
布線設計方法、布線シミュレーション装置及びプログラム
【課題】ワイヤーハーネスの製造工程を正確に模擬することができる布線設計方法を提供する。
【解決手段】布線シミュレーション装置1の制御部11は、初期設計情報を取得すると(ステップ101)、取得された初期設計情報を制約条件とする解析モデルを用いて、所定の処理を複数回実行する収束計算を行うことによって、電線の布線作業を模擬する(ステップ102)。また、制御部11は、ステップ102における模擬結果に基づいて、所定の処理を複数回実行する収束計算を行うことによって、電線のパッキング作業を模擬する(ステップ103)。そして、布線シミュレーション装置1の制御部11は、ステップ102、103における模擬結果を表示部16等に出力する(ステップ104)。
【解決手段】布線シミュレーション装置1の制御部11は、初期設計情報を取得すると(ステップ101)、取得された初期設計情報を制約条件とする解析モデルを用いて、所定の処理を複数回実行する収束計算を行うことによって、電線の布線作業を模擬する(ステップ102)。また、制御部11は、ステップ102における模擬結果に基づいて、所定の処理を複数回実行する収束計算を行うことによって、電線のパッキング作業を模擬する(ステップ103)。そして、布線シミュレーション装置1の制御部11は、ステップ102、103における模擬結果を表示部16等に出力する(ステップ104)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ワイヤーハーネスの製造工程を模擬するための布線設計方法等に関する。特に、電線が1本ずつ布線され、パッキングされるまでの製造工程を模擬することができる布線設計方法等に関する。
【背景技術】
【0002】
ワイヤーハーネスは、車両等に搭載される電線をコンパクトに装着することを目的として、関連部品とともに束ねられるものである。ワイヤーハーネスは、比較的フレキシブルな性質を持つことから、製造盤(ASSY盤、治具盤とも言う。)と呼ばれる平面上で製造されている。このようにして製造されたワイヤーハーネスは、車両等に搭載されたときに予想以上の逃げや捻りが生じて、製品として機能しなくなってしまう場合がある。その為、ワイヤーハーネスの設計においては試作が必要不可欠であった。しかしながら、試作による方法だけでは時間とコストがかかる為、従来からワイヤーハーネスの解析、設計等を行うシミュレーション装置が提案されている。
【0003】
特許文献1では、ワイヤーハーネスの拘束点間の特定部位を移動させた場合において、解析対象のワイヤーハーネス全体の変形を有限要素法により解析して画面上で確認可能にする変形解析装置が開示されている。特許文献1の変形解析装置では、ワイヤーハーネスの物性データ、形状データ及び拘束条件を制約条件として、画面上で指示された特定部位及び移動位置の三次元座標値データに応答して、有限要素法により特定部位の移動に伴って初期状態の解析モデルが変形するのを解析して変形解析モデルを作成する。
【0004】
特許文献2では、ワイヤーハーネスへの負荷の少ない最適な結束の位置を自動的に設計可能とするハーネス設計装置が開示されている。特許文献2のハーネス設計装置は、ワイヤーハーネス上の結束の位置、あるいは、ワイヤーハーネス自身が満たすべき制約条件を取得する条件取得手段と、該条件取得手段で示された結束の位置の条件の下に結束の位置を可変し、ワイヤーハーネス全体の力学的エネルギーが最小になるような位置を結束の位置として取得する結束位置取得手段とを備える。これによって、ワイヤーハーネスへの負荷の少ない最適な結束の位置を得ることが出来る。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第4266783号公報
【特許文献2】特開2009−134369号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、ワイヤーハーネスの製造では、製造盤に埋設された複数の治具に電線を1本ずつ布線していく。より詳細には、複数の電線の組(ワイヤーハーネスの製品形態となる前であれば、「サブ単位」と言う。)を作り、その組み合わせを配置していく。そして、サブ単位を束ねてテープ等でパッキングしていく。従って、ワイヤーハーネスの製造工程を正確に模擬するためには、製造盤に布線される各電線の初期状態の形状から模擬する必要がある。
しかしながら、特許文献1が採用する有限要素法では、いくつかの問題がある。1つ目の問題は、正確な初期位置が定まってからでないと対応できないことである。また、2つ目の問題は、有限要素法の制限によって、電線が交差すると正確な解析が出来ない為、交差を外す必要があることである。また、3つ目の問題は、模擬結果を出力するまでにかなりの時間がかかることである。
【0007】
また、特許文献2を含めて、従来技術においては、複数本の電線が束ねられた束(ワイヤーハーネスの製品形態を意味する。以下では、ワイヤーハーネスの製品形態の一部を意味する用語として、「サブハーネス」を用いる。)を最小単位として各種の解析を行っている。従って、サブハーネスとして束ねられる前の状態、即ち電線を1本ずつ布線していく状態を模擬することができない。具体的には、サブハーネスとして束ねる電線の選択、サブハーネスとして電線を束ねていく順序などの影響を解析することができない。
また、従来技術においては、同一のサブハーネスに含まれる電線は、全て同一の線長、同一の剛性として表現されてしまうので、実物において発生する各電線の線長やレイアウトのばらつきを表現することができない。
また、サブハーネスを最小単位とした従来技術による解析では、サブハーネスの形状、位置などが製品寸法を満たすように模擬を行う為、分岐箇所などの寸法を現実に即して正確に表現することができず、製品寸法の公差を満たすかどうか検証することができない。
【0008】
以上の通り、従来技術では、電線が1本ずつ布線され、パッキングされるまでのワイヤーハーネスの製造工程を正確に模擬することができていない。
【0009】
本発明は、前述した問題点に鑑みてなされたもので、その目的とすることは、ワイヤーハーネスの製造工程を正確に模擬することができる布線設計方法等を提供することである。
【課題を解決するための手段】
【0010】
前述した目的を達成するために第1の発明は、ワイヤーハーネスの布線設計を行う布線設計方法であって、製造盤に埋設される治具の形状情報、治具の配置情報、ワイヤーハーネスを構成する電線の物性情報、電線の経路情報を取得し、取得された情報を制約条件とする解析モデルにおいて、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求める第1ステップと、前記電線の形状関数に基づいて各電線の曲率を算出し、各電線の曲率が小さくなる方向に各電線が移動する力を作用させることによって各治具の治具平面内における各電線の配置位置を変更する第2ステップと、を複数回繰返し実行することによって電線の布線作業を模擬し、前記電線の布線作業の模擬結果を出力する布線設計方法である。
【0011】
治具の形状情報とは、電線を支持する平面(=治具平面)の形状等である。例えば、治具が製造盤に埋設される支持柱と、支持柱の上端に配置されるU型の支持部とによって構成される場合、治具平面はU型の支持部の内側の領域となる。
治具の配置情報とは、治具の配置位置、治具平面の法線方向等である。
電線の物性情報とは、電線の径、剛性値、線長等である。
電線の経路情報とは、電線に接続されるコネクタやクリップ等の位置(固定位置)、電線が通過すべき治具の順序等である。また、電線の経路情報は、サブハーネスとして束ねる電線のグループ、サブハーネスとして束ねていく順序等も含むものとする。
【0012】
第1の発明によって、電線を1本ずつ布線していく状態を模擬し、ワイヤーハーネスの製造工程を正確に模擬することができる。
また、第1の発明では、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求めるので、製造現場での利用に耐えられる程度の処理速度で電線の布線作業を正確に模擬することができる。すなわち、各治具の治具平面は2次元空間であるため、最適化問題の算出時間を短縮することができる。更に、各治具の治具平面でエネルギーを考慮した結果が治具間にも反映されるため、電線の経路全体でエネルギーを考慮した形状を算出することができる。
また、第1の発明では、第1ステップと第2ステップとを複数回繰返し実行するので、各電線の配置位置を現実に即して精度良く決定することができる。
【0013】
第1の発明は、更に、前記電線の布線作業の模擬結果を初期状態として取得し、同一のパッキング対象となる複数の電線の集合であるサブハーネスの情報を取得し、前記サブハーネスごとに、前記サブハーネスに含まれる電線群の重心に向けてパッキング力を作用させるとともに、各電線の曲率に応じて各電線が現在位置を保とうとする力を作用させることによって各治具の治具平面内における各電線の配置位置を変更する第3ステップと、前記解析モデルにおいて、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求める第4ステップと、を複数回繰返し実行することによって電線のパッキング作業を模擬し、前記電線のパッキング作業の模擬結果を出力することが望ましい。
これによって、電線1本ずつ布線してパッキング作業を模擬することができ、現実のパッキング作業において発生する寸法のばらつきを表現できる。
また、第3ステップと第4ステップとを複数回繰返し実行するので、電線の布線作業の模擬結果の精度を維持して、電線のパッキング作業を模擬することができる。
【0014】
第1の発明における前記第2ステップ及び前記第3ステップでは、配置位置の決定対象の電線が、周辺の電線又は治具と干渉する場合には、更に、配置位置の決定対象の電線に対して、前記周辺の電線又は治具から受ける力を作用させることが望ましい。
これによって、周辺の電線又は治具の影響を考慮して、電線の布線作業やパッキング作業を模擬することができる。
【0015】
また、前記解析モデルは、各電線の対向する治具間がばね要素によって連結され、かつ電線同士が治具平面内でばね要素によって連結されるようにモデル化されていることが望ましい。
各電線の治具間がばね要素によって連結され、かつ電線同士が治具平面内でばね要素によって連結される解析モデルとすることで、モデルを簡略化しながら現実に即した結果が得られる。
【0016】
また、前記電線ごとに加わるエネルギーは、曲げエネルギー、張力エネルギー、重力エネルギーの和であることが望ましい。
これによって、電線を布線したときに負荷の少ない経路を正確に模擬することができる。
【0017】
第2の発明は、ワイヤーハーネスの布線設計を行うための布線設計装置であって、製造盤に埋設される治具の形状情報、治具の配置情報、ワイヤーハーネスを構成する電線の物性情報、電線の経路情報を取得する取得手段と、前記取得手段によって取得された情報を制約条件とする解析モデルにおいて、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求める第1ステップと、前記電線の形状関数に基づいて各電線の曲率を算出し、各電線の曲率が小さくなる方向に各電線が移動するように各治具の治具平面内における各電線の配置位置を変更する第2ステップと、を複数回繰返し実行することによって電線の布線作業を模擬する模擬手段と、前記模擬手段によって模擬される前記電線の布線作業の模擬結果を出力する出力手段と、を具備する布線シミュレーション装置である。
第2の発明によって、電線を1本ずつ布線していく状態を模擬し、ワイヤーハーネスの製造工程を正確に模擬することができる。
【0018】
第3の発明は、コンピュータを第2の発明の布線シミュレーション装置として機能させるためのプログラムである。
第3の発明のプログラムをコンピュータにインストールすることで、第2の発明の布線シミュレーション装置を得ることができ、電線を1本ずつ布線していく状態を模擬し、ワイヤーハーネスの製造工程を正確に模擬することができる。
【発明の効果】
【0019】
本発明により、ワイヤーハーネスの製造工程を正確に模擬することができる布線設計方法等を提供することができる。
【図面の簡単な説明】
【0020】
【図1】布線シミュレーション装置1のハードウエア構成図
【図2】布線設計処理の概要を示す図
【図3】治具の形状情報を説明する図
【図4】治具の配置情報を説明する図
【図5】電線の物性情報、経路情報を説明する図
【図6】電線の布線作業を模擬する処理の流れを示すフローチャート
【図7】エネルギー最小スプライン計算の処理の流れを示すフローチャート
【図8】電線の治具間の取扱いについて説明する図
【図9】治具平面内における電線同士の取扱いについて説明する図
【図10】電線の位置座標を説明する図
【図11】電線の自重を定義するための座標系を説明する図
【図12】曲率に基づく電線の配置位置の変更を説明する図
【図13】電線の布線作業の模擬結果を説明する図
【図14】電線のパッキング作業を模擬する処理の流れを示すフローチャート
【図15】電線のパッキング作業の模擬結果を説明する図
【図16】電線と治具との干渉に基づく外力計算を説明する図
【図17】布線作業の模擬結果の一例を示す図
【図18】図17のA−A断面図
【図19】パッキング作業の模擬結果の一例を示す図
【図20】図19のA−A断面図
【発明を実施するための形態】
【0021】
以下図面に基づいて、本発明の実施形態を詳細に説明する。
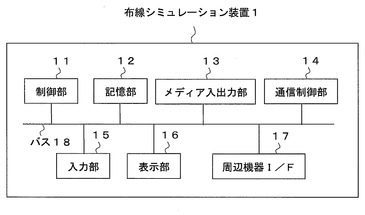
図1は、布線シミュレーション装置1のハードウエア構成図である。尚、図1のハードウエア構成は一例であり、用途、目的に応じて様々な構成を採ることが可能である。
【0022】
布線シミュレーション装置1は、制御部11、記憶部12、メディア入出力部13、通信制御部14、入力部15、表示部16、周辺機器I/F部17等が、バス18を介して接続される。
【0023】
制御部11は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等で構成される。
【0024】
CPUは、記憶部12、ROM、記録媒体等に格納されるプログラムをRAM上のワークメモリ領域に呼び出して実行し、バス18を介して接続された各装置を駆動制御し、布線シミュレーション装置1が行う後述する処理を実現する。
ROMは、不揮発性メモリであり、コンピュータのブートプログラムやBIOS等のプログラム、データ等を恒久的に保持している。
RAMは、揮発性メモリであり、記憶部12、ROM、記録媒体等からロードしたプログラム、データ等を一時的に保持するとともに、制御部11が各種処理を行う為に使用するワークエリアを備える。
【0025】
記憶部12は、HDD(ハードディスクドライブ)であり、制御部11が実行するプログラム、プログラム実行に必要なデータ、OS(オペレーティングシステム)等が格納される。プログラムに関しては、OS(オペレーティングシステム)に相当する制御プログラムや、後述する処理をコンピュータに実行させるためのアプリケーションプログラムが格納されている。
これらの各プログラムコードは、制御部11により必要に応じて読み出されてRAMに移され、CPUに読み出されて各種の手段として実行される。
【0026】
メディア入出力部13(ドライブ装置)は、データの入出力を行い、例えば、CDドライブ(−ROM、−R、−RW等)、DVDドライブ(−ROM、−R、−RW等)等のメディア入出力装置を有する。
通信制御部14は、通信制御装置、通信ポート等を有し、コンピュータとネットワーク間の通信を媒介する通信インタフェースであり、ネットワークを介して、他のコンピュータ間との通信制御を行う。ネットワークは、有線、無線を問わない。
【0027】
入力部15は、データの入力を行い、例えば、キーボード、マウス等のポインティングデバイス、テンキー等の入力装置を有する。
入力部15を介して、コンピュータに対して、操作指示、動作指示、データ入力等を行うことができる。
表示部16は、CRTモニタ、液晶パネル等のディスプレイ装置、ディスプレイ装置と連携してコンピュータのビデオ機能を実現するための論理回路等(ビデオアダプタ等)を有する。
【0028】
周辺機器I/F(インタフェース)部17は、コンピュータに周辺機器を接続させるためのポートであり、周辺機器I/F部17を介してコンピュータは周辺機器とのデータの送受信を行う。周辺機器I/F部17は、USBやIEEE1394やRS−232C等で構成されており、通常複数の周辺機器I/Fを有する。周辺機器との接続形態は有線、無線を問わない。
バス18は、各装置間の制御信号、データ信号等の授受を媒介する経路である。
【0029】
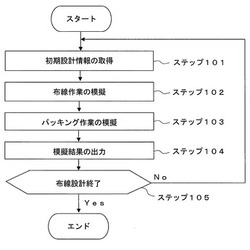
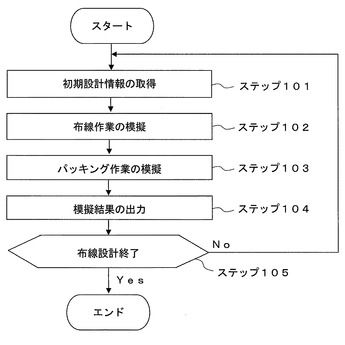
図2は、布線設計処理の概要を示す図である。本実施の形態に係る布線設計処理では、例えば、自動車メーカ等の顧客が作成した初期設計情報(CAD情報)に基づいて、最適な布線設計を行う。
【0030】
布線シミュレーション装置1の制御部11は、初期設計情報を取得する(ステップ101)。初期設計情報は、治具の形状情報、治具の配置情報、電線の物性情報、電線の経路情報等である。制御部11は、入力手段(メディア入出力部13、通信制御部14、入力部15、周辺機器I/F部16等)を介して入力される初期設計情報を取得しても良いし、記憶部12に記憶されている初期設計情報を取得しても良い。初期設計情報の詳細については後述する。
【0031】
次に、布線シミュレーション装置1の制御部11は、取得された初期設計情報を制約条件とする解析モデルを用いて、電線の布線作業を模擬する(ステップ102)。制御部11は、所定の処理を複数回実行する収束計算を行うことによって、電線の布線作業を模擬する。電線の布線作業を模擬する処理の詳細については後述する。
【0032】
次に、布線シミュレーション装置1の制御部11は、ステップ102における模擬結果に基づいて、電線のパッキング作業を模擬する(ステップ103)。制御部11は、所定の処理を複数回実行する収束計算を行うことによって、電線のパッキング作業を模擬する。電線のパッキング作業を模擬する処理の詳細については後述する。
【0033】
次に、布線シミュレーション装置1の制御部11は、ステップ102、103における模擬結果を表示部16等に出力する(ステップ104)。模擬結果の表示処理の詳細については後述する。
【0034】
設計者は、模擬結果を確認し、布線設計を終了するかどうか判断する(ステップ105)。布線設計を続行する場合、設計者は、初期設計情報を適宜変更し、布線シミュレーション装置1に対して、初期設計情報を入力する。布線シミュレーション装置1の制御部11は、ステップ102からステップ104を繰り返す。
【0035】
次に、図3から図5を参照し、初期設計情報について説明する。
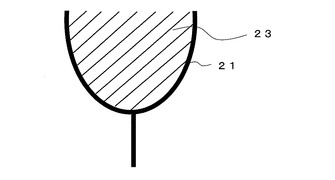
治具の形状情報とは、電線を支持する平面(=治具平面)の形状等である。例えば、治具が製造盤に埋設される支持柱と、支持柱の上端に配置されるU型の支持部とによって構成される場合、治具平面はU型の支持部の内側の領域となる。
【0036】
図3は、治具の形状情報を説明する図である。図3は、製造盤の水平方向から見た図である。図3では、治具21を太線によって示し、治具平面23を斜線によって示している。実際の製造盤では、電線が治具平面23を通過する場合、電線は治具21に支持される。一方、電線が治具平面23を通過しない場合、電線は治具21に支持されない。すなわち、治具平面23は電線が治具21に支持される状態を維持して自由に動ける範囲を示している。このことを模擬するために、本解析モデルでは、治具平面23を制約条件として扱う。
【0037】
治具の配置情報とは、治具の配置位置、治具平面の法線方向等である。治具の配置位置は、製造盤に配置する治具の間隔に基づいて算出するようにしても良い。この場合には、初期設計情報として、製造盤に配置する治具の間隔を入力すれば良い。
【0038】
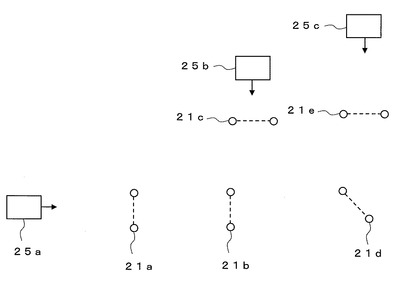
図4は、治具の配置情報を説明する図である。図4は、製造盤の垂直方向から見た図である。図4では、一例として、治具21a〜21e、コネクタ25a〜25cを示している。
【0039】
治具の点線部分は、治具平面の上端となる辺を示している。コネクタの矢印は、電線が接続されたときの伸長方向を示している。
実際の製造盤では、治具平面の法線方向は様々である。また、コネクタに対して電線が接続可能な位置が限定される。このことを模擬する為に、本解析モデルでは、治具平面の法線方向、コネクタに対して電線が接続可能な位置を制約条件として扱う。
【0040】
電線の物性情報とは、電線の径、剛性値等である。
電線の経路情報とは、電線に接続されるコネクタやクリップ等の位置(固定位置)、電線が通過すべき治具の順序、電線を布線していく順序、サブハーネスとして束ねる電線のグループ等である。
【0041】
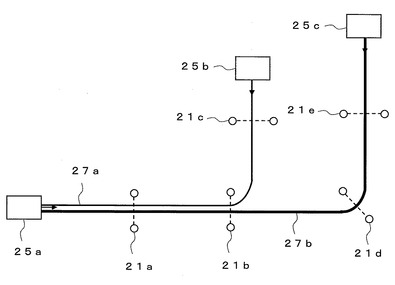
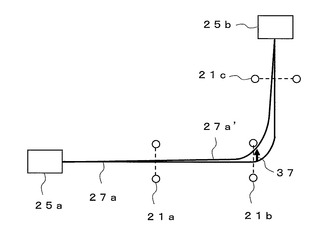
図5は、電線の物性情報、経路情報を説明する図である。図5は、図4に示す治具の配置に対して電線の経路を示したものである。図5では、一例として、電線27a、27bを示している。電線27bの径は、電線27aの径よりも大きい。
【0042】
電線の経路情報は、リスト形式となっている。図5に示す例では、電線27aの経路情報は(コネクタ25a、治具21a、治具21b、治具21c、コネクタ25b)、電線27bの経路情報は(コネクタ25a、治具21a、治具21b、治具21d、治具21e、コネクタ25c)である。
また、電線の経路情報は、電線27aと電線27bのどちらを先に布線するか、電線27aと電線27bは同じサブハーネスとして束ねるかなどの情報も有する。
実際の製造盤では、電線ごとに通過する治具23が異なる。また、電線を布線していく順序によって最終的な製品形態が変わる。また、電線の径、剛性なども電線ごとに異なる。このことを模擬する為に、本解析モデルでは、電線ごとに物性情報、経路情報を与える。
【0043】
次に、図6〜図13を参照しながら、電線の布線作業を模擬する処理について説明する。
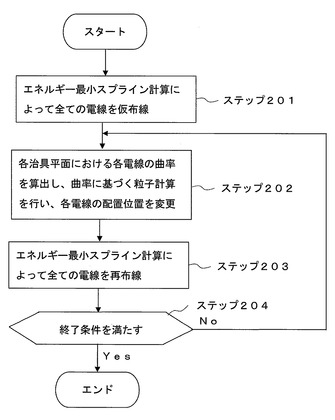
図6は、電線の布線作業を模擬する処理の流れを示すフローチャートである。
図6に示すように、布線シミュレーション装置1の制御部11は、エネルギー最小スプライン計算によって全ての電線の仮布線を行う(ステップ201)。
【0044】
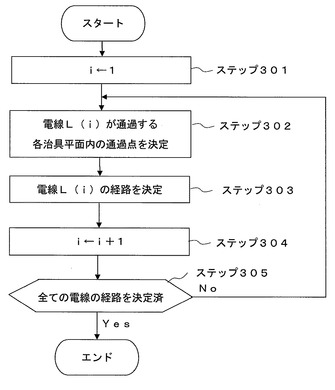
図7は、エネルギー最小スプライン計算の処理の流れを示すフローチャートである。図7では、電線の変数をLとし、電線の布線順序を示す添え字をiとして説明する。
布線シミュレーション装置1の制御部11は、添え字iに1を代入し(ステップ301)、電線L(i)が通過する各治具平面内の配置点を決定する(ステップ302)。配置点の決定は、後述するエネルギー最小原理スプライン手法に基づく。
【0045】
次に、布線シミュレーション装置1の制御部11は、ステップ302において決定した各治具平面内の配置点を通る曲線を補間し、電線L(i)の経路を決定する(ステップ303)。経路の決定は、後述するエネルギー最小原理スプライン手法に基づく。
【0046】
次に、布線シミュレーション装置1の制御部11は、添え字iにi+1を代入し(ステップ304)、全ての電線の経路を決定済であるかどうか確認する(ステップ305)。
全ての電線の経路を決定していない場合(ステップ305のNo)、布線シミュレーション装置1の制御部11は、ステップ302から繰り返す。
全ての電線の経路を決定済の場合(ステップ305のYes)、布線シミュレーション装置1の制御部11は、処理を終了する。
【0047】
このように、布線シミュレーション装置1の制御部11は、後述するエネルギー原理スプラインに基づいて、電線の経路を1本ずつ決定し、電線の布線作業を模擬する。
【0048】
図8から図11を参照しながら、エネルギー最小原理スプライン手法について説明する。エネルギー最小原理スプライン手法とは、スプライン関数を拡張し、エネルギー最小原理を適用するものである。
【0049】
図8は、電線の治具間の取扱いについて説明する図である。図8では、一例として、コネクタ25a〜25b、治具21a〜21c、電線の配置点31a〜31e、ばね要素33a〜33dを示している。配置点31a、31eは、コネクタ25a、25bと電線の接続点である為、固定である。配置点31b、31c、31dは、治具21a、21b、21cの治具平面内で自由に移動できる。前述のステップ302では、電線ごとに、移動可能な配置点の位置を決定する。ここで、配置点の位置は、治具平面上の2次元座標として表現される。
【0050】
全ての対向する治具間は、有限要素法で一般に用いられるばね要素で連結されているものとする。例えば、配置点31aと配置点31bは、ばね要素33aで連結されている。ばね要素33a〜33dは、電線が変位したときの復元力をモデル化する為のものである。治具間をばね要素として計算に組み込むことで、モデルを簡略化しながら現実に即した結果が得られる。例えば、ある治具において電線に力が加えられた場合、他の治具の配置点も連動して変更されることを模擬することができる。
【0051】
図9は、治具平面内における電線同士の取扱いについて説明する図である。図9では、一例として、治具21f、治具平面23f、配置点31f〜35h、ばね要素35a〜35cを示している。
【0052】
前述のステップ302において、2本目以降の電線を布線するときには、治具平面内に既に他の電線の配置点が存在する場合がある。このような場合を考慮し、治具平面内における電線同士は、有限要素法で一般に用いられるばね要素で連結されているものとする。例えば、配置点31fと配置点31gは、ばね要素35aで連結されている。ばね要素35a〜35cは、治具平面内における電線同士の接触力をモデル化する為のものである。治具平面内において電線同士が重なり合って配置された場合には、重なり合った面積に応じた接触力を双方の電線に作用させて配置位置を補正する。電線同士の接触力をばね要素として計算に組み込むことで、モデルを簡略化しながら現実に即した結果が得られる。例えば、2本目以降の電線を布線するときに、既に配置された電線の領域と重ならないように配置できる。
また、配置点は、電線の径を直径とする円で表現される。これによって、電線ごとに径が異なることを考慮できるので、現実に即した結果が得られる。
【0053】
以下では、エネルギー最小原理スプライン手法の定式化について説明する。
エネルギー最小原理スプライン手法では、電線にかかる力として、例えば剪断力、張力、重力を考える。そして、これらの3つの力によるエネルギーを最小とする電線の配置点の位置を算出する。また、算出された配置点の位置を通るように曲線を補間し、電線の経路を算出する。
【0054】
図10は、電線の位置座標を説明する図である。
エネルギー最小原理スプライン手法では、電線上の位置座標(3次元座標)を(x(t)、y(t)、z(t))で表す。
図10に示す例では、電線27cのt=t1での位置座標が(x(t1)、y(t1)、z(t1))=(x1、y1、z1)、電線27cのt=t2での位置座標が(x(t2)、y(t2)、z(t2))=(x2、y2、z2)となっている。
【0055】
電線の曲げ剛性をEI、曲げ歪をεb、剪断力によるエネルギー(曲げエネルギー)をE1とする。曲げ剛性EIは、電線ごとに与えることができる。
曲げ歪εbは次式で定義される。
【数1】

曲げエネルギーE1は次式で定義される。
【数2】
【0056】
電線の張力をT、伸び歪(グリーンの歪)をεe、張力Tが関係するエネルギー(張力エネルギー)をE2とする。張力Tは、電線ごとに与えることができる。
伸び歪εeは次式で定義される。
【数3】
張力エネルギーE2は次式で定義される。
【数4】
【0057】
図11は、電線の自重を定義するための座標系を説明する図である。図11では、一例として、製造盤41が示されている。製造盤41は、座標X−Y−Z系に対して角度θだけ傾斜しているものとする。
座標X−Y−Z系における電線の自重をw、座標x−y−z系におけるy方向の自重をwy、座標x−y−z系におけるz方向の自重をwz、自重に関係するエネルギー(自重エネルギー)をE3とする。自重wは、電線ごとに与えることができる。
座標x−y−z系におけるy方向の自重wyは次式で定義される。
【数5】
座標x−y−z系におけるz方向の自重wzは次式で定義される。
【数6】
自重エネルギーE3は次式で定義される。
【数7】
【0058】
以上から、E1、E2、E3が定義され、全エネルギーの凡関数E(t、x(t)、y(t)、z(t))=E1+E2+E3が定義される。
電線の形状関数c(t)=(x(t)、y(t)、z(t))は、エネルギー最小となるオイラー・ラグランジェ方程式で表すことができる。そこで、あるcの成分を改めてcと記述すると、支配方程式は定数係数の4階微分方程式である次式で定義される。
【数8】
但し、σ12=T/EI、σ2=w/EI、w=wyまたはwzである。
式(8)の支配方程式の解は、次式を満たす解である。
【数9】
但し、a、bは定数である。
【0059】
ここで、形状関数c(t)は、スプラインの条件を仮定し、区間(治具間)ごとに定義される区間関数Ci(t)(i=1、2、・・・)で表す。スプラインの条件とは、治具平面上の点における区間関数同士の接続が滑らかであることである。すなわち各区間関数はC2級の関数であって、隣り合う区間関数の2回微分が等しいことである。
式(9)の定数a、bは、スプラインの条件から区間(治具間)ごとに決定することができる。また、未定係数法によって式(9)の非斉次方程式の特解を求めることで、式(9)の非斉次方程式の一般解が求まる。すなわち、電線の形状関数c(t)の一般解が導出される。そして、c´(t)に基づいてエネルギーが最小となる形状関数c(t)が決定される。
【0060】
以上の通り、式(9)の解として導出される電線の形状関数c(t)は、治具間ごとに定義される接続が滑らかな区間関数で表され、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通る。このように電線の形状関数c(t)を区間関数で表現して治具ごとに形状を決定できるのは、図8を参照して説明したように治具間をばね要素として計算に組み込んでいるので、ある治具の最適化結果が隣接する治具に伝播する為である。
【0061】
実際の製品の治具の形成面は3次元形状であるが、本発明の実施の形態では、計算を効率的に行う為に、各治具平面が2次元の平面空間上に構成されていると仮定する。そして、各治具平面(2次元のローカル座標系、図3の治具平面23を参照)において解(配置位置)を算出した後、算出した解を製造盤(3次元のグローバル座標系、図11の製造盤41を参照)の座標点に変換し、製造盤における解(電線の形状)を算出する。これによって、直接3次元空間において解(電線の形状)を算出するよりも最適化問題の算出時間を短縮することができる。更に、治具平面内における電線の配置挙動を解析することも可能となる。
尚、前述の説明では、電線にかかる力として、剪断力、張力、重力の3つを考慮したが、いずれか1つまたは2つとしても良い。
【0062】
図6の説明に戻る。
次に、制御部11は、各治具平面における各電線の曲率を算出し、曲率に基づく粒子計算を行い、各電線の曲率が小さくなる方向に各電線が移動する力を作用させることによって各電線の配置位置を変更する(ステップ202)。より詳細には、制御部11は、ステップ201における仮布線によって求められる電線の形状関数に基づいて各電線の曲率を算出する。次に、制御部11は、各電線を分子動力学法における粒子と見立てて、粒子の運動を模擬する粒子計算を実行する。粒子計算では、各電線の曲率に応じた粒子の加速度を定義し、粒子間の衝突(電線間の干渉に相当する。)や粒子と境界物との衝突(電線と治具との干渉に相当する。)を考慮して、粒子の運動(電線の配置位置の最適化プロセスに相当する。)が模擬される。1回の繰返し計算ごとの粒子の運動時間(電線の移動量)については、粒子同士の衝突(電線同士の干渉)が検知できる程度とする。例えば、制御部11は、1回の繰返し計算ごとに、各電線の曲率が小さくなる方向に、電線の最小径の半分ずつ移動させると、互いに正反対の方向に移動する最小径の電線同士であっても、干渉を確実に検知することができる。
【0063】
ここで、図12を参照しながら、曲率に基づいて各電線の配置位置を変更することの技術的意義について説明する。
図12は、曲率に基づく電線の配置位置の変更を説明する図である。図12における電線27aは、ステップ201における仮布線によって求められる電線の形状関数に基づいて布線されている。
ステップ201では、制御部11は、初期設計情報(電線を布線していく順序など)に応じて、各電線の配置位置を仮決めして、エネルギー最小スプライン計算を行うので、電線は治具平面内に静的に配置される。しかしながら、静的に電線が配置されると、曲率が比較的大きい経路の電線は、先に配置されている他の電線群に邪魔されて、ゆとりがある位置(電線がピン張りとならない位置)に配置することができない場合がある。そこで、全ての電線をゆとりがある位置に配置する為に、ステップ202において、制御部11は、曲率に基づく粒子計算を行い、各電線の曲率が小さくなる方向に各電線が移動する力を作用させることによって各電線の配置位置を変更する。
図12における電線27bは、ステップ202の処理によって、矢印37の方向(曲率が小さくなる方向)に配置位置が変更されている。
【0064】
図6の説明に戻る。
次に、制御部11は、ステップS202によって変更された各電線の配置位置に基づくエネルギー最小スプライン計算によって全ての電線の再布線を行う(ステップ203)。エネルギー最小スプライン計算の詳細は、前述した通りであり、制御部11は、各電線にかかる力として、剪断力、張力、重力なども計算する。
【0065】
次に、制御部11は、収束計算の終了条件を満たすか否か確認する(ステップ204)。
終了条件を満たさない場合(ステップ204のNo)、制御部11は、ステップ202から処理を繰り返す。
終了条件を満たす場合(ステップ204のYes)、制御部11は、処理を終了する。
【0066】
収束計算の終了条件について説明する。収束計算の終了条件としては、例えば、以下の例が考えられる。
(1)繰返し計算の回数が、予め定められた回数に達したか。
(2)全ての電線の曲率の変化量(又は大きさ)が、予め定められた閾値よりも小さくなったか。
(3)全ての電線の張力の変化量(又は大きさ)が、予め定められた閾値よりも小さくなったか。
(4)全ての電線の剪断力の変化量(又は大きさ)が、予め定められた閾値よりも小さくなったか。
【0067】
前述の(2)〜(4)は、ステップ202及び203の処理を複数回繰り返すことによって、各電線の曲率、張力、剪断力が次第に小さくなり、一定の値に収束していくことを仮定している。収束計算の終了条件については、計算時間と精度とのトレードオフによって適宜決定される。
【0068】
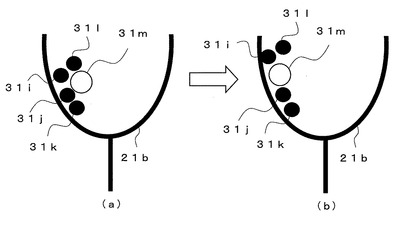
図13は、電線の布線作業の模擬結果を説明する図である。図13に示す例では、配置点31i〜31lに対応する電線の曲率は小さく、配置点31mに対応する電線の曲率は大きいものとする。また、配置点31mに対応する電線の曲率が小さくなる方向は、紙面右から紙面左の方向とする。この場合、紙面左側にコネクタ25が存在することになる(不図示)。
図13(a)は、ステップ201による仮布線の状態を示している。また、図13(b)は、ステップ203による再布線がなされ、終了条件を満たした状態を示している。
制御部11が、図6に示すフローチャートに従って収束計算を行うことによって、配置点31mは、次第に紙面右から紙面左の方向に移動していき、図13(a)の状態から図13(b)の状態に変化する。
【0069】
このように、曲率に応じて電線の配置位置を変更することによって、図13に示すように、実際の布線作業において発生する電線の沈み込みを精度良く模擬することができる。ここで、電線の沈み込みとは、曲線的に布線される電線が、先行して直線的に布線されている複数の電線の間に沈み込んでいくことを意味する。
【0070】
次に、図14、図15を参照しながら、電線のパッキング作業を模擬する処理について説明する。
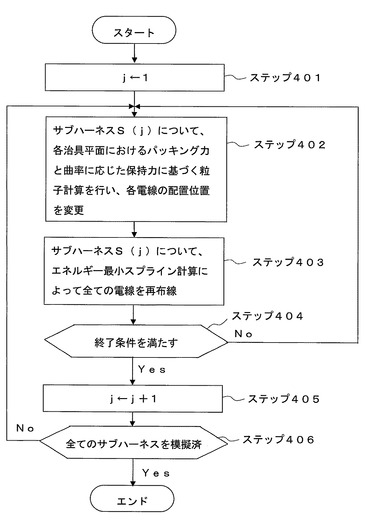
図14は、電線のパッキング作業を模擬する処理の流れを示すフローチャートである。図14では、サブハーネスの変数をSとし、サブハーネスを識別する添え字をjとする。尚、一つの治具平面に対して複数のサブハーネスが存在する場合もある。
【0071】
布線シミュレーション装置1の制御部11は、添え字jに1を代入し(ステップ401)、サブハーネスS(j)について、パッキング力と、曲率に応じた保持力に基づく粒子計算を行い、各電線の配置位置を変更する(ステップ402)。より詳細には、制御部11は、電線の布線作業の模擬結果を初期状態として各電線の曲率を算出する。次に、制御部11は、各電線を分子動力学法における粒子と見立てて、粒子の運動を模擬する粒子計算を実行する。
【0072】
電線の布線作業の模擬計算では、前述したように、制御部11は、各電線の曲率が小さくなる方向に各電線が移動する力(以下、「吸着力」という。)を作用させる。一方、電線のパッキング作業の模擬計算では、制御部11は、サブハーネスに含まれる電線群の重心に向けてパッキング力を作用させるとともに、各電線の曲率に応じて各電線が現在位置を保とうとする力(以下、「保持力」という。)を作用させる。パッキング力は、人間の平均的な力や外装部材などを考慮して設定されるものである。外装部材としては、例えば、チューブ、シート、テープ等がある。
【0073】
次に、制御部11は、ステップS402によって変更された各電線の配置位置に基づくエネルギー最小スプライン計算によって全ての電線の再布線を行う(ステップ403)。エネルギー最小スプライン計算の詳細は、前述した通りであり、制御部11は、各電線にかかる力として、剪断力、張力、重力なども計算する。
【0074】
次に、制御部11は、収束計算の終了条件を満たすか否か確認する(ステップ404)。収束計算の終了条件については、電線の布線作業の模擬計算の説明と同様である。
終了条件を満たさない場合(ステップ404のNo)、制御部11は、ステップ402から処理を繰り返す。
終了条件を満たす場合(ステップ404のYes)、制御部11は、ステップ405に進む。
【0075】
次に、制御部11は、添え字jにj+1を代入し(ステップ405)、全てのサブハーネスに対して模擬済であるかどうか確認する(ステップ406)。
全てのサブハーネスに対して模擬していない場合(ステップ406のNo)、制御部11は、ステップ402から繰り返す。
全てのサブハーネスに対して模擬済の場合(ステップ406のYes)、制御部11は、処理を終了する。
【0076】
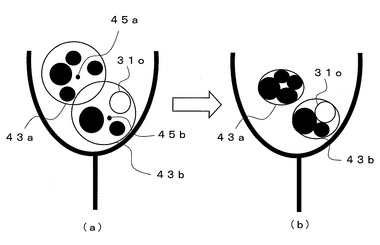
図15は、電線のパッキング作業の模擬結果を説明する図である。図15に示す例では、配置点31oに対応する電線の保持力は大きく、それ以外の電線の保持力は小さいものとする。
【0077】
図15では、例として、4本の電線を束ねるサブハーネス43a、3本の電線を束ねるサブハーネス43bを示している。また、45a、45bは、それぞれサブハーネス43a、43bに含まれる電線群の重心を示している。
制御部11は、同一のパッキング対象となる複数の電線群の重心を算出する。複数の電線群の重心は、電線の曲率によって重み付けして算出される。これによって、保持力が収束計算に反映される。そして、制御部11は、サブハーネスごとに、収束計算を行う。
【0078】
図15(a)は、電線の布線作業の模擬計算が終了した状態を示している。また、図15(b)は、ステップ403による再布線がなされ、終了条件を満たした状態を示している。
制御部11が、図14に示すフローチャートに従って収束計算を行うことによって、配置点31oがほとんど移動せず、それ以外の電線の配置点がパッキング力に応じて移動していき、図15(a)の状態から図15(b)の状態に変化する。
【0079】
図15(b)に示すように、電線のパッキング作業を模擬した後の状態では、サブハーネスの断面形状は円形に限らず、パッキング対象の電線が布線された位置、電線の剛性などに応じて、楕円形、多角形など様々な形状となる。従って、現実に即した模擬結果を得ることができる。
また、図15(b)に示すように、保持力が大きい電線の配置位置は、電線の布線作業の模擬計算からほとんど変更されないので、電線の布線作業の模擬結果の精度を維持することができる。
【0080】
次に、図16を参照しながら、電線同士の干渉や電線と治具との干渉について詳細に説明する。
前述した通り、布線シミュレーション装置1の制御部11は、収束計算を行うことによって電線の布線作業及び電線のパッキング作業を模擬する。これらの収束計算の中で各電線の配置位置を変更する際、制御部11は、電線同士の干渉や電線と治具との干渉についても考慮する必要がある。そこで、電線の布線作業及びパッキング作業の両方の模擬計算において、制御部11は、配置位置の決定対象の電線が、周辺の電線又は治具と干渉する場合には、更に、配置位置の決定対象の電線に対して、周辺の電線又は治具から受ける力(外力)を作用させる。
以下では、1例として、電線のパッキング作業の模擬計算における電線と治具との干渉に基づく外力計算について説明する。
【0081】
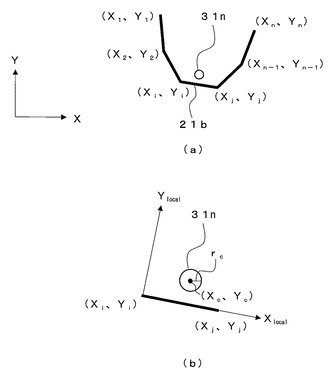
図16は、電線と治具との干渉に基づく外力計算を説明する図である。
図16(a)は、グローバル座標系(X、Y)における電線31nと治具21bとの位置関係を示している。図16(b)は、ローカル座標系(Xlocal、Ylocal)における電線31nと治具21bとの位置関係を示している。
【0082】
治具21bは、複数の区間に分割され、治具棒の集合として表現される。例えば、(xi、yi)から(xj、yj)までの区間の治具棒の区間セグメント長Lは、次式によって求まる。
【数10】
【0083】
また、治具と電線との反発方向(l、m)を次式によって定義する。
【数11】
【0084】
また、グローバル座標系(X、Y)におけるサブハーネスの半径をrc、中心座標を(xc、yc)とする。更に、治具棒の軸方向をXlocal、治具棒の軸方向と直交する方向をYlocalとするローカル座標系(Xlocal、Ylocal)を考える。式(11)より、サブハーネスのローカル座標位置(xl、yl)は次式によって定義される。
【数12】
【0085】
0≦xl≦Lの場合、このサブハーネスは、(xi、yi)から(xj、yj)までの区間の治具棒から受ける外力計算の対象となる。
更に、yl≧r+rcの場合は外力を0とし、yl<r+rcの場合は次式の通り外力を与えて粒子計算を行う。尚、ksは電線と治具の物性に応じた係数である。
【数13】
【0086】
以上の通り、制御部11は、電線のパッキング作業の模擬計算において、電線と治具との干渉に基づく外力を粒子計算に反映する。
また、制御部11は、同様の考え方によって、電線の布線作業の模擬計算において、電線と治具との干渉に基づく外力を粒子計算に反映する。
また、制御部11は、同様の考え方によって、電線の布線作業及びパッキング作業の両方の模擬計算において、電線同士の干渉に基づく外力を粒子計算に反映する。
【0087】
次に、図17〜図20を参照しながら、模擬結果の表示処理の詳細について説明する。
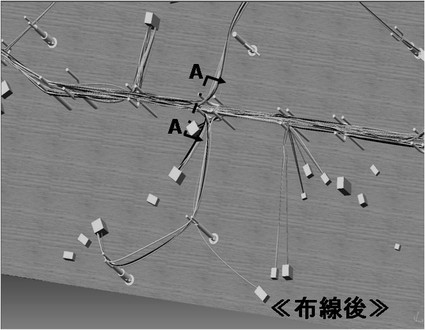
図17は、布線作業の模擬結果の一例を示す図である。尚、図17はカラー画像をグレースケール化したものであり、原図は電線が色分けされている。
【0088】
布線シミュレーション装置1の制御部11は、布線作業の模擬結果として、電線の曲線形態を1本ずつ3次元で表現したCG(Computer Graphics)画像を表示部16に表示する。本発明の実施の形態に係る布線シミュレーション装置1は、電線を1本ごとにリアルに表現することができる。また、布線シミュレーション装置1の制御部11は、電線ごとに線長を算出し、表示部16に表示することもできる。
【0089】
図17を見ると分かるように、例えば、全ての電線が治具間を結ぶ仮想的な直線上に布線されるのではなく、治具間を結ぶ仮想的な直線上から外れて大きく湾曲して布線される電線も存在することが表現されている。
【0090】
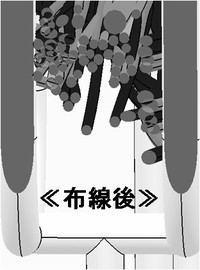
図18は、図17のA−A断面図である。図18を見ると分かるように、同じ治具を通過する場合でも、電線ごとに治具平面内を通過する位置が異なることが表現されている。また、電線の径もそれぞれ異なることが表現されている。このように、布線シミュレーション装置1では、実物において発生するレイアウトのばらつきを表現することができる。
【0091】
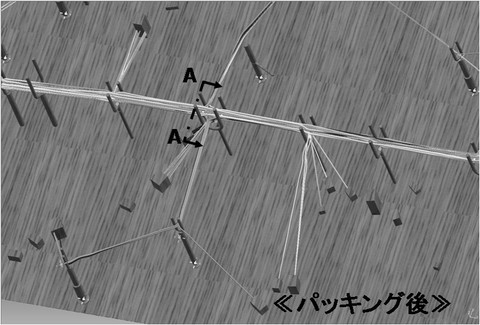
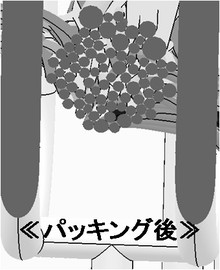
図19は、パッキング作業の模擬結果の一例を示す図である。図19はカラー画像をグレースケール化したものであり、原図はサブハーネスが色分けされている。
【0092】
布線シミュレーション装置1の制御部11は、パッキング作業の模擬結果として、パッキングした後のサブハーネスを3次元で表現したCG(Computer Graphics)画像を表示部16に表示する。本発明の実施の形態に係る布線シミュレーション装置1は、サブハーネスの製品形態をリアルに表現することができる。
【0093】
図13と図15を比較すると分かるように、電線を布線してパッキングする前の状態(布線状態)と、電線をパッキングしてサブハーネスとした状態(製品状態)との違いが表現されている。
【0094】
図20は、図19のA−A断面図である。図20を見ると分かるように、径や剛性の異なる電線を束ねることによってサブハーネスが構成されていることが表現されている。前述した通り、サブハーネスの断面形状はパッキング作業の模擬結果に基づいて算出されるので、正円に限らず、楕円形、多角形など様々な形状となることを表現することができる。
【0095】
サブハーネスごとに模擬する従来の技術では、サブハーネスの形状が製品寸法を満たすように模擬を行っていた為、寸法のばらつきを表現できていなかった。つまり、従来の技術のように、バンドル束でしか表現できない場合、車種ごとの仕様差の影響に関係無く、正しい寸法(正寸)によって表現するしかない為、製品公差を検証することができなかった。従って、実際に製造盤上で電線を1本ずつ布線してパッキングをしたときに、サブハーネスの形状が製品寸法の公差を満たさないという事態が生じていた。
一方、本発明の実施の形態では、電線1本ずつ布線してパッキング作業を模擬しているので、実際に発生する寸法のばらつきを表現できる。従って、製品寸法の公差を満たすまで設計を繰り返すことで、ワイヤーハーネスの品質を向上することができる。つまり、本発明の実施の形態では、電線単位によって表現している為、シミュレーションによって治具のアンマッチや位置補正を早い段階で検討し、製造時の手戻りをなくすことによって、品質を向上することができる。
【0096】
以上では、治具の配置情報、治具の形状情報、電線の物性情報、電線の経路情報を固定し、電線ごとのレイアウトと線長を出力する布線設計について説明した。しかしながら、本発明の実施の形態に係る布線シミュレーション装置1を用いた布線設計は、これに限定されるものではない。
【0097】
設計者は、例えば、電線にかかるエネルギーについて所定の許容範囲を入力し、入力された許容範囲内のエネルギーで全ての電線の線長の総和が最小となるように電線の布線作業を模擬するようにしても良い。これによって、製品として機能する範囲で、コストを抑えた布線設計を行うことができる。
【0098】
以上説明した通り、本発明の実施の形態における布線シミュレーション装置は、解析モデルにおいて、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求めるステップと、電線の形状関数に基づいて各電線の曲率を算出し、各電線の曲率が小さくなる方向に各電線が移動する力を作用させることによって各治具の治具平面内における各電線の配置位置を変更するステップと、を複数回繰返し実行する(収束計算する)ことによって電線の布線作業を模擬する。また、布線シミュレーション装置は、サブハーネスごとに、サブハーネスに含まれる電線群の重心に向けてパッキング力を作用させるとともに、各電線の曲率に応じて各電線が現在位置を保とうとする力を作用させることによって各治具の治具平面内における各電線の配置位置を変更するステップと、解析モデルにおいて、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求めるステップと、を複数回繰返し実行する(収束計算する)ことによって電線のパッキング作業を模擬する。
【0099】
エネルギー最小スプライン計算は、各治具平面における各電線の配置位置が決定されて、更に治具間の経路を算出するものである。従って、仮にエネルギー最小スプライン計算を1回だけ行い、電線の布線作業やパッキング作業を模擬すると、最初の各電線の配置位置が現実に即していない場合でも、そのまま治具間の経路が模擬されてしまう。一方、本発明の実施の形態では、曲率に応じて各電線の配置位置を変更し、エネルギー最小スプライン計算を行うという処理を複数回繰り返すことから、最初の各電線の配置位置が現実に即していない場合でも、各電線の配置位置は次第に現実に即した位置に移動し、電線の布線経路を精度良く模擬することができる。
【0100】
以上、添付図面を参照しながら、本発明に係る布線設計方法等の好適な実施形態について説明したが、本発明はかかる例に限定されない。当業者であれば、本願で開示した技術的思想の範疇内において、各種の変更例又は修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【符号の説明】
【0101】
1………布線シミュレーション装置
21………治具
23………治具平面
25………コネクタ
27………電線
31………配置点
33、35………ばね要素
41………製造盤
43………サブハーネス
45………電線群の重心
【技術分野】
【0001】
本発明は、ワイヤーハーネスの製造工程を模擬するための布線設計方法等に関する。特に、電線が1本ずつ布線され、パッキングされるまでの製造工程を模擬することができる布線設計方法等に関する。
【背景技術】
【0002】
ワイヤーハーネスは、車両等に搭載される電線をコンパクトに装着することを目的として、関連部品とともに束ねられるものである。ワイヤーハーネスは、比較的フレキシブルな性質を持つことから、製造盤(ASSY盤、治具盤とも言う。)と呼ばれる平面上で製造されている。このようにして製造されたワイヤーハーネスは、車両等に搭載されたときに予想以上の逃げや捻りが生じて、製品として機能しなくなってしまう場合がある。その為、ワイヤーハーネスの設計においては試作が必要不可欠であった。しかしながら、試作による方法だけでは時間とコストがかかる為、従来からワイヤーハーネスの解析、設計等を行うシミュレーション装置が提案されている。
【0003】
特許文献1では、ワイヤーハーネスの拘束点間の特定部位を移動させた場合において、解析対象のワイヤーハーネス全体の変形を有限要素法により解析して画面上で確認可能にする変形解析装置が開示されている。特許文献1の変形解析装置では、ワイヤーハーネスの物性データ、形状データ及び拘束条件を制約条件として、画面上で指示された特定部位及び移動位置の三次元座標値データに応答して、有限要素法により特定部位の移動に伴って初期状態の解析モデルが変形するのを解析して変形解析モデルを作成する。
【0004】
特許文献2では、ワイヤーハーネスへの負荷の少ない最適な結束の位置を自動的に設計可能とするハーネス設計装置が開示されている。特許文献2のハーネス設計装置は、ワイヤーハーネス上の結束の位置、あるいは、ワイヤーハーネス自身が満たすべき制約条件を取得する条件取得手段と、該条件取得手段で示された結束の位置の条件の下に結束の位置を可変し、ワイヤーハーネス全体の力学的エネルギーが最小になるような位置を結束の位置として取得する結束位置取得手段とを備える。これによって、ワイヤーハーネスへの負荷の少ない最適な結束の位置を得ることが出来る。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第4266783号公報
【特許文献2】特開2009−134369号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、ワイヤーハーネスの製造では、製造盤に埋設された複数の治具に電線を1本ずつ布線していく。より詳細には、複数の電線の組(ワイヤーハーネスの製品形態となる前であれば、「サブ単位」と言う。)を作り、その組み合わせを配置していく。そして、サブ単位を束ねてテープ等でパッキングしていく。従って、ワイヤーハーネスの製造工程を正確に模擬するためには、製造盤に布線される各電線の初期状態の形状から模擬する必要がある。
しかしながら、特許文献1が採用する有限要素法では、いくつかの問題がある。1つ目の問題は、正確な初期位置が定まってからでないと対応できないことである。また、2つ目の問題は、有限要素法の制限によって、電線が交差すると正確な解析が出来ない為、交差を外す必要があることである。また、3つ目の問題は、模擬結果を出力するまでにかなりの時間がかかることである。
【0007】
また、特許文献2を含めて、従来技術においては、複数本の電線が束ねられた束(ワイヤーハーネスの製品形態を意味する。以下では、ワイヤーハーネスの製品形態の一部を意味する用語として、「サブハーネス」を用いる。)を最小単位として各種の解析を行っている。従って、サブハーネスとして束ねられる前の状態、即ち電線を1本ずつ布線していく状態を模擬することができない。具体的には、サブハーネスとして束ねる電線の選択、サブハーネスとして電線を束ねていく順序などの影響を解析することができない。
また、従来技術においては、同一のサブハーネスに含まれる電線は、全て同一の線長、同一の剛性として表現されてしまうので、実物において発生する各電線の線長やレイアウトのばらつきを表現することができない。
また、サブハーネスを最小単位とした従来技術による解析では、サブハーネスの形状、位置などが製品寸法を満たすように模擬を行う為、分岐箇所などの寸法を現実に即して正確に表現することができず、製品寸法の公差を満たすかどうか検証することができない。
【0008】
以上の通り、従来技術では、電線が1本ずつ布線され、パッキングされるまでのワイヤーハーネスの製造工程を正確に模擬することができていない。
【0009】
本発明は、前述した問題点に鑑みてなされたもので、その目的とすることは、ワイヤーハーネスの製造工程を正確に模擬することができる布線設計方法等を提供することである。
【課題を解決するための手段】
【0010】
前述した目的を達成するために第1の発明は、ワイヤーハーネスの布線設計を行う布線設計方法であって、製造盤に埋設される治具の形状情報、治具の配置情報、ワイヤーハーネスを構成する電線の物性情報、電線の経路情報を取得し、取得された情報を制約条件とする解析モデルにおいて、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求める第1ステップと、前記電線の形状関数に基づいて各電線の曲率を算出し、各電線の曲率が小さくなる方向に各電線が移動する力を作用させることによって各治具の治具平面内における各電線の配置位置を変更する第2ステップと、を複数回繰返し実行することによって電線の布線作業を模擬し、前記電線の布線作業の模擬結果を出力する布線設計方法である。
【0011】
治具の形状情報とは、電線を支持する平面(=治具平面)の形状等である。例えば、治具が製造盤に埋設される支持柱と、支持柱の上端に配置されるU型の支持部とによって構成される場合、治具平面はU型の支持部の内側の領域となる。
治具の配置情報とは、治具の配置位置、治具平面の法線方向等である。
電線の物性情報とは、電線の径、剛性値、線長等である。
電線の経路情報とは、電線に接続されるコネクタやクリップ等の位置(固定位置)、電線が通過すべき治具の順序等である。また、電線の経路情報は、サブハーネスとして束ねる電線のグループ、サブハーネスとして束ねていく順序等も含むものとする。
【0012】
第1の発明によって、電線を1本ずつ布線していく状態を模擬し、ワイヤーハーネスの製造工程を正確に模擬することができる。
また、第1の発明では、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求めるので、製造現場での利用に耐えられる程度の処理速度で電線の布線作業を正確に模擬することができる。すなわち、各治具の治具平面は2次元空間であるため、最適化問題の算出時間を短縮することができる。更に、各治具の治具平面でエネルギーを考慮した結果が治具間にも反映されるため、電線の経路全体でエネルギーを考慮した形状を算出することができる。
また、第1の発明では、第1ステップと第2ステップとを複数回繰返し実行するので、各電線の配置位置を現実に即して精度良く決定することができる。
【0013】
第1の発明は、更に、前記電線の布線作業の模擬結果を初期状態として取得し、同一のパッキング対象となる複数の電線の集合であるサブハーネスの情報を取得し、前記サブハーネスごとに、前記サブハーネスに含まれる電線群の重心に向けてパッキング力を作用させるとともに、各電線の曲率に応じて各電線が現在位置を保とうとする力を作用させることによって各治具の治具平面内における各電線の配置位置を変更する第3ステップと、前記解析モデルにおいて、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求める第4ステップと、を複数回繰返し実行することによって電線のパッキング作業を模擬し、前記電線のパッキング作業の模擬結果を出力することが望ましい。
これによって、電線1本ずつ布線してパッキング作業を模擬することができ、現実のパッキング作業において発生する寸法のばらつきを表現できる。
また、第3ステップと第4ステップとを複数回繰返し実行するので、電線の布線作業の模擬結果の精度を維持して、電線のパッキング作業を模擬することができる。
【0014】
第1の発明における前記第2ステップ及び前記第3ステップでは、配置位置の決定対象の電線が、周辺の電線又は治具と干渉する場合には、更に、配置位置の決定対象の電線に対して、前記周辺の電線又は治具から受ける力を作用させることが望ましい。
これによって、周辺の電線又は治具の影響を考慮して、電線の布線作業やパッキング作業を模擬することができる。
【0015】
また、前記解析モデルは、各電線の対向する治具間がばね要素によって連結され、かつ電線同士が治具平面内でばね要素によって連結されるようにモデル化されていることが望ましい。
各電線の治具間がばね要素によって連結され、かつ電線同士が治具平面内でばね要素によって連結される解析モデルとすることで、モデルを簡略化しながら現実に即した結果が得られる。
【0016】
また、前記電線ごとに加わるエネルギーは、曲げエネルギー、張力エネルギー、重力エネルギーの和であることが望ましい。
これによって、電線を布線したときに負荷の少ない経路を正確に模擬することができる。
【0017】
第2の発明は、ワイヤーハーネスの布線設計を行うための布線設計装置であって、製造盤に埋設される治具の形状情報、治具の配置情報、ワイヤーハーネスを構成する電線の物性情報、電線の経路情報を取得する取得手段と、前記取得手段によって取得された情報を制約条件とする解析モデルにおいて、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求める第1ステップと、前記電線の形状関数に基づいて各電線の曲率を算出し、各電線の曲率が小さくなる方向に各電線が移動するように各治具の治具平面内における各電線の配置位置を変更する第2ステップと、を複数回繰返し実行することによって電線の布線作業を模擬する模擬手段と、前記模擬手段によって模擬される前記電線の布線作業の模擬結果を出力する出力手段と、を具備する布線シミュレーション装置である。
第2の発明によって、電線を1本ずつ布線していく状態を模擬し、ワイヤーハーネスの製造工程を正確に模擬することができる。
【0018】
第3の発明は、コンピュータを第2の発明の布線シミュレーション装置として機能させるためのプログラムである。
第3の発明のプログラムをコンピュータにインストールすることで、第2の発明の布線シミュレーション装置を得ることができ、電線を1本ずつ布線していく状態を模擬し、ワイヤーハーネスの製造工程を正確に模擬することができる。
【発明の効果】
【0019】
本発明により、ワイヤーハーネスの製造工程を正確に模擬することができる布線設計方法等を提供することができる。
【図面の簡単な説明】
【0020】
【図1】布線シミュレーション装置1のハードウエア構成図
【図2】布線設計処理の概要を示す図
【図3】治具の形状情報を説明する図
【図4】治具の配置情報を説明する図
【図5】電線の物性情報、経路情報を説明する図
【図6】電線の布線作業を模擬する処理の流れを示すフローチャート
【図7】エネルギー最小スプライン計算の処理の流れを示すフローチャート
【図8】電線の治具間の取扱いについて説明する図
【図9】治具平面内における電線同士の取扱いについて説明する図
【図10】電線の位置座標を説明する図
【図11】電線の自重を定義するための座標系を説明する図
【図12】曲率に基づく電線の配置位置の変更を説明する図
【図13】電線の布線作業の模擬結果を説明する図
【図14】電線のパッキング作業を模擬する処理の流れを示すフローチャート
【図15】電線のパッキング作業の模擬結果を説明する図
【図16】電線と治具との干渉に基づく外力計算を説明する図
【図17】布線作業の模擬結果の一例を示す図
【図18】図17のA−A断面図
【図19】パッキング作業の模擬結果の一例を示す図
【図20】図19のA−A断面図
【発明を実施するための形態】
【0021】
以下図面に基づいて、本発明の実施形態を詳細に説明する。
図1は、布線シミュレーション装置1のハードウエア構成図である。尚、図1のハードウエア構成は一例であり、用途、目的に応じて様々な構成を採ることが可能である。
【0022】
布線シミュレーション装置1は、制御部11、記憶部12、メディア入出力部13、通信制御部14、入力部15、表示部16、周辺機器I/F部17等が、バス18を介して接続される。
【0023】
制御部11は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等で構成される。
【0024】
CPUは、記憶部12、ROM、記録媒体等に格納されるプログラムをRAM上のワークメモリ領域に呼び出して実行し、バス18を介して接続された各装置を駆動制御し、布線シミュレーション装置1が行う後述する処理を実現する。
ROMは、不揮発性メモリであり、コンピュータのブートプログラムやBIOS等のプログラム、データ等を恒久的に保持している。
RAMは、揮発性メモリであり、記憶部12、ROM、記録媒体等からロードしたプログラム、データ等を一時的に保持するとともに、制御部11が各種処理を行う為に使用するワークエリアを備える。
【0025】
記憶部12は、HDD(ハードディスクドライブ)であり、制御部11が実行するプログラム、プログラム実行に必要なデータ、OS(オペレーティングシステム)等が格納される。プログラムに関しては、OS(オペレーティングシステム)に相当する制御プログラムや、後述する処理をコンピュータに実行させるためのアプリケーションプログラムが格納されている。
これらの各プログラムコードは、制御部11により必要に応じて読み出されてRAMに移され、CPUに読み出されて各種の手段として実行される。
【0026】
メディア入出力部13(ドライブ装置)は、データの入出力を行い、例えば、CDドライブ(−ROM、−R、−RW等)、DVDドライブ(−ROM、−R、−RW等)等のメディア入出力装置を有する。
通信制御部14は、通信制御装置、通信ポート等を有し、コンピュータとネットワーク間の通信を媒介する通信インタフェースであり、ネットワークを介して、他のコンピュータ間との通信制御を行う。ネットワークは、有線、無線を問わない。
【0027】
入力部15は、データの入力を行い、例えば、キーボード、マウス等のポインティングデバイス、テンキー等の入力装置を有する。
入力部15を介して、コンピュータに対して、操作指示、動作指示、データ入力等を行うことができる。
表示部16は、CRTモニタ、液晶パネル等のディスプレイ装置、ディスプレイ装置と連携してコンピュータのビデオ機能を実現するための論理回路等(ビデオアダプタ等)を有する。
【0028】
周辺機器I/F(インタフェース)部17は、コンピュータに周辺機器を接続させるためのポートであり、周辺機器I/F部17を介してコンピュータは周辺機器とのデータの送受信を行う。周辺機器I/F部17は、USBやIEEE1394やRS−232C等で構成されており、通常複数の周辺機器I/Fを有する。周辺機器との接続形態は有線、無線を問わない。
バス18は、各装置間の制御信号、データ信号等の授受を媒介する経路である。
【0029】
図2は、布線設計処理の概要を示す図である。本実施の形態に係る布線設計処理では、例えば、自動車メーカ等の顧客が作成した初期設計情報(CAD情報)に基づいて、最適な布線設計を行う。
【0030】
布線シミュレーション装置1の制御部11は、初期設計情報を取得する(ステップ101)。初期設計情報は、治具の形状情報、治具の配置情報、電線の物性情報、電線の経路情報等である。制御部11は、入力手段(メディア入出力部13、通信制御部14、入力部15、周辺機器I/F部16等)を介して入力される初期設計情報を取得しても良いし、記憶部12に記憶されている初期設計情報を取得しても良い。初期設計情報の詳細については後述する。
【0031】
次に、布線シミュレーション装置1の制御部11は、取得された初期設計情報を制約条件とする解析モデルを用いて、電線の布線作業を模擬する(ステップ102)。制御部11は、所定の処理を複数回実行する収束計算を行うことによって、電線の布線作業を模擬する。電線の布線作業を模擬する処理の詳細については後述する。
【0032】
次に、布線シミュレーション装置1の制御部11は、ステップ102における模擬結果に基づいて、電線のパッキング作業を模擬する(ステップ103)。制御部11は、所定の処理を複数回実行する収束計算を行うことによって、電線のパッキング作業を模擬する。電線のパッキング作業を模擬する処理の詳細については後述する。
【0033】
次に、布線シミュレーション装置1の制御部11は、ステップ102、103における模擬結果を表示部16等に出力する(ステップ104)。模擬結果の表示処理の詳細については後述する。
【0034】
設計者は、模擬結果を確認し、布線設計を終了するかどうか判断する(ステップ105)。布線設計を続行する場合、設計者は、初期設計情報を適宜変更し、布線シミュレーション装置1に対して、初期設計情報を入力する。布線シミュレーション装置1の制御部11は、ステップ102からステップ104を繰り返す。
【0035】
次に、図3から図5を参照し、初期設計情報について説明する。
治具の形状情報とは、電線を支持する平面(=治具平面)の形状等である。例えば、治具が製造盤に埋設される支持柱と、支持柱の上端に配置されるU型の支持部とによって構成される場合、治具平面はU型の支持部の内側の領域となる。
【0036】
図3は、治具の形状情報を説明する図である。図3は、製造盤の水平方向から見た図である。図3では、治具21を太線によって示し、治具平面23を斜線によって示している。実際の製造盤では、電線が治具平面23を通過する場合、電線は治具21に支持される。一方、電線が治具平面23を通過しない場合、電線は治具21に支持されない。すなわち、治具平面23は電線が治具21に支持される状態を維持して自由に動ける範囲を示している。このことを模擬するために、本解析モデルでは、治具平面23を制約条件として扱う。
【0037】
治具の配置情報とは、治具の配置位置、治具平面の法線方向等である。治具の配置位置は、製造盤に配置する治具の間隔に基づいて算出するようにしても良い。この場合には、初期設計情報として、製造盤に配置する治具の間隔を入力すれば良い。
【0038】
図4は、治具の配置情報を説明する図である。図4は、製造盤の垂直方向から見た図である。図4では、一例として、治具21a〜21e、コネクタ25a〜25cを示している。
【0039】
治具の点線部分は、治具平面の上端となる辺を示している。コネクタの矢印は、電線が接続されたときの伸長方向を示している。
実際の製造盤では、治具平面の法線方向は様々である。また、コネクタに対して電線が接続可能な位置が限定される。このことを模擬する為に、本解析モデルでは、治具平面の法線方向、コネクタに対して電線が接続可能な位置を制約条件として扱う。
【0040】
電線の物性情報とは、電線の径、剛性値等である。
電線の経路情報とは、電線に接続されるコネクタやクリップ等の位置(固定位置)、電線が通過すべき治具の順序、電線を布線していく順序、サブハーネスとして束ねる電線のグループ等である。
【0041】
図5は、電線の物性情報、経路情報を説明する図である。図5は、図4に示す治具の配置に対して電線の経路を示したものである。図5では、一例として、電線27a、27bを示している。電線27bの径は、電線27aの径よりも大きい。
【0042】
電線の経路情報は、リスト形式となっている。図5に示す例では、電線27aの経路情報は(コネクタ25a、治具21a、治具21b、治具21c、コネクタ25b)、電線27bの経路情報は(コネクタ25a、治具21a、治具21b、治具21d、治具21e、コネクタ25c)である。
また、電線の経路情報は、電線27aと電線27bのどちらを先に布線するか、電線27aと電線27bは同じサブハーネスとして束ねるかなどの情報も有する。
実際の製造盤では、電線ごとに通過する治具23が異なる。また、電線を布線していく順序によって最終的な製品形態が変わる。また、電線の径、剛性なども電線ごとに異なる。このことを模擬する為に、本解析モデルでは、電線ごとに物性情報、経路情報を与える。
【0043】
次に、図6〜図13を参照しながら、電線の布線作業を模擬する処理について説明する。
図6は、電線の布線作業を模擬する処理の流れを示すフローチャートである。
図6に示すように、布線シミュレーション装置1の制御部11は、エネルギー最小スプライン計算によって全ての電線の仮布線を行う(ステップ201)。
【0044】
図7は、エネルギー最小スプライン計算の処理の流れを示すフローチャートである。図7では、電線の変数をLとし、電線の布線順序を示す添え字をiとして説明する。
布線シミュレーション装置1の制御部11は、添え字iに1を代入し(ステップ301)、電線L(i)が通過する各治具平面内の配置点を決定する(ステップ302)。配置点の決定は、後述するエネルギー最小原理スプライン手法に基づく。
【0045】
次に、布線シミュレーション装置1の制御部11は、ステップ302において決定した各治具平面内の配置点を通る曲線を補間し、電線L(i)の経路を決定する(ステップ303)。経路の決定は、後述するエネルギー最小原理スプライン手法に基づく。
【0046】
次に、布線シミュレーション装置1の制御部11は、添え字iにi+1を代入し(ステップ304)、全ての電線の経路を決定済であるかどうか確認する(ステップ305)。
全ての電線の経路を決定していない場合(ステップ305のNo)、布線シミュレーション装置1の制御部11は、ステップ302から繰り返す。
全ての電線の経路を決定済の場合(ステップ305のYes)、布線シミュレーション装置1の制御部11は、処理を終了する。
【0047】
このように、布線シミュレーション装置1の制御部11は、後述するエネルギー原理スプラインに基づいて、電線の経路を1本ずつ決定し、電線の布線作業を模擬する。
【0048】
図8から図11を参照しながら、エネルギー最小原理スプライン手法について説明する。エネルギー最小原理スプライン手法とは、スプライン関数を拡張し、エネルギー最小原理を適用するものである。
【0049】
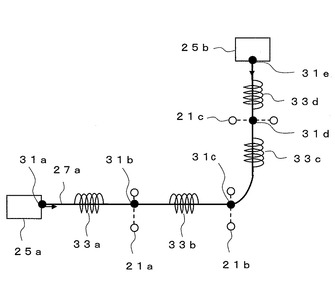
図8は、電線の治具間の取扱いについて説明する図である。図8では、一例として、コネクタ25a〜25b、治具21a〜21c、電線の配置点31a〜31e、ばね要素33a〜33dを示している。配置点31a、31eは、コネクタ25a、25bと電線の接続点である為、固定である。配置点31b、31c、31dは、治具21a、21b、21cの治具平面内で自由に移動できる。前述のステップ302では、電線ごとに、移動可能な配置点の位置を決定する。ここで、配置点の位置は、治具平面上の2次元座標として表現される。
【0050】
全ての対向する治具間は、有限要素法で一般に用いられるばね要素で連結されているものとする。例えば、配置点31aと配置点31bは、ばね要素33aで連結されている。ばね要素33a〜33dは、電線が変位したときの復元力をモデル化する為のものである。治具間をばね要素として計算に組み込むことで、モデルを簡略化しながら現実に即した結果が得られる。例えば、ある治具において電線に力が加えられた場合、他の治具の配置点も連動して変更されることを模擬することができる。
【0051】
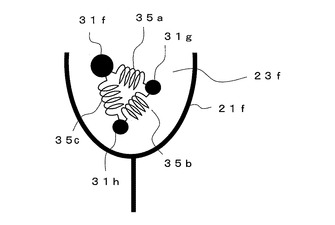
図9は、治具平面内における電線同士の取扱いについて説明する図である。図9では、一例として、治具21f、治具平面23f、配置点31f〜35h、ばね要素35a〜35cを示している。
【0052】
前述のステップ302において、2本目以降の電線を布線するときには、治具平面内に既に他の電線の配置点が存在する場合がある。このような場合を考慮し、治具平面内における電線同士は、有限要素法で一般に用いられるばね要素で連結されているものとする。例えば、配置点31fと配置点31gは、ばね要素35aで連結されている。ばね要素35a〜35cは、治具平面内における電線同士の接触力をモデル化する為のものである。治具平面内において電線同士が重なり合って配置された場合には、重なり合った面積に応じた接触力を双方の電線に作用させて配置位置を補正する。電線同士の接触力をばね要素として計算に組み込むことで、モデルを簡略化しながら現実に即した結果が得られる。例えば、2本目以降の電線を布線するときに、既に配置された電線の領域と重ならないように配置できる。
また、配置点は、電線の径を直径とする円で表現される。これによって、電線ごとに径が異なることを考慮できるので、現実に即した結果が得られる。
【0053】
以下では、エネルギー最小原理スプライン手法の定式化について説明する。
エネルギー最小原理スプライン手法では、電線にかかる力として、例えば剪断力、張力、重力を考える。そして、これらの3つの力によるエネルギーを最小とする電線の配置点の位置を算出する。また、算出された配置点の位置を通るように曲線を補間し、電線の経路を算出する。
【0054】
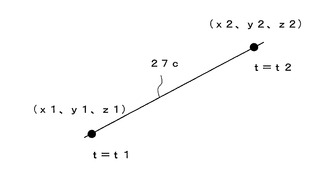
図10は、電線の位置座標を説明する図である。
エネルギー最小原理スプライン手法では、電線上の位置座標(3次元座標)を(x(t)、y(t)、z(t))で表す。
図10に示す例では、電線27cのt=t1での位置座標が(x(t1)、y(t1)、z(t1))=(x1、y1、z1)、電線27cのt=t2での位置座標が(x(t2)、y(t2)、z(t2))=(x2、y2、z2)となっている。
【0055】
電線の曲げ剛性をEI、曲げ歪をεb、剪断力によるエネルギー(曲げエネルギー)をE1とする。曲げ剛性EIは、電線ごとに与えることができる。
曲げ歪εbは次式で定義される。
【数1】
曲げエネルギーE1は次式で定義される。
【数2】
【0056】
電線の張力をT、伸び歪(グリーンの歪)をεe、張力Tが関係するエネルギー(張力エネルギー)をE2とする。張力Tは、電線ごとに与えることができる。
伸び歪εeは次式で定義される。
【数3】
張力エネルギーE2は次式で定義される。
【数4】
【0057】
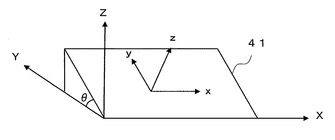
図11は、電線の自重を定義するための座標系を説明する図である。図11では、一例として、製造盤41が示されている。製造盤41は、座標X−Y−Z系に対して角度θだけ傾斜しているものとする。
座標X−Y−Z系における電線の自重をw、座標x−y−z系におけるy方向の自重をwy、座標x−y−z系におけるz方向の自重をwz、自重に関係するエネルギー(自重エネルギー)をE3とする。自重wは、電線ごとに与えることができる。
座標x−y−z系におけるy方向の自重wyは次式で定義される。
【数5】
座標x−y−z系におけるz方向の自重wzは次式で定義される。
【数6】
自重エネルギーE3は次式で定義される。
【数7】
【0058】
以上から、E1、E2、E3が定義され、全エネルギーの凡関数E(t、x(t)、y(t)、z(t))=E1+E2+E3が定義される。
電線の形状関数c(t)=(x(t)、y(t)、z(t))は、エネルギー最小となるオイラー・ラグランジェ方程式で表すことができる。そこで、あるcの成分を改めてcと記述すると、支配方程式は定数係数の4階微分方程式である次式で定義される。
【数8】
但し、σ12=T/EI、σ2=w/EI、w=wyまたはwzである。
式(8)の支配方程式の解は、次式を満たす解である。
【数9】
但し、a、bは定数である。
【0059】
ここで、形状関数c(t)は、スプラインの条件を仮定し、区間(治具間)ごとに定義される区間関数Ci(t)(i=1、2、・・・)で表す。スプラインの条件とは、治具平面上の点における区間関数同士の接続が滑らかであることである。すなわち各区間関数はC2級の関数であって、隣り合う区間関数の2回微分が等しいことである。
式(9)の定数a、bは、スプラインの条件から区間(治具間)ごとに決定することができる。また、未定係数法によって式(9)の非斉次方程式の特解を求めることで、式(9)の非斉次方程式の一般解が求まる。すなわち、電線の形状関数c(t)の一般解が導出される。そして、c´(t)に基づいてエネルギーが最小となる形状関数c(t)が決定される。
【0060】
以上の通り、式(9)の解として導出される電線の形状関数c(t)は、治具間ごとに定義される接続が滑らかな区間関数で表され、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通る。このように電線の形状関数c(t)を区間関数で表現して治具ごとに形状を決定できるのは、図8を参照して説明したように治具間をばね要素として計算に組み込んでいるので、ある治具の最適化結果が隣接する治具に伝播する為である。
【0061】
実際の製品の治具の形成面は3次元形状であるが、本発明の実施の形態では、計算を効率的に行う為に、各治具平面が2次元の平面空間上に構成されていると仮定する。そして、各治具平面(2次元のローカル座標系、図3の治具平面23を参照)において解(配置位置)を算出した後、算出した解を製造盤(3次元のグローバル座標系、図11の製造盤41を参照)の座標点に変換し、製造盤における解(電線の形状)を算出する。これによって、直接3次元空間において解(電線の形状)を算出するよりも最適化問題の算出時間を短縮することができる。更に、治具平面内における電線の配置挙動を解析することも可能となる。
尚、前述の説明では、電線にかかる力として、剪断力、張力、重力の3つを考慮したが、いずれか1つまたは2つとしても良い。
【0062】
図6の説明に戻る。
次に、制御部11は、各治具平面における各電線の曲率を算出し、曲率に基づく粒子計算を行い、各電線の曲率が小さくなる方向に各電線が移動する力を作用させることによって各電線の配置位置を変更する(ステップ202)。より詳細には、制御部11は、ステップ201における仮布線によって求められる電線の形状関数に基づいて各電線の曲率を算出する。次に、制御部11は、各電線を分子動力学法における粒子と見立てて、粒子の運動を模擬する粒子計算を実行する。粒子計算では、各電線の曲率に応じた粒子の加速度を定義し、粒子間の衝突(電線間の干渉に相当する。)や粒子と境界物との衝突(電線と治具との干渉に相当する。)を考慮して、粒子の運動(電線の配置位置の最適化プロセスに相当する。)が模擬される。1回の繰返し計算ごとの粒子の運動時間(電線の移動量)については、粒子同士の衝突(電線同士の干渉)が検知できる程度とする。例えば、制御部11は、1回の繰返し計算ごとに、各電線の曲率が小さくなる方向に、電線の最小径の半分ずつ移動させると、互いに正反対の方向に移動する最小径の電線同士であっても、干渉を確実に検知することができる。
【0063】
ここで、図12を参照しながら、曲率に基づいて各電線の配置位置を変更することの技術的意義について説明する。
図12は、曲率に基づく電線の配置位置の変更を説明する図である。図12における電線27aは、ステップ201における仮布線によって求められる電線の形状関数に基づいて布線されている。
ステップ201では、制御部11は、初期設計情報(電線を布線していく順序など)に応じて、各電線の配置位置を仮決めして、エネルギー最小スプライン計算を行うので、電線は治具平面内に静的に配置される。しかしながら、静的に電線が配置されると、曲率が比較的大きい経路の電線は、先に配置されている他の電線群に邪魔されて、ゆとりがある位置(電線がピン張りとならない位置)に配置することができない場合がある。そこで、全ての電線をゆとりがある位置に配置する為に、ステップ202において、制御部11は、曲率に基づく粒子計算を行い、各電線の曲率が小さくなる方向に各電線が移動する力を作用させることによって各電線の配置位置を変更する。
図12における電線27bは、ステップ202の処理によって、矢印37の方向(曲率が小さくなる方向)に配置位置が変更されている。
【0064】
図6の説明に戻る。
次に、制御部11は、ステップS202によって変更された各電線の配置位置に基づくエネルギー最小スプライン計算によって全ての電線の再布線を行う(ステップ203)。エネルギー最小スプライン計算の詳細は、前述した通りであり、制御部11は、各電線にかかる力として、剪断力、張力、重力なども計算する。
【0065】
次に、制御部11は、収束計算の終了条件を満たすか否か確認する(ステップ204)。
終了条件を満たさない場合(ステップ204のNo)、制御部11は、ステップ202から処理を繰り返す。
終了条件を満たす場合(ステップ204のYes)、制御部11は、処理を終了する。
【0066】
収束計算の終了条件について説明する。収束計算の終了条件としては、例えば、以下の例が考えられる。
(1)繰返し計算の回数が、予め定められた回数に達したか。
(2)全ての電線の曲率の変化量(又は大きさ)が、予め定められた閾値よりも小さくなったか。
(3)全ての電線の張力の変化量(又は大きさ)が、予め定められた閾値よりも小さくなったか。
(4)全ての電線の剪断力の変化量(又は大きさ)が、予め定められた閾値よりも小さくなったか。
【0067】
前述の(2)〜(4)は、ステップ202及び203の処理を複数回繰り返すことによって、各電線の曲率、張力、剪断力が次第に小さくなり、一定の値に収束していくことを仮定している。収束計算の終了条件については、計算時間と精度とのトレードオフによって適宜決定される。
【0068】
図13は、電線の布線作業の模擬結果を説明する図である。図13に示す例では、配置点31i〜31lに対応する電線の曲率は小さく、配置点31mに対応する電線の曲率は大きいものとする。また、配置点31mに対応する電線の曲率が小さくなる方向は、紙面右から紙面左の方向とする。この場合、紙面左側にコネクタ25が存在することになる(不図示)。
図13(a)は、ステップ201による仮布線の状態を示している。また、図13(b)は、ステップ203による再布線がなされ、終了条件を満たした状態を示している。
制御部11が、図6に示すフローチャートに従って収束計算を行うことによって、配置点31mは、次第に紙面右から紙面左の方向に移動していき、図13(a)の状態から図13(b)の状態に変化する。
【0069】
このように、曲率に応じて電線の配置位置を変更することによって、図13に示すように、実際の布線作業において発生する電線の沈み込みを精度良く模擬することができる。ここで、電線の沈み込みとは、曲線的に布線される電線が、先行して直線的に布線されている複数の電線の間に沈み込んでいくことを意味する。
【0070】
次に、図14、図15を参照しながら、電線のパッキング作業を模擬する処理について説明する。
図14は、電線のパッキング作業を模擬する処理の流れを示すフローチャートである。図14では、サブハーネスの変数をSとし、サブハーネスを識別する添え字をjとする。尚、一つの治具平面に対して複数のサブハーネスが存在する場合もある。
【0071】
布線シミュレーション装置1の制御部11は、添え字jに1を代入し(ステップ401)、サブハーネスS(j)について、パッキング力と、曲率に応じた保持力に基づく粒子計算を行い、各電線の配置位置を変更する(ステップ402)。より詳細には、制御部11は、電線の布線作業の模擬結果を初期状態として各電線の曲率を算出する。次に、制御部11は、各電線を分子動力学法における粒子と見立てて、粒子の運動を模擬する粒子計算を実行する。
【0072】
電線の布線作業の模擬計算では、前述したように、制御部11は、各電線の曲率が小さくなる方向に各電線が移動する力(以下、「吸着力」という。)を作用させる。一方、電線のパッキング作業の模擬計算では、制御部11は、サブハーネスに含まれる電線群の重心に向けてパッキング力を作用させるとともに、各電線の曲率に応じて各電線が現在位置を保とうとする力(以下、「保持力」という。)を作用させる。パッキング力は、人間の平均的な力や外装部材などを考慮して設定されるものである。外装部材としては、例えば、チューブ、シート、テープ等がある。
【0073】
次に、制御部11は、ステップS402によって変更された各電線の配置位置に基づくエネルギー最小スプライン計算によって全ての電線の再布線を行う(ステップ403)。エネルギー最小スプライン計算の詳細は、前述した通りであり、制御部11は、各電線にかかる力として、剪断力、張力、重力なども計算する。
【0074】
次に、制御部11は、収束計算の終了条件を満たすか否か確認する(ステップ404)。収束計算の終了条件については、電線の布線作業の模擬計算の説明と同様である。
終了条件を満たさない場合(ステップ404のNo)、制御部11は、ステップ402から処理を繰り返す。
終了条件を満たす場合(ステップ404のYes)、制御部11は、ステップ405に進む。
【0075】
次に、制御部11は、添え字jにj+1を代入し(ステップ405)、全てのサブハーネスに対して模擬済であるかどうか確認する(ステップ406)。
全てのサブハーネスに対して模擬していない場合(ステップ406のNo)、制御部11は、ステップ402から繰り返す。
全てのサブハーネスに対して模擬済の場合(ステップ406のYes)、制御部11は、処理を終了する。
【0076】
図15は、電線のパッキング作業の模擬結果を説明する図である。図15に示す例では、配置点31oに対応する電線の保持力は大きく、それ以外の電線の保持力は小さいものとする。
【0077】
図15では、例として、4本の電線を束ねるサブハーネス43a、3本の電線を束ねるサブハーネス43bを示している。また、45a、45bは、それぞれサブハーネス43a、43bに含まれる電線群の重心を示している。
制御部11は、同一のパッキング対象となる複数の電線群の重心を算出する。複数の電線群の重心は、電線の曲率によって重み付けして算出される。これによって、保持力が収束計算に反映される。そして、制御部11は、サブハーネスごとに、収束計算を行う。
【0078】
図15(a)は、電線の布線作業の模擬計算が終了した状態を示している。また、図15(b)は、ステップ403による再布線がなされ、終了条件を満たした状態を示している。
制御部11が、図14に示すフローチャートに従って収束計算を行うことによって、配置点31oがほとんど移動せず、それ以外の電線の配置点がパッキング力に応じて移動していき、図15(a)の状態から図15(b)の状態に変化する。
【0079】
図15(b)に示すように、電線のパッキング作業を模擬した後の状態では、サブハーネスの断面形状は円形に限らず、パッキング対象の電線が布線された位置、電線の剛性などに応じて、楕円形、多角形など様々な形状となる。従って、現実に即した模擬結果を得ることができる。
また、図15(b)に示すように、保持力が大きい電線の配置位置は、電線の布線作業の模擬計算からほとんど変更されないので、電線の布線作業の模擬結果の精度を維持することができる。
【0080】
次に、図16を参照しながら、電線同士の干渉や電線と治具との干渉について詳細に説明する。
前述した通り、布線シミュレーション装置1の制御部11は、収束計算を行うことによって電線の布線作業及び電線のパッキング作業を模擬する。これらの収束計算の中で各電線の配置位置を変更する際、制御部11は、電線同士の干渉や電線と治具との干渉についても考慮する必要がある。そこで、電線の布線作業及びパッキング作業の両方の模擬計算において、制御部11は、配置位置の決定対象の電線が、周辺の電線又は治具と干渉する場合には、更に、配置位置の決定対象の電線に対して、周辺の電線又は治具から受ける力(外力)を作用させる。
以下では、1例として、電線のパッキング作業の模擬計算における電線と治具との干渉に基づく外力計算について説明する。
【0081】
図16は、電線と治具との干渉に基づく外力計算を説明する図である。
図16(a)は、グローバル座標系(X、Y)における電線31nと治具21bとの位置関係を示している。図16(b)は、ローカル座標系(Xlocal、Ylocal)における電線31nと治具21bとの位置関係を示している。
【0082】
治具21bは、複数の区間に分割され、治具棒の集合として表現される。例えば、(xi、yi)から(xj、yj)までの区間の治具棒の区間セグメント長Lは、次式によって求まる。
【数10】
【0083】
また、治具と電線との反発方向(l、m)を次式によって定義する。
【数11】
【0084】
また、グローバル座標系(X、Y)におけるサブハーネスの半径をrc、中心座標を(xc、yc)とする。更に、治具棒の軸方向をXlocal、治具棒の軸方向と直交する方向をYlocalとするローカル座標系(Xlocal、Ylocal)を考える。式(11)より、サブハーネスのローカル座標位置(xl、yl)は次式によって定義される。
【数12】
【0085】
0≦xl≦Lの場合、このサブハーネスは、(xi、yi)から(xj、yj)までの区間の治具棒から受ける外力計算の対象となる。
更に、yl≧r+rcの場合は外力を0とし、yl<r+rcの場合は次式の通り外力を与えて粒子計算を行う。尚、ksは電線と治具の物性に応じた係数である。
【数13】
【0086】
以上の通り、制御部11は、電線のパッキング作業の模擬計算において、電線と治具との干渉に基づく外力を粒子計算に反映する。
また、制御部11は、同様の考え方によって、電線の布線作業の模擬計算において、電線と治具との干渉に基づく外力を粒子計算に反映する。
また、制御部11は、同様の考え方によって、電線の布線作業及びパッキング作業の両方の模擬計算において、電線同士の干渉に基づく外力を粒子計算に反映する。
【0087】
次に、図17〜図20を参照しながら、模擬結果の表示処理の詳細について説明する。
図17は、布線作業の模擬結果の一例を示す図である。尚、図17はカラー画像をグレースケール化したものであり、原図は電線が色分けされている。
【0088】
布線シミュレーション装置1の制御部11は、布線作業の模擬結果として、電線の曲線形態を1本ずつ3次元で表現したCG(Computer Graphics)画像を表示部16に表示する。本発明の実施の形態に係る布線シミュレーション装置1は、電線を1本ごとにリアルに表現することができる。また、布線シミュレーション装置1の制御部11は、電線ごとに線長を算出し、表示部16に表示することもできる。
【0089】
図17を見ると分かるように、例えば、全ての電線が治具間を結ぶ仮想的な直線上に布線されるのではなく、治具間を結ぶ仮想的な直線上から外れて大きく湾曲して布線される電線も存在することが表現されている。
【0090】
図18は、図17のA−A断面図である。図18を見ると分かるように、同じ治具を通過する場合でも、電線ごとに治具平面内を通過する位置が異なることが表現されている。また、電線の径もそれぞれ異なることが表現されている。このように、布線シミュレーション装置1では、実物において発生するレイアウトのばらつきを表現することができる。
【0091】
図19は、パッキング作業の模擬結果の一例を示す図である。図19はカラー画像をグレースケール化したものであり、原図はサブハーネスが色分けされている。
【0092】
布線シミュレーション装置1の制御部11は、パッキング作業の模擬結果として、パッキングした後のサブハーネスを3次元で表現したCG(Computer Graphics)画像を表示部16に表示する。本発明の実施の形態に係る布線シミュレーション装置1は、サブハーネスの製品形態をリアルに表現することができる。
【0093】
図13と図15を比較すると分かるように、電線を布線してパッキングする前の状態(布線状態)と、電線をパッキングしてサブハーネスとした状態(製品状態)との違いが表現されている。
【0094】
図20は、図19のA−A断面図である。図20を見ると分かるように、径や剛性の異なる電線を束ねることによってサブハーネスが構成されていることが表現されている。前述した通り、サブハーネスの断面形状はパッキング作業の模擬結果に基づいて算出されるので、正円に限らず、楕円形、多角形など様々な形状となることを表現することができる。
【0095】
サブハーネスごとに模擬する従来の技術では、サブハーネスの形状が製品寸法を満たすように模擬を行っていた為、寸法のばらつきを表現できていなかった。つまり、従来の技術のように、バンドル束でしか表現できない場合、車種ごとの仕様差の影響に関係無く、正しい寸法(正寸)によって表現するしかない為、製品公差を検証することができなかった。従って、実際に製造盤上で電線を1本ずつ布線してパッキングをしたときに、サブハーネスの形状が製品寸法の公差を満たさないという事態が生じていた。
一方、本発明の実施の形態では、電線1本ずつ布線してパッキング作業を模擬しているので、実際に発生する寸法のばらつきを表現できる。従って、製品寸法の公差を満たすまで設計を繰り返すことで、ワイヤーハーネスの品質を向上することができる。つまり、本発明の実施の形態では、電線単位によって表現している為、シミュレーションによって治具のアンマッチや位置補正を早い段階で検討し、製造時の手戻りをなくすことによって、品質を向上することができる。
【0096】
以上では、治具の配置情報、治具の形状情報、電線の物性情報、電線の経路情報を固定し、電線ごとのレイアウトと線長を出力する布線設計について説明した。しかしながら、本発明の実施の形態に係る布線シミュレーション装置1を用いた布線設計は、これに限定されるものではない。
【0097】
設計者は、例えば、電線にかかるエネルギーについて所定の許容範囲を入力し、入力された許容範囲内のエネルギーで全ての電線の線長の総和が最小となるように電線の布線作業を模擬するようにしても良い。これによって、製品として機能する範囲で、コストを抑えた布線設計を行うことができる。
【0098】
以上説明した通り、本発明の実施の形態における布線シミュレーション装置は、解析モデルにおいて、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求めるステップと、電線の形状関数に基づいて各電線の曲率を算出し、各電線の曲率が小さくなる方向に各電線が移動する力を作用させることによって各治具の治具平面内における各電線の配置位置を変更するステップと、を複数回繰返し実行する(収束計算する)ことによって電線の布線作業を模擬する。また、布線シミュレーション装置は、サブハーネスごとに、サブハーネスに含まれる電線群の重心に向けてパッキング力を作用させるとともに、各電線の曲率に応じて各電線が現在位置を保とうとする力を作用させることによって各治具の治具平面内における各電線の配置位置を変更するステップと、解析モデルにおいて、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求めるステップと、を複数回繰返し実行する(収束計算する)ことによって電線のパッキング作業を模擬する。
【0099】
エネルギー最小スプライン計算は、各治具平面における各電線の配置位置が決定されて、更に治具間の経路を算出するものである。従って、仮にエネルギー最小スプライン計算を1回だけ行い、電線の布線作業やパッキング作業を模擬すると、最初の各電線の配置位置が現実に即していない場合でも、そのまま治具間の経路が模擬されてしまう。一方、本発明の実施の形態では、曲率に応じて各電線の配置位置を変更し、エネルギー最小スプライン計算を行うという処理を複数回繰り返すことから、最初の各電線の配置位置が現実に即していない場合でも、各電線の配置位置は次第に現実に即した位置に移動し、電線の布線経路を精度良く模擬することができる。
【0100】
以上、添付図面を参照しながら、本発明に係る布線設計方法等の好適な実施形態について説明したが、本発明はかかる例に限定されない。当業者であれば、本願で開示した技術的思想の範疇内において、各種の変更例又は修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【符号の説明】
【0101】
1………布線シミュレーション装置
21………治具
23………治具平面
25………コネクタ
27………電線
31………配置点
33、35………ばね要素
41………製造盤
43………サブハーネス
45………電線群の重心
【特許請求の範囲】
【請求項1】
ワイヤーハーネスの布線設計を行う布線設計方法であって、
製造盤に埋設される治具の形状情報、治具の配置情報、ワイヤーハーネスを構成する電線の物性情報、電線の経路情報を取得し、
取得された情報を制約条件とする解析モデルにおいて、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求める第1ステップと、前記電線の形状関数に基づいて各電線の曲率を算出し、各電線の曲率が小さくなる方向に各電線が移動する力を作用させることによって各治具の治具平面内における各電線の配置位置を変更する第2ステップと、を複数回繰返し実行することによって電線の布線作業を模擬し、
前記電線の布線作業の模擬結果を出力する
布線設計方法。
【請求項2】
前記電線の布線作業の模擬結果を初期状態として取得し、同一のパッキング対象となる複数の電線の集合であるサブハーネスの情報を取得し、
前記サブハーネスごとに、前記サブハーネスに含まれる電線群の重心に向けてパッキング力を作用させるとともに、各電線の曲率に応じて各電線が現在位置を保とうとする力を作用させることによって各治具の治具平面内における各電線の配置位置を変更する第3ステップと、前記解析モデルにおいて、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求める第4ステップと、を複数回繰返し実行することによって電線の
パッキング作業を模擬し、
前記電線のパッキング作業の模擬結果を出力する
請求項1に記載の布線設計方法。
【請求項3】
前記第2ステップ及び前記第3ステップでは、配置位置の決定対象の電線が、周辺の電線又は治具と干渉する場合には、更に、配置位置の決定対象の電線に対して、前記周辺の電線又は治具から受ける力を作用させる
請求項2に記載の布線設計方法。
【請求項4】
前記解析モデルは、各電線の対向する治具間がばね要素によって連結され、かつ電線同士が治具平面内でばね要素によって連結されるものである請求項1乃至請求項3のいずれかに記載の布線設計方法。
【請求項5】
前記電線ごとに加わるエネルギーは、曲げエネルギー、張力エネルギー、重力エネルギーの和である請求項1乃至請求項4のいずれかに記載の布線設計方法。
【請求項6】
ワイヤーハーネスの布線設計を行うための布線設計装置であって、
製造盤に埋設される治具の形状情報、治具の配置情報、ワイヤーハーネスを構成する電線の物性情報、電線の経路情報を取得する取得手段と、
前記取得手段によって取得された情報を制約条件とする解析モデルにおいて、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求める第1ステップと、前記電線の形状関数に基づいて各電線の曲率を算出し、各電線の曲率が小さくなる方向に各電線が移動するように各治具の治具平面内における各電線の配置位置を変更する第2ステップと、を複数回繰返し実行することによって電線の布線作業を模擬する模擬手段と、
前記模擬手段によって模擬される前記電線の布線作業の模擬結果を出力する出力手段と、
を具備する布線シミュレーション装置。
【請求項7】
コンピュータを請求項6に記載の布線シミュレーション装置として機能させるためのプログラム。
【請求項1】
ワイヤーハーネスの布線設計を行う布線設計方法であって、
製造盤に埋設される治具の形状情報、治具の配置情報、ワイヤーハーネスを構成する電線の物性情報、電線の経路情報を取得し、
取得された情報を制約条件とする解析モデルにおいて、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求める第1ステップと、前記電線の形状関数に基づいて各電線の曲率を算出し、各電線の曲率が小さくなる方向に各電線が移動する力を作用させることによって各治具の治具平面内における各電線の配置位置を変更する第2ステップと、を複数回繰返し実行することによって電線の布線作業を模擬し、
前記電線の布線作業の模擬結果を出力する
布線設計方法。
【請求項2】
前記電線の布線作業の模擬結果を初期状態として取得し、同一のパッキング対象となる複数の電線の集合であるサブハーネスの情報を取得し、
前記サブハーネスごとに、前記サブハーネスに含まれる電線群の重心に向けてパッキング力を作用させるとともに、各電線の曲率に応じて各電線が現在位置を保とうとする力を作用させることによって各治具の治具平面内における各電線の配置位置を変更する第3ステップと、前記解析モデルにおいて、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求める第4ステップと、を複数回繰返し実行することによって電線の
パッキング作業を模擬し、
前記電線のパッキング作業の模擬結果を出力する
請求項1に記載の布線設計方法。
【請求項3】
前記第2ステップ及び前記第3ステップでは、配置位置の決定対象の電線が、周辺の電線又は治具と干渉する場合には、更に、配置位置の決定対象の電線に対して、前記周辺の電線又は治具から受ける力を作用させる
請求項2に記載の布線設計方法。
【請求項4】
前記解析モデルは、各電線の対向する治具間がばね要素によって連結され、かつ電線同士が治具平面内でばね要素によって連結されるものである請求項1乃至請求項3のいずれかに記載の布線設計方法。
【請求項5】
前記電線ごとに加わるエネルギーは、曲げエネルギー、張力エネルギー、重力エネルギーの和である請求項1乃至請求項4のいずれかに記載の布線設計方法。
【請求項6】
ワイヤーハーネスの布線設計を行うための布線設計装置であって、
製造盤に埋設される治具の形状情報、治具の配置情報、ワイヤーハーネスを構成する電線の物性情報、電線の経路情報を取得する取得手段と、
前記取得手段によって取得された情報を制約条件とする解析モデルにおいて、各治具の治具平面内において電線ごとに加わるエネルギーが最小となる点を通り、治具間ごとに定義される接続が滑らかな区間関数として、電線の形状関数を求める第1ステップと、前記電線の形状関数に基づいて各電線の曲率を算出し、各電線の曲率が小さくなる方向に各電線が移動するように各治具の治具平面内における各電線の配置位置を変更する第2ステップと、を複数回繰返し実行することによって電線の布線作業を模擬する模擬手段と、
前記模擬手段によって模擬される前記電線の布線作業の模擬結果を出力する出力手段と、
を具備する布線シミュレーション装置。
【請求項7】
コンピュータを請求項6に記載の布線シミュレーション装置として機能させるためのプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2012−208903(P2012−208903A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−76034(P2011−76034)
【出願日】平成23年3月30日(2011.3.30)
【出願人】(391045897)古河AS株式会社 (571)
【出願人】(598018786)古河インフォメーション・テクノロジー株式会社 (9)
【出願人】(000005290)古河電気工業株式会社 (4,457)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月30日(2011.3.30)
【出願人】(391045897)古河AS株式会社 (571)
【出願人】(598018786)古河インフォメーション・テクノロジー株式会社 (9)
【出願人】(000005290)古河電気工業株式会社 (4,457)
【Fターム(参考)】
[ Back to top ]