
希薄化制約補正を用いた画像復元法
磁気共鳴画像法(MRI)やX線コンピュータ断層撮影法(CT)やポジトロン放出断層撮影法(PET)や単光子放出コンピュータ断層撮影法(SPECT)を含む、多数の異なる画像モダリティに適用できる画像復元法を開示した。希薄化画像は、一連の取得されたアンダーサンプリングされたデータから復元されて、画像化された対象の演繹的知識を提供する。希薄化画像から引き算された場合に、画像フレームに対して質の高い画像を生成する与えられた画像フレームのために、補正画像を反復して求める反復復元プロセスが、さらに採用される。

【発明の詳細な説明】
【技術分野】
【0001】
(関連する出願との相互参照)
本出願は、2007年12月20日に出願された米国暫定特許出願第61/015,559号、発明の名称「前の画像の制約された圧縮されたセンシングを用いた画像復元方法」と、2008年1月14日に出願された米国暫定特許出願第61/020,847号、発明の名称「前の画像の制約された圧縮されたセンシングを用いた画像復元方法」と、2008年6月9日に出願された米国暫定特許出願第61/059,891号、発明の名称「前の画像の制約された圧縮されたセンシングを用いた画像復元方法」の利益を主張する。
(連邦支援の研究に関する陳述)
【0002】
本発明は、合衆国政府の国立衛生研究所のNIH EB005712、NIH EB007021、NIH CA116380の支援を受けてなされた。合衆国政府は、本発明に関し、一定の権利を有する。
【0003】
本発明の技術分野は、医用画像、特に収集した画像データからの画像復元法に関する。
【背景技術】
【0004】
コンピュータ断層撮影システムにおいて、X線源は、「画像面」と呼ばれるデカルト座標系のx−y平面上で平行になる円錐形のビームを放射する。X線ビームは、例えば患者のような画像化される対象を通過して、放射線検出器アレーに衝突する。通過した放射線の強度は、対象物によるX線ビームの減衰に依存し、各検出器は、ビーム減衰量の測定値である独立した電気信号を生成する。全ての検出器からの減衰量の測定値は、個別に収集されて、いわゆる「透過プロファイル」、又は「減衰プロファイル」又は「プロジェクション」を生成する。
【0005】
従来のCTシステムにおけるX線源と検出器アレーは、画像平面内でガントリー上を対象の回りに回転して、対象を横断するX線ビームの角度が常に変化するようになっている。所定の角度における検出器アレーからの透過プロファイルは、「ビュー」と称され、そして、対象の「スキャン」は、X線源と検出器の一回の回転の間の異なる角度方向の集まりで構成されたビューのセットを備えている。2次元スキャンにおいて、データは対象を横切る2次元スライスに対応した画像を構築するように処理される。2次元データから画像を復元する一般的な方法は、技術的に、フィルタ処理した逆投影技術と称されている。この画像復元プロセスは、スキャン中に収集された減衰量の測定値を、「CTナンバ」又は「ハウンズフィールドユニット」と呼ばれる、ディスプレイ上の対応する画素の輝度を制御するために用いられる整数に変換する。
【0006】
放射線治療法は、対象の明確な目的組織に放射線を供給する治療法である。放射線は、周辺の健康な組織が許容範囲を上回る放射線量を受けないような方法で供給される。この対象への放射線量の制御を達成するために、高度に正確な放射線供給技術が要求される。計画された放射線量と供給される放射線量との差異や、処理システムに対する患者の位置の不確定さなどの多くの要因が、所望のレベルの精度を得ることを困難なものにしている。
【0007】
強度変調放射線治療(「IMRT」)は、コンピュータのソフトウエアを利用して、対象腫瘍の形状や位置、動特性に特有の3次元放射線量マップを生成する放射線治療技術である。IMRT法には高精度が要求されるので、腫瘍の位置や動特性に関する詳細データを集める必要がある。そうすることで、病気に冒された領域、例えば腫瘍への放射線量を増加させる一方で、健康な組織への放射線量を削減することができる。これを達成するために、治療計画段階の間、正確な幾何学的精度が要求される。
【0008】
画像誘導放射線治療法(「IGRT」)は、治療中の対象への放射線供給と同時に、例えばコンピュータ断層撮影(CT)のような医用画像を利用する。一般にIGRTは、医用画像からの位置情報を用いて所定の放射線供給計画を補い、精密な直接放射線治療を行なう。第一に、放射線場配置において精度を向上させるための手段を提供する。第二に、治療中の健康な組織への放射線量を削減する方法を提供する。さらに、放射線場の供給精度が向上することで、腫瘍への放射線量を増加させ、一方、周囲の健康な組織への放射線量を軽減するという効果が得られる。IGRT法の典型的な例では、2次元と3次元の画像技術が用いられる。加えて、3次元画像の時系列からなるいわゆる「4次元」画像技術も、IGRTの最中に用いられる。2次元IGRTにおいては、平面的なデジタル放射線写真や蛍光透視画像フレーム又は超高圧(MV)画像が、放射線供給計画からのデジタル復元放射線写真(DRRs)と適合するのに対し、3次元IGRTにおいては、円錐状ビームを用いたコンピュータ断層撮影(「CBCT」)が画像化に用いられる。最近開発されたCBCTベースのIGRTシステムには、CBCTが医用線形加速器と一体化されたシステムが含まれている。フラットパネル技術の進歩によって、CBCTは容量画像化が可能になり、治療中のX線や蛍光透視モニタリングが可能になった。
【発明の概要】
【0009】
本発明は、磁気共鳴画像法(MRI)やX線コンピュータ断層撮影法(CT)やポジトロン放出断層撮影法(PET)や単光子放出コンピュータ断層撮影法(SPECT)を含む、多数の異なる画像モダリティに適用できる画像復元法を提供する。本方法において、希薄化画像が収集されたデータから復元されて、画像化される対象の演繹的知識を提供する。希薄化画像から引き算された時に画像フレームに対する高品質画像を生成する補正画像を所定の画像フレームに対して反復して求めるために、反復復元プロセスが利用される。
【0010】
本発明の一般的な態様は、画像の対象に関する演繹的情報によって復元プロセスを制約することによって医用画像の復元行為を向上させることである。希薄化画像は、一連の取得されたアンダーサンプリングされたデータセットから復元されて、アンダーサンプリングされたデータセットから高品質の画像を生成するために利用される。補正画像は、高品質画像を生成するための各画像データセットに対して生成される。これらの画像のそれぞれは、希薄化画像から対応する補正画像を引き算することによって生成される。本発明のもたらす改善点は、スキャン時間の削減や、放射線量の削減や、時間分解研究におけるより高い時間分解能など、さまざまな形で自然に現れる。
【0011】
本発明の別の態様は、低品質の一連の画像における予め復元された画像の品質を向上することである。複数の画像データセットが、対応する画像をX線投影空間に再投影することによって生成され、そこから希薄化画像が生成される。画像データセットの1つに対応した補正画像を生成するために、反復復元プロセスが利用される。この補正画像は、希薄化画像から引き算されて、対応するオリジナルの画像のより高品質なバージョンを生成する。このプロセスは、一連のオリジナルのより低品質の画像群の各画像に対して繰り返される。
【0012】
本発明のまた別の態様は、改善された画像誘導放射線治療(IGRT)によって、患者への放射線供給をより高精度に調整する方法を提供する。患者の呼吸を示す信号と同時に得られた画像データから、前の画像が復元される。前の画像は、収集した画像データから復元された「希薄化」画像及び所定の呼吸相の間の投影ビュー、又はいわゆる「呼吸相画像データセット」から復元された「希薄化」画像の合成画像を用いて復元される。このように、所望の画像が復元されるための特定の呼吸相に関連した情報を、前の画像は含んでいる。このように、腫瘍の動特性を、より正確に求めることができ、放射線供給プランは、それに応じて調整される。
【0013】
本発明の前述の内容と他の様相と長所とは、以下の明細書によって明らかにされる。本明細書の一部を形成し、本発明を実施することができる特定の実施形態を図によって示す添付の図面を参照する。この実施例は、本発明の全範囲を表わす必要はないが、しかし、請求項と、本発明の範囲を解釈するためにここに参照される。
【図面の簡単な説明】
【0014】
【図1】本発明を実施する際に用いられる画像復元法の一実施例を示すフローチャートである。
【図2】本発明を実施する際に用いられる画像復元法の他の実施例を示すフローチャートである。
【図3】本発明を実施する際に用いられる画像復元法のまた別の実施例を示すフローチャートである。
【図4】本発明の実施例を利用した磁気共鳴画像(MRI)システムのブロック図である。
【図5】本発明の一実施例を実践した図4のMRIシステムで用いられるパルスシーケンスのグラフ表現である。
【図6】図5のパルスシーケンスを用いてサンプリングされたk空間データの図的記述である。
【図7】図5のパルスシーケンスと共に図4のMRIシステムで用いられる本発明の実施例のフローチャートである。
【図8】インターリーブされた投影ビューのグラフ表現である。
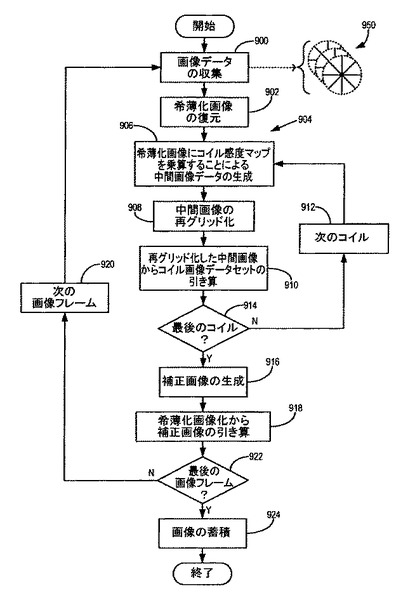
【図9】図5のパルスシーケンスと共に図4のMRIシステムで用いられる本発明の他の実施例のフローチャートである。
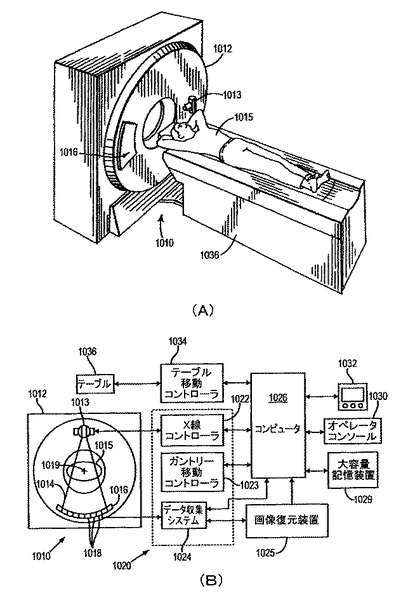
【図10】(A)本発明の他の実施例を用いたX線コンピュータ断層撮影(CT)画像システムの透視図である。 (B)図10AのCT画像システムのブロック図である。
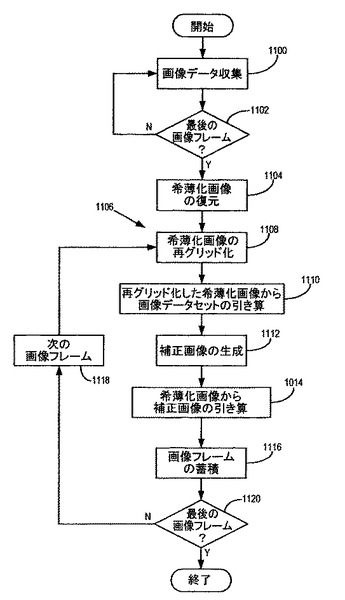
【図11】図10Aと図10BのCT画像システムで用いられる本発明の実施例のフローチャートである。
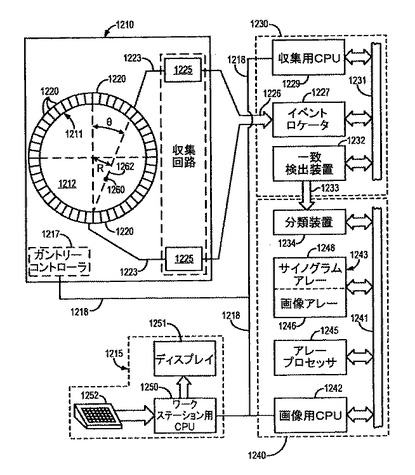
【図12】本発明のまた別の実施例を用いたポジトロン放出断層撮影(PET)画像システムのブロック図である。
【図13】図12のPET画像システムを用いた本発明のまた別の実施例のフローチャートである。
【図14】本発明のまた別の実施例を用いた画像誘導放射線治療(IGRT)システム例のブロック図である。
【図15】図14のIGRTシステムを用いた本発明のまた別の実施例のフローチャートである。
【発明を実施するための形態】
【0015】
一般的に言えば、データセットから画像を復元する方法には、測定したデータサンプルYから所望の画像Iを見積もるための一連の数値的ステップが含まれる。より具体的には、画像復元は、以下の一致条件を満足させる必要がある。
【0016】
【数1】
【0017】
ここでAはシステム行列である。一般的に、システム行列Aは、所望の画像Iを収集したデータサンプルYに関連付ける前方投影演算子と見なすことができる。コンピュータ断層撮影(CT)画像を取り扱う場合、例えば、システム行列には再投影演算子が含まれる。Eqn.(1)の一致条件は、つまり、画像が忠実に復元された場合に、測定された投影データの正確な見積もりを生成するために、前方投影演算子は実質的に実際のデータ取得手順を再現するということである。
【0018】
では次に、本発明を実施する際に用いられる画像復元法の例を見てみると、一般的に要求されるものより少ない画像データから高品質の所望の画像が復元される方法が提供されている。一般的に「前の画像」は、compressed sensing (CS)の原理が利用されている繰り返し画像復元法を制約するために用いられる。例えば、CSで一般的に用いられている希薄化変換に加えて、所望の画像から前の画像を引き算することによって、画像はさらに希薄化される。結果的に、CS法で要求される数より実質的により少ないサンプル数を用いて、画像を正確に復元することができる。
【0019】
より具体的には、前の画像IPと、復元すべき所望の画像Iに対して、本発明を実施するために用いられる画像復元法の例は、以下の目的関数を最小化することによって実行される。
【0020】
【数2】
【0021】
ここでΨ1とΨ2は希薄化変換で、
【数3】
はL1−norm演算子で、αはEqn.(2)の目的関数における2項目の相対的重さを制御するために用いられる正則化パラメータである。上述のように、次式
【数4】
は、N次元ベクトルxの1つのL1−normを示している。より一般的には、真のL1−normからの偏差が、所望の画像における十分な画質を維持しながら可能である。例えば、Eqn.(2)の目的関数は、
【数5】
として一般化できる。ここで、
【数6】
は、Lp−norm演算子で、
【数7】
の形を取る。
【0022】
上述のように、好ましくはp=1.0であるが、選択的に、異なるpの値を取る事ができる。p=1.0からpの値が大きく偏差するほど、復元された所望の画像における劣化が大きくなることが明白なのは、当業者にとって当然のことである。
【0023】
Eqn.(2)の希薄化変換Ψ1とΨ2は、一般的に異なる。しかし、選択的に、Ψ1とΨ2を同じ希薄化変換にすることができる。希薄化変換の例としては、ウェーブレット変換や、一次有限差分や、二次有限差分、そして例えば以下の式で表わされる離散的傾斜変換を含む。
【数8】
ここで、添え字m、nは画像Iの画素の位置を示す。
【数9】
で特定される画像は、一般的に「傾斜画像」と呼ばれている。
【0024】
Eqn.(2)の目的関数の両方の項ともに重要である。それらの重要性の結果として、正則化パラメータαの選択が、画像復元プロセス全体の制御のために利用される。従って、正則化パラメータαの選択は、前の画像Ipの選択と、目前の臨床的応用とに依存する。例えば、Eqn.(2)の目的関数の第二項
【数10】
は、前の画像Ipから潜在的に引き継いだストリーキング・アーチファクトを軽減する。別の例では、正則化パラメータαを約0.3〜0.7の間に選択すれば、反復的な画像応用に対しては一般的に十分である。
【0025】
Eqn.(1)の一貫性条件を全体的な画像復元プロセスに組み込むために、ラグランジュの未定係数法が用いられる。こんなふうに、一貫性条件は、Eqn.(2)に記述されている目的関数の最小化にさらなる制約を加えるために利用される。このようにして、次式の新たな目的関数が生み出される。
【数11】
ここで、λはラグランジュ乗数、Xは差分行列、そして
【数12】
は、L2−norm演算子の二乗であって、N次元ベクトルxに対して、以下の形をとる。
【数13】
【0026】
Eqn.(7)の差分行列は、Eqn.(1)の一貫性条件を満たし、以下の式を有する。
【数14】
【0027】
ラグランジュ乗数λは、本発明を実施した場合に用いられる特定の画像システムに対して、経験的に求められる。例えば、ラグランジュ乗数λは、所望のデータ一貫性要求と、前の画像Ipとの類似性との間の、あらかじめ定められたトレードオフによって求められる。大きなラグランジュ乗数λを選択した場合、復元画像は、より低い雑音分散を有する。しかしこれは、前の画像の高い空間分解能が失われることにより達成される。同様に、小さなラグランジュ乗数λを用いた場合、前の画像の高い空間分解能は保たれるが、所望の画像における雑音分散は大きくなる。このような状況は、用いられる画像システムによって達成されるコントラスト・ノイズ比に影響を与える。
【0028】
Eqn.(7)で表わされた目的関数は、画像システムのノイズのために、さらに改変することができる。このようにして、以下の目的関数が最小化される。
【数15】
ここで、XTは差分行列Xの転置行列、Dはシステムノイズ行列であって、以下の行列成分を有する対角行列である。
【数16】
ここで
【数17】
は、雑音分散であって、本発明を実施する際に用いられる特定の画像システムにおけるノイズを示すパラメータである。例えば、X線画像システムにおいて、ノイズパラメータ
【数18】
は、n番目のX線検出器に関連した雑音分散である。
【0029】
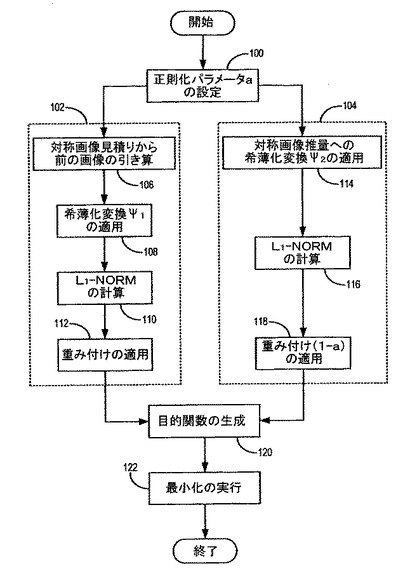
図1を参照して、前述の画像復元法の一実施例として、Eqn.(2)の目的関数を利用し、ステップ100で示された正則化パラメータαの初期化から始める。正則化パラメータαの選択は、所望の画像の希薄度と、所望の画像に対する前の画像の影響度のトレードオフを決定する。従って、正則化パラメータαの値は、目前の臨床用途に依存して変化する。例えば、αが約0.3〜0.7の値の場合、一般的に、呼吸器官の画像分野では十分である。続いて、ステップ102とステップ104にそれぞれ示されているように、Eqn.(2)の目的関数の第一項と第二項が初期化される。第一項
【数19】
の初期化は、ステップ106で開始され、そこでは前の画像Ipが、所望の画像Iの見積もりから引き算されて、「差分画像」を生成している。前の画像Ipの特定の選択と、所望の画像Iの見積もりとは、画像診断法と臨床用途とに依存している。従って、これらの選択に対する異なる例を、以下に詳細に議論する。差分画像は、ステップ108に示すように、続けて希薄化変換Ψ1を適用することによって希薄化される。上述のように、希薄化変換は、ウェーブレット変換、一次有限差分や、二次有限差分、そして離散的傾斜変換を含む数学演算の任意の数からなっている。この希薄化された差分画像のL1−normは、次にステップ110で計算される。このプロセスの結果は、次にステップ112に示すように、正則化パラメータαによって重み付けられる。
【0030】
Eqn.(2)の目的関数の第二項
【数20】
の初期化は、ステップ114で開始され、そこでは所望の画像Iの見積もりが、希薄化変換Ψ2によって希薄化される。続けて、この希薄化された所望の画像見積もりのL1−normがステップ116で計算される。離散的傾斜変換
【数21】
が希薄化変換Ψ2として選択された場合、ステップ114と116は、所望の画像見積もりの全変動TVを計算するステップとして見なすことができる。TVは次式で表わされる。
【数22】
【0031】
希薄化された所望の画像の見積もりのL1−normを計算した後に、その結果がステップ118に示すように、(1−α)によって重み付けられる。Eqn.(2)の目的関数は、続けてステップ120において、第一項と第二項を一緒に加えることによって生成される。この目的関数は、次に、例えば非線形共役勾配法を用いて、ステップ122に示すように最小化される。停止基準が満足されるまで、最小化プロセスは継続される。停止基準は、例えば、現在の所望の画像見積もりと前回の繰り返しでの所望の画像見積もりとの比較を含む。このような停止基準は、以下の式で表わされる。
【数23】
ここで、
【数24】
は、画素位置(i,j)における(k+1)番目の所望の画像の見積もりで、
【数25】
は、画素位置(i,j)におけるk番目の所望の画像の見積もりである。
【0032】
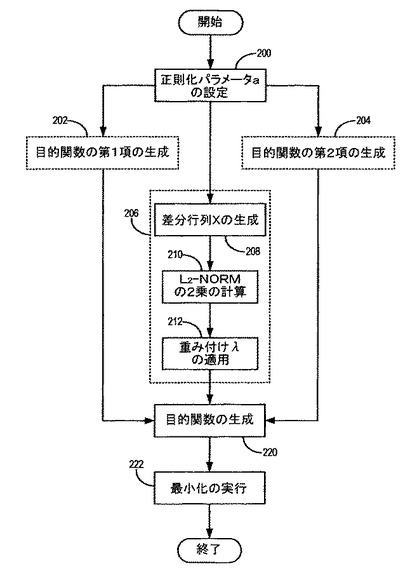
次に図2を参照して、前述の画像復元法の他の実施例は、Eqn.(7)の目的関数を用い、ステップ200で示す正則化パラメータαの初期化から始める。続けて、Eqn.(7)の目的関数の第一項と第二項が、ステップ202と204に示すようにそれぞれ初期化される。このプロセスは、図1のステップ102と104を参照して、上記と同様の方法で行なわれる。しかし、Eqn.(1)の一貫性条件
【数26】
が第三項に組み込まれ、これはステップ206で初期化される。ステップ206では、第一にステップ208に示すように差分行列Xが生成される。詳細は上述したように、差分行列Xは、Eqn.(1)の一貫性条件に対応し、Eqn.(9)の形を有する。
【0033】
従って、差分行列Xは、所望の画像Iの見積もりにシステム行列Aを適用して、続けて収集した画像データYを引き算することによって求められる。差分行列XのL2−normの二乗が、次のステップ210で計算される。差分行列XのL2−normの二乗が生成された後に、ステップ212で示すように、ラグランジュ乗数λが求められ、差分行列XXを重み付けするために用いられる。上述のように、ラグランジュ乗数λは、目前の臨床用途に基づいてユーザーが選択した値によって経験的に求められる。Eqn.(7)の目的関数は、続けてステップ220で第一項と第二項と第三項を一緒に加えることによって生成される。この目的関数は、例えば非線形共役勾配法を用いて、ステップ222で最小化される。上述のように、停止基準が満足されるまで、最小化プロセスは継続される。
【0034】
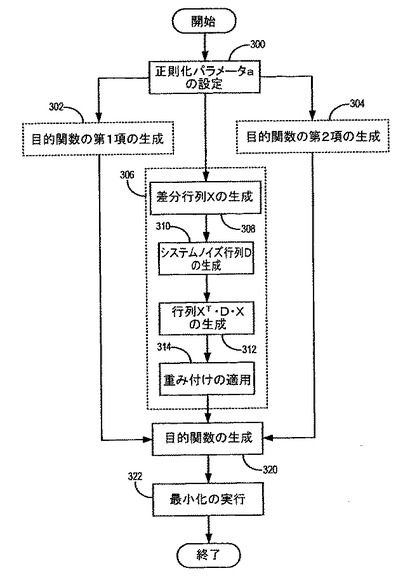
次に図3を参照して、前述の画像復元法の他の実施例は、Eqn.(10)の目的関数を用い、ステップ300で示す正則化パラメータαの初期化から始める。続いて、ステップ302と304に示すように、Eqn.(10)の目的関数の第一項と第二項をそれぞれ初期化する。このプロセスは、図1のステップ102、104を参照して、上記と同様の方法で行なわれる。しかし、Eqn.(1)の一貫性条件と、画像システムのノイズの効果が第三項
【数27】
に組み入れられ、ステップ306で初期化される。ステップ306では、第一に差分行列Xが、図2のステップ208と同様に、ステップ308で生成される。次に、システムノイズ行列Dが、ステップ310で生成される。システムノイズ行列Dは、以下の式で求められる行列成分を有する対角行列である。
【数28】
上述のように、
【数29】
は雑音分散であり、本発明を実施する際に利用される画像システムにおけるノイズを示すパラメータである。例えば、X線画像システムにおいて、ノイズパラメータ
【数30】
は、n番目のX線検出器に関連した雑音分散である。システムノイズ行列Dが生成された後に、以下の行列乗算がステップ312で実行される。
【数31】
この演算の結果は、続けてステップ314で示すラグランジュ乗数によって重み付けられる。続いてステップ320で、第一項、第二項、第三項を一緒に加えることで、Eqn.(10)の目的関数が生成される。ステップ322に示すように、例えば非線形共役勾配法を用いて、目的関数は次に最小化される。上述のように、停止基準が満足されるまで、最小化プロセスは継続される。
【0035】
圧縮されたセンシング・ガイドラインに沿った不完全なデータセットから、潜在する画像Iを見積もるために、以下の問題が解かれる。
【数32】
ここでAはエンコーディング行列、Yは画像システムによって収集された画像データを含むベクトル、λは最小化プロセスの残余誤差と画像Iの希薄度とをバランスする制御パラメータ、そしてΨは希薄化行列である。希薄化行列Ψは、対象を希薄化するように動作する行列の任意の数からなっている。1つの例として、Ψは恒等行列である。放射状サンプリング・プロジェクション(例えば放射状MRI、コンピュータ断層撮影、ポジトロン放出断層撮影など)で収集された画像データに対し、エンコーディング行列Aはラドン変換行列であり、YはX線投影空間値を有するベクトルである。1つの例として、もし画像データがデカルト標本化パターンにおいて初期的に収集されたものか、又はデカルト格子に再グリッドされた非デカルトk空間サンプルであった場合、Aはフーリエ変換行列で、Yはk空間値を有するベクトルである。画像Yは、復元されるべき潜在的な画像である。
【0036】
しばしば、データは時間次元又はパラメトリック次元においてサンプリングされ、かなりの程度の冗長性を保有する。これは、画素がこのような次元と高い相関関係を有するからである。例えば、時間分解された血管造影イメージング研究における背景組織は、実質的に同じ画素情報を含有する。同様に、拡散性に関する研究において、脳や脊髄の灰白質画素は、実質的に等方性の拡散挙動を示し、従って、異なる拡散勾配方向に対する灰白質画素は、高度に相関関係を有する。この特性は、圧縮センシング・フレームワークにおいて、以下の式を用いて利用することができる。
【数33】
ここでISは画像強度分布の合理的見積もりである希薄化画像であり、
【数34】
はp−normであり、長さKの任意のベクトルxは、以下で表わされる。
【数35】
ここで
【数36】
である。
【0037】
希薄化画像ISは、スライド窓復元法を含む種々の方法によって生成することができる。1つの例として、希薄化画像は、例えば同時継続出願である米国特許出願第11/482,372号に記載されたHYPRや、同時継続出願である米国特許出願第12/032,240号に記載されたHYPR−LRや、同時継続出願である米国特許出願第12/032,262号に記載されたI−HYPRなどの、他の画像復元法を用いて復元することができる。例えばHYPR−LR法を用いることによって、所望の画像フレームにおいて信号対雑音比(SNR)を向上させることができる。
【0038】
例として、例えばダイナミックプロセスをイメージして、一定期間に医用画像システムで収集された一連のアンダーサンプリングされたデータセットを考える。状況の例としては、患者の血管系を造影剤が流れている間に収集された一連の画像データセットである。画像フレームを生成するために、個々の画像データセットを復元することができる。しかし、アンダーサンプリング・アーチファクトの結果として、これらの画像フレームは低品質であろう。この状況において、希薄化画像ISが、複数の画像データセットから復元することができて、一連の画像フレームを通して画像強度の合理的な表現を生成する。高品質の画像フレームを復元するために、上記Eqn.(17)を反復復元法において利用することができ、所望の潜在的画像フレームの一部を形成するものではない希薄化画像に存在する情報を示す補正画像が生成される。このようにして、Eqn.(17)は以下のように書き直される。
【数37】
ここで
【数38】
は補正画像データを含むベクトルであり、
【数39】
は補正画像である。したがって、Eqn.(19)を反復して最小化することによって、補正画像Icorrが生成され、希薄化画像ISから引き算されることによって、所望の潜在的な画像フレームIの高品質な見積もりが得られる。本発明を実施するために、Eqn.(19)と類似した他の最小化法も、採用することができる。このような最小化法の例としては、次式がある。
【数40】
ここで
【数41】
であり、
【数42】
は従来のq番目の動的操作を示す。
【0039】
本発明は、多くの異なる医用画像モダリティに適用することができ、多くの異なる臨床用途に適用することができる。本発明のこれらの臨床用途の多数を以下に記載して、本発明の対象範囲を示す。本発明の好ましい実施例は、医用画像システムを用いて収集したデータから画像を復元することであるが、既存の画像の品質を高める目的でも本発明を利用できることは、当業者には当然のことである。このような既存の画像は、投影ビューのセットに分解して、本発明の復元法を用いてそれらから新しい画像を復元することができる。改善度は、もちろん用いられる希薄化画像の品質に依存し、これは、画像化すべき対象に関する利用可能な演繹的な情報に依存する。
(磁気共鳴映像法)
【0040】
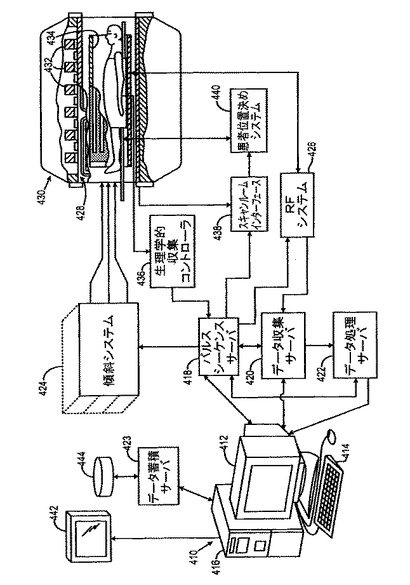
特に図4を参照して、本発明の好ましい実施例は、MRIシステムに利用される。MRIシステムには、ディスプレイ412とキーボード414を備えたワークステーション410が含まれる。ワークステーション410には、商業的に利用可能なオペレーティングシステムを走らせる商業的に利用可能なプログラマブルマシンであるプロセッサ416が含まれる。ワークステーション410は、スキャン処方箋をMRIシステムに入力することを可能にするオペレータ・インタフェースを提供する。ワークステーション410は、4つのサーバと結合している。パルスシーケンス・サーバ418と、データ収集サーバ420と、データ処理サーバ422と、データ蓄積サーバ423である。ワークステーション410と各サーバ418、420、422、423との間は、互いに通信ができるように接続されている。
【0041】
パルスシーケンス・サーバ418は、ワークステーション410からダウンロードされた指示に応じて、傾斜システム424とRFシステムを操作するように機能する。所定のスキャンを実行するために必要な傾斜波形が生成され、傾斜システム424に加えられ、傾斜システム424は、アセンブリ428内の傾斜コイルを励起して、位置エンコーディングMR信号のために用いられる傾斜磁場Gx,Gy,Gzを生成する。傾斜コイルアセンブリ428は、分極マグネット432と全身用RFコイル434を備えたマグネット・アセンブリ430の一部を形成している。
【0042】
RF励磁波形は、RFシステム426によってRFコイル434に加えられて、所定の磁気共鳴パルスシーケンスを実行する。RFコイル434又は個別のローカル・コイル(図4には図示せず)によって検出された応答性MR信号は、RFシステム426によって受信され、パルスシーケンス・サーバ418が生成した命令の下に、増幅され、復調され、フィルタ処理され、デジタル化される。RFシステム426は、MRパルスシーケンスで用いられる各種RFパルスを生成するためのRFトランスミッタを備えている。RFトランスミッタは、スキャン処方箋とパルスシーケンス・サーバ418からの方向とに応答して、所望の周波数、位相、パルス振幅波形を有するRFパルスを生成する。生成されたRFパルスは、全身用RFコイル434か、1つ以上のローカル・コイル、又はコイルアレー(図4には図示せず)に加えられる。
【0043】
RFシステム426は、1つ以上のRF受信チャネルも備えている。各RF受信チャネルは、接続されたコイルによって受信されたMR信号を増幅するRF増幅器と、受信したMR信号の直角成分I,Qを検出してデジタル化する検出器とを備えている。受信したMR信号の大きさは、あらゆるサンプリング点で、I,Q成分の二乗の和の平方根をとることによって求められる。
【数43】
そして受信したMR信号の位相も求められる。
【数44】
【0044】
パルスシーケンス・サーバ418は、生理学的収集コントローラ436からの患者データも任意で受信する。生理学的収集コントローラ436は、例えば電極からのECG信号や肺からの呼吸信号といった、患者に接続された多数の異なるセンサからの信号を受信する。このような信号は、一般的にパルスシーケンス・サーバ418によって利用されて、対象の呼吸や心臓の鼓動にスキャン動作を同期させ、又は"gate"させる。
【0045】
パルスシーケンス・サーバ418は、患者の状態やマグネットシステムと関連した様々なセンサからの信号を受信するスキャンルーム・インターフェース回路438とも接続している。スキャン中に患者を所望の位置に動かすための指示を受信する患者位置決めシステム440も、スキャンルーム・インターフェース回路438を経由している。
【0046】
RFシステム426が生成したデジタル化されたMR信号サンプルは、データ収集サーバ420によって受信される。データ収集サーバ420は、ワークステーション410からダウンロードされた指示に応じて動作し、リアルタイムMRデータを受信して、データオーバーランによってデータが紛失しないように、バッファ記憶装置を提供する。いくつかのスキャンにおいて、データ収集サーバ420は収集したMRデータをデータ処理サーバ422に送るのと変わらない動作をする。しかし、スキャンを続行させるために収集したMRデータから情報が必要なスキャンにおいて、データ収集サーバ420はそのような情報を生成してパルスシーケンス・サーバ418に送るようにプログラムされている。例えば、予備スキャンの間、MRデータが収集されて、パルスシーケンス・サーバ418が実行するパルスシーケンスを較正するために用いられる。また、スキャン中にナビゲータ信号が収集されて、RF又は傾斜システム動作パラメータを調整するために用いられたり、k空間がサンプリングされるview orderを制御するために用いられる。そして、データ収集サーバ420は、磁気共鳴血管造影(MRA)スキャンにおいて造影剤の到着を検出するMR信号を処理するために利用される。これらすべてのサンプルにおいて、データ収集サーバ420はMRデータを収集して、リアルタイムに処理し、スキャンを制御するための情報を生成する。
【0047】
データ処理サーバ422はデータ収集サーバ420からのMRデータを受信して、ワークステーション410からダウンロードした命令に従ってMRデータを処理する。このような処理には、例えば生のk空間MRデータをフーリエ変換して、2次元又は3次元画像を生成する処理や、復元データへのフィルタの応用や、収集したMRデータの逆投影画像復元の実行や、機能的MR画像の計算や、動画像の計算等が含まれる。
【0048】
データ処理サーバ422によって復元された画像は、ワークステーション410に戻されて、そこで蓄積される。リアルタイム画像は、データベースメモリキャッシュ(図示せず)に蓄積されて、そこからオペレータ・ディスプレイ412又はマグネットアセンブリ430の近傍に設けたディスプレイ442に出力されて、主治医の利用に供される。バッチモード画像又は選択されたリアルタイム画像がホストデータベースのディスク記憶装置444に蓄積される。これらの画像が復元されて記憶装置に転送された場合、データ処理サーバ422はワークステーション410上のデータ蓄積サーバ423に通知する。ワークステーション410は、オペレータによって操作されて、画像を獲得したり、フィルムを生成したり、画像をネットワークを通じて他の設備に送ったりする。
(パルスシーケンスの実施例)
【0049】
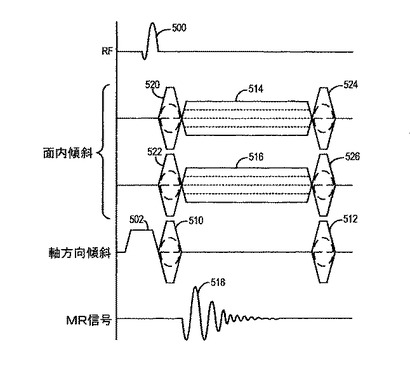
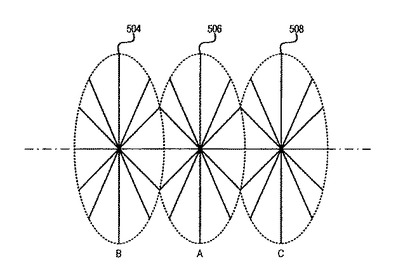
前述のMRIシステムを用いた本発明の実施例を実施する場合、核磁気共鳴(NMR)データが、投影復元又は半径方向のパルスシーケンスを用いて、図5のように収集される。これは、選択的非対称切頂型シンクRF励起パルス500が、スライス選択傾斜502の存在下で生成された、高速傾斜リコール・エコー・パルスシーケンスである。このパルスシーケンスは、単一k空間円形平面をサンプリングして単一2次元スライスを収集するために用いられるか、又は、図6の504、506、508に示すような複数の円形k空間平面をサンプリングするために用いられる。多重2次元スライスを収集する場合、傾斜502は、位相エンコーディング傾斜突起510と、反対の極性を有する巻き取り傾斜突起512とにフォローされた厚切り選択傾斜である。この軸方向の位相エンコーディング傾斜510は各2次元k空間平面504、506、508をサンプリングするためのスキャン中に、値を段階的に変化させる。
【0050】
半径方向の軌道に沿った2次元平面504、506、508におけるk空間サンプリングのためにNMRエコー信号518を収集している間、二つの面内読み取り傾斜514、516が用いられる。これらの面内傾斜514、516は、軸方向傾斜と直交しており、また、互いに直交している。スキャンの間、これらは一連の値を段階的にとって、詳細は後述するが、半径方向のサンプリング軌道の視野角を回転させる。面内読み取り傾斜のそれぞれは、予備位相整合傾斜突起520、522によって先行され、巻き取り傾斜突起524、526によって追従される。
【0051】
好適な直線軌道以外に、k空間周辺境界上の一点から延在して、k空間の中央を経由して、k空間周辺境界上の対向する点へ至るサンプリング軌道も用いることができるのは、当業者には明白であろう。1つのバリエーションは、サンプルk空間体積の全範囲にわたらない軌道に沿ってサンプリングする部分的NMRエコー信号518を収集することである。この方法の例示的なパルスシーケンスは、例えば、米国特許第7,148,685号に見ることができる。直線投影復元パルスシーケンスと等価な、もう1つのバリエーションは、直線でなく、曲線経路又はらせん経路に沿ってサンプリングするものである。このようなパルスシーケンスは、例えばby F. E. Boada, et al., in "Fast Three Dimensional Sodium Imaging," Magnetic Resonance in Medicine, 1997; 37:706-715, や、by K. V. Koladia, et al., in "Rapid 3D PC-MRA Using Spiral Projection Imaging", Proc. Intl. Soc. Magn. Reson. Med. 13, 2005, そして、 by J. G. Pipe and K. V. Koladia in "Spiral Projection Imaging: a new fast 3D trajectory", Proc. Intl. Soc. Mag. Reson. Med. 13, 2005などに記載されている。デカルト系サンプリングパターンもインターリーブ式であって、本発明を実施するために採用することができるということは、当業者には高く評価されるであろう。また、本発明はこれらサンプリング法の2次元バージョンと同様に3次元にも適用できる。ここで「画素」という用語の使用は、2次元又は3次元画像における位置を示すことを意図している。
【0052】
上述のMRIシステムは、1つ以上の画像を復元するために用いられる投影ビューの2次元又は3次元セットを収集して、広範囲の医療用途に用いることができる。本発明の画像復元法は、全ての収集された投影ビューより少ない数を用いて1つ以上の画像フレームを復元する場合に、特に有用である。本発明は、以下に詳細に説明するパラレルMR画像技術と共に実施することができる。
(MR画像システムにおける画像復元)
【0053】
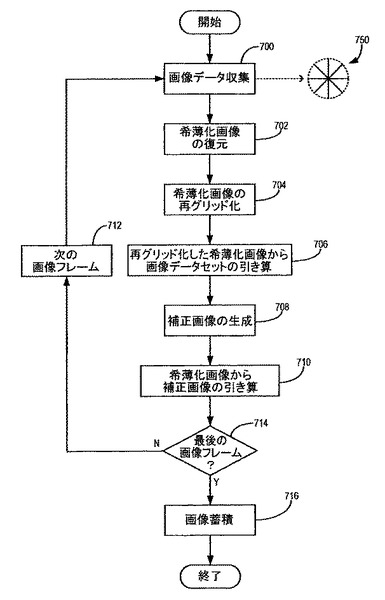
本発明に係る画像復元法の第一実施例は、2次元投影ビューを収集して、一定時間にわたって対象を表現した一連の画像フレームを復元するMRIシステムを利用するものである。特に図7を参照して、プロセスブロック700に示すように画像フレームが復元されるための、投影ビュー750のセットが収集される。これらの投影ビュー750は数が少なく(例えば10ビュー)、できるだけ均一になるようにk空間をサンプリングして均等に分散されている。収集された投影ビューの数がすくないので、この画像フレームは非常に短時間で収集することができるが、k空間がアンダーサンプリングされているので、従来の方法を用いると、どの復元画像にも縞状アーチファクトが発生する。ここで画像データセットという用語の使用は、図5を参照して上述のパルスシーケンスを所定数繰り返して収集された投影ビュー750のセットを意味するものとする。
【0054】
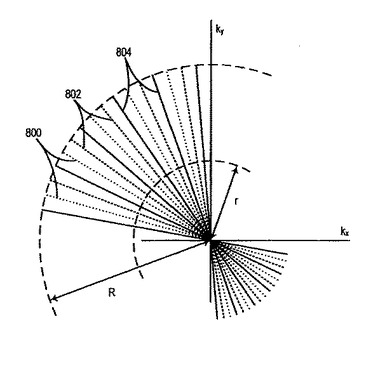
プロセスブロック702に示された次のステップは、試験対象から収集されたすべての投影ビューを組み合わせて、複合又は希薄化画像ISを復元することである。これには、現在の画像フレームのためのビューと交互に配置され、従ってk空間のより完全なサンプリングを提供する、先に収集された投影ビューが含まれる。図8を参照して、例えば、現在の画像フレーム投影ビューが点線ライン800で示されたk空間をサンプリングし、先に収集された画像フレームビューが鎖線802と実線804で示されたk空間をサンプリングしたものである。十分な数のビューが利用可能で、画像アーチファクトを回避することができるので、希薄化画像は、従来法を用いて復元することができる。好ましい実施例において、この復元には、組み合わされて収集されたk空間投影データのデカルト座標系への再グリッド化と、次に2次元逆フーリエ変換(2DFT)の実行が含まれ、それによって希薄化画像ISが生成される。
【0055】
現在の画像フレームは、次に本発明の教示に従って復元される。より具体的には、ステップ704に示すように、希薄化画像ISは、現在の画像フレームと同じサンプリングパターンに沿ってk空間に再グリッド化される。再グリッド化プロセスの例としては、by K. P. Pruessman, et al., in "Advances in Sensitivity Encoding With Arbitrary k-Space Trajectories," Magnetic Resonance in Medicine, 2001 ; 46:638-651に記載されている。現在の画像データセットは、次に、ステップ706で再グリッド化した希薄化画像から引き算されて、差分データセットを生成する。希薄化画像は上述の方法で再グリッド化されているので、図8に示すようなk空間投影ビューの交互配置されたセットではなくなっており、代わりに、再グリッド化データは、現在の画像データセットと同じサンプリングパターンを有し、複数の画像フレームに対応した情報を有するk空間における値のセットとなっている。従って、引き算を行なった際に、現在の画像データセットに含まれている情報は、単に再グリッド化データから除去された訳ではなく、ステップ700で収集された画像フレームを合成したスライド窓から現在の画像データセットを引き算したものである。
【0056】
次のステップ708で、補正画像が生成される。第一に、差分データセットのk空間投影ビューは、一次元高速フーリエ逆変換を実行することによって、X線投影又はsinogram空間に変換され、ベクトルYcorrを生成する。差分データセットの各投影ビューに対してこれが繰り返されて、差分データベクトル行列Ycorrを形成する。エンコーディング行列Aが、次に、ランダム変換行列として選択される。別の方法として、差分データベクトル行列Ycorrは、k空間値を含むことができ、対応するエンコーディング行列Aとして、フーリエ変換行列を選択することができる。制御パラメータλの固定値と、適切な希薄化変換Ψが選択されて、Eqn.(19)に表わされた最小化問題が、反復して解かれて、現在の画像フレームに対する補正画像が生成される。最小化問題は、反復再重み付けアルゴリズムを用いて解かれ、例えばby I. F. Gorodnitsky and B. D. Rao in "Sparse Signal Reconstruction from Limited Data Using FOCUSS: A Re-weighted Minimum Norm Algorithm" IEEE Transactions on Signal Processing, 1997; 45(3):600-616に記載されている。別な方法としては、他の反復復元法と同様に、非反復復元法を採用することができ、例えばby B. Wohlberg and P. Rodriguez in "An Iteratively Reweighted Norm Algorithm for Minimization of Total Variation Functionals" IEEE Signal Processing Letters, 2007; 14(12):948-951に記載されている。希薄化変換Ψは、画像勾配Dとなるように選択され、ここでDは一次画像差分行列である。別な方法として、Ψは離散ウェーブレット変換又は恒等行列となるように選択することができる。Ψの選択は、さまざまなものが可能であり、多くのバリエーションが可能で、それらは本発明の範囲内であることが、当業者には当然のことである。
【0057】
補正画像Icorrは、希薄化画像と現在の画像フレームとの間の画像強度差を示す画素値を有している。従って、現在の画像フレームに対応する最終画像が、ステップ710で生成され、そこでは補正画像Icorrが希薄化画像から引き算されています。希薄化画像の中の演繹的情報は、復元画像フレームを制約するために用いられ、それによって復元画像フレームの品質が向上します。
【0058】
追加の画像フレームはプロセスブロック712に示すように復元されます。判断ブロック714で最終画像フレームが完成すると、復元プロセスは停止され、全ての画像フレームはプロセスブロック716に示すように蓄積されます。
(MR画像システムにおけるパラレル画像復元)
【0059】
画像復元法のもう一つの実施例も、2次元投影ビューを収集するMRIシステムを利用し、一定時間にわたって対象を表現する一連の画像フレームを復元する。本実施例において、画像データはパラレルRF受信コイルアレーを用いて収集され、1つの画像データセットは、集合して「コイル画像データセット」950を形成する各受信コイル素子から収集される。特に図9を参照して、コイル画像データセットが収集され、そこからプロセスブロック900で示すように画像フレームが復元される。コイル画像データセット950内の各画像データセットを構成する投影ビューは、数が少なく、できるだけ均一にk空間をサンプリングするように、均等に分散されている。収集される投影ビューの数が少ないので、各画像フレームは非常に短い時間で収集されるが、k空間がアンダーサンプリングされているので、従来の方法を用いると、どの復元画像にも縞状アーチファクトが発生する。パラレルMR収集スキームを採用することによって、全体的なスキャン時間のさらなる削減が達成される。
【0060】
プロセスブロック902で示された次のステップは、試験の対象から収集された全ての投影ビューを組み合わせて、複合、又は希薄化画像ISを復元することである。第一に、パラレル受信機アレーにおける各コイル素子に対する画像データセットが組み合わせられる。これらの組み合わせられた画像データセットのそれぞれは、現在の画像フレームに対するビューと交互配置され、従ってk空間のより完全なサンプリングを提供する、先に収集された投影ビューを備えている。図8を参照して、例えば、現在の画像フレーム投影ビューが点線ライン800で示されたk空間をサンプリングし、先に収集された画像フレームビューが鎖線802と実線804で示されたk空間をサンプリングしたものである。しかし、k空間はまだアンダーサンプリングされており、パラレルMR画像復元法が、各コイル素子から組み合わせられた画像データセットから、希薄化画像ISを生成するために用いられている。希薄化画像は、本発明を実施するために採用したk空間軌跡に依存した復元法を選択する中から、従来のパラレル復元法を用いて復元される。例えば、非デカルト系SENSE法を採用することができ、例えばby K. P. Pruessman, et al., in "Advances in Sensitivity Encoding with Arbitrary k-Space Trajectories," Magnetic Resonance in Medicine, 2001; 46:638-651に記載されている。
【0061】
次にステップ904でループに入って、そこではコイル画像データセット950から希薄化画像データセットが生成される。より具体的には、ステップ906に示すように、各コイル素子に対して、希薄化画像ISが最初に対応するコイル感度マップと掛け算されて、中間画像が生成される。ステップ908において、各中間画像は、現在の画像フレームと同じサンプリングパターンに沿ってk空間に再グリッド化される。ステップ910で、対応するコイル素子に対する現在の画像データセットが、次に、再グリッド化された中間画像から引き算され、前記コイルに対する差分データセットを生成する。ステップ912に示すように、このプロセスは次のコイル素子に対応する画像データセットに対して繰り返される。判断ブロック914に示すように、パラレル受信機アレーにおける各コイルについての現在の画像フレームに対し差分データセットが生成されると、現在の画像フレームに対する復元プロセスが継続される。
【0062】
次にステップ916で、補正画像が生成される。第一に、差分データセットのk空間投影ビューは、一次元高速フーリエ逆変換を実行することによって、X線投影又はsinogram空間に変換され、ベクトルYcorrを生成する。そして、適切なエンコーディング行列Aがさらに生成される。加えて、各差分データベクトルYcorrは、パラレル受信機コイルアレーの各コイルの与えられた投影ビューについての情報を有している。上述のように、差分データベクトルYcorrは、代替的に、k空間値を有することができる。制御パラメータλの固定値と、適切な希薄化変換Ψが選択されて、Eqn.(19)に表わされた最小化問題が、反復して解かれて、現在の画像フレームに対する補正画像が生成される。本実施例において、エンコーディング行列Aは、パラレル受信機アレーにおける各コイル素子のコイル感度プロファイルを含むように選択される。最小化問題は、例えばI. F. Gorodnitsky and B. D. Rao in "Sparse Signal Reconstruction from Limited Data Using FOCUSS: A Re-weighted Minimum Norm Algorithm" IEEE Transactions on Signal Processing, 1997; 45(3):600-616に記載されている、反復再重み付けアルゴリズムを用いて解かれる。別の方法では、他の反復復元法と同様に、非反復画像復元法が採用され、例えばその1つがby B. Wohlberg and P. Rodriguez in "An Iteratively Reweighted Norm Algorithm for Minimization of Total Variation Functionals" IEEE Signal Processing Letters, 2007; 14(12):948-951に記載されている。希薄化変換Ψが、画像勾配Dとなるように選択され、ここでDは1次画像差分行列である。別の方法では、Ψは離散ウェーブレット変換又は恒等行列を選択することができる。Ψの選択は、さまざまなものが可能であり、多くのバリエーションが可能で、それらは本発明の範囲内であることが、当業者には当然のことである。
【0063】
現在の画像が希薄化画像ISから引き算されて、現在の画像フレームに対応した最後の画像が次にステップ916で生成される。希薄化画像に具体化された演繹的情報が、制約のために用いられて、復元画像フレームの画質が向上する。プロセスブロック920に示すように、追加の画像フレームが復元される。判断ブロック922で最後の画像フレームが完了したと判断されると、復元プロセスは終了して、プロセスブロック924に示すように、すべての画像フレームが蓄積される。
(X線コンピュータ断層撮影画像システム)
【0064】
本発明は、対象のインターリーブされた投影ビューが収集される他の医療用画像診断法にも、応用可能である。そのような画像診断法の1つが、X線コンピュータ断層撮影である。初めに図10A,10Bを参照して、X線コンピュータ断層撮影(CT)画像システム1010は、「第三世代」CTスキャナを代表するガントリー1012を有している。ガントリー1012は、X線の扇形ビーム又は円錐形ビームをガントリーの対向側にある検出器アレー1016に向かって投射するX線源1013を有している。検出器アレー1016は、患者1015を通過してくる投影X線を検知する多数の検出器素子1018で構成されている。各検出器素子1018は、衝突するX線ビームの強度と、従って患者を通過したことによるビームの減衰量とを表わす電気信号を生成する。X線投影データ収集の間、ガントリー1012とそこに設けられたコンポーネントは、患者1015の回転中心1019周りに回転する。
【0065】
ガントリーの回転とX線源1013の操作は、制御メカニズム1020によって制御されている。制御メカニズム1020は、出力信号とタイミング信号をX線源1013に供給するX線コントローラ1022と、ガントリー1012の回転速度と位置を制御するガントリー移動コントローラとを有している。制御メカニズム1020内のデータ収集システム(DAS)1024は、アナログデータを検出器素子からサンプリングして、そのデータを次の処理のためのデジタル信号に変換する。画像復元装置1025は、サンプリングされデジタル化されたX線データをDAS1024から受け取り、高速画像復元を実行する。復元された画像は、入力としてコンピュータ1026に加えられ、そこで画像を大容量記憶装置1028に蓄積する。
【0066】
コンピュータ1026は、また、キーボードを有するコンソール1030を介してオペレータから命令やスキャンパラメータを受け取る。コンピュータに付属したディスプレイ1032によって、オペレータはコンピュータ1026からの復元画像や他のデータを観察できる。オペレータの送った命令やパラメータは、コンピュータ1026に処理されて、DAS1024やX線コントローラ1022やガントリー移動コントローラ1023に制御信号やデータとして供給される。加えて、モーター駆動テーブル1036をガントリー1012内の患者1015に位置付けるように制御するテーブル移動コントローラ1034を、コンピュータ1026は操作する。
【0067】
MRIシステムと同様に、CTシステムは多くの様々な臨床用途を有しており、投影ビューの2次元又は3次元セットが収集されて、患者の1つ以上の画像を復元するために用いられる。MRIシステムで収集される投影ビューは、k空間(又はフーリエ空間)サンプルで構成されているのに対し、CTシステムで収集される投影ビューは、X線投影空間サンプルで構成されている。CTシステムで収集されたデータを用いた画像復元は、必然的にX線投影空間から実空間への変換が要求される。
(CT画像システムにおける画像復元)
【0068】
特に図11を参照して、本発明の別の実施例は、CTシステムを利用して、一連の2次元スライス画像を収集するものである。プロセスブロック1100に示されるように、2次元画像フレームを復元するための投影ビューのセットが収集される。これは、高度にアンダーサンプリングされたものであり、投影ビューがX線投影空間を均一にサンプリングする等間隔のビュー角度になっている。本実施例において、スキャンのデータ収集段階は、画像復元に先立って完了しており、従って、一連の画像フレームは、判断ブロック1102で判断されるスキャンの段階の完了前に、収集されている。例えば、一連の画像フレームは、造影剤が対象領域を流れる動的研究中に収集される。上述の第一実施例のように、このスキャン中に収集される投影ビューは、図8に示すようにインターリーブ式であって、それらがすべて組み合わせられたときに、各画像データセットがX線投影空間をアンダーサンプリングしたものであっても、X線投影空間は高度にサンプリングされているようにデータセットは形成されている。
【0069】
プロセスブロック1104に示すように、希薄化画像は、スキャンの収集段階の間に収集された組み合わされた投影ビューから復元される。各画像フレームを形成する等間隔の投影ビューのセットは、インターリーブ式に配されて、画像フレームの組み合わせから得られる投影ビューが、より十分にX線投影空間をサンプリングし、より高画質の画像を生成する。希薄化画像は、例えばフィルタ逆投影法のような従来の画像復元技術を用いて、これらの組み合わせられた投影ビューから復元される。
【0070】
ステップ1106でループに入り、そこで上述の復元法は、各フレーム画像の復元に用いられる。第一に、ステップ1108に示すように、希薄化画像が復元すべき画像フレームと同じサンプリングパターンに再グリッド化される。次に、ステップ1110において、現在の画像データが再グリッド化された希薄化画像から引き算されて、差分データセットを生成する。ステップ1112において、差分データセットは、上記Eqn.(19)で表わされる最小化問題に利用されて、補正画像を生成する。CT画像システムで収集されたデータは、本質的にX線投影空間内にあるので、差分データは、反復最小化プロセスの前に変換する必要が無い。代わりの方法として、例えばフィルタ逆投影法のような非反復法も、補正画像の復元に利用することができる。上述のように、この状況におけるエンコーディング行列は、ラドン変換行列であり、制御パラメータλと適切な希薄化変換Ψが選択される。ステップ1114で、補正画像を希薄化画像から引き算することによって、補正画像フレームが生成される。この結果として生じた補正画像フレームは、プロセスブロック1116に示すように、蓄積される。
【0071】
判断ブロック1120に示すように、スキャンのデータ収集段階で収集された全てのデータが利用されるまで、プロセスブロック1018に示すように、更なる画像フレームが復元される。スキャンの復元段階は、この時点で終了するが、復元された画像フレームは特定の臨床用途に依存して、さらに加工される。本実施例において、希薄化画像はスキャン中に収集されたすべてのビューによって形成されて、画像フレームSNRにおける実質的改良を提供するが、画像フレームは実時間において利用可能ではない。
(ポジトロン放出断層撮影画像システム)
【0072】
上記実施例において、希薄化画像を復元するために用いられる演繹的情報は、インターリーブされた投影ビューにおける複数の画像フレームの収集に由来する。本発明には、他の臨床用途が存在するが、しかし、そこでは追加の投影ビューを収集することなく高品質希薄化画像のための演繹的情報が利用可能である。これらの1つが、ポジトロン放出断層撮影(PET)スキャナで収集されたデータである。
【0073】
図12を特に参照して、PETスキャナシステムは、中央開口又は穴1210周りの検出器リングアセンブリ1211を支持するガントリー1210を備えている。ガントリーコントローラ1210がガントリー1210内部に設けられ、第二のシリアル通信リンク1218を通してオペレータ・ワークステーション1215から受信した命令に応答して、ガントリーを操作する。
【0074】
検出器リング1211は複数の検出器ブロック1220で構成されている。各検出器ブロック1220は、シンチレータ結晶光電子増倍管のセットを備えている。収集回路1225のセットがガントリー1210内部に設けられて、検出器リング1211内の各モジュール1220からの信号を受信する。収集回路1225が、シンチレータ結晶の各ブロック内のイベント座標を求め、そして、結晶ブロック信号の合計と共にこれら座標(x,z)がデジタル化されて、ケーブル1226を介して別個のキャビネット1228に収容されたイベントロケータ回路1227に送られる。各収集回路1225は、シンチレーション・イベントが発生した正確な瞬間を示すイベント検出パルス(EDP)も生成する。
【0075】
イベントロケータ回路1227は、収集回路1225が生成した信号を周期的にサンプリングするデータ収集プロセッサ1230の一部を構成する。このプロセッサ1230は、バックプレーンバス構造1231と、このバス1231の通信を制御し、このプロセッサ1230をローカルエリアネットワーク1218とリンクさせる収集用CPU1229と、を有している。イベントロケータ1227は、それぞれケーブル1226と接続してガントリー1210内の対応する収集回路1225からの信号を受信する個別の回路基板のセットで構成されている。イベントロケータ1227は、収集回路1225が生成したイベントパルス(EDP)を検出して、それを現在のサンプル期間内にシンチレーション・イベントが発生したことを示す8ビットのタイムマーカーに変換することによって、イベントをプロセッサ1230の動作に同期させる。また、この回路1227は、もしシンチレーションの総エネルギーが511keV±20%の範囲外であった場合、あらゆる検出されたイベントを廃棄する。各サンプル期間中、各有効イベントに関する情報は、デジタルナンバーのセットに組立てられ、このデジタルナンバーは、イベントが発生した時期と、イベントを検出したシンチレータ結晶の位置を正確に示す。このイベントデータパケットは、データ収集プロセッサ1230の一部である一致検出装置1232に搬送される。
【0076】
一致検出装置1232は、イベントロケータ1227からのイベントデータパケットを受け入れ、それらのいずれか2つが一致しているか判断する。一致しなかったイベントは廃棄され、一致したイベントペアは、一致データパケットとして記録され、シリアルリンク1223を通って分類装置1234に搬送される。各一致データパケットは、イベントを検出した二つのシンチレータ結晶のアドレスを正確に識別する一対のデジタルナンバーを含んでいる。これらから、一致イベントを生成した光線経路の位置と角度とを求めることができる。
【0077】
分類装置1234は、画像復元プロセッサ1240の一部を構成する回路である。画像復元プロセッサ1240は、バックプレーンバス1241の周囲に形成されている。画像用CPU1242が、バックプレーンバス1241を制御し、プロセッサ1240をローカルエリアネットワーク1218とリンクさせている。メモリモジュール1243もバックプレーンバス1241と接続しており、以下に詳細に説明する復元画像に用いるデータを蓄積する。アレープロセッサ1245もバックプレーンバス1241と接続しており、画像用CPU1242の指示を受けて動作し、メモリモジュール1243内のデータを用いて画像復元を実行する。処理結果を反映した画像アレー1246がメモリモジュール1243に蓄積され、画像用CPU1242によってオペレータ・ワークステーション1215に出力される。
【0078】
分類装置1234の機能は、一致データパケットを受信して、一致データの効率的な蓄積のためのメモリアドレスを生成することである。スキャナの視野を介した同一の方向、θ、経路を指す、すべての一致イベント光線のセットは、完全な投影、又は「ビュー」である。投影ビューにおける特定の光線経路と視野の中心の間の距離Rは、光線をビューの内部に位置付ける。図12に示すように、例えばイベント1260が、投影角度θで距離Rの投影光線1262に沿って発生する。スキャンの間、分類装置1234は、この投影光線上の二つのシンチレータ結晶によるイベントを示す一致データパケットを仕分けることによって、この投影光線(R,θ)上で発生したすべてのイベントをカウントする。放射スキャンの間、一致カウントは、各軸方向の画像に対して1つ、1つの次元が投影角θで、他の次元が距離Rで構成された2次元アレーとしてメモリ1243内に整理される。
【0079】
一致イベントはランダムに発生し、分類装置1234は各一致データパケットにおける二つのシンチレータ結晶アドレスから、θとRを迅速に求め、対応するサイノグラムアレー要素のカウントをインクリメントする。放射スキャンの完了時に、サイノグラムアレー1248は各光線に沿って発生した対消滅イベントの総数を蓄積する。このような対消滅イベントの数は、放射スキャン中の光線(R,θ)に沿って発生した陽電子電子消滅イベントの数を示しており、一般的に数分の間に数十万のイベントが記録される。
【0080】
当然のことながら、PET画像の品質は、サイノグラム1248に蓄積可能なシンチレーション・イベントの数に大きく依存する。スキャンを長く続けるほど、検出されたシンチレーション・イベントの数が大きくなり、復元画像の品質が高くなる。
(PET画像システムにおける画像復元)
【0081】
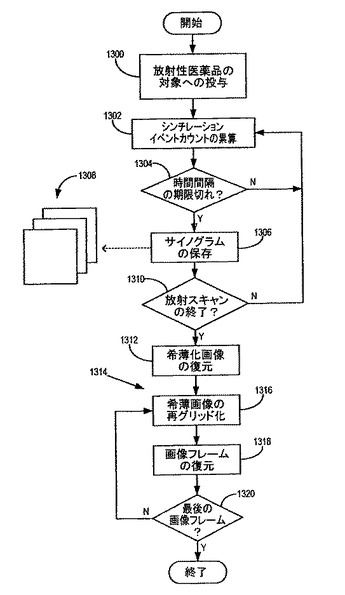
特に図13を参照して、本発明は時間分解された放射スキャンを実行するためのPETスキャナに採用される。放射スキャンは、プロセスブロック1300に示すように、放射性核種を試験対象に注入することによって開始される。画像診断において最もよく利用される放射性核種は、フッ素18(18F)と、炭素11(11C)と窒素13(13N)と酸素15(15O)である。これらは、「放射性医薬品」と呼ばれる放射性トレーサーとして、例えばグルコースや炭酸ガスのような材料に包含して用いられる。放射性医薬品は患者に注入されて、グルコース代謝や脂肪酸代謝、たんぱく質合成といったプロセスに関与する。
【0082】
対象はPETスキャナの穴1212に置かれ、プロセスブロック1302に示すようにシンチレーション・イベントが検出されカウントされる。上述のように、シンチレーション・イベントが検出され、分類され、投射角度θにおける各光線Rのカウント数としてサイノグラム1248に蓄積される。判断ブロック1304に示すように、比較的短い時間間隔に対してイベントがカウントされ蓄積される。この時間間隔は、放射スキャンの時間分解能を決定し、例えば、従来の放射スキャン期間の10分の1である。プロセスブロック1306に示すように、時間間隔が満了すると、蓄積されたシンチレーション・イベント・カウントが時間間隔サイノグラム1308として保存される。
【0083】
放射スキャンは継続し、判断ブロック1310でスキャンの最後が検出されるまで、蓄積されたサイノグラム・カウントは各時間間隔の経過後に保存され続ける。スキャンの終了は、プリセットされた時間か、時間間隔のプリセットされた数で決まる。どちらの場合にも、複数の時間間隔サイノグラム1308が放射スキャンの間に生成され、最後のサイノグラム1308は、放射スキャン全体に対する総カウント数を保存する。各時間間隔サイノグラムは上述のMRやCT画像システムで収集される画像データセットに似ている。
【0084】
次にスキャンの画像復元段階が開始され、この段階の間、放射性医薬品の摂取を示す画像フレームが各時間間隔の終了時に復元される。第一に、プロセスブロック1312に示すように、希薄化画像が復元される。これは、放射スキャン中に保存した最後のサイノグラム1308を用いた従来の逆投影復元である。これには、放射スキャン全体に対する蓄積されたシンチレーション・イベントが含まれており、画質は可能な範囲で最良である。
【0085】
次にステップ1314でループに入り、時間分解された画像フレームがこの希薄化画像を用いて復元される。より具体的には、プロセスブロック1316に示すように、各保存された時間間隔サイノグラム1308の反復復元が実行される。この反復復元は、ステップ1316に示すように、上述のEqn.(19)において第一に最新の復元された希薄化画像を再グリッド化することによって実行される。これは、制約された最小化問題であって、そこでは時間間隔サイノグラム1308の各光線に対し蓄積されたシンチレーション・カウントR、各ビューにおけるθが、データベクトルsとしてEqn.(19)に入力される。加えて、本発明の他の実施例を参照して、再グリッド化した希薄化画像データから時間間隔サイノグラム1308を引き算することによって、差分データセットが各時間間隔サイノグラム1308に対して生成される。
【0086】
画像フレーム復元プロセス1318は、判断ブロック1320に示すように、各時間間隔サイノグラム1308に対応する画像フレームが生成されるまで繰り返される。結果的に、放射スキャンの間の各時間間隔における放射性医薬品の摂取を示す一連の画像フレームが生成される。復元時に、より高画質の希薄化画像を用いることによって、低い対消滅イベントカウント数を有するサイノグラムを用いて復元された従来の画像よりも、実質的に各画像フレームの画質が向上する。
【0087】
このPETスキャナ実施例において、希薄化画像はスキャン中に収集される追加的交互ビューを用いては形成されず、むしろ、スキャン中の複数の時間間隔のそれぞれの間の同一のビューセットで収集されたデータを組み合わせている。この実施例において、希薄化画像の品質は、上述の先の実施例のようにビューの数を増やすよりはむしろ、各ビューのSNRを増加させることによって向上させている。この同じ戦略は、例えばX線CTでも用いることができて、画質を低減することなく患者へのX線被爆量を低減させることができる。このような実施例において、一連の画像フレームは、各画像フレームにおける投影角の同一のセットを用いて収集される。しかし、X線ドーズ量を低くして、患者の被爆量を減らしている。フレーム画像SNRは、各画像フレーム収集中の低ドーズ減衰測定を組み合わせることによって生成した希薄化画像を用いた本発明の復元方法によって保持される。
PETスキャナ実施例において、一致イベントカウントを加えることより、むしろ、このX線実施例において「組み合わせ」が収集されたフレーム画像における全ての対応する減衰測定の長所である。
【0088】
この同じ画像復元戦略は、単光子放出コンピュータ断層撮影(SPECT)システムを用いて収集した復元画像にも利用することができる。PETスキャナの場合と同様に、SPECTシステムは異なる光線経路に沿った対象から放射され検出されたフォトンのカウント数を蓄積する。スキャン中、ガンマカメラがゆっくり動いて、異なるビュー角度でのカウントを蓄積する。本発明を用いて、一連の画像フレームは、同じ一連のビュー角度を通してガンマカメラをより迅速に繰り返し動かして収集される。総スキャン時間が増加しないように、各ビュー角度でより少ないカウント数が蓄積されるが、各復元された画像フレームのSNRは、各ビュー角度に対するカウントを全て加えることによって形成された希薄化画像を用いることによって、維持される。
(画像誘導放射線治療システム)
【0089】
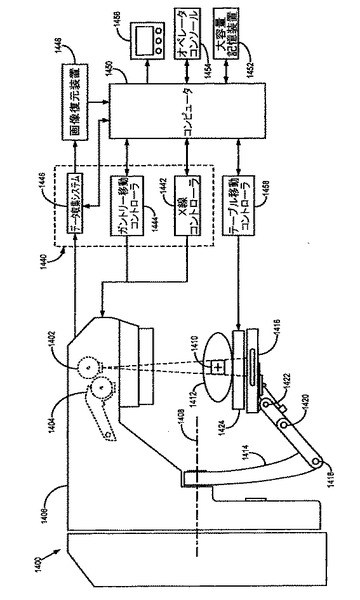
初めに図14を参照して、画像誘導放射線治療(IGRT)システム1400は、治療用X線源1402と診断用X線源1404とを備えている。診断用X線源1404は、円錐状ビームを検出器アレー1416に向けて投射する。治療用X線源1402と診断用X線源1404は、隣接して設けられ、回転軸1408回りに回転する第一の回転自在ガントリー1406の同じ端部に収容されている。第一の回転自在ガントリー1406は、X線源1402、1404のどちらかを、所望の方法で、患者テーブル1424上に位置する対象1412の標的部位1410に位置合わせできるようにしている。第二の回転自在ガントリー1414は、第一の回転自在ガントリー1406に回転自在に取り付けられていて、同様に回転軸1408回りに回転可能になっている。X線検出器1416が第二の回転自在ガントリー1414の一端に設けられている。X線検出器1416は、診断用X線源1404からのX線を受信して診断画像装置として機能するのみならず、治療用X線源1402からのX線を受信して、ポータル画像装置としても機能する。検出器アレー1416は、対象1412を通過して投影されたX線を感知する多数の検出器素子で形成されている。各検出器素子は、衝突X線ビームの強度、従って、対象1412を通過したビームの減衰量を表わす電気信号を生成する。第二の回転自在ガントリー1414は、1418、1420、1422の3点のまわりに回転する関節機構をさらに備えている。1418、1420、1422の3点が提供する回転運動は、X線検出器1416が2次元平面内を移動することを可能にしている。
【0090】
回転自在ガントリー1406、1414の回転や、X線源1402、1404の動作は、IGRTシステムの制御機構1440が制御している。制御機構1440は、出力信号とタイミング信号をX線源1402、1404に供給するX線コントローラ1442と、ガントリー1406、1414の回転速度と位置を制御するガントリー移動コントローラ1444とを有している。制御機構1440内のデータ収集システム(DAS)1446は、検出器素子からアナログデータをサンプリングして、次の処理のためにそのデータをデジタル信号に変換する。画像復元装置1448は、サンプリングされデジタル化されたX線データをDAS1446から受け取り、高速画像復元を実行する。復元された画像は、コンピュータ1450への入力として加えられ、コンピュータ1450は画像を大容量記憶装置1452に蓄積する。
【0091】
コンピュータ1450は、キーボードを有するコンソール1454を介してオペレータからの命令やスキャンパラメータも、受信する。付随したディスプレイ1456が、オペレータにコンピュータ1450からの復元された画像や他のデータを観察することを可能にする。オペレータが入力した命令やパラメータは、コンピュータ1450に利用されて、制御信号やデータをDAS1446やX線コントローラ1442やガントリー移動コントローラ1444に供給する。加えて、コンピュータ1450は、移動式患者テーブル1424を制御して対象1412をガントリー1406、1414内に位置させるテーブル移動コントローラ1458を操作する。
(IGRTシステムにおける画像復元)
【0092】
本発明のまた別な実施例において、図11を参照した上記画像復元法が、治療期間中に供給される放射線の精度を向上させるために利用される。より具体的には、詳細は以下に述べるが、補正画像が生成されて、例えば同時継続米国特許出願第12/248,590号に記載されているPICC画像復元法のための「先行画像」を生成するために利用される。
【0093】
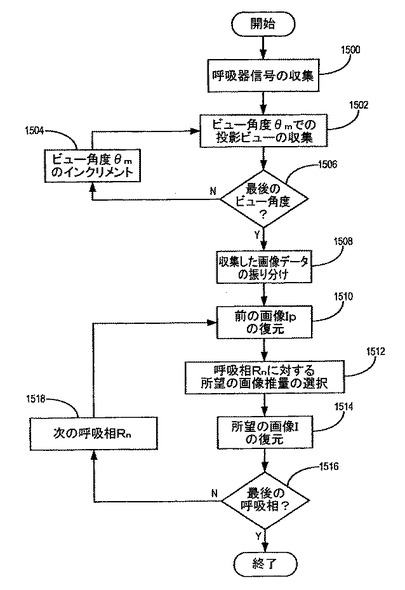
例えば図14を参照した上記のように、画像誘導放射線治療システムは、本発明の1つの実施例を実行するために用いることができる。特に図15を参照して、上記実施例の方法は、ステップ1500に示すように、対象の呼吸運動を示す信号を収集するところから開始される。このような信号は、例えば肺活量計、呼吸器ベローズ、又は呼吸運動追跡システムといった呼吸器モニター装置を用いて収集される。呼吸運動追跡システムの例としては、商標名が「Real-time Position ManagementTM」(Varian Medical Systems, Palo Alto, CA)という商業的に利用可能なシステムがある。この呼吸運動信号は、収集されたX線画像データをN個の異なる呼吸相に振り分けるために後に用いられる。ステップ1502に示すように、続けてデータ収集が始まり、X線画像データを第一ビュー角度θmにおける投影ビューのセットの形式で収集する。続いて診断用X線源1404と検出器1416がステップ1504の新たなビュー角度になるまで回転して、画像データが再び収集される。このプロセスは、判断ブロック1506に示すように、診断用X線源1404と検出器1416が最後のビュー角度θMになるまで繰り返される。
【0094】
画像データが全て収集された後に、復元プロセスが開始される。続いて、ステップ1508に示すように、収集されたX線画像データがN個の異なる呼吸相Rnに振り分けられる。例えば第一のゲート窓W1の間に収集された全ての画像データは、対応する第一の呼吸相R1として選択される。この遡及的ゲート動作は、N個の異なる所望の呼吸相のそれぞれに対し、「呼吸相画像データセット」を生成する。従って、各呼吸相画像データセットには、与えられた呼吸相Rnに対応するゲート窓Wnの間に収集された複数の投影ビューが含まれている。別の方法では、オリジナル画像データ収集が、先を見越して振り分けられて、呼吸信号の間の所定時点でのみ画像データが収集される。このデータ収集スキームに従って、選択された呼吸相の間に収集された全ての画像データが、同様に呼吸相画像データセットに組み合わせられる。
【0095】
ステップ1510に示すように、先の画像IPが次に復元される。一般的に、先の画像IPは、復元すべき所望の呼吸相画像内の情報を含んだ方法を用いて復元される。このような方法の1つの実施例が、図11を参照した上記方法であって、そこでは先の画像IPが各呼吸相に対して復元される。一般的に、特定の呼吸相に対する利用可能なデータは非常に限定的である。例えば、与えられた呼吸相画像データセットにおいて、約20の投影ビュー角度のみが含まれている。各呼吸相画像データセットは高度にアンダーサンプリングされているので、標準的な画像復元アルゴリズムを用いて画像を復元しようとする試み、例えば公知のフィルタ逆投影法(FBP)などは、シビアなストリーキングと歪みアーチファクトをもたらす。高品質の画像を復元するために、第一呼吸相Rnがステップ1512で選択される。次にステップ1514で示すように、選択された呼吸相Rnの所望の画像Iが続けて図1〜3を参照した上述の復元方法を部分的に利用した方法を用いて復元される。
【0096】
判断ブロック1516に示すように、所望の呼吸相の全てに対する画像が復元されるまで、この方法で、所望の画像Iは各呼吸相Rnに対して復元される。もし所望の画像全てが復元完了していなかった場合には、ステップ1518で次の呼吸相Rnが選択されて、上記画像復元法が繰り返される。上記画像復元法を用いることによって、各呼吸相に対応する情報が、各個々の呼吸相画像を復元する際に用いた先の画像に含まれる。このようにして、対象の呼吸運動をより正確に表現した時系列の画像が生成される。この時系列の画像から、対象の呼吸に応じた腫瘍の動特性が求められる。この動特性を用いて、腫瘍への放射線量を増大させながら、健康な組織への放射線量を削減するように、治療期間の放射線供給計画が調整される。
【0097】
上で議論したように、本発明の1つの実施例において、対象の一連の画像の一部を形成する画像を生成するための方法は、一連の画像を変換して、複数の対応する画像データセットを形成することを含んでいる。例えば、画像はX線投影空間又はk空間に変換される。これらの画像は、医療画像システム又は光学カメラのようなより伝統的な画像システムを含む、あらゆる一般的な画像システムで生成可能である。画像データセットから、複数の収集された画像データセットから第一に組み合わせられたデータによって、希薄化画像が復元される。1つの実施例において、希薄化画像は上記HYPR−LR画像復元法を用いて復元される。
【0098】
続いて、先に復元された希薄化画像を変換することによって、希薄化画像データセットが生成される。例えば、希薄化画像を選択された画像データセットのサンプリングパターンに再グリッド化させることによって、希薄化画像データセットが生成される。次に、希薄化画像データセットから選択された画像データセットを引き算することによって、差分画像データセットが生成される。この差分画像データセットは、補正画像を復元するために用いられる。一般的に、補正画像は反復復元法を用いて復元されるが、別の方法として、他の非反復法を利用することもできる。次に、対象の所望の画像を生成するために、補正画像は、先に復元された希薄化画像から引き算される。当業者には当然のことながら、上記方法は、一連の画像の各画像に対して繰り返すことができる。
【0099】
上で議論したように、本発明の他の実施例において、画像誘導放射線治療(IGRT)システムにある対象への放射線供給計画を更新する方法には、呼吸器モニタ装置や対象の呼吸動作を示す信号を用いて収集したり、IGRTシステムやX線画像データを用いて収集することが含まれる。例示的な呼吸器モニタ装置には、上述のように、肺活量計や呼吸器ベローズや赤外追跡システムが含まれる。当業者には当然のことながら、IGRTシステムには、例えば、平行、扇形、又は円錐型ビームのX線源を有するコンピュータ断層撮影画像システムが含まれる。呼吸相画像データセットは、呼吸動作を示す収集された信号を用いて、X線画像データから生成される。例えば、呼吸相画像データセットは、呼吸運動中の時間に基づいて、対象の呼吸サイクルと実質的に同じ時間中に収集された投影ビューを含んでいる。
【0100】
続いて、収集されたX線画像データと呼吸相画像データセットとを用いて、先の画像が生成される。例えば、先の画像は、本発明の実施例に従って生成される。具体的には、画像、例えば希薄化画像がX線画像データから復元される。次に、復元された「希薄化」画像をX線投影空間に呼吸相画像データセットのサンプリングパターンに沿って再投影することによって、再投影データセットが生成される。次に呼吸相画像データセットから再投影データセットを引き算することによって、差分データが生成され、そして、この差分データを復元することによって差分画像が生成される。続いて、差分画像が希薄化画像に加えられて、先の画像を生成する。対象の評価画像が次に選択される。評価画像は、例えば、本発明の実施例に従って生成された希薄化画像である。別の方法では、評価画像は先に生成された先の画像である。続けて、先の画像と評価画像とを用いて、対象の希薄化画像が生成される。次に、希薄化画像と評価画像と呼吸相画像とを用いて、呼吸相画像が復元される。この呼吸相画像とそこに含まれる情報とを用いて、放射線供給計画が更新される。例えば、第一に複数の呼吸相画像から腫瘍の位置を求めることによって、放射線供給計画は更新される。次に、複数の呼吸相画像間の腫瘍位置の変化を求める。この情報から、又はいわゆる腫瘍の「移動プロファイル」から、放射線供給計画は更新されて、健康な組織に加えられる放射線量が実質的に削減される。
【0101】
本発明は、1つ以上の好ましい実施例を用いて記載されており、それら明確に述べたものの他にも、多くの同等物、代替手段、変形、改良が可能であり、本発明の範囲内であることは当然のことである。当業者には当然のことながら、上記特定の実施例から多くの変形が可能である。例えば、当業者には当然のことながら、Eqn.(19)と(20)は、複数の希薄化画像が用いられて、対応する複数の補正画像を求めるように変形することが可能である。
【技術分野】
【0001】
(関連する出願との相互参照)
本出願は、2007年12月20日に出願された米国暫定特許出願第61/015,559号、発明の名称「前の画像の制約された圧縮されたセンシングを用いた画像復元方法」と、2008年1月14日に出願された米国暫定特許出願第61/020,847号、発明の名称「前の画像の制約された圧縮されたセンシングを用いた画像復元方法」と、2008年6月9日に出願された米国暫定特許出願第61/059,891号、発明の名称「前の画像の制約された圧縮されたセンシングを用いた画像復元方法」の利益を主張する。
(連邦支援の研究に関する陳述)
【0002】
本発明は、合衆国政府の国立衛生研究所のNIH EB005712、NIH EB007021、NIH CA116380の支援を受けてなされた。合衆国政府は、本発明に関し、一定の権利を有する。
【0003】
本発明の技術分野は、医用画像、特に収集した画像データからの画像復元法に関する。
【背景技術】
【0004】
コンピュータ断層撮影システムにおいて、X線源は、「画像面」と呼ばれるデカルト座標系のx−y平面上で平行になる円錐形のビームを放射する。X線ビームは、例えば患者のような画像化される対象を通過して、放射線検出器アレーに衝突する。通過した放射線の強度は、対象物によるX線ビームの減衰に依存し、各検出器は、ビーム減衰量の測定値である独立した電気信号を生成する。全ての検出器からの減衰量の測定値は、個別に収集されて、いわゆる「透過プロファイル」、又は「減衰プロファイル」又は「プロジェクション」を生成する。
【0005】
従来のCTシステムにおけるX線源と検出器アレーは、画像平面内でガントリー上を対象の回りに回転して、対象を横断するX線ビームの角度が常に変化するようになっている。所定の角度における検出器アレーからの透過プロファイルは、「ビュー」と称され、そして、対象の「スキャン」は、X線源と検出器の一回の回転の間の異なる角度方向の集まりで構成されたビューのセットを備えている。2次元スキャンにおいて、データは対象を横切る2次元スライスに対応した画像を構築するように処理される。2次元データから画像を復元する一般的な方法は、技術的に、フィルタ処理した逆投影技術と称されている。この画像復元プロセスは、スキャン中に収集された減衰量の測定値を、「CTナンバ」又は「ハウンズフィールドユニット」と呼ばれる、ディスプレイ上の対応する画素の輝度を制御するために用いられる整数に変換する。
【0006】
放射線治療法は、対象の明確な目的組織に放射線を供給する治療法である。放射線は、周辺の健康な組織が許容範囲を上回る放射線量を受けないような方法で供給される。この対象への放射線量の制御を達成するために、高度に正確な放射線供給技術が要求される。計画された放射線量と供給される放射線量との差異や、処理システムに対する患者の位置の不確定さなどの多くの要因が、所望のレベルの精度を得ることを困難なものにしている。
【0007】
強度変調放射線治療(「IMRT」)は、コンピュータのソフトウエアを利用して、対象腫瘍の形状や位置、動特性に特有の3次元放射線量マップを生成する放射線治療技術である。IMRT法には高精度が要求されるので、腫瘍の位置や動特性に関する詳細データを集める必要がある。そうすることで、病気に冒された領域、例えば腫瘍への放射線量を増加させる一方で、健康な組織への放射線量を削減することができる。これを達成するために、治療計画段階の間、正確な幾何学的精度が要求される。
【0008】
画像誘導放射線治療法(「IGRT」)は、治療中の対象への放射線供給と同時に、例えばコンピュータ断層撮影(CT)のような医用画像を利用する。一般にIGRTは、医用画像からの位置情報を用いて所定の放射線供給計画を補い、精密な直接放射線治療を行なう。第一に、放射線場配置において精度を向上させるための手段を提供する。第二に、治療中の健康な組織への放射線量を削減する方法を提供する。さらに、放射線場の供給精度が向上することで、腫瘍への放射線量を増加させ、一方、周囲の健康な組織への放射線量を軽減するという効果が得られる。IGRT法の典型的な例では、2次元と3次元の画像技術が用いられる。加えて、3次元画像の時系列からなるいわゆる「4次元」画像技術も、IGRTの最中に用いられる。2次元IGRTにおいては、平面的なデジタル放射線写真や蛍光透視画像フレーム又は超高圧(MV)画像が、放射線供給計画からのデジタル復元放射線写真(DRRs)と適合するのに対し、3次元IGRTにおいては、円錐状ビームを用いたコンピュータ断層撮影(「CBCT」)が画像化に用いられる。最近開発されたCBCTベースのIGRTシステムには、CBCTが医用線形加速器と一体化されたシステムが含まれている。フラットパネル技術の進歩によって、CBCTは容量画像化が可能になり、治療中のX線や蛍光透視モニタリングが可能になった。
【発明の概要】
【0009】
本発明は、磁気共鳴画像法(MRI)やX線コンピュータ断層撮影法(CT)やポジトロン放出断層撮影法(PET)や単光子放出コンピュータ断層撮影法(SPECT)を含む、多数の異なる画像モダリティに適用できる画像復元法を提供する。本方法において、希薄化画像が収集されたデータから復元されて、画像化される対象の演繹的知識を提供する。希薄化画像から引き算された時に画像フレームに対する高品質画像を生成する補正画像を所定の画像フレームに対して反復して求めるために、反復復元プロセスが利用される。
【0010】
本発明の一般的な態様は、画像の対象に関する演繹的情報によって復元プロセスを制約することによって医用画像の復元行為を向上させることである。希薄化画像は、一連の取得されたアンダーサンプリングされたデータセットから復元されて、アンダーサンプリングされたデータセットから高品質の画像を生成するために利用される。補正画像は、高品質画像を生成するための各画像データセットに対して生成される。これらの画像のそれぞれは、希薄化画像から対応する補正画像を引き算することによって生成される。本発明のもたらす改善点は、スキャン時間の削減や、放射線量の削減や、時間分解研究におけるより高い時間分解能など、さまざまな形で自然に現れる。
【0011】
本発明の別の態様は、低品質の一連の画像における予め復元された画像の品質を向上することである。複数の画像データセットが、対応する画像をX線投影空間に再投影することによって生成され、そこから希薄化画像が生成される。画像データセットの1つに対応した補正画像を生成するために、反復復元プロセスが利用される。この補正画像は、希薄化画像から引き算されて、対応するオリジナルの画像のより高品質なバージョンを生成する。このプロセスは、一連のオリジナルのより低品質の画像群の各画像に対して繰り返される。
【0012】
本発明のまた別の態様は、改善された画像誘導放射線治療(IGRT)によって、患者への放射線供給をより高精度に調整する方法を提供する。患者の呼吸を示す信号と同時に得られた画像データから、前の画像が復元される。前の画像は、収集した画像データから復元された「希薄化」画像及び所定の呼吸相の間の投影ビュー、又はいわゆる「呼吸相画像データセット」から復元された「希薄化」画像の合成画像を用いて復元される。このように、所望の画像が復元されるための特定の呼吸相に関連した情報を、前の画像は含んでいる。このように、腫瘍の動特性を、より正確に求めることができ、放射線供給プランは、それに応じて調整される。
【0013】
本発明の前述の内容と他の様相と長所とは、以下の明細書によって明らかにされる。本明細書の一部を形成し、本発明を実施することができる特定の実施形態を図によって示す添付の図面を参照する。この実施例は、本発明の全範囲を表わす必要はないが、しかし、請求項と、本発明の範囲を解釈するためにここに参照される。
【図面の簡単な説明】
【0014】
【図1】本発明を実施する際に用いられる画像復元法の一実施例を示すフローチャートである。
【図2】本発明を実施する際に用いられる画像復元法の他の実施例を示すフローチャートである。
【図3】本発明を実施する際に用いられる画像復元法のまた別の実施例を示すフローチャートである。
【図4】本発明の実施例を利用した磁気共鳴画像(MRI)システムのブロック図である。
【図5】本発明の一実施例を実践した図4のMRIシステムで用いられるパルスシーケンスのグラフ表現である。
【図6】図5のパルスシーケンスを用いてサンプリングされたk空間データの図的記述である。
【図7】図5のパルスシーケンスと共に図4のMRIシステムで用いられる本発明の実施例のフローチャートである。
【図8】インターリーブされた投影ビューのグラフ表現である。
【図9】図5のパルスシーケンスと共に図4のMRIシステムで用いられる本発明の他の実施例のフローチャートである。
【図10】(A)本発明の他の実施例を用いたX線コンピュータ断層撮影(CT)画像システムの透視図である。 (B)図10AのCT画像システムのブロック図である。
【図11】図10Aと図10BのCT画像システムで用いられる本発明の実施例のフローチャートである。
【図12】本発明のまた別の実施例を用いたポジトロン放出断層撮影(PET)画像システムのブロック図である。
【図13】図12のPET画像システムを用いた本発明のまた別の実施例のフローチャートである。
【図14】本発明のまた別の実施例を用いた画像誘導放射線治療(IGRT)システム例のブロック図である。
【図15】図14のIGRTシステムを用いた本発明のまた別の実施例のフローチャートである。
【発明を実施するための形態】
【0015】
一般的に言えば、データセットから画像を復元する方法には、測定したデータサンプルYから所望の画像Iを見積もるための一連の数値的ステップが含まれる。より具体的には、画像復元は、以下の一致条件を満足させる必要がある。
【0016】
【数1】
【0017】
ここでAはシステム行列である。一般的に、システム行列Aは、所望の画像Iを収集したデータサンプルYに関連付ける前方投影演算子と見なすことができる。コンピュータ断層撮影(CT)画像を取り扱う場合、例えば、システム行列には再投影演算子が含まれる。Eqn.(1)の一致条件は、つまり、画像が忠実に復元された場合に、測定された投影データの正確な見積もりを生成するために、前方投影演算子は実質的に実際のデータ取得手順を再現するということである。
【0018】
では次に、本発明を実施する際に用いられる画像復元法の例を見てみると、一般的に要求されるものより少ない画像データから高品質の所望の画像が復元される方法が提供されている。一般的に「前の画像」は、compressed sensing (CS)の原理が利用されている繰り返し画像復元法を制約するために用いられる。例えば、CSで一般的に用いられている希薄化変換に加えて、所望の画像から前の画像を引き算することによって、画像はさらに希薄化される。結果的に、CS法で要求される数より実質的により少ないサンプル数を用いて、画像を正確に復元することができる。
【0019】
より具体的には、前の画像IPと、復元すべき所望の画像Iに対して、本発明を実施するために用いられる画像復元法の例は、以下の目的関数を最小化することによって実行される。
【0020】
【数2】
【0021】
ここでΨ1とΨ2は希薄化変換で、
【数3】
はL1−norm演算子で、αはEqn.(2)の目的関数における2項目の相対的重さを制御するために用いられる正則化パラメータである。上述のように、次式
【数4】
は、N次元ベクトルxの1つのL1−normを示している。より一般的には、真のL1−normからの偏差が、所望の画像における十分な画質を維持しながら可能である。例えば、Eqn.(2)の目的関数は、
【数5】
として一般化できる。ここで、
【数6】
は、Lp−norm演算子で、
【数7】
の形を取る。
【0022】
上述のように、好ましくはp=1.0であるが、選択的に、異なるpの値を取る事ができる。p=1.0からpの値が大きく偏差するほど、復元された所望の画像における劣化が大きくなることが明白なのは、当業者にとって当然のことである。
【0023】
Eqn.(2)の希薄化変換Ψ1とΨ2は、一般的に異なる。しかし、選択的に、Ψ1とΨ2を同じ希薄化変換にすることができる。希薄化変換の例としては、ウェーブレット変換や、一次有限差分や、二次有限差分、そして例えば以下の式で表わされる離散的傾斜変換を含む。
【数8】
ここで、添え字m、nは画像Iの画素の位置を示す。
【数9】
で特定される画像は、一般的に「傾斜画像」と呼ばれている。
【0024】
Eqn.(2)の目的関数の両方の項ともに重要である。それらの重要性の結果として、正則化パラメータαの選択が、画像復元プロセス全体の制御のために利用される。従って、正則化パラメータαの選択は、前の画像Ipの選択と、目前の臨床的応用とに依存する。例えば、Eqn.(2)の目的関数の第二項
【数10】
は、前の画像Ipから潜在的に引き継いだストリーキング・アーチファクトを軽減する。別の例では、正則化パラメータαを約0.3〜0.7の間に選択すれば、反復的な画像応用に対しては一般的に十分である。
【0025】
Eqn.(1)の一貫性条件を全体的な画像復元プロセスに組み込むために、ラグランジュの未定係数法が用いられる。こんなふうに、一貫性条件は、Eqn.(2)に記述されている目的関数の最小化にさらなる制約を加えるために利用される。このようにして、次式の新たな目的関数が生み出される。
【数11】
ここで、λはラグランジュ乗数、Xは差分行列、そして
【数12】
は、L2−norm演算子の二乗であって、N次元ベクトルxに対して、以下の形をとる。
【数13】
【0026】
Eqn.(7)の差分行列は、Eqn.(1)の一貫性条件を満たし、以下の式を有する。
【数14】
【0027】
ラグランジュ乗数λは、本発明を実施した場合に用いられる特定の画像システムに対して、経験的に求められる。例えば、ラグランジュ乗数λは、所望のデータ一貫性要求と、前の画像Ipとの類似性との間の、あらかじめ定められたトレードオフによって求められる。大きなラグランジュ乗数λを選択した場合、復元画像は、より低い雑音分散を有する。しかしこれは、前の画像の高い空間分解能が失われることにより達成される。同様に、小さなラグランジュ乗数λを用いた場合、前の画像の高い空間分解能は保たれるが、所望の画像における雑音分散は大きくなる。このような状況は、用いられる画像システムによって達成されるコントラスト・ノイズ比に影響を与える。
【0028】
Eqn.(7)で表わされた目的関数は、画像システムのノイズのために、さらに改変することができる。このようにして、以下の目的関数が最小化される。
【数15】
ここで、XTは差分行列Xの転置行列、Dはシステムノイズ行列であって、以下の行列成分を有する対角行列である。
【数16】
ここで
【数17】
は、雑音分散であって、本発明を実施する際に用いられる特定の画像システムにおけるノイズを示すパラメータである。例えば、X線画像システムにおいて、ノイズパラメータ
【数18】
は、n番目のX線検出器に関連した雑音分散である。
【0029】
図1を参照して、前述の画像復元法の一実施例として、Eqn.(2)の目的関数を利用し、ステップ100で示された正則化パラメータαの初期化から始める。正則化パラメータαの選択は、所望の画像の希薄度と、所望の画像に対する前の画像の影響度のトレードオフを決定する。従って、正則化パラメータαの値は、目前の臨床用途に依存して変化する。例えば、αが約0.3〜0.7の値の場合、一般的に、呼吸器官の画像分野では十分である。続いて、ステップ102とステップ104にそれぞれ示されているように、Eqn.(2)の目的関数の第一項と第二項が初期化される。第一項
【数19】
の初期化は、ステップ106で開始され、そこでは前の画像Ipが、所望の画像Iの見積もりから引き算されて、「差分画像」を生成している。前の画像Ipの特定の選択と、所望の画像Iの見積もりとは、画像診断法と臨床用途とに依存している。従って、これらの選択に対する異なる例を、以下に詳細に議論する。差分画像は、ステップ108に示すように、続けて希薄化変換Ψ1を適用することによって希薄化される。上述のように、希薄化変換は、ウェーブレット変換、一次有限差分や、二次有限差分、そして離散的傾斜変換を含む数学演算の任意の数からなっている。この希薄化された差分画像のL1−normは、次にステップ110で計算される。このプロセスの結果は、次にステップ112に示すように、正則化パラメータαによって重み付けられる。
【0030】
Eqn.(2)の目的関数の第二項
【数20】
の初期化は、ステップ114で開始され、そこでは所望の画像Iの見積もりが、希薄化変換Ψ2によって希薄化される。続けて、この希薄化された所望の画像見積もりのL1−normがステップ116で計算される。離散的傾斜変換
【数21】
が希薄化変換Ψ2として選択された場合、ステップ114と116は、所望の画像見積もりの全変動TVを計算するステップとして見なすことができる。TVは次式で表わされる。
【数22】
【0031】
希薄化された所望の画像の見積もりのL1−normを計算した後に、その結果がステップ118に示すように、(1−α)によって重み付けられる。Eqn.(2)の目的関数は、続けてステップ120において、第一項と第二項を一緒に加えることによって生成される。この目的関数は、次に、例えば非線形共役勾配法を用いて、ステップ122に示すように最小化される。停止基準が満足されるまで、最小化プロセスは継続される。停止基準は、例えば、現在の所望の画像見積もりと前回の繰り返しでの所望の画像見積もりとの比較を含む。このような停止基準は、以下の式で表わされる。
【数23】
ここで、
【数24】
は、画素位置(i,j)における(k+1)番目の所望の画像の見積もりで、
【数25】
は、画素位置(i,j)におけるk番目の所望の画像の見積もりである。
【0032】
次に図2を参照して、前述の画像復元法の他の実施例は、Eqn.(7)の目的関数を用い、ステップ200で示す正則化パラメータαの初期化から始める。続けて、Eqn.(7)の目的関数の第一項と第二項が、ステップ202と204に示すようにそれぞれ初期化される。このプロセスは、図1のステップ102と104を参照して、上記と同様の方法で行なわれる。しかし、Eqn.(1)の一貫性条件
【数26】
が第三項に組み込まれ、これはステップ206で初期化される。ステップ206では、第一にステップ208に示すように差分行列Xが生成される。詳細は上述したように、差分行列Xは、Eqn.(1)の一貫性条件に対応し、Eqn.(9)の形を有する。
【0033】
従って、差分行列Xは、所望の画像Iの見積もりにシステム行列Aを適用して、続けて収集した画像データYを引き算することによって求められる。差分行列XのL2−normの二乗が、次のステップ210で計算される。差分行列XのL2−normの二乗が生成された後に、ステップ212で示すように、ラグランジュ乗数λが求められ、差分行列XXを重み付けするために用いられる。上述のように、ラグランジュ乗数λは、目前の臨床用途に基づいてユーザーが選択した値によって経験的に求められる。Eqn.(7)の目的関数は、続けてステップ220で第一項と第二項と第三項を一緒に加えることによって生成される。この目的関数は、例えば非線形共役勾配法を用いて、ステップ222で最小化される。上述のように、停止基準が満足されるまで、最小化プロセスは継続される。
【0034】
次に図3を参照して、前述の画像復元法の他の実施例は、Eqn.(10)の目的関数を用い、ステップ300で示す正則化パラメータαの初期化から始める。続いて、ステップ302と304に示すように、Eqn.(10)の目的関数の第一項と第二項をそれぞれ初期化する。このプロセスは、図1のステップ102、104を参照して、上記と同様の方法で行なわれる。しかし、Eqn.(1)の一貫性条件と、画像システムのノイズの効果が第三項
【数27】
に組み入れられ、ステップ306で初期化される。ステップ306では、第一に差分行列Xが、図2のステップ208と同様に、ステップ308で生成される。次に、システムノイズ行列Dが、ステップ310で生成される。システムノイズ行列Dは、以下の式で求められる行列成分を有する対角行列である。
【数28】
上述のように、
【数29】
は雑音分散であり、本発明を実施する際に利用される画像システムにおけるノイズを示すパラメータである。例えば、X線画像システムにおいて、ノイズパラメータ
【数30】
は、n番目のX線検出器に関連した雑音分散である。システムノイズ行列Dが生成された後に、以下の行列乗算がステップ312で実行される。
【数31】
この演算の結果は、続けてステップ314で示すラグランジュ乗数によって重み付けられる。続いてステップ320で、第一項、第二項、第三項を一緒に加えることで、Eqn.(10)の目的関数が生成される。ステップ322に示すように、例えば非線形共役勾配法を用いて、目的関数は次に最小化される。上述のように、停止基準が満足されるまで、最小化プロセスは継続される。
【0035】
圧縮されたセンシング・ガイドラインに沿った不完全なデータセットから、潜在する画像Iを見積もるために、以下の問題が解かれる。
【数32】
ここでAはエンコーディング行列、Yは画像システムによって収集された画像データを含むベクトル、λは最小化プロセスの残余誤差と画像Iの希薄度とをバランスする制御パラメータ、そしてΨは希薄化行列である。希薄化行列Ψは、対象を希薄化するように動作する行列の任意の数からなっている。1つの例として、Ψは恒等行列である。放射状サンプリング・プロジェクション(例えば放射状MRI、コンピュータ断層撮影、ポジトロン放出断層撮影など)で収集された画像データに対し、エンコーディング行列Aはラドン変換行列であり、YはX線投影空間値を有するベクトルである。1つの例として、もし画像データがデカルト標本化パターンにおいて初期的に収集されたものか、又はデカルト格子に再グリッドされた非デカルトk空間サンプルであった場合、Aはフーリエ変換行列で、Yはk空間値を有するベクトルである。画像Yは、復元されるべき潜在的な画像である。
【0036】
しばしば、データは時間次元又はパラメトリック次元においてサンプリングされ、かなりの程度の冗長性を保有する。これは、画素がこのような次元と高い相関関係を有するからである。例えば、時間分解された血管造影イメージング研究における背景組織は、実質的に同じ画素情報を含有する。同様に、拡散性に関する研究において、脳や脊髄の灰白質画素は、実質的に等方性の拡散挙動を示し、従って、異なる拡散勾配方向に対する灰白質画素は、高度に相関関係を有する。この特性は、圧縮センシング・フレームワークにおいて、以下の式を用いて利用することができる。
【数33】
ここでISは画像強度分布の合理的見積もりである希薄化画像であり、
【数34】
はp−normであり、長さKの任意のベクトルxは、以下で表わされる。
【数35】
ここで
【数36】
である。
【0037】
希薄化画像ISは、スライド窓復元法を含む種々の方法によって生成することができる。1つの例として、希薄化画像は、例えば同時継続出願である米国特許出願第11/482,372号に記載されたHYPRや、同時継続出願である米国特許出願第12/032,240号に記載されたHYPR−LRや、同時継続出願である米国特許出願第12/032,262号に記載されたI−HYPRなどの、他の画像復元法を用いて復元することができる。例えばHYPR−LR法を用いることによって、所望の画像フレームにおいて信号対雑音比(SNR)を向上させることができる。
【0038】
例として、例えばダイナミックプロセスをイメージして、一定期間に医用画像システムで収集された一連のアンダーサンプリングされたデータセットを考える。状況の例としては、患者の血管系を造影剤が流れている間に収集された一連の画像データセットである。画像フレームを生成するために、個々の画像データセットを復元することができる。しかし、アンダーサンプリング・アーチファクトの結果として、これらの画像フレームは低品質であろう。この状況において、希薄化画像ISが、複数の画像データセットから復元することができて、一連の画像フレームを通して画像強度の合理的な表現を生成する。高品質の画像フレームを復元するために、上記Eqn.(17)を反復復元法において利用することができ、所望の潜在的画像フレームの一部を形成するものではない希薄化画像に存在する情報を示す補正画像が生成される。このようにして、Eqn.(17)は以下のように書き直される。
【数37】
ここで
【数38】
は補正画像データを含むベクトルであり、
【数39】
は補正画像である。したがって、Eqn.(19)を反復して最小化することによって、補正画像Icorrが生成され、希薄化画像ISから引き算されることによって、所望の潜在的な画像フレームIの高品質な見積もりが得られる。本発明を実施するために、Eqn.(19)と類似した他の最小化法も、採用することができる。このような最小化法の例としては、次式がある。
【数40】
ここで
【数41】
であり、
【数42】
は従来のq番目の動的操作を示す。
【0039】
本発明は、多くの異なる医用画像モダリティに適用することができ、多くの異なる臨床用途に適用することができる。本発明のこれらの臨床用途の多数を以下に記載して、本発明の対象範囲を示す。本発明の好ましい実施例は、医用画像システムを用いて収集したデータから画像を復元することであるが、既存の画像の品質を高める目的でも本発明を利用できることは、当業者には当然のことである。このような既存の画像は、投影ビューのセットに分解して、本発明の復元法を用いてそれらから新しい画像を復元することができる。改善度は、もちろん用いられる希薄化画像の品質に依存し、これは、画像化すべき対象に関する利用可能な演繹的な情報に依存する。
(磁気共鳴映像法)
【0040】
特に図4を参照して、本発明の好ましい実施例は、MRIシステムに利用される。MRIシステムには、ディスプレイ412とキーボード414を備えたワークステーション410が含まれる。ワークステーション410には、商業的に利用可能なオペレーティングシステムを走らせる商業的に利用可能なプログラマブルマシンであるプロセッサ416が含まれる。ワークステーション410は、スキャン処方箋をMRIシステムに入力することを可能にするオペレータ・インタフェースを提供する。ワークステーション410は、4つのサーバと結合している。パルスシーケンス・サーバ418と、データ収集サーバ420と、データ処理サーバ422と、データ蓄積サーバ423である。ワークステーション410と各サーバ418、420、422、423との間は、互いに通信ができるように接続されている。
【0041】
パルスシーケンス・サーバ418は、ワークステーション410からダウンロードされた指示に応じて、傾斜システム424とRFシステムを操作するように機能する。所定のスキャンを実行するために必要な傾斜波形が生成され、傾斜システム424に加えられ、傾斜システム424は、アセンブリ428内の傾斜コイルを励起して、位置エンコーディングMR信号のために用いられる傾斜磁場Gx,Gy,Gzを生成する。傾斜コイルアセンブリ428は、分極マグネット432と全身用RFコイル434を備えたマグネット・アセンブリ430の一部を形成している。
【0042】
RF励磁波形は、RFシステム426によってRFコイル434に加えられて、所定の磁気共鳴パルスシーケンスを実行する。RFコイル434又は個別のローカル・コイル(図4には図示せず)によって検出された応答性MR信号は、RFシステム426によって受信され、パルスシーケンス・サーバ418が生成した命令の下に、増幅され、復調され、フィルタ処理され、デジタル化される。RFシステム426は、MRパルスシーケンスで用いられる各種RFパルスを生成するためのRFトランスミッタを備えている。RFトランスミッタは、スキャン処方箋とパルスシーケンス・サーバ418からの方向とに応答して、所望の周波数、位相、パルス振幅波形を有するRFパルスを生成する。生成されたRFパルスは、全身用RFコイル434か、1つ以上のローカル・コイル、又はコイルアレー(図4には図示せず)に加えられる。
【0043】
RFシステム426は、1つ以上のRF受信チャネルも備えている。各RF受信チャネルは、接続されたコイルによって受信されたMR信号を増幅するRF増幅器と、受信したMR信号の直角成分I,Qを検出してデジタル化する検出器とを備えている。受信したMR信号の大きさは、あらゆるサンプリング点で、I,Q成分の二乗の和の平方根をとることによって求められる。
【数43】
そして受信したMR信号の位相も求められる。
【数44】
【0044】
パルスシーケンス・サーバ418は、生理学的収集コントローラ436からの患者データも任意で受信する。生理学的収集コントローラ436は、例えば電極からのECG信号や肺からの呼吸信号といった、患者に接続された多数の異なるセンサからの信号を受信する。このような信号は、一般的にパルスシーケンス・サーバ418によって利用されて、対象の呼吸や心臓の鼓動にスキャン動作を同期させ、又は"gate"させる。
【0045】
パルスシーケンス・サーバ418は、患者の状態やマグネットシステムと関連した様々なセンサからの信号を受信するスキャンルーム・インターフェース回路438とも接続している。スキャン中に患者を所望の位置に動かすための指示を受信する患者位置決めシステム440も、スキャンルーム・インターフェース回路438を経由している。
【0046】
RFシステム426が生成したデジタル化されたMR信号サンプルは、データ収集サーバ420によって受信される。データ収集サーバ420は、ワークステーション410からダウンロードされた指示に応じて動作し、リアルタイムMRデータを受信して、データオーバーランによってデータが紛失しないように、バッファ記憶装置を提供する。いくつかのスキャンにおいて、データ収集サーバ420は収集したMRデータをデータ処理サーバ422に送るのと変わらない動作をする。しかし、スキャンを続行させるために収集したMRデータから情報が必要なスキャンにおいて、データ収集サーバ420はそのような情報を生成してパルスシーケンス・サーバ418に送るようにプログラムされている。例えば、予備スキャンの間、MRデータが収集されて、パルスシーケンス・サーバ418が実行するパルスシーケンスを較正するために用いられる。また、スキャン中にナビゲータ信号が収集されて、RF又は傾斜システム動作パラメータを調整するために用いられたり、k空間がサンプリングされるview orderを制御するために用いられる。そして、データ収集サーバ420は、磁気共鳴血管造影(MRA)スキャンにおいて造影剤の到着を検出するMR信号を処理するために利用される。これらすべてのサンプルにおいて、データ収集サーバ420はMRデータを収集して、リアルタイムに処理し、スキャンを制御するための情報を生成する。
【0047】
データ処理サーバ422はデータ収集サーバ420からのMRデータを受信して、ワークステーション410からダウンロードした命令に従ってMRデータを処理する。このような処理には、例えば生のk空間MRデータをフーリエ変換して、2次元又は3次元画像を生成する処理や、復元データへのフィルタの応用や、収集したMRデータの逆投影画像復元の実行や、機能的MR画像の計算や、動画像の計算等が含まれる。
【0048】
データ処理サーバ422によって復元された画像は、ワークステーション410に戻されて、そこで蓄積される。リアルタイム画像は、データベースメモリキャッシュ(図示せず)に蓄積されて、そこからオペレータ・ディスプレイ412又はマグネットアセンブリ430の近傍に設けたディスプレイ442に出力されて、主治医の利用に供される。バッチモード画像又は選択されたリアルタイム画像がホストデータベースのディスク記憶装置444に蓄積される。これらの画像が復元されて記憶装置に転送された場合、データ処理サーバ422はワークステーション410上のデータ蓄積サーバ423に通知する。ワークステーション410は、オペレータによって操作されて、画像を獲得したり、フィルムを生成したり、画像をネットワークを通じて他の設備に送ったりする。
(パルスシーケンスの実施例)
【0049】
前述のMRIシステムを用いた本発明の実施例を実施する場合、核磁気共鳴(NMR)データが、投影復元又は半径方向のパルスシーケンスを用いて、図5のように収集される。これは、選択的非対称切頂型シンクRF励起パルス500が、スライス選択傾斜502の存在下で生成された、高速傾斜リコール・エコー・パルスシーケンスである。このパルスシーケンスは、単一k空間円形平面をサンプリングして単一2次元スライスを収集するために用いられるか、又は、図6の504、506、508に示すような複数の円形k空間平面をサンプリングするために用いられる。多重2次元スライスを収集する場合、傾斜502は、位相エンコーディング傾斜突起510と、反対の極性を有する巻き取り傾斜突起512とにフォローされた厚切り選択傾斜である。この軸方向の位相エンコーディング傾斜510は各2次元k空間平面504、506、508をサンプリングするためのスキャン中に、値を段階的に変化させる。
【0050】
半径方向の軌道に沿った2次元平面504、506、508におけるk空間サンプリングのためにNMRエコー信号518を収集している間、二つの面内読み取り傾斜514、516が用いられる。これらの面内傾斜514、516は、軸方向傾斜と直交しており、また、互いに直交している。スキャンの間、これらは一連の値を段階的にとって、詳細は後述するが、半径方向のサンプリング軌道の視野角を回転させる。面内読み取り傾斜のそれぞれは、予備位相整合傾斜突起520、522によって先行され、巻き取り傾斜突起524、526によって追従される。
【0051】
好適な直線軌道以外に、k空間周辺境界上の一点から延在して、k空間の中央を経由して、k空間周辺境界上の対向する点へ至るサンプリング軌道も用いることができるのは、当業者には明白であろう。1つのバリエーションは、サンプルk空間体積の全範囲にわたらない軌道に沿ってサンプリングする部分的NMRエコー信号518を収集することである。この方法の例示的なパルスシーケンスは、例えば、米国特許第7,148,685号に見ることができる。直線投影復元パルスシーケンスと等価な、もう1つのバリエーションは、直線でなく、曲線経路又はらせん経路に沿ってサンプリングするものである。このようなパルスシーケンスは、例えばby F. E. Boada, et al., in "Fast Three Dimensional Sodium Imaging," Magnetic Resonance in Medicine, 1997; 37:706-715, や、by K. V. Koladia, et al., in "Rapid 3D PC-MRA Using Spiral Projection Imaging", Proc. Intl. Soc. Magn. Reson. Med. 13, 2005, そして、 by J. G. Pipe and K. V. Koladia in "Spiral Projection Imaging: a new fast 3D trajectory", Proc. Intl. Soc. Mag. Reson. Med. 13, 2005などに記載されている。デカルト系サンプリングパターンもインターリーブ式であって、本発明を実施するために採用することができるということは、当業者には高く評価されるであろう。また、本発明はこれらサンプリング法の2次元バージョンと同様に3次元にも適用できる。ここで「画素」という用語の使用は、2次元又は3次元画像における位置を示すことを意図している。
【0052】
上述のMRIシステムは、1つ以上の画像を復元するために用いられる投影ビューの2次元又は3次元セットを収集して、広範囲の医療用途に用いることができる。本発明の画像復元法は、全ての収集された投影ビューより少ない数を用いて1つ以上の画像フレームを復元する場合に、特に有用である。本発明は、以下に詳細に説明するパラレルMR画像技術と共に実施することができる。
(MR画像システムにおける画像復元)
【0053】
本発明に係る画像復元法の第一実施例は、2次元投影ビューを収集して、一定時間にわたって対象を表現した一連の画像フレームを復元するMRIシステムを利用するものである。特に図7を参照して、プロセスブロック700に示すように画像フレームが復元されるための、投影ビュー750のセットが収集される。これらの投影ビュー750は数が少なく(例えば10ビュー)、できるだけ均一になるようにk空間をサンプリングして均等に分散されている。収集された投影ビューの数がすくないので、この画像フレームは非常に短時間で収集することができるが、k空間がアンダーサンプリングされているので、従来の方法を用いると、どの復元画像にも縞状アーチファクトが発生する。ここで画像データセットという用語の使用は、図5を参照して上述のパルスシーケンスを所定数繰り返して収集された投影ビュー750のセットを意味するものとする。
【0054】
プロセスブロック702に示された次のステップは、試験対象から収集されたすべての投影ビューを組み合わせて、複合又は希薄化画像ISを復元することである。これには、現在の画像フレームのためのビューと交互に配置され、従ってk空間のより完全なサンプリングを提供する、先に収集された投影ビューが含まれる。図8を参照して、例えば、現在の画像フレーム投影ビューが点線ライン800で示されたk空間をサンプリングし、先に収集された画像フレームビューが鎖線802と実線804で示されたk空間をサンプリングしたものである。十分な数のビューが利用可能で、画像アーチファクトを回避することができるので、希薄化画像は、従来法を用いて復元することができる。好ましい実施例において、この復元には、組み合わされて収集されたk空間投影データのデカルト座標系への再グリッド化と、次に2次元逆フーリエ変換(2DFT)の実行が含まれ、それによって希薄化画像ISが生成される。
【0055】
現在の画像フレームは、次に本発明の教示に従って復元される。より具体的には、ステップ704に示すように、希薄化画像ISは、現在の画像フレームと同じサンプリングパターンに沿ってk空間に再グリッド化される。再グリッド化プロセスの例としては、by K. P. Pruessman, et al., in "Advances in Sensitivity Encoding With Arbitrary k-Space Trajectories," Magnetic Resonance in Medicine, 2001 ; 46:638-651に記載されている。現在の画像データセットは、次に、ステップ706で再グリッド化した希薄化画像から引き算されて、差分データセットを生成する。希薄化画像は上述の方法で再グリッド化されているので、図8に示すようなk空間投影ビューの交互配置されたセットではなくなっており、代わりに、再グリッド化データは、現在の画像データセットと同じサンプリングパターンを有し、複数の画像フレームに対応した情報を有するk空間における値のセットとなっている。従って、引き算を行なった際に、現在の画像データセットに含まれている情報は、単に再グリッド化データから除去された訳ではなく、ステップ700で収集された画像フレームを合成したスライド窓から現在の画像データセットを引き算したものである。
【0056】
次のステップ708で、補正画像が生成される。第一に、差分データセットのk空間投影ビューは、一次元高速フーリエ逆変換を実行することによって、X線投影又はsinogram空間に変換され、ベクトルYcorrを生成する。差分データセットの各投影ビューに対してこれが繰り返されて、差分データベクトル行列Ycorrを形成する。エンコーディング行列Aが、次に、ランダム変換行列として選択される。別の方法として、差分データベクトル行列Ycorrは、k空間値を含むことができ、対応するエンコーディング行列Aとして、フーリエ変換行列を選択することができる。制御パラメータλの固定値と、適切な希薄化変換Ψが選択されて、Eqn.(19)に表わされた最小化問題が、反復して解かれて、現在の画像フレームに対する補正画像が生成される。最小化問題は、反復再重み付けアルゴリズムを用いて解かれ、例えばby I. F. Gorodnitsky and B. D. Rao in "Sparse Signal Reconstruction from Limited Data Using FOCUSS: A Re-weighted Minimum Norm Algorithm" IEEE Transactions on Signal Processing, 1997; 45(3):600-616に記載されている。別な方法としては、他の反復復元法と同様に、非反復復元法を採用することができ、例えばby B. Wohlberg and P. Rodriguez in "An Iteratively Reweighted Norm Algorithm for Minimization of Total Variation Functionals" IEEE Signal Processing Letters, 2007; 14(12):948-951に記載されている。希薄化変換Ψは、画像勾配Dとなるように選択され、ここでDは一次画像差分行列である。別な方法として、Ψは離散ウェーブレット変換又は恒等行列となるように選択することができる。Ψの選択は、さまざまなものが可能であり、多くのバリエーションが可能で、それらは本発明の範囲内であることが、当業者には当然のことである。
【0057】
補正画像Icorrは、希薄化画像と現在の画像フレームとの間の画像強度差を示す画素値を有している。従って、現在の画像フレームに対応する最終画像が、ステップ710で生成され、そこでは補正画像Icorrが希薄化画像から引き算されています。希薄化画像の中の演繹的情報は、復元画像フレームを制約するために用いられ、それによって復元画像フレームの品質が向上します。
【0058】
追加の画像フレームはプロセスブロック712に示すように復元されます。判断ブロック714で最終画像フレームが完成すると、復元プロセスは停止され、全ての画像フレームはプロセスブロック716に示すように蓄積されます。
(MR画像システムにおけるパラレル画像復元)
【0059】
画像復元法のもう一つの実施例も、2次元投影ビューを収集するMRIシステムを利用し、一定時間にわたって対象を表現する一連の画像フレームを復元する。本実施例において、画像データはパラレルRF受信コイルアレーを用いて収集され、1つの画像データセットは、集合して「コイル画像データセット」950を形成する各受信コイル素子から収集される。特に図9を参照して、コイル画像データセットが収集され、そこからプロセスブロック900で示すように画像フレームが復元される。コイル画像データセット950内の各画像データセットを構成する投影ビューは、数が少なく、できるだけ均一にk空間をサンプリングするように、均等に分散されている。収集される投影ビューの数が少ないので、各画像フレームは非常に短い時間で収集されるが、k空間がアンダーサンプリングされているので、従来の方法を用いると、どの復元画像にも縞状アーチファクトが発生する。パラレルMR収集スキームを採用することによって、全体的なスキャン時間のさらなる削減が達成される。
【0060】
プロセスブロック902で示された次のステップは、試験の対象から収集された全ての投影ビューを組み合わせて、複合、又は希薄化画像ISを復元することである。第一に、パラレル受信機アレーにおける各コイル素子に対する画像データセットが組み合わせられる。これらの組み合わせられた画像データセットのそれぞれは、現在の画像フレームに対するビューと交互配置され、従ってk空間のより完全なサンプリングを提供する、先に収集された投影ビューを備えている。図8を参照して、例えば、現在の画像フレーム投影ビューが点線ライン800で示されたk空間をサンプリングし、先に収集された画像フレームビューが鎖線802と実線804で示されたk空間をサンプリングしたものである。しかし、k空間はまだアンダーサンプリングされており、パラレルMR画像復元法が、各コイル素子から組み合わせられた画像データセットから、希薄化画像ISを生成するために用いられている。希薄化画像は、本発明を実施するために採用したk空間軌跡に依存した復元法を選択する中から、従来のパラレル復元法を用いて復元される。例えば、非デカルト系SENSE法を採用することができ、例えばby K. P. Pruessman, et al., in "Advances in Sensitivity Encoding with Arbitrary k-Space Trajectories," Magnetic Resonance in Medicine, 2001; 46:638-651に記載されている。
【0061】
次にステップ904でループに入って、そこではコイル画像データセット950から希薄化画像データセットが生成される。より具体的には、ステップ906に示すように、各コイル素子に対して、希薄化画像ISが最初に対応するコイル感度マップと掛け算されて、中間画像が生成される。ステップ908において、各中間画像は、現在の画像フレームと同じサンプリングパターンに沿ってk空間に再グリッド化される。ステップ910で、対応するコイル素子に対する現在の画像データセットが、次に、再グリッド化された中間画像から引き算され、前記コイルに対する差分データセットを生成する。ステップ912に示すように、このプロセスは次のコイル素子に対応する画像データセットに対して繰り返される。判断ブロック914に示すように、パラレル受信機アレーにおける各コイルについての現在の画像フレームに対し差分データセットが生成されると、現在の画像フレームに対する復元プロセスが継続される。
【0062】
次にステップ916で、補正画像が生成される。第一に、差分データセットのk空間投影ビューは、一次元高速フーリエ逆変換を実行することによって、X線投影又はsinogram空間に変換され、ベクトルYcorrを生成する。そして、適切なエンコーディング行列Aがさらに生成される。加えて、各差分データベクトルYcorrは、パラレル受信機コイルアレーの各コイルの与えられた投影ビューについての情報を有している。上述のように、差分データベクトルYcorrは、代替的に、k空間値を有することができる。制御パラメータλの固定値と、適切な希薄化変換Ψが選択されて、Eqn.(19)に表わされた最小化問題が、反復して解かれて、現在の画像フレームに対する補正画像が生成される。本実施例において、エンコーディング行列Aは、パラレル受信機アレーにおける各コイル素子のコイル感度プロファイルを含むように選択される。最小化問題は、例えばI. F. Gorodnitsky and B. D. Rao in "Sparse Signal Reconstruction from Limited Data Using FOCUSS: A Re-weighted Minimum Norm Algorithm" IEEE Transactions on Signal Processing, 1997; 45(3):600-616に記載されている、反復再重み付けアルゴリズムを用いて解かれる。別の方法では、他の反復復元法と同様に、非反復画像復元法が採用され、例えばその1つがby B. Wohlberg and P. Rodriguez in "An Iteratively Reweighted Norm Algorithm for Minimization of Total Variation Functionals" IEEE Signal Processing Letters, 2007; 14(12):948-951に記載されている。希薄化変換Ψが、画像勾配Dとなるように選択され、ここでDは1次画像差分行列である。別の方法では、Ψは離散ウェーブレット変換又は恒等行列を選択することができる。Ψの選択は、さまざまなものが可能であり、多くのバリエーションが可能で、それらは本発明の範囲内であることが、当業者には当然のことである。
【0063】
現在の画像が希薄化画像ISから引き算されて、現在の画像フレームに対応した最後の画像が次にステップ916で生成される。希薄化画像に具体化された演繹的情報が、制約のために用いられて、復元画像フレームの画質が向上する。プロセスブロック920に示すように、追加の画像フレームが復元される。判断ブロック922で最後の画像フレームが完了したと判断されると、復元プロセスは終了して、プロセスブロック924に示すように、すべての画像フレームが蓄積される。
(X線コンピュータ断層撮影画像システム)
【0064】
本発明は、対象のインターリーブされた投影ビューが収集される他の医療用画像診断法にも、応用可能である。そのような画像診断法の1つが、X線コンピュータ断層撮影である。初めに図10A,10Bを参照して、X線コンピュータ断層撮影(CT)画像システム1010は、「第三世代」CTスキャナを代表するガントリー1012を有している。ガントリー1012は、X線の扇形ビーム又は円錐形ビームをガントリーの対向側にある検出器アレー1016に向かって投射するX線源1013を有している。検出器アレー1016は、患者1015を通過してくる投影X線を検知する多数の検出器素子1018で構成されている。各検出器素子1018は、衝突するX線ビームの強度と、従って患者を通過したことによるビームの減衰量とを表わす電気信号を生成する。X線投影データ収集の間、ガントリー1012とそこに設けられたコンポーネントは、患者1015の回転中心1019周りに回転する。
【0065】
ガントリーの回転とX線源1013の操作は、制御メカニズム1020によって制御されている。制御メカニズム1020は、出力信号とタイミング信号をX線源1013に供給するX線コントローラ1022と、ガントリー1012の回転速度と位置を制御するガントリー移動コントローラとを有している。制御メカニズム1020内のデータ収集システム(DAS)1024は、アナログデータを検出器素子からサンプリングして、そのデータを次の処理のためのデジタル信号に変換する。画像復元装置1025は、サンプリングされデジタル化されたX線データをDAS1024から受け取り、高速画像復元を実行する。復元された画像は、入力としてコンピュータ1026に加えられ、そこで画像を大容量記憶装置1028に蓄積する。
【0066】
コンピュータ1026は、また、キーボードを有するコンソール1030を介してオペレータから命令やスキャンパラメータを受け取る。コンピュータに付属したディスプレイ1032によって、オペレータはコンピュータ1026からの復元画像や他のデータを観察できる。オペレータの送った命令やパラメータは、コンピュータ1026に処理されて、DAS1024やX線コントローラ1022やガントリー移動コントローラ1023に制御信号やデータとして供給される。加えて、モーター駆動テーブル1036をガントリー1012内の患者1015に位置付けるように制御するテーブル移動コントローラ1034を、コンピュータ1026は操作する。
【0067】
MRIシステムと同様に、CTシステムは多くの様々な臨床用途を有しており、投影ビューの2次元又は3次元セットが収集されて、患者の1つ以上の画像を復元するために用いられる。MRIシステムで収集される投影ビューは、k空間(又はフーリエ空間)サンプルで構成されているのに対し、CTシステムで収集される投影ビューは、X線投影空間サンプルで構成されている。CTシステムで収集されたデータを用いた画像復元は、必然的にX線投影空間から実空間への変換が要求される。
(CT画像システムにおける画像復元)
【0068】
特に図11を参照して、本発明の別の実施例は、CTシステムを利用して、一連の2次元スライス画像を収集するものである。プロセスブロック1100に示されるように、2次元画像フレームを復元するための投影ビューのセットが収集される。これは、高度にアンダーサンプリングされたものであり、投影ビューがX線投影空間を均一にサンプリングする等間隔のビュー角度になっている。本実施例において、スキャンのデータ収集段階は、画像復元に先立って完了しており、従って、一連の画像フレームは、判断ブロック1102で判断されるスキャンの段階の完了前に、収集されている。例えば、一連の画像フレームは、造影剤が対象領域を流れる動的研究中に収集される。上述の第一実施例のように、このスキャン中に収集される投影ビューは、図8に示すようにインターリーブ式であって、それらがすべて組み合わせられたときに、各画像データセットがX線投影空間をアンダーサンプリングしたものであっても、X線投影空間は高度にサンプリングされているようにデータセットは形成されている。
【0069】
プロセスブロック1104に示すように、希薄化画像は、スキャンの収集段階の間に収集された組み合わされた投影ビューから復元される。各画像フレームを形成する等間隔の投影ビューのセットは、インターリーブ式に配されて、画像フレームの組み合わせから得られる投影ビューが、より十分にX線投影空間をサンプリングし、より高画質の画像を生成する。希薄化画像は、例えばフィルタ逆投影法のような従来の画像復元技術を用いて、これらの組み合わせられた投影ビューから復元される。
【0070】
ステップ1106でループに入り、そこで上述の復元法は、各フレーム画像の復元に用いられる。第一に、ステップ1108に示すように、希薄化画像が復元すべき画像フレームと同じサンプリングパターンに再グリッド化される。次に、ステップ1110において、現在の画像データが再グリッド化された希薄化画像から引き算されて、差分データセットを生成する。ステップ1112において、差分データセットは、上記Eqn.(19)で表わされる最小化問題に利用されて、補正画像を生成する。CT画像システムで収集されたデータは、本質的にX線投影空間内にあるので、差分データは、反復最小化プロセスの前に変換する必要が無い。代わりの方法として、例えばフィルタ逆投影法のような非反復法も、補正画像の復元に利用することができる。上述のように、この状況におけるエンコーディング行列は、ラドン変換行列であり、制御パラメータλと適切な希薄化変換Ψが選択される。ステップ1114で、補正画像を希薄化画像から引き算することによって、補正画像フレームが生成される。この結果として生じた補正画像フレームは、プロセスブロック1116に示すように、蓄積される。
【0071】
判断ブロック1120に示すように、スキャンのデータ収集段階で収集された全てのデータが利用されるまで、プロセスブロック1018に示すように、更なる画像フレームが復元される。スキャンの復元段階は、この時点で終了するが、復元された画像フレームは特定の臨床用途に依存して、さらに加工される。本実施例において、希薄化画像はスキャン中に収集されたすべてのビューによって形成されて、画像フレームSNRにおける実質的改良を提供するが、画像フレームは実時間において利用可能ではない。
(ポジトロン放出断層撮影画像システム)
【0072】
上記実施例において、希薄化画像を復元するために用いられる演繹的情報は、インターリーブされた投影ビューにおける複数の画像フレームの収集に由来する。本発明には、他の臨床用途が存在するが、しかし、そこでは追加の投影ビューを収集することなく高品質希薄化画像のための演繹的情報が利用可能である。これらの1つが、ポジトロン放出断層撮影(PET)スキャナで収集されたデータである。
【0073】
図12を特に参照して、PETスキャナシステムは、中央開口又は穴1210周りの検出器リングアセンブリ1211を支持するガントリー1210を備えている。ガントリーコントローラ1210がガントリー1210内部に設けられ、第二のシリアル通信リンク1218を通してオペレータ・ワークステーション1215から受信した命令に応答して、ガントリーを操作する。
【0074】
検出器リング1211は複数の検出器ブロック1220で構成されている。各検出器ブロック1220は、シンチレータ結晶光電子増倍管のセットを備えている。収集回路1225のセットがガントリー1210内部に設けられて、検出器リング1211内の各モジュール1220からの信号を受信する。収集回路1225が、シンチレータ結晶の各ブロック内のイベント座標を求め、そして、結晶ブロック信号の合計と共にこれら座標(x,z)がデジタル化されて、ケーブル1226を介して別個のキャビネット1228に収容されたイベントロケータ回路1227に送られる。各収集回路1225は、シンチレーション・イベントが発生した正確な瞬間を示すイベント検出パルス(EDP)も生成する。
【0075】
イベントロケータ回路1227は、収集回路1225が生成した信号を周期的にサンプリングするデータ収集プロセッサ1230の一部を構成する。このプロセッサ1230は、バックプレーンバス構造1231と、このバス1231の通信を制御し、このプロセッサ1230をローカルエリアネットワーク1218とリンクさせる収集用CPU1229と、を有している。イベントロケータ1227は、それぞれケーブル1226と接続してガントリー1210内の対応する収集回路1225からの信号を受信する個別の回路基板のセットで構成されている。イベントロケータ1227は、収集回路1225が生成したイベントパルス(EDP)を検出して、それを現在のサンプル期間内にシンチレーション・イベントが発生したことを示す8ビットのタイムマーカーに変換することによって、イベントをプロセッサ1230の動作に同期させる。また、この回路1227は、もしシンチレーションの総エネルギーが511keV±20%の範囲外であった場合、あらゆる検出されたイベントを廃棄する。各サンプル期間中、各有効イベントに関する情報は、デジタルナンバーのセットに組立てられ、このデジタルナンバーは、イベントが発生した時期と、イベントを検出したシンチレータ結晶の位置を正確に示す。このイベントデータパケットは、データ収集プロセッサ1230の一部である一致検出装置1232に搬送される。
【0076】
一致検出装置1232は、イベントロケータ1227からのイベントデータパケットを受け入れ、それらのいずれか2つが一致しているか判断する。一致しなかったイベントは廃棄され、一致したイベントペアは、一致データパケットとして記録され、シリアルリンク1223を通って分類装置1234に搬送される。各一致データパケットは、イベントを検出した二つのシンチレータ結晶のアドレスを正確に識別する一対のデジタルナンバーを含んでいる。これらから、一致イベントを生成した光線経路の位置と角度とを求めることができる。
【0077】
分類装置1234は、画像復元プロセッサ1240の一部を構成する回路である。画像復元プロセッサ1240は、バックプレーンバス1241の周囲に形成されている。画像用CPU1242が、バックプレーンバス1241を制御し、プロセッサ1240をローカルエリアネットワーク1218とリンクさせている。メモリモジュール1243もバックプレーンバス1241と接続しており、以下に詳細に説明する復元画像に用いるデータを蓄積する。アレープロセッサ1245もバックプレーンバス1241と接続しており、画像用CPU1242の指示を受けて動作し、メモリモジュール1243内のデータを用いて画像復元を実行する。処理結果を反映した画像アレー1246がメモリモジュール1243に蓄積され、画像用CPU1242によってオペレータ・ワークステーション1215に出力される。
【0078】
分類装置1234の機能は、一致データパケットを受信して、一致データの効率的な蓄積のためのメモリアドレスを生成することである。スキャナの視野を介した同一の方向、θ、経路を指す、すべての一致イベント光線のセットは、完全な投影、又は「ビュー」である。投影ビューにおける特定の光線経路と視野の中心の間の距離Rは、光線をビューの内部に位置付ける。図12に示すように、例えばイベント1260が、投影角度θで距離Rの投影光線1262に沿って発生する。スキャンの間、分類装置1234は、この投影光線上の二つのシンチレータ結晶によるイベントを示す一致データパケットを仕分けることによって、この投影光線(R,θ)上で発生したすべてのイベントをカウントする。放射スキャンの間、一致カウントは、各軸方向の画像に対して1つ、1つの次元が投影角θで、他の次元が距離Rで構成された2次元アレーとしてメモリ1243内に整理される。
【0079】
一致イベントはランダムに発生し、分類装置1234は各一致データパケットにおける二つのシンチレータ結晶アドレスから、θとRを迅速に求め、対応するサイノグラムアレー要素のカウントをインクリメントする。放射スキャンの完了時に、サイノグラムアレー1248は各光線に沿って発生した対消滅イベントの総数を蓄積する。このような対消滅イベントの数は、放射スキャン中の光線(R,θ)に沿って発生した陽電子電子消滅イベントの数を示しており、一般的に数分の間に数十万のイベントが記録される。
【0080】
当然のことながら、PET画像の品質は、サイノグラム1248に蓄積可能なシンチレーション・イベントの数に大きく依存する。スキャンを長く続けるほど、検出されたシンチレーション・イベントの数が大きくなり、復元画像の品質が高くなる。
(PET画像システムにおける画像復元)
【0081】
特に図13を参照して、本発明は時間分解された放射スキャンを実行するためのPETスキャナに採用される。放射スキャンは、プロセスブロック1300に示すように、放射性核種を試験対象に注入することによって開始される。画像診断において最もよく利用される放射性核種は、フッ素18(18F)と、炭素11(11C)と窒素13(13N)と酸素15(15O)である。これらは、「放射性医薬品」と呼ばれる放射性トレーサーとして、例えばグルコースや炭酸ガスのような材料に包含して用いられる。放射性医薬品は患者に注入されて、グルコース代謝や脂肪酸代謝、たんぱく質合成といったプロセスに関与する。
【0082】
対象はPETスキャナの穴1212に置かれ、プロセスブロック1302に示すようにシンチレーション・イベントが検出されカウントされる。上述のように、シンチレーション・イベントが検出され、分類され、投射角度θにおける各光線Rのカウント数としてサイノグラム1248に蓄積される。判断ブロック1304に示すように、比較的短い時間間隔に対してイベントがカウントされ蓄積される。この時間間隔は、放射スキャンの時間分解能を決定し、例えば、従来の放射スキャン期間の10分の1である。プロセスブロック1306に示すように、時間間隔が満了すると、蓄積されたシンチレーション・イベント・カウントが時間間隔サイノグラム1308として保存される。
【0083】
放射スキャンは継続し、判断ブロック1310でスキャンの最後が検出されるまで、蓄積されたサイノグラム・カウントは各時間間隔の経過後に保存され続ける。スキャンの終了は、プリセットされた時間か、時間間隔のプリセットされた数で決まる。どちらの場合にも、複数の時間間隔サイノグラム1308が放射スキャンの間に生成され、最後のサイノグラム1308は、放射スキャン全体に対する総カウント数を保存する。各時間間隔サイノグラムは上述のMRやCT画像システムで収集される画像データセットに似ている。
【0084】
次にスキャンの画像復元段階が開始され、この段階の間、放射性医薬品の摂取を示す画像フレームが各時間間隔の終了時に復元される。第一に、プロセスブロック1312に示すように、希薄化画像が復元される。これは、放射スキャン中に保存した最後のサイノグラム1308を用いた従来の逆投影復元である。これには、放射スキャン全体に対する蓄積されたシンチレーション・イベントが含まれており、画質は可能な範囲で最良である。
【0085】
次にステップ1314でループに入り、時間分解された画像フレームがこの希薄化画像を用いて復元される。より具体的には、プロセスブロック1316に示すように、各保存された時間間隔サイノグラム1308の反復復元が実行される。この反復復元は、ステップ1316に示すように、上述のEqn.(19)において第一に最新の復元された希薄化画像を再グリッド化することによって実行される。これは、制約された最小化問題であって、そこでは時間間隔サイノグラム1308の各光線に対し蓄積されたシンチレーション・カウントR、各ビューにおけるθが、データベクトルsとしてEqn.(19)に入力される。加えて、本発明の他の実施例を参照して、再グリッド化した希薄化画像データから時間間隔サイノグラム1308を引き算することによって、差分データセットが各時間間隔サイノグラム1308に対して生成される。
【0086】
画像フレーム復元プロセス1318は、判断ブロック1320に示すように、各時間間隔サイノグラム1308に対応する画像フレームが生成されるまで繰り返される。結果的に、放射スキャンの間の各時間間隔における放射性医薬品の摂取を示す一連の画像フレームが生成される。復元時に、より高画質の希薄化画像を用いることによって、低い対消滅イベントカウント数を有するサイノグラムを用いて復元された従来の画像よりも、実質的に各画像フレームの画質が向上する。
【0087】
このPETスキャナ実施例において、希薄化画像はスキャン中に収集される追加的交互ビューを用いては形成されず、むしろ、スキャン中の複数の時間間隔のそれぞれの間の同一のビューセットで収集されたデータを組み合わせている。この実施例において、希薄化画像の品質は、上述の先の実施例のようにビューの数を増やすよりはむしろ、各ビューのSNRを増加させることによって向上させている。この同じ戦略は、例えばX線CTでも用いることができて、画質を低減することなく患者へのX線被爆量を低減させることができる。このような実施例において、一連の画像フレームは、各画像フレームにおける投影角の同一のセットを用いて収集される。しかし、X線ドーズ量を低くして、患者の被爆量を減らしている。フレーム画像SNRは、各画像フレーム収集中の低ドーズ減衰測定を組み合わせることによって生成した希薄化画像を用いた本発明の復元方法によって保持される。
PETスキャナ実施例において、一致イベントカウントを加えることより、むしろ、このX線実施例において「組み合わせ」が収集されたフレーム画像における全ての対応する減衰測定の長所である。
【0088】
この同じ画像復元戦略は、単光子放出コンピュータ断層撮影(SPECT)システムを用いて収集した復元画像にも利用することができる。PETスキャナの場合と同様に、SPECTシステムは異なる光線経路に沿った対象から放射され検出されたフォトンのカウント数を蓄積する。スキャン中、ガンマカメラがゆっくり動いて、異なるビュー角度でのカウントを蓄積する。本発明を用いて、一連の画像フレームは、同じ一連のビュー角度を通してガンマカメラをより迅速に繰り返し動かして収集される。総スキャン時間が増加しないように、各ビュー角度でより少ないカウント数が蓄積されるが、各復元された画像フレームのSNRは、各ビュー角度に対するカウントを全て加えることによって形成された希薄化画像を用いることによって、維持される。
(画像誘導放射線治療システム)
【0089】
初めに図14を参照して、画像誘導放射線治療(IGRT)システム1400は、治療用X線源1402と診断用X線源1404とを備えている。診断用X線源1404は、円錐状ビームを検出器アレー1416に向けて投射する。治療用X線源1402と診断用X線源1404は、隣接して設けられ、回転軸1408回りに回転する第一の回転自在ガントリー1406の同じ端部に収容されている。第一の回転自在ガントリー1406は、X線源1402、1404のどちらかを、所望の方法で、患者テーブル1424上に位置する対象1412の標的部位1410に位置合わせできるようにしている。第二の回転自在ガントリー1414は、第一の回転自在ガントリー1406に回転自在に取り付けられていて、同様に回転軸1408回りに回転可能になっている。X線検出器1416が第二の回転自在ガントリー1414の一端に設けられている。X線検出器1416は、診断用X線源1404からのX線を受信して診断画像装置として機能するのみならず、治療用X線源1402からのX線を受信して、ポータル画像装置としても機能する。検出器アレー1416は、対象1412を通過して投影されたX線を感知する多数の検出器素子で形成されている。各検出器素子は、衝突X線ビームの強度、従って、対象1412を通過したビームの減衰量を表わす電気信号を生成する。第二の回転自在ガントリー1414は、1418、1420、1422の3点のまわりに回転する関節機構をさらに備えている。1418、1420、1422の3点が提供する回転運動は、X線検出器1416が2次元平面内を移動することを可能にしている。
【0090】
回転自在ガントリー1406、1414の回転や、X線源1402、1404の動作は、IGRTシステムの制御機構1440が制御している。制御機構1440は、出力信号とタイミング信号をX線源1402、1404に供給するX線コントローラ1442と、ガントリー1406、1414の回転速度と位置を制御するガントリー移動コントローラ1444とを有している。制御機構1440内のデータ収集システム(DAS)1446は、検出器素子からアナログデータをサンプリングして、次の処理のためにそのデータをデジタル信号に変換する。画像復元装置1448は、サンプリングされデジタル化されたX線データをDAS1446から受け取り、高速画像復元を実行する。復元された画像は、コンピュータ1450への入力として加えられ、コンピュータ1450は画像を大容量記憶装置1452に蓄積する。
【0091】
コンピュータ1450は、キーボードを有するコンソール1454を介してオペレータからの命令やスキャンパラメータも、受信する。付随したディスプレイ1456が、オペレータにコンピュータ1450からの復元された画像や他のデータを観察することを可能にする。オペレータが入力した命令やパラメータは、コンピュータ1450に利用されて、制御信号やデータをDAS1446やX線コントローラ1442やガントリー移動コントローラ1444に供給する。加えて、コンピュータ1450は、移動式患者テーブル1424を制御して対象1412をガントリー1406、1414内に位置させるテーブル移動コントローラ1458を操作する。
(IGRTシステムにおける画像復元)
【0092】
本発明のまた別な実施例において、図11を参照した上記画像復元法が、治療期間中に供給される放射線の精度を向上させるために利用される。より具体的には、詳細は以下に述べるが、補正画像が生成されて、例えば同時継続米国特許出願第12/248,590号に記載されているPICC画像復元法のための「先行画像」を生成するために利用される。
【0093】
例えば図14を参照した上記のように、画像誘導放射線治療システムは、本発明の1つの実施例を実行するために用いることができる。特に図15を参照して、上記実施例の方法は、ステップ1500に示すように、対象の呼吸運動を示す信号を収集するところから開始される。このような信号は、例えば肺活量計、呼吸器ベローズ、又は呼吸運動追跡システムといった呼吸器モニター装置を用いて収集される。呼吸運動追跡システムの例としては、商標名が「Real-time Position ManagementTM」(Varian Medical Systems, Palo Alto, CA)という商業的に利用可能なシステムがある。この呼吸運動信号は、収集されたX線画像データをN個の異なる呼吸相に振り分けるために後に用いられる。ステップ1502に示すように、続けてデータ収集が始まり、X線画像データを第一ビュー角度θmにおける投影ビューのセットの形式で収集する。続いて診断用X線源1404と検出器1416がステップ1504の新たなビュー角度になるまで回転して、画像データが再び収集される。このプロセスは、判断ブロック1506に示すように、診断用X線源1404と検出器1416が最後のビュー角度θMになるまで繰り返される。
【0094】
画像データが全て収集された後に、復元プロセスが開始される。続いて、ステップ1508に示すように、収集されたX線画像データがN個の異なる呼吸相Rnに振り分けられる。例えば第一のゲート窓W1の間に収集された全ての画像データは、対応する第一の呼吸相R1として選択される。この遡及的ゲート動作は、N個の異なる所望の呼吸相のそれぞれに対し、「呼吸相画像データセット」を生成する。従って、各呼吸相画像データセットには、与えられた呼吸相Rnに対応するゲート窓Wnの間に収集された複数の投影ビューが含まれている。別の方法では、オリジナル画像データ収集が、先を見越して振り分けられて、呼吸信号の間の所定時点でのみ画像データが収集される。このデータ収集スキームに従って、選択された呼吸相の間に収集された全ての画像データが、同様に呼吸相画像データセットに組み合わせられる。
【0095】
ステップ1510に示すように、先の画像IPが次に復元される。一般的に、先の画像IPは、復元すべき所望の呼吸相画像内の情報を含んだ方法を用いて復元される。このような方法の1つの実施例が、図11を参照した上記方法であって、そこでは先の画像IPが各呼吸相に対して復元される。一般的に、特定の呼吸相に対する利用可能なデータは非常に限定的である。例えば、与えられた呼吸相画像データセットにおいて、約20の投影ビュー角度のみが含まれている。各呼吸相画像データセットは高度にアンダーサンプリングされているので、標準的な画像復元アルゴリズムを用いて画像を復元しようとする試み、例えば公知のフィルタ逆投影法(FBP)などは、シビアなストリーキングと歪みアーチファクトをもたらす。高品質の画像を復元するために、第一呼吸相Rnがステップ1512で選択される。次にステップ1514で示すように、選択された呼吸相Rnの所望の画像Iが続けて図1〜3を参照した上述の復元方法を部分的に利用した方法を用いて復元される。
【0096】
判断ブロック1516に示すように、所望の呼吸相の全てに対する画像が復元されるまで、この方法で、所望の画像Iは各呼吸相Rnに対して復元される。もし所望の画像全てが復元完了していなかった場合には、ステップ1518で次の呼吸相Rnが選択されて、上記画像復元法が繰り返される。上記画像復元法を用いることによって、各呼吸相に対応する情報が、各個々の呼吸相画像を復元する際に用いた先の画像に含まれる。このようにして、対象の呼吸運動をより正確に表現した時系列の画像が生成される。この時系列の画像から、対象の呼吸に応じた腫瘍の動特性が求められる。この動特性を用いて、腫瘍への放射線量を増大させながら、健康な組織への放射線量を削減するように、治療期間の放射線供給計画が調整される。
【0097】
上で議論したように、本発明の1つの実施例において、対象の一連の画像の一部を形成する画像を生成するための方法は、一連の画像を変換して、複数の対応する画像データセットを形成することを含んでいる。例えば、画像はX線投影空間又はk空間に変換される。これらの画像は、医療画像システム又は光学カメラのようなより伝統的な画像システムを含む、あらゆる一般的な画像システムで生成可能である。画像データセットから、複数の収集された画像データセットから第一に組み合わせられたデータによって、希薄化画像が復元される。1つの実施例において、希薄化画像は上記HYPR−LR画像復元法を用いて復元される。
【0098】
続いて、先に復元された希薄化画像を変換することによって、希薄化画像データセットが生成される。例えば、希薄化画像を選択された画像データセットのサンプリングパターンに再グリッド化させることによって、希薄化画像データセットが生成される。次に、希薄化画像データセットから選択された画像データセットを引き算することによって、差分画像データセットが生成される。この差分画像データセットは、補正画像を復元するために用いられる。一般的に、補正画像は反復復元法を用いて復元されるが、別の方法として、他の非反復法を利用することもできる。次に、対象の所望の画像を生成するために、補正画像は、先に復元された希薄化画像から引き算される。当業者には当然のことながら、上記方法は、一連の画像の各画像に対して繰り返すことができる。
【0099】
上で議論したように、本発明の他の実施例において、画像誘導放射線治療(IGRT)システムにある対象への放射線供給計画を更新する方法には、呼吸器モニタ装置や対象の呼吸動作を示す信号を用いて収集したり、IGRTシステムやX線画像データを用いて収集することが含まれる。例示的な呼吸器モニタ装置には、上述のように、肺活量計や呼吸器ベローズや赤外追跡システムが含まれる。当業者には当然のことながら、IGRTシステムには、例えば、平行、扇形、又は円錐型ビームのX線源を有するコンピュータ断層撮影画像システムが含まれる。呼吸相画像データセットは、呼吸動作を示す収集された信号を用いて、X線画像データから生成される。例えば、呼吸相画像データセットは、呼吸運動中の時間に基づいて、対象の呼吸サイクルと実質的に同じ時間中に収集された投影ビューを含んでいる。
【0100】
続いて、収集されたX線画像データと呼吸相画像データセットとを用いて、先の画像が生成される。例えば、先の画像は、本発明の実施例に従って生成される。具体的には、画像、例えば希薄化画像がX線画像データから復元される。次に、復元された「希薄化」画像をX線投影空間に呼吸相画像データセットのサンプリングパターンに沿って再投影することによって、再投影データセットが生成される。次に呼吸相画像データセットから再投影データセットを引き算することによって、差分データが生成され、そして、この差分データを復元することによって差分画像が生成される。続いて、差分画像が希薄化画像に加えられて、先の画像を生成する。対象の評価画像が次に選択される。評価画像は、例えば、本発明の実施例に従って生成された希薄化画像である。別の方法では、評価画像は先に生成された先の画像である。続けて、先の画像と評価画像とを用いて、対象の希薄化画像が生成される。次に、希薄化画像と評価画像と呼吸相画像とを用いて、呼吸相画像が復元される。この呼吸相画像とそこに含まれる情報とを用いて、放射線供給計画が更新される。例えば、第一に複数の呼吸相画像から腫瘍の位置を求めることによって、放射線供給計画は更新される。次に、複数の呼吸相画像間の腫瘍位置の変化を求める。この情報から、又はいわゆる腫瘍の「移動プロファイル」から、放射線供給計画は更新されて、健康な組織に加えられる放射線量が実質的に削減される。
【0101】
本発明は、1つ以上の好ましい実施例を用いて記載されており、それら明確に述べたものの他にも、多くの同等物、代替手段、変形、改良が可能であり、本発明の範囲内であることは当然のことである。当業者には当然のことながら、上記特定の実施例から多くの変形が可能である。例えば、当業者には当然のことながら、Eqn.(19)と(20)は、複数の希薄化画像が用いられて、対応する複数の補正画像を求めるように変形することが可能である。
【特許請求の範囲】
【請求項1】
a)画像診断システムを用いて、対応する複数の時間フレームにおける視野内に置かれた対象の複数の画像データセットを収集するステップと、
b)前記複数の収集した画像データセットからデータを組み合わせることによって希薄化画像を復元するステップと、
c)ステップb)で復元した前記希薄化画像を変換して、希薄化画像データセットを生成するステップと、
d)ステップc)で生成した前記希薄化画像データセットから、選択した時間フレームに収集した画像データセットを引き算して差分画像データセットを生成するステップと、
e)ステップd)で生成した前記差分画像データセットを用いて、補正画像を復元するステップと、
f)ステップb)で復元した前記希薄化画像から前記補正画像を引き算して、選択した時間フレームにおける前記対象の画像を生成するステップと、
で構成された、画像診断システムの視野(FOV)内に置かれた対象の画像を生成するための方法。
【請求項2】
前記ステップc)が、選択された時間に収集された前記画像データセットのサンプリングパターンに沿って前記希薄化画像を再グリッド化するステップを含んでいることを特徴とする請求項1に記載の方法。
【請求項3】
前記ステップe)が、反復最小化法を用いて前記補正画像を反復復元するステップを含んでいることを特徴とする請求項1に記載の方法。
【請求項4】
前記画像診断システムが、核磁気共鳴画像(MRI)システムであって、前記ステップa)で収集された前記画像データセットが、インターリーブされたk空間データセットであることを特徴とする請求項1に記載の方法。
【請求項5】
前記MRIシステムが、複数の受信機コイル素子を有するパラレル無線周波数(RF)受信機コイルを備え、1つの画像データセットが、複数の時間フレームのそれぞれにおいて各コイル素子によって収集されたものであることを特徴とする請求項4に記載の方法。
【請求項6】
前記ステップb)が、さらに、
各受信機コイル素子のための感度プロファイルを見積もるステップと、
前記希薄化画像に対応する前記受信機コイル素子の前記感度プロファイルを乗算することによって、前記各受信機コイル素子に対応した中間希薄化画像を生成するステップと、をさらに有していることを特徴とする請求項5に記載の方法。
【請求項7】
前記ステップc)が、前記中間希薄化画像を変換することによって複数の希薄化画像データセットを生成するステップを有していることを特徴とする請求項6に記載の方法。
【請求項8】
前記ステップd)が、対応する前記中間希薄化画像から、選択された時間フレームでの複数の前記受信機コイル素子によって収集された画像データセットを引き算することによって、複数の差分画像データセットを生成するステップを有していることを特徴とする請求項7に記載の方法。
【請求項9】
前記ステップe)が、前記ステップd)で生成された複数の差分画像データセットを用いて、補正画像を反復復元するステップを有していることを特徴とする請求項8に記載の方法。
【請求項10】
前記ステップb)が、HYPR−LR画像復元法を用いて希薄化画像を復元するステップを有していることを特徴とする請求項1に記載の方法。
【請求項11】
前記画像診断システムが、画像誘導放射線治療(IGRT)システムであって、前記ステップa)で収集された前記画像データセットが、X線投影空間データセットであることを特徴とする請求項1に記載の方法。
【請求項12】
g)呼吸モニタ装置を用いて、前記対象の呼吸運動を示す信号を収集するステップと、
h)PICCS画像復元法を用いて、前記対象の画像を復元するステップと、
をさらに有していることを特徴とする請求項11に記載の方法。
【請求項13】
前記ステップd)が、呼吸動作を示す収集した信号を用いて、前記ステップa)で収集した複数の画像データセットから、呼吸相画像データセットを生成するステップを有していることを特徴とする請求項12に記載の方法。
【請求項14】
前記ステップe)で生成した前記補正画像が、呼吸相を示し、前記ステップh)が、前の画像として、前記ステップf)で復元された画像を用いるステップを有していることを特徴とする請求項13に記載の方法。
【請求項15】
i)前記ステップh)で復元された画像を用いて、放射線供給計画を更新するステップをさらに有していることを特徴とする請求項13に記載の方法。
【請求項1】
a)画像診断システムを用いて、対応する複数の時間フレームにおける視野内に置かれた対象の複数の画像データセットを収集するステップと、
b)前記複数の収集した画像データセットからデータを組み合わせることによって希薄化画像を復元するステップと、
c)ステップb)で復元した前記希薄化画像を変換して、希薄化画像データセットを生成するステップと、
d)ステップc)で生成した前記希薄化画像データセットから、選択した時間フレームに収集した画像データセットを引き算して差分画像データセットを生成するステップと、
e)ステップd)で生成した前記差分画像データセットを用いて、補正画像を復元するステップと、
f)ステップb)で復元した前記希薄化画像から前記補正画像を引き算して、選択した時間フレームにおける前記対象の画像を生成するステップと、
で構成された、画像診断システムの視野(FOV)内に置かれた対象の画像を生成するための方法。
【請求項2】
前記ステップc)が、選択された時間に収集された前記画像データセットのサンプリングパターンに沿って前記希薄化画像を再グリッド化するステップを含んでいることを特徴とする請求項1に記載の方法。
【請求項3】
前記ステップe)が、反復最小化法を用いて前記補正画像を反復復元するステップを含んでいることを特徴とする請求項1に記載の方法。
【請求項4】
前記画像診断システムが、核磁気共鳴画像(MRI)システムであって、前記ステップa)で収集された前記画像データセットが、インターリーブされたk空間データセットであることを特徴とする請求項1に記載の方法。
【請求項5】
前記MRIシステムが、複数の受信機コイル素子を有するパラレル無線周波数(RF)受信機コイルを備え、1つの画像データセットが、複数の時間フレームのそれぞれにおいて各コイル素子によって収集されたものであることを特徴とする請求項4に記載の方法。
【請求項6】
前記ステップb)が、さらに、
各受信機コイル素子のための感度プロファイルを見積もるステップと、
前記希薄化画像に対応する前記受信機コイル素子の前記感度プロファイルを乗算することによって、前記各受信機コイル素子に対応した中間希薄化画像を生成するステップと、をさらに有していることを特徴とする請求項5に記載の方法。
【請求項7】
前記ステップc)が、前記中間希薄化画像を変換することによって複数の希薄化画像データセットを生成するステップを有していることを特徴とする請求項6に記載の方法。
【請求項8】
前記ステップd)が、対応する前記中間希薄化画像から、選択された時間フレームでの複数の前記受信機コイル素子によって収集された画像データセットを引き算することによって、複数の差分画像データセットを生成するステップを有していることを特徴とする請求項7に記載の方法。
【請求項9】
前記ステップe)が、前記ステップd)で生成された複数の差分画像データセットを用いて、補正画像を反復復元するステップを有していることを特徴とする請求項8に記載の方法。
【請求項10】
前記ステップb)が、HYPR−LR画像復元法を用いて希薄化画像を復元するステップを有していることを特徴とする請求項1に記載の方法。
【請求項11】
前記画像診断システムが、画像誘導放射線治療(IGRT)システムであって、前記ステップa)で収集された前記画像データセットが、X線投影空間データセットであることを特徴とする請求項1に記載の方法。
【請求項12】
g)呼吸モニタ装置を用いて、前記対象の呼吸運動を示す信号を収集するステップと、
h)PICCS画像復元法を用いて、前記対象の画像を復元するステップと、
をさらに有していることを特徴とする請求項11に記載の方法。
【請求項13】
前記ステップd)が、呼吸動作を示す収集した信号を用いて、前記ステップa)で収集した複数の画像データセットから、呼吸相画像データセットを生成するステップを有していることを特徴とする請求項12に記載の方法。
【請求項14】
前記ステップe)で生成した前記補正画像が、呼吸相を示し、前記ステップh)が、前の画像として、前記ステップf)で復元された画像を用いるステップを有していることを特徴とする請求項13に記載の方法。
【請求項15】
i)前記ステップh)で復元された画像を用いて、放射線供給計画を更新するステップをさらに有していることを特徴とする請求項13に記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公表番号】特表2011−507640(P2011−507640A)
【公表日】平成23年3月10日(2011.3.10)
【国際特許分類】
【出願番号】特願2010−539935(P2010−539935)
【出願日】平成20年12月22日(2008.12.22)
【国際出願番号】PCT/US2008/088010
【国際公開番号】WO2009/082736
【国際公開日】平成21年7月2日(2009.7.2)
【出願人】(390023641)ウイスコンシン アラムナイ リサーチ ファウンデーシヨン (61)
【氏名又は名称原語表記】WISCONSIN ALUMNI RESEARCH FOUNDATION
【Fターム(参考)】
【公表日】平成23年3月10日(2011.3.10)
【国際特許分類】
【出願日】平成20年12月22日(2008.12.22)
【国際出願番号】PCT/US2008/088010
【国際公開番号】WO2009/082736
【国際公開日】平成21年7月2日(2009.7.2)
【出願人】(390023641)ウイスコンシン アラムナイ リサーチ ファウンデーシヨン (61)
【氏名又は名称原語表記】WISCONSIN ALUMNI RESEARCH FOUNDATION
【Fターム(参考)】
[ Back to top ]