
帯電粒子の帯電量特定装置
【課題】装置規模を大型化することなく、粒径が数μm以上の帯電粒子の帯電量を精緻に測定もしくは特定することのできる、帯電粒子の帯電量特定装置を提供する。
【解決手段】帯電粒子pを含む気体Aを取り込むとともに、帯電粒子pをセンシングする粒子センサを備えた導入部10、気体Aの流速を調整し、少なくとも検出部20aにて気体Aを静止させる流速調整部30、電界生成機構、照射機構、受光機構を有する検出部20aと、粒子センサから送信された帯電粒子データを受信し、流速調整部30の作動を制御する制御部40と、を備え、検出部20aにおいて、電界生成機構が作動されて該検出部20a内で電界を生じさせ、作用する電界および重力によって帯電粒子pの移動が生ぜしめられ、移動する該帯電粒子pから発せられる散乱光の受光データから帯電粒子の帯電量を特定する装置100である。
【解決手段】帯電粒子pを含む気体Aを取り込むとともに、帯電粒子pをセンシングする粒子センサを備えた導入部10、気体Aの流速を調整し、少なくとも検出部20aにて気体Aを静止させる流速調整部30、電界生成機構、照射機構、受光機構を有する検出部20aと、粒子センサから送信された帯電粒子データを受信し、流速調整部30の作動を制御する制御部40と、を備え、検出部20aにおいて、電界生成機構が作動されて該検出部20a内で電界を生じさせ、作用する電界および重力によって帯電粒子pの移動が生ぜしめられ、移動する該帯電粒子pから発せられる散乱光の受光データから帯電粒子の帯電量を特定する装置100である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、空中に浮遊する帯電粒子を取り込んでその帯電量を特定する、帯電粒子の帯電量特定装置に関するものである。
【背景技術】
【0002】
電界内においては、粒子が帯電してなる帯電粒子にクーロン力が作用し、電界発生源にこの帯電粒子が付着し易くなることは知られるところである。この電界発生源として静電気帯電した種々の部材が挙げられるが、特に、この静電気帯電にともなう粒子の付着は、以下の生産施設、すなわち、FPD素材(フラットパネルディスプレイ)として透明電極を製造するプロセス、生産装置を組立・製造する施設、次世代二次電池を製造する施設、などの生産施設において、粒子汚染として問題となっている。
【0003】
上記施設で製造される製品(ワーク)は、低いクリーン度(クリーン度:1000〜10000程度)での製造を許容するが、上記する各種生産施設空間においては、摩擦や剥離、洗浄、乾燥などの製造過程で生じ得る数μmサイズの大きな粒子も存在しており、その製品への付着が製品歩留まり低下の主要因の一つとなっている。
【0004】
また、クリーンルームの内装部材には導電性材料が一般に適用されているが、これには±100V程度の電位が帯電しており、これがルーム内空間に帯電粒子を生ぜしめて製品に付着する結果、製品のクリーン度が低下することとなる。
【0005】
ところで、粒子の挙動には、重力による終末沈降、気流、クーロン力が影響し、ワークや内装部材への帯電粒子の吸着は、このうちのクーロン力が主として関係し、帯電粒子の有する帯電量(電荷量)とワークの表面電位によって生じる電界強度で吸着力が決定される。このため、静電気対策として、イオナイザや軟X線によるワーク表面の除電がおこなわれている。
【0006】
しかし、現在のクリーンルーム等においては、その空間内の静電気分布や摩擦、剥離等によって生じ得る粒子の帯電量が把握できていないことから、実際には、上記する電位除去対策が十分に功を奏しているとは言い難い。中でも、帯電粒子の発生機構やその性状、帯電量は、除電対策にとって重要な要素であるにも関わらず、数μmサイズの粒子を実環境下において測定もしくは特定する方法が未だ確立されていない。
【0007】
なお、上記する帯電粒子の帯電量の測定、特定に際し、微分型静電分級器(DMA: Differential Mobility Analyzer)を使用する方法が現在用いられている。
【0008】
このDMAを使用する方法は、常温常圧下での粒子分級に有効な測定方法であり、その装置構成は、二重同心円筒形で、その内筒に電圧を印加し、外筒を接地した姿勢でこれら円筒間に電位差を持たせるものであり、内外筒間の距離や電位は一定に保たれ、電界が均一となるように設計されている。そして、内外筒間には清浄空気を層流状態(シース気流)で導入する一方、帯電粒子を含んだサンプル空気は外筒の壁に沿って流入させるようにしている。このDMA内においては、電位差に依存する電界と帯電粒子の帯電量(荷電量)の間で生じるクーロン力が帯電粒子に作用し、電位差に応じた電気移動度を有する移動速度で中心電極に引き寄せられることとなる。
【0009】
ここで、電気移動度の大きな粒子ほど移動速度が大きく、結果として中心電極の上部に沈着し易い一方で、電気移動度の小さな粒子は中心電極に捕集されずにシース気流とともにDMAから流出し易い。なお、この中心電極の下部にはスリットが設けてあり、一定の電気移動度よりも小さな帯電粒子のみが取り出されることとなる。また、凝縮核計数器(CNC: Condensation Nucleus Counter)等を使用してその濃度を測定することにより、電気移動度の分布を得ることもできる。
【0010】
上記するように、DMAは、粒子の粒径と電気移動度(すなわち荷電数)が、設定された気流およびクーロン力と一致した場合に、分級粒子としてスリットから取り出せる仕組みとなっている。したがって、粒子の径が大きくなるにつれて下方に作用する重力と気流による移動速度が大きくなり、自ずとDMAの長さも長くならざるを得ない。また、下方への移動速度が速く、荷電数が少ない場合は、スリットで粒子を分級するにあたって強い電界を付与する必要があるが、さらに電極(内筒)と接地(外筒)の間の距離が小さい場合には、放電の危険性を回避するべく、DMAの断面寸法も大きくせざるを得なくなる。
【0011】
なお、本発明者等の検証によれば、外筒径が10cm、長さが30cmのDMAによる実験において、粒径0.5μm、荷電数±6個が測定可能な最大の大きさであり、それよりも大きな粒径の粒子の測定はほぼ不可能である。
【0012】
一方、既述した種々の生産施設における粒子汚染においては、粒径が数μm以上の粒子(もしくは微粒子)の付着が問題となるケースが多い現状に鑑みれば、これに対応したDMAによる測定や特定をプロセスエリアで実施するには、極めて大掛かりな装置を要することとなり、このように大規模な測定装置の適用は現実的とは言えない。
【0013】
なお、上記するDMAを構造改良した技術が特許文献1に開示されている。特許文献1に開示の微粒子分級装置は、その特徴構成として、複数の粒径別の中心電極部を有するものであり、この粒径別の中心電極部のそれぞれに微粒子導出スリットが個別に形成されていることで、複数種類の粒径の微粒子を同時に分級(粒径選別)することを可能としたものである。
【0014】
しかし、この改良型の微粒子分級装置をもってしても、依然として上記する課題、すなわち、装置規模を大型化することなく、粒径が数μm以上の帯電粒子(もしくは微粒子)の付着が問題となるクリーンルーム等の実環境下において、該帯電粒子の帯電量を精緻に測定もしくは特定する、という課題を解決するには至らない。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】特開2007−315817号公報
【発明の概要】
【発明が解決しようとする課題】
【0016】
本発明は、上記する問題に鑑みてなされたものであり、装置規模を大型化することなく、粒径が数μm以上の帯電粒子の帯電量を精緻に測定もしくは特定することのできる、帯電粒子の帯電量特定装置を提供することを目的とする。
【課題を解決するための手段】
【0017】
前記目的を達成すべく、本発明による帯電粒子の帯電量特定装置は、浮遊する帯電粒子を含む気体を取り込むとともに、帯電粒子をセンシングする粒子センサを備えた導入部と、前記導入部を通過して流速を有する前記気体の該流速を調整し、少なくとも検出部にて該気体を静止させる流速調整部と、前記流速調整部を通過した前記気体が導入される前記検出部であって、電界生成機構と、該帯電粒子にレーザ光を照射する照射機構と、帯電粒子から発せられる散乱光を受光する受光機構と、を有する検出部と、前記粒子センサから送信された帯電粒子データを受信し、前記流速調整部の作動を制御する制御部と、を少なくとも備え、前記導入部、前記流速調整部、前記検出部が相互に流路を介して接続されており、前記検出部において、前記電界生成機構が作動されて該検出部内で電界を生じさせ、作用する電界および重力によって帯電粒子の移動が生ぜしめられ、移動する該帯電粒子から発せられる散乱光の受光データから帯電粒子の帯電量を特定するものである。
【0018】
従来構造の上記するDMAが、帯電粒子(この粒子は、エアロゾルと称することもできる)の気流や重力、クーロン力をパラメータとして、スリット内に移動した粒子を測定することでその帯電量を特定するものであるのに対して、本発明の帯電量特定装置は、帯電粒子を含む気体である、たとえば空気の流れを静止状態とすることにより、重力とクーロン力のみをパラメータとして帯電粒子の移動速度を光学系の検出部にて測定し、その帯電量もしくは荷電数を特定するものである。
【0019】
帯電粒子の移動速度の測定に際し、まず、この帯電粒子を含む気体の流れが静止していることから、さらにクーロン力を考慮しない(無視した)場合には、帯電粒子の移動速度は重力に起因する終末沈降速度のみとなり、重力と気流、およびクーロン力から移動速度が決定される場合に比して帯電粒子の移動速度は相対的に低速となる。このために、計測に要する帯電粒子の移動路は短くてよく、装置自体の小型化が実現される。
【0020】
また、従来構造の上記するDMAでは、電極(内筒)に電圧を印加し、帯電粒子との間にクーロン力を作用させることでスリットに帯電粒子を導く装置であることから、帯電量が未知の条件下では、電圧をパラメータとして種々変化させ、粒子の帯電量(荷電数)とマッチングさせる必要がある。そのために、クリーンルームのように浮遊する粒子が少ない環境下では、帯電粒子の測定に加えて電圧を仮に決定し、結果的に分級できた場合の荷電数をもって荷電数が特定されたとする測定フローとなり、分級できなかった場合には、電圧を変化させて仮に決定し、再度分級できるまで同様の操作を繰り返す必要があり、帯電量の特定に多大な時間を要することは理解に易い。これに対して本発明の帯電量特定装置では、測定した帯電粒子の移動状況を確認しながらその帯電量を計測、特定することが可能であり、帯電粒子の帯電量の特定に要する時間を大幅に短縮できるものである。
【0021】
ここで、「少なくとも検出部にて該気体を静止させる」に関し、検出部を構成するセル内において、この「静止させる」とは、気体が完全に静止することのみならず、極低速で移動することをも含む意味であり、パラメータとして考慮する必要がない程度の速度にまで気体の流速が低減された状態であればよい。
【0022】
最終的に、移動する帯電粒子から発せられる散乱光の受光データは、たとえば上記する制御部を内蔵したコンピュータ、もしくはこれとは別体のコンピュータに取り込まれ、このコンピュータ画面上で帯電粒子の移動情況が管理者によって逐次確認されながら、該帯電粒子の帯電量が特定される。
【0023】
また、上記する導入部に備えられた粒子センサや検出部では帯電粒子の粒径が測定され、この検出部ではさらに散乱光の受光データから帯電粒子の移動速度が特定され、これら帯電粒子の粒径と移動速度から帯電量を特定することができる。
【0024】
また、上記する流速調整部は、上記する流路に介在して、制御部にてその開度が調整されるアクチュエータバルブ、もしくは、気体に対して圧力エア等の流体を提供して気体の速度を低下させる流体提供機構と該アクチュエータバルブとの組み合わせ、のいずれか一種からなる形態であってもよい。
【0025】
流入してくる気体の流速等に応じてアクチュエータバルブの開度を調整したり、あるいは、流入してくる気体に対して一端バルブを完全に閉じてその流れを止め、漸次その開度を調整しながら、気体の流速を静止もしくはそれに近い速度にまで落とすことができる。また、流体提供機構を有する形態においては、バルブの開度調整に加えて、流入する気体の流速を減じる方向に圧力エア等を提供することで、より効果的に気体の流速を静止もしくはそれに近い速度にまで落とすことが可能となる。
【0026】
また、上記する照射機構は、レーザ発振器と、該レーザ発振器から照射されたレーザ光を集光する集光レンズと、集光レンズを通過したレーザ光を帯電粒子に合焦させる合焦レンズと、からなり、受光機構は、帯電粒子で発せられる散乱光を集光する集光レンズと、集光レンズを通過した散乱光を合焦する合焦レンズと、からなる形態であってもよい。
【0027】
より具体的には、たとえば、合焦レンズを介して、CCDカメラ等の撮像機構に対して合焦された散乱光に関する受光データがコンピュータへデータ送信されるようになっている。この帯電粒子へのレーザ光の合焦と、散乱光のCCDカメラ等(コンピュータ画面)への合焦の双方が相俟って、帯電粒子の精緻な測定とこれに基づく帯電量の精緻な特定を実現することができる。
【発明の効果】
【0028】
以上の説明から理解できるように、本発明の帯電粒子の帯電量特定装置によれば、光学系の検出部内に導入された帯電粒子を含む気体の流れが静止され、したがって、従来構造のDMAに比して格段に検出部内での帯電粒子の移動速度を低速なものとしながら、この移動速度に基づいて、帯電粒子の帯電量を特定することができる。そのため、計測に要する帯電粒子の移動路を短縮でき、もって装置自体の小型化を実現することが可能となる。また、測定した帯電粒子の移動状況を確認しながら計測、特定することが可能であり、帯電粒子の帯電量の特定に要する時間を大幅に短縮することができる。これらのことから、本発明の帯電量特定装置は、帯電粒子の帯電量を精緻かつ迅速に、しかも小規模な装置にて特定したいクリーンルーム等に好適なものと言える。
【図面の簡単な説明】
【0029】
【図1】本発明の帯電量特定装置の装置構成を説明する説明図である。
【図2】帯電量特定装置を構成する検出部の断面図である。
【図3】帯電量特定装置の作動フローの一実施の形態を示す図である。
【発明を実施するための形態】
【0030】
以下、図面を参照して本発明の実施の形態を説明する。
図1は、本発明の帯電量特定装置の装置構成を説明する説明図であり、図2は、この帯電量特定装置を構成する検出部を詳細に説明した断面図である。
【0031】
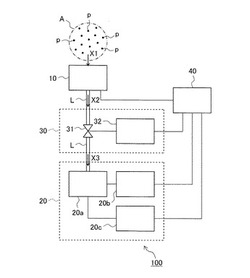
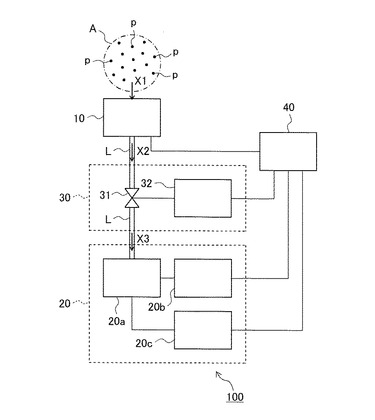
図示する帯電量特定装置100は、クリーンルーム等のルーム内で浮遊する帯電粒子p、…を含むエアAを取り込むとともに、導入された帯電粒子pの粒径等をセンシングする不図示の粒子センサを備えた導入部10と、この導入部10を通過するエアAの流速を調整する流速調整部30と、不図示の電界生成機構を備えた検出セル1、レーザ光LZ1を照射するレーザ発振器4、送光系ユニット2、受光系ユニット3、からなる検出部20aと、粒子センサから送信された帯電粒子に関するデータを受信して流速調整部30の作動を制御する制御部40と、から大略構成されている。
【0032】
導入部10と流速調整部30と検出部20aは、エアAが流通する流路Lを介して直列に繋がれており、導入部10に取り込まれた(X1方向)帯電粒子p、…を含むエアAは、流路Lを介して流通し(X2方向)、流速調整部30を経る過程でその流速が減じられ、さらに流路Lを介して検出部20a内に導入された(X3方向)際には、その流速がゼロ、もしくはそれに近似した速度となるように流速調整部30による流速制御が実行される。
【0033】
流速調整部30は、アクチュエータバルブ31のほかに、エアAに対して高圧流体等を提供してエアAの速度を低下させるコンプレッサや、バルブの開閉制御を実行する制御装置からなる流体提供機構32などから構成されており、導入部10へのエアAの取り込み前の状態において、アクチュエータバルブ31は閉じている。
【0034】
エアAの取り込みに際し、アクチュエータバルブ31は不図示のコンピュータ内に内蔵された制御部40によって開制御され、アクチュエータバルブ31が開くことで導入部10へのエアAの取り込みが開始される。
【0035】
導入部10では、内蔵された粒子センサにより、エアAに混入される帯電粒子pの粒径や粒数等、さらには、エアAの流速などがセンシングされ、これらの帯電粒子データや流速データが制御部40に送信される。たとえば、この導入部10に、OPC(Optical Particle Counter)と直結したプローブを適用することができる。
【0036】
制御部40では、流速調整部30にてエアAの流速が減じられ、少なくとも下流側の検出部20a内に該エアAが導入された際にその速度がゼロ、もしくはそれに近似した速度となるように、流速調整部30のアクチュエータバルブ31の開度の調整、流体提供機構32からの圧力流体の流量や流体圧の調整等がおこなわれる。
【0037】
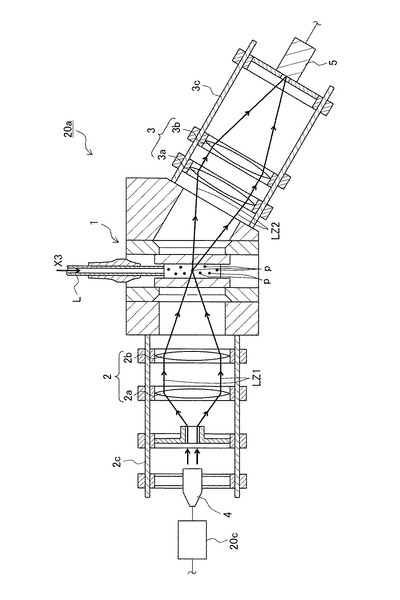
検出部20aは、帯電粒子pを導入するとともに、その内部に内部電極等の電界生成機構を備えた検出セル1と、レーザ光LZ1を照射するレーザ発振器4と、送光系ユニット2と、受光系ユニット3と、から大略構成されている。
【0038】
この送光系ユニット2は、照射されたレーザ光LZ1を集光する集光レンズ2aと、集光レンズ2aを通過したレーザ光LZ1を帯電粒子pに合焦させる合焦レンズ2bと、から構成されており、それらがフレーム2cにて一体とされている。一方、受光系ユニット3は、帯電粒子pで発せられる散乱光LZ2を集光する集光レンズ3aと、集光レンズ3aを通過した散乱光LZ2を合焦する合焦レンズ3bと、から構成されており、それらがフレーム3cにて一体とされている。なお、各集光レンズ2a、3a,合焦レンズ2b,3bのそれぞれが、フレーム2c、3cに沿って可動自在に装着され、自動制御にて焦点合わせ等される構成であるのが好ましく、図示例は、この各種レンズの位置調整を制御する光学系ユニット調整部20bを具備するものである。
【0039】
受光系ユニット3の合焦レンズ3bでは、その前方に配設されたCCDカメラ等の撮像部5で帯電粒子pの画像焦点が合焦されるように、その焦点合わせが実行され、焦点合わせされた帯電粒子pに関する画像が、制御部40を内蔵するコンピュータ、もしくは別体のコンピュータへ送信され、コンピュータ画面上で管理者が画像の確認や、画像を用いた帯電粒子pの帯電量の算定を実行できるようになっている。
【0040】
なお、検出ユニット2は、上記する検出部20aと、光学系ユニット調整部20bと、レーザ発振器4の電源であり、かつ、検出セル1内の電界生成機構を構成する電極に印加する電源でもある電源20cと、から構成されるものである。
【0041】
検出セル1内に導入された帯電粒子pの静止状態が確認されたら、電界生成機構に電圧を印加して、該帯電粒子pに作用する重力とクーロン力にて帯電粒子pを移動させる。この移動が確認される前後でレーザ光LZ1を照射し、任意の移動速度で移動する帯電粒子pからの散乱光LZ2をコンピュータ画面上で確認する。なお、確認される情報としては、この帯電粒子pの移動速度のみならず、検出セル1内に存在する帯電粒子pの数などがある。
【0042】
ここで、帯電量特定装置100の作動フローの一実施の形態を図3を参照して概説する。
【0043】
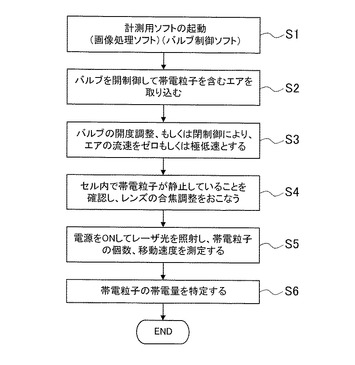
制御部40内には、計測用ソフトとして、画像処理ソフトとアクチュエータバルブ制御ソフトがインストールされており、まず、これらの計測用ソフトを起動させる(ステップS1)。
【0044】
ここで、画像処理ソフトとしては、多機能TV用ソフトウエアである、mAgicTVを適用できる。また、アクチュエータバルブ31としては、榎本マイクロポンプ製作所社製のMX−8085T−Wを適用でき、このアクチュエータバルブ制御ソフトとしては、日本ナショナルインスツルメンツ社製のUSB−6251、株式会社司測研社製のCHM−AIRを適用できる。
【0045】
次に、アクチュエータバルブ31を開制御して、帯電粒子p、…を含むエアAを導入部10に取り込む(ステップS2)。
【0046】
エアAが導入部10に取り込まれると、アクチュエータバルブ制御ソフトが作動してバルブの開度調整、もしくは閉制御等により、エアAの流速を減じて、その値がゼロもしくは極低速に調整される(ステップS3)。
【0047】
次に、エアAは検出部20aの検出セル1内に導入されるが、この検出セル1内において、帯電粒子pが静止していることを確認するとともに、この帯電粒子pに対する合焦レンズ2bの焦点調整、撮像部5に対する合焦レンズ3bの焦点調整が実行される(ステップS4)。
【0048】
次に、電源20cをON制御し、検出セル1内に電界を生じさせるとともに、レーザ光を照射し、重力およびクーロン力にて比較的低速で移動する帯電粒子pにて反射する散乱光を撮像部5を介してコンピュータ画面上で確認しながら、検出セル1内における帯電粒子pの個数や粒径、その移動速度を測定する(ステップS5)。
【0049】
最後に、帯電粒子pの粒径と移動速度から、該帯電粒子pの帯電量を特定する。
ここで、粒径と移動速度から帯電量を特定する際のアルゴリズムを概説する。
【0050】
帯電粒子を電界強度E(V/m)の電場内に導入すると、粒子の帯電量npe(C)は、以下の式1で示される。
【0051】
【数1】

【0052】
ここで、Dpは粒径(m)、vetは粒子の移動速度(m/s)、Ccはカニンガムの補正係数、e=1.60217733×10-19(C)であり、その導出式を以下の式2で示す。また、μはエアの粘度で、0.018110-3(Pa・s)である。
【0053】
【数2】
【0054】
ここで、Knはクヌーセン数で、エアの平均自由行程をλとすると、以下の式3で表すことができる。
【0055】
【数3】
【0056】
上式1〜3より、帯電粒子の帯電量は、その粒径と電界中の粒子の移動速度に依存することが分かり、したがって、これらを精緻に計測することで、帯電粒子の帯電量を特定することができる。
【0057】
上記する算定式も、たとえば制御部40を構成するコンピュータ内に内蔵されており、画面上で帯電粒子の移動速度と粒径が確認された後に、読み取られたこれらの値を算定式内に代入し、帯電粒子の帯電量が特定されることとなる。
【0058】
なお、導入部10の粒子センサでセンシングされた帯電粒子の計測数と、検出セル1内で確認された帯電粒子の数を比較し、検出セル内の帯電粒子の検出割合が一定の閾値を下回った場合に、上記する各機器の設定、調整を再度おこない、同様の作動フローにて、再度帯電量の特定をおこなうこともできる。
【0059】
上記する帯電量特定装置100によれば、光学系の検出部20a内に導入された帯電粒子pを含む気体Aの流れが静止され、したがって、検出部20a内での帯電粒子pの移動速度を低速なものとしながら、この移動速度に基づいて、帯電粒子pの帯電量を特定することができるため、計測に要する帯電粒子pの移動路を短縮でき、その小型化を実現することが可能となる。また、測定した帯電粒子pの移動状況を確認しながら計測、特定することができるため、帯電粒子pの帯電量の特定に要する時間を大幅に短縮することが可能となるものである。
【0060】
以上、本発明の実施の形態を図面を用いて詳述してきたが、具体的な構成はこの実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲における設計変更等があっても、それらは本発明に含まれるものである。
【符号の説明】
【0061】
10…導入部、20…検出ユニット、20a…検出部、20b…光学系ユニット調整部、20c…電源、30…流速調整部、31…アクチュエータバルブ、32…圧力エア提供ユニット、40…制御部、100…帯電量特定装置、L…流路、A…エア(気体)、p…帯電粒子
【技術分野】
【0001】
本発明は、空中に浮遊する帯電粒子を取り込んでその帯電量を特定する、帯電粒子の帯電量特定装置に関するものである。
【背景技術】
【0002】
電界内においては、粒子が帯電してなる帯電粒子にクーロン力が作用し、電界発生源にこの帯電粒子が付着し易くなることは知られるところである。この電界発生源として静電気帯電した種々の部材が挙げられるが、特に、この静電気帯電にともなう粒子の付着は、以下の生産施設、すなわち、FPD素材(フラットパネルディスプレイ)として透明電極を製造するプロセス、生産装置を組立・製造する施設、次世代二次電池を製造する施設、などの生産施設において、粒子汚染として問題となっている。
【0003】
上記施設で製造される製品(ワーク)は、低いクリーン度(クリーン度:1000〜10000程度)での製造を許容するが、上記する各種生産施設空間においては、摩擦や剥離、洗浄、乾燥などの製造過程で生じ得る数μmサイズの大きな粒子も存在しており、その製品への付着が製品歩留まり低下の主要因の一つとなっている。
【0004】
また、クリーンルームの内装部材には導電性材料が一般に適用されているが、これには±100V程度の電位が帯電しており、これがルーム内空間に帯電粒子を生ぜしめて製品に付着する結果、製品のクリーン度が低下することとなる。
【0005】
ところで、粒子の挙動には、重力による終末沈降、気流、クーロン力が影響し、ワークや内装部材への帯電粒子の吸着は、このうちのクーロン力が主として関係し、帯電粒子の有する帯電量(電荷量)とワークの表面電位によって生じる電界強度で吸着力が決定される。このため、静電気対策として、イオナイザや軟X線によるワーク表面の除電がおこなわれている。
【0006】
しかし、現在のクリーンルーム等においては、その空間内の静電気分布や摩擦、剥離等によって生じ得る粒子の帯電量が把握できていないことから、実際には、上記する電位除去対策が十分に功を奏しているとは言い難い。中でも、帯電粒子の発生機構やその性状、帯電量は、除電対策にとって重要な要素であるにも関わらず、数μmサイズの粒子を実環境下において測定もしくは特定する方法が未だ確立されていない。
【0007】
なお、上記する帯電粒子の帯電量の測定、特定に際し、微分型静電分級器(DMA: Differential Mobility Analyzer)を使用する方法が現在用いられている。
【0008】
このDMAを使用する方法は、常温常圧下での粒子分級に有効な測定方法であり、その装置構成は、二重同心円筒形で、その内筒に電圧を印加し、外筒を接地した姿勢でこれら円筒間に電位差を持たせるものであり、内外筒間の距離や電位は一定に保たれ、電界が均一となるように設計されている。そして、内外筒間には清浄空気を層流状態(シース気流)で導入する一方、帯電粒子を含んだサンプル空気は外筒の壁に沿って流入させるようにしている。このDMA内においては、電位差に依存する電界と帯電粒子の帯電量(荷電量)の間で生じるクーロン力が帯電粒子に作用し、電位差に応じた電気移動度を有する移動速度で中心電極に引き寄せられることとなる。
【0009】
ここで、電気移動度の大きな粒子ほど移動速度が大きく、結果として中心電極の上部に沈着し易い一方で、電気移動度の小さな粒子は中心電極に捕集されずにシース気流とともにDMAから流出し易い。なお、この中心電極の下部にはスリットが設けてあり、一定の電気移動度よりも小さな帯電粒子のみが取り出されることとなる。また、凝縮核計数器(CNC: Condensation Nucleus Counter)等を使用してその濃度を測定することにより、電気移動度の分布を得ることもできる。
【0010】
上記するように、DMAは、粒子の粒径と電気移動度(すなわち荷電数)が、設定された気流およびクーロン力と一致した場合に、分級粒子としてスリットから取り出せる仕組みとなっている。したがって、粒子の径が大きくなるにつれて下方に作用する重力と気流による移動速度が大きくなり、自ずとDMAの長さも長くならざるを得ない。また、下方への移動速度が速く、荷電数が少ない場合は、スリットで粒子を分級するにあたって強い電界を付与する必要があるが、さらに電極(内筒)と接地(外筒)の間の距離が小さい場合には、放電の危険性を回避するべく、DMAの断面寸法も大きくせざるを得なくなる。
【0011】
なお、本発明者等の検証によれば、外筒径が10cm、長さが30cmのDMAによる実験において、粒径0.5μm、荷電数±6個が測定可能な最大の大きさであり、それよりも大きな粒径の粒子の測定はほぼ不可能である。
【0012】
一方、既述した種々の生産施設における粒子汚染においては、粒径が数μm以上の粒子(もしくは微粒子)の付着が問題となるケースが多い現状に鑑みれば、これに対応したDMAによる測定や特定をプロセスエリアで実施するには、極めて大掛かりな装置を要することとなり、このように大規模な測定装置の適用は現実的とは言えない。
【0013】
なお、上記するDMAを構造改良した技術が特許文献1に開示されている。特許文献1に開示の微粒子分級装置は、その特徴構成として、複数の粒径別の中心電極部を有するものであり、この粒径別の中心電極部のそれぞれに微粒子導出スリットが個別に形成されていることで、複数種類の粒径の微粒子を同時に分級(粒径選別)することを可能としたものである。
【0014】
しかし、この改良型の微粒子分級装置をもってしても、依然として上記する課題、すなわち、装置規模を大型化することなく、粒径が数μm以上の帯電粒子(もしくは微粒子)の付着が問題となるクリーンルーム等の実環境下において、該帯電粒子の帯電量を精緻に測定もしくは特定する、という課題を解決するには至らない。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】特開2007−315817号公報
【発明の概要】
【発明が解決しようとする課題】
【0016】
本発明は、上記する問題に鑑みてなされたものであり、装置規模を大型化することなく、粒径が数μm以上の帯電粒子の帯電量を精緻に測定もしくは特定することのできる、帯電粒子の帯電量特定装置を提供することを目的とする。
【課題を解決するための手段】
【0017】
前記目的を達成すべく、本発明による帯電粒子の帯電量特定装置は、浮遊する帯電粒子を含む気体を取り込むとともに、帯電粒子をセンシングする粒子センサを備えた導入部と、前記導入部を通過して流速を有する前記気体の該流速を調整し、少なくとも検出部にて該気体を静止させる流速調整部と、前記流速調整部を通過した前記気体が導入される前記検出部であって、電界生成機構と、該帯電粒子にレーザ光を照射する照射機構と、帯電粒子から発せられる散乱光を受光する受光機構と、を有する検出部と、前記粒子センサから送信された帯電粒子データを受信し、前記流速調整部の作動を制御する制御部と、を少なくとも備え、前記導入部、前記流速調整部、前記検出部が相互に流路を介して接続されており、前記検出部において、前記電界生成機構が作動されて該検出部内で電界を生じさせ、作用する電界および重力によって帯電粒子の移動が生ぜしめられ、移動する該帯電粒子から発せられる散乱光の受光データから帯電粒子の帯電量を特定するものである。
【0018】
従来構造の上記するDMAが、帯電粒子(この粒子は、エアロゾルと称することもできる)の気流や重力、クーロン力をパラメータとして、スリット内に移動した粒子を測定することでその帯電量を特定するものであるのに対して、本発明の帯電量特定装置は、帯電粒子を含む気体である、たとえば空気の流れを静止状態とすることにより、重力とクーロン力のみをパラメータとして帯電粒子の移動速度を光学系の検出部にて測定し、その帯電量もしくは荷電数を特定するものである。
【0019】
帯電粒子の移動速度の測定に際し、まず、この帯電粒子を含む気体の流れが静止していることから、さらにクーロン力を考慮しない(無視した)場合には、帯電粒子の移動速度は重力に起因する終末沈降速度のみとなり、重力と気流、およびクーロン力から移動速度が決定される場合に比して帯電粒子の移動速度は相対的に低速となる。このために、計測に要する帯電粒子の移動路は短くてよく、装置自体の小型化が実現される。
【0020】
また、従来構造の上記するDMAでは、電極(内筒)に電圧を印加し、帯電粒子との間にクーロン力を作用させることでスリットに帯電粒子を導く装置であることから、帯電量が未知の条件下では、電圧をパラメータとして種々変化させ、粒子の帯電量(荷電数)とマッチングさせる必要がある。そのために、クリーンルームのように浮遊する粒子が少ない環境下では、帯電粒子の測定に加えて電圧を仮に決定し、結果的に分級できた場合の荷電数をもって荷電数が特定されたとする測定フローとなり、分級できなかった場合には、電圧を変化させて仮に決定し、再度分級できるまで同様の操作を繰り返す必要があり、帯電量の特定に多大な時間を要することは理解に易い。これに対して本発明の帯電量特定装置では、測定した帯電粒子の移動状況を確認しながらその帯電量を計測、特定することが可能であり、帯電粒子の帯電量の特定に要する時間を大幅に短縮できるものである。
【0021】
ここで、「少なくとも検出部にて該気体を静止させる」に関し、検出部を構成するセル内において、この「静止させる」とは、気体が完全に静止することのみならず、極低速で移動することをも含む意味であり、パラメータとして考慮する必要がない程度の速度にまで気体の流速が低減された状態であればよい。
【0022】
最終的に、移動する帯電粒子から発せられる散乱光の受光データは、たとえば上記する制御部を内蔵したコンピュータ、もしくはこれとは別体のコンピュータに取り込まれ、このコンピュータ画面上で帯電粒子の移動情況が管理者によって逐次確認されながら、該帯電粒子の帯電量が特定される。
【0023】
また、上記する導入部に備えられた粒子センサや検出部では帯電粒子の粒径が測定され、この検出部ではさらに散乱光の受光データから帯電粒子の移動速度が特定され、これら帯電粒子の粒径と移動速度から帯電量を特定することができる。
【0024】
また、上記する流速調整部は、上記する流路に介在して、制御部にてその開度が調整されるアクチュエータバルブ、もしくは、気体に対して圧力エア等の流体を提供して気体の速度を低下させる流体提供機構と該アクチュエータバルブとの組み合わせ、のいずれか一種からなる形態であってもよい。
【0025】
流入してくる気体の流速等に応じてアクチュエータバルブの開度を調整したり、あるいは、流入してくる気体に対して一端バルブを完全に閉じてその流れを止め、漸次その開度を調整しながら、気体の流速を静止もしくはそれに近い速度にまで落とすことができる。また、流体提供機構を有する形態においては、バルブの開度調整に加えて、流入する気体の流速を減じる方向に圧力エア等を提供することで、より効果的に気体の流速を静止もしくはそれに近い速度にまで落とすことが可能となる。
【0026】
また、上記する照射機構は、レーザ発振器と、該レーザ発振器から照射されたレーザ光を集光する集光レンズと、集光レンズを通過したレーザ光を帯電粒子に合焦させる合焦レンズと、からなり、受光機構は、帯電粒子で発せられる散乱光を集光する集光レンズと、集光レンズを通過した散乱光を合焦する合焦レンズと、からなる形態であってもよい。
【0027】
より具体的には、たとえば、合焦レンズを介して、CCDカメラ等の撮像機構に対して合焦された散乱光に関する受光データがコンピュータへデータ送信されるようになっている。この帯電粒子へのレーザ光の合焦と、散乱光のCCDカメラ等(コンピュータ画面)への合焦の双方が相俟って、帯電粒子の精緻な測定とこれに基づく帯電量の精緻な特定を実現することができる。
【発明の効果】
【0028】
以上の説明から理解できるように、本発明の帯電粒子の帯電量特定装置によれば、光学系の検出部内に導入された帯電粒子を含む気体の流れが静止され、したがって、従来構造のDMAに比して格段に検出部内での帯電粒子の移動速度を低速なものとしながら、この移動速度に基づいて、帯電粒子の帯電量を特定することができる。そのため、計測に要する帯電粒子の移動路を短縮でき、もって装置自体の小型化を実現することが可能となる。また、測定した帯電粒子の移動状況を確認しながら計測、特定することが可能であり、帯電粒子の帯電量の特定に要する時間を大幅に短縮することができる。これらのことから、本発明の帯電量特定装置は、帯電粒子の帯電量を精緻かつ迅速に、しかも小規模な装置にて特定したいクリーンルーム等に好適なものと言える。
【図面の簡単な説明】
【0029】
【図1】本発明の帯電量特定装置の装置構成を説明する説明図である。
【図2】帯電量特定装置を構成する検出部の断面図である。
【図3】帯電量特定装置の作動フローの一実施の形態を示す図である。
【発明を実施するための形態】
【0030】
以下、図面を参照して本発明の実施の形態を説明する。
図1は、本発明の帯電量特定装置の装置構成を説明する説明図であり、図2は、この帯電量特定装置を構成する検出部を詳細に説明した断面図である。
【0031】
図示する帯電量特定装置100は、クリーンルーム等のルーム内で浮遊する帯電粒子p、…を含むエアAを取り込むとともに、導入された帯電粒子pの粒径等をセンシングする不図示の粒子センサを備えた導入部10と、この導入部10を通過するエアAの流速を調整する流速調整部30と、不図示の電界生成機構を備えた検出セル1、レーザ光LZ1を照射するレーザ発振器4、送光系ユニット2、受光系ユニット3、からなる検出部20aと、粒子センサから送信された帯電粒子に関するデータを受信して流速調整部30の作動を制御する制御部40と、から大略構成されている。
【0032】
導入部10と流速調整部30と検出部20aは、エアAが流通する流路Lを介して直列に繋がれており、導入部10に取り込まれた(X1方向)帯電粒子p、…を含むエアAは、流路Lを介して流通し(X2方向)、流速調整部30を経る過程でその流速が減じられ、さらに流路Lを介して検出部20a内に導入された(X3方向)際には、その流速がゼロ、もしくはそれに近似した速度となるように流速調整部30による流速制御が実行される。
【0033】
流速調整部30は、アクチュエータバルブ31のほかに、エアAに対して高圧流体等を提供してエアAの速度を低下させるコンプレッサや、バルブの開閉制御を実行する制御装置からなる流体提供機構32などから構成されており、導入部10へのエアAの取り込み前の状態において、アクチュエータバルブ31は閉じている。
【0034】
エアAの取り込みに際し、アクチュエータバルブ31は不図示のコンピュータ内に内蔵された制御部40によって開制御され、アクチュエータバルブ31が開くことで導入部10へのエアAの取り込みが開始される。
【0035】
導入部10では、内蔵された粒子センサにより、エアAに混入される帯電粒子pの粒径や粒数等、さらには、エアAの流速などがセンシングされ、これらの帯電粒子データや流速データが制御部40に送信される。たとえば、この導入部10に、OPC(Optical Particle Counter)と直結したプローブを適用することができる。
【0036】
制御部40では、流速調整部30にてエアAの流速が減じられ、少なくとも下流側の検出部20a内に該エアAが導入された際にその速度がゼロ、もしくはそれに近似した速度となるように、流速調整部30のアクチュエータバルブ31の開度の調整、流体提供機構32からの圧力流体の流量や流体圧の調整等がおこなわれる。
【0037】
検出部20aは、帯電粒子pを導入するとともに、その内部に内部電極等の電界生成機構を備えた検出セル1と、レーザ光LZ1を照射するレーザ発振器4と、送光系ユニット2と、受光系ユニット3と、から大略構成されている。
【0038】
この送光系ユニット2は、照射されたレーザ光LZ1を集光する集光レンズ2aと、集光レンズ2aを通過したレーザ光LZ1を帯電粒子pに合焦させる合焦レンズ2bと、から構成されており、それらがフレーム2cにて一体とされている。一方、受光系ユニット3は、帯電粒子pで発せられる散乱光LZ2を集光する集光レンズ3aと、集光レンズ3aを通過した散乱光LZ2を合焦する合焦レンズ3bと、から構成されており、それらがフレーム3cにて一体とされている。なお、各集光レンズ2a、3a,合焦レンズ2b,3bのそれぞれが、フレーム2c、3cに沿って可動自在に装着され、自動制御にて焦点合わせ等される構成であるのが好ましく、図示例は、この各種レンズの位置調整を制御する光学系ユニット調整部20bを具備するものである。
【0039】
受光系ユニット3の合焦レンズ3bでは、その前方に配設されたCCDカメラ等の撮像部5で帯電粒子pの画像焦点が合焦されるように、その焦点合わせが実行され、焦点合わせされた帯電粒子pに関する画像が、制御部40を内蔵するコンピュータ、もしくは別体のコンピュータへ送信され、コンピュータ画面上で管理者が画像の確認や、画像を用いた帯電粒子pの帯電量の算定を実行できるようになっている。
【0040】
なお、検出ユニット2は、上記する検出部20aと、光学系ユニット調整部20bと、レーザ発振器4の電源であり、かつ、検出セル1内の電界生成機構を構成する電極に印加する電源でもある電源20cと、から構成されるものである。
【0041】
検出セル1内に導入された帯電粒子pの静止状態が確認されたら、電界生成機構に電圧を印加して、該帯電粒子pに作用する重力とクーロン力にて帯電粒子pを移動させる。この移動が確認される前後でレーザ光LZ1を照射し、任意の移動速度で移動する帯電粒子pからの散乱光LZ2をコンピュータ画面上で確認する。なお、確認される情報としては、この帯電粒子pの移動速度のみならず、検出セル1内に存在する帯電粒子pの数などがある。
【0042】
ここで、帯電量特定装置100の作動フローの一実施の形態を図3を参照して概説する。
【0043】
制御部40内には、計測用ソフトとして、画像処理ソフトとアクチュエータバルブ制御ソフトがインストールされており、まず、これらの計測用ソフトを起動させる(ステップS1)。
【0044】
ここで、画像処理ソフトとしては、多機能TV用ソフトウエアである、mAgicTVを適用できる。また、アクチュエータバルブ31としては、榎本マイクロポンプ製作所社製のMX−8085T−Wを適用でき、このアクチュエータバルブ制御ソフトとしては、日本ナショナルインスツルメンツ社製のUSB−6251、株式会社司測研社製のCHM−AIRを適用できる。
【0045】
次に、アクチュエータバルブ31を開制御して、帯電粒子p、…を含むエアAを導入部10に取り込む(ステップS2)。
【0046】
エアAが導入部10に取り込まれると、アクチュエータバルブ制御ソフトが作動してバルブの開度調整、もしくは閉制御等により、エアAの流速を減じて、その値がゼロもしくは極低速に調整される(ステップS3)。
【0047】
次に、エアAは検出部20aの検出セル1内に導入されるが、この検出セル1内において、帯電粒子pが静止していることを確認するとともに、この帯電粒子pに対する合焦レンズ2bの焦点調整、撮像部5に対する合焦レンズ3bの焦点調整が実行される(ステップS4)。
【0048】
次に、電源20cをON制御し、検出セル1内に電界を生じさせるとともに、レーザ光を照射し、重力およびクーロン力にて比較的低速で移動する帯電粒子pにて反射する散乱光を撮像部5を介してコンピュータ画面上で確認しながら、検出セル1内における帯電粒子pの個数や粒径、その移動速度を測定する(ステップS5)。
【0049】
最後に、帯電粒子pの粒径と移動速度から、該帯電粒子pの帯電量を特定する。
ここで、粒径と移動速度から帯電量を特定する際のアルゴリズムを概説する。
【0050】
帯電粒子を電界強度E(V/m)の電場内に導入すると、粒子の帯電量npe(C)は、以下の式1で示される。
【0051】
【数1】
【0052】
ここで、Dpは粒径(m)、vetは粒子の移動速度(m/s)、Ccはカニンガムの補正係数、e=1.60217733×10-19(C)であり、その導出式を以下の式2で示す。また、μはエアの粘度で、0.018110-3(Pa・s)である。
【0053】
【数2】
【0054】
ここで、Knはクヌーセン数で、エアの平均自由行程をλとすると、以下の式3で表すことができる。
【0055】
【数3】
【0056】
上式1〜3より、帯電粒子の帯電量は、その粒径と電界中の粒子の移動速度に依存することが分かり、したがって、これらを精緻に計測することで、帯電粒子の帯電量を特定することができる。
【0057】
上記する算定式も、たとえば制御部40を構成するコンピュータ内に内蔵されており、画面上で帯電粒子の移動速度と粒径が確認された後に、読み取られたこれらの値を算定式内に代入し、帯電粒子の帯電量が特定されることとなる。
【0058】
なお、導入部10の粒子センサでセンシングされた帯電粒子の計測数と、検出セル1内で確認された帯電粒子の数を比較し、検出セル内の帯電粒子の検出割合が一定の閾値を下回った場合に、上記する各機器の設定、調整を再度おこない、同様の作動フローにて、再度帯電量の特定をおこなうこともできる。
【0059】
上記する帯電量特定装置100によれば、光学系の検出部20a内に導入された帯電粒子pを含む気体Aの流れが静止され、したがって、検出部20a内での帯電粒子pの移動速度を低速なものとしながら、この移動速度に基づいて、帯電粒子pの帯電量を特定することができるため、計測に要する帯電粒子pの移動路を短縮でき、その小型化を実現することが可能となる。また、測定した帯電粒子pの移動状況を確認しながら計測、特定することができるため、帯電粒子pの帯電量の特定に要する時間を大幅に短縮することが可能となるものである。
【0060】
以上、本発明の実施の形態を図面を用いて詳述してきたが、具体的な構成はこの実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲における設計変更等があっても、それらは本発明に含まれるものである。
【符号の説明】
【0061】
10…導入部、20…検出ユニット、20a…検出部、20b…光学系ユニット調整部、20c…電源、30…流速調整部、31…アクチュエータバルブ、32…圧力エア提供ユニット、40…制御部、100…帯電量特定装置、L…流路、A…エア(気体)、p…帯電粒子
【特許請求の範囲】
【請求項1】
浮遊する帯電粒子を含む気体を取り込むとともに、帯電粒子をセンシングする粒子センサを備えた導入部と、
前記導入部を通過して流速を有する前記気体の該流速を調整し、少なくとも検出部にて該気体を静止させる流速調整部と、
前記流速調整部を通過した前記気体が導入される前記検出部であって、電界生成機構と、該帯電粒子にレーザ光を照射する照射機構と、帯電粒子から発せられる散乱光を受光する受光機構と、を有する検出部と、
前記粒子センサから送信された帯電粒子データを受信し、前記流速調整部の作動を制御する制御部と、を少なくとも備え、前記導入部、前記流速調整部、前記検出部が相互に流路を介して接続されており、
前記検出部において、前記電界生成機構が作動されて該検出部内で電界を生じさせ、作用する電界および重力によって帯電粒子の移動が生ぜしめられ、移動する該帯電粒子から発せられる散乱光の受光データから帯電粒子の帯電量を特定する、帯電粒子の帯電量特定装置。
【請求項2】
前記粒子センサでは、少なくとも帯電粒子の粒径が測定され、
前記検出部では、散乱光の前記受光データから帯電粒子の移動速度が特定され、
帯電粒子の前記粒径と前記移動速度から前記帯電量が特定される、請求項1に記載の帯電粒子の帯電量特定装置。
【請求項3】
前記流速調整部は、前記流路に介在して前記制御部にてその開度が調整されるアクチュエータバルブ、もしくは、前記気体に対して流体を提供してその速度を低下させる流体提供機構と該アクチュエータバルブとの組み合わせ、のいずれか一種からなる、請求項1または2に記載の帯電粒子の帯電量特定装置。
【請求項4】
前記照射機構は、レーザ発振器と、該レーザ発振器から照射されたレーザ光を集光する集光レンズと、集光レンズを通過したレーザ光を帯電粒子に合焦させる合焦レンズと、からなり、
前記受光機構は、帯電粒子で発せられる散乱光を集光する集光レンズと、集光レンズを通過した散乱光を合焦する合焦レンズと、からなる、請求項1〜3のいずれかに記載の帯電粒子の帯電量特定装置。
【請求項1】
浮遊する帯電粒子を含む気体を取り込むとともに、帯電粒子をセンシングする粒子センサを備えた導入部と、
前記導入部を通過して流速を有する前記気体の該流速を調整し、少なくとも検出部にて該気体を静止させる流速調整部と、
前記流速調整部を通過した前記気体が導入される前記検出部であって、電界生成機構と、該帯電粒子にレーザ光を照射する照射機構と、帯電粒子から発せられる散乱光を受光する受光機構と、を有する検出部と、
前記粒子センサから送信された帯電粒子データを受信し、前記流速調整部の作動を制御する制御部と、を少なくとも備え、前記導入部、前記流速調整部、前記検出部が相互に流路を介して接続されており、
前記検出部において、前記電界生成機構が作動されて該検出部内で電界を生じさせ、作用する電界および重力によって帯電粒子の移動が生ぜしめられ、移動する該帯電粒子から発せられる散乱光の受光データから帯電粒子の帯電量を特定する、帯電粒子の帯電量特定装置。
【請求項2】
前記粒子センサでは、少なくとも帯電粒子の粒径が測定され、
前記検出部では、散乱光の前記受光データから帯電粒子の移動速度が特定され、
帯電粒子の前記粒径と前記移動速度から前記帯電量が特定される、請求項1に記載の帯電粒子の帯電量特定装置。
【請求項3】
前記流速調整部は、前記流路に介在して前記制御部にてその開度が調整されるアクチュエータバルブ、もしくは、前記気体に対して流体を提供してその速度を低下させる流体提供機構と該アクチュエータバルブとの組み合わせ、のいずれか一種からなる、請求項1または2に記載の帯電粒子の帯電量特定装置。
【請求項4】
前記照射機構は、レーザ発振器と、該レーザ発振器から照射されたレーザ光を集光する集光レンズと、集光レンズを通過したレーザ光を帯電粒子に合焦させる合焦レンズと、からなり、
前記受光機構は、帯電粒子で発せられる散乱光を集光する集光レンズと、集光レンズを通過した散乱光を合焦する合焦レンズと、からなる、請求項1〜3のいずれかに記載の帯電粒子の帯電量特定装置。
【図1】

【図2】
【図3】
【図2】
【図3】
【公開番号】特開2011−202965(P2011−202965A)
【公開日】平成23年10月13日(2011.10.13)
【国際特許分類】
【出願番号】特願2010−67694(P2010−67694)
【出願日】平成22年3月24日(2010.3.24)
【出願人】(000206211)大成建設株式会社 (1,602)
【出願人】(504160781)国立大学法人金沢大学 (282)
【Fターム(参考)】
【公開日】平成23年10月13日(2011.10.13)
【国際特許分類】
【出願日】平成22年3月24日(2010.3.24)
【出願人】(000206211)大成建設株式会社 (1,602)
【出願人】(504160781)国立大学法人金沢大学 (282)
【Fターム(参考)】
[ Back to top ]