
常時定荷重をかけながら架空送電線を電線移線する工法及びこれに使用する定荷重載荷装置
【課題】
移線する電線に常に一定の荷重を与えることで移線中の電線の過不足を自動的に調整し、電線の挙動の安定化を図り、作業の安全確実化と省力化を実現する。
【解決手段】
架空送電線の電線移線工法において、移線する電線4の固定側一端部にワイヤロープ10の一端を接続し、当該ワイヤロープ10の他端を、鉄塔1を経由して地上付近に設けた定荷重載荷体11に接続し、上記荷重載荷体11による移線したい電線への荷重のかけ方は、鉄塔間の距離、電線の撓み距離、及び、電線の単位重量から計算される張力に見合った定荷重を常時かけ、上記定荷重は、上記電線4に接続したワイヤロープ10のワイヤロープ荷重と上記定荷重とが、常に等しくなるようにワイヤロープ巻取リールの電動モータの正逆回転をコンピュータで制御して行う。
移線する電線に常に一定の荷重を与えることで移線中の電線の過不足を自動的に調整し、電線の挙動の安定化を図り、作業の安全確実化と省力化を実現する。
【解決手段】
架空送電線の電線移線工法において、移線する電線4の固定側一端部にワイヤロープ10の一端を接続し、当該ワイヤロープ10の他端を、鉄塔1を経由して地上付近に設けた定荷重載荷体11に接続し、上記荷重載荷体11による移線したい電線への荷重のかけ方は、鉄塔間の距離、電線の撓み距離、及び、電線の単位重量から計算される張力に見合った定荷重を常時かけ、上記定荷重は、上記電線4に接続したワイヤロープ10のワイヤロープ荷重と上記定荷重とが、常に等しくなるようにワイヤロープ巻取リールの電動モータの正逆回転をコンピュータで制御して行う。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、架空送電線の電線移線工事、即ち、鉄塔等に取り付けられていた電線を、主に別の鉄塔や嵩上げした鉄塔等に移し替える移線工事において、移線する電線に常に定荷重をかけながら移線する工法及びこの移線工法に使用する定荷重載荷装置に関するものである。
【背景技術】
【0002】
上記移線工事では、移線する電線の取り付け間の距離(以下径間長という)が変化することにより電線長の過不足が生じる。このため、電線が不足する場合は電線張力が上昇し、反対に電線が余剰となった場合には電線は垂下することとなる。そのため、従来では、移線作業において電線の状態(張力及び垂下量)を調整するために、図10に示すように、移線側の電線端部と反対側の端部で、作業員が電線を目視で確認しながらウインチにより電線の送り出しや巻き込みを行って、電線の過不足を調整しながら移線を行っていた。
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、近年の架空送電線の電線移線工事では、鉄道等の重要横過物の上方での作業や、充電部に接近した条件など、多少でも電線垂下や過張力が許されない施工環境の場合が多い。従来の電線端部でのウインチによる送り出しや巻き込み作業は、移線側の電線の動きとの同調性が要求されており、これらを作業員が目視しながら作業するため、熟練を要するとともに、極めて手間や時間のかかる作業であった。しかも、作業員の連絡ミスや操作ミスによる同調不良など人為的なトラブルが発生する恐れがある。また、万が一、電線が垂下して地上の工作物や歩行者に接触しないよう、防護ネットを当該箇所に設置する必要がある。
【0004】
この発明はこれらの点に鑑みて為されたもので、移線する電線に常に一定の荷重を与えることで移線中の電線の過不足を自動的に調整し、電線の挙動の安定化を図り、作業の安全確実化と省力化を実現する工法及びこの工法に使用する定荷重載荷装置を提供し、上記課題を解決しようとするものである。
【0005】
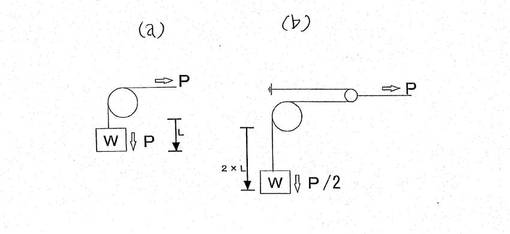
通常、架空送電線路の電線は、20000N〜40000Nで架設されている。そのため、原理的には2000Kg〜3000Kgのウエイトが必要となる。これでは、ウエイトの重量が大きくなり、取り扱い時の作業性が悪く、また、ウエイトを吊り下げる鉄塔などの設備に載荷される荷重が大きくなり、現実には実施できない可能性が大きい。そこで、滑車の原理により必要なウエイト重量を低減することが考えられる。しかし、この場合のウエイトの移動距離は荷重の低減に反比例して増加する。図11は荷重PとウエイトWの移動距離の関係を表すものであり、図11の(a)は荷重Pに対するウエイトWの移動距離はLであるのに対し、滑車のセミ組を用いた場合、図11の(b)に示すように、ウエイトWの荷重はP/2となるが、ウエイトWの移動距離はL×2となる。従って、ウエイトWの荷重Pを1/5にすれば、ウエイトWの移動距離は5倍となり、これではウエイトWを吊り下げる設備(鉄塔)は相当の高さが必要となる。これを解決するため、ウエイトと同様の一定荷重をワイヤロープに載荷することの出来る、ワイヤ巻取機から成る定荷重載荷装置を開発した。
【0006】
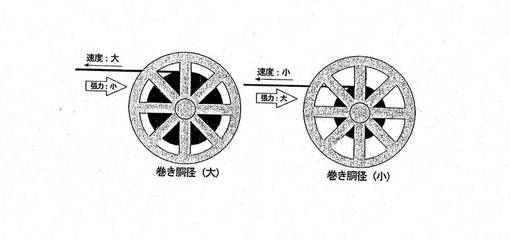
しかしながら、ワイヤ巻取機は、図12に示すように、通常、ワイヤロープをボビンに巻き付けると、巻径が変化するため、一定トルクでボビンを回転させるとワイヤロープの荷重は変化する。そこで、ワイヤロープの巻径を検知し、ワイヤロープの張力は一定になるように巻き取りトルクを調整する方式を採用した。
【課題を解決するための手段】
【0007】
具体的には、請求項1の発明は、移線したい鉄塔の上端部に移線したい電線の一端を接続し、他端を当該電線近くの鉄塔を経由して、地上付近に設けた荷重載荷体に接続することにより、上記移線したい電線に荷重をかけながら電線を移線させる架空送電線の電線移線工法において、上記荷重載荷体による移線したい電線への荷重のかけ方は、鉄塔間の距離、電線の撓み距離、及び、電線の単位重量から計算される張力に見合った定荷重を常時かけ、上記定荷重は、上記電線に接続したワイヤロープのワイヤロープ荷重と上記定荷重とが、常に等しくなるようにワイヤロープ巻取リールの電動モータの正逆回転をコンピュータで制御することにより行う、常時定荷重をかけながら架空送電線を電線移線する工法とした。また、請求項2の発明は、請求項1におけるコンピュータ制御には、上記ワイヤロープ荷重と上記定荷重とが、常に等しくなるようにワイヤロープ巻取リールの電動モータの正逆回転をコンピュータで制御するアルゴリズムが組み込まれている、請求項1に記載の常時定荷重をかけながら架空送電線を電線移線する工法とした。
【0008】
また、請求項3の発明は、ワイヤロープの一端を巻き付けたリールを回転自在に設け、当該リールを回転駆動させる回転駆動装置を設け、当該回転駆動装置により上記リールから導出した上記ワイヤロープに張力をかけ、当該ワイヤロープの移動速度を検出する速度センサを設け、当該速度センサにより検出したワイヤロープの移動速度と当該回転駆動装置の回転速度とを比較演算して当該ワイヤロープの巻径を検知し、この巻径を基に、ワイヤロープに載荷したい請求項1に記載の方法により得られた定荷重値から当該回転駆動装置の回転トルクを演算し、当該回転駆動装置の回転方向及び回転トルクを制御する、請求項1の方法に使用する定荷重載荷装置とした。
【0009】
また、請求項4の発明は、ワイヤロープの一端を巻き付けたリールを回転自在に設け、当該リールを回転駆動させる回転駆動装置を設け、当該回転駆動装置により上記リールから導出した上記ワイヤロープに張力をかけ、当該ワイヤロープの張力を検出する荷重センサを設け、当該荷重センサにより検出したワイヤロープの荷重値とワイヤロープに載荷したい請求項1に記載の方法により得られた定荷重値を比較して、これらの荷重値が常に同じとなるように上記回転駆動装置の回転方向及び回転トルクを制御する、請求項1の方法に使用する定荷重載荷装置とした。また、請求項5の発明は、請求項3乃至4の定荷重載荷装置における各種制御を自動的に行うコンピュータ装置とした。
【発明の効果】
【0010】
請求項1及び2の発明によれば、電線の移線中に、電線長が不足して電線の張力が上昇したり、また、反対に電線が余剰になって電線が垂下しようとするが、当該電線に常に鉄塔間の距離、電線の撓み距離、及び電線の単位重量から計算した定荷重を与えているため、自動的に電線長が調整され、電線の荷重の上昇や垂れ下がりが起こらない。従って、安定した作業が実現できるものである。それ故、従来のような各作業箇所との連絡ミスによる電線の過張力や異常垂下など、人為的なトラブルが防止でき、特に鉄道や主要道路などの重要横過物件上空での作業でも安全性を確保できる。また、電線の状態は、自動的に調整されるので、作業員による調整に比べて作業の連続性が高まり、作業時間の短縮が図れ、施工費を低廉化することができる。また、電線の異常垂下が生じないので、これらの電線の下に防護用ネットを張る必要がなくなり、施工費を低廉化することができる。また、これまで、電線の状態を作業員が目視で確認することが困難な夜間作業が可能となった。これにより鉄道の上空での作業など、トラブルが発生すると甚大な社会的影響を与える箇所では、夜間に作業を行うことで、重大災害を回避することができる。また、従来の工法では、各作業箇所の作業員同士で頻繁に連絡を取り合う必要があるが、連絡方法は無線機や拡声器を用いるため、現場周囲は非常に騒がしい。しかしながら、この工法により頻繁な連絡は不要となるため、騒音を低減できる。
【0011】
また、請求項3、4及び5の各発明では、リールから導出するワイヤロープに常時張力をかけ、このワイヤロープの動きをセンサで検知して、リールの回転駆動装置の回転の正逆、又は回転トルクを制御して、常に上記ワイヤロープに係る荷重を、効率よく保持することが出来る。その上、ワイヤロープを回転駆動装置によりリールに巻き付けたり、リールから繰り出して移動させるため、ワイヤロープの移動距離が長くても瞬時に処理できる。従って、高い荷重が必要な場合でも、多段のセミ組を行うことができる。
【発明を実施するための最良の形態】
【0012】
移線したい鉄塔の上端部に移線したい電線の一端を接続し、他端を当該電線近くの鉄塔を経由して、地上付近に設けた荷重載荷体に接続することにより、上記移線したい電線に荷重をかけながら電線を移線せる架空送電線の電線移線工法において、上記荷重載荷体による移線したい電線への荷重のかけ方は、鉄塔間の距離、電線の撓み距離、及び、電線の単位重量から計算される張力に見合った定荷重を常時かけ、上記定荷重は、上記電線に接続したワイヤロープのワイヤロープ荷重と上記定荷重とが、常に等しくなるようにワイヤロープ巻取リールの電動モータの正逆回転をコンピュータで制御することにより行う、常時定荷重をかけながら架空送電線を電線移線する。これにより、自動的に移線する電線長が調整され、移線中に、電線長が不足して電線の張力が上昇したり、また、電線が余剰になって電線が垂下することがなく、作業の安全確実化と省力化を実現できる。
【実施例1】
【0013】
以下この発明を図面に基づいて説明する。
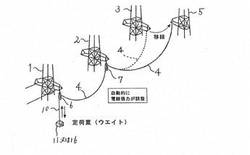
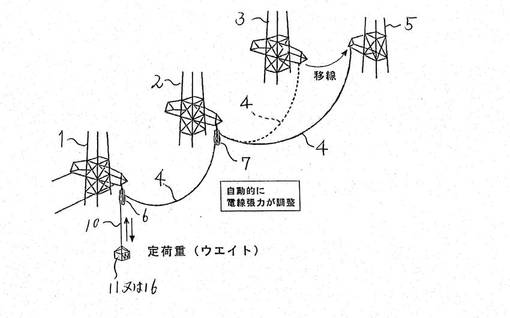
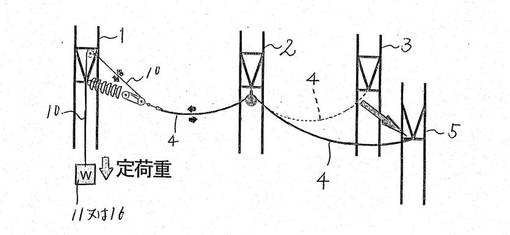
図1及び図2はこの発明の工法の概略構成図であり、三基の鉄塔1、2、3に取り付けられていた電線4の一端を、鉄塔3から鉄塔5に移線する場合、当該電線4の鉄塔1,2及び3の碍子の支持を外して、各鉄塔1、2に取り付けた金車6,7に電線4を移す。そして、鉄塔3に取り付けた電線4の一端を鉄塔5に移動させる。その際、図2に示すように、当該電線4の移線の一端に2本のワイヤロープ8、9を接続し、一方のロープ8を鉄塔3上で支持し、他方のロープ9を移線先の鉄塔5の上で支持し、一方のロープ8を伸ばしながら、他方のロープ9を引っ張りつつ電線4を移線させる。またこの移線の際、当該電線4の固定側の端部にワイヤロープ10の一端を接続し、当該ワイヤロープ10の他端に定荷重載荷体(ただし、図1及び図2では定荷重と表示)11を接続する。これにより、電線4の移線中、電線4は張力が上昇して上方に上がったり、また、反対に張力が弱められて大きく弛んだりしようとするが、電線4に常に一定荷重がかかり、電線4が異常に上昇したり、弛んだりすることが起こらない。
【0014】
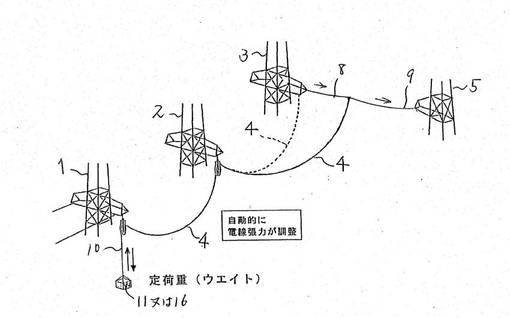
上記定荷重載荷体への定荷重は、次のようにして決定する。図3は、鉄塔間の距離Sに電線4を鉄塔の上端より距離Dだけ撓んで緊張した状態を示している。電線4の単位重量wの場合、電線4にかかる張力Tは、当該技術分野では、次の(1)式により、
T=wS2/8D ・・・・・・(1)
で表されことが知られている。また、この張力Tは、図1における定荷重と等しい値である。
そこで、図1における定荷重は、予め鉄塔5と鉄塔2間の距離Sが分かっており、また、電線4を撓ませる距離Dも分かっていると、使用する電線4の単位重量wは分かっているので、電線を移線させる作業の前から、想定することができるのである。
また、この定荷重は、電線を移線させる作業現場において、予め想定されている重量があればよいので、山岳地帯のような運搬車が入りにくい作業現場へは、定荷重載荷体を分割して、人力で搬送し、現場で組み立てることも出来る。
通常、架空送電線を移線する場合は、計画段階から上記鉄塔間の距離S、電線4の撓み距離D、電線4の単位重量wは分かっているので、上記(1)式より、張力T、すなわち、定荷重Wを計算することができ、定荷重体として、何Kgのものを用意しておけば良いかを、予め想定することができる。
【0015】
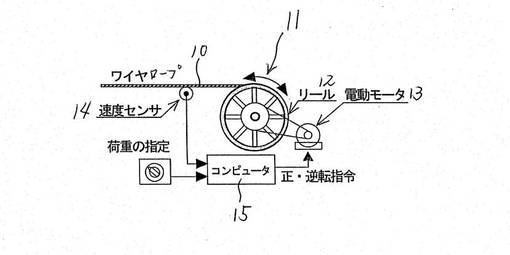
この定荷重載荷体11の装置構成は、図4に示すように、上記ワイヤロープ10の一端を巻き付けたリール12を回転自在に設け、当該リール12を回転駆動させる電動モータ(具体的には三相の誘導電動機)13を設け、当該電動モータ13により上記リール12に巻き付けたワイヤロープ10に張力をかけ、当該ワイヤロープ10の移動速度を検出する速度センサ14を設け、当該速度センサ14により検出したワイヤロープ10の移動速度と当該電動モータ13の回転速度とを比較演算することで当該ワイヤロープ10の巻径を検知し、この巻径を基に、ワイヤロープ10に載荷したい指定荷重値(上記方法により得られた値)から当該電動モータ13の回転トルクを演算し、当該電動モータ13の回転方向及び回転トルクを制御する構成となっている。また、これらの速度センサ14により検出したワイヤロープ10の移動速度と当該電動モータ13の回転速度とを比較演算して当該ワイヤロープ10の巻径を検知し、この巻径を基に、ワイヤロープ10に載荷したい指定荷重値(上記方法により得られた値)から当該電動モータ13の回転トルクを演算し、当該電動モータ13の回転方向及び回転トルクを制御することはコンピュータ15で行う。
【0016】
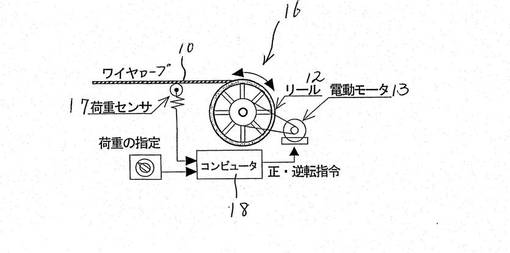
また、上記図3に示す定荷重載荷体11に代えて、図5に示す定荷重載荷体16にしても良い。この場合は、リール12に一他を巻き付けたワイヤロープ10の張力を検出する荷重センサ17を設け、この荷重センサ17で検出したワイヤロープ10の荷重値と当該ワイヤロープ10に載荷したい指定荷重値とをコンピュータ18で比較し、これらの値が常に同じとなるように電動モータ13の回転トルクを演算し、当該電動モータ13の回転方向及び回転トルクを制御する構成となっている。
これらの定荷重載荷体11、16には、上記コンピュータが最適に機能するようなアルゴリズムを組み込んでおけば、容易に機能させることができる。
【0017】
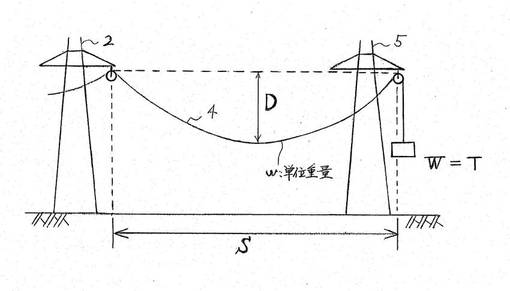
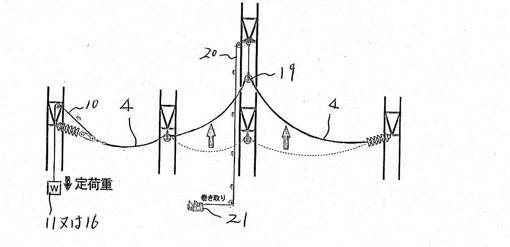
この工法は、図6から図9に示す電線の移線形態に適用可能である。まず、図6はこの工法の第1使用例を示すもので、上記図1及び図2で示したものと同様に、電線の片端の取付点を他の鉄塔又は支持物に変更する移線工事を示すものである。また、図7に示すものはこの工法の第2使用例を示すもので、連続した電線の中間部の取付点を上方に変更する移線工事である。この場合は、移線する電線4の一端(図7では左側)にワイヤロープ10を接続して、当該ワイヤロープ10に上記定荷重載荷体11又は16を接続して定荷重をかけながら、上記中間部の電線4を吊り下げた金車19のロープ20を地上に設置した巻き取り機21で巻き取り、電線4の中間部を上に移動させ、移線する。
【0018】
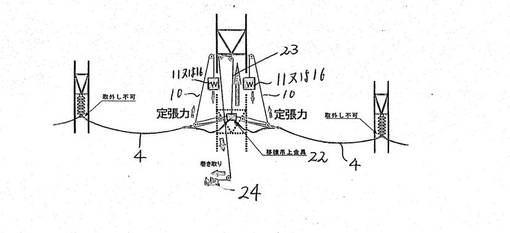
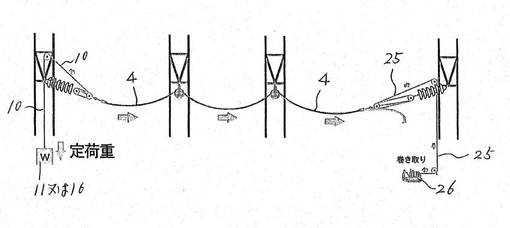
図8に示すものはこの工法の第3使用例を示すもので、図7と同様に、電線の中間部の取付点を上方に変更する移線工事であるが、電線の両側などの他の鉄塔の下に定荷重載荷体を設置できない場合である。そこで、当該電線の、取付点を上方に変更する箇所に移線吊上金具22を設け、この移線吊上金具22に接続したロープ23を当該鉄塔の下に設置した巻き取り機24で巻き上げ、電線4を上方に移動させ、移線する。その際、上記移線吊上金具22の両側の電線4箇所にワイヤロープ10を夫々接続して当該ワイヤロープ10に上記定荷重載荷体11又は16を夫々接続して定荷重をかける。また、図9に示すものはこの工法の第4使用例を示すもので、鉄塔等の支持物に吊架された電線4の一部が損傷した場合などに、電線を数十メートル横移動させるときの移線工事である。この場合も電線4の一端にロープ25を接続してこのロープ25を巻き取り機26で巻き上げ、電線4を横方向に移動させる。その際、電線4の他端にワイヤロープ10を取り付け、このワイヤロープ10に上記定荷重載荷体11又は16を接続して電線4に定荷重をかける。そして電線4の損傷箇所が、鉄塔箇所に移動すると、そこで、電線4の損傷箇所を補修し、電線4をもとの位置に戻す作業である。
【0019】
なお、上記実施例では、移線する電線にワイヤロープを接続し、これを定荷重載荷体に接続したが、ワイヤロープに限らず、ロープ、電線等、適宜の線条体であれば良い。また、上記実施例では電動モータ13としたが、他の適宜の回転駆動装置であれば良い。また、上記図5から図8のこの工法の使用例では、移線する電線4とワイヤロープ10との接続に、セミ組を介在させているが、このセミ組の使用は任意である。
【図面の簡単な説明】
【0020】
【図1】この発明の移線工法を示す概略構成図である。
【図2】この発明の移線工法の途中を示す概略構成図である。
【図3】この発明の移線工法に使用する定荷重の算出方法を示す原理説明図である。
【図4】この発明の移線工法に使用する定荷重載荷体の装置の概略構成図である。
【図5】この発明の移線工法に使用する定荷重載荷体の装置の他の実施例の概略構成図である。
【図6】この発明の移線工法の第1使用例を示す概略構成図である。
【図7】この発明の移線工法の第2使用例を示す概略構成図である。
【図8】この発明の移線工法の第3使用例を示す概略構成図である。
【図9】この発明の移線工法の第4使用例を示す概略構成図である。
【図10】従来の移線工法の概略構成図である。
【図11】(a)図は定荷重をウエイトを用いてかけた場合のウエイト荷重と移動距離の関係を示す説明図、(b)図はこれに滑車のセミ組を介在させた場合のウエイト荷重と移動距離の関係を示す説明図である。
【図12】この発明の移線工法に使用する定荷重載荷装置の原理を説明する説明構成図である。
【符号の説明】
【0021】
1 鉄塔 2 鉄塔
3 鉄塔 4 電線
5 鉄塔 6 金車
7 金車 8 ロープ
9 ロープ 10 ワイヤロープ
11 定荷重載荷体 12 リール
13 電動モータ 14 速度センサ
15 コンピュータ 16 定荷重載荷体
17 荷重センサ 18 コンピュータ
19 金車 20 ロープ
21 巻き取り機 22 移線吊上金具
23 ロープ 24 巻き取り機
25 ロープ 26 巻き取り機
【技術分野】
【0001】
この発明は、架空送電線の電線移線工事、即ち、鉄塔等に取り付けられていた電線を、主に別の鉄塔や嵩上げした鉄塔等に移し替える移線工事において、移線する電線に常に定荷重をかけながら移線する工法及びこの移線工法に使用する定荷重載荷装置に関するものである。
【背景技術】
【0002】
上記移線工事では、移線する電線の取り付け間の距離(以下径間長という)が変化することにより電線長の過不足が生じる。このため、電線が不足する場合は電線張力が上昇し、反対に電線が余剰となった場合には電線は垂下することとなる。そのため、従来では、移線作業において電線の状態(張力及び垂下量)を調整するために、図10に示すように、移線側の電線端部と反対側の端部で、作業員が電線を目視で確認しながらウインチにより電線の送り出しや巻き込みを行って、電線の過不足を調整しながら移線を行っていた。
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、近年の架空送電線の電線移線工事では、鉄道等の重要横過物の上方での作業や、充電部に接近した条件など、多少でも電線垂下や過張力が許されない施工環境の場合が多い。従来の電線端部でのウインチによる送り出しや巻き込み作業は、移線側の電線の動きとの同調性が要求されており、これらを作業員が目視しながら作業するため、熟練を要するとともに、極めて手間や時間のかかる作業であった。しかも、作業員の連絡ミスや操作ミスによる同調不良など人為的なトラブルが発生する恐れがある。また、万が一、電線が垂下して地上の工作物や歩行者に接触しないよう、防護ネットを当該箇所に設置する必要がある。
【0004】
この発明はこれらの点に鑑みて為されたもので、移線する電線に常に一定の荷重を与えることで移線中の電線の過不足を自動的に調整し、電線の挙動の安定化を図り、作業の安全確実化と省力化を実現する工法及びこの工法に使用する定荷重載荷装置を提供し、上記課題を解決しようとするものである。
【0005】
通常、架空送電線路の電線は、20000N〜40000Nで架設されている。そのため、原理的には2000Kg〜3000Kgのウエイトが必要となる。これでは、ウエイトの重量が大きくなり、取り扱い時の作業性が悪く、また、ウエイトを吊り下げる鉄塔などの設備に載荷される荷重が大きくなり、現実には実施できない可能性が大きい。そこで、滑車の原理により必要なウエイト重量を低減することが考えられる。しかし、この場合のウエイトの移動距離は荷重の低減に反比例して増加する。図11は荷重PとウエイトWの移動距離の関係を表すものであり、図11の(a)は荷重Pに対するウエイトWの移動距離はLであるのに対し、滑車のセミ組を用いた場合、図11の(b)に示すように、ウエイトWの荷重はP/2となるが、ウエイトWの移動距離はL×2となる。従って、ウエイトWの荷重Pを1/5にすれば、ウエイトWの移動距離は5倍となり、これではウエイトWを吊り下げる設備(鉄塔)は相当の高さが必要となる。これを解決するため、ウエイトと同様の一定荷重をワイヤロープに載荷することの出来る、ワイヤ巻取機から成る定荷重載荷装置を開発した。
【0006】
しかしながら、ワイヤ巻取機は、図12に示すように、通常、ワイヤロープをボビンに巻き付けると、巻径が変化するため、一定トルクでボビンを回転させるとワイヤロープの荷重は変化する。そこで、ワイヤロープの巻径を検知し、ワイヤロープの張力は一定になるように巻き取りトルクを調整する方式を採用した。
【課題を解決するための手段】
【0007】
具体的には、請求項1の発明は、移線したい鉄塔の上端部に移線したい電線の一端を接続し、他端を当該電線近くの鉄塔を経由して、地上付近に設けた荷重載荷体に接続することにより、上記移線したい電線に荷重をかけながら電線を移線させる架空送電線の電線移線工法において、上記荷重載荷体による移線したい電線への荷重のかけ方は、鉄塔間の距離、電線の撓み距離、及び、電線の単位重量から計算される張力に見合った定荷重を常時かけ、上記定荷重は、上記電線に接続したワイヤロープのワイヤロープ荷重と上記定荷重とが、常に等しくなるようにワイヤロープ巻取リールの電動モータの正逆回転をコンピュータで制御することにより行う、常時定荷重をかけながら架空送電線を電線移線する工法とした。また、請求項2の発明は、請求項1におけるコンピュータ制御には、上記ワイヤロープ荷重と上記定荷重とが、常に等しくなるようにワイヤロープ巻取リールの電動モータの正逆回転をコンピュータで制御するアルゴリズムが組み込まれている、請求項1に記載の常時定荷重をかけながら架空送電線を電線移線する工法とした。
【0008】
また、請求項3の発明は、ワイヤロープの一端を巻き付けたリールを回転自在に設け、当該リールを回転駆動させる回転駆動装置を設け、当該回転駆動装置により上記リールから導出した上記ワイヤロープに張力をかけ、当該ワイヤロープの移動速度を検出する速度センサを設け、当該速度センサにより検出したワイヤロープの移動速度と当該回転駆動装置の回転速度とを比較演算して当該ワイヤロープの巻径を検知し、この巻径を基に、ワイヤロープに載荷したい請求項1に記載の方法により得られた定荷重値から当該回転駆動装置の回転トルクを演算し、当該回転駆動装置の回転方向及び回転トルクを制御する、請求項1の方法に使用する定荷重載荷装置とした。
【0009】
また、請求項4の発明は、ワイヤロープの一端を巻き付けたリールを回転自在に設け、当該リールを回転駆動させる回転駆動装置を設け、当該回転駆動装置により上記リールから導出した上記ワイヤロープに張力をかけ、当該ワイヤロープの張力を検出する荷重センサを設け、当該荷重センサにより検出したワイヤロープの荷重値とワイヤロープに載荷したい請求項1に記載の方法により得られた定荷重値を比較して、これらの荷重値が常に同じとなるように上記回転駆動装置の回転方向及び回転トルクを制御する、請求項1の方法に使用する定荷重載荷装置とした。また、請求項5の発明は、請求項3乃至4の定荷重載荷装置における各種制御を自動的に行うコンピュータ装置とした。
【発明の効果】
【0010】
請求項1及び2の発明によれば、電線の移線中に、電線長が不足して電線の張力が上昇したり、また、反対に電線が余剰になって電線が垂下しようとするが、当該電線に常に鉄塔間の距離、電線の撓み距離、及び電線の単位重量から計算した定荷重を与えているため、自動的に電線長が調整され、電線の荷重の上昇や垂れ下がりが起こらない。従って、安定した作業が実現できるものである。それ故、従来のような各作業箇所との連絡ミスによる電線の過張力や異常垂下など、人為的なトラブルが防止でき、特に鉄道や主要道路などの重要横過物件上空での作業でも安全性を確保できる。また、電線の状態は、自動的に調整されるので、作業員による調整に比べて作業の連続性が高まり、作業時間の短縮が図れ、施工費を低廉化することができる。また、電線の異常垂下が生じないので、これらの電線の下に防護用ネットを張る必要がなくなり、施工費を低廉化することができる。また、これまで、電線の状態を作業員が目視で確認することが困難な夜間作業が可能となった。これにより鉄道の上空での作業など、トラブルが発生すると甚大な社会的影響を与える箇所では、夜間に作業を行うことで、重大災害を回避することができる。また、従来の工法では、各作業箇所の作業員同士で頻繁に連絡を取り合う必要があるが、連絡方法は無線機や拡声器を用いるため、現場周囲は非常に騒がしい。しかしながら、この工法により頻繁な連絡は不要となるため、騒音を低減できる。
【0011】
また、請求項3、4及び5の各発明では、リールから導出するワイヤロープに常時張力をかけ、このワイヤロープの動きをセンサで検知して、リールの回転駆動装置の回転の正逆、又は回転トルクを制御して、常に上記ワイヤロープに係る荷重を、効率よく保持することが出来る。その上、ワイヤロープを回転駆動装置によりリールに巻き付けたり、リールから繰り出して移動させるため、ワイヤロープの移動距離が長くても瞬時に処理できる。従って、高い荷重が必要な場合でも、多段のセミ組を行うことができる。
【発明を実施するための最良の形態】
【0012】
移線したい鉄塔の上端部に移線したい電線の一端を接続し、他端を当該電線近くの鉄塔を経由して、地上付近に設けた荷重載荷体に接続することにより、上記移線したい電線に荷重をかけながら電線を移線せる架空送電線の電線移線工法において、上記荷重載荷体による移線したい電線への荷重のかけ方は、鉄塔間の距離、電線の撓み距離、及び、電線の単位重量から計算される張力に見合った定荷重を常時かけ、上記定荷重は、上記電線に接続したワイヤロープのワイヤロープ荷重と上記定荷重とが、常に等しくなるようにワイヤロープ巻取リールの電動モータの正逆回転をコンピュータで制御することにより行う、常時定荷重をかけながら架空送電線を電線移線する。これにより、自動的に移線する電線長が調整され、移線中に、電線長が不足して電線の張力が上昇したり、また、電線が余剰になって電線が垂下することがなく、作業の安全確実化と省力化を実現できる。
【実施例1】
【0013】
以下この発明を図面に基づいて説明する。
図1及び図2はこの発明の工法の概略構成図であり、三基の鉄塔1、2、3に取り付けられていた電線4の一端を、鉄塔3から鉄塔5に移線する場合、当該電線4の鉄塔1,2及び3の碍子の支持を外して、各鉄塔1、2に取り付けた金車6,7に電線4を移す。そして、鉄塔3に取り付けた電線4の一端を鉄塔5に移動させる。その際、図2に示すように、当該電線4の移線の一端に2本のワイヤロープ8、9を接続し、一方のロープ8を鉄塔3上で支持し、他方のロープ9を移線先の鉄塔5の上で支持し、一方のロープ8を伸ばしながら、他方のロープ9を引っ張りつつ電線4を移線させる。またこの移線の際、当該電線4の固定側の端部にワイヤロープ10の一端を接続し、当該ワイヤロープ10の他端に定荷重載荷体(ただし、図1及び図2では定荷重と表示)11を接続する。これにより、電線4の移線中、電線4は張力が上昇して上方に上がったり、また、反対に張力が弱められて大きく弛んだりしようとするが、電線4に常に一定荷重がかかり、電線4が異常に上昇したり、弛んだりすることが起こらない。
【0014】
上記定荷重載荷体への定荷重は、次のようにして決定する。図3は、鉄塔間の距離Sに電線4を鉄塔の上端より距離Dだけ撓んで緊張した状態を示している。電線4の単位重量wの場合、電線4にかかる張力Tは、当該技術分野では、次の(1)式により、
T=wS2/8D ・・・・・・(1)
で表されことが知られている。また、この張力Tは、図1における定荷重と等しい値である。
そこで、図1における定荷重は、予め鉄塔5と鉄塔2間の距離Sが分かっており、また、電線4を撓ませる距離Dも分かっていると、使用する電線4の単位重量wは分かっているので、電線を移線させる作業の前から、想定することができるのである。
また、この定荷重は、電線を移線させる作業現場において、予め想定されている重量があればよいので、山岳地帯のような運搬車が入りにくい作業現場へは、定荷重載荷体を分割して、人力で搬送し、現場で組み立てることも出来る。
通常、架空送電線を移線する場合は、計画段階から上記鉄塔間の距離S、電線4の撓み距離D、電線4の単位重量wは分かっているので、上記(1)式より、張力T、すなわち、定荷重Wを計算することができ、定荷重体として、何Kgのものを用意しておけば良いかを、予め想定することができる。
【0015】
この定荷重載荷体11の装置構成は、図4に示すように、上記ワイヤロープ10の一端を巻き付けたリール12を回転自在に設け、当該リール12を回転駆動させる電動モータ(具体的には三相の誘導電動機)13を設け、当該電動モータ13により上記リール12に巻き付けたワイヤロープ10に張力をかけ、当該ワイヤロープ10の移動速度を検出する速度センサ14を設け、当該速度センサ14により検出したワイヤロープ10の移動速度と当該電動モータ13の回転速度とを比較演算することで当該ワイヤロープ10の巻径を検知し、この巻径を基に、ワイヤロープ10に載荷したい指定荷重値(上記方法により得られた値)から当該電動モータ13の回転トルクを演算し、当該電動モータ13の回転方向及び回転トルクを制御する構成となっている。また、これらの速度センサ14により検出したワイヤロープ10の移動速度と当該電動モータ13の回転速度とを比較演算して当該ワイヤロープ10の巻径を検知し、この巻径を基に、ワイヤロープ10に載荷したい指定荷重値(上記方法により得られた値)から当該電動モータ13の回転トルクを演算し、当該電動モータ13の回転方向及び回転トルクを制御することはコンピュータ15で行う。
【0016】
また、上記図3に示す定荷重載荷体11に代えて、図5に示す定荷重載荷体16にしても良い。この場合は、リール12に一他を巻き付けたワイヤロープ10の張力を検出する荷重センサ17を設け、この荷重センサ17で検出したワイヤロープ10の荷重値と当該ワイヤロープ10に載荷したい指定荷重値とをコンピュータ18で比較し、これらの値が常に同じとなるように電動モータ13の回転トルクを演算し、当該電動モータ13の回転方向及び回転トルクを制御する構成となっている。
これらの定荷重載荷体11、16には、上記コンピュータが最適に機能するようなアルゴリズムを組み込んでおけば、容易に機能させることができる。
【0017】
この工法は、図6から図9に示す電線の移線形態に適用可能である。まず、図6はこの工法の第1使用例を示すもので、上記図1及び図2で示したものと同様に、電線の片端の取付点を他の鉄塔又は支持物に変更する移線工事を示すものである。また、図7に示すものはこの工法の第2使用例を示すもので、連続した電線の中間部の取付点を上方に変更する移線工事である。この場合は、移線する電線4の一端(図7では左側)にワイヤロープ10を接続して、当該ワイヤロープ10に上記定荷重載荷体11又は16を接続して定荷重をかけながら、上記中間部の電線4を吊り下げた金車19のロープ20を地上に設置した巻き取り機21で巻き取り、電線4の中間部を上に移動させ、移線する。
【0018】
図8に示すものはこの工法の第3使用例を示すもので、図7と同様に、電線の中間部の取付点を上方に変更する移線工事であるが、電線の両側などの他の鉄塔の下に定荷重載荷体を設置できない場合である。そこで、当該電線の、取付点を上方に変更する箇所に移線吊上金具22を設け、この移線吊上金具22に接続したロープ23を当該鉄塔の下に設置した巻き取り機24で巻き上げ、電線4を上方に移動させ、移線する。その際、上記移線吊上金具22の両側の電線4箇所にワイヤロープ10を夫々接続して当該ワイヤロープ10に上記定荷重載荷体11又は16を夫々接続して定荷重をかける。また、図9に示すものはこの工法の第4使用例を示すもので、鉄塔等の支持物に吊架された電線4の一部が損傷した場合などに、電線を数十メートル横移動させるときの移線工事である。この場合も電線4の一端にロープ25を接続してこのロープ25を巻き取り機26で巻き上げ、電線4を横方向に移動させる。その際、電線4の他端にワイヤロープ10を取り付け、このワイヤロープ10に上記定荷重載荷体11又は16を接続して電線4に定荷重をかける。そして電線4の損傷箇所が、鉄塔箇所に移動すると、そこで、電線4の損傷箇所を補修し、電線4をもとの位置に戻す作業である。
【0019】
なお、上記実施例では、移線する電線にワイヤロープを接続し、これを定荷重載荷体に接続したが、ワイヤロープに限らず、ロープ、電線等、適宜の線条体であれば良い。また、上記実施例では電動モータ13としたが、他の適宜の回転駆動装置であれば良い。また、上記図5から図8のこの工法の使用例では、移線する電線4とワイヤロープ10との接続に、セミ組を介在させているが、このセミ組の使用は任意である。
【図面の簡単な説明】
【0020】
【図1】この発明の移線工法を示す概略構成図である。
【図2】この発明の移線工法の途中を示す概略構成図である。
【図3】この発明の移線工法に使用する定荷重の算出方法を示す原理説明図である。
【図4】この発明の移線工法に使用する定荷重載荷体の装置の概略構成図である。
【図5】この発明の移線工法に使用する定荷重載荷体の装置の他の実施例の概略構成図である。
【図6】この発明の移線工法の第1使用例を示す概略構成図である。
【図7】この発明の移線工法の第2使用例を示す概略構成図である。
【図8】この発明の移線工法の第3使用例を示す概略構成図である。
【図9】この発明の移線工法の第4使用例を示す概略構成図である。
【図10】従来の移線工法の概略構成図である。
【図11】(a)図は定荷重をウエイトを用いてかけた場合のウエイト荷重と移動距離の関係を示す説明図、(b)図はこれに滑車のセミ組を介在させた場合のウエイト荷重と移動距離の関係を示す説明図である。
【図12】この発明の移線工法に使用する定荷重載荷装置の原理を説明する説明構成図である。
【符号の説明】
【0021】
1 鉄塔 2 鉄塔
3 鉄塔 4 電線
5 鉄塔 6 金車
7 金車 8 ロープ
9 ロープ 10 ワイヤロープ
11 定荷重載荷体 12 リール
13 電動モータ 14 速度センサ
15 コンピュータ 16 定荷重載荷体
17 荷重センサ 18 コンピュータ
19 金車 20 ロープ
21 巻き取り機 22 移線吊上金具
23 ロープ 24 巻き取り機
25 ロープ 26 巻き取り機
【特許請求の範囲】
【請求項1】
移線したい鉄塔の上端部に移線したい電線の一端を接続し、他端を当該電線近くの鉄塔を経由して、地上付近に設けた荷重載荷体に接続することにより、上記移線したい電線に荷重をかけながら電線を移線させる架空送電線の電線移線工法において、
上記荷重載荷体による移線したい電線への荷重のかけ方は、鉄塔間の距離、電線の撓み距離、及び、電線の単位重量から計算される張力に見合った定荷重を常時かけ、
上記定荷重は、上記電線に接続したワイヤロープのワイヤロープ荷重と上記定荷重とが、常に等しくなるようにワイヤロープ巻取リールの電動モータの正逆回転をコンピュータで制御することにより行うことを特徴とする、常時定荷重をかけながら架空送電線を電線移線する工法。
【請求項2】
請求項1におけるコンピュータ制御には、上記ワイヤロープ荷重と上記定荷重とが、常に等しくなるようにワイヤロープ巻取リールの電動モータの正逆回転をコンピュータで制御するアルゴリズムが組み込まれていることを特徴とする、請求項1に記載の常時定荷重をかけながら架空送電線を電線移線する工法。
【請求項3】
ワイヤロープの一端を巻き付けたリールを回転自在に設け、当該リールを回転駆動させる回転駆動装置を設け、当該回転駆動装置により上記リールから導出した上記ワイヤロープに張力をかけ、当該ワイヤロープの移動速度を検出する速度センサを設け、当該速度センサにより検出したワイヤロープの移動速度と当該回転駆動装置の回転速度とを比較演算して当該ワイヤロープの巻径を検知し、この巻径を基に、ワイヤロープに載荷したい請求項1に記載の方法により得られた定荷重値から当該回転駆動装置の回転トルクを演算し、当該回転駆動装置の回転方向及び回転トルクを制御することを特徴とする、請求項1の方法に使用する定荷重載荷装置。
【請求項4】
ワイヤロープの一端を巻き付けたリールを回転自在に設け、当該リールを回転駆動させる回転駆動装置を設け、当該回転駆動装置により上記リールから導出した上記ワイヤロープに張力をかけ、当該ワイヤロープの張力を検出する荷重センサを設け、当該荷重センサにより検出したワイヤロープの荷重値とワイヤロープに載荷したい請求項1に記載の方法により得られた定荷重値を比較して、これらの荷重値が常に同じとなるように上記回転駆動装置の回転方向及び回転トルクを制御することを特徴とする、請求項1の方法に使用する定荷重載荷装置。
【請求項5】
請求項3乃至4の定荷重載荷装置における各種制御を自動的に行うことを特徴とするコンピュータ装置。
【請求項1】
移線したい鉄塔の上端部に移線したい電線の一端を接続し、他端を当該電線近くの鉄塔を経由して、地上付近に設けた荷重載荷体に接続することにより、上記移線したい電線に荷重をかけながら電線を移線させる架空送電線の電線移線工法において、
上記荷重載荷体による移線したい電線への荷重のかけ方は、鉄塔間の距離、電線の撓み距離、及び、電線の単位重量から計算される張力に見合った定荷重を常時かけ、
上記定荷重は、上記電線に接続したワイヤロープのワイヤロープ荷重と上記定荷重とが、常に等しくなるようにワイヤロープ巻取リールの電動モータの正逆回転をコンピュータで制御することにより行うことを特徴とする、常時定荷重をかけながら架空送電線を電線移線する工法。
【請求項2】
請求項1におけるコンピュータ制御には、上記ワイヤロープ荷重と上記定荷重とが、常に等しくなるようにワイヤロープ巻取リールの電動モータの正逆回転をコンピュータで制御するアルゴリズムが組み込まれていることを特徴とする、請求項1に記載の常時定荷重をかけながら架空送電線を電線移線する工法。
【請求項3】
ワイヤロープの一端を巻き付けたリールを回転自在に設け、当該リールを回転駆動させる回転駆動装置を設け、当該回転駆動装置により上記リールから導出した上記ワイヤロープに張力をかけ、当該ワイヤロープの移動速度を検出する速度センサを設け、当該速度センサにより検出したワイヤロープの移動速度と当該回転駆動装置の回転速度とを比較演算して当該ワイヤロープの巻径を検知し、この巻径を基に、ワイヤロープに載荷したい請求項1に記載の方法により得られた定荷重値から当該回転駆動装置の回転トルクを演算し、当該回転駆動装置の回転方向及び回転トルクを制御することを特徴とする、請求項1の方法に使用する定荷重載荷装置。
【請求項4】
ワイヤロープの一端を巻き付けたリールを回転自在に設け、当該リールを回転駆動させる回転駆動装置を設け、当該回転駆動装置により上記リールから導出した上記ワイヤロープに張力をかけ、当該ワイヤロープの張力を検出する荷重センサを設け、当該荷重センサにより検出したワイヤロープの荷重値とワイヤロープに載荷したい請求項1に記載の方法により得られた定荷重値を比較して、これらの荷重値が常に同じとなるように上記回転駆動装置の回転方向及び回転トルクを制御することを特徴とする、請求項1の方法に使用する定荷重載荷装置。
【請求項5】
請求項3乃至4の定荷重載荷装置における各種制御を自動的に行うことを特徴とするコンピュータ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2007−221949(P2007−221949A)
【公開日】平成19年8月30日(2007.8.30)
【国際特許分類】
【出願番号】特願2006−41645(P2006−41645)
【出願日】平成18年2月17日(2006.2.17)
【出願人】(000141060)株式会社関電工 (115)
【公開日】平成19年8月30日(2007.8.30)
【国際特許分類】
【出願日】平成18年2月17日(2006.2.17)
【出願人】(000141060)株式会社関電工 (115)
[ Back to top ]