
幅寄せ装置、パレタイズ搬送システムおよびパレタイジング方法

【課題】小型且つ低コストの装置によって、効率的にワークの幅寄せ作業を行う。
【解決手段】本発明の幅寄せ装置1は、パレット2上に載置された複数のワークWを、パレット2上にて密着整列させる幅寄せ装置1である。この幅寄せ装置1は、一対の幅寄せ体3,4と、押さえ体8とを備える。一対の幅寄せ体3,4をそれぞれ前進させて複数のワークWを押し込み、且つ、押し込まれるワークWとは反対側に配列される他の複数のワークWに対して、その側方から押さえ体8を当てておく。これにより、パレット2上にて複数のワークWを密着整列させる。
【解決手段】本発明の幅寄せ装置1は、パレット2上に載置された複数のワークWを、パレット2上にて密着整列させる幅寄せ装置1である。この幅寄せ装置1は、一対の幅寄せ体3,4と、押さえ体8とを備える。一対の幅寄せ体3,4をそれぞれ前進させて複数のワークWを押し込み、且つ、押し込まれるワークWとは反対側に配列される他の複数のワークWに対して、その側方から押さえ体8を当てておく。これにより、パレット2上にて複数のワークWを密着整列させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、パレット上に載置した複数のワークを幅寄せして密着整列させるための技術に関する。
【背景技術】
【0002】
工場等において、複数のワークを一まとめに搬送しようとする場合、パレタイジングロボットを用いて、所定箇所のパレット上に複数のワークを順次載置してゆき、載置が完了したパレットごと、そのままコンベアで搬送することが行われる(特許文献1等を参照)。
【0003】
ところで、パレット上に複数のワークを順次載置していくに際して、パレット上に載置した段階で、隣接するワーク同士を隙間なく密着整列させておくことは困難である。特に、パレタイジングロボットが、両側からワーク下端に爪部を差し入れて把持するような構造である場合には、載置後に爪部を引き出すための隙間も必要となる。
【0004】
そのため、隣接するワーク間に一定の隙間を確保しながらパレット上に載置していくことが、一般的である。そして、これらワーク間の隙間が、パレットごとワークを搬送する際の荷崩れの原因となる。
【0005】
これに対して、従来は、前記荷崩れを防止するための手段として、ワークを載置したパレットをコンベアで作業エリア外まで搬送した後に、作業エリア外に設置してある大型の幅寄せ装置を用いて、パレット上のワークの幅寄せ作業を別途行っていた。
【0006】
この従来の幅寄せ装置は、パレットを90°回転させる回転機構と、コンベアおよびパレットを挟む両側位置に一対配置される大型の幅寄せ板と、一対の幅寄せ板を近接離間させる駆動機構とから成る装置である。この装置にあっては、作業エリア外にまで搬送されてきたパレット上のワーク全体を、大型の幅寄せ板で両側から挟みこむことで、まず一方向の幅寄せをする。次いで、回転機構でパレットごと90°回転させたうえで、再び両側から一対の幅寄せ板で挟みこむことにより、前記一方向とは直交する他方向の幅寄せを行う。これら幅寄せによって、パレット上で隣接するワーク間の隙間を詰めて、荷崩れ防止を図る。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平6−126668号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、前記した従来の幅寄せ装置は、大量に載置したワークに対してもこれら全てを作業スペース外で一気に幅寄せする構造であるため、幅寄せ板として非常に大型の金属板が必要となり、また、回転機構や駆動機構についても、大型で大出力の機構が必要となる。つまり、従来の幅寄せ装置においては、装置全体が非常に大型となって製造コストが高くなるという問題や、幅寄せ作業を行うためだけに作業エリア外に専用の大きな設置スペースが必要になるという問題がある。
【0009】
また、従来の幅寄せ装置では、パレット上にワークを順次載置していくための時間とは別に、作業エリア外で幅寄せ装置を駆動してワーク同士を密着させるための時間が必要となり、全体としての作業効率が低下するという問題がある。
【0010】
本発明は前記問題点に鑑みて発明したものであって、低コストで製造することができ且つ作業エリア内にコンパクトに設置可能な幅寄せ装置を提供し、全体の作業効率についても向上させることを、課題とする。そして、前記幅寄せ装置を用いた効率的なパレタイズ搬送システムやパレタイジング方法を提供することを、課題とする。
【課題を解決するための手段】
【0011】
本発明の幅寄せ装置1は、パレタイジングロボット103によってパレット2上に隙間をあけて載置された複数のワークWを、パレット2上にて密着整列させる幅寄せ装置1であって、互いの整列面3a,4aが直交方向をむくように配置された一対の幅寄せ体3,4と、一対の幅寄せ体3,4をそれぞれの整列面3a,4aの向きに進退させる第一駆動機構と、一対の幅寄せ体3,4とは離れた位置に設けられる押さえ体8と、パレット2上のワークWの側面に対して押さえ体8を接離させる第二駆動機構とを備え、第一駆動機構によって、一対の幅寄せ体3,4をそれぞれ前進させて複数のワークWを押し込み、且つ、第二駆動機構によって、押し込まれるワークWとは反対側に配列される他の複数のワークWに対してその側方から押さえ体8を当てておくことで、パレット2上にて複数のワークWを密着整列させるように設けている。
【0012】
前記幅寄せ装置1によれば、一対の幅寄せ体3,4と押さえ体8を所定箇所のパレット2に近接配置しておけば、該パレット2上にワークWが配列された後に、これらワークWに押さえ体8を当てたうえで一対の幅寄せ体3,4を前進させ、ワークWを押さえ体8側に押し込むことで、パレット2上の複数のワークWを、その個所にて速やかに密着整列させることができる。そのため、従来のような大型の構造が必要でなく、製造コストが低くて済むとともに、幅寄せ作業を行うためだけに作業エリア外に専用の大きなスペースを設ける必要もない。また、パレタイジングロボット103でパレット2上にワークWを載置した状態のまま、幅寄せ作業を完了させることができるので、作業効率が低下することも抑えられる。
【0013】
さらに、本発明の幅寄せ装置1において、第一駆動機構は、前記一対の幅寄せ体3,4の高さを変更自在なものであることが好ましい。高さ変更を自在にすることで、所定箇所のパレット2上にてワークWを複数段積層させる場合に、下段側のワークWを載置した段階でまずその下段側のワークWの幅寄せを行い、次いで、幅寄せ後のワークW上に載置した上段側のワークWを幅寄せするといったように、各段で幅寄せ作業を完了させておくことが可能となる。そのため、各幅寄せ体3,4として大型の部材が必要でなくなり、また、各幅寄せ体3,4を進退駆動させるための機構もコンパクト化することができ、結果として装置全体が小型化、低コスト化される。また、パレット2上に全てのワークWを積層させた後、速やかに、全ての幅寄せ作業が完了することになるので、作業効率が低下することも抑えられる。
【0014】
このとき、第二駆動機構は、前記押さえ体8の高さを変更自在なものであることが好ましい。押さえ体8の高さ変更を自在にすることで、押さえ体8として大型のものを備えずとも、その押さえ体8の高さを適宜変更しながら各段での幅寄せ作業に利用することができ、結果として装置全体が小型化、低コスト化される。
【0015】
また、本発明のパレタイジング方法は、前記幅寄せ装置1を用いてパレット2上に複数のワークWを段積み密着整列させるパレタイジング方法であって、パレタイジングロボット103によって水平方向に隙間をあけて複数のワークWをマトリクス状に載置し、配置された複数のワークWを、各幅寄せ体3,4と押さえ体8との間で挟み込むことにより、下段側での密着整列を完了し、次いで、密着整列した下段側の複数のワークW上にて、パレタイジングロボット103によって水平方向に隙間をあけて複数のワークWをマトリクス状に載置し、一対の幅寄せ体3,4を(又は一対の幅寄せ体3,4と押さえ体8を共に)上昇させ、載置された複数のワークWを、各幅寄せ体3,4と押さえ体8との間で挟み込むことにより、上段側での密着整列を完了するように設けている。
【0016】
前記パレタイジング方法によれば、パレット2上にてワークWを複数段積層させるに際して、各段で幅寄せ作業を完了させてゆき、パレット2上へのワークWの積層が完了した直後の段階において、全体の幅寄せ作業も迅速に完了させることができる。そのため、全体としての作業効率を低下させることなく、効果的に荷崩れを防止することができる。また、このために用いる幅寄せ体3,4や第一駆動機構、押さえ体8や第二駆動機構についても、従来のような大型の構造が必要でない。そのため、装置に要するコストが低くて済むとともに、専用の大きな設置スペースも必要でないという利点がある。
【0017】
また、本発明のパレタイジング方法では、パレタイジングロボット103に備えたセンサでワークWの高さを検知し、この検知結果に基づいた距離だけ、第一駆動機構によって一対の幅寄せ体3,4を上昇させることが好ましい。
【0018】
このようにすることで、当日の環境等に応じてワークWの高さが変化するような場合でも、自動的に最適な所定距離が決定される。
【0019】
また、本発明のパレタイズ搬送システムは、所定のパレット設置箇所P2にあるパレット2上に複数のワークWを密着配列させ、該密着配列が完了したパレット2を搬送するパレタイズ搬送システムであって、前記パレタイズ搬送システム100では、ワークWの密着整列が完了したパレット2を所定の搬送方向aへと搬送するパレット搬送コンベア102を備え、さらに、前記幅寄せ装置1の一方の幅寄せ体3は、パレット設置箇所P2に対してパレット搬送コンベア102の搬送方向aとは反対側に配置し、他方の幅寄せ体4は、パレット設置箇所P2に対してパレタイジングロボット103とは反対側に配置する。
【0020】
前記パレタイズ搬送システム100によれば、パレタイジングロボット103によりパレット2上にワークWを載置し、そのままの状態で幅寄せを完了してワークWを密着整列させたうえで、速やかに外部搬送することのできるシステムを、所定の作業エリア内にコンパクトに形成することができる。
【発明の効果】
【0021】
本発明によれば、低コストで製造することができ且つ作業エリア内にコンパクトに設置可能な幅寄せ装置や、これを用いたパレタイズ搬送システムやパレタイジング方法を提供し、全体の作業効率についても向上させることができるという効果を奏する。
【図面の簡単な説明】
【0022】
【図1】本発明の実施形態における一例の幅寄せ装置を用いたパレタイズ搬送システムを示す平面図である。
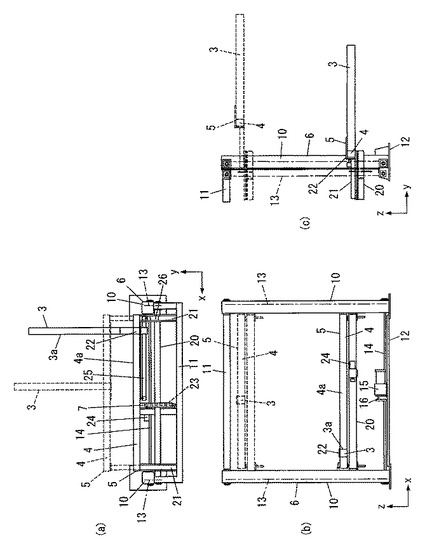
【図2】同上の幅寄せ装置を示し、(a)は平面図、(b)は正面図、(c)は側面図である。
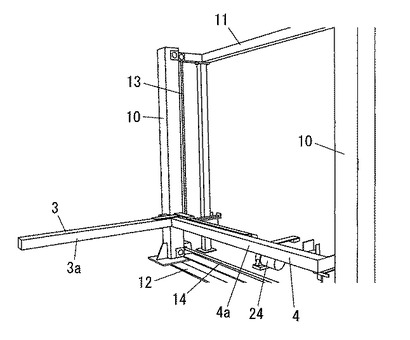
【図3】同上の幅寄せ装置の斜視図である。
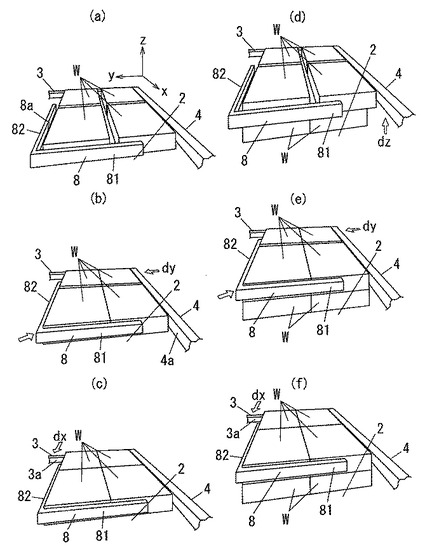
【図4】同上の幅寄せ装置によるワーク幅寄せ手順の説明図であり、(a)〜(c)は下段のワーク幅寄せ、(d)〜(f)は上段のワーク幅寄せを、それぞれ順に示している。
【発明を実施するための形態】
【0023】
本発明を、添付図面に示す実施形態に基づいて説明する。図1には、本発明の実施形態における一例の幅寄せ装置1と、これを用いて構成したパレタイズ搬送システム100を示している。以下においては、パレタイズ搬送システム100の全体構成についてまず説明する。
【0024】
図1中ではワークWの図示を省略しているが、ここで配列するワークWとしては、適宜のものが選択可能である。なお、ワークWの形状は、パレット2上に密着状態で積層可能なブロック状のもの(例えば、折畳み状態で積層したダンボールを結束させて、全体を直方体状に設けたもの)であることが好ましい。
【0025】
パレタイズ搬送システム100は、ワーク搬送コンベア101と、パレット搬送コンベア102とを備える。
【0026】
ワーク搬送コンベア101は、作業エリアA外(図1中では右側の領域)から、作業エリアA内にある所定のワーク搬送箇所P1にまで、多数のワークWを順次搬送していくものである。パレット搬送コンベア102は、作業エリアA内にある所定のパレット設置箇所P2から、作業エリアA外(図1中では左側の領域)にまで、パレット2を順次搬送していくものである。
【0027】
さらに、パレタイズ搬送システム100は、パレタイジングロボット103と、パレット供給装置104とを備えている。
【0028】
パレタイジングロボット103は、床面上に設置される基台部103aと、基台部103aから延設されるアーム部103bと、アーム部103bの先端に支持されるハンド部103cとから成る。このパレタイジングロボット103は、パレット搬送コンベア102によってワーク搬送箇所P1にまで搬送されたワークWを、ハンド部103cにて把持したうえで、パレット設置箇所P2に配置されるパレット2上にまで、順次搬送する。そして、パレット2上にてハンド部103cによる把持を解除することで、ワークWを、パレット2上にマトリクス状に順次配列させていく。
【0029】
パレット供給装置104は、ワークWが配置される前の空のパレット2を、パレット設置箇所P2にまで順次供給するものである。
【0030】
そして、一例の幅寄せ装置1は、一対の幅寄せ体3,4と、これら幅寄せ体3,4とは離れて位置する押さえ体8とを有する。一対の幅寄せ体3,4は、パレット2上に配列された複数のワークWをそれぞれ所定方向に押し付けることにより、幅寄せを行うものである。押さえ体8は、この幅寄せの際に、各幅寄せ体3,4に押し込まれるワークWとは反対側に配列される複数のワークWに対して、その側方から接触させておくものである。各幅寄せ体3,4と押さえ体8は、共にパレット設置箇所P2に近接して配置される。
【0031】
一対の幅寄せ体3,4は、互いに直交方向に伸びるように形成された直線バー状の部材であり、平面視にてL字状を成すように直交配置される。各幅寄せ体3,4のパレット2側をむく側面が、パレット2上のワークWを押し込むための平坦な整列面3a,4aとなっている。
【0032】
より具体的には、一方の幅寄せ体3を、パレット設置箇所P2に対して、パレット搬送コンベア102での搬送方向aとは反対側(図1中では右側)に配置している。他方の幅寄せ体4は、パレット設置箇所P2やここに配置されるパレット2に対して、パレタイジングロボット103が位置する側とは反対側(図1中では下側)に配置している。
【0033】
L字状に配置される一対の幅寄せ体3,4は、互いに連結されることにより、幅寄せブロック5を形成している。この幅寄せブロック5は、後述の支持フレーム6に設けた昇降機構によって、ブロック全体が昇降駆動される。幅寄せブロック5を構成する一対の幅寄せ体3,4は、後述の水平駆動機構によって、それぞれが所定方向にむけて進退駆動される。
【0034】
両幅寄せ体3,4の前進方向は、互いの整列面3a,4aが向く方向である。両幅寄せ体3,4は、この前進方向に駆動されることで、それぞれの整列面3a,4aをパレット設置箇所P2に接近させていく。
【0035】
押さえ体8は、直線バーをその中央部で直角に屈折させた形状を有するL字バー状の部材である。L字状である押さえ体8の内側に形成される平坦な側面が、パレット2上のワークWに当てるための押さえ面8aとなる。この押さえ体8は、パレタイジングロボット103と隣接して設置される多関節型のロボットアーム9の先端に支持される。押さえ体8は、ロボットアーム9が有する各関節を駆動させることによって全方向に移動自在であり、また、姿勢変更が自在である。
【0036】
パレタイズ搬送システム100が備える前記のワーク搬送箇所P1、パレタイジングロボット103、パレット設置箇所P2、幅寄せ装置1等は、安全柵105によって覆われる。この安全柵105で覆われるエリアが、パレタイジング作業を行うための作業エリアAとなる。この作業エリアA外に、制御盤106が配置される。
【0037】
以下、一例の幅寄せ装置1の更に具体的な構造について、図2、図3に基づいて説明する。
【0038】
図2中においては、幅寄せブロック5を実線と点線で示している。実線の幅寄せブロック5は初期状態であり、点線で示す幅寄せブロック5は、この初期状態からブロック全体を最上位にまで上昇させ、且つ、両幅寄せ体3,4をそれぞれパレット2側に前進させた状態である。
【0039】
図中に示すX方向は、パレット搬送コンベア102によるパレット2の搬送方向であり、また、一方の幅寄せ体3の前進方向である。図中のY方向は、パレット設置箇所P2に対してパレタイジングロボット103が位置する方向であり、また、他方の幅寄せ体4の前進方向である。図中のZ方向は、上下方向である。
【0040】
以下においては、区別のために、X軸方向に進退する一方の幅寄せ体3を「X軸幅寄せ体3」といい、Y軸方向に進退する他方の幅寄せ体4を「Y軸幅寄せ体4」という。
【0041】
幅寄せ装置1は、幅寄せブロック5を支持する矩形枠状の支持フレーム6を有する。この支持フレーム6は、X軸方向に距離をあけて床面上に立設される柱状のベースフレーム10と、両ベースフレーム10の上端部同士をつなぐ上部サポートフレーム11と、両ベースフレーム10の下端部同士をつなぐ下部サポートフレーム12とを有する。
【0042】
各ベースフレーム10の上下端部には、プーリ(図示せず)を回動自在に配置しており、上下のプーリ間に、一巻きのローラーチェーンである昇降チェーン13(図2中の一点鎖線)を架け渡している。幅寄せブロック5は、各ベースフレーム10にて、この昇降チェーン13に上下から連結固定されている。両ベースフレーム10の下端部に配されるプーリ同士は、昇降シャフト14を介して連結されている。昇降シャフト14は、下部サポートフレーム12上に設置固定した昇降モータ15によって、伝達チェーン16を介して正逆回転される。
【0043】
つまり、昇降モータ15で昇降シャフト14を回転させることで、両側のプーリや昇降チェーン13を介して、幅寄せブロック5の上下位置を変更することができる。これらの機構が、幅寄せブロック5全体を昇降自在に支持する昇降機構となっている。なお、幅寄せブロック5のZ軸方向の移動(上下動)は、各ベースフレーム10に設けた図示略の直動ガイドによってガイドされる。
【0044】
幅寄せブロック5は、前記昇降機構によって昇降自在に支持される昇降フレーム20と、昇降フレーム20に対してY軸方向に進退自在に連結されるY軸幅寄せ体4と、このY軸幅寄せ体4に対してX軸方向に進退自在に連結されるX軸幅寄せ体3とを有する。
【0045】
直線バー状の部材であるY軸幅寄せ体4の両端部からは、Y軸方向の後退側にむけて移動アーム21をそれぞれ延設している。昇降フレーム20は、両移動アーム21をY軸方向にスライド自在に保持しており、この機構によって、Y軸幅寄せ体4は昇降フレーム20に対してY軸方向にスライド自在に連結されている。
【0046】
また、直線バー状の部材であるX軸幅寄せ体3の基端部(即ち、Y軸方向の後退側の端部)は、連結支持部22を介して、Y軸寄せ体4に対してX軸方向にスライド自在に連結されている。
【0047】
Y軸幅寄せ体4をY軸方向に進退させる駆動機構は、その周方向の一部をY軸幅寄せ体4の連結片7に固定したY軸歯付ベルト23と、昇降フレーム20側に固定したY軸駆動モータ24とを、動力伝達自在に噛み合わせることで構成している(図2(a)参照)。
【0048】
また、X軸幅寄せ体3をX軸方向に進退させる駆動機構は、その周方向の一部をX軸幅寄せ体3の基端部に固定させたX軸歯付ベルト25と、Y軸幅寄せ体4側に固定したX軸駆動モータ26とを、動力伝達自在に噛み合わせることで構成している(図2(a)参照)。
【0049】
これらの機構が、一対の幅寄せ体3,4を水平面上においてそれぞれ進退駆動させる水平駆動機構となる。この水平駆動機構と、幅寄せブロック5ごと昇降させる前記昇降機構によって、一対の幅寄せ体3,4をX,Y,Z軸方向の全方向に移動させる第一駆動機構が構成される。
【0050】
一方、押さえ体8を移動させる第二駆動機構は、前記のロボットアーム9から構成される。ロボットアーム9は、狙いのワークWの側面に対して接離するように押さえ体8を移動させるものであり、パレット設置箇所P2を中心として、第1駆動機構の支持フレーム6を配置している側とは反対側のスペースに、配置される。
【0051】
つまり、パレット設置箇所P2を挟んで一方の側の床面上に、一対の幅寄せ体3,4を動作させる第一駆動機構が設置され、パレット設置箇所P2を挟んで他方の側の床面上に、押さえ体8を動作させる第二駆動機構が設置される。
【0052】
幅寄せ装置1における第一駆動機構の駆動制御と、第二駆動機構の駆動制御は、パレタイジングロボット103によるパレット2上へのワークWの配置とタイミングを合わせて行われる。図4には、パレット2上にワークWを、X軸方向の複数行×Y軸方向の複数列(図示例は2行×2列)のマトリクス状に整列させ、これを順次積層させていく場合を示している。
【0053】
図4(a)は、パレタイジングロボット103によって、パレット2上に1段目(下段側)のワークWをマトリクス状に配置した状態である。この段階の配置では、X軸方向とY軸方向のいずれにおいても、隣接するワークW間には所定の隙間が形成されている。
【0054】
図4(b)、(c)には、パレタイジングロボット103が2段目用のワークWを把持してパレット2側に搬送するまでの間に、一対の幅寄せ体3,4と押さえ体8を協働させて、1段目で生じたX軸方向とY軸方向の隙間を一気に解消させる様子を、順に示している。
【0055】
図4(b)では、ロボットアーム9の各関節を駆動させて、先端に支持するL字状の押さえ体8を、その内側の押さえ面8aが複数のワークWに対して側方から接触するように移動させ、移動後の位置及び姿勢で保持させている。
【0056】
押さえ体8の半部81は、直線バー状の部分であり、マトリクス状に配置された複数のワークWを、X軸幅寄せ体3との間でX軸方向に挟むように位置する。また、押さえ体8の残り半部82は、同じく直線バー状の部分であり、マトリクス状に配置された複数のワークWを、Y軸幅寄せ体4との間でY軸方向に挟むように位置する。言い換えれば、押さえ体8は、押さえ面8aを有する直線バー状の部材81と、同じく押さえ面8aを有する直線バー状の部材82とを、互いの押さえ面8aが内側方をむくように端部同士を連結させ、L字状に一体化させたものである。なお、各部材81,82が別体に備えてあってもよい。
【0057】
図4(b)では、前記のように押さえ体8をセットしたうえで、Y軸駆動モータ24を駆動させて、Y軸幅寄せ体4を所定距離dyだけY軸方向に前進させている。Y軸幅寄せ体4は、その平坦な整列面4aを複数のワークWに対して側方から押し込むことによって幅寄せを行い、Y軸方向に隣接するワークW同士を密着させる。所定距離dyは、パレタイジングロボット103によるワークWの当初配列に対応して、適宜設定される。
【0058】
このとき、マトリクス状に配置される複数のワークWのうち、直接的に押し込まれるワークWとは反対側の端部にてX軸方向に列設される複数のワークWには、押さえ体8のうち半部82側の平坦な押さえ面8aが当たっている。即ち、マトリクス状に配された複数のワークWは、固定側のバーとなる押さえ体8の半部82と、可動側のバーとなるY軸幅寄せ体4との間で、全体がY軸方向に挟み込まれる。これにより、一段目に配置される複数のワークW全体が、Y軸方向にズレなく幅寄せされる。
【0059】
次いで、図4(c)では、X軸駆動モータ26を駆動させ、X軸幅寄せ体3を所定距離dxだけX軸方向に前進させている。X軸幅寄せ体3は、その平坦な整列面3aを複数のワークWに対して側方から押し込むことによって幅寄せを行い、X軸方向に隣接するワークW同士を密着させる。所定距離dxは、パレタイジングロボット103によるワークWの当初配列に対応して、適宜設定される。
【0060】
このとき、マトリクス状に配置される複数のワークWのうち、直接的に押し込まれるワークWとは反対側の端部にてY軸方向に列設される複数のワークWには、押さえ体8の半部81側の平坦な押さえ面8aが当たっている。即ち、マトリクス状に配された複数のワークWは、固定側のバーとなる押さえ体8の半部81と、可動側のバーとなるX軸幅寄せ体3との間で、全体がX軸方向に挟み込まれる。これにより、一段目に配置される複数のワークW全体が、X軸方向においてもズレなく幅寄せされる。
【0061】
つまり、本例の幅寄せ装置1においては、マトリクス状に配置されるワークWのうち、X軸幅寄せ体3とY軸幅寄せ体4から最も離れたコーナー部分にあるワークW(図4中では左下にあるワークW)が、幅寄せのターゲットとなる。そして、このターゲットにむけて、他のワークWをX軸方向およびY軸方向に幅寄せすることで、全体の密着整列が完了される。
【0062】
このとき、ターゲットとなるコーナー部分のワークWと、このコーナー部分のワークWに対してX軸方向に並設される他のワークW(図4中では左上にあるワークW)と、このコーナー部分のワークWに対してY軸方向に並設される他のワークW(図4中では右下に位置するワークW)とには、L字状の押さえ体8が側方から当っているので、幅寄せ作業の際にワークWの位置が不意にズレることも防止されている。
【0063】
以上のようにして、パレタイジングロボット103が2段目用のワークWを把持してパレット2側に搬送してきた段階では、1段目のワークWはその全てがX軸方向およびY軸方向において密着整列された状態となる。パレタイジングロボット103は、この密着整列されたワークW上に、1段目のときと同様の隙間をあけながら、2段目(上段側)のワークWをマトリクス状に配置していく。
【0064】
ここで、パレタイジングロボット103による2段目の配置が完了するまでの間に、昇降機構によって幅寄せブロック5を所定距離dzだけ上昇させておく。所定距離dzは、ワークWの高さ寸法と略一致するように適宜設定される。押さえ体8についても、これを2段目のワークWに当てるまでの間に、所定距離dzだけ上昇させておく。
【0065】
そして、図4(e)、図4(f)に示すように、1段目の場合と同様に、2段目に配列される複数のワークWに対して押さえ体8を側方から当てたうえで、一段上昇させておいた幅寄せブロック5の各幅寄せ体3,4を、所定距離dx,dyだけ順に前進させる。これにより、密着整列された1段目の複数のワークW上にて、2段目の複数のワークWのX軸方向およびY軸方向の隙間が解消される。
【0066】
この手順をさらに3段目、4段目、…と繰り返すことで、パレット2上には、水平方向に密着整列したワークWが、何段にも積層される。ワークWを所定の段数だけ積層し終えれば、パレット搬送コンベア102によってパレット2ごと作業エリアA外へと搬送させる。パレット2をパレット設置箇所P2から搬送させる際には、パレット2上のワークWに押さえ体8が接触しないように、ロボットアーム9の各関節を駆動させて、押さえ体8を適宜スペースに退避させておく。
【0067】
以上説明したように、一例の幅寄せ装置1やこれを用いたパレタイズ搬送システム100によれば、幅寄せブロック5が有する一対の幅寄せ体3,4と押さえ体8によって、下段側のワークWの密着整列を完了させ、次いで、ここで用いた一対の幅寄せ体3,4と押さえ体8を共に一段階上昇させ、上段側のワークWの密着整列を完了させるといった手順を繰り返すことにより、パレット2上でのワークWの荷崩れを効果的に防止することができる。
【0068】
一対の幅寄せ体3,4は、従来例のように積層したワークW全体を一気に幅寄せするものではなく、積層する途中において一段ずつワークWの幅寄せを完了させていくものである。そのため、両幅寄せ体3,4や押さえ体8の上下幅も、ワークW単体の高さと同程度またはそれより短く設けてあればよい。また、各幅寄せ体3,4や押さえ体8を駆動させるために大型の機構も必要でなく、従来例のようにパレット2を回転させる回転機構も必要とならない。
【0069】
そのため、製造コストが低くて済むとともに、幅寄せ作業を行うためだけに専用の大きな設置スペースも必要にならないという利点がある。また、パレット2上にワークWを順次積層していく間に、幅寄せ作業を段階的に進めていくことができるので、幅寄せ作業のために全体の作業効率が低下することが抑えられるという利点もがある。
【0070】
以上、本発明を添付図面に示す実施形態に基づいて説明したが、本発明は前記実施形態に限定されるものではない。
【0071】
例えば、一例においては、まずY軸幅寄せ体4を駆動させることでY軸方向の幅寄せを行い、次いでX軸幅寄せ体3を駆動させてX軸方向の幅寄せを行っているが、この逆の手順で幅寄せを行ってもよい。さらに、第一駆動機構や第二駆動機構の構造が、前記以外の構造であっても構わない。
【0072】
パレット2上でのワークWの配置も、図示のマトリクス状の配置には限定されない。また、ワークWの配置が一段だけであってもよい。
【0073】
また、幅寄せブロック5や押さえ体8を上昇させる所定距離dzについても、ワークWに応じた値を予め設定してあってもよいし、パレタイジングロボット103に備えたセンサ(図示略)によって、ワークWを搬送する際にその高さを検知し、ここで検知されるワークWの高さに基づいて所定距離dzを決定してもよい。特に、多段に配列させるワークWが、ダンボールのように当日の湿度等で高さが変化しやすいものである場合には、このようにワークWの高さを検知して利用することが好適である。センサは、例えばパレタイジングロボット103のハンド部103cに配置された光センサから成り、ワークWを把持する際にその高さを検知する。
【0074】
その他の構成についても、本発明の意図する範囲内であれば、適宜の設計変更を行うことが可能である。
【符号の説明】
【0075】
1 幅寄せ装置
2 パレット
3 幅寄せ体
3a 整列面
4 幅寄せ体
4a 整列面
8 押さえ体
100 整列搬送システム
102 パレット搬送コンベア
103 パレタイジングロボット
a 搬送方向
A 作業エリア
P2 パレット設置箇所
W ワーク
【技術分野】
【0001】
本発明は、パレット上に載置した複数のワークを幅寄せして密着整列させるための技術に関する。
【背景技術】
【0002】
工場等において、複数のワークを一まとめに搬送しようとする場合、パレタイジングロボットを用いて、所定箇所のパレット上に複数のワークを順次載置してゆき、載置が完了したパレットごと、そのままコンベアで搬送することが行われる(特許文献1等を参照)。
【0003】
ところで、パレット上に複数のワークを順次載置していくに際して、パレット上に載置した段階で、隣接するワーク同士を隙間なく密着整列させておくことは困難である。特に、パレタイジングロボットが、両側からワーク下端に爪部を差し入れて把持するような構造である場合には、載置後に爪部を引き出すための隙間も必要となる。
【0004】
そのため、隣接するワーク間に一定の隙間を確保しながらパレット上に載置していくことが、一般的である。そして、これらワーク間の隙間が、パレットごとワークを搬送する際の荷崩れの原因となる。
【0005】
これに対して、従来は、前記荷崩れを防止するための手段として、ワークを載置したパレットをコンベアで作業エリア外まで搬送した後に、作業エリア外に設置してある大型の幅寄せ装置を用いて、パレット上のワークの幅寄せ作業を別途行っていた。
【0006】
この従来の幅寄せ装置は、パレットを90°回転させる回転機構と、コンベアおよびパレットを挟む両側位置に一対配置される大型の幅寄せ板と、一対の幅寄せ板を近接離間させる駆動機構とから成る装置である。この装置にあっては、作業エリア外にまで搬送されてきたパレット上のワーク全体を、大型の幅寄せ板で両側から挟みこむことで、まず一方向の幅寄せをする。次いで、回転機構でパレットごと90°回転させたうえで、再び両側から一対の幅寄せ板で挟みこむことにより、前記一方向とは直交する他方向の幅寄せを行う。これら幅寄せによって、パレット上で隣接するワーク間の隙間を詰めて、荷崩れ防止を図る。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平6−126668号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、前記した従来の幅寄せ装置は、大量に載置したワークに対してもこれら全てを作業スペース外で一気に幅寄せする構造であるため、幅寄せ板として非常に大型の金属板が必要となり、また、回転機構や駆動機構についても、大型で大出力の機構が必要となる。つまり、従来の幅寄せ装置においては、装置全体が非常に大型となって製造コストが高くなるという問題や、幅寄せ作業を行うためだけに作業エリア外に専用の大きな設置スペースが必要になるという問題がある。
【0009】
また、従来の幅寄せ装置では、パレット上にワークを順次載置していくための時間とは別に、作業エリア外で幅寄せ装置を駆動してワーク同士を密着させるための時間が必要となり、全体としての作業効率が低下するという問題がある。
【0010】
本発明は前記問題点に鑑みて発明したものであって、低コストで製造することができ且つ作業エリア内にコンパクトに設置可能な幅寄せ装置を提供し、全体の作業効率についても向上させることを、課題とする。そして、前記幅寄せ装置を用いた効率的なパレタイズ搬送システムやパレタイジング方法を提供することを、課題とする。
【課題を解決するための手段】
【0011】
本発明の幅寄せ装置1は、パレタイジングロボット103によってパレット2上に隙間をあけて載置された複数のワークWを、パレット2上にて密着整列させる幅寄せ装置1であって、互いの整列面3a,4aが直交方向をむくように配置された一対の幅寄せ体3,4と、一対の幅寄せ体3,4をそれぞれの整列面3a,4aの向きに進退させる第一駆動機構と、一対の幅寄せ体3,4とは離れた位置に設けられる押さえ体8と、パレット2上のワークWの側面に対して押さえ体8を接離させる第二駆動機構とを備え、第一駆動機構によって、一対の幅寄せ体3,4をそれぞれ前進させて複数のワークWを押し込み、且つ、第二駆動機構によって、押し込まれるワークWとは反対側に配列される他の複数のワークWに対してその側方から押さえ体8を当てておくことで、パレット2上にて複数のワークWを密着整列させるように設けている。
【0012】
前記幅寄せ装置1によれば、一対の幅寄せ体3,4と押さえ体8を所定箇所のパレット2に近接配置しておけば、該パレット2上にワークWが配列された後に、これらワークWに押さえ体8を当てたうえで一対の幅寄せ体3,4を前進させ、ワークWを押さえ体8側に押し込むことで、パレット2上の複数のワークWを、その個所にて速やかに密着整列させることができる。そのため、従来のような大型の構造が必要でなく、製造コストが低くて済むとともに、幅寄せ作業を行うためだけに作業エリア外に専用の大きなスペースを設ける必要もない。また、パレタイジングロボット103でパレット2上にワークWを載置した状態のまま、幅寄せ作業を完了させることができるので、作業効率が低下することも抑えられる。
【0013】
さらに、本発明の幅寄せ装置1において、第一駆動機構は、前記一対の幅寄せ体3,4の高さを変更自在なものであることが好ましい。高さ変更を自在にすることで、所定箇所のパレット2上にてワークWを複数段積層させる場合に、下段側のワークWを載置した段階でまずその下段側のワークWの幅寄せを行い、次いで、幅寄せ後のワークW上に載置した上段側のワークWを幅寄せするといったように、各段で幅寄せ作業を完了させておくことが可能となる。そのため、各幅寄せ体3,4として大型の部材が必要でなくなり、また、各幅寄せ体3,4を進退駆動させるための機構もコンパクト化することができ、結果として装置全体が小型化、低コスト化される。また、パレット2上に全てのワークWを積層させた後、速やかに、全ての幅寄せ作業が完了することになるので、作業効率が低下することも抑えられる。
【0014】
このとき、第二駆動機構は、前記押さえ体8の高さを変更自在なものであることが好ましい。押さえ体8の高さ変更を自在にすることで、押さえ体8として大型のものを備えずとも、その押さえ体8の高さを適宜変更しながら各段での幅寄せ作業に利用することができ、結果として装置全体が小型化、低コスト化される。
【0015】
また、本発明のパレタイジング方法は、前記幅寄せ装置1を用いてパレット2上に複数のワークWを段積み密着整列させるパレタイジング方法であって、パレタイジングロボット103によって水平方向に隙間をあけて複数のワークWをマトリクス状に載置し、配置された複数のワークWを、各幅寄せ体3,4と押さえ体8との間で挟み込むことにより、下段側での密着整列を完了し、次いで、密着整列した下段側の複数のワークW上にて、パレタイジングロボット103によって水平方向に隙間をあけて複数のワークWをマトリクス状に載置し、一対の幅寄せ体3,4を(又は一対の幅寄せ体3,4と押さえ体8を共に)上昇させ、載置された複数のワークWを、各幅寄せ体3,4と押さえ体8との間で挟み込むことにより、上段側での密着整列を完了するように設けている。
【0016】
前記パレタイジング方法によれば、パレット2上にてワークWを複数段積層させるに際して、各段で幅寄せ作業を完了させてゆき、パレット2上へのワークWの積層が完了した直後の段階において、全体の幅寄せ作業も迅速に完了させることができる。そのため、全体としての作業効率を低下させることなく、効果的に荷崩れを防止することができる。また、このために用いる幅寄せ体3,4や第一駆動機構、押さえ体8や第二駆動機構についても、従来のような大型の構造が必要でない。そのため、装置に要するコストが低くて済むとともに、専用の大きな設置スペースも必要でないという利点がある。
【0017】
また、本発明のパレタイジング方法では、パレタイジングロボット103に備えたセンサでワークWの高さを検知し、この検知結果に基づいた距離だけ、第一駆動機構によって一対の幅寄せ体3,4を上昇させることが好ましい。
【0018】
このようにすることで、当日の環境等に応じてワークWの高さが変化するような場合でも、自動的に最適な所定距離が決定される。
【0019】
また、本発明のパレタイズ搬送システムは、所定のパレット設置箇所P2にあるパレット2上に複数のワークWを密着配列させ、該密着配列が完了したパレット2を搬送するパレタイズ搬送システムであって、前記パレタイズ搬送システム100では、ワークWの密着整列が完了したパレット2を所定の搬送方向aへと搬送するパレット搬送コンベア102を備え、さらに、前記幅寄せ装置1の一方の幅寄せ体3は、パレット設置箇所P2に対してパレット搬送コンベア102の搬送方向aとは反対側に配置し、他方の幅寄せ体4は、パレット設置箇所P2に対してパレタイジングロボット103とは反対側に配置する。
【0020】
前記パレタイズ搬送システム100によれば、パレタイジングロボット103によりパレット2上にワークWを載置し、そのままの状態で幅寄せを完了してワークWを密着整列させたうえで、速やかに外部搬送することのできるシステムを、所定の作業エリア内にコンパクトに形成することができる。
【発明の効果】
【0021】
本発明によれば、低コストで製造することができ且つ作業エリア内にコンパクトに設置可能な幅寄せ装置や、これを用いたパレタイズ搬送システムやパレタイジング方法を提供し、全体の作業効率についても向上させることができるという効果を奏する。
【図面の簡単な説明】
【0022】
【図1】本発明の実施形態における一例の幅寄せ装置を用いたパレタイズ搬送システムを示す平面図である。
【図2】同上の幅寄せ装置を示し、(a)は平面図、(b)は正面図、(c)は側面図である。
【図3】同上の幅寄せ装置の斜視図である。
【図4】同上の幅寄せ装置によるワーク幅寄せ手順の説明図であり、(a)〜(c)は下段のワーク幅寄せ、(d)〜(f)は上段のワーク幅寄せを、それぞれ順に示している。
【発明を実施するための形態】
【0023】
本発明を、添付図面に示す実施形態に基づいて説明する。図1には、本発明の実施形態における一例の幅寄せ装置1と、これを用いて構成したパレタイズ搬送システム100を示している。以下においては、パレタイズ搬送システム100の全体構成についてまず説明する。
【0024】
図1中ではワークWの図示を省略しているが、ここで配列するワークWとしては、適宜のものが選択可能である。なお、ワークWの形状は、パレット2上に密着状態で積層可能なブロック状のもの(例えば、折畳み状態で積層したダンボールを結束させて、全体を直方体状に設けたもの)であることが好ましい。
【0025】
パレタイズ搬送システム100は、ワーク搬送コンベア101と、パレット搬送コンベア102とを備える。
【0026】
ワーク搬送コンベア101は、作業エリアA外(図1中では右側の領域)から、作業エリアA内にある所定のワーク搬送箇所P1にまで、多数のワークWを順次搬送していくものである。パレット搬送コンベア102は、作業エリアA内にある所定のパレット設置箇所P2から、作業エリアA外(図1中では左側の領域)にまで、パレット2を順次搬送していくものである。
【0027】
さらに、パレタイズ搬送システム100は、パレタイジングロボット103と、パレット供給装置104とを備えている。
【0028】
パレタイジングロボット103は、床面上に設置される基台部103aと、基台部103aから延設されるアーム部103bと、アーム部103bの先端に支持されるハンド部103cとから成る。このパレタイジングロボット103は、パレット搬送コンベア102によってワーク搬送箇所P1にまで搬送されたワークWを、ハンド部103cにて把持したうえで、パレット設置箇所P2に配置されるパレット2上にまで、順次搬送する。そして、パレット2上にてハンド部103cによる把持を解除することで、ワークWを、パレット2上にマトリクス状に順次配列させていく。
【0029】
パレット供給装置104は、ワークWが配置される前の空のパレット2を、パレット設置箇所P2にまで順次供給するものである。
【0030】
そして、一例の幅寄せ装置1は、一対の幅寄せ体3,4と、これら幅寄せ体3,4とは離れて位置する押さえ体8とを有する。一対の幅寄せ体3,4は、パレット2上に配列された複数のワークWをそれぞれ所定方向に押し付けることにより、幅寄せを行うものである。押さえ体8は、この幅寄せの際に、各幅寄せ体3,4に押し込まれるワークWとは反対側に配列される複数のワークWに対して、その側方から接触させておくものである。各幅寄せ体3,4と押さえ体8は、共にパレット設置箇所P2に近接して配置される。
【0031】
一対の幅寄せ体3,4は、互いに直交方向に伸びるように形成された直線バー状の部材であり、平面視にてL字状を成すように直交配置される。各幅寄せ体3,4のパレット2側をむく側面が、パレット2上のワークWを押し込むための平坦な整列面3a,4aとなっている。
【0032】
より具体的には、一方の幅寄せ体3を、パレット設置箇所P2に対して、パレット搬送コンベア102での搬送方向aとは反対側(図1中では右側)に配置している。他方の幅寄せ体4は、パレット設置箇所P2やここに配置されるパレット2に対して、パレタイジングロボット103が位置する側とは反対側(図1中では下側)に配置している。
【0033】
L字状に配置される一対の幅寄せ体3,4は、互いに連結されることにより、幅寄せブロック5を形成している。この幅寄せブロック5は、後述の支持フレーム6に設けた昇降機構によって、ブロック全体が昇降駆動される。幅寄せブロック5を構成する一対の幅寄せ体3,4は、後述の水平駆動機構によって、それぞれが所定方向にむけて進退駆動される。
【0034】
両幅寄せ体3,4の前進方向は、互いの整列面3a,4aが向く方向である。両幅寄せ体3,4は、この前進方向に駆動されることで、それぞれの整列面3a,4aをパレット設置箇所P2に接近させていく。
【0035】
押さえ体8は、直線バーをその中央部で直角に屈折させた形状を有するL字バー状の部材である。L字状である押さえ体8の内側に形成される平坦な側面が、パレット2上のワークWに当てるための押さえ面8aとなる。この押さえ体8は、パレタイジングロボット103と隣接して設置される多関節型のロボットアーム9の先端に支持される。押さえ体8は、ロボットアーム9が有する各関節を駆動させることによって全方向に移動自在であり、また、姿勢変更が自在である。
【0036】
パレタイズ搬送システム100が備える前記のワーク搬送箇所P1、パレタイジングロボット103、パレット設置箇所P2、幅寄せ装置1等は、安全柵105によって覆われる。この安全柵105で覆われるエリアが、パレタイジング作業を行うための作業エリアAとなる。この作業エリアA外に、制御盤106が配置される。
【0037】
以下、一例の幅寄せ装置1の更に具体的な構造について、図2、図3に基づいて説明する。
【0038】
図2中においては、幅寄せブロック5を実線と点線で示している。実線の幅寄せブロック5は初期状態であり、点線で示す幅寄せブロック5は、この初期状態からブロック全体を最上位にまで上昇させ、且つ、両幅寄せ体3,4をそれぞれパレット2側に前進させた状態である。
【0039】
図中に示すX方向は、パレット搬送コンベア102によるパレット2の搬送方向であり、また、一方の幅寄せ体3の前進方向である。図中のY方向は、パレット設置箇所P2に対してパレタイジングロボット103が位置する方向であり、また、他方の幅寄せ体4の前進方向である。図中のZ方向は、上下方向である。
【0040】
以下においては、区別のために、X軸方向に進退する一方の幅寄せ体3を「X軸幅寄せ体3」といい、Y軸方向に進退する他方の幅寄せ体4を「Y軸幅寄せ体4」という。
【0041】
幅寄せ装置1は、幅寄せブロック5を支持する矩形枠状の支持フレーム6を有する。この支持フレーム6は、X軸方向に距離をあけて床面上に立設される柱状のベースフレーム10と、両ベースフレーム10の上端部同士をつなぐ上部サポートフレーム11と、両ベースフレーム10の下端部同士をつなぐ下部サポートフレーム12とを有する。
【0042】
各ベースフレーム10の上下端部には、プーリ(図示せず)を回動自在に配置しており、上下のプーリ間に、一巻きのローラーチェーンである昇降チェーン13(図2中の一点鎖線)を架け渡している。幅寄せブロック5は、各ベースフレーム10にて、この昇降チェーン13に上下から連結固定されている。両ベースフレーム10の下端部に配されるプーリ同士は、昇降シャフト14を介して連結されている。昇降シャフト14は、下部サポートフレーム12上に設置固定した昇降モータ15によって、伝達チェーン16を介して正逆回転される。
【0043】
つまり、昇降モータ15で昇降シャフト14を回転させることで、両側のプーリや昇降チェーン13を介して、幅寄せブロック5の上下位置を変更することができる。これらの機構が、幅寄せブロック5全体を昇降自在に支持する昇降機構となっている。なお、幅寄せブロック5のZ軸方向の移動(上下動)は、各ベースフレーム10に設けた図示略の直動ガイドによってガイドされる。
【0044】
幅寄せブロック5は、前記昇降機構によって昇降自在に支持される昇降フレーム20と、昇降フレーム20に対してY軸方向に進退自在に連結されるY軸幅寄せ体4と、このY軸幅寄せ体4に対してX軸方向に進退自在に連結されるX軸幅寄せ体3とを有する。
【0045】
直線バー状の部材であるY軸幅寄せ体4の両端部からは、Y軸方向の後退側にむけて移動アーム21をそれぞれ延設している。昇降フレーム20は、両移動アーム21をY軸方向にスライド自在に保持しており、この機構によって、Y軸幅寄せ体4は昇降フレーム20に対してY軸方向にスライド自在に連結されている。
【0046】
また、直線バー状の部材であるX軸幅寄せ体3の基端部(即ち、Y軸方向の後退側の端部)は、連結支持部22を介して、Y軸寄せ体4に対してX軸方向にスライド自在に連結されている。
【0047】
Y軸幅寄せ体4をY軸方向に進退させる駆動機構は、その周方向の一部をY軸幅寄せ体4の連結片7に固定したY軸歯付ベルト23と、昇降フレーム20側に固定したY軸駆動モータ24とを、動力伝達自在に噛み合わせることで構成している(図2(a)参照)。
【0048】
また、X軸幅寄せ体3をX軸方向に進退させる駆動機構は、その周方向の一部をX軸幅寄せ体3の基端部に固定させたX軸歯付ベルト25と、Y軸幅寄せ体4側に固定したX軸駆動モータ26とを、動力伝達自在に噛み合わせることで構成している(図2(a)参照)。
【0049】
これらの機構が、一対の幅寄せ体3,4を水平面上においてそれぞれ進退駆動させる水平駆動機構となる。この水平駆動機構と、幅寄せブロック5ごと昇降させる前記昇降機構によって、一対の幅寄せ体3,4をX,Y,Z軸方向の全方向に移動させる第一駆動機構が構成される。
【0050】
一方、押さえ体8を移動させる第二駆動機構は、前記のロボットアーム9から構成される。ロボットアーム9は、狙いのワークWの側面に対して接離するように押さえ体8を移動させるものであり、パレット設置箇所P2を中心として、第1駆動機構の支持フレーム6を配置している側とは反対側のスペースに、配置される。
【0051】
つまり、パレット設置箇所P2を挟んで一方の側の床面上に、一対の幅寄せ体3,4を動作させる第一駆動機構が設置され、パレット設置箇所P2を挟んで他方の側の床面上に、押さえ体8を動作させる第二駆動機構が設置される。
【0052】
幅寄せ装置1における第一駆動機構の駆動制御と、第二駆動機構の駆動制御は、パレタイジングロボット103によるパレット2上へのワークWの配置とタイミングを合わせて行われる。図4には、パレット2上にワークWを、X軸方向の複数行×Y軸方向の複数列(図示例は2行×2列)のマトリクス状に整列させ、これを順次積層させていく場合を示している。
【0053】
図4(a)は、パレタイジングロボット103によって、パレット2上に1段目(下段側)のワークWをマトリクス状に配置した状態である。この段階の配置では、X軸方向とY軸方向のいずれにおいても、隣接するワークW間には所定の隙間が形成されている。
【0054】
図4(b)、(c)には、パレタイジングロボット103が2段目用のワークWを把持してパレット2側に搬送するまでの間に、一対の幅寄せ体3,4と押さえ体8を協働させて、1段目で生じたX軸方向とY軸方向の隙間を一気に解消させる様子を、順に示している。
【0055】
図4(b)では、ロボットアーム9の各関節を駆動させて、先端に支持するL字状の押さえ体8を、その内側の押さえ面8aが複数のワークWに対して側方から接触するように移動させ、移動後の位置及び姿勢で保持させている。
【0056】
押さえ体8の半部81は、直線バー状の部分であり、マトリクス状に配置された複数のワークWを、X軸幅寄せ体3との間でX軸方向に挟むように位置する。また、押さえ体8の残り半部82は、同じく直線バー状の部分であり、マトリクス状に配置された複数のワークWを、Y軸幅寄せ体4との間でY軸方向に挟むように位置する。言い換えれば、押さえ体8は、押さえ面8aを有する直線バー状の部材81と、同じく押さえ面8aを有する直線バー状の部材82とを、互いの押さえ面8aが内側方をむくように端部同士を連結させ、L字状に一体化させたものである。なお、各部材81,82が別体に備えてあってもよい。
【0057】
図4(b)では、前記のように押さえ体8をセットしたうえで、Y軸駆動モータ24を駆動させて、Y軸幅寄せ体4を所定距離dyだけY軸方向に前進させている。Y軸幅寄せ体4は、その平坦な整列面4aを複数のワークWに対して側方から押し込むことによって幅寄せを行い、Y軸方向に隣接するワークW同士を密着させる。所定距離dyは、パレタイジングロボット103によるワークWの当初配列に対応して、適宜設定される。
【0058】
このとき、マトリクス状に配置される複数のワークWのうち、直接的に押し込まれるワークWとは反対側の端部にてX軸方向に列設される複数のワークWには、押さえ体8のうち半部82側の平坦な押さえ面8aが当たっている。即ち、マトリクス状に配された複数のワークWは、固定側のバーとなる押さえ体8の半部82と、可動側のバーとなるY軸幅寄せ体4との間で、全体がY軸方向に挟み込まれる。これにより、一段目に配置される複数のワークW全体が、Y軸方向にズレなく幅寄せされる。
【0059】
次いで、図4(c)では、X軸駆動モータ26を駆動させ、X軸幅寄せ体3を所定距離dxだけX軸方向に前進させている。X軸幅寄せ体3は、その平坦な整列面3aを複数のワークWに対して側方から押し込むことによって幅寄せを行い、X軸方向に隣接するワークW同士を密着させる。所定距離dxは、パレタイジングロボット103によるワークWの当初配列に対応して、適宜設定される。
【0060】
このとき、マトリクス状に配置される複数のワークWのうち、直接的に押し込まれるワークWとは反対側の端部にてY軸方向に列設される複数のワークWには、押さえ体8の半部81側の平坦な押さえ面8aが当たっている。即ち、マトリクス状に配された複数のワークWは、固定側のバーとなる押さえ体8の半部81と、可動側のバーとなるX軸幅寄せ体3との間で、全体がX軸方向に挟み込まれる。これにより、一段目に配置される複数のワークW全体が、X軸方向においてもズレなく幅寄せされる。
【0061】
つまり、本例の幅寄せ装置1においては、マトリクス状に配置されるワークWのうち、X軸幅寄せ体3とY軸幅寄せ体4から最も離れたコーナー部分にあるワークW(図4中では左下にあるワークW)が、幅寄せのターゲットとなる。そして、このターゲットにむけて、他のワークWをX軸方向およびY軸方向に幅寄せすることで、全体の密着整列が完了される。
【0062】
このとき、ターゲットとなるコーナー部分のワークWと、このコーナー部分のワークWに対してX軸方向に並設される他のワークW(図4中では左上にあるワークW)と、このコーナー部分のワークWに対してY軸方向に並設される他のワークW(図4中では右下に位置するワークW)とには、L字状の押さえ体8が側方から当っているので、幅寄せ作業の際にワークWの位置が不意にズレることも防止されている。
【0063】
以上のようにして、パレタイジングロボット103が2段目用のワークWを把持してパレット2側に搬送してきた段階では、1段目のワークWはその全てがX軸方向およびY軸方向において密着整列された状態となる。パレタイジングロボット103は、この密着整列されたワークW上に、1段目のときと同様の隙間をあけながら、2段目(上段側)のワークWをマトリクス状に配置していく。
【0064】
ここで、パレタイジングロボット103による2段目の配置が完了するまでの間に、昇降機構によって幅寄せブロック5を所定距離dzだけ上昇させておく。所定距離dzは、ワークWの高さ寸法と略一致するように適宜設定される。押さえ体8についても、これを2段目のワークWに当てるまでの間に、所定距離dzだけ上昇させておく。
【0065】
そして、図4(e)、図4(f)に示すように、1段目の場合と同様に、2段目に配列される複数のワークWに対して押さえ体8を側方から当てたうえで、一段上昇させておいた幅寄せブロック5の各幅寄せ体3,4を、所定距離dx,dyだけ順に前進させる。これにより、密着整列された1段目の複数のワークW上にて、2段目の複数のワークWのX軸方向およびY軸方向の隙間が解消される。
【0066】
この手順をさらに3段目、4段目、…と繰り返すことで、パレット2上には、水平方向に密着整列したワークWが、何段にも積層される。ワークWを所定の段数だけ積層し終えれば、パレット搬送コンベア102によってパレット2ごと作業エリアA外へと搬送させる。パレット2をパレット設置箇所P2から搬送させる際には、パレット2上のワークWに押さえ体8が接触しないように、ロボットアーム9の各関節を駆動させて、押さえ体8を適宜スペースに退避させておく。
【0067】
以上説明したように、一例の幅寄せ装置1やこれを用いたパレタイズ搬送システム100によれば、幅寄せブロック5が有する一対の幅寄せ体3,4と押さえ体8によって、下段側のワークWの密着整列を完了させ、次いで、ここで用いた一対の幅寄せ体3,4と押さえ体8を共に一段階上昇させ、上段側のワークWの密着整列を完了させるといった手順を繰り返すことにより、パレット2上でのワークWの荷崩れを効果的に防止することができる。
【0068】
一対の幅寄せ体3,4は、従来例のように積層したワークW全体を一気に幅寄せするものではなく、積層する途中において一段ずつワークWの幅寄せを完了させていくものである。そのため、両幅寄せ体3,4や押さえ体8の上下幅も、ワークW単体の高さと同程度またはそれより短く設けてあればよい。また、各幅寄せ体3,4や押さえ体8を駆動させるために大型の機構も必要でなく、従来例のようにパレット2を回転させる回転機構も必要とならない。
【0069】
そのため、製造コストが低くて済むとともに、幅寄せ作業を行うためだけに専用の大きな設置スペースも必要にならないという利点がある。また、パレット2上にワークWを順次積層していく間に、幅寄せ作業を段階的に進めていくことができるので、幅寄せ作業のために全体の作業効率が低下することが抑えられるという利点もがある。
【0070】
以上、本発明を添付図面に示す実施形態に基づいて説明したが、本発明は前記実施形態に限定されるものではない。
【0071】
例えば、一例においては、まずY軸幅寄せ体4を駆動させることでY軸方向の幅寄せを行い、次いでX軸幅寄せ体3を駆動させてX軸方向の幅寄せを行っているが、この逆の手順で幅寄せを行ってもよい。さらに、第一駆動機構や第二駆動機構の構造が、前記以外の構造であっても構わない。
【0072】
パレット2上でのワークWの配置も、図示のマトリクス状の配置には限定されない。また、ワークWの配置が一段だけであってもよい。
【0073】
また、幅寄せブロック5や押さえ体8を上昇させる所定距離dzについても、ワークWに応じた値を予め設定してあってもよいし、パレタイジングロボット103に備えたセンサ(図示略)によって、ワークWを搬送する際にその高さを検知し、ここで検知されるワークWの高さに基づいて所定距離dzを決定してもよい。特に、多段に配列させるワークWが、ダンボールのように当日の湿度等で高さが変化しやすいものである場合には、このようにワークWの高さを検知して利用することが好適である。センサは、例えばパレタイジングロボット103のハンド部103cに配置された光センサから成り、ワークWを把持する際にその高さを検知する。
【0074】
その他の構成についても、本発明の意図する範囲内であれば、適宜の設計変更を行うことが可能である。
【符号の説明】
【0075】
1 幅寄せ装置
2 パレット
3 幅寄せ体
3a 整列面
4 幅寄せ体
4a 整列面
8 押さえ体
100 整列搬送システム
102 パレット搬送コンベア
103 パレタイジングロボット
a 搬送方向
A 作業エリア
P2 パレット設置箇所
W ワーク
【特許請求の範囲】
【請求項1】
パレタイジングロボットによってパレット上に隙間をあけて載置された複数のワークを、パレット上にて密着整列させる幅寄せ装置であって、
互いの整列面が直交方向をむくように配置された一対の幅寄せ体と、
一対の幅寄せ体をそれぞれの整列面の向きに進退させる第一駆動機構と、
一対の幅寄せ体とは離れた位置に設けられる押さえ体と、
パレット上のワークの側面に対して押さえ体を接離させる第二駆動機構とを備え、
第一駆動機構によって、一対の幅寄せ体をそれぞれ前進させて複数のワークを押し込み、且つ、第二駆動機構によって、押し込まれるワークとは反対側に配列される他の複数のワークに対してその側方から押さえ体を当てておくことで、パレット上にて複数のワークを密着整列させるように設けたことを特徴とする幅寄せ装置。
【請求項2】
第一駆動機構は、前記一対の幅寄せ体の高さを変更自在なものであることを特徴とする請求項1記載の幅寄せ装置。
【請求項3】
第二駆動機構は、前記押さえ体の高さを変更自在なものであることを特徴とする請求項2記載の幅寄せ装置。
【請求項4】
請求項2に記載の幅寄せ装置を用いてパレット上に複数のワークを段積み密着整列させるパレタイジング方法であって、
パレタイジングロボットによって水平方向に隙間をあけて複数のワークをマトリクス状に載置し、載置された複数のワークを、各幅寄せ体と押さえ体との間で挟み込むことにより、下段側での密着整列を完了し、
次いで、密着整列した下段側の複数のワーク上にて、パレタイジングロボットによって水平方向に隙間をあけて複数のワークをマトリクス状に載置し、一対の幅寄せ体を上昇させ、載置された複数のワークを、各幅寄せ体と押さえ体との間で挟み込むことにより、上段側での密着整列を完了することを特徴とするパレタイジング方法。
【請求項5】
請求項3に記載の幅寄せ装置を用いてパレット上に複数のワークを段積み密着整列させるパレタイジング方法であって、
パレタイジングロボットによって水平方向に隙間をあけて複数のワークをマトリクス状に載置し、載置された複数のワークを、各幅寄せ体と押さえ体との間で挟み込むことにより、下段側での密着整列を完了し、
次いで、密着整列した下段側の複数のワーク上にて、パレタイジングロボットによって水平方向に隙間をあけて複数のワークをマトリクス状に載置し、一対の幅寄せ体と押さえ体を共に上昇させ、載置された複数のワークを、各幅寄せ体と押さえ体との間で挟み込むことにより、上段側での密着整列を完了することを特徴とするパレタイジング方法。
【請求項6】
パレタイジングロボットに備えたセンサでワークの高さを検知し、この検知結果に基づいた距離だけ、第一駆動機構によって一対の幅寄せ体を上昇させることを特徴とする請求項4又は5に記載のパレタジング方法。
【請求項7】
請求項1〜3のいずれか一項に記載の幅寄せ装置を用いて、所定のパレット設置箇所にあるパレット上に複数のワークを密着配列させ、この密着配列が完了したパレットを搬送するパレタイズ搬送システムであって、
ワークの密着整列が完了したパレットを所定の搬送方向へと搬送するパレット搬送コンベアを備え、
前記幅寄せ装置の一方の幅寄せ体は、パレット設置箇所に対してパレット搬送コンベアの搬送方向とは反対側に配置し、他方の幅寄せ体は、パレット設置箇所に対してパレタイジングロボットとは反対側に配置したことを特徴とするパレタイズ搬送システム。
【請求項1】
パレタイジングロボットによってパレット上に隙間をあけて載置された複数のワークを、パレット上にて密着整列させる幅寄せ装置であって、
互いの整列面が直交方向をむくように配置された一対の幅寄せ体と、
一対の幅寄せ体をそれぞれの整列面の向きに進退させる第一駆動機構と、
一対の幅寄せ体とは離れた位置に設けられる押さえ体と、
パレット上のワークの側面に対して押さえ体を接離させる第二駆動機構とを備え、
第一駆動機構によって、一対の幅寄せ体をそれぞれ前進させて複数のワークを押し込み、且つ、第二駆動機構によって、押し込まれるワークとは反対側に配列される他の複数のワークに対してその側方から押さえ体を当てておくことで、パレット上にて複数のワークを密着整列させるように設けたことを特徴とする幅寄せ装置。
【請求項2】
第一駆動機構は、前記一対の幅寄せ体の高さを変更自在なものであることを特徴とする請求項1記載の幅寄せ装置。
【請求項3】
第二駆動機構は、前記押さえ体の高さを変更自在なものであることを特徴とする請求項2記載の幅寄せ装置。
【請求項4】
請求項2に記載の幅寄せ装置を用いてパレット上に複数のワークを段積み密着整列させるパレタイジング方法であって、
パレタイジングロボットによって水平方向に隙間をあけて複数のワークをマトリクス状に載置し、載置された複数のワークを、各幅寄せ体と押さえ体との間で挟み込むことにより、下段側での密着整列を完了し、
次いで、密着整列した下段側の複数のワーク上にて、パレタイジングロボットによって水平方向に隙間をあけて複数のワークをマトリクス状に載置し、一対の幅寄せ体を上昇させ、載置された複数のワークを、各幅寄せ体と押さえ体との間で挟み込むことにより、上段側での密着整列を完了することを特徴とするパレタイジング方法。
【請求項5】
請求項3に記載の幅寄せ装置を用いてパレット上に複数のワークを段積み密着整列させるパレタイジング方法であって、
パレタイジングロボットによって水平方向に隙間をあけて複数のワークをマトリクス状に載置し、載置された複数のワークを、各幅寄せ体と押さえ体との間で挟み込むことにより、下段側での密着整列を完了し、
次いで、密着整列した下段側の複数のワーク上にて、パレタイジングロボットによって水平方向に隙間をあけて複数のワークをマトリクス状に載置し、一対の幅寄せ体と押さえ体を共に上昇させ、載置された複数のワークを、各幅寄せ体と押さえ体との間で挟み込むことにより、上段側での密着整列を完了することを特徴とするパレタイジング方法。
【請求項6】
パレタイジングロボットに備えたセンサでワークの高さを検知し、この検知結果に基づいた距離だけ、第一駆動機構によって一対の幅寄せ体を上昇させることを特徴とする請求項4又は5に記載のパレタジング方法。
【請求項7】
請求項1〜3のいずれか一項に記載の幅寄せ装置を用いて、所定のパレット設置箇所にあるパレット上に複数のワークを密着配列させ、この密着配列が完了したパレットを搬送するパレタイズ搬送システムであって、
ワークの密着整列が完了したパレットを所定の搬送方向へと搬送するパレット搬送コンベアを備え、
前記幅寄せ装置の一方の幅寄せ体は、パレット設置箇所に対してパレット搬送コンベアの搬送方向とは反対側に配置し、他方の幅寄せ体は、パレット設置箇所に対してパレタイジングロボットとは反対側に配置したことを特徴とするパレタイズ搬送システム。
【図1】



【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−6685(P2013−6685A)
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願番号】特願2011−142089(P2011−142089)
【出願日】平成23年6月27日(2011.6.27)
【出願人】(309042602)有限会社山本機械 (2)
【Fターム(参考)】
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願日】平成23年6月27日(2011.6.27)
【出願人】(309042602)有限会社山本機械 (2)
【Fターム(参考)】
[ Back to top ]