
干渉力補償制御装置
【課題】可動部間に生じる摩擦力に起因する干渉力を高精度に算出することで、高精度な外乱の推定により、高精度な位置決めを行うことができる干渉力補償制御装置を提供する。
【解決手段】連設されている第一可動部と第二可動部との間において可動部同士の摺動面間に生じる可動部間摩擦力に基づいて干渉力モデルを設定する。第一可動部を駆動する第一アクチュエータに対する第一目標位置指令値110に基づいて第一基準推力指令値を算出する。第二可動部を駆動する第二アクチュエータに対する第二目標位置指令値210と干渉力モデルとに基づいて、可動部間摩擦力の影響により第二可動部の動作に起因して第一可動部の動作に作用する第一干渉力を算出する。そして、第一基準推力指令値と第一干渉力とを加算することにより第一補償推力指令値を算出し、第一補償推力指令値に基づいて第一アクチュエータを制御する。
【解決手段】連設されている第一可動部と第二可動部との間において可動部同士の摺動面間に生じる可動部間摩擦力に基づいて干渉力モデルを設定する。第一可動部を駆動する第一アクチュエータに対する第一目標位置指令値110に基づいて第一基準推力指令値を算出する。第二可動部を駆動する第二アクチュエータに対する第二目標位置指令値210と干渉力モデルとに基づいて、可動部間摩擦力の影響により第二可動部の動作に起因して第一可動部の動作に作用する第一干渉力を算出する。そして、第一基準推力指令値と第一干渉力とを加算することにより第一補償推力指令値を算出し、第一補償推力指令値に基づいて第一アクチュエータを制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の可動部とそれぞれの可動部を駆動する複数のアクチュエータとを備える機械装置において、一方の可動部が動作することに起因して他方の可動部の動作に干渉力が作用する場合に、その干渉力を補償して機械装置を制御する干渉力補償制御装置に関するものである。
【背景技術】
【0002】
例えば、電子部品実装機などにおいては、各可動部が他の可動部から干渉力を受けることにより、位置決め精度に悪影響を及ぼすことがあった。そこで、特許第4241240号公報(特許文献1)には、各可動部の推力の総和(機台から伝わる反力)から機台の位置までの伝達特性を用いて、干渉力を算出することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4241240号公報([0009]など)
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、外乱には、特許文献1に記載されているような各可動部の推力に起因する伝達振動の他に、可動部間に生じる摩擦力が存在する。そして、位置決め精度をより高精度にするためには、可動部の間に生じる摩擦力の影響が大きいことが分かってきた。また、摩擦力の影響による干渉力は、非線形な特性となり、特許文献1に記載されているような伝達特性に基づく干渉力では十分に把握できない。
【0005】
本発明は、このような事情に鑑みてなされたものであり、可動部間に生じる摩擦力に起因する干渉力を高精度に算出することで、高精度な外乱の推定により、高精度な位置決めを行うことができる干渉力補償制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1に係る発明は、複数の可動部とそれぞれの前記可動部を駆動する複数のアクチュエータとを備える機械装置において、第二可動部が動作することに起因して第一可動部の動作に干渉力が作用する場合に、当該干渉力を補償して前記機械装置を制御する干渉力補償制御装置である。
【0007】
そして、前記第一可動部と前記第二可動部は、直接連設される関係にあり、または、他の可動部を介して間接的に連設される関係にある。ここで、連設とは、連続して設けられることを意味する。つまり、第一可動部と第二可動部とが直接連設される関係とは、第一可動部と第二可動部とが直接接触している場合である。また、第一可動部と第二可動部とが他の可動部を介して間接的に連設される関係とは、第一可動部と他の可動部、および、第二可動部と当該他の可動部が、それぞれ直接接触している場合である。なお、第一可動部と第二可動部との間に介在する他の可動部は、一つの場合に限られず、複数の場合を含む。
【0008】
さらに、前記干渉力補償制御装置は、連設されている前記第一可動部と前記第二可動部との間において可動部同士の摺動面間に生じる可動部間摩擦力に基づいて設定される干渉力モデルを記憶する干渉力モデル記憶手段と、前記第一可動部を駆動する第一アクチュエータに対する第一目標位置指令値に基づいて、前記第一アクチュエータに対する第一基準推力指令値を算出する第一基準推力指令値算出手段と、前記第二可動部を駆動する第二アクチュエータに対する第二目標位置指令値と前記干渉力モデルとに基づいて、前記可動部間摩擦力の影響により前記第二可動部の動作に起因して前記第一可動部の動作に作用する第一干渉力を算出する第一干渉力算出手段と、前記第一基準推力指令値と前記第一干渉力とを加算することにより第一補償推力指令値を算出し、前記第一補償推力指令値に基づいて前記第一アクチュエータを制御する第一補償手段とを備えることである。
【0009】
請求項2に係る発明は、前記第一可動部と前記第二可動部との摺動面におけるクーロン摩擦および非線形ばね摩擦に基づいて設定される数式モデルを相対非線形型ばね特性モデルと定義し、前記摺動面において前記第一可動部と前記第二可動部との相対速度に応じて発生する相対的な粘性摩擦力に基づいて設定される数式モデルを相対速度モデルと定義した場合に、前記干渉力モデルは、それぞれ別々に設定された前記相対非線形型ばね特性モデルと前記相対速度モデルとを加算した数式モデルに基づいて設定されることである。
【0010】
請求項3に係る発明は、前記摺動面において前記第一可動部と前記第二可動部との相対加速度に応じて発生する連動力に基づいて設定される数式モデルを相対加速度モデルと定義した場合に、前記干渉力モデルは、それぞれ別々に設定された前記相対非線形型ばね特性モデルと前記相対速度モデルと前記相対加速度モデルとを加算した数式モデルに基づいて設定されることである。
【0011】
請求項4に係る発明は、前記干渉力補償制御装置が、前記第一可動部は、固定部材との摺動面または前記第一可動部自身を構成する部材間の摺動面における単体摩擦力に基づいて設定される第一単体外乱力モデルを記憶する第一単体外乱力モデル記憶手段と、前記第一アクチュエータに対する第一目標位置指令値と前記第一単体外乱力モデルとに基づいて、前記単体摩擦力の影響により前記第一可動部自身の動作に起因して前記第一可動部の動作に作用する第一単体外乱力を算出する第一単体外乱力算出手段と、を備え、前記第一補償手段は、前記第一基準推力指令値、前記第一干渉力および前記第一単体外乱力を加算することにより前記第一補償推力指令値を算出し、前記第一補償推力指令値に基づいて前記第一アクチュエータを制御することである。
【0012】
請求項5に係る発明は、前記第一可動部と固定部材との摺動面または前記第一可動部自身を構成する部材間の摺動面におけるクーロン摩擦および非線形ばね摩擦に基づいて設定される数式モデルを単体非線形型ばね特性モデルと定義し、前記第一可動部自身の動作速度に応じて発生する粘性摩擦力に基づいて設定される数式モデルを単体速度モデルと定義した場合に、前記第一単体外乱力モデルは、それぞれ別々に設定された前記単体非線形型ばね特性モデルと前記単体速度モデルとを加算した数式モデルに基づいて設定されることである。
【0013】
請求項6に係る発明は、前記第一可動部自身の慣性モーメントおよび前記第一アクチュエータのトルク定数のモデル化誤差としての数式モデルを単体加速度モデルと定義した場合に、前記第一単体外乱力モデルは、それぞれ別々に設定された前記単体非線形型ばね特性モデルと前記単体速度モデルと前記単体加速度モデルとを加算した数式モデルに基づいて設定されることである。
【0014】
請求項7に係る発明は、前記第一可動部と前記第二可動部のそれぞれについて、相互に前記可動部間摩擦力の影響による当該干渉力を補償して制御することである。
【0015】
請求項8に係る発明は、前記第二可動部の動作に起因して前記第一可動部の動作に作用する前記第一干渉力を補償して前記第一アクチュエータを制御すると共に、前記第一可動部の動作に起因して前記第二可動部の動作に作用する第二干渉力を補償しないで前記第二アクチュエータを制御することである。
【0016】
請求項9に係る発明は、前記干渉力モデルは、前記第一可動部および前記第二可動部を実際に駆動した場合における前記第一目標位置指令値と前記第一可動部の実際の位置とに基づいて、学習制御を反復させることによって同定されることである。
【0017】
請求項10に係る発明は、前記相対非線形型ばね特性モデルは、式(1)により定義されることである。
【0018】
【数1】

【0019】
請求項11に係る発明は、前記相対速度モデルは、式(2)により定義されることである。
【0020】
【数2】
【0021】
請求項12に係る発明は、前記相対加速度モデルは、式(3)により定義されることである。
【0022】
【数3】
【0023】
請求項13に係る発明は、前記機械装置が、第一回転軸部材と、前記第一回転軸部材の先端に設けられた円盤と、前記第一回転軸部材を回転駆動する第一アクチュエータと、前記円盤の回転と同期しながら前記円盤に対して公転すると共に、前記第一回転軸部材の中心軸に対して偏心した偏心軸回りに自転可能に前記円盤に支持された第二回転軸部材と、前記第二回転軸部材と同軸的に設けられた第一歯車と、前記第一回転軸部材の外周側に前記第一回転軸部材と同軸的に配置され、前記第一回転軸部材に対して相対回転可能に支持され、かつ、前記第一歯車に噛合する第二歯車と、前記第二歯車を前記第一回転軸部材の中心軸周りに回転駆動する第二アクチュエータと、を備え、前記第一可動部は、前記第一回転軸部材および前記円盤を備え、前記第二可動部は、前記第二回転軸部材、第一歯車および第二歯車を備えることである。
【発明の効果】
【0024】
請求項1に係る発明によれば、第一可動部と第二可動部との間の摩擦力(可動部間摩擦力)の影響によって、第二可動部の動作が第一可動部の動作に影響を及ぼす第一干渉力を考慮して、第一可動部を駆動することができる。従って、第一可動部の位置制御を高精度にすることができる。
【0025】
請求項2に係る発明によれば、相対非線形ばね特性モデルと粘性摩擦力に基づく相対速度モデルとをそれぞれ別々の数式モデルとして設定することで、より詳細な物理現象を把握することができる。そして、これらを加算した数式モデルを用いて干渉力モデルを設定することで、第二可動部が第一可動部に影響を及ぼす第一干渉力を高精度に算出することができる。その結果、高精度な位置決めが可能となる。
【0026】
請求項3に係る発明によれば、さらに相対加速度モデルを数式モデルとして設定することで、より詳細な物理現象を把握することができる。そして、相対非線形型ばね特性モデルと相対速度モデルと相対加速度モデルを加算した数式モデルを用いて干渉力モデルを設定することで、第二可動部が第一可動部に影響を及ぼす第一干渉力をより高精度に算出することができる。その結果、より高精度な位置決めが可能となる。
【0027】
請求項4に係る発明によれば、干渉力に加えて、第一可動部自身の動作により生じる単体摩擦力の影響によって、第一可動部の動作に影響を及ぼす第一単体外乱力を考慮して、第一可動部を駆動することができる。従って、第一可動部の位置制御を高精度にすることができる。
【0028】
請求項5に係る発明によれば、単体非線形ばね特性モデルと粘性摩擦力に基づく第一単体速度モデルとをそれぞれ別々の数式モデルとして設定することで、より詳細な物理現象を把握することができる。そして、これらを加算した数式モデルを用いて第一単体外乱力モデルを設定することで、第一可動部自身の動作により生じる摩擦力に起因する第一単体外乱力を高精度に算出することができる。その結果、高精度な位置決めが可能となる。
【0029】
請求項6に係る発明によれば、さらに単体加速度モデルを数式モデルとして設定することで、第一可動部自身の慣性モーメントおよび第一アクチュエータのトルク定数のモデル化誤差を確実に低減することができる。そして、単体非線形型ばね特性モデルと単体速度モデルと単体加速度モデルを加算した数式モデルを用いて第一単体外乱力モデルを設定することで、第一可動部自身の動作により生じる摩擦力に起因する第一単体外乱力をより高精度に算出することができる。その結果、より高精度な位置決めが可能となる。
【0030】
請求項7に係る発明によれば、相互に影響を及ぼし合う機械装置に対して適用することができる。
ところで、機械構成によっては、第一可動部の動作が第二可動部に影響を及ぼすのに対して、その逆の影響は全くない、もしくは、その逆の影響が相対的に小さい場合がある。このような場合に、請求項8に係る発明によれば、一方の干渉力に対してのみ補償することで、演算処理を低減することができる。
請求項9に係る発明によれば、高精度に干渉力モデルを同定することができる。
請求項10〜12に係る発明によれば、それぞれ確実にモデル化することができる。
【0031】
請求項13に係る発明によれば、当該機械装置では、第一可動部と第二可動部との間の摩擦力に伴う干渉力が発生する。そこで、当該機械装置に上述した本発明を適用することで、第一可動部の位置制御を高精度にすることができる。
【図面の簡単な説明】
【0032】
【図1】機械装置の例を示す断面図である。
【図2】外乱力の分類図である。
【図3】干渉力補償制御装置による制御ブロック線図である。
【図4】相対非線形型ばね特性モデルの出力を示す。
【図5】相対速度とトルクの関係を示す。
【図6】相対加速度とトルクの関係を示す。
【図7】第一アクチュエータの位置とトルクの関係を示す。
【図8】第一アクチュエータの速度とトルクの関係を示す。
【図9】第一アクチュエータの加速度とトルクの関係を示す。
【図10】単体外乱力同定処理を示す制御ブロック線図である。
【図11】干渉力同定処理を示す制御ブロック線図である。
【図12】解析結果を示す。
【図13】解析結果を示す。
【図14】解析結果を示す。
【図15】その他の実施形態における制御ブロック線図である。
【発明を実施するための形態】
【0033】
以下、本発明の干渉力補償制御装置を具体化した実施形態について図面を参照しつつ説明する。
【0034】
(1.本実施形態の構成)
(1−1.機械装置の構成)
本発明の干渉力補償制御装置は、以下に説明する機械装置を制御する装置である。当該機械装置は、複数の可動部とそれぞれの可動部を駆動する複数のアクチュエータとを備える。そして、当該機械装置は、それぞれの可動部が動作することに起因して、他の可動部の動作に対する干渉力を作用させる構成を有する。つまり、ある可動部が動作すると、その動作が他の可動部の動作に影響を及ぼす。
【0035】
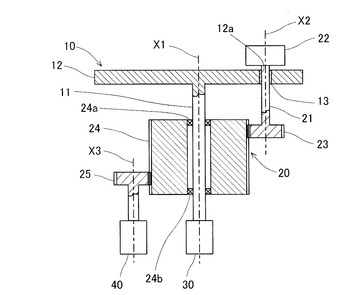
この機械装置の例として、図1に示す。例えば、電子部品実装器における電子部品を吸着するヘッドなどに適用される。具体的には、機械装置は、第一可動部10と、第一可動部10に対して支持されている第二可動部20と、第一可動部10を回転駆動する第一アクチュエータ30と、第二可動部20を回転駆動する第二アクチュエータ40とを備える。ここで、本例の機械装置は、第一可動部10と第二可動部20とが直接連設される関係にある。なお、本発明は、第一可動部10と第二可動部20とが他の可動部を介して間接的に連設される機械装置にも適用できる。
【0036】
第一可動部10は、第一回転軸部材11と、円盤12と、すべり軸受13とを備える。第一回転軸部材11は、第一アクチュエータ30としてのモータの出力軸に連結された軸部材である。つまり、第一回転軸部材11は、第一アクチュエータ30により軸X1回りに回転駆動される。円盤12は、第一回転軸部材11の先端(図1においては上端)に、第一回転軸部材11と同軸上に一体的に設けられている。つまり、第一アクチュエータ30が駆動することで、第一回転軸部材11および円盤12が軸X1回りに自転する。さらに、円盤12には、回転中心から偏心した位置に、円形断面の貫通孔12aが設けられている。すべり軸受13は、環状に形成されており、円盤12の円形孔12aに嵌挿されている。
【0037】
第二可動部20は、第二回転軸部材21と、先端部材22と、第一歯車23と、第二歯車24と、第三歯車25とを備える。第二回転軸部材21は、円盤12の円形孔12aにすべり軸受13を介して支持されている。つまり、第二回転軸部材21は、円盤12に対して、第二回転軸部材21の中心軸X2回りに相対回転可能に設けられている。従って、第二回転軸部材21は、円盤12に直接連設されている関係にある。
【0038】
先端部材22は、第二回転軸部材21の先端(図1においては上端)に、第二回転軸部材21と同軸上に一体的に設けられている。第一歯車23は、外歯歯車を構成し、第二回転軸部材21と同軸的に一体的に設けられている。第二歯車24は、外歯歯車を構成している。この第二歯車24は、第一回転軸部材11の外周側に第一回転軸部材11と同軸的に配置され、転がり軸受24a,24bを介して第一回転軸部材11に対して相対回転可能に支持されている。つまり、第二歯車24は、第一回転軸部材11に直接連設されている関係にある。さらに、第二歯車24は、第一歯車23に噛合する。第三歯車25は、外歯歯車を構成し、第二アクチュエータ40としてのモータの出力軸に連結され、軸X3回りに回転可能に設けられている。そして、第三歯車25は、第二歯車24に噛合する。
【0039】
第二アクチュエータ40が駆動することで第三歯車25が軸X3回りに自転し、第三歯車25の自転により第二歯車24が第一回転軸部材11に対して軸X1回りに相対的に自転し、第二歯車24が自転することで第一歯車23、第二回転軸部材21および先端部材22が軸X2回りに自転する。
【0040】
また、第一アクチュエータ30が駆動しており、第二アクチュエータ40が駆動しない場合には、第二回転軸部材21は、軸X1回りの円盤12の自転に伴い、軸X1回りに公転する。このとき、第一歯車23と第二歯車24とが噛合していることから、第二回転軸部材21は、軸X1回りに自転しながら公転することになる。また、第一アクチュエータ30および第二アクチュエータ40が駆動している場合には、第二回転軸部材21は、第一アクチュエータ30のみの駆動による動作と第二アクチュエータ40のみの駆動による動作とが作用しながら動作する。
【0041】
(1−2.機械装置に作用する力)
上述した機械装置において、第一アクチュエータ30および第二アクチュエータ40が駆動する場合、第一可動部10と第二可動部20のそれぞれに作用する外乱力について、図2を参照して説明する。以下には、第一可動部10に作用する外乱力について説明するが、第二可動部20についても同様の外乱力が生じる。
【0042】
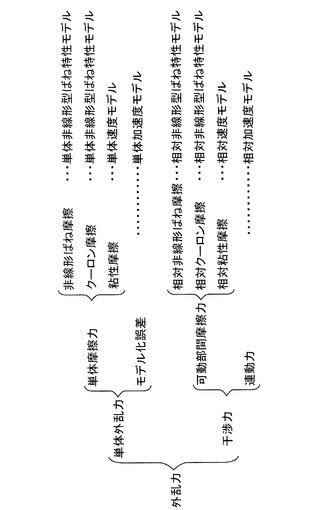
図2に示すように、第一可動部10に作用する外乱力は、第一可動部10の単体の動作に起因して生じる外乱力(以下、「単体外乱力」と称する)と、第二可動部20の動作に起因して第一可動部10の動作に作用する干渉力とに分類することができる。
【0043】
単体外乱力は、第一可動部10と固定部材(図示せず)との摺動面において作用する力と、第一可動部10を構成する部材11〜13の間の摺動面において作用する力とを含む。この単体外乱力は、第一可動部10の単体として作用する非線形摩擦と、第一可動部10を制御するためのモデル化誤差とに分類される。単体外乱力における非線形摩擦をさらに詳細に分類すると、当該非線形摩擦は、整定位置付近での非線形ばね摩擦と、クーロン摩擦と、粘性摩擦とに分類される。そして、非線形ばね摩擦およびクーロン摩擦は、単体非線形ばねモデルとしての数式モデルにより定義し、粘性摩擦は単体の速度に依存することから、単体速度モデルとしての数式モデルにより定義する。また、モデル化誤差は、第一可動部10自身の慣性モーメントおよび第一アクチュエータ30のトルク定数のモデル化誤差に相当する外乱成分であり、単体の加速度により表すことが可能であることから、単体加速度モデルとしての数式モデルにより定義する。
【0044】
干渉力は、連設されている第一可動部10と第二可動部20との間において可動部同士の摺動面間に作用する力である。具体的には、第一可動部10と第二可動部20とが直接連設(直接接触)している場合には、干渉力は、第一可動部10と第二可動部20との摺動面において相互に作用する力である。また、第一可動部10と第二可動部20とが他の可動部を介して間接的に連設されている場合には、干渉力は、第一可動部10と他の可動部との摺動面および第二可動部20と当該他の可動部との摺動面において相互に作用する力である。この他、干渉力は、第一可動部10と第二可動部20との間に複数の他の可動部が連設されている場合には、他の可動部同士の摺動面に作用する力も含まれる。本実施形態における機械装置は、前者のみを有する構成を例示している。
【0045】
この干渉力は、第二可動部20の動作に起因して第一可動部10に作用する相対非線形摩擦と、第二可動部20の動作に起因して第一可動部10が連動して作用する力(以下、「連動力」と称する)とに分類される。ここで言う連動力は、例えば、図1において、第二回転軸部材21は、円盤12が軸X1回りに自転すると、軸X1回りに公転する。つまり、第二回転軸部材21は、円盤12の自転に連動して、軸X1回りに公転する。このとき、第二回転軸部材21が、円盤12から受ける力を連動力と言う。
【0046】
干渉力における相対非線形摩擦をさらに詳細に分類すると、当該相対非線形摩擦は、相対的な整定位置付近での相対非線形ばね摩擦と、相対クーロン摩擦と、相対粘性摩擦とに分類される。そして、相対非線形ばね摩擦および相対クーロン摩擦は、相対非線形ばねモデルとしての数式モデルにより定義し、相対粘性摩擦は相対速度に依存することから、相対速度モデルとしての数式モデルにより定義する。また、連動力は、相対加速度により表すことが可能であることから、相対加速度モデルとしての数式モデルにより定義する。
【0047】
(1−3.干渉力補償制御装置の構成)
(1−3−1.制御ブロック線図)
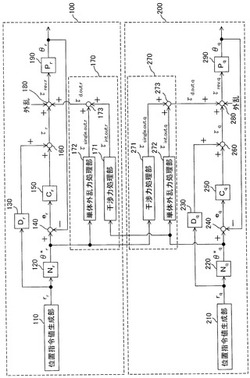
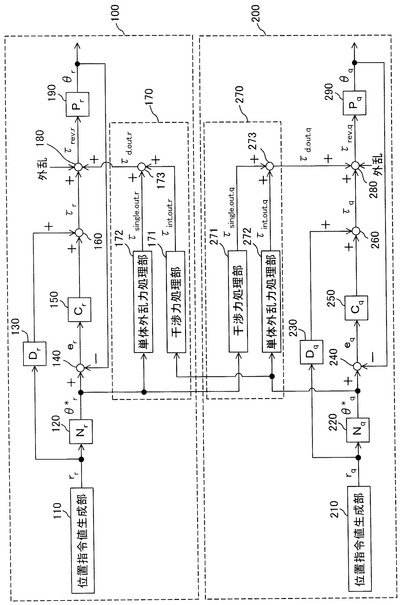
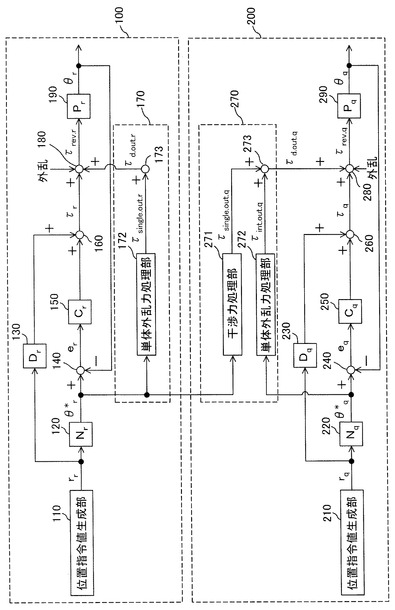
次に、上述した機械装置において、第一アクチュエータ30および第二アクチュエータ40を制御する干渉力補償制御装置について、図3を参照して説明する。当該干渉力補償制御装置は、第一アクチュエータ30を制御する第一制御部100と、第二アクチュエータ40を制御する第二制御部200とを備える。なお、本実施形態においては、アクチュエータを2個とした例を挙げているため、干渉力補償制御装置が2個の制御部を有するが、制御部の数はアクチュエータの数に応じた数となる。
【0048】
第一制御部100は、位置指令値生成部110と、第一FF(フィードフォワード)補償器120と、第二FF補償器130と、偏差算出器140と、FB(フィードバック)補償器150と、基準トルク算出器160と、外乱補償器170と、補償トルク算出器180と、第一アクチュエータ30としてのプラント190の伝達特性とにより構成される。
【0049】
また、第二制御部200は、第一制御部100と実質的に同一の構成を有する。第二制御部200の詳細な構成については省略する。ただし、両者において、各構成の実際の係数などは相違する。そして、図3において、第二制御部200の各構成の符号は、第一制御部100の各構成の符号の百の値「1」を「2」に変更したものとして図示する。また、記号の添え字を、第一制御部100によるものを「r」とし、第二制御部200によるものを「q」としている。
【0050】
以下に、主として、第一制御部100の詳細な構成について説明する。ただし、必要に応じて、第二制御部200の構成について説明する。
【0051】
位置指令値生成部110は、制御プログラムに基づいて第一アクチュエータ30としてモータの位置指令値rrを生成する。第一FF補償器120は、既約分解表現に基づくFF補償器であって、第一アクチュエータ30としてのモータの目標位置軌道(本発明の「第一目標位置指令値」に相当)θ*rを算出する。さらに、第二FF補償器130は、既約分解表現に基づくFF補償器であって、第一FF補償器120と共に、過渡応答を含む負荷位置の目標値追従特性を規定している。この第二FF補償器130は、トルクに相当する補償値を算出する。ここで、第二制御部200を構成する第一FF補償器220は、第二アクチュエータ40としてのモータの目標位置軌道(本発明の「第二目標位置指令値」に相当)θ*qを算出する。
【0052】
偏差算出器140は、第一FF補償器120により算出された目標位置軌道θ*rから、第一アクチュエータ30としてのモータの実際の位置(角度)θrをフィードバックして減算する。そして、偏差算出器140は、位置偏差としての軌跡追従誤差erを算出する。FB補償器150は、偏差算出器140により算出された軌跡追従誤差erに対してFB補償を行い、トルクに相当する値を算出する。このFB補償器150は、ロバスト安定化を前提にモデル化誤差および外乱に対する抑圧性能を規定する。
【0053】
基準トルク算出器160(本発明の「第一基準推力指令値算出手段」に相当)は、第二FF補償器130により算出されたトルク値と、FB補償器150により算出されたトルク値とを加算して、モータに対する基準トルク指令値τr(本発明の「第一基準推力指令値」に相当)を算出する。
【0054】
外乱補償器170は、図2を参照して説明した外乱力によって影響を受ける第一アクチュエータ30としてのモータに対する補償トルクτd.out.rを算出する。この補償トルクτd.out.rは、第二可動部20の動作に起因した干渉力τint.out.rと、第一可動部10が単体で作用する外乱力としての単体外乱力τsingle.out.rとを加算した値となる。
【0055】
この外乱補償器170は、さらに機能を区分けすると、干渉力処理部171と、単体外乱力処理部172と、外乱加算器173とを備えて構成される。干渉力処理部171(本発明の「第一干渉力モデル記憶手段」および「第一干渉力算出手段」に相当)は、図2に示す干渉力を数式モデルとして定義した干渉力モデルを記憶している。この干渉力モデルについては、後に詳細に説明する。さらに、干渉力処理部171は、干渉力モデルを用いて、かつ、第二制御部200の第一FF補償器220により算出されたモータの目標位置軌道θ*qを用いて、第一可動部10が第二可動部20から影響を受ける干渉力τint.out.rを算出する。
【0056】
単体外乱力処理部172(本発明の「第一単体外乱力モデル記憶手段」および「第一単体外乱力算出手段」に相当)は、図2に示す単体外乱力を数式モデルとして定義した単体外乱力モデルを記憶している。この単体外乱力モデルについては、後に詳細に説明する。さらに、単体外乱力処理部172は、単体外乱力モデルを用いて、かつ、第一制御部100の第一FF補償器120により算出されたモータの目標位置軌道θ*rを用いて、第一可動部10自身によって作用する単体外乱力τsingle.out.rを算出する。
外乱加算器173は、干渉力τint.out.rと単体外乱力τsingle.out.rとを加算して、第一可動部10に影響を受ける外乱力τd.out.rを算出する。つまり、外乱力τd.out.rは、式(4)のように定義する。また、第二制御部200の外乱加算器273は、式(5)に従って、第二可動部20に影響を受ける外乱力τd.out.qを算出する。
【0057】
【数4】
【0058】
【数5】
【0059】
補償トルク算出器180(本発明の「第一補償手段」に相当)は、基準トルク算出器160により算出された基準トルク指令値τrと、外乱加算器173により算出された外乱力τd.out.rとを加算することにより、補償トルク指令値τrev.rを算出する。つまり、この補償トルク指令値τrev.rは、外乱力τd.out.rを補償したトルク指令値となる。そして、補償トルク算出器180は、算出した補償トルク指令値τrev.rを制御信号として、第一アクチュエータ30としてのモータに対して出力する。
【0060】
プラント190は、第一アクチュエータ30の伝達特性を示したものである。つまり、第一アクチュエータ30としてのモータが補償トルク指令値τrev.rに基づいて駆動する。そして、そのときの当該モータの実際の位置をθrとして表される。なお、モータの実際の位置θrは、例えば、レゾルバやエンコーダなどの回転角検出器により検出される。
【0061】
ここで、第二制御部200は、上述したように、第一制御部100と実質的に同一の構成である。従って、本実施形態における干渉力補償制御装置の例は、第一アクチュエータ30と第二アクチュエータ40とは、相互に干渉力τint.out.r,τint.out.qを含む外乱力τd.out.r,τd.out.qを補償して制御されている。
【0062】
(1−3−2.干渉力モデルの算出方法)
次に、干渉力処理部171,271にて記憶されている干渉力モデルについて、以下に説明する。ここで、数式モデルとしては、第一制御部100の干渉力処理部171に記憶されている干渉力モデルと、第二制御部200の干渉力処理部271に記憶されている干渉力モデルは、係数が相違するのみで、実質的に同一である。そこで、以下において、第一制御部100を示す添え字「r」および第二制御部200を示す添え字「q」を省略した記号を用いて説明する。
【0063】
干渉力モデルは、式(6)に示す数式モデルにより定義する。つまり、干渉力モデルτint.outは、それぞれ別々に設定された、相対非線形型ばね特性モデルτf.spring.intと相対速度モデルτf.vel.intと相対加速度モデルτf.acc.intとを加算した数式モデルに基づいて設定される。ここで、相対非線形型ばね特性モデルτf.spring.intは、可動部間摩擦力、すなわち相対非線形ばね摩擦および相対クーロン摩擦を数式モデルとして定義している。相対速度モデルτf.vel.intは、相対粘性摩擦を数式モデルとして定義している。相対加速度モデルτf.acc.intは、連動力を数式モデルとして定義している。
【0064】
【数6】
【0065】
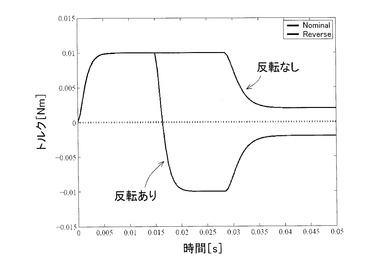
式(6)における相対非線形型ばね特性モデルτf.spring.intは、式(7)のように定義している。この式(7)に示す相対非線形型ばね特性モデルの出力を図4に示す。図4は、横軸を時間として、縦軸を相対非線形型ばね特性モデルτf.spring.intとしている。
【0066】
ここで、相対速度の反転とは、例えば、第一回転軸部材11と第二歯車24との相対速度の反転を意味する。例えば、第一回転軸部材11が一定速度で自転している場合に、第二歯車24が第一回転軸部材11と同方向に自転している場合であっても、第二歯車24の速度が変化している際には、相対速度が反転することがある。
【0067】
【数7】
【0068】
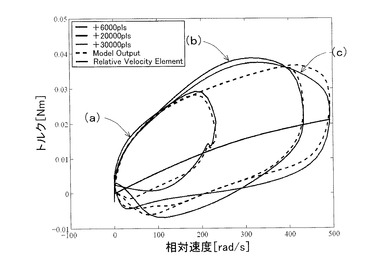
また、式(6)における相対速度モデルτf.vel.intは、式(8)のように定義している。ここで、図5において、第一アクチュエータ30のストロークを-3,000plsに固定した場合に、第二アクチュエータ40のストロークを+6,000plsの場合を(a)とし、+20,000plsの場合を(b)とし、+30,000plsの場合を(c)として示す。図5より、相対速度に比例した外乱が作用していることが確認できる。そこで、式(8)に示す相対速度モデルτf.vel.intは、一定相対速度試験により獲得した相対粘性摩擦に対して多項式近似した。また、図5において、破線は、式(8)の相対速度モデルτf.vel.intによる出力である。
【0069】
【数8】
【0070】
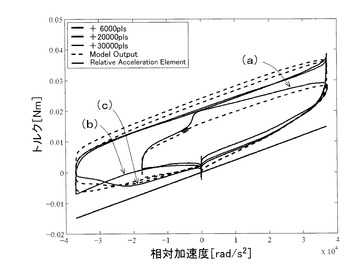
また、式(6)における相対加速度モデルτf.acc.intは、式(9)のように定義している。ここで、図6において、第一アクチュエータ30のストロークを-3,000plsに固定した場合に、第二アクチュエータ40のストロークを+6,000plsの場合を(a)とし、+20,000plsの場合を(b)とし、+30,000plsの場合を(c)として示す。図6より、相対加速度が負の領域から正の領域に向けて右肩上がりに傾いていることが確認できる。これは、第一アクチュエータ30が第二アクチュエータ40の動作に連動した力を受けているためだと考えられる。
【0071】
【数9】
【0072】
(1−3−3.単体外乱力モデルの算出方法)
次に、単体外乱力処理部172,272にて記憶されている単体外乱力モデルについて、以下に説明する。ここで、数式モデルとしては、第一制御部100の単体外乱力処理部172に記憶されている単体外乱力モデルと、第二制御部200の単体外乱力処理部272に記憶されている単体外乱力モデルは、係数が相違するのみで、実質的に同一である。そこで、以下において、第一制御部100を示す添え字「r」および第二制御部200を示す添え字「q」を省略した記号を用いて説明する。
【0073】
単体外乱力モデルは、式(10)に示す数式モデルにより定義する。つまり、単体外乱力モデルτsingle.outは、それぞれ別々に設定された、単体非線形型ばね特性モデルτf.spring.singleと単体速度モデルτf.vel.singleと単体加速度モデルτf.acc.singleとを加算した数式モデルに基づいて設定される。ここで、単体非線形型ばね特性モデルτf.spring. singleは、単体摩擦力、すなわち非線形ばね摩擦およびクーロン摩擦を数式モデルとして定義している。単体速度モデルτf.vel.singleは、単体粘性摩擦を数式モデルとして定義している。単体加速度モデルτf.acc.singleは、モデル化誤差として加速度成分により表した数式モデルとして定義している。
【0074】
【数10】
【0075】
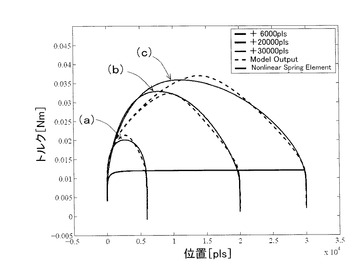
式(10)における単体非線形型ばね特性モデルτf.spring.singleは、式(11)のように定義している。ここで、図7において、第一アクチュエータ30のストロークを+6,000plsの場合を(a)とし、+20,000plsの場合を(b)とし、+30,000plsの場合を(c)として示す。図7より、整定位置付近で急激に外乱が変化していることが確認できる。これは、整定位置付近での非線形ばね摩擦やクーロン摩擦の変化によるものであることが分かった。そこで、式(11)に示す単体非線形型ばね特性モデルτf.spring.singleは、2次標準伝達特性とステップ信号を入力として与え、非線形ばね要素とクーロン摩擦の和として表現した。また、図7において、破線は、式(11)の単体非線形型ばね特性モデルτf.spring.singleによる出力である。
【0076】
【数11】
【0077】
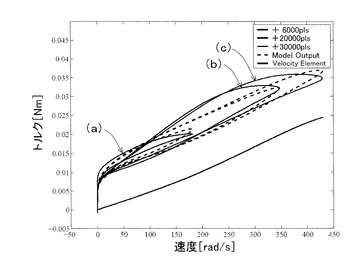
また、式(10)における単体速度モデルτf.vel.singleは、式(12)のように定義している。ここで、図8において、第一アクチュエータ30のストロークを-3,000plsに固定した場合に、第二アクチュエータ40のストロークを+6000plsの場合を(a)とし、+20000plsの場合を(b)とし、+30000plsの場合を(c)として示す。図8より、速度に比例した外乱が作用していることが確認できる。この外乱は、粘性摩擦力に相当するものと考えられる。そこで、式(12)に示す単体速度モデルτf.vel.singleは、一定相対速度試験により獲得した粘性摩擦に対して多項式近似した。また、図8において、破線は、式(12)の単体速度モデルτf.vel.singleによる出力である。
【0078】
【数12】
【0079】
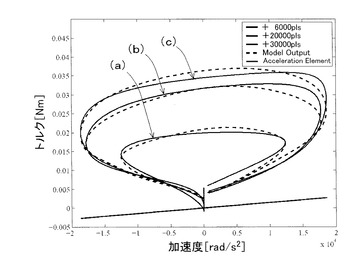
また、式(10)における単体加速度モデルτf.acc.singleは、式(13)のように定義している。ここで、図9において、第一アクチュエータ30のストロークを+6000plsの場合を(a)とし、+20000plsの場合を(b)とし、+30000plsの場合を(c)として示す。図9より、単体加速度が負の領域から正の領域に向けて右肩上がりに傾いていることが確認できる。この傾きは、既約分解表現に基づくフィードフォワード補償器設計モデルと実際の制御対象の慣性値およびトルク定数の誤差の影響によるものである。
【0080】
【数13】
【0081】
(1−4.外乱補償器の各モデルの同定処理)
(1−4−1.各モデルの同定処理の概要)
次に、上述した外乱補償器170における単体外乱力モデルおよび干渉力モデルの同定処理について説明する。各モデルの同定処理により、各モデルの係数を決定する。2種のモデルのうち、最初に単体外乱力モデルの同定処理を行い、次に、単体外乱力モデルを利用して干渉力モデルの同定処理を行う。
【0082】
(1−4−2.単体外乱力モデルの同定処理)
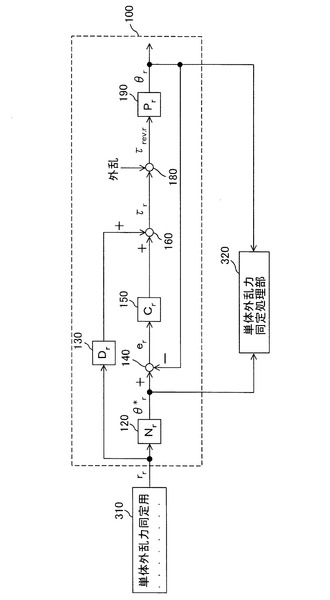
単体外乱力モデルの同定処理について、図10を参照して説明する。図10において、図3と同一符号については同一構成を示し、詳細な説明を省略する。単体外乱力モデルの同定処理において、干渉力補償制御装置は、単体外乱力同定用位置指令値生成部310と、単体外乱力同定処理部320とを備える。単体外乱力同定用位置指令値生成部310は、図3の位置指令値生成部110と同種の位置指令値rrを生成する。ただし、同定用のプログラムに基づいて、当該位置指令値rrが生成される。
【0083】
そして、第一制御部100は、単体外乱力同定用位置指令値生成部310により生成された位置指令値rrに従って、通常の制御と同様の制御処理が実行される。つまり、第一アクチュエータ30としてのモータが回転駆動する。ただし、このときには、第一制御部100において、外乱補償器170は実行されない。
【0084】
このとき、単体外乱力同定処理部320が、第一制御部100の第一FF補償器120により算出されたモータの目標位置軌道θ*rと、第一アクチュエータ30としてのモータの実際の位置(角度)θrとを用いて、単体外乱力を同定する。ここで、単体外乱力同定処理部320は、学習制御を反復させることによって、単体外乱力を同定している。このようにして同定された単体外乱力モデルは、単体外乱力処理部172に記憶される。
【0085】
(1−4−3.干渉力モデルの同定処理)
干渉力モデルの同定処理について、図11を参照して説明する。図11において、図3と同一符号については同一構成を示し、詳細な説明を省略する。ここで、第一制御部100における干渉力処理部171に記憶される干渉力モデルの同定処理について説明する。
【0086】
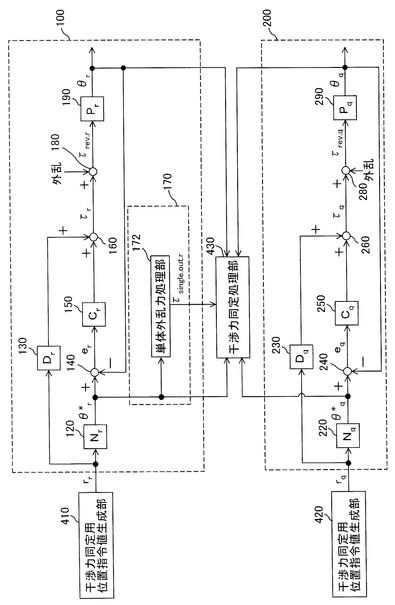
当該干渉力モデルの同定処理において、干渉力補償制御装置は、第一制御部100に対する干渉力同定用位置指令値生成部410と、第二制御部200に対する干渉力同定用位置指令値生成部420と、干渉力同定処理部430とを備える。干渉力同定用位置指令値生成部410,420は、図3の位置指令値生成部110,210と同種の位置指令値rr,rqを生成する。ただし、同定用のプログラムに基づいて、当該位置指令値rr,rqが生成される。
【0087】
そして、第一制御部100および第二制御部200は、干渉力同定用位置指令値生成部410,420により生成された位置指令値rr,rqに従って、通常の制御と同様の制御処理が実行される。つまり、第一,第二アクチュエータ30,40としてのモータがそれぞれ回転駆動する。このときには、第一制御部100において、干渉力処理部171、単体外乱力処理部172および外乱加算器173は実行されない。
【0088】
このとき、干渉力同定処理部430が、第一制御部100の第一FF補償器120により算出されたモータの目標位置軌道θ*rと、第二制御部200の第一FF補償器220により算出されたモータの目標位置軌道θ*qと、第一アクチュエータ30としてのモータの実際の位置(角度)θrと、単体外乱力処理部172に記憶されている単体外乱力モデルを用いて、干渉力を同定する。ここで、干渉力同定処理部430は、学習制御を反復させることによって、干渉力を同定している。このようにして同定された干渉力モデルは、干渉力処理部171に記憶される。なお、第二制御部200における干渉力処理部271に記憶される干渉力モデルの同定処理は、上記の第一制御部100に対する処理を第二制御部200に対する処理に置換することで、実質的に同様の処理となる。
【0089】
(2.解析)
次に、上述した干渉力補償制御装置の効果について解析を行った。比較のために、第一制御部100および第二制御部200における外乱補償器170,270を実行していない場合(比較例1)、並びに、第一制御部100および第二制御部200における干渉力処理部171,271を実行していない場合(比較例2)を例にあげる。つまり、比較例1は、外乱補償を行っていない場合に相当し、比較例2は、単体外乱力に対する補償を行った場合に相当する。
【0090】
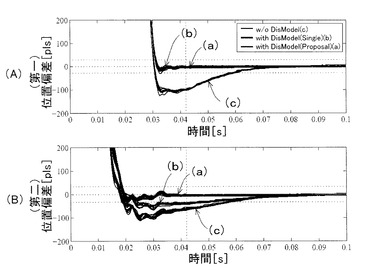
解析条件として、第一アクチュエータ30のストロークを+30,000plsとし、第二アクチュエータ40のストロークを+6,000plsとした場合に、位置決め結果について比較した。解析結果を図12〜図14に示す。
【0091】
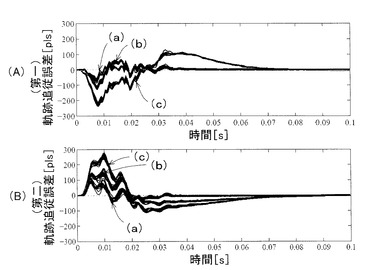
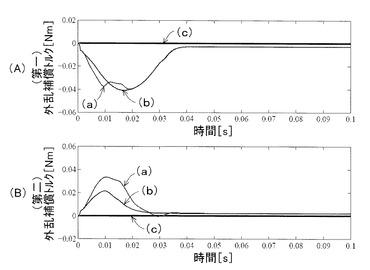
図12(A)は、第一アクチュエータ30の位置偏差の時間応答を示し、図12(B)は、第二アクチュエータ40の位置偏差の時間応答を示す。また、図13(A)は、第一アクチュエータ30の軌跡追従誤差の時間応答を示し、図13(B)は、第二アクチュエータ40の軌跡追従誤差の時間応答を示す。図14(A)は、第一アクチュエータ30の外乱補償トルクの時間応答を示し、図14(B)は、第二アクチュエータ40の外乱補償トルクの時間応答を示す。また、図12〜図14のグラフ内部において、本実施形態を(a)とし、比較例1を(b)とし、比較例2を(c)としている。
【0092】
図12〜図14により、比較例1,2に比べて、本実施形態の干渉力補償と単体外乱力補償を行った場合には、補償性能が向上していることが確認できる。特に、図13(A)(B)に示す軌跡追従誤差を非常に小さくすることができている。なお、第一可動部10が第二可動部20から受ける整定位置付近での干渉力の影響は小さいのに対して、第二可動部20が第一可動部10から受ける干渉力の影響は大きいことが分かる。
【0093】
以上より、干渉力モデルを用いて外乱力補償を行うことで、高精度に位置決めを行うことができる。特に、第一可動部10と第二可動部20との間の摩擦力(可動部間摩擦力)の影響によって、第一可動部10と第二可動部20の一方の動作が他方の動作に影響を及ぼす干渉力を考慮して、一方の可動部を駆動することで、当該一方の可動部の位置制御を高精度にすることができる。
【0094】
また、上述したように、干渉力モデルについて、相対非線形ばね特性モデルと粘性摩擦力に基づく相対速度モデルと相対加速度モデルを数式モデルとをそれぞれ別々の数式モデルとして設定することで、より詳細な物理現象を把握することができる。そして、これらを加算した数式モデルを用いて干渉力モデルを設定することで、第一可動部10と第二可動部20の一方が他方に影響を及ぼす干渉力を高精度に算出することができる。その結果、高精度な位置決めが可能となる。
【0095】
さらに、干渉力モデルに加えて、単体外乱力モデルによる外乱力補償を行うことで、より第一可動部10および第二可動部20の位置制御を高精度にすることができる。また、単体外乱力モデルについても、干渉力モデルと同様に、単体非線形ばね特性モデルと粘性摩擦力に基づく単体速度モデルと単体加速度モデルとをそれぞれ別々の数式モデルとして設定することで、より詳細な物理現象を把握することができる。そして、これらを加算した数式モデルを用いて単体外乱力モデルを設定することで、可動部自身の動作により生じる摩擦力に起因する単体外乱力を高精度に算出することができる。その結果、高精度な位置決めが可能となる。さらに、単体加速度モデルを数式モデルとして設定することで、可動部自身の慣性モーメントおよびアクチュエータのトルク定数のモデル化誤差を確実に低減することができる。
【0096】
さらに、第一制御部100および第二制御部200の両者に、外乱補償器170,270を設けることで、第一可動部10と第二可動部20とが相互に影響を及ぼし合うとしても、確実に外乱力補償ができる。
【0097】
(その他)
上記実施形態において、第一制御部100と第二制御部200の両者に対して、外乱補償器170,270を設けた。ここで、上記解析結果より、第一可動部10が第二可動部20から受ける整定位置付近での干渉力の影響は小さいのに対して、第二可動部20が第一可動部10から受ける干渉力の影響は大きい。そこで、図15に示すように、第二制御部200の外乱補償器270において、干渉力処理部271および単体外乱力処理部272を機能させるが、第一制御部100の外乱補償器170の干渉力処理部271は機能させず、単体外乱力処理部172のみ機能させるようにすることもできる。このようにすることで、演算処理能力を大幅に上げることなく、大きな効果を得ることができる。
【0098】
また、上記実施形態においては、回転体を対象としたが、直動する装置を対象とすることもできる。直動する場合であっても、一方の可動部が他方の可動に対して干渉力を作用する場合には、本発明を適用できる。
【符号の説明】
【0099】
10:第一可動部、 11:第一回転軸部材、 12:円盤
20:第二可動部、 21:第二回転軸部材、 23:第一歯車、 24:第二歯車
30:第一アクチュエータ、 40:第二アクチュエータ
100:第一制御部、 200:第二制御部
【技術分野】
【0001】
本発明は、複数の可動部とそれぞれの可動部を駆動する複数のアクチュエータとを備える機械装置において、一方の可動部が動作することに起因して他方の可動部の動作に干渉力が作用する場合に、その干渉力を補償して機械装置を制御する干渉力補償制御装置に関するものである。
【背景技術】
【0002】
例えば、電子部品実装機などにおいては、各可動部が他の可動部から干渉力を受けることにより、位置決め精度に悪影響を及ぼすことがあった。そこで、特許第4241240号公報(特許文献1)には、各可動部の推力の総和(機台から伝わる反力)から機台の位置までの伝達特性を用いて、干渉力を算出することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4241240号公報([0009]など)
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、外乱には、特許文献1に記載されているような各可動部の推力に起因する伝達振動の他に、可動部間に生じる摩擦力が存在する。そして、位置決め精度をより高精度にするためには、可動部の間に生じる摩擦力の影響が大きいことが分かってきた。また、摩擦力の影響による干渉力は、非線形な特性となり、特許文献1に記載されているような伝達特性に基づく干渉力では十分に把握できない。
【0005】
本発明は、このような事情に鑑みてなされたものであり、可動部間に生じる摩擦力に起因する干渉力を高精度に算出することで、高精度な外乱の推定により、高精度な位置決めを行うことができる干渉力補償制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1に係る発明は、複数の可動部とそれぞれの前記可動部を駆動する複数のアクチュエータとを備える機械装置において、第二可動部が動作することに起因して第一可動部の動作に干渉力が作用する場合に、当該干渉力を補償して前記機械装置を制御する干渉力補償制御装置である。
【0007】
そして、前記第一可動部と前記第二可動部は、直接連設される関係にあり、または、他の可動部を介して間接的に連設される関係にある。ここで、連設とは、連続して設けられることを意味する。つまり、第一可動部と第二可動部とが直接連設される関係とは、第一可動部と第二可動部とが直接接触している場合である。また、第一可動部と第二可動部とが他の可動部を介して間接的に連設される関係とは、第一可動部と他の可動部、および、第二可動部と当該他の可動部が、それぞれ直接接触している場合である。なお、第一可動部と第二可動部との間に介在する他の可動部は、一つの場合に限られず、複数の場合を含む。
【0008】
さらに、前記干渉力補償制御装置は、連設されている前記第一可動部と前記第二可動部との間において可動部同士の摺動面間に生じる可動部間摩擦力に基づいて設定される干渉力モデルを記憶する干渉力モデル記憶手段と、前記第一可動部を駆動する第一アクチュエータに対する第一目標位置指令値に基づいて、前記第一アクチュエータに対する第一基準推力指令値を算出する第一基準推力指令値算出手段と、前記第二可動部を駆動する第二アクチュエータに対する第二目標位置指令値と前記干渉力モデルとに基づいて、前記可動部間摩擦力の影響により前記第二可動部の動作に起因して前記第一可動部の動作に作用する第一干渉力を算出する第一干渉力算出手段と、前記第一基準推力指令値と前記第一干渉力とを加算することにより第一補償推力指令値を算出し、前記第一補償推力指令値に基づいて前記第一アクチュエータを制御する第一補償手段とを備えることである。
【0009】
請求項2に係る発明は、前記第一可動部と前記第二可動部との摺動面におけるクーロン摩擦および非線形ばね摩擦に基づいて設定される数式モデルを相対非線形型ばね特性モデルと定義し、前記摺動面において前記第一可動部と前記第二可動部との相対速度に応じて発生する相対的な粘性摩擦力に基づいて設定される数式モデルを相対速度モデルと定義した場合に、前記干渉力モデルは、それぞれ別々に設定された前記相対非線形型ばね特性モデルと前記相対速度モデルとを加算した数式モデルに基づいて設定されることである。
【0010】
請求項3に係る発明は、前記摺動面において前記第一可動部と前記第二可動部との相対加速度に応じて発生する連動力に基づいて設定される数式モデルを相対加速度モデルと定義した場合に、前記干渉力モデルは、それぞれ別々に設定された前記相対非線形型ばね特性モデルと前記相対速度モデルと前記相対加速度モデルとを加算した数式モデルに基づいて設定されることである。
【0011】
請求項4に係る発明は、前記干渉力補償制御装置が、前記第一可動部は、固定部材との摺動面または前記第一可動部自身を構成する部材間の摺動面における単体摩擦力に基づいて設定される第一単体外乱力モデルを記憶する第一単体外乱力モデル記憶手段と、前記第一アクチュエータに対する第一目標位置指令値と前記第一単体外乱力モデルとに基づいて、前記単体摩擦力の影響により前記第一可動部自身の動作に起因して前記第一可動部の動作に作用する第一単体外乱力を算出する第一単体外乱力算出手段と、を備え、前記第一補償手段は、前記第一基準推力指令値、前記第一干渉力および前記第一単体外乱力を加算することにより前記第一補償推力指令値を算出し、前記第一補償推力指令値に基づいて前記第一アクチュエータを制御することである。
【0012】
請求項5に係る発明は、前記第一可動部と固定部材との摺動面または前記第一可動部自身を構成する部材間の摺動面におけるクーロン摩擦および非線形ばね摩擦に基づいて設定される数式モデルを単体非線形型ばね特性モデルと定義し、前記第一可動部自身の動作速度に応じて発生する粘性摩擦力に基づいて設定される数式モデルを単体速度モデルと定義した場合に、前記第一単体外乱力モデルは、それぞれ別々に設定された前記単体非線形型ばね特性モデルと前記単体速度モデルとを加算した数式モデルに基づいて設定されることである。
【0013】
請求項6に係る発明は、前記第一可動部自身の慣性モーメントおよび前記第一アクチュエータのトルク定数のモデル化誤差としての数式モデルを単体加速度モデルと定義した場合に、前記第一単体外乱力モデルは、それぞれ別々に設定された前記単体非線形型ばね特性モデルと前記単体速度モデルと前記単体加速度モデルとを加算した数式モデルに基づいて設定されることである。
【0014】
請求項7に係る発明は、前記第一可動部と前記第二可動部のそれぞれについて、相互に前記可動部間摩擦力の影響による当該干渉力を補償して制御することである。
【0015】
請求項8に係る発明は、前記第二可動部の動作に起因して前記第一可動部の動作に作用する前記第一干渉力を補償して前記第一アクチュエータを制御すると共に、前記第一可動部の動作に起因して前記第二可動部の動作に作用する第二干渉力を補償しないで前記第二アクチュエータを制御することである。
【0016】
請求項9に係る発明は、前記干渉力モデルは、前記第一可動部および前記第二可動部を実際に駆動した場合における前記第一目標位置指令値と前記第一可動部の実際の位置とに基づいて、学習制御を反復させることによって同定されることである。
【0017】
請求項10に係る発明は、前記相対非線形型ばね特性モデルは、式(1)により定義されることである。
【0018】
【数1】
【0019】
請求項11に係る発明は、前記相対速度モデルは、式(2)により定義されることである。
【0020】
【数2】
【0021】
請求項12に係る発明は、前記相対加速度モデルは、式(3)により定義されることである。
【0022】
【数3】
【0023】
請求項13に係る発明は、前記機械装置が、第一回転軸部材と、前記第一回転軸部材の先端に設けられた円盤と、前記第一回転軸部材を回転駆動する第一アクチュエータと、前記円盤の回転と同期しながら前記円盤に対して公転すると共に、前記第一回転軸部材の中心軸に対して偏心した偏心軸回りに自転可能に前記円盤に支持された第二回転軸部材と、前記第二回転軸部材と同軸的に設けられた第一歯車と、前記第一回転軸部材の外周側に前記第一回転軸部材と同軸的に配置され、前記第一回転軸部材に対して相対回転可能に支持され、かつ、前記第一歯車に噛合する第二歯車と、前記第二歯車を前記第一回転軸部材の中心軸周りに回転駆動する第二アクチュエータと、を備え、前記第一可動部は、前記第一回転軸部材および前記円盤を備え、前記第二可動部は、前記第二回転軸部材、第一歯車および第二歯車を備えることである。
【発明の効果】
【0024】
請求項1に係る発明によれば、第一可動部と第二可動部との間の摩擦力(可動部間摩擦力)の影響によって、第二可動部の動作が第一可動部の動作に影響を及ぼす第一干渉力を考慮して、第一可動部を駆動することができる。従って、第一可動部の位置制御を高精度にすることができる。
【0025】
請求項2に係る発明によれば、相対非線形ばね特性モデルと粘性摩擦力に基づく相対速度モデルとをそれぞれ別々の数式モデルとして設定することで、より詳細な物理現象を把握することができる。そして、これらを加算した数式モデルを用いて干渉力モデルを設定することで、第二可動部が第一可動部に影響を及ぼす第一干渉力を高精度に算出することができる。その結果、高精度な位置決めが可能となる。
【0026】
請求項3に係る発明によれば、さらに相対加速度モデルを数式モデルとして設定することで、より詳細な物理現象を把握することができる。そして、相対非線形型ばね特性モデルと相対速度モデルと相対加速度モデルを加算した数式モデルを用いて干渉力モデルを設定することで、第二可動部が第一可動部に影響を及ぼす第一干渉力をより高精度に算出することができる。その結果、より高精度な位置決めが可能となる。
【0027】
請求項4に係る発明によれば、干渉力に加えて、第一可動部自身の動作により生じる単体摩擦力の影響によって、第一可動部の動作に影響を及ぼす第一単体外乱力を考慮して、第一可動部を駆動することができる。従って、第一可動部の位置制御を高精度にすることができる。
【0028】
請求項5に係る発明によれば、単体非線形ばね特性モデルと粘性摩擦力に基づく第一単体速度モデルとをそれぞれ別々の数式モデルとして設定することで、より詳細な物理現象を把握することができる。そして、これらを加算した数式モデルを用いて第一単体外乱力モデルを設定することで、第一可動部自身の動作により生じる摩擦力に起因する第一単体外乱力を高精度に算出することができる。その結果、高精度な位置決めが可能となる。
【0029】
請求項6に係る発明によれば、さらに単体加速度モデルを数式モデルとして設定することで、第一可動部自身の慣性モーメントおよび第一アクチュエータのトルク定数のモデル化誤差を確実に低減することができる。そして、単体非線形型ばね特性モデルと単体速度モデルと単体加速度モデルを加算した数式モデルを用いて第一単体外乱力モデルを設定することで、第一可動部自身の動作により生じる摩擦力に起因する第一単体外乱力をより高精度に算出することができる。その結果、より高精度な位置決めが可能となる。
【0030】
請求項7に係る発明によれば、相互に影響を及ぼし合う機械装置に対して適用することができる。
ところで、機械構成によっては、第一可動部の動作が第二可動部に影響を及ぼすのに対して、その逆の影響は全くない、もしくは、その逆の影響が相対的に小さい場合がある。このような場合に、請求項8に係る発明によれば、一方の干渉力に対してのみ補償することで、演算処理を低減することができる。
請求項9に係る発明によれば、高精度に干渉力モデルを同定することができる。
請求項10〜12に係る発明によれば、それぞれ確実にモデル化することができる。
【0031】
請求項13に係る発明によれば、当該機械装置では、第一可動部と第二可動部との間の摩擦力に伴う干渉力が発生する。そこで、当該機械装置に上述した本発明を適用することで、第一可動部の位置制御を高精度にすることができる。
【図面の簡単な説明】
【0032】
【図1】機械装置の例を示す断面図である。
【図2】外乱力の分類図である。
【図3】干渉力補償制御装置による制御ブロック線図である。
【図4】相対非線形型ばね特性モデルの出力を示す。
【図5】相対速度とトルクの関係を示す。
【図6】相対加速度とトルクの関係を示す。
【図7】第一アクチュエータの位置とトルクの関係を示す。
【図8】第一アクチュエータの速度とトルクの関係を示す。
【図9】第一アクチュエータの加速度とトルクの関係を示す。
【図10】単体外乱力同定処理を示す制御ブロック線図である。
【図11】干渉力同定処理を示す制御ブロック線図である。
【図12】解析結果を示す。
【図13】解析結果を示す。
【図14】解析結果を示す。
【図15】その他の実施形態における制御ブロック線図である。
【発明を実施するための形態】
【0033】
以下、本発明の干渉力補償制御装置を具体化した実施形態について図面を参照しつつ説明する。
【0034】
(1.本実施形態の構成)
(1−1.機械装置の構成)
本発明の干渉力補償制御装置は、以下に説明する機械装置を制御する装置である。当該機械装置は、複数の可動部とそれぞれの可動部を駆動する複数のアクチュエータとを備える。そして、当該機械装置は、それぞれの可動部が動作することに起因して、他の可動部の動作に対する干渉力を作用させる構成を有する。つまり、ある可動部が動作すると、その動作が他の可動部の動作に影響を及ぼす。
【0035】
この機械装置の例として、図1に示す。例えば、電子部品実装器における電子部品を吸着するヘッドなどに適用される。具体的には、機械装置は、第一可動部10と、第一可動部10に対して支持されている第二可動部20と、第一可動部10を回転駆動する第一アクチュエータ30と、第二可動部20を回転駆動する第二アクチュエータ40とを備える。ここで、本例の機械装置は、第一可動部10と第二可動部20とが直接連設される関係にある。なお、本発明は、第一可動部10と第二可動部20とが他の可動部を介して間接的に連設される機械装置にも適用できる。
【0036】
第一可動部10は、第一回転軸部材11と、円盤12と、すべり軸受13とを備える。第一回転軸部材11は、第一アクチュエータ30としてのモータの出力軸に連結された軸部材である。つまり、第一回転軸部材11は、第一アクチュエータ30により軸X1回りに回転駆動される。円盤12は、第一回転軸部材11の先端(図1においては上端)に、第一回転軸部材11と同軸上に一体的に設けられている。つまり、第一アクチュエータ30が駆動することで、第一回転軸部材11および円盤12が軸X1回りに自転する。さらに、円盤12には、回転中心から偏心した位置に、円形断面の貫通孔12aが設けられている。すべり軸受13は、環状に形成されており、円盤12の円形孔12aに嵌挿されている。
【0037】
第二可動部20は、第二回転軸部材21と、先端部材22と、第一歯車23と、第二歯車24と、第三歯車25とを備える。第二回転軸部材21は、円盤12の円形孔12aにすべり軸受13を介して支持されている。つまり、第二回転軸部材21は、円盤12に対して、第二回転軸部材21の中心軸X2回りに相対回転可能に設けられている。従って、第二回転軸部材21は、円盤12に直接連設されている関係にある。
【0038】
先端部材22は、第二回転軸部材21の先端(図1においては上端)に、第二回転軸部材21と同軸上に一体的に設けられている。第一歯車23は、外歯歯車を構成し、第二回転軸部材21と同軸的に一体的に設けられている。第二歯車24は、外歯歯車を構成している。この第二歯車24は、第一回転軸部材11の外周側に第一回転軸部材11と同軸的に配置され、転がり軸受24a,24bを介して第一回転軸部材11に対して相対回転可能に支持されている。つまり、第二歯車24は、第一回転軸部材11に直接連設されている関係にある。さらに、第二歯車24は、第一歯車23に噛合する。第三歯車25は、外歯歯車を構成し、第二アクチュエータ40としてのモータの出力軸に連結され、軸X3回りに回転可能に設けられている。そして、第三歯車25は、第二歯車24に噛合する。
【0039】
第二アクチュエータ40が駆動することで第三歯車25が軸X3回りに自転し、第三歯車25の自転により第二歯車24が第一回転軸部材11に対して軸X1回りに相対的に自転し、第二歯車24が自転することで第一歯車23、第二回転軸部材21および先端部材22が軸X2回りに自転する。
【0040】
また、第一アクチュエータ30が駆動しており、第二アクチュエータ40が駆動しない場合には、第二回転軸部材21は、軸X1回りの円盤12の自転に伴い、軸X1回りに公転する。このとき、第一歯車23と第二歯車24とが噛合していることから、第二回転軸部材21は、軸X1回りに自転しながら公転することになる。また、第一アクチュエータ30および第二アクチュエータ40が駆動している場合には、第二回転軸部材21は、第一アクチュエータ30のみの駆動による動作と第二アクチュエータ40のみの駆動による動作とが作用しながら動作する。
【0041】
(1−2.機械装置に作用する力)
上述した機械装置において、第一アクチュエータ30および第二アクチュエータ40が駆動する場合、第一可動部10と第二可動部20のそれぞれに作用する外乱力について、図2を参照して説明する。以下には、第一可動部10に作用する外乱力について説明するが、第二可動部20についても同様の外乱力が生じる。
【0042】
図2に示すように、第一可動部10に作用する外乱力は、第一可動部10の単体の動作に起因して生じる外乱力(以下、「単体外乱力」と称する)と、第二可動部20の動作に起因して第一可動部10の動作に作用する干渉力とに分類することができる。
【0043】
単体外乱力は、第一可動部10と固定部材(図示せず)との摺動面において作用する力と、第一可動部10を構成する部材11〜13の間の摺動面において作用する力とを含む。この単体外乱力は、第一可動部10の単体として作用する非線形摩擦と、第一可動部10を制御するためのモデル化誤差とに分類される。単体外乱力における非線形摩擦をさらに詳細に分類すると、当該非線形摩擦は、整定位置付近での非線形ばね摩擦と、クーロン摩擦と、粘性摩擦とに分類される。そして、非線形ばね摩擦およびクーロン摩擦は、単体非線形ばねモデルとしての数式モデルにより定義し、粘性摩擦は単体の速度に依存することから、単体速度モデルとしての数式モデルにより定義する。また、モデル化誤差は、第一可動部10自身の慣性モーメントおよび第一アクチュエータ30のトルク定数のモデル化誤差に相当する外乱成分であり、単体の加速度により表すことが可能であることから、単体加速度モデルとしての数式モデルにより定義する。
【0044】
干渉力は、連設されている第一可動部10と第二可動部20との間において可動部同士の摺動面間に作用する力である。具体的には、第一可動部10と第二可動部20とが直接連設(直接接触)している場合には、干渉力は、第一可動部10と第二可動部20との摺動面において相互に作用する力である。また、第一可動部10と第二可動部20とが他の可動部を介して間接的に連設されている場合には、干渉力は、第一可動部10と他の可動部との摺動面および第二可動部20と当該他の可動部との摺動面において相互に作用する力である。この他、干渉力は、第一可動部10と第二可動部20との間に複数の他の可動部が連設されている場合には、他の可動部同士の摺動面に作用する力も含まれる。本実施形態における機械装置は、前者のみを有する構成を例示している。
【0045】
この干渉力は、第二可動部20の動作に起因して第一可動部10に作用する相対非線形摩擦と、第二可動部20の動作に起因して第一可動部10が連動して作用する力(以下、「連動力」と称する)とに分類される。ここで言う連動力は、例えば、図1において、第二回転軸部材21は、円盤12が軸X1回りに自転すると、軸X1回りに公転する。つまり、第二回転軸部材21は、円盤12の自転に連動して、軸X1回りに公転する。このとき、第二回転軸部材21が、円盤12から受ける力を連動力と言う。
【0046】
干渉力における相対非線形摩擦をさらに詳細に分類すると、当該相対非線形摩擦は、相対的な整定位置付近での相対非線形ばね摩擦と、相対クーロン摩擦と、相対粘性摩擦とに分類される。そして、相対非線形ばね摩擦および相対クーロン摩擦は、相対非線形ばねモデルとしての数式モデルにより定義し、相対粘性摩擦は相対速度に依存することから、相対速度モデルとしての数式モデルにより定義する。また、連動力は、相対加速度により表すことが可能であることから、相対加速度モデルとしての数式モデルにより定義する。
【0047】
(1−3.干渉力補償制御装置の構成)
(1−3−1.制御ブロック線図)
次に、上述した機械装置において、第一アクチュエータ30および第二アクチュエータ40を制御する干渉力補償制御装置について、図3を参照して説明する。当該干渉力補償制御装置は、第一アクチュエータ30を制御する第一制御部100と、第二アクチュエータ40を制御する第二制御部200とを備える。なお、本実施形態においては、アクチュエータを2個とした例を挙げているため、干渉力補償制御装置が2個の制御部を有するが、制御部の数はアクチュエータの数に応じた数となる。
【0048】
第一制御部100は、位置指令値生成部110と、第一FF(フィードフォワード)補償器120と、第二FF補償器130と、偏差算出器140と、FB(フィードバック)補償器150と、基準トルク算出器160と、外乱補償器170と、補償トルク算出器180と、第一アクチュエータ30としてのプラント190の伝達特性とにより構成される。
【0049】
また、第二制御部200は、第一制御部100と実質的に同一の構成を有する。第二制御部200の詳細な構成については省略する。ただし、両者において、各構成の実際の係数などは相違する。そして、図3において、第二制御部200の各構成の符号は、第一制御部100の各構成の符号の百の値「1」を「2」に変更したものとして図示する。また、記号の添え字を、第一制御部100によるものを「r」とし、第二制御部200によるものを「q」としている。
【0050】
以下に、主として、第一制御部100の詳細な構成について説明する。ただし、必要に応じて、第二制御部200の構成について説明する。
【0051】
位置指令値生成部110は、制御プログラムに基づいて第一アクチュエータ30としてモータの位置指令値rrを生成する。第一FF補償器120は、既約分解表現に基づくFF補償器であって、第一アクチュエータ30としてのモータの目標位置軌道(本発明の「第一目標位置指令値」に相当)θ*rを算出する。さらに、第二FF補償器130は、既約分解表現に基づくFF補償器であって、第一FF補償器120と共に、過渡応答を含む負荷位置の目標値追従特性を規定している。この第二FF補償器130は、トルクに相当する補償値を算出する。ここで、第二制御部200を構成する第一FF補償器220は、第二アクチュエータ40としてのモータの目標位置軌道(本発明の「第二目標位置指令値」に相当)θ*qを算出する。
【0052】
偏差算出器140は、第一FF補償器120により算出された目標位置軌道θ*rから、第一アクチュエータ30としてのモータの実際の位置(角度)θrをフィードバックして減算する。そして、偏差算出器140は、位置偏差としての軌跡追従誤差erを算出する。FB補償器150は、偏差算出器140により算出された軌跡追従誤差erに対してFB補償を行い、トルクに相当する値を算出する。このFB補償器150は、ロバスト安定化を前提にモデル化誤差および外乱に対する抑圧性能を規定する。
【0053】
基準トルク算出器160(本発明の「第一基準推力指令値算出手段」に相当)は、第二FF補償器130により算出されたトルク値と、FB補償器150により算出されたトルク値とを加算して、モータに対する基準トルク指令値τr(本発明の「第一基準推力指令値」に相当)を算出する。
【0054】
外乱補償器170は、図2を参照して説明した外乱力によって影響を受ける第一アクチュエータ30としてのモータに対する補償トルクτd.out.rを算出する。この補償トルクτd.out.rは、第二可動部20の動作に起因した干渉力τint.out.rと、第一可動部10が単体で作用する外乱力としての単体外乱力τsingle.out.rとを加算した値となる。
【0055】
この外乱補償器170は、さらに機能を区分けすると、干渉力処理部171と、単体外乱力処理部172と、外乱加算器173とを備えて構成される。干渉力処理部171(本発明の「第一干渉力モデル記憶手段」および「第一干渉力算出手段」に相当)は、図2に示す干渉力を数式モデルとして定義した干渉力モデルを記憶している。この干渉力モデルについては、後に詳細に説明する。さらに、干渉力処理部171は、干渉力モデルを用いて、かつ、第二制御部200の第一FF補償器220により算出されたモータの目標位置軌道θ*qを用いて、第一可動部10が第二可動部20から影響を受ける干渉力τint.out.rを算出する。
【0056】
単体外乱力処理部172(本発明の「第一単体外乱力モデル記憶手段」および「第一単体外乱力算出手段」に相当)は、図2に示す単体外乱力を数式モデルとして定義した単体外乱力モデルを記憶している。この単体外乱力モデルについては、後に詳細に説明する。さらに、単体外乱力処理部172は、単体外乱力モデルを用いて、かつ、第一制御部100の第一FF補償器120により算出されたモータの目標位置軌道θ*rを用いて、第一可動部10自身によって作用する単体外乱力τsingle.out.rを算出する。
外乱加算器173は、干渉力τint.out.rと単体外乱力τsingle.out.rとを加算して、第一可動部10に影響を受ける外乱力τd.out.rを算出する。つまり、外乱力τd.out.rは、式(4)のように定義する。また、第二制御部200の外乱加算器273は、式(5)に従って、第二可動部20に影響を受ける外乱力τd.out.qを算出する。
【0057】
【数4】
【0058】
【数5】
【0059】
補償トルク算出器180(本発明の「第一補償手段」に相当)は、基準トルク算出器160により算出された基準トルク指令値τrと、外乱加算器173により算出された外乱力τd.out.rとを加算することにより、補償トルク指令値τrev.rを算出する。つまり、この補償トルク指令値τrev.rは、外乱力τd.out.rを補償したトルク指令値となる。そして、補償トルク算出器180は、算出した補償トルク指令値τrev.rを制御信号として、第一アクチュエータ30としてのモータに対して出力する。
【0060】
プラント190は、第一アクチュエータ30の伝達特性を示したものである。つまり、第一アクチュエータ30としてのモータが補償トルク指令値τrev.rに基づいて駆動する。そして、そのときの当該モータの実際の位置をθrとして表される。なお、モータの実際の位置θrは、例えば、レゾルバやエンコーダなどの回転角検出器により検出される。
【0061】
ここで、第二制御部200は、上述したように、第一制御部100と実質的に同一の構成である。従って、本実施形態における干渉力補償制御装置の例は、第一アクチュエータ30と第二アクチュエータ40とは、相互に干渉力τint.out.r,τint.out.qを含む外乱力τd.out.r,τd.out.qを補償して制御されている。
【0062】
(1−3−2.干渉力モデルの算出方法)
次に、干渉力処理部171,271にて記憶されている干渉力モデルについて、以下に説明する。ここで、数式モデルとしては、第一制御部100の干渉力処理部171に記憶されている干渉力モデルと、第二制御部200の干渉力処理部271に記憶されている干渉力モデルは、係数が相違するのみで、実質的に同一である。そこで、以下において、第一制御部100を示す添え字「r」および第二制御部200を示す添え字「q」を省略した記号を用いて説明する。
【0063】
干渉力モデルは、式(6)に示す数式モデルにより定義する。つまり、干渉力モデルτint.outは、それぞれ別々に設定された、相対非線形型ばね特性モデルτf.spring.intと相対速度モデルτf.vel.intと相対加速度モデルτf.acc.intとを加算した数式モデルに基づいて設定される。ここで、相対非線形型ばね特性モデルτf.spring.intは、可動部間摩擦力、すなわち相対非線形ばね摩擦および相対クーロン摩擦を数式モデルとして定義している。相対速度モデルτf.vel.intは、相対粘性摩擦を数式モデルとして定義している。相対加速度モデルτf.acc.intは、連動力を数式モデルとして定義している。
【0064】
【数6】
【0065】
式(6)における相対非線形型ばね特性モデルτf.spring.intは、式(7)のように定義している。この式(7)に示す相対非線形型ばね特性モデルの出力を図4に示す。図4は、横軸を時間として、縦軸を相対非線形型ばね特性モデルτf.spring.intとしている。
【0066】
ここで、相対速度の反転とは、例えば、第一回転軸部材11と第二歯車24との相対速度の反転を意味する。例えば、第一回転軸部材11が一定速度で自転している場合に、第二歯車24が第一回転軸部材11と同方向に自転している場合であっても、第二歯車24の速度が変化している際には、相対速度が反転することがある。
【0067】
【数7】
【0068】
また、式(6)における相対速度モデルτf.vel.intは、式(8)のように定義している。ここで、図5において、第一アクチュエータ30のストロークを-3,000plsに固定した場合に、第二アクチュエータ40のストロークを+6,000plsの場合を(a)とし、+20,000plsの場合を(b)とし、+30,000plsの場合を(c)として示す。図5より、相対速度に比例した外乱が作用していることが確認できる。そこで、式(8)に示す相対速度モデルτf.vel.intは、一定相対速度試験により獲得した相対粘性摩擦に対して多項式近似した。また、図5において、破線は、式(8)の相対速度モデルτf.vel.intによる出力である。
【0069】
【数8】
【0070】
また、式(6)における相対加速度モデルτf.acc.intは、式(9)のように定義している。ここで、図6において、第一アクチュエータ30のストロークを-3,000plsに固定した場合に、第二アクチュエータ40のストロークを+6,000plsの場合を(a)とし、+20,000plsの場合を(b)とし、+30,000plsの場合を(c)として示す。図6より、相対加速度が負の領域から正の領域に向けて右肩上がりに傾いていることが確認できる。これは、第一アクチュエータ30が第二アクチュエータ40の動作に連動した力を受けているためだと考えられる。
【0071】
【数9】
【0072】
(1−3−3.単体外乱力モデルの算出方法)
次に、単体外乱力処理部172,272にて記憶されている単体外乱力モデルについて、以下に説明する。ここで、数式モデルとしては、第一制御部100の単体外乱力処理部172に記憶されている単体外乱力モデルと、第二制御部200の単体外乱力処理部272に記憶されている単体外乱力モデルは、係数が相違するのみで、実質的に同一である。そこで、以下において、第一制御部100を示す添え字「r」および第二制御部200を示す添え字「q」を省略した記号を用いて説明する。
【0073】
単体外乱力モデルは、式(10)に示す数式モデルにより定義する。つまり、単体外乱力モデルτsingle.outは、それぞれ別々に設定された、単体非線形型ばね特性モデルτf.spring.singleと単体速度モデルτf.vel.singleと単体加速度モデルτf.acc.singleとを加算した数式モデルに基づいて設定される。ここで、単体非線形型ばね特性モデルτf.spring. singleは、単体摩擦力、すなわち非線形ばね摩擦およびクーロン摩擦を数式モデルとして定義している。単体速度モデルτf.vel.singleは、単体粘性摩擦を数式モデルとして定義している。単体加速度モデルτf.acc.singleは、モデル化誤差として加速度成分により表した数式モデルとして定義している。
【0074】
【数10】
【0075】
式(10)における単体非線形型ばね特性モデルτf.spring.singleは、式(11)のように定義している。ここで、図7において、第一アクチュエータ30のストロークを+6,000plsの場合を(a)とし、+20,000plsの場合を(b)とし、+30,000plsの場合を(c)として示す。図7より、整定位置付近で急激に外乱が変化していることが確認できる。これは、整定位置付近での非線形ばね摩擦やクーロン摩擦の変化によるものであることが分かった。そこで、式(11)に示す単体非線形型ばね特性モデルτf.spring.singleは、2次標準伝達特性とステップ信号を入力として与え、非線形ばね要素とクーロン摩擦の和として表現した。また、図7において、破線は、式(11)の単体非線形型ばね特性モデルτf.spring.singleによる出力である。
【0076】
【数11】
【0077】
また、式(10)における単体速度モデルτf.vel.singleは、式(12)のように定義している。ここで、図8において、第一アクチュエータ30のストロークを-3,000plsに固定した場合に、第二アクチュエータ40のストロークを+6000plsの場合を(a)とし、+20000plsの場合を(b)とし、+30000plsの場合を(c)として示す。図8より、速度に比例した外乱が作用していることが確認できる。この外乱は、粘性摩擦力に相当するものと考えられる。そこで、式(12)に示す単体速度モデルτf.vel.singleは、一定相対速度試験により獲得した粘性摩擦に対して多項式近似した。また、図8において、破線は、式(12)の単体速度モデルτf.vel.singleによる出力である。
【0078】
【数12】
【0079】
また、式(10)における単体加速度モデルτf.acc.singleは、式(13)のように定義している。ここで、図9において、第一アクチュエータ30のストロークを+6000plsの場合を(a)とし、+20000plsの場合を(b)とし、+30000plsの場合を(c)として示す。図9より、単体加速度が負の領域から正の領域に向けて右肩上がりに傾いていることが確認できる。この傾きは、既約分解表現に基づくフィードフォワード補償器設計モデルと実際の制御対象の慣性値およびトルク定数の誤差の影響によるものである。
【0080】
【数13】
【0081】
(1−4.外乱補償器の各モデルの同定処理)
(1−4−1.各モデルの同定処理の概要)
次に、上述した外乱補償器170における単体外乱力モデルおよび干渉力モデルの同定処理について説明する。各モデルの同定処理により、各モデルの係数を決定する。2種のモデルのうち、最初に単体外乱力モデルの同定処理を行い、次に、単体外乱力モデルを利用して干渉力モデルの同定処理を行う。
【0082】
(1−4−2.単体外乱力モデルの同定処理)
単体外乱力モデルの同定処理について、図10を参照して説明する。図10において、図3と同一符号については同一構成を示し、詳細な説明を省略する。単体外乱力モデルの同定処理において、干渉力補償制御装置は、単体外乱力同定用位置指令値生成部310と、単体外乱力同定処理部320とを備える。単体外乱力同定用位置指令値生成部310は、図3の位置指令値生成部110と同種の位置指令値rrを生成する。ただし、同定用のプログラムに基づいて、当該位置指令値rrが生成される。
【0083】
そして、第一制御部100は、単体外乱力同定用位置指令値生成部310により生成された位置指令値rrに従って、通常の制御と同様の制御処理が実行される。つまり、第一アクチュエータ30としてのモータが回転駆動する。ただし、このときには、第一制御部100において、外乱補償器170は実行されない。
【0084】
このとき、単体外乱力同定処理部320が、第一制御部100の第一FF補償器120により算出されたモータの目標位置軌道θ*rと、第一アクチュエータ30としてのモータの実際の位置(角度)θrとを用いて、単体外乱力を同定する。ここで、単体外乱力同定処理部320は、学習制御を反復させることによって、単体外乱力を同定している。このようにして同定された単体外乱力モデルは、単体外乱力処理部172に記憶される。
【0085】
(1−4−3.干渉力モデルの同定処理)
干渉力モデルの同定処理について、図11を参照して説明する。図11において、図3と同一符号については同一構成を示し、詳細な説明を省略する。ここで、第一制御部100における干渉力処理部171に記憶される干渉力モデルの同定処理について説明する。
【0086】
当該干渉力モデルの同定処理において、干渉力補償制御装置は、第一制御部100に対する干渉力同定用位置指令値生成部410と、第二制御部200に対する干渉力同定用位置指令値生成部420と、干渉力同定処理部430とを備える。干渉力同定用位置指令値生成部410,420は、図3の位置指令値生成部110,210と同種の位置指令値rr,rqを生成する。ただし、同定用のプログラムに基づいて、当該位置指令値rr,rqが生成される。
【0087】
そして、第一制御部100および第二制御部200は、干渉力同定用位置指令値生成部410,420により生成された位置指令値rr,rqに従って、通常の制御と同様の制御処理が実行される。つまり、第一,第二アクチュエータ30,40としてのモータがそれぞれ回転駆動する。このときには、第一制御部100において、干渉力処理部171、単体外乱力処理部172および外乱加算器173は実行されない。
【0088】
このとき、干渉力同定処理部430が、第一制御部100の第一FF補償器120により算出されたモータの目標位置軌道θ*rと、第二制御部200の第一FF補償器220により算出されたモータの目標位置軌道θ*qと、第一アクチュエータ30としてのモータの実際の位置(角度)θrと、単体外乱力処理部172に記憶されている単体外乱力モデルを用いて、干渉力を同定する。ここで、干渉力同定処理部430は、学習制御を反復させることによって、干渉力を同定している。このようにして同定された干渉力モデルは、干渉力処理部171に記憶される。なお、第二制御部200における干渉力処理部271に記憶される干渉力モデルの同定処理は、上記の第一制御部100に対する処理を第二制御部200に対する処理に置換することで、実質的に同様の処理となる。
【0089】
(2.解析)
次に、上述した干渉力補償制御装置の効果について解析を行った。比較のために、第一制御部100および第二制御部200における外乱補償器170,270を実行していない場合(比較例1)、並びに、第一制御部100および第二制御部200における干渉力処理部171,271を実行していない場合(比較例2)を例にあげる。つまり、比較例1は、外乱補償を行っていない場合に相当し、比較例2は、単体外乱力に対する補償を行った場合に相当する。
【0090】
解析条件として、第一アクチュエータ30のストロークを+30,000plsとし、第二アクチュエータ40のストロークを+6,000plsとした場合に、位置決め結果について比較した。解析結果を図12〜図14に示す。
【0091】
図12(A)は、第一アクチュエータ30の位置偏差の時間応答を示し、図12(B)は、第二アクチュエータ40の位置偏差の時間応答を示す。また、図13(A)は、第一アクチュエータ30の軌跡追従誤差の時間応答を示し、図13(B)は、第二アクチュエータ40の軌跡追従誤差の時間応答を示す。図14(A)は、第一アクチュエータ30の外乱補償トルクの時間応答を示し、図14(B)は、第二アクチュエータ40の外乱補償トルクの時間応答を示す。また、図12〜図14のグラフ内部において、本実施形態を(a)とし、比較例1を(b)とし、比較例2を(c)としている。
【0092】
図12〜図14により、比較例1,2に比べて、本実施形態の干渉力補償と単体外乱力補償を行った場合には、補償性能が向上していることが確認できる。特に、図13(A)(B)に示す軌跡追従誤差を非常に小さくすることができている。なお、第一可動部10が第二可動部20から受ける整定位置付近での干渉力の影響は小さいのに対して、第二可動部20が第一可動部10から受ける干渉力の影響は大きいことが分かる。
【0093】
以上より、干渉力モデルを用いて外乱力補償を行うことで、高精度に位置決めを行うことができる。特に、第一可動部10と第二可動部20との間の摩擦力(可動部間摩擦力)の影響によって、第一可動部10と第二可動部20の一方の動作が他方の動作に影響を及ぼす干渉力を考慮して、一方の可動部を駆動することで、当該一方の可動部の位置制御を高精度にすることができる。
【0094】
また、上述したように、干渉力モデルについて、相対非線形ばね特性モデルと粘性摩擦力に基づく相対速度モデルと相対加速度モデルを数式モデルとをそれぞれ別々の数式モデルとして設定することで、より詳細な物理現象を把握することができる。そして、これらを加算した数式モデルを用いて干渉力モデルを設定することで、第一可動部10と第二可動部20の一方が他方に影響を及ぼす干渉力を高精度に算出することができる。その結果、高精度な位置決めが可能となる。
【0095】
さらに、干渉力モデルに加えて、単体外乱力モデルによる外乱力補償を行うことで、より第一可動部10および第二可動部20の位置制御を高精度にすることができる。また、単体外乱力モデルについても、干渉力モデルと同様に、単体非線形ばね特性モデルと粘性摩擦力に基づく単体速度モデルと単体加速度モデルとをそれぞれ別々の数式モデルとして設定することで、より詳細な物理現象を把握することができる。そして、これらを加算した数式モデルを用いて単体外乱力モデルを設定することで、可動部自身の動作により生じる摩擦力に起因する単体外乱力を高精度に算出することができる。その結果、高精度な位置決めが可能となる。さらに、単体加速度モデルを数式モデルとして設定することで、可動部自身の慣性モーメントおよびアクチュエータのトルク定数のモデル化誤差を確実に低減することができる。
【0096】
さらに、第一制御部100および第二制御部200の両者に、外乱補償器170,270を設けることで、第一可動部10と第二可動部20とが相互に影響を及ぼし合うとしても、確実に外乱力補償ができる。
【0097】
(その他)
上記実施形態において、第一制御部100と第二制御部200の両者に対して、外乱補償器170,270を設けた。ここで、上記解析結果より、第一可動部10が第二可動部20から受ける整定位置付近での干渉力の影響は小さいのに対して、第二可動部20が第一可動部10から受ける干渉力の影響は大きい。そこで、図15に示すように、第二制御部200の外乱補償器270において、干渉力処理部271および単体外乱力処理部272を機能させるが、第一制御部100の外乱補償器170の干渉力処理部271は機能させず、単体外乱力処理部172のみ機能させるようにすることもできる。このようにすることで、演算処理能力を大幅に上げることなく、大きな効果を得ることができる。
【0098】
また、上記実施形態においては、回転体を対象としたが、直動する装置を対象とすることもできる。直動する場合であっても、一方の可動部が他方の可動に対して干渉力を作用する場合には、本発明を適用できる。
【符号の説明】
【0099】
10:第一可動部、 11:第一回転軸部材、 12:円盤
20:第二可動部、 21:第二回転軸部材、 23:第一歯車、 24:第二歯車
30:第一アクチュエータ、 40:第二アクチュエータ
100:第一制御部、 200:第二制御部
【特許請求の範囲】
【請求項1】
複数の可動部とそれぞれの前記可動部を駆動する複数のアクチュエータとを備える機械装置において、第二可動部が動作することに起因して第一可動部の動作に干渉力が作用する場合に、当該干渉力を補償して前記機械装置を制御する干渉力補償制御装置であって、
前記第一可動部と前記第二可動部は、直接連設される関係にあり、または、他の可動部を介して間接的に連設される関係にあり、
前記干渉力補償制御装置は、
連設されている前記第一可動部と前記第二可動部との間において可動部同士の摺動面間に生じる可動部間摩擦力に基づいて設定される干渉力モデルを記憶する干渉力モデル記憶手段と、
前記第一可動部を駆動する第一アクチュエータに対する第一目標位置指令値に基づいて、前記第一アクチュエータに対する第一基準推力指令値を算出する第一基準推力指令値算出手段と、
前記第二可動部を駆動する第二アクチュエータに対する第二目標位置指令値と前記干渉力モデルとに基づいて、前記可動部間摩擦力の影響により前記第二可動部の動作に起因して前記第一可動部の動作に作用する第一干渉力を算出する第一干渉力算出手段と、
前記第一基準推力指令値と前記第一干渉力とを加算することにより第一補償推力指令値を算出し、前記第一補償推力指令値に基づいて前記第一アクチュエータを制御する第一補償手段と、
を備える干渉力補償制御装置。
【請求項2】
請求項1において、
前記第一可動部と前記第二可動部との摺動面におけるクーロン摩擦および非線形ばね摩擦に基づいて設定される数式モデルを相対非線形型ばね特性モデルと定義し、
前記摺動面において前記第一可動部と前記第二可動部との相対速度に応じて発生する相対的な粘性摩擦力に基づいて設定される数式モデルを相対速度モデルと定義した場合に、
前記干渉力モデルは、それぞれ別々に設定された前記相対非線形型ばね特性モデルと前記相対速度モデルとを加算した数式モデルに基づいて設定される干渉力補償制御装置。
【請求項3】
請求項2において、
前記摺動面において前記第一可動部と前記第二可動部との相対加速度に応じて発生する連動力に基づいて設定される数式モデルを相対加速度モデルと定義した場合に、
前記干渉力モデルは、それぞれ別々に設定された前記相対非線形型ばね特性モデルと前記相対速度モデルと前記相対加速度モデルとを加算した数式モデルに基づいて設定される干渉力補償制御装置。
【請求項4】
請求項1〜3の何れか一項において、
前記干渉力補償制御装置は、
前記第一可動部は、固定部材との摺動面または前記第一可動部自身を構成する部材間の摺動面における単体摩擦力に基づいて設定される第一単体外乱力モデルを記憶する第一単体外乱力モデル記憶手段と、
前記第一アクチュエータに対する第一目標位置指令値と前記第一単体外乱力モデルとに基づいて、前記単体摩擦力の影響により前記第一可動部自身の動作に起因して前記第一可動部の動作に作用する第一単体外乱力を算出する第一単体外乱力算出手段と、
を備え、
前記第一補償手段は、前記第一基準推力指令値、前記第一干渉力および前記第一単体外乱力を加算することにより前記第一補償推力指令値を算出し、前記第一補償推力指令値に基づいて前記第一アクチュエータを制御する干渉力補償制御装置。
【請求項5】
請求項4において、
前記第一可動部と固定部材との摺動面または前記第一可動部自身を構成する部材間の摺動面におけるクーロン摩擦および非線形ばね摩擦に基づいて設定される数式モデルを単体非線形型ばね特性モデルと定義し、
前記第一可動部自身の動作速度に応じて発生する粘性摩擦力に基づいて設定される数式モデルを単体速度モデルと定義した場合に、
前記第一単体外乱力モデルは、それぞれ別々に設定された前記単体非線形型ばね特性モデルと前記単体速度モデルとを加算した数式モデルに基づいて設定される干渉力補償制御装置。
【請求項6】
請求項5において、
前記第一可動部自身の慣性モーメントおよび前記第一アクチュエータのトルク定数のモデル化誤差としての数式モデルを単体加速度モデルと定義した場合に、
前記第一単体外乱力モデルは、それぞれ別々に設定された前記単体非線形型ばね特性モデルと前記単体速度モデルと前記単体加速度モデルとを加算した数式モデルに基づいて設定される干渉力補償制御装置。
【請求項7】
請求項1〜6の何れか一項において、
前記第一可動部と前記第二可動部のそれぞれについて、相互に前記可動部間摩擦力の影響による当該干渉力を補償して制御する干渉力補償制御装置。
【請求項8】
請求項1〜7の何れか一項において、
前記第二可動部の動作に起因して前記第一可動部の動作に作用する前記第一干渉力を補償して前記第一アクチュエータを制御すると共に、
前記第一可動部の動作に起因して前記第二可動部の動作に作用する第二干渉力を補償しないで前記第二アクチュエータを制御する干渉力補償制御装置。
【請求項9】
請求項1〜8の何れか一項において、
前記干渉力モデルは、前記第一可動部および前記第二可動部を実際に駆動した場合における前記第一目標位置指令値と前記第一可動部の実際の位置とに基づいて、学習制御を反復させることによって同定される干渉力補償制御装置。
【請求項10】
請求項2において、
前記相対非線形型ばね特性モデルは、式(1)により定義される干渉力補償制御装置。
【数1】
【請求項11】
請求項2において、
前記相対速度モデルは、式(2)により定義される干渉力補償制御装置。
【数2】
【請求項12】
請求項3において、
前記相対加速度モデルは、式(3)により定義される干渉力補償制御装置。
【数3】
【請求項13】
請求項1〜12の何れか一項において、
前記機械装置は、
第一回転軸部材と、
前記第一回転軸部材の先端に設けられた円盤と、
前記第一回転軸部材を回転駆動する第一アクチュエータと、
前記円盤の回転と同期しながら前記円盤に対して公転すると共に、前記第一回転軸部材の中心軸に対して偏心した偏心軸回りに自転可能に前記円盤に支持された第二回転軸部材と、
前記第二回転軸部材と同軸的に設けられた第一歯車と、
前記第一回転軸部材の外周側に前記第一回転軸部材と同軸的に配置され、前記第一回転軸部材に対して相対回転可能に支持され、かつ、前記第一歯車に噛合する第二歯車と、
前記第二歯車を前記第一回転軸部材の中心軸周りに回転駆動する第二アクチュエータと、
を備え、
前記第一可動部は、前記第一回転軸部材および前記円盤を備え、
前記第二可動部は、前記第二回転軸部材、第一歯車および第二歯車を備える干渉力補償制御装置。
【請求項1】
複数の可動部とそれぞれの前記可動部を駆動する複数のアクチュエータとを備える機械装置において、第二可動部が動作することに起因して第一可動部の動作に干渉力が作用する場合に、当該干渉力を補償して前記機械装置を制御する干渉力補償制御装置であって、
前記第一可動部と前記第二可動部は、直接連設される関係にあり、または、他の可動部を介して間接的に連設される関係にあり、
前記干渉力補償制御装置は、
連設されている前記第一可動部と前記第二可動部との間において可動部同士の摺動面間に生じる可動部間摩擦力に基づいて設定される干渉力モデルを記憶する干渉力モデル記憶手段と、
前記第一可動部を駆動する第一アクチュエータに対する第一目標位置指令値に基づいて、前記第一アクチュエータに対する第一基準推力指令値を算出する第一基準推力指令値算出手段と、
前記第二可動部を駆動する第二アクチュエータに対する第二目標位置指令値と前記干渉力モデルとに基づいて、前記可動部間摩擦力の影響により前記第二可動部の動作に起因して前記第一可動部の動作に作用する第一干渉力を算出する第一干渉力算出手段と、
前記第一基準推力指令値と前記第一干渉力とを加算することにより第一補償推力指令値を算出し、前記第一補償推力指令値に基づいて前記第一アクチュエータを制御する第一補償手段と、
を備える干渉力補償制御装置。
【請求項2】
請求項1において、
前記第一可動部と前記第二可動部との摺動面におけるクーロン摩擦および非線形ばね摩擦に基づいて設定される数式モデルを相対非線形型ばね特性モデルと定義し、
前記摺動面において前記第一可動部と前記第二可動部との相対速度に応じて発生する相対的な粘性摩擦力に基づいて設定される数式モデルを相対速度モデルと定義した場合に、
前記干渉力モデルは、それぞれ別々に設定された前記相対非線形型ばね特性モデルと前記相対速度モデルとを加算した数式モデルに基づいて設定される干渉力補償制御装置。
【請求項3】
請求項2において、
前記摺動面において前記第一可動部と前記第二可動部との相対加速度に応じて発生する連動力に基づいて設定される数式モデルを相対加速度モデルと定義した場合に、
前記干渉力モデルは、それぞれ別々に設定された前記相対非線形型ばね特性モデルと前記相対速度モデルと前記相対加速度モデルとを加算した数式モデルに基づいて設定される干渉力補償制御装置。
【請求項4】
請求項1〜3の何れか一項において、
前記干渉力補償制御装置は、
前記第一可動部は、固定部材との摺動面または前記第一可動部自身を構成する部材間の摺動面における単体摩擦力に基づいて設定される第一単体外乱力モデルを記憶する第一単体外乱力モデル記憶手段と、
前記第一アクチュエータに対する第一目標位置指令値と前記第一単体外乱力モデルとに基づいて、前記単体摩擦力の影響により前記第一可動部自身の動作に起因して前記第一可動部の動作に作用する第一単体外乱力を算出する第一単体外乱力算出手段と、
を備え、
前記第一補償手段は、前記第一基準推力指令値、前記第一干渉力および前記第一単体外乱力を加算することにより前記第一補償推力指令値を算出し、前記第一補償推力指令値に基づいて前記第一アクチュエータを制御する干渉力補償制御装置。
【請求項5】
請求項4において、
前記第一可動部と固定部材との摺動面または前記第一可動部自身を構成する部材間の摺動面におけるクーロン摩擦および非線形ばね摩擦に基づいて設定される数式モデルを単体非線形型ばね特性モデルと定義し、
前記第一可動部自身の動作速度に応じて発生する粘性摩擦力に基づいて設定される数式モデルを単体速度モデルと定義した場合に、
前記第一単体外乱力モデルは、それぞれ別々に設定された前記単体非線形型ばね特性モデルと前記単体速度モデルとを加算した数式モデルに基づいて設定される干渉力補償制御装置。
【請求項6】
請求項5において、
前記第一可動部自身の慣性モーメントおよび前記第一アクチュエータのトルク定数のモデル化誤差としての数式モデルを単体加速度モデルと定義した場合に、
前記第一単体外乱力モデルは、それぞれ別々に設定された前記単体非線形型ばね特性モデルと前記単体速度モデルと前記単体加速度モデルとを加算した数式モデルに基づいて設定される干渉力補償制御装置。
【請求項7】
請求項1〜6の何れか一項において、
前記第一可動部と前記第二可動部のそれぞれについて、相互に前記可動部間摩擦力の影響による当該干渉力を補償して制御する干渉力補償制御装置。
【請求項8】
請求項1〜7の何れか一項において、
前記第二可動部の動作に起因して前記第一可動部の動作に作用する前記第一干渉力を補償して前記第一アクチュエータを制御すると共に、
前記第一可動部の動作に起因して前記第二可動部の動作に作用する第二干渉力を補償しないで前記第二アクチュエータを制御する干渉力補償制御装置。
【請求項9】
請求項1〜8の何れか一項において、
前記干渉力モデルは、前記第一可動部および前記第二可動部を実際に駆動した場合における前記第一目標位置指令値と前記第一可動部の実際の位置とに基づいて、学習制御を反復させることによって同定される干渉力補償制御装置。
【請求項10】
請求項2において、
前記相対非線形型ばね特性モデルは、式(1)により定義される干渉力補償制御装置。
【数1】
【請求項11】
請求項2において、
前記相対速度モデルは、式(2)により定義される干渉力補償制御装置。
【数2】
【請求項12】
請求項3において、
前記相対加速度モデルは、式(3)により定義される干渉力補償制御装置。
【数3】
【請求項13】
請求項1〜12の何れか一項において、
前記機械装置は、
第一回転軸部材と、
前記第一回転軸部材の先端に設けられた円盤と、
前記第一回転軸部材を回転駆動する第一アクチュエータと、
前記円盤の回転と同期しながら前記円盤に対して公転すると共に、前記第一回転軸部材の中心軸に対して偏心した偏心軸回りに自転可能に前記円盤に支持された第二回転軸部材と、
前記第二回転軸部材と同軸的に設けられた第一歯車と、
前記第一回転軸部材の外周側に前記第一回転軸部材と同軸的に配置され、前記第一回転軸部材に対して相対回転可能に支持され、かつ、前記第一歯車に噛合する第二歯車と、
前記第二歯車を前記第一回転軸部材の中心軸周りに回転駆動する第二アクチュエータと、
を備え、
前記第一可動部は、前記第一回転軸部材および前記円盤を備え、
前記第二可動部は、前記第二回転軸部材、第一歯車および第二歯車を備える干渉力補償制御装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−185603(P2012−185603A)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願番号】特願2011−47263(P2011−47263)
【出願日】平成23年3月4日(2011.3.4)
【出願人】(000237271)富士機械製造株式会社 (775)
【出願人】(304021277)国立大学法人 名古屋工業大学 (784)
【Fターム(参考)】
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願日】平成23年3月4日(2011.3.4)
【出願人】(000237271)富士機械製造株式会社 (775)
【出願人】(304021277)国立大学法人 名古屋工業大学 (784)
【Fターム(参考)】
[ Back to top ]