
干渉防止レーダ装置
【課題】電波を送信する他の装置との電波干渉をより確実に防止することのできる干渉防止レーダ装置を提供する。
【解決手段】ミリ波を発信して当該ミリ波に対する反射波を受信するレーダセンサ1を有し、受信された当該反射波により周囲環境を検出する干渉防止レーダ装置10であって、ミリ波を発信する他のレーダ装置と同期してレーダセンサ1によりミリ波を発信するために用いられる時刻同期信号を受信する同期信号取得部42と、同期信号取得部42により受信された時刻同期信号に対応する方角に向けてミリ波が発信されるように、レーダセンサ1を制御する時分割駆動制御部41と、を備える。この干渉防止レーダ装置10により、ミリ波を送信する他の装置との電波干渉をより確実に防止することができる。
【解決手段】ミリ波を発信して当該ミリ波に対する反射波を受信するレーダセンサ1を有し、受信された当該反射波により周囲環境を検出する干渉防止レーダ装置10であって、ミリ波を発信する他のレーダ装置と同期してレーダセンサ1によりミリ波を発信するために用いられる時刻同期信号を受信する同期信号取得部42と、同期信号取得部42により受信された時刻同期信号に対応する方角に向けてミリ波が発信されるように、レーダセンサ1を制御する時分割駆動制御部41と、を備える。この干渉防止レーダ装置10により、ミリ波を送信する他の装置との電波干渉をより確実に防止することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電磁波を発信して当該電磁波に対する反射波を受信するレーダセンサを有し、受信された当該反射波により周囲環境を検出する干渉防止レーダ装置に関するものである。
【背景技術】
【0002】
従来、車両に設置されるレーダ装置が知られている。例えば、下記の特許文献1には、車両といった移動体に搭載され、送信波を発信し、反射波を受信して、当該車両の周囲環境を検出するレーダ装置が開示されている。このレーダ装置には、共通の時刻に関する無線信号を受信する受信部が設けられており、電波の発信周期が割り付けられる。そして、所定の第一の時間帯には、車両からみた所定の第一の方向への電波の放射のみが許可され、所定の第二の時間帯には、当該車両からみた所定の第二の方向への電波の放射のみが許可される。この結果、このレーダ装置が搭載された複数の車両が同一の進路方向に走行移動中の場合、同期されて放射された電波は互いに逆の方向に送信されることがないため、互いの電波干渉が防止される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−187632号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載のレーダ装置が搭載された複数の車両が互いに対向して走行移動中である場合、放射される電波はある程度の角度の幅を有しておりミリ波同士で交差する可能性が大きくなるため、特に、これらの車両が走行移動中の道路が湾曲している場合に、ミリ波の検出失敗の原因となる電波干渉が発生してしまうおそれがあるという課題があった。
【0005】
そこで本発明は、このような課題を解決するためになされたものであり、電波を送信する他の装置との電波干渉をより確実に防止することのできる干渉防止レーダ装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る干渉防止レーダ装置は、電磁波を発信して当該電磁波に対する反射波を受信するレーダセンサを有し、受信された当該反射波により周囲環境を検出する干渉防止レーダ装置であって、電磁波を発信する他のレーダ装置と同期してレーダセンサにより電磁波を発信するために用いられる同期信号を受信する受信手段と、受信手段により受信された同期信号に対応する方角に向けて電磁波が発信されるように、レーダセンサを制御する制御手段と、を備えることを特徴とする。
【0007】
この干渉防止レーダ装置によれば、他のレーダ装置と同期して電磁波を発信するために用いられる同期信号が受信され、この同期信号に対応する方角に向けて電磁波が発信されるように、レーダセンサが制御される。このため、この干渉防止レーダ装置を搭載した車両が、他の干渉防止レーダ装置を搭載した他の車両と互いに対向して走行移動中であっても、これらの車両のそれぞれにおいて、上記の同期信号に対応する同一の方角に向けて電磁波が発信されるため、電波干渉が発生しない。この結果、電波を送信する他の装置との電波干渉をより確実に防止することができる。
【0008】
また、レーダセンサにより電磁波が発信される発信方角を検知する検知手段を更に備え、制御手段は、検知手段により検知された発信方角に基づいて、レーダセンサを制御するのも好ましい。
【0009】
これにより、検知された発信方角に基づいて、レーダセンサが制御されるため、電磁波が発信される方角をより正確に制御することが可能になる。
【発明の効果】
【0010】
本発明によれば、電波を送信する他の装置との電波干渉をより確実に防止することのできる干渉防止レーダ装置を提供することができる。
【図面の簡単な説明】
【0011】
【図1】本実施形態に係る干渉防止レーダ装置の構成概略図である。
【図2】時刻同期信号の一例を説明するための説明図である。
【図3】時刻同期信号の一例において用いられる方角を説明するための説明図である。
【図4】ミリ波が発信される方角を説明するための説明図である。
【図5】ミリ波が発信される方角を説明するための説明図である。
【図6】ミリ波が発信される方角を説明するための説明図である。
【図7】ミリ波が発信される方角を説明するための説明図である。
【図8】干渉防止レーダ装置で実行されるミリ波の発信制御の処理手順を説明するためのフローチャートである。
【発明を実施するための形態】
【0012】
以下、添付図面を参照しながら本発明の好適な実施形態を説明する。なお、図面の説明において同一要素には同一符号を付し、重複する説明を省略する。
【0013】
(1)干渉防止レーダ装置の構成
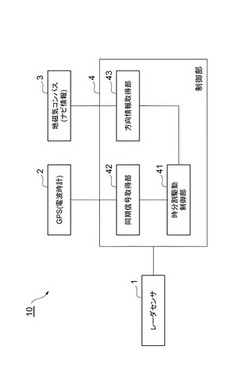
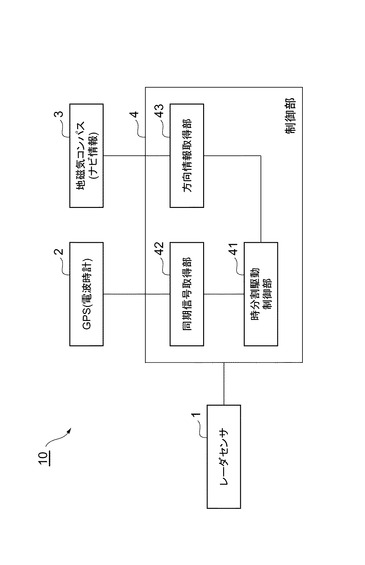
まず、図1を用いて、本実施形態に係る干渉防止レーダ装置の構成について説明する。図1は、本実施形態に係る干渉防止レーダ装置10の構成概略図である。干渉防止レーダ装置10は、自動車等の移動体車両(以下、自車両という。)に搭載され、電磁波を発信して反射波を受信することにより周囲環境(例えば、他の車両、人、道路上の物体や障害物等)を検出する車載用センシング装置である。
【0014】
本実施形態に係る干渉防止レーダ装置10は、レーダセンサ1、GPS2(Global Positioning System)、地磁気コンパス3、及び制御部4(制御手段)を備えている。また、制御部4は、時分割駆動制御部41(制御手段)、同期信号取得部42(受信手段)、及び方向情報取得部43(検知手段)を有している。
【0015】
レーダセンサ1は、自車両の外部に1台又は複数台設置され、自車両からみた所定方向の領域(例えば、前方領域、後方領域、右側方領域、左側方領域)に向けてミリ波(レーダ波としての電磁波)を発信し、当該ミリ波に対する反射波を受信して信号解析することにより、反射物の存在や反射物までの距離等をセンシングするFM−CW方式のセンサである。レーダセンサ1が発信するミリ波の利用周波数帯域は、日本では76〜77GHzである。
【0016】
GPS2は、GPS衛星から送信される電波信号に基づいて、自車両の現在位置に関する緯度経度情報を検出するシステムである。また、GPS2は、ジャイロ機構を備えており、このジャイロ機構によって角速度情報が検出される。そして、検出された角速度情報により、上記の緯度経度情報が微修正される。なお、GPS2の代わりに、後述の時刻同期信号を受信可能な電波時計が用いられてもよい。
【0017】
地磁気コンパス3は、地磁気を利用することにより方角を測定して示す計器である。地磁気コンパス3は、例えば、自車両の進行方向の方角を示す。なお、地磁気コンパス3の代わりに、従来利用されているナビゲーションシステムが取得可能な、方角情報を含むナビ情報が用いられてもよい。
【0018】
同期信号取得部42は、ミリ波を発信する他のレーダ送信装置と同期してミリ波を発信するために用いられる時刻同期信号を、GPS2により取得された緯度経度情報から抽出して取得受信することによって、他のレーダ送信装置と時間情報を共有する部分である。受信されたこの時刻同期信号に基づいて、レーダセンサ1によりミリ波が発信される。時刻同期信号の詳細については後述する。
【0019】
方向情報取得部43は、地磁気コンパス3により測定された方角に基づいて、レーダセンサ1によりミリ波が発信される方角である発信方角を刻一刻と検知して取得する部分である。なお、方向情報取得部43は、この発信方角だけでなく、自車両の進行方向が向く方角を検知して取得することも可能である。
【0020】
時分割駆動制御部41は、同期信号取得部42により受信された時刻同期信号に対応する方角(方位)のみに向けてミリ波が発信されるようにレーダセンサ1を駆動することによって、レーダセンサ1によりミリ波が発信される方角を制御して発信タイミングをスケジューリングする時分割同期部分である。時刻同期信号に対応する方角は、時分割駆動制御部41において記憶されている。時刻同期信号の詳細については後述する。
【0021】
また、時分割駆動制御部41は、方向情報取得部43により検知された発信方角に基づいて、レーダセンサ1を制御することができる。これにより、同期信号取得部42により受信された時刻同期信号に対応する方角と、方向情報取得部43により検知された発信方角とが一致した場合にのみ、この方角のみに向けてミリ波が発信されるようレーダセンサ1が制御される。この結果、ミリ波が発信される方角をより正確に制御することが可能になる。
【0022】
(2)時刻同期信号の一例
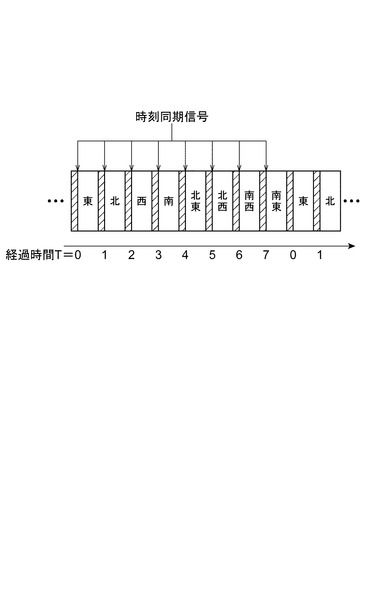
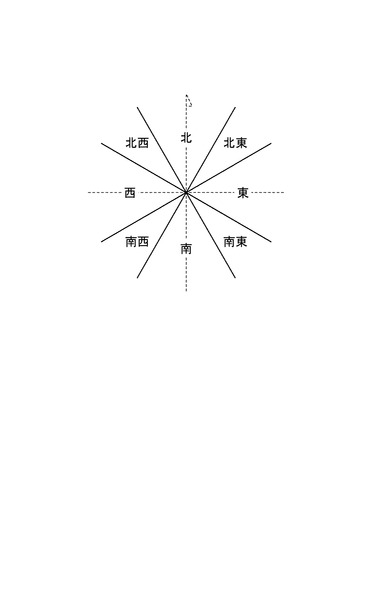
引き続き、図2及び図3を用いて、時刻同期信号の一例について説明する。図2は、時分割でスケジューリングされたミリ波送信タイミングを示す時刻同期信号の一例を説明するための説明図であり、図3は、この時刻同期信号の一例において用いられる方角を説明するための説明図である。
【0023】
まず、図2に示すように、所定の時刻(例えば、正午)からの経過時間Tが0(単位は例えば「秒」。以下、単位の記載を省略する。)以上1未満である場合に送信された時刻同期信号によって「東」が方角として割り当てられ、経過時間Tが1以上2未満である場合に送信された時刻同期信号によって「北」が方角として割り当てられ、経過時間Tが2以上3未満である場合に送信された時刻同期信号によって「西」が方角として割り当てられ、経過時間Tが3以上4未満である場合に送信された時刻同期信号によって「南」が方角として割り当てられる。
【0024】
同様に、経過時間Tが4以上5未満である場合に送信された時刻同期信号によって「北東」が方角として割り当てられ、経過時間Tが5以上6未満である場合に送信された時刻同期信号によって「北西」が方角として割り当てられ、経過時間Tが6以上7未満である場合に送信された時刻同期信号によって「南西」が方角として割り当てられ、経過時間Tが7以上8(2つ目の「0」として記載)未満である場合に送信された時刻同期信号によって「南東」が方角として割り当てられる。そして、この経過時間Tが0から8までの期間を1サイクルとして、再度、同じサイクルが繰り返される。
【0025】
次に、図3に示すように、この時刻同期信号の一例において用いられる方角として、「東」、「北」、「西」、「南」、「北東」、「北西」、「南西」、「南東」という8つの方角に対応して8つに区切られた領域が用いられる。より詳しくは、真東より北側に22.5度の境界から、真東より南側に22.5度の境界までの範囲が「東」と定められ、真南より東側に22.5度の境界から、真南より西側に22.5度の境界までの範囲が「南」と定められ、真西より南側に22.5度の境界から、真西より北側に22.5度の境界までの範囲が「西」と定められ、真北より西側に22.5度の境界から、真北より東側に22.5度の境界までの範囲が「北」と定められている。
【0026】
そして、「北」の範囲と「東」の範囲との間の範囲が「北東」と定められ、「東」の範囲と「南」の範囲との間の範囲が「南東」と定められ、「南」の範囲と「西」の範囲との間の範囲が「南西」と定められ、「西」の範囲と「北」の範囲との間の範囲が「北西」と定められている。
【0027】
(3)時刻同期信号に対応する方角に向けたミリ波の発信方法の一例
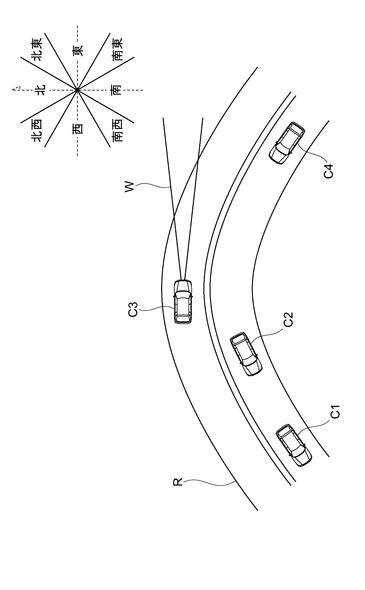
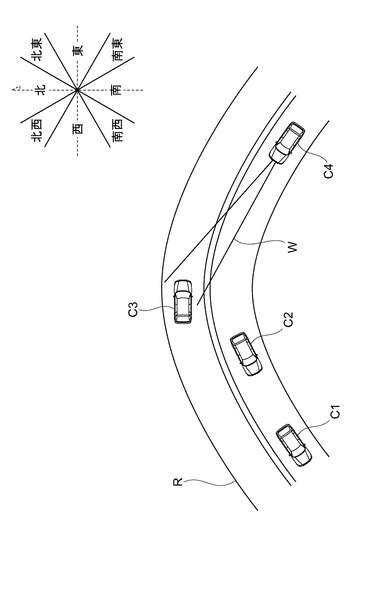
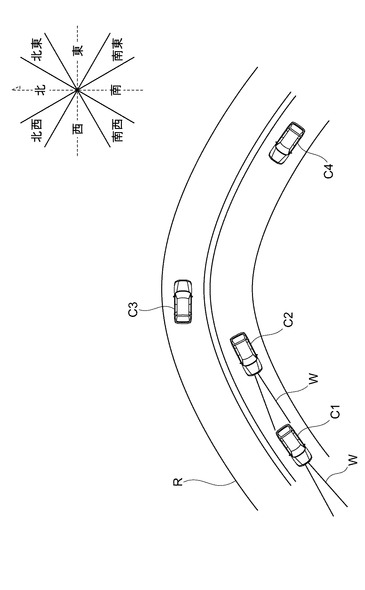
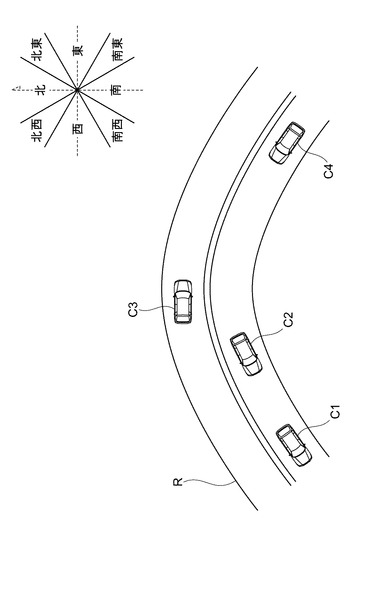
引き続き、図4〜図7を用いて、時刻同期信号に対応する方角に向けたミリ波の発信方法の一例について説明する。図4は、所定の時刻からの経過時間Tが0以上1未満である場合においてミリ波が発信される方角を説明するための説明図であり、図5は、所定の時刻からの経過時間Tが5以上6未満である場合においてミリ波が発信される方角を説明するための説明図であり、図6は、所定の時刻からの経過時間Tが6以上7未満である場合においてミリ波が発信される方角を説明するための説明図であり、図7は、所定の時刻からの経過時間Tが7以上8未満である場合においてミリ波が発信される方角を説明するための説明図である。
【0028】
まず、図4に示すように、干渉防止レーダ装置10が搭載された車両C1〜C4がカーブした車道Rを走行移動中であるとし、現時点で、所定の時刻(例えば、正午)からの経過時間Tが0(単位は例えば「秒」。以下、単位の記載を省略する。)以上1未満であるとする。このとき、車両C1〜C4において時刻同期信号が受信されることにより、ミリ波が発信される方角として「東」が割り当てられる。そして、車両C1〜C4において、方向情報取得部43が、「東」領域の方角にミリ波を発信可能なレーダセンサ1が存在するか否かを判定し、判定の結果、この「東」領域の方角にミリ波を発信可能なレーダセンサ1を有する車両C3のみからミリ波Wが発信される。一方、判定の結果、「東」にミリ波を発信可能なレーダセンサ1を有していない車両C1,C2,C4からはミリ波Wは発信されない。
【0029】
次に、図5に示すように、しばらく時間が経過して、所定の時刻(ここでは正午)からの経過時間Tが5以上6未満の状態であるとする。このとき、車両C1〜C4において新たな時刻同期信号が受信されることにより、ミリ波が発信される方角として「北西」が割り当てられる。そして、車両C1〜C4において、方向情報取得部43が、「北西」領域の方角にミリ波を発信可能なレーダセンサ1が存在するか否かを判定し、判定の結果、この「北西」領域の方角にミリ波を発信可能なレーダセンサ1を有する車両C4のみからミリ波Wが発信される。車両C4からミリ波Wが発信されることにより、車両C4において車両C3の存在が検知される。一方、判定の結果、「北西」にミリ波を発信可能なレーダセンサ1を有していない車両C1,C2,C3からはミリ波Wは発信されない。
【0030】
次に、図6に示すように、しばらく時間が経過して、所定の時刻(ここでは正午)からの経過時間Tが6以上7未満の状態であるとする。このとき、車両C1〜C4において新たな時刻同期信号が受信されることにより、ミリ波が発信される方角として「南西」が割り当てられる。そして、車両C1〜C4において、方向情報取得部43が、「南西」領域の方角にミリ波を発信可能なレーダセンサ1が存在するか否かを判定し、判定の結果、この「南西」領域の方角にミリ波を発信可能なレーダセンサ1を有する車両C1,C2のみからミリ波Wが発信される。車両C2からミリ波Wが発信されることにより、車両C2において車両C1の存在が検知される。一方、判定の結果、「南西」にミリ波を発信可能なレーダセンサ1を有していない車両C3,C4からはミリ波Wは発信されない。
【0031】
次に、図7に示すように、しばらく時間が経過して、所定の時刻(ここでは正午)からの経過時間Tが7以上8未満の状態であるとする。このとき、車両C1〜C4において新たな時刻同期信号が受信されることにより、ミリ波が発信される方角として「南東」が割り当てられる。そして、車両C1〜C4において、方向情報取得部43が、「南東」にミリ波を発信可能なレーダセンサ1が存在するか否かを判定し、判定の結果、「南東」にミリ波を発信可能なレーダセンサ1を有していない車両C1〜C4からはミリ波Wは発信されない。なお、この場合の車両C1〜C4におけるレーダセンサ1は、ミリ波の受信処理を一時的に停止してもよく(即ち、時分割制御してもよく)、また、受信処理を継続することにより他の車両からのミリ波を受信して存在を検知できる状態にしていてもよい。
【0032】
ここで、時分割制御せずに受信処理を継続する場合は、受信したミリ波は他車両から送信されたミリ波であるか否かを判定し、他車両から送信されたミリ波である場合は、その判定結果に基づいた処理(例えば、受信したミリ波を採用しないことを決定する処理や、この他車両が自車両と対面している位置関係である場合、次にこの方角のミリ波送信スケジュールになったときは慎重にスキャンすることを決定する処理)を行うアルゴリズムを用いた制御が行なわれる。
【0033】
(4)ミリ波の発信制御の処理手順
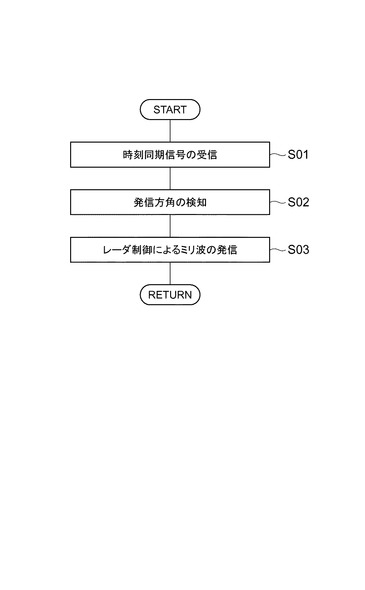
引き続き、図8を用いて、干渉防止レーダ装置10で実行されるミリ波の発信制御の処理手順について説明する。図8は、干渉防止レーダ装置10で実行されるミリ波の発信制御の処理手順を説明するためのフローチャートである。図8のフローチャートに示される処理は、干渉防止レーダ装置10の電源がオンされて処理が開始してからオフされるまでの間、所定の時間間隔で繰り返し実行される。
【0034】
まず、同期信号取得部42が、ミリ波を発信する他の干渉防止レーダ装置と同期するために用いられる時刻同期信号を、GPS2により取得された緯度経度情報から抽出して取得受信する(ステップS01)。
【0035】
次に、方向情報取得部43が、地磁気コンパス3により測定された方角に基づいて、レーダセンサ1によりミリ波が発信される方角である発信方角を検知して取得する(ステップS02)。
【0036】
そして、時分割駆動制御部41が、同期信号取得部42により受信された時刻同期信号に対応する方角と、方向情報取得部43により検知された発信方角とが一致した場合にのみ、この方角に向けてミリ波が発信されるように、当該方角にミリ波を発信可能なレーダセンサ1に切り替わるよう制御してミリ波を発信させる(ステップS03)。これにより一連の処理が終了し、再びステップS01に移行する。
【0037】
(5)本実施形態の作用効果
引き続き、本実施形態の作用効果について説明する。本実施形態によれば、他の干渉防止レーダ装置と同期してミリ波を発信するために用いられる時刻同期信号が受信され、この時刻同期信号に対応する方角のみに向けてミリ波が発信されるように、レーダセンサ1が制御される。このように、ミリ波の発信タイミングは、時刻同期信号により示されるタイミングと、図2に示すような、所定の時間帯によって決定されるミリ波発信可能方角とにより制限される。
【0038】
このため、図5に示すように、干渉防止レーダ装置10を搭載した車両C4が、他の干渉防止レーダ装置を搭載した他の車両C3と互いに対向して走行移動中であっても、これらの車両C3,C4のそれぞれにおいて、上記の時刻同期信号に対応する同一の方角(ここでは「北西」)のみに向けてミリ波Wが発信可能な車両(ここでは車両C4)のみから発信されるため、電波干渉が発生しない。この結果、ミリ波を送信する他の装置との電波干渉をより確実に防止することができ、ミリ波による周囲環境の検出をより正確に行なうことが可能になる。
【0039】
なお、時刻同期信号に対応する同一の方角(ここでは「北西」)のみに向けてミリ波Wが発信されるため、1台の自車両の外部に設置されるレーダセンサ1の台数がより多くなっても、各レーダセンサ1における上記のスケジューリングを変更することなく、電波干渉をより確実に防止することができる。
【0040】
また、方向情報取得部43により検知された発信方角に基づいて、レーダセンサ1が制御されるため、ミリ波が発信される方角をより正確に制御することが可能になる。
【0041】
(6)変形例
以上、本発明の好適な実施形態について説明したが、本発明は上記実施形態に限定されるものではない。例えば、上記の実施形態では、図3に示すように8つの方角に対応して分割された領域が用いられる態様としているが、方角の数は特に限定されず、更に「東北東」、「東南東」、「南南東」、「南南西」、「西南西」、「西北西」、「北北西」、「北北東」という8つの方角を併せて用いることもでき、また等分としなくてもよい。
【0042】
また、上記の実施形態では、図2に示すように所定の時刻(例えば、正午)に時刻同期信号が受信されてから経過時間Tが8(2つ目の「0」として記載)となるまでに同期信号取得部42により時刻同期信号が7回受信される態様としているが、時刻同期信号の受信頻度は、より少なくなるような態様としてもよい。この場合、例えば、所定の時刻(例えば、正午)に時刻同期信号が受信されてから経過時間Tが8となるまでは、干渉防止レーダ装置10が管理する経過時間情報に基づいて、レーダセンサ1が切り替えられる態様とすることができる。
【0043】
また、上記の実施形態では、ミリ波発信可能方角は時間帯によって決定される態様としているが、ミリ波発信可能方角を自車両の現在位置によって決定する態様とすることもできる。より詳しくは、高速道路等ではカーブも緩く交差点も無く走行中の車両の進行方位は略一定であるため、ミリ波発信可能方角として2つや4つといった比較的少ない数の方角でスケジューリングしておき、一般道では8つといった比較的多い数の方角でスケジューリングするよう切り替えるといった態様にすることもできる。
【0044】
この場合、上記のスケジューリングは予め干渉防止レーダ装置10に組み込まれていてもよく、また、各地域に対応したローカルなスケジューリング情報として予め規定しておき、干渉防止レーダ装置10が外部と通信することによって移動先の各地域に対応したこのスケジューリング情報を取得する態様とすることもできる。
【産業上の利用可能性】
【0045】
本発明によれば、電波を送信する他の装置との電波干渉をより確実に防止することのできる干渉防止レーダ装置を提供することができる。
【符号の説明】
【0046】
1…レーダセンサ、2…GPS、3…地磁気コンパス、4…制御部、10…干渉防止レーダ装置、41…時分割駆動制御部、42…同期信号取得部、43…方向情報取得部、C1〜C4…車両、R…車道、W…ミリ波。
【技術分野】
【0001】
本発明は、電磁波を発信して当該電磁波に対する反射波を受信するレーダセンサを有し、受信された当該反射波により周囲環境を検出する干渉防止レーダ装置に関するものである。
【背景技術】
【0002】
従来、車両に設置されるレーダ装置が知られている。例えば、下記の特許文献1には、車両といった移動体に搭載され、送信波を発信し、反射波を受信して、当該車両の周囲環境を検出するレーダ装置が開示されている。このレーダ装置には、共通の時刻に関する無線信号を受信する受信部が設けられており、電波の発信周期が割り付けられる。そして、所定の第一の時間帯には、車両からみた所定の第一の方向への電波の放射のみが許可され、所定の第二の時間帯には、当該車両からみた所定の第二の方向への電波の放射のみが許可される。この結果、このレーダ装置が搭載された複数の車両が同一の進路方向に走行移動中の場合、同期されて放射された電波は互いに逆の方向に送信されることがないため、互いの電波干渉が防止される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−187632号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載のレーダ装置が搭載された複数の車両が互いに対向して走行移動中である場合、放射される電波はある程度の角度の幅を有しておりミリ波同士で交差する可能性が大きくなるため、特に、これらの車両が走行移動中の道路が湾曲している場合に、ミリ波の検出失敗の原因となる電波干渉が発生してしまうおそれがあるという課題があった。
【0005】
そこで本発明は、このような課題を解決するためになされたものであり、電波を送信する他の装置との電波干渉をより確実に防止することのできる干渉防止レーダ装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る干渉防止レーダ装置は、電磁波を発信して当該電磁波に対する反射波を受信するレーダセンサを有し、受信された当該反射波により周囲環境を検出する干渉防止レーダ装置であって、電磁波を発信する他のレーダ装置と同期してレーダセンサにより電磁波を発信するために用いられる同期信号を受信する受信手段と、受信手段により受信された同期信号に対応する方角に向けて電磁波が発信されるように、レーダセンサを制御する制御手段と、を備えることを特徴とする。
【0007】
この干渉防止レーダ装置によれば、他のレーダ装置と同期して電磁波を発信するために用いられる同期信号が受信され、この同期信号に対応する方角に向けて電磁波が発信されるように、レーダセンサが制御される。このため、この干渉防止レーダ装置を搭載した車両が、他の干渉防止レーダ装置を搭載した他の車両と互いに対向して走行移動中であっても、これらの車両のそれぞれにおいて、上記の同期信号に対応する同一の方角に向けて電磁波が発信されるため、電波干渉が発生しない。この結果、電波を送信する他の装置との電波干渉をより確実に防止することができる。
【0008】
また、レーダセンサにより電磁波が発信される発信方角を検知する検知手段を更に備え、制御手段は、検知手段により検知された発信方角に基づいて、レーダセンサを制御するのも好ましい。
【0009】
これにより、検知された発信方角に基づいて、レーダセンサが制御されるため、電磁波が発信される方角をより正確に制御することが可能になる。
【発明の効果】
【0010】
本発明によれば、電波を送信する他の装置との電波干渉をより確実に防止することのできる干渉防止レーダ装置を提供することができる。
【図面の簡単な説明】
【0011】
【図1】本実施形態に係る干渉防止レーダ装置の構成概略図である。
【図2】時刻同期信号の一例を説明するための説明図である。
【図3】時刻同期信号の一例において用いられる方角を説明するための説明図である。
【図4】ミリ波が発信される方角を説明するための説明図である。
【図5】ミリ波が発信される方角を説明するための説明図である。
【図6】ミリ波が発信される方角を説明するための説明図である。
【図7】ミリ波が発信される方角を説明するための説明図である。
【図8】干渉防止レーダ装置で実行されるミリ波の発信制御の処理手順を説明するためのフローチャートである。
【発明を実施するための形態】
【0012】
以下、添付図面を参照しながら本発明の好適な実施形態を説明する。なお、図面の説明において同一要素には同一符号を付し、重複する説明を省略する。
【0013】
(1)干渉防止レーダ装置の構成
まず、図1を用いて、本実施形態に係る干渉防止レーダ装置の構成について説明する。図1は、本実施形態に係る干渉防止レーダ装置10の構成概略図である。干渉防止レーダ装置10は、自動車等の移動体車両(以下、自車両という。)に搭載され、電磁波を発信して反射波を受信することにより周囲環境(例えば、他の車両、人、道路上の物体や障害物等)を検出する車載用センシング装置である。
【0014】
本実施形態に係る干渉防止レーダ装置10は、レーダセンサ1、GPS2(Global Positioning System)、地磁気コンパス3、及び制御部4(制御手段)を備えている。また、制御部4は、時分割駆動制御部41(制御手段)、同期信号取得部42(受信手段)、及び方向情報取得部43(検知手段)を有している。
【0015】
レーダセンサ1は、自車両の外部に1台又は複数台設置され、自車両からみた所定方向の領域(例えば、前方領域、後方領域、右側方領域、左側方領域)に向けてミリ波(レーダ波としての電磁波)を発信し、当該ミリ波に対する反射波を受信して信号解析することにより、反射物の存在や反射物までの距離等をセンシングするFM−CW方式のセンサである。レーダセンサ1が発信するミリ波の利用周波数帯域は、日本では76〜77GHzである。
【0016】
GPS2は、GPS衛星から送信される電波信号に基づいて、自車両の現在位置に関する緯度経度情報を検出するシステムである。また、GPS2は、ジャイロ機構を備えており、このジャイロ機構によって角速度情報が検出される。そして、検出された角速度情報により、上記の緯度経度情報が微修正される。なお、GPS2の代わりに、後述の時刻同期信号を受信可能な電波時計が用いられてもよい。
【0017】
地磁気コンパス3は、地磁気を利用することにより方角を測定して示す計器である。地磁気コンパス3は、例えば、自車両の進行方向の方角を示す。なお、地磁気コンパス3の代わりに、従来利用されているナビゲーションシステムが取得可能な、方角情報を含むナビ情報が用いられてもよい。
【0018】
同期信号取得部42は、ミリ波を発信する他のレーダ送信装置と同期してミリ波を発信するために用いられる時刻同期信号を、GPS2により取得された緯度経度情報から抽出して取得受信することによって、他のレーダ送信装置と時間情報を共有する部分である。受信されたこの時刻同期信号に基づいて、レーダセンサ1によりミリ波が発信される。時刻同期信号の詳細については後述する。
【0019】
方向情報取得部43は、地磁気コンパス3により測定された方角に基づいて、レーダセンサ1によりミリ波が発信される方角である発信方角を刻一刻と検知して取得する部分である。なお、方向情報取得部43は、この発信方角だけでなく、自車両の進行方向が向く方角を検知して取得することも可能である。
【0020】
時分割駆動制御部41は、同期信号取得部42により受信された時刻同期信号に対応する方角(方位)のみに向けてミリ波が発信されるようにレーダセンサ1を駆動することによって、レーダセンサ1によりミリ波が発信される方角を制御して発信タイミングをスケジューリングする時分割同期部分である。時刻同期信号に対応する方角は、時分割駆動制御部41において記憶されている。時刻同期信号の詳細については後述する。
【0021】
また、時分割駆動制御部41は、方向情報取得部43により検知された発信方角に基づいて、レーダセンサ1を制御することができる。これにより、同期信号取得部42により受信された時刻同期信号に対応する方角と、方向情報取得部43により検知された発信方角とが一致した場合にのみ、この方角のみに向けてミリ波が発信されるようレーダセンサ1が制御される。この結果、ミリ波が発信される方角をより正確に制御することが可能になる。
【0022】
(2)時刻同期信号の一例
引き続き、図2及び図3を用いて、時刻同期信号の一例について説明する。図2は、時分割でスケジューリングされたミリ波送信タイミングを示す時刻同期信号の一例を説明するための説明図であり、図3は、この時刻同期信号の一例において用いられる方角を説明するための説明図である。
【0023】
まず、図2に示すように、所定の時刻(例えば、正午)からの経過時間Tが0(単位は例えば「秒」。以下、単位の記載を省略する。)以上1未満である場合に送信された時刻同期信号によって「東」が方角として割り当てられ、経過時間Tが1以上2未満である場合に送信された時刻同期信号によって「北」が方角として割り当てられ、経過時間Tが2以上3未満である場合に送信された時刻同期信号によって「西」が方角として割り当てられ、経過時間Tが3以上4未満である場合に送信された時刻同期信号によって「南」が方角として割り当てられる。
【0024】
同様に、経過時間Tが4以上5未満である場合に送信された時刻同期信号によって「北東」が方角として割り当てられ、経過時間Tが5以上6未満である場合に送信された時刻同期信号によって「北西」が方角として割り当てられ、経過時間Tが6以上7未満である場合に送信された時刻同期信号によって「南西」が方角として割り当てられ、経過時間Tが7以上8(2つ目の「0」として記載)未満である場合に送信された時刻同期信号によって「南東」が方角として割り当てられる。そして、この経過時間Tが0から8までの期間を1サイクルとして、再度、同じサイクルが繰り返される。
【0025】
次に、図3に示すように、この時刻同期信号の一例において用いられる方角として、「東」、「北」、「西」、「南」、「北東」、「北西」、「南西」、「南東」という8つの方角に対応して8つに区切られた領域が用いられる。より詳しくは、真東より北側に22.5度の境界から、真東より南側に22.5度の境界までの範囲が「東」と定められ、真南より東側に22.5度の境界から、真南より西側に22.5度の境界までの範囲が「南」と定められ、真西より南側に22.5度の境界から、真西より北側に22.5度の境界までの範囲が「西」と定められ、真北より西側に22.5度の境界から、真北より東側に22.5度の境界までの範囲が「北」と定められている。
【0026】
そして、「北」の範囲と「東」の範囲との間の範囲が「北東」と定められ、「東」の範囲と「南」の範囲との間の範囲が「南東」と定められ、「南」の範囲と「西」の範囲との間の範囲が「南西」と定められ、「西」の範囲と「北」の範囲との間の範囲が「北西」と定められている。
【0027】
(3)時刻同期信号に対応する方角に向けたミリ波の発信方法の一例
引き続き、図4〜図7を用いて、時刻同期信号に対応する方角に向けたミリ波の発信方法の一例について説明する。図4は、所定の時刻からの経過時間Tが0以上1未満である場合においてミリ波が発信される方角を説明するための説明図であり、図5は、所定の時刻からの経過時間Tが5以上6未満である場合においてミリ波が発信される方角を説明するための説明図であり、図6は、所定の時刻からの経過時間Tが6以上7未満である場合においてミリ波が発信される方角を説明するための説明図であり、図7は、所定の時刻からの経過時間Tが7以上8未満である場合においてミリ波が発信される方角を説明するための説明図である。
【0028】
まず、図4に示すように、干渉防止レーダ装置10が搭載された車両C1〜C4がカーブした車道Rを走行移動中であるとし、現時点で、所定の時刻(例えば、正午)からの経過時間Tが0(単位は例えば「秒」。以下、単位の記載を省略する。)以上1未満であるとする。このとき、車両C1〜C4において時刻同期信号が受信されることにより、ミリ波が発信される方角として「東」が割り当てられる。そして、車両C1〜C4において、方向情報取得部43が、「東」領域の方角にミリ波を発信可能なレーダセンサ1が存在するか否かを判定し、判定の結果、この「東」領域の方角にミリ波を発信可能なレーダセンサ1を有する車両C3のみからミリ波Wが発信される。一方、判定の結果、「東」にミリ波を発信可能なレーダセンサ1を有していない車両C1,C2,C4からはミリ波Wは発信されない。
【0029】
次に、図5に示すように、しばらく時間が経過して、所定の時刻(ここでは正午)からの経過時間Tが5以上6未満の状態であるとする。このとき、車両C1〜C4において新たな時刻同期信号が受信されることにより、ミリ波が発信される方角として「北西」が割り当てられる。そして、車両C1〜C4において、方向情報取得部43が、「北西」領域の方角にミリ波を発信可能なレーダセンサ1が存在するか否かを判定し、判定の結果、この「北西」領域の方角にミリ波を発信可能なレーダセンサ1を有する車両C4のみからミリ波Wが発信される。車両C4からミリ波Wが発信されることにより、車両C4において車両C3の存在が検知される。一方、判定の結果、「北西」にミリ波を発信可能なレーダセンサ1を有していない車両C1,C2,C3からはミリ波Wは発信されない。
【0030】
次に、図6に示すように、しばらく時間が経過して、所定の時刻(ここでは正午)からの経過時間Tが6以上7未満の状態であるとする。このとき、車両C1〜C4において新たな時刻同期信号が受信されることにより、ミリ波が発信される方角として「南西」が割り当てられる。そして、車両C1〜C4において、方向情報取得部43が、「南西」領域の方角にミリ波を発信可能なレーダセンサ1が存在するか否かを判定し、判定の結果、この「南西」領域の方角にミリ波を発信可能なレーダセンサ1を有する車両C1,C2のみからミリ波Wが発信される。車両C2からミリ波Wが発信されることにより、車両C2において車両C1の存在が検知される。一方、判定の結果、「南西」にミリ波を発信可能なレーダセンサ1を有していない車両C3,C4からはミリ波Wは発信されない。
【0031】
次に、図7に示すように、しばらく時間が経過して、所定の時刻(ここでは正午)からの経過時間Tが7以上8未満の状態であるとする。このとき、車両C1〜C4において新たな時刻同期信号が受信されることにより、ミリ波が発信される方角として「南東」が割り当てられる。そして、車両C1〜C4において、方向情報取得部43が、「南東」にミリ波を発信可能なレーダセンサ1が存在するか否かを判定し、判定の結果、「南東」にミリ波を発信可能なレーダセンサ1を有していない車両C1〜C4からはミリ波Wは発信されない。なお、この場合の車両C1〜C4におけるレーダセンサ1は、ミリ波の受信処理を一時的に停止してもよく(即ち、時分割制御してもよく)、また、受信処理を継続することにより他の車両からのミリ波を受信して存在を検知できる状態にしていてもよい。
【0032】
ここで、時分割制御せずに受信処理を継続する場合は、受信したミリ波は他車両から送信されたミリ波であるか否かを判定し、他車両から送信されたミリ波である場合は、その判定結果に基づいた処理(例えば、受信したミリ波を採用しないことを決定する処理や、この他車両が自車両と対面している位置関係である場合、次にこの方角のミリ波送信スケジュールになったときは慎重にスキャンすることを決定する処理)を行うアルゴリズムを用いた制御が行なわれる。
【0033】
(4)ミリ波の発信制御の処理手順
引き続き、図8を用いて、干渉防止レーダ装置10で実行されるミリ波の発信制御の処理手順について説明する。図8は、干渉防止レーダ装置10で実行されるミリ波の発信制御の処理手順を説明するためのフローチャートである。図8のフローチャートに示される処理は、干渉防止レーダ装置10の電源がオンされて処理が開始してからオフされるまでの間、所定の時間間隔で繰り返し実行される。
【0034】
まず、同期信号取得部42が、ミリ波を発信する他の干渉防止レーダ装置と同期するために用いられる時刻同期信号を、GPS2により取得された緯度経度情報から抽出して取得受信する(ステップS01)。
【0035】
次に、方向情報取得部43が、地磁気コンパス3により測定された方角に基づいて、レーダセンサ1によりミリ波が発信される方角である発信方角を検知して取得する(ステップS02)。
【0036】
そして、時分割駆動制御部41が、同期信号取得部42により受信された時刻同期信号に対応する方角と、方向情報取得部43により検知された発信方角とが一致した場合にのみ、この方角に向けてミリ波が発信されるように、当該方角にミリ波を発信可能なレーダセンサ1に切り替わるよう制御してミリ波を発信させる(ステップS03)。これにより一連の処理が終了し、再びステップS01に移行する。
【0037】
(5)本実施形態の作用効果
引き続き、本実施形態の作用効果について説明する。本実施形態によれば、他の干渉防止レーダ装置と同期してミリ波を発信するために用いられる時刻同期信号が受信され、この時刻同期信号に対応する方角のみに向けてミリ波が発信されるように、レーダセンサ1が制御される。このように、ミリ波の発信タイミングは、時刻同期信号により示されるタイミングと、図2に示すような、所定の時間帯によって決定されるミリ波発信可能方角とにより制限される。
【0038】
このため、図5に示すように、干渉防止レーダ装置10を搭載した車両C4が、他の干渉防止レーダ装置を搭載した他の車両C3と互いに対向して走行移動中であっても、これらの車両C3,C4のそれぞれにおいて、上記の時刻同期信号に対応する同一の方角(ここでは「北西」)のみに向けてミリ波Wが発信可能な車両(ここでは車両C4)のみから発信されるため、電波干渉が発生しない。この結果、ミリ波を送信する他の装置との電波干渉をより確実に防止することができ、ミリ波による周囲環境の検出をより正確に行なうことが可能になる。
【0039】
なお、時刻同期信号に対応する同一の方角(ここでは「北西」)のみに向けてミリ波Wが発信されるため、1台の自車両の外部に設置されるレーダセンサ1の台数がより多くなっても、各レーダセンサ1における上記のスケジューリングを変更することなく、電波干渉をより確実に防止することができる。
【0040】
また、方向情報取得部43により検知された発信方角に基づいて、レーダセンサ1が制御されるため、ミリ波が発信される方角をより正確に制御することが可能になる。
【0041】
(6)変形例
以上、本発明の好適な実施形態について説明したが、本発明は上記実施形態に限定されるものではない。例えば、上記の実施形態では、図3に示すように8つの方角に対応して分割された領域が用いられる態様としているが、方角の数は特に限定されず、更に「東北東」、「東南東」、「南南東」、「南南西」、「西南西」、「西北西」、「北北西」、「北北東」という8つの方角を併せて用いることもでき、また等分としなくてもよい。
【0042】
また、上記の実施形態では、図2に示すように所定の時刻(例えば、正午)に時刻同期信号が受信されてから経過時間Tが8(2つ目の「0」として記載)となるまでに同期信号取得部42により時刻同期信号が7回受信される態様としているが、時刻同期信号の受信頻度は、より少なくなるような態様としてもよい。この場合、例えば、所定の時刻(例えば、正午)に時刻同期信号が受信されてから経過時間Tが8となるまでは、干渉防止レーダ装置10が管理する経過時間情報に基づいて、レーダセンサ1が切り替えられる態様とすることができる。
【0043】
また、上記の実施形態では、ミリ波発信可能方角は時間帯によって決定される態様としているが、ミリ波発信可能方角を自車両の現在位置によって決定する態様とすることもできる。より詳しくは、高速道路等ではカーブも緩く交差点も無く走行中の車両の進行方位は略一定であるため、ミリ波発信可能方角として2つや4つといった比較的少ない数の方角でスケジューリングしておき、一般道では8つといった比較的多い数の方角でスケジューリングするよう切り替えるといった態様にすることもできる。
【0044】
この場合、上記のスケジューリングは予め干渉防止レーダ装置10に組み込まれていてもよく、また、各地域に対応したローカルなスケジューリング情報として予め規定しておき、干渉防止レーダ装置10が外部と通信することによって移動先の各地域に対応したこのスケジューリング情報を取得する態様とすることもできる。
【産業上の利用可能性】
【0045】
本発明によれば、電波を送信する他の装置との電波干渉をより確実に防止することのできる干渉防止レーダ装置を提供することができる。
【符号の説明】
【0046】
1…レーダセンサ、2…GPS、3…地磁気コンパス、4…制御部、10…干渉防止レーダ装置、41…時分割駆動制御部、42…同期信号取得部、43…方向情報取得部、C1〜C4…車両、R…車道、W…ミリ波。
【特許請求の範囲】
【請求項1】
電磁波を発信して当該電磁波に対する反射波を受信するレーダセンサを有し、受信された当該反射波により周囲環境を検出する干渉防止レーダ装置であって、
電磁波を発信する他のレーダ装置と同期して前記レーダセンサにより電磁波を発信するために用いられる同期信号を受信する受信手段と、
前記受信手段により受信された前記同期信号に対応する方角に向けて電磁波が発信されるように、前記レーダセンサを制御する制御手段と、
を備えることを特徴とする干渉防止レーダ装置。
【請求項2】
前記レーダセンサにより電磁波が発信される発信方角を検知する検知手段を更に備え、
前記制御手段は、前記検知手段により検知された前記発信方角に基づいて、前記レーダセンサを制御する、
ことを特徴とする請求項1に記載の干渉防止レーダ装置。
【請求項1】
電磁波を発信して当該電磁波に対する反射波を受信するレーダセンサを有し、受信された当該反射波により周囲環境を検出する干渉防止レーダ装置であって、
電磁波を発信する他のレーダ装置と同期して前記レーダセンサにより電磁波を発信するために用いられる同期信号を受信する受信手段と、
前記受信手段により受信された前記同期信号に対応する方角に向けて電磁波が発信されるように、前記レーダセンサを制御する制御手段と、
を備えることを特徴とする干渉防止レーダ装置。
【請求項2】
前記レーダセンサにより電磁波が発信される発信方角を検知する検知手段を更に備え、
前記制御手段は、前記検知手段により検知された前記発信方角に基づいて、前記レーダセンサを制御する、
ことを特徴とする請求項1に記載の干渉防止レーダ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−256133(P2010−256133A)
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願番号】特願2009−105514(P2009−105514)
【出願日】平成21年4月23日(2009.4.23)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願日】平成21年4月23日(2009.4.23)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]