
底擦り回避補助装置
【課題】車両の底擦りの発生を事前に知ることができ、これを確実に回避することができるようにする。
【解決手段】地図データ入力部1から入力した自車両周辺の地図データからデータ抽出部2で地面形状データAを抽出し、データ取得部3で自車両周辺の特徴点の位置データBを取得する。また、カメラ部4で得られた自車両周辺の画像から、抽出部6と算出部7とにより、特徴点の位置データCを求める。そして、位置袷部8で特徴点の位置データB,Cを一致させる座標変換のパラメータを求め、このパラメータを用いて、座標変換部9により、地面形状データAを自車両の座標系の地面形状データDを求める。この地面形状データDと自車両形状データ入力部1からの自車両形状データを基に、底擦り判定部10で自車両が底擦りするか否かを判定し、この結果を出力部12に与える。
【解決手段】地図データ入力部1から入力した自車両周辺の地図データからデータ抽出部2で地面形状データAを抽出し、データ取得部3で自車両周辺の特徴点の位置データBを取得する。また、カメラ部4で得られた自車両周辺の画像から、抽出部6と算出部7とにより、特徴点の位置データCを求める。そして、位置袷部8で特徴点の位置データB,Cを一致させる座標変換のパラメータを求め、このパラメータを用いて、座標変換部9により、地面形状データAを自車両の座標系の地面形状データDを求める。この地面形状データDと自車両形状データ入力部1からの自車両形状データを基に、底擦り判定部10で自車両が底擦りするか否かを判定し、この結果を出力部12に与える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両などの底面が地面や障害物に接触することによる底擦りを防止することができるようにした運転支援装置としての底擦り回避補助装置に関する。
【背景技術】
【0002】
車載カメラとして車両にカメラなど撮像装置を搭載し、車両の周辺の地面を撮像することにより、得られた画像データから地面や地面状の障害物を検出するようにした技術が知られている(例えば、特許文献1参照)。
【0003】
この特許文献1に記載の技術では、撮像装置から得られた画像データの各画素の三次元座標系での位置や画素値といった属性情報を検出し、かかる属性情報に基づいて画素の位置分布を求め、かかる分布から地面を推定するとともに、地面上の障害物を検出するものである。
【特許文献1】公開番号 特開平10−143659
【発明の開示】
【発明が解決しようとする課題】
【0004】
車両の底をする危険性があるにもかかわらず、乗り越えられると運転者が判断した地面の段差や傾斜を走行して車両の底をすったり、乗り上げたりする課題があった。
【0005】
上記特許文献1の記載の技術では、車両が走行する地面やその地面上の障害物を検出することができ、この障害物を回避するように、車両を走行させることにより、この障害物との衝突を避けることができる。
【0006】
しかしながら、地面に起伏がある場合には、上記特許文献1に記載の技術では、この起伏を地面の一部と見なしてしまい、車両の底面がこの起伏によって地面を擦り、底擦りが生ずるものであっても、これを回避させるような情報を提供するものではない。
【0007】
本発明の目的は、かかる問題を解消し、車両の底擦りの発生を事前に確実に知ることができ、これを確実に回避することができるようにした底擦り回避補助装置を提供することにある。
【0008】
本発明の他の目的は、車両に底擦りが生じた場合の修理に関する情報を即座に知ることができるようにした底擦り回避補助装置を提供することにある。
【0009】
本発明のさらに他の目的は、車両に底擦りが生じたとき、この底擦りの位置を即座に知ることができるようにした底擦り回避補助装置を提供することにある。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明は、自車両が走行している地面を撮像する撮像手段と、撮像手段により撮像した地面情報を用いて地面の形状データを求める地面形状抽出手段と、地面形状抽出手段から求めた地面の形状データと自車両の形状データとから、自車両の走行中に自車両の底面が地面に接触する底擦りが生ずるか否かを判定する底擦り判定手段と、底擦り判定手段による底擦りが生ずるとの判定により、事前に警告する警告手段とを備えたことを特徴とするものである。
【0011】
また、本発明は、自車両の周辺の地図データを取得する地図データ入力手段と、地図データ入力部から入力された地図データから自車両の周辺の第1の地面形状データを抽出する地面形状データ抽出手段と、地面形状データ抽出部で抽出された地面形状データから地面の形状の第1の特徴点の位置データを取得する特徴点位置データ取得手段と、自車両の下側の地面や該自車両の周囲を撮像する2以上の撮像手段と、撮像手段から得られた画像データから地面の形状の第2の特徴点の位置データを算出する特徴点位置算出手段と、第1の特徴位置データが第2の特徴点位置データと重なるように、地面形状データ抽出手段で抽出された地面形状データを座標変換し、自車両を基にする座標系での第2の地面形状データを取得する地面形状データ取得手段と、地面形状データ取得手段で取得した第2の地面形状データと自車両の形状データとから、自車両の走行中に自車両の底面が地面に接触する底擦りが生ずるか否かを判定する底擦り判定手段と、底擦り判定手段による底擦りが生ずるとの判定により、事前に警告する警告手段とを備えたことを特徴とするものである。
【0012】
また、本発明は、底擦り判定手段による底擦り有りとの判定により、底擦りを生ずる特徴点を回避する底擦り回避迂回経路を探索する通過経路演算手段を設けたことを特徴とするものである。
【0013】
また、本発明は、自車両の周辺の地図データを取得する地図データ入力手段と、地図データ入力部から入力された地図データから自車両の周辺の第1の地面形状データを抽出する地面形状データ抽出手段と、地面形状データ抽出部で抽出された地面形状データから地面の形状の第1の特徴点の位置データを取得する特徴点位置データ取得手段と、自車両の下の地面や自車両の周囲を撮像する2以上の撮像手段と、撮像手段から得られた画像データから地面の形状の第2の特徴点の位置データを算出する特徴点位置算出手段と、第1の特徴位置データが第2の特徴点位置データと重なるように、地面形状データ抽出手段で抽出された地面形状データを座標変換し、自車両を基にする座標系での第2の地面形状データを取得する地面形状データ取得手段とからなる地面形状データ算出部と、地面形状データ算出部からの第2の地面形状データと自車両の形状データとから、自車両の走行中に自車両の底面が地面に接触する底擦りが生ずるか否かを判定する底擦り判定部と、底擦り判定部による底擦りありとの判定により、底擦りを生ずる特徴点を回避する底擦り回避迂回経路を探索する通過経路演算部と、通過経路演算部で得られた底擦り回避迂回経路の情報を蓄積する底擦り経路蓄積部と、自車両の位置データと自車両の形状データとをもとに、底擦り経路蓄積部から自車両に対する底擦り回避迂回経路を選択する経路選択部と、経路選択部で選択された底擦り回避迂回経路を表示する出力部とを備えたことを特徴とするものである。
【0014】
また、本発明は、自車両以外の他の車両で取得された地面形状データと他の車両の車両形状データとを入力するデータ入力手段と、データ入力手段から入力された地面形状データを前記底擦り経路蓄積部に蓄積する蓄積手段とを設け、データ入力手段から入力された他の車両の車両形状データを、前記前記底擦り経路蓄積部に蓄積された他の車両で取得された地面形状データと関連付けて、保存することを特徴とするものである。
【0015】
また、本発明は、自車両の走行路での地面の起伏による底擦り判定開始位置と底擦り判定終了位置とを決定する決定手段と、底擦り開始位置から所定の距離間隔で底擦り判定処理を指示する判定開始指示手段と、自車両が底擦り終了位置に達するまでに自車両に底擦りが生ずることが判定されると、底擦り判定処理の終了を指示する判定終了指示手段とを設け、地面の起伏の程度に応じて、所定の距離間隔を異ならせることを特徴とするものである。
【0016】
また、本発明は、自車両の形状データが、自車両の走行速度や車両スペックによる車両の浮き沈みや傾きなどに関する情報も含むことを特徴とするものである。
【0017】
上記他の目的を達成するために、本発明は、車両が底擦りした箇所を撮像する撮像手段と、撮像手段によって撮像された車両の底擦りよって変形した変形形状と変形前の形状とを画像データをもとに比較する比較手段と、比較手段の比較によって得られる車両の底擦りに応じた修理情報を抽出し、出力手段で表示させる修理情報抽出手段とを備えたことを特徴とするものである。
【0018】
また、本発明は、得られた前記底擦り回避迂回経路の情報をもとに、自車両を自動で運転する車両制御手段とを備えたことを特徴とするものである。
【0019】
また、本発明は、得られた前記底擦り回避迂回経路の情報をもとに、自車両の底面の高さを調整する車高調整部を備えたことを特徴とするものである。
【0020】
上記さらに他の目的を達成するために、本発明は、自車両の通過経路での予想される底擦り地形箇所を表示する手段を設けたことを特徴とするものである。
【0021】
また、本発明は、自車両と自車両の通過経路での予想される底擦り地形箇所とを表わす地図画面と、底擦り地形箇所を含む底擦り地形領域を地面画面と、自車両の底面での予想される底擦り箇所を表わす底面画面とを1つの表示手段で表示することを特徴とするものである。
【0022】
また、本発明は、自車両と自車両の通過経路での予想される底擦り地形箇所とを表わす地図を拡大表示する第1の表示手段と、自車両での予測される底擦り箇所の位置を拡大表示する第2の表示手段と、地面での底擦り地形箇所を拡大表示する第3の表示手段と、自車両の底面での予想される底擦り箇所を拡大表示する第4の表示手段とを設けたことを特徴とするものである。
【発明の効果】
【0023】
本発明によると、車両の地面との予想される底擦り情報をリアルタイムで取得し、運転手などに知らせることができ、底擦りを回避する通過経路を画面表示で運転手などに提供することができ、車両の運転を支援することを可能とする。
【0024】
また、本発明によると、取得した底擦りの情報に応じて、車体の高さを調整することができ、通過経路上に底擦りを生ずる地形(特徴点)があっても、これによる底擦りを回避することができる。
【0025】
また、本発明によると、車両の底擦りによる修理情報を取得し、これを車両の運転手などに提供することができる。
【0026】
即ち、本発明によると、底擦り判定を行なうことで、車両を安全に運転することを可能とし、車両の底擦りなどによる思わぬ事故や故障を避けることが可能となる。また、蓄積した底擦り判定の情報を利用することにより、地図データが更新されていなくても、さらに、精度の高い情報を取得することが可能である。本発明では、自車両の形状など車両の底面の形状データを入力したり、記憶することが可能なため、自車両以外の車両からの底擦り情報を利用してさらに精度の高い底擦り判定を行なうことも可能である。また、底擦り情報を蓄積することによって、底擦りすることが分かっていても、あえて車底を擦って走行した車両でも、底を擦った情報を蓄積しているため、修理情報として利用することが可能である。また、底擦り情報を持った車両であれば、新車、中古車購入時にユーザーが底擦り情報を事前に知った上で購入することが可能となる。
【発明を実施するための最良の形態】
【0027】
以下、本発明の実施形態を図面を参照しながら説明する。
【0028】
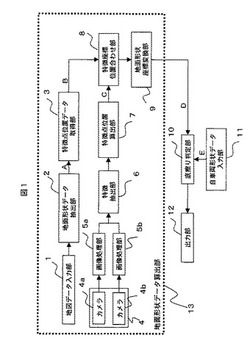
図1は本発明による底擦り回避補助装置の第1の実施形態を示すブロック構成図であって、1は地図データ入力部、2は地面形状データ抽出部、3は特徴点位置データ取得部、4はステレオカメラ、4a,4bはカメラ、5a,5bは画像処理部、6は特徴抽出部、7は特徴点位置算出部、8は特徴座標位置袷部、9は地面形状座標変換部、10は底擦り判定部、11は自車両形状データ入力部、12は出力部、13は地面形状データ算出部である。
【0029】
同図において、この第1の実施形態は、自車両の走行路(道路や踏切,駐車場など)の進行方向の地面形状データを算出する地面形状データ算出部13と、自車両の底面の形状データが入力される自車両形状データ入力部11と、地面形状データ算出部13からの走行路の地面形状データと自車両形状データ入力部11からの自車両の底面形状データとから自車両に底擦れが生ずるか否かを判定する底擦れ判定部10と、底擦り判定部10の判定結果を運転手などの搭乗者に通知する出力部12とから構成されており、自車両に搭載されている。
【0030】
また、地面形状データ算出部13は、自車両の進行方向の3次元または2次元の地図データを受信する地図データ入力部1と、受信された地図データから自車両の走行路の地面の形状データ(地面の各位置での高さや傾斜などのデータ)Aを抽出する地面形状データ抽出部2と、この地面形状データAから地面の凹凸部や地面上の障害物などがある特徴点の位置を表わす特徴点位置データBを抽出する特徴位置データ取得部3と、2つのカメラ4a,4bからなり、自車両での地面や自車両の周辺の地面を撮像するステレオカメラ4と、カメラ4a,4b夫々から出力される映像情報を処理する画像処理部5a,5bと、画像処理部5a,5bの出力映像情報から自車両での地面やその周辺の地面の形状の特徴を抽出する特徴抽出部6と、特徴抽出部6で抽出された特徴点の位置(即ち、自車両からの距離,方向)のデータ(特徴点位置データC)を算出する特徴点位置算出部7と、特徴点位置データ取得部3で抽出された特徴点位置データBと特徴点位置算出部7で算出された特徴点位置データCとを重ね合わせ、これらデータの特徴点がマッチングするための座標変換のパラメータを算出する特徴座標位置合わせ部8と、特徴点位置データ取得部3で得られた地面形状データAをこのパラメータを用いて座標変換し、自車両の底擦りの有無の判定をするための地面形状データ(地面の特徴点を含む各位置での高さや傾斜などの情報)Dを求める地面形状座標変換部9とから構成されている。
【0031】
即ち、地面形状データ算出部13は、ステレオカメラ4の撮像によって得られる映像情報から、自車両での地面や自車両の周辺の地面の特徴点の位置を求め、この特徴点の位置での地面の形状の具体的な値(地面の傾斜や高さなどの値)を、地図データ入力部1で受信された地図データから地面形状データ抽出部2で得られる地面形状データAをもとに、求めるものである。このために、特徴座標位置合わせ部8により、地面形状データAから特徴点位置データ取得部3で抽出された特徴点位置データBでの特徴点の位置と特徴点位置算出部7で算出された特徴点位置データCでの特徴点の位置とが一致するための座標変換のパラメータを求め、このパラメータによって地面形状データ抽出部2で抽出された地面形状データAを座標変換することにより、この地面形状データAをステレオカメラ4からの映像情報から得られたデータと同等の地面形状データDとするものである。これにより、地面形状座標変換部9において、自車両の位置での地面や自車両の周辺での地面の傾斜や高さなどの地面形状データDを取得することができるものである。
【0032】
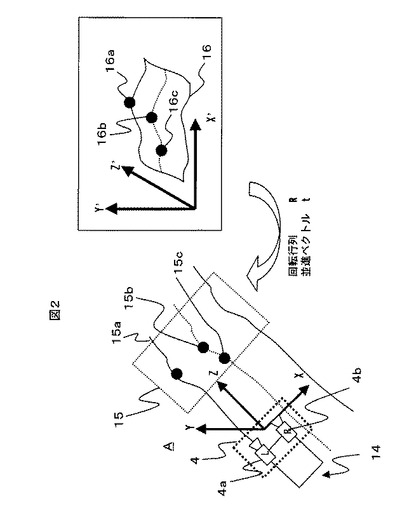
図2は地図データ入力部1で得られた地図データのワールド座標系(World Coordinate System)をステレオカメラ4のワールド座標系への変換の一具体例を示す図である。
【0033】
同図において、Aは自車両に搭載されたステレオカメラ4に対して設定されたワールド座標系XYZを示すものであって、ステレオカメラ4での左側のカメラ4aと右側のカメラ4bとの撮像によって得られる地面形状データ15は、このワールド座標系XYZのデータとして得られる。かかる地面形状データ15で特徴点15a,15b,15cが存在する場合には、これらの特徴点位置データが特徴抽出部6と特徴点位置算出部7とによって得られる。
【0034】
また、16は地図データ入力部1から得られる絶対空間のワールド座標系X’Y’Z’での地図データを示すものであって、かかる地図データ16から地面形状データ抽出部2(図1)により、地面での各位置がX’Y’Z’の座標値からなる地面形状データAが得られ、この地面形状データAから、特徴点位置データ取得部3により、この地面形状データAでの特徴点16a,16b,16cに対する特徴点位置データBが得られる。
【0035】
ここで、地面形状データAでの特徴点16aが地面形状データ15での特徴点15aに相当し、以下、特徴点16bが特徴点15bに、特徴点16cが特徴点15cに相当するものとすると、特徴点16aを特徴点15aに、特徴点16bを特徴点15bに、特徴点16cを特徴点15cに夫々一致させるように、ワールド座標系X’Y’Z’のX,Y,Z軸方向への各々の回転成分を表わす3×3の回転行列をR、ワールド座標系X’Y’Z’のX,Y,Z軸方向への平行移動の移動量を表わす3×1の並進ベクトルをtとして、
【数1】

【0036】
により、ワールド座標系X’Y’Z’をワールド座標系XYZに座標変換するものである。かかる回転行列Rと並進ベクトルtとが特徴座標位置合わせ部8で求められ、かかるパラメータに基づいて座標変換が地面形状座標変換部9で行なわれる。
【0037】
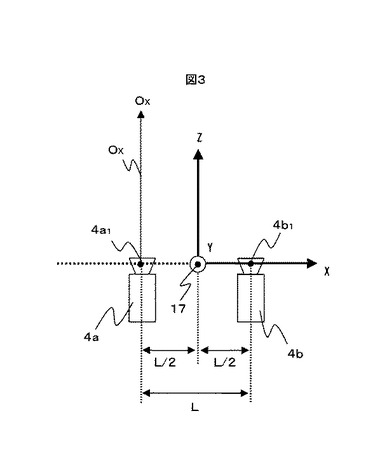
図3はステレオカメラ4のワールド座標系XYZの定義を示す図である。
【0038】
同図において、左側のカメラ4aと右側のカメラ4bとは、光軸Oxが平行となるように設置されている。3次元のワールド座標系XYZは、左側のカメラ4aのレンズの中心点4a1と右側のカメラ4bのレンズの中心点4b1を結ぶ直線上の中点17を原点として、この原点17を通るこの直線に沿う軸をX軸とし、原点17を通り、光軸Oxに平行な軸をZ軸とし、原点17を通り、X,Z軸に垂直な軸をY軸とするものである。
【0039】
図1において、地面形状座標変換部9で得られた地面形状データDと自車両形状データ入力部11からの自車両の底面の形状データ(以下、自車両形状データという)Eとから、底擦り判定部10により、自車両の底面が走行経路上の地面あるいは障害物に擦れるかどうか判定される。自車両の底面が擦れると判定された場合には、その判定結果に基づいて、出力部12から人間が認識可能な感覚、例えば、視覚で認識可能な表示や聴覚で認識可能な音声により、搭乗者に底擦りすることを事前に知らせる警告が発せられる。
【0040】
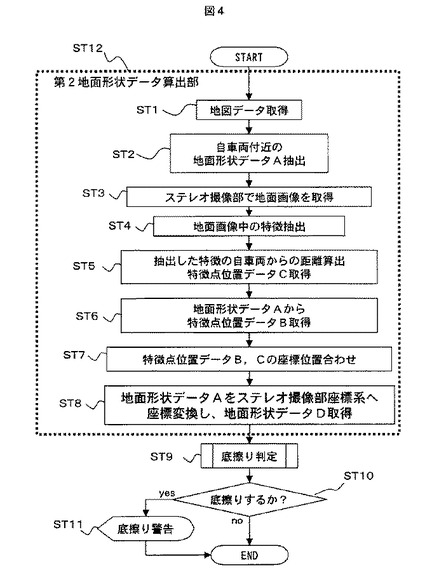
図4はこの第1の実施形態の以上の一連の処理の流れを示すフローチャートである。以下、この処理の流れを前出図面も参照して説明する。
【0041】
同図において、地図データ入力部1から地図データを取得し(ST(ステップ)1)、地面形状データ抽出部2により、取得したこの地図データから地面形状データAを抽出する(ST2)。また、停車中あるいは走行中の自車両やその付近の地面をステレオカメラ4が撮像して画像情報を取得し(ST3)、画像処理部5a,5bで処理した後、特徴抽出部6によってこの画像情報から地面の特徴点を抽出し(ST4)、特徴点位置算出部7で自車両からこの特徴点までの距離を算出して第1の特徴点位置データ(図2での特徴点15a,15b,15cの位置データに相当)Cを得る(ST5)。また、地面形状データ抽出部2で抽出した(ST2)地面形状データAからも、特徴点の位置データ、即ち、第2の特徴点位置データ(図2での特徴点16a,16b,16cの位置データに相当)Bを抽出する(ST6)。
【0042】
そして、特徴座標位置合わせ部8でこれら第1,第2の特徴点位置データB,Cでの特徴点の座標位置合わせを行なって、座標変換のパラメータ(上記数1での回転行列R,並進ベクトルt)を求め(ST7)、地面形状データ抽出部2で抽出された地面形状データAをステレオカメラ4の座標系のデータへと座標変換して、この座標変換された地面形状データAから地面形状データDを取得する(ST8)。
【0043】
以上が地面形状データ算出部13で行なわれる処理である(ST12)。
【0044】
次に、この地面形状データDは底擦り判定部10に送られ、自車両形状データ入力部11からの自車両の底面の形状データ、即ち、自車両形状データEとに基づいて、自車両の底擦りの有無の判定を行なう(ST9)。底擦りが生ずるか否かの判定は、自車両の底面と地面との間の距離が0以下であるか否かを検出することによって行なう。その判定の結果が底擦りすることである場合には(ST10)、人間が認識可能な聴覚,視覚あるいは触覚などの伝達手段により、音声や画像の表示,振動などを行なって搭乗者に底擦りすることを伝える(ST11)。
【0045】
かかる処理は、自車両が特徴点からその車速に応じた所定の距離の位置に達すると、開始する。
【0046】
この第1の実施形態においては、特徴点の地面の形状として、単に地面上の起伏などの特徴を利用するばかりでなく、底擦り判定の特徴点の抽出の対応の応用として、道路上の白線を利用したり、踏み切りのレールを利用したりするなど道路上や走行する地面の形状以外の特徴を用いることにより、特徴点抽出の速度や正確さを向上させてもよい。また、ステレオカメラ4からの画像情報から抽出した地面形状データを地図データに反映させることにより、地図データの更新をも可能とする。
【0047】
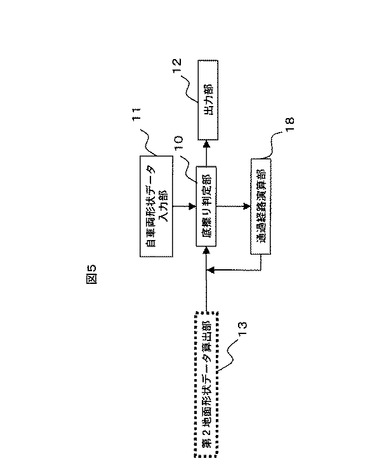
図5は本発明による底擦り回避補助装置の第2の実施形態の要部を示すブロック構成図であって、18は通過経路演算部であり、図1に対応する部分には同一符号を付けて重複する説明を省略する。
【0048】
同図において、この第2の実施形態は、図1に示す第1の実施形態に通過経路演算部18を追加し、底擦りを回避するための通過径路やその進入角度を指示するようにしたものである。ここで、「通過経路」とは、道路などの走行路上での中央寄りや右側寄り,左側寄りといった自車両が走行(通過)する経路をいい、特に、後述するようにして底擦りを回避可能に求められた通過経路を「底擦り回避迂回経路」という。
【0049】
この第2の実施形態においても、上記第1の実施形態と同様、底擦り判定部10において、地面形状データ算出部13からの地面形状データDと自車両形状データ入力部11からの自車両形状データEとから、自車両の底面が地面や地面上の障害物に底擦りするかどうかが判定されるが、その判定結果が底擦りを行なうというものであるときには、自車両がその走行路上をそのときの通過経路でそのまま走行し続けると、底擦りが生ずるので、出力部12でその旨の警報が発せられるようにするとともに、通過経路演算部18により、その走行路上での通過経路を変更し、地面の底擦りを生じさせる形状部分や障害物を避けて進行可能な新たな通過経路とそれへの進入位置や進入角度が算出され、この算出結果を基に、この新たな通過経路、即ち、底擦り回避迂回経路やそれへの進入位置,進入角度を出力部12に表示したり、音声などでこの底擦り回避迂回経路を通過可能とするための情報を伝達し、底擦り回避を補助する。なお、かかる出力結果を用いることにより、そのときには、人間が運転しなくとも、この出力結果を車両の制御系に伝達することで自動運転による底擦り回避をも可能とすることができる。
【0050】
図6はこの第2の実施形態の以上の一連の処理の流れを示すフローチャートである。以下、この処理の流れを図5も参照して説明する。
【0051】
同図において、ST12,ST9,ST10は、第1の実施形態での図4のST12,ST9,ST10と同様であり、説明を省略する。
【0052】
底擦り判定手段10により、底擦りするとの判定があると(ST10の“yes”)、このときに想定する底擦りを回避するための通過経路への進入位置までの距離をZ0=0とし、この進入位置でのこの想定する通過経路への進入角度をθ=0である。このときに、ST10で底擦りするとの判定があるのである。
【0053】
そこで、新たに底擦りを回避する通過経路を想定するために、その通過経路への進入位置までの距離Z0をこれまでの距離Z0に所定の距離ΔZ0を加えたZ0+ΔZ0としてΔZ0だけ変化させ、進入角θをこれまでの進入角θに所定の角度Δθを加えたθ+ΔθとしてΔθだけ変化させ(ST13)、かかる通過経路での地面形状を地面形状データ算出部13から求めた地面形状データDをもとに求めて、底擦りが生ずるか否かを判定する(ST14)。そして、この新たな通過経路で底擦りが生じなければ(ST15の“no”)、かかる通過経路を、底擦り回避迂回経路として、その情報(この底擦り回避迂回経路までの距離Z0と進入角θなど)を出力部12に送り、カーナビなどの画面や視覚で確認できる方法で運転者に伝える(ST16)。
【0054】
新たに想定した通過経路でも、底擦りが生ずる場合には(ST15の“yes”)、ST13に戻って、さらに、進入位置までの距離Z0をΔZ0だけ変化させ、また、進入角θをΔθだけ変化させて(ST13)、さらに新たな通過経路を想定し、これでもって底擦りの有無の判定を行なう(ST14)。そして、底擦りが生じないと判定される通過通路が得られるまで(即ち、ST15で“no”となるまで)、進入角θをΔθずつ、また、進入位置までの距離Z0をΔZ0ずつ夫々順次変化させる。これにより、底擦りが生じないとの判定があると(ST15の“no”)、このとき想定されている通過経路を底擦り回避迂回経路として、その情報を出力部12に送り、カーナビなどの画面や視覚で確認できる方法で搭乗者に伝える(ST16)。
【0055】
かかる処理は、自車両が特徴点からその車速に応じた所定の距離の位置に達すると、開始する。
【0056】
なお、底擦り判定部10によるST14の底擦り判定では、新たに想定された通過経路での地面形状を地面形状データ算出部13からの地面形状データDから求め、この地面形状と自車両形状データEとを基に行なわれる。
【0057】
また、このような底擦り回避通過通路の探索処理中、実際には、自車両が走行しているし、また、運転者がハンドルを切るなどして進行方向も変化している。このため、この運転者の反応速度や車両の特性などのデータを利用して、車体が進む距離や走行方向の変化をも考慮して、進入角θや進入位置までの距離Z0を修正する。これにより、精度の高い底擦り回避のための進行経路の決定処理が行なわれることになる。
【0058】
このようにして、この第2の実施形態では、走行路を走行中に底擦りが生ずる特徴点があることを運転者や同乗者に通報するとともに、この底擦りを回避するための通過経路、即ち、底擦り回避迂回経路も運転者や同乗者に知らされることができ、これにより、自車両の底擦りを回避できる通過経路も知ることができる。
【0059】
図7は本発明による底擦り回避補助装置の第3の実施形態の要部を示すブロック構成図であって、19は底擦り経路蓄積部、20は底擦り回避迂回経路選択部、21は底擦り回避迂回経路出力部であり、図5に対応する部分には同一符号を付けて重複する説明を省略する。
【0060】
この第3の実施形態は、これまで走行した走行路での特徴点の底擦りが生ずる通過経路(底擦り通過経路)と底擦りを回避できる通過経路(底擦り回避迂回経路)との情報(侵入位置や侵入角度など)を蓄積しておき、この走行経路を自車両が再度走行するときに、この蓄積情報を利用して底擦りを回避することができるようにしたものである。図7(a)は情報の蓄積システムを示すものであり、図7(b)は蓄積情報の利用システムを示すものである。
【0061】
同図において、図5に示す第2の実施形態と同様、底擦り判定部10と通過経路演算部18とにより、地面形状データ算出部13からの地面の特徴点の属性情報と自車両形状データ入力部11からの自車両形状データEとから、底擦りを生ずる底擦り通過経路と底擦りを回避できる底擦り回避迂回経路とが求められる。このようにして得られた情報は、特徴点毎に、地面形状データ算出部13の特徴点位置データ取得部3で得られた特徴点位置データB(図1)と関連付けて底擦り経路蓄積部19に蓄積される。
【0062】
このようにして、底擦り経路蓄積部19には、自車両が一度走行した走行路で検出される特徴点毎に、底擦り通過経路と底擦り回避迂回経路との情報が特徴点位置データBと関連付けて蓄積される。
【0063】
図7(b)に示す蓄積情報の利用システムは、カーナビゲーションシステムなどを利用して底擦り経路蓄積部19から選択した底擦り回避迂回経路との情報を表示するものであり、底擦り回避迂回経路出力部21は、かかるカーナビゲーションシステムなどに設けられているものである。
【0064】
装置に電源が入ると、底擦り回避迂回経路選択部20は、底擦り経路蓄積部19から特徴点位置データBを読み出し、また、自車両の現在位置を示す自車両位置データEが供給され、自車両の現在位置と特徴点の位置との関係を監視する。自車両の現在位置がある特徴点の位置から所定の距離の位置となると、底擦り回避迂回経路選択部20は、特徴点データをもとに、自車両から所定の距離の位置にある上記特徴点に対する底擦り回避迂回経路の情報を底擦り経路蓄積部19から選択し、これを底擦り回避迂回経路蓄積部21に供給する。これにより、出力部12では、このときの底擦り回避迂回経路が表示され、また、その属性情報(進入位置までの距離や進入角度など)が視覚的、聴覚的に表示される。
【0065】
このようにして、既に取得した底擦り回避迂回経路の情報を利用することができ、かかる情報を迅速に表示させることができて、できるだけ早く運転者に通報することが可能となる。また、底擦り回避迂回経路の表示手段としても、車両に搭載されるカーナビゲーションシステムのディスプレイなどを利用することができ、車両内に配置するディスプレイの個数を低減でき、運転者が見る対象を減らすことができて運転への支障を防止することができる。
【0066】
ところで、底擦り経路蓄積部19に蓄積した情報を、他の車両でも、利用することができようにすることもできる。但し、この場合には、底擦り経路蓄積部19には、さらに、各特徴点に対し、上記の底擦り回避迂回経路の情報などとともに、これに対して地面形状データ算出部13から得られた地面形状データDも蓄積する。また、この場合には、底擦り回避補助装置としては、図7(b)に示す蓄積情報の利用システムだけを備えたものでもよい。
【0067】
以下では、図7(b)を用いてこの点について説明する。
【0068】
少なくとも図7(a)に示す情報の蓄積システムを備えた車両では、上記のように、底擦り経路蓄積部19に、特徴点毎に、底擦り通過経路と底擦り回避迂回経路との情報が特徴点位置データBと関連付けて蓄積されるが、さらに、地面形状算出部13からの地面形状データDも関連付けて蓄積される。かかる底擦り経路蓄積部19の蓄積情報は、通信手段やリムーバブルメディアなどを用いて、他の車両に送り、その底擦り経路蓄積部19にコピーすることができる。また、この蓄積情報を送る際には、その車両の底面の形状データも送る。
【0069】
このようにして、他の車両から送られてきた蓄積情報は、図7(b)において、自車両の底擦り経路蓄積部19に、提供元の車両毎に区分して、蓄積される。また、他の車両から送られてきた車両の底面の形状データは自車両形状データ入力部11に登録されるが、このとき、この情報提供元の車両が提供元の車両が自車両と車種が同一であるかどうか、また、異種の車両であっても、底面の形状が自車両と同一であるかどうかが判断され、その判断結果の情報(以下、車種情報という)が自車両形状データ入力部11に保存される。なお、他の車両が自車両と同一車種や底面が同一である場合、以下では、この他の車両を同一車種の車両という。
【0070】
装置に電源が入ると、底擦り回避迂回経路選択部21は、自車位置を表わす自車位置データEを取り込むとともに、底擦り経路蓄積部19から全ての特徴点位置データがこれを提供した他の車両と関連付けて読み出し、自車位置データEと特徴点位置データとを照合して自車両の現在位置と特徴点の位置との関係を監視する。自車両の現在位置がある特徴点の位置から所定の距離の位置となると、底擦り回避迂回経路選択部21は、自車両形状データ入力部11に蓄積されている車種情報をもとに、底擦り回避迂回経路の情報や特徴点位置データなどを提供した上記の他の車両が自車両と同一車種であるかどうかを判断する。
【0071】
そして、他の車両が自車両と同一車種である場合には、底擦り回避迂回経路選択部21は、読み出した特徴点データをもとに、自車両から所定の距離の位置にある上記特徴点に対する底擦り回避迂回経路の情報を底擦り経路蓄積部19から選択し、これを底擦り回避迂回経路出力部21に供給する。これにより、底擦り回避迂回経路出力部21では、このときの底擦り回避迂回経路が表示され、また、その属性情報(進入位置までの距離や進入角度など)が視覚的、聴覚的に表示される。
【0072】
また、他の車両が自車両と車種が異なる場合には、底擦り回避迂回経路選択部21は、読み出した特徴点データをもとに、自車両から所定の距離の位置にある上記特徴点に対する地面形状データDを選択し、これと自車両形状データ入力部11からの該当する車両の底面の形状データとから、上記のようにして、底擦り回避迂回経路の情報を求め、これを底擦り回避迂回経路出力部21に供給する。これにより、底擦り回避迂回経路出力部21では、このときの底擦り回避迂回経路が表示され、また、その属性情報が視覚的、聴覚的に表示される。
【0073】
このようにして、この第3の実施形態では、第2の実施形態と同様の効果が得られるとともに、他の車両で得られた情報も利用することができ、始めて走行する走行路についても、底擦りを回避するための情報を迅速に取得することができて、これを利用することができる。
【0074】
なお、図7(a)における地面形状データ算出部13は、上記のように、常時走行路の特徴点を検出し、特徴点が検出したときには、上記の処理を行なって地面形状データ算出部13からの地面形状データDをもとに底擦り判定部10から得られた底擦り通過経路と底擦り回避迂回経路との情報を、この新たな特徴点の位置情報(特徴点位置データ)と関連付けて、底擦り経路蓄積部19に追加蓄積するが、かかる情報によって既に蓄積されている同じ特徴点の情報を更新するようにすることもできる。
【0075】
また、走行路の補修工事などにより、特徴点が解消された場合には、この特徴点に対する底擦り経路蓄積部19の蓄積情報は使用されなくなる。この場合、かかる情報をそのまま底擦り経路蓄積部19に残しておくようにしてもよいが、底擦り経路蓄積部19に蓄積されている特徴点位置データによる特徴点の位置に自車両の現在位置が達したとき、地面形状データ算出部13の特徴点位置データ取得部3(図1)で特徴点位置データが得られない場合、この特徴点位置データに関する底擦り経路蓄積部19の蓄積情報を削除するようにしてもよい。これにより、不要な蓄積情報をなくし、底擦り経路蓄積部19を有効に利用することを可能にする。
【0076】
次に、本発明による底擦り回避補助装置の第4の実施形態について説明する。この第4の実施形態も、その構成は先の第1,第2または第3の実施形態と同様の図1,図5または図7に示す構成をなすものであるが、地面形状、即ち、地面の起伏の形状に応じて、底擦り判定の間隔を異ならせるものである。
【0077】
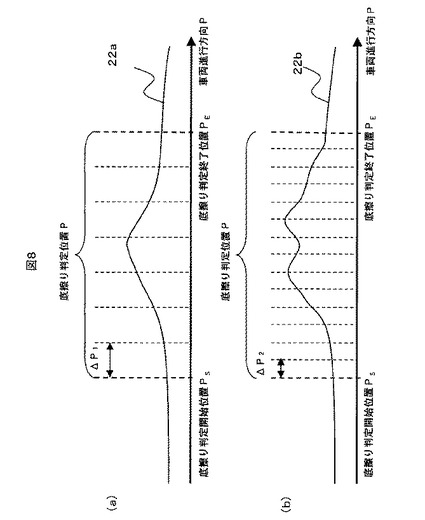
図8は地面を真横から見た場合の地面の異なる起伏の例を模式的に示す図であって、同図(a)は起伏が緩やかな地面(ここでは、特徴点が1つある)を示し、同図(b)は起伏が複雑な地面(ここでは、3個の特徴点が続いてある)を示すものである。同図(a),(b)において、22a,22bは地面、PSは底擦り判定開始位置、PEは底擦り判定終了点、Pは破線で示す底擦り判定位置、ΔP1,ΔP2は底擦り判定位置P間の間隔である。
【0078】
図8(a),(b)において、地面22a,22bでの隆起が始まる位置を底擦り判定開始位置PSとし、隆起が終わる位置を底擦り判定終了位置PEとして、底擦り判定開始位置PSから底擦り判定終了位置PEまでの間隔ΔP1,ΔP2の位置を底擦り判定位置Pとして、底擦りが生ずることが判定されるまで、この底擦り判定位置P毎に底擦り判定を行なう。従って、地面22a,22bの起伏が底擦りを生じないものである場合には、底擦り判定終了位置PEまで底擦り判定が行なわれる。
【0079】
図8(a)に示すように、起伏が緩やかな形状の地面22aに対しては、底擦り判定位置Pの間隔ΔP1を長くして底擦り判定開始位置PSから底擦り判定終了位置PEまでの底擦り判定位置P、従って、底擦り判定回数を少なくする。これに対し、図8(b)に示すように、起伏が複雑な形状の地面22bに対しては、底擦り判定位置Pの間隔ΔP1を短くして、底擦り判定開始位置PSから底擦り判定終了位置PEまでの距離が図8(a)に示す場合と同じとした場合、底擦り判定開始位置PSから底擦り判定終了位置PEまでの底擦り判定位置P、従って、底擦り判定回数を少なくする。
【0080】
地面の起伏が緩やかな場合に比べ、地面の起伏が複雑な場合には、車両の底面と地面との間隔の変化が頻繁であり、底擦りが何度も生ずる可能性がある。このために、底擦り判定位置Pの間隔ΔP1を短くして頻繁に生ずる可能性のある底擦りを逃さずに検出できるようにする。
【0081】
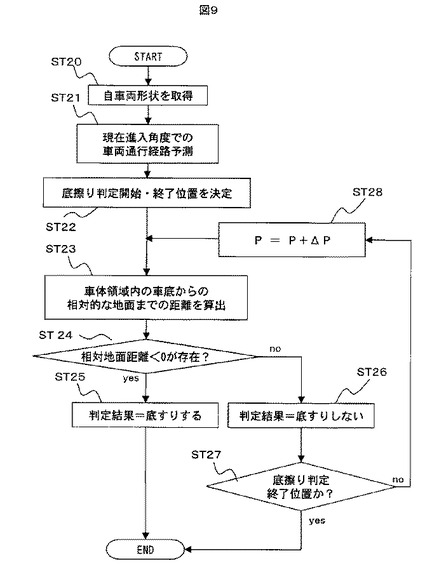
図9はかかる処理の流れを示すフローチャートである。
【0082】
同図において、自車両形状データEを取得した後(ST20)、現在の自車両が走行している走行路での現在の進入角度の通過経路を予測する(ST21)。そして、入力した地図データからこの通過経路での底擦り判定開始位置PSと底擦り判定終了位置PEを決定する(ST22)。
【0083】
次いで、まず、底擦り判定開始位置PSを底擦り判定位置Pとして、自車両の底面から地面までの距離Lを算出し(ST23)、この距離Lが0より小さい場合には(ST24の“yes”)、底擦りが生ずると判定し(ST25)、先の実施形態のように、出力部に警報を発生し、あるいは、底擦り回避迂回経路の情報などを求め、出力部で警報するとともに、この底擦り回避迂回経路の情報を出力部に供給してかかる情報を表示させる。これにより、このときの特徴点に対するかかる処理を終了する。
【0084】
また、算出した自車両の底面から地面までの距離Lが0を越える場合には(ST24の“no”)、底擦りは生じないと判定し(ST26)、底擦り判定終了位置PEに達していないので(ST26の“no”)、底擦りの有無の判定をこの底擦り判定位置Pから距離ΔPだけ離れたP+ΔPの次の底擦り判定位置Pとし(ST28)、ST23からの同様の処理を行なう。
【0085】
そして、底擦りが生ずると判定があるまで(ST24,25)、ST23,24,26,27,28の一連の処理が各底擦り判定位置P毎に行なわれ、自車両が底擦り判定終了位置PEに達するまでに底擦りが生ずると判定があると、この処理が終了し、出力部で警報や底擦り回避迂回経路の情報の表示を行なわせるが、底擦り判定終了位置PEまで処理を行なっても、底擦りが生ずるとの判定がない場合には(ST24,26)、全ての底擦り判定位置Pでの処理が終了し、底擦りは生じないものとして(ST27の“yes”)、一連の処理を終了する。
【0086】
この処理において、底擦りの有無の判定時の通過経路や自車両の車速などの情報を蓄積しておき、これを再利用することも可能とする。車両が加速や減速,バウンドなどをすることにより、地面からの自車両の底面の高さが変わるため、車速や車両スペック(仕様)によってどの程度この底面が浮き沈みしたり、傾いたりするかという情報を蓄積しておき、スペック値と実際の底擦りの有無の判定時の情報を利用して更に精度の高い底擦りの有無の判定を行なうことも可能とする。また、このことは、他の実施形態においても、底擦りの有無の判定の際に適用できるものである。
【0087】
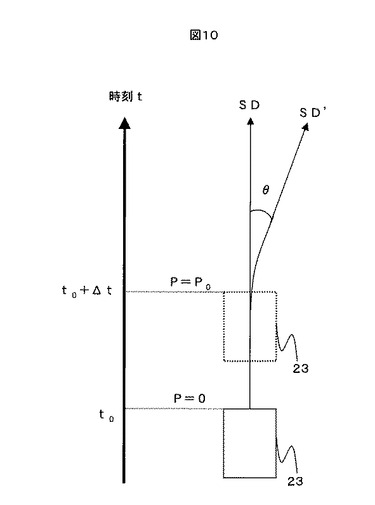
ここで、図10により、自車両の進行方向を変える処理(ヨー角変更処理)について説明する。
【0088】
同図において、現時点t0での車両23の走行(進行)方向を軸SDに沿う方向とし、この時点での車両23の移動量PをP=0とする。また、このときの車両23の進行方向の変化量θをθ=0とする。また、現時点t0から時間Δt経過後の時刻t0+Δtでの車両23がP0だけ移動するものとすると、時間Δtだけ経過した後の車両23の予測移動量PはP=P0となる。この時間Δt経過中での車両の走行方向が変わらないものとすると、この間の車両23の走行方向も軸SDに沿うものであり、進行方向の予測変化量θはθ=0である。
【0089】
いま、水平面上での進行方向の変化量θ及び垂直面での進行方向の変化量ψ(即ち、坂などによる高さ方向の変化量)に対し、進行方向を(sinθ,sinψ,cosθ)と定義する。従って、車両が水平面上を軸SDに沿って走行する場合、θ=ψ=0であるから、移動量P=0の現時点t0での車両23の進行方向は(0,0,1)であり、また、時刻tがto≦t≦t0+Δtの車両23P0だけ移動しているときの進行方向も、同じく(0,0,1)と予測される。
【0090】
ここで、現時点t0から時刻Δt経過してP0だけ移動したとき、軸SD’方向の底擦り回避迂回経路に進行するために、車両23の進行方向を水平面上で角度θ(≠0)だけ変化させるものとすると、現時点t0から時刻Δt経過した後では(t0+Δt<t:P0<P)、車両23の進行方向は(sinθ,0,cosθ)となる。
【0091】
このように進行方向を定義をすることにより、車両の移動とともに時々刻々と変化する進入角度や進行方向を明確に表わすことができ、底擦り回避迂回経路の算出に反映させることができる。
【0092】
図11は本発明による底擦り回避補助装置の第5の実施形態の要部を示すブロック構成図であって、24は撮像部、25は自車両形状データ蓄積部、26は自車両形状比較部、27は修理情報抽出部であり、前出図面に対応する部分には同一符号を付けている。
【0093】
同図において、この実施形態では、自車両の底面の底擦りが生ずる可能性のある部分を撮像する1以上のカメラからなる撮像部24を備えている。この撮像部24は、自車両の底面の底擦りが生じない位置、例えば、車軸の近くなどに設けられている。この撮像部24では、そのカメラの撮像によって得られた画像情報から自車両の底面の形状を表わす自車両形状データFを作成し、自車両形状データ入力部11を介して自車両形状比較部26に供給する。ここで、撮像部24では、さらに、各カメラ毎に撮像した画像情報の変化の有無を監視しており、カメラの1つまたは2以上の撮像画像情報に変化があると、自車両の底面のこのカメラが撮像した部分に底擦りが発生したものと判断し、そのときにのみ自動的に自車両形状データFを自車両形状入力部11に出力する。これにより、底擦りが発生した部分の自車両形状データFが自車両形状比較部26に供給される。
【0094】
一方、自車両形状データ蓄積部25には、自車両の底擦りが生じてないときの底面の形状データ(自車両形状データ)Gが、撮像部24でのカメラの撮像領域毎に区分されて蓄積されており、撮像部24のいずれかのカメラからの画像情報に底擦りがあったと判断されると、このカメラに対応する自車両形状データGが読み出され、自車両形状比較部26に供給される。
【0095】
これにより、自車両形状比較部26は、自車両形状データ蓄積部25からの底擦り前の自車両形状データGと自車両形状入力部11からの底擦り後の自車両形状データFとを比較し、底擦りの程度を表わすその比較結果を修理情報抽出部27に供給する。この修理情報抽出部27では、底擦りによる自車両形状データの変形の程度に応じた修理情報Hが保存されており、自車両形状比較部26での比較結果に応じた修理情報Hを抽出して自車両形状比較部26に供給する。自車両形状比較部26は、この修理情報Hを出力部12に供給し、この出力部12で警報を発生させるとともに、修理情報Hを表示させる。
【0096】
ここで、形状に変形がなくとも、底擦りによる塗装の剥げ具合で地金が見えている場合には、即時に塗装を促す修理情報Hを出力したり、地金も見えていない場合には、即時に塗装修理をしなくても良いことなどを案内する。また、車底を擦っているが、修理をしなかった場合にどの程度の期間で修理や交換が必要かといった情報も出力するようにすることもできるし、底擦りにより変形した場合などで、走行に支障を来たす場合や直ぐには走行に支障を来たさないが、将来走行に支障を来たす恐れがある場合には、警告やログを出力するようにすることもできる。さらに、底擦りした箇所を定期または不定期、または、任意に底擦り箇所を撮像部24で撮像し、底擦り箇所の錆び具合や劣化の程度を映像で出力部12により表示出力し、底擦り時からの変化を確認するようにすることもできる。さらにまた、底擦りの程度により、必ず修理が必要な状態に陥った場合には、修理の必要な箇所の部位を文字や画像によって出力部12で一覧表示するようにすることも可能であり、修理費用の予算など修理に関する情報を提供するようにすることも可能である。
【0097】
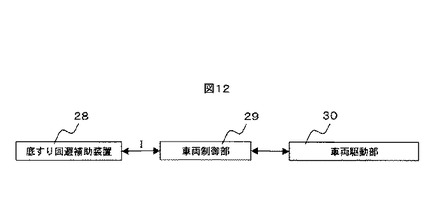
図12は底擦り回避補助装置の第6の実施形態の要部を示すブロック構成図であって、28は底擦り回避補助装置、29は車両制御部、30は車両駆動部である。
【0098】
同図において、底擦り回避補助装置28は、先の第2〜第4の実施形態のように、底擦り回避迂回経路の情報Iを出力するものであり、この情報を基に、車両制御部29が車両駆動部30を制御して、自車両を自動的に底擦り回避迂回経路を走行させるものである。勿論、このときには、図示しない出力部により、運転手にこのことを通知し、底擦り回避迂回経路への自動走行に対し、運転手が戸惑うことがないようにする。
【0099】
これにより、運転手が意識することなく、自車両は底擦りを生ずる特徴点を回避する走行を行なうことになる。
【0100】
次に、以上の実施形態では、特に説明しなかったが、底擦りが予想される箇所(底擦り予想箇所)が底擦り判定部10で検出されると、出力部12でこれを表わす画面表示をすることができる。以下では、かかる画面表示の具体例について説明する。
【0101】
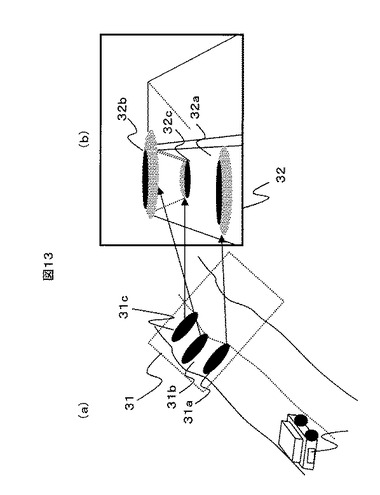
図13は本発明による底擦り回避補助装置での底擦り情報の画面表示の第1の具体例を示す図であって、同図(a)は予想される底擦りエリアがある走行路を自車両が走行している状態を示す図、同図(b)はその場合の画面表示を示す図であって、14は自車両、31は予想される底擦り地形エリア、31a,31b,31cは予想される底擦り地形箇所(特徴点)、32は予想される地形底擦りエリア表示画面、32a,32b,32cは予想される底擦り地形箇所(特徴点)である。
【0102】
同図(a)において、いま、車両14が走行路を走行中、底擦りの判定処理により、現在の進入角度や速度で走行すれば、例えば、図示するように、底擦りが予想される箇所、即ち、底擦り地形箇所31a,31b,31cを含む底擦り地形エリア31が検出されたものとすると、上記の出力部12では、図14(b)に示すように、この底擦り地形エリア31を表わす底擦りエリア表示画面32が表示される。底擦りエリア表示画面32は、底擦り地形エリア31を車両14から正面にみた画面であり、底擦り地形エリア31での底擦り地形箇所31a,31b,31cが夫々底擦り地形箇所32a,32b,32cとして表示される。
【0103】
ここで、底擦りエリア表示画面32では、底擦り地形箇所32a,32b,32cが、車両14に生ずる底擦りの強弱の度合いを運転手などが直感的に認識できるように、その表示の仕方を異ならせている。例えば、色の濃淡や色の種類の違いなどに応じて予想される底擦りの度合いを表現することが考えられるが、色の濃淡で表現する場合、例えば、強い底擦りが生ずると予想される底擦り箇所は色を濃く表示し、強い底擦りが生じないと予想される底擦り箇所は色を淡く表示するように、画像処理を行なう。
【0104】
なお、現状の走行状態で走行している場合に底擦りが生じないと予想される地形箇所については、底擦りエリア表示画面32に表示ないようにすることもできるし(従って、上記のように設定された底擦り回避迂回経路に車両が進入すると、これによって影響しない底擦り地形箇所は、底擦りエリア表示画面32から消えることになる)、また、底擦り地形箇所を一定の時間間隔、または、不定期の時間間隔や、任意の時間間隔で点滅表示させるようにすることもできる。
【0105】
図14は本発明による底擦り回避補助装置での底擦り情報の画面表示の第2の具体例を示す図であって、33は表示画面、34は地図画面、35は自車両、36は予想される底擦り地形エリア、36a,36b,36cは予想される底擦り地形箇所、37は地面画面、38a,38b,38cは予想される底擦り地形箇所、39は枠、40は文字、41は矢印、42は車底画面、43は車底、44a〜44dは予想される底擦り箇所である。
【0106】
同図において、表示画面33には、画面分割により、走行する自車両35とその周辺を示す地図を表示する地図画面34と、自車両35からみた地面の予想される形状を表示する地面画面37と、自車両の底面43を表示する車底画面42とが表示される。
【0107】
地図画面34では、予想される通過経路に沿って走行する自車両35とこの通過経路上での予想される底擦り地形箇所36a〜36cを含む底擦り地形エりア36が表示される。この通過経路上にない底擦り地形箇所は表示されない。
【0108】
また、地面画面37には、通過経路と地図画面34での底擦り地形箇所36a〜36cに対応する底擦り地形箇所38a〜38cとが表示される。この場合、底擦り地面箇所であることを明確にするために、底擦り地形箇所38a〜38c夫々に対し、枠39で囲む枠表示をしたり、例えば、「キケン」といったような文字列40を表示する文字表示をしたり、底擦り地形箇所を指し示す矢印41を表示したりすることも可能である。
【0109】
車底画面42には、自車両の車底43の画像と、地図画面34で表示される底擦り地形箇所36a〜36cや地面画面37で表示される底擦り地形箇所38a〜38cによって予想される車底43での底擦り箇所44a〜44dとが表示される。このような車底43の画像は先の自車両形状データ入力部11から得られる自車両形状データの1つであり、底擦り箇所44a〜44dは底擦り判定部10での判定処理によって得られるものである。
【0110】
また、これとともに、予測した底擦りの程度に応じて、音声出力の音量の大きさで危険度を表現することにより、音量が大きければ、底擦りの影響が大きく、小さければ、底擦りの影響が小さいというように表現するようにすることもでき、運転手などが画面を見なくても、直感的に底擦りの危険度を認識することができるようにすることもできる。
【0111】
なお、車底と地面との接触する箇所(底擦り箇所)を画面に表示する際、その拡大表示や縮小表示も可能とすることができるし、また、画面分割表示させる際には、画面の分割数や画面の配置は任意な設定可能とすることができるし、さらには、複数のモニタに底擦りの優先度に応じて表示できるようにすることができ、優先順位の高い底擦り箇所の画像を優先的に画面表示できるようにすることもできる。
【0112】
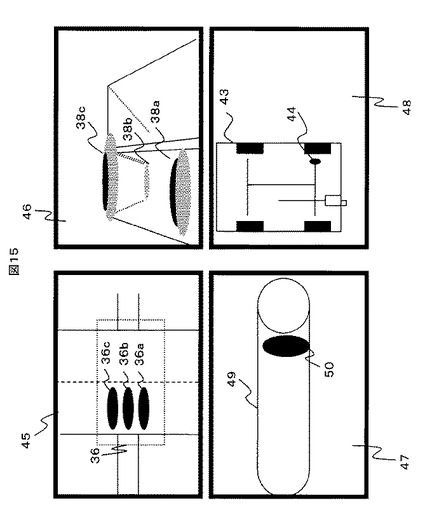
図15は本発明による底擦り回避補助装置での底擦り情報の画面表示の第3の具体例を示す図であって、44は底擦り箇所、45〜48はディスプレイ、49は車体、50は底擦り箇所であり、図14に対応する部分には同一符号を付けている。
【0113】
同図において、この具体例は4個のディスプレイ45〜48を用い、夫々毎に底擦りに関する異なる情報の画面表示を行なうようにしたものである。
【0114】
ディスプレイ45には、底擦り地形エリア35が拡大して表示されるものであり、ここでは、図14に示す地図画面34での底擦り地形エリア35が拡大して表示された状態を示す。ディスプレイ46には、自車両から見た走行方向の地面が拡大して表示されるものであって、ここでは、図14に示す地面画面37での底擦り地形エリア35が拡大して表示されている状態を示す。ディスプレイ47には、自車両の車体49の画像とこの車体49での底擦り箇所50の位置が概略的に拡大して表示される。これにより、運転手などは、自車両での底擦り箇所50の概略位置を知ることができる。ディスプレイ48には、自車両の車底43が、そこでの予想される底擦り箇所44とともに、拡大して表示される。
【0115】
また、これらディスプレイ45〜48に同一または異なる角度からの底擦りに関する画像を表示することも可能とする。
【0116】
なお、ここで、4個のディスプレイを用いたが、これ以外の複数のディスプレイを用いて、夫々毎に底擦れに関する必要な情報を表示できるようにすることも可能である。
【0117】
ところで、上記の各実施形態では、底擦りが予想される特徴点、即ち、底擦り地形箇所が判定処理によって検出されると、これを回避する底擦り回避迂回経路が探索され、車両がこの底擦り回避迂回路に進行して走行できるようにしたものであるが、現状の進行方向で走行したとき、底擦り地形箇所が予想され場合には、サスペンションなどの自車両の車高を調整する制御を行なうようにすることもできる。自車両が車底を擦ると判断した場合には、サスペンションの強度を強くして固く調整することにより、車体の浮き沈みを抑えて車高を高く調整するようにし、これにより、底擦りを回避できるようにする。また、サスペンション以外でも、車の車高調整機構部分を制御することにより、底擦りを回避するようにしてもよい。
【0118】
また、上記各実施形態では、地面の凸状の起伏部のみならず、路面に轍や陥没部分,側溝などの凹部をも認識できるようにすることも可能である。例えば、車両の走行中に轍などの凹部にタイヤが嵌まり込むことが予測される場合には、轍の凹部を避けて走行するように、上記の案内制御ができるようにすることもできる。また、陥没部分があると予想される場合には、陥没部分を予め避ける制御を行なったり、警告したりすることにより、乗り心地を損なうことなく、運転,走行をさせることを可能とする。同様に、側溝部分があるような道路では、側溝部分を避ける案内制御や警告を行なうことにより、タイヤが側溝に嵌まったりするようなことが起こらないように、運転、走行をさせることを可能とする。
【0119】
さらに、以上の実施形態は、自家用車などの車両を例に説明したが、本発明は、これのみに限られるものではなく、船舶や航空機など移動する移動体全てに適用することも可能である。例えば、航空機が着陸する場合、滑走路の長さや形状などの情報と航空機の機体の情報とを基に、自動で着陸することをも可能とすることができる。また、船舶の場合であれば、岩礁などの海底の形状の情報と潮位や船舶の形状情報を基に、岩礁に接触しないように航行させることをも可能とする。
【0120】
以上、上記実施形態では、カメラを用いて事前に自車両の底擦りを判定し、底擦りすることを事前に知ることを可能としたり、また、そのような底擦りをする経路を迂回する経路、即ち、底擦り回避迂回経路を表示することが可能であるし、さらに、人手で運転しなくとも、自動運転により、底擦りを回避することも可能にする。これまで、人間の感覚に頼っていた部分を、ステレオカメラによる特徴点の測定技術を利用することにより、さらに安全な運転をすることが可能となる。
【図面の簡単な説明】
【0121】
【図1】本発明による底擦り回避補助装置の第1の実施形態を示すブロック構成図である。
【図2】図1での地図データ入力部で得られた地図データのワールド座標系をステレオカメラ4のワールド座標系への変換の一具体例を示す図である。
【図3】図1でのステレオカメラのワールド座標系XYZの定義を示す図である。
【図4】図1に示す第1の実施形態の一連の処理の流れを示すフローチャートである。
【図5】本発明による底擦り回避補助装置の第2の実施形態の要部を示すブロック構成図である。
【図6】図5に示す第2の実施形態の一連の処理の流れを示すフローチャートである。
【図7】本発明による底擦り回避補助装置の第3の実施形態の要部を示すブロック構成図である。
【図8】地面を真横から見た場合の地面の異なる起伏の例を模式的に示す図である。
【図9】本発明による底擦り回避補助装置の第4の実施形態での処理の流れを示すフローチャートである。
【図10】自車両の進行方向を変える処理(ヨー角変更処理)について説明した図である。
【図11】本発明による底擦り回避補助装置の第5の実施形態の要部を示すブロック構成図である。
【図12】本発明による底擦り回避補助装置の第6の実施形態の要部を示すブロック構成図である。
【図13】本発明による底擦り回避補助装置での画面表示の第1の具体例を示す図である。
【図14】本発明による底擦り回避補助装置での画面表示の第2の具体例を示す図である。
【図15】本発明による底擦り回避補助装置での画面表示の第3の具体例を示す図である。
【符号の説明】
【0122】
1 地図データ入力部
2 地面形状データ抽出部
3 特徴点位置データ取得部
4 ステレオカメラ
4a,4a カメラ
5a,5b 画像処理部
6 特徴抽出部
7 特徴点位置算出部
8 特徴座標位置袷部
9 地面形状座標変換部
10 底擦り判定部
11 自車両形状データ入力部
12 出力部
13 地面形状データ算出部
18 通過経路演算部
19 底擦り経路蓄積部
20 底擦り回避迂回経路選択部
21 底擦り回避迂回経路出力部
24 撮像部
25 自車両形状データ蓄積部
26 自車両形状比較部
27 修理情報抽出部
28 底擦り回避補助装置
29 車両制御部
30 車両駆動部
31 予想される底擦り地形エリア
31a,31b,31c 予想される底擦り地形箇所(特徴点)
32 予想される地形底擦りエリア表示画面
32a,32b,32c 予想される底擦り地形箇所
33 表示画面
34 地図画面
35 自車両
36 予想される底擦り地形エリア
36a,36b,36c 予想される底擦り地形箇所
37 地面画面
38a,38b,38c 予想される底擦り地形箇所
39 枠
40 文字
41 矢印
42 車底画面
43 車底
44a〜44d 予想される底擦り箇所
44 底擦り箇所
45〜48 ディスプレイ
49 車体
50 底擦り箇所
【技術分野】
【0001】
本発明は、車両などの底面が地面や障害物に接触することによる底擦りを防止することができるようにした運転支援装置としての底擦り回避補助装置に関する。
【背景技術】
【0002】
車載カメラとして車両にカメラなど撮像装置を搭載し、車両の周辺の地面を撮像することにより、得られた画像データから地面や地面状の障害物を検出するようにした技術が知られている(例えば、特許文献1参照)。
【0003】
この特許文献1に記載の技術では、撮像装置から得られた画像データの各画素の三次元座標系での位置や画素値といった属性情報を検出し、かかる属性情報に基づいて画素の位置分布を求め、かかる分布から地面を推定するとともに、地面上の障害物を検出するものである。
【特許文献1】公開番号 特開平10−143659
【発明の開示】
【発明が解決しようとする課題】
【0004】
車両の底をする危険性があるにもかかわらず、乗り越えられると運転者が判断した地面の段差や傾斜を走行して車両の底をすったり、乗り上げたりする課題があった。
【0005】
上記特許文献1の記載の技術では、車両が走行する地面やその地面上の障害物を検出することができ、この障害物を回避するように、車両を走行させることにより、この障害物との衝突を避けることができる。
【0006】
しかしながら、地面に起伏がある場合には、上記特許文献1に記載の技術では、この起伏を地面の一部と見なしてしまい、車両の底面がこの起伏によって地面を擦り、底擦りが生ずるものであっても、これを回避させるような情報を提供するものではない。
【0007】
本発明の目的は、かかる問題を解消し、車両の底擦りの発生を事前に確実に知ることができ、これを確実に回避することができるようにした底擦り回避補助装置を提供することにある。
【0008】
本発明の他の目的は、車両に底擦りが生じた場合の修理に関する情報を即座に知ることができるようにした底擦り回避補助装置を提供することにある。
【0009】
本発明のさらに他の目的は、車両に底擦りが生じたとき、この底擦りの位置を即座に知ることができるようにした底擦り回避補助装置を提供することにある。
【課題を解決するための手段】
【0010】
上記目的を達成するために、本発明は、自車両が走行している地面を撮像する撮像手段と、撮像手段により撮像した地面情報を用いて地面の形状データを求める地面形状抽出手段と、地面形状抽出手段から求めた地面の形状データと自車両の形状データとから、自車両の走行中に自車両の底面が地面に接触する底擦りが生ずるか否かを判定する底擦り判定手段と、底擦り判定手段による底擦りが生ずるとの判定により、事前に警告する警告手段とを備えたことを特徴とするものである。
【0011】
また、本発明は、自車両の周辺の地図データを取得する地図データ入力手段と、地図データ入力部から入力された地図データから自車両の周辺の第1の地面形状データを抽出する地面形状データ抽出手段と、地面形状データ抽出部で抽出された地面形状データから地面の形状の第1の特徴点の位置データを取得する特徴点位置データ取得手段と、自車両の下側の地面や該自車両の周囲を撮像する2以上の撮像手段と、撮像手段から得られた画像データから地面の形状の第2の特徴点の位置データを算出する特徴点位置算出手段と、第1の特徴位置データが第2の特徴点位置データと重なるように、地面形状データ抽出手段で抽出された地面形状データを座標変換し、自車両を基にする座標系での第2の地面形状データを取得する地面形状データ取得手段と、地面形状データ取得手段で取得した第2の地面形状データと自車両の形状データとから、自車両の走行中に自車両の底面が地面に接触する底擦りが生ずるか否かを判定する底擦り判定手段と、底擦り判定手段による底擦りが生ずるとの判定により、事前に警告する警告手段とを備えたことを特徴とするものである。
【0012】
また、本発明は、底擦り判定手段による底擦り有りとの判定により、底擦りを生ずる特徴点を回避する底擦り回避迂回経路を探索する通過経路演算手段を設けたことを特徴とするものである。
【0013】
また、本発明は、自車両の周辺の地図データを取得する地図データ入力手段と、地図データ入力部から入力された地図データから自車両の周辺の第1の地面形状データを抽出する地面形状データ抽出手段と、地面形状データ抽出部で抽出された地面形状データから地面の形状の第1の特徴点の位置データを取得する特徴点位置データ取得手段と、自車両の下の地面や自車両の周囲を撮像する2以上の撮像手段と、撮像手段から得られた画像データから地面の形状の第2の特徴点の位置データを算出する特徴点位置算出手段と、第1の特徴位置データが第2の特徴点位置データと重なるように、地面形状データ抽出手段で抽出された地面形状データを座標変換し、自車両を基にする座標系での第2の地面形状データを取得する地面形状データ取得手段とからなる地面形状データ算出部と、地面形状データ算出部からの第2の地面形状データと自車両の形状データとから、自車両の走行中に自車両の底面が地面に接触する底擦りが生ずるか否かを判定する底擦り判定部と、底擦り判定部による底擦りありとの判定により、底擦りを生ずる特徴点を回避する底擦り回避迂回経路を探索する通過経路演算部と、通過経路演算部で得られた底擦り回避迂回経路の情報を蓄積する底擦り経路蓄積部と、自車両の位置データと自車両の形状データとをもとに、底擦り経路蓄積部から自車両に対する底擦り回避迂回経路を選択する経路選択部と、経路選択部で選択された底擦り回避迂回経路を表示する出力部とを備えたことを特徴とするものである。
【0014】
また、本発明は、自車両以外の他の車両で取得された地面形状データと他の車両の車両形状データとを入力するデータ入力手段と、データ入力手段から入力された地面形状データを前記底擦り経路蓄積部に蓄積する蓄積手段とを設け、データ入力手段から入力された他の車両の車両形状データを、前記前記底擦り経路蓄積部に蓄積された他の車両で取得された地面形状データと関連付けて、保存することを特徴とするものである。
【0015】
また、本発明は、自車両の走行路での地面の起伏による底擦り判定開始位置と底擦り判定終了位置とを決定する決定手段と、底擦り開始位置から所定の距離間隔で底擦り判定処理を指示する判定開始指示手段と、自車両が底擦り終了位置に達するまでに自車両に底擦りが生ずることが判定されると、底擦り判定処理の終了を指示する判定終了指示手段とを設け、地面の起伏の程度に応じて、所定の距離間隔を異ならせることを特徴とするものである。
【0016】
また、本発明は、自車両の形状データが、自車両の走行速度や車両スペックによる車両の浮き沈みや傾きなどに関する情報も含むことを特徴とするものである。
【0017】
上記他の目的を達成するために、本発明は、車両が底擦りした箇所を撮像する撮像手段と、撮像手段によって撮像された車両の底擦りよって変形した変形形状と変形前の形状とを画像データをもとに比較する比較手段と、比較手段の比較によって得られる車両の底擦りに応じた修理情報を抽出し、出力手段で表示させる修理情報抽出手段とを備えたことを特徴とするものである。
【0018】
また、本発明は、得られた前記底擦り回避迂回経路の情報をもとに、自車両を自動で運転する車両制御手段とを備えたことを特徴とするものである。
【0019】
また、本発明は、得られた前記底擦り回避迂回経路の情報をもとに、自車両の底面の高さを調整する車高調整部を備えたことを特徴とするものである。
【0020】
上記さらに他の目的を達成するために、本発明は、自車両の通過経路での予想される底擦り地形箇所を表示する手段を設けたことを特徴とするものである。
【0021】
また、本発明は、自車両と自車両の通過経路での予想される底擦り地形箇所とを表わす地図画面と、底擦り地形箇所を含む底擦り地形領域を地面画面と、自車両の底面での予想される底擦り箇所を表わす底面画面とを1つの表示手段で表示することを特徴とするものである。
【0022】
また、本発明は、自車両と自車両の通過経路での予想される底擦り地形箇所とを表わす地図を拡大表示する第1の表示手段と、自車両での予測される底擦り箇所の位置を拡大表示する第2の表示手段と、地面での底擦り地形箇所を拡大表示する第3の表示手段と、自車両の底面での予想される底擦り箇所を拡大表示する第4の表示手段とを設けたことを特徴とするものである。
【発明の効果】
【0023】
本発明によると、車両の地面との予想される底擦り情報をリアルタイムで取得し、運転手などに知らせることができ、底擦りを回避する通過経路を画面表示で運転手などに提供することができ、車両の運転を支援することを可能とする。
【0024】
また、本発明によると、取得した底擦りの情報に応じて、車体の高さを調整することができ、通過経路上に底擦りを生ずる地形(特徴点)があっても、これによる底擦りを回避することができる。
【0025】
また、本発明によると、車両の底擦りによる修理情報を取得し、これを車両の運転手などに提供することができる。
【0026】
即ち、本発明によると、底擦り判定を行なうことで、車両を安全に運転することを可能とし、車両の底擦りなどによる思わぬ事故や故障を避けることが可能となる。また、蓄積した底擦り判定の情報を利用することにより、地図データが更新されていなくても、さらに、精度の高い情報を取得することが可能である。本発明では、自車両の形状など車両の底面の形状データを入力したり、記憶することが可能なため、自車両以外の車両からの底擦り情報を利用してさらに精度の高い底擦り判定を行なうことも可能である。また、底擦り情報を蓄積することによって、底擦りすることが分かっていても、あえて車底を擦って走行した車両でも、底を擦った情報を蓄積しているため、修理情報として利用することが可能である。また、底擦り情報を持った車両であれば、新車、中古車購入時にユーザーが底擦り情報を事前に知った上で購入することが可能となる。
【発明を実施するための最良の形態】
【0027】
以下、本発明の実施形態を図面を参照しながら説明する。
【0028】
図1は本発明による底擦り回避補助装置の第1の実施形態を示すブロック構成図であって、1は地図データ入力部、2は地面形状データ抽出部、3は特徴点位置データ取得部、4はステレオカメラ、4a,4bはカメラ、5a,5bは画像処理部、6は特徴抽出部、7は特徴点位置算出部、8は特徴座標位置袷部、9は地面形状座標変換部、10は底擦り判定部、11は自車両形状データ入力部、12は出力部、13は地面形状データ算出部である。
【0029】
同図において、この第1の実施形態は、自車両の走行路(道路や踏切,駐車場など)の進行方向の地面形状データを算出する地面形状データ算出部13と、自車両の底面の形状データが入力される自車両形状データ入力部11と、地面形状データ算出部13からの走行路の地面形状データと自車両形状データ入力部11からの自車両の底面形状データとから自車両に底擦れが生ずるか否かを判定する底擦れ判定部10と、底擦り判定部10の判定結果を運転手などの搭乗者に通知する出力部12とから構成されており、自車両に搭載されている。
【0030】
また、地面形状データ算出部13は、自車両の進行方向の3次元または2次元の地図データを受信する地図データ入力部1と、受信された地図データから自車両の走行路の地面の形状データ(地面の各位置での高さや傾斜などのデータ)Aを抽出する地面形状データ抽出部2と、この地面形状データAから地面の凹凸部や地面上の障害物などがある特徴点の位置を表わす特徴点位置データBを抽出する特徴位置データ取得部3と、2つのカメラ4a,4bからなり、自車両での地面や自車両の周辺の地面を撮像するステレオカメラ4と、カメラ4a,4b夫々から出力される映像情報を処理する画像処理部5a,5bと、画像処理部5a,5bの出力映像情報から自車両での地面やその周辺の地面の形状の特徴を抽出する特徴抽出部6と、特徴抽出部6で抽出された特徴点の位置(即ち、自車両からの距離,方向)のデータ(特徴点位置データC)を算出する特徴点位置算出部7と、特徴点位置データ取得部3で抽出された特徴点位置データBと特徴点位置算出部7で算出された特徴点位置データCとを重ね合わせ、これらデータの特徴点がマッチングするための座標変換のパラメータを算出する特徴座標位置合わせ部8と、特徴点位置データ取得部3で得られた地面形状データAをこのパラメータを用いて座標変換し、自車両の底擦りの有無の判定をするための地面形状データ(地面の特徴点を含む各位置での高さや傾斜などの情報)Dを求める地面形状座標変換部9とから構成されている。
【0031】
即ち、地面形状データ算出部13は、ステレオカメラ4の撮像によって得られる映像情報から、自車両での地面や自車両の周辺の地面の特徴点の位置を求め、この特徴点の位置での地面の形状の具体的な値(地面の傾斜や高さなどの値)を、地図データ入力部1で受信された地図データから地面形状データ抽出部2で得られる地面形状データAをもとに、求めるものである。このために、特徴座標位置合わせ部8により、地面形状データAから特徴点位置データ取得部3で抽出された特徴点位置データBでの特徴点の位置と特徴点位置算出部7で算出された特徴点位置データCでの特徴点の位置とが一致するための座標変換のパラメータを求め、このパラメータによって地面形状データ抽出部2で抽出された地面形状データAを座標変換することにより、この地面形状データAをステレオカメラ4からの映像情報から得られたデータと同等の地面形状データDとするものである。これにより、地面形状座標変換部9において、自車両の位置での地面や自車両の周辺での地面の傾斜や高さなどの地面形状データDを取得することができるものである。
【0032】
図2は地図データ入力部1で得られた地図データのワールド座標系(World Coordinate System)をステレオカメラ4のワールド座標系への変換の一具体例を示す図である。
【0033】
同図において、Aは自車両に搭載されたステレオカメラ4に対して設定されたワールド座標系XYZを示すものであって、ステレオカメラ4での左側のカメラ4aと右側のカメラ4bとの撮像によって得られる地面形状データ15は、このワールド座標系XYZのデータとして得られる。かかる地面形状データ15で特徴点15a,15b,15cが存在する場合には、これらの特徴点位置データが特徴抽出部6と特徴点位置算出部7とによって得られる。
【0034】
また、16は地図データ入力部1から得られる絶対空間のワールド座標系X’Y’Z’での地図データを示すものであって、かかる地図データ16から地面形状データ抽出部2(図1)により、地面での各位置がX’Y’Z’の座標値からなる地面形状データAが得られ、この地面形状データAから、特徴点位置データ取得部3により、この地面形状データAでの特徴点16a,16b,16cに対する特徴点位置データBが得られる。
【0035】
ここで、地面形状データAでの特徴点16aが地面形状データ15での特徴点15aに相当し、以下、特徴点16bが特徴点15bに、特徴点16cが特徴点15cに相当するものとすると、特徴点16aを特徴点15aに、特徴点16bを特徴点15bに、特徴点16cを特徴点15cに夫々一致させるように、ワールド座標系X’Y’Z’のX,Y,Z軸方向への各々の回転成分を表わす3×3の回転行列をR、ワールド座標系X’Y’Z’のX,Y,Z軸方向への平行移動の移動量を表わす3×1の並進ベクトルをtとして、
【数1】
【0036】
により、ワールド座標系X’Y’Z’をワールド座標系XYZに座標変換するものである。かかる回転行列Rと並進ベクトルtとが特徴座標位置合わせ部8で求められ、かかるパラメータに基づいて座標変換が地面形状座標変換部9で行なわれる。
【0037】
図3はステレオカメラ4のワールド座標系XYZの定義を示す図である。
【0038】
同図において、左側のカメラ4aと右側のカメラ4bとは、光軸Oxが平行となるように設置されている。3次元のワールド座標系XYZは、左側のカメラ4aのレンズの中心点4a1と右側のカメラ4bのレンズの中心点4b1を結ぶ直線上の中点17を原点として、この原点17を通るこの直線に沿う軸をX軸とし、原点17を通り、光軸Oxに平行な軸をZ軸とし、原点17を通り、X,Z軸に垂直な軸をY軸とするものである。
【0039】
図1において、地面形状座標変換部9で得られた地面形状データDと自車両形状データ入力部11からの自車両の底面の形状データ(以下、自車両形状データという)Eとから、底擦り判定部10により、自車両の底面が走行経路上の地面あるいは障害物に擦れるかどうか判定される。自車両の底面が擦れると判定された場合には、その判定結果に基づいて、出力部12から人間が認識可能な感覚、例えば、視覚で認識可能な表示や聴覚で認識可能な音声により、搭乗者に底擦りすることを事前に知らせる警告が発せられる。
【0040】
図4はこの第1の実施形態の以上の一連の処理の流れを示すフローチャートである。以下、この処理の流れを前出図面も参照して説明する。
【0041】
同図において、地図データ入力部1から地図データを取得し(ST(ステップ)1)、地面形状データ抽出部2により、取得したこの地図データから地面形状データAを抽出する(ST2)。また、停車中あるいは走行中の自車両やその付近の地面をステレオカメラ4が撮像して画像情報を取得し(ST3)、画像処理部5a,5bで処理した後、特徴抽出部6によってこの画像情報から地面の特徴点を抽出し(ST4)、特徴点位置算出部7で自車両からこの特徴点までの距離を算出して第1の特徴点位置データ(図2での特徴点15a,15b,15cの位置データに相当)Cを得る(ST5)。また、地面形状データ抽出部2で抽出した(ST2)地面形状データAからも、特徴点の位置データ、即ち、第2の特徴点位置データ(図2での特徴点16a,16b,16cの位置データに相当)Bを抽出する(ST6)。
【0042】
そして、特徴座標位置合わせ部8でこれら第1,第2の特徴点位置データB,Cでの特徴点の座標位置合わせを行なって、座標変換のパラメータ(上記数1での回転行列R,並進ベクトルt)を求め(ST7)、地面形状データ抽出部2で抽出された地面形状データAをステレオカメラ4の座標系のデータへと座標変換して、この座標変換された地面形状データAから地面形状データDを取得する(ST8)。
【0043】
以上が地面形状データ算出部13で行なわれる処理である(ST12)。
【0044】
次に、この地面形状データDは底擦り判定部10に送られ、自車両形状データ入力部11からの自車両の底面の形状データ、即ち、自車両形状データEとに基づいて、自車両の底擦りの有無の判定を行なう(ST9)。底擦りが生ずるか否かの判定は、自車両の底面と地面との間の距離が0以下であるか否かを検出することによって行なう。その判定の結果が底擦りすることである場合には(ST10)、人間が認識可能な聴覚,視覚あるいは触覚などの伝達手段により、音声や画像の表示,振動などを行なって搭乗者に底擦りすることを伝える(ST11)。
【0045】
かかる処理は、自車両が特徴点からその車速に応じた所定の距離の位置に達すると、開始する。
【0046】
この第1の実施形態においては、特徴点の地面の形状として、単に地面上の起伏などの特徴を利用するばかりでなく、底擦り判定の特徴点の抽出の対応の応用として、道路上の白線を利用したり、踏み切りのレールを利用したりするなど道路上や走行する地面の形状以外の特徴を用いることにより、特徴点抽出の速度や正確さを向上させてもよい。また、ステレオカメラ4からの画像情報から抽出した地面形状データを地図データに反映させることにより、地図データの更新をも可能とする。
【0047】
図5は本発明による底擦り回避補助装置の第2の実施形態の要部を示すブロック構成図であって、18は通過経路演算部であり、図1に対応する部分には同一符号を付けて重複する説明を省略する。
【0048】
同図において、この第2の実施形態は、図1に示す第1の実施形態に通過経路演算部18を追加し、底擦りを回避するための通過径路やその進入角度を指示するようにしたものである。ここで、「通過経路」とは、道路などの走行路上での中央寄りや右側寄り,左側寄りといった自車両が走行(通過)する経路をいい、特に、後述するようにして底擦りを回避可能に求められた通過経路を「底擦り回避迂回経路」という。
【0049】
この第2の実施形態においても、上記第1の実施形態と同様、底擦り判定部10において、地面形状データ算出部13からの地面形状データDと自車両形状データ入力部11からの自車両形状データEとから、自車両の底面が地面や地面上の障害物に底擦りするかどうかが判定されるが、その判定結果が底擦りを行なうというものであるときには、自車両がその走行路上をそのときの通過経路でそのまま走行し続けると、底擦りが生ずるので、出力部12でその旨の警報が発せられるようにするとともに、通過経路演算部18により、その走行路上での通過経路を変更し、地面の底擦りを生じさせる形状部分や障害物を避けて進行可能な新たな通過経路とそれへの進入位置や進入角度が算出され、この算出結果を基に、この新たな通過経路、即ち、底擦り回避迂回経路やそれへの進入位置,進入角度を出力部12に表示したり、音声などでこの底擦り回避迂回経路を通過可能とするための情報を伝達し、底擦り回避を補助する。なお、かかる出力結果を用いることにより、そのときには、人間が運転しなくとも、この出力結果を車両の制御系に伝達することで自動運転による底擦り回避をも可能とすることができる。
【0050】
図6はこの第2の実施形態の以上の一連の処理の流れを示すフローチャートである。以下、この処理の流れを図5も参照して説明する。
【0051】
同図において、ST12,ST9,ST10は、第1の実施形態での図4のST12,ST9,ST10と同様であり、説明を省略する。
【0052】
底擦り判定手段10により、底擦りするとの判定があると(ST10の“yes”)、このときに想定する底擦りを回避するための通過経路への進入位置までの距離をZ0=0とし、この進入位置でのこの想定する通過経路への進入角度をθ=0である。このときに、ST10で底擦りするとの判定があるのである。
【0053】
そこで、新たに底擦りを回避する通過経路を想定するために、その通過経路への進入位置までの距離Z0をこれまでの距離Z0に所定の距離ΔZ0を加えたZ0+ΔZ0としてΔZ0だけ変化させ、進入角θをこれまでの進入角θに所定の角度Δθを加えたθ+ΔθとしてΔθだけ変化させ(ST13)、かかる通過経路での地面形状を地面形状データ算出部13から求めた地面形状データDをもとに求めて、底擦りが生ずるか否かを判定する(ST14)。そして、この新たな通過経路で底擦りが生じなければ(ST15の“no”)、かかる通過経路を、底擦り回避迂回経路として、その情報(この底擦り回避迂回経路までの距離Z0と進入角θなど)を出力部12に送り、カーナビなどの画面や視覚で確認できる方法で運転者に伝える(ST16)。
【0054】
新たに想定した通過経路でも、底擦りが生ずる場合には(ST15の“yes”)、ST13に戻って、さらに、進入位置までの距離Z0をΔZ0だけ変化させ、また、進入角θをΔθだけ変化させて(ST13)、さらに新たな通過経路を想定し、これでもって底擦りの有無の判定を行なう(ST14)。そして、底擦りが生じないと判定される通過通路が得られるまで(即ち、ST15で“no”となるまで)、進入角θをΔθずつ、また、進入位置までの距離Z0をΔZ0ずつ夫々順次変化させる。これにより、底擦りが生じないとの判定があると(ST15の“no”)、このとき想定されている通過経路を底擦り回避迂回経路として、その情報を出力部12に送り、カーナビなどの画面や視覚で確認できる方法で搭乗者に伝える(ST16)。
【0055】
かかる処理は、自車両が特徴点からその車速に応じた所定の距離の位置に達すると、開始する。
【0056】
なお、底擦り判定部10によるST14の底擦り判定では、新たに想定された通過経路での地面形状を地面形状データ算出部13からの地面形状データDから求め、この地面形状と自車両形状データEとを基に行なわれる。
【0057】
また、このような底擦り回避通過通路の探索処理中、実際には、自車両が走行しているし、また、運転者がハンドルを切るなどして進行方向も変化している。このため、この運転者の反応速度や車両の特性などのデータを利用して、車体が進む距離や走行方向の変化をも考慮して、進入角θや進入位置までの距離Z0を修正する。これにより、精度の高い底擦り回避のための進行経路の決定処理が行なわれることになる。
【0058】
このようにして、この第2の実施形態では、走行路を走行中に底擦りが生ずる特徴点があることを運転者や同乗者に通報するとともに、この底擦りを回避するための通過経路、即ち、底擦り回避迂回経路も運転者や同乗者に知らされることができ、これにより、自車両の底擦りを回避できる通過経路も知ることができる。
【0059】
図7は本発明による底擦り回避補助装置の第3の実施形態の要部を示すブロック構成図であって、19は底擦り経路蓄積部、20は底擦り回避迂回経路選択部、21は底擦り回避迂回経路出力部であり、図5に対応する部分には同一符号を付けて重複する説明を省略する。
【0060】
この第3の実施形態は、これまで走行した走行路での特徴点の底擦りが生ずる通過経路(底擦り通過経路)と底擦りを回避できる通過経路(底擦り回避迂回経路)との情報(侵入位置や侵入角度など)を蓄積しておき、この走行経路を自車両が再度走行するときに、この蓄積情報を利用して底擦りを回避することができるようにしたものである。図7(a)は情報の蓄積システムを示すものであり、図7(b)は蓄積情報の利用システムを示すものである。
【0061】
同図において、図5に示す第2の実施形態と同様、底擦り判定部10と通過経路演算部18とにより、地面形状データ算出部13からの地面の特徴点の属性情報と自車両形状データ入力部11からの自車両形状データEとから、底擦りを生ずる底擦り通過経路と底擦りを回避できる底擦り回避迂回経路とが求められる。このようにして得られた情報は、特徴点毎に、地面形状データ算出部13の特徴点位置データ取得部3で得られた特徴点位置データB(図1)と関連付けて底擦り経路蓄積部19に蓄積される。
【0062】
このようにして、底擦り経路蓄積部19には、自車両が一度走行した走行路で検出される特徴点毎に、底擦り通過経路と底擦り回避迂回経路との情報が特徴点位置データBと関連付けて蓄積される。
【0063】
図7(b)に示す蓄積情報の利用システムは、カーナビゲーションシステムなどを利用して底擦り経路蓄積部19から選択した底擦り回避迂回経路との情報を表示するものであり、底擦り回避迂回経路出力部21は、かかるカーナビゲーションシステムなどに設けられているものである。
【0064】
装置に電源が入ると、底擦り回避迂回経路選択部20は、底擦り経路蓄積部19から特徴点位置データBを読み出し、また、自車両の現在位置を示す自車両位置データEが供給され、自車両の現在位置と特徴点の位置との関係を監視する。自車両の現在位置がある特徴点の位置から所定の距離の位置となると、底擦り回避迂回経路選択部20は、特徴点データをもとに、自車両から所定の距離の位置にある上記特徴点に対する底擦り回避迂回経路の情報を底擦り経路蓄積部19から選択し、これを底擦り回避迂回経路蓄積部21に供給する。これにより、出力部12では、このときの底擦り回避迂回経路が表示され、また、その属性情報(進入位置までの距離や進入角度など)が視覚的、聴覚的に表示される。
【0065】
このようにして、既に取得した底擦り回避迂回経路の情報を利用することができ、かかる情報を迅速に表示させることができて、できるだけ早く運転者に通報することが可能となる。また、底擦り回避迂回経路の表示手段としても、車両に搭載されるカーナビゲーションシステムのディスプレイなどを利用することができ、車両内に配置するディスプレイの個数を低減でき、運転者が見る対象を減らすことができて運転への支障を防止することができる。
【0066】
ところで、底擦り経路蓄積部19に蓄積した情報を、他の車両でも、利用することができようにすることもできる。但し、この場合には、底擦り経路蓄積部19には、さらに、各特徴点に対し、上記の底擦り回避迂回経路の情報などとともに、これに対して地面形状データ算出部13から得られた地面形状データDも蓄積する。また、この場合には、底擦り回避補助装置としては、図7(b)に示す蓄積情報の利用システムだけを備えたものでもよい。
【0067】
以下では、図7(b)を用いてこの点について説明する。
【0068】
少なくとも図7(a)に示す情報の蓄積システムを備えた車両では、上記のように、底擦り経路蓄積部19に、特徴点毎に、底擦り通過経路と底擦り回避迂回経路との情報が特徴点位置データBと関連付けて蓄積されるが、さらに、地面形状算出部13からの地面形状データDも関連付けて蓄積される。かかる底擦り経路蓄積部19の蓄積情報は、通信手段やリムーバブルメディアなどを用いて、他の車両に送り、その底擦り経路蓄積部19にコピーすることができる。また、この蓄積情報を送る際には、その車両の底面の形状データも送る。
【0069】
このようにして、他の車両から送られてきた蓄積情報は、図7(b)において、自車両の底擦り経路蓄積部19に、提供元の車両毎に区分して、蓄積される。また、他の車両から送られてきた車両の底面の形状データは自車両形状データ入力部11に登録されるが、このとき、この情報提供元の車両が提供元の車両が自車両と車種が同一であるかどうか、また、異種の車両であっても、底面の形状が自車両と同一であるかどうかが判断され、その判断結果の情報(以下、車種情報という)が自車両形状データ入力部11に保存される。なお、他の車両が自車両と同一車種や底面が同一である場合、以下では、この他の車両を同一車種の車両という。
【0070】
装置に電源が入ると、底擦り回避迂回経路選択部21は、自車位置を表わす自車位置データEを取り込むとともに、底擦り経路蓄積部19から全ての特徴点位置データがこれを提供した他の車両と関連付けて読み出し、自車位置データEと特徴点位置データとを照合して自車両の現在位置と特徴点の位置との関係を監視する。自車両の現在位置がある特徴点の位置から所定の距離の位置となると、底擦り回避迂回経路選択部21は、自車両形状データ入力部11に蓄積されている車種情報をもとに、底擦り回避迂回経路の情報や特徴点位置データなどを提供した上記の他の車両が自車両と同一車種であるかどうかを判断する。
【0071】
そして、他の車両が自車両と同一車種である場合には、底擦り回避迂回経路選択部21は、読み出した特徴点データをもとに、自車両から所定の距離の位置にある上記特徴点に対する底擦り回避迂回経路の情報を底擦り経路蓄積部19から選択し、これを底擦り回避迂回経路出力部21に供給する。これにより、底擦り回避迂回経路出力部21では、このときの底擦り回避迂回経路が表示され、また、その属性情報(進入位置までの距離や進入角度など)が視覚的、聴覚的に表示される。
【0072】
また、他の車両が自車両と車種が異なる場合には、底擦り回避迂回経路選択部21は、読み出した特徴点データをもとに、自車両から所定の距離の位置にある上記特徴点に対する地面形状データDを選択し、これと自車両形状データ入力部11からの該当する車両の底面の形状データとから、上記のようにして、底擦り回避迂回経路の情報を求め、これを底擦り回避迂回経路出力部21に供給する。これにより、底擦り回避迂回経路出力部21では、このときの底擦り回避迂回経路が表示され、また、その属性情報が視覚的、聴覚的に表示される。
【0073】
このようにして、この第3の実施形態では、第2の実施形態と同様の効果が得られるとともに、他の車両で得られた情報も利用することができ、始めて走行する走行路についても、底擦りを回避するための情報を迅速に取得することができて、これを利用することができる。
【0074】
なお、図7(a)における地面形状データ算出部13は、上記のように、常時走行路の特徴点を検出し、特徴点が検出したときには、上記の処理を行なって地面形状データ算出部13からの地面形状データDをもとに底擦り判定部10から得られた底擦り通過経路と底擦り回避迂回経路との情報を、この新たな特徴点の位置情報(特徴点位置データ)と関連付けて、底擦り経路蓄積部19に追加蓄積するが、かかる情報によって既に蓄積されている同じ特徴点の情報を更新するようにすることもできる。
【0075】
また、走行路の補修工事などにより、特徴点が解消された場合には、この特徴点に対する底擦り経路蓄積部19の蓄積情報は使用されなくなる。この場合、かかる情報をそのまま底擦り経路蓄積部19に残しておくようにしてもよいが、底擦り経路蓄積部19に蓄積されている特徴点位置データによる特徴点の位置に自車両の現在位置が達したとき、地面形状データ算出部13の特徴点位置データ取得部3(図1)で特徴点位置データが得られない場合、この特徴点位置データに関する底擦り経路蓄積部19の蓄積情報を削除するようにしてもよい。これにより、不要な蓄積情報をなくし、底擦り経路蓄積部19を有効に利用することを可能にする。
【0076】
次に、本発明による底擦り回避補助装置の第4の実施形態について説明する。この第4の実施形態も、その構成は先の第1,第2または第3の実施形態と同様の図1,図5または図7に示す構成をなすものであるが、地面形状、即ち、地面の起伏の形状に応じて、底擦り判定の間隔を異ならせるものである。
【0077】
図8は地面を真横から見た場合の地面の異なる起伏の例を模式的に示す図であって、同図(a)は起伏が緩やかな地面(ここでは、特徴点が1つある)を示し、同図(b)は起伏が複雑な地面(ここでは、3個の特徴点が続いてある)を示すものである。同図(a),(b)において、22a,22bは地面、PSは底擦り判定開始位置、PEは底擦り判定終了点、Pは破線で示す底擦り判定位置、ΔP1,ΔP2は底擦り判定位置P間の間隔である。
【0078】
図8(a),(b)において、地面22a,22bでの隆起が始まる位置を底擦り判定開始位置PSとし、隆起が終わる位置を底擦り判定終了位置PEとして、底擦り判定開始位置PSから底擦り判定終了位置PEまでの間隔ΔP1,ΔP2の位置を底擦り判定位置Pとして、底擦りが生ずることが判定されるまで、この底擦り判定位置P毎に底擦り判定を行なう。従って、地面22a,22bの起伏が底擦りを生じないものである場合には、底擦り判定終了位置PEまで底擦り判定が行なわれる。
【0079】
図8(a)に示すように、起伏が緩やかな形状の地面22aに対しては、底擦り判定位置Pの間隔ΔP1を長くして底擦り判定開始位置PSから底擦り判定終了位置PEまでの底擦り判定位置P、従って、底擦り判定回数を少なくする。これに対し、図8(b)に示すように、起伏が複雑な形状の地面22bに対しては、底擦り判定位置Pの間隔ΔP1を短くして、底擦り判定開始位置PSから底擦り判定終了位置PEまでの距離が図8(a)に示す場合と同じとした場合、底擦り判定開始位置PSから底擦り判定終了位置PEまでの底擦り判定位置P、従って、底擦り判定回数を少なくする。
【0080】
地面の起伏が緩やかな場合に比べ、地面の起伏が複雑な場合には、車両の底面と地面との間隔の変化が頻繁であり、底擦りが何度も生ずる可能性がある。このために、底擦り判定位置Pの間隔ΔP1を短くして頻繁に生ずる可能性のある底擦りを逃さずに検出できるようにする。
【0081】
図9はかかる処理の流れを示すフローチャートである。
【0082】
同図において、自車両形状データEを取得した後(ST20)、現在の自車両が走行している走行路での現在の進入角度の通過経路を予測する(ST21)。そして、入力した地図データからこの通過経路での底擦り判定開始位置PSと底擦り判定終了位置PEを決定する(ST22)。
【0083】
次いで、まず、底擦り判定開始位置PSを底擦り判定位置Pとして、自車両の底面から地面までの距離Lを算出し(ST23)、この距離Lが0より小さい場合には(ST24の“yes”)、底擦りが生ずると判定し(ST25)、先の実施形態のように、出力部に警報を発生し、あるいは、底擦り回避迂回経路の情報などを求め、出力部で警報するとともに、この底擦り回避迂回経路の情報を出力部に供給してかかる情報を表示させる。これにより、このときの特徴点に対するかかる処理を終了する。
【0084】
また、算出した自車両の底面から地面までの距離Lが0を越える場合には(ST24の“no”)、底擦りは生じないと判定し(ST26)、底擦り判定終了位置PEに達していないので(ST26の“no”)、底擦りの有無の判定をこの底擦り判定位置Pから距離ΔPだけ離れたP+ΔPの次の底擦り判定位置Pとし(ST28)、ST23からの同様の処理を行なう。
【0085】
そして、底擦りが生ずると判定があるまで(ST24,25)、ST23,24,26,27,28の一連の処理が各底擦り判定位置P毎に行なわれ、自車両が底擦り判定終了位置PEに達するまでに底擦りが生ずると判定があると、この処理が終了し、出力部で警報や底擦り回避迂回経路の情報の表示を行なわせるが、底擦り判定終了位置PEまで処理を行なっても、底擦りが生ずるとの判定がない場合には(ST24,26)、全ての底擦り判定位置Pでの処理が終了し、底擦りは生じないものとして(ST27の“yes”)、一連の処理を終了する。
【0086】
この処理において、底擦りの有無の判定時の通過経路や自車両の車速などの情報を蓄積しておき、これを再利用することも可能とする。車両が加速や減速,バウンドなどをすることにより、地面からの自車両の底面の高さが変わるため、車速や車両スペック(仕様)によってどの程度この底面が浮き沈みしたり、傾いたりするかという情報を蓄積しておき、スペック値と実際の底擦りの有無の判定時の情報を利用して更に精度の高い底擦りの有無の判定を行なうことも可能とする。また、このことは、他の実施形態においても、底擦りの有無の判定の際に適用できるものである。
【0087】
ここで、図10により、自車両の進行方向を変える処理(ヨー角変更処理)について説明する。
【0088】
同図において、現時点t0での車両23の走行(進行)方向を軸SDに沿う方向とし、この時点での車両23の移動量PをP=0とする。また、このときの車両23の進行方向の変化量θをθ=0とする。また、現時点t0から時間Δt経過後の時刻t0+Δtでの車両23がP0だけ移動するものとすると、時間Δtだけ経過した後の車両23の予測移動量PはP=P0となる。この時間Δt経過中での車両の走行方向が変わらないものとすると、この間の車両23の走行方向も軸SDに沿うものであり、進行方向の予測変化量θはθ=0である。
【0089】
いま、水平面上での進行方向の変化量θ及び垂直面での進行方向の変化量ψ(即ち、坂などによる高さ方向の変化量)に対し、進行方向を(sinθ,sinψ,cosθ)と定義する。従って、車両が水平面上を軸SDに沿って走行する場合、θ=ψ=0であるから、移動量P=0の現時点t0での車両23の進行方向は(0,0,1)であり、また、時刻tがto≦t≦t0+Δtの車両23P0だけ移動しているときの進行方向も、同じく(0,0,1)と予測される。
【0090】
ここで、現時点t0から時刻Δt経過してP0だけ移動したとき、軸SD’方向の底擦り回避迂回経路に進行するために、車両23の進行方向を水平面上で角度θ(≠0)だけ変化させるものとすると、現時点t0から時刻Δt経過した後では(t0+Δt<t:P0<P)、車両23の進行方向は(sinθ,0,cosθ)となる。
【0091】
このように進行方向を定義をすることにより、車両の移動とともに時々刻々と変化する進入角度や進行方向を明確に表わすことができ、底擦り回避迂回経路の算出に反映させることができる。
【0092】
図11は本発明による底擦り回避補助装置の第5の実施形態の要部を示すブロック構成図であって、24は撮像部、25は自車両形状データ蓄積部、26は自車両形状比較部、27は修理情報抽出部であり、前出図面に対応する部分には同一符号を付けている。
【0093】
同図において、この実施形態では、自車両の底面の底擦りが生ずる可能性のある部分を撮像する1以上のカメラからなる撮像部24を備えている。この撮像部24は、自車両の底面の底擦りが生じない位置、例えば、車軸の近くなどに設けられている。この撮像部24では、そのカメラの撮像によって得られた画像情報から自車両の底面の形状を表わす自車両形状データFを作成し、自車両形状データ入力部11を介して自車両形状比較部26に供給する。ここで、撮像部24では、さらに、各カメラ毎に撮像した画像情報の変化の有無を監視しており、カメラの1つまたは2以上の撮像画像情報に変化があると、自車両の底面のこのカメラが撮像した部分に底擦りが発生したものと判断し、そのときにのみ自動的に自車両形状データFを自車両形状入力部11に出力する。これにより、底擦りが発生した部分の自車両形状データFが自車両形状比較部26に供給される。
【0094】
一方、自車両形状データ蓄積部25には、自車両の底擦りが生じてないときの底面の形状データ(自車両形状データ)Gが、撮像部24でのカメラの撮像領域毎に区分されて蓄積されており、撮像部24のいずれかのカメラからの画像情報に底擦りがあったと判断されると、このカメラに対応する自車両形状データGが読み出され、自車両形状比較部26に供給される。
【0095】
これにより、自車両形状比較部26は、自車両形状データ蓄積部25からの底擦り前の自車両形状データGと自車両形状入力部11からの底擦り後の自車両形状データFとを比較し、底擦りの程度を表わすその比較結果を修理情報抽出部27に供給する。この修理情報抽出部27では、底擦りによる自車両形状データの変形の程度に応じた修理情報Hが保存されており、自車両形状比較部26での比較結果に応じた修理情報Hを抽出して自車両形状比較部26に供給する。自車両形状比較部26は、この修理情報Hを出力部12に供給し、この出力部12で警報を発生させるとともに、修理情報Hを表示させる。
【0096】
ここで、形状に変形がなくとも、底擦りによる塗装の剥げ具合で地金が見えている場合には、即時に塗装を促す修理情報Hを出力したり、地金も見えていない場合には、即時に塗装修理をしなくても良いことなどを案内する。また、車底を擦っているが、修理をしなかった場合にどの程度の期間で修理や交換が必要かといった情報も出力するようにすることもできるし、底擦りにより変形した場合などで、走行に支障を来たす場合や直ぐには走行に支障を来たさないが、将来走行に支障を来たす恐れがある場合には、警告やログを出力するようにすることもできる。さらに、底擦りした箇所を定期または不定期、または、任意に底擦り箇所を撮像部24で撮像し、底擦り箇所の錆び具合や劣化の程度を映像で出力部12により表示出力し、底擦り時からの変化を確認するようにすることもできる。さらにまた、底擦りの程度により、必ず修理が必要な状態に陥った場合には、修理の必要な箇所の部位を文字や画像によって出力部12で一覧表示するようにすることも可能であり、修理費用の予算など修理に関する情報を提供するようにすることも可能である。
【0097】
図12は底擦り回避補助装置の第6の実施形態の要部を示すブロック構成図であって、28は底擦り回避補助装置、29は車両制御部、30は車両駆動部である。
【0098】
同図において、底擦り回避補助装置28は、先の第2〜第4の実施形態のように、底擦り回避迂回経路の情報Iを出力するものであり、この情報を基に、車両制御部29が車両駆動部30を制御して、自車両を自動的に底擦り回避迂回経路を走行させるものである。勿論、このときには、図示しない出力部により、運転手にこのことを通知し、底擦り回避迂回経路への自動走行に対し、運転手が戸惑うことがないようにする。
【0099】
これにより、運転手が意識することなく、自車両は底擦りを生ずる特徴点を回避する走行を行なうことになる。
【0100】
次に、以上の実施形態では、特に説明しなかったが、底擦りが予想される箇所(底擦り予想箇所)が底擦り判定部10で検出されると、出力部12でこれを表わす画面表示をすることができる。以下では、かかる画面表示の具体例について説明する。
【0101】
図13は本発明による底擦り回避補助装置での底擦り情報の画面表示の第1の具体例を示す図であって、同図(a)は予想される底擦りエリアがある走行路を自車両が走行している状態を示す図、同図(b)はその場合の画面表示を示す図であって、14は自車両、31は予想される底擦り地形エリア、31a,31b,31cは予想される底擦り地形箇所(特徴点)、32は予想される地形底擦りエリア表示画面、32a,32b,32cは予想される底擦り地形箇所(特徴点)である。
【0102】
同図(a)において、いま、車両14が走行路を走行中、底擦りの判定処理により、現在の進入角度や速度で走行すれば、例えば、図示するように、底擦りが予想される箇所、即ち、底擦り地形箇所31a,31b,31cを含む底擦り地形エリア31が検出されたものとすると、上記の出力部12では、図14(b)に示すように、この底擦り地形エリア31を表わす底擦りエリア表示画面32が表示される。底擦りエリア表示画面32は、底擦り地形エリア31を車両14から正面にみた画面であり、底擦り地形エリア31での底擦り地形箇所31a,31b,31cが夫々底擦り地形箇所32a,32b,32cとして表示される。
【0103】
ここで、底擦りエリア表示画面32では、底擦り地形箇所32a,32b,32cが、車両14に生ずる底擦りの強弱の度合いを運転手などが直感的に認識できるように、その表示の仕方を異ならせている。例えば、色の濃淡や色の種類の違いなどに応じて予想される底擦りの度合いを表現することが考えられるが、色の濃淡で表現する場合、例えば、強い底擦りが生ずると予想される底擦り箇所は色を濃く表示し、強い底擦りが生じないと予想される底擦り箇所は色を淡く表示するように、画像処理を行なう。
【0104】
なお、現状の走行状態で走行している場合に底擦りが生じないと予想される地形箇所については、底擦りエリア表示画面32に表示ないようにすることもできるし(従って、上記のように設定された底擦り回避迂回経路に車両が進入すると、これによって影響しない底擦り地形箇所は、底擦りエリア表示画面32から消えることになる)、また、底擦り地形箇所を一定の時間間隔、または、不定期の時間間隔や、任意の時間間隔で点滅表示させるようにすることもできる。
【0105】
図14は本発明による底擦り回避補助装置での底擦り情報の画面表示の第2の具体例を示す図であって、33は表示画面、34は地図画面、35は自車両、36は予想される底擦り地形エリア、36a,36b,36cは予想される底擦り地形箇所、37は地面画面、38a,38b,38cは予想される底擦り地形箇所、39は枠、40は文字、41は矢印、42は車底画面、43は車底、44a〜44dは予想される底擦り箇所である。
【0106】
同図において、表示画面33には、画面分割により、走行する自車両35とその周辺を示す地図を表示する地図画面34と、自車両35からみた地面の予想される形状を表示する地面画面37と、自車両の底面43を表示する車底画面42とが表示される。
【0107】
地図画面34では、予想される通過経路に沿って走行する自車両35とこの通過経路上での予想される底擦り地形箇所36a〜36cを含む底擦り地形エりア36が表示される。この通過経路上にない底擦り地形箇所は表示されない。
【0108】
また、地面画面37には、通過経路と地図画面34での底擦り地形箇所36a〜36cに対応する底擦り地形箇所38a〜38cとが表示される。この場合、底擦り地面箇所であることを明確にするために、底擦り地形箇所38a〜38c夫々に対し、枠39で囲む枠表示をしたり、例えば、「キケン」といったような文字列40を表示する文字表示をしたり、底擦り地形箇所を指し示す矢印41を表示したりすることも可能である。
【0109】
車底画面42には、自車両の車底43の画像と、地図画面34で表示される底擦り地形箇所36a〜36cや地面画面37で表示される底擦り地形箇所38a〜38cによって予想される車底43での底擦り箇所44a〜44dとが表示される。このような車底43の画像は先の自車両形状データ入力部11から得られる自車両形状データの1つであり、底擦り箇所44a〜44dは底擦り判定部10での判定処理によって得られるものである。
【0110】
また、これとともに、予測した底擦りの程度に応じて、音声出力の音量の大きさで危険度を表現することにより、音量が大きければ、底擦りの影響が大きく、小さければ、底擦りの影響が小さいというように表現するようにすることもでき、運転手などが画面を見なくても、直感的に底擦りの危険度を認識することができるようにすることもできる。
【0111】
なお、車底と地面との接触する箇所(底擦り箇所)を画面に表示する際、その拡大表示や縮小表示も可能とすることができるし、また、画面分割表示させる際には、画面の分割数や画面の配置は任意な設定可能とすることができるし、さらには、複数のモニタに底擦りの優先度に応じて表示できるようにすることができ、優先順位の高い底擦り箇所の画像を優先的に画面表示できるようにすることもできる。
【0112】
図15は本発明による底擦り回避補助装置での底擦り情報の画面表示の第3の具体例を示す図であって、44は底擦り箇所、45〜48はディスプレイ、49は車体、50は底擦り箇所であり、図14に対応する部分には同一符号を付けている。
【0113】
同図において、この具体例は4個のディスプレイ45〜48を用い、夫々毎に底擦りに関する異なる情報の画面表示を行なうようにしたものである。
【0114】
ディスプレイ45には、底擦り地形エリア35が拡大して表示されるものであり、ここでは、図14に示す地図画面34での底擦り地形エリア35が拡大して表示された状態を示す。ディスプレイ46には、自車両から見た走行方向の地面が拡大して表示されるものであって、ここでは、図14に示す地面画面37での底擦り地形エリア35が拡大して表示されている状態を示す。ディスプレイ47には、自車両の車体49の画像とこの車体49での底擦り箇所50の位置が概略的に拡大して表示される。これにより、運転手などは、自車両での底擦り箇所50の概略位置を知ることができる。ディスプレイ48には、自車両の車底43が、そこでの予想される底擦り箇所44とともに、拡大して表示される。
【0115】
また、これらディスプレイ45〜48に同一または異なる角度からの底擦りに関する画像を表示することも可能とする。
【0116】
なお、ここで、4個のディスプレイを用いたが、これ以外の複数のディスプレイを用いて、夫々毎に底擦れに関する必要な情報を表示できるようにすることも可能である。
【0117】
ところで、上記の各実施形態では、底擦りが予想される特徴点、即ち、底擦り地形箇所が判定処理によって検出されると、これを回避する底擦り回避迂回経路が探索され、車両がこの底擦り回避迂回路に進行して走行できるようにしたものであるが、現状の進行方向で走行したとき、底擦り地形箇所が予想され場合には、サスペンションなどの自車両の車高を調整する制御を行なうようにすることもできる。自車両が車底を擦ると判断した場合には、サスペンションの強度を強くして固く調整することにより、車体の浮き沈みを抑えて車高を高く調整するようにし、これにより、底擦りを回避できるようにする。また、サスペンション以外でも、車の車高調整機構部分を制御することにより、底擦りを回避するようにしてもよい。
【0118】
また、上記各実施形態では、地面の凸状の起伏部のみならず、路面に轍や陥没部分,側溝などの凹部をも認識できるようにすることも可能である。例えば、車両の走行中に轍などの凹部にタイヤが嵌まり込むことが予測される場合には、轍の凹部を避けて走行するように、上記の案内制御ができるようにすることもできる。また、陥没部分があると予想される場合には、陥没部分を予め避ける制御を行なったり、警告したりすることにより、乗り心地を損なうことなく、運転,走行をさせることを可能とする。同様に、側溝部分があるような道路では、側溝部分を避ける案内制御や警告を行なうことにより、タイヤが側溝に嵌まったりするようなことが起こらないように、運転、走行をさせることを可能とする。
【0119】
さらに、以上の実施形態は、自家用車などの車両を例に説明したが、本発明は、これのみに限られるものではなく、船舶や航空機など移動する移動体全てに適用することも可能である。例えば、航空機が着陸する場合、滑走路の長さや形状などの情報と航空機の機体の情報とを基に、自動で着陸することをも可能とすることができる。また、船舶の場合であれば、岩礁などの海底の形状の情報と潮位や船舶の形状情報を基に、岩礁に接触しないように航行させることをも可能とする。
【0120】
以上、上記実施形態では、カメラを用いて事前に自車両の底擦りを判定し、底擦りすることを事前に知ることを可能としたり、また、そのような底擦りをする経路を迂回する経路、即ち、底擦り回避迂回経路を表示することが可能であるし、さらに、人手で運転しなくとも、自動運転により、底擦りを回避することも可能にする。これまで、人間の感覚に頼っていた部分を、ステレオカメラによる特徴点の測定技術を利用することにより、さらに安全な運転をすることが可能となる。
【図面の簡単な説明】
【0121】
【図1】本発明による底擦り回避補助装置の第1の実施形態を示すブロック構成図である。
【図2】図1での地図データ入力部で得られた地図データのワールド座標系をステレオカメラ4のワールド座標系への変換の一具体例を示す図である。
【図3】図1でのステレオカメラのワールド座標系XYZの定義を示す図である。
【図4】図1に示す第1の実施形態の一連の処理の流れを示すフローチャートである。
【図5】本発明による底擦り回避補助装置の第2の実施形態の要部を示すブロック構成図である。
【図6】図5に示す第2の実施形態の一連の処理の流れを示すフローチャートである。
【図7】本発明による底擦り回避補助装置の第3の実施形態の要部を示すブロック構成図である。
【図8】地面を真横から見た場合の地面の異なる起伏の例を模式的に示す図である。
【図9】本発明による底擦り回避補助装置の第4の実施形態での処理の流れを示すフローチャートである。
【図10】自車両の進行方向を変える処理(ヨー角変更処理)について説明した図である。
【図11】本発明による底擦り回避補助装置の第5の実施形態の要部を示すブロック構成図である。
【図12】本発明による底擦り回避補助装置の第6の実施形態の要部を示すブロック構成図である。
【図13】本発明による底擦り回避補助装置での画面表示の第1の具体例を示す図である。
【図14】本発明による底擦り回避補助装置での画面表示の第2の具体例を示す図である。
【図15】本発明による底擦り回避補助装置での画面表示の第3の具体例を示す図である。
【符号の説明】
【0122】
1 地図データ入力部
2 地面形状データ抽出部
3 特徴点位置データ取得部
4 ステレオカメラ
4a,4a カメラ
5a,5b 画像処理部
6 特徴抽出部
7 特徴点位置算出部
8 特徴座標位置袷部
9 地面形状座標変換部
10 底擦り判定部
11 自車両形状データ入力部
12 出力部
13 地面形状データ算出部
18 通過経路演算部
19 底擦り経路蓄積部
20 底擦り回避迂回経路選択部
21 底擦り回避迂回経路出力部
24 撮像部
25 自車両形状データ蓄積部
26 自車両形状比較部
27 修理情報抽出部
28 底擦り回避補助装置
29 車両制御部
30 車両駆動部
31 予想される底擦り地形エリア
31a,31b,31c 予想される底擦り地形箇所(特徴点)
32 予想される地形底擦りエリア表示画面
32a,32b,32c 予想される底擦り地形箇所
33 表示画面
34 地図画面
35 自車両
36 予想される底擦り地形エリア
36a,36b,36c 予想される底擦り地形箇所
37 地面画面
38a,38b,38c 予想される底擦り地形箇所
39 枠
40 文字
41 矢印
42 車底画面
43 車底
44a〜44d 予想される底擦り箇所
44 底擦り箇所
45〜48 ディスプレイ
49 車体
50 底擦り箇所
【特許請求の範囲】
【請求項1】
自車両が走行している地面を撮像する撮像手段と、
撮像手段により撮像した地面情報を用いて地面の形状データを求める地面形状抽出手段と、
該地面形状抽出手段から求めた該地面の形状データと自車両の形状データとから、該自車両の走行中に該自車両の底面が地面に接触する底擦りが生ずるか否かを判定する底擦り判定手段と、
該底擦り判定手段による底擦りが生ずるとの判定により、事前に警告する警告手段と
を備えたことを特徴とする底擦り回避補助装置。
【請求項2】
自車両の周辺の地図データを取得する地図データ入力手段と、
該地図データ入力部から入力された地図データから自車両の周辺の第1の地面形状データを抽出する地面形状データ抽出手段と、
該地面形状データ抽出部で抽出された地面形状データから地面の形状の第1の特徴点の位置データを取得する特徴点位置データ取得手段と、
該自車両の下側の地面や該自車両の周囲を撮像する2以上の撮像手段と、
該撮像手段から得られた画像データから地面の形状の第2の特徴点の位置データを算出する特徴点位置算出手段と、
該第1の特徴位置データが該第2の特徴点位置データと重なるように、該地面形状データ抽出手段で抽出された該地面形状データを座標変換し、自車両を基にする座標系での第2の地面形状データを取得する地面形状データ取得手段と、
該地面形状データ取得手段で取得した該第2の地面形状データと該自車両の形状データとから、該自車両の走行中に該自車両の底面が地面に接触する底擦りが生ずるか否かを判定する底擦り判定手段と、
該底擦り判定手段による底擦りが生ずるとの判定により、事前に警告する警告手段と
を備えたことを特徴とする底擦り回避補助装置。
【請求項3】
請求項1または2において、
該底擦り判定手段による底擦りありとの判定により、底擦りを生ずる特徴点を回避する底擦り回避迂回経路を探索する通過経路演算手段を設けたことを特徴とする底擦り回避補助装置。
【請求項4】
自車両の周辺の地図データを取得する地図データ入力手段と、該地図データ入力部から入力された地図データから自車両の周辺の第1の地面形状データを抽出する地面形状データ抽出手段と、該地面形状データ抽出部で抽出された地面形状データから地面の形状の第1の特徴点の位置データを取得する特徴点位置データ取得手段と、該自車両の下側の地面や該自車両の周囲を撮像する撮像手段と、該撮像手段から得られた画像データから地面の形状の第2の特徴点の位置データを算出する特徴点位置算出手段と、該第1の特徴位置データが該第2の特徴点位置データと重なるように、該地面形状データ抽出手段で抽出された該地面形状データを座標変換し、自車両を基にする座標系での第2の地面形状データを取得する地面形状データ取得手段とからなる地面形状データ算出部と、
該地面形状データ算出部からの該第2の地面形状データと該自車両の形状データとから、該自車両の走行中に該自車両の底面が地面に接触する底擦りが生ずるか否かを判定する底擦り判定部と、
該底擦り判定部による底擦りありとの判定により、底擦りを生ずる特徴点を回避する底擦り回避迂回経路を探索する通過経路演算部と、
該通過経路演算部で得られた底擦り回避迂回経路の情報を蓄積する底擦り経路蓄積部と、
該自車両の位置データと該自車両の形状データとをもとに、該底擦り経路蓄積部から該自車両に対する底擦り回避迂回経路を選択する経路選択部と、
該経路選択部で選択された該底擦り回避迂回経路を表示する出力部と
を備えたことを特徴とする底擦り回避補助装置。
【請求項5】
請求項4において、
自車両以外の他の車両で取得された地面形状データと該他の車両の車両形状データとを入力するデータ入力手段と、
該データ入力手段から入力された該地面形状データを前記底擦り経路蓄積部に蓄積する蓄積手段と
を設け、
該データ入力手段から入力された該他の車両の車両形状データを、前記前記底擦り経路蓄積部に蓄積された他の車両で取得された地面形状データと関連付けて、保存することを特徴とする底擦り回避補助装置。
【請求項6】
請求項1〜5のいずれか1つにおいて、
自車両の走行路での地面の起伏による底擦り判定開始位置と底擦り判定終了位置とを決定する決定手段と、
該底擦り開始位置から所定の距離間隔で底擦り判定処理を指示する判定開始指示手段と、
自車両が該底擦り終了位置に達するまでに自車両に底擦りが生ずることが判定されると、該底擦り判定処理の終了を指示する判定終了指示手段と
を設け、
該地面の起伏の程度に応じて、該所定の距離間隔を異ならせることを特徴とする底擦り回避補助装置。
【請求項7】
請求項1〜6のいずれか1つにおいて、
前記自車両の形状データは、自車両の走行速度や車両スペックによる車両の浮き沈みや傾きなどに関する情報も含むことを特徴とする底擦り回避補助装置。
【請求項8】
車両が底擦りした箇所を撮像する撮像手段と、
該撮像手段によって撮像された該車両の底擦りよって変形した変形形状と変形前の形状とを画像データをもとに比較する比較手段と、
該比較手段の比較によって得られる該車両の底擦りに応じた修理情報を抽出し、出力手段で表示させる修理情報抽出手段と
を備えたことを特徴とする底擦り回避補助装置。
【請求項9】
請求項3〜7のいずれか1つにおいて、
得られた前記底擦り回避迂回経路の情報をもとに、自車両を自動で運転する車両制御手段とを備えたことを特徴とする底擦り回避補助装置。
【請求項10】
請求項3〜7のいずれか1つにおいて、
得られた前記底擦り回避迂回経路の情報をもとに、自車両の底面の高さを調整する車高調整部を備えたことを特徴とする底擦り回避補助装置。
【請求項11】
請求項1〜10のいずれか1つにおいて、
自車両の通過経路での予想される底擦り地形箇所を表示する手段を設けたことを特徴とする底擦り回避補助装置。
【請求項12】
請求項1〜10のいずれか1つにおいて、
自車両と該自車両の通過経路での予想される底擦り地形箇所とを表わす地図画面と、
該底擦り地形箇所を含む底擦り地形領域を地面画面と
該自車両の底面での予想される底擦り箇所を表わす底面画面と
を1つの表示手段で表示することを特徴とする底擦り回避補助装置。
【請求項13】
請求項1〜10のいずれか1つにおいて、
自車両と該自車両の通過経路での予想される底擦り地形箇所とを表わす地図を拡大表示する第1の表示手段と、
自車両での予測される底擦り箇所の位置を拡大表示する第2の表示手段と、
地面での底擦り地形箇所を拡大表示する第3の表示手段と、
自車両の底面での予想される底擦り箇所を拡大表示する第4の表示手段と
を設けたことを特徴とする底擦り回避補助装置。
【請求項1】
自車両が走行している地面を撮像する撮像手段と、
撮像手段により撮像した地面情報を用いて地面の形状データを求める地面形状抽出手段と、
該地面形状抽出手段から求めた該地面の形状データと自車両の形状データとから、該自車両の走行中に該自車両の底面が地面に接触する底擦りが生ずるか否かを判定する底擦り判定手段と、
該底擦り判定手段による底擦りが生ずるとの判定により、事前に警告する警告手段と
を備えたことを特徴とする底擦り回避補助装置。
【請求項2】
自車両の周辺の地図データを取得する地図データ入力手段と、
該地図データ入力部から入力された地図データから自車両の周辺の第1の地面形状データを抽出する地面形状データ抽出手段と、
該地面形状データ抽出部で抽出された地面形状データから地面の形状の第1の特徴点の位置データを取得する特徴点位置データ取得手段と、
該自車両の下側の地面や該自車両の周囲を撮像する2以上の撮像手段と、
該撮像手段から得られた画像データから地面の形状の第2の特徴点の位置データを算出する特徴点位置算出手段と、
該第1の特徴位置データが該第2の特徴点位置データと重なるように、該地面形状データ抽出手段で抽出された該地面形状データを座標変換し、自車両を基にする座標系での第2の地面形状データを取得する地面形状データ取得手段と、
該地面形状データ取得手段で取得した該第2の地面形状データと該自車両の形状データとから、該自車両の走行中に該自車両の底面が地面に接触する底擦りが生ずるか否かを判定する底擦り判定手段と、
該底擦り判定手段による底擦りが生ずるとの判定により、事前に警告する警告手段と
を備えたことを特徴とする底擦り回避補助装置。
【請求項3】
請求項1または2において、
該底擦り判定手段による底擦りありとの判定により、底擦りを生ずる特徴点を回避する底擦り回避迂回経路を探索する通過経路演算手段を設けたことを特徴とする底擦り回避補助装置。
【請求項4】
自車両の周辺の地図データを取得する地図データ入力手段と、該地図データ入力部から入力された地図データから自車両の周辺の第1の地面形状データを抽出する地面形状データ抽出手段と、該地面形状データ抽出部で抽出された地面形状データから地面の形状の第1の特徴点の位置データを取得する特徴点位置データ取得手段と、該自車両の下側の地面や該自車両の周囲を撮像する撮像手段と、該撮像手段から得られた画像データから地面の形状の第2の特徴点の位置データを算出する特徴点位置算出手段と、該第1の特徴位置データが該第2の特徴点位置データと重なるように、該地面形状データ抽出手段で抽出された該地面形状データを座標変換し、自車両を基にする座標系での第2の地面形状データを取得する地面形状データ取得手段とからなる地面形状データ算出部と、
該地面形状データ算出部からの該第2の地面形状データと該自車両の形状データとから、該自車両の走行中に該自車両の底面が地面に接触する底擦りが生ずるか否かを判定する底擦り判定部と、
該底擦り判定部による底擦りありとの判定により、底擦りを生ずる特徴点を回避する底擦り回避迂回経路を探索する通過経路演算部と、
該通過経路演算部で得られた底擦り回避迂回経路の情報を蓄積する底擦り経路蓄積部と、
該自車両の位置データと該自車両の形状データとをもとに、該底擦り経路蓄積部から該自車両に対する底擦り回避迂回経路を選択する経路選択部と、
該経路選択部で選択された該底擦り回避迂回経路を表示する出力部と
を備えたことを特徴とする底擦り回避補助装置。
【請求項5】
請求項4において、
自車両以外の他の車両で取得された地面形状データと該他の車両の車両形状データとを入力するデータ入力手段と、
該データ入力手段から入力された該地面形状データを前記底擦り経路蓄積部に蓄積する蓄積手段と
を設け、
該データ入力手段から入力された該他の車両の車両形状データを、前記前記底擦り経路蓄積部に蓄積された他の車両で取得された地面形状データと関連付けて、保存することを特徴とする底擦り回避補助装置。
【請求項6】
請求項1〜5のいずれか1つにおいて、
自車両の走行路での地面の起伏による底擦り判定開始位置と底擦り判定終了位置とを決定する決定手段と、
該底擦り開始位置から所定の距離間隔で底擦り判定処理を指示する判定開始指示手段と、
自車両が該底擦り終了位置に達するまでに自車両に底擦りが生ずることが判定されると、該底擦り判定処理の終了を指示する判定終了指示手段と
を設け、
該地面の起伏の程度に応じて、該所定の距離間隔を異ならせることを特徴とする底擦り回避補助装置。
【請求項7】
請求項1〜6のいずれか1つにおいて、
前記自車両の形状データは、自車両の走行速度や車両スペックによる車両の浮き沈みや傾きなどに関する情報も含むことを特徴とする底擦り回避補助装置。
【請求項8】
車両が底擦りした箇所を撮像する撮像手段と、
該撮像手段によって撮像された該車両の底擦りよって変形した変形形状と変形前の形状とを画像データをもとに比較する比較手段と、
該比較手段の比較によって得られる該車両の底擦りに応じた修理情報を抽出し、出力手段で表示させる修理情報抽出手段と
を備えたことを特徴とする底擦り回避補助装置。
【請求項9】
請求項3〜7のいずれか1つにおいて、
得られた前記底擦り回避迂回経路の情報をもとに、自車両を自動で運転する車両制御手段とを備えたことを特徴とする底擦り回避補助装置。
【請求項10】
請求項3〜7のいずれか1つにおいて、
得られた前記底擦り回避迂回経路の情報をもとに、自車両の底面の高さを調整する車高調整部を備えたことを特徴とする底擦り回避補助装置。
【請求項11】
請求項1〜10のいずれか1つにおいて、
自車両の通過経路での予想される底擦り地形箇所を表示する手段を設けたことを特徴とする底擦り回避補助装置。
【請求項12】
請求項1〜10のいずれか1つにおいて、
自車両と該自車両の通過経路での予想される底擦り地形箇所とを表わす地図画面と、
該底擦り地形箇所を含む底擦り地形領域を地面画面と
該自車両の底面での予想される底擦り箇所を表わす底面画面と
を1つの表示手段で表示することを特徴とする底擦り回避補助装置。
【請求項13】
請求項1〜10のいずれか1つにおいて、
自車両と該自車両の通過経路での予想される底擦り地形箇所とを表わす地図を拡大表示する第1の表示手段と、
自車両での予測される底擦り箇所の位置を拡大表示する第2の表示手段と、
地面での底擦り地形箇所を拡大表示する第3の表示手段と、
自車両の底面での予想される底擦り箇所を拡大表示する第4の表示手段と
を設けたことを特徴とする底擦り回避補助装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図7】

【図8】
【図9】
【図10】
【図11】

【図12】
【図13】
【図14】

【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2007−213143(P2007−213143A)
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願番号】特願2006−29915(P2006−29915)
【出願日】平成18年2月7日(2006.2.7)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願日】平成18年2月7日(2006.2.7)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]