
座標入力システム
【課題】外部抵抗成分の影響を補正することのできる対角方式の座標計算方法を備える座標検出システムを提供する。
【解決手段】単位長さ当たりの抵抗値が等しい直線の抵抗性周囲電極13と、長方形の座標入力領域18の4個の頂点に前記抵抗性周囲電極13と電気的に接触するように設けられた検出電極14〜17と、該4個の検出電極14〜17に流れる電流を計測する電流計測手段と、前記座標入力領域18内の位置を指21で指示したときに、前記4個の検出電極14〜17に流れる電流値から、前記指21で指示前記座標入力領域18内の位置を計算する座標計算手段と、前記4個の検出電極14〜17に流れる電流値から、前記座標入力領域18内を1本の指21で1点を指示しているか、2本の指21でそれぞれ異なる2点を指示しているかを識別し、更に、2本の指21で2点を指示していると識別した場合、前記2本の指21が行っている相対運動を認識する。
【解決手段】単位長さ当たりの抵抗値が等しい直線の抵抗性周囲電極13と、長方形の座標入力領域18の4個の頂点に前記抵抗性周囲電極13と電気的に接触するように設けられた検出電極14〜17と、該4個の検出電極14〜17に流れる電流を計測する電流計測手段と、前記座標入力領域18内の位置を指21で指示したときに、前記4個の検出電極14〜17に流れる電流値から、前記指21で指示前記座標入力領域18内の位置を計算する座標計算手段と、前記4個の検出電極14〜17に流れる電流値から、前記座標入力領域18内を1本の指21で1点を指示しているか、2本の指21でそれぞれ異なる2点を指示しているかを識別し、更に、2本の指21で2点を指示していると識別した場合、前記2本の指21が行っている相対運動を認識する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、指によりタッチされた位置を検出する座標入力システム、いわゆるタッチパネルに関する。
【背景技術】
【0002】
図10は従来の長方形の座標入力領域8を有する座標入力パネル1であり、均一な面抵抗体2に、面抵抗体2と電気的に接続するように、面抵抗体2を取り囲む抵抗性周囲電極3を配設しており、4個の頂点に検出電極4、5、6、及び7を備えている。検出電極4、5、6、及び7は、抵抗性周囲電極3と電気的に接続されている。座標入力領域8は、面抵抗体2上にあり、抵抗性周囲電極3の内側である。
上記座標入力パネル1を用いた座標入力システムの座標検出方法として、面抵抗体2全体を電圧振動させて、静電容量結合もしくは直接の接触を介し、指で指示した点の位置を入力パネル側で検出する方法がある。例えば、面抵抗体2の一点に出入りする電流の、4個の頂点(4、5、6、及び7)へ配分される電流値を計測し、それらの電流値を元に座標を計算するものが知られている(特許3237629号(特許文献1)参照)。このような方式を用いた座標入力システムは、表面型のタッチパネルと呼ばれる。
なお、指で「点」を「指示する」とは、指で、座標入力領域8内部の、ある位置座標に対応する点にタッチすることを意味する。
前記のような表面型のタッチパネルでは、同一の座標入力領域内を、複数の指で同時に指示した場合、4個の頂点に流れる電流値を基に、それぞれの指が指示した位置の座標を計算することは、不可能であるとされている。そのような機能が必要とされる用途には、座標入力領域内に縦横に電極を配設した投影型の静電容量結合方式タッチパネルや、カメラを用いた工学的なタッチパネル等が使用される。
ただし、本願出願人による特開2010−157029号(特許文献2)において、長方形の座標入力領域を有し、長方形の4個の頂点に検出電極を備える表面型の座標入力システムであっても、座標入力領域内を1本の指で1点を指示しているか、2本の指でそれぞれ異なる2点を指示しているかを識別できる、ということが開示されている。
一方、タッチパネルの用途の一つとして、ジェスチャ入力が挙げられる。これは、座標入力領域内を指示する指の動きによって、座標入力システムが接続される後段の装置に対して特定の命令を伝達するものである。ジェスチャは、1本の指によって実現されるものもあるが、近年の、マルチタッチ可能なタッチパネルの普及に伴い、複数の指を用いたジェスチャが使用されるようになっている。
【先行技術文献】
【特許文献】
【0003】
特許3237629号
特開2010−157029号
【発明の概要】
【発明が解決しようとする課題】
【0004】
表面型のタッチパネルは、例えば投影型と比較すると、複数の指の指示位置を計算できない一方で、パネルの構造が単純であり、配線の数も非常に少なくて済む、という利点がある。また、前述したように、表面型のタッチパネルでは、複数の指で同時に指示した場合、それぞれの指が指示した全ての位置の座標を個別に計算することは不可能である。しかし、ジェスチャの認識であれば、それぞれの指が指示した位置の相対関係及び相対関係の変化を認識できればよく、それぞれの指が指示した全ての位置の座標を個別に求めることは必須ではない場合が存在する。
本発明はこのような点を考慮してなされたものであり、表面型の座標入力システムでありながら、2本の指で同時に指示した際のジェスチャに関する情報を検出できるような座標入力システムを提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明は、少なくとも面抵抗体が形成された単連結である長方形の座標入力領域と、該長方形の座標入力領域の外縁を構成する4辺上に前記面抵抗体と電気的に接触するように設けられた、単位長さ当たりの抵抗値が一定であり、少なくとも対向辺同士の単位長さ当たりの抵抗値が等しいような直線の抵抗性周囲電極と、前記長方形の座標入力領域の4個の頂点に前記抵抗性周囲電極と電気的に接触するように設けられた検出電極と、該4個の検出電極に流れる電流を計測する電流計測手段と、前記座標入力領域内の位置を指で指示したときに、前記4個の検出電極に流れる電流値から、前記指で指示前記座標入力領域内の位置を計算する座標計算手段と、前記4個の検出電極に流れる電流値から、前記座標入力領域内を1本の指で1点を指示しているか、2本の指でそれぞれ異なる2点を指示しているかを識別し、更に、2本の指で2点を指示していると識別した場合、前記2本の指が行っている相対運動を認識する識別認識手段を有する座標入力システムを要旨とする。
【発明の効果】
【0006】
本発明による座標入力システムによれば、投影型と比較してパネルの構造が単純である表面型のタッチパネルにおいて、複数の指を用いたジェスチャの一部を認識することができる。
また、投影型が苦手とするような比較的大きなタッチパネルについて、例えばカメラ方式に見られるような、パネルの表面側の枠の厚みを増すことなく、複数の指を用いたジェスチャの一部を認識することができる。
【図面の簡単な説明】
【0007】
【図1】第1の実施の形態を示す模式図
【図2】座標系を示す図
【図3】拡大及び縮小ジェスチャを説明する模式図
【図4】2本指スクロールジェスチャを説明する模式図
【図5】回転ジェスチャを説明する模式図
【図6】実施例1の座標入力パネルの模式図
【図7】実施例1の座標入力システムの実験結果
【図8】実施例2の座標入力システムの実験結果
【図9】実施例3の座標入力システムの実験結果
【図10】従来の長方形の座標入力パネル
【発明を実施するための形態】
【0008】
以下、添付図面に従って、本発明に係る座標補正方法の好ましい実施の形態について詳説する。
〈第1の実施の形態〉
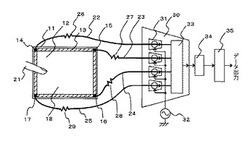
図1は、第1の実施の形態になる座標入力システムの一例を示す模式図である。指21が座標入力パネル11の座標入力領域18内で指示した位置((X,Y)座標)を検出する座標入力システムの構成図である。面抵抗体12は、透明なガラス、樹脂、または不透明な絶縁基材の片面に塗布、蒸着等により均一に形成したものである。面抵抗体12の表面は、指21が面抵抗体12に直接触れない様に絶縁処理することによって、指21と面抵抗体12との静電容量結合による信号伝達をさせるようにしてもよいし、絶縁処理せず、指21と面抵抗体12の直接的な電気的接触による信号伝達をさせるようにしてもよい。ここでは、面抵抗体12の表面に絶縁処理をした場合を説明する。
均一な面抵抗体12の周囲又は内部に、各辺が直線である長方形の抵抗性周囲電極13を密着配設し、抵抗性周囲電極13が囲む領域の内部を長方形の座標入力領域18とする。抵抗性周囲電極13上において、長方形の座標入力領域18の4頂点に当たる位置を検出電極14〜17とし、そこにそれぞれ1本ずつ引き出し線22〜25を接続する。引き出し線22〜25は、一般的に、それぞれ外部抵抗成分26〜29を含む。引き出し線22〜25を、アナログ信号処理部30内の振動電圧印加回路31に接続する。
座標を検出する際、AC信号源としての振動電圧発生器32は、振動電圧印加回路31に振動電圧を与え、振動電圧印加回路31は、検出電極14〜17を低インピーダンスで電圧振動させ、且つ、アナログマルチプレクサ33に検出電極14〜17から流入した電流を出力する。簡単な例としては、トランジスタのベースをAC信号で振動させ、エミッタを検出電極と接続して、コレクタから電流出力するものがある。
AC信号源としての振動電圧発生器32によって、面抵抗体12は、全面が電圧振動する。人体は、従来から知られているように、AC信号に対して接地効果を持っており、人体の指21が面抵抗体12に接触または近接すると、静電容量結合により、指先を通して面抵抗体12との間にAC信号電流が流れる。検出電極14〜17は、アナログマルチプレクサ33を通してA/Dコンバータ(アナログ/デジタル変換器)34に接続しており、各検出電極に流れる電流に比例した電圧がA/Dコンバータ34に印加される。このため、指先から面抵抗体12を通して流れ、検出電極14〜17へ配分される電流の値を、電圧値としてデジタル値で得ることができる。
CPU35は、アナログマルチプレクサ33を順番に切り替え(図示せず)、A/Dコンバータ34が出力するデジタル値を入力し、後述するような方法で、指21の指示位置の座標を計算する。また、CPU35は、A/Dコンバータ34が出力するデジタル値、及びそれらの時間的な変化を基に、面抵抗体12に接触または近接している指が1本なのか2本なのかを識別し、2本であると識別した場合、2本の指が行っている相対運動をジェスチャとして認識することを試みる。CPU35は計算した座標及び/もしくは認識したジェスチャをデータとして出力し、座標及びジェスチャは後段の装置によって利用される。
面抵抗体12は、不透明なカーボン膜、または、スパッタ法によって形成した透明なITO(インジウム錫酸化物)膜、CVD法によって形成したNESA(酸化錫)膜、等を、基材上に均一に成膜したものであり、面抵抗値は約1KΩ/□程度が好ましい。基材は、例えば、ソーダガラスを使用することができるが、特に材質が限定されるものではなく、任意のガラス素材あるいはアクリル樹脂、ポリエチレン樹脂などの透明な樹脂素材を使用できる。用途によっては不透明な絶縁性の基材を用いてもよい。
単連結である面抵抗体12の周囲又は内部に、各辺が直線である長方形の抵抗性周囲電極13を、全ての辺が面抵抗体12と電気的に接触する様に設ける。ここで単連結とは、面抵抗体12は内部に孤立した穴が存在しないような形状であり、ひとつながりになっていることを意味するものである。ただし、成膜方法に応じて面抵抗体12上に生じるピンホール程度の大きさの穴のような、面抵抗体12内部の電流の巨視的な流れを阻害しないものであれば、あっても何ら問題にならない。また、受傷などによってより大きな穴が生じた場合は、少なくともその穴の周りで、穴の大きさに応じて座標が歪むものの、穴から離れるほど指21の指示位置の座標計算に及ぼす影響は小さくなるため、穴が小さければ、実用上の問題は生じない。
面抵抗体12を取り囲む抵抗性周囲電極13は、カーボン、銀カーボン、又は銀等を密着配設したものであり、例えば、銀インクのような導電性インクをスクリーン印刷し、焼成する等の手法で作成する。抵抗性周囲電極13の各辺は、幅を持った直線形状でもよいし、低抵抗の導電性エレメントを互いに分離させて配列し、面抵抗体12の抵抗を活用して形成するようにしたものでもよい。抵抗性周囲電極13は、各辺毎に長さ当たりの抵抗値を一定にし、少なくとも、長方形の上下辺の長さ当たりの抵抗値、及び左右辺の長さ当たりの抵抗値を等しくする。
また、抵抗性周囲電極13の抵抗値は面抵抗体12の抵抗値に比べて低い方がよく、面抵抗体12の面抵抗値を1KΩ/□程度とした場合は、抵抗性周囲電極13の隣り合う頂点間の抵抗値を、20〜200Ω程度にするのが好ましい。
各頂点の検出電極14〜17は、引き出し線を接続するためのものであり、ハンダ付け可能な導電性インクを印刷・焼成して形成する。検出電極14〜17を形成するための導電性インクとして、抵抗性周囲電極13と同じものを使用することができる場合には、検出電極14〜17と、抵抗性周囲電極13は、一回の処理で印刷・焼成して形成することが可能である。
外部抵抗成分26〜29は、引き出し線22〜25の抵抗、及び振動電圧印加回路31等の要素に含まれる抵抗成分の、検出電極14〜17の各々から発する経路ごとの合計である。一般的には、引き出し線22〜25に内在する抵抗がそのうちの大きな部分を占める。
引き出し線22〜25として、充分に低抵抗のリード線等を使用する場合は、外部抵抗成分26〜29は、抵抗性周囲電極13の抵抗値よりも極めて小さくなり、座標を計算する上で、独立して考慮しなくても済む程度になる。一方で、例えば、引き出し線22〜25の延長が長かったり、引き出し線22〜25の材質や形状によって抵抗が比較的高い場合などには、外部抵抗成分26〜29が大きくなる。また、座標入力パネル11とアナログ信号処理部30を接続するケーブルをまとめるために、座標入力パネル11上の、抵抗性周囲電極13の外側に、検出電極14〜17のそれぞれから座標入力パネル11の外周の任意の位置まで、導電性のパターンを形成するような場合にも、使用する導電性インク、パターンの太さなどに応じて、外部抵抗成分26〜29が大きくなる(このとき、導電性のパターンは、引き出し線22〜25の一部とみなす)。特に、印刷の回数を増やさないように、導電性パターンを抵抗性周囲電極13と同じ導電性インクで印刷する場合は、外部抵抗成分26〜29の抵抗値と抵抗性周囲電極13の抵抗値の比率は、パターンの太さに応じて、ほぼ数倍以内という低い比率になる。
抵抗性周囲電極13もしくは外部抵抗成分26〜29の抵抗値が、面抵抗体12の抵抗値に比べて十分に低くない場合には、後述の方法で計算する指21の指示位置の座標が、実際の指示位置に比べて、パネルの内側に向けてずれる傾向がある。そのような場合は、抵抗値の大きさに応じて、座標を補正する必要がある。
抵抗性周囲電極13は、印刷等の手法で形成するうえ、検出電極14〜17に引き出し線22〜25を接続する必要があるため、有限の幅を持つ。このとき、少なくとも抵抗性周囲電極13と面抵抗体12の境界線においては、抵抗性周囲電極13と面抵抗体12が電気的に接触している必要がある。通常、面抵抗体12を成膜した上から抵抗性周囲電極13を形成するが、面抵抗体12が抵抗性周囲電極13の外側にはみ出ていても構わない。その際も、座標入力領域18は、抵抗性周囲電極13が囲む領域の内部である。
抵抗性周囲電極13及び面抵抗体12の形状は、基材に収まるものであればよく、必ずしも抵抗性周囲電極13及び面抵抗体12と基材の形状を略一致させる必要はないが、抵抗性周囲電極13及び面抵抗体12と基材の形状を同じようにした方が、座標入力システムを何らかの製品に組み込む際に、組み込む製品のデザイン上の自由度が大きくなるため好ましい。抵抗性周囲電極13の外側に、引き出し線22〜25の一部として導電性パターンを形成する場合は、面抵抗体12が導電性パターンと重ならないようにする必要がある。
次に、指21の指示位置の座標を計算する方法について説明する。指21で「点」を「指示する」とは、指で、座標入力領域18内部の、ある位置座標に対応する点にタッチすることを意味する。
また、「タッチする」とは、指21が、面抵抗体12上の絶縁処理部に接触または近接することを意味する。指21と面抵抗体12との静電容量結合の強さは、両者の対向する面積及び距離によって変化する。このため、検出電極14〜17に流れる電流の合計値を監視し、合計値が予め定めた閾値を超えた場合に、タッチした、と判断する。
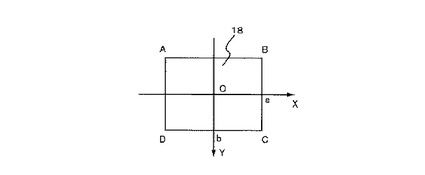
図2に、長方形の座標入力領域18と、座標を計算する直交座標系XYを示す。長方形の4頂点に便宜的に名前をつけ、検出電極14〜17に当たるそれぞれの頂点を、頂点A〜Dと呼ぶことにする。また、直交座標系XYは、利用者の都合に応じ、長方形の座標入力領域18に対して任意の位置関係で設定された直交座標系であり、長方形の座標入力領域18に対して、原点を任意の位置とし、X軸を任意の方向にとることができる。長方形の座標入力領域18の中心に対する座標系のオフセットが既知であり、また長方形の座標入力領域18のいずれかの辺に対するX軸の傾きが既知であれば、よく知られたアフィン変換によって、最終的に任意の直交座標系XYの座標を求めることができる。本実施の形態では、説明のため、図2で示したように、直交座標系XYの原点を長方形の座標入力領域18の中心と同一とし、X軸を長方形の座標入力領域18の辺ABと平行とした場合を例とすることにするが、構成をこの関係に限定するものではない。
今、指21が座標入力パネル11の座標入力領域18内にタッチしているとき、指先から面抵抗体12を通して座標入力パネル11に流れた電流のうち、検出電極14(頂点A)に流れる電流をA/Dコンバータ35によって測定した値を測定値A、検出電極15(頂点B)に流れる電流を測定した値を測定値B、検出電極16(頂点C)に流れる電流を測定した値を測定値C、及び、検出電極17(頂点D)に流れる電流を測定した値を測定値Dとする。
このとき、指21が指示する位置の座標(X,Y)は、もし外部抵抗成分26〜29の抵抗値を0とするなら、直交座標系XYにおいて、次の数式1によって求めることができることが知られている。a及びbは、座標入力領域18の中心を原点とした場合の、原点から、それぞれX方向及びY方向の座標入力領域18の境界までの距離を示す。ただし、後述するように、aとbの関係は、上下辺の長さ当たりの抵抗値と左右辺の長さ当たりの抵抗値の関係を調整することにより、適宜変更することが可能である。
【0009】
【数1】

もし、2本の指でそれぞれ異なる2点を指示している場合、数式1によって計算される座標(X,Y)は、2本の指で指示している2点を結ぶ直線上になる。2本の指の、面抵抗体12との間の静電容量結合の強さが互いに等しければ、数式1によって計算される座標は、2本の指で指示している2点を結ぶ直線をちょうど2分する中間点になる。静電容量結合の強さが互いに等しくなければ、数式1によって計算される座標は、2本の指で指示している2点を結ぶ直線上の、静電容量結合の強さがより強い指が指示している方に近い位置になる。
本願出願人による特開2010−157029号(特許文献2)には、1本の指で1点を指示している場合、A×C=B×D(つまりA×C−B×D=0)が成立するが、2本の指でそれぞれ異なる2点を指示している場合には成立しない、ということが開示されている。更に詳細に調べた結果、2本の指でそれぞれ異なる2点を指示している場合には、次に示す数式2が成立することが分かった。ただし、第1の指が指示している位置の座標を(X1,Y1)、測定値Aのうち、第1の指による分の数値をA1(以下B、C、Dについても同様)、また、第2の指が指示している位置の座標を(X2,Y2)、測定値Aのうち、第2の指による分の数値をA2(以下B、C、Dについても同様)とする。
【0010】
【数2】
測定の結果得られるのはA(=A1+A2)(及びB、C、D)であり、個別のA1及びA2は不可知である。従って、(X1,Y1)及び(X2,Y2)を求めることはできない。しかし、数式2は、A×C−B×Dが0でなければ、タッチしているのが複数の指である、と判断してよいことを示すものである。また、A×C−B×Dは、(X1−X2)×(Y1−Y2)を含むため、2本の指でそれぞれ異なる2点を指示している場合、2点間の距離が離れていればいるほど、0から離れた数値となる。ただし、(X1−X2)×(Y1−Y2)の形であるため、2本の指でそれぞれ異なる2点を指示していても、その2点を結ぶ直線が、XY座標系に対して水平もしくは垂直である場合、数式2は0になり、タッチしているのが2本の指であることを識別できなくなることには、注意する必要がある。
また、タッチしている指が3本以上の場合には、A×C−B×Dが0になる条件が増加する上、A×C−B×Dの数値から複数の指の位置関係を読み取るのが困難になるため、本出願では、タッチする指は1本もしくは2本に限定する。
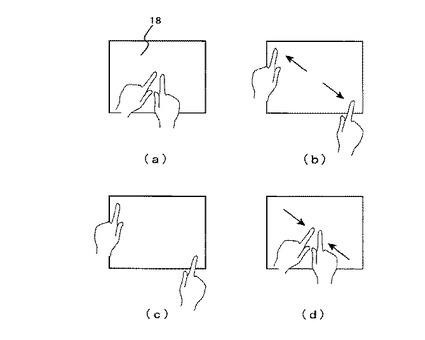
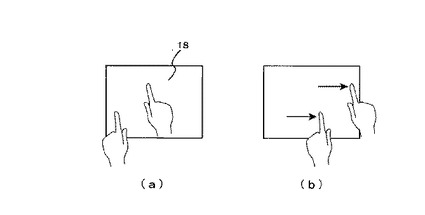
数式2を用いて認識できるジェスチャとしては、次のようなものがある。例えば、まず、2本の指で、座標入力パネル11の座標入力領域18内の略同じ点を指示する(図3(a)、座標入力パネル11にタッチしているのは指先である)。その後、2本の指を、タッチしたまま、座標入力領域18内の対角方向に向けて、互いに離していく(図3(b))。このような相対運動は、一般的に、拡大を意味するジェスチャとして知られている。
このとき、数式1によって計算される座標は、2本の指で指示している2点を結ぶ直線上になる。ある使用者が、例えば、両手の人差し指を用い、同じ程度の強さで2点にタッチしていて、同じような速度で指を離していっていれば、2本の指がタッチしたまま離れていく間も、数式1によって計算される座標は、2本の指で指示している2点を結ぶ直線を略2分する中間点を示し続ける。一方、2本の指が指示している点同士の間隔が広がっていくに従って、A×C−B×Dは、その絶対値が、0から次第に大きくなっていく。
これらのことから、数式1によって計算された座標が時間的にそれほど変化せず、一方でA×C−B×Dが時間の経過とともに大きくなっていく場合には、一般的に拡大を意味するジェスチャがなされたと認識することができる。また、A×C−B×Dは、図2のXY座標系において、2本の指が指示している2点の位置関係が右下がりであれば正に、右上がりであれば負になるため、2種類の拡大ジェスチャを識別することができる。
ただし、2本の指を互いに離す方向を、水平方向もしくは垂直方向とすると、前記したように、2本の指でそれぞれ異なる点を指示しているときでも、A×C−B×Dが0となってしまうため、2本の指でタッチしているということを識別できない。このため、2本の指を互いに離す方向は、斜めにする必要があり、(X1−X2)×(Y1−Y2)の形であることから、XY座標系において+45度もしくは−45度方向が最も好ましい。
また、1本の指で1点を指示している場合、A×C−B×Dは、理論的には常に0であるはずであった。しかし、測定値を用いて、A×C−B×Dを実際に計算してみると、特に、長方形の座標入力領域18の4頂点に近づくほど、A×C−B×Dが0から離れる傾向があることが分かった。従って、前記のジェスチャについて、数式1によって計算される座標が、座標入力領域18の4頂点の近傍になるような位置における操作は、タッチしている指が1本であるか2本であるかを識別しにくくなるため、好ましくない。
このことから、拡大のジェスチャについて、数式1によって計算される座標が座標入力領域18の中央付近になるようにするのが特に好ましい。つまり、検出可能な拡大のジェスチャとしては、2本の指で、座標入力領域18内部のうち、少なくとも抵抗性周囲電極13の近傍を除外した略同じ点をまず指示し、その後、2本の指を、それぞれが指示する点を結ぶ直線の傾きが、少なくとも水平及び垂直でないように、最も好ましくは+45度もしくは−45度方向に近い傾きであるよう、広げていく、というものに限定される。
このジェスチャについては、ジェスチャの開始時には、2本の指が略同じ点を指示しているため、1本ではなく2本の指がタッチしている、ということを識別できない。2本の指が指示する点がある程度離れて初めて、2本の指がそれぞれ異なる点を指示している、ということを認識できる。また、それ以降は、2本の指が指示する点の間の距離が大きいほど、A×C−B×Dの絶対値が大きくなるため、A×C−B×Dを連続的に評価することによって、2本の指が指示する点間の距離が広がっていっているのか、とどまっているのか、広がっていっているとすればどのような速度で広がっているか、を判断することができる。
従って、CPU35が、後段の装置に情報を出力する際には、数式1によって計算された座標を出力し続けるとともに、A×C−B×Dもしくはそれを適当に整形した数値を、2本の指が指示する点間の距離の代替値として出力するのが好ましい。
同様に、まず、2本の指で、座標入力領域18内の、互いに対角方向に離れた2点を指示し(図3(c))、その後、2本の指を、タッチしたまま、互いに近づけていく(図3(d))ような相対運動は、一般的に、縮小を意味するジェスチャとして知られている。
これに対しては、数式1によって計算された座標が時間的にそれほど変化せず、一方で、A×C−B×Dが、タッチ当初に絶対値が大きく、その後時間の経過とともに小さくなっていくような場合は、この、縮小を意味するジェスチャがなされたと認識することができる。
ただし、縮小を意味するジェスチャについても、2本の指を互いに離す方向を、水平方向もしくは垂直方向とすると、A×C−B×Dが0となってしまうため、2本の指を互いに離す方向は、斜めにする必要があり、+45度もしくは−45度方向が最も好ましい。
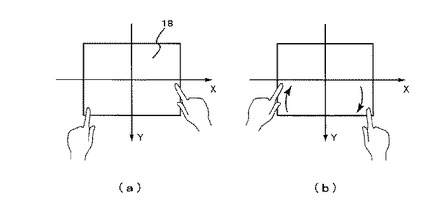
また、数式2を用いて認識できる別のジェスチャとしては、次のようなものがある。例えば、まず、2本の指で、座標入力パネル11の座標入力領域18内の、互いに対角方向に離れた2点を指示する(図4(a))。その後、タッチしたまま、2本の指が指示する点の相互関係を維持しつつ、2本の指を同じ方向に移動させる(図4(b))。このような相対運動は、例えば、(2本指)スクロール(もしくは(2本指)フリック)を意味するジェスチャとして知られている。
このジェスチャについても、2本の指を互いに離す方向を、水平方向もしくは垂直方向とすると、A×C−B×Dが0となってしまうため、2本の指を互いに離す方向は、斜めにする必要がある。また、2本の指が指示する点間の距離が小さいと、A×C−B×Dが0に近く、2本であることを識別できないため、2本の指が指示する点間の距離は大きいほど好ましい。更に、前記したように、A×C−B×Dは、1本の指で1点を指示している場合でも、長方形の座標入力領域18の4頂点に近づくほど、0から離れる傾向があるため、数式1によって計算される座標が、座標入力領域18の4頂点の近傍になるような位置における操作は、タッチしている指が1本であるか2本であるかを識別しにくくなるため、好ましくない。
次に、別の関係式を用いたジェスチャの認識について説明する。2本の指でそれぞれ異なる2点を指示している場合には、限定的な条件下で、次に示す数式3が成立することが分かった。ただし、θは、2本の指で指示している2点を結ぶ直線の、X軸に対する、X軸の正方向からY軸の正方向に向かう角度(図2では時計回り)である。
【0011】
【数3】
数式3の逆正接関数の引数の分母には、(a2−b2)という表式が存在する。これは、座標入力領域18の横と縦の長さが等しい場合、数式3の計算結果が常に+45度もしくは−45度になってしまい、角度を検出できなくなる、ということを示している。抵抗性周囲電極13の上下辺の長さ及び左右辺の長さ(これらは、座標入力領域18の横の長さ、及び縦の長さに対応する)、及び、上下辺の長さ当たりの抵抗値と左右辺の長さ当たりの抵抗値の関係を調整することにより、計算に用いるa及びbについて、それらが等しくならないようにすることができる。例えば、抵抗性周囲電極13の上下辺の長さ及び左右辺の長さが等しくなければ、抵抗性周囲電極13の上下辺の長さ当たりの抵抗値と左右辺の長さ当たりの抵抗値を等しくすることにより、aとbが等しくならないようにできる。
数式3を用いて角度を計算する際、逆正接関数の引数の分母と分子を独立して評価することにより、逆正接関数の出力を、[−180,+180]度の間で求めることができる。数式3には、逆正接関数に1/2がついているので、結果として、求められる角度θは、[−90、+90]度の範囲になる。2本の指で指示している2点を結ぶ直線に、どちらが始点でどちらが終点か、という区別がないため、2点を結ぶ直線の角度は、常に[−90、+90]度の範囲になる。
数式3によって求められる情報を用いて、一般的に回転を意味するジェスチャを認識することができる。例えば、まず、2本の指で、座標入力パネル11の座標入力領域18内の、第1象限の右上部と、第2象限の左下部とを指示する(図5(a))。その後、2本の指を、タッチしたまま、第1象限内を指示した指は下方向へ、第2象限内を指示した指は上方向へ、それぞれ動かしていく(図5(b))。このとき、数式1を用いて、2本の指で指示した点の略中間点を求めることができ、A×C−B×Dを用いて、開始時に、2本の指でタッチしていることを識別することができ、数式3を用いて、2本の指で指示している点を結ぶ直線の傾きを求めることができる。
ただし、数式3を用いて角度を計算するにあたって、ジェスチャの開始時に、2本の指で最初に指示する2点の位置関係は、それぞれが第1象限と第3象限、もしくは第2象限と第4象限にあるような位置関係であってはならない。2点は、同じ象限内にあるか、互いに隣り合った象限内にある必要がある。また、開始時の2点の位置関係が水平もしくは垂直であると、2本の指でタッチしていることを識別できないので、斜めである必要がある。加えて、ジェスチャの終了時、それぞれの指は、最初に指示した象限から別の象限に移動させてはならない。
CPU35は、後段の装置に情報を出力する際には、数式1によって計算された座標を出力し続けるとともに、A×C−B×Dもしくはそれを適当に整形した数値を、2本の指が指示する点間の距離の代替値として出力し、更に、数式3によって計算した数値をも出力するのが好ましい。もしくは、A、B、C、Dといった測定値を後段の装置に出力し、数式3を用いた計算などを、後段の装置において実行しても構わない。
【実施例】
【0012】
以下、実施例により、本発明を説明する。本発明は、以下の実施例に限定されるものでなく、本発明の技術範囲において、種々の変形例を含むものである。
(実施例1)
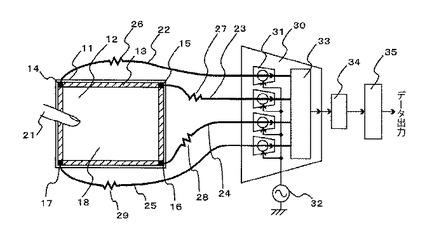
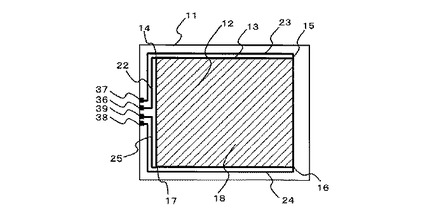
座標入力パネル11は、次のようにして作成した。ガラス基材として、ソーダガラス(厚さ3ミリ)を略469×375mmの大きさに切断したものを用い、ガラス基材の表面に、スパッタ法によってITO(インジウム酸化物)膜を形成して面抵抗体12とした。次に、抵抗性周囲電極13、及び引き出し線22〜25の一部を、(株)アサヒ化学研究所製銀ペーストLS−504(樹脂バインダー)にカーボンを混合したペーストをスクリーン印刷し、加熱硬化させることで形成した。このとき、座標入力領域18の形状として、2a=378mm、2b=303mmの長方形とした。抵抗性周囲電極13の幅は、抵抗性周囲電極13の頂点AB間の抵抗値が約68Ω、頂点BC間の抵抗値が約52Ωになるよう調整し、378/303=1.25≒68/52=1.31とすることによって、抵抗性周囲電極13の全ての辺の長さ当たりの抵抗値をほぼ等しくした。また、引き出し線22〜25は、それぞれをガラス上に印刷した部分と低抵抗のリード線部分とに分割し、印刷した部分は、抵抗性周囲電極13の外側に、座標入力パネルの左辺中央部で引き出し線22〜25の低抵抗のリード線と接続するように、全てがそれぞれ最短距離となるようなパターンで構成し、印刷した部分の幅は、一辺当たりの抵抗値が抵抗性周囲電極の一辺の抵抗値の1/2〜1/4程度になるよう、調整した。図6に、引き出し線22〜25の印刷した部分を含めた座標入力パネル11の模式図を示す。次に、座標入力パネルの左辺中央部にある引き出し線22〜25のリード線との接合部に、銀ペーストを用いて、接合部36〜39を形成した。
更に、面抵抗体12上に、透明絶縁性基材を形成した。透明絶縁性基材を形成するには、面抵抗体12と抵抗性周囲電極13上にガラスペーストを印刷し、熱処理して粉末ガラスを溶融させ、焼結させた。最後に、接合部36〜39上に、引き出し線22〜25を、ハンダ付けにより接続した。この際、面抵抗体12のシート抵抗は500Ω/□となるようにした。
このように作成した座標入力パネル11を、図1に示した構成図のように作成したハードウエアに接続した。また、CPU35からは、座標データ、及びA、B、C、Dといった測定値を出力するようにし、それらをシリアル通信によってパソコンに取り込むようにして、座標以外の計算をパソコンで行うようにした。直交座標系XYは、図2のように設定した。また、2本の指で指示しているかどうかを評価する数値として、A×C−B×Dの代わりに、それを正規化した(A×C−B×D)/((A+C)×(B+D))を用いた。
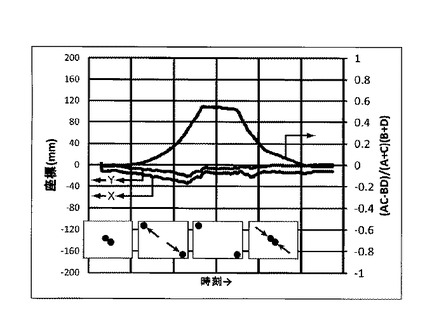
この座標入力システムを用い、図3(a)〜(d)に示したような拡大及び縮小のジェスチャに対して、前記の数値を評価したところ、図7のグラフに示すような結果を得た。横軸は時刻を示し、左側の縦軸は、数式1によって計算した座標(X,Y)を、また右側の縦軸は、(A×C−B×D)/((A+C)×(B+D))を示す。グラフ下部に4つ並べた模式図は、それぞれの模式図を配置した横軸上の位置に対応して、まず、2本の指で、座標入力パネル11の座標入力領域18のほぼ中央部を指示し、その後、2本の指を、タッチしたまま、座標入力領域18内の対角方向(左上と右下)に向けて、互いに離していき、2本の指で座標入力領域18の対角部をしばらく指示してから、最後に、タッチしたまま、座標入力領域18のほぼ中央部に向けて、互いに近づけていったことを示す。
このとき、座標(X,Y)は、2本の指で指示したそれぞれ異なる点の略中間点((0,0)近傍)を示し続ける一方、(A×C−B×D)/((A+C)×(B+D))は、2本の指が指示する点が互いに離れるにつれて大きくなっていき、その後、近づくにつれて次第に小さくなっている。
従って、本座標入力システムが、2本の指でそれぞれ異なる2点を指示していること、及びその2本の指の、パネル対角方向への相対運動を検出できることが確認された。
(実施例2)
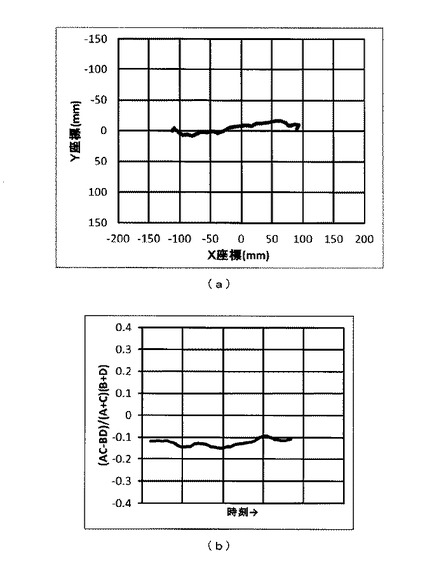
実施例1において製作した座標入力システムを用い、図4(a)及び(b)に示したような2本指スクロールのジェスチャに対して、数式1によって計算される座標(X,Y)、及び(A×C−B×D)/((A+C)×(B+D))を評価したところ、図8に示すような結果を得た。
図8(a)は、数式1によって計算された座標を、XY平面内でプロットしたものである。2本の指を左から右に動かしていったとき、Y座標は、上下方向に関してパネルの略中央を維持している。これは、数式1によって計算された座標が、2本の指でそれぞれ指示した2点の略中間点になっていることを示している。一方、図8(b)は、そのときの(A×C−B×D)/((A+C)×(B+D))をプロットしたものであり、横軸は時刻を示す。2本の指を左から右に動かしていったとき、数値は、ほぼ−0.1前後を維持している。数値が負であることは、2本の指でそれぞれ指示した2点の位置関係が、右上がりであることを示している。
1本の指で、座標入力領域18の左端からパネルの幅の約1/4、上下方向に関してパネルの略中央部を指示し、そのまま左から右に動かしていったときは、座標は図8(a)と似た動きをするものの、(A×C−B×D)/((A+C)×(B+D))は、プラスマイナス0.01程度にしかならない。
従って、本座標入力システムが、2本の指で互いに対角方向に離れた異なる2点を指示しているときに、2本の指の相対関係を維持したまま行われる運動を検出できることが確認された。
(実施例3)
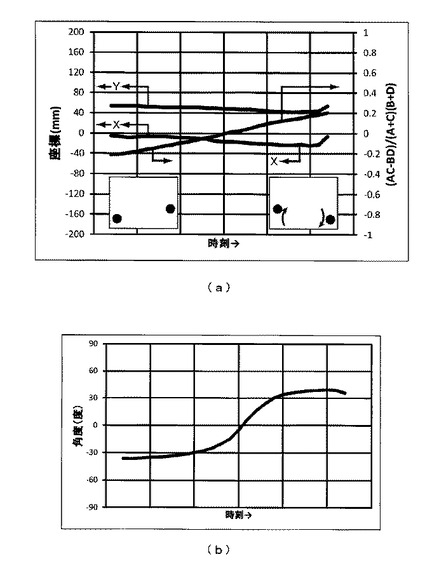
実施例1において製作した座標入力システムを用い、図5(a)及び(b)に示したような回転のジェスチャに対して、数式1によって計算される座標(X,Y)、(A×C−B×D)/((A+C)×(B+D))、及び数式3によって計算される角度を評価したところ、図9に示すような結果を得た。
図9(a)の横軸は時刻を示し、左側の縦軸は、数式1によって計算した座標(X,Y)を、また右側の縦軸は、(A×C−B×D)/((A+C)×(B+D))を示す。グラフ下部に2つ並べた模式図は、それぞれの模式図を配置した横軸上の位置に対応して、まず、2本の指で、座標入力領域18内の、第1象限の右上部と、第2象限の左下部とを指示し、その後、2本の指を、タッチしたまま、第1象限内を指示した指は下方向へ、第2象限内を指示した指は上方向へ、それぞれ動かしていったことを示す。
また、図9(b)は、図9(a)と同じ横軸で、数式3によって計算した角度を示す。
このとき、座標(X,Y)は、2本の指で指示したそれぞれ異なる点の略中間点、つまり、X座標はほぼ0、Y座標は0から離れた値をそれほど変動せずに示し続ける一方、(A×C−B×D)/((A+C)×(B+D))は、2本の指が指示するそれぞれ異なる2点の位置関係が右上がりだった開始時は負の値を、右下がりになる終了時には正の値を示した。途中、2本の指が指示する2点の位置関係が水平になったときには、0になる。しかし、開始時に、数式1によって計算される座標が、座標入力領域18の4頂点の近傍ではない状態で、A×C−B×D)/((A+C)×(B+D))の絶対値が0.2程度であるので、開始の時点で、タッチしている指が2本であることを識別することができる。
更に、図9(b)に示すように、数式3によって計算した、2本の指がそれぞれ指示する異なる2点を結ぶ直線の角度は、開始時には約−30度、終了時には約+40度を示し、その間、滑らかな変化を示している。
従って、本座標入力システムが、2本の指で互いに対角方向に離れた異なる2点を指示しているときに、2本の指によって行われる回転様の相対運動を検出できることが確認された。
【符号の説明】
【0013】
1 座標入力パネル
2 面抵抗体
3 抵抗性周囲電極
4、5、6、7 検出電極
8 座標入力領域
11 座標入力パネル
12 面抵抗体
13 抵抗性周囲電極
14、15、16、17 検出電極
18 座標入力領域
21 指
22、23、24、25 引き出し線
26、27、28、29 外部抵抗成分
30 アナログ信号処理部
31 振動電圧印加回路
32 振動電圧発生器
33 アナログマルチプレクサ
34 A/Dコンバータ
35 CPU
36、37、38、39 接合部
【技術分野】
【0001】
本発明は、指によりタッチされた位置を検出する座標入力システム、いわゆるタッチパネルに関する。
【背景技術】
【0002】
図10は従来の長方形の座標入力領域8を有する座標入力パネル1であり、均一な面抵抗体2に、面抵抗体2と電気的に接続するように、面抵抗体2を取り囲む抵抗性周囲電極3を配設しており、4個の頂点に検出電極4、5、6、及び7を備えている。検出電極4、5、6、及び7は、抵抗性周囲電極3と電気的に接続されている。座標入力領域8は、面抵抗体2上にあり、抵抗性周囲電極3の内側である。
上記座標入力パネル1を用いた座標入力システムの座標検出方法として、面抵抗体2全体を電圧振動させて、静電容量結合もしくは直接の接触を介し、指で指示した点の位置を入力パネル側で検出する方法がある。例えば、面抵抗体2の一点に出入りする電流の、4個の頂点(4、5、6、及び7)へ配分される電流値を計測し、それらの電流値を元に座標を計算するものが知られている(特許3237629号(特許文献1)参照)。このような方式を用いた座標入力システムは、表面型のタッチパネルと呼ばれる。
なお、指で「点」を「指示する」とは、指で、座標入力領域8内部の、ある位置座標に対応する点にタッチすることを意味する。
前記のような表面型のタッチパネルでは、同一の座標入力領域内を、複数の指で同時に指示した場合、4個の頂点に流れる電流値を基に、それぞれの指が指示した位置の座標を計算することは、不可能であるとされている。そのような機能が必要とされる用途には、座標入力領域内に縦横に電極を配設した投影型の静電容量結合方式タッチパネルや、カメラを用いた工学的なタッチパネル等が使用される。
ただし、本願出願人による特開2010−157029号(特許文献2)において、長方形の座標入力領域を有し、長方形の4個の頂点に検出電極を備える表面型の座標入力システムであっても、座標入力領域内を1本の指で1点を指示しているか、2本の指でそれぞれ異なる2点を指示しているかを識別できる、ということが開示されている。
一方、タッチパネルの用途の一つとして、ジェスチャ入力が挙げられる。これは、座標入力領域内を指示する指の動きによって、座標入力システムが接続される後段の装置に対して特定の命令を伝達するものである。ジェスチャは、1本の指によって実現されるものもあるが、近年の、マルチタッチ可能なタッチパネルの普及に伴い、複数の指を用いたジェスチャが使用されるようになっている。
【先行技術文献】
【特許文献】
【0003】
特許3237629号
特開2010−157029号
【発明の概要】
【発明が解決しようとする課題】
【0004】
表面型のタッチパネルは、例えば投影型と比較すると、複数の指の指示位置を計算できない一方で、パネルの構造が単純であり、配線の数も非常に少なくて済む、という利点がある。また、前述したように、表面型のタッチパネルでは、複数の指で同時に指示した場合、それぞれの指が指示した全ての位置の座標を個別に計算することは不可能である。しかし、ジェスチャの認識であれば、それぞれの指が指示した位置の相対関係及び相対関係の変化を認識できればよく、それぞれの指が指示した全ての位置の座標を個別に求めることは必須ではない場合が存在する。
本発明はこのような点を考慮してなされたものであり、表面型の座標入力システムでありながら、2本の指で同時に指示した際のジェスチャに関する情報を検出できるような座標入力システムを提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明は、少なくとも面抵抗体が形成された単連結である長方形の座標入力領域と、該長方形の座標入力領域の外縁を構成する4辺上に前記面抵抗体と電気的に接触するように設けられた、単位長さ当たりの抵抗値が一定であり、少なくとも対向辺同士の単位長さ当たりの抵抗値が等しいような直線の抵抗性周囲電極と、前記長方形の座標入力領域の4個の頂点に前記抵抗性周囲電極と電気的に接触するように設けられた検出電極と、該4個の検出電極に流れる電流を計測する電流計測手段と、前記座標入力領域内の位置を指で指示したときに、前記4個の検出電極に流れる電流値から、前記指で指示前記座標入力領域内の位置を計算する座標計算手段と、前記4個の検出電極に流れる電流値から、前記座標入力領域内を1本の指で1点を指示しているか、2本の指でそれぞれ異なる2点を指示しているかを識別し、更に、2本の指で2点を指示していると識別した場合、前記2本の指が行っている相対運動を認識する識別認識手段を有する座標入力システムを要旨とする。
【発明の効果】
【0006】
本発明による座標入力システムによれば、投影型と比較してパネルの構造が単純である表面型のタッチパネルにおいて、複数の指を用いたジェスチャの一部を認識することができる。
また、投影型が苦手とするような比較的大きなタッチパネルについて、例えばカメラ方式に見られるような、パネルの表面側の枠の厚みを増すことなく、複数の指を用いたジェスチャの一部を認識することができる。
【図面の簡単な説明】
【0007】
【図1】第1の実施の形態を示す模式図
【図2】座標系を示す図
【図3】拡大及び縮小ジェスチャを説明する模式図
【図4】2本指スクロールジェスチャを説明する模式図
【図5】回転ジェスチャを説明する模式図
【図6】実施例1の座標入力パネルの模式図
【図7】実施例1の座標入力システムの実験結果
【図8】実施例2の座標入力システムの実験結果
【図9】実施例3の座標入力システムの実験結果
【図10】従来の長方形の座標入力パネル
【発明を実施するための形態】
【0008】
以下、添付図面に従って、本発明に係る座標補正方法の好ましい実施の形態について詳説する。
〈第1の実施の形態〉
図1は、第1の実施の形態になる座標入力システムの一例を示す模式図である。指21が座標入力パネル11の座標入力領域18内で指示した位置((X,Y)座標)を検出する座標入力システムの構成図である。面抵抗体12は、透明なガラス、樹脂、または不透明な絶縁基材の片面に塗布、蒸着等により均一に形成したものである。面抵抗体12の表面は、指21が面抵抗体12に直接触れない様に絶縁処理することによって、指21と面抵抗体12との静電容量結合による信号伝達をさせるようにしてもよいし、絶縁処理せず、指21と面抵抗体12の直接的な電気的接触による信号伝達をさせるようにしてもよい。ここでは、面抵抗体12の表面に絶縁処理をした場合を説明する。
均一な面抵抗体12の周囲又は内部に、各辺が直線である長方形の抵抗性周囲電極13を密着配設し、抵抗性周囲電極13が囲む領域の内部を長方形の座標入力領域18とする。抵抗性周囲電極13上において、長方形の座標入力領域18の4頂点に当たる位置を検出電極14〜17とし、そこにそれぞれ1本ずつ引き出し線22〜25を接続する。引き出し線22〜25は、一般的に、それぞれ外部抵抗成分26〜29を含む。引き出し線22〜25を、アナログ信号処理部30内の振動電圧印加回路31に接続する。
座標を検出する際、AC信号源としての振動電圧発生器32は、振動電圧印加回路31に振動電圧を与え、振動電圧印加回路31は、検出電極14〜17を低インピーダンスで電圧振動させ、且つ、アナログマルチプレクサ33に検出電極14〜17から流入した電流を出力する。簡単な例としては、トランジスタのベースをAC信号で振動させ、エミッタを検出電極と接続して、コレクタから電流出力するものがある。
AC信号源としての振動電圧発生器32によって、面抵抗体12は、全面が電圧振動する。人体は、従来から知られているように、AC信号に対して接地効果を持っており、人体の指21が面抵抗体12に接触または近接すると、静電容量結合により、指先を通して面抵抗体12との間にAC信号電流が流れる。検出電極14〜17は、アナログマルチプレクサ33を通してA/Dコンバータ(アナログ/デジタル変換器)34に接続しており、各検出電極に流れる電流に比例した電圧がA/Dコンバータ34に印加される。このため、指先から面抵抗体12を通して流れ、検出電極14〜17へ配分される電流の値を、電圧値としてデジタル値で得ることができる。
CPU35は、アナログマルチプレクサ33を順番に切り替え(図示せず)、A/Dコンバータ34が出力するデジタル値を入力し、後述するような方法で、指21の指示位置の座標を計算する。また、CPU35は、A/Dコンバータ34が出力するデジタル値、及びそれらの時間的な変化を基に、面抵抗体12に接触または近接している指が1本なのか2本なのかを識別し、2本であると識別した場合、2本の指が行っている相対運動をジェスチャとして認識することを試みる。CPU35は計算した座標及び/もしくは認識したジェスチャをデータとして出力し、座標及びジェスチャは後段の装置によって利用される。
面抵抗体12は、不透明なカーボン膜、または、スパッタ法によって形成した透明なITO(インジウム錫酸化物)膜、CVD法によって形成したNESA(酸化錫)膜、等を、基材上に均一に成膜したものであり、面抵抗値は約1KΩ/□程度が好ましい。基材は、例えば、ソーダガラスを使用することができるが、特に材質が限定されるものではなく、任意のガラス素材あるいはアクリル樹脂、ポリエチレン樹脂などの透明な樹脂素材を使用できる。用途によっては不透明な絶縁性の基材を用いてもよい。
単連結である面抵抗体12の周囲又は内部に、各辺が直線である長方形の抵抗性周囲電極13を、全ての辺が面抵抗体12と電気的に接触する様に設ける。ここで単連結とは、面抵抗体12は内部に孤立した穴が存在しないような形状であり、ひとつながりになっていることを意味するものである。ただし、成膜方法に応じて面抵抗体12上に生じるピンホール程度の大きさの穴のような、面抵抗体12内部の電流の巨視的な流れを阻害しないものであれば、あっても何ら問題にならない。また、受傷などによってより大きな穴が生じた場合は、少なくともその穴の周りで、穴の大きさに応じて座標が歪むものの、穴から離れるほど指21の指示位置の座標計算に及ぼす影響は小さくなるため、穴が小さければ、実用上の問題は生じない。
面抵抗体12を取り囲む抵抗性周囲電極13は、カーボン、銀カーボン、又は銀等を密着配設したものであり、例えば、銀インクのような導電性インクをスクリーン印刷し、焼成する等の手法で作成する。抵抗性周囲電極13の各辺は、幅を持った直線形状でもよいし、低抵抗の導電性エレメントを互いに分離させて配列し、面抵抗体12の抵抗を活用して形成するようにしたものでもよい。抵抗性周囲電極13は、各辺毎に長さ当たりの抵抗値を一定にし、少なくとも、長方形の上下辺の長さ当たりの抵抗値、及び左右辺の長さ当たりの抵抗値を等しくする。
また、抵抗性周囲電極13の抵抗値は面抵抗体12の抵抗値に比べて低い方がよく、面抵抗体12の面抵抗値を1KΩ/□程度とした場合は、抵抗性周囲電極13の隣り合う頂点間の抵抗値を、20〜200Ω程度にするのが好ましい。
各頂点の検出電極14〜17は、引き出し線を接続するためのものであり、ハンダ付け可能な導電性インクを印刷・焼成して形成する。検出電極14〜17を形成するための導電性インクとして、抵抗性周囲電極13と同じものを使用することができる場合には、検出電極14〜17と、抵抗性周囲電極13は、一回の処理で印刷・焼成して形成することが可能である。
外部抵抗成分26〜29は、引き出し線22〜25の抵抗、及び振動電圧印加回路31等の要素に含まれる抵抗成分の、検出電極14〜17の各々から発する経路ごとの合計である。一般的には、引き出し線22〜25に内在する抵抗がそのうちの大きな部分を占める。
引き出し線22〜25として、充分に低抵抗のリード線等を使用する場合は、外部抵抗成分26〜29は、抵抗性周囲電極13の抵抗値よりも極めて小さくなり、座標を計算する上で、独立して考慮しなくても済む程度になる。一方で、例えば、引き出し線22〜25の延長が長かったり、引き出し線22〜25の材質や形状によって抵抗が比較的高い場合などには、外部抵抗成分26〜29が大きくなる。また、座標入力パネル11とアナログ信号処理部30を接続するケーブルをまとめるために、座標入力パネル11上の、抵抗性周囲電極13の外側に、検出電極14〜17のそれぞれから座標入力パネル11の外周の任意の位置まで、導電性のパターンを形成するような場合にも、使用する導電性インク、パターンの太さなどに応じて、外部抵抗成分26〜29が大きくなる(このとき、導電性のパターンは、引き出し線22〜25の一部とみなす)。特に、印刷の回数を増やさないように、導電性パターンを抵抗性周囲電極13と同じ導電性インクで印刷する場合は、外部抵抗成分26〜29の抵抗値と抵抗性周囲電極13の抵抗値の比率は、パターンの太さに応じて、ほぼ数倍以内という低い比率になる。
抵抗性周囲電極13もしくは外部抵抗成分26〜29の抵抗値が、面抵抗体12の抵抗値に比べて十分に低くない場合には、後述の方法で計算する指21の指示位置の座標が、実際の指示位置に比べて、パネルの内側に向けてずれる傾向がある。そのような場合は、抵抗値の大きさに応じて、座標を補正する必要がある。
抵抗性周囲電極13は、印刷等の手法で形成するうえ、検出電極14〜17に引き出し線22〜25を接続する必要があるため、有限の幅を持つ。このとき、少なくとも抵抗性周囲電極13と面抵抗体12の境界線においては、抵抗性周囲電極13と面抵抗体12が電気的に接触している必要がある。通常、面抵抗体12を成膜した上から抵抗性周囲電極13を形成するが、面抵抗体12が抵抗性周囲電極13の外側にはみ出ていても構わない。その際も、座標入力領域18は、抵抗性周囲電極13が囲む領域の内部である。
抵抗性周囲電極13及び面抵抗体12の形状は、基材に収まるものであればよく、必ずしも抵抗性周囲電極13及び面抵抗体12と基材の形状を略一致させる必要はないが、抵抗性周囲電極13及び面抵抗体12と基材の形状を同じようにした方が、座標入力システムを何らかの製品に組み込む際に、組み込む製品のデザイン上の自由度が大きくなるため好ましい。抵抗性周囲電極13の外側に、引き出し線22〜25の一部として導電性パターンを形成する場合は、面抵抗体12が導電性パターンと重ならないようにする必要がある。
次に、指21の指示位置の座標を計算する方法について説明する。指21で「点」を「指示する」とは、指で、座標入力領域18内部の、ある位置座標に対応する点にタッチすることを意味する。
また、「タッチする」とは、指21が、面抵抗体12上の絶縁処理部に接触または近接することを意味する。指21と面抵抗体12との静電容量結合の強さは、両者の対向する面積及び距離によって変化する。このため、検出電極14〜17に流れる電流の合計値を監視し、合計値が予め定めた閾値を超えた場合に、タッチした、と判断する。
図2に、長方形の座標入力領域18と、座標を計算する直交座標系XYを示す。長方形の4頂点に便宜的に名前をつけ、検出電極14〜17に当たるそれぞれの頂点を、頂点A〜Dと呼ぶことにする。また、直交座標系XYは、利用者の都合に応じ、長方形の座標入力領域18に対して任意の位置関係で設定された直交座標系であり、長方形の座標入力領域18に対して、原点を任意の位置とし、X軸を任意の方向にとることができる。長方形の座標入力領域18の中心に対する座標系のオフセットが既知であり、また長方形の座標入力領域18のいずれかの辺に対するX軸の傾きが既知であれば、よく知られたアフィン変換によって、最終的に任意の直交座標系XYの座標を求めることができる。本実施の形態では、説明のため、図2で示したように、直交座標系XYの原点を長方形の座標入力領域18の中心と同一とし、X軸を長方形の座標入力領域18の辺ABと平行とした場合を例とすることにするが、構成をこの関係に限定するものではない。
今、指21が座標入力パネル11の座標入力領域18内にタッチしているとき、指先から面抵抗体12を通して座標入力パネル11に流れた電流のうち、検出電極14(頂点A)に流れる電流をA/Dコンバータ35によって測定した値を測定値A、検出電極15(頂点B)に流れる電流を測定した値を測定値B、検出電極16(頂点C)に流れる電流を測定した値を測定値C、及び、検出電極17(頂点D)に流れる電流を測定した値を測定値Dとする。
このとき、指21が指示する位置の座標(X,Y)は、もし外部抵抗成分26〜29の抵抗値を0とするなら、直交座標系XYにおいて、次の数式1によって求めることができることが知られている。a及びbは、座標入力領域18の中心を原点とした場合の、原点から、それぞれX方向及びY方向の座標入力領域18の境界までの距離を示す。ただし、後述するように、aとbの関係は、上下辺の長さ当たりの抵抗値と左右辺の長さ当たりの抵抗値の関係を調整することにより、適宜変更することが可能である。
【0009】
【数1】
もし、2本の指でそれぞれ異なる2点を指示している場合、数式1によって計算される座標(X,Y)は、2本の指で指示している2点を結ぶ直線上になる。2本の指の、面抵抗体12との間の静電容量結合の強さが互いに等しければ、数式1によって計算される座標は、2本の指で指示している2点を結ぶ直線をちょうど2分する中間点になる。静電容量結合の強さが互いに等しくなければ、数式1によって計算される座標は、2本の指で指示している2点を結ぶ直線上の、静電容量結合の強さがより強い指が指示している方に近い位置になる。
本願出願人による特開2010−157029号(特許文献2)には、1本の指で1点を指示している場合、A×C=B×D(つまりA×C−B×D=0)が成立するが、2本の指でそれぞれ異なる2点を指示している場合には成立しない、ということが開示されている。更に詳細に調べた結果、2本の指でそれぞれ異なる2点を指示している場合には、次に示す数式2が成立することが分かった。ただし、第1の指が指示している位置の座標を(X1,Y1)、測定値Aのうち、第1の指による分の数値をA1(以下B、C、Dについても同様)、また、第2の指が指示している位置の座標を(X2,Y2)、測定値Aのうち、第2の指による分の数値をA2(以下B、C、Dについても同様)とする。
【0010】
【数2】
測定の結果得られるのはA(=A1+A2)(及びB、C、D)であり、個別のA1及びA2は不可知である。従って、(X1,Y1)及び(X2,Y2)を求めることはできない。しかし、数式2は、A×C−B×Dが0でなければ、タッチしているのが複数の指である、と判断してよいことを示すものである。また、A×C−B×Dは、(X1−X2)×(Y1−Y2)を含むため、2本の指でそれぞれ異なる2点を指示している場合、2点間の距離が離れていればいるほど、0から離れた数値となる。ただし、(X1−X2)×(Y1−Y2)の形であるため、2本の指でそれぞれ異なる2点を指示していても、その2点を結ぶ直線が、XY座標系に対して水平もしくは垂直である場合、数式2は0になり、タッチしているのが2本の指であることを識別できなくなることには、注意する必要がある。
また、タッチしている指が3本以上の場合には、A×C−B×Dが0になる条件が増加する上、A×C−B×Dの数値から複数の指の位置関係を読み取るのが困難になるため、本出願では、タッチする指は1本もしくは2本に限定する。
数式2を用いて認識できるジェスチャとしては、次のようなものがある。例えば、まず、2本の指で、座標入力パネル11の座標入力領域18内の略同じ点を指示する(図3(a)、座標入力パネル11にタッチしているのは指先である)。その後、2本の指を、タッチしたまま、座標入力領域18内の対角方向に向けて、互いに離していく(図3(b))。このような相対運動は、一般的に、拡大を意味するジェスチャとして知られている。
このとき、数式1によって計算される座標は、2本の指で指示している2点を結ぶ直線上になる。ある使用者が、例えば、両手の人差し指を用い、同じ程度の強さで2点にタッチしていて、同じような速度で指を離していっていれば、2本の指がタッチしたまま離れていく間も、数式1によって計算される座標は、2本の指で指示している2点を結ぶ直線を略2分する中間点を示し続ける。一方、2本の指が指示している点同士の間隔が広がっていくに従って、A×C−B×Dは、その絶対値が、0から次第に大きくなっていく。
これらのことから、数式1によって計算された座標が時間的にそれほど変化せず、一方でA×C−B×Dが時間の経過とともに大きくなっていく場合には、一般的に拡大を意味するジェスチャがなされたと認識することができる。また、A×C−B×Dは、図2のXY座標系において、2本の指が指示している2点の位置関係が右下がりであれば正に、右上がりであれば負になるため、2種類の拡大ジェスチャを識別することができる。
ただし、2本の指を互いに離す方向を、水平方向もしくは垂直方向とすると、前記したように、2本の指でそれぞれ異なる点を指示しているときでも、A×C−B×Dが0となってしまうため、2本の指でタッチしているということを識別できない。このため、2本の指を互いに離す方向は、斜めにする必要があり、(X1−X2)×(Y1−Y2)の形であることから、XY座標系において+45度もしくは−45度方向が最も好ましい。
また、1本の指で1点を指示している場合、A×C−B×Dは、理論的には常に0であるはずであった。しかし、測定値を用いて、A×C−B×Dを実際に計算してみると、特に、長方形の座標入力領域18の4頂点に近づくほど、A×C−B×Dが0から離れる傾向があることが分かった。従って、前記のジェスチャについて、数式1によって計算される座標が、座標入力領域18の4頂点の近傍になるような位置における操作は、タッチしている指が1本であるか2本であるかを識別しにくくなるため、好ましくない。
このことから、拡大のジェスチャについて、数式1によって計算される座標が座標入力領域18の中央付近になるようにするのが特に好ましい。つまり、検出可能な拡大のジェスチャとしては、2本の指で、座標入力領域18内部のうち、少なくとも抵抗性周囲電極13の近傍を除外した略同じ点をまず指示し、その後、2本の指を、それぞれが指示する点を結ぶ直線の傾きが、少なくとも水平及び垂直でないように、最も好ましくは+45度もしくは−45度方向に近い傾きであるよう、広げていく、というものに限定される。
このジェスチャについては、ジェスチャの開始時には、2本の指が略同じ点を指示しているため、1本ではなく2本の指がタッチしている、ということを識別できない。2本の指が指示する点がある程度離れて初めて、2本の指がそれぞれ異なる点を指示している、ということを認識できる。また、それ以降は、2本の指が指示する点の間の距離が大きいほど、A×C−B×Dの絶対値が大きくなるため、A×C−B×Dを連続的に評価することによって、2本の指が指示する点間の距離が広がっていっているのか、とどまっているのか、広がっていっているとすればどのような速度で広がっているか、を判断することができる。
従って、CPU35が、後段の装置に情報を出力する際には、数式1によって計算された座標を出力し続けるとともに、A×C−B×Dもしくはそれを適当に整形した数値を、2本の指が指示する点間の距離の代替値として出力するのが好ましい。
同様に、まず、2本の指で、座標入力領域18内の、互いに対角方向に離れた2点を指示し(図3(c))、その後、2本の指を、タッチしたまま、互いに近づけていく(図3(d))ような相対運動は、一般的に、縮小を意味するジェスチャとして知られている。
これに対しては、数式1によって計算された座標が時間的にそれほど変化せず、一方で、A×C−B×Dが、タッチ当初に絶対値が大きく、その後時間の経過とともに小さくなっていくような場合は、この、縮小を意味するジェスチャがなされたと認識することができる。
ただし、縮小を意味するジェスチャについても、2本の指を互いに離す方向を、水平方向もしくは垂直方向とすると、A×C−B×Dが0となってしまうため、2本の指を互いに離す方向は、斜めにする必要があり、+45度もしくは−45度方向が最も好ましい。
また、数式2を用いて認識できる別のジェスチャとしては、次のようなものがある。例えば、まず、2本の指で、座標入力パネル11の座標入力領域18内の、互いに対角方向に離れた2点を指示する(図4(a))。その後、タッチしたまま、2本の指が指示する点の相互関係を維持しつつ、2本の指を同じ方向に移動させる(図4(b))。このような相対運動は、例えば、(2本指)スクロール(もしくは(2本指)フリック)を意味するジェスチャとして知られている。
このジェスチャについても、2本の指を互いに離す方向を、水平方向もしくは垂直方向とすると、A×C−B×Dが0となってしまうため、2本の指を互いに離す方向は、斜めにする必要がある。また、2本の指が指示する点間の距離が小さいと、A×C−B×Dが0に近く、2本であることを識別できないため、2本の指が指示する点間の距離は大きいほど好ましい。更に、前記したように、A×C−B×Dは、1本の指で1点を指示している場合でも、長方形の座標入力領域18の4頂点に近づくほど、0から離れる傾向があるため、数式1によって計算される座標が、座標入力領域18の4頂点の近傍になるような位置における操作は、タッチしている指が1本であるか2本であるかを識別しにくくなるため、好ましくない。
次に、別の関係式を用いたジェスチャの認識について説明する。2本の指でそれぞれ異なる2点を指示している場合には、限定的な条件下で、次に示す数式3が成立することが分かった。ただし、θは、2本の指で指示している2点を結ぶ直線の、X軸に対する、X軸の正方向からY軸の正方向に向かう角度(図2では時計回り)である。
【0011】
【数3】
数式3の逆正接関数の引数の分母には、(a2−b2)という表式が存在する。これは、座標入力領域18の横と縦の長さが等しい場合、数式3の計算結果が常に+45度もしくは−45度になってしまい、角度を検出できなくなる、ということを示している。抵抗性周囲電極13の上下辺の長さ及び左右辺の長さ(これらは、座標入力領域18の横の長さ、及び縦の長さに対応する)、及び、上下辺の長さ当たりの抵抗値と左右辺の長さ当たりの抵抗値の関係を調整することにより、計算に用いるa及びbについて、それらが等しくならないようにすることができる。例えば、抵抗性周囲電極13の上下辺の長さ及び左右辺の長さが等しくなければ、抵抗性周囲電極13の上下辺の長さ当たりの抵抗値と左右辺の長さ当たりの抵抗値を等しくすることにより、aとbが等しくならないようにできる。
数式3を用いて角度を計算する際、逆正接関数の引数の分母と分子を独立して評価することにより、逆正接関数の出力を、[−180,+180]度の間で求めることができる。数式3には、逆正接関数に1/2がついているので、結果として、求められる角度θは、[−90、+90]度の範囲になる。2本の指で指示している2点を結ぶ直線に、どちらが始点でどちらが終点か、という区別がないため、2点を結ぶ直線の角度は、常に[−90、+90]度の範囲になる。
数式3によって求められる情報を用いて、一般的に回転を意味するジェスチャを認識することができる。例えば、まず、2本の指で、座標入力パネル11の座標入力領域18内の、第1象限の右上部と、第2象限の左下部とを指示する(図5(a))。その後、2本の指を、タッチしたまま、第1象限内を指示した指は下方向へ、第2象限内を指示した指は上方向へ、それぞれ動かしていく(図5(b))。このとき、数式1を用いて、2本の指で指示した点の略中間点を求めることができ、A×C−B×Dを用いて、開始時に、2本の指でタッチしていることを識別することができ、数式3を用いて、2本の指で指示している点を結ぶ直線の傾きを求めることができる。
ただし、数式3を用いて角度を計算するにあたって、ジェスチャの開始時に、2本の指で最初に指示する2点の位置関係は、それぞれが第1象限と第3象限、もしくは第2象限と第4象限にあるような位置関係であってはならない。2点は、同じ象限内にあるか、互いに隣り合った象限内にある必要がある。また、開始時の2点の位置関係が水平もしくは垂直であると、2本の指でタッチしていることを識別できないので、斜めである必要がある。加えて、ジェスチャの終了時、それぞれの指は、最初に指示した象限から別の象限に移動させてはならない。
CPU35は、後段の装置に情報を出力する際には、数式1によって計算された座標を出力し続けるとともに、A×C−B×Dもしくはそれを適当に整形した数値を、2本の指が指示する点間の距離の代替値として出力し、更に、数式3によって計算した数値をも出力するのが好ましい。もしくは、A、B、C、Dといった測定値を後段の装置に出力し、数式3を用いた計算などを、後段の装置において実行しても構わない。
【実施例】
【0012】
以下、実施例により、本発明を説明する。本発明は、以下の実施例に限定されるものでなく、本発明の技術範囲において、種々の変形例を含むものである。
(実施例1)
座標入力パネル11は、次のようにして作成した。ガラス基材として、ソーダガラス(厚さ3ミリ)を略469×375mmの大きさに切断したものを用い、ガラス基材の表面に、スパッタ法によってITO(インジウム酸化物)膜を形成して面抵抗体12とした。次に、抵抗性周囲電極13、及び引き出し線22〜25の一部を、(株)アサヒ化学研究所製銀ペーストLS−504(樹脂バインダー)にカーボンを混合したペーストをスクリーン印刷し、加熱硬化させることで形成した。このとき、座標入力領域18の形状として、2a=378mm、2b=303mmの長方形とした。抵抗性周囲電極13の幅は、抵抗性周囲電極13の頂点AB間の抵抗値が約68Ω、頂点BC間の抵抗値が約52Ωになるよう調整し、378/303=1.25≒68/52=1.31とすることによって、抵抗性周囲電極13の全ての辺の長さ当たりの抵抗値をほぼ等しくした。また、引き出し線22〜25は、それぞれをガラス上に印刷した部分と低抵抗のリード線部分とに分割し、印刷した部分は、抵抗性周囲電極13の外側に、座標入力パネルの左辺中央部で引き出し線22〜25の低抵抗のリード線と接続するように、全てがそれぞれ最短距離となるようなパターンで構成し、印刷した部分の幅は、一辺当たりの抵抗値が抵抗性周囲電極の一辺の抵抗値の1/2〜1/4程度になるよう、調整した。図6に、引き出し線22〜25の印刷した部分を含めた座標入力パネル11の模式図を示す。次に、座標入力パネルの左辺中央部にある引き出し線22〜25のリード線との接合部に、銀ペーストを用いて、接合部36〜39を形成した。
更に、面抵抗体12上に、透明絶縁性基材を形成した。透明絶縁性基材を形成するには、面抵抗体12と抵抗性周囲電極13上にガラスペーストを印刷し、熱処理して粉末ガラスを溶融させ、焼結させた。最後に、接合部36〜39上に、引き出し線22〜25を、ハンダ付けにより接続した。この際、面抵抗体12のシート抵抗は500Ω/□となるようにした。
このように作成した座標入力パネル11を、図1に示した構成図のように作成したハードウエアに接続した。また、CPU35からは、座標データ、及びA、B、C、Dといった測定値を出力するようにし、それらをシリアル通信によってパソコンに取り込むようにして、座標以外の計算をパソコンで行うようにした。直交座標系XYは、図2のように設定した。また、2本の指で指示しているかどうかを評価する数値として、A×C−B×Dの代わりに、それを正規化した(A×C−B×D)/((A+C)×(B+D))を用いた。
この座標入力システムを用い、図3(a)〜(d)に示したような拡大及び縮小のジェスチャに対して、前記の数値を評価したところ、図7のグラフに示すような結果を得た。横軸は時刻を示し、左側の縦軸は、数式1によって計算した座標(X,Y)を、また右側の縦軸は、(A×C−B×D)/((A+C)×(B+D))を示す。グラフ下部に4つ並べた模式図は、それぞれの模式図を配置した横軸上の位置に対応して、まず、2本の指で、座標入力パネル11の座標入力領域18のほぼ中央部を指示し、その後、2本の指を、タッチしたまま、座標入力領域18内の対角方向(左上と右下)に向けて、互いに離していき、2本の指で座標入力領域18の対角部をしばらく指示してから、最後に、タッチしたまま、座標入力領域18のほぼ中央部に向けて、互いに近づけていったことを示す。
このとき、座標(X,Y)は、2本の指で指示したそれぞれ異なる点の略中間点((0,0)近傍)を示し続ける一方、(A×C−B×D)/((A+C)×(B+D))は、2本の指が指示する点が互いに離れるにつれて大きくなっていき、その後、近づくにつれて次第に小さくなっている。
従って、本座標入力システムが、2本の指でそれぞれ異なる2点を指示していること、及びその2本の指の、パネル対角方向への相対運動を検出できることが確認された。
(実施例2)
実施例1において製作した座標入力システムを用い、図4(a)及び(b)に示したような2本指スクロールのジェスチャに対して、数式1によって計算される座標(X,Y)、及び(A×C−B×D)/((A+C)×(B+D))を評価したところ、図8に示すような結果を得た。
図8(a)は、数式1によって計算された座標を、XY平面内でプロットしたものである。2本の指を左から右に動かしていったとき、Y座標は、上下方向に関してパネルの略中央を維持している。これは、数式1によって計算された座標が、2本の指でそれぞれ指示した2点の略中間点になっていることを示している。一方、図8(b)は、そのときの(A×C−B×D)/((A+C)×(B+D))をプロットしたものであり、横軸は時刻を示す。2本の指を左から右に動かしていったとき、数値は、ほぼ−0.1前後を維持している。数値が負であることは、2本の指でそれぞれ指示した2点の位置関係が、右上がりであることを示している。
1本の指で、座標入力領域18の左端からパネルの幅の約1/4、上下方向に関してパネルの略中央部を指示し、そのまま左から右に動かしていったときは、座標は図8(a)と似た動きをするものの、(A×C−B×D)/((A+C)×(B+D))は、プラスマイナス0.01程度にしかならない。
従って、本座標入力システムが、2本の指で互いに対角方向に離れた異なる2点を指示しているときに、2本の指の相対関係を維持したまま行われる運動を検出できることが確認された。
(実施例3)
実施例1において製作した座標入力システムを用い、図5(a)及び(b)に示したような回転のジェスチャに対して、数式1によって計算される座標(X,Y)、(A×C−B×D)/((A+C)×(B+D))、及び数式3によって計算される角度を評価したところ、図9に示すような結果を得た。
図9(a)の横軸は時刻を示し、左側の縦軸は、数式1によって計算した座標(X,Y)を、また右側の縦軸は、(A×C−B×D)/((A+C)×(B+D))を示す。グラフ下部に2つ並べた模式図は、それぞれの模式図を配置した横軸上の位置に対応して、まず、2本の指で、座標入力領域18内の、第1象限の右上部と、第2象限の左下部とを指示し、その後、2本の指を、タッチしたまま、第1象限内を指示した指は下方向へ、第2象限内を指示した指は上方向へ、それぞれ動かしていったことを示す。
また、図9(b)は、図9(a)と同じ横軸で、数式3によって計算した角度を示す。
このとき、座標(X,Y)は、2本の指で指示したそれぞれ異なる点の略中間点、つまり、X座標はほぼ0、Y座標は0から離れた値をそれほど変動せずに示し続ける一方、(A×C−B×D)/((A+C)×(B+D))は、2本の指が指示するそれぞれ異なる2点の位置関係が右上がりだった開始時は負の値を、右下がりになる終了時には正の値を示した。途中、2本の指が指示する2点の位置関係が水平になったときには、0になる。しかし、開始時に、数式1によって計算される座標が、座標入力領域18の4頂点の近傍ではない状態で、A×C−B×D)/((A+C)×(B+D))の絶対値が0.2程度であるので、開始の時点で、タッチしている指が2本であることを識別することができる。
更に、図9(b)に示すように、数式3によって計算した、2本の指がそれぞれ指示する異なる2点を結ぶ直線の角度は、開始時には約−30度、終了時には約+40度を示し、その間、滑らかな変化を示している。
従って、本座標入力システムが、2本の指で互いに対角方向に離れた異なる2点を指示しているときに、2本の指によって行われる回転様の相対運動を検出できることが確認された。
【符号の説明】
【0013】
1 座標入力パネル
2 面抵抗体
3 抵抗性周囲電極
4、5、6、7 検出電極
8 座標入力領域
11 座標入力パネル
12 面抵抗体
13 抵抗性周囲電極
14、15、16、17 検出電極
18 座標入力領域
21 指
22、23、24、25 引き出し線
26、27、28、29 外部抵抗成分
30 アナログ信号処理部
31 振動電圧印加回路
32 振動電圧発生器
33 アナログマルチプレクサ
34 A/Dコンバータ
35 CPU
36、37、38、39 接合部
【特許請求の範囲】
【請求項1】
少なくとも面抵抗体が形成された単連結である長方形の座標入力領域と、該長方形の座標入力領域の外縁を構成する4辺上に前記面抵抗体と電気的に接触するように設けられた、単位長さ当たりの抵抗値が一定であり、少なくとも対向辺同士の単位長さ当たりの抵抗値が等しいような直線の抵抗性周囲電極と、前記長方形の座標入力領域の4個の頂点に前記抵抗性周囲電極と電気的に接触するように設けられた検出電極と、該4個の検出電極に流れる電流を計測する電流計測手段と、前記座標入力領域内の位置を指で指示したときに、前記4個の検出電極に流れる電流値から、前記指で指示前記座標入力領域内の位置を計算する座標計算手段と、前記4個の検出電極に流れる電流値から、前記座標入力領域内を1本の指で1点を指示しているか、2本の指でそれぞれ異なる2点を指示しているかを識別し、更に、2本の指で2点を指示していると識別した場合、前記2本の指が行っている相対運動を認識する識別認識手段を有することを特徴とする座標入力システム。
【請求項1】
少なくとも面抵抗体が形成された単連結である長方形の座標入力領域と、該長方形の座標入力領域の外縁を構成する4辺上に前記面抵抗体と電気的に接触するように設けられた、単位長さ当たりの抵抗値が一定であり、少なくとも対向辺同士の単位長さ当たりの抵抗値が等しいような直線の抵抗性周囲電極と、前記長方形の座標入力領域の4個の頂点に前記抵抗性周囲電極と電気的に接触するように設けられた検出電極と、該4個の検出電極に流れる電流を計測する電流計測手段と、前記座標入力領域内の位置を指で指示したときに、前記4個の検出電極に流れる電流値から、前記指で指示前記座標入力領域内の位置を計算する座標計算手段と、前記4個の検出電極に流れる電流値から、前記座標入力領域内を1本の指で1点を指示しているか、2本の指でそれぞれ異なる2点を指示しているかを識別し、更に、2本の指で2点を指示していると識別した場合、前記2本の指が行っている相対運動を認識する識別認識手段を有することを特徴とする座標入力システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−73576(P2013−73576A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−214316(P2011−214316)
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000005511)ぺんてる株式会社 (899)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月29日(2011.9.29)
【出願人】(000005511)ぺんてる株式会社 (899)
【Fターム(参考)】
[ Back to top ]