
座標検出装置及び座標検出プログラム
【課題】操作面に対する検出対象の接触方法等の使用状況が変化する場合であっても、座標の検出の精度の低下を抑制すること。
【解決手段】所定方向に対して並設された複数の電極(12、13)の静電容量をそれぞれ検出する検出部(14、15)と、複数の電極(12、13)の静電容量の変化量の状態に応じて異なる算出方法を適用し、検出対象の座標を算出する演算処理部(18)とを備え、演算処理部(18)は、ピーク電極の静電容量変化量と、ピーク電極と隣り合わない電極の静電容量変化量との比較値に応じて、重心座標を計算する重心計算法と、曲線の頂点を求める曲線近似計算法とを切り替えて適用して検出対象の座標を算出する。
【解決手段】所定方向に対して並設された複数の電極(12、13)の静電容量をそれぞれ検出する検出部(14、15)と、複数の電極(12、13)の静電容量の変化量の状態に応じて異なる算出方法を適用し、検出対象の座標を算出する演算処理部(18)とを備え、演算処理部(18)は、ピーク電極の静電容量変化量と、ピーク電極と隣り合わない電極の静電容量変化量との比較値に応じて、重心座標を計算する重心計算法と、曲線の頂点を求める曲線近似計算法とを切り替えて適用して検出対象の座標を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、座標検出装置及び座標検出プログラムに関し、特に、画面上の操作に関する座標検出装置及び座標検出プログラムに関する。
【背景技術】
【0002】
近年、コンピュータ、携帯電話端末又はPDA(Personal Digital Assistant)等の電子機器において、指で接触した位置を特定することによって電子機器を操作する座標検出装置を備えるものが盛んに開発されている。
【0003】
例えば、座標検出装置を具備するデバイスとして、コンピュータに搭載されるパッド、タッチパッド或いはトラックパッドなどの名称で呼ばれるポインティングデバイス(座標入力装置)がある。このような座標入力装置は、携帯型のノート型パーソナルコンピュータに埋め込まれた形態や、デスクトップ型のコンピュータに外付けされた形態で使用される。この場合、マウスのように機器自体を移動させる必要がないことから、卓上などの限られたスペースであっても支障なく操作できるという特徴を有している。
【0004】
また、表示画面に座標検出装置が組み込まれた携帯電話端末やPDA等の携帯機器等では、表示画面(操作面)を指で直接タッチすることにより所望の操作を行うことができる。
【0005】
このような座標検出装置として、ユーザの指の接触により、電極とその周囲との間に形成される静電容量が変化することを利用したものがある。静電容量方式の座標検出装置は、一般的に、X軸方向とY軸方向に沿ってマトリクス状に配置された複数の電極と、各電極の静電容量を検出する検出部を備え、複数の電極の中で静電容量変化が大きいX軸とY軸の電極を検出することにより、ユーザが接触した位置を特定する。
【0006】
静電容量方式を適用した座標の検出方法として、例えば、所定値以上の静電容量変化を有する有効領域の重心位置に基づいて座標を算出することが提案されている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2010−244302号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、静電容量方式のタッチパッド等では、操作面に直接接触していない指であっても近接した位置にある指が電極の静電容量変化に大きな影響を与えてしまう場合がある。また、操作面に対する指の接触のさせ方等により、接触面積が大きく変化する場合がある。この場合、常に重心位置に基づいて座標を算出すると、操作面に接触していない指の影響や、指の接触のさせ方等により検出される座標が変化し、座標の検出精度が低下するおそれがある。
【0009】
本発明は、かかる点に鑑みてなされたものであり、操作面に対する検出対象の接触方法等の使用状況が変化する場合であっても、座標の検出精度の低下を抑制できる座標検出装置及び座標検出プログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の座標検出装置は、所定方向に対して並設された複数の電極と、前記複数の電極の静電容量をそれぞれ検出する検出部と、前記複数の電極の静電容量の変化量の状態に応じて異なる算出方法を適用し、検出対象の座標を算出する演算処理部と、を備え、前記演算処理部は、ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との比較値に応じて、重心座標を計算する重心計算法と、曲線の頂点を求める曲線近似計算法とを切り替えて適用して前記検出対象の座標を算出することを特徴とする。この構成によれば、使用状況に応じて異なる算出方法を適用して検出対象の座標を算出するため、使用状況が変化した場合であっても、座標の検出を高い精度で行うことができる。
【0011】
また、本発明の座標検出装置において、前記演算処理部は、ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値以下である場合に、前記ピーク電極から連続して静電容量変化量が第1の閾値以上の電極を少なくとも含む第1の認識領域内の電極に対して重心計算法を適用して前記検出対象の座標を算出し、前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値より大きい場合に、前記ピーク電極及び前記ピーク電極に隣接するいずれかの電極を少なくとも含む第2の認識領域内の電極に対して曲線近似計算法を適用して前記検出対象の座標を算出することができる。
【0012】
また、本発明の座標検出装置において、前記演算処理部は、前記曲線近似計算法の計算結果の移動平均値と、前記曲線近似計算法の計算結果との差の絶対値が、所定期間以上継続してノイズ閾値より大きくなる場合に、前記曲線近似計算法を前記重心計算法に切り替えて前記検出対象の座標を算出することができる。この構成により、ノイズの影響が大きい状態であっても、重心計算法を適用することにより、座標の検出精度が低下することを抑制できる。
【0013】
また、本発明の座標検出装置において、前記演算処理部は、前記所定期間以上継続してノイズ閾値を越えてから、検出対象が離れるまで前記重心計算法を連続して適用することが好ましい。
【0014】
また、本発明の座標検出装置において、前記演算処理部は、前記ピーク電極から連続して静電容量変化量が第1の閾値以上となる電極と、前記第1の認識閾値を下回って1つ目又は2つ目までの電極とを含む領域を前記第1の認識領域とすることができる。
【0015】
また、本発明の座標検出装置において、前記演算処理部は、下記の式(1)を用いて前記重心計算法を行うことができる。
式(1)
XG=(ΣnXn/ΣXn)×RESO
n:計算に用いる電極番号
Xn:電極nの静電容量変化量
RESO:電極間分解能
【0016】
また、本発明の座標検出装置において、前記演算処理部は、前記ピーク電極と前記ピーク電極近傍の2つの電極の静電容量変化量に基づいて、下記の式(2)を用いて前記曲線近似計算法を適用することができる。

【0017】
また、本発明の座標検出装置において、前記演算処理部は、前記ピーク電極から連続して静電容量変化量が第2の閾値以上となる電極を少なくとも含む領域を前記第2の認識領域に設定して、前記曲線近似計算法を適用することができる。また、前記演算処理部は、前記ピーク電極から連続して静電容量変化量が第2の閾値以上となる電極と、前記第2の閾値を下回って1つ目又は2つ目までの電極を含む領域を前記第2の認識領域に設定してもよい。
【0018】
また、本発明の座標検出装置において、前記演算処理部は、前記検出部で検出される前記複数の電極の中から、前記検出対象の接触により静電容量が変化する所定の座標領域をあらかじめ設定し、前記所定の座標領域の電極に対して、前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量とを比較して、前記重心計算法と、前記曲線近似計算法とを切り替えることができる。
【0019】
また、本発明の座標検出装置において、前記所定方向に対して直交する直交方向に対して並設された複数の直交電極を有し、前記演算処理部は、直交方向における電極に対しても検出された複数の静電容量変化量の状態に応じて異なる算出方法を適用することができる。
【0020】
本発明の座標検出装置は、検出対象が接触した座標を用いて操作制御を行う座標入力装置に適用することができる。
【0021】
本発明の座標検出プログラムは、所定方向に対して並設された複数の電極の静電容量変化量に基づいて、検出対象の座標を決定するための演算処理を実行させる座標検出プログラムであって、検出された複数の電極の中から、静電容量変化量が最大となるピーク電極を認識するステップと、前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量とを比較するステップと、前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値以下である場合に、前記ピーク電極から連続して静電容量変化量が第1の閾値以上の電極を少なくとも含む第1の認識領域内の電極に対して重心計算法を適用して前記検出対象の座標を算出するステップと、前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値より大きい場合に、前記ピーク電極及び前記ピーク電極に隣接するいずれかの電極を少なくとも含む第2の認識領域内の電極に対して曲線近似計算法を適用して前記検出対象の座標を算出するステップとを有することを特徴とする。
【0022】
また、本発明の座標検出プログラムにおいて、前記曲線近似計算法の計算結果の移動平均値と、前記曲線近似計算法の計算結果との差の絶対値が、所定期間以上継続してノイズ閾値より大きくなる場合に、前記曲線近似計算法を前記重心計算法に切り替えて前記検出対象の座標を算出するステップをさらに有することができる。
【発明の効果】
【0023】
本発明によれば、使用状況に応じて異なる算出方法を適用して検出対象の座標を算出するため、使用状況(例えば、操作面に対する検出対象の接触方法等)が変化する場合であっても、座標の検出精度の低下を抑制できる座標検出装置及び座標検出プログラムを提供することができる。
【図面の簡単な説明】
【0024】
【図1】本実施の形態に係る座標検出装置のブロック図を示す図である。
【図2】指の先端部分で操作面をタッチする場合の模式図と、各電極の静電容量の変化量を示す図である。
【図3】指の腹部分で操作面をタッチする場合の模式図と、各電極の静電容量の変化量を示す図である。
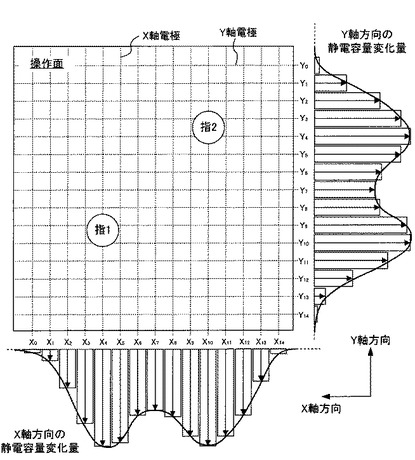
【図4】本実施の形態に係る座標検出装置の操作面と、操作面のX軸方向及びY軸方向で検出される静電容量の変化量の一例を示す図である。
【図5】指認識領域における各電極の静電容量の変化量の一例を示す図である。
【図6】指認識領域における各電極の静電容量の変化量に応じて適用する算出方法を説明する図である。
【図7】重心計算法と曲線近似計算法により算出した座標変化を比較する図である。
【図8】ノイズ状態の判断方法を説明する図である。
【図9】操作面に検出対象を接触させた状態で移動した場合のノイズ状態の判断方法を説明する図である。
【図10】ノイズ状態において、重心計算法と曲線近似計算法を適用して算出される座標の変化を示す図である。
【図11】曲線近似計算法として、2点の電極データを用いて座標を算出する方法を説明する図である。
【発明を実施するための形態】
【0025】
静電容量式の座標検出装置では、上述したように、センサ基板に設けられた電極の静電容量の変化に基づいて座標を算出するため、センサ基板に形成される電極本数や電極間隔が座標の算出に影響する。座標の検出精度を高める観点からは電極の本数を多くする(電極間隔を小さくする)ことが好ましい。その一方で、コストや演算処理の簡略化の観点からは電極の本数を少なくする(電極間隔を大きくする)ことが好ましい場合もある。
【0026】
一般的に、最適な電極の本数は、操作面の面積、検出対象(例えば、人の指)のサイズ及び分解能(単位座標に対する電極間隔)によって定めることができる。例えば、検出対象が人の指である場合、検出精度やコスト等を考慮した際の最適な電極間隔は、指の先端部分で操作面をタッチする場合の接触領域と同程度か、接触領域よりやや大きい間隔とすることが好ましい。
【0027】
しかし、本発明者が検討を行ったところ、電極間隔を上記のように設定した場合であっても、使用状態(例えば、操作面にタッチするユーザの接触方法等)に起因して、検出される座標が大きく変化する場合があることが分かった。この点について、さらに詳細に検討を行ったところ、本発明者は、操作面にタッチするユーザの接触方法として大きく2つの状態があり、使用状況に応じて操作面と指の接触面積を大きく2つの状態に分類できることを見出した。
【0028】
具体的には、指の先端部分で操作面を軽くタッチする(接触面積が小さい)場合と、指の腹部分で操作面をタッチする(接触面積が大きい)場合である。例えば、爪が長いユーザが操作面にタッチする場合には、指の腹(ベタ指)でタッチすることが多く接触面積が大きくなる傾向にある。
【0029】
また、2つの状態における複数の静電容量変化量を詳細に検討したところ、指の先端部分でタッチする場合とベタ指でタッチする場合で、静電容量の変化量が最も大きくなる電極(ピーク電極)と、当該ピーク電極近傍の電極の静電容量の変化量の分布状態が大きく変化することが分かった。
【0030】
そこで、本発明者は、検出対象が接触した位置の座標の算出において、検出される複数の電極の静電容量変化量の状態に応じて、異なる算出方法を適用することを着想した。より具体的には、操作面を指の先端部分でタッチする(接触面積が小さい)場合、操作面をベタ指でタッチする(接触面積が大きい)場合、ノイズが発生する場合等で、異なる算出方法を切り替えて適用して検出対象の座標を算出する。以下に、使用状態と座標の算出方法の関係について説明する。
【0031】
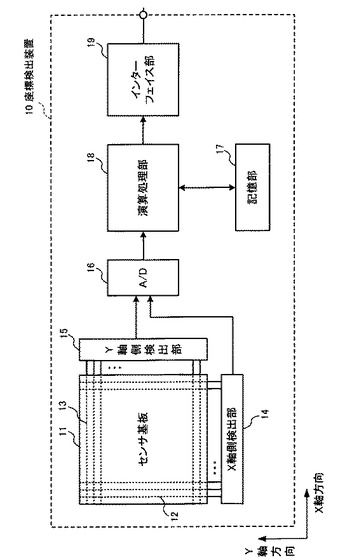
図2は、検出対象(例えば、人の指)の先端部分で操作面を軽くタッチする(接触面積が小さい)場合の模式図(図2A)と、その際の各電極の静電容量の変化量を表すグラフ(図2B)を示している。図2に示すように、操作面と指の接触領域が電極間隔と同程度の場合、複数の電極の静電容量の変化量の分布は検出対象の接触部分を頂点とする曲線に近似した形状となる(図2B参照)。これは、接触領域の近傍領域(操作面と指が僅かに離れている領域)では、電極の静電容量変化量が指と操作面の距離に概略反比例した出力となるためである。したがって、この場合には、静電容量変化量が最も大きいピーク電極(X2)と、ピーク電極に近接する電極(例えば、X1及び/又はX3)の静電容量変化量等に基づいて、曲線の頂点を求める曲線近似計算法を適用して検出対象の座標を算出することが望ましい。
【0032】
また、この際に得られる曲線は、微小区間では回帰計算を行いやすい放物線と見なせる場合が多いため、回帰計算を行うことができる。回帰計算に使うデータの範囲として、電極間隔が広く、出力誤差が小さい場合には、演算処理の簡略化の観点から、2次曲線の当てはめに最小限度必要な3点の電極(例えば、X1〜X3)の静電容量変化量を用いることが好ましい。逆に、電極の間隔が狭く、出力誤差が大きい場合には、4点以上(ピーク電極を中心とするのであれば奇数個)の電極の静電容量変化量を用いて、曲線とデータ群の距離が最小となるような曲線を当てはめることが適している。
【0033】
このように、指の先端部分で操作面をタッチする(接触面積が小さい)場合には、曲線近似計算法を適用して座標の算出を行うことにより、操作について意図していない指の影響を排除することができる。これにより、演算処理を簡略化すると共に、指の接触により静電容量の変化量が最も高い部分の座標を高い精度で算出することが可能となる。
【0034】
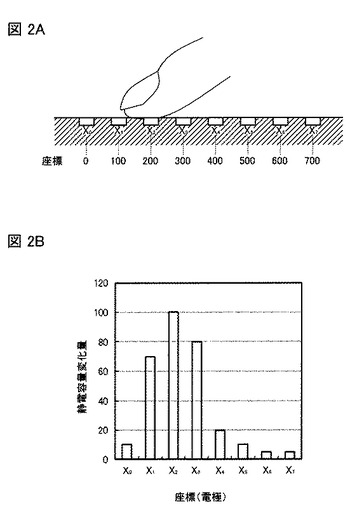
図3は、ベタ指で操作面をタッチする(接触面積が大きい)場合の模式図(図3A)と、その際の各電極の静電容量の変化量を表すグラフ(図3B)を示している。図3に示すように、操作面と検出対象の接触面積が電極間隔より大きい場合、複数の電極の静電容量の変化量の分布は台形状となる(図3B参照)。これは、指が接触するある程度の広い範囲の電極で同程度の静電容量が変化するためである。したがって、この場合には、静電容量の変化量が所定の閾値以上の電極に対して、重心計算法を適用して検出対象の座標を算出することが望ましい。
【0035】
特に、ベタ指で操作面をタッチしている場合には、指をわずかに移動した場合であっても、ピーク電極が入れ替わる(ピーク電極が電極間でジャンプする)場合がある(図3C参照)。重心計算法を適用して検出座標の算出を行うことにより、ピーク電極が入れ替わる場合であっても、算出される座標の変化を小さくすることができる。
【0036】
使用状況に応じて算出方法を切り替えて検出対象の座標を算出することにより、検出対象の接触方法によらずに座標を高い精度で算出することができる。また、適用する算出方法の選択は、複数の電極の静電容量の変化量の状態(分布)に基づいて判断することができる。例えば、ピーク電極を検出した後に、ピーク電極の静電容量変化量と、ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値以下である場合に重心計算法を適用し、所定値より大きい場合に曲線近似計算法を適用する。このように、ピーク電極の静電容量の変化量と、ピーク電極と隣り合わない電極の静電容量の変化量とを比較することにより、使用状況(検出対象の接触方法)を適切に反映することができる。
【0037】
また、指の接触面積が小さい場合であっても、ノイズが多く検出される場合がある。ノイズの影響が大きい状態において曲線近似計算法を適用すると、誤差が大きくなり座標の検出精度が低下する可能性がある。一方で、上述した重心計算法では、演算によりノイズが平均化されるため、曲線近似計算法と比較してノイズの影響を受けにくいという利点を有している。そのため、ノイズの状態が確認された場合には、曲線近似計算法ではなく、重心計算法を適用して検出対象の座標を算出することが望ましい。
【0038】
以下に、本発明の実施の形態の座標検出装置の構成及び検出座標の算出方法について添付図面を参照して詳細に説明する。
【0039】
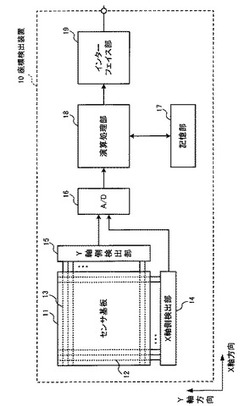
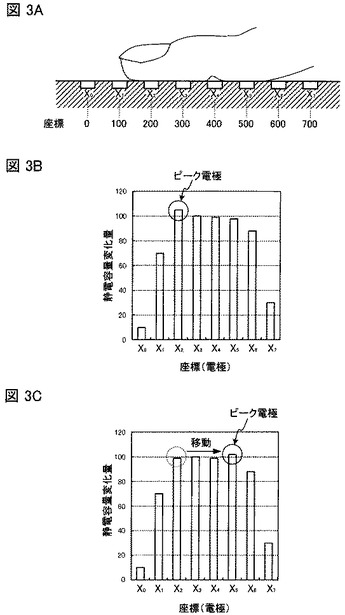
図1は、本実施の形態に係る座標検出装置の主要な構成を示すブロック図である。図1に示す座標検出装置10は、センサ基板11と、センサ基板11に設けられた電極(X軸電極12、Y軸電極13)と、各電極の静電容量を検出する検出部(X軸側検出部14、Y軸側検出部15)と、検出した各電極の静電容量の変化量等を用いて演算処理を行う演算処理部18とを有している。
【0040】
センサ基板11には、X軸方向(図1の横方向)の静電容量を検出するための複数のX軸電極12と、Y軸方向(図1の縦方向)の静電容量を検出するための複数のY軸電極13とがマトリクス状に並設されている。
【0041】
本実施の形態の座標検出装置10は、操作面にユーザの指等の検出対象が接触した際に変化する静電容量の変化量を検出して接触位置を特定する方式(静電容量方式)を採用している。つまり、座標検出装置10は、検出対象が接触していない状態の電極の静電容量の値を基準として、検出対象が接触した際に変化する量(静電容量変化量)に基づいて座標を算出する。静電容量方式として、電極とグランド(GND)間に形成される自己容量を検出対象とする自己容量検出方式、2つの電極間に形成される相互容量を検出対象とする相互容量検出方式、基準電極と2つのセンサ電極の間に形成される相互容量の差として定義される容量を検出対象とする差動型相互容量検出方式があるが、座標検出装置10はいずれの方式を適用してもよい。なお、自己容量検出方式では、接触部分の静電容量が増加(プラス方向に変化)し、相互容量検出方式では、接触部分の静電容量が減少(マイナス方向に変化)する。
【0042】
なお、本実施の形態の座標検出装置では、X軸電極12とY軸電極13が互いに直交して並設される場合を示しているが、電極の配置や数等は図1に示した構成に限られない。また、座標検出装置の構造は、静電容量の変化を利用して座標を検出する構造であれば特定の構造に限られない。
【0043】
X軸側検出部14は、X軸方向に対して並設されたX軸電極12の静電容量を検出し、Y軸側検出部15は、Y軸方向に対して並設されたY軸電極13の静電容量を検出する。また、X軸側検出部14、Y軸側検出部15は、それぞれX軸方向、Y軸方向に沿ってX軸電極12、Y軸電極13の静電容量を順に検出する構成としてもよい。なお、本実施の形態の座標検出装置10では、X軸側検出部14、Y軸側検出部15において、各電極の静電容量変化量を直接検出する構成とすることができる。この場合、X軸側検出部14、Y軸側検出部15において、各電極の静電容量の値と、検出対象が接触していない状態の電極の静電容量の値(基準容量値)とを比較することにより静電容量の変化量が得られる。また、本実施の形態はこれに限られず、X軸側検出部14、Y軸検出部15で各電極の静電容量の値を検出し、得られた静電容量の値を演算処理部18等の他の回路において基準容量値と比較することにより、検出される電極の静電容量変化量を算出する構成とすることもできる。
【0044】
A/D(アナログ/デジタル)変換部16は、X軸側検出部14の検出信号(X軸電極12の静電容量に関するデータ)及びY軸側検出部15の検出信号(Y軸電極13の静電容量に関するデータ)をデジタル信号に変換し、演算処理部18、記憶部17に供給する。
【0045】
記憶部17は、検出された電極の静電容量等を記憶するための記憶領域を有している。また、静電容量変化量の記憶に加えて、演算処理部18に実行させるためのプログラムを記憶する媒体としてもよい。ここでは、X軸側検出部14、Y軸側検出部15で検出されたデータが、演算処理部18を介して記憶部17に供給される構成を示しているが、X軸側検出部14、Y軸側検出部15からA/D変換部16を介して記憶部17に直接データが供給される構成としてもよい。
【0046】
なお、静電容量として、上述したように各電極の静電容量の変化量を演算処理部18で算出する場合には、X軸側検出部14で検出した各電極の静電容量の値を記憶部17に記憶させる。また、X軸側検出部14で各電極の静電容量の変化量を検出する場合には、検出された静電容量の変化量を記憶部17に記憶させることができる。
【0047】
演算処理部18は、検出された各電極の静電容量変化量等に基づいて演算処理を行うことにより、検出対象が接触した座標を算出する。また、演算処理部18は、検出された複数の電極の静電容量変化量の状態に応じて異なる算出方法を切り替えて適用し、検出対象の座標を算出する。
【0048】
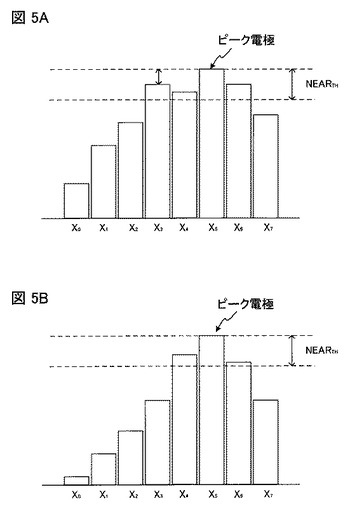
例えば、演算処理部18は、静電容量の変化量が最も大きくなる電極(ピーク電極)の静電容量の変化量と、当該ピーク電極と隣り合わない電極の静電容量の変化量を比較する。そして、比較値(例えば、差分値)が所定の値(NEARTH)以下である場合と、NEARTHより大きい場合とで異なる算出方法を切り替えて適用する。また、ノイズの影響が大きい場合には、ノイズの検出に応じて算出方法を切り替えて適用することができる。
【0049】
具体的に、演算処理部18は、ピーク電極の静電容量の変化量と、ピーク電極と隣り合わない電極の静電容量の変化量との差の絶対値が所定の値(NEARTH)以下である場合に、ベタ指で操作面をタッチしている(接触面積が大きい)と判断して重心計算法を適用する。また、NEARTHより大きい場合には、指の先端部分で操作面をタッチしている(接触面積が小さい)と判断して曲線近似計算法を適用する。
【0050】
演算処理部18は、曲線近似計算法の適用時であっても、検出対象の移動平均値と曲線近似計算法の計算結果の差の絶対値が、所定期間以上継続してノイズ閾値(NCTH)より大きくなる場合には、曲線近似計算法を重心計算法に切り替えて適用することができる。このように、演算処理部18は、使用状態に応じて最適な算出方法を適用して検出対象の座標を算出することができる。
【0051】
また、演算処理部18は、ノイズの影響により曲線近似計算法を重心計算法に切り替えて適用する場合に、所定期間以上継続してノイズ閾値を越えた時点から、検出対象が操作面から離れるまで重心計算法を適用し続けることが好ましい。曲線近似計算と重心計算の結果が必ずしも一致しないことから計算方法を変えると座標が変わる。このため、計算方法を変えて座標が動く回数を最小限に抑える為に、一度、重心計算法を適用した後には、重心計算法を適用し続けることが好ましいためである。
【0052】
なお、ノイズの検出により重心計算法を行う場合、演算処理に使う範囲は指に反応して容量が変化している範囲内の電極を多く選択することが好ましいため、上記ベタ指の場合と同様に設定することができる。また、演算処理部18は、検出対象の操作面への接触の有無をX軸電極12又はY軸電極13の静電容量変化量に基づいて判断することができる。例えば、演算処理部18は、X軸側検出部14又はY軸側検出部15において、静電容量変化量が所定値以上となる電極が検出出来なくなったときに、検出対象が操作面から離れたことを判断する。
【0053】
また、演算処理部18は、記憶部17又は別途設けられるメモリに記憶された座標検出プログラムを利用して、使用状態に適した算出方法を選択して検出対象の座標の算出を実行する。座標検出プログラムは、複数の電極の中からピーク電極を認識するステップと、複数の電極の静電容量変化量の状態に基づいて算出方法を選択するステップと、選択した算出方法を適用して検出対象の座標を算出するステップ等を有している。また、座標検出プログラムは、ノイズを検出するステップと、ノイズが検出された際に所定の算出方法を適用して検出対象の座標を算出するステップをさらに有していてもよい。
【0054】
インターフェイス部19は、座標検出装置10と、他の構成を有する回路又は機器等との間でデータの授受を行うための回路である。例えば、本実施の形態の座標検出装置10が、パーソナルコンピュータのタッチパッド等のポインティングデバイス(入力装置)に適用される場合には、インターフェイス部19を介してパーソナルコンピュータの表示部に座標を出力する機器に接続することができる。また、本実施の形態の座標検出装置が、携帯電話端末やPDA等の携帯機器等の表示画面に組み込まれる場合には、インターフェイス部19を介して演算処理部18で特定された座標に応じた処理・操作を行う回路に接続することができる。このように、本実施の形態で示す座標検出装置は、種々の座標入力装置に組み込むことが可能である。
【0055】
なお、本実施の形態の座標検出装置10において、演算処理部18は、検出部(X軸側検出部14、Y軸側検出部15)が検出する複数の電極の中から、特定の電極で構成される座標領域(指認識領域)をあらかじめ設定し、当該座標領域の電極に対して上述した算出方法を適用して検出対象の座標を算出する構成としてもよい。この場合、操作面上の全ての電極を考慮して演算処理を行う必要がなく、所定の座標領域に限定して演算処理を行うことができるため、検出対象の座標を求めるための演算処理を簡略化することができる。なお、特定の電極で構成される座標領域は、操作面に検出対象が接触する大まかな領域を選択する方法であればよい。例えば、検出対象の接触により静電容量の変化量が特定の条件を満たす電極を含む領域とすることができる。
【0056】
次に、本実施の形態の座標検出装置において、検出対象の座標を決定する手順について詳細に説明する。以下の説明では、図4に示すように、15本のX軸電極(X0〜X14)及びY軸電極(Y0〜Y14)がマトリクス状に設けられた操作面に対して、2本の指(指1と指2)が同時に接触する場合を想定した座標の決定手順について説明するが、X軸電極12及びY軸電極13の数、検出可能な指の数はこれに限られない。
【0057】
また、ここでは、指の接触により静電容量変化量が特定の条件を満たす電極で構成される座標領域(指認識領域)をあらかじめ決定し、当該指認識領域の電極を用いて検出対象の座標を算出する場合を示す。また、以下の説明では、指1のX軸方向の座標の決定手順について中心に説明するが、指1のY軸方向の座標、指2のX軸方向及びY軸方向の座標についても同様の手順で算出することができる。
【0058】
<指認識領域決定ステップ>
演算処理部18は、X軸側検出部14で検出される複数の電極の静電容量変化量に基づいて、検出対象が接触した領域数や指認識領域を決定する。例えば、演算処理部18は、静電容量変化量が所定値以上となる電極が複数連続する領域を指認識領域として決定することができる。
【0059】
また、演算処理部18は、各電極について隣接する電極と静電容量変化量を比較し(差分をとり)、比較値及び検出された電極の静電容量変化量の大きさに基づいて、指認識領域を決定することができる。この場合、X軸側検出部14が、X軸電極12の一端側から他端側へ向かって複数の電極の静電容量変化量を順に検出し、演算処理部18が、順に検出される複数の電極について、隣接する電極の静電容量変化量の比較値等に基づいて、指認識領域を決定することができる。隣接する電極の静電容量変化量の比較値に基づいて指認識領域を決定することにより、全ての電極の静電容量変化量を同時に記憶領域に記憶させることなく、簡単な演算処理により指認識領域を決定することができる。
【0060】
なお、指認識領域決定ステップでは、検出対象が接触した領域数や指認識領域を特定できる方法であれば特に限定されない。また、検出対象が接触する領域が一つである(1本の指が接触する)場合や操作面の大きさ等を考慮して、指認識領域決定ステップを省略してもよい。
【0061】
<ピーク電極認識ステップ>
ピーク電極認識ステップにおいて、演算処理部18は、X軸側検出部14で検出された各電極の静電容量変化量に基づいて、ピーク電極を認識する。ここでは、指認識領域の電極の中から静電容量の変化量が最も大きくなる電極をピーク電極として認識する。ピーク電極の認識方法は、例えば、指認識領域の複数の電極の静電容量の変化量を比較することにより決定することができる。
【0062】
<算出方法選択ステップ>
次に、演算処理部18は、複数の電極の静電容量変化量の状態に基づいて、検出対象の座標の決定に適用する算出方法を選択する。
【0063】
演算処理部18は、ピーク電極の静電容量変化量と、当該ピーク電極に隣接する電極以外の電極(ピーク電極と隣り合わない電極)の静電容量変化量の差を取り、差分の絶対値が所定の値(NEARTH)以下であるか、又は、NEARTHより大きいか判断する。差分の絶対値がNEARTH以下である場合には、重心計算法を選択し、差分の絶対値がNEARTHより大きい場合には、曲線近似計算法を選択する。
【0064】
例えば、指認識領域(X0〜X7)の各電極の静電容量変化量が図5Aに示すように検出された場合、まず、演算処理部18は、上述したピーク電極認識ステップにおいて、静電容量変化量が最も大きい電極(X5)をピーク電極として認識する。続いて、演算処理部18は、ピーク電極(X5)と、ピーク電極と隣り合わない電極(X0〜X3、X7)の静電容量変化量を比較する。ここでは、ピーク電極(X5)の静電容量変化量と、ピーク電極と隣り合わない電極(X3)の静電容量変化量との差の絶対値が所定の値(NEARTH)以下となる。この場合、演算処理部18は、ベタ指で操作面をタッチしている(接触面積が大きい)と判断して重心計算法を適用する。
【0065】
一方で、指認識領域(X0〜X7)の各電極の静電容量変化量が図5Bに示すように検出された場合には、ピーク電極(X5)の静電容量変化量と、ピーク電極と隣り合わない電極(X0〜X3、X7)の静電容量変化量との差の絶対値が所定の値(NEARTH)より大きくなる。この場合、演算処理部18は、指の先端部分で操作面をタッチしている(接触面積が小さい)と判断して曲線近似計算法を適用する。
【0066】
なお、ここでは、算出方法の選択方法として、ピーク電極(X5)と、ピーク電極と隣り合わない電極(X0〜X3、X7)の静電容量変化量を比較する場合を示したが、電極間距離の条件によっては比較対象を変えてもよい。例えば、電極間距離がより狭い場合には、ピーク電極(X5)と、ピーク電極と2つ目まで隣り合わない電極(X0〜X2)の静電容量変化量を比較してもよい。
【0067】
演算処理部18は、算出方法を選択した後、選択した算出方法を用いて検出対象の座標を算出する。
【0068】
<重心計算法による座標算出ステップ>
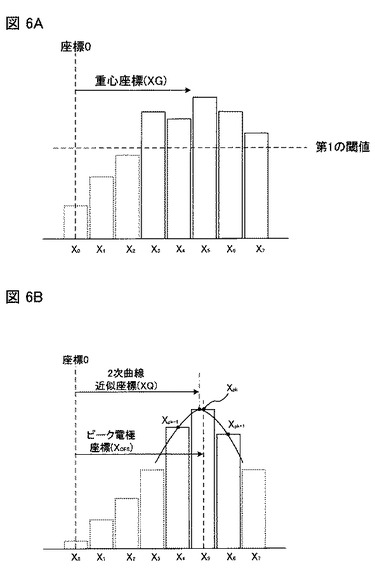
演算処理部18は、重心計算法を行う場合、指認識領域内の電極の静電容量変化量に基づいて演算処理を行う。例えば、演算処理部18は、ピーク電極(X5)から連続して静電容量変化量が第1の閾値以上となる電極を少なくとも含む第1の領域の電極(図6Aにおける、X3〜X7)に対して重心計算法を行うことができる。なお、好ましくは、ピーク電極から連続して静電容量の変化量が第1の閾値以上となる電極(X3〜X7)に加えて、第1の認識閾値を下回って1つ目の電極(X2)又は2つ目までの電極(X1)までを含む領域を第1の認識領域とする。これにより、検出される座標の精度をより高めることが可能となる。
【0069】
このように、重心計算法においては、検出される各電極の静電容量変化量に応じて、指認識領域の全ての電極の静電容量変化量を用いる場合もあれば、一部の電極の静電容量変化量のみを用いて演算処理を行う場合がある。
【0070】
また、演算処理部18は、重心計算法において、下記の式(1)を用いて検出対象の座標(XG)を算出することができる。
【0071】
式(1)
XG=(ΣnXn/ΣXn)×RESO
n:計算に用いる電極番号
Xn:電極nの静電容量変化量
RESO:電極間分解能
【0072】
例えば、3つの電極X0〜X2、電極X0の座標=0、電極間分解能=100に対して、上記式(1)を適用して重心座標の計算を行う場合には、
XG=(0*X0の静電容量変化量+1*X1の静電容量変化量+2*X2の静電容量変化量)/(X0の静電容量変化量+X1の静電容量変化量+X2の静電容量変化量)×100
となる。
【0073】
重心計算法では、検出対象と操作面の接触面積が大きい場合(ベタ指操作)であっても、算出される座標の変化を小さくすることができる。また、演算によりノイズが平均化されるために、曲線近似計算法と比較して、ノイズの影響を受けにくいという利点を有している。
【0074】
<曲線近似計算法による座標算出ステップ>
演算処理部18は、曲線近似計算法を行う場合、重心計算法の場合と同様に指認識領域から選択された所定の電極の静電容量変化量に基づいて演算処理を行う。例えば、演算処理部18は、ピーク電極(X5)と、ピーク電極近傍の電極(例えば、図6Bにおける、X4及び/又はX6)を少なくとも含む第2の領域の電極の静電容量の変化量を用いて曲線近似計算法を行うことができる。
【0075】
例えば、演算処理部18は、ピーク電極(X5)とピーク電極近傍の2つの電極(X4及びX6)の3つの電極の静電容量変化量に基づいて、下記の式(2)を用いて2次曲線近似計算法により検出対象の座標(XQ)を算出する。
【0076】
【数1】
【0077】
このように、曲線近似計算法を適用する際に、ピーク電極近傍の電極の静電容量変化量を選択的に使用して算出を行うことにより、操作について意図していない指の影響を排除することができる。その結果、検出対象の接触により静電容量変化が最も高い部分の座標を高い精度で算出することが可能となる。
【0078】
また、演算処理部18は、上記式(2)を用いて2次曲線近似計算法で座標を求めるかわりに、2次曲線に対する回帰曲線を求める方法を適用して座標を算出してもよい。
【0079】
また、演算処理部18は、重心計算法と同様に、ピーク電極(X5)から連続して静電容量の変化量が所定の閾値以上となる電極を少なくとも含む領域を第2の領域に設定して、曲線の回帰計算を行うことによって、検出対象の座標を算出してもよい。第2の認識領域には、ピーク電極から連続して静電容量の変化量が第2の閾値以上となる電極に加えて、当該第2の閾値を下回って1つ目の電極又は2つ目までの電極までを含めてもよい。なお、第2の閾値を上記重心計算法の際に適用する第1の閾値と同じ値としてもよい。
【0080】
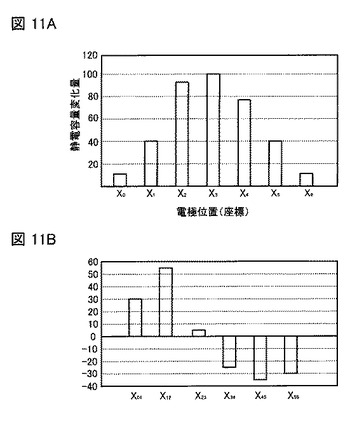
他にも、演算処理部18は、2点の電極(ピーク電極と、ピーク電極に隣接するいずれかの電極)に基づいて、曲線のピークの傾きが0になることを利用して検出対象の座標を求めてもよい。以下に、2点の電極に基づいて座標を算出する方法について、具体的に説明する。以下の説明では、各電極の静電容量変化量が図11Aに示すように検出される場合について説明する。
【0081】
まず、得られたデータ(図11A参照)を用いて、隣接する電極の静電容量変化量の差分を取る(図11B参照)。図11Bにおいて、「X01」は、X1の電極の静電容量変化量とX0の電極の静電容量変化量の差分(X01=X1−X0)を表している。この場合、図11Bにおいて、差分の値がプラスからマイナスになる部分の間(ここでは、X2とX3の中心と、X3とX4の中心との間)に頂点(傾きが0)があることとなる。
【0082】
そのため、X23とX34のデータに基づいて、差分が0となる座標を求める。具体的には、三角形の相似の概念を用いて、差分が0となる座標(XR=(X23×RESO)/(X23+|X34|)を求めることができる。その後、求めた座標にX2とX3の中心座標を加算することにより、曲線のピークとなる座標を求めることができる。このように、曲線近似計算法では、2点の電極のデータから検出態様の座標を求めてもよい。
【0083】
上述したように、曲線近似計算法では様々な方法が適用でき、特定の方法に限定されない。
【0084】
<各算出方法による効果>
以下に、座標の算出に重心計算法と曲線近似計算法の切り替える場合の効果について説明する。
【0085】
各電極の静電容量の変化量が、図2Bに示すように検出された場合に、重心計算法と曲線近似法でそれぞれ算出された座標を表1に示す。なお、ここでは、重心計算法においては、電極X0〜X4について上記式(1)を用いて座標を算出し、曲線近似法においては、電極X1〜X3について上記式(2)を用いて座標を算出した。また、電極間分解能(電極間の座標)は、100とした。
【0086】
【表1】
【0087】
表1に示すように、指の先端部分で操作面を軽くタッチする(接触面積が小さい)場合には、曲線近似計算法を適用する場合であっても座標の検出精度を向上することができる。また、曲線近似計算法による算出の方が用いるデータが少なくすることができるため、演算処理を簡略化することができる。
【0088】
次に、各電極の静電容量の変化量が、図3B、Cに示すように検出された場合に、重心計算法と曲線近似法でそれぞれ算出された座標を表2に示す。なお、ここでは、重心計算法においては、電極X0〜X7について上記式(1)を用いて座標を算出し、曲線近似法においては、図3Bの場合に電極X1〜X3、図3Cの場合に電極X4〜X6について上記式(2)を用いて座標を算出した。また、分解能(電極間の座標)は、100とした。
【0089】
【表2】
【0090】
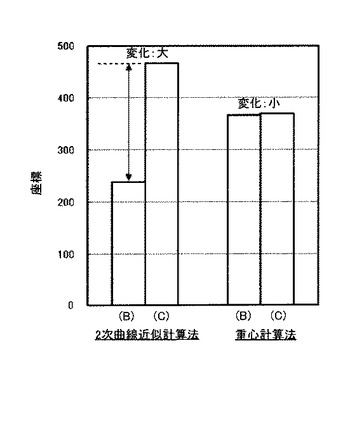
表2に示すように、ベタ指で操作面をタッチする(接触面積が大きい)場合には、曲線近似計算法に比べて重心計算法を適用する方が座標の検出精度を向上することができる。特に、曲線近似計算法では、図3Bの状態と図3Cの状態で算出する座標が大きく変化するが、重心計算法を適用する場合には、ピーク電極が変化した場合であっても算出する座標の変化を小さくすることができる(図7参照)。
【0091】
<ノイズ検出時の座標算出ステップ>
演算処理部18は、曲線近似計算法の適用時にノイズ(例えば、ジッタノイズ)の状態を確認した場合には、算出方法を曲線近似計算法から重心計算法に切り替えて検出対象の座標を算出する。
【0092】
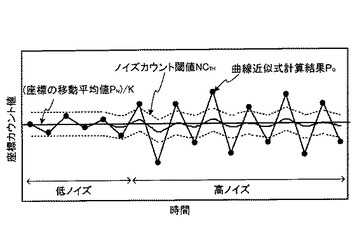
例えば、演算処理部18は、検出対象の移動平均値と曲線近似計算法の計算結果の差の絶対値が、所定期間以上継続してノイズ閾値より大きくなる場合に、ノイズ状態と判断することができる。以下に、具体的な判断方法の一例について図8を参照して説明する。
【0093】
曲線近似計算法の計算結果の値をPQ、曲線近似計算法の計算結果の移動平均値をPN、過去(前回)の曲線近似計算法の計算結果の移動平均値をPN−1、フィルタ重みをKとし、曲線近似計算法の計算結果の移動平均値PNを下記の式(3)を用いて計算する。
【0094】
式(3)
PN=PN−1×(K−1)/K+PQ
【0095】
また、下記の式(4)を用いて、曲線近似計算法の計算結果の移動平均値と曲線近似計算法の計算結果の差(ノイズカウント(NC))を計算する。
【0096】
式(4)
NC=(PN/K)−PQ
【0097】
そして、計算で連続して得られる(k−1)番目のノイズカウントとk番目のノイズカウントの極性が一致せず、且つノイズカウントの絶対値がノイズカウント閾値(NCTH)より大きい場合にノイズカウントを積算し、ノイズカウントの積算値をノイズカウント和(NCSUM)と定義する。
【0098】
演算処理部18は、ノイズカウント和を一定時間毎に確認し、規定値(SUMTH)以上となっている場合(NCSUM>SUMTH)に「ノイズ状態」と判断し、座標算出方法を曲線近似計算法から重心計算法に切り替える。なお、ノイズカウント和(NCSUM)は、一定時間毎の確認時に0にクリアして処理を繰り返せばよい。
【0099】
また、演算処理部18は、規定値(SUMTH)以上となっている場合(NCSUM>SUMTH)に「ノイズ状態」と判断するかわりに、「ノイズ状態」と判断した回数が複数回連続していることが確認された場合に、座標算出方法を曲線近似計算法から重心計算法に切り替える構成としてもよい。
【0100】
このように、ノイズ閾値より大きくなった瞬間でなく、所定期間以上継続してノイズ閾値より大きくなる場合にノイズ状態と判断することにより、一瞬のノイズの影響を排除して座標を算出することができる。その結果、ノイズの影響を適切に見積もって座標の算出を高精度で行うことが可能となる。
【0101】
また、演算処理部18は、ノイズの影響により曲線近似計算法を重心計算法に切り替えて適用する場合に、所定期間以上継続してノイズ閾値を越えた時点から、検出対象が操作面から離れるまでに重心計算法を適用し続けることが好ましい。通常、曲線近似計算と重心計算の結果が必ずしも一致しないことから計算方法を変えると座標が変わるため、重心計算法を適用した後には、重心計算法を適用し続けることにより、計算方法の変化に伴って座標が動く回数を最小限に抑えることができる。
【0102】
また、上述したノイズ状態の判断において、計算で連続して得られる(k−1)番目のノイズカウントとk番目のノイズカウントの極性が一致しない場合に、ノイズカウントを積算することにより、ユーザの所定の操作によって誤動作する(ノイズと判断される)ことを抑制することができる。
【0103】
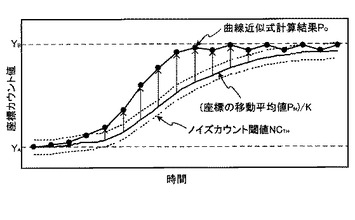
例えば、ユーザが操作面に指を接触させた状態で座標YAからYBに移動する場合(例えば、ドラッグ操作)、移動平均値は遅れて追従を始めるため、ノイズカウントの極性は変化しない(図9参照)。そのため、計算で連続して得られるデータのノイズカウントの極性が一致しない場合にカウントすることにより、ユーザの移動操作に応じた動作をノイズカウントの積算から排除し、ノイズとして認識されない構成とすることができる。
【0104】
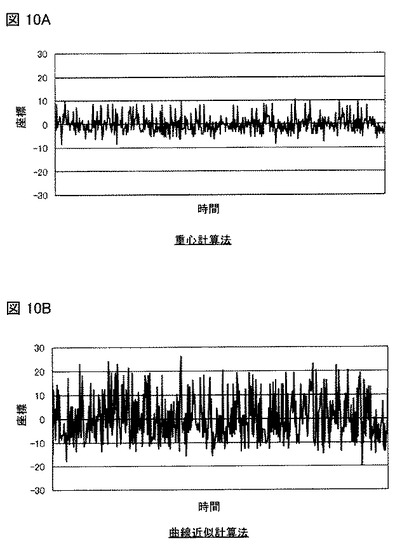
図10に、ノイズ状態において、重心計算法と曲線近似計算法で算出した場合の座標の変化を示す。ここでは、操作面に鉄柱(φ8mm)を接触させた状態で、鉄柱にホワイトノイズ20Vppを印加した時の座標出力結果を示している。図10Aは、ノイズ状態において、重心計算法により算出した座標の変化を示し、図10Bは、ノイズ状態において、2次曲線近似計算法により算出した座標の変化を示している。
【0105】
得られた結果に基づいて、各算出方法の標準偏差を求めたところ、重心計算法では3.57、曲線近似計算法では9.59となり、重心計算法を適用した場合には、63%ノイズの低減効果が得られ、曲線近似法と比較してノイズの影響を低減できた。
【0106】
以上のように、検出される複数の電極の静電容量変化量の状態に応じて、算出方法を切り替えて座標の算出を行うことにより、使用状況が変化する場合であっても、座標の検出の精度が低下することを抑制することが可能となる。
【0107】
本発明は上述した実施の形態に限定されるものではない。その他、本発明の要旨を逸脱しない範囲において種々変形実施可能である。
【符号の説明】
【0108】
10 座標検出装置
11 センサ基板
12 X軸電極
13 Y軸電極
14 X軸側検出部
15 Y軸側検出部
16 A/D変換部
17 記憶部
18 演算処理部
19 インターフェイス部
【技術分野】
【0001】
本発明は、座標検出装置及び座標検出プログラムに関し、特に、画面上の操作に関する座標検出装置及び座標検出プログラムに関する。
【背景技術】
【0002】
近年、コンピュータ、携帯電話端末又はPDA(Personal Digital Assistant)等の電子機器において、指で接触した位置を特定することによって電子機器を操作する座標検出装置を備えるものが盛んに開発されている。
【0003】
例えば、座標検出装置を具備するデバイスとして、コンピュータに搭載されるパッド、タッチパッド或いはトラックパッドなどの名称で呼ばれるポインティングデバイス(座標入力装置)がある。このような座標入力装置は、携帯型のノート型パーソナルコンピュータに埋め込まれた形態や、デスクトップ型のコンピュータに外付けされた形態で使用される。この場合、マウスのように機器自体を移動させる必要がないことから、卓上などの限られたスペースであっても支障なく操作できるという特徴を有している。
【0004】
また、表示画面に座標検出装置が組み込まれた携帯電話端末やPDA等の携帯機器等では、表示画面(操作面)を指で直接タッチすることにより所望の操作を行うことができる。
【0005】
このような座標検出装置として、ユーザの指の接触により、電極とその周囲との間に形成される静電容量が変化することを利用したものがある。静電容量方式の座標検出装置は、一般的に、X軸方向とY軸方向に沿ってマトリクス状に配置された複数の電極と、各電極の静電容量を検出する検出部を備え、複数の電極の中で静電容量変化が大きいX軸とY軸の電極を検出することにより、ユーザが接触した位置を特定する。
【0006】
静電容量方式を適用した座標の検出方法として、例えば、所定値以上の静電容量変化を有する有効領域の重心位置に基づいて座標を算出することが提案されている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2010−244302号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、静電容量方式のタッチパッド等では、操作面に直接接触していない指であっても近接した位置にある指が電極の静電容量変化に大きな影響を与えてしまう場合がある。また、操作面に対する指の接触のさせ方等により、接触面積が大きく変化する場合がある。この場合、常に重心位置に基づいて座標を算出すると、操作面に接触していない指の影響や、指の接触のさせ方等により検出される座標が変化し、座標の検出精度が低下するおそれがある。
【0009】
本発明は、かかる点に鑑みてなされたものであり、操作面に対する検出対象の接触方法等の使用状況が変化する場合であっても、座標の検出精度の低下を抑制できる座標検出装置及び座標検出プログラムを提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の座標検出装置は、所定方向に対して並設された複数の電極と、前記複数の電極の静電容量をそれぞれ検出する検出部と、前記複数の電極の静電容量の変化量の状態に応じて異なる算出方法を適用し、検出対象の座標を算出する演算処理部と、を備え、前記演算処理部は、ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との比較値に応じて、重心座標を計算する重心計算法と、曲線の頂点を求める曲線近似計算法とを切り替えて適用して前記検出対象の座標を算出することを特徴とする。この構成によれば、使用状況に応じて異なる算出方法を適用して検出対象の座標を算出するため、使用状況が変化した場合であっても、座標の検出を高い精度で行うことができる。
【0011】
また、本発明の座標検出装置において、前記演算処理部は、ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値以下である場合に、前記ピーク電極から連続して静電容量変化量が第1の閾値以上の電極を少なくとも含む第1の認識領域内の電極に対して重心計算法を適用して前記検出対象の座標を算出し、前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値より大きい場合に、前記ピーク電極及び前記ピーク電極に隣接するいずれかの電極を少なくとも含む第2の認識領域内の電極に対して曲線近似計算法を適用して前記検出対象の座標を算出することができる。
【0012】
また、本発明の座標検出装置において、前記演算処理部は、前記曲線近似計算法の計算結果の移動平均値と、前記曲線近似計算法の計算結果との差の絶対値が、所定期間以上継続してノイズ閾値より大きくなる場合に、前記曲線近似計算法を前記重心計算法に切り替えて前記検出対象の座標を算出することができる。この構成により、ノイズの影響が大きい状態であっても、重心計算法を適用することにより、座標の検出精度が低下することを抑制できる。
【0013】
また、本発明の座標検出装置において、前記演算処理部は、前記所定期間以上継続してノイズ閾値を越えてから、検出対象が離れるまで前記重心計算法を連続して適用することが好ましい。
【0014】
また、本発明の座標検出装置において、前記演算処理部は、前記ピーク電極から連続して静電容量変化量が第1の閾値以上となる電極と、前記第1の認識閾値を下回って1つ目又は2つ目までの電極とを含む領域を前記第1の認識領域とすることができる。
【0015】
また、本発明の座標検出装置において、前記演算処理部は、下記の式(1)を用いて前記重心計算法を行うことができる。
式(1)
XG=(ΣnXn/ΣXn)×RESO
n:計算に用いる電極番号
Xn:電極nの静電容量変化量
RESO:電極間分解能
【0016】
また、本発明の座標検出装置において、前記演算処理部は、前記ピーク電極と前記ピーク電極近傍の2つの電極の静電容量変化量に基づいて、下記の式(2)を用いて前記曲線近似計算法を適用することができる。
【0017】
また、本発明の座標検出装置において、前記演算処理部は、前記ピーク電極から連続して静電容量変化量が第2の閾値以上となる電極を少なくとも含む領域を前記第2の認識領域に設定して、前記曲線近似計算法を適用することができる。また、前記演算処理部は、前記ピーク電極から連続して静電容量変化量が第2の閾値以上となる電極と、前記第2の閾値を下回って1つ目又は2つ目までの電極を含む領域を前記第2の認識領域に設定してもよい。
【0018】
また、本発明の座標検出装置において、前記演算処理部は、前記検出部で検出される前記複数の電極の中から、前記検出対象の接触により静電容量が変化する所定の座標領域をあらかじめ設定し、前記所定の座標領域の電極に対して、前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量とを比較して、前記重心計算法と、前記曲線近似計算法とを切り替えることができる。
【0019】
また、本発明の座標検出装置において、前記所定方向に対して直交する直交方向に対して並設された複数の直交電極を有し、前記演算処理部は、直交方向における電極に対しても検出された複数の静電容量変化量の状態に応じて異なる算出方法を適用することができる。
【0020】
本発明の座標検出装置は、検出対象が接触した座標を用いて操作制御を行う座標入力装置に適用することができる。
【0021】
本発明の座標検出プログラムは、所定方向に対して並設された複数の電極の静電容量変化量に基づいて、検出対象の座標を決定するための演算処理を実行させる座標検出プログラムであって、検出された複数の電極の中から、静電容量変化量が最大となるピーク電極を認識するステップと、前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量とを比較するステップと、前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値以下である場合に、前記ピーク電極から連続して静電容量変化量が第1の閾値以上の電極を少なくとも含む第1の認識領域内の電極に対して重心計算法を適用して前記検出対象の座標を算出するステップと、前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値より大きい場合に、前記ピーク電極及び前記ピーク電極に隣接するいずれかの電極を少なくとも含む第2の認識領域内の電極に対して曲線近似計算法を適用して前記検出対象の座標を算出するステップとを有することを特徴とする。
【0022】
また、本発明の座標検出プログラムにおいて、前記曲線近似計算法の計算結果の移動平均値と、前記曲線近似計算法の計算結果との差の絶対値が、所定期間以上継続してノイズ閾値より大きくなる場合に、前記曲線近似計算法を前記重心計算法に切り替えて前記検出対象の座標を算出するステップをさらに有することができる。
【発明の効果】
【0023】
本発明によれば、使用状況に応じて異なる算出方法を適用して検出対象の座標を算出するため、使用状況(例えば、操作面に対する検出対象の接触方法等)が変化する場合であっても、座標の検出精度の低下を抑制できる座標検出装置及び座標検出プログラムを提供することができる。
【図面の簡単な説明】
【0024】
【図1】本実施の形態に係る座標検出装置のブロック図を示す図である。
【図2】指の先端部分で操作面をタッチする場合の模式図と、各電極の静電容量の変化量を示す図である。
【図3】指の腹部分で操作面をタッチする場合の模式図と、各電極の静電容量の変化量を示す図である。
【図4】本実施の形態に係る座標検出装置の操作面と、操作面のX軸方向及びY軸方向で検出される静電容量の変化量の一例を示す図である。
【図5】指認識領域における各電極の静電容量の変化量の一例を示す図である。
【図6】指認識領域における各電極の静電容量の変化量に応じて適用する算出方法を説明する図である。
【図7】重心計算法と曲線近似計算法により算出した座標変化を比較する図である。
【図8】ノイズ状態の判断方法を説明する図である。
【図9】操作面に検出対象を接触させた状態で移動した場合のノイズ状態の判断方法を説明する図である。
【図10】ノイズ状態において、重心計算法と曲線近似計算法を適用して算出される座標の変化を示す図である。
【図11】曲線近似計算法として、2点の電極データを用いて座標を算出する方法を説明する図である。
【発明を実施するための形態】
【0025】
静電容量式の座標検出装置では、上述したように、センサ基板に設けられた電極の静電容量の変化に基づいて座標を算出するため、センサ基板に形成される電極本数や電極間隔が座標の算出に影響する。座標の検出精度を高める観点からは電極の本数を多くする(電極間隔を小さくする)ことが好ましい。その一方で、コストや演算処理の簡略化の観点からは電極の本数を少なくする(電極間隔を大きくする)ことが好ましい場合もある。
【0026】
一般的に、最適な電極の本数は、操作面の面積、検出対象(例えば、人の指)のサイズ及び分解能(単位座標に対する電極間隔)によって定めることができる。例えば、検出対象が人の指である場合、検出精度やコスト等を考慮した際の最適な電極間隔は、指の先端部分で操作面をタッチする場合の接触領域と同程度か、接触領域よりやや大きい間隔とすることが好ましい。
【0027】
しかし、本発明者が検討を行ったところ、電極間隔を上記のように設定した場合であっても、使用状態(例えば、操作面にタッチするユーザの接触方法等)に起因して、検出される座標が大きく変化する場合があることが分かった。この点について、さらに詳細に検討を行ったところ、本発明者は、操作面にタッチするユーザの接触方法として大きく2つの状態があり、使用状況に応じて操作面と指の接触面積を大きく2つの状態に分類できることを見出した。
【0028】
具体的には、指の先端部分で操作面を軽くタッチする(接触面積が小さい)場合と、指の腹部分で操作面をタッチする(接触面積が大きい)場合である。例えば、爪が長いユーザが操作面にタッチする場合には、指の腹(ベタ指)でタッチすることが多く接触面積が大きくなる傾向にある。
【0029】
また、2つの状態における複数の静電容量変化量を詳細に検討したところ、指の先端部分でタッチする場合とベタ指でタッチする場合で、静電容量の変化量が最も大きくなる電極(ピーク電極)と、当該ピーク電極近傍の電極の静電容量の変化量の分布状態が大きく変化することが分かった。
【0030】
そこで、本発明者は、検出対象が接触した位置の座標の算出において、検出される複数の電極の静電容量変化量の状態に応じて、異なる算出方法を適用することを着想した。より具体的には、操作面を指の先端部分でタッチする(接触面積が小さい)場合、操作面をベタ指でタッチする(接触面積が大きい)場合、ノイズが発生する場合等で、異なる算出方法を切り替えて適用して検出対象の座標を算出する。以下に、使用状態と座標の算出方法の関係について説明する。
【0031】
図2は、検出対象(例えば、人の指)の先端部分で操作面を軽くタッチする(接触面積が小さい)場合の模式図(図2A)と、その際の各電極の静電容量の変化量を表すグラフ(図2B)を示している。図2に示すように、操作面と指の接触領域が電極間隔と同程度の場合、複数の電極の静電容量の変化量の分布は検出対象の接触部分を頂点とする曲線に近似した形状となる(図2B参照)。これは、接触領域の近傍領域(操作面と指が僅かに離れている領域)では、電極の静電容量変化量が指と操作面の距離に概略反比例した出力となるためである。したがって、この場合には、静電容量変化量が最も大きいピーク電極(X2)と、ピーク電極に近接する電極(例えば、X1及び/又はX3)の静電容量変化量等に基づいて、曲線の頂点を求める曲線近似計算法を適用して検出対象の座標を算出することが望ましい。
【0032】
また、この際に得られる曲線は、微小区間では回帰計算を行いやすい放物線と見なせる場合が多いため、回帰計算を行うことができる。回帰計算に使うデータの範囲として、電極間隔が広く、出力誤差が小さい場合には、演算処理の簡略化の観点から、2次曲線の当てはめに最小限度必要な3点の電極(例えば、X1〜X3)の静電容量変化量を用いることが好ましい。逆に、電極の間隔が狭く、出力誤差が大きい場合には、4点以上(ピーク電極を中心とするのであれば奇数個)の電極の静電容量変化量を用いて、曲線とデータ群の距離が最小となるような曲線を当てはめることが適している。
【0033】
このように、指の先端部分で操作面をタッチする(接触面積が小さい)場合には、曲線近似計算法を適用して座標の算出を行うことにより、操作について意図していない指の影響を排除することができる。これにより、演算処理を簡略化すると共に、指の接触により静電容量の変化量が最も高い部分の座標を高い精度で算出することが可能となる。
【0034】
図3は、ベタ指で操作面をタッチする(接触面積が大きい)場合の模式図(図3A)と、その際の各電極の静電容量の変化量を表すグラフ(図3B)を示している。図3に示すように、操作面と検出対象の接触面積が電極間隔より大きい場合、複数の電極の静電容量の変化量の分布は台形状となる(図3B参照)。これは、指が接触するある程度の広い範囲の電極で同程度の静電容量が変化するためである。したがって、この場合には、静電容量の変化量が所定の閾値以上の電極に対して、重心計算法を適用して検出対象の座標を算出することが望ましい。
【0035】
特に、ベタ指で操作面をタッチしている場合には、指をわずかに移動した場合であっても、ピーク電極が入れ替わる(ピーク電極が電極間でジャンプする)場合がある(図3C参照)。重心計算法を適用して検出座標の算出を行うことにより、ピーク電極が入れ替わる場合であっても、算出される座標の変化を小さくすることができる。
【0036】
使用状況に応じて算出方法を切り替えて検出対象の座標を算出することにより、検出対象の接触方法によらずに座標を高い精度で算出することができる。また、適用する算出方法の選択は、複数の電極の静電容量の変化量の状態(分布)に基づいて判断することができる。例えば、ピーク電極を検出した後に、ピーク電極の静電容量変化量と、ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値以下である場合に重心計算法を適用し、所定値より大きい場合に曲線近似計算法を適用する。このように、ピーク電極の静電容量の変化量と、ピーク電極と隣り合わない電極の静電容量の変化量とを比較することにより、使用状況(検出対象の接触方法)を適切に反映することができる。
【0037】
また、指の接触面積が小さい場合であっても、ノイズが多く検出される場合がある。ノイズの影響が大きい状態において曲線近似計算法を適用すると、誤差が大きくなり座標の検出精度が低下する可能性がある。一方で、上述した重心計算法では、演算によりノイズが平均化されるため、曲線近似計算法と比較してノイズの影響を受けにくいという利点を有している。そのため、ノイズの状態が確認された場合には、曲線近似計算法ではなく、重心計算法を適用して検出対象の座標を算出することが望ましい。
【0038】
以下に、本発明の実施の形態の座標検出装置の構成及び検出座標の算出方法について添付図面を参照して詳細に説明する。
【0039】
図1は、本実施の形態に係る座標検出装置の主要な構成を示すブロック図である。図1に示す座標検出装置10は、センサ基板11と、センサ基板11に設けられた電極(X軸電極12、Y軸電極13)と、各電極の静電容量を検出する検出部(X軸側検出部14、Y軸側検出部15)と、検出した各電極の静電容量の変化量等を用いて演算処理を行う演算処理部18とを有している。
【0040】
センサ基板11には、X軸方向(図1の横方向)の静電容量を検出するための複数のX軸電極12と、Y軸方向(図1の縦方向)の静電容量を検出するための複数のY軸電極13とがマトリクス状に並設されている。
【0041】
本実施の形態の座標検出装置10は、操作面にユーザの指等の検出対象が接触した際に変化する静電容量の変化量を検出して接触位置を特定する方式(静電容量方式)を採用している。つまり、座標検出装置10は、検出対象が接触していない状態の電極の静電容量の値を基準として、検出対象が接触した際に変化する量(静電容量変化量)に基づいて座標を算出する。静電容量方式として、電極とグランド(GND)間に形成される自己容量を検出対象とする自己容量検出方式、2つの電極間に形成される相互容量を検出対象とする相互容量検出方式、基準電極と2つのセンサ電極の間に形成される相互容量の差として定義される容量を検出対象とする差動型相互容量検出方式があるが、座標検出装置10はいずれの方式を適用してもよい。なお、自己容量検出方式では、接触部分の静電容量が増加(プラス方向に変化)し、相互容量検出方式では、接触部分の静電容量が減少(マイナス方向に変化)する。
【0042】
なお、本実施の形態の座標検出装置では、X軸電極12とY軸電極13が互いに直交して並設される場合を示しているが、電極の配置や数等は図1に示した構成に限られない。また、座標検出装置の構造は、静電容量の変化を利用して座標を検出する構造であれば特定の構造に限られない。
【0043】
X軸側検出部14は、X軸方向に対して並設されたX軸電極12の静電容量を検出し、Y軸側検出部15は、Y軸方向に対して並設されたY軸電極13の静電容量を検出する。また、X軸側検出部14、Y軸側検出部15は、それぞれX軸方向、Y軸方向に沿ってX軸電極12、Y軸電極13の静電容量を順に検出する構成としてもよい。なお、本実施の形態の座標検出装置10では、X軸側検出部14、Y軸側検出部15において、各電極の静電容量変化量を直接検出する構成とすることができる。この場合、X軸側検出部14、Y軸側検出部15において、各電極の静電容量の値と、検出対象が接触していない状態の電極の静電容量の値(基準容量値)とを比較することにより静電容量の変化量が得られる。また、本実施の形態はこれに限られず、X軸側検出部14、Y軸検出部15で各電極の静電容量の値を検出し、得られた静電容量の値を演算処理部18等の他の回路において基準容量値と比較することにより、検出される電極の静電容量変化量を算出する構成とすることもできる。
【0044】
A/D(アナログ/デジタル)変換部16は、X軸側検出部14の検出信号(X軸電極12の静電容量に関するデータ)及びY軸側検出部15の検出信号(Y軸電極13の静電容量に関するデータ)をデジタル信号に変換し、演算処理部18、記憶部17に供給する。
【0045】
記憶部17は、検出された電極の静電容量等を記憶するための記憶領域を有している。また、静電容量変化量の記憶に加えて、演算処理部18に実行させるためのプログラムを記憶する媒体としてもよい。ここでは、X軸側検出部14、Y軸側検出部15で検出されたデータが、演算処理部18を介して記憶部17に供給される構成を示しているが、X軸側検出部14、Y軸側検出部15からA/D変換部16を介して記憶部17に直接データが供給される構成としてもよい。
【0046】
なお、静電容量として、上述したように各電極の静電容量の変化量を演算処理部18で算出する場合には、X軸側検出部14で検出した各電極の静電容量の値を記憶部17に記憶させる。また、X軸側検出部14で各電極の静電容量の変化量を検出する場合には、検出された静電容量の変化量を記憶部17に記憶させることができる。
【0047】
演算処理部18は、検出された各電極の静電容量変化量等に基づいて演算処理を行うことにより、検出対象が接触した座標を算出する。また、演算処理部18は、検出された複数の電極の静電容量変化量の状態に応じて異なる算出方法を切り替えて適用し、検出対象の座標を算出する。
【0048】
例えば、演算処理部18は、静電容量の変化量が最も大きくなる電極(ピーク電極)の静電容量の変化量と、当該ピーク電極と隣り合わない電極の静電容量の変化量を比較する。そして、比較値(例えば、差分値)が所定の値(NEARTH)以下である場合と、NEARTHより大きい場合とで異なる算出方法を切り替えて適用する。また、ノイズの影響が大きい場合には、ノイズの検出に応じて算出方法を切り替えて適用することができる。
【0049】
具体的に、演算処理部18は、ピーク電極の静電容量の変化量と、ピーク電極と隣り合わない電極の静電容量の変化量との差の絶対値が所定の値(NEARTH)以下である場合に、ベタ指で操作面をタッチしている(接触面積が大きい)と判断して重心計算法を適用する。また、NEARTHより大きい場合には、指の先端部分で操作面をタッチしている(接触面積が小さい)と判断して曲線近似計算法を適用する。
【0050】
演算処理部18は、曲線近似計算法の適用時であっても、検出対象の移動平均値と曲線近似計算法の計算結果の差の絶対値が、所定期間以上継続してノイズ閾値(NCTH)より大きくなる場合には、曲線近似計算法を重心計算法に切り替えて適用することができる。このように、演算処理部18は、使用状態に応じて最適な算出方法を適用して検出対象の座標を算出することができる。
【0051】
また、演算処理部18は、ノイズの影響により曲線近似計算法を重心計算法に切り替えて適用する場合に、所定期間以上継続してノイズ閾値を越えた時点から、検出対象が操作面から離れるまで重心計算法を適用し続けることが好ましい。曲線近似計算と重心計算の結果が必ずしも一致しないことから計算方法を変えると座標が変わる。このため、計算方法を変えて座標が動く回数を最小限に抑える為に、一度、重心計算法を適用した後には、重心計算法を適用し続けることが好ましいためである。
【0052】
なお、ノイズの検出により重心計算法を行う場合、演算処理に使う範囲は指に反応して容量が変化している範囲内の電極を多く選択することが好ましいため、上記ベタ指の場合と同様に設定することができる。また、演算処理部18は、検出対象の操作面への接触の有無をX軸電極12又はY軸電極13の静電容量変化量に基づいて判断することができる。例えば、演算処理部18は、X軸側検出部14又はY軸側検出部15において、静電容量変化量が所定値以上となる電極が検出出来なくなったときに、検出対象が操作面から離れたことを判断する。
【0053】
また、演算処理部18は、記憶部17又は別途設けられるメモリに記憶された座標検出プログラムを利用して、使用状態に適した算出方法を選択して検出対象の座標の算出を実行する。座標検出プログラムは、複数の電極の中からピーク電極を認識するステップと、複数の電極の静電容量変化量の状態に基づいて算出方法を選択するステップと、選択した算出方法を適用して検出対象の座標を算出するステップ等を有している。また、座標検出プログラムは、ノイズを検出するステップと、ノイズが検出された際に所定の算出方法を適用して検出対象の座標を算出するステップをさらに有していてもよい。
【0054】
インターフェイス部19は、座標検出装置10と、他の構成を有する回路又は機器等との間でデータの授受を行うための回路である。例えば、本実施の形態の座標検出装置10が、パーソナルコンピュータのタッチパッド等のポインティングデバイス(入力装置)に適用される場合には、インターフェイス部19を介してパーソナルコンピュータの表示部に座標を出力する機器に接続することができる。また、本実施の形態の座標検出装置が、携帯電話端末やPDA等の携帯機器等の表示画面に組み込まれる場合には、インターフェイス部19を介して演算処理部18で特定された座標に応じた処理・操作を行う回路に接続することができる。このように、本実施の形態で示す座標検出装置は、種々の座標入力装置に組み込むことが可能である。
【0055】
なお、本実施の形態の座標検出装置10において、演算処理部18は、検出部(X軸側検出部14、Y軸側検出部15)が検出する複数の電極の中から、特定の電極で構成される座標領域(指認識領域)をあらかじめ設定し、当該座標領域の電極に対して上述した算出方法を適用して検出対象の座標を算出する構成としてもよい。この場合、操作面上の全ての電極を考慮して演算処理を行う必要がなく、所定の座標領域に限定して演算処理を行うことができるため、検出対象の座標を求めるための演算処理を簡略化することができる。なお、特定の電極で構成される座標領域は、操作面に検出対象が接触する大まかな領域を選択する方法であればよい。例えば、検出対象の接触により静電容量の変化量が特定の条件を満たす電極を含む領域とすることができる。
【0056】
次に、本実施の形態の座標検出装置において、検出対象の座標を決定する手順について詳細に説明する。以下の説明では、図4に示すように、15本のX軸電極(X0〜X14)及びY軸電極(Y0〜Y14)がマトリクス状に設けられた操作面に対して、2本の指(指1と指2)が同時に接触する場合を想定した座標の決定手順について説明するが、X軸電極12及びY軸電極13の数、検出可能な指の数はこれに限られない。
【0057】
また、ここでは、指の接触により静電容量変化量が特定の条件を満たす電極で構成される座標領域(指認識領域)をあらかじめ決定し、当該指認識領域の電極を用いて検出対象の座標を算出する場合を示す。また、以下の説明では、指1のX軸方向の座標の決定手順について中心に説明するが、指1のY軸方向の座標、指2のX軸方向及びY軸方向の座標についても同様の手順で算出することができる。
【0058】
<指認識領域決定ステップ>
演算処理部18は、X軸側検出部14で検出される複数の電極の静電容量変化量に基づいて、検出対象が接触した領域数や指認識領域を決定する。例えば、演算処理部18は、静電容量変化量が所定値以上となる電極が複数連続する領域を指認識領域として決定することができる。
【0059】
また、演算処理部18は、各電極について隣接する電極と静電容量変化量を比較し(差分をとり)、比較値及び検出された電極の静電容量変化量の大きさに基づいて、指認識領域を決定することができる。この場合、X軸側検出部14が、X軸電極12の一端側から他端側へ向かって複数の電極の静電容量変化量を順に検出し、演算処理部18が、順に検出される複数の電極について、隣接する電極の静電容量変化量の比較値等に基づいて、指認識領域を決定することができる。隣接する電極の静電容量変化量の比較値に基づいて指認識領域を決定することにより、全ての電極の静電容量変化量を同時に記憶領域に記憶させることなく、簡単な演算処理により指認識領域を決定することができる。
【0060】
なお、指認識領域決定ステップでは、検出対象が接触した領域数や指認識領域を特定できる方法であれば特に限定されない。また、検出対象が接触する領域が一つである(1本の指が接触する)場合や操作面の大きさ等を考慮して、指認識領域決定ステップを省略してもよい。
【0061】
<ピーク電極認識ステップ>
ピーク電極認識ステップにおいて、演算処理部18は、X軸側検出部14で検出された各電極の静電容量変化量に基づいて、ピーク電極を認識する。ここでは、指認識領域の電極の中から静電容量の変化量が最も大きくなる電極をピーク電極として認識する。ピーク電極の認識方法は、例えば、指認識領域の複数の電極の静電容量の変化量を比較することにより決定することができる。
【0062】
<算出方法選択ステップ>
次に、演算処理部18は、複数の電極の静電容量変化量の状態に基づいて、検出対象の座標の決定に適用する算出方法を選択する。
【0063】
演算処理部18は、ピーク電極の静電容量変化量と、当該ピーク電極に隣接する電極以外の電極(ピーク電極と隣り合わない電極)の静電容量変化量の差を取り、差分の絶対値が所定の値(NEARTH)以下であるか、又は、NEARTHより大きいか判断する。差分の絶対値がNEARTH以下である場合には、重心計算法を選択し、差分の絶対値がNEARTHより大きい場合には、曲線近似計算法を選択する。
【0064】
例えば、指認識領域(X0〜X7)の各電極の静電容量変化量が図5Aに示すように検出された場合、まず、演算処理部18は、上述したピーク電極認識ステップにおいて、静電容量変化量が最も大きい電極(X5)をピーク電極として認識する。続いて、演算処理部18は、ピーク電極(X5)と、ピーク電極と隣り合わない電極(X0〜X3、X7)の静電容量変化量を比較する。ここでは、ピーク電極(X5)の静電容量変化量と、ピーク電極と隣り合わない電極(X3)の静電容量変化量との差の絶対値が所定の値(NEARTH)以下となる。この場合、演算処理部18は、ベタ指で操作面をタッチしている(接触面積が大きい)と判断して重心計算法を適用する。
【0065】
一方で、指認識領域(X0〜X7)の各電極の静電容量変化量が図5Bに示すように検出された場合には、ピーク電極(X5)の静電容量変化量と、ピーク電極と隣り合わない電極(X0〜X3、X7)の静電容量変化量との差の絶対値が所定の値(NEARTH)より大きくなる。この場合、演算処理部18は、指の先端部分で操作面をタッチしている(接触面積が小さい)と判断して曲線近似計算法を適用する。
【0066】
なお、ここでは、算出方法の選択方法として、ピーク電極(X5)と、ピーク電極と隣り合わない電極(X0〜X3、X7)の静電容量変化量を比較する場合を示したが、電極間距離の条件によっては比較対象を変えてもよい。例えば、電極間距離がより狭い場合には、ピーク電極(X5)と、ピーク電極と2つ目まで隣り合わない電極(X0〜X2)の静電容量変化量を比較してもよい。
【0067】
演算処理部18は、算出方法を選択した後、選択した算出方法を用いて検出対象の座標を算出する。
【0068】
<重心計算法による座標算出ステップ>
演算処理部18は、重心計算法を行う場合、指認識領域内の電極の静電容量変化量に基づいて演算処理を行う。例えば、演算処理部18は、ピーク電極(X5)から連続して静電容量変化量が第1の閾値以上となる電極を少なくとも含む第1の領域の電極(図6Aにおける、X3〜X7)に対して重心計算法を行うことができる。なお、好ましくは、ピーク電極から連続して静電容量の変化量が第1の閾値以上となる電極(X3〜X7)に加えて、第1の認識閾値を下回って1つ目の電極(X2)又は2つ目までの電極(X1)までを含む領域を第1の認識領域とする。これにより、検出される座標の精度をより高めることが可能となる。
【0069】
このように、重心計算法においては、検出される各電極の静電容量変化量に応じて、指認識領域の全ての電極の静電容量変化量を用いる場合もあれば、一部の電極の静電容量変化量のみを用いて演算処理を行う場合がある。
【0070】
また、演算処理部18は、重心計算法において、下記の式(1)を用いて検出対象の座標(XG)を算出することができる。
【0071】
式(1)
XG=(ΣnXn/ΣXn)×RESO
n:計算に用いる電極番号
Xn:電極nの静電容量変化量
RESO:電極間分解能
【0072】
例えば、3つの電極X0〜X2、電極X0の座標=0、電極間分解能=100に対して、上記式(1)を適用して重心座標の計算を行う場合には、
XG=(0*X0の静電容量変化量+1*X1の静電容量変化量+2*X2の静電容量変化量)/(X0の静電容量変化量+X1の静電容量変化量+X2の静電容量変化量)×100
となる。
【0073】
重心計算法では、検出対象と操作面の接触面積が大きい場合(ベタ指操作)であっても、算出される座標の変化を小さくすることができる。また、演算によりノイズが平均化されるために、曲線近似計算法と比較して、ノイズの影響を受けにくいという利点を有している。
【0074】
<曲線近似計算法による座標算出ステップ>
演算処理部18は、曲線近似計算法を行う場合、重心計算法の場合と同様に指認識領域から選択された所定の電極の静電容量変化量に基づいて演算処理を行う。例えば、演算処理部18は、ピーク電極(X5)と、ピーク電極近傍の電極(例えば、図6Bにおける、X4及び/又はX6)を少なくとも含む第2の領域の電極の静電容量の変化量を用いて曲線近似計算法を行うことができる。
【0075】
例えば、演算処理部18は、ピーク電極(X5)とピーク電極近傍の2つの電極(X4及びX6)の3つの電極の静電容量変化量に基づいて、下記の式(2)を用いて2次曲線近似計算法により検出対象の座標(XQ)を算出する。
【0076】
【数1】
【0077】
このように、曲線近似計算法を適用する際に、ピーク電極近傍の電極の静電容量変化量を選択的に使用して算出を行うことにより、操作について意図していない指の影響を排除することができる。その結果、検出対象の接触により静電容量変化が最も高い部分の座標を高い精度で算出することが可能となる。
【0078】
また、演算処理部18は、上記式(2)を用いて2次曲線近似計算法で座標を求めるかわりに、2次曲線に対する回帰曲線を求める方法を適用して座標を算出してもよい。
【0079】
また、演算処理部18は、重心計算法と同様に、ピーク電極(X5)から連続して静電容量の変化量が所定の閾値以上となる電極を少なくとも含む領域を第2の領域に設定して、曲線の回帰計算を行うことによって、検出対象の座標を算出してもよい。第2の認識領域には、ピーク電極から連続して静電容量の変化量が第2の閾値以上となる電極に加えて、当該第2の閾値を下回って1つ目の電極又は2つ目までの電極までを含めてもよい。なお、第2の閾値を上記重心計算法の際に適用する第1の閾値と同じ値としてもよい。
【0080】
他にも、演算処理部18は、2点の電極(ピーク電極と、ピーク電極に隣接するいずれかの電極)に基づいて、曲線のピークの傾きが0になることを利用して検出対象の座標を求めてもよい。以下に、2点の電極に基づいて座標を算出する方法について、具体的に説明する。以下の説明では、各電極の静電容量変化量が図11Aに示すように検出される場合について説明する。
【0081】
まず、得られたデータ(図11A参照)を用いて、隣接する電極の静電容量変化量の差分を取る(図11B参照)。図11Bにおいて、「X01」は、X1の電極の静電容量変化量とX0の電極の静電容量変化量の差分(X01=X1−X0)を表している。この場合、図11Bにおいて、差分の値がプラスからマイナスになる部分の間(ここでは、X2とX3の中心と、X3とX4の中心との間)に頂点(傾きが0)があることとなる。
【0082】
そのため、X23とX34のデータに基づいて、差分が0となる座標を求める。具体的には、三角形の相似の概念を用いて、差分が0となる座標(XR=(X23×RESO)/(X23+|X34|)を求めることができる。その後、求めた座標にX2とX3の中心座標を加算することにより、曲線のピークとなる座標を求めることができる。このように、曲線近似計算法では、2点の電極のデータから検出態様の座標を求めてもよい。
【0083】
上述したように、曲線近似計算法では様々な方法が適用でき、特定の方法に限定されない。
【0084】
<各算出方法による効果>
以下に、座標の算出に重心計算法と曲線近似計算法の切り替える場合の効果について説明する。
【0085】
各電極の静電容量の変化量が、図2Bに示すように検出された場合に、重心計算法と曲線近似法でそれぞれ算出された座標を表1に示す。なお、ここでは、重心計算法においては、電極X0〜X4について上記式(1)を用いて座標を算出し、曲線近似法においては、電極X1〜X3について上記式(2)を用いて座標を算出した。また、電極間分解能(電極間の座標)は、100とした。
【0086】
【表1】
【0087】
表1に示すように、指の先端部分で操作面を軽くタッチする(接触面積が小さい)場合には、曲線近似計算法を適用する場合であっても座標の検出精度を向上することができる。また、曲線近似計算法による算出の方が用いるデータが少なくすることができるため、演算処理を簡略化することができる。
【0088】
次に、各電極の静電容量の変化量が、図3B、Cに示すように検出された場合に、重心計算法と曲線近似法でそれぞれ算出された座標を表2に示す。なお、ここでは、重心計算法においては、電極X0〜X7について上記式(1)を用いて座標を算出し、曲線近似法においては、図3Bの場合に電極X1〜X3、図3Cの場合に電極X4〜X6について上記式(2)を用いて座標を算出した。また、分解能(電極間の座標)は、100とした。
【0089】
【表2】
【0090】
表2に示すように、ベタ指で操作面をタッチする(接触面積が大きい)場合には、曲線近似計算法に比べて重心計算法を適用する方が座標の検出精度を向上することができる。特に、曲線近似計算法では、図3Bの状態と図3Cの状態で算出する座標が大きく変化するが、重心計算法を適用する場合には、ピーク電極が変化した場合であっても算出する座標の変化を小さくすることができる(図7参照)。
【0091】
<ノイズ検出時の座標算出ステップ>
演算処理部18は、曲線近似計算法の適用時にノイズ(例えば、ジッタノイズ)の状態を確認した場合には、算出方法を曲線近似計算法から重心計算法に切り替えて検出対象の座標を算出する。
【0092】
例えば、演算処理部18は、検出対象の移動平均値と曲線近似計算法の計算結果の差の絶対値が、所定期間以上継続してノイズ閾値より大きくなる場合に、ノイズ状態と判断することができる。以下に、具体的な判断方法の一例について図8を参照して説明する。
【0093】
曲線近似計算法の計算結果の値をPQ、曲線近似計算法の計算結果の移動平均値をPN、過去(前回)の曲線近似計算法の計算結果の移動平均値をPN−1、フィルタ重みをKとし、曲線近似計算法の計算結果の移動平均値PNを下記の式(3)を用いて計算する。
【0094】
式(3)
PN=PN−1×(K−1)/K+PQ
【0095】
また、下記の式(4)を用いて、曲線近似計算法の計算結果の移動平均値と曲線近似計算法の計算結果の差(ノイズカウント(NC))を計算する。
【0096】
式(4)
NC=(PN/K)−PQ
【0097】
そして、計算で連続して得られる(k−1)番目のノイズカウントとk番目のノイズカウントの極性が一致せず、且つノイズカウントの絶対値がノイズカウント閾値(NCTH)より大きい場合にノイズカウントを積算し、ノイズカウントの積算値をノイズカウント和(NCSUM)と定義する。
【0098】
演算処理部18は、ノイズカウント和を一定時間毎に確認し、規定値(SUMTH)以上となっている場合(NCSUM>SUMTH)に「ノイズ状態」と判断し、座標算出方法を曲線近似計算法から重心計算法に切り替える。なお、ノイズカウント和(NCSUM)は、一定時間毎の確認時に0にクリアして処理を繰り返せばよい。
【0099】
また、演算処理部18は、規定値(SUMTH)以上となっている場合(NCSUM>SUMTH)に「ノイズ状態」と判断するかわりに、「ノイズ状態」と判断した回数が複数回連続していることが確認された場合に、座標算出方法を曲線近似計算法から重心計算法に切り替える構成としてもよい。
【0100】
このように、ノイズ閾値より大きくなった瞬間でなく、所定期間以上継続してノイズ閾値より大きくなる場合にノイズ状態と判断することにより、一瞬のノイズの影響を排除して座標を算出することができる。その結果、ノイズの影響を適切に見積もって座標の算出を高精度で行うことが可能となる。
【0101】
また、演算処理部18は、ノイズの影響により曲線近似計算法を重心計算法に切り替えて適用する場合に、所定期間以上継続してノイズ閾値を越えた時点から、検出対象が操作面から離れるまでに重心計算法を適用し続けることが好ましい。通常、曲線近似計算と重心計算の結果が必ずしも一致しないことから計算方法を変えると座標が変わるため、重心計算法を適用した後には、重心計算法を適用し続けることにより、計算方法の変化に伴って座標が動く回数を最小限に抑えることができる。
【0102】
また、上述したノイズ状態の判断において、計算で連続して得られる(k−1)番目のノイズカウントとk番目のノイズカウントの極性が一致しない場合に、ノイズカウントを積算することにより、ユーザの所定の操作によって誤動作する(ノイズと判断される)ことを抑制することができる。
【0103】
例えば、ユーザが操作面に指を接触させた状態で座標YAからYBに移動する場合(例えば、ドラッグ操作)、移動平均値は遅れて追従を始めるため、ノイズカウントの極性は変化しない(図9参照)。そのため、計算で連続して得られるデータのノイズカウントの極性が一致しない場合にカウントすることにより、ユーザの移動操作に応じた動作をノイズカウントの積算から排除し、ノイズとして認識されない構成とすることができる。
【0104】
図10に、ノイズ状態において、重心計算法と曲線近似計算法で算出した場合の座標の変化を示す。ここでは、操作面に鉄柱(φ8mm)を接触させた状態で、鉄柱にホワイトノイズ20Vppを印加した時の座標出力結果を示している。図10Aは、ノイズ状態において、重心計算法により算出した座標の変化を示し、図10Bは、ノイズ状態において、2次曲線近似計算法により算出した座標の変化を示している。
【0105】
得られた結果に基づいて、各算出方法の標準偏差を求めたところ、重心計算法では3.57、曲線近似計算法では9.59となり、重心計算法を適用した場合には、63%ノイズの低減効果が得られ、曲線近似法と比較してノイズの影響を低減できた。
【0106】
以上のように、検出される複数の電極の静電容量変化量の状態に応じて、算出方法を切り替えて座標の算出を行うことにより、使用状況が変化する場合であっても、座標の検出の精度が低下することを抑制することが可能となる。
【0107】
本発明は上述した実施の形態に限定されるものではない。その他、本発明の要旨を逸脱しない範囲において種々変形実施可能である。
【符号の説明】
【0108】
10 座標検出装置
11 センサ基板
12 X軸電極
13 Y軸電極
14 X軸側検出部
15 Y軸側検出部
16 A/D変換部
17 記憶部
18 演算処理部
19 インターフェイス部
【特許請求の範囲】
【請求項1】
所定方向に対して並設された複数の電極と、
前記複数の電極の静電容量をそれぞれ検出する検出部と、
前記複数の電極の静電容量の変化量の状態に応じて異なる算出方法を適用し、検出対象の座標を算出する演算処理部と、を備え、
前記演算処理部は、ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との比較値に応じて、重心座標を計算する重心計算法と、曲線の頂点を求める曲線近似計算法とを切り替えて適用して前記検出対象の座標を算出することを特徴とする座標検出装置。
【請求項2】
前記演算処理部は、ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値以下である場合に、前記ピーク電極から連続して静電容量変化量が第1の閾値以上の電極を少なくとも含む第1の認識領域内の電極に対して重心計算法を適用して前記検出対象の座標を算出し、
前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値より大きい場合に、前記ピーク電極及び前記ピーク電極に隣接するいずれかの電極を少なくとも含む第2の認識領域内の電極に対して曲線近似計算法を適用して前記検出対象の座標を算出することを特徴とする請求項1に記載の座標検出装置。
【請求項3】
前記演算処理部は、前記曲線近似計算法の計算結果の移動平均値と、前記曲線近似計算法の計算結果との差の絶対値が、所定期間以上継続してノイズ閾値より大きくなる場合に、前記曲線近似計算法を前記重心計算法に切り替えて前記検出対象の座標を算出することを特徴とする請求項1又は請求項2に記載の座標検出装置。
【請求項4】
前記演算処理部は、前記所定期間以上継続してノイズ閾値を越えてから、検出対象が離れるまで前記重心計算法を連続して適用することを特徴とする請求項3に記載の座標検出装置。
【請求項5】
前記演算処理部は、前記ピーク電極から連続して静電容量変化量が第1の閾値以上となる電極と、前記第1の認識閾値を下回って1つ目又は2つ目までの電極とを含む領域を前記第1の認識領域とすることを特徴とする請求項1から請求項4のいずれかに記載の座標検出装置。
【請求項6】
前記演算処理部は、下記の式(1)を用いて前記重心計算法を行うことを特徴とする請求項1から請求項5のいずれかに記載の座標検出装置。
式(1)
XG=(ΣnXn/ΣXn)×RESO
n:計算に用いる電極番号
Xn:電極nの静電容量変化量
RESO:電極間分解能
【請求項7】
前記演算処理部は、前記ピーク電極と前記ピーク電極近傍の2つの電極の静電容量変化量に基づいて、下記の式(2)を用いて前記曲線近似計算法を適用することを特徴とする請求項1から請求項5のいずれかに記載の座標検出装置。
【数2】
【請求項8】
前記演算処理部は、前記ピーク電極から連続して静電容量変化量が第2の閾値以上となる電極を少なくとも含む領域を前記第2の認識領域に設定して、前記曲線近似計算法を適用することを特徴とする請求項1から請求項6のいずれかに記載の座標検出装置。
【請求項9】
前記演算処理部は、前記ピーク電極から連続して静電容量変化量が第2の閾値以上となる電極と、前記第2の閾値を下回って1つ目又は2つ目までの電極を含む領域を前記第2の認識領域に設定することを特徴とする請求項8に記載の座標検出装置。
【請求項10】
前記演算処理部は、前記検出部で検出される前記複数の電極の中から、前記検出対象の接触により静電容量が変化する所定の座標領域をあらかじめ設定し、前記所定の座標領域の電極に対して、前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量とを比較して、前記重心計算法と、前記曲線近似計算法とを切り替えることを特徴とする請求項1から請求項9のいずれかに記載の座標検出装置。
【請求項11】
前記所定方向に対して直交する直交方向に対して並設された複数の直交電極を有し、前記演算処理部は、直交方向における電極に対しても検出された複数の静電容量変化量の状態に応じて異なる算出方法を適用することを特徴とする請求項1から請求項10のいずれかに記載の座標検出装置。
【請求項12】
請求項1から請求項11のいずれかに記載の座標検出装置を用いて座標の入力を制御する座標入力装置。
【請求項13】
所定方向に対して並設された複数の電極の静電容量変化量に基づいて、検出対象の座標を決定するための演算処理を実行させる座標検出プログラムであって、
検出された複数の電極の中から、静電容量変化量が最大となるピーク電極を認識するステップと、
前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量とを比較するステップと、
前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値以下である場合に、前記ピーク電極から連続して静電容量変化量が第1の閾値以上の電極を少なくとも含む第1の認識領域内の電極に対して重心計算法を適用して前記検出対象の座標を算出するステップと、
前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値より大きい場合に、前記ピーク電極及び前記ピーク電極に隣接するいずれかの電極を少なくとも含む第2の認識領域内の電極に対して曲線近似計算法を適用して前記検出対象の座標を算出するステップと、を有することを特徴とする座標検出プログラム。
【請求項14】
前記曲線近似計算法の計算結果の移動平均値と、前記曲線近似計算法の計算結果との差の絶対値が、所定期間以上継続してノイズ閾値より大きくなる場合に、前記曲線近似計算法を前記重心計算法に切り替えて前記検出対象の座標を算出するステップをさらに有することを特徴とする請求項13に記載の座標検出プログラム。
【請求項1】
所定方向に対して並設された複数の電極と、
前記複数の電極の静電容量をそれぞれ検出する検出部と、
前記複数の電極の静電容量の変化量の状態に応じて異なる算出方法を適用し、検出対象の座標を算出する演算処理部と、を備え、
前記演算処理部は、ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との比較値に応じて、重心座標を計算する重心計算法と、曲線の頂点を求める曲線近似計算法とを切り替えて適用して前記検出対象の座標を算出することを特徴とする座標検出装置。
【請求項2】
前記演算処理部は、ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値以下である場合に、前記ピーク電極から連続して静電容量変化量が第1の閾値以上の電極を少なくとも含む第1の認識領域内の電極に対して重心計算法を適用して前記検出対象の座標を算出し、
前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値より大きい場合に、前記ピーク電極及び前記ピーク電極に隣接するいずれかの電極を少なくとも含む第2の認識領域内の電極に対して曲線近似計算法を適用して前記検出対象の座標を算出することを特徴とする請求項1に記載の座標検出装置。
【請求項3】
前記演算処理部は、前記曲線近似計算法の計算結果の移動平均値と、前記曲線近似計算法の計算結果との差の絶対値が、所定期間以上継続してノイズ閾値より大きくなる場合に、前記曲線近似計算法を前記重心計算法に切り替えて前記検出対象の座標を算出することを特徴とする請求項1又は請求項2に記載の座標検出装置。
【請求項4】
前記演算処理部は、前記所定期間以上継続してノイズ閾値を越えてから、検出対象が離れるまで前記重心計算法を連続して適用することを特徴とする請求項3に記載の座標検出装置。
【請求項5】
前記演算処理部は、前記ピーク電極から連続して静電容量変化量が第1の閾値以上となる電極と、前記第1の認識閾値を下回って1つ目又は2つ目までの電極とを含む領域を前記第1の認識領域とすることを特徴とする請求項1から請求項4のいずれかに記載の座標検出装置。
【請求項6】
前記演算処理部は、下記の式(1)を用いて前記重心計算法を行うことを特徴とする請求項1から請求項5のいずれかに記載の座標検出装置。
式(1)
XG=(ΣnXn/ΣXn)×RESO
n:計算に用いる電極番号
Xn:電極nの静電容量変化量
RESO:電極間分解能
【請求項7】
前記演算処理部は、前記ピーク電極と前記ピーク電極近傍の2つの電極の静電容量変化量に基づいて、下記の式(2)を用いて前記曲線近似計算法を適用することを特徴とする請求項1から請求項5のいずれかに記載の座標検出装置。
【数2】
【請求項8】
前記演算処理部は、前記ピーク電極から連続して静電容量変化量が第2の閾値以上となる電極を少なくとも含む領域を前記第2の認識領域に設定して、前記曲線近似計算法を適用することを特徴とする請求項1から請求項6のいずれかに記載の座標検出装置。
【請求項9】
前記演算処理部は、前記ピーク電極から連続して静電容量変化量が第2の閾値以上となる電極と、前記第2の閾値を下回って1つ目又は2つ目までの電極を含む領域を前記第2の認識領域に設定することを特徴とする請求項8に記載の座標検出装置。
【請求項10】
前記演算処理部は、前記検出部で検出される前記複数の電極の中から、前記検出対象の接触により静電容量が変化する所定の座標領域をあらかじめ設定し、前記所定の座標領域の電極に対して、前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量とを比較して、前記重心計算法と、前記曲線近似計算法とを切り替えることを特徴とする請求項1から請求項9のいずれかに記載の座標検出装置。
【請求項11】
前記所定方向に対して直交する直交方向に対して並設された複数の直交電極を有し、前記演算処理部は、直交方向における電極に対しても検出された複数の静電容量変化量の状態に応じて異なる算出方法を適用することを特徴とする請求項1から請求項10のいずれかに記載の座標検出装置。
【請求項12】
請求項1から請求項11のいずれかに記載の座標検出装置を用いて座標の入力を制御する座標入力装置。
【請求項13】
所定方向に対して並設された複数の電極の静電容量変化量に基づいて、検出対象の座標を決定するための演算処理を実行させる座標検出プログラムであって、
検出された複数の電極の中から、静電容量変化量が最大となるピーク電極を認識するステップと、
前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量とを比較するステップと、
前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値以下である場合に、前記ピーク電極から連続して静電容量変化量が第1の閾値以上の電極を少なくとも含む第1の認識領域内の電極に対して重心計算法を適用して前記検出対象の座標を算出するステップと、
前記ピーク電極の静電容量変化量と、前記ピーク電極と隣り合わない電極の静電容量変化量との差の絶対値が所定値より大きい場合に、前記ピーク電極及び前記ピーク電極に隣接するいずれかの電極を少なくとも含む第2の認識領域内の電極に対して曲線近似計算法を適用して前記検出対象の座標を算出するステップと、を有することを特徴とする座標検出プログラム。
【請求項14】
前記曲線近似計算法の計算結果の移動平均値と、前記曲線近似計算法の計算結果との差の絶対値が、所定期間以上継続してノイズ閾値より大きくなる場合に、前記曲線近似計算法を前記重心計算法に切り替えて前記検出対象の座標を算出するステップをさらに有することを特徴とする請求項13に記載の座標検出プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−3978(P2013−3978A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−136629(P2011−136629)
【出願日】平成23年6月20日(2011.6.20)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月20日(2011.6.20)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]