
廃棄物処理システム

【課題】破袋機能と選別機能とを併せ持つことにより、廃棄物を簡単かつ効率的に処理することのできる廃棄物処理システムを提案すること。
【解決手段】この廃棄物処理システムSは、内容物を包装材で内包して構成される廃棄物の包装材を破断し、内容物PBを包装材PCから外部に取り出す破袋ユニットS1と、破袋ユニットS1による破袋後の廃棄物PAを、複数の搬送ローター212が配列されたローラーコンベア202による傾斜搬送を利用して軽量物P1、重量物P2及び細粒物P3に選別する選別ユニットS2とを備えており、破袋ユニットS1は、案内ローター104と破袋ローター108と取り出しローター110とを有して構成され、かつ選別ユニットS2は、廃棄物PAを選別するローラーコンベア202における傾斜上部側Uの搬送ローター212と傾斜下部側Dの搬送ローター212とを異なる回転速度で回転駆動するモータ204有している。
【解決手段】この廃棄物処理システムSは、内容物を包装材で内包して構成される廃棄物の包装材を破断し、内容物PBを包装材PCから外部に取り出す破袋ユニットS1と、破袋ユニットS1による破袋後の廃棄物PAを、複数の搬送ローター212が配列されたローラーコンベア202による傾斜搬送を利用して軽量物P1、重量物P2及び細粒物P3に選別する選別ユニットS2とを備えており、破袋ユニットS1は、案内ローター104と破袋ローター108と取り出しローター110とを有して構成され、かつ選別ユニットS2は、廃棄物PAを選別するローラーコンベア202における傾斜上部側Uの搬送ローター212と傾斜下部側Dの搬送ローター212とを異なる回転速度で回転駆動するモータ204有している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、廃棄物処理システムに係り、特に破袋ユニットと選別ユニットとの組合せにより、効率的に廃棄物の破袋及び選別を行うことのできる廃棄物処理システムに関する。
【背景技術】
【0002】
従来より、袋詰めされた廃棄物の包装材を破断する破袋装置が知られている。例えば、特許文献1には、無端コンベヤに設けられた移動爪とプレートに設けられた固定刃とによって破袋する用のカッターが列状に配置され、コンベヤを回転させることにより包装材を破断する装置が開示されている。
【0003】
また、特許文献2には、揺動可能に回転するカッターと固定刃とによって廃棄物の包装材を破断する装置が開示されている。これらの装置においては、回転又は移動するカッター(又は移動爪)と固定刃との相対移動により廃棄物の包装材を引き裂くようになっている。そして、廃棄物から包装材を除去して、その内容物を包装材と選別することができるようになっている。
【0004】
また、様々な物体が混合した混合物を、その物体の態様(物性)に応じて選別する選別装置が知られている。例えば、選別装置は、土砂、石、ビニール袋、ペットボトル、空き缶、木材等が混在する混合廃棄物を、比重、重量、形状に基づく空気抵抗などに応じて、選別することができるようになっている。
【0005】
この選別装置の一態様として、ローラーコンベアを用いたものがある(例えば、特許文献3を参照。)。ローラーコンベアは、同軸に複数の搬送ローターが取り付けられてローター軸が構成され、そのローター軸が平行に複数並んで配置されたものである。
【0006】
この種の選別装置においては、例えば、このローラーコンベアを傾斜配置して傾斜上部側に向けて混合物を搬送するように搬送ローターを回転駆動させる。それにより、混合物中の軽量物は搬送ローターにより傾斜上部側へと搬送され、重量物はその重量により傾斜下部側へと滑落し、細粒物は搬送ローター間の隙間から下方に落下するように選別される。このように、このローラーコンベアでは搬送ローターを複数有して混合物の選別を行うので、ロータースクリーンとも呼ばれる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2000−317337号公報
【特許文献2】特開2008−68249号公報
【特許文献3】特開2003−260414号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上記特許文献1に開示のものは、無端コンベヤの駆動により破袋を行うものであり、構造が複雑でかつ大型になってしまう。それに伴い、必然的に装置コストも高いものとなってしまう。また、上記特許文献1,2に開示のものは、固定刃とカッター(又は移動爪)との相対移動により破袋を行うので、1つの廃棄物に対する破袋の機会が少なく、充分な破袋率(投入した廃棄物個数のうち、包装材が破断された廃棄物個数の割合)を獲得することが難しい。包装材を破断したものの、内容物が破断された包装材の内部に引っかかるように残っているものも多く、排出後に内容物と包装材との分離を作業員による手作業で行う必要がある。
【0009】
また、破袋装置は、そもそもゴミのようなある程度予想可能な粒度、重量のゴミを内容物として、それらがゴミ袋等の包装材に内包される廃棄物を処理することを想定している。したがって、例えば電子レンジ等の比較的大きな粒度、重量のある家電製品等の処理を想定していないが、万一そのような物が装置内に投入された場合は、異物として除去しなければならない。
【0010】
しかしながら、従来のものは、これらの異物の除去を作業員の手作業で行わなければならず、作業が煩雑で、かつ安全面においても懸念があった。回転軸やカッターに廃棄物の一部が巻き付いた場合にも、手作業で頻繁に除去しなければならず、やはり作業が大変であった。
【0011】
一方、選別装置においては、より一層の処理速度の向上と選別の信頼性向上が望まれている。その処理速度や信頼性は、搬送ローターの回転速度や外形形状、ローラーコンベアの傾斜角度等に依存する部分が大きい。ここで、選別の信頼性が高いとは、重量物側に軽量物が混ざったり軽量物側に重量物が混ざったりすることが殆どなく、重量物と軽量物との選別を確実に行える能力を言う。
【0012】
例えば、処理速度向上のために、搬送ローターの回転速度を一律に増速させると、石や木材等の重量物でさえ傾斜上部へと搬送されてしまう傾向となり、軽量物側に重量物が混ざってしまう。そのため、選別の信頼性低下を招いてしまう。一方、重量物の滑落を確実とするためにローラーコンベアの傾斜角度を増大させると、今度は紙くずやビニール袋などの軽量物が傾斜面を上りきれず、重量物側に軽量物が混ざってしまうこととなる。また、より確実な選別信頼性のために回転速度や傾斜角度を減少させると、処理速度が低下し、単位時間当たりの処理量が減少してしまう。
【0013】
更に、破袋機能と選別機能とを併せ持つことにより、一層高機能な廃棄物処理を行う装置の提案が強く要求されている。すなわち、廃棄物を投入口に投入するだけで、外側の包装材を破断してその内容物を取り出し、更にその内容物を物性に基づいて3種類に選別するようになっていれば、廃棄物の処理(破袋及び選別)が一層簡単かつ効率的となって好ましい。
【0014】
本発明は、上記の事情に鑑みて為されたもので、破袋機能と選別機能とを併せ持つことにより、廃棄物を簡単かつ効率的に処理(破袋及び選別)することのできる廃棄物処理システムを提案することを例示的課題とする。更に、その破袋機能においては、破袋率を顕著に向上させ、破袋後の包装材内部への内容物残りを減少させて包装材と内容物との分離を確実に行うことができ、また、異物処理の作業軽減や巻き付き防止において大きな効果を発揮させることを例示的課題とする。また、その選別機能においては、高い次元で処理速度の向上と選別信頼性の向上との両立を実現させることを例示的課題とする。
【課題を解決するための手段】
【0015】
上記の課題を解決するために、本発明の例示的側面としての廃棄物処理システムは、内容物を包装材で内包して構成される廃棄物の包装材を破断し、内容物を包装材から外部に取り出す破袋ユニットと、破袋ユニットによる破袋後の廃棄物を、複数の搬送ローターが配列されたローラーコンベアによる傾斜搬送を利用して第1物体、第2物体及び第3物体に選別する選別ユニットと、を備えた廃棄物処理システムであって、破袋ユニットは、廃棄物を投入する投入口と、軸部材とその軸部材から略放射状に突出する案内ブレードとを有して投入口の下方に配置され、投入口から投入された廃棄物を案内ブレードの回転により排出口へ向けて送り出す案内ローターと、軸部材とその軸部材から略放射状に突出する破袋ブレードとを有して、案内ローターの斜め上方に、破袋ブレードの回転軌跡と案内ブレードの回転軌跡とが第1の重複寸法で部分的に重複するように配置された破袋ローターと、軸部材とその軸部材から略放射状に突出する取り出しブレードとを有して、案内ローターの斜め下方に、取り出しブレードの回転軌跡と案内ブレードの回転軌跡とが第1の重複寸法よりも大きい第2重複寸法で部分的に重複するように配置された取り出しローターと、案内ローター、破袋ローター及び取り出しローターを回転駆動する1又は複数の駆動源と、を有して構成され、かつ、選別ユニットは、破袋ユニットからの廃棄物を受け入れる受け入れ口と、複数の搬送ローターの回転により、傾斜上部へと搬送される第1物体と傾斜下部へと滑落する第2物体と複数の搬送ローターの隙間から下方に落下する第3物体とに、廃棄物を選別するローラーコンベアと、傾斜上部側の搬送ローターと傾斜下部側の搬送ローターとを異なる回転速度で回転駆動する駆動手段と、ローラーコンベアを搬送方向に向けて上り傾斜に傾斜保持する保持手段と、を有して構成されることを特徴とする。
【0016】
この廃棄物処理システムは、破袋ユニットと選別ユニットとを有しているので、破袋機能と選別機能の両方の機能を発揮し、高効率な廃棄物の処理作業を実現することができる。投入口から廃棄物を投入するだけで、その廃棄物の包装材が破断されて内容物が引き出され、更にその内容物が特性に応じて3種類に自動的に選別(分類)される。廃棄物処理作業における手作業を大幅に削減し、高い処理速度で廃棄物処理を行うことができる。
【0017】
廃棄物処理システムにおける破袋ユニットは、案内ローターの回転と破袋ローターの回転とにより破袋処理を行うので、1つの廃棄物に対する破袋ブレードの接触機会を大きく増大させることができる。案内ローターの回転方向と破袋ローターの回転方向とを逆回転とすれば、案内ブレードと破袋ブレードとの相対速度を増大させることができる。したがって、相対速度向上と引き裂き機会の増大との相乗効果により、破袋率を大きく向上させることができる。
【0018】
しかも、この破袋ユニットによれば、案内ローターの斜め下方に、取り出しローターも配置されている。この取り出しローターは、破袋ローターで破断しきれなかった包装材の破断、包装材の中に更に小袋に包装された内容物が内包されている場合のその小袋の破断、破袋後の包装材からの内容物の弾き出し(取り出し)の機能を発揮するようになっている。したがって、この取り出しローターの回転方向を案内ローターの回転方向と逆方向とすることにより、取り出しブレードと案内ブレードとの相対速度向上、1つの廃棄物に対する取り出しローターの接触機会の向上を図ることができる。その結果、更なる破袋率の向上、小袋破袋率の向上、包装材と内容物との分離の確実を実現することができる。
【0019】
なお、包装材の破断を主目的とする破袋ブレードの回転軌跡と案内ブレードの回転軌跡との重複寸法である第1の重複寸法よりも、包装材の破断に加えて破袋後の包装材からの内容物の取り出し(弾き出し)や包装材内の小袋の破断をも主目的とする取り出しブレードの回転軌跡と案内ブレードの回転軌跡との重複寸法である第2の重複寸法の方が大きく設定されている。したがって、包装材の破断及び内容物の取り出しを各々効率よく行うことができるようになっている。
【0020】
選別ユニットにおいては、傾斜上部側の搬送ローターの回転速度と傾斜下部側の搬送ローターの回転速度とを各々異なる回転速度で回転駆動しているので、選別装置の処理速度の向上と選別信頼性の向上とを高い次元で両立させることができる。例えば、傾斜上部側の搬送ローターを傾斜下部側よりも高速回転させると、ローラーコンベアの中ほどで上部側へ搬送されつつある第1物体を、より高速かつより強力に上部側へと搬送することができる。そして、ローラーコンベアの中ほどで下部側へと滑落しつつある第2物体を、より円滑に下部側へと滑落させることができる。
【0021】
第1物体と第2物体の中間的な特性を有する物体が、ローラーコンベアの中ほどで滞留する時間を短縮し、より高速な選別を実現することができる。また、滑落しかけた物体の滑落を推進し、上部側へ搬送されかけた物体の搬送を促進する機能を発揮するので、第1物体と第2物体とを明確に切り分けることができ、選別信頼性を向上させることができる。
【0022】
もちろん、設計上の都合によっては、傾斜上部側の搬送ローターの回転速度を低速にし、傾斜下部側の搬送ローターの回転速度を高速にすることもできる。それにより、積極的にローラーコンベア上での混合物の滞留時間を長時間とすることができる。第3物体の搬送や滑落を防止して、確実に第3物体を搬送ローターの隙間から下方へ落下させることができる。
【0023】
なお、ここで第1物体とは典型的には軽量物であり、紙くず、ビニール袋、綿埃、小片(金属、プラスチック、木材等を材料とするもの)などを例示することができる。また、第2物体とは典型的には重量物であり、岩石、空き缶、ペットボトル、廃材(ここでは、金属、プラスチック、木材を材料とする比較的大きく重量のある物体を意味する。)などを例示することができる。第3物体とは典型的には細粒物であり、土砂、小石などを例示することができる。これら第1物体〜第3物体は、いずれも廃棄物内に含まれる物体である。
【0024】
案内ブレードの回転軌跡と破袋ブレードの回転軌跡との回転中心間における重複寸法が、20mm以上かつ60mm以下であることが望ましい。また、案内ブレードの回転軌跡と取り出しブレードの回転軌跡との回転中心間における重複寸法が、40mm以上かつ160mm以下であることが望ましい。
【0025】
案内ブレードの回転軌跡と破袋ブレードや取り出しブレードの回転軌跡との回転中心間における重複が小さ過ぎると包装材の破袋率や小袋の破袋率が低下し、また、解れ率(投入した廃棄物個数のうち、内容物と包装材とが分離された廃棄物個数の割合)も低下する。
【0026】
一方、ブレード同士の重複が大き過ぎると、駆動源による所要動力が大きくなり、消費電力の増大を招いてしまう。また、ブレードへの廃棄物の噛み込みも増加してしまい、駆動源の負荷増大にも繋がってしまう。案内ブレードと破袋ブレードとの重複や案内ブレードと取り出しブレードとの重複には適正な範囲が存在し、その適正範囲内に設定することが、処理効率向上や駆動源の負荷軽減にとって望ましい。本発明においては、案内ブレードの回転軌跡と破袋ブレードの回転軌跡との回転中心間における重複寸法を20mm以上かつ60mm以下に設定することにより、高い破袋率、高い解れ率及び駆動源の負荷軽減(消費電力低減を含む)を実現することができる。
【0027】
案内ローターの回転数に対する破袋ローターの回転数の比率が20倍以上かつ40倍以下であることが望ましい。
【0028】
包装材の破断の機会を増大させるには、案内ローターの回転数に対して破袋ローターの回転数を大きくすることが望ましい。一方で、破袋ローターの回転数を過大にすると、やはり駆動源の消費電力や負荷の点で望ましくなく、適正な範囲が存在する。本発明においては、案内ローターの回転数に対する破袋ローターの回転数の比率を20倍以上かつ40倍以下とすることにより、高い破袋率と駆動源の負荷軽減を実現することができる。なお、案内ローターの回転数に対する取り出しローターの回転数の比率も、同様に20倍以上かつ40倍以下とすることにより、高い解れ率と駆動源の負荷軽減を実現することができる。
【0029】
案内ローター、破袋ローター及び取り出しローターのうち少なくともいずれかの軸部材が、その軸直交面内における断面形状が少なくとも3つの頂角を有する非円形状である多角形状部を有することが望ましい。
【0030】
回転軸式を採用した場合、長尺の廃棄物や破袋後の包装材などが軸部材に巻き付き易い。また、巻き付いた長尺廃棄物や包装材には円周方向に均一に引っ張り応力が発生し、その引っ張り応力は円中心方向に向かう均一な締め付け力を生じる。したがって、一旦巻き付いてしまった長尺廃棄物等は、バランスよく均等に作用する応力のために安定的に巻き付き状態を維持し、なかなか軸部材から除去されない。
【0031】
しかしながら、軸部材の直径を大きくし、軸周長を一般的な収集袋長よりも長くすることで、その収集袋の軸への巻き付きを低減することができる。また、仮に巻き付いた場合であっても、引っ張り応力が均一でなく頂角部分と辺部分とで引っ張り応力に不均衡が生じ、安定的に巻き付き状態を維持することが難しい。したがって、容易に軸部材から除去することができる。
【0032】
より具体的には、軸部材の直径を大きくすることにより、主に包装材の軸部材への巻き付きを軽減することができ、軸部材が多角形状部を有することにより、巻き付いてしまった包装材の軸部材からの脱落を促進することができる。例えば、軸部材の直径をφ≧270mmとすれば、一般的に使用されるゴミ袋等の包装材が軸部材の全周長に至らず、軸部材の全周に亘って包装材が巻き付くのを防止することができる。そのため、包装材はなかなか軸部材へとしっかり巻き付くことができない。
【0033】
一方、軸部材が多角形状部を有すると、引張り応力のアンバランスが生じるので、仮に包装材が巻き付いた場合であっても、外乱の影響(例えば、回転停止や逆回転など)によって簡単に包装材が軸部材から脱落する。その結果、巻き付いた包装材が徐々に堆積していくことが防止される。
【0034】
軸部材への廃棄物の巻き付き厚さを検出する巻き付き検出手段と、巻き付き検出手段からの出力に応じて駆動源を制御する制御手段と、を更に有することが望ましい。
【0035】
軸部材へ長尺廃棄物等が多量に巻き付いてしまうと、駆動源への過負荷となり、駆動源の回転が停止してしまったり、過電流等の不具合の原因となり得る。また、破袋処理へも悪影響を与え、破袋率や解れ率の低下を招いてしまう。巻き付き検出手段により軸部材への長尺廃棄物等の巻き付きを検出し、その検出結果に応じて駆動源を制御することにより、上記のような不都合を回避することができる。
【0036】
ここで、巻き付き検出手段には、例えば、軸部材の見かけ半径(巻き付きにより、見かけ半径が増大する)が一定値以上となったことを検出する非接触タイプの投受光センサーや、軸部材に当接付勢された検出ロッドとその検出ロッドの角度位置を検出する位置センサーとの組合せ等を適用することができる。また、制御手段による駆動源の制御には、例えば回転数を減速させる減速制御や逆回転させる逆回転制御等を含む。
【0037】
廃棄物処理システムが、破袋ローター及び取り出しローターと案内ローターとの間を実質的に遮蔽すると共に、破袋ブレードを案内ローター側に貫通させる上部スリットと、取り出しブレードを案内ローター側に貫通させる下部スリットとが形成され、かつ下部スリットと取り出しブレードとの軸方向における開口ギャップが上部スリットと破袋ブレードとの軸方向における開口ギャップよりも大きく形成されたガイドプレートを更に有することが望ましい。
【0038】
投入された廃棄物が、案内ブレードとガイドプレートとに挟まれるようにして円滑に排出口へと導かれる。案内ブレードとガイドプレートとにより挟まれるようにして導かれるので、廃棄物の逃げを防止して確実に廃棄物にせん断力を発生させることができる。
【0039】
また、ガイドプレートの上部スリットにおける開口ギャップよりも下部スリットにおける開口ギャップを大きく形成している。ガイドプレートに対して破袋ローター及び取り出しローターが配置される側では、主に破袋後の収集袋等の包装材の取り出しを目的としている。したがって、ガイドプレートに対して案内ローターが配置される側では、包装材が除去された残りの内容物が多く存在する。この内容物は、上部スリット側よりも下部スリット側近傍に多く存在し、そのため、下部スリットにおける開口ギャップが小さいとそのギャップ部分に多くの内容物が詰まってしまう。その結果、取り出しブレードが挟まってしまって動作不良や故障の原因となる可能性がある。しかしながら、この発明においては、下部スリットにおける開口ギャップを大きくしているので、内容物のスリットへの詰まりが予防される。
【0040】
なお、これらの上部スリット及び下部スリットを通過して案内ローター側から破袋ローター側へと破袋された包装材及び各スリット幅よりも小さいものが引き出されるようになっている。その結果、内容物はガイドプレートの案内ローター側、包装材及び各スリット幅よりも小さいものは破袋ローター側と、両者の効率的な分離が可能となっている。
【0041】
廃棄物処理システムが、投入口からの異物の投入を検出する異物検出手段と、異物検出手段からの出力に応じて駆動源を逆回転制御する制御手段と、案内ローターの逆回転により異物を排出させる排出口とは異なる異物排出口と、を更に有することが望ましい。
【0042】
投入口から異物が投入された場合に、わざわざ作業員の手作業によって異物を取り出す必要がなく、異物排出口から自動排出させることができる。ここで、異物検出手段には、例えば駆動源の電流異常(過電流)を検出する電流計を適用することができる。大型の家電製品等の異物が投入され、案内ローターが停止してしまったような場合に、過電流を検出することにより異物投入を検知することができる。
【0043】
そして、異物検知をした場合に、案内ローターを逆回転させることにより、通常の排出口とは異なる異物排出口から異物をスムーズに排出することができるので、通常の廃棄物と異物との分離を確実に行うことができる。
【0044】
傾斜上部側又は傾斜下部側の少なくともいずれか一方において、より上部側の搬送ローターの回転速度がより下部側の搬送ローターの回転速度よりも高速回転してもよい。
【0045】
より下部側の搬送ローターの回転速度が比較的低速で、より上部となるに従い高速回転しているので、、混合物のローラーコンベア上での滞留時間を短縮することができる。したがって、効率的に処理速度の向上と選別信頼性の向上とを実現することができる。
【0046】
駆動手段が、傾斜上部側の搬送ローターを、傾斜下部側の搬送ローター回転速度の1.4倍以上の回転速度で回転駆動することが望ましい。
【0047】
傾斜上部側の搬送ローターの回転速度が傾斜下部側の搬送ローターの回転速度の1.4倍以上となっているので、混合物のローラーコンベア上での滞留時間を充分に短縮することができる。したがって、効率的に処理速度の向上と選別信頼性の向上とを実現することができる。
【0048】
ローラーコンベアが、搬送ローターを同軸状に複数有して構成されたローター軸を複数本有して構成され、かつ、駆動手段が、複数本のうちの傾斜上部側における実質的に半分の本数のローター軸に係る搬送ローター回転速度と、傾斜下部側における残りの本数のローター軸に係る搬送ローター回転速度と、を異なる回転速度で回転駆動することが望ましい。
【0049】
回転速度が異なる傾斜上部側と傾斜下部側との境界部をローラーコンベアの略中央部に設定することができる。したがって、ローラーコンベアの上端又は下端に到達するまでに、第1物体にも第2物体にも選別のための充分な距離を確保することができる。なお、実質的に半分の本数とは、例えば、ローター軸が総数で偶数の場合はその半数、総数で奇数の場合はその半数に近い整数を意味する。例えば、ローター軸が総数で7本の場合は、傾斜上部側のローター軸を4本、傾斜下部側のローター軸を3本としてもよいし、傾斜上部側を3本、傾斜下部側を4本としてもよい。
【0050】
受け入れ口が、傾斜上部側の搬送ローターと傾斜下部側の搬送ローターとの境界近傍に配置されることが望ましい。
【0051】
受け入れ口が傾斜上部側と傾斜下部側との境界近傍、すなわち異なる回転速度の搬送ローター間の境界近傍に配置されているので、破袋ユニットから受け入れた結果傾斜下部側へ落下してしまった第1物体がスムーズかつ迅速に傾斜上部側へと搬送される。また、傾斜上部側へ落下してしまった第2物体もスムーズかつ迅速に傾斜下部側へと滑落する。したがって、この廃棄物処理システムにおける一層の処理速度向上と選別信頼性向上とに寄与することができる。
【0052】
廃棄物処理システムが、ローラーコンベアの傾斜角度又はそれ以上の傾斜角度で、傾斜下部側から傾斜上部側へ向けて送風する送風手段を、ローラーコンベアの上方に更に有することが望ましい。
【0053】
破袋ユニットから受け入れた破袋後の廃棄物を、送風手段からの送風により適度に分散させてローラーコンベア上に落下させることができる。その際、混合物内の物体のうち、低比重の物体や軽量の物体や空気抵抗の大きい物体等を、選択的に風下側へと分散させることができる。
【0054】
例えば、岩石や廃材等の重量物については送風の影響を殆ど与えずに、紙くずやビニール袋などの軽量物を風下側(すなわち、傾斜上部側。)へと分散させることができる。したがって、ローラーコンベア上に到達する前に、廃棄物の粗選別を実施することができ、この廃棄物処理システムにおける一層の処理速度向上と選別信頼性向上とに寄与することができる。
【0055】
本発明の更なる目的又はその他の特徴は、以下添付図面を参照して説明される好ましい実施の形態によって明らかにされるであろう。
【発明の効果】
【0056】
本発明によれば、廃棄物を投入するだけで、破袋処理及び選別処理を自動的に行うので、効率的に廃棄物の処理を行うことができ、作業員の手間を大幅に削減することができる。また、破袋処理においては、包装材や小袋の破袋率の向上や解れ率の向上を実現することができる。回転軸への巻き付きを予防したり、異物投入の場合の排出をスムーズに行うことにより、破袋処理の効率向上と装置の耐久性や信頼性の確保及び作業員の安全確保を実現することができる。更に、選別処理においては、傾斜上部側の搬送ローターの回転速度と傾斜下部側の搬送ローターの回転速度とを異なる回転速度で回転駆動することにより、処理速度の向上と選別信頼性の向上との両立を高い次元で実現することができる。
【図面の簡単な説明】
【0057】
【図1】本発明の実施の形態に係る廃棄物処理システムの内部構造の概略を示す構造図である。
【図2】図1に示す廃棄物処理システムにおける破袋ユニットの実施形態1に係る内部構造の概略を示す構造図である。
【図3】図2に示す案内ローターの概略を示す外観斜視図である。
【図4】図2に示すガイドプレートの正面図である。
【図5】案内ローターの軸部材の軸直交面での断面図である。
【図6】図2に示す破袋ブレードの概略形状を示す二面図である。
【図7】破袋ブレードの他の例を示す二面図である。
【図8】図1に示す廃棄物処理システムにおける破袋ユニットの実施形態2に係る内部構造の概略を示す構造図である。
【図9】図1に示す廃棄物処理システムにおける破袋ユニットの実施形態3に係る内部構造の概略を示す構造図である。
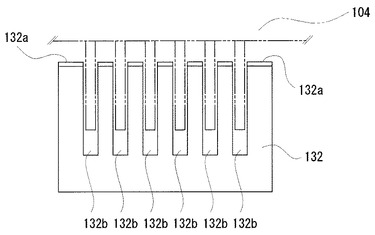
【図10】図9に示す案内ガイドプレートの正面図である。
【図11】実施例1−1において、案内ローターの回転数に対する破袋ローターの回転数の比率と破袋率及び解れ率との関係を示すグラフである。
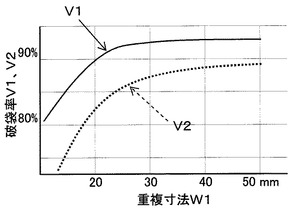
【図12】実施例1−2において、案内ブレードの回転軌跡と破袋ブレードの回転軌跡との回転中心間における重複寸法と破袋率との関係を示すグラフである。
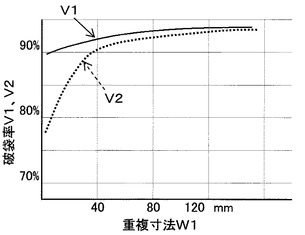
【図13】実施例1−3において、案内ブレードの回転軌跡と取り出しブレードの回転軌跡との回転中心間における重複寸法と破袋率との関係を示すグラフである。
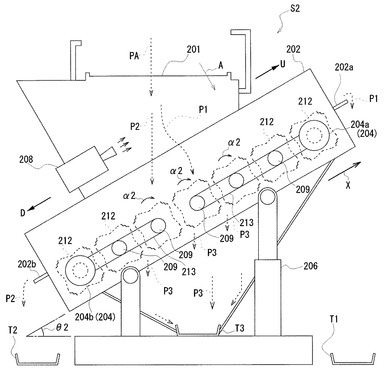
【図14】図1に示す廃棄物処理システムにおける選別ユニットの実施形態に係る内部構造の概略を示す構造図である。
【図15】図14に示すローラーコンベアの内部構造を正面から見た正面図である。
【図16】図15に示すローター軸の二面図である。
【発明を実施するための形態】
【0058】
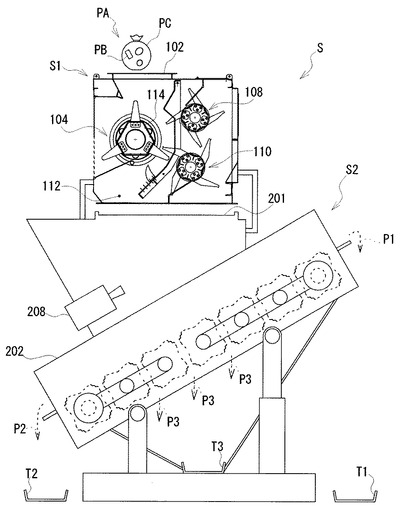
以下、本発明の実施の形態に係る廃棄物処理システムSについて図面を用いて説明する。図1は、本発明の実施の形態に係る廃棄物処理システムSの内部構造の概略を示す構造図である。この廃棄物処理システムSは、破袋ユニットS1と選別ユニットS2とを有して大略構成されている。その破袋ユニットS1は、選別ユニットS2の上方に配置されている。破袋ユニットS1の投入口102から投入された廃棄物PAは、破袋ローター108及び取り出しローラー110により破袋処理され排出口112から排出されると、選別ユニットS2の受け入れ口201を介してローラーコンベア202上に落下し、ローラーコンベア202によって軽量物P1、重量物P2、細粒物P3に選別されるようになっている。以下、破袋ユニットS1及び選別ユニットS2について、順次その構成を説明する。
【0059】
<破袋ユニットの説明>
[破袋ユニットの実施形態1]
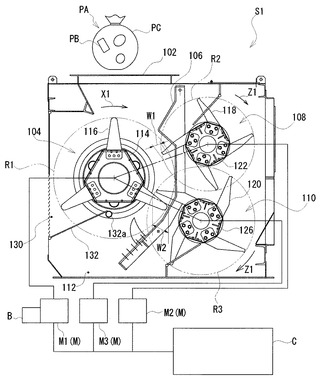
図2は、図1に示す廃棄物処理システムSが備える破袋ユニットS1の実施形態1に係る内部構造の概略を示す構造図である。図2は、破袋ユニットS1の内部を側方から見た図である。この破袋ユニットS1は、全体として略立方体形状を呈し、投入口102、案内ローター104、ガイドプレート106、破袋ローター108、取り出しローター110、排出口112、駆動モータ(駆動源)M及び制御装置(制御手段)Cを有して大略構成される。
【0060】
投入口102は、この破袋ユニットS1内に廃棄物PAを投入するための開口であって、破袋ユニットS1の上部に開口形成されている。廃棄物PAは、例えば紙くず、プラスチック容器、缶等の内容物PBを内包し、その外側をプラスチックゴミ袋等の包装材PCで包んだものである。廃棄物PAの中には、包装材PC内部に小袋に包装された内容物PBが含まれている場合もあり、この破袋ユニットS1は、外側の包装材PCのみならず、その内部の小袋をも破断する必要がある。投入口102から投入された廃棄物PAは、その下方に配置された案内ローター104へと落下するようになっている。
【0061】
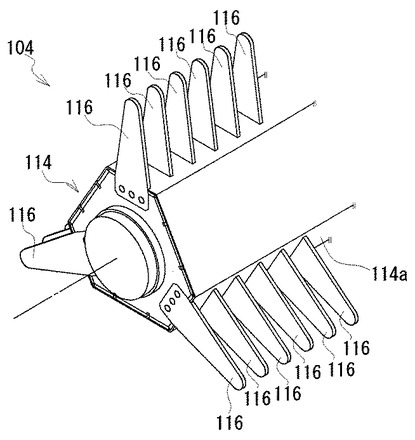
案内ローター104は、投入口102から落下してきた廃棄物を排出口112へと送るための回転部材である。案内ローター104は、図2における紙面垂直方向を軸方向とする軸部材114とその軸部材114に取り付けられ略放射状に突出する案内ブレード116とを有して構成されている。図3は、この案内ローター104の概略を示す外観斜視図である。略放射状に3つの案内ブレード116が1組で取り付けられ、その1組が軸部材114の軸方向に等間隔で配置されている。
【0062】
案内ローター104は、図中矢印X1方向に回転し、投入口102から落下してきた廃棄物PAを案内ブレード116とガイドプレート106とで挟み込むようにしながら排出口112にまで送出する。その送出の過程において、ガイドプレート106と破袋ローター108及び取り出しローター110によって包装材PCが破断され内容物PBが包装材PCの中から弾き出されるようになっている。
【0063】
ガイドプレート106は、破袋ユニットS1の内部で軸方向に延びるプレートであって、破袋ローター108及び取り出しローター110によって引っ張られた廃棄物PAを固定し、破断作用を発生させると共に、投入口102から投入された廃棄物PAを排出口112にまで案内する案内路を形成する案内部材である。ガイドプレート106は、案内ローター104が配置される側と、破袋ローター108や取り出しローター110が配置される側との間を実質的に遮蔽し、廃棄物PAの内容物PBが破袋ローター108側へと紛れ込んでしまうのを防止している。
【0064】
図4は、ガイドプレート106の正面図である。図2における紙面垂直方向(軸方向)を、図4における矢印Y1方向としている。ガイドプレート106の上部側には、破袋ブレード118の配置位置に対応するように、上部スリット106aが形成されている。この上部スリット106aは、略長方形状に形成されて破袋ブレード118の貫通を許容している。上部スリット106aの形成により、破袋ブレード118が案内ローター104側に侵入してその回転軌跡と案内ブレード116の回転軌跡とがオーバーラップできるようになっている。
【0065】
上部スリット106aの軸方向寸法(幅寸法)は、破袋ブレード118の軸方向寸法(厚さ寸法)よりも若干大きく形成されており、例えば、破袋ブレード118の厚さ9mmに対して上部スリット106aの幅寸法は30mm以上100mm以下に設定されている。この上部スリット106aと破袋ブレード118との開口ギャップから、破袋後の包装材PCが案内ローター104側から破袋ローター108側へと破袋ブレード118により引き出されるようになっている。したがって、ガイドプレート106を挟んで、案内ローター104側にスリット106aより大きな内容物PB、破袋ローター108側に包装材PC及びスリット106aより小さな内容物というように、大きな内容物PBと包装材PC及び小さな内容物との分離が行われるようになっている。なお、上部スリット106aと破袋ブレード118との開口ギャップが狭いので、内容物PBが破袋ローター108側へと移動することは殆どない。
【0066】
ガイドプレート106の下部側には、取り出しブレード120の配置位置に対応するように、下部スリット106bが形成されている。この下部スリット106bも、略長方形状に形成されて取り出しブレード120の貫通を許容している。下部スリット106bの形成により、取り出しブレード120が案内ローター104側に侵入してその回転軌跡と案内ブレード116の回転軌跡とがオーバーラップできるようになっている。
【0067】
下部スリット106bの幅寸法と取り出しブレード120の厚さ寸法との開口ギャップは、上部スリット106aの幅寸法と破袋ブレード118の厚さ寸法との開口ギャップよりも大きく形成されている。より具体的には、取り出しブレード120の厚さが破袋ブレード118の厚さと同寸の9mmである場合に、下部スリット106bの幅寸法は80mm以上150mm以下に設定されている。
【0068】
下部スリット106bの近傍においては、取り出しブレード120による内容物PBの弾き出しが行われ、内容物PBやその粉砕物が付近に散乱する状態となっている。したがって、下部スリット106bと取り出しブレード120との開口ギャップが上部スリット106aにおける開口ギャップ同様に小さいと、内容物PBやその粉砕物が開口ギャップに挟まってしまい、破袋ユニットS1の異常停止等の不具合を生じてしまう。したがって、下部スリット106bにおいては、上部スリット106aにおける場合よりも開口ギャップを大きく設定し、破袋ユニットS1への不具合を防止している。なお、この下部スリット106bと取り出しブレード120との開口ギャップからも、案内ローター104側に残存する包装材PCが取り出しローター110側へと取り出しブレード120によって引き出されるようになっている。
【0069】
包装材PCの破断は、主に以下のような原理に基づき行われる。すなわち、案内ローター104とガイドプレート106との挟み込みにより廃棄物PAが略固定され、その廃棄物PAに対して破袋ブレード118や取り出しブレード120が突き刺さる。そして、ブレード118,120の回転により、ブレード118,120とスリット106a,106bとの間でせん断力が生じ、包装材PCから内容物PBが弾き出されつつ包装材PCが引き裂かれるのである。引き裂かれた包装材PCは、ブレード118,120に刺さっているので、そのままスリット106a,106bを通り抜けて破袋ローター108及び取り出しローター110が配置される側へと引きずり出される。
【0070】
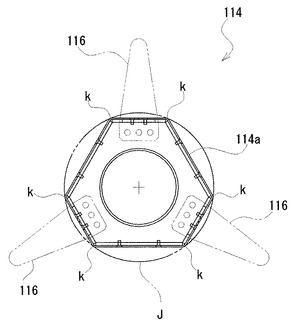
案内ローター104の軸部材114は、図3及び図5に示すように軸方向直交面内における断面形状が非円形状である多角形状部114aを有している。また、この多角形状部114aの各頂角kを結ぶ仮想円Jの直径は望ましくはφ270mm以上、より望ましくはφ340mm以上、更に望ましくはφ460mm以上と大径に構成されている。
【0071】
直径が大きいだけでなく、その断面形状が頂角kを有する多角形状とされているので、破袋後の包装材PCや長尺の廃棄物等が巻き付いてしまった場合にも引っ張り応力のアンバランスにより外れ易くなっている。したがって、軸部材114への長尺廃棄物等の巻き付きを予防又は軽減している。
【0072】
破袋ローター108は、廃棄物PAの包装材PCを破断するための回転部材である。図2における紙面垂直方向を軸方向とする軸部材122とその軸部材122に取り付けられ略放射状に突出する破袋ブレード118とを有して構成され、図中矢印Z1方向に回転している。破袋ローター108においては、略放射状に4つの破袋ブレード118が1組で軸部材122に取り付けられ、その1組が軸部材122の軸方向に等間隔で配置されている。なお、破袋ブレード118と案内ブレード116とは、相互に干渉しないように軸方向位置がずれて配置され、いわゆる入れ子状に配置されている。
【0073】
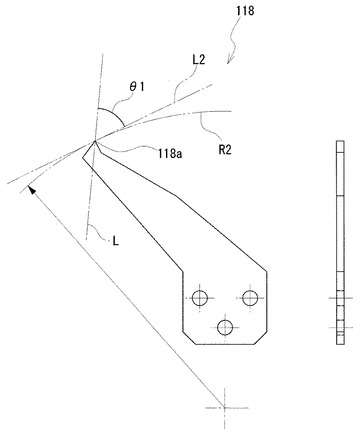
図6は、この破袋ブレード118の概略形状を示す二面図である。破袋ブレード118は、その先端に包装材PCを破断するための爪部118aを有している。この爪部118aの頂角における二等分線Lは、この破袋ブレード118の回転軌跡R1の爪部118aにおける接線方向L2よりも角度θ1分だけ外向きに傾斜している。この角度θ1の設定により爪部118aが円周外方向に向いて設定されることとなる。したがって、爪部118aによる包装材PCへの突き刺しや包装材PCの上部スリット106aを通しての引きずり出しを充分に機能達成しつつ、爪部118aに突き刺さった状態の包装材PCが、破袋ブレード118の回転に伴い容易に脱落するようになっている。
【0074】
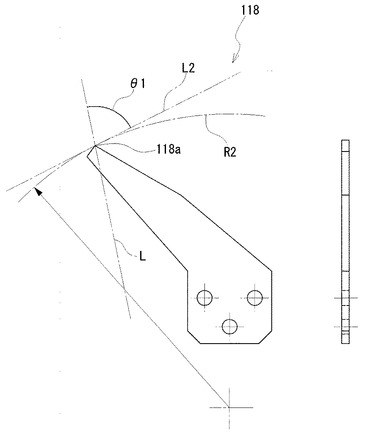
なお、破袋ブレード118が図7に示すように、その先端に突出部を有さない形状である場合であっても、ブレード118の頂角が爪部118aとして機能する。そして、爪部118aとしての頂角の二等分線Lがこの破袋ブレード18の回転軌跡R1の爪部118aにおける接線方向L2よりも角度θ1分だけ外向きに傾斜していればよい。
【0075】
破袋ブレード118の回転軌跡R1と案内ブレード116の回転軌跡R2とは、図2に示すように部分的に重複しており、その中心間における重複寸法W1は、望ましくは20mm以上かつ60mm以下、より望ましくは30mm以上かつ50mm以下に設定されている。これにより、包装材PCの確実な破断を実現しつつ、内容物PBやその粉砕物の不用意な引っ掛かりを防止している。
【0076】
また、破袋ローター108の回転数は、案内ローター104の回転数よりもかなり高く設定され、望ましくは案内ローター104の回転数の20倍以上かつ40倍以下、より望ましくは25倍以上かつ35倍以下に設定されている。例えば、案内ローター104の回転数:4.3rpmに対し、破袋ローター108の回転数:150rpmに設定される。廃棄物PAが案内ローター104で送られる間に、数多くの破袋ブレード118との接触機会を付与することができる。したがって、確実な破袋を実現することができる。
【0077】
取り出しローター110は、破袋ローター108により破断されなかった残りの包装材PCを破断したり、包装材PC内の小袋を破断することも目的とするが、加えて、破袋後の包装材PCから内容物PBを弾き出す(取り出す)ことを主目的とする回転部材である。また、破袋後の包装材PCや小袋を下部スリット106bを介して取り出しローター110側に分離することも目的の1つとしている。図2における紙面垂直方向を軸方向とする軸部材126とその軸部材126に取り付けられ略放射状に突出する取り出しブレード120とを有して構成され、図中矢印Z1方向に回転している。破袋ローター108の場合と同様に、取り出しローター110においても、略放射状に4つの取り出しブレード120が1組で軸部材126に取り付けられ、その1組が軸部材126の軸方向に等間隔で配置されている。なお、取り出しブレード120は、案内ブレード116及び破袋ブレード118と相互に干渉しないように軸方向位置がずれて配置され、いわゆる入れ子状に配置されている。なお、取り出しブレード120の概略形状は、図6に示す破袋ブレード118と略同様であるので、図示及び説明を省略する。
【0078】
取り出しブレード120の回転軌跡R3と案内ブレード116の回転軌跡R2とは、図2に示すように部分的に重複しており、その中心間における重複寸法W2は、望ましくは40mm以上かつ160mm以下、より望ましくは60mm以上かつ140mm以下に設定されている。これにより、包装材PCからの内容物PBの確実な弾き出しを実現している。なお、重複寸法W1と重複寸法W2とは異なる寸法であることが望ましく、重複寸法W1よりも重複寸法W2の方が大きいことがもちろん望ましい。
【0079】
また、取り出しローター110の回転数は、破袋ローター108の場合と同様に、望ましくは案内ローター104の回転数の20倍以上かつ40倍以下、より望ましくは25倍以上かつ35倍以下に設定されている。例えば、案内ローター104の回転数:4.3rpmに対し、取り出しローター110の回転数:150rpmに設定される。廃棄物PAが案内ローター104で送られる間に、数多くの取り出しブレード120との接触機会を付与することができ、内容物PBの確実な弾き出しにより解れ率の向上を実現している。また、包装材PC内部の小袋の破袋率向上にも寄与している。
【0080】
排出口112は、案内ローター104の下方に配置され、案内ローター104によって送り出された廃棄物PAを破袋ユニットS1外、すなわち選別ユニットS2の受け入れ口201へと排出するための開口である。なお、破袋ローター108及び取り出しローター110の機能により、大半の包装材PCはガイドプレート106の破袋ローター108側へと引き出されているので、排出口112から排出される廃棄物PAの大半は内容物PBである。なお、破袋ローター108側の包装材PCも選別ユニットS2の受け入れ口201を介してローラーコンベア202上に落下するようになっている。
【0081】
駆動モータMは、案内ローター104、破袋ローター108及び取り出しローター110を回転駆動するための駆動源であり、制御装置Cによってその動作が制御される。1つの駆動モータMによって3つのローター104,108,110のすべてを回転駆動してもよいし、3つの駆動モータM1〜M3が各々3つのローター104,108,110を回転駆動してもよい。
【0082】
案内ローター104を回転駆動する駆動モータM1には、その駆動電流を検出する電流計(異物検出手段)Bが接続されている。この電流計Bは、投入口102に異物が投入された等により、案内ローター104が回転不能に陥った場合に、駆動モータM1への過大電流を検知し、異常信号を制御装置Cへと送信する機能を有する。
【0083】
異常信号を受信した制御装置Cは、駆動モータM1の回転駆動を速やかに停止し、続いて駆動モータM1を低速で逆回転に回転駆動する。それにより、案内ローター104が矢印X1の逆方向へと回転し、投入された異物等は、排出口112とは別に形成された異物排出口130から破袋ユニットS1外へと排出されるようになっている。異物を異物排出口130へと導く案内ガイドプレート132は、異物を異物排出口130へと円滑に案内するように、案内ローター104の軸部材114の外周近傍から異物排出口130に架けて配置されている。この案内ガイドプレート132は、軸部材114近傍においてスクレーパとしての機能を発揮している。すなわち、案内ガイドプレート132の一端132aは、軸部材114の外径から所定距離分だけ離れた半径位置に固定されており、軸部材114への長尺廃棄物等の巻き付きが一定以上となるのを防止している。
【0084】
[破袋ユニットの実施形態2]
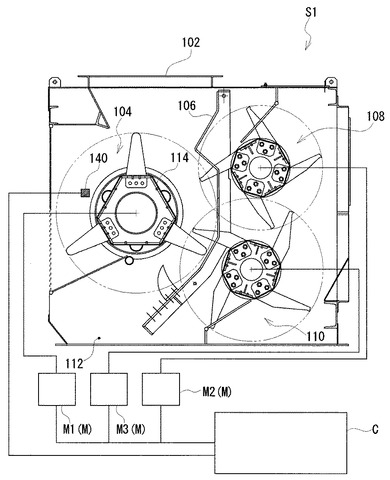
図8は、廃棄物処理システムSが備える破袋ユニットS1の実施形態2に係る内部構造の概略を示す構造図である。この破袋ユニットS1は、案内ローター104の軸部材114の近傍に、軸方向に向けて検出光を投受光する投受光センサー(巻き付き検出手段)140を備えている。この検出光は、案内ローター104の回転中心から半径方向に一定距離ra離れた位置において、軸部材114への長尺廃棄物等の巻き付きが一定厚さ以上とならないことを検出している。
【0085】
長尺廃棄物等の巻き付きが一定厚さ以上となって検出光を遮光すると、投受光センサー140は、制御装置Cに向けて報知信号を送信するようになっている。制御装置Cは、報知信号を受信すると、破袋ユニットS1の筐体外壁に配置された警告ランプ(図示せず)を点滅制御し、長尺廃棄物等の巻き付き厚さが一定以上となって処理効率が低下していることを報知する。もちろん、投受光センサー140は、報知信号と共に減速信号又は停止信号を制御装置Cに向けて送信し、制御装置Cが減速信号又は停止信号に基づき案内ローター104を回転駆動する駆動モータM1を減速/停止させるようになっていてもよい。
【0086】
[破袋ユニットの実施形態3]
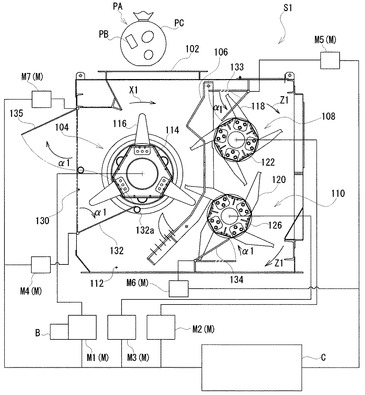
図9は、廃棄物処理システムSが備える破袋ユニットS1の実施形態3に係る内部構造の概略を示す構造図である。この破袋ユニットS1は、セルフクリーニング機能を有しており、このセルフクリーニング機能に基づいて、軸部材114,122,126へ巻き付いてしまった包装材PC等の除去が可能となっている。セルフクリーニング機能は、以下に説明する案内ガイドプレート132、スクレーパ133,134、開閉扉135の往復揺動動作及び案内ローター104、破袋ローター108、取り出しローター110の正逆回転動作により実現される。
【0087】
この破袋ユニットS1は、可動式の案内ガイドプレート132及びスクレーパ133,134を有しており、これら案内ガイドプレート132及びスクレーパ133,134は、各々駆動モータM4〜M6によって往復揺動するように構成されている。スクレーパ133,134は各々破袋ローター108の軸部材122及び取り出しローター110の軸部材126から包装材PC等の巻き付き物を除去するためのものである。
【0088】
更に、異物排出口130の近傍には、可動式の開閉扉135を有しており、この開閉扉135は駆動モータM7によって往復陽動するようになっている。そして、これら駆動モータM4〜M7及び駆動モータM1〜M3は、制御手段Cによってその動作(回転/停止、回転速度、回転方向など)が制御されるようになっている。
【0089】
通常の破袋処理時においては、案内ガイドプレート132、スクレーパ133,134、開閉扉135は、退避位置(図9中の二点鎖線部)にある。しかし、セルフクリーニングモードに設定されると、駆動モータM4〜M7が案内ガイドプレート132、スクレーパ133,134、開閉扉135をα1方向へと揺動動作させ、クリーニング位置(図9中の実線部)に位置させる。これにより、案内ガイドプレート132、スクレーパ133,134が軸部材114,122,126に巻き付いた包装材PC等を除去することが可能となる。
【0090】
なお、案内ガイドプレート132を正面方向(図9における紙面左から右へ向く方向)から矢視すると、おおよそ図10に示すような形状をしている。案内ガイドプレート132の切り欠き部132bが送りブレード116との干渉を回避しており、先端(一端)132aが軸部材114に巻き付いた包装材PC等の巻き付き物を除去する機能を発揮している。また、スクレーパ133,134の外観形状も、大略案内ガイドプレート132と同様である。案内ガイドプレート132と開閉扉135とは、破袋処理動作時においては協働して異物排出口130を閉鎖している。そして、クリーニングモードにおいては、案内ガイドプレート132と開閉扉135とが動作することにより、破袋ユニットS1の側面に異物排出口30が開口されることとなる。
【0091】
このクリーニングモードは、破袋ユニットS1に配置された図示しないクリーニングボタン等の押圧によって機能するものであってもよいし、一定時間の破袋処理動作ごとに行われたり、一定量の巻き付き物の堆積を検知することによって行われるものであってもよい。
【0092】
次に、案内ローター104、破袋ローター108、取り出しローター110の正逆回転制御に基づくクリーニング動作について説明する。
【0093】
上記で説明したクリーニングボタンの押圧、一定時間の破袋処理動作又は一定量の巻き付き物の堆積の検知に基づき、クリーニングモードが設定され、クリーニング処理が開始する。クリーニング処理においては、一旦駆動モータM1〜M3が停止され、案内ローター104、破袋ローター108、取り出しローター110が回転停止する。
【0094】
その後、下記に示すいずれかの動作パターンに基づき、駆動モータM1〜M3を回転駆動し、案内ローター104及び/又は破袋ローター108及び/又は取り出しローター110を回転させる。それにより、軸部材114,122,126に巻き付いた包装材PC等の巻き付き物が円滑に除去され、巻き付きの堆積量が減少するようになっている。なお、各表1〜3において、正回転方向は、破袋処理時における回転方向と同方向であることを意味し、回転速度比は、破袋処理時における回転速度に対する回転速度比を意味する。
【0095】
【表1】

【0096】
【表2】
【0097】
【表3】
なお、上記のパターン1−1〜1−3、パターン2−1〜2−6、パターン3−1〜3−6のうち、いずれか1つのパターンのみでもクリーニング効果を得ることができるが、もちろん、上記の中から適宜選択される複数のパターンの組合せによって、更に高いクリーニング効果を得ることができる。
【0098】
特に、パターン1−1〜1−3の中から選択される1つのパターンと、パターン2−1〜2−6の中から選択される1つのパターンと、パターン3−1〜3−6の中から選択される1つのパターンとを組み合わせて動作させることにより、非常に高いクリーニング効果を発揮する。これらの選択された3つのパターンは、順次動作させるように制御してもよいし、同時的に動作させるように制御してもよい。
【0099】
なお、これらの実施形態に係る破袋ユニットS1に関し、以下に示すように実験を行ったので説明する。
【0100】
[実施例1−1]
図11及び表4は、実施形態1に係る破袋ユニットS1を用いて廃棄物PAの破袋処理を行った場合の実験結果を示すものである。この実施例1−1においては、案内ローター104の回転数に対する破袋ローター108の回転数(取り出しローター110の回転数も同一回転数)の比率Tを変化させ、包装材PCの破袋率V1、包装材PC内部の小袋の破袋率V2、解れ率V3、駆動モータM1の所要動力、軸部材114への長尺廃棄物等の巻き付きの程度(巻き付き厚さ)の変化の度合いを評価した。なお、表4において、◎〜×は観察者による評価の程度を表し、◎は優、○は良、△は可、×は不可を意味する。
【0101】
図11は、横軸を比率T、縦軸を破袋率V1,V2及び解れ率V3としたグラフである。図11には、比率Tが20倍を下回ると包装材PCの破袋率V1が90%を下回ることが示されている。また、表1には、比率Tが40倍を超えると、駆動モータM1の所要動力が過大となることが示されている。
【0102】
【表4】
【0103】
[実施例1−2]
図12及び表5は、実施形態1に係る破袋ユニットS1を用いて廃棄物PAの破袋処理を行った場合の実験結果を示すものである。この実施例1−2においては、案内ブレード116の回転軌跡R1と破袋ブレード118の回転軌跡R2との回転中心間における重複寸法W1を変化させ、包装材PCの破袋率V1、包装材PC内部の小袋の破袋率V2、解れ率V3、駆動モータM1の所要動力、軸部材114への長尺廃棄物等の巻き付きの程度(巻き付き厚さ)の変化の度合いを評価した。なお、表5においても、◎〜×は観察者による評価の程度を表し、◎は優、○は良、△は可、×は不可を意味する。
【0104】
図12は、横軸を重複寸法W1、縦軸を破袋率V1,V2としたグラフである。図12には、重複寸法W1が20mmを下回ると包装材PCの破袋率V1が90%を下回ることが示されている。また、表2には、重複寸法W1が50mmを超えると、駆動モータM1の所要動力が過大となり始めることが示されている。
【0105】
【表5】
【0106】
[実施例1−3]
図13及び表6は、実施形態1に係る破袋ユニットS1を用いて廃棄物PAの破袋処理を行った場合の実験結果を示すものである。この実施例1−3においては、案内ブレード116の回転軌跡R1と取り出しブレード120の回転軌跡R3との回転中心間における重複寸法W2を変化させ、包装材PCの破袋率V1、包装材PC内部の小袋の破袋率V2、解れ率V3、駆動モータM1の所要動力、軸部材114への長尺廃棄物等の巻き付きの程度(巻き付き厚さ)の変化の度合いを評価した。なお、表6においても、◎〜×は観察者による評価の程度を表し、◎は優、○は良、△は可、×は不可を意味する。
【0107】
図13は、横軸を重複寸法W2、縦軸を破袋率V1,V2としたグラフである。図13には、重複寸法W2が40mmを下回ると小袋の破袋率V2が90%を下回ることが示されている。また、表3には、重複寸法W2が160mmを超えると、駆動モータM1の所要動力が過大となることが示されている。
【0108】
【表6】
【0109】
<選別ユニットの説明>
[選別ユニットの実施形態]
図14は、図1に示す廃棄物処理システムSが備える選別ユニットS2の実施形態に係る内部構造の概略を示す構造図である。図14は、選別ユニットS2の内部を側方から見た図である。この選別ユニットS2は、受け入れ口201、ローラーコンベア202、モータ(駆動手段)4、シリンダ(保持手段)206を有して大略構成され、そのローラーコンベア202には送風機(送風手段)208が取り付けられている。
【0110】
受け入れ口201は、破袋ユニットS1から排出された廃棄物PA(内容物PB及び包装材PCを含む。)を受け入れるための開口であり、ローラーコンベア202の上方に配置されている。廃棄物PAは、内容物PBとして、例えば、家庭内や事業所、作業現場等から排出され、紙くず・小片・ビニール袋等の軽量物(第1物体)P1、岩石・廃材・空き缶等の重量物(第2物体)P2、土砂・小石等の細粒物(第3物体)P3を混合的に含んでいる。なお、包装材PCは、大略軽量物P1に分類される。受け入れ口201から受け入れた廃棄物PAは、ローラーコンベア202上に落下し、ローラーコンベア202によって搬送方向X2へと搬送される軽量物P1、搬送方向X2の逆方向−X2へと滑落する重量物P2、搬送ローター212の隙間G(図15参照)から下方へと落下する細粒物P3とに選別されるようになっている。
【0111】
なお、この廃棄物処理システムSにおいては、選別ユニットS2が廃棄物PAを受け入れる前に、破袋ユニットS1によって廃棄物PAが破袋され、かつ内容物PBと包装材PCとに大略分離されている。そして、大半の内容物PBと包装材PCとが、別々の位置から受け入れ口201へと落下するようになっている。したがって、この時点で初期段階の粗選別が行われており、一層の選別信頼性の向上に寄与している。
【0112】
ローラーコンベア202は、後述するシリンダ206によって例えば、傾斜角θ2で傾斜配置されており、その傾斜上部側Uの下方には、ローラーコンベア202の上端202aから排出される軽量物P1を回収するためのストッカーT1が配置されている。傾斜下部側Dの下方には、ローラーコンベア202の下端202bから排出される重量物P2を回収するためのストッカーT2が配置されている。ローラーコンベア202の略中央下方には、隙間Gから落下する細粒物P3を回収するためのストッカーT3が配置されている。
【0113】
ローラーコンベア202は、複数の搬送ローターの回転により混合物を搬送するためのものである。図15は、このローラーコンベア202の内部構造を正面(図14における矢印A方向)から見た正面図である。ローラーコンベア202は、複数のローター軸210を有しており、本実施の形態においては、ローター軸210を7本有している。そのローター軸210は、ローラーコンベア202の搬送方向X2と直交する方向を軸方向Y2として、搬送方向X2に沿って互いに平行に配置されている。
【0114】
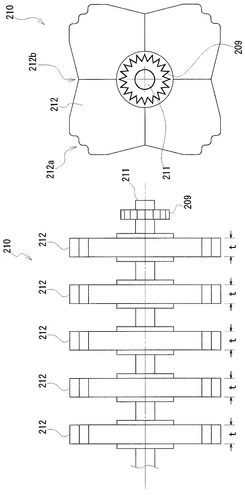
図16は、このローター軸210の二面図である。ローター軸210はシャフト211と複数の搬送ローター212とを有している。搬送ローター212は、シャフト211に同軸状に一定間隔で複数取り付けられており、シャフト211と共に回転するようになっている。その搬送ローター212は、図16に示すように、頂部212aと凹部212bとを有して丸みを帯びた略四角形断面形状を呈している。この搬送ローター212が回転方向α2に回転することにより、頂部212aによって軽量物P1を弾くようにして搬送方向X2へと搬送することができるようになっている。
【0115】
搬送ローター212は、軸方向Y2に沿って一定の厚さtを有している。そして、軸方向Y2で隣接する搬送ローター212同士はその厚さtより大きい寸法間隔で配置されている。図15に示すように、ローター軸210同士は、搬送方向X2に沿って平行に配置されている。そして、搬送方向X2に隣接する搬送ローター212同士が、互い違いに入れ子状となるように、ローター軸210が隣接配置されている。この入れ子状となった搬送ローター212と搬送ローター212との間には隙間Gが形成されている。そして、その隙間Gから、細粒物P3が落下するようになっている。
【0116】
なお、ローター軸210にはその軸端近傍にスプロケット209が取り付けられている。このスプロケット209がチェーン213と係合することにより、モータ204からの駆動力が伝達されるようになっている。
【0117】
モータ204は、搬送ローター212を回転駆動するためのものである。より具体的には、モータ204は、チェーン(伝達手段)213を介してローター軸210を回転駆動することにより、搬送ローター212を回転させるようになっている。モータ204は、搬送ローター212を回転方向α2に回転駆動することにより、軽量物P1を搬送方向X2へと搬送する。
【0118】
本実施の形態においては、選別ユニットS2は、傾斜上部側Uの4本のローター軸210を回転駆動する上部側モータ204aと、傾斜下部側Dの3本のローター軸210を回転駆動する下部側モータ204bとを有している。そして、上部側モータ204aは下部側モータ204bよりも高速で駆動され、その結果、傾斜上部側Uのローター軸210及び搬送ローター212は、傾斜下部側Dのローター軸210及び搬送ローター212の回転速度の約1.4倍の回転速度で駆動されるようになっている。
【0119】
なお、上部側モータ204aと下部側モータ204bの2つのモータ204を用いるのでなく、1つのモータ204によって傾斜上部側Uのローター軸210と傾斜下部側Dのローター軸210とを異なる回転速度で駆動することも可能である。その場合、チェーン213と係合する傾斜上部側Uのローター軸210に係るスプロケット209の歯数を傾斜下部側Dのローター軸210に係るスプロケット209の歯数よりも少なくすればよい。
【0120】
シリンダ206は、ローラーコンベア202を搬送方向X2に向けて上り傾斜となるように傾斜保持するためのものである。シリンダ206は、ローラーコンベア202を下方で支持しており、その傾斜上部側Uが上、傾斜下部側Dが下となるように保持している。その傾斜角θ2は、図示しない高さ調整手段によって、この選別ユニットS2が処理する廃棄物PAの種類等に応じて調整可能となっている。
【0121】
送風機208は、受け入れ口201から受け入れた廃棄物PAに向けて送風するためのもので、受け入れ口201の下方であってローラーコンベア202の上方に配置されている。送風機208は、ローラーコンベア202の傾斜角θ2と平行な方向で、かつ搬送方向X2に向けて(すなわち、傾斜下部側Dから傾斜上部側Uへ向けて)廃棄物PAに送風するようになっている。送風機208は、ローラーコンベア202の傾斜角θ2以上で廃棄物PAに向けて送風してもよい。
【0122】
受け入れ口201は、傾斜上部側Uと傾斜下部側Dとの境界近傍の上方に配置されている。本実施の形態においては、傾斜上部側Uの4本のローター軸210と傾斜下部側Dの3本のローター軸210との境界近傍の上方位置に配置されている。したがって、受け入れ口201から受け入れた廃棄物PAは、送風機208によって一層分散されてローラーコンベア202上に落下する。その際、軽量物P1は送風の影響を強く受けて、傾斜上部側Uへと流されて落下する。一方、重量物P2は送風の影響を殆ど受けることなく受け入れ口201から略真下に落下する。
【0123】
傾斜上部側Uへと落下した軽量物P1は、回転速度の速い傾斜上部側Uの搬送ローター212の回転によって迅速に搬送方向X2へと搬送され、上端202aへと至る。そして、上端202aから排出されて、ストッカーT1内へと回収される。一方、送風の影響を殆ど受けることなく落下した重量物P2は、そのまま回転速度の遅い傾斜下部側Dの搬送ローター212上を搬送方向の逆方向(−X2方向)へと円滑に滑落して行き、下端202bへと至る。そして、下端202bから排出されて、ストッカーT2内へと回収される。
【0124】
次に、この選別ユニットS2が受け入れた廃棄物PAが選別されるまでの手順について説明する予め、選別ユニットS2のモータ204はローター軸210の回転駆動を開始しており、送風機208は送風を開始している。まず、受け入れ口201を介して破袋ユニットS1から廃棄物PAを受け入れる。この廃棄物PAは、破袋ユニットS1側から受け入れた段階で、既に内容物PBと包装材PCとに大略分類されている。受け入れた廃棄物PAは、送風機208からの送風により、軽量物P1と重量物P2とに分散されてローラーコンベア202上に落下する。その場合、軽量物P1の大半が傾斜上部側Uの搬送ローター212上に落下し、重量物P2の大半が、そのまま略真っ直ぐ下方に(すなわち、傾斜上部側Uと傾斜下部側Dとの境界付近に)落下する。したがって、この時点で送風機208の風によって、廃棄物PAの粗選別が行われる。
【0125】
傾斜上部側Uの搬送ローター212上に落下した軽量物P1は、傾斜上部側Uの高速回転により搬送ローター212の頂部212aに弾かれるようにして迅速に搬送方向X2へと搬送されて行き、上端202aへと至る。そして、上端202aから排出されてストッカーT1内へと回収される。
【0126】
なお、一部の重量物P2が傾斜上部側Uの搬送ローター212上に落下する場合もあり得る。しかし、重量物P2は、搬送に拘らずその重量により滑落を開始する。受け入れ口201が傾斜上部側Uと傾斜下部側Dとの境界近傍に配置されているので、重量物P2が滑落を開始すると、すぐに傾斜下部側Dの搬送ローター212上へと移動する。傾斜下部側Dの搬送ローター212は、傾斜上部側Uよりも低速(2/3以下の回転速度)で回転している。したがって、重量物P2は円滑に下端202bへ向けて滑落して行く。下端202bから排出された重量物P2はストッカーT2内へと回収される。
【0127】
そのまま略真っ直ぐ下方に落下した重量物P2は、傾斜上部側Uと傾斜下部側Dとの境界近傍に落下することとなる。そして、傾斜下部側Dの搬送ローター212上に落下した重量物P2は、搬送ローター212の回転速度が低いので、その回転方向α2への回転に拘らず円滑に滑落して行く、そして、迅速に下端202bへと至り、ストッカーT2内へと回収される。傾斜上部側Uの搬送ローター212上に落下した重量物P2についても、上述したものと同様に、搬送方向X2へ搬送されることなく滑落し、下端202bへと至る。
【0128】
なお、一部の軽量物P1が傾斜下部側Dの搬送ローター212上に落下する場合があり得る。しかし、軽量物P1は、搬送ローター212の回転速度が低速であっても、搬送ローター212上を滑落して行くことはなく、弾かれながら徐々に搬送方向X2へと搬送される。そうすると、すぐに傾斜上部側Uの搬送ローター212上へと移動することができるので、そのまま迅速に上端202aへと搬送される。
【0129】
なお、細粒物P3については、一部が受け入れ口201からそのまま真っ直ぐに落下し、一部が送風機208の送風によって傾斜上部側Uへと分散される。いずれも細粒物P3についても、搬送されたり滑落したりすることなく、隙間Gから下方に落下し、ストッカーT3によって回収されることとなる。
【0130】
以上、本発明の好ましい実施の形態を説明したが、本発明はこれらに限定されるものではなく、その要旨の範囲内で様々な変形や変更が可能である。
【0131】
例えば、本実施の形態においては、傾斜上部側Uの搬送ローター212の回転速度を傾斜下部側Dの搬送ローター212の回転速度の1.4倍としているが、もちろん傾斜上部側Uの搬送ローター212の回転数はそれ以上の回転速度であってもよい。傾斜上部側Uと傾斜下部側Dとでどの程度の回転速度比とするかは、受け入れる廃棄物PAの種類、ローラーコンベア202の傾斜角θ2、搬送ローター212の形状、必要とされる処理速度等に応じて適宜設定可能な事項である。また、場合によっては、傾斜上部側Uの搬送ローター212の回転速度を傾斜下部側Dの搬送ローター212の回転速度よりも低速とすることも考えられる。廃棄物PAのローラーコンベア202上での滞留時間を長くすることができるので、処理の高速化よりも選別の信頼性向上、特に細粒物P3の確実な選別が要求される場合に適切な方法である。
【0132】
上記実施形態においては、傾斜上部側Uの搬送ローター212の回転速度を傾斜下部側Dの搬送ローター212の回転速度の1.4倍としているが、傾斜上部側Uにおける複数の搬送ローター212同士の回転速度は同速度であり、傾斜下部側Dにおける複数の搬送ローター212同士の回転速度は同速度である。
【0133】
しかし、傾斜上部側U内での複数の搬送ローター212の各々の回転速度を、より下部側のものよりもより上部側のものが高速回転となるようにすることもできる。同様に、傾斜下部側D内での複数の搬送ローター212の各々の回転速度を、より下部側のものよりもより上部側のものが高速回転となるようにすることもできる。必要に応じて、ローラーコンベア202内の全搬送ローター212を、下方から上方にかけて順次徐々に高速回転となるように構成することもできる。
【0134】
このように、下方から順に上方へ向けて高速回転とすることで、廃棄物PAの態様によっては、一層選別の高速化と信頼性を高い次元で両立させることができる。なお、各搬送ローター212ごとの回転速度調整は、各々別々の駆動モータによることも可能であるが、例えば、搬送ローター212ごとに異なる歯数のスプロケット209を使用し、これらをチェーン213によって連結すれば、1つの駆動モータによって実現することも可能である。
【0135】
また、送風機208による送風方向をローラーコンベア202の傾斜方向と略平行としているが、もちろん送風方向がより一層大きい傾斜であってもよい。より受け入れ口201側へ向けて上向きに送風することで、分散の程度をより強めることができる。
【0136】
なお、ローター軸210の本数、ローラーコンベア202の傾斜角θ2、搬送ローター212の形状や回転速度等は適宜設定可能な設計事項である。また、傾斜上部側Uと傾斜下部側Dとの境界は、搬送方向X2におけるローラーコンベア202の中央近傍であることが望ましく、その上方に受け入れ口201が配置されることが望ましいが、もちろんこれについても事情に応じて適宜変更可能である。
【0137】
[実施例2−1]
上記実施形態において説明した選別ユニットS2を有する廃棄物処理システムSを用いて、廃棄物PAの選別試験を行った。廃棄物PAとして、体積2m3の軽量プラスチック(軽量物)P1と体積0.12m3の重量プラスチック(重量物)P2とを含み、全体として体積2.12m3の廃棄物PAの選別試験を行った。
【0138】
実施例2−1においては、傾斜下部側Dの3本のローター軸110に係る搬送ローター212の回転速度をN(rpm)、傾斜上部側Uの4本のローター軸210に係る搬送ローター212の回転速度を1.4倍の1.4N(rpm)とした。また、比較例として、傾斜上部側Uの搬送ローター212の回転速度を、傾斜下部側Dの搬送ローター212の回転速度と同速度のN(rpm)とした場合についても試験を行った。実施例2−1及び比較例において、上端202a側から排出された軽量プラスチックP1の量と下端202b側から排出された軽量プラスチックP1の量とを以下表7にまとめた。
【0139】
なお、廃棄物PAの投入を、傾斜上部側Uに近い傾斜下部側Dの位置付近に落下するように行ったところ、表7に示すように、破袋ユニットS1による案内ローター104側へと破袋ローター108側へとの分離、及び送風機208からの送風に起因して、体積2m3の軽量プラスチックP1のうち体積0.65m3分が、また、体積0.12m3の重量プラスチックP2のうち体積0.025m3分が傾斜上部側Uへと落下した。
【0140】
表7からわかるように、実施例2−1においては投入した軽量プラスチックP1のすべてが上端202a側から排出されているのに対し、比較例においては2m3のうち1.35m3の軽量プラスチックP1が上端202a側へと搬送されているが、残りの0.65m3については、下端202b側から排出されてしまっている。
【0141】
つまり、実施例2−1においては、傾斜下部側Dに落下した軽量プラスチックP1も傾斜上部側Uへと搬送されて上端202a側から排出されており、比較例においては、傾斜下部側Dに落下した軽量プラスチックP1は、傾斜上部側Uへと送られずにそのまま傾斜下部側Dを滑落して下端202bから排出されている。
【0142】
実施例2−1で上端202aから排出された軽量プラスチックP1の量(2m3)は、比較例で上端202aから排出された軽量プラスチックP1の量(0.65m3)の約1.48倍の体積である。これは、傾斜上部側Uの搬送ローター212の回転速度を傾斜下部側Dの搬送ローター212の回転速度の1.4倍とすることにより、選別ユニットS2の選別処理能力が約1.48倍に向上することを意味している。傾斜上部側Uの搬送ローター212の回転速度を上昇させることで、選別ユニットS2の処理能力を向上させることができ、ひいては、処理能力を低下させることなく選別ユニットS2のサイズの小型化、ひいては廃棄物処理システムSの小型化を図ることができる。
【0143】
【表7】
【符号の説明】
【0144】
α1,α2:回転方向
θ1:角度
θ2:傾斜角
A:矢印
B:電流計(異物検出手段)
C:制御装置(制御手段)
D:傾斜下部側
G:隙間
J:仮想円
k:頂角
L:二等分線
L2:接線方向
M,M1〜M7:駆動モータ(駆動源)
P1:軽量物(第1物体)
P2:重量物(第2物体)
P3:細粒物(第3物体)
PA:廃棄物
PB:内容物
PC:包装材
R1〜R3:回転軌跡
S:廃棄物処理システム
S1:破袋ユニット
S2:選別ユニット
T:比率
T1〜T3:ストッカー
t:厚さ
ra:一定距離
U:傾斜上部側
W1,W2:重複寸法
X1,Y1,Z1:矢印
X2:搬送方向
Y2:軸方向
102:投入口
104:案内ローター
106:ガイドプレート
106a:上部スリット
106b:下部スリット
108:破袋ローター
110:取り出しローター
112:排出口
114,122,126:軸部材
114a:多角形状部
116:案内ブレード
118:破袋ブレード
118a:爪部
120:取り出しブレード
130:異物排出口
132:案内ガイドプレート
132a:一端
132b:切り欠き部
133,134:スクレーパ
135:開閉扉
140:投受光センサー(巻き付き検出手段)
201:受け入れ口
202:ローラーコンベア
202a:上端
202b:下端
204:モータ(駆動手段)
204a:上部側モータ(駆動手段)
204b:下部側モータ(駆動手段)
206:シリンダ(保持手段)
208:送風機(送風手段)
209:スプロケット
210:ローター軸
211:シャフト
212:搬送ローター
212a:頂部
212b:凹部
213:チェーン(伝達手段)
【技術分野】
【0001】
本発明は、廃棄物処理システムに係り、特に破袋ユニットと選別ユニットとの組合せにより、効率的に廃棄物の破袋及び選別を行うことのできる廃棄物処理システムに関する。
【背景技術】
【0002】
従来より、袋詰めされた廃棄物の包装材を破断する破袋装置が知られている。例えば、特許文献1には、無端コンベヤに設けられた移動爪とプレートに設けられた固定刃とによって破袋する用のカッターが列状に配置され、コンベヤを回転させることにより包装材を破断する装置が開示されている。
【0003】
また、特許文献2には、揺動可能に回転するカッターと固定刃とによって廃棄物の包装材を破断する装置が開示されている。これらの装置においては、回転又は移動するカッター(又は移動爪)と固定刃との相対移動により廃棄物の包装材を引き裂くようになっている。そして、廃棄物から包装材を除去して、その内容物を包装材と選別することができるようになっている。
【0004】
また、様々な物体が混合した混合物を、その物体の態様(物性)に応じて選別する選別装置が知られている。例えば、選別装置は、土砂、石、ビニール袋、ペットボトル、空き缶、木材等が混在する混合廃棄物を、比重、重量、形状に基づく空気抵抗などに応じて、選別することができるようになっている。
【0005】
この選別装置の一態様として、ローラーコンベアを用いたものがある(例えば、特許文献3を参照。)。ローラーコンベアは、同軸に複数の搬送ローターが取り付けられてローター軸が構成され、そのローター軸が平行に複数並んで配置されたものである。
【0006】
この種の選別装置においては、例えば、このローラーコンベアを傾斜配置して傾斜上部側に向けて混合物を搬送するように搬送ローターを回転駆動させる。それにより、混合物中の軽量物は搬送ローターにより傾斜上部側へと搬送され、重量物はその重量により傾斜下部側へと滑落し、細粒物は搬送ローター間の隙間から下方に落下するように選別される。このように、このローラーコンベアでは搬送ローターを複数有して混合物の選別を行うので、ロータースクリーンとも呼ばれる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2000−317337号公報
【特許文献2】特開2008−68249号公報
【特許文献3】特開2003−260414号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、上記特許文献1に開示のものは、無端コンベヤの駆動により破袋を行うものであり、構造が複雑でかつ大型になってしまう。それに伴い、必然的に装置コストも高いものとなってしまう。また、上記特許文献1,2に開示のものは、固定刃とカッター(又は移動爪)との相対移動により破袋を行うので、1つの廃棄物に対する破袋の機会が少なく、充分な破袋率(投入した廃棄物個数のうち、包装材が破断された廃棄物個数の割合)を獲得することが難しい。包装材を破断したものの、内容物が破断された包装材の内部に引っかかるように残っているものも多く、排出後に内容物と包装材との分離を作業員による手作業で行う必要がある。
【0009】
また、破袋装置は、そもそもゴミのようなある程度予想可能な粒度、重量のゴミを内容物として、それらがゴミ袋等の包装材に内包される廃棄物を処理することを想定している。したがって、例えば電子レンジ等の比較的大きな粒度、重量のある家電製品等の処理を想定していないが、万一そのような物が装置内に投入された場合は、異物として除去しなければならない。
【0010】
しかしながら、従来のものは、これらの異物の除去を作業員の手作業で行わなければならず、作業が煩雑で、かつ安全面においても懸念があった。回転軸やカッターに廃棄物の一部が巻き付いた場合にも、手作業で頻繁に除去しなければならず、やはり作業が大変であった。
【0011】
一方、選別装置においては、より一層の処理速度の向上と選別の信頼性向上が望まれている。その処理速度や信頼性は、搬送ローターの回転速度や外形形状、ローラーコンベアの傾斜角度等に依存する部分が大きい。ここで、選別の信頼性が高いとは、重量物側に軽量物が混ざったり軽量物側に重量物が混ざったりすることが殆どなく、重量物と軽量物との選別を確実に行える能力を言う。
【0012】
例えば、処理速度向上のために、搬送ローターの回転速度を一律に増速させると、石や木材等の重量物でさえ傾斜上部へと搬送されてしまう傾向となり、軽量物側に重量物が混ざってしまう。そのため、選別の信頼性低下を招いてしまう。一方、重量物の滑落を確実とするためにローラーコンベアの傾斜角度を増大させると、今度は紙くずやビニール袋などの軽量物が傾斜面を上りきれず、重量物側に軽量物が混ざってしまうこととなる。また、より確実な選別信頼性のために回転速度や傾斜角度を減少させると、処理速度が低下し、単位時間当たりの処理量が減少してしまう。
【0013】
更に、破袋機能と選別機能とを併せ持つことにより、一層高機能な廃棄物処理を行う装置の提案が強く要求されている。すなわち、廃棄物を投入口に投入するだけで、外側の包装材を破断してその内容物を取り出し、更にその内容物を物性に基づいて3種類に選別するようになっていれば、廃棄物の処理(破袋及び選別)が一層簡単かつ効率的となって好ましい。
【0014】
本発明は、上記の事情に鑑みて為されたもので、破袋機能と選別機能とを併せ持つことにより、廃棄物を簡単かつ効率的に処理(破袋及び選別)することのできる廃棄物処理システムを提案することを例示的課題とする。更に、その破袋機能においては、破袋率を顕著に向上させ、破袋後の包装材内部への内容物残りを減少させて包装材と内容物との分離を確実に行うことができ、また、異物処理の作業軽減や巻き付き防止において大きな効果を発揮させることを例示的課題とする。また、その選別機能においては、高い次元で処理速度の向上と選別信頼性の向上との両立を実現させることを例示的課題とする。
【課題を解決するための手段】
【0015】
上記の課題を解決するために、本発明の例示的側面としての廃棄物処理システムは、内容物を包装材で内包して構成される廃棄物の包装材を破断し、内容物を包装材から外部に取り出す破袋ユニットと、破袋ユニットによる破袋後の廃棄物を、複数の搬送ローターが配列されたローラーコンベアによる傾斜搬送を利用して第1物体、第2物体及び第3物体に選別する選別ユニットと、を備えた廃棄物処理システムであって、破袋ユニットは、廃棄物を投入する投入口と、軸部材とその軸部材から略放射状に突出する案内ブレードとを有して投入口の下方に配置され、投入口から投入された廃棄物を案内ブレードの回転により排出口へ向けて送り出す案内ローターと、軸部材とその軸部材から略放射状に突出する破袋ブレードとを有して、案内ローターの斜め上方に、破袋ブレードの回転軌跡と案内ブレードの回転軌跡とが第1の重複寸法で部分的に重複するように配置された破袋ローターと、軸部材とその軸部材から略放射状に突出する取り出しブレードとを有して、案内ローターの斜め下方に、取り出しブレードの回転軌跡と案内ブレードの回転軌跡とが第1の重複寸法よりも大きい第2重複寸法で部分的に重複するように配置された取り出しローターと、案内ローター、破袋ローター及び取り出しローターを回転駆動する1又は複数の駆動源と、を有して構成され、かつ、選別ユニットは、破袋ユニットからの廃棄物を受け入れる受け入れ口と、複数の搬送ローターの回転により、傾斜上部へと搬送される第1物体と傾斜下部へと滑落する第2物体と複数の搬送ローターの隙間から下方に落下する第3物体とに、廃棄物を選別するローラーコンベアと、傾斜上部側の搬送ローターと傾斜下部側の搬送ローターとを異なる回転速度で回転駆動する駆動手段と、ローラーコンベアを搬送方向に向けて上り傾斜に傾斜保持する保持手段と、を有して構成されることを特徴とする。
【0016】
この廃棄物処理システムは、破袋ユニットと選別ユニットとを有しているので、破袋機能と選別機能の両方の機能を発揮し、高効率な廃棄物の処理作業を実現することができる。投入口から廃棄物を投入するだけで、その廃棄物の包装材が破断されて内容物が引き出され、更にその内容物が特性に応じて3種類に自動的に選別(分類)される。廃棄物処理作業における手作業を大幅に削減し、高い処理速度で廃棄物処理を行うことができる。
【0017】
廃棄物処理システムにおける破袋ユニットは、案内ローターの回転と破袋ローターの回転とにより破袋処理を行うので、1つの廃棄物に対する破袋ブレードの接触機会を大きく増大させることができる。案内ローターの回転方向と破袋ローターの回転方向とを逆回転とすれば、案内ブレードと破袋ブレードとの相対速度を増大させることができる。したがって、相対速度向上と引き裂き機会の増大との相乗効果により、破袋率を大きく向上させることができる。
【0018】
しかも、この破袋ユニットによれば、案内ローターの斜め下方に、取り出しローターも配置されている。この取り出しローターは、破袋ローターで破断しきれなかった包装材の破断、包装材の中に更に小袋に包装された内容物が内包されている場合のその小袋の破断、破袋後の包装材からの内容物の弾き出し(取り出し)の機能を発揮するようになっている。したがって、この取り出しローターの回転方向を案内ローターの回転方向と逆方向とすることにより、取り出しブレードと案内ブレードとの相対速度向上、1つの廃棄物に対する取り出しローターの接触機会の向上を図ることができる。その結果、更なる破袋率の向上、小袋破袋率の向上、包装材と内容物との分離の確実を実現することができる。
【0019】
なお、包装材の破断を主目的とする破袋ブレードの回転軌跡と案内ブレードの回転軌跡との重複寸法である第1の重複寸法よりも、包装材の破断に加えて破袋後の包装材からの内容物の取り出し(弾き出し)や包装材内の小袋の破断をも主目的とする取り出しブレードの回転軌跡と案内ブレードの回転軌跡との重複寸法である第2の重複寸法の方が大きく設定されている。したがって、包装材の破断及び内容物の取り出しを各々効率よく行うことができるようになっている。
【0020】
選別ユニットにおいては、傾斜上部側の搬送ローターの回転速度と傾斜下部側の搬送ローターの回転速度とを各々異なる回転速度で回転駆動しているので、選別装置の処理速度の向上と選別信頼性の向上とを高い次元で両立させることができる。例えば、傾斜上部側の搬送ローターを傾斜下部側よりも高速回転させると、ローラーコンベアの中ほどで上部側へ搬送されつつある第1物体を、より高速かつより強力に上部側へと搬送することができる。そして、ローラーコンベアの中ほどで下部側へと滑落しつつある第2物体を、より円滑に下部側へと滑落させることができる。
【0021】
第1物体と第2物体の中間的な特性を有する物体が、ローラーコンベアの中ほどで滞留する時間を短縮し、より高速な選別を実現することができる。また、滑落しかけた物体の滑落を推進し、上部側へ搬送されかけた物体の搬送を促進する機能を発揮するので、第1物体と第2物体とを明確に切り分けることができ、選別信頼性を向上させることができる。
【0022】
もちろん、設計上の都合によっては、傾斜上部側の搬送ローターの回転速度を低速にし、傾斜下部側の搬送ローターの回転速度を高速にすることもできる。それにより、積極的にローラーコンベア上での混合物の滞留時間を長時間とすることができる。第3物体の搬送や滑落を防止して、確実に第3物体を搬送ローターの隙間から下方へ落下させることができる。
【0023】
なお、ここで第1物体とは典型的には軽量物であり、紙くず、ビニール袋、綿埃、小片(金属、プラスチック、木材等を材料とするもの)などを例示することができる。また、第2物体とは典型的には重量物であり、岩石、空き缶、ペットボトル、廃材(ここでは、金属、プラスチック、木材を材料とする比較的大きく重量のある物体を意味する。)などを例示することができる。第3物体とは典型的には細粒物であり、土砂、小石などを例示することができる。これら第1物体〜第3物体は、いずれも廃棄物内に含まれる物体である。
【0024】
案内ブレードの回転軌跡と破袋ブレードの回転軌跡との回転中心間における重複寸法が、20mm以上かつ60mm以下であることが望ましい。また、案内ブレードの回転軌跡と取り出しブレードの回転軌跡との回転中心間における重複寸法が、40mm以上かつ160mm以下であることが望ましい。
【0025】
案内ブレードの回転軌跡と破袋ブレードや取り出しブレードの回転軌跡との回転中心間における重複が小さ過ぎると包装材の破袋率や小袋の破袋率が低下し、また、解れ率(投入した廃棄物個数のうち、内容物と包装材とが分離された廃棄物個数の割合)も低下する。
【0026】
一方、ブレード同士の重複が大き過ぎると、駆動源による所要動力が大きくなり、消費電力の増大を招いてしまう。また、ブレードへの廃棄物の噛み込みも増加してしまい、駆動源の負荷増大にも繋がってしまう。案内ブレードと破袋ブレードとの重複や案内ブレードと取り出しブレードとの重複には適正な範囲が存在し、その適正範囲内に設定することが、処理効率向上や駆動源の負荷軽減にとって望ましい。本発明においては、案内ブレードの回転軌跡と破袋ブレードの回転軌跡との回転中心間における重複寸法を20mm以上かつ60mm以下に設定することにより、高い破袋率、高い解れ率及び駆動源の負荷軽減(消費電力低減を含む)を実現することができる。
【0027】
案内ローターの回転数に対する破袋ローターの回転数の比率が20倍以上かつ40倍以下であることが望ましい。
【0028】
包装材の破断の機会を増大させるには、案内ローターの回転数に対して破袋ローターの回転数を大きくすることが望ましい。一方で、破袋ローターの回転数を過大にすると、やはり駆動源の消費電力や負荷の点で望ましくなく、適正な範囲が存在する。本発明においては、案内ローターの回転数に対する破袋ローターの回転数の比率を20倍以上かつ40倍以下とすることにより、高い破袋率と駆動源の負荷軽減を実現することができる。なお、案内ローターの回転数に対する取り出しローターの回転数の比率も、同様に20倍以上かつ40倍以下とすることにより、高い解れ率と駆動源の負荷軽減を実現することができる。
【0029】
案内ローター、破袋ローター及び取り出しローターのうち少なくともいずれかの軸部材が、その軸直交面内における断面形状が少なくとも3つの頂角を有する非円形状である多角形状部を有することが望ましい。
【0030】
回転軸式を採用した場合、長尺の廃棄物や破袋後の包装材などが軸部材に巻き付き易い。また、巻き付いた長尺廃棄物や包装材には円周方向に均一に引っ張り応力が発生し、その引っ張り応力は円中心方向に向かう均一な締め付け力を生じる。したがって、一旦巻き付いてしまった長尺廃棄物等は、バランスよく均等に作用する応力のために安定的に巻き付き状態を維持し、なかなか軸部材から除去されない。
【0031】
しかしながら、軸部材の直径を大きくし、軸周長を一般的な収集袋長よりも長くすることで、その収集袋の軸への巻き付きを低減することができる。また、仮に巻き付いた場合であっても、引っ張り応力が均一でなく頂角部分と辺部分とで引っ張り応力に不均衡が生じ、安定的に巻き付き状態を維持することが難しい。したがって、容易に軸部材から除去することができる。
【0032】
より具体的には、軸部材の直径を大きくすることにより、主に包装材の軸部材への巻き付きを軽減することができ、軸部材が多角形状部を有することにより、巻き付いてしまった包装材の軸部材からの脱落を促進することができる。例えば、軸部材の直径をφ≧270mmとすれば、一般的に使用されるゴミ袋等の包装材が軸部材の全周長に至らず、軸部材の全周に亘って包装材が巻き付くのを防止することができる。そのため、包装材はなかなか軸部材へとしっかり巻き付くことができない。
【0033】
一方、軸部材が多角形状部を有すると、引張り応力のアンバランスが生じるので、仮に包装材が巻き付いた場合であっても、外乱の影響(例えば、回転停止や逆回転など)によって簡単に包装材が軸部材から脱落する。その結果、巻き付いた包装材が徐々に堆積していくことが防止される。
【0034】
軸部材への廃棄物の巻き付き厚さを検出する巻き付き検出手段と、巻き付き検出手段からの出力に応じて駆動源を制御する制御手段と、を更に有することが望ましい。
【0035】
軸部材へ長尺廃棄物等が多量に巻き付いてしまうと、駆動源への過負荷となり、駆動源の回転が停止してしまったり、過電流等の不具合の原因となり得る。また、破袋処理へも悪影響を与え、破袋率や解れ率の低下を招いてしまう。巻き付き検出手段により軸部材への長尺廃棄物等の巻き付きを検出し、その検出結果に応じて駆動源を制御することにより、上記のような不都合を回避することができる。
【0036】
ここで、巻き付き検出手段には、例えば、軸部材の見かけ半径(巻き付きにより、見かけ半径が増大する)が一定値以上となったことを検出する非接触タイプの投受光センサーや、軸部材に当接付勢された検出ロッドとその検出ロッドの角度位置を検出する位置センサーとの組合せ等を適用することができる。また、制御手段による駆動源の制御には、例えば回転数を減速させる減速制御や逆回転させる逆回転制御等を含む。
【0037】
廃棄物処理システムが、破袋ローター及び取り出しローターと案内ローターとの間を実質的に遮蔽すると共に、破袋ブレードを案内ローター側に貫通させる上部スリットと、取り出しブレードを案内ローター側に貫通させる下部スリットとが形成され、かつ下部スリットと取り出しブレードとの軸方向における開口ギャップが上部スリットと破袋ブレードとの軸方向における開口ギャップよりも大きく形成されたガイドプレートを更に有することが望ましい。
【0038】
投入された廃棄物が、案内ブレードとガイドプレートとに挟まれるようにして円滑に排出口へと導かれる。案内ブレードとガイドプレートとにより挟まれるようにして導かれるので、廃棄物の逃げを防止して確実に廃棄物にせん断力を発生させることができる。
【0039】
また、ガイドプレートの上部スリットにおける開口ギャップよりも下部スリットにおける開口ギャップを大きく形成している。ガイドプレートに対して破袋ローター及び取り出しローターが配置される側では、主に破袋後の収集袋等の包装材の取り出しを目的としている。したがって、ガイドプレートに対して案内ローターが配置される側では、包装材が除去された残りの内容物が多く存在する。この内容物は、上部スリット側よりも下部スリット側近傍に多く存在し、そのため、下部スリットにおける開口ギャップが小さいとそのギャップ部分に多くの内容物が詰まってしまう。その結果、取り出しブレードが挟まってしまって動作不良や故障の原因となる可能性がある。しかしながら、この発明においては、下部スリットにおける開口ギャップを大きくしているので、内容物のスリットへの詰まりが予防される。
【0040】
なお、これらの上部スリット及び下部スリットを通過して案内ローター側から破袋ローター側へと破袋された包装材及び各スリット幅よりも小さいものが引き出されるようになっている。その結果、内容物はガイドプレートの案内ローター側、包装材及び各スリット幅よりも小さいものは破袋ローター側と、両者の効率的な分離が可能となっている。
【0041】
廃棄物処理システムが、投入口からの異物の投入を検出する異物検出手段と、異物検出手段からの出力に応じて駆動源を逆回転制御する制御手段と、案内ローターの逆回転により異物を排出させる排出口とは異なる異物排出口と、を更に有することが望ましい。
【0042】
投入口から異物が投入された場合に、わざわざ作業員の手作業によって異物を取り出す必要がなく、異物排出口から自動排出させることができる。ここで、異物検出手段には、例えば駆動源の電流異常(過電流)を検出する電流計を適用することができる。大型の家電製品等の異物が投入され、案内ローターが停止してしまったような場合に、過電流を検出することにより異物投入を検知することができる。
【0043】
そして、異物検知をした場合に、案内ローターを逆回転させることにより、通常の排出口とは異なる異物排出口から異物をスムーズに排出することができるので、通常の廃棄物と異物との分離を確実に行うことができる。
【0044】
傾斜上部側又は傾斜下部側の少なくともいずれか一方において、より上部側の搬送ローターの回転速度がより下部側の搬送ローターの回転速度よりも高速回転してもよい。
【0045】
より下部側の搬送ローターの回転速度が比較的低速で、より上部となるに従い高速回転しているので、、混合物のローラーコンベア上での滞留時間を短縮することができる。したがって、効率的に処理速度の向上と選別信頼性の向上とを実現することができる。
【0046】
駆動手段が、傾斜上部側の搬送ローターを、傾斜下部側の搬送ローター回転速度の1.4倍以上の回転速度で回転駆動することが望ましい。
【0047】
傾斜上部側の搬送ローターの回転速度が傾斜下部側の搬送ローターの回転速度の1.4倍以上となっているので、混合物のローラーコンベア上での滞留時間を充分に短縮することができる。したがって、効率的に処理速度の向上と選別信頼性の向上とを実現することができる。
【0048】
ローラーコンベアが、搬送ローターを同軸状に複数有して構成されたローター軸を複数本有して構成され、かつ、駆動手段が、複数本のうちの傾斜上部側における実質的に半分の本数のローター軸に係る搬送ローター回転速度と、傾斜下部側における残りの本数のローター軸に係る搬送ローター回転速度と、を異なる回転速度で回転駆動することが望ましい。
【0049】
回転速度が異なる傾斜上部側と傾斜下部側との境界部をローラーコンベアの略中央部に設定することができる。したがって、ローラーコンベアの上端又は下端に到達するまでに、第1物体にも第2物体にも選別のための充分な距離を確保することができる。なお、実質的に半分の本数とは、例えば、ローター軸が総数で偶数の場合はその半数、総数で奇数の場合はその半数に近い整数を意味する。例えば、ローター軸が総数で7本の場合は、傾斜上部側のローター軸を4本、傾斜下部側のローター軸を3本としてもよいし、傾斜上部側を3本、傾斜下部側を4本としてもよい。
【0050】
受け入れ口が、傾斜上部側の搬送ローターと傾斜下部側の搬送ローターとの境界近傍に配置されることが望ましい。
【0051】
受け入れ口が傾斜上部側と傾斜下部側との境界近傍、すなわち異なる回転速度の搬送ローター間の境界近傍に配置されているので、破袋ユニットから受け入れた結果傾斜下部側へ落下してしまった第1物体がスムーズかつ迅速に傾斜上部側へと搬送される。また、傾斜上部側へ落下してしまった第2物体もスムーズかつ迅速に傾斜下部側へと滑落する。したがって、この廃棄物処理システムにおける一層の処理速度向上と選別信頼性向上とに寄与することができる。
【0052】
廃棄物処理システムが、ローラーコンベアの傾斜角度又はそれ以上の傾斜角度で、傾斜下部側から傾斜上部側へ向けて送風する送風手段を、ローラーコンベアの上方に更に有することが望ましい。
【0053】
破袋ユニットから受け入れた破袋後の廃棄物を、送風手段からの送風により適度に分散させてローラーコンベア上に落下させることができる。その際、混合物内の物体のうち、低比重の物体や軽量の物体や空気抵抗の大きい物体等を、選択的に風下側へと分散させることができる。
【0054】
例えば、岩石や廃材等の重量物については送風の影響を殆ど与えずに、紙くずやビニール袋などの軽量物を風下側(すなわち、傾斜上部側。)へと分散させることができる。したがって、ローラーコンベア上に到達する前に、廃棄物の粗選別を実施することができ、この廃棄物処理システムにおける一層の処理速度向上と選別信頼性向上とに寄与することができる。
【0055】
本発明の更なる目的又はその他の特徴は、以下添付図面を参照して説明される好ましい実施の形態によって明らかにされるであろう。
【発明の効果】
【0056】
本発明によれば、廃棄物を投入するだけで、破袋処理及び選別処理を自動的に行うので、効率的に廃棄物の処理を行うことができ、作業員の手間を大幅に削減することができる。また、破袋処理においては、包装材や小袋の破袋率の向上や解れ率の向上を実現することができる。回転軸への巻き付きを予防したり、異物投入の場合の排出をスムーズに行うことにより、破袋処理の効率向上と装置の耐久性や信頼性の確保及び作業員の安全確保を実現することができる。更に、選別処理においては、傾斜上部側の搬送ローターの回転速度と傾斜下部側の搬送ローターの回転速度とを異なる回転速度で回転駆動することにより、処理速度の向上と選別信頼性の向上との両立を高い次元で実現することができる。
【図面の簡単な説明】
【0057】
【図1】本発明の実施の形態に係る廃棄物処理システムの内部構造の概略を示す構造図である。
【図2】図1に示す廃棄物処理システムにおける破袋ユニットの実施形態1に係る内部構造の概略を示す構造図である。
【図3】図2に示す案内ローターの概略を示す外観斜視図である。
【図4】図2に示すガイドプレートの正面図である。
【図5】案内ローターの軸部材の軸直交面での断面図である。
【図6】図2に示す破袋ブレードの概略形状を示す二面図である。
【図7】破袋ブレードの他の例を示す二面図である。
【図8】図1に示す廃棄物処理システムにおける破袋ユニットの実施形態2に係る内部構造の概略を示す構造図である。
【図9】図1に示す廃棄物処理システムにおける破袋ユニットの実施形態3に係る内部構造の概略を示す構造図である。
【図10】図9に示す案内ガイドプレートの正面図である。
【図11】実施例1−1において、案内ローターの回転数に対する破袋ローターの回転数の比率と破袋率及び解れ率との関係を示すグラフである。
【図12】実施例1−2において、案内ブレードの回転軌跡と破袋ブレードの回転軌跡との回転中心間における重複寸法と破袋率との関係を示すグラフである。
【図13】実施例1−3において、案内ブレードの回転軌跡と取り出しブレードの回転軌跡との回転中心間における重複寸法と破袋率との関係を示すグラフである。
【図14】図1に示す廃棄物処理システムにおける選別ユニットの実施形態に係る内部構造の概略を示す構造図である。
【図15】図14に示すローラーコンベアの内部構造を正面から見た正面図である。
【図16】図15に示すローター軸の二面図である。
【発明を実施するための形態】
【0058】
以下、本発明の実施の形態に係る廃棄物処理システムSについて図面を用いて説明する。図1は、本発明の実施の形態に係る廃棄物処理システムSの内部構造の概略を示す構造図である。この廃棄物処理システムSは、破袋ユニットS1と選別ユニットS2とを有して大略構成されている。その破袋ユニットS1は、選別ユニットS2の上方に配置されている。破袋ユニットS1の投入口102から投入された廃棄物PAは、破袋ローター108及び取り出しローラー110により破袋処理され排出口112から排出されると、選別ユニットS2の受け入れ口201を介してローラーコンベア202上に落下し、ローラーコンベア202によって軽量物P1、重量物P2、細粒物P3に選別されるようになっている。以下、破袋ユニットS1及び選別ユニットS2について、順次その構成を説明する。
【0059】
<破袋ユニットの説明>
[破袋ユニットの実施形態1]
図2は、図1に示す廃棄物処理システムSが備える破袋ユニットS1の実施形態1に係る内部構造の概略を示す構造図である。図2は、破袋ユニットS1の内部を側方から見た図である。この破袋ユニットS1は、全体として略立方体形状を呈し、投入口102、案内ローター104、ガイドプレート106、破袋ローター108、取り出しローター110、排出口112、駆動モータ(駆動源)M及び制御装置(制御手段)Cを有して大略構成される。
【0060】
投入口102は、この破袋ユニットS1内に廃棄物PAを投入するための開口であって、破袋ユニットS1の上部に開口形成されている。廃棄物PAは、例えば紙くず、プラスチック容器、缶等の内容物PBを内包し、その外側をプラスチックゴミ袋等の包装材PCで包んだものである。廃棄物PAの中には、包装材PC内部に小袋に包装された内容物PBが含まれている場合もあり、この破袋ユニットS1は、外側の包装材PCのみならず、その内部の小袋をも破断する必要がある。投入口102から投入された廃棄物PAは、その下方に配置された案内ローター104へと落下するようになっている。
【0061】
案内ローター104は、投入口102から落下してきた廃棄物を排出口112へと送るための回転部材である。案内ローター104は、図2における紙面垂直方向を軸方向とする軸部材114とその軸部材114に取り付けられ略放射状に突出する案内ブレード116とを有して構成されている。図3は、この案内ローター104の概略を示す外観斜視図である。略放射状に3つの案内ブレード116が1組で取り付けられ、その1組が軸部材114の軸方向に等間隔で配置されている。
【0062】
案内ローター104は、図中矢印X1方向に回転し、投入口102から落下してきた廃棄物PAを案内ブレード116とガイドプレート106とで挟み込むようにしながら排出口112にまで送出する。その送出の過程において、ガイドプレート106と破袋ローター108及び取り出しローター110によって包装材PCが破断され内容物PBが包装材PCの中から弾き出されるようになっている。
【0063】
ガイドプレート106は、破袋ユニットS1の内部で軸方向に延びるプレートであって、破袋ローター108及び取り出しローター110によって引っ張られた廃棄物PAを固定し、破断作用を発生させると共に、投入口102から投入された廃棄物PAを排出口112にまで案内する案内路を形成する案内部材である。ガイドプレート106は、案内ローター104が配置される側と、破袋ローター108や取り出しローター110が配置される側との間を実質的に遮蔽し、廃棄物PAの内容物PBが破袋ローター108側へと紛れ込んでしまうのを防止している。
【0064】
図4は、ガイドプレート106の正面図である。図2における紙面垂直方向(軸方向)を、図4における矢印Y1方向としている。ガイドプレート106の上部側には、破袋ブレード118の配置位置に対応するように、上部スリット106aが形成されている。この上部スリット106aは、略長方形状に形成されて破袋ブレード118の貫通を許容している。上部スリット106aの形成により、破袋ブレード118が案内ローター104側に侵入してその回転軌跡と案内ブレード116の回転軌跡とがオーバーラップできるようになっている。
【0065】
上部スリット106aの軸方向寸法(幅寸法)は、破袋ブレード118の軸方向寸法(厚さ寸法)よりも若干大きく形成されており、例えば、破袋ブレード118の厚さ9mmに対して上部スリット106aの幅寸法は30mm以上100mm以下に設定されている。この上部スリット106aと破袋ブレード118との開口ギャップから、破袋後の包装材PCが案内ローター104側から破袋ローター108側へと破袋ブレード118により引き出されるようになっている。したがって、ガイドプレート106を挟んで、案内ローター104側にスリット106aより大きな内容物PB、破袋ローター108側に包装材PC及びスリット106aより小さな内容物というように、大きな内容物PBと包装材PC及び小さな内容物との分離が行われるようになっている。なお、上部スリット106aと破袋ブレード118との開口ギャップが狭いので、内容物PBが破袋ローター108側へと移動することは殆どない。
【0066】
ガイドプレート106の下部側には、取り出しブレード120の配置位置に対応するように、下部スリット106bが形成されている。この下部スリット106bも、略長方形状に形成されて取り出しブレード120の貫通を許容している。下部スリット106bの形成により、取り出しブレード120が案内ローター104側に侵入してその回転軌跡と案内ブレード116の回転軌跡とがオーバーラップできるようになっている。
【0067】
下部スリット106bの幅寸法と取り出しブレード120の厚さ寸法との開口ギャップは、上部スリット106aの幅寸法と破袋ブレード118の厚さ寸法との開口ギャップよりも大きく形成されている。より具体的には、取り出しブレード120の厚さが破袋ブレード118の厚さと同寸の9mmである場合に、下部スリット106bの幅寸法は80mm以上150mm以下に設定されている。
【0068】
下部スリット106bの近傍においては、取り出しブレード120による内容物PBの弾き出しが行われ、内容物PBやその粉砕物が付近に散乱する状態となっている。したがって、下部スリット106bと取り出しブレード120との開口ギャップが上部スリット106aにおける開口ギャップ同様に小さいと、内容物PBやその粉砕物が開口ギャップに挟まってしまい、破袋ユニットS1の異常停止等の不具合を生じてしまう。したがって、下部スリット106bにおいては、上部スリット106aにおける場合よりも開口ギャップを大きく設定し、破袋ユニットS1への不具合を防止している。なお、この下部スリット106bと取り出しブレード120との開口ギャップからも、案内ローター104側に残存する包装材PCが取り出しローター110側へと取り出しブレード120によって引き出されるようになっている。
【0069】
包装材PCの破断は、主に以下のような原理に基づき行われる。すなわち、案内ローター104とガイドプレート106との挟み込みにより廃棄物PAが略固定され、その廃棄物PAに対して破袋ブレード118や取り出しブレード120が突き刺さる。そして、ブレード118,120の回転により、ブレード118,120とスリット106a,106bとの間でせん断力が生じ、包装材PCから内容物PBが弾き出されつつ包装材PCが引き裂かれるのである。引き裂かれた包装材PCは、ブレード118,120に刺さっているので、そのままスリット106a,106bを通り抜けて破袋ローター108及び取り出しローター110が配置される側へと引きずり出される。
【0070】
案内ローター104の軸部材114は、図3及び図5に示すように軸方向直交面内における断面形状が非円形状である多角形状部114aを有している。また、この多角形状部114aの各頂角kを結ぶ仮想円Jの直径は望ましくはφ270mm以上、より望ましくはφ340mm以上、更に望ましくはφ460mm以上と大径に構成されている。
【0071】
直径が大きいだけでなく、その断面形状が頂角kを有する多角形状とされているので、破袋後の包装材PCや長尺の廃棄物等が巻き付いてしまった場合にも引っ張り応力のアンバランスにより外れ易くなっている。したがって、軸部材114への長尺廃棄物等の巻き付きを予防又は軽減している。
【0072】
破袋ローター108は、廃棄物PAの包装材PCを破断するための回転部材である。図2における紙面垂直方向を軸方向とする軸部材122とその軸部材122に取り付けられ略放射状に突出する破袋ブレード118とを有して構成され、図中矢印Z1方向に回転している。破袋ローター108においては、略放射状に4つの破袋ブレード118が1組で軸部材122に取り付けられ、その1組が軸部材122の軸方向に等間隔で配置されている。なお、破袋ブレード118と案内ブレード116とは、相互に干渉しないように軸方向位置がずれて配置され、いわゆる入れ子状に配置されている。
【0073】
図6は、この破袋ブレード118の概略形状を示す二面図である。破袋ブレード118は、その先端に包装材PCを破断するための爪部118aを有している。この爪部118aの頂角における二等分線Lは、この破袋ブレード118の回転軌跡R1の爪部118aにおける接線方向L2よりも角度θ1分だけ外向きに傾斜している。この角度θ1の設定により爪部118aが円周外方向に向いて設定されることとなる。したがって、爪部118aによる包装材PCへの突き刺しや包装材PCの上部スリット106aを通しての引きずり出しを充分に機能達成しつつ、爪部118aに突き刺さった状態の包装材PCが、破袋ブレード118の回転に伴い容易に脱落するようになっている。
【0074】
なお、破袋ブレード118が図7に示すように、その先端に突出部を有さない形状である場合であっても、ブレード118の頂角が爪部118aとして機能する。そして、爪部118aとしての頂角の二等分線Lがこの破袋ブレード18の回転軌跡R1の爪部118aにおける接線方向L2よりも角度θ1分だけ外向きに傾斜していればよい。
【0075】
破袋ブレード118の回転軌跡R1と案内ブレード116の回転軌跡R2とは、図2に示すように部分的に重複しており、その中心間における重複寸法W1は、望ましくは20mm以上かつ60mm以下、より望ましくは30mm以上かつ50mm以下に設定されている。これにより、包装材PCの確実な破断を実現しつつ、内容物PBやその粉砕物の不用意な引っ掛かりを防止している。
【0076】
また、破袋ローター108の回転数は、案内ローター104の回転数よりもかなり高く設定され、望ましくは案内ローター104の回転数の20倍以上かつ40倍以下、より望ましくは25倍以上かつ35倍以下に設定されている。例えば、案内ローター104の回転数:4.3rpmに対し、破袋ローター108の回転数:150rpmに設定される。廃棄物PAが案内ローター104で送られる間に、数多くの破袋ブレード118との接触機会を付与することができる。したがって、確実な破袋を実現することができる。
【0077】
取り出しローター110は、破袋ローター108により破断されなかった残りの包装材PCを破断したり、包装材PC内の小袋を破断することも目的とするが、加えて、破袋後の包装材PCから内容物PBを弾き出す(取り出す)ことを主目的とする回転部材である。また、破袋後の包装材PCや小袋を下部スリット106bを介して取り出しローター110側に分離することも目的の1つとしている。図2における紙面垂直方向を軸方向とする軸部材126とその軸部材126に取り付けられ略放射状に突出する取り出しブレード120とを有して構成され、図中矢印Z1方向に回転している。破袋ローター108の場合と同様に、取り出しローター110においても、略放射状に4つの取り出しブレード120が1組で軸部材126に取り付けられ、その1組が軸部材126の軸方向に等間隔で配置されている。なお、取り出しブレード120は、案内ブレード116及び破袋ブレード118と相互に干渉しないように軸方向位置がずれて配置され、いわゆる入れ子状に配置されている。なお、取り出しブレード120の概略形状は、図6に示す破袋ブレード118と略同様であるので、図示及び説明を省略する。
【0078】
取り出しブレード120の回転軌跡R3と案内ブレード116の回転軌跡R2とは、図2に示すように部分的に重複しており、その中心間における重複寸法W2は、望ましくは40mm以上かつ160mm以下、より望ましくは60mm以上かつ140mm以下に設定されている。これにより、包装材PCからの内容物PBの確実な弾き出しを実現している。なお、重複寸法W1と重複寸法W2とは異なる寸法であることが望ましく、重複寸法W1よりも重複寸法W2の方が大きいことがもちろん望ましい。
【0079】
また、取り出しローター110の回転数は、破袋ローター108の場合と同様に、望ましくは案内ローター104の回転数の20倍以上かつ40倍以下、より望ましくは25倍以上かつ35倍以下に設定されている。例えば、案内ローター104の回転数:4.3rpmに対し、取り出しローター110の回転数:150rpmに設定される。廃棄物PAが案内ローター104で送られる間に、数多くの取り出しブレード120との接触機会を付与することができ、内容物PBの確実な弾き出しにより解れ率の向上を実現している。また、包装材PC内部の小袋の破袋率向上にも寄与している。
【0080】
排出口112は、案内ローター104の下方に配置され、案内ローター104によって送り出された廃棄物PAを破袋ユニットS1外、すなわち選別ユニットS2の受け入れ口201へと排出するための開口である。なお、破袋ローター108及び取り出しローター110の機能により、大半の包装材PCはガイドプレート106の破袋ローター108側へと引き出されているので、排出口112から排出される廃棄物PAの大半は内容物PBである。なお、破袋ローター108側の包装材PCも選別ユニットS2の受け入れ口201を介してローラーコンベア202上に落下するようになっている。
【0081】
駆動モータMは、案内ローター104、破袋ローター108及び取り出しローター110を回転駆動するための駆動源であり、制御装置Cによってその動作が制御される。1つの駆動モータMによって3つのローター104,108,110のすべてを回転駆動してもよいし、3つの駆動モータM1〜M3が各々3つのローター104,108,110を回転駆動してもよい。
【0082】
案内ローター104を回転駆動する駆動モータM1には、その駆動電流を検出する電流計(異物検出手段)Bが接続されている。この電流計Bは、投入口102に異物が投入された等により、案内ローター104が回転不能に陥った場合に、駆動モータM1への過大電流を検知し、異常信号を制御装置Cへと送信する機能を有する。
【0083】
異常信号を受信した制御装置Cは、駆動モータM1の回転駆動を速やかに停止し、続いて駆動モータM1を低速で逆回転に回転駆動する。それにより、案内ローター104が矢印X1の逆方向へと回転し、投入された異物等は、排出口112とは別に形成された異物排出口130から破袋ユニットS1外へと排出されるようになっている。異物を異物排出口130へと導く案内ガイドプレート132は、異物を異物排出口130へと円滑に案内するように、案内ローター104の軸部材114の外周近傍から異物排出口130に架けて配置されている。この案内ガイドプレート132は、軸部材114近傍においてスクレーパとしての機能を発揮している。すなわち、案内ガイドプレート132の一端132aは、軸部材114の外径から所定距離分だけ離れた半径位置に固定されており、軸部材114への長尺廃棄物等の巻き付きが一定以上となるのを防止している。
【0084】
[破袋ユニットの実施形態2]
図8は、廃棄物処理システムSが備える破袋ユニットS1の実施形態2に係る内部構造の概略を示す構造図である。この破袋ユニットS1は、案内ローター104の軸部材114の近傍に、軸方向に向けて検出光を投受光する投受光センサー(巻き付き検出手段)140を備えている。この検出光は、案内ローター104の回転中心から半径方向に一定距離ra離れた位置において、軸部材114への長尺廃棄物等の巻き付きが一定厚さ以上とならないことを検出している。
【0085】
長尺廃棄物等の巻き付きが一定厚さ以上となって検出光を遮光すると、投受光センサー140は、制御装置Cに向けて報知信号を送信するようになっている。制御装置Cは、報知信号を受信すると、破袋ユニットS1の筐体外壁に配置された警告ランプ(図示せず)を点滅制御し、長尺廃棄物等の巻き付き厚さが一定以上となって処理効率が低下していることを報知する。もちろん、投受光センサー140は、報知信号と共に減速信号又は停止信号を制御装置Cに向けて送信し、制御装置Cが減速信号又は停止信号に基づき案内ローター104を回転駆動する駆動モータM1を減速/停止させるようになっていてもよい。
【0086】
[破袋ユニットの実施形態3]
図9は、廃棄物処理システムSが備える破袋ユニットS1の実施形態3に係る内部構造の概略を示す構造図である。この破袋ユニットS1は、セルフクリーニング機能を有しており、このセルフクリーニング機能に基づいて、軸部材114,122,126へ巻き付いてしまった包装材PC等の除去が可能となっている。セルフクリーニング機能は、以下に説明する案内ガイドプレート132、スクレーパ133,134、開閉扉135の往復揺動動作及び案内ローター104、破袋ローター108、取り出しローター110の正逆回転動作により実現される。
【0087】
この破袋ユニットS1は、可動式の案内ガイドプレート132及びスクレーパ133,134を有しており、これら案内ガイドプレート132及びスクレーパ133,134は、各々駆動モータM4〜M6によって往復揺動するように構成されている。スクレーパ133,134は各々破袋ローター108の軸部材122及び取り出しローター110の軸部材126から包装材PC等の巻き付き物を除去するためのものである。
【0088】
更に、異物排出口130の近傍には、可動式の開閉扉135を有しており、この開閉扉135は駆動モータM7によって往復陽動するようになっている。そして、これら駆動モータM4〜M7及び駆動モータM1〜M3は、制御手段Cによってその動作(回転/停止、回転速度、回転方向など)が制御されるようになっている。
【0089】
通常の破袋処理時においては、案内ガイドプレート132、スクレーパ133,134、開閉扉135は、退避位置(図9中の二点鎖線部)にある。しかし、セルフクリーニングモードに設定されると、駆動モータM4〜M7が案内ガイドプレート132、スクレーパ133,134、開閉扉135をα1方向へと揺動動作させ、クリーニング位置(図9中の実線部)に位置させる。これにより、案内ガイドプレート132、スクレーパ133,134が軸部材114,122,126に巻き付いた包装材PC等を除去することが可能となる。
【0090】
なお、案内ガイドプレート132を正面方向(図9における紙面左から右へ向く方向)から矢視すると、おおよそ図10に示すような形状をしている。案内ガイドプレート132の切り欠き部132bが送りブレード116との干渉を回避しており、先端(一端)132aが軸部材114に巻き付いた包装材PC等の巻き付き物を除去する機能を発揮している。また、スクレーパ133,134の外観形状も、大略案内ガイドプレート132と同様である。案内ガイドプレート132と開閉扉135とは、破袋処理動作時においては協働して異物排出口130を閉鎖している。そして、クリーニングモードにおいては、案内ガイドプレート132と開閉扉135とが動作することにより、破袋ユニットS1の側面に異物排出口30が開口されることとなる。
【0091】
このクリーニングモードは、破袋ユニットS1に配置された図示しないクリーニングボタン等の押圧によって機能するものであってもよいし、一定時間の破袋処理動作ごとに行われたり、一定量の巻き付き物の堆積を検知することによって行われるものであってもよい。
【0092】
次に、案内ローター104、破袋ローター108、取り出しローター110の正逆回転制御に基づくクリーニング動作について説明する。
【0093】
上記で説明したクリーニングボタンの押圧、一定時間の破袋処理動作又は一定量の巻き付き物の堆積の検知に基づき、クリーニングモードが設定され、クリーニング処理が開始する。クリーニング処理においては、一旦駆動モータM1〜M3が停止され、案内ローター104、破袋ローター108、取り出しローター110が回転停止する。
【0094】
その後、下記に示すいずれかの動作パターンに基づき、駆動モータM1〜M3を回転駆動し、案内ローター104及び/又は破袋ローター108及び/又は取り出しローター110を回転させる。それにより、軸部材114,122,126に巻き付いた包装材PC等の巻き付き物が円滑に除去され、巻き付きの堆積量が減少するようになっている。なお、各表1〜3において、正回転方向は、破袋処理時における回転方向と同方向であることを意味し、回転速度比は、破袋処理時における回転速度に対する回転速度比を意味する。
【0095】
【表1】
【0096】
【表2】
【0097】
【表3】
なお、上記のパターン1−1〜1−3、パターン2−1〜2−6、パターン3−1〜3−6のうち、いずれか1つのパターンのみでもクリーニング効果を得ることができるが、もちろん、上記の中から適宜選択される複数のパターンの組合せによって、更に高いクリーニング効果を得ることができる。
【0098】
特に、パターン1−1〜1−3の中から選択される1つのパターンと、パターン2−1〜2−6の中から選択される1つのパターンと、パターン3−1〜3−6の中から選択される1つのパターンとを組み合わせて動作させることにより、非常に高いクリーニング効果を発揮する。これらの選択された3つのパターンは、順次動作させるように制御してもよいし、同時的に動作させるように制御してもよい。
【0099】
なお、これらの実施形態に係る破袋ユニットS1に関し、以下に示すように実験を行ったので説明する。
【0100】
[実施例1−1]
図11及び表4は、実施形態1に係る破袋ユニットS1を用いて廃棄物PAの破袋処理を行った場合の実験結果を示すものである。この実施例1−1においては、案内ローター104の回転数に対する破袋ローター108の回転数(取り出しローター110の回転数も同一回転数)の比率Tを変化させ、包装材PCの破袋率V1、包装材PC内部の小袋の破袋率V2、解れ率V3、駆動モータM1の所要動力、軸部材114への長尺廃棄物等の巻き付きの程度(巻き付き厚さ)の変化の度合いを評価した。なお、表4において、◎〜×は観察者による評価の程度を表し、◎は優、○は良、△は可、×は不可を意味する。
【0101】
図11は、横軸を比率T、縦軸を破袋率V1,V2及び解れ率V3としたグラフである。図11には、比率Tが20倍を下回ると包装材PCの破袋率V1が90%を下回ることが示されている。また、表1には、比率Tが40倍を超えると、駆動モータM1の所要動力が過大となることが示されている。
【0102】
【表4】
【0103】
[実施例1−2]
図12及び表5は、実施形態1に係る破袋ユニットS1を用いて廃棄物PAの破袋処理を行った場合の実験結果を示すものである。この実施例1−2においては、案内ブレード116の回転軌跡R1と破袋ブレード118の回転軌跡R2との回転中心間における重複寸法W1を変化させ、包装材PCの破袋率V1、包装材PC内部の小袋の破袋率V2、解れ率V3、駆動モータM1の所要動力、軸部材114への長尺廃棄物等の巻き付きの程度(巻き付き厚さ)の変化の度合いを評価した。なお、表5においても、◎〜×は観察者による評価の程度を表し、◎は優、○は良、△は可、×は不可を意味する。
【0104】
図12は、横軸を重複寸法W1、縦軸を破袋率V1,V2としたグラフである。図12には、重複寸法W1が20mmを下回ると包装材PCの破袋率V1が90%を下回ることが示されている。また、表2には、重複寸法W1が50mmを超えると、駆動モータM1の所要動力が過大となり始めることが示されている。
【0105】
【表5】
【0106】
[実施例1−3]
図13及び表6は、実施形態1に係る破袋ユニットS1を用いて廃棄物PAの破袋処理を行った場合の実験結果を示すものである。この実施例1−3においては、案内ブレード116の回転軌跡R1と取り出しブレード120の回転軌跡R3との回転中心間における重複寸法W2を変化させ、包装材PCの破袋率V1、包装材PC内部の小袋の破袋率V2、解れ率V3、駆動モータM1の所要動力、軸部材114への長尺廃棄物等の巻き付きの程度(巻き付き厚さ)の変化の度合いを評価した。なお、表6においても、◎〜×は観察者による評価の程度を表し、◎は優、○は良、△は可、×は不可を意味する。
【0107】
図13は、横軸を重複寸法W2、縦軸を破袋率V1,V2としたグラフである。図13には、重複寸法W2が40mmを下回ると小袋の破袋率V2が90%を下回ることが示されている。また、表3には、重複寸法W2が160mmを超えると、駆動モータM1の所要動力が過大となることが示されている。
【0108】
【表6】
【0109】
<選別ユニットの説明>
[選別ユニットの実施形態]
図14は、図1に示す廃棄物処理システムSが備える選別ユニットS2の実施形態に係る内部構造の概略を示す構造図である。図14は、選別ユニットS2の内部を側方から見た図である。この選別ユニットS2は、受け入れ口201、ローラーコンベア202、モータ(駆動手段)4、シリンダ(保持手段)206を有して大略構成され、そのローラーコンベア202には送風機(送風手段)208が取り付けられている。
【0110】
受け入れ口201は、破袋ユニットS1から排出された廃棄物PA(内容物PB及び包装材PCを含む。)を受け入れるための開口であり、ローラーコンベア202の上方に配置されている。廃棄物PAは、内容物PBとして、例えば、家庭内や事業所、作業現場等から排出され、紙くず・小片・ビニール袋等の軽量物(第1物体)P1、岩石・廃材・空き缶等の重量物(第2物体)P2、土砂・小石等の細粒物(第3物体)P3を混合的に含んでいる。なお、包装材PCは、大略軽量物P1に分類される。受け入れ口201から受け入れた廃棄物PAは、ローラーコンベア202上に落下し、ローラーコンベア202によって搬送方向X2へと搬送される軽量物P1、搬送方向X2の逆方向−X2へと滑落する重量物P2、搬送ローター212の隙間G(図15参照)から下方へと落下する細粒物P3とに選別されるようになっている。
【0111】
なお、この廃棄物処理システムSにおいては、選別ユニットS2が廃棄物PAを受け入れる前に、破袋ユニットS1によって廃棄物PAが破袋され、かつ内容物PBと包装材PCとに大略分離されている。そして、大半の内容物PBと包装材PCとが、別々の位置から受け入れ口201へと落下するようになっている。したがって、この時点で初期段階の粗選別が行われており、一層の選別信頼性の向上に寄与している。
【0112】
ローラーコンベア202は、後述するシリンダ206によって例えば、傾斜角θ2で傾斜配置されており、その傾斜上部側Uの下方には、ローラーコンベア202の上端202aから排出される軽量物P1を回収するためのストッカーT1が配置されている。傾斜下部側Dの下方には、ローラーコンベア202の下端202bから排出される重量物P2を回収するためのストッカーT2が配置されている。ローラーコンベア202の略中央下方には、隙間Gから落下する細粒物P3を回収するためのストッカーT3が配置されている。
【0113】
ローラーコンベア202は、複数の搬送ローターの回転により混合物を搬送するためのものである。図15は、このローラーコンベア202の内部構造を正面(図14における矢印A方向)から見た正面図である。ローラーコンベア202は、複数のローター軸210を有しており、本実施の形態においては、ローター軸210を7本有している。そのローター軸210は、ローラーコンベア202の搬送方向X2と直交する方向を軸方向Y2として、搬送方向X2に沿って互いに平行に配置されている。
【0114】
図16は、このローター軸210の二面図である。ローター軸210はシャフト211と複数の搬送ローター212とを有している。搬送ローター212は、シャフト211に同軸状に一定間隔で複数取り付けられており、シャフト211と共に回転するようになっている。その搬送ローター212は、図16に示すように、頂部212aと凹部212bとを有して丸みを帯びた略四角形断面形状を呈している。この搬送ローター212が回転方向α2に回転することにより、頂部212aによって軽量物P1を弾くようにして搬送方向X2へと搬送することができるようになっている。
【0115】
搬送ローター212は、軸方向Y2に沿って一定の厚さtを有している。そして、軸方向Y2で隣接する搬送ローター212同士はその厚さtより大きい寸法間隔で配置されている。図15に示すように、ローター軸210同士は、搬送方向X2に沿って平行に配置されている。そして、搬送方向X2に隣接する搬送ローター212同士が、互い違いに入れ子状となるように、ローター軸210が隣接配置されている。この入れ子状となった搬送ローター212と搬送ローター212との間には隙間Gが形成されている。そして、その隙間Gから、細粒物P3が落下するようになっている。
【0116】
なお、ローター軸210にはその軸端近傍にスプロケット209が取り付けられている。このスプロケット209がチェーン213と係合することにより、モータ204からの駆動力が伝達されるようになっている。
【0117】
モータ204は、搬送ローター212を回転駆動するためのものである。より具体的には、モータ204は、チェーン(伝達手段)213を介してローター軸210を回転駆動することにより、搬送ローター212を回転させるようになっている。モータ204は、搬送ローター212を回転方向α2に回転駆動することにより、軽量物P1を搬送方向X2へと搬送する。
【0118】
本実施の形態においては、選別ユニットS2は、傾斜上部側Uの4本のローター軸210を回転駆動する上部側モータ204aと、傾斜下部側Dの3本のローター軸210を回転駆動する下部側モータ204bとを有している。そして、上部側モータ204aは下部側モータ204bよりも高速で駆動され、その結果、傾斜上部側Uのローター軸210及び搬送ローター212は、傾斜下部側Dのローター軸210及び搬送ローター212の回転速度の約1.4倍の回転速度で駆動されるようになっている。
【0119】
なお、上部側モータ204aと下部側モータ204bの2つのモータ204を用いるのでなく、1つのモータ204によって傾斜上部側Uのローター軸210と傾斜下部側Dのローター軸210とを異なる回転速度で駆動することも可能である。その場合、チェーン213と係合する傾斜上部側Uのローター軸210に係るスプロケット209の歯数を傾斜下部側Dのローター軸210に係るスプロケット209の歯数よりも少なくすればよい。
【0120】
シリンダ206は、ローラーコンベア202を搬送方向X2に向けて上り傾斜となるように傾斜保持するためのものである。シリンダ206は、ローラーコンベア202を下方で支持しており、その傾斜上部側Uが上、傾斜下部側Dが下となるように保持している。その傾斜角θ2は、図示しない高さ調整手段によって、この選別ユニットS2が処理する廃棄物PAの種類等に応じて調整可能となっている。
【0121】
送風機208は、受け入れ口201から受け入れた廃棄物PAに向けて送風するためのもので、受け入れ口201の下方であってローラーコンベア202の上方に配置されている。送風機208は、ローラーコンベア202の傾斜角θ2と平行な方向で、かつ搬送方向X2に向けて(すなわち、傾斜下部側Dから傾斜上部側Uへ向けて)廃棄物PAに送風するようになっている。送風機208は、ローラーコンベア202の傾斜角θ2以上で廃棄物PAに向けて送風してもよい。
【0122】
受け入れ口201は、傾斜上部側Uと傾斜下部側Dとの境界近傍の上方に配置されている。本実施の形態においては、傾斜上部側Uの4本のローター軸210と傾斜下部側Dの3本のローター軸210との境界近傍の上方位置に配置されている。したがって、受け入れ口201から受け入れた廃棄物PAは、送風機208によって一層分散されてローラーコンベア202上に落下する。その際、軽量物P1は送風の影響を強く受けて、傾斜上部側Uへと流されて落下する。一方、重量物P2は送風の影響を殆ど受けることなく受け入れ口201から略真下に落下する。
【0123】
傾斜上部側Uへと落下した軽量物P1は、回転速度の速い傾斜上部側Uの搬送ローター212の回転によって迅速に搬送方向X2へと搬送され、上端202aへと至る。そして、上端202aから排出されて、ストッカーT1内へと回収される。一方、送風の影響を殆ど受けることなく落下した重量物P2は、そのまま回転速度の遅い傾斜下部側Dの搬送ローター212上を搬送方向の逆方向(−X2方向)へと円滑に滑落して行き、下端202bへと至る。そして、下端202bから排出されて、ストッカーT2内へと回収される。
【0124】
次に、この選別ユニットS2が受け入れた廃棄物PAが選別されるまでの手順について説明する予め、選別ユニットS2のモータ204はローター軸210の回転駆動を開始しており、送風機208は送風を開始している。まず、受け入れ口201を介して破袋ユニットS1から廃棄物PAを受け入れる。この廃棄物PAは、破袋ユニットS1側から受け入れた段階で、既に内容物PBと包装材PCとに大略分類されている。受け入れた廃棄物PAは、送風機208からの送風により、軽量物P1と重量物P2とに分散されてローラーコンベア202上に落下する。その場合、軽量物P1の大半が傾斜上部側Uの搬送ローター212上に落下し、重量物P2の大半が、そのまま略真っ直ぐ下方に(すなわち、傾斜上部側Uと傾斜下部側Dとの境界付近に)落下する。したがって、この時点で送風機208の風によって、廃棄物PAの粗選別が行われる。
【0125】
傾斜上部側Uの搬送ローター212上に落下した軽量物P1は、傾斜上部側Uの高速回転により搬送ローター212の頂部212aに弾かれるようにして迅速に搬送方向X2へと搬送されて行き、上端202aへと至る。そして、上端202aから排出されてストッカーT1内へと回収される。
【0126】
なお、一部の重量物P2が傾斜上部側Uの搬送ローター212上に落下する場合もあり得る。しかし、重量物P2は、搬送に拘らずその重量により滑落を開始する。受け入れ口201が傾斜上部側Uと傾斜下部側Dとの境界近傍に配置されているので、重量物P2が滑落を開始すると、すぐに傾斜下部側Dの搬送ローター212上へと移動する。傾斜下部側Dの搬送ローター212は、傾斜上部側Uよりも低速(2/3以下の回転速度)で回転している。したがって、重量物P2は円滑に下端202bへ向けて滑落して行く。下端202bから排出された重量物P2はストッカーT2内へと回収される。
【0127】
そのまま略真っ直ぐ下方に落下した重量物P2は、傾斜上部側Uと傾斜下部側Dとの境界近傍に落下することとなる。そして、傾斜下部側Dの搬送ローター212上に落下した重量物P2は、搬送ローター212の回転速度が低いので、その回転方向α2への回転に拘らず円滑に滑落して行く、そして、迅速に下端202bへと至り、ストッカーT2内へと回収される。傾斜上部側Uの搬送ローター212上に落下した重量物P2についても、上述したものと同様に、搬送方向X2へ搬送されることなく滑落し、下端202bへと至る。
【0128】
なお、一部の軽量物P1が傾斜下部側Dの搬送ローター212上に落下する場合があり得る。しかし、軽量物P1は、搬送ローター212の回転速度が低速であっても、搬送ローター212上を滑落して行くことはなく、弾かれながら徐々に搬送方向X2へと搬送される。そうすると、すぐに傾斜上部側Uの搬送ローター212上へと移動することができるので、そのまま迅速に上端202aへと搬送される。
【0129】
なお、細粒物P3については、一部が受け入れ口201からそのまま真っ直ぐに落下し、一部が送風機208の送風によって傾斜上部側Uへと分散される。いずれも細粒物P3についても、搬送されたり滑落したりすることなく、隙間Gから下方に落下し、ストッカーT3によって回収されることとなる。
【0130】
以上、本発明の好ましい実施の形態を説明したが、本発明はこれらに限定されるものではなく、その要旨の範囲内で様々な変形や変更が可能である。
【0131】
例えば、本実施の形態においては、傾斜上部側Uの搬送ローター212の回転速度を傾斜下部側Dの搬送ローター212の回転速度の1.4倍としているが、もちろん傾斜上部側Uの搬送ローター212の回転数はそれ以上の回転速度であってもよい。傾斜上部側Uと傾斜下部側Dとでどの程度の回転速度比とするかは、受け入れる廃棄物PAの種類、ローラーコンベア202の傾斜角θ2、搬送ローター212の形状、必要とされる処理速度等に応じて適宜設定可能な事項である。また、場合によっては、傾斜上部側Uの搬送ローター212の回転速度を傾斜下部側Dの搬送ローター212の回転速度よりも低速とすることも考えられる。廃棄物PAのローラーコンベア202上での滞留時間を長くすることができるので、処理の高速化よりも選別の信頼性向上、特に細粒物P3の確実な選別が要求される場合に適切な方法である。
【0132】
上記実施形態においては、傾斜上部側Uの搬送ローター212の回転速度を傾斜下部側Dの搬送ローター212の回転速度の1.4倍としているが、傾斜上部側Uにおける複数の搬送ローター212同士の回転速度は同速度であり、傾斜下部側Dにおける複数の搬送ローター212同士の回転速度は同速度である。
【0133】
しかし、傾斜上部側U内での複数の搬送ローター212の各々の回転速度を、より下部側のものよりもより上部側のものが高速回転となるようにすることもできる。同様に、傾斜下部側D内での複数の搬送ローター212の各々の回転速度を、より下部側のものよりもより上部側のものが高速回転となるようにすることもできる。必要に応じて、ローラーコンベア202内の全搬送ローター212を、下方から上方にかけて順次徐々に高速回転となるように構成することもできる。
【0134】
このように、下方から順に上方へ向けて高速回転とすることで、廃棄物PAの態様によっては、一層選別の高速化と信頼性を高い次元で両立させることができる。なお、各搬送ローター212ごとの回転速度調整は、各々別々の駆動モータによることも可能であるが、例えば、搬送ローター212ごとに異なる歯数のスプロケット209を使用し、これらをチェーン213によって連結すれば、1つの駆動モータによって実現することも可能である。
【0135】
また、送風機208による送風方向をローラーコンベア202の傾斜方向と略平行としているが、もちろん送風方向がより一層大きい傾斜であってもよい。より受け入れ口201側へ向けて上向きに送風することで、分散の程度をより強めることができる。
【0136】
なお、ローター軸210の本数、ローラーコンベア202の傾斜角θ2、搬送ローター212の形状や回転速度等は適宜設定可能な設計事項である。また、傾斜上部側Uと傾斜下部側Dとの境界は、搬送方向X2におけるローラーコンベア202の中央近傍であることが望ましく、その上方に受け入れ口201が配置されることが望ましいが、もちろんこれについても事情に応じて適宜変更可能である。
【0137】
[実施例2−1]
上記実施形態において説明した選別ユニットS2を有する廃棄物処理システムSを用いて、廃棄物PAの選別試験を行った。廃棄物PAとして、体積2m3の軽量プラスチック(軽量物)P1と体積0.12m3の重量プラスチック(重量物)P2とを含み、全体として体積2.12m3の廃棄物PAの選別試験を行った。
【0138】
実施例2−1においては、傾斜下部側Dの3本のローター軸110に係る搬送ローター212の回転速度をN(rpm)、傾斜上部側Uの4本のローター軸210に係る搬送ローター212の回転速度を1.4倍の1.4N(rpm)とした。また、比較例として、傾斜上部側Uの搬送ローター212の回転速度を、傾斜下部側Dの搬送ローター212の回転速度と同速度のN(rpm)とした場合についても試験を行った。実施例2−1及び比較例において、上端202a側から排出された軽量プラスチックP1の量と下端202b側から排出された軽量プラスチックP1の量とを以下表7にまとめた。
【0139】
なお、廃棄物PAの投入を、傾斜上部側Uに近い傾斜下部側Dの位置付近に落下するように行ったところ、表7に示すように、破袋ユニットS1による案内ローター104側へと破袋ローター108側へとの分離、及び送風機208からの送風に起因して、体積2m3の軽量プラスチックP1のうち体積0.65m3分が、また、体積0.12m3の重量プラスチックP2のうち体積0.025m3分が傾斜上部側Uへと落下した。
【0140】
表7からわかるように、実施例2−1においては投入した軽量プラスチックP1のすべてが上端202a側から排出されているのに対し、比較例においては2m3のうち1.35m3の軽量プラスチックP1が上端202a側へと搬送されているが、残りの0.65m3については、下端202b側から排出されてしまっている。
【0141】
つまり、実施例2−1においては、傾斜下部側Dに落下した軽量プラスチックP1も傾斜上部側Uへと搬送されて上端202a側から排出されており、比較例においては、傾斜下部側Dに落下した軽量プラスチックP1は、傾斜上部側Uへと送られずにそのまま傾斜下部側Dを滑落して下端202bから排出されている。
【0142】
実施例2−1で上端202aから排出された軽量プラスチックP1の量(2m3)は、比較例で上端202aから排出された軽量プラスチックP1の量(0.65m3)の約1.48倍の体積である。これは、傾斜上部側Uの搬送ローター212の回転速度を傾斜下部側Dの搬送ローター212の回転速度の1.4倍とすることにより、選別ユニットS2の選別処理能力が約1.48倍に向上することを意味している。傾斜上部側Uの搬送ローター212の回転速度を上昇させることで、選別ユニットS2の処理能力を向上させることができ、ひいては、処理能力を低下させることなく選別ユニットS2のサイズの小型化、ひいては廃棄物処理システムSの小型化を図ることができる。
【0143】
【表7】
【符号の説明】
【0144】
α1,α2:回転方向
θ1:角度
θ2:傾斜角
A:矢印
B:電流計(異物検出手段)
C:制御装置(制御手段)
D:傾斜下部側
G:隙間
J:仮想円
k:頂角
L:二等分線
L2:接線方向
M,M1〜M7:駆動モータ(駆動源)
P1:軽量物(第1物体)
P2:重量物(第2物体)
P3:細粒物(第3物体)
PA:廃棄物
PB:内容物
PC:包装材
R1〜R3:回転軌跡
S:廃棄物処理システム
S1:破袋ユニット
S2:選別ユニット
T:比率
T1〜T3:ストッカー
t:厚さ
ra:一定距離
U:傾斜上部側
W1,W2:重複寸法
X1,Y1,Z1:矢印
X2:搬送方向
Y2:軸方向
102:投入口
104:案内ローター
106:ガイドプレート
106a:上部スリット
106b:下部スリット
108:破袋ローター
110:取り出しローター
112:排出口
114,122,126:軸部材
114a:多角形状部
116:案内ブレード
118:破袋ブレード
118a:爪部
120:取り出しブレード
130:異物排出口
132:案内ガイドプレート
132a:一端
132b:切り欠き部
133,134:スクレーパ
135:開閉扉
140:投受光センサー(巻き付き検出手段)
201:受け入れ口
202:ローラーコンベア
202a:上端
202b:下端
204:モータ(駆動手段)
204a:上部側モータ(駆動手段)
204b:下部側モータ(駆動手段)
206:シリンダ(保持手段)
208:送風機(送風手段)
209:スプロケット
210:ローター軸
211:シャフト
212:搬送ローター
212a:頂部
212b:凹部
213:チェーン(伝達手段)
【特許請求の範囲】
【請求項1】
内容物を包装材で内包して構成される廃棄物の該包装材を破断し、前記内容物を前記包装材から外部に取り出す破袋ユニットと、
該破袋ユニットによる破袋後の廃棄物を、複数の搬送ローターが配列されたローラーコンベアによる傾斜搬送を利用して第1物体、第2物体及び第3物体に選別する選別ユニットと、を備えた廃棄物処理システムであって、
前記破袋ユニットは、
前記廃棄物を投入する投入口と、
軸部材とその軸部材から略放射状に突出する案内ブレードとを有して前記投入口の下方に配置され、該投入口から投入された前記廃棄物を該案内ブレードの回転により排出口へ向けて送り出す案内ローターと、
軸部材とその軸部材から略放射状に突出する破袋ブレードとを有して、前記案内ローターの斜め上方に、該破袋ブレードの回転軌跡と前記案内ブレードの回転軌跡とが第1の重複寸法で部分的に重複するように配置された破袋ローターと、
軸部材とその軸部材から略放射状に突出する取り出しブレードとを有して、前記案内ローターの斜め下方に、該取り出しブレードの回転軌跡と前記案内ブレードの回転軌跡とが前記第1の重複寸法よりも大きい第2重複寸法で部分的に重複するように配置された取り出しローターと、
前記案内ローター、前記破袋ローター及び前記取り出しローターを回転駆動する1又は複数の駆動源と、を有して構成され、かつ、
前記選別ユニットは、
前記破袋ユニットからの前記廃棄物を受け入れる受け入れ口と、
前記複数の搬送ローターの回転により、傾斜上部へと搬送される第1物体と傾斜下部へと滑落する第2物体と前記複数の搬送ローターの隙間から下方に落下する第3物体とに、前記廃棄物を選別するローラーコンベアと、
前記傾斜上部側の搬送ローターと前記傾斜下部側の搬送ローターとを異なる回転速度で回転駆動する駆動手段と、
該ローラーコンベアを搬送方向に向けて上り傾斜に傾斜保持する保持手段と、を有して構成されている廃棄物処理システム。
【請求項2】
前記案内ブレードの回転軌跡と前記破袋ブレードの回転軌跡との回転中心間における重複寸法が、20mm以上かつ60mm以下である請求項1に記載の廃棄物処理システム。
【請求項3】
前記案内ブレードの回転軌跡と前記取り出しブレードの回転軌跡との回転中心間における重複寸法が、40mm以上かつ160mm以下である請求項1又は請求項2に記載の廃棄物処理システム。
【請求項4】
前記案内ローターの回転数に対する前記破袋ローターの回転数の比率が20倍以上かつ40倍以下である請求項1から請求項3のうちいずれか1項に記載の廃棄物処理システム。
【請求項5】
前記案内ローター、前記破袋ローター及び前記取り出しローターのうち少なくともいずれかの軸部材が、
その軸直交面内における断面形状が少なくとも3つの頂角を有する非円形状である多角形状部を有する請求項1から請求項4のうちいずれか1項に記載の廃棄物処理システム。
【請求項6】
前記軸部材への前記廃棄物の巻き付き厚さを検出する巻き付き検出手段と、
該巻き付き検出手段からの出力に応じて前記駆動源を制御する制御手段と、を更に有する請求項5に記載の廃棄物処理システム。
【請求項7】
前記破袋ローター及び前記取り出しローターと前記案内ローターとの間を実質的に遮蔽すると共に、
前記破袋ブレードを前記案内ローター側に貫通させる上部スリットと、前記取り出しブレードを前記案内ローター側に貫通させる下部スリットとが形成され、かつ該下部スリットと前記取り出しブレードとの軸方向における開口ギャップが前記上部スリットと前記破袋ブレードとの軸方向における開口ギャップよりも大きく形成されたガイドプレートを更に有する請求項1から請求項6のうちいずれか1項に記載の廃棄物処理システム。
【請求項8】
前記投入口からの異物の投入を検出する異物検出手段と、
該異物検出手段からの出力に応じて前記駆動源を逆回転制御する制御手段と、
前記案内ローターの逆回転により前記異物を排出させる前記排出口とは異なる異物排出口と、を更に有する請求項1から請求項7のうちいずれか1項に記載の廃棄物処理システム。
【請求項9】
前記傾斜上部側又は前記傾斜下部側の少なくともいずれか一方において、より上部側の搬送ローターの回転速度がより下部側の搬送ローターの回転速度よりも高速回転する請求項1から請求項8のうちいずれか1項に記載の廃棄物処理システム。
【請求項10】
前記駆動手段が、
前記傾斜上部側の搬送ローターを、前記傾斜下部側の搬送ローター回転速度の1.4倍以上の回転速度で回転駆動する請求項1から請求項9のうちいずれか1項に記載の廃棄物処理システム。
【請求項11】
前記ローラーコンベアが、前記搬送ローターを同軸状に複数有して構成されたローター軸を複数本有して構成され、かつ、
前記駆動手段が、
該複数本のうちの前記傾斜上部側における実質的に半分の本数のローター軸に係る搬送ローター回転速度と、
前記傾斜下部側における残りの本数のローター軸に係る搬送ローター回転速度と、を異なる回転速度で回転駆動する請求項1から請求項10のうちいずれか1項に記載の廃棄物処理システム。
【請求項12】
前記受け入れ口が、
前記傾斜上部側の搬送ローターと前記傾斜下部側の搬送ローターとの境界近傍に配置される請求項1から請求項11のうちいずれか1項に記載の廃棄物処理システム。
【請求項13】
前記ローラーコンベアの傾斜角度又はそれ以上の傾斜角度で、前記傾斜下部側から前記傾斜上部側へ向けて送風する送風手段を、前記ローラーコンベアの上方に更に有する請求項1から請求項12のうちいずれか1項に記載の廃棄物処理システム。
【請求項1】
内容物を包装材で内包して構成される廃棄物の該包装材を破断し、前記内容物を前記包装材から外部に取り出す破袋ユニットと、
該破袋ユニットによる破袋後の廃棄物を、複数の搬送ローターが配列されたローラーコンベアによる傾斜搬送を利用して第1物体、第2物体及び第3物体に選別する選別ユニットと、を備えた廃棄物処理システムであって、
前記破袋ユニットは、
前記廃棄物を投入する投入口と、
軸部材とその軸部材から略放射状に突出する案内ブレードとを有して前記投入口の下方に配置され、該投入口から投入された前記廃棄物を該案内ブレードの回転により排出口へ向けて送り出す案内ローターと、
軸部材とその軸部材から略放射状に突出する破袋ブレードとを有して、前記案内ローターの斜め上方に、該破袋ブレードの回転軌跡と前記案内ブレードの回転軌跡とが第1の重複寸法で部分的に重複するように配置された破袋ローターと、
軸部材とその軸部材から略放射状に突出する取り出しブレードとを有して、前記案内ローターの斜め下方に、該取り出しブレードの回転軌跡と前記案内ブレードの回転軌跡とが前記第1の重複寸法よりも大きい第2重複寸法で部分的に重複するように配置された取り出しローターと、
前記案内ローター、前記破袋ローター及び前記取り出しローターを回転駆動する1又は複数の駆動源と、を有して構成され、かつ、
前記選別ユニットは、
前記破袋ユニットからの前記廃棄物を受け入れる受け入れ口と、
前記複数の搬送ローターの回転により、傾斜上部へと搬送される第1物体と傾斜下部へと滑落する第2物体と前記複数の搬送ローターの隙間から下方に落下する第3物体とに、前記廃棄物を選別するローラーコンベアと、
前記傾斜上部側の搬送ローターと前記傾斜下部側の搬送ローターとを異なる回転速度で回転駆動する駆動手段と、
該ローラーコンベアを搬送方向に向けて上り傾斜に傾斜保持する保持手段と、を有して構成されている廃棄物処理システム。
【請求項2】
前記案内ブレードの回転軌跡と前記破袋ブレードの回転軌跡との回転中心間における重複寸法が、20mm以上かつ60mm以下である請求項1に記載の廃棄物処理システム。
【請求項3】
前記案内ブレードの回転軌跡と前記取り出しブレードの回転軌跡との回転中心間における重複寸法が、40mm以上かつ160mm以下である請求項1又は請求項2に記載の廃棄物処理システム。
【請求項4】
前記案内ローターの回転数に対する前記破袋ローターの回転数の比率が20倍以上かつ40倍以下である請求項1から請求項3のうちいずれか1項に記載の廃棄物処理システム。
【請求項5】
前記案内ローター、前記破袋ローター及び前記取り出しローターのうち少なくともいずれかの軸部材が、
その軸直交面内における断面形状が少なくとも3つの頂角を有する非円形状である多角形状部を有する請求項1から請求項4のうちいずれか1項に記載の廃棄物処理システム。
【請求項6】
前記軸部材への前記廃棄物の巻き付き厚さを検出する巻き付き検出手段と、
該巻き付き検出手段からの出力に応じて前記駆動源を制御する制御手段と、を更に有する請求項5に記載の廃棄物処理システム。
【請求項7】
前記破袋ローター及び前記取り出しローターと前記案内ローターとの間を実質的に遮蔽すると共に、
前記破袋ブレードを前記案内ローター側に貫通させる上部スリットと、前記取り出しブレードを前記案内ローター側に貫通させる下部スリットとが形成され、かつ該下部スリットと前記取り出しブレードとの軸方向における開口ギャップが前記上部スリットと前記破袋ブレードとの軸方向における開口ギャップよりも大きく形成されたガイドプレートを更に有する請求項1から請求項6のうちいずれか1項に記載の廃棄物処理システム。
【請求項8】
前記投入口からの異物の投入を検出する異物検出手段と、
該異物検出手段からの出力に応じて前記駆動源を逆回転制御する制御手段と、
前記案内ローターの逆回転により前記異物を排出させる前記排出口とは異なる異物排出口と、を更に有する請求項1から請求項7のうちいずれか1項に記載の廃棄物処理システム。
【請求項9】
前記傾斜上部側又は前記傾斜下部側の少なくともいずれか一方において、より上部側の搬送ローターの回転速度がより下部側の搬送ローターの回転速度よりも高速回転する請求項1から請求項8のうちいずれか1項に記載の廃棄物処理システム。
【請求項10】
前記駆動手段が、
前記傾斜上部側の搬送ローターを、前記傾斜下部側の搬送ローター回転速度の1.4倍以上の回転速度で回転駆動する請求項1から請求項9のうちいずれか1項に記載の廃棄物処理システム。
【請求項11】
前記ローラーコンベアが、前記搬送ローターを同軸状に複数有して構成されたローター軸を複数本有して構成され、かつ、
前記駆動手段が、
該複数本のうちの前記傾斜上部側における実質的に半分の本数のローター軸に係る搬送ローター回転速度と、
前記傾斜下部側における残りの本数のローター軸に係る搬送ローター回転速度と、を異なる回転速度で回転駆動する請求項1から請求項10のうちいずれか1項に記載の廃棄物処理システム。
【請求項12】
前記受け入れ口が、
前記傾斜上部側の搬送ローターと前記傾斜下部側の搬送ローターとの境界近傍に配置される請求項1から請求項11のうちいずれか1項に記載の廃棄物処理システム。
【請求項13】
前記ローラーコンベアの傾斜角度又はそれ以上の傾斜角度で、前記傾斜下部側から前記傾斜上部側へ向けて送風する送風手段を、前記ローラーコンベアの上方に更に有する請求項1から請求項12のうちいずれか1項に記載の廃棄物処理システム。
【図1】

【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】

【図12】
【図13】
【図14】
【図15】

【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2010−207697(P2010−207697A)
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願番号】特願2009−55766(P2009−55766)
【出願日】平成21年3月9日(2009.3.9)
【出願人】(507214083)メタウォーター株式会社 (277)
【出願人】(502165300)富士電機サーモシステムズ株式会社 (33)
【出願人】(392036119)株式会社松本鉄工所 (11)
【Fターム(参考)】
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願日】平成21年3月9日(2009.3.9)
【出願人】(507214083)メタウォーター株式会社 (277)
【出願人】(502165300)富士電機サーモシステムズ株式会社 (33)
【出願人】(392036119)株式会社松本鉄工所 (11)
【Fターム(参考)】
[ Back to top ]