
建設機械および建設機械管理システム
【課題】簡単な構成でセキュリティを高くすることができること。
【解決手段】走行体と、走行体に接続された作業機と、走行体に設けられた操縦領域と、作業機および前記走行体の動作を制御する駆動制御部と、操縦領域に配置され作業機を操作する操作部と、操縦領域に配置され操縦者が着座する操縦席と、操縦領域に配置され携帯端末と接続する接続端子と、携帯端末と通信を行い、各部を制御する車体制御部と、認証情報を記憶する記憶部と、を有し、車体制御部は、接続端子に携帯端末が接続された場合、携帯端末から送信される認証情報と記憶部に記憶している認証情報とを照合し、両者が一致した場合、入力された操作に対する動作を実行可能とし、両者が異なる場合、作業機および走行体を動作禁止とすること。
【解決手段】走行体と、走行体に接続された作業機と、走行体に設けられた操縦領域と、作業機および前記走行体の動作を制御する駆動制御部と、操縦領域に配置され作業機を操作する操作部と、操縦領域に配置され操縦者が着座する操縦席と、操縦領域に配置され携帯端末と接続する接続端子と、携帯端末と通信を行い、各部を制御する車体制御部と、認証情報を記憶する記憶部と、を有し、車体制御部は、接続端子に携帯端末が接続された場合、携帯端末から送信される認証情報と記憶部に記憶している認証情報とを照合し、両者が一致した場合、入力された操作に対する動作を実行可能とし、両者が異なる場合、作業機および走行体を動作禁止とすること。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、作業者の操作で駆動される建設機械および建設機械管理システムに関する。
【背景技術】
【0002】
油圧ショベルなどの建設機械には、作業者が操作をする領域に配置されたモニタを備えるものがある(特許文献1参照)。建設機械は、モニタを設け機械の状態を表示させることで、作業者が操作を実行しやすくすることができる。
【0003】
また、油圧ショベルなどの建設機械には、保守点検のために携帯端末を用いるものがある。例えば、特許文献2には、エンジン関連データ、車体関連データ、稼働時間または日付時刻を記憶するデータ記憶装置を有する建設機械と、建設機械の点検項目をモニタに表示させるCPU、モニタに表示した点検項目に対するデータを作業者が入力可能なタブレット、入力したデータを点検履歴データとして記憶する保存デバイスを備えた携帯端末(タブレット型のパソコン)と、を有する管理システムが記載されている。この管理システムは、携帯端末が、第1通信手段を介しデータ記録装置に稼働時間又は日付時刻を入力し、この入力した稼働時間又は日付時刻と前記点検履歴データとを関連付けて保存デバイスに記憶する。
【0004】
また、特許文献3は、車両を起動させるキーとして情報機能付きキーを用いることが記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−105569号公報
【特許文献2】再表2007−80835号公報
【特許文献3】特開2005−67278号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ここで、建設機械は、高価な機械であるため盗難されると問題である。特許文献3に記載されているように情報機能付きキーを建設機械に用いた場合でも、情報機能付きキーが盗難等で不正に入手されると、当該建設機械が盗まれる恐れがある。また、起動時にパスワードを入力することでセキュリティを高くすることもできるが、この場合もパスワードが不正に入手されると同様に建設機械が盗まれる恐れがある。また、パスワードを用いる場合は、作業者が各自パスワードを覚える必要があり、安易に変更すると作業者にとって負担が大きい。
【0007】
本発明は、上記に鑑みてなされたものであって、簡単な構成でセキュリティを高くすることができる建設機械および建設機械管理システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、建設機械であって、走行体と、前記走行体に接続された作業機と、前記走行体に設けられた操縦領域と、前記作業機および前記走行体の動作を制御する駆動制御部と、前記操縦領域に配置され作業機を操作する操作部と、前記操縦領域に配置され操縦者が着座する操縦席と、前記操縦領域に配置され携帯端末と接続する接続端子と、前記携帯端末と通信を行い、各部を制御する車体制御部と、認証情報を記憶する記憶部と、を有し、前記車体制御部は、前記接続端子に前記携帯端末が接続された場合、前記携帯端末から送信される認証情報と前記記憶部に記憶している認証情報とを照合し、両者が一致した場合、入力された操作に対する動作を実行可能とし、両者が異なる場合、前記作業機および前記走行体を動作禁止とすることを特徴とする。
【0009】
ここで、自機の状態を検出するセンサをさらに有し、前記車体制御部は、前記センサで検出した情報を前記携帯端末に送信することが好ましい。
【0010】
また、前記車体制御部は、前記走行体および前記作業機の操作情報と、前記走行体および前記作業機を稼働するそれぞれの駆動源の稼働情報を取得し、取得した情報を前記携帯端末に送信することが好ましい。
【0011】
また、前記操縦領域に配置され、前記携帯端末を固定する取付装置をさらに有することが好ましい。
【0012】
また、前記認証情報は、照合時の条件に基づいて一致条件が変化する情報であることが好ましい。
【0013】
また、前記接続端子は、有線で前記携帯端末と接続することが好ましい。
【0014】
前記入力された操作に対する動作は、起動動作を含むことが好ましい。
【0015】
また、本発明は、建設機械管理システムであって、上記のいずれかに記載の建設機械と、前記建設機械の前記接続端子と接続可能な携帯端末と、前記携帯端末と無線で通信する管理端末と、を有し、前記携帯端末は、前記管理端末と通信して、認証情報を取得することを特徴とする。
【0016】
ここで、前記携帯端末は、前記建設機械および前記管理端末から取得した情報を表示することが好ましい。
【0017】
また、前記携帯端末は、前記操作部からの入力に対して、前記走行体および前記作業機で実行する動作の設定を変更することができることが好ましい。
【0018】
また、前記携帯端末は、自機の位置情報を検出するGPS部をさらに有し、前記管理端末から前記認証情報とともに前記建設機械の移動領域の情報を取得し、前記GPS部で取得した自機の位置情報が前記建設機械の移動領域の情報に含まれていない場合、前記建設機械を停止させることが好ましい。
【発明の効果】
【0019】
本発明は、携帯端末から建設機械に送信される認証情報と記憶部に記憶している認証情報とを照合し、一致している場合に駆動可能とすることで、簡単な構成でセキュリティを高くすることができる。また、携帯端末を建設機械に有線で接続し、操縦領域内に配置することで、作業者は操作時に携帯端末を用いて、建設機械の種々の情報を確認することができる。これにより、操作性を向上できる。
【図面の簡単な説明】
【0020】
【図1】図1は、本実施形態に係る建設機械を用いた建設機械管理システムを示す構成図である。
【図2】図2は、建設機械の一部を拡大して示す斜視図である。
【図3】図3は、建設機械の一部を図2とは異なる方向から示す図である。
【図4】図4は、建設機械管理システムの処理動作の一例を説明するフローチャートである。
【図5】図5は、建設機械の処理動作の一例を説明するフローチャートである。
【図6】図6は、建設機械の処理動作の一例を説明するフローチャートである。
【図7】図7は、携帯端末の処理動作の一例を説明するフローチャートである。
【図8】図8は、携帯端末の処理動作の一例を説明するフローチャートである。
【図9】図9は、携帯端末の処理動作の一例を説明するフローチャートである。
【発明を実施するための形態】
【0021】
本発明を実施するための形態(実施形態)につき、図面を参照しつつ詳細に説明する。以下の実施形態に記載した内容により本発明が限定されるものではない。また、以下に記載した構成要素には、当業者が容易に想定できるもの、実質的に同一のものが含まれる。さらに、以下に記載した構成要素は適宜組み合わせることが可能である。また、本発明の要旨を逸脱しない範囲で構成要素の種々の省略、置換又は変更を行うことができる。
【0022】
<建設機械管理システム>
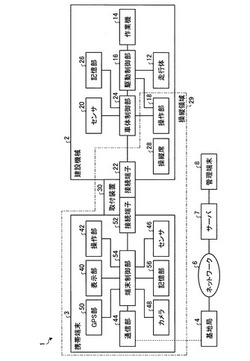
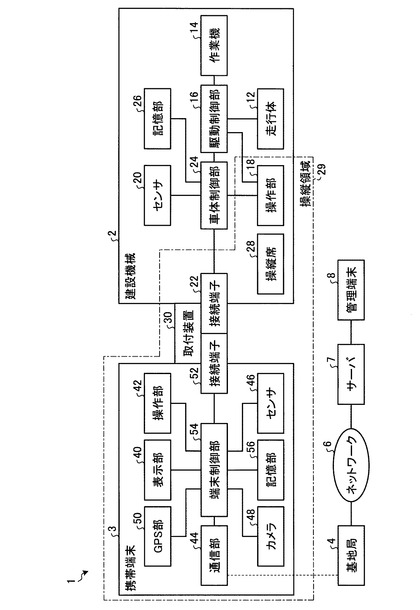
図1は、本実施形態に係る建設機械を用いた建設機械管理システムを示す構成図である。図2は、建設機械の一部を拡大して示す斜視図である。図3は、建設機械の一部を図2とは異なる方向から示す図である。建設機械管理システム1は、建設機械2と携帯端末3と基地局4とネットワーク6とサーバ7と管理端末8とを有する。建設機械管理システム1は、建設機械2の起動動作、停止動作を制御するシステムである。図1では1つの建設機械2と1つの携帯端末3を示したが、それぞれの個数は特に限定されない。
【0023】
<建設機械>
建設機械2は、油圧ショベルであり、図1に示すように、走行体12と、作業機14と、走行体12と作業機14の駆動を制御する駆動制御部16と、操作部18と、センサ20と、接続端子22と、車体制御部24と、記憶部26と、操縦席28と、取付装置30と、を含む。なお、図1には、建設機械2の一部の構成のみを記載したが、建設機械2が備える基本的な構成、例えば駆動源となるエンジン、油圧ポンプ等も備えている。なお、駆動源としては電気モータを用いてもよい。
【0024】
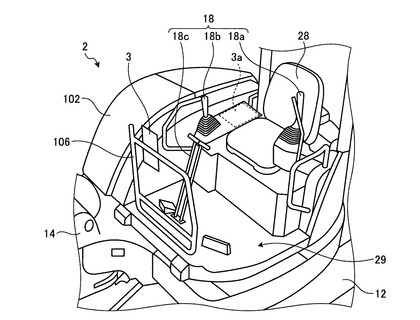
建設機械2は、図2および図3に示すように、走行体12の上側に車体102が配置されている。また、車体102には、作業機14が取り付けられており、作業機14の近傍でかつ車体102の中央部に操縦領域29が設けられている。この操縦領域29は、建設機械2の操作時に作業者が乗る領域であり、操作部18と、操縦席28とが配置されている。操作部18は、操作レバー18a、18b、18cで構成される。操作レバー18aは、操縦席28の左側(作業者が操縦席28に座った場合に左側となる位置)に配置され、操作レバー18bは、操縦席28の右側(作業者が操縦席28に座った場合に右側となる位置)に配置され、操作レバー18cは、操縦席28の前側(作業者が操縦席28に座った場合に前側となる位置)に配置される。また、建設機械2において、枠106は、操縦領域29内でかつ操縦席28の前方に配置されている。枠106は、上方向に延在し、乗り込み時等に手すりとなる。取付装置30は、枠106に配置されている。取付装置30は、携帯端末3を固定している。
【0025】
なお、本実施形態では、取付装置30を枠106に設けたが取付装置30は、操縦領域29内であれば配置位置は特に限定されない。つまり、携帯端末3を固定する位置としては種々の位置とすることができる。例えば、図2および図3に点線で示すように操作レバー18bの近傍に携帯端末3aを配置してもよい。
【0026】
図1に戻り各部について説明する。走行体12は、車体102の下部に配置された左右一対の履帯を有する。走行体12は、一対の履帯を右走行油圧モータと左走行油圧モータとにより駆動し、建設機械2を走行させる。
【0027】
作業機14は、図示しないブーム、アーム及びバケットを含む。作業機14のブーム、アーム及びバケットは、駆動源となる油圧ポンプから圧送される作動油によって、コントロールバルブを介して各々ブーム用、アーム用、バケット用の油圧シリンダによって駆動されて、掘削等の作業を実行する。
【0028】
図1において、駆動制御部16は、走行体12および作業機14の動作を制御する。駆動制御部16は、操作部18および車体制御部24から入力された指示に基づいて走行体12および作業機14を動作させる。駆動制御部16は、制御回路や、油圧回路、燃料供給回路等で構成され、入力された指示に基づいて供給する電気信号や、油圧、燃料の供給タイミング等を制御し、走行体12および作業機14を動作させる。
【0029】
操作部18は、作業者が建設機械2の走行体12、作業機14に対する操作を入力する機構であり、上述したように操作レバー18a、18b、18cを含む。操作部18は、作業者により入力された操作を操作信号として駆動制御部16および車体制御部24に送る。
【0030】
センサ20は、建設機械2の種々の検出値を検出する。センサ20としては、走行速度を検出する速度センサや、走行体12を駆動するエンジンの回転数を検出するセンサ、油圧ポンプの各値(圧力、作動油の温度等)を検出するセンサ、作業機14の位置を検出するセンサ等がある。なお、センサ20は、検出値を直接測定しても、走行体12や作業機14の制御条件に基づいて推定することで測定してもよい。センサ20は、検出した検出値を車体制御部24に送る。
【0031】
接続端子22は、取付装置30に付属して設けられている。接続端子22は、携帯端末3と接続する端子である。接続端子22は、有線で情報の通信を行う端子であり、車体制御部24から送られた情報(信号、データ)を携帯端末3に送り、携帯端末3から送られた情報を車体制御部24に送る。なお、接続端子22は、携帯端末3と着脱可能な機構である。
【0032】
車体制御部24は、CPU(Central Processing Unit)やRAM(Random Access Memory)で構成された制御回路であり、建設機械2の各部の動作を制御する。具体的には、車体制御部24は、記憶部26に記憶されたプログラムや、自身に記憶されたプログラムを実行し、各種処理を実行する。車体制御部24は、例えば、操作部18から入力された指示、接続端子22から送られた指示、センサ20で検出した検出値に基づいて、実行する処理を決定し、決定した処理の情報を駆動制御部16に送る。なお、車体制御部24で実行する処理については後述する。
【0033】
記憶部26は、ROM(Read Only Memory)等の記憶媒体であり、車体制御部24で実行するプログラムや、プログラムで用いる各種条件、自機を特定するID情報、後述する認証情報を記憶する。記憶部26は、車体制御部24により記憶している各種情報が読み出される。また、記憶部26は、車体制御部24により各種情報が書き込まれる。
【0034】
操縦席28は、上述したように作業者が座る椅子であり、車体102の上面に設けられている。取付装置30は、携帯端末3を操縦領域29の所定の位置に着脱可能な状態で固定する機構である。取付装置(クレイドル)30は、携帯端末3の画像を表示する面が操縦席28に座った作業者に見える向きで携帯端末3を固定する。
【0035】
なお、本実施形態では、建設機械2が油圧ショベルの場合として説明するが、建設機械2の種類は特に限定されない。建設機械2は、走行体と作業機とを備える構成であればよく、ホイルローダ、ブルドーザ、ダンプトラック、モータグレーダ、タイヤローラ、解体用機械等、種々の建設機械を用いることができる。なお、本件では、建設機械の作業を実行する部分を作業機とする。
【0036】
<携帯端末>
携帯端末3は、いわゆるスマートフォンといわれる無線通信機能を備える携帯端末であり、表示部40と、操作部42と、通信部44と、センサ46と、カメラ48と、GPS(Global Positioning System)部50と、接続端子52と、端末制御部54と、記憶部56と、を含む。
【0037】
表示部40は、液晶ディスプレイ等であり画像を表示する。操作部42は、タッチセンサであり、表示部40の表面に配置されている。本実施形態の携帯端末3は、積層した表示部40と操作部42がタッチパネルとなり、表示部40に画像を表示させた状態で操作部42が画面上にタッチされた位置を検出することで、当該タッチした領域に表示させている画像に対応する操作を検出する。なお、表示した画像とタッチした際に実行する操作とは予め対応付けられている。
【0038】
通信部44は、アンテナ等と有し、基地局4と無線で通信する。通信部44は、端末制御部54から供給された情報を信号に変換して基地局4に送る。通信部44は、基地局4から送られた信号を端末制御部54で処理可能な情報に変換して端末制御部54に送る。
【0039】
センサ46は、携帯端末3の種々の検出値を検出する。センサ46としては、携帯端末3の移動を検出する加速度センサおよび地磁気センサの少なくとも一方や、周囲の明るさを検出する照度センサ等がある。センサ46は、検出した検出値を端末制御部54に送る。
【0040】
カメラ48は、画像を撮影する撮影機構である。GPS部50は、GPS(Global Positioning System)衛星から出力される信号を受信し、自機の位置を検出する位置検出部である。
【0041】
接続端子52は、建設機械2の接続端子22と接続する端子である。接続端子52は、有線で情報の通信を行う端子であり、建設機械2の車体制御部24から送られた情報(信号、データ)を端末制御部54に送り、端末制御部54から送られた情報を建設機械2の車体制御部24に送る。接続端子52は、接続端子22と着脱可能な機構である。
【0042】
端末制御部54は、CPU(Central Processing Unit)やRAM(Random Access Memory)で構成された制御回路であり、携帯端末3の各部の動作を制御する。具体的には、端末制御部54は、記憶部56に記憶されたプログラムや、自身に記憶されたプログラムを実行し、各種処理を実行する。端末制御部54は、例えば、操作部42から入力された指示、接続端子52から送られた指示、センサ46で検出した検出値、カメラ48で撮影した画像情報、GPS部50で検出した位置情報に基づいて、実行する処理を決定し、各部の処理を実行する。なお、端末制御部54で実行する処理については後述する。
【0043】
記憶部56は、ROM(Read Only Memory)等の記憶媒体であり、端末制御部54で実行するプログラム、プログラムで用いる各種条件、自機を特定するID情報(端末ID、電話番号等)を記憶する。記憶部56は、端末制御部54により記憶している各種情報が読み込まれる。また、記憶部56は、端末制御部54により各種情報が書き込まれる。
【0044】
<基地局>
基地局4は、無線通信で携帯端末3の通信部44と通信する機器である。図1では、1つの基地局4を示したが、建設機械管理システム1は、所定の距離毎に複数の基地局4が配置されている。基地局4は、有線の通信回線や、他の基地局4との無線通信でネットワーク6と通信を行う。
【0045】
<ネットワーク>
ネットワーク6は、公衆回線の通信網であり、有線通信、無線通信で通信を伝達する回線である。
【0046】
<サーバ>
サーバ7は、ネットワーク6と通信を行う通信機であり、建設機械管理システム1の通信を管理する処理装置である。サーバ7は、管理端末8から送られる情報を基地局4、ネットワーク6を介して対象の携帯端末3に送信する。また、対象の携帯端末3から送られる情報を管理端末8に送る。
【0047】
<管理端末>
管理端末8は、建設機械管理システム1で管理する対象の建設機械2と、当該建設機械2に接続する携帯端末3と、の対応関係を管理する情報処理装置である。管理端末8は、当該建設機械2に接続する携帯端末3に認証情報と当該携帯端末3を所有する作業者が当該建設機械2で実行する予定の作業の情報(予定作業情報)を送る。なお予定作業情報は、作業工程に基づいて実施する予定の作業に関する各種情報であり、スケジュール、施工内容、施工場所、施工時間などを含み、文章、地図、写真、音声等の形式で提供される。
【0048】
なお、図1に示す建設機械管理システム1は、基地局4、ネットワーク6およびサーバ7を介して、携帯端末3と管理端末8とを通信させる構成とすることで、遠隔地にある携帯端末や、複数の携帯端末と通信が可能であり、より多くの建設機械を一括で管理できる。なお、建設機械管理システム1は、これに限定されない。建設機械管理システム1は、携帯端末3と管理端末8とは、通信可能な構成であればよく、例えば、無線LANや、赤外線通信等の近距離通信で通信を行う構成としてもよい。
【0049】
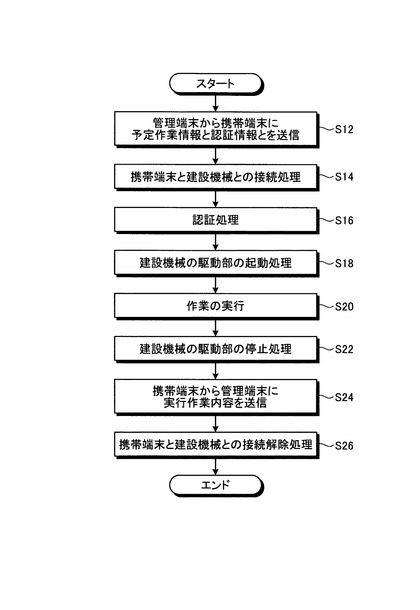
<建設機械管理システムの処理動作>
図4は、建設機械管理システムの処理動作の一例を説明するフローチャートである。以下、図4を用いて、建設機械管理システムの処理動作の一例について説明する。建設機械管理システム1は、ステップS12として、管理端末8から携帯端末3に予定作業情報と認証情報とを送信する。つまり、管理端末8は、建設機械2を操作して予定している所定の作業を実行する作業者の携帯端末3に予定作業情報を送るとともに、当該作業を実行する建設機械2を駆動可能とするための認証情報を送る。携帯端末3は、管理端末8から送られた予定作業情報と認証情報とを記憶部56に記憶する。
【0050】
ここで、作業者は、携帯端末3が予定作業情報を受信した場合、受信した予定作業情報に基づいて、対象の建設機械2を特定し、特定した建設機械2に携帯端末3を接続する。具体的には、携帯端末3を取付装置30に固定し、接続端子22と接続端子52とを接続する。建設機械管理システム1は、建設機械2と携帯端末3とが接続したことを検出した場合、ステップS14として、携帯端末3と建設機械2との接続処理を行う。具体的には、建設機械管理システム1は、接続した接続端子22と接続端子52とを介して、車体制御部24と端末制御部54との間でIDの交換や通信方法の設定等を行い両者で通信可能な状態とする。
【0051】
建設機械管理システム1は、ステップS14で接続処理が行われたら、ステップS16として、建設機械2と携帯端末3とにより認証処理を行う。ここで、認証処理とは、携帯端末3がステップS12で取得した認証情報と建設機械2に記憶されている認証情報とが一致するかを判定する処理である。図4は、認証情報が一致する場合の処理であるが、一致しない場合は、ステップS16より後の処理は行わない。
【0052】
建設機械管理システム1は、ステップS16で認証処理を行い、認証情報が一致した場合、ステップS18として建設機械2が駆動部(走行体12および作業機14を駆動する部分、駆動源および駆動制御部16)の起動処理を行う。
【0053】
建設機械管理システム1は、ステップS18で建設機械2が駆動部を起動したら、ステップS20で作業を実行する。ここでの作業とは、作業者が建設機械2を操作して実行する作業であり、基本的には携帯端末3に記憶された予定作業情報に基づいた作業である。
【0054】
建設機械管理システム1は、ステップS20で実行していた作業が完了した場合、または、作業者から終了指示が入力された場合、ステップS22として建設機械2で駆動部の停止処理を実行する。なお、停止処理とは、建設機械2の駆動部(走行体12および作業機14を駆動する部分、駆動源および駆動制御部16)が駆動していない状態である。
【0055】
建設機械管理システム1は、ステップS22で停止処理を行ったら、ステップS24として、携帯端末3から管理端末8に実行作業内容を送信させる。つまり、携帯端末3は、作業の実行時に各センサ20、46で取得した情報を含む各種情報と、予定作業情報と、の比較等を行い、建設機械2で実行された作業内容を記憶し、記憶した情報を実行作業内容として管理端末8に送る。
【0056】
建設機械管理システム1は、ステップS24の処理を行ったら、ステップS26として、携帯端末3と建設機械2との接続を解除する処理を行う。つまり、接続端子22と接続端子52とを介して携帯端末3と建設機械2との間で有線での通信を行わないように処理を行う。建設機械管理システム1は、ステップS26の処理を行ったら本処理を終了する。
【0057】
建設機械管理システム1は、ステップS24の処理とステップS26の処理とを逆の順番で実行してもよい。また、作業者により実行される接続端子22と接続端子52との接触を物理的に解除する処理は、ステップS22での処理が終わった後であればいつ実行してもよい。建設機械管理システム1は、接続端子22と接続端子52とが物理的に接続した状態であってもステップS26で通信を切断する処理を行うことで、建設機械2と携帯端末3との間で通信が行われることを抑制できる。
【0058】
<建設機械の処理動作>
図5および図6は、建設機械の処理動作の一例を説明するフローチャートである。以下、図5および図6を用いて、建設機械の処理動作の一例について説明する。
【0059】
まず、図5に示す処理を説明する。図5に示す処理は、建設機械2に携帯端末3が接続されていない状態または建設機械2の駆動部(走行体12、作業機14)が駆動されていない状態の場合に繰り返し実行される。建設機械2の車体制御部24は、ステップS102として携帯端末3の接続ありか、つまり接続端子22と接続端子52とを介して端末制御部54と接続しているかを判定する。車体制御部24は、ステップS102で接続なし(No)と判定した場合、本処理を終了する。車体制御部24は、携帯端末3と接続するまで、本処理を繰り返す。
【0060】
車体制御部24は、ステップS102で接続あり(Yes)と判定した場合、ステップS104として通信を開始する。つまり、車体制御部24は、上述したS14の接続処理を行い、携帯端末3の端末制御部54と通信ができる状態とする。車体制御部24は、ステップS104で通信を開始したら、ステップS106として認証処理を行う。具体的には、端末制御部54が保持する認証情報と記憶部26から読み出した認証情報との照合を行う。ここで、照合処理は、車体制御部24で実行することでセキュリティ性を向上させることができる。本実施形態では、照合処理を車体制御部24で実行するが、端末制御部54で実行してもよい。
【0061】
車体制御部24は、ステップS106で認証処理を行ったら、ステップS108として許可か、つまり認証情報が一致したかを判定する。車体制御部24は、ステップS108で許可でない(No)、つまり認証情報が一致しないと判定した場合、ステップS110として、エラーを通知する。つまり車体制御部24は、認証情報が一致しない旨をエラーとして端末制御部54に送り、本処理を終了する。車体制御部24は、認証情報が一致しない場合、エラーを通知して処理を終了することで、走行体12と作業機14とを稼動せずに処理を終了する。つまり、車体制御部24は、認証情報が一致しない場合、走行体12と作業機14とを動作禁止とする。
【0062】
車体制御部24は、ステップS108で許可である(Yes)、つまり認証情報が一致すると判定した場合、ステップS112として許可を通知する。つまり、車体制御部24は、認証情報が一致した旨の情報を許可情報として端末制御部54に送る。
【0063】
車体制御部24は、ステップS112で許可を通知したら、ステップS114として起動指示があるか、つまり端末制御部54から起動指示が送信されたかを判定する。車体制御部24は、ステップS114で起動指示なし(No)と判定した場合、ステップS114に進む。つまり車体制御部24は、起動指示を検出するまでステップS114の処理を繰り返す。
【0064】
車体制御部24は、ステップS114で起動指示あり(Yes)と判定した場合、ステップS116として起動動作を実行する。ここで、起動動作とは、駆動制御部16により走行体12を走行可能な状態とし、作業機14を稼動可能な状態とする処理である。例えばエンジンの始動動作であり、油圧ポンプの始動動作である。車体制御部24は、ステップS116で起動動作を行ったら、本処理を終了する。車体制御部24は、起動動作後は、各部から入力される指示に基づいて走行体12、作業機14を駆動し作業を実行する。
【0065】
次に、図6を用いて車体制御部24の駆動時の動作について説明する。車体制御部24は、ステップS120で制御指示があるかを判定する。なお、制御指示は、作業者により操作部18に入力された操作やセンサ20で検出した検出値に基づいて車体制御部24で作成した指示や、端末制御部54から入力された指示である。
【0066】
車体制御部24は、ステップ120で制御指示あり(Yes)と判定した場合、ステップS122として指示された動作を実行する。つまり、ステップS120で検出した指示に基づいて建設機械2の各部を動作させる。また、車体制御部24は、ステップS120で制御指示なし(No)と判定した場合、ステップS124に進む。
【0067】
車体制御部24は、ステップS120でNoと判定した場合またはステップS122の処理を実行した場合、ステップS124として車両情報を端末制御部54に送信するかを判定する。ここで、車両情報とは、センサ20で検出した検出値や、駆動制御部16と車体制御部24とが生成した指示に基づいて算出される値等の建設機械2の各種情報である。具体的には、水温、油温、燃料量、警告の種類と回数、メンテナンス情報、アームクレーン情報、作業量、作業モード等がある。
【0068】
車体制御部24は、ステップS124で車両情報を送信する(Yes)と判定した場合、ステップS126として車両情報を取得し、ステップS128として端末制御部54に車両情報を送信する。車体制御部24は、ステップS128の処理を行ったら、本処理を終了する。車体制御部24は、ステップS124で車両情報を送信しない(No)と判定した場合、本処理を終了する。
【0069】
なお、本実施形態の車体制御部24は、認証情報が一致した場合、起動指示があるかを判定したが、具体的には起動動作を実行可能な状態で起動指示の入力の受付を行うようにしたが、これに限定されない。建設制御部24は、認証情報が一致した場合、起動指示を含む各種操作に基づいた動作を実行可能とする。また、起動操作としては、走行体12、作業機14を起動させる操作以外にも、各種起動操作、例えば計器の起動操作、ライトの点灯操作やモニタの点灯操作等も含まれる。
【0070】
<携帯端末の処理動作>
図7および図8は、携帯端末の処理動作の一例を説明するフローチャートである。以下、図7および図8を用いて、携帯端末の処理動作の一例について説明する。
【0071】
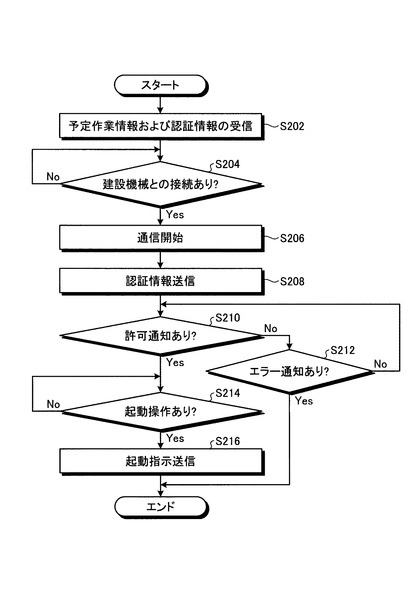
まず、図7に示す処理を説明する。図7に示す処理は、携帯端末3が建設機械2に接続されていない状態の場合に実行される。携帯端末3の端末制御部54は、ステップS202として、予定作業情報および認証情報を受信する。なお、携帯端末3は、作業者が操作部42に入力した操作に基づいて管理端末8にアクセスして予定作業情報および認証情報を受信しても、管理端末8から自動的に送られてくる予定作業情報および認証情報を受信してもよい。
【0072】
端末制御部54は、ステップS202で情報を受信したら、ステップS204として建設機械2との接続ありか、つまり接続端子22と接続端子52とを介して車体制御部24と接続しているかを判定する。端末制御部54は、ステップS204で接続なし(No)と判定した場合、ステップS204に進む。端末制御部54は、情報を受信した後、建設機械2と接続されるまで、ステップS204の処理を繰り返す。
【0073】
端末制御部54は、ステップS204で接続あり(Yes)と判定した場合、ステップS206として通信を開始する。つまり、端末制御部54は、上述した図4のステップS14の接続処理を行い、建設機械2の車体制御部24と通信ができる状態とする。端末制御部54は、ステップS206で通信を開始したら、ステップS208として認証情報を送信する。具体的には、端末制御部54は、ステップS202で取得した認証情報を車体制御部24に送信する。
【0074】
端末制御部54は、ステップS208で認証情報を送信したら、ステップS210として許可通知があるか、つまり認証情報が一致した旨の情報を受信したかを判定する。端末制御部54は、ステップS210で許可通知がない(No)と判定した場合、ステップS212として、エラー通知があるか、つまり認証情報が一致しない旨の情報を受信したかを判定する。端末制御部54は、ステップS212でエラー通知なし(No)と判定した場合、ステップS210に進む。このように端末制御部54は、許可通知またはエラー通知のいずれかを受信するまでステップS210、ステップS212の処理を繰り返す。端末制御部54は、ステップS212でエラー通知あり(Yes)と判定した場合、本処理を終了する。つまり、端末制御部54は、認証情報が一致しない場合、建設機械2の駆動処理に移行することなく、処理を終了する。これにより、建設機械2は停止した状態となる。
【0075】
端末制御部54は、ステップS210で許可通知あり(Yes)と判定した場合、ステップS214として起動操作があるかを判定する。端末制御部54は、操作部42に入力された操作に所定の操作が入力された場合また予め設定された条件が満たされた場合、起動操作ありと判定する。
【0076】
端末制御部54は、ステップS214で起動操作なし(No)と判定した場合、ステップS214に進む。端末制御部54は、起動操作ありとなるまでステップS214の処理を繰り返す。端末制御部54は、ステップS214で起動操作あり(Yes)と判定した場合、ステップS216として、車体制御部24に起動操作に基づいた起動指示を送信し、本処理を終了する。端末制御部54は、車体制御部24に起動指示を送信することで、建設機械2を起動させることができる。
【0077】
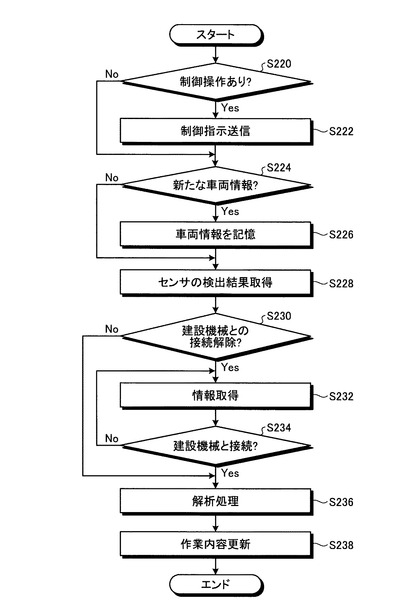
次に、図8を用いて端末制御部54の駆動時の動作について説明する。端末制御部54は、ステップS220で制御操作があるかを判定する。なお、制御指示は、作業者により操作部42に入力された操作やセンサ46で検出した検出値に基づいて作成した指示である。
【0078】
端末制御部54は、ステップ220で制御操作あり(Yes)と判定した場合、ステップS222として制御操作に基づいて作成した制御指示を車体制御部24に送信し、ステップS224に進む。また、端末制御部54は、ステップS220で制御操作なし(No)と判定した場合、ステップS224に進む。
【0079】
端末制御部54は、ステップS220でNoと判定した場合またはステップS222の処理を実行した場合、ステップS224として新たな車両情報があるか、つまり車体制御部24から送られた車両情報が新たにあるかを判定する。
【0080】
端末制御部54は、ステップS224で車両情報あり(Yes)と判定した場合、ステップS226として車両情報を処理し、記憶部56に記憶し、ステップS228に進む。端末制御部54は、ステップS224で車両情報なし(No)と判定した場合、ステップS228としてセンサ46の検出結果を取得する。なお、端末制御部54は、センサ46の検出結果のうち後述する作業内容の作成に必要な検出値を取得する。
【0081】
端末制御部54は、ステップS228でセンサ46の検出結果を取得したら、ステップS230として建設機械2との接続が解除されているかを判定する。端末制御部54は、ステップS230で接続が解除されていない(No)と判定した場合、ステップS236に進む。端末制御部54は、ステップS230で接続が解除されている(Yes)と判定した場合、ステップS232として情報を取得する。なお、建設機械2は、携帯端末3との接続が解除されたと判定した場合、走行体12、作業機14を停止させることが好ましい。ここで、端末制御部54は、作業者が操作部42に入力した操作に基づいて各種処理を実行し、情報を取得する。例えば、カメラ48により画像を撮影し、作業対象の画像を取得する。
【0082】
端末制御部54は、ステップS232で情報を取得したら、ステップS234として建設機械2と接続しているかを判定する。端末制御部54は、建設機械2と接続していない(No)と判定した場合、ステップS232に進み、情報を取得する。端末制御部54は、ステップS234で建設機械2と接続している(Yes)と判定した場合、ステップS236に進む。
【0083】
端末制御部54は、ステップS230でNoと判定した場合またはステップS234でYesと判定した場合、ステップS236として解析処理を実行する。解析処理とは、ステップS226で取得した車両情報、ステップS228で取得したセンサ46の検出結果、ステップS232で取得した情報を解析して、建設機械2で実行した作業内容を特定する処理である。端末制御部54は、ステップS236で解析処理を実行したら、ステップS238として、解析結果に基づいて作業内容を更新し、本処理を終了する。なお、端末制御部54は、建設機械2の駆動時に図8に示す処理を繰り返し実行し、上述したように建設機械2の駆動が終了し場合、作成した作業内容を管理端末8に送信する。
【0084】
建設機械管理システム1は、以上のように、携帯端末3が記憶した認証情報と、建設機械2が記憶した認証情報とが一致することを条件として、建設機械2を稼動できるようにすることで、つまり、携帯端末3で送受信する情報を鍵として用いることで、建設機械2のセキュリティ性を高くすることができる。つまり、所有者が特定可能な携帯端末3を鍵として用いることで、どの作業者に鍵となる認証情報を付与したかを正確に把握することができる。
【0085】
また、作業者は、必要な情報を管理端末8からダウンロード等で自身の携帯端末3に記憶させた後、携帯端末3を建設機械2に接続することで、建設機械2を起動させることができる。これにより作業者は、パスワード等を覚える必要がなくなり操作性を高くすることができる。
【0086】
また、建設機械2を管理する管理者は、管理端末8で認証情報を管理することで複数の建設機械2の情報を一括で管理することができる。また、管理端末8を操作することで、必要な作業者の携帯端末3に認証情報を提供することができる。
【0087】
なお、認証情報は、作業を実行する時間毎に認証情報の内容が変化する情報とすることが好ましい。このように、認証情報を変化する情報として作成することで、認証情報を所定の時間のみ使用可能な認証情報とすることができる。これにより、認証情報を取得した作業者が、許可された時間以外に建設機械2を駆動することができないようにすることができ、セキュリティ性をより高くすることができる。
【0088】
また、上記実施形態では、起動時に認証情報が一致するかの判定(認証処理)を行ったが、設定した時間毎に定期的に実行するようにしてもよい。認証処理を定期的に実行することで、許可した作業時間を越えて作業を行っている場合に作業を停止させることができる。
【0089】
また、建設機械管理システム1は、認証処理に、認証情報に加え、予定作業情報の一部を用いることが好ましい。例えば、建設機械管理システム1および建設機械2は、予定作業情報に記憶されている作業日時の情報を用い、暗証コードである上述の認証情報に加え、当該建設機械2を使用する時間情報が一致している場合に、建設機械2を駆動可能とすることができる。これにより、セキュリティ性をより高くすることができる。
【0090】
<その他の処理動作>
また、建設機械管理システム1は、予定作業情報と位置情報とに基づいて建設機械2を駆動可能とするかを判定することも好ましい。ここで、図9は、携帯端末の処理動作の一例を説明するフローチャートである。端末制御部54は、ステップS250として、GPS部50により自身の位置情報を取得し、ステップS252として作業条件を取得する。端末制御部54は、予定作業情報を解析することで、作業条件を取得することができる。端末制御部54は、作業条件として、予定作業情報に含まれている作業を実行する領域の情報を取得する。
【0091】
端末制御部54は、ステップS252で作業条件を取得したら、ステップS254として、許可領域内であるかを判定する。つまり端末制御部54は、ステップS250で取得した位置情報がステップS252で取得した作業を実行する領域(許可領域)に含まれているかを判定する。
【0092】
端末制御部54は、ステップS254で許可領域内である(Yes)と判定した場合、ステップS256として、作業を継続、つまりそのままの状態として、本処理を終了する。また、端末制御部54は、ステップS254で許可領域内ではない(No)と判定して場合、ステップS258として作業停止処理を実行する。ここで作業停止処理とは、走行体12および作業機14の駆動を停止する状態である。なお、設定された領域に向けての走行は可能としてもよい。条件付きで走行を可能とすることで、路上で急に停止したり、路上で移動不可能な状態になったりする恐れを低減することができる。端末制御部54は、ステップS258で作業停止処理を実行したら、本処理を終了する。
【0093】
建設機械管理システム1は、このように携帯端末3のGPS部50の機能を利用し、建設機械2が駆動可能な領域を制限することでつまりジオフェンスを設けることで、仮に建設機械2が盗難された場合でも建設機械2の移動範囲を制限することができる。これにより、建設機械2のセキュリティ性をより向上させることができる。
【0094】
なお、上記実施形態では、駆動を制限したが、許可領域ではないと判定した場合、警告(音、フラッシュ、バイブ)を発するようにしてもよい。
【0095】
また、建設機械管理システム1は、作業者がそれぞれ所有する携帯端末3と建設機械2とを着脱可能な状態とすることで、作業者は、必要に応じた認証情報を取得することで自身が所有する携帯端末3を用いて複数の異なる建設機械2を駆動させることが可能となる。また、建設機械管理システム1および建設機械2は、作業者がそれぞれ所有する携帯端末3に対して予定作業情報と認証情報を送信することで、作業者毎に適切な作業を実行させることができる。これにより、建設機械管理システム1は、作業者の免許の有無や、労務状態(労働時間、作業内容)に応じた作業を割り当てることができる。
【0096】
また、建設機械管理システム1は、携帯端末3に記憶されている作業者の個人情報に基づいて、建設機械2を駆動させるかを判定してもよい。例えば、携帯端末3に記憶されている作業者の個人情報として、当該建設機械2の操作免許を保持している情報が含まれていない場合、建設機械2を駆動させないようにしてもよい。また、当該作業者の労働時間が所定の閾値を超えている場合、建設機械2を駆動させないようにしてもよい。
【0097】
また、建設機械管理システム1は、各部から取得した情報に基づいて作業内容を検出し、纏めた作業内容を管理端末8に送信することで、自動的に作業内容の日報を作成し、送信することができる。これにより、作業者の負担を低減することができる。また、建設機械2や携帯端末3で検出した情報に基づいて作業内容を特定できるため、客観的で詳細な情報の作業内容を作成することができる。
【0098】
また、建設機械2に対して着脱可能でカメラ48を備える携帯端末3を用いることで、カメラ48で撮影した作業現場の写真も作業内容に含めることができる。これにより、日報に画像が必要な場合でも必要な画像を随時取得することができる。例えば、携帯端末3は、作業現場の作業の対象部分(故障の修理の場合は故障部分)の写真を取得し、作業内容として送ることで現場にいない人物も故障部分の判定を行うことができ、必要な部品を適切に手配することが可能となる。また、対象の部品についている二次元バーコードを撮影することで、故障部品情報取得、点検箇所のチェックの情報を取得することもできる。
【0099】
また、建設機械管理システム1は、駆動時に携帯端末3の表示部40に各種情報を表示させ、建設機械2のモニタとして用いることが好ましい。携帯端末3の表示部40をモニタとして用いることで、作業者は、表示部40で各種情報を確認することができる。これにより、モニタを備えない建設機械を、モニタを備える建設機械とすることができ、モニタを備えている建設機械をモニタがより多い(マルチモニタ)の建設機械とすることができる。また、建設機械管理システム1および建設機械2は、駆動時に携帯端末3の操作部42に建設機械2の操作を入力可能にすることが好ましい。つまり、表示部40と操作部42で構成されるタッチパネルで建設機械2の各種操作を実行できることが好ましい。これにより、携帯端末3を建設機械2の操作部として利用することができ、作業時により多くの操作の入力が可能となる。
【0100】
また、建設機械管理システム1は、予定作業情報(予定作業の内容の情報)を予め取得することで、作業者に次に実行する操作を通知することができる。つまり作業をナビゲートすることができる。これにより、作業者に対する負荷を低減することができる。
【0101】
また、建設機械管理システム1は、携帯端末3の端末制御部54で各種演算処理を実行し、端末制御部54の制御機能を建設機械2の制御部として用いることが好ましい。このように端末制御部54で各種処理を実行することで、車体制御部24の処理能力が低い構成であっても各種処理を円滑に実現することができる。これにより車体制御部24を簡単な構成にすることができ、建設機械2の構成を簡単にし、装置を安価にすることができる。
【0102】
また、建設機械管理システム1は、管理端末8で各建設機械2の使用状態、使用頻度を検出できるため、建設機械2のメンテナンスの必要性等を事前に判断することができる。これにより、実行する作業内容と使用する建設機械2との対応関係を適切に決定できるため、作業効率を向上させることができ、作業者への負担を低減することができる。
【0103】
建設機械管理システム1は、携帯端末3で停止時の建設機械2の位置情報を取得し、記憶することで、再使用時に、当該建設機械2の位置を作業者に通知することができる。また、一括で情報を管理することで、前日とは違う作業者が建設機械2を使用する場合でも必要な情報を通知することができる。
【0104】
また、作業者が個人で所有する携帯端末3を用い、使用時は作業者の携帯端末3と建設機械2とを接続して処理を実行することで、建設機械2の使用時の条件を作業者の好みに合わせた設定とすることができる。
【0105】
また携帯端末3は音声を取得し、建設機械2の状態を判定するようにしてもよい。具体的には、建設機械2のエンジン音等を取得し異音が発生しているかを判定してもよい。
【0106】
また、建設機械管理システム1は、携帯端末3が基地局4と通信可能な場合、建設機械2での作業中も作業内容の情報を管理端末8に送信することが好ましい。これにより、作業中に必要になった援助を迅速に判断することができる。
【0107】
また、携帯端末3は、通信回線を用いて制御ソフトウェアやアプリケーションのプログラムをダウンロードで取得することができる。また、建設機械2も携帯端末3を介して制御ソフトウェアやアプリケーションのプログラムをダウンロードで取得することができる。これにより、必要なプログラムを随時取得することができ、プログラムのアップデートを簡単に実行することができる。
【0108】
建設機械管理システム1は、携帯端末3を建設機械2から取り外し、カメラ48の撮影機能とGPS部50の位置検出機能とを用いて、計測や写真を撮影することで、施工データを収集し蓄積することができる。また、建設機械管理システム1は、携帯端末3を建設機械2から取り外し、建設機械2の故障診断データを取得し、蓄積することもできる。
【0109】
建設機械管理システム1は、携帯端末3のセンサ46の検出結果や、基地局4を介したネットワークとの通信により、座標、傾斜、方位、温度、天気等の情報を取得することができる。例えば、携帯端末3のセンサ46として、電子コンパス、ジャイロセンサ、加速度センサで取得した情報、さらに必要に応じてGPS部50で取得した位置情報に基づいて、建設機械2の傾斜や方向や位置を検出し表示部40に表示することで、作業者の作業に活用することができる。また、建設機械管理システム1は、検出した建設機械2の座標、傾斜、方位に基づいてあおり防止の制御や姿勢制御を実行することで、作業者はより円滑に作業を行うことができる。あおり防止の制御や姿勢制御は、端末制御部54で実行しても車体制御部24で実行してもよい。また、建設機械管理システム1は、検出した建設機械2の座標、傾斜、方位の情報、例えば電子コンパスをセンサとして用いて検出した情報に基づいて、建設機械2の旋回を計測して作業回数をカウントするようにしてもよい。
【0110】
また、建設機械2の駆動源を電気モータとし、建設機械2を充電可能な構成とした場合、充電により使用した電気料金の情報を取得することができる。また、建設機械管理システム1は、建設機器2から取得した充電状態や、使用した電気料金、ネットワーク6等を介して取得した安価に充電できる時間帯を携帯端末3の表示部40に表示することが好ましい。
【0111】
また、携帯端末3は、GPS部50と通信部44の機能を用いて、RTK−GPS(Real Time Kinematic GPS)測量の移動局とすることができる。
【0112】
建設機械管理システム1は、携帯端末3と建設機械2とが接続していない状態でも携帯端末3で建設機械2を操作できるようにしてもよい。なお、この場合、建設機械2に近距離通信部等の無線通信機能を備えている必要がある。このように、携帯端末3で建設機械2を遠隔操作可能とすることで、操縦席28から離れた位置で建設機械2を操作でき、作業対象が見やすい位置で建設機械2を操作できる。
【0113】
建設機械管理システム1は、携帯端末3のGPS部50で検出した位置情報と予定作業情報の地図情報に基づいて、目的地、施工現場(作業場)までのナビゲーションを行うようにしてもよい。
【0114】
建設機械管理システム1は、携帯端末3の表示部40に画像を表示して、または音声を出力して、予定の作業の内容のガイダンスを行うようにしてもよい。例えば、施工場所、注意事項(配管やケーブルが埋まっている等)、最終形状等を通知する。これにより、作業者は次に施工する作業をより確実に理解することができ、円滑に作業を行うことができる。
【0115】
建設機械管理システム1は、携帯端末3で外部(他の通信端末)と通信可能とすることで、外部から情報を受信して、警告を画像表示や音声で通知することができる。例えば、他の通信端末で所定の距離以内にダンプが近づいたことを検出した場合、警告を出力することができる。また、携帯端末3が接続している建設機械2の状態を他の通信端末に出力し、他の通信端末、他の建設機械での警告や制御に活用することができる。例えば、建設機械2のペイロード(最大積載量)を外部に出力したり、作業支援の依頼を出力したりすることができる。
【0116】
建設機械管理システム1は、携帯端末3の作業者に対して建設機械2をレンタルとして貸与するシステムとすることもできる。この場合、携帯端末3から取得した各種情報に基づいて使用実績を検出し、課金を行うことができる。また、特定の携帯端末3に認証情報を提供するため、作業者(使用者)を特定することができる。
【0117】
また上記実施形態では、建設機械2と携帯端末3との通信回線を有線の回線としたが、非接触型ICを用いた通信や、無線LANを用いた通信、Bluetoothを用いた通信等で通信を行ってもよい。
【符号の説明】
【0118】
1 建設機械管理システム
2 建設機械
3 携帯端末
4 基地局
6 ネットワーク
7 サーバ
8 管理端末
12 走行体
14 作業機
16 駆動制御部
18 操作部
20 センサ
22 接続端子
24 車体制御部
26 記憶部
28 操縦席
29 操縦領域
30 取付装置
40 表示部
42 操作部
44 通信部
46 センサ
50 GPS部
52 接続端子
54 端末制御部
56 記憶部
102 車体
106 枠
【技術分野】
【0001】
本発明は、作業者の操作で駆動される建設機械および建設機械管理システムに関する。
【背景技術】
【0002】
油圧ショベルなどの建設機械には、作業者が操作をする領域に配置されたモニタを備えるものがある(特許文献1参照)。建設機械は、モニタを設け機械の状態を表示させることで、作業者が操作を実行しやすくすることができる。
【0003】
また、油圧ショベルなどの建設機械には、保守点検のために携帯端末を用いるものがある。例えば、特許文献2には、エンジン関連データ、車体関連データ、稼働時間または日付時刻を記憶するデータ記憶装置を有する建設機械と、建設機械の点検項目をモニタに表示させるCPU、モニタに表示した点検項目に対するデータを作業者が入力可能なタブレット、入力したデータを点検履歴データとして記憶する保存デバイスを備えた携帯端末(タブレット型のパソコン)と、を有する管理システムが記載されている。この管理システムは、携帯端末が、第1通信手段を介しデータ記録装置に稼働時間又は日付時刻を入力し、この入力した稼働時間又は日付時刻と前記点検履歴データとを関連付けて保存デバイスに記憶する。
【0004】
また、特許文献3は、車両を起動させるキーとして情報機能付きキーを用いることが記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−105569号公報
【特許文献2】再表2007−80835号公報
【特許文献3】特開2005−67278号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ここで、建設機械は、高価な機械であるため盗難されると問題である。特許文献3に記載されているように情報機能付きキーを建設機械に用いた場合でも、情報機能付きキーが盗難等で不正に入手されると、当該建設機械が盗まれる恐れがある。また、起動時にパスワードを入力することでセキュリティを高くすることもできるが、この場合もパスワードが不正に入手されると同様に建設機械が盗まれる恐れがある。また、パスワードを用いる場合は、作業者が各自パスワードを覚える必要があり、安易に変更すると作業者にとって負担が大きい。
【0007】
本発明は、上記に鑑みてなされたものであって、簡単な構成でセキュリティを高くすることができる建設機械および建設機械管理システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、建設機械であって、走行体と、前記走行体に接続された作業機と、前記走行体に設けられた操縦領域と、前記作業機および前記走行体の動作を制御する駆動制御部と、前記操縦領域に配置され作業機を操作する操作部と、前記操縦領域に配置され操縦者が着座する操縦席と、前記操縦領域に配置され携帯端末と接続する接続端子と、前記携帯端末と通信を行い、各部を制御する車体制御部と、認証情報を記憶する記憶部と、を有し、前記車体制御部は、前記接続端子に前記携帯端末が接続された場合、前記携帯端末から送信される認証情報と前記記憶部に記憶している認証情報とを照合し、両者が一致した場合、入力された操作に対する動作を実行可能とし、両者が異なる場合、前記作業機および前記走行体を動作禁止とすることを特徴とする。
【0009】
ここで、自機の状態を検出するセンサをさらに有し、前記車体制御部は、前記センサで検出した情報を前記携帯端末に送信することが好ましい。
【0010】
また、前記車体制御部は、前記走行体および前記作業機の操作情報と、前記走行体および前記作業機を稼働するそれぞれの駆動源の稼働情報を取得し、取得した情報を前記携帯端末に送信することが好ましい。
【0011】
また、前記操縦領域に配置され、前記携帯端末を固定する取付装置をさらに有することが好ましい。
【0012】
また、前記認証情報は、照合時の条件に基づいて一致条件が変化する情報であることが好ましい。
【0013】
また、前記接続端子は、有線で前記携帯端末と接続することが好ましい。
【0014】
前記入力された操作に対する動作は、起動動作を含むことが好ましい。
【0015】
また、本発明は、建設機械管理システムであって、上記のいずれかに記載の建設機械と、前記建設機械の前記接続端子と接続可能な携帯端末と、前記携帯端末と無線で通信する管理端末と、を有し、前記携帯端末は、前記管理端末と通信して、認証情報を取得することを特徴とする。
【0016】
ここで、前記携帯端末は、前記建設機械および前記管理端末から取得した情報を表示することが好ましい。
【0017】
また、前記携帯端末は、前記操作部からの入力に対して、前記走行体および前記作業機で実行する動作の設定を変更することができることが好ましい。
【0018】
また、前記携帯端末は、自機の位置情報を検出するGPS部をさらに有し、前記管理端末から前記認証情報とともに前記建設機械の移動領域の情報を取得し、前記GPS部で取得した自機の位置情報が前記建設機械の移動領域の情報に含まれていない場合、前記建設機械を停止させることが好ましい。
【発明の効果】
【0019】
本発明は、携帯端末から建設機械に送信される認証情報と記憶部に記憶している認証情報とを照合し、一致している場合に駆動可能とすることで、簡単な構成でセキュリティを高くすることができる。また、携帯端末を建設機械に有線で接続し、操縦領域内に配置することで、作業者は操作時に携帯端末を用いて、建設機械の種々の情報を確認することができる。これにより、操作性を向上できる。
【図面の簡単な説明】
【0020】
【図1】図1は、本実施形態に係る建設機械を用いた建設機械管理システムを示す構成図である。
【図2】図2は、建設機械の一部を拡大して示す斜視図である。
【図3】図3は、建設機械の一部を図2とは異なる方向から示す図である。
【図4】図4は、建設機械管理システムの処理動作の一例を説明するフローチャートである。
【図5】図5は、建設機械の処理動作の一例を説明するフローチャートである。
【図6】図6は、建設機械の処理動作の一例を説明するフローチャートである。
【図7】図7は、携帯端末の処理動作の一例を説明するフローチャートである。
【図8】図8は、携帯端末の処理動作の一例を説明するフローチャートである。
【図9】図9は、携帯端末の処理動作の一例を説明するフローチャートである。
【発明を実施するための形態】
【0021】
本発明を実施するための形態(実施形態)につき、図面を参照しつつ詳細に説明する。以下の実施形態に記載した内容により本発明が限定されるものではない。また、以下に記載した構成要素には、当業者が容易に想定できるもの、実質的に同一のものが含まれる。さらに、以下に記載した構成要素は適宜組み合わせることが可能である。また、本発明の要旨を逸脱しない範囲で構成要素の種々の省略、置換又は変更を行うことができる。
【0022】
<建設機械管理システム>
図1は、本実施形態に係る建設機械を用いた建設機械管理システムを示す構成図である。図2は、建設機械の一部を拡大して示す斜視図である。図3は、建設機械の一部を図2とは異なる方向から示す図である。建設機械管理システム1は、建設機械2と携帯端末3と基地局4とネットワーク6とサーバ7と管理端末8とを有する。建設機械管理システム1は、建設機械2の起動動作、停止動作を制御するシステムである。図1では1つの建設機械2と1つの携帯端末3を示したが、それぞれの個数は特に限定されない。
【0023】
<建設機械>
建設機械2は、油圧ショベルであり、図1に示すように、走行体12と、作業機14と、走行体12と作業機14の駆動を制御する駆動制御部16と、操作部18と、センサ20と、接続端子22と、車体制御部24と、記憶部26と、操縦席28と、取付装置30と、を含む。なお、図1には、建設機械2の一部の構成のみを記載したが、建設機械2が備える基本的な構成、例えば駆動源となるエンジン、油圧ポンプ等も備えている。なお、駆動源としては電気モータを用いてもよい。
【0024】
建設機械2は、図2および図3に示すように、走行体12の上側に車体102が配置されている。また、車体102には、作業機14が取り付けられており、作業機14の近傍でかつ車体102の中央部に操縦領域29が設けられている。この操縦領域29は、建設機械2の操作時に作業者が乗る領域であり、操作部18と、操縦席28とが配置されている。操作部18は、操作レバー18a、18b、18cで構成される。操作レバー18aは、操縦席28の左側(作業者が操縦席28に座った場合に左側となる位置)に配置され、操作レバー18bは、操縦席28の右側(作業者が操縦席28に座った場合に右側となる位置)に配置され、操作レバー18cは、操縦席28の前側(作業者が操縦席28に座った場合に前側となる位置)に配置される。また、建設機械2において、枠106は、操縦領域29内でかつ操縦席28の前方に配置されている。枠106は、上方向に延在し、乗り込み時等に手すりとなる。取付装置30は、枠106に配置されている。取付装置30は、携帯端末3を固定している。
【0025】
なお、本実施形態では、取付装置30を枠106に設けたが取付装置30は、操縦領域29内であれば配置位置は特に限定されない。つまり、携帯端末3を固定する位置としては種々の位置とすることができる。例えば、図2および図3に点線で示すように操作レバー18bの近傍に携帯端末3aを配置してもよい。
【0026】
図1に戻り各部について説明する。走行体12は、車体102の下部に配置された左右一対の履帯を有する。走行体12は、一対の履帯を右走行油圧モータと左走行油圧モータとにより駆動し、建設機械2を走行させる。
【0027】
作業機14は、図示しないブーム、アーム及びバケットを含む。作業機14のブーム、アーム及びバケットは、駆動源となる油圧ポンプから圧送される作動油によって、コントロールバルブを介して各々ブーム用、アーム用、バケット用の油圧シリンダによって駆動されて、掘削等の作業を実行する。
【0028】
図1において、駆動制御部16は、走行体12および作業機14の動作を制御する。駆動制御部16は、操作部18および車体制御部24から入力された指示に基づいて走行体12および作業機14を動作させる。駆動制御部16は、制御回路や、油圧回路、燃料供給回路等で構成され、入力された指示に基づいて供給する電気信号や、油圧、燃料の供給タイミング等を制御し、走行体12および作業機14を動作させる。
【0029】
操作部18は、作業者が建設機械2の走行体12、作業機14に対する操作を入力する機構であり、上述したように操作レバー18a、18b、18cを含む。操作部18は、作業者により入力された操作を操作信号として駆動制御部16および車体制御部24に送る。
【0030】
センサ20は、建設機械2の種々の検出値を検出する。センサ20としては、走行速度を検出する速度センサや、走行体12を駆動するエンジンの回転数を検出するセンサ、油圧ポンプの各値(圧力、作動油の温度等)を検出するセンサ、作業機14の位置を検出するセンサ等がある。なお、センサ20は、検出値を直接測定しても、走行体12や作業機14の制御条件に基づいて推定することで測定してもよい。センサ20は、検出した検出値を車体制御部24に送る。
【0031】
接続端子22は、取付装置30に付属して設けられている。接続端子22は、携帯端末3と接続する端子である。接続端子22は、有線で情報の通信を行う端子であり、車体制御部24から送られた情報(信号、データ)を携帯端末3に送り、携帯端末3から送られた情報を車体制御部24に送る。なお、接続端子22は、携帯端末3と着脱可能な機構である。
【0032】
車体制御部24は、CPU(Central Processing Unit)やRAM(Random Access Memory)で構成された制御回路であり、建設機械2の各部の動作を制御する。具体的には、車体制御部24は、記憶部26に記憶されたプログラムや、自身に記憶されたプログラムを実行し、各種処理を実行する。車体制御部24は、例えば、操作部18から入力された指示、接続端子22から送られた指示、センサ20で検出した検出値に基づいて、実行する処理を決定し、決定した処理の情報を駆動制御部16に送る。なお、車体制御部24で実行する処理については後述する。
【0033】
記憶部26は、ROM(Read Only Memory)等の記憶媒体であり、車体制御部24で実行するプログラムや、プログラムで用いる各種条件、自機を特定するID情報、後述する認証情報を記憶する。記憶部26は、車体制御部24により記憶している各種情報が読み出される。また、記憶部26は、車体制御部24により各種情報が書き込まれる。
【0034】
操縦席28は、上述したように作業者が座る椅子であり、車体102の上面に設けられている。取付装置30は、携帯端末3を操縦領域29の所定の位置に着脱可能な状態で固定する機構である。取付装置(クレイドル)30は、携帯端末3の画像を表示する面が操縦席28に座った作業者に見える向きで携帯端末3を固定する。
【0035】
なお、本実施形態では、建設機械2が油圧ショベルの場合として説明するが、建設機械2の種類は特に限定されない。建設機械2は、走行体と作業機とを備える構成であればよく、ホイルローダ、ブルドーザ、ダンプトラック、モータグレーダ、タイヤローラ、解体用機械等、種々の建設機械を用いることができる。なお、本件では、建設機械の作業を実行する部分を作業機とする。
【0036】
<携帯端末>
携帯端末3は、いわゆるスマートフォンといわれる無線通信機能を備える携帯端末であり、表示部40と、操作部42と、通信部44と、センサ46と、カメラ48と、GPS(Global Positioning System)部50と、接続端子52と、端末制御部54と、記憶部56と、を含む。
【0037】
表示部40は、液晶ディスプレイ等であり画像を表示する。操作部42は、タッチセンサであり、表示部40の表面に配置されている。本実施形態の携帯端末3は、積層した表示部40と操作部42がタッチパネルとなり、表示部40に画像を表示させた状態で操作部42が画面上にタッチされた位置を検出することで、当該タッチした領域に表示させている画像に対応する操作を検出する。なお、表示した画像とタッチした際に実行する操作とは予め対応付けられている。
【0038】
通信部44は、アンテナ等と有し、基地局4と無線で通信する。通信部44は、端末制御部54から供給された情報を信号に変換して基地局4に送る。通信部44は、基地局4から送られた信号を端末制御部54で処理可能な情報に変換して端末制御部54に送る。
【0039】
センサ46は、携帯端末3の種々の検出値を検出する。センサ46としては、携帯端末3の移動を検出する加速度センサおよび地磁気センサの少なくとも一方や、周囲の明るさを検出する照度センサ等がある。センサ46は、検出した検出値を端末制御部54に送る。
【0040】
カメラ48は、画像を撮影する撮影機構である。GPS部50は、GPS(Global Positioning System)衛星から出力される信号を受信し、自機の位置を検出する位置検出部である。
【0041】
接続端子52は、建設機械2の接続端子22と接続する端子である。接続端子52は、有線で情報の通信を行う端子であり、建設機械2の車体制御部24から送られた情報(信号、データ)を端末制御部54に送り、端末制御部54から送られた情報を建設機械2の車体制御部24に送る。接続端子52は、接続端子22と着脱可能な機構である。
【0042】
端末制御部54は、CPU(Central Processing Unit)やRAM(Random Access Memory)で構成された制御回路であり、携帯端末3の各部の動作を制御する。具体的には、端末制御部54は、記憶部56に記憶されたプログラムや、自身に記憶されたプログラムを実行し、各種処理を実行する。端末制御部54は、例えば、操作部42から入力された指示、接続端子52から送られた指示、センサ46で検出した検出値、カメラ48で撮影した画像情報、GPS部50で検出した位置情報に基づいて、実行する処理を決定し、各部の処理を実行する。なお、端末制御部54で実行する処理については後述する。
【0043】
記憶部56は、ROM(Read Only Memory)等の記憶媒体であり、端末制御部54で実行するプログラム、プログラムで用いる各種条件、自機を特定するID情報(端末ID、電話番号等)を記憶する。記憶部56は、端末制御部54により記憶している各種情報が読み込まれる。また、記憶部56は、端末制御部54により各種情報が書き込まれる。
【0044】
<基地局>
基地局4は、無線通信で携帯端末3の通信部44と通信する機器である。図1では、1つの基地局4を示したが、建設機械管理システム1は、所定の距離毎に複数の基地局4が配置されている。基地局4は、有線の通信回線や、他の基地局4との無線通信でネットワーク6と通信を行う。
【0045】
<ネットワーク>
ネットワーク6は、公衆回線の通信網であり、有線通信、無線通信で通信を伝達する回線である。
【0046】
<サーバ>
サーバ7は、ネットワーク6と通信を行う通信機であり、建設機械管理システム1の通信を管理する処理装置である。サーバ7は、管理端末8から送られる情報を基地局4、ネットワーク6を介して対象の携帯端末3に送信する。また、対象の携帯端末3から送られる情報を管理端末8に送る。
【0047】
<管理端末>
管理端末8は、建設機械管理システム1で管理する対象の建設機械2と、当該建設機械2に接続する携帯端末3と、の対応関係を管理する情報処理装置である。管理端末8は、当該建設機械2に接続する携帯端末3に認証情報と当該携帯端末3を所有する作業者が当該建設機械2で実行する予定の作業の情報(予定作業情報)を送る。なお予定作業情報は、作業工程に基づいて実施する予定の作業に関する各種情報であり、スケジュール、施工内容、施工場所、施工時間などを含み、文章、地図、写真、音声等の形式で提供される。
【0048】
なお、図1に示す建設機械管理システム1は、基地局4、ネットワーク6およびサーバ7を介して、携帯端末3と管理端末8とを通信させる構成とすることで、遠隔地にある携帯端末や、複数の携帯端末と通信が可能であり、より多くの建設機械を一括で管理できる。なお、建設機械管理システム1は、これに限定されない。建設機械管理システム1は、携帯端末3と管理端末8とは、通信可能な構成であればよく、例えば、無線LANや、赤外線通信等の近距離通信で通信を行う構成としてもよい。
【0049】
<建設機械管理システムの処理動作>
図4は、建設機械管理システムの処理動作の一例を説明するフローチャートである。以下、図4を用いて、建設機械管理システムの処理動作の一例について説明する。建設機械管理システム1は、ステップS12として、管理端末8から携帯端末3に予定作業情報と認証情報とを送信する。つまり、管理端末8は、建設機械2を操作して予定している所定の作業を実行する作業者の携帯端末3に予定作業情報を送るとともに、当該作業を実行する建設機械2を駆動可能とするための認証情報を送る。携帯端末3は、管理端末8から送られた予定作業情報と認証情報とを記憶部56に記憶する。
【0050】
ここで、作業者は、携帯端末3が予定作業情報を受信した場合、受信した予定作業情報に基づいて、対象の建設機械2を特定し、特定した建設機械2に携帯端末3を接続する。具体的には、携帯端末3を取付装置30に固定し、接続端子22と接続端子52とを接続する。建設機械管理システム1は、建設機械2と携帯端末3とが接続したことを検出した場合、ステップS14として、携帯端末3と建設機械2との接続処理を行う。具体的には、建設機械管理システム1は、接続した接続端子22と接続端子52とを介して、車体制御部24と端末制御部54との間でIDの交換や通信方法の設定等を行い両者で通信可能な状態とする。
【0051】
建設機械管理システム1は、ステップS14で接続処理が行われたら、ステップS16として、建設機械2と携帯端末3とにより認証処理を行う。ここで、認証処理とは、携帯端末3がステップS12で取得した認証情報と建設機械2に記憶されている認証情報とが一致するかを判定する処理である。図4は、認証情報が一致する場合の処理であるが、一致しない場合は、ステップS16より後の処理は行わない。
【0052】
建設機械管理システム1は、ステップS16で認証処理を行い、認証情報が一致した場合、ステップS18として建設機械2が駆動部(走行体12および作業機14を駆動する部分、駆動源および駆動制御部16)の起動処理を行う。
【0053】
建設機械管理システム1は、ステップS18で建設機械2が駆動部を起動したら、ステップS20で作業を実行する。ここでの作業とは、作業者が建設機械2を操作して実行する作業であり、基本的には携帯端末3に記憶された予定作業情報に基づいた作業である。
【0054】
建設機械管理システム1は、ステップS20で実行していた作業が完了した場合、または、作業者から終了指示が入力された場合、ステップS22として建設機械2で駆動部の停止処理を実行する。なお、停止処理とは、建設機械2の駆動部(走行体12および作業機14を駆動する部分、駆動源および駆動制御部16)が駆動していない状態である。
【0055】
建設機械管理システム1は、ステップS22で停止処理を行ったら、ステップS24として、携帯端末3から管理端末8に実行作業内容を送信させる。つまり、携帯端末3は、作業の実行時に各センサ20、46で取得した情報を含む各種情報と、予定作業情報と、の比較等を行い、建設機械2で実行された作業内容を記憶し、記憶した情報を実行作業内容として管理端末8に送る。
【0056】
建設機械管理システム1は、ステップS24の処理を行ったら、ステップS26として、携帯端末3と建設機械2との接続を解除する処理を行う。つまり、接続端子22と接続端子52とを介して携帯端末3と建設機械2との間で有線での通信を行わないように処理を行う。建設機械管理システム1は、ステップS26の処理を行ったら本処理を終了する。
【0057】
建設機械管理システム1は、ステップS24の処理とステップS26の処理とを逆の順番で実行してもよい。また、作業者により実行される接続端子22と接続端子52との接触を物理的に解除する処理は、ステップS22での処理が終わった後であればいつ実行してもよい。建設機械管理システム1は、接続端子22と接続端子52とが物理的に接続した状態であってもステップS26で通信を切断する処理を行うことで、建設機械2と携帯端末3との間で通信が行われることを抑制できる。
【0058】
<建設機械の処理動作>
図5および図6は、建設機械の処理動作の一例を説明するフローチャートである。以下、図5および図6を用いて、建設機械の処理動作の一例について説明する。
【0059】
まず、図5に示す処理を説明する。図5に示す処理は、建設機械2に携帯端末3が接続されていない状態または建設機械2の駆動部(走行体12、作業機14)が駆動されていない状態の場合に繰り返し実行される。建設機械2の車体制御部24は、ステップS102として携帯端末3の接続ありか、つまり接続端子22と接続端子52とを介して端末制御部54と接続しているかを判定する。車体制御部24は、ステップS102で接続なし(No)と判定した場合、本処理を終了する。車体制御部24は、携帯端末3と接続するまで、本処理を繰り返す。
【0060】
車体制御部24は、ステップS102で接続あり(Yes)と判定した場合、ステップS104として通信を開始する。つまり、車体制御部24は、上述したS14の接続処理を行い、携帯端末3の端末制御部54と通信ができる状態とする。車体制御部24は、ステップS104で通信を開始したら、ステップS106として認証処理を行う。具体的には、端末制御部54が保持する認証情報と記憶部26から読み出した認証情報との照合を行う。ここで、照合処理は、車体制御部24で実行することでセキュリティ性を向上させることができる。本実施形態では、照合処理を車体制御部24で実行するが、端末制御部54で実行してもよい。
【0061】
車体制御部24は、ステップS106で認証処理を行ったら、ステップS108として許可か、つまり認証情報が一致したかを判定する。車体制御部24は、ステップS108で許可でない(No)、つまり認証情報が一致しないと判定した場合、ステップS110として、エラーを通知する。つまり車体制御部24は、認証情報が一致しない旨をエラーとして端末制御部54に送り、本処理を終了する。車体制御部24は、認証情報が一致しない場合、エラーを通知して処理を終了することで、走行体12と作業機14とを稼動せずに処理を終了する。つまり、車体制御部24は、認証情報が一致しない場合、走行体12と作業機14とを動作禁止とする。
【0062】
車体制御部24は、ステップS108で許可である(Yes)、つまり認証情報が一致すると判定した場合、ステップS112として許可を通知する。つまり、車体制御部24は、認証情報が一致した旨の情報を許可情報として端末制御部54に送る。
【0063】
車体制御部24は、ステップS112で許可を通知したら、ステップS114として起動指示があるか、つまり端末制御部54から起動指示が送信されたかを判定する。車体制御部24は、ステップS114で起動指示なし(No)と判定した場合、ステップS114に進む。つまり車体制御部24は、起動指示を検出するまでステップS114の処理を繰り返す。
【0064】
車体制御部24は、ステップS114で起動指示あり(Yes)と判定した場合、ステップS116として起動動作を実行する。ここで、起動動作とは、駆動制御部16により走行体12を走行可能な状態とし、作業機14を稼動可能な状態とする処理である。例えばエンジンの始動動作であり、油圧ポンプの始動動作である。車体制御部24は、ステップS116で起動動作を行ったら、本処理を終了する。車体制御部24は、起動動作後は、各部から入力される指示に基づいて走行体12、作業機14を駆動し作業を実行する。
【0065】
次に、図6を用いて車体制御部24の駆動時の動作について説明する。車体制御部24は、ステップS120で制御指示があるかを判定する。なお、制御指示は、作業者により操作部18に入力された操作やセンサ20で検出した検出値に基づいて車体制御部24で作成した指示や、端末制御部54から入力された指示である。
【0066】
車体制御部24は、ステップ120で制御指示あり(Yes)と判定した場合、ステップS122として指示された動作を実行する。つまり、ステップS120で検出した指示に基づいて建設機械2の各部を動作させる。また、車体制御部24は、ステップS120で制御指示なし(No)と判定した場合、ステップS124に進む。
【0067】
車体制御部24は、ステップS120でNoと判定した場合またはステップS122の処理を実行した場合、ステップS124として車両情報を端末制御部54に送信するかを判定する。ここで、車両情報とは、センサ20で検出した検出値や、駆動制御部16と車体制御部24とが生成した指示に基づいて算出される値等の建設機械2の各種情報である。具体的には、水温、油温、燃料量、警告の種類と回数、メンテナンス情報、アームクレーン情報、作業量、作業モード等がある。
【0068】
車体制御部24は、ステップS124で車両情報を送信する(Yes)と判定した場合、ステップS126として車両情報を取得し、ステップS128として端末制御部54に車両情報を送信する。車体制御部24は、ステップS128の処理を行ったら、本処理を終了する。車体制御部24は、ステップS124で車両情報を送信しない(No)と判定した場合、本処理を終了する。
【0069】
なお、本実施形態の車体制御部24は、認証情報が一致した場合、起動指示があるかを判定したが、具体的には起動動作を実行可能な状態で起動指示の入力の受付を行うようにしたが、これに限定されない。建設制御部24は、認証情報が一致した場合、起動指示を含む各種操作に基づいた動作を実行可能とする。また、起動操作としては、走行体12、作業機14を起動させる操作以外にも、各種起動操作、例えば計器の起動操作、ライトの点灯操作やモニタの点灯操作等も含まれる。
【0070】
<携帯端末の処理動作>
図7および図8は、携帯端末の処理動作の一例を説明するフローチャートである。以下、図7および図8を用いて、携帯端末の処理動作の一例について説明する。
【0071】
まず、図7に示す処理を説明する。図7に示す処理は、携帯端末3が建設機械2に接続されていない状態の場合に実行される。携帯端末3の端末制御部54は、ステップS202として、予定作業情報および認証情報を受信する。なお、携帯端末3は、作業者が操作部42に入力した操作に基づいて管理端末8にアクセスして予定作業情報および認証情報を受信しても、管理端末8から自動的に送られてくる予定作業情報および認証情報を受信してもよい。
【0072】
端末制御部54は、ステップS202で情報を受信したら、ステップS204として建設機械2との接続ありか、つまり接続端子22と接続端子52とを介して車体制御部24と接続しているかを判定する。端末制御部54は、ステップS204で接続なし(No)と判定した場合、ステップS204に進む。端末制御部54は、情報を受信した後、建設機械2と接続されるまで、ステップS204の処理を繰り返す。
【0073】
端末制御部54は、ステップS204で接続あり(Yes)と判定した場合、ステップS206として通信を開始する。つまり、端末制御部54は、上述した図4のステップS14の接続処理を行い、建設機械2の車体制御部24と通信ができる状態とする。端末制御部54は、ステップS206で通信を開始したら、ステップS208として認証情報を送信する。具体的には、端末制御部54は、ステップS202で取得した認証情報を車体制御部24に送信する。
【0074】
端末制御部54は、ステップS208で認証情報を送信したら、ステップS210として許可通知があるか、つまり認証情報が一致した旨の情報を受信したかを判定する。端末制御部54は、ステップS210で許可通知がない(No)と判定した場合、ステップS212として、エラー通知があるか、つまり認証情報が一致しない旨の情報を受信したかを判定する。端末制御部54は、ステップS212でエラー通知なし(No)と判定した場合、ステップS210に進む。このように端末制御部54は、許可通知またはエラー通知のいずれかを受信するまでステップS210、ステップS212の処理を繰り返す。端末制御部54は、ステップS212でエラー通知あり(Yes)と判定した場合、本処理を終了する。つまり、端末制御部54は、認証情報が一致しない場合、建設機械2の駆動処理に移行することなく、処理を終了する。これにより、建設機械2は停止した状態となる。
【0075】
端末制御部54は、ステップS210で許可通知あり(Yes)と判定した場合、ステップS214として起動操作があるかを判定する。端末制御部54は、操作部42に入力された操作に所定の操作が入力された場合また予め設定された条件が満たされた場合、起動操作ありと判定する。
【0076】
端末制御部54は、ステップS214で起動操作なし(No)と判定した場合、ステップS214に進む。端末制御部54は、起動操作ありとなるまでステップS214の処理を繰り返す。端末制御部54は、ステップS214で起動操作あり(Yes)と判定した場合、ステップS216として、車体制御部24に起動操作に基づいた起動指示を送信し、本処理を終了する。端末制御部54は、車体制御部24に起動指示を送信することで、建設機械2を起動させることができる。
【0077】
次に、図8を用いて端末制御部54の駆動時の動作について説明する。端末制御部54は、ステップS220で制御操作があるかを判定する。なお、制御指示は、作業者により操作部42に入力された操作やセンサ46で検出した検出値に基づいて作成した指示である。
【0078】
端末制御部54は、ステップ220で制御操作あり(Yes)と判定した場合、ステップS222として制御操作に基づいて作成した制御指示を車体制御部24に送信し、ステップS224に進む。また、端末制御部54は、ステップS220で制御操作なし(No)と判定した場合、ステップS224に進む。
【0079】
端末制御部54は、ステップS220でNoと判定した場合またはステップS222の処理を実行した場合、ステップS224として新たな車両情報があるか、つまり車体制御部24から送られた車両情報が新たにあるかを判定する。
【0080】
端末制御部54は、ステップS224で車両情報あり(Yes)と判定した場合、ステップS226として車両情報を処理し、記憶部56に記憶し、ステップS228に進む。端末制御部54は、ステップS224で車両情報なし(No)と判定した場合、ステップS228としてセンサ46の検出結果を取得する。なお、端末制御部54は、センサ46の検出結果のうち後述する作業内容の作成に必要な検出値を取得する。
【0081】
端末制御部54は、ステップS228でセンサ46の検出結果を取得したら、ステップS230として建設機械2との接続が解除されているかを判定する。端末制御部54は、ステップS230で接続が解除されていない(No)と判定した場合、ステップS236に進む。端末制御部54は、ステップS230で接続が解除されている(Yes)と判定した場合、ステップS232として情報を取得する。なお、建設機械2は、携帯端末3との接続が解除されたと判定した場合、走行体12、作業機14を停止させることが好ましい。ここで、端末制御部54は、作業者が操作部42に入力した操作に基づいて各種処理を実行し、情報を取得する。例えば、カメラ48により画像を撮影し、作業対象の画像を取得する。
【0082】
端末制御部54は、ステップS232で情報を取得したら、ステップS234として建設機械2と接続しているかを判定する。端末制御部54は、建設機械2と接続していない(No)と判定した場合、ステップS232に進み、情報を取得する。端末制御部54は、ステップS234で建設機械2と接続している(Yes)と判定した場合、ステップS236に進む。
【0083】
端末制御部54は、ステップS230でNoと判定した場合またはステップS234でYesと判定した場合、ステップS236として解析処理を実行する。解析処理とは、ステップS226で取得した車両情報、ステップS228で取得したセンサ46の検出結果、ステップS232で取得した情報を解析して、建設機械2で実行した作業内容を特定する処理である。端末制御部54は、ステップS236で解析処理を実行したら、ステップS238として、解析結果に基づいて作業内容を更新し、本処理を終了する。なお、端末制御部54は、建設機械2の駆動時に図8に示す処理を繰り返し実行し、上述したように建設機械2の駆動が終了し場合、作成した作業内容を管理端末8に送信する。
【0084】
建設機械管理システム1は、以上のように、携帯端末3が記憶した認証情報と、建設機械2が記憶した認証情報とが一致することを条件として、建設機械2を稼動できるようにすることで、つまり、携帯端末3で送受信する情報を鍵として用いることで、建設機械2のセキュリティ性を高くすることができる。つまり、所有者が特定可能な携帯端末3を鍵として用いることで、どの作業者に鍵となる認証情報を付与したかを正確に把握することができる。
【0085】
また、作業者は、必要な情報を管理端末8からダウンロード等で自身の携帯端末3に記憶させた後、携帯端末3を建設機械2に接続することで、建設機械2を起動させることができる。これにより作業者は、パスワード等を覚える必要がなくなり操作性を高くすることができる。
【0086】
また、建設機械2を管理する管理者は、管理端末8で認証情報を管理することで複数の建設機械2の情報を一括で管理することができる。また、管理端末8を操作することで、必要な作業者の携帯端末3に認証情報を提供することができる。
【0087】
なお、認証情報は、作業を実行する時間毎に認証情報の内容が変化する情報とすることが好ましい。このように、認証情報を変化する情報として作成することで、認証情報を所定の時間のみ使用可能な認証情報とすることができる。これにより、認証情報を取得した作業者が、許可された時間以外に建設機械2を駆動することができないようにすることができ、セキュリティ性をより高くすることができる。
【0088】
また、上記実施形態では、起動時に認証情報が一致するかの判定(認証処理)を行ったが、設定した時間毎に定期的に実行するようにしてもよい。認証処理を定期的に実行することで、許可した作業時間を越えて作業を行っている場合に作業を停止させることができる。
【0089】
また、建設機械管理システム1は、認証処理に、認証情報に加え、予定作業情報の一部を用いることが好ましい。例えば、建設機械管理システム1および建設機械2は、予定作業情報に記憶されている作業日時の情報を用い、暗証コードである上述の認証情報に加え、当該建設機械2を使用する時間情報が一致している場合に、建設機械2を駆動可能とすることができる。これにより、セキュリティ性をより高くすることができる。
【0090】
<その他の処理動作>
また、建設機械管理システム1は、予定作業情報と位置情報とに基づいて建設機械2を駆動可能とするかを判定することも好ましい。ここで、図9は、携帯端末の処理動作の一例を説明するフローチャートである。端末制御部54は、ステップS250として、GPS部50により自身の位置情報を取得し、ステップS252として作業条件を取得する。端末制御部54は、予定作業情報を解析することで、作業条件を取得することができる。端末制御部54は、作業条件として、予定作業情報に含まれている作業を実行する領域の情報を取得する。
【0091】
端末制御部54は、ステップS252で作業条件を取得したら、ステップS254として、許可領域内であるかを判定する。つまり端末制御部54は、ステップS250で取得した位置情報がステップS252で取得した作業を実行する領域(許可領域)に含まれているかを判定する。
【0092】
端末制御部54は、ステップS254で許可領域内である(Yes)と判定した場合、ステップS256として、作業を継続、つまりそのままの状態として、本処理を終了する。また、端末制御部54は、ステップS254で許可領域内ではない(No)と判定して場合、ステップS258として作業停止処理を実行する。ここで作業停止処理とは、走行体12および作業機14の駆動を停止する状態である。なお、設定された領域に向けての走行は可能としてもよい。条件付きで走行を可能とすることで、路上で急に停止したり、路上で移動不可能な状態になったりする恐れを低減することができる。端末制御部54は、ステップS258で作業停止処理を実行したら、本処理を終了する。
【0093】
建設機械管理システム1は、このように携帯端末3のGPS部50の機能を利用し、建設機械2が駆動可能な領域を制限することでつまりジオフェンスを設けることで、仮に建設機械2が盗難された場合でも建設機械2の移動範囲を制限することができる。これにより、建設機械2のセキュリティ性をより向上させることができる。
【0094】
なお、上記実施形態では、駆動を制限したが、許可領域ではないと判定した場合、警告(音、フラッシュ、バイブ)を発するようにしてもよい。
【0095】
また、建設機械管理システム1は、作業者がそれぞれ所有する携帯端末3と建設機械2とを着脱可能な状態とすることで、作業者は、必要に応じた認証情報を取得することで自身が所有する携帯端末3を用いて複数の異なる建設機械2を駆動させることが可能となる。また、建設機械管理システム1および建設機械2は、作業者がそれぞれ所有する携帯端末3に対して予定作業情報と認証情報を送信することで、作業者毎に適切な作業を実行させることができる。これにより、建設機械管理システム1は、作業者の免許の有無や、労務状態(労働時間、作業内容)に応じた作業を割り当てることができる。
【0096】
また、建設機械管理システム1は、携帯端末3に記憶されている作業者の個人情報に基づいて、建設機械2を駆動させるかを判定してもよい。例えば、携帯端末3に記憶されている作業者の個人情報として、当該建設機械2の操作免許を保持している情報が含まれていない場合、建設機械2を駆動させないようにしてもよい。また、当該作業者の労働時間が所定の閾値を超えている場合、建設機械2を駆動させないようにしてもよい。
【0097】
また、建設機械管理システム1は、各部から取得した情報に基づいて作業内容を検出し、纏めた作業内容を管理端末8に送信することで、自動的に作業内容の日報を作成し、送信することができる。これにより、作業者の負担を低減することができる。また、建設機械2や携帯端末3で検出した情報に基づいて作業内容を特定できるため、客観的で詳細な情報の作業内容を作成することができる。
【0098】
また、建設機械2に対して着脱可能でカメラ48を備える携帯端末3を用いることで、カメラ48で撮影した作業現場の写真も作業内容に含めることができる。これにより、日報に画像が必要な場合でも必要な画像を随時取得することができる。例えば、携帯端末3は、作業現場の作業の対象部分(故障の修理の場合は故障部分)の写真を取得し、作業内容として送ることで現場にいない人物も故障部分の判定を行うことができ、必要な部品を適切に手配することが可能となる。また、対象の部品についている二次元バーコードを撮影することで、故障部品情報取得、点検箇所のチェックの情報を取得することもできる。
【0099】
また、建設機械管理システム1は、駆動時に携帯端末3の表示部40に各種情報を表示させ、建設機械2のモニタとして用いることが好ましい。携帯端末3の表示部40をモニタとして用いることで、作業者は、表示部40で各種情報を確認することができる。これにより、モニタを備えない建設機械を、モニタを備える建設機械とすることができ、モニタを備えている建設機械をモニタがより多い(マルチモニタ)の建設機械とすることができる。また、建設機械管理システム1および建設機械2は、駆動時に携帯端末3の操作部42に建設機械2の操作を入力可能にすることが好ましい。つまり、表示部40と操作部42で構成されるタッチパネルで建設機械2の各種操作を実行できることが好ましい。これにより、携帯端末3を建設機械2の操作部として利用することができ、作業時により多くの操作の入力が可能となる。
【0100】
また、建設機械管理システム1は、予定作業情報(予定作業の内容の情報)を予め取得することで、作業者に次に実行する操作を通知することができる。つまり作業をナビゲートすることができる。これにより、作業者に対する負荷を低減することができる。
【0101】
また、建設機械管理システム1は、携帯端末3の端末制御部54で各種演算処理を実行し、端末制御部54の制御機能を建設機械2の制御部として用いることが好ましい。このように端末制御部54で各種処理を実行することで、車体制御部24の処理能力が低い構成であっても各種処理を円滑に実現することができる。これにより車体制御部24を簡単な構成にすることができ、建設機械2の構成を簡単にし、装置を安価にすることができる。
【0102】
また、建設機械管理システム1は、管理端末8で各建設機械2の使用状態、使用頻度を検出できるため、建設機械2のメンテナンスの必要性等を事前に判断することができる。これにより、実行する作業内容と使用する建設機械2との対応関係を適切に決定できるため、作業効率を向上させることができ、作業者への負担を低減することができる。
【0103】
建設機械管理システム1は、携帯端末3で停止時の建設機械2の位置情報を取得し、記憶することで、再使用時に、当該建設機械2の位置を作業者に通知することができる。また、一括で情報を管理することで、前日とは違う作業者が建設機械2を使用する場合でも必要な情報を通知することができる。
【0104】
また、作業者が個人で所有する携帯端末3を用い、使用時は作業者の携帯端末3と建設機械2とを接続して処理を実行することで、建設機械2の使用時の条件を作業者の好みに合わせた設定とすることができる。
【0105】
また携帯端末3は音声を取得し、建設機械2の状態を判定するようにしてもよい。具体的には、建設機械2のエンジン音等を取得し異音が発生しているかを判定してもよい。
【0106】
また、建設機械管理システム1は、携帯端末3が基地局4と通信可能な場合、建設機械2での作業中も作業内容の情報を管理端末8に送信することが好ましい。これにより、作業中に必要になった援助を迅速に判断することができる。
【0107】
また、携帯端末3は、通信回線を用いて制御ソフトウェアやアプリケーションのプログラムをダウンロードで取得することができる。また、建設機械2も携帯端末3を介して制御ソフトウェアやアプリケーションのプログラムをダウンロードで取得することができる。これにより、必要なプログラムを随時取得することができ、プログラムのアップデートを簡単に実行することができる。
【0108】
建設機械管理システム1は、携帯端末3を建設機械2から取り外し、カメラ48の撮影機能とGPS部50の位置検出機能とを用いて、計測や写真を撮影することで、施工データを収集し蓄積することができる。また、建設機械管理システム1は、携帯端末3を建設機械2から取り外し、建設機械2の故障診断データを取得し、蓄積することもできる。
【0109】
建設機械管理システム1は、携帯端末3のセンサ46の検出結果や、基地局4を介したネットワークとの通信により、座標、傾斜、方位、温度、天気等の情報を取得することができる。例えば、携帯端末3のセンサ46として、電子コンパス、ジャイロセンサ、加速度センサで取得した情報、さらに必要に応じてGPS部50で取得した位置情報に基づいて、建設機械2の傾斜や方向や位置を検出し表示部40に表示することで、作業者の作業に活用することができる。また、建設機械管理システム1は、検出した建設機械2の座標、傾斜、方位に基づいてあおり防止の制御や姿勢制御を実行することで、作業者はより円滑に作業を行うことができる。あおり防止の制御や姿勢制御は、端末制御部54で実行しても車体制御部24で実行してもよい。また、建設機械管理システム1は、検出した建設機械2の座標、傾斜、方位の情報、例えば電子コンパスをセンサとして用いて検出した情報に基づいて、建設機械2の旋回を計測して作業回数をカウントするようにしてもよい。
【0110】
また、建設機械2の駆動源を電気モータとし、建設機械2を充電可能な構成とした場合、充電により使用した電気料金の情報を取得することができる。また、建設機械管理システム1は、建設機器2から取得した充電状態や、使用した電気料金、ネットワーク6等を介して取得した安価に充電できる時間帯を携帯端末3の表示部40に表示することが好ましい。
【0111】
また、携帯端末3は、GPS部50と通信部44の機能を用いて、RTK−GPS(Real Time Kinematic GPS)測量の移動局とすることができる。
【0112】
建設機械管理システム1は、携帯端末3と建設機械2とが接続していない状態でも携帯端末3で建設機械2を操作できるようにしてもよい。なお、この場合、建設機械2に近距離通信部等の無線通信機能を備えている必要がある。このように、携帯端末3で建設機械2を遠隔操作可能とすることで、操縦席28から離れた位置で建設機械2を操作でき、作業対象が見やすい位置で建設機械2を操作できる。
【0113】
建設機械管理システム1は、携帯端末3のGPS部50で検出した位置情報と予定作業情報の地図情報に基づいて、目的地、施工現場(作業場)までのナビゲーションを行うようにしてもよい。
【0114】
建設機械管理システム1は、携帯端末3の表示部40に画像を表示して、または音声を出力して、予定の作業の内容のガイダンスを行うようにしてもよい。例えば、施工場所、注意事項(配管やケーブルが埋まっている等)、最終形状等を通知する。これにより、作業者は次に施工する作業をより確実に理解することができ、円滑に作業を行うことができる。
【0115】
建設機械管理システム1は、携帯端末3で外部(他の通信端末)と通信可能とすることで、外部から情報を受信して、警告を画像表示や音声で通知することができる。例えば、他の通信端末で所定の距離以内にダンプが近づいたことを検出した場合、警告を出力することができる。また、携帯端末3が接続している建設機械2の状態を他の通信端末に出力し、他の通信端末、他の建設機械での警告や制御に活用することができる。例えば、建設機械2のペイロード(最大積載量)を外部に出力したり、作業支援の依頼を出力したりすることができる。
【0116】
建設機械管理システム1は、携帯端末3の作業者に対して建設機械2をレンタルとして貸与するシステムとすることもできる。この場合、携帯端末3から取得した各種情報に基づいて使用実績を検出し、課金を行うことができる。また、特定の携帯端末3に認証情報を提供するため、作業者(使用者)を特定することができる。
【0117】
また上記実施形態では、建設機械2と携帯端末3との通信回線を有線の回線としたが、非接触型ICを用いた通信や、無線LANを用いた通信、Bluetoothを用いた通信等で通信を行ってもよい。
【符号の説明】
【0118】
1 建設機械管理システム
2 建設機械
3 携帯端末
4 基地局
6 ネットワーク
7 サーバ
8 管理端末
12 走行体
14 作業機
16 駆動制御部
18 操作部
20 センサ
22 接続端子
24 車体制御部
26 記憶部
28 操縦席
29 操縦領域
30 取付装置
40 表示部
42 操作部
44 通信部
46 センサ
50 GPS部
52 接続端子
54 端末制御部
56 記憶部
102 車体
106 枠
【特許請求の範囲】
【請求項1】
走行体と、
前記走行体に接続された作業機と、
前記走行体に設けられた操縦領域と、
前記作業機および前記走行体の動作を制御する駆動制御部と、
前記操縦領域に配置され作業機を操作する操作部と、
前記操縦領域に配置され操縦者が着座する操縦席と、
前記操縦領域に配置され携帯端末と接続する接続端子と、
前記携帯端末と通信を行い、各部を制御する車体制御部と、
認証情報を記憶する記憶部と、を有し、
前記車体制御部は、前記接続端子に前記携帯端末が接続された場合、前記携帯端末から送信される認証情報と前記記憶部に記憶している認証情報とを照合し、
両者が一致した場合、入力された操作に対する動作を実行可能とし、両者が異なる場合、前記作業機および前記走行体を動作禁止とすることを特徴とする建設機械。
【請求項2】
自機の状態を検出するセンサをさらに有し、
前記車体制御部は、前記センサで検出した情報を前記携帯端末に送信することを特徴とする請求項1に記載の建設機械。
【請求項3】
前記車体制御部は、前記走行体および前記作業機の操作情報と、前記走行体および前記作業機を稼働するそれぞれの駆動源の稼働情報を取得し、取得した情報を前記携帯端末に送信することを特徴とする請求項1または2に記載の建設機械。
【請求項4】
前記操縦領域に配置され、前記携帯端末を固定する取付装置をさらに有することを特徴とする請求項1から3のいずれか一項に記載の建設機械。
【請求項5】
前記認証情報は、照合時の条件に基づいて一致条件が変化する情報であることを特徴とする請求項1から4のいずれか一項に記載の建設機械。
【請求項6】
前記接続端子は、有線で前記携帯端末と接続することを特徴とする請求項1から5のいずれか一項に記載の建設機械。
【請求項7】
前記入力された操作に対する動作は、起動動作を含むことを特徴とする請求項1から6のいずれか一項に記載の建設機械。
【請求項8】
請求項1から7のいずれか一項に記載の建設機械と、
前記建設機械の前記接続端子と接続可能な携帯端末と、
前記携帯端末と無線で通信する管理端末と、を有し、
前記携帯端末は、前記管理端末と通信して、認証情報を取得することを特徴とする建設機械管理システム。
【請求項9】
前記携帯端末は、前記建設機械および前記管理端末から取得した情報を表示することを特徴とする請求項8に記載の建設機械管理システム。
【請求項10】
前記携帯端末は、前記操作部からの入力に対して、前記走行体および前記作業機で実行する動作の設定を変更することができることを特徴とする請求項8または9に記載の建設機械管理システム。
【請求項11】
前記携帯端末は、自機の位置情報を検出するGPS部をさらに有し、前記管理端末から前記認証情報とともに前記建設機械の移動領域の情報を取得し、
前記GPS部で取得した自機の位置情報が前記建設機械の移動領域の情報に含まれていない場合、前記建設機械を停止させることを特徴とする請求項8から10のいずれか一項に記載の建設機械管理システム。
【請求項1】
走行体と、
前記走行体に接続された作業機と、
前記走行体に設けられた操縦領域と、
前記作業機および前記走行体の動作を制御する駆動制御部と、
前記操縦領域に配置され作業機を操作する操作部と、
前記操縦領域に配置され操縦者が着座する操縦席と、
前記操縦領域に配置され携帯端末と接続する接続端子と、
前記携帯端末と通信を行い、各部を制御する車体制御部と、
認証情報を記憶する記憶部と、を有し、
前記車体制御部は、前記接続端子に前記携帯端末が接続された場合、前記携帯端末から送信される認証情報と前記記憶部に記憶している認証情報とを照合し、
両者が一致した場合、入力された操作に対する動作を実行可能とし、両者が異なる場合、前記作業機および前記走行体を動作禁止とすることを特徴とする建設機械。
【請求項2】
自機の状態を検出するセンサをさらに有し、
前記車体制御部は、前記センサで検出した情報を前記携帯端末に送信することを特徴とする請求項1に記載の建設機械。
【請求項3】
前記車体制御部は、前記走行体および前記作業機の操作情報と、前記走行体および前記作業機を稼働するそれぞれの駆動源の稼働情報を取得し、取得した情報を前記携帯端末に送信することを特徴とする請求項1または2に記載の建設機械。
【請求項4】
前記操縦領域に配置され、前記携帯端末を固定する取付装置をさらに有することを特徴とする請求項1から3のいずれか一項に記載の建設機械。
【請求項5】
前記認証情報は、照合時の条件に基づいて一致条件が変化する情報であることを特徴とする請求項1から4のいずれか一項に記載の建設機械。
【請求項6】
前記接続端子は、有線で前記携帯端末と接続することを特徴とする請求項1から5のいずれか一項に記載の建設機械。
【請求項7】
前記入力された操作に対する動作は、起動動作を含むことを特徴とする請求項1から6のいずれか一項に記載の建設機械。
【請求項8】
請求項1から7のいずれか一項に記載の建設機械と、
前記建設機械の前記接続端子と接続可能な携帯端末と、
前記携帯端末と無線で通信する管理端末と、を有し、
前記携帯端末は、前記管理端末と通信して、認証情報を取得することを特徴とする建設機械管理システム。
【請求項9】
前記携帯端末は、前記建設機械および前記管理端末から取得した情報を表示することを特徴とする請求項8に記載の建設機械管理システム。
【請求項10】
前記携帯端末は、前記操作部からの入力に対して、前記走行体および前記作業機で実行する動作の設定を変更することができることを特徴とする請求項8または9に記載の建設機械管理システム。
【請求項11】
前記携帯端末は、自機の位置情報を検出するGPS部をさらに有し、前記管理端末から前記認証情報とともに前記建設機械の移動領域の情報を取得し、
前記GPS部で取得した自機の位置情報が前記建設機械の移動領域の情報に含まれていない場合、前記建設機械を停止させることを特徴とする請求項8から10のいずれか一項に記載の建設機械管理システム。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】

【図7】
【図8】
【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−232682(P2012−232682A)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2011−103060(P2011−103060)
【出願日】平成23年5月2日(2011.5.2)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(000001236)株式会社小松製作所 (1,686)
【公開日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願日】平成23年5月2日(2011.5.2)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Bluetooth
【出願人】(000001236)株式会社小松製作所 (1,686)
[ Back to top ]