
建設機械用安全装置
【課題】キャリアユニット及びそのキャリアユニットに対し可動な駆動ユニットを有する建設機械用の安全装置を提供する。
【解決手段】キャリアユニット10に対する駆動ユニット18の現在位置を1個又は複数個の検出手段28,29で検出する。建設機械1の傾きに対し所与レベルの安全性を提供しつつ駆動ユニット18を動かせる可動範囲を、1個又は複数個の入力値に基づき、評価ユニット22が1個又は複数個定める。表示手段20が、キャリアユニット10に対する駆動ユニット18の現在位置と併せ、その可動範囲を表示する。
【解決手段】キャリアユニット10に対する駆動ユニット18の現在位置を1個又は複数個の検出手段28,29で検出する。建設機械1の傾きに対し所与レベルの安全性を提供しつつ駆動ユニット18を動かせる可動範囲を、1個又は複数個の入力値に基づき、評価ユニット22が1個又は複数個定める。表示手段20が、キャリアユニット10に対する駆動ユニット18の現在位置と併せ、その可動範囲を表示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、請求項1記載の通り、キャリアユニット及びそのキャリアユニットに対し可動な駆動ユニットを有する建設機械用安全装置に関する。
【背景技術】
【0002】
アースドリル機等の大型建設機械では稼働中に傾きモーメントが発生することがある。その傾きモーメントには、積載物の出っ張り等が原因で生じる静的なものと、遠心力等が原因で生じる動的なものとがある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許出願公開第2006/289205号公報
【特許文献2】米国特許出願公開第2009/089703号公報
【特許文献3】米国特許出願公開第2003/060923号公報
【特許文献4】米国特許第6032094号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
過剰な傾きモーメントが生じることを防ぐには、例えば、積載物の出っ張り方を制限すればよいことがわかっている。しかし、そのような制限を課すとその建設機械の可動範囲が狭くなる。ひいては、その建設機械の利用可能範囲が限られてしまう。
【0005】
本発明の目的は、その建設機械の稼働時信頼性特に対傾き安全性を大きく高めるのと同時に、その建設機械の作業半径を大きく拡げ、用途を大きく増やし強め且つ効率を大きく高めることが可能な、建設機械用安全装置を提供することである。
【課題を解決するための手段】
【0006】
この目的を達成すべく、請求項1記載の特徴を有する安全装置を提案する。他の請求項に記載したのはその好適な実施形態である。
【0007】
即ち、本発明に係る安全装置は、キャリアユニット及びそのキャリアユニットに対し可動な駆動ユニットを有する建設機械用の安全装置であって、キャリアユニットに対する駆動ユニットの現在位置を検出する1個又は複数個の検出手段と、キャリアユニットに対する駆動ユニットの現在位置を表示する表示手段と、建設機械の傾きに対し所与レベルの安全性を提供しつつ駆動ユニットを動かせる可動範囲を1個又は複数個の入力値に基づき1個又は複数個定める評価ユニットと、を備え、駆動ユニットの現在位置と併せその可動範囲をその表示手段で表示させるものである。
【0008】
本発明の基礎をなしている知識は、キャリアユニットで支持される駆動ユニットに重量があるため、キャリアユニットに対する駆動ユニット位置の調整中に、重心位置がずれて変動的な傾きモーメントが発生する、という知識である。そうした変動的な傾きモーメントに対抗して対傾き安全稼働を実現するため、本発明では、キャリアユニットに対し駆動ユニットを安全に動かせる可動範囲を、評価ユニットで定めるようにしている。可動範囲は、所定の傾き安全性要因が見られること等を特徴とするものであるので、それを定めるには、相応の特性曲線乃至チャートを評価ユニット内に格納等しておくこともできる。評価ユニットで可動範囲を定める処理は、1個又は複数個の入力値に基づき実行される。即ち、包括的な検討を踏まえ、評価ユニットでは、傾き方が駆動ユニットの出っ張りによって左右される事実や他の諸要因(例えば駆動ユニット上の積載物や建設機械の力学的状態)の影響を受ける事実を反映させることができる。例えば、駆動ユニットによってドリルパイプが保持されている場合、そのドリルパイプの直径を上述した入力値の一つとして利用することで、そのドリルパイプの関連部分質量が傾きモーメントに及ぼす影響を反映させることができる。
【0009】
更に、本発明における表示手段では、求まった安全な可動範囲及び実際に調整される駆動ユニットの現在位置の双方がオペレータ向けにまとめて表示される。オペレータは、その表示を一目で看取することができ、それを通じ、駆動ユニットの現在位置が安全な可動範囲の中心か(高安定領域内か)それとも安全な可動範囲の辺縁部での稼働となっているか(駆動ユニットをそれ以上出っ張らせることが不可能と見られるか)を知ることができる。従って、オペレータは、更なる対傾き安全性向上手段(例えば動的な力の制限)が必要であるか否かを早期段階で知ることもできるので、極めて高い効率及び安全性での稼働が実現されることとなる。即ち、本発明によれば、対傾き安全性の現状が可視表示されるため、オペレータがそれを極めて容易且つ直観的に把握することができ、それによって極めて高い稼働時信頼性が実現されることとなる。
【0010】
また、想定される建設機械の一つはアースドリル機である。アースドリル機で駆動ユニットとなるのはアースドリルツール駆動用のドリル駆動装置等であり、キャリアユニットとなるのはそのドリル機の下部キャリッジ等である。
【0011】
これは、駆動ユニットがキャリアユニットに対し鉛直軸周りで可枢動な建設機械であるので、1個又は複数個の検出手段がキャリアユニットに対する駆動ユニットの鉛直軸周りでの枢動方向現在位置を検出し、表示手段に駆動ユニットの枢動方向現在位置と併せその可動範囲を表示させる、といった構成にするのが望ましい。この構成では、駆動ユニット例えばドリル駆動装置の鉛直軸周り位置を調整することができ、従って大きな作業半径を有する建設機械を提供することができる。その場合、上述の可動範囲は鉛直軸周り枢動角に係る成分、現在位置は駆動ユニットの鉛直軸周り枢動方向位置に係る成分を含むものとなる。
【0012】
更に、駆動ユニットが鉛直軸に対し径方向に可動な建設機械でもあるので、1個又は複数個の検出手段が鉛直軸に対する駆動ユニットの径方向現在位置を検出し、表示手段に駆動ユニットの径方向現在位置と併せその可動範囲を表示させる構成とするのが望ましい。この構成では、鉛直軸に対する駆動ユニットの径方向位置を調整することができる。上述の安全な可動範囲はその径方向位置に係る成分、現在位置は駆動ユニットの径方向位置に係る成分を含むものとなる。
【0013】
また、安全装置が特に役立つのは、傾きに対し特段の注意を払わねばならない可動な建設機械である。従って、好ましい構成の一つは、そのキャリアユニットが走行装置を有する建設機械で使用することである。
【0014】
特に望ましいのは、駆動ユニットがドリルツール等の基礎構築ツールを1個又は複数個有する建設機械で使用することである。例えば、そうした基礎構築ツール向けのロータリドリル駆動装置、振動ドリル駆動装置等を駆動ユニットとして備える建設機械である。
【0015】
また、原理的には、可動範囲と、駆動装置の現在位置とを、同じ画面上で互いに隣り合わせに表示させることも可能であるが、より効果的なのは、表示手段で、現在位置と併せ可動範囲を同じスケッチマップ上に表示させることである。この表示を見ることで、オペレータは、対傾き安全性の状況を非常に容易に把握することができる。安全な可動範囲の限界に対し、現在位置が直に関連付けて表示されるからである。そのスケッチマップは単一の画面上に表示させるのが望ましい。
【0016】
データの表示に関していえば、更に望ましいのは、駆動ユニットの位置が変化しているとき、表示手段で可動範囲を固定表示させることである。この構成では、その位置が調整されるにつれ画面上での駆動ユニットの表示が移動する一方、同じ画面上で可動範囲が固定的に表示され続けるため、表示される画像が非常に安定なものとなる。なお、原理的には、その位置が変化しても駆動ユニットが固定的に表示され続ける一方、可動範囲の表示が移動するようにすることも可能であり、そのようにすれば表示される画像が非常に把握容易なものとなる。
【0017】
表示手段については、建設機械又はその一部の平面的な模式像と併せ可動範囲を表示させる構成とするのが望ましい。そうすることで、直観的に非常に把握しやすい状況表示を実現することができる。
【0018】
本発明における表示手段は、可動範囲を有色ハイライト表示する構成とするのが望ましい。具体的には、可動範囲に対応する領域を画面上に有色ハイライト表示させる構成、例えば許容できる可動範囲を画面上に緑色で表示させる構成である。これに代え又は加え、可動範囲の限界線を画面上に表示させてもよい。駆動ユニットの現在位置の変化に応じ、表示されている可動範囲を過ぎり画面上を移動するよう、駆動ユニットの現在位置を画面上にドット、レティクル等で表示させることもできる。駆動ユニットの現在位置を、その駆動ユニットの模式像を画面上に表示させることで表示させ、それにより抽象化の程度を抑えることもできる。
【0019】
本発明は、また、稼働制限のない第1可動範囲及び建設機械稼働制限がある第2可動範囲を評価ユニットが定める形態でも好適に実施することもできる。稼働制限のない第1可動範囲、とは、所要レベルの対傾き安全性を達成するのに別の稼働パラメタ(例えば駆動ユニットの負荷)を制限することが必要な範囲、という意味である。械稼働制限がある第2可動範囲、とは、当該別の稼働パラメタに対する制限が必要ない範囲、という意味である。複数個の可動範囲を定めることで、その建設機械の作業半径を拡げることができる。
【0020】
この点との関連でいうと、表示手段は、それらの可動範囲を、互いに色を違え且つ現在位置と併せ、互いに同じスケッチマップ上に表示する構成にするのが望ましい。特に、稼働制限のない第1可動範囲を緑色、稼働制限がある第2可動範囲を黄色、というように、危険度表示に広く用いられている色で表示させれば、オペレータが状況を素早く判断することが可能となる。
【0021】
本発明は、また、1個又は複数個の入力値に基づき評価ユニットが可動範囲を1個又は複数個定める際に、その入力値としてセンサによる検出値を使用する形態でも実施することができる。使用できる検出値としては、その建設機械の位置乃至姿勢に係る値、その建設機械に影響を及ぼす力に係る値等がある。これに代え又は加え、1個又は複数個の入力値をマニュアル入力するようにしてもよい。例えば、評価ユニットが、オペレータにより初期設定される建設機械稼働パラメタを参照して可動範囲を定めるようにするのが有益である。オペレータによって入力乃至初期設定される稼働パラメタとしては、ドリルツールの構成に関するもの、実行されるのが相応の動力を伴うドリル動作かそれともドリルツール交換のための純粋なハンドリング動作かを示すもの等がある。
【0022】
本発明における評価ユニットへの入力値は、特に、建設機械に備わる検出手段によって検出された値、マニュアル入力された値、データベースから得られた値又はその任意の組合せにするのが望ましい。
【0023】
そして、本発明に係る建設機械は本発明に係る安全装置を備える。
【図面の簡単な説明】
【0024】
【図1】本発明に係る安全装置を備えた建設機械の側面図である。
【図2】本発明の第1実施形態に係る安全装置内画面表示例を示す図である。
【図3】本発明の第2実施形態に係る画面表示例を示す図である。
【発明を実施するための形態】
【0025】
以下、別紙図面に模式化して示した好適な実施形態を参照し本発明についてより詳細に説明する。
【0026】
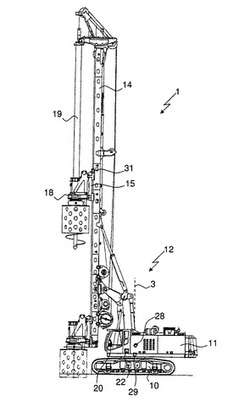
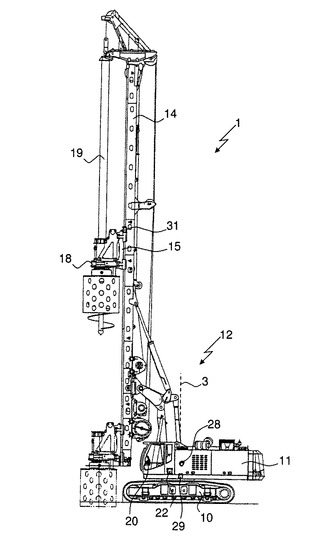
図1に、本発明に係る安全装置を備えた建設機械の構成を示す。この建設機械1は、キャリアユニット10たるクローラ型走行装置を備えた可動アースドリル機として構成されており、そのキャリアユニット10にはその建設機械の上部キャリッジ11が載っている。上部キャリッジ11は鉛直軸3周りで枢動させうるようキャリアユニット10に載せられており、その上部キャリッジ11には、マスト14を支持し上部キャリッジ11に連結するマストサポート12が載っている。マストサポート12が水平走行軸周りで可枢動な形態で設けられているため、マストサポート12を枢動させることで、上部キャリッジ11ひいてはキャリアユニット10に対するマスト14の径方向位置を調整することができる。更に、そのマスト14上には、鉛直変位可能な形態にてスレッジ15が設けられている。そのスレッジ15には、ドリルロッド19用のドリル駆動装置たる駆動ユニット18が載せられている。
【0027】
従って、キャリアユニット10に対し上部キャリッジ11を枢動させると、駆動ユニット18もキャリアユニット10に対し鉛直軸3周りで枢動する。マストサポート12を枢動させると、駆動ユニット18がキャリアユニット10に対し枢動し鉛直軸3に対して径方向に移動する。
【0028】
また、上部キャリッジ11上には、キャリアユニット10に対する上部キャリッジ11ひいては駆動ユニット18の枢動方向現在位置を検出する検出手段29や、上部キャリッジ11ひいてはキャリアユニット10に対する駆動ユニット18の径方向現在位置を検出する検出手段28が設けられている。後者の検出手段28は、マストサポート12の水平走行軸周り枢動角を求める回動角検出手段として構成されている。
【0029】
本発明に係る安全装置は、更に、接続先の検出手段28及び29から信号を受け取り駆動ユニット18の現在位置を調べる評価ユニット22や、建設機械1のオペレータ用キャビン内に設けられた表示手段20を備えている。評価ユニット22には、建設機械1上の他の検出手段からも信号を供給することができる。図1には、そうした検出手段の一例として、マスト14に対するスレッジ15の鉛直送りに際し作用する牽引力、押下力又はその双方を検出する検出手段31が示されている。
【0030】
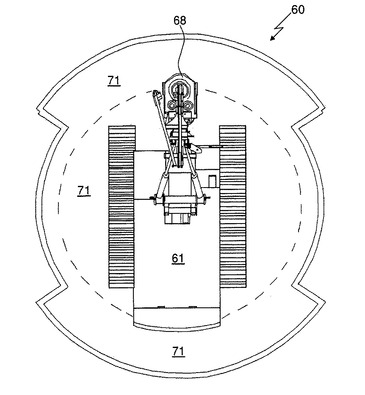
評価ユニット22及び表示手段20は、建設機械1の対傾き安定性を可視的に示すスケッチマップを作成して表示する。図2にそうしたスケッチマップの一例60を示す。このスケッチマップ60は表示手段20の画面その他に表示させることができる。
【0031】
図2に示したスケッチマップ60は建設機械1を模式的且つ平面的に示したものであり、その上には駆動ユニット18の模式像68を含め建設機械1の模式像61が表示されている。その背景の一部を占める領域71は、安全に枢動可能な範囲を示している。この領域71は画面上に例えば緑色で表示させるとよい。オペレータがこのマップ60を見たとき、駆動ユニット18の模式像68が領域71内にあったのなら、それは、危険な傾き無しで稼働している、ということである。その逆に、模式像68が領域71外にあったとすれば、それは、傾きが危険なレベルに達しているかもしれない、ということである。
【0032】
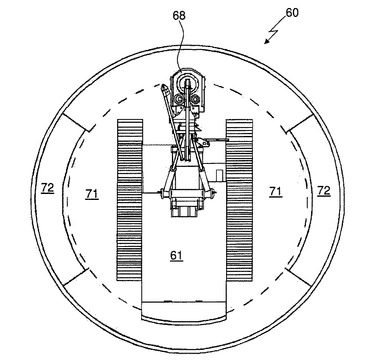
図3にスケッチマップ60の別例を示す。この図の例では二種類の可動範囲、即ち稼働制限のない第1可動範囲及び稼働制限がある第2可動範囲が画定されている。稼働制限モードでは付加的な制限、例えばメインウィンチ、補助ウィンチ、送りウィンチ等によるウィンチ牽引力に制限が課される。
【0033】
このスケッチマップ60では、第1可動範囲が領域71、第2可動範囲が領域72で表示されている。こうした場合、領域71を例えば緑色、領域72を例えば黄色で表示させるのが望ましい。オペレータは、駆動ユニット18の模式像68が領域71の範囲内にあるのかそれとも領域72の範囲内にあるのかを見分けることができ、それにより、稼働制限がないのかあるのかを知ることができる。
【0034】
稼働制限付の第2可動範囲に入ったことをオペレータに知らせるため、第2可動範囲への到達に応じ、そのことを示す通知窓を表示手段20で表示するようにしてもよい。その場合、牽引力許容値を示す情報窓を画面に挿入するのが望ましい。特に、その挿入先は、スケッチマップ60が示されているのと同じ画面とするのが望ましい。
【符号の説明】
【0035】
1 建設機械、3 鉛直軸、10 キャリアユニット、11 上部キャリッジ、12 マストサポート、14 マスト、15 スレッジ、18 駆動ユニット、19 ドリルロッド、20 表示手段、22 評価ユニット、28,29,31 検出手段、60 スケッチマップ、61,68 模式像、71,72 領域。
【技術分野】
【0001】
本発明は、請求項1記載の通り、キャリアユニット及びそのキャリアユニットに対し可動な駆動ユニットを有する建設機械用安全装置に関する。
【背景技術】
【0002】
アースドリル機等の大型建設機械では稼働中に傾きモーメントが発生することがある。その傾きモーメントには、積載物の出っ張り等が原因で生じる静的なものと、遠心力等が原因で生じる動的なものとがある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許出願公開第2006/289205号公報
【特許文献2】米国特許出願公開第2009/089703号公報
【特許文献3】米国特許出願公開第2003/060923号公報
【特許文献4】米国特許第6032094号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
過剰な傾きモーメントが生じることを防ぐには、例えば、積載物の出っ張り方を制限すればよいことがわかっている。しかし、そのような制限を課すとその建設機械の可動範囲が狭くなる。ひいては、その建設機械の利用可能範囲が限られてしまう。
【0005】
本発明の目的は、その建設機械の稼働時信頼性特に対傾き安全性を大きく高めるのと同時に、その建設機械の作業半径を大きく拡げ、用途を大きく増やし強め且つ効率を大きく高めることが可能な、建設機械用安全装置を提供することである。
【課題を解決するための手段】
【0006】
この目的を達成すべく、請求項1記載の特徴を有する安全装置を提案する。他の請求項に記載したのはその好適な実施形態である。
【0007】
即ち、本発明に係る安全装置は、キャリアユニット及びそのキャリアユニットに対し可動な駆動ユニットを有する建設機械用の安全装置であって、キャリアユニットに対する駆動ユニットの現在位置を検出する1個又は複数個の検出手段と、キャリアユニットに対する駆動ユニットの現在位置を表示する表示手段と、建設機械の傾きに対し所与レベルの安全性を提供しつつ駆動ユニットを動かせる可動範囲を1個又は複数個の入力値に基づき1個又は複数個定める評価ユニットと、を備え、駆動ユニットの現在位置と併せその可動範囲をその表示手段で表示させるものである。
【0008】
本発明の基礎をなしている知識は、キャリアユニットで支持される駆動ユニットに重量があるため、キャリアユニットに対する駆動ユニット位置の調整中に、重心位置がずれて変動的な傾きモーメントが発生する、という知識である。そうした変動的な傾きモーメントに対抗して対傾き安全稼働を実現するため、本発明では、キャリアユニットに対し駆動ユニットを安全に動かせる可動範囲を、評価ユニットで定めるようにしている。可動範囲は、所定の傾き安全性要因が見られること等を特徴とするものであるので、それを定めるには、相応の特性曲線乃至チャートを評価ユニット内に格納等しておくこともできる。評価ユニットで可動範囲を定める処理は、1個又は複数個の入力値に基づき実行される。即ち、包括的な検討を踏まえ、評価ユニットでは、傾き方が駆動ユニットの出っ張りによって左右される事実や他の諸要因(例えば駆動ユニット上の積載物や建設機械の力学的状態)の影響を受ける事実を反映させることができる。例えば、駆動ユニットによってドリルパイプが保持されている場合、そのドリルパイプの直径を上述した入力値の一つとして利用することで、そのドリルパイプの関連部分質量が傾きモーメントに及ぼす影響を反映させることができる。
【0009】
更に、本発明における表示手段では、求まった安全な可動範囲及び実際に調整される駆動ユニットの現在位置の双方がオペレータ向けにまとめて表示される。オペレータは、その表示を一目で看取することができ、それを通じ、駆動ユニットの現在位置が安全な可動範囲の中心か(高安定領域内か)それとも安全な可動範囲の辺縁部での稼働となっているか(駆動ユニットをそれ以上出っ張らせることが不可能と見られるか)を知ることができる。従って、オペレータは、更なる対傾き安全性向上手段(例えば動的な力の制限)が必要であるか否かを早期段階で知ることもできるので、極めて高い効率及び安全性での稼働が実現されることとなる。即ち、本発明によれば、対傾き安全性の現状が可視表示されるため、オペレータがそれを極めて容易且つ直観的に把握することができ、それによって極めて高い稼働時信頼性が実現されることとなる。
【0010】
また、想定される建設機械の一つはアースドリル機である。アースドリル機で駆動ユニットとなるのはアースドリルツール駆動用のドリル駆動装置等であり、キャリアユニットとなるのはそのドリル機の下部キャリッジ等である。
【0011】
これは、駆動ユニットがキャリアユニットに対し鉛直軸周りで可枢動な建設機械であるので、1個又は複数個の検出手段がキャリアユニットに対する駆動ユニットの鉛直軸周りでの枢動方向現在位置を検出し、表示手段に駆動ユニットの枢動方向現在位置と併せその可動範囲を表示させる、といった構成にするのが望ましい。この構成では、駆動ユニット例えばドリル駆動装置の鉛直軸周り位置を調整することができ、従って大きな作業半径を有する建設機械を提供することができる。その場合、上述の可動範囲は鉛直軸周り枢動角に係る成分、現在位置は駆動ユニットの鉛直軸周り枢動方向位置に係る成分を含むものとなる。
【0012】
更に、駆動ユニットが鉛直軸に対し径方向に可動な建設機械でもあるので、1個又は複数個の検出手段が鉛直軸に対する駆動ユニットの径方向現在位置を検出し、表示手段に駆動ユニットの径方向現在位置と併せその可動範囲を表示させる構成とするのが望ましい。この構成では、鉛直軸に対する駆動ユニットの径方向位置を調整することができる。上述の安全な可動範囲はその径方向位置に係る成分、現在位置は駆動ユニットの径方向位置に係る成分を含むものとなる。
【0013】
また、安全装置が特に役立つのは、傾きに対し特段の注意を払わねばならない可動な建設機械である。従って、好ましい構成の一つは、そのキャリアユニットが走行装置を有する建設機械で使用することである。
【0014】
特に望ましいのは、駆動ユニットがドリルツール等の基礎構築ツールを1個又は複数個有する建設機械で使用することである。例えば、そうした基礎構築ツール向けのロータリドリル駆動装置、振動ドリル駆動装置等を駆動ユニットとして備える建設機械である。
【0015】
また、原理的には、可動範囲と、駆動装置の現在位置とを、同じ画面上で互いに隣り合わせに表示させることも可能であるが、より効果的なのは、表示手段で、現在位置と併せ可動範囲を同じスケッチマップ上に表示させることである。この表示を見ることで、オペレータは、対傾き安全性の状況を非常に容易に把握することができる。安全な可動範囲の限界に対し、現在位置が直に関連付けて表示されるからである。そのスケッチマップは単一の画面上に表示させるのが望ましい。
【0016】
データの表示に関していえば、更に望ましいのは、駆動ユニットの位置が変化しているとき、表示手段で可動範囲を固定表示させることである。この構成では、その位置が調整されるにつれ画面上での駆動ユニットの表示が移動する一方、同じ画面上で可動範囲が固定的に表示され続けるため、表示される画像が非常に安定なものとなる。なお、原理的には、その位置が変化しても駆動ユニットが固定的に表示され続ける一方、可動範囲の表示が移動するようにすることも可能であり、そのようにすれば表示される画像が非常に把握容易なものとなる。
【0017】
表示手段については、建設機械又はその一部の平面的な模式像と併せ可動範囲を表示させる構成とするのが望ましい。そうすることで、直観的に非常に把握しやすい状況表示を実現することができる。
【0018】
本発明における表示手段は、可動範囲を有色ハイライト表示する構成とするのが望ましい。具体的には、可動範囲に対応する領域を画面上に有色ハイライト表示させる構成、例えば許容できる可動範囲を画面上に緑色で表示させる構成である。これに代え又は加え、可動範囲の限界線を画面上に表示させてもよい。駆動ユニットの現在位置の変化に応じ、表示されている可動範囲を過ぎり画面上を移動するよう、駆動ユニットの現在位置を画面上にドット、レティクル等で表示させることもできる。駆動ユニットの現在位置を、その駆動ユニットの模式像を画面上に表示させることで表示させ、それにより抽象化の程度を抑えることもできる。
【0019】
本発明は、また、稼働制限のない第1可動範囲及び建設機械稼働制限がある第2可動範囲を評価ユニットが定める形態でも好適に実施することもできる。稼働制限のない第1可動範囲、とは、所要レベルの対傾き安全性を達成するのに別の稼働パラメタ(例えば駆動ユニットの負荷)を制限することが必要な範囲、という意味である。械稼働制限がある第2可動範囲、とは、当該別の稼働パラメタに対する制限が必要ない範囲、という意味である。複数個の可動範囲を定めることで、その建設機械の作業半径を拡げることができる。
【0020】
この点との関連でいうと、表示手段は、それらの可動範囲を、互いに色を違え且つ現在位置と併せ、互いに同じスケッチマップ上に表示する構成にするのが望ましい。特に、稼働制限のない第1可動範囲を緑色、稼働制限がある第2可動範囲を黄色、というように、危険度表示に広く用いられている色で表示させれば、オペレータが状況を素早く判断することが可能となる。
【0021】
本発明は、また、1個又は複数個の入力値に基づき評価ユニットが可動範囲を1個又は複数個定める際に、その入力値としてセンサによる検出値を使用する形態でも実施することができる。使用できる検出値としては、その建設機械の位置乃至姿勢に係る値、その建設機械に影響を及ぼす力に係る値等がある。これに代え又は加え、1個又は複数個の入力値をマニュアル入力するようにしてもよい。例えば、評価ユニットが、オペレータにより初期設定される建設機械稼働パラメタを参照して可動範囲を定めるようにするのが有益である。オペレータによって入力乃至初期設定される稼働パラメタとしては、ドリルツールの構成に関するもの、実行されるのが相応の動力を伴うドリル動作かそれともドリルツール交換のための純粋なハンドリング動作かを示すもの等がある。
【0022】
本発明における評価ユニットへの入力値は、特に、建設機械に備わる検出手段によって検出された値、マニュアル入力された値、データベースから得られた値又はその任意の組合せにするのが望ましい。
【0023】
そして、本発明に係る建設機械は本発明に係る安全装置を備える。
【図面の簡単な説明】
【0024】
【図1】本発明に係る安全装置を備えた建設機械の側面図である。
【図2】本発明の第1実施形態に係る安全装置内画面表示例を示す図である。
【図3】本発明の第2実施形態に係る画面表示例を示す図である。
【発明を実施するための形態】
【0025】
以下、別紙図面に模式化して示した好適な実施形態を参照し本発明についてより詳細に説明する。
【0026】
図1に、本発明に係る安全装置を備えた建設機械の構成を示す。この建設機械1は、キャリアユニット10たるクローラ型走行装置を備えた可動アースドリル機として構成されており、そのキャリアユニット10にはその建設機械の上部キャリッジ11が載っている。上部キャリッジ11は鉛直軸3周りで枢動させうるようキャリアユニット10に載せられており、その上部キャリッジ11には、マスト14を支持し上部キャリッジ11に連結するマストサポート12が載っている。マストサポート12が水平走行軸周りで可枢動な形態で設けられているため、マストサポート12を枢動させることで、上部キャリッジ11ひいてはキャリアユニット10に対するマスト14の径方向位置を調整することができる。更に、そのマスト14上には、鉛直変位可能な形態にてスレッジ15が設けられている。そのスレッジ15には、ドリルロッド19用のドリル駆動装置たる駆動ユニット18が載せられている。
【0027】
従って、キャリアユニット10に対し上部キャリッジ11を枢動させると、駆動ユニット18もキャリアユニット10に対し鉛直軸3周りで枢動する。マストサポート12を枢動させると、駆動ユニット18がキャリアユニット10に対し枢動し鉛直軸3に対して径方向に移動する。
【0028】
また、上部キャリッジ11上には、キャリアユニット10に対する上部キャリッジ11ひいては駆動ユニット18の枢動方向現在位置を検出する検出手段29や、上部キャリッジ11ひいてはキャリアユニット10に対する駆動ユニット18の径方向現在位置を検出する検出手段28が設けられている。後者の検出手段28は、マストサポート12の水平走行軸周り枢動角を求める回動角検出手段として構成されている。
【0029】
本発明に係る安全装置は、更に、接続先の検出手段28及び29から信号を受け取り駆動ユニット18の現在位置を調べる評価ユニット22や、建設機械1のオペレータ用キャビン内に設けられた表示手段20を備えている。評価ユニット22には、建設機械1上の他の検出手段からも信号を供給することができる。図1には、そうした検出手段の一例として、マスト14に対するスレッジ15の鉛直送りに際し作用する牽引力、押下力又はその双方を検出する検出手段31が示されている。
【0030】
評価ユニット22及び表示手段20は、建設機械1の対傾き安定性を可視的に示すスケッチマップを作成して表示する。図2にそうしたスケッチマップの一例60を示す。このスケッチマップ60は表示手段20の画面その他に表示させることができる。
【0031】
図2に示したスケッチマップ60は建設機械1を模式的且つ平面的に示したものであり、その上には駆動ユニット18の模式像68を含め建設機械1の模式像61が表示されている。その背景の一部を占める領域71は、安全に枢動可能な範囲を示している。この領域71は画面上に例えば緑色で表示させるとよい。オペレータがこのマップ60を見たとき、駆動ユニット18の模式像68が領域71内にあったのなら、それは、危険な傾き無しで稼働している、ということである。その逆に、模式像68が領域71外にあったとすれば、それは、傾きが危険なレベルに達しているかもしれない、ということである。
【0032】
図3にスケッチマップ60の別例を示す。この図の例では二種類の可動範囲、即ち稼働制限のない第1可動範囲及び稼働制限がある第2可動範囲が画定されている。稼働制限モードでは付加的な制限、例えばメインウィンチ、補助ウィンチ、送りウィンチ等によるウィンチ牽引力に制限が課される。
【0033】
このスケッチマップ60では、第1可動範囲が領域71、第2可動範囲が領域72で表示されている。こうした場合、領域71を例えば緑色、領域72を例えば黄色で表示させるのが望ましい。オペレータは、駆動ユニット18の模式像68が領域71の範囲内にあるのかそれとも領域72の範囲内にあるのかを見分けることができ、それにより、稼働制限がないのかあるのかを知ることができる。
【0034】
稼働制限付の第2可動範囲に入ったことをオペレータに知らせるため、第2可動範囲への到達に応じ、そのことを示す通知窓を表示手段20で表示するようにしてもよい。その場合、牽引力許容値を示す情報窓を画面に挿入するのが望ましい。特に、その挿入先は、スケッチマップ60が示されているのと同じ画面とするのが望ましい。
【符号の説明】
【0035】
1 建設機械、3 鉛直軸、10 キャリアユニット、11 上部キャリッジ、12 マストサポート、14 マスト、15 スレッジ、18 駆動ユニット、19 ドリルロッド、20 表示手段、22 評価ユニット、28,29,31 検出手段、60 スケッチマップ、61,68 模式像、71,72 領域。
【特許請求の範囲】
【請求項1】
キャリアユニット及びそのキャリアユニットに対し可動な駆動ユニットを有する建設機械用の安全装置であって、
キャリアユニットに対する駆動ユニットの現在位置を検出する1個又は複数個の検出手段と、
キャリアユニットに対する駆動ユニットの現在位置を表示する表示手段と、
建設機械の傾きに対し所与レベルの安全性を提供しつつ駆動ユニットを動かせる可動範囲を1個又は複数個の入力値に基づき1個又は複数個定める評価ユニットと、
を備え、駆動ユニットの現在位置と併せその可動範囲を表示手段で表示させる安全装置。
【請求項2】
請求項1記載の安全装置であって、駆動ユニットがキャリアユニットに対し鉛直軸周りで可枢動な建設機械で使用される安全装置において、
1個又は複数個の検出手段が、キャリアユニットに対する駆動ユニットの鉛直軸周りでの枢動方向現在位置を検出し、
駆動ユニットの枢動方向現在位置と併せその可動範囲を表示手段で表示させる安全装置。
【請求項3】
請求項2記載の安全装置であって、駆動ユニットが鉛直軸に対し径方向に可動な建設機械で使用される安全装置において、
1個又は複数個の検出手段が、鉛直軸に対する駆動ユニットの径方向現在位置を検出し、
駆動ユニットの径方向現在位置と併せその可動範囲を表示手段で表示させる安全装置。
【請求項4】
請求項1記載の安全装置であって、キャリアユニットが走行装置、駆動ユニットがドリルツール等の基礎構築ツールを1個又は複数個有する建設機械で使用される安全装置。
【請求項5】
請求項1記載の安全装置であって、上記現在位置と併せ上記可動範囲を、表示手段で同じスケッチマップ上に表示させる安全装置。
【請求項6】
請求項1記載の安全装置であって、駆動ユニットの位置が変化しているときに、表示手段で上記可動範囲を固定表示させる安全装置。
【請求項7】
請求項1記載の安全装置であって、建設機械又はその一部の平面的な模式像と併せ、上記可動範囲を表示手段で表示させる安全装置。
【請求項8】
請求項1記載の安全装置であって、表示手段で上記可動範囲を有色ハイライト表示させる安全装置。
【請求項9】
請求項1記載の安全装置であって、
評価ユニットが、稼働制限のない第1可動範囲及び建設機械稼働制限がある第2可動範囲を定め、
それらの可動範囲を、互いに色を違え且つ上記現在位置と併せ、表示手段で互いに同じスケッチマップ上に表示する安全装置。
【請求項10】
請求項1記載の安全装置であって、評価ユニットが、オペレータにより初期設定される建設機械稼働パラメタを参照して上記可動範囲を定める安全装置。
【請求項11】
請求項1記載の安全装置であって、評価ユニットに対する入力値が、建設機械に備わる検出手段によって検出された値、マニュアル入力された値、データベースから得られた値又はその任意の組合せである安全装置。
【請求項12】
請求項1記載の安全装置を備える建設機械。
【請求項1】
キャリアユニット及びそのキャリアユニットに対し可動な駆動ユニットを有する建設機械用の安全装置であって、
キャリアユニットに対する駆動ユニットの現在位置を検出する1個又は複数個の検出手段と、
キャリアユニットに対する駆動ユニットの現在位置を表示する表示手段と、
建設機械の傾きに対し所与レベルの安全性を提供しつつ駆動ユニットを動かせる可動範囲を1個又は複数個の入力値に基づき1個又は複数個定める評価ユニットと、
を備え、駆動ユニットの現在位置と併せその可動範囲を表示手段で表示させる安全装置。
【請求項2】
請求項1記載の安全装置であって、駆動ユニットがキャリアユニットに対し鉛直軸周りで可枢動な建設機械で使用される安全装置において、
1個又は複数個の検出手段が、キャリアユニットに対する駆動ユニットの鉛直軸周りでの枢動方向現在位置を検出し、
駆動ユニットの枢動方向現在位置と併せその可動範囲を表示手段で表示させる安全装置。
【請求項3】
請求項2記載の安全装置であって、駆動ユニットが鉛直軸に対し径方向に可動な建設機械で使用される安全装置において、
1個又は複数個の検出手段が、鉛直軸に対する駆動ユニットの径方向現在位置を検出し、
駆動ユニットの径方向現在位置と併せその可動範囲を表示手段で表示させる安全装置。
【請求項4】
請求項1記載の安全装置であって、キャリアユニットが走行装置、駆動ユニットがドリルツール等の基礎構築ツールを1個又は複数個有する建設機械で使用される安全装置。
【請求項5】
請求項1記載の安全装置であって、上記現在位置と併せ上記可動範囲を、表示手段で同じスケッチマップ上に表示させる安全装置。
【請求項6】
請求項1記載の安全装置であって、駆動ユニットの位置が変化しているときに、表示手段で上記可動範囲を固定表示させる安全装置。
【請求項7】
請求項1記載の安全装置であって、建設機械又はその一部の平面的な模式像と併せ、上記可動範囲を表示手段で表示させる安全装置。
【請求項8】
請求項1記載の安全装置であって、表示手段で上記可動範囲を有色ハイライト表示させる安全装置。
【請求項9】
請求項1記載の安全装置であって、
評価ユニットが、稼働制限のない第1可動範囲及び建設機械稼働制限がある第2可動範囲を定め、
それらの可動範囲を、互いに色を違え且つ上記現在位置と併せ、表示手段で互いに同じスケッチマップ上に表示する安全装置。
【請求項10】
請求項1記載の安全装置であって、評価ユニットが、オペレータにより初期設定される建設機械稼働パラメタを参照して上記可動範囲を定める安全装置。
【請求項11】
請求項1記載の安全装置であって、評価ユニットに対する入力値が、建設機械に備わる検出手段によって検出された値、マニュアル入力された値、データベースから得られた値又はその任意の組合せである安全装置。
【請求項12】
請求項1記載の安全装置を備える建設機械。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2011−226257(P2011−226257A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2011−85433(P2011−85433)
【出願日】平成23年4月7日(2011.4.7)
【出願人】(502407107)バウアー マシーネン ゲーエムベーハー (48)
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願日】平成23年4月7日(2011.4.7)
【出願人】(502407107)バウアー マシーネン ゲーエムベーハー (48)
【Fターム(参考)】
[ Back to top ]