
弁の不感領域判別方法
本発明は、削岩装置のアクチュエータの制御に用いる比例制御弁(8)の不感領域判別方法であって、制御弁(8)を電気的Pコントローラ(12)で制御し、アクチュエータの動きを表す座標系におけるアクチュエータの位置を別個の位置検出器で測定することを含むものである。不感領域は、制御弁(8)のPコントローラと差分値との積によって判別する。
【発明の詳細な説明】
【発明の背景】
【0001】
本発明は、削岩装置のアクチュエータの制御に用いる比例制御弁の不感領域判別方法に関するものであり、本方法は、制御弁を電気的Pコントローラで制御し、アクチュエータの動きを表す座標系におけるアクチュエータの位置を別個の位置検出器によって測定することを含むものである。
【0002】
液圧式削岩装置において、ブームの送りビームシリンダとしてのアクチュエータは、比例方向制御弁を用いて制御される。実際上、これはアクチュエータを両方向に制御することを意味し、これによって、弁が中央位置、すなわち0位置にあると、アクチュエータが動かず、弁スプールがいずれかの方向にずれると、アクチュエータがスプールのずれに比例した速度で動き、スプールが0位置からずれるほどアクチュエータは速く作動する。
【0003】
しかし、今日の制御方式で注目されていることは、弁の作動中、典型的には0点の両側に、いわゆる不感領域が生じ、制御信号があっても圧力流体がアクチュエータへ流れないことである。
【0004】
弁のこのような不感領域が分かっていれば、不感領域を考慮することによって、および電気信号、例えば0位置から始める際に不感領域の程度で初期オフセット値を生成することによって、制御を修正し、制御信号の初期値を必要誤差に等しくすることができる。
【0005】
しかし実際には、不感領域は弁に固有の変化をするので、このようなことは実行可能でない。さらに不感領域は、弁の作動方向が異なれば変化することがある。弁が異なれば、不感領域の程度も異なり、このような事態を単一の弁で修正するものはない。
【発明の簡単な説明】
【0006】
本発明は、削岩装置の液圧アクチュエータの作動を従前より正確に制御できる方法を提供することを目的とする。
【0007】
本発明による方法は、以下の工程を含む方法によって特徴付けられる。すなわち、
(a) 制御弁(8)を制御するPコントローラにコントローラ利得の初期値を0に、またはアクチュエータがその影響を受けて動かないと期待される値に設定し、アクチュエータについてその現在値から外れる目標値を設定し、これによってアクチュエータの現在値と目標値との間の差によって第1の差分値を求める工程、
(b) コントローラ利得の値に、制御弁を制御するPコントローラの所定のステップ幅の増分値を加算する工程、
(c) 所定の時間待機して、アクチュエータの位置検出器により与えられた位置値がアクチュエータが動き始めたことを表しているかを判定する工程、
(d) 位置検出器の位置値に基づいて、アクチュエータが動き始めている場合、工程(f)へ移る工程、
(e) 工程(d)に基づいて、工程(f)に移る時まで、工程(b)から工程(c)までを繰り返す工程、
(f) アクチュエータの位置検出器に基づいて、アクチュエータの動きが停止するまで待機し、目標位置と停止時点の位置との間の差分値として第2の差分値を求める工程、
(g) 工程(h)および/または工程(i)に従って少なくとも1つのオフセット値を求め、これを記憶保存して、制御弁を制御する際に制御弁の不感領域の補償に用いる工程、
(h) 工程(d)に従ったPコントローラ利得と工程(a)に従った第1の差分値との積として第1のオフセット値を求める工程、
(i) 工程(d)に従ったPコントローラ利得と工程(f)に従った第2の差分値との積として第2のオフセット値を求める工程である。
【0008】
本発明の本質的概念は、各制御弁について制御弁スプールの運動範囲の中央にある不感領域に対応する少なくとも1つのオフセット値を求め、弁を制御する度にこの弁の運動方向における不感領域を考慮することである。本発明の一実施例は、各制御弁ごとに、不感領域に対応する少なくとも1つのオフセット値を両運動方向において求め、両運動方向において、対応するオフセット値を使用して弁を制御し、弁の不感領域を補償することを含む。
【0009】
本発明の利点は、各弁の諸特性、および弁の両運動方向における弁に固有の不感領域を単純な方法で、必要ならば制御系において、判別することができ、これによって、アクチュエータの制御に際して、誤差が単に弁の特性によるものか、または弁の特性と制御回路とによって生ずるものかにかかわらず、弁の不感領域を実質的になくすことができることにある。
【図面の簡単な説明】
【0010】
次に、添付図面において本発明をさらに詳細に説明する。
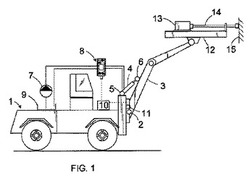
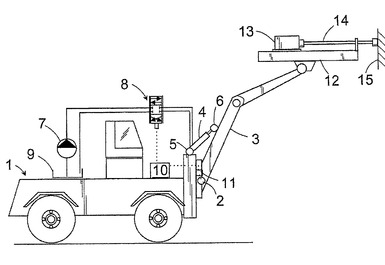
【図1】削岩装置のアクチュエータの模式図である。
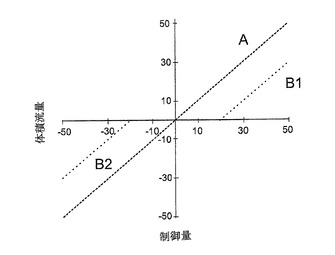
【図2】比例位置制御弁の例示的特性曲線と、これに必要な制御信号を模式的に示す図である。
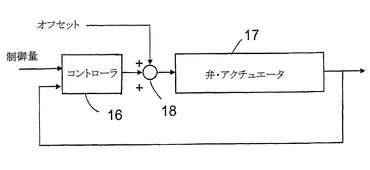
【図3】弁およびアクチュエータの制御に適用可能な方式の模式的ブロック図である。
【図4】本発明による方法を適用するための模式的フロー図である。 明瞭にするため、本発明の実施例は各図で簡略化して示す。同様の部分は同じ参照番号で示す。
【発明の詳細な説明】
【0011】
図1は、削岩装置におけるアクチュエータを模式的に示す。参照番号1は基部を模式的に示し、これには、ブーム3が継ぎ手2によって回動可能に連結されている。ブーム3は、継ぎ手2の軸を中心にアクチュエータ、すなわち液圧シリンダ4によって回動させることができ、シリンダは、その一方の端部が基部1へ継ぎ手5によって連結され、同様に他の端部がブーム3へ継ぎ手6によって連結されている。液圧シリンダ4を制御するために、ポンプ7から圧力媒体がこの中へ比例制御弁8を経由して供給され、これによって、液圧シリンダ4の他方の端部から加圧流体がやはり弁8を経由して加圧流体容器9へ流入する。液圧シリンダ4を制御するために、比例制御弁8は制御装置10によって制御され、制御装置にはブームの回動角を示すセンサ11も接続されている。さらに、図にはブーム3の端部に送りビーム12が示され、これに沿って削岩機13およびこれに連結されたドリルロッド14が動いて、岩盤15に穿孔する。ブームに対して送りビームを回動させるさまざまな回転シリンダまたは回転モータや、削岩機および他のアクチュエータを動かす送り装置は、それ自体公知のものであり、本質的に本発明とは関係ないので、図示する必要も、さらに詳細に説明する必要もない。
【0012】
図2は、弁の代表的な特性曲線を模式的に示し、直線Aは、弁の理論上の特性曲線、すなわち弁に到達する制御信号と弁を通過する加圧流体の流量との関係を示す。同様に、直線B1およびB2は、実際の弁操作の制御信号と弁を通過する加圧流体の体積流量を示す。
【0013】
同図から分かるように、制御信号と弁を通過する体積流量との関係は、制御信号が0の時、体積流量も0であり、弁を通過する体積流量は、制御信号の値に応じて0から一方の方向もしくは他方の方向へ直線的に変化する。
【0014】
実際は、弁の特性として、または弁の特性と制御回路の複合効果によって弁の作動に不感領域が存在し、この不感領域は、図2では±20単位である。したがって、制御信号の弁が一方もしくは他方の方向において20単位になるまで、弁には体積流が流れ始めず、この値より大きい時のみ加圧流体の体積流は、制御信号の値に従って弁を流れる。
【0015】
すべての制御弁でこの理想的な状態になれば、これは、不感領域に必要なオフセットを制御系にて弁の制御信号に設定することによって、容易に修正されるであろう。実際上、これは実現不可能である。なぜなら、各弁の不感領域と各弁スプールの運動方向の不感領域は、別であるからである。
【0016】
図3は、弁アクチュエータの制御に適用可能な方式のブロック図を模式的に示す。同図はコントローラ16を示し、これは、制御装置の一部であり、または制御装置におけるコンピュータプログラムによって、もしくはその一部によって形成してもよい。コントローラ16は、制御弁8およびアクチュエータで形成された構成体17を制御信号によって制御するように接続され、制御信号は、アクチュエータの測定した位置とその所望の位置との間の差分値に比例するものであり、ここでは一般に制御量と称する。コントローラ16はいわゆるPコントローラである。すなわち、コントローラは、弁、およびこれを介してアクチュエータを制御して、これに到来する制御信号にそれが直接比例するようにする。同図はさらに、加算器18を模式的に示し、これには、オフセット値およびコントローラ16により与えられる制御信号が送られて弁を制御する。これらに基づいて加算器18は、その制御弁について確定した制御量を生成する。
【0017】
弁およびアクチュエータの較正は先ず、利得値0、または制御弁が加圧流体をアクチュエータに供給し始めないうちの値をコントローラに設定することによって行なわれる。この段階で、オフセット値は当然、0である。この後、制御すべきアクチュエータについて目標値、すなわち現在位置から外れた位置値が設定されて、アクチュエータの現在位置と所望の位置との間の差分値が所定の値、例えば目盛りで回動角1度、もしくは直線運動で1メートルになるようにする。当然、角度もしくは直線運動に関する他の数値も実行可能である。Pコントローラ利得の利得値も、利得値と差分値との積で与えられる制御量でアクチュエータの運動が生じない限りは、0以外の値でもよい。実際上、差分値を求めるための利得値および目標値は、どのような順序でも、または同時ですらも設定することができる。したがって本発明は、請求項1の工程(a)において、記載された特定の順序で値を求めなくてもよく、設定順序は上述した順序のいずれでもよい。
【0018】
Pコントローラ利得が0である時、弁制御量は0である。これは、弁制御量が各時点でアクチュエータの差分値をコントローラ利得に乗じたものであることによる。コントローラ利得が十分に小さいと、アクチュエータは運動を開始しない。なぜなら、利得と差分値の積は弁に必要な制御利得を超えないからである。
【0019】
次に、Pコントローラ利得の値が増大する。例えば、利得として値1を設定することができ、これによってPコントローラ利得×差分値、例えば1が弁制御量の値として得られる。
【0020】
この段階において、制御弁へ送られたこの制御量で、アクチュエータの位置が目標位置へ向かって動き始めることを意味するものとなるアクチュエータの動きが生ずるかを位置検出センサから到来する信号に基づいて見るためには、ある時間、例えば0.5秒間、もしくは装置によってはもっと長く待たなければならない。このような動きが検出されないと、Pコントローラ利得は所定の増分量で、すなわち段階的に、1回に1ステップ幅増大し、増分した都度、アクチュエータの起こり得る動きを検出してからPコントローラ利得をさらに増大できるようにするため、待ち時間がある。アクチュエータに動きが検出されると、第1のオフセット値は、上述のアクチュエータの初期位置と目標位置との差分値にコントローラ利得を乗じたものと同じになる。
【0021】
アクチュエータにおけるオフセットが第1の利得値設定後すぐに検出されると、制御弁には不感領域が存在せず、その弁制御量から生ずる加圧流体の体積流は、このような最小制御量でも、良好な制御結果を達成するには大きすぎることがある。
【0022】
一方、アクチュエータが動き始めると、Pコントローラに設定されているその動きを生じた利得値と差分値との積に従った第1のオフセット値を記憶保存し、これは後に、弁、したがってアクチュエータを制御するのに用いることができる。
【0023】
制御弁が開いた結果、アクチュエータが作動し始めると、弁制御量は減少し始める。なぜなら、その値は、Pコントローラ利得と残りの差分値との積であるからである。差分値とは、ここでは目標位置と特定の時点ごとの位置との間の距離である。アクチュエータが動き続けると、弁制御量の値は減少し、ある点でアクチュエータは動きを止める。なぜなら、制御弁の制御量の値は、制御弁がアクチュエータへの加圧流体の供給を停止して閉じる程度になるまで、差分値の減少とともに減少するからである。アクチュエータの動きは、アクチュエータが目標位置に達して差分値が0になるので、もちろん停止する。閉鎖を生じた制御弁の第2のオフセット値は、運動の終わりのオフセット値であったアクチュエータの差分値にPコントローラに設定の利得を乗じることによって得られ、この第2のオフセット値は記憶保存しておく。このアクチュエータの動きが停止した時に得られたPコントローラ利得と差分値との積は、制御弁制御量に対する第2のオフセット値であり、弁作動中の弁の中央領域における不感領域を表している。実際には、これによって、弁制御を開始するのに必要なオフセットを表す弁制御の第1のオフセット値と、弁制御終了時に残ったオフセットを表す弁制御の第2のオフセット値の両方が得られる。これら2つの値は互いに異なり、弁を後に制御する際、両方の値、片方の値のみ、または両値の間のある値を使用して、不感領域を補償することができる。同様に、これらの値は通常、弁スプールの運動方向が異なれば異なるので、両運動方向に1つのオフセット値のみを用いたり、各方向ごとに別のオフセット値を用いたりすることができる。極度に正確さを必要とする実施例では、得られた両方のオフセット値は当然、両運動方向に用いてもよい。
【0024】
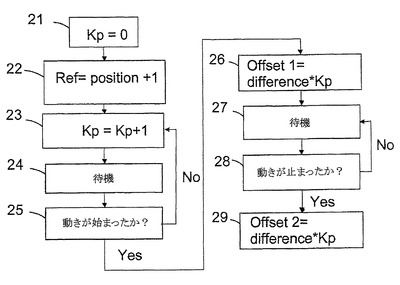
制御弁の不感領域のこのような判別方法を図4に模式的に示す。これは、オフセット値、すなわち不感領域を判別する例を示し、第1および第2のオフセット値の両方を求める場合のフロー図である。
【0025】
図4において、Pコントローラの利得Kp、すなわち制御値は、このフロー図の第1段階21において0に設定されている。このため制御弁は、制御を受けることができず、したがってアクチュエータも動くことができない。
【0026】
次に、段階22には、アクチュエータの現在位置に対する基準値Refとしてのposition値1、および所望の運動方向を設定することが含まれる。この値1は、角度では例えば1度、直線運動では1メートル、もしくは他の適切な表示値、一例として数1でもよい。
【0027】
続いて段階23において、現在の利得値Kpに1を加算したもの、すなわちKp=Kp+1がPコントローラの利得として設定される。同様に、ここで1は、所定の1ステップ幅を意味し、一例として、数1で表される。
【0028】
これを行なった後、当該利得値の結果として段階24において待機して、その値でアクチュエータが動いたかを見る必要がある。この動きがいくらかあると、位置検出器によって与えられる位置値に基づいてこれを検出する。
【0029】
段階25では、位置検出器によって与えられアクチュエータが動き始めたかを表す位置値に基づいて、どのように進行させるかの判断を行なう。動きが検出されないと、段階23に戻って、Pコントローラ利得Kpにさらに所定の1利得ステップ幅を加える。段階23ないし25のループは、アクチュエータが動き始めたことが段階25で認められるまで繰り返す。そこで、段階26に従って、Pコントローラ利得値と段階22で設定された差分値Refとの積によって生成された現在の制御値、すなわち第1のオフセット値offset 1を記憶保存して、後にアクチュエータの制御弁の制御に使用する。
【0030】
アクチュエータの動きが検出されると、制御弁の制御量に何の変更も行なうことなく段階27で待機する。
【0031】
次の段階28では、アクチュエータの位置検出器によって、アクチュエータがまだ動いているか、すなわち位置検出器によって得られた位置の値が変わるかをチェックする。この値が変化し続ける限り、段階27に戻り、所定の期間後に再び段階28へ進んでアクチュエータが動いているかをチェックする。
【0032】
段階28でアクチュエータの位置検出器の位置の値がこれ以上変化しないことが観察されたら、段階29へ進む。ここでは、アクチュエータについて設定された目標値と停止時点の位置との間の差分値、すなわちdifference値を求める。こうして、制御弁の第2のオフセット値offset 2、すなわち弁の中央領域における0位置から測定された運動方向へ向かう不感領域の範囲は、difference値の値にPコントローラの利得値を乗ずることによって得られる。この第2のオフセット値は記憶保存しておき、使用される制御系がアナログかデジタルかに関係なく、また手操作、例えばジョイスティックを用いる場合でも、取得したオフセット値を弁の制御値に加算することによって、図3に記載の模式表示に使用することができる。
【0033】
上述の方法は、コンピュータ制御装置において自動的に実現することができる。その場合、制御は誰でも行うことができ、制御の専門家を必要としない。いくつかの異なるアクチュエータを有する削岩装置において、この較正は、すべての制御弁およびそれらで制御されるアクチュエータに対して自動的に行なうことができる。その場合、これらのそれぞれごとに別個のオフセット値が得られる。制御はまた、両運動方向において行なうことができ、その場合、異なる運動方向において異なるオフセット値を各弁および各アクチュエータごとに記憶することができる。場合によっては、初期オフセット値と最終オフセット値との間にあるオフセット値を選択することによって、またこの値を用いて制御を修正することによって、十分な制御精度が得られる。所望に応じて、同じ値を両運動方向において用いることができる。
【0034】
明細書および図面では本発明を一例として説明したにすぎないが、本発明はこれらに提示した事項に限定されることはない。本質的なことは、比例制御弁の作動において、実際に弁が制御しない不感領域を請求項に記載の方法で判別し、こうして得られた誤差値を用いて、装置の使用中および弁の制御中に弁の不感領域を補償することである。オフセット値は、記憶しておくと、実制御に使用する制御方式またはコントローラのモードに関係なく、アクチュエータの制御に使用することができる。このように、これらの値は、P、Dおよび/またはIコントローラで使用できるばかりでなく、アナログおよびデジタル制御信号を用いて弁を制御する制御系にも使用することができる。同様に、制御に手操作装置を用いる場合、制御系はオフセット値を所望のやり方で考慮することができる。
【0035】
場合によっては、本願の各構成要件を他の構成要件とは関係なく用いることができる。他方、本願に記載の各構成要件を組み合わせてさまざまな組合せを作ることができる。
【0036】
図面およびその関連説明は、本発明の概念を説明することのみを意図したものである。本発明の詳細は特許請求の範囲内で変化させることができる。
【発明の背景】
【0001】
本発明は、削岩装置のアクチュエータの制御に用いる比例制御弁の不感領域判別方法に関するものであり、本方法は、制御弁を電気的Pコントローラで制御し、アクチュエータの動きを表す座標系におけるアクチュエータの位置を別個の位置検出器によって測定することを含むものである。
【0002】
液圧式削岩装置において、ブームの送りビームシリンダとしてのアクチュエータは、比例方向制御弁を用いて制御される。実際上、これはアクチュエータを両方向に制御することを意味し、これによって、弁が中央位置、すなわち0位置にあると、アクチュエータが動かず、弁スプールがいずれかの方向にずれると、アクチュエータがスプールのずれに比例した速度で動き、スプールが0位置からずれるほどアクチュエータは速く作動する。
【0003】
しかし、今日の制御方式で注目されていることは、弁の作動中、典型的には0点の両側に、いわゆる不感領域が生じ、制御信号があっても圧力流体がアクチュエータへ流れないことである。
【0004】
弁のこのような不感領域が分かっていれば、不感領域を考慮することによって、および電気信号、例えば0位置から始める際に不感領域の程度で初期オフセット値を生成することによって、制御を修正し、制御信号の初期値を必要誤差に等しくすることができる。
【0005】
しかし実際には、不感領域は弁に固有の変化をするので、このようなことは実行可能でない。さらに不感領域は、弁の作動方向が異なれば変化することがある。弁が異なれば、不感領域の程度も異なり、このような事態を単一の弁で修正するものはない。
【発明の簡単な説明】
【0006】
本発明は、削岩装置の液圧アクチュエータの作動を従前より正確に制御できる方法を提供することを目的とする。
【0007】
本発明による方法は、以下の工程を含む方法によって特徴付けられる。すなわち、
(a) 制御弁(8)を制御するPコントローラにコントローラ利得の初期値を0に、またはアクチュエータがその影響を受けて動かないと期待される値に設定し、アクチュエータについてその現在値から外れる目標値を設定し、これによってアクチュエータの現在値と目標値との間の差によって第1の差分値を求める工程、
(b) コントローラ利得の値に、制御弁を制御するPコントローラの所定のステップ幅の増分値を加算する工程、
(c) 所定の時間待機して、アクチュエータの位置検出器により与えられた位置値がアクチュエータが動き始めたことを表しているかを判定する工程、
(d) 位置検出器の位置値に基づいて、アクチュエータが動き始めている場合、工程(f)へ移る工程、
(e) 工程(d)に基づいて、工程(f)に移る時まで、工程(b)から工程(c)までを繰り返す工程、
(f) アクチュエータの位置検出器に基づいて、アクチュエータの動きが停止するまで待機し、目標位置と停止時点の位置との間の差分値として第2の差分値を求める工程、
(g) 工程(h)および/または工程(i)に従って少なくとも1つのオフセット値を求め、これを記憶保存して、制御弁を制御する際に制御弁の不感領域の補償に用いる工程、
(h) 工程(d)に従ったPコントローラ利得と工程(a)に従った第1の差分値との積として第1のオフセット値を求める工程、
(i) 工程(d)に従ったPコントローラ利得と工程(f)に従った第2の差分値との積として第2のオフセット値を求める工程である。
【0008】
本発明の本質的概念は、各制御弁について制御弁スプールの運動範囲の中央にある不感領域に対応する少なくとも1つのオフセット値を求め、弁を制御する度にこの弁の運動方向における不感領域を考慮することである。本発明の一実施例は、各制御弁ごとに、不感領域に対応する少なくとも1つのオフセット値を両運動方向において求め、両運動方向において、対応するオフセット値を使用して弁を制御し、弁の不感領域を補償することを含む。
【0009】
本発明の利点は、各弁の諸特性、および弁の両運動方向における弁に固有の不感領域を単純な方法で、必要ならば制御系において、判別することができ、これによって、アクチュエータの制御に際して、誤差が単に弁の特性によるものか、または弁の特性と制御回路とによって生ずるものかにかかわらず、弁の不感領域を実質的になくすことができることにある。
【図面の簡単な説明】
【0010】
次に、添付図面において本発明をさらに詳細に説明する。
【図1】削岩装置のアクチュエータの模式図である。
【図2】比例位置制御弁の例示的特性曲線と、これに必要な制御信号を模式的に示す図である。
【図3】弁およびアクチュエータの制御に適用可能な方式の模式的ブロック図である。
【図4】本発明による方法を適用するための模式的フロー図である。 明瞭にするため、本発明の実施例は各図で簡略化して示す。同様の部分は同じ参照番号で示す。
【発明の詳細な説明】
【0011】
図1は、削岩装置におけるアクチュエータを模式的に示す。参照番号1は基部を模式的に示し、これには、ブーム3が継ぎ手2によって回動可能に連結されている。ブーム3は、継ぎ手2の軸を中心にアクチュエータ、すなわち液圧シリンダ4によって回動させることができ、シリンダは、その一方の端部が基部1へ継ぎ手5によって連結され、同様に他の端部がブーム3へ継ぎ手6によって連結されている。液圧シリンダ4を制御するために、ポンプ7から圧力媒体がこの中へ比例制御弁8を経由して供給され、これによって、液圧シリンダ4の他方の端部から加圧流体がやはり弁8を経由して加圧流体容器9へ流入する。液圧シリンダ4を制御するために、比例制御弁8は制御装置10によって制御され、制御装置にはブームの回動角を示すセンサ11も接続されている。さらに、図にはブーム3の端部に送りビーム12が示され、これに沿って削岩機13およびこれに連結されたドリルロッド14が動いて、岩盤15に穿孔する。ブームに対して送りビームを回動させるさまざまな回転シリンダまたは回転モータや、削岩機および他のアクチュエータを動かす送り装置は、それ自体公知のものであり、本質的に本発明とは関係ないので、図示する必要も、さらに詳細に説明する必要もない。
【0012】
図2は、弁の代表的な特性曲線を模式的に示し、直線Aは、弁の理論上の特性曲線、すなわち弁に到達する制御信号と弁を通過する加圧流体の流量との関係を示す。同様に、直線B1およびB2は、実際の弁操作の制御信号と弁を通過する加圧流体の体積流量を示す。
【0013】
同図から分かるように、制御信号と弁を通過する体積流量との関係は、制御信号が0の時、体積流量も0であり、弁を通過する体積流量は、制御信号の値に応じて0から一方の方向もしくは他方の方向へ直線的に変化する。
【0014】
実際は、弁の特性として、または弁の特性と制御回路の複合効果によって弁の作動に不感領域が存在し、この不感領域は、図2では±20単位である。したがって、制御信号の弁が一方もしくは他方の方向において20単位になるまで、弁には体積流が流れ始めず、この値より大きい時のみ加圧流体の体積流は、制御信号の値に従って弁を流れる。
【0015】
すべての制御弁でこの理想的な状態になれば、これは、不感領域に必要なオフセットを制御系にて弁の制御信号に設定することによって、容易に修正されるであろう。実際上、これは実現不可能である。なぜなら、各弁の不感領域と各弁スプールの運動方向の不感領域は、別であるからである。
【0016】
図3は、弁アクチュエータの制御に適用可能な方式のブロック図を模式的に示す。同図はコントローラ16を示し、これは、制御装置の一部であり、または制御装置におけるコンピュータプログラムによって、もしくはその一部によって形成してもよい。コントローラ16は、制御弁8およびアクチュエータで形成された構成体17を制御信号によって制御するように接続され、制御信号は、アクチュエータの測定した位置とその所望の位置との間の差分値に比例するものであり、ここでは一般に制御量と称する。コントローラ16はいわゆるPコントローラである。すなわち、コントローラは、弁、およびこれを介してアクチュエータを制御して、これに到来する制御信号にそれが直接比例するようにする。同図はさらに、加算器18を模式的に示し、これには、オフセット値およびコントローラ16により与えられる制御信号が送られて弁を制御する。これらに基づいて加算器18は、その制御弁について確定した制御量を生成する。
【0017】
弁およびアクチュエータの較正は先ず、利得値0、または制御弁が加圧流体をアクチュエータに供給し始めないうちの値をコントローラに設定することによって行なわれる。この段階で、オフセット値は当然、0である。この後、制御すべきアクチュエータについて目標値、すなわち現在位置から外れた位置値が設定されて、アクチュエータの現在位置と所望の位置との間の差分値が所定の値、例えば目盛りで回動角1度、もしくは直線運動で1メートルになるようにする。当然、角度もしくは直線運動に関する他の数値も実行可能である。Pコントローラ利得の利得値も、利得値と差分値との積で与えられる制御量でアクチュエータの運動が生じない限りは、0以外の値でもよい。実際上、差分値を求めるための利得値および目標値は、どのような順序でも、または同時ですらも設定することができる。したがって本発明は、請求項1の工程(a)において、記載された特定の順序で値を求めなくてもよく、設定順序は上述した順序のいずれでもよい。
【0018】
Pコントローラ利得が0である時、弁制御量は0である。これは、弁制御量が各時点でアクチュエータの差分値をコントローラ利得に乗じたものであることによる。コントローラ利得が十分に小さいと、アクチュエータは運動を開始しない。なぜなら、利得と差分値の積は弁に必要な制御利得を超えないからである。
【0019】
次に、Pコントローラ利得の値が増大する。例えば、利得として値1を設定することができ、これによってPコントローラ利得×差分値、例えば1が弁制御量の値として得られる。
【0020】
この段階において、制御弁へ送られたこの制御量で、アクチュエータの位置が目標位置へ向かって動き始めることを意味するものとなるアクチュエータの動きが生ずるかを位置検出センサから到来する信号に基づいて見るためには、ある時間、例えば0.5秒間、もしくは装置によってはもっと長く待たなければならない。このような動きが検出されないと、Pコントローラ利得は所定の増分量で、すなわち段階的に、1回に1ステップ幅増大し、増分した都度、アクチュエータの起こり得る動きを検出してからPコントローラ利得をさらに増大できるようにするため、待ち時間がある。アクチュエータに動きが検出されると、第1のオフセット値は、上述のアクチュエータの初期位置と目標位置との差分値にコントローラ利得を乗じたものと同じになる。
【0021】
アクチュエータにおけるオフセットが第1の利得値設定後すぐに検出されると、制御弁には不感領域が存在せず、その弁制御量から生ずる加圧流体の体積流は、このような最小制御量でも、良好な制御結果を達成するには大きすぎることがある。
【0022】
一方、アクチュエータが動き始めると、Pコントローラに設定されているその動きを生じた利得値と差分値との積に従った第1のオフセット値を記憶保存し、これは後に、弁、したがってアクチュエータを制御するのに用いることができる。
【0023】
制御弁が開いた結果、アクチュエータが作動し始めると、弁制御量は減少し始める。なぜなら、その値は、Pコントローラ利得と残りの差分値との積であるからである。差分値とは、ここでは目標位置と特定の時点ごとの位置との間の距離である。アクチュエータが動き続けると、弁制御量の値は減少し、ある点でアクチュエータは動きを止める。なぜなら、制御弁の制御量の値は、制御弁がアクチュエータへの加圧流体の供給を停止して閉じる程度になるまで、差分値の減少とともに減少するからである。アクチュエータの動きは、アクチュエータが目標位置に達して差分値が0になるので、もちろん停止する。閉鎖を生じた制御弁の第2のオフセット値は、運動の終わりのオフセット値であったアクチュエータの差分値にPコントローラに設定の利得を乗じることによって得られ、この第2のオフセット値は記憶保存しておく。このアクチュエータの動きが停止した時に得られたPコントローラ利得と差分値との積は、制御弁制御量に対する第2のオフセット値であり、弁作動中の弁の中央領域における不感領域を表している。実際には、これによって、弁制御を開始するのに必要なオフセットを表す弁制御の第1のオフセット値と、弁制御終了時に残ったオフセットを表す弁制御の第2のオフセット値の両方が得られる。これら2つの値は互いに異なり、弁を後に制御する際、両方の値、片方の値のみ、または両値の間のある値を使用して、不感領域を補償することができる。同様に、これらの値は通常、弁スプールの運動方向が異なれば異なるので、両運動方向に1つのオフセット値のみを用いたり、各方向ごとに別のオフセット値を用いたりすることができる。極度に正確さを必要とする実施例では、得られた両方のオフセット値は当然、両運動方向に用いてもよい。
【0024】
制御弁の不感領域のこのような判別方法を図4に模式的に示す。これは、オフセット値、すなわち不感領域を判別する例を示し、第1および第2のオフセット値の両方を求める場合のフロー図である。
【0025】
図4において、Pコントローラの利得Kp、すなわち制御値は、このフロー図の第1段階21において0に設定されている。このため制御弁は、制御を受けることができず、したがってアクチュエータも動くことができない。
【0026】
次に、段階22には、アクチュエータの現在位置に対する基準値Refとしてのposition値1、および所望の運動方向を設定することが含まれる。この値1は、角度では例えば1度、直線運動では1メートル、もしくは他の適切な表示値、一例として数1でもよい。
【0027】
続いて段階23において、現在の利得値Kpに1を加算したもの、すなわちKp=Kp+1がPコントローラの利得として設定される。同様に、ここで1は、所定の1ステップ幅を意味し、一例として、数1で表される。
【0028】
これを行なった後、当該利得値の結果として段階24において待機して、その値でアクチュエータが動いたかを見る必要がある。この動きがいくらかあると、位置検出器によって与えられる位置値に基づいてこれを検出する。
【0029】
段階25では、位置検出器によって与えられアクチュエータが動き始めたかを表す位置値に基づいて、どのように進行させるかの判断を行なう。動きが検出されないと、段階23に戻って、Pコントローラ利得Kpにさらに所定の1利得ステップ幅を加える。段階23ないし25のループは、アクチュエータが動き始めたことが段階25で認められるまで繰り返す。そこで、段階26に従って、Pコントローラ利得値と段階22で設定された差分値Refとの積によって生成された現在の制御値、すなわち第1のオフセット値offset 1を記憶保存して、後にアクチュエータの制御弁の制御に使用する。
【0030】
アクチュエータの動きが検出されると、制御弁の制御量に何の変更も行なうことなく段階27で待機する。
【0031】
次の段階28では、アクチュエータの位置検出器によって、アクチュエータがまだ動いているか、すなわち位置検出器によって得られた位置の値が変わるかをチェックする。この値が変化し続ける限り、段階27に戻り、所定の期間後に再び段階28へ進んでアクチュエータが動いているかをチェックする。
【0032】
段階28でアクチュエータの位置検出器の位置の値がこれ以上変化しないことが観察されたら、段階29へ進む。ここでは、アクチュエータについて設定された目標値と停止時点の位置との間の差分値、すなわちdifference値を求める。こうして、制御弁の第2のオフセット値offset 2、すなわち弁の中央領域における0位置から測定された運動方向へ向かう不感領域の範囲は、difference値の値にPコントローラの利得値を乗ずることによって得られる。この第2のオフセット値は記憶保存しておき、使用される制御系がアナログかデジタルかに関係なく、また手操作、例えばジョイスティックを用いる場合でも、取得したオフセット値を弁の制御値に加算することによって、図3に記載の模式表示に使用することができる。
【0033】
上述の方法は、コンピュータ制御装置において自動的に実現することができる。その場合、制御は誰でも行うことができ、制御の専門家を必要としない。いくつかの異なるアクチュエータを有する削岩装置において、この較正は、すべての制御弁およびそれらで制御されるアクチュエータに対して自動的に行なうことができる。その場合、これらのそれぞれごとに別個のオフセット値が得られる。制御はまた、両運動方向において行なうことができ、その場合、異なる運動方向において異なるオフセット値を各弁および各アクチュエータごとに記憶することができる。場合によっては、初期オフセット値と最終オフセット値との間にあるオフセット値を選択することによって、またこの値を用いて制御を修正することによって、十分な制御精度が得られる。所望に応じて、同じ値を両運動方向において用いることができる。
【0034】
明細書および図面では本発明を一例として説明したにすぎないが、本発明はこれらに提示した事項に限定されることはない。本質的なことは、比例制御弁の作動において、実際に弁が制御しない不感領域を請求項に記載の方法で判別し、こうして得られた誤差値を用いて、装置の使用中および弁の制御中に弁の不感領域を補償することである。オフセット値は、記憶しておくと、実制御に使用する制御方式またはコントローラのモードに関係なく、アクチュエータの制御に使用することができる。このように、これらの値は、P、Dおよび/またはIコントローラで使用できるばかりでなく、アナログおよびデジタル制御信号を用いて弁を制御する制御系にも使用することができる。同様に、制御に手操作装置を用いる場合、制御系はオフセット値を所望のやり方で考慮することができる。
【0035】
場合によっては、本願の各構成要件を他の構成要件とは関係なく用いることができる。他方、本願に記載の各構成要件を組み合わせてさまざまな組合せを作ることができる。
【0036】
図面およびその関連説明は、本発明の概念を説明することのみを意図したものである。本発明の詳細は特許請求の範囲内で変化させることができる。
【特許請求の範囲】
【請求項1】
削岩装置のアクチュエータの制御に用いる比例制御弁(8)を電気的Pコントローラで制御し、前記アクチュエータの動きを表す座標系における該アクチュエータの位置を別個の位置検出器によって測定することを含む比例制御弁の不感領域判別方法において、該方法は、
(a) 前記制御弁(8)を制御するPコントローラにコントローラ利得の初期値を0に、または前記アクチュエータがその影響を受けて動かないと期待される値に設定し、該アクチュエータについてその現在値から外れる目標値を設定し、これによって前記アクチュエータの現在値と目標値との間の差によって第1の差分値を求める工程と、
(b) 前記コントローラ利得の値に、前記制御弁(8)を制御するPコントローラの所定のステップ幅の増分値を加算する工程と、
(c) 所定の時間待機して、前記アクチュエータの位置検出器により与えられた位置値が該アクチュエータが動き始めたことを表しているかを判定する工程と、
(d) 前記位置検出器の位置値に基づいて、前記アクチュエータが動き始めている場合、工程(f)へ移る工程と、
(e) 工程(d)に基づいて、工程(f)に移る時まで、工程(b)から工程(c)までを繰り返す工程と、
(f) 前記アクチュエータの位置検出器に基づいて、該アクチュエータの動きが停止するまで待機し、目標位置と停止時点の位置との間の差分値として第2の差分値を求める工程と、
(g) 工程(h)および/または工程(i)に従って少なくとも1つのオフセット値を求め、これを記憶保存して、前記制御弁(8)を制御する際に該制御弁の不感領域の補償に用いる工程と、
(h) 工程(d)に従った前記Pコントローラ利得と工程(a)に従った第1の差分値との積として第1のオフセット値を求める工程と、
(i) 工程(d)に従った前記Pコントローラ利得と工程(f)に従った第2の差分値との積として第2のオフセット値を求める工程とを含むことを特徴とする比例制御弁の不感領域判別方法。
【請求項2】
請求項1に記載の方法において、第1および第2のオフセット値を前記制御弁(8)の少なくとも1つの運動方向において求め、これらを記憶保存して該制御弁(8)を制御する際に前記不感領域の補償に使用することを特徴とする方法。
【請求項3】
請求項1または2に記載の方法において、前記オフセット値を前記制御弁(8)の両運動方向において求めることを特徴とする方法。
【請求項4】
請求項3に記載の方法において、両運動方向のオフセット値を用いて、それを測定した運動方向においてのみ前記制御弁(8)の不感領域を補償することを特徴とする方法。
【請求項5】
請求項3に記載の方法において、前記制御弁(8)をその運動方向の少なくとも1つにおいて制御する場合、前記オフセット値から、これらのオフセット値の間にある値、好ましく平均値に対応する値を形成して、前記制御弁(8)の不感領域を補償することを特徴とする方法。
【請求項6】
請求項5に記載の方法において、前記オフセット値の間のこの形成された値を使用して、前記制御弁(8)をその運動方向の両方において制御する場合の該制御弁(8)の不感領域を補償することを特徴とする方法。
【請求項7】
請求項1ないし4のいずれかに記載の方法において、第1のオフセット値を使用して前記制御弁(8)の不感領域を補償することを特徴とする方法。
【請求項8】
請求項1ないし4のいずれかに記載の方法において、第2のオフセット値を使用して前記制御弁(8)の不感領域を補償することを特徴とする方法。
【請求項1】
削岩装置のアクチュエータの制御に用いる比例制御弁(8)を電気的Pコントローラで制御し、前記アクチュエータの動きを表す座標系における該アクチュエータの位置を別個の位置検出器によって測定することを含む比例制御弁の不感領域判別方法において、該方法は、
(a) 前記制御弁(8)を制御するPコントローラにコントローラ利得の初期値を0に、または前記アクチュエータがその影響を受けて動かないと期待される値に設定し、該アクチュエータについてその現在値から外れる目標値を設定し、これによって前記アクチュエータの現在値と目標値との間の差によって第1の差分値を求める工程と、
(b) 前記コントローラ利得の値に、前記制御弁(8)を制御するPコントローラの所定のステップ幅の増分値を加算する工程と、
(c) 所定の時間待機して、前記アクチュエータの位置検出器により与えられた位置値が該アクチュエータが動き始めたことを表しているかを判定する工程と、
(d) 前記位置検出器の位置値に基づいて、前記アクチュエータが動き始めている場合、工程(f)へ移る工程と、
(e) 工程(d)に基づいて、工程(f)に移る時まで、工程(b)から工程(c)までを繰り返す工程と、
(f) 前記アクチュエータの位置検出器に基づいて、該アクチュエータの動きが停止するまで待機し、目標位置と停止時点の位置との間の差分値として第2の差分値を求める工程と、
(g) 工程(h)および/または工程(i)に従って少なくとも1つのオフセット値を求め、これを記憶保存して、前記制御弁(8)を制御する際に該制御弁の不感領域の補償に用いる工程と、
(h) 工程(d)に従った前記Pコントローラ利得と工程(a)に従った第1の差分値との積として第1のオフセット値を求める工程と、
(i) 工程(d)に従った前記Pコントローラ利得と工程(f)に従った第2の差分値との積として第2のオフセット値を求める工程とを含むことを特徴とする比例制御弁の不感領域判別方法。
【請求項2】
請求項1に記載の方法において、第1および第2のオフセット値を前記制御弁(8)の少なくとも1つの運動方向において求め、これらを記憶保存して該制御弁(8)を制御する際に前記不感領域の補償に使用することを特徴とする方法。
【請求項3】
請求項1または2に記載の方法において、前記オフセット値を前記制御弁(8)の両運動方向において求めることを特徴とする方法。
【請求項4】
請求項3に記載の方法において、両運動方向のオフセット値を用いて、それを測定した運動方向においてのみ前記制御弁(8)の不感領域を補償することを特徴とする方法。
【請求項5】
請求項3に記載の方法において、前記制御弁(8)をその運動方向の少なくとも1つにおいて制御する場合、前記オフセット値から、これらのオフセット値の間にある値、好ましく平均値に対応する値を形成して、前記制御弁(8)の不感領域を補償することを特徴とする方法。
【請求項6】
請求項5に記載の方法において、前記オフセット値の間のこの形成された値を使用して、前記制御弁(8)をその運動方向の両方において制御する場合の該制御弁(8)の不感領域を補償することを特徴とする方法。
【請求項7】
請求項1ないし4のいずれかに記載の方法において、第1のオフセット値を使用して前記制御弁(8)の不感領域を補償することを特徴とする方法。
【請求項8】
請求項1ないし4のいずれかに記載の方法において、第2のオフセット値を使用して前記制御弁(8)の不感領域を補償することを特徴とする方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公表番号】特表2011−522174(P2011−522174A)
【公表日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願番号】特願2011−508960(P2011−508960)
【出願日】平成21年5月11日(2009.5.11)
【国際出願番号】PCT/FI2009/050379
【国際公開番号】WO2009/138558
【国際公開日】平成21年11月19日(2009.11.19)
【出願人】(506286478)サンドビク マイニング アンド コンストラクション オサケ ユキチュア (70)
【氏名又は名称原語表記】SANDVIK MINING AND CONSTRUCTION OY
【Fターム(参考)】
【公表日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願日】平成21年5月11日(2009.5.11)
【国際出願番号】PCT/FI2009/050379
【国際公開番号】WO2009/138558
【国際公開日】平成21年11月19日(2009.11.19)
【出願人】(506286478)サンドビク マイニング アンド コンストラクション オサケ ユキチュア (70)
【氏名又は名称原語表記】SANDVIK MINING AND CONSTRUCTION OY
【Fターム(参考)】
[ Back to top ]