
引張変形検知布
【課題】障害者、人型ロボットの身体挙動を検知するシステムに使用される引張変形検知布において、編物又は織物の伸縮を静電容量の変化として検出することにより、検知システムとしての消費電力を抑制する。
【解決手段】複数の導電糸11を含んで構成された織物10を一方向に伸縮自在にすると共に、その伸縮に伴って導電糸11の隣接するもの同士の間隔が変化し、その隣接する導電糸同士間は絶縁状態が維持されるように構成され、隣接する各導電糸11の端部が静電容量を測定するための一対の電極13,14とされている。織物10の伸縮を静電容量として検出するため、導電糸11には電圧は印加されても電流は流れず、この部分での消費電力はゼロとすることができ、検知システム全体としての消費電力を抑制することができる。
【解決手段】複数の導電糸11を含んで構成された織物10を一方向に伸縮自在にすると共に、その伸縮に伴って導電糸11の隣接するもの同士の間隔が変化し、その隣接する導電糸同士間は絶縁状態が維持されるように構成され、隣接する各導電糸11の端部が静電容量を測定するための一対の電極13,14とされている。織物10の伸縮を静電容量として検出するため、導電糸11には電圧は印加されても電流は流れず、この部分での消費電力はゼロとすることができ、検知システム全体としての消費電力を抑制することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、障害者、人型ロボットの身体挙動を検知するシステムに使用される引張変形検知布に関する。
【背景技術】
【0002】
障害者、人型ロボットなどの身体挙動を検知するシステムとして、身体の動きをCCDカメラで撮影して、それをデータ化するモーションキャプチャーシステムがある。しかし、このシステムは大掛かりなものであり、高価である。
安価な検知システムとして、下記特許文献1に開示されたものが提案されている。この特許文献1の技術は、導電性の繊維と非導電性の繊維を混ぜ合わせた混紡糸から成る編物又は織物を検知対象物に取り付け、検知対象物の動きに伴う編物又は織物の伸縮を電気抵抗の変化として検出するものである。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3782951号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記特許文献1の検知システムは、電気抵抗の変化を検出するものであるため、検出のために導電性の繊維に電流を流す必要があり、検知システムとしての消費電力が大きくなる問題がある。身体挙動を検知するシステムを障害者などの身体に取り付ける場合は、検知システムの電源は、電池の方が便利であるため、消費電力は極力少ないことが望ましい。
本発明は、このような問題に鑑み、編物又は織物の伸縮を静電容量の変化として検出することにより、検知システムとしての消費電力を抑制することを課題とする。
【課題を解決するための手段】
【0005】
本発明の第1発明は、複数の導電糸を含んで構成された編物又は織物を一方向に伸縮自在にすると共に、その伸縮に伴って前記導電糸の隣接するもの同士の間隔が変化し、その隣接する導電糸同士間は絶縁状態が維持されるように構成され、隣接する各導電糸の端部が静電容量を測定するための一対の電極とされていることを特徴とする引張変形検知布である。
第1発明によれば、編物又は織物の伸縮を静電容量として検出するため、導電糸には電圧は印加されても電流は流れず、この部分での消費電力はゼロとすることができ、検知システム全体としての消費電力を抑制することができる。
【0006】
本発明の第2発明は、経糸、緯糸としてそれぞれ導電糸、弾性糸が織込まれた織物を、緯糸の方向に弾性糸の伸縮により伸縮自在にすると共に、その伸縮に伴って前記導電糸の隣接するもの同士の間隔が変化し、その隣接する導電糸同士間は絶縁状態が維持されるように構成され、隣接する各導電糸の端部が静電容量を測定するための一対の電極とされていることを特徴とする引張変形検知布である。
第2発明によれば、省電力型の引張変形検知布を織物によって実現できる。
【0007】
本発明の第3発明は、導電性繊維を含む芯と、該芯の周りを絶縁性繊維で覆う鞘とから成る導電糸を複数本を用いて天竺編みとした編物を、編み込まれた導電糸の両端を結ぶ方向が伸縮方向とされ、各導電糸の端部が静電容量を測定するための一対の電極とされていることを特徴とする引張変形検知布である。
第3発明によれば、省電力型の引張変形検知布を編物によって実現できる。
【0008】
本発明の第4発明は、上記第3発明の引張変形検知布において、互いに天竺編みされる導電糸同士の間に絶縁糸を挟んで天竺編みされていることを特徴とする引張変形検知布である。
第4発明によれば、省電力型の引張変形検知布を編物によって実現できると共に、コンデンサを成す導電糸と導電糸との間に絶縁糸が挟まれるため、伸縮に伴う静電容量の変化を大きくして感度を高めることができる。
【0009】
本発明の第5発明は、上記第1発明乃至第4発明のいずれかに記載の引張変形検知布において、前記導電糸はフィラメント糸であることを特徴とする引張変形検知布である。
第5発明によれば、上記特許文献1のように導電糸として混紡糸を使用した場合は混紡ムラのため変形個所により検知特性が異なる可能性があるが、フィラメント糸の場合は連続繊維であるため変形個所によるムラの発生を防止することができる。
【図面の簡単な説明】
【0010】
【図1】本発明に係る引張変形検知布の第1の実施形態の説明図である。
【図2】第1の実施形態における特性図である。
【図3】第1の実施形態を使用した検知システムの電気回路ブロック図である。
【図4】図3の検知システムの出力例を示すタイムチャートである。
【図5】図3の検知システムによる人の腕の動作検知例を説明する説明図である。
【図6】第1の実施形態の写真である。
【図7】第1の実施形態の伸張状態の写真である。
【図8】第1の実施形態の機能を説明する説明図である。
【図9】第1の実施形態の伸張状態の機能を説明する説明図である。
【図10】第2の実施形態を説明する説明図である。
【図11】第3の実施形態を説明する説明図である。
【図12】第2及び第3の実施形態の伸張状態を説明する説明図
【図13】第4の実施形態を説明する説明図である。
【発明を実施するための形態】
【0011】
次に図面に基づいて本発明の実施形態を説明する。
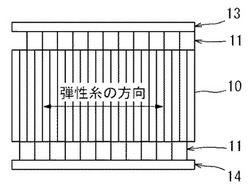
図1は、第1の実施形態を示し、引張変形検知布を織物によって構成した場合である。織物10は、経糸(縦糸)に導電糸11、緯糸(横糸)に弾性糸(不図示)が織り込まれており、導電糸11は1本おきに別の電極に接続され、偶数列の導電糸11は電極A13に接続され、奇数列の導電糸11は電極B14に接続される。
導電糸11は、太さが共通式番手1/7相当の二層構造糸であり、例えば、次の構造から成るカバリング糸が考えられる。
芯:三菱マテリアル社製のシルファイバー(登録商標)(ポリエステル・銀メッキ糸、太さ:167dTex)(本発明におけるフィラメント糸に相当する)
内層鞘:ポリエステル糸(太さ:330dTex)
外層鞘:綿の撚糸(太さ:20/1、撚り方:S476t/m)
導電糸11の芯糸としては、この他に、日本蚕毛染色社製のサンダーロン(登録商標)、クラレトレーディング社製のクラカーボ(登録商標)、一般的なステンレス線のような金属線、炭素繊維などが使用可能である。
また、弾性糸(ストレッチ糸)は、太さが綿番手40/2相当の複合糸であり、例えば、次のような構成が考えられる。
糸1:弾性繊維(東レ社製のライクラ(登録商標)、太さ:33dTex)
糸2:綿(太さ:綿番手40/1)2本
撚糸条件:S撚り850t/m、送り比:2.7
弾性糸としては、この他に、旭化成せんい社製のロイカ(登録商標)などが使用可能である。
更に電極A13,電極B14は、織物10から延出された導電糸11の端部に、導電糸11の芯と同じポリエステル・銀メッキ糸(太さ:167dTex)を用いて平織され、その表面に導電接着剤が塗布されて構成されている。このとき、電極A13,電極B14は、織物10の緯糸の方向への伸縮を妨げないように、織物10がフルに伸びたときの長さと電極A13,電極B14の長さが略等しくされ、織物10が収縮したときには、電極A13,電極B14はひだを持って縮められるようにされている。
【0012】
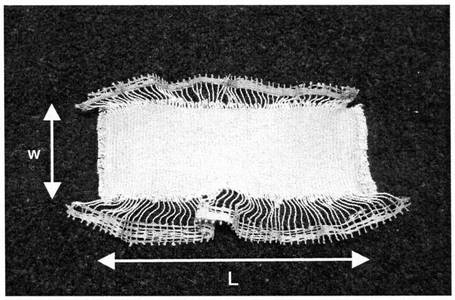
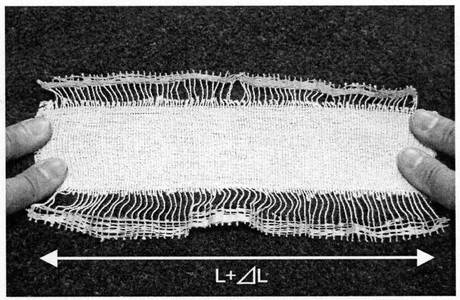
このような第1の実施形態の引張変形検知布の写真が図6、7に示されている。図6は引張変形検知布が収縮状態にある場合を示し、写真中、Wは経糸方向の寸法を示し、Lが緯糸の方向の寸法を示す。また、図7は引張変形検知布が伸張状態にある場合を示し、緯糸の方向に伸びて、その寸法がL+ΔLとなっている様子を示している。この実施形態の織物は、導電糸11の密度が12本/cm、弾性糸の密度が29本/cmの平織である。
【0013】
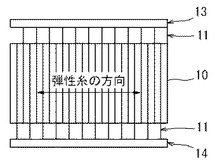
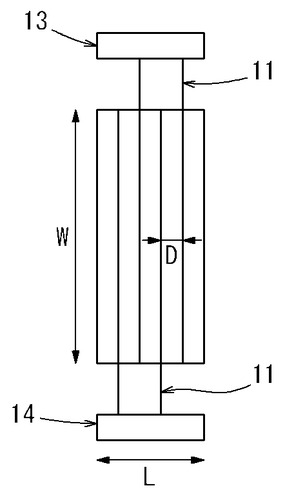
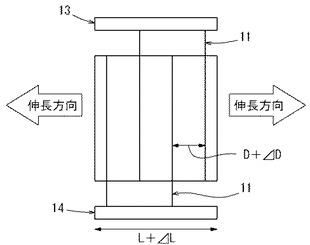
図8、9は、第1の実施形態の引張変形検知布が図6のように収縮した状態と図7のように伸張した状態における電気的特性を説明している。図8において、Dは引張変形検知布が収縮状態にあるときの互いに隣接する導電糸11同士間の間隔を示し、図9においてD+ΔDは、引張変形検知布が伸張状態にあるときの互いに隣接する導電糸11同士間の間隔を示している。ここでは、引張変形検知布が伸張されることにより導電糸11同士の間隔がDからD+ΔDに広がることを示している。
単位長さの平行線の静電容量Cpは一般に次の数式1の関係がある。
【数1】

但し、D:導電糸11同士の間隔
a:導電糸11の半径
ε0:誘電体の誘電率
織物全体の静電容量Cは、平行な導電糸11にキャパシタが並列に接続されていると考え、このキャパシタの総数をMc、織物の幅をWとすると、次の数式2が得られる。
【数2】
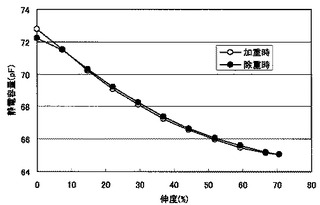
導電糸11同士間の間隔が変化すると、数式2により電極A13,電極B14間の静電容量は変化し、図2はその様子を示している。引張変形検知布に引張力が加えられず、伸度0%のときには、静電容量は約72pFであり、引張力が加えられるのに応じて静電容量は減少し、70%の伸度で約65pFとなり、その後、引張力を取り除いて行くと、引張力を加えるときの静電容量の変化と略同じ軌跡で静電容量は変化する。
【0014】
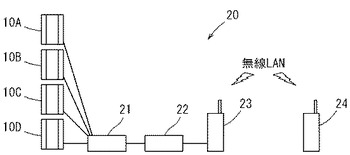
図3は、人体の腕の肘の動きを検出するための検知システムを示し、2人の人の左右の肘の外側に引張変形検知布10A〜10Dを装着して、各引張変形検知布10A〜10Dの電極A13,電極B14をスキャナ21に接続し、スキャナ21を介して各引張変形検知布10A〜10Dが静電容量計22に順次接続されている。各引張変形検知布10A〜10Dを肘に装着する際には、各引張変形検知布10A〜10Dの織物10をサポータに縫い付けて、そのサポータを肘に通すことにより装着することができる。なお、スキャナ21はマルチプレクサとして機能する。
静電容量計22で検出された静電容量は、無線データ転送装置23によって無線LANを介して通信可能とされた無線データ転送装置24にデータ転送される。引張変形検知布10A〜10D、スキャナ21、静電容量計22及び無線データ転送装置23は、人体に装着されるものであり、無線データ転送装置24は固定側にあって監視装置(不図示)に接続されている。
かかる検知システム20によれば、人体の肘の動きを静電容量の変化として検出することができ、人体の肘の動きを監視装置によって監視することができる。
【0015】
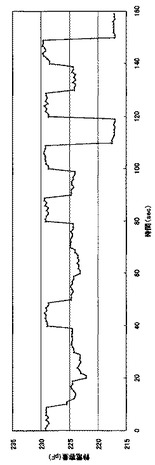
このようにして検出された静電容量データの一例が図4に示されている。このデータは、移動平均法によって高周波成分が除去されている。図4において、静電容量が高くなっている時間帯は肘が伸ばされて、引張変形検知布が縮められているときであり、静電容量が低くなっている時間帯は肘が曲げられて、引張変形検知布が伸ばされているときである。
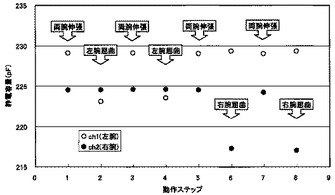
また、図5は、図3で説明したように、引張変形検知布を肘に装着して腕を屈曲した際の静電容量の平均値を示している。ここで、動作ステップ1、3、5、7は、両腕を伸張した状態、動作ステップ2、4は、左腕を屈曲した状態、動作ステップ6、8は、右腕を屈曲した状態をそれぞれ示している。図中、シロ丸は左腕に対応するデータを示し、クロ丸は右腕に対応するデータを示す。
この図から明らかなように、引張変形検知布から得られる静電容量データによって人体の肘の動きを明確に検出することができる。
【0016】
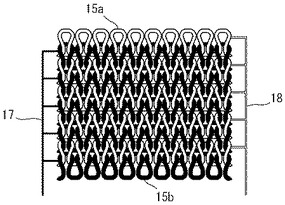
図10は、第2の実施形態を示しており、この場合は、導電糸同士を天竺編みした編物によって引張変形検知布が構成されている。互いに天竺編みされた複数の導電糸15a,15bは、一本おきに電極A17と電極B18に接続され、両電極A17、電極B18間の静電容量が検出されるようになっている。両電極A17、電極B18間は、絶縁状態を維持する必要があり、各導電糸15a,15bは、第1の実施形態の導電糸11と同様の二層構造糸とされている。つまり、導電糸15a,15bは、芯鞘構造とされており、芯は導電性を備え、鞘は絶縁性を備える。
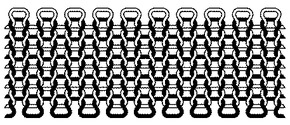
かかる編物によって構成された引張変形検知布が導電糸15aの両端を結ぶ方向、つまり図10の左右方向に引張られると、図12のように編物は伸ばされ、別々の電極に接続された導電糸15a,15b間の間隔が実質的に小さくなり、両電極A17、電極B18間の静電容量は大きくなる。このように編物による引張変形検知布は、伸ばされることにより静電容量が大きくなるため、第1の実施形態における図2の引張変形検知布の伸度と静電容量の関係とは逆の関係となる。そのため、編物による引張変形検知布を使って検知対象物の変形を検知する場合は、検出される静電容量が大きくなったとき、変形は大きくなったと検知するように構成することになる。
【0017】
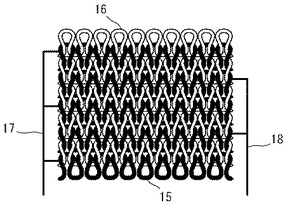
図11は、第3の実施形態を示し、複数の導電糸15間に絶縁糸16を介在させて天竺編みした編物によって引張変形検知布が構成されている。第2の実施形態の場合は、導電糸15a,15b同士が天竺編みされていたのに対し、第3の実施形態では、導電糸15同士が直接接触しないようにしている。この場合、絶縁糸16を挟んで両側に配置された導電糸15が互いに別の電極に接続されて引張変形検知布が構成されていることにより、導電糸15間に構成されるコンデンサの静電容量が増加され、検出感度が向上するメリットがある。
第3の実施形態において、他の構成は第2実施形態の場合と同一であり、引張変形検知布としての使い方も第2の実施形態の場合と同一である。
【0018】
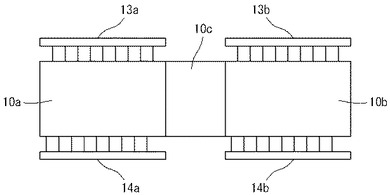
図13は、第4の実施形態を示し、この実施形態は、第1の実施形態で示した引張変形検知布を複数個連結して構成されており、検知対象物の部位による変形量の違いを区別して検出できるようにしたものである。織物10a,10bは第1の実施形態の織物10と同一であり、織物10a,10bは連結布10cによって連結されている。この連結布10cは経糸が絶縁糸、緯糸は織物10a,10bの緯糸がそのまま延長された弾性糸によって構成されている。織物10a,10bの導電糸は第1の実施形態で説明したとおり各電極13a,14a,13b,14bに接続されている。
このように構成された引張変形検知布を比較的広い面積の検知対象物に装着して上述したように静電容量を検出し、織物10aの変形に基づいて電極13a,14a間で検出される静電容量と、織物10bの変形に基づいて電極13b,14b間で検出される静電容量とを比較することにより、各織物10a,10bが装着された部位の変形の違いを検出することができる。
【0019】
以上の各実施形態によれば、単純な織物や編物で構成されるため、布厚は薄く、人体に装着した場合でも、装着部の形状に合わせて変形し易く、装着し易い。そのため、装着感が良好となる。検知対象物の変形の検知は、静電容量の変化によって行われるため、検知部に電流を流す必要はなく、検知システム全体を省電力型とすることができる。検知システム内で引張変形検知布の量が多い場合には特に省電力の効果が顕著となる。
なお、本発明の引張変形検知布を使った検知システムは次のような場合に活用することができる。
(1)身体障害者のリハビリにおいて、運動量と回復度をチェックするシステム
(2)複雑な曲面形状の機械可動部の監視
(3)家庭用ゲーム機の入力装置
(4)微弱な地震の影響による建物の変形検知やビニールハウスの強風による撓み検知
【0020】
本発明は、上記実施形態で説明した外観、構成に限定されず、本発明の要旨を変更しない範囲で種々の変更、追加、削除が可能である。例えば、織物の織り方及び編物の編み方は、実施形態で説明したものに限定されず、各種の織り方及び編み方が採用可能である。
【符号の説明】
【0021】
10、10a,10b 織物
11、15、15a,15b 導電糸
16 絶縁糸
13、17 電極A
14,18 電極B
20 検知システム
【技術分野】
【0001】
本発明は、例えば、障害者、人型ロボットの身体挙動を検知するシステムに使用される引張変形検知布に関する。
【背景技術】
【0002】
障害者、人型ロボットなどの身体挙動を検知するシステムとして、身体の動きをCCDカメラで撮影して、それをデータ化するモーションキャプチャーシステムがある。しかし、このシステムは大掛かりなものであり、高価である。
安価な検知システムとして、下記特許文献1に開示されたものが提案されている。この特許文献1の技術は、導電性の繊維と非導電性の繊維を混ぜ合わせた混紡糸から成る編物又は織物を検知対象物に取り付け、検知対象物の動きに伴う編物又は織物の伸縮を電気抵抗の変化として検出するものである。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3782951号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記特許文献1の検知システムは、電気抵抗の変化を検出するものであるため、検出のために導電性の繊維に電流を流す必要があり、検知システムとしての消費電力が大きくなる問題がある。身体挙動を検知するシステムを障害者などの身体に取り付ける場合は、検知システムの電源は、電池の方が便利であるため、消費電力は極力少ないことが望ましい。
本発明は、このような問題に鑑み、編物又は織物の伸縮を静電容量の変化として検出することにより、検知システムとしての消費電力を抑制することを課題とする。
【課題を解決するための手段】
【0005】
本発明の第1発明は、複数の導電糸を含んで構成された編物又は織物を一方向に伸縮自在にすると共に、その伸縮に伴って前記導電糸の隣接するもの同士の間隔が変化し、その隣接する導電糸同士間は絶縁状態が維持されるように構成され、隣接する各導電糸の端部が静電容量を測定するための一対の電極とされていることを特徴とする引張変形検知布である。
第1発明によれば、編物又は織物の伸縮を静電容量として検出するため、導電糸には電圧は印加されても電流は流れず、この部分での消費電力はゼロとすることができ、検知システム全体としての消費電力を抑制することができる。
【0006】
本発明の第2発明は、経糸、緯糸としてそれぞれ導電糸、弾性糸が織込まれた織物を、緯糸の方向に弾性糸の伸縮により伸縮自在にすると共に、その伸縮に伴って前記導電糸の隣接するもの同士の間隔が変化し、その隣接する導電糸同士間は絶縁状態が維持されるように構成され、隣接する各導電糸の端部が静電容量を測定するための一対の電極とされていることを特徴とする引張変形検知布である。
第2発明によれば、省電力型の引張変形検知布を織物によって実現できる。
【0007】
本発明の第3発明は、導電性繊維を含む芯と、該芯の周りを絶縁性繊維で覆う鞘とから成る導電糸を複数本を用いて天竺編みとした編物を、編み込まれた導電糸の両端を結ぶ方向が伸縮方向とされ、各導電糸の端部が静電容量を測定するための一対の電極とされていることを特徴とする引張変形検知布である。
第3発明によれば、省電力型の引張変形検知布を編物によって実現できる。
【0008】
本発明の第4発明は、上記第3発明の引張変形検知布において、互いに天竺編みされる導電糸同士の間に絶縁糸を挟んで天竺編みされていることを特徴とする引張変形検知布である。
第4発明によれば、省電力型の引張変形検知布を編物によって実現できると共に、コンデンサを成す導電糸と導電糸との間に絶縁糸が挟まれるため、伸縮に伴う静電容量の変化を大きくして感度を高めることができる。
【0009】
本発明の第5発明は、上記第1発明乃至第4発明のいずれかに記載の引張変形検知布において、前記導電糸はフィラメント糸であることを特徴とする引張変形検知布である。
第5発明によれば、上記特許文献1のように導電糸として混紡糸を使用した場合は混紡ムラのため変形個所により検知特性が異なる可能性があるが、フィラメント糸の場合は連続繊維であるため変形個所によるムラの発生を防止することができる。
【図面の簡単な説明】
【0010】
【図1】本発明に係る引張変形検知布の第1の実施形態の説明図である。
【図2】第1の実施形態における特性図である。
【図3】第1の実施形態を使用した検知システムの電気回路ブロック図である。
【図4】図3の検知システムの出力例を示すタイムチャートである。
【図5】図3の検知システムによる人の腕の動作検知例を説明する説明図である。
【図6】第1の実施形態の写真である。
【図7】第1の実施形態の伸張状態の写真である。
【図8】第1の実施形態の機能を説明する説明図である。
【図9】第1の実施形態の伸張状態の機能を説明する説明図である。
【図10】第2の実施形態を説明する説明図である。
【図11】第3の実施形態を説明する説明図である。
【図12】第2及び第3の実施形態の伸張状態を説明する説明図
【図13】第4の実施形態を説明する説明図である。
【発明を実施するための形態】
【0011】
次に図面に基づいて本発明の実施形態を説明する。
図1は、第1の実施形態を示し、引張変形検知布を織物によって構成した場合である。織物10は、経糸(縦糸)に導電糸11、緯糸(横糸)に弾性糸(不図示)が織り込まれており、導電糸11は1本おきに別の電極に接続され、偶数列の導電糸11は電極A13に接続され、奇数列の導電糸11は電極B14に接続される。
導電糸11は、太さが共通式番手1/7相当の二層構造糸であり、例えば、次の構造から成るカバリング糸が考えられる。
芯:三菱マテリアル社製のシルファイバー(登録商標)(ポリエステル・銀メッキ糸、太さ:167dTex)(本発明におけるフィラメント糸に相当する)
内層鞘:ポリエステル糸(太さ:330dTex)
外層鞘:綿の撚糸(太さ:20/1、撚り方:S476t/m)
導電糸11の芯糸としては、この他に、日本蚕毛染色社製のサンダーロン(登録商標)、クラレトレーディング社製のクラカーボ(登録商標)、一般的なステンレス線のような金属線、炭素繊維などが使用可能である。
また、弾性糸(ストレッチ糸)は、太さが綿番手40/2相当の複合糸であり、例えば、次のような構成が考えられる。
糸1:弾性繊維(東レ社製のライクラ(登録商標)、太さ:33dTex)
糸2:綿(太さ:綿番手40/1)2本
撚糸条件:S撚り850t/m、送り比:2.7
弾性糸としては、この他に、旭化成せんい社製のロイカ(登録商標)などが使用可能である。
更に電極A13,電極B14は、織物10から延出された導電糸11の端部に、導電糸11の芯と同じポリエステル・銀メッキ糸(太さ:167dTex)を用いて平織され、その表面に導電接着剤が塗布されて構成されている。このとき、電極A13,電極B14は、織物10の緯糸の方向への伸縮を妨げないように、織物10がフルに伸びたときの長さと電極A13,電極B14の長さが略等しくされ、織物10が収縮したときには、電極A13,電極B14はひだを持って縮められるようにされている。
【0012】
このような第1の実施形態の引張変形検知布の写真が図6、7に示されている。図6は引張変形検知布が収縮状態にある場合を示し、写真中、Wは経糸方向の寸法を示し、Lが緯糸の方向の寸法を示す。また、図7は引張変形検知布が伸張状態にある場合を示し、緯糸の方向に伸びて、その寸法がL+ΔLとなっている様子を示している。この実施形態の織物は、導電糸11の密度が12本/cm、弾性糸の密度が29本/cmの平織である。
【0013】
図8、9は、第1の実施形態の引張変形検知布が図6のように収縮した状態と図7のように伸張した状態における電気的特性を説明している。図8において、Dは引張変形検知布が収縮状態にあるときの互いに隣接する導電糸11同士間の間隔を示し、図9においてD+ΔDは、引張変形検知布が伸張状態にあるときの互いに隣接する導電糸11同士間の間隔を示している。ここでは、引張変形検知布が伸張されることにより導電糸11同士の間隔がDからD+ΔDに広がることを示している。
単位長さの平行線の静電容量Cpは一般に次の数式1の関係がある。
【数1】
但し、D:導電糸11同士の間隔
a:導電糸11の半径
ε0:誘電体の誘電率
織物全体の静電容量Cは、平行な導電糸11にキャパシタが並列に接続されていると考え、このキャパシタの総数をMc、織物の幅をWとすると、次の数式2が得られる。
【数2】
導電糸11同士間の間隔が変化すると、数式2により電極A13,電極B14間の静電容量は変化し、図2はその様子を示している。引張変形検知布に引張力が加えられず、伸度0%のときには、静電容量は約72pFであり、引張力が加えられるのに応じて静電容量は減少し、70%の伸度で約65pFとなり、その後、引張力を取り除いて行くと、引張力を加えるときの静電容量の変化と略同じ軌跡で静電容量は変化する。
【0014】
図3は、人体の腕の肘の動きを検出するための検知システムを示し、2人の人の左右の肘の外側に引張変形検知布10A〜10Dを装着して、各引張変形検知布10A〜10Dの電極A13,電極B14をスキャナ21に接続し、スキャナ21を介して各引張変形検知布10A〜10Dが静電容量計22に順次接続されている。各引張変形検知布10A〜10Dを肘に装着する際には、各引張変形検知布10A〜10Dの織物10をサポータに縫い付けて、そのサポータを肘に通すことにより装着することができる。なお、スキャナ21はマルチプレクサとして機能する。
静電容量計22で検出された静電容量は、無線データ転送装置23によって無線LANを介して通信可能とされた無線データ転送装置24にデータ転送される。引張変形検知布10A〜10D、スキャナ21、静電容量計22及び無線データ転送装置23は、人体に装着されるものであり、無線データ転送装置24は固定側にあって監視装置(不図示)に接続されている。
かかる検知システム20によれば、人体の肘の動きを静電容量の変化として検出することができ、人体の肘の動きを監視装置によって監視することができる。
【0015】
このようにして検出された静電容量データの一例が図4に示されている。このデータは、移動平均法によって高周波成分が除去されている。図4において、静電容量が高くなっている時間帯は肘が伸ばされて、引張変形検知布が縮められているときであり、静電容量が低くなっている時間帯は肘が曲げられて、引張変形検知布が伸ばされているときである。
また、図5は、図3で説明したように、引張変形検知布を肘に装着して腕を屈曲した際の静電容量の平均値を示している。ここで、動作ステップ1、3、5、7は、両腕を伸張した状態、動作ステップ2、4は、左腕を屈曲した状態、動作ステップ6、8は、右腕を屈曲した状態をそれぞれ示している。図中、シロ丸は左腕に対応するデータを示し、クロ丸は右腕に対応するデータを示す。
この図から明らかなように、引張変形検知布から得られる静電容量データによって人体の肘の動きを明確に検出することができる。
【0016】
図10は、第2の実施形態を示しており、この場合は、導電糸同士を天竺編みした編物によって引張変形検知布が構成されている。互いに天竺編みされた複数の導電糸15a,15bは、一本おきに電極A17と電極B18に接続され、両電極A17、電極B18間の静電容量が検出されるようになっている。両電極A17、電極B18間は、絶縁状態を維持する必要があり、各導電糸15a,15bは、第1の実施形態の導電糸11と同様の二層構造糸とされている。つまり、導電糸15a,15bは、芯鞘構造とされており、芯は導電性を備え、鞘は絶縁性を備える。
かかる編物によって構成された引張変形検知布が導電糸15aの両端を結ぶ方向、つまり図10の左右方向に引張られると、図12のように編物は伸ばされ、別々の電極に接続された導電糸15a,15b間の間隔が実質的に小さくなり、両電極A17、電極B18間の静電容量は大きくなる。このように編物による引張変形検知布は、伸ばされることにより静電容量が大きくなるため、第1の実施形態における図2の引張変形検知布の伸度と静電容量の関係とは逆の関係となる。そのため、編物による引張変形検知布を使って検知対象物の変形を検知する場合は、検出される静電容量が大きくなったとき、変形は大きくなったと検知するように構成することになる。
【0017】
図11は、第3の実施形態を示し、複数の導電糸15間に絶縁糸16を介在させて天竺編みした編物によって引張変形検知布が構成されている。第2の実施形態の場合は、導電糸15a,15b同士が天竺編みされていたのに対し、第3の実施形態では、導電糸15同士が直接接触しないようにしている。この場合、絶縁糸16を挟んで両側に配置された導電糸15が互いに別の電極に接続されて引張変形検知布が構成されていることにより、導電糸15間に構成されるコンデンサの静電容量が増加され、検出感度が向上するメリットがある。
第3の実施形態において、他の構成は第2実施形態の場合と同一であり、引張変形検知布としての使い方も第2の実施形態の場合と同一である。
【0018】
図13は、第4の実施形態を示し、この実施形態は、第1の実施形態で示した引張変形検知布を複数個連結して構成されており、検知対象物の部位による変形量の違いを区別して検出できるようにしたものである。織物10a,10bは第1の実施形態の織物10と同一であり、織物10a,10bは連結布10cによって連結されている。この連結布10cは経糸が絶縁糸、緯糸は織物10a,10bの緯糸がそのまま延長された弾性糸によって構成されている。織物10a,10bの導電糸は第1の実施形態で説明したとおり各電極13a,14a,13b,14bに接続されている。
このように構成された引張変形検知布を比較的広い面積の検知対象物に装着して上述したように静電容量を検出し、織物10aの変形に基づいて電極13a,14a間で検出される静電容量と、織物10bの変形に基づいて電極13b,14b間で検出される静電容量とを比較することにより、各織物10a,10bが装着された部位の変形の違いを検出することができる。
【0019】
以上の各実施形態によれば、単純な織物や編物で構成されるため、布厚は薄く、人体に装着した場合でも、装着部の形状に合わせて変形し易く、装着し易い。そのため、装着感が良好となる。検知対象物の変形の検知は、静電容量の変化によって行われるため、検知部に電流を流す必要はなく、検知システム全体を省電力型とすることができる。検知システム内で引張変形検知布の量が多い場合には特に省電力の効果が顕著となる。
なお、本発明の引張変形検知布を使った検知システムは次のような場合に活用することができる。
(1)身体障害者のリハビリにおいて、運動量と回復度をチェックするシステム
(2)複雑な曲面形状の機械可動部の監視
(3)家庭用ゲーム機の入力装置
(4)微弱な地震の影響による建物の変形検知やビニールハウスの強風による撓み検知
【0020】
本発明は、上記実施形態で説明した外観、構成に限定されず、本発明の要旨を変更しない範囲で種々の変更、追加、削除が可能である。例えば、織物の織り方及び編物の編み方は、実施形態で説明したものに限定されず、各種の織り方及び編み方が採用可能である。
【符号の説明】
【0021】
10、10a,10b 織物
11、15、15a,15b 導電糸
16 絶縁糸
13、17 電極A
14,18 電極B
20 検知システム
【特許請求の範囲】
【請求項1】
複数の導電糸を含んで構成された編物又は織物を一方向に伸縮自在にすると共に、その伸縮に伴って前記導電糸の隣接するもの同士の間隔が変化し、その隣接する導電糸同士間は絶縁状態が維持されるように構成され、隣接する各導電糸の端部が静電容量を測定するための一対の電極とされていることを特徴とする引張変形検知布。
【請求項2】
経糸、緯糸としてそれぞれ導電糸、弾性糸が織込まれた織物を、緯糸の方向に弾性糸の伸縮により伸縮自在にすると共に、その伸縮に伴って前記導電糸の隣接するもの同士の間隔が変化し、その隣接する導電糸同士間は絶縁状態が維持されるように構成され、隣接する各導電糸の端部が静電容量を測定するための一対の電極とされていることを特徴とする引張変形検知布。
【請求項3】
導電性繊維を含む芯と、該芯の周りを絶縁性繊維で覆う鞘とから成る導電糸を複数本を用いて天竺編みとした編物を、編み込まれた導電糸の両端を結ぶ方向が伸縮方向とされ、各導電糸の端部が静電容量を測定するための一対の電極とされていることを特徴とする引張変形検知布。
【請求項4】
請求項3に記載の引張変形検知布において、互いに天竺編みされる導電糸同士の間に絶縁糸を挟んで天竺編みされていることを特徴とする引張変形検知布。
【請求項5】
請求項1乃至4のいずれかに記載の引張変形検知布において、前記導電糸はフィラメント糸であることを特徴とする引張変形検知布。
【請求項1】
複数の導電糸を含んで構成された編物又は織物を一方向に伸縮自在にすると共に、その伸縮に伴って前記導電糸の隣接するもの同士の間隔が変化し、その隣接する導電糸同士間は絶縁状態が維持されるように構成され、隣接する各導電糸の端部が静電容量を測定するための一対の電極とされていることを特徴とする引張変形検知布。
【請求項2】
経糸、緯糸としてそれぞれ導電糸、弾性糸が織込まれた織物を、緯糸の方向に弾性糸の伸縮により伸縮自在にすると共に、その伸縮に伴って前記導電糸の隣接するもの同士の間隔が変化し、その隣接する導電糸同士間は絶縁状態が維持されるように構成され、隣接する各導電糸の端部が静電容量を測定するための一対の電極とされていることを特徴とする引張変形検知布。
【請求項3】
導電性繊維を含む芯と、該芯の周りを絶縁性繊維で覆う鞘とから成る導電糸を複数本を用いて天竺編みとした編物を、編み込まれた導電糸の両端を結ぶ方向が伸縮方向とされ、各導電糸の端部が静電容量を測定するための一対の電極とされていることを特徴とする引張変形検知布。
【請求項4】
請求項3に記載の引張変形検知布において、互いに天竺編みされる導電糸同士の間に絶縁糸を挟んで天竺編みされていることを特徴とする引張変形検知布。
【請求項5】
請求項1乃至4のいずれかに記載の引張変形検知布において、前記導電糸はフィラメント糸であることを特徴とする引張変形検知布。
【図1】

【図2】
【図3】
【図4】
【図5】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図6】
【図7】
【公開番号】特開2012−177565(P2012−177565A)
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願番号】特願2011−39534(P2011−39534)
【出願日】平成23年2月25日(2011.2.25)
【出願人】(000150774)株式会社槌屋 (56)
【出願人】(000116622)愛知県 (99)
【Fターム(参考)】
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願日】平成23年2月25日(2011.2.25)
【出願人】(000150774)株式会社槌屋 (56)
【出願人】(000116622)愛知県 (99)
【Fターム(参考)】
[ Back to top ]