
弱測定を利用した信号の増幅装置
【課題】微弱信号を増幅可能な増幅装置を提供する。
【解決手段】増幅装置は、被測定系の観測量^Aを測定する際に、測定器と、初期状態が事前選択された被測定系を相互作用させ、次に被測定系の終状態を事後選択し、測定器の波動関数ξ(p)を用いて物理量の測定を行う。被測定系の量子状態の事前選択状態、事後選択状態それぞれのベクトルを|i>、|f>とするとき、式(1)の弱値AWが既知であり、AW=<f|^A|i>/<f|i>…(1)、測定器と被測定系の相互作用ハミルトニアンHが、測定器の運動量演算子^pおよび結合係数g(ただしg>0)を用いて式(2)で与えられ、H=g・δ(t−t0)・^A・^p…(2)、^A2=1のときに、測定器は、波動関数ξ(p)が運動量表示で実質的に式(3)となる。

【解決手段】増幅装置は、被測定系の観測量^Aを測定する際に、測定器と、初期状態が事前選択された被測定系を相互作用させ、次に被測定系の終状態を事後選択し、測定器の波動関数ξ(p)を用いて物理量の測定を行う。被測定系の量子状態の事前選択状態、事後選択状態それぞれのベクトルを|i>、|f>とするとき、式(1)の弱値AWが既知であり、AW=<f|^A|i>/<f|i>…(1)、測定器と被測定系の相互作用ハミルトニアンHが、測定器の運動量演算子^pおよび結合係数g(ただしg>0)を用いて式(2)で与えられ、H=g・δ(t−t0)・^A・^p…(2)、^A2=1のときに、測定器は、波動関数ξ(p)が運動量表示で実質的に式(3)となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、弱測定を利用した微弱信号を増幅する増幅装置に関する。
【背景技術】
【0002】
微弱な物理量を測定するための方法として、「弱測定(Weak Measurement)」が提案されている(非特許文献1)。「弱測定」において、被測定系(Measured system)は、測定器(Measuring device)と弱く結合される。ある被測定系の観測量(Observable)^Aを測定するときに、弱測定では、まず測定器と、初期状態(Initial state)が事前選択(Pre-selection)された被測定系を相互作用させる。次に被測定系の終状態(Final state)を事後選択(Post-selection)し、測定器の波動関数を用いて物理量の測定を行う。
【0003】
被測定系の量子状態の事前選択状態を|i>、事後選択状態を|f>としたとき、式(1)で与えられる量AWは弱値と呼ばれる。
AW:=<f|^A|i>/<f|i>
これは測定器の波動関数の中心値の弱測定前と後の差として得ることができる。この弱値AWは|i>と|f>とがほぼ直交すると大きくなり、測定で得られる微弱な信号が増幅される。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】Y. Aharonov、D. Z. Albert、L. Vaidman、Phys. Rev. Lett. 60、1351 (1988)
【非特許文献2】O. Hosten、 P. Kwiat、Science 319、787 (2008)
【非特許文献3】N. W. M. Ritchie、J. G. Story、R. G. Hulet、Phys. Rev. Lett. 66、1107 (1991)
【非特許文献4】P. B. Dixon、D. J. Starling、A. N. Jordan、J. C. Howell、Phys. Rev. Lett. 102、173601 (2009)
【非特許文献5】S. Wu、Y. Li、Phys.Rev. A 83、052106 (2011)
【非特許文献6】K. Nakamura、A. Nishizawa、M. Fujimoto、arXiv:1108.2114v2 [quant-ph]
【非特許文献7】X. Zhu、Y. Zhang、S. Pang、C. Qiao、Q. Liu、S. Wu、arXiv:1108.1608v2 [quant-ph]
【非特許文献8】T. Koike、S. Tanaka、arXiv:1108.2050v1 [quant-ph]
【非特許文献9】A. M. Steinberg、Nature (London) 463、890-891 (2010)
【非特許文献10】A. Feizpour、X. Xing、A. M. Steinberg、Phys. Rev. Lett. 107、133603 (2011)
【非特許文献11】D. J. Starling、P. B. Dixon、A. N. Jordan、J. C. Howell、Phys. Rev. A 80、041803 (2009)
【非特許文献12】古田 彩 「存在確率マイナス1」、日経サイエンス、2009年10月号、22〜23ページ
【発明の概要】
【発明が解決しようとする課題】
【0005】
弱測定の効果は例えば非特許文献2〜4の実験で確認されている。具体的には、弱測定を利用した増幅装置は、ミラーやスライドガラスの微少な傾きを、レーザビームの位置の非常に大きな変化に増幅することができる。弱測定による信号増幅度は、|i>と|f>の直交度次第でいくらでも大きくすることができるため、増幅に限界は無いと考えられていた。
【0006】
しかしこの評価は、相互作用が小さい事を仮定した1次近似を用いているため正確ではないことが指摘されている(非特許文献5)。また観測量が^A2=1を充たす系で、測定器の波動関数をガウシアンと仮定した場合において信号の増幅には上限があることが示されている(非特許文献6〜8)。
【0007】
本発明は係る課題に鑑みてなされたものであり、そのある態様の例示的な目的のひとつは、微弱信号を最適に増幅可能な増幅装置の提供にある。
【課題を解決するための手段】
【0008】
本発明のある態様は、弱測定を利用した信号の増幅装置に関する。この増幅装置は、測定器と、被測定系と、を備える。被測定系の観測量^Aを測定する際に、測定器と、初期状態が事前選択された被測定系を相互作用させる。次に被測定系の終状態を事後選択し、測定器の波動関数ξ(p)を用いて物理量の測定を行う。被測定系の量子状態の事前選択状態のケットベクトルを|i>、事後選択状態のケットベクトルを|f>とするとき、式(1)で与えられる弱値AWが既知であり、
AW=<f|^A|i>/<f|i> …(1)
測定器と被測定系の相互作用ハミルトニアンHが、測定器の運動量演算子^pおよび結合係数g(ただしg>0)を用いて式(2)で与えられ、
H=g・δ(t−t0)・^A・^p …(2)
かつ、^A2=1が成り立つときに、測定器は、その波動関数ξ(p)が、運動量表示で実質的に式(3)となるように構成されている。なお現実的には、機械的、物理的、電気的、光学的な制約から、波動関数を式(3)に完全に一致させるのは困難である場合もあり、「実質的に式(3)となる」とは、このようば場合にある程度の誤差を許容する趣旨である。このような誤差があったとしても、波動関数に何らの配慮も払わない場合に比べて、増幅度を大きく改善することができる。
【数1】
【0009】
ある態様において、被測定系は、干渉計と、干渉計に光ビームを入射する光源と、を有してもよい。測定すべき信号は、干渉計に設けられた光学素子の微少な傾きであってもよい。増幅装置は、傾きを、事後選択に対応して干渉計から出力される光ビームの横方向の変位に増幅してもよい。光源は、光ビームの波動関数が実質的に式(3)で表され、光ビームの断面の複素振幅の空間座標表示が、式(3)を逆フーリエ変換したものとなるように光ビームを生成してもよい。
傾斜する「光学素子」は、干渉計を構成するミラーであってもよいし、干渉計に挿入されたスライドガラスなどの光学素子であってもよい。
【0010】
なお、以上の構成要素を任意に組み合わせたもの、あるいは本発明の表現を、方法、装置などの間で変換したものもまた、本発明の態様として有効である。
【発明の効果】
【0011】
本発明の増幅装置によれば、微弱信号を大きな利得で増幅できる。
【図面の簡単な説明】
【0012】
【図1】第1の構成例に係る増幅装置を示す図である。
【図2】第2の構成例に係る増幅装置を示す図である。
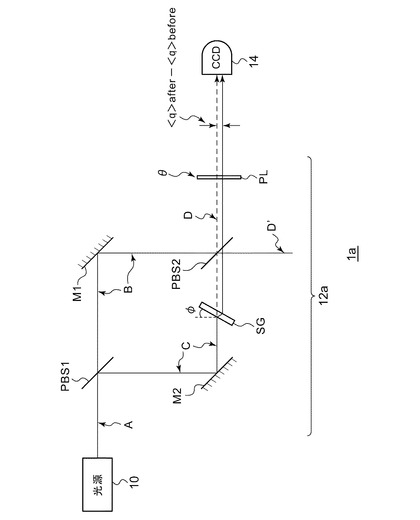
【図3】図3(a)〜(d)は、運動量表示の波動関数ξ(p)の実部、虚部、絶対値の2乗、位相G(p)を示す図である。
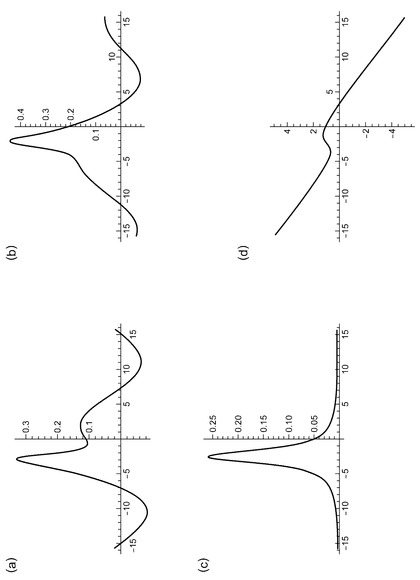
【図4】図4(a)〜(d)は、座標表示の波動関数ξ(q)の実部、虚部、絶対値の2乗、位相を示す図である。
【発明を実施するための形態】
【0013】
以下、本発明を好適な実施の形態をもとに図面を参照しながら説明する。各図面に示される同一または同等の構成要素、部材、処理には、同一の符号を付するものとし、適宜重複した説明は省略する。また、実施の形態は、発明を限定するものではなく例示であって、実施の形態に記述されるすべての特徴やその組み合わせは、必ずしも発明の本質的なものであるとは限らない。
【0014】
(原理)
本実施の形態では、弱測定を利用した信号の増幅装置について説明する。一般的に、増幅装置は、測定器と、被測定系と、を備える。この増幅装置において被測定系の観測量^Aを測定する際には、まず、測定器と、初期状態が事前選択された被測定系を相互作用させる。次に被測定系の終状態を事後選択し、測定器の波動関数ξ(p)を用いて物理量の測定を行う。
【0015】
被測定系の量子状態の事前選択状態のケットベクトルを|i>、事後選択状態のケットベクトルを|f>とするとき、式(1)で与えられる弱値AWが既知であるとする。
AW=<f|^A|i>/<f|i> …(1)
また、測定器と被測定系の相互作用ハミルトニアンHが、測定器の運動量演算子^pおよび結合係数g(ただしg>0)を用いて式(2)で与えられる。
H=g・δ(t−t0)・^A・^p …(2)
また^A2=1が成り立つものとする。
【0016】
従来の弱測定を用いた増幅装置では、波動関数ξ(p)には特に配慮がなされておらず、最も簡易に利用可能なガウシアン型の波動関数ξ(p)を用いられていた。これに対して、本実施の形態に係る増幅装置では、式(3)で与えられる波動関数ξ(p)を用いる。
【数2】
Rは実部を表しており、RAWは、弱値AWの実部を表す。
【0017】
詳しくは後述するように、式(3)の波動関数ξ(p)は、弱測定の前における測定器の位置演算子<^q>beforeと、弱測定後の測定器の位置演算子<^q>afterの差分、つまりシフト量<^q>after−<^q>beforeに最大値を与える。すなわち、波動関数ξ(p)を、単なるガウシアン型ではなく、弱値AWに応じた関数に最適化することにより、増幅率を最大化することができる。
【0018】
そして、式(3)の波動関数ξ(p)を用いた場合、測定器の位置演算子の期待値<^q>afterは、以下の式(4)で与えられる。
【数3】
【0019】
つまり、事前選択と事後選択の状態が直交すると、R(AW)が無限大となり、上式の右辺が発散するため、増幅に上限がないことを示している。
【0020】
たとえば干渉計とレーザ光を利用し、干渉計内に設けられた光学素子の傾きを、レーザビームの横方向の変位に増幅する増幅器においては、測定器の位置演算子の期待値<^q>は、レーザビームの変位量の期待値に相当する。
【0021】
(増幅装置の具体例)
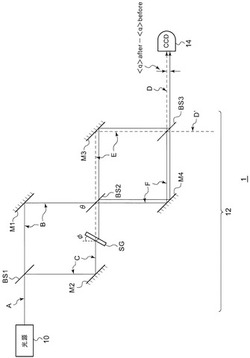
波動関数の導出の前に、理解を助けるために、具体的な増幅装置1について説明する。図1は、第1の構成例に係る増幅装置1を示す図である。増幅装置1は、レーザ光源10、干渉計12、受光デバイス14およびスライドガラスSGを備える。
【0022】
レーザ光源10は、ある波動関数を有するレーザ光を出力する。後述するように、レーザ光源10は、レーザ光の運動量もしくはビームプロファイルを調節可能に構成される。
【0023】
波形整形されたレーザ光は、ダブルタイプのマッハツェンダー干渉計(以下、単に干渉計という)12に入力される。干渉計12は、第1ミラーM1〜第4ミラーM4、第1ビームスプリッタBS1〜第3ビームスプリッタBS3と、を備える。
【0024】
レーザ光源10からのレーザ光は、第1ビームスプリッタBS1に入力される。第1ビームスプリッタBS1を通過したビームは、第1ミラーM1によって反射される。第1ビームスプリッタBS1により反射されたビームは、第2ミラーM2によって反射される。第2ミラーM2により反射されたビームの経路上には、スライドガラスSGが設けられる。図1の増幅装置1では、スライドガラスSGの傾きφが、増幅すべき微少信号となる。
【0025】
第1ミラーM1、第2ミラーM2それぞれにより反射されたビームは、第2ビームスプリッタBS2に入射する。第2ビームスプリッタBS2を第1の方向に通過したビームは、第3ミラーM3により反射される。第2ビームスプリッタBS2を第2の方向に通過したビームは、第4ミラーM4により反射される。第3ミラーM3、第4ミラーM4それぞれによって反射されたビームは、第3ビームスプリッタBS3に入力される。
【0026】
第3ビームスプリッタBS3を第1の方向に通過したビームは、受光デバイス14に入力される。第3ビームスプリッタBS3を第2の方向に通過したビームは捨てられる。
【0027】
第2ビームスプリッタBS2およびスライドガラスSGを除くすべての光学素子は、レーザビームを45°の入射角で受けるように配置される。第2ビームスプリッタBS2の傾きをθとする。
【0028】
受光デバイス14は、たとえばCCD(Charge Coupled Device)カメラをはじめとする撮像デバイスであり、入射されるレーザビームの横方向の強度分布を測定する。受光デバイス14に入射するレーザビームの強度分布は、スライドガラスSGの傾きφによって変化する。増幅装置1は、スライドガラスSGの傾きφを、レーザビームの横方向の変位量に変換、増幅する。
【0029】
図1の増幅装置1において、干渉計12に対してレーザビームを入射することは、測定器と、初期状態が事前選択された被測定系を相互作用させることに対応する。
また、干渉計12によって、第3ビームスプリッタBS3から出力される一方のレーザビームを測定し、他方のビームを捨てることは、被測定系の終状態を事後選択することに対応している。受光デバイス14による測定は、位置演算子の期待値<^q>を測定することに他ならない。
【0030】
増幅装置1において、レーザビームの各状態を、A〜Dと記す。
初期状態が事前選択された被測定系の状態|i>は、以下の式で与えられる。
|i>=|A>=1/√2×(|B>+|C>)
|B>=cosθ・|E>+sinθ・|F>
|C>=−sinθ・|E>+cosθ・|F>
また、終状態が事後選択された被測定系の状態|f>は、以下の式で与えられる。
|f>=|D>=1/√2×(|E>−|F>)
=1/√2×[(cosθ−sinθ)|B>−(cosθ−sinθ)|C>]
【0031】
図1の増幅装置1において、観測量^KはC×Cである(A=2K−1)。したがって観測量C×Cの弱値KWは、
<f|^K|i>=<f|C×C|i>=−(sinθ+cosθ)/2
<f|i>=−sinθ
を用いて、以下の式で与えられる。
KW=(sinθ+cosθ)/(2sinθ)
=1/√2×sin(θ+π/4)/sinθ
【0032】
つまり、図1の増幅装置1は、第2ビームスプリッタBS2の傾きθに応じた弱値KWを有する。弱値KWは、θ=3π/4のときに1となり、θがゼロに近づくにつれて無限大に発散する。
【0033】
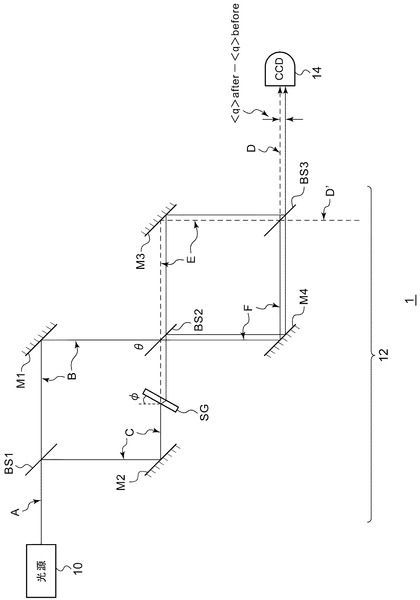
図2は、第2の構成例に係る増幅装置1aを示す図である。増幅装置1aは、図1と同様に、レーザ光源10、干渉計12、受光デバイス14および光学素子(スライドガラスSG)を備える。
【0034】
レーザ光源10は、ある波動関数を有するレーザ光を出力する。このレーザ光は、H偏光成分とV偏光成分を含む。シングルタイプのマッハツェンダー干渉計(以下、単に干渉計という)12aに入力される。干渉計12aは、第1ミラーM1、第2ミラーM2、第1偏光ビームスプリッタPBS1、第2偏光ビームスプリッタPBS2、偏光板PL、スライドガラスSGを備える。
【0035】
レーザ光源10からのレーザ光は、第1偏光ビームスプリッタPBS1に入力される。H偏光成分は第1偏光ビームスプリッタPBS1を通過し、続いて第1ミラーM1によって反射される。V偏光成分は第1偏光ビームスプリッタPBS1により反射され、続いて第2ミラーM2によって反射される。
【0036】
第2ミラーM2により反射されたビームの経路上には、スライドガラスSGが設けられる。図2の増幅装置1aにおいても、スライドガラスSGの傾きφが、増幅すべき微少信号となる。
【0037】
第1ミラーM1、第2ミラーM2それぞれにより反射されたビームは、第2偏光ビームスプリッタPBS2に入射する。第2偏光ビームスプリッタPBS2を第1の方向に通過したビームは、偏光板PLを通過して受光デバイス14に入射する。直線偏光板PLは、水平方向に対して(θ+π/4)傾いた偏光成分を通過させる。反対に第2偏光ビームスプリッタPBS2を第2の方向に通過したビームは捨てられる。
【0038】
受光デバイス14は、入射されるレーザビームの横方向の強度分布を測定する。受光デバイス14に入射するレーザビームの強度分布は、スライドガラスSGの傾きφによって変化する。増幅装置1は、スライドガラスSGの傾きφを、レーザビームの横方向の変位量に変換、増幅する。
【0039】
図2の増幅装置1aにおいても、干渉計12aに対してレーザビームを入射することは、測定器と、初期状態が事前選択された被測定系を相互作用させることに対応する。
また、干渉計12aによって、第2偏光ビームスプリッタPBS2から出力される一方のレーザビームを測定し、他方のビームを捨てることは、被測定系の終状態を事後選択することに対応している。受光デバイス14による測定は、位置演算子の期待値<^q>を測定することに他ならない。
【0040】
増幅装置1aの弱値KWは、以下のように導出できる。
初期状態|ψint>、終状態|ψpost>はそれぞれ、以下のように定められる。
|ψint>:=1/√2×(|H>+|V>)
|ψpost>:=cos(θ+π/4)|H>+sin(θ+π/4)|V>
ただし、
|H>=(1,0)T、
|V>=(0,1)T、
Tは転置行列を表す。
【0041】
偏光ビームスプリッタPBS1、PBS2を通ることにより、事前選択状態|i>、事後選択状態|f>は、以下のように与えられる。
|i>=1/√2×(|B>|H>+|C>|V>)
|f>=cos(θ+π/4)|B>|H>+sin(θ+π/4)|C>|V>
【0042】
図2の増幅装置1aにおいても、観測量^KはC×Cである(A=2K−1)。したがって観測量C×Cの弱値KWは、
<f|^K|i>=<f|C×C|i>=−1/√2×sin(θ+π/4)
<f|i>=1/√2×{cos(θ+π/4)+sin((θ+π/4))}
=sin(θ+π/4)+cos(θ+π/4)
を用いて、以下の式で与えられる。
KW=<f|^K|i>/<f|i>=(1+tanθ)/2
【0043】
つまり、図2の増幅装置1aは、偏光板PLの偏光方向に応じた弱値KWを有する。弱値KWは、θ=−π/4のときに0となり、θ=±π/2に近づくにつれて発散する。
【0044】
(最適な波動関数の導出)
図1、図2を参照したここまでの説明で、増幅装置1(1a)は、その構成に応じた弱値KWを有することが理解される。続いて、増幅装置1により、最大の増幅率を実現しうる波動関数ξ(p)を導出する。
【0045】
増幅率を最大化することは、受光デバイス14によって測定されるレーザビームの強度の横方向の座標のシフト量<^q>after−<^q>beforeを最大化することに他ならない。以下の説明では、ビームのシフト方向と平行に、座標軸qおよび運動量pの軸をとるものとする。
【0046】
1. ラグランジュ未定乗数法
弱測定前の測定器の量子状態を|φ>と書くとき、弱測定前の測定器の位置演算子の期待値<^q>beforeは、式(5)で与えられる。
【数4】
ここで、ξ(p)=<p|φ>とする。測定器と被測定系の相互作用ハミルトニアンは、測定器の運動量演算子^pおよび結合係数gを用いて、上述した式(2)で与えられる。
H=g・δ(t−t0)・^A・^p …(再2)
【0047】
相互作用後に、被測定系の事後選択を経て、弱測定後の測定器の量子状態は、式(6)で与えられる。
【数5】
【0048】
2行目の式変形の際に^A2=1の条件を用いている。これにより弱測定後の測定器の位置演算子の期待値として、式(7)〜(11)を得る。
【数6】
【0049】
1.1 変分問題
ラグラジアンLを以下のようにとって、<^q>afterが極値をとるときのξ(p)を求める。ここでは簡単のため、<^q>before=0とする。測定器の最適な波動関数ξ(p)が求まった後に、<^q>before=0となるように調節する。
【0050】
【数7】
【0051】
ここで、λは未定乗数で拘束条件はξ(p)の規格化条件である。まず、未定乗数λで変分すると、式(13)を得る。次にξ*(p)を変分すると、式(14)を得る。これをpについて不定積分すると、式(15)、(16)が得られる。これらより、式(17)となる。Cは実数の規格化定数である。
【0052】
1.2 未定乗数の決定
式(17)より、Z,C,C0を計算する。Zは式(8)より式(18)と求まり、Cは式(13)より式(19)と求まる。またC0は式(10より式(20)と求まる。そしてこれらを用いてDを計算するとDの値は不定になるがλ=0が導かれる。
【数8】
【0053】
2. 信号増幅
2.1 期待値のシフト
弱測定前の期待値<^q>beforeを計算する。式(4)より、式(21)を得る。
【数9】
【0054】
ここで第1項目が0かつC=0となるような積分区間として、F(p)がπ/gの周期関数であることから、その1周期分の[−π/2g,π/2g]を採用する。このときF(π/2g)=F(−π/2g)=|AW|2となり、第1項目は0になる。またCは式(19)よりF−1(p)の積分を計算して式(22)となり、確かにC≠0であることが確認される。
【数10】
【0055】
ここでそれを満たすために、AWの実部がゼロではないという条件R(AW)≠0を課している。よって弱測定前後での期待値のシフトは式(21)よりF−2(p)の積分を計算して、式(23)と求まる。
【数11】
【0056】
2.2 弱測定前後の位置演算子の期待値
ξ(p)を用いた測定において<^q>before=0となるように調節する。今、周期性F(p+π/g)=F(p)から、式(17)より式(24)を得る。kは任意の実数である。いま、G(p)は式(16)より、式(25)で与えられる。
【数12】
【0057】
式(24)の対数をとると波動関数の周期性は、
G(p+π/g)=πk+G(p) …(26)
と表される。これより、式(27)を得る。
<^q>after=g(±1−k) …(27)
<^q>afterの符号は、R(AW)>0のとき正、R(AW)<0のとき負である。このとき<^q>beforeは式(21)より、式(28)で表される。任意定数kを、式(29)と選べば<^q>before=0となる。
【数13】
【0058】
よって式(27)は、式(30)に書き換えられる。
【数14】
【0059】
式(30)は、|i>と|f>が直交する極限、すなわち|AW|2|が無限大の極限をとる場合に、シフト量が無限大に発散することを示している。これは弱測定による信号増幅には原理的な上限が無いことを示している。
【数15】
【0060】
また、式(31)が成り立つことから、シフトには下限がある。最小値はgで、これはR(AW)=1、I(AW)=0のときである。式(1)からこの場合、^Aを被測定系に射影測定していて、このときユニタリー変換e±ig・^pは測定器の座標を±gだけシフトする。すなわち測定器の最適な波動関数ξ(p)による測定を行うと、射影測定により信号を検出した場合に比べて、必ず信号を増幅することができる。また、弱測定後の位置演算子の2乗の期待値を計算すると、
<^q2>after=(<^q>after)2 …(32)
であることがわかる。よって分散が0なので弱測定後の測定器の波動関数は座標表示でデルタ関数のような振る舞いをすることが分かる。
【0061】
3. 最適波動関数
これまでで、ξ(p)は、式(11)、(15)、(22)、(25)、(30)より、式(33)と書かれる。
【数16】
【0062】
ここで、αを式(34)で定義すると、式(35)−(37)が成り立つ。
【数17】
【0063】
これらを用いると、式(33)の波動関数は、式(38)に書き改められ、これは式(3)と一致する。
【数18】
【0064】
最後に、波動関数ξ(p)の具体例を示す。図3(a)〜(d)は、運動量表示の波動関数ξ(p)の実部、虚部、絶対値の2乗、位相G(p)を示す図である。計算は、弱値AW=1.7+3.2i、g=0.1にもとづいて行っている。図4(a)〜(d)は、座標表示の波動関数ξ(q)の実部、虚部、絶対値の2乗、位相を示す図である。座標表示の波動関数ξ(q)は、運動量表示の波動関数ξ(p)を逆フーリエ変換することにより求めることができる。座標表示の波動関数ξ(q)の絶対値の2乗は、ビーム強度の横方向(シフト方向)の断面プロファイルに相当する。
【0065】
レーザ光源10の設計は、運動量表示の波動関数ξ(p)にしたがって行うことができる。実際に生成されるビームが、運動量表示の波動関数ξ(p)を満たすか否かは、直接測定することは困難である。そこでビーム強度の軸方向のプロファイルを測定し、座標表示の波動関数ξ(q)の絶対値の2乗と比較することにより、最適なビームが生成されているかを確認できる。
【0066】
レーザービームを整形する技術は、最近では研究室レベルで標準的になりつつある。したがって、測定器の波動関数ξ(p)あるいはξ(q)を、弱値AWに応じて最適なプロファイルとすることは十分に可能である。したがって、本発明は、微弱な信号の増幅一般に広汎な応用が期待される。
【0067】
一例として増幅装置1は、重力波などきわめて微弱な信号の測定に利用することが期待される。
【0068】
以上、本発明について、実施の形態をもとに説明した。この実施の形態は例示であり、それらの各構成要素や各処理プロセスの組み合わせにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。以下、こうした変形例について説明する。
【0069】
増幅装置1の構成は、実施の形態で例示したものには限定されず、列挙した非特許文献に記載される構成を用いてもよいし、その他の構成を用いてもよく、つまりは弱値AWが理論的に予測可能な被測定系であれば任意のものを採用しうる。
【0070】
実施の形態にもとづき、具体的な用語を用いて本発明を説明したが、実施の形態は、本発明の原理、応用を示しているにすぎず、実施の形態には、請求の範囲に規定された本発明の思想を逸脱しない範囲において、多くの変形例や配置の変更が認められる。
【符号の説明】
【0071】
1…増幅装置、10…レーザ光源、12…干渉計、14…受光デバイス、PBS1…第1偏光ビームスプリッタ、PBS2…第2偏光ビームスプリッタ、M1…第1ミラー、M2…第2ミラー、M3…第3ミラー、M4…第4ミラー、BS1…第1ビームスプリッタ、BS2…第2ビームスプリッタ、BS3…第3ビームスプリッタ、SG…スライドガラス、PL…偏光板。
【技術分野】
【0001】
本発明は、弱測定を利用した微弱信号を増幅する増幅装置に関する。
【背景技術】
【0002】
微弱な物理量を測定するための方法として、「弱測定(Weak Measurement)」が提案されている(非特許文献1)。「弱測定」において、被測定系(Measured system)は、測定器(Measuring device)と弱く結合される。ある被測定系の観測量(Observable)^Aを測定するときに、弱測定では、まず測定器と、初期状態(Initial state)が事前選択(Pre-selection)された被測定系を相互作用させる。次に被測定系の終状態(Final state)を事後選択(Post-selection)し、測定器の波動関数を用いて物理量の測定を行う。
【0003】
被測定系の量子状態の事前選択状態を|i>、事後選択状態を|f>としたとき、式(1)で与えられる量AWは弱値と呼ばれる。
AW:=<f|^A|i>/<f|i>
これは測定器の波動関数の中心値の弱測定前と後の差として得ることができる。この弱値AWは|i>と|f>とがほぼ直交すると大きくなり、測定で得られる微弱な信号が増幅される。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】Y. Aharonov、D. Z. Albert、L. Vaidman、Phys. Rev. Lett. 60、1351 (1988)
【非特許文献2】O. Hosten、 P. Kwiat、Science 319、787 (2008)
【非特許文献3】N. W. M. Ritchie、J. G. Story、R. G. Hulet、Phys. Rev. Lett. 66、1107 (1991)
【非特許文献4】P. B. Dixon、D. J. Starling、A. N. Jordan、J. C. Howell、Phys. Rev. Lett. 102、173601 (2009)
【非特許文献5】S. Wu、Y. Li、Phys.Rev. A 83、052106 (2011)
【非特許文献6】K. Nakamura、A. Nishizawa、M. Fujimoto、arXiv:1108.2114v2 [quant-ph]
【非特許文献7】X. Zhu、Y. Zhang、S. Pang、C. Qiao、Q. Liu、S. Wu、arXiv:1108.1608v2 [quant-ph]
【非特許文献8】T. Koike、S. Tanaka、arXiv:1108.2050v1 [quant-ph]
【非特許文献9】A. M. Steinberg、Nature (London) 463、890-891 (2010)
【非特許文献10】A. Feizpour、X. Xing、A. M. Steinberg、Phys. Rev. Lett. 107、133603 (2011)
【非特許文献11】D. J. Starling、P. B. Dixon、A. N. Jordan、J. C. Howell、Phys. Rev. A 80、041803 (2009)
【非特許文献12】古田 彩 「存在確率マイナス1」、日経サイエンス、2009年10月号、22〜23ページ
【発明の概要】
【発明が解決しようとする課題】
【0005】
弱測定の効果は例えば非特許文献2〜4の実験で確認されている。具体的には、弱測定を利用した増幅装置は、ミラーやスライドガラスの微少な傾きを、レーザビームの位置の非常に大きな変化に増幅することができる。弱測定による信号増幅度は、|i>と|f>の直交度次第でいくらでも大きくすることができるため、増幅に限界は無いと考えられていた。
【0006】
しかしこの評価は、相互作用が小さい事を仮定した1次近似を用いているため正確ではないことが指摘されている(非特許文献5)。また観測量が^A2=1を充たす系で、測定器の波動関数をガウシアンと仮定した場合において信号の増幅には上限があることが示されている(非特許文献6〜8)。
【0007】
本発明は係る課題に鑑みてなされたものであり、そのある態様の例示的な目的のひとつは、微弱信号を最適に増幅可能な増幅装置の提供にある。
【課題を解決するための手段】
【0008】
本発明のある態様は、弱測定を利用した信号の増幅装置に関する。この増幅装置は、測定器と、被測定系と、を備える。被測定系の観測量^Aを測定する際に、測定器と、初期状態が事前選択された被測定系を相互作用させる。次に被測定系の終状態を事後選択し、測定器の波動関数ξ(p)を用いて物理量の測定を行う。被測定系の量子状態の事前選択状態のケットベクトルを|i>、事後選択状態のケットベクトルを|f>とするとき、式(1)で与えられる弱値AWが既知であり、
AW=<f|^A|i>/<f|i> …(1)
測定器と被測定系の相互作用ハミルトニアンHが、測定器の運動量演算子^pおよび結合係数g(ただしg>0)を用いて式(2)で与えられ、
H=g・δ(t−t0)・^A・^p …(2)
かつ、^A2=1が成り立つときに、測定器は、その波動関数ξ(p)が、運動量表示で実質的に式(3)となるように構成されている。なお現実的には、機械的、物理的、電気的、光学的な制約から、波動関数を式(3)に完全に一致させるのは困難である場合もあり、「実質的に式(3)となる」とは、このようば場合にある程度の誤差を許容する趣旨である。このような誤差があったとしても、波動関数に何らの配慮も払わない場合に比べて、増幅度を大きく改善することができる。
【数1】
【0009】
ある態様において、被測定系は、干渉計と、干渉計に光ビームを入射する光源と、を有してもよい。測定すべき信号は、干渉計に設けられた光学素子の微少な傾きであってもよい。増幅装置は、傾きを、事後選択に対応して干渉計から出力される光ビームの横方向の変位に増幅してもよい。光源は、光ビームの波動関数が実質的に式(3)で表され、光ビームの断面の複素振幅の空間座標表示が、式(3)を逆フーリエ変換したものとなるように光ビームを生成してもよい。
傾斜する「光学素子」は、干渉計を構成するミラーであってもよいし、干渉計に挿入されたスライドガラスなどの光学素子であってもよい。
【0010】
なお、以上の構成要素を任意に組み合わせたもの、あるいは本発明の表現を、方法、装置などの間で変換したものもまた、本発明の態様として有効である。
【発明の効果】
【0011】
本発明の増幅装置によれば、微弱信号を大きな利得で増幅できる。
【図面の簡単な説明】
【0012】
【図1】第1の構成例に係る増幅装置を示す図である。
【図2】第2の構成例に係る増幅装置を示す図である。
【図3】図3(a)〜(d)は、運動量表示の波動関数ξ(p)の実部、虚部、絶対値の2乗、位相G(p)を示す図である。
【図4】図4(a)〜(d)は、座標表示の波動関数ξ(q)の実部、虚部、絶対値の2乗、位相を示す図である。
【発明を実施するための形態】
【0013】
以下、本発明を好適な実施の形態をもとに図面を参照しながら説明する。各図面に示される同一または同等の構成要素、部材、処理には、同一の符号を付するものとし、適宜重複した説明は省略する。また、実施の形態は、発明を限定するものではなく例示であって、実施の形態に記述されるすべての特徴やその組み合わせは、必ずしも発明の本質的なものであるとは限らない。
【0014】
(原理)
本実施の形態では、弱測定を利用した信号の増幅装置について説明する。一般的に、増幅装置は、測定器と、被測定系と、を備える。この増幅装置において被測定系の観測量^Aを測定する際には、まず、測定器と、初期状態が事前選択された被測定系を相互作用させる。次に被測定系の終状態を事後選択し、測定器の波動関数ξ(p)を用いて物理量の測定を行う。
【0015】
被測定系の量子状態の事前選択状態のケットベクトルを|i>、事後選択状態のケットベクトルを|f>とするとき、式(1)で与えられる弱値AWが既知であるとする。
AW=<f|^A|i>/<f|i> …(1)
また、測定器と被測定系の相互作用ハミルトニアンHが、測定器の運動量演算子^pおよび結合係数g(ただしg>0)を用いて式(2)で与えられる。
H=g・δ(t−t0)・^A・^p …(2)
また^A2=1が成り立つものとする。
【0016】
従来の弱測定を用いた増幅装置では、波動関数ξ(p)には特に配慮がなされておらず、最も簡易に利用可能なガウシアン型の波動関数ξ(p)を用いられていた。これに対して、本実施の形態に係る増幅装置では、式(3)で与えられる波動関数ξ(p)を用いる。
【数2】
Rは実部を表しており、RAWは、弱値AWの実部を表す。
【0017】
詳しくは後述するように、式(3)の波動関数ξ(p)は、弱測定の前における測定器の位置演算子<^q>beforeと、弱測定後の測定器の位置演算子<^q>afterの差分、つまりシフト量<^q>after−<^q>beforeに最大値を与える。すなわち、波動関数ξ(p)を、単なるガウシアン型ではなく、弱値AWに応じた関数に最適化することにより、増幅率を最大化することができる。
【0018】
そして、式(3)の波動関数ξ(p)を用いた場合、測定器の位置演算子の期待値<^q>afterは、以下の式(4)で与えられる。
【数3】
【0019】
つまり、事前選択と事後選択の状態が直交すると、R(AW)が無限大となり、上式の右辺が発散するため、増幅に上限がないことを示している。
【0020】
たとえば干渉計とレーザ光を利用し、干渉計内に設けられた光学素子の傾きを、レーザビームの横方向の変位に増幅する増幅器においては、測定器の位置演算子の期待値<^q>は、レーザビームの変位量の期待値に相当する。
【0021】
(増幅装置の具体例)
波動関数の導出の前に、理解を助けるために、具体的な増幅装置1について説明する。図1は、第1の構成例に係る増幅装置1を示す図である。増幅装置1は、レーザ光源10、干渉計12、受光デバイス14およびスライドガラスSGを備える。
【0022】
レーザ光源10は、ある波動関数を有するレーザ光を出力する。後述するように、レーザ光源10は、レーザ光の運動量もしくはビームプロファイルを調節可能に構成される。
【0023】
波形整形されたレーザ光は、ダブルタイプのマッハツェンダー干渉計(以下、単に干渉計という)12に入力される。干渉計12は、第1ミラーM1〜第4ミラーM4、第1ビームスプリッタBS1〜第3ビームスプリッタBS3と、を備える。
【0024】
レーザ光源10からのレーザ光は、第1ビームスプリッタBS1に入力される。第1ビームスプリッタBS1を通過したビームは、第1ミラーM1によって反射される。第1ビームスプリッタBS1により反射されたビームは、第2ミラーM2によって反射される。第2ミラーM2により反射されたビームの経路上には、スライドガラスSGが設けられる。図1の増幅装置1では、スライドガラスSGの傾きφが、増幅すべき微少信号となる。
【0025】
第1ミラーM1、第2ミラーM2それぞれにより反射されたビームは、第2ビームスプリッタBS2に入射する。第2ビームスプリッタBS2を第1の方向に通過したビームは、第3ミラーM3により反射される。第2ビームスプリッタBS2を第2の方向に通過したビームは、第4ミラーM4により反射される。第3ミラーM3、第4ミラーM4それぞれによって反射されたビームは、第3ビームスプリッタBS3に入力される。
【0026】
第3ビームスプリッタBS3を第1の方向に通過したビームは、受光デバイス14に入力される。第3ビームスプリッタBS3を第2の方向に通過したビームは捨てられる。
【0027】
第2ビームスプリッタBS2およびスライドガラスSGを除くすべての光学素子は、レーザビームを45°の入射角で受けるように配置される。第2ビームスプリッタBS2の傾きをθとする。
【0028】
受光デバイス14は、たとえばCCD(Charge Coupled Device)カメラをはじめとする撮像デバイスであり、入射されるレーザビームの横方向の強度分布を測定する。受光デバイス14に入射するレーザビームの強度分布は、スライドガラスSGの傾きφによって変化する。増幅装置1は、スライドガラスSGの傾きφを、レーザビームの横方向の変位量に変換、増幅する。
【0029】
図1の増幅装置1において、干渉計12に対してレーザビームを入射することは、測定器と、初期状態が事前選択された被測定系を相互作用させることに対応する。
また、干渉計12によって、第3ビームスプリッタBS3から出力される一方のレーザビームを測定し、他方のビームを捨てることは、被測定系の終状態を事後選択することに対応している。受光デバイス14による測定は、位置演算子の期待値<^q>を測定することに他ならない。
【0030】
増幅装置1において、レーザビームの各状態を、A〜Dと記す。
初期状態が事前選択された被測定系の状態|i>は、以下の式で与えられる。
|i>=|A>=1/√2×(|B>+|C>)
|B>=cosθ・|E>+sinθ・|F>
|C>=−sinθ・|E>+cosθ・|F>
また、終状態が事後選択された被測定系の状態|f>は、以下の式で与えられる。
|f>=|D>=1/√2×(|E>−|F>)
=1/√2×[(cosθ−sinθ)|B>−(cosθ−sinθ)|C>]
【0031】
図1の増幅装置1において、観測量^KはC×Cである(A=2K−1)。したがって観測量C×Cの弱値KWは、
<f|^K|i>=<f|C×C|i>=−(sinθ+cosθ)/2
<f|i>=−sinθ
を用いて、以下の式で与えられる。
KW=(sinθ+cosθ)/(2sinθ)
=1/√2×sin(θ+π/4)/sinθ
【0032】
つまり、図1の増幅装置1は、第2ビームスプリッタBS2の傾きθに応じた弱値KWを有する。弱値KWは、θ=3π/4のときに1となり、θがゼロに近づくにつれて無限大に発散する。
【0033】
図2は、第2の構成例に係る増幅装置1aを示す図である。増幅装置1aは、図1と同様に、レーザ光源10、干渉計12、受光デバイス14および光学素子(スライドガラスSG)を備える。
【0034】
レーザ光源10は、ある波動関数を有するレーザ光を出力する。このレーザ光は、H偏光成分とV偏光成分を含む。シングルタイプのマッハツェンダー干渉計(以下、単に干渉計という)12aに入力される。干渉計12aは、第1ミラーM1、第2ミラーM2、第1偏光ビームスプリッタPBS1、第2偏光ビームスプリッタPBS2、偏光板PL、スライドガラスSGを備える。
【0035】
レーザ光源10からのレーザ光は、第1偏光ビームスプリッタPBS1に入力される。H偏光成分は第1偏光ビームスプリッタPBS1を通過し、続いて第1ミラーM1によって反射される。V偏光成分は第1偏光ビームスプリッタPBS1により反射され、続いて第2ミラーM2によって反射される。
【0036】
第2ミラーM2により反射されたビームの経路上には、スライドガラスSGが設けられる。図2の増幅装置1aにおいても、スライドガラスSGの傾きφが、増幅すべき微少信号となる。
【0037】
第1ミラーM1、第2ミラーM2それぞれにより反射されたビームは、第2偏光ビームスプリッタPBS2に入射する。第2偏光ビームスプリッタPBS2を第1の方向に通過したビームは、偏光板PLを通過して受光デバイス14に入射する。直線偏光板PLは、水平方向に対して(θ+π/4)傾いた偏光成分を通過させる。反対に第2偏光ビームスプリッタPBS2を第2の方向に通過したビームは捨てられる。
【0038】
受光デバイス14は、入射されるレーザビームの横方向の強度分布を測定する。受光デバイス14に入射するレーザビームの強度分布は、スライドガラスSGの傾きφによって変化する。増幅装置1は、スライドガラスSGの傾きφを、レーザビームの横方向の変位量に変換、増幅する。
【0039】
図2の増幅装置1aにおいても、干渉計12aに対してレーザビームを入射することは、測定器と、初期状態が事前選択された被測定系を相互作用させることに対応する。
また、干渉計12aによって、第2偏光ビームスプリッタPBS2から出力される一方のレーザビームを測定し、他方のビームを捨てることは、被測定系の終状態を事後選択することに対応している。受光デバイス14による測定は、位置演算子の期待値<^q>を測定することに他ならない。
【0040】
増幅装置1aの弱値KWは、以下のように導出できる。
初期状態|ψint>、終状態|ψpost>はそれぞれ、以下のように定められる。
|ψint>:=1/√2×(|H>+|V>)
|ψpost>:=cos(θ+π/4)|H>+sin(θ+π/4)|V>
ただし、
|H>=(1,0)T、
|V>=(0,1)T、
Tは転置行列を表す。
【0041】
偏光ビームスプリッタPBS1、PBS2を通ることにより、事前選択状態|i>、事後選択状態|f>は、以下のように与えられる。
|i>=1/√2×(|B>|H>+|C>|V>)
|f>=cos(θ+π/4)|B>|H>+sin(θ+π/4)|C>|V>
【0042】
図2の増幅装置1aにおいても、観測量^KはC×Cである(A=2K−1)。したがって観測量C×Cの弱値KWは、
<f|^K|i>=<f|C×C|i>=−1/√2×sin(θ+π/4)
<f|i>=1/√2×{cos(θ+π/4)+sin((θ+π/4))}
=sin(θ+π/4)+cos(θ+π/4)
を用いて、以下の式で与えられる。
KW=<f|^K|i>/<f|i>=(1+tanθ)/2
【0043】
つまり、図2の増幅装置1aは、偏光板PLの偏光方向に応じた弱値KWを有する。弱値KWは、θ=−π/4のときに0となり、θ=±π/2に近づくにつれて発散する。
【0044】
(最適な波動関数の導出)
図1、図2を参照したここまでの説明で、増幅装置1(1a)は、その構成に応じた弱値KWを有することが理解される。続いて、増幅装置1により、最大の増幅率を実現しうる波動関数ξ(p)を導出する。
【0045】
増幅率を最大化することは、受光デバイス14によって測定されるレーザビームの強度の横方向の座標のシフト量<^q>after−<^q>beforeを最大化することに他ならない。以下の説明では、ビームのシフト方向と平行に、座標軸qおよび運動量pの軸をとるものとする。
【0046】
1. ラグランジュ未定乗数法
弱測定前の測定器の量子状態を|φ>と書くとき、弱測定前の測定器の位置演算子の期待値<^q>beforeは、式(5)で与えられる。
【数4】
ここで、ξ(p)=<p|φ>とする。測定器と被測定系の相互作用ハミルトニアンは、測定器の運動量演算子^pおよび結合係数gを用いて、上述した式(2)で与えられる。
H=g・δ(t−t0)・^A・^p …(再2)
【0047】
相互作用後に、被測定系の事後選択を経て、弱測定後の測定器の量子状態は、式(6)で与えられる。
【数5】
【0048】
2行目の式変形の際に^A2=1の条件を用いている。これにより弱測定後の測定器の位置演算子の期待値として、式(7)〜(11)を得る。
【数6】
【0049】
1.1 変分問題
ラグラジアンLを以下のようにとって、<^q>afterが極値をとるときのξ(p)を求める。ここでは簡単のため、<^q>before=0とする。測定器の最適な波動関数ξ(p)が求まった後に、<^q>before=0となるように調節する。
【0050】
【数7】
【0051】
ここで、λは未定乗数で拘束条件はξ(p)の規格化条件である。まず、未定乗数λで変分すると、式(13)を得る。次にξ*(p)を変分すると、式(14)を得る。これをpについて不定積分すると、式(15)、(16)が得られる。これらより、式(17)となる。Cは実数の規格化定数である。
【0052】
1.2 未定乗数の決定
式(17)より、Z,C,C0を計算する。Zは式(8)より式(18)と求まり、Cは式(13)より式(19)と求まる。またC0は式(10より式(20)と求まる。そしてこれらを用いてDを計算するとDの値は不定になるがλ=0が導かれる。
【数8】
【0053】
2. 信号増幅
2.1 期待値のシフト
弱測定前の期待値<^q>beforeを計算する。式(4)より、式(21)を得る。
【数9】
【0054】
ここで第1項目が0かつC=0となるような積分区間として、F(p)がπ/gの周期関数であることから、その1周期分の[−π/2g,π/2g]を採用する。このときF(π/2g)=F(−π/2g)=|AW|2となり、第1項目は0になる。またCは式(19)よりF−1(p)の積分を計算して式(22)となり、確かにC≠0であることが確認される。
【数10】
【0055】
ここでそれを満たすために、AWの実部がゼロではないという条件R(AW)≠0を課している。よって弱測定前後での期待値のシフトは式(21)よりF−2(p)の積分を計算して、式(23)と求まる。
【数11】
【0056】
2.2 弱測定前後の位置演算子の期待値
ξ(p)を用いた測定において<^q>before=0となるように調節する。今、周期性F(p+π/g)=F(p)から、式(17)より式(24)を得る。kは任意の実数である。いま、G(p)は式(16)より、式(25)で与えられる。
【数12】
【0057】
式(24)の対数をとると波動関数の周期性は、
G(p+π/g)=πk+G(p) …(26)
と表される。これより、式(27)を得る。
<^q>after=g(±1−k) …(27)
<^q>afterの符号は、R(AW)>0のとき正、R(AW)<0のとき負である。このとき<^q>beforeは式(21)より、式(28)で表される。任意定数kを、式(29)と選べば<^q>before=0となる。
【数13】
【0058】
よって式(27)は、式(30)に書き換えられる。
【数14】
【0059】
式(30)は、|i>と|f>が直交する極限、すなわち|AW|2|が無限大の極限をとる場合に、シフト量が無限大に発散することを示している。これは弱測定による信号増幅には原理的な上限が無いことを示している。
【数15】
【0060】
また、式(31)が成り立つことから、シフトには下限がある。最小値はgで、これはR(AW)=1、I(AW)=0のときである。式(1)からこの場合、^Aを被測定系に射影測定していて、このときユニタリー変換e±ig・^pは測定器の座標を±gだけシフトする。すなわち測定器の最適な波動関数ξ(p)による測定を行うと、射影測定により信号を検出した場合に比べて、必ず信号を増幅することができる。また、弱測定後の位置演算子の2乗の期待値を計算すると、
<^q2>after=(<^q>after)2 …(32)
であることがわかる。よって分散が0なので弱測定後の測定器の波動関数は座標表示でデルタ関数のような振る舞いをすることが分かる。
【0061】
3. 最適波動関数
これまでで、ξ(p)は、式(11)、(15)、(22)、(25)、(30)より、式(33)と書かれる。
【数16】
【0062】
ここで、αを式(34)で定義すると、式(35)−(37)が成り立つ。
【数17】
【0063】
これらを用いると、式(33)の波動関数は、式(38)に書き改められ、これは式(3)と一致する。
【数18】
【0064】
最後に、波動関数ξ(p)の具体例を示す。図3(a)〜(d)は、運動量表示の波動関数ξ(p)の実部、虚部、絶対値の2乗、位相G(p)を示す図である。計算は、弱値AW=1.7+3.2i、g=0.1にもとづいて行っている。図4(a)〜(d)は、座標表示の波動関数ξ(q)の実部、虚部、絶対値の2乗、位相を示す図である。座標表示の波動関数ξ(q)は、運動量表示の波動関数ξ(p)を逆フーリエ変換することにより求めることができる。座標表示の波動関数ξ(q)の絶対値の2乗は、ビーム強度の横方向(シフト方向)の断面プロファイルに相当する。
【0065】
レーザ光源10の設計は、運動量表示の波動関数ξ(p)にしたがって行うことができる。実際に生成されるビームが、運動量表示の波動関数ξ(p)を満たすか否かは、直接測定することは困難である。そこでビーム強度の軸方向のプロファイルを測定し、座標表示の波動関数ξ(q)の絶対値の2乗と比較することにより、最適なビームが生成されているかを確認できる。
【0066】
レーザービームを整形する技術は、最近では研究室レベルで標準的になりつつある。したがって、測定器の波動関数ξ(p)あるいはξ(q)を、弱値AWに応じて最適なプロファイルとすることは十分に可能である。したがって、本発明は、微弱な信号の増幅一般に広汎な応用が期待される。
【0067】
一例として増幅装置1は、重力波などきわめて微弱な信号の測定に利用することが期待される。
【0068】
以上、本発明について、実施の形態をもとに説明した。この実施の形態は例示であり、それらの各構成要素や各処理プロセスの組み合わせにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。以下、こうした変形例について説明する。
【0069】
増幅装置1の構成は、実施の形態で例示したものには限定されず、列挙した非特許文献に記載される構成を用いてもよいし、その他の構成を用いてもよく、つまりは弱値AWが理論的に予測可能な被測定系であれば任意のものを採用しうる。
【0070】
実施の形態にもとづき、具体的な用語を用いて本発明を説明したが、実施の形態は、本発明の原理、応用を示しているにすぎず、実施の形態には、請求の範囲に規定された本発明の思想を逸脱しない範囲において、多くの変形例や配置の変更が認められる。
【符号の説明】
【0071】
1…増幅装置、10…レーザ光源、12…干渉計、14…受光デバイス、PBS1…第1偏光ビームスプリッタ、PBS2…第2偏光ビームスプリッタ、M1…第1ミラー、M2…第2ミラー、M3…第3ミラー、M4…第4ミラー、BS1…第1ビームスプリッタ、BS2…第2ビームスプリッタ、BS3…第3ビームスプリッタ、SG…スライドガラス、PL…偏光板。
【特許請求の範囲】
【請求項1】
弱測定を利用した信号の増幅装置であって、
測定器と、
被測定系と、
を備え、
前記被測定系の観測量^Aを測定する際に、前記測定器と、初期状態が事前選択された被測定系を相互作用させ、次に前記被測定系の終状態を事後選択し、前記測定器の波動関数ξ(p)を用いて物理量の測定を行うよう構成され、
前記被測定系の量子状態の事前選択状態のケットベクトルを|i>、事後選択状態のケットベクトルを|f>とするとき、式(1)で与えられる弱値AWが既知であり、
AW=<f|^A|i>/<f|i> …(1)
前記測定器と前記被測定系の相互作用ハミルトニアンHが、前記測定器の運動量演算子^pおよび結合係数g(ただしg>0)を用いて式(2)で与えられ、
H=g・δ(t−t0)・^A・^p …(2)
かつ、^A2=1が成り立つときに、前記測定器は、その波動関数ξ(p)が運動量表示で実質的に式(3)となるように構成されていることを特徴とする増幅装置。
【数1】
【請求項2】
前記被測定系は、干渉計と、前記干渉計に光ビームを入射する光源と、を有し、
測定すべき前記信号は、前記干渉計に設けられた光学素子の微少な傾きであり、
本増幅装置は、前記傾きを、事後選択に対応して前記干渉計から出力される光ビームの横方向の変位に増幅し、
前記光源は、前記光ビームの波動関数が実質的に式(3)で表され、前記光ビームの断面の複素振幅の空間座標表示が、式(3)を逆フーリエ変換したものとなるように前記光ビームを生成することを特徴とする請求項1に記載の増幅装置。
【請求項1】
弱測定を利用した信号の増幅装置であって、
測定器と、
被測定系と、
を備え、
前記被測定系の観測量^Aを測定する際に、前記測定器と、初期状態が事前選択された被測定系を相互作用させ、次に前記被測定系の終状態を事後選択し、前記測定器の波動関数ξ(p)を用いて物理量の測定を行うよう構成され、
前記被測定系の量子状態の事前選択状態のケットベクトルを|i>、事後選択状態のケットベクトルを|f>とするとき、式(1)で与えられる弱値AWが既知であり、
AW=<f|^A|i>/<f|i> …(1)
前記測定器と前記被測定系の相互作用ハミルトニアンHが、前記測定器の運動量演算子^pおよび結合係数g(ただしg>0)を用いて式(2)で与えられ、
H=g・δ(t−t0)・^A・^p …(2)
かつ、^A2=1が成り立つときに、前記測定器は、その波動関数ξ(p)が運動量表示で実質的に式(3)となるように構成されていることを特徴とする増幅装置。
【数1】
【請求項2】
前記被測定系は、干渉計と、前記干渉計に光ビームを入射する光源と、を有し、
測定すべき前記信号は、前記干渉計に設けられた光学素子の微少な傾きであり、
本増幅装置は、前記傾きを、事後選択に対応して前記干渉計から出力される光ビームの横方向の変位に増幅し、
前記光源は、前記光ビームの波動関数が実質的に式(3)で表され、前記光ビームの断面の複素振幅の空間座標表示が、式(3)を逆フーリエ変換したものとなるように前記光ビームを生成することを特徴とする請求項1に記載の増幅装置。
【図1】

【図2】
【図3】
【図4】

【図2】
【図3】
【図4】
【公開番号】特開2013−108806(P2013−108806A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−253063(P2011−253063)
【出願日】平成23年11月18日(2011.11.18)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月18日(2011.11.18)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
[ Back to top ]