
強風時微動を利用した橋脚健全度評価方法
【課題】強風により橋脚の微動が大きくなることを利用して構造物の振動特性を推定することで、優れた健全性評価を行うことができる。
【解決手段】橋脚に取り付けた加速度センサより強風時微動を取得する工程と、強風時微動に基づいて累積スペクトルを算出する工程と、累積スペクトルに対して渦励振状の応答の有無を検出する工程と、渦励振状の応答を有する場合の卓越振動数に基づいて固有振動数を推定し、橋脚の健全度を評価する工程とを有し、橋脚に作用する外力特性を加速度センサの応答に基づいて振動特性を評価する強風時微動を利用した橋脚健全度評価方法を提供する。
【解決手段】橋脚に取り付けた加速度センサより強風時微動を取得する工程と、強風時微動に基づいて累積スペクトルを算出する工程と、累積スペクトルに対して渦励振状の応答の有無を検出する工程と、渦励振状の応答を有する場合の卓越振動数に基づいて固有振動数を推定し、橋脚の健全度を評価する工程とを有し、橋脚に作用する外力特性を加速度センサの応答に基づいて振動特性を評価する強風時微動を利用した橋脚健全度評価方法を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、強風時微動を利用した橋脚健全度評価方法に関する。
【背景技術】
【0002】
従来、鉄道構造物を効率よく維持管理するための性能規定型維持管理へ移行するに従い、性能を定量化する方法が重要であることが知られている。このような構造物性能の定量化方法として、上部構造物では、変位測定や応力測定により耐荷力や耐久性を評価する方法が実用化されており、下部構造物では、衝撃振動試験により固有振動数を評価する方法が実用化されている。しかし、健全度評価が必要となる河川の増水時に衝撃振動試験を行うことは、作業性が低下するなどの課題があり、また特別な設備が必要となることからコストがかかるといった課題が生じていた。
このため、増水時の微動を利用した橋脚健全度評価方法が、例えば特許文献1に提案されている。
【0003】
特許文献1には、増水時における橋脚の振動数を示す微動データに基づき、橋脚の卓越振動数を演算し、この卓越振動数から得た固有振動数を、予め測定しておいた橋脚の固有振動数と比較することで橋脚基礎の健全性を評価する健全性評価システムについて記載されている。
【0004】
また、橋脚天端の微動応答から橋脚の健全性を評価する方法があるが、性能評価方法として汎用化されていない。この原因として、微動応答はシグナルとノイズの比であるS/N比が低いため、感度がよく、センサ性能や測定環境で決まる自己ノイズの小さな高価なセンサを必要とすることがある。また、地震動や列車通過時の振動を計測するためには計測範囲を大きくとらなくてはいけないため、高帯域で高価なセンサを利用するか、或いはモニタリングの用途を限定せざるを得ない。
これに対して、上述した特許文献1の評価方法のように、増水時の橋脚の応答は大きくなることが知られており、また構造物の特性が明確に表れるため、比較的安価なセンサでも信頼性が高く、地震時の評価を併用する等、多機能なモニタリングシステムを構築することが可能となっている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−210335号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、橋脚の微動が大きくなる増水以外の要因としては、強風による影響が考えられている。しかしながら、強風によって長大橋や高層ビルの微動振動が大きくなることは良く知られているが、橋脚の微動応答が強風時に大きくなることはあまり知られていない。
また、ヘルスモニタリングの指標という観点から、ヘルスモニタリングでは、運転規制といったリアルタイムの警報に利用する目的以外にも、構造物の状態監視において指標の変化傾向を捉えることが考えられる。そのため、橋脚においても、指標の算出頻度は運用上重要であり、その点で強風は比較的頻繁に発生することから、その強風を利用した有効的な指標の算出方法が求められており、その点で改良の余地があった。
【0007】
本発明は、上述する問題点に鑑みてなされたもので、強風により橋脚の微動が大きくなることを利用して構造物の振動特性を推定することで、優れた健全性評価を行うことができる強風時微動を利用した橋脚健全度評価方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明に係る強風時微動を利用した橋脚健全度評価方法では、 橋脚に作用する外力特性を加速度センサの応答に基づいて振動特性を評価する強風時微動を利用した橋脚健全度評価方法であって、橋脚に取り付けた加速度センサより強風時微動を取得する工程と、強風時微動に基づいて累積スペクトルを算出する工程と、累積スペクトルに対して渦励振状の応答の有無を検出する工程と、渦励振状の応答を有する場合の卓越振動数に基づいて固有振動数を推定し、橋脚の健全度を評価する工程とを有することを特徴としている。
【0009】
本発明では、強風時に橋脚に作用する微動を加速度センサにより取得し、この強風時微動に対して累積スペクトルを算出し、この累積スペクトルの卓越振動数に基づいて固有振動数を推定して橋脚の健全度を評価することができる。このとき、取得した累積スペクトルに対して強風時に観測される特有の渦励振状の応答を判定し、その渦励振状有りが検出されたときに卓越振動数が得られ、その卓越振動数に基づいて固有振動数を推定することで、精度の高い健全度評価を行うことができる。
【0010】
このように、強風を利用して簡単な方法で固有振動数を求めることができる。
また、強風は比較的頻繁に発生するため、従来のような増水による健全度評価方法に比べて、健全度評価頻度を増やすことができるので、精度の高い解析を行うことが可能となる利点がある。
【0011】
また、本発明に係る強風時微動を利用した橋脚健全度評価方法では、強風時微動により算出した累積スペクトルにおいて、複数の卓越振動数の有無を検出し、卓越振動数が1つである場合には、累積スペクトルより固有振動数を推定し橋脚の健全度を評価し、又は、卓越振動数が複数有する場合には、累積スペクトルを減衰比の大きさに基づいて複数の領域に分割することが好ましい。
また、卓越振動数が複数有る場合には、分割された累積スペクトルに対して、それぞれ再度累積スペクトルを算出し、この累積スペクトルより固有振動数を推定し橋脚の健全度を評価することがより好ましい。
【0012】
本発明では、卓越振動数が複数検出された場合には、累積スペクトルを減衰比の大きさに基づいて適宜複数の領域に分割し、分割された領域ごとの累積スペクトルに対して再度累積スペクトルを算出することで、前記分割領域において卓越振動数を1つにすることができる。そして、この1つの卓越振動数に基づいて固有振動数を推定することが可能となるので、精度の高い健全度評価を行うことができる。
【発明の効果】
【0013】
本発明の強風時微動を利用した橋脚健全度評価方法によれば、強風により橋脚の微動が大きくなることを利用して構造物の振動特性を推定することで、優れた健全性評価を行うことができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態による強風時微動を利用した橋脚健全度評価方法の動作フローを示す図である。
【図2】実施例による橋脚健全度評価方法を実施するための橋脚における計測対象を示す図である。
【図3】図2において、加速度センサの設置状態を示す拡大図である。
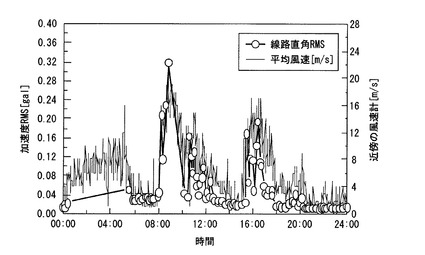
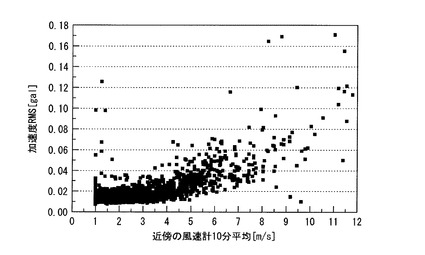
【図4】実施例による橋脚健全度評価方法を説明するための図であって、A橋における加速度RMSと風速の関係の一例を示すグラフである。
【図5】実施例による橋脚健全度評価方法を説明するための図であって、A橋における加速度RMSと風速の関係の一例を示すグラフである。
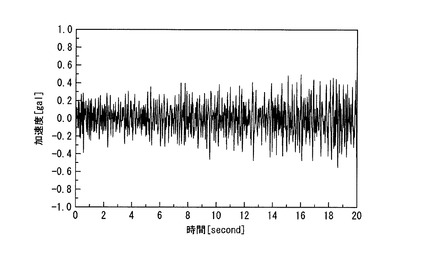
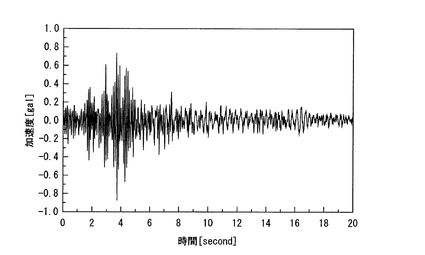
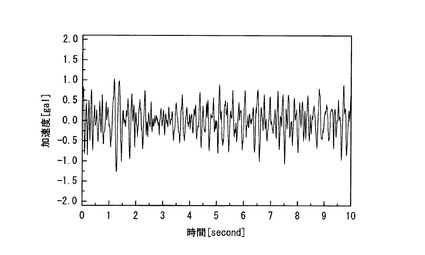
【図6】実施例による橋脚健全度評価方法を説明するための図であって、A橋における強風時の微動波形の一例を示すグラフである。
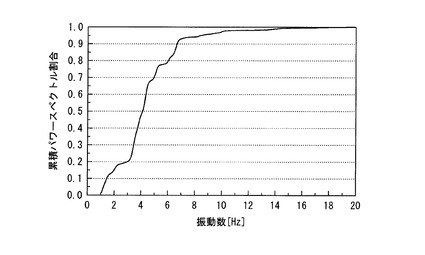
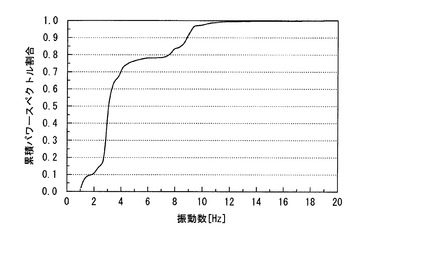
【図7】実施例による橋脚健全度評価方法を説明するための図であって、A橋におけるパワースペクトルの一例を示すグラフである。
【図8】実施例による橋脚健全度評価方法を説明するための図であって、B橋における強風時の微動波形の一例を示すグラフである。
【図9】実施例による橋脚健全度評価方法を説明するための図であって、B橋におけるパワースペクトルの一例を示すグラフである。
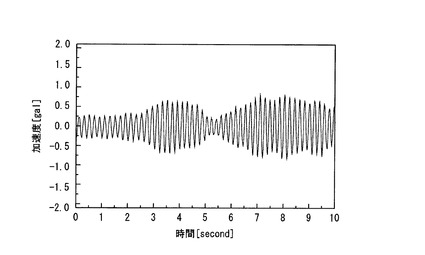
【図10】実施例による橋脚健全度評価方法を説明するための図であって、B橋における渦励振状の応答波形の一例を示すグラフである。
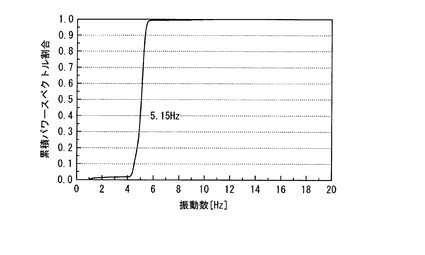
【図11】実施例による橋脚健全度評価方法を説明するための図であって、B橋における累積スペクトルの一例を示すグラフである。
【図12】実施例による橋脚健全度評価方法を説明するための図であって、A橋における渦励振状の応答波形の一例を示すグラフである。
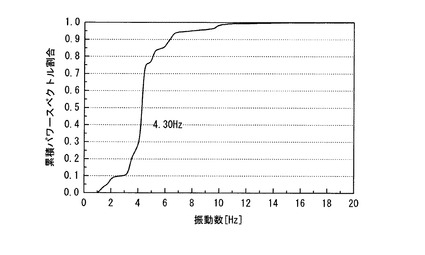
【図13】実施例による橋脚健全度評価方法を説明するための図であって、A橋における累積スペクトルの一例を示すグラフである。
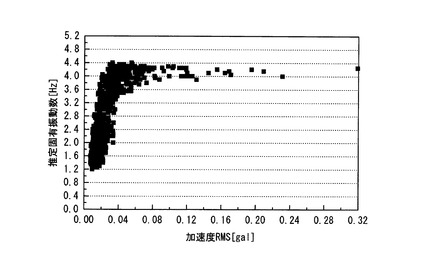
【図14】実施例による橋脚健全度評価方法を説明するための図であって、A橋における固有振動数の推定を示すグラフである。
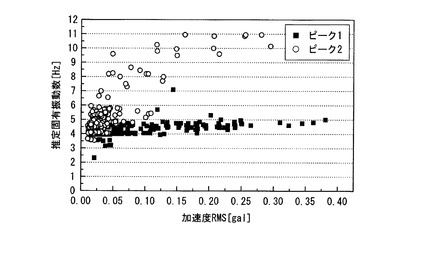
【図15】実施例による橋脚健全度評価方法を説明するための図であって、B橋における固有振動数の推定を示すグラフである。
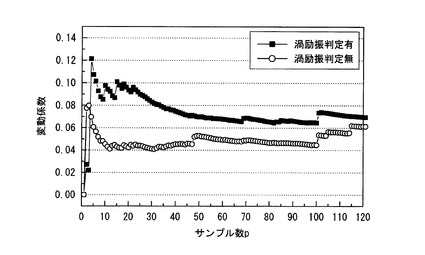
【図16】実施例による橋脚健全度評価方法を説明するための図であって、評価基準選定のためのサンプル数Mの決定例を示すグラフである。
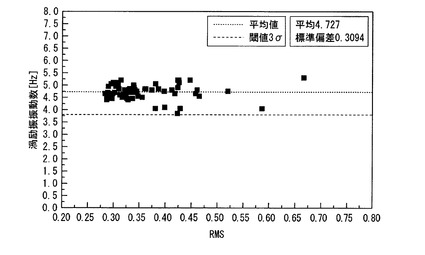
【図17】実施例による橋脚健全度評価方法を説明するための図であって、渦励振状振動が無い場合の性能評価を示すグラフである。
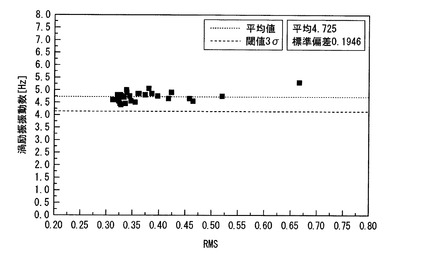
【図18】実施例による橋脚健全度評価方法を説明するための図であって、渦励振状振動が有り場合の性能評価を示すグラフである。
【発明を実施するための形態】
【0015】
以下、本発明による強風時微動を利用した橋脚健全度評価方法の実施の形態について、図面に基づいて説明する。
【0016】
図1に示すように、本実施の形態による強風時微動を利用した橋脚健全度評価方法は、強風時微動を利用した橋脚健全度評価方法では、橋脚(図2参照)に作用する外力特性を加速度センサの応答に基づいて振動特性を評価するものである。
ここで、本実施の形態による橋脚は、河川の内外に関係なく設けられるものを対象としている。加速度センサは、橋脚の上部の適宜な位置に取り付けられている。
なお、本実施の形態で強風とは、例えば10m/s以上の風速を対象としている。
【0017】
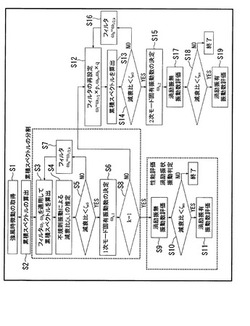
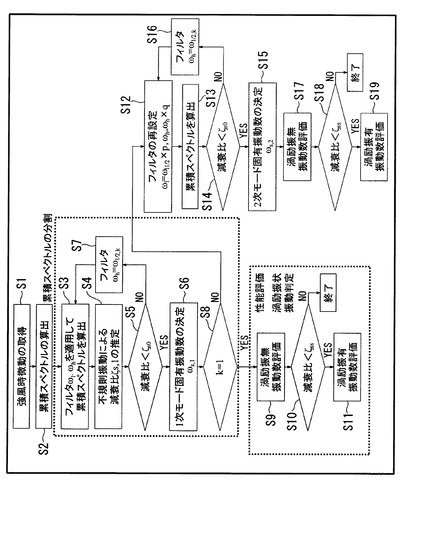
図1に示すように、橋脚健全度評価方法は、先ずステップS1で橋脚に取り付けた加速度センサより強風時微動を取得する。次いで、ステップS2において、取得した強風時微動に対して累積スペクトルを算出する。そして、フィルタω1、ωhを適用して累積スペクトルを算出し(ステップS3)、不規則振動による減衰比ζS,1を推定し(ステップS4)、ステップS5において、このζS,1がζS0より小さい場合(ステップS5:YES)にはステップS6へ進み、ζS,1がζS0より大きい場合(ステップS5:NO)にはステップS7へ進む。そして、ステップS6では1次固有振動数ωs,1が決定され、ステップS8へ進む。また、ステップS7ではフィルタωh=ω1/2、kを適用し、ステップS3へ戻る。
【0018】
その後、ステップS8で、累積スペクトルにおいて複数の卓越振動数の有無を検出し、その卓越振動数が複数有する場合(k≠1、ステップS8:NO)にはステップS12へ進む。また、卓越振動数が1つである場合(k=1、ステップS8:YES)には、ステップS9へ進む。
【0019】
次いで、ステップS9〜S11において、卓越振動数が1つである場合には、累積スペクトルより固有振動数を推定し橋脚の健全度が評価される。つまり、渦励振状の応答の振動判定が行われ、ステップS10で累積スペクトルに対して渦励振状の応答(減衰比<ζSS)の有無を検出し、渦励振状の応答を有する場合(ステップS10:YES)にステップS11へ進んで固有振動数が推定され、橋脚の健全度が評価される。そして、ステップS10において、渦励振状の応答が無い場合(ステップS10:NO)には、動作フローが終了となる。
【0020】
また、卓越振動数が複数有る場合には、ステップS12〜S19において、分割された累積スペクトルを減衰日の大きさに基づいて複数の領域に分割し、分割された領域ごとの累積スペクトルに対して再度累積スペクトルを算出し、この分割領域において卓越振動数を1つにすることができる。そして、この1つの卓越振動数に基づいて固有振動数を推定することができ、精度の高い健全度評価を行うことができる。
【0021】
次に、強風時の振動特性の推定方法について、さらに詳細に説明する。
【0022】
(振動特性推定のための累積スペクトルの分割)
ここで、微動応答から固有振動数を推定する方法として、不規則振動理論を利用する方法(「不規則外力に対する加速度記録からの最大応答変位推定」阿部 雅人、藤野 陽三、土木学会論文集A、Vol.66、No.3、pp.477−490(2010))を採用する。この手法では、(1)式および(2)式により強風時微動に対して応答加速度の累積スペクトルを算出し(ステップS2)、固有振動数と減衰比を求める。
【0023】
【数1】

【0024】
ここで、ωは外力の角振動数であり、ωlおよびωhは外力特性やセンサ性能等から決まるバンドパスフィルタであり、累積スペクトルの形状から適宜決定される。この場合、(3)式に基づく正規化を利用すれば、フィルタを適用する場合の誤差を消去することができる。
さらに、構造物の固有振動数ωsと減衰比ζSは、(3)式の四分位点からそれぞれ(4)式、(5)式により求めることができる。
【0025】
【数2】
【0026】
【数3】
【0027】
ここで、風を外力とした応答は、通常ガスト応答となり、応答加速度のパワースペクトルに複数の卓越振動数が見られる場合がある。その場合は、そのまま手法を適用すると振動数の推定精度を確保できないが、図1に示すように、減衰比が大きくなるため、減衰比の大きさにより応答スペクトルを分割し、モードごとの振動数を推定する。
【0028】
(性能評価方法)
風により構造物が振動する場合、風速が大きくなれば振幅が大きくなることが考えられる。このときの振幅の大きさは、微動波形のRMSの大きさにより評価することができる。
また、ある限定的な風速が生じれば、渦励振を生じ、孤立峰的な応答(lock−in現象)を示し、大きな振幅が生じると想定される。これは、「構造物の耐風工学」、日本鋼構造協会編、東京電機大学出版局や、「耐風設計の豆知識」久保喜延、橋梁と基礎89−8や、「風による構造物の振動」、伊藤学、土木学会論文集第362号/I−4、1985.10に記載されている。
【0029】
渦励振は鈍い物体周りの流体のはく離から生じるが、物体周りの流れの状態は、(6)式のレイノルズ数により決まる。
ここで、Uは風速であり、νは動粘性係数であり、Dは物体の代表長により特徴づけられている。そして、Re数がある大きさ以上になると、カルマン渦が生じ、渦励振が生じるが、その時の構造物の振動数の特性は(7)式となる。
【0030】
【数4】
【0031】
【数5】
【0032】
ここで、Stはストローハル数と呼ばれ、物体の断面形状およびRe数により決まる値である。
渦励振が生じれば、ある振動数が卓越し、累積スペクトルから固有振動数を安定して推定できる。また、センサの分解能が十分ではない場合は、小さな微動応答ではS/N比が低く、推定精度を確保することができない。そのため、推定精度は振幅の大きさと減衰比の大きさ(渦励振が生じているか否か)により評価することができる。
そこで、加速度微動波形でk=1,2,…,Nが得られたとして、推定したωs,kをζS,kと(8)式に示す標準偏差σkとを利用して評価する。
【0033】
【数6】
【0034】
σkの大きい方からωs,kをM個抽出し、大きい順からp=1,…Mとする。 このMは、例えば変動係数の値から(9)式のように決めることができる。
ここで、m0は、変動係数が安定して得られる最低のサンプル数である。
ただし、Mは、実用的な観点から検討して決定する。性能評価における異常値判定は、(10)式の条件で決めることができる。
【0035】
【数7】
【0036】
【数8】
【0037】
なお、統計的には正規分布を仮定すれば、両側1%有意水準となる。
さらに、渦励振判定を(11)式のように行い、渦励振有と判定された結果のみで(10)式の評価を行う。この場合はより精度の良い評価となるが、渦励振の発生頻度が低くなるため、判定までに要する時間は長くなる。
なお、ここで、減衰比ζSSは、波形等を確認して決める定数である。
【0038】
【数9】
【0039】
次に、上述した強風時微動を利用した橋脚健全度評価方法の作用について、詳細に説明する。
本実施の形態の橋脚健全度評価方法では、強風時に橋脚に作用する微動を加速度センサにより取得し、この強風時微動に対して累積スペクトルを算出し、この累積スペクトルの卓越振動数に基づいて固有振動数を推定して橋脚の健全度を評価することができる。このとき、取得した累積スペクトルに対して強風時に観測される特有の渦励振状の応答を判定し、その渦励振状有りが検出されたときに卓越振動数が得られ、その卓越振動数に基づいて固有振動数を推定することで、精度の高い健全度評価を行うことができる。
【0040】
このように、強風を利用して簡単な方法で固有振動数を求めることができる。
また、強風は比較的頻繁に発生するため、従来のような増水による健全度評価方法に比べて、健全度評価頻度を増やすことができるので、精度の高い解析を行うことが可能となる利点がある。
【0041】
しかも、卓越振動数が複数検出された場合には、累積スペクトルを減衰比の大きさに基づいて適宜複数の領域に分割し、分割された領域ごとの累積スペクトルに対して再度累積スペクトルを算出することで、前記分割領域において卓越振動数を1つにすることができる。そして、この1つの卓越振動数に基づいて固有振動数を推定することが可能となるので、精度の高い健全度評価を行うことができる。
【0042】
上述した実施の形態による強風時微動を利用した橋脚健全度評価方法では、強風により橋脚の微動が大きくなることを利用して構造物の振動特性を推定することで、優れた健全性評価を行うことができる。
【0043】
次に、上述した実施の形態による強風時微動を利用した橋脚健全度評価方法の効果を裏付けるために行った実施例について以下説明する。
【0044】
先ず、本実施例では、実橋脚の振動計測を行った。
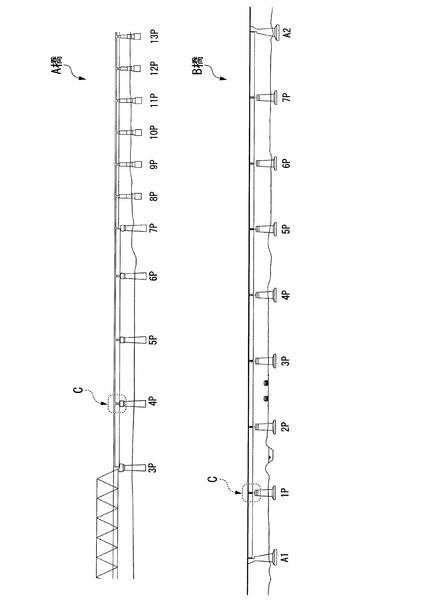
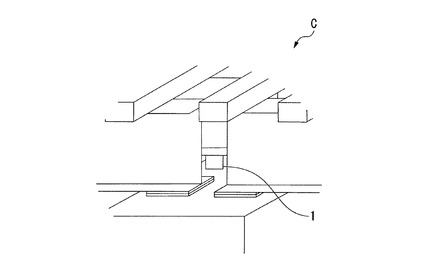
図2に示すように、橋脚天端の加速度応答を、表1に示すサーボ型の3軸加速度センサにより長期間計測した。
観測した橋脚は、図2で上段に示す築1年程度のA橋(図2で符号3P〜13Pの橋脚)と、下段に示す築2年程度のB橋(図2で符号A1、A2、1P〜7Pの橋脚)を計測対象とした。そして、図4および図5に示す加速度センサ1の計測では、列車通過や地震による5Gal以上の加速度応答をトリガーとし120秒間計測した。微動応答は、波形の最後の20秒間のデータを利用した。
【0045】
【表1】
【0046】
なお、微動応答と列車通過時の応答は明らかに相違するので、徐行等により列車が混じっている波形は除外している。風速データに関しては、可能な限り近傍にある風速計による応答を利用しているが、同期計測については行っていない。
図6〜図9に示すように、風速(1分毎との風速値を10分毎に平均したもの)と橋脚の線路直角方向の微動RMSには相関があることがわかる。微動応答のスペクトルを示すがガスト応答となっており、複数のピークが生じていることがわかる。
【0047】
次に、橋脚における渦励振状応答の観測を行った。
図10および図11に示すように、微動応答の中には渦励振状の応答が見られ、生じた時間帯では11m/s程度の風速が観測され、スペクトルからは卓越振動数は5.15Hzであることがわかる。
【0048】
A橋においても図12、図13に示すようなB橋ほど明確ではないが、渦励振状の応答が確認でき、卓越振動数が4.30Hzであることがわかった。この時の風速は21m/sである。
本計測では、風速と振動の同期計測を行っていないため、実際の現地での風速は不明であるが、近傍の風速計の値からは表2のようにDは算定される。なお、ストローハル数Stは0.2としている。この結果では、物体の代表長さは橋脚の直径や橋桁の桁高よりも小さい値となっており、橋側歩道等の付帯物との連成している可能性も考えられる。
【0049】
【表2】
【0050】
次いで、固有振動数の推定結果について説明する。
微動応答を利用した固有振動数の推定結果をA橋とB橋について示す。なお、B橋については、分割による同定結果も示した。図14および図15は、横軸をRMSを示し、縦軸に推定固有振動数を示している。図14および図15に示すように、微動が大きい場合には、固有振動数が安定して得られていることが確認できる。この場合は、渦励振状の応答が確認できるため、真の固有振動数に近いものと考えられる。また、分割を行った場合は、高次の振動数についても同定することが可能となることがわかった。
【0051】
以下、B橋を例に性能評価結果を示すが、本手法により性能評価を行うためには、上記(9)式のMの値を決定する必要がある。図16には、RMSが大きい順に並べ替え、サンプル数pを増やしていった場合の推定固有振動数の変動係数の変化を示している。
この結果から、Mは70、渦励振判定の場合のMは30としている。なお、衝撃振動試験の評価基準では固有振動数が15%程度低下した場合を異常としており、本手法では3σの基準は低下率が20%(渦励振有12%)である。
それぞれ平均と標準偏差を求めると、図17および図18のようにしきい値を設定できる。渦励振判定を含めた評価により、より精度の良い評価が可能となる。しきい値以下に低下した場合は何らかの確認を行うことになる。
【0052】
以上、本発明による強風時微動を利用した橋脚健全度評価方法の実施の形態について説明したが、本発明は上記の実施の形態に限定されるものではなく、その趣旨を逸脱しない範囲で適宜変更可能である。
例えば、本実施の形態では取得した累積スペクトルに対して卓越振動数が複数有する場合に累積スペクトルを減衰比の大きさに基づいて複数の領域に分割する方法としているが、このように分割する動作フローを設ける方法とすることに限定されることはなく、省略することも可能である。
【0053】
その他、本発明の趣旨を逸脱しない範囲で、上記した実施の形態における構成要素を周知の構成要素に置き換えることは適宜可能である。
【技術分野】
【0001】
本発明は、強風時微動を利用した橋脚健全度評価方法に関する。
【背景技術】
【0002】
従来、鉄道構造物を効率よく維持管理するための性能規定型維持管理へ移行するに従い、性能を定量化する方法が重要であることが知られている。このような構造物性能の定量化方法として、上部構造物では、変位測定や応力測定により耐荷力や耐久性を評価する方法が実用化されており、下部構造物では、衝撃振動試験により固有振動数を評価する方法が実用化されている。しかし、健全度評価が必要となる河川の増水時に衝撃振動試験を行うことは、作業性が低下するなどの課題があり、また特別な設備が必要となることからコストがかかるといった課題が生じていた。
このため、増水時の微動を利用した橋脚健全度評価方法が、例えば特許文献1に提案されている。
【0003】
特許文献1には、増水時における橋脚の振動数を示す微動データに基づき、橋脚の卓越振動数を演算し、この卓越振動数から得た固有振動数を、予め測定しておいた橋脚の固有振動数と比較することで橋脚基礎の健全性を評価する健全性評価システムについて記載されている。
【0004】
また、橋脚天端の微動応答から橋脚の健全性を評価する方法があるが、性能評価方法として汎用化されていない。この原因として、微動応答はシグナルとノイズの比であるS/N比が低いため、感度がよく、センサ性能や測定環境で決まる自己ノイズの小さな高価なセンサを必要とすることがある。また、地震動や列車通過時の振動を計測するためには計測範囲を大きくとらなくてはいけないため、高帯域で高価なセンサを利用するか、或いはモニタリングの用途を限定せざるを得ない。
これに対して、上述した特許文献1の評価方法のように、増水時の橋脚の応答は大きくなることが知られており、また構造物の特性が明確に表れるため、比較的安価なセンサでも信頼性が高く、地震時の評価を併用する等、多機能なモニタリングシステムを構築することが可能となっている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−210335号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、橋脚の微動が大きくなる増水以外の要因としては、強風による影響が考えられている。しかしながら、強風によって長大橋や高層ビルの微動振動が大きくなることは良く知られているが、橋脚の微動応答が強風時に大きくなることはあまり知られていない。
また、ヘルスモニタリングの指標という観点から、ヘルスモニタリングでは、運転規制といったリアルタイムの警報に利用する目的以外にも、構造物の状態監視において指標の変化傾向を捉えることが考えられる。そのため、橋脚においても、指標の算出頻度は運用上重要であり、その点で強風は比較的頻繁に発生することから、その強風を利用した有効的な指標の算出方法が求められており、その点で改良の余地があった。
【0007】
本発明は、上述する問題点に鑑みてなされたもので、強風により橋脚の微動が大きくなることを利用して構造物の振動特性を推定することで、優れた健全性評価を行うことができる強風時微動を利用した橋脚健全度評価方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明に係る強風時微動を利用した橋脚健全度評価方法では、 橋脚に作用する外力特性を加速度センサの応答に基づいて振動特性を評価する強風時微動を利用した橋脚健全度評価方法であって、橋脚に取り付けた加速度センサより強風時微動を取得する工程と、強風時微動に基づいて累積スペクトルを算出する工程と、累積スペクトルに対して渦励振状の応答の有無を検出する工程と、渦励振状の応答を有する場合の卓越振動数に基づいて固有振動数を推定し、橋脚の健全度を評価する工程とを有することを特徴としている。
【0009】
本発明では、強風時に橋脚に作用する微動を加速度センサにより取得し、この強風時微動に対して累積スペクトルを算出し、この累積スペクトルの卓越振動数に基づいて固有振動数を推定して橋脚の健全度を評価することができる。このとき、取得した累積スペクトルに対して強風時に観測される特有の渦励振状の応答を判定し、その渦励振状有りが検出されたときに卓越振動数が得られ、その卓越振動数に基づいて固有振動数を推定することで、精度の高い健全度評価を行うことができる。
【0010】
このように、強風を利用して簡単な方法で固有振動数を求めることができる。
また、強風は比較的頻繁に発生するため、従来のような増水による健全度評価方法に比べて、健全度評価頻度を増やすことができるので、精度の高い解析を行うことが可能となる利点がある。
【0011】
また、本発明に係る強風時微動を利用した橋脚健全度評価方法では、強風時微動により算出した累積スペクトルにおいて、複数の卓越振動数の有無を検出し、卓越振動数が1つである場合には、累積スペクトルより固有振動数を推定し橋脚の健全度を評価し、又は、卓越振動数が複数有する場合には、累積スペクトルを減衰比の大きさに基づいて複数の領域に分割することが好ましい。
また、卓越振動数が複数有る場合には、分割された累積スペクトルに対して、それぞれ再度累積スペクトルを算出し、この累積スペクトルより固有振動数を推定し橋脚の健全度を評価することがより好ましい。
【0012】
本発明では、卓越振動数が複数検出された場合には、累積スペクトルを減衰比の大きさに基づいて適宜複数の領域に分割し、分割された領域ごとの累積スペクトルに対して再度累積スペクトルを算出することで、前記分割領域において卓越振動数を1つにすることができる。そして、この1つの卓越振動数に基づいて固有振動数を推定することが可能となるので、精度の高い健全度評価を行うことができる。
【発明の効果】
【0013】
本発明の強風時微動を利用した橋脚健全度評価方法によれば、強風により橋脚の微動が大きくなることを利用して構造物の振動特性を推定することで、優れた健全性評価を行うことができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態による強風時微動を利用した橋脚健全度評価方法の動作フローを示す図である。
【図2】実施例による橋脚健全度評価方法を実施するための橋脚における計測対象を示す図である。
【図3】図2において、加速度センサの設置状態を示す拡大図である。
【図4】実施例による橋脚健全度評価方法を説明するための図であって、A橋における加速度RMSと風速の関係の一例を示すグラフである。
【図5】実施例による橋脚健全度評価方法を説明するための図であって、A橋における加速度RMSと風速の関係の一例を示すグラフである。
【図6】実施例による橋脚健全度評価方法を説明するための図であって、A橋における強風時の微動波形の一例を示すグラフである。
【図7】実施例による橋脚健全度評価方法を説明するための図であって、A橋におけるパワースペクトルの一例を示すグラフである。
【図8】実施例による橋脚健全度評価方法を説明するための図であって、B橋における強風時の微動波形の一例を示すグラフである。
【図9】実施例による橋脚健全度評価方法を説明するための図であって、B橋におけるパワースペクトルの一例を示すグラフである。
【図10】実施例による橋脚健全度評価方法を説明するための図であって、B橋における渦励振状の応答波形の一例を示すグラフである。
【図11】実施例による橋脚健全度評価方法を説明するための図であって、B橋における累積スペクトルの一例を示すグラフである。
【図12】実施例による橋脚健全度評価方法を説明するための図であって、A橋における渦励振状の応答波形の一例を示すグラフである。
【図13】実施例による橋脚健全度評価方法を説明するための図であって、A橋における累積スペクトルの一例を示すグラフである。
【図14】実施例による橋脚健全度評価方法を説明するための図であって、A橋における固有振動数の推定を示すグラフである。
【図15】実施例による橋脚健全度評価方法を説明するための図であって、B橋における固有振動数の推定を示すグラフである。
【図16】実施例による橋脚健全度評価方法を説明するための図であって、評価基準選定のためのサンプル数Mの決定例を示すグラフである。
【図17】実施例による橋脚健全度評価方法を説明するための図であって、渦励振状振動が無い場合の性能評価を示すグラフである。
【図18】実施例による橋脚健全度評価方法を説明するための図であって、渦励振状振動が有り場合の性能評価を示すグラフである。
【発明を実施するための形態】
【0015】
以下、本発明による強風時微動を利用した橋脚健全度評価方法の実施の形態について、図面に基づいて説明する。
【0016】
図1に示すように、本実施の形態による強風時微動を利用した橋脚健全度評価方法は、強風時微動を利用した橋脚健全度評価方法では、橋脚(図2参照)に作用する外力特性を加速度センサの応答に基づいて振動特性を評価するものである。
ここで、本実施の形態による橋脚は、河川の内外に関係なく設けられるものを対象としている。加速度センサは、橋脚の上部の適宜な位置に取り付けられている。
なお、本実施の形態で強風とは、例えば10m/s以上の風速を対象としている。
【0017】
図1に示すように、橋脚健全度評価方法は、先ずステップS1で橋脚に取り付けた加速度センサより強風時微動を取得する。次いで、ステップS2において、取得した強風時微動に対して累積スペクトルを算出する。そして、フィルタω1、ωhを適用して累積スペクトルを算出し(ステップS3)、不規則振動による減衰比ζS,1を推定し(ステップS4)、ステップS5において、このζS,1がζS0より小さい場合(ステップS5:YES)にはステップS6へ進み、ζS,1がζS0より大きい場合(ステップS5:NO)にはステップS7へ進む。そして、ステップS6では1次固有振動数ωs,1が決定され、ステップS8へ進む。また、ステップS7ではフィルタωh=ω1/2、kを適用し、ステップS3へ戻る。
【0018】
その後、ステップS8で、累積スペクトルにおいて複数の卓越振動数の有無を検出し、その卓越振動数が複数有する場合(k≠1、ステップS8:NO)にはステップS12へ進む。また、卓越振動数が1つである場合(k=1、ステップS8:YES)には、ステップS9へ進む。
【0019】
次いで、ステップS9〜S11において、卓越振動数が1つである場合には、累積スペクトルより固有振動数を推定し橋脚の健全度が評価される。つまり、渦励振状の応答の振動判定が行われ、ステップS10で累積スペクトルに対して渦励振状の応答(減衰比<ζSS)の有無を検出し、渦励振状の応答を有する場合(ステップS10:YES)にステップS11へ進んで固有振動数が推定され、橋脚の健全度が評価される。そして、ステップS10において、渦励振状の応答が無い場合(ステップS10:NO)には、動作フローが終了となる。
【0020】
また、卓越振動数が複数有る場合には、ステップS12〜S19において、分割された累積スペクトルを減衰日の大きさに基づいて複数の領域に分割し、分割された領域ごとの累積スペクトルに対して再度累積スペクトルを算出し、この分割領域において卓越振動数を1つにすることができる。そして、この1つの卓越振動数に基づいて固有振動数を推定することができ、精度の高い健全度評価を行うことができる。
【0021】
次に、強風時の振動特性の推定方法について、さらに詳細に説明する。
【0022】
(振動特性推定のための累積スペクトルの分割)
ここで、微動応答から固有振動数を推定する方法として、不規則振動理論を利用する方法(「不規則外力に対する加速度記録からの最大応答変位推定」阿部 雅人、藤野 陽三、土木学会論文集A、Vol.66、No.3、pp.477−490(2010))を採用する。この手法では、(1)式および(2)式により強風時微動に対して応答加速度の累積スペクトルを算出し(ステップS2)、固有振動数と減衰比を求める。
【0023】
【数1】
【0024】
ここで、ωは外力の角振動数であり、ωlおよびωhは外力特性やセンサ性能等から決まるバンドパスフィルタであり、累積スペクトルの形状から適宜決定される。この場合、(3)式に基づく正規化を利用すれば、フィルタを適用する場合の誤差を消去することができる。
さらに、構造物の固有振動数ωsと減衰比ζSは、(3)式の四分位点からそれぞれ(4)式、(5)式により求めることができる。
【0025】
【数2】
【0026】
【数3】
【0027】
ここで、風を外力とした応答は、通常ガスト応答となり、応答加速度のパワースペクトルに複数の卓越振動数が見られる場合がある。その場合は、そのまま手法を適用すると振動数の推定精度を確保できないが、図1に示すように、減衰比が大きくなるため、減衰比の大きさにより応答スペクトルを分割し、モードごとの振動数を推定する。
【0028】
(性能評価方法)
風により構造物が振動する場合、風速が大きくなれば振幅が大きくなることが考えられる。このときの振幅の大きさは、微動波形のRMSの大きさにより評価することができる。
また、ある限定的な風速が生じれば、渦励振を生じ、孤立峰的な応答(lock−in現象)を示し、大きな振幅が生じると想定される。これは、「構造物の耐風工学」、日本鋼構造協会編、東京電機大学出版局や、「耐風設計の豆知識」久保喜延、橋梁と基礎89−8や、「風による構造物の振動」、伊藤学、土木学会論文集第362号/I−4、1985.10に記載されている。
【0029】
渦励振は鈍い物体周りの流体のはく離から生じるが、物体周りの流れの状態は、(6)式のレイノルズ数により決まる。
ここで、Uは風速であり、νは動粘性係数であり、Dは物体の代表長により特徴づけられている。そして、Re数がある大きさ以上になると、カルマン渦が生じ、渦励振が生じるが、その時の構造物の振動数の特性は(7)式となる。
【0030】
【数4】
【0031】
【数5】
【0032】
ここで、Stはストローハル数と呼ばれ、物体の断面形状およびRe数により決まる値である。
渦励振が生じれば、ある振動数が卓越し、累積スペクトルから固有振動数を安定して推定できる。また、センサの分解能が十分ではない場合は、小さな微動応答ではS/N比が低く、推定精度を確保することができない。そのため、推定精度は振幅の大きさと減衰比の大きさ(渦励振が生じているか否か)により評価することができる。
そこで、加速度微動波形でk=1,2,…,Nが得られたとして、推定したωs,kをζS,kと(8)式に示す標準偏差σkとを利用して評価する。
【0033】
【数6】
【0034】
σkの大きい方からωs,kをM個抽出し、大きい順からp=1,…Mとする。 このMは、例えば変動係数の値から(9)式のように決めることができる。
ここで、m0は、変動係数が安定して得られる最低のサンプル数である。
ただし、Mは、実用的な観点から検討して決定する。性能評価における異常値判定は、(10)式の条件で決めることができる。
【0035】
【数7】
【0036】
【数8】
【0037】
なお、統計的には正規分布を仮定すれば、両側1%有意水準となる。
さらに、渦励振判定を(11)式のように行い、渦励振有と判定された結果のみで(10)式の評価を行う。この場合はより精度の良い評価となるが、渦励振の発生頻度が低くなるため、判定までに要する時間は長くなる。
なお、ここで、減衰比ζSSは、波形等を確認して決める定数である。
【0038】
【数9】
【0039】
次に、上述した強風時微動を利用した橋脚健全度評価方法の作用について、詳細に説明する。
本実施の形態の橋脚健全度評価方法では、強風時に橋脚に作用する微動を加速度センサにより取得し、この強風時微動に対して累積スペクトルを算出し、この累積スペクトルの卓越振動数に基づいて固有振動数を推定して橋脚の健全度を評価することができる。このとき、取得した累積スペクトルに対して強風時に観測される特有の渦励振状の応答を判定し、その渦励振状有りが検出されたときに卓越振動数が得られ、その卓越振動数に基づいて固有振動数を推定することで、精度の高い健全度評価を行うことができる。
【0040】
このように、強風を利用して簡単な方法で固有振動数を求めることができる。
また、強風は比較的頻繁に発生するため、従来のような増水による健全度評価方法に比べて、健全度評価頻度を増やすことができるので、精度の高い解析を行うことが可能となる利点がある。
【0041】
しかも、卓越振動数が複数検出された場合には、累積スペクトルを減衰比の大きさに基づいて適宜複数の領域に分割し、分割された領域ごとの累積スペクトルに対して再度累積スペクトルを算出することで、前記分割領域において卓越振動数を1つにすることができる。そして、この1つの卓越振動数に基づいて固有振動数を推定することが可能となるので、精度の高い健全度評価を行うことができる。
【0042】
上述した実施の形態による強風時微動を利用した橋脚健全度評価方法では、強風により橋脚の微動が大きくなることを利用して構造物の振動特性を推定することで、優れた健全性評価を行うことができる。
【0043】
次に、上述した実施の形態による強風時微動を利用した橋脚健全度評価方法の効果を裏付けるために行った実施例について以下説明する。
【0044】
先ず、本実施例では、実橋脚の振動計測を行った。
図2に示すように、橋脚天端の加速度応答を、表1に示すサーボ型の3軸加速度センサにより長期間計測した。
観測した橋脚は、図2で上段に示す築1年程度のA橋(図2で符号3P〜13Pの橋脚)と、下段に示す築2年程度のB橋(図2で符号A1、A2、1P〜7Pの橋脚)を計測対象とした。そして、図4および図5に示す加速度センサ1の計測では、列車通過や地震による5Gal以上の加速度応答をトリガーとし120秒間計測した。微動応答は、波形の最後の20秒間のデータを利用した。
【0045】
【表1】
【0046】
なお、微動応答と列車通過時の応答は明らかに相違するので、徐行等により列車が混じっている波形は除外している。風速データに関しては、可能な限り近傍にある風速計による応答を利用しているが、同期計測については行っていない。
図6〜図9に示すように、風速(1分毎との風速値を10分毎に平均したもの)と橋脚の線路直角方向の微動RMSには相関があることがわかる。微動応答のスペクトルを示すがガスト応答となっており、複数のピークが生じていることがわかる。
【0047】
次に、橋脚における渦励振状応答の観測を行った。
図10および図11に示すように、微動応答の中には渦励振状の応答が見られ、生じた時間帯では11m/s程度の風速が観測され、スペクトルからは卓越振動数は5.15Hzであることがわかる。
【0048】
A橋においても図12、図13に示すようなB橋ほど明確ではないが、渦励振状の応答が確認でき、卓越振動数が4.30Hzであることがわかった。この時の風速は21m/sである。
本計測では、風速と振動の同期計測を行っていないため、実際の現地での風速は不明であるが、近傍の風速計の値からは表2のようにDは算定される。なお、ストローハル数Stは0.2としている。この結果では、物体の代表長さは橋脚の直径や橋桁の桁高よりも小さい値となっており、橋側歩道等の付帯物との連成している可能性も考えられる。
【0049】
【表2】
【0050】
次いで、固有振動数の推定結果について説明する。
微動応答を利用した固有振動数の推定結果をA橋とB橋について示す。なお、B橋については、分割による同定結果も示した。図14および図15は、横軸をRMSを示し、縦軸に推定固有振動数を示している。図14および図15に示すように、微動が大きい場合には、固有振動数が安定して得られていることが確認できる。この場合は、渦励振状の応答が確認できるため、真の固有振動数に近いものと考えられる。また、分割を行った場合は、高次の振動数についても同定することが可能となることがわかった。
【0051】
以下、B橋を例に性能評価結果を示すが、本手法により性能評価を行うためには、上記(9)式のMの値を決定する必要がある。図16には、RMSが大きい順に並べ替え、サンプル数pを増やしていった場合の推定固有振動数の変動係数の変化を示している。
この結果から、Mは70、渦励振判定の場合のMは30としている。なお、衝撃振動試験の評価基準では固有振動数が15%程度低下した場合を異常としており、本手法では3σの基準は低下率が20%(渦励振有12%)である。
それぞれ平均と標準偏差を求めると、図17および図18のようにしきい値を設定できる。渦励振判定を含めた評価により、より精度の良い評価が可能となる。しきい値以下に低下した場合は何らかの確認を行うことになる。
【0052】
以上、本発明による強風時微動を利用した橋脚健全度評価方法の実施の形態について説明したが、本発明は上記の実施の形態に限定されるものではなく、その趣旨を逸脱しない範囲で適宜変更可能である。
例えば、本実施の形態では取得した累積スペクトルに対して卓越振動数が複数有する場合に累積スペクトルを減衰比の大きさに基づいて複数の領域に分割する方法としているが、このように分割する動作フローを設ける方法とすることに限定されることはなく、省略することも可能である。
【0053】
その他、本発明の趣旨を逸脱しない範囲で、上記した実施の形態における構成要素を周知の構成要素に置き換えることは適宜可能である。
【特許請求の範囲】
【請求項1】
橋脚に作用する外力特性を加速度センサの応答に基づいて振動特性を評価する強風時微動を利用した橋脚健全度評価方法であって、
前記橋脚に取り付けた前記加速度センサより強風時微動を取得する工程と、
前記強風時微動に基づいて累積スペクトルを算出する工程と、
該累積スペクトルに対して渦励振状の応答の有無を検出する工程と、
該渦励振状の応答を有する場合の卓越振動数に基づいて固有振動数を推定し、前記橋脚の健全度を評価する工程と、
を有することを特徴とする強風時微動を利用した橋脚健全度評価方法。
【請求項2】
強風時微動により算出した前記累積スペクトルにおいて、複数の卓越振動数の有無を検出し、
前記卓越振動数が1つである場合には、前記累積スペクトルより固有振動数を推定し前記橋脚の健全度を評価し、
又は、前記卓越振動数が複数有する場合には、前記累積スペクトルを減衰比の大きさに基づいて複数の領域に分割するようにしたことを特徴とする請求項1に記載の強風時微動を利用した橋脚健全度評価方法。
【請求項3】
前記卓越振動数が複数有る場合には、分割された前記累積スペクトルに対して、それぞれ再度累積スペクトルを算出し、この累積スペクトルより固有振動数を推定し前記橋脚の健全度を評価することを特徴とする請求項2に記載の強風時微動を利用した橋脚健全度評価方法。
【請求項1】
橋脚に作用する外力特性を加速度センサの応答に基づいて振動特性を評価する強風時微動を利用した橋脚健全度評価方法であって、
前記橋脚に取り付けた前記加速度センサより強風時微動を取得する工程と、
前記強風時微動に基づいて累積スペクトルを算出する工程と、
該累積スペクトルに対して渦励振状の応答の有無を検出する工程と、
該渦励振状の応答を有する場合の卓越振動数に基づいて固有振動数を推定し、前記橋脚の健全度を評価する工程と、
を有することを特徴とする強風時微動を利用した橋脚健全度評価方法。
【請求項2】
強風時微動により算出した前記累積スペクトルにおいて、複数の卓越振動数の有無を検出し、
前記卓越振動数が1つである場合には、前記累積スペクトルより固有振動数を推定し前記橋脚の健全度を評価し、
又は、前記卓越振動数が複数有する場合には、前記累積スペクトルを減衰比の大きさに基づいて複数の領域に分割するようにしたことを特徴とする請求項1に記載の強風時微動を利用した橋脚健全度評価方法。
【請求項3】
前記卓越振動数が複数有る場合には、分割された前記累積スペクトルに対して、それぞれ再度累積スペクトルを算出し、この累積スペクトルより固有振動数を推定し前記橋脚の健全度を評価することを特徴とする請求項2に記載の強風時微動を利用した橋脚健全度評価方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−242363(P2012−242363A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−116109(P2011−116109)
【出願日】平成23年5月24日(2011.5.24)
【出願人】(000221616)東日本旅客鉄道株式会社 (833)
【出願人】(596001173)株式会社ビーエムシー (4)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月24日(2011.5.24)
【出願人】(000221616)東日本旅客鉄道株式会社 (833)
【出願人】(596001173)株式会社ビーエムシー (4)
【Fターム(参考)】
[ Back to top ]