
弾性スリーブフィルムラベルを容器に装着する装置および方法
【課題】弾性スリーブフィルムラベルを容器に装着する装置であって、さまざまな容器サイズおよびフィルムタイプに適合させること。
【解決手段】スリーブフィルムラベルを伸ばす複数の伸張ユニット5と、スリーブフィルムラベルが装着された容器を取り出す複数の取り出しユニット7とが、ラベル装着カルーセル4の上に取り付けられている。さらに、伸張ユニットにスリーブフィルムラベルを装備させるラベルディスペンサ9が設けられている。取り出しユニットは把持ユニットを備えており、把持ユニットは、容器を把持するための把持位置と、ラベルディスペンサとの衝突を避けるための回避位置との間で、ラベル装着カルーセルに対して前後に移動させることができ、これにより、把持ユニットのサイズおよび形状を柔軟に設計することができる。さらには、ラベルディスペンサの領域における伸張ユニットの回避運動を省くことができる。
【解決手段】スリーブフィルムラベルを伸ばす複数の伸張ユニット5と、スリーブフィルムラベルが装着された容器を取り出す複数の取り出しユニット7とが、ラベル装着カルーセル4の上に取り付けられている。さらに、伸張ユニットにスリーブフィルムラベルを装備させるラベルディスペンサ9が設けられている。取り出しユニットは把持ユニットを備えており、把持ユニットは、容器を把持するための把持位置と、ラベルディスペンサとの衝突を避けるための回避位置との間で、ラベル装着カルーセルに対して前後に移動させることができ、これにより、把持ユニットのサイズおよび形状を柔軟に設計することができる。さらには、ラベルディスペンサの領域における伸張ユニットの回避運動を省くことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、請求項1のプリアンブルに記載されている、弾性スリーブフィルムラベルを容器に装着する装置と、本発明による装置を使用する対応する方法とに関する。
【背景技術】
【0002】
容器(例えば飲料用ボトル)にラベルを装着する1つの方法は、容器の外面に弾性スリーブフィルムラベルを引き込むことによる。これを目的として、特許文献1には、高弾性のスリーブラベルを装着する装置であって、中央の開口部の周囲に配置された互いに本質的に平行に延びる複数の伸張フィンガー(spreading fingers)を使用してスリーブラベルを広げることにより、ラベルを装着する容器を下から上昇させてスリーブラベルの中に入れる、装置、が記載されている。次いで、ラベルが装着された容器を、ボトルの口部の領域における把持ユニットによって伸張フィンガーから上方向に取り出すことができる。これを目的として、把持ユニットは、伸張フィンガーと一緒にラベル装着ホイール(labelling wheel)を中心に回転し、これによって、ラベルが装着された容器が伸張フィンガーから持ち上げられた後、容器を適切な排出ユニットに搬送することができる。スリーブラベルは、固定されているラベルディスペンサから伸張ユニットに引き込む。スリーブラベルができる限り高い信頼性で確実に伸張ユニットに送られるようにする目的で、ラベルディスペンサおよび伸張ユニットは、上から見たとき、ラベルディスペンサの領域において本質的にラベル装着ホイールの基準ピッチ円(common pitch circle)の上に配置されている。
【0003】
ラベルが装着された容器を取り出す把持ユニットも、本質的に伸張ユニットと同軸上に位置合わせされており、これに起因する問題として、固定されているラベルディスペンサと把持ユニットとの衝突を避けるため、大きな制約が生じる。例えば、ラベルディスペンサの内側に設けられている開口部を通るように把持ユニットをガイドする目的で、把持ユニットの垂直位置を限られた領域に制限しなければならない。この開口部は、例えばラベルディスペンサの送りローラの間の領域に位置している。さらには、把持ユニットに設けられている容器クランプ(container clamp)をラベルディスペンサの中央に延在するピンを通過させることができるように、これらの容器クランプを広げなければならない。結果として、把持ユニットおよび容器クランプのいずれも、極めて特定の容器タイプに合わせた寸法しかとることがでない、あるいは、別の容器タイプに切り替えるためには、装置レベルでの多大な変更が要求される。
【0004】
代替方法として、特許文献1では、把持ユニットがラベルディスペンサと衝突しないように、ラベルディスペンサを半径方向外側にオフセットさせることが提案されている。しかしながら、この結果として、外側にオフセットしたラベルディスペンサの下、その中央に伸張ユニットを駆動できるようにするため、機械的に複雑かつ重量のある伸張ユニットを、ラベルディスペンサの領域において、制御カムを用いて外側に駆動しなければならない。しかしながら、このような解決策は、装置レベルの極めて大きな変更およびそれに関連するコストが要求されるため、実用的ではない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】国際公開第2008/076718号
【発明の概要】
【0006】
したがって、弾性スリーブフィルムラベルを容器に装着する装置であって、さまざまな容器サイズおよびフィルムタイプに適合させることができ、装置レベルの変更が最小限であると同時に、記載した装置の構成要素を互いに最適な位置に配置することができ、移動する構成要素と固定されているラベルディスペンサとの衝突を回避できる、装置、が必要とされている。
【0007】
この目的は、請求項1による装置によって解決される。したがって、本発明による装置は、スリーブフィルムラベルが装着された容器を把持ユニットによって取り出す、循環する取り出しユニット、を備えており、把持ユニットは、容器を把持するための把持位置と、ラベルディスペンサとの衝突を避けるための回避位置との間で、ラベル装着カルーセル(labelling carousel)に対して前後に移動させることができる。すなわち、把持ユニット全体(したがって例えば把持ユニットの本体)の位置と、把持ユニットの開閉状態とが互いに独立している。言い換えれば、把持ユニットの循環経路が、ラベルディスペンサの正面もしくは横またはその両方の領域において円形経路から逸脱している。把持ユニットの位置が変化することに加えて、個々の把持要素(例えば把持爪)の設定を変更することも可能である。例えば、回避位置において、把持ユニットを開く、または閉じることができる。言い換えれば、把持位置と回避位置とでは、ラベル装着カルーセルに対する、開状態の把持ユニットがとる位置がそれぞれ異なる。把持ユニットの位置を把持位置と回避位置との間で変化させることができるため、ラベルディスペンサとの衝突を避ける目的でラベル装着カルーセルに対する伸張ユニットの位置を調整する必要がない。したがって、比較的複雑で重量のある伸張ユニットを、ラベル装着カルーセル上の固定された位置に配置することができる。
【0008】
回避位置における把持ユニットからラベル装着カルーセルの回転の軸線までの距離は、把持位置における距離よりも小さい。結果として、把持ユニットを、円形経路から少なくとも部分的に内側に逸脱する循環経路に沿ってラベルディスペンサを通過させることができる。把持位置よりも内側にオフセットする回避位置は、特に、装置レベルの小さい変更によって実現することができる。
【0009】
有利な発展形態においては、把持ユニットは、半径方向に摺動する、もしくは、横方向に旋回する、またはその両方を行うことができるように、支持されている。縦軸線を中心とする水平旋回が特に好ましい。ラベル装着カルーセル上の把持ユニットの半径方向位置は、カムコントローラを用いて、このように支持することによって、特に単純な方法で実現することができる。
【0010】
さらに有利な実施形態においては、把持ユニットをラベルディスペンサの上方に離れた位置まで駆動する目的で、回避位置が把持位置より上方に位置している。この配置構造をとる理由として、ラベルが装着された容器は、伸張ユニットから取り出して下流の排出ユニットに搬送するため、いずれにしても持ち上げなければならないことが挙げられる。したがって、場合によっては、持ち上げる距離をわずかに大きくするだけで、把持ユニットをラベルディスペンサの上方に十分に離れた位置まで駆動することができる。この場合、把持位置と回避位置との間で切り替えるためのさらなる転換機構を省くことが可能である。
【0011】
したがって、把持ユニットは、垂直方向に摺動する、もしくは、垂直方向に旋回する、またはその両方を行うことができるように、取り出しユニットに支持されていることが好ましい。これによって、装置レベルの単純な変更により、把持ユニットをカムローラによって高い信頼性で制御することが可能になる。
【0012】
特に好ましい発展形態においては、取り出しユニットそれぞれが、把持ユニットを上昇および下降させる昇降機構を備えており、この昇降機構は、半径方向に摺動する、もしくは、水平方向に旋回する、またはその両方を行うことができる。これによって、ラベルが装着された容器を取り出す目的と、把持ユニットとラベルディスペンサとの衝突を防止する目的で、把持ユニットの位置を特に高い柔軟性で3次元に変化させることが可能になる。
【0013】
昇降機構を駆動するサーボモータが設けられていることが好ましい。このようにすることで、昇降機構を、さまざまな容器サイズおよびフィルムタイプに特に柔軟に適合させることができる。
【0014】
本発明による装置の特に好ましい発展形態においては、ラベル装着時に、把持位置において保持される容器の長軸と、スリーブフィルムラベルの長軸とが、ラベル装着カルーセルの基準ピッチ円の上に位置するように、把持位置がラベルディスペンサに対して位置合わせされる。このようにすることで、スリーブフィルムラベルを特に高い信頼性で伸張ユニットに送ることができ、ラベルが装着された容器を、特に単純に伸張ユニットから取り出すことができる。したがって、ラベルを送るときと、ラベルが装着された容器を取り出すときとで、伸張ユニットの半径方向位置を変化させる必要がない。把持ユニットと比較して伸張ユニットは特に複雑であり、さまざまな容器に適合させることが難しいため、これは特に有利である。したがって、特に、伸張ユニットをラベル装着カルーセル上に永久的に固定することができ、これは好ましい。
【0015】
ラベルディスペンサの下を通過する伸張ユニットにスリーブラベルを上から送り込む目的で、ラベルディスペンサは、本質的に伸張ユニットの上方に固定された状態に配置されていることが好ましい。このタイプの特に信頼性が高く特に高速な構造では、スリーブラベルを伸張ユニットの上に位置させることができる。この結果として、特に高い機械性能を実現することができる。これを目的として、少なくとも2基のラベルディスペンサを、伸張ユニットの循環経路に沿って前後に並べることもできる。このようにすることで、ラベルの送りおよび装着の信頼性と、ラベル装着カルーセルの速度とを、同時に高めることができる。
【0016】
把持ユニットは、特に制御カムによって切り替えることのできる切替え可能な容器クランプを備えていることが好ましい。切替え可能な容器クランプとは、少なくとも、容器を保持するための閉設定と、開設定とが提供されており、適切な切替え機構によって開設定と閉設定との間で切り替えることが可能であるクランプとして理解されたい。この場合、容器クランプは、ラベルが装着された容器を把持するときにのみ、下流の排出ユニットに容器が搬送されるまで、閉設定にあることが好ましい。容器クランプは、開設定においては、本質的に自身の循環経路の接線方向を向くように、または上に定義した基準ピッチ円に平行になるように、旋回させ得ることが好ましい。
【0017】
本発明による装置の特に有利な発展形態においては、取り出しユニットは、把持位置と回避位置との間で変化させる目的で、カムによって制御されるリニアガイド、もしくはカムによって制御される旋回機構、またはその両方を備えている。把持ユニットとラベルディスペンサとの衝突を避ける目的には、この種類のガイドは特に信頼性が高い。言い換えれば、カムコントローラは、把持位置と回避位置との間の調整が突然に機能しなくなるような障害が特に起こりにくい。
【0018】
さらに、前述した目的は、請求項12による方法によって解決され、この方法においては、ラベルディスペンサを避ける目的で、把持ユニットの循環経路が、ラベルディスペンサに達する前の少なくとも5〜45°の回転角度範囲において、平面的な円形経路から、特に内側または上方に、逸脱している。したがって、把持ユニットは、大きな回転角度範囲にわたって把持位置として循環する。したがって、大きな角度範囲をラベル装着に使用することができる。これによって、特に高い機械性能レベルと、特に省スペースの設計とが可能になる。さらに、把持ユニットは、ラベルディスペンサの正面およびラベルディスペンサの領域において(すなわちラベルディスペンサに達した後)、0〜5°の範囲内において、円形の循環経路から逸脱することができる。したがって、カルーセルの回転の大部分を、円形経路に沿ったラベル装着に使用することができ、それと同時に、衝突を高い信頼性で避けることができる。これによって、機械の性能および運転の信頼性が最大化される。
【0019】
伸張ユニットは、ラベルディスペンサの領域において円形経路上を循環することが好ましい。これによって、スリーブフィルムラベルの送り時における伸張ユニットの駆動が単純化される。
【0020】
把持ユニットは、回避位置において、特に、閉設定に対する合計開角度(total opening angle)として少なくとも90°、特に少なくとも180°開くことが好ましい。このようにすることで、把持位置と回避位置との間で要求される、把持ユニットの半径方向位置の変化を、最小にすることができる。これによって、特にコンパクトな構造が可能となる。しかしながら、用途によっては、45〜90°の開角度も可能である。
【0021】
スリーブフィルムラベルは、上方から伸張ユニットに送られることが好ましく、ラベルが装着された容器は、伸張ユニットから上方に取り出される。
【0022】
図面には、本発明の好ましい実施形態を示してある。
【図面の簡単な説明】
【0023】
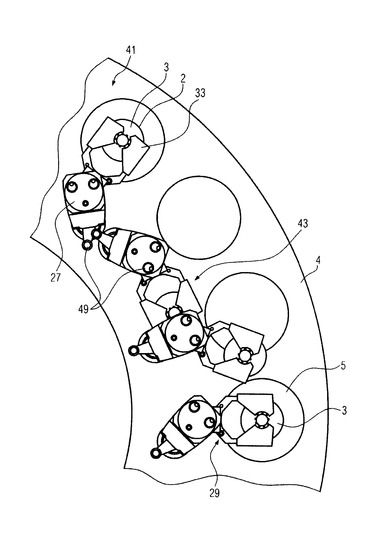
【図1】本発明による装置の第1の実施形態の平面図である。
【図2】図1に示した装置の取り出しユニットである。
【図3】代替形態の取り出しユニットを備えた本発明の第2の実施形態の斜視図である。
【図4】図3の細部の平面図である。
【発明を実施するための形態】
【0024】
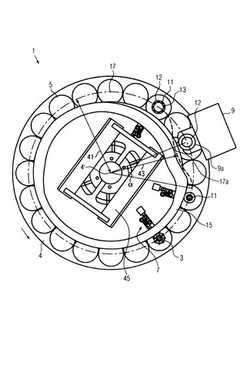
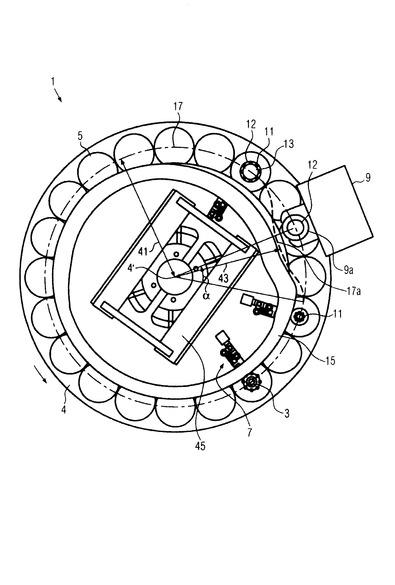
図1から理解できるように、容器3(例えば飲料用ボトル、例えば特にPETから製造された飲料用ボトル)に弾性スリーブフィルムラベル2を装着するための、本発明による装置の第1の実施形態1は、ラベル装着カルーセル4を備えており、ラベル装着カルーセル4の上には、スリーブフィルムラベル2を伸ばすための多数の伸張ユニット5が、周縁部に等間隔に配設されている。伸張ユニット5のそれぞれに取り出しユニット7が割り当てられており、取り出しユニット7は、スリーブフィルムラベル2が装着された容器3を伸張ユニット5から取り出し、経路に沿って回転する。図を簡潔にするため、図1には3つの取り出しユニット7のみを示してある。
【0025】
さらに、ラベル装着カルーセル4(この例では左回りに回転する)の外周部付近には、送り込み機構9aを備えた、本質的に固定されているラベルディスペンサ9が設けられており、送り込み機構9aは、自身の下を通過する伸張ユニット5にスリーブフィルムラベル2を送り込む。適切なローラ機構を備えたこのようなラベルディスペンサ9は、従来技術から公知である。スリーブフィルムラベル2は、高い弾性(例えば少なくとも50%の伸縮性)を有することが好ましく、容器のラベル装着に使用されることが好ましい。しかしながら、別の目的でスリーブフィルムラベル2を容器に装着することもできる。
【0026】
ラベルを装着する容器3を下方から伸張ユニット5の中央開口部13を通じてスリーブフィルムラベル2の中に入れることができるようにスリーブフィルムラベル2を広げる目的で、伸張ユニット5は、半径方向に摺動する伸張フィンガー11を備えている。複数の伸張フィンガー11が一緒に駆動された後、スリーブフィルムラベル2が容器3に送られ、取り出しユニット7が、容器3の首部もしくは肩部またはその両方およびスリーブフィルムラベル2を把持し、容器3を伸張ユニット5から上方に引き上げることができる。
【0027】
図1には、さらに、取り出しユニット7の制御もしくは切替えまたはその両方を行う制御カム15を示してある。さらには、ラベル装着カルーセル4の想像ピッチ円17を示してある。図1においてさらに理解できるように、このピッチ円17は、伸張ユニット5の中心軸線および送り込み機構9aの中心軸線を通っている。これによって、伸張ユニット5への送り時に、ラベル装着カルーセル4に対するスリーブフィルムラベル2の半径方向位置と、伸張ユニット5の半径方向位置とが、確実に揃う。
【0028】
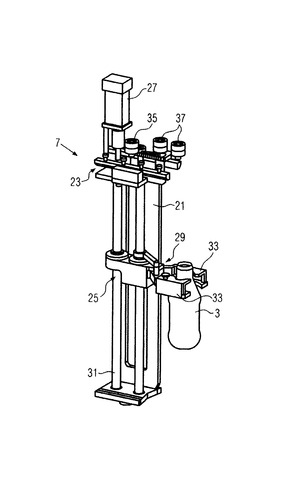
図2は、取り出しユニット7を詳細に示している。取り出しユニット7は、フレーム21と、リニアガイド23と、昇降ユニット25とを備えている。フレーム21は、ラベル装着カルーセル4の上にリニアガイド23によって取り付けられている。昇降ユニット25は、例えばシャフトガイドによってフレーム21に支持されている。昇降ユニット25は、サーボモータ27および把持ユニット29を備えており、把持ユニット29は、ねじスピンドル31を介してサーボモータ27によって上昇または下降させることができる。把持ユニット29には切替え可能な容器クランプ33が設けられており、スプロケット35を利用して容器クランプの開閉を行うことができる。容器クランプ33は、すばやく交換できるように嵌合部品(fitting part)として形成されていることが好ましい。
【0029】
リニアガイド23を作動させるための制御ローラ37が設けられており、これらの制御ローラ15は、昇降ユニット25をリニアガイド23に沿って本質的に半径方向に変位させる目的で、制御カム15と噛み合う。リニアガイド23に沿って変位させる結果として、把持ユニット29を外側の把持位置41と内側の回避位置43との間で調整することができる。半径方向における把持ユニット29の変位は、特に単純な方法で実現することができる。しかしながら、リニアガイド23の位置を半径方向の基準位置から水平方向に回転させる、もしくは垂直方向に傾ける、またはその両方を行うことも考えられる。
【0030】
図1において、把持位置41および回避位置43は、半径方向の両方向矢印を用いて概略的にのみ示してある。しかしながら、この図から理解できるように、把持位置41の定義として、把持ユニット29に保持されている容器3の長軸が本質的にピッチ円17上に位置する。これとは異なり、回避位置43の本質的な定義は、把持ユニット29を衝突なしにラベルディスペンサ9を通過させる、特に、送り込み機構9aを通過させることができるように、把持ユニット29の循環経路が、ラベルディスペンサ9の領域において(すなわち図1の例では経路の一部分17aにおいて)ピッチ円17から内側に逸脱していることである。循環経路上のこれ以外の領域(ラベルが装着された容器3を取り出して保持するために把持ユニット29が必要ない領域)においては、制御カム15の曲線形状と、把持ユニット29の対応する経路曲線は、任意のものでよい。
【0031】
サーボモータ27は、昇降ユニット25の上昇動作をさまざまな容器サイズおよびフィルムタイプに柔軟に適合させるうえで特に適している。ラベルが装着された容器3を伸張ユニット5から取り出す動作も、サーボモータ27によって特に正確に調整することができる。特に、サーボモータ27の制御を、伸張フィンガー11(同様にサーボモータ(図示していない)によって駆動できる)の制御と連動させることができる。この連動は、例えば、図1に示した制御ユニット45によって行うことができる。
【0032】
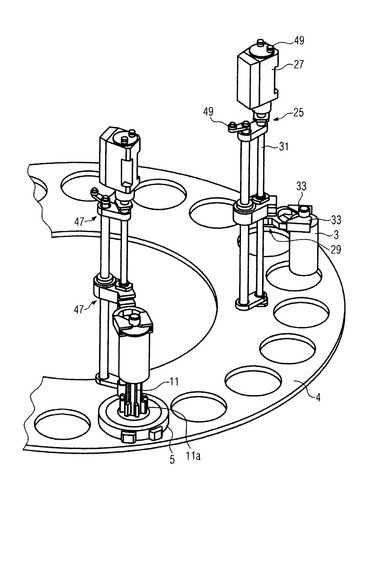
図3は、取り出しユニット7の代替バリエーションを示しており、リニアガイド23の代わりに水平旋回機構47が設けられている。この第2の実施形態の残りの構成要素および機能は、第1の実施形態と本質的に同じである。したがって、第2の実施形態の同一または同等の構成要素および機能については、ここでは詳しく説明しない。図3には、図を簡潔にするため、伸張ユニット5および付随する伸張フィンガー11を1組のみ示してある。この場合、伸張フィンガー11には、オプションのバリエーションとして追加の伸張爪11aが設けられており、これらの伸張爪11aは、例えば、特定の容器サイズもしくはラベルタイプまたはその両方に伸張フィンガー11を適合させることができるように、すばやく交換される嵌合部品として使用することができる。
【0033】
図4に示したように、昇降ユニット25は、旋回機構47を用いて、把持ユニット29およびサーボモータ27と一緒に旋回させることができる。旋回機構は、制御カム15を利用して旋回運動を制御するための適切な制御ローラ、もしくは、スプロケット49または同等の要素、またはその両方を備えている。把持ユニット29を旋回させることによって、把持ユニット29の把持位置41と回避位置43との間で変更することが可能である。ラベル装着カルーセル4に対する把持ユニット29全体の位置が、把持位置41および回避位置43とで異なる(すなわち容器クランプ33の設定には依存しない)ことを示す目的で、把持ユニット29それぞれを、閉設定において容器3を保持している状態として示してある。これらの把持ユニット29は、同様に、位置の変化を示す目的で、開設定の状態として示すこともできる。なお、把持ユニット29は、ラベルディスペンサ9を通過するとき通常では容器3を保持していないものと理解されたい。
【0034】
容器クランプ33のサイズおよび構造に応じて、容器クランプ33を閉設定または開設定の状態でラベルディスペンサ9を通過させることができる。このとき、容器クランプ33を開設定によって、把持ユニット29をラベルディスペンサ19を通過させるプロセスを単純化することが考えられる。この場合、容器クランプ33を、スプロケット35(図4には示していない)を利用して適切な設定(例えば開設定)に動かすことができる。開設定では、容器クランプ33の位置に応じて、閉設定に対して少なくとも90°、好ましくは少なくとも180°旋回させる。このようにすることで、ラベルディスペンサ9の領域において本質的にピッチ円17または循環経路17aの接線方向に向いた容器クランプ33の配置を、必要な場合に適合させることができる。しかしながら、用途によっては、45〜90°の開角度も考えられる。
【0035】
ここまで説明した実施形態に代えて、または加えて、第3の実施形態として、把持ユニット29を送り込み機構9aの上方においてラベルディスペンサ9を通過させることができるように、ラベルディスペンサ9の領域において把持ユニット29を持ち上げることも可能である。これは、例えば、昇降ユニット25の対応する上昇によって実現することができる。このような場合、オプションとして、追加のガイドローラ37などを使用せずに行うことが可能である。しかしながら、ラベルディスペンサ9の領域およびラベルディスペンサ9より上流の回転角度範囲において、把持ユニット29の水平方向(特に半径方向)の調整と、把持ユニット29の垂直方向の調整の両方を組み合わせることも考えられる。
【0036】
説明したいずれの実施形態においても、把持位置41と回避位置43との間の変更は、一例として図1に示したように、循環経路に沿ってラベルディスペンサ9の上流5〜45°の回転角度範囲αにおいて行われることが好ましい。このようにすることで、回避運動の結果として機械の性能が大幅に制限されることなく、送り込み機構9aの手前から送り込み機構9aの領域において把持ユニット29の十分な変位を実現することができる。特に好ましいバリエーションでは、把持位置41から回避位置43への把持ユニット29の変位が、送り込み機構9aの手前、少なくとも5〜20°の角度範囲αにおいて行われる。
【0037】
説明した実施形態は、技術的に実用的な任意の様式で組み合わせることができる。いずれの実施形態も、共通点として、把持位置41から回避位置43、およびその逆方向の把持ユニット29の切替えを、本発明による装置1において単純な設計の方法で実現することができる。特に、このようにすることで、ラベルディスペンサ9を通過するときの伸張ユニット5の技術的に複雑な回避運動を不要にすることができる。したがって、伸張ユニット5と、ラベルディスペンサ9の送り込み機構9aとを、ピッチ円17に対して互いに最適な位置に配置することができる。
【0038】
さらに、図示した実施形態の利点として、さまざまな容器サイズおよびフィルムタイプに応じて、回避位置43を柔軟に適合させることができる。例えば、取り出しユニット7の上昇動作を、サーボモータ27を利用して柔軟に適合させることができる。さらに、把持ユニット29の半径方向の変位または水平方向の旋回運動を、実施形態に基づいて説明したカムコントローラを用いて、技術的に信頼性が高くかつ単純な方法で適合させることも可能である。同様に、容器クランプ33の開閉を、スプロケット35を利用して単純かつ信頼できる方法で行うことができる。
【0039】
本発明による装置1における動作は、以下のように進行する。
ラベルを装着する一連の連続する容器3が、図3に示した構成要素より下の送りレベル(図示していない)においてラベル装着カルーセル4に供給され、これらは伸張ユニット5の下に維持される。これらの容器それぞれに、ラベルディスペンサ9によって弾性スリーブフィルムラベル2を装着する。各伸張ユニット5に割り当てられている把持ユニット29がラベル装着ユニット9を通過するとき、送り込み機構9aと衝突しないように、把持ユニット29が回避位置43に駆動される。スリーブフィルムラベル2が装備された伸張ユニット5がラベル装着カルーセル4上でさらに回転する。下側の送りレベルにおいて供給された容器3が、中央開口部13を通って、弾性的に伸ばされたスリーブフィルムラベル2の中に上昇できるように、スリーブラベル2が伸張フィンガー11によって広げられる。
【0040】
把持ユニット29は、ラベルディスペンサ9を通過した後に回避位置43から元の把持位置41に駆動される。伸張ユニット5の下に供給された容器3が上昇し、伸ばされたスリーブフィルムラベル2が容器3に装着される。容器クランプ33が容器3の周囲およびオプションとしてスリーブフィルムラベル2の周囲に閉じた後、把持ユニット29が昇降ユニット25によって上昇し、容器3が伸張ユニット5の領域から取り出される。このようにしてラベルが装着された容器3が、出口スターホイールなどに搬送するのに適する搬送高さまで持ち上げられ、最終的に搬送される。把持ユニット29は、再びラベルディスペンサ9の領域に達するまで把持位置41の状態を維持することができる。
【技術分野】
【0001】
本発明は、請求項1のプリアンブルに記載されている、弾性スリーブフィルムラベルを容器に装着する装置と、本発明による装置を使用する対応する方法とに関する。
【背景技術】
【0002】
容器(例えば飲料用ボトル)にラベルを装着する1つの方法は、容器の外面に弾性スリーブフィルムラベルを引き込むことによる。これを目的として、特許文献1には、高弾性のスリーブラベルを装着する装置であって、中央の開口部の周囲に配置された互いに本質的に平行に延びる複数の伸張フィンガー(spreading fingers)を使用してスリーブラベルを広げることにより、ラベルを装着する容器を下から上昇させてスリーブラベルの中に入れる、装置、が記載されている。次いで、ラベルが装着された容器を、ボトルの口部の領域における把持ユニットによって伸張フィンガーから上方向に取り出すことができる。これを目的として、把持ユニットは、伸張フィンガーと一緒にラベル装着ホイール(labelling wheel)を中心に回転し、これによって、ラベルが装着された容器が伸張フィンガーから持ち上げられた後、容器を適切な排出ユニットに搬送することができる。スリーブラベルは、固定されているラベルディスペンサから伸張ユニットに引き込む。スリーブラベルができる限り高い信頼性で確実に伸張ユニットに送られるようにする目的で、ラベルディスペンサおよび伸張ユニットは、上から見たとき、ラベルディスペンサの領域において本質的にラベル装着ホイールの基準ピッチ円(common pitch circle)の上に配置されている。
【0003】
ラベルが装着された容器を取り出す把持ユニットも、本質的に伸張ユニットと同軸上に位置合わせされており、これに起因する問題として、固定されているラベルディスペンサと把持ユニットとの衝突を避けるため、大きな制約が生じる。例えば、ラベルディスペンサの内側に設けられている開口部を通るように把持ユニットをガイドする目的で、把持ユニットの垂直位置を限られた領域に制限しなければならない。この開口部は、例えばラベルディスペンサの送りローラの間の領域に位置している。さらには、把持ユニットに設けられている容器クランプ(container clamp)をラベルディスペンサの中央に延在するピンを通過させることができるように、これらの容器クランプを広げなければならない。結果として、把持ユニットおよび容器クランプのいずれも、極めて特定の容器タイプに合わせた寸法しかとることがでない、あるいは、別の容器タイプに切り替えるためには、装置レベルでの多大な変更が要求される。
【0004】
代替方法として、特許文献1では、把持ユニットがラベルディスペンサと衝突しないように、ラベルディスペンサを半径方向外側にオフセットさせることが提案されている。しかしながら、この結果として、外側にオフセットしたラベルディスペンサの下、その中央に伸張ユニットを駆動できるようにするため、機械的に複雑かつ重量のある伸張ユニットを、ラベルディスペンサの領域において、制御カムを用いて外側に駆動しなければならない。しかしながら、このような解決策は、装置レベルの極めて大きな変更およびそれに関連するコストが要求されるため、実用的ではない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】国際公開第2008/076718号
【発明の概要】
【0006】
したがって、弾性スリーブフィルムラベルを容器に装着する装置であって、さまざまな容器サイズおよびフィルムタイプに適合させることができ、装置レベルの変更が最小限であると同時に、記載した装置の構成要素を互いに最適な位置に配置することができ、移動する構成要素と固定されているラベルディスペンサとの衝突を回避できる、装置、が必要とされている。
【0007】
この目的は、請求項1による装置によって解決される。したがって、本発明による装置は、スリーブフィルムラベルが装着された容器を把持ユニットによって取り出す、循環する取り出しユニット、を備えており、把持ユニットは、容器を把持するための把持位置と、ラベルディスペンサとの衝突を避けるための回避位置との間で、ラベル装着カルーセル(labelling carousel)に対して前後に移動させることができる。すなわち、把持ユニット全体(したがって例えば把持ユニットの本体)の位置と、把持ユニットの開閉状態とが互いに独立している。言い換えれば、把持ユニットの循環経路が、ラベルディスペンサの正面もしくは横またはその両方の領域において円形経路から逸脱している。把持ユニットの位置が変化することに加えて、個々の把持要素(例えば把持爪)の設定を変更することも可能である。例えば、回避位置において、把持ユニットを開く、または閉じることができる。言い換えれば、把持位置と回避位置とでは、ラベル装着カルーセルに対する、開状態の把持ユニットがとる位置がそれぞれ異なる。把持ユニットの位置を把持位置と回避位置との間で変化させることができるため、ラベルディスペンサとの衝突を避ける目的でラベル装着カルーセルに対する伸張ユニットの位置を調整する必要がない。したがって、比較的複雑で重量のある伸張ユニットを、ラベル装着カルーセル上の固定された位置に配置することができる。
【0008】
回避位置における把持ユニットからラベル装着カルーセルの回転の軸線までの距離は、把持位置における距離よりも小さい。結果として、把持ユニットを、円形経路から少なくとも部分的に内側に逸脱する循環経路に沿ってラベルディスペンサを通過させることができる。把持位置よりも内側にオフセットする回避位置は、特に、装置レベルの小さい変更によって実現することができる。
【0009】
有利な発展形態においては、把持ユニットは、半径方向に摺動する、もしくは、横方向に旋回する、またはその両方を行うことができるように、支持されている。縦軸線を中心とする水平旋回が特に好ましい。ラベル装着カルーセル上の把持ユニットの半径方向位置は、カムコントローラを用いて、このように支持することによって、特に単純な方法で実現することができる。
【0010】
さらに有利な実施形態においては、把持ユニットをラベルディスペンサの上方に離れた位置まで駆動する目的で、回避位置が把持位置より上方に位置している。この配置構造をとる理由として、ラベルが装着された容器は、伸張ユニットから取り出して下流の排出ユニットに搬送するため、いずれにしても持ち上げなければならないことが挙げられる。したがって、場合によっては、持ち上げる距離をわずかに大きくするだけで、把持ユニットをラベルディスペンサの上方に十分に離れた位置まで駆動することができる。この場合、把持位置と回避位置との間で切り替えるためのさらなる転換機構を省くことが可能である。
【0011】
したがって、把持ユニットは、垂直方向に摺動する、もしくは、垂直方向に旋回する、またはその両方を行うことができるように、取り出しユニットに支持されていることが好ましい。これによって、装置レベルの単純な変更により、把持ユニットをカムローラによって高い信頼性で制御することが可能になる。
【0012】
特に好ましい発展形態においては、取り出しユニットそれぞれが、把持ユニットを上昇および下降させる昇降機構を備えており、この昇降機構は、半径方向に摺動する、もしくは、水平方向に旋回する、またはその両方を行うことができる。これによって、ラベルが装着された容器を取り出す目的と、把持ユニットとラベルディスペンサとの衝突を防止する目的で、把持ユニットの位置を特に高い柔軟性で3次元に変化させることが可能になる。
【0013】
昇降機構を駆動するサーボモータが設けられていることが好ましい。このようにすることで、昇降機構を、さまざまな容器サイズおよびフィルムタイプに特に柔軟に適合させることができる。
【0014】
本発明による装置の特に好ましい発展形態においては、ラベル装着時に、把持位置において保持される容器の長軸と、スリーブフィルムラベルの長軸とが、ラベル装着カルーセルの基準ピッチ円の上に位置するように、把持位置がラベルディスペンサに対して位置合わせされる。このようにすることで、スリーブフィルムラベルを特に高い信頼性で伸張ユニットに送ることができ、ラベルが装着された容器を、特に単純に伸張ユニットから取り出すことができる。したがって、ラベルを送るときと、ラベルが装着された容器を取り出すときとで、伸張ユニットの半径方向位置を変化させる必要がない。把持ユニットと比較して伸張ユニットは特に複雑であり、さまざまな容器に適合させることが難しいため、これは特に有利である。したがって、特に、伸張ユニットをラベル装着カルーセル上に永久的に固定することができ、これは好ましい。
【0015】
ラベルディスペンサの下を通過する伸張ユニットにスリーブラベルを上から送り込む目的で、ラベルディスペンサは、本質的に伸張ユニットの上方に固定された状態に配置されていることが好ましい。このタイプの特に信頼性が高く特に高速な構造では、スリーブラベルを伸張ユニットの上に位置させることができる。この結果として、特に高い機械性能を実現することができる。これを目的として、少なくとも2基のラベルディスペンサを、伸張ユニットの循環経路に沿って前後に並べることもできる。このようにすることで、ラベルの送りおよび装着の信頼性と、ラベル装着カルーセルの速度とを、同時に高めることができる。
【0016】
把持ユニットは、特に制御カムによって切り替えることのできる切替え可能な容器クランプを備えていることが好ましい。切替え可能な容器クランプとは、少なくとも、容器を保持するための閉設定と、開設定とが提供されており、適切な切替え機構によって開設定と閉設定との間で切り替えることが可能であるクランプとして理解されたい。この場合、容器クランプは、ラベルが装着された容器を把持するときにのみ、下流の排出ユニットに容器が搬送されるまで、閉設定にあることが好ましい。容器クランプは、開設定においては、本質的に自身の循環経路の接線方向を向くように、または上に定義した基準ピッチ円に平行になるように、旋回させ得ることが好ましい。
【0017】
本発明による装置の特に有利な発展形態においては、取り出しユニットは、把持位置と回避位置との間で変化させる目的で、カムによって制御されるリニアガイド、もしくはカムによって制御される旋回機構、またはその両方を備えている。把持ユニットとラベルディスペンサとの衝突を避ける目的には、この種類のガイドは特に信頼性が高い。言い換えれば、カムコントローラは、把持位置と回避位置との間の調整が突然に機能しなくなるような障害が特に起こりにくい。
【0018】
さらに、前述した目的は、請求項12による方法によって解決され、この方法においては、ラベルディスペンサを避ける目的で、把持ユニットの循環経路が、ラベルディスペンサに達する前の少なくとも5〜45°の回転角度範囲において、平面的な円形経路から、特に内側または上方に、逸脱している。したがって、把持ユニットは、大きな回転角度範囲にわたって把持位置として循環する。したがって、大きな角度範囲をラベル装着に使用することができる。これによって、特に高い機械性能レベルと、特に省スペースの設計とが可能になる。さらに、把持ユニットは、ラベルディスペンサの正面およびラベルディスペンサの領域において(すなわちラベルディスペンサに達した後)、0〜5°の範囲内において、円形の循環経路から逸脱することができる。したがって、カルーセルの回転の大部分を、円形経路に沿ったラベル装着に使用することができ、それと同時に、衝突を高い信頼性で避けることができる。これによって、機械の性能および運転の信頼性が最大化される。
【0019】
伸張ユニットは、ラベルディスペンサの領域において円形経路上を循環することが好ましい。これによって、スリーブフィルムラベルの送り時における伸張ユニットの駆動が単純化される。
【0020】
把持ユニットは、回避位置において、特に、閉設定に対する合計開角度(total opening angle)として少なくとも90°、特に少なくとも180°開くことが好ましい。このようにすることで、把持位置と回避位置との間で要求される、把持ユニットの半径方向位置の変化を、最小にすることができる。これによって、特にコンパクトな構造が可能となる。しかしながら、用途によっては、45〜90°の開角度も可能である。
【0021】
スリーブフィルムラベルは、上方から伸張ユニットに送られることが好ましく、ラベルが装着された容器は、伸張ユニットから上方に取り出される。
【0022】
図面には、本発明の好ましい実施形態を示してある。
【図面の簡単な説明】
【0023】
【図1】本発明による装置の第1の実施形態の平面図である。
【図2】図1に示した装置の取り出しユニットである。
【図3】代替形態の取り出しユニットを備えた本発明の第2の実施形態の斜視図である。
【図4】図3の細部の平面図である。
【発明を実施するための形態】
【0024】
図1から理解できるように、容器3(例えば飲料用ボトル、例えば特にPETから製造された飲料用ボトル)に弾性スリーブフィルムラベル2を装着するための、本発明による装置の第1の実施形態1は、ラベル装着カルーセル4を備えており、ラベル装着カルーセル4の上には、スリーブフィルムラベル2を伸ばすための多数の伸張ユニット5が、周縁部に等間隔に配設されている。伸張ユニット5のそれぞれに取り出しユニット7が割り当てられており、取り出しユニット7は、スリーブフィルムラベル2が装着された容器3を伸張ユニット5から取り出し、経路に沿って回転する。図を簡潔にするため、図1には3つの取り出しユニット7のみを示してある。
【0025】
さらに、ラベル装着カルーセル4(この例では左回りに回転する)の外周部付近には、送り込み機構9aを備えた、本質的に固定されているラベルディスペンサ9が設けられており、送り込み機構9aは、自身の下を通過する伸張ユニット5にスリーブフィルムラベル2を送り込む。適切なローラ機構を備えたこのようなラベルディスペンサ9は、従来技術から公知である。スリーブフィルムラベル2は、高い弾性(例えば少なくとも50%の伸縮性)を有することが好ましく、容器のラベル装着に使用されることが好ましい。しかしながら、別の目的でスリーブフィルムラベル2を容器に装着することもできる。
【0026】
ラベルを装着する容器3を下方から伸張ユニット5の中央開口部13を通じてスリーブフィルムラベル2の中に入れることができるようにスリーブフィルムラベル2を広げる目的で、伸張ユニット5は、半径方向に摺動する伸張フィンガー11を備えている。複数の伸張フィンガー11が一緒に駆動された後、スリーブフィルムラベル2が容器3に送られ、取り出しユニット7が、容器3の首部もしくは肩部またはその両方およびスリーブフィルムラベル2を把持し、容器3を伸張ユニット5から上方に引き上げることができる。
【0027】
図1には、さらに、取り出しユニット7の制御もしくは切替えまたはその両方を行う制御カム15を示してある。さらには、ラベル装着カルーセル4の想像ピッチ円17を示してある。図1においてさらに理解できるように、このピッチ円17は、伸張ユニット5の中心軸線および送り込み機構9aの中心軸線を通っている。これによって、伸張ユニット5への送り時に、ラベル装着カルーセル4に対するスリーブフィルムラベル2の半径方向位置と、伸張ユニット5の半径方向位置とが、確実に揃う。
【0028】
図2は、取り出しユニット7を詳細に示している。取り出しユニット7は、フレーム21と、リニアガイド23と、昇降ユニット25とを備えている。フレーム21は、ラベル装着カルーセル4の上にリニアガイド23によって取り付けられている。昇降ユニット25は、例えばシャフトガイドによってフレーム21に支持されている。昇降ユニット25は、サーボモータ27および把持ユニット29を備えており、把持ユニット29は、ねじスピンドル31を介してサーボモータ27によって上昇または下降させることができる。把持ユニット29には切替え可能な容器クランプ33が設けられており、スプロケット35を利用して容器クランプの開閉を行うことができる。容器クランプ33は、すばやく交換できるように嵌合部品(fitting part)として形成されていることが好ましい。
【0029】
リニアガイド23を作動させるための制御ローラ37が設けられており、これらの制御ローラ15は、昇降ユニット25をリニアガイド23に沿って本質的に半径方向に変位させる目的で、制御カム15と噛み合う。リニアガイド23に沿って変位させる結果として、把持ユニット29を外側の把持位置41と内側の回避位置43との間で調整することができる。半径方向における把持ユニット29の変位は、特に単純な方法で実現することができる。しかしながら、リニアガイド23の位置を半径方向の基準位置から水平方向に回転させる、もしくは垂直方向に傾ける、またはその両方を行うことも考えられる。
【0030】
図1において、把持位置41および回避位置43は、半径方向の両方向矢印を用いて概略的にのみ示してある。しかしながら、この図から理解できるように、把持位置41の定義として、把持ユニット29に保持されている容器3の長軸が本質的にピッチ円17上に位置する。これとは異なり、回避位置43の本質的な定義は、把持ユニット29を衝突なしにラベルディスペンサ9を通過させる、特に、送り込み機構9aを通過させることができるように、把持ユニット29の循環経路が、ラベルディスペンサ9の領域において(すなわち図1の例では経路の一部分17aにおいて)ピッチ円17から内側に逸脱していることである。循環経路上のこれ以外の領域(ラベルが装着された容器3を取り出して保持するために把持ユニット29が必要ない領域)においては、制御カム15の曲線形状と、把持ユニット29の対応する経路曲線は、任意のものでよい。
【0031】
サーボモータ27は、昇降ユニット25の上昇動作をさまざまな容器サイズおよびフィルムタイプに柔軟に適合させるうえで特に適している。ラベルが装着された容器3を伸張ユニット5から取り出す動作も、サーボモータ27によって特に正確に調整することができる。特に、サーボモータ27の制御を、伸張フィンガー11(同様にサーボモータ(図示していない)によって駆動できる)の制御と連動させることができる。この連動は、例えば、図1に示した制御ユニット45によって行うことができる。
【0032】
図3は、取り出しユニット7の代替バリエーションを示しており、リニアガイド23の代わりに水平旋回機構47が設けられている。この第2の実施形態の残りの構成要素および機能は、第1の実施形態と本質的に同じである。したがって、第2の実施形態の同一または同等の構成要素および機能については、ここでは詳しく説明しない。図3には、図を簡潔にするため、伸張ユニット5および付随する伸張フィンガー11を1組のみ示してある。この場合、伸張フィンガー11には、オプションのバリエーションとして追加の伸張爪11aが設けられており、これらの伸張爪11aは、例えば、特定の容器サイズもしくはラベルタイプまたはその両方に伸張フィンガー11を適合させることができるように、すばやく交換される嵌合部品として使用することができる。
【0033】
図4に示したように、昇降ユニット25は、旋回機構47を用いて、把持ユニット29およびサーボモータ27と一緒に旋回させることができる。旋回機構は、制御カム15を利用して旋回運動を制御するための適切な制御ローラ、もしくは、スプロケット49または同等の要素、またはその両方を備えている。把持ユニット29を旋回させることによって、把持ユニット29の把持位置41と回避位置43との間で変更することが可能である。ラベル装着カルーセル4に対する把持ユニット29全体の位置が、把持位置41および回避位置43とで異なる(すなわち容器クランプ33の設定には依存しない)ことを示す目的で、把持ユニット29それぞれを、閉設定において容器3を保持している状態として示してある。これらの把持ユニット29は、同様に、位置の変化を示す目的で、開設定の状態として示すこともできる。なお、把持ユニット29は、ラベルディスペンサ9を通過するとき通常では容器3を保持していないものと理解されたい。
【0034】
容器クランプ33のサイズおよび構造に応じて、容器クランプ33を閉設定または開設定の状態でラベルディスペンサ9を通過させることができる。このとき、容器クランプ33を開設定によって、把持ユニット29をラベルディスペンサ19を通過させるプロセスを単純化することが考えられる。この場合、容器クランプ33を、スプロケット35(図4には示していない)を利用して適切な設定(例えば開設定)に動かすことができる。開設定では、容器クランプ33の位置に応じて、閉設定に対して少なくとも90°、好ましくは少なくとも180°旋回させる。このようにすることで、ラベルディスペンサ9の領域において本質的にピッチ円17または循環経路17aの接線方向に向いた容器クランプ33の配置を、必要な場合に適合させることができる。しかしながら、用途によっては、45〜90°の開角度も考えられる。
【0035】
ここまで説明した実施形態に代えて、または加えて、第3の実施形態として、把持ユニット29を送り込み機構9aの上方においてラベルディスペンサ9を通過させることができるように、ラベルディスペンサ9の領域において把持ユニット29を持ち上げることも可能である。これは、例えば、昇降ユニット25の対応する上昇によって実現することができる。このような場合、オプションとして、追加のガイドローラ37などを使用せずに行うことが可能である。しかしながら、ラベルディスペンサ9の領域およびラベルディスペンサ9より上流の回転角度範囲において、把持ユニット29の水平方向(特に半径方向)の調整と、把持ユニット29の垂直方向の調整の両方を組み合わせることも考えられる。
【0036】
説明したいずれの実施形態においても、把持位置41と回避位置43との間の変更は、一例として図1に示したように、循環経路に沿ってラベルディスペンサ9の上流5〜45°の回転角度範囲αにおいて行われることが好ましい。このようにすることで、回避運動の結果として機械の性能が大幅に制限されることなく、送り込み機構9aの手前から送り込み機構9aの領域において把持ユニット29の十分な変位を実現することができる。特に好ましいバリエーションでは、把持位置41から回避位置43への把持ユニット29の変位が、送り込み機構9aの手前、少なくとも5〜20°の角度範囲αにおいて行われる。
【0037】
説明した実施形態は、技術的に実用的な任意の様式で組み合わせることができる。いずれの実施形態も、共通点として、把持位置41から回避位置43、およびその逆方向の把持ユニット29の切替えを、本発明による装置1において単純な設計の方法で実現することができる。特に、このようにすることで、ラベルディスペンサ9を通過するときの伸張ユニット5の技術的に複雑な回避運動を不要にすることができる。したがって、伸張ユニット5と、ラベルディスペンサ9の送り込み機構9aとを、ピッチ円17に対して互いに最適な位置に配置することができる。
【0038】
さらに、図示した実施形態の利点として、さまざまな容器サイズおよびフィルムタイプに応じて、回避位置43を柔軟に適合させることができる。例えば、取り出しユニット7の上昇動作を、サーボモータ27を利用して柔軟に適合させることができる。さらに、把持ユニット29の半径方向の変位または水平方向の旋回運動を、実施形態に基づいて説明したカムコントローラを用いて、技術的に信頼性が高くかつ単純な方法で適合させることも可能である。同様に、容器クランプ33の開閉を、スプロケット35を利用して単純かつ信頼できる方法で行うことができる。
【0039】
本発明による装置1における動作は、以下のように進行する。
ラベルを装着する一連の連続する容器3が、図3に示した構成要素より下の送りレベル(図示していない)においてラベル装着カルーセル4に供給され、これらは伸張ユニット5の下に維持される。これらの容器それぞれに、ラベルディスペンサ9によって弾性スリーブフィルムラベル2を装着する。各伸張ユニット5に割り当てられている把持ユニット29がラベル装着ユニット9を通過するとき、送り込み機構9aと衝突しないように、把持ユニット29が回避位置43に駆動される。スリーブフィルムラベル2が装備された伸張ユニット5がラベル装着カルーセル4上でさらに回転する。下側の送りレベルにおいて供給された容器3が、中央開口部13を通って、弾性的に伸ばされたスリーブフィルムラベル2の中に上昇できるように、スリーブラベル2が伸張フィンガー11によって広げられる。
【0040】
把持ユニット29は、ラベルディスペンサ9を通過した後に回避位置43から元の把持位置41に駆動される。伸張ユニット5の下に供給された容器3が上昇し、伸ばされたスリーブフィルムラベル2が容器3に装着される。容器クランプ33が容器3の周囲およびオプションとしてスリーブフィルムラベル2の周囲に閉じた後、把持ユニット29が昇降ユニット25によって上昇し、容器3が伸張ユニット5の領域から取り出される。このようにしてラベルが装着された容器3が、出口スターホイールなどに搬送するのに適する搬送高さまで持ち上げられ、最終的に搬送される。把持ユニット29は、再びラベルディスペンサ9の領域に達するまで把持位置41の状態を維持することができる。
【特許請求の範囲】
【請求項1】
弾性スリーブフィルムラベル(2)を容器(3)に装着する装置(1)であって、
− 前記スリーブフィルムラベルを伸ばす複数の伸張ユニット(5)と、前記スリーブフィルムラベルが装着された前記容器を取り出す複数の取り出しユニット(7)とが、上に取り付けられている、ラベル装着カルーセル(4)と、
− 前記伸張ユニットに前記スリーブフィルムラベルを装備させる少なくとも1つのラベルディスペンサ(9)と、
を備え、
前記取り出しユニットが把持ユニット(29)を備えており、前記把持ユニット(29)を、前記容器を把持するための把持位置(41)と、前記ラベルディスペンサとの衝突を避けるための回避位置(43)との間で、前記ラベル装着カルーセルに対して移動させることができることを特徴とする、装置。
【請求項2】
前記把持ユニット(29)から前記ラベル装着カルーセルの回転軸線(4‘)までの距離が、前記把持位置(41)におけるよりも前記回避位置(43)における方が小さい、
請求項1に記載の装置。
【請求項3】
前記把持ユニット(29)が、横方向に摺動する、もしくは、横方向に旋回する、またはその両方を行うことができるように、支持されている、
請求項1または請求項2に記載の装置。
【請求項4】
前記把持ユニット(29)を前記ラベルディスペンサ(9)の上方に離れた位置までガイドする目的で、前記回避位置(43)が前記把持位置(41)より上方に位置している、
請求項1から請求項3のいずれか1項に記載の装置。
【請求項5】
前記把持ユニット(29)が、垂直方向に摺動する、もしくは、垂直方向に旋回する、またはその両方を行うことができるように、前記取り出しユニット(7)に支持されている、
請求項1から請求項4のいずれか1項に記載の装置。
【請求項6】
前記取り出しユニット(7)それぞれが、
前記把持ユニット(29)を上昇および下降させる昇降機構(25)であって、半径方向に摺動する、もしくは、横方向に旋回する、またはその両方を行う、前記昇降機構(25)、
を備えている、
請求項1から請求項5のいずれか1項に記載の装置。
【請求項7】
前記昇降機構(25)を駆動するサーボモータ(27)が設けられている、
請求項6に記載の装置。
【請求項8】
ラベル装着工程時に、前記把持位置において保持される前記容器(3)の長軸と、前記スリーブフィルムラベル(2)の長軸とが、前記ラベル装着カルーセル(4)の基準ピッチ円(17)の上に位置するように、前記把持位置(41)が前記ラベルディスペンサ(9)に対して位置合わせされる、
請求項1から請求項7のいずれか1項に記載の装置。
【請求項9】
前記ラベルディスペンサの下を通過する前記伸張ユニットに前記スリーブフィルムラベル(2)を上から送り込む目的で、前記ラベルディスペンサ(9)が、本質的に前記伸張ユニット(5)の上方に、固定された状態に配置されている、
請求項1から請求項8のいずれか1項に記載の装置。
【請求項10】
前記把持ユニット(29)が、特に制御カム(15)によって切り替えることのできる切替え可能な容器クランプ(33)、を備えている、
請求項1から請求項9のいずれか1項に記載の装置。
【請求項11】
前記把持位置(41)と前記回避位置(43)との間で変化させる目的で、前記取り出しユニット(7)が、カムによって制御されるリニアガイド(23)、もしくはカムによって制御される旋回機構(47)、またはその両方を備えている、
請求項1から請求項10のいずれか1項に記載の装置。
【請求項12】
請求項1から請求項11の少なくとも1項に記載の装置によって弾性スリーブフィルムラベルを容器に装着する方法であって、
前記ラベルディスペンサを避ける目的で、前記把持ユニットの循環経路(17a)が、前記ラベルディスペンサ(9)に達する前の少なくとも5〜45°、特に5〜20°の回転角度範囲(α)内において、平面的な円形経路から、特に内側または上方に、逸脱している、
方法。
【請求項13】
前記伸張ユニット(5)が、前記ラベルディスペンサ(9)の領域において円形経路上を循環する、
請求項12に記載の方法。
【請求項14】
前記把持ユニット(29)が、前記回避位置(43)において、特に、閉設定に対する開角度として少なくとも90°開く、
請求項12または請求項13に記載の方法。
【請求項15】
前記スリーブフィルムラベルが、上方から前記伸張ユニット(5)に送られ、ラベルが装着された前記容器が、前記伸張ユニットから上方に取り出される、
請求項12から請求項14のいずれか1項に記載の方法。
【請求項1】
弾性スリーブフィルムラベル(2)を容器(3)に装着する装置(1)であって、
− 前記スリーブフィルムラベルを伸ばす複数の伸張ユニット(5)と、前記スリーブフィルムラベルが装着された前記容器を取り出す複数の取り出しユニット(7)とが、上に取り付けられている、ラベル装着カルーセル(4)と、
− 前記伸張ユニットに前記スリーブフィルムラベルを装備させる少なくとも1つのラベルディスペンサ(9)と、
を備え、
前記取り出しユニットが把持ユニット(29)を備えており、前記把持ユニット(29)を、前記容器を把持するための把持位置(41)と、前記ラベルディスペンサとの衝突を避けるための回避位置(43)との間で、前記ラベル装着カルーセルに対して移動させることができることを特徴とする、装置。
【請求項2】
前記把持ユニット(29)から前記ラベル装着カルーセルの回転軸線(4‘)までの距離が、前記把持位置(41)におけるよりも前記回避位置(43)における方が小さい、
請求項1に記載の装置。
【請求項3】
前記把持ユニット(29)が、横方向に摺動する、もしくは、横方向に旋回する、またはその両方を行うことができるように、支持されている、
請求項1または請求項2に記載の装置。
【請求項4】
前記把持ユニット(29)を前記ラベルディスペンサ(9)の上方に離れた位置までガイドする目的で、前記回避位置(43)が前記把持位置(41)より上方に位置している、
請求項1から請求項3のいずれか1項に記載の装置。
【請求項5】
前記把持ユニット(29)が、垂直方向に摺動する、もしくは、垂直方向に旋回する、またはその両方を行うことができるように、前記取り出しユニット(7)に支持されている、
請求項1から請求項4のいずれか1項に記載の装置。
【請求項6】
前記取り出しユニット(7)それぞれが、
前記把持ユニット(29)を上昇および下降させる昇降機構(25)であって、半径方向に摺動する、もしくは、横方向に旋回する、またはその両方を行う、前記昇降機構(25)、
を備えている、
請求項1から請求項5のいずれか1項に記載の装置。
【請求項7】
前記昇降機構(25)を駆動するサーボモータ(27)が設けられている、
請求項6に記載の装置。
【請求項8】
ラベル装着工程時に、前記把持位置において保持される前記容器(3)の長軸と、前記スリーブフィルムラベル(2)の長軸とが、前記ラベル装着カルーセル(4)の基準ピッチ円(17)の上に位置するように、前記把持位置(41)が前記ラベルディスペンサ(9)に対して位置合わせされる、
請求項1から請求項7のいずれか1項に記載の装置。
【請求項9】
前記ラベルディスペンサの下を通過する前記伸張ユニットに前記スリーブフィルムラベル(2)を上から送り込む目的で、前記ラベルディスペンサ(9)が、本質的に前記伸張ユニット(5)の上方に、固定された状態に配置されている、
請求項1から請求項8のいずれか1項に記載の装置。
【請求項10】
前記把持ユニット(29)が、特に制御カム(15)によって切り替えることのできる切替え可能な容器クランプ(33)、を備えている、
請求項1から請求項9のいずれか1項に記載の装置。
【請求項11】
前記把持位置(41)と前記回避位置(43)との間で変化させる目的で、前記取り出しユニット(7)が、カムによって制御されるリニアガイド(23)、もしくはカムによって制御される旋回機構(47)、またはその両方を備えている、
請求項1から請求項10のいずれか1項に記載の装置。
【請求項12】
請求項1から請求項11の少なくとも1項に記載の装置によって弾性スリーブフィルムラベルを容器に装着する方法であって、
前記ラベルディスペンサを避ける目的で、前記把持ユニットの循環経路(17a)が、前記ラベルディスペンサ(9)に達する前の少なくとも5〜45°、特に5〜20°の回転角度範囲(α)内において、平面的な円形経路から、特に内側または上方に、逸脱している、
方法。
【請求項13】
前記伸張ユニット(5)が、前記ラベルディスペンサ(9)の領域において円形経路上を循環する、
請求項12に記載の方法。
【請求項14】
前記把持ユニット(29)が、前記回避位置(43)において、特に、閉設定に対する開角度として少なくとも90°開く、
請求項12または請求項13に記載の方法。
【請求項15】
前記スリーブフィルムラベルが、上方から前記伸張ユニット(5)に送られ、ラベルが装着された前記容器が、前記伸張ユニットから上方に取り出される、
請求項12から請求項14のいずれか1項に記載の方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−148821(P2012−148821A)
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−6859(P2012−6859)
【出願日】平成24年1月17日(2012.1.17)
【出願人】(506040652)クロネス アクティェンゲゼルシャフト (55)
【Fターム(参考)】
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願番号】特願2012−6859(P2012−6859)
【出願日】平成24年1月17日(2012.1.17)
【出願人】(506040652)クロネス アクティェンゲゼルシャフト (55)
【Fターム(参考)】
[ Back to top ]