
弾性表面波伝搬状態計測装置、弾性表面波伝搬状態計測方法、環境変化計測装置、環境変化計測方法及び多重周回弾性表面波素子
【課題】多重周回弾性表面波素子における周波数変化量を高精度に算出する。
【解決手段】周波数変化量算出装置20は、共振状態における弾性表面波の参照強度と参照位相とを含む参照信号のデータ及びこの弾性表面波を励起するための参照周波数を予め記憶する記憶部23と、高周波バースト信号の搬送周波数を調整して共振周波数にするための共振調整部24と、検出信号の位相である検出位相と参照位相との差が一定となるように、高周波バースト信号の搬送周波数を調整するための波形調整部25と、両者の位相差が一定となるとき、波形調整部25により調整された搬送周波数と参照周波数との差分を算出する算出部26とを備える。
【解決手段】周波数変化量算出装置20は、共振状態における弾性表面波の参照強度と参照位相とを含む参照信号のデータ及びこの弾性表面波を励起するための参照周波数を予め記憶する記憶部23と、高周波バースト信号の搬送周波数を調整して共振周波数にするための共振調整部24と、検出信号の位相である検出位相と参照位相との差が一定となるように、高周波バースト信号の搬送周波数を調整するための波形調整部25と、両者の位相差が一定となるとき、波形調整部25により調整された搬送周波数と参照周波数との差分を算出する算出部26とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、多重周回弾性表面波素子における周波数変化量を算出する弾性表面波伝搬状態計測装置に係り、特に高精度に周波数変化量を算出する弾性表面波伝搬状態計測装置に関する。
【背景技術】
【0002】
近年、弾性表面波素子が各種センサーに応用されている。弾性表面波素子を応用したセンサーには、例えば球形状の水晶の伝搬面に弾性表面波を多重周回させて、多重周回後の弾性表面波の位相変化から物理状態の変化を検知するものがある。
【0003】
詳しくは、多重周回させた検出信号の位相と基準となる参照信号の位相とを比較して、その位相の変化量から周波数変化量等の値を求めることにより、伝搬面の物理状態の変化を検知する。
【0004】
球状弾性表面波素子においては、弾性表面波がバースト信号により伝搬面に励起される。この励起された弾性表面波が伝搬面を多重周回する度に、周回受信信号としてエネルギーが放出される。すなわち、弾性表面波エネルギーが電気音響変換素子(すだれ状電極)を介して、電気エネルギーとして変換消費される。
【0005】
そこで、マッチングセクションを高インピーダンス回路にし、弾性表面波のエネルギーの放出を防ぐ。これにより、弾性表面波を多重周回させることができる(例えば、特許文献1参照)。
【特許文献1】特開2005−010098号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、バースト信号がすだれ状電極を通過する際に、異なる位相成分の波を発生し、バースト信号の波形を変えてしまう。すなわち、位相ノイズが発生することがある。
【0007】
さらに、ノイズによるエネルギーが搬送周波数のエネルギーより相対的に大きくなる場合がある。この場合、測定結果に誤差が生じてしまうため、位相変化を正確に算出することが困難となる。結果として、位相の変化量から周波数変化量等を算出することができなくなる。
【0008】
さらに、搬送周波数の信号強度を上げる為に1周回より長い継続時間のバースト信号を入力しようとすると、1周回前に入力した信号により励起された弾性表面波と新たに入力した信号により励起した弾性表面波とが干渉を起こしてしまう。このため、弾性表面波素子から出力される弾性表面波の信号の正確な位相や強度の計測が困難になる。
【0009】
また、通常、位相の変化を算出する場合、検出信号と参照信号との強度を等しくするが、強度を等しくする過程において、信号の位相が変わってしまい、周波数変化量を算出することができなくなることがある。
本発明の目的は、多重周回弾性表面波素子における周波数変化量を高精度に算出することである。
【課題を解決するための手段】
【0010】
上記の目的を達成するために、以下のような手段を講じる。
【0011】
請求項1に対応する発明は、搬送周波数を有する高周波バースト信号の入力により伝搬面を多重周回する弾性表面波が励起される多重周回弾性表面波素子に接続され、前記弾性表面波素子からの出力周波数の変化量を計測する弾性表面波伝搬状態計測装置であって、前記多重周回弾性表面波素子に、前記高周波バースト信号を入力する入力手段と、前記入力の後、前記伝搬面を多重周回する弾性表面波を検出し、得られた検出信号を出力する出力手段と、前記伝搬面を弾性表面波が1周回するのに要する周回時間に占める前記搬送周波数における1周期の割合が整数分の1となる共振状態に関し、当該共振状態における弾性表面波の参照位相を含む参照信号のデータ及びこの弾性表面波を励起するための参照周波数を予め記憶する記憶手段と、前記弾性表面波の検出信号を共振状態にするように、前記高周波バースト信号の搬送周波数を調整して共振周波数にするための第1調整手段と、前記第1調整手段による調整の後、前記出力手段から出力された検出信号の位相である検出位相と前記記憶手段に記憶された参照位相との差が一定となるように、前記高周波バースト信号の搬送周波数を調整するための第2調整手段と、前記第2調整手段による調整の結果、両者の位相差が一定となるとき、前記第2調整手段により調整された搬送周波数と前記記憶手段に記憶された参照周波数との差分を算出する算出手段とを備えた弾性表面波伝搬状態計測装置である。
【0012】
請求項2に対応する発明は、請求項1に対応する弾性表面波伝搬状態計測装置において、前記多重周回弾性表面波素子は、伝搬面が球形であり、前記第2調整手段は、前記検出信号の波形と前記参照信号の波形とを、前記高周波バースト信号を入力してから周回数の小さな時刻から順次一致させるようにし、少なくとも前記共振周波数の周期の5000倍に相当する時間以降の波形を一致させるように、前記共振周波数を調整する弾性表面波伝搬状態計測装置である。
【0013】
請求項3に対応する発明は、請求項1又は請求項2に対応する弾性表面波伝搬状態計測装置において、前記高周波バースト信号は、10MHz以上の搬送周波数を有し、少なくとも1周回の周回時間以上の波からなる弾性表面波伝搬状態計測装置である。
【0014】
請求項4に対応する発明は、請求項1乃至請求項3のいずれか1項に対応する弾性表面波伝搬状態計測装置において、前記第2調整手段は、前記共振周波数の5ppm毎に、前記高周波バースト信号の搬送周波数を可変とする弾性表面波伝搬状態計測装置である。
【0015】
請求項5に対応する発明は、請求項1乃至請求項4のいずれか1項に対応する弾性表面波伝搬状態計測装置において、前記入力手段は、前記弾性表面波が前記伝搬面を1周回するのに要する時間の2倍以上の時間にわたり前記高周波バースト信号を入力する弾性表面波伝搬状態計測装置である。
【0016】
請求項6に対応する発明は、請求項1に対応する弾性表面波伝搬状態計測装置を用いた環境変化計測装置であって、前記多重周回弾性表面波素子の周囲の環境状態に対して予め設定された特徴周波数と該環境状態とを関連付けて記憶する環境記憶手段と、前記算出手段により算出された差分の周波数と、前記環境記憶手段により記憶された特徴周波数とを比較する比較手段と、前記比較手段による比較の結果、前記環境記憶手段により記憶された環境状態を出力する環境状態出力手段とを備えた環境変化計測装置である。
【0017】
請求項7に対応する発明は、請求項1に対応する弾性表面波伝搬状態計測装置に用いられる多重周回弾性表面波素子において、前記伝搬面に対向して非接触で設置され、前記伝搬面に電界を印加して弾性表面波を励起する、すだれ状電極を備えた多重周回弾性表面波素子である。
【0018】
請求項8に対応する発明は、搬送周波数を有する高周波バースト信号の入力により伝搬面を多重周回する弾性表面波が励起される多重周回弾性表面波素子からの出力周波数の変化量を計測する弾性表面波伝搬状態計測方法であって、前記多重周回弾性表面波素子に、前記高周波バースト信号を入力する入力ステップと、前記入力の後、前記伝搬面を多重周回する弾性表面波を検出し、得られた検出信号を出力する出力ステップと、前記伝搬面を弾性表面波が1周回するのに要する周回時間に占める前記搬送周波数における1周期の割合が整数分の1となる共振状態に関し、当該共振状態における弾性表面波の参照位相を含む参照信号のデータ及びこの弾性表面波を励起するための参照周波数を予め記憶する記憶ステップと、前記弾性表面波の検出信号を共振状態にするように、前記高周波バースト信号の搬送周波数を調整して共振周波数にするための第1調整ステップと、前記第1調整ステップによる調整の後、前記出力ステップから出力された検出信号の位相である検出位相と前記記憶ステップに記憶された参照位相との差が一定となるように、前記高周波バースト信号の搬送周波数を調整するための第2調整ステップと、前記第2調整ステップによる調整の結果、両者の位相差が一定となるとき、前記第2調整ステップにより調整された搬送周波数と前記記憶手段に記憶された参照周波数との差分を算出する算出ステップとを備えた弾性表面波伝搬状態計測方法である。
【0019】
請求項9に対応する発明は、請求項8に対応する弾性表面波伝搬状態計測方法において、前記多重周回弾性表面波素子は、伝搬面が球形であり、前記第2調整ステップは、前記検出信号の波形と前記参照信号の波形とを、前記高周波バースト信号を入力してから周回数の小さな時刻から順次一致させるようにし、少なくとも前記共振周波数の周期の5000倍に相当する時間以降の波形を一致させるように、前記共振周波数を調整する弾性表面波伝搬状態計測方法である。
【0020】
請求項10に対応する発明は、請求項8又は請求項9に対応する弾性表面波伝搬状態計測方法において、前記高周波バースト信号は、10MHz以上の搬送周波数を有し、少なくとも1周回の周回時間以上の波からなる弾性表面波伝搬状態計測方法である。
【0021】
請求項11に対応する発明は、請求項8乃至請求項10のいずれか1項に対応する弾性表面波伝搬状態計測方法において、前記第2調整ステップは、前記共振周波数の5ppm毎に、前記高周波バースト信号の搬送周波数を可変とする弾性表面波伝搬状態計測方法である。
【0022】
請求項12に対応する発明は、請求項8乃至請求項11のいずれか1項に対応する弾性表面波伝搬状態計測方法において、前記入力ステップは、前記弾性表面波が前記伝搬面を1周回するのに要する時間2倍以上の時間にわたり前記高周波バースト信号を入力する弾性表面波伝搬状態計測方法である。
【0023】
請求項13に対応する発明は、請求項8に対応する弾性表面波伝搬状態計測方法を用いた環境変化計測方法であって、前記多重周回弾性表面波素子の周囲の環境状態に対して予め設定された特徴周波数と該環境状態と関連付けて記憶する環境記憶ステップと、前記算出ステップにより算出された差分の周波数と、前記環境記憶ステップにより記憶された特徴周波数とを比較する比較ステップと、前記比較ステップによる比較の結果、前記環境記憶ステップにより記憶された環境状態を出力する環境状態出力ステップとを備えた環境変化計測方法である。
【0024】
<用語>
ここで、本発明において、「弾性表面波」と表記している波は、境界波、回廊波、内郭を周回する表面波、弾性表面波、漏洩弾性表面波、擬似弾性表面波、擬似漏洩弾性表面波等、球形表面にエネルギーを集中させて伝搬する弾性波全般を包含する。
【0025】
同様に、本発明においては、伝搬路が異なる材料との境界によってなる弾性表面波素子(球状弾性境界波素子)も境界を弾性波が多重周回伝搬する現象に基づいた素子であれば、多重周回弾性表面波素子と呼ぶこととする。例えば多重周回弾性表面波素子は、3次元基体が球形状の素子に限らず、伝搬路が円環状表面を有していれば、球形状の一部が平面形状など他の形状に加工されている素子も包含する。
【0026】
また、本発明において、周回速度とは、厳密な意味での伝搬速度ではない場合がある。一般に周囲の温度が変化すると、弾性表面波の伝搬速度は変化するが、伝搬路の周回長も熱膨張によって変化するため、これらの影響が重畳されて弾性表面波の周回に必要な時間が変わってしまう場合がある。また、異方性材料を用いて伝搬路を作る場合、場所によって物理的な意味における弾性表面波の伝搬速度は変化する。すなわち、本発明において、周回速度とは、周回経路を所定の周回数あるいは所定の位置の間を伝搬するのに必要な時間によって定義される速度をいう。
【0027】
また、本発明においては、電気信号を弾性波に変換するものとしては、1個のすだれ状電極を用いているが、2個以上の複数の電気音響変換素子を除外するものではない。例えば、1対のすだれ状電極を使用し、一方を送信用とし、他方を受信用として使用しても良い。
【0028】
<作用>
従って、請求項1,8に対応する発明は、高周波バースト信号の搬送周波数を調整して共振周波数にするための第1調整手段と、前記高周波バースト信号の入力から搬送周波数の周期の所定の倍数の時間を経過させた後に、多重周回弾性表面波素子から出力された検出信号の位相を所定の値に一致させるように、前記搬送周波数を調整するための第2調整手段と、第2調整手段により調整された搬送周波数と参照周波数との差分を算出する算出手段とを備えた構成により、共振状態にしてから所定の波数の弾性表面波を伝搬した後の状態における位相の変化を求めているので、多重周回した弾性表面波の干渉の影響を抑えることができ、多重周回弾性表面波素子において同じ経路を伝搬する弾性表面波の周波数変化量を高精度に算出することができる。
【0029】
請求項2,9に対応する発明は、請求項1,8に対応する作用に加え、第2調整手段は、検出信号の波形と参照信号の波形とを、高周波バースト信号を入力してから順次一致させるようにし、少なくとも前記共振周波数の周期の5000倍に相当する時間以降の波形を一致させるように、共振周波数を調整するので、多重周回による位相の変化を高確度で検出することができる。このように長時間伝搬をさせることは、弾性表面波の伝搬面が球形である場合には周回に伴う減衰を抑制できる。これにより、実用的な強度で検出できる。
【0030】
請求項3,10に対応する発明は、請求項1〜2,8〜9に対応する作用に加え、高周波バースト信号は、10MHz以上の搬送周波数を有し、少なくとも1周回の周回時間の3分の1以上の継続時間からなるので、弾性表面波の強度が多重周回により減衰しても位相の変化を求めることができる。
【0031】
請求項4,11に対応する発明は、請求項1〜3,8〜10に対応する作用に加え、第2調整手段は、共振周波数の5ppm毎に高周波バースト信号の搬送周波数を可変とするものであるので、高精度に波形を一致させることができる。
【0032】
請求項5,12に対応する発明は、請求項1〜4,8〜11に対応する作用に加え、入力手段は、1周回の周回時間の2倍の時間にわたり高周波バースト信号を入力するので、多重周回された検出信号の干渉によるノイズを抑えることができる。
【0033】
請求項6,13に対応する発明は、多重周回弾性表面波素子の周囲の環境状態に対して予め設定された特徴周波数と該環境状態とを関連付けて記憶する環境記憶手段と、算出手段により算出された差分の周波数と、環境記憶手段により記憶された特徴周波数とを比較する比較手段と、比較手段による比較の結果、環境記憶手段により記憶された環境状態を出力する環境状態出力手段とを備えているので、環境の変化による周波数の変動幅から環境の変化を検知することができる。
【0034】
請求項7に対応する発明は、弾性表面波伝搬状態計測装置に用いられる多重周回弾性表面波素子において、伝搬面に対向して非接触で設置され、伝搬面に電界を印加して弾性表面波を励起する、すだれ状電極を備えた構成により、すだれ状電極の質量による影響やすだれ状電極と弾性表面波との散乱効果による影響を受けずに、弾性表面波を伝搬面に伝搬させることができるので、周波数変化量を高精度に算出できる多重周回弾性表面波素子を提供できる。
【発明の効果】
【0035】
本発明によれば、多重周回弾性表面波素子における周波数変化量を高精度に算出することができる。
【0036】
これにより、弾性表面波の伝搬状態の変化をその共振周波数の変化から高精度に算出することができる。例えば、多重周回弾性表面波素子表面への物質や分子の付着があった場合に、その伝搬面の変化(環境変化)に利用することができる。
【発明を実施するための最良の形態】
【0037】
以下、図面を参照して本発明の実施形態を説明する。
【0038】
<第1の実施形態>
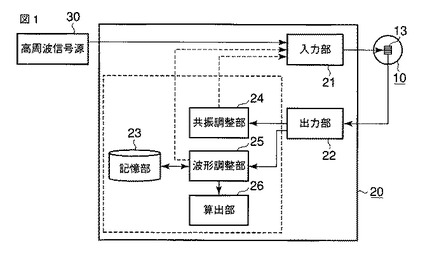
図1は本発明の第1の実施形態に係る周波数変化量算出システムの構成を示す模式図である。
【0039】
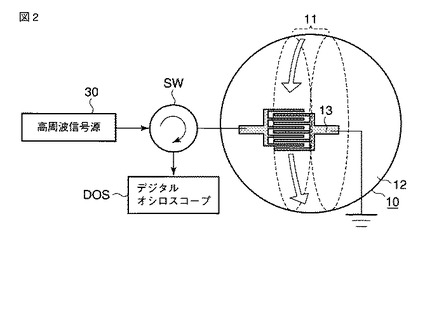
多重周回弾性表面波素子10は、図2に示すように、伝搬面11を有する球状部材12、すだれ状電極13を備えている。これにより、高周波信号源30による高周波信号の入力により伝搬面11を多重周回する弾性表面波が励起される。また、多重周回した弾性表面波は、すだれ状電極13で検出され、スイッチSWを介してデジタルオシロスコープDOS等で計測される。
【0040】
伝搬面11は、連続した曲面からなる円環状の表面を有し、この円環状の表面の少なくとも一部には、すだれ状電極13により励起される互いに逆方向に伝搬する弾性表面波を周回させるための周回経路を備えている。
【0041】
球状部材12は、一旦励起された弾性表面波が多重周回可能な伝搬面11を有する3次元基体であり、ここでは単結晶の水晶材料を球形状に加工したものを用いている。
【0042】
すだれ状電極13は、高周波バースト信号の入力により伝搬面を多重周回する弾性表面波を励起するとともに、多重周回した弾性表面波を検出するものである。例えば、金属の蒸着とフォトリソグラフィプロセスによるエッチングとを用いることにより、球状部材12の表面に接して形成される。
【0043】
周波数変化量算出装置(弾性表面波伝搬状態計測装置)20は、高周波信号源30による高周波信号の搬送周波数を変化させた量を算出するものであり、入力部21、出力部22、記憶部23、共振調整部24(第1調整手段)、波形調整部25(第2調整手段)、算出部26を備える。
【0044】
入力部21は、高周波信号源30から出力される高周波信号の搬送周波数を設定及び変更する機能を有し、多重周回弾性表面波素子10に高周波バースト信号を入力するものである。
【0045】
また、入力される高周波バースト信号は、10MHz以上の搬送周波数を有し、少なくとも1周回の周回時間以上の継続時間の波からなるものである。これにより、多重周回弾性表面波素子10の伝搬面11を周回する弾性表面波のバースト信号の両端の影響を小さくすることができる。また、励起する弾性表面波の振幅を大きくすることができる。
【0046】
なお、通常、100MHz以上の周波数により弾性表面波を励起する場合に、パルス幅の短い高周波信号(極端な場合はインパルス)を用いると、高周波信号の周波数成分のパワーは相対的に小さくなる。このため、1ppmの精度で計測を行うのが困難となる。ただし、特定周波数を有する狭帯域のバースト信号を用いて高周波信号源30の高周波信号と位相比較を行う場合に限り、計測の対象とする周波数の成分についての十分なパワーを確保でき、1ppmの計測を行うことができる。
【0047】
出力部22は、入力部21による高周波バースト信号の入力後、伝搬面11を多重周回する弾性表面波を検出し、得られた検出信号を共振調整部24又は波形調整部25に出力するものである。なお、検出信号の位相はヘテロダイン検波により得られる。
【0048】
記憶部23は、共振状態における弾性表面波の参照位相を含む参照信号のデータ及びこの弾性表面波を励起するための参照周波数を予め記憶するものである。
【0049】
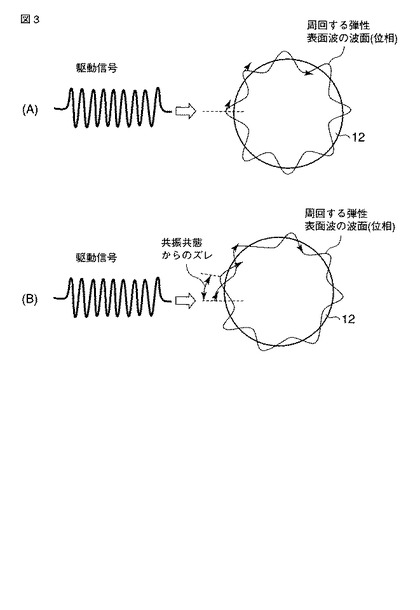
ここで、「共振状態」とは、伝搬面11を弾性表面波が1周回するのに要する周回時間Tに占める弾性表面波の1周期の割合が周回時間Tの整数分の1となる状態である。
【0050】
共振状態では、図3(A)に示すように、駆動信号がすだれ状電極13に入力された場合に、弾性表面波の1周回分の周回時間Tが弾性表面波の振動周期の整数倍となる。このため、すだれ状電極13は、既に周回している弾性表面波と同じ位相で、弾性表面波の振動を増幅する電界を球状部材12に印加するので、弾性表面波の出力強度が極大となる。
【0051】
共振状態では無い状態では、図3(B)に示すように、駆動信号がすだれ状電極13に入力された場合に、弾性表面波の1周回分の周回時間Tが弾性表面波の振動周期の整数倍とはならない。このため、すだれ状電極13により、周回中の弾性表面波に対して異なる位相の弾性表面波が印加され、既に周回中の弾性表面波を打ち消してしまう。よって、弾性表面波の強度は不十分になり、出力される検出信号の位相は、時間的に不安定になる。
【0052】
共振調整部24は、出力部22により検出された弾性表面波の検出信号を共振状態にするように、高周波バースト信号の搬送周波数を調整して共振周波数にするためのものである。
【0053】
共振状態にする理由は、弾性表面波素子の伝搬面の変化(以下、環境変化ともいう。)を、伝搬面の変化の前後の周波数応答から求める場合に、再現しやすい伝搬状態であるからである。共振状態は、1周期を波長比の何倍に相当させるかによって複数存在する。あらかじめ環境の変動幅を設定しておけば、一意にその周波数を環境に対する特定周波数として採用できる。
【0054】
もう一つの共振状態にする理由は、位相変動の小さい安定した振幅を有する信号を測定するためである。共振状態で測定を行うと、出力信号の位相が時刻に従って比例する為、位相の変化から弾性表面波の伝搬速度を求めることができる、という大きな利点がある。
【0055】
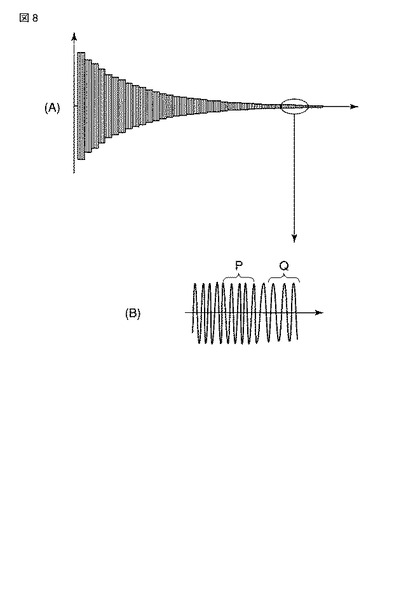
例えば、温度が上昇して弾性表面波の伝搬速度が上昇する場合、図7(B)に示すように、出力信号の位相は時間に対して不規則になる為に、波形の変化を追いながら信号の出力時刻(位相)を測定しなくてはならない。しかし、共振状態の場合には図8(B)に示すように、出力信号は時間的に安定している。そのため、波形の変化を追う必要がなく、特定の時刻における出力信号の位相の変化から弾性表面波の伝搬速度を求めることができる。
【0056】
波形調整部25は、共振調整部24による調整の後、出力部22から出力された検出信号の位相である検出位相と記憶部23に記憶された参照位相との差が一定となるように、高周波バースト信号の搬送周波数を調整するためのものである。
【0057】
具体的には、高周波バースト信号の搬送周波数を、共振周波数の5ppm毎に調整する。
【0058】
また、波形調整部25は、高周波バースト信号を多重周回弾性表面波素子10に入力し、その検出信号の波形と参照信号の波形とを順次一致させるようにする。
【0059】
そして、少なくとも周回時間Tの5000倍に相当する時間以降の波形を一致させるように、共振周波数を調整する。ここで、伝搬面が球面の場合には周回に伴う弾性表面波の減衰率は小さい。そのため、波長の5000倍以上の周回時間が経過して検出信号の強度が減少したり、弾性表面波がすだれ状電極を通過する度に発生する反射波が増加したりしても位相検出が可能である。共振状態での測定は、5000倍以上の周回時間経過後の位相測定で有効である。
【0060】
算出部26は、波形調整部25による調整の結果、検出信号と参照信号との位相差が一定となるとき、波形調整部25により調整された搬送周波数と記憶部23に記憶された参照周波数との差分を算出するものである。
【0061】
ここで、位相差を一定にさせた場合における周波数の変化量を求める手順について説明する。
【0062】
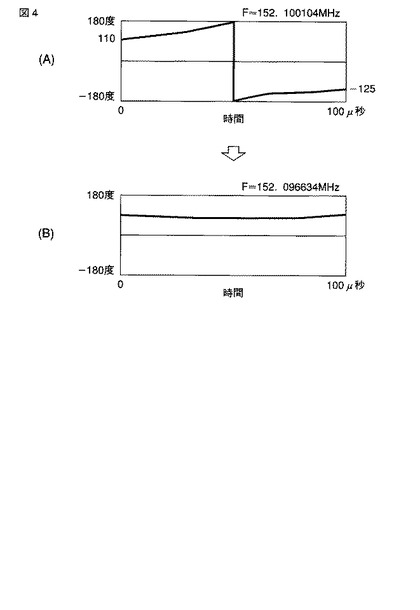
図4(A)は、検出位相と参照位相との差を、駆動用のバースト信号を印加した直後に測定した結果の例である。ここで、図4において、縦軸は位相差を示し、横軸は経過時間を示す。すなわち、位相差を一定にさせた場合における周波数の変化量は、図4(A)の状態を図4(B)の状態にするように調整した時の周波数に他ならない。
【0063】
なお、球状弾性表面波素子の直径は3.3mmであり、搬送周波数は150MHz近傍(ここでは、152.1MHz)である。
【0064】
図4(A)において、時間0秒のときに位相差が110度であったものが、100μ秒経過後には−125度に変化している。
【0065】
つまり、時間0秒から100μ秒の間に、180度―110度+(−125度―(−180))度=70度+55度=125度の位相が変化したことになる。
【0066】
ここで、152.1MHzの信号の位相が125度変化する時間の変化は、1周期に要する時間と位相変化の割合との積となる。
【0067】
換言すれば、
(信号周期)×(多重周回による位相変化量/360度)
=1/(152.1×106) × 125度/360度
となる。そして、これだけの変化が100μ秒で起きているので、その変化率は、
(信号周期)×(多重周回による位相変化量/360度)/(多重周回に要した全時間)
1/(152.1×106) × 125度/360度 /(100×10−6)となる。つまり、この比率だけ弾性表面波の信号の位相が早くなる。
【0068】
逆に、周波数をこの比率分だけ低くすると、位相の変化が打ち消されることになる。このときの周波数の変化量は、以下のように算出される。
【0069】
(周波数の変化量)
=(搬送周波数)×{(多重周回による位相変化量/360度)×(信号周期)}/(多重周回に要した時間)
=152.1×106×(70+55)/360×(1/(152.1×106))/(100×10−6)
=3470Hz
となる。
【0070】
すなわち、搬送周波数を3470Hz変化させると、図4(B)のように、検出位相が参照位相に平行に漸近する。
【0071】
ところで、今回の測定の前に測定した際、共振周波数として測定した周波数は152.103464MHzであり、100マイクロ秒時刻における位相値は、−128.3度であった。よって、今回の値125度と3.3度の差がある。
【0072】
そこで、さらに前式に対して修正を行うと、求める周波数変化量は、
152.096634×106×(3.3)/360×(1/(152.096634×106))/(100×106)
=9.2Hz
となる。
【0073】
よって、
152096634Hz−9.2Hz=152096625Hz
となる。
【0074】
前回の測定結果の周波数152103464MHzとは、6839Hzの差がある。
【0075】
これにより、6839Hz/152103464Hz=約44ppmの伝搬速度の変化があることを求めることができる。
【0076】
なお、記憶部23、共振調整部24、波形調整部25、算出部26は、ハードウェア構成で実現可能であり、ハードウェア構成とソフトウェア構成の組合せとしても実現可能となっている。後者の場合、ソフトウェア構成は、予めコンピュータ読み取り可能な記憶媒体又はネットワークから得られたプログラムがコンピュータにインストールされることにより各機能が実現される。
【0077】
高周波信号源30は、高周波を発生して入力部21に出力するものである。
【0078】
(周波数変化量算出装置20の動作)
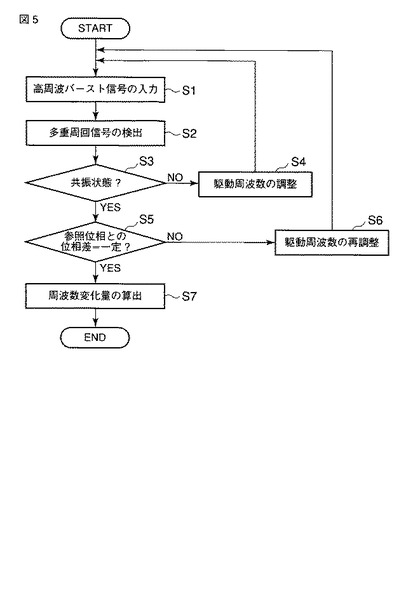
次に本実施形態に係る周波数変化量算出装置20の動作について図5のフローチャートを用いて説明する。
【0079】
まず、入力部21により、多重周回弾性表面波素子10のすだれ状電極13に、高周波バースト信号が入力される(S1)。これにより、多重周回弾性表面波素子10における伝搬面11に弾性表面波が励起する。
【0080】
そして、励起した弾性表面波は、すだれ状電極13により検出されて出力部22を介して、共振調整部24及び波形調整部25に出力される(S2)。
【0081】
次に、共振調整部24により共振状態になるように搬送周波数が調整される(S3)。ここで、共振状態でない場合、搬送周波数が変更される。そして、出力部22により出力される検出信号が共振状態となるまで、この動作が繰り返される(S3―No,S4)。
【0082】
なお、共振状態となったか否かの判断は、検出信号の強度によっても判断することができる。すなわち、共振状態では波が強め合うため強度値が急激に大きな値となる。
【0083】
次に、共振調整部24により共振状態になるように搬送周波数が調整された場合、出力部22から出力された検出信号の検出位相と記憶部23に予め記憶された参照位相との差が一定となるように、波形調整部25により高周波バースト信号の搬送周波数が調整される(S3−Yes,S5)。ここで、位相差が一定でない場合、搬送周波数が変更される。そして、出力部22により出力される検出位相と参照位相との差が一定となるまで、この動作が繰り返される(S5―No,S6)。
【0084】
次に、波形調整部25による調整の結果、検出位相と参照位相との位相差が一定となるとき、波形調整部25により調整された搬送周波数と記憶部23に記憶された参照周波数との差分が算出部26により算出される(S5−Yes,S7)。
【0085】
以上説明したように、本実施形態に係る周波数変化量算出装置20によれば、共振状態における弾性表面波の少なくとも参照位相と好ましくは強度情報を有している参照信号のデータ及びこの弾性表面波を励起するための参照周波数を予め記憶する記憶部23と、高周波バースト信号の搬送周波数を調整して共振周波数にするための共振調整部24と、検出信号の位相である検出位相と参照位相との差が時間に対して一定となるように、高周波バースト信号の搬送周波数を調整するための波形調整部25と、両者の位相差が一定となるとき、波形調整部25により調整された搬送周波数と参照周波数との差分を算出する算出部26とを備えた構成により、共振状態にしてから位相の変化を求めているので、多重周回した弾性表面波の干渉の影響を抑えることができ、多重周回弾性表面波素子10における周波数変化量を高精度に算出することができる。
【0086】
なお、本実施形態に係る周波数変化量の算出方法は、通常の共振状態の周波数(共振周波数)を求めるだけのものではない。バースト信号を用いて共振状態にしたとしても、バースト信号を用いて計測する限り位相が時刻と完全な比例関係にはならない。このような場合であっても、共振状態を現出し、さらに記憶した参照位相と比較をすることで正確な測定を実現するものであれば、本実施形態に係る周波数変化量の算出方法はこれを除くものではない。
【0087】
さらに、本実施形態によれば、波形調整部25は、検出信号の波形と参照信号の波形とを、高周波バースト信号を入力してから順次一致させるようにし、伝搬面を球形にして周回に伴う波の回折の影響による減衰を小さくしている。そして、少なくとも周回時間の5000倍に相当する時間以降の波形を一致させるように、共振周波数を調整するので、多重周回による位相の変化を高確度で検出することができる。
【0088】
また、本実施形態によれば、波形調整部25は、共振周波数の5ppm毎に高周波バースト信号の搬送周波数を可変とするものであるので、高精度に波形を一致させることができる。
【0089】
また、本実施形態によれば、高周波バースト信号は、10MHz以上の搬送周波数を有し、少なくとも1周回の周回時間以上の波からなるので、弾性表面波の強度が多重周回により減衰しても位相の変化を求めることができる。
【0090】
なお、検出信号の位相と参照位相との差が360度以上の場合は、2周目の信号の位相と比較するなど周回が重ならないようにする。これにより、位相差が大きくならない時刻での位相データを用いて、周回数が大きな時刻において共振周波数の算出を精密に行うことができる。
【0091】
なお、共振周波数の算出とそれを用いた周波数値とによる伝搬状態の変化測定は、最低2個の位相データがあれば可能である。
【0092】
なお、周波数変化量算出装置20に対して、さらに、多重周回弾性表面波素子の周囲の環境状態に対して予め設定された特徴周波数と該環境状態とを関連付けて記憶する環境記憶手段と、算出手段により算出された差分の周波数と環境記憶手段により記憶された特徴周波数とを比較する比較手段と、比較結果による比較の結果、環境記憶手段により記憶された環境状態を出力する環境状態出力手段とを備えて環境計測装置を作成することもできる。この場合は、環境の変化による周波数の変動幅から環境の変化を検知することができる。
【0093】
<第2の実施形態>
本発明の第2の実施形態は、入力部21における高周波バースト信号を入力するタイミングを調整する。
【0094】
入力部21は、高周波バースト信号を周回時間Tの整数倍の時間にわたり多重周回弾性表面波素子10に入力する。これにより比較的安定した位相の信号を得ることができる。
【0095】
ここで、高周波バースト信号を入力するタイミングに応じて得られる3パターンの検出信号について説明する。
【0096】
(1.共振状態ではない短いバースト)
通常、弾性表面波は、多重周回弾性表面波素子10の表面に形成されるすだれ状電極13などよって僅かに反射される。そのため、検出される信号が、時間領域の前後に広がってしまう。
【0097】
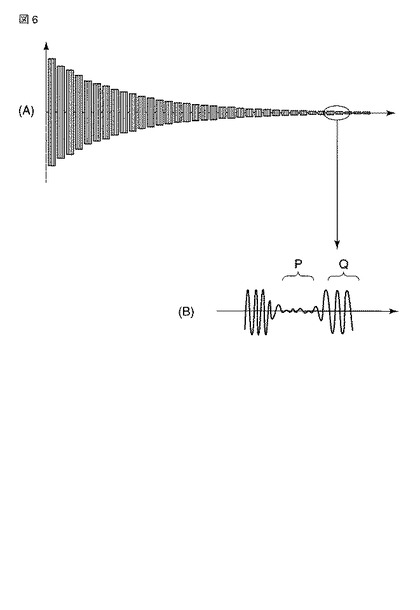
すなわち、バースト信号の周波数が共振周波数でなく入力時間が周回時間Tの整数倍ではない場合、多重周回弾性表面波素子10を多重周回して出力される検出信号は、周回毎のバースト信号となる(図6(A)参照)。
【0098】
この場合、周回数が大きくなると時間的に広がり、前後の信号と干渉してしまう(図6(B)参照)。
【0099】
すなわち、周回数の大きい領域で位相を計測した場合、バースト信号が観測される領域(図6(B)のQ領域)では安定した位相値が得られるが、バースト信号が観測されない領域(図6(B)のP領域)では信号強度が小さく、位相自体も不明瞭となる。
【0100】
この場合、温度が変わると観測の対象となるQ領域の時刻に、位相の不安定なP領域が移動してくる。そのため、直線的なデータの位相変化を測定することができなくなる。
【0101】
(2.共振状態ではない長いバースト)
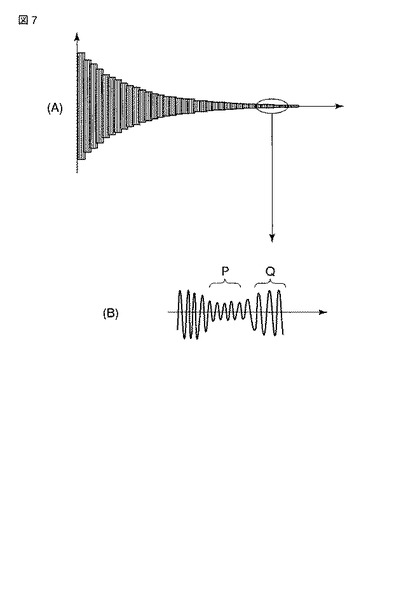
バースト信号の周波数が共振周波数ではなく入力時間が周回時間Tの整数倍とした場合、バースト信号の時間長は共振周波数ではないため、隣り合う信号の重なる領域では干渉により強度が変化する(図7(A)参照)。そのため、この領域では、当然に位相は不連続となる(図7(B)参照)。
【0102】
(3.共振状態のバースト)
共振状態の場合、上述したパターンに比して、弾性表面波の反射した成分や早い時刻に広げられた弾性表面波の重畳による位相への影響が少ない。
【0103】
例えば、バースト信号の周波数が共振周波数であり入力時間が周回時間Tの整数倍であると、Q領域及びP領域のいずれの領域でも信号の位相は安定した分布となる(図8参照)。このため、多少信号の到達時刻が温度などによって変化しても測定値は安定する。
【0104】
なお、バースト信号の周波数が共振周波数であれば、入力時間が周回時間Tより短い場合でも、比較的安定した位相の信号が得られる。結果として、測定を正確に行うことができる。
【0105】
上述したように、本実施形態によれば、入力部21は、周回時間Tの整数倍の時間にわたり高周波バースト信号を入力するので、多重周回された検出信号の干渉によるノイズを抑えることができる。
【0106】
特に周回数(弾性表面波の伝搬長の波長に対する比率)が大きい場合には、高精度の位相検出ができる。
【0107】
例えば、弾性表面波の伝搬速度計測の分解能が3ppmを超えるような場合で、波長の5000倍を超える場合には、高精度の位相検出ができる。
【0108】
また、直径1cmの水晶のZ軸シリンダーを用いた45MHz素子であれば、20周を超える周回数(9500倍に相当)の場合に、この効果が現れる。一方、同様の水晶基材を用いて15MHzの素子を作成する場合、30周(4500倍)程度でバースト信号の形状は崩れる。波長の倍数からは十分小さな伝搬長であっても、周回する度に電極などから受ける影響が大きくなり、位相測定に影響を及ぼすからである。
【0109】
また、本実施形態に係る周波数変化量算出装置20においては、信号強度は周回にしたがって指数関数的に変化する信号を測定対象とする。そのため、検出信号と参照信号との強度を等しくする過程において、位相の絶対値が変わることにより、測定が不正確になることを防ぐことができる。
【0110】
<第3の実施形態>
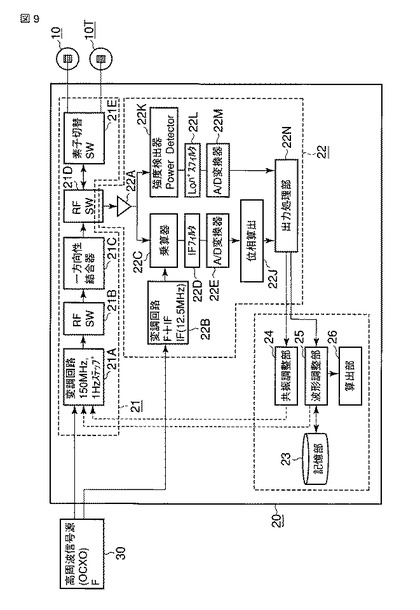
図9は本発明の第3の実施形態に係る周波数変化量算出システムの構成を示す模式図である。なお、第1の実施形態で説明した部分と同一部分には同一符号を付し、重複した説明を省略する。また、以下の各実施形態においても同様にして重複した説明を省略する。
【0111】
多重周回弾性表面波素子10Tは、温度較正のために用いられるものである。
【0112】
入力部21は、変調回路21A,RFスイッチ21B,一方向性結合器21C,RFスイッチ21D,素子切替スイッチ21Eを備えている。
【0113】
変調回路21Aは、高周波信号源30の高周波信号の搬送周波数を150MHzで変調し、変調した周波数を1Hz間隔で微調整できるものである。
【0114】
RFスイッチ21Bは、変調回路21Aで調整した高周波信号をバースト信号にするものである。
【0115】
一方向性結合器21Cは、多重周回弾性表面波素子10からの弾性表面波の検出信号が逆進行しないようにするためのものである。
【0116】
RFスイッチ21Dは、一方向性結合器21Cと素子切替スイッチ21Eとを接続させるか、一方向性結合器21Cと増幅器22Aとを接続させるか、どちらとも接続させないか、を選択できるスイッチである。
【0117】
素子切替スイッチ21Eは、多重周回弾性表面波素子10又は10Tを選択できるスイッチである。
【0118】
出力部22は、増幅部22A,変調回路22B,乗算器22C,IFフィルター22D,A/D変換器22E,乗算器22F、I/D22G,乗算器22H,I/D22I,位相算出器22J,強度検出器22K,ローパスフィルター22L,A/D変換器22M,出力処理部22Nを備えている。
【0119】
また、変調回路22B,乗算器22C,IFフィルター22D,A/D変換器22Eにより、検出信号の波形をヘテロダイン検波により得ることを可能とする。
【0120】
ヘテロダイン検波を用いる理由は以下の通りである。
【0121】
弾性表面波の測定は、非常に僅かな位相の変化率を測定対象とする。そのため、駆動信号を同一にして素子間や素子の時間的な不安定性に影響されないような条件が必要である。
【0122】
特に広い帯域の信号を用いる場合、観測の対象とする特定周波数のみを通過させる周波数フィルターを用いても、その他の雑音信号の除去を行うことが困難である。
【0123】
この場合、狭帯域の1周回以上の継続時間以上のバースト信号を用い、ヘテロダイン検波方式を用いて検波する場合に限り、周期の5000回分の伝搬距離の弾性表面波信号の位相を正確に捉えることができる。
【0124】
なお、A/D変換器22Eにより、ヘテロダイン検波におり得られた波形の強度をデジタル化し、デジタル強度値を得ている。
【0125】
なお、出力処理部22Nは、位相算出器22J及びA/D変換器22Mから得られた信号を共振調整部24及び波形調整部25に出力するためのものである。
【0126】
記憶部23は、ヘテロダイン検波により得られた参照波形の強度をデジタル化して示すデジタル強度値を記憶する。
【0127】
波形調整部25は、A/D変換器22Eにより得られた検出信号のデジタル強度値と、参照波形のデジタル強度値とを一致させるように、搬送周波数を調整する。これにより、出力部22から出力された検出位相と記憶部23に記憶された参照位相との差を一定とすることができる。
【0128】
上述したように本実施形態においては、出力部22は、検出信号の波形をヘテロダイン検波により得ており、さらに得られた波形の強度をデジタル化し、記憶部23には参照信号の波形の強度をデジタル化して示すデジタル強度値が記憶されており、波形調整部25はA/D変換器22Eにより得られたデジタル強度値と、参照信号の波形のデジタル強度値とを一致させるように、共振周波数を調整する。このように、波形をデジタル強度値により一致させる構成を備えているので、コンピュータによる信号処理を高精度に実行することができる。
【0129】
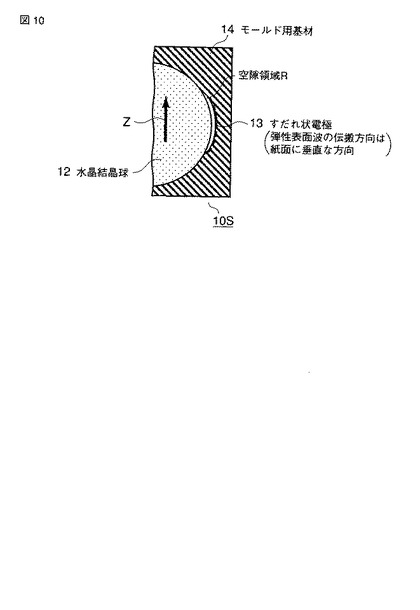
<第4の実施形態>
図10は本発明の第4の実施形態に係る多重周回弾性表面波素子10Sの構成を示す模式図である。
【0130】
多重周回弾性表面波素子10Sは、伝搬面11に対向して非接触で設置され、伝搬面に電界を印加して弾性表面波を励起する、すだれ状電極13を備えている。
【0131】
具体的には、球状部材12の周囲に外部基材14を備え、球状部材12とモールド用基材14とに空隙領域Rを設け、この空隙領域Rにすだれ状電極13を形成している。
【0132】
また、図10中の矢印Zは水晶の結晶軸Z軸方向を示しており、すだれ状電極13が励起する弾性表面波の伝搬方向は紙面に垂直な方向である。
【0133】
ところで、周回する弾性表面波がすだれ状電極を通過する際には、(a)弾性表面波が周回する毎にエネルギーを電気回路に漏出する(b)空中や水中に対して弾性表面波のエネルギーを漏洩する、(c)伝搬路上の物質により弾性表面波が反射散乱される等の原因により、弾性表面波のエネルギーが損失する。
【0134】
このうち、回路へ漏出することによるエネルギーの損失(上記(c))の影響は、特に大きい。
【0135】
これに対し、本実施形態の多重周回弾性表面波素子10を用いれば、球状部材12とすだれ状電極13との電気的な相互作用はあるが、すだれ状電極13の質量や弾性表面波の散乱効果の影響は除去することができる。これにより、位相計測にかかわる悪影響を極力減らすことができる。
【0136】
以上説明したように、本実施形態に係る多重周回弾性表面波素子10は、伝搬面11に対向して非接触で設置され、伝搬面11に電界を印加して弾性表面波を励起する、すだれ状電極13を備えた構成により、すだれ状電極13の質量による影響やすだれ状電極13と弾性表面波との散乱効果による影響を受けずに、弾性表面波を伝搬面11に伝搬させることができるので、周波数変化量を高精度に算出できる多重周回弾性表面波素子10を提供できる。
【0137】
なお、本発明は、上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。更に、異なる実施形態に構成要素を適宜組合せてもよい。
【図面の簡単な説明】
【0138】
【図1】本発明の第1の実施形態に係る周波数変化量算出システムの構成の一例を示す模式図である。
【図2】同実施形態に係る多重周回弾性表面波素子の構成の一例を示す図である。
【図3】同実施形態に係る共振状態を説明するための図である。
【図4】同実施形態に係る位相の変化を示す図である。
【図5】同実施形態に係る周波数変化量算出装置20の動作を説明するためのフローチャートである。
【図6】本発明の第2の実施形態に係る検出信号を示す図である。
【図7】同実施形態に係る検出信号を示す図である。
【図8】同実施形態に係る検出信号を示す図である。
【図9】本発明の第3の実施形態に係る周波数変化量算出システムの構成の一例を示す模式図である。
【図10】本発明の第4の実施形態に係る多重周回弾性表面波素子10の構成の一例を示す模式図である。
【符号の説明】
【0139】
10・・・多重周回弾性表面波素子、11・・・伝搬面、12・・・球状部材、13・・・すだれ状電極、20・・・周波数変化量算出装置、21・・・入力部、21A・・・変調回路、21B・・・RFスイッチ、21C・・・一方向性結合器、21D・・・RFスイッチ、21E・・・素子切替スイッチ、22・・・出力部、22A・・・増幅部、22B・・・変調回路、22C・・・乗算器、22D・・・IFフィルター、22E・・・A/D変換器、22F・・・乗算器、22G・・・I/D、22H・・・乗算器、22I・・・I/D、22J・・・位相算出器、22K・・・強度検出器、22L・・・ローパスフィルター、22M・・・A/D変換器、22N・・・出力処理部、23・・・記憶部、24・・・共振調整部、25・・・波形調整部、26・・・算出部、30・・・高周波信号源。
【技術分野】
【0001】
本発明は、多重周回弾性表面波素子における周波数変化量を算出する弾性表面波伝搬状態計測装置に係り、特に高精度に周波数変化量を算出する弾性表面波伝搬状態計測装置に関する。
【背景技術】
【0002】
近年、弾性表面波素子が各種センサーに応用されている。弾性表面波素子を応用したセンサーには、例えば球形状の水晶の伝搬面に弾性表面波を多重周回させて、多重周回後の弾性表面波の位相変化から物理状態の変化を検知するものがある。
【0003】
詳しくは、多重周回させた検出信号の位相と基準となる参照信号の位相とを比較して、その位相の変化量から周波数変化量等の値を求めることにより、伝搬面の物理状態の変化を検知する。
【0004】
球状弾性表面波素子においては、弾性表面波がバースト信号により伝搬面に励起される。この励起された弾性表面波が伝搬面を多重周回する度に、周回受信信号としてエネルギーが放出される。すなわち、弾性表面波エネルギーが電気音響変換素子(すだれ状電極)を介して、電気エネルギーとして変換消費される。
【0005】
そこで、マッチングセクションを高インピーダンス回路にし、弾性表面波のエネルギーの放出を防ぐ。これにより、弾性表面波を多重周回させることができる(例えば、特許文献1参照)。
【特許文献1】特開2005−010098号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、バースト信号がすだれ状電極を通過する際に、異なる位相成分の波を発生し、バースト信号の波形を変えてしまう。すなわち、位相ノイズが発生することがある。
【0007】
さらに、ノイズによるエネルギーが搬送周波数のエネルギーより相対的に大きくなる場合がある。この場合、測定結果に誤差が生じてしまうため、位相変化を正確に算出することが困難となる。結果として、位相の変化量から周波数変化量等を算出することができなくなる。
【0008】
さらに、搬送周波数の信号強度を上げる為に1周回より長い継続時間のバースト信号を入力しようとすると、1周回前に入力した信号により励起された弾性表面波と新たに入力した信号により励起した弾性表面波とが干渉を起こしてしまう。このため、弾性表面波素子から出力される弾性表面波の信号の正確な位相や強度の計測が困難になる。
【0009】
また、通常、位相の変化を算出する場合、検出信号と参照信号との強度を等しくするが、強度を等しくする過程において、信号の位相が変わってしまい、周波数変化量を算出することができなくなることがある。
本発明の目的は、多重周回弾性表面波素子における周波数変化量を高精度に算出することである。
【課題を解決するための手段】
【0010】
上記の目的を達成するために、以下のような手段を講じる。
【0011】
請求項1に対応する発明は、搬送周波数を有する高周波バースト信号の入力により伝搬面を多重周回する弾性表面波が励起される多重周回弾性表面波素子に接続され、前記弾性表面波素子からの出力周波数の変化量を計測する弾性表面波伝搬状態計測装置であって、前記多重周回弾性表面波素子に、前記高周波バースト信号を入力する入力手段と、前記入力の後、前記伝搬面を多重周回する弾性表面波を検出し、得られた検出信号を出力する出力手段と、前記伝搬面を弾性表面波が1周回するのに要する周回時間に占める前記搬送周波数における1周期の割合が整数分の1となる共振状態に関し、当該共振状態における弾性表面波の参照位相を含む参照信号のデータ及びこの弾性表面波を励起するための参照周波数を予め記憶する記憶手段と、前記弾性表面波の検出信号を共振状態にするように、前記高周波バースト信号の搬送周波数を調整して共振周波数にするための第1調整手段と、前記第1調整手段による調整の後、前記出力手段から出力された検出信号の位相である検出位相と前記記憶手段に記憶された参照位相との差が一定となるように、前記高周波バースト信号の搬送周波数を調整するための第2調整手段と、前記第2調整手段による調整の結果、両者の位相差が一定となるとき、前記第2調整手段により調整された搬送周波数と前記記憶手段に記憶された参照周波数との差分を算出する算出手段とを備えた弾性表面波伝搬状態計測装置である。
【0012】
請求項2に対応する発明は、請求項1に対応する弾性表面波伝搬状態計測装置において、前記多重周回弾性表面波素子は、伝搬面が球形であり、前記第2調整手段は、前記検出信号の波形と前記参照信号の波形とを、前記高周波バースト信号を入力してから周回数の小さな時刻から順次一致させるようにし、少なくとも前記共振周波数の周期の5000倍に相当する時間以降の波形を一致させるように、前記共振周波数を調整する弾性表面波伝搬状態計測装置である。
【0013】
請求項3に対応する発明は、請求項1又は請求項2に対応する弾性表面波伝搬状態計測装置において、前記高周波バースト信号は、10MHz以上の搬送周波数を有し、少なくとも1周回の周回時間以上の波からなる弾性表面波伝搬状態計測装置である。
【0014】
請求項4に対応する発明は、請求項1乃至請求項3のいずれか1項に対応する弾性表面波伝搬状態計測装置において、前記第2調整手段は、前記共振周波数の5ppm毎に、前記高周波バースト信号の搬送周波数を可変とする弾性表面波伝搬状態計測装置である。
【0015】
請求項5に対応する発明は、請求項1乃至請求項4のいずれか1項に対応する弾性表面波伝搬状態計測装置において、前記入力手段は、前記弾性表面波が前記伝搬面を1周回するのに要する時間の2倍以上の時間にわたり前記高周波バースト信号を入力する弾性表面波伝搬状態計測装置である。
【0016】
請求項6に対応する発明は、請求項1に対応する弾性表面波伝搬状態計測装置を用いた環境変化計測装置であって、前記多重周回弾性表面波素子の周囲の環境状態に対して予め設定された特徴周波数と該環境状態とを関連付けて記憶する環境記憶手段と、前記算出手段により算出された差分の周波数と、前記環境記憶手段により記憶された特徴周波数とを比較する比較手段と、前記比較手段による比較の結果、前記環境記憶手段により記憶された環境状態を出力する環境状態出力手段とを備えた環境変化計測装置である。
【0017】
請求項7に対応する発明は、請求項1に対応する弾性表面波伝搬状態計測装置に用いられる多重周回弾性表面波素子において、前記伝搬面に対向して非接触で設置され、前記伝搬面に電界を印加して弾性表面波を励起する、すだれ状電極を備えた多重周回弾性表面波素子である。
【0018】
請求項8に対応する発明は、搬送周波数を有する高周波バースト信号の入力により伝搬面を多重周回する弾性表面波が励起される多重周回弾性表面波素子からの出力周波数の変化量を計測する弾性表面波伝搬状態計測方法であって、前記多重周回弾性表面波素子に、前記高周波バースト信号を入力する入力ステップと、前記入力の後、前記伝搬面を多重周回する弾性表面波を検出し、得られた検出信号を出力する出力ステップと、前記伝搬面を弾性表面波が1周回するのに要する周回時間に占める前記搬送周波数における1周期の割合が整数分の1となる共振状態に関し、当該共振状態における弾性表面波の参照位相を含む参照信号のデータ及びこの弾性表面波を励起するための参照周波数を予め記憶する記憶ステップと、前記弾性表面波の検出信号を共振状態にするように、前記高周波バースト信号の搬送周波数を調整して共振周波数にするための第1調整ステップと、前記第1調整ステップによる調整の後、前記出力ステップから出力された検出信号の位相である検出位相と前記記憶ステップに記憶された参照位相との差が一定となるように、前記高周波バースト信号の搬送周波数を調整するための第2調整ステップと、前記第2調整ステップによる調整の結果、両者の位相差が一定となるとき、前記第2調整ステップにより調整された搬送周波数と前記記憶手段に記憶された参照周波数との差分を算出する算出ステップとを備えた弾性表面波伝搬状態計測方法である。
【0019】
請求項9に対応する発明は、請求項8に対応する弾性表面波伝搬状態計測方法において、前記多重周回弾性表面波素子は、伝搬面が球形であり、前記第2調整ステップは、前記検出信号の波形と前記参照信号の波形とを、前記高周波バースト信号を入力してから周回数の小さな時刻から順次一致させるようにし、少なくとも前記共振周波数の周期の5000倍に相当する時間以降の波形を一致させるように、前記共振周波数を調整する弾性表面波伝搬状態計測方法である。
【0020】
請求項10に対応する発明は、請求項8又は請求項9に対応する弾性表面波伝搬状態計測方法において、前記高周波バースト信号は、10MHz以上の搬送周波数を有し、少なくとも1周回の周回時間以上の波からなる弾性表面波伝搬状態計測方法である。
【0021】
請求項11に対応する発明は、請求項8乃至請求項10のいずれか1項に対応する弾性表面波伝搬状態計測方法において、前記第2調整ステップは、前記共振周波数の5ppm毎に、前記高周波バースト信号の搬送周波数を可変とする弾性表面波伝搬状態計測方法である。
【0022】
請求項12に対応する発明は、請求項8乃至請求項11のいずれか1項に対応する弾性表面波伝搬状態計測方法において、前記入力ステップは、前記弾性表面波が前記伝搬面を1周回するのに要する時間2倍以上の時間にわたり前記高周波バースト信号を入力する弾性表面波伝搬状態計測方法である。
【0023】
請求項13に対応する発明は、請求項8に対応する弾性表面波伝搬状態計測方法を用いた環境変化計測方法であって、前記多重周回弾性表面波素子の周囲の環境状態に対して予め設定された特徴周波数と該環境状態と関連付けて記憶する環境記憶ステップと、前記算出ステップにより算出された差分の周波数と、前記環境記憶ステップにより記憶された特徴周波数とを比較する比較ステップと、前記比較ステップによる比較の結果、前記環境記憶ステップにより記憶された環境状態を出力する環境状態出力ステップとを備えた環境変化計測方法である。
【0024】
<用語>
ここで、本発明において、「弾性表面波」と表記している波は、境界波、回廊波、内郭を周回する表面波、弾性表面波、漏洩弾性表面波、擬似弾性表面波、擬似漏洩弾性表面波等、球形表面にエネルギーを集中させて伝搬する弾性波全般を包含する。
【0025】
同様に、本発明においては、伝搬路が異なる材料との境界によってなる弾性表面波素子(球状弾性境界波素子)も境界を弾性波が多重周回伝搬する現象に基づいた素子であれば、多重周回弾性表面波素子と呼ぶこととする。例えば多重周回弾性表面波素子は、3次元基体が球形状の素子に限らず、伝搬路が円環状表面を有していれば、球形状の一部が平面形状など他の形状に加工されている素子も包含する。
【0026】
また、本発明において、周回速度とは、厳密な意味での伝搬速度ではない場合がある。一般に周囲の温度が変化すると、弾性表面波の伝搬速度は変化するが、伝搬路の周回長も熱膨張によって変化するため、これらの影響が重畳されて弾性表面波の周回に必要な時間が変わってしまう場合がある。また、異方性材料を用いて伝搬路を作る場合、場所によって物理的な意味における弾性表面波の伝搬速度は変化する。すなわち、本発明において、周回速度とは、周回経路を所定の周回数あるいは所定の位置の間を伝搬するのに必要な時間によって定義される速度をいう。
【0027】
また、本発明においては、電気信号を弾性波に変換するものとしては、1個のすだれ状電極を用いているが、2個以上の複数の電気音響変換素子を除外するものではない。例えば、1対のすだれ状電極を使用し、一方を送信用とし、他方を受信用として使用しても良い。
【0028】
<作用>
従って、請求項1,8に対応する発明は、高周波バースト信号の搬送周波数を調整して共振周波数にするための第1調整手段と、前記高周波バースト信号の入力から搬送周波数の周期の所定の倍数の時間を経過させた後に、多重周回弾性表面波素子から出力された検出信号の位相を所定の値に一致させるように、前記搬送周波数を調整するための第2調整手段と、第2調整手段により調整された搬送周波数と参照周波数との差分を算出する算出手段とを備えた構成により、共振状態にしてから所定の波数の弾性表面波を伝搬した後の状態における位相の変化を求めているので、多重周回した弾性表面波の干渉の影響を抑えることができ、多重周回弾性表面波素子において同じ経路を伝搬する弾性表面波の周波数変化量を高精度に算出することができる。
【0029】
請求項2,9に対応する発明は、請求項1,8に対応する作用に加え、第2調整手段は、検出信号の波形と参照信号の波形とを、高周波バースト信号を入力してから順次一致させるようにし、少なくとも前記共振周波数の周期の5000倍に相当する時間以降の波形を一致させるように、共振周波数を調整するので、多重周回による位相の変化を高確度で検出することができる。このように長時間伝搬をさせることは、弾性表面波の伝搬面が球形である場合には周回に伴う減衰を抑制できる。これにより、実用的な強度で検出できる。
【0030】
請求項3,10に対応する発明は、請求項1〜2,8〜9に対応する作用に加え、高周波バースト信号は、10MHz以上の搬送周波数を有し、少なくとも1周回の周回時間の3分の1以上の継続時間からなるので、弾性表面波の強度が多重周回により減衰しても位相の変化を求めることができる。
【0031】
請求項4,11に対応する発明は、請求項1〜3,8〜10に対応する作用に加え、第2調整手段は、共振周波数の5ppm毎に高周波バースト信号の搬送周波数を可変とするものであるので、高精度に波形を一致させることができる。
【0032】
請求項5,12に対応する発明は、請求項1〜4,8〜11に対応する作用に加え、入力手段は、1周回の周回時間の2倍の時間にわたり高周波バースト信号を入力するので、多重周回された検出信号の干渉によるノイズを抑えることができる。
【0033】
請求項6,13に対応する発明は、多重周回弾性表面波素子の周囲の環境状態に対して予め設定された特徴周波数と該環境状態とを関連付けて記憶する環境記憶手段と、算出手段により算出された差分の周波数と、環境記憶手段により記憶された特徴周波数とを比較する比較手段と、比較手段による比較の結果、環境記憶手段により記憶された環境状態を出力する環境状態出力手段とを備えているので、環境の変化による周波数の変動幅から環境の変化を検知することができる。
【0034】
請求項7に対応する発明は、弾性表面波伝搬状態計測装置に用いられる多重周回弾性表面波素子において、伝搬面に対向して非接触で設置され、伝搬面に電界を印加して弾性表面波を励起する、すだれ状電極を備えた構成により、すだれ状電極の質量による影響やすだれ状電極と弾性表面波との散乱効果による影響を受けずに、弾性表面波を伝搬面に伝搬させることができるので、周波数変化量を高精度に算出できる多重周回弾性表面波素子を提供できる。
【発明の効果】
【0035】
本発明によれば、多重周回弾性表面波素子における周波数変化量を高精度に算出することができる。
【0036】
これにより、弾性表面波の伝搬状態の変化をその共振周波数の変化から高精度に算出することができる。例えば、多重周回弾性表面波素子表面への物質や分子の付着があった場合に、その伝搬面の変化(環境変化)に利用することができる。
【発明を実施するための最良の形態】
【0037】
以下、図面を参照して本発明の実施形態を説明する。
【0038】
<第1の実施形態>
図1は本発明の第1の実施形態に係る周波数変化量算出システムの構成を示す模式図である。
【0039】
多重周回弾性表面波素子10は、図2に示すように、伝搬面11を有する球状部材12、すだれ状電極13を備えている。これにより、高周波信号源30による高周波信号の入力により伝搬面11を多重周回する弾性表面波が励起される。また、多重周回した弾性表面波は、すだれ状電極13で検出され、スイッチSWを介してデジタルオシロスコープDOS等で計測される。
【0040】
伝搬面11は、連続した曲面からなる円環状の表面を有し、この円環状の表面の少なくとも一部には、すだれ状電極13により励起される互いに逆方向に伝搬する弾性表面波を周回させるための周回経路を備えている。
【0041】
球状部材12は、一旦励起された弾性表面波が多重周回可能な伝搬面11を有する3次元基体であり、ここでは単結晶の水晶材料を球形状に加工したものを用いている。
【0042】
すだれ状電極13は、高周波バースト信号の入力により伝搬面を多重周回する弾性表面波を励起するとともに、多重周回した弾性表面波を検出するものである。例えば、金属の蒸着とフォトリソグラフィプロセスによるエッチングとを用いることにより、球状部材12の表面に接して形成される。
【0043】
周波数変化量算出装置(弾性表面波伝搬状態計測装置)20は、高周波信号源30による高周波信号の搬送周波数を変化させた量を算出するものであり、入力部21、出力部22、記憶部23、共振調整部24(第1調整手段)、波形調整部25(第2調整手段)、算出部26を備える。
【0044】
入力部21は、高周波信号源30から出力される高周波信号の搬送周波数を設定及び変更する機能を有し、多重周回弾性表面波素子10に高周波バースト信号を入力するものである。
【0045】
また、入力される高周波バースト信号は、10MHz以上の搬送周波数を有し、少なくとも1周回の周回時間以上の継続時間の波からなるものである。これにより、多重周回弾性表面波素子10の伝搬面11を周回する弾性表面波のバースト信号の両端の影響を小さくすることができる。また、励起する弾性表面波の振幅を大きくすることができる。
【0046】
なお、通常、100MHz以上の周波数により弾性表面波を励起する場合に、パルス幅の短い高周波信号(極端な場合はインパルス)を用いると、高周波信号の周波数成分のパワーは相対的に小さくなる。このため、1ppmの精度で計測を行うのが困難となる。ただし、特定周波数を有する狭帯域のバースト信号を用いて高周波信号源30の高周波信号と位相比較を行う場合に限り、計測の対象とする周波数の成分についての十分なパワーを確保でき、1ppmの計測を行うことができる。
【0047】
出力部22は、入力部21による高周波バースト信号の入力後、伝搬面11を多重周回する弾性表面波を検出し、得られた検出信号を共振調整部24又は波形調整部25に出力するものである。なお、検出信号の位相はヘテロダイン検波により得られる。
【0048】
記憶部23は、共振状態における弾性表面波の参照位相を含む参照信号のデータ及びこの弾性表面波を励起するための参照周波数を予め記憶するものである。
【0049】
ここで、「共振状態」とは、伝搬面11を弾性表面波が1周回するのに要する周回時間Tに占める弾性表面波の1周期の割合が周回時間Tの整数分の1となる状態である。
【0050】
共振状態では、図3(A)に示すように、駆動信号がすだれ状電極13に入力された場合に、弾性表面波の1周回分の周回時間Tが弾性表面波の振動周期の整数倍となる。このため、すだれ状電極13は、既に周回している弾性表面波と同じ位相で、弾性表面波の振動を増幅する電界を球状部材12に印加するので、弾性表面波の出力強度が極大となる。
【0051】
共振状態では無い状態では、図3(B)に示すように、駆動信号がすだれ状電極13に入力された場合に、弾性表面波の1周回分の周回時間Tが弾性表面波の振動周期の整数倍とはならない。このため、すだれ状電極13により、周回中の弾性表面波に対して異なる位相の弾性表面波が印加され、既に周回中の弾性表面波を打ち消してしまう。よって、弾性表面波の強度は不十分になり、出力される検出信号の位相は、時間的に不安定になる。
【0052】
共振調整部24は、出力部22により検出された弾性表面波の検出信号を共振状態にするように、高周波バースト信号の搬送周波数を調整して共振周波数にするためのものである。
【0053】
共振状態にする理由は、弾性表面波素子の伝搬面の変化(以下、環境変化ともいう。)を、伝搬面の変化の前後の周波数応答から求める場合に、再現しやすい伝搬状態であるからである。共振状態は、1周期を波長比の何倍に相当させるかによって複数存在する。あらかじめ環境の変動幅を設定しておけば、一意にその周波数を環境に対する特定周波数として採用できる。
【0054】
もう一つの共振状態にする理由は、位相変動の小さい安定した振幅を有する信号を測定するためである。共振状態で測定を行うと、出力信号の位相が時刻に従って比例する為、位相の変化から弾性表面波の伝搬速度を求めることができる、という大きな利点がある。
【0055】
例えば、温度が上昇して弾性表面波の伝搬速度が上昇する場合、図7(B)に示すように、出力信号の位相は時間に対して不規則になる為に、波形の変化を追いながら信号の出力時刻(位相)を測定しなくてはならない。しかし、共振状態の場合には図8(B)に示すように、出力信号は時間的に安定している。そのため、波形の変化を追う必要がなく、特定の時刻における出力信号の位相の変化から弾性表面波の伝搬速度を求めることができる。
【0056】
波形調整部25は、共振調整部24による調整の後、出力部22から出力された検出信号の位相である検出位相と記憶部23に記憶された参照位相との差が一定となるように、高周波バースト信号の搬送周波数を調整するためのものである。
【0057】
具体的には、高周波バースト信号の搬送周波数を、共振周波数の5ppm毎に調整する。
【0058】
また、波形調整部25は、高周波バースト信号を多重周回弾性表面波素子10に入力し、その検出信号の波形と参照信号の波形とを順次一致させるようにする。
【0059】
そして、少なくとも周回時間Tの5000倍に相当する時間以降の波形を一致させるように、共振周波数を調整する。ここで、伝搬面が球面の場合には周回に伴う弾性表面波の減衰率は小さい。そのため、波長の5000倍以上の周回時間が経過して検出信号の強度が減少したり、弾性表面波がすだれ状電極を通過する度に発生する反射波が増加したりしても位相検出が可能である。共振状態での測定は、5000倍以上の周回時間経過後の位相測定で有効である。
【0060】
算出部26は、波形調整部25による調整の結果、検出信号と参照信号との位相差が一定となるとき、波形調整部25により調整された搬送周波数と記憶部23に記憶された参照周波数との差分を算出するものである。
【0061】
ここで、位相差を一定にさせた場合における周波数の変化量を求める手順について説明する。
【0062】
図4(A)は、検出位相と参照位相との差を、駆動用のバースト信号を印加した直後に測定した結果の例である。ここで、図4において、縦軸は位相差を示し、横軸は経過時間を示す。すなわち、位相差を一定にさせた場合における周波数の変化量は、図4(A)の状態を図4(B)の状態にするように調整した時の周波数に他ならない。
【0063】
なお、球状弾性表面波素子の直径は3.3mmであり、搬送周波数は150MHz近傍(ここでは、152.1MHz)である。
【0064】
図4(A)において、時間0秒のときに位相差が110度であったものが、100μ秒経過後には−125度に変化している。
【0065】
つまり、時間0秒から100μ秒の間に、180度―110度+(−125度―(−180))度=70度+55度=125度の位相が変化したことになる。
【0066】
ここで、152.1MHzの信号の位相が125度変化する時間の変化は、1周期に要する時間と位相変化の割合との積となる。
【0067】
換言すれば、
(信号周期)×(多重周回による位相変化量/360度)
=1/(152.1×106) × 125度/360度
となる。そして、これだけの変化が100μ秒で起きているので、その変化率は、
(信号周期)×(多重周回による位相変化量/360度)/(多重周回に要した全時間)
1/(152.1×106) × 125度/360度 /(100×10−6)となる。つまり、この比率だけ弾性表面波の信号の位相が早くなる。
【0068】
逆に、周波数をこの比率分だけ低くすると、位相の変化が打ち消されることになる。このときの周波数の変化量は、以下のように算出される。
【0069】
(周波数の変化量)
=(搬送周波数)×{(多重周回による位相変化量/360度)×(信号周期)}/(多重周回に要した時間)
=152.1×106×(70+55)/360×(1/(152.1×106))/(100×10−6)
=3470Hz
となる。
【0070】
すなわち、搬送周波数を3470Hz変化させると、図4(B)のように、検出位相が参照位相に平行に漸近する。
【0071】
ところで、今回の測定の前に測定した際、共振周波数として測定した周波数は152.103464MHzであり、100マイクロ秒時刻における位相値は、−128.3度であった。よって、今回の値125度と3.3度の差がある。
【0072】
そこで、さらに前式に対して修正を行うと、求める周波数変化量は、
152.096634×106×(3.3)/360×(1/(152.096634×106))/(100×106)
=9.2Hz
となる。
【0073】
よって、
152096634Hz−9.2Hz=152096625Hz
となる。
【0074】
前回の測定結果の周波数152103464MHzとは、6839Hzの差がある。
【0075】
これにより、6839Hz/152103464Hz=約44ppmの伝搬速度の変化があることを求めることができる。
【0076】
なお、記憶部23、共振調整部24、波形調整部25、算出部26は、ハードウェア構成で実現可能であり、ハードウェア構成とソフトウェア構成の組合せとしても実現可能となっている。後者の場合、ソフトウェア構成は、予めコンピュータ読み取り可能な記憶媒体又はネットワークから得られたプログラムがコンピュータにインストールされることにより各機能が実現される。
【0077】
高周波信号源30は、高周波を発生して入力部21に出力するものである。
【0078】
(周波数変化量算出装置20の動作)
次に本実施形態に係る周波数変化量算出装置20の動作について図5のフローチャートを用いて説明する。
【0079】
まず、入力部21により、多重周回弾性表面波素子10のすだれ状電極13に、高周波バースト信号が入力される(S1)。これにより、多重周回弾性表面波素子10における伝搬面11に弾性表面波が励起する。
【0080】
そして、励起した弾性表面波は、すだれ状電極13により検出されて出力部22を介して、共振調整部24及び波形調整部25に出力される(S2)。
【0081】
次に、共振調整部24により共振状態になるように搬送周波数が調整される(S3)。ここで、共振状態でない場合、搬送周波数が変更される。そして、出力部22により出力される検出信号が共振状態となるまで、この動作が繰り返される(S3―No,S4)。
【0082】
なお、共振状態となったか否かの判断は、検出信号の強度によっても判断することができる。すなわち、共振状態では波が強め合うため強度値が急激に大きな値となる。
【0083】
次に、共振調整部24により共振状態になるように搬送周波数が調整された場合、出力部22から出力された検出信号の検出位相と記憶部23に予め記憶された参照位相との差が一定となるように、波形調整部25により高周波バースト信号の搬送周波数が調整される(S3−Yes,S5)。ここで、位相差が一定でない場合、搬送周波数が変更される。そして、出力部22により出力される検出位相と参照位相との差が一定となるまで、この動作が繰り返される(S5―No,S6)。
【0084】
次に、波形調整部25による調整の結果、検出位相と参照位相との位相差が一定となるとき、波形調整部25により調整された搬送周波数と記憶部23に記憶された参照周波数との差分が算出部26により算出される(S5−Yes,S7)。
【0085】
以上説明したように、本実施形態に係る周波数変化量算出装置20によれば、共振状態における弾性表面波の少なくとも参照位相と好ましくは強度情報を有している参照信号のデータ及びこの弾性表面波を励起するための参照周波数を予め記憶する記憶部23と、高周波バースト信号の搬送周波数を調整して共振周波数にするための共振調整部24と、検出信号の位相である検出位相と参照位相との差が時間に対して一定となるように、高周波バースト信号の搬送周波数を調整するための波形調整部25と、両者の位相差が一定となるとき、波形調整部25により調整された搬送周波数と参照周波数との差分を算出する算出部26とを備えた構成により、共振状態にしてから位相の変化を求めているので、多重周回した弾性表面波の干渉の影響を抑えることができ、多重周回弾性表面波素子10における周波数変化量を高精度に算出することができる。
【0086】
なお、本実施形態に係る周波数変化量の算出方法は、通常の共振状態の周波数(共振周波数)を求めるだけのものではない。バースト信号を用いて共振状態にしたとしても、バースト信号を用いて計測する限り位相が時刻と完全な比例関係にはならない。このような場合であっても、共振状態を現出し、さらに記憶した参照位相と比較をすることで正確な測定を実現するものであれば、本実施形態に係る周波数変化量の算出方法はこれを除くものではない。
【0087】
さらに、本実施形態によれば、波形調整部25は、検出信号の波形と参照信号の波形とを、高周波バースト信号を入力してから順次一致させるようにし、伝搬面を球形にして周回に伴う波の回折の影響による減衰を小さくしている。そして、少なくとも周回時間の5000倍に相当する時間以降の波形を一致させるように、共振周波数を調整するので、多重周回による位相の変化を高確度で検出することができる。
【0088】
また、本実施形態によれば、波形調整部25は、共振周波数の5ppm毎に高周波バースト信号の搬送周波数を可変とするものであるので、高精度に波形を一致させることができる。
【0089】
また、本実施形態によれば、高周波バースト信号は、10MHz以上の搬送周波数を有し、少なくとも1周回の周回時間以上の波からなるので、弾性表面波の強度が多重周回により減衰しても位相の変化を求めることができる。
【0090】
なお、検出信号の位相と参照位相との差が360度以上の場合は、2周目の信号の位相と比較するなど周回が重ならないようにする。これにより、位相差が大きくならない時刻での位相データを用いて、周回数が大きな時刻において共振周波数の算出を精密に行うことができる。
【0091】
なお、共振周波数の算出とそれを用いた周波数値とによる伝搬状態の変化測定は、最低2個の位相データがあれば可能である。
【0092】
なお、周波数変化量算出装置20に対して、さらに、多重周回弾性表面波素子の周囲の環境状態に対して予め設定された特徴周波数と該環境状態とを関連付けて記憶する環境記憶手段と、算出手段により算出された差分の周波数と環境記憶手段により記憶された特徴周波数とを比較する比較手段と、比較結果による比較の結果、環境記憶手段により記憶された環境状態を出力する環境状態出力手段とを備えて環境計測装置を作成することもできる。この場合は、環境の変化による周波数の変動幅から環境の変化を検知することができる。
【0093】
<第2の実施形態>
本発明の第2の実施形態は、入力部21における高周波バースト信号を入力するタイミングを調整する。
【0094】
入力部21は、高周波バースト信号を周回時間Tの整数倍の時間にわたり多重周回弾性表面波素子10に入力する。これにより比較的安定した位相の信号を得ることができる。
【0095】
ここで、高周波バースト信号を入力するタイミングに応じて得られる3パターンの検出信号について説明する。
【0096】
(1.共振状態ではない短いバースト)
通常、弾性表面波は、多重周回弾性表面波素子10の表面に形成されるすだれ状電極13などよって僅かに反射される。そのため、検出される信号が、時間領域の前後に広がってしまう。
【0097】
すなわち、バースト信号の周波数が共振周波数でなく入力時間が周回時間Tの整数倍ではない場合、多重周回弾性表面波素子10を多重周回して出力される検出信号は、周回毎のバースト信号となる(図6(A)参照)。
【0098】
この場合、周回数が大きくなると時間的に広がり、前後の信号と干渉してしまう(図6(B)参照)。
【0099】
すなわち、周回数の大きい領域で位相を計測した場合、バースト信号が観測される領域(図6(B)のQ領域)では安定した位相値が得られるが、バースト信号が観測されない領域(図6(B)のP領域)では信号強度が小さく、位相自体も不明瞭となる。
【0100】
この場合、温度が変わると観測の対象となるQ領域の時刻に、位相の不安定なP領域が移動してくる。そのため、直線的なデータの位相変化を測定することができなくなる。
【0101】
(2.共振状態ではない長いバースト)
バースト信号の周波数が共振周波数ではなく入力時間が周回時間Tの整数倍とした場合、バースト信号の時間長は共振周波数ではないため、隣り合う信号の重なる領域では干渉により強度が変化する(図7(A)参照)。そのため、この領域では、当然に位相は不連続となる(図7(B)参照)。
【0102】
(3.共振状態のバースト)
共振状態の場合、上述したパターンに比して、弾性表面波の反射した成分や早い時刻に広げられた弾性表面波の重畳による位相への影響が少ない。
【0103】
例えば、バースト信号の周波数が共振周波数であり入力時間が周回時間Tの整数倍であると、Q領域及びP領域のいずれの領域でも信号の位相は安定した分布となる(図8参照)。このため、多少信号の到達時刻が温度などによって変化しても測定値は安定する。
【0104】
なお、バースト信号の周波数が共振周波数であれば、入力時間が周回時間Tより短い場合でも、比較的安定した位相の信号が得られる。結果として、測定を正確に行うことができる。
【0105】
上述したように、本実施形態によれば、入力部21は、周回時間Tの整数倍の時間にわたり高周波バースト信号を入力するので、多重周回された検出信号の干渉によるノイズを抑えることができる。
【0106】
特に周回数(弾性表面波の伝搬長の波長に対する比率)が大きい場合には、高精度の位相検出ができる。
【0107】
例えば、弾性表面波の伝搬速度計測の分解能が3ppmを超えるような場合で、波長の5000倍を超える場合には、高精度の位相検出ができる。
【0108】
また、直径1cmの水晶のZ軸シリンダーを用いた45MHz素子であれば、20周を超える周回数(9500倍に相当)の場合に、この効果が現れる。一方、同様の水晶基材を用いて15MHzの素子を作成する場合、30周(4500倍)程度でバースト信号の形状は崩れる。波長の倍数からは十分小さな伝搬長であっても、周回する度に電極などから受ける影響が大きくなり、位相測定に影響を及ぼすからである。
【0109】
また、本実施形態に係る周波数変化量算出装置20においては、信号強度は周回にしたがって指数関数的に変化する信号を測定対象とする。そのため、検出信号と参照信号との強度を等しくする過程において、位相の絶対値が変わることにより、測定が不正確になることを防ぐことができる。
【0110】
<第3の実施形態>
図9は本発明の第3の実施形態に係る周波数変化量算出システムの構成を示す模式図である。なお、第1の実施形態で説明した部分と同一部分には同一符号を付し、重複した説明を省略する。また、以下の各実施形態においても同様にして重複した説明を省略する。
【0111】
多重周回弾性表面波素子10Tは、温度較正のために用いられるものである。
【0112】
入力部21は、変調回路21A,RFスイッチ21B,一方向性結合器21C,RFスイッチ21D,素子切替スイッチ21Eを備えている。
【0113】
変調回路21Aは、高周波信号源30の高周波信号の搬送周波数を150MHzで変調し、変調した周波数を1Hz間隔で微調整できるものである。
【0114】
RFスイッチ21Bは、変調回路21Aで調整した高周波信号をバースト信号にするものである。
【0115】
一方向性結合器21Cは、多重周回弾性表面波素子10からの弾性表面波の検出信号が逆進行しないようにするためのものである。
【0116】
RFスイッチ21Dは、一方向性結合器21Cと素子切替スイッチ21Eとを接続させるか、一方向性結合器21Cと増幅器22Aとを接続させるか、どちらとも接続させないか、を選択できるスイッチである。
【0117】
素子切替スイッチ21Eは、多重周回弾性表面波素子10又は10Tを選択できるスイッチである。
【0118】
出力部22は、増幅部22A,変調回路22B,乗算器22C,IFフィルター22D,A/D変換器22E,乗算器22F、I/D22G,乗算器22H,I/D22I,位相算出器22J,強度検出器22K,ローパスフィルター22L,A/D変換器22M,出力処理部22Nを備えている。
【0119】
また、変調回路22B,乗算器22C,IFフィルター22D,A/D変換器22Eにより、検出信号の波形をヘテロダイン検波により得ることを可能とする。
【0120】
ヘテロダイン検波を用いる理由は以下の通りである。
【0121】
弾性表面波の測定は、非常に僅かな位相の変化率を測定対象とする。そのため、駆動信号を同一にして素子間や素子の時間的な不安定性に影響されないような条件が必要である。
【0122】
特に広い帯域の信号を用いる場合、観測の対象とする特定周波数のみを通過させる周波数フィルターを用いても、その他の雑音信号の除去を行うことが困難である。
【0123】
この場合、狭帯域の1周回以上の継続時間以上のバースト信号を用い、ヘテロダイン検波方式を用いて検波する場合に限り、周期の5000回分の伝搬距離の弾性表面波信号の位相を正確に捉えることができる。
【0124】
なお、A/D変換器22Eにより、ヘテロダイン検波におり得られた波形の強度をデジタル化し、デジタル強度値を得ている。
【0125】
なお、出力処理部22Nは、位相算出器22J及びA/D変換器22Mから得られた信号を共振調整部24及び波形調整部25に出力するためのものである。
【0126】
記憶部23は、ヘテロダイン検波により得られた参照波形の強度をデジタル化して示すデジタル強度値を記憶する。
【0127】
波形調整部25は、A/D変換器22Eにより得られた検出信号のデジタル強度値と、参照波形のデジタル強度値とを一致させるように、搬送周波数を調整する。これにより、出力部22から出力された検出位相と記憶部23に記憶された参照位相との差を一定とすることができる。
【0128】
上述したように本実施形態においては、出力部22は、検出信号の波形をヘテロダイン検波により得ており、さらに得られた波形の強度をデジタル化し、記憶部23には参照信号の波形の強度をデジタル化して示すデジタル強度値が記憶されており、波形調整部25はA/D変換器22Eにより得られたデジタル強度値と、参照信号の波形のデジタル強度値とを一致させるように、共振周波数を調整する。このように、波形をデジタル強度値により一致させる構成を備えているので、コンピュータによる信号処理を高精度に実行することができる。
【0129】
<第4の実施形態>
図10は本発明の第4の実施形態に係る多重周回弾性表面波素子10Sの構成を示す模式図である。
【0130】
多重周回弾性表面波素子10Sは、伝搬面11に対向して非接触で設置され、伝搬面に電界を印加して弾性表面波を励起する、すだれ状電極13を備えている。
【0131】
具体的には、球状部材12の周囲に外部基材14を備え、球状部材12とモールド用基材14とに空隙領域Rを設け、この空隙領域Rにすだれ状電極13を形成している。
【0132】
また、図10中の矢印Zは水晶の結晶軸Z軸方向を示しており、すだれ状電極13が励起する弾性表面波の伝搬方向は紙面に垂直な方向である。
【0133】
ところで、周回する弾性表面波がすだれ状電極を通過する際には、(a)弾性表面波が周回する毎にエネルギーを電気回路に漏出する(b)空中や水中に対して弾性表面波のエネルギーを漏洩する、(c)伝搬路上の物質により弾性表面波が反射散乱される等の原因により、弾性表面波のエネルギーが損失する。
【0134】
このうち、回路へ漏出することによるエネルギーの損失(上記(c))の影響は、特に大きい。
【0135】
これに対し、本実施形態の多重周回弾性表面波素子10を用いれば、球状部材12とすだれ状電極13との電気的な相互作用はあるが、すだれ状電極13の質量や弾性表面波の散乱効果の影響は除去することができる。これにより、位相計測にかかわる悪影響を極力減らすことができる。
【0136】
以上説明したように、本実施形態に係る多重周回弾性表面波素子10は、伝搬面11に対向して非接触で設置され、伝搬面11に電界を印加して弾性表面波を励起する、すだれ状電極13を備えた構成により、すだれ状電極13の質量による影響やすだれ状電極13と弾性表面波との散乱効果による影響を受けずに、弾性表面波を伝搬面11に伝搬させることができるので、周波数変化量を高精度に算出できる多重周回弾性表面波素子10を提供できる。
【0137】
なお、本発明は、上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。更に、異なる実施形態に構成要素を適宜組合せてもよい。
【図面の簡単な説明】
【0138】
【図1】本発明の第1の実施形態に係る周波数変化量算出システムの構成の一例を示す模式図である。
【図2】同実施形態に係る多重周回弾性表面波素子の構成の一例を示す図である。
【図3】同実施形態に係る共振状態を説明するための図である。
【図4】同実施形態に係る位相の変化を示す図である。
【図5】同実施形態に係る周波数変化量算出装置20の動作を説明するためのフローチャートである。
【図6】本発明の第2の実施形態に係る検出信号を示す図である。
【図7】同実施形態に係る検出信号を示す図である。
【図8】同実施形態に係る検出信号を示す図である。
【図9】本発明の第3の実施形態に係る周波数変化量算出システムの構成の一例を示す模式図である。
【図10】本発明の第4の実施形態に係る多重周回弾性表面波素子10の構成の一例を示す模式図である。
【符号の説明】
【0139】
10・・・多重周回弾性表面波素子、11・・・伝搬面、12・・・球状部材、13・・・すだれ状電極、20・・・周波数変化量算出装置、21・・・入力部、21A・・・変調回路、21B・・・RFスイッチ、21C・・・一方向性結合器、21D・・・RFスイッチ、21E・・・素子切替スイッチ、22・・・出力部、22A・・・増幅部、22B・・・変調回路、22C・・・乗算器、22D・・・IFフィルター、22E・・・A/D変換器、22F・・・乗算器、22G・・・I/D、22H・・・乗算器、22I・・・I/D、22J・・・位相算出器、22K・・・強度検出器、22L・・・ローパスフィルター、22M・・・A/D変換器、22N・・・出力処理部、23・・・記憶部、24・・・共振調整部、25・・・波形調整部、26・・・算出部、30・・・高周波信号源。
【特許請求の範囲】
【請求項1】
搬送周波数を有する高周波バースト信号の入力により伝搬面を多重周回する弾性表面波が励起される多重周回弾性表面波素子に接続され、前記弾性表面波素子からの出力周波数の変化量を計測する弾性表面波伝搬状態計測装置であって、
前記多重周回弾性表面波素子に、前記高周波バースト信号を入力する入力手段と、
前記入力の後、前記伝搬面を多重周回する弾性表面波を検出し、得られた検出信号を出力する出力手段と、
前記伝搬面を弾性表面波が1周回するのに要する周回時間に占める前記搬送周波数における1周期の割合が整数分の1となる共振状態に関し、当該共振状態における弾性表面波の参照位相を含む参照信号のデータ及びこの弾性表面波を励起するための参照周波数を予め記憶する記憶手段と、
前記弾性表面波の検出信号を共振状態にするように、前記高周波バースト信号の搬送周波数を調整して共振周波数にするための第1調整手段と、
前記第1調整手段による調整の後、前記出力手段から出力された検出信号の位相である検出位相と前記記憶手段に記憶された参照位相との差が一定となるように、前記高周波バースト信号の搬送周波数を調整するための第2調整手段と、
前記第2調整手段による調整の結果、両者の位相差が一定となるとき、前記第2調整手段により調整された搬送周波数と前記記憶手段に記憶された参照周波数との差分を算出する算出手段と
を備えたことを特徴とする弾性表面波伝搬状態計測装置。
【請求項2】
請求項1に記載の弾性表面波伝搬状態計測装置において、
前記多重周回弾性表面波素子は、伝搬面が球形であり、
前記第2調整手段は、
前記検出信号の波形と前記参照信号の波形とを、前記高周波バースト信号を入力してから周回数の小さな時刻から順次一致させるようにし、少なくとも前記共振周波数の周期の5000倍に相当する時間以降の波形を一致させるように、前記共振周波数を調整する
ことを特徴とする弾性表面波伝搬状態計測装置。
【請求項3】
請求項1又は請求項2に記載の弾性表面波伝搬状態計測装置において、
前記高周波バースト信号は、10MHz以上の搬送周波数を有し、少なくとも1周回の周回時間以上の波からなる
ことを特徴とする弾性表面波伝搬状態計測装置。
【請求項4】
請求項1乃至請求項3のいずれか1項に記載の弾性表面波伝搬状態計測装置において、
前記第2調整手段は、前記共振周波数の5ppm毎に、前記高周波バースト信号の搬送周波数を可変とする
ことを特徴とする弾性表面波伝搬状態計測装置。
【請求項5】
請求項1乃至請求項4のいずれか1項に記載の弾性表面波伝搬状態計測装置において、
前記入力手段は、前記弾性表面波が前記伝搬面を1周回するのに要する時間の2倍以上の時間にわたり前記高周波バースト信号を入力する
ことを特徴とする弾性表面波伝搬状態計測装置。
【請求項6】
請求項1に記載の弾性表面波伝搬状態計測装置を用いた環境変化計測装置であって、
前記多重周回弾性表面波素子の周囲の環境状態に対して予め設定された特徴周波数と該環境状態とを関連付けて記憶する環境記憶手段と、
前記算出手段により算出された差分の周波数と、前記環境記憶手段により記憶された特徴周波数とを比較する比較手段と、
前記比較手段による比較の結果、前記環境記憶手段により記憶された環境状態を出力する環境状態出力手段と
を備えたことを特徴とする環境変化計測装置。
【請求項7】
請求項1に記載の弾性表面波伝搬状態計測装置に用いられる多重周回弾性表面波素子において、
前記伝搬面に対向して非接触で設置され、前記伝搬面に電界を印加して弾性表面波を励起する、すだれ状電極を備えたことを特徴とする多重周回弾性表面波素子。
【請求項8】
搬送周波数を有する高周波バースト信号の入力により伝搬面を多重周回する弾性表面波が励起される多重周回弾性表面波素子からの出力周波数の変化量を計測する弾性表面波伝搬状態計測方法であって、
前記多重周回弾性表面波素子に、前記高周波バースト信号を入力する入力ステップと、
前記入力の後、前記伝搬面を多重周回する弾性表面波を検出し、得られた検出信号を出力する出力ステップと、
前記伝搬面を弾性表面波が1周回するのに要する周回時間に占める前記搬送周波数における1周期の割合が整数分の1となる共振状態に関し、当該共振状態における弾性表面波の参照位相を含む参照信号のデータ及びこの弾性表面波を励起するための参照周波数を予め記憶する記憶ステップと、
前記弾性表面波の検出信号を共振状態にするように、前記高周波バースト信号の搬送周波数を調整して共振周波数にするための第1調整ステップと、
前記第1調整ステップによる調整の後、前記出力ステップから出力された検出信号の位相である検出位相と前記記憶ステップに記憶された参照位相との差が一定となるように、前記高周波バースト信号の搬送周波数を調整するための第2調整ステップと、
前記第2調整ステップによる調整の結果、両者の位相差が一定となるとき、前記第2調整ステップにより調整された搬送周波数と前記記憶手段に記憶された参照周波数との差分を算出する算出ステップと
を備えたことを特徴とする弾性表面波伝搬状態計測方法。
【請求項9】
請求項8に記載の弾性表面波伝搬状態計測方法において、
前記多重周回弾性表面波素子は、伝搬面が球形であり、
前記第2調整ステップは、
前記検出信号の波形と前記参照信号の波形とを、前記高周波バースト信号を入力してから周回数の小さな時刻から順次一致させるようにし、少なくとも前記共振周波数の周期の5000倍に相当する時間以降の波形を一致させるように、前記共振周波数を調整する
ことを特徴とする弾性表面波伝搬状態計測方法。
【請求項10】
請求項8又は請求項9に記載の弾性表面波伝搬状態計測方法において、
前記高周波バースト信号は、10MHz以上の搬送周波数を有し、少なくとも1周回の周回時間以上の波からなる
ことを特徴とする弾性表面波伝搬状態計測方法。
【請求項11】
請求項8乃至請求項10のいずれか1項に記載の弾性表面波伝搬状態計測方法において、
前記第2調整ステップは、前記共振周波数の5ppm毎に、前記高周波バースト信号の搬送周波数を可変とする
ことを特徴とする弾性表面波伝搬状態計測方法。
【請求項12】
請求項8乃至請求項11のいずれか1項に記載の弾性表面波伝搬状態計測方法において、
前記入力ステップは、前記弾性表面波が前記伝搬面を1周回するのに要する時間2倍以上の時間にわたり前記高周波バースト信号を入力する
ことを特徴とする弾性表面波伝搬状態計測方法。
【請求項13】
請求項8に記載の弾性表面波伝搬状態計測方法を用いた環境変化計測方法であって、
前記多重周回弾性表面波素子の周囲の環境状態に対して予め設定された特徴周波数と該環境状態と関連付けて記憶する環境記憶ステップと、
前記算出ステップにより算出された差分の周波数と、前記環境記憶ステップにより記憶された特徴周波数とを比較する比較ステップと、
前記比較ステップによる比較の結果、前記環境記憶ステップにより記憶された環境状態を出力する環境状態出力ステップと
を備えたことを特徴とする環境変化計測方法。
【請求項1】
搬送周波数を有する高周波バースト信号の入力により伝搬面を多重周回する弾性表面波が励起される多重周回弾性表面波素子に接続され、前記弾性表面波素子からの出力周波数の変化量を計測する弾性表面波伝搬状態計測装置であって、
前記多重周回弾性表面波素子に、前記高周波バースト信号を入力する入力手段と、
前記入力の後、前記伝搬面を多重周回する弾性表面波を検出し、得られた検出信号を出力する出力手段と、
前記伝搬面を弾性表面波が1周回するのに要する周回時間に占める前記搬送周波数における1周期の割合が整数分の1となる共振状態に関し、当該共振状態における弾性表面波の参照位相を含む参照信号のデータ及びこの弾性表面波を励起するための参照周波数を予め記憶する記憶手段と、
前記弾性表面波の検出信号を共振状態にするように、前記高周波バースト信号の搬送周波数を調整して共振周波数にするための第1調整手段と、
前記第1調整手段による調整の後、前記出力手段から出力された検出信号の位相である検出位相と前記記憶手段に記憶された参照位相との差が一定となるように、前記高周波バースト信号の搬送周波数を調整するための第2調整手段と、
前記第2調整手段による調整の結果、両者の位相差が一定となるとき、前記第2調整手段により調整された搬送周波数と前記記憶手段に記憶された参照周波数との差分を算出する算出手段と
を備えたことを特徴とする弾性表面波伝搬状態計測装置。
【請求項2】
請求項1に記載の弾性表面波伝搬状態計測装置において、
前記多重周回弾性表面波素子は、伝搬面が球形であり、
前記第2調整手段は、
前記検出信号の波形と前記参照信号の波形とを、前記高周波バースト信号を入力してから周回数の小さな時刻から順次一致させるようにし、少なくとも前記共振周波数の周期の5000倍に相当する時間以降の波形を一致させるように、前記共振周波数を調整する
ことを特徴とする弾性表面波伝搬状態計測装置。
【請求項3】
請求項1又は請求項2に記載の弾性表面波伝搬状態計測装置において、
前記高周波バースト信号は、10MHz以上の搬送周波数を有し、少なくとも1周回の周回時間以上の波からなる
ことを特徴とする弾性表面波伝搬状態計測装置。
【請求項4】
請求項1乃至請求項3のいずれか1項に記載の弾性表面波伝搬状態計測装置において、
前記第2調整手段は、前記共振周波数の5ppm毎に、前記高周波バースト信号の搬送周波数を可変とする
ことを特徴とする弾性表面波伝搬状態計測装置。
【請求項5】
請求項1乃至請求項4のいずれか1項に記載の弾性表面波伝搬状態計測装置において、
前記入力手段は、前記弾性表面波が前記伝搬面を1周回するのに要する時間の2倍以上の時間にわたり前記高周波バースト信号を入力する
ことを特徴とする弾性表面波伝搬状態計測装置。
【請求項6】
請求項1に記載の弾性表面波伝搬状態計測装置を用いた環境変化計測装置であって、
前記多重周回弾性表面波素子の周囲の環境状態に対して予め設定された特徴周波数と該環境状態とを関連付けて記憶する環境記憶手段と、
前記算出手段により算出された差分の周波数と、前記環境記憶手段により記憶された特徴周波数とを比較する比較手段と、
前記比較手段による比較の結果、前記環境記憶手段により記憶された環境状態を出力する環境状態出力手段と
を備えたことを特徴とする環境変化計測装置。
【請求項7】
請求項1に記載の弾性表面波伝搬状態計測装置に用いられる多重周回弾性表面波素子において、
前記伝搬面に対向して非接触で設置され、前記伝搬面に電界を印加して弾性表面波を励起する、すだれ状電極を備えたことを特徴とする多重周回弾性表面波素子。
【請求項8】
搬送周波数を有する高周波バースト信号の入力により伝搬面を多重周回する弾性表面波が励起される多重周回弾性表面波素子からの出力周波数の変化量を計測する弾性表面波伝搬状態計測方法であって、
前記多重周回弾性表面波素子に、前記高周波バースト信号を入力する入力ステップと、
前記入力の後、前記伝搬面を多重周回する弾性表面波を検出し、得られた検出信号を出力する出力ステップと、
前記伝搬面を弾性表面波が1周回するのに要する周回時間に占める前記搬送周波数における1周期の割合が整数分の1となる共振状態に関し、当該共振状態における弾性表面波の参照位相を含む参照信号のデータ及びこの弾性表面波を励起するための参照周波数を予め記憶する記憶ステップと、
前記弾性表面波の検出信号を共振状態にするように、前記高周波バースト信号の搬送周波数を調整して共振周波数にするための第1調整ステップと、
前記第1調整ステップによる調整の後、前記出力ステップから出力された検出信号の位相である検出位相と前記記憶ステップに記憶された参照位相との差が一定となるように、前記高周波バースト信号の搬送周波数を調整するための第2調整ステップと、
前記第2調整ステップによる調整の結果、両者の位相差が一定となるとき、前記第2調整ステップにより調整された搬送周波数と前記記憶手段に記憶された参照周波数との差分を算出する算出ステップと
を備えたことを特徴とする弾性表面波伝搬状態計測方法。
【請求項9】
請求項8に記載の弾性表面波伝搬状態計測方法において、
前記多重周回弾性表面波素子は、伝搬面が球形であり、
前記第2調整ステップは、
前記検出信号の波形と前記参照信号の波形とを、前記高周波バースト信号を入力してから周回数の小さな時刻から順次一致させるようにし、少なくとも前記共振周波数の周期の5000倍に相当する時間以降の波形を一致させるように、前記共振周波数を調整する
ことを特徴とする弾性表面波伝搬状態計測方法。
【請求項10】
請求項8又は請求項9に記載の弾性表面波伝搬状態計測方法において、
前記高周波バースト信号は、10MHz以上の搬送周波数を有し、少なくとも1周回の周回時間以上の波からなる
ことを特徴とする弾性表面波伝搬状態計測方法。
【請求項11】
請求項8乃至請求項10のいずれか1項に記載の弾性表面波伝搬状態計測方法において、
前記第2調整ステップは、前記共振周波数の5ppm毎に、前記高周波バースト信号の搬送周波数を可変とする
ことを特徴とする弾性表面波伝搬状態計測方法。
【請求項12】
請求項8乃至請求項11のいずれか1項に記載の弾性表面波伝搬状態計測方法において、
前記入力ステップは、前記弾性表面波が前記伝搬面を1周回するのに要する時間2倍以上の時間にわたり前記高周波バースト信号を入力する
ことを特徴とする弾性表面波伝搬状態計測方法。
【請求項13】
請求項8に記載の弾性表面波伝搬状態計測方法を用いた環境変化計測方法であって、
前記多重周回弾性表面波素子の周囲の環境状態に対して予め設定された特徴周波数と該環境状態と関連付けて記憶する環境記憶ステップと、
前記算出ステップにより算出された差分の周波数と、前記環境記憶ステップにより記憶された特徴周波数とを比較する比較ステップと、
前記比較ステップによる比較の結果、前記環境記憶ステップにより記憶された環境状態を出力する環境状態出力ステップと
を備えたことを特徴とする環境変化計測方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−64790(P2007−64790A)
【公開日】平成19年3月15日(2007.3.15)
【国際特許分類】
【出願番号】特願2005−251088(P2005−251088)
【出願日】平成17年8月31日(2005.8.31)
【出願人】(000003193)凸版印刷株式会社 (10,630)
【Fターム(参考)】
【公開日】平成19年3月15日(2007.3.15)
【国際特許分類】
【出願日】平成17年8月31日(2005.8.31)
【出願人】(000003193)凸版印刷株式会社 (10,630)
【Fターム(参考)】
[ Back to top ]