
弾球式遊技機の操作検出器
【課題】耐久性・コスト性・操作性に優れ、デザイン的な自由度も広い発射操作装置を簡単に実現できる弾球式遊技機の操作検出器を提供する。
【解決手段】発射操作装置は、回動操作されるハンドル回転体の回転角を検出する角度検出部11を有し、角度検出部11は、少なくとも2軸を有する加速度センサ15を用いて構成されている。加速度センサ15及びその出力より回転角を算出する演算出力部19は、同一のプリント基板上で搭載された状態で、モジュール化されて、ハンドルセンサモジュール14を構成している。
【解決手段】発射操作装置は、回動操作されるハンドル回転体の回転角を検出する角度検出部11を有し、角度検出部11は、少なくとも2軸を有する加速度センサ15を用いて構成されている。加速度センサ15及びその出力より回転角を算出する演算出力部19は、同一のプリント基板上で搭載された状態で、モジュール化されて、ハンドルセンサモジュール14を構成している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、パチンコ機等の弾球式遊技機に搭載される操作検出器に関する。
【背景技術】
【0002】
パチンコ遊技機に代表される弾球式遊技機では、安定した力で遊技球を発射するために、ロータリーソレノイドなどを駆動部として用いた電動式の遊技球発射装置が採用されている。このような発射装置に対して、遊技者の意図を正確に反映させるために、回動式の発射操作装置が使用される(例えば、特許文献1)。
【0003】
発射操作装置は、遊技者の操作を検出する操作検出器として、遊技者がハンドル部を回動操作した際の操作角を検出する操作角検出器(以下、角度検出器と略記する)を備えている。角度検出器としては、可変抵抗器(抵抗式ボリューム)や、ホール素子を用いた電子式ボリュームが一般的に用いられている。
【0004】
このような可変抵抗器や電子式ボリュームを用いた角度検出器では、センサ部本体と、このセンサ部本体に付随する回転軸と、該回転軸の回転角に応じて変化する抵抗値あるいは出力電圧より、回転角に応じた電気信号を生成する内部回路とを備えている。そして、センサ部本体が、発射操作装置における遊技者が回転操作するハンドル部側、あるいは遊技機側に固定されるハンドルベース部側の何れかに取り付けられ、内部回路が他方側に取り付けられる。回転軸とセンサ本体部とは、回転軸の回転角を機械的に伝達する複数の連結ギヤを介して連結される。
【0005】
また、弾球式遊技機においては、上記角度検出器の他、遊技者の操作を検出する検出器として、遊技者がハンドル部分に触れていることを検知するタッチセンサや、遊技者がハンドル部分を回動させたままで発射を強制的に停止させる際に操作するストップスイッチも備えられる。これら検出器も多くの場合、発射操作装置に搭載される。
【0006】
上記タッチセンサとしては、静電容量式が一般的である。遊技者が触れる部分に電極が設けられており、タッチセンサは、該電極に遊技者が直接または間接的に触れることで変化する静電容量の差を検出する。このようなタッチセンサは、発射操作装置の内部に配置された場合、タッチセンサの電極部と発射操作装置のタッチ電極部とが、直接または間接的に電気的に接続される。
【0007】
また、上記ストップスイッチとしては、メカ接点式のマイクロスイッチが一般的である。これには、スイッチ操作部が設けられており、スイッチ操作部を遊技者が直接または間接的に操作したことを検出する。このようなストップスイッチは、発射操作装置の内部に配置される場合、遊技者が操作するストップ操作レバー部材とリンクされ、このレバーの動きに連動して操作されるようになっている。
【0008】
そして、これら発射操作装置に内蔵された、角度検出器や、タッチセンサ、ストップスイッチ等の電子回路は、遊技機本体に設置された発射制御基板等の電子回路基板と、複数の配線により接続される。複数の配線は、具体的には、発射操作装置側に内蔵された電子回路に対する電力供給用の配線、角度検出器から出力されるハンドル部の回転角を検出した信号を伝送する信号線、タッチスイッチのタッチ信号を伝送する信号線、ストップスイッチの操作状態を検出した信号を伝送する信号線などである。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2008−301948号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、上述のような、可変抵抗器や電子式ボリュームを用いた角度検出器を搭載した弾球式遊技機には、以下に記載するように、コスト面および耐久面に課題があり、かつ、デザイン的な自由度を損なうといった課題を有している。
【0011】
1)可変抵抗器や電子式ボリュームを用いた角度検出器は、センサ部本体に付随する回転軸を有しており、回動操作による回転軸の角度変化を、抵抗値の変化あるいは出力電圧の変化にて検出するようになっている。そのため、発射操作装置に搭載した場合、センサ部本体と内部回路とをハンドル部側とハンドルベース部側とに分けて設置する必要があり、かつ、回転角を機械的に伝達するために、複数の連結ギヤ等の回転角伝達部材等が必要となる。
【0012】
その結果、角度検出器として部品点数が多くなり、発射操作装置としてのコストが必然的に高くなる。加えて、部品点数が多くなることで、発射操作装置自体及び遊技機本体側に設計的レイアウト制約が発生し、デザインや大きさ、または稼動条件等の自由度が大きく損なわれることにもなる。また、複数の連結ギヤを用いる構成では、バックラッシュによるガタつきを抑える目的でバネ部材も必要で、このバネ部材を起因として、ハンドル操作が重いなどの不具合もある。
【0013】
2)弾球式遊技機での遊技球の発射強度は、この遊技の性質上狙う範囲が大よそ限定され、この限定された周辺で微調整される。そのため、上記回転角伝達に関する部材は、特に使用される箇所が限定され易く、その限定された箇所と周囲の接触部の消耗が最も激しくなる。消耗が進むと遊技者が狙いたいところでの微調整が困難となる。可変抵抗器を用いた角度検出器では、抵抗器の接触部で頻繁に使用される範囲は特に限定され易く、上記影響がより顕著に現れる。そのため、遊技者が狙いたいところでの微調整が困難となるなどの問題がある。
【0014】
本発明は、上記課題に鑑みなされたものであって、耐久性、コスト性、操作性に優れ、デザイン的な自由度も広い弾球式遊技機を容易に実現できる操作検出器を提供することを目的としている。
【課題を解決するための手段】
【0015】
本発明の弾球式遊技機の操作検出器は、上記の課題を解決するために、回動操作される回転体を備えた発射操作装置が搭載される弾球式遊技機の操作検出器において、上記回転体の回転角を検出する角度検出部を備え、該角度検出部が、少なくとも2軸を有すると共に該2軸が上記回転体の回転軸に直交するように配置された加速度センサと、上記加速度センサの上記2軸を用いて上記回転体の回転角を算出する演算部とを備えることを特徴としている。
【0016】
これによれば、角度検出部が加速度センサを用いて構成されており、演算部が加速度センサの2軸を用いて回転体の回転角を算出する。したがって、操作検出器を、発射操作装置の回転体に固定するだけで、角度検出部を発射操作装置に取り付けることが可能となる。したがって、センサ部本体と内部回路とを回転側と固定側とに分けて設置する必要のあった従来構成に比して、回転角を機械的に伝達するための複数の連結ギヤ等の回転角伝達部材等が不要となり、角度検出部として部品点数が大きく削減でき、コスト削減に加えて、発射操作装置自体及び遊技機側への設計的レイアウト制約を小さくし、デザインや大きさ、稼動条件等の自由度を広げることができる。また、複数の連結ギヤが必要なくなるので、バックラッシュによるガタつきを抑える目的で用いられていたバネ部材も不要となり、操作性も向上する。しかも、従来の可変抵抗器を用いた角度検出部のように、磨耗による耐久性の問題もなく、耐久性にも優れている。
【0017】
これにより、本発明の操作検出器を発射操作装置の回転体に取り付けるだけで、従来の可変抵抗器や電子式ボリュームを用いた角度検出器を搭載していた発射操作装置に比して格段に耐久性・コスト性・操作性に優れ、デザイン的な自由度も広い弾球式遊技機を容易に実現して提供することができる。
【0018】
本発明の弾球式遊技機の操作検出器においては、上記角度検出部が、上記演算部にて算出された回転角に応じた出力を生成する出力生成部をさらに備える構成とすることもできる。
【0019】
これによれば、演算部が加速度センサの出力より回転角を算出し、出力生成部が算出された回転角に応じた出力を生成する。例えば、出力生成部は、後段に配置される遊技機側の例えば発射制御基板に対して、回転角を直線的あるいは非直線的にアナログ電圧に変換して出力したり、回転角をダイレクトに角度データとしたデジタル数値出力したり、回転角に対して発射制御基板と取り決めた任意なデジタル数値出力したりする構成が考えられる。
【0020】
本発明の弾球式遊技機の操作検出器においては、さらに、遊技者が遊技球の発射を強制的に停止させるために操作するストップレバーの操作状態を検出するストップ操作検出部を備え、上記角度検出部と上記ストップ操作検出部とが一体化されている構成とすることもできる。
【0021】
これよれば、ストップ操作検出部も角度検出部と一体化されているので、本発明の操作検出器を発射操作装置に取り付けるだけで、ストップ操作検出部も一緒に取り付けることができ、部品点数の削減、及び組み立て工程数の削減等も図れる。
【0022】
この場合、上記出力生成部が、回転角に応じた出力にストップ操作の検出結果を統合して出力する構成とすることもできる。
【0023】
これによれば、回転角に応じた出力にストップ操作の検出結果を統合して出力されることで、ストップ操作が成されているか否かを遊技機側に伝達するためのハーネスが不要となる。特に、ストップ操作が成されているか否かを遊技機側に伝達する信号を統合させた場合、発射制御基板と接続されるハーネス本数の削減だけでなく、遊技機側の発射制御基板等の信号入力回路及びこれに付随する電子部品の削減が可能となり、全体でのコスト削減効果と発射制御基板の実装面積の縮小効果が得られる。
【0024】
本発明の弾球式遊技機の操作検出器においては、さらに、上記回転体に遊技者が触れていることを検出するタッチ検出部を備え、上記角度検出部と上記タッチ検出部とが一体化されている構成とすることもできる。
【0025】
これよれば、タッチ検出部も角度検出部と一体化されているので、本発明の操作検出器を発射操作装置に取り付けるだけで、タッチ検出部も一緒に取り付けることができ、部品点数の削減、及び組み立て工程数の削減等も図れる。
【0026】
この場合、上記出力生成部が、回転角に応じた出力に上記タッチ検出部の検出結果を統合して出力する構成とすることもできる。
【0027】
これによれば、回転体に遊技者が触れていることを検出するタッチ検出部の検出結果が統合して出力されるので、遊戯者のタッチの有無を遊技機側に伝達するためのハーネスが不要となる。
【0028】
本発明の弾球式遊技機の操作検出器においては、さらに、上記加速度センサは3軸を有すると共に3軸目が上記回転軸に平行に配置されており、上記演算部が、上記回転軸に平行に配置された上記加速度センサの3軸目の傾斜を検出する構成とすることもできる。
【0029】
加速度センサは2軸構成のものもあるが、通常は3軸構成であり、3軸のものが普及している。上記構成では、このような普及型の3軸の加速度センサが用いられ、演算部が、回転体の回転角の検出に使用していない3軸目の傾斜を検出する。したがって、遊技機との間で、この3軸目を傾斜させることで何がしかの指示を発射操作装置側あるいは遊技機側で検出できるように構成しておくことで、従来には無い発射操作装置の新しい操作方法を提供できる。また、回転角の検出精度の補正などにも用いることができる。
【0030】
例えば、演算部にて検出された上記加速度センサの3軸目の傾斜に基づいて、出力生成部が生成する出力を無効にするストップ操作を検出させる構成とすることができる。
【0031】
これによれば、回転体を持ったままで把持している部分を上あるいは下に変位させることで、遊技球の発射を強制的に停止させることができる。例えば、強制停止をストップレバー操作として行う構成では、レバーを操作していた指の動きによる回転体ズレを抑制することができる。
【0032】
また、演算部にて検出された上記加速度センサの3軸目の傾斜に基づいて、出力生成部が、生成する出力のレベルを可変する構成とすることもできる。これによれば、回転体を持ったままで把持している部分を傾斜させる動作を、発射強度の切り替えとして用いることが可能となり、発射強度の微調整などが容易にできるようになる。
【0033】
本発明の弾球式遊技機の操作検出器においては、さらに、上記加速度センサは3軸を有すると共に3軸目が上記回転軸に平行に配置されており、記演算部が、上記回転軸に平行に配置された上記加速度センサの3軸目にその軸方向にかかる加速度を検出し、上記演算部にて検出された3軸目の加速度に基づいて、当該操作検出器が搭載される弾球式遊技機に加わる衝撃の有無を検出する構成とすることもできる。
【発明の効果】
【0034】
本発明によれば、従来の可変抵抗器や電子式ボリュームを用いた角度検出器を搭載していた発射操作装置に比して格段に耐久性・コスト性・操作性に優れ、デザイン的な自由度も広い発射操作装置を備えた弾球式遊技機を、本発明の操作検出器を発射操作装置に取り付けるだけで簡単に提供することができるという効果を奏する。
【図面の簡単な説明】
【0035】
【図1】本発明の実施の一形態を示すもので、遊技機の概略斜視図である。
【図2】(a)(b)は共に、前記発射ハンドル装置の外観斜視図であり、(a)は、発射ハンドル装置を前面側より見た図、(b)は発射ハンドル装置を後面側より見た図である。
【図3】(a)〜(f)は順に、前記発射ハンドル装置の上面図、左側面図、前面図(正面図)、右側面図、下面図、および後面図(裏面図)である。
【図4】前記発射ハンドル装置を前面側から見た分解斜視図である。
【図5】前記発射ハンドル装置を後面側から見た分解斜視図である。
【図6】(a)(b)は共に、前記発射ハンドル装置に搭載されたハンドルセンサモジュールの外観斜視図であり、(a)は、前記ハンドルセンサモジュールを前面側より見た図、(b)はハンドルセンサモジュールを後面側より見た図である。
【図7】(a)〜(f)は順に、前記ハンドルセンサモジュールの上面図、左側面図、前面図(正面図)、右側面図、後面図(裏面図)、および下面図である。
【図8】前記ハンドルセンサモジュールを前面側から見た分解斜視図である。
【図9】前記ハンドルセンサモジュールを後面側から見た分解斜視図である。
【図10】前記ハンドルセンサモジュールにおける加速度センサおよびその周辺の部材の配置を示す拡大図である。
【図11】前記遊技機の制御ブロック図である。
【図12】(a)(b)共に、加速度センサの2軸を用いて姿勢(角度)を検出する概念を示す説明図である。
【図13】前記ハンドルセンサモジュールを搭載した発射制御装置による、操作角信号生成・出力処理のフローチャートである。
【図14】図13のフローチャートのS13〜S17における操作角信号への変換に用いた変換式のグラフである。
【図15】前記遊技機に搭載された発射制御基板に入力される、タッチ信号、ストップ信号、および操作角信号のタイミングチャートである。
【図16】本発明のその他の実施の形態を示すもので、遊技機における制御ブロック図である。
【図17】図16に制御ブロック図を示す遊技機の発射制御装置による操作角信号生成・出力処理のフローチャートである。
【図18】本発明のその他の実施の形態を示すもので、遊技機における制御ブロック図である。
【図19】本発明のその他の実施の形態を示すもので、遊技機における制御ブロック図である。
【図20】図19に制御ブロック図を示す遊技機の発射ハンドル装置が下向き変位する様子を示す説明図である。
【図21】図19に制御ブロック図を示す遊技機の発射制御装置による操作角信号生成・出力処理のフローチャートである。
【図22】図21のフローチャートにおけるストップ状態取得処理を示すフローチャートである。
【図23】図19に制御ブロック図を示す遊技機の発射制御装置の変形例を示すもので、ストップ信号を個別に出力する場合のストップ状態検出処理を示すフローチャートである。
【図24】図19に制御ブロック図を示す遊技機の発射制御装置による不正検出処理を実施して不正信号を出力する不正検出処理を示すフローチャートである。
【図25】図19に制御ブロック図を示す遊技機に搭載された発射制御基板に入力される、タッチ信号、ストップ操作判定、操作角信号、不正(衝撃)判定、および不正信号出力のタイミングチャートである。
【図26】本発明のその他の実施の形態を示すもので、遊技機における制御ブロック図である。
【図27】図26に制御ブロック図を示す遊技機の発射ハンドル装置が上向き・下向きに変位する様子を示す説明図である。
【図28】図26に制御ブロック図を示す遊技機の発射制御装置による操作角信号生成・出力処理のフローチャートである。
【図29】図28のフローチャートにおけるレベル判定処理を示すフローチャートである。
【図30】図28のフローチャートのS60における操作角信号への変換に用いた変換式のグラフである。
【図31】図28のフローチャートのS60における操作角信号への変換に用いた変換式の回転角と出力電圧(操作角信号)との関係を示すテーブルである。
【図32】本発明の実施の他の形態を示すもので、(a)〜(c)は、発射ハンドル装置のハンドル部分が上向き・下向きに変位する様子を示す説明図である。
【図33】(a)〜(f)は順に、図32に示す発射ハンドル装置の上面図、左側面図、前面図(正面図)、右側面図、下面図、および後面図(裏面図)である。
【図34】図32に示す発射ハンドル装置を前面側から見た分解斜視図である。
【図35】図32に示す発射ハンドル装置を後面側から見た分解斜視図である。
【図36】(a)〜(c)は、図32に示す発射ハンドル装置のハンドル部分が上向き・下向きに変位する様子をより詳細に示すもので、(a)(b)は発射ハンドル装置を上下方向に沿って位置をずらして切断した断面図、(c)は後面図(裏面図)である。
【図37】(a)〜(c)は、図32に示す発射ハンドル装置のハンドル部分が上向き・下向きに変位する様子をより詳細に示すもので、(a)(b)は発射ハンドル装置を上下方向に沿って位置をずらして切断した断面図、(c)は後面図(裏面図)である。
【図38】図32に示す発射ハンドル装置を水平方向に沿って切断した断面図である。
【図39】複数の実施の形態を適宜組み合わせることで採用できるハンドルセンサモジュール、およびそれを搭載する発射制御装置の組合せ例を説明する図面である。
【発明を実施するための形態】
【0036】
〔実施の形態1〕
以下、図面を参照しつつ、本発明の実施の一形態について詳細に説明する。まずは、図1を用いて、弾球式遊技機(以下、遊技機と略記する)の概略構成について説明する。図1は、遊技機の概略斜視図である。
【0037】
図1に示すように、遊技機1は、遊技機本体9と発射ハンドル装置(発射操作装置)4とを有している。遊技機本体9は、上部から中央部の大部分の領域に遊技盤2が設けられ、下部には玉受け部3が設置されている。遊技盤2の略中央部には、表示装置8が配設されており、入賞の有無などに応じて様々に変化する遊技情報が表示される。発射ハンドル装置4は、遊技機本体9の下部に取り付けられており、遊技者に回動操作されるハンドル回転体(回転体)51を有している。
【0038】
遊技機1では、遊技者が発射ハンドル装置4のハンドル回転体51を回動操作すると、遊技機1に内蔵された後述する発射装置30にて、一定の発射間隔で、操作角度(回転角)に応じた発射速度(発射強度)で遊技球が発射される。発射された遊技球は、遊技盤2の側方に設けられたレール5に沿って上方へ移動し、遊技盤2上に設けられた多数の障害釘6の間を落下する。そして、落下する遊技球が入賞口7に入る(入賞する)と、所定個数の遊技球が、遊技盤2の背面に設置された賞球払出装置(図示せず)を通じて玉受け部3へ払い出される。
【0039】
次に、図2〜図5を用いて、発射ハンドル装置について説明する。図2の(a)および(b)は共に、発射ハンドル装置の外観斜視図であり、図2の(a)は、発射ハンドル装置を前面側より見た図、図2の(b)は、発射ハンドル装置を後面側より見た図である。図3の(a)〜(f)は順に、発射ハンドル装置の上面図、左側面図、前面図(正面図)、右側面図、下面図、および後面図(裏面図)である。図4は、発射ハンドル装置を前面側から見た分解斜視図であり、図5は、発射ハンドル装置を後面側から見た分解斜視図である。
【0040】
図2〜図5の何れかに示すように、発射ハンドル装置4は、前面側から後面側にかけて、ハンドルキャップ52と、復帰バネ57と、ハンドルセンサモジュール(操作検出器)14と、ハンドル回転体51と、発射停止レバー55と、ハンドル本体53とが、この順に組み付けられて構成されている。
【0041】
ハンドルキャップ52は、掌が滑らかに当って握り易くするために前面が球面状に形成されており、後面には、当該ハンドルキャップ52をハンドル本体53と連結するための複数の固定軸52aが突出して設けられている。
【0042】
ハンドル本体53は、前面側の端部が鍔状に広がった筒状体53aを有している。筒状体53aの鍔状部の前面には、前記したハンドルキャップ52の固定軸52aが挿入される中空の案内軸53bが複数、突出して設けられている。また、ハンドル本体53には、後述する回転軸53c、およびスイッチ用開口53dが設けられている。
【0043】
ハンドルキャップ52の前記固定軸52aは、ハンドルキャップ52とハンドル本体53との間にハンドル回転体51を介在させた状態で、ハンドルキャップ52に複数のビス60を用いてビス留めされている。詳細には、前記固定軸52aは、ハンドル本体53の前記案内軸53bの内部に挿入され、ハンドル本体53の筒状体53aの鍔状部の後面側より挿通されたビス60にて、案内軸53bの内部においてビス留めされている。
【0044】
ハンドル回転体51は、ハンドルキャップ52の後面とハンドル本体53の前面との間に回動自由に介在されている。ハンドル回転体51は、浅い有底筒の部材であり、その外周面に、指掛け部62を有する環状の把持部63を有している。また、ハンドル回転体51における有底筒の底部となる面には、周方向に伸びる一対の円弧状の案内穴66が、軸心部を中心に向かい合うように形成されている。ハンドル本体53に形成された上記案内軸53bは、これら一対の案内穴66内に摺動自在に挿入されており、これにより、ハンドル回転体51は、一対の案内穴66が描く円弧の範囲内において回転自在となっている。このほか、ハンドル回転体51における有底筒の底部となる面には、軸心部に後述する検出用開口65、ハンドルセンサモジュール14用の位置決めボス51bおよび固定穴51aが形成されている。
【0045】
ハンドルセンサモジュール14は、ハンドル回転体51の前面にビス68にて固定されている。ハンドルセンサモジュール14の詳細については後述するが、本実施の形態では、遊技者の操作内容を検出する検出器として、角度検出部11、タッチセンサ(タッチ検出部)12、およびストップセンサ13を備えている(図11参照)。角度検出部11は、ハンドル回転体51が回動操作された操作角を検出する検出器であり、タッチセンサ12は、遊技者がハンドル回転体51に触れていることを検出する検出器、ストップセンサ13は、遊技者が発射停止レバー55を操作していることを検出する検出器である。本実施の形態では、角度検出部11、タッチセンサ(タッチ検出部)12、およびストップセンサ13は、ハンドルセンサモジュール14として、1部品化(一体化)されている。
【0046】
復帰バネ57は、コイル状を有し、ハンドルキャップ52とハンドル回転体51との対向面間に介在されている。復帰バネ57は、一端がハンドル本体53あるいはハンドルキャップ52に係止されると共に、他端がハンドル回転体51に係止されている。復帰バネ57は、ハンドル回転体51を、回動操作が成されていない初期位置に戻す方向に常時付勢している。復帰バネ57が設けられることで、ハンドル回転体51の回動操作に対して適度な操作感を与えることができると共に、回動操作が解除された時、ハンドル回転体51を初期位置に自動復帰させることが可能となる。
【0047】
発射停止レバー55は、ハンドル回転体51の後面側に設けられており、遊技者がこれを遊技中に操作することで、ハンドル回転体51を回動させた状態のまま、遊技球の発射の停止/再開を指示できる。発射停止レバー55は、くの字状の部材であり、くの字の折れ曲がり部を回転支点として、ハンドル本体53の前面に設けられた回転軸53cに回転自在に取り付けられている。
【0048】
発射停止レバー55の一端部は、小さなくの字を描くようにさらに折曲されることで操作片55aが形成されている。発射停止レバー55は、図示しない付勢バネにて、操作片55aが、ハンドル本体53に設けられたスイッチ用開口53dから突出する方向に常時付勢されている。
【0049】
一方、発射停止レバー55の他端部は、ハンドルセンサモジュール14におけるストップセンサ(ストップ操作検出部)13のセンサ作用部55bとなっている。ストップセンサ13は、発射停止レバー(ストップレバー)55が操作されているか否かを検出するもので、ハンドル回転体51の有底筒の底部となる面の軸心部に形成された検出用開口65を通して、センサ作用部55bによる作用の有無を検出する。
【0050】
遊技者が、発射停止レバー55の操作片55aをスイッチ用開口53dに押し込むように操作すると、発射停止レバー55が回転してセンサ作用部55bがストップセンサ13の検出位置に移動する。ストップセンサ13は、検出位置にセンサ作用部55bの存在を検知する間、発射停止レバー55が操作されていると検出する。
【0051】
一方、遊技者が操作片55aを押し込む操作を解除すると、レバーの自重または図示しない付勢バネの力で、発射停止レバー55が復帰方向に回転して、操作片55aがスイッチ用開口53dから突出した元の状態に復帰すると共に、センサ作用部55bがストップセンサ13の検出位置から外れる。ストップセンサ13は、検出位置にセンサ作用部55bの存在を検知しない場合は、発射停止レバー55は操作されていないと検出する。
【0052】
上記ストップセンサ13として、本実施の形態では、発光部と受光部が同じ側に設けられている反射式フォトマイクロセンサを用いている。
【0053】
また、上記ハンドル回転体51は、把持部63から有底筒の底部となる面を含めて導電性を有しており、ハンドルセンサモジュール14における後述するタッチセンサ12(図11参照)の電極部として作用する。タッチセンサ12は、遊技者がハンドル回転体51を把持することで変化する静電容量の差を検出する。
【0054】
次に、図6〜図10を用いて、上記ハンドルセンサモジュール14について説明する。図6の(a)および(b)は共に、ハンドルセンサモジュールの外観斜視図であり、図6の(a)は、ハンドルセンサモジュールを前面側より見た図、図6の(b)は、ハンドルセンサモジュールを後面側より見た図である。図7の(a)〜(f)は順に、ハンドルセンサモジュールの上面図、左側面図、前面図(正面図)、右側面図、後面図(裏面図)、および下面図である。図8は、ハンドルセンサモジュールを前面側から見た分解斜視図であり、図9は、ハンドルセンサモジュールを後面側から見た分解斜視図である。また、図10は、前記ハンドルセンサモジュールにおける加速度センサおよびその周辺の部材の配置を示す拡大図である。
【0055】
図6〜図10の何れかに示すように、ハンドルセンサモジュール14は、前面(正面)から見た投影面の形状が正方形に近い矩形形状を有している。ハンドルセンサモジュール14は、ケース86とカバー81とで構成される外郭部材の内部に、複数の回路部材が搭載されたプリント基板82が収容されてなる。
【0056】
プリント基板82は、第1の面に、コネクタ85、加速度センサ15、演算出力部19、タッチ主回路83、およびタッチ回路用コイル84を搭載し、その裏面の第2の面に、反射式のフォトマイクロセンサよりなるストップセンサ13を搭載している。また、第2の面には、タッチセンサ用の接続電極90も形成されている。
【0057】
加速度センサ15は、詳細については後述するが、演算出力部19とで、ハンドル回転体51の回動操作された角度(操作角)を検出する角度検出部11を構成するものである。加速度センサ15は、3軸の加速度センサであり、ハンドルセンサモジュール14の厚み方向にZ軸を有し、ハンドル回転体51の初期位置(回転角0°)において、X軸が水平方向、Y軸が鉛直方向となるように、プリント基板82の中央部に設置されている(図10参照)。
【0058】
本実施の形態では、加速度センサ15のZ軸が、発射ハンドル装置4の回転軸(ハンドル回転体51の回動軸)と一致するように取り付けられている。なお、加速度センサ15のZ軸は、発射ハンドル装置4におけるハンドル回転体51の回転軸に平行であればよい。
【0059】
演算出力部(演算部、出力生成部)19は、加速度センサ15のX軸およびY軸の出力信号(データ)より、ハンドル回転体51の操作角を検出し、操作角に応じた操作角信号Eを生成して出力するものである。
【0060】
タッチ主回路83およびタッチ回路用コイル84は、後述するタッチセンサ12(図11参照)を構成しており、遊技者がハンドル回転体51に触れているか否かを、遊技者がハンドル回転体51を把持することで変化する静電容量の差より検出する。タッチ主回路83は、遊技者がハンドル回転体51に触れているか否かを示すタッチ信号を出力する。
【0061】
ストップセンサ13は、上述したように、発射停止レバー55が操作されているか否かを検出するものであり、遊技者が発射停止レバー55を操作しているか否かを示すストップ信号を出力する。
【0062】
コネクタ85は、当該ハンドルセンサモジュール14と後述する発射制御基板20(図11参照)、および図示しない電源とを繋ぐハーネスが接続される接続部である。ハンドルセンサモジュール14で検出された、操作角信号E、タッチ信号、ストップ信号は、コネクタ85に接続されたハーネスを介して、発射制御基板20へと供給される。
【0063】
複数の上記回路部品が実装されたプリント基板82は、ストップセンサ13が搭載されている第2の面がケース86と対峙するようケース86内に収容されており、ケース86の開放端はカバー81にて覆われている。
【0064】
ケース86における、プリント基板82を収容する収容部は、前面(正面)から見た投影面の形状が、4角の一つが切り欠かれた正方形に近い矩形形状を有しており、カバー81およびプリント基板82も、同様の投影面の形状を有している。ケース86における切り欠かれた角部には、ハンドルセンサモジュール14をビス68(図4参照)にてハンドル回転体51に固定するための固定部86bが設けられている。該固定部86bには、ビス68が挿通される固定穴86cが形成されている。
【0065】
また、固定部86bには、タッチ主回路83およびタッチ回路用コイル84に、遊技者がハンドル回転体51に触れているか否かを検知させるための信号を伝える電極プレート87が取り付けられている。電極プレート87は、固定部86bを挟み込むようにコの字状に折曲されており、固定部86bを挟み込むコの字の部分には、ビス68が挿通される固定穴87aが形成されている。また、電極プレート87の一端は、ケース86の収容部に形成された図示しないスリット状の開口よりケース内部に挿入されており、プリント基板82の第2の面に形成されたタッチセンサ用の接続電極90に接触している。
【0066】
ハンドルセンサモジュール14は、電極プレート87が固定部86bを挟み込むよう取り付けられた状態で、電極プレート87ごとビス68にてハンドル回転体51に固定されており、その状態で、電極プレート87はハンドル回転体51の有底筒の底部の面に接触している。これにより、ハンドル回転体51に遊技者が触れているか否かの情報を、プリント基板82にまで伝達することが可能となる。
【0067】
また、ケース86には、プリント基板82に搭載されたストップセンサ13に対応する位置にセンサ用開口部86aが設けられている。これにより、ストップセンサ13は、ケース86に遮られることなく、センサ用開口部86aを通して、センサ作用部55bによる作用の有無を検出できる。
【0068】
さらにケース86における固定部86bと対角をなす角部には、ハンドル回転体51に対して当該ハンドルセンサモジュール14の取り付け位置を決めるための位置決め穴86eが形成されている。ハンドル回転体51に形成された位置決めボス51bがこの位置決め穴86eに嵌合されており、これにより、ハンドルセンサモジュール14が精度よくハンドル回転体51に固定されている。
【0069】
カバー81には、プリント基板82に搭載されたコネクタ85に対応する位置に、コネクタ用開口部81aが設けられている。コネクタ85の一部は、このコネクタ用開口部81aを介して、ハンドルセンサモジュール14の外面に露出している。
【0070】
また、ケース86の収容部およびカバー81には、複数の掛止爪86dおよび掛止溝81bが形成されており、これらが掛わり合うことで、ケース86とカバー81とが掛止されている。
【0071】
次に、図11を用いて、遊技機の制御系について説明する。図11は、遊技機の制御ブロック図である。
【0072】
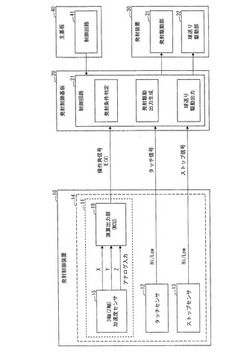
遊技機1は、発射制御装置10と、発射制御基板20と、発射装置30と、主基板40とを備えている。このうち、発射制御装置10は、発射ハンドル装置4に搭載されており、上記ハンドルセンサモジュール14を備えている。発射制御基板20と発射装置30と主基板40とは、遊技盤2等を含む遊技機本体9側に配置されている。
【0073】
主基板40は、制御回路41を搭載しており、制御回路41にて、遊技盤2における入賞口7の開閉動作を始めとして表示装置8への遊技情報の表示、遊技盤2に施された装飾照明等、遊技機1における各部の駆動を制御する。また、制御回路41は、発射制御基板20に対して遊技球の発射を許可する許可信号を出力する。発射制御基板20は、許可信号が入力されている間、遊技球を発射する。
【0074】
発射制御装置10は、遊技者が発射ハンドル装置4に対して行った操作を電気信号に変換して発射制御基板20へと出力するもので、角度検出部11、タッチセンサ12、およびストップセンサ13が内蔵された前述のハンドルセンサモジュール14を備えている。
【0075】
角度検出部11は、上述したように、遊技者がハンドル回転体51を回動操作した操作角を検出するものであり、本実施の形態では、角度検出部11は、3軸の加速度センサ15と演算出力部19とから構成されている。
【0076】
加速度センサ15は、姿勢(角度)検出用デバイスであり、X軸およびY軸が発射ハンドル装置4におけるハンドル回転体51の回転軸に直交するように配置されている。加速度センサ15のX軸およびY軸からは、ハンドル回転体51が回動操作された操作角に応じた電気信号が出力される。なお、本実施の形態では、X軸とY軸とを回転角検出に用いているが、3軸のうちの任意の2軸を用いればよい。また、本実施の形態では、Z軸を使用しないので、加速度センサ15は2軸のものであってもよい。
【0077】
演算出力部19は、加速度センサ15から得られるX軸およびY軸の信号(データ)を取得してハンドル回転体51の操作角を算出して、操作角に応じた操作角信号E(V)を生成して出力するものである。演算出力部19に代えて、X軸およびY軸の信号(データ)から操作角を検出する演算部と、算出された操作角を操作角信号Eに変換する出力回路とに分けて構成してもよい。なお、加速度センサ15の2軸を用いて操作角を検出する概念については後述する。
【0078】
タッチセンサ12は、上述したように、遊技者が発射ハンドル装置4に触れていることを検知するものである。タッチセンサ12は、触れているか否かを信号レベルによって表すHi/Lowレベルのタッチ信号を出力する。本実施の形態では、タッチ信号はLowアクティブに設定されており、遊技者が発射ハンドル装置4に触れている間、タッチ信号はLowレベルとなる。
【0079】
ストップセンサ13は、上述したように、遊技者がハンドル回転体51を回動させた状態で遊技球の発射を強制的に停止させるストップ操作に使用するものであり、本実施の形態では、反射式フォトマイクロセンサからなる。ストップセンサ13も、タッチセンサ12と同様、操作されているか否かを信号レベルによって表すHi/Lowレベルのストップ信号を出力する。実施形態では、ストップ信号は、遊技者にてタッチセンサ12が操作されている間、Hiレベルとなる。
【0080】
発射制御装置10より出力されるこれらの操作角信号E、タッチ信号、およびストップ信号は、ハンドルセンサモジュール14に設けられた前記コネクタ85に接続された図示しないハーネスを介して発射制御基板20に入力される。
【0081】
発射制御基板20は、制御回路21を搭載しており、制御回路21にて、主基板40より発射を許可する許可信号が入力されている間、発射制御装置10のハンドルセンサモジュール14から入力される、操作角信号E、タッチ信号およびストップ信号とに基づいて、遊技球の発射条件を判定し、その結果に基づいた駆動出力を生成して発射装置30へと出力するものである。なお、詳細については後述する。
【0082】
発射装置30は、発射駆動部31と球送り駆動部32とを備えている。発射駆動部31は、発射制御基板20の制御回路21より入力される発射駆動出力に応じた速度で遊技球を発射するものである。遊技球は、発射駆動出力が大きいほど強い力で発射され、発射速度も速くなる。球送り駆動部32は、発射制御基板20の制御回路21より入力される球送り駆動出力に応じて駆動し、発射駆動部と31と連動して遊技球を個別に発射駆動部31へ送り込むものである。
【0083】
次に、図12を参照して、加速度センサの2軸を用いて姿勢(角度)を検出する概念にいて説明する。図12の(a)(b)に示すように、加速度センサ15のX軸およびY軸は、回転軸100に対して直交するように配置される。図12の(a)は、回転していない初期位置における重力GのベクトルA(基準ベクトル)を示している。原点O(0,0)は、回転軸100に相当する。図12の(a)の初期位置から時計回りにθ(°)回転すると、重力GのベクトルBは、図12の(b)に示すようになる。図12の(a)の状態から図12の(b)の状態に変化した場合の回転角θは、変化角度θとして求めることができる。そして、図12の(a)の初期位置から図12の(b)の状態に変化した場合の変化角度θ(°)は、ベクトルA(Ax,Ay)とベクトルB(Bx,By)の内積で求めることができる。以下に変化角度θを算出する式を記載する。
【0084】
【数1】

【0085】
次に、図13のフローチャートを用いて、発射制御装置10における操作角信号生成・出力処理について説明する。図13は、前記ハンドルセンサモジュールを搭載した発射制御装置による、操作角信号生成・出力処理のフローチャートである。なお、本実施の形態では、加速度センサ15のZ軸は用いないので、図13において、Z軸については括弧記載としている。
【0086】
遊技機1に電源が投入されて発射ハンドル装置4に電力が供給されると、演算出力部19は、まず、加速度センサ15の原点データを初期化する(S1)。ここでは、回転角0°の状態で、X軸の初期電圧(Xorg)およびY軸の初期電圧(Yorg)が共に1.4Vとなるように調整する。また、加速度1G時の出力電圧変化量(Data1G)は1.0Vである。続いて、加速度データを初期化する(S2)。つまり、X軸データのデータ(Xnow)、およびY軸データのデータ(Ynow)を0Vとする。
【0087】
原点データの初期化および加速度データの初期化が完了すると、演算出力部19は、計測回数をカウントするカウンタを初期化し(S3)、加速度センサ15からX軸データおよびY軸データを取得する(S4)。X軸データおよびY軸データを取得すると、2msec待って(S5)、上記カウンタを1UPし(S6)、S4〜S7を10回ループしたか否かを判断する(S7)。ここで、10回ループしていない場合は、S4に戻り、S7にて10回ループしたと判断するまでS4〜S7の処理を繰り返す。この間、演算出力部19は、S4で取得したX軸データおよびY軸データを積算(累積)していく。
【0088】
演算出力部19は、S7にて10回ループしたと判断すると、X軸データおよびY軸データの積算値をループした回数の10で割って平均化し、これをX軸データおよびY軸データとする。このようにX軸データおよびY軸データを平均化することで、ノイズの除去が可能となる。
【0089】
S8にて、平均化されたX軸データおよびY軸データが得られると、演算出力部19は、基準ベクトルA(Ax,Ay)の座標を算出する(S9)。基準ベクトルAのX座標Axは、Ax=0、基準ベクトルAのY座標Ayは、Ay=|Data1G−Yorg|にて算出される。ここで、Data1Gは1.0Vであり、Y軸の初期電圧(Yorg)は1.4Vであるので、基準ベクトルAのY座標Ayは、0.4となる。
【0090】
次に、演算出力部19は、ハンドル回転体51の回動により基準ベクトルAから変化している現在ベクトルB(Bx,By)の座標を算出する(S10)。現在ベクトルBのX座標Bxは、Bx=|Xorg−Xnow|、現在ベクトルBのY座標Byは、By=|Yorg−Ynow|にて算出される。
【0091】
S9、S10にて、基準ベクトルA(Ax,Ay)および現在ベクトルB(Bx,By)の座標が算出されると、演算出力部19は、上述した変化角度θを求める式を用いて、ハンドル回転体51が回動操作された角度である操作角(変化角)θを、基準ベクトルA(Ax,Ay)と現在ベクトルB(Bx,By)の内積から計算する(S11、S12)。
【0092】
次に、演算出力部19は、算出された操作角θを操作角信号Eに変換して出力する(S13〜S17)。つまり、S13、S14において、演算出力部19は、算出された操作角θと、予め定められた角度θA、角度θB(θA<θB)とを比較し、操作角θが角度θA以下であれば、S15に進み、E=(a3)θ + (b3)の変換式を用いて変換する。また、操作角θが角度θA以上角度B未満であれば、S16に進み、E=(a2)θ + (b2)の変換式を用いて変換する。そして、操作角θが角度θB以上であれば、S17に進み、E=(a1)θ + (b1)の変換式を用いて変換する。
【0093】
演算出力部19は、S15、S16、あるいはS17で生成された操作角信号Eを発射制御基板20に出力する(S18)。その後、処理をS2に戻して、加速度データ(Xnow、Ynow)を初期化し、次回の操作角θの検出を開始する。
【0094】
図14に、図13のS13〜S17において、操作角信号の変換に用いた変換式のグラフを示す。
【0095】
角度θA以下の操作角θに使用される変換式E=(a3)θ + (b3)は、大きな傾斜を有する。したがって、操作角θが0から角度θAまでの区間では、ハンドル回転体51の回転量に対して遊技球の発射強度が大きく変化することとなる。
【0096】
角度θA〜角度θBの操作角θに使用される変換式E=(a2)θ + (b2)は、緩やかな傾斜を有する。したがって、操作角θが角度θA〜角度θBの区間では、ハンドル回転体51の回転量に対して遊技球の発射強度の変化量は小さく、発射強度を微調整することができる。
【0097】
角度θB以上の回転角θに使用される変換式E=(a1)θ + (b1)も、比較的大きな傾斜を有する。したがって、操作角θが角度θBを超えると、ハンドル回転体51の回転量に対して再び遊技球の発射強度が大きく変化することとなる。なお、図5の例では、ハンドル回転体51の回転角に応じた出力傾斜を設けたが、出力傾斜を設けないリニア出力の構成であれば、単純な係数付加等で対応可能である。
【0098】
また、本実施の形態では、操作角θを変換式を用いてアナログ出力する構成を例示したが、操作角θをダイレクトに角度データとしたデジタル数値出力、あるいは操作角θに対して、上位となる遊技機本体9側の発射制御基板20等と取り決めた任意なデジタル数値を出力構成としてもよい。
【0099】
図15に、タッチ信号、ストップ信号、および操作角信号のタイミングチャートを示す。タッチ信号は、遊技者がハンドル回転体51に触れている間、Lowレベルとなり、遊技者がハンドル回転体51に触れていない間、Hiレベルとなる。発射制御基板20の制御回路21は、タッチ信号に基づいて遊技球発射の許可・不許可を判定し、タッチ信号がLowレベルの間、遊技球の発射を許可(Enable)する。
【0100】
ストップ信号は、遊技者が発射停止レバー55を操作している間、Hiレベルとなり、遊技者が発射停止レバー55の操作を止めると、Lowレベルとなる。発射制御基板20の制御回路21は、ストップ信号に基づいて遊技球の発射を停止させる処理を行うか否かを判定し、ストップ信号がLowレベルの間、遊技球の発射を許可(Enable)し、Hiレベルの間は不許可とする。
【0101】
本実施の形態では、操作角信号Eは、ストップ信号、タッチ信号とは関係なく、独立して出力される。したがって、操作角信号Eは、ハンドル回転体51の回動操作が成されているかぎり、その操作角に応じた電圧を有した信号となる。本実施の形態では、操作角信号Eは、たとえば0〜2.9Vの間で変動する電圧である。
【0102】
図15のタイミングチャートの例であれば、発射制御基板20の制御回路21は、タッチ信号およびストップ信号が共にLowレベルの期間のみ、操作角度に応じた発射駆動出力を生成出力し、その間、遊技球が発射されることとなる。
【0103】
以上のように、本実施の形態では、発射ハンドル装置4において、3軸(2軸)の加速度センサ15を用いた角度検出部11を備え、ハンドル回転体51の操作角度の検出を、3軸(2軸)の加速度センサ15と演算出力部19とで行い、操作角度に応じた操作角信号Eを出力するようになっている。
【0104】
これにより、操作角度の検出に、回転角検出のための回転軸が不要となるので、回転角検出のための回転軸を有する可変抵抗器や電子式ボリュームを用いた角度検出器による全ての問題をクリアできる。
【0105】
つまり、上記構成では、角度検出部11が加速度センサを用いて構成されているので、角度検出部11を、回転体に固定するだけで、取り付けることが可能となる。したがって、センサ部本体と内部回路とを回転側と固定側とに分けて設置する必要のあった従来構成に比して、回転角を機械的に伝達するための複数の連結ギヤ等の回転角伝達部材等が不要となり、角度検出部として部品点数が大きく削減でき、コスト削減に加えて、発射操作装置自体及び遊技機側への設計的レイアウト制約を小さくし、デザインや大きさ、稼動条件等の自由度を広げることができる。しかも、従来の可変抵抗器を用いた角度検出部のように、磨耗による耐久性の問題もなく、耐久性にも優れている。
【0106】
これにより、従来の可変抵抗器や電子式ボリュームを用いた角度検出器を搭載していた発射操作装置に比して格段に耐久性・コスト・操作性に優れ、デザイン的な自由度も広い発射ハンドル装置4、遊技機1を提供することができる。
【0107】
〔実施の形態2〕
以下、図面を参照しつつ、本発明のその他の実施の形態について詳細に説明する。なお、説明の便宜上、実施の形態1で用いた部材と同じ機能を有する部材には同じ符号を付して説明を省略して異なる点のみ説明する。
【0108】
本実施の形態と実施の形態1との違いは、ハンドルセンサモジュール、発射制御装置、および発射制御基板にある。
【0109】
図16に、本実施の形態の遊技機における制御ブロック図を示す。実施の形態1で参照した図11と比較すると分かるように、本実施の形態では、発射制御装置10Aに備えられたハンドルセンサモジュール14Aにおいては、タッチセンサ12から出力されるタッチ信号およびストップセンサ13から出力されるストップ信号が共に演算出力部19Aに入力され、演算出力部19Aからは、タッチ信号およびストップ信号が共に出力許可(遊技球の発射許可)である場合にのみ、操作角信号Eが出力される。つまり、本実施の形態においては、操作角信号Eにタッチ信号およびストップ信号が統合されている。
【0110】
実施の形態1の構成では、ストップ信号、タッチ信号、および操作角信号Eがそれぞれ独立して発射制御基板20へと出力されていたため、発射制御装置10と発射制御基板20との間には、ストップ信号用、タッチ信号用、操作角信号E用として、3本のハーネスが必要であった。これに対し、実施の形態では、ハーネスを操作角信号E用の1本に減らすことができる。
【0111】
図17のフローチャートを用いて、発射制御装置10Aにおける操作角信号生成・出力処理について説明する。図17は、前記ハンドルセンサモジュール14Aを搭載した発射制御装置10Aによる、操作角信号生成・出力処理のフローチャートである。
【0112】
実施の形態1で参照した図13のフローチャートと比較すると分かるように、本実施の形態では、S12とS13との間に、S21〜S23が追加されており、さらに、S23でNOと判断された場合に移行するS24が追加されている。
【0113】
S21では、演算出力部19Aが、タッチ信号を取得し、S22では、演算出力部19Aが、ストップ信号を取得する。S23では、演算出力部19Aが、取得したタッチ信号およびストップ信号より、操作角信号Eの出力を許可するか否かを判断する。本実施の形態では、タッチ信号およびストップ信号が共にLowレベルである場合に、演算出力部19Aは操作角信号Eの出力許可と判断してS13に進む。これにより、操作角に応じて、例えば1.5V〜2.9V程度の操作角信号Eは出力される。一方、演算出力部19は、タッチ信号およびストップ信号のいずれか一方でもHiレベルである場合は、S23にて操作角信号Eの出力不許可と判断して、S24に進み、操作角信号Eを出力しない。なお、操作角信号Eを出力しないとはつまり、電圧を0V、あるいは0.5V以下とするなどして、発射制御基板20Aが、操作角信号Eに基づいて発射駆動出力を生成する通常の出力範囲外とすることである。
【0114】
発射制御基板20Aは制御回路21Aを搭載しており、制御回路21Aにて、主基板40より発射を許可する許可信号が入力されている間、発射制御装置10Aのハンドルセンサモジュール14Aから入力されるストップ信号およびタッチ信号を統合した操作角信号Eのみに基づいて、遊技球の発射条件を判定し、その結果に基づいた駆動出力を生成して発射装置30へと出力する。制御回路21Aは、操作角信号Eが0V、あるいは0.5V以下等の発射駆動出力を生成する通常の出力範囲外である場合は、発射駆動出力および球送り駆動出力の生成を行わない。
【0115】
なお、本実施形態では、タッチ信号およびストップ信号の両方を、操作角信号Eに統合したが、タッチ信号あるいはストップ信号の何れか一方を統合する構成としてもよい。その場合は、3本のハーネスを2本に減らすことができる。
【0116】
タッチ信号のみを統合した構成では、発射制御基板は、搭載する制御回路にて、主基板40より発射を許可する許可信号が入力されている間、発射制御装置のハンドルセンサモジュールから入力される操作角信号とストップ信号とに基づいて、遊技球の発射条件を判定し、その結果に基づいた駆動出力を生成して発射装置30へと出力する。一方、ストップ信号のみを統合した構成では、発射制御基板は、搭載する制御回路にて、主基板40より発射を許可する許可信号が入力されている間、発射制御装置のハンドルセンサモジュールから入力される操作角信号とタッチ信号とに基づいて、遊技球の発射条件を判定し、その結果に基づいた駆動出力を生成して発射装置30へと出力する。
【0117】
〔実施の形態3〕
以下、図面を参照しつつ、本発明のその他の実施の形態について詳細に説明する。なお、説明の便宜上、実施の形態1、2で用いた部材と同じ機能を有する部材には同じ符号を付して説明を省略して異なる点のみ説明する。
【0118】
本実施の形態と実施の形態1との違いは、ハンドルセンサモジュール、発射制御装置にある。
【0119】
図18に、本実施の形態の遊技機における制御ブロック図を示す。実施の形態1では、発射制御装置10において、タッチセンサ12と、ストップセンサ13とは、角度検出部11を構成する加速度センサ15等と共にプリント基板82上に実装されて、ケース86とカバー81からなる外郭部材内部に収容されて、ハンドルセンサモジュール14を構成している。
【0120】
これに対し、本実施の形態では、発射制御装置10Bにおいて、ストップセンサ13に代えてメカ接点方式のストップスイッチ25が備えられ、ストップスイッチ25と共にタッチセンサ12も、ハンドルセンサモジュール14Bの外部に外付けされている。つまり、ハンドルセンサモジュール14Bは、遊技者の操作内容を検出する検出器として、加速度センサ15と演算出力部19よりなる角度検出部11のみを備えた構成である。
【0121】
図8、図9の分解斜視図を参照して説明すると、ハンドルセンサモジュール14Bは、タッチセンサ12を構成するタッチ主回路83およびタッチ回路用コイル84、タッチセンサ12に信号を伝達するための電極プレート87、接続電極90、ストップセンサ13を構成する反射式フォトマイクロセンサ等が設けられていない構成となる。
【0122】
実施の形態1のハンドルセンサモジュール14を備える構成と比較して、ストップスイッチ25とタッチセンサ12とを、ハンドルセンサモジュール14Bとは別途取り付ける必要はあるが、従来からある発射ハンドル装置の仕様を大きく変えることなく、操作角度の検出のための回転軸が不要となることによる効果を得ることができる。
【0123】
なお、図18の構成では、タッチセンサ12およびストップスイッチ25の両方を外付けとしたが、何れか一方のみを外付けとしてもよい。
【0124】
つまり、ストップスイッチ25のみを外付けとし、タッチセンサ12は、ハンドルセンサモジュール14、ハンドルセンサモジュール14Aと同様に、加速度センサ15と共にハンドルセンサモジュール内部に設けてもよい。その場合のハンドルセンサモジュールは、図8、図9の分解斜視図を参照して説明すれば、ストップセンサ13を構成する反射式フォトマイクロセンサが設けられていない構成となる。また、その場合の、タッチ信号の出力の仕方としては、個別に出力する形態、および操作角信号Eに統合して出力する形態の何れも可能である。
【0125】
一方、タッチセンサ12のみを外付けとする構成では、ハンドルセンサモジュール14、ハンドルセンサモジュール14Aと同様に、加速度センサ15と共にストップセンサ13をハンドルセンサモジュール内部に設けることとなる。その場合のハンドルセンサモジュールは、図8、図9の分解斜視図を参照して説明すると、タッチセンサ12を構成するタッチ主回路83およびタッチ回路用コイル84、タッチセンサ12に信号を伝達するための電極プレート87、接続電極90が設けられていない構成となる。また、その場合も、ストップ信号の出力の仕方としては、個別に出力する形態、および操作角信号Eに統合して出力する形態の何れも可能である。
【0126】
〔実施の形態4〕
以下、図面を参照しつつ、本発明のその他の実施の形態について詳細に説明する。なお、説明の便宜上、実施の形態1〜3で用いた部材と同じ機能を有する部材には同じ符号を付して説明を省略して異なる点のみ説明する。
【0127】
本実施の形態と実施の形態1との違いは、発射ハンドル装置、ハンドルセンサモジュール、発射制御装置、および発射制御基板にある。
【0128】
図19に、本実施の形態の遊技機における制御ブロック図を示す。本実施の形態では、発射制御装置10Cにおいて、角度検出部11Cが、加速度センサ15の3軸目を利用して、ストップ信号および不正信号を検出する点である。そのため、本実施の形態では、発射制御装置10Cに備えられたハンドルセンサモジュール14Cには、ストップセンサもストップスイッチも設けられていない。
【0129】
なお、タッチ信号については、ハンドルセンサモジュール14Cに内蔵されたタッチセンサ12より個別出力される構成としている。しかしながら、実施の形態2で参照した図16に示す発射制御装置10Aのように、操作角信号Eに統合する構成としてもよいし、実施の形態3で参照した図18に示す発射制御装置10Bのように、ハンドルセンサモジュール外部に外付けとして、個別出力する構成としてもよい。
【0130】
加速度センサ15のZ軸は前述したように、発射ハンドル装置におけるハンドル回転体51の回転軸と平行に配置されている。そのため、Z軸にかかる重力Gは、ハンドル回転体51の回転軸が元の状態から上下方向(鉛直線方向)に傾くことと、Z軸の方向である遊技機1の前後方向に瞬間的かかる衝撃とによって変化し、傾斜及び衝撃に応じた値を出力する。これはつまり、Z軸のデータを取得することにより、そのデータより、発射ハンドル装置4に対して上下方向への力が加えられたことと、発射ハンドル装置4あるいは遊技機1に対して、前後方向に瞬間的な衝撃が加えられたことを検出できるということに他ならない。
【0131】
本実施の形態では、このZ軸のデータを利用して、角度検出部11Cに、操作角度検出以外の機能として、ストップ操作検出機能と不正操作検出機能とを具備させている。ストップ操作とは、前述したように、遊技者が発射ハンドル装置4のハンドル回転体51の回転させたままで遊技球の発射のみ停止させたい場合にストップスイッチを押す等の操作である。また、不正操作とは、発射ハンドル装置4のハンドル部分を故意に強く押したり引いたりする操作や、遊技機1の遊戯盤2を覆っているガラス面やその周囲等を故意に叩いたりする操作である。
【0132】
演算出力部19Cは、X軸とY軸の出力より、ハンドル回転体51の操作角度を検出し、Z軸の出力より、ストップ操作が成されたかどうか、および、不正操作がなされたかどうかを検出する。
【0133】
遊技者に対しては、ストップ操作の行い方として、発射ハンドル装置4Cである遊技機本体9から突出しているハンドル部分全体を下方向に停止するまで、あるいはロック音が発生するまで、あるいはロック感が得られるまで押し下げる、といった取り決めがなされている。なお、ここでは、ストップ操作を、ハンドル部分全体を押し下げる操作としているが、逆に、ハンドル部分全体を持ち上げる操作とすることもできる。
【0134】
図20の(a)(b)に示すように、本実施の形態では、発射ハンドル装置4Cにおけるハンドル本体53の後面に、発射ハンドル装置4Cにおけるハンドル部分全体を下向きに角度変位させることを可能にする変位機構部59が取り付けられている。図20の(a)(b)は、発射ハンドル装置4Cが下向きに変位する様子を示す説明図である。変位機構部59は、発射ハンドル装置4Cにおける遊技機本体9との取り付け部を基点として、所定角度θZ_stop押し下げ可能に構成されている。また、変位機構部59には、ハンドル部分を所定角度押し下げることで、押し下げた位置でハンドル部分をロックするロック機構も備えている。
【0135】
ロック機構は、ハンドル部分を元に戻す方向に所定以上の力で回動させることで、解除され、発射ハンドル装置4Cは傾きのない元の状態に復帰する。ここで、下方向に押し下げる角度としては、遊技機本体9に対してその後面より前面に水平に突出するように設けられている構成では、15〜20°程度とすることが操作性上好ましい。但し、発射ハンドル装置が、遊技機本体に対して、もともと傾斜して設置されている場合などは、この限りではない。
【0136】
本実施の形態では、演算出力部19Cが、Z軸が下方向に15°以上傾いた場合のZ軸の出力値をストップ操作検出用の閾値(Z_stop)として予め記憶しており、取得したZ軸のデータより、Z軸のデータが上記閾値超えたことを検出すると、ストップ操作が成されたと判断するようになっている。
【0137】
さらに、本実施の形態では、演算出力部19Cは、遊技機1を叩いたり、発射ハンドル装置4Cのハンドル部分を押したり引いたりして、遊技機1に対して衝撃を与えた場合にZ軸より出力される値を不正操作検出用の閾値(Z_wrong)として予め記憶しており、取得したZ軸のデータより、Z軸のデータが上記閾値超えたことを検出すると、不正操作が成されたと判断するようになっている。
【0138】
不正操作によって、遊技機1に瞬間的な衝撃が加わると、遊技機1の前後方向の加速度を検出するZ軸の出力に、衝撃による急峻なピークが発生する。不正操作検出用の閾値(Z_wrong)は、このピークを検出できるように設定されており、ストップ操作検出用の閾値(Z_stop)に比べて十分に大きな値が設定される。演算出力部19Cは、不正操作が成されたと判断すると、その旨を示す後述する不正信号を生成する。不正信号は、主基板40へと出力される。
【0139】
発射制御基板20C、および制御回路21Cは、主基板40より発射を許可する許可信号が入力されている間、発射制御装置のハンドルセンサモジュールから入力されるストップ信号を統合した操作角信号とタッチ信号とに基づいて、遊技球の発射条件を判定し、その結果に基づいた駆動出力を生成して発射装置30へと出力する。
【0140】
図21のフローチャートを用いて、発射制御装置10Cにおける操作角信号生成・出力処理について説明する。図21は、前記ハンドルセンサモジュール14Cを搭載した発射制御装置10Cによる、操作角信号生成・出力処理のフローチャートである。
【0141】
実施の形態1、2で参照した図13、図17のフローチャートと比較すると分かるように、本実施の形態では、Z軸の括弧書きが全て有効であり、S1、S2、S4、S8においては、Z軸の原点データの初期化、Z軸の加速度データの初期化、Z軸データの取得および平均化を実施する。
【0142】
そして、S12にて、ハンドル回転体51が回動操作された角度である操作角(変化角)θを算出すると、S30に進み、図22に示すストップ状態取得処理を実施する。図22は、図21のフローチャートにおけるストップ状態取得処理を示すフローチャートである。
【0143】
ストップ状態取得処理では、演算出力部19Cが、S8にて算出されたZ軸データの平均値(Znow)とストップ操作が成されたと判断できる閾値(Z_stop)とを比較する(S31)。S31において、Z軸データの平均値(Znow)が閾値(Z_stop)未満である場合は、S32に進み、操作角信号Eの出力を許可(S_in=0)とする。S31において、Z軸データの平均値(Znow)が閾値(Z_stop)以上である場合は、S33に進み、操作角信号Eの出力を禁止(S_in=1)する。
【0144】
図21にフローチャートに戻り、S23では、演算出力部19Cは、S30で実施されたストップ状態を判別し、操作角信号Eの出力を許可(S_in=0)であれば、S13に進む。一方、操作角信号Eの出力を禁止(S_in=1)であれば、S24に進み、操作角信号Eを出力しない。
【0145】
なお、図21のフローチャートは、操作角信号Eにストップ信号を統合して出力する処理例を示しているが、Z軸のデータで検出したストップ状態によるストップ信号Sを、実施の形態1で参照した図11に示すハンドルセンサモジュール14のように、操作角信号Eとは個別に出力する構成でもよい。その場合の操作角信号生成・出力処理のフローチャートは、実施の形態1で参照した図13に示すフローチャートと同様のものとなる。
【0146】
図23に、ストップ信号Sを個別に出力する場合のストップ状態検出処理のフローチャートを示す。演算出力部19Cは、図13のフローチャートにおけるS8にて算出されたZ軸データの平均値(Znow)とストップ操作が成されたと判断できる閾値(Z_stop)とを比較する(S34)。S34において、Z軸データの平均値(Znow)が閾値(Z_stop)未満である場合は、S35に進み、ストップ信号Sを出力しない。すなわちストップ信号をLowレベルとする。一方、S34において、Z軸データの平均値(Znow)が閾値(Z_stop)以上である場合は、S36に進み、ストップ信号Sを出力する。すなわちストップ信号SをHiレベルとする。
【0147】
ストップ信号Sを個別に出力する構成では、演算出力部19Cは、S8にて、Z軸データの平均値(Znow)が算出されるごとに、図23のストップ状態検出処理を実施する。
【0148】
ところで、不正操作が行われた場合にZ軸の出力に現れる急峻なピークは、ストップ操作検出用の閾値(Z_stop)を大きく超える値である。したがって、不正操作による急峻なピークが出力されている瞬間的な期間は、操作角信号Eの出力が禁止されたり、ストップ信号SがHiレベルになったりして、瞬間的に遊技球の発射を停止する指示がなされる。しかしながら、このような遊技球の発射を停止させる指示は継続性を有するものではないため、遊技球の発射への影響はない。
【0149】
また、図24に、ハンドルセンサモジュール14Cにおける演算出力部19Cが、不正検出処理を実施して不正信号Pを出力する不正検出処理のフローチャートを示す。演算出力部19Cは、図21あるいは図13のフローチャートにおけるS8にて算出されたZ軸データの平均値(Znow)と、不正な操作が成されたと判断できる閾値(Z_wrong)とを比較する(S41)。S41において、Z軸データの平均値(Znow)が閾値(Z_wrong)未満である場合は、S42に進み、不正信号Pを出力しない。すなわち不正信号PをLowレベルとする。一方、S41において、Z軸データの平均値(Znow)が閾値(Z_wrong)以上である場合は、S43に進み、不正信号Pを出力する。すなわち不正信号PをHiレベルとする。
【0150】
ここで、不正信号Pは、ストップ信号Sとは異なり、遊技者によって遊技機1に衝撃が加えられるなどした、瞬間的な操作を検出して瞬間的にHiレベルとなるものである。したがって、非常に短い期間のみHiレベルとなり、見過ごされる危険性を有している。
【0151】
そこで、本実施の形態では、Z軸データの平均値(Znow)が閾値(Z_wrong)以上となることをトリガーとしてタイマーを作動させ、予め定めた期間、不正信号PのHiレベルを保持する構成としている。
【0152】
不正信号Pは、発射制御装置10Cにおけるハンドルセンサモジュール14Cから個別に出力されて、主基板40を備える制御回路41へと入力される。制御回路41は、不正信号PがHiレベルの期間、当該遊技機1の異常を知らせるランプを点灯させたり、遊技機1を設置しているホール管理者に報知したりするなどの所定の処理を実施する。
【0153】
図25に、タッチ信号、ストップ操作判定、操作角信号、不正(衝撃)判定、および不正信号出力のタイミングチャートを示す。タッチ信号は、遊技者がハンドル回転体51に触れている間、Lowレベルとなり、遊技者がハンドル回転体51に触れていない間、Hiレベルとなる。発射制御基板20Cの制御回路21Cは、タッチ信号に基づいて遊技球発射の許可・不許可を判定し、タッチ信号がLowレベルの間、操作角信号Eの出力を許可(Enable)する。
【0154】
ストップ操作判定は、遊技者が発射ハンドル装置4Cのハンドル部分を下方に15°以上押し下げるストップ操作を行わない限りLowレベルであるが、ストップ操作を行うと、その間Hiレベルとなる。そして、遊技者がハンドル部分を元の状態に戻すと、再びLowレベルとなる。
【0155】
操作角信号Eは、演算出力部19Cより、ストップ操作判定がLowレベルの場合は、ハンドル回転体51の回動操作が成されているかぎり、操作角に応じた電圧を有するものとなるが、ストップ操作判定の信号がHiレベルとなると0V電圧となり、出力されない。
【0156】
不正(衝撃)判定は、遊技者が遊技機1に衝撃を与えるなどの行為により変動するZ軸データが、不正と判断できる閾値(Z_wrong)以上となると、演算出力部19Cが、その時点から所定時間不正信号をHiレベルとする。
【0157】
なお、本実施の形態では、角度検出部11Cが、加速度センサ15の3軸目を利用して、ストップ信号および不正信号の両方を検出する構成としていたが、ストップ信号および不正信号の何れか一方のみを検出する構成であってもよい。
【0158】
〔実施の形態5〕
以下、図面を参照しつつ、本発明のその他の実施の形態について詳細に説明する。なお、説明の便宜上、実施の形態1〜4で用いた部材と同じ機能を有する部材には同じ符号を付して説明を省略して異なる点のみ説明する。
【0159】
本実施の形態と実施の形態4との違いは、発射ハンドル装置、ハンドルセンサモジュール、および発射制御装置にある。
【0160】
図26に、本実施の形態の遊技機における制御ブロック図を示す。本実施の形態では、発射制御装置10Dにおいて、角度検出部11Dが、加速度センサ15の3軸目を利用して、ストップ信号および不正信号の検出に加えて、さらに、発射ハンドル装置のハンドル部分の傾き角度によって、操作角信号Eの出力レベルを可変するレベル可変機能を備えている。
【0161】
レベル可変機能とは、遊技者が発射ハンドル装置のハンドル回転体51の同じ操作角度で回転させたとしても、発射ハンドル装置におけるハンドル部分の傾斜を切り変えることで、遊技球の発射強度(発射速度)の切り換えを可能にするものである。
【0162】
演算出力部19Dは、X軸とY軸の出力より、ハンドル回転体51の操作角度を検出し、Z軸の出力より、実施の形態4と同様に、ストップ操作が成されたかどうか、不正操作がなされたかどうかを検出し、さらに、ここでは、レベル可変がなされたどうかを検出する。
【0163】
遊技者に対しては、レベル可変の行い方として、発射ハンドル装置4Dである遊技機本体9から突出しているハンドル部分全体を上方向に停止するまで、あるいはロック音が発生するまで、あるいはロック感が得られるまで持ち上げる、といった取り決めがなされている。なお、ここでは、レベル可変操作を、ハンドル部分全体を持ち上げる操作としているが、ストップ操作と逆にして、ハンドル部分全体を押し下げる操作とすることもできる。
【0164】
図27の(a)に示すように、本実施の形態では、発射ハンドル装置4Dにおけるハンドル本体53の後面に、発射ハンドル装置4Dにおけるハンドル部分全体を上向き・下向きに角度変位させることを可能にする変位機構部59Aが取り付けられている。図27の(a)〜(c)は、発射ハンドル装置4Dが上向き、下向きに変位する様子を示す説明図である。変位機構部59Aは、発射ハンドル装置4Dにおける遊技機本体9との取り付け部を基点として、下向きに所定角度θZ_stop押し下げ可能、かつ、上向きに所定角度θZ1持ち上げ可能に構成されている。また、変位機構部59Aには、ハンドル部分を所定角度押し下げた場合と同様に、所定角度持ち上げた位置でハンドル部分をロックするロック機構も備えている。
【0165】
ロック機構は、ハンドル部分を元に戻す方向に所定以上の力で回動させることで解除され、発射ハンドル装置4Dは傾きのない元の状態に復帰する。ここで、下方向に押し下げる角度と同様、上方向に持ち上げる場合の角度は、遊技機本体9に対してその後面より前面に水平に突出するように設けられている構成では、15〜20°程度とすることが操作性上好ましい。但し、発射ハンドル装置が、遊技機本体に対して、もともと傾斜して設置されている場合などは、この限りではない。
【0166】
本実施の形態では、演算出力部19Dが、Z軸が上方向に15°以上傾いた場合のZ軸の出力値をレベル可変用の閾値(Z_level)として予め記憶しており、取得したZ軸のデータより、Z軸のデータが上記閾値未満となったことを検出すると、レベル可変が指示されたと判断するようになっている。なお、Z軸が下方向に15°以上傾いた場合のZ軸の出力値であるストップ操作用の閾値(Z_stop)はプラス出力であり、Z軸が上方向に15°以上傾いた場合のZ軸の出力値であるレベル可変用の閾値(Z_strong)は、マイナス出力である。
【0167】
発射制御基板20C、および制御回路21Cは、前述したように、主基板40より発射を許可する許可信号が入力されている間、発射制御装置のハンドルセンサモジュールから入力されるストップ信号を統合した操作角信号とタッチ信号とに基づいて、遊技球の発射条件を判定し、その結果に基づいた駆動出力を生成して発射装置30へと出力する。
【0168】
図28のフローチャートを用いて、発射制御装置10Dにおける操作角信号生成・出力処理について説明する。図28は、前記ハンドルセンサモジュール14Dを搭載した発射制御装置10Dによる、操作角信号生成・出力処理のフローチャートである。
【0169】
実施の形態4で参照した図21のフローチャートと同様、本実施の形態では、Z軸の括弧書きが全て有効であり、S1、S2、S4、S8においては、Z軸の原点データの初期化、Z軸の加速度データの初期化、Z軸データの取得および平均化を実施する。
【0170】
そして、S12にて、ハンドル回転体51が回動操作された角度である操作角(変化角)θを算出すると、S50に進み、図29に示すレベル判定処理を実施する。図29は、図28のフローチャートにおけるレベル判定処理を示すフローチャートである。なお、レベル判定処理には、ストップ状態の判定が含まれている。
【0171】
レベル判定処理では、演算出力部19Dが、S8にて算出されたZ軸データの平均値(Znow)とストップ操作が成されたと判断できる第1閾値(Z_stop)とを比較する(S51)。S51において、Z軸データの平均値(Znow)が第1閾値(Z_stop)以上である場合は、S53に進み、操作角信号Eの出力を禁止(S_in=1)する。S51において、Z軸データの平均値(Znow)が第1閾値(Z_stop)未満である場合は、S52に進み、S8にて算出されたZ軸データの平均値(Znow)とレベル可変が指示されたと判断できる第2閾値(Z_level)とを比較する。ここで、S53において、Z軸データの平均値(Znow)が第2閾値(Z_level)以上である場合は、S54に進み、レベル可変が指示されたとして、出力仕様4(2)の変換式を選択する。一方、S52において、Z軸データの平均値(Znow)が第2閾値(Z_level)以上である場合は、S55に進み、レベル可変は指示されていないとして、通常の出力仕様3(1)の変換式を選択する。
【0172】
図28にフローチャートに戻り、S23では、演算出力部19Dは、S50で実施されたストップ状態の判別を含むレベル判定処理の結果に基づき、操作角信号Eの出力を許可(S_in=0)であれば、S60に進み、S50で決定された出力仕様に応じた変換式を用いて操作角信号Eを生成し、出力する(S18)。一方、操作角信号Eの出力を禁止(S_in=1)であれば、S24に進み、操作角信号Eを出力しない。
【0173】
なお、図28のフローチャートは、操作角信号Eにストップ信号を統合して出力する処理例を示しているが、Z軸のデータで検出したストップ状態によるストップ信号Sを、実施の形態1で参照した図11に示すハンドルセンサモジュール14のように、操作角信号Eとは個別に出力する構成でもよい。その場合の操作角信号生成・出力処理のフローチャートは、実施の形態1で参照した図13に示すフローチャートと同様のものとなる。
【0174】
図30、図31に、上記した出力仕様1〜4の変換式のグラフとテーブルを示す。発射ハンドル装置4Dのハンドル部分が傾けられない状態で用いられる出力仕様3(1)に対し、ハンドル部分が傾けられた場合に用いられる出力仕様4(2)は、ハンドル回転体51の回転量が同じであっても、出力される操作角信号Eが大きくなり、遊技球の発射速度も速くなる。
【0175】
本実施の形態では、演算出力部19Dは、出力仕様3(1)においては、例えば1.5V〜2.1Vの範囲で操作角に応じた操作角信号Eを生成し、出力仕様4(2)においては、1.9V〜2.9Vの範囲で操作角に応じた操作角信号Eを生成する。
【0176】
なお、出力仕様3,4は、角度に対する出力傾斜を持たせたもので、出力仕様1,2は、角度に対する出力傾斜を持たせないリニア出力である。出力仕様3,4の組合せを用いるか、出力仕様1,2の組合せを用いるかは、あらかじめ演算出力部19D内に設定される係数などで容易に変更が可能なものである。
【0177】
なお、タッチ信号については、ハンドルセンサモジュール14Dに内蔵されたタッチセンサ12より個別出力される構成としているが、実施の形態4と同様に、実施の形態2で参照した図16に示す発射制御装置10Aのように、操作角信号Eに統合する構成としてもよいし、実施の形態3で参照した図18に示す発射制御装置10Bのように、ハンドルセンサモジュール外部に外付けとして、個別出力する構成としてもよい。
【0178】
〔実施の形態6〕
以下、図面を参照しつつ、本発明のその他の実施の形態について詳細に説明する。なお、説明の便宜上、実施の形態1〜5で用いた部材と同じ機能を有する部材には同じ符号を付して説明を省略して異なる点のみ説明する。
【0179】
本実施の形態では、図32〜図38を用いて、ハンドル部分が上向き・下向きに変位する発射ハンドル装置について説明する。図32の(a)〜(c)は、発射ハンドル装置のハンドル部分が上向き・下向きに変位する様子を示す説明図である。図33の(a)〜(f)は順に、本実施の形態の発射ハンドル装置の上面図、左側面図、前面図(正面図)、右側面図、下面図、および後面図(裏面図)である。図34は、発射ハンドル装置を前面側から見た分解斜視図であり、図35は、発射ハンドル装置を後面側から見た分解斜視図である。図36の(a)〜(c)、および図37の(a)〜(c)は、発射ハンドル装置のハンドル部分が上向き・下向きに変位する様子をより詳細に示すもので、(a)(b)は発射ハンドル装置を上下方向に沿って位置をずらして切断した断面図、(c)は後面図(裏面図)である。また、図38は、発射ハンドル装置を水平方向に沿って切断した断面図である。
【0180】
図32の(a)〜(c)に示すように、本実施の形態の発射ハンドル装置4Eにおいては、ハンドル本体53Eが、第1ハンドルベース部530と第2ハンドルベース部531とから構成されている。このうち、第1ハンドルベース部530が遊技機本体9に固定され(図1参照)、第2ハンドルベース部531にハンドル回転体51が回動自在に取り付けられている。
【0181】
第2ハンドルベース部531は、第1ハンドルベース部530に対して、上向き・下向きに変位可能に設けられている。その変位範囲は、第2ハンドルベース部531の筒状体531aの後端部に円弧を描くように切り込むことで形成された上側及び下側の係止部531b・531bにて決定される。上側及び下側の係止部531b・531bは、第1ハンドルベース部530の前面に突き当たることで係止され、これにて第2ハンドルベース部531の回動が記載される。係止部531b・531bを構成する前面側への切り込みを深くすることで、変位範囲を大きくすることができる。なお、実施の形態4で述べた発射ハンドル装置4Cのように、下向き(あるいは上向き)の一方にのみ変位する構成においては、係止部は変位する側のみに形成すればよい。
【0182】
第2ハンドルベース部531を第1ハンドルベース部530に回動自在に支持する構成として、図34、図35に示すように、第1ハンドルベース部530には、前面側に半球状の球面部532が設けられている。第2ハンドルベース部531は、この球面部532に沿って上下方向に所定角度回動するようになっている。
【0183】
球面部532には、球面の中心から外れた部分に変位方向である上下方向に伸びる2本の案内溝532a・532aが形成され、球面部532の裏面側には、これら案内溝532aと連通する案内部材534・534が後方に突出するように形成されている。そして、該案内部材534・534には、図38に示すように、第2ハンドルベース部531に設けられた後述する案内片533・533を回動自在に支持する突起535・535が形成されている。
【0184】
一方、第2ハンドルベース部531においては、後面に、第1ハンドルベース部530の球面部532に形成された案内溝532a・532aおよびそれに連通する案内部材534・534に挿入される案内片533・533が、後方に突出するように形成されている。案内片533・533の先端部には、回動穴533a・533aが形成されており、図38に示すように、該回動穴533a・533aに、第1ハンドルベース部530側に形成された案内部材534・534に形成された突起535・535が回動自在に係合する。
【0185】
これにより、図36の(a)〜(c)、図37の(a)〜(c)に示すように、第2ハンドルベース部531は、案内片533・533の先端部に形成された回動穴533a・533aを回動中心として、球面部532に沿って上下方向に回動自在となる。
【0186】
そしてまた、上記構成では、ハンドル部分を上向き・下向きに変位させた位置でハンドル部分をロックするロック機構に代わる構成として、ハンドル部分の回動に適度な負荷を持たせ、第2ハンドルベース部53に形成された上側及び下側の係止部531b・531bが、第1ハンドルベース部530の前面に突き当たる位置において、遊技者に負担を掛けることなくハンドル部分が停止する構成としている。負荷は、ハンドル部分が自重にて回動しないことはもちろんのこと、下方向に向く遊技者の手の重みで回動することなく、かつ、適度な操作性が得られるように調整されている。
【0187】
本発明は上述した各実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能であり、異なる実施形態にそれぞれ開示された技術的手段を適宜組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
【0188】
図39に、前記した実施の形態1〜5を適宜組み合わせることで採用できるハンドルセンサモジュール、およびそれを搭載する発射制御装置の組合せ例を記載する。
【符号の説明】
【0189】
1 遊技機(弾球式遊技機)
2 遊技盤
4,4C,4D,4E 発射ハンドル装置
9 遊技機本体
10,10A〜10D 発射制御装置
11,11C,11D 角度検出部
12 タッチセンサ(タッチ検出部)
13 ストップセンサ (ストップ操作検出部)
14,14A〜14D ハンドルセンサモジュール
15 加速度センサ
19,19A,19C,19D 演算出力部
20,20A,20C 発射制御基板
30 発射装置
31 発射駆動部
32 球送り駆動部
40 主基板
51 ハンドル回転体(回転体)
55 発射停止レバー(ストップレバー)
55a 操作片
55b センサ作用部
57 復帰バネ
59,59A 変位機構部
530 第1ハンドルベース部
531 第2ハンドルベース部
531a 筒状体
531b 係止部
532 球面部
532a 案内溝
533 案内片
533a 回動穴
534 案内部材
535 突起
θ 回転角
【技術分野】
【0001】
本発明は、パチンコ機等の弾球式遊技機に搭載される操作検出器に関する。
【背景技術】
【0002】
パチンコ遊技機に代表される弾球式遊技機では、安定した力で遊技球を発射するために、ロータリーソレノイドなどを駆動部として用いた電動式の遊技球発射装置が採用されている。このような発射装置に対して、遊技者の意図を正確に反映させるために、回動式の発射操作装置が使用される(例えば、特許文献1)。
【0003】
発射操作装置は、遊技者の操作を検出する操作検出器として、遊技者がハンドル部を回動操作した際の操作角を検出する操作角検出器(以下、角度検出器と略記する)を備えている。角度検出器としては、可変抵抗器(抵抗式ボリューム)や、ホール素子を用いた電子式ボリュームが一般的に用いられている。
【0004】
このような可変抵抗器や電子式ボリュームを用いた角度検出器では、センサ部本体と、このセンサ部本体に付随する回転軸と、該回転軸の回転角に応じて変化する抵抗値あるいは出力電圧より、回転角に応じた電気信号を生成する内部回路とを備えている。そして、センサ部本体が、発射操作装置における遊技者が回転操作するハンドル部側、あるいは遊技機側に固定されるハンドルベース部側の何れかに取り付けられ、内部回路が他方側に取り付けられる。回転軸とセンサ本体部とは、回転軸の回転角を機械的に伝達する複数の連結ギヤを介して連結される。
【0005】
また、弾球式遊技機においては、上記角度検出器の他、遊技者の操作を検出する検出器として、遊技者がハンドル部分に触れていることを検知するタッチセンサや、遊技者がハンドル部分を回動させたままで発射を強制的に停止させる際に操作するストップスイッチも備えられる。これら検出器も多くの場合、発射操作装置に搭載される。
【0006】
上記タッチセンサとしては、静電容量式が一般的である。遊技者が触れる部分に電極が設けられており、タッチセンサは、該電極に遊技者が直接または間接的に触れることで変化する静電容量の差を検出する。このようなタッチセンサは、発射操作装置の内部に配置された場合、タッチセンサの電極部と発射操作装置のタッチ電極部とが、直接または間接的に電気的に接続される。
【0007】
また、上記ストップスイッチとしては、メカ接点式のマイクロスイッチが一般的である。これには、スイッチ操作部が設けられており、スイッチ操作部を遊技者が直接または間接的に操作したことを検出する。このようなストップスイッチは、発射操作装置の内部に配置される場合、遊技者が操作するストップ操作レバー部材とリンクされ、このレバーの動きに連動して操作されるようになっている。
【0008】
そして、これら発射操作装置に内蔵された、角度検出器や、タッチセンサ、ストップスイッチ等の電子回路は、遊技機本体に設置された発射制御基板等の電子回路基板と、複数の配線により接続される。複数の配線は、具体的には、発射操作装置側に内蔵された電子回路に対する電力供給用の配線、角度検出器から出力されるハンドル部の回転角を検出した信号を伝送する信号線、タッチスイッチのタッチ信号を伝送する信号線、ストップスイッチの操作状態を検出した信号を伝送する信号線などである。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2008−301948号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、上述のような、可変抵抗器や電子式ボリュームを用いた角度検出器を搭載した弾球式遊技機には、以下に記載するように、コスト面および耐久面に課題があり、かつ、デザイン的な自由度を損なうといった課題を有している。
【0011】
1)可変抵抗器や電子式ボリュームを用いた角度検出器は、センサ部本体に付随する回転軸を有しており、回動操作による回転軸の角度変化を、抵抗値の変化あるいは出力電圧の変化にて検出するようになっている。そのため、発射操作装置に搭載した場合、センサ部本体と内部回路とをハンドル部側とハンドルベース部側とに分けて設置する必要があり、かつ、回転角を機械的に伝達するために、複数の連結ギヤ等の回転角伝達部材等が必要となる。
【0012】
その結果、角度検出器として部品点数が多くなり、発射操作装置としてのコストが必然的に高くなる。加えて、部品点数が多くなることで、発射操作装置自体及び遊技機本体側に設計的レイアウト制約が発生し、デザインや大きさ、または稼動条件等の自由度が大きく損なわれることにもなる。また、複数の連結ギヤを用いる構成では、バックラッシュによるガタつきを抑える目的でバネ部材も必要で、このバネ部材を起因として、ハンドル操作が重いなどの不具合もある。
【0013】
2)弾球式遊技機での遊技球の発射強度は、この遊技の性質上狙う範囲が大よそ限定され、この限定された周辺で微調整される。そのため、上記回転角伝達に関する部材は、特に使用される箇所が限定され易く、その限定された箇所と周囲の接触部の消耗が最も激しくなる。消耗が進むと遊技者が狙いたいところでの微調整が困難となる。可変抵抗器を用いた角度検出器では、抵抗器の接触部で頻繁に使用される範囲は特に限定され易く、上記影響がより顕著に現れる。そのため、遊技者が狙いたいところでの微調整が困難となるなどの問題がある。
【0014】
本発明は、上記課題に鑑みなされたものであって、耐久性、コスト性、操作性に優れ、デザイン的な自由度も広い弾球式遊技機を容易に実現できる操作検出器を提供することを目的としている。
【課題を解決するための手段】
【0015】
本発明の弾球式遊技機の操作検出器は、上記の課題を解決するために、回動操作される回転体を備えた発射操作装置が搭載される弾球式遊技機の操作検出器において、上記回転体の回転角を検出する角度検出部を備え、該角度検出部が、少なくとも2軸を有すると共に該2軸が上記回転体の回転軸に直交するように配置された加速度センサと、上記加速度センサの上記2軸を用いて上記回転体の回転角を算出する演算部とを備えることを特徴としている。
【0016】
これによれば、角度検出部が加速度センサを用いて構成されており、演算部が加速度センサの2軸を用いて回転体の回転角を算出する。したがって、操作検出器を、発射操作装置の回転体に固定するだけで、角度検出部を発射操作装置に取り付けることが可能となる。したがって、センサ部本体と内部回路とを回転側と固定側とに分けて設置する必要のあった従来構成に比して、回転角を機械的に伝達するための複数の連結ギヤ等の回転角伝達部材等が不要となり、角度検出部として部品点数が大きく削減でき、コスト削減に加えて、発射操作装置自体及び遊技機側への設計的レイアウト制約を小さくし、デザインや大きさ、稼動条件等の自由度を広げることができる。また、複数の連結ギヤが必要なくなるので、バックラッシュによるガタつきを抑える目的で用いられていたバネ部材も不要となり、操作性も向上する。しかも、従来の可変抵抗器を用いた角度検出部のように、磨耗による耐久性の問題もなく、耐久性にも優れている。
【0017】
これにより、本発明の操作検出器を発射操作装置の回転体に取り付けるだけで、従来の可変抵抗器や電子式ボリュームを用いた角度検出器を搭載していた発射操作装置に比して格段に耐久性・コスト性・操作性に優れ、デザイン的な自由度も広い弾球式遊技機を容易に実現して提供することができる。
【0018】
本発明の弾球式遊技機の操作検出器においては、上記角度検出部が、上記演算部にて算出された回転角に応じた出力を生成する出力生成部をさらに備える構成とすることもできる。
【0019】
これによれば、演算部が加速度センサの出力より回転角を算出し、出力生成部が算出された回転角に応じた出力を生成する。例えば、出力生成部は、後段に配置される遊技機側の例えば発射制御基板に対して、回転角を直線的あるいは非直線的にアナログ電圧に変換して出力したり、回転角をダイレクトに角度データとしたデジタル数値出力したり、回転角に対して発射制御基板と取り決めた任意なデジタル数値出力したりする構成が考えられる。
【0020】
本発明の弾球式遊技機の操作検出器においては、さらに、遊技者が遊技球の発射を強制的に停止させるために操作するストップレバーの操作状態を検出するストップ操作検出部を備え、上記角度検出部と上記ストップ操作検出部とが一体化されている構成とすることもできる。
【0021】
これよれば、ストップ操作検出部も角度検出部と一体化されているので、本発明の操作検出器を発射操作装置に取り付けるだけで、ストップ操作検出部も一緒に取り付けることができ、部品点数の削減、及び組み立て工程数の削減等も図れる。
【0022】
この場合、上記出力生成部が、回転角に応じた出力にストップ操作の検出結果を統合して出力する構成とすることもできる。
【0023】
これによれば、回転角に応じた出力にストップ操作の検出結果を統合して出力されることで、ストップ操作が成されているか否かを遊技機側に伝達するためのハーネスが不要となる。特に、ストップ操作が成されているか否かを遊技機側に伝達する信号を統合させた場合、発射制御基板と接続されるハーネス本数の削減だけでなく、遊技機側の発射制御基板等の信号入力回路及びこれに付随する電子部品の削減が可能となり、全体でのコスト削減効果と発射制御基板の実装面積の縮小効果が得られる。
【0024】
本発明の弾球式遊技機の操作検出器においては、さらに、上記回転体に遊技者が触れていることを検出するタッチ検出部を備え、上記角度検出部と上記タッチ検出部とが一体化されている構成とすることもできる。
【0025】
これよれば、タッチ検出部も角度検出部と一体化されているので、本発明の操作検出器を発射操作装置に取り付けるだけで、タッチ検出部も一緒に取り付けることができ、部品点数の削減、及び組み立て工程数の削減等も図れる。
【0026】
この場合、上記出力生成部が、回転角に応じた出力に上記タッチ検出部の検出結果を統合して出力する構成とすることもできる。
【0027】
これによれば、回転体に遊技者が触れていることを検出するタッチ検出部の検出結果が統合して出力されるので、遊戯者のタッチの有無を遊技機側に伝達するためのハーネスが不要となる。
【0028】
本発明の弾球式遊技機の操作検出器においては、さらに、上記加速度センサは3軸を有すると共に3軸目が上記回転軸に平行に配置されており、上記演算部が、上記回転軸に平行に配置された上記加速度センサの3軸目の傾斜を検出する構成とすることもできる。
【0029】
加速度センサは2軸構成のものもあるが、通常は3軸構成であり、3軸のものが普及している。上記構成では、このような普及型の3軸の加速度センサが用いられ、演算部が、回転体の回転角の検出に使用していない3軸目の傾斜を検出する。したがって、遊技機との間で、この3軸目を傾斜させることで何がしかの指示を発射操作装置側あるいは遊技機側で検出できるように構成しておくことで、従来には無い発射操作装置の新しい操作方法を提供できる。また、回転角の検出精度の補正などにも用いることができる。
【0030】
例えば、演算部にて検出された上記加速度センサの3軸目の傾斜に基づいて、出力生成部が生成する出力を無効にするストップ操作を検出させる構成とすることができる。
【0031】
これによれば、回転体を持ったままで把持している部分を上あるいは下に変位させることで、遊技球の発射を強制的に停止させることができる。例えば、強制停止をストップレバー操作として行う構成では、レバーを操作していた指の動きによる回転体ズレを抑制することができる。
【0032】
また、演算部にて検出された上記加速度センサの3軸目の傾斜に基づいて、出力生成部が、生成する出力のレベルを可変する構成とすることもできる。これによれば、回転体を持ったままで把持している部分を傾斜させる動作を、発射強度の切り替えとして用いることが可能となり、発射強度の微調整などが容易にできるようになる。
【0033】
本発明の弾球式遊技機の操作検出器においては、さらに、上記加速度センサは3軸を有すると共に3軸目が上記回転軸に平行に配置されており、記演算部が、上記回転軸に平行に配置された上記加速度センサの3軸目にその軸方向にかかる加速度を検出し、上記演算部にて検出された3軸目の加速度に基づいて、当該操作検出器が搭載される弾球式遊技機に加わる衝撃の有無を検出する構成とすることもできる。
【発明の効果】
【0034】
本発明によれば、従来の可変抵抗器や電子式ボリュームを用いた角度検出器を搭載していた発射操作装置に比して格段に耐久性・コスト性・操作性に優れ、デザイン的な自由度も広い発射操作装置を備えた弾球式遊技機を、本発明の操作検出器を発射操作装置に取り付けるだけで簡単に提供することができるという効果を奏する。
【図面の簡単な説明】
【0035】
【図1】本発明の実施の一形態を示すもので、遊技機の概略斜視図である。
【図2】(a)(b)は共に、前記発射ハンドル装置の外観斜視図であり、(a)は、発射ハンドル装置を前面側より見た図、(b)は発射ハンドル装置を後面側より見た図である。
【図3】(a)〜(f)は順に、前記発射ハンドル装置の上面図、左側面図、前面図(正面図)、右側面図、下面図、および後面図(裏面図)である。
【図4】前記発射ハンドル装置を前面側から見た分解斜視図である。
【図5】前記発射ハンドル装置を後面側から見た分解斜視図である。
【図6】(a)(b)は共に、前記発射ハンドル装置に搭載されたハンドルセンサモジュールの外観斜視図であり、(a)は、前記ハンドルセンサモジュールを前面側より見た図、(b)はハンドルセンサモジュールを後面側より見た図である。
【図7】(a)〜(f)は順に、前記ハンドルセンサモジュールの上面図、左側面図、前面図(正面図)、右側面図、後面図(裏面図)、および下面図である。
【図8】前記ハンドルセンサモジュールを前面側から見た分解斜視図である。
【図9】前記ハンドルセンサモジュールを後面側から見た分解斜視図である。
【図10】前記ハンドルセンサモジュールにおける加速度センサおよびその周辺の部材の配置を示す拡大図である。
【図11】前記遊技機の制御ブロック図である。
【図12】(a)(b)共に、加速度センサの2軸を用いて姿勢(角度)を検出する概念を示す説明図である。
【図13】前記ハンドルセンサモジュールを搭載した発射制御装置による、操作角信号生成・出力処理のフローチャートである。
【図14】図13のフローチャートのS13〜S17における操作角信号への変換に用いた変換式のグラフである。
【図15】前記遊技機に搭載された発射制御基板に入力される、タッチ信号、ストップ信号、および操作角信号のタイミングチャートである。
【図16】本発明のその他の実施の形態を示すもので、遊技機における制御ブロック図である。
【図17】図16に制御ブロック図を示す遊技機の発射制御装置による操作角信号生成・出力処理のフローチャートである。
【図18】本発明のその他の実施の形態を示すもので、遊技機における制御ブロック図である。
【図19】本発明のその他の実施の形態を示すもので、遊技機における制御ブロック図である。
【図20】図19に制御ブロック図を示す遊技機の発射ハンドル装置が下向き変位する様子を示す説明図である。
【図21】図19に制御ブロック図を示す遊技機の発射制御装置による操作角信号生成・出力処理のフローチャートである。
【図22】図21のフローチャートにおけるストップ状態取得処理を示すフローチャートである。
【図23】図19に制御ブロック図を示す遊技機の発射制御装置の変形例を示すもので、ストップ信号を個別に出力する場合のストップ状態検出処理を示すフローチャートである。
【図24】図19に制御ブロック図を示す遊技機の発射制御装置による不正検出処理を実施して不正信号を出力する不正検出処理を示すフローチャートである。
【図25】図19に制御ブロック図を示す遊技機に搭載された発射制御基板に入力される、タッチ信号、ストップ操作判定、操作角信号、不正(衝撃)判定、および不正信号出力のタイミングチャートである。
【図26】本発明のその他の実施の形態を示すもので、遊技機における制御ブロック図である。
【図27】図26に制御ブロック図を示す遊技機の発射ハンドル装置が上向き・下向きに変位する様子を示す説明図である。
【図28】図26に制御ブロック図を示す遊技機の発射制御装置による操作角信号生成・出力処理のフローチャートである。
【図29】図28のフローチャートにおけるレベル判定処理を示すフローチャートである。
【図30】図28のフローチャートのS60における操作角信号への変換に用いた変換式のグラフである。
【図31】図28のフローチャートのS60における操作角信号への変換に用いた変換式の回転角と出力電圧(操作角信号)との関係を示すテーブルである。
【図32】本発明の実施の他の形態を示すもので、(a)〜(c)は、発射ハンドル装置のハンドル部分が上向き・下向きに変位する様子を示す説明図である。
【図33】(a)〜(f)は順に、図32に示す発射ハンドル装置の上面図、左側面図、前面図(正面図)、右側面図、下面図、および後面図(裏面図)である。
【図34】図32に示す発射ハンドル装置を前面側から見た分解斜視図である。
【図35】図32に示す発射ハンドル装置を後面側から見た分解斜視図である。
【図36】(a)〜(c)は、図32に示す発射ハンドル装置のハンドル部分が上向き・下向きに変位する様子をより詳細に示すもので、(a)(b)は発射ハンドル装置を上下方向に沿って位置をずらして切断した断面図、(c)は後面図(裏面図)である。
【図37】(a)〜(c)は、図32に示す発射ハンドル装置のハンドル部分が上向き・下向きに変位する様子をより詳細に示すもので、(a)(b)は発射ハンドル装置を上下方向に沿って位置をずらして切断した断面図、(c)は後面図(裏面図)である。
【図38】図32に示す発射ハンドル装置を水平方向に沿って切断した断面図である。
【図39】複数の実施の形態を適宜組み合わせることで採用できるハンドルセンサモジュール、およびそれを搭載する発射制御装置の組合せ例を説明する図面である。
【発明を実施するための形態】
【0036】
〔実施の形態1〕
以下、図面を参照しつつ、本発明の実施の一形態について詳細に説明する。まずは、図1を用いて、弾球式遊技機(以下、遊技機と略記する)の概略構成について説明する。図1は、遊技機の概略斜視図である。
【0037】
図1に示すように、遊技機1は、遊技機本体9と発射ハンドル装置(発射操作装置)4とを有している。遊技機本体9は、上部から中央部の大部分の領域に遊技盤2が設けられ、下部には玉受け部3が設置されている。遊技盤2の略中央部には、表示装置8が配設されており、入賞の有無などに応じて様々に変化する遊技情報が表示される。発射ハンドル装置4は、遊技機本体9の下部に取り付けられており、遊技者に回動操作されるハンドル回転体(回転体)51を有している。
【0038】
遊技機1では、遊技者が発射ハンドル装置4のハンドル回転体51を回動操作すると、遊技機1に内蔵された後述する発射装置30にて、一定の発射間隔で、操作角度(回転角)に応じた発射速度(発射強度)で遊技球が発射される。発射された遊技球は、遊技盤2の側方に設けられたレール5に沿って上方へ移動し、遊技盤2上に設けられた多数の障害釘6の間を落下する。そして、落下する遊技球が入賞口7に入る(入賞する)と、所定個数の遊技球が、遊技盤2の背面に設置された賞球払出装置(図示せず)を通じて玉受け部3へ払い出される。
【0039】
次に、図2〜図5を用いて、発射ハンドル装置について説明する。図2の(a)および(b)は共に、発射ハンドル装置の外観斜視図であり、図2の(a)は、発射ハンドル装置を前面側より見た図、図2の(b)は、発射ハンドル装置を後面側より見た図である。図3の(a)〜(f)は順に、発射ハンドル装置の上面図、左側面図、前面図(正面図)、右側面図、下面図、および後面図(裏面図)である。図4は、発射ハンドル装置を前面側から見た分解斜視図であり、図5は、発射ハンドル装置を後面側から見た分解斜視図である。
【0040】
図2〜図5の何れかに示すように、発射ハンドル装置4は、前面側から後面側にかけて、ハンドルキャップ52と、復帰バネ57と、ハンドルセンサモジュール(操作検出器)14と、ハンドル回転体51と、発射停止レバー55と、ハンドル本体53とが、この順に組み付けられて構成されている。
【0041】
ハンドルキャップ52は、掌が滑らかに当って握り易くするために前面が球面状に形成されており、後面には、当該ハンドルキャップ52をハンドル本体53と連結するための複数の固定軸52aが突出して設けられている。
【0042】
ハンドル本体53は、前面側の端部が鍔状に広がった筒状体53aを有している。筒状体53aの鍔状部の前面には、前記したハンドルキャップ52の固定軸52aが挿入される中空の案内軸53bが複数、突出して設けられている。また、ハンドル本体53には、後述する回転軸53c、およびスイッチ用開口53dが設けられている。
【0043】
ハンドルキャップ52の前記固定軸52aは、ハンドルキャップ52とハンドル本体53との間にハンドル回転体51を介在させた状態で、ハンドルキャップ52に複数のビス60を用いてビス留めされている。詳細には、前記固定軸52aは、ハンドル本体53の前記案内軸53bの内部に挿入され、ハンドル本体53の筒状体53aの鍔状部の後面側より挿通されたビス60にて、案内軸53bの内部においてビス留めされている。
【0044】
ハンドル回転体51は、ハンドルキャップ52の後面とハンドル本体53の前面との間に回動自由に介在されている。ハンドル回転体51は、浅い有底筒の部材であり、その外周面に、指掛け部62を有する環状の把持部63を有している。また、ハンドル回転体51における有底筒の底部となる面には、周方向に伸びる一対の円弧状の案内穴66が、軸心部を中心に向かい合うように形成されている。ハンドル本体53に形成された上記案内軸53bは、これら一対の案内穴66内に摺動自在に挿入されており、これにより、ハンドル回転体51は、一対の案内穴66が描く円弧の範囲内において回転自在となっている。このほか、ハンドル回転体51における有底筒の底部となる面には、軸心部に後述する検出用開口65、ハンドルセンサモジュール14用の位置決めボス51bおよび固定穴51aが形成されている。
【0045】
ハンドルセンサモジュール14は、ハンドル回転体51の前面にビス68にて固定されている。ハンドルセンサモジュール14の詳細については後述するが、本実施の形態では、遊技者の操作内容を検出する検出器として、角度検出部11、タッチセンサ(タッチ検出部)12、およびストップセンサ13を備えている(図11参照)。角度検出部11は、ハンドル回転体51が回動操作された操作角を検出する検出器であり、タッチセンサ12は、遊技者がハンドル回転体51に触れていることを検出する検出器、ストップセンサ13は、遊技者が発射停止レバー55を操作していることを検出する検出器である。本実施の形態では、角度検出部11、タッチセンサ(タッチ検出部)12、およびストップセンサ13は、ハンドルセンサモジュール14として、1部品化(一体化)されている。
【0046】
復帰バネ57は、コイル状を有し、ハンドルキャップ52とハンドル回転体51との対向面間に介在されている。復帰バネ57は、一端がハンドル本体53あるいはハンドルキャップ52に係止されると共に、他端がハンドル回転体51に係止されている。復帰バネ57は、ハンドル回転体51を、回動操作が成されていない初期位置に戻す方向に常時付勢している。復帰バネ57が設けられることで、ハンドル回転体51の回動操作に対して適度な操作感を与えることができると共に、回動操作が解除された時、ハンドル回転体51を初期位置に自動復帰させることが可能となる。
【0047】
発射停止レバー55は、ハンドル回転体51の後面側に設けられており、遊技者がこれを遊技中に操作することで、ハンドル回転体51を回動させた状態のまま、遊技球の発射の停止/再開を指示できる。発射停止レバー55は、くの字状の部材であり、くの字の折れ曲がり部を回転支点として、ハンドル本体53の前面に設けられた回転軸53cに回転自在に取り付けられている。
【0048】
発射停止レバー55の一端部は、小さなくの字を描くようにさらに折曲されることで操作片55aが形成されている。発射停止レバー55は、図示しない付勢バネにて、操作片55aが、ハンドル本体53に設けられたスイッチ用開口53dから突出する方向に常時付勢されている。
【0049】
一方、発射停止レバー55の他端部は、ハンドルセンサモジュール14におけるストップセンサ(ストップ操作検出部)13のセンサ作用部55bとなっている。ストップセンサ13は、発射停止レバー(ストップレバー)55が操作されているか否かを検出するもので、ハンドル回転体51の有底筒の底部となる面の軸心部に形成された検出用開口65を通して、センサ作用部55bによる作用の有無を検出する。
【0050】
遊技者が、発射停止レバー55の操作片55aをスイッチ用開口53dに押し込むように操作すると、発射停止レバー55が回転してセンサ作用部55bがストップセンサ13の検出位置に移動する。ストップセンサ13は、検出位置にセンサ作用部55bの存在を検知する間、発射停止レバー55が操作されていると検出する。
【0051】
一方、遊技者が操作片55aを押し込む操作を解除すると、レバーの自重または図示しない付勢バネの力で、発射停止レバー55が復帰方向に回転して、操作片55aがスイッチ用開口53dから突出した元の状態に復帰すると共に、センサ作用部55bがストップセンサ13の検出位置から外れる。ストップセンサ13は、検出位置にセンサ作用部55bの存在を検知しない場合は、発射停止レバー55は操作されていないと検出する。
【0052】
上記ストップセンサ13として、本実施の形態では、発光部と受光部が同じ側に設けられている反射式フォトマイクロセンサを用いている。
【0053】
また、上記ハンドル回転体51は、把持部63から有底筒の底部となる面を含めて導電性を有しており、ハンドルセンサモジュール14における後述するタッチセンサ12(図11参照)の電極部として作用する。タッチセンサ12は、遊技者がハンドル回転体51を把持することで変化する静電容量の差を検出する。
【0054】
次に、図6〜図10を用いて、上記ハンドルセンサモジュール14について説明する。図6の(a)および(b)は共に、ハンドルセンサモジュールの外観斜視図であり、図6の(a)は、ハンドルセンサモジュールを前面側より見た図、図6の(b)は、ハンドルセンサモジュールを後面側より見た図である。図7の(a)〜(f)は順に、ハンドルセンサモジュールの上面図、左側面図、前面図(正面図)、右側面図、後面図(裏面図)、および下面図である。図8は、ハンドルセンサモジュールを前面側から見た分解斜視図であり、図9は、ハンドルセンサモジュールを後面側から見た分解斜視図である。また、図10は、前記ハンドルセンサモジュールにおける加速度センサおよびその周辺の部材の配置を示す拡大図である。
【0055】
図6〜図10の何れかに示すように、ハンドルセンサモジュール14は、前面(正面)から見た投影面の形状が正方形に近い矩形形状を有している。ハンドルセンサモジュール14は、ケース86とカバー81とで構成される外郭部材の内部に、複数の回路部材が搭載されたプリント基板82が収容されてなる。
【0056】
プリント基板82は、第1の面に、コネクタ85、加速度センサ15、演算出力部19、タッチ主回路83、およびタッチ回路用コイル84を搭載し、その裏面の第2の面に、反射式のフォトマイクロセンサよりなるストップセンサ13を搭載している。また、第2の面には、タッチセンサ用の接続電極90も形成されている。
【0057】
加速度センサ15は、詳細については後述するが、演算出力部19とで、ハンドル回転体51の回動操作された角度(操作角)を検出する角度検出部11を構成するものである。加速度センサ15は、3軸の加速度センサであり、ハンドルセンサモジュール14の厚み方向にZ軸を有し、ハンドル回転体51の初期位置(回転角0°)において、X軸が水平方向、Y軸が鉛直方向となるように、プリント基板82の中央部に設置されている(図10参照)。
【0058】
本実施の形態では、加速度センサ15のZ軸が、発射ハンドル装置4の回転軸(ハンドル回転体51の回動軸)と一致するように取り付けられている。なお、加速度センサ15のZ軸は、発射ハンドル装置4におけるハンドル回転体51の回転軸に平行であればよい。
【0059】
演算出力部(演算部、出力生成部)19は、加速度センサ15のX軸およびY軸の出力信号(データ)より、ハンドル回転体51の操作角を検出し、操作角に応じた操作角信号Eを生成して出力するものである。
【0060】
タッチ主回路83およびタッチ回路用コイル84は、後述するタッチセンサ12(図11参照)を構成しており、遊技者がハンドル回転体51に触れているか否かを、遊技者がハンドル回転体51を把持することで変化する静電容量の差より検出する。タッチ主回路83は、遊技者がハンドル回転体51に触れているか否かを示すタッチ信号を出力する。
【0061】
ストップセンサ13は、上述したように、発射停止レバー55が操作されているか否かを検出するものであり、遊技者が発射停止レバー55を操作しているか否かを示すストップ信号を出力する。
【0062】
コネクタ85は、当該ハンドルセンサモジュール14と後述する発射制御基板20(図11参照)、および図示しない電源とを繋ぐハーネスが接続される接続部である。ハンドルセンサモジュール14で検出された、操作角信号E、タッチ信号、ストップ信号は、コネクタ85に接続されたハーネスを介して、発射制御基板20へと供給される。
【0063】
複数の上記回路部品が実装されたプリント基板82は、ストップセンサ13が搭載されている第2の面がケース86と対峙するようケース86内に収容されており、ケース86の開放端はカバー81にて覆われている。
【0064】
ケース86における、プリント基板82を収容する収容部は、前面(正面)から見た投影面の形状が、4角の一つが切り欠かれた正方形に近い矩形形状を有しており、カバー81およびプリント基板82も、同様の投影面の形状を有している。ケース86における切り欠かれた角部には、ハンドルセンサモジュール14をビス68(図4参照)にてハンドル回転体51に固定するための固定部86bが設けられている。該固定部86bには、ビス68が挿通される固定穴86cが形成されている。
【0065】
また、固定部86bには、タッチ主回路83およびタッチ回路用コイル84に、遊技者がハンドル回転体51に触れているか否かを検知させるための信号を伝える電極プレート87が取り付けられている。電極プレート87は、固定部86bを挟み込むようにコの字状に折曲されており、固定部86bを挟み込むコの字の部分には、ビス68が挿通される固定穴87aが形成されている。また、電極プレート87の一端は、ケース86の収容部に形成された図示しないスリット状の開口よりケース内部に挿入されており、プリント基板82の第2の面に形成されたタッチセンサ用の接続電極90に接触している。
【0066】
ハンドルセンサモジュール14は、電極プレート87が固定部86bを挟み込むよう取り付けられた状態で、電極プレート87ごとビス68にてハンドル回転体51に固定されており、その状態で、電極プレート87はハンドル回転体51の有底筒の底部の面に接触している。これにより、ハンドル回転体51に遊技者が触れているか否かの情報を、プリント基板82にまで伝達することが可能となる。
【0067】
また、ケース86には、プリント基板82に搭載されたストップセンサ13に対応する位置にセンサ用開口部86aが設けられている。これにより、ストップセンサ13は、ケース86に遮られることなく、センサ用開口部86aを通して、センサ作用部55bによる作用の有無を検出できる。
【0068】
さらにケース86における固定部86bと対角をなす角部には、ハンドル回転体51に対して当該ハンドルセンサモジュール14の取り付け位置を決めるための位置決め穴86eが形成されている。ハンドル回転体51に形成された位置決めボス51bがこの位置決め穴86eに嵌合されており、これにより、ハンドルセンサモジュール14が精度よくハンドル回転体51に固定されている。
【0069】
カバー81には、プリント基板82に搭載されたコネクタ85に対応する位置に、コネクタ用開口部81aが設けられている。コネクタ85の一部は、このコネクタ用開口部81aを介して、ハンドルセンサモジュール14の外面に露出している。
【0070】
また、ケース86の収容部およびカバー81には、複数の掛止爪86dおよび掛止溝81bが形成されており、これらが掛わり合うことで、ケース86とカバー81とが掛止されている。
【0071】
次に、図11を用いて、遊技機の制御系について説明する。図11は、遊技機の制御ブロック図である。
【0072】
遊技機1は、発射制御装置10と、発射制御基板20と、発射装置30と、主基板40とを備えている。このうち、発射制御装置10は、発射ハンドル装置4に搭載されており、上記ハンドルセンサモジュール14を備えている。発射制御基板20と発射装置30と主基板40とは、遊技盤2等を含む遊技機本体9側に配置されている。
【0073】
主基板40は、制御回路41を搭載しており、制御回路41にて、遊技盤2における入賞口7の開閉動作を始めとして表示装置8への遊技情報の表示、遊技盤2に施された装飾照明等、遊技機1における各部の駆動を制御する。また、制御回路41は、発射制御基板20に対して遊技球の発射を許可する許可信号を出力する。発射制御基板20は、許可信号が入力されている間、遊技球を発射する。
【0074】
発射制御装置10は、遊技者が発射ハンドル装置4に対して行った操作を電気信号に変換して発射制御基板20へと出力するもので、角度検出部11、タッチセンサ12、およびストップセンサ13が内蔵された前述のハンドルセンサモジュール14を備えている。
【0075】
角度検出部11は、上述したように、遊技者がハンドル回転体51を回動操作した操作角を検出するものであり、本実施の形態では、角度検出部11は、3軸の加速度センサ15と演算出力部19とから構成されている。
【0076】
加速度センサ15は、姿勢(角度)検出用デバイスであり、X軸およびY軸が発射ハンドル装置4におけるハンドル回転体51の回転軸に直交するように配置されている。加速度センサ15のX軸およびY軸からは、ハンドル回転体51が回動操作された操作角に応じた電気信号が出力される。なお、本実施の形態では、X軸とY軸とを回転角検出に用いているが、3軸のうちの任意の2軸を用いればよい。また、本実施の形態では、Z軸を使用しないので、加速度センサ15は2軸のものであってもよい。
【0077】
演算出力部19は、加速度センサ15から得られるX軸およびY軸の信号(データ)を取得してハンドル回転体51の操作角を算出して、操作角に応じた操作角信号E(V)を生成して出力するものである。演算出力部19に代えて、X軸およびY軸の信号(データ)から操作角を検出する演算部と、算出された操作角を操作角信号Eに変換する出力回路とに分けて構成してもよい。なお、加速度センサ15の2軸を用いて操作角を検出する概念については後述する。
【0078】
タッチセンサ12は、上述したように、遊技者が発射ハンドル装置4に触れていることを検知するものである。タッチセンサ12は、触れているか否かを信号レベルによって表すHi/Lowレベルのタッチ信号を出力する。本実施の形態では、タッチ信号はLowアクティブに設定されており、遊技者が発射ハンドル装置4に触れている間、タッチ信号はLowレベルとなる。
【0079】
ストップセンサ13は、上述したように、遊技者がハンドル回転体51を回動させた状態で遊技球の発射を強制的に停止させるストップ操作に使用するものであり、本実施の形態では、反射式フォトマイクロセンサからなる。ストップセンサ13も、タッチセンサ12と同様、操作されているか否かを信号レベルによって表すHi/Lowレベルのストップ信号を出力する。実施形態では、ストップ信号は、遊技者にてタッチセンサ12が操作されている間、Hiレベルとなる。
【0080】
発射制御装置10より出力されるこれらの操作角信号E、タッチ信号、およびストップ信号は、ハンドルセンサモジュール14に設けられた前記コネクタ85に接続された図示しないハーネスを介して発射制御基板20に入力される。
【0081】
発射制御基板20は、制御回路21を搭載しており、制御回路21にて、主基板40より発射を許可する許可信号が入力されている間、発射制御装置10のハンドルセンサモジュール14から入力される、操作角信号E、タッチ信号およびストップ信号とに基づいて、遊技球の発射条件を判定し、その結果に基づいた駆動出力を生成して発射装置30へと出力するものである。なお、詳細については後述する。
【0082】
発射装置30は、発射駆動部31と球送り駆動部32とを備えている。発射駆動部31は、発射制御基板20の制御回路21より入力される発射駆動出力に応じた速度で遊技球を発射するものである。遊技球は、発射駆動出力が大きいほど強い力で発射され、発射速度も速くなる。球送り駆動部32は、発射制御基板20の制御回路21より入力される球送り駆動出力に応じて駆動し、発射駆動部と31と連動して遊技球を個別に発射駆動部31へ送り込むものである。
【0083】
次に、図12を参照して、加速度センサの2軸を用いて姿勢(角度)を検出する概念にいて説明する。図12の(a)(b)に示すように、加速度センサ15のX軸およびY軸は、回転軸100に対して直交するように配置される。図12の(a)は、回転していない初期位置における重力GのベクトルA(基準ベクトル)を示している。原点O(0,0)は、回転軸100に相当する。図12の(a)の初期位置から時計回りにθ(°)回転すると、重力GのベクトルBは、図12の(b)に示すようになる。図12の(a)の状態から図12の(b)の状態に変化した場合の回転角θは、変化角度θとして求めることができる。そして、図12の(a)の初期位置から図12の(b)の状態に変化した場合の変化角度θ(°)は、ベクトルA(Ax,Ay)とベクトルB(Bx,By)の内積で求めることができる。以下に変化角度θを算出する式を記載する。
【0084】
【数1】
【0085】
次に、図13のフローチャートを用いて、発射制御装置10における操作角信号生成・出力処理について説明する。図13は、前記ハンドルセンサモジュールを搭載した発射制御装置による、操作角信号生成・出力処理のフローチャートである。なお、本実施の形態では、加速度センサ15のZ軸は用いないので、図13において、Z軸については括弧記載としている。
【0086】
遊技機1に電源が投入されて発射ハンドル装置4に電力が供給されると、演算出力部19は、まず、加速度センサ15の原点データを初期化する(S1)。ここでは、回転角0°の状態で、X軸の初期電圧(Xorg)およびY軸の初期電圧(Yorg)が共に1.4Vとなるように調整する。また、加速度1G時の出力電圧変化量(Data1G)は1.0Vである。続いて、加速度データを初期化する(S2)。つまり、X軸データのデータ(Xnow)、およびY軸データのデータ(Ynow)を0Vとする。
【0087】
原点データの初期化および加速度データの初期化が完了すると、演算出力部19は、計測回数をカウントするカウンタを初期化し(S3)、加速度センサ15からX軸データおよびY軸データを取得する(S4)。X軸データおよびY軸データを取得すると、2msec待って(S5)、上記カウンタを1UPし(S6)、S4〜S7を10回ループしたか否かを判断する(S7)。ここで、10回ループしていない場合は、S4に戻り、S7にて10回ループしたと判断するまでS4〜S7の処理を繰り返す。この間、演算出力部19は、S4で取得したX軸データおよびY軸データを積算(累積)していく。
【0088】
演算出力部19は、S7にて10回ループしたと判断すると、X軸データおよびY軸データの積算値をループした回数の10で割って平均化し、これをX軸データおよびY軸データとする。このようにX軸データおよびY軸データを平均化することで、ノイズの除去が可能となる。
【0089】
S8にて、平均化されたX軸データおよびY軸データが得られると、演算出力部19は、基準ベクトルA(Ax,Ay)の座標を算出する(S9)。基準ベクトルAのX座標Axは、Ax=0、基準ベクトルAのY座標Ayは、Ay=|Data1G−Yorg|にて算出される。ここで、Data1Gは1.0Vであり、Y軸の初期電圧(Yorg)は1.4Vであるので、基準ベクトルAのY座標Ayは、0.4となる。
【0090】
次に、演算出力部19は、ハンドル回転体51の回動により基準ベクトルAから変化している現在ベクトルB(Bx,By)の座標を算出する(S10)。現在ベクトルBのX座標Bxは、Bx=|Xorg−Xnow|、現在ベクトルBのY座標Byは、By=|Yorg−Ynow|にて算出される。
【0091】
S9、S10にて、基準ベクトルA(Ax,Ay)および現在ベクトルB(Bx,By)の座標が算出されると、演算出力部19は、上述した変化角度θを求める式を用いて、ハンドル回転体51が回動操作された角度である操作角(変化角)θを、基準ベクトルA(Ax,Ay)と現在ベクトルB(Bx,By)の内積から計算する(S11、S12)。
【0092】
次に、演算出力部19は、算出された操作角θを操作角信号Eに変換して出力する(S13〜S17)。つまり、S13、S14において、演算出力部19は、算出された操作角θと、予め定められた角度θA、角度θB(θA<θB)とを比較し、操作角θが角度θA以下であれば、S15に進み、E=(a3)θ + (b3)の変換式を用いて変換する。また、操作角θが角度θA以上角度B未満であれば、S16に進み、E=(a2)θ + (b2)の変換式を用いて変換する。そして、操作角θが角度θB以上であれば、S17に進み、E=(a1)θ + (b1)の変換式を用いて変換する。
【0093】
演算出力部19は、S15、S16、あるいはS17で生成された操作角信号Eを発射制御基板20に出力する(S18)。その後、処理をS2に戻して、加速度データ(Xnow、Ynow)を初期化し、次回の操作角θの検出を開始する。
【0094】
図14に、図13のS13〜S17において、操作角信号の変換に用いた変換式のグラフを示す。
【0095】
角度θA以下の操作角θに使用される変換式E=(a3)θ + (b3)は、大きな傾斜を有する。したがって、操作角θが0から角度θAまでの区間では、ハンドル回転体51の回転量に対して遊技球の発射強度が大きく変化することとなる。
【0096】
角度θA〜角度θBの操作角θに使用される変換式E=(a2)θ + (b2)は、緩やかな傾斜を有する。したがって、操作角θが角度θA〜角度θBの区間では、ハンドル回転体51の回転量に対して遊技球の発射強度の変化量は小さく、発射強度を微調整することができる。
【0097】
角度θB以上の回転角θに使用される変換式E=(a1)θ + (b1)も、比較的大きな傾斜を有する。したがって、操作角θが角度θBを超えると、ハンドル回転体51の回転量に対して再び遊技球の発射強度が大きく変化することとなる。なお、図5の例では、ハンドル回転体51の回転角に応じた出力傾斜を設けたが、出力傾斜を設けないリニア出力の構成であれば、単純な係数付加等で対応可能である。
【0098】
また、本実施の形態では、操作角θを変換式を用いてアナログ出力する構成を例示したが、操作角θをダイレクトに角度データとしたデジタル数値出力、あるいは操作角θに対して、上位となる遊技機本体9側の発射制御基板20等と取り決めた任意なデジタル数値を出力構成としてもよい。
【0099】
図15に、タッチ信号、ストップ信号、および操作角信号のタイミングチャートを示す。タッチ信号は、遊技者がハンドル回転体51に触れている間、Lowレベルとなり、遊技者がハンドル回転体51に触れていない間、Hiレベルとなる。発射制御基板20の制御回路21は、タッチ信号に基づいて遊技球発射の許可・不許可を判定し、タッチ信号がLowレベルの間、遊技球の発射を許可(Enable)する。
【0100】
ストップ信号は、遊技者が発射停止レバー55を操作している間、Hiレベルとなり、遊技者が発射停止レバー55の操作を止めると、Lowレベルとなる。発射制御基板20の制御回路21は、ストップ信号に基づいて遊技球の発射を停止させる処理を行うか否かを判定し、ストップ信号がLowレベルの間、遊技球の発射を許可(Enable)し、Hiレベルの間は不許可とする。
【0101】
本実施の形態では、操作角信号Eは、ストップ信号、タッチ信号とは関係なく、独立して出力される。したがって、操作角信号Eは、ハンドル回転体51の回動操作が成されているかぎり、その操作角に応じた電圧を有した信号となる。本実施の形態では、操作角信号Eは、たとえば0〜2.9Vの間で変動する電圧である。
【0102】
図15のタイミングチャートの例であれば、発射制御基板20の制御回路21は、タッチ信号およびストップ信号が共にLowレベルの期間のみ、操作角度に応じた発射駆動出力を生成出力し、その間、遊技球が発射されることとなる。
【0103】
以上のように、本実施の形態では、発射ハンドル装置4において、3軸(2軸)の加速度センサ15を用いた角度検出部11を備え、ハンドル回転体51の操作角度の検出を、3軸(2軸)の加速度センサ15と演算出力部19とで行い、操作角度に応じた操作角信号Eを出力するようになっている。
【0104】
これにより、操作角度の検出に、回転角検出のための回転軸が不要となるので、回転角検出のための回転軸を有する可変抵抗器や電子式ボリュームを用いた角度検出器による全ての問題をクリアできる。
【0105】
つまり、上記構成では、角度検出部11が加速度センサを用いて構成されているので、角度検出部11を、回転体に固定するだけで、取り付けることが可能となる。したがって、センサ部本体と内部回路とを回転側と固定側とに分けて設置する必要のあった従来構成に比して、回転角を機械的に伝達するための複数の連結ギヤ等の回転角伝達部材等が不要となり、角度検出部として部品点数が大きく削減でき、コスト削減に加えて、発射操作装置自体及び遊技機側への設計的レイアウト制約を小さくし、デザインや大きさ、稼動条件等の自由度を広げることができる。しかも、従来の可変抵抗器を用いた角度検出部のように、磨耗による耐久性の問題もなく、耐久性にも優れている。
【0106】
これにより、従来の可変抵抗器や電子式ボリュームを用いた角度検出器を搭載していた発射操作装置に比して格段に耐久性・コスト・操作性に優れ、デザイン的な自由度も広い発射ハンドル装置4、遊技機1を提供することができる。
【0107】
〔実施の形態2〕
以下、図面を参照しつつ、本発明のその他の実施の形態について詳細に説明する。なお、説明の便宜上、実施の形態1で用いた部材と同じ機能を有する部材には同じ符号を付して説明を省略して異なる点のみ説明する。
【0108】
本実施の形態と実施の形態1との違いは、ハンドルセンサモジュール、発射制御装置、および発射制御基板にある。
【0109】
図16に、本実施の形態の遊技機における制御ブロック図を示す。実施の形態1で参照した図11と比較すると分かるように、本実施の形態では、発射制御装置10Aに備えられたハンドルセンサモジュール14Aにおいては、タッチセンサ12から出力されるタッチ信号およびストップセンサ13から出力されるストップ信号が共に演算出力部19Aに入力され、演算出力部19Aからは、タッチ信号およびストップ信号が共に出力許可(遊技球の発射許可)である場合にのみ、操作角信号Eが出力される。つまり、本実施の形態においては、操作角信号Eにタッチ信号およびストップ信号が統合されている。
【0110】
実施の形態1の構成では、ストップ信号、タッチ信号、および操作角信号Eがそれぞれ独立して発射制御基板20へと出力されていたため、発射制御装置10と発射制御基板20との間には、ストップ信号用、タッチ信号用、操作角信号E用として、3本のハーネスが必要であった。これに対し、実施の形態では、ハーネスを操作角信号E用の1本に減らすことができる。
【0111】
図17のフローチャートを用いて、発射制御装置10Aにおける操作角信号生成・出力処理について説明する。図17は、前記ハンドルセンサモジュール14Aを搭載した発射制御装置10Aによる、操作角信号生成・出力処理のフローチャートである。
【0112】
実施の形態1で参照した図13のフローチャートと比較すると分かるように、本実施の形態では、S12とS13との間に、S21〜S23が追加されており、さらに、S23でNOと判断された場合に移行するS24が追加されている。
【0113】
S21では、演算出力部19Aが、タッチ信号を取得し、S22では、演算出力部19Aが、ストップ信号を取得する。S23では、演算出力部19Aが、取得したタッチ信号およびストップ信号より、操作角信号Eの出力を許可するか否かを判断する。本実施の形態では、タッチ信号およびストップ信号が共にLowレベルである場合に、演算出力部19Aは操作角信号Eの出力許可と判断してS13に進む。これにより、操作角に応じて、例えば1.5V〜2.9V程度の操作角信号Eは出力される。一方、演算出力部19は、タッチ信号およびストップ信号のいずれか一方でもHiレベルである場合は、S23にて操作角信号Eの出力不許可と判断して、S24に進み、操作角信号Eを出力しない。なお、操作角信号Eを出力しないとはつまり、電圧を0V、あるいは0.5V以下とするなどして、発射制御基板20Aが、操作角信号Eに基づいて発射駆動出力を生成する通常の出力範囲外とすることである。
【0114】
発射制御基板20Aは制御回路21Aを搭載しており、制御回路21Aにて、主基板40より発射を許可する許可信号が入力されている間、発射制御装置10Aのハンドルセンサモジュール14Aから入力されるストップ信号およびタッチ信号を統合した操作角信号Eのみに基づいて、遊技球の発射条件を判定し、その結果に基づいた駆動出力を生成して発射装置30へと出力する。制御回路21Aは、操作角信号Eが0V、あるいは0.5V以下等の発射駆動出力を生成する通常の出力範囲外である場合は、発射駆動出力および球送り駆動出力の生成を行わない。
【0115】
なお、本実施形態では、タッチ信号およびストップ信号の両方を、操作角信号Eに統合したが、タッチ信号あるいはストップ信号の何れか一方を統合する構成としてもよい。その場合は、3本のハーネスを2本に減らすことができる。
【0116】
タッチ信号のみを統合した構成では、発射制御基板は、搭載する制御回路にて、主基板40より発射を許可する許可信号が入力されている間、発射制御装置のハンドルセンサモジュールから入力される操作角信号とストップ信号とに基づいて、遊技球の発射条件を判定し、その結果に基づいた駆動出力を生成して発射装置30へと出力する。一方、ストップ信号のみを統合した構成では、発射制御基板は、搭載する制御回路にて、主基板40より発射を許可する許可信号が入力されている間、発射制御装置のハンドルセンサモジュールから入力される操作角信号とタッチ信号とに基づいて、遊技球の発射条件を判定し、その結果に基づいた駆動出力を生成して発射装置30へと出力する。
【0117】
〔実施の形態3〕
以下、図面を参照しつつ、本発明のその他の実施の形態について詳細に説明する。なお、説明の便宜上、実施の形態1、2で用いた部材と同じ機能を有する部材には同じ符号を付して説明を省略して異なる点のみ説明する。
【0118】
本実施の形態と実施の形態1との違いは、ハンドルセンサモジュール、発射制御装置にある。
【0119】
図18に、本実施の形態の遊技機における制御ブロック図を示す。実施の形態1では、発射制御装置10において、タッチセンサ12と、ストップセンサ13とは、角度検出部11を構成する加速度センサ15等と共にプリント基板82上に実装されて、ケース86とカバー81からなる外郭部材内部に収容されて、ハンドルセンサモジュール14を構成している。
【0120】
これに対し、本実施の形態では、発射制御装置10Bにおいて、ストップセンサ13に代えてメカ接点方式のストップスイッチ25が備えられ、ストップスイッチ25と共にタッチセンサ12も、ハンドルセンサモジュール14Bの外部に外付けされている。つまり、ハンドルセンサモジュール14Bは、遊技者の操作内容を検出する検出器として、加速度センサ15と演算出力部19よりなる角度検出部11のみを備えた構成である。
【0121】
図8、図9の分解斜視図を参照して説明すると、ハンドルセンサモジュール14Bは、タッチセンサ12を構成するタッチ主回路83およびタッチ回路用コイル84、タッチセンサ12に信号を伝達するための電極プレート87、接続電極90、ストップセンサ13を構成する反射式フォトマイクロセンサ等が設けられていない構成となる。
【0122】
実施の形態1のハンドルセンサモジュール14を備える構成と比較して、ストップスイッチ25とタッチセンサ12とを、ハンドルセンサモジュール14Bとは別途取り付ける必要はあるが、従来からある発射ハンドル装置の仕様を大きく変えることなく、操作角度の検出のための回転軸が不要となることによる効果を得ることができる。
【0123】
なお、図18の構成では、タッチセンサ12およびストップスイッチ25の両方を外付けとしたが、何れか一方のみを外付けとしてもよい。
【0124】
つまり、ストップスイッチ25のみを外付けとし、タッチセンサ12は、ハンドルセンサモジュール14、ハンドルセンサモジュール14Aと同様に、加速度センサ15と共にハンドルセンサモジュール内部に設けてもよい。その場合のハンドルセンサモジュールは、図8、図9の分解斜視図を参照して説明すれば、ストップセンサ13を構成する反射式フォトマイクロセンサが設けられていない構成となる。また、その場合の、タッチ信号の出力の仕方としては、個別に出力する形態、および操作角信号Eに統合して出力する形態の何れも可能である。
【0125】
一方、タッチセンサ12のみを外付けとする構成では、ハンドルセンサモジュール14、ハンドルセンサモジュール14Aと同様に、加速度センサ15と共にストップセンサ13をハンドルセンサモジュール内部に設けることとなる。その場合のハンドルセンサモジュールは、図8、図9の分解斜視図を参照して説明すると、タッチセンサ12を構成するタッチ主回路83およびタッチ回路用コイル84、タッチセンサ12に信号を伝達するための電極プレート87、接続電極90が設けられていない構成となる。また、その場合も、ストップ信号の出力の仕方としては、個別に出力する形態、および操作角信号Eに統合して出力する形態の何れも可能である。
【0126】
〔実施の形態4〕
以下、図面を参照しつつ、本発明のその他の実施の形態について詳細に説明する。なお、説明の便宜上、実施の形態1〜3で用いた部材と同じ機能を有する部材には同じ符号を付して説明を省略して異なる点のみ説明する。
【0127】
本実施の形態と実施の形態1との違いは、発射ハンドル装置、ハンドルセンサモジュール、発射制御装置、および発射制御基板にある。
【0128】
図19に、本実施の形態の遊技機における制御ブロック図を示す。本実施の形態では、発射制御装置10Cにおいて、角度検出部11Cが、加速度センサ15の3軸目を利用して、ストップ信号および不正信号を検出する点である。そのため、本実施の形態では、発射制御装置10Cに備えられたハンドルセンサモジュール14Cには、ストップセンサもストップスイッチも設けられていない。
【0129】
なお、タッチ信号については、ハンドルセンサモジュール14Cに内蔵されたタッチセンサ12より個別出力される構成としている。しかしながら、実施の形態2で参照した図16に示す発射制御装置10Aのように、操作角信号Eに統合する構成としてもよいし、実施の形態3で参照した図18に示す発射制御装置10Bのように、ハンドルセンサモジュール外部に外付けとして、個別出力する構成としてもよい。
【0130】
加速度センサ15のZ軸は前述したように、発射ハンドル装置におけるハンドル回転体51の回転軸と平行に配置されている。そのため、Z軸にかかる重力Gは、ハンドル回転体51の回転軸が元の状態から上下方向(鉛直線方向)に傾くことと、Z軸の方向である遊技機1の前後方向に瞬間的かかる衝撃とによって変化し、傾斜及び衝撃に応じた値を出力する。これはつまり、Z軸のデータを取得することにより、そのデータより、発射ハンドル装置4に対して上下方向への力が加えられたことと、発射ハンドル装置4あるいは遊技機1に対して、前後方向に瞬間的な衝撃が加えられたことを検出できるということに他ならない。
【0131】
本実施の形態では、このZ軸のデータを利用して、角度検出部11Cに、操作角度検出以外の機能として、ストップ操作検出機能と不正操作検出機能とを具備させている。ストップ操作とは、前述したように、遊技者が発射ハンドル装置4のハンドル回転体51の回転させたままで遊技球の発射のみ停止させたい場合にストップスイッチを押す等の操作である。また、不正操作とは、発射ハンドル装置4のハンドル部分を故意に強く押したり引いたりする操作や、遊技機1の遊戯盤2を覆っているガラス面やその周囲等を故意に叩いたりする操作である。
【0132】
演算出力部19Cは、X軸とY軸の出力より、ハンドル回転体51の操作角度を検出し、Z軸の出力より、ストップ操作が成されたかどうか、および、不正操作がなされたかどうかを検出する。
【0133】
遊技者に対しては、ストップ操作の行い方として、発射ハンドル装置4Cである遊技機本体9から突出しているハンドル部分全体を下方向に停止するまで、あるいはロック音が発生するまで、あるいはロック感が得られるまで押し下げる、といった取り決めがなされている。なお、ここでは、ストップ操作を、ハンドル部分全体を押し下げる操作としているが、逆に、ハンドル部分全体を持ち上げる操作とすることもできる。
【0134】
図20の(a)(b)に示すように、本実施の形態では、発射ハンドル装置4Cにおけるハンドル本体53の後面に、発射ハンドル装置4Cにおけるハンドル部分全体を下向きに角度変位させることを可能にする変位機構部59が取り付けられている。図20の(a)(b)は、発射ハンドル装置4Cが下向きに変位する様子を示す説明図である。変位機構部59は、発射ハンドル装置4Cにおける遊技機本体9との取り付け部を基点として、所定角度θZ_stop押し下げ可能に構成されている。また、変位機構部59には、ハンドル部分を所定角度押し下げることで、押し下げた位置でハンドル部分をロックするロック機構も備えている。
【0135】
ロック機構は、ハンドル部分を元に戻す方向に所定以上の力で回動させることで、解除され、発射ハンドル装置4Cは傾きのない元の状態に復帰する。ここで、下方向に押し下げる角度としては、遊技機本体9に対してその後面より前面に水平に突出するように設けられている構成では、15〜20°程度とすることが操作性上好ましい。但し、発射ハンドル装置が、遊技機本体に対して、もともと傾斜して設置されている場合などは、この限りではない。
【0136】
本実施の形態では、演算出力部19Cが、Z軸が下方向に15°以上傾いた場合のZ軸の出力値をストップ操作検出用の閾値(Z_stop)として予め記憶しており、取得したZ軸のデータより、Z軸のデータが上記閾値超えたことを検出すると、ストップ操作が成されたと判断するようになっている。
【0137】
さらに、本実施の形態では、演算出力部19Cは、遊技機1を叩いたり、発射ハンドル装置4Cのハンドル部分を押したり引いたりして、遊技機1に対して衝撃を与えた場合にZ軸より出力される値を不正操作検出用の閾値(Z_wrong)として予め記憶しており、取得したZ軸のデータより、Z軸のデータが上記閾値超えたことを検出すると、不正操作が成されたと判断するようになっている。
【0138】
不正操作によって、遊技機1に瞬間的な衝撃が加わると、遊技機1の前後方向の加速度を検出するZ軸の出力に、衝撃による急峻なピークが発生する。不正操作検出用の閾値(Z_wrong)は、このピークを検出できるように設定されており、ストップ操作検出用の閾値(Z_stop)に比べて十分に大きな値が設定される。演算出力部19Cは、不正操作が成されたと判断すると、その旨を示す後述する不正信号を生成する。不正信号は、主基板40へと出力される。
【0139】
発射制御基板20C、および制御回路21Cは、主基板40より発射を許可する許可信号が入力されている間、発射制御装置のハンドルセンサモジュールから入力されるストップ信号を統合した操作角信号とタッチ信号とに基づいて、遊技球の発射条件を判定し、その結果に基づいた駆動出力を生成して発射装置30へと出力する。
【0140】
図21のフローチャートを用いて、発射制御装置10Cにおける操作角信号生成・出力処理について説明する。図21は、前記ハンドルセンサモジュール14Cを搭載した発射制御装置10Cによる、操作角信号生成・出力処理のフローチャートである。
【0141】
実施の形態1、2で参照した図13、図17のフローチャートと比較すると分かるように、本実施の形態では、Z軸の括弧書きが全て有効であり、S1、S2、S4、S8においては、Z軸の原点データの初期化、Z軸の加速度データの初期化、Z軸データの取得および平均化を実施する。
【0142】
そして、S12にて、ハンドル回転体51が回動操作された角度である操作角(変化角)θを算出すると、S30に進み、図22に示すストップ状態取得処理を実施する。図22は、図21のフローチャートにおけるストップ状態取得処理を示すフローチャートである。
【0143】
ストップ状態取得処理では、演算出力部19Cが、S8にて算出されたZ軸データの平均値(Znow)とストップ操作が成されたと判断できる閾値(Z_stop)とを比較する(S31)。S31において、Z軸データの平均値(Znow)が閾値(Z_stop)未満である場合は、S32に進み、操作角信号Eの出力を許可(S_in=0)とする。S31において、Z軸データの平均値(Znow)が閾値(Z_stop)以上である場合は、S33に進み、操作角信号Eの出力を禁止(S_in=1)する。
【0144】
図21にフローチャートに戻り、S23では、演算出力部19Cは、S30で実施されたストップ状態を判別し、操作角信号Eの出力を許可(S_in=0)であれば、S13に進む。一方、操作角信号Eの出力を禁止(S_in=1)であれば、S24に進み、操作角信号Eを出力しない。
【0145】
なお、図21のフローチャートは、操作角信号Eにストップ信号を統合して出力する処理例を示しているが、Z軸のデータで検出したストップ状態によるストップ信号Sを、実施の形態1で参照した図11に示すハンドルセンサモジュール14のように、操作角信号Eとは個別に出力する構成でもよい。その場合の操作角信号生成・出力処理のフローチャートは、実施の形態1で参照した図13に示すフローチャートと同様のものとなる。
【0146】
図23に、ストップ信号Sを個別に出力する場合のストップ状態検出処理のフローチャートを示す。演算出力部19Cは、図13のフローチャートにおけるS8にて算出されたZ軸データの平均値(Znow)とストップ操作が成されたと判断できる閾値(Z_stop)とを比較する(S34)。S34において、Z軸データの平均値(Znow)が閾値(Z_stop)未満である場合は、S35に進み、ストップ信号Sを出力しない。すなわちストップ信号をLowレベルとする。一方、S34において、Z軸データの平均値(Znow)が閾値(Z_stop)以上である場合は、S36に進み、ストップ信号Sを出力する。すなわちストップ信号SをHiレベルとする。
【0147】
ストップ信号Sを個別に出力する構成では、演算出力部19Cは、S8にて、Z軸データの平均値(Znow)が算出されるごとに、図23のストップ状態検出処理を実施する。
【0148】
ところで、不正操作が行われた場合にZ軸の出力に現れる急峻なピークは、ストップ操作検出用の閾値(Z_stop)を大きく超える値である。したがって、不正操作による急峻なピークが出力されている瞬間的な期間は、操作角信号Eの出力が禁止されたり、ストップ信号SがHiレベルになったりして、瞬間的に遊技球の発射を停止する指示がなされる。しかしながら、このような遊技球の発射を停止させる指示は継続性を有するものではないため、遊技球の発射への影響はない。
【0149】
また、図24に、ハンドルセンサモジュール14Cにおける演算出力部19Cが、不正検出処理を実施して不正信号Pを出力する不正検出処理のフローチャートを示す。演算出力部19Cは、図21あるいは図13のフローチャートにおけるS8にて算出されたZ軸データの平均値(Znow)と、不正な操作が成されたと判断できる閾値(Z_wrong)とを比較する(S41)。S41において、Z軸データの平均値(Znow)が閾値(Z_wrong)未満である場合は、S42に進み、不正信号Pを出力しない。すなわち不正信号PをLowレベルとする。一方、S41において、Z軸データの平均値(Znow)が閾値(Z_wrong)以上である場合は、S43に進み、不正信号Pを出力する。すなわち不正信号PをHiレベルとする。
【0150】
ここで、不正信号Pは、ストップ信号Sとは異なり、遊技者によって遊技機1に衝撃が加えられるなどした、瞬間的な操作を検出して瞬間的にHiレベルとなるものである。したがって、非常に短い期間のみHiレベルとなり、見過ごされる危険性を有している。
【0151】
そこで、本実施の形態では、Z軸データの平均値(Znow)が閾値(Z_wrong)以上となることをトリガーとしてタイマーを作動させ、予め定めた期間、不正信号PのHiレベルを保持する構成としている。
【0152】
不正信号Pは、発射制御装置10Cにおけるハンドルセンサモジュール14Cから個別に出力されて、主基板40を備える制御回路41へと入力される。制御回路41は、不正信号PがHiレベルの期間、当該遊技機1の異常を知らせるランプを点灯させたり、遊技機1を設置しているホール管理者に報知したりするなどの所定の処理を実施する。
【0153】
図25に、タッチ信号、ストップ操作判定、操作角信号、不正(衝撃)判定、および不正信号出力のタイミングチャートを示す。タッチ信号は、遊技者がハンドル回転体51に触れている間、Lowレベルとなり、遊技者がハンドル回転体51に触れていない間、Hiレベルとなる。発射制御基板20Cの制御回路21Cは、タッチ信号に基づいて遊技球発射の許可・不許可を判定し、タッチ信号がLowレベルの間、操作角信号Eの出力を許可(Enable)する。
【0154】
ストップ操作判定は、遊技者が発射ハンドル装置4Cのハンドル部分を下方に15°以上押し下げるストップ操作を行わない限りLowレベルであるが、ストップ操作を行うと、その間Hiレベルとなる。そして、遊技者がハンドル部分を元の状態に戻すと、再びLowレベルとなる。
【0155】
操作角信号Eは、演算出力部19Cより、ストップ操作判定がLowレベルの場合は、ハンドル回転体51の回動操作が成されているかぎり、操作角に応じた電圧を有するものとなるが、ストップ操作判定の信号がHiレベルとなると0V電圧となり、出力されない。
【0156】
不正(衝撃)判定は、遊技者が遊技機1に衝撃を与えるなどの行為により変動するZ軸データが、不正と判断できる閾値(Z_wrong)以上となると、演算出力部19Cが、その時点から所定時間不正信号をHiレベルとする。
【0157】
なお、本実施の形態では、角度検出部11Cが、加速度センサ15の3軸目を利用して、ストップ信号および不正信号の両方を検出する構成としていたが、ストップ信号および不正信号の何れか一方のみを検出する構成であってもよい。
【0158】
〔実施の形態5〕
以下、図面を参照しつつ、本発明のその他の実施の形態について詳細に説明する。なお、説明の便宜上、実施の形態1〜4で用いた部材と同じ機能を有する部材には同じ符号を付して説明を省略して異なる点のみ説明する。
【0159】
本実施の形態と実施の形態4との違いは、発射ハンドル装置、ハンドルセンサモジュール、および発射制御装置にある。
【0160】
図26に、本実施の形態の遊技機における制御ブロック図を示す。本実施の形態では、発射制御装置10Dにおいて、角度検出部11Dが、加速度センサ15の3軸目を利用して、ストップ信号および不正信号の検出に加えて、さらに、発射ハンドル装置のハンドル部分の傾き角度によって、操作角信号Eの出力レベルを可変するレベル可変機能を備えている。
【0161】
レベル可変機能とは、遊技者が発射ハンドル装置のハンドル回転体51の同じ操作角度で回転させたとしても、発射ハンドル装置におけるハンドル部分の傾斜を切り変えることで、遊技球の発射強度(発射速度)の切り換えを可能にするものである。
【0162】
演算出力部19Dは、X軸とY軸の出力より、ハンドル回転体51の操作角度を検出し、Z軸の出力より、実施の形態4と同様に、ストップ操作が成されたかどうか、不正操作がなされたかどうかを検出し、さらに、ここでは、レベル可変がなされたどうかを検出する。
【0163】
遊技者に対しては、レベル可変の行い方として、発射ハンドル装置4Dである遊技機本体9から突出しているハンドル部分全体を上方向に停止するまで、あるいはロック音が発生するまで、あるいはロック感が得られるまで持ち上げる、といった取り決めがなされている。なお、ここでは、レベル可変操作を、ハンドル部分全体を持ち上げる操作としているが、ストップ操作と逆にして、ハンドル部分全体を押し下げる操作とすることもできる。
【0164】
図27の(a)に示すように、本実施の形態では、発射ハンドル装置4Dにおけるハンドル本体53の後面に、発射ハンドル装置4Dにおけるハンドル部分全体を上向き・下向きに角度変位させることを可能にする変位機構部59Aが取り付けられている。図27の(a)〜(c)は、発射ハンドル装置4Dが上向き、下向きに変位する様子を示す説明図である。変位機構部59Aは、発射ハンドル装置4Dにおける遊技機本体9との取り付け部を基点として、下向きに所定角度θZ_stop押し下げ可能、かつ、上向きに所定角度θZ1持ち上げ可能に構成されている。また、変位機構部59Aには、ハンドル部分を所定角度押し下げた場合と同様に、所定角度持ち上げた位置でハンドル部分をロックするロック機構も備えている。
【0165】
ロック機構は、ハンドル部分を元に戻す方向に所定以上の力で回動させることで解除され、発射ハンドル装置4Dは傾きのない元の状態に復帰する。ここで、下方向に押し下げる角度と同様、上方向に持ち上げる場合の角度は、遊技機本体9に対してその後面より前面に水平に突出するように設けられている構成では、15〜20°程度とすることが操作性上好ましい。但し、発射ハンドル装置が、遊技機本体に対して、もともと傾斜して設置されている場合などは、この限りではない。
【0166】
本実施の形態では、演算出力部19Dが、Z軸が上方向に15°以上傾いた場合のZ軸の出力値をレベル可変用の閾値(Z_level)として予め記憶しており、取得したZ軸のデータより、Z軸のデータが上記閾値未満となったことを検出すると、レベル可変が指示されたと判断するようになっている。なお、Z軸が下方向に15°以上傾いた場合のZ軸の出力値であるストップ操作用の閾値(Z_stop)はプラス出力であり、Z軸が上方向に15°以上傾いた場合のZ軸の出力値であるレベル可変用の閾値(Z_strong)は、マイナス出力である。
【0167】
発射制御基板20C、および制御回路21Cは、前述したように、主基板40より発射を許可する許可信号が入力されている間、発射制御装置のハンドルセンサモジュールから入力されるストップ信号を統合した操作角信号とタッチ信号とに基づいて、遊技球の発射条件を判定し、その結果に基づいた駆動出力を生成して発射装置30へと出力する。
【0168】
図28のフローチャートを用いて、発射制御装置10Dにおける操作角信号生成・出力処理について説明する。図28は、前記ハンドルセンサモジュール14Dを搭載した発射制御装置10Dによる、操作角信号生成・出力処理のフローチャートである。
【0169】
実施の形態4で参照した図21のフローチャートと同様、本実施の形態では、Z軸の括弧書きが全て有効であり、S1、S2、S4、S8においては、Z軸の原点データの初期化、Z軸の加速度データの初期化、Z軸データの取得および平均化を実施する。
【0170】
そして、S12にて、ハンドル回転体51が回動操作された角度である操作角(変化角)θを算出すると、S50に進み、図29に示すレベル判定処理を実施する。図29は、図28のフローチャートにおけるレベル判定処理を示すフローチャートである。なお、レベル判定処理には、ストップ状態の判定が含まれている。
【0171】
レベル判定処理では、演算出力部19Dが、S8にて算出されたZ軸データの平均値(Znow)とストップ操作が成されたと判断できる第1閾値(Z_stop)とを比較する(S51)。S51において、Z軸データの平均値(Znow)が第1閾値(Z_stop)以上である場合は、S53に進み、操作角信号Eの出力を禁止(S_in=1)する。S51において、Z軸データの平均値(Znow)が第1閾値(Z_stop)未満である場合は、S52に進み、S8にて算出されたZ軸データの平均値(Znow)とレベル可変が指示されたと判断できる第2閾値(Z_level)とを比較する。ここで、S53において、Z軸データの平均値(Znow)が第2閾値(Z_level)以上である場合は、S54に進み、レベル可変が指示されたとして、出力仕様4(2)の変換式を選択する。一方、S52において、Z軸データの平均値(Znow)が第2閾値(Z_level)以上である場合は、S55に進み、レベル可変は指示されていないとして、通常の出力仕様3(1)の変換式を選択する。
【0172】
図28にフローチャートに戻り、S23では、演算出力部19Dは、S50で実施されたストップ状態の判別を含むレベル判定処理の結果に基づき、操作角信号Eの出力を許可(S_in=0)であれば、S60に進み、S50で決定された出力仕様に応じた変換式を用いて操作角信号Eを生成し、出力する(S18)。一方、操作角信号Eの出力を禁止(S_in=1)であれば、S24に進み、操作角信号Eを出力しない。
【0173】
なお、図28のフローチャートは、操作角信号Eにストップ信号を統合して出力する処理例を示しているが、Z軸のデータで検出したストップ状態によるストップ信号Sを、実施の形態1で参照した図11に示すハンドルセンサモジュール14のように、操作角信号Eとは個別に出力する構成でもよい。その場合の操作角信号生成・出力処理のフローチャートは、実施の形態1で参照した図13に示すフローチャートと同様のものとなる。
【0174】
図30、図31に、上記した出力仕様1〜4の変換式のグラフとテーブルを示す。発射ハンドル装置4Dのハンドル部分が傾けられない状態で用いられる出力仕様3(1)に対し、ハンドル部分が傾けられた場合に用いられる出力仕様4(2)は、ハンドル回転体51の回転量が同じであっても、出力される操作角信号Eが大きくなり、遊技球の発射速度も速くなる。
【0175】
本実施の形態では、演算出力部19Dは、出力仕様3(1)においては、例えば1.5V〜2.1Vの範囲で操作角に応じた操作角信号Eを生成し、出力仕様4(2)においては、1.9V〜2.9Vの範囲で操作角に応じた操作角信号Eを生成する。
【0176】
なお、出力仕様3,4は、角度に対する出力傾斜を持たせたもので、出力仕様1,2は、角度に対する出力傾斜を持たせないリニア出力である。出力仕様3,4の組合せを用いるか、出力仕様1,2の組合せを用いるかは、あらかじめ演算出力部19D内に設定される係数などで容易に変更が可能なものである。
【0177】
なお、タッチ信号については、ハンドルセンサモジュール14Dに内蔵されたタッチセンサ12より個別出力される構成としているが、実施の形態4と同様に、実施の形態2で参照した図16に示す発射制御装置10Aのように、操作角信号Eに統合する構成としてもよいし、実施の形態3で参照した図18に示す発射制御装置10Bのように、ハンドルセンサモジュール外部に外付けとして、個別出力する構成としてもよい。
【0178】
〔実施の形態6〕
以下、図面を参照しつつ、本発明のその他の実施の形態について詳細に説明する。なお、説明の便宜上、実施の形態1〜5で用いた部材と同じ機能を有する部材には同じ符号を付して説明を省略して異なる点のみ説明する。
【0179】
本実施の形態では、図32〜図38を用いて、ハンドル部分が上向き・下向きに変位する発射ハンドル装置について説明する。図32の(a)〜(c)は、発射ハンドル装置のハンドル部分が上向き・下向きに変位する様子を示す説明図である。図33の(a)〜(f)は順に、本実施の形態の発射ハンドル装置の上面図、左側面図、前面図(正面図)、右側面図、下面図、および後面図(裏面図)である。図34は、発射ハンドル装置を前面側から見た分解斜視図であり、図35は、発射ハンドル装置を後面側から見た分解斜視図である。図36の(a)〜(c)、および図37の(a)〜(c)は、発射ハンドル装置のハンドル部分が上向き・下向きに変位する様子をより詳細に示すもので、(a)(b)は発射ハンドル装置を上下方向に沿って位置をずらして切断した断面図、(c)は後面図(裏面図)である。また、図38は、発射ハンドル装置を水平方向に沿って切断した断面図である。
【0180】
図32の(a)〜(c)に示すように、本実施の形態の発射ハンドル装置4Eにおいては、ハンドル本体53Eが、第1ハンドルベース部530と第2ハンドルベース部531とから構成されている。このうち、第1ハンドルベース部530が遊技機本体9に固定され(図1参照)、第2ハンドルベース部531にハンドル回転体51が回動自在に取り付けられている。
【0181】
第2ハンドルベース部531は、第1ハンドルベース部530に対して、上向き・下向きに変位可能に設けられている。その変位範囲は、第2ハンドルベース部531の筒状体531aの後端部に円弧を描くように切り込むことで形成された上側及び下側の係止部531b・531bにて決定される。上側及び下側の係止部531b・531bは、第1ハンドルベース部530の前面に突き当たることで係止され、これにて第2ハンドルベース部531の回動が記載される。係止部531b・531bを構成する前面側への切り込みを深くすることで、変位範囲を大きくすることができる。なお、実施の形態4で述べた発射ハンドル装置4Cのように、下向き(あるいは上向き)の一方にのみ変位する構成においては、係止部は変位する側のみに形成すればよい。
【0182】
第2ハンドルベース部531を第1ハンドルベース部530に回動自在に支持する構成として、図34、図35に示すように、第1ハンドルベース部530には、前面側に半球状の球面部532が設けられている。第2ハンドルベース部531は、この球面部532に沿って上下方向に所定角度回動するようになっている。
【0183】
球面部532には、球面の中心から外れた部分に変位方向である上下方向に伸びる2本の案内溝532a・532aが形成され、球面部532の裏面側には、これら案内溝532aと連通する案内部材534・534が後方に突出するように形成されている。そして、該案内部材534・534には、図38に示すように、第2ハンドルベース部531に設けられた後述する案内片533・533を回動自在に支持する突起535・535が形成されている。
【0184】
一方、第2ハンドルベース部531においては、後面に、第1ハンドルベース部530の球面部532に形成された案内溝532a・532aおよびそれに連通する案内部材534・534に挿入される案内片533・533が、後方に突出するように形成されている。案内片533・533の先端部には、回動穴533a・533aが形成されており、図38に示すように、該回動穴533a・533aに、第1ハンドルベース部530側に形成された案内部材534・534に形成された突起535・535が回動自在に係合する。
【0185】
これにより、図36の(a)〜(c)、図37の(a)〜(c)に示すように、第2ハンドルベース部531は、案内片533・533の先端部に形成された回動穴533a・533aを回動中心として、球面部532に沿って上下方向に回動自在となる。
【0186】
そしてまた、上記構成では、ハンドル部分を上向き・下向きに変位させた位置でハンドル部分をロックするロック機構に代わる構成として、ハンドル部分の回動に適度な負荷を持たせ、第2ハンドルベース部53に形成された上側及び下側の係止部531b・531bが、第1ハンドルベース部530の前面に突き当たる位置において、遊技者に負担を掛けることなくハンドル部分が停止する構成としている。負荷は、ハンドル部分が自重にて回動しないことはもちろんのこと、下方向に向く遊技者の手の重みで回動することなく、かつ、適度な操作性が得られるように調整されている。
【0187】
本発明は上述した各実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能であり、異なる実施形態にそれぞれ開示された技術的手段を適宜組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
【0188】
図39に、前記した実施の形態1〜5を適宜組み合わせることで採用できるハンドルセンサモジュール、およびそれを搭載する発射制御装置の組合せ例を記載する。
【符号の説明】
【0189】
1 遊技機(弾球式遊技機)
2 遊技盤
4,4C,4D,4E 発射ハンドル装置
9 遊技機本体
10,10A〜10D 発射制御装置
11,11C,11D 角度検出部
12 タッチセンサ(タッチ検出部)
13 ストップセンサ (ストップ操作検出部)
14,14A〜14D ハンドルセンサモジュール
15 加速度センサ
19,19A,19C,19D 演算出力部
20,20A,20C 発射制御基板
30 発射装置
31 発射駆動部
32 球送り駆動部
40 主基板
51 ハンドル回転体(回転体)
55 発射停止レバー(ストップレバー)
55a 操作片
55b センサ作用部
57 復帰バネ
59,59A 変位機構部
530 第1ハンドルベース部
531 第2ハンドルベース部
531a 筒状体
531b 係止部
532 球面部
532a 案内溝
533 案内片
533a 回動穴
534 案内部材
535 突起
θ 回転角
【特許請求の範囲】
【請求項1】
回動操作される回転体を備えた発射操作装置が搭載される弾球式遊技機の操作検出器において、
上記回転体の回転角を検出する角度検出部を備え、
該角度検出部が、
少なくとも2軸を有すると共に該2軸が上記回転体の回転軸に直交するように配置された加速度センサと、
上記加速度センサの上記2軸を用いて上記回転体の回転角を算出する演算部とを備えることを特徴とする弾球式遊技機の操作検出器。
【請求項2】
上記角度検出部が、
上記演算部にて算出された回転角に応じた出力を生成する出力生成部をさらに備えることを特徴とする請求項1に記載の弾球式遊技機の操作検出器。
【請求項3】
さらに、遊技者が遊技球の発射を強制的に停止させるために操作するストップレバーの操作状態を検出するストップ操作検出部を備え、
上記角度検出部と上記ストップ操作検出部とが一体化されていることを特徴とする請求項1又は2に記載の弾球式遊技機の操作検出器。
【請求項4】
さらに、遊技者が遊技球の発射を強制的に停止させるために操作するストップレバーの操作状態を検出するストップ操作検出部を備え、
上記角度検出部と上記ストップ操作検出部とが一体化され、
かつ、上記出力生成部が、回転角に応じた出力にストップ操作の検出結果を統合して出力することを特徴とする請求項2に記載の弾球式遊技機の操作検出器。
【請求項5】
さらに、上記回転体に遊技者が触れていることを検出するタッチ検出部を備え、
上記角度検出部と上記タッチ検出部とが一体化されていることを特徴とする請求項1〜4の何れか1項に記載の弾球式遊技機の操作検出器。
【請求項6】
さらに、上記回転体に遊技者が触れていることを検出するタッチ検出部を備え、
上記角度検出部と上記タッチ検出部とが一体化され、
上記出力生成部が、回転角に応じた出力に上記タッチ検出部の検出結果を統合して出力することを特徴とする請求項2に記載の弾球式遊技機の操作検出器。
【請求項7】
上記加速度センサは3軸を有すると共に3軸目が上記回転軸に平行に配置されており、
上記演算部が、上記回転軸に平行に配置された上記加速度センサの3軸目の傾斜を検出することを特徴とする請求項1〜6の何れか1項に記載の弾球式遊技機の操作検出器。
【請求項8】
上記加速度センサは3軸を有すると共に3軸目が上記回転軸に平行に配置されており、
上記演算部が、上記回転軸に平行に配置された上記加速度センサの3軸目の傾斜を検出し、
上記演算部にて検出された3軸目の傾斜に基づいて、上記出力生成部が生成する出力を無効にするストップ操作の有無を検出することを特徴とする請求項2に記載の弾球式遊技機の操作検出器。
【請求項9】
上記加速度センサは3軸を有すると共に3軸目が上記回転軸に平行に配置されており、
上記演算部が、上記回転軸に平行に配置された上記加速度センサの3軸目の傾斜を検出し、
上記演算部にて検出された3軸目の傾斜に基づいて、上記出力生成部が生成する出力のレベルを可変することを特徴とする請求項2に記載の弾球式遊技機の操作検出器。
【請求項10】
上記加速度センサは3軸を有すると共に3軸目が上記回転軸に平行に配置されており、
上記演算部が、上記回転軸に平行に配置された上記加速度センサの3軸目にその軸方向にかかる加速度を検出し、
上記演算部にて検出された3軸目の加速度に基づいて、当該操作検出器が搭載される弾球式遊技機に加わる衝撃の有無を検出することを特徴とする請求項1〜6の何れか1項に記載の弾球式遊技機の操作検出器。
【請求項11】
上記演算部が、上記回転軸に平行に配置された上記加速度センサの3軸目にその軸方向にかかる加速度をさらに検出し、
上記演算部にて検出された3軸目の加速度に基づいて、当該操作検出器が搭載される弾球式遊技機に加わる衝撃の有無を検出することを特徴とする請求項7〜9の何れか1項に記載の弾球式遊技機の操作検出器。
【請求項1】
回動操作される回転体を備えた発射操作装置が搭載される弾球式遊技機の操作検出器において、
上記回転体の回転角を検出する角度検出部を備え、
該角度検出部が、
少なくとも2軸を有すると共に該2軸が上記回転体の回転軸に直交するように配置された加速度センサと、
上記加速度センサの上記2軸を用いて上記回転体の回転角を算出する演算部とを備えることを特徴とする弾球式遊技機の操作検出器。
【請求項2】
上記角度検出部が、
上記演算部にて算出された回転角に応じた出力を生成する出力生成部をさらに備えることを特徴とする請求項1に記載の弾球式遊技機の操作検出器。
【請求項3】
さらに、遊技者が遊技球の発射を強制的に停止させるために操作するストップレバーの操作状態を検出するストップ操作検出部を備え、
上記角度検出部と上記ストップ操作検出部とが一体化されていることを特徴とする請求項1又は2に記載の弾球式遊技機の操作検出器。
【請求項4】
さらに、遊技者が遊技球の発射を強制的に停止させるために操作するストップレバーの操作状態を検出するストップ操作検出部を備え、
上記角度検出部と上記ストップ操作検出部とが一体化され、
かつ、上記出力生成部が、回転角に応じた出力にストップ操作の検出結果を統合して出力することを特徴とする請求項2に記載の弾球式遊技機の操作検出器。
【請求項5】
さらに、上記回転体に遊技者が触れていることを検出するタッチ検出部を備え、
上記角度検出部と上記タッチ検出部とが一体化されていることを特徴とする請求項1〜4の何れか1項に記載の弾球式遊技機の操作検出器。
【請求項6】
さらに、上記回転体に遊技者が触れていることを検出するタッチ検出部を備え、
上記角度検出部と上記タッチ検出部とが一体化され、
上記出力生成部が、回転角に応じた出力に上記タッチ検出部の検出結果を統合して出力することを特徴とする請求項2に記載の弾球式遊技機の操作検出器。
【請求項7】
上記加速度センサは3軸を有すると共に3軸目が上記回転軸に平行に配置されており、
上記演算部が、上記回転軸に平行に配置された上記加速度センサの3軸目の傾斜を検出することを特徴とする請求項1〜6の何れか1項に記載の弾球式遊技機の操作検出器。
【請求項8】
上記加速度センサは3軸を有すると共に3軸目が上記回転軸に平行に配置されており、
上記演算部が、上記回転軸に平行に配置された上記加速度センサの3軸目の傾斜を検出し、
上記演算部にて検出された3軸目の傾斜に基づいて、上記出力生成部が生成する出力を無効にするストップ操作の有無を検出することを特徴とする請求項2に記載の弾球式遊技機の操作検出器。
【請求項9】
上記加速度センサは3軸を有すると共に3軸目が上記回転軸に平行に配置されており、
上記演算部が、上記回転軸に平行に配置された上記加速度センサの3軸目の傾斜を検出し、
上記演算部にて検出された3軸目の傾斜に基づいて、上記出力生成部が生成する出力のレベルを可変することを特徴とする請求項2に記載の弾球式遊技機の操作検出器。
【請求項10】
上記加速度センサは3軸を有すると共に3軸目が上記回転軸に平行に配置されており、
上記演算部が、上記回転軸に平行に配置された上記加速度センサの3軸目にその軸方向にかかる加速度を検出し、
上記演算部にて検出された3軸目の加速度に基づいて、当該操作検出器が搭載される弾球式遊技機に加わる衝撃の有無を検出することを特徴とする請求項1〜6の何れか1項に記載の弾球式遊技機の操作検出器。
【請求項11】
上記演算部が、上記回転軸に平行に配置された上記加速度センサの3軸目にその軸方向にかかる加速度をさらに検出し、
上記演算部にて検出された3軸目の加速度に基づいて、当該操作検出器が搭載される弾球式遊技機に加わる衝撃の有無を検出することを特徴とする請求項7〜9の何れか1項に記載の弾球式遊技機の操作検出器。
【図1】

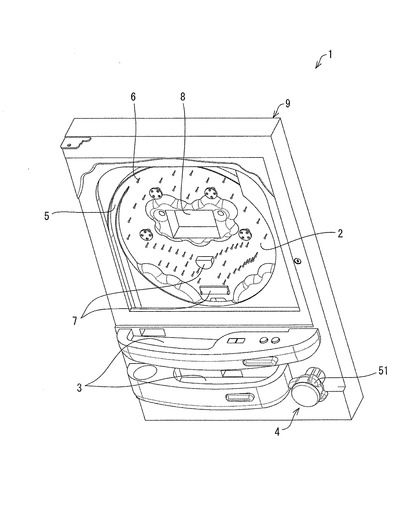
【図2】
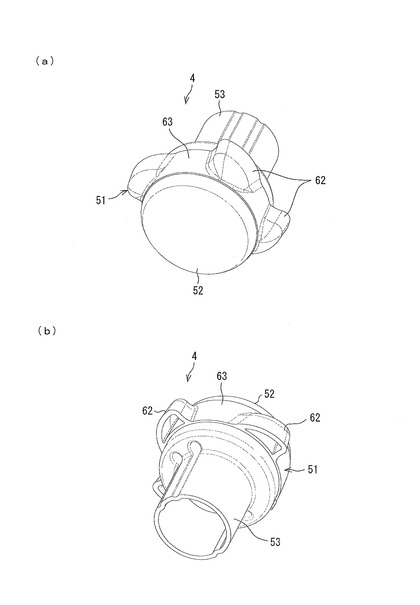
【図3】
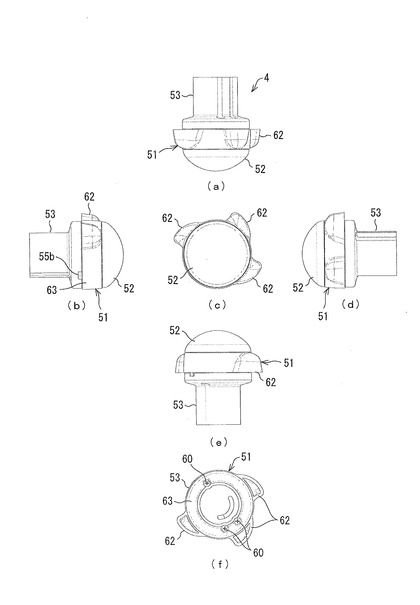
【図4】
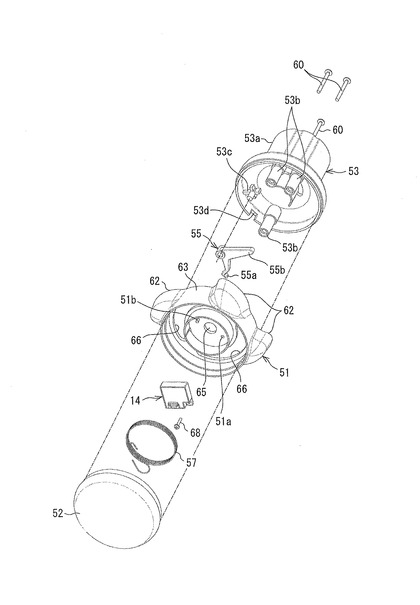
【図5】
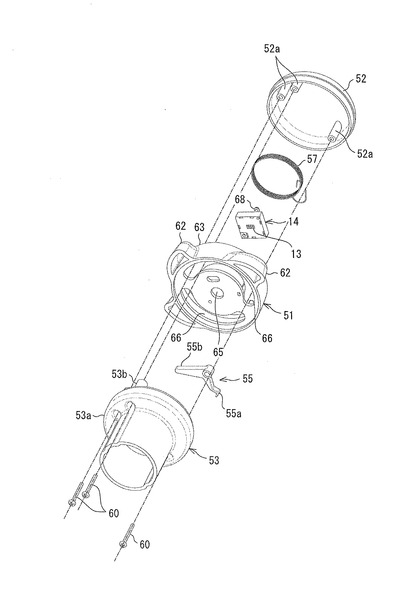
【図6】
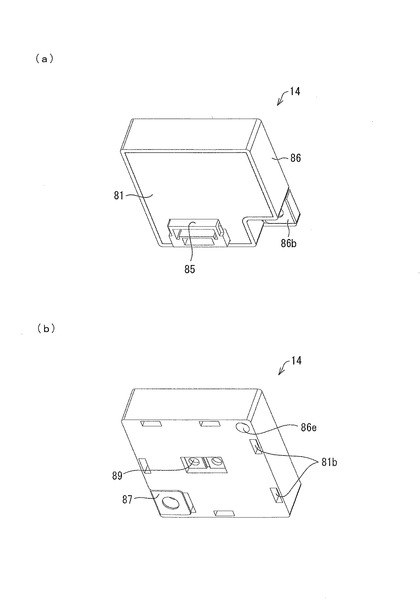
【図7】
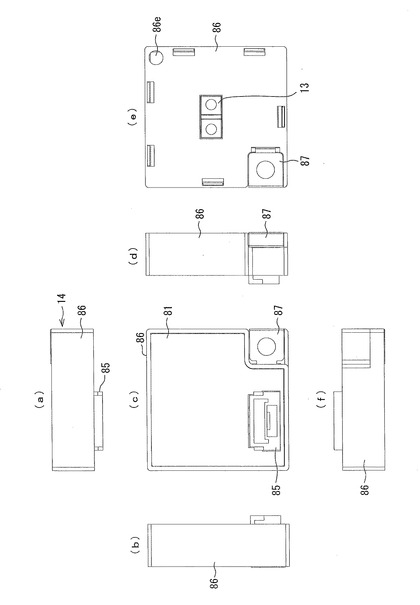
【図8】
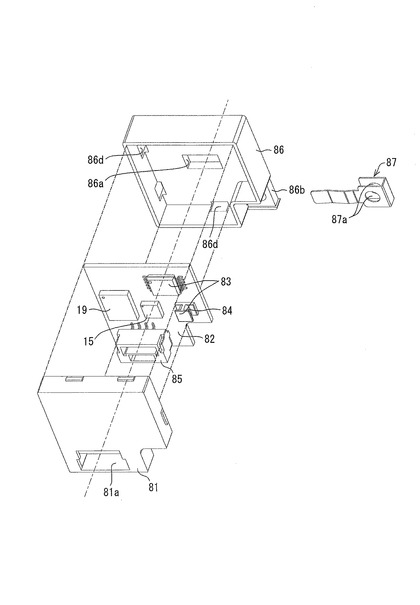
【図9】
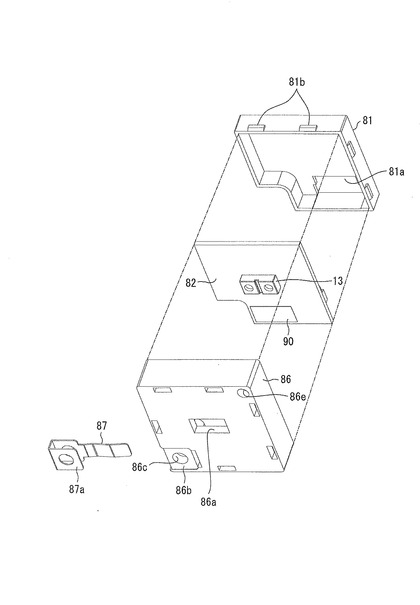
【図10】
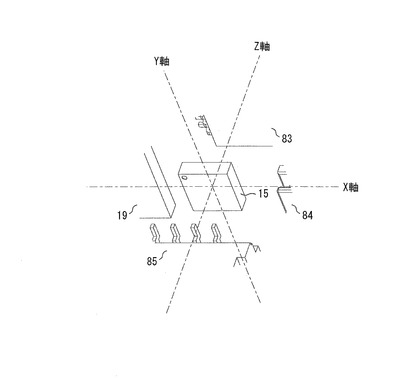
【図11】
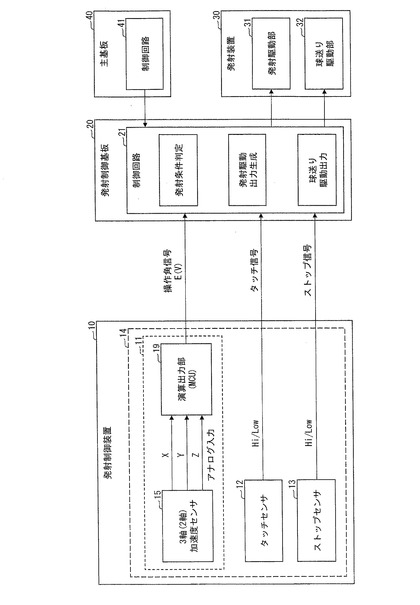
【図12】
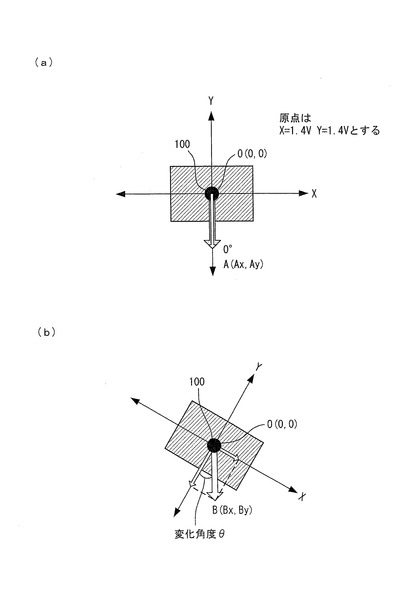
【図13】
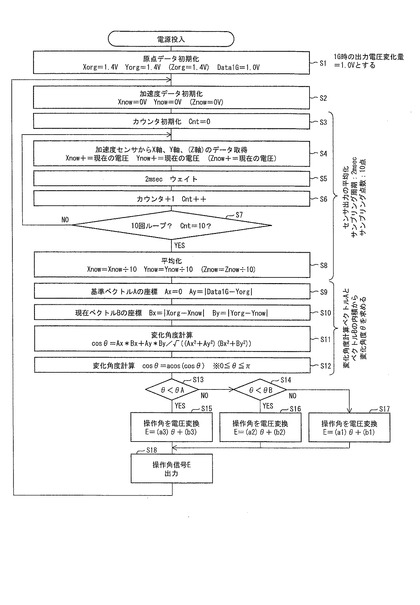
【図14】
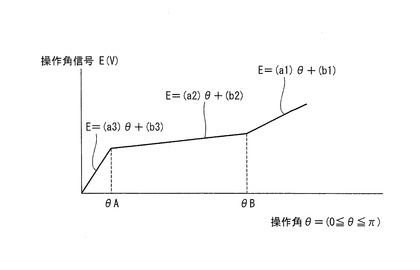
【図15】
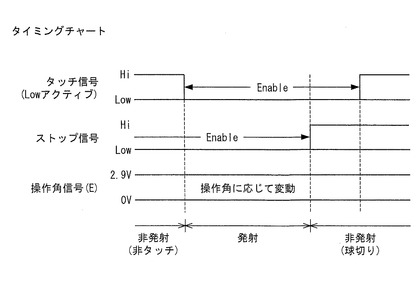
【図16】
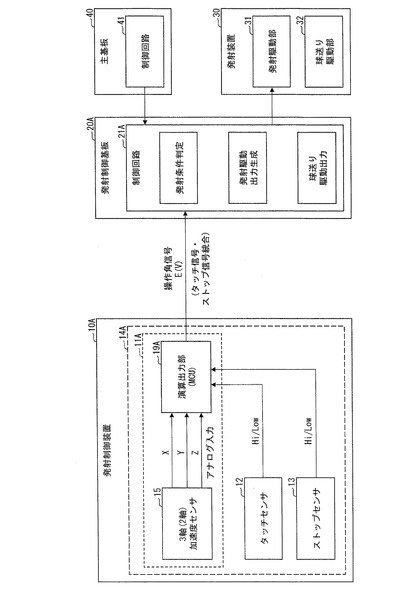
【図17】
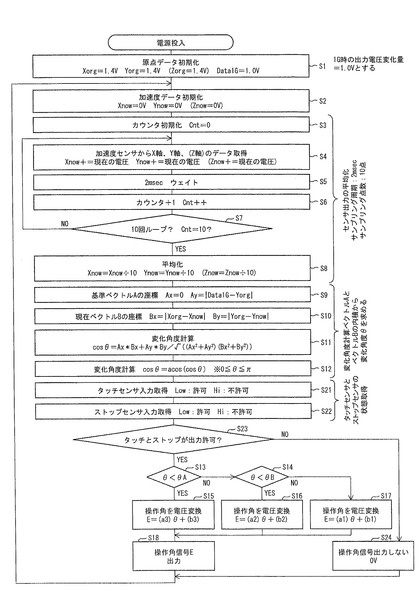
【図18】
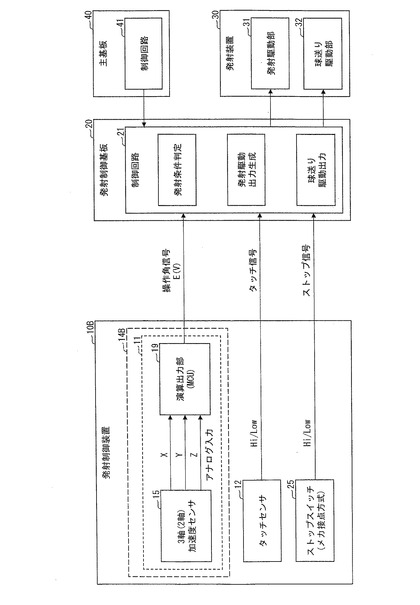
【図19】
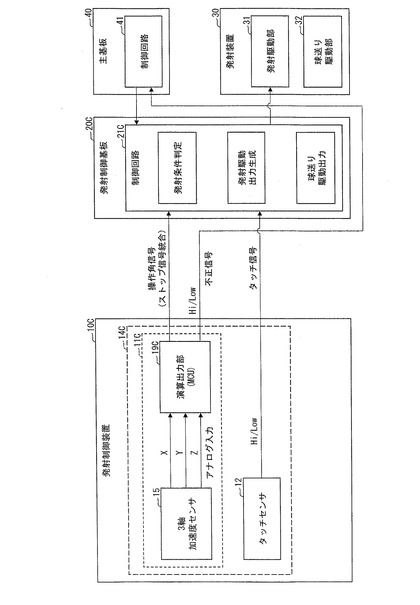
【図20】
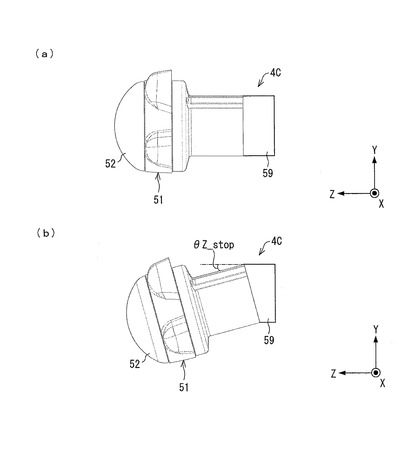
【図21】
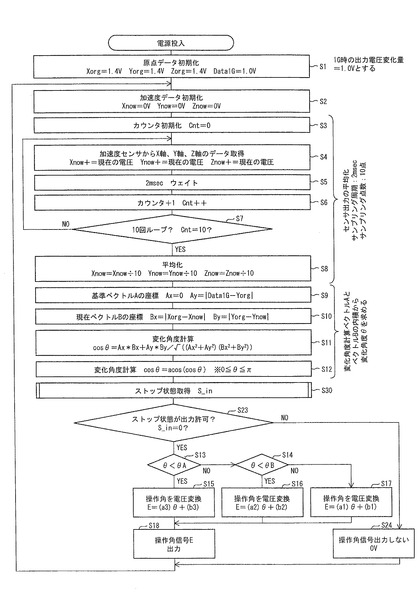
【図22】
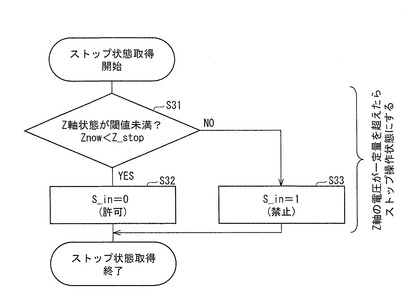
【図23】
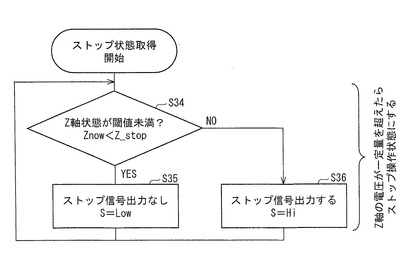
【図24】
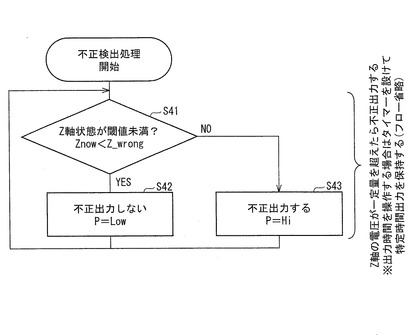
【図25】
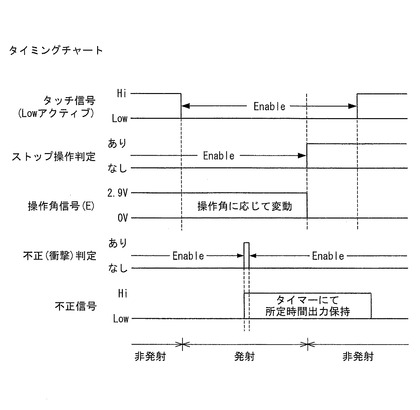
【図26】
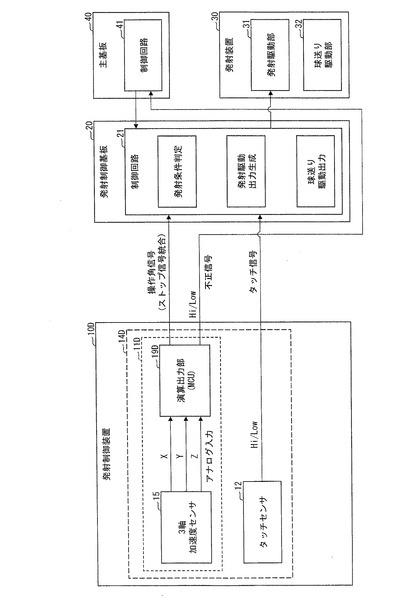
【図27】
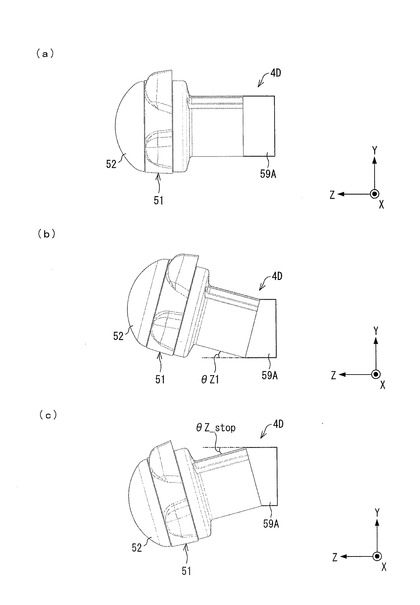
【図28】
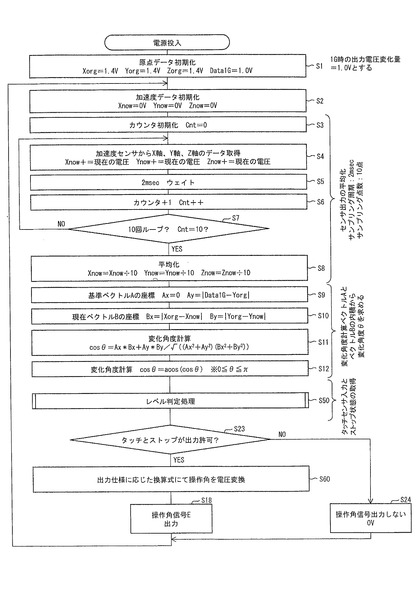
【図29】
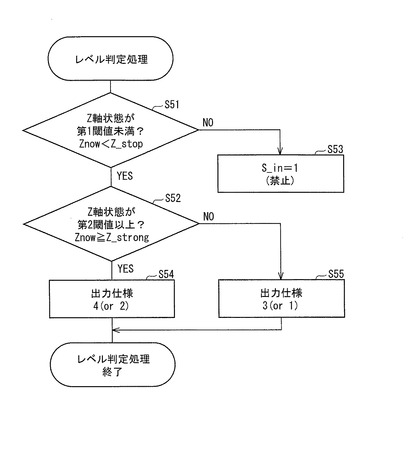
【図30】
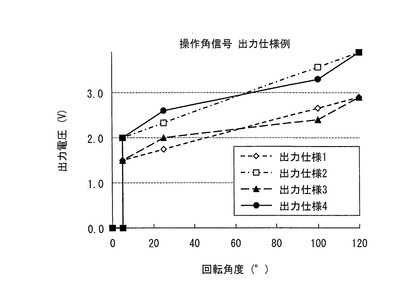
【図31】
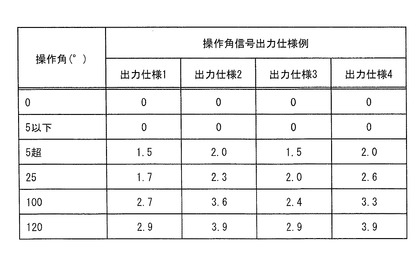
【図32】
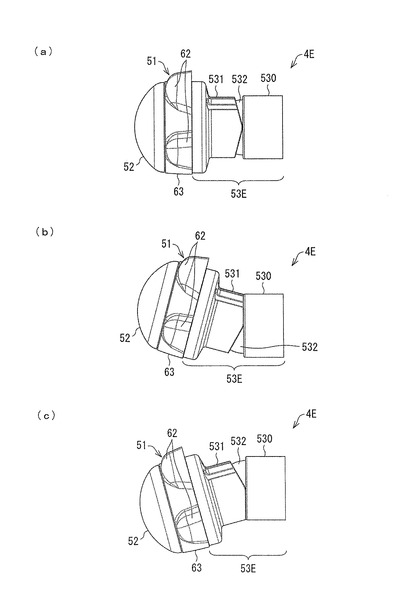
【図33】
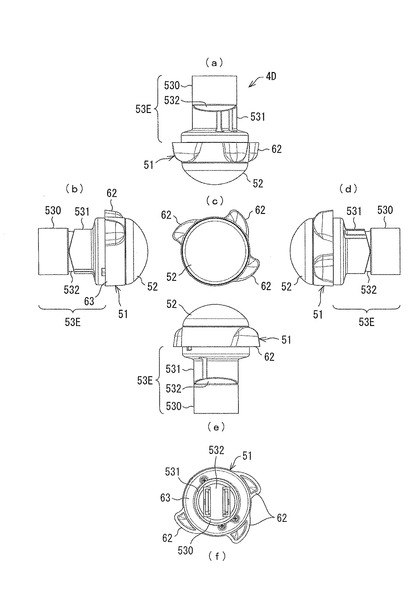
【図34】
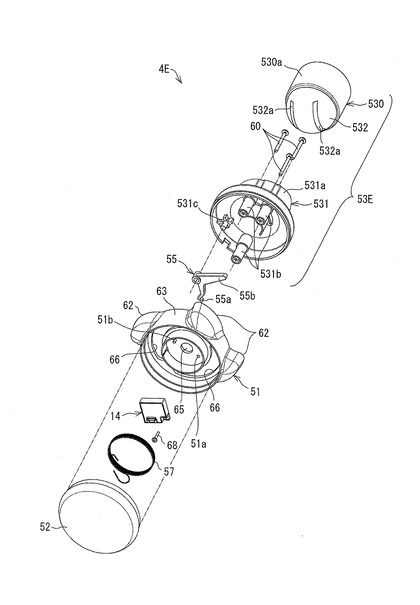
【図35】

【図36】
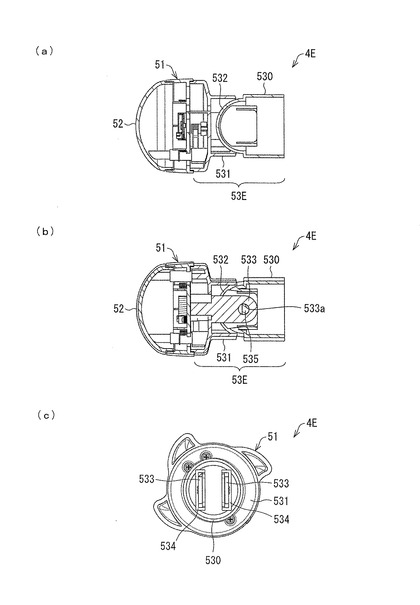
【図37】
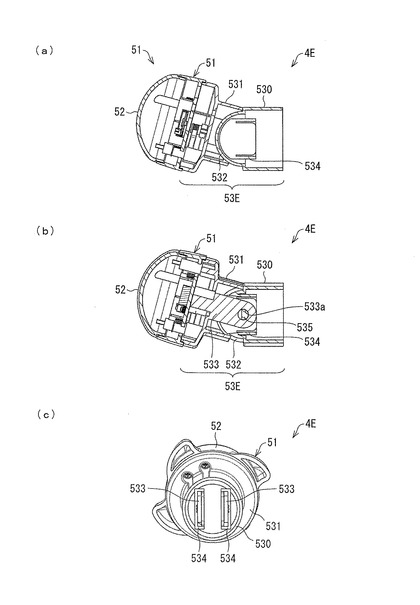
【図38】
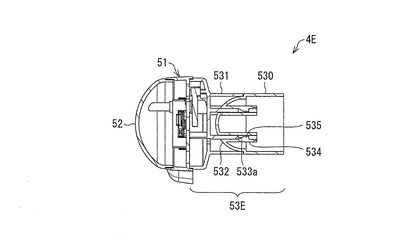
【図39】
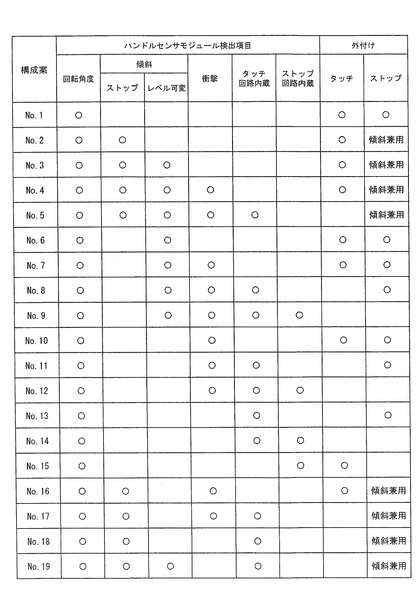
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【公開番号】特開2013−22324(P2013−22324A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−161402(P2011−161402)
【出願日】平成23年7月22日(2011.7.22)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月22日(2011.7.22)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]