
弾着観測装置
【課題】 従来の弾着観測装置は、追尾目標に対するビームの受信信号から水柱を検出し、弾着位置として観測していたが、弾丸が目標の近くに弾着した場合や波が荒れている場合、水柱が目標の陰に隠れてしまう場合等、水柱の検出が困難な状況では弾着位置を観測できず、追尾目標と弾着位置との誤差を出力できないことが課題であった。
【解決手段】 弾丸に対しビームを照射した受信信号から検出される弾丸の観測値をもとに弾丸の弾道を算出し、その高度が0となるときを弾着位置として算出するとともに、弾丸が水面に着弾したときに発生する水柱から弾着位置を算出する。
【解決手段】 弾丸に対しビームを照射した受信信号から検出される弾丸の観測値をもとに弾丸の弾道を算出し、その高度が0となるときを弾着位置として算出するとともに、弾丸が水面に着弾したときに発生する水柱から弾着位置を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数のビームを同時に照射可能なレーダ装置を有する射撃指揮装置において、砲の射撃による弾着位置を観測する弾着観測装置に関する。
【背景技術】
【0002】
従来の射撃指揮装置は、海面上の目標に対してビームを照射し、受信した反射波より、目標の観測位置から目標位置、速度を算出する。射撃指揮装置は、算出した目標位置、速度をもとに砲指向データを算出し、砲より目標に対して発砲する。発砲された弾丸は追尾目標近傍の水面に着弾し、水柱を発生させる。このときレーダ装置より水柱位置即ち弾着位置と追尾目標位置との誤差を観測することで射撃の有効性を評価する。弾着観測装置は、弾丸の着弾位置と追尾目標位置との誤差を観測する(例えば、特許文献1、2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−123241号公報
【0004】
【特許文献2】特開2000−97596号公報(2貢、第5図、第6図)
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の弾着観測装置は、以下のような問題があった。
まず、目標前後の特定の距離範囲で水柱の検出処理を行っているため、弾丸が目標の極めて近くの海面上に弾着した場合、目標と水柱の識別が付かず、水柱の検出が困難になるという問題があった。また、弾丸が目標に命中して水柱が発生しない場合は、水柱の検出は不可能であった。
【0006】
また、目標前後の海面が波で荒れているときは、誤って高波を水柱として検出してしまう可能性があるため、正確な弾着観測が困難になるという問題があった。
【0007】
また、弾丸が海面に着弾して発生する水柱に対して、追尾目標が大きすぎる場合、水柱が追尾目標の影に隠れてしまい、水柱の信号の検出が困難になるという問題があった。
【0008】
また、弾丸が海面に着弾して発生する水柱に対して、追尾目標が小さすぎる場合、追尾目標が水柱の影に隠れてしまい、追尾目標の信号の検出が困難になるという問題があった。
【0009】
本発明による弾着観測装置はかかる課題を解決するためになされたものであり、弾着による水柱の検出が困難な場合であっても、弾着観測を可能ならしめることを目的としている。
【課題を解決するための手段】
【0010】
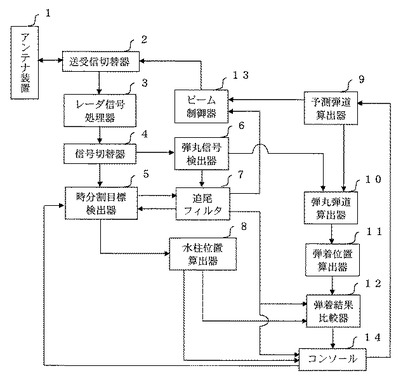
本発明による弾着観測装置は、追尾目標もしくは弾丸に対してビームを照射するようにビームの指向方向を定めるビーム制御器と、上記ビーム制御器により定められたビームの指向方向で電波の送受信を行うアンテナ装置と、上記アンテナ装置との間で送信信号もしくは受信信号を授受する送受信切替器と、上記送受信切替器の受信信号を検波するレーダ信号処理器と、上記レーダ信号処理器の出力信号について、追尾目標を指向したビームから検波した出力信号と、弾丸を指向したビームから検波した出力信号とを、切り替えて出力する信号切替器と、上記レーダ信号処理器からの追尾目標に対応した出力信号に基づいて、追尾目標と当該追尾目標周辺の水面から発生する水柱の観測値を時分割で出力する時分割目標検出器と、上記レーダ信号処理器からの弾丸に対応した出力信号に基づいて弾丸の観測値を算出する弾丸信号検出器と、上記追尾目標及び弾丸に対する観測値をもとに追尾予測位置を算出する追尾フィルタと、上記時分割目標検出器からの水柱の観測値に基づいて弾丸の弾着位置を算出する水柱位置算出器と、弾丸の予測弾道を算出する予測弾道算出器と、上記弾丸の観測値から上記予測弾道算出器により算出された予測弾道を修正する修正予測弾道を算出する弾丸弾道算出器と、上記弾丸弾道算出器の算出した修正予測弾道から高度0となる弾着位置を算出する弾着位置算出器と、上記追尾フィルタから得られた追尾目標予測位置と、上記水柱位置算出器及び上記弾着位置算出器から得られたそれぞれの弾着位置との誤差を算出する弾着結果比較器と、上記追尾フィルタから得られた追尾目標予測位置と、上記水柱位置算出器及び上記弾着位置算出器から得られたそれぞれの弾着位置と、上記弾着結果比較器から得られた追尾目標予測位置と弾着位置との誤差を表示するコンソールと、を備えたものである。
【発明の効果】
【0011】
本発明によれば、弾着による水柱の検出が困難な場合であっても、弾丸の観測により弾着位置を得ることができるので、より確実な弾着位置の観測が可能となる。
【図面の簡単な説明】
【0012】
【図1】実施の形態1による弾着観測装置の構成を示すブロック図である。
【図2】実施の形態1による追尾目標及び水柱の受信信号と時分割目標検出器の制御動作との関係を例示する概念図である。
【図3】実施の形態1による弾丸の受信信号を示す概念図である。
【図4】実施の形態1による予測弾道のスケーリング処理を示す概念図である。
【図5】実施の形態2による弾着観測装置の構成を示すブロック図である。
【図6】実施の形態3による弾着観測装置の構成を示すブロック図である。
【図7】実施の形態4による弾着観測装置の構成を示すブロック図である。
【発明を実施するための形態】
【0013】
実施の形態1.
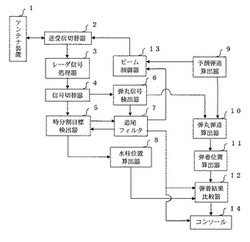
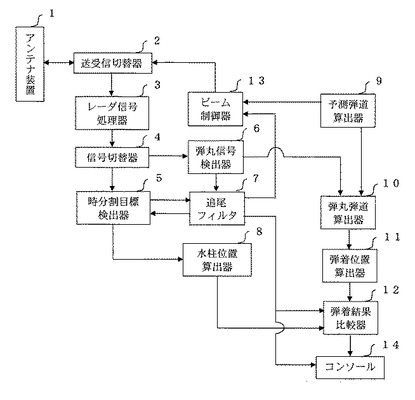
図1は、本発明に係る実施の形態1による弾着観測装置の構成を示すブロック図である。図において、実施の形態1の弾着観測装置は、アンテナ装置1と、送受信切替器2と、レーダ信号処理器3と、信号切替器4と、時分割目標検出器5と、弾丸信号検出器6と、追尾フィルタ7と、水柱位置算出器8と、予測弾道算出器9と、弾丸弾道算出器10と、弾着位置算出器11と、弾着結果比較器12と、ビーム制御器13と、コンソール14を備えて構成される。
【0014】
次に、実施の形態1の弾着観測装置における各構成の動作について説明する。実施の形態1の弾着観測装置は、操作員からの指示又は自動制御により、弾着時の水柱を観測することによる弾着位置の算出処理と、弾丸を追尾観測することによる弾着位置の算出処理とを切替えるように構成されている。
まず、弾着時の水柱を観測することによる弾着位置の算出処理の動作から説明する。砲(図示せず)から弾丸が発砲されると、弾着観測装置は発砲された弾丸が追尾目標近傍の海面に着弾し、水柱を発生した際の水柱の位置を観測することにより、弾着位置を算出する。
【0015】
ビーム制御器13は、ビーム指向方向を制御する。ビーム制御器13は、水柱を観測することによる弾着位置の算出処理時に、追尾フィルタ7により前サンプリング時刻に算出されている目標予測位置に対してビームを照射するようビーム指向位置を定め、送受信切替器2に出力する。送受信切替器2は、ビーム制御器13により定められたビーム指向位置に対応する送信信号を、アンテナ装置1に出力する。アンテナ装置1は、ビーム指向方向を可変に制御可能である。アンテナ装置1は、ビーム制御器13により定められたビーム指向位置に、追尾目標に対してパルス変調されたビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は、受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は、受信信号のパルスを検波し、検波により得られたレーダ受信信号を信号切替器4に出力する。信号切替器4は信号の出力先を切替え可能に構成されている。信号切替器4は、水柱を観測することによる弾着位置の算出処理時に、追尾目標に対し照射したビームにより得られたレーダ受信信号を、時分割目標検出器5に出力する。時分割目標検出器5は、追尾目標の距離及び前後特定距離の合計3ケ所においてレーダ受信信号を検出し、それぞれ3次元位置の観測を実施する。
【0016】
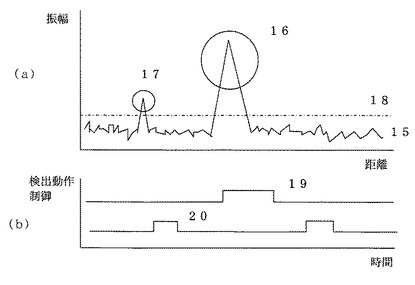
図2は、追尾目標及び水柱の受信信号と時分割目標検出器の制御動作との関係を例示する図であり、(a)は追尾目標及び水柱の受信信号を検波して得られたレーダ受信信号、(b)は時分割目標検出器5の検出制御タイミングを示す。図2(a)において、横軸方向は距離であり、縦軸は振幅である。レーダ信号処理器3が検波したレーダ受信信号は、距離に応じた振幅情報から構成され、当該距離はパルスをビーム送信してから目標で反射し受信されるまでの時間に比例する。また、符号15は追尾目標に照射したビームのレーダ受信信号を示し、追尾目標の前後での受信信号を示している。符号16は追尾目標の受信信号、符号17は水柱の受信信号、符号18はしきい値である。また、符号19,20は時分割目標検出器5に対する制御状態を示しており、符号19は追尾目標に対する検出動作を行うタイミング、符号20は水柱に対する検出動作を行うタイミングであり、追尾目標の前後2ケ所において当該タイミングに合せて検出動作が実施される。時分割目標検出器5は、後述する検出制御信号に基づいて、タイミング19、20を設定する。
【0017】
ここで、水柱は弾丸が追尾目標を外れ海面上に弾着した場合に発生し、この水柱の位置が弾着位置である。水柱の検出を行う2ケ所の位置は追尾目標の前後における固定された距離の値として設定する。このように時分割目標検出器5において追尾目標と水柱の検出位置を定めることで、時分割目標検出器5は信号切替器4から入力される受信信号をしきい値18と比較して、時分割で追尾目標の信号及び水柱の信号の観測を実施する。ここで、観測された追尾目標の予測距離に相当するタイミング19で検出された追尾目標の観測値は、時分割目標検出器5から追尾フィルタ7に出力される。追尾フィルタ7は、追尾目標の観測値から数1に従いサンプリング時刻における追尾目標予測位置、目標速度を算出する。
【0018】
【数1】

【0019】
ここでRot,Bot,Eotは、追尾フィルタ7に入力された追尾目標の観測値で、それぞれ距離、方位角、高角を示す。nはサンプリング回数、Rst(n),Bst(n),Est(n)はサンプリング回数nにおける平滑位置、DRst(n),DBst(n),DEst(n)はサンプリング回数nにおける平滑速度、Rpt(n+1),Bpt(n+1),Ept(n+1)はサンプリング回数n+1における予測位置である。また、Tはサンプリング間隔、α、βは平滑定数であり、固有値を設定する。追尾フィルタ7の算出した追尾目標予測位置はビーム制御器13に出力され、ビーム制御器13にて次サンプリング時刻におけるビーム照射の指示が実施される。また、追尾フィルタ7の算出した追尾目標予測位置は時分割検出器5に出力され、次サンプリング時刻における追尾目標の検出距離(検出タイミング)を定めるための検出制御信号として用いられる。
【0020】
また、砲から目標に対して発砲された弾丸は、空間を飛翔し、目標近傍に着弾し、目標に対して照射されたビーム内に水柱を発生させる。このとき、水柱は時分割検出器5において検出され、水柱位置の観測値は水柱位置算出器8に出力される。水柱位置算出器8は入力された水柱位置の観測値の一定時間内の平均値を弾着位置として、その距離Rb,砲角Eb,高角Bbを算出し、弾着結果比較器12に出力する。
【0021】
次に、弾丸を追尾観測することによる弾着位置の算出処理に切替えた後の動作について説明する。
発砲後、予測弾道算出器9は発砲角及び射表から、理論上で弾丸が飛翔する予測弾道を算出し、ビーム制御器13に出力する。ビーム制御器13は、弾丸を追尾観測することによる弾着位置の算出処理時に、予測弾道算出器9からの予測弾道に基づいてビームを照射するようにビーム指向位置を定め、送受信器2に出力する。送受信切替器2は、ビーム制御器13により指定されたビーム指向位置に対応する送信信号を、アンテナ装置1に出力する。アンテナ装置1は、ビーム制御器13により指定されたビーム指向位置に基づいて、弾丸に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は、受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は、弾丸を追尾観測することによる弾着位置の算出処理時に、受信信号を検波し、検波により得られたレーダ受信信号を信号切替器4に出力する。信号切替器4は、弾丸に対し照射したビームの受信信号を弾丸信号検出器6に出力する。弾丸信号検出器6は、弾丸の信号を検出し、3次元位置の観測を実施する。
【0022】
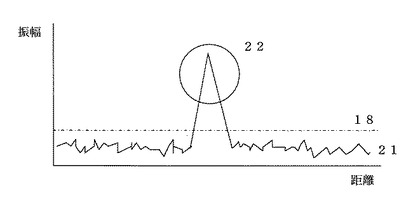
図3は、弾丸の受信信号を例示する図である。図3において、横軸方向は距離であり、レーダ信号ではビーム送信からの時間に比例する。また、縦軸は振幅である。符号21は弾丸に照射したビームの受信信号を示し、符号22は弾丸からの受信信号を示している。弾丸信号検出器6は、受信信号としきい値18を比較して弾丸からの受信信号22の観測を実施する。ここで、弾丸の予測距離に相当するタイミングで検出された受信信号22の観測値は、追尾フィルタ7に出力される。追尾フィルタ7は、数2に従いサンプリング時刻における弾丸予測位置、弾丸速度を算出する。
【0023】
【数2】
【0024】
ここでRob,Bob,Eobは、追尾フィルタ7に入力された弾丸の観測値でそれぞれ距離、方位角、高角を示す。nはサンプリング回数、Rsb(n),Bsb(n),Esb(n)はサンプリング回数nにおける平滑位置、DRsb(n),DBsb(n),DEsb(n)はサンプリング回数nにおける平滑速度、Rpb(n+1),Bpb(n+1),Epb(n+1)はサンプリング回数n+1における予測位置、Tはサンプリング間隔、α,βは平滑定数である。追尾フィルタ7の算出した弾丸予測位置はビーム制御器13に出力されて、次サンプリング時刻におけるビーム照射の指示が実施される。
【0025】
ビーム制御器13は、追尾フィルタ7の出力に基づき、前サンプリング時刻に算出された上記弾丸予測位置に向けてビームを照射するように、ビーム指向位置を定め、定めたビーム指向位置を送受信切替器2に出力する。送受信切替器2は、ビーム制御器13により指定された指向位置に対応する送信信号をアンテナ装置1に出力する。アンテナ装置1は、弾丸に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、信号切替器4に出力する。信号切替器4は、弾丸に対し照射したビームの受信信号を弾丸信号検出器6に出力する。弾丸信号検出器6は弾丸の信号を検出し、それぞれ3次元位置の観測を実施する。観測された弾丸の予測距離に相当するタイミングで検出された弾丸の観測値は、追尾フィルタ7及び弾丸弾道算出器10に出力される。
【0026】
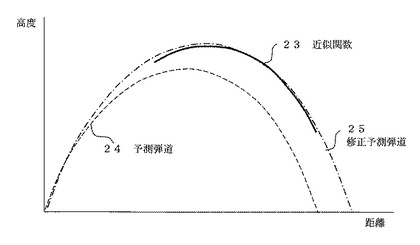
弾丸弾道算出器10は、入力された弾丸の観測値をもとに距離、方位角、高角それぞれに対し、数3に従い多項式近似による近似関数を算出する。ここでnはサンプリング回数、Rvb,Bvb,Evbは距離、方位角、高角の近似関数を示す。また、Rvb,Bvbは1次、Evbは2次の近似関数を算出する。a,b,c,d,e,f,gは近似係数であり、固有値を設定する。
【0027】
【数3】
【0028】
図4は、予測弾道のスケーリング処理の概念を示す図である。予測弾道算出器9は、算出した予測弾道を弾丸弾道算出器10に出力する。弾丸弾道算出器10は、数4に基づいて算出した図4の近似関数23と予測弾道24の軌道が重なるよう、予測弾道24について、高度方向及び距離方向を任意倍数で拡大、縮小し平行移動するスケーリング処理を行い、スケーリング処理を行った修正予測弾道25を弾着位置算出器11に出力する。
【0029】
弾着位置算出器11は、弾丸弾道算出器10より入力された修正予測弾道25をもとに高度が0となるときの弾着位置を算出する。ここで算出された弾着位置は弾着結果比較器12に出力される。
【0030】
弾着結果比較器12は、追尾フィルタ7から入力された追尾目標位置、水柱位置算出器8から入力された水柱観測による弾着位置、及び弾着位置算出器11から入力された弾丸観測による弾着位置をもとに、弾着観測結果の比較を実施する。弾着結果比較器12は、当該比較によって、水柱観測より算出した弾着位置、弾丸観測より算出した弾着位置と追尾目標位置との誤差を算出する。例えば、追尾目標位置と水柱観測による弾着位置との第1の位置誤差と、追尾目標位置と弾丸観測による弾着位置との第2の位置誤差と、水柱観測による弾着位置と弾丸観測による弾着位置との第3の位置誤差を算出する。弾着結果比較器12は、水柱観測より算出した弾着位置、弾丸観測より算出した弾着位置と追尾目標位置との算出した誤差をコンソール14へ出力する。また、弾着結果比較器12は、追尾フィルタ7から入力された追尾目標位置、速度と、水柱位置算出器8から入力された水柱観測による弾着位置と、弾着位置算出器11から入力された弾丸観測による弾着位置を、コンソール14へ出力する。
【0031】
コンソール14は、追尾目標の位置、速度を図示しない画面に常に表示し、また水柱観測及び弾丸観測から推定される弾着位置を図示しない画面に表示し、弾着結果比較器12で算出した追尾目標と弾着位置との誤差を図示しない画面に表示することで、操作員に対して砲射撃の精度を伝達することができる。
【0032】
以上説明した通り、実施の形態1による弾着観測装置は、複数のビームを同時に照射可能な射撃指揮装置において、目標からの受信信号により検出される目標観測値をもとに追尾処理を実施し、目標追尾位置を算出する。また、弾丸が目標近傍に着弾することによって発生する水柱位置を目標からの受信信号から検出し、水柱観測値をもとに弾着位置を算出する。また、弾丸からの受信信号より検出される弾丸観測値をもとに追尾処理を実施し、弾丸追尾位置を算出し、高度が0となるときの弾着位置を算出する。このように、2つの弾着観測方式を備えることで、水柱の検出が不可能な場合や、波が高い場合であっても、弾丸を観測することにより弾着位置を観測することができる。また、弾丸の検出が不可能な場合でも、水柱を観測することにより弾着位置を観測することができる。
【0033】
実施の形態2.
図5は本発明に係る実施の形態2による弾着観測装置の構成を示すブロック図である。図において、実施の形態2の弾着観測装置は、アンテナ装置1と、送受信切替器2と、レーダ信号処理器3と、信号切替器4と、時分割目標検出器5と、弾丸信号検出器6と、追尾フィルタ7と、水柱位置算出器8と、予測弾道算出器9と、弾丸弾道算出器10と、弾着位置算出器11と、弾着結果比較器12と、ビーム制御器13と、コンソール14を備えて構成される。
【0034】
次に、実施の形態2の弾着観測装置における各構成の動作について説明する。実施の形態2の弾着観測装置は、複数のビームを同時に照射可能であるため、運用状況に応じて、水柱観測による弾着観測方式と弾丸観測による弾着観測方式の両方を実施することができる。また、どちらか一方の方式を選択して実施することも可能である。
弾着観測方式の選択はコンソール14から行い、水柱観測による弾着観測のみを実施する場合は、予測弾道算出器9に対して、予測弾道の算出を実施しない制御をかける。また、弾丸観測による弾着観測のみを実施する場合は、時分割目標検出器5に対して、水柱の受信信号検出を実施しない制御をかける。
【0035】
まず、水柱のみを観測することにより弾着位置を観測する弾着観測装置の処理を説明する。ビーム制御器13は、追尾フィルタ7により前サンプリング時刻に算出されている目標予測位置に対してビームを照射するようビーム指向位置を定め、送受信切替器2に出力する。送受信切替器2は、ビーム制御器13により指定された指向位置に対応する送信信号を、アンテナ装置1に出力する。アンテナ装置1は、追尾目標に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。
【0036】
送受信切替器2は、受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は、受信信号の検波を行い、検波により得られたレーダ受信信号を信号切替器4に出力する。信号切替器4は、追尾目標に対し照射したビームより得られたレーダ受信信号を時分割目標検出器5に出力する。時分割目標検出器5は、追尾目標の距離及び前後特定距離の合計3ケ所においてレーダ受信信号を検出し、それぞれ3次元位置の観測を実施する。
【0037】
時分割目標検出器5にて観測された追尾目標の観測値は、追尾フィルタ7に出力される。追尾フィルタ7は、次サンプリング時刻における追尾目標予測位置、目標速度を算出する。ここで算出された追尾目標予測位置は、次サンプリング時刻におけるビーム照射のためにビーム制御器13に出力され、また目標位置、速度表示のためにコンソール14に出力され、目標と弾着位置誤差比較のために弾着結果比較器12に出力される。また、砲から目標に対して発砲された弾丸の弾着により発生する水柱は時分割検出器5において検出され、観測値は水柱位置算出器8に出力される。水柱位置算出器8は、入力された水柱位置の観測値の一定時間内の平均値を弾着位置として、コンソール14に出力する。コンソール14では、追尾目標の位置、速度を常に表示し、また水柱観測から推定される弾着位置を表示し、弾着結果比較器12で算出した追尾目標と弾着位置との誤差を表示し、操作員に対して砲射撃の精度を伝達する。
【0038】
次に、弾丸のみを追尾観測することにより弾着位置を算出する弾着観測装置の処理を説明する。
発砲後、予測弾道算出器9では発砲角及び射表から理論上で弾丸が飛翔する予測弾道を算出し、ビーム制御器13に出力する。ビーム制御器13は、予測弾道算出器9からの予測弾道に基づいてビームを照射するようにビーム指向位置を定め、送受信器2に出力する。送受信切替器2は、ビーム制御器13により指定されたビーム指向位置に対応する送信信号を、アンテナ装置1に出力する。アンテナ装置1は、ビーム制御器13により指定されたビーム指向位置に基づいて、弾丸目標に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2では受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、検波により得られたレーダ受信信号を信号切替器4に出力する。信号切替器4は、弾丸に対し照射したビームの受信信号を弾丸信号検出器6に出力する。
【0039】
弾丸信号検出器6は、弾丸の信号を検出し、それぞれ3次元位置の観測を実施する。上記において観測された弾丸の観測値は、追尾フィルタ7に出力され、次サンプリング時刻における弾丸予測位置、弾丸速度を算出する。ここで算出された弾丸の予測位置はビーム制御器13に出力され、次サンプリング時刻におけるビーム照射の指示が実施される。
【0040】
ビーム制御器13は、追尾フィルタ7により前サンプリング時刻に算出されている弾丸予測位置に対してビームを照射するようビーム指向位置を定め、定めたビーム指向位置を送受信切替器2に出力する。送受信切替器2は、ビーム制御器13により指定された指向位置に対応する送信信号をアンテナ装置1に出力する。アンテナ装置1は、弾丸に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、信号切替器4に出力する。信号切替器4は、弾丸に対し照射したビームの受信信号を弾丸信号検出器6に出力する。弾丸信号検出器6は弾丸の信号を検出し、それぞれ3次元位置の観測を実施する。観測された弾丸の観測値は、追尾フィルタ7及び弾丸弾道算出器10に出力される。
【0041】
弾丸弾道算出器10は、入力された弾丸の観測値をもとに距離、方位角、高角それぞれに対し多項式近似による近似関数を算出する。また、予測弾道算出器9は、算出した予測弾道を弾丸弾道算出器10に出力し、数4に基づいて算出した図4の近似関数23と予測弾道24の軌道が重なるよう、予測弾道24をスケーリング処理した修正予測弾道25を弾着位置算出器11に出力する。
【0042】
弾着位置算出器11は、弾丸弾道算出器10より入力された修正予測弾道25をもとに高度が0のときの弾着位置を算出する。ここで算出された弾着位置は弾着結果比較器12に出力される。
【0043】
弾着結果比較器12は、追尾フィルタ7から入力された追尾目標位置、弾着位置算出器11から入力された水柱観測により算出した弾着位置、弾丸観測により算出した弾着位置をもとに、弾着観測結果の比較を実施する。弾着結果比較器12は、当該比較によって、弾丸にビームを照射させ観測した弾着位置と追尾目標位置との誤差を算出し、コンソール14へ出力する。
【0044】
コンソール14は、追尾目標の位置、速度を図示しない画面に常に表示し、また弾丸観測から推定される弾着位置を図示しない画面に表示し、弾着結果比較器で算出した追尾目標と弾着位置との誤差を図示しない画面に表示することで、操作員に対して砲射撃の精度を伝達することができる。
【0045】
以上説明した通り、実施の形態2による弾着観測装置は、複数のビームを同時に照射可能な射撃指揮装置において、目標からの受信信号より検出される目標観測値をもとに追尾処理を実施し、目標追尾位置を算出する。また、弾丸が目標近傍に着弾することによって発生する水柱位置を目標からの受信信号から検出し、水柱観測値をもとに弾着位置を算出する。また、弾丸からの受信信号より検出される弾丸観測値をもとに追尾処理を実施し、弾丸追尾位置を算出し、高度が0となるときの弾着位置を算出する。このように、2つの弾着位置を算出する方式を備えることで、水柱の検出が不可能な場合や、波が高い場合であっても、弾丸を観測することにより弾着位置を観測することができる。また、弾丸の検出が不可能な場合でも、水柱を観測することにより弾着位置を観測することができる。さらに、水柱を観測する弾着観測方式と弾丸を追尾する弾着観測方式の2方式を切替可能とすることにより、運用状況に応じて、一方をあるいは両方の弾着観測方式を実施して、評価することが可能である。
【0046】
実施の形態3.
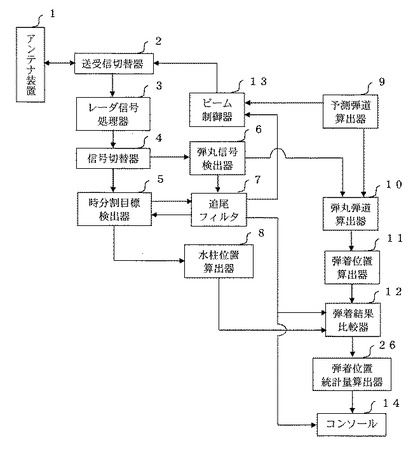
図6は本発明に係る実施の形態3による弾着観測装置の構成を示すブロック図である。図において、実施の形態3の弾着観測装置は、アンテナ装置1と、送受信切替器2と、レーダ信号処理器3と、信号切替器4と、時分割目標検出器5と、弾丸信号検出器6と、追尾フィルタ7と、水柱位置算出器8と、予測弾道算出器9と、弾丸弾道算出器10と、弾着位置算出器11と、弾着結果比較器12と、ビーム制御器13と、コンソール14と、弾着位置統計量算出器26を備えて構成される。
【0047】
まず、水柱を観測することにより弾着位置を算出する弾着観測装置の処理を説明する。ビーム制御器13は、追尾フィルタ7により前サンプリング時刻に算出されている目標予測位置に対してビームを照射するようビーム指向位置を定め、送受信切替器2に出力する。
【0048】
送受信切替器2は、ビーム制御器13により指定された指向位置に対応する送信信号をアンテナ装置1に出力する。アンテナ装置1は、追尾目標に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、検波により得られたレーダ受信信号を信号切替器4に出力する。信号切替器4は、追尾目標に対し照射したビームにより得られたレーダ受信信号を、時分割目標検出器5に出力する。時分割目標検出器5は、追尾目標の距離及び前後特定距離の合計3ケ所においてレーダ受信信号を検出し、それぞれ3次元位置の観測を実施する。
【0049】
時分割目標検出器5にて観測された追尾目標の観測値は、追尾フィルタ7に出力される。追尾フィルタ7は、次サンプリング時刻における追尾目標予測位置、目標速度を算出する。ここで、算出された追尾目標予測位置は、次サンプリング時刻におけるビーム照射のためにビーム制御器13に出力され、また目標位置、速度表示のためにコンソール14に出力され、目標と弾着位置誤差比較のために弾着結果比較器12に出力される。また、砲から目標に対して発砲された弾丸の弾着により発生する水柱は、時分割検出器5において検出され、観測値は水柱位置算出器8に出力される。水柱位置算出器8は入力された水柱位置の観測値の一定時間内の平均値を弾着位置として、弾着結果比較器12に出力する。
【0050】
次に、弾丸を追尾観測することにより弾着位置を算出する弾着観測装置の処理を説明する。
発砲後、予測弾道算出器9では発砲角及び射表から理論上で弾丸が飛翔する予測弾道を算出し、ビーム制御器13に出力する。ビーム制御器13は、予測弾道算出器9からの予測弾道に基づいてビームを照射するようにビーム指向位置を定め、送受信器2に出力する。送受信切替器2は、ビーム制御器13により指定されたビーム指向位置に対応する送信信号を、アンテナ装置1に出力する。アンテナ装置1は、ビーム制御器13により指定されたビーム指向位置に基づいて、弾丸目標に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は、受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、検波により得られたレーダ受信信号を信号切替器4に出力する。信号切替器4は、弾丸に対し照射したビームの受信信号を弾丸信号検出器6に出力する。
【0051】
弾丸信号検出器6は、弾丸の信号を検出し、それぞれ3次元位置の観測を実施する。弾丸信号検出器6にて観測された弾丸の観測値は、追尾フィルタ7に出力される。追尾フィルタ7は、次サンプリング時刻における弾丸予測位置、弾丸速度を算出する。ここで算出された弾丸予測位置はビーム制御器13に出力され、次サンプリング時刻におけるビーム照射の指示が実施される。
【0052】
ビーム制御器13は、追尾フィルタ7により前サンプリング時刻に算出されている弾丸予測位置に対してビームを照射するようビーム指向位置を定め、定めたビーム指向位置を送受信切替器2に出力する。送受信切替器2は、ビーム制御器13により指定された指向位置に対応する送信信号をアンテナ装置1に出力する。アンテナ装置1は、弾丸に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、信号切替器4に出力する。信号切替器4は、弾丸に対し照射したビームの受信信号を弾丸信号検出器6に出力する。弾丸信号検出器6は弾丸の信号を検出し、それぞれ3次元位置の観測を実施する。観測された弾丸の観測値は、追尾フィルタ7及び弾丸弾道算出器10に出力される。
【0053】
弾丸弾道算出器10は、入力された弾丸の観測値をもとに距離、方位角、高角それぞれに対し多項式近似による近似関数を算出する。また、予測弾道算出器9で算出した予測弾道を弾丸弾道算出器10に出力し、数4に基づいて算出した図4の近似関数23と予測弾道24の軌道が重なるよう、予測弾道24をスケーリング処理した修正予測弾道25を弾着位置算出器11に出力する。
【0054】
弾着位置算出器11は、弾丸弾道算出器10から入力された修正予測弾道25をもとに高度が0のときの弾着位置を算出する。ここで算出された弾着位置は弾着結果比較器12に出力される。
【0055】
弾着結果比較器12は、追尾フィルタ7から入力された追尾目標位置、水柱位置算出器8及び弾着位置算出器11から入力されたそれぞれの弾着位置をもとに弾着観測結果の比較を実施する。弾着結果比較器12は、水柱観測により算出した弾着位置、弾丸観測により算出した弾着位置と追尾目標との誤差を算出し、弾着位置統計量算出器26へ出力する。
【0056】
弾着位置統計量算出器26は、数次回発砲した弾丸の弾着位置の統計的評価を実施する。ここでは、統計的評価として、水柱を観測し弾着位置を算出する方式、弾丸を観測し弾着位置を算出する方式の各方式での弾着位置の平均値及び/又は分散値を算出する。また、2方式で算出した全ての弾着位置の平均値及び/又は分散値を算出する。ここで算出された弾着位置統計量はコンソール14に出力される。
【0057】
コンソール14では、上記目標追尾の位置及び速度を常に表示し、また弾着位置統計量算出器26で算出した弾着位置の平均値及び分散値を表示し、操作員に対して砲射撃の精度を伝達する。
【0058】
以上説明した通り、実施の形態3による弾着観測装置は、複数のビームを同時に照射可能な射撃指揮装置において、目標からの受信信号より検出される目標観測値をもとに追尾処理を実施し、目標追尾位置を算出する。また、弾丸が目標近傍に着弾することによって発生する水柱位置を目標からの受信信号から検出し、水柱観測値をもとに弾着位置を算出する。また、弾丸からの受信信号より検出される弾丸観測値をもとに追尾処理を実施し、弾丸追尾位置を算出し、高度が0となるときの弾着位置を算出することを特徴とする。このように2つの弾着観測方式を備えることで、水柱の検出が不可能な場合や、波が高い場合であっても、弾丸を観測することにより弾着観測が可能である。また、弾丸の検出が不可能な場合でも水柱を観測することにより弾着観測が可能である。さらに、数回時に渡る射撃において2方式の弾着観測方式で観測した弾着位置の統計的評価を実施し、操作員に対し弾着観測精度を知らせることができる。
【0059】
実施の形態4.
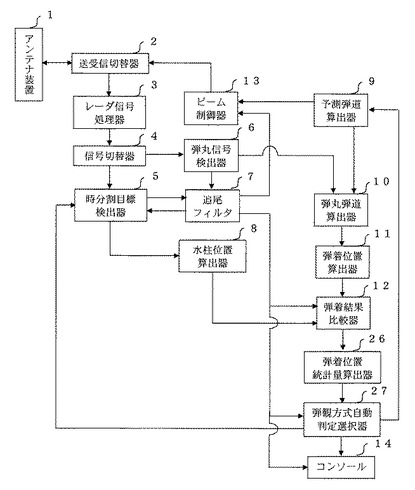
図7は本発明に係る実施の形態4による弾着観測装置の構成を示すブロック図である。図において、実施の形態4の弾着観測装置は、アンテナ装置1と、送受信切替器2と、レーダ信号処理器3と、信号切替器4と、時分割目標検出器5と、弾丸信号検出器6と、追尾フィルタ7と、水柱位置算出器8と、予測弾道算出器9と、弾丸弾道算出器10と、弾着位置算出器11と、弾着結果比較器12と、ビーム制御器13と、コンソール14と、弾着位置統計量算出器26と、弾観方式自動判定選択器27を備えて構成される。
【0060】
まず、水柱を観測することにより弾着位置を算出する弾着観測装置の処理を説明する。ビーム制御器13は、追尾フィルタ7により前サンプリング時刻に算出されている目標予測位置に対してビームを照射するようビーム指向位置を定め、送受信切替器2に出力する。
【0061】
送受信切替器2は、ビーム制御器13により指定された指向位置に対応する送信信号をアンテナ装置1に出力する。アンテナ装置1は、追尾目標に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、検波により得られたレーダ受信信号を信号切替器4に出力する。信号切替器4は、追尾目標に対し照射したビームにより得られたレーダ受信信号を、時分割目標検出器5に出力する。時分割目標検出器5は、追尾目標の距離及び前後特定距離の合計3ケ所においてレーダ受信信号を検出し、それぞれ3次元位置の観測を実施する。
【0062】
時分割目標検出器5にて観測された追尾目標の観測値は、追尾フィルタ7に出力される。追尾フィルタ7は、次のサンプリング時刻における追尾目標予測位置、目標速度を算出する。ここで、算出された追尾目標予測位置は、次サンプリング時刻におけるビーム照射のためにビーム制御器13に出力され、また目標位置、速度表示のためにコンソール14に出力され、目標と弾着位置誤差比較のために弾着結果比較器12に出力される。また、砲から目標に対して発砲された弾丸の弾着により発生する水柱は、時分割検出器5において検出され、観測値は水柱位置算出器8に出力される。水柱位置算出器8は入力された水柱位置の観測値の一定時間内の平均値を弾着位置として、弾着結果比較器12に出力する。
【0063】
次に、弾丸を追尾観測することにより弾着位置を算出する弾着観測装置の処理を説明する。
発砲後、予測弾道算出器9では発砲角及び射表から理論上で弾丸が飛翔する予測弾道を算出し、ビーム制御器13に出力する。ビーム制御器13は、予測弾道算出器9からの予測弾道に基づいてビームを照射するようにビーム指向位置を定め、送受信器2に出力する。送受信切替器2は、ビーム制御器13により指定されたビーム指向位置に対応する送信信号を、アンテナ装置1に出力する。アンテナ装置1は、ビーム制御器13により指定されたビーム指向位置に基づいて、弾丸目標に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は、受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、検波により得られたレーダ受信信号を信号切替器4に出力する。信号切替器4は、弾丸に対し照射したビームの受信信号を弾丸信号検出器6に出力する。
【0064】
弾丸信号検出器6は、弾丸の信号を検出し、それぞれ3次元位置の観測を実施する。弾丸信号検出器6にて観測された弾丸の観測値は、追尾フィルタ7に出力される。追尾フィルタ7は、次サンプリング時刻における弾丸予測位置、弾丸速度を算出する。ここで算出された弾丸予測位置はビーム制御器13に出力され、次サンプリング時刻におけるビーム照射の指示が実施される。
【0065】
ビーム制御器13は、追尾フィルタ7により前サンプリング時刻に算出されている弾丸予測位置に対してビームを照射するようビーム指向位置を定め、定めたビーム指向位置を送受信切替器2に出力する。送受信切替器2は、ビーム制御器13により指定された指向位置に対応する送信信号をアンテナ装置1に出力する。アンテナ装置1は、弾丸に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、信号切替器4に出力する。信号切替器4は、弾丸に対し照射したビームの受信信号を弾丸信号検出器6に出力する。弾丸信号検出器6は弾丸の信号を検出し、それぞれ3次元位置の観測を実施する。観測された弾丸の観測値は、追尾フィルタ7及び弾丸弾道算出器10に出力される。
【0066】
弾丸弾道算出器10は、入力された弾丸の観測値をもとに距離、方位角、高角それぞれに対し多項式近似による近似関数を算出する。また、予測弾道算出器9で算出した予測弾道を弾丸弾道算出器10に出力し、数4に基づいて算出した図4の近似関数23と予測弾道24の軌道が重なるよう、予測弾道24をスケーリング処理した修正予測弾道25を弾着位置算出器11に出力する。
【0067】
弾着位置算出器11は、弾丸弾道算出器10から入力された修正予測弾道25をもとに高度が0のときの弾着位置を算出する。ここで算出された弾着位置は弾着結果比較器12に出力される。
【0068】
弾着結果比較器12は、追尾フィルタ7から入力された追尾目標位置、水柱位置算出器8及び弾着位置算出器11から入力されたそれぞれの弾着位置をもとに弾着観測結果の比較を実施する。弾着結果比較器12は、水柱観測により算出した弾着位置、弾丸観測により算出した弾着位置と追尾目標との誤差を算出し、弾着位置統計量算出器26へ出力する。
【0069】
弾着位置統計量算出器26は、数次回発砲した弾丸の弾着位置の統計的評価を実施する。ここでは、統計的評価として、水柱を観測し弾着位置を算出する方式、弾丸を観測し弾着位置を算出する方式の各方式での弾着位置の平均値及び/又は分散値を算出する。また、2方式で算出した全ての弾着位置の平均値及び/又は分散値を算出する。ここで算出された弾着位置統計量は、弾観方式自動選択器27に出力される。
【0070】
弾観方式自動判定選択器27は、水柱観測による弾着観測方式と弾丸観測による弾着観測方式の平均値及び分散値を比較し、追尾目標位置との誤差が小さい方の弾着観測方式を選択し、選択した弾着観測方式をコンソール14の図示しない画面に明示的に表示する。また、その後に実施する射撃での弾着観測方式は、上記により選択された方式を実施する。
【0071】
また、弾観方式自動判定選択器27で判定された誤差が小さい弾着観測方式が水柱観測による方式であった場合は、予測弾道算出器9に対し、予測弾道の算出を実施しない制御をかけ、その後の弾着観測は水柱観測による方式が実施される。また、誤差が小さい弾着観測方式が弾丸観測による方式であった場合、時分割目標検出器5に対し、水柱の受信信号検出を実施しない制御をかけ、その後の弾着観測は弾丸観測による方式が実施される。
【0072】
以上説明した通り、実施の形態4による弾着観測装置は、複数のビームを同時に照射可能な射撃指揮装置において、目標からの受信信号より検出される目標観測値をもとに追尾処理を実施し、目標追尾位置を算出する。また、弾丸が目標近傍に着弾することによって発生する水柱位置を目標からの受信信号から検出し、水柱観測値をもとに弾着位置を算出する。また、弾丸からの受信信号より検出される弾丸観測値をもとに追尾処理を実施し、弾丸追尾位置を算出し、高度が0となるときの弾着位置を算出する。このように2つの弾着観測方式を備えることで、水柱の検出が不可能な場合でも、波が高い場合でも、弾丸を観測することにより弾着観測が可能である。また、弾丸の検出が不可能な場合でも水柱を観測することにより弾着観測が可能である。さらに、数回時に渡る射撃において2方式の弾着観測方式で観測した弾着位置の統計的評価を実施することで、その後の射撃は算出した統計的評価から追尾目標位置との弾着位置の誤差が小さい方の弾着観測方式を自動で選択し、実施することが可能である。
【符号の説明】
【0073】
1 アンテナ装置、2 送受信切替、3 レーダ信号処理器、4 信号切替器、5 時分割目標検出器、6 弾丸信号検出器、7 追尾フィルタ、8 水柱位置算出器、9 予測弾道算出器、10 弾丸弾道算出器、11 弾着位置算出器、12 弾着結果比較器、13ビーム制御器、14 コンソール、26 弾着位置統計量算出器、27 弾観方式自動判定選択器。
【技術分野】
【0001】
本発明は、複数のビームを同時に照射可能なレーダ装置を有する射撃指揮装置において、砲の射撃による弾着位置を観測する弾着観測装置に関する。
【背景技術】
【0002】
従来の射撃指揮装置は、海面上の目標に対してビームを照射し、受信した反射波より、目標の観測位置から目標位置、速度を算出する。射撃指揮装置は、算出した目標位置、速度をもとに砲指向データを算出し、砲より目標に対して発砲する。発砲された弾丸は追尾目標近傍の水面に着弾し、水柱を発生させる。このときレーダ装置より水柱位置即ち弾着位置と追尾目標位置との誤差を観測することで射撃の有効性を評価する。弾着観測装置は、弾丸の着弾位置と追尾目標位置との誤差を観測する(例えば、特許文献1、2参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−123241号公報
【0004】
【特許文献2】特開2000−97596号公報(2貢、第5図、第6図)
【発明の概要】
【発明が解決しようとする課題】
【0005】
従来の弾着観測装置は、以下のような問題があった。
まず、目標前後の特定の距離範囲で水柱の検出処理を行っているため、弾丸が目標の極めて近くの海面上に弾着した場合、目標と水柱の識別が付かず、水柱の検出が困難になるという問題があった。また、弾丸が目標に命中して水柱が発生しない場合は、水柱の検出は不可能であった。
【0006】
また、目標前後の海面が波で荒れているときは、誤って高波を水柱として検出してしまう可能性があるため、正確な弾着観測が困難になるという問題があった。
【0007】
また、弾丸が海面に着弾して発生する水柱に対して、追尾目標が大きすぎる場合、水柱が追尾目標の影に隠れてしまい、水柱の信号の検出が困難になるという問題があった。
【0008】
また、弾丸が海面に着弾して発生する水柱に対して、追尾目標が小さすぎる場合、追尾目標が水柱の影に隠れてしまい、追尾目標の信号の検出が困難になるという問題があった。
【0009】
本発明による弾着観測装置はかかる課題を解決するためになされたものであり、弾着による水柱の検出が困難な場合であっても、弾着観測を可能ならしめることを目的としている。
【課題を解決するための手段】
【0010】
本発明による弾着観測装置は、追尾目標もしくは弾丸に対してビームを照射するようにビームの指向方向を定めるビーム制御器と、上記ビーム制御器により定められたビームの指向方向で電波の送受信を行うアンテナ装置と、上記アンテナ装置との間で送信信号もしくは受信信号を授受する送受信切替器と、上記送受信切替器の受信信号を検波するレーダ信号処理器と、上記レーダ信号処理器の出力信号について、追尾目標を指向したビームから検波した出力信号と、弾丸を指向したビームから検波した出力信号とを、切り替えて出力する信号切替器と、上記レーダ信号処理器からの追尾目標に対応した出力信号に基づいて、追尾目標と当該追尾目標周辺の水面から発生する水柱の観測値を時分割で出力する時分割目標検出器と、上記レーダ信号処理器からの弾丸に対応した出力信号に基づいて弾丸の観測値を算出する弾丸信号検出器と、上記追尾目標及び弾丸に対する観測値をもとに追尾予測位置を算出する追尾フィルタと、上記時分割目標検出器からの水柱の観測値に基づいて弾丸の弾着位置を算出する水柱位置算出器と、弾丸の予測弾道を算出する予測弾道算出器と、上記弾丸の観測値から上記予測弾道算出器により算出された予測弾道を修正する修正予測弾道を算出する弾丸弾道算出器と、上記弾丸弾道算出器の算出した修正予測弾道から高度0となる弾着位置を算出する弾着位置算出器と、上記追尾フィルタから得られた追尾目標予測位置と、上記水柱位置算出器及び上記弾着位置算出器から得られたそれぞれの弾着位置との誤差を算出する弾着結果比較器と、上記追尾フィルタから得られた追尾目標予測位置と、上記水柱位置算出器及び上記弾着位置算出器から得られたそれぞれの弾着位置と、上記弾着結果比較器から得られた追尾目標予測位置と弾着位置との誤差を表示するコンソールと、を備えたものである。
【発明の効果】
【0011】
本発明によれば、弾着による水柱の検出が困難な場合であっても、弾丸の観測により弾着位置を得ることができるので、より確実な弾着位置の観測が可能となる。
【図面の簡単な説明】
【0012】
【図1】実施の形態1による弾着観測装置の構成を示すブロック図である。
【図2】実施の形態1による追尾目標及び水柱の受信信号と時分割目標検出器の制御動作との関係を例示する概念図である。
【図3】実施の形態1による弾丸の受信信号を示す概念図である。
【図4】実施の形態1による予測弾道のスケーリング処理を示す概念図である。
【図5】実施の形態2による弾着観測装置の構成を示すブロック図である。
【図6】実施の形態3による弾着観測装置の構成を示すブロック図である。
【図7】実施の形態4による弾着観測装置の構成を示すブロック図である。
【発明を実施するための形態】
【0013】
実施の形態1.
図1は、本発明に係る実施の形態1による弾着観測装置の構成を示すブロック図である。図において、実施の形態1の弾着観測装置は、アンテナ装置1と、送受信切替器2と、レーダ信号処理器3と、信号切替器4と、時分割目標検出器5と、弾丸信号検出器6と、追尾フィルタ7と、水柱位置算出器8と、予測弾道算出器9と、弾丸弾道算出器10と、弾着位置算出器11と、弾着結果比較器12と、ビーム制御器13と、コンソール14を備えて構成される。
【0014】
次に、実施の形態1の弾着観測装置における各構成の動作について説明する。実施の形態1の弾着観測装置は、操作員からの指示又は自動制御により、弾着時の水柱を観測することによる弾着位置の算出処理と、弾丸を追尾観測することによる弾着位置の算出処理とを切替えるように構成されている。
まず、弾着時の水柱を観測することによる弾着位置の算出処理の動作から説明する。砲(図示せず)から弾丸が発砲されると、弾着観測装置は発砲された弾丸が追尾目標近傍の海面に着弾し、水柱を発生した際の水柱の位置を観測することにより、弾着位置を算出する。
【0015】
ビーム制御器13は、ビーム指向方向を制御する。ビーム制御器13は、水柱を観測することによる弾着位置の算出処理時に、追尾フィルタ7により前サンプリング時刻に算出されている目標予測位置に対してビームを照射するようビーム指向位置を定め、送受信切替器2に出力する。送受信切替器2は、ビーム制御器13により定められたビーム指向位置に対応する送信信号を、アンテナ装置1に出力する。アンテナ装置1は、ビーム指向方向を可変に制御可能である。アンテナ装置1は、ビーム制御器13により定められたビーム指向位置に、追尾目標に対してパルス変調されたビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は、受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は、受信信号のパルスを検波し、検波により得られたレーダ受信信号を信号切替器4に出力する。信号切替器4は信号の出力先を切替え可能に構成されている。信号切替器4は、水柱を観測することによる弾着位置の算出処理時に、追尾目標に対し照射したビームにより得られたレーダ受信信号を、時分割目標検出器5に出力する。時分割目標検出器5は、追尾目標の距離及び前後特定距離の合計3ケ所においてレーダ受信信号を検出し、それぞれ3次元位置の観測を実施する。
【0016】
図2は、追尾目標及び水柱の受信信号と時分割目標検出器の制御動作との関係を例示する図であり、(a)は追尾目標及び水柱の受信信号を検波して得られたレーダ受信信号、(b)は時分割目標検出器5の検出制御タイミングを示す。図2(a)において、横軸方向は距離であり、縦軸は振幅である。レーダ信号処理器3が検波したレーダ受信信号は、距離に応じた振幅情報から構成され、当該距離はパルスをビーム送信してから目標で反射し受信されるまでの時間に比例する。また、符号15は追尾目標に照射したビームのレーダ受信信号を示し、追尾目標の前後での受信信号を示している。符号16は追尾目標の受信信号、符号17は水柱の受信信号、符号18はしきい値である。また、符号19,20は時分割目標検出器5に対する制御状態を示しており、符号19は追尾目標に対する検出動作を行うタイミング、符号20は水柱に対する検出動作を行うタイミングであり、追尾目標の前後2ケ所において当該タイミングに合せて検出動作が実施される。時分割目標検出器5は、後述する検出制御信号に基づいて、タイミング19、20を設定する。
【0017】
ここで、水柱は弾丸が追尾目標を外れ海面上に弾着した場合に発生し、この水柱の位置が弾着位置である。水柱の検出を行う2ケ所の位置は追尾目標の前後における固定された距離の値として設定する。このように時分割目標検出器5において追尾目標と水柱の検出位置を定めることで、時分割目標検出器5は信号切替器4から入力される受信信号をしきい値18と比較して、時分割で追尾目標の信号及び水柱の信号の観測を実施する。ここで、観測された追尾目標の予測距離に相当するタイミング19で検出された追尾目標の観測値は、時分割目標検出器5から追尾フィルタ7に出力される。追尾フィルタ7は、追尾目標の観測値から数1に従いサンプリング時刻における追尾目標予測位置、目標速度を算出する。
【0018】
【数1】
【0019】
ここでRot,Bot,Eotは、追尾フィルタ7に入力された追尾目標の観測値で、それぞれ距離、方位角、高角を示す。nはサンプリング回数、Rst(n),Bst(n),Est(n)はサンプリング回数nにおける平滑位置、DRst(n),DBst(n),DEst(n)はサンプリング回数nにおける平滑速度、Rpt(n+1),Bpt(n+1),Ept(n+1)はサンプリング回数n+1における予測位置である。また、Tはサンプリング間隔、α、βは平滑定数であり、固有値を設定する。追尾フィルタ7の算出した追尾目標予測位置はビーム制御器13に出力され、ビーム制御器13にて次サンプリング時刻におけるビーム照射の指示が実施される。また、追尾フィルタ7の算出した追尾目標予測位置は時分割検出器5に出力され、次サンプリング時刻における追尾目標の検出距離(検出タイミング)を定めるための検出制御信号として用いられる。
【0020】
また、砲から目標に対して発砲された弾丸は、空間を飛翔し、目標近傍に着弾し、目標に対して照射されたビーム内に水柱を発生させる。このとき、水柱は時分割検出器5において検出され、水柱位置の観測値は水柱位置算出器8に出力される。水柱位置算出器8は入力された水柱位置の観測値の一定時間内の平均値を弾着位置として、その距離Rb,砲角Eb,高角Bbを算出し、弾着結果比較器12に出力する。
【0021】
次に、弾丸を追尾観測することによる弾着位置の算出処理に切替えた後の動作について説明する。
発砲後、予測弾道算出器9は発砲角及び射表から、理論上で弾丸が飛翔する予測弾道を算出し、ビーム制御器13に出力する。ビーム制御器13は、弾丸を追尾観測することによる弾着位置の算出処理時に、予測弾道算出器9からの予測弾道に基づいてビームを照射するようにビーム指向位置を定め、送受信器2に出力する。送受信切替器2は、ビーム制御器13により指定されたビーム指向位置に対応する送信信号を、アンテナ装置1に出力する。アンテナ装置1は、ビーム制御器13により指定されたビーム指向位置に基づいて、弾丸に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は、受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は、弾丸を追尾観測することによる弾着位置の算出処理時に、受信信号を検波し、検波により得られたレーダ受信信号を信号切替器4に出力する。信号切替器4は、弾丸に対し照射したビームの受信信号を弾丸信号検出器6に出力する。弾丸信号検出器6は、弾丸の信号を検出し、3次元位置の観測を実施する。
【0022】
図3は、弾丸の受信信号を例示する図である。図3において、横軸方向は距離であり、レーダ信号ではビーム送信からの時間に比例する。また、縦軸は振幅である。符号21は弾丸に照射したビームの受信信号を示し、符号22は弾丸からの受信信号を示している。弾丸信号検出器6は、受信信号としきい値18を比較して弾丸からの受信信号22の観測を実施する。ここで、弾丸の予測距離に相当するタイミングで検出された受信信号22の観測値は、追尾フィルタ7に出力される。追尾フィルタ7は、数2に従いサンプリング時刻における弾丸予測位置、弾丸速度を算出する。
【0023】
【数2】
【0024】
ここでRob,Bob,Eobは、追尾フィルタ7に入力された弾丸の観測値でそれぞれ距離、方位角、高角を示す。nはサンプリング回数、Rsb(n),Bsb(n),Esb(n)はサンプリング回数nにおける平滑位置、DRsb(n),DBsb(n),DEsb(n)はサンプリング回数nにおける平滑速度、Rpb(n+1),Bpb(n+1),Epb(n+1)はサンプリング回数n+1における予測位置、Tはサンプリング間隔、α,βは平滑定数である。追尾フィルタ7の算出した弾丸予測位置はビーム制御器13に出力されて、次サンプリング時刻におけるビーム照射の指示が実施される。
【0025】
ビーム制御器13は、追尾フィルタ7の出力に基づき、前サンプリング時刻に算出された上記弾丸予測位置に向けてビームを照射するように、ビーム指向位置を定め、定めたビーム指向位置を送受信切替器2に出力する。送受信切替器2は、ビーム制御器13により指定された指向位置に対応する送信信号をアンテナ装置1に出力する。アンテナ装置1は、弾丸に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、信号切替器4に出力する。信号切替器4は、弾丸に対し照射したビームの受信信号を弾丸信号検出器6に出力する。弾丸信号検出器6は弾丸の信号を検出し、それぞれ3次元位置の観測を実施する。観測された弾丸の予測距離に相当するタイミングで検出された弾丸の観測値は、追尾フィルタ7及び弾丸弾道算出器10に出力される。
【0026】
弾丸弾道算出器10は、入力された弾丸の観測値をもとに距離、方位角、高角それぞれに対し、数3に従い多項式近似による近似関数を算出する。ここでnはサンプリング回数、Rvb,Bvb,Evbは距離、方位角、高角の近似関数を示す。また、Rvb,Bvbは1次、Evbは2次の近似関数を算出する。a,b,c,d,e,f,gは近似係数であり、固有値を設定する。
【0027】
【数3】
【0028】
図4は、予測弾道のスケーリング処理の概念を示す図である。予測弾道算出器9は、算出した予測弾道を弾丸弾道算出器10に出力する。弾丸弾道算出器10は、数4に基づいて算出した図4の近似関数23と予測弾道24の軌道が重なるよう、予測弾道24について、高度方向及び距離方向を任意倍数で拡大、縮小し平行移動するスケーリング処理を行い、スケーリング処理を行った修正予測弾道25を弾着位置算出器11に出力する。
【0029】
弾着位置算出器11は、弾丸弾道算出器10より入力された修正予測弾道25をもとに高度が0となるときの弾着位置を算出する。ここで算出された弾着位置は弾着結果比較器12に出力される。
【0030】
弾着結果比較器12は、追尾フィルタ7から入力された追尾目標位置、水柱位置算出器8から入力された水柱観測による弾着位置、及び弾着位置算出器11から入力された弾丸観測による弾着位置をもとに、弾着観測結果の比較を実施する。弾着結果比較器12は、当該比較によって、水柱観測より算出した弾着位置、弾丸観測より算出した弾着位置と追尾目標位置との誤差を算出する。例えば、追尾目標位置と水柱観測による弾着位置との第1の位置誤差と、追尾目標位置と弾丸観測による弾着位置との第2の位置誤差と、水柱観測による弾着位置と弾丸観測による弾着位置との第3の位置誤差を算出する。弾着結果比較器12は、水柱観測より算出した弾着位置、弾丸観測より算出した弾着位置と追尾目標位置との算出した誤差をコンソール14へ出力する。また、弾着結果比較器12は、追尾フィルタ7から入力された追尾目標位置、速度と、水柱位置算出器8から入力された水柱観測による弾着位置と、弾着位置算出器11から入力された弾丸観測による弾着位置を、コンソール14へ出力する。
【0031】
コンソール14は、追尾目標の位置、速度を図示しない画面に常に表示し、また水柱観測及び弾丸観測から推定される弾着位置を図示しない画面に表示し、弾着結果比較器12で算出した追尾目標と弾着位置との誤差を図示しない画面に表示することで、操作員に対して砲射撃の精度を伝達することができる。
【0032】
以上説明した通り、実施の形態1による弾着観測装置は、複数のビームを同時に照射可能な射撃指揮装置において、目標からの受信信号により検出される目標観測値をもとに追尾処理を実施し、目標追尾位置を算出する。また、弾丸が目標近傍に着弾することによって発生する水柱位置を目標からの受信信号から検出し、水柱観測値をもとに弾着位置を算出する。また、弾丸からの受信信号より検出される弾丸観測値をもとに追尾処理を実施し、弾丸追尾位置を算出し、高度が0となるときの弾着位置を算出する。このように、2つの弾着観測方式を備えることで、水柱の検出が不可能な場合や、波が高い場合であっても、弾丸を観測することにより弾着位置を観測することができる。また、弾丸の検出が不可能な場合でも、水柱を観測することにより弾着位置を観測することができる。
【0033】
実施の形態2.
図5は本発明に係る実施の形態2による弾着観測装置の構成を示すブロック図である。図において、実施の形態2の弾着観測装置は、アンテナ装置1と、送受信切替器2と、レーダ信号処理器3と、信号切替器4と、時分割目標検出器5と、弾丸信号検出器6と、追尾フィルタ7と、水柱位置算出器8と、予測弾道算出器9と、弾丸弾道算出器10と、弾着位置算出器11と、弾着結果比較器12と、ビーム制御器13と、コンソール14を備えて構成される。
【0034】
次に、実施の形態2の弾着観測装置における各構成の動作について説明する。実施の形態2の弾着観測装置は、複数のビームを同時に照射可能であるため、運用状況に応じて、水柱観測による弾着観測方式と弾丸観測による弾着観測方式の両方を実施することができる。また、どちらか一方の方式を選択して実施することも可能である。
弾着観測方式の選択はコンソール14から行い、水柱観測による弾着観測のみを実施する場合は、予測弾道算出器9に対して、予測弾道の算出を実施しない制御をかける。また、弾丸観測による弾着観測のみを実施する場合は、時分割目標検出器5に対して、水柱の受信信号検出を実施しない制御をかける。
【0035】
まず、水柱のみを観測することにより弾着位置を観測する弾着観測装置の処理を説明する。ビーム制御器13は、追尾フィルタ7により前サンプリング時刻に算出されている目標予測位置に対してビームを照射するようビーム指向位置を定め、送受信切替器2に出力する。送受信切替器2は、ビーム制御器13により指定された指向位置に対応する送信信号を、アンテナ装置1に出力する。アンテナ装置1は、追尾目標に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。
【0036】
送受信切替器2は、受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は、受信信号の検波を行い、検波により得られたレーダ受信信号を信号切替器4に出力する。信号切替器4は、追尾目標に対し照射したビームより得られたレーダ受信信号を時分割目標検出器5に出力する。時分割目標検出器5は、追尾目標の距離及び前後特定距離の合計3ケ所においてレーダ受信信号を検出し、それぞれ3次元位置の観測を実施する。
【0037】
時分割目標検出器5にて観測された追尾目標の観測値は、追尾フィルタ7に出力される。追尾フィルタ7は、次サンプリング時刻における追尾目標予測位置、目標速度を算出する。ここで算出された追尾目標予測位置は、次サンプリング時刻におけるビーム照射のためにビーム制御器13に出力され、また目標位置、速度表示のためにコンソール14に出力され、目標と弾着位置誤差比較のために弾着結果比較器12に出力される。また、砲から目標に対して発砲された弾丸の弾着により発生する水柱は時分割検出器5において検出され、観測値は水柱位置算出器8に出力される。水柱位置算出器8は、入力された水柱位置の観測値の一定時間内の平均値を弾着位置として、コンソール14に出力する。コンソール14では、追尾目標の位置、速度を常に表示し、また水柱観測から推定される弾着位置を表示し、弾着結果比較器12で算出した追尾目標と弾着位置との誤差を表示し、操作員に対して砲射撃の精度を伝達する。
【0038】
次に、弾丸のみを追尾観測することにより弾着位置を算出する弾着観測装置の処理を説明する。
発砲後、予測弾道算出器9では発砲角及び射表から理論上で弾丸が飛翔する予測弾道を算出し、ビーム制御器13に出力する。ビーム制御器13は、予測弾道算出器9からの予測弾道に基づいてビームを照射するようにビーム指向位置を定め、送受信器2に出力する。送受信切替器2は、ビーム制御器13により指定されたビーム指向位置に対応する送信信号を、アンテナ装置1に出力する。アンテナ装置1は、ビーム制御器13により指定されたビーム指向位置に基づいて、弾丸目標に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2では受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、検波により得られたレーダ受信信号を信号切替器4に出力する。信号切替器4は、弾丸に対し照射したビームの受信信号を弾丸信号検出器6に出力する。
【0039】
弾丸信号検出器6は、弾丸の信号を検出し、それぞれ3次元位置の観測を実施する。上記において観測された弾丸の観測値は、追尾フィルタ7に出力され、次サンプリング時刻における弾丸予測位置、弾丸速度を算出する。ここで算出された弾丸の予測位置はビーム制御器13に出力され、次サンプリング時刻におけるビーム照射の指示が実施される。
【0040】
ビーム制御器13は、追尾フィルタ7により前サンプリング時刻に算出されている弾丸予測位置に対してビームを照射するようビーム指向位置を定め、定めたビーム指向位置を送受信切替器2に出力する。送受信切替器2は、ビーム制御器13により指定された指向位置に対応する送信信号をアンテナ装置1に出力する。アンテナ装置1は、弾丸に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、信号切替器4に出力する。信号切替器4は、弾丸に対し照射したビームの受信信号を弾丸信号検出器6に出力する。弾丸信号検出器6は弾丸の信号を検出し、それぞれ3次元位置の観測を実施する。観測された弾丸の観測値は、追尾フィルタ7及び弾丸弾道算出器10に出力される。
【0041】
弾丸弾道算出器10は、入力された弾丸の観測値をもとに距離、方位角、高角それぞれに対し多項式近似による近似関数を算出する。また、予測弾道算出器9は、算出した予測弾道を弾丸弾道算出器10に出力し、数4に基づいて算出した図4の近似関数23と予測弾道24の軌道が重なるよう、予測弾道24をスケーリング処理した修正予測弾道25を弾着位置算出器11に出力する。
【0042】
弾着位置算出器11は、弾丸弾道算出器10より入力された修正予測弾道25をもとに高度が0のときの弾着位置を算出する。ここで算出された弾着位置は弾着結果比較器12に出力される。
【0043】
弾着結果比較器12は、追尾フィルタ7から入力された追尾目標位置、弾着位置算出器11から入力された水柱観測により算出した弾着位置、弾丸観測により算出した弾着位置をもとに、弾着観測結果の比較を実施する。弾着結果比較器12は、当該比較によって、弾丸にビームを照射させ観測した弾着位置と追尾目標位置との誤差を算出し、コンソール14へ出力する。
【0044】
コンソール14は、追尾目標の位置、速度を図示しない画面に常に表示し、また弾丸観測から推定される弾着位置を図示しない画面に表示し、弾着結果比較器で算出した追尾目標と弾着位置との誤差を図示しない画面に表示することで、操作員に対して砲射撃の精度を伝達することができる。
【0045】
以上説明した通り、実施の形態2による弾着観測装置は、複数のビームを同時に照射可能な射撃指揮装置において、目標からの受信信号より検出される目標観測値をもとに追尾処理を実施し、目標追尾位置を算出する。また、弾丸が目標近傍に着弾することによって発生する水柱位置を目標からの受信信号から検出し、水柱観測値をもとに弾着位置を算出する。また、弾丸からの受信信号より検出される弾丸観測値をもとに追尾処理を実施し、弾丸追尾位置を算出し、高度が0となるときの弾着位置を算出する。このように、2つの弾着位置を算出する方式を備えることで、水柱の検出が不可能な場合や、波が高い場合であっても、弾丸を観測することにより弾着位置を観測することができる。また、弾丸の検出が不可能な場合でも、水柱を観測することにより弾着位置を観測することができる。さらに、水柱を観測する弾着観測方式と弾丸を追尾する弾着観測方式の2方式を切替可能とすることにより、運用状況に応じて、一方をあるいは両方の弾着観測方式を実施して、評価することが可能である。
【0046】
実施の形態3.
図6は本発明に係る実施の形態3による弾着観測装置の構成を示すブロック図である。図において、実施の形態3の弾着観測装置は、アンテナ装置1と、送受信切替器2と、レーダ信号処理器3と、信号切替器4と、時分割目標検出器5と、弾丸信号検出器6と、追尾フィルタ7と、水柱位置算出器8と、予測弾道算出器9と、弾丸弾道算出器10と、弾着位置算出器11と、弾着結果比較器12と、ビーム制御器13と、コンソール14と、弾着位置統計量算出器26を備えて構成される。
【0047】
まず、水柱を観測することにより弾着位置を算出する弾着観測装置の処理を説明する。ビーム制御器13は、追尾フィルタ7により前サンプリング時刻に算出されている目標予測位置に対してビームを照射するようビーム指向位置を定め、送受信切替器2に出力する。
【0048】
送受信切替器2は、ビーム制御器13により指定された指向位置に対応する送信信号をアンテナ装置1に出力する。アンテナ装置1は、追尾目標に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、検波により得られたレーダ受信信号を信号切替器4に出力する。信号切替器4は、追尾目標に対し照射したビームにより得られたレーダ受信信号を、時分割目標検出器5に出力する。時分割目標検出器5は、追尾目標の距離及び前後特定距離の合計3ケ所においてレーダ受信信号を検出し、それぞれ3次元位置の観測を実施する。
【0049】
時分割目標検出器5にて観測された追尾目標の観測値は、追尾フィルタ7に出力される。追尾フィルタ7は、次サンプリング時刻における追尾目標予測位置、目標速度を算出する。ここで、算出された追尾目標予測位置は、次サンプリング時刻におけるビーム照射のためにビーム制御器13に出力され、また目標位置、速度表示のためにコンソール14に出力され、目標と弾着位置誤差比較のために弾着結果比較器12に出力される。また、砲から目標に対して発砲された弾丸の弾着により発生する水柱は、時分割検出器5において検出され、観測値は水柱位置算出器8に出力される。水柱位置算出器8は入力された水柱位置の観測値の一定時間内の平均値を弾着位置として、弾着結果比較器12に出力する。
【0050】
次に、弾丸を追尾観測することにより弾着位置を算出する弾着観測装置の処理を説明する。
発砲後、予測弾道算出器9では発砲角及び射表から理論上で弾丸が飛翔する予測弾道を算出し、ビーム制御器13に出力する。ビーム制御器13は、予測弾道算出器9からの予測弾道に基づいてビームを照射するようにビーム指向位置を定め、送受信器2に出力する。送受信切替器2は、ビーム制御器13により指定されたビーム指向位置に対応する送信信号を、アンテナ装置1に出力する。アンテナ装置1は、ビーム制御器13により指定されたビーム指向位置に基づいて、弾丸目標に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は、受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、検波により得られたレーダ受信信号を信号切替器4に出力する。信号切替器4は、弾丸に対し照射したビームの受信信号を弾丸信号検出器6に出力する。
【0051】
弾丸信号検出器6は、弾丸の信号を検出し、それぞれ3次元位置の観測を実施する。弾丸信号検出器6にて観測された弾丸の観測値は、追尾フィルタ7に出力される。追尾フィルタ7は、次サンプリング時刻における弾丸予測位置、弾丸速度を算出する。ここで算出された弾丸予測位置はビーム制御器13に出力され、次サンプリング時刻におけるビーム照射の指示が実施される。
【0052】
ビーム制御器13は、追尾フィルタ7により前サンプリング時刻に算出されている弾丸予測位置に対してビームを照射するようビーム指向位置を定め、定めたビーム指向位置を送受信切替器2に出力する。送受信切替器2は、ビーム制御器13により指定された指向位置に対応する送信信号をアンテナ装置1に出力する。アンテナ装置1は、弾丸に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、信号切替器4に出力する。信号切替器4は、弾丸に対し照射したビームの受信信号を弾丸信号検出器6に出力する。弾丸信号検出器6は弾丸の信号を検出し、それぞれ3次元位置の観測を実施する。観測された弾丸の観測値は、追尾フィルタ7及び弾丸弾道算出器10に出力される。
【0053】
弾丸弾道算出器10は、入力された弾丸の観測値をもとに距離、方位角、高角それぞれに対し多項式近似による近似関数を算出する。また、予測弾道算出器9で算出した予測弾道を弾丸弾道算出器10に出力し、数4に基づいて算出した図4の近似関数23と予測弾道24の軌道が重なるよう、予測弾道24をスケーリング処理した修正予測弾道25を弾着位置算出器11に出力する。
【0054】
弾着位置算出器11は、弾丸弾道算出器10から入力された修正予測弾道25をもとに高度が0のときの弾着位置を算出する。ここで算出された弾着位置は弾着結果比較器12に出力される。
【0055】
弾着結果比較器12は、追尾フィルタ7から入力された追尾目標位置、水柱位置算出器8及び弾着位置算出器11から入力されたそれぞれの弾着位置をもとに弾着観測結果の比較を実施する。弾着結果比較器12は、水柱観測により算出した弾着位置、弾丸観測により算出した弾着位置と追尾目標との誤差を算出し、弾着位置統計量算出器26へ出力する。
【0056】
弾着位置統計量算出器26は、数次回発砲した弾丸の弾着位置の統計的評価を実施する。ここでは、統計的評価として、水柱を観測し弾着位置を算出する方式、弾丸を観測し弾着位置を算出する方式の各方式での弾着位置の平均値及び/又は分散値を算出する。また、2方式で算出した全ての弾着位置の平均値及び/又は分散値を算出する。ここで算出された弾着位置統計量はコンソール14に出力される。
【0057】
コンソール14では、上記目標追尾の位置及び速度を常に表示し、また弾着位置統計量算出器26で算出した弾着位置の平均値及び分散値を表示し、操作員に対して砲射撃の精度を伝達する。
【0058】
以上説明した通り、実施の形態3による弾着観測装置は、複数のビームを同時に照射可能な射撃指揮装置において、目標からの受信信号より検出される目標観測値をもとに追尾処理を実施し、目標追尾位置を算出する。また、弾丸が目標近傍に着弾することによって発生する水柱位置を目標からの受信信号から検出し、水柱観測値をもとに弾着位置を算出する。また、弾丸からの受信信号より検出される弾丸観測値をもとに追尾処理を実施し、弾丸追尾位置を算出し、高度が0となるときの弾着位置を算出することを特徴とする。このように2つの弾着観測方式を備えることで、水柱の検出が不可能な場合や、波が高い場合であっても、弾丸を観測することにより弾着観測が可能である。また、弾丸の検出が不可能な場合でも水柱を観測することにより弾着観測が可能である。さらに、数回時に渡る射撃において2方式の弾着観測方式で観測した弾着位置の統計的評価を実施し、操作員に対し弾着観測精度を知らせることができる。
【0059】
実施の形態4.
図7は本発明に係る実施の形態4による弾着観測装置の構成を示すブロック図である。図において、実施の形態4の弾着観測装置は、アンテナ装置1と、送受信切替器2と、レーダ信号処理器3と、信号切替器4と、時分割目標検出器5と、弾丸信号検出器6と、追尾フィルタ7と、水柱位置算出器8と、予測弾道算出器9と、弾丸弾道算出器10と、弾着位置算出器11と、弾着結果比較器12と、ビーム制御器13と、コンソール14と、弾着位置統計量算出器26と、弾観方式自動判定選択器27を備えて構成される。
【0060】
まず、水柱を観測することにより弾着位置を算出する弾着観測装置の処理を説明する。ビーム制御器13は、追尾フィルタ7により前サンプリング時刻に算出されている目標予測位置に対してビームを照射するようビーム指向位置を定め、送受信切替器2に出力する。
【0061】
送受信切替器2は、ビーム制御器13により指定された指向位置に対応する送信信号をアンテナ装置1に出力する。アンテナ装置1は、追尾目標に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、検波により得られたレーダ受信信号を信号切替器4に出力する。信号切替器4は、追尾目標に対し照射したビームにより得られたレーダ受信信号を、時分割目標検出器5に出力する。時分割目標検出器5は、追尾目標の距離及び前後特定距離の合計3ケ所においてレーダ受信信号を検出し、それぞれ3次元位置の観測を実施する。
【0062】
時分割目標検出器5にて観測された追尾目標の観測値は、追尾フィルタ7に出力される。追尾フィルタ7は、次のサンプリング時刻における追尾目標予測位置、目標速度を算出する。ここで、算出された追尾目標予測位置は、次サンプリング時刻におけるビーム照射のためにビーム制御器13に出力され、また目標位置、速度表示のためにコンソール14に出力され、目標と弾着位置誤差比較のために弾着結果比較器12に出力される。また、砲から目標に対して発砲された弾丸の弾着により発生する水柱は、時分割検出器5において検出され、観測値は水柱位置算出器8に出力される。水柱位置算出器8は入力された水柱位置の観測値の一定時間内の平均値を弾着位置として、弾着結果比較器12に出力する。
【0063】
次に、弾丸を追尾観測することにより弾着位置を算出する弾着観測装置の処理を説明する。
発砲後、予測弾道算出器9では発砲角及び射表から理論上で弾丸が飛翔する予測弾道を算出し、ビーム制御器13に出力する。ビーム制御器13は、予測弾道算出器9からの予測弾道に基づいてビームを照射するようにビーム指向位置を定め、送受信器2に出力する。送受信切替器2は、ビーム制御器13により指定されたビーム指向位置に対応する送信信号を、アンテナ装置1に出力する。アンテナ装置1は、ビーム制御器13により指定されたビーム指向位置に基づいて、弾丸目標に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は、受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、検波により得られたレーダ受信信号を信号切替器4に出力する。信号切替器4は、弾丸に対し照射したビームの受信信号を弾丸信号検出器6に出力する。
【0064】
弾丸信号検出器6は、弾丸の信号を検出し、それぞれ3次元位置の観測を実施する。弾丸信号検出器6にて観測された弾丸の観測値は、追尾フィルタ7に出力される。追尾フィルタ7は、次サンプリング時刻における弾丸予測位置、弾丸速度を算出する。ここで算出された弾丸予測位置はビーム制御器13に出力され、次サンプリング時刻におけるビーム照射の指示が実施される。
【0065】
ビーム制御器13は、追尾フィルタ7により前サンプリング時刻に算出されている弾丸予測位置に対してビームを照射するようビーム指向位置を定め、定めたビーム指向位置を送受信切替器2に出力する。送受信切替器2は、ビーム制御器13により指定された指向位置に対応する送信信号をアンテナ装置1に出力する。アンテナ装置1は、弾丸に対してビームを照射し、反射により受信された信号を送受信切替器2に出力する。送受信切替器2は受信された信号に対して復調、増幅等の処理を行い、レーダ信号処理器3に出力する。レーダ信号処理器3は受信信号の検波を行い、信号切替器4に出力する。信号切替器4は、弾丸に対し照射したビームの受信信号を弾丸信号検出器6に出力する。弾丸信号検出器6は弾丸の信号を検出し、それぞれ3次元位置の観測を実施する。観測された弾丸の観測値は、追尾フィルタ7及び弾丸弾道算出器10に出力される。
【0066】
弾丸弾道算出器10は、入力された弾丸の観測値をもとに距離、方位角、高角それぞれに対し多項式近似による近似関数を算出する。また、予測弾道算出器9で算出した予測弾道を弾丸弾道算出器10に出力し、数4に基づいて算出した図4の近似関数23と予測弾道24の軌道が重なるよう、予測弾道24をスケーリング処理した修正予測弾道25を弾着位置算出器11に出力する。
【0067】
弾着位置算出器11は、弾丸弾道算出器10から入力された修正予測弾道25をもとに高度が0のときの弾着位置を算出する。ここで算出された弾着位置は弾着結果比較器12に出力される。
【0068】
弾着結果比較器12は、追尾フィルタ7から入力された追尾目標位置、水柱位置算出器8及び弾着位置算出器11から入力されたそれぞれの弾着位置をもとに弾着観測結果の比較を実施する。弾着結果比較器12は、水柱観測により算出した弾着位置、弾丸観測により算出した弾着位置と追尾目標との誤差を算出し、弾着位置統計量算出器26へ出力する。
【0069】
弾着位置統計量算出器26は、数次回発砲した弾丸の弾着位置の統計的評価を実施する。ここでは、統計的評価として、水柱を観測し弾着位置を算出する方式、弾丸を観測し弾着位置を算出する方式の各方式での弾着位置の平均値及び/又は分散値を算出する。また、2方式で算出した全ての弾着位置の平均値及び/又は分散値を算出する。ここで算出された弾着位置統計量は、弾観方式自動選択器27に出力される。
【0070】
弾観方式自動判定選択器27は、水柱観測による弾着観測方式と弾丸観測による弾着観測方式の平均値及び分散値を比較し、追尾目標位置との誤差が小さい方の弾着観測方式を選択し、選択した弾着観測方式をコンソール14の図示しない画面に明示的に表示する。また、その後に実施する射撃での弾着観測方式は、上記により選択された方式を実施する。
【0071】
また、弾観方式自動判定選択器27で判定された誤差が小さい弾着観測方式が水柱観測による方式であった場合は、予測弾道算出器9に対し、予測弾道の算出を実施しない制御をかけ、その後の弾着観測は水柱観測による方式が実施される。また、誤差が小さい弾着観測方式が弾丸観測による方式であった場合、時分割目標検出器5に対し、水柱の受信信号検出を実施しない制御をかけ、その後の弾着観測は弾丸観測による方式が実施される。
【0072】
以上説明した通り、実施の形態4による弾着観測装置は、複数のビームを同時に照射可能な射撃指揮装置において、目標からの受信信号より検出される目標観測値をもとに追尾処理を実施し、目標追尾位置を算出する。また、弾丸が目標近傍に着弾することによって発生する水柱位置を目標からの受信信号から検出し、水柱観測値をもとに弾着位置を算出する。また、弾丸からの受信信号より検出される弾丸観測値をもとに追尾処理を実施し、弾丸追尾位置を算出し、高度が0となるときの弾着位置を算出する。このように2つの弾着観測方式を備えることで、水柱の検出が不可能な場合でも、波が高い場合でも、弾丸を観測することにより弾着観測が可能である。また、弾丸の検出が不可能な場合でも水柱を観測することにより弾着観測が可能である。さらに、数回時に渡る射撃において2方式の弾着観測方式で観測した弾着位置の統計的評価を実施することで、その後の射撃は算出した統計的評価から追尾目標位置との弾着位置の誤差が小さい方の弾着観測方式を自動で選択し、実施することが可能である。
【符号の説明】
【0073】
1 アンテナ装置、2 送受信切替、3 レーダ信号処理器、4 信号切替器、5 時分割目標検出器、6 弾丸信号検出器、7 追尾フィルタ、8 水柱位置算出器、9 予測弾道算出器、10 弾丸弾道算出器、11 弾着位置算出器、12 弾着結果比較器、13ビーム制御器、14 コンソール、26 弾着位置統計量算出器、27 弾観方式自動判定選択器。
【特許請求の範囲】
【請求項1】
追尾目標もしくは弾丸に対してビームを照射するようにビームの指向方向を定めるビーム制御器と、
上記ビーム制御器により定められたビームの指向方向で電波の送受信を行うアンテナ装置と、
上記アンテナ装置との間で送信信号もしくは受信信号を授受する送受信切替器と、
上記送受信切替器の受信信号を検波するレーダ信号処理器と、
上記レーダ信号処理器の出力信号について、追尾目標を指向したビームから検波した出力信号と、弾丸を指向したビームから検波した出力信号とを、切り替えて出力する信号切替器と、
上記レーダ信号処理器からの追尾目標に対応した出力信号に基づいて、追尾目標と当該追尾目標周辺の水面から発生する水柱の観測値を時分割で出力する時分割目標検出器と、
上記レーダ信号処理器からの弾丸に対応した出力信号に基づいて弾丸の観測値を算出する弾丸信号検出器と、
上記追尾目標及び弾丸に対する観測値をもとに追尾予測位置を算出する追尾フィルタと、
上記時分割目標検出器からの水柱の観測値に基づいて弾丸の弾着位置を算出する水柱位置算出器と、
弾丸の予測弾道を算出する予測弾道算出器と、
上記弾丸の観測値から上記予測弾道算出器により算出された予測弾道を修正する修正予測弾道を算出する弾丸弾道算出器と、
上記弾丸弾道算出器の算出した修正予測弾道から高度0となる弾着位置を算出する弾着位置算出器と、
上記追尾フィルタから得られた追尾目標予測位置と、上記水柱位置算出器及び上記弾着位置算出器から得られたそれぞれの弾着位置との誤差を算出する弾着結果比較器と、
上記追尾フィルタから得られた追尾目標予測位置と、上記水柱位置算出器及び上記弾着位置算出器から得られたそれぞれの弾着位置と、上記弾着結果比較器から得られた追尾目標予測位置と弾着位置の誤差を表示するコンソールと、
を備えた弾着観測装置。
【請求項2】
追尾目標もしくは弾丸に対してビームを照射するようにビームの指向方向を定めるビーム制御器と、
上記ビーム制御器により定められたビームの指向方向で電波の送受信を行うアンテナ装置と、
上記アンテナ装置との間で送信信号もしくは受信信号を授受する送受信切替器と、
上記送受信切替器の受信信号を検波するレーダ信号処理器と、
上記レーダ信号処理器の出力信号について、追尾目標を指向したビームから検波した出力信号と、弾丸を指向したビームから検波した出力信号とを、切り替えて出力する信号切替器と、
上記レーダ信号処理器からの追尾目標に対応した出力信号に基づいて、追尾目標と当該追尾目標周辺の水面から発生する水柱の観測値を時分割で出力する時分割目標検出器と、
上記レーダ信号処理器からの弾丸に対応した出力信号に基づいて弾丸の観測値を算出する弾丸信号検出器と、
上記追尾目標及び弾丸に対する観測値をもとに追尾予測位置を算出する追尾フィルタと、
上記時分割目標検出器からの水柱の観測値に基づいて弾丸の弾着位置を算出する水柱位置算出器と、
弾丸の予測弾道を算出する予測弾道算出器と、
上記弾丸の観測値から上記予測弾道算出器により算出された予測弾道を修正する修正予測弾道を算出する弾丸弾道算出器と、
上記弾丸弾道算出器の算出した修正予測弾道から高度0となる弾着位置を算出する弾着位置算出器と、
上記追尾フィルタから得られた追尾目標予測位置と、上記水柱位置算出器及び上記弾着位置算出器から得られたそれぞれの弾着位置との誤差を算出する弾着結果比較器と、
上記追尾フィルタから得られた追尾目標予測位置と、上記水柱位置算出器及び上記弾着位置算出器から得られたそれぞれの弾着位置と、上記弾着結果比較器から得られた追尾目標予測位置と弾着位置の誤差を表示するとともに、水柱観測もしくは弾丸観測による弾着観測の切替操作により、上記予測弾道算出器もしくは上記時分割目標検出器の処理を非実施とするコンソールと、
を備えた弾着観測装置。
【請求項3】
上記水柱位置算出器及び上記弾着位置算出器から得られたそれぞれの弾着位置を記録し、各弾着位置の平均弾着位置又は分散値を算出する弾着位置統計量算出器を更に備え、
上記コンソールは、上記弾着位置統計量算出器により算出された平均弾着位置又は分散値を表示することを特徴とする請求項1記載の弾着観測装置。
【請求項4】
上記弾着位置統計量算出器により算出された平均弾着位置から、上記水柱位置算出器または上記弾着位置算出器から、追尾目標位置との弾着誤差の小さい方を選択し、選択した方から得られる弾着位置を上記コンソールに出力する自動判定選択器を更に備えたことを特徴とする請求項1記載の弾着観測装置。
【請求項1】
追尾目標もしくは弾丸に対してビームを照射するようにビームの指向方向を定めるビーム制御器と、
上記ビーム制御器により定められたビームの指向方向で電波の送受信を行うアンテナ装置と、
上記アンテナ装置との間で送信信号もしくは受信信号を授受する送受信切替器と、
上記送受信切替器の受信信号を検波するレーダ信号処理器と、
上記レーダ信号処理器の出力信号について、追尾目標を指向したビームから検波した出力信号と、弾丸を指向したビームから検波した出力信号とを、切り替えて出力する信号切替器と、
上記レーダ信号処理器からの追尾目標に対応した出力信号に基づいて、追尾目標と当該追尾目標周辺の水面から発生する水柱の観測値を時分割で出力する時分割目標検出器と、
上記レーダ信号処理器からの弾丸に対応した出力信号に基づいて弾丸の観測値を算出する弾丸信号検出器と、
上記追尾目標及び弾丸に対する観測値をもとに追尾予測位置を算出する追尾フィルタと、
上記時分割目標検出器からの水柱の観測値に基づいて弾丸の弾着位置を算出する水柱位置算出器と、
弾丸の予測弾道を算出する予測弾道算出器と、
上記弾丸の観測値から上記予測弾道算出器により算出された予測弾道を修正する修正予測弾道を算出する弾丸弾道算出器と、
上記弾丸弾道算出器の算出した修正予測弾道から高度0となる弾着位置を算出する弾着位置算出器と、
上記追尾フィルタから得られた追尾目標予測位置と、上記水柱位置算出器及び上記弾着位置算出器から得られたそれぞれの弾着位置との誤差を算出する弾着結果比較器と、
上記追尾フィルタから得られた追尾目標予測位置と、上記水柱位置算出器及び上記弾着位置算出器から得られたそれぞれの弾着位置と、上記弾着結果比較器から得られた追尾目標予測位置と弾着位置の誤差を表示するコンソールと、
を備えた弾着観測装置。
【請求項2】
追尾目標もしくは弾丸に対してビームを照射するようにビームの指向方向を定めるビーム制御器と、
上記ビーム制御器により定められたビームの指向方向で電波の送受信を行うアンテナ装置と、
上記アンテナ装置との間で送信信号もしくは受信信号を授受する送受信切替器と、
上記送受信切替器の受信信号を検波するレーダ信号処理器と、
上記レーダ信号処理器の出力信号について、追尾目標を指向したビームから検波した出力信号と、弾丸を指向したビームから検波した出力信号とを、切り替えて出力する信号切替器と、
上記レーダ信号処理器からの追尾目標に対応した出力信号に基づいて、追尾目標と当該追尾目標周辺の水面から発生する水柱の観測値を時分割で出力する時分割目標検出器と、
上記レーダ信号処理器からの弾丸に対応した出力信号に基づいて弾丸の観測値を算出する弾丸信号検出器と、
上記追尾目標及び弾丸に対する観測値をもとに追尾予測位置を算出する追尾フィルタと、
上記時分割目標検出器からの水柱の観測値に基づいて弾丸の弾着位置を算出する水柱位置算出器と、
弾丸の予測弾道を算出する予測弾道算出器と、
上記弾丸の観測値から上記予測弾道算出器により算出された予測弾道を修正する修正予測弾道を算出する弾丸弾道算出器と、
上記弾丸弾道算出器の算出した修正予測弾道から高度0となる弾着位置を算出する弾着位置算出器と、
上記追尾フィルタから得られた追尾目標予測位置と、上記水柱位置算出器及び上記弾着位置算出器から得られたそれぞれの弾着位置との誤差を算出する弾着結果比較器と、
上記追尾フィルタから得られた追尾目標予測位置と、上記水柱位置算出器及び上記弾着位置算出器から得られたそれぞれの弾着位置と、上記弾着結果比較器から得られた追尾目標予測位置と弾着位置の誤差を表示するとともに、水柱観測もしくは弾丸観測による弾着観測の切替操作により、上記予測弾道算出器もしくは上記時分割目標検出器の処理を非実施とするコンソールと、
を備えた弾着観測装置。
【請求項3】
上記水柱位置算出器及び上記弾着位置算出器から得られたそれぞれの弾着位置を記録し、各弾着位置の平均弾着位置又は分散値を算出する弾着位置統計量算出器を更に備え、
上記コンソールは、上記弾着位置統計量算出器により算出された平均弾着位置又は分散値を表示することを特徴とする請求項1記載の弾着観測装置。
【請求項4】
上記弾着位置統計量算出器により算出された平均弾着位置から、上記水柱位置算出器または上記弾着位置算出器から、追尾目標位置との弾着誤差の小さい方を選択し、選択した方から得られる弾着位置を上記コンソールに出力する自動判定選択器を更に備えたことを特徴とする請求項1記載の弾着観測装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−198040(P2012−198040A)
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願番号】特願2011−60753(P2011−60753)
【出願日】平成23年3月18日(2011.3.18)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願日】平成23年3月18日(2011.3.18)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]