
形態変化玩具
【課題】従来の形態変化の要素を備えながら、ユーザーの手を加えることなく形態を変化させることができる部分を備えるとともに、その形態の変化に直接関係しないが遊び心を備えた形態変化玩具を提供すること。
【解決手段】一つの形態と他の形態とに形態を変化させる形態変化玩具Aにおいて、該形態変化玩具Aは第1の部材1と、第2の部材2との2つの部材で構成するとともに、上記第2の部材2を連結部材3を介して上記第1の部材1に対して上下に回動可能に連結し、上記第1の部材1に設けたロック部材20が機能しているときは第2の部材2は第1の部材1と前後の位置関係となって一つの形態を構成し、ロックの機能を解除したときには第2の部材2は自重で下方に回動し、第1の部材1と上下の位置関係となって他の形態を構成するようにした。
【解決手段】一つの形態と他の形態とに形態を変化させる形態変化玩具Aにおいて、該形態変化玩具Aは第1の部材1と、第2の部材2との2つの部材で構成するとともに、上記第2の部材2を連結部材3を介して上記第1の部材1に対して上下に回動可能に連結し、上記第1の部材1に設けたロック部材20が機能しているときは第2の部材2は第1の部材1と前後の位置関係となって一つの形態を構成し、ロックの機能を解除したときには第2の部材2は自重で下方に回動し、第1の部材1と上下の位置関係となって他の形態を構成するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一つの形態から他の形態に相互に形態を変化させることができる形態変化玩具であって、特に形態の変化の過程で動きを伴う新しい発想の形態変化玩具に関するものである。
【背景技術】
【0002】
従来、形態変化玩具の形態を変化させて遊ぶときには構成部品を一つひとつ手で操作しなければならず、操作の手順が煩雑であったため簡単な操作で玩具の形態を変化させることができる形態変化玩具が提案されている(例えば、特許文献1)。この形態変化玩具は折り畳み可能な2つの連結リンクの両端をそれぞれ基部材と可動部材とに回動可能に軸支し、上記可動部材の前後には前部材と後部材とを回動可能に軸支し、2つの連結リンクを折り畳んだ時には前部材と後部材とは連続して一つの形態を構成し、2つの連結リンクを伸長した時には上記前部材と後部材とは2つの連結リンクを両側から挟んで他の形態を構成するようにしたものである。
【特許文献1】実用新案登録第3068216号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
本発明が解決しようとする問題点は、上述の形態変化玩具は、ワンタッチで形態を変化させることができるが、ユーザーが構成部品を動かして形態が変化していく様を楽しむことができないため、飽きられてしまう恐れがあった。
【0004】
本発明は、上記問題点を解決し、従来の形態変化の要素を備えながら、ユーザーの手を加えることなく形態を変化させることができる部分を備えるとともに、その形態の変化に直接関係しないが遊び心を備えた新しい発想の形態変化玩具を提供することを課題とする。
【課題を解決するための手段】
【0005】
前記課題を解決するために本発明に係る形態変化玩具は、一つの形態と他の形態とに相互に形態を変化させる、以下の要件を備えることを特徴とする。
(イ)上記形態変化玩具は第1の部材と、第2の部材との2つの部材で構成されていること
(ロ)上記第2の部材は連結部材を介して上記第1の部材に対して上下に回動可能に連結されていること
(ハ)上記第1の部材又は第2の部材にはロック部材を設け、該ロック部材が機能しているときは第2の部材は第1の部材と前後の位置関係となって一つの形態を構成し、ロックの機能を解除したときには第2の部材は自重で下方に回動し、第1の部材と上下の位置関係となって他の形態を構成すること
(二)上記連結部材は上記第2の部材を回転させる回転機構を備え、該回転機構は上記第2の部材が自重で下方に回動するとき、第2の部材を自転させること
【0006】
なお、前記連結部材と第1の部材との間には、前記第2の部材を下方に付勢するバネ部材を設け、第2の部材の自重に加えバネ部材の弾性力で強制的に下動させることが好ましい。
【発明の効果】
【0007】
請求項1の発明によれば、ロック部材を機能させているときは第1の部材と第2の部材とが前後の位置関係を保持して一つの形態を構成し、ロックを解除すると第2の部材が自重で下方に回動して第1の部材と第2の部材とが上下の位置関係となって他の形態を構成するとともに、第2の部材が自転しながら回動するので、自動的に形態が変化するだけではなく、形態の変化には直接関係ないが自転する動作が加わり、遊び心を備えた形態変化玩具を実現することができる。
【0008】
請求項2の発明によれば、バネ部材で第2の部材を下方に強制的に回動させるので、第2の部材を確実に第1の部材の下方に回動させ、上下の位置関係を速やかに且つ確実に構成することができる。
【発明を実施するための最良の形態】
【0009】
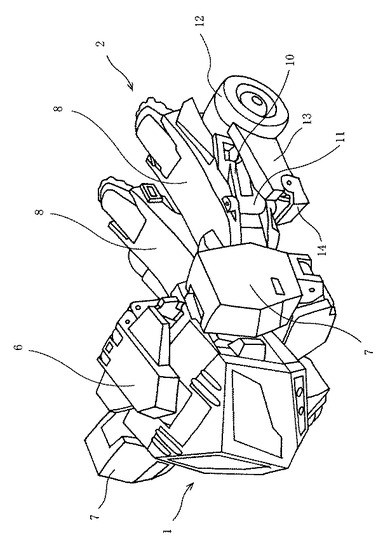
図1は、本発明に係る形態変化玩具Aの一つの形態である走行体の一例を示す斜視図、図2は、側面図を示す。この走行体はトレーラーを牽引するトラクタトレーラーを模して形成されており、トラクタトレーラーの運転席(ロボットの形態時には上半身を構成)を模して形成された第1の部材1と、車台(ロボットの形態時には下半身を構成)を模して形成された第2の部材2とで構成され、第1の部材1と第2の部材2とは連結部材3で連結されるとともに、この連結部材3を介して第1の部材1に対して第2の部材2が上下方向に回動できるように連結されている。
【0010】
第1の部材1は、上部にロボットの頭部4を起倒可能に収容する収容凹部5が形成され、この収容凹部5を覆う屋根部材6が開閉可能に設けられ、両側部にはロボットの形態における腕部7が回動可能に設けられている。
【0011】
第2の部材2は、ロボットの形態における2つの脚部8で構成され、この脚部8の側面には後輪9と回動板10とが設けられ、回動板10は脚部8に軸11で回動可能に取り付けられるとともに、先端には前輪12を支持する支持板13が取り付けられている。そして、支持板13の先端にはバンパー14が回動可能に取り付けられている。
【0012】
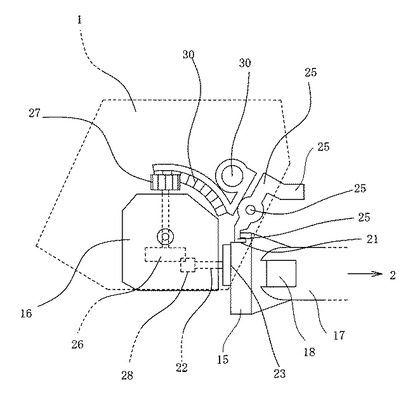
連結部材3は、図3に示すように、基台15と回転機構(歯車ユニット)16とで構成され、基台15はロボットの形態においてロボットの腰部を構成するもので、基台15の両側部にはロボットの形態における脚部8を構成する第2の部材2を連結する連結材17を回動可能に支持する支持部材18が前後方向に回動可能に取り付けられ、この支持体18に脚部8が連結材17を介して回動可能に支持されて基台15に対して脚部8が前後左右に回動できるようになっている。
【0013】
そして、この基台15の前面には、第1の部材1に形成された支軸(図示せず)に軸孔20bが回動可能に軸支されているロック部材20の係止爪20aがかみ込む係止凹部21が形成され、上面には歯車ユニット16の底部から下方に突出した軸22の先端に形成された連結板23が適宜手段で固定されている。
【0014】
歯車ユニット16は、ユニットケース25と、ユニットケース25の内部に配置されたクラウン歯車26と、クラウン歯車26と同軸でユニットケース25の外部に配置された駆動歯車27と、クラウン歯車26に噛み合うピニオン歯車28とで構成され、ピニオン歯車28の軸22には上述の連結板23が一体に形成されている。
【0015】
ユニットケース25は両側面に支軸29が突出して形成され、この支軸29が第1の部材1に形成された軸受(図示せず)に軸支され、歯車ユニット16は第1の部材1内で支軸29を中心に回動できるように配置されている。
【0016】
そして、上記駆動歯車27は、上記ユニットケース25の支軸29と同心円の円弧状に湾曲して形成されたラックギヤ30に噛み合うようになっており、このラックギヤ30は嵌合穴30aが第1の部材1内に設けた嵌合軸(図示せず)に嵌合して固定されている。
【0017】
なお、符号31は、バネ部材を示し、このバネ部材31は一端31aがユニットケース25の側面に形成された孔32に差し込まれ、他端31bが第1の部材1に形成された支持孔(図示せず)に取り付けられ、第2の部材2(脚部8)は自重に加え、このバネ部材31の弾性力で下方に回動するように付勢されている。
【0018】
図4に示すように、ロック部材25の係止爪25aが基台15の係止凹部21に噛み合って、第2の部材2が下方に回動できないようにロックしている状態では、図2に示すように、第1の部材1と第2の部材2とは前後の位置関係を維持し、形態変化玩具Aは走行体の形態をなしている。
【0019】
次に、上記構成の形態変化玩具を第1の形態である走行体の形態から、第2の形態であるロボットの形態に形態を変化させる場合について説明する。先ず、第2の部材2に取り付けられている回動板10を軸11を支点にして後方に折り返し、前輪12を脚部8の側面に並接するように移動させるとともに、腕部7を第1の部材1から離反するように外側に回動させ(図5参照)、第1の部材1を一方の手で保持して玩具A全体を持ち上げた状態で他方の手でロック部材20の操作部25cを下に押し下げて、基台15のロック状態を解除する(図6(a)参照)。
【0020】
基台15には連結材17を介して第2の部材2(脚部8)が取り付けられているので、脚部8の自重に加え、バネ部材31の弾性力に付勢されて下方に強制的に回動させられる。
【0021】
そして、第2の部材2は連結部材3を介して第1の部材1に連結されているので、歯車ユニット16は第2の部材2と一体で支軸20を中心に下方に回動する。この時、歯車ユニット16の駆動歯車27はラックギヤ30に噛み合っているので、駆動歯車27が回転させられ、この駆動歯車27と同軸のクラウン歯車26が回転させられるので、クラウン歯車26に噛合しているピニオン歯車28が回転させられることになる。
【0022】
ピニオン歯車28が回転すると連結板23が回転することになるが、この連結板23は基台15に固定されているので、連結板23と一体の基台15が回転することにより連結材17を介して連結されている第2の部材2(脚部8)は自転しながら下方に回動する(図6(b)参照)。
【0023】
第2の部材2が自重に加えてバネ部材31に付勢されて垂直の状態になるまで回動すると、駆動歯車27とラックギヤ30との噛み合いが外れて駆動歯車27はフリーになっているので第1の部材1に対して第2の部材2を自由に回転させることができる状態になる(図6(c)参照)。
【0024】
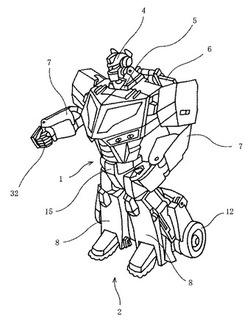
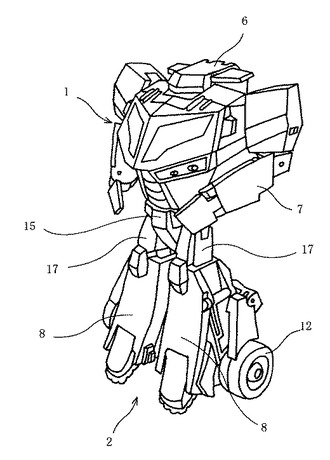
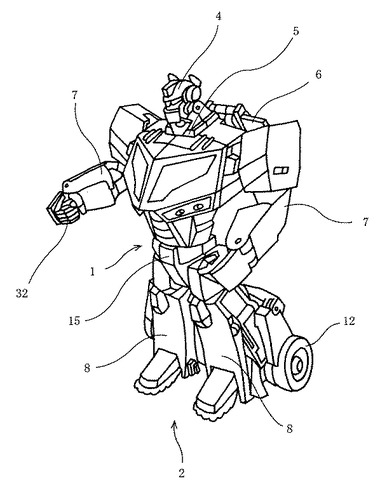
この状態では第1の部材1と第2の部材2との位置関係は前後位置から上下位置に変わっているので、形態変化玩具Aは、図7に示すように、第2の部材2を下半身、第1の部材を上半身として起立した状態になり、ロボットの形態に変化したことになるが、さらに完璧なロボットの形態にするためには、第1の部材1の上面の一部を覆っている屋根部材6を後方に倒し、収容凹部5に収容されている頭部4を起こし、折り畳まれている手部32を引き起こせば、図8に示すような完全な状態のロボットの形態をなす他の形態に変化させることができる。
【0025】
上述したように、ロック部材25によるロック状態を解除し、第1の部材1に対し第2の部材2を自重に加えバネ部材31の弾性力を利用して下方に回動させ、第1の部材と第2の部材との位置関係を前後位置から上下位置に変えることにより、第1の形態から第2の形態への形態の変化をさせることができるとともに、形態の変化の過程で、形態の変化には直接関係ないが第2の部材2が自転しながら下方に回動する動きを楽しむことができ、従来の形態変化玩具にはなかった遊び心を備えた形態変化玩具を実現することができる。
【図面の簡単な説明】
【0026】
【図1】本発明の形態変化玩具の一つの形態を説明する斜視図
【図2】上記形態変化玩具の一つの形態を説明する側面図
【図3】連結部材の構成を説明する分解斜視図
【図4】上記連結部材と第1の部材、第2の部材との関係を説明する側面図
【図5】上記形態変化玩具の形態を変化させる準備段階を説明する斜視図
【図6】(a)〜(c)はロック部材を解除したときの第2の部材の動きを説明する側面図
【図7】上記形態変化玩具が他の形態に形態を変化させる過程を説明する斜視図
【図8】上記形態変化玩具が他の形態に形態が変化状態を説明する斜視図
【符号の説明】
【0027】
1 第1の部材
2 第2の部材
3 連結部材
16 回転機構(歯車ユニット)
20 ロック部材
A 形態変化玩具
【技術分野】
【0001】
本発明は、一つの形態から他の形態に相互に形態を変化させることができる形態変化玩具であって、特に形態の変化の過程で動きを伴う新しい発想の形態変化玩具に関するものである。
【背景技術】
【0002】
従来、形態変化玩具の形態を変化させて遊ぶときには構成部品を一つひとつ手で操作しなければならず、操作の手順が煩雑であったため簡単な操作で玩具の形態を変化させることができる形態変化玩具が提案されている(例えば、特許文献1)。この形態変化玩具は折り畳み可能な2つの連結リンクの両端をそれぞれ基部材と可動部材とに回動可能に軸支し、上記可動部材の前後には前部材と後部材とを回動可能に軸支し、2つの連結リンクを折り畳んだ時には前部材と後部材とは連続して一つの形態を構成し、2つの連結リンクを伸長した時には上記前部材と後部材とは2つの連結リンクを両側から挟んで他の形態を構成するようにしたものである。
【特許文献1】実用新案登録第3068216号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
本発明が解決しようとする問題点は、上述の形態変化玩具は、ワンタッチで形態を変化させることができるが、ユーザーが構成部品を動かして形態が変化していく様を楽しむことができないため、飽きられてしまう恐れがあった。
【0004】
本発明は、上記問題点を解決し、従来の形態変化の要素を備えながら、ユーザーの手を加えることなく形態を変化させることができる部分を備えるとともに、その形態の変化に直接関係しないが遊び心を備えた新しい発想の形態変化玩具を提供することを課題とする。
【課題を解決するための手段】
【0005】
前記課題を解決するために本発明に係る形態変化玩具は、一つの形態と他の形態とに相互に形態を変化させる、以下の要件を備えることを特徴とする。
(イ)上記形態変化玩具は第1の部材と、第2の部材との2つの部材で構成されていること
(ロ)上記第2の部材は連結部材を介して上記第1の部材に対して上下に回動可能に連結されていること
(ハ)上記第1の部材又は第2の部材にはロック部材を設け、該ロック部材が機能しているときは第2の部材は第1の部材と前後の位置関係となって一つの形態を構成し、ロックの機能を解除したときには第2の部材は自重で下方に回動し、第1の部材と上下の位置関係となって他の形態を構成すること
(二)上記連結部材は上記第2の部材を回転させる回転機構を備え、該回転機構は上記第2の部材が自重で下方に回動するとき、第2の部材を自転させること
【0006】
なお、前記連結部材と第1の部材との間には、前記第2の部材を下方に付勢するバネ部材を設け、第2の部材の自重に加えバネ部材の弾性力で強制的に下動させることが好ましい。
【発明の効果】
【0007】
請求項1の発明によれば、ロック部材を機能させているときは第1の部材と第2の部材とが前後の位置関係を保持して一つの形態を構成し、ロックを解除すると第2の部材が自重で下方に回動して第1の部材と第2の部材とが上下の位置関係となって他の形態を構成するとともに、第2の部材が自転しながら回動するので、自動的に形態が変化するだけではなく、形態の変化には直接関係ないが自転する動作が加わり、遊び心を備えた形態変化玩具を実現することができる。
【0008】
請求項2の発明によれば、バネ部材で第2の部材を下方に強制的に回動させるので、第2の部材を確実に第1の部材の下方に回動させ、上下の位置関係を速やかに且つ確実に構成することができる。
【発明を実施するための最良の形態】
【0009】
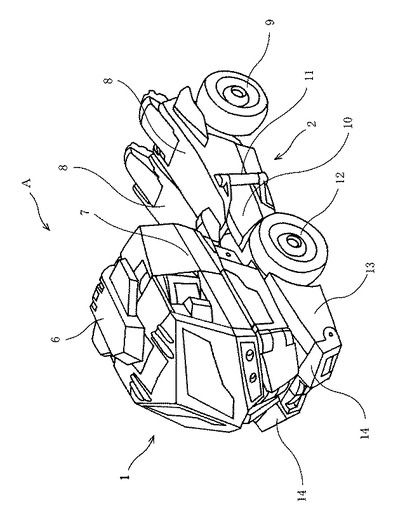
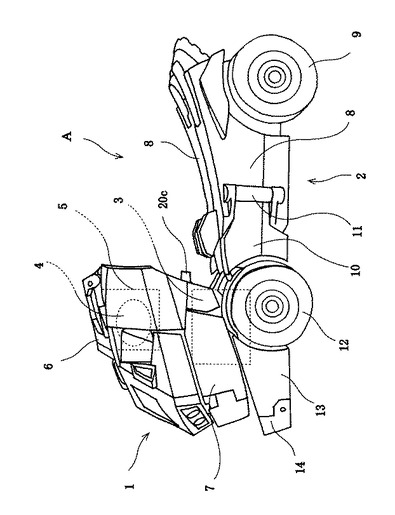
図1は、本発明に係る形態変化玩具Aの一つの形態である走行体の一例を示す斜視図、図2は、側面図を示す。この走行体はトレーラーを牽引するトラクタトレーラーを模して形成されており、トラクタトレーラーの運転席(ロボットの形態時には上半身を構成)を模して形成された第1の部材1と、車台(ロボットの形態時には下半身を構成)を模して形成された第2の部材2とで構成され、第1の部材1と第2の部材2とは連結部材3で連結されるとともに、この連結部材3を介して第1の部材1に対して第2の部材2が上下方向に回動できるように連結されている。
【0010】
第1の部材1は、上部にロボットの頭部4を起倒可能に収容する収容凹部5が形成され、この収容凹部5を覆う屋根部材6が開閉可能に設けられ、両側部にはロボットの形態における腕部7が回動可能に設けられている。
【0011】
第2の部材2は、ロボットの形態における2つの脚部8で構成され、この脚部8の側面には後輪9と回動板10とが設けられ、回動板10は脚部8に軸11で回動可能に取り付けられるとともに、先端には前輪12を支持する支持板13が取り付けられている。そして、支持板13の先端にはバンパー14が回動可能に取り付けられている。
【0012】
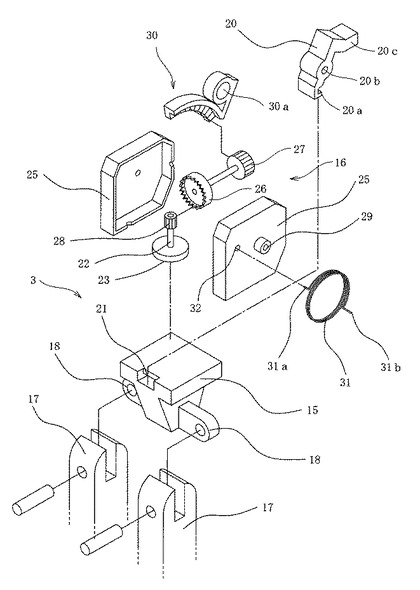
連結部材3は、図3に示すように、基台15と回転機構(歯車ユニット)16とで構成され、基台15はロボットの形態においてロボットの腰部を構成するもので、基台15の両側部にはロボットの形態における脚部8を構成する第2の部材2を連結する連結材17を回動可能に支持する支持部材18が前後方向に回動可能に取り付けられ、この支持体18に脚部8が連結材17を介して回動可能に支持されて基台15に対して脚部8が前後左右に回動できるようになっている。
【0013】
そして、この基台15の前面には、第1の部材1に形成された支軸(図示せず)に軸孔20bが回動可能に軸支されているロック部材20の係止爪20aがかみ込む係止凹部21が形成され、上面には歯車ユニット16の底部から下方に突出した軸22の先端に形成された連結板23が適宜手段で固定されている。
【0014】
歯車ユニット16は、ユニットケース25と、ユニットケース25の内部に配置されたクラウン歯車26と、クラウン歯車26と同軸でユニットケース25の外部に配置された駆動歯車27と、クラウン歯車26に噛み合うピニオン歯車28とで構成され、ピニオン歯車28の軸22には上述の連結板23が一体に形成されている。
【0015】
ユニットケース25は両側面に支軸29が突出して形成され、この支軸29が第1の部材1に形成された軸受(図示せず)に軸支され、歯車ユニット16は第1の部材1内で支軸29を中心に回動できるように配置されている。
【0016】
そして、上記駆動歯車27は、上記ユニットケース25の支軸29と同心円の円弧状に湾曲して形成されたラックギヤ30に噛み合うようになっており、このラックギヤ30は嵌合穴30aが第1の部材1内に設けた嵌合軸(図示せず)に嵌合して固定されている。
【0017】
なお、符号31は、バネ部材を示し、このバネ部材31は一端31aがユニットケース25の側面に形成された孔32に差し込まれ、他端31bが第1の部材1に形成された支持孔(図示せず)に取り付けられ、第2の部材2(脚部8)は自重に加え、このバネ部材31の弾性力で下方に回動するように付勢されている。
【0018】
図4に示すように、ロック部材25の係止爪25aが基台15の係止凹部21に噛み合って、第2の部材2が下方に回動できないようにロックしている状態では、図2に示すように、第1の部材1と第2の部材2とは前後の位置関係を維持し、形態変化玩具Aは走行体の形態をなしている。
【0019】
次に、上記構成の形態変化玩具を第1の形態である走行体の形態から、第2の形態であるロボットの形態に形態を変化させる場合について説明する。先ず、第2の部材2に取り付けられている回動板10を軸11を支点にして後方に折り返し、前輪12を脚部8の側面に並接するように移動させるとともに、腕部7を第1の部材1から離反するように外側に回動させ(図5参照)、第1の部材1を一方の手で保持して玩具A全体を持ち上げた状態で他方の手でロック部材20の操作部25cを下に押し下げて、基台15のロック状態を解除する(図6(a)参照)。
【0020】
基台15には連結材17を介して第2の部材2(脚部8)が取り付けられているので、脚部8の自重に加え、バネ部材31の弾性力に付勢されて下方に強制的に回動させられる。
【0021】
そして、第2の部材2は連結部材3を介して第1の部材1に連結されているので、歯車ユニット16は第2の部材2と一体で支軸20を中心に下方に回動する。この時、歯車ユニット16の駆動歯車27はラックギヤ30に噛み合っているので、駆動歯車27が回転させられ、この駆動歯車27と同軸のクラウン歯車26が回転させられるので、クラウン歯車26に噛合しているピニオン歯車28が回転させられることになる。
【0022】
ピニオン歯車28が回転すると連結板23が回転することになるが、この連結板23は基台15に固定されているので、連結板23と一体の基台15が回転することにより連結材17を介して連結されている第2の部材2(脚部8)は自転しながら下方に回動する(図6(b)参照)。
【0023】
第2の部材2が自重に加えてバネ部材31に付勢されて垂直の状態になるまで回動すると、駆動歯車27とラックギヤ30との噛み合いが外れて駆動歯車27はフリーになっているので第1の部材1に対して第2の部材2を自由に回転させることができる状態になる(図6(c)参照)。
【0024】
この状態では第1の部材1と第2の部材2との位置関係は前後位置から上下位置に変わっているので、形態変化玩具Aは、図7に示すように、第2の部材2を下半身、第1の部材を上半身として起立した状態になり、ロボットの形態に変化したことになるが、さらに完璧なロボットの形態にするためには、第1の部材1の上面の一部を覆っている屋根部材6を後方に倒し、収容凹部5に収容されている頭部4を起こし、折り畳まれている手部32を引き起こせば、図8に示すような完全な状態のロボットの形態をなす他の形態に変化させることができる。
【0025】
上述したように、ロック部材25によるロック状態を解除し、第1の部材1に対し第2の部材2を自重に加えバネ部材31の弾性力を利用して下方に回動させ、第1の部材と第2の部材との位置関係を前後位置から上下位置に変えることにより、第1の形態から第2の形態への形態の変化をさせることができるとともに、形態の変化の過程で、形態の変化には直接関係ないが第2の部材2が自転しながら下方に回動する動きを楽しむことができ、従来の形態変化玩具にはなかった遊び心を備えた形態変化玩具を実現することができる。
【図面の簡単な説明】
【0026】
【図1】本発明の形態変化玩具の一つの形態を説明する斜視図
【図2】上記形態変化玩具の一つの形態を説明する側面図
【図3】連結部材の構成を説明する分解斜視図
【図4】上記連結部材と第1の部材、第2の部材との関係を説明する側面図
【図5】上記形態変化玩具の形態を変化させる準備段階を説明する斜視図
【図6】(a)〜(c)はロック部材を解除したときの第2の部材の動きを説明する側面図
【図7】上記形態変化玩具が他の形態に形態を変化させる過程を説明する斜視図
【図8】上記形態変化玩具が他の形態に形態が変化状態を説明する斜視図
【符号の説明】
【0027】
1 第1の部材
2 第2の部材
3 連結部材
16 回転機構(歯車ユニット)
20 ロック部材
A 形態変化玩具
【特許請求の範囲】
【請求項1】
一つの形態と他の形態とに相互に形態を変化させる、以下の要件を備えることを特徴とする形態変化玩具。
(イ)上記形態変化玩具は第1の部材と、第2の部材との2つの部材で構成されていること
(ロ)上記第2の部材は連結部材を介して上記第1の部材に対して上下に回動可能に連結されていること
(ハ)上記第1の部材又は第2の部材にはロック部材を設け、該ロック部材が機能しているときは第2の部材は第1の部材と前後の位置関係となって一つの形態を構成し、ロックの機能を解除したときには第2の部材は自重で下方に回動し、第1の部材と上下の位置関係となって他の形態を構成すること
(二)上記連結部材は上記第2の部材を回転させる回転機構を備え、該回転機構は上記第2の部材が自重で下方に回動するとき、第2の部材を自転させること
【請求項2】
前記連結部材と第1の部材との間には、前記第2の部材を下方に付勢するバネ部材を設けた、請求項1記載の形態変化玩具。
【請求項1】
一つの形態と他の形態とに相互に形態を変化させる、以下の要件を備えることを特徴とする形態変化玩具。
(イ)上記形態変化玩具は第1の部材と、第2の部材との2つの部材で構成されていること
(ロ)上記第2の部材は連結部材を介して上記第1の部材に対して上下に回動可能に連結されていること
(ハ)上記第1の部材又は第2の部材にはロック部材を設け、該ロック部材が機能しているときは第2の部材は第1の部材と前後の位置関係となって一つの形態を構成し、ロックの機能を解除したときには第2の部材は自重で下方に回動し、第1の部材と上下の位置関係となって他の形態を構成すること
(二)上記連結部材は上記第2の部材を回転させる回転機構を備え、該回転機構は上記第2の部材が自重で下方に回動するとき、第2の部材を自転させること
【請求項2】
前記連結部材と第1の部材との間には、前記第2の部材を下方に付勢するバネ部材を設けた、請求項1記載の形態変化玩具。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−213668(P2009−213668A)
【公開日】平成21年9月24日(2009.9.24)
【国際特許分類】
【出願番号】特願2008−60300(P2008−60300)
【出願日】平成20年3月10日(2008.3.10)
【出願人】(000003584)株式会社タカラトミー (248)
【Fターム(参考)】
【公開日】平成21年9月24日(2009.9.24)
【国際特許分類】
【出願日】平成20年3月10日(2008.3.10)
【出願人】(000003584)株式会社タカラトミー (248)
【Fターム(参考)】
[ Back to top ]