
形態変化玩具
【課題】障害物に衝突したときに大きく形態を変化させることが可能な形態変化玩具を提供することを課題とする。
【解決手段】走行可能な形態Aから別の形態Bへと形態が変化する形態変化玩具10において、前記走行可能な形態Aにおいて前方に突出して設けられ、前記形態変化玩具10が障害物に衝突したときに後方へと変位可能な突出部材11と、前記突出部材11が後方へと変位することにより作動し、前記前記走行可能な形態Aから前記別の形態Bへと形態を変化させるための形態変化機構と、前記前記走行可能な形態Aにおいて前記形態変化玩具10の後部底面に配置され、後方側を支点として回動可能な接地部材27と、を備え、前記接地部材27は、前記形態変化機構が作動したときに接地方向に回動して前記形態変化玩具10を立ち上げることを特徴とする。
【解決手段】走行可能な形態Aから別の形態Bへと形態が変化する形態変化玩具10において、前記走行可能な形態Aにおいて前方に突出して設けられ、前記形態変化玩具10が障害物に衝突したときに後方へと変位可能な突出部材11と、前記突出部材11が後方へと変位することにより作動し、前記前記走行可能な形態Aから前記別の形態Bへと形態を変化させるための形態変化機構と、前記前記走行可能な形態Aにおいて前記形態変化玩具10の後部底面に配置され、後方側を支点として回動可能な接地部材27と、を備え、前記接地部材27は、前記形態変化機構が作動したときに接地方向に回動して前記形態変化玩具10を立ち上げることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、形態変化玩具に関し、特に、障害物に衝突したときに形態が変化する形態変化玩具に関するものである。
【背景技術】
【0002】
従来、障害物に衝突したときに形態が変化する玩具が知られている。
【0003】
例えば、特許文献1には、床上を走行する玩具用の車において、外力を受けたときにフック機構が係合部から離脱し、カバーがバネの弾性力によりシャーシーから分離するようにしたものが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−163761号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記した特許文献1記載の玩具においては、車の形態を逸脱しない範囲でしか形態が変化しないため、意外性に欠けるという問題点があった。
【0006】
そこで、本発明は、障害物に衝突したときに大きく形態を変化させることが可能な形態変化玩具を提供することを課題とする。
【課題を解決するための手段】
【0007】
本発明は、上記した課題を解決するためになされたものであり、以下を特徴とする。
【0008】
(請求項1)
請求項1に記載の発明は、以下の点を特徴とする。
【0009】
すなわち、請求項1に記載の形態変化玩具は、走行可能な形態から別の形態へと形態が変化する形態変化玩具であって、前記走行可能な形態において前方に突出して設けられ、前記形態変化玩具が障害物に衝突したときに後方へと変位可能な突出部材と、前記突出部材が後方へと変位することにより作動し、前記走行可能な形態から前記別の形態へと形態を変化させるための形態変化機構と、前記走行可能な形態において前記形態変化玩具の後部底面に配置され、後方側を支点として回動可能な接地部材と、を備え、前記接地部材は、前記形態変化機構が作動したときに接地方向に回動して前記形態変化玩具を立ち上げることを特徴とする。
【0010】
(請求項2)
請求項2に記載の発明は、上記した請求項1記載の発明の特徴点に加え、以下の点を特徴とする。
【0011】
すなわち、前記形態変化機構は、前記形態変化機構が作動した時に変位する複数の可動部材と、前記複数の可動部材に設けられて互いに係合する複数の係合部と、を備えて構成されていることを特徴とする。
【0012】
(請求項3)
請求項3に記載の発明は、上記した請求項2記載の発明の特徴点に加え、以下の点を特徴とする。
【0013】
すなわち、前記形態変化機構は、前記複数の係合部の係合が順次作用することによって作動することを特徴とする。
【0014】
(請求項4)
請求項4に記載の発明は、上記した請求項1〜3のいずれかに記載の発明の特徴点に加え、以下の点を特徴とする。
【0015】
すなわち、前記走行可能な形態において前記形態変化玩具の側部に配置され、前記形態変化機構が作動したときに外側へ変位する腕部材を設けたことを特徴とする。
【発明の効果】
【0016】
本発明は上記の通りであり、走行可能な形態において前方に突出して設けられ、形態変化玩具が障害物に衝突したときに後方へと変位可能な突出部材と、前記突出部材が後方へと変位することにより作動し、前記走行可能な形態から別の形態へと形態を変化させるための形態変化機構を備えているので、障害物に衝突したときに瞬時に形態を変化させることができる。
【0017】
しかも、走行可能な形態において形態変化玩具の後部底面に配置された接地部材が、形態変化時に接地方向に回動して形態変化玩具を立ち上げるように作用する。このため、障害物に衝突すると、その場で形態変化玩具が直立して別の形態に変化するので、走行可能な形態から大きく形態を変化させることができ、意外性と面白みに富んだ形態変化玩具を提供できる。
【0018】
なお、形態を変化させるための形態変化機構を複数の可動部材と複数の係合部とを備えて構成すれば、複雑な形態変化が可能となるため、様々なバリエーションの形態変化を実現することができる。
【0019】
また、このような形態変化を複数の係合部の係合が順次作用することによって行うようにすれば、更に複雑かつ面白みのある形態変化をさせることができる。
【0020】
なお、走行可能な形態からヒト型のロボットの形態などに変化させるには、走行可能な形態において形態変化玩具の側部に配置され、形態変化機構が作動したときに外側へ変位する腕部材を設けるようにすればよい。
【図面の簡単な説明】
【0021】
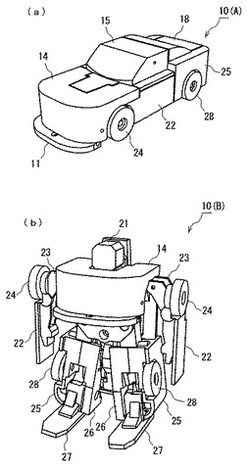
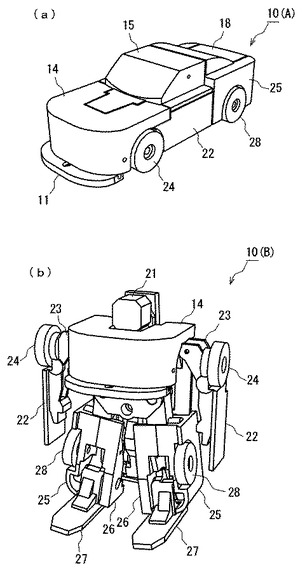
【図1】形態変化玩具の斜視図であって、(a)車の形態を示す図、(b)ロボットの形態を示す図である。
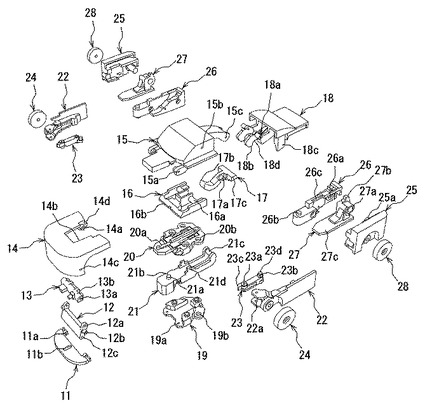
【図2】形態変化玩具の分解図である。
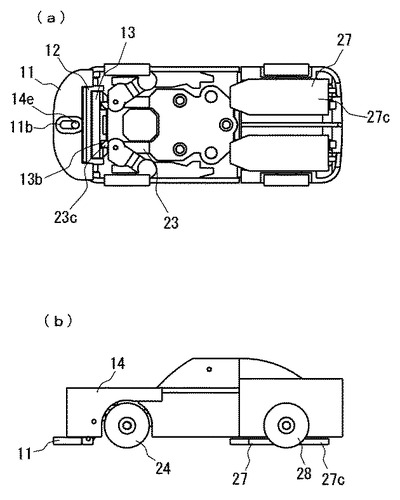
【図3】車の形態の(a)底面図、(b)側面図である。
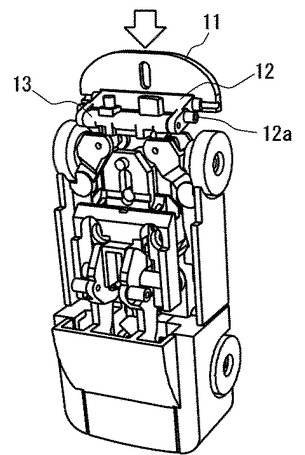
【図4】第1係合部の作動を説明するための図であって、突出部材付近の内部構造を示す図である。
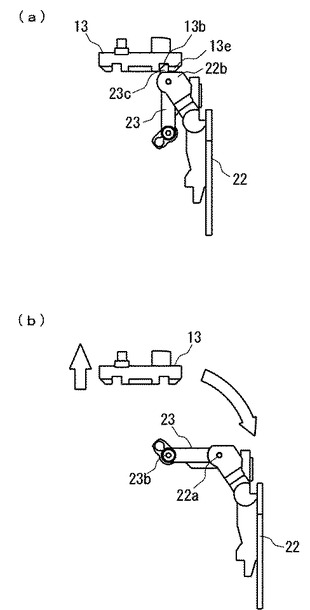
【図5】第1係合部及び第2係合部の作動を説明するための図であって、(a)係合状態を示す図、(b)係合が解除された状態を示す図である。
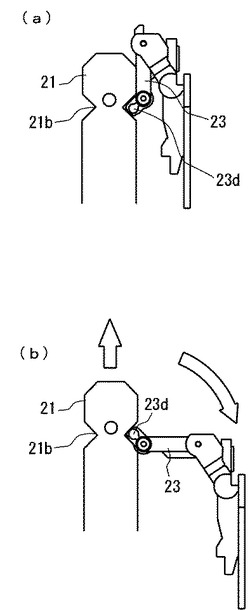
【図6】第3係合部の作動を説明するための図であって、(a)作動前の状態を示す図、(b)作動後の状態を示す図である。
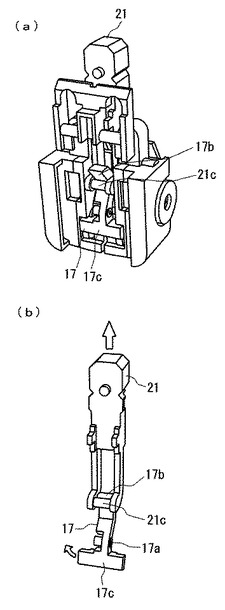
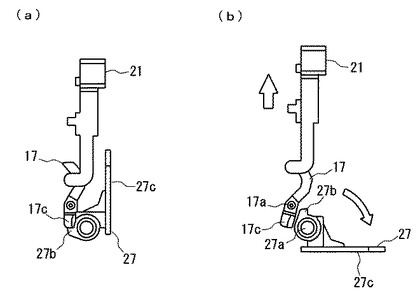
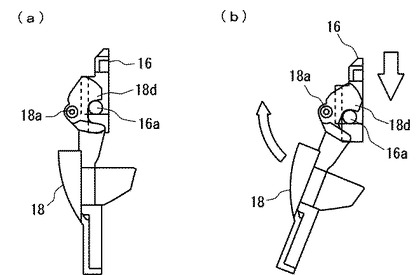
【図7】第4係合部及び第5係合部の作動を説明するための図であって、(a)頭部材付近の内部構造を示す図、(b)頭部材と揺動部材との関係を示す図である。
【図8】第4係合部及び第5係合部の作動を説明するための図であって、(a)係合状態を示す図、(b)係合が解除された状態を示す図である。
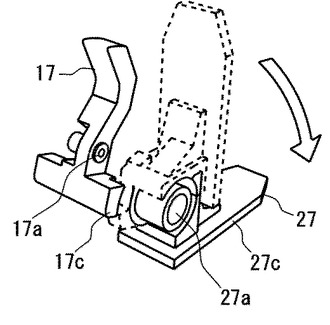
【図9】第5係合部の作動を説明するための図であって、接地部材の動きを示す図である。
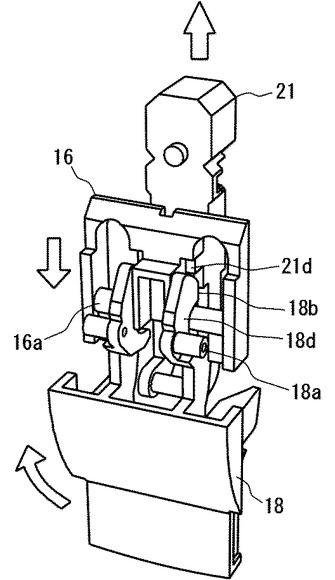
【図10】第6係合部及び第8係合部の作動を説明するための図である。
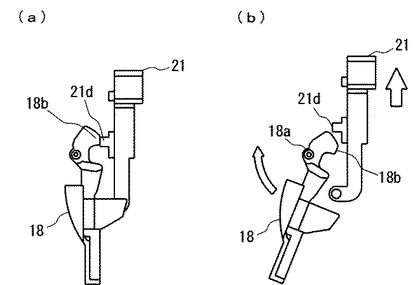
【図11】第6係合部の作動を説明するための図であって、(a)係合状態を示す図、(b)係合が解除された状態を示す図である。
【図12】第7係合部の作動を説明するための図であって、(a)係合状態を示す図、(b)係合が解除された状態を示す図である。
【図13】第7係合部の作動を説明するための図であって、脚部材の作動方向を示す図である。
【図14】第8係合部の作動を説明するための図であって、(a)作動前の状態を示す図、(b)作動後の状態を示す図である。
【図15】第9係合部の作動を説明するための図であって、(a)係合状態を示す図、(b)係合が解除された状態を示す図である。
【図16】第9係合部の作動を説明するための図であって、頭部材が外部に露出する様子を示す図である。
【発明を実施するための形態】
【0022】
本発明の実施形態について、図を参照しながら説明する。
【0023】
本実施形態に係る形態変化玩具10は、図1に示すように、走行可能な形態から別の形態、具体的には車の形態Aからロボットの形態Bへと形態が変化するものである。
【0024】
以下の説明においては、車の形態Aにおける進行方向を前方、車の形態Aにおける後退方向を後方、車の形態Aにおける進行方向にみて左右を左右方向(横方向)、車の形態Aにおける上方を上方、車の形態Aにおける下方を下方として説明する。
【0025】
この形態変化玩具10は、図1(a)に示すように、車の形態Aにおいて2つの前輪24及び2つの後輪28により手押しなどで走行可能に形成されている。この車の形態Aにおいては、ボンネット部分を形成する前部材14、ルーフ部分を形成するルーフ部材15、トランク部分を形成する後尾部材18、左右のドア部分を形成する前横部材22、左右の前横部材22の後部に位置する後横部材25、バンパー位置に設けられた突出部材11などにより、車体が形成されている。
【0026】
この車の形態Aから変化するロボットの形態Bは、図1(b)に示すように、両手両足を備えた直立した人型となっている。このロボットの形態Bにおいては、形態変化玩具10は、左右の足先を形成する接地部材27によって支持されて2本足で直立するようになっている。なお、前述した前部材14はロボットの胸を形成し、前横部材22はロボットの下腕を形成している。また、後横部材25は、後述する脚部材26などとともにロボットの脚を形成している。
【0027】
この形態変化玩具10は、図2に示すように、複数のパーツが一部変位可能に組み合わされることにより、車の形態Aから別のロボットの形態Bへと形態が変化できるように形成されている。なお、実際には、図2に示す部材の他にも、各部材を回動可能に連結するための回動軸や、各部材を付勢するためのバネ部材等が存在するが、これらについては文中にて説明することとし、図2においては省略している。
【0028】
以下、この形態変化玩具10を構成する部材(突出部材11、リンク部材12、ストッパー部材13、前部材14、ルーフ部材15、スライド部材16、揺動部材17、後尾部材18、前胴体19、後胴体20、頭部材21、前横部材22、腕部材23、前輪24、後横部材25、脚部材26、接地部材27、後輪28)について説明する。
【0029】
ルーフ部材15は、前述したように車の形態Aのルーフ部分を形成する部材である。このルーフ部材15の前部には、図2に示すように、前軸孔15aが左右に対向するように2つ穿設されている。また、このルーフ部材15の中央部には、中軸孔15bが左右に対向するように2つ穿設されている。また、このルーフ部材15の後部には、後軸孔15cが左右の側部に対向するように2つずつ穿設されている。
【0030】
前部材14は、上記したルーフ部材15に回動可能に連結される部材であり、後端に設けられた軸孔14aを貫通する回動軸を介してルーフ部材15の前軸孔15aに固定される。この前部材14には、図2に示すように、後方に開口する切欠き14bが形成されており、この切欠き14bの両側の開口縁付近には被差込部14dが凹設されている。
【0031】
リンク部材12は、前部材14の前端付近に回動可能に固定される部材である。このリンク部材12には、図2に示すように、上部に上軸孔12a、下部に下軸孔12b、中央にリンク孔12cがそれぞれ設けられている。このリンク部材12は、リンク孔12cを貫通する回動軸を介して、前部材14のリンク固定部14cに回動可能に固定される。特に図示しないが、このリンク孔12cを貫通する回動軸には、捩りコイルバネが設けられており、これにより、リンク部材12は、上端が後方に変位する方向、言い換えると、下端が前方に変位する方向に付勢されている。
【0032】
ストッパー部材13は、リンク部材12の上端に連結される部材である。このストッパー部材13は、左右に貫通形成された軸孔13aを貫通する回動軸を介して、リンク部材12の上軸孔12aに連結される。このストッパー部材13は、リンク部材12(を付勢する捩りコイルバネ)によって後方へと変位する方向に付勢されている。また、このストッパー部材13は、後端縁に左右2つの係合溝13bを備えている。
【0033】
突出部材11は、リンク部材12の下端に連結される部材である。この突出部材11は、後端付近で左右に貫通形成された軸孔11aを貫通する回動軸を介して、リンク部材12の下軸孔12bに連結される。この突出部材11は、リンク部材12(を付勢する捩りコイルバネ)によって前方へと変位する方向に付勢されている。また、この突出部材11には、図2に示すように、前後方向に長細のスライド孔11bが貫通形成されている。このスライド孔11bは、前部材14の底面に設けられた突起14e(図3(a)参照)を貫通させ、突出部材11の前後方向への摺動をガイドするためのものである。この突出部材11は、図1に示すように、車の形態Aにおいて前方に突出して設けられ、車の形態Aの形態変化玩具10を走行させて障害物に衝突したときに、リンク部材12(を付勢する捩りコイルバネ)の付勢力に抗って後方へと変位するように形成されている。
【0034】
揺動部材17は、ルーフ部材15に揺動可能に連結される部材であり、中央付近に設けられた軸孔17aを貫通する回動軸を介してルーフ部材15の中軸孔15bに固定される。この揺動部材17には、図2に示すように、前端側に引掛爪17bが形成されるとともに、後端側にストッパ部17cが形成されている。
【0035】
後胴体20は、ルーフ部材15の下面側に嵌め込まれて固定される部材である。この後胴体20には、前後方向に長細のガイド孔20aが設けられており、後部付近には左右2つの脚軸孔20bが設けられている。
【0036】
前胴体19は、後胴体20に対向するように嵌め込まれて固定される部材である。この前胴体19には、前部付近に左右2つの腕軸孔19aが設けられており、後部付近には左右2つの脚軸孔19bが設けられている。この脚軸孔19bは、後胴体20の脚軸孔20bと対向する位置に設けられている。
【0037】
頭部材21は、前胴体19と後胴体20との間に挟まれるように、前後に摺動可能に配置される部材である。この頭部材21の上面にはガイド突起21aが突出形成されており、このガイド突起21aが後胴体20のガイド孔20aに嵌り込むことで、頭部材21がガイド孔20aに沿って摺動可能となっている。この頭部材21の左右両側には、係合凹部21bが凹設されている。また、この頭部材21の後端付近には軸が左右方向に延びる引掛軸部21cが設けられており、この頭部材21の中央付近には上方に突出して設けられた当接部21dが設けられている。
【0038】
スライド部材16は、ルーフ部材15と後胴体20との間に挟まれるように、前後に摺動可能に配置される部材である。このスライド部材16の前端付近は刃先状に傾斜した差込部16bとなっており、また、このスライド部材16の後端付近には軸が左右方向に延びる被押下部16aが設けられている。
【0039】
腕部材23は、前胴体19と後胴体20との間に挟まれるように回動可能に固定される部材である。この腕部材23の一方の端部には基端軸孔23bが形成されており、この基端軸孔23bを貫通する回動軸を介して前胴体19の腕軸孔19aに回動可能に固定される。また、この腕部材23の他方の端部には先端軸孔23aが形成されている。なお、この腕部材23には、基端軸孔23b付近に係合凸部23dが突出形成されており、先端軸孔23a付近に被係合部23cが突出形成されている。
【0040】
前横部材22は、腕部材23の先端に回動可能に固定される部材である。この前横部材22の基端部には軸孔22aが形成されている。この前横部材22は、軸孔22aを貫通する回動軸を介して腕部材23の先端軸孔23aに回動可能に固定される。
【0041】
前輪24は、前横部材22の側部に回転可能に軸支される車輪である。
【0042】
脚部材26は、前胴体19と後胴体20との間に挟まれるように回動可能に固定される部材である。この脚部材26の前端部には回動軸部26bが突出形成されており、この回動軸部26bが前胴体19の脚軸孔19bと後胴体20の脚軸孔20bと回動可能に固定されることで、左右方向に回動可能となっている。この脚部材26の中央上部は、一部が切欠かれて被挟持部26cを形成している。また、この脚部材26の後端付近には、軸受部26aが凹設されている。
【0043】
後横部材25は、脚部材26の外側に嵌め込み固定される部材である。この後横部材25の後端付近には、前記した軸受部26aに嵌合される突軸25aが設けられている。
【0044】
後輪28は、後横部材25の側部に回転可能に軸支される車輪である。
【0045】
接地部材27は、ロボットの状態Bにおいて足先部を形成する部材である。この接地部材27の後部付近には、前記した突軸25aを差し込むための軸孔27aが設けられている。この接地部材27は、この軸孔27aを支点として後横部材25に対して回動可能に固定される。また、この接地部材27の上端には係止突起27bが突出形成されている。また、この接地部材27は、下方に板状の接地部27cを有している。この接地部材27は、図3に示すように、車の形態Aにおいて車体の後部底面に配置され、地面に接触しないように配置されている。
【0046】
なお、上記した腕部材23、前横部材22、前輪24、脚部材26、後横部材25、後輪28は、図2に示すように、左右両側にそれぞれ2つずつ設けられている(ただし、左側のパーツと右側のパーツとを比較すると、左右が逆の構成となっている)。
【0047】
後尾部材18は、ルーフ部材15に回動可能に連結される部材であり、前端付近に設けられた軸孔18aを貫通する回動軸を介してルーフ部材15の後軸孔15cに固定される。この後尾部材18には、図2に示すように、軸孔18aの更に前方に被当接部18bが突出形成されており、この被当接部18bへと至る突出部分の下面側がやや内側に湾曲して押下部18dを形成している。また、この後尾部材18の両側には、挟持部18cが下方に突出形成されている。
【0048】
次に本実施形態に係る形態変化玩具10の形態変化について説明する。
【0049】
本実施形態に係る形態変化玩具10は、上記した突出部材11が後方へと変位することにより、車の形態Aからロボットの形態Bへと形態を変化させるための形態変化機構が作動するように形成されている。具体的には、突出部材11が後方へと変位すると、上記したストッパー部材13、前部材14、スライド部材16、揺動部材17、後尾部材18、頭部材21、前横部材22、腕部材23、脚部材26、接地部材27などの複数の可動部材がそれぞれ変位して、ロボットの形態Bへと形態変化するように形成されている。
【0050】
なお、上記した複数の可動部材は互いに係合する複数の係合部を備えており、具体的には、9つの係合部を備えている。突出部材11が後方へと変位すると、この9つの係合部が順次作用することによって形態変化機構が作動し、形態が変化するように形成されている。
【0051】
以下、各係合部が順次作用する様子について説明する。
【0052】
まず、車の形態Aにおいては、図3(a)に示すように、リンク部材12が捩りコイルバネによって付勢されていることにより、突出部材11が前方に付勢され、ストッパー部材13が後方に付勢されている。このため、ストッパー部材13の係合溝13bに腕部材23の被係合部23cが嵌り込んで係合している(第1係合部)。
【0053】
この状態で、例えば玩具を走行させて前方の障害物に衝突させると、突出部材11が後方に変位する(図4参照)。すると、突出部材11に連動して、リンク部材12がリンク孔12cを支点として回動し、ストッパー部材13を前方に引き出す。
【0054】
すると、図5に示すように、ストッパー部材13が変位したことにより、係合溝13bと被係合部23cとの係合(第1係合部)が解除される。なお、腕部材23の基端軸孔23bを貫通する回動軸には捩りコイルバネが設けられており(図示せず)、この捩りコイルバネによって腕部材23は外側に変位する方向(開き方向)に付勢されている。このため、第1係合部が解除されると、この捩りコイルバネの付勢力によって腕部材23は外側に変位する。
【0055】
そして、図5に示すように、この腕部材23の変位により、前横部材22も外側に変位する。すなわち、前横部材22は、軸孔22aを貫通する回動軸に設けられた捩りコイルバネ(図示せず)によって外側(開き方向)に付勢されているものの、上記した第1係合部が係合している状態では前端部の被接触部22bがストッパー部材13の接触部13cに当接している(第2係合部)ため、外側に変位できない。しかしながら、腕部材23が変位すると、被接触部22bが接触部13cから離れるため、前横部材22は捩りコイルバネの付勢力により外側に変位する(図5(b)参照)。
【0056】
また、上記した腕部材23の変位により、頭部材21も前方に変位する。すなわち、頭部材21は、図示しないバネによって前方へと付勢されているものの、図6に示すように、腕部材23の係合凸部23dが頭部材21の係合凹部21bに嵌り込んでいる(第3係合部)ため、前方へと変位できない。しかしながら、腕部材23が回動すると、係合凸部23dが前方に回動するため頭部材21が前方に変位可能となり、頭部材21はバネの付勢力により前方に変位する。
【0057】
このように頭部材21が前方に変位すると、揺動部材17も連動して変位する。すなわち、図7(a)に示すように、揺動部材17は、軸孔17aを貫通する回動軸に設けられた捩りコイルバネ(図示せず)によって、引掛爪17bが頭部材21の引掛軸部21cに係合(第4係合部)する方向に付勢されている。この状態で頭部材21が前方に変位すると、図7(b)に示すように、揺動部材17は頭部材21の引掛軸部21cに押されて揺動する。
【0058】
このように揺動部材17が揺動すると、接地部材27も連動して変位する。すなわち、接地部材27は、軸孔27aを貫通する回動軸に設けられた捩りコイルバネ(図示せず)によって外側(開き方向)に付勢されているものの、上記した揺動部材17が揺動する前の状態(図8(a)参照)においては、係止突起27bが揺動部材17のストッパ部17cに係合している(第5係合部)ため、外側に変位できない。しかしながら、図8(b)に示すように揺動部材17が揺動すると、係止突起27bとストッパ部17cとの係合が解除されるため、接地部材27は捩りコイルバネの付勢力により外側に約90度回動する。
【0059】
このとき、接地部材27は、図3で説明した通り、車体の後部底面に配置されているので、接地部材27が外側(接地方向)に回動すると、接地部材27の接地部27cが地面に当接することとなる。接地部材27を付勢している付勢部材は形態変化玩具10を立ち上げるのに十分な程度のバネ力を持っているので、接地部材27が回動すると、図9に示すように、バネの力で地面を蹴り上げ、形態変化玩具10をジャンプさせる。そして、接地部27cの底面が地面に当接し、形態変化玩具10を自立させる。すなわち、車の形態Aにおける前方がロボットの形態Bにおける上方となるような形で、車体を約90度持ち上げて形態変化玩具10を立ち上げる。
【0060】
また、上記した頭部材21が前方に変位することにより、図10に示すように、後尾部材18も上方に変位する。すなわち、後尾部材18は、軸孔18aを貫通する回動軸に設けられた捩りコイルバネ(図示せず)によって外側(開き方向)に付勢されているものの、頭部材21が前方に変位する前の状態では被当接部18bが頭部材21の当接部21dに当接している(第6係合部)ため、外側に変位できない(図11(a)参照)。しかしながら、頭部材21が前方に変位すると、被当接部18bが当接部21dから離れてフリーになるため、後尾部材18は捩りコイルバネの付勢力により外側に変位する(図11(b)参照)。
【0061】
このように、後尾部材18が外側に変位すると、これと連動して脚部材26も変位する。すなわち、2つの脚部材26は、回動軸部26bに設けられた捩りコイルバネ(図示せず)によって外側(互いに開き方向)に付勢されているものの、後尾部材18が外側に変位する前の状態では被挟持部26cが後尾部材18の挟持部18cによって外側から押さえ込まれるように係合している(第7係合部)ため、外側に変位できない(図12(a)参照)。しかしながら、後尾部材18が外側に変位すると、被挟持部26cと挟持部18cとの係合が解除されるため、脚部材26は捩りコイルバネの付勢力により外側に変位する(図12(b)、図13参照)。
【0062】
また、後尾部材18が外側に変位すると、これと連動してスライド部材16も変位する。すなわち、スライド部材16は、図示しないバネによって前方に付勢されて位置し、図14(a)に示すように、被押下部16aを後尾部材18の押下部18dと係合させている(第8係合部)。この状態で後尾部材18が外側に変位すると、後尾部材18の押下部18dがスライド部材16の被押下部16aを後方へ押し込み、スライド部材16はバネの付勢力に抗って後方へと変位する(図14(b)参照)。
【0063】
このように、スライド部材16が後方に変位すると、これと連動して前部材14も変位する。すなわち、前部材14は、軸孔14aを貫通する回動軸に設けられた捩りコイルバネ(図示せず)によって下方に付勢されているものの、スライド部材16が後方に変位する前の状態では、被差込部14dにスライド部材16の差込部16bが係合(第9係合部)し、下方に変位できない(図15(a)参照)。しかしながら、スライド部材16が後方に変位すると、被差込部14dと差込部16bとの係合が解除されるため、前部材14は捩りコイルバネの付勢力により下方に変位する(図15(b))。
【0064】
なお、前部材14が変位すると、図16に示すように、頭部材21の前端部が切欠き14bから突出するように形成されている。
【0065】
このように、各係合部の係合が順次作用し、各部材が順次変異していくことにより、形態変化玩具10が車の形態Aから、図1(b)に示すようなロボットの形態Bへと形態変化するように形成されている。なお、ロボットの形態Bにおける形態変化玩具10は、接地部材27の接地部27cが接地することによって自立可能に支持されるとともに、後尾部材18の後端が接地することによってロボットの背面側も支持されるようなっている。このため、2つの接地部材27と後尾部材18とによって安定して自立するように形成されている。
【0066】
なお、ロボットの形態Bから車の形態Aへと形態変化させる場合には、各部材を同時に折り畳むようにして車の形態Aに戻せば、各係合部が適切に係合し、容易に車の形態Aに戻すことができる。
【0067】
上記したように、本実施形態によれば、車の形態Aにおいて前方に突出して設けられ、形態変化玩具10が障害物に衝突したときに後方へと変位可能な突出部材11と、前記突出部材11が後方へと変位することにより作動し、車の形態Aからロボットの形態Bへと形態を変化させるための形態変化機構を備えているので、障害物に衝突したときに瞬時に形態を変化させることができる。
【0068】
しかも、車の形態Aにおいて車体の後部底面に配置された接地部材27が、形態変化時に接地方向に回動して形態変化玩具10を立ち上げるように作用する。このため、障害物に衝突すると、その場で形態変化玩具10が直立してロボットの形態Bに変化するので、車の形態Aから大きく形態を変化させることができ、意外性と面白みに富んだ形態変化玩具10を提供できる。
【0069】
また、形態を変化させるための形態変化機構を複数の可動部材と複数の係合部とを備えて構成したので、複雑な形態変化となっており、このような形態変化を複数の係合部の係合が順次作用することによって行うこととしているので、更に複雑かつ面白みのある形態変化となっている。
【0070】
なお、走行可能な形態としては、上記したような車の形態Aに限らず、様々なデザインのものが採用可能である。例えば、飛行機、列車、バイクなどの形態としてもよい。また、別の形態としても、上記したようなロボットの形態Bに限らず、様々なデザインのものが採用可能である。例えば、動物の形態や、建物の形態としてもよい。
【符号の説明】
【0071】
10 形態変化玩具
11 突出部材
11a 軸孔
11b スライド孔
12 リンク部材
12a 上軸孔
12b 下軸孔
12c リンク孔
13 ストッパー部材(可動部材)
13a 軸孔
13b 係合溝(第1係合部)
13c 接触部(第2係合部)
14 前部材(可動部材)
14a 軸孔
14b 切欠き
14c リンク固定部
14d 被差込部(第9係合部)
14e 突起
15 ルーフ部材
15a 前軸孔
15b 中軸孔
15c 後軸孔
16 スライド部材(可動部材)
16a 被押下部(第8係合部)
16b 差込部(第9係合部)
17 揺動部材(可動部材)
17a 軸孔
17b 引掛爪(第4係合部)
17c ストッパ部(第5係合部)
18 後尾部材(可動部材)
18a 軸孔
18b 被当接部(第6係合部)
18c 挟持部(第7係合部)
18d 押下部(第8係合部)
19 前胴体
19a 腕軸孔
19b 脚軸孔
20 後胴体
20a ガイド孔
20b 脚軸孔
21 頭部材(可動部材)
21a ガイド突起
21b 係合凹部(第3係合部)
21c 引掛軸部(第4係合部)
21d 当接部(第6係合部)
22 前横部材(可動部材)
22a 軸孔
22b 被接触部(第2係合部)
23 腕部材(可動部材)
23a 先端軸孔
23b 基端軸孔
23c 被係合部(第1係合部)
23d 係合凸部(第3係合部)
24 前輪
25 後横部材
25a 突軸
26 脚部材(可動部材)
26a 軸受部
26b 回動軸部
26c 被挟持部(第7係合部)
27 接地部材(可動部材)
27a 軸孔
27b 係止突起(第5係合部)
27c 接地部
28 後輪
A 車の形態(走行可能な形態)
B ロボットの形態(別の形態)
【技術分野】
【0001】
この発明は、形態変化玩具に関し、特に、障害物に衝突したときに形態が変化する形態変化玩具に関するものである。
【背景技術】
【0002】
従来、障害物に衝突したときに形態が変化する玩具が知られている。
【0003】
例えば、特許文献1には、床上を走行する玩具用の車において、外力を受けたときにフック機構が係合部から離脱し、カバーがバネの弾性力によりシャーシーから分離するようにしたものが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−163761号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記した特許文献1記載の玩具においては、車の形態を逸脱しない範囲でしか形態が変化しないため、意外性に欠けるという問題点があった。
【0006】
そこで、本発明は、障害物に衝突したときに大きく形態を変化させることが可能な形態変化玩具を提供することを課題とする。
【課題を解決するための手段】
【0007】
本発明は、上記した課題を解決するためになされたものであり、以下を特徴とする。
【0008】
(請求項1)
請求項1に記載の発明は、以下の点を特徴とする。
【0009】
すなわち、請求項1に記載の形態変化玩具は、走行可能な形態から別の形態へと形態が変化する形態変化玩具であって、前記走行可能な形態において前方に突出して設けられ、前記形態変化玩具が障害物に衝突したときに後方へと変位可能な突出部材と、前記突出部材が後方へと変位することにより作動し、前記走行可能な形態から前記別の形態へと形態を変化させるための形態変化機構と、前記走行可能な形態において前記形態変化玩具の後部底面に配置され、後方側を支点として回動可能な接地部材と、を備え、前記接地部材は、前記形態変化機構が作動したときに接地方向に回動して前記形態変化玩具を立ち上げることを特徴とする。
【0010】
(請求項2)
請求項2に記載の発明は、上記した請求項1記載の発明の特徴点に加え、以下の点を特徴とする。
【0011】
すなわち、前記形態変化機構は、前記形態変化機構が作動した時に変位する複数の可動部材と、前記複数の可動部材に設けられて互いに係合する複数の係合部と、を備えて構成されていることを特徴とする。
【0012】
(請求項3)
請求項3に記載の発明は、上記した請求項2記載の発明の特徴点に加え、以下の点を特徴とする。
【0013】
すなわち、前記形態変化機構は、前記複数の係合部の係合が順次作用することによって作動することを特徴とする。
【0014】
(請求項4)
請求項4に記載の発明は、上記した請求項1〜3のいずれかに記載の発明の特徴点に加え、以下の点を特徴とする。
【0015】
すなわち、前記走行可能な形態において前記形態変化玩具の側部に配置され、前記形態変化機構が作動したときに外側へ変位する腕部材を設けたことを特徴とする。
【発明の効果】
【0016】
本発明は上記の通りであり、走行可能な形態において前方に突出して設けられ、形態変化玩具が障害物に衝突したときに後方へと変位可能な突出部材と、前記突出部材が後方へと変位することにより作動し、前記走行可能な形態から別の形態へと形態を変化させるための形態変化機構を備えているので、障害物に衝突したときに瞬時に形態を変化させることができる。
【0017】
しかも、走行可能な形態において形態変化玩具の後部底面に配置された接地部材が、形態変化時に接地方向に回動して形態変化玩具を立ち上げるように作用する。このため、障害物に衝突すると、その場で形態変化玩具が直立して別の形態に変化するので、走行可能な形態から大きく形態を変化させることができ、意外性と面白みに富んだ形態変化玩具を提供できる。
【0018】
なお、形態を変化させるための形態変化機構を複数の可動部材と複数の係合部とを備えて構成すれば、複雑な形態変化が可能となるため、様々なバリエーションの形態変化を実現することができる。
【0019】
また、このような形態変化を複数の係合部の係合が順次作用することによって行うようにすれば、更に複雑かつ面白みのある形態変化をさせることができる。
【0020】
なお、走行可能な形態からヒト型のロボットの形態などに変化させるには、走行可能な形態において形態変化玩具の側部に配置され、形態変化機構が作動したときに外側へ変位する腕部材を設けるようにすればよい。
【図面の簡単な説明】
【0021】
【図1】形態変化玩具の斜視図であって、(a)車の形態を示す図、(b)ロボットの形態を示す図である。
【図2】形態変化玩具の分解図である。
【図3】車の形態の(a)底面図、(b)側面図である。
【図4】第1係合部の作動を説明するための図であって、突出部材付近の内部構造を示す図である。
【図5】第1係合部及び第2係合部の作動を説明するための図であって、(a)係合状態を示す図、(b)係合が解除された状態を示す図である。
【図6】第3係合部の作動を説明するための図であって、(a)作動前の状態を示す図、(b)作動後の状態を示す図である。
【図7】第4係合部及び第5係合部の作動を説明するための図であって、(a)頭部材付近の内部構造を示す図、(b)頭部材と揺動部材との関係を示す図である。
【図8】第4係合部及び第5係合部の作動を説明するための図であって、(a)係合状態を示す図、(b)係合が解除された状態を示す図である。
【図9】第5係合部の作動を説明するための図であって、接地部材の動きを示す図である。
【図10】第6係合部及び第8係合部の作動を説明するための図である。
【図11】第6係合部の作動を説明するための図であって、(a)係合状態を示す図、(b)係合が解除された状態を示す図である。
【図12】第7係合部の作動を説明するための図であって、(a)係合状態を示す図、(b)係合が解除された状態を示す図である。
【図13】第7係合部の作動を説明するための図であって、脚部材の作動方向を示す図である。
【図14】第8係合部の作動を説明するための図であって、(a)作動前の状態を示す図、(b)作動後の状態を示す図である。
【図15】第9係合部の作動を説明するための図であって、(a)係合状態を示す図、(b)係合が解除された状態を示す図である。
【図16】第9係合部の作動を説明するための図であって、頭部材が外部に露出する様子を示す図である。
【発明を実施するための形態】
【0022】
本発明の実施形態について、図を参照しながら説明する。
【0023】
本実施形態に係る形態変化玩具10は、図1に示すように、走行可能な形態から別の形態、具体的には車の形態Aからロボットの形態Bへと形態が変化するものである。
【0024】
以下の説明においては、車の形態Aにおける進行方向を前方、車の形態Aにおける後退方向を後方、車の形態Aにおける進行方向にみて左右を左右方向(横方向)、車の形態Aにおける上方を上方、車の形態Aにおける下方を下方として説明する。
【0025】
この形態変化玩具10は、図1(a)に示すように、車の形態Aにおいて2つの前輪24及び2つの後輪28により手押しなどで走行可能に形成されている。この車の形態Aにおいては、ボンネット部分を形成する前部材14、ルーフ部分を形成するルーフ部材15、トランク部分を形成する後尾部材18、左右のドア部分を形成する前横部材22、左右の前横部材22の後部に位置する後横部材25、バンパー位置に設けられた突出部材11などにより、車体が形成されている。
【0026】
この車の形態Aから変化するロボットの形態Bは、図1(b)に示すように、両手両足を備えた直立した人型となっている。このロボットの形態Bにおいては、形態変化玩具10は、左右の足先を形成する接地部材27によって支持されて2本足で直立するようになっている。なお、前述した前部材14はロボットの胸を形成し、前横部材22はロボットの下腕を形成している。また、後横部材25は、後述する脚部材26などとともにロボットの脚を形成している。
【0027】
この形態変化玩具10は、図2に示すように、複数のパーツが一部変位可能に組み合わされることにより、車の形態Aから別のロボットの形態Bへと形態が変化できるように形成されている。なお、実際には、図2に示す部材の他にも、各部材を回動可能に連結するための回動軸や、各部材を付勢するためのバネ部材等が存在するが、これらについては文中にて説明することとし、図2においては省略している。
【0028】
以下、この形態変化玩具10を構成する部材(突出部材11、リンク部材12、ストッパー部材13、前部材14、ルーフ部材15、スライド部材16、揺動部材17、後尾部材18、前胴体19、後胴体20、頭部材21、前横部材22、腕部材23、前輪24、後横部材25、脚部材26、接地部材27、後輪28)について説明する。
【0029】
ルーフ部材15は、前述したように車の形態Aのルーフ部分を形成する部材である。このルーフ部材15の前部には、図2に示すように、前軸孔15aが左右に対向するように2つ穿設されている。また、このルーフ部材15の中央部には、中軸孔15bが左右に対向するように2つ穿設されている。また、このルーフ部材15の後部には、後軸孔15cが左右の側部に対向するように2つずつ穿設されている。
【0030】
前部材14は、上記したルーフ部材15に回動可能に連結される部材であり、後端に設けられた軸孔14aを貫通する回動軸を介してルーフ部材15の前軸孔15aに固定される。この前部材14には、図2に示すように、後方に開口する切欠き14bが形成されており、この切欠き14bの両側の開口縁付近には被差込部14dが凹設されている。
【0031】
リンク部材12は、前部材14の前端付近に回動可能に固定される部材である。このリンク部材12には、図2に示すように、上部に上軸孔12a、下部に下軸孔12b、中央にリンク孔12cがそれぞれ設けられている。このリンク部材12は、リンク孔12cを貫通する回動軸を介して、前部材14のリンク固定部14cに回動可能に固定される。特に図示しないが、このリンク孔12cを貫通する回動軸には、捩りコイルバネが設けられており、これにより、リンク部材12は、上端が後方に変位する方向、言い換えると、下端が前方に変位する方向に付勢されている。
【0032】
ストッパー部材13は、リンク部材12の上端に連結される部材である。このストッパー部材13は、左右に貫通形成された軸孔13aを貫通する回動軸を介して、リンク部材12の上軸孔12aに連結される。このストッパー部材13は、リンク部材12(を付勢する捩りコイルバネ)によって後方へと変位する方向に付勢されている。また、このストッパー部材13は、後端縁に左右2つの係合溝13bを備えている。
【0033】
突出部材11は、リンク部材12の下端に連結される部材である。この突出部材11は、後端付近で左右に貫通形成された軸孔11aを貫通する回動軸を介して、リンク部材12の下軸孔12bに連結される。この突出部材11は、リンク部材12(を付勢する捩りコイルバネ)によって前方へと変位する方向に付勢されている。また、この突出部材11には、図2に示すように、前後方向に長細のスライド孔11bが貫通形成されている。このスライド孔11bは、前部材14の底面に設けられた突起14e(図3(a)参照)を貫通させ、突出部材11の前後方向への摺動をガイドするためのものである。この突出部材11は、図1に示すように、車の形態Aにおいて前方に突出して設けられ、車の形態Aの形態変化玩具10を走行させて障害物に衝突したときに、リンク部材12(を付勢する捩りコイルバネ)の付勢力に抗って後方へと変位するように形成されている。
【0034】
揺動部材17は、ルーフ部材15に揺動可能に連結される部材であり、中央付近に設けられた軸孔17aを貫通する回動軸を介してルーフ部材15の中軸孔15bに固定される。この揺動部材17には、図2に示すように、前端側に引掛爪17bが形成されるとともに、後端側にストッパ部17cが形成されている。
【0035】
後胴体20は、ルーフ部材15の下面側に嵌め込まれて固定される部材である。この後胴体20には、前後方向に長細のガイド孔20aが設けられており、後部付近には左右2つの脚軸孔20bが設けられている。
【0036】
前胴体19は、後胴体20に対向するように嵌め込まれて固定される部材である。この前胴体19には、前部付近に左右2つの腕軸孔19aが設けられており、後部付近には左右2つの脚軸孔19bが設けられている。この脚軸孔19bは、後胴体20の脚軸孔20bと対向する位置に設けられている。
【0037】
頭部材21は、前胴体19と後胴体20との間に挟まれるように、前後に摺動可能に配置される部材である。この頭部材21の上面にはガイド突起21aが突出形成されており、このガイド突起21aが後胴体20のガイド孔20aに嵌り込むことで、頭部材21がガイド孔20aに沿って摺動可能となっている。この頭部材21の左右両側には、係合凹部21bが凹設されている。また、この頭部材21の後端付近には軸が左右方向に延びる引掛軸部21cが設けられており、この頭部材21の中央付近には上方に突出して設けられた当接部21dが設けられている。
【0038】
スライド部材16は、ルーフ部材15と後胴体20との間に挟まれるように、前後に摺動可能に配置される部材である。このスライド部材16の前端付近は刃先状に傾斜した差込部16bとなっており、また、このスライド部材16の後端付近には軸が左右方向に延びる被押下部16aが設けられている。
【0039】
腕部材23は、前胴体19と後胴体20との間に挟まれるように回動可能に固定される部材である。この腕部材23の一方の端部には基端軸孔23bが形成されており、この基端軸孔23bを貫通する回動軸を介して前胴体19の腕軸孔19aに回動可能に固定される。また、この腕部材23の他方の端部には先端軸孔23aが形成されている。なお、この腕部材23には、基端軸孔23b付近に係合凸部23dが突出形成されており、先端軸孔23a付近に被係合部23cが突出形成されている。
【0040】
前横部材22は、腕部材23の先端に回動可能に固定される部材である。この前横部材22の基端部には軸孔22aが形成されている。この前横部材22は、軸孔22aを貫通する回動軸を介して腕部材23の先端軸孔23aに回動可能に固定される。
【0041】
前輪24は、前横部材22の側部に回転可能に軸支される車輪である。
【0042】
脚部材26は、前胴体19と後胴体20との間に挟まれるように回動可能に固定される部材である。この脚部材26の前端部には回動軸部26bが突出形成されており、この回動軸部26bが前胴体19の脚軸孔19bと後胴体20の脚軸孔20bと回動可能に固定されることで、左右方向に回動可能となっている。この脚部材26の中央上部は、一部が切欠かれて被挟持部26cを形成している。また、この脚部材26の後端付近には、軸受部26aが凹設されている。
【0043】
後横部材25は、脚部材26の外側に嵌め込み固定される部材である。この後横部材25の後端付近には、前記した軸受部26aに嵌合される突軸25aが設けられている。
【0044】
後輪28は、後横部材25の側部に回転可能に軸支される車輪である。
【0045】
接地部材27は、ロボットの状態Bにおいて足先部を形成する部材である。この接地部材27の後部付近には、前記した突軸25aを差し込むための軸孔27aが設けられている。この接地部材27は、この軸孔27aを支点として後横部材25に対して回動可能に固定される。また、この接地部材27の上端には係止突起27bが突出形成されている。また、この接地部材27は、下方に板状の接地部27cを有している。この接地部材27は、図3に示すように、車の形態Aにおいて車体の後部底面に配置され、地面に接触しないように配置されている。
【0046】
なお、上記した腕部材23、前横部材22、前輪24、脚部材26、後横部材25、後輪28は、図2に示すように、左右両側にそれぞれ2つずつ設けられている(ただし、左側のパーツと右側のパーツとを比較すると、左右が逆の構成となっている)。
【0047】
後尾部材18は、ルーフ部材15に回動可能に連結される部材であり、前端付近に設けられた軸孔18aを貫通する回動軸を介してルーフ部材15の後軸孔15cに固定される。この後尾部材18には、図2に示すように、軸孔18aの更に前方に被当接部18bが突出形成されており、この被当接部18bへと至る突出部分の下面側がやや内側に湾曲して押下部18dを形成している。また、この後尾部材18の両側には、挟持部18cが下方に突出形成されている。
【0048】
次に本実施形態に係る形態変化玩具10の形態変化について説明する。
【0049】
本実施形態に係る形態変化玩具10は、上記した突出部材11が後方へと変位することにより、車の形態Aからロボットの形態Bへと形態を変化させるための形態変化機構が作動するように形成されている。具体的には、突出部材11が後方へと変位すると、上記したストッパー部材13、前部材14、スライド部材16、揺動部材17、後尾部材18、頭部材21、前横部材22、腕部材23、脚部材26、接地部材27などの複数の可動部材がそれぞれ変位して、ロボットの形態Bへと形態変化するように形成されている。
【0050】
なお、上記した複数の可動部材は互いに係合する複数の係合部を備えており、具体的には、9つの係合部を備えている。突出部材11が後方へと変位すると、この9つの係合部が順次作用することによって形態変化機構が作動し、形態が変化するように形成されている。
【0051】
以下、各係合部が順次作用する様子について説明する。
【0052】
まず、車の形態Aにおいては、図3(a)に示すように、リンク部材12が捩りコイルバネによって付勢されていることにより、突出部材11が前方に付勢され、ストッパー部材13が後方に付勢されている。このため、ストッパー部材13の係合溝13bに腕部材23の被係合部23cが嵌り込んで係合している(第1係合部)。
【0053】
この状態で、例えば玩具を走行させて前方の障害物に衝突させると、突出部材11が後方に変位する(図4参照)。すると、突出部材11に連動して、リンク部材12がリンク孔12cを支点として回動し、ストッパー部材13を前方に引き出す。
【0054】
すると、図5に示すように、ストッパー部材13が変位したことにより、係合溝13bと被係合部23cとの係合(第1係合部)が解除される。なお、腕部材23の基端軸孔23bを貫通する回動軸には捩りコイルバネが設けられており(図示せず)、この捩りコイルバネによって腕部材23は外側に変位する方向(開き方向)に付勢されている。このため、第1係合部が解除されると、この捩りコイルバネの付勢力によって腕部材23は外側に変位する。
【0055】
そして、図5に示すように、この腕部材23の変位により、前横部材22も外側に変位する。すなわち、前横部材22は、軸孔22aを貫通する回動軸に設けられた捩りコイルバネ(図示せず)によって外側(開き方向)に付勢されているものの、上記した第1係合部が係合している状態では前端部の被接触部22bがストッパー部材13の接触部13cに当接している(第2係合部)ため、外側に変位できない。しかしながら、腕部材23が変位すると、被接触部22bが接触部13cから離れるため、前横部材22は捩りコイルバネの付勢力により外側に変位する(図5(b)参照)。
【0056】
また、上記した腕部材23の変位により、頭部材21も前方に変位する。すなわち、頭部材21は、図示しないバネによって前方へと付勢されているものの、図6に示すように、腕部材23の係合凸部23dが頭部材21の係合凹部21bに嵌り込んでいる(第3係合部)ため、前方へと変位できない。しかしながら、腕部材23が回動すると、係合凸部23dが前方に回動するため頭部材21が前方に変位可能となり、頭部材21はバネの付勢力により前方に変位する。
【0057】
このように頭部材21が前方に変位すると、揺動部材17も連動して変位する。すなわち、図7(a)に示すように、揺動部材17は、軸孔17aを貫通する回動軸に設けられた捩りコイルバネ(図示せず)によって、引掛爪17bが頭部材21の引掛軸部21cに係合(第4係合部)する方向に付勢されている。この状態で頭部材21が前方に変位すると、図7(b)に示すように、揺動部材17は頭部材21の引掛軸部21cに押されて揺動する。
【0058】
このように揺動部材17が揺動すると、接地部材27も連動して変位する。すなわち、接地部材27は、軸孔27aを貫通する回動軸に設けられた捩りコイルバネ(図示せず)によって外側(開き方向)に付勢されているものの、上記した揺動部材17が揺動する前の状態(図8(a)参照)においては、係止突起27bが揺動部材17のストッパ部17cに係合している(第5係合部)ため、外側に変位できない。しかしながら、図8(b)に示すように揺動部材17が揺動すると、係止突起27bとストッパ部17cとの係合が解除されるため、接地部材27は捩りコイルバネの付勢力により外側に約90度回動する。
【0059】
このとき、接地部材27は、図3で説明した通り、車体の後部底面に配置されているので、接地部材27が外側(接地方向)に回動すると、接地部材27の接地部27cが地面に当接することとなる。接地部材27を付勢している付勢部材は形態変化玩具10を立ち上げるのに十分な程度のバネ力を持っているので、接地部材27が回動すると、図9に示すように、バネの力で地面を蹴り上げ、形態変化玩具10をジャンプさせる。そして、接地部27cの底面が地面に当接し、形態変化玩具10を自立させる。すなわち、車の形態Aにおける前方がロボットの形態Bにおける上方となるような形で、車体を約90度持ち上げて形態変化玩具10を立ち上げる。
【0060】
また、上記した頭部材21が前方に変位することにより、図10に示すように、後尾部材18も上方に変位する。すなわち、後尾部材18は、軸孔18aを貫通する回動軸に設けられた捩りコイルバネ(図示せず)によって外側(開き方向)に付勢されているものの、頭部材21が前方に変位する前の状態では被当接部18bが頭部材21の当接部21dに当接している(第6係合部)ため、外側に変位できない(図11(a)参照)。しかしながら、頭部材21が前方に変位すると、被当接部18bが当接部21dから離れてフリーになるため、後尾部材18は捩りコイルバネの付勢力により外側に変位する(図11(b)参照)。
【0061】
このように、後尾部材18が外側に変位すると、これと連動して脚部材26も変位する。すなわち、2つの脚部材26は、回動軸部26bに設けられた捩りコイルバネ(図示せず)によって外側(互いに開き方向)に付勢されているものの、後尾部材18が外側に変位する前の状態では被挟持部26cが後尾部材18の挟持部18cによって外側から押さえ込まれるように係合している(第7係合部)ため、外側に変位できない(図12(a)参照)。しかしながら、後尾部材18が外側に変位すると、被挟持部26cと挟持部18cとの係合が解除されるため、脚部材26は捩りコイルバネの付勢力により外側に変位する(図12(b)、図13参照)。
【0062】
また、後尾部材18が外側に変位すると、これと連動してスライド部材16も変位する。すなわち、スライド部材16は、図示しないバネによって前方に付勢されて位置し、図14(a)に示すように、被押下部16aを後尾部材18の押下部18dと係合させている(第8係合部)。この状態で後尾部材18が外側に変位すると、後尾部材18の押下部18dがスライド部材16の被押下部16aを後方へ押し込み、スライド部材16はバネの付勢力に抗って後方へと変位する(図14(b)参照)。
【0063】
このように、スライド部材16が後方に変位すると、これと連動して前部材14も変位する。すなわち、前部材14は、軸孔14aを貫通する回動軸に設けられた捩りコイルバネ(図示せず)によって下方に付勢されているものの、スライド部材16が後方に変位する前の状態では、被差込部14dにスライド部材16の差込部16bが係合(第9係合部)し、下方に変位できない(図15(a)参照)。しかしながら、スライド部材16が後方に変位すると、被差込部14dと差込部16bとの係合が解除されるため、前部材14は捩りコイルバネの付勢力により下方に変位する(図15(b))。
【0064】
なお、前部材14が変位すると、図16に示すように、頭部材21の前端部が切欠き14bから突出するように形成されている。
【0065】
このように、各係合部の係合が順次作用し、各部材が順次変異していくことにより、形態変化玩具10が車の形態Aから、図1(b)に示すようなロボットの形態Bへと形態変化するように形成されている。なお、ロボットの形態Bにおける形態変化玩具10は、接地部材27の接地部27cが接地することによって自立可能に支持されるとともに、後尾部材18の後端が接地することによってロボットの背面側も支持されるようなっている。このため、2つの接地部材27と後尾部材18とによって安定して自立するように形成されている。
【0066】
なお、ロボットの形態Bから車の形態Aへと形態変化させる場合には、各部材を同時に折り畳むようにして車の形態Aに戻せば、各係合部が適切に係合し、容易に車の形態Aに戻すことができる。
【0067】
上記したように、本実施形態によれば、車の形態Aにおいて前方に突出して設けられ、形態変化玩具10が障害物に衝突したときに後方へと変位可能な突出部材11と、前記突出部材11が後方へと変位することにより作動し、車の形態Aからロボットの形態Bへと形態を変化させるための形態変化機構を備えているので、障害物に衝突したときに瞬時に形態を変化させることができる。
【0068】
しかも、車の形態Aにおいて車体の後部底面に配置された接地部材27が、形態変化時に接地方向に回動して形態変化玩具10を立ち上げるように作用する。このため、障害物に衝突すると、その場で形態変化玩具10が直立してロボットの形態Bに変化するので、車の形態Aから大きく形態を変化させることができ、意外性と面白みに富んだ形態変化玩具10を提供できる。
【0069】
また、形態を変化させるための形態変化機構を複数の可動部材と複数の係合部とを備えて構成したので、複雑な形態変化となっており、このような形態変化を複数の係合部の係合が順次作用することによって行うこととしているので、更に複雑かつ面白みのある形態変化となっている。
【0070】
なお、走行可能な形態としては、上記したような車の形態Aに限らず、様々なデザインのものが採用可能である。例えば、飛行機、列車、バイクなどの形態としてもよい。また、別の形態としても、上記したようなロボットの形態Bに限らず、様々なデザインのものが採用可能である。例えば、動物の形態や、建物の形態としてもよい。
【符号の説明】
【0071】
10 形態変化玩具
11 突出部材
11a 軸孔
11b スライド孔
12 リンク部材
12a 上軸孔
12b 下軸孔
12c リンク孔
13 ストッパー部材(可動部材)
13a 軸孔
13b 係合溝(第1係合部)
13c 接触部(第2係合部)
14 前部材(可動部材)
14a 軸孔
14b 切欠き
14c リンク固定部
14d 被差込部(第9係合部)
14e 突起
15 ルーフ部材
15a 前軸孔
15b 中軸孔
15c 後軸孔
16 スライド部材(可動部材)
16a 被押下部(第8係合部)
16b 差込部(第9係合部)
17 揺動部材(可動部材)
17a 軸孔
17b 引掛爪(第4係合部)
17c ストッパ部(第5係合部)
18 後尾部材(可動部材)
18a 軸孔
18b 被当接部(第6係合部)
18c 挟持部(第7係合部)
18d 押下部(第8係合部)
19 前胴体
19a 腕軸孔
19b 脚軸孔
20 後胴体
20a ガイド孔
20b 脚軸孔
21 頭部材(可動部材)
21a ガイド突起
21b 係合凹部(第3係合部)
21c 引掛軸部(第4係合部)
21d 当接部(第6係合部)
22 前横部材(可動部材)
22a 軸孔
22b 被接触部(第2係合部)
23 腕部材(可動部材)
23a 先端軸孔
23b 基端軸孔
23c 被係合部(第1係合部)
23d 係合凸部(第3係合部)
24 前輪
25 後横部材
25a 突軸
26 脚部材(可動部材)
26a 軸受部
26b 回動軸部
26c 被挟持部(第7係合部)
27 接地部材(可動部材)
27a 軸孔
27b 係止突起(第5係合部)
27c 接地部
28 後輪
A 車の形態(走行可能な形態)
B ロボットの形態(別の形態)
【特許請求の範囲】
【請求項1】
走行可能な形態から別の形態へと形態が変化する形態変化玩具であって、
前記走行可能な形態において前方に突出して設けられ、前記形態変化玩具が障害物に衝突したときに後方へと変位可能な突出部材と、
前記突出部材が後方へと変位することにより作動し、前記走行可能な形態から前記別の形態へと形態を変化させるための形態変化機構と、
前記走行可能な形態において前記形態変化玩具の後部底面に配置され、後方側を支点として回動可能な接地部材と、
を備え、
前記接地部材は、前記形態変化機構が作動したときに接地方向に回動して前記形態変化玩具を立ち上げることを特徴とする、形態変化玩具。
【請求項2】
前記形態変化機構は、前記形態変化機構が作動した時に変位する複数の可動部材と、前記複数の可動部材に設けられて互いに係合する複数の係合部と、を備えて構成されていることを特徴とする、請求項1記載の形態変化玩具。
【請求項3】
前記形態変化機構は、前記複数の係合部の係合が順次作用することによって作動することを特徴とする、請求項2記載の形態変化玩具。
【請求項4】
前記走行可能な形態において前記形態変化玩具の側部に配置され、前記形態変化機構が作動したときに外側へ変位する腕部材を設けたことを特徴とする、請求項1〜3のいずれか記載の形態変化玩具。
【請求項1】
走行可能な形態から別の形態へと形態が変化する形態変化玩具であって、
前記走行可能な形態において前方に突出して設けられ、前記形態変化玩具が障害物に衝突したときに後方へと変位可能な突出部材と、
前記突出部材が後方へと変位することにより作動し、前記走行可能な形態から前記別の形態へと形態を変化させるための形態変化機構と、
前記走行可能な形態において前記形態変化玩具の後部底面に配置され、後方側を支点として回動可能な接地部材と、
を備え、
前記接地部材は、前記形態変化機構が作動したときに接地方向に回動して前記形態変化玩具を立ち上げることを特徴とする、形態変化玩具。
【請求項2】
前記形態変化機構は、前記形態変化機構が作動した時に変位する複数の可動部材と、前記複数の可動部材に設けられて互いに係合する複数の係合部と、を備えて構成されていることを特徴とする、請求項1記載の形態変化玩具。
【請求項3】
前記形態変化機構は、前記複数の係合部の係合が順次作用することによって作動することを特徴とする、請求項2記載の形態変化玩具。
【請求項4】
前記走行可能な形態において前記形態変化玩具の側部に配置され、前記形態変化機構が作動したときに外側へ変位する腕部材を設けたことを特徴とする、請求項1〜3のいずれか記載の形態変化玩具。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図13】

【図14】
【図15】

【図16】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−187353(P2012−187353A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−55563(P2011−55563)
【出願日】平成23年3月14日(2011.3.14)
【出願人】(594177472)有限会社イング二十一 (5)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月14日(2011.3.14)
【出願人】(594177472)有限会社イング二十一 (5)
【Fターム(参考)】
[ Back to top ]