
形状検知による追跡を行うことを特徴とする小線源治療方法及び装置
小線源治療方法及び装置は、少なくとも1つの放射線源又は放射線種を受け取るチャネルを有するアプリケータを、照射されるべき標的領域(40)に隣接する軟部組織へ注入する手順を有する。前記アプリケータを含む前記標的領域(40)の高解像度透視像(64)が生成される。前記高解像度透視像(64)は、3次元治療用概略図(66)を決定するのに用いられる。前記標的領域(40)及び3次元治療用概略図(66)に関する前記アプリケータの位置が追跡される。前記位置の追跡は、形状検知によって、前記少なくとも1つの放射線源又は放射線種を受け取るチャネルの位置及び形状を測定する手順を有する。

【発明の詳細な説明】
【技術分野】
【0001】
本実施例は概して医療システムに関し、より詳細には、形状検知による追跡を行うことを特徴とする小線源治療方法及び装置に関する。
【0002】
本願は治療技術に関する。本願は高線量(HDR)小線源治療が行われる特殊用途に適するので、その特殊用途を参照しながら本願を説明することにする。しかし本開示の実施例は、他の治療用途−たとえば低線量小線源治療及び他の治療用線源の位置決定−が行われる用途にも適する。それに加えて、本願で提示される様々な例は、前立腺癌の小線源治療に関する。しかし本願に記載された方法は、前立腺以外の臓器−たとえば胸、肺、肝臓、子宮、子宮頸管、並びに、同様の治療及び改善された作業手順及び患者の処置が望ましい他の臓器−の治療にも適用されうる。
【背景技術】
【0003】
癌は通常、複数の治療法−たとえば外科的処置、化学療法、放射線治療等−を組み合わせることで処置される。たとえば腫瘍は通常外科的に除去され、その後患者は、除去されなかった癌細胞を殺すための化学療法又は放射線治療を受ける。一の放射線処置では、線形加速器からのX線ビームが、標的領域へ案内される。対照的に小線源治療では、種が標的領域へ挿入されることで、内部からその標的領域が照射される。
【0004】
HDR小線源治療では、カテーテルの形態をとるアプリケータが、患者内に設置され、照射されるべき標的領域にまで拡張する。高線量の線源(たとえばイリジウム192)又は線種は、ワイヤ端部のカテーテル内を移動して、決められた期間、1か所以上の予め決められた位置に留まる。この処置は、数日にわたって、典型的には1日に1,2回繰り返される。
【0005】
HDR小線源治療処理は、体腔又は腫瘍へ小さな種放射線源(たとえばIr-192)を、時間を決めて挿入することによって、分別された治療線量を指定された標的体積への供給に依存する処理に依存する。Ir-192線源は、ワイヤに取り付けられて、先に外科的に挿入されたカテーテルを介して出し入れされる。現在、HDR処理は、体内での線源の位置を追跡するコンピュータ制御された機械的供給システムに依拠している。そのような線源追跡システム法が一般的に受け入れられている一方で、場合によっては、挿入期間と小線源処置期間との間で外科的に挿入されたカテーテルが動くことで、種線源の位置がずれてしまうという問題が存在する。そのような運動は、臓器の運動、膨張、及びカテーテルの移動に起因する。カテーテルの組の位置を検証する処理は、今日のX線及び超音波イメージングを用いることによって、どの処理前にも行われる。しかし不幸なことに、この処理は、まどろっこしく、退屈で、時間が長くかかり、かつコストもかかる。検出されない運動が生じる極端な場合、患者の健康な細胞がそのような高線量に意図せず長時間曝露されることで、その患者は深刻な病気又は死を招くことになる恐れがある。
【発明の概要】
【発明が解決しようとする課題】
【0006】
よって小線源処置中での放射線源又は種の正しい位置を保証するため、種線源チャネル/アプリケータのその場リアルタイム追跡装置及び方法が強く必要とされている。
【0007】
従って上記問題を解決するために改善された方法及びシステムが必要とされている。
【課題を解決するための手段】
【0008】
小線源治療方法及び装置は、少なくとも1つの放射線源又は放射線種を受け取るチャネルを有するアプリケータを、照射されるべき標的領域に隣接する軟部組織へ注入する手順を有する。前記アプリケータを含む前記標的領域の高解像度透視像が生成される。前記高解像度透視像は、3次元治療用概略図を決定するのに用いられる。前記標的領域及び3次元治療用概略図に関する前記アプリケータの位置が追跡される。前記位置の追跡は、形状検知によって、前記少なくとも1つの放射線源又は放射線種を受け取るチャネルの位置及び形状を測定する手順を有する。
【図面の簡単な説明】
【0009】
【図1】当技術分野において既知の小線源治療法のフローダイアグラムである。
【図2】本開示の実施例による形状検知による追跡を行うことを特徴とする小線源治療法のフローダイアグラムである。
【図3】小線源処置中に照射される標的領域、隣接する組織、超音波プローブ、及び本開示の実施例で用いられるテンプレートの概略的側面図である。
【図4】小線源処置中に処置される標的領域の一部と隣接する組織を表す超音波像のスライスを表している。
【図5】小線源処置中に照射される標的領域、隣接する組織、超音波プローブ、テンプレート、及び本開示の一実施例で用いられる放射線源又は種を受け取るチャネルのアレイの3次元概略図である。
【図6】小線源処置中に処置される標的領域の一部、該標的領域内部の多数の計画された処置位置、及び隣接する組織を表す超音波像のスライスを表している。
【図7】小線源処置中に処置される標的領域の一部と隣接する組織を表す超音波像を表す体積の3次元斜視図である。図中、標的領域−より詳細には、様々な滞在位置を有する放射線源又は種を受け取るチャネルの対応するアレイ−内部の多数の計画された処置位置が、各対応するアレイ内に表されている。
【図8】本開示の一実施例による小線源治療方法及び装置に用いられる、先端部に結合した放射線源又は種を有する線源供給装置のケーブルの概略図である。
【図9】標的領域及び処置計画に関するアプリケータの位置を追跡するのに用いられるファイバブラッググレーティング(FBG)光ファイバの概略図である。前記位置の追跡は、形状検知による、本開示の一実施例による小線源治療装置内の少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状を測定する手順を有する。
【図10】本開示の実施例による形状検知による追跡を行うことを特徴とする小線源装置のブロック図である。
【図11】本開示の一実施例によるシミュレーションによる供給装置の配置及び検索のうちの少なくとも1つによる形状検知による追跡を行うことを特徴とする小線源装置のブロック図である。
【図12】本開示の一実施例による線源供給装置の配置及び検索のうちの少なくとも1つによる形状検知による追跡を行うことを特徴とする小線源装置のブロック図である。
【発明を実施するための形態】
【0010】
現在市販されているアフターローダーは、一軸のカテーテル/ニードルに沿った線源の長さ(つまり深さ)の制御及び監視を行う構成に制限されている。現在のアフターローダーは、できるとしても、組織及びこれまでの線源が供給された他の位置に関する供給位置を不十分にしか制御できない。本開示の実施例は有利となるように、現在市販されているアフターローダー装置の問題と限界を克服する。本開示の実施例は有利となるように、小線源治療を容易にし、制御を改善し、かつ、治療法が計画に従って供給されることを保証する。
【0011】
本開示の実施例の一の利点は、小線源治療中での健康な組織への意図しない放射線曝露の減少、及び、意図した処置位置への放射線照射の精度の向上である。換言すると、本開示の実施例は、計画された小線源治療をより保証された精度で行う。本開示の実施例は有利となるように、既存のアフターローダー装置の付属物として(複数の)ファイバブラッググレーティング(FBG)光ファイバを利用する。(複数の)FBG光ファイバは、各カテーテルの位置と形状を測定し、かつ、カテーテルのすべての組についての情報を3Dにおいて収集する。それにより一のカテーテルから他のカテーテルへの運動が生じないことが保証される。一の実施例では、最初にFBGが、アフターローダーによる「ダミー」線源として配置され、検索される。一旦測定結果が(数秒以内に)取得されると、ケーブルに取り付けられた放射線源は、所望の処置を供するため、所望の位置に配置される。他の実施例では、放射線源のケーブルもまたFBG光ファイバを有する。FBGケーブルは、小線源処置の間も放射線源を追跡するのに用いられる。
【0012】
本開示の実施例によると、ファイバブラッググレーティング技術は有利となるように、HDR小線源治療の供給処理中に利用される可撓性カテーテルのリアルタイムの位置特定と歪み情報を与える。FBG光ファイバは有利となるように、小線源処置の放射線の供給前及びその間に、挿入されたカテーテルの全体形状を確認及び監視する単純で、迅速で、正確な方法を供する。それに加えて、FBG光ファイバのサイズ、可撓性、及び形状因子は、アフターローダー及びカテーテルでの使用に非常に適したものである。さらにFBG光ファイバは、(電磁気系と比較して)周辺の金属環境に対する影響を受けない。しかもアフターローダー装置のアクティブ線源ケーブルは外径が0.7mmのオーダーである。FBG光ファイバは外径が0.4mmのオーダーであるので、アフターローダーによく適合する。
【0013】
一の実施例では、小線源治療装置及び方法は、アフターローダーに組み込まれた形状検知を利用する。その形状検知は、アプリケータ/ニードル又はカテーテルの先端部のリアルタイムでの3Dの位置及び形状を検出するのみならず、放射線処置を行う際に用いられる、ニードル及びカテーテル内部の放射線源/種をも検出する。先端部の位置及びニードルとカテーテルの形状に関する情報は、放射線が供給される(複数の)位置の最適制御を保証するように処置の計画又は供給を制御及び適応させるのに用いられる。ファイバ光学形状センサは、この用途に十分適する。なぜならファイバ光学形状センサは、内部での構築が容易であり、かつ、アフターローダーによる駆動が可能であるからである。放射線源は、既存のケーブル/ガイドワイヤを置換するものとしてファイバに取り付けられるように設計されて良いし、又は、実際の線源の供給の直前の供給をシミュレーションするための、ファイバに基づく「ダミー線源」であってもよい。
【0014】
動作時、アクティブ線源が、事前に計画された位置及び滞在パラメータにて、体内の標的サイトへ供給されることで、位置、形状、及び放射線照射量測定のリアルタイム評価が、制御装置又は制御ステーションへ送られて良い。標的サイトの局所的な組織上及び機能上の局所環境が変化して、既存の計画と比較して評価することが可能な場合、計画用ワークステーションは、新たな情報を考慮して、リアルタイムで、及び/又は、必要なときには、3D照射量分布を再計算する。アクティブ線源が現在のチャネル及び/又は次のチャネルに配置されるときには、より正確な放射線治療、並びに、前立腺の周辺に存在及び/又は前立腺に隣接する健康な組織(たとえば尿道、神経、血管、括約筋、直腸、及び膀胱)への副作用の減少という要求に応えるため、照射量分布面が監視及び調節される。
【0015】
さらに他の実施例によると、FBG光ファイバが、計画及び照射量の供給を補助するため、像取得中に尿道の3D形状を表す手段として用いられる。尿道は、この処理のための重要な部位/組織であり、従来の画像処理法では識別が困難であることに留意して欲しい。
【0016】
他の実施例では、小線源治療方法は、3D形状検知光ファイバを用いて、複数の画像化モダリティを、その場登録により一緒に登録するのを補助する手段を供する手順を有する。たとえば、FBG光ファイバは、CT、MR、PET、又は3Dアンギオグラフィの間に尿道内部に挿入され、かつ、尿道の3D形状は、(i)計画(よって複数の画像化モダリティを1つにする)のため、及び、(ii)3D超音波による介入の間に、3Dの尿道に一致させるのに用いられて良い。
【0017】
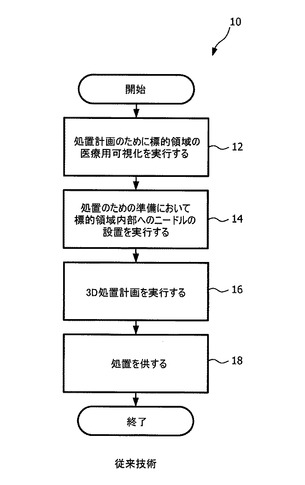
ここで図1を参照すると、当技術分野において既知の小線源治療法10のフローダイアグラムが示されている。当該方法は、参照番号12によって示されているように、処置計画のための標的領域の医用画像処理を実行することから開始される。医用画像処理の実行に続いて、当該方法は、参照番号14で示されているように、小線源処置のための準備において標的領域内部へニードルを設置する手順を有する。ニードルを設置する際、参照番号16で示されているように、3D処置計画が実行される。続いて処置は18にて供され、その後当該方法は終了する。小線源治療方法の作業手順の各処理は、標的である組織とその放射線分布に依存する。それに加えて、作業手順は、一の組織と他の組織とで異なって良い。
【0018】
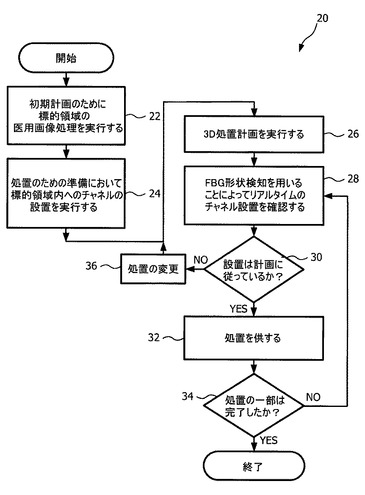
図2は、本開示の実施例による形状検知による追跡を行うことを特徴とする小線源治療方法20のフローダイアグラムである。当該方法は、参照番号22で示されているように、処置計画のための標的領域の医用画像処理の実行から開始される。医用画像処理の実行に続いて、当該方法は、小線源処置のための準備において標的領域内にチャネルを設置する手順を有する。後述するように、設置されたチャネルは、所与の組織及び小線源処置のための、1つ以上のカテーテル、コネクタ、及びアプリケータのニードルを有して良い。チャネルが設置される際、参照番号26で示されているように、3D処置計画が実行される。3D処置計画の実行に続いて、当該方法は、参照番号28で示されているように、FBG形状検知を用いることによって、リアルタイムでのチャネルの設置を確認する手順を有する。続いて参照番号30で示されているように、設置が3D処置計画に従って実行されているのか否かを判断するためのクエリが実行される。その設置が、閾値量の範囲内での3D処置計画に従っている場合、参照番号32で示されているように、当該方法は供給処置に進む。供された処置の完了の際、所与の処置の一部(又はその全て)が完了したか否かについてのクエリが実行される。所与の小線源処置の一部(又はその全て)が完了したと仮定すると、当該方法は終了する。他方、所与の処置の一部が完了していない場合、一の実施例によると、当該方法は、FBG形状検知を用いたリアルタイムチャネル設置の確認を行う手順28に戻る。続いて当該方法は、手順30でのクエリを行うことで継続する。再度手順30を参照すると、チャネルの設置が計画に従っているか否かというクエリの結果、そのチャネルの設置が閾値量の範囲内にない場合、当該方法は手順36へ進む。手順36では、処置(又は処置計画)は、チャネルの設置のずれの関数として変更される。当該方法は次に、3D処置計画を実行する手順26へ再度進む。しかしこの場合、3D処置計画の実行は、チャネル設置のずれの関数としての処置の変更を考慮する。従って当該方法は有利となるように、処置を供する前だけでなく、処置を供している間にも、リアルタイムでチャネルの設置の確認を行う。それに加えて、チャネル設置の確認は有利となるように、単一の処置の一部について、及び、多数の処理の一部にわたって供される。
【0019】
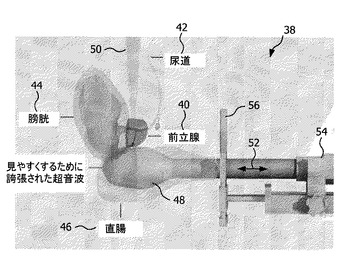
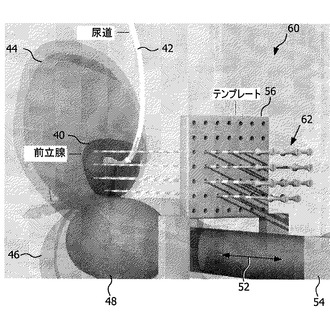
図3は、小線源治療の間に照射される標的領域、隣接する組織、超音波プローブ、及び、本開示の実施例で用いられるテンプレートの概略的側面図である。たとえば隣接する組織は、尿道42、膀胱44、小腸46を有する。超音波プローブ48は、小腸46の内部に挿入され、かつ前立腺に近接するものとして表されている。超音波プローブ48は、小線源処理による治療を行う前及び又はその間に、たとえば参照番号50で表されているような1つ以上の超音波ビームを生成するように構成される。超音波プローブ48は、標的領域又は組織40の1つ以上の超音波像(図4参照のこと)を取得するのに用いられる。
【0020】
さらに図3を参照すると、超音波プローブ48は、標的領域40に対して、たとえば矢印52で示された方向に変位される、又は動かされるように構成される。超音波プローブの移動は、たとえば適切なステッピングモーター54を用いることによって実行される。それに加えて、標的領域40に対してアプリケータを変位させるために用いられるテンプレート56は、適切な結合手段を介して、超音波プローブを介して、超音波プローブに対して結合する。テンプレート(とひいてはアプリケータ)間での登録は、超音波プローブを参照しながらすぐに決定することができる。換言すると、超音波プローブの画像化システムと、標的領域と処置計画に対するアプリケータの位置の追跡の画像化システムを、後述するように、得ることができる。図4は超音波像58の2次元スライスの概略図で、小線源治療中に処理される標的領域40の一部と、隣接する組織を図示している。
【0021】
図5は、小線源処置中に照射される標的領域40、隣接する組織(42,44,46)、超音波プローブ48、テンプレート56、及び、本発明の一の実施例により用いられる放射線源又は種を受け取るチャネル62のアレイの3次元概略図である。一の実施例では、放射線源又は種を受け取るチャネル62のアレイはアプリケータを有する。従ってアプリケータは、以降で図10〜図12を参照しながら詳述されているように、照射される標的領域40に隣接する軟組織内に注入される少なくとも1つの放射線源又は種を受け取るチャネル62を有する。本願明細書で用いられているように、「標的領域40に隣接して注入される」という語句は、標的領域40内部に注入される状態も含むものと解される。その理由は、標的領域の組織の中には照射される部分が存在する一方で、照射されない部分も存在するからである。この理解は、図6及び図7を参照した議論からより明確になるはずである。
【0022】
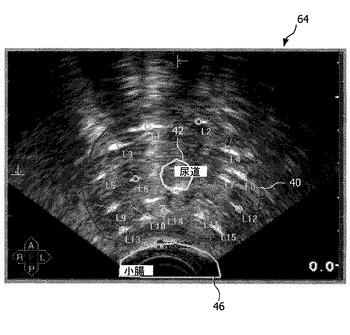
図6は、小線源処置中に処置される標的領域の一部、該標的領域内部の多数の計画された処置位置、及び隣接する組織を表す超音波像の2次元(2D)スライスを表している。この2D像64では、認識可能な隣接する組織には、尿道42及び小腸46が含まれる。この2D像64内では、標的領域40は、参照符号L1,L2,L3,L4,L5が付された円によって示された多数の処置位置を有する。標的領域内では、処置位置の数は、有害(たとえば癌)と診断された標的位置の3次元体積内のサイト数の関数である。
【0023】
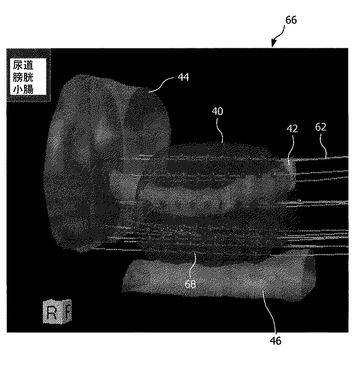
図7は、小線源処置中に処置される標的領域40の一部と隣接する組織を表す超音波像を表す体積の3次元斜視図66である。図中、標的領域−より詳細には、様々な滞在位置を有する放射線源又は種を受け取るチャネルの対応するアレイ−内部の多数の計画された処置位置が、各対応するアレイ内に表されている。簡明を期すため、複数の滞在地点のうちの1つだけが、参照番号68によって特定されている。図7から理解できるように、放射線源又は種を受け取るチャネル62のアレイの各チャネルは多数の滞在地点68を有して良い。多数の滞在地点68は放射線源又は種を受け取るチャネル62に沿った1つ以上の地点68に対応する。放射線源又は種を受け取るチャネル62に沿った1つ以上の地点68では、放射線源は、所与の処置計画に従ってさらに決定される、標的領域40内の組織への所望の局所放射線治療を供するように、所与の期間中に保持、停止、又は設置される。図3及び図5に図示される超音波プローブ48は、一連の2D超音波像を取得しながら、標的領域(矢印52)に沿って横切ってよいことに留意して欲しい。一連の2D超音波像は、標的領域の3D体積像を生成するのに用いられて良い。
【0024】
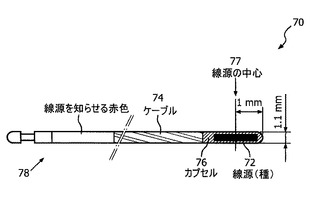
図8は、本開示の一実施例による小線源治療方法及び装置に用いられる、先端部に結合した放射線源又は種を有する、全体として参照番号70で示された線源供給装置のケーブルの概略図である。一の実施例では、ケーブル70のケーブル部分74はステンレス鋼を有する。他の実施例では、ケーブル部分74は、本明細書で詳述するようにFBG光ファイバを有する。ケーブル部分74の端部すなわち先端部では、線源(又は種)72を含むカプセル76は、ケーブルに固着される。全体が参照番号78で示される前記先端部の反対側では、ケーブル70は、以降で詳述するように、アフターローダーの線源供給装置との併用に適した端部構成を有する。ケーブル端部78は、ケーブル70を放射線源ケーブルとして識別するのに適した有色(たとえば赤色)端部を有して良い。それに加えて、一例では、カプセル76は1.1mmオーダーの外径を有し、かつ、線源72は、1mmオーダーの位置で、カプセル76内の中心(参照番号77で示されている)に位置している。ケーブル70の全長は、所与の小線源治療の実施に係る要件に従って決定される。
【0025】
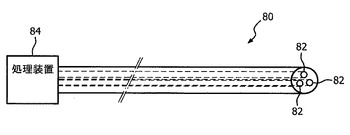
図9は、標的領域及び処置計画に関するアプリケータの位置を追跡するのに用いられるファイバブラッググレーティング(FBG)光ファイバ80の概略図である。前記位置の追跡は、形状検知による、本開示の一実施例による小線源治療装置内の少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状を測定する手順を有する。図9のFBG光ファイバ80は3チャネルFBG光ケーブルを有する。各チャネルは参照番号82で示されている。FBG光ケーブル80は、1チャネル、2チャネル、又は4チャネルFBG光ケーブルであってもよい。それに加えて、本開示の実施例は1つ以上のFBG光ケーブルを有して良い。前記1つ以上のFBG光ケーブルは、1つ以上の1チャネル、2チャネル、2チャネル、若しくは4チャネル、又はこれらの組み合わせをさらに有して良い。形状検知によって対応するFBG光ケーブルの位置及び形状を測定する処理装置84が、FBGケーブル80と共に図示されている。FBG光ケーブル80の全長は、所与の小線源治療の実施に係る要件に従って決定される。
【0026】
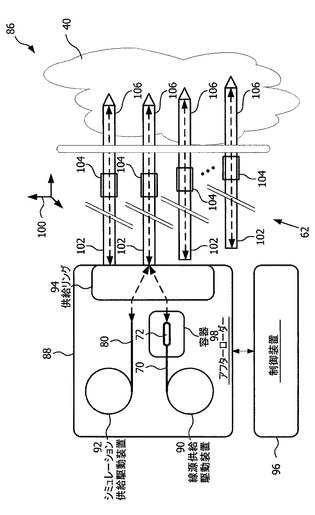
図10は、本開示の実施例による形状検知による追跡を行うことを特徴とする小線源装置のブロック図である。小線源治療装置86は、供給装置88−たとえばアフターローダー装置−を有する。供給装置88は、線源供給駆動装置90、シミュレーション供給駆動装置92、及び、供給リング94を有する。制御装置96は供給装置88と結合する。制御装置96は、適切にプログラムされた処理装置、コンピュータ、又は、本明細書に記載された様々な機能及び処理手順を実施/実行するように構成された制御装置を有する。制御装置96は、供給装置88と一体化しても良いし、又は分離しても良い。
【0027】
線源供給駆動装置90は、該線源供給駆動装置90と結合したケーブル70を有する。ケーブル70は、該ケーブル70の先端部と結合した放射線源又は種72を有する。放射線源又は種72を有するケーブル70を、複数のチャネル62のアレイのうちの所与のチャネルへ配置する、かつ/又は、複数のチャネル62のアレイのうちの所与のチャネルから取得する制御装置96によって、放射線源供給駆動装置90は制御される。放射線処置に用いられないとき、放射線源又は種72は、供給装置88内部に設けられた容器98内に保持される。FBG光ケーブル80を、複数のチャネル62のアレイのうちの所与のチャネルへ配置する、かつ/又は、複数のチャネル62のアレイのうちの所与のチャネルから取得する制御装置96によって、シミュレーション供給駆動装置92は制御される。それに加えて、供給リング94はたとえば、1つ以上の供給ケーブル又は線源ケーブルを、対応するシミュレーション又は線源供給駆動装置から、複数のチャネル62のアレイのうちの所望の1つ以上のチャネルへ再案内する内部にアパーチャを有する回転可能リングを有する。所与の供給ケーブル又は線源ケーブルの回転させる供給リング94の回転は、制御装置96によって制御される。制御装置96は、所与の小線源処置の特性に従って、複数のチャネル62のうちの1つ以上のチャネルへ線源ケーブル70又はFGB光ケーブルのいずれかを案内する供給リング94を制御する。
【0028】
3次元空間内に配置される複数のチャネル62のアレイをよりよく理解するため、座標∈100が図10には与えられる。複数のチャネル62のアレイは、所与の組織及び小線源処置のために構成された、1つ以上のカテーテル102、コネクタ104、及びアプリケータのニードル106を有する。コネクタ104は、カテーテル102を対応するニードル106と結合させる。ニードル106は、標的領域40の軟組織内に注入される。
【0029】
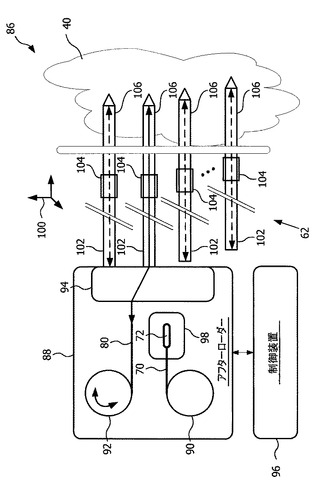
図11は、本開示の一実施例によるシミュレーションによる供給装置の配置及び検索のうちの少なくとも1つによる形状検知による追跡を行うことを特徴とする小線源装置のブロック図である。上述したように、制御装置96は、FBG光ケーブル80を、複数のチャネル62のアレイのうちの所与のチャネルへ配置する、かつ/又は、複数のチャネル62のアレイのうちの所与のチャネルから取得するシミュレーションによる供給駆動装置92を、回転により操作するように制御する。それに加えて、制御装置96は、位置を追跡するため、FBG光ファイバケーブル80を、複数のチャネル62のアレイのうちの所望のチャネルへ送るように、供給リング94を制御するように構成される。位置の追跡は、所与の小線源処置の特性に従って、少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状を、形状検知により測定する手順を有する。形状検知による測定は、図9の処理装置84及び/又は制御装置96と一体化した処理装置84によって実行されて良い。つまり形状検知によって対応するFBG光ケーブルの位置及び形状を測定する処理装置84は、制御装置96内に組み込まれても良いし、又は、制御装置96とは分離していても良い。
【0030】
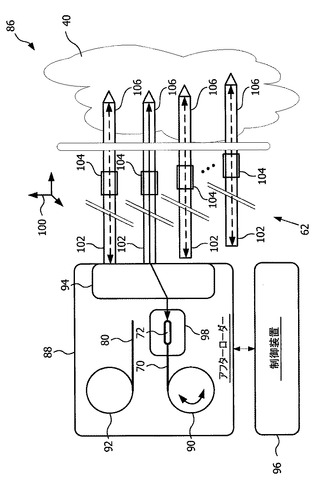
図12は、本開示の一実施例による線源供給装置の配置及び検索のうちの少なくとも1つによる形状検知による追跡を行うことを特徴とする小線源装置のブロック図である。上述したように、制御装置96は、制御装置96は、線源ケーブル70を、複数のチャネル62のアレイのうちの所与のチャネルへ配置する、かつ/又は、複数のチャネル62のアレイのうちの所与のチャネルから取得する線源供給駆動装置90を、回転により操作するように制御する。それに加えて、制御装置96は、線源ケーブル70を、複数のチャネル62のアレイのうちの所望のチャネルへ送るように、供給リング94を制御するように構成される。その結果、線源72は、所与の小線源処置の特性に従って、少なくとも1つの放射線源又は種を受け取るチャネル内に配置される。代替実施例では、ケーブル72は、本明細書で論じたようにFBG光ケーブルを有する。別な実施例では、FBG光ケーブルを有するケーブル72は、線源の位置の追跡を可能にする。
位置の追跡は、所与の小線源処置の特性に従って、少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状のみならず、少なくとも1つの放射線源又は種の位置及び形状を、形状検知により測定する手順を有する。形状検知による測定は、図9の処理装置84及び/又は制御装置96と一体化した処理装置84によって実行されて良い。
【0031】
動作時において、供給装置(又はアフターローダー)88は、計画された小線源期間で予め定められたように動作し、ケーブル70と所定位置に存在する(複数の)放射性ペレット/線源72が与えられ、かつ、チャネル62のアプリケータの搬送端部に取り付けられる。その後、アフターローダーは、各計算された期間、線源を、選択されたカテーテル102の各々の中で、各計算された位置(図7の68)まで移動させる。繰り返しになるが、小線源期間は典型的には、数日間(たとえば1〜2週間)、1日に1,2又は数回行われる。小線源期間の間、アプリケータは注入されたままである。位置合わせ確認/再調節処理は、各小線源期間の前に実行される。次の小線源期間が開始されるとき、FBG光ファイバを用いた形状検知による対応するチャネルの位置及び形状の測定は、アプリケータ−特に患者上のアプリケータ−の位置及び配向を特定又は決定するのに用いられる。計画用像メモリ内に保存された計画像上でのアプリケータ及び患者の相対位置は、制御装置/処理装置96によって、計画像内のアプリケータの現在の相対位置と比較される。相対位置が閾値よりも変化していなかった場合、アプリケータは軟組織に対して配向も位置も変化させておらず、アフターローダー64は再接続され、かつ、次の小線源治療期間が開始される。
【0032】
しかし制御装置/処理装置96が、位置が変化したと判断した場合、一の選択肢は、対応するFBG光ファイバ及びチャネルの位置と形状の追加測定を行うことで、アプリケータの位置の再設定を試みることである。それによりアプリケータは元に戻される、すなわち可能な限り本来の位置と配向に近い状態にされる。アプリケータが、治療が計画された本来の位置に存在しない場合、アプリケータの現在の位置と本来の位置との間(従って周囲の(隣接する)組織と標的領域との間)での変換が、処理装置96によって決定される。この変換は、処理装置96内での像変換処理によって用いられて、計画像メモリからの計画像上で作用することで、前記変換に従ってアプリケータ及び標的領域の相対位置をシフトさせることによって、変換された治療計画像が生成される。このシフトされた情報は、処理装置96の自動治療計画処理へ送られることで、適合された小線源計画が生成される。適合された小線源計画はアフターローダー88へ送られる。そして次の小線源期間が開始される。
【0033】
一の小線源治療の適合計画に係る実施例では、アプリケータが注入され、診断3D像の組が生成され、かつ、照射計画が作成される。照射中、アプリケータ及び/又は放射性パレットが追跡され、かつ、照射量が計算される。たとえば標的組織は、3Dマトリックスを構成する複数の小領域に分割されて良い。追跡された線源の位置を3Dマトリックスにマッピングすることによって、各小領域での累積的照射量は、時間と線源からの距離に基づいて、連続的又は間断的に更新することができる。照射量は、コンピュータ及び/又は医療者によって監視されて良い。照射計画からのずれが検出される場合、更新された照射計画が生成される。それに加えて、光ファイバが、放射線照射量を測定するのに用いられて良い。換言すれば、FBGファイバは、適合計画のためのループを閉じる目的を果たすことができる。
【0034】
ここで、一の実施例による小線源治療法が供されることに留意して欲しい。当該方法は、少なくとも1つの放射線源又は種を受け取るチャネルを有するアプリケータを、照射されるべき標的領域に隣接する軟組織内に注入する手順、前記アプリケータを有する標的領域の高解像度計画像を生成する手順であって、前記高解像度計画像は3次元処置計画の決定に利用される手順、並びに、前記標的領域及び処置計画に対する前記アプリケータの位置を追跡する手順を有する。前記位置を追跡する手順は、形状検知によって、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状を測定する手順を有する。それに加えて一の実施例では、前記高解像度計画像を生成する手順は、超音波、CT、MRI、X線、PET、及び他の医用画像処理からなる群から選ばれる1つ以上の手法を用いる手順を有する。さらに他の実施例では、前記3次元処置計画を決定する手順は、放射線照射量分布マップを生成する手順を有する。しかもさらに他の実施例では、前記追跡は、(i)ファイバブラッググレーティング及び/又は(ii)レイリー散乱に基づくファイバ光学検知デバイスを用いた形状検知による測定を行う手順をさらに有する。
【0035】
他の実施例では、当該方法は、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルを介して少なくとも1つの放射線源又は種を前記標的領域へ配置する手順、及び、(ii) 前記少なくとも1つの放射線源又は種を受け取るチャネルを介して前記標的領域から前記少なくとも1つの放射線源又は種を検索する手順、からなる群から選ばれる少なくとも1つの手順をさらに有する。前記少なくとも1つの放射線源又は種は、処置計画に従って、標的領域内部のチャネルを横断する。一の実施例では、前記位置の追跡は、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルを介して少なくとも1つの放射線源又は種を前記標的領域へ配置する手順、及び、(ii) 前記少なくとも1つの放射線源又は種を受け取るチャネルを介して前記標的領域から前記少なくとも1つの放射線源又は種を検索する手順、からなる群から選ばれる少なくとも1つの手順を有してよい。前記位置の追跡はまた、ファイバブラッググレーティング光ファイバにより測定された前記少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状の測定情報を取得する手順をも有する。
【0036】
他の実施例では、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した前記少なくとも1つの放射線源又は種の前記標的領域への配置及び前記標的領域からの検索は、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した前記少なくとも1つの放射線源又は種の前記標的領域への配置及び前記標的領域からの検索を行うように構成された供給装置を用いる手順を有する。前記供給装置は1つ以上の線源供給装置を有する。前記1つ以上の線源供給装置は、先端部と結合した状態で放射線源又は種を有するケーブルを有する。
【0037】
さらに他の実施例では、前記供給装置は1つ以上のシミュレーション供給装置をさらに有する。前記1つ以上のシミュレーション供給装置は少なくとも1つのファイバブラッググレーティング光ケーブルを有する。前記ファイバブラッググレーティング光ケーブルは、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの少なくとも前記標的領域への配置及び/又は(ii)少なくとも前記標的領域からの前記少なくとも1つの放射線源又は種を受け取るチャネルの検索に応じて、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状の形状検知による測定を実施するように構成される。他の実施例では、前記少なくとも1つの放射線源又は種を受け取るチャネルは複数のチャネルからなるアレイを有し、前記1つ以上のシミュレーション供給装置は複数のシミュレーション供給装置を有し、さらに前記複数のシミュレーション供給装置は、(i)配置と検索を順次行う手順及び(ii)配置と検索を同時に行う手順からなる群から選ばれる1つの手順に従って、配置及び検索される。
【0038】
さらに他の実施例では、前記1つ以上の線源供給装置のケーブルはファイバブラッググレーティング光ケーブルを有する。前記ファイバブラッググレーティング光ケーブルは、処置中に、(b)(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの少なくとも前記標的領域への配置及び(b)(ii)少なくとも前記標的領域からの前記少なくとも1つの放射線源又は種を受け取るチャネルの検索からなる群から選ばれた1つの手順に応じて、(a)(i)前記少なくとも1つの放射線源又は種を受け取るチャネル及び(a)(ii)前記少なくとも1つの放射線源又は種の位置と形状の、形状検知による測定を実施するように構成される。
【0039】
さらに他の実施例によると、前記少なくとも1つの放射線源又は種を受け取るチャネルは複数のチャネルからなるアレイを有する。前記1つ以上の線源供給装置は複数の線源供給装置を有する。さらに前記複数の線源供給装置は、前記処置計画に従って配置及び検索される。前記複数の線源供給装置の配置と検索は、(c)(i)配置と検索を順次行う手順及び(c)(ii)配置と検索を同時に行う手順からなる群から選ばれる1つの手順を有する。
【0040】
さらに他の実施例によると、当該方法は、処置計画を決定する手順、及び、前記処置計画の各手順を実施する前に、前記標的領域に対する前記アプリケータの位置を確認する手順をさらに有する。前記処置計画は多数の手順を有する。各手順は、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した少なくとも1つの放射線源又は種の配置及び検索によって前記標的領域を照射する手順を有する。前記少なくとも1つの放射線源又は種は、前記処置計画の手順に従って、前記標的領域内で各対応するチャネルを横断する。各処理計画を実施する前に、前記標的領域に対する前記アプリケータの位置が確認される。閾値の範囲内であることが確認された前記標的領域に対する前記アプリケータの位置に応じて、当該方法は前記処置計画へ進む。閾値の範囲内であることが確認されなかった前記標的領域に対する前記アプリケータの位置に応じて、当該方法は、前記処置計画を修正して補正措置を実施する。
【0041】
一の実施例では、前記処置計画を修正する手順は、前記アプリケータの位置の変化に従って、前記小線源処置の対応する手順と任意の他の手順を適合するように修正する手順を有する。他の実施例では、確認する手順は、前記アプリケータの少なくとも1つの放射線源又は種を受け取るチャネルの位置と形状を形状検知により測定する手順を有する。
【0042】
他の実施例では、前記少なくとも1つの放射線源又は種を受け取るチャネルは複数のチャネルからなるアレイを有する。前記アプリケータの位置の確認は、(a)(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの互いに対する位置を確認する手順及び(a)(ii)前記少なくとも1つの放射線源又は種を受け取るチャネルの前記標的領域に対する位置を確認する手順を有する。確認は、前記標的領域に対する前記アプリケータの位置を追跡する手順、並びに、(i)先の追跡位置及び(ii)処置計画により指定された追跡位置からなる群から選ばれた少なくとも1つの位置と、前記の追跡された位置とを比較する手順をさらに有する。
【0043】
さらに他の実施例では、前記アプリケータは放射線源又は種を受け取るチャネルからなるアレイを有する。この実施例では、形状検知による測定による追跡は、前記アレイの内の所定の組の放射線源又は種を受け取るチャネルの位置と形状を測定する手順を有する。当該方法は、前記アプリケータの位置の追跡に基づいて前記アレイについての3次元での追跡された位置情報を収集することで、一の放射線源又は種を受け取るチャネルから他の放射線源又は種を受け取るチャネルまでで、指定された位置からある閾値を超えた位置の変化が生じていないことを保証する手順をさらに有する。それに加えて、前記アレイに関する3次元での位置情報の収集は、(i)処置期間にわたる位置情報のリアルタイム収集及び(ii)前記処置の手順間での位置情報の収集からなる群から選ばれる少なくとも1つの収集方法に従って実行される。
【0044】
他の実施例では、小線源治療法は、標的領域の処置中に意図しない照射を受けやすい、前記標的領域に隣接する組織の一部の位置と形状を形状検知により測定する手順をさらに有する。前記組織の一部の位置と形状を形状検地により測定する手順は、前記意図しない照射を受けやすい組織の一部内にファイバブラッググレーティング光ファイバを配置する手順を有する。たとえば前記組織の一部が尿道を含む場合には、FBG光ファイバは、尿道内部に配置されることで、小線源治療処置の1つ以上の処理のうちの少なくとも一部の間に、尿道の位置と形状を形状検知によって測定してよい。従って、尿道の位置と形状の知識によって、意図しない照射から尿道を保護するように、処置計画に関する適切な処置をとることができる。他の実施例では、小線源治療法は、前記意図しない照射を受けやすい組織の一部内にファイバブラッググレーティング光ファイバを配置することによって尿道の位置と形状を形状検知によって測定しながら、前記標的領域の高分解像を生成する手順をさらに有する。
【0045】
さらに他の実施例では、小線源治療法は、照射されるべき標的領域に隣接する軟組織内に、少なくとも1つの放射線源又は種を受け取るチャネルを有するアプリケータを注入する手順、処置計画の決定に利用される、前記アプリケータを含む標的領域の高分解像を生成する手順、前記標的領域と処置計画に関する前記アプリケータの位置を追跡する手順であって、前記追跡は、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置と形状を形状検知により測定する手順を有し、前記追跡は、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した前記標的領域へのファイバブラッググレーティング光ファイバの配置、前記標的領域からのファイバブラッググレーティング光ファイバの検索、及び、前記ファイバブラッググレーティング光ファイバを介した前記少なくとも1つの放射線源又は種を受け取るチャネルの測定された位置と形状の情報の取得を有する、手順、前記処置計画を決定する手順であって、前記処置計画は多数の処理を有し、各処理は、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した前記標的領域への少なくとも1つの放射線源又は種の配置、前記標的領域からの少なくとも1つの放射線源又は種の検索による前記標的領域の照射を有し、前記少なくとも1つの放射線源又は種は前記処置計画の処理に従って前記標的領域内で各対応するチャネルを横断する、手順、ならびに、(a)(i)処置計画処理の実施前及び/又は(a)(ii)処置計画処理中にリアルタイムに、前記標的位置に対する前記アプリケータの位置を確認する手順であって、前記確認は、前記アプリケータの少なくとも1つの放射線源又は種を受け取るチャネルの位置と形状を形状検知により測定する手順、ならびに、(b)(i)先の追跡位置及び/又は(b)(ii)処置計画により指定された追跡位置と、前記確認による追跡結果とを比較する手順を有する、手順、を有する。
【0046】
一の実施例では、小線源治療装置は、照射されるべき標的領域に隣接する軟組織内に、少なくとも1つの放射線源又は種を受け取るチャネルを有するアプリケータ、3次元処置計画の決定に利用される、前記アプリケータを含む標的領域の高分解像を生成する手段、ならびに、前記標的領域と処置計画に関する前記アプリケータの位置を追跡する追跡装置を有する。前記追跡装置は、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置と形状を形状検知により測定することによって前記のアプリケータの位置を追跡するように構成される。
【0047】
他の実施例では、小線源治療装置は、(i)前記アプリケータの少なくとも1つの放射線源又は種を受け取るチャネルを介した前記標的領域への前記少なくとも1つの放射線源又は種の配置及び/又は(ii)前記アプリケータの少なくとも1つの放射線源又は種を受け取るチャネルを介した前記標的領域からの前記少なくとも1つの放射線源又は種の検索を実行するように構成された供給装置をさらに有する。前記供給装置は1つ以上の線源供給装置を有する。前記1つ以上の線源供給装置はケーブルを有する。前記ケーブルは、該ケーブルの先端部と結合した放射線源又は種を有する。前記供給装置は1つ以上のシミュレーション供給装置をさらに有する。前記1つ以上のシミュレーション供給装置の各々はファイバブラッググレーティング光ケーブルを有する。前記ファイバブラッググレーティング光ケーブルは、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの少なくとも前記標的領域への配置及び/又は(ii)少なくとも前記標的領域からの前記少なくとも1つの放射線源又は種を受け取るチャネルの検索に応じて、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状の形状検知による測定を実施するように構成される。
【0048】
他の実施例では、前記1つ以上の線源供給装置のケーブルはファイバブラッググレーティング光ケーブルを有する。前記ファイバブラッググレーティング光ケーブルは、処置中に、前記少なくとも1つの放射線源又は種の位置と形状の、形状検知による測定を実施するように構成される。前記ファイバブラッググレーティング光ケーブルによる形状検知測定は、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの少なくとも前記標的領域への配置及び(ii)少なくとも前記標的領域からの前記少なくとも1つの放射線源又は種を受け取るチャネルの検索からなる群から選ばれた1つの手順に応じて行われる。
【技術分野】
【0001】
本実施例は概して医療システムに関し、より詳細には、形状検知による追跡を行うことを特徴とする小線源治療方法及び装置に関する。
【0002】
本願は治療技術に関する。本願は高線量(HDR)小線源治療が行われる特殊用途に適するので、その特殊用途を参照しながら本願を説明することにする。しかし本開示の実施例は、他の治療用途−たとえば低線量小線源治療及び他の治療用線源の位置決定−が行われる用途にも適する。それに加えて、本願で提示される様々な例は、前立腺癌の小線源治療に関する。しかし本願に記載された方法は、前立腺以外の臓器−たとえば胸、肺、肝臓、子宮、子宮頸管、並びに、同様の治療及び改善された作業手順及び患者の処置が望ましい他の臓器−の治療にも適用されうる。
【背景技術】
【0003】
癌は通常、複数の治療法−たとえば外科的処置、化学療法、放射線治療等−を組み合わせることで処置される。たとえば腫瘍は通常外科的に除去され、その後患者は、除去されなかった癌細胞を殺すための化学療法又は放射線治療を受ける。一の放射線処置では、線形加速器からのX線ビームが、標的領域へ案内される。対照的に小線源治療では、種が標的領域へ挿入されることで、内部からその標的領域が照射される。
【0004】
HDR小線源治療では、カテーテルの形態をとるアプリケータが、患者内に設置され、照射されるべき標的領域にまで拡張する。高線量の線源(たとえばイリジウム192)又は線種は、ワイヤ端部のカテーテル内を移動して、決められた期間、1か所以上の予め決められた位置に留まる。この処置は、数日にわたって、典型的には1日に1,2回繰り返される。
【0005】
HDR小線源治療処理は、体腔又は腫瘍へ小さな種放射線源(たとえばIr-192)を、時間を決めて挿入することによって、分別された治療線量を指定された標的体積への供給に依存する処理に依存する。Ir-192線源は、ワイヤに取り付けられて、先に外科的に挿入されたカテーテルを介して出し入れされる。現在、HDR処理は、体内での線源の位置を追跡するコンピュータ制御された機械的供給システムに依拠している。そのような線源追跡システム法が一般的に受け入れられている一方で、場合によっては、挿入期間と小線源処置期間との間で外科的に挿入されたカテーテルが動くことで、種線源の位置がずれてしまうという問題が存在する。そのような運動は、臓器の運動、膨張、及びカテーテルの移動に起因する。カテーテルの組の位置を検証する処理は、今日のX線及び超音波イメージングを用いることによって、どの処理前にも行われる。しかし不幸なことに、この処理は、まどろっこしく、退屈で、時間が長くかかり、かつコストもかかる。検出されない運動が生じる極端な場合、患者の健康な細胞がそのような高線量に意図せず長時間曝露されることで、その患者は深刻な病気又は死を招くことになる恐れがある。
【発明の概要】
【発明が解決しようとする課題】
【0006】
よって小線源処置中での放射線源又は種の正しい位置を保証するため、種線源チャネル/アプリケータのその場リアルタイム追跡装置及び方法が強く必要とされている。
【0007】
従って上記問題を解決するために改善された方法及びシステムが必要とされている。
【課題を解決するための手段】
【0008】
小線源治療方法及び装置は、少なくとも1つの放射線源又は放射線種を受け取るチャネルを有するアプリケータを、照射されるべき標的領域に隣接する軟部組織へ注入する手順を有する。前記アプリケータを含む前記標的領域の高解像度透視像が生成される。前記高解像度透視像は、3次元治療用概略図を決定するのに用いられる。前記標的領域及び3次元治療用概略図に関する前記アプリケータの位置が追跡される。前記位置の追跡は、形状検知によって、前記少なくとも1つの放射線源又は放射線種を受け取るチャネルの位置及び形状を測定する手順を有する。
【図面の簡単な説明】
【0009】
【図1】当技術分野において既知の小線源治療法のフローダイアグラムである。
【図2】本開示の実施例による形状検知による追跡を行うことを特徴とする小線源治療法のフローダイアグラムである。
【図3】小線源処置中に照射される標的領域、隣接する組織、超音波プローブ、及び本開示の実施例で用いられるテンプレートの概略的側面図である。
【図4】小線源処置中に処置される標的領域の一部と隣接する組織を表す超音波像のスライスを表している。
【図5】小線源処置中に照射される標的領域、隣接する組織、超音波プローブ、テンプレート、及び本開示の一実施例で用いられる放射線源又は種を受け取るチャネルのアレイの3次元概略図である。
【図6】小線源処置中に処置される標的領域の一部、該標的領域内部の多数の計画された処置位置、及び隣接する組織を表す超音波像のスライスを表している。
【図7】小線源処置中に処置される標的領域の一部と隣接する組織を表す超音波像を表す体積の3次元斜視図である。図中、標的領域−より詳細には、様々な滞在位置を有する放射線源又は種を受け取るチャネルの対応するアレイ−内部の多数の計画された処置位置が、各対応するアレイ内に表されている。
【図8】本開示の一実施例による小線源治療方法及び装置に用いられる、先端部に結合した放射線源又は種を有する線源供給装置のケーブルの概略図である。
【図9】標的領域及び処置計画に関するアプリケータの位置を追跡するのに用いられるファイバブラッググレーティング(FBG)光ファイバの概略図である。前記位置の追跡は、形状検知による、本開示の一実施例による小線源治療装置内の少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状を測定する手順を有する。
【図10】本開示の実施例による形状検知による追跡を行うことを特徴とする小線源装置のブロック図である。
【図11】本開示の一実施例によるシミュレーションによる供給装置の配置及び検索のうちの少なくとも1つによる形状検知による追跡を行うことを特徴とする小線源装置のブロック図である。
【図12】本開示の一実施例による線源供給装置の配置及び検索のうちの少なくとも1つによる形状検知による追跡を行うことを特徴とする小線源装置のブロック図である。
【発明を実施するための形態】
【0010】
現在市販されているアフターローダーは、一軸のカテーテル/ニードルに沿った線源の長さ(つまり深さ)の制御及び監視を行う構成に制限されている。現在のアフターローダーは、できるとしても、組織及びこれまでの線源が供給された他の位置に関する供給位置を不十分にしか制御できない。本開示の実施例は有利となるように、現在市販されているアフターローダー装置の問題と限界を克服する。本開示の実施例は有利となるように、小線源治療を容易にし、制御を改善し、かつ、治療法が計画に従って供給されることを保証する。
【0011】
本開示の実施例の一の利点は、小線源治療中での健康な組織への意図しない放射線曝露の減少、及び、意図した処置位置への放射線照射の精度の向上である。換言すると、本開示の実施例は、計画された小線源治療をより保証された精度で行う。本開示の実施例は有利となるように、既存のアフターローダー装置の付属物として(複数の)ファイバブラッググレーティング(FBG)光ファイバを利用する。(複数の)FBG光ファイバは、各カテーテルの位置と形状を測定し、かつ、カテーテルのすべての組についての情報を3Dにおいて収集する。それにより一のカテーテルから他のカテーテルへの運動が生じないことが保証される。一の実施例では、最初にFBGが、アフターローダーによる「ダミー」線源として配置され、検索される。一旦測定結果が(数秒以内に)取得されると、ケーブルに取り付けられた放射線源は、所望の処置を供するため、所望の位置に配置される。他の実施例では、放射線源のケーブルもまたFBG光ファイバを有する。FBGケーブルは、小線源処置の間も放射線源を追跡するのに用いられる。
【0012】
本開示の実施例によると、ファイバブラッググレーティング技術は有利となるように、HDR小線源治療の供給処理中に利用される可撓性カテーテルのリアルタイムの位置特定と歪み情報を与える。FBG光ファイバは有利となるように、小線源処置の放射線の供給前及びその間に、挿入されたカテーテルの全体形状を確認及び監視する単純で、迅速で、正確な方法を供する。それに加えて、FBG光ファイバのサイズ、可撓性、及び形状因子は、アフターローダー及びカテーテルでの使用に非常に適したものである。さらにFBG光ファイバは、(電磁気系と比較して)周辺の金属環境に対する影響を受けない。しかもアフターローダー装置のアクティブ線源ケーブルは外径が0.7mmのオーダーである。FBG光ファイバは外径が0.4mmのオーダーであるので、アフターローダーによく適合する。
【0013】
一の実施例では、小線源治療装置及び方法は、アフターローダーに組み込まれた形状検知を利用する。その形状検知は、アプリケータ/ニードル又はカテーテルの先端部のリアルタイムでの3Dの位置及び形状を検出するのみならず、放射線処置を行う際に用いられる、ニードル及びカテーテル内部の放射線源/種をも検出する。先端部の位置及びニードルとカテーテルの形状に関する情報は、放射線が供給される(複数の)位置の最適制御を保証するように処置の計画又は供給を制御及び適応させるのに用いられる。ファイバ光学形状センサは、この用途に十分適する。なぜならファイバ光学形状センサは、内部での構築が容易であり、かつ、アフターローダーによる駆動が可能であるからである。放射線源は、既存のケーブル/ガイドワイヤを置換するものとしてファイバに取り付けられるように設計されて良いし、又は、実際の線源の供給の直前の供給をシミュレーションするための、ファイバに基づく「ダミー線源」であってもよい。
【0014】
動作時、アクティブ線源が、事前に計画された位置及び滞在パラメータにて、体内の標的サイトへ供給されることで、位置、形状、及び放射線照射量測定のリアルタイム評価が、制御装置又は制御ステーションへ送られて良い。標的サイトの局所的な組織上及び機能上の局所環境が変化して、既存の計画と比較して評価することが可能な場合、計画用ワークステーションは、新たな情報を考慮して、リアルタイムで、及び/又は、必要なときには、3D照射量分布を再計算する。アクティブ線源が現在のチャネル及び/又は次のチャネルに配置されるときには、より正確な放射線治療、並びに、前立腺の周辺に存在及び/又は前立腺に隣接する健康な組織(たとえば尿道、神経、血管、括約筋、直腸、及び膀胱)への副作用の減少という要求に応えるため、照射量分布面が監視及び調節される。
【0015】
さらに他の実施例によると、FBG光ファイバが、計画及び照射量の供給を補助するため、像取得中に尿道の3D形状を表す手段として用いられる。尿道は、この処理のための重要な部位/組織であり、従来の画像処理法では識別が困難であることに留意して欲しい。
【0016】
他の実施例では、小線源治療方法は、3D形状検知光ファイバを用いて、複数の画像化モダリティを、その場登録により一緒に登録するのを補助する手段を供する手順を有する。たとえば、FBG光ファイバは、CT、MR、PET、又は3Dアンギオグラフィの間に尿道内部に挿入され、かつ、尿道の3D形状は、(i)計画(よって複数の画像化モダリティを1つにする)のため、及び、(ii)3D超音波による介入の間に、3Dの尿道に一致させるのに用いられて良い。
【0017】
ここで図1を参照すると、当技術分野において既知の小線源治療法10のフローダイアグラムが示されている。当該方法は、参照番号12によって示されているように、処置計画のための標的領域の医用画像処理を実行することから開始される。医用画像処理の実行に続いて、当該方法は、参照番号14で示されているように、小線源処置のための準備において標的領域内部へニードルを設置する手順を有する。ニードルを設置する際、参照番号16で示されているように、3D処置計画が実行される。続いて処置は18にて供され、その後当該方法は終了する。小線源治療方法の作業手順の各処理は、標的である組織とその放射線分布に依存する。それに加えて、作業手順は、一の組織と他の組織とで異なって良い。
【0018】
図2は、本開示の実施例による形状検知による追跡を行うことを特徴とする小線源治療方法20のフローダイアグラムである。当該方法は、参照番号22で示されているように、処置計画のための標的領域の医用画像処理の実行から開始される。医用画像処理の実行に続いて、当該方法は、小線源処置のための準備において標的領域内にチャネルを設置する手順を有する。後述するように、設置されたチャネルは、所与の組織及び小線源処置のための、1つ以上のカテーテル、コネクタ、及びアプリケータのニードルを有して良い。チャネルが設置される際、参照番号26で示されているように、3D処置計画が実行される。3D処置計画の実行に続いて、当該方法は、参照番号28で示されているように、FBG形状検知を用いることによって、リアルタイムでのチャネルの設置を確認する手順を有する。続いて参照番号30で示されているように、設置が3D処置計画に従って実行されているのか否かを判断するためのクエリが実行される。その設置が、閾値量の範囲内での3D処置計画に従っている場合、参照番号32で示されているように、当該方法は供給処置に進む。供された処置の完了の際、所与の処置の一部(又はその全て)が完了したか否かについてのクエリが実行される。所与の小線源処置の一部(又はその全て)が完了したと仮定すると、当該方法は終了する。他方、所与の処置の一部が完了していない場合、一の実施例によると、当該方法は、FBG形状検知を用いたリアルタイムチャネル設置の確認を行う手順28に戻る。続いて当該方法は、手順30でのクエリを行うことで継続する。再度手順30を参照すると、チャネルの設置が計画に従っているか否かというクエリの結果、そのチャネルの設置が閾値量の範囲内にない場合、当該方法は手順36へ進む。手順36では、処置(又は処置計画)は、チャネルの設置のずれの関数として変更される。当該方法は次に、3D処置計画を実行する手順26へ再度進む。しかしこの場合、3D処置計画の実行は、チャネル設置のずれの関数としての処置の変更を考慮する。従って当該方法は有利となるように、処置を供する前だけでなく、処置を供している間にも、リアルタイムでチャネルの設置の確認を行う。それに加えて、チャネル設置の確認は有利となるように、単一の処置の一部について、及び、多数の処理の一部にわたって供される。
【0019】
図3は、小線源治療の間に照射される標的領域、隣接する組織、超音波プローブ、及び、本開示の実施例で用いられるテンプレートの概略的側面図である。たとえば隣接する組織は、尿道42、膀胱44、小腸46を有する。超音波プローブ48は、小腸46の内部に挿入され、かつ前立腺に近接するものとして表されている。超音波プローブ48は、小線源処理による治療を行う前及び又はその間に、たとえば参照番号50で表されているような1つ以上の超音波ビームを生成するように構成される。超音波プローブ48は、標的領域又は組織40の1つ以上の超音波像(図4参照のこと)を取得するのに用いられる。
【0020】
さらに図3を参照すると、超音波プローブ48は、標的領域40に対して、たとえば矢印52で示された方向に変位される、又は動かされるように構成される。超音波プローブの移動は、たとえば適切なステッピングモーター54を用いることによって実行される。それに加えて、標的領域40に対してアプリケータを変位させるために用いられるテンプレート56は、適切な結合手段を介して、超音波プローブを介して、超音波プローブに対して結合する。テンプレート(とひいてはアプリケータ)間での登録は、超音波プローブを参照しながらすぐに決定することができる。換言すると、超音波プローブの画像化システムと、標的領域と処置計画に対するアプリケータの位置の追跡の画像化システムを、後述するように、得ることができる。図4は超音波像58の2次元スライスの概略図で、小線源治療中に処理される標的領域40の一部と、隣接する組織を図示している。
【0021】
図5は、小線源処置中に照射される標的領域40、隣接する組織(42,44,46)、超音波プローブ48、テンプレート56、及び、本発明の一の実施例により用いられる放射線源又は種を受け取るチャネル62のアレイの3次元概略図である。一の実施例では、放射線源又は種を受け取るチャネル62のアレイはアプリケータを有する。従ってアプリケータは、以降で図10〜図12を参照しながら詳述されているように、照射される標的領域40に隣接する軟組織内に注入される少なくとも1つの放射線源又は種を受け取るチャネル62を有する。本願明細書で用いられているように、「標的領域40に隣接して注入される」という語句は、標的領域40内部に注入される状態も含むものと解される。その理由は、標的領域の組織の中には照射される部分が存在する一方で、照射されない部分も存在するからである。この理解は、図6及び図7を参照した議論からより明確になるはずである。
【0022】
図6は、小線源処置中に処置される標的領域の一部、該標的領域内部の多数の計画された処置位置、及び隣接する組織を表す超音波像の2次元(2D)スライスを表している。この2D像64では、認識可能な隣接する組織には、尿道42及び小腸46が含まれる。この2D像64内では、標的領域40は、参照符号L1,L2,L3,L4,L5が付された円によって示された多数の処置位置を有する。標的領域内では、処置位置の数は、有害(たとえば癌)と診断された標的位置の3次元体積内のサイト数の関数である。
【0023】
図7は、小線源処置中に処置される標的領域40の一部と隣接する組織を表す超音波像を表す体積の3次元斜視図66である。図中、標的領域−より詳細には、様々な滞在位置を有する放射線源又は種を受け取るチャネルの対応するアレイ−内部の多数の計画された処置位置が、各対応するアレイ内に表されている。簡明を期すため、複数の滞在地点のうちの1つだけが、参照番号68によって特定されている。図7から理解できるように、放射線源又は種を受け取るチャネル62のアレイの各チャネルは多数の滞在地点68を有して良い。多数の滞在地点68は放射線源又は種を受け取るチャネル62に沿った1つ以上の地点68に対応する。放射線源又は種を受け取るチャネル62に沿った1つ以上の地点68では、放射線源は、所与の処置計画に従ってさらに決定される、標的領域40内の組織への所望の局所放射線治療を供するように、所与の期間中に保持、停止、又は設置される。図3及び図5に図示される超音波プローブ48は、一連の2D超音波像を取得しながら、標的領域(矢印52)に沿って横切ってよいことに留意して欲しい。一連の2D超音波像は、標的領域の3D体積像を生成するのに用いられて良い。
【0024】
図8は、本開示の一実施例による小線源治療方法及び装置に用いられる、先端部に結合した放射線源又は種を有する、全体として参照番号70で示された線源供給装置のケーブルの概略図である。一の実施例では、ケーブル70のケーブル部分74はステンレス鋼を有する。他の実施例では、ケーブル部分74は、本明細書で詳述するようにFBG光ファイバを有する。ケーブル部分74の端部すなわち先端部では、線源(又は種)72を含むカプセル76は、ケーブルに固着される。全体が参照番号78で示される前記先端部の反対側では、ケーブル70は、以降で詳述するように、アフターローダーの線源供給装置との併用に適した端部構成を有する。ケーブル端部78は、ケーブル70を放射線源ケーブルとして識別するのに適した有色(たとえば赤色)端部を有して良い。それに加えて、一例では、カプセル76は1.1mmオーダーの外径を有し、かつ、線源72は、1mmオーダーの位置で、カプセル76内の中心(参照番号77で示されている)に位置している。ケーブル70の全長は、所与の小線源治療の実施に係る要件に従って決定される。
【0025】
図9は、標的領域及び処置計画に関するアプリケータの位置を追跡するのに用いられるファイバブラッググレーティング(FBG)光ファイバ80の概略図である。前記位置の追跡は、形状検知による、本開示の一実施例による小線源治療装置内の少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状を測定する手順を有する。図9のFBG光ファイバ80は3チャネルFBG光ケーブルを有する。各チャネルは参照番号82で示されている。FBG光ケーブル80は、1チャネル、2チャネル、又は4チャネルFBG光ケーブルであってもよい。それに加えて、本開示の実施例は1つ以上のFBG光ケーブルを有して良い。前記1つ以上のFBG光ケーブルは、1つ以上の1チャネル、2チャネル、2チャネル、若しくは4チャネル、又はこれらの組み合わせをさらに有して良い。形状検知によって対応するFBG光ケーブルの位置及び形状を測定する処理装置84が、FBGケーブル80と共に図示されている。FBG光ケーブル80の全長は、所与の小線源治療の実施に係る要件に従って決定される。
【0026】
図10は、本開示の実施例による形状検知による追跡を行うことを特徴とする小線源装置のブロック図である。小線源治療装置86は、供給装置88−たとえばアフターローダー装置−を有する。供給装置88は、線源供給駆動装置90、シミュレーション供給駆動装置92、及び、供給リング94を有する。制御装置96は供給装置88と結合する。制御装置96は、適切にプログラムされた処理装置、コンピュータ、又は、本明細書に記載された様々な機能及び処理手順を実施/実行するように構成された制御装置を有する。制御装置96は、供給装置88と一体化しても良いし、又は分離しても良い。
【0027】
線源供給駆動装置90は、該線源供給駆動装置90と結合したケーブル70を有する。ケーブル70は、該ケーブル70の先端部と結合した放射線源又は種72を有する。放射線源又は種72を有するケーブル70を、複数のチャネル62のアレイのうちの所与のチャネルへ配置する、かつ/又は、複数のチャネル62のアレイのうちの所与のチャネルから取得する制御装置96によって、放射線源供給駆動装置90は制御される。放射線処置に用いられないとき、放射線源又は種72は、供給装置88内部に設けられた容器98内に保持される。FBG光ケーブル80を、複数のチャネル62のアレイのうちの所与のチャネルへ配置する、かつ/又は、複数のチャネル62のアレイのうちの所与のチャネルから取得する制御装置96によって、シミュレーション供給駆動装置92は制御される。それに加えて、供給リング94はたとえば、1つ以上の供給ケーブル又は線源ケーブルを、対応するシミュレーション又は線源供給駆動装置から、複数のチャネル62のアレイのうちの所望の1つ以上のチャネルへ再案内する内部にアパーチャを有する回転可能リングを有する。所与の供給ケーブル又は線源ケーブルの回転させる供給リング94の回転は、制御装置96によって制御される。制御装置96は、所与の小線源処置の特性に従って、複数のチャネル62のうちの1つ以上のチャネルへ線源ケーブル70又はFGB光ケーブルのいずれかを案内する供給リング94を制御する。
【0028】
3次元空間内に配置される複数のチャネル62のアレイをよりよく理解するため、座標∈100が図10には与えられる。複数のチャネル62のアレイは、所与の組織及び小線源処置のために構成された、1つ以上のカテーテル102、コネクタ104、及びアプリケータのニードル106を有する。コネクタ104は、カテーテル102を対応するニードル106と結合させる。ニードル106は、標的領域40の軟組織内に注入される。
【0029】
図11は、本開示の一実施例によるシミュレーションによる供給装置の配置及び検索のうちの少なくとも1つによる形状検知による追跡を行うことを特徴とする小線源装置のブロック図である。上述したように、制御装置96は、FBG光ケーブル80を、複数のチャネル62のアレイのうちの所与のチャネルへ配置する、かつ/又は、複数のチャネル62のアレイのうちの所与のチャネルから取得するシミュレーションによる供給駆動装置92を、回転により操作するように制御する。それに加えて、制御装置96は、位置を追跡するため、FBG光ファイバケーブル80を、複数のチャネル62のアレイのうちの所望のチャネルへ送るように、供給リング94を制御するように構成される。位置の追跡は、所与の小線源処置の特性に従って、少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状を、形状検知により測定する手順を有する。形状検知による測定は、図9の処理装置84及び/又は制御装置96と一体化した処理装置84によって実行されて良い。つまり形状検知によって対応するFBG光ケーブルの位置及び形状を測定する処理装置84は、制御装置96内に組み込まれても良いし、又は、制御装置96とは分離していても良い。
【0030】
図12は、本開示の一実施例による線源供給装置の配置及び検索のうちの少なくとも1つによる形状検知による追跡を行うことを特徴とする小線源装置のブロック図である。上述したように、制御装置96は、制御装置96は、線源ケーブル70を、複数のチャネル62のアレイのうちの所与のチャネルへ配置する、かつ/又は、複数のチャネル62のアレイのうちの所与のチャネルから取得する線源供給駆動装置90を、回転により操作するように制御する。それに加えて、制御装置96は、線源ケーブル70を、複数のチャネル62のアレイのうちの所望のチャネルへ送るように、供給リング94を制御するように構成される。その結果、線源72は、所与の小線源処置の特性に従って、少なくとも1つの放射線源又は種を受け取るチャネル内に配置される。代替実施例では、ケーブル72は、本明細書で論じたようにFBG光ケーブルを有する。別な実施例では、FBG光ケーブルを有するケーブル72は、線源の位置の追跡を可能にする。
位置の追跡は、所与の小線源処置の特性に従って、少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状のみならず、少なくとも1つの放射線源又は種の位置及び形状を、形状検知により測定する手順を有する。形状検知による測定は、図9の処理装置84及び/又は制御装置96と一体化した処理装置84によって実行されて良い。
【0031】
動作時において、供給装置(又はアフターローダー)88は、計画された小線源期間で予め定められたように動作し、ケーブル70と所定位置に存在する(複数の)放射性ペレット/線源72が与えられ、かつ、チャネル62のアプリケータの搬送端部に取り付けられる。その後、アフターローダーは、各計算された期間、線源を、選択されたカテーテル102の各々の中で、各計算された位置(図7の68)まで移動させる。繰り返しになるが、小線源期間は典型的には、数日間(たとえば1〜2週間)、1日に1,2又は数回行われる。小線源期間の間、アプリケータは注入されたままである。位置合わせ確認/再調節処理は、各小線源期間の前に実行される。次の小線源期間が開始されるとき、FBG光ファイバを用いた形状検知による対応するチャネルの位置及び形状の測定は、アプリケータ−特に患者上のアプリケータ−の位置及び配向を特定又は決定するのに用いられる。計画用像メモリ内に保存された計画像上でのアプリケータ及び患者の相対位置は、制御装置/処理装置96によって、計画像内のアプリケータの現在の相対位置と比較される。相対位置が閾値よりも変化していなかった場合、アプリケータは軟組織に対して配向も位置も変化させておらず、アフターローダー64は再接続され、かつ、次の小線源治療期間が開始される。
【0032】
しかし制御装置/処理装置96が、位置が変化したと判断した場合、一の選択肢は、対応するFBG光ファイバ及びチャネルの位置と形状の追加測定を行うことで、アプリケータの位置の再設定を試みることである。それによりアプリケータは元に戻される、すなわち可能な限り本来の位置と配向に近い状態にされる。アプリケータが、治療が計画された本来の位置に存在しない場合、アプリケータの現在の位置と本来の位置との間(従って周囲の(隣接する)組織と標的領域との間)での変換が、処理装置96によって決定される。この変換は、処理装置96内での像変換処理によって用いられて、計画像メモリからの計画像上で作用することで、前記変換に従ってアプリケータ及び標的領域の相対位置をシフトさせることによって、変換された治療計画像が生成される。このシフトされた情報は、処理装置96の自動治療計画処理へ送られることで、適合された小線源計画が生成される。適合された小線源計画はアフターローダー88へ送られる。そして次の小線源期間が開始される。
【0033】
一の小線源治療の適合計画に係る実施例では、アプリケータが注入され、診断3D像の組が生成され、かつ、照射計画が作成される。照射中、アプリケータ及び/又は放射性パレットが追跡され、かつ、照射量が計算される。たとえば標的組織は、3Dマトリックスを構成する複数の小領域に分割されて良い。追跡された線源の位置を3Dマトリックスにマッピングすることによって、各小領域での累積的照射量は、時間と線源からの距離に基づいて、連続的又は間断的に更新することができる。照射量は、コンピュータ及び/又は医療者によって監視されて良い。照射計画からのずれが検出される場合、更新された照射計画が生成される。それに加えて、光ファイバが、放射線照射量を測定するのに用いられて良い。換言すれば、FBGファイバは、適合計画のためのループを閉じる目的を果たすことができる。
【0034】
ここで、一の実施例による小線源治療法が供されることに留意して欲しい。当該方法は、少なくとも1つの放射線源又は種を受け取るチャネルを有するアプリケータを、照射されるべき標的領域に隣接する軟組織内に注入する手順、前記アプリケータを有する標的領域の高解像度計画像を生成する手順であって、前記高解像度計画像は3次元処置計画の決定に利用される手順、並びに、前記標的領域及び処置計画に対する前記アプリケータの位置を追跡する手順を有する。前記位置を追跡する手順は、形状検知によって、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状を測定する手順を有する。それに加えて一の実施例では、前記高解像度計画像を生成する手順は、超音波、CT、MRI、X線、PET、及び他の医用画像処理からなる群から選ばれる1つ以上の手法を用いる手順を有する。さらに他の実施例では、前記3次元処置計画を決定する手順は、放射線照射量分布マップを生成する手順を有する。しかもさらに他の実施例では、前記追跡は、(i)ファイバブラッググレーティング及び/又は(ii)レイリー散乱に基づくファイバ光学検知デバイスを用いた形状検知による測定を行う手順をさらに有する。
【0035】
他の実施例では、当該方法は、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルを介して少なくとも1つの放射線源又は種を前記標的領域へ配置する手順、及び、(ii) 前記少なくとも1つの放射線源又は種を受け取るチャネルを介して前記標的領域から前記少なくとも1つの放射線源又は種を検索する手順、からなる群から選ばれる少なくとも1つの手順をさらに有する。前記少なくとも1つの放射線源又は種は、処置計画に従って、標的領域内部のチャネルを横断する。一の実施例では、前記位置の追跡は、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルを介して少なくとも1つの放射線源又は種を前記標的領域へ配置する手順、及び、(ii) 前記少なくとも1つの放射線源又は種を受け取るチャネルを介して前記標的領域から前記少なくとも1つの放射線源又は種を検索する手順、からなる群から選ばれる少なくとも1つの手順を有してよい。前記位置の追跡はまた、ファイバブラッググレーティング光ファイバにより測定された前記少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状の測定情報を取得する手順をも有する。
【0036】
他の実施例では、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した前記少なくとも1つの放射線源又は種の前記標的領域への配置及び前記標的領域からの検索は、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した前記少なくとも1つの放射線源又は種の前記標的領域への配置及び前記標的領域からの検索を行うように構成された供給装置を用いる手順を有する。前記供給装置は1つ以上の線源供給装置を有する。前記1つ以上の線源供給装置は、先端部と結合した状態で放射線源又は種を有するケーブルを有する。
【0037】
さらに他の実施例では、前記供給装置は1つ以上のシミュレーション供給装置をさらに有する。前記1つ以上のシミュレーション供給装置は少なくとも1つのファイバブラッググレーティング光ケーブルを有する。前記ファイバブラッググレーティング光ケーブルは、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの少なくとも前記標的領域への配置及び/又は(ii)少なくとも前記標的領域からの前記少なくとも1つの放射線源又は種を受け取るチャネルの検索に応じて、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状の形状検知による測定を実施するように構成される。他の実施例では、前記少なくとも1つの放射線源又は種を受け取るチャネルは複数のチャネルからなるアレイを有し、前記1つ以上のシミュレーション供給装置は複数のシミュレーション供給装置を有し、さらに前記複数のシミュレーション供給装置は、(i)配置と検索を順次行う手順及び(ii)配置と検索を同時に行う手順からなる群から選ばれる1つの手順に従って、配置及び検索される。
【0038】
さらに他の実施例では、前記1つ以上の線源供給装置のケーブルはファイバブラッググレーティング光ケーブルを有する。前記ファイバブラッググレーティング光ケーブルは、処置中に、(b)(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの少なくとも前記標的領域への配置及び(b)(ii)少なくとも前記標的領域からの前記少なくとも1つの放射線源又は種を受け取るチャネルの検索からなる群から選ばれた1つの手順に応じて、(a)(i)前記少なくとも1つの放射線源又は種を受け取るチャネル及び(a)(ii)前記少なくとも1つの放射線源又は種の位置と形状の、形状検知による測定を実施するように構成される。
【0039】
さらに他の実施例によると、前記少なくとも1つの放射線源又は種を受け取るチャネルは複数のチャネルからなるアレイを有する。前記1つ以上の線源供給装置は複数の線源供給装置を有する。さらに前記複数の線源供給装置は、前記処置計画に従って配置及び検索される。前記複数の線源供給装置の配置と検索は、(c)(i)配置と検索を順次行う手順及び(c)(ii)配置と検索を同時に行う手順からなる群から選ばれる1つの手順を有する。
【0040】
さらに他の実施例によると、当該方法は、処置計画を決定する手順、及び、前記処置計画の各手順を実施する前に、前記標的領域に対する前記アプリケータの位置を確認する手順をさらに有する。前記処置計画は多数の手順を有する。各手順は、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した少なくとも1つの放射線源又は種の配置及び検索によって前記標的領域を照射する手順を有する。前記少なくとも1つの放射線源又は種は、前記処置計画の手順に従って、前記標的領域内で各対応するチャネルを横断する。各処理計画を実施する前に、前記標的領域に対する前記アプリケータの位置が確認される。閾値の範囲内であることが確認された前記標的領域に対する前記アプリケータの位置に応じて、当該方法は前記処置計画へ進む。閾値の範囲内であることが確認されなかった前記標的領域に対する前記アプリケータの位置に応じて、当該方法は、前記処置計画を修正して補正措置を実施する。
【0041】
一の実施例では、前記処置計画を修正する手順は、前記アプリケータの位置の変化に従って、前記小線源処置の対応する手順と任意の他の手順を適合するように修正する手順を有する。他の実施例では、確認する手順は、前記アプリケータの少なくとも1つの放射線源又は種を受け取るチャネルの位置と形状を形状検知により測定する手順を有する。
【0042】
他の実施例では、前記少なくとも1つの放射線源又は種を受け取るチャネルは複数のチャネルからなるアレイを有する。前記アプリケータの位置の確認は、(a)(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの互いに対する位置を確認する手順及び(a)(ii)前記少なくとも1つの放射線源又は種を受け取るチャネルの前記標的領域に対する位置を確認する手順を有する。確認は、前記標的領域に対する前記アプリケータの位置を追跡する手順、並びに、(i)先の追跡位置及び(ii)処置計画により指定された追跡位置からなる群から選ばれた少なくとも1つの位置と、前記の追跡された位置とを比較する手順をさらに有する。
【0043】
さらに他の実施例では、前記アプリケータは放射線源又は種を受け取るチャネルからなるアレイを有する。この実施例では、形状検知による測定による追跡は、前記アレイの内の所定の組の放射線源又は種を受け取るチャネルの位置と形状を測定する手順を有する。当該方法は、前記アプリケータの位置の追跡に基づいて前記アレイについての3次元での追跡された位置情報を収集することで、一の放射線源又は種を受け取るチャネルから他の放射線源又は種を受け取るチャネルまでで、指定された位置からある閾値を超えた位置の変化が生じていないことを保証する手順をさらに有する。それに加えて、前記アレイに関する3次元での位置情報の収集は、(i)処置期間にわたる位置情報のリアルタイム収集及び(ii)前記処置の手順間での位置情報の収集からなる群から選ばれる少なくとも1つの収集方法に従って実行される。
【0044】
他の実施例では、小線源治療法は、標的領域の処置中に意図しない照射を受けやすい、前記標的領域に隣接する組織の一部の位置と形状を形状検知により測定する手順をさらに有する。前記組織の一部の位置と形状を形状検地により測定する手順は、前記意図しない照射を受けやすい組織の一部内にファイバブラッググレーティング光ファイバを配置する手順を有する。たとえば前記組織の一部が尿道を含む場合には、FBG光ファイバは、尿道内部に配置されることで、小線源治療処置の1つ以上の処理のうちの少なくとも一部の間に、尿道の位置と形状を形状検知によって測定してよい。従って、尿道の位置と形状の知識によって、意図しない照射から尿道を保護するように、処置計画に関する適切な処置をとることができる。他の実施例では、小線源治療法は、前記意図しない照射を受けやすい組織の一部内にファイバブラッググレーティング光ファイバを配置することによって尿道の位置と形状を形状検知によって測定しながら、前記標的領域の高分解像を生成する手順をさらに有する。
【0045】
さらに他の実施例では、小線源治療法は、照射されるべき標的領域に隣接する軟組織内に、少なくとも1つの放射線源又は種を受け取るチャネルを有するアプリケータを注入する手順、処置計画の決定に利用される、前記アプリケータを含む標的領域の高分解像を生成する手順、前記標的領域と処置計画に関する前記アプリケータの位置を追跡する手順であって、前記追跡は、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置と形状を形状検知により測定する手順を有し、前記追跡は、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した前記標的領域へのファイバブラッググレーティング光ファイバの配置、前記標的領域からのファイバブラッググレーティング光ファイバの検索、及び、前記ファイバブラッググレーティング光ファイバを介した前記少なくとも1つの放射線源又は種を受け取るチャネルの測定された位置と形状の情報の取得を有する、手順、前記処置計画を決定する手順であって、前記処置計画は多数の処理を有し、各処理は、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した前記標的領域への少なくとも1つの放射線源又は種の配置、前記標的領域からの少なくとも1つの放射線源又は種の検索による前記標的領域の照射を有し、前記少なくとも1つの放射線源又は種は前記処置計画の処理に従って前記標的領域内で各対応するチャネルを横断する、手順、ならびに、(a)(i)処置計画処理の実施前及び/又は(a)(ii)処置計画処理中にリアルタイムに、前記標的位置に対する前記アプリケータの位置を確認する手順であって、前記確認は、前記アプリケータの少なくとも1つの放射線源又は種を受け取るチャネルの位置と形状を形状検知により測定する手順、ならびに、(b)(i)先の追跡位置及び/又は(b)(ii)処置計画により指定された追跡位置と、前記確認による追跡結果とを比較する手順を有する、手順、を有する。
【0046】
一の実施例では、小線源治療装置は、照射されるべき標的領域に隣接する軟組織内に、少なくとも1つの放射線源又は種を受け取るチャネルを有するアプリケータ、3次元処置計画の決定に利用される、前記アプリケータを含む標的領域の高分解像を生成する手段、ならびに、前記標的領域と処置計画に関する前記アプリケータの位置を追跡する追跡装置を有する。前記追跡装置は、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置と形状を形状検知により測定することによって前記のアプリケータの位置を追跡するように構成される。
【0047】
他の実施例では、小線源治療装置は、(i)前記アプリケータの少なくとも1つの放射線源又は種を受け取るチャネルを介した前記標的領域への前記少なくとも1つの放射線源又は種の配置及び/又は(ii)前記アプリケータの少なくとも1つの放射線源又は種を受け取るチャネルを介した前記標的領域からの前記少なくとも1つの放射線源又は種の検索を実行するように構成された供給装置をさらに有する。前記供給装置は1つ以上の線源供給装置を有する。前記1つ以上の線源供給装置はケーブルを有する。前記ケーブルは、該ケーブルの先端部と結合した放射線源又は種を有する。前記供給装置は1つ以上のシミュレーション供給装置をさらに有する。前記1つ以上のシミュレーション供給装置の各々はファイバブラッググレーティング光ケーブルを有する。前記ファイバブラッググレーティング光ケーブルは、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの少なくとも前記標的領域への配置及び/又は(ii)少なくとも前記標的領域からの前記少なくとも1つの放射線源又は種を受け取るチャネルの検索に応じて、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状の形状検知による測定を実施するように構成される。
【0048】
他の実施例では、前記1つ以上の線源供給装置のケーブルはファイバブラッググレーティング光ケーブルを有する。前記ファイバブラッググレーティング光ケーブルは、処置中に、前記少なくとも1つの放射線源又は種の位置と形状の、形状検知による測定を実施するように構成される。前記ファイバブラッググレーティング光ケーブルによる形状検知測定は、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの少なくとも前記標的領域への配置及び(ii)少なくとも前記標的領域からの前記少なくとも1つの放射線源又は種を受け取るチャネルの検索からなる群から選ばれた1つの手順に応じて行われる。
【特許請求の範囲】
【請求項1】
小線源治療方法であって:
少なくとも1つの放射線源又は放射線種を受け取るチャネルを有するアプリケータを、照射されるべき標的領域に隣接する軟部組織へ注入する手順;
3次元治療用概略図を決定するのに用いられる、前記アプリケータを含む前記標的領域の高解像度透視像を生成する手順;
前記少なくとも1つの放射線源又は放射線種を受け取るチャネルの位置及び形状を形状検知によって測定することで、前記標的領域及び3次元治療用概略図に関する前記アプリケータの位置を追跡する手順;
を有する方法。
【請求項2】
(i)前記少なくとも1つの放射線源又は種を受け取るチャネルを介して少なくとも1つの放射線源又は種を前記標的領域へ配置する手順、及び、(ii)前記少なくとも1つの放射線源又は種を受け取るチャネルを介して前記標的領域から前記少なくとも1つの放射線源又は種を検索する手順、からなる群から選ばれる少なくとも1つの手順をさらに有する請求項1に記載の方法であって、
前記少なくとも1つの放射線源又は種は、処置計画に従って、標的領域内部のチャネルを横断する、方法。
【請求項3】
前記位置の追跡は、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルを介して少なくとも1つの放射線源又は種を前記標的領域へ配置する手順、及び、(ii) 前記少なくとも1つの放射線源又は種を受け取るチャネルを介して前記標的領域から前記少なくとも1つの放射線源又は種を検索する手順、からなる群から選ばれる少なくとも1つの手順;
ファイバブラッググレーティング光ファイバにより測定された前記少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状の測定情報を取得する手順;
を有する、請求項2に記載の方法。
【請求項4】
前記少なくとも1つの放射線源又は種を受け取るチャネルを介した前記少なくとも1つの放射線源又は種の前記標的領域への配置及び前記標的領域からの検索は、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した前記少なくとも1つの放射線源又は種の前記標的領域への配置及び前記標的領域からの検索を行うように構成された供給装置を用いる手順を有する、請求項2に記載の方法。
【請求項5】
前記供給装置は1つ以上の線源供給装置をさらに有し、前記1つ以上の線源供給装置は、先端部と結合した状態で放射線源又は種を有するケーブルを有する、請求項4に記載の方法。
【請求項6】
前記供給装置は1つ以上のシミュレーション供給装置をさらに有し、
前記1つ以上のシミュレーション供給装置は少なくとも1つのファイバブラッググレーティング光ケーブルを有し、
前記ファイバブラッググレーティング光ケーブルは、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの少なくとも前記標的領域への配置及び/又は(ii)少なくとも前記標的領域からの前記少なくとも1つの放射線源又は種を受け取るチャネルの検索に応じて、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状の形状検知による測定を実施するように構成される、請求項5に記載の方法。
【請求項7】
前記少なくとも1つの放射線源又は種を受け取るチャネルは複数のチャネルからなるアレイを有し、前記1つ以上のシミュレーション供給装置は複数のシミュレーション供給装置を有し、さらに前記複数のシミュレーション供給装置は、(i)配置と検索を順次行う手順及び(ii)配置と検索を同時に行う手順からなる群から選ばれる1つの手順に従って、前記アレイを介して、配置及び検索される。
請求項6に記載の方法。
【請求項8】
前記1つ以上の線源供給装置のケーブルはファイバブラッググレーティング光ケーブルをし、
前記ファイバブラッググレーティング光ケーブルは、処置中に、(b)(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの少なくとも前記標的領域への配置及び(b)(ii)少なくとも前記標的領域からの前記少なくとも1つの放射線源又は種を受け取るチャネルの検索からなる群から選ばれた1つの手順に応じて、(a)(i)前記少なくとも1つの放射線源又は種を受け取るチャネル及び(a)(ii)前記少なくとも1つの放射線源又は種の位置と形状の、形状検知による測定を実施するように構成される、請求項5に記載の方法。
【請求項9】
前記少なくとも1つの放射線源又は種を受け取るチャネルは複数のチャネルからなるアレイを有し、
前記1つ以上の線源供給装置は複数の線源供給装置を有し、
さらに前記複数の線源供給装置は、前記処置計画に従って配置及び検索され、
前記複数の線源供給装置の配置と検索は、(c)(i)配置と検索を順次行う手順及び(c)(ii)配置と検索を同時に行う手順からなる群から選ばれる1つの手順を有する、
請求項8に記載の方法。
【請求項10】
処置計画を決定する手順、及び、前記処置計画の各手順を実施する前に、前記標的領域に対する前記アプリケータの位置を確認する手順をさらに有する請求項1に記載の方法であって、
前記処置計画は多数の手順を有し、
各手順は、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した少なくとも1つの放射線源又は種の配置及び検索によって前記標的領域を照射する手順を有し、
前記少なくとも1つの放射線源又は種は、前記処置計画の手順に従って、前記標的領域内で各対応するチャネルを横断し、
各処理計画を実施する前に、前記標的領域に対する前記アプリケータの位置が確認され、閾値の範囲内であることが確認された前記標的領域に対する前記アプリケータの位置に応じて、当該方法は前記処置計画へ進み、
閾値の範囲内であることが確認されなかった前記標的領域に対する前記アプリケータの位置に応じて前記処置計画を修正して補正措置を実施する、方法。
【請求項11】
前記処置計画を修正する手順は、前記アプリケータの位置の変化に従って、前記小線源処置の対応する手順と任意の他の手順を適合するように修正する手順を有する、請求項10に記載の方法。
【請求項12】
前記確認する手順は、前記アプリケータの少なくとも1つの放射線源又は種を受け取るチャネルの位置と形状を形状検知により測定する手順を有する、請求項10に記載の方法。
【請求項13】
前記少なくとも1つの放射線源又は種を受け取るチャネルは複数のチャネルからなるアレイを有し、
前記アプリケータの位置の確認は、(a)(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの互いに対する位置を確認する手順及び(a)(ii)前記少なくとも1つの放射線源又は種を受け取るチャネルの前記標的領域に対する位置を確認する手順を有する、
請求項10に記載の方法。
【請求項14】
前記確認は、前記標的領域に対する前記アプリケータの位置を追跡する手順、並びに、(i)先の追跡位置及び(ii)処置計画により指定された追跡位置からなる群から選ばれた少なくとも1つの位置と、前記の追跡された位置とを比較する手順をさらに有する、請求項13に記載の方法。
【請求項15】
前記高解像度計画像を生成する手順は、超音波、CT、MRI、X線、PET、及び他の医用画像処理からなる群から選ばれる1つ以上の手法を用いる手順を有する、請求項1に記載の方法。
【請求項16】
前記3次元処置計画を決定する手順は、放射線照射量分布マップを生成する手順を有する、請求項1に記載の方法。
【請求項17】
前記追跡は、(i)ファイバブラッググレーティング及び/又は(ii)レイリー散乱に基づくファイバ光学検知デバイスを用いた形状検知による測定を行う手順をさらに有する、請求項1に記載の方法。
【請求項18】
前記アプリケータは放射線源又は種を受け取るチャネルからなるアレイを有する、請求項1に記載の方法。
【請求項19】
前記形状検知による測定による追跡は、前記アレイの内の所定の組の放射線源又は種を受け取るチャネルの位置と形状を測定する手順を有する、請求項18に記載の方法。
【請求項20】
前記アプリケータの位置の追跡に基づいて前記アレイについての3次元での追跡された位置情報を収集することで、一の放射線源又は種を受け取るチャネルから他の放射線源又は種を受け取るチャネルまでで、指定された位置からある閾値を超えた位置の変化が生じていないことを保証する手順をさらに有する、請求項18に記載の方法。
【請求項21】
前記アレイに関する3次元での位置情報の収集は、(i)処置期間にわたる位置情報のリアルタイム収集及び(ii)前記処置の手順間での位置情報の収集からなる群から選ばれる少なくとも1つの収集方法に従って実行される、請求項20に記載の方法。
【請求項22】
前記標的領域の処置中に意図しない照射を受けやすい、前記標的領域に隣接する組織の一部の位置と形状を形状検知により測定する手順をさらに有する、請求項1に記載の方法。
【請求項23】
前記組織の一部の位置と形状を形状検地により測定する手順は、前記意図しない照射を受けやすい組織の一部内にファイバブラッググレーティング光ファイバを配置する手順を有する、請求項22に記載の方法。
【請求項24】
前記意図しない照射を受けやすい組織の一部内にファイバブラッググレーティング光ファイバを配置することによって前記組織の位置と形状を形状検知によって測定しながら、前記標的領域の高分解像を生成する手順をさらに有する、請求項23に記載の方法。
【請求項25】
小線源治療方法であって:
照射されるべき標的領域に隣接する軟組織内に、少なくとも1つの放射線源又は種を受け取るチャネルを有するアプリケータを注入する手順;
処置計画の決定に利用される、前記アプリケータを含む標的領域の高分解像を生成する手順;
前記標的領域と処置計画に関する前記アプリケータの位置を追跡する手順であって、前記追跡は、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置と形状を形状検知により測定する手順を有し、前記追跡は、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した前記標的領域へのファイバブラッググレーティング光ファイバの配置、前記標的領域からのファイバブラッググレーティング光ファイバの検索、及び、前記ファイバブラッググレーティング光ファイバを介した前記少なくとも1つの放射線源又は種を受け取るチャネルの測定された位置と形状の情報の取得を有する、手順;
前記処置計画を決定する手順であって、前記処置計画は多数の処理を有し、各処理は、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した前記標的領域への少なくとも1つの放射線源又は種の配置、前記標的領域からの少なくとも1つの放射線源又は種の検索による前記標的領域の照射を有し、前記少なくとも1つの放射線源又は種は前記処置計画の処理に従って前記標的領域内で各対応するチャネルを横断する、手順;ならびに、
(a)(i)処置計画処理の実施前及び/又は(a)(ii)処置計画処理中にリアルタイムに、前記標的位置に対する前記アプリケータの位置を確認する手順であって、前記確認は、前記アプリケータの少なくとも1つの放射線源又は種を受け取るチャネルの位置と形状を形状検知により測定する手順、ならびに、(b)(i)先の追跡位置及び/又は(b)(ii)処置計画により指定された追跡位置と、前記確認による追跡結果とを比較する手順を有する、手順、を有する、
方法。
【請求項26】
照射されるべき標的領域に隣接する軟組織内に、少なくとも1つの放射線源又は種を受け取るチャネルを有するアプリケータ、
3次元処置計画の決定に利用される、前記アプリケータを含む標的領域の高分解像を生成する手段、ならびに、
前記標的領域と処置計画に関する前記アプリケータの位置を追跡する追跡装置を有する小線源治療装置であって、
前記追跡装置は、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置と形状を形状検知により測定することによって前記のアプリケータの位置を追跡するように構成される、小線源治療装置。
【請求項27】
(i)前記アプリケータの少なくとも1つの放射線源又は種を受け取るチャネルを介した前記標的領域への前記少なくとも1つの放射線源又は種の配置及び/又は(ii)前記アプリケータの少なくとも1つの放射線源又は種を受け取るチャネルを介した前記標的領域からの前記少なくとも1つの放射線源又は種の検索を実行するように構成された供給装置をさらに有する 請求項26 に記載の小線源治療装置であって、
前記供給装置は1つ以上の線源供給装置を有し、
前記1つ以上の線源供給装置はケーブルを有し、
前記ケーブルは、該ケーブルの先端部と結合した放射線源又は種を有し、
前記供給装置は1つ以上のシミュレーション供給装置をさらに有する、
小線源治療装置。
【請求項28】
前記供給装置は1つ以上のシミュレーション供給装置をさらに有し、
前記1つ以上のシミュレーション供給装置の各々はファイバブラッググレーティング光ケーブルを有し、
前記ファイバブラッググレーティング光ケーブルは、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの少なくとも前記標的領域への配置及び/又は(ii)少なくとも前記標的領域からの前記少なくとも1つの放射線源又は種を受け取るチャネルの検索に応じて、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状の形状検知による測定を実施するように構成される、
請求項27 に記載の小線源治療装置。
【請求項29】
前記供給装置はアフターローダー装置を有する、 請求項27 に記載の小線源治療装置。
【請求項30】
前記1つ以上の線源供給装置のケーブルはファイバブラッググレーティング光ケーブルを有し、
前記ファイバブラッググレーティング光ケーブルは、処置中に、前記少なくとも1つの放射線源又は種の位置と形状の、形状検知による測定を実施するように構成され、
前記ファイバブラッググレーティング光ケーブルによる形状検知測定は、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの少なくとも前記標的領域への配置及び(ii)少なくとも前記標的領域からの前記少なくとも1つの放射線源又は種を受け取るチャネルの検索からなる群から選ばれた1つの手順に応じて行われる、
請求項27 に記載の小線源治療装置。
【請求項31】
少なくとも1つの放射線源又は種を受け取るチャネルの形状を検知するセンサを有する供給装置であって、前記少なくとも1つの放射線源又は種を受け取るチャネルによって、標的領域への少なくとも1つの放射線源若しくは種の配置、又は、標的領域からの少なくとも1つの放射線源若しくは種の検索を行うように構成される、供給装置。
【請求項1】
小線源治療方法であって:
少なくとも1つの放射線源又は放射線種を受け取るチャネルを有するアプリケータを、照射されるべき標的領域に隣接する軟部組織へ注入する手順;
3次元治療用概略図を決定するのに用いられる、前記アプリケータを含む前記標的領域の高解像度透視像を生成する手順;
前記少なくとも1つの放射線源又は放射線種を受け取るチャネルの位置及び形状を形状検知によって測定することで、前記標的領域及び3次元治療用概略図に関する前記アプリケータの位置を追跡する手順;
を有する方法。
【請求項2】
(i)前記少なくとも1つの放射線源又は種を受け取るチャネルを介して少なくとも1つの放射線源又は種を前記標的領域へ配置する手順、及び、(ii)前記少なくとも1つの放射線源又は種を受け取るチャネルを介して前記標的領域から前記少なくとも1つの放射線源又は種を検索する手順、からなる群から選ばれる少なくとも1つの手順をさらに有する請求項1に記載の方法であって、
前記少なくとも1つの放射線源又は種は、処置計画に従って、標的領域内部のチャネルを横断する、方法。
【請求項3】
前記位置の追跡は、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルを介して少なくとも1つの放射線源又は種を前記標的領域へ配置する手順、及び、(ii) 前記少なくとも1つの放射線源又は種を受け取るチャネルを介して前記標的領域から前記少なくとも1つの放射線源又は種を検索する手順、からなる群から選ばれる少なくとも1つの手順;
ファイバブラッググレーティング光ファイバにより測定された前記少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状の測定情報を取得する手順;
を有する、請求項2に記載の方法。
【請求項4】
前記少なくとも1つの放射線源又は種を受け取るチャネルを介した前記少なくとも1つの放射線源又は種の前記標的領域への配置及び前記標的領域からの検索は、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した前記少なくとも1つの放射線源又は種の前記標的領域への配置及び前記標的領域からの検索を行うように構成された供給装置を用いる手順を有する、請求項2に記載の方法。
【請求項5】
前記供給装置は1つ以上の線源供給装置をさらに有し、前記1つ以上の線源供給装置は、先端部と結合した状態で放射線源又は種を有するケーブルを有する、請求項4に記載の方法。
【請求項6】
前記供給装置は1つ以上のシミュレーション供給装置をさらに有し、
前記1つ以上のシミュレーション供給装置は少なくとも1つのファイバブラッググレーティング光ケーブルを有し、
前記ファイバブラッググレーティング光ケーブルは、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの少なくとも前記標的領域への配置及び/又は(ii)少なくとも前記標的領域からの前記少なくとも1つの放射線源又は種を受け取るチャネルの検索に応じて、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状の形状検知による測定を実施するように構成される、請求項5に記載の方法。
【請求項7】
前記少なくとも1つの放射線源又は種を受け取るチャネルは複数のチャネルからなるアレイを有し、前記1つ以上のシミュレーション供給装置は複数のシミュレーション供給装置を有し、さらに前記複数のシミュレーション供給装置は、(i)配置と検索を順次行う手順及び(ii)配置と検索を同時に行う手順からなる群から選ばれる1つの手順に従って、前記アレイを介して、配置及び検索される。
請求項6に記載の方法。
【請求項8】
前記1つ以上の線源供給装置のケーブルはファイバブラッググレーティング光ケーブルをし、
前記ファイバブラッググレーティング光ケーブルは、処置中に、(b)(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの少なくとも前記標的領域への配置及び(b)(ii)少なくとも前記標的領域からの前記少なくとも1つの放射線源又は種を受け取るチャネルの検索からなる群から選ばれた1つの手順に応じて、(a)(i)前記少なくとも1つの放射線源又は種を受け取るチャネル及び(a)(ii)前記少なくとも1つの放射線源又は種の位置と形状の、形状検知による測定を実施するように構成される、請求項5に記載の方法。
【請求項9】
前記少なくとも1つの放射線源又は種を受け取るチャネルは複数のチャネルからなるアレイを有し、
前記1つ以上の線源供給装置は複数の線源供給装置を有し、
さらに前記複数の線源供給装置は、前記処置計画に従って配置及び検索され、
前記複数の線源供給装置の配置と検索は、(c)(i)配置と検索を順次行う手順及び(c)(ii)配置と検索を同時に行う手順からなる群から選ばれる1つの手順を有する、
請求項8に記載の方法。
【請求項10】
処置計画を決定する手順、及び、前記処置計画の各手順を実施する前に、前記標的領域に対する前記アプリケータの位置を確認する手順をさらに有する請求項1に記載の方法であって、
前記処置計画は多数の手順を有し、
各手順は、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した少なくとも1つの放射線源又は種の配置及び検索によって前記標的領域を照射する手順を有し、
前記少なくとも1つの放射線源又は種は、前記処置計画の手順に従って、前記標的領域内で各対応するチャネルを横断し、
各処理計画を実施する前に、前記標的領域に対する前記アプリケータの位置が確認され、閾値の範囲内であることが確認された前記標的領域に対する前記アプリケータの位置に応じて、当該方法は前記処置計画へ進み、
閾値の範囲内であることが確認されなかった前記標的領域に対する前記アプリケータの位置に応じて前記処置計画を修正して補正措置を実施する、方法。
【請求項11】
前記処置計画を修正する手順は、前記アプリケータの位置の変化に従って、前記小線源処置の対応する手順と任意の他の手順を適合するように修正する手順を有する、請求項10に記載の方法。
【請求項12】
前記確認する手順は、前記アプリケータの少なくとも1つの放射線源又は種を受け取るチャネルの位置と形状を形状検知により測定する手順を有する、請求項10に記載の方法。
【請求項13】
前記少なくとも1つの放射線源又は種を受け取るチャネルは複数のチャネルからなるアレイを有し、
前記アプリケータの位置の確認は、(a)(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの互いに対する位置を確認する手順及び(a)(ii)前記少なくとも1つの放射線源又は種を受け取るチャネルの前記標的領域に対する位置を確認する手順を有する、
請求項10に記載の方法。
【請求項14】
前記確認は、前記標的領域に対する前記アプリケータの位置を追跡する手順、並びに、(i)先の追跡位置及び(ii)処置計画により指定された追跡位置からなる群から選ばれた少なくとも1つの位置と、前記の追跡された位置とを比較する手順をさらに有する、請求項13に記載の方法。
【請求項15】
前記高解像度計画像を生成する手順は、超音波、CT、MRI、X線、PET、及び他の医用画像処理からなる群から選ばれる1つ以上の手法を用いる手順を有する、請求項1に記載の方法。
【請求項16】
前記3次元処置計画を決定する手順は、放射線照射量分布マップを生成する手順を有する、請求項1に記載の方法。
【請求項17】
前記追跡は、(i)ファイバブラッググレーティング及び/又は(ii)レイリー散乱に基づくファイバ光学検知デバイスを用いた形状検知による測定を行う手順をさらに有する、請求項1に記載の方法。
【請求項18】
前記アプリケータは放射線源又は種を受け取るチャネルからなるアレイを有する、請求項1に記載の方法。
【請求項19】
前記形状検知による測定による追跡は、前記アレイの内の所定の組の放射線源又は種を受け取るチャネルの位置と形状を測定する手順を有する、請求項18に記載の方法。
【請求項20】
前記アプリケータの位置の追跡に基づいて前記アレイについての3次元での追跡された位置情報を収集することで、一の放射線源又は種を受け取るチャネルから他の放射線源又は種を受け取るチャネルまでで、指定された位置からある閾値を超えた位置の変化が生じていないことを保証する手順をさらに有する、請求項18に記載の方法。
【請求項21】
前記アレイに関する3次元での位置情報の収集は、(i)処置期間にわたる位置情報のリアルタイム収集及び(ii)前記処置の手順間での位置情報の収集からなる群から選ばれる少なくとも1つの収集方法に従って実行される、請求項20に記載の方法。
【請求項22】
前記標的領域の処置中に意図しない照射を受けやすい、前記標的領域に隣接する組織の一部の位置と形状を形状検知により測定する手順をさらに有する、請求項1に記載の方法。
【請求項23】
前記組織の一部の位置と形状を形状検地により測定する手順は、前記意図しない照射を受けやすい組織の一部内にファイバブラッググレーティング光ファイバを配置する手順を有する、請求項22に記載の方法。
【請求項24】
前記意図しない照射を受けやすい組織の一部内にファイバブラッググレーティング光ファイバを配置することによって前記組織の位置と形状を形状検知によって測定しながら、前記標的領域の高分解像を生成する手順をさらに有する、請求項23に記載の方法。
【請求項25】
小線源治療方法であって:
照射されるべき標的領域に隣接する軟組織内に、少なくとも1つの放射線源又は種を受け取るチャネルを有するアプリケータを注入する手順;
処置計画の決定に利用される、前記アプリケータを含む標的領域の高分解像を生成する手順;
前記標的領域と処置計画に関する前記アプリケータの位置を追跡する手順であって、前記追跡は、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置と形状を形状検知により測定する手順を有し、前記追跡は、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した前記標的領域へのファイバブラッググレーティング光ファイバの配置、前記標的領域からのファイバブラッググレーティング光ファイバの検索、及び、前記ファイバブラッググレーティング光ファイバを介した前記少なくとも1つの放射線源又は種を受け取るチャネルの測定された位置と形状の情報の取得を有する、手順;
前記処置計画を決定する手順であって、前記処置計画は多数の処理を有し、各処理は、前記少なくとも1つの放射線源又は種を受け取るチャネルを介した前記標的領域への少なくとも1つの放射線源又は種の配置、前記標的領域からの少なくとも1つの放射線源又は種の検索による前記標的領域の照射を有し、前記少なくとも1つの放射線源又は種は前記処置計画の処理に従って前記標的領域内で各対応するチャネルを横断する、手順;ならびに、
(a)(i)処置計画処理の実施前及び/又は(a)(ii)処置計画処理中にリアルタイムに、前記標的位置に対する前記アプリケータの位置を確認する手順であって、前記確認は、前記アプリケータの少なくとも1つの放射線源又は種を受け取るチャネルの位置と形状を形状検知により測定する手順、ならびに、(b)(i)先の追跡位置及び/又は(b)(ii)処置計画により指定された追跡位置と、前記確認による追跡結果とを比較する手順を有する、手順、を有する、
方法。
【請求項26】
照射されるべき標的領域に隣接する軟組織内に、少なくとも1つの放射線源又は種を受け取るチャネルを有するアプリケータ、
3次元処置計画の決定に利用される、前記アプリケータを含む標的領域の高分解像を生成する手段、ならびに、
前記標的領域と処置計画に関する前記アプリケータの位置を追跡する追跡装置を有する小線源治療装置であって、
前記追跡装置は、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置と形状を形状検知により測定することによって前記のアプリケータの位置を追跡するように構成される、小線源治療装置。
【請求項27】
(i)前記アプリケータの少なくとも1つの放射線源又は種を受け取るチャネルを介した前記標的領域への前記少なくとも1つの放射線源又は種の配置及び/又は(ii)前記アプリケータの少なくとも1つの放射線源又は種を受け取るチャネルを介した前記標的領域からの前記少なくとも1つの放射線源又は種の検索を実行するように構成された供給装置をさらに有する 請求項26 に記載の小線源治療装置であって、
前記供給装置は1つ以上の線源供給装置を有し、
前記1つ以上の線源供給装置はケーブルを有し、
前記ケーブルは、該ケーブルの先端部と結合した放射線源又は種を有し、
前記供給装置は1つ以上のシミュレーション供給装置をさらに有する、
小線源治療装置。
【請求項28】
前記供給装置は1つ以上のシミュレーション供給装置をさらに有し、
前記1つ以上のシミュレーション供給装置の各々はファイバブラッググレーティング光ケーブルを有し、
前記ファイバブラッググレーティング光ケーブルは、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの少なくとも前記標的領域への配置及び/又は(ii)少なくとも前記標的領域からの前記少なくとも1つの放射線源又は種を受け取るチャネルの検索に応じて、前記少なくとも1つの放射線源又は種を受け取るチャネルの位置及び形状の形状検知による測定を実施するように構成される、
請求項27 に記載の小線源治療装置。
【請求項29】
前記供給装置はアフターローダー装置を有する、 請求項27 に記載の小線源治療装置。
【請求項30】
前記1つ以上の線源供給装置のケーブルはファイバブラッググレーティング光ケーブルを有し、
前記ファイバブラッググレーティング光ケーブルは、処置中に、前記少なくとも1つの放射線源又は種の位置と形状の、形状検知による測定を実施するように構成され、
前記ファイバブラッググレーティング光ケーブルによる形状検知測定は、(i)前記少なくとも1つの放射線源又は種を受け取るチャネルの少なくとも前記標的領域への配置及び(ii)少なくとも前記標的領域からの前記少なくとも1つの放射線源又は種を受け取るチャネルの検索からなる群から選ばれた1つの手順に応じて行われる、
請求項27 に記載の小線源治療装置。
【請求項31】
少なくとも1つの放射線源又は種を受け取るチャネルの形状を検知するセンサを有する供給装置であって、前記少なくとも1つの放射線源又は種を受け取るチャネルによって、標的領域への少なくとも1つの放射線源若しくは種の配置、又は、標的領域からの少なくとも1つの放射線源若しくは種の検索を行うように構成される、供給装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公表番号】特表2013−515582(P2013−515582A)
【公表日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2012−546522(P2012−546522)
【出願日】平成22年11月17日(2010.11.17)
【国際出願番号】PCT/IB2010/055239
【国際公開番号】WO2011/080606
【国際公開日】平成23年7月7日(2011.7.7)
【出願人】(590000248)コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ (12,071)
【Fターム(参考)】
【公表日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成22年11月17日(2010.11.17)
【国際出願番号】PCT/IB2010/055239
【国際公開番号】WO2011/080606
【国際公開日】平成23年7月7日(2011.7.7)
【出願人】(590000248)コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ (12,071)
【Fターム(参考)】
[ Back to top ]