
形状測定方法
【課題】高精度でなく安価な姿勢変更機構でも、被測定物を高精度に測定することができる形状測定方法を提供する。
【解決手段】被測定物Wを載置したテーブル14の姿勢を傾ける姿勢変更機構4を備え、プローブによって被測定物の形状を測定する形状測定方法。テーブル14の被測定物載置面14Aに3つの基準球21,22,23を互いに離間して配置し、この3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更前基準面を算出する。次に、姿勢変更機構を動作させてテーブルの姿勢を傾けたのち、3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更後基準面を算出する。そして、姿勢変更前基準面と姿勢変更後基準面とから姿勢変更機構により傾けられたテーブルの姿勢傾き量を算出する。
【解決手段】被測定物Wを載置したテーブル14の姿勢を傾ける姿勢変更機構4を備え、プローブによって被測定物の形状を測定する形状測定方法。テーブル14の被測定物載置面14Aに3つの基準球21,22,23を互いに離間して配置し、この3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更前基準面を算出する。次に、姿勢変更機構を動作させてテーブルの姿勢を傾けたのち、3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更後基準面を算出する。そして、姿勢変更前基準面と姿勢変更後基準面とから姿勢変更機構により傾けられたテーブルの姿勢傾き量を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被測定物の形状や寸法などを測定する形状測定方法に関する。
【背景技術】
【0002】
被測定物を載置したテーブルとプローブとを相対移動させながら、プローブを被測定物に接触させ、このときの座標から被測定物の形状や寸法などを測定する形状測定機が知られている。
形状測定機のなかには、被測定物にあけられた斜め孔や横孔などを測定できるように、プローブの姿勢(向き)を変更できるようにした構造のもの(例えば、特許文献1等)や、プローブが極微細などの理由から、プローブの姿勢(向き)を変更できない構造のものも知られている。
【0003】
プローブの姿勢(向き)を変更できない構造の測定機において、斜め方向や横方向の測定箇所を測定しようとする場合、従来、被測定物の姿勢を変更するための回転テーブルなどの姿勢変更機構が必要となる。つまり、回転テーブルなどの姿勢変更機構によって、被測定物の測定箇所がプローブの方向に向くように、被測定物の姿勢を変更させる必要がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−20118号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、従来の回転テーブルなどの姿勢変更機構を備えた測定機において、高精度な測定を行うには、回転テーブルの回転精度(例えば、角度の絶対精度、回転面の振れなど)が高精度なものが要求される。
しかし、市販されているものは非常に高価で、しかも、微細形状の被測定物に適する大きさのものは見当たらない。また、専用に製作する場合でも、技術的課題や開発工数は小さくなく、結局、高価となってしまう。
【0006】
本発明の目的は、高精度でなく安価な姿勢変更機構でも、被測定物を高精度に測定することができる形状測定方法を提供することにある。
【課題を解決するための手段】
【0007】
本発明の形状測定方法は、被測定物を載置したテーブルの姿勢を傾ける姿勢変更機構を備え、前記テーブルとプローブとを相対移動させながら、前記被測定物の形状を測定する形状測定方法において、前記テーブルの被測定物載置面に3つの基準球を互いに離間して配置する工程と、前記3つの基準球を前記プローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更前基準面を算出する姿勢変更前基準面算出工程と、前記姿勢変更機構を動作させて前記テーブルの姿勢を傾ける姿勢変更工程と、前記テーブルの姿勢変更後において、前記3つの基準球を前記プローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更後基準面を算出する姿勢変更後基準面算出工程と、前記姿勢変更前基準面と前記姿勢変更後基準面とから前記姿勢変更機構により傾けられた前記テーブルの傾き量を算出する傾き量算出工程と、を備えることを特徴とする。
【0008】
このような構成によれば、まず、テーブルの被測定物載置面に3つの基準球を互いに離間して配置したのち、3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更前基準面を算出する。
次に、姿勢変更機構を動作させてテーブルの姿勢を傾けたのち、3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更後基準面を算出する。
そして、姿勢変更前基準面と姿勢変更後基準面とから姿勢変更機構により傾けられたテーブルの傾き量を算出すると、テーブル上に載置される被測定物の位置も計算することができるから、例えば、被測定物の測定部位がプローブによって測定できる向きにテーブルを傾けても、テーブル上に載置される被測定物の位置を計算で求めることができるから、高精度でなく安価な姿勢変更機構を用いても、被測定物の形状などを高精度に測定することができる。
【0009】
本発明の他の形状測定方法は、被測定物を載置したテーブルの姿勢を傾ける姿勢変更機構を備え、前記テーブルとプローブとを相対移動させながら、前記被測定物の形状を測定する形状測定方法において、前記テーブルの被測定物載置面に3つの基準球を互いに離間して配置する工程と、前記3つの基準球を前記プローブによって測定して各基準球の中心座標を求め、これら中心座標を含む面を座標面とする第1基準球座標系を作成する第1基準球座標系作成工程と、前記被測定物を前記プローブによって測定して被測定物の特定面を座標面とするワーク座標系を作成するワーク座標系作成工程と、前記姿勢変更機構を動作させて前記テーブルの姿勢を傾ける姿勢変更工程と、前記テーブルの姿勢変更後において、前記3つの基準球を前記プローブによって測定して各基準球の中心座標を求め、これら中心座標を含む面を座標面とする第2基準球座標系を作成する第2基準球座標系作成工程と、前記テーブルの姿勢変更後において、前記被測定物を前記プローブによって測定する測定工程と、この測定工程で得られた結果を前記第2基準球座標系上に算出するとともに、この第2基準球座標系上に前記ワーク座標系を再現し、このワーク座標系において、測定結果を算出する測定結果算出工程と、を備えることを特徴とする。
【0010】
このような構成によれば、まず、テーブルの被測定物載置面に3つの基準球を互いに離間して配置したのち、3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む面を座標面とする第1基準球座標系を作成する(第1基準球座標系作成工程)。また、被測定物をプローブによって測定して被測定物の特定面を座標面とするワーク座標系を作成する(ワーク座標系作成工程)。
次に、姿勢変更機構を動作させてテーブルの姿勢を傾けたのち(姿勢変更工程)、3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む面を座標面とする第2基準球座標系を作成する(第2基準球座標系作成工程)。また、テーブルの姿勢変更後において、被測定物をプローブによって測定する(測定工程)。
最後に、測定工程で得られた結果を第2基準球座標系上に算出するとともに、この第2基準球座標系上にワーク座標系を再現すると、このワーク座標系において、測定結果を求めることができる(測定結果算出工程)。
従って、第1基準球座標系作成工程と第2基準球座標系作成工程とからテーブルの傾き量を求めることができるから、高精度でなく安価な姿勢変更機構を用いても、被測定物の形状などを高精度に測定することができる。
【0011】
本発明の形状測定方法において、前記姿勢変更機構は、前記プローブの軸線に対して直交する軸を中心に前記テーブルを回転させる第1回転テーブルと、この第1回転テーブルに設けられ前記第1回転テーブルの回転軸に対して直交する軸を中心に前記テーブルを回転させる第2回転テーブルとを備えている、を備えることが好ましい。
このような構成によれば、第1回転テーブルと第2回転テーブルとを備えているから、これら第1、第2回転テーブルを回転させることにより、被測定物の測定部位をプローブの向きに合わせることができる。従って、プローブによって測定できる向きに被測定物の姿勢を傾かせることができるから、被測定物をテーブルに載置固定したまま、被測定物の異なる測定部位を高精度に測定することができる。
【図面の簡単な説明】
【0012】
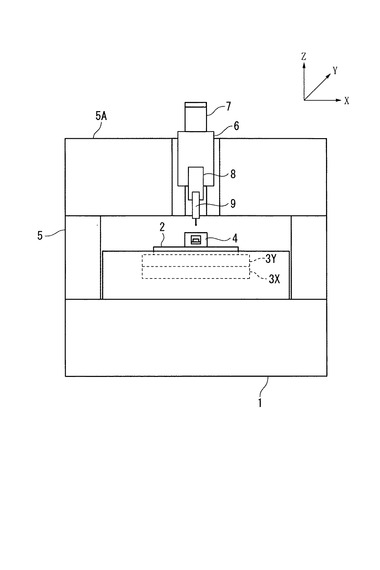
【図1】本発明の実施形態に係る形状測定機を示す正面図。
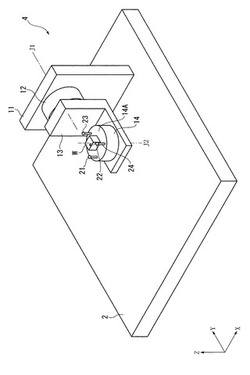
【図2】同上実施形態のXYステージおよび姿勢変更機構を示す斜視図。
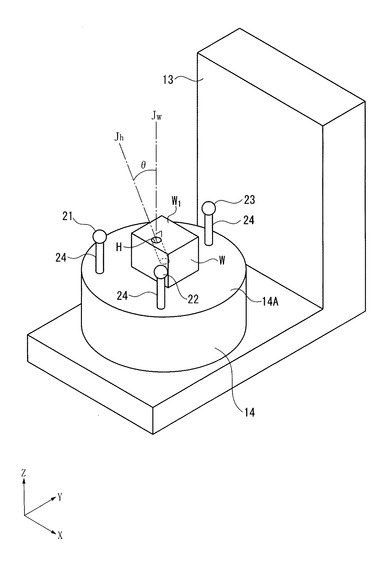
【図3】同上実施形態の姿勢変更機構の部分拡大斜視図。
【図4】同上実施形態の第1基準球座標系作成手順を示すフローチャート。
【図5】同上実施形態の第1基準球座標系を説明するための図。
【図6】同上実施形態のワーク座標系作成手順を示すフローチャート。
【図7】同上実施形態のワーク球座標系を説明するための図。
【図8】同上実施形態において、被測定物の姿勢変更動作を示すフローチャート。
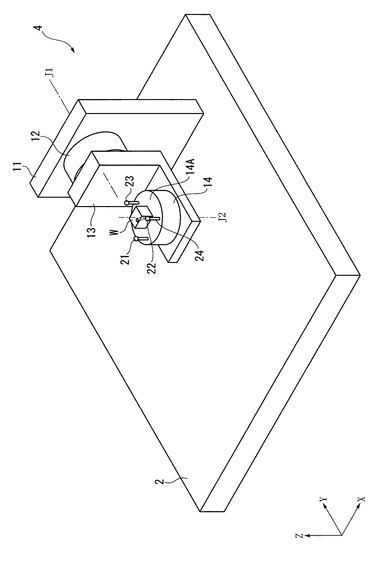
【図9】同上実施形態において、被測定物の姿勢を変更したときの斜視図。
【図10】同上実施形態の第2基準球座標系作成手順を示すフローチャート。
【図11】同上実施形態の第2基準球座標系を説明するための図。
【図12】同上実施形態における測定及び測定結果出力手順を示すフローチャート。
【図13】同上実施形態の測定時の状態を示す図。
【図14】同上実施形態のワーク座標系を再現するための図。
【図15】同上実施形態の測定結果を算出するための図。
【発明を実施するための形態】
【0013】
<形状測定機の説明(図1〜図3参照)>
形状測定機は、図1に示すように、基台1と、XYステージ2と、このXYステージ2を水平面内の互いに直交するXおよびY軸方向へ変位させるX軸駆動機構3XおよびY軸駆動機構3Yと、XYステージ2上に設けられ被測定物を載置するとともに被測定物の姿勢を調整する姿勢変更機構4と、基台1の上面に跨って設けられた門形フレーム5と、この門形フレーム5のクロスレール5Aに設けられたZ軸スライダ6と、このZ軸スライダ6をXおよびY軸方向に対して直交するZ軸方向へ変位させるZ軸駆動機構7と、Z軸スライダ6にプローブホルダ8を介して取り付けられたプローブ9とを含んで構成されている。
【0014】
X軸駆動機構3XおよびY軸駆動機構3Yは、例えば、ボールねじ軸と、このボールねじ軸に螺合されたナット部材とを有する送りねじ機構によって構成されている。
Z軸駆動機構7も、X軸駆動機構3XやY軸駆動機構3Yと同様に、例えば、ボールねじ軸と、このボールねじ軸に螺合されたナット部材とを有する送りねじ機構によって構成されている。
つまり、XYステージ2とプローブ9とは、X軸駆動機構3X、Y軸駆動機構3YおよびZ軸駆動機構7を含む相対移動機構によって、三次元方向へ相対移動可能に構成されている。
【0015】
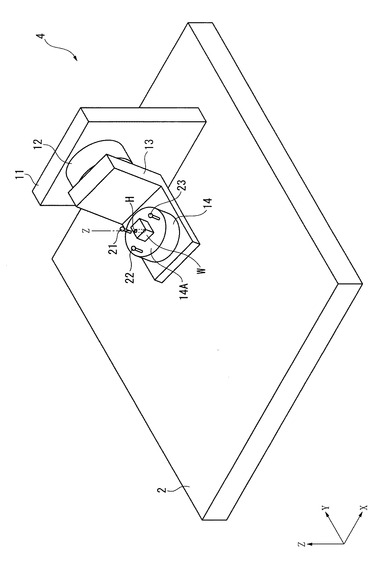
姿勢変更機構4は、図2に示すように、XYステージ2上に固定された固定プレート11と、この固定プレート11にXYステージ2と平行な軸J1を中心に回転可能に設けられた第1回転テーブル12と、この第1回転テーブル12に固定されたL字状の連結ブラケット13と、この連結ブラケット13に軸J1に対して直交する軸J2を中心に回転可能に設けられた第2回転テーブル14とを含んで構成されている。
なお、第1回転テーブル12および第2回転テーブル14は、共に、内部にステッピングモータが内蔵され、このステッピングモータによって回転駆動される構造である。
【0016】
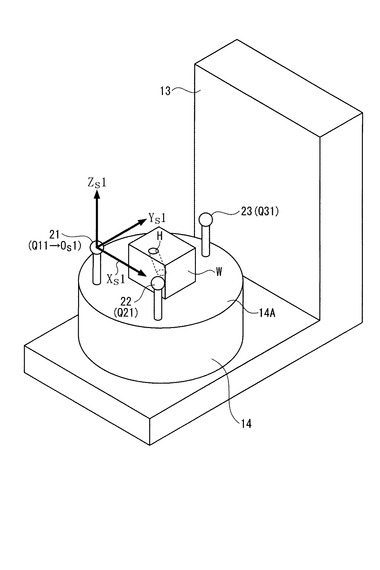
第2回転テーブル14の上面(被測定物載置面14A)には、図3にも示すように、被測定物Wが載置されているとともに、3つの基準球21,22,23が互いに離間して配置されている。つまり、3つの基準球21,22,23は、第2回転テーブル14の外周120度間隔位置に立設された支柱24の上端にそれぞれ一体的に形成されている。ここでは、被測定物Wの外周に3つの基準球21,22,23が配置されているが、基準球21,22,23は必ずしも被測定物Wの外周に配置する場合に限られない。
【0017】
<測定方法の説明(図4〜図14参照)>
ここでは、図3に示すように、略直方体形状の被測定物Wの上面にあけられた斜め穴Hの角度、つまり、被測定物Wの上面W1からの垂直軸線Jwと斜め穴Hの中心軸線Jhとのなす角度θを測定する例について説明する。
【0018】
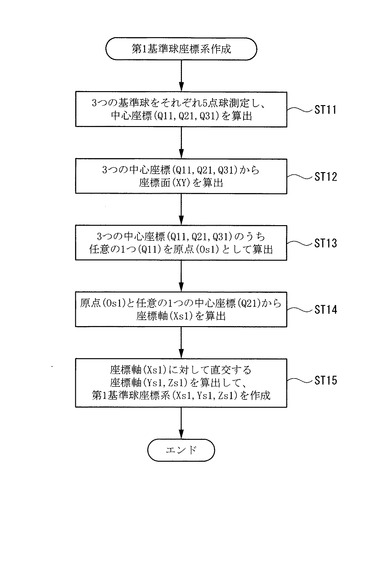
(第1基準球座標系作成工程)
この工程では、図4に示す手順に従って、第1基準球座標系(図5参照)を作成する。
ステップ(以下、STと略す)11において、3つの基準球21,22,23をそれぞれ5点球測定し、この測定結果から各基準球21,22,23の中心座標Q11,Q21,Q31を算出する。
ST12において、3つの中心座標Q11,Q21,Q31から、座標面(XY)を算出する。つまり、3つの中心座標Q11,Q21,Q31を含む姿勢変更前基準面(座標面)を算出する。
ST13において、3つの中心座標Q11,Q21,Q31のうち任意の1つ、例えば、中心座標Q11を第1基準球座標系の原点Os1として算出する。
ST14において、原点Os1として算出した中心座標Q11と残るいずれかの中心座標、例えば、中心座標Q21とから第1基準球座標系の座標軸Xs1を算出する。
ST15において、姿勢変更前基準面(座標面)において座標軸Xs1に対して直交する座標軸Ys1と、これら座標軸Xs1,Ys1に対して直交する座標軸Zs1とを算出して、第1基準球座標系(Xs1,Ys1,Zs1)を作成する(図5参照)。
【0019】
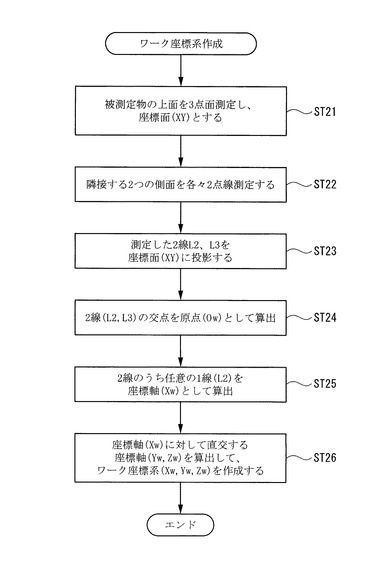
(ワーク座標系作成工程)
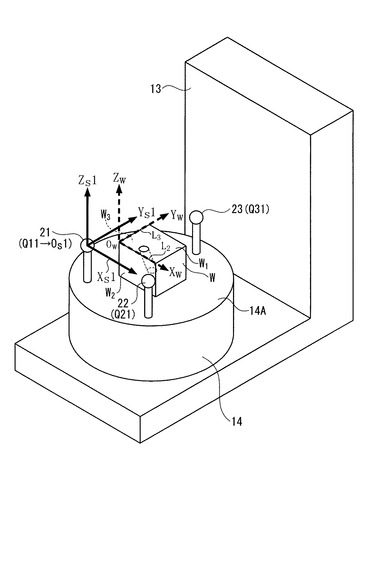
この工程では、図6に示す手順に従って、ワーク座標系(図7参照)を作成する。
ST21において、被測定物Wの上面W1を3点面測定し、これをワーク座標系の座標面(XY面)とする。
ST22において、被測定物Wの上面W1に隣接する2つの側面W2,W3を各々2点線測定する。
ST23において、測定した2線L2,L3を座標面(ワーク上面のXY面)に投影する。
ST24において、2線L2,L3の交点をワーク座標系の原点Owとして算出する。
ST25において、2線L2,L3のうち任意の1線、例えば、線L2をワーク座標系の座標軸Xwとして算出する。
ST26において、XY面および座標軸Xwに対して直交する座標軸Ywと、座標軸Xw,Ywに対して直交する座標軸Zwとを算出して、第1基準球座標系(Xs1,Ys1,Zs1)上にワーク座標系(Xw,Yw,Zw)を作成する(図7参照)。
【0020】
(姿勢変更工程)
この工程では、図8に示す手順に従って、被測定物Wの姿勢を傾ける(図9参照)。
ST31において、斜め穴Hが測定できる位置(プローブ9が挿入できる測定機Z軸と平行な位置)に第1回転テーブル12および第2回転テーブル14を回転させる(図9参照)。
【0021】
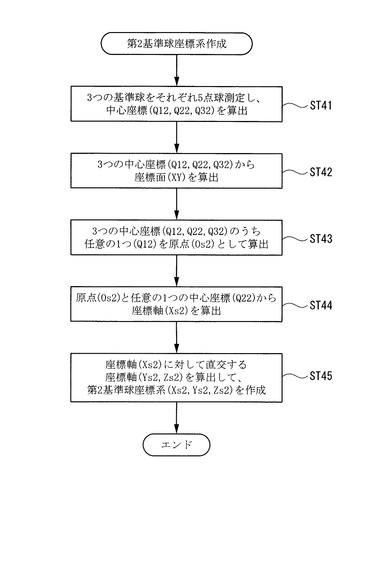
(第2基準球座標系作成工程)
この工程では、図10に示す手順に従って、第2基準球座標系(図11参照)を作成する。
ST41において、3つの基準球21,22,23をそれぞれ5点球測定し、この測定結果から各基準球21,22,23の中心座標Q12,Q22,Q32を算出する。
ST42において、3つの中心座標Q12,Q22,Q32から、座標面(XY)を算出する。つまり、3つの中心座標Q12,Q22,Q32を含む姿勢変更後基準面(座標面XY)を算出する。
ST43において、3つの中心座標Q12,Q22,Q32のうち任意の1つ、例えば、中心座標Q12を基準球座標系の原点Os2として算出する。
ST44において、原点Os2として算出した中心座標Q12と残るいずれかの中心座標、例えば、中心座標Q22とから第2基準球座標系の座標軸Xs2を算出する。
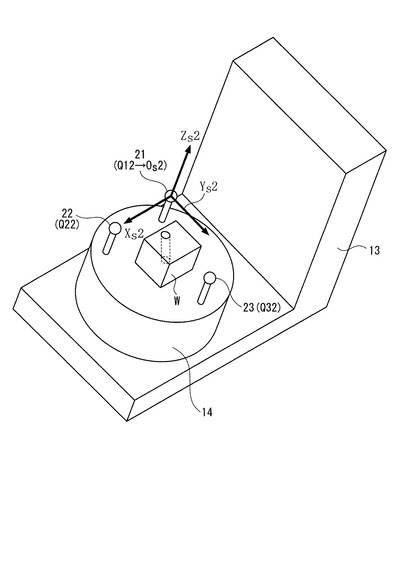
ST45において、姿勢変更後基準面(座標面XY)および座標軸Xs2に対して直交する座標軸Ys2、座標軸Xs2,Ys2に対して直交する座標軸Zs2とを算出して、第2基準球座標系(Xs2,Ys2,Zs2)を作成する(図11参照)。
【0022】
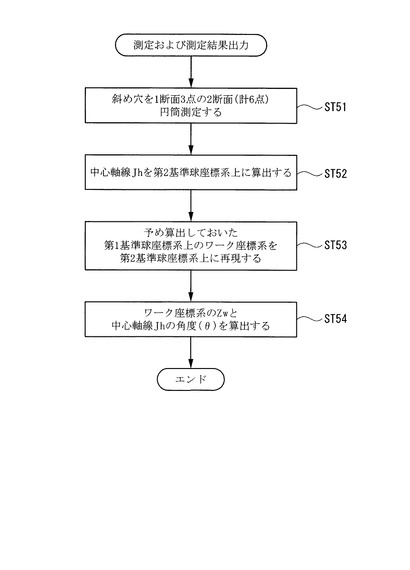
(測定および測定結果出力)
ここでは、図12に示す手順に従って、測定工程および測定結果算出工程を行う。
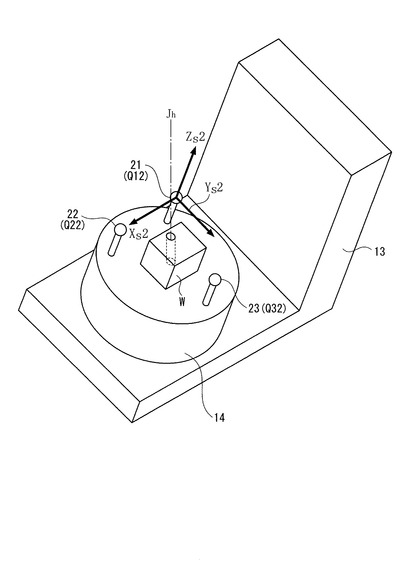
ST51において、斜め穴Hを1断面3点、2断面(計6点)円測定し、斜め穴Hの中心軸線Jhを算出する(測定工程)。
ST52において、中心軸線Jhを第2基準球座標系(Xs2,Ys2,Zs2)上に算出する(図13参照)。
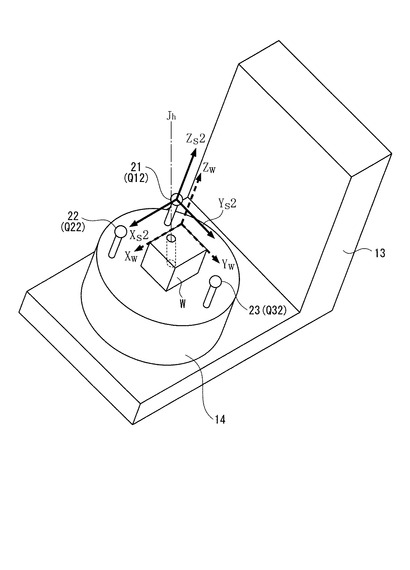
ST53において、予め算出しておいた第1基準球座標系(Xs1,Ys1,Zs1)上のワク座標系(Xw,Yw,Zw)を、第2基準球座標系(Xs2,Ys2,Zs2)上に再現する(図14参照)。
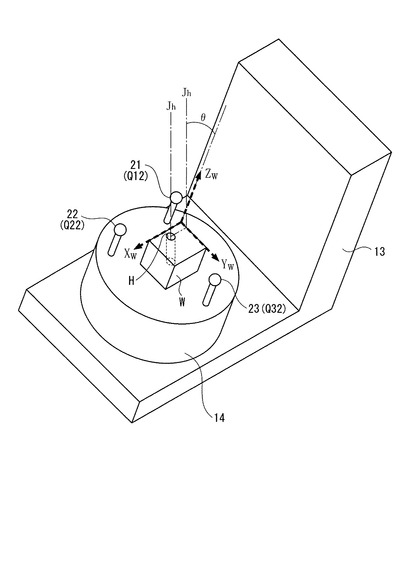
ST54において、ワーク座標系(Xw,Yw,Zw)のZw軸と中心軸線Jhとの角度θを算出する(図15参照:測定結果演算工程)。
【0023】
<実施形態の効果>
本実施形態によれば、3つの基準球21,22,23をプローブ9によって測定して各基準球21,22,23の中心座標を求め、これら中心座標を含む面を座標面とする第1基準球座標系を作成する(第1基準球座標系作成工程)。また、被測定物Wをプローブ9によって測定して被測定物Wの上面W1を座標面とするワーク座標系を作成する(ワーク座標系作成工程)。
次に、姿勢変更機構4を動作させてテーブル(第2回転テーブル14の被測定物載置面14A)の姿勢を傾けたのち(姿勢変更工程)、3つの基準球21,22,23をプローブ9によって測定して各基準球21,22,23の中心座標を求め、これら中心座標を含む面を座標面とする第2基準球座標系を作成する(第2基準球座標系作成工程)。また、テーブルの姿勢変更後において、被測定物Wをプローブ9によって測定する(測定工程)。
最後に、測定工程で得られた結果を第2基準球座標系上に算出するとともに、この第2基準球座標系上にワーク座標系を再現すると、このワーク座標系において、測定結果を算出することができる(測定結果算出工程)。
従って、第1基準球座標系作成工程と第2基準球座標系作成工程とからテーブルの傾き量を求めることができるから、高精度でなく安価な姿勢変更機構を用いても、被測定物Wの形状などを高精度に測定することができる。
【0024】
また、姿勢変更機構4は、プローブ9の軸線に対して直交する軸を中心にテーブルを回転させる第1回転テーブル12と、この第1回転テーブル12に設けられ第1回転テーブル12の軸J1に対して直交する軸J2を中心にテーブルを回転させる第2回転テーブル14とを備えているから、こられ第1、第2回転テーブル12,14を回転させることにより、被測定物Wの測定部位をプローブ9の向きに合わせることができる。従って、プローブ9によって測定できる向きに被測定物Wの姿勢を傾かせることができるから、被測定物Wを被測定物載置面14Aに載置固定したまま、被測定物Wの異なる測定部位を高精度に測定することができる。
【0025】
<変形例>
本発明は、前述の実施形態に限定されるものでなく、本発明の目的を達成できる範囲での変形、改良などは本考案に含まれる。
前記実施形態において、姿勢変更機構4は、XYステージ2と平行な軸J1を中心に回転可能に設けられた第1回転テーブル12と、軸J1に対して直交する軸J2を中心に転可能に設けられた第2回転テーブル14とを含んで構成されていたが、第2回転テーブル14を省略し、第1回転テーブル12のみでもよい。
また、姿勢を変更する構成としては、回転テーブルに限らず、テーブルの一端を支点として他端が起伏可能に構成された構造であってもよい。
【0026】
前記実施形態では、接触式のプローブ9を用いたが、接触式のプローブに限らず、非接触式のプローブであってもよい。例えば、画像プローブなどであってもよい。
【0027】
前記実施形態では、被測定物Wの上面W1にあけられた斜め穴Hを測定する例を示したが、これに限られない。例えば、被測定物の側面形状や、棒状部材の一部にくびれ部を有する被測定物において、くびれ部の形状を測定する場合などにも適用できる。
【産業上の利用可能性】
【0028】
本発明は、プローブの姿勢(向き)を変更できない構造の形状測定機などに利用できる。
【符号の説明】
【0029】
4…姿勢変更機構、
9…プローブ、
12…第1回転テーブル、
14…第2回転テーブル、
14A…被測定物載置面(テーブル)、
21,22,23…基準球、
W…被測定物。
【技術分野】
【0001】
本発明は、被測定物の形状や寸法などを測定する形状測定方法に関する。
【背景技術】
【0002】
被測定物を載置したテーブルとプローブとを相対移動させながら、プローブを被測定物に接触させ、このときの座標から被測定物の形状や寸法などを測定する形状測定機が知られている。
形状測定機のなかには、被測定物にあけられた斜め孔や横孔などを測定できるように、プローブの姿勢(向き)を変更できるようにした構造のもの(例えば、特許文献1等)や、プローブが極微細などの理由から、プローブの姿勢(向き)を変更できない構造のものも知られている。
【0003】
プローブの姿勢(向き)を変更できない構造の測定機において、斜め方向や横方向の測定箇所を測定しようとする場合、従来、被測定物の姿勢を変更するための回転テーブルなどの姿勢変更機構が必要となる。つまり、回転テーブルなどの姿勢変更機構によって、被測定物の測定箇所がプローブの方向に向くように、被測定物の姿勢を変更させる必要がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2009−20118号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところが、従来の回転テーブルなどの姿勢変更機構を備えた測定機において、高精度な測定を行うには、回転テーブルの回転精度(例えば、角度の絶対精度、回転面の振れなど)が高精度なものが要求される。
しかし、市販されているものは非常に高価で、しかも、微細形状の被測定物に適する大きさのものは見当たらない。また、専用に製作する場合でも、技術的課題や開発工数は小さくなく、結局、高価となってしまう。
【0006】
本発明の目的は、高精度でなく安価な姿勢変更機構でも、被測定物を高精度に測定することができる形状測定方法を提供することにある。
【課題を解決するための手段】
【0007】
本発明の形状測定方法は、被測定物を載置したテーブルの姿勢を傾ける姿勢変更機構を備え、前記テーブルとプローブとを相対移動させながら、前記被測定物の形状を測定する形状測定方法において、前記テーブルの被測定物載置面に3つの基準球を互いに離間して配置する工程と、前記3つの基準球を前記プローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更前基準面を算出する姿勢変更前基準面算出工程と、前記姿勢変更機構を動作させて前記テーブルの姿勢を傾ける姿勢変更工程と、前記テーブルの姿勢変更後において、前記3つの基準球を前記プローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更後基準面を算出する姿勢変更後基準面算出工程と、前記姿勢変更前基準面と前記姿勢変更後基準面とから前記姿勢変更機構により傾けられた前記テーブルの傾き量を算出する傾き量算出工程と、を備えることを特徴とする。
【0008】
このような構成によれば、まず、テーブルの被測定物載置面に3つの基準球を互いに離間して配置したのち、3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更前基準面を算出する。
次に、姿勢変更機構を動作させてテーブルの姿勢を傾けたのち、3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更後基準面を算出する。
そして、姿勢変更前基準面と姿勢変更後基準面とから姿勢変更機構により傾けられたテーブルの傾き量を算出すると、テーブル上に載置される被測定物の位置も計算することができるから、例えば、被測定物の測定部位がプローブによって測定できる向きにテーブルを傾けても、テーブル上に載置される被測定物の位置を計算で求めることができるから、高精度でなく安価な姿勢変更機構を用いても、被測定物の形状などを高精度に測定することができる。
【0009】
本発明の他の形状測定方法は、被測定物を載置したテーブルの姿勢を傾ける姿勢変更機構を備え、前記テーブルとプローブとを相対移動させながら、前記被測定物の形状を測定する形状測定方法において、前記テーブルの被測定物載置面に3つの基準球を互いに離間して配置する工程と、前記3つの基準球を前記プローブによって測定して各基準球の中心座標を求め、これら中心座標を含む面を座標面とする第1基準球座標系を作成する第1基準球座標系作成工程と、前記被測定物を前記プローブによって測定して被測定物の特定面を座標面とするワーク座標系を作成するワーク座標系作成工程と、前記姿勢変更機構を動作させて前記テーブルの姿勢を傾ける姿勢変更工程と、前記テーブルの姿勢変更後において、前記3つの基準球を前記プローブによって測定して各基準球の中心座標を求め、これら中心座標を含む面を座標面とする第2基準球座標系を作成する第2基準球座標系作成工程と、前記テーブルの姿勢変更後において、前記被測定物を前記プローブによって測定する測定工程と、この測定工程で得られた結果を前記第2基準球座標系上に算出するとともに、この第2基準球座標系上に前記ワーク座標系を再現し、このワーク座標系において、測定結果を算出する測定結果算出工程と、を備えることを特徴とする。
【0010】
このような構成によれば、まず、テーブルの被測定物載置面に3つの基準球を互いに離間して配置したのち、3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む面を座標面とする第1基準球座標系を作成する(第1基準球座標系作成工程)。また、被測定物をプローブによって測定して被測定物の特定面を座標面とするワーク座標系を作成する(ワーク座標系作成工程)。
次に、姿勢変更機構を動作させてテーブルの姿勢を傾けたのち(姿勢変更工程)、3つの基準球をプローブによって測定して各基準球の中心座標を求め、これら中心座標を含む面を座標面とする第2基準球座標系を作成する(第2基準球座標系作成工程)。また、テーブルの姿勢変更後において、被測定物をプローブによって測定する(測定工程)。
最後に、測定工程で得られた結果を第2基準球座標系上に算出するとともに、この第2基準球座標系上にワーク座標系を再現すると、このワーク座標系において、測定結果を求めることができる(測定結果算出工程)。
従って、第1基準球座標系作成工程と第2基準球座標系作成工程とからテーブルの傾き量を求めることができるから、高精度でなく安価な姿勢変更機構を用いても、被測定物の形状などを高精度に測定することができる。
【0011】
本発明の形状測定方法において、前記姿勢変更機構は、前記プローブの軸線に対して直交する軸を中心に前記テーブルを回転させる第1回転テーブルと、この第1回転テーブルに設けられ前記第1回転テーブルの回転軸に対して直交する軸を中心に前記テーブルを回転させる第2回転テーブルとを備えている、を備えることが好ましい。
このような構成によれば、第1回転テーブルと第2回転テーブルとを備えているから、これら第1、第2回転テーブルを回転させることにより、被測定物の測定部位をプローブの向きに合わせることができる。従って、プローブによって測定できる向きに被測定物の姿勢を傾かせることができるから、被測定物をテーブルに載置固定したまま、被測定物の異なる測定部位を高精度に測定することができる。
【図面の簡単な説明】
【0012】
【図1】本発明の実施形態に係る形状測定機を示す正面図。
【図2】同上実施形態のXYステージおよび姿勢変更機構を示す斜視図。
【図3】同上実施形態の姿勢変更機構の部分拡大斜視図。
【図4】同上実施形態の第1基準球座標系作成手順を示すフローチャート。
【図5】同上実施形態の第1基準球座標系を説明するための図。
【図6】同上実施形態のワーク座標系作成手順を示すフローチャート。
【図7】同上実施形態のワーク球座標系を説明するための図。
【図8】同上実施形態において、被測定物の姿勢変更動作を示すフローチャート。
【図9】同上実施形態において、被測定物の姿勢を変更したときの斜視図。
【図10】同上実施形態の第2基準球座標系作成手順を示すフローチャート。
【図11】同上実施形態の第2基準球座標系を説明するための図。
【図12】同上実施形態における測定及び測定結果出力手順を示すフローチャート。
【図13】同上実施形態の測定時の状態を示す図。
【図14】同上実施形態のワーク座標系を再現するための図。
【図15】同上実施形態の測定結果を算出するための図。
【発明を実施するための形態】
【0013】
<形状測定機の説明(図1〜図3参照)>
形状測定機は、図1に示すように、基台1と、XYステージ2と、このXYステージ2を水平面内の互いに直交するXおよびY軸方向へ変位させるX軸駆動機構3XおよびY軸駆動機構3Yと、XYステージ2上に設けられ被測定物を載置するとともに被測定物の姿勢を調整する姿勢変更機構4と、基台1の上面に跨って設けられた門形フレーム5と、この門形フレーム5のクロスレール5Aに設けられたZ軸スライダ6と、このZ軸スライダ6をXおよびY軸方向に対して直交するZ軸方向へ変位させるZ軸駆動機構7と、Z軸スライダ6にプローブホルダ8を介して取り付けられたプローブ9とを含んで構成されている。
【0014】
X軸駆動機構3XおよびY軸駆動機構3Yは、例えば、ボールねじ軸と、このボールねじ軸に螺合されたナット部材とを有する送りねじ機構によって構成されている。
Z軸駆動機構7も、X軸駆動機構3XやY軸駆動機構3Yと同様に、例えば、ボールねじ軸と、このボールねじ軸に螺合されたナット部材とを有する送りねじ機構によって構成されている。
つまり、XYステージ2とプローブ9とは、X軸駆動機構3X、Y軸駆動機構3YおよびZ軸駆動機構7を含む相対移動機構によって、三次元方向へ相対移動可能に構成されている。
【0015】
姿勢変更機構4は、図2に示すように、XYステージ2上に固定された固定プレート11と、この固定プレート11にXYステージ2と平行な軸J1を中心に回転可能に設けられた第1回転テーブル12と、この第1回転テーブル12に固定されたL字状の連結ブラケット13と、この連結ブラケット13に軸J1に対して直交する軸J2を中心に回転可能に設けられた第2回転テーブル14とを含んで構成されている。
なお、第1回転テーブル12および第2回転テーブル14は、共に、内部にステッピングモータが内蔵され、このステッピングモータによって回転駆動される構造である。
【0016】
第2回転テーブル14の上面(被測定物載置面14A)には、図3にも示すように、被測定物Wが載置されているとともに、3つの基準球21,22,23が互いに離間して配置されている。つまり、3つの基準球21,22,23は、第2回転テーブル14の外周120度間隔位置に立設された支柱24の上端にそれぞれ一体的に形成されている。ここでは、被測定物Wの外周に3つの基準球21,22,23が配置されているが、基準球21,22,23は必ずしも被測定物Wの外周に配置する場合に限られない。
【0017】
<測定方法の説明(図4〜図14参照)>
ここでは、図3に示すように、略直方体形状の被測定物Wの上面にあけられた斜め穴Hの角度、つまり、被測定物Wの上面W1からの垂直軸線Jwと斜め穴Hの中心軸線Jhとのなす角度θを測定する例について説明する。
【0018】
(第1基準球座標系作成工程)
この工程では、図4に示す手順に従って、第1基準球座標系(図5参照)を作成する。
ステップ(以下、STと略す)11において、3つの基準球21,22,23をそれぞれ5点球測定し、この測定結果から各基準球21,22,23の中心座標Q11,Q21,Q31を算出する。
ST12において、3つの中心座標Q11,Q21,Q31から、座標面(XY)を算出する。つまり、3つの中心座標Q11,Q21,Q31を含む姿勢変更前基準面(座標面)を算出する。
ST13において、3つの中心座標Q11,Q21,Q31のうち任意の1つ、例えば、中心座標Q11を第1基準球座標系の原点Os1として算出する。
ST14において、原点Os1として算出した中心座標Q11と残るいずれかの中心座標、例えば、中心座標Q21とから第1基準球座標系の座標軸Xs1を算出する。
ST15において、姿勢変更前基準面(座標面)において座標軸Xs1に対して直交する座標軸Ys1と、これら座標軸Xs1,Ys1に対して直交する座標軸Zs1とを算出して、第1基準球座標系(Xs1,Ys1,Zs1)を作成する(図5参照)。
【0019】
(ワーク座標系作成工程)
この工程では、図6に示す手順に従って、ワーク座標系(図7参照)を作成する。
ST21において、被測定物Wの上面W1を3点面測定し、これをワーク座標系の座標面(XY面)とする。
ST22において、被測定物Wの上面W1に隣接する2つの側面W2,W3を各々2点線測定する。
ST23において、測定した2線L2,L3を座標面(ワーク上面のXY面)に投影する。
ST24において、2線L2,L3の交点をワーク座標系の原点Owとして算出する。
ST25において、2線L2,L3のうち任意の1線、例えば、線L2をワーク座標系の座標軸Xwとして算出する。
ST26において、XY面および座標軸Xwに対して直交する座標軸Ywと、座標軸Xw,Ywに対して直交する座標軸Zwとを算出して、第1基準球座標系(Xs1,Ys1,Zs1)上にワーク座標系(Xw,Yw,Zw)を作成する(図7参照)。
【0020】
(姿勢変更工程)
この工程では、図8に示す手順に従って、被測定物Wの姿勢を傾ける(図9参照)。
ST31において、斜め穴Hが測定できる位置(プローブ9が挿入できる測定機Z軸と平行な位置)に第1回転テーブル12および第2回転テーブル14を回転させる(図9参照)。
【0021】
(第2基準球座標系作成工程)
この工程では、図10に示す手順に従って、第2基準球座標系(図11参照)を作成する。
ST41において、3つの基準球21,22,23をそれぞれ5点球測定し、この測定結果から各基準球21,22,23の中心座標Q12,Q22,Q32を算出する。
ST42において、3つの中心座標Q12,Q22,Q32から、座標面(XY)を算出する。つまり、3つの中心座標Q12,Q22,Q32を含む姿勢変更後基準面(座標面XY)を算出する。
ST43において、3つの中心座標Q12,Q22,Q32のうち任意の1つ、例えば、中心座標Q12を基準球座標系の原点Os2として算出する。
ST44において、原点Os2として算出した中心座標Q12と残るいずれかの中心座標、例えば、中心座標Q22とから第2基準球座標系の座標軸Xs2を算出する。
ST45において、姿勢変更後基準面(座標面XY)および座標軸Xs2に対して直交する座標軸Ys2、座標軸Xs2,Ys2に対して直交する座標軸Zs2とを算出して、第2基準球座標系(Xs2,Ys2,Zs2)を作成する(図11参照)。
【0022】
(測定および測定結果出力)
ここでは、図12に示す手順に従って、測定工程および測定結果算出工程を行う。
ST51において、斜め穴Hを1断面3点、2断面(計6点)円測定し、斜め穴Hの中心軸線Jhを算出する(測定工程)。
ST52において、中心軸線Jhを第2基準球座標系(Xs2,Ys2,Zs2)上に算出する(図13参照)。
ST53において、予め算出しておいた第1基準球座標系(Xs1,Ys1,Zs1)上のワク座標系(Xw,Yw,Zw)を、第2基準球座標系(Xs2,Ys2,Zs2)上に再現する(図14参照)。
ST54において、ワーク座標系(Xw,Yw,Zw)のZw軸と中心軸線Jhとの角度θを算出する(図15参照:測定結果演算工程)。
【0023】
<実施形態の効果>
本実施形態によれば、3つの基準球21,22,23をプローブ9によって測定して各基準球21,22,23の中心座標を求め、これら中心座標を含む面を座標面とする第1基準球座標系を作成する(第1基準球座標系作成工程)。また、被測定物Wをプローブ9によって測定して被測定物Wの上面W1を座標面とするワーク座標系を作成する(ワーク座標系作成工程)。
次に、姿勢変更機構4を動作させてテーブル(第2回転テーブル14の被測定物載置面14A)の姿勢を傾けたのち(姿勢変更工程)、3つの基準球21,22,23をプローブ9によって測定して各基準球21,22,23の中心座標を求め、これら中心座標を含む面を座標面とする第2基準球座標系を作成する(第2基準球座標系作成工程)。また、テーブルの姿勢変更後において、被測定物Wをプローブ9によって測定する(測定工程)。
最後に、測定工程で得られた結果を第2基準球座標系上に算出するとともに、この第2基準球座標系上にワーク座標系を再現すると、このワーク座標系において、測定結果を算出することができる(測定結果算出工程)。
従って、第1基準球座標系作成工程と第2基準球座標系作成工程とからテーブルの傾き量を求めることができるから、高精度でなく安価な姿勢変更機構を用いても、被測定物Wの形状などを高精度に測定することができる。
【0024】
また、姿勢変更機構4は、プローブ9の軸線に対して直交する軸を中心にテーブルを回転させる第1回転テーブル12と、この第1回転テーブル12に設けられ第1回転テーブル12の軸J1に対して直交する軸J2を中心にテーブルを回転させる第2回転テーブル14とを備えているから、こられ第1、第2回転テーブル12,14を回転させることにより、被測定物Wの測定部位をプローブ9の向きに合わせることができる。従って、プローブ9によって測定できる向きに被測定物Wの姿勢を傾かせることができるから、被測定物Wを被測定物載置面14Aに載置固定したまま、被測定物Wの異なる測定部位を高精度に測定することができる。
【0025】
<変形例>
本発明は、前述の実施形態に限定されるものでなく、本発明の目的を達成できる範囲での変形、改良などは本考案に含まれる。
前記実施形態において、姿勢変更機構4は、XYステージ2と平行な軸J1を中心に回転可能に設けられた第1回転テーブル12と、軸J1に対して直交する軸J2を中心に転可能に設けられた第2回転テーブル14とを含んで構成されていたが、第2回転テーブル14を省略し、第1回転テーブル12のみでもよい。
また、姿勢を変更する構成としては、回転テーブルに限らず、テーブルの一端を支点として他端が起伏可能に構成された構造であってもよい。
【0026】
前記実施形態では、接触式のプローブ9を用いたが、接触式のプローブに限らず、非接触式のプローブであってもよい。例えば、画像プローブなどであってもよい。
【0027】
前記実施形態では、被測定物Wの上面W1にあけられた斜め穴Hを測定する例を示したが、これに限られない。例えば、被測定物の側面形状や、棒状部材の一部にくびれ部を有する被測定物において、くびれ部の形状を測定する場合などにも適用できる。
【産業上の利用可能性】
【0028】
本発明は、プローブの姿勢(向き)を変更できない構造の形状測定機などに利用できる。
【符号の説明】
【0029】
4…姿勢変更機構、
9…プローブ、
12…第1回転テーブル、
14…第2回転テーブル、
14A…被測定物載置面(テーブル)、
21,22,23…基準球、
W…被測定物。
【特許請求の範囲】
【請求項1】
被測定物を載置したテーブルの姿勢を傾ける姿勢変更機構を備え、前記テーブルとプローブとを相対移動させながら、前記被測定物の形状を測定する形状測定方法において、
前記テーブルの被測定物載置面に3つの基準球を互いに離間して配置する工程と、
前記3つの基準球を前記プローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更前基準面を算出する姿勢変更前基準面算出工程と、
前記姿勢変更機構を動作させて前記テーブルの姿勢を傾ける姿勢変更工程と、
前記テーブルの姿勢変更後において、前記3つの基準球を前記プローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更後基準面を算出する姿勢変更後基準面算出工程と、
前記姿勢変更前基準面と前記姿勢変更後基準面とから前記姿勢変更機構により傾けられた前記テーブルの傾き量を算出する傾き量算出工程と、を備えることを特徴とする形状測定方法。
【請求項2】
被測定物を載置したテーブルの姿勢を傾ける姿勢変更機構を備え、前記テーブルとプローブとを相対移動させながら、前記被測定物の形状を測定する形状測定方法において、
前記テーブルの被測定物載置面に3つの基準球を互いに離間して配置する工程と、
前記3つの基準球を前記プローブによって測定して各基準球の中心座標を求め、これら中心座標を含む面を座標面とする第1基準球座標系を作成する第1基準球座標系作成工程と、
前記被測定物を前記プローブによって測定して被測定物の特定面を座標面とするワーク座標系を作成するワーク座標系作成工程と、
前記姿勢変更機構を動作させて前記テーブルの姿勢を傾ける姿勢変更工程と、
前記テーブルの姿勢変更後において、前記3つの基準球を前記プローブによって測定して各基準球の中心座標を求め、これら中心座標を含む面を座標面とする第2基準球座標系を作成する第2基準球座標系作成工程と、
前記テーブルの姿勢変更後において、前記被測定物を前記プローブによって測定する測定工程と、
この測定工程で得られた結果を前記第2基準球座標系上に算出するとともに、この第2基準球座標系上に前記ワーク座標系を再現し、このワーク座標系において、測定結果を算出する測定結果算出工程と、を備えることを特徴とする形状測定方法。
【請求項3】
請求項1または請求項2に記載の形状測定方法において、
前記姿勢変更機構は、前記プローブの軸線に対して直交する軸を中心に前記テーブルを回転させる第1回転テーブルと、この第1回転テーブルに設けられ前記第1回転テーブルの回転軸に対して直交する軸を中心に前記テーブルを回転させる第2回転テーブルとを備えている、ことを特徴とする形状測定方法。
【請求項1】
被測定物を載置したテーブルの姿勢を傾ける姿勢変更機構を備え、前記テーブルとプローブとを相対移動させながら、前記被測定物の形状を測定する形状測定方法において、
前記テーブルの被測定物載置面に3つの基準球を互いに離間して配置する工程と、
前記3つの基準球を前記プローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更前基準面を算出する姿勢変更前基準面算出工程と、
前記姿勢変更機構を動作させて前記テーブルの姿勢を傾ける姿勢変更工程と、
前記テーブルの姿勢変更後において、前記3つの基準球を前記プローブによって測定して各基準球の中心座標を求め、これら中心座標を含む姿勢変更後基準面を算出する姿勢変更後基準面算出工程と、
前記姿勢変更前基準面と前記姿勢変更後基準面とから前記姿勢変更機構により傾けられた前記テーブルの傾き量を算出する傾き量算出工程と、を備えることを特徴とする形状測定方法。
【請求項2】
被測定物を載置したテーブルの姿勢を傾ける姿勢変更機構を備え、前記テーブルとプローブとを相対移動させながら、前記被測定物の形状を測定する形状測定方法において、
前記テーブルの被測定物載置面に3つの基準球を互いに離間して配置する工程と、
前記3つの基準球を前記プローブによって測定して各基準球の中心座標を求め、これら中心座標を含む面を座標面とする第1基準球座標系を作成する第1基準球座標系作成工程と、
前記被測定物を前記プローブによって測定して被測定物の特定面を座標面とするワーク座標系を作成するワーク座標系作成工程と、
前記姿勢変更機構を動作させて前記テーブルの姿勢を傾ける姿勢変更工程と、
前記テーブルの姿勢変更後において、前記3つの基準球を前記プローブによって測定して各基準球の中心座標を求め、これら中心座標を含む面を座標面とする第2基準球座標系を作成する第2基準球座標系作成工程と、
前記テーブルの姿勢変更後において、前記被測定物を前記プローブによって測定する測定工程と、
この測定工程で得られた結果を前記第2基準球座標系上に算出するとともに、この第2基準球座標系上に前記ワーク座標系を再現し、このワーク座標系において、測定結果を算出する測定結果算出工程と、を備えることを特徴とする形状測定方法。
【請求項3】
請求項1または請求項2に記載の形状測定方法において、
前記姿勢変更機構は、前記プローブの軸線に対して直交する軸を中心に前記テーブルを回転させる第1回転テーブルと、この第1回転テーブルに設けられ前記第1回転テーブルの回転軸に対して直交する軸を中心に前記テーブルを回転させる第2回転テーブルとを備えている、ことを特徴とする形状測定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2011−209102(P2011−209102A)
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願番号】特願2010−76824(P2010−76824)
【出願日】平成22年3月30日(2010.3.30)
【出願人】(000137694)株式会社ミツトヨ (979)
【Fターム(参考)】
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願日】平成22年3月30日(2010.3.30)
【出願人】(000137694)株式会社ミツトヨ (979)
【Fターム(参考)】
[ Back to top ]