
形状測定装置および該方法

【課題】本発明は、受信信号を得てからより短い時間で物体の形状を求め得る形状測定装置および形状測定方法を提供する。
【解決手段】本発明の形状測定装置は、物体に対して位置を変えながら送信パルスを放射することで受信された複数の受信信号の波形と送信パルスの波形との相互相関をそれぞれ求めて複数の相関波形を求める相関波形演算部131と、相関波形の極値を求めてこの極値を与える値を遅延時間として複数の相関波形のそれぞれについて求める遅延時間演算部132と、送信パルスの中心周波数および受信信号の中心周波数に基づいて遅延時間を補正する補正値を複数の相関波形のそれぞれについて求める補正値演算部133と、各補正値で補正された各遅延時間に基づいて擬似波面を求める、または各遅延時間に基づいて擬似波面を求め各補正値に基づき補正する擬似波面演算部134と、擬似波面に基づいて前記物体の形状を求める形状演算部135とを備える。
【解決手段】本発明の形状測定装置は、物体に対して位置を変えながら送信パルスを放射することで受信された複数の受信信号の波形と送信パルスの波形との相互相関をそれぞれ求めて複数の相関波形を求める相関波形演算部131と、相関波形の極値を求めてこの極値を与える値を遅延時間として複数の相関波形のそれぞれについて求める遅延時間演算部132と、送信パルスの中心周波数および受信信号の中心周波数に基づいて遅延時間を補正する補正値を複数の相関波形のそれぞれについて求める補正値演算部133と、各補正値で補正された各遅延時間に基づいて擬似波面を求める、または各遅延時間に基づいて擬似波面を求め各補正値に基づき補正する擬似波面演算部134と、擬似波面に基づいて前記物体の形状を求める形状演算部135とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、送信パルスを放射して目標の物体から反射した該送信パルスの反射波を受信することによって該物体の形状を測定する形状測定装置および形状測定方法に関し、特に、より短い時間で物体の形状を測定することができる形状測定装置および形状測定方法に関する。
【背景技術】
【0002】
ロボット、車両、船舶および航空機等の移動体が移動する場合や室内から外界の状況を知りたい場合等において、周囲の物体を認識し、その形状を認識することは、重要である。特に、このことは、移動体を自動走行させる場合にはより重要となる。
【0003】
物体の形状を測定する技術として、光学的な画像化手法やレーダシステムを用いた手法等が多数提案されている。発明者らは、種々の研究を重ねた結果、その一技術として、送信パルスの送受信位置を変化させることによって得られる直接散乱波の遅延時間変化と物体の形状との間に成り立つ可逆な変換関係を利用して物体の形状を推定するSEABED(Shape Estimation Algorithm based on BST(Boundary Scattering Transform) and Extraction of Directly scattered waves)法を開発し、提案してきた(例えば、特許文献1、および、非特許文献1ないし非特許文献4参照)。
【0004】
このSEABED法は、これら特許文献1および非特許文献1ないし非特許文献4において詳細に説明されているが、その原理を以下に概説する。
【0005】
図8は、SEABED法におけるアンテナ走査の様子を説明するための図である。この原理説明では、図8に示すように、目標の物体Oおよび送受信アンテナAが同一平面内に存在すると仮定した2次元問題を扱い、電波の伝播は、TE波であるとする。この目標の物体Oおよび送受信アンテナAが存在する空間を「r−空間(r−domainまたはr−space)」と呼称することとし、r−空間で集合を表現する場合その表現を「r−領域での表現」と呼称することとする。また、r−空間の点を(x,y)で表現する。ここで、xおよびy(y>0)は、何れも真空中での送信パルスの中心波長λによって正規化される。送受信アンテナAは、無指向性であり、r−空間のx軸上を走査しながら所定の間隔(例えば等間隔)を空けた各測定位置xn(n=1〜Nの整数)でモノサイクルパルスの送受信を繰り返すものとする。
【0006】
そして、送受信アンテナAの測定位置(x,y)=(X,0)における受信電界をs’(X,Y)と定義し、送信信号(送信パルス)の送信からその反射波の受信までの時間をτ、真空中の光速をcとした場合にYをY=(c×τ)/(2×λ)と定義する。なお、y>0よりY>0であり、また、送受信アンテナAの測定位置xnにおける電界の瞬時包絡線が最大となる時刻をt=0とする。
【0007】
さらに、雑音除去の観点からs’(X,Y)のY方向に送信パルスの波形を用いた整合フィルタを適用し、この整合フィルタを適用して得られる受信信号の波形を新たにs(X,Y)とする。このs(X,Y)を目標の物体Oの形状を求めるデータとして用いる。ここで、(X,Y)で表現される空間を「d-空間(d−domainまたはd−space)」と呼称することとし、d−空間で集合を表現する場合その表現を「d−領域での表現」と呼称することとする。XおよびYは、それぞれ送信パルスの中心波長および送信パルスの中心周期で正規化されている。
【0008】
連続した境界面を持つ目標の物体Oにおける複素誘電率ε(x,y)の変化が複数の区分的に微分可能な曲線の集合であるとする。すなわち、目標の物体Oにおける複素誘電率ε(x,y)が式1で表される。
【0009】
【数1】

ここで、gq(x)は、微分可能な1価関数であり、q={(x,y)|y=gq(x),x∈Jq}∈Hとする。Jqは、関数gq(x)の定義域である。aqは、q∈Hに依存する正の定数であり、Hは、q全体の集合である。Hの要素が「目標境界面」である。
【0010】
d−空間の部分集合Pを式2で定義する。
【0011】
【数2】
【0012】
連結な閉集合p⊂Pを考え、領域Ipを式3で定義する。
【0013】
【数3】
【0014】
任意のX∈Ipに対し(X,Y)∈pを満たすYが唯一存在する場合にpに対し定義域Ipを有し、Y=fp(X)を満たす1価関数fp(X)が存在する。関数fp(X)が微分可能でかつ|∂fp(X)/∂X|≦1を満たすpの集合をGと定義し、このGの要素を「擬似波面(Quasi Wavefront)」と呼称することとする。
【0015】
目標の物体Oの表面(目標境界面)で反射する散乱波には、目標境界面で反射した送信パルスの反射波を直接受信することによって得られる直接散乱波と、目標境界面で反射した送信パルスの反射波がさらに目標境界面における別の部分で1または複数回反射した反射波を受信することによって得られる多重散乱波とがある。ここで、式1が満たされる場合、境界からの直接散乱波は、目標境界面(目標の物体Oの表面、目標の物体Oの形状を表す)の情報を保持している。
【0016】
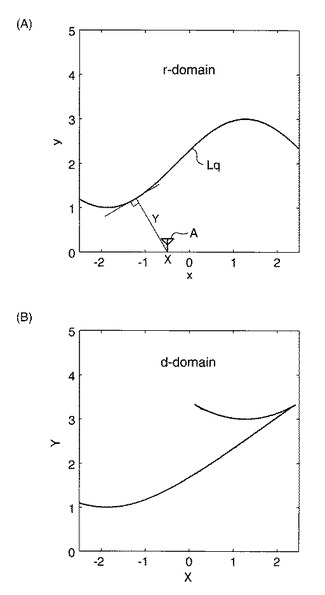
図9は、境界散乱変換を説明するための図である。図9(A)は、r−空間における複素誘電率の変化の一例を示し、図9(B)は、図9(A)に対応するd−空間の擬似波面を示す。
【0017】
pがqからの直接散乱に対応すると仮定すると、図9から分かるように、送受信アンテナAからqの表す曲線Lqへ下ろした垂線の長さと送受信アンテナAの位置との関係を用いることで、p上の点(X,Y)は、式4によって表される。この式4によって表される変換を境界散乱変換(Boundary Scattering Transform、BST)と呼称することとする。
【0018】
【数4】
但し、(x,y)は、q上に存在する点である。
【0019】
この境界散乱変換の逆変換を求めれば、受信波形から目標の物体Oの形状を求めることができる。この逆変換は、式5のように求められる。この逆変換を逆境界散乱変換(Inverse Boundary Scattering Transform、IBST)と呼称することとする。SEABED法は、この式5を用いて受信信号の波形から目標の物体Oの形状を推定し、求めている。
【0020】
【数5】
【0021】
なお、上述では、簡単のため、2次元の場合について説明したが、3次元へ容易に拡張可能である。また、送受信アンテナAが直線で走行する場合について説明したが、任意の曲線に沿った走行に対応する変換式も容易に求めることができる。さらに、直接波の伝播経路は、全て真空であるとしたが、伝播速度が一定で既知である媒質でも同様に説明可能である。
【0022】
このようなSEABED法では、受信信号の波形が送受信アンテナAから放射される送信パルスの波形と同一形状であると仮定し、それらの相関を求めることによって直接散乱波を求めている。このため、目標の物体Oが点であったり、目標の物体Oに角があったりすると、このような点や角で反射した送信パルスの反射波における波形が異なった波形となるから、SEABED法で求めた物体Oの形状に比較的大きな誤差を含んでしまう。
【0023】
そこで、前記特許文献1では、この点を改善すべく、パルスを生成して送信パルスとして空間に放射するパルス生成放射部と、前記送信パルスを放射した位置で前記物体で反射した前記送信パルスの反射波を受信信号として受信する受信部と、前記物体に対して前記パルス生成放射部の位置を変えながら前記送信パルスを放射することによって前記受信部で受信された複数の受信信号の波形と参照信号の波形との相互相関をそれぞれ求めることで複数の相関波形を求める相関部と、前記相関部で求められた複数の相関波形に基づいて擬似波面を抽出して擬似波面と物体の形状との対応関係から前記物体の形状を推定する形状推定部と、前記形状推定部で推定した物体の形状に応じた受信信号の波形を推定する波形推定部とを備え、前記参照信号の波形として最初は前記送信パルスの波形を用いると共に次回以降は前記波形推定部で推定した受信信号の波形を用い、前記物体の形状を複数回推定することによって前記物体の形状を求める形状測定装置が提案されている。
【特許文献1】特開2006−343205号公報
【非特許文献1】阪本卓也、佐藤亨、「UWBパルスレーダシステムのためのノンパラメトリックな目標形状推定法」、電子情報通信学会技術研究報告、A・P2003−36、103巻120号、1〜6頁、2003年6月19日
【非特許文献2】阪本卓也、佐藤亨、「パルスレーダを用いた高分解能形状推定のための位相補正法」、電子情報通信学会技術研究報告、A・P2004−72、104巻202号、37〜42頁、2004年7月22日
【非特許文献3】木寺正平、阪本卓也、佐藤亨、「UWBパルスレーダのための高精度物体形状推定法の開発」、電子情報通信学会研究報告、A・P2004−131、104巻283号、41〜46頁、2004年9月9日
【非特許文献4】Takuya SAKAMOTO,Toru SATO,”A Target Shape Estimation Algorithm for pulse Radar Systems based on Boundary Scattering Transform”,IEICE TRANSACTIONS on Communications,Vol.E87-B,No.5,MAY 2004,pp1357-1365
【発明の開示】
【発明が解決しようとする課題】
【0024】
ところで、前記特許文献1に開示の手法では、目標の物体Oに点や角等がある場合でも、比較的正しく物体Oの形状が求められる。しかしながら、物体Oの形状を複数回繰り返して推定(参照信号を反復改良)しているので、受信信号を得てから物体Oの形状を求めるまでに比較的長い時間が必要であった。例えば、プロセッサが3.2GHzのXeon(インテル社製)である場合に、物体Oの形状の推定を5回繰り返すと約10秒の時間がかかっていた。
【0025】
本発明は、上述の事情に鑑みて為された発明であり、その目的は、受信信号を得てから、より短い時間で物体Oの形状を求めることができる形状測定装置および形状測定方法を提供することである。
【課題を解決するための手段】
【0026】
本発明者は、種々検討した結果、上記目的は、以下の本発明により達成されることを見出した。すなわち、本発明の一態様に係る、物体の形状を測定する形状測定装置は、パルスを生成して送信パルスとして空間に放射するパルス生成放射部と、前記送信パルスが前記物体で反射した反射波を受信信号として受信する受信部と、前記物体に対して前記送信パルスの放射位置を変えながら前記パルス生成放射部から前記送信パルスを放射することによって前記受信部で受信された複数の受信信号の波形と前記送信パルスの波形との相互相関をそれぞれ求めることで複数の相関波形を求める相関波形演算部と、前記相関波形の極値を求めて前記極値を与える値を、前記送信パルスを送信してから前記反射波を受信するまでの遅延時間として、前記複数の相関波形のそれぞれについて求める遅延時間演算部と、前記送信パルスの中心周波数および前記受信信号の中心周波数に基づいて前記遅延時間を補正する補正値を前記複数の相関波形のそれぞれについて求める補正値演算部と、前記補正値演算部で求めた前記各補正値で前記遅延時間演算部で求めた前記各遅延時間をそれぞれ補正し、補正した前記各遅延時間に基づいて擬似波面を求める、または、前記遅延時間演算部で求めた前記各遅延時間に基づいて擬似波面を求め、求めた前記擬似波面を前記補正値演算部で求めた前記各補正値に基づき補正する擬似波面演算部と、前記擬似波面演算部で求めた前記擬似波面に基づいて前記物体の形状を求める形状演算部とを備えることを特徴とする。また、本発明の他の一態様に係る、物体の形状を測定する形状測定方法は、パルスを生成して送信パルスとして空間に放射するパルス生成放射ステップと、前記送信パルスが前記物体で反射した反射波を受信信号として受信する受信ステップと、前記物体に対して前記送信パルスの放射位置を変えながら前記パルス生成放射部から前記送信パルスを放射することによって前記受信部で受信された複数の受信信号の波形と前記送信パルスの波形との相互相関をそれぞれ求めることで複数の相関波形を求める相関波形演算ステップと、前記相関波形の極値を求めて前記極値を与える値を、前記送信パルスを送信してから前記反射波を受信するまでの遅延時間として、前記複数の相関波形のそれぞれについて求める遅延時間演算ステップと、前記送信パルスの中心周波数および前記受信信号の中心周波数に基づいて前記遅延時間を補正する補正値を前記複数の相関波形のそれぞれについて求める補正値演算ステップと、前記補正値演算ステップで求めた前記各補正値で前記遅延時間演算ステップで求めた前記各遅延時間をそれぞれ補正し、補正した前記各遅延時間に基づいて擬似波面を求める、または、前記遅延時間演算ステップで求めた前記各遅延時間に基づいて擬似波面を求め、求めた前記擬似波面を前記補正値演算ステップで求めた前記各補正値に基づき補正する擬似波面演算ステップと、前記擬似波面演算ステップで求めた前記擬似波面に基づいて前記物体の形状を求める形状演算ステップとを備えることを特徴とする。
【0027】
このような構成の形状測定装置および形状測定方法では、送信パルスの中心周波数および受信信号の中心周波数に基づいて遅延時間を補正する補正値が複数の相関波形のそれぞれについて求められ、各遅延時間がそれぞれ各補正値で、または各遅延時間に基づいて求められた擬似波面が各補正値に基づき補正される。このため、受信信号の波形と送信パルスの波形との相関を求めることによって得られる相関波形に基づいて、送信パルスを送信してから反射波を受信するまでの遅延時間を求めた場合に、この遅延時間に含まれる誤差が直接的に補正される。したがって、背景技術のように、受信信号の波形と参照信号の波形との相関を求めることによって得られる相関波形に基づいて、送信パルスを送信してから反射波を受信するまでの遅延時間を求めた場合に、この遅延時間に含まれる誤差を減少すべく、参照信号の波形を反復改良する必要がない。このため、このような構成の形状測定装置および形状測定方法では、受信信号を得てからより短い時間で物体の形状を求めることができる。
【0028】
また、上述の形状測定装置において、前記形状演算部は、逆境界散乱変換法によって前記擬似波面に基づいて前記物体の形状を求めることを特徴とする。
【0029】
このような構成の形状測定装置では、前記式5を用いた逆境界散乱変換によって物体の形状を求めるので、演算処理が容易となり、高速に物体の形状を求めることができる。
【0030】
また、上述の形状測定装置において、前記形状演算部は、球群の包絡面法によって前記擬似波面に基づいて前記物体の形状を求めることを特徴とする。
【0031】
このような構成の形状測定装置では、擬似波面により各測定位置xnから物体の各表面までの各距離Ynを求め、この各測定位置xnを中心に各距離Ynを半径とする球(半球でよい)を描き、これら球群の包絡面を求め、この包絡面を物体の表面とする球群の包絡面法によって物体の形状を求めるので、安定的に物体の形状を求めることが可能となる。
【0032】
また、上述の形状測定装置において、前記パルス生成放射部における、前記送信パルスを放射するアンテナと、前記受信部における、前記反射波を受信するアンテナとは、複数の無指向性のアンテナを所定の等間隔で配置したアレイアンテナであることを特徴とする。
【0033】
このような構成の形状測定装置では、送信パルスの放射やその反射波の受信に複数のアンテナを持つアレイアンテナが用いられる。このため、このアレイアンテナが1次元アレイアンテナの場合には走査のためにアンテナを一方向に移動すればよく、またこのアレイアンテナが2次元アレイアンテナの場合には走査のためにアンテナを移動する必要が無く、走査の手間を軽減または省くことができる。また、各アンテナ(アンテナ素子)がアレイ状に固定的に配置されるので、各アンテナ間の間隔を所望の間隔に高精度に固定することができ、精度よく所望の分解能を得ることが可能となる。
【0034】
また、上述の形状測定装置において、前記パルス生成放射部における、前記送信パルスを放射するアンテナは、複数の無指向性のアンテナを備えて構成され、前記受信部における、前記反射波を受信するアンテナは、1個の受信アンテナから構成されて成ることを特徴とする。
【0035】
このような構成の形状測定装置では、多点送信1点受信であるので、送受信の切替を行うことなく、一度の送受信で受信信号を得ることができるため、より短時間でデータを取得することが可能となる。
【発明の効果】
【0036】
本発明にかかる形状測定装置および形状測定方法では、受信信号を得てからより短い時間で物体の形状を求めることができる。
【発明を実施するための最良の形態】
【0037】
以下、本発明に係る実施の一形態を図面に基づいて説明する。なお、各図において同一の符号を付した構成は、同一の構成であることを示し、その説明を省略する。
(実施形態の構成)
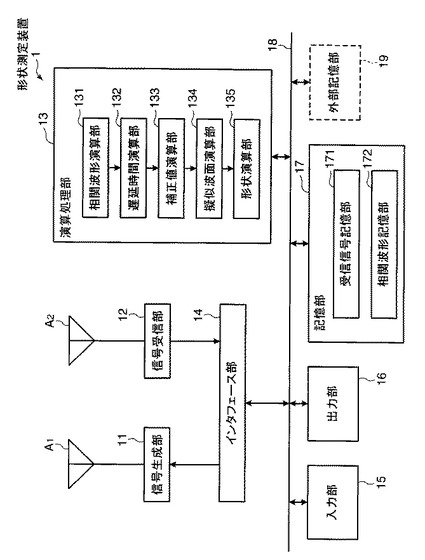
図1は、実施形態における形状測定装置の構成を示す図である。図1において、本発明の実施形態にかかる形状測定装置1は、送信アンテナA1と、受信アンテナA2と、信号生成部11と、信号受信部12と、演算処理部13と、インタフェース部14と、入力部15と、出力部16と、記憶部17と、バス18とを備えて構成される。
【0038】
送信アンテナA1は、信号生成部11で生成された電気信号のパルスを電波の送信パルスに変換し、この送信パルスを送信信号として空間に放射する無指向性のアンテナである。受信アンテナA2は、目標の物体Oで反射した送信パルスの反射波を受信して電気信号の受信波に変換し、この受信波を受信信号として信号受信部12に出力するアンテナである。なお、送信アンテナA1と受信アンテナA2とは、送受信アンテナAとして1個のアンテナで兼用されてもよい。
【0039】
送信パルスは、電磁波のエネルギーが所定の時間範囲に集中している電波である。送信パルスにおける中心周波数ftrに対する占有帯域幅B0の比である比帯域B0/ftrが大きくなるに従って測定精度が向上する。ここで、パワースペクトルの最大値に対し−10dBとなる周波数のうちで大きい方および小さい方をそれぞれfHおよびfLとすると、中心周波数ftrは、(fH+fL)/2であり、占有帯域幅B0は、(fH−fL)である。特に、比帯域B0/ftrが20%以上では測定精度が背景技術の欄で説明した従来のSEABED法に較べて数倍に向上する。このような送信パルスは、例えば、米国FCC(Federal Communications Commission)に定義されているUWB(Ultra Wide Band)のパルスがある。米国FCCの定義は、例えば、「Subpart F−Ultra−Wideband Operation §15.503 Definitions」[online]、平成17年6月3日検索、インターネット<URL:http://a257.g.akamaitech.net/7/257/2422/12feb20041500/edocket.access.gpo.gov/cfr_2004/octqtr/pdf/47cfr15.503.pdf>に開示されている。また、送信パルスは、測定精度を向上させる観点からモノサイクルパルスでもよい。
【0040】
信号生成部11は、インタフェース部14を介した演算処理部13の制御に従って送信すべき送信パルスに応じた電気信号のパルスを生成し、送信アンテナA1に出力する。信号受信部12は、受信アンテナA2から入力された受信波をA/D変換し、インタフェース部14を介して受信信号として記憶部17に記憶する。なお、信号受信部12は、受信アンテナA2から入力された受信波を必要に応じて、増幅してもよい。また、送信アンテナA1が放射した電波を受信アンテナA2が直接受信する直接波は、散乱波を測定する上で不要な干渉波となるので、信号処理部12は、A/D変換前に、あるいは、A/D変換後に、この直接波を除去する処理を行ってもよい。この直接波の除去処理は、目標の物体Oが存在しない場合における受信信号d(t)の波形を予め記憶しておき、s(t)−d(t+τa)を計算することによって直接波を除去する。s(t)は、散乱波の測定中における受信信号であり、τaは、s(t)と信号d(t+τa)との相関が最大と成る場合である。ここで、受信アンテナA2に対し、目標の物体Oが送信アンテナA1に較べて遠方にあるために、直接波の受信時刻帯と散乱波の受信時刻帯とが時間的に分離することができる場合には、直接波の受信時刻帯は、受信信号を測定しない、あるいは、無視することによっても直接波を除去することができる。
【0041】
インタフェース部14は、信号生成部11、信号受信部12、演算処理部13および記憶部17の間で相互に信号を交換するためのインタフェース回路である。入力部15は、本発明の手法により目標の物体Oの形状を測定する形状測定プログラムを起動するコマンドや送信パルスの送受信を指示するコマンド等の各種コマンド、および、目標の物体Oの形状を測定する上で必要な例えば後述の閾値αや閾値β等の各種データを形状測定装置1に入力する機器であり、例えば、キーボードやマウス等である。出力部16は、入力部15から入力されたコマンドやデータ、および、本形状測定装置1によって測定された物体の形状を出力する機器であり、例えばCRTディスプレイ、LCD、有機ELディスプレイおよびプラズマディスプレイ等の表示装置やプリンタ等の印刷装置等である。
【0042】
記憶部17は、信号受信部12からの受信信号を記憶する受信信号記憶部171と、後述の相関波形演算部131で求められた相関波形を記憶する相関波形記憶部172とを備え、形状測定プログラム等の各種プログラム、および、各種プログラムの実行に必要なデータやその実行中に生じるデータ等の各種データを記憶する。記憶部17は、例えば、演算処理部13の所謂ワーキングメモリとなるRAM(Random Access Memory)等の揮発性の記憶素子、ROM(Read Only Memory)や書換え可能なEEPROM(Electrically Erasable Programmable Read Only Memory)等の不揮発性の記憶素子、および、各種プログラムや各種データを格納しておくハードディスク等を備えて構成される。
【0043】
演算処理部13は、例えば、マイクロプロセッサおよびその周辺回路等を備えて構成され、機能的に、受信信号の波形と参照信号の波形との間における相互相関を演算して相関波形を求める相関波形演算部131と、相関波形に基づいて遅延時間τを求める遅延時間演算部132と、遅延時間τの補正値△τを求める補正値演算部133と、遅延時間τを補正値△τで補正し補正後の遅延時間τに基づいて擬似波面を求める擬似波面演算部134と、擬似波面に基づいて物体Oの形状を求める形状演算部135とを備え、制御プログラムに従い信号生成部11、信号受信部12、インタフェース部14、入力部15、出力部16および記憶部17を当該機能に応じてそれぞれ制御する。
【0044】
これら演算処理部13、インタフェース部14、入力部15、出力部16および記憶部17は、信号を相互に交換することができるようにバス18でそれぞれ接続される。
【0045】
このような演算処理部13、インタフェース部14、入力部15、出力部16、記憶部17およびバス18は、例えば、コンピュータ、より具体的にはノート型やディスクトップ型等のパーソナルコンピュータ等によって構成可能である。そして、信号生成部11、送信アンテナA1、受信アンテナA2および信号受信部もレーダに用いられる公知の構成によって構成可能である。
【0046】
なお、必要に応じて形状測定装置1は、破線で示すように、外部記憶部19をさらに備えてもよい。外部記憶部19は、例えば、フレキシブルディスク、CD−ROM(Compact Disc Read Only Memory)、CD−R(Compact Disc Recordable)、DVD−R(Digital Versatile DiscRecordable)およびブルーレイディスク(Blu-ray Disc)等の記録媒体との間でデータを読み込みおよび/または書き込みを行う装置であり、例えば、フレキシブルディスクドライブ、CD−ROMドライブ、CD−Rドライブ、DVD−Rドライブおよびブルーレイディスクドライブ等である。
【0047】
ここで、形状測定プログラム等が格納されていない場合には、形状測定プログラム等を記録した記録媒体から外部記憶部19を介して記憶部17にインストールされるように構成してもよい。あるいは、取得した受信信号や推定した物体の形状を表すデータ等のデータが外部記憶部19を介して記録媒体に記録されるように構成してもよい。
【0048】
次に、本実施形態の動作について説明する。
(実施形態の動作)
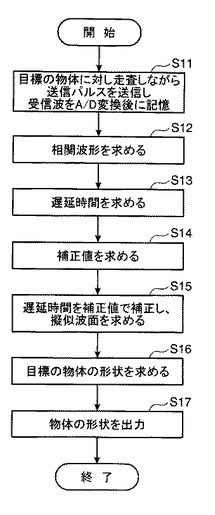
図2は、実施形態における形状測定装置の動作を示すフローチャートである。図2において、形状測定装置1は、目標の物体Oに対して送信アンテナA1および受信アンテナA2を走査しながら(目標の物体Oに対して送信アンテナA1および受信アンテナA2の位置を変えながら)各測定位置xnで、送信パルスを送信し、目標の物体Oから反射した送信パルスの反射波を受信し、そして、受信波をA/D変換して記憶する(S11)。
【0049】
より具体的には、例えば、ユーザが目標の物体Oに対し測定開始位置x1に送信アンテナA1および受信アンテナA2を配置し、形状測定装置1に入力部15を介して送信パルスの送受信を指示する。この指示を受付けると、演算処理部13は、信号生成部11に送信パルスを生成させ、送信アンテナA1から送信パルスを送信する。目標の物体Oから反射した送信パルスの反射波が受信アンテナA2で受信されると、信号受信部12は、受信波をA/D変換して第1受信信号を生成し、記憶部17の受信信号記憶部171に測定位置x1と対応付けて記憶する。測定開始位置x1における送受信が完了すると、その旨を出力部16に提示してユーザに通知する。この通知を受けるとユーザは、測定開始位置x1から所定の間隔だけ移動した測定位置x2に送信アンテナA1および受信アンテナA2を配置し、形状測定装置1に入力部15を介して送信パルスの送受信を指示する。この指示を受付けると、演算処理部13は、信号生成部11に送信パルスを生成させ、送信アンテナA1から送信パルスを送信する。目標の物体Oから反射した送信パルスの反射波が受信アンテナA2で受信されると、信号受信部12は、受信波をA/D変換して第2受信信号を生成し、記憶部17の受信信号記憶部171に測定位置x2と対応付けて記憶する。測定位置x2における送受信が完了すると、その旨を出力部16に提示してユーザに通知する。以下同様に、測定開始位置x1から測定終了位置xNまでの各測定位置xnで、形状測定装置1は、送信アンテナA1から送信パルスを送信し、目標の物体Oから反射した送信パルスの反射波を送信パルスの略放射位置で送信アンテナA2によって受信し、信号受信部12で受信波をA/D変換し、記憶部17の受信信号記憶部171に測定位置xnと対応付けて記憶する。こうして測定開始位置x1における第1受信信号から測定終了位置xNにおける第N受信信号が得られ、記憶部17の受信信号記憶部171に記憶される。
【0050】
なお、上述では、送信アンテナA1および受信アンテナA2をユーザが各測定位置xnに移動させたが、車輪や無限軌道等の運動部材と、運動部材を駆動する例えばモータ等の駆動装置と、駆動装置を演算処理部13の制御に従って制御する例えばマイクロコンピュータ等の制御装置と、駆動装置および制御装置にエネルギーを供給するエネルギー源とを備えた走行装置に少なくとも送信アンテナA1および受信アンテナA2を載せ、送信アンテナA1および受信アンテナA2を走行装置で移動させることにより、送信アンテナA1および受信アンテナA2を走査しながら各測定位置xnで送信パルスを送信し、目標の物体Oから反射した送信パルスの反射波を受信し、受信波をA/D変換し、記憶するように、形状測定装置1が構成されてもよい。
【0051】
測定開始位置x1における第1受信信号から測定終了位置xNにおける第N受信信号が得られ、記憶部17の受信信号記憶部171に記憶されると、演算処理部13の相関波形演算部131は、第1ないし第Nの各受信信号に対し、当該受信信号の波形と参照信号の波形との相互相関を求めることによって、第1ないし第Nの各受信信号にそれぞれ対応する第1ないし第Nの相関波形を求める(S12)。
【0052】
相関関数ρ(τ)は、遅延時間をτ、参照信号をr(t)、受信信号をs(t)とすると、式6で与えられる。なお、積分範囲は、受信信号s(t)が存在する範囲である。遅延時間τは、送信信号(本実施形態では送信パルス)を送信してからその反射波を受信するまでの時間、より具体的には、送信信号を送信してから、目標の物体Oの表面における接平面に対し垂直に入射して反射した送信信号の反射波(直接散乱波)を直接受信するまでの時間である。
【0053】
【数6】
【0054】
ここで、参照信号の波形は、送信パルスの波形とされており、これは、受信信号の波形が送信パルスの波形と同一形状であると仮定していることに相当する。この処理S12は、受信信号に整合フィルタを適用することに相当する。
【0055】
第1ないし第Nの相関波形ρ(τ)が生成されると、演算処理部13の遅延時間演算部132は、第1ないし第Nの相関波形ρ(τ)に基づいて各遅延時間τをそれぞれ求める(S13)。より具体的には、遅延時間演算部132は、第1ないし第Nの相関波形ρ(τ)における極値(極大値および極小値)をそれぞれ求める。この各極値を与える各値が各測定位置xnにおける各遅延時間τである。
【0056】
ここで、送信パルスは、物体Oで反射すると、その帯域が狭まるなど変形するので、受信信号の波形が送信パルスの波形と一致しない。このため、式6のρ(τ)における遅延時間τには、誤差が含まれている。
【0057】
背景技術の特許文献1では、この誤差を減らすために、参照信号の波形を直接散乱波の受信信号における実際の物体形状に対応する波形に近づけるべく、参照信号の波形が反復改良されていた。
【0058】
一方、本実施形態では、参照信号の波形を改良するのではなく、参照信号の波形に送信信号の波形を用いて相関波形ρ(τ)を求め、この遅延時間τに含まれる誤差が補正値△τで補正される。
【0059】
図3は、送信信号の波形と受信信号の波形とを示す図である。図3の横軸は、時間であり、その縦軸は、振幅である。実線は、受信信号(Scattered)を表し、破線は、送信信号(Transmitter)を表す。
【0060】
通常、送信信号は、物体Oで反射すると、その反射波に基づく受信信号は、送信信号よりも帯域が狭まり、受信信号の中心周波数frefは、送信信号の中心周波数ftrよりも小さく(低く)なる。このため、周期では、図3に示すように、受信信号の周期は、送信信号の周期よりも長くなるため、受信信号のゼロクロス点と送信信号のゼロクロス点とを一致させると(整合フィルタによる整合位置(Matching point)で揃えると)、受信信号の波形の始端(振幅0)および終端(振幅0)と送信信号の波形の始端および終端とがそれぞれずれる。このずれ量が前記補正値△τに相当し、式7で与えられる。
【0061】
【数7】
ここで、2で割っているのでは、受信信号の波形と送信信号の波形とのずれが波形の両端で生じているからである。
【0062】
本実施形態では、この誤差を補正すべく、第1ないし第Nの相関波形ρ(τ)に基づいて各測定位置xnにおける各遅延時間τが求められると、演算処理部13の補正値演算部133は、送信信号の波形と受信信号の波形とに基づいて補正値△τを各遅延時間τのそれぞれについて求める(S14)。
【0063】
より具体的には、補正値演算部133は、まず、受信信号をフーリエ変換してその中から最も大きな周波数成分を抽出することによって受信信号の中心周波数frefを各遅延時間τのそれぞれについて求める。なお、送信信号の中心周波数ftrは、送信信号の送信パルスが予め設定され既定されるので、送信パルスをフーリエ変換してその中から最も大きな周波数成分を抽出することによって送信パルス(送信信号)の中心周波数ftrを予め求め、この求めた送信信号の中心周波数ftrを記憶部17に予め記憶しておき、この記憶部17に記憶しておいた送信信号の中心周波数ftrが用いられてもよい。あるいは、受信信号の中心周波数frefの演算に合わせて、送信パルスをフーリエ変換してその中から最も大きな周波数成分を抽出することによって送信パルス(送信信号)の中心周波数ftrが求められてもよい。次に、補正値演算部133は、受信信号の中心周波数frefおよび送信パルス(送信信号)の中心周波数ftrを用いて式7によって補正値△τを各遅延時間τのそれぞれについて求める。
【0064】
各測定位置xnにおける各補正値△τが求められると、演算処理部13の擬似波面演算部134は、各補正値△τで各遅延時間τを補正し、補正後の各遅延時間τcoに基づいて真の擬似波面を求める(S15)。真の擬似波面を求めるに当たって、擬似波面演算部134は、まず、補正値△τで補正した極値τを連結して擬似波面を生成し、そして、真の擬似波面を抽出する。
【0065】
より具体的には、まず、擬似波面演算部134は、処理S14で求めた各補正値△τを用いて、処理S13で相関波形ρ(τ)に基づいて求めた各遅延時間τをそれぞれ補正する。すなわち、擬似波面演算部134は、処理S13で相関波形ρ(τ)に基づいて求めた各遅延時間τに処理S14で求めた各補正値△τをそれぞれ加算する。補正後の各遅延時間をτcoとすると、τco=τ+△τである。これによって、処理S13で求めた遅延時間τに含まれる誤差が軽減される。
【0066】
次に、擬似波面演算部134は、処理S13で求めた各相関波形ρ(τ)の各極値を与える各値τに対する補正後の各値τcoを用いて近隣の補正後の各値τco同士を連結する。すなわち、擬似波面演算部134は、式8を満たすように補正後の各遅延時間τcoを用いた極値を連結する。
【0067】
【数8】
ここで、極値Mnの位置は、測定位置xnにおいて得られた第nの相関波形ρ(τ)から求められた補正後の極値τcoのXY平面における位置である。このように極値を連結して得られた曲線が擬似波面である。この擬似波面Yと遅延時間τとの間には、光速をcとすると、Y=c×τ/2の関係がある。
【0068】
次に、擬似波面演算部134は、波形歪みの影響を除いた真の擬似波面を抽出する。前記処理によって得られた擬似波面には、雑音により生じたもの、振動的な部分を抽出したもの、および、多重散乱により生じたもの等の不要な擬似波面が含まれている。このため、これらを取り除き、真に物体Oの境界面を示す真の擬似波面を抽出する必要がある。この真の擬似波面の抽出は、第1に、式9で定義される評価値wpを用い、所定の閾値αよりも評価値wpが大きい擬似波面を選択し、抽出する。閾値αは、その値を小さくし過ぎると不要な擬似波面が多く含まれ、その値を大きくし過ぎると真の擬似波面まで除去されてしまうので、評価値wpの最大値を考慮の上、実験的、経験的に設定される。
【0069】
【数9】
評価値wpは、擬似波面上における受信信号の振幅が大きく、しかもfp(X)の定義域が広い範囲に亘るものについて大きな値をとる。
【0070】
ここで、式9のみによって真の擬似波面を抽出すると、例えば、雑音に起因する擬似波面が有意な擬似波面の近くに存在する場合ではその評価値wpが大きくなり、除去することができない場合が生じ得る。そのため、p1,p2∈G、p1≠p2、wp1≦wp2に対し(x,y)∈p1かつ(x,y)∈p2が成立する場合には、p1→p1’、p1”(但し、p1’∪p1”=p1かつp1’∩p1”=p1∩p2)に擬似波面の分割を行って評価値wpを求め不要な擬似波面を除去する。
【0071】
そして、真の擬似波面の抽出は、第2に、第1フレネルゾーンとして知られる式10で表されるFpを用いて式11で定義される新たな評価値Wpを用い、所定の閾値βよりも評価値Wpが大きい擬似波面を選択し、抽出する。閾値βは、その値を小さくし過ぎると不要な擬似波面が多く含まれ、その値を大きくし過ぎると真の擬似波面まで除去されてしまうので、評価値Wpの最大値を考慮の上、実験的、経験的に設定される。
【0072】
【数10】
【0073】
【数11】
評価値Wpは、或る擬似波面のフレネルゾーン内に値の大きい別の境界面が存在する場合にはその値が低下する。ξ(x)は、重み関数であり、簡単のために、例えば、ξ(x)=1に設定する。
【0074】
このように抽出された真の擬似波面は、各測定位置xnで得られる、送信パルスを送信してから、目標の物体Oの表面における接平面に対し垂直に入射して反射した送信パルスの反射波を直接受信するまでの補正後の遅延時間τcoの集合である。
【0075】
真の擬似波面が補正されると、演算処理部13の形状演算部135は、補正後の真の擬似波面から前記式5を用いて物体Oの形状を求める(S16)。
【0076】
そして、演算処理部13は、この求めた物体Oの形状を出力部16に出力し(S17)、処理を終了する。
【0077】
このように動作することによって形状測定装置1は、送信信号(送信パルス)の中心周波数ftrと受信信号の中心周波数frefとを用いて補正値△τを求め、直接、遅延時間τを補正するので、特許文献1のように参照信号の波形を反復改良する必要が無く、第1ないし第Nの受信信号を得てから、より短い時間で物体Oの形状を求めることができる。
【0078】
そして、本実施形態の形状測定装置1では、送信パルスにおける波長の1/100程度の精度で物体Oの形状が求められる。例えば、送信パルスに波長10cmのマイクロ波モノサイクルパルスが用いられた場合には、1mmの精度で目標の物体Oの形状が測定可能である。
【0079】
ここで、上述の実施形態では、擬似波面演算部134は、補正値演算部133で求めた各補正値△τで遅延時間演算部132で求めた各遅延時間τをそれぞれ補正し、補正した各遅延時間τcoに基づいて擬似波面を求めたが、まず、遅延時間演算部132で求めた各遅延時間τに基づいて擬似波面を求め、求めた擬似波面を補正値演算部133で求めた各補正値△τに基づき補正してもよい。
【0080】
すなわち、処理S15では、上述の処理に代えて、次のように処理される。まず、擬似波面演算部134は、処理S13で求めた各相関波形ρ(τ)の各極値を用いて近隣の各極値ρ(τ)同士を連結する。すなわち、擬似波面演算部134は、上記式8を満たすように極値を連結する。次に、擬似波面演算部134は、上記式9および式10を用いて真の擬似波面を抽出する。次に、擬似波面演算部134は、真の擬似波面を処理S14で求めた各補正値△τに基づいて補正する。補正値△τと擬似波面Yを補正するための補正値△Yとの間には、△Y=c×△τ/2の関係がある。
【0081】
また、上述の実施形態では、2次元の場合について説明したが、3次元へ容易に拡張可能である。例えば、垂直方向に所定の間隔で並ぶ各測定位置において、水平方向に上述した2次元の場合における形状をそれぞれ測定することによって、3次元形状を得ることができる。以下の場合も同様である。
【0082】
また、上述の実施形態では、処理S15において、物体Oの形状は、式5を用いたIBST(逆境界散乱変換)法によって求められたが、他の手法によって求められても良い。例えば、球群の包絡面法によって物体Oの形状が求められても良い。この手法は、例えば、「Shouhei Kidera,Takuya Sakamoto and Toru Sato,”A Robust and Fast Imaging Algorithm without derivative operations for UWB Pulse Radars”European Conference on Antennas & Propagation(EuCAP) 2006,paper no.314368,Nice,France,Nov.2006」や「木寺正平、阪本卓也、佐藤亨、“UWBパルスレーダのための球群の包絡面を利用した高速立体像推定法の安定化”、電子情報通信学会総合大会、B−42,名城大学、Mar.2007」に開示されている。
【0083】
図4は、球群の包絡面法を説明するための図である。球群の包絡面法は、3次元であるが、図4では、簡単化のために、z(図4の紙面に垂直な方向)を固定したxy平面における場合について示している。
【0084】
補正後の真の擬似波面は、上述したように、各測定位置xnで得られる、送信パルスを送信してから、目標の物体Oの表面における接平面に対し垂直に入射して反射した送信パルスの反射波を直接受信するまでの補正後の遅延時間τcoの集合である。このため、補正後の真の擬似波面を用いることによって、各測定位置xnから目標の物体Oの各表面までの各距離Ynを求めることができる。球群の包絡面法では、図4に示すように、この各測定位置xnを中心に、各距離Ynを半径とする球(半球でよい)を描き、これら球群の包絡面を求める。この包絡面が物体Oの表面となる。図4では、xminないしxmaxの範囲γにおける球群の包絡面∂Tが示されている。包絡面には、物体Oの表面に外接する球群の包絡面である外包絡面と、物体Oの表面に内接する球群の包絡面である内包絡面とがある。
【0085】
例えば、外包絡面では、2次元では、各(X,Y)に対して円内点集合S(X,Y)を式12および式13のように定義すると、∂x/∂X>0(円外接条件)の場合に∂T/∂S+が成立する。
S(X,Y)={(x,y)|(x−X)2+y2<Y2} ・・・(式12)
S+=∪S(X,Y) ・・・(式13)
ここで、S+の境界点集合を∂S+,(x∈γ)とする。
【0086】
球群の包絡面法を用いることによって、物体Oの形状を求める場合に、微分演算が無くなり、安定的に物体Oの形状を求めることが可能となる。また、この球群の包絡面法における球に代えて、回転楕円体が用いられても良い。
【0087】
また、上述の実施形態では、アンテナAは、1個の送信アンテナA1と1個の受信アンテナA2とを用いたが、無指向性のアンテナを所定の等間隔で配置したアレイアンテナを用いた、BST法の拡張であるバイスタティックレーダであってもよい。このバイスタティックレーダを用いた手法は、例えば、「木寺正平、阪本卓也、佐藤亨、“UWBパルスレーダのためのバイスタティックアンテナ型高速物体像推定法の開発”、電子情報通信学会 第34回電磁界理論シンポジウム、EMT−05−58、Nov.2005」や「木寺正平、可児佑介、阪本卓也、佐藤亨、“UWBパルスレーダのための線形アレイを用いた高解像度立体形状推定法の実験的検討”、電子情報通信学会 アンテナ・伝播研究会(AP)、AP2007−24、May 2007」に開示されている。
【0088】
このバイスタティックレーダにおいて、上述の処理S11では、形状測定装置1は、目標の物体Oに対し送信パルスの送信位置(放射位置)を変えながらアレイアンテナから送信パルスを送信(放射)し、目標の物体Oから反射した送信パルスの反射波を受信し、そして、受信波をA/D変換して記憶する。受信波のデータが得られると、形状測定装置1は、このデータを用いて上述の処理S12ないし処理S15と同様の処理を実行する。そして、形状測定装置1は、上述の処理S16では、バイスタティックレーダに対応した拡張されたBST法、または回転楕円体の包絡面法で目標の物体Oの形状を求める。
【0089】
このバイスタティックレーダを用いることによって、1次元アレイアンテナの場合には走査のためにアンテナを一方向に移動すればよく、また2次元アレイアンテナの場合には走査のためにアンテナを移動する必要が無く、走査の手間を軽減または省くことができる。また、各アンテナ素子がアレイ状に固定的に配置されるので、各アンテナ素子間の間隔を所望の間隔に高精度に固定することができ、精度よく所望の分解能を得ることが可能となる。
【0090】
また、上述の実施形態では、アンテナAは、1個の送信アンテナA1と1個の受信アンテナA2とを用いたが、複数の送信アンテナと1個の受信アンテナとを用いた多点送信1点受信型レーダであってもよい。この多点送信1点受信型レーダにおいて、複数の送信アンテナの配置位置と1個の受信アンテナの配置位置とは、固定される。上述の処理S11では、形状測定装置1は、目標の物体Oに対し送信パルスの送信位置(放射位置)を変えながら送信パルスを送信(放射)し、目標の物体Oから反射した送信パルスの反射波を受信し、そして、受信波をA/D変換して記憶する。受信波のデータが得られると、形状測定装置1は、このデータを用いて上述の処理S12ないし処理S15と同様の処理を実行する。そして、形状測定装置1は、上述の処理S16では、多点送信1点受信型レーダに対応した拡張されたBST法、または回転楕円体の包絡面法で目標の物体Oの形状を求める。この構成によれば、送受信の切替を行うことなく、一度の送受信で受信信号を得ることができるため、より短時間でデータを取得することが可能となる。
【0091】
また、上述の実施形態では、送信パルスに電波を用いたが、超音波や光を用いてもよい。超音波の短パルスは、公知の技術によって生成することができ、超音波短パルスについては、例えば、『椿健治、山中浩、北田耕作、菰田卓哉、越田信義、「熱誘起ナノ結晶Si超音波源の空中3次元イメージセンサへの応用−超音波源の動特性評価−」、Proc.Symp.Ultrason.Electron.、Vol.25(2004)、pp339−340』に開示されている。例えば、中心周波数50kHzの超音波モノサイクルパルスを用いた場合には、室温(25℃)において、音速が331.5+0.6×25=346.5m/秒となって波長が7mm程度になるので、1/100波長(=波長/100)の70μmの精度で理論的には目標の物体Oの形状を測定することができる。
【0092】
さらに、光の短パルスは、公知の技術によって生成されるフェムト秒光パルスを利用することができる。フェムト秒光パルスについては、例えば、『「超短光パルス技術評価ラボ」、電子技術総合研究所彙報、第64巻、第7号、pp11−13』に開示されている。例えば、1.3μm帯で20fsのフェムト秒光パルスを用いた場合には、波長が6μm程度になるので、1/100波長の60nmの精度で理論的には目標の物体Oの形状を測定することができる。また、例えば、0.8μm帯で11fsのフェムト秒光パルスを用いた場合には、波長が3.3μm程度になるので、1/100波長の30nmの精度で理論的には目標の物体Oの形状を測定することができる。
【0093】
このような超音波短パルスやフェムト秒光パルスを利用することによって高分解能で高速処理の顕微鏡が構成される。
(実施例および比較例)
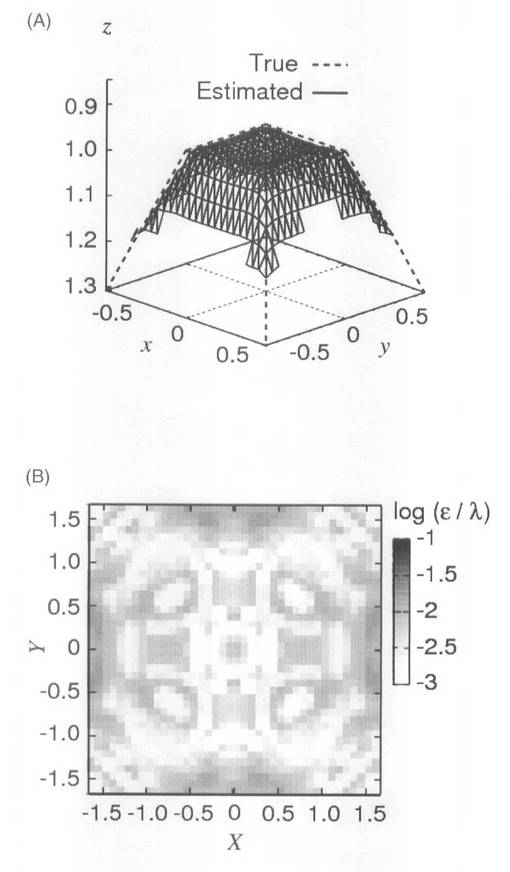
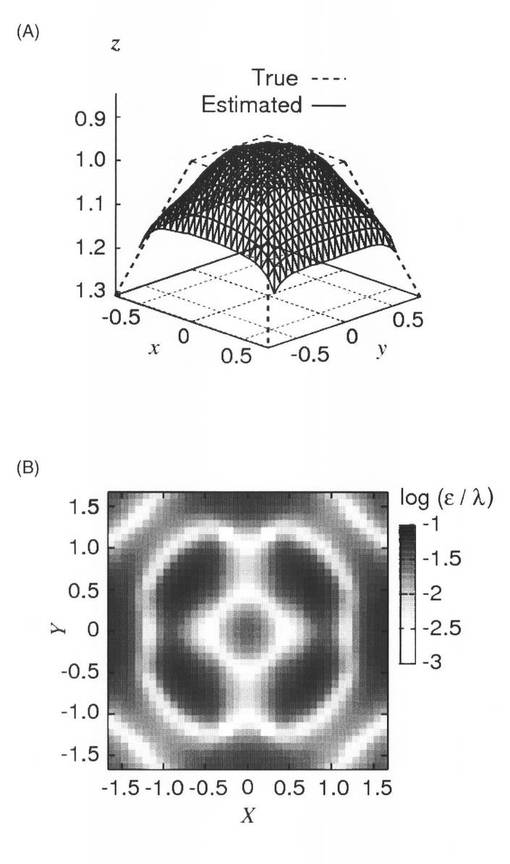
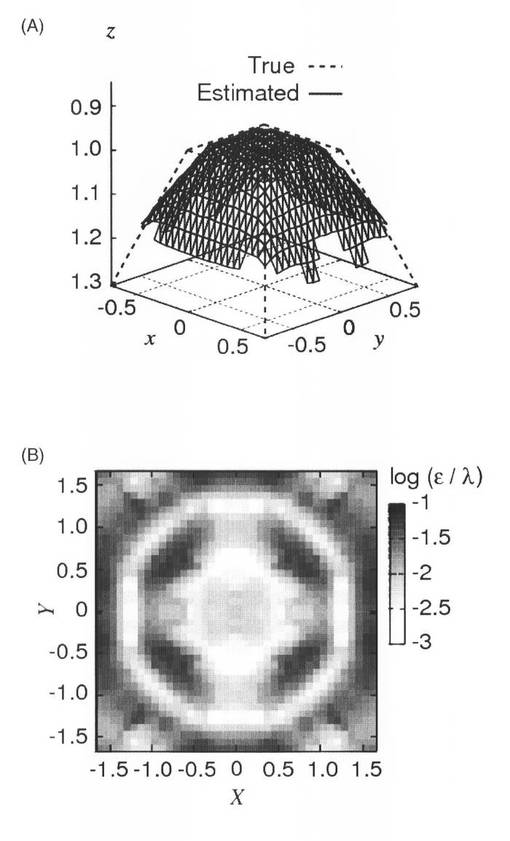
この形状測定装置1を用いて具体的な目標の物体Oの形状を求めた結果の一例について説明する。図5は、本発明に係る形状測定装置によって求められた物体の形状の測定結果を示す図である。図5(A)は、物体Oの形状を示し、図5(B)は、XY平面の各位置(X,Y,0)における実際の形状から算出した擬似波面と受信信号から求めた擬似波面との誤差を示す図である。図6は、背景技術における球群の包絡面法を用いたSEABED法によって求められた物体の形状の測定結果を示す図である。図6(A)は、物体Oの形状を示し、図6(B)は、XY平面の各位置(X,Y,0)における実際の形状から算出した擬似波面と受信信号から求めた擬似波面との誤差を示す図である。図7は、背景技術における特許文献1の反復改良および球群の包絡面法を用いたSEABED法によって求められた物体の形状の測定結果を示す図である。図7(A)は、物体Oの形状を示し、図7(B)は、XY平面の各位置(X,Y,0)における実際の形状から算出した擬似波面と受信信号から求めた擬似波面との誤差を示す図である。図5(A)〜図7(A)において、破線は、物体Oの実際の形状を表し、実線は、各手法によって求められた物体の形状を表す。図5(B)〜図7(B)では、測定誤差は、送信信号の波長λで規格化されており、その常用対数で表示されている。黒色は、誤差が1/10波長であって誤差が大きいことを表し、白色は、誤差が1/1000波長であって誤差が小さいことを表し、黒色から白色へ向かうにしたがって誤差が小さくなる。
【0094】
目標の物体Oは、略均一な導体であって、その実際の形状は、図5(A)〜図7(A)に破線で示すように、角錐台形状である。
【0095】
この物体Oの形状を、本実施形態の形状測定装置1によって測定すると、図5(A)に示すように、測定による擬似波面の形状は、ほぼ実際の形状に基づく擬似波面に沿っており、その測定誤差は、図5(B)に示すように、小さく、全体的に白くなっている。特に、側面の各稜の部分や上面の各辺の部分では、1/1000波長の誤差しかなく、最も精度が悪い部分でも1/100波長の誤差である。したがって、本実施形態の形状測定装置1では、全体的に高い精度で物体Oの擬似波面が求められている、すなわち、全体的に高い精度で物体Oの形状が測定されている。
【0096】
一方、この物体Oの形状を、背景技術における球群の包絡面法を用いたSEABED法によって測定すると、図6(A)に示すように、測定による擬似波面の形状は、実際の形状に基づく擬似波面に沿っている部分もあるが、実際の擬似波面から乖離している部分が目立ち、その測定誤差は、図6(B)に示すように、比較的大きく、全体的に暗くなっている。特に、側面の各稜の部分や上面の各辺の部分では、誤差が1/10波長もあり、側面の各稜の部分や上面の各辺の部分がなまっている。背景技術の本手法では、高い精度で物体Oの擬似波面が求められている部分が僅かであり、全体的にあまり高い精度で物体Oの擬似波面は、求められていない、すなわち、全体的にあまり高い精度で物体Oの形状は、測定されていない。
【0097】
また、この物体Oの形状を、背景技術における特許文献1の反復改良および球群の包絡面法を用いたSEABED法によって測定すると、図7(A)に示すように、測定による擬似波面の形状は、実際の形状に基づく擬似波面に沿っている部分が増えるが、実際の擬似波面から乖離している部分も多く、その測定誤差は、図7(B)に示すように、比較的まだ大きく、全体的に灰色になっている。特に、側面の各稜の部分や上面の各辺の部分では、誤差が1/10波長の部分が残っており、側面の各稜の部分や上面の各辺の部分になまりが残っている。背景技術の本手法では、図6の場合よりは改善されているが図5に示すほど高精度に物体Oの擬似波面が求められていない、すなわち、図5に示すほど高精度に物体Oの形状が測定されていない。
【0098】
そして、プロセッサが3.2GHzのXeon(インテル社製)である場合には、参照波形の改良を5回行う、背景技術における特許文献1の反復改良および球群の包絡面法を用いたSEABED法による物体Oの形状測定では、その処理時間が約10秒であるが、本実施形態にかかる形状測定装置1による物体Oの形状測定では、その処理時間は、約0.2秒である。
【0099】
本発明を表現するために、上述において図面を参照しながら実施形態を通して本発明を適切且つ十分に説明したが、当業者であれば上述の実施形態を変更及び/又は改良することは容易に為し得ることであると認識すべきである。従って、当業者が実施する変更形態又は改良形態が、請求の範囲に記載された請求項の権利範囲を離脱するレベルのものでない限り、当該変更形態又は当該改良形態は、当該請求項の権利範囲に包括されると解釈される。
【図面の簡単な説明】
【0100】
【図1】実施形態における形状測定装置の構成を示す図である。
【図2】実施形態における形状測定装置の動作を示すフローチャートである。
【図3】送信信号の波形と受信信号の波形とを示す図である。
【図4】球群の包絡面法を説明するための図である。
【図5】本発明に係る形状測定装置によって求められた物体の形状の測定結果を示す図である。
【図6】背景技術における球群の包絡面法を用いたSEABED法によって求められた物体の形状の測定結果を示す図である。
【図7】背景技術における特許文献1の反復改良および球群の包絡面法を用いたSEABED法によって求められた物体の形状の測定結果を示す図である。
【図8】SEABED法におけるアンテナ走査の様子を説明するための図である。
【図9】境界散乱変換を説明するための図である。
【符号の説明】
【0101】
1 形状測定装置
11 信号生成部
12 信号受信部
13 演算処理部
17 記憶部
131 相関波形演算部
132 遅延時間演算部
133 補正値演算部
134 擬似波面演算部
135 形状演算部
171 受信信号記憶部
172 相関波形記憶部
A1 送信アンテナ
A2 受信アンテナ
【技術分野】
【0001】
本発明は、送信パルスを放射して目標の物体から反射した該送信パルスの反射波を受信することによって該物体の形状を測定する形状測定装置および形状測定方法に関し、特に、より短い時間で物体の形状を測定することができる形状測定装置および形状測定方法に関する。
【背景技術】
【0002】
ロボット、車両、船舶および航空機等の移動体が移動する場合や室内から外界の状況を知りたい場合等において、周囲の物体を認識し、その形状を認識することは、重要である。特に、このことは、移動体を自動走行させる場合にはより重要となる。
【0003】
物体の形状を測定する技術として、光学的な画像化手法やレーダシステムを用いた手法等が多数提案されている。発明者らは、種々の研究を重ねた結果、その一技術として、送信パルスの送受信位置を変化させることによって得られる直接散乱波の遅延時間変化と物体の形状との間に成り立つ可逆な変換関係を利用して物体の形状を推定するSEABED(Shape Estimation Algorithm based on BST(Boundary Scattering Transform) and Extraction of Directly scattered waves)法を開発し、提案してきた(例えば、特許文献1、および、非特許文献1ないし非特許文献4参照)。
【0004】
このSEABED法は、これら特許文献1および非特許文献1ないし非特許文献4において詳細に説明されているが、その原理を以下に概説する。
【0005】
図8は、SEABED法におけるアンテナ走査の様子を説明するための図である。この原理説明では、図8に示すように、目標の物体Oおよび送受信アンテナAが同一平面内に存在すると仮定した2次元問題を扱い、電波の伝播は、TE波であるとする。この目標の物体Oおよび送受信アンテナAが存在する空間を「r−空間(r−domainまたはr−space)」と呼称することとし、r−空間で集合を表現する場合その表現を「r−領域での表現」と呼称することとする。また、r−空間の点を(x,y)で表現する。ここで、xおよびy(y>0)は、何れも真空中での送信パルスの中心波長λによって正規化される。送受信アンテナAは、無指向性であり、r−空間のx軸上を走査しながら所定の間隔(例えば等間隔)を空けた各測定位置xn(n=1〜Nの整数)でモノサイクルパルスの送受信を繰り返すものとする。
【0006】
そして、送受信アンテナAの測定位置(x,y)=(X,0)における受信電界をs’(X,Y)と定義し、送信信号(送信パルス)の送信からその反射波の受信までの時間をτ、真空中の光速をcとした場合にYをY=(c×τ)/(2×λ)と定義する。なお、y>0よりY>0であり、また、送受信アンテナAの測定位置xnにおける電界の瞬時包絡線が最大となる時刻をt=0とする。
【0007】
さらに、雑音除去の観点からs’(X,Y)のY方向に送信パルスの波形を用いた整合フィルタを適用し、この整合フィルタを適用して得られる受信信号の波形を新たにs(X,Y)とする。このs(X,Y)を目標の物体Oの形状を求めるデータとして用いる。ここで、(X,Y)で表現される空間を「d-空間(d−domainまたはd−space)」と呼称することとし、d−空間で集合を表現する場合その表現を「d−領域での表現」と呼称することとする。XおよびYは、それぞれ送信パルスの中心波長および送信パルスの中心周期で正規化されている。
【0008】
連続した境界面を持つ目標の物体Oにおける複素誘電率ε(x,y)の変化が複数の区分的に微分可能な曲線の集合であるとする。すなわち、目標の物体Oにおける複素誘電率ε(x,y)が式1で表される。
【0009】
【数1】
ここで、gq(x)は、微分可能な1価関数であり、q={(x,y)|y=gq(x),x∈Jq}∈Hとする。Jqは、関数gq(x)の定義域である。aqは、q∈Hに依存する正の定数であり、Hは、q全体の集合である。Hの要素が「目標境界面」である。
【0010】
d−空間の部分集合Pを式2で定義する。
【0011】
【数2】
【0012】
連結な閉集合p⊂Pを考え、領域Ipを式3で定義する。
【0013】
【数3】
【0014】
任意のX∈Ipに対し(X,Y)∈pを満たすYが唯一存在する場合にpに対し定義域Ipを有し、Y=fp(X)を満たす1価関数fp(X)が存在する。関数fp(X)が微分可能でかつ|∂fp(X)/∂X|≦1を満たすpの集合をGと定義し、このGの要素を「擬似波面(Quasi Wavefront)」と呼称することとする。
【0015】
目標の物体Oの表面(目標境界面)で反射する散乱波には、目標境界面で反射した送信パルスの反射波を直接受信することによって得られる直接散乱波と、目標境界面で反射した送信パルスの反射波がさらに目標境界面における別の部分で1または複数回反射した反射波を受信することによって得られる多重散乱波とがある。ここで、式1が満たされる場合、境界からの直接散乱波は、目標境界面(目標の物体Oの表面、目標の物体Oの形状を表す)の情報を保持している。
【0016】
図9は、境界散乱変換を説明するための図である。図9(A)は、r−空間における複素誘電率の変化の一例を示し、図9(B)は、図9(A)に対応するd−空間の擬似波面を示す。
【0017】
pがqからの直接散乱に対応すると仮定すると、図9から分かるように、送受信アンテナAからqの表す曲線Lqへ下ろした垂線の長さと送受信アンテナAの位置との関係を用いることで、p上の点(X,Y)は、式4によって表される。この式4によって表される変換を境界散乱変換(Boundary Scattering Transform、BST)と呼称することとする。
【0018】
【数4】
但し、(x,y)は、q上に存在する点である。
【0019】
この境界散乱変換の逆変換を求めれば、受信波形から目標の物体Oの形状を求めることができる。この逆変換は、式5のように求められる。この逆変換を逆境界散乱変換(Inverse Boundary Scattering Transform、IBST)と呼称することとする。SEABED法は、この式5を用いて受信信号の波形から目標の物体Oの形状を推定し、求めている。
【0020】
【数5】
【0021】
なお、上述では、簡単のため、2次元の場合について説明したが、3次元へ容易に拡張可能である。また、送受信アンテナAが直線で走行する場合について説明したが、任意の曲線に沿った走行に対応する変換式も容易に求めることができる。さらに、直接波の伝播経路は、全て真空であるとしたが、伝播速度が一定で既知である媒質でも同様に説明可能である。
【0022】
このようなSEABED法では、受信信号の波形が送受信アンテナAから放射される送信パルスの波形と同一形状であると仮定し、それらの相関を求めることによって直接散乱波を求めている。このため、目標の物体Oが点であったり、目標の物体Oに角があったりすると、このような点や角で反射した送信パルスの反射波における波形が異なった波形となるから、SEABED法で求めた物体Oの形状に比較的大きな誤差を含んでしまう。
【0023】
そこで、前記特許文献1では、この点を改善すべく、パルスを生成して送信パルスとして空間に放射するパルス生成放射部と、前記送信パルスを放射した位置で前記物体で反射した前記送信パルスの反射波を受信信号として受信する受信部と、前記物体に対して前記パルス生成放射部の位置を変えながら前記送信パルスを放射することによって前記受信部で受信された複数の受信信号の波形と参照信号の波形との相互相関をそれぞれ求めることで複数の相関波形を求める相関部と、前記相関部で求められた複数の相関波形に基づいて擬似波面を抽出して擬似波面と物体の形状との対応関係から前記物体の形状を推定する形状推定部と、前記形状推定部で推定した物体の形状に応じた受信信号の波形を推定する波形推定部とを備え、前記参照信号の波形として最初は前記送信パルスの波形を用いると共に次回以降は前記波形推定部で推定した受信信号の波形を用い、前記物体の形状を複数回推定することによって前記物体の形状を求める形状測定装置が提案されている。
【特許文献1】特開2006−343205号公報
【非特許文献1】阪本卓也、佐藤亨、「UWBパルスレーダシステムのためのノンパラメトリックな目標形状推定法」、電子情報通信学会技術研究報告、A・P2003−36、103巻120号、1〜6頁、2003年6月19日
【非特許文献2】阪本卓也、佐藤亨、「パルスレーダを用いた高分解能形状推定のための位相補正法」、電子情報通信学会技術研究報告、A・P2004−72、104巻202号、37〜42頁、2004年7月22日
【非特許文献3】木寺正平、阪本卓也、佐藤亨、「UWBパルスレーダのための高精度物体形状推定法の開発」、電子情報通信学会研究報告、A・P2004−131、104巻283号、41〜46頁、2004年9月9日
【非特許文献4】Takuya SAKAMOTO,Toru SATO,”A Target Shape Estimation Algorithm for pulse Radar Systems based on Boundary Scattering Transform”,IEICE TRANSACTIONS on Communications,Vol.E87-B,No.5,MAY 2004,pp1357-1365
【発明の開示】
【発明が解決しようとする課題】
【0024】
ところで、前記特許文献1に開示の手法では、目標の物体Oに点や角等がある場合でも、比較的正しく物体Oの形状が求められる。しかしながら、物体Oの形状を複数回繰り返して推定(参照信号を反復改良)しているので、受信信号を得てから物体Oの形状を求めるまでに比較的長い時間が必要であった。例えば、プロセッサが3.2GHzのXeon(インテル社製)である場合に、物体Oの形状の推定を5回繰り返すと約10秒の時間がかかっていた。
【0025】
本発明は、上述の事情に鑑みて為された発明であり、その目的は、受信信号を得てから、より短い時間で物体Oの形状を求めることができる形状測定装置および形状測定方法を提供することである。
【課題を解決するための手段】
【0026】
本発明者は、種々検討した結果、上記目的は、以下の本発明により達成されることを見出した。すなわち、本発明の一態様に係る、物体の形状を測定する形状測定装置は、パルスを生成して送信パルスとして空間に放射するパルス生成放射部と、前記送信パルスが前記物体で反射した反射波を受信信号として受信する受信部と、前記物体に対して前記送信パルスの放射位置を変えながら前記パルス生成放射部から前記送信パルスを放射することによって前記受信部で受信された複数の受信信号の波形と前記送信パルスの波形との相互相関をそれぞれ求めることで複数の相関波形を求める相関波形演算部と、前記相関波形の極値を求めて前記極値を与える値を、前記送信パルスを送信してから前記反射波を受信するまでの遅延時間として、前記複数の相関波形のそれぞれについて求める遅延時間演算部と、前記送信パルスの中心周波数および前記受信信号の中心周波数に基づいて前記遅延時間を補正する補正値を前記複数の相関波形のそれぞれについて求める補正値演算部と、前記補正値演算部で求めた前記各補正値で前記遅延時間演算部で求めた前記各遅延時間をそれぞれ補正し、補正した前記各遅延時間に基づいて擬似波面を求める、または、前記遅延時間演算部で求めた前記各遅延時間に基づいて擬似波面を求め、求めた前記擬似波面を前記補正値演算部で求めた前記各補正値に基づき補正する擬似波面演算部と、前記擬似波面演算部で求めた前記擬似波面に基づいて前記物体の形状を求める形状演算部とを備えることを特徴とする。また、本発明の他の一態様に係る、物体の形状を測定する形状測定方法は、パルスを生成して送信パルスとして空間に放射するパルス生成放射ステップと、前記送信パルスが前記物体で反射した反射波を受信信号として受信する受信ステップと、前記物体に対して前記送信パルスの放射位置を変えながら前記パルス生成放射部から前記送信パルスを放射することによって前記受信部で受信された複数の受信信号の波形と前記送信パルスの波形との相互相関をそれぞれ求めることで複数の相関波形を求める相関波形演算ステップと、前記相関波形の極値を求めて前記極値を与える値を、前記送信パルスを送信してから前記反射波を受信するまでの遅延時間として、前記複数の相関波形のそれぞれについて求める遅延時間演算ステップと、前記送信パルスの中心周波数および前記受信信号の中心周波数に基づいて前記遅延時間を補正する補正値を前記複数の相関波形のそれぞれについて求める補正値演算ステップと、前記補正値演算ステップで求めた前記各補正値で前記遅延時間演算ステップで求めた前記各遅延時間をそれぞれ補正し、補正した前記各遅延時間に基づいて擬似波面を求める、または、前記遅延時間演算ステップで求めた前記各遅延時間に基づいて擬似波面を求め、求めた前記擬似波面を前記補正値演算ステップで求めた前記各補正値に基づき補正する擬似波面演算ステップと、前記擬似波面演算ステップで求めた前記擬似波面に基づいて前記物体の形状を求める形状演算ステップとを備えることを特徴とする。
【0027】
このような構成の形状測定装置および形状測定方法では、送信パルスの中心周波数および受信信号の中心周波数に基づいて遅延時間を補正する補正値が複数の相関波形のそれぞれについて求められ、各遅延時間がそれぞれ各補正値で、または各遅延時間に基づいて求められた擬似波面が各補正値に基づき補正される。このため、受信信号の波形と送信パルスの波形との相関を求めることによって得られる相関波形に基づいて、送信パルスを送信してから反射波を受信するまでの遅延時間を求めた場合に、この遅延時間に含まれる誤差が直接的に補正される。したがって、背景技術のように、受信信号の波形と参照信号の波形との相関を求めることによって得られる相関波形に基づいて、送信パルスを送信してから反射波を受信するまでの遅延時間を求めた場合に、この遅延時間に含まれる誤差を減少すべく、参照信号の波形を反復改良する必要がない。このため、このような構成の形状測定装置および形状測定方法では、受信信号を得てからより短い時間で物体の形状を求めることができる。
【0028】
また、上述の形状測定装置において、前記形状演算部は、逆境界散乱変換法によって前記擬似波面に基づいて前記物体の形状を求めることを特徴とする。
【0029】
このような構成の形状測定装置では、前記式5を用いた逆境界散乱変換によって物体の形状を求めるので、演算処理が容易となり、高速に物体の形状を求めることができる。
【0030】
また、上述の形状測定装置において、前記形状演算部は、球群の包絡面法によって前記擬似波面に基づいて前記物体の形状を求めることを特徴とする。
【0031】
このような構成の形状測定装置では、擬似波面により各測定位置xnから物体の各表面までの各距離Ynを求め、この各測定位置xnを中心に各距離Ynを半径とする球(半球でよい)を描き、これら球群の包絡面を求め、この包絡面を物体の表面とする球群の包絡面法によって物体の形状を求めるので、安定的に物体の形状を求めることが可能となる。
【0032】
また、上述の形状測定装置において、前記パルス生成放射部における、前記送信パルスを放射するアンテナと、前記受信部における、前記反射波を受信するアンテナとは、複数の無指向性のアンテナを所定の等間隔で配置したアレイアンテナであることを特徴とする。
【0033】
このような構成の形状測定装置では、送信パルスの放射やその反射波の受信に複数のアンテナを持つアレイアンテナが用いられる。このため、このアレイアンテナが1次元アレイアンテナの場合には走査のためにアンテナを一方向に移動すればよく、またこのアレイアンテナが2次元アレイアンテナの場合には走査のためにアンテナを移動する必要が無く、走査の手間を軽減または省くことができる。また、各アンテナ(アンテナ素子)がアレイ状に固定的に配置されるので、各アンテナ間の間隔を所望の間隔に高精度に固定することができ、精度よく所望の分解能を得ることが可能となる。
【0034】
また、上述の形状測定装置において、前記パルス生成放射部における、前記送信パルスを放射するアンテナは、複数の無指向性のアンテナを備えて構成され、前記受信部における、前記反射波を受信するアンテナは、1個の受信アンテナから構成されて成ることを特徴とする。
【0035】
このような構成の形状測定装置では、多点送信1点受信であるので、送受信の切替を行うことなく、一度の送受信で受信信号を得ることができるため、より短時間でデータを取得することが可能となる。
【発明の効果】
【0036】
本発明にかかる形状測定装置および形状測定方法では、受信信号を得てからより短い時間で物体の形状を求めることができる。
【発明を実施するための最良の形態】
【0037】
以下、本発明に係る実施の一形態を図面に基づいて説明する。なお、各図において同一の符号を付した構成は、同一の構成であることを示し、その説明を省略する。
(実施形態の構成)
図1は、実施形態における形状測定装置の構成を示す図である。図1において、本発明の実施形態にかかる形状測定装置1は、送信アンテナA1と、受信アンテナA2と、信号生成部11と、信号受信部12と、演算処理部13と、インタフェース部14と、入力部15と、出力部16と、記憶部17と、バス18とを備えて構成される。
【0038】
送信アンテナA1は、信号生成部11で生成された電気信号のパルスを電波の送信パルスに変換し、この送信パルスを送信信号として空間に放射する無指向性のアンテナである。受信アンテナA2は、目標の物体Oで反射した送信パルスの反射波を受信して電気信号の受信波に変換し、この受信波を受信信号として信号受信部12に出力するアンテナである。なお、送信アンテナA1と受信アンテナA2とは、送受信アンテナAとして1個のアンテナで兼用されてもよい。
【0039】
送信パルスは、電磁波のエネルギーが所定の時間範囲に集中している電波である。送信パルスにおける中心周波数ftrに対する占有帯域幅B0の比である比帯域B0/ftrが大きくなるに従って測定精度が向上する。ここで、パワースペクトルの最大値に対し−10dBとなる周波数のうちで大きい方および小さい方をそれぞれfHおよびfLとすると、中心周波数ftrは、(fH+fL)/2であり、占有帯域幅B0は、(fH−fL)である。特に、比帯域B0/ftrが20%以上では測定精度が背景技術の欄で説明した従来のSEABED法に較べて数倍に向上する。このような送信パルスは、例えば、米国FCC(Federal Communications Commission)に定義されているUWB(Ultra Wide Band)のパルスがある。米国FCCの定義は、例えば、「Subpart F−Ultra−Wideband Operation §15.503 Definitions」[online]、平成17年6月3日検索、インターネット<URL:http://a257.g.akamaitech.net/7/257/2422/12feb20041500/edocket.access.gpo.gov/cfr_2004/octqtr/pdf/47cfr15.503.pdf>に開示されている。また、送信パルスは、測定精度を向上させる観点からモノサイクルパルスでもよい。
【0040】
信号生成部11は、インタフェース部14を介した演算処理部13の制御に従って送信すべき送信パルスに応じた電気信号のパルスを生成し、送信アンテナA1に出力する。信号受信部12は、受信アンテナA2から入力された受信波をA/D変換し、インタフェース部14を介して受信信号として記憶部17に記憶する。なお、信号受信部12は、受信アンテナA2から入力された受信波を必要に応じて、増幅してもよい。また、送信アンテナA1が放射した電波を受信アンテナA2が直接受信する直接波は、散乱波を測定する上で不要な干渉波となるので、信号処理部12は、A/D変換前に、あるいは、A/D変換後に、この直接波を除去する処理を行ってもよい。この直接波の除去処理は、目標の物体Oが存在しない場合における受信信号d(t)の波形を予め記憶しておき、s(t)−d(t+τa)を計算することによって直接波を除去する。s(t)は、散乱波の測定中における受信信号であり、τaは、s(t)と信号d(t+τa)との相関が最大と成る場合である。ここで、受信アンテナA2に対し、目標の物体Oが送信アンテナA1に較べて遠方にあるために、直接波の受信時刻帯と散乱波の受信時刻帯とが時間的に分離することができる場合には、直接波の受信時刻帯は、受信信号を測定しない、あるいは、無視することによっても直接波を除去することができる。
【0041】
インタフェース部14は、信号生成部11、信号受信部12、演算処理部13および記憶部17の間で相互に信号を交換するためのインタフェース回路である。入力部15は、本発明の手法により目標の物体Oの形状を測定する形状測定プログラムを起動するコマンドや送信パルスの送受信を指示するコマンド等の各種コマンド、および、目標の物体Oの形状を測定する上で必要な例えば後述の閾値αや閾値β等の各種データを形状測定装置1に入力する機器であり、例えば、キーボードやマウス等である。出力部16は、入力部15から入力されたコマンドやデータ、および、本形状測定装置1によって測定された物体の形状を出力する機器であり、例えばCRTディスプレイ、LCD、有機ELディスプレイおよびプラズマディスプレイ等の表示装置やプリンタ等の印刷装置等である。
【0042】
記憶部17は、信号受信部12からの受信信号を記憶する受信信号記憶部171と、後述の相関波形演算部131で求められた相関波形を記憶する相関波形記憶部172とを備え、形状測定プログラム等の各種プログラム、および、各種プログラムの実行に必要なデータやその実行中に生じるデータ等の各種データを記憶する。記憶部17は、例えば、演算処理部13の所謂ワーキングメモリとなるRAM(Random Access Memory)等の揮発性の記憶素子、ROM(Read Only Memory)や書換え可能なEEPROM(Electrically Erasable Programmable Read Only Memory)等の不揮発性の記憶素子、および、各種プログラムや各種データを格納しておくハードディスク等を備えて構成される。
【0043】
演算処理部13は、例えば、マイクロプロセッサおよびその周辺回路等を備えて構成され、機能的に、受信信号の波形と参照信号の波形との間における相互相関を演算して相関波形を求める相関波形演算部131と、相関波形に基づいて遅延時間τを求める遅延時間演算部132と、遅延時間τの補正値△τを求める補正値演算部133と、遅延時間τを補正値△τで補正し補正後の遅延時間τに基づいて擬似波面を求める擬似波面演算部134と、擬似波面に基づいて物体Oの形状を求める形状演算部135とを備え、制御プログラムに従い信号生成部11、信号受信部12、インタフェース部14、入力部15、出力部16および記憶部17を当該機能に応じてそれぞれ制御する。
【0044】
これら演算処理部13、インタフェース部14、入力部15、出力部16および記憶部17は、信号を相互に交換することができるようにバス18でそれぞれ接続される。
【0045】
このような演算処理部13、インタフェース部14、入力部15、出力部16、記憶部17およびバス18は、例えば、コンピュータ、より具体的にはノート型やディスクトップ型等のパーソナルコンピュータ等によって構成可能である。そして、信号生成部11、送信アンテナA1、受信アンテナA2および信号受信部もレーダに用いられる公知の構成によって構成可能である。
【0046】
なお、必要に応じて形状測定装置1は、破線で示すように、外部記憶部19をさらに備えてもよい。外部記憶部19は、例えば、フレキシブルディスク、CD−ROM(Compact Disc Read Only Memory)、CD−R(Compact Disc Recordable)、DVD−R(Digital Versatile DiscRecordable)およびブルーレイディスク(Blu-ray Disc)等の記録媒体との間でデータを読み込みおよび/または書き込みを行う装置であり、例えば、フレキシブルディスクドライブ、CD−ROMドライブ、CD−Rドライブ、DVD−Rドライブおよびブルーレイディスクドライブ等である。
【0047】
ここで、形状測定プログラム等が格納されていない場合には、形状測定プログラム等を記録した記録媒体から外部記憶部19を介して記憶部17にインストールされるように構成してもよい。あるいは、取得した受信信号や推定した物体の形状を表すデータ等のデータが外部記憶部19を介して記録媒体に記録されるように構成してもよい。
【0048】
次に、本実施形態の動作について説明する。
(実施形態の動作)
図2は、実施形態における形状測定装置の動作を示すフローチャートである。図2において、形状測定装置1は、目標の物体Oに対して送信アンテナA1および受信アンテナA2を走査しながら(目標の物体Oに対して送信アンテナA1および受信アンテナA2の位置を変えながら)各測定位置xnで、送信パルスを送信し、目標の物体Oから反射した送信パルスの反射波を受信し、そして、受信波をA/D変換して記憶する(S11)。
【0049】
より具体的には、例えば、ユーザが目標の物体Oに対し測定開始位置x1に送信アンテナA1および受信アンテナA2を配置し、形状測定装置1に入力部15を介して送信パルスの送受信を指示する。この指示を受付けると、演算処理部13は、信号生成部11に送信パルスを生成させ、送信アンテナA1から送信パルスを送信する。目標の物体Oから反射した送信パルスの反射波が受信アンテナA2で受信されると、信号受信部12は、受信波をA/D変換して第1受信信号を生成し、記憶部17の受信信号記憶部171に測定位置x1と対応付けて記憶する。測定開始位置x1における送受信が完了すると、その旨を出力部16に提示してユーザに通知する。この通知を受けるとユーザは、測定開始位置x1から所定の間隔だけ移動した測定位置x2に送信アンテナA1および受信アンテナA2を配置し、形状測定装置1に入力部15を介して送信パルスの送受信を指示する。この指示を受付けると、演算処理部13は、信号生成部11に送信パルスを生成させ、送信アンテナA1から送信パルスを送信する。目標の物体Oから反射した送信パルスの反射波が受信アンテナA2で受信されると、信号受信部12は、受信波をA/D変換して第2受信信号を生成し、記憶部17の受信信号記憶部171に測定位置x2と対応付けて記憶する。測定位置x2における送受信が完了すると、その旨を出力部16に提示してユーザに通知する。以下同様に、測定開始位置x1から測定終了位置xNまでの各測定位置xnで、形状測定装置1は、送信アンテナA1から送信パルスを送信し、目標の物体Oから反射した送信パルスの反射波を送信パルスの略放射位置で送信アンテナA2によって受信し、信号受信部12で受信波をA/D変換し、記憶部17の受信信号記憶部171に測定位置xnと対応付けて記憶する。こうして測定開始位置x1における第1受信信号から測定終了位置xNにおける第N受信信号が得られ、記憶部17の受信信号記憶部171に記憶される。
【0050】
なお、上述では、送信アンテナA1および受信アンテナA2をユーザが各測定位置xnに移動させたが、車輪や無限軌道等の運動部材と、運動部材を駆動する例えばモータ等の駆動装置と、駆動装置を演算処理部13の制御に従って制御する例えばマイクロコンピュータ等の制御装置と、駆動装置および制御装置にエネルギーを供給するエネルギー源とを備えた走行装置に少なくとも送信アンテナA1および受信アンテナA2を載せ、送信アンテナA1および受信アンテナA2を走行装置で移動させることにより、送信アンテナA1および受信アンテナA2を走査しながら各測定位置xnで送信パルスを送信し、目標の物体Oから反射した送信パルスの反射波を受信し、受信波をA/D変換し、記憶するように、形状測定装置1が構成されてもよい。
【0051】
測定開始位置x1における第1受信信号から測定終了位置xNにおける第N受信信号が得られ、記憶部17の受信信号記憶部171に記憶されると、演算処理部13の相関波形演算部131は、第1ないし第Nの各受信信号に対し、当該受信信号の波形と参照信号の波形との相互相関を求めることによって、第1ないし第Nの各受信信号にそれぞれ対応する第1ないし第Nの相関波形を求める(S12)。
【0052】
相関関数ρ(τ)は、遅延時間をτ、参照信号をr(t)、受信信号をs(t)とすると、式6で与えられる。なお、積分範囲は、受信信号s(t)が存在する範囲である。遅延時間τは、送信信号(本実施形態では送信パルス)を送信してからその反射波を受信するまでの時間、より具体的には、送信信号を送信してから、目標の物体Oの表面における接平面に対し垂直に入射して反射した送信信号の反射波(直接散乱波)を直接受信するまでの時間である。
【0053】
【数6】
【0054】
ここで、参照信号の波形は、送信パルスの波形とされており、これは、受信信号の波形が送信パルスの波形と同一形状であると仮定していることに相当する。この処理S12は、受信信号に整合フィルタを適用することに相当する。
【0055】
第1ないし第Nの相関波形ρ(τ)が生成されると、演算処理部13の遅延時間演算部132は、第1ないし第Nの相関波形ρ(τ)に基づいて各遅延時間τをそれぞれ求める(S13)。より具体的には、遅延時間演算部132は、第1ないし第Nの相関波形ρ(τ)における極値(極大値および極小値)をそれぞれ求める。この各極値を与える各値が各測定位置xnにおける各遅延時間τである。
【0056】
ここで、送信パルスは、物体Oで反射すると、その帯域が狭まるなど変形するので、受信信号の波形が送信パルスの波形と一致しない。このため、式6のρ(τ)における遅延時間τには、誤差が含まれている。
【0057】
背景技術の特許文献1では、この誤差を減らすために、参照信号の波形を直接散乱波の受信信号における実際の物体形状に対応する波形に近づけるべく、参照信号の波形が反復改良されていた。
【0058】
一方、本実施形態では、参照信号の波形を改良するのではなく、参照信号の波形に送信信号の波形を用いて相関波形ρ(τ)を求め、この遅延時間τに含まれる誤差が補正値△τで補正される。
【0059】
図3は、送信信号の波形と受信信号の波形とを示す図である。図3の横軸は、時間であり、その縦軸は、振幅である。実線は、受信信号(Scattered)を表し、破線は、送信信号(Transmitter)を表す。
【0060】
通常、送信信号は、物体Oで反射すると、その反射波に基づく受信信号は、送信信号よりも帯域が狭まり、受信信号の中心周波数frefは、送信信号の中心周波数ftrよりも小さく(低く)なる。このため、周期では、図3に示すように、受信信号の周期は、送信信号の周期よりも長くなるため、受信信号のゼロクロス点と送信信号のゼロクロス点とを一致させると(整合フィルタによる整合位置(Matching point)で揃えると)、受信信号の波形の始端(振幅0)および終端(振幅0)と送信信号の波形の始端および終端とがそれぞれずれる。このずれ量が前記補正値△τに相当し、式7で与えられる。
【0061】
【数7】
ここで、2で割っているのでは、受信信号の波形と送信信号の波形とのずれが波形の両端で生じているからである。
【0062】
本実施形態では、この誤差を補正すべく、第1ないし第Nの相関波形ρ(τ)に基づいて各測定位置xnにおける各遅延時間τが求められると、演算処理部13の補正値演算部133は、送信信号の波形と受信信号の波形とに基づいて補正値△τを各遅延時間τのそれぞれについて求める(S14)。
【0063】
より具体的には、補正値演算部133は、まず、受信信号をフーリエ変換してその中から最も大きな周波数成分を抽出することによって受信信号の中心周波数frefを各遅延時間τのそれぞれについて求める。なお、送信信号の中心周波数ftrは、送信信号の送信パルスが予め設定され既定されるので、送信パルスをフーリエ変換してその中から最も大きな周波数成分を抽出することによって送信パルス(送信信号)の中心周波数ftrを予め求め、この求めた送信信号の中心周波数ftrを記憶部17に予め記憶しておき、この記憶部17に記憶しておいた送信信号の中心周波数ftrが用いられてもよい。あるいは、受信信号の中心周波数frefの演算に合わせて、送信パルスをフーリエ変換してその中から最も大きな周波数成分を抽出することによって送信パルス(送信信号)の中心周波数ftrが求められてもよい。次に、補正値演算部133は、受信信号の中心周波数frefおよび送信パルス(送信信号)の中心周波数ftrを用いて式7によって補正値△τを各遅延時間τのそれぞれについて求める。
【0064】
各測定位置xnにおける各補正値△τが求められると、演算処理部13の擬似波面演算部134は、各補正値△τで各遅延時間τを補正し、補正後の各遅延時間τcoに基づいて真の擬似波面を求める(S15)。真の擬似波面を求めるに当たって、擬似波面演算部134は、まず、補正値△τで補正した極値τを連結して擬似波面を生成し、そして、真の擬似波面を抽出する。
【0065】
より具体的には、まず、擬似波面演算部134は、処理S14で求めた各補正値△τを用いて、処理S13で相関波形ρ(τ)に基づいて求めた各遅延時間τをそれぞれ補正する。すなわち、擬似波面演算部134は、処理S13で相関波形ρ(τ)に基づいて求めた各遅延時間τに処理S14で求めた各補正値△τをそれぞれ加算する。補正後の各遅延時間をτcoとすると、τco=τ+△τである。これによって、処理S13で求めた遅延時間τに含まれる誤差が軽減される。
【0066】
次に、擬似波面演算部134は、処理S13で求めた各相関波形ρ(τ)の各極値を与える各値τに対する補正後の各値τcoを用いて近隣の補正後の各値τco同士を連結する。すなわち、擬似波面演算部134は、式8を満たすように補正後の各遅延時間τcoを用いた極値を連結する。
【0067】
【数8】
ここで、極値Mnの位置は、測定位置xnにおいて得られた第nの相関波形ρ(τ)から求められた補正後の極値τcoのXY平面における位置である。このように極値を連結して得られた曲線が擬似波面である。この擬似波面Yと遅延時間τとの間には、光速をcとすると、Y=c×τ/2の関係がある。
【0068】
次に、擬似波面演算部134は、波形歪みの影響を除いた真の擬似波面を抽出する。前記処理によって得られた擬似波面には、雑音により生じたもの、振動的な部分を抽出したもの、および、多重散乱により生じたもの等の不要な擬似波面が含まれている。このため、これらを取り除き、真に物体Oの境界面を示す真の擬似波面を抽出する必要がある。この真の擬似波面の抽出は、第1に、式9で定義される評価値wpを用い、所定の閾値αよりも評価値wpが大きい擬似波面を選択し、抽出する。閾値αは、その値を小さくし過ぎると不要な擬似波面が多く含まれ、その値を大きくし過ぎると真の擬似波面まで除去されてしまうので、評価値wpの最大値を考慮の上、実験的、経験的に設定される。
【0069】
【数9】
評価値wpは、擬似波面上における受信信号の振幅が大きく、しかもfp(X)の定義域が広い範囲に亘るものについて大きな値をとる。
【0070】
ここで、式9のみによって真の擬似波面を抽出すると、例えば、雑音に起因する擬似波面が有意な擬似波面の近くに存在する場合ではその評価値wpが大きくなり、除去することができない場合が生じ得る。そのため、p1,p2∈G、p1≠p2、wp1≦wp2に対し(x,y)∈p1かつ(x,y)∈p2が成立する場合には、p1→p1’、p1”(但し、p1’∪p1”=p1かつp1’∩p1”=p1∩p2)に擬似波面の分割を行って評価値wpを求め不要な擬似波面を除去する。
【0071】
そして、真の擬似波面の抽出は、第2に、第1フレネルゾーンとして知られる式10で表されるFpを用いて式11で定義される新たな評価値Wpを用い、所定の閾値βよりも評価値Wpが大きい擬似波面を選択し、抽出する。閾値βは、その値を小さくし過ぎると不要な擬似波面が多く含まれ、その値を大きくし過ぎると真の擬似波面まで除去されてしまうので、評価値Wpの最大値を考慮の上、実験的、経験的に設定される。
【0072】
【数10】
【0073】
【数11】
評価値Wpは、或る擬似波面のフレネルゾーン内に値の大きい別の境界面が存在する場合にはその値が低下する。ξ(x)は、重み関数であり、簡単のために、例えば、ξ(x)=1に設定する。
【0074】
このように抽出された真の擬似波面は、各測定位置xnで得られる、送信パルスを送信してから、目標の物体Oの表面における接平面に対し垂直に入射して反射した送信パルスの反射波を直接受信するまでの補正後の遅延時間τcoの集合である。
【0075】
真の擬似波面が補正されると、演算処理部13の形状演算部135は、補正後の真の擬似波面から前記式5を用いて物体Oの形状を求める(S16)。
【0076】
そして、演算処理部13は、この求めた物体Oの形状を出力部16に出力し(S17)、処理を終了する。
【0077】
このように動作することによって形状測定装置1は、送信信号(送信パルス)の中心周波数ftrと受信信号の中心周波数frefとを用いて補正値△τを求め、直接、遅延時間τを補正するので、特許文献1のように参照信号の波形を反復改良する必要が無く、第1ないし第Nの受信信号を得てから、より短い時間で物体Oの形状を求めることができる。
【0078】
そして、本実施形態の形状測定装置1では、送信パルスにおける波長の1/100程度の精度で物体Oの形状が求められる。例えば、送信パルスに波長10cmのマイクロ波モノサイクルパルスが用いられた場合には、1mmの精度で目標の物体Oの形状が測定可能である。
【0079】
ここで、上述の実施形態では、擬似波面演算部134は、補正値演算部133で求めた各補正値△τで遅延時間演算部132で求めた各遅延時間τをそれぞれ補正し、補正した各遅延時間τcoに基づいて擬似波面を求めたが、まず、遅延時間演算部132で求めた各遅延時間τに基づいて擬似波面を求め、求めた擬似波面を補正値演算部133で求めた各補正値△τに基づき補正してもよい。
【0080】
すなわち、処理S15では、上述の処理に代えて、次のように処理される。まず、擬似波面演算部134は、処理S13で求めた各相関波形ρ(τ)の各極値を用いて近隣の各極値ρ(τ)同士を連結する。すなわち、擬似波面演算部134は、上記式8を満たすように極値を連結する。次に、擬似波面演算部134は、上記式9および式10を用いて真の擬似波面を抽出する。次に、擬似波面演算部134は、真の擬似波面を処理S14で求めた各補正値△τに基づいて補正する。補正値△τと擬似波面Yを補正するための補正値△Yとの間には、△Y=c×△τ/2の関係がある。
【0081】
また、上述の実施形態では、2次元の場合について説明したが、3次元へ容易に拡張可能である。例えば、垂直方向に所定の間隔で並ぶ各測定位置において、水平方向に上述した2次元の場合における形状をそれぞれ測定することによって、3次元形状を得ることができる。以下の場合も同様である。
【0082】
また、上述の実施形態では、処理S15において、物体Oの形状は、式5を用いたIBST(逆境界散乱変換)法によって求められたが、他の手法によって求められても良い。例えば、球群の包絡面法によって物体Oの形状が求められても良い。この手法は、例えば、「Shouhei Kidera,Takuya Sakamoto and Toru Sato,”A Robust and Fast Imaging Algorithm without derivative operations for UWB Pulse Radars”European Conference on Antennas & Propagation(EuCAP) 2006,paper no.314368,Nice,France,Nov.2006」や「木寺正平、阪本卓也、佐藤亨、“UWBパルスレーダのための球群の包絡面を利用した高速立体像推定法の安定化”、電子情報通信学会総合大会、B−42,名城大学、Mar.2007」に開示されている。
【0083】
図4は、球群の包絡面法を説明するための図である。球群の包絡面法は、3次元であるが、図4では、簡単化のために、z(図4の紙面に垂直な方向)を固定したxy平面における場合について示している。
【0084】
補正後の真の擬似波面は、上述したように、各測定位置xnで得られる、送信パルスを送信してから、目標の物体Oの表面における接平面に対し垂直に入射して反射した送信パルスの反射波を直接受信するまでの補正後の遅延時間τcoの集合である。このため、補正後の真の擬似波面を用いることによって、各測定位置xnから目標の物体Oの各表面までの各距離Ynを求めることができる。球群の包絡面法では、図4に示すように、この各測定位置xnを中心に、各距離Ynを半径とする球(半球でよい)を描き、これら球群の包絡面を求める。この包絡面が物体Oの表面となる。図4では、xminないしxmaxの範囲γにおける球群の包絡面∂Tが示されている。包絡面には、物体Oの表面に外接する球群の包絡面である外包絡面と、物体Oの表面に内接する球群の包絡面である内包絡面とがある。
【0085】
例えば、外包絡面では、2次元では、各(X,Y)に対して円内点集合S(X,Y)を式12および式13のように定義すると、∂x/∂X>0(円外接条件)の場合に∂T/∂S+が成立する。
S(X,Y)={(x,y)|(x−X)2+y2<Y2} ・・・(式12)
S+=∪S(X,Y) ・・・(式13)
ここで、S+の境界点集合を∂S+,(x∈γ)とする。
【0086】
球群の包絡面法を用いることによって、物体Oの形状を求める場合に、微分演算が無くなり、安定的に物体Oの形状を求めることが可能となる。また、この球群の包絡面法における球に代えて、回転楕円体が用いられても良い。
【0087】
また、上述の実施形態では、アンテナAは、1個の送信アンテナA1と1個の受信アンテナA2とを用いたが、無指向性のアンテナを所定の等間隔で配置したアレイアンテナを用いた、BST法の拡張であるバイスタティックレーダであってもよい。このバイスタティックレーダを用いた手法は、例えば、「木寺正平、阪本卓也、佐藤亨、“UWBパルスレーダのためのバイスタティックアンテナ型高速物体像推定法の開発”、電子情報通信学会 第34回電磁界理論シンポジウム、EMT−05−58、Nov.2005」や「木寺正平、可児佑介、阪本卓也、佐藤亨、“UWBパルスレーダのための線形アレイを用いた高解像度立体形状推定法の実験的検討”、電子情報通信学会 アンテナ・伝播研究会(AP)、AP2007−24、May 2007」に開示されている。
【0088】
このバイスタティックレーダにおいて、上述の処理S11では、形状測定装置1は、目標の物体Oに対し送信パルスの送信位置(放射位置)を変えながらアレイアンテナから送信パルスを送信(放射)し、目標の物体Oから反射した送信パルスの反射波を受信し、そして、受信波をA/D変換して記憶する。受信波のデータが得られると、形状測定装置1は、このデータを用いて上述の処理S12ないし処理S15と同様の処理を実行する。そして、形状測定装置1は、上述の処理S16では、バイスタティックレーダに対応した拡張されたBST法、または回転楕円体の包絡面法で目標の物体Oの形状を求める。
【0089】
このバイスタティックレーダを用いることによって、1次元アレイアンテナの場合には走査のためにアンテナを一方向に移動すればよく、また2次元アレイアンテナの場合には走査のためにアンテナを移動する必要が無く、走査の手間を軽減または省くことができる。また、各アンテナ素子がアレイ状に固定的に配置されるので、各アンテナ素子間の間隔を所望の間隔に高精度に固定することができ、精度よく所望の分解能を得ることが可能となる。
【0090】
また、上述の実施形態では、アンテナAは、1個の送信アンテナA1と1個の受信アンテナA2とを用いたが、複数の送信アンテナと1個の受信アンテナとを用いた多点送信1点受信型レーダであってもよい。この多点送信1点受信型レーダにおいて、複数の送信アンテナの配置位置と1個の受信アンテナの配置位置とは、固定される。上述の処理S11では、形状測定装置1は、目標の物体Oに対し送信パルスの送信位置(放射位置)を変えながら送信パルスを送信(放射)し、目標の物体Oから反射した送信パルスの反射波を受信し、そして、受信波をA/D変換して記憶する。受信波のデータが得られると、形状測定装置1は、このデータを用いて上述の処理S12ないし処理S15と同様の処理を実行する。そして、形状測定装置1は、上述の処理S16では、多点送信1点受信型レーダに対応した拡張されたBST法、または回転楕円体の包絡面法で目標の物体Oの形状を求める。この構成によれば、送受信の切替を行うことなく、一度の送受信で受信信号を得ることができるため、より短時間でデータを取得することが可能となる。
【0091】
また、上述の実施形態では、送信パルスに電波を用いたが、超音波や光を用いてもよい。超音波の短パルスは、公知の技術によって生成することができ、超音波短パルスについては、例えば、『椿健治、山中浩、北田耕作、菰田卓哉、越田信義、「熱誘起ナノ結晶Si超音波源の空中3次元イメージセンサへの応用−超音波源の動特性評価−」、Proc.Symp.Ultrason.Electron.、Vol.25(2004)、pp339−340』に開示されている。例えば、中心周波数50kHzの超音波モノサイクルパルスを用いた場合には、室温(25℃)において、音速が331.5+0.6×25=346.5m/秒となって波長が7mm程度になるので、1/100波長(=波長/100)の70μmの精度で理論的には目標の物体Oの形状を測定することができる。
【0092】
さらに、光の短パルスは、公知の技術によって生成されるフェムト秒光パルスを利用することができる。フェムト秒光パルスについては、例えば、『「超短光パルス技術評価ラボ」、電子技術総合研究所彙報、第64巻、第7号、pp11−13』に開示されている。例えば、1.3μm帯で20fsのフェムト秒光パルスを用いた場合には、波長が6μm程度になるので、1/100波長の60nmの精度で理論的には目標の物体Oの形状を測定することができる。また、例えば、0.8μm帯で11fsのフェムト秒光パルスを用いた場合には、波長が3.3μm程度になるので、1/100波長の30nmの精度で理論的には目標の物体Oの形状を測定することができる。
【0093】
このような超音波短パルスやフェムト秒光パルスを利用することによって高分解能で高速処理の顕微鏡が構成される。
(実施例および比較例)
この形状測定装置1を用いて具体的な目標の物体Oの形状を求めた結果の一例について説明する。図5は、本発明に係る形状測定装置によって求められた物体の形状の測定結果を示す図である。図5(A)は、物体Oの形状を示し、図5(B)は、XY平面の各位置(X,Y,0)における実際の形状から算出した擬似波面と受信信号から求めた擬似波面との誤差を示す図である。図6は、背景技術における球群の包絡面法を用いたSEABED法によって求められた物体の形状の測定結果を示す図である。図6(A)は、物体Oの形状を示し、図6(B)は、XY平面の各位置(X,Y,0)における実際の形状から算出した擬似波面と受信信号から求めた擬似波面との誤差を示す図である。図7は、背景技術における特許文献1の反復改良および球群の包絡面法を用いたSEABED法によって求められた物体の形状の測定結果を示す図である。図7(A)は、物体Oの形状を示し、図7(B)は、XY平面の各位置(X,Y,0)における実際の形状から算出した擬似波面と受信信号から求めた擬似波面との誤差を示す図である。図5(A)〜図7(A)において、破線は、物体Oの実際の形状を表し、実線は、各手法によって求められた物体の形状を表す。図5(B)〜図7(B)では、測定誤差は、送信信号の波長λで規格化されており、その常用対数で表示されている。黒色は、誤差が1/10波長であって誤差が大きいことを表し、白色は、誤差が1/1000波長であって誤差が小さいことを表し、黒色から白色へ向かうにしたがって誤差が小さくなる。
【0094】
目標の物体Oは、略均一な導体であって、その実際の形状は、図5(A)〜図7(A)に破線で示すように、角錐台形状である。
【0095】
この物体Oの形状を、本実施形態の形状測定装置1によって測定すると、図5(A)に示すように、測定による擬似波面の形状は、ほぼ実際の形状に基づく擬似波面に沿っており、その測定誤差は、図5(B)に示すように、小さく、全体的に白くなっている。特に、側面の各稜の部分や上面の各辺の部分では、1/1000波長の誤差しかなく、最も精度が悪い部分でも1/100波長の誤差である。したがって、本実施形態の形状測定装置1では、全体的に高い精度で物体Oの擬似波面が求められている、すなわち、全体的に高い精度で物体Oの形状が測定されている。
【0096】
一方、この物体Oの形状を、背景技術における球群の包絡面法を用いたSEABED法によって測定すると、図6(A)に示すように、測定による擬似波面の形状は、実際の形状に基づく擬似波面に沿っている部分もあるが、実際の擬似波面から乖離している部分が目立ち、その測定誤差は、図6(B)に示すように、比較的大きく、全体的に暗くなっている。特に、側面の各稜の部分や上面の各辺の部分では、誤差が1/10波長もあり、側面の各稜の部分や上面の各辺の部分がなまっている。背景技術の本手法では、高い精度で物体Oの擬似波面が求められている部分が僅かであり、全体的にあまり高い精度で物体Oの擬似波面は、求められていない、すなわち、全体的にあまり高い精度で物体Oの形状は、測定されていない。
【0097】
また、この物体Oの形状を、背景技術における特許文献1の反復改良および球群の包絡面法を用いたSEABED法によって測定すると、図7(A)に示すように、測定による擬似波面の形状は、実際の形状に基づく擬似波面に沿っている部分が増えるが、実際の擬似波面から乖離している部分も多く、その測定誤差は、図7(B)に示すように、比較的まだ大きく、全体的に灰色になっている。特に、側面の各稜の部分や上面の各辺の部分では、誤差が1/10波長の部分が残っており、側面の各稜の部分や上面の各辺の部分になまりが残っている。背景技術の本手法では、図6の場合よりは改善されているが図5に示すほど高精度に物体Oの擬似波面が求められていない、すなわち、図5に示すほど高精度に物体Oの形状が測定されていない。
【0098】
そして、プロセッサが3.2GHzのXeon(インテル社製)である場合には、参照波形の改良を5回行う、背景技術における特許文献1の反復改良および球群の包絡面法を用いたSEABED法による物体Oの形状測定では、その処理時間が約10秒であるが、本実施形態にかかる形状測定装置1による物体Oの形状測定では、その処理時間は、約0.2秒である。
【0099】
本発明を表現するために、上述において図面を参照しながら実施形態を通して本発明を適切且つ十分に説明したが、当業者であれば上述の実施形態を変更及び/又は改良することは容易に為し得ることであると認識すべきである。従って、当業者が実施する変更形態又は改良形態が、請求の範囲に記載された請求項の権利範囲を離脱するレベルのものでない限り、当該変更形態又は当該改良形態は、当該請求項の権利範囲に包括されると解釈される。
【図面の簡単な説明】
【0100】
【図1】実施形態における形状測定装置の構成を示す図である。
【図2】実施形態における形状測定装置の動作を示すフローチャートである。
【図3】送信信号の波形と受信信号の波形とを示す図である。
【図4】球群の包絡面法を説明するための図である。
【図5】本発明に係る形状測定装置によって求められた物体の形状の測定結果を示す図である。
【図6】背景技術における球群の包絡面法を用いたSEABED法によって求められた物体の形状の測定結果を示す図である。
【図7】背景技術における特許文献1の反復改良および球群の包絡面法を用いたSEABED法によって求められた物体の形状の測定結果を示す図である。
【図8】SEABED法におけるアンテナ走査の様子を説明するための図である。
【図9】境界散乱変換を説明するための図である。
【符号の説明】
【0101】
1 形状測定装置
11 信号生成部
12 信号受信部
13 演算処理部
17 記憶部
131 相関波形演算部
132 遅延時間演算部
133 補正値演算部
134 擬似波面演算部
135 形状演算部
171 受信信号記憶部
172 相関波形記憶部
A1 送信アンテナ
A2 受信アンテナ
【特許請求の範囲】
【請求項1】
物体の形状を測定する形状測定装置において、
パルスを生成して送信パルスとして空間に放射するパルス生成放射部と、
前記送信パルスが前記物体で反射した反射波を受信信号として受信する受信部と、
前記物体に対して前記送信パルスの放射位置を変えながら前記パルス生成放射部から前記送信パルスを放射することによって前記受信部で受信された複数の受信信号の波形と前記送信パルスの波形との相互相関をそれぞれ求めることで複数の相関波形を求める相関波形演算部と、
前記相関波形の極値を求めて前記極値を与える値を、前記送信パルスを送信してから前記反射波を受信するまでの遅延時間として、前記複数の相関波形のそれぞれについて求める遅延時間演算部と、
前記送信パルスの中心周波数および前記受信信号の中心周波数に基づいて前記遅延時間を補正する補正値を前記複数の相関波形のそれぞれについて求める補正値演算部と、
前記補正値演算部で求めた前記各補正値で前記遅延時間演算部で求めた前記各遅延時間をそれぞれ補正し、補正した前記各遅延時間に基づいて擬似波面を求める、または、前記遅延時間演算部で求めた前記各遅延時間に基づいて擬似波面を求め、求めた前記擬似波面を前記補正値演算部で求めた前記各補正値に基づき補正する擬似波面演算部と、
前記擬似波面演算部で求めた前記擬似波面に基づいて前記物体の形状を求める形状演算部とを備えること
を特徴とする形状測定装置。
【請求項2】
前記形状演算部は、逆境界散乱変換法によって前記擬似波面に基づいて前記物体の形状を求めること
を特徴とする請求項1に記載の形状測定装置。
【請求項3】
前記形状演算部は、球群の包絡面法によって前記擬似波面に基づいて前記物体の形状を求めること
を特徴とする請求項1に記載の形状測定装置。
【請求項4】
前記パルス生成放射部における、前記送信パルスを放射するアンテナと、前記受信部における、前記反射波を受信するアンテナとは、複数の無指向性のアンテナを所定の等間隔で配置したアレイアンテナであること
を特徴とする請求項1に記載の形状測定装置。
【請求項5】
前記パルス生成放射部における、前記送信パルスを放射するアンテナは、複数の無指向性のアンテナを備えて構成され、
前記受信部における、前記反射波を受信するアンテナは、1個の受信アンテナから構成されて成ること
を特徴とする請求項1に記載の形状測定装置。
【請求項6】
物体の形状を測定する形状測定方法において、
パルスを生成して送信パルスとして空間に放射するパルス生成放射ステップと、
前記送信パルスが前記物体で反射した反射波を受信信号として受信する受信ステップと、
前記物体に対して前記送信パルスの放射位置を変えながら前記パルス生成放射部から前記送信パルスを放射することによって前記受信部で受信された複数の受信信号の波形と前記送信パルスの波形との相互相関をそれぞれ求めることで複数の相関波形を求める相関波形演算ステップと、
前記相関波形の極値を求めて前記極値を与える値を、前記送信パルスを送信してから前記反射波を受信するまでの遅延時間として、前記複数の相関波形のそれぞれについて求める遅延時間演算ステップと、
前記送信パルスの中心周波数および前記受信信号の中心周波数に基づいて前記遅延時間を補正する補正値を前記複数の相関波形のそれぞれについて求める補正値演算ステップと、
前記補正値演算ステップで求めた前記各補正値で前記遅延時間演算ステップで求めた前記各遅延時間をそれぞれ補正し、補正した前記各遅延時間に基づいて擬似波面を求める、または、前記遅延時間演算ステップで求めた前記各遅延時間に基づいて擬似波面を求め、求めた前記擬似波面を前記補正値演算ステップで求めた前記各補正値に基づき補正する擬似波面演算ステップと、
前記擬似波面演算ステップで求めた前記擬似波面に基づいて前記物体の形状を求める形状演算ステップとを備えること
を特徴とする形状測定方法。
【請求項1】
物体の形状を測定する形状測定装置において、
パルスを生成して送信パルスとして空間に放射するパルス生成放射部と、
前記送信パルスが前記物体で反射した反射波を受信信号として受信する受信部と、
前記物体に対して前記送信パルスの放射位置を変えながら前記パルス生成放射部から前記送信パルスを放射することによって前記受信部で受信された複数の受信信号の波形と前記送信パルスの波形との相互相関をそれぞれ求めることで複数の相関波形を求める相関波形演算部と、
前記相関波形の極値を求めて前記極値を与える値を、前記送信パルスを送信してから前記反射波を受信するまでの遅延時間として、前記複数の相関波形のそれぞれについて求める遅延時間演算部と、
前記送信パルスの中心周波数および前記受信信号の中心周波数に基づいて前記遅延時間を補正する補正値を前記複数の相関波形のそれぞれについて求める補正値演算部と、
前記補正値演算部で求めた前記各補正値で前記遅延時間演算部で求めた前記各遅延時間をそれぞれ補正し、補正した前記各遅延時間に基づいて擬似波面を求める、または、前記遅延時間演算部で求めた前記各遅延時間に基づいて擬似波面を求め、求めた前記擬似波面を前記補正値演算部で求めた前記各補正値に基づき補正する擬似波面演算部と、
前記擬似波面演算部で求めた前記擬似波面に基づいて前記物体の形状を求める形状演算部とを備えること
を特徴とする形状測定装置。
【請求項2】
前記形状演算部は、逆境界散乱変換法によって前記擬似波面に基づいて前記物体の形状を求めること
を特徴とする請求項1に記載の形状測定装置。
【請求項3】
前記形状演算部は、球群の包絡面法によって前記擬似波面に基づいて前記物体の形状を求めること
を特徴とする請求項1に記載の形状測定装置。
【請求項4】
前記パルス生成放射部における、前記送信パルスを放射するアンテナと、前記受信部における、前記反射波を受信するアンテナとは、複数の無指向性のアンテナを所定の等間隔で配置したアレイアンテナであること
を特徴とする請求項1に記載の形状測定装置。
【請求項5】
前記パルス生成放射部における、前記送信パルスを放射するアンテナは、複数の無指向性のアンテナを備えて構成され、
前記受信部における、前記反射波を受信するアンテナは、1個の受信アンテナから構成されて成ること
を特徴とする請求項1に記載の形状測定装置。
【請求項6】
物体の形状を測定する形状測定方法において、
パルスを生成して送信パルスとして空間に放射するパルス生成放射ステップと、
前記送信パルスが前記物体で反射した反射波を受信信号として受信する受信ステップと、
前記物体に対して前記送信パルスの放射位置を変えながら前記パルス生成放射部から前記送信パルスを放射することによって前記受信部で受信された複数の受信信号の波形と前記送信パルスの波形との相互相関をそれぞれ求めることで複数の相関波形を求める相関波形演算ステップと、
前記相関波形の極値を求めて前記極値を与える値を、前記送信パルスを送信してから前記反射波を受信するまでの遅延時間として、前記複数の相関波形のそれぞれについて求める遅延時間演算ステップと、
前記送信パルスの中心周波数および前記受信信号の中心周波数に基づいて前記遅延時間を補正する補正値を前記複数の相関波形のそれぞれについて求める補正値演算ステップと、
前記補正値演算ステップで求めた前記各補正値で前記遅延時間演算ステップで求めた前記各遅延時間をそれぞれ補正し、補正した前記各遅延時間に基づいて擬似波面を求める、または、前記遅延時間演算ステップで求めた前記各遅延時間に基づいて擬似波面を求め、求めた前記擬似波面を前記補正値演算ステップで求めた前記各補正値に基づき補正する擬似波面演算ステップと、
前記擬似波面演算ステップで求めた前記擬似波面に基づいて前記物体の形状を求める形状演算ステップとを備えること
を特徴とする形状測定方法。
【図1】

【図2】
【図3】

【図8】

【図9】
【図4】

【図5】
【図6】
【図7】
【図2】
【図3】
【図8】
【図9】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−25030(P2009−25030A)
【公開日】平成21年2月5日(2009.2.5)
【国際特許分類】
【出願番号】特願2007−185809(P2007−185809)
【出願日】平成19年7月17日(2007.7.17)
【出願人】(504132272)国立大学法人京都大学 (1,269)
【Fターム(参考)】
【公開日】平成21年2月5日(2009.2.5)
【国際特許分類】
【出願日】平成19年7月17日(2007.7.17)
【出願人】(504132272)国立大学法人京都大学 (1,269)
【Fターム(参考)】
[ Back to top ]