
形状計測装置及び形状計測方法
【課題】二次元平面を構成する基準面を複数用いて物体の三次元形状を計測する形状計測装置及び形状計測方法を提供する。
【解決手段】本発明の形状計測装置100は、物体を照射する第1の光源20と、物体を照射する第2の光源30と、物体を撮像するための複数の画素を有するカメラ10と、第1の光源20及び第2の光源30の各々で得られる画素毎の輝度比を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルを予め保持するメモリ70と、物体を撮像して得られるそれぞれの画像信号の画素毎の輝度比を算出し、該輝度比の値から画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元座標を決定する制御ユニット50とを備える。
【解決手段】本発明の形状計測装置100は、物体を照射する第1の光源20と、物体を照射する第2の光源30と、物体を撮像するための複数の画素を有するカメラ10と、第1の光源20及び第2の光源30の各々で得られる画素毎の輝度比を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルを予め保持するメモリ70と、物体を撮像して得られるそれぞれの画像信号の画素毎の輝度比を算出し、該輝度比の値から画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元座標を決定する制御ユニット50とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体の形状計測を非接触かつ高精度で行い得る多数の基準面を用いた形状計測装置及び形状計測方法に関する。
【背景技術】
【0002】
従来から、カメラとプロジェクタを用いて複数の基準面を基に物体の形状計測を行う技術がある。例えば、互いに直交するX,Y軸平面を有する基準面を、基準面の法線方向(即ち、X,Y軸平面に垂直なZ軸方向)に所定の間隔で複数設定しておき、計測すべき物体を当該複数の基準面の内、両端に位置する基準面の間に配置し、その後、物体の表面上の点Sの座標を求めるために、物体上の点Sを撮像するカメラの視線と物体上の点Sを通るプロジェクタからの光線の各々が当該複数の基準面にそれぞれ交わる点を算出し、カメラの視線上の当該交わる点からなる直線と、プロジェクタからの光線上の当該交わる点からなる直線との交点を求め、この交点のZ座標からその点に最も近接した2つの基準面を選出し、選出した2つの基準面を用いて物体の形状を計測する技術が知られている(例えば、特許文献1参照)。
【0003】
他方、カメラとプロジェクタを用いて複数の基準面を基に物体の形状計測を行う別の技術として、X,Y軸平面を有する基準面をその法線方向に微小量ずつ平行移動させたときの複数の基準面について、後述する二次元パターンや空間分割パターンを利用することにより、物体に投影する空間分割パターンの輝度分布が余弦波状でなくても、物体に投影する空間分割パターンのピッチが不等間隔であっても、精度良く形状計測を行い得る形状計測装置が知られている(例えば、特許文献2参照)。
【0004】
以下、特許文献2の技術について、さらに詳細に説明する。特許文献2の技術では、基準面を構成する基準平板として例えば液晶ディスプレイを用いる。このような基準平板(液晶ディスプレイ)は、移動ステージ上に設置され、基準面の法線方向(即ち、X,Y軸平面に垂直なZ軸方向)に所定の間隔で設定可能となっている。
【0005】
この基準平板(液晶ディスプレイ)は、所定の二次元パターン(例えば等間隔格子)を表示可能である。この二次元パターンは、カメラで撮像された画像の画素と、X,Y軸平面におけるx,y座標の対応付けに用いる。
【0006】
一方、プロジェクタも、当該移動ステージのZ軸方向に平行移動する各位置の基準面に対してX,Y軸方向の空間分割パターン(例えば格子状の濃淡パターン)を位相シフトしながら投影可能である。ただし、この空間分割パターンは、基準平板(液晶ディスプレイ)上に計測する物体が載置されているとき、物体上に投影されることになる。
【0007】
カメラは、基準面に対して正面に設置され、当該移動ステージのZ軸方向に平行移動する各位置の基準面にそれぞれ形成されるX,Y軸方向の二次元パターンを撮影した第1撮影画像に対応する第1撮影画像信号と、基準面に投影される空間分割パターンを撮影した第2撮影画像に対応する第2撮影画像信号と、基準平板に物体を載置して物体に投影される空間分割パターンを撮影した第3撮影画像に対応する第3撮影画像信号を生成する。
【0008】
これらの第1撮影画像信号、第2撮影画像信号及び第3撮影画像信号を用いて、物体の形状を解析する解析装置としてPC(Personal Computer)が設けられる。解析装置は、校正処理部と、連続撮影部と、実時間解析部と、精密解析部とを備える。
【0009】
校正処理部は、投影された格子の位相と計測する三次元座標との対応関係を予めカメラの画素毎に求める校正処理を行う。具体的には、校正処理部は、第1撮影画像信号及び第2撮影画像信号を用いて、基準面に表示された格子の位相とx座標及びy座標を取得して対応付けを行う。z座標に関しては、基準面が移動する位置(基準平板の移動量)がz座標に対応する。したがって、校正処理部は、空間分割パターンの位相と三次元空間座標とを1対1で対応付けたテーブル(以下、「位相・座標テーブル」という)を作成し、作成した位相・座標テーブルをメモリに保存する。
【0010】
連続撮影部は、物体の形状計測をリアルタイムに行うために、プロジェクタにおける空間分割パターン画像(例えば格子画像)の位相をシフトさせながら投影画像として入力するのに同期して連続撮影を行なって、第3撮影画像信号を取得する機能部である。
【0011】
実時間解析部は、空間分割パターン画像の位相シフトに同期して連続撮像された第3撮影画像信号を構成する連続する4フレームの画像から、1画素ずつ空間分割パターンの位相を求め、得られた位相から、校正処理部で作成した位相・座標テーブルを用いて、x座標又はy座標と、z座標とを求め、表示画像処理を行って、x座標、y座標及びz座標を用いて物体の形状データをモニタに表示することを繰り返す。
【0012】
精密解析部は、実時間解析部とは別に、空間分割パターン画像の位相シフトに同期して連続撮像された第3撮影画像信号を構成する連続する4フレームの画像から、1画素ずつ空間分割パターンの位相を求め、物体の形状データをメモリに格納する。
【0013】
このように、上述の特許文献1及び特許文献2に開示される技術では、カメラとプロジェクタを用いて複数の基準面を基に物体の形状計測を行うものであるため、プロジェクタによる投影が不可欠である。
【0014】
一方、プロジェクタを用いることなしに物体の形状を計測する、より単純な技法が従来から知られている。図8に示すように、2つの光源L1,L2(それぞれ点光源20,30で表される)により照明された物体をカメラ10で撮影することで、物体の形状を計測することができる。カメラ10の光軸に対して垂直に基準平板40を置き、これを基準面とする。この基準面上に、直交するX,Y軸をとり、このX,Y軸に対して垂直にZ軸をとる。基準平板40の上に物体を置いて、物体上の一点Sの基準平板40からの高さをz(変数)とする。
【0015】
点光源により照明された物体をカメラ10で撮影すると、この撮影された画像から得られる輝度Iの値は、点光源の発光輝度ISに比例し、点光源と物体との間の距離の2乗に反比例する。カメラ10による像面の物体の光の反射率をrとすると、反射した光の輝度は、この反射率rに比例する。結局、カメラ10で撮影された物体の画像の輝度Iは、式(1)で表現することができる。ここで、kは、感度等のカメラのパラメータを含む光学系固有の比例係数である。
【0016】
【数1】

【0017】
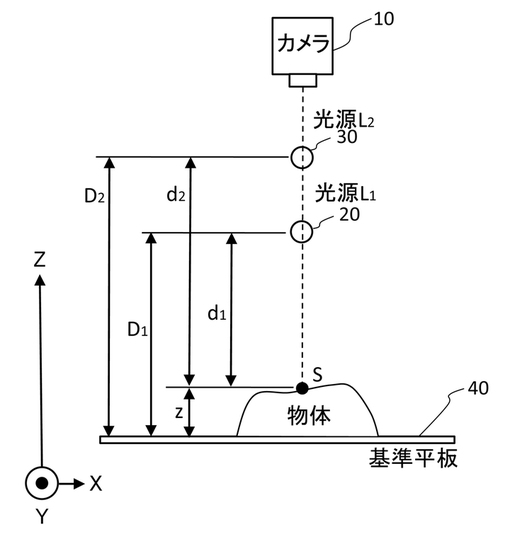
図8に示すように、カメラ10の光軸に対して垂直に基準平板40を設置し、さらにカメラ10の光軸上に光源L1,L2を設置するものとする。物体上の一点Sからの距離の異なる位置d1,d2は、物体上の一点Sの基準平板40からの高さzと、基準平板40から光源L1,L2までの距離D1,D2とを用いて(D2>D1)、式(2)、式(3)のように表すことができる。
【0018】
【数2】
【0019】
【数3】
【0020】
一方、物体上の一点Sからの距離の異なる位置d1,d2にある2個の光源L1,L2を発光させ、そのときの物体の画像を上方に設置したカメラ10で撮影する。光源L1,L2の発光輝度をそれぞれIS1,IS2とする。2個の光源L1,L2を別々に点灯し、カメラ10で撮影したそれぞれの画像のS点における輝度I1,I2は、式(4)及び式(5)のように表すことができる。
【0021】
【数4】
【0022】
【数5】
【0023】
式(2)、式(3)をそれぞれ式(4)、式(5)に代入すると、式(6)及び式(7)が得られる。
【0024】
【数6】
【0025】
【数7】
【0026】
この式(6)及び式(7)を利用すると、撮影した画像の輝度I1,I2から物体上の点Sにおける高さzを求めることができる。すなわち、zが求めるべき未知数である。距離D1,D2は光学系の寸法から決まる既知数である。輝度I1,I2は、カメラ10で計測した輝度値である。係数k及び係数rも未知数であるが、これらを求める必要はない。k・rを一つの未知数とすると、未知数はk・rとzの2個となり、式が2個あるので解けることになる。
【0027】
一方、式(6)を式(7)で割ると、式(8)となる。
【0028】
【数8】
【0029】
すなわち、式(8)は式(9)のように表される。
【0030】
【数9】
【0031】
このzに関する2次方程式を解くと、式(10)のようにzを求めることができる。
【0032】
【数10】
【0033】
式(10)について、I12=I1/I2、IS12=IS1/IS2とおくと、式(11)が得られる。
【0034】
【数11】
【0035】
式(11)の2次方程式を解くと、式(12)のようにzが求められる。
【0036】
【数12】
【0037】
このように、プロジェクタを用いることなしに、2つの光源とカメラを用いることで物体の形状を計測することができる。
【先行技術文献】
【特許文献】
【0038】
【特許文献1】特許第3446020号明細書
【特許文献2】特開2008−281491号公報
【発明の概要】
【発明が解決しようとする課題】
【0039】
前述したように、特許文献1及び特許文献2の技術は、プロジェクタを用いて投影した空間分割パターンや格子パターン自体の細密な変化又は空間分割パターンや格子パターンから生じる細密な位相変化を読み取ることにより物体の形状を計測する技術であるため、高精度の計測が可能となるが、プロジェクタを用いる点で装置構成が大きくなる欠点とコストが増大する欠点がある。
【0040】
一方、前述したようにプロジェクタを用いることなしに、2つの光源とカメラを用いることにより物体の形状を計測する従来の技法では、物体上の計測される点と2つの光源がカメラの光軸の同じ直線上にあることが基本となっている。このため、実際に物体の形状を計測する際には、カメラと2つの光源を基準面(X,Y軸の平面)に対して平行に走査させる必要がある。この平行走査を維持するための機構を設ける点で、やはり装置構成が大きくなる欠点とコストが増大する欠点がある。
【0041】
仮に、2つの光源とカメラを用いることにより物体の形状を計測する技法において、物体上の計測される点と2つの光源が同じ直線上でない場合を想定すると、光源と物体との距離が垂直方向の位置zだけでなくX,Y軸平面の位置x,yの関数にもなり、式(10)や式(12)で示される関数はさらに複雑化することになる。また、この場合、2つの光源のあらゆる照射方向に対して光源の発光輝度IS1,IS2にムラがないことが要求される。しかし、実際の光源は方向によって発光輝度のムラがあるため、正確な計測が困難になる。発光輝度のムラを考慮した計算ができる場合も複雑な式となり、計算に時間がかかることになる。
【0042】
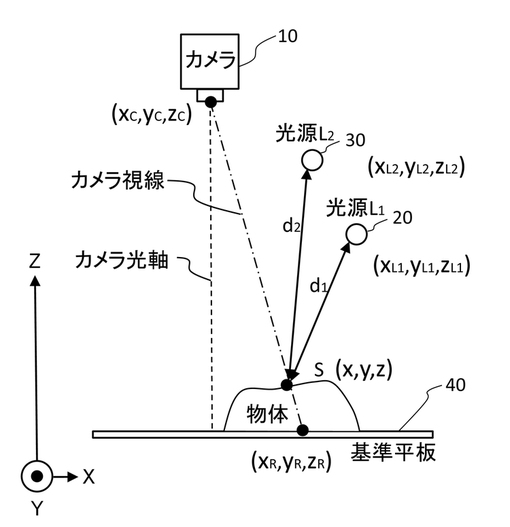
すなわち、図9に示すように、2つの光源L1,L2の位置と物体上の点Sが同一直線上にない場合を考える。この場合も、この撮影された画像の輝度Iは点光源からの発光輝度ISに比例し、光源と物体間の距離dの2乗に反比例する。ここでは、光源の発光輝度のムラはなくあらゆる方向に均一な輝度分布であると仮定する。この場合、光源L1,L2及び物体上の一点Sの三次元位置をそれぞれ、(xL1,yL1,zL1)、(xL2,yL2,zL2)及び(x,y,z)とすると、この場合の式(1)のdは、式(13)及び式(14)のように表現できる。
【0043】
【数13】
【0044】
【数14】
【0045】
式(13)及び式(14)を、式(2)及び式(3)に代入すると、カメラ10で撮影したそれぞれの画像のS点における輝度I1,I2は、式(15)及び式(16)のように表される。
【0046】
【数15】
【0047】
【数16】
【0048】
式(15)を式(16)で割ると、カメラ10で撮影したそれぞれの画像のS点における輝度比R12は式(17)となる。ここで、式(18)で表すRS12はS点における2つの光源の輝度比であり、光源の発光輝度のムラを考えると、一般に場所の関数である。
【0049】
【数17】
【0050】
【数18】
【0051】
式(17)は、x,y,zに関する2次方程式である。撮影した物体上の点Sを見るカメラ10の画素の視線を考えると、視線は直線であり、この視線上でx,yはそれぞれzの1次関数となる。この1次関数を、式(17)に代入すると、x,yは消去されるが、式(17)はzの複雑な2次式となる。このため、この複雑な式の計算をするのに時間がかかることになる。また、S点から見た2つの光源の方向が異なっているため、光源の光軸からの方向により、発光輝度にムラがあると、IS1,IS2が一定でなくなり、その計算は非常に複雑となる。したがって、物体上の計測される点Sと2つの光源L1,L2の位置がカメラ10の光軸の同じ直線上にあることが基本となり、実際に物体の形状を計測する際には、カメラ10と2つの光源L1,L2を基準面(X,Y軸平面)に対して平行に走査させるのが一般的である。
【0052】
このように、従来の技術においては、装置構成が大きくなる欠点とコストが増大する欠点がある。
【0053】
本発明は、上述の問題を鑑みて為されたものであり、物体の形状計測を非接触かつ高精度で行い得る多数の基準面を用いた形状計測装置及び形状計測方法を提供することを目的とする。
【課題を解決するための手段】
【0054】
本発明の形状計測装置は、二次元平面を構成する基準面を複数用いて物体の三次元形状を計測する形状計測装置であって、物体を照射するための第1の光源と、該第1の光源とは異なる三次元空間位置に固定される、物体を照射するための第2の光源と、物体を撮像するための複数の画素を有するカメラと、二次元平面の座標と濃度が定義される基準平板の法線方向に、前記基準平板を所定間隔で平行移動させたときのそれぞれの当該二次元平面を高さ方向の基準面としたとき、当該複数の基準面について、前記カメラによって前記第1の光源及び前記第2の光源の各々で照射した各基準面を撮像して得られるそれぞれの画像信号の画素毎の輝度から、前記第1の光源及び前記第2の光源の各々で得られる画素毎の輝度比を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルを予め保持するメモリと、前記カメラによって前記第1の光源及び前記第2の光源の各々で照射した物体を撮像して得られるそれぞれの画像信号の画素毎の輝度から、前記第1の光源及び前記第2の光源の各々で得られる輝度比を算出し、該輝度比の値から前記画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元形状を決定する制御ユニットと、を備えることを特徴とする。
【0055】
また、本発明の形状計測装置において、前記第1の光源は1個または複数のLED光源からなり、前記第2の光源は1個または複数のLED光源からなり、前記制御ユニットは、前記第1の光源及び前記第2の光源の各々を構成するLED光源の点灯及び消灯を制御することにより調光制御を行う光源決定部を備えることを特徴とする。
【0056】
また、本発明の形状計測装置において、前記制御ユニットは、前記第1の光源及び前記第2の光源の各々で得られる輝度比を算出するにあたり、複数回撮像して得られた画像信号の平均値から当該輝度比を算出する画素別輝度比算出部を備えることを特徴とする。
【0057】
また、本発明の形状計測装置において、前記第2の光源は、前記第1の光源よりも光源の輝度が高く、前記第1の光源及び前記第2の光源は略同一の波長分布を有することを特徴とする。
【0058】
また、本発明の形状計測装置において、前記制御ユニットは、当該物体の三次元形状を決定するとともに、当該物体の明るさ及び色情報を決定することを特徴とする。
【0059】
さらに、本発明の形状計測方法は、二次元平面を構成する基準面を複数用いて物体の三次元形状を計測する形状計測方法であって、物体を照射するための第1の光源、該第1の光源とは異なる三次元空間位置に固定される、物体を照射するための第2の光源、物体を撮像するための複数の画素を有するカメラ、及び、制御ユニットが設けられており、前記制御ユニットの処理手順は、二次元平面の座標と濃度が定義される基準平板の法線方向に、前記基準平板を所定間隔で平行移動させたときのそれぞれの当該二次元平面を高さ方向の基準面としたとき、当該複数の基準面について、前記カメラによって前記第1の光源及び前記第2の光源の各々で照射した各基準面を撮像して得られるそれぞれの画像信号の画素毎の輝度から、前記第1の光源及び前記第2の光源の各々で得られる画素毎の輝度比を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルをメモリに予め保持するステップと、前記カメラによって前記第1の光源及び前記第2の光源の各々で照射した物体を撮像して得られるそれぞれの画像信号の画素毎の輝度から、前記第1の光源及び前記第2の光源の各々で得られる輝度比を算出し、該輝度比の値から前記画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元形状を決定するステップと、を含むことを特徴とする。
【発明の効果】
【0060】
本発明によれば、光源の位置誤差、対象物体の位置誤差、光源の輝度のばらつき、光源の輝度分布ムラ、カメラのレンズの収差、カメラのレンズの汚れなどの影響をキャンセルしながら物体の形状計測を非接触かつ高精度で行うことができる。さらに、物体計測時に、物体に対して光学系(カメラ、第1の光源及び第2の光源)を平行移動させる機構やプロジェクタを必要せず、カメラ、第1の光源及び第2の光源を一直線上に配置することなしに固定した光学系で物体の計測が可能であることから、従来よりも装置構成を小型化することが可能となり、さらに装置のコストを低減させることができる。
【図面の簡単な説明】
【0061】
【図1】本発明による第1実施形態の形状計測装置の概略図である。
【図2】本発明による第1実施形態の形状計測装置における制御ユニットのブロック図である。
【図3】本発明による第1実施形態の形状計測装置における制御ユニットの校正処理フローを示す図である。
【図4】本発明による第1実施形態の形状計測装置における制御ユニットの形状計測処理フローを示す図である。
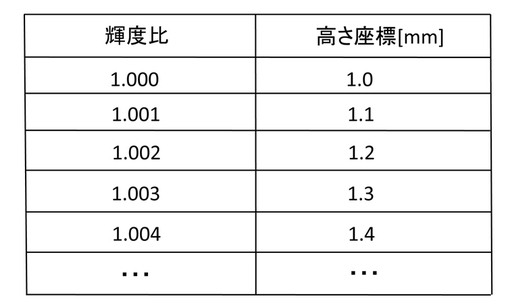
【図5】本発明による第1実施形態の形状計測装置における輝度比から高さ座標に変換する輝度比・高さ座標変換テーブルの一例を示す図である。
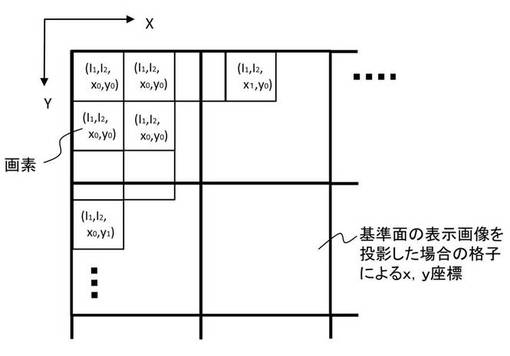
【図6】本発明による第1実施形態の形状計測装置における輝度比から三次元座標に変換する画素別輝度比・三次元座標変換テーブルの概念を説明するための図である。
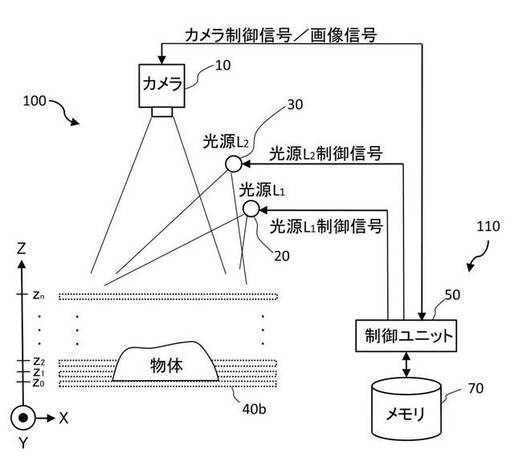
【図7】本発明による第2実施形態の形状計測装置の概略図である。
【図8】従来の形状計測装置における計測原理の概略図である。
【図9】本発明に係る形状計測装置における計測原理の概略図である。
【図10】本発明に係る形状計測装置における輝度比から高さ座標に変換する変換テーブルの実際値の一例を示す図である。
【発明を実施するための形態】
【0062】
以下、図面を参照して、本発明による各実施形態の形状計測装置について説明する。第1実施形態の形状計測装置は基準平板の上に載置された物体を計測する例であり、第2実施形態の形状計測装置は物体の形状計測時にて基準平板を用いずに物体を計測する例であり、順に説明する。
【0063】
<第1実施形態>
〔装置構成〕
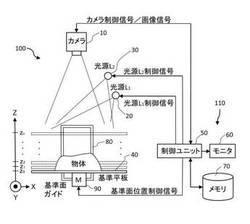
図1は、本発明による第1実施形態の形状計測装置の概略図である。本実施形態の形状計測装置100は、二次元平面を構成する基準面を複数用いて物体の三次元形状を計測する装置であり、カメラ10と、光源20,30(第1の光源L1及び第2の光源L2)と、制御ユニット50と、メモリ70とを備える。形状計測装置100における光学系の校正処理時には、基準平板40と、基準面ガイド80と、モータ90とを備える機構を用いて光学系の校正処理を行う。尚、光学系の校正処理時には、基準平板40と、基準面ガイド80と、モータ90とを備える機構について、以下の説明は一例を示すものである。モニタ60は、必要に応じて計測結果の表示を行うのに用いる。
【0064】
本実施形態の形状計測装置100は、2つの光源L1,L2(それぞれ点光源20,30で表される)により照明された物体をカメラ10で撮影することで、物体の形状を計測する。一方、光学系の校正処理を行うために、カメラ10の光軸に対して垂直に基準平板40を置き、これを基準面とする。この基準面上に、直交するX,Y軸をとり、このX,Y軸に対して垂直にZ軸をとる。基準平板40の上に物体を置いた場合、物体上の一点Sの基準平板40からの高さをz(変数)とする。
【0065】
点光源により照明された物体をカメラ10で撮影すると、この撮影された画像から得られる輝度Iの値は、点光源の発光輝度ISに比例し、点光源と物体との間の距離の2乗に反比例する。カメラ10による像面の物体の光の反射率をrとすると、反射した光の輝度は、この反射率rに比例する。
【0066】
光源20(第1の光源L1)は、物体を照射するための光源であり、発光輝度IS1を有する。光源20(第1の光源L1)は、複数のLED光源からなる点光源として構成することが好適であり、これにより各LED光源の点灯及び消灯の組み合わせで調光することが可能となる。第1の光源L1の点灯及び消灯、又は調光制御は、制御ユニット50からの制御信号(光源L1制御信号)によってなされる。
【0067】
光源30(第2の光源L2)は、第1の光源L1とは異なる三次元空間位置に固定される、物体を照射するための光源であり、発光輝度IS2を有する。光源30(第2の光源L2)は、複数のLED光源からなる点光源として構成することが好適であり、これにより各LED光源の点灯及び消灯の組み合わせで調光することが可能となる。また、光源30(第2の光源L2)は、第1の光源L1よりも光源の発光輝度が高い(IS2>IS1)ように構成するのが好適であり、より好適には第1の光源L1及び第2の光源L2について基準平板40までの距離の2乗に反比例することを加味した輝度バランスとすることで、SN比を揃えるようにするのが望ましい。第2の光源L2の点灯及び消灯、又は調光制御は、制御ユニット50からの制御信号(光源L2制御信号)によってなされる。
【0068】
カメラ10は、物体を撮像するための複数の画素を有し、例えばCCDセンサやCMOSセンサなどの撮像素子を用いたカメラを利用する。このようなカメラは、単色撮像又は多色撮像のいずれでもよく、例えば単色(フィルタなし)用のカメラであれば感度がよくなり、RGBカラーフィルタを有するカメラの場合には、RGB出力値を輝度値に変換することができる。カメラ10の撮像制御や画像信号の取得は、制御ユニット50からの制御信号(カメラ制御信号/画像信号)によってなされる。
【0069】
基準平板40は、X,Y軸の二次元平面を構成する。基準平板40は、校正処理時にのみ用いればよい。校正処理の際には、基準平板40の表面に、計測結果のx,y座標の目盛とするための格子(X軸方向に平行で等間隔の格子及びY軸方向に平行で等間隔の格子)を例えば白色面に黒色で格子線を描いたシートを載置したり、画素毎の輝度比R12(=I1/I2)を決定するための一定濃度のシート(例えば、反射率が既知の白色シート)を載置したりする方法があるが、以下の説明では、主に、白色面に黒色で格子線を描いたシート(以下、総括して校正像を表示したシートを「校正シート」と称する)を用いて光学系の校正処理を行う例を説明する。尚、誤差要因として無視できる場合には、液晶ディスプレイを用いることも可能である。つまり、基準平板40を構成する液晶ディスプレイの表面に計測結果のx,y座標の目盛とするための格子像を表示し、その位相をシフトすることができる。
【0070】
基準面ガイド80は、二次元平面の座標と濃度が定義される基準平板40の法線方向(Z軸方向)に、基準平板40をΔzの所定間隔(z=z0,z1,z2,・・・,zn:nは任意の整数であり、znで高さ分布の分解能や計測範囲が定まり、z=z0はすなわち、物体の高さ座標として0である)で平行移動させたときのそれぞれの当該二次元平面を高さ方向の基準面とするためのガイドレールである。モータ90は、基準平板40を基準面ガイド80に沿って平行移動させるための駆動源であり、その機構については既知の技術を用いればよく、更なる詳細な説明は省略する。基準平板40を所定間隔(z=z0,z1,z2,・・・,zn)で平行移動させるための制御は、制御ユニット50からの制御信号(基準面位置制御信号)によってなされる。
【0071】
制御ユニット50は、校正処理時に、基準平板40の法線方向(Z軸方向)に、基準平板40を所定間隔で平行移動させたときのそれぞれの当該二次元平面を高さ方向の基準面としたとき、当該複数の基準面について、カメラ10によって第1の光源L1及び第2の光源L2の各々で照射した各基準面を撮像して得られるそれぞれの画像信号の画素毎の輝度I1,I2から、第1の光源L1及び第2の光源L2の各々で得られる画素毎の輝度比R12(=I1/I2)を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルを作成してメモリ70に予め保持する。また、制御ユニット50は、形状計測処理時に、カメラ10によって第1の光源L1及び第2の光源L2の各々で照射した物体を撮像して得られるそれぞれの画像信号の画素毎の輝度I1,I2から、第1の光源L1及び第2の光源L2の各々で得られる輝度比R12を算出し、該輝度比の値からメモリ70に予め保持した画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元形状を決定する。
【0072】
モニタ60は、制御ユニット50によって決定した物体の三次元形状を表示するための装置である。モニタ60で計測結果を表示する代わりに、プリンタによる出力を用いてもよいし、記録媒体に記録する構成としてもよい。
【0073】
尚、本実施形態の制御ユニット50、モニタ60及びメモリ70は、コンピュータ装置110として構成することができ、制御ユニット50をコンピュータとして構成させる場合には、当該コンピュータに、後述する制御ユニット50の各構成要素を実現させるためのプログラムをメモリ70に記憶する。当該コンピュータに備えられる中央演算処理部(CPU)が、各構成要素の機能を実現するための処理内容が記述されたプログラムや処理データを、適宜、メモリ70から読み込んで制御ユニット50の各構成要素の機能をコンピュータ上で実現させることができる。ここで、各構成要素の機能をハードウェアの一部で実現してもよいことは勿論である。
【0074】
〔制御ユニット〕
図2は、本発明による第1実施形態の形状計測装置における制御ユニットのブロック図である。制御ユニット50は、校正処理部510と、形状計測部520と、モニタ60で計測結果を表示する制御を行う表示制御部530とを備える。
【0075】
校正処理部510は、基準面可変位置設定部511と、光源決定部512と、カメラ撮像処理部513と、画素別輝度比算出部514と、輝度比・高さ座標処理部515と、画素別輝度比・三次元座標変換テーブル生成部516とを備える。
【0076】
基準面可変位置設定部511は、基準平板40を所定間隔(z=z0,z1,z2,・・・,zn)で基準面ガイド80に沿ってZ軸方向に平行移動させるために、モータ90に対して基準面位置制御信号を発生する機能部である。基準面可変位置設定部511は、この平行移動の制御のために必要であれば、モータの制御値と所定間隔(z=z0,z1,z2,・・・,zn)とを予め対応付けた基準面位置データ710をメモリ70から参照して制御する。
【0077】
光源決定部512は、所定間隔(z=z0,z1,z2,・・・,zn)の複数の基準面について、それぞれカメラ10によって第1の光源L1及び第2の光源L2の各々で照射した各基準面を撮像するために、カメラ10の撮像に同期して第1の光源L1及び第2の光源L2の点灯(調光制御も含む)及び消灯の切り替えを行うための光源L1制御信号や光源L2制御信号を発生する機能部である。光源決定部512は、第1の光源L1又は第2の光源L2の調光制御に必要であれば、第1の光源L1や第2の光源L2の基準平板40からの高さ(Z軸方向)や光源のタイプ(複数のLED光源からなる点光源等)に応じて予め決定された光源調光用データ730をメモリ70から参照して制御する。
【0078】
カメラ撮像処理部513は、所定間隔(z=z0,z1,z2,・・・,zn)の複数の基準面について、それぞれ第1の光源L1又は第2の光源L2の点灯に同期してカメラ10の撮像を制御して画像信号を取得するためのカメラ制御信号/画像信号を発生する機能部である。
【0079】
画素別輝度比算出部514は、基準平板40の法線方向(Z軸方向)に、基準平板40を所定間隔で平行移動させたときのそれぞれの当該二次元平面を高さ方向の基準面としたとき、当該複数の基準面(校正シートを載置した面)について、カメラ10によって第1の光源L1及び第2の光源L2の各々で照射した各基準面を撮像して得られるそれぞれの画像信号の画素毎の輝度I1,I2から、第1の光源L1及び第2の光源L2の各々で得られる画素毎の輝度比R12(=I1/I2)を算出する機能部である。尚、画素別輝度比算出部514は、第1の光源L1及び第2の光源L2の各々で得られる輝度比を算出するにあたり、複数回撮像して得られた画像信号の平均値から当該輝度比を算出するように構成することもできる。
【0080】
輝度比・高さ座標処理部515は、算出された複数の基準面における画素毎の輝度比R12(=I1/I2)を高さ座標(z=z0,z1,z2,・・・,zn)に対応付けた輝度比・高さ座標変換テーブルを生成する機能部である。輝度比・高さ座標処理部515は、生成した輝度比・高さ座標変換テーブル740(図5参照)をメモリ70に格納することができる。
【0081】
画素別輝度比・三次元座標変換テーブル生成部516は、算出された複数の基準面における画素毎の輝度比・高さ座標変換テーブル740における高さ座標(z座標)と、校正像(又は格子像)を撮像したことで得られるX,Y軸平面(x,y座標)から、輝度比R12を基準にした複数の基準面における画素毎のx,y,z座標を画素別輝度比・三次元座標変換テーブルとして生成してメモリ70に格納する。例えば、図6に示すように、各画素で、各基準面における均一像部分による輝度I1,I2を取得し、格子線部分によるx,y座標を決定することができ、画素毎の輝度比R12(=I1/I2)を高さ座標に対応付けを行っていることから、画素別輝度比・三次元座標変換テーブルを作成することができる。尚、格子線上にある画素(複数のx,y座標値を跨る画素)については、格子像からx,y座標を決定することができ、格子線上にない画素は、輝度値の算出のために用いることができる。また、図6では、格子線を1画素サイズ以下で例示的に表しているが、格子線部分が複数画素に跨って撮像される構成となっても同様に処理することができる。
【0082】
形状計測部520は、基準面初期位置設定部521と、光源決定部522と、カメラ撮像処理部523と、画素別輝度比算出部524と、画素別三次元座標決定処理部525とを備える。
【0083】
基準面初期位置設定部521は、基準平板40を初期位置(z=z0)となるように基準面ガイド80に沿ってZ軸方向に平行移動させるために、モータ90に対して基準面位置制御信号を発生する機能部である。計測対象の物体のサイズは、z=z0〜znの範囲内であり、且つ基準面に描写される格子像によるx,y座標の範囲内であり、この物体は、計測処理時に、初期位置(z=z0=0)の基準平板40に載置される。基準面初期位置設定部521は、この平行移動の制御のために必要であれば、モータの制御値と所定間隔(z=z0,z1,z2,・・・,zn)とを予め対応付けた基準面位置データ710をメモリ70から参照して制御する。ただし、基準平板40を用いずに物体の形状を計測する場合には、当該複数の基準面の範囲内(z=z0〜znの範囲内)に物体を置けばよいため、基準面初期位置設定部521の処理は、基準平板40に物体を載置する場合の処理である。
【0084】
光源決定部522は、当該複数の基準面の範囲内(z=z0〜znの範囲内)にある物体形状について、カメラ10によって第1の光源L1及び第2の光源L2の各々で照射した物体をそれぞれ撮像するために、カメラ10の撮像に同期して第1の光源L1及び第2の光源L2の点灯(調光制御も含む)及び消灯の切り替えを行うための光源L1制御信号や光源L2制御信号を発生する機能部である。光源決定部522は、第1の光源L1又は第2の光源L2の調光制御に必要であれば、第1の光源L1や第2の光源L2の基準平板40からの高さ(Z軸方向)や光源のタイプ(複数のLED光源からなる点光源等)に応じて予め決定された光源調光用データ730をメモリ70から参照して制御する。
【0085】
カメラ撮像処理部523は、当該複数の基準面の範囲内(z=z0〜znの範囲内)にある物体形状について、第1の光源L1又は第2の光源L2の点灯に同期してカメラ10の撮像を制御して画像信号を取得するためのカメラ制御信号/画像信号を発生する機能部である。
【0086】
画素別輝度比算出部524は、当該複数の基準面の範囲内(z=z0〜znの範囲内)にある物体形状について、カメラ10によって第1の光源L1及び第2の光源L2の各々で照射した物体を撮像して得られるそれぞれの画像信号の画素毎の輝度I1,I2から、第1の光源L1及び第2の光源L2の各々で得られる画素毎の輝度比R12(=I1/I2)を算出する機能部である。尚、画素別輝度比算出部524は、第1の光源L1及び第2の光源L2の各々で得られる輝度比を算出するにあたり、複数回撮像して得られた画像信号の平均値から当該輝度比を算出するように構成することもできる。
【0087】
画素別三次元座標決定処理部525は、算出された第1の光源L1及び第2の光源L2の各々で得られる輝度比R12の値から校正処理でメモリ70に予め保持した画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元形状を決定し、計測結果をメモリ70に格納し、表示制御部530と協働して物体の三次元座標をモニタ60に表示する機能部である。
【0088】
〔装置動作〕
次に、本発明による第1実施形態の形状計測装置の装置動作について説明する。
【0089】
(校正処理)
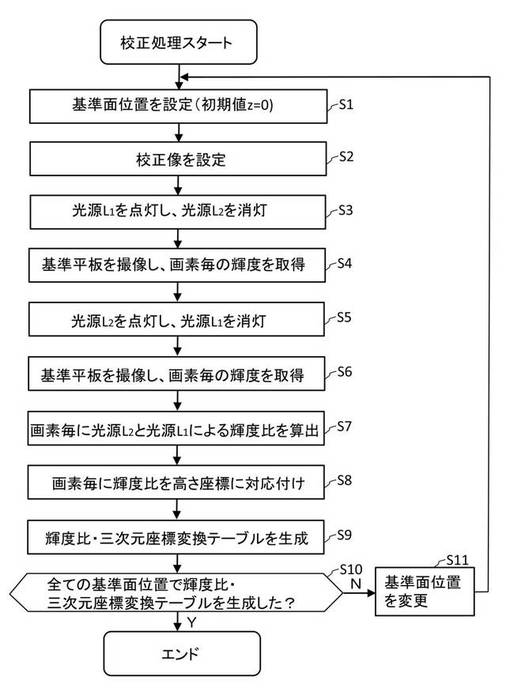
図3は、本発明による第1実施形態の形状計測装置における制御ユニットの校正処理フローを示す図である。以下の動作説明では、格子像と一定濃度の均一像を兼ねて1つの校正像(一定濃度の均一像の部分と格子線部分からなる)の校正シートを用いる場合を説明する。
【0090】
まず、基準面可変位置設定部511によって基準平板40を初期位置(z=z0)に設定する(ステップS1)。x,y座標の目盛とするための格子並びに光源別の輝度比のための一定濃度の均一像からなる校正像の校正シートは基準平板40に設定される(ステップS2)。
【0091】
次に、光源決定部512によって第1の光源L1を点灯し第2の光源L2を消灯する(ステップS3)。続いて、カメラ撮像処理部513によって基準平板40を撮像し、校正像における格子のx,y座標と画素との対応付けと画素毎の輝度値をデータとして保持する(ステップS4)。
【0092】
次に、光源決定部512によって第2の光源L2を点灯し第1の光源L1を消灯する(ステップS5)。続いて、カメラ撮像処理部513によって基準平板40を撮像し、校正像における格子のx,y座標と画素との対応付けと画素毎の輝度値をデータとして保持する(ステップS6)。校正像における格子のx,y座標と画素との対応付けのために、第1の光源L1と第2の光源L2のいずれか一方のみで取得したデータを用いてもよいが、複数のデータを用いて平均処理することで精度を向上させることができる。
【0093】
次に、画素別輝度比算出部514によって、初期位置(z=z0=0)に設定した基準平板40の基準面(一定濃度の均一像の部分)を撮像して得られるそれぞれの画像信号の画素毎の輝度I1,I2から、第1の光源L1及び第2の光源L2の各々で得られる画素毎の輝度比R12(=I1/I2)を算出する(ステップS7)。続いて、輝度比・高さ座標処理部515によって、算出された基準面における画素毎の輝度比R12(=I1/I2)を高さ座標に対応付けを行い(ステップS8)、画素別輝度比・三次元座標変換テーブル生成部516によって初期位置(z=z0)に設定した基準平板40の基準面における画素別輝度比・三次元座標変換テーブルを生成してメモリ70に格納する(ステップS9)。
【0094】
ステップS1〜S9について、所定間隔(z=z0,z1,z2,・・・,zn)の複数の基準面について繰り返し行い、複数の基準面における画素別輝度比・三次元座標変換テーブルを生成してメモリ70に格納する(ステップS10,S11)。
【0095】
このようにして、形状計測装置100は、物体の形状計測前の校正処理として、複数の基準面における画素別輝度比・三次元座標変換テーブルを生成してメモリ70に格納しておく。
【0096】
(形状計測処理)
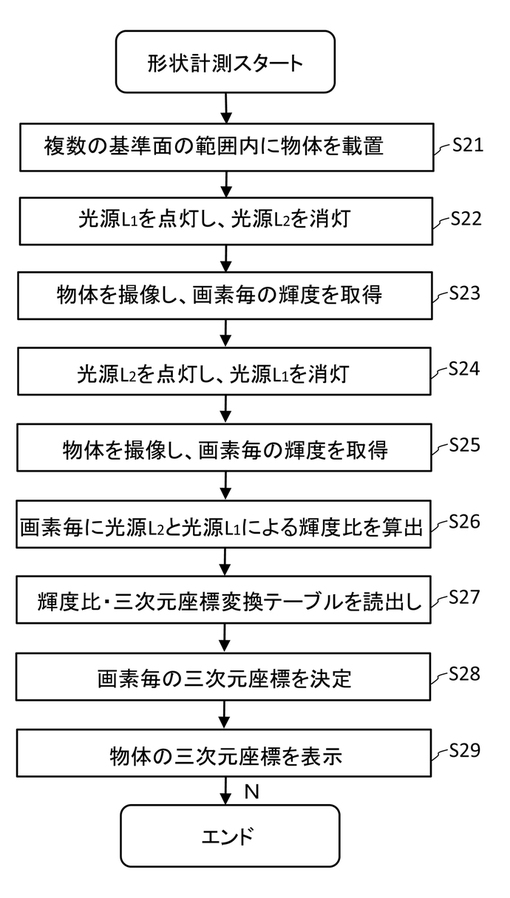
図4は、本発明による第1実施形態の形状計測装置における制御ユニットの形状計測処理フローを示す図である。
【0097】
まず、基準面初期位置設定部521によって基準平板40を初期位置(z=z0)に設定する(ステップS21)。物体は、初期位置(z=z0=0)に設定される基準平板40に載置されているものとする。ただし、基準平板40を用いずに物体の形状を計測する場合には、当該複数の基準面の範囲内(z=z0〜znの範囲内)に物体が置かれる。
【0098】
次に、光源決定部522によって第1の光源L1を点灯し第2の光源L2を消灯する(ステップS22)。続いて、カメラ撮像処理部523によって基準平板40に載置した物体を撮像し、画素毎の輝度値をデータとして保持する(ステップS23)。
【0099】
次に、光源決定部522によって第2の光源L2を点灯し第1の光源L1を消灯する(ステップS24)。続いて、カメラ撮像処理部523によって基準平板40に載置した物体を撮像し、画素毎の輝度値をデータとして保持する(ステップS25)。
【0100】
次に、画素別輝度比算出部524によって、初期位置(z=z0=0)に設定した基準平板40に載置した物体を撮像して得られるそれぞれの画像信号の画素毎の輝度I1,I2から、第1の光源L1及び第2の光源L2の各々で得られる画素毎の輝度比R12(=I1/I2)を算出する(ステップS26)。
【0101】
続いて、画素別三次元座標決定処理部525によって、算出された第1の光源L1及び第2の光源L2の各々で得られる輝度比R12の値から校正処理でメモリ70に予め保持した画素別輝度比・三次元座標変換テーブルを参照して(ステップS27)、当該物体の三次元形状を決定し(ステップS28)、計測結果をメモリ70に格納し、表示制御部530と協働して物体の三次元座標をモニタ60に表示する(ステップS29)。
【0102】
尚、複数回の物体の三次元座標の計測結果を平均処理した結果を表示したりするように構成することができる。
【0103】
このようにして、形状計測装置100は、従来よりも装置構成を小型化し、コストを低減させた構成で、物体の形状計測を行うことができるようになる。
【0104】
また、光源の位置誤差、対象物体の位置誤差、光源の輝度のばらつき、光源の輝度分布ムラ、カメラのレンズの収差、カメラのレンズの汚れなどの影響をキャンセルしながら物体の形状計測を非接触かつ高精度で行うことができる。
【0105】
次に、本発明による第2実施形態の形状計測装置について説明する。第2実施形態の形状計測装置は、第1実施形態とは相違して、基準平板を用いずに物体を計測する例である。
【0106】
<第2実施形態>
〔装置構成〕
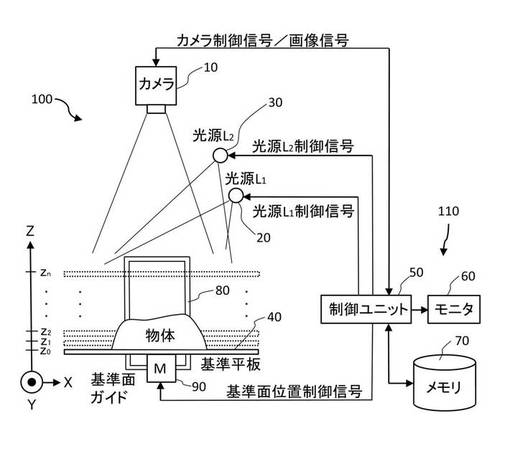
図7は、本発明による第2実施形態の形状計測装置の概略図である。第1実施形態と同様な構成要素には同一の参照番号を付している。本実施形態の形状計測装置100は、物体の形状計測時にて基準平板を用いずに、複数の基準面40bの範囲内(z=z0〜znの範囲内)に置かれる物体の三次元形状を計測する装置であり、カメラ10と、光源20,30(第1の光源L1及び第2の光源L2)と、制御ユニット50と、メモリ70とを備える。
【0107】
第2実施形態においても、第1実施形態の場合と同様に、物体の形状計測前の校正処理として、複数の基準面における画素別輝度比・三次元座標変換テーブルを生成してメモリ70に格納しておく。
【0108】
物体の三次元形状の計測時には、複数の基準面40bの範囲内(z=z0〜znの範囲内)にある物体形状を、第1実施形態の場合と同様に処理すればよく、すなわち、制御ユニット50は、形状計測処理時に、カメラ10によって第1の光源L1及び第2の光源L2の各々で照射した物体を撮像して得られるそれぞれの画像信号の画素毎の輝度I1,I2から、第1の光源L1及び第2の光源L2の各々で得られる輝度比R12を算出し、該輝度比の値からメモリ70に予め保持した画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元形状を決定する。したがって、第2実施形態では、図2で説明した制御ユニット50における機能部のうち、基準面初期位置設定部521が不要となる。
【0109】
第2実施形態によれば、物体計測時にて基準平板40を用いる必要がないため、例えば、人間の顔の三次元形状を計測したりする場合など、ハンディタイプの装置構成を実現することができるようになる。
【0110】
以下、計測対象の物体の形状計測について、「輝度比」を算出することで、複数の基準面における画素別輝度比・三次元座標変換テーブルから物体の形状計測を行うことができる原理についてさらに詳細に説明する。
【0111】
本発明の形状計測装置100では、式(17)の計算について、物体の高さ座標zの値を見つけることのできるようにするために、画素別輝度比・三次元座標変換テーブルによるx,y,z座標の全空間テーブル化法を用いる。
【0112】
(zとR12の関係の各画素のテーブル化)
式(17)の具体例として数値を入れて計算をしてみることにする。図9より、式(19)で表される視線上のデータを見ている画素について、例えばy=0の場合を計算してみる。
【0113】
【数19】
【0114】
ここで、zCは視線とカメラ光軸との交点であり,xRは基準面がzCにあるときの基準面と視線の交点であり、zC=400mm、xR=10mmとする。
【0115】
2つの光源L1及びL2の位置(xL1,yL1,zL1)、(xL2,yL2,zL2)及び各光源自体の輝度比RS12を以下の値とする。
(xL1,yL1,zL1)=(30mm,0mm,200mm)
(xL2,yL2,zL2)=(20mm,0mm,300mm)
RS12=IS1/IS2=0.5
【0116】
これらの値を式(17)に代入すると、R12とzの関係は式(20)となり、この関係をグラフにすると図10のようになる。
【0117】
【数20】
【0118】
このように図9のようなカメラ10の光軸上に第1の光源L1及び第2の光源L2がない光学系の場合でも、その光学系を物体に対して走査することなしに、図10に示すように、カメラ10の画素ごとに、zはR12の一価関数となり、R12の値が決まればzが一意に決まる。すなわち、図9のような光学系の場合でも、その光学系を物体に対して走査することなしに精度よく式(17)を解くために、予めR12とx,y,zの関係を各画素について画素別輝度比・三次元座標変換テーブルとして求めておき、物体を撮影したときの画素の輝度比R12より画素別輝度比・三次元座標変換テーブルを参照することでその画素が見ている点のx,y,z座標が求められる。したがって、全ての画素について物体を撮影したときの画素の輝度比R12を求めることで物体の三次元形状を求めることができる。
【0119】
尚、光源の輝度比RS12も各画素の関数とすることもでき、この値を含めて画素別輝度比・三次元座標変換テーブルとして生成することもできる。
【0120】
次に、画素別輝度比・三次元座標変換テーブルの生成手順の一例について説明する。
【0121】
(1)z方向に移動する基準面を用いたx,y座標とz座標の関係のテーブル化
基準面の表面にx方向に平行で等間隔の格子及びy方向に平行で等間隔の格子を描くか、液晶ディスプレイなどを用いて表示させることで、x,y座標の目盛とすることができる。
【0122】
先ず、基準平板40をzの原点(z=z0=0)に設置した基準面を設定し、この画像をカメラ10で撮影し、撮影した格子像から画素が見ている格子の基準面上のx座標及びy座標を求め、画素とx,y座標の対応付けを行う。撮影した格子像からx座標及びy座標を求める際に、例えばフーリエ変換法或いは位相シフト法により座標を解析してもよい。
【0123】
次に、基準平板40を垂直方向に所定間隔Δzだけ動かした基準面を設定し、光源L1,L2のいずれか一方又は双方を点灯し、この画像をカメラ10で撮影し、撮影した格子像から所定間隔Δzだけ動かした基準面のz位置に対して画素が見ている格子の基準面上のx座標及びy座標を求め、画素とx,y座標の対応付けを行う。このようにして基準面のz座標を一定間隔Δzずつ増加させながら、各画素におけるzとx,yの関係をテーブルとして生成してメモリ70に記憶する。この動作を、zの計測したい範囲(z0〜zn)まで繰り返す。これにより、各画素におけるx,y座標とz座標の対応関係をテーブルとして生成することができる。
【0124】
(2)各画素の輝度比R12とz座標の関係のテーブル化
次に、基準面の格子の表示から、基準面を均一な明るさの白色に変更する。基準平板40をzの原点(z=z0=0)に設置した基準面を設定し、光源L1,L2を順次点灯し、それぞれの画像を撮影する。そして各画素における画像の輝度比R12を求める。次に、基準平板40を垂直方向に一定間隔Δzだけ動かした基準面を設定し、再度、光源L1,L2を順次点灯し、それぞれの画像を撮影する。そして、各画素における画像の輝度比R12を求める。基準平板40を垂直方向に一定間隔Δzずつ動かしながらこの動作を繰り返し、各画素におけるz座標と輝度比R12の関係をテーブルとして生成してメモリ70に記憶する。
【0125】
上記(1)及び(2)で生成したテーブルを組み合わせることで、各画素で輝度比R12が求められると、x,y,z座標が求められる画素別輝度比・三次元座標変換テーブルを生成することができる。この画素別輝度比・三次元座標変換テーブルは一度作成すると、光学系の構成や配置を変えないかぎり、いつまでも使えることになる。
【0126】
また、画素別輝度比・三次元座標変換テーブルの分解能を上げたい場合には、画素別輝度比・三次元座標変換テーブルの各要素の近傍のデータを用いた補間により大きな要素数の画素別輝度比・三次元座標変換テーブルを生成して分解能を向上させることができる。
【0127】
次に、画素別輝度比・三次元座標変換テーブルを用いた形状計測の一例について説明する。
【0128】
基準平板40をzの原点(z=z0=0)に設置した基準面を設定し、物体を基準平板40に載置する。形状計測時には、2つの光源L1,L2を順次点灯し、それぞれの画像を撮影する。そして各画素における画像の輝度比R12を求める。この輝度比R12を画素別輝度比・三次元座標変換テーブルと比較することにより、x,y,z座標が直ちに分かることになる。計算としては輝度比R12を求めるだけで物体の三次元座標を求めることができる。尚、この輝度比R12の算出も2つの光源L1,L2による輝度の値から輝度比を求めることができるテーブルを作成しておくのが処理速度の向上に好適である。
【0129】
(物体の明るさ情報や色情報のマッピング)
本発明に係る計測方法では、撮影した画像の輝度I1及びI2がいわゆる写真画像であるので、その輝度値を得られた座標にそのままマッピングすれば、三次元CG画像データを生成することもできる。
【0130】
(画素別輝度比・三次元座標変換テーブルに基づく全空間テーブル化法による誤差のキャンセル)
画素別輝度比・三次元座標変換テーブルに基づく全空間テーブル化法を用いると、画素別輝度比・三次元座標変換テーブルの作成時の光学系と物体計測時の光学系が同じである場合、光学系の影響による誤差は基本的にキャンセルされる。具体的には、光源の位置誤差、対象物体の位置誤差、光源の輝度のばらつき、光源の輝度分布ムラ、カメラのレンズの収差、カメラのレンズの汚れなどはキャンセルされる。また、計測対象の物体の反射率(色)の違いも原理的に削除される。
【0131】
(カメラの各画素における輝度のばらつきのキャンセル)
カメラの各画素における輝度の時間的ばらつきが無視できない場合、複数回、画像を撮影して平均処理を施し、この平均の輝度値を用いるのが好適である。また、物体には、2つの光源L1,L2からの光以外のいわゆる外光の影響を受けないように、暗室の中で計測を行うか、物体を含めた光学系を無反射布で覆われた暗箱の中に納めることが考えられるが、装置の可搬性を高めるために外光防止の黒色フードを設けるのが好適である。
【0132】
尚、2つの光源L1,L2の波長が異なると反射率が異なってくる影響を、上記の画素別輝度比・三次元座標変換テーブルによる方法では取り除けないことから、ペアとなる2つの光源L1,L2の波長分布は略同一の波長分布とする(略同一の波長分布とは、2つの光源L1,L2の波長分布の差によってカメラ10の撮像分解能として与える誤差がx,y,z座標の分解能以下となる波長分布を云う)のが好適である。光源としては、点光源が望ましいが面光源或いは多数の点光源で構成してもよい。例えば、第1の光源L1や第2の光源L2について、それぞれx,y座標で異なる複数個の光源を第1の光源L1や第2の光源L2として構成したとしても上記の画素別輝度比・三次元座標変換テーブルのようにテーブル化する為、計測上の問題が生じない。LEDチップを用いた光源は、小さな面積で、高出力であり、輝度のムラの影響が少ないことから、より好適である。また、LED光源によれば発光時間の調整が容易であり、高速に対応でき、カメラ10の撮像処理の同期も容易である。LED光源は、発光効率もよく省エネルギでもある。
【0133】
また、撮影にあたって輝度分解能を上げるために、第2の光源L2の発光輝度を第1の光源L1の発光輝度よりも高く設定しておき、サチレーションを起こさない範囲の最高輝度をもつ画像が得られるように第1の光源L1及び第2の光源L2の発光輝度やカメラ10の撮像パラメータを設定するのが好適である。このため、カメラ10の撮影時間を変えることや、複数のLEDを用いた光源とした場合にはその数を変えることや、LEDの印加電流を変えることなどの方法が考えられる。また、カメラ10の撮影時間は、物体に近い方の第1の光源L1で撮影した画像がサチレーションを起こさない範囲の最高輝度をもつように決めるとよい。
【産業上の利用可能性】
【0134】
本発明は、装置構成を小型化し、コストを低減させることができるため、物体の形状計測を非接触かつ高精度で行う用途に有用である。
【符号の説明】
【0135】
10 カメラ
20 第1の光源L1
30 第2の光源L2
40 基準平板
50 制御ユニット
60 モニタ
70 メモリ
80 基準面ガイド
90 モータ
100 形状計測装置
【技術分野】
【0001】
本発明は、物体の形状計測を非接触かつ高精度で行い得る多数の基準面を用いた形状計測装置及び形状計測方法に関する。
【背景技術】
【0002】
従来から、カメラとプロジェクタを用いて複数の基準面を基に物体の形状計測を行う技術がある。例えば、互いに直交するX,Y軸平面を有する基準面を、基準面の法線方向(即ち、X,Y軸平面に垂直なZ軸方向)に所定の間隔で複数設定しておき、計測すべき物体を当該複数の基準面の内、両端に位置する基準面の間に配置し、その後、物体の表面上の点Sの座標を求めるために、物体上の点Sを撮像するカメラの視線と物体上の点Sを通るプロジェクタからの光線の各々が当該複数の基準面にそれぞれ交わる点を算出し、カメラの視線上の当該交わる点からなる直線と、プロジェクタからの光線上の当該交わる点からなる直線との交点を求め、この交点のZ座標からその点に最も近接した2つの基準面を選出し、選出した2つの基準面を用いて物体の形状を計測する技術が知られている(例えば、特許文献1参照)。
【0003】
他方、カメラとプロジェクタを用いて複数の基準面を基に物体の形状計測を行う別の技術として、X,Y軸平面を有する基準面をその法線方向に微小量ずつ平行移動させたときの複数の基準面について、後述する二次元パターンや空間分割パターンを利用することにより、物体に投影する空間分割パターンの輝度分布が余弦波状でなくても、物体に投影する空間分割パターンのピッチが不等間隔であっても、精度良く形状計測を行い得る形状計測装置が知られている(例えば、特許文献2参照)。
【0004】
以下、特許文献2の技術について、さらに詳細に説明する。特許文献2の技術では、基準面を構成する基準平板として例えば液晶ディスプレイを用いる。このような基準平板(液晶ディスプレイ)は、移動ステージ上に設置され、基準面の法線方向(即ち、X,Y軸平面に垂直なZ軸方向)に所定の間隔で設定可能となっている。
【0005】
この基準平板(液晶ディスプレイ)は、所定の二次元パターン(例えば等間隔格子)を表示可能である。この二次元パターンは、カメラで撮像された画像の画素と、X,Y軸平面におけるx,y座標の対応付けに用いる。
【0006】
一方、プロジェクタも、当該移動ステージのZ軸方向に平行移動する各位置の基準面に対してX,Y軸方向の空間分割パターン(例えば格子状の濃淡パターン)を位相シフトしながら投影可能である。ただし、この空間分割パターンは、基準平板(液晶ディスプレイ)上に計測する物体が載置されているとき、物体上に投影されることになる。
【0007】
カメラは、基準面に対して正面に設置され、当該移動ステージのZ軸方向に平行移動する各位置の基準面にそれぞれ形成されるX,Y軸方向の二次元パターンを撮影した第1撮影画像に対応する第1撮影画像信号と、基準面に投影される空間分割パターンを撮影した第2撮影画像に対応する第2撮影画像信号と、基準平板に物体を載置して物体に投影される空間分割パターンを撮影した第3撮影画像に対応する第3撮影画像信号を生成する。
【0008】
これらの第1撮影画像信号、第2撮影画像信号及び第3撮影画像信号を用いて、物体の形状を解析する解析装置としてPC(Personal Computer)が設けられる。解析装置は、校正処理部と、連続撮影部と、実時間解析部と、精密解析部とを備える。
【0009】
校正処理部は、投影された格子の位相と計測する三次元座標との対応関係を予めカメラの画素毎に求める校正処理を行う。具体的には、校正処理部は、第1撮影画像信号及び第2撮影画像信号を用いて、基準面に表示された格子の位相とx座標及びy座標を取得して対応付けを行う。z座標に関しては、基準面が移動する位置(基準平板の移動量)がz座標に対応する。したがって、校正処理部は、空間分割パターンの位相と三次元空間座標とを1対1で対応付けたテーブル(以下、「位相・座標テーブル」という)を作成し、作成した位相・座標テーブルをメモリに保存する。
【0010】
連続撮影部は、物体の形状計測をリアルタイムに行うために、プロジェクタにおける空間分割パターン画像(例えば格子画像)の位相をシフトさせながら投影画像として入力するのに同期して連続撮影を行なって、第3撮影画像信号を取得する機能部である。
【0011】
実時間解析部は、空間分割パターン画像の位相シフトに同期して連続撮像された第3撮影画像信号を構成する連続する4フレームの画像から、1画素ずつ空間分割パターンの位相を求め、得られた位相から、校正処理部で作成した位相・座標テーブルを用いて、x座標又はy座標と、z座標とを求め、表示画像処理を行って、x座標、y座標及びz座標を用いて物体の形状データをモニタに表示することを繰り返す。
【0012】
精密解析部は、実時間解析部とは別に、空間分割パターン画像の位相シフトに同期して連続撮像された第3撮影画像信号を構成する連続する4フレームの画像から、1画素ずつ空間分割パターンの位相を求め、物体の形状データをメモリに格納する。
【0013】
このように、上述の特許文献1及び特許文献2に開示される技術では、カメラとプロジェクタを用いて複数の基準面を基に物体の形状計測を行うものであるため、プロジェクタによる投影が不可欠である。
【0014】
一方、プロジェクタを用いることなしに物体の形状を計測する、より単純な技法が従来から知られている。図8に示すように、2つの光源L1,L2(それぞれ点光源20,30で表される)により照明された物体をカメラ10で撮影することで、物体の形状を計測することができる。カメラ10の光軸に対して垂直に基準平板40を置き、これを基準面とする。この基準面上に、直交するX,Y軸をとり、このX,Y軸に対して垂直にZ軸をとる。基準平板40の上に物体を置いて、物体上の一点Sの基準平板40からの高さをz(変数)とする。
【0015】
点光源により照明された物体をカメラ10で撮影すると、この撮影された画像から得られる輝度Iの値は、点光源の発光輝度ISに比例し、点光源と物体との間の距離の2乗に反比例する。カメラ10による像面の物体の光の反射率をrとすると、反射した光の輝度は、この反射率rに比例する。結局、カメラ10で撮影された物体の画像の輝度Iは、式(1)で表現することができる。ここで、kは、感度等のカメラのパラメータを含む光学系固有の比例係数である。
【0016】
【数1】
【0017】
図8に示すように、カメラ10の光軸に対して垂直に基準平板40を設置し、さらにカメラ10の光軸上に光源L1,L2を設置するものとする。物体上の一点Sからの距離の異なる位置d1,d2は、物体上の一点Sの基準平板40からの高さzと、基準平板40から光源L1,L2までの距離D1,D2とを用いて(D2>D1)、式(2)、式(3)のように表すことができる。
【0018】
【数2】
【0019】
【数3】
【0020】
一方、物体上の一点Sからの距離の異なる位置d1,d2にある2個の光源L1,L2を発光させ、そのときの物体の画像を上方に設置したカメラ10で撮影する。光源L1,L2の発光輝度をそれぞれIS1,IS2とする。2個の光源L1,L2を別々に点灯し、カメラ10で撮影したそれぞれの画像のS点における輝度I1,I2は、式(4)及び式(5)のように表すことができる。
【0021】
【数4】
【0022】
【数5】
【0023】
式(2)、式(3)をそれぞれ式(4)、式(5)に代入すると、式(6)及び式(7)が得られる。
【0024】
【数6】
【0025】
【数7】
【0026】
この式(6)及び式(7)を利用すると、撮影した画像の輝度I1,I2から物体上の点Sにおける高さzを求めることができる。すなわち、zが求めるべき未知数である。距離D1,D2は光学系の寸法から決まる既知数である。輝度I1,I2は、カメラ10で計測した輝度値である。係数k及び係数rも未知数であるが、これらを求める必要はない。k・rを一つの未知数とすると、未知数はk・rとzの2個となり、式が2個あるので解けることになる。
【0027】
一方、式(6)を式(7)で割ると、式(8)となる。
【0028】
【数8】
【0029】
すなわち、式(8)は式(9)のように表される。
【0030】
【数9】
【0031】
このzに関する2次方程式を解くと、式(10)のようにzを求めることができる。
【0032】
【数10】
【0033】
式(10)について、I12=I1/I2、IS12=IS1/IS2とおくと、式(11)が得られる。
【0034】
【数11】
【0035】
式(11)の2次方程式を解くと、式(12)のようにzが求められる。
【0036】
【数12】
【0037】
このように、プロジェクタを用いることなしに、2つの光源とカメラを用いることで物体の形状を計測することができる。
【先行技術文献】
【特許文献】
【0038】
【特許文献1】特許第3446020号明細書
【特許文献2】特開2008−281491号公報
【発明の概要】
【発明が解決しようとする課題】
【0039】
前述したように、特許文献1及び特許文献2の技術は、プロジェクタを用いて投影した空間分割パターンや格子パターン自体の細密な変化又は空間分割パターンや格子パターンから生じる細密な位相変化を読み取ることにより物体の形状を計測する技術であるため、高精度の計測が可能となるが、プロジェクタを用いる点で装置構成が大きくなる欠点とコストが増大する欠点がある。
【0040】
一方、前述したようにプロジェクタを用いることなしに、2つの光源とカメラを用いることにより物体の形状を計測する従来の技法では、物体上の計測される点と2つの光源がカメラの光軸の同じ直線上にあることが基本となっている。このため、実際に物体の形状を計測する際には、カメラと2つの光源を基準面(X,Y軸の平面)に対して平行に走査させる必要がある。この平行走査を維持するための機構を設ける点で、やはり装置構成が大きくなる欠点とコストが増大する欠点がある。
【0041】
仮に、2つの光源とカメラを用いることにより物体の形状を計測する技法において、物体上の計測される点と2つの光源が同じ直線上でない場合を想定すると、光源と物体との距離が垂直方向の位置zだけでなくX,Y軸平面の位置x,yの関数にもなり、式(10)や式(12)で示される関数はさらに複雑化することになる。また、この場合、2つの光源のあらゆる照射方向に対して光源の発光輝度IS1,IS2にムラがないことが要求される。しかし、実際の光源は方向によって発光輝度のムラがあるため、正確な計測が困難になる。発光輝度のムラを考慮した計算ができる場合も複雑な式となり、計算に時間がかかることになる。
【0042】
すなわち、図9に示すように、2つの光源L1,L2の位置と物体上の点Sが同一直線上にない場合を考える。この場合も、この撮影された画像の輝度Iは点光源からの発光輝度ISに比例し、光源と物体間の距離dの2乗に反比例する。ここでは、光源の発光輝度のムラはなくあらゆる方向に均一な輝度分布であると仮定する。この場合、光源L1,L2及び物体上の一点Sの三次元位置をそれぞれ、(xL1,yL1,zL1)、(xL2,yL2,zL2)及び(x,y,z)とすると、この場合の式(1)のdは、式(13)及び式(14)のように表現できる。
【0043】
【数13】
【0044】
【数14】
【0045】
式(13)及び式(14)を、式(2)及び式(3)に代入すると、カメラ10で撮影したそれぞれの画像のS点における輝度I1,I2は、式(15)及び式(16)のように表される。
【0046】
【数15】
【0047】
【数16】
【0048】
式(15)を式(16)で割ると、カメラ10で撮影したそれぞれの画像のS点における輝度比R12は式(17)となる。ここで、式(18)で表すRS12はS点における2つの光源の輝度比であり、光源の発光輝度のムラを考えると、一般に場所の関数である。
【0049】
【数17】
【0050】
【数18】
【0051】
式(17)は、x,y,zに関する2次方程式である。撮影した物体上の点Sを見るカメラ10の画素の視線を考えると、視線は直線であり、この視線上でx,yはそれぞれzの1次関数となる。この1次関数を、式(17)に代入すると、x,yは消去されるが、式(17)はzの複雑な2次式となる。このため、この複雑な式の計算をするのに時間がかかることになる。また、S点から見た2つの光源の方向が異なっているため、光源の光軸からの方向により、発光輝度にムラがあると、IS1,IS2が一定でなくなり、その計算は非常に複雑となる。したがって、物体上の計測される点Sと2つの光源L1,L2の位置がカメラ10の光軸の同じ直線上にあることが基本となり、実際に物体の形状を計測する際には、カメラ10と2つの光源L1,L2を基準面(X,Y軸平面)に対して平行に走査させるのが一般的である。
【0052】
このように、従来の技術においては、装置構成が大きくなる欠点とコストが増大する欠点がある。
【0053】
本発明は、上述の問題を鑑みて為されたものであり、物体の形状計測を非接触かつ高精度で行い得る多数の基準面を用いた形状計測装置及び形状計測方法を提供することを目的とする。
【課題を解決するための手段】
【0054】
本発明の形状計測装置は、二次元平面を構成する基準面を複数用いて物体の三次元形状を計測する形状計測装置であって、物体を照射するための第1の光源と、該第1の光源とは異なる三次元空間位置に固定される、物体を照射するための第2の光源と、物体を撮像するための複数の画素を有するカメラと、二次元平面の座標と濃度が定義される基準平板の法線方向に、前記基準平板を所定間隔で平行移動させたときのそれぞれの当該二次元平面を高さ方向の基準面としたとき、当該複数の基準面について、前記カメラによって前記第1の光源及び前記第2の光源の各々で照射した各基準面を撮像して得られるそれぞれの画像信号の画素毎の輝度から、前記第1の光源及び前記第2の光源の各々で得られる画素毎の輝度比を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルを予め保持するメモリと、前記カメラによって前記第1の光源及び前記第2の光源の各々で照射した物体を撮像して得られるそれぞれの画像信号の画素毎の輝度から、前記第1の光源及び前記第2の光源の各々で得られる輝度比を算出し、該輝度比の値から前記画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元形状を決定する制御ユニットと、を備えることを特徴とする。
【0055】
また、本発明の形状計測装置において、前記第1の光源は1個または複数のLED光源からなり、前記第2の光源は1個または複数のLED光源からなり、前記制御ユニットは、前記第1の光源及び前記第2の光源の各々を構成するLED光源の点灯及び消灯を制御することにより調光制御を行う光源決定部を備えることを特徴とする。
【0056】
また、本発明の形状計測装置において、前記制御ユニットは、前記第1の光源及び前記第2の光源の各々で得られる輝度比を算出するにあたり、複数回撮像して得られた画像信号の平均値から当該輝度比を算出する画素別輝度比算出部を備えることを特徴とする。
【0057】
また、本発明の形状計測装置において、前記第2の光源は、前記第1の光源よりも光源の輝度が高く、前記第1の光源及び前記第2の光源は略同一の波長分布を有することを特徴とする。
【0058】
また、本発明の形状計測装置において、前記制御ユニットは、当該物体の三次元形状を決定するとともに、当該物体の明るさ及び色情報を決定することを特徴とする。
【0059】
さらに、本発明の形状計測方法は、二次元平面を構成する基準面を複数用いて物体の三次元形状を計測する形状計測方法であって、物体を照射するための第1の光源、該第1の光源とは異なる三次元空間位置に固定される、物体を照射するための第2の光源、物体を撮像するための複数の画素を有するカメラ、及び、制御ユニットが設けられており、前記制御ユニットの処理手順は、二次元平面の座標と濃度が定義される基準平板の法線方向に、前記基準平板を所定間隔で平行移動させたときのそれぞれの当該二次元平面を高さ方向の基準面としたとき、当該複数の基準面について、前記カメラによって前記第1の光源及び前記第2の光源の各々で照射した各基準面を撮像して得られるそれぞれの画像信号の画素毎の輝度から、前記第1の光源及び前記第2の光源の各々で得られる画素毎の輝度比を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルをメモリに予め保持するステップと、前記カメラによって前記第1の光源及び前記第2の光源の各々で照射した物体を撮像して得られるそれぞれの画像信号の画素毎の輝度から、前記第1の光源及び前記第2の光源の各々で得られる輝度比を算出し、該輝度比の値から前記画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元形状を決定するステップと、を含むことを特徴とする。
【発明の効果】
【0060】
本発明によれば、光源の位置誤差、対象物体の位置誤差、光源の輝度のばらつき、光源の輝度分布ムラ、カメラのレンズの収差、カメラのレンズの汚れなどの影響をキャンセルしながら物体の形状計測を非接触かつ高精度で行うことができる。さらに、物体計測時に、物体に対して光学系(カメラ、第1の光源及び第2の光源)を平行移動させる機構やプロジェクタを必要せず、カメラ、第1の光源及び第2の光源を一直線上に配置することなしに固定した光学系で物体の計測が可能であることから、従来よりも装置構成を小型化することが可能となり、さらに装置のコストを低減させることができる。
【図面の簡単な説明】
【0061】
【図1】本発明による第1実施形態の形状計測装置の概略図である。
【図2】本発明による第1実施形態の形状計測装置における制御ユニットのブロック図である。
【図3】本発明による第1実施形態の形状計測装置における制御ユニットの校正処理フローを示す図である。
【図4】本発明による第1実施形態の形状計測装置における制御ユニットの形状計測処理フローを示す図である。
【図5】本発明による第1実施形態の形状計測装置における輝度比から高さ座標に変換する輝度比・高さ座標変換テーブルの一例を示す図である。
【図6】本発明による第1実施形態の形状計測装置における輝度比から三次元座標に変換する画素別輝度比・三次元座標変換テーブルの概念を説明するための図である。
【図7】本発明による第2実施形態の形状計測装置の概略図である。
【図8】従来の形状計測装置における計測原理の概略図である。
【図9】本発明に係る形状計測装置における計測原理の概略図である。
【図10】本発明に係る形状計測装置における輝度比から高さ座標に変換する変換テーブルの実際値の一例を示す図である。
【発明を実施するための形態】
【0062】
以下、図面を参照して、本発明による各実施形態の形状計測装置について説明する。第1実施形態の形状計測装置は基準平板の上に載置された物体を計測する例であり、第2実施形態の形状計測装置は物体の形状計測時にて基準平板を用いずに物体を計測する例であり、順に説明する。
【0063】
<第1実施形態>
〔装置構成〕
図1は、本発明による第1実施形態の形状計測装置の概略図である。本実施形態の形状計測装置100は、二次元平面を構成する基準面を複数用いて物体の三次元形状を計測する装置であり、カメラ10と、光源20,30(第1の光源L1及び第2の光源L2)と、制御ユニット50と、メモリ70とを備える。形状計測装置100における光学系の校正処理時には、基準平板40と、基準面ガイド80と、モータ90とを備える機構を用いて光学系の校正処理を行う。尚、光学系の校正処理時には、基準平板40と、基準面ガイド80と、モータ90とを備える機構について、以下の説明は一例を示すものである。モニタ60は、必要に応じて計測結果の表示を行うのに用いる。
【0064】
本実施形態の形状計測装置100は、2つの光源L1,L2(それぞれ点光源20,30で表される)により照明された物体をカメラ10で撮影することで、物体の形状を計測する。一方、光学系の校正処理を行うために、カメラ10の光軸に対して垂直に基準平板40を置き、これを基準面とする。この基準面上に、直交するX,Y軸をとり、このX,Y軸に対して垂直にZ軸をとる。基準平板40の上に物体を置いた場合、物体上の一点Sの基準平板40からの高さをz(変数)とする。
【0065】
点光源により照明された物体をカメラ10で撮影すると、この撮影された画像から得られる輝度Iの値は、点光源の発光輝度ISに比例し、点光源と物体との間の距離の2乗に反比例する。カメラ10による像面の物体の光の反射率をrとすると、反射した光の輝度は、この反射率rに比例する。
【0066】
光源20(第1の光源L1)は、物体を照射するための光源であり、発光輝度IS1を有する。光源20(第1の光源L1)は、複数のLED光源からなる点光源として構成することが好適であり、これにより各LED光源の点灯及び消灯の組み合わせで調光することが可能となる。第1の光源L1の点灯及び消灯、又は調光制御は、制御ユニット50からの制御信号(光源L1制御信号)によってなされる。
【0067】
光源30(第2の光源L2)は、第1の光源L1とは異なる三次元空間位置に固定される、物体を照射するための光源であり、発光輝度IS2を有する。光源30(第2の光源L2)は、複数のLED光源からなる点光源として構成することが好適であり、これにより各LED光源の点灯及び消灯の組み合わせで調光することが可能となる。また、光源30(第2の光源L2)は、第1の光源L1よりも光源の発光輝度が高い(IS2>IS1)ように構成するのが好適であり、より好適には第1の光源L1及び第2の光源L2について基準平板40までの距離の2乗に反比例することを加味した輝度バランスとすることで、SN比を揃えるようにするのが望ましい。第2の光源L2の点灯及び消灯、又は調光制御は、制御ユニット50からの制御信号(光源L2制御信号)によってなされる。
【0068】
カメラ10は、物体を撮像するための複数の画素を有し、例えばCCDセンサやCMOSセンサなどの撮像素子を用いたカメラを利用する。このようなカメラは、単色撮像又は多色撮像のいずれでもよく、例えば単色(フィルタなし)用のカメラであれば感度がよくなり、RGBカラーフィルタを有するカメラの場合には、RGB出力値を輝度値に変換することができる。カメラ10の撮像制御や画像信号の取得は、制御ユニット50からの制御信号(カメラ制御信号/画像信号)によってなされる。
【0069】
基準平板40は、X,Y軸の二次元平面を構成する。基準平板40は、校正処理時にのみ用いればよい。校正処理の際には、基準平板40の表面に、計測結果のx,y座標の目盛とするための格子(X軸方向に平行で等間隔の格子及びY軸方向に平行で等間隔の格子)を例えば白色面に黒色で格子線を描いたシートを載置したり、画素毎の輝度比R12(=I1/I2)を決定するための一定濃度のシート(例えば、反射率が既知の白色シート)を載置したりする方法があるが、以下の説明では、主に、白色面に黒色で格子線を描いたシート(以下、総括して校正像を表示したシートを「校正シート」と称する)を用いて光学系の校正処理を行う例を説明する。尚、誤差要因として無視できる場合には、液晶ディスプレイを用いることも可能である。つまり、基準平板40を構成する液晶ディスプレイの表面に計測結果のx,y座標の目盛とするための格子像を表示し、その位相をシフトすることができる。
【0070】
基準面ガイド80は、二次元平面の座標と濃度が定義される基準平板40の法線方向(Z軸方向)に、基準平板40をΔzの所定間隔(z=z0,z1,z2,・・・,zn:nは任意の整数であり、znで高さ分布の分解能や計測範囲が定まり、z=z0はすなわち、物体の高さ座標として0である)で平行移動させたときのそれぞれの当該二次元平面を高さ方向の基準面とするためのガイドレールである。モータ90は、基準平板40を基準面ガイド80に沿って平行移動させるための駆動源であり、その機構については既知の技術を用いればよく、更なる詳細な説明は省略する。基準平板40を所定間隔(z=z0,z1,z2,・・・,zn)で平行移動させるための制御は、制御ユニット50からの制御信号(基準面位置制御信号)によってなされる。
【0071】
制御ユニット50は、校正処理時に、基準平板40の法線方向(Z軸方向)に、基準平板40を所定間隔で平行移動させたときのそれぞれの当該二次元平面を高さ方向の基準面としたとき、当該複数の基準面について、カメラ10によって第1の光源L1及び第2の光源L2の各々で照射した各基準面を撮像して得られるそれぞれの画像信号の画素毎の輝度I1,I2から、第1の光源L1及び第2の光源L2の各々で得られる画素毎の輝度比R12(=I1/I2)を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルを作成してメモリ70に予め保持する。また、制御ユニット50は、形状計測処理時に、カメラ10によって第1の光源L1及び第2の光源L2の各々で照射した物体を撮像して得られるそれぞれの画像信号の画素毎の輝度I1,I2から、第1の光源L1及び第2の光源L2の各々で得られる輝度比R12を算出し、該輝度比の値からメモリ70に予め保持した画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元形状を決定する。
【0072】
モニタ60は、制御ユニット50によって決定した物体の三次元形状を表示するための装置である。モニタ60で計測結果を表示する代わりに、プリンタによる出力を用いてもよいし、記録媒体に記録する構成としてもよい。
【0073】
尚、本実施形態の制御ユニット50、モニタ60及びメモリ70は、コンピュータ装置110として構成することができ、制御ユニット50をコンピュータとして構成させる場合には、当該コンピュータに、後述する制御ユニット50の各構成要素を実現させるためのプログラムをメモリ70に記憶する。当該コンピュータに備えられる中央演算処理部(CPU)が、各構成要素の機能を実現するための処理内容が記述されたプログラムや処理データを、適宜、メモリ70から読み込んで制御ユニット50の各構成要素の機能をコンピュータ上で実現させることができる。ここで、各構成要素の機能をハードウェアの一部で実現してもよいことは勿論である。
【0074】
〔制御ユニット〕
図2は、本発明による第1実施形態の形状計測装置における制御ユニットのブロック図である。制御ユニット50は、校正処理部510と、形状計測部520と、モニタ60で計測結果を表示する制御を行う表示制御部530とを備える。
【0075】
校正処理部510は、基準面可変位置設定部511と、光源決定部512と、カメラ撮像処理部513と、画素別輝度比算出部514と、輝度比・高さ座標処理部515と、画素別輝度比・三次元座標変換テーブル生成部516とを備える。
【0076】
基準面可変位置設定部511は、基準平板40を所定間隔(z=z0,z1,z2,・・・,zn)で基準面ガイド80に沿ってZ軸方向に平行移動させるために、モータ90に対して基準面位置制御信号を発生する機能部である。基準面可変位置設定部511は、この平行移動の制御のために必要であれば、モータの制御値と所定間隔(z=z0,z1,z2,・・・,zn)とを予め対応付けた基準面位置データ710をメモリ70から参照して制御する。
【0077】
光源決定部512は、所定間隔(z=z0,z1,z2,・・・,zn)の複数の基準面について、それぞれカメラ10によって第1の光源L1及び第2の光源L2の各々で照射した各基準面を撮像するために、カメラ10の撮像に同期して第1の光源L1及び第2の光源L2の点灯(調光制御も含む)及び消灯の切り替えを行うための光源L1制御信号や光源L2制御信号を発生する機能部である。光源決定部512は、第1の光源L1又は第2の光源L2の調光制御に必要であれば、第1の光源L1や第2の光源L2の基準平板40からの高さ(Z軸方向)や光源のタイプ(複数のLED光源からなる点光源等)に応じて予め決定された光源調光用データ730をメモリ70から参照して制御する。
【0078】
カメラ撮像処理部513は、所定間隔(z=z0,z1,z2,・・・,zn)の複数の基準面について、それぞれ第1の光源L1又は第2の光源L2の点灯に同期してカメラ10の撮像を制御して画像信号を取得するためのカメラ制御信号/画像信号を発生する機能部である。
【0079】
画素別輝度比算出部514は、基準平板40の法線方向(Z軸方向)に、基準平板40を所定間隔で平行移動させたときのそれぞれの当該二次元平面を高さ方向の基準面としたとき、当該複数の基準面(校正シートを載置した面)について、カメラ10によって第1の光源L1及び第2の光源L2の各々で照射した各基準面を撮像して得られるそれぞれの画像信号の画素毎の輝度I1,I2から、第1の光源L1及び第2の光源L2の各々で得られる画素毎の輝度比R12(=I1/I2)を算出する機能部である。尚、画素別輝度比算出部514は、第1の光源L1及び第2の光源L2の各々で得られる輝度比を算出するにあたり、複数回撮像して得られた画像信号の平均値から当該輝度比を算出するように構成することもできる。
【0080】
輝度比・高さ座標処理部515は、算出された複数の基準面における画素毎の輝度比R12(=I1/I2)を高さ座標(z=z0,z1,z2,・・・,zn)に対応付けた輝度比・高さ座標変換テーブルを生成する機能部である。輝度比・高さ座標処理部515は、生成した輝度比・高さ座標変換テーブル740(図5参照)をメモリ70に格納することができる。
【0081】
画素別輝度比・三次元座標変換テーブル生成部516は、算出された複数の基準面における画素毎の輝度比・高さ座標変換テーブル740における高さ座標(z座標)と、校正像(又は格子像)を撮像したことで得られるX,Y軸平面(x,y座標)から、輝度比R12を基準にした複数の基準面における画素毎のx,y,z座標を画素別輝度比・三次元座標変換テーブルとして生成してメモリ70に格納する。例えば、図6に示すように、各画素で、各基準面における均一像部分による輝度I1,I2を取得し、格子線部分によるx,y座標を決定することができ、画素毎の輝度比R12(=I1/I2)を高さ座標に対応付けを行っていることから、画素別輝度比・三次元座標変換テーブルを作成することができる。尚、格子線上にある画素(複数のx,y座標値を跨る画素)については、格子像からx,y座標を決定することができ、格子線上にない画素は、輝度値の算出のために用いることができる。また、図6では、格子線を1画素サイズ以下で例示的に表しているが、格子線部分が複数画素に跨って撮像される構成となっても同様に処理することができる。
【0082】
形状計測部520は、基準面初期位置設定部521と、光源決定部522と、カメラ撮像処理部523と、画素別輝度比算出部524と、画素別三次元座標決定処理部525とを備える。
【0083】
基準面初期位置設定部521は、基準平板40を初期位置(z=z0)となるように基準面ガイド80に沿ってZ軸方向に平行移動させるために、モータ90に対して基準面位置制御信号を発生する機能部である。計測対象の物体のサイズは、z=z0〜znの範囲内であり、且つ基準面に描写される格子像によるx,y座標の範囲内であり、この物体は、計測処理時に、初期位置(z=z0=0)の基準平板40に載置される。基準面初期位置設定部521は、この平行移動の制御のために必要であれば、モータの制御値と所定間隔(z=z0,z1,z2,・・・,zn)とを予め対応付けた基準面位置データ710をメモリ70から参照して制御する。ただし、基準平板40を用いずに物体の形状を計測する場合には、当該複数の基準面の範囲内(z=z0〜znの範囲内)に物体を置けばよいため、基準面初期位置設定部521の処理は、基準平板40に物体を載置する場合の処理である。
【0084】
光源決定部522は、当該複数の基準面の範囲内(z=z0〜znの範囲内)にある物体形状について、カメラ10によって第1の光源L1及び第2の光源L2の各々で照射した物体をそれぞれ撮像するために、カメラ10の撮像に同期して第1の光源L1及び第2の光源L2の点灯(調光制御も含む)及び消灯の切り替えを行うための光源L1制御信号や光源L2制御信号を発生する機能部である。光源決定部522は、第1の光源L1又は第2の光源L2の調光制御に必要であれば、第1の光源L1や第2の光源L2の基準平板40からの高さ(Z軸方向)や光源のタイプ(複数のLED光源からなる点光源等)に応じて予め決定された光源調光用データ730をメモリ70から参照して制御する。
【0085】
カメラ撮像処理部523は、当該複数の基準面の範囲内(z=z0〜znの範囲内)にある物体形状について、第1の光源L1又は第2の光源L2の点灯に同期してカメラ10の撮像を制御して画像信号を取得するためのカメラ制御信号/画像信号を発生する機能部である。
【0086】
画素別輝度比算出部524は、当該複数の基準面の範囲内(z=z0〜znの範囲内)にある物体形状について、カメラ10によって第1の光源L1及び第2の光源L2の各々で照射した物体を撮像して得られるそれぞれの画像信号の画素毎の輝度I1,I2から、第1の光源L1及び第2の光源L2の各々で得られる画素毎の輝度比R12(=I1/I2)を算出する機能部である。尚、画素別輝度比算出部524は、第1の光源L1及び第2の光源L2の各々で得られる輝度比を算出するにあたり、複数回撮像して得られた画像信号の平均値から当該輝度比を算出するように構成することもできる。
【0087】
画素別三次元座標決定処理部525は、算出された第1の光源L1及び第2の光源L2の各々で得られる輝度比R12の値から校正処理でメモリ70に予め保持した画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元形状を決定し、計測結果をメモリ70に格納し、表示制御部530と協働して物体の三次元座標をモニタ60に表示する機能部である。
【0088】
〔装置動作〕
次に、本発明による第1実施形態の形状計測装置の装置動作について説明する。
【0089】
(校正処理)
図3は、本発明による第1実施形態の形状計測装置における制御ユニットの校正処理フローを示す図である。以下の動作説明では、格子像と一定濃度の均一像を兼ねて1つの校正像(一定濃度の均一像の部分と格子線部分からなる)の校正シートを用いる場合を説明する。
【0090】
まず、基準面可変位置設定部511によって基準平板40を初期位置(z=z0)に設定する(ステップS1)。x,y座標の目盛とするための格子並びに光源別の輝度比のための一定濃度の均一像からなる校正像の校正シートは基準平板40に設定される(ステップS2)。
【0091】
次に、光源決定部512によって第1の光源L1を点灯し第2の光源L2を消灯する(ステップS3)。続いて、カメラ撮像処理部513によって基準平板40を撮像し、校正像における格子のx,y座標と画素との対応付けと画素毎の輝度値をデータとして保持する(ステップS4)。
【0092】
次に、光源決定部512によって第2の光源L2を点灯し第1の光源L1を消灯する(ステップS5)。続いて、カメラ撮像処理部513によって基準平板40を撮像し、校正像における格子のx,y座標と画素との対応付けと画素毎の輝度値をデータとして保持する(ステップS6)。校正像における格子のx,y座標と画素との対応付けのために、第1の光源L1と第2の光源L2のいずれか一方のみで取得したデータを用いてもよいが、複数のデータを用いて平均処理することで精度を向上させることができる。
【0093】
次に、画素別輝度比算出部514によって、初期位置(z=z0=0)に設定した基準平板40の基準面(一定濃度の均一像の部分)を撮像して得られるそれぞれの画像信号の画素毎の輝度I1,I2から、第1の光源L1及び第2の光源L2の各々で得られる画素毎の輝度比R12(=I1/I2)を算出する(ステップS7)。続いて、輝度比・高さ座標処理部515によって、算出された基準面における画素毎の輝度比R12(=I1/I2)を高さ座標に対応付けを行い(ステップS8)、画素別輝度比・三次元座標変換テーブル生成部516によって初期位置(z=z0)に設定した基準平板40の基準面における画素別輝度比・三次元座標変換テーブルを生成してメモリ70に格納する(ステップS9)。
【0094】
ステップS1〜S9について、所定間隔(z=z0,z1,z2,・・・,zn)の複数の基準面について繰り返し行い、複数の基準面における画素別輝度比・三次元座標変換テーブルを生成してメモリ70に格納する(ステップS10,S11)。
【0095】
このようにして、形状計測装置100は、物体の形状計測前の校正処理として、複数の基準面における画素別輝度比・三次元座標変換テーブルを生成してメモリ70に格納しておく。
【0096】
(形状計測処理)
図4は、本発明による第1実施形態の形状計測装置における制御ユニットの形状計測処理フローを示す図である。
【0097】
まず、基準面初期位置設定部521によって基準平板40を初期位置(z=z0)に設定する(ステップS21)。物体は、初期位置(z=z0=0)に設定される基準平板40に載置されているものとする。ただし、基準平板40を用いずに物体の形状を計測する場合には、当該複数の基準面の範囲内(z=z0〜znの範囲内)に物体が置かれる。
【0098】
次に、光源決定部522によって第1の光源L1を点灯し第2の光源L2を消灯する(ステップS22)。続いて、カメラ撮像処理部523によって基準平板40に載置した物体を撮像し、画素毎の輝度値をデータとして保持する(ステップS23)。
【0099】
次に、光源決定部522によって第2の光源L2を点灯し第1の光源L1を消灯する(ステップS24)。続いて、カメラ撮像処理部523によって基準平板40に載置した物体を撮像し、画素毎の輝度値をデータとして保持する(ステップS25)。
【0100】
次に、画素別輝度比算出部524によって、初期位置(z=z0=0)に設定した基準平板40に載置した物体を撮像して得られるそれぞれの画像信号の画素毎の輝度I1,I2から、第1の光源L1及び第2の光源L2の各々で得られる画素毎の輝度比R12(=I1/I2)を算出する(ステップS26)。
【0101】
続いて、画素別三次元座標決定処理部525によって、算出された第1の光源L1及び第2の光源L2の各々で得られる輝度比R12の値から校正処理でメモリ70に予め保持した画素別輝度比・三次元座標変換テーブルを参照して(ステップS27)、当該物体の三次元形状を決定し(ステップS28)、計測結果をメモリ70に格納し、表示制御部530と協働して物体の三次元座標をモニタ60に表示する(ステップS29)。
【0102】
尚、複数回の物体の三次元座標の計測結果を平均処理した結果を表示したりするように構成することができる。
【0103】
このようにして、形状計測装置100は、従来よりも装置構成を小型化し、コストを低減させた構成で、物体の形状計測を行うことができるようになる。
【0104】
また、光源の位置誤差、対象物体の位置誤差、光源の輝度のばらつき、光源の輝度分布ムラ、カメラのレンズの収差、カメラのレンズの汚れなどの影響をキャンセルしながら物体の形状計測を非接触かつ高精度で行うことができる。
【0105】
次に、本発明による第2実施形態の形状計測装置について説明する。第2実施形態の形状計測装置は、第1実施形態とは相違して、基準平板を用いずに物体を計測する例である。
【0106】
<第2実施形態>
〔装置構成〕
図7は、本発明による第2実施形態の形状計測装置の概略図である。第1実施形態と同様な構成要素には同一の参照番号を付している。本実施形態の形状計測装置100は、物体の形状計測時にて基準平板を用いずに、複数の基準面40bの範囲内(z=z0〜znの範囲内)に置かれる物体の三次元形状を計測する装置であり、カメラ10と、光源20,30(第1の光源L1及び第2の光源L2)と、制御ユニット50と、メモリ70とを備える。
【0107】
第2実施形態においても、第1実施形態の場合と同様に、物体の形状計測前の校正処理として、複数の基準面における画素別輝度比・三次元座標変換テーブルを生成してメモリ70に格納しておく。
【0108】
物体の三次元形状の計測時には、複数の基準面40bの範囲内(z=z0〜znの範囲内)にある物体形状を、第1実施形態の場合と同様に処理すればよく、すなわち、制御ユニット50は、形状計測処理時に、カメラ10によって第1の光源L1及び第2の光源L2の各々で照射した物体を撮像して得られるそれぞれの画像信号の画素毎の輝度I1,I2から、第1の光源L1及び第2の光源L2の各々で得られる輝度比R12を算出し、該輝度比の値からメモリ70に予め保持した画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元形状を決定する。したがって、第2実施形態では、図2で説明した制御ユニット50における機能部のうち、基準面初期位置設定部521が不要となる。
【0109】
第2実施形態によれば、物体計測時にて基準平板40を用いる必要がないため、例えば、人間の顔の三次元形状を計測したりする場合など、ハンディタイプの装置構成を実現することができるようになる。
【0110】
以下、計測対象の物体の形状計測について、「輝度比」を算出することで、複数の基準面における画素別輝度比・三次元座標変換テーブルから物体の形状計測を行うことができる原理についてさらに詳細に説明する。
【0111】
本発明の形状計測装置100では、式(17)の計算について、物体の高さ座標zの値を見つけることのできるようにするために、画素別輝度比・三次元座標変換テーブルによるx,y,z座標の全空間テーブル化法を用いる。
【0112】
(zとR12の関係の各画素のテーブル化)
式(17)の具体例として数値を入れて計算をしてみることにする。図9より、式(19)で表される視線上のデータを見ている画素について、例えばy=0の場合を計算してみる。
【0113】
【数19】
【0114】
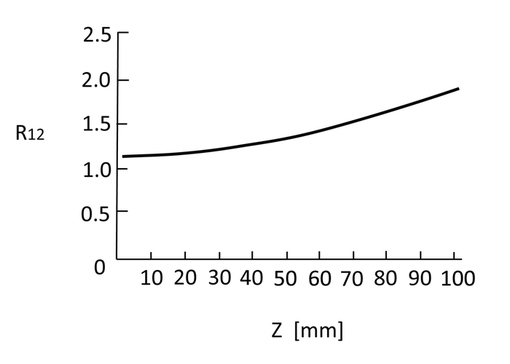
ここで、zCは視線とカメラ光軸との交点であり,xRは基準面がzCにあるときの基準面と視線の交点であり、zC=400mm、xR=10mmとする。
【0115】
2つの光源L1及びL2の位置(xL1,yL1,zL1)、(xL2,yL2,zL2)及び各光源自体の輝度比RS12を以下の値とする。
(xL1,yL1,zL1)=(30mm,0mm,200mm)
(xL2,yL2,zL2)=(20mm,0mm,300mm)
RS12=IS1/IS2=0.5
【0116】
これらの値を式(17)に代入すると、R12とzの関係は式(20)となり、この関係をグラフにすると図10のようになる。
【0117】
【数20】
【0118】
このように図9のようなカメラ10の光軸上に第1の光源L1及び第2の光源L2がない光学系の場合でも、その光学系を物体に対して走査することなしに、図10に示すように、カメラ10の画素ごとに、zはR12の一価関数となり、R12の値が決まればzが一意に決まる。すなわち、図9のような光学系の場合でも、その光学系を物体に対して走査することなしに精度よく式(17)を解くために、予めR12とx,y,zの関係を各画素について画素別輝度比・三次元座標変換テーブルとして求めておき、物体を撮影したときの画素の輝度比R12より画素別輝度比・三次元座標変換テーブルを参照することでその画素が見ている点のx,y,z座標が求められる。したがって、全ての画素について物体を撮影したときの画素の輝度比R12を求めることで物体の三次元形状を求めることができる。
【0119】
尚、光源の輝度比RS12も各画素の関数とすることもでき、この値を含めて画素別輝度比・三次元座標変換テーブルとして生成することもできる。
【0120】
次に、画素別輝度比・三次元座標変換テーブルの生成手順の一例について説明する。
【0121】
(1)z方向に移動する基準面を用いたx,y座標とz座標の関係のテーブル化
基準面の表面にx方向に平行で等間隔の格子及びy方向に平行で等間隔の格子を描くか、液晶ディスプレイなどを用いて表示させることで、x,y座標の目盛とすることができる。
【0122】
先ず、基準平板40をzの原点(z=z0=0)に設置した基準面を設定し、この画像をカメラ10で撮影し、撮影した格子像から画素が見ている格子の基準面上のx座標及びy座標を求め、画素とx,y座標の対応付けを行う。撮影した格子像からx座標及びy座標を求める際に、例えばフーリエ変換法或いは位相シフト法により座標を解析してもよい。
【0123】
次に、基準平板40を垂直方向に所定間隔Δzだけ動かした基準面を設定し、光源L1,L2のいずれか一方又は双方を点灯し、この画像をカメラ10で撮影し、撮影した格子像から所定間隔Δzだけ動かした基準面のz位置に対して画素が見ている格子の基準面上のx座標及びy座標を求め、画素とx,y座標の対応付けを行う。このようにして基準面のz座標を一定間隔Δzずつ増加させながら、各画素におけるzとx,yの関係をテーブルとして生成してメモリ70に記憶する。この動作を、zの計測したい範囲(z0〜zn)まで繰り返す。これにより、各画素におけるx,y座標とz座標の対応関係をテーブルとして生成することができる。
【0124】
(2)各画素の輝度比R12とz座標の関係のテーブル化
次に、基準面の格子の表示から、基準面を均一な明るさの白色に変更する。基準平板40をzの原点(z=z0=0)に設置した基準面を設定し、光源L1,L2を順次点灯し、それぞれの画像を撮影する。そして各画素における画像の輝度比R12を求める。次に、基準平板40を垂直方向に一定間隔Δzだけ動かした基準面を設定し、再度、光源L1,L2を順次点灯し、それぞれの画像を撮影する。そして、各画素における画像の輝度比R12を求める。基準平板40を垂直方向に一定間隔Δzずつ動かしながらこの動作を繰り返し、各画素におけるz座標と輝度比R12の関係をテーブルとして生成してメモリ70に記憶する。
【0125】
上記(1)及び(2)で生成したテーブルを組み合わせることで、各画素で輝度比R12が求められると、x,y,z座標が求められる画素別輝度比・三次元座標変換テーブルを生成することができる。この画素別輝度比・三次元座標変換テーブルは一度作成すると、光学系の構成や配置を変えないかぎり、いつまでも使えることになる。
【0126】
また、画素別輝度比・三次元座標変換テーブルの分解能を上げたい場合には、画素別輝度比・三次元座標変換テーブルの各要素の近傍のデータを用いた補間により大きな要素数の画素別輝度比・三次元座標変換テーブルを生成して分解能を向上させることができる。
【0127】
次に、画素別輝度比・三次元座標変換テーブルを用いた形状計測の一例について説明する。
【0128】
基準平板40をzの原点(z=z0=0)に設置した基準面を設定し、物体を基準平板40に載置する。形状計測時には、2つの光源L1,L2を順次点灯し、それぞれの画像を撮影する。そして各画素における画像の輝度比R12を求める。この輝度比R12を画素別輝度比・三次元座標変換テーブルと比較することにより、x,y,z座標が直ちに分かることになる。計算としては輝度比R12を求めるだけで物体の三次元座標を求めることができる。尚、この輝度比R12の算出も2つの光源L1,L2による輝度の値から輝度比を求めることができるテーブルを作成しておくのが処理速度の向上に好適である。
【0129】
(物体の明るさ情報や色情報のマッピング)
本発明に係る計測方法では、撮影した画像の輝度I1及びI2がいわゆる写真画像であるので、その輝度値を得られた座標にそのままマッピングすれば、三次元CG画像データを生成することもできる。
【0130】
(画素別輝度比・三次元座標変換テーブルに基づく全空間テーブル化法による誤差のキャンセル)
画素別輝度比・三次元座標変換テーブルに基づく全空間テーブル化法を用いると、画素別輝度比・三次元座標変換テーブルの作成時の光学系と物体計測時の光学系が同じである場合、光学系の影響による誤差は基本的にキャンセルされる。具体的には、光源の位置誤差、対象物体の位置誤差、光源の輝度のばらつき、光源の輝度分布ムラ、カメラのレンズの収差、カメラのレンズの汚れなどはキャンセルされる。また、計測対象の物体の反射率(色)の違いも原理的に削除される。
【0131】
(カメラの各画素における輝度のばらつきのキャンセル)
カメラの各画素における輝度の時間的ばらつきが無視できない場合、複数回、画像を撮影して平均処理を施し、この平均の輝度値を用いるのが好適である。また、物体には、2つの光源L1,L2からの光以外のいわゆる外光の影響を受けないように、暗室の中で計測を行うか、物体を含めた光学系を無反射布で覆われた暗箱の中に納めることが考えられるが、装置の可搬性を高めるために外光防止の黒色フードを設けるのが好適である。
【0132】
尚、2つの光源L1,L2の波長が異なると反射率が異なってくる影響を、上記の画素別輝度比・三次元座標変換テーブルによる方法では取り除けないことから、ペアとなる2つの光源L1,L2の波長分布は略同一の波長分布とする(略同一の波長分布とは、2つの光源L1,L2の波長分布の差によってカメラ10の撮像分解能として与える誤差がx,y,z座標の分解能以下となる波長分布を云う)のが好適である。光源としては、点光源が望ましいが面光源或いは多数の点光源で構成してもよい。例えば、第1の光源L1や第2の光源L2について、それぞれx,y座標で異なる複数個の光源を第1の光源L1や第2の光源L2として構成したとしても上記の画素別輝度比・三次元座標変換テーブルのようにテーブル化する為、計測上の問題が生じない。LEDチップを用いた光源は、小さな面積で、高出力であり、輝度のムラの影響が少ないことから、より好適である。また、LED光源によれば発光時間の調整が容易であり、高速に対応でき、カメラ10の撮像処理の同期も容易である。LED光源は、発光効率もよく省エネルギでもある。
【0133】
また、撮影にあたって輝度分解能を上げるために、第2の光源L2の発光輝度を第1の光源L1の発光輝度よりも高く設定しておき、サチレーションを起こさない範囲の最高輝度をもつ画像が得られるように第1の光源L1及び第2の光源L2の発光輝度やカメラ10の撮像パラメータを設定するのが好適である。このため、カメラ10の撮影時間を変えることや、複数のLEDを用いた光源とした場合にはその数を変えることや、LEDの印加電流を変えることなどの方法が考えられる。また、カメラ10の撮影時間は、物体に近い方の第1の光源L1で撮影した画像がサチレーションを起こさない範囲の最高輝度をもつように決めるとよい。
【産業上の利用可能性】
【0134】
本発明は、装置構成を小型化し、コストを低減させることができるため、物体の形状計測を非接触かつ高精度で行う用途に有用である。
【符号の説明】
【0135】
10 カメラ
20 第1の光源L1
30 第2の光源L2
40 基準平板
50 制御ユニット
60 モニタ
70 メモリ
80 基準面ガイド
90 モータ
100 形状計測装置
【特許請求の範囲】
【請求項1】
二次元平面を構成する基準面を複数用いて物体の三次元形状を計測する形状計測装置であって、
物体を照射するための第1の光源と、
該第1の光源とは異なる三次元空間位置に固定される、物体を照射するための第2の光源と、
物体を撮像するための複数の画素を有するカメラと、
二次元平面の座標と濃度が定義される基準平板の法線方向に、前記基準平板を所定間隔で平行移動させたときのそれぞれの当該二次元平面を高さ方向の基準面としたとき、当該複数の基準面について、前記カメラによって前記第1の光源及び前記第2の光源の各々で照射した各基準面を撮像して得られるそれぞれの画像信号の画素毎の輝度から、前記第1の光源及び前記第2の光源の各々で得られる画素毎の輝度比を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルを予め保持するメモリと、
前記カメラによって前記第1の光源及び前記第2の光源の各々で照射した物体を撮像して得られるそれぞれの画像信号の画素毎の輝度から、前記第1の光源及び前記第2の光源の各々で得られる輝度比を算出し、該輝度比の値から前記画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元形状を決定する制御ユニットと、
を備えることを特徴とする形状計測装置。
【請求項2】
請求項1に記載の形状計測装置において、前記第1の光源は1個または複数のLED光源からなり、前記第2の光源は1個または複数のLED光源からなり、前記制御ユニットは、前記第1の光源及び前記第2の光源の各々を構成するLED光源の点灯及び消灯を制御することにより調光制御を行う光源決定部を備えることを特徴とする形状計測装置。
【請求項3】
請求項1又は2に記載の形状計測装置において、前記制御ユニットは、前記第1の光源及び前記第2の光源の各々で得られる輝度比を算出するにあたり、複数回撮像して得られた画像信号の平均値から当該輝度比を算出する画素別輝度比算出部を備えることを特徴とする形状計測装置。
【請求項4】
請求項1〜3のいずれか一項に記載の形状計測装置において、前記第2の光源は、前記第1の光源よりも光源の輝度が高く、前記第1の光源及び前記第2の光源は略同一の波長分布を有することを特徴とする形状計測装置。
【請求項5】
請求項1〜4のいずれか一項に記載の形状計測装置において、前記制御ユニットは、当該物体の三次元形状を決定するとともに、当該物体の明るさ及び色情報を決定することを特徴とする形状計測装置。
【請求項6】
二次元平面を構成する基準面を複数用いて物体の三次元形状を計測する形状計測方法であって、
物体を照射するための第1の光源、該第1の光源とは異なる三次元空間位置に固定される、物体を照射するための第2の光源、物体を撮像するための複数の画素を有するカメラ、及び、制御ユニットが設けられており、
前記制御ユニットの処理手順は、
二次元平面の座標と濃度が定義される基準平板の法線方向に、前記基準平板を所定間隔で平行移動させたときのそれぞれの当該二次元平面を高さ方向の基準面としたとき、当該複数の基準面について、前記カメラによって前記第1の光源及び前記第2の光源の各々で照射した各基準面を撮像して得られるそれぞれの画像信号の画素毎の輝度から、前記第1の光源及び前記第2の光源の各々で得られる画素毎の輝度比を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルをメモリに予め保持するステップと、
前記カメラによって前記第1の光源及び前記第2の光源の各々で照射した物体を撮像して得られるそれぞれの画像信号の画素毎の輝度から、前記第1の光源及び前記第2の光源の各々で得られる輝度比を算出し、該輝度比の値から前記画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元形状を決定するステップと、
を含むことを特徴とする形状計測方法。
【請求項1】
二次元平面を構成する基準面を複数用いて物体の三次元形状を計測する形状計測装置であって、
物体を照射するための第1の光源と、
該第1の光源とは異なる三次元空間位置に固定される、物体を照射するための第2の光源と、
物体を撮像するための複数の画素を有するカメラと、
二次元平面の座標と濃度が定義される基準平板の法線方向に、前記基準平板を所定間隔で平行移動させたときのそれぞれの当該二次元平面を高さ方向の基準面としたとき、当該複数の基準面について、前記カメラによって前記第1の光源及び前記第2の光源の各々で照射した各基準面を撮像して得られるそれぞれの画像信号の画素毎の輝度から、前記第1の光源及び前記第2の光源の各々で得られる画素毎の輝度比を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルを予め保持するメモリと、
前記カメラによって前記第1の光源及び前記第2の光源の各々で照射した物体を撮像して得られるそれぞれの画像信号の画素毎の輝度から、前記第1の光源及び前記第2の光源の各々で得られる輝度比を算出し、該輝度比の値から前記画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元形状を決定する制御ユニットと、
を備えることを特徴とする形状計測装置。
【請求項2】
請求項1に記載の形状計測装置において、前記第1の光源は1個または複数のLED光源からなり、前記第2の光源は1個または複数のLED光源からなり、前記制御ユニットは、前記第1の光源及び前記第2の光源の各々を構成するLED光源の点灯及び消灯を制御することにより調光制御を行う光源決定部を備えることを特徴とする形状計測装置。
【請求項3】
請求項1又は2に記載の形状計測装置において、前記制御ユニットは、前記第1の光源及び前記第2の光源の各々で得られる輝度比を算出するにあたり、複数回撮像して得られた画像信号の平均値から当該輝度比を算出する画素別輝度比算出部を備えることを特徴とする形状計測装置。
【請求項4】
請求項1〜3のいずれか一項に記載の形状計測装置において、前記第2の光源は、前記第1の光源よりも光源の輝度が高く、前記第1の光源及び前記第2の光源は略同一の波長分布を有することを特徴とする形状計測装置。
【請求項5】
請求項1〜4のいずれか一項に記載の形状計測装置において、前記制御ユニットは、当該物体の三次元形状を決定するとともに、当該物体の明るさ及び色情報を決定することを特徴とする形状計測装置。
【請求項6】
二次元平面を構成する基準面を複数用いて物体の三次元形状を計測する形状計測方法であって、
物体を照射するための第1の光源、該第1の光源とは異なる三次元空間位置に固定される、物体を照射するための第2の光源、物体を撮像するための複数の画素を有するカメラ、及び、制御ユニットが設けられており、
前記制御ユニットの処理手順は、
二次元平面の座標と濃度が定義される基準平板の法線方向に、前記基準平板を所定間隔で平行移動させたときのそれぞれの当該二次元平面を高さ方向の基準面としたとき、当該複数の基準面について、前記カメラによって前記第1の光源及び前記第2の光源の各々で照射した各基準面を撮像して得られるそれぞれの画像信号の画素毎の輝度から、前記第1の光源及び前記第2の光源の各々で得られる画素毎の輝度比を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルをメモリに予め保持するステップと、
前記カメラによって前記第1の光源及び前記第2の光源の各々で照射した物体を撮像して得られるそれぞれの画像信号の画素毎の輝度から、前記第1の光源及び前記第2の光源の各々で得られる輝度比を算出し、該輝度比の値から前記画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元形状を決定するステップと、
を含むことを特徴とする形状計測方法。
【図1】

【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−237613(P2012−237613A)
【公開日】平成24年12月6日(2012.12.6)
【国際特許分類】
【出願番号】特願2011−105885(P2011−105885)
【出願日】平成23年5月11日(2011.5.11)
【出願人】(509347239)一般社団法人モアレ研究所 (6)
【Fターム(参考)】
【公開日】平成24年12月6日(2012.12.6)
【国際特許分類】
【出願日】平成23年5月11日(2011.5.11)
【出願人】(509347239)一般社団法人モアレ研究所 (6)
【Fターム(参考)】
[ Back to top ]