
形状計測装置及び形状計測方法
【課題】物体の形状計測を非接触且つ高精度で行い得る形状計測装置及び形状計測方法を提供する。
【解決手段】 本発明の形状計測装置1は、少なくとも5つの光源を等間隔に直線状に配列した光源アレイ11、1次元格子の格子面を有する格子プレート12、1次元格子が投影される計測対象物体21を撮影するカメラ13及び制御ユニット50を備える。制御ユニット50は、少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定し、この2組の光源組における各光源を順次点灯するよう光源アレイ11を制御するとともに、それぞれ計測対象物体21に投影される1次元格子を撮影するようカメラ13を制御し、撮影された画像から2組の光源組による計測対象物体21上に投影された1次元格子の位相をそれぞれ算出し、当該2つの位相の差を位相シフト量として予め定めた換算式に基づいて計測対象物体21に関する高さ座標を求める。
【解決手段】 本発明の形状計測装置1は、少なくとも5つの光源を等間隔に直線状に配列した光源アレイ11、1次元格子の格子面を有する格子プレート12、1次元格子が投影される計測対象物体21を撮影するカメラ13及び制御ユニット50を備える。制御ユニット50は、少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定し、この2組の光源組における各光源を順次点灯するよう光源アレイ11を制御するとともに、それぞれ計測対象物体21に投影される1次元格子を撮影するようカメラ13を制御し、撮影された画像から2組の光源組による計測対象物体21上に投影された1次元格子の位相をそれぞれ算出し、当該2つの位相の差を位相シフト量として予め定めた換算式に基づいて計測対象物体21に関する高さ座標を求める。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体の形状計測を非接触且つ高精度で行い得る形状計測装置及び形状計測方法に関する。
【背景技術】
【0002】
従来、物体や人体等の計測対象物体の形状を非接触且つ3次元的に計測する方法として、位相シフト法を用いた方法がある。位相シフト法は、位相を変化させながら格子画像や干渉縞画像を1台のカメラで順次撮影し、これら位相を変化させた複数枚の格子画像や干渉縞画像に基づいて格子の位相分布を求めるものである。
【0003】
位相シフト法を用いた方法として、例えば、カメラとプロジェクタを用いて、これらのカメラ又はプロジェクタのレンズ収差の影響を受けることなく高精度な形状計測を行うために、格子が描かれた基準平板の画像からカメラ又はプロジェクタのレンズ中心座標を算出するのではなく、複数の基準面における各基準面に固定された2次元格子から、カメラの画素毎の視線が通る光路と、プロジェクタから投影される光の光路とをそれぞれ全て求めて、これらの光路の交点として空間座標を算出する形状計測方法及び形状計測装置が知られている(例えば、特許文献1参照)。
【0004】
また、カメラとプロジェクタを用いて複数の基準面を基に物体の形状計測を行う別の技術がある。例えば、互いに直交するX,Y軸平面を有する基準面を、基準面の法線方向(即ち、X,Y軸平面に垂直なZ軸方向)に所定の間隔で複数設定しておき、計測すべき物体を当該複数の基準面のうち、両端に位置する基準面の間に配置し、その後、物体の表面上の点Sの座標を求めるために、物体上の点Sを撮影するカメラの視線と物体上の点Sを通るプロジェクタからの光線の各々が当該複数の基準面にそれぞれ交わる点を算出し、カメラの視線上の当該交わる点からなる直線と、プロジェクタからの光線上の当該交わる点からなる直線との交点を求め、この交点のZ座標からその点に最も近接した2つの基準面を選出し、選出した2つの基準面を用いて物体の形状を計測する技術が知られている(例えば、特許文献2参照)。
【0005】
他方、カメラとプロジェクタを用いて複数の基準面を基に物体の形状計測を行う更に別の技術として、X,Y軸平面を有する基準面をその法線方向に微小量ずつ平行移動させたときの複数の基準面について、所定の2次元パターンや空間分割パターンを利用することにより、物体に投影する空間分割パターンの輝度分布が余弦波状でなくても、さらには物体に投影する空間分割パターンのピッチが不等間隔であっても、精度良く形状計測を行い得る形状計測装置が知られている(例えば、特許文献3参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第2913021号明細書
【特許文献2】特許第3446020号明細書
【特許文献3】特開2008−281491号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述の特許文献1〜3に開示される技術では、位相シフトを行うための格子を描いた基板(格子基板)の移動機構を用いることが代表的な実施形態として考えられる。例えば、特許文献1に開示される技術では、位相シフトを行うために格子基板を移動機構上に設けて格子基板を機械的に移動させることになる。この移動機構は、例えばピエゾステージ等で構成され非常に高価なものとなるだけでなく、格子の位相シフトを高速に行うことに不向きであり、高速で移動する物体の形状を計測することが困難な構成要素となる。
【0008】
また、位相シフトに基づいて形状計測を行うためには、この位相シフト量をより高精度で求める工夫が要望される。
【0009】
本発明は、上述の問題に鑑みて為されたものであり、本発明の目的は、物体の形状計測を非接触且つ高精度で行い得る形状計測装置及び形状計測方法を提供することにある。
【課題を解決するための手段】
【0010】
本発明では、少なくとも5つの光源を等間隔かつ一列に並べ、このうち隣接配置の少なくとも4つの光源からなる光源組を少なくとも2組設定し、2つの光源組における各光源を順次点灯して計測対象物体上に投影される格子を撮影し、それぞれの光源組による格子の位相を算出し、求めた2つの格子の位相の差を位相シフト量として予め定めた換算式に基づいて高さ座標を求める。また、3つ以上の光源組としてもよい。これにより、光源の切り替え制御で格子の位相シフトを高速化するとともに、少なくとも2つの光源組を用いるため計測対象物体の形状計測を高精度化する。尚、本発明では、少なくとも4つの光源からなる光源組毎に、この少なくとも4つの光源の順次点灯によって格子を位相シフトさせるため、この位相シフト量は、従来の位相シフト法のように2πを整数で割った値とはならずに上記少なくとも4つの光源を通る直線からの距離に依存することとなり、空間座標と位相との間で距離に依存しない換算式を用いる従来の位相シフト法とは異なる方式となっている。
【0011】
即ち、本発明の形状計測装置は、計測対象物体の形状を非接触で計測する形状計測装置であって、少なくとも5つの光源を等間隔に直線状に配列した光源アレイと、前記少なくとも5つの光源を配列した直線に対して垂直方向の直線からなる光透過領域を光遮蔽領域に対して等間隔で並べて構成された1次元格子の格子面を有する格子プレートと、前記少なくとも5つの光源の順次点灯により前記1次元格子がそれぞれ前記計測対象物体上に投影される計測対象物体を撮影するカメラと、前記少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定し、前記2組の光源組における各光源を順次点灯するよう前記光源アレイを制御するとともに、前記各光源を順次点灯してそれぞれ投影される1次元格子を撮影するよう前記カメラを制御し、前記2組の光源組による前記計測対象物体上に投影された前記1次元格子の位相をそれぞれ算出し、算出した当該2つの位相の差を位相シフト量として、前記位相シフト量から距離を決定する予め定めた換算式に基づいて前記計測対象物体に関する高さ座標を求める制御ユニットと、を備えることを特徴とする。ここで、光源の各々を複数のLEDからなるものとし、この複数のLEDを点光源として構成して高輝度化することができる。また、この複数のLEDを直線からなる光透過領域に対して平行に配置することで更に高輝度化することができる。
【0012】
また、本発明の形状計測装置において、前記位相シフト量から距離を決定する予め定めた換算式は、前記少なくとも5つの光源を配列した直線上の1点を原点として、前記格子プレートのそれぞれの光透過領域の配列方向をX軸、前記光透過領域の直線をY軸、及び前記格子プレートの格子面の法線方向をZ軸とし、前記光源アレイの原点から前記計測対象物体の表面までの前記Z軸方向の距離をz、前記光源アレイの各光源の間隔をl、前記光源アレイの原点から前記格子面までのZ軸方向の距離をd、前記位相シフト量をΨ、前記1次元格子の間隔をpとしたとき、
【数1】

【0013】
また、本発明の形状計測装置において、前記制御ユニットは、当該投影された1次元格子の位相から距離を決定する予め定めた換算式に基づいて前記計測対象物体に関する高さ座標を求める手段を有し、前記少なくとも5つの光源を配列した直線上の1点を原点として、前記格子プレートのそれぞれの光透過領域の配列方向をX軸、前記光透過領域の直線をY軸、及び前記格子プレートの格子面の法線方向をZ軸とし、前記光源アレイの原点から前記計測対象物体の表面までの前記Z軸方向の距離をz、前記光源アレイの原点から前記格子面までの前記Z軸方向の距離をd、前記1次元格子の位相をΦ、前記1次元格子の間隔をp、前記原点から前記計測対象物体の表面までの前記X軸方向の距離をx、前記1次元格子を構成する各光透過領域の中央位置のうち前記Z軸からの最短距離をeとしたとき、
【数2】
【0014】
また、本発明の形状計測装置において、前記1次元格子が投影されるように配置された基準面を有する基準平板を更に備え、前記制御ユニットは、前記少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定し、前記2組の光源組における各光源を順次点灯するよう前記光源アレイを制御するとともに、前記各光源を順次点灯してそれぞれ前記基準面に投影される1次元格子を撮影するよう前記カメラを制御し、前記2組の光源組による前記基準面上に投影された前記1次元格子の位相をそれぞれ算出してメモリに保持する手段と、前記2組の光源組のそれぞれについて、前記メモリに保持した前記基準面上に投影された前記1次元格子の位相と、前記計測対象物体上に投影された前記1次元格子の位相との差分を算出し、該差分から距離を決定する予め定めた換算式に基づいて前記計測対象物体に関する高さ座標を求める手段とを備えることを特徴とする。
【0015】
また、本発明の形状計測装置において、前記差分から距離を決定する予め定めた換算式は、前記少なくとも5つの光源を配列した直線上の1点を原点として、前記格子プレートのそれぞれの光透過領域の配列方向をX軸、前記光透過領域の直線をY軸、及び前記格子プレートの格子面の法線方向をZ軸とし、前記光源アレイの原点から前記計測対象物体の表面までの前記Z軸方向の距離をz、前記光源アレイの原点から前記格子面までの前記Z軸方向の距離をd、前記原点から前記カメラのレンズの中心までの距離をv、前記原点から前記基準面までのZ軸方向の距離をzR、前記1次元格子の間隔をp、前記原点から前記計測対象物体の表面までの前記X軸方向の距離xにおける当該投影された前記1次元格子の位相をΦS、前記距離xの前記計測対象物体の表面位置と前記レンズの中心とを通る直線と、前記基準面との交点における当該投影された前記1次元格子の位相をΦRとしたとき、
【数3】
【0016】
また、本発明の形状計測装置において、前記制御ユニットは、前記カメラの画素位置で定まるX軸及びY軸のx,y座標とZ軸のz座標からなる三次元座標について、前記基準平板を用いて計測された一定間隔のz座標毎に、前記位相と前記x,y座標との関係、及び前記位相シフト量と前記x,y座標との関係を関連づけるテーブルをそれぞれ作成して前記メモリに保持する手段と、前記計測対象物体について算出した前記1次元格子の位相及び前記位相シフト量から、前記メモリに保持したテーブルを参照して前記計測対象物体に関する三次元座標を導出する手段とを備えることを特徴とする。
【0017】
さらに、本発明の形状計測方法は、少なくとも5つの光源を等間隔に直線状に配列した光源アレイと、前記少なくとも5つの光源を配列した直線に対して垂直方向の直線からなる光透過領域を光遮蔽領域に対して等間隔で並べて構成された1次元格子の格子面を有する格子プレートと、前記少なくとも5つの光源の順次点灯により前記1次元格子がそれぞれ投影される計測対象物体を撮影するカメラと、制御ユニットと、を備える形状計測装置によって前記計測対象物体の形状を計測する形状計測方法であって、前記制御ユニットの処理は、前記少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定するステップと、前記2組の光源組における各光源を順次点灯するよう前記光源アレイを制御するステップと、前記各光源を順次点灯してそれぞれ前記計測対象物体上に投影される1次元格子を撮影するよう前記カメラを制御するステップと、前記2組の光源組による前記計測対象物体上に投影された前記1次元格子の位相をそれぞれ算出するステップと、算出した当該2つの位相の差を位相シフト量として、前記位相シフト量から距離を決定する予め定めた換算式に基づいて前記計測対象物体に関する高さ座標を求めるステップと、を含むことを特徴とする。
【発明の効果】
【0018】
本発明によれば、少なくとも5つの光源を順次点灯させることにより位相シフトを高速に行うことができるため、計測対象物体の形状を高速かつ高精度に計測することができる。
【図面の簡単な説明】
【0019】
【図1】本発明による第1実施形態の形状計測装置の構成とその動作原理を示す図である。
【図2】(A),(B)は、本発明による第1実施形態(及び第2実施形態)の形状計測装置における光源アレイと格子プレートの配置例を示す図である。
【図3】本発明による第1実施形態(及び第2実施形態)の形状計測装置における制御ユニットのブロック図である。
【図4】本発明に係る光ステッピング法における位相シフト量と輝度との関係を示す図である。
【図5】本発明による第1実施形態の形状計測装置の動作フローの一例を示す図である。
【図6】本発明による第1実施形態の形状計測装置による三次元座標テーブルの例を示す図である。
【図7】本発明による第2実施形態の形状計測装置の構成とその動作原理を示す図である。
【図8】本発明による第2実施形態の形状計測装置による三次元座標テーブルの例を示す図である。
【図9】本発明に係る位相シフト量の余弦と高さとの関係の例を示す図である。
【図10】本発明に係る位相の正接と高さとの関係の例を示す図である。
【図11】本発明に係る計測対象物体上での位相と基準面上での位相との差と、高さとの関係を示す図である。
【発明を実施するための形態】
【0020】
以下、本発明による第1実施形態及び第2実施形態の形状計測装置について、それぞれ図面を参照して説明する。尚、第1実施形態の形状計測装置1は、基準面を用いずに計測対象物体の形状を計測する態様であり、第2実施形態の形状計測装置2は、基準面を用いて計測対象物体の形状を計測する態様である。
【0021】
〔第1実施形態〕
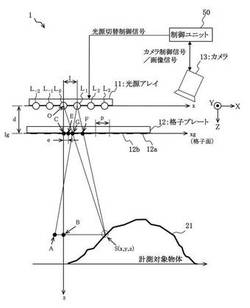
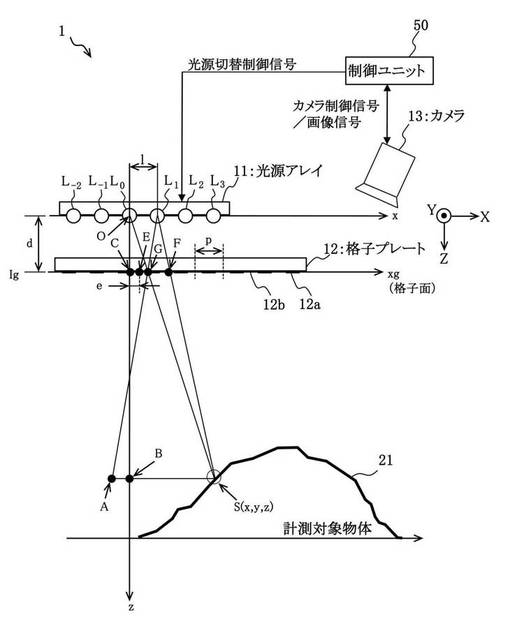
まず、本発明による第1実施形態の形状計測装置1について説明する。図1は、本発明による第1実施形態の形状計測装置1の構成とその動作原理を示す図である。本実施形態の形状計測装置1は、計測対象物体21の三次元形状を計測する装置であり、等間隔且つ一列に並べられた6つの光源L−2,L−1,L0,L1,L2及びL3からなる光源アレイ11と、1次元格子からなる格子面を有する格子プレート12と、カメラ13と、制御ユニット50とを備える。
【0022】
X軸、Y軸及びZ軸からなる座標点x,y,zで三次元空間を規定するために、光源アレイ11を構成する6つの光源L−2,L−1,L0,L1,L2及びL3のうちのいずれかの光源の位置(図1に示す例では、L0の位置)を原点O(即ち、x=0,y=0,z=0)とし、格子プレート12のそれぞれの光透過領域12bの配列方向をX軸、光透過領域12bの直線をY軸、及び格子プレート12の格子面の法線方向をZ軸とする。計測対象物体21は、Z軸方向に配置される。尚、原点Oの位置は、光源アレイ11における両端の光源間の中央位置として規定することもできるが、ここでは6つの光源のうちのいずれかの位置を原点Oとする。
【0023】
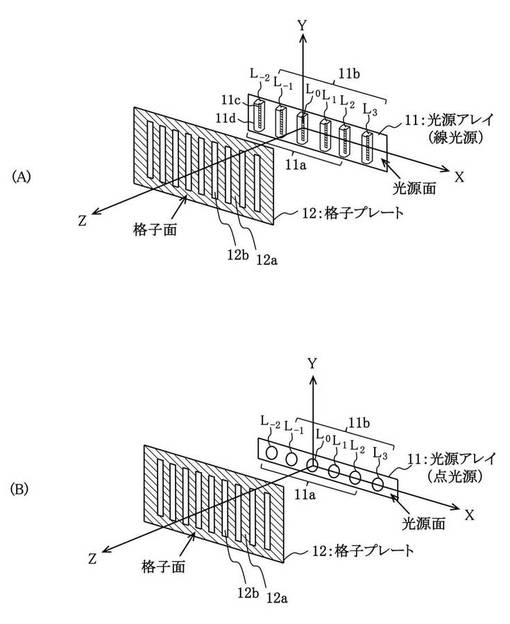
光源アレイ11は、6つの光源L−2,L−1,L0,L1,L2及びL3を等間隔に直線状に配列した構成となっている。図1では、光源アレイ11として、X軸方向に等間隔で配列した6つの光源からなる例を代表的に説明するが、5つの光源、又は7つ以上の光源を備えるように構成することもできる。また、光源として発光ダイオード(LED)を用いており、各LEDは線光源又は点光源として構成することができる。即ち、LEDチップの出力は小さいため、複数のLEDチップをY軸方向に並べてY軸に対して平行となる線光源とし、この各線光源をX軸方向に等間隔で配列して6つの光源L−2,L−1,L0,L1,L2及びL3を構成することができる。更に、複数のLEDチップを集約して1つの点光源とすることもできる。例えば、図2(A)に示すように、各光源は、複数のLEDチップ11cをY軸方向に配列し、必要に応じて指向性レンズ11dを設けることで線光源として構成することができる。また、図2(B)に示すように、各光源は、複数のLEDチップを集約して1つの点光源として構成することができる。また、6つの光源間の間隔はlである。以下、6つの光源L−2,L−1,L0,L1,L2及びL3を含むz=0の面(X軸及びY軸からなるX,Y軸平面に平行でz=0となる面)を「光源面」と称する。つまり、光源アレイ11上から計測対象物体21の表面までのZ軸方向の距離をz(換言すれば、光源面からZ軸方向の位置を「高さ」を表す座標点z)とすることができる。
【0024】
格子プレート12は、6つの光源L−2,L−1,L0,L1,L2及びL3を配列した方向(図1及び図2に示す例では、X軸方向)に対して垂直方向(即ち、Y軸方向)の直線からなる光透過領域12bを光遮蔽領域12aに対して等間隔で並べて構成された1次元格子の格子面を有する。例えば、格子プレート12は、透明のガラス又はプラスチック材の表面に黒色の1次元格子の格子面を印刷することで構成することができるほか、光を遮蔽する部材(光遮蔽領域12a)にスリット(光透過領域12b)を設けて構成することもできる。この格子プレート12は、光源アレイ11から照射された光が格子プレート12を通過することにより、1次元格子が計測対象物体21上に投影されるように構成されている。1次元格子を構成する各光透過領域12bの格子間隔はpであり、図1に例示する態様では光源面と格子面は平行であり、光源面と格子面との間隔はdである。また、1次元格子を構成する各光透過領域12bの中央位置のうちZ軸からの距離が最短なものを基準点E(Φ=0)とし、格子プレート12の格子面とZ軸との交点をCとする。尚、当該投影される1次元格子の輝度分布は余弦波状である必要がある。このため、格子プレート12上の輝度分布(透過率分布)が矩形波状であっても、距離dの位置に設けた光源アレイ11の光源から照射された光によって計測対象物体21に投影される1次元格子は、カメラ13による撮像画像上において、ほぼ余弦波状になる。尚、厳密に余弦波とならなくともよい。特に、後述する全空間テーブル化手法を使うことによりその誤差を打ち消すこともできる。
【0025】
本実施形態では、図2に示すように、各光源をX軸方向に等間隔で配列して6つの光源L−2,L−1,L0,L1,L2及びL3を構成する光源アレイ11と格子プレート12をX,Y軸平面で平行となるようにZ軸方向に配置している。ただし、光源アレイ11をz=0のX,Y軸平面内において原点Oを中心にしてX軸に対して傾けて配置することができる。つまり、光源アレイ11は、X軸に対して平行である必要はない。この場合、上記の説明における6つの光源間の間隔lとしては、X軸方向(即ち、1次元格子を構成する光透過領域12bの直線に垂直な方向)の光源間の間隔(即ち、6つの光源間の間隔のX軸方向の成分)を用いる。光源間の間隔を物理的に狭めることは困難であるが、上記のように光源アレイ11をX軸に対して傾けることにより、X軸方向の光源間の間隔を容易に狭めることができるようになる。また、格子プレート12は、光透過領域12bの直線がY軸に平行であればよい。
【0026】
図2に示すように、本実施形態では、6つの光源L−2,L−1,L0,L1,L2及びL3のうち、隣接配置の5つの光源からなる光源組を2組設定する。具体的には、5つの光源L−2,L−1,L0,L1及びL2を第1の光源組11aとし、5つの光源L−1,L0,L1,L2及びL3を第2の光源組11bとする。これは、詳細に後述するが、それぞれの光源組において各光源を順次点灯して計測対象物体21上に投影される1次元格子を撮影し、それぞれの光源組による1次元格子の位相を算出し、求めた2つの1次元格子の位相の差を位相シフト量として高さ座標zを求めるためである。隣接配置の5つの光源からなる光源組を3組以上とした場合も、定めた原点Oの光源を含む光源組とすることで位相シフト量を正確に求めることができる。例えば、第1、第2及び第3の光源組として3つの光源組を設定した場合、第1、第2の光源組による位相シフト量、第2、第3の光源組による位相シフト量、及び第1、第3の光源組による位相シフト量をそれぞれ求めることができる。したがって、隣接配置の5つの光源からなる光源組を3組以上とした場合も、3組以上の光源組のうち位相シフト量を求める光源組を2組設定することで高さ座標zを求めることができる。
【0027】
図1を参照するに、カメラ13は、6つの光源L−2,L−1,L0,L1,L2及びL3のうちの1つの点灯によってそれぞれ1次元格子が投影された計測対象物体21を撮影する。カメラ13としては、CCDセンサやCMOSセンサ等を使用したものとすることができる。x,y座標については、例えばフーリエ変換格子法により、X軸方向及びY軸方向の位相をそれぞれ求め、更に位相接続を行うことにより、各点におけるx座標及びy座標をそれぞれ得ることができる(例えば、特許第3281918号明細書参照)。
【0028】
尚、光源と格子プレート12との間や、格子プレート12と計測対象物体21との間に、レンズ等の像の拡大や縮小を行う部材を配置することもできる。
【0029】
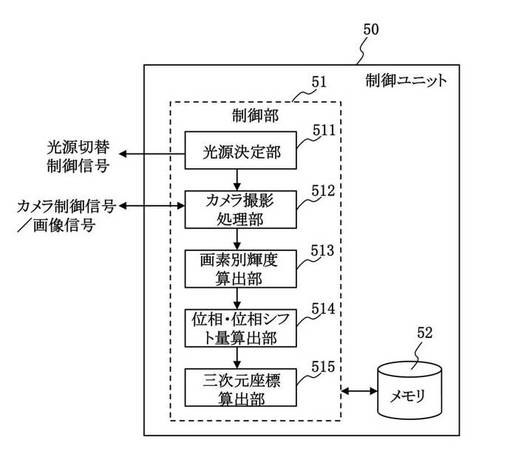
図3に示すように、制御ユニット50は、それぞれの光源組11a,11bにおける各光源を順次点灯するための光源切替制御信号を光源アレイ11に供給するとともに、各光源を順次点灯したことによる計測対象物体21上に投影される1次元格子を撮影するためのカメラ制御信号をカメラ13に供給してカメラ13から1次元格子を撮影した画像信号を取得する。更に、制御ユニット50は、撮影した画像信号から得られる画素毎の輝度値を基に、それぞれの光源組11a,11bによる計測対象物体21上に投影される1次元格子の位相をそれぞれ算出し、算出した2つの投影された1次元格子の位相の差を位相シフト量として定め、位相シフト量から距離を決定する予め定めた換算式に基づいて計測対象物体21に関する高さ座標を求める。より具体的には、制御ユニット50は、制御部51と、メモリ52とを備える。制御部51は、光源決定部511と、カメラ撮影処理部512と、画素別輝度算出部513と、位相・位相シフト量算出部514と、三次元座標算出部515とを備える。
【0030】
光源決定部511は、それぞれの光源組11a,11bにおいて各光源を順次点灯するための光源切替制御信号を光源アレイ11に供給する。
【0031】
カメラ撮影処理部512は、各光源を順次点灯したことによる計測対象物体21上に投影される1次元格子を撮影するためのカメラ制御信号をカメラ13に供給してカメラ13から撮影した画像の画像信号を取得する。
【0032】
画素別輝度算出部513は、取得した画像信号から、各画素位置における輝度値を算出する。
【0033】
位相・位相シフト量算出部514は、撮影画像の画像信号から得られる画素毎の輝度値を基に、それぞれの光源組11a,11bによる1次元格子の位相を算出し、求めた2つの1次元格子の位相の差である位相シフト量を算出する。以下、位相Φ及び位相シフト量Ψを求める処理を「位相解析処理」と称する。また、例えばフーリエ変換格子法による位相解析によって、この位相から画素毎にx,y座標を求める。
【0034】
三次元座標算出部515は、計測対象物体21における画素毎に得られた位相シフト量から、予め定めた換算式に基づいて高さ座標zを求め、計測対象物体21の三次元座標データをメモリ52に記憶する。
【0035】
この位相解析処理には、1次元格子の位相と空間座標とを関連づけるテーブルを予め画素毎に作成しておき、該テーブルを参照して、各画素から得られる1次元格子の位相から空間座標(即ち、計測対象物体21上の点Sの座標)を求める全空間テーブル化手法を適用することもできる。より具体的には、制御ユニット50における三次元座標算出部515の一機能として、カメラ13の画素位置で定まるX軸及びY軸のx,y座標とZ軸のz座標からなる三次元座標について、特許文献1で開示されるような所定の基準平板を用いて計測された一定間隔のz座標毎に、位相とx,y座標との関係、及び位相シフト量とx,y座標との関係を関連づけるテーブルをそれぞれ作成してメモリ52に保持しておき、計測対象物体21について算出した1次元格子の位相及び位相シフト量から、メモリ52に保持したこれらのテーブルを参照して計測対象物体21に関する三次元座標を導出するように構成すればよい。
【0036】
つまり、制御ユニット50は、カメラ13の撮影画像から得られる各画素位置の「輝度」から「それぞれの光源組11a,11bによる1次元格子の位相」を算出し、「それぞれの光源組11a,11bによる2つの1次元格子の位相の差である位相シフト量」を算出し、この位相シフト量から予め定めた換算式に基づいて計測対象物体21における「高さ座標z」を求める処理を行う。x,y座標については、例えばフーリエ変換格子法による位相解析から求めることができる。したがって、カメラ13の画素毎に、z座標が得られ、また、x,y座標も得られる。
【0037】
以下、計測原理について、図1を参照してより具体的に説明する。
【0038】
以下の説明では、6つの光源L−2,L−1,L0,L1,L2及びL3のそれぞれの発光輝度分布(発光の指向特性)は、観測範囲内において均一で等しいと仮定する。尚、均一でない場合は、その分布を係数として撮影画像から得られる輝度値を補正すればよい。また、光源面と格子面を平行に配置した例について説明する。ここで、光源面と格子面が平行でない場合、光源面と格子面との間の距離dは、光源アレイ11の原点Oから格子プレート12の格子面までZ軸方向の距離として、これに伴う各光源の発光輝度分布(発光の指向特性)の不均一性も同様に輝度値を補正すればよい。
【0039】
まず、光源組11aにおける5つの光源Lnを順次点灯し、1次元格子が計測対称物体21上に投影することを考える。ここで、nは、原点Oを0とした光源の位置を示す−2,−1,0,1,2として与えられる。このとき、z=dにある1次元格子の透過率分布は余弦波状になっており、光源Lnにより照射された1次元格子の影の輝度分布は、以下の式で表される。
【0040】
【数4】
【0041】
ここで、Φは1次元格子の位相、agは振幅、bgは背景輝度、xgは格子面におけるx座標、eは格子面における基準点E(Φ=0)と点Cとの間の距離である。尚、格子プレート12の1次元格子を構成する各光透過領域12bの中央位置のうちZ軸からの距離が最短なものを基準点E(Φ=0)とし、格子プレート12の格子面とZ軸との交点をCとしている。
【0042】
まず、5つの光源L−2,L−1,L0,L1及びL2のうち、光源L0の点灯により1次元格子が投影された計測対象物体21上の位置S(x,y,z)における輝度I0は、近似的に次式で表される。
【0043】
【数5】
【0044】
ここで、任意の点の輝度は、光源からの距離の2乗に反比例することを考慮している。また、図1に示すように、計測対象物体21上の1点Sには、図1における格子面上の1次元格子のG点の影が投影されている。
【0045】
このとき、幾何学的関係より、次式の関係がある。
【0046】
【数6】
【0047】
次に、光源をL0からL1に切り換えると、G点の影は、座標点zの(x,y)面では、A点に向かって投影される。このとき、点Sには1次元格子のF点の影が投影され、位相シフトが生じている。したがって、点Sでは光源の切り替えによって生じる位相シフト量に起因して異なる輝度値となる。
【0048】
光源L1による位置S(x,y,z)における輝度と位相シフト量Ψとの関係は、次のようにして定式化することができる。即ち、光源をL0からL1に切り替えたことにより、計測対象物体21に投影される1次元格子の位相(アンラッピングされた位相)は、以下の式(4)で与えられる量だけシフトする。尚、アンラッピングとは、得られる位相分布が限定された範囲に折りたたまれてしまう現象(ラッピング)に対して位相特性を連続的に繋いだ状態を云う。
【0049】
【数7】
【0050】
この位相シフト量Ψは、以下のようにして求められる。即ち、図1における点L0,L1,Gからなる三角形(以下、このような三角形を「△L0L1G」と表す)と、点S,A,Gからなる△SAGとが相似であるため、次式となる。
【0051】
【数8】
【0052】
また、点S,A,L1からなる△SAL1と、点F,G,L1からなる△FGL1とが相似であるため、次式となる。
【0053】
【数9】
【0054】
式(5)及び式(6)から、次式が得られる。
【0055】
【数10】
【0056】
また、式(4)及び式(7)から、次式が得られる。
【0057】
【数11】
【0058】
こうして、光源をL0からL1に切り替えたときの、計測対象物体21に投影された1次元格子の位相シフト量Ψの値を定式化することができる。この位相シフト量Ψは、zに依存することが分かる。
【0059】
同様に、光源L0から光源Lnに切り替えることにより、式(2)に比べて位相がn・Ψだけシフトするため、位置S(x,y,z)における輝度Inは、次式となる。尚、nは、原点Oを0とした光源の位置を示す−2,−1,0,1,2として与えられる。
【0060】
【数12】
【0061】
この式(9)について、式(8)及び式(10)〜(12)を用いて置き直すと、式(13)が得られる。
【0062】
【数13】
【0063】
【数14】
【0064】
【数15】
【0065】
【数16】
【0066】
こうして、光源Lnを点灯したときの、位置S(x,y,z)における輝度Inと位相Φ及び位相シフト量Ψとの関係を定式化することができる。
【0067】
尚、計測対象物体21の反射率rを考慮する場合は、式(13)におけるa及びbに反射率rを乗じればよいが、ここでは説明を簡単化するために省略している。
【0068】
したがって、計測対象物体21までの高さ座標zを求めるためには、位相シフト量Ψ又は位相Φが分かればよい。この高さzと位相シフト量Ψとの関係は、式(8)から次式のように得られる。
【0069】
【数17】
【0070】
ここで、光源アレイ11の原点Oから計測対象物体21の表面までのZ軸方向の距離をz、光源アレイ11の各光源の間隔をl、光源アレイ11の原点Oから格子プレート12の格子面までのZ軸方向の距離をd、位相シフト量をΨ、格子プレート12の1次元格子の間隔をpとしている。これにより、高さzを求めることができる。この場合、等位相線は等高線となっている。
【0071】
また、位相Φが求められると、式(12)から次式が得られる。
【0072】
【数18】
【0073】
ここで、光源アレイ11の原点Oから計測対象物体21の表面までのZ軸方向の距離をz、光源アレイ11の原点Oから格子プレート12の格子面までのZ軸方向の距離をd、格子プレート12の1次元格子の位相をΦ、格子プレート12の1次元格子の間隔をp、原点Oから計測対象物体21の表面までのX軸方向の距離をx、格子プレート12の1次元格子を構成する各光透過領域12bの中央位置のうちZ軸からの最短距離をeとしている。これにより、位相Φが求められると、高さzが求められる。この場合、等位相線はxの関数となっており、等高線とはならない。
【0074】
このように、光源組11aにおける5つの光源L−2,L−1,L0,L1及びL2を順次点灯するのみで、位相シフト量Ψ又は位相Φを求めることができ、位相シフト量Ψ又は位相Φを求めることができれば、式(14)又は式(15)から、カメラ13の位置とは無関係に高さzを求めることができる。同様にして、光源組11bにおける5つの光源L−1,L0,L1,L2及びL3を順次点灯するのみで、位相シフト量Ψ又は位相Φを求めることができ、高さzを求めることができる。ただし、本実施形態では、この位相シフト量Ψを更に高精度化するために、光源組11aにおける5つの光源L−2,L−1,L0,L1及びL2を順次点灯することで得られる位相Φ1と、光源組11bにおける5つの光源L−1,L0,L1,L2及びL3を順次点灯することで得られる位相Φ2との差分を位相シフト量Ψとする。この各光源組で得られる位相Φの差分による位相シフト量Ψとすることで高精度化する理由を説明する前に、位相解析による位相Φ及び位相シフト量Ψの具体的な算出法とその問題点について説明する。各光源組で得られる位相Φの差分による位相シフト量Ψとすることで位相解析による問題点を改善することができるためである。
【0075】
そこで、高さzを求めるために必要な、位相Φ及び位相シフト量Ψを求める方法について説明する。上述のように、従来の位相シフト法が、図1の格子プレート12を直接動かすことにより、位相2πを整数Nで割算して、全ての位置にて位相を2π/Nずつシフトさせるのに対し、本発明に係る位相シフト法においては、5つの光源を順次選択して点灯させることにより、計測対象物体21に投影される1次元格子の位相を、式(8)で示される位相シフト量Ψにて等間隔に5回シフトさせる(初期位置を含めて)位相シフトを行う。この位相シフト量Ψは、通常、2πを5等分したものでないため従来法とは異なる。また、式(8)から明らかなように、zの値によって位相シフト量Ψは異なる。こうした本発明に係る光源切替方式の位相シフト法を、光源切り替えで等間隔に位相をステッピングさせることから「光ステッピング法」と呼ぶことにする。
【0076】
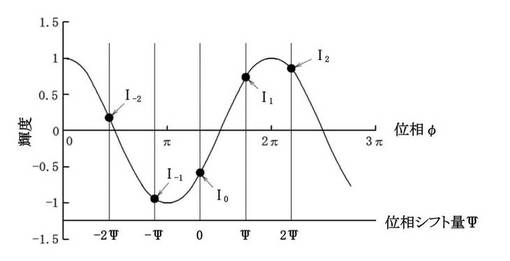
図4は、余弦波状に輝度が変化する1次元格子の位相を、位相シフト量Ψにて等間隔に位相シフトさせたときの、標本点の輝度及び位相シフト量の関係を示す。光ステッピング法においては、原点Oに位置する光源L0の輝度I0における位相Φが求めるべき位相であり、光源Lnを切り替えて順次点灯させる毎に、Ψずつ位相シフトする。このとき、輝度は上述の式(13)で表され、全てのnについて書くと、式(16)〜式(20)となる。
【0077】
【数19】
【0078】
【数20】
【0079】
【数21】
【0080】
【数22】
【0081】
【数23】
【0082】
ここで、未知数はΦ,Ψ,a及びbの4つであり、これらの式から位相Φのラッピングされた値φと、位相シフト量Ψのラッピングされた値ψは、それぞれ以下の式(21)及び(22)のようになる。
【0083】
【数24】
【0084】
【数25】
【0085】
これらの式(21)及び(22)を用いれば、容易にラッピングされた位相φ及び位相シフト量ψを求めることができる。尚、式(13)を解くのに、式(16)〜(20)の5つの式を用いたが、未知数の数が4つであるため、この5つの式のうちの4つを用いれば、4つの未知数を求めることができるのは言うまでもない。即ち、本発明においては、少なくとも5つの光源を等間隔かつ一列に並べた光源アレイ11について、このうち隣接配置の少なくとも4つの光源からなる光源組を少なくとも2組設定し、この2つの光源組における各光源を順次点灯して計測対象物体21上に投影される一次元格子をカメラ13で撮影して輝度値を得る。これにより、この少なくとも4つの光源の順次点灯によって位相シフトさせた位相φ及び位相シフト量ψを求めることができる。
【0086】
このように、光源組11aにおける5つの光源L−2,L−1,L0,L1及びL2を順次点灯するのみで、位相シフト量Ψ又は位相Φを求めることができ、位相シフト量Ψ又は位相Φを求めることができれば、式(14)又は式(15)から、カメラ13の位置とは無関係に高さzを求めることができる。同様にして、光源組11bにおける5つの光源L−1,L0,L1,L2及びL3を順次点灯するのみで、位相シフト量Ψ又は位相Φを求めることができ、高さzを求めることができる。
【0087】
ただし、本実施形態では、光源組11aにおける5つの光源L−2,L−1,L0,L1及びL2を順次点灯することで得られる位相Φ1と、光源組11bにおける5つの光源L−1,L0,L1,L2及びL3を順次点灯することで得られる位相Φ2との差分を位相シフト量Ψとして、高さzを求めるようにする。
【0088】
実験で式(22)の位相シフト量Ψを求めたところ,分母が0に近くなる付近で誤差が大きくなり、また、全範囲でばらつきも大きい。また、式(22)の位相シフト量ΨはcosΨから求めるため、誤差があると式(22)の右辺が−1と1の間を超えてしまうことが起こり、この場合Ψを求めることができない。一方、位相Φについては式(21)を用いてかなり精度よく求めることができる。
【0089】
そこで、単一の光源組で位相シフト量Ψを求めるよりも、高精度の位相シフト量Ψを別途求めるために、光源組11aにおける5つの光源L−2,L−1,L0,L1及びL2を順次点灯することで得られる位相Φ1と、光源組11bにおける5つの光源L−1,L0,L1,L2及びL3を順次点灯することで得られる位相Φ2との差分を位相シフト量Ψとする。
【0090】
即ち、2つの光源組を用いた位相シフト量Ψは、次式で得られる。
【0091】
【数26】
【0092】
位相Φ1も位相Φ2も精度よく得られるので、式(23)で得られる位相シフト量Ψも精度よく得られることになる。
【0093】
この式(23)で示す位相シフト量Ψを用いることで位相接続の高精度化を図ることができる。即ち、式(14)と式(22)から決まるcosψとzとの関係は、後述する図9から分かるように、zの広い範囲にわたってψの一価関数である。また、式(15)と式(21)から決まるtanφとzとの関係は、後述する図10から分かるように、位相φはzの多価関数となっており、一価関数として扱えるのはzの狭い範囲だけである。したがって位相φだけでは、広いレンジのzは決まらない。そこで、この位相シフト量ψを使ってzを求め、そのz付近の式(15)の関係より、位相φ(即ち、位相φ1や位相φ2)を用いて細密で正確なzを求めることができる。或いは、位相φ2と位相φ1の2つのデータから、zを2個求めることができるので、その平均を取るとその分精度が上がることになる。
【0094】
次に、図5を参照して本実施形態の形状計測装置1の動作について説明する。
【0095】
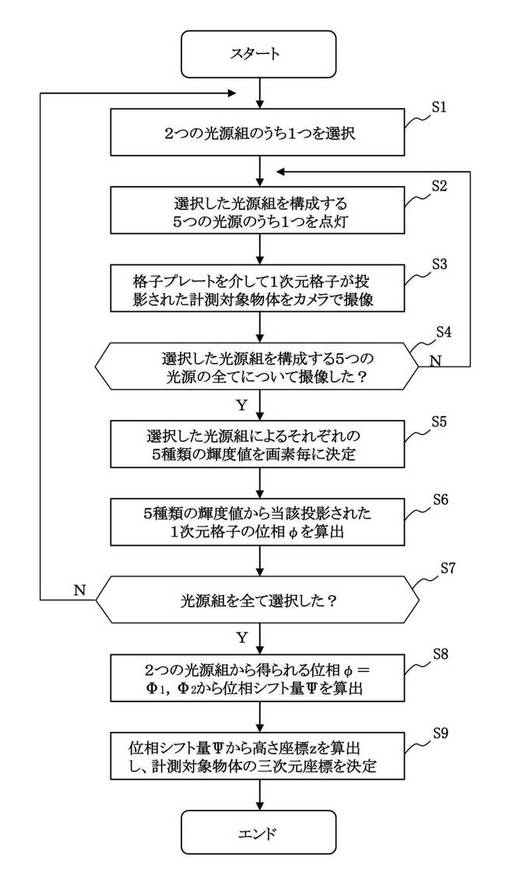
まず、制御ユニット50の光源決定部511は、2つの光源組11a,11bのうち1つを選択する(ステップS1)。
【0096】
続いて、制御ユニット50の光源決定部511は、選択した光源組(例えば、光源組11a)を構成する5つの光源のうち1つを点灯する(ステップS2)。
【0097】
続いて、制御ユニット50のカメラ撮像処理部512は、格子プレート12を介して1次元格子が投影された計測対象物体21をカメラで撮影する(ステップS3)。
【0098】
続いて、制御ユニット50のカメラ撮像処理部512は、選択した光源組を構成する5つの光源の全てについて撮影したか否かを判定する(ステップS4)。5つの光源の全てについて撮影していた場合(ステップS4のY)、ステップS5に移行にする。他方、5つの光源の全てについて撮影していない場合(ステップS4のN)、5つの光源の全てについて撮影するまでステップS2,S3を繰り返す。これにより、5つの光源を順次点灯させて、計測対象物体21に投影される1次元格子の位相をシフトさせながら計測対象物体21を撮影した画像信号を得ることができる。この画像信号は、画素別の輝度値として得ることができる。
【0099】
つまり、制御ユニット50の画素別輝度算出部513は、当該選択した光源組によるそれぞれの5種類の輝度値をカメラの画素毎に決定する(ステップS5)。
【0100】
続いて、制御ユニット50の位相・位相シフト量算出部514は、当該5種類の輝度値から当該投影された1次元格子の位相φを算出する(ステップS6)。
【0101】
さらに、制御ユニット50の光源決定部511は、光源組を全て選択したか否かを判定する(ステップS7)。光源組を全て選択していた場合(ステップS7のY)、ステップS8に移行する。他方、光源組を全て選択していない場合(ステップS7のN)、光源組を全て選択するまで、ステップS1〜S6を繰り返す。これにより、各光源組による当該投影された1次元格子の位相が求められる。
【0102】
続いて、制御ユニット50の位相・位相シフト量算出部514は、2つの光源組から得られる位相φ=Φ1,Φ2からその差分で表される位相シフト量Ψを算出する(ステップS8)。
【0103】
続いて、制御ユニット50の三次元座標算出部515は、算出した位相シフト量Ψから式(14)に基づいて高さ座標zを算出し、計測対象物体21の三次元座標を決定する(ステップS9)。このようにして、撮影された画像に対して光ステッピング法により位相解析処理を施して、計測対象物体21の形状を求めることができる。図5に示す動作フローでは、光源組毎に撮像して位相を算出する例を説明したが、全ての光源による撮像をした後、光源組を設定して位相を算出するように動作させることもできる。
【0104】
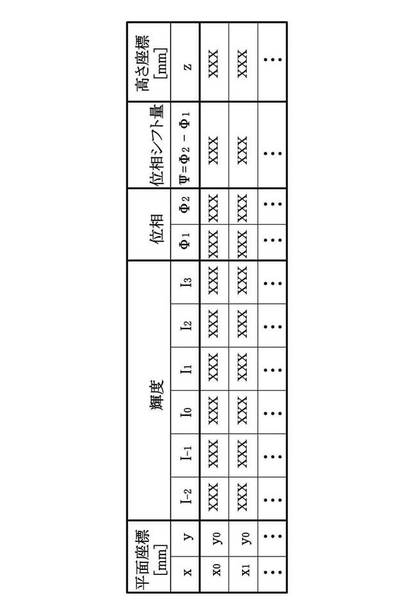
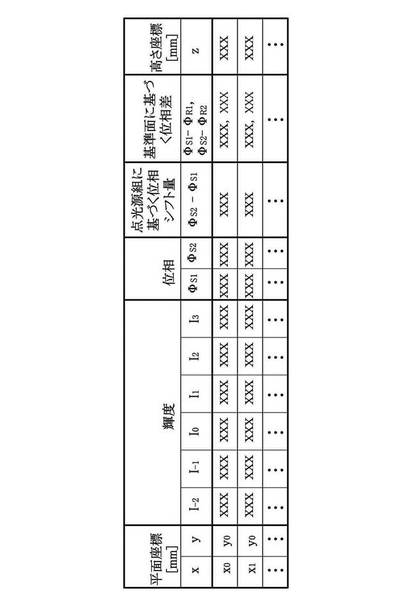
これにより、例えば、図8に示すように、各光源により撮像して得られる輝度値から2つの位相Φ1,Φ2を算出して位相シフト量Ψを算出し、2つの位相Φ1,Φ2及び位相シフト量Ψを用いて高さ座標zを算出するとともに例えばフーリエ変換格子法による位相解析からx,y座標を求めることにより、三次元座標テーブルを高精度に生成することができる。
【0105】
尚、図1において、光源アレイ11以外の構成の配置をX軸,Y軸,Z軸の三次元空間で全て固定した状態で、光源アレイ11をz=0の面内において原点Oを中心にしてX軸に対して傾けて配置することができる。つまり、光源アレイ11は、X軸に対して平行である必要はない。この場合、6つの光源間の間隔lとしては、6つの光源間の間隔のX軸方向の成分を用いる。光源間の間隔を物理的に狭めることは困難であるが、上記のように光源アレイ11をX軸に対して傾けることにより、X軸方向の光源間の間隔を容易に狭めることができるようになる。
【0106】
また、図1において、光源アレイ11以外の構成の配置をX軸,Y軸,Z軸の三次元空間で全て固定した状態で、z=0の面内において、光源アレイ11を構成する光源L−2,L−1,L0,L1,L2及びL3の各々を、Y軸方向の任意の位置に配置することもできる。つまり、光源アレイ11を構成する光源L−2,L−1,L0,L1,L2及びL3は、X軸方向の距離成分として等間隔に並んでいればよい。
【0107】
〔第2実施形態〕
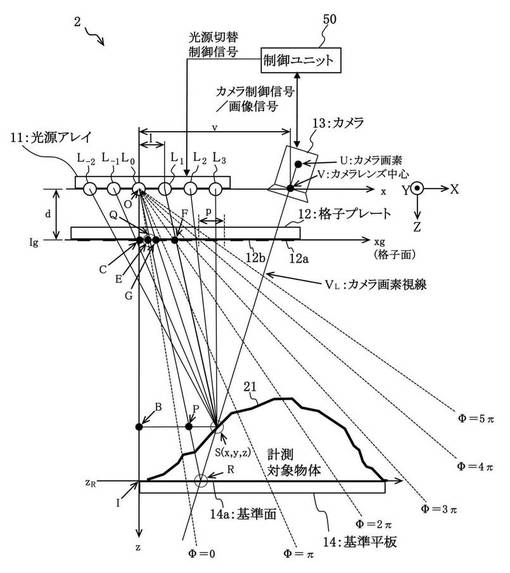
次に、本発明による基準面を用いる第2実施形態の形状計測装置について説明する。図7は、本発明による第2実施形態の形状計測装置2の構成とその動作原理を示す図である。図1の構成と同様な構成要素には同一の参照番号を付している。
【0108】
第2実施形態の形状計測装置2は、図1に示す形状計測装置1の構成と対比して、光源面からZ軸方向に距離zRだけ離れた位置に、格子プレート12に対して平行な基準面14aを有する基準平板14を更に備える点で相違する。第2実施形態の形状計測装置2は、計測対象物体21に格子プレート12の1次元格子を投影して撮影することとは別に、計測対象物体21を載置可能な基準平板14に格子プレート12の1次元格子を投影して撮影することで、計測対象物体21と基準面14aとの間の位相差を計測し、この位相差から予め定めた換算式を基に計測対象物体21の高さzを求めて三次元形状を計測する。
【0109】
また、第2実施形態では、カメラ13のレンズの中心Vは、X軸方向の所定位置(X=v)に配置されている。即ち、原点Oからレンズの中心VまでのX軸方向の距離はvである。尚、第1実施形態と同様に、計測対象物体21は、格子プレート12と基準平板14との間に配置される。図7では、原点Oから格子プレート12を介して得られる1次元格子の位相φ=0〜5πの様子を点線で示しており、格子面の格子の明るい中心を通る位相φが偶数πとなり、格子面の格子の暗い中心を通る位相φが奇数πとなる。
【0110】
第2実施形態における形状計測装置2では、まず、制御ユニット50における光源決定部511の制御により、基準面14aに光源組11aのそれぞれの光源による1次元格子を投影し、カメラ撮影処理部512の制御により基準面14aに投影した各光源による1次元格子を撮影し、画素別輝度算出部513により各光源による各画素の輝度値を算出し、位相・位相シフト算出部514により、その位相ΦR1分布をメモリ52に記録する。次いで、基準面14aと格子プレート12との間に計測対象物体21を配置し、第1実施形態と同様に計測対象物体21上の点Sにおける、光源組11aのそれぞれの光源によって投影された1次元格子の位相ΦS1を求める。続いて、三次元座標算出部515により、カメラ13の各画素において、基準面14aと計測対象物体21上の点Sとの位相差(ΦS1−ΦR1)から、光源組11aにおける原点OからのZ軸方向の高さz又は基準面14aからの計測対象物体21の高さhS=zR−zを求める。同様にして、光源組11bのそれぞれの光源による点Sとの位相差(ΦS2−ΦR2)から、原点OからのZ軸方向の高さz又は基準面14aからの計測対象物体21の高さhS=zR−zを求める。更に、第1実施形態と同様に、位相シフト量(ΦS2−ΦS1)から、原点OからのZ軸方向の高さz又は基準面14aからの計測対象物体21の高さhS=zR−zを求める。位相シフト量(ΦS2−ΦS1)を用いて細密で正確なzを求めることができ、位相ΦS2と位相ΦS1の2つのデータから、zを2個求めることができるので、これらのzの平均を取るとその分精度が上がることになる。
【0111】
以下に、その原理について詳細に説明する。
【0112】
今、カメラ13のある1画素Uが、格子プレート12と基準平板14との間にて、計測対象物体21を配置していないときの基準面14a上の点Rを、計測対象物体21を配置しているときの該計測対象物体21上の点Sを見ているとする。光源組11a,11bのいずれかによって計測対象物体21上に投影された1次元格子の点Sでの位相をΦS、点Rでの位相をΦRとする。点Rと原点Oを結ぶ直線の格子面12aとの交点をQとする。このとき、位相ΦSとΦRは、それぞれ点Gと点Qにおける1次元格子の位相と同じであり、それらの位相差から次式の関係が得られる。
【0113】
【数27】
【0114】
また、点S,P,Oからなる△SPOと、点G,Q,Oからなる△GQOとが相似であるため、次式が得られる。
【0115】
【数28】
【0116】
式(24)及び式(25)から、次式が得られる。
【0117】
【数29】
【0118】
また、点S,P,Rからなる△SPRと、点V,O,Rからなる△VORとが相似であるため、次式が得られる。
【0119】
【数30】
【0120】
式(26)及び式(27)から、次式が得られる。
【0121】
【数31】
【0122】
この式(28)から、高さzは、次式が得られる。
【0123】
【数32】
【0124】
ここで、光源アレイ11上から計測対象物体21の表面までのZ軸方向の距離をz、原点Oから格子プレート12の格子面までのZ軸方向の距離をd、原点Oからレンズの中心Vまでの距離をv、原点Oから基準平板14の基準面14aまでのZ軸方向の距離をzR、格子プレート12の1次元格子の間隔をp、原点Oから計測対象物体21の表面までのX軸方向の距離xにおける当該投影された1次元格子の位相をΦS、距離xの計測対象物体21の表面位置とレンズの中心Vとを通る直線と、基準面14aとの交点における当該投影された1次元格子の位相をΦRとしている。このように、式(29)に基づいて、カメラ13の画素の基準面14aにおける位相ΦR及び計測対象物体21上の点Sの位相ΦSから、光源組11a,11bのそれぞれにおける点Sのz座標を求めることができる。また、等位相差(ΦS−ΦR)線は等高線となる。更に、第1実施形態と同様に、位相シフト量(ΦS2−ΦS1)から、z又は基準面14aからの計測対象物体21の高さhS=zR−zを求めることができる。
【0125】
また、x座標及びy座標については、第1実施形態の場合と同様に、例えばフーリエ変換格子法により、X軸方向及びY軸方向の位相をそれぞれ求め、更に位相接続を行うことにより、各点におけるx座標及びy座標をそれぞれ得ることができる。
【0126】
尚、第1実施形態の場合と同様に、第2実施形態においても、光源アレイ11以外の構成の配置をX軸,Y軸,Z軸の三次元空間で全て固定した状態で、光源アレイ11をz=0の面内において原点Oを中心にしてX軸に対して傾けて配置することができる。つまり、光源アレイ11は、X軸に対して平行である必要はない。この場合、6つの光源間の間隔lとしては、6つの光源間の間隔のX軸方向の成分を用いる。光源間の間隔を物理的に狭めることは困難であるが、上記のように光源アレイ11をX軸に対して傾けることにより、X軸方向の光源間の間隔を容易に狭めることができるようになる。
【0127】
また、図1において、光源アレイ11以外の構成の配置をX軸,Y軸,Z軸の三次元空間で全て固定した状態で、z=0の面内において、光源アレイ11を構成する光源L−2,L−1,L0,L1,L2及びL3の各々を、Y軸方向の任意の位置に配置することもできる。つまり、光源アレイ11を構成する光源L−2,L−1,L0,L1,L2及びL3は、X軸方向の距離成分として等間隔に並んでいればよい。
【0128】
こうして、計測対象物体21上の点Sの座標x,y及びzを求めることができ、計測対象物体21の形状を求めることができる。例えば、図8に示すように、制御ユニット50の制御により、2つの光源組11a,11bの各光源によって撮像された各画素の輝度値から、それぞれ2つの位相ΦS1,ΦS2を算出して位相シフト量Ψ=ΦS2−ΦS1を算出し、この算出した位相シフト量Ψと位相差(ΦS1−ΦR1)及び(ΦS2−ΦR2)を用いて位相接続し、高さ座標zを算出した三次元座標テーブルを生成してメモリ53に格納することができる。尚、制御ユニット50の制御により、この三次元座標テーブルを用いて、形状計測装置2に接続される表示装置(図示せず)に計測対象物体21の三次元像を表示するように構成することもできる。
【0129】
本発明の第2実施形態においても、全空間テーブル化手法を適用することにより、計測対象物体21の形状計測を更に高速に行うことができる(例えば、特開2008−281491号公報参照)。即ち、図7に示すように、格子面12aに平行に配置された2次元格子が描かれた(又は投影された)基準面14aを有する基準平板14を用意し、該基準平板14をZ軸方向に所定の微少量だけ移動させながら基準面14aを撮影し、撮影された画像に対して位相解析処理を施すことにより、カメラ13の各画素に対して、x,y座標を定めるとともに、位相シフト量Ψ、位相Φ及び位相差(ΦS−ΦR)と高さz との関係を定め、それぞれテーブルとしてメモリ52に予め格納しておく。計測対称物体21の計測時には、こうして予め用意しておいた各画素に対するテーブルを参照することにより、各画素に対して得られた輝度から位相Φを算出し、算出した位相Φを基に位相シフト量Ψや位相差(ΦS−ΦR)を算出して高さzの値を求めることができる。
【0130】
この全空間テーブル化手法においては、予め用意した画素毎のテーブルを参照するだけであり、三角測量などで用いる幾何学的計算をする必要がほとんどないため、計測対象物体21の形状を更に高速に求めることができる。
【0131】
(zとΨ,Φ,ΦS及びΦRとの関係の具体的検証)
ここで、高さzとΨ及びΦとの関係について、更に具体的に説明する。上記した式(14)及び式(15)は、位相Φ(及び位相シフト量Ψ)と高さzとの関係を表しており、Ψ及びΦ、又は(ΦS−ΦR)が求められれば、これらのいずれかの式を用いて高さzを求めることができる。しかし、実際には、式(21)及び式(22)で表されるtanΦ,cosΨ,tanΦS及びtanΦRとして求める。これらの位相(及び位相シフト量)はラッピングされており、2mπ≦Φ≦2(m+1)π或いはqπ≦Ψ≦(q+1)πなどに制限されて出力される。ここで、m及びqは整数である。一般には、m=0及びq=0の場合に制限されている。そこで、tanΦ,cosΨ,tanΦS及びtanΦRを用いて、これらと高さzとの関係を以下のように具体的に求めてみた。
【0132】
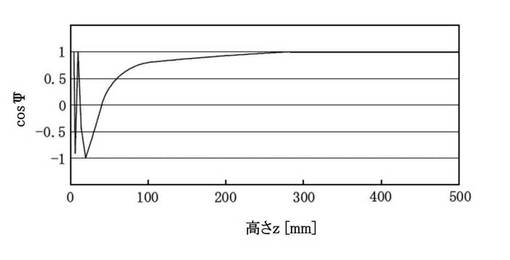
例として、光源アレイ11が5つの光源からなる場合を考え、l=0.5mm、d=10mm、p=0.5mm、v=50mm、zR=500mm及びe=0mmの場合を考える。このとき、式(14)を用いて得られたzとcosΨの関係は図9のようになる。
【0133】
一方、式(15)を用いて得られたzは、xの関数である。ここで、基準面14aとZ軸との交点Iと、該交点Iを見ているカメラ13のある画素とを通る直線の式は、次式となる。
【0134】
【数33】
【0135】
この式(29)を、式(12)に代入してxを消去すると、次式が得られる。
【0136】
【数34】
【0137】
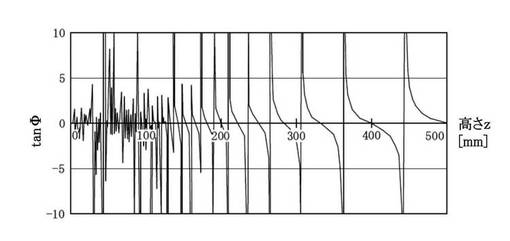
この式(30)で与えられるzとtanΦとの関係を図10に示す。
【0138】
例えば光源組11aにおける5つの光源L−2,L−1,L0,L1及びL2を順次点灯して撮影することで、5回の位相シフトを高速におこなうことができ、図9及び図10の位相が得られる。
【0139】
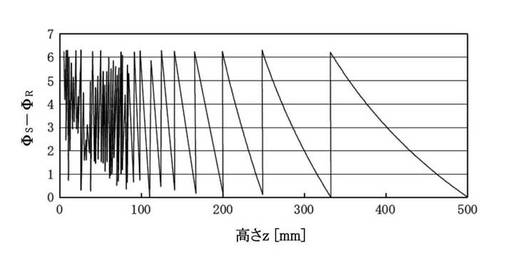
同様にして、予め基準面14aの位相分布を求めておけば、式(28)を用いて得られたzと0〜2πの範囲にラッピングされた(ΦS−ΦR)の関係を示す位相分布も同時に得られ(図11参照)、メモリ52に保持することができる。
【0140】
したがって、一度の事前実験で得られた図9、図10及び図11で示される特性のいずれを使っても高さzを得ることができる。ただし、高さと位相の関係は、高さと位相とが1対1の対応がつく範囲でしか求められない。即ち、2mπ≦Φ≦2(m+1)π或いはqπ≦Ψ≦(q+1)πの範囲だけが解析できる。
【0141】
前述したように、図9においては、cosΨはzの広い範囲にわたって単調増加或いは単調減少となる範囲がある。そのため、分解能は低いといえるが、ダイナミックレンジが広いといえる。一方、図10或いは図11においては、tanΦ或いは(ΦS−ΦR)が単調増加或いは単調減少するzの範囲は狭いため、ダイナミックレンジは狭いが、分解能が高いといえる。
【0142】
そこで、図9に示したzとcosΨとの関係において、分解能がやや悪い高さzを予め求めておき、図10又は図11の関係において、予め求めたz付近の1対1の対応が成り立つ範囲においてzの値を高い分解能で求める。これにより、広い範囲にわたって高さzを高精度に求めることができる。さらに、本発明に係る式(23)の位相シフト量Ψを用いることによって、より高精度にzの値を求めることができるようになる。
【0143】
また、第2実施形態において、撮影装置13のレンズの中心Vを原点Oとした場合は、v=0、x=0となり、式(12)より、Φ=0となり、図10における高さzとtanΦとの関係において高さzは不定となり、決まらない。このように、図10において、高さzと位相Φの関係は位置によって大きく異なり、精度も位置によって大きく異なることになる。したがって、図10に示した高さzとtanΦとの関係は使わず、図9に示したzとcosΨとの関係と図11に示した高さzと位相差(ΦS−ΦR)との関係を組み合わせて使用することが好適である。
【0144】
さらに、第1実施形態と同様に、位相シフト量(ΦS2−ΦS1)から、z又は基準面14aからの計測対象物体21の高さhS=zR−zを求めることで、より高精度のzを求めることができる。
【0145】
また、式(14)や式(15)でその都度求めたzで十分に精度が得られることも考えられるが、全空間テーブル化手法を用いると式(14)や式(15)を直接用いなくてもよい。
【0146】
こうして、逐次算出するか、予め位相Φと座標x,y及びz又は位相シフト量Ψと座標x,y及びzの換算式を示す全空間テーブルを保持しておくことで、計測対象物体21上の点Sの位相Φや位相シフト量Ψから座標x,y及びzを求めて、計測対象物体21の形状を求めることができる。
【0147】
また、第1実施形態及び第2実施形態では、光源や格子面の配置等に、種々の拘束条件を設けたが、6つの光源の発光輝度分布に多少のムラがある場合、点光源が完全な点ではなくて多少の面積がある場合、1次元格子やLEDの間隔が一定ではなく少々異なる場合、カメラ13のレンズの位置が光源面から少々外れる場合、平行に配置された各構成が平行から多少ずれる場合、及び1次元格子の輝度分布が余弦波から多少ずれる場合があるとしても、このような基準面14aを用いた位相解析により、計測された位相Φと高さzとの関係が単調に変化して1対1の対応関係がありさえすれば、これらの誤差を打ち消し、計測対象物体21の形状を精度良く求めることができる。
【0148】
より具体的には、基準面14aを用いて全空間テーブルを作成するにあたり、まず、第1の光源組10aによる5回の位相シフトで式(21)を用いて位相Φ1と高さzの関係を求める。次に、第2の光源組10bによる5回の位相シフトで式(21)を用いて位相Φ2と高さzの関係を求める。同時に位相シフト量Ψ=Φ2−Φ1を求め、位相シフト量Ψと高さzの関係を求める。基準面14aのz座標の位置を一定間隔で変えながらこの作業を繰り返し、位相Φ1と高さzの関係をテーブルT1として求めてメモリ52に格納する。同様に位相Φ2と高さzの関係をテーブルT2として求めてメモリ52に格納する。さらに、位相シフト量Ψ(=Φ2−Φ1)とzの関係をテーブルT3として求めてメモリ52に格納する。テーブルT1,T2,T3を用いて、一定間隔の位相Φ1,Φ2及び位相シフト量Ψに対するそれぞれのzの値z1,z2及びz3となるテーブルを補間して求め直し、それぞれのテーブルT1’,T2’及びT3’を生成する。図9及び図10又は図11から分かるように、Ψとzの関係が1:1の対応となる範囲に対して、Φ1,Φ2とzの関係は、zに対してΦ1,Φ2が多価関数となっていることから、これらのテーブルT1’,T2’及びT3’を生成するのが好適となる。
【0149】
次に、計測対象物体21を置いたときに、まず、第1の光源組10aによる5回の位相シフトで位相Φ1を求め、次に、第2の光源組10bによる5回の位相シフトで位相Φ2を求め、これらの差より位相シフト量Ψを得る。そして、テーブルT3’を参照して高さz3を得る。これだけでも高さzの値をかなり精度よく求めることができる。更に、テーブルT1’,T2’のうち、高さz3付近の位相Φ1,Φ2と高さzの関係が一価関数となる範囲の位相Φ1や位相Φ2を用いることにより、高さz1,z2が一意に決まる。つまり、テーブルT1’を参照して位相Φ1から高さz1を得る。更に、テーブルT2’を参照して位相Φ2から高さz2を得る。最終的に、得られたz1とz2の値を平均して求めたいzの値とする。これにより、zを高精度に求めることができる。
【0150】
また、それぞれx,y方向の座標値x,yを基に、位相Φ1,Φ2及び位相シフト量Ψに対して全空間テーブル化手法を適用することができ、計測対象物体21のx,y,zの三次元座標を得ることができる。
【0151】
つまり、第1実施形態の形状計測装置1において、全空間テーブル化手法を使うと精度が良くなり計測速度が高速となる。また、第2実施形態の形状計測装置2において、基準平板14と全空間テーブル化手法を使うと計測速度が高速になるだけでなく、さらに精度が良くなる。尚、第1実施形態及び第2実施形態において、格子面に平行に配置された基準面を有する所定の基準平板(第2実施形態では、基準平板14)を用いる例について説明したが、この全空間テーブル化手法を使うことで、投影される1次元格子の位相と三次元座標の関係をテーブル化してメモリ52に保持しておくことができるので、この基準平板と格子プレート12における格子面とを平行に配置しなくともよくなる。例えば、基準平板14上にX軸及びY軸を取り、その基準面14aに垂直な方向にZ軸を取るようにする。この全空間テーブル化手法により、座標値x,yを示す2次元格子を基準平板14上に投影するプロジェクタ(図示せず)を用いる場合においても、このプロジェクタ、光源アレイ11及びカメラ13の位置を自由に配置することができるようになる。したがって、本発明に係る形状計測装置で所定の基準平板を用いる場合に、全空間テーブル化手法を適用することは、この基準平板を格子面に平行に配置しなくてもよくなる点で有効である。
【0152】
尚、各実施形態における制御ユニット50は、コンピュータとして構成することができ、制御ユニット50をコンピュータとして構成させる場合には、当該コンピュータに、制御ユニット50の各構成要素を実現させるためのプログラムをメモリ52に記憶する。当該コンピュータに備えられる中央演算処理部(CPU)が、各構成要素の機能を実現するための処理内容が記述されたプログラムや処理データを、適宜、メモリ52から読み込んで制御ユニット50の各構成要素の機能をコンピュータ上で実現させることができる。ここで、各構成要素の機能をハードウェアの一部で実現してもよいことは勿論である。
【産業上の利用可能性】
【0153】
本発明によれば、少なくとも5つの光源を順次切り替えることにより位相シフトを高速に行うことができ、計測対象物体の形状を高速且つ高精度に計測することができるため、電子部品の検査、人体計測、医療、及び小型生物の立体観察や立体計測等の用途に有用である。
【符号の説明】
【0154】
1,2 形状計測装置
11 光源アレイ
12 格子プレート
12a 格子の光遮蔽領域
12b 格子の光透過領域
13 カメラ
14 基準平板
14a 基準面
21 計測対象物体
50 制御ユニット
51 制御部
52 メモリ
511 光源決定部
512 カメラ撮影処理部
513 画素別輝度算出部
514 位相・位相シフト量算出部
515 三次元座標算出部
L−2,L−1,L0,L1,L2,L3 光源
U 撮影装置の画素
V 撮影装置のレンズの中心
【技術分野】
【0001】
本発明は、物体の形状計測を非接触且つ高精度で行い得る形状計測装置及び形状計測方法に関する。
【背景技術】
【0002】
従来、物体や人体等の計測対象物体の形状を非接触且つ3次元的に計測する方法として、位相シフト法を用いた方法がある。位相シフト法は、位相を変化させながら格子画像や干渉縞画像を1台のカメラで順次撮影し、これら位相を変化させた複数枚の格子画像や干渉縞画像に基づいて格子の位相分布を求めるものである。
【0003】
位相シフト法を用いた方法として、例えば、カメラとプロジェクタを用いて、これらのカメラ又はプロジェクタのレンズ収差の影響を受けることなく高精度な形状計測を行うために、格子が描かれた基準平板の画像からカメラ又はプロジェクタのレンズ中心座標を算出するのではなく、複数の基準面における各基準面に固定された2次元格子から、カメラの画素毎の視線が通る光路と、プロジェクタから投影される光の光路とをそれぞれ全て求めて、これらの光路の交点として空間座標を算出する形状計測方法及び形状計測装置が知られている(例えば、特許文献1参照)。
【0004】
また、カメラとプロジェクタを用いて複数の基準面を基に物体の形状計測を行う別の技術がある。例えば、互いに直交するX,Y軸平面を有する基準面を、基準面の法線方向(即ち、X,Y軸平面に垂直なZ軸方向)に所定の間隔で複数設定しておき、計測すべき物体を当該複数の基準面のうち、両端に位置する基準面の間に配置し、その後、物体の表面上の点Sの座標を求めるために、物体上の点Sを撮影するカメラの視線と物体上の点Sを通るプロジェクタからの光線の各々が当該複数の基準面にそれぞれ交わる点を算出し、カメラの視線上の当該交わる点からなる直線と、プロジェクタからの光線上の当該交わる点からなる直線との交点を求め、この交点のZ座標からその点に最も近接した2つの基準面を選出し、選出した2つの基準面を用いて物体の形状を計測する技術が知られている(例えば、特許文献2参照)。
【0005】
他方、カメラとプロジェクタを用いて複数の基準面を基に物体の形状計測を行う更に別の技術として、X,Y軸平面を有する基準面をその法線方向に微小量ずつ平行移動させたときの複数の基準面について、所定の2次元パターンや空間分割パターンを利用することにより、物体に投影する空間分割パターンの輝度分布が余弦波状でなくても、さらには物体に投影する空間分割パターンのピッチが不等間隔であっても、精度良く形状計測を行い得る形状計測装置が知られている(例えば、特許文献3参照)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第2913021号明細書
【特許文献2】特許第3446020号明細書
【特許文献3】特開2008−281491号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述の特許文献1〜3に開示される技術では、位相シフトを行うための格子を描いた基板(格子基板)の移動機構を用いることが代表的な実施形態として考えられる。例えば、特許文献1に開示される技術では、位相シフトを行うために格子基板を移動機構上に設けて格子基板を機械的に移動させることになる。この移動機構は、例えばピエゾステージ等で構成され非常に高価なものとなるだけでなく、格子の位相シフトを高速に行うことに不向きであり、高速で移動する物体の形状を計測することが困難な構成要素となる。
【0008】
また、位相シフトに基づいて形状計測を行うためには、この位相シフト量をより高精度で求める工夫が要望される。
【0009】
本発明は、上述の問題に鑑みて為されたものであり、本発明の目的は、物体の形状計測を非接触且つ高精度で行い得る形状計測装置及び形状計測方法を提供することにある。
【課題を解決するための手段】
【0010】
本発明では、少なくとも5つの光源を等間隔かつ一列に並べ、このうち隣接配置の少なくとも4つの光源からなる光源組を少なくとも2組設定し、2つの光源組における各光源を順次点灯して計測対象物体上に投影される格子を撮影し、それぞれの光源組による格子の位相を算出し、求めた2つの格子の位相の差を位相シフト量として予め定めた換算式に基づいて高さ座標を求める。また、3つ以上の光源組としてもよい。これにより、光源の切り替え制御で格子の位相シフトを高速化するとともに、少なくとも2つの光源組を用いるため計測対象物体の形状計測を高精度化する。尚、本発明では、少なくとも4つの光源からなる光源組毎に、この少なくとも4つの光源の順次点灯によって格子を位相シフトさせるため、この位相シフト量は、従来の位相シフト法のように2πを整数で割った値とはならずに上記少なくとも4つの光源を通る直線からの距離に依存することとなり、空間座標と位相との間で距離に依存しない換算式を用いる従来の位相シフト法とは異なる方式となっている。
【0011】
即ち、本発明の形状計測装置は、計測対象物体の形状を非接触で計測する形状計測装置であって、少なくとも5つの光源を等間隔に直線状に配列した光源アレイと、前記少なくとも5つの光源を配列した直線に対して垂直方向の直線からなる光透過領域を光遮蔽領域に対して等間隔で並べて構成された1次元格子の格子面を有する格子プレートと、前記少なくとも5つの光源の順次点灯により前記1次元格子がそれぞれ前記計測対象物体上に投影される計測対象物体を撮影するカメラと、前記少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定し、前記2組の光源組における各光源を順次点灯するよう前記光源アレイを制御するとともに、前記各光源を順次点灯してそれぞれ投影される1次元格子を撮影するよう前記カメラを制御し、前記2組の光源組による前記計測対象物体上に投影された前記1次元格子の位相をそれぞれ算出し、算出した当該2つの位相の差を位相シフト量として、前記位相シフト量から距離を決定する予め定めた換算式に基づいて前記計測対象物体に関する高さ座標を求める制御ユニットと、を備えることを特徴とする。ここで、光源の各々を複数のLEDからなるものとし、この複数のLEDを点光源として構成して高輝度化することができる。また、この複数のLEDを直線からなる光透過領域に対して平行に配置することで更に高輝度化することができる。
【0012】
また、本発明の形状計測装置において、前記位相シフト量から距離を決定する予め定めた換算式は、前記少なくとも5つの光源を配列した直線上の1点を原点として、前記格子プレートのそれぞれの光透過領域の配列方向をX軸、前記光透過領域の直線をY軸、及び前記格子プレートの格子面の法線方向をZ軸とし、前記光源アレイの原点から前記計測対象物体の表面までの前記Z軸方向の距離をz、前記光源アレイの各光源の間隔をl、前記光源アレイの原点から前記格子面までのZ軸方向の距離をd、前記位相シフト量をΨ、前記1次元格子の間隔をpとしたとき、
【数1】
【0013】
また、本発明の形状計測装置において、前記制御ユニットは、当該投影された1次元格子の位相から距離を決定する予め定めた換算式に基づいて前記計測対象物体に関する高さ座標を求める手段を有し、前記少なくとも5つの光源を配列した直線上の1点を原点として、前記格子プレートのそれぞれの光透過領域の配列方向をX軸、前記光透過領域の直線をY軸、及び前記格子プレートの格子面の法線方向をZ軸とし、前記光源アレイの原点から前記計測対象物体の表面までの前記Z軸方向の距離をz、前記光源アレイの原点から前記格子面までの前記Z軸方向の距離をd、前記1次元格子の位相をΦ、前記1次元格子の間隔をp、前記原点から前記計測対象物体の表面までの前記X軸方向の距離をx、前記1次元格子を構成する各光透過領域の中央位置のうち前記Z軸からの最短距離をeとしたとき、
【数2】
【0014】
また、本発明の形状計測装置において、前記1次元格子が投影されるように配置された基準面を有する基準平板を更に備え、前記制御ユニットは、前記少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定し、前記2組の光源組における各光源を順次点灯するよう前記光源アレイを制御するとともに、前記各光源を順次点灯してそれぞれ前記基準面に投影される1次元格子を撮影するよう前記カメラを制御し、前記2組の光源組による前記基準面上に投影された前記1次元格子の位相をそれぞれ算出してメモリに保持する手段と、前記2組の光源組のそれぞれについて、前記メモリに保持した前記基準面上に投影された前記1次元格子の位相と、前記計測対象物体上に投影された前記1次元格子の位相との差分を算出し、該差分から距離を決定する予め定めた換算式に基づいて前記計測対象物体に関する高さ座標を求める手段とを備えることを特徴とする。
【0015】
また、本発明の形状計測装置において、前記差分から距離を決定する予め定めた換算式は、前記少なくとも5つの光源を配列した直線上の1点を原点として、前記格子プレートのそれぞれの光透過領域の配列方向をX軸、前記光透過領域の直線をY軸、及び前記格子プレートの格子面の法線方向をZ軸とし、前記光源アレイの原点から前記計測対象物体の表面までの前記Z軸方向の距離をz、前記光源アレイの原点から前記格子面までの前記Z軸方向の距離をd、前記原点から前記カメラのレンズの中心までの距離をv、前記原点から前記基準面までのZ軸方向の距離をzR、前記1次元格子の間隔をp、前記原点から前記計測対象物体の表面までの前記X軸方向の距離xにおける当該投影された前記1次元格子の位相をΦS、前記距離xの前記計測対象物体の表面位置と前記レンズの中心とを通る直線と、前記基準面との交点における当該投影された前記1次元格子の位相をΦRとしたとき、
【数3】
【0016】
また、本発明の形状計測装置において、前記制御ユニットは、前記カメラの画素位置で定まるX軸及びY軸のx,y座標とZ軸のz座標からなる三次元座標について、前記基準平板を用いて計測された一定間隔のz座標毎に、前記位相と前記x,y座標との関係、及び前記位相シフト量と前記x,y座標との関係を関連づけるテーブルをそれぞれ作成して前記メモリに保持する手段と、前記計測対象物体について算出した前記1次元格子の位相及び前記位相シフト量から、前記メモリに保持したテーブルを参照して前記計測対象物体に関する三次元座標を導出する手段とを備えることを特徴とする。
【0017】
さらに、本発明の形状計測方法は、少なくとも5つの光源を等間隔に直線状に配列した光源アレイと、前記少なくとも5つの光源を配列した直線に対して垂直方向の直線からなる光透過領域を光遮蔽領域に対して等間隔で並べて構成された1次元格子の格子面を有する格子プレートと、前記少なくとも5つの光源の順次点灯により前記1次元格子がそれぞれ投影される計測対象物体を撮影するカメラと、制御ユニットと、を備える形状計測装置によって前記計測対象物体の形状を計測する形状計測方法であって、前記制御ユニットの処理は、前記少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定するステップと、前記2組の光源組における各光源を順次点灯するよう前記光源アレイを制御するステップと、前記各光源を順次点灯してそれぞれ前記計測対象物体上に投影される1次元格子を撮影するよう前記カメラを制御するステップと、前記2組の光源組による前記計測対象物体上に投影された前記1次元格子の位相をそれぞれ算出するステップと、算出した当該2つの位相の差を位相シフト量として、前記位相シフト量から距離を決定する予め定めた換算式に基づいて前記計測対象物体に関する高さ座標を求めるステップと、を含むことを特徴とする。
【発明の効果】
【0018】
本発明によれば、少なくとも5つの光源を順次点灯させることにより位相シフトを高速に行うことができるため、計測対象物体の形状を高速かつ高精度に計測することができる。
【図面の簡単な説明】
【0019】
【図1】本発明による第1実施形態の形状計測装置の構成とその動作原理を示す図である。
【図2】(A),(B)は、本発明による第1実施形態(及び第2実施形態)の形状計測装置における光源アレイと格子プレートの配置例を示す図である。
【図3】本発明による第1実施形態(及び第2実施形態)の形状計測装置における制御ユニットのブロック図である。
【図4】本発明に係る光ステッピング法における位相シフト量と輝度との関係を示す図である。
【図5】本発明による第1実施形態の形状計測装置の動作フローの一例を示す図である。
【図6】本発明による第1実施形態の形状計測装置による三次元座標テーブルの例を示す図である。
【図7】本発明による第2実施形態の形状計測装置の構成とその動作原理を示す図である。
【図8】本発明による第2実施形態の形状計測装置による三次元座標テーブルの例を示す図である。
【図9】本発明に係る位相シフト量の余弦と高さとの関係の例を示す図である。
【図10】本発明に係る位相の正接と高さとの関係の例を示す図である。
【図11】本発明に係る計測対象物体上での位相と基準面上での位相との差と、高さとの関係を示す図である。
【発明を実施するための形態】
【0020】
以下、本発明による第1実施形態及び第2実施形態の形状計測装置について、それぞれ図面を参照して説明する。尚、第1実施形態の形状計測装置1は、基準面を用いずに計測対象物体の形状を計測する態様であり、第2実施形態の形状計測装置2は、基準面を用いて計測対象物体の形状を計測する態様である。
【0021】
〔第1実施形態〕
まず、本発明による第1実施形態の形状計測装置1について説明する。図1は、本発明による第1実施形態の形状計測装置1の構成とその動作原理を示す図である。本実施形態の形状計測装置1は、計測対象物体21の三次元形状を計測する装置であり、等間隔且つ一列に並べられた6つの光源L−2,L−1,L0,L1,L2及びL3からなる光源アレイ11と、1次元格子からなる格子面を有する格子プレート12と、カメラ13と、制御ユニット50とを備える。
【0022】
X軸、Y軸及びZ軸からなる座標点x,y,zで三次元空間を規定するために、光源アレイ11を構成する6つの光源L−2,L−1,L0,L1,L2及びL3のうちのいずれかの光源の位置(図1に示す例では、L0の位置)を原点O(即ち、x=0,y=0,z=0)とし、格子プレート12のそれぞれの光透過領域12bの配列方向をX軸、光透過領域12bの直線をY軸、及び格子プレート12の格子面の法線方向をZ軸とする。計測対象物体21は、Z軸方向に配置される。尚、原点Oの位置は、光源アレイ11における両端の光源間の中央位置として規定することもできるが、ここでは6つの光源のうちのいずれかの位置を原点Oとする。
【0023】
光源アレイ11は、6つの光源L−2,L−1,L0,L1,L2及びL3を等間隔に直線状に配列した構成となっている。図1では、光源アレイ11として、X軸方向に等間隔で配列した6つの光源からなる例を代表的に説明するが、5つの光源、又は7つ以上の光源を備えるように構成することもできる。また、光源として発光ダイオード(LED)を用いており、各LEDは線光源又は点光源として構成することができる。即ち、LEDチップの出力は小さいため、複数のLEDチップをY軸方向に並べてY軸に対して平行となる線光源とし、この各線光源をX軸方向に等間隔で配列して6つの光源L−2,L−1,L0,L1,L2及びL3を構成することができる。更に、複数のLEDチップを集約して1つの点光源とすることもできる。例えば、図2(A)に示すように、各光源は、複数のLEDチップ11cをY軸方向に配列し、必要に応じて指向性レンズ11dを設けることで線光源として構成することができる。また、図2(B)に示すように、各光源は、複数のLEDチップを集約して1つの点光源として構成することができる。また、6つの光源間の間隔はlである。以下、6つの光源L−2,L−1,L0,L1,L2及びL3を含むz=0の面(X軸及びY軸からなるX,Y軸平面に平行でz=0となる面)を「光源面」と称する。つまり、光源アレイ11上から計測対象物体21の表面までのZ軸方向の距離をz(換言すれば、光源面からZ軸方向の位置を「高さ」を表す座標点z)とすることができる。
【0024】
格子プレート12は、6つの光源L−2,L−1,L0,L1,L2及びL3を配列した方向(図1及び図2に示す例では、X軸方向)に対して垂直方向(即ち、Y軸方向)の直線からなる光透過領域12bを光遮蔽領域12aに対して等間隔で並べて構成された1次元格子の格子面を有する。例えば、格子プレート12は、透明のガラス又はプラスチック材の表面に黒色の1次元格子の格子面を印刷することで構成することができるほか、光を遮蔽する部材(光遮蔽領域12a)にスリット(光透過領域12b)を設けて構成することもできる。この格子プレート12は、光源アレイ11から照射された光が格子プレート12を通過することにより、1次元格子が計測対象物体21上に投影されるように構成されている。1次元格子を構成する各光透過領域12bの格子間隔はpであり、図1に例示する態様では光源面と格子面は平行であり、光源面と格子面との間隔はdである。また、1次元格子を構成する各光透過領域12bの中央位置のうちZ軸からの距離が最短なものを基準点E(Φ=0)とし、格子プレート12の格子面とZ軸との交点をCとする。尚、当該投影される1次元格子の輝度分布は余弦波状である必要がある。このため、格子プレート12上の輝度分布(透過率分布)が矩形波状であっても、距離dの位置に設けた光源アレイ11の光源から照射された光によって計測対象物体21に投影される1次元格子は、カメラ13による撮像画像上において、ほぼ余弦波状になる。尚、厳密に余弦波とならなくともよい。特に、後述する全空間テーブル化手法を使うことによりその誤差を打ち消すこともできる。
【0025】
本実施形態では、図2に示すように、各光源をX軸方向に等間隔で配列して6つの光源L−2,L−1,L0,L1,L2及びL3を構成する光源アレイ11と格子プレート12をX,Y軸平面で平行となるようにZ軸方向に配置している。ただし、光源アレイ11をz=0のX,Y軸平面内において原点Oを中心にしてX軸に対して傾けて配置することができる。つまり、光源アレイ11は、X軸に対して平行である必要はない。この場合、上記の説明における6つの光源間の間隔lとしては、X軸方向(即ち、1次元格子を構成する光透過領域12bの直線に垂直な方向)の光源間の間隔(即ち、6つの光源間の間隔のX軸方向の成分)を用いる。光源間の間隔を物理的に狭めることは困難であるが、上記のように光源アレイ11をX軸に対して傾けることにより、X軸方向の光源間の間隔を容易に狭めることができるようになる。また、格子プレート12は、光透過領域12bの直線がY軸に平行であればよい。
【0026】
図2に示すように、本実施形態では、6つの光源L−2,L−1,L0,L1,L2及びL3のうち、隣接配置の5つの光源からなる光源組を2組設定する。具体的には、5つの光源L−2,L−1,L0,L1及びL2を第1の光源組11aとし、5つの光源L−1,L0,L1,L2及びL3を第2の光源組11bとする。これは、詳細に後述するが、それぞれの光源組において各光源を順次点灯して計測対象物体21上に投影される1次元格子を撮影し、それぞれの光源組による1次元格子の位相を算出し、求めた2つの1次元格子の位相の差を位相シフト量として高さ座標zを求めるためである。隣接配置の5つの光源からなる光源組を3組以上とした場合も、定めた原点Oの光源を含む光源組とすることで位相シフト量を正確に求めることができる。例えば、第1、第2及び第3の光源組として3つの光源組を設定した場合、第1、第2の光源組による位相シフト量、第2、第3の光源組による位相シフト量、及び第1、第3の光源組による位相シフト量をそれぞれ求めることができる。したがって、隣接配置の5つの光源からなる光源組を3組以上とした場合も、3組以上の光源組のうち位相シフト量を求める光源組を2組設定することで高さ座標zを求めることができる。
【0027】
図1を参照するに、カメラ13は、6つの光源L−2,L−1,L0,L1,L2及びL3のうちの1つの点灯によってそれぞれ1次元格子が投影された計測対象物体21を撮影する。カメラ13としては、CCDセンサやCMOSセンサ等を使用したものとすることができる。x,y座標については、例えばフーリエ変換格子法により、X軸方向及びY軸方向の位相をそれぞれ求め、更に位相接続を行うことにより、各点におけるx座標及びy座標をそれぞれ得ることができる(例えば、特許第3281918号明細書参照)。
【0028】
尚、光源と格子プレート12との間や、格子プレート12と計測対象物体21との間に、レンズ等の像の拡大や縮小を行う部材を配置することもできる。
【0029】
図3に示すように、制御ユニット50は、それぞれの光源組11a,11bにおける各光源を順次点灯するための光源切替制御信号を光源アレイ11に供給するとともに、各光源を順次点灯したことによる計測対象物体21上に投影される1次元格子を撮影するためのカメラ制御信号をカメラ13に供給してカメラ13から1次元格子を撮影した画像信号を取得する。更に、制御ユニット50は、撮影した画像信号から得られる画素毎の輝度値を基に、それぞれの光源組11a,11bによる計測対象物体21上に投影される1次元格子の位相をそれぞれ算出し、算出した2つの投影された1次元格子の位相の差を位相シフト量として定め、位相シフト量から距離を決定する予め定めた換算式に基づいて計測対象物体21に関する高さ座標を求める。より具体的には、制御ユニット50は、制御部51と、メモリ52とを備える。制御部51は、光源決定部511と、カメラ撮影処理部512と、画素別輝度算出部513と、位相・位相シフト量算出部514と、三次元座標算出部515とを備える。
【0030】
光源決定部511は、それぞれの光源組11a,11bにおいて各光源を順次点灯するための光源切替制御信号を光源アレイ11に供給する。
【0031】
カメラ撮影処理部512は、各光源を順次点灯したことによる計測対象物体21上に投影される1次元格子を撮影するためのカメラ制御信号をカメラ13に供給してカメラ13から撮影した画像の画像信号を取得する。
【0032】
画素別輝度算出部513は、取得した画像信号から、各画素位置における輝度値を算出する。
【0033】
位相・位相シフト量算出部514は、撮影画像の画像信号から得られる画素毎の輝度値を基に、それぞれの光源組11a,11bによる1次元格子の位相を算出し、求めた2つの1次元格子の位相の差である位相シフト量を算出する。以下、位相Φ及び位相シフト量Ψを求める処理を「位相解析処理」と称する。また、例えばフーリエ変換格子法による位相解析によって、この位相から画素毎にx,y座標を求める。
【0034】
三次元座標算出部515は、計測対象物体21における画素毎に得られた位相シフト量から、予め定めた換算式に基づいて高さ座標zを求め、計測対象物体21の三次元座標データをメモリ52に記憶する。
【0035】
この位相解析処理には、1次元格子の位相と空間座標とを関連づけるテーブルを予め画素毎に作成しておき、該テーブルを参照して、各画素から得られる1次元格子の位相から空間座標(即ち、計測対象物体21上の点Sの座標)を求める全空間テーブル化手法を適用することもできる。より具体的には、制御ユニット50における三次元座標算出部515の一機能として、カメラ13の画素位置で定まるX軸及びY軸のx,y座標とZ軸のz座標からなる三次元座標について、特許文献1で開示されるような所定の基準平板を用いて計測された一定間隔のz座標毎に、位相とx,y座標との関係、及び位相シフト量とx,y座標との関係を関連づけるテーブルをそれぞれ作成してメモリ52に保持しておき、計測対象物体21について算出した1次元格子の位相及び位相シフト量から、メモリ52に保持したこれらのテーブルを参照して計測対象物体21に関する三次元座標を導出するように構成すればよい。
【0036】
つまり、制御ユニット50は、カメラ13の撮影画像から得られる各画素位置の「輝度」から「それぞれの光源組11a,11bによる1次元格子の位相」を算出し、「それぞれの光源組11a,11bによる2つの1次元格子の位相の差である位相シフト量」を算出し、この位相シフト量から予め定めた換算式に基づいて計測対象物体21における「高さ座標z」を求める処理を行う。x,y座標については、例えばフーリエ変換格子法による位相解析から求めることができる。したがって、カメラ13の画素毎に、z座標が得られ、また、x,y座標も得られる。
【0037】
以下、計測原理について、図1を参照してより具体的に説明する。
【0038】
以下の説明では、6つの光源L−2,L−1,L0,L1,L2及びL3のそれぞれの発光輝度分布(発光の指向特性)は、観測範囲内において均一で等しいと仮定する。尚、均一でない場合は、その分布を係数として撮影画像から得られる輝度値を補正すればよい。また、光源面と格子面を平行に配置した例について説明する。ここで、光源面と格子面が平行でない場合、光源面と格子面との間の距離dは、光源アレイ11の原点Oから格子プレート12の格子面までZ軸方向の距離として、これに伴う各光源の発光輝度分布(発光の指向特性)の不均一性も同様に輝度値を補正すればよい。
【0039】
まず、光源組11aにおける5つの光源Lnを順次点灯し、1次元格子が計測対称物体21上に投影することを考える。ここで、nは、原点Oを0とした光源の位置を示す−2,−1,0,1,2として与えられる。このとき、z=dにある1次元格子の透過率分布は余弦波状になっており、光源Lnにより照射された1次元格子の影の輝度分布は、以下の式で表される。
【0040】
【数4】
【0041】
ここで、Φは1次元格子の位相、agは振幅、bgは背景輝度、xgは格子面におけるx座標、eは格子面における基準点E(Φ=0)と点Cとの間の距離である。尚、格子プレート12の1次元格子を構成する各光透過領域12bの中央位置のうちZ軸からの距離が最短なものを基準点E(Φ=0)とし、格子プレート12の格子面とZ軸との交点をCとしている。
【0042】
まず、5つの光源L−2,L−1,L0,L1及びL2のうち、光源L0の点灯により1次元格子が投影された計測対象物体21上の位置S(x,y,z)における輝度I0は、近似的に次式で表される。
【0043】
【数5】
【0044】
ここで、任意の点の輝度は、光源からの距離の2乗に反比例することを考慮している。また、図1に示すように、計測対象物体21上の1点Sには、図1における格子面上の1次元格子のG点の影が投影されている。
【0045】
このとき、幾何学的関係より、次式の関係がある。
【0046】
【数6】
【0047】
次に、光源をL0からL1に切り換えると、G点の影は、座標点zの(x,y)面では、A点に向かって投影される。このとき、点Sには1次元格子のF点の影が投影され、位相シフトが生じている。したがって、点Sでは光源の切り替えによって生じる位相シフト量に起因して異なる輝度値となる。
【0048】
光源L1による位置S(x,y,z)における輝度と位相シフト量Ψとの関係は、次のようにして定式化することができる。即ち、光源をL0からL1に切り替えたことにより、計測対象物体21に投影される1次元格子の位相(アンラッピングされた位相)は、以下の式(4)で与えられる量だけシフトする。尚、アンラッピングとは、得られる位相分布が限定された範囲に折りたたまれてしまう現象(ラッピング)に対して位相特性を連続的に繋いだ状態を云う。
【0049】
【数7】
【0050】
この位相シフト量Ψは、以下のようにして求められる。即ち、図1における点L0,L1,Gからなる三角形(以下、このような三角形を「△L0L1G」と表す)と、点S,A,Gからなる△SAGとが相似であるため、次式となる。
【0051】
【数8】
【0052】
また、点S,A,L1からなる△SAL1と、点F,G,L1からなる△FGL1とが相似であるため、次式となる。
【0053】
【数9】
【0054】
式(5)及び式(6)から、次式が得られる。
【0055】
【数10】
【0056】
また、式(4)及び式(7)から、次式が得られる。
【0057】
【数11】
【0058】
こうして、光源をL0からL1に切り替えたときの、計測対象物体21に投影された1次元格子の位相シフト量Ψの値を定式化することができる。この位相シフト量Ψは、zに依存することが分かる。
【0059】
同様に、光源L0から光源Lnに切り替えることにより、式(2)に比べて位相がn・Ψだけシフトするため、位置S(x,y,z)における輝度Inは、次式となる。尚、nは、原点Oを0とした光源の位置を示す−2,−1,0,1,2として与えられる。
【0060】
【数12】
【0061】
この式(9)について、式(8)及び式(10)〜(12)を用いて置き直すと、式(13)が得られる。
【0062】
【数13】
【0063】
【数14】
【0064】
【数15】
【0065】
【数16】
【0066】
こうして、光源Lnを点灯したときの、位置S(x,y,z)における輝度Inと位相Φ及び位相シフト量Ψとの関係を定式化することができる。
【0067】
尚、計測対象物体21の反射率rを考慮する場合は、式(13)におけるa及びbに反射率rを乗じればよいが、ここでは説明を簡単化するために省略している。
【0068】
したがって、計測対象物体21までの高さ座標zを求めるためには、位相シフト量Ψ又は位相Φが分かればよい。この高さzと位相シフト量Ψとの関係は、式(8)から次式のように得られる。
【0069】
【数17】
【0070】
ここで、光源アレイ11の原点Oから計測対象物体21の表面までのZ軸方向の距離をz、光源アレイ11の各光源の間隔をl、光源アレイ11の原点Oから格子プレート12の格子面までのZ軸方向の距離をd、位相シフト量をΨ、格子プレート12の1次元格子の間隔をpとしている。これにより、高さzを求めることができる。この場合、等位相線は等高線となっている。
【0071】
また、位相Φが求められると、式(12)から次式が得られる。
【0072】
【数18】
【0073】
ここで、光源アレイ11の原点Oから計測対象物体21の表面までのZ軸方向の距離をz、光源アレイ11の原点Oから格子プレート12の格子面までのZ軸方向の距離をd、格子プレート12の1次元格子の位相をΦ、格子プレート12の1次元格子の間隔をp、原点Oから計測対象物体21の表面までのX軸方向の距離をx、格子プレート12の1次元格子を構成する各光透過領域12bの中央位置のうちZ軸からの最短距離をeとしている。これにより、位相Φが求められると、高さzが求められる。この場合、等位相線はxの関数となっており、等高線とはならない。
【0074】
このように、光源組11aにおける5つの光源L−2,L−1,L0,L1及びL2を順次点灯するのみで、位相シフト量Ψ又は位相Φを求めることができ、位相シフト量Ψ又は位相Φを求めることができれば、式(14)又は式(15)から、カメラ13の位置とは無関係に高さzを求めることができる。同様にして、光源組11bにおける5つの光源L−1,L0,L1,L2及びL3を順次点灯するのみで、位相シフト量Ψ又は位相Φを求めることができ、高さzを求めることができる。ただし、本実施形態では、この位相シフト量Ψを更に高精度化するために、光源組11aにおける5つの光源L−2,L−1,L0,L1及びL2を順次点灯することで得られる位相Φ1と、光源組11bにおける5つの光源L−1,L0,L1,L2及びL3を順次点灯することで得られる位相Φ2との差分を位相シフト量Ψとする。この各光源組で得られる位相Φの差分による位相シフト量Ψとすることで高精度化する理由を説明する前に、位相解析による位相Φ及び位相シフト量Ψの具体的な算出法とその問題点について説明する。各光源組で得られる位相Φの差分による位相シフト量Ψとすることで位相解析による問題点を改善することができるためである。
【0075】
そこで、高さzを求めるために必要な、位相Φ及び位相シフト量Ψを求める方法について説明する。上述のように、従来の位相シフト法が、図1の格子プレート12を直接動かすことにより、位相2πを整数Nで割算して、全ての位置にて位相を2π/Nずつシフトさせるのに対し、本発明に係る位相シフト法においては、5つの光源を順次選択して点灯させることにより、計測対象物体21に投影される1次元格子の位相を、式(8)で示される位相シフト量Ψにて等間隔に5回シフトさせる(初期位置を含めて)位相シフトを行う。この位相シフト量Ψは、通常、2πを5等分したものでないため従来法とは異なる。また、式(8)から明らかなように、zの値によって位相シフト量Ψは異なる。こうした本発明に係る光源切替方式の位相シフト法を、光源切り替えで等間隔に位相をステッピングさせることから「光ステッピング法」と呼ぶことにする。
【0076】
図4は、余弦波状に輝度が変化する1次元格子の位相を、位相シフト量Ψにて等間隔に位相シフトさせたときの、標本点の輝度及び位相シフト量の関係を示す。光ステッピング法においては、原点Oに位置する光源L0の輝度I0における位相Φが求めるべき位相であり、光源Lnを切り替えて順次点灯させる毎に、Ψずつ位相シフトする。このとき、輝度は上述の式(13)で表され、全てのnについて書くと、式(16)〜式(20)となる。
【0077】
【数19】
【0078】
【数20】
【0079】
【数21】
【0080】
【数22】
【0081】
【数23】
【0082】
ここで、未知数はΦ,Ψ,a及びbの4つであり、これらの式から位相Φのラッピングされた値φと、位相シフト量Ψのラッピングされた値ψは、それぞれ以下の式(21)及び(22)のようになる。
【0083】
【数24】
【0084】
【数25】
【0085】
これらの式(21)及び(22)を用いれば、容易にラッピングされた位相φ及び位相シフト量ψを求めることができる。尚、式(13)を解くのに、式(16)〜(20)の5つの式を用いたが、未知数の数が4つであるため、この5つの式のうちの4つを用いれば、4つの未知数を求めることができるのは言うまでもない。即ち、本発明においては、少なくとも5つの光源を等間隔かつ一列に並べた光源アレイ11について、このうち隣接配置の少なくとも4つの光源からなる光源組を少なくとも2組設定し、この2つの光源組における各光源を順次点灯して計測対象物体21上に投影される一次元格子をカメラ13で撮影して輝度値を得る。これにより、この少なくとも4つの光源の順次点灯によって位相シフトさせた位相φ及び位相シフト量ψを求めることができる。
【0086】
このように、光源組11aにおける5つの光源L−2,L−1,L0,L1及びL2を順次点灯するのみで、位相シフト量Ψ又は位相Φを求めることができ、位相シフト量Ψ又は位相Φを求めることができれば、式(14)又は式(15)から、カメラ13の位置とは無関係に高さzを求めることができる。同様にして、光源組11bにおける5つの光源L−1,L0,L1,L2及びL3を順次点灯するのみで、位相シフト量Ψ又は位相Φを求めることができ、高さzを求めることができる。
【0087】
ただし、本実施形態では、光源組11aにおける5つの光源L−2,L−1,L0,L1及びL2を順次点灯することで得られる位相Φ1と、光源組11bにおける5つの光源L−1,L0,L1,L2及びL3を順次点灯することで得られる位相Φ2との差分を位相シフト量Ψとして、高さzを求めるようにする。
【0088】
実験で式(22)の位相シフト量Ψを求めたところ,分母が0に近くなる付近で誤差が大きくなり、また、全範囲でばらつきも大きい。また、式(22)の位相シフト量ΨはcosΨから求めるため、誤差があると式(22)の右辺が−1と1の間を超えてしまうことが起こり、この場合Ψを求めることができない。一方、位相Φについては式(21)を用いてかなり精度よく求めることができる。
【0089】
そこで、単一の光源組で位相シフト量Ψを求めるよりも、高精度の位相シフト量Ψを別途求めるために、光源組11aにおける5つの光源L−2,L−1,L0,L1及びL2を順次点灯することで得られる位相Φ1と、光源組11bにおける5つの光源L−1,L0,L1,L2及びL3を順次点灯することで得られる位相Φ2との差分を位相シフト量Ψとする。
【0090】
即ち、2つの光源組を用いた位相シフト量Ψは、次式で得られる。
【0091】
【数26】
【0092】
位相Φ1も位相Φ2も精度よく得られるので、式(23)で得られる位相シフト量Ψも精度よく得られることになる。
【0093】
この式(23)で示す位相シフト量Ψを用いることで位相接続の高精度化を図ることができる。即ち、式(14)と式(22)から決まるcosψとzとの関係は、後述する図9から分かるように、zの広い範囲にわたってψの一価関数である。また、式(15)と式(21)から決まるtanφとzとの関係は、後述する図10から分かるように、位相φはzの多価関数となっており、一価関数として扱えるのはzの狭い範囲だけである。したがって位相φだけでは、広いレンジのzは決まらない。そこで、この位相シフト量ψを使ってzを求め、そのz付近の式(15)の関係より、位相φ(即ち、位相φ1や位相φ2)を用いて細密で正確なzを求めることができる。或いは、位相φ2と位相φ1の2つのデータから、zを2個求めることができるので、その平均を取るとその分精度が上がることになる。
【0094】
次に、図5を参照して本実施形態の形状計測装置1の動作について説明する。
【0095】
まず、制御ユニット50の光源決定部511は、2つの光源組11a,11bのうち1つを選択する(ステップS1)。
【0096】
続いて、制御ユニット50の光源決定部511は、選択した光源組(例えば、光源組11a)を構成する5つの光源のうち1つを点灯する(ステップS2)。
【0097】
続いて、制御ユニット50のカメラ撮像処理部512は、格子プレート12を介して1次元格子が投影された計測対象物体21をカメラで撮影する(ステップS3)。
【0098】
続いて、制御ユニット50のカメラ撮像処理部512は、選択した光源組を構成する5つの光源の全てについて撮影したか否かを判定する(ステップS4)。5つの光源の全てについて撮影していた場合(ステップS4のY)、ステップS5に移行にする。他方、5つの光源の全てについて撮影していない場合(ステップS4のN)、5つの光源の全てについて撮影するまでステップS2,S3を繰り返す。これにより、5つの光源を順次点灯させて、計測対象物体21に投影される1次元格子の位相をシフトさせながら計測対象物体21を撮影した画像信号を得ることができる。この画像信号は、画素別の輝度値として得ることができる。
【0099】
つまり、制御ユニット50の画素別輝度算出部513は、当該選択した光源組によるそれぞれの5種類の輝度値をカメラの画素毎に決定する(ステップS5)。
【0100】
続いて、制御ユニット50の位相・位相シフト量算出部514は、当該5種類の輝度値から当該投影された1次元格子の位相φを算出する(ステップS6)。
【0101】
さらに、制御ユニット50の光源決定部511は、光源組を全て選択したか否かを判定する(ステップS7)。光源組を全て選択していた場合(ステップS7のY)、ステップS8に移行する。他方、光源組を全て選択していない場合(ステップS7のN)、光源組を全て選択するまで、ステップS1〜S6を繰り返す。これにより、各光源組による当該投影された1次元格子の位相が求められる。
【0102】
続いて、制御ユニット50の位相・位相シフト量算出部514は、2つの光源組から得られる位相φ=Φ1,Φ2からその差分で表される位相シフト量Ψを算出する(ステップS8)。
【0103】
続いて、制御ユニット50の三次元座標算出部515は、算出した位相シフト量Ψから式(14)に基づいて高さ座標zを算出し、計測対象物体21の三次元座標を決定する(ステップS9)。このようにして、撮影された画像に対して光ステッピング法により位相解析処理を施して、計測対象物体21の形状を求めることができる。図5に示す動作フローでは、光源組毎に撮像して位相を算出する例を説明したが、全ての光源による撮像をした後、光源組を設定して位相を算出するように動作させることもできる。
【0104】
これにより、例えば、図8に示すように、各光源により撮像して得られる輝度値から2つの位相Φ1,Φ2を算出して位相シフト量Ψを算出し、2つの位相Φ1,Φ2及び位相シフト量Ψを用いて高さ座標zを算出するとともに例えばフーリエ変換格子法による位相解析からx,y座標を求めることにより、三次元座標テーブルを高精度に生成することができる。
【0105】
尚、図1において、光源アレイ11以外の構成の配置をX軸,Y軸,Z軸の三次元空間で全て固定した状態で、光源アレイ11をz=0の面内において原点Oを中心にしてX軸に対して傾けて配置することができる。つまり、光源アレイ11は、X軸に対して平行である必要はない。この場合、6つの光源間の間隔lとしては、6つの光源間の間隔のX軸方向の成分を用いる。光源間の間隔を物理的に狭めることは困難であるが、上記のように光源アレイ11をX軸に対して傾けることにより、X軸方向の光源間の間隔を容易に狭めることができるようになる。
【0106】
また、図1において、光源アレイ11以外の構成の配置をX軸,Y軸,Z軸の三次元空間で全て固定した状態で、z=0の面内において、光源アレイ11を構成する光源L−2,L−1,L0,L1,L2及びL3の各々を、Y軸方向の任意の位置に配置することもできる。つまり、光源アレイ11を構成する光源L−2,L−1,L0,L1,L2及びL3は、X軸方向の距離成分として等間隔に並んでいればよい。
【0107】
〔第2実施形態〕
次に、本発明による基準面を用いる第2実施形態の形状計測装置について説明する。図7は、本発明による第2実施形態の形状計測装置2の構成とその動作原理を示す図である。図1の構成と同様な構成要素には同一の参照番号を付している。
【0108】
第2実施形態の形状計測装置2は、図1に示す形状計測装置1の構成と対比して、光源面からZ軸方向に距離zRだけ離れた位置に、格子プレート12に対して平行な基準面14aを有する基準平板14を更に備える点で相違する。第2実施形態の形状計測装置2は、計測対象物体21に格子プレート12の1次元格子を投影して撮影することとは別に、計測対象物体21を載置可能な基準平板14に格子プレート12の1次元格子を投影して撮影することで、計測対象物体21と基準面14aとの間の位相差を計測し、この位相差から予め定めた換算式を基に計測対象物体21の高さzを求めて三次元形状を計測する。
【0109】
また、第2実施形態では、カメラ13のレンズの中心Vは、X軸方向の所定位置(X=v)に配置されている。即ち、原点Oからレンズの中心VまでのX軸方向の距離はvである。尚、第1実施形態と同様に、計測対象物体21は、格子プレート12と基準平板14との間に配置される。図7では、原点Oから格子プレート12を介して得られる1次元格子の位相φ=0〜5πの様子を点線で示しており、格子面の格子の明るい中心を通る位相φが偶数πとなり、格子面の格子の暗い中心を通る位相φが奇数πとなる。
【0110】
第2実施形態における形状計測装置2では、まず、制御ユニット50における光源決定部511の制御により、基準面14aに光源組11aのそれぞれの光源による1次元格子を投影し、カメラ撮影処理部512の制御により基準面14aに投影した各光源による1次元格子を撮影し、画素別輝度算出部513により各光源による各画素の輝度値を算出し、位相・位相シフト算出部514により、その位相ΦR1分布をメモリ52に記録する。次いで、基準面14aと格子プレート12との間に計測対象物体21を配置し、第1実施形態と同様に計測対象物体21上の点Sにおける、光源組11aのそれぞれの光源によって投影された1次元格子の位相ΦS1を求める。続いて、三次元座標算出部515により、カメラ13の各画素において、基準面14aと計測対象物体21上の点Sとの位相差(ΦS1−ΦR1)から、光源組11aにおける原点OからのZ軸方向の高さz又は基準面14aからの計測対象物体21の高さhS=zR−zを求める。同様にして、光源組11bのそれぞれの光源による点Sとの位相差(ΦS2−ΦR2)から、原点OからのZ軸方向の高さz又は基準面14aからの計測対象物体21の高さhS=zR−zを求める。更に、第1実施形態と同様に、位相シフト量(ΦS2−ΦS1)から、原点OからのZ軸方向の高さz又は基準面14aからの計測対象物体21の高さhS=zR−zを求める。位相シフト量(ΦS2−ΦS1)を用いて細密で正確なzを求めることができ、位相ΦS2と位相ΦS1の2つのデータから、zを2個求めることができるので、これらのzの平均を取るとその分精度が上がることになる。
【0111】
以下に、その原理について詳細に説明する。
【0112】
今、カメラ13のある1画素Uが、格子プレート12と基準平板14との間にて、計測対象物体21を配置していないときの基準面14a上の点Rを、計測対象物体21を配置しているときの該計測対象物体21上の点Sを見ているとする。光源組11a,11bのいずれかによって計測対象物体21上に投影された1次元格子の点Sでの位相をΦS、点Rでの位相をΦRとする。点Rと原点Oを結ぶ直線の格子面12aとの交点をQとする。このとき、位相ΦSとΦRは、それぞれ点Gと点Qにおける1次元格子の位相と同じであり、それらの位相差から次式の関係が得られる。
【0113】
【数27】
【0114】
また、点S,P,Oからなる△SPOと、点G,Q,Oからなる△GQOとが相似であるため、次式が得られる。
【0115】
【数28】
【0116】
式(24)及び式(25)から、次式が得られる。
【0117】
【数29】
【0118】
また、点S,P,Rからなる△SPRと、点V,O,Rからなる△VORとが相似であるため、次式が得られる。
【0119】
【数30】
【0120】
式(26)及び式(27)から、次式が得られる。
【0121】
【数31】
【0122】
この式(28)から、高さzは、次式が得られる。
【0123】
【数32】
【0124】
ここで、光源アレイ11上から計測対象物体21の表面までのZ軸方向の距離をz、原点Oから格子プレート12の格子面までのZ軸方向の距離をd、原点Oからレンズの中心Vまでの距離をv、原点Oから基準平板14の基準面14aまでのZ軸方向の距離をzR、格子プレート12の1次元格子の間隔をp、原点Oから計測対象物体21の表面までのX軸方向の距離xにおける当該投影された1次元格子の位相をΦS、距離xの計測対象物体21の表面位置とレンズの中心Vとを通る直線と、基準面14aとの交点における当該投影された1次元格子の位相をΦRとしている。このように、式(29)に基づいて、カメラ13の画素の基準面14aにおける位相ΦR及び計測対象物体21上の点Sの位相ΦSから、光源組11a,11bのそれぞれにおける点Sのz座標を求めることができる。また、等位相差(ΦS−ΦR)線は等高線となる。更に、第1実施形態と同様に、位相シフト量(ΦS2−ΦS1)から、z又は基準面14aからの計測対象物体21の高さhS=zR−zを求めることができる。
【0125】
また、x座標及びy座標については、第1実施形態の場合と同様に、例えばフーリエ変換格子法により、X軸方向及びY軸方向の位相をそれぞれ求め、更に位相接続を行うことにより、各点におけるx座標及びy座標をそれぞれ得ることができる。
【0126】
尚、第1実施形態の場合と同様に、第2実施形態においても、光源アレイ11以外の構成の配置をX軸,Y軸,Z軸の三次元空間で全て固定した状態で、光源アレイ11をz=0の面内において原点Oを中心にしてX軸に対して傾けて配置することができる。つまり、光源アレイ11は、X軸に対して平行である必要はない。この場合、6つの光源間の間隔lとしては、6つの光源間の間隔のX軸方向の成分を用いる。光源間の間隔を物理的に狭めることは困難であるが、上記のように光源アレイ11をX軸に対して傾けることにより、X軸方向の光源間の間隔を容易に狭めることができるようになる。
【0127】
また、図1において、光源アレイ11以外の構成の配置をX軸,Y軸,Z軸の三次元空間で全て固定した状態で、z=0の面内において、光源アレイ11を構成する光源L−2,L−1,L0,L1,L2及びL3の各々を、Y軸方向の任意の位置に配置することもできる。つまり、光源アレイ11を構成する光源L−2,L−1,L0,L1,L2及びL3は、X軸方向の距離成分として等間隔に並んでいればよい。
【0128】
こうして、計測対象物体21上の点Sの座標x,y及びzを求めることができ、計測対象物体21の形状を求めることができる。例えば、図8に示すように、制御ユニット50の制御により、2つの光源組11a,11bの各光源によって撮像された各画素の輝度値から、それぞれ2つの位相ΦS1,ΦS2を算出して位相シフト量Ψ=ΦS2−ΦS1を算出し、この算出した位相シフト量Ψと位相差(ΦS1−ΦR1)及び(ΦS2−ΦR2)を用いて位相接続し、高さ座標zを算出した三次元座標テーブルを生成してメモリ53に格納することができる。尚、制御ユニット50の制御により、この三次元座標テーブルを用いて、形状計測装置2に接続される表示装置(図示せず)に計測対象物体21の三次元像を表示するように構成することもできる。
【0129】
本発明の第2実施形態においても、全空間テーブル化手法を適用することにより、計測対象物体21の形状計測を更に高速に行うことができる(例えば、特開2008−281491号公報参照)。即ち、図7に示すように、格子面12aに平行に配置された2次元格子が描かれた(又は投影された)基準面14aを有する基準平板14を用意し、該基準平板14をZ軸方向に所定の微少量だけ移動させながら基準面14aを撮影し、撮影された画像に対して位相解析処理を施すことにより、カメラ13の各画素に対して、x,y座標を定めるとともに、位相シフト量Ψ、位相Φ及び位相差(ΦS−ΦR)と高さz との関係を定め、それぞれテーブルとしてメモリ52に予め格納しておく。計測対称物体21の計測時には、こうして予め用意しておいた各画素に対するテーブルを参照することにより、各画素に対して得られた輝度から位相Φを算出し、算出した位相Φを基に位相シフト量Ψや位相差(ΦS−ΦR)を算出して高さzの値を求めることができる。
【0130】
この全空間テーブル化手法においては、予め用意した画素毎のテーブルを参照するだけであり、三角測量などで用いる幾何学的計算をする必要がほとんどないため、計測対象物体21の形状を更に高速に求めることができる。
【0131】
(zとΨ,Φ,ΦS及びΦRとの関係の具体的検証)
ここで、高さzとΨ及びΦとの関係について、更に具体的に説明する。上記した式(14)及び式(15)は、位相Φ(及び位相シフト量Ψ)と高さzとの関係を表しており、Ψ及びΦ、又は(ΦS−ΦR)が求められれば、これらのいずれかの式を用いて高さzを求めることができる。しかし、実際には、式(21)及び式(22)で表されるtanΦ,cosΨ,tanΦS及びtanΦRとして求める。これらの位相(及び位相シフト量)はラッピングされており、2mπ≦Φ≦2(m+1)π或いはqπ≦Ψ≦(q+1)πなどに制限されて出力される。ここで、m及びqは整数である。一般には、m=0及びq=0の場合に制限されている。そこで、tanΦ,cosΨ,tanΦS及びtanΦRを用いて、これらと高さzとの関係を以下のように具体的に求めてみた。
【0132】
例として、光源アレイ11が5つの光源からなる場合を考え、l=0.5mm、d=10mm、p=0.5mm、v=50mm、zR=500mm及びe=0mmの場合を考える。このとき、式(14)を用いて得られたzとcosΨの関係は図9のようになる。
【0133】
一方、式(15)を用いて得られたzは、xの関数である。ここで、基準面14aとZ軸との交点Iと、該交点Iを見ているカメラ13のある画素とを通る直線の式は、次式となる。
【0134】
【数33】
【0135】
この式(29)を、式(12)に代入してxを消去すると、次式が得られる。
【0136】
【数34】
【0137】
この式(30)で与えられるzとtanΦとの関係を図10に示す。
【0138】
例えば光源組11aにおける5つの光源L−2,L−1,L0,L1及びL2を順次点灯して撮影することで、5回の位相シフトを高速におこなうことができ、図9及び図10の位相が得られる。
【0139】
同様にして、予め基準面14aの位相分布を求めておけば、式(28)を用いて得られたzと0〜2πの範囲にラッピングされた(ΦS−ΦR)の関係を示す位相分布も同時に得られ(図11参照)、メモリ52に保持することができる。
【0140】
したがって、一度の事前実験で得られた図9、図10及び図11で示される特性のいずれを使っても高さzを得ることができる。ただし、高さと位相の関係は、高さと位相とが1対1の対応がつく範囲でしか求められない。即ち、2mπ≦Φ≦2(m+1)π或いはqπ≦Ψ≦(q+1)πの範囲だけが解析できる。
【0141】
前述したように、図9においては、cosΨはzの広い範囲にわたって単調増加或いは単調減少となる範囲がある。そのため、分解能は低いといえるが、ダイナミックレンジが広いといえる。一方、図10或いは図11においては、tanΦ或いは(ΦS−ΦR)が単調増加或いは単調減少するzの範囲は狭いため、ダイナミックレンジは狭いが、分解能が高いといえる。
【0142】
そこで、図9に示したzとcosΨとの関係において、分解能がやや悪い高さzを予め求めておき、図10又は図11の関係において、予め求めたz付近の1対1の対応が成り立つ範囲においてzの値を高い分解能で求める。これにより、広い範囲にわたって高さzを高精度に求めることができる。さらに、本発明に係る式(23)の位相シフト量Ψを用いることによって、より高精度にzの値を求めることができるようになる。
【0143】
また、第2実施形態において、撮影装置13のレンズの中心Vを原点Oとした場合は、v=0、x=0となり、式(12)より、Φ=0となり、図10における高さzとtanΦとの関係において高さzは不定となり、決まらない。このように、図10において、高さzと位相Φの関係は位置によって大きく異なり、精度も位置によって大きく異なることになる。したがって、図10に示した高さzとtanΦとの関係は使わず、図9に示したzとcosΨとの関係と図11に示した高さzと位相差(ΦS−ΦR)との関係を組み合わせて使用することが好適である。
【0144】
さらに、第1実施形態と同様に、位相シフト量(ΦS2−ΦS1)から、z又は基準面14aからの計測対象物体21の高さhS=zR−zを求めることで、より高精度のzを求めることができる。
【0145】
また、式(14)や式(15)でその都度求めたzで十分に精度が得られることも考えられるが、全空間テーブル化手法を用いると式(14)や式(15)を直接用いなくてもよい。
【0146】
こうして、逐次算出するか、予め位相Φと座標x,y及びz又は位相シフト量Ψと座標x,y及びzの換算式を示す全空間テーブルを保持しておくことで、計測対象物体21上の点Sの位相Φや位相シフト量Ψから座標x,y及びzを求めて、計測対象物体21の形状を求めることができる。
【0147】
また、第1実施形態及び第2実施形態では、光源や格子面の配置等に、種々の拘束条件を設けたが、6つの光源の発光輝度分布に多少のムラがある場合、点光源が完全な点ではなくて多少の面積がある場合、1次元格子やLEDの間隔が一定ではなく少々異なる場合、カメラ13のレンズの位置が光源面から少々外れる場合、平行に配置された各構成が平行から多少ずれる場合、及び1次元格子の輝度分布が余弦波から多少ずれる場合があるとしても、このような基準面14aを用いた位相解析により、計測された位相Φと高さzとの関係が単調に変化して1対1の対応関係がありさえすれば、これらの誤差を打ち消し、計測対象物体21の形状を精度良く求めることができる。
【0148】
より具体的には、基準面14aを用いて全空間テーブルを作成するにあたり、まず、第1の光源組10aによる5回の位相シフトで式(21)を用いて位相Φ1と高さzの関係を求める。次に、第2の光源組10bによる5回の位相シフトで式(21)を用いて位相Φ2と高さzの関係を求める。同時に位相シフト量Ψ=Φ2−Φ1を求め、位相シフト量Ψと高さzの関係を求める。基準面14aのz座標の位置を一定間隔で変えながらこの作業を繰り返し、位相Φ1と高さzの関係をテーブルT1として求めてメモリ52に格納する。同様に位相Φ2と高さzの関係をテーブルT2として求めてメモリ52に格納する。さらに、位相シフト量Ψ(=Φ2−Φ1)とzの関係をテーブルT3として求めてメモリ52に格納する。テーブルT1,T2,T3を用いて、一定間隔の位相Φ1,Φ2及び位相シフト量Ψに対するそれぞれのzの値z1,z2及びz3となるテーブルを補間して求め直し、それぞれのテーブルT1’,T2’及びT3’を生成する。図9及び図10又は図11から分かるように、Ψとzの関係が1:1の対応となる範囲に対して、Φ1,Φ2とzの関係は、zに対してΦ1,Φ2が多価関数となっていることから、これらのテーブルT1’,T2’及びT3’を生成するのが好適となる。
【0149】
次に、計測対象物体21を置いたときに、まず、第1の光源組10aによる5回の位相シフトで位相Φ1を求め、次に、第2の光源組10bによる5回の位相シフトで位相Φ2を求め、これらの差より位相シフト量Ψを得る。そして、テーブルT3’を参照して高さz3を得る。これだけでも高さzの値をかなり精度よく求めることができる。更に、テーブルT1’,T2’のうち、高さz3付近の位相Φ1,Φ2と高さzの関係が一価関数となる範囲の位相Φ1や位相Φ2を用いることにより、高さz1,z2が一意に決まる。つまり、テーブルT1’を参照して位相Φ1から高さz1を得る。更に、テーブルT2’を参照して位相Φ2から高さz2を得る。最終的に、得られたz1とz2の値を平均して求めたいzの値とする。これにより、zを高精度に求めることができる。
【0150】
また、それぞれx,y方向の座標値x,yを基に、位相Φ1,Φ2及び位相シフト量Ψに対して全空間テーブル化手法を適用することができ、計測対象物体21のx,y,zの三次元座標を得ることができる。
【0151】
つまり、第1実施形態の形状計測装置1において、全空間テーブル化手法を使うと精度が良くなり計測速度が高速となる。また、第2実施形態の形状計測装置2において、基準平板14と全空間テーブル化手法を使うと計測速度が高速になるだけでなく、さらに精度が良くなる。尚、第1実施形態及び第2実施形態において、格子面に平行に配置された基準面を有する所定の基準平板(第2実施形態では、基準平板14)を用いる例について説明したが、この全空間テーブル化手法を使うことで、投影される1次元格子の位相と三次元座標の関係をテーブル化してメモリ52に保持しておくことができるので、この基準平板と格子プレート12における格子面とを平行に配置しなくともよくなる。例えば、基準平板14上にX軸及びY軸を取り、その基準面14aに垂直な方向にZ軸を取るようにする。この全空間テーブル化手法により、座標値x,yを示す2次元格子を基準平板14上に投影するプロジェクタ(図示せず)を用いる場合においても、このプロジェクタ、光源アレイ11及びカメラ13の位置を自由に配置することができるようになる。したがって、本発明に係る形状計測装置で所定の基準平板を用いる場合に、全空間テーブル化手法を適用することは、この基準平板を格子面に平行に配置しなくてもよくなる点で有効である。
【0152】
尚、各実施形態における制御ユニット50は、コンピュータとして構成することができ、制御ユニット50をコンピュータとして構成させる場合には、当該コンピュータに、制御ユニット50の各構成要素を実現させるためのプログラムをメモリ52に記憶する。当該コンピュータに備えられる中央演算処理部(CPU)が、各構成要素の機能を実現するための処理内容が記述されたプログラムや処理データを、適宜、メモリ52から読み込んで制御ユニット50の各構成要素の機能をコンピュータ上で実現させることができる。ここで、各構成要素の機能をハードウェアの一部で実現してもよいことは勿論である。
【産業上の利用可能性】
【0153】
本発明によれば、少なくとも5つの光源を順次切り替えることにより位相シフトを高速に行うことができ、計測対象物体の形状を高速且つ高精度に計測することができるため、電子部品の検査、人体計測、医療、及び小型生物の立体観察や立体計測等の用途に有用である。
【符号の説明】
【0154】
1,2 形状計測装置
11 光源アレイ
12 格子プレート
12a 格子の光遮蔽領域
12b 格子の光透過領域
13 カメラ
14 基準平板
14a 基準面
21 計測対象物体
50 制御ユニット
51 制御部
52 メモリ
511 光源決定部
512 カメラ撮影処理部
513 画素別輝度算出部
514 位相・位相シフト量算出部
515 三次元座標算出部
L−2,L−1,L0,L1,L2,L3 光源
U 撮影装置の画素
V 撮影装置のレンズの中心
【特許請求の範囲】
【請求項1】
計測対象物体の形状を非接触で計測する形状計測装置であって、
少なくとも5つの光源を等間隔に直線状に配列した光源アレイと、
前記少なくとも5つの光源を配列した直線に対して垂直方向の直線からなる光透過領域を光遮蔽領域に対して等間隔で並べて構成された1次元格子の格子面を有する格子プレートと、
前記少なくとも5つの光源の順次点灯により前記1次元格子がそれぞれ投影される計測対象物体を撮影するカメラと、
前記少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定し、前記2組の光源組における各光源を順次点灯するよう前記光源アレイを制御するとともに、前記各光源を順次点灯してそれぞれ前記計測対象物体上に投影される1次元格子を撮影するよう前記カメラを制御し、前記2組の光源組による前記計測対象物体上に投影された前記1次元格子の位相をそれぞれ算出し、算出した当該2つの位相の差を位相シフト量として、前記位相シフト量から距離を決定する予め定めた換算式に基づいて前記計測対象物体に関する高さ座標を求める制御ユニットと、
を備えることを特徴とする形状計測装置。
【請求項2】
前記位相シフト量から距離を決定する予め定めた換算式は、前記少なくとも5つの光源を配列した直線上の1点を原点として、前記格子プレートのそれぞれの光透過領域の配列方向をX軸、前記光透過領域の直線をY軸、及び前記格子プレートの格子面の法線方向をZ軸とし、前記光源アレイの原点から前記計測対象物体の表面までの前記Z軸方向の距離をz、前記光源アレイの各光源の間隔をl、前記光源アレイの原点から前記格子面までのZ軸方向の距離をd、前記位相シフト量をΨ、前記1次元格子の間隔をpとしたとき、
【数1】
【請求項3】
前記制御ユニットは、当該投影された1次元格子の位相から距離を決定する予め定めた換算式に基づいて前記計測対象物体に関する高さ座標を求める手段を有し、前記少なくとも5つの光源を配列した直線上の1点を原点として、前記格子プレートのそれぞれの光透過領域の配列方向をX軸、前記光透過領域の直線をY軸、及び前記格子プレートの格子面の法線方向をZ軸とし、前記光源アレイの原点から前記計測対象物体の表面までの前記Z軸方向の距離をz、前記光源アレイの原点から前記格子面までの前記Z軸方向の距離をd、前記1次元格子の位相をΦ、前記1次元格子の間隔をp、前記原点から前記計測対象物体の表面までの前記X軸方向の距離をx、前記1次元格子を構成する各光透過領域の中央位置のうち前記Z軸からの最短距離をeとしたとき、
【数2】
【請求項4】
前記1次元格子が投影されるように配置された基準面を有する基準平板を更に備え、前記制御ユニットは、前記少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定し、前記2組の光源組における各光源を順次点灯するよう前記光源アレイを制御するとともに、前記各光源を順次点灯してそれぞれ前記基準面に投影される1次元格子を撮影するよう前記カメラを制御し、前記2組の光源組による前記基準面上に投影された前記1次元格子の位相をそれぞれ算出してメモリに保持する手段と、前記2組の光源組のそれぞれについて、前記メモリに保持した前記基準面上に投影された前記1次元格子の位相と、前記計測対象物体上に投影された前記1次元格子の位相との差分を算出し、該差分から距離を決定する予め定めた換算式に基づいて前記計測対象物体に関する高さ座標を求める手段とを備えることを特徴とする、請求項1〜3のいずれか一項に記載の形状計測装置。
【請求項5】
前記差分から距離を決定する予め定めた換算式は、前記少なくとも5つの光源を配列した直線上の1点を原点として、前記格子プレートのそれぞれの光透過領域の配列方向をX軸、前記光透過領域の直線をY軸、及び前記格子プレートの格子面の法線方向をZ軸とし、前記光源アレイの原点から前記計測対象物体の表面までの前記Z軸方向の距離をz、前記光源アレイの原点から前記格子面までの前記Z軸方向の距離をd、前記原点から前記カメラのレンズの中心までの距離をv、前記原点から前記基準面までのZ軸方向の距離をzR、前記1次元格子の間隔をp、前記原点から前記計測対象物体の表面までの前記X軸方向の距離xにおける当該投影された前記1次元格子の位相をΦS、前記距離xの前記計測対象物体の表面位置と前記レンズの中心とを通る直線と、前記基準面との交点における当該投影された前記1次元格子の位相をΦRとしたとき、
【数3】
【請求項6】
前記制御ユニットは、前記カメラの画素位置で定まるX軸及びY軸のx,y座標とZ軸のz座標からなる三次元座標について、前記基準平板を用いて計測された一定間隔のz座標毎に、前記位相と前記x,y座標との関係、及び前記位相シフト量と前記x,y座標との関係を関連づけるテーブルをそれぞれ作成して前記メモリに保持する手段と、前記計測対象物体について算出した前記1次元格子の位相及び前記位相シフト量から、前記メモリに保持したテーブルを参照して前記計測対象物体に関する三次元座標を導出する手段とを備えることを特徴とする、請求項1〜5のいずれか一項に記載の形状計測装置。
【請求項7】
少なくとも5つの光源を等間隔に直線状に配列した光源アレイと、前記少なくとも5つの光源を配列した直線に対して垂直方向の直線からなる光透過領域を光遮蔽領域に対して等間隔で並べて構成された1次元格子の格子面を有する格子プレートと、前記少なくとも5つの光源の順次点灯により前記1次元格子がそれぞれ投影される計測対象物体を撮影するカメラと、制御ユニットと、を備える形状計測装置によって前記計測対象物体の形状を計測する形状計測方法であって、
前記制御ユニットの処理は、
前記少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定するステップと、
前記2組の光源組における各光源を順次点灯するよう前記光源アレイを制御するステップと、
前記各光源を順次点灯してそれぞれ前記計測対象物体上に投影される1次元格子を撮影するよう前記カメラを制御するステップと、
前記2組の光源組による前記計測対象物体上に投影された前記1次元格子の位相をそれぞれ算出するステップと、
算出した当該2つの位相の差を位相シフト量として、前記位相シフト量から距離を決定する予め定めた換算式に基づいて前記計測対象物体に関する高さ座標を求めるステップと、
を含むことを特徴とする形状計測方法。
【請求項1】
計測対象物体の形状を非接触で計測する形状計測装置であって、
少なくとも5つの光源を等間隔に直線状に配列した光源アレイと、
前記少なくとも5つの光源を配列した直線に対して垂直方向の直線からなる光透過領域を光遮蔽領域に対して等間隔で並べて構成された1次元格子の格子面を有する格子プレートと、
前記少なくとも5つの光源の順次点灯により前記1次元格子がそれぞれ投影される計測対象物体を撮影するカメラと、
前記少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定し、前記2組の光源組における各光源を順次点灯するよう前記光源アレイを制御するとともに、前記各光源を順次点灯してそれぞれ前記計測対象物体上に投影される1次元格子を撮影するよう前記カメラを制御し、前記2組の光源組による前記計測対象物体上に投影された前記1次元格子の位相をそれぞれ算出し、算出した当該2つの位相の差を位相シフト量として、前記位相シフト量から距離を決定する予め定めた換算式に基づいて前記計測対象物体に関する高さ座標を求める制御ユニットと、
を備えることを特徴とする形状計測装置。
【請求項2】
前記位相シフト量から距離を決定する予め定めた換算式は、前記少なくとも5つの光源を配列した直線上の1点を原点として、前記格子プレートのそれぞれの光透過領域の配列方向をX軸、前記光透過領域の直線をY軸、及び前記格子プレートの格子面の法線方向をZ軸とし、前記光源アレイの原点から前記計測対象物体の表面までの前記Z軸方向の距離をz、前記光源アレイの各光源の間隔をl、前記光源アレイの原点から前記格子面までのZ軸方向の距離をd、前記位相シフト量をΨ、前記1次元格子の間隔をpとしたとき、
【数1】
【請求項3】
前記制御ユニットは、当該投影された1次元格子の位相から距離を決定する予め定めた換算式に基づいて前記計測対象物体に関する高さ座標を求める手段を有し、前記少なくとも5つの光源を配列した直線上の1点を原点として、前記格子プレートのそれぞれの光透過領域の配列方向をX軸、前記光透過領域の直線をY軸、及び前記格子プレートの格子面の法線方向をZ軸とし、前記光源アレイの原点から前記計測対象物体の表面までの前記Z軸方向の距離をz、前記光源アレイの原点から前記格子面までの前記Z軸方向の距離をd、前記1次元格子の位相をΦ、前記1次元格子の間隔をp、前記原点から前記計測対象物体の表面までの前記X軸方向の距離をx、前記1次元格子を構成する各光透過領域の中央位置のうち前記Z軸からの最短距離をeとしたとき、
【数2】
【請求項4】
前記1次元格子が投影されるように配置された基準面を有する基準平板を更に備え、前記制御ユニットは、前記少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定し、前記2組の光源組における各光源を順次点灯するよう前記光源アレイを制御するとともに、前記各光源を順次点灯してそれぞれ前記基準面に投影される1次元格子を撮影するよう前記カメラを制御し、前記2組の光源組による前記基準面上に投影された前記1次元格子の位相をそれぞれ算出してメモリに保持する手段と、前記2組の光源組のそれぞれについて、前記メモリに保持した前記基準面上に投影された前記1次元格子の位相と、前記計測対象物体上に投影された前記1次元格子の位相との差分を算出し、該差分から距離を決定する予め定めた換算式に基づいて前記計測対象物体に関する高さ座標を求める手段とを備えることを特徴とする、請求項1〜3のいずれか一項に記載の形状計測装置。
【請求項5】
前記差分から距離を決定する予め定めた換算式は、前記少なくとも5つの光源を配列した直線上の1点を原点として、前記格子プレートのそれぞれの光透過領域の配列方向をX軸、前記光透過領域の直線をY軸、及び前記格子プレートの格子面の法線方向をZ軸とし、前記光源アレイの原点から前記計測対象物体の表面までの前記Z軸方向の距離をz、前記光源アレイの原点から前記格子面までの前記Z軸方向の距離をd、前記原点から前記カメラのレンズの中心までの距離をv、前記原点から前記基準面までのZ軸方向の距離をzR、前記1次元格子の間隔をp、前記原点から前記計測対象物体の表面までの前記X軸方向の距離xにおける当該投影された前記1次元格子の位相をΦS、前記距離xの前記計測対象物体の表面位置と前記レンズの中心とを通る直線と、前記基準面との交点における当該投影された前記1次元格子の位相をΦRとしたとき、
【数3】
【請求項6】
前記制御ユニットは、前記カメラの画素位置で定まるX軸及びY軸のx,y座標とZ軸のz座標からなる三次元座標について、前記基準平板を用いて計測された一定間隔のz座標毎に、前記位相と前記x,y座標との関係、及び前記位相シフト量と前記x,y座標との関係を関連づけるテーブルをそれぞれ作成して前記メモリに保持する手段と、前記計測対象物体について算出した前記1次元格子の位相及び前記位相シフト量から、前記メモリに保持したテーブルを参照して前記計測対象物体に関する三次元座標を導出する手段とを備えることを特徴とする、請求項1〜5のいずれか一項に記載の形状計測装置。
【請求項7】
少なくとも5つの光源を等間隔に直線状に配列した光源アレイと、前記少なくとも5つの光源を配列した直線に対して垂直方向の直線からなる光透過領域を光遮蔽領域に対して等間隔で並べて構成された1次元格子の格子面を有する格子プレートと、前記少なくとも5つの光源の順次点灯により前記1次元格子がそれぞれ投影される計測対象物体を撮影するカメラと、制御ユニットと、を備える形状計測装置によって前記計測対象物体の形状を計測する形状計測方法であって、
前記制御ユニットの処理は、
前記少なくとも5つの光源のうち隣接配置の少なくとも4つの光源からなる光源組を2組設定するステップと、
前記2組の光源組における各光源を順次点灯するよう前記光源アレイを制御するステップと、
前記各光源を順次点灯してそれぞれ前記計測対象物体上に投影される1次元格子を撮影するよう前記カメラを制御するステップと、
前記2組の光源組による前記計測対象物体上に投影された前記1次元格子の位相をそれぞれ算出するステップと、
算出した当該2つの位相の差を位相シフト量として、前記位相シフト量から距離を決定する予め定めた換算式に基づいて前記計測対象物体に関する高さ座標を求めるステップと、
を含むことを特徴とする形状計測方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−44689(P2013−44689A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−184185(P2011−184185)
【出願日】平成23年8月25日(2011.8.25)
【出願人】(509347239)一般社団法人モアレ研究所 (6)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月25日(2011.8.25)
【出願人】(509347239)一般社団法人モアレ研究所 (6)
【Fターム(参考)】
[ Back to top ]