
形状計測装置及び方法並びにプログラム
【課題】試験体に沿って移動させる機構を不要とすること。
【解決手段】試験体の輪郭を撮像した画像の画素毎の輝度情報を抽出し、各画素を第1方向に分割して複数の小領域を定義するとともに、各小領域の輝度情報を、各画素の輝度情報および第1方向に隣接する他の画素の輝度情報に基づいて決定する小領域定義部21と、第1方向に直交する第2方向に並ぶ複数列のそれぞれの前記画素について、小領域定義部21により決定された各小領域の輝度情報を第1方向に走査して、輝度情報が所定の閾値を越える境界の小領域の位置情報を抽出する作業を実施して試験体の輪郭データを生成する輪郭データ生成部22とを備える。
【解決手段】試験体の輪郭を撮像した画像の画素毎の輝度情報を抽出し、各画素を第1方向に分割して複数の小領域を定義するとともに、各小領域の輝度情報を、各画素の輝度情報および第1方向に隣接する他の画素の輝度情報に基づいて決定する小領域定義部21と、第1方向に直交する第2方向に並ぶ複数列のそれぞれの前記画素について、小領域定義部21により決定された各小領域の輝度情報を第1方向に走査して、輝度情報が所定の閾値を越える境界の小領域の位置情報を抽出する作業を実施して試験体の輪郭データを生成する輪郭データ生成部22とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、形状計測装置及び方法並びにプログラムに関するものである。
【背景技術】
【0002】
従来、配管等の試験体の形状を計測するには、接触型変位計またはレーザ変位計をスライドさせて、接触型変位計またはレーザ変位計から照射するレーザ光によって試験体の輪郭上を走査することにより、変位計から試験体までの高さ位置および距離等に基づいて輪郭の座標を取得し、この座標変化を試験体の形状とする方法が知られている。
また、特許文献1には、被測定物に照射するスリット光を走査させ、被測定物から反射して得られる散乱光に基づいて輝度データを取得することによって、物体の形状認識を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平5−67197号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のように、変位計をスライドさせて座標の情報を得る場合には、変位計をスライドさせて試験体に照射するレーザ光を走査させて形状を計測するため、変位計をスライドさせる機構が必要になるという問題があった。また、試験体に直接光を照射することによって形状を計測していたため、変位計と試験体とが試験時に揃っていて初めて試験体の形状計測が可能となるという問題があった。
【0005】
本発明は、このような事情に鑑みてなされたものであって、試験体に沿って移動させる機構を不要とし、試験後においても形状決定できる形状計測装置及び方法並びにプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明は以下の手段を採用する。
本発明は、試験体の輪郭を撮像した画像の画素毎の輝度情報を抽出し、各前記画素を第1方向に分割して複数の小領域を定義するとともに、各前記小領域の輝度情報を、各前記画素の輝度情報および前記第1方向に隣接する他の前記画素の輝度情報に基づいて決定する小領域定義手段と、前記第1方向に直交する第2方向に並ぶ複数列のそれぞれの前記画素について、該小領域定義手段により決定された各前記小領域の輝度情報を前記第1方向に走査して、該輝度情報が所定の閾値を越える境界の前記小領域の位置情報を抽出する作業を実施して前記試験体の輪郭データを生成する輪郭データ生成手段とを具備する形状計測装置を提供する。
【0007】
このような構成によれば、試験体の輪郭は、撮像した画像の各画素のうち、所定の閾値に基づいて輝度の変化があるとされる画素が輪郭位置とされ、さらに、小領域定義手段により画素を分割して定義された小領域に割り当てられた輝度情報に基づいて、輪郭データ生成手段が輪郭データを生成するので、画像の解像度を超えて精密に試験体の輪郭形状を計測することができる。
この場合に、試験体を撮像した画像に基づいて試験体の輪郭を計測するので、試験体に変位計を当てて輪郭の一部を計測し、変位計の位置を移動させながら順次測定範囲の輪郭を計測する場合と比較すると、変位計の位置を移動させる移動機構が不要となる。また、画像さえ取得しておけば輪郭形状を計測することができるので、例えば、試験中に画像を取得しておき、試験後に後から輪郭形状を決定することが可能である。
【0008】
上記形状計測装置の前記試験体は、形状変化する試験体であることとしてもよい。
画像を撮像した各時刻における試験体の形状を決定するので、形状変化する試験体であっても形状を簡便に決定することができる。例えば、変位計を移動させながら輪郭を計測する場合には、形状変化した時点での試験体形状を保たせるために試験を停止して計測する必要があるが、本発明においては、形状変化した各時刻の画像に基づいて輪郭を決定でき、試験を停止する必要がないので、試験時間の短縮につながる。また、荷重負荷をかけている場合の変形中の形状を画像によって各時刻に分割して取得することができるので、変形中の形状を計測することができる。
【0009】
上記形状計測装置の前記小領域定義手段が、各前記小領域の前記輝度情報を補間関数に基づいて決定することとしてもよい。
補間関数を用いることにより、小領域に割り当てる輝度情報を連続的に変化させることができ、第1方向の隣接する輝度情報と滑らかに輝度変化させることができる。これにより、試験体の輪郭形状をより精度よく計測することができる。
【0010】
上記形状計測装置の前記輪郭データ生成手段が、前記第2方向に分布する前記輪郭データを生成する前記小領域の前記第1方向の変位量の移動平均を算出し、前記輪郭データを生成する前記画素上の位置を調整することとしてもよい。
変形(水平)方向の変位量の移動平均によって輪郭データの新たな位置を算出して輪郭データが調整されるので、輪郭データが平滑化され、計測精度が向上される。
【0011】
上記形状計測装置において、調整された前記輪郭データに基づいて、曲げ歪みを算出する歪み算出手段を備えることとしてもよい。
試験体の画像に基づいて、簡便に曲げ歪みを算出することができる。
【0012】
上記形状計測装置の前記試験体に光源から光を照射させた場合に、生成される前記試験体の影を撮像することによって得られる前記画像に基づいて前記試験体の輪郭形状を計測することとしてもよい。
試験体に光源からの光が照射されてできる影を撮像した画像を用いることにより、影によって輪郭の明暗が明確となるので、試験体の輪郭形状を正しく取得することができる。例えば、試験体を撮像した場合に、試験体が円筒形状である場合や周囲の輝度の状態等により輪郭部分が明確とならないことがあるが、このような場合であっても、影を撮像した画像を用いることにより、試験体の形状や周囲の輝度状況に関わらず、明確に輪郭を取得することができる。
【0013】
上記形状計測装置の前記試験体に光を照射する前記光源と、前記試験体の影が投影されるスクリーンとを具備することとしてもよい。
光源とスクリーンとを用いることによって、試験体の影を簡便に生成することができる。
【0014】
本発明は、試験体の輪郭を撮像した画像の画素毎の輝度情報を抽出し、各前記画素を第1方向に分割して複数の小領域を定義するとともに、各前記小領域の輝度情報を、各前記画素の輝度情報および前記第1方向に隣接する他の前記画素の輝度情報に基づいて決定する小領域定義過程と、前記第1方向に直交する第2方向に並ぶ複数列のそれぞれの前記画素について、該小領域定義過程により決定された各前記小領域の輝度情報を前記第1方向に走査して、該輝度情報が所定の閾値を越える境界の前記小領域の位置情報を抽出する作業を実施して前記試験体の輪郭データを生成する輪郭データ生成過程とを有する形状計測方法を提供する。
【0015】
本発明は、試験体の輪郭を撮像した画像の画素毎の輝度情報を抽出し、各前記画素を第1方向に分割して複数の小領域を定義するとともに、各前記小領域の輝度情報を、各前記画素の輝度情報および前記第1方向に隣接する他の前記画素の輝度情報に基づいて決定する小領域定義処理と、前記第1方向に直交する第2方向に並ぶ複数列のそれぞれの前記画素について、該小領域定義処理により決定された各前記小領域の輝度情報を前記第1方向に走査して、該輝度情報が所定の閾値を越える境界の前記小領域の位置情報を抽出する作業を実施して前記試験体の輪郭データを生成する輪郭データ生成処理とをコンピュータに実行させるための形状計測プログラムを提供する。
【発明の効果】
【0016】
本発明は、試験体に沿って移動させる機構を不要とするという効果を奏する。
【図面の簡単な説明】
【0017】
【図1】本発明の第1の実施形態に係る形状計測装置の全体概略図である。
【図2】第1の実施形態に係る解析部の概略構成を示すブロック図である。
【図3】第1の実施形態に係る第1画像の一例を示した図である。
【図4】第1の実施形態に係る第2画像の一例を示した図である。
【図5】第1の実施形態に係る第3画像に基づいて算出された軸方向の曲げ歪みと供試体の初期高さとの関係の一例を示した図である。
【図6】画像から算出された曲げ歪みと歪みゲージから測定された曲げ歪みとを比較した図である。
【図7】変位量δの計測方法を説明するための図である。
【図8】±3ミリメートル位置からの相対変位測定値と曲げ歪みとの関係の一例を示した図である。
【図9】理論的な誤差範囲と実測誤差の範囲とを比較した図である。
【図10】本発明の第2の実施形態に係る形状計測装置の全体概略図である。
【発明を実施するための形態】
【0018】
以下に、本発明に係る形状計測装置及び方法並びにプログラムの一実施形態について、図面を参照して説明する。
〔第1の実施形態〕
以下、本発明の第1実施形態について、図を用いて説明する。
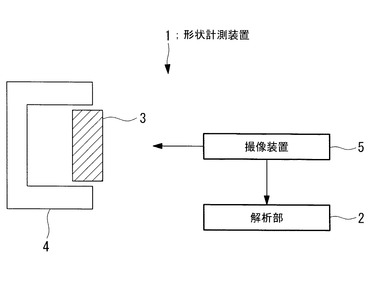
図1に示されるように、形状計測装置1は、解析部2、試験体3、試験装置4、及び撮像装置5を備えている。
試験装置4は、外部から入力される指示等に基づいて試験体3に対する試験が施される装置である。本実施形態では、試験装置4によって試験体3に対する試験を実施すると、試験体3の形状に変化が生じる場合を例に挙げて説明する。
撮像装置5は、試験体3の輪郭を撮像することにより、試験体3の輪郭を含む画像(以下「輪郭画像」という)を取得し、試験体3の輪郭画像を解析部2に出力する。撮像装置5は、例えば、デジタルカメラである。また、試験体3は、例えば、円筒形状の配管であることとして説明する。
【0019】
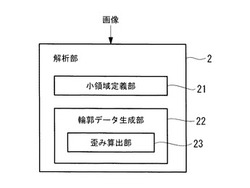
図2は、本実施形態に係る解析部2の機能ブロック図である。
図2に示されるように、解析部2は、小領域定義部(小領域定義手段)21及び輪郭データ生成部(輪郭データ生成手段)22とを備えている。
小領域定義部21は、試験体3の輪郭画像の画素毎の輝度情報を抽出し、各画素を第1方向に分割して複数の小領域を定義するとともに、各小領域の輝度情報を、各画素の輝度情報および第1方向に隣接する他の画素の輝度情報に基づいて決定する。
【0020】
例えば、小領域定義部21は、取得した輪郭画像の水平方向を第1方向、垂直方向を第2方向とし、輪郭画像の各画素を第1方向に対して10個に分割して10個の小領域を定義する。また、小領域定義部21は、注目する画素(以下「注目画素」という)の輝度情報と注目画素の水平方向における両隣の画素の輝度情報とから求められる2次補間関数によって、各小領域の輝度情報を決定する。このように各小領域の輝度情報が、小領域を構成する画素と両隣の画素との2次補間関数によって求められることによって、両隣の画素の輝度と滑らかな輝度変化となるように割り当てられる。小領域定義部21によって第1方向に各画素が10個に分割されて生成された画像(以下「第1画像」という)は、輪郭データ生成部22に出力される。
【0021】
輪郭データ生成部22は、水平方向(第1方向)に直交する垂直方向(第2方向)に並ぶ複数列のそれぞれの画素について、小領域定義部21により決定された各小領域の輝度情報を水平方向(第1方向)に走査して、輝度情報が所定の閾値を越える境界の小領域の位置情報を抽出する作業を実施して試験体3の輪郭データ(以下「第2画像」という)を生成する。
【0022】
また、輪郭データ生成部22は、垂直方向(第2方向)に分布する輪郭データを生成する小領域の水平方向(第1方向)の変位量の移動平均を算出し、輪郭データを生成する画素上の位置を調整する。このように調整された輪郭データは、以下「第3画像」という。また、輪郭データ生成部22は、小領域の境界を定義する所定の閾値を予め保有しておくこととしてもよいし、外部から入力されることとしてもよい。
【0023】
ここで、第3画像を生成して輪郭データを調整する根拠を説明する。ノイズやピクセル感度のばらつきは、光学的なばらつき、RGB素子配列、及びCCD非受光エリアの影響等に基づいて発生するため、形状変化が小さい垂直方向の上下に対して画素ピッチの数倍の距離(例えば、画素ピッチが0.05mmである場合には、注目画素の10倍である±0.5mm範囲である20画素分)の輪郭データを平均化処理することで、精度の向上を図る。
また、輪郭データ生成部22は、歪み算出部(歪み算出手段)23を備えている。歪み算出部23は、調整された輪郭データ(第3画像)に基づいて、曲げ歪みを算出する。
【0024】
ここで、例えば、水平方向をx方向とし、垂直方向をy方向とし、撮像装置5によって撮像した画像の画素ピッチがx=0.05mm(ミリメートル)、y=0.05mm(ミリメートル)とした場合を一例に、試験体3の形状計測方法を説明する。
撮像装置5によって試験体3が撮像されると、x=0.05mm、y=0.05mmの画素ピッチの輪郭画像が取得され、解析部2に入力される。解析部2の小領域定義部21に入力された輪郭画像は、画素毎の輝度情報が抽出され、各画素が水平方向に10個に分割され、10個の小領域が生成される。
【0025】
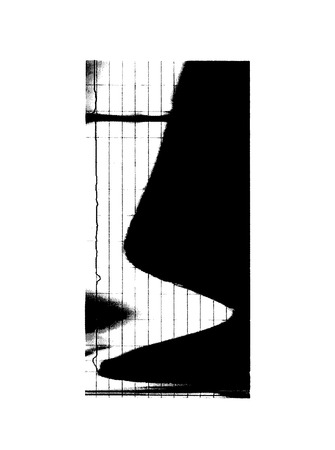
注目画素と注目画素の両隣の画素とから生成される2次補間関数に基づいて、注目画素を分割した各小領域の輝度情報が算出される。このように、輪郭画像は、水平方向に10個に分割され、x=0.005mm、y=0.05mmのピッチの第1画像になる。図3に示されるように、第1画像は、試験体3を撮像した輪郭画像が輝度情報に基づいて示されており、試験体3が白色領域、試験体3でない背景が黒色領域で示され、輪郭の明暗が明確になっている。
【0026】
輪郭データ生成部22に第1画像が入力されると、y方向に並ぶ複数列のそれぞれの画素について、各小領域の輝度情報がx方向に走査され、輝度情報が所定の閾値を超える小領域の位置情報が抽出され、試験体3の輪郭データである第2画像が生成される。図4は、横軸に周方向の変位量Dx(mm(ミリメートル))、縦軸に試験体3の初期高さh(mm)を示し、第1画像に基づいて生成される第2画像の一例を示している。
【0027】
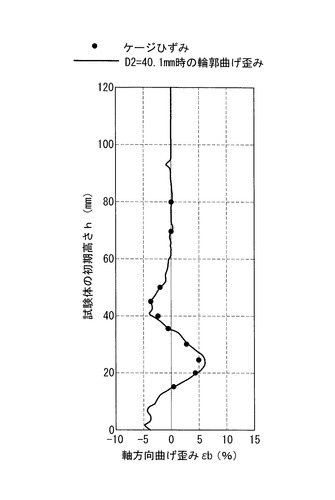
さらに、第2画像のうち、y方向に分布する輪郭データに対し、画素ピッチの10倍である±0.5mm範囲(20画素分)のx方向の変位量の移動平均処理が施され、y=0.5mmの画素ピッチに間引かれた第3画像が生成される。さらに、輪郭データ生成部22の歪み算出部23は、生成されたx=0.005mm、y=0.5mmのピッチで示される第3画像に基づいて、曲げ歪みが算出される。図5は、横軸に軸方向曲げ歪みεb(%)、縦軸に試験体の初期高さh(mm)を示した図であり、第3画像に基づいて曲げ歪みを算出した一例の図である。
【0028】
ここで、本実施形態に係る第3画像に基づいて算出される曲げ歪みと、試験体3に歪みゲージを取り付けて計測される曲げ歪みとの比較について説明する。
図6に、第3画像に基づいて算出された曲げ歪みの値(点表示)と、試験体3に歪みゲージを取り付けて計測された場合の曲げ歪みの値(線表示)とを重ねて表示した図の一例を示す。図6は、試験装置4によって試験体3に対して力を加えた場合に、座屈によって発生する曲げ歪みの最大位置近傍(試験体3の初期高さh25mmの位置)と、最小位置(試験体3の初期高さh45mm)との曲げ歪みの履歴を示している。また、図6に示されるように、最大位置近傍の歪みゲージ測定値は線(a)、最大位置近傍の算出された曲げ歪みの値は白点、最小位置の歪みゲージ測定値は線(b)、最小位置の算出された曲げ歪みの値は黒点とする。
【0029】
図6に示されるように、曲げ歪み最小位置は、両者の歪み値がよく一致しているが、曲げ歪み最大位置は、歪み値が4%を超過する付近から、画像に基づく歪み値が、歪みゲージによる歪み値に比べて大きくなる傾向となった。この領域は、表面の歪みが歪みゲージの測定限界(5%)を超えた値であり、歪みゲージが試験体3の歪みに追従できなかったと推測される。これらのことから、第3画像に基づく曲げ歪みの算出は、歪みゲージによる測定値と近似できる。
【0030】
また、以下に、第1方向(x方向)に各画素(x=0.05mmのピッチの画素)を10個に分割した根拠について説明する。
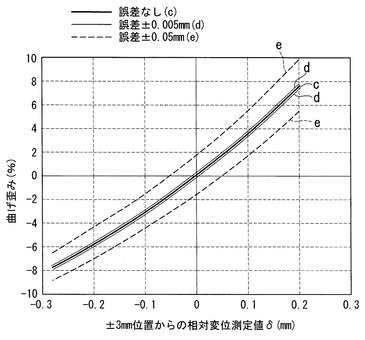
図7に示されるような、試験体3の注目位置と注目位置のy方向に±3mm離れた位置とのx方向の相対的な変位量δ(mm)と、その変位量δの場合の曲げ歪みとの関係を図8に示す。図8は、横軸が変位量δ(mm)、縦軸が曲げ歪み(%)とし、論理的な誤差範囲を示している。また、図8において、線(c)は誤差がない場合、線(d)は線(c)と誤差が±0.005mm(元画像の画素を10個に分割し小領域化したピッチ分の誤差)である場合、線(e)は線(c)と誤差が±0.05mm(元画像の画素ピッチ分の誤差)である場合を示している。
【0031】
図8に示されるように、元画像の画素ピッチ程度の読み取り誤差がある場合の曲げ歪み算出値は1.5から2%程度の誤差があるが、小領域に分割したピッチ(元の画素ピッチの1/10ピッチ)の誤差がある場合は、曲げ歪みの測定誤差も1/10程度となる。これにより、画素を小領域に分割する方が、元の画像のままの値を読み取って曲げ歪みを算出する場合よりも誤差が小さくなるといえる。
【0032】
図9は、上述した図6における歪みゲージによる歪み値と画像に基づく歪み値との差(点表示)、及び上述した図8における理論的な誤差範囲(線表示;線(d)は±0.005mmの誤差がある場合、線(e)は±0.05mmの誤差がある場合)を重ねて表示したものである。図9に示されるように、本実施形態による画像に基づく歪み値と歪みゲージによる歪み値との差は、0.005mmの画像に基づく歪み読み取りによる論理誤差の範囲内であるため、小領域のピッチによる歪み値の読み取りが妥当であるといえる。
【0033】
以上説明してきたように、本実施形態に係る形状計測装置1及び方法並びにプログラムによれば、試験体3の輪郭は、撮像した画像の各画素のうち、所定の閾値に基づいて輝度の変化があるとされる画素が輪郭位置とされ、さらに、小領域定義部21により画素を分割して定義された小領域に割り当てられた輝度情報に基づいて、輪郭データ生成部22が輪郭データを生成するので、画像の解像度を超えて精密に試験体の輪郭形状を決定することができる。また、画像を撮像した各時刻における試験体3の形状を決定するので、形状変化する試験体であっても形状を簡便に決定することができる。例えば、変位計を移動させながら輪郭を計測する場合には、形状変化した時点での試験体3の形状を保たせるために試験を停止して計測する必要があるが、本発明においては、形状変化した各時刻の画像に基づいて輪郭を決定でき、試験を停止する必要がないので、試験時間の短縮につながる。また、荷重負荷をかけている場合の変形中の形状を画像によって各時刻に分割して取得することができるので、変形中の形状を計測することができる。
【0034】
なお、本実施形態においては、試験中に試験体3の形状が変化する場合を例に挙げて説明していたが、試験体3の性状はこれに限定されない。例えば、試験中に試験体3の形状が変化しない試験体であっても、よいこととする。
【0035】
また、上述した実施形態では、形状計測装置1としてハードウェアによる処理を前提としていたが、このような構成に限定される必要はない。例えば、別途ソフトウェアにて処理する構成も可能である。この場合、形状計測装置1は、CPU、RAM等の主記憶装置、及び上記処理の全て或いは一部を実現させるためのプログラムが記録されたコンピュータ読み取り可能な記録媒体を備えている。そして、CPUが上記記憶媒体に記録されているプログラムを読み出して、情報の加工・演算処理を実行することにより、上述の形状計測装置1と同様の処理を実現させる。
ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
【0036】
〔第2の実施形態〕
次に、本発明の第2の実施形態に係る形状計測装置1´について図10を用いて説明する。本実施形態においては、試験体に光源から光を照射させた場合に、生成される試験体の影を撮像することによって得られる画像に基づいて試験体の輪郭形状を計測する点で上記第1の実施形態と異なる。以下、本実施形態の形状計測装置1´について、第1の実施形態と共通する点については説明を省略し、異なる点について主に説明する。
【0037】
図10に示されるように、形状計測装置1´は、解析部2、試験体3、試験装置4、撮像装置5、光源6、及びスクリーン7を備えている。また、試験体3及び試験装置4、光源6、スクリーン7が直線上に配置されており、光源6から試験体3に光を照射させた場合に、試験体3の光源6側とは反対側のスクリーン7に試験体3の影が投影されるようになっている。
また、光源6と試験体3との距離が近すぎる場合は、スクリーン7上に投影される試験体3の影がぼやける(換言すると、試験体3の輪郭が明確にならない)可能性があるため、光源6と試験体3とは所定距離離すことが望ましい。
【0038】
撮像装置5は、スクリーン7に投影される試験体3の影を撮像できる位置に配置されており、撮像の指示を取得した各時刻において、スクリーン7に投影される試験体3の影を撮像する。また、撮像装置5は、撮像時に生成した試験体3の影の画像を解析部2に出力する。
解析部2は、撮像装置5から取得した試験体3の影の画像に基づいて、試験体3の輪郭を計測して、試験体3の形状を計測する。
【0039】
このように、本実施形態に係る形状計測装置1´及び方法並びにプログラムによれば、試験体3に光源6からの光が照射されてできる影を撮像した画像を用いることにより、試験体3の輪郭を撮像することにより画像を得る場合と比較して、輪郭の明暗が明確となるので、試験体3の輪郭形状を正しく取得することができる。また、例えば、試験体3が円筒形状である場合には、輪郭部以外の部分がぼやけた状態の画像となる場合があるが、影を撮像することにより、輪郭形状を明確にすることができる。さらに、試験体3を直接撮像した場合には背後の輝度の状態等により輪郭部分が明確とならないことがあるが、このような場合であっても、周囲の輝度に関わらず、輪郭形状に特化した画像を取得することができる。
【0040】
〔変形例〕
また、本実施形態においては、スクリーン7に投影された試験体3の影を撮像装置5によって撮像することとして説明していたが、試験体3の影の撮像方法はこれに限定されない。例えば、スクリーン7に投影される試験体3の影を映した鏡を設け、鏡に映された試験体3の影を撮像する等のように、間接的にスクリーン7に投影される試験体3の影を撮像することとしてもよい。
【符号の説明】
【0041】
1、1´ 形状計測装置
2 解析部
3 試験体
4 試験装置
5 撮像装置
6 光源
7 スクリーン
21 小領域定義部
22 輪郭データ生成部
23 歪み算出部
【技術分野】
【0001】
本発明は、形状計測装置及び方法並びにプログラムに関するものである。
【背景技術】
【0002】
従来、配管等の試験体の形状を計測するには、接触型変位計またはレーザ変位計をスライドさせて、接触型変位計またはレーザ変位計から照射するレーザ光によって試験体の輪郭上を走査することにより、変位計から試験体までの高さ位置および距離等に基づいて輪郭の座標を取得し、この座標変化を試験体の形状とする方法が知られている。
また、特許文献1には、被測定物に照射するスリット光を走査させ、被測定物から反射して得られる散乱光に基づいて輝度データを取得することによって、物体の形状認識を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平5−67197号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記のように、変位計をスライドさせて座標の情報を得る場合には、変位計をスライドさせて試験体に照射するレーザ光を走査させて形状を計測するため、変位計をスライドさせる機構が必要になるという問題があった。また、試験体に直接光を照射することによって形状を計測していたため、変位計と試験体とが試験時に揃っていて初めて試験体の形状計測が可能となるという問題があった。
【0005】
本発明は、このような事情に鑑みてなされたものであって、試験体に沿って移動させる機構を不要とし、試験後においても形状決定できる形状計測装置及び方法並びにプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明は以下の手段を採用する。
本発明は、試験体の輪郭を撮像した画像の画素毎の輝度情報を抽出し、各前記画素を第1方向に分割して複数の小領域を定義するとともに、各前記小領域の輝度情報を、各前記画素の輝度情報および前記第1方向に隣接する他の前記画素の輝度情報に基づいて決定する小領域定義手段と、前記第1方向に直交する第2方向に並ぶ複数列のそれぞれの前記画素について、該小領域定義手段により決定された各前記小領域の輝度情報を前記第1方向に走査して、該輝度情報が所定の閾値を越える境界の前記小領域の位置情報を抽出する作業を実施して前記試験体の輪郭データを生成する輪郭データ生成手段とを具備する形状計測装置を提供する。
【0007】
このような構成によれば、試験体の輪郭は、撮像した画像の各画素のうち、所定の閾値に基づいて輝度の変化があるとされる画素が輪郭位置とされ、さらに、小領域定義手段により画素を分割して定義された小領域に割り当てられた輝度情報に基づいて、輪郭データ生成手段が輪郭データを生成するので、画像の解像度を超えて精密に試験体の輪郭形状を計測することができる。
この場合に、試験体を撮像した画像に基づいて試験体の輪郭を計測するので、試験体に変位計を当てて輪郭の一部を計測し、変位計の位置を移動させながら順次測定範囲の輪郭を計測する場合と比較すると、変位計の位置を移動させる移動機構が不要となる。また、画像さえ取得しておけば輪郭形状を計測することができるので、例えば、試験中に画像を取得しておき、試験後に後から輪郭形状を決定することが可能である。
【0008】
上記形状計測装置の前記試験体は、形状変化する試験体であることとしてもよい。
画像を撮像した各時刻における試験体の形状を決定するので、形状変化する試験体であっても形状を簡便に決定することができる。例えば、変位計を移動させながら輪郭を計測する場合には、形状変化した時点での試験体形状を保たせるために試験を停止して計測する必要があるが、本発明においては、形状変化した各時刻の画像に基づいて輪郭を決定でき、試験を停止する必要がないので、試験時間の短縮につながる。また、荷重負荷をかけている場合の変形中の形状を画像によって各時刻に分割して取得することができるので、変形中の形状を計測することができる。
【0009】
上記形状計測装置の前記小領域定義手段が、各前記小領域の前記輝度情報を補間関数に基づいて決定することとしてもよい。
補間関数を用いることにより、小領域に割り当てる輝度情報を連続的に変化させることができ、第1方向の隣接する輝度情報と滑らかに輝度変化させることができる。これにより、試験体の輪郭形状をより精度よく計測することができる。
【0010】
上記形状計測装置の前記輪郭データ生成手段が、前記第2方向に分布する前記輪郭データを生成する前記小領域の前記第1方向の変位量の移動平均を算出し、前記輪郭データを生成する前記画素上の位置を調整することとしてもよい。
変形(水平)方向の変位量の移動平均によって輪郭データの新たな位置を算出して輪郭データが調整されるので、輪郭データが平滑化され、計測精度が向上される。
【0011】
上記形状計測装置において、調整された前記輪郭データに基づいて、曲げ歪みを算出する歪み算出手段を備えることとしてもよい。
試験体の画像に基づいて、簡便に曲げ歪みを算出することができる。
【0012】
上記形状計測装置の前記試験体に光源から光を照射させた場合に、生成される前記試験体の影を撮像することによって得られる前記画像に基づいて前記試験体の輪郭形状を計測することとしてもよい。
試験体に光源からの光が照射されてできる影を撮像した画像を用いることにより、影によって輪郭の明暗が明確となるので、試験体の輪郭形状を正しく取得することができる。例えば、試験体を撮像した場合に、試験体が円筒形状である場合や周囲の輝度の状態等により輪郭部分が明確とならないことがあるが、このような場合であっても、影を撮像した画像を用いることにより、試験体の形状や周囲の輝度状況に関わらず、明確に輪郭を取得することができる。
【0013】
上記形状計測装置の前記試験体に光を照射する前記光源と、前記試験体の影が投影されるスクリーンとを具備することとしてもよい。
光源とスクリーンとを用いることによって、試験体の影を簡便に生成することができる。
【0014】
本発明は、試験体の輪郭を撮像した画像の画素毎の輝度情報を抽出し、各前記画素を第1方向に分割して複数の小領域を定義するとともに、各前記小領域の輝度情報を、各前記画素の輝度情報および前記第1方向に隣接する他の前記画素の輝度情報に基づいて決定する小領域定義過程と、前記第1方向に直交する第2方向に並ぶ複数列のそれぞれの前記画素について、該小領域定義過程により決定された各前記小領域の輝度情報を前記第1方向に走査して、該輝度情報が所定の閾値を越える境界の前記小領域の位置情報を抽出する作業を実施して前記試験体の輪郭データを生成する輪郭データ生成過程とを有する形状計測方法を提供する。
【0015】
本発明は、試験体の輪郭を撮像した画像の画素毎の輝度情報を抽出し、各前記画素を第1方向に分割して複数の小領域を定義するとともに、各前記小領域の輝度情報を、各前記画素の輝度情報および前記第1方向に隣接する他の前記画素の輝度情報に基づいて決定する小領域定義処理と、前記第1方向に直交する第2方向に並ぶ複数列のそれぞれの前記画素について、該小領域定義処理により決定された各前記小領域の輝度情報を前記第1方向に走査して、該輝度情報が所定の閾値を越える境界の前記小領域の位置情報を抽出する作業を実施して前記試験体の輪郭データを生成する輪郭データ生成処理とをコンピュータに実行させるための形状計測プログラムを提供する。
【発明の効果】
【0016】
本発明は、試験体に沿って移動させる機構を不要とするという効果を奏する。
【図面の簡単な説明】
【0017】
【図1】本発明の第1の実施形態に係る形状計測装置の全体概略図である。
【図2】第1の実施形態に係る解析部の概略構成を示すブロック図である。
【図3】第1の実施形態に係る第1画像の一例を示した図である。
【図4】第1の実施形態に係る第2画像の一例を示した図である。
【図5】第1の実施形態に係る第3画像に基づいて算出された軸方向の曲げ歪みと供試体の初期高さとの関係の一例を示した図である。
【図6】画像から算出された曲げ歪みと歪みゲージから測定された曲げ歪みとを比較した図である。
【図7】変位量δの計測方法を説明するための図である。
【図8】±3ミリメートル位置からの相対変位測定値と曲げ歪みとの関係の一例を示した図である。
【図9】理論的な誤差範囲と実測誤差の範囲とを比較した図である。
【図10】本発明の第2の実施形態に係る形状計測装置の全体概略図である。
【発明を実施するための形態】
【0018】
以下に、本発明に係る形状計測装置及び方法並びにプログラムの一実施形態について、図面を参照して説明する。
〔第1の実施形態〕
以下、本発明の第1実施形態について、図を用いて説明する。
図1に示されるように、形状計測装置1は、解析部2、試験体3、試験装置4、及び撮像装置5を備えている。
試験装置4は、外部から入力される指示等に基づいて試験体3に対する試験が施される装置である。本実施形態では、試験装置4によって試験体3に対する試験を実施すると、試験体3の形状に変化が生じる場合を例に挙げて説明する。
撮像装置5は、試験体3の輪郭を撮像することにより、試験体3の輪郭を含む画像(以下「輪郭画像」という)を取得し、試験体3の輪郭画像を解析部2に出力する。撮像装置5は、例えば、デジタルカメラである。また、試験体3は、例えば、円筒形状の配管であることとして説明する。
【0019】
図2は、本実施形態に係る解析部2の機能ブロック図である。
図2に示されるように、解析部2は、小領域定義部(小領域定義手段)21及び輪郭データ生成部(輪郭データ生成手段)22とを備えている。
小領域定義部21は、試験体3の輪郭画像の画素毎の輝度情報を抽出し、各画素を第1方向に分割して複数の小領域を定義するとともに、各小領域の輝度情報を、各画素の輝度情報および第1方向に隣接する他の画素の輝度情報に基づいて決定する。
【0020】
例えば、小領域定義部21は、取得した輪郭画像の水平方向を第1方向、垂直方向を第2方向とし、輪郭画像の各画素を第1方向に対して10個に分割して10個の小領域を定義する。また、小領域定義部21は、注目する画素(以下「注目画素」という)の輝度情報と注目画素の水平方向における両隣の画素の輝度情報とから求められる2次補間関数によって、各小領域の輝度情報を決定する。このように各小領域の輝度情報が、小領域を構成する画素と両隣の画素との2次補間関数によって求められることによって、両隣の画素の輝度と滑らかな輝度変化となるように割り当てられる。小領域定義部21によって第1方向に各画素が10個に分割されて生成された画像(以下「第1画像」という)は、輪郭データ生成部22に出力される。
【0021】
輪郭データ生成部22は、水平方向(第1方向)に直交する垂直方向(第2方向)に並ぶ複数列のそれぞれの画素について、小領域定義部21により決定された各小領域の輝度情報を水平方向(第1方向)に走査して、輝度情報が所定の閾値を越える境界の小領域の位置情報を抽出する作業を実施して試験体3の輪郭データ(以下「第2画像」という)を生成する。
【0022】
また、輪郭データ生成部22は、垂直方向(第2方向)に分布する輪郭データを生成する小領域の水平方向(第1方向)の変位量の移動平均を算出し、輪郭データを生成する画素上の位置を調整する。このように調整された輪郭データは、以下「第3画像」という。また、輪郭データ生成部22は、小領域の境界を定義する所定の閾値を予め保有しておくこととしてもよいし、外部から入力されることとしてもよい。
【0023】
ここで、第3画像を生成して輪郭データを調整する根拠を説明する。ノイズやピクセル感度のばらつきは、光学的なばらつき、RGB素子配列、及びCCD非受光エリアの影響等に基づいて発生するため、形状変化が小さい垂直方向の上下に対して画素ピッチの数倍の距離(例えば、画素ピッチが0.05mmである場合には、注目画素の10倍である±0.5mm範囲である20画素分)の輪郭データを平均化処理することで、精度の向上を図る。
また、輪郭データ生成部22は、歪み算出部(歪み算出手段)23を備えている。歪み算出部23は、調整された輪郭データ(第3画像)に基づいて、曲げ歪みを算出する。
【0024】
ここで、例えば、水平方向をx方向とし、垂直方向をy方向とし、撮像装置5によって撮像した画像の画素ピッチがx=0.05mm(ミリメートル)、y=0.05mm(ミリメートル)とした場合を一例に、試験体3の形状計測方法を説明する。
撮像装置5によって試験体3が撮像されると、x=0.05mm、y=0.05mmの画素ピッチの輪郭画像が取得され、解析部2に入力される。解析部2の小領域定義部21に入力された輪郭画像は、画素毎の輝度情報が抽出され、各画素が水平方向に10個に分割され、10個の小領域が生成される。
【0025】
注目画素と注目画素の両隣の画素とから生成される2次補間関数に基づいて、注目画素を分割した各小領域の輝度情報が算出される。このように、輪郭画像は、水平方向に10個に分割され、x=0.005mm、y=0.05mmのピッチの第1画像になる。図3に示されるように、第1画像は、試験体3を撮像した輪郭画像が輝度情報に基づいて示されており、試験体3が白色領域、試験体3でない背景が黒色領域で示され、輪郭の明暗が明確になっている。
【0026】
輪郭データ生成部22に第1画像が入力されると、y方向に並ぶ複数列のそれぞれの画素について、各小領域の輝度情報がx方向に走査され、輝度情報が所定の閾値を超える小領域の位置情報が抽出され、試験体3の輪郭データである第2画像が生成される。図4は、横軸に周方向の変位量Dx(mm(ミリメートル))、縦軸に試験体3の初期高さh(mm)を示し、第1画像に基づいて生成される第2画像の一例を示している。
【0027】
さらに、第2画像のうち、y方向に分布する輪郭データに対し、画素ピッチの10倍である±0.5mm範囲(20画素分)のx方向の変位量の移動平均処理が施され、y=0.5mmの画素ピッチに間引かれた第3画像が生成される。さらに、輪郭データ生成部22の歪み算出部23は、生成されたx=0.005mm、y=0.5mmのピッチで示される第3画像に基づいて、曲げ歪みが算出される。図5は、横軸に軸方向曲げ歪みεb(%)、縦軸に試験体の初期高さh(mm)を示した図であり、第3画像に基づいて曲げ歪みを算出した一例の図である。
【0028】
ここで、本実施形態に係る第3画像に基づいて算出される曲げ歪みと、試験体3に歪みゲージを取り付けて計測される曲げ歪みとの比較について説明する。
図6に、第3画像に基づいて算出された曲げ歪みの値(点表示)と、試験体3に歪みゲージを取り付けて計測された場合の曲げ歪みの値(線表示)とを重ねて表示した図の一例を示す。図6は、試験装置4によって試験体3に対して力を加えた場合に、座屈によって発生する曲げ歪みの最大位置近傍(試験体3の初期高さh25mmの位置)と、最小位置(試験体3の初期高さh45mm)との曲げ歪みの履歴を示している。また、図6に示されるように、最大位置近傍の歪みゲージ測定値は線(a)、最大位置近傍の算出された曲げ歪みの値は白点、最小位置の歪みゲージ測定値は線(b)、最小位置の算出された曲げ歪みの値は黒点とする。
【0029】
図6に示されるように、曲げ歪み最小位置は、両者の歪み値がよく一致しているが、曲げ歪み最大位置は、歪み値が4%を超過する付近から、画像に基づく歪み値が、歪みゲージによる歪み値に比べて大きくなる傾向となった。この領域は、表面の歪みが歪みゲージの測定限界(5%)を超えた値であり、歪みゲージが試験体3の歪みに追従できなかったと推測される。これらのことから、第3画像に基づく曲げ歪みの算出は、歪みゲージによる測定値と近似できる。
【0030】
また、以下に、第1方向(x方向)に各画素(x=0.05mmのピッチの画素)を10個に分割した根拠について説明する。
図7に示されるような、試験体3の注目位置と注目位置のy方向に±3mm離れた位置とのx方向の相対的な変位量δ(mm)と、その変位量δの場合の曲げ歪みとの関係を図8に示す。図8は、横軸が変位量δ(mm)、縦軸が曲げ歪み(%)とし、論理的な誤差範囲を示している。また、図8において、線(c)は誤差がない場合、線(d)は線(c)と誤差が±0.005mm(元画像の画素を10個に分割し小領域化したピッチ分の誤差)である場合、線(e)は線(c)と誤差が±0.05mm(元画像の画素ピッチ分の誤差)である場合を示している。
【0031】
図8に示されるように、元画像の画素ピッチ程度の読み取り誤差がある場合の曲げ歪み算出値は1.5から2%程度の誤差があるが、小領域に分割したピッチ(元の画素ピッチの1/10ピッチ)の誤差がある場合は、曲げ歪みの測定誤差も1/10程度となる。これにより、画素を小領域に分割する方が、元の画像のままの値を読み取って曲げ歪みを算出する場合よりも誤差が小さくなるといえる。
【0032】
図9は、上述した図6における歪みゲージによる歪み値と画像に基づく歪み値との差(点表示)、及び上述した図8における理論的な誤差範囲(線表示;線(d)は±0.005mmの誤差がある場合、線(e)は±0.05mmの誤差がある場合)を重ねて表示したものである。図9に示されるように、本実施形態による画像に基づく歪み値と歪みゲージによる歪み値との差は、0.005mmの画像に基づく歪み読み取りによる論理誤差の範囲内であるため、小領域のピッチによる歪み値の読み取りが妥当であるといえる。
【0033】
以上説明してきたように、本実施形態に係る形状計測装置1及び方法並びにプログラムによれば、試験体3の輪郭は、撮像した画像の各画素のうち、所定の閾値に基づいて輝度の変化があるとされる画素が輪郭位置とされ、さらに、小領域定義部21により画素を分割して定義された小領域に割り当てられた輝度情報に基づいて、輪郭データ生成部22が輪郭データを生成するので、画像の解像度を超えて精密に試験体の輪郭形状を決定することができる。また、画像を撮像した各時刻における試験体3の形状を決定するので、形状変化する試験体であっても形状を簡便に決定することができる。例えば、変位計を移動させながら輪郭を計測する場合には、形状変化した時点での試験体3の形状を保たせるために試験を停止して計測する必要があるが、本発明においては、形状変化した各時刻の画像に基づいて輪郭を決定でき、試験を停止する必要がないので、試験時間の短縮につながる。また、荷重負荷をかけている場合の変形中の形状を画像によって各時刻に分割して取得することができるので、変形中の形状を計測することができる。
【0034】
なお、本実施形態においては、試験中に試験体3の形状が変化する場合を例に挙げて説明していたが、試験体3の性状はこれに限定されない。例えば、試験中に試験体3の形状が変化しない試験体であっても、よいこととする。
【0035】
また、上述した実施形態では、形状計測装置1としてハードウェアによる処理を前提としていたが、このような構成に限定される必要はない。例えば、別途ソフトウェアにて処理する構成も可能である。この場合、形状計測装置1は、CPU、RAM等の主記憶装置、及び上記処理の全て或いは一部を実現させるためのプログラムが記録されたコンピュータ読み取り可能な記録媒体を備えている。そして、CPUが上記記憶媒体に記録されているプログラムを読み出して、情報の加工・演算処理を実行することにより、上述の形状計測装置1と同様の処理を実現させる。
ここでコンピュータ読み取り可能な記録媒体とは、磁気ディスク、光磁気ディスク、CD−ROM、DVD−ROM、半導体メモリ等をいう。また、このコンピュータプログラムを通信回線によってコンピュータに配信し、この配信を受けたコンピュータが当該プログラムを実行するようにしても良い。
【0036】
〔第2の実施形態〕
次に、本発明の第2の実施形態に係る形状計測装置1´について図10を用いて説明する。本実施形態においては、試験体に光源から光を照射させた場合に、生成される試験体の影を撮像することによって得られる画像に基づいて試験体の輪郭形状を計測する点で上記第1の実施形態と異なる。以下、本実施形態の形状計測装置1´について、第1の実施形態と共通する点については説明を省略し、異なる点について主に説明する。
【0037】
図10に示されるように、形状計測装置1´は、解析部2、試験体3、試験装置4、撮像装置5、光源6、及びスクリーン7を備えている。また、試験体3及び試験装置4、光源6、スクリーン7が直線上に配置されており、光源6から試験体3に光を照射させた場合に、試験体3の光源6側とは反対側のスクリーン7に試験体3の影が投影されるようになっている。
また、光源6と試験体3との距離が近すぎる場合は、スクリーン7上に投影される試験体3の影がぼやける(換言すると、試験体3の輪郭が明確にならない)可能性があるため、光源6と試験体3とは所定距離離すことが望ましい。
【0038】
撮像装置5は、スクリーン7に投影される試験体3の影を撮像できる位置に配置されており、撮像の指示を取得した各時刻において、スクリーン7に投影される試験体3の影を撮像する。また、撮像装置5は、撮像時に生成した試験体3の影の画像を解析部2に出力する。
解析部2は、撮像装置5から取得した試験体3の影の画像に基づいて、試験体3の輪郭を計測して、試験体3の形状を計測する。
【0039】
このように、本実施形態に係る形状計測装置1´及び方法並びにプログラムによれば、試験体3に光源6からの光が照射されてできる影を撮像した画像を用いることにより、試験体3の輪郭を撮像することにより画像を得る場合と比較して、輪郭の明暗が明確となるので、試験体3の輪郭形状を正しく取得することができる。また、例えば、試験体3が円筒形状である場合には、輪郭部以外の部分がぼやけた状態の画像となる場合があるが、影を撮像することにより、輪郭形状を明確にすることができる。さらに、試験体3を直接撮像した場合には背後の輝度の状態等により輪郭部分が明確とならないことがあるが、このような場合であっても、周囲の輝度に関わらず、輪郭形状に特化した画像を取得することができる。
【0040】
〔変形例〕
また、本実施形態においては、スクリーン7に投影された試験体3の影を撮像装置5によって撮像することとして説明していたが、試験体3の影の撮像方法はこれに限定されない。例えば、スクリーン7に投影される試験体3の影を映した鏡を設け、鏡に映された試験体3の影を撮像する等のように、間接的にスクリーン7に投影される試験体3の影を撮像することとしてもよい。
【符号の説明】
【0041】
1、1´ 形状計測装置
2 解析部
3 試験体
4 試験装置
5 撮像装置
6 光源
7 スクリーン
21 小領域定義部
22 輪郭データ生成部
23 歪み算出部
【特許請求の範囲】
【請求項1】
試験体の輪郭を撮像した画像の画素毎の輝度情報を抽出し、各前記画素を第1方向に分割して複数の小領域を定義するとともに、各前記小領域の輝度情報を、各前記画素の輝度情報および前記第1方向に隣接する他の前記画素の輝度情報に基づいて決定する小領域定義手段と、
前記第1方向に直交する第2方向に並ぶ複数列のそれぞれの前記画素について、該小領域定義手段により決定された各前記小領域の輝度情報を前記第1方向に走査して、該輝度情報が所定の閾値を越える境界の前記小領域の位置情報を抽出する作業を実施して前記試験体の輪郭データを生成する輪郭データ生成手段と
を具備する形状計測装置。
【請求項2】
前記試験体は、形状変化する試験体である請求項1に記載の形状計測装置。
【請求項3】
前記小領域定義手段が、各前記小領域の前記輝度情報を補間関数に基づいて決定する請求項1または請求項2に記載の形状計測装置。
【請求項4】
前記輪郭データ生成手段が、前記第2方向に分布する前記輪郭データを生成する前記小領域の前記第1方向の変位量の移動平均を算出し、前記輪郭データを生成する前記画素上の位置を調整する請求項1から請求項3のいずれかに記載の形状計測装置。
【請求項5】
調整された前記輪郭データに基づいて、曲げ歪みを算出する歪み算出手段を備える請求項4に記載の形状計測装置。
【請求項6】
前記試験体に光源から光を照射させた場合に、生成される前記試験体の影を撮像することによって得られる前記画像に基づいて前記試験体の輪郭形状を計測する請求項1から請求項5のいずれかに記載の形状計測装置。
【請求項7】
前記試験体に光を照射する前記光源と、前記試験体の影が投影されるスクリーンとを具備する請求項6に記載の形状計測装置。
【請求項8】
試験体の輪郭を撮像した画像の画素毎の輝度情報を抽出し、各前記画素を第1方向に分割して複数の小領域を定義するとともに、各前記小領域の輝度情報を、各前記画素の輝度情報および前記第1方向に隣接する他の前記画素の輝度情報に基づいて決定する小領域定義過程と、
前記第1方向に直交する第2方向に並ぶ複数列のそれぞれの前記画素について、該小領域定義過程により決定された各前記小領域の輝度情報を前記第1方向に走査して、該輝度情報が所定の閾値を越える境界の前記小領域の位置情報を抽出する作業を実施して前記試験体の輪郭データを生成する輪郭データ生成過程と
を有する形状計測方法。
【請求項9】
試験体の輪郭を撮像した画像の画素毎の輝度情報を抽出し、各前記画素を第1方向に分割して複数の小領域を定義するとともに、各前記小領域の輝度情報を、各前記画素の輝度情報および前記第1方向に隣接する他の前記画素の輝度情報に基づいて決定する小領域定義処理と、
前記第1方向に直交する第2方向に並ぶ複数列のそれぞれの前記画素について、該小領域定義処理により決定された各前記小領域の輝度情報を前記第1方向に走査して、該輝度情報が所定の閾値を越える境界の前記小領域の位置情報を抽出する作業を実施して前記試験体の輪郭データを生成する輪郭データ生成処理と
をコンピュータに実行させるための形状計測プログラム。
【請求項1】
試験体の輪郭を撮像した画像の画素毎の輝度情報を抽出し、各前記画素を第1方向に分割して複数の小領域を定義するとともに、各前記小領域の輝度情報を、各前記画素の輝度情報および前記第1方向に隣接する他の前記画素の輝度情報に基づいて決定する小領域定義手段と、
前記第1方向に直交する第2方向に並ぶ複数列のそれぞれの前記画素について、該小領域定義手段により決定された各前記小領域の輝度情報を前記第1方向に走査して、該輝度情報が所定の閾値を越える境界の前記小領域の位置情報を抽出する作業を実施して前記試験体の輪郭データを生成する輪郭データ生成手段と
を具備する形状計測装置。
【請求項2】
前記試験体は、形状変化する試験体である請求項1に記載の形状計測装置。
【請求項3】
前記小領域定義手段が、各前記小領域の前記輝度情報を補間関数に基づいて決定する請求項1または請求項2に記載の形状計測装置。
【請求項4】
前記輪郭データ生成手段が、前記第2方向に分布する前記輪郭データを生成する前記小領域の前記第1方向の変位量の移動平均を算出し、前記輪郭データを生成する前記画素上の位置を調整する請求項1から請求項3のいずれかに記載の形状計測装置。
【請求項5】
調整された前記輪郭データに基づいて、曲げ歪みを算出する歪み算出手段を備える請求項4に記載の形状計測装置。
【請求項6】
前記試験体に光源から光を照射させた場合に、生成される前記試験体の影を撮像することによって得られる前記画像に基づいて前記試験体の輪郭形状を計測する請求項1から請求項5のいずれかに記載の形状計測装置。
【請求項7】
前記試験体に光を照射する前記光源と、前記試験体の影が投影されるスクリーンとを具備する請求項6に記載の形状計測装置。
【請求項8】
試験体の輪郭を撮像した画像の画素毎の輝度情報を抽出し、各前記画素を第1方向に分割して複数の小領域を定義するとともに、各前記小領域の輝度情報を、各前記画素の輝度情報および前記第1方向に隣接する他の前記画素の輝度情報に基づいて決定する小領域定義過程と、
前記第1方向に直交する第2方向に並ぶ複数列のそれぞれの前記画素について、該小領域定義過程により決定された各前記小領域の輝度情報を前記第1方向に走査して、該輝度情報が所定の閾値を越える境界の前記小領域の位置情報を抽出する作業を実施して前記試験体の輪郭データを生成する輪郭データ生成過程と
を有する形状計測方法。
【請求項9】
試験体の輪郭を撮像した画像の画素毎の輝度情報を抽出し、各前記画素を第1方向に分割して複数の小領域を定義するとともに、各前記小領域の輝度情報を、各前記画素の輝度情報および前記第1方向に隣接する他の前記画素の輝度情報に基づいて決定する小領域定義処理と、
前記第1方向に直交する第2方向に並ぶ複数列のそれぞれの前記画素について、該小領域定義処理により決定された各前記小領域の輝度情報を前記第1方向に走査して、該輝度情報が所定の閾値を越える境界の前記小領域の位置情報を抽出する作業を実施して前記試験体の輪郭データを生成する輪郭データ生成処理と
をコンピュータに実行させるための形状計測プログラム。
【図1】


【図2】

【図3】
【図4】

【図5】
【図6】

【図7】

【図8】
【図9】

【図10】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−112512(P2011−112512A)
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願番号】特願2009−269194(P2009−269194)
【出願日】平成21年11月26日(2009.11.26)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成23年6月9日(2011.6.9)
【国際特許分類】
【出願日】平成21年11月26日(2009.11.26)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]