
形状/加速度測定機器および装置
本発明は、少なくとも2つの場測定センサ対を有する、センサアレイを提供しており、2自由度における場計測が可能である、各センサ対は、2以上の自由度で柔軟基板に搭載されており、場測定センサは、地盤、構造体および生体の動的及び静的形状の精度、及び動的及び静的振動の精度を計測又は改善するために、基板にそって2自由度の方位データを提供する。本発明は、場測定センサにより実現される精度を更に改善するために、追加的な非場測定センサを更に追加する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測定用のセンサアレイ(配列)に関する。より特別には、本発明は、対象物および経路の形状および加速度を感知する方法および装置に関する。
【背景技術】
【0002】
対象物の形状は、対象物に沿う、または対象物を通る1つ以上の経路により記述(又は表現)でき、経路は、経路に沿う定義された間隔で配置された点と、点を結び、既知の方位を有する線を含む。例えば、経路に沿う点における表面の法線を定義するように、各点に位置する表面または剛性立体の方位を定義することが有効な場合がある。
【0003】
本発明は、制約された幾何学的形状のシステム(装置)内において、較正された方法で場の強度を感知することに基づく経路測定を教示する。追加的な教示は、本発明を使用して、慣性または他のセンサにより行われる経路測定を改善することに関する。
【0004】
地質学および地球科学の分野では、穿孔の経路を、傾斜センサを使用して測定することがよく知られている。典型的には、傾斜センサは、チューブの形状をしており、重力場に関する傾斜の2自由度(DOF)を感知するように配置された、電解質、抵抗性、容量性、「ゼロ変位」、または微細機械加工されたシリコン重力センサを含む。通常は、2自由度は直交しており、傾斜のx成分およびy成分と称される。傾斜センサを穿孔の中に降下させて、ある間隔で傾斜データを取得できる。または、いくつかの傾斜センサを穿孔の中で上下に配置して、既知の位置での傾斜の変化を検出するために使用できる。穿孔の中に降下させた加速度計を使用して、s波とp波を含む、地震の振動を測定することも知られている。s波は主に地球表面に平行な加速度を生成する。また、磁気センサを使用して、穿孔中のセンサを含めて、地球の磁場におけるセンサの方位を決定することも知られている。慣性手段により、方位を測定し、角速度の時間積分から、角度位置を推定することも知られている。
【0005】
穿孔に加えて、上記の方法は、橋、建物、鉱山立坑のような構造物と、地面または土塁に取り付けられた、または埋め込まれたセンサに適用される。
【0006】
上記の方法の欠点は、経路に沿って3D形状を測定する一般化された方法を可能にする、固有の幾何学的制約のある較正されたアレイ(又は、センサアレイ)がないということである。更なる欠点は、広い動的条件の範囲内で、形状をリアルタイムには測定できないということ、または形状の急激な変化を測定できないということ、または形状と振動を同時には測定できないということである。
【0007】
更なる欠点は、センサを保持し、センサを水または機械的力から保護するための、較正され、変形可能、携帯可能な基板がないことである。更なる欠点は、傾斜センサが、較正された構造または捩れのない構造内に配置されないために、重力ベクトルについての方位の磁気または慣性測定が必要になり、より多くのセンサが必要であることであり、または特別な穿孔ケーシングが必要であるということである。現在の傾斜センサ技術のほとんどは、地震の間のs波のような動的加速度を測定しない。
【0008】
湾曲感知および湾曲/捻り感知アレイ(又は、センサアレイ)を使用して、穿孔、建物、人間、計器、および地質構造の動的および静的形状を測定することも知られている。例としては、1994年6月14日に出願された、デンマークのL.A.による米国特許第5,321,257号の「光導体の一部上に形成された光放射表面を含むファイバー光学的湾曲および位置センサ」や、1997年5月27日に出願された、デンマークのL.A.による米国特許第5,633,494号の「選択された曲面光放射表面を有するファイバー光学的湾曲および位置センサ」や、1997年10月22日に出願された、デンマークのL.A.による欧州特許第EP 0 702 780号の「ファイバー光学的湾曲および位置センサ」や、2000年10月3日に出願された、デンマークのL.A.による米国特許第6,127,672号の「位相的および移動測定ツール」や、デンマークのL.A.による米国特許第6,563,107号の「位相的および移動測定ツール(II)」がある。このタイプのアレイは、本明細書においては、「湾曲感知アレイ」と称することにする。
【0009】
デンマークの特許第’672号においては、経路を3Dでマッッピングをするために使用できる2自由度湾曲感知アレイが記載されている。捩れを3番目の自由度として追加することにより(デンマークのL.A.による特許第’107号参照)、アレイ内のセンサは、接合部において回転が可能になり、または長軸に沿って連続的に回転が可能になる。デンマークのL.A.による特許第’107号は、表面の要素間の角度を測定するために、湾曲センサを使用する表面マッピングアレイを記載している。これらのセンサアレイは、湾曲センサを使用して、変形可能な表面に沿って角度を測定する。センサは修正光学ファイバーであることもよくある。更に、これらの参考文献において教示されるセンサは、柔軟基板上に位置、または搭載される。
【0010】
2自由度湾曲感知アレイまたは3自由度湾曲/捩れ感知アレイの、最も一般的な形態における欠点は、穿孔測定を含める多数の適用において遭遇する、小さな角度を正確に測定できないということである。それらは、短時間の間は小さな角度を解像することができるが、ドリフトにより、長期の測定には問題となる不正確さが引き起こされる。この不正確さは、強固な部材間の2自由度および3自由度結合を使用し、結合の自由度を高精度のエンコーダーにより測定することにより克服できる。しかし、これには多大なコストがかかり、その複雑さのため、変形の長期にわたる測定に使用される可能性は少ない。
【発明の開示】
【0011】
我々はここで、低コストで場に設置するために最適化された単一のシステム(装置)において、加速度と変形の静的および動的形状の両者の正確な測定を可能にする、センサの較正された組合せと、測定と較正方法を開示する。場内の角度を測定して微分をすれば、従来技術の方法の精度を大幅に改善できることが示される。更に、測定、シールディング、およびシーリング機能を組み合わせるパッケージ化技術も開示され、低コストの、携帯可能な集積測定ツールが得られる。
【0012】
デンマークの特許第’672号とデンマークの特許第’107号においては、表面は、表面の要素間の角度関係を知ることにより、6自由度における基準表面に関して測定される。「世界」座標系(WCS)における要素の絶対角度は直接には測定されない。それらは、湾曲センサにより測定される角度関係、または要素間の「局所」角度を積分することにより計算される。例えば、ヒンジにより接続され、すべて同一垂直面において湾曲しているロッドは、10、20、−10、および30度の局所ヒンジ角度を有する可能性がある。世界座標系において水平な基準ロッドに関して、ロッド間のWCS角度は10、30、20、および50度であり、経路に沿って局所角度を積分(加算)することにより得られる。ロッドの長さが分かっていて、それらのWCS角度が決定されているときは、ロッド系の経路は完全に決定される。ここにおいて、我々は、WCSまたは「絶対」という用語を、関心対象の領域内において不動の座標系において測定された角度に言及するときに使用する。そのような座標系は、地球の座標系である必要はなく、地球の座標系を含むことができ、例えば、それを太陽または任意の基準位置に結び付けてもよい。更に、我々は、「局所角度」または「物体間方位」という用語をここでは、1つの剛体と他の剛体間の角度関係を示すために互換的に使用する。一般的に、2つの剛体間の角度関係(つまり、「局所角度」または「物体間方位」)は、オイラー角(ロール、ピッチ、ヨー)を含む、標準数学的手段によるか、方位マトリックスまたは変換、または四元数により記述できる。2つの剛体間の湾曲および捩れは、局所角度または物体間方位であり、オイラー角として考えられるということも分かる。
【0013】
ロッド間の接続が、多軸湾曲および捩れのような追加的自由度を可能にするときは、ロッド間には2または3角度的自由度があり、積分は3D数学を必要とする。3D空間曲線の数学は、使用可能であり、デンマークの特許第’672号とデンマークの特許第’107号に記載されている。ロッドの単なる集積ではない、変形可能表面または立体は、角度関係が測定可能で、表面上のセンサの位置が分かっていれば、この方法で測定できる。測定は、任意の角度誤差の位置を越えて計算された表面のすべての部分に対して、重大な誤差の影響を受け易い。更に、センサにおけるドリフトは、形状の不正確さにつながる可能性があり、その不正確さは、表面を前に測定捕捉された姿勢に戻し、オフセットを除去して測定された形状を、前記測定捕捉姿勢の形状に復元することにより補正しなければならない。しかし、測定は、光ファイバーの非常に薄いアレイを使用して、急速に変化する形状に対して、毎秒10,000フレームのような、非常な高速度で行うことができるので有効である。
【0014】
静的形状に沿う間隔での方位測定に対しては、一定または「DC」加速度までの範囲の周波数応答を有する加速度計を使用して、出力が、約9.8m/s/sの一定の加速度を有する重力場に応答するようにすることが可能である。シリコンを微細機械加工することにより製造される、正確で、低コストな、超小型機器(MEMSまたは微細機械加工電子機械センサ(MicroMachined ElectroMechanical Sensors))が、単軸または2軸形態において利用できる。例としては、Analog Devices Inc.のADXL311集積回路があり、DCから数千ヘルツまでの加速度に対する応答を有する。2軸MEMS機器は、小角度傾斜を解像でき、何年にもわたる高精度と、広い温度範囲を維持することができる。これらのアレイ(即ち、センサアレイ)を変形可能表面上に設置すると、取付け位置のWCS角度を表現する傾斜信号のアレイを生成できる。位置間の距離が分かっていれば、経路、表面、または立体形状を高精度に決定できる。局所角度の積分に基づく形状測定とは違い、直接測定WCS角度に基づく形状測定は、累積誤差を生じることはなく、はるかに正確であり得る。MEMSの代替としては、電解傾斜センサ、容量性傾斜センサ、誘導性傾斜センサ、および、質量を測定フレームの中心に保ち、それを行うために必要な力を決定するゼロ変位加速度計が含まれる。しかし、すべての従来技術の傾斜感知方法の不都合点は、測定は、形状が変化していないときに行わなければならず、センサは、複数自由度測定が可能なセンサの較正されたアレイを形成するための機械的移動が制約された基板上には搭載されないということである。
【0015】
MEMS技術により製造された角速度センサも利用できる。そのようなセンサは、振動構造を使用して、基準慣性フレーム内の角度的移動に起因するコリオリ力を感知する。1つの例としては、Analog Devices Inc.のADXRS401 Angular Rate Sensor(角速度センサ)がある。角速度の単一時間積分は、開始角に関する角度的位置を生成する。そのような単一積分の精度は、積分定数の数がより少ないので、位置を生成する加速度の二重積分より優っている。
【0016】
上記の実施の形態において、剛体の方位または速度の2自由度の測定は、少なくとも2つのセンサを剛体に取り付けることを必要とする。更に、上記に実施の形態においては、剛体に取り付けられたセンサの最大感度軸は、整列されてはならない(つまり、それらは平行であることはできない)。剛体上のセンサは、剛体のすべての部分は、位置に無関係に同じ方位を有するので、同じ位置にあっても、なくてもよい。最適には、センサは、お互いに関して90度の方位を有するべきである。最適な結果を得るためには、剛体に取り付けられる第3センサは、第1および第2センサに直交すべきである。
【0017】
従来技術の傾斜感知は、傾斜センサを、WCSに関して既知の方位角に保持するための溝を有する特別な穿孔ケーシングを必要とした。傾斜センサを穿孔内に降下させ、ケーシング内において溝により一定の方位角回転に維持され、穿孔ケーシングの形状を推定するために、間隔をおいて表示値が読み込まれる。捩れないように制約された傾斜センサの較正アレイは、溝付き穿孔ケーシングなしで使用でき、間隔をおいて降下させる必要はない。そのような較正アレイに対する方法と装置を本明細書で説明する。
【0018】
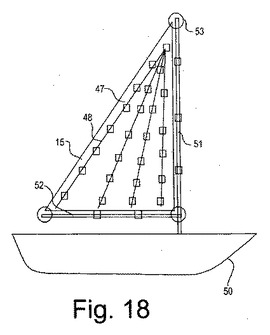
帆船レースにおいては、帆の形状を最適にして、所与の風および海の条件において最大速度を得ることができることは望ましいことであり、そのため、帆形状を測定して記録することは望ましい。これは、以前には、帆上の光学目標を、甲板またはマストから撮像する試みによりなされていた。問題は、明るい日光と、較正の難しさ、および妨害する水滴である。本明細書において、帆形状、マストの捩れ、および帆桁の角度を、帆、マスト、および帆桁を含む基板上に搭載され、較正された加速度計を使用して測定する方法を説明する。これらの基板の形状と方位の三次元的測定は、基板が2自由度に制約され、センサが、搭載、較正、および計算方法においてここでの教示に準拠しているので、加速度計のみで行える。
【0019】
穿孔および帆形状測定に使用される方法は、センサのアレイが、自由度と幾何学的形状の範囲に関して、本発明の教示に準拠している限り、幾何学的形状の広いクラス(種類)の測定に一般化できる。従って、我々は、場センサをどのように使用して、不安定な傾斜を横切るほぼ水平な経路を含む非垂直経路の形状、椅子の座部および背もたれの形状を測定するかを示し、また、人間および他の形状の測定を、本発明の教示を含めることによりいかにして改善するかを示す。
【0020】
アレイが、広範囲の周波数応答を有するMEMs加速度センサから形成されると、センサは、重力のような静的加速度場に応答し、また、地震の振動のような急速に変化する場にも応答する。電子機器とソフトウェアを調整して、総合(全ての)信号の長期平均を表現する出力データ(緩速データ)、および急速に変化する成分のみを表現する他の出力データ(急速データ)を提供することができる。緩速データは、重力に対する応答を表現し、急速データは、重力場内のアレイの振動または他の急激な動きに対する応答を表現している。緩速データは、データの多数のフレームを平均し、それ以外は、標準フィルタ処理技術を使用して、急激に変化する信号を排除することにより得られる。急速データは、フィルタ処理されていない総合(全ての)データから緩速データを減算することにより得られる。緩速および急速データを得る従来技術の方法はよく知られている。急速データが、フィルタにおいて時間についての積分でゼロになる場合は、平均形状を表現する正確な緩速データが得られる。平均形状が不変、または非常に緩速にしか変化しない場合は、急速データは、アレイ内の各センサにおいて存在する振動を表現する。従って、アレイを使用して、WCS傾斜角度(緩速データ)から静的形状を得ることができ、一方、急速データは、各センサにおいてアレイに加えられる振動を定義するために使用される。
【0021】
急速に変化する形状を有することが可能であり、それにより、加速度は、アレイの要素の動きが原因となり、同時に重力場に関しての方位における変化(傾斜変化)が原因となる。全体的な振動場もあってもよい。これらの場合は、形状と振動は、加速度のみに基づいては、別々の出力データセットに分離できない。本発明の実施の形態において、角速度を測定するセンサは、これらの動的変化の際に専用に使用され、角速度の単一な時間積分を必要とする変化する形状を決定する。角速度とWCS角度センサの両者からの信号を使用して、静的形状から動的形状への遷移が起きたことを決定することもできる。最新の既知の静的形状は、最適開始形状を有する動的形状測定を開始するために使用できる。
【0022】
加速度センサのみが存在するときは(角速度センサなし)、静的および動的形状は、一般的には、動的形状が変化する間は、知ることができない。しかし、本発明は、場が時間的に変化しても、均一な加速度場が存在する場合は、加速度計のみで、有効な動的形状を提供する。このように、均一加速度場により、我々は、空間的に均一な加速度場を意味する。例としては、空間的に均一な水平方向の地震の振動を受けている均一岩床における穿孔内のセンサの垂直アレイがある。この場合、傾斜センサのすべては、振動からの同じ加速度と、重力からの一定の加速度を受け、それにより、ここで説明するように、その事象の間に、アレイから静的形状情報を抽出することができる。
【0023】
本発明の1つの実施の形態において、形状システム(装置)が提供され、システムは、間隔をおいて配置された2つ以上の剛体のアレイであって、隣接する剛体は、物体間方位の少なくとも2自由度を有し、組み合わされた方位と配置間隔値に対して、システムに操作可能に関連するアレイと、剛体と操作可能に関連する場測定センサのアレイであって、剛体はそれぞれ、お互いに非平行な方位を有していて且つ予め定義された基準に対して、剛体の絶対方位に関連する入力データを受信するように適合された、センサのアレイの内の少なくとも2つのセンサを有するアレイと、システムの形状特性の2自由度に関するデータを、入力データから決定し、システムの形状特性の2自由度を定義する出力信号を生成する手段と、出力信号を表示、送信、または記憶する出力手段と、を具備する。
【0024】
望ましくは、センサは、柔軟、または非柔軟対象物に搭載でき、対象物の形状を測定するように適合され、場測定センサは、加速度計であり、重力ベクトルに関しての物体間方位の自由度を有しておらず、システムは、場強度の所定の分布を有する場において利用されるように適合され、場測定センサは場内において、測定可能な方位数を超えない数の自由度で、且つ測定信号に何らの変化ももたらさない方位における変化を除く測定範囲の制約内で、方位に応答し、場測定センサは、磁気計であり、磁気ベクトルに関しての物体間方位の自由度を有していない。
【0025】
上記の実施の形態において、物体間方位の最大3自由度を、場の基準なしで、物体間方位を測定する非場測定センサから決定でき、非場測定センサは角速度センサであり、非場測定センサは、少なくとも1つの湾曲感知アレイを含み、システムは、少なくとも1自由度における角速度が、少なくとも1自由度における場測定に最小限の影響を与えるときに、同一剛体に操作可能に関連する非場測定方位センサからの方位データの少なくとも1自由度の精度を向上するために使用され、湾曲感知アレイは、同一剛体に操作可能に関連する非場測定センサからの方位データの少なくとも1自由度の精度を向上すると更に望ましい。
【0026】
更に、センサは、配置間隔値と組み合わされた物体間方位に関連する出力形状データを生成でき、形状特性は、曲線、表面、および立体から構成されるグループから選択されたいずれか1つ以上であり、システムは、最小捩れの影響を受け易く、システムは、湾曲の1自由度の影響を受け易いと望ましい。
【0027】
本発明の別の実施の形態において、方位付けられた場内に幾何学的形状を有する柔軟基板が提供され、基板は、柔軟基板に操作可能に関連する2つ以上の予め定義された非同一センサ位置を有し、基板は2自由度で湾曲でき、前記位置のそれぞれにおける少なくとも1対のセンサであって、少なくとも1対のセンサは、前記位置に操作可能に関連し、そこにおいてお互いに対して非平行方位に位置し、センサは、場の方向の周りの回転運動は除く、定義された移動範囲内の位置のそれぞれの、それぞれの方位を測定するように適合され、センサは、幾何学的形状を示す2つ以上のセンサ位置のそれぞれにおいて、少なくとも1対のセンサの測定された方位に対応して、出力信号を生成でき、センサは、幾何学的形状情報出力信号を表示、送信、または記憶するための手段に操作可能に関連する。
【0028】
好ましくは、各位置におけるセンサは、2軸または3軸加速度計であって、加速度計は振動および形状データを提供し、加速度計は、世界座標系における傾斜を感知し、振動加速度データと、一定重力加速度データを提供し、実質的に垂直方位に搭載されると、柔軟基板は最小限に捩れ、柔軟基板は、1自由度においてのみ湾曲し、実質的に水平方位に搭載されると、柔軟基板は、1自由度においてのみ湾曲し、1自由度においてのみ捩れる。
【0029】
少なくとも1対のセンサは、測定用に、曲線と表面上、および立体内の場に設置するために較正でき、曲線、表面、および立体は、地盤工学および構造土木工学システムであると更に好ましい。
【0030】
更に、上記の実施の形態において、加速度計は、柔軟チューブにより端部において接続された剛性で、実質的に垂直なパイプ内に搭載され、加速度計は、2自由度の傾斜と、垂直軸に対するパイプの長軸の移動に関連する加速度データを提供し、加速度計は、柔軟チューブにより接続された剛性で、実質的に水平なパイプ内に搭載され、実質的な水平な表面との整列のための整列表面を備え、加速度計は、2自由度の傾斜と、垂直軸に対する実質的に水平なパイプの実質的に水平な軸の移動に関連する加速度データを提供し、少なくとも1対のセンサは、立体内に曲線を描く、実質的な垂直または水平な湾曲内に配置され、各曲線からのデータは、共通収集点に送られ、立体の静的および動的形状についての出力データを収集し、出力データは、固定通信線により送信されると望ましい。
【0031】
少なくとも1対のセンサは、地震を測定するように適合され、センサは、地震の前、その間、およびその後に地面の動きを測定し、曲線、表面、および立体は、船の帆、人間および動物の胴体から構成されるグループから選択され、柔軟基板は、センサの対を含む剛性リンクを具備する多関節アームを具備し、センサの対は、回転可能接合部により接続された場測定センサであり、多関節アームは、1自由度において回転可能であって且つ回転センサを備えた、接合部により、固定基準表面に接続され、リンクは、場内で、多関節アームの位置と方位を測定するために、所定の範囲内に場測定センサを維持するように制約され、場測定センサに操作可能に関連する回転センサを更に含み、回転センサは、デジタルシャフトエンコーダーであると更に望ましい。
【0032】
本発明の別の実施の形態において、柔軟基板内に場測定センサを有するセンサアレイが提供され、場測定センサは、基板に対して方位データを提供でき、基板の隣接部分内の信号における差から、動的形状を定義するように適合される。
【0033】
本発明の更に別の実施の形態において、変形の静的および動的形状と加速度の測定方法が提供され、測定用に、ここで上述した基板を利用するステップを具備する。
【0034】
更に、本発明の別の実施の形態において、地盤工学体、構造体、および生体における静的および動的形状を測定するための、本発明のセンサアレイの使用法が提供される。
【0035】
本発明の更に別の実施の形態において、穿孔における使用に適切なセンサシステムが提供され、センサシステムは、柔軟基板に操作可能に関連していて且つ柔軟基板の少なくとも長さの部分に沿って延伸する、複数のセンサを具備するセンサアレイを具備し、センサは、柔軟基板の長さに沿って、離間する複数の場測定センサを具備し、場に対して、柔軟基板の長さに沿う方位データを具備する入力幾何学的形状を測定するように適合されており、場測定センサは、センサが、場の定義された値から逸脱する測定の動的または静的条件を検出すると、柔軟基板の動的および静的データの少なくとも1つを具備する出力方位データを生成し、センサシステムは、センサにより生成された出力データを表示、送信、または記憶する手段を更に具備する。
【0036】
本発明の更に別の実施の形態において、穿孔の特性を決定する方法が提供され、場の特性を決定する個々のセンサに関する入力方位データを取得するための、間隔をおいて配置された複数の場測定センサのセンサアレイを提供するステップと、センサアレイからデータを収集して、場の動的および静的データの少なくとも1つを具備するセンサ出力データを取得し、静的条件または定義された値から逸脱している測定値を反映する出力データを提供するステップと、センサから出力データを生成して、データを、穿孔の特性分析のために表示、送信、または記憶するステップと、を具備する。
【0037】
本発明の更に別の実施の形態において、穿孔の特性を決定する方法が提供され、基準方位に関しての方位を決定する個々のセンサに関する入力角速度データを取得するための、間隔をおいて配置された複数の慣性角速度測定センサのセンサアレイを提供するステップと、センサアレイからデータを収集して、場の動的および静的データの少なくとも1つを具備するセンサ出力データを取得し、静的条件または定義された値から逸脱している測定値を反映する出力データを提供するステップと、センサから出力データを生成して、データを、穿孔の特性分析のために表示、送信、または記憶するステップと、を具備する。
【0038】
更に、本発明の別の実施の形態において、お互いに関して移動可能な一対の剛体の位置と方位を決定する方法が提供され、予め定義された間隔でお互いに間隔をおいて配置され、その間を、少なくとも2自由度で移動可能な、少なくとも第1および第2剛体を提供するステップと、第1および第2剛体のそれぞれの上に一対のセンサを位置決めし、各センサは、お互いに操作可能に関連し、お互いに関して非平行方向に位置決めされるステップと、基準方位に関して、剛体の方位の2自由度における差を測定するステップと、第1剛体から第2剛体への、角度における測定された差を定義する出力信号を生成するステップと、測定された差を表示、送信、または記憶するステップと、を具備する。
【0039】
望ましくは、上記の実施の形態において、剛体のそれぞれは、予め定義された線の周りの回転を除く移動範囲を有し、第1および第2剛体は、衛星同士、束縛衛星同士、地球と空間エレベータの部分、束縛遠隔操作車両同士、接続荷船(バージ)同士、船の甲板と帆桁、船の甲板とマストヘッド、地球と超高層ビルのフロア、橋台と橋の路面、トンネル支持リングの隣接部分同士、および飛行機の胴体と翼端の内の1つ以上から選択され、少なくとも一対のセンサは、単軸、2軸、または3軸加速度計であり、方位における変化率が、低率とまったくない(ゼロ)状態の間で起きるときは、自由度において方位を測定するセンサの別のセットからのデータを補正するステップを更に具備する。
【0040】
望ましくは、上記の実施の形態において、補正されるセンサのセットは、角速度センサを具備する。
【0041】
望ましくは、上記の実施の形態において、補正されるセンサのセットは、角速度センサを具備し、角速度センサにより感知された少なくとも1自由度からのデータを補正するように適合された少なくとも1つの湾曲感知アレイが追加される。
【発明を実施するための最良の形態】
【0042】
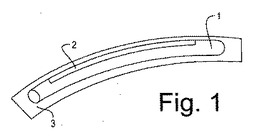
図1は、デンマークの特許第’257号に詳細が記載されている、湾曲を感知可能なファイバー光学センサを示している。センサは、好ましくは、湾曲が感知される全長に沿って、損失ゾーン2を介して、一方の側において光を失うように処理されたファイバー1を具備する。光学的設計は、湾曲が、ファイバーの処理された部分に沿って積分されるようになっている。ファイバーを介して送信される光学強度は、経路に無関係に、処理された領域の端部間の正味の角度的変位に従って変調される。センサを、湾曲可能基板3に取り付けて、基板の湾曲を感知するようにもできる。
【0043】
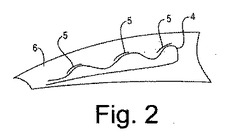
図2は、図1の湾曲感知方法の拡大図を示しており、デンマークの特許第’672号に詳細が説明されている。光ファイバー4は、示されている波形のほぼ全長である感知領域において、基板に沿って波形状にされている。基板の長軸に対して約45度方位のファイバー5の部分上では、ファイバーは湾曲を感知するように処理されており、この場合は、この湾曲は、基板6の湾曲および捩れ成分を含む。基板の反対側の第2ファイバーは、逆の方法で波形状にされており、それにより、その約45度の部分は、第1ファイバーと共に、ほぼX形状を形成する。デンマークの特許第’672号においては、湾曲と捩れを、別々のデータとして一対のセンサから抽出する方法が記載されている。湾曲と捩れ感知基板を使用して、2つの剛体間の2自由度の湾曲を感知できる。ファイバー光学「ロープ」を、デンマークの特許第’107号に記載された方法を使用して、剛体間に接続することもできる。ロープは、2自由度における湾曲を感知するように、または合計3自由度に対する捩れを感知するように処理できる。2つの剛体を、それに制限されるわけではないが、導電ゴム、ポテンショメーター、回転式エンコーダー、角度計、およびxyアレイ上に入射する光ビームを含む他の湾曲感知技術を使用して接続することもできる。
【0044】
一般的に、剛体間の角度を感知する上記の方法はすべて、局所角度を感知する手段であり、局所角度は、用途に依存して、1自由度湾曲、2自由度湾曲、2自由度湾曲と捩れ、または捩れのみを含む種々の自由度において感知できる。これらすべてに全体として言及するために、我々は、湾曲と捩れの組合せ、またはそれぞれを単独に示すために「湾曲」という用語を使用する。
【0045】
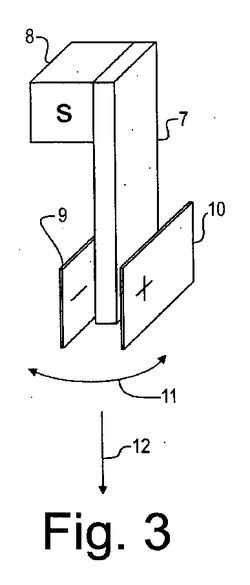
WCS角度は、前述した一般的説明において触れたMEMs加速度計により感知できる。MEMsセンサは、半導体集積回路技術を使用して、シリコン内で微細機械加工したものである。図3は、MEMs加速度計の一般的物理原理を示す模式図である。実際の構成はこの記述とは異なるが、原理は同じである。導電性の、湾曲可能カンチレバー(片持ち梁)7が、図において、信号がそこに存在することを示すために「S」のマークが付けられている基準フレーム8に固定される。基準フレームは、センサのケース(図示せず)に機械的に取り付けられるが、導電性があり、カンチレバー上に存在する電荷を搬送する。カンチレバーの近くの、反対に帯電された2つのプレート9と10(それぞれ、「−」と「+」のマークが付けられている)間の容量場は、カンチレバーの動きにより非平衡であり、1つのプレートまたは他方に近接していることを示す、Sにおけるポテンシャルという結果になる。カンチレバーは、矢印12に示されるような重力場に起因する、またはセンサのケースの変化する速度に起因する、双方向矢印11により示されている円弧に沿う加速度により湾曲される。カンチレバーが、図示のように垂直の場合は、出力信号は、中間レベルである。カンチレバーが+プレートに接近するように傾斜すると、信号は増大する。カンチレバーが他方に傾斜すると、信号は減少する。重力場における出力sは
s=gain(ゲイン)*g*sinθ [方程式A]
であり、ここにおいてgain(ゲイン)は較正定数であり、典型的には0.0034であり、カンチレバーの質量、材料、および寸法と、回路の詳細に依存し、gは重力加速度(典型的には、9.8m/秒/秒)であり、θは垂直方向に対するラジアンによる角度である。
【0046】
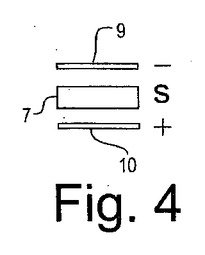
図4は、同じMEMs加速度計の、上方から見た模式図を示している。
【0047】
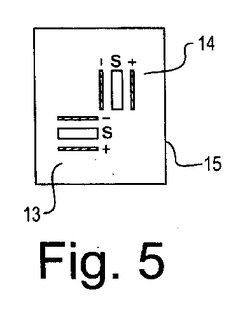
図5は、2自由度における傾斜と角速度を感知するために、直交方向に配置された2つの模式的加速度センサの上面図を示している。両者のセンサは、典型的には、1辺が数ミリメートルの小さな表面搭載可能なケースである、同じケース15内にある。
【0048】
図3に示されているようなカンチレバーセンサは、それが垂直のとき(重力場12に整列しているとき)に、角度における変化を最大に感知可能である。カンチレバーセンサは、重力場に直交するように方位付けられたときに最大出力(正または負)を有するが、この条件では、角度についての変化は最小限となる。両者の効果は、ゼロクロッシングの近くでは急激であるが、極大値または極小値の近くでは低勾配である正弦関数の形状の結果である。
【0049】
垂直方向からの正または負の変化は、それらが中間の垂直状態から、それぞれ信号を増大または減少するので、カンチレバー加速度計により区別できるが、垂直方向から90度を越える角度は、垂直方向から90度未満の角度と区別できない。従って、直交する一対のセンサによっても、「上側が下を向く状態」は、「右側が上を向く状態」から区別されない。しかし、第3の直交加速度計が追加されて三つ組構成センサが形成されると、この曖昧さは解決される。
【0050】
3軸加速度計の最も一般的な形式は、直交軸に沿って搭載された3つの加速度計を具備する。それぞれは、その軸に沿う重力の場強度を報告する。加速度計の基準フレームに関する重力ベクトルを計算するために、3つの数を使用できる。加速度計はまた慣性センサなので、3軸加速度計はまた、その3軸に沿う非重力加速度も報告する。
【0051】
場測定センサの別の例は磁気計であり、磁場、通常は地球の磁場の強度を、1つ以上の軸に沿って測定する。3軸磁気計は、3つの直交する軸に沿って場の強度を測定し、磁気計の基準フレームに関する磁気ベクトルの計算が可能になる。
【0052】
純粋な慣性センサの例は、角速度センサである。3軸角速度センサは、その基準フレームに関する、3つの直交する軸に沿って、時間に関する方位の変化を測定する。
【0053】
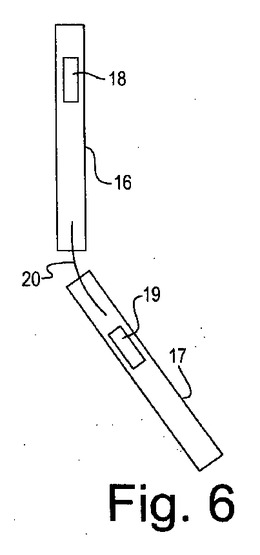
柔軟体内の2つの剛体16と17に、加速度計、角速度センサ、および磁気計を取り付けてWCS角度を感知することができる。これは図6に示されており、曲線20は、湾曲および/または捩れを可能にする機械的接続を表現し、長方形18と19は、加速度計(単独、二つ組構成、または三つ組構成)を表現しており、オプションで角速度センサおよび/または磁気計を追加できる。
【0054】
剛体間の3D曲線20は、湾曲センサが直線状のときの、曲がっていない長さの合計長さを有するポリラインとしてモデル化できる。平面的な湾曲のみが存在するときは、正味の湾曲は、内挿法によりポリラインに沿って均一に分布され、円弧を形成する。湾曲と捩れが存在するときは、それらはポリラインに沿って均一に分布され、螺旋の一部を形成する。または、湾曲と捩れを分布させるために、スプラインまたは他の内挿関数を使用できる。
【0055】
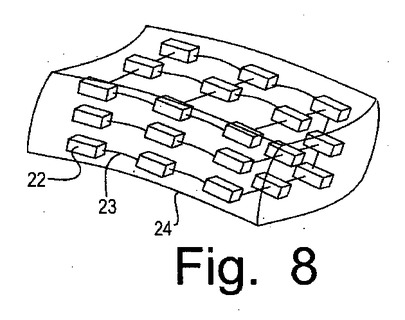
図7は、ゴム製の直方体のような、変形可能な立体21内の、局所およびWCSセンサのより一般的な配置を示している。局所センサ23は、感知される自由度により要求される数と位置のWCSセンサ22間で延伸できるが、本特許の主題ではない。図において、これらのセンサのいくつかは、図を簡略にするために省略されている。WCSセンサは、その間に湾曲可能な材料を伴う小さな剛体としてモデル化できる。立体の湾曲と捩れは、局所およびWCS角度の変化として測定される。図8は、変形状態の例における立体を示している。WCSセンサは傾斜され、その間の経路は曲げられ、および/または捻られる。変形した立体の形状は、「経路計算」によりモデル化できる。ポリラインは、WCSセンサを接続する曲線に沿って形成される。穿孔内の、湾曲可能要素により接続されたセンサストリングは、まさに上述した一般的な立体センサのサブセット(小集団)である。伸張と圧縮が重要な場合は、圧縮および伸張センサを追加することによりそのいずれも感知でき、または、弾性率のような、材料の物理的特性が分かっている場合は計算できる。
【0056】
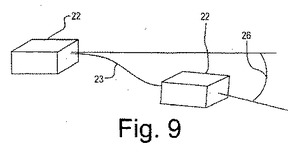
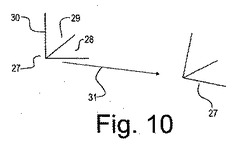
図9は、立体内の2つのWCSセンサ22を示しており、その間には、曲線経路23がある。WCSセンサを含む2つの剛体間の角度は、角度26で示されている。一般的に、WCSセンサのそれぞれは、WCSにおいて3自由度方位を有する剛体であり、方位間の差は、ロール、ピッチ、およびヨー値を使用して記述される。しかし、ロール、ピッチ、およびヨーは不確定な極条件に影響を受け易いので、図10に示すように、方位ベクトルを使用する方がより明確になる。各剛体は、3つの直交単位方位ベクトル28、29、および30のセット27により記述できる。剛体中心間の3D変位は、3D変位ベクトル31により、または内挿法を使用すれば、複数の3D変位ベクトルから構成されるポリラインにより記述できる。立体における各WCS剛体に対するそのような測定値を収集することにより、立体の形状を完全に記述できる。立体内の各剛体位置において、位置と方位は知られており、典型的には、合計の6自由度に対しては、WCSは、x、y、z変位およびrx、ry、およびrz方位として表わされる。rx、ry、およびrzはロール、ピッチ、およびヨーとして、または単位方位ベクトルの三つ組として表現できる(各三つ組は、9個の数を含み、そのうち3個は余分であるが、この9個で3自由度を表現している)。
【0057】
すべての自由度は、関心対象の形状に対して必要でなければ、そのすべてが、すべてのセンサ位置で感知される必要はない。従って、捻れが起きない機械的システムは、捻れセンサを必要とせず、または、別のシステムは、各局所角度センサ位置において湾曲の単一自由度のみを必要とすることもある。しばしば、地球の磁場における方位は知る必要はなく、または必要であっても、WCS内で形状の方位を確定するためには、非磁気的手段により測定される形状に沿う1点における単一の磁気センサ三つ組で十分なこともある。
【0058】
静的形状は、各剛体の局所角度変化を見出すことにより、WCS情報のみから決定できる。加速度センサが、経路に沿う、異なる点において、静的形状を決定するために使用される場合は、下記の条件が存在しなければならない。
1) 経路における各リンクは、その先行するリンクに関して、1つまたは2つの既知の回転角自由度のみを有するように制約されなければならない。
2) 如何なる回転角自由度も、純粋に重力ベクトルの周りで存在することはできない(つまり、水平面における回転は容認されない)。
3) 各感知位置に存在する動的加速度は、重力の大きさと比較して無視できるか、平均化によりフィルタ処理できるか、または経路に沿って均一(つまり、共通モード)のいずれかでなければならない。
【0059】
2つの隣接する剛体における基準座標フレームがRnおよびRn+1の場合、そして、Rn+1の方位が、局所xnおよびyn軸(この順番)の周りの回転で表現できると仮定すると、Rnは、下記のマトリックス方程式によりRn+1に関連付けられる。
Rn=[1 0 0][cos(ryn) 0 sin(ryn)]
[0 cos(rxn) −sin(rxn)]*[0 1 0]*
Rn+1
[0 sin(rxn) cos(rxn)][−sin(ryn) 0 cos(ryn)]
=[cos(ryn) 0 sin(ryn)]
[sin(rxn)sin(ryn) cos(rxn) −sin(rxn)cos(ryn)]*Rn+1
[−cos(rxn)sin(rxn) cos(rxn)*cos(ryn)]
[方程式1]
ここでrxnは局所xn軸の周りの回転であり、rynは、RnをRn+1と同一直線状にする位置「n」における局所yn軸の周りの回転である。各剛体の局所角度rxnおよびrynは、上記に定義したマトリックス関係を使用して、連続する剛体の加速度ベクトルを比較することにより計算できる。重力による加速度場は、測定されている経路に沿って均一と仮定されるので、局所加速度ベクトルanおよびan+1(nおよびn+1において、加速度計により測定されたもの)は次のように関連付けられる。
an=[cos(ryn) 0 sin(ryn)]*an+1
[sin(rxn)sin(ryn) cos(rxn) −sin(rxn)cos(ryn)]
[−cos(rxn)sin(rxn) sin(rxn)cos(rxn)*cos(ryn)] [方程式1.1]
【0060】
局所加速度ベクトルは、加速度計の出力から知られる。これにより、次の形式の方程式が得られる。
A=B*cos(ryn)+C*sin(ryn)
ここにおいて、A、B、およびCは、加速度計の出力から決定された既知の値である。特にAは、anのx成分であり、Bは、an+1のx成分であり、Cは、an+1のz成分である。一般的に、この方程式を解くには、数値的解法を使用する必要がある。rynが計算されれば、rxnは、同じ方法で計算できる。
【0061】
局所回転は、典型的には、角度またはマトリックスの形状で記憶され、測定された基板の形状を決定するために組み合わせることができる。
【0062】
上記の計算は、所与の制約(2つまたはそれより少ない自由度)においてのみ実行でき、純粋に重力ベクトルの周りの回転はないということに留意されたい。磁気感知に関しては、回転制限が磁場ベクトルに適用され、重力ベクトルには適用されないことを除いては、同じ規則が適用される。この方法は、既知の場強度分布と、場内の方位に応答する場センサと、測定可能な方位の数を越えない数の自由度と、測定された信号において何らの変化も引き起こさない方位における変化を排除する測定範囲の制約と、を有する任意の場に一般化できる。
【0063】
ここにおいて、本発明は以下のことを可能にすることが示される。
1. 2自由度で変形可能な形状の直接測定に対する場測定センサの使用。
2. 非場測定センサにより得られた方位データの2自由度の補正に対する場測定センサの使用。
3. 非場測定センサにより得られた方位データの第3自由度を補正するための、湾曲感知アレイの追加。
4. 上記のタイプ3のシステムであって、非場測定センサは湾曲感知アレイを具備する。
5. 3自由度の1つが無視できるほど小さいことが知られているときに、3自由度で変形可能な形状の2自由度の直接測定に対する場測定センサの使用。
【0064】
上記の実施の形態の多くにおいて、センサの出力におけるバラツキを生成する形状に対しての測定範囲の制限は、磁場と重力場を含む、多数の場の対称性により必要となる。例えば、地球の重力場は、地球の中心を指しているベクトルにより表現できる。地球の磁場は、磁極を指す、または磁極から離れるベクトルにより、通常は、地球の表面に関するある3D角度において表現できる。加速度センサの軸が、純粋に重力場の周りを回転すると、重力場ベクトルをその中心とする平面または円錐を描き、センサの出力には何らの変化もない。それが三つ組センサの1つである場合は、三つ組センサのいずれかにおける出力には変化がある。同様な議論が、磁気ベクトルの周りの磁気センサの回転についても当てはまる。同様な議論は、束縛されている剛体上に影響を与える水または気体の流れの力に対しても当てはまる。流れの方向に対する角度は、剛体の角度または力の測定値から測定できるが、流れの方向についての角度からは測定できない。同様な議論が、好ましい放射方向を有する非偏光照明場に関する角度の測定に対しても当てはまる。
【0065】
上記の実施の形態の多くにおいて、物体間方位の3自由度の測定を可能にするために非場測定センサの第1セットを含み、少なくとも1自由度における角速度が、その少なくとも1自由度における場測定に最小限に影響する場合に、非場測定センサの第1セットの少なくとも1自由度の精度を改善するために上記の実施の形態の場測定システムを使用し、および非場測定センサの第2セットを含むことは更に望ましく、第2セットは、場測定システムにより測定されない物体間方位のひとつの自由度の精度を改善するための湾曲感知アレイであり、第1セットは、加速度センサを具備する。
【0066】
更に、上記の非場測定センサの第1セットが、少なくとも1つの湾曲感知アレイを具備し、第2セットは含まれない、システムであって、少なくとも1自由度における角速度が、少なくとも1自由度における場測定に最小限に影響する場合、第1セットの少なくとも1自由度のデータは、前記場測定センサにより補正され、方位測定の残りの自由度が、湾曲感知アレイにより提供される、システムを設けることは望ましい。
【0067】
上記の柔軟性および移動範囲の制約に合致するように設計された、較正された構造は、広い範囲の用途において、高い測定能力を発揮する。
【0068】
加速度計に対して記述された上記の方法は、センサを、重力加速度と比較して意味のない程度にしか加速しない、形状における非常に緩速な変化に対しても機能する。
【0069】
より急激な変化に対しては、角速度センサもまた実装されていれば、角速度センサを、急激変化が開始する前の、WCSセンサにより感知された最後の有効な形状からの偏差として形状を計算するために使用できる。この場合は、積分された角速度は、剛体離間距離を満たすポリライン経路を計算するために使用される。
【0070】
WCSセンサが加速度計の場合は、加速度は、その時点での傾斜により変調された静的重力と、地震の振動または、センサが取り付けられる脚部の移動のような、加えられた加速度信号との組合せとして直接得られる。好適な実施の形態においては、加速度は、時間に関してのフィルタ処理なしの合計信号から、時間に関してフィルタ処理された信号を減算したものとして計算される。この加速度信号は、剛体における加速度計により測定された加速度であり、振動場の軸に関して傾斜している可能性もある。例えば、穿孔においては、所与の剛体は、垂直方向から10度の角度にあり、振動は水平方向であり得る。そのような場合は、傾斜が知られているときは、振動の水平成分を求めるために補正を実行できる。MEMS加速度計が、垂直方向に関して角度θだけ傾斜し、加速度aを受けると、その出力は下記のようになる。
s=gain(ゲイン)*g*sinθ+gain(ゲイン)*a*cosθ [方程式2]
【0071】
これは、θが、局所センサにより表わされる経路に沿う計算から知られる場合は、加速度aを求めるために解くことができる。
【0072】
共通の加速度は、ポリライン(ポリラインの第1頂点)に対する基準センサから得られる。例えば、センサストリングが穿孔内にある場合は、最上部センサは、地球の表面に垂直に固定され、計算の開始に対する基準として使用でき、地球の表面に平行なs波全体の加速度を示すためにも使用できる。加速度がすべてのセンサにおいて均一である限りは、動的形状の計算は正確であり、それを実行するために、湾曲または捻れ(局所)センサは必要ない。本発明のこの好適な実施の形態においては、較正されたアレイにおけるセンサのタイプおよび数の削減により、コストが削減される。
【0073】
加速度計技術においてよく知られている二重積分技術を使用して、加速度計信号から動的形状を計算することもできる。各動的加速度信号は、まず速度を求めるために積分され、その位置を求めるために再び積分できる。しかし、各自由度における各剛体の角度が知られていないときは、水平加速度を求める場合は、加速度は、垂直方向に関するカンチレバーの角度の余弦だけ削減される。
【0074】
改善された動的形状測定は、剛体の角速度を積分して角度位置を求めることにより行われる。
【0075】
アレイが、広い周波数応答範囲を有するMEMs加速度センサにより形成されている場合は、センサは、重力のような静加速度場に応答し、また、地震の振動のような急激に変化する場に対しても応答する。電子機器およびソフトウェアを、合計信号(緩速データ)の長期平均を表現する出力データ、および急激に変化する成分(急速データ)のみを表現する出力データを提供するために配置することができる。緩速データは、重力への応答を表現し、急速データは、重力場内のアレイの振動または他の急激な動きを表現する。緩速データは、多数のデータフレームを平均することにより、および標準フィルタ処理技術を使用して、他の急激に変化する信号を排除することにより得られる。急速データは、フィルタ未処理の合計データから、緩速データを減算することで得られる。緩速および急速データを得る従来の技術はよく知られている。フィルタにおいて、急速データの時間に関しての積分がゼロになる場合は、平均形状を表現する正確な緩速データが得られる。平均形状が不変、または非常に緩速にしか変化しない場合は、急速データは、アレイ内の各センサに存在する振動を表現している。従って、アレイを使用して、WCS傾斜角度(緩速データ)から静的形状を得ることができ、一方、急速データを使用して、各センサにおいてアレイに加えられた振動を定義することができる。
【0076】
急激に変化している形状を有することができ、それにより、加速度は、アレイの要素の動きと、同時に、重力場に関する方位の変化(傾斜変化)によることになる。また、全体的な振動場があってもよい。これらの場合は、形状と振動は、加速度だけに基づいては、分離した出力データセットに分離できない。本発明の実施の形態においては、動的変化の際は、角速度を測定するセンサが専用に使用されて、変化する形状を決定し、そのために、角速度の単一時間積分が必要となる。角速度とWCS角度センサ両者からの信号を使用して、静的から動的形状への遷移が起きたことを判断することができる。最終的に知られた形状は、最適な開始形状による、動的形状測定を開始するために使用できる。
【0077】
加速度センサのみが存在する場合は(角速度センサはない)、静的および動的形状は、一般的に、動的形状変化の間は知ることができない。しかし、本発明は、均一な加速度場が存在する場合は、場が時間的に変化しても、加速度計のみで有効な動的形状を提供する。このように、均一な加速度場により、我々は、空間的に均一な加速度場を意味している。例としては、空間的に均一な水平方向の地震の振動を受けている均一な岩床における穿孔内のセンサの垂直アレイである。この場合は、傾斜センサのすべてが、振動から同じ加速度と、重力からの一定の加速度を受けており、従って、静的形状情報をこの事象の間にアレイから抽出することができる。
【0078】
地震に対する穿孔感知および傾斜の監視において、および多数の構造的監視への適用に対しては、剛体内の加速度計のカンチレバーは通常、ほぼ垂直であり、垂直方向から45度以上は動かない。ほとんどの場合、捻れの測定は必要なく、そのため、本発明の好適な実施の形態は、短い柔軟なホースにより接続されたパイプ中における2軸加速度計と、捻れを削減または除去する要素を具備する。捻れが容認されない、または必要ない場合は、システムは、場に設置可能なユニットとして較正でき、また、輸送または格納のために巻いたり畳んだりできる単一の構造として構築できる。捻れを感知しなければならない場合は、剛体間の局所捻れセンサのいずれかが必要となり、または磁気計を追加しなければならない。
【0079】
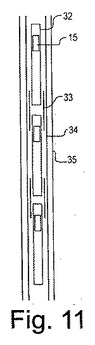
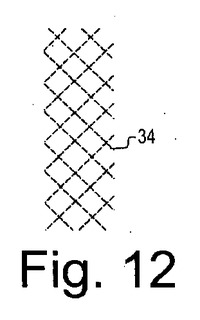
図11は、捻れを最小化し、センサの数とタイプを最小化するように設計されたアレイの好適な実施の形態の図を示している。2軸加速度計15は、薄壁金属パイプ32内に搭載され、2自由度の傾斜と加速度の感知を含む剛体を形成している。12mm以下の内径を有するパイプは、センサと、連結された配線および回路を保持するには十分な大きさである。パイプはその端部間が、典型的には、その被覆内で45度の限度の湾曲を容認するために十分な距離だけ分離されている。典型的には、間隔は5−10mmである。被覆は、好ましくは、第1層として、一体的接着剤/シーリング剤を有する熱収縮可能チューブである、ぴったりと固定されている柔軟チューブ33の短部セクションを具備する。円形金属ブレード(編み状体)の第2層34は、図12に詳細に示されており、好ましくは熱収縮可能チューブである、柔軟チューブ35の第3層により金属チューブと接触して保持される全体的な電気シールド(絶縁)を提供する。柔軟チューブは、要素に対してシーリング(密封)を提供する。それぞれは、水密端部キャップ(図示せず)を備えることができる。金属ブレードは、被覆により、ほぼ円柱形に維持されているが、接合部における捻れを大幅に削減し、過湾曲に対する保護を提供する。二重柔軟チューブは、水分透過のための2つのバリアを提供する。好適な実施の形態においては、接着剤を使用してブレードを柔軟チューブに取り付けて、容易に湾曲するが、捻れモーメントにはほとんど影響されない複合構造を形成する。
【0080】
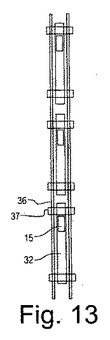
図13に示される代替実施の形態においては、パイプ32は、外側から各パイプに金属クランプ37により締め付けられた柔軟ホース36により覆われている。柔軟ホースは、好ましくは、金属またはポリマーブレードを含み、捻れを削減し、強度を与える。金属ブレードは、パイプと接触するホース内に含めることができ、電気シールドを提供する。
【0081】
図11と図13の実施の形態は、角速度センサおよび/または磁気計を含むことができる。
【0082】
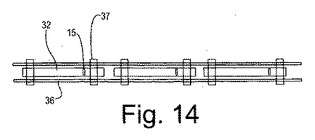
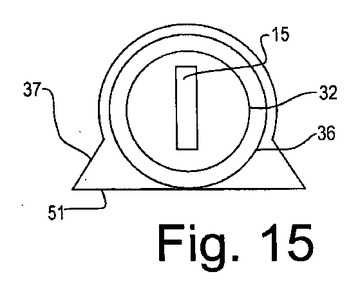
アレイが水平、または水平方向から約45度以内でなければならないときは、図11と図13のアレイにおける加速度計は、パイプが水平のとき(角度の変化に対する信号の変化は小さく、正負が確定せず、垂直軸に関しての方位も分からない)は、適切に測定できないので、静的測定のためには、別の配置を使用しなければならない。この場合は、図14に示されているように、加速度計15は、パイプ32が水平のときはそのカンチレバーが垂直になるように搭載されるべきである。外部の取付け具を追加して、取付け具が水平表面上にあるときは、加速度計のカンチレバーが垂直になるように方位付けることもできる。この実施の形態は図15に示されており、クランプ37が、水平表面51を含むように変形されている。多くの場合、このタイプのセンサは平面内で作動できるため、各パイプのWCS角度の単一自由度を測定するためには、単一軸の加速度計のみを備える必要がある。水平センサへの適用は、ビルディング、および埋立地、傾斜地、鉱山、橋、およびトンネルの監視を含む。上記の平坦固定の締付けシステムは、垂直アレイを垂直壁に取り付けるなど、垂直アレイに対しても使用できる。
【0083】
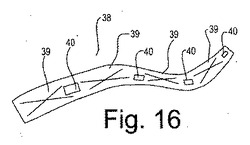
別の実施の形態においては、加速度計を感知リボンに取り付けることができる。感知リボンとロープは、デンマークの特許第’672号とデンマークの特許第’107号に記載されている。リボン38への加速度計の追加は、図16に示されている。X形対象物39は、デンマークの特許第’672号に記載されているような、湾曲/捩れセンサ対を表現しており、ここでは完全に示されているが、それはこの出願の主題ではない。長方形40は、柔軟基板に沿って既知の間隔での単軸、2軸、または3軸加速度計を表わしており、3軸角速度センサを追加して動的形状を決定することも可能である。基板が動いていないときは、加速度計の信号を使用して、WCS方位を高い精度で計算することができる。WCS方位は、局所湾曲と捩れセンサからのデータを「初期状態に戻し」て、それにより、形状が動いているときにその精度を改善できる。角速度センサからの信号は、含まれているならば、形状が実際は静的であることを判定するために使用でき、それにより、静的条件が優勢であるときはいつでも、自動的に初期状態に戻すことを可能にする。角速度センサは、加速度計のいくつかが極の近くにあり、または上下逆さまであるようなときに、加速度計の不確定さを解消するためにも使用できる。磁気計を、重力ベクトルの周りの回転を分析するために追加できるが、多くの場合は、自由度のいくつかが「初期状態に戻る」だけで、精度は大幅に改善されるので、それらを追加する必要はない。
【0084】
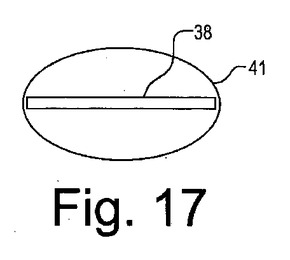
デンマークの特許第’672号に記載されているようなリボン形状の基板を、単独の加速度計と共に(局所湾曲および捩れセンサなしで)使用することができ、垂直または水平感知アレイを形成できる。アレイは、図16においてX形状のセンサ対がないもののように見える。加速度計は、単軸、2軸、または3軸加速度計であってよい。リボンが垂直であり、磁気計または角速度センサが使用されないときは、重力ベクトルの周りの捻れは、磁気計または各速度センサなしでは分析できないので、平面的な湾曲を感知するために使用される。リボンが水平の場合は、カンチレバーが垂直な2軸加速度計は、WCS傾斜における差から、湾曲と捩れを決定できる。通常は、局所湾曲および捩れセンサを有するリボンと共に使用される数学は、WCSセンサから導出されたデータと共に使用できる。図17に示されているようにリボン38は、楕円状の断面41を有するホース内に格納でき、楕円の長軸内のそのエッジにおいて支持される。
【0085】
上記の、接続された剛体を使用する測定法においては、測定システムへの入力は、剛体間の接続の機械的な構成により決定される、定義された自由度内のセンサの方位を具備することが分かる。入力に対して計算が行われ、アレイの形状を決定する。形状が出力である。
【0086】
非常に深い穿孔に対しては、合計深度よりも長さの短いアレイを使用することが望ましい。アレイは、既知の量だけ穿孔内を降下され、測定値が取得され、アレイは既知の量だけ更に降下されて、別の測定値が取得される。この工程は、穿孔全体の形状のサンプリングが行われるまで、測定された部分間を随意的に重ねて繰り返すことができる。アレイ内では、捻れの整列は、ソフトウェアにより自動的に使用される較正表から知ることができる。隣接する測定ステーション間の捻れ関係を感知するために、磁気計をアレイの少なくとも1つの部分に取り付けて、地球の磁場内の絶対方位を測定することができる。穿孔の完全な形状は、サンプルを三次元で連結するソフトウェアにより計算できる。
【0087】
図18に示されているような、帆の測定への適用においては、加速度計を水上帆船50の帆に取り付けて、その静的および動的形状を測定して、それにより、帆のデザインまたは張り具合の制御を通して、セーリング性能を改善することができる。この実施の形態においては、加速度計は、好ましくは、三角形の帆47の頂点から、帆の底部におけるほぼ水平な帆桁52に沿う間隔を開けた点に向けて放射状に走る線に沿って搭載される2軸対15である。本発明において記載される他のセンサを、マスト51と帆桁に追加して、その形状と絶対方位を分析することもできる。例えば、磁気計、3軸加速度計、および角速度センサを備える方位センサ53を使用して、磁場を参照し、2垂直自由度におけるマストと帆桁の絶対方位を提供することができる。好ましくは、帆上およびマストと帆桁の多数の部分上で、磁気センサに優先して加速度計15を使用することにより、コストと重量を削減する。帆の上では、加速度計を使用して、帆に沿う前記線のそれぞれの静的および動的形状を計算する。帆が完全には張られていないときは、3D曲面を形成する線48をまとめると、帆の3D形状を描く。方位センサと組み合わせると、形状は、船のロール、ピッチ、およびヨーを説明する絶対3D座標に置き換えることができる。方位センサは、船が転覆して、いくつかのセンサが逆さまになった場合に起こる極を分析し、および他の未知の磁気的進路(heading)による不明確さも解消する。
【0088】
場測定加速度計だけでも、帆船に固有な、幾何学的制約を利用することにより、帆、マスト、および帆桁形状を測定することができる。マストが垂直な場合は、そこに取り付けられた加速度計は、マストの中心線の周りの回転についてのデータを生成しない。同様に、帆桁または帆上の加速度計は、マストの垂直中心線に関しての方位についてのデータも提供しない。しかし、航行中は、帆船のマストは、非垂直であることは回避できない。非垂直マストの上部および底部に搭載された2軸または3軸加速度計は、マストが湾曲しておらず、捻れてもいない場合は、同一の表示値を示す。非垂直マストが捻れていると(例えば、帆の力により)、加速度計は、その個々の軸から異なる信号を生成し、この信号を使用して、捻れの大きさと方向を計算することができる。マストもまた、既知の平面内(例えば、船の前後方向、または左右方向)で湾曲しているときは、個々の軸の表示値を使用して、湾曲の大きさと、捻れの大きさと方向を計算できる。
【0089】
マストは柔軟基板なので、計算の同じ原理が2つ以上のグループで帆上に搭載された多軸センサにも当てはまり、帆は、2自由度(それ自身の平面内では湾曲できない)に制限された柔軟基板である。同様に、帆桁は、ヒンジによりマストに取り付けられた剛体としてモデル化でき、そのデッキの平面における方位角(ヨー)がマストまたはデッキ上の多軸加速度計または帆桁上の別の加速度計から計算できる、柔軟基板である。方程式1と1.1と、それに関連する記述は、計算が、マストが非垂直という条件以外は、地球の表面に関するマストの角度に依存しないということを示しており、従って、マスト、帆、および帆桁の計算は、実際の適用の広い範囲にわたり、船のロール、ピッチ、およびヨーには依存しない。
【0090】
帆形状の測定の実際の例として、帆の弦(帆が静止しているときの、帆に沿うほぼ水平な線)に沿って搭載された2軸または3軸加速度計を考えてみる。この場合、帆は2自由度に湾曲可能であるが、その面内では湾曲できない基板である。弦に沿っては、これらの2自由度は、湾曲と捩れとして考えることができる。従って、弦に沿う帆の方位は、センサの既知の間隔と共に、入力に基づいて弦の3D形状を出力するために使用される、感知アレイへの入力である。所与の弦の上方および下方の他の弦も感知すると、帆表面の3D形状が出力となる。必要な条件は、センサ測定の自由度より多くの基板形状変化の自由度は容認されないということである(詳細は、上記の方程式1と1.1を参照)。
【0091】
帆形状測定に類似する適用は、椅子、自動車のシート形状、またはベッド形状の測定である。椅子の座部および椅子の背もたれのような、ほぼ水平またはほぼ垂直な表面上の既知の位置に分散された加速度計は、それらの表面の形状測定に使用できる。加速度計を、重力ベクトルの2つの主要成分を感知するように配置すべきである。ほぼ水平表面上では、傾斜が測定される。椅子の背もたれの測定は、帆の測定のように、椅子の背もたれが非垂直であり、変形は主に2自由度であることが必要である。非磁気表面上では、磁気計を使用して類似の測定を行うことができる。磁気ベクトルは非垂直であり、従って、垂直表面は測定可能であるが、磁気ベクトルについての測定が必要な幾何学的形状は回避しなければならない。
【0092】
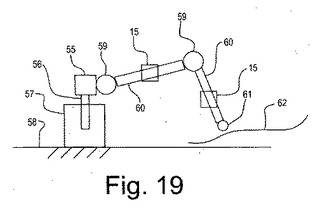
図19に示されている別の例においては、加速度計の対15が、剛体アーム60上に搭載されている。アームは、垂直面内においてのみ回転自在の接合部59に取り付けられている。簡略化のために、2本のアームのみが示されている。アームは、垂直線の周りをベアリング57内で回転自在である、シャフト56に取り付けられている支持体55に取り付けられている。シャフトは、水平面内のシャフトの角度を測定する角度測定センサ(図示せず)に取り付けられている。適切な角度測定センサには、ポテンショメーター、シャフトエンコーダー、およびファイバー光学捻れまたは湾曲センサが含まれる。または、磁気計を使用して、磁場におけるシャフトの角度を測定することもできる。ベアリングは、測定の基準表面を形成する静止表面58に取り付けられる。アームの長さが既知の場合は、加速度計により測定される傾斜角度と、ベアリングの回転角は、滑らかなボールまたはピンのような表面62に沿って走査できる、端部ツール61のx、yおよびz座標を決定するには十分である。走査の結果としてのデータセットは、3次元で表面を表わすために使用できる。垂直面においてのみ回転する代わりに、接合部59を修正して、2自由度での回転を容認するようにして、ベアリングの表示値と組み合わされた加速度計の対の表示値を、端部ツールのx、yおよびz座標ばかりでなく、3次元空間における絶対傾斜を表わすために使用し、端部ツールに対して、6自由度データが利用できるようにすることも可能である。不明確さを回避するために、アームは水平状態を通過することを容認されてはならない、または、3軸加速度計または3軸角速度センサを使用して、上方または下方に向かうアームに関する不明確さを解消することができる。アームの静止姿勢に対しては、高精度なデータが得られ、アームが動いているときは、それよりは精度は落ちるが、依然として有効な精度のデータが得られる。アームのシステムは、表面の走査、または移動物体上の点の位置と方位の追尾に使用できる。例えば、システムは、手術の準備中の患者上の点の座標を測定し、または、患者上の点の位置と方位を追尾して、患者が呼吸をし、またはその位置を変える間に、患者の胸部または他の部位のX線、磁気共鳴、または他の医療画像を安定させるために使用できる。他の適用においては、システムは、プローブの端部またはプローブの一部の位置と方位を追尾するために、内視鏡または他のプローブの一部を形成することもできる。
【0093】
図19のシステムが、点の位置および/方位を追尾するために使用されると、多くの場合、動きは、中心点の周りの小さな動きを含む。例えば、呼吸をしている対象患者は、中心点の周りの小さな動きをし、それにより、測定システムの接合部は、呼吸サイクルの最中に、患者の胸部上の点を描く静止姿勢に対する修正として、わずかな距離のみを動く。これらの場合、動きによる加速度は、静止加速度から区別される繰返しパターンを形成し、それにより、加速度が全体的な共通場を表現しない場合でも、形状と位置の動的測定を可能にする。
【0094】
図11、13、および16のようなアレイ内のパイプは、それらを垂直に保持し、その出力を測定して、垂直を表現する中間電圧を求めることにより較正できる。温度センサがいくつかのパイプまたは全パイプ中に組み込まれると、パイプを、温度の較正因子を導出するために、異なる温度に晒すこともできる。パイプを水平表面上を回転させて、信号の最大および最小値を求めることができ、各パイプは、最大および最小に対応するxおよびy軸を示すようにマークを付けることができる(xとyは二次元においてポリラインを描く直交軸で任意に指定でき、zは、垂直アレイの垂直寸法を記述するために使用される)。パイプが完全なアレイに組み立てられた後、アレイを、第1パイプ内の第1加速度計が最大信号を有するまで、水平表面上を回転させることができる。そして、第1パイプは、x軸を示すようにマークが付けられる。そしてアレイは、第2パイプ中の第1加速度計が最大出力を有するまで回転させることができる。第1パイプのxおよびy出力は、この条件に対して記録される。そして、これを、第1パイプのxおよびy値の表が得られるまで各パイプに対して繰り返す。これらの値は、組み立て後に、その長軸についてのパイプの角度オフセットを計算するために使用できる。値は、各パイプにおけるxとy傾斜センサからのデータを、その軸の周りに、下記の回転補正方程式を使用して回転することにより、これらのオフセットを補正するために使用される。
sx’=sx*cos(roll(ロール))−sy*sin(roll(ロール)) [方程式6]
sy’=sy*cos(roll(ロール))+sx*sin(roll(ロール)) [方程式7]
ここにおいて、sx’とsy’は、補正された値であり、sxは、2軸加速度計のxセンサの出力であり、syは、2軸加速度計のyセンサの出力であり、「roll(ロール)」は、パイプの長軸の周りの角度オフセットである。この処理は、アレイを既知の速度で回転するか、回転中にその回転角を測定し、既知の回転角度において、センサの最大および最小、またはゼロクロッシングを測定することにより自動化できる。アレイが、図14におけるように水平方向で使用される場合は、中間電圧は、パイプを水平表面上で水平に設置し、それらを回転して最大および最小を求め、平均を使用して中間電圧を求める。「roll(ロール)」オフセットは、垂直アレイと同様な方法で求められる。
【0095】
連続するセンサ位置間の捻れの不整列(パイプの長軸の周りの「roll(ロール)」オフセット)は、アレイを直線状、非垂直線に保持することにより決定できる。連続するノード(節点)間のセンサの不整列のすべては、実際には捻れていると仮定することができるので、第n番目のノードで測定された重力加速度ベクトルは、下記のマトリックス方程式により、第n+1番目のセンサ位置により測定された重力ベクトルに関連付けられる。
[axn]=[cos(t) −sin(t) 0]*[axn+1]
[ayn] [sin(t) cos(t) 0] [axn+1]
[azn] [0 −0 0] [axn+1]
ここで、axn、ayn、aznは、第n番目のセンサ位置におけるセンサにより測定された加速度であり、axn+1、ayn+1、azn+1は、第n+1番目のセンサ位置におけるセンサにより測定された加速度であり、tは、第n番目のセンサ位置に関する第n+1番目の捻れの不整列である。
【0096】
tについて解くと、
t=acos((axn*axn+1+ayn*ayn+1)/(axn+12+ayn+12))
または
t=−acos((axn*axn+1+ayn*ayn+1)/(axn+12+ayn+12))
となり、どちらも上記のマトリックス方程式を満たす。
【0097】
上記の較正ステップと、上述の構成および計算方法の結果は、較正されたアレイであり該アレイは、場で携帯可能で、所与の作業に対して、最小の数とタイプを使用して、既知の軸に沿う加速度データを提供し、場において最小限の取付け具で使用できて、静的および動的条件において絶対形状データを提供できる。アレイは、センサから利用できるよりも多い自由度を容認しないという条件を満たす。
【0098】
アレイの好適な実施の形態は、図11、13、14、および17のアレイを含み、センサは、柔軟チューブ内に配置され、通常は、上端のような曲線の一端である基準点から開始する3D曲線上のデータを提供する。土、空気、または水の立体は、上記のアレイのようなアレイにより感知できる。各アレイからの信号は、アレイ内またはアレイ近傍のマイクロプロセッサにより収集できる。より大きな立体的なアレイ内のアレイは、そのすべてのデータを、ワイヤを使用して、またはワイヤレス通信により中心点に送ることができる。
【0099】
別の好適実施の形態は、人間または動物の脚部または胴体部を具備する剛体のそれぞれに搭載された、角速度センサと加速度計を具備する。人間上の剛体の例には、上腕、前腕、手の裏、および指の指節骨がある。剛体の形状は、角速度の時間積分により、既知の開始形状(「初期状態に戻された」形状)からの方位を生成することにより求めることができる。胴体の一部が動いていないときは、または角速度センサからのゼロ信号により示されるように最小限に動く(最小加速度で)ときは、加速度計からの加速度信号を使用して、方位の自由度のいくつかに対して方位を決定することができ(垂直線の周りの方位を含まないもの)、そのため、形状測定の精度を改善することができる。胴体が、既知の「初期状態に戻された」形状へ戻ることは、すべての自由度の再較正を可能にする。この方法は、形状または方位を決定する磁気感知に依存しない、携帯型動き捕捉システムを作成するために使用できる。単一の磁気センサは、WCSにおける胴体の方位を決定するために追加できる。角速度センサを使用して方位を決定する代わりに、上記のシステムは、加速度計により同様に補正される方位の選択された自由度で、方位を測定するために、湾曲感知アレイを使用できる。
【0100】
関連する構成において、角速度センサと加速度計は、上述のように、すべての剛体に取り付けることができ、肘や膝のような、方位の主な2自由度のみの接合部を測定するために使用される。臀部や肩のようなより難しい接合部は、方位の3自由度を有し、本明細書の前述した「位相的および移動測定ツール」のような、湾曲感知アレイを備えることができる。湾曲感知アレイの方位の単一自由度は、低角速度の期間中に、場測定センサにより補正できない自由度を供給または補正するために使用できる。湾曲感知アレイによる補正は、角速度に無関係に、随時行うことができる。この構成は、可能な場合はいつでも、センササイズとセンサ数を最小にでき、湾曲感知アレイにおけるエラーの影響は、全データの最小サブセットに対してそれに依存することにより、最小化することができるという利点を有している。追加データは、当然、湾曲感知アレイから使用して、胴体に関しての、肩に対する変位データを提供することなどもできる。
【0101】
当業者には容易に分かるように、本発明はまた、種々の形式での方位データを出力するための出力手段の使用も考慮している。例えば、従来のタイプは、モニターのように、出力を表示する任意の手段を含むが、信号処理ソフトウェア、1つ以上の記憶装置などの使用も考慮できる。
添付された図面を参照して、本発明の概要を上記に説明した。
【図面の簡単な説明】
【0102】
【図1】図1は、局所湾曲の従来技術において知られているファイバー光学センサを示している。
【図2】図2は、局所湾曲および捻れのファイバー光学従来技術センサを示している。
【図3】図3は、MEMs加速度計としての、本発明のカンチレバーセンサの部分的模式図を示している。
【図4】図4は、図3のカンチレバーセンサの上面模式図を示している。
【図5】図5は、MEMS加速度計の直交対を形成する一対のカンチレバーセンサを有する、本発明の代替実施の形態の上面模式図を示している。
【図6】図6は、加速度計を有していて且つ湾曲センサを有する湾曲可能領域により分離されている、2つの剛体を有する、本発明の別の実施の形態を示している。
【図7】図7は、湾曲および捻れが可能であり、非湾曲状態のときに、複数の湾曲センサにより接続される複数の加速度計を備える、柔軟材料の立体を示している。
【図8】図8は、湾曲状態のときの、図7における柔軟材料の立体を示している。
【図9】図9は、図8の2つの加速度感知ユニットの図であり、その間の距離と角度的方位を示している。
【図10】図10は、直交単位ベクトルの2つのセットと、2つの剛体間の方位および位置情報をそれぞれ表現する、その間の距離ベクトルを示している。
【図11】図11は、収縮可能チューブを使用する、垂直方向の測定のための柔軟容器内のセンサアレイを示している。
【図12】図12は、シールディング(絶縁)と捻れ耐性を提供するブレードを示している。
【図13】図13は、外側から締め付けられた柔軟容器内のセンサアレイを示している。
【図14】図14は、水平方向の測定に使用される柔軟容器内のセンサアレイを示している。
【図15】図15は、表面への整列を提供するように修正されたクランプを示している。
【図16】図16は、リボン状柔軟基板上のセンサアレイを示している。
【図17】図17は、楕円形保護ホースにおける、図16のリボンを示している。
【図18】図18は、帆船で使用される本発明を示している。
【図19】図19は、端点測定への適用として使用される本発明を示している。
【技術分野】
【0001】
本発明は、測定用のセンサアレイ(配列)に関する。より特別には、本発明は、対象物および経路の形状および加速度を感知する方法および装置に関する。
【背景技術】
【0002】
対象物の形状は、対象物に沿う、または対象物を通る1つ以上の経路により記述(又は表現)でき、経路は、経路に沿う定義された間隔で配置された点と、点を結び、既知の方位を有する線を含む。例えば、経路に沿う点における表面の法線を定義するように、各点に位置する表面または剛性立体の方位を定義することが有効な場合がある。
【0003】
本発明は、制約された幾何学的形状のシステム(装置)内において、較正された方法で場の強度を感知することに基づく経路測定を教示する。追加的な教示は、本発明を使用して、慣性または他のセンサにより行われる経路測定を改善することに関する。
【0004】
地質学および地球科学の分野では、穿孔の経路を、傾斜センサを使用して測定することがよく知られている。典型的には、傾斜センサは、チューブの形状をしており、重力場に関する傾斜の2自由度(DOF)を感知するように配置された、電解質、抵抗性、容量性、「ゼロ変位」、または微細機械加工されたシリコン重力センサを含む。通常は、2自由度は直交しており、傾斜のx成分およびy成分と称される。傾斜センサを穿孔の中に降下させて、ある間隔で傾斜データを取得できる。または、いくつかの傾斜センサを穿孔の中で上下に配置して、既知の位置での傾斜の変化を検出するために使用できる。穿孔の中に降下させた加速度計を使用して、s波とp波を含む、地震の振動を測定することも知られている。s波は主に地球表面に平行な加速度を生成する。また、磁気センサを使用して、穿孔中のセンサを含めて、地球の磁場におけるセンサの方位を決定することも知られている。慣性手段により、方位を測定し、角速度の時間積分から、角度位置を推定することも知られている。
【0005】
穿孔に加えて、上記の方法は、橋、建物、鉱山立坑のような構造物と、地面または土塁に取り付けられた、または埋め込まれたセンサに適用される。
【0006】
上記の方法の欠点は、経路に沿って3D形状を測定する一般化された方法を可能にする、固有の幾何学的制約のある較正されたアレイ(又は、センサアレイ)がないということである。更なる欠点は、広い動的条件の範囲内で、形状をリアルタイムには測定できないということ、または形状の急激な変化を測定できないということ、または形状と振動を同時には測定できないということである。
【0007】
更なる欠点は、センサを保持し、センサを水または機械的力から保護するための、較正され、変形可能、携帯可能な基板がないことである。更なる欠点は、傾斜センサが、較正された構造または捩れのない構造内に配置されないために、重力ベクトルについての方位の磁気または慣性測定が必要になり、より多くのセンサが必要であることであり、または特別な穿孔ケーシングが必要であるということである。現在の傾斜センサ技術のほとんどは、地震の間のs波のような動的加速度を測定しない。
【0008】
湾曲感知および湾曲/捻り感知アレイ(又は、センサアレイ)を使用して、穿孔、建物、人間、計器、および地質構造の動的および静的形状を測定することも知られている。例としては、1994年6月14日に出願された、デンマークのL.A.による米国特許第5,321,257号の「光導体の一部上に形成された光放射表面を含むファイバー光学的湾曲および位置センサ」や、1997年5月27日に出願された、デンマークのL.A.による米国特許第5,633,494号の「選択された曲面光放射表面を有するファイバー光学的湾曲および位置センサ」や、1997年10月22日に出願された、デンマークのL.A.による欧州特許第EP 0 702 780号の「ファイバー光学的湾曲および位置センサ」や、2000年10月3日に出願された、デンマークのL.A.による米国特許第6,127,672号の「位相的および移動測定ツール」や、デンマークのL.A.による米国特許第6,563,107号の「位相的および移動測定ツール(II)」がある。このタイプのアレイは、本明細書においては、「湾曲感知アレイ」と称することにする。
【0009】
デンマークの特許第’672号においては、経路を3Dでマッッピングをするために使用できる2自由度湾曲感知アレイが記載されている。捩れを3番目の自由度として追加することにより(デンマークのL.A.による特許第’107号参照)、アレイ内のセンサは、接合部において回転が可能になり、または長軸に沿って連続的に回転が可能になる。デンマークのL.A.による特許第’107号は、表面の要素間の角度を測定するために、湾曲センサを使用する表面マッピングアレイを記載している。これらのセンサアレイは、湾曲センサを使用して、変形可能な表面に沿って角度を測定する。センサは修正光学ファイバーであることもよくある。更に、これらの参考文献において教示されるセンサは、柔軟基板上に位置、または搭載される。
【0010】
2自由度湾曲感知アレイまたは3自由度湾曲/捩れ感知アレイの、最も一般的な形態における欠点は、穿孔測定を含める多数の適用において遭遇する、小さな角度を正確に測定できないということである。それらは、短時間の間は小さな角度を解像することができるが、ドリフトにより、長期の測定には問題となる不正確さが引き起こされる。この不正確さは、強固な部材間の2自由度および3自由度結合を使用し、結合の自由度を高精度のエンコーダーにより測定することにより克服できる。しかし、これには多大なコストがかかり、その複雑さのため、変形の長期にわたる測定に使用される可能性は少ない。
【発明の開示】
【0011】
我々はここで、低コストで場に設置するために最適化された単一のシステム(装置)において、加速度と変形の静的および動的形状の両者の正確な測定を可能にする、センサの較正された組合せと、測定と較正方法を開示する。場内の角度を測定して微分をすれば、従来技術の方法の精度を大幅に改善できることが示される。更に、測定、シールディング、およびシーリング機能を組み合わせるパッケージ化技術も開示され、低コストの、携帯可能な集積測定ツールが得られる。
【0012】
デンマークの特許第’672号とデンマークの特許第’107号においては、表面は、表面の要素間の角度関係を知ることにより、6自由度における基準表面に関して測定される。「世界」座標系(WCS)における要素の絶対角度は直接には測定されない。それらは、湾曲センサにより測定される角度関係、または要素間の「局所」角度を積分することにより計算される。例えば、ヒンジにより接続され、すべて同一垂直面において湾曲しているロッドは、10、20、−10、および30度の局所ヒンジ角度を有する可能性がある。世界座標系において水平な基準ロッドに関して、ロッド間のWCS角度は10、30、20、および50度であり、経路に沿って局所角度を積分(加算)することにより得られる。ロッドの長さが分かっていて、それらのWCS角度が決定されているときは、ロッド系の経路は完全に決定される。ここにおいて、我々は、WCSまたは「絶対」という用語を、関心対象の領域内において不動の座標系において測定された角度に言及するときに使用する。そのような座標系は、地球の座標系である必要はなく、地球の座標系を含むことができ、例えば、それを太陽または任意の基準位置に結び付けてもよい。更に、我々は、「局所角度」または「物体間方位」という用語をここでは、1つの剛体と他の剛体間の角度関係を示すために互換的に使用する。一般的に、2つの剛体間の角度関係(つまり、「局所角度」または「物体間方位」)は、オイラー角(ロール、ピッチ、ヨー)を含む、標準数学的手段によるか、方位マトリックスまたは変換、または四元数により記述できる。2つの剛体間の湾曲および捩れは、局所角度または物体間方位であり、オイラー角として考えられるということも分かる。
【0013】
ロッド間の接続が、多軸湾曲および捩れのような追加的自由度を可能にするときは、ロッド間には2または3角度的自由度があり、積分は3D数学を必要とする。3D空間曲線の数学は、使用可能であり、デンマークの特許第’672号とデンマークの特許第’107号に記載されている。ロッドの単なる集積ではない、変形可能表面または立体は、角度関係が測定可能で、表面上のセンサの位置が分かっていれば、この方法で測定できる。測定は、任意の角度誤差の位置を越えて計算された表面のすべての部分に対して、重大な誤差の影響を受け易い。更に、センサにおけるドリフトは、形状の不正確さにつながる可能性があり、その不正確さは、表面を前に測定捕捉された姿勢に戻し、オフセットを除去して測定された形状を、前記測定捕捉姿勢の形状に復元することにより補正しなければならない。しかし、測定は、光ファイバーの非常に薄いアレイを使用して、急速に変化する形状に対して、毎秒10,000フレームのような、非常な高速度で行うことができるので有効である。
【0014】
静的形状に沿う間隔での方位測定に対しては、一定または「DC」加速度までの範囲の周波数応答を有する加速度計を使用して、出力が、約9.8m/s/sの一定の加速度を有する重力場に応答するようにすることが可能である。シリコンを微細機械加工することにより製造される、正確で、低コストな、超小型機器(MEMSまたは微細機械加工電子機械センサ(MicroMachined ElectroMechanical Sensors))が、単軸または2軸形態において利用できる。例としては、Analog Devices Inc.のADXL311集積回路があり、DCから数千ヘルツまでの加速度に対する応答を有する。2軸MEMS機器は、小角度傾斜を解像でき、何年にもわたる高精度と、広い温度範囲を維持することができる。これらのアレイ(即ち、センサアレイ)を変形可能表面上に設置すると、取付け位置のWCS角度を表現する傾斜信号のアレイを生成できる。位置間の距離が分かっていれば、経路、表面、または立体形状を高精度に決定できる。局所角度の積分に基づく形状測定とは違い、直接測定WCS角度に基づく形状測定は、累積誤差を生じることはなく、はるかに正確であり得る。MEMSの代替としては、電解傾斜センサ、容量性傾斜センサ、誘導性傾斜センサ、および、質量を測定フレームの中心に保ち、それを行うために必要な力を決定するゼロ変位加速度計が含まれる。しかし、すべての従来技術の傾斜感知方法の不都合点は、測定は、形状が変化していないときに行わなければならず、センサは、複数自由度測定が可能なセンサの較正されたアレイを形成するための機械的移動が制約された基板上には搭載されないということである。
【0015】
MEMS技術により製造された角速度センサも利用できる。そのようなセンサは、振動構造を使用して、基準慣性フレーム内の角度的移動に起因するコリオリ力を感知する。1つの例としては、Analog Devices Inc.のADXRS401 Angular Rate Sensor(角速度センサ)がある。角速度の単一時間積分は、開始角に関する角度的位置を生成する。そのような単一積分の精度は、積分定数の数がより少ないので、位置を生成する加速度の二重積分より優っている。
【0016】
上記の実施の形態において、剛体の方位または速度の2自由度の測定は、少なくとも2つのセンサを剛体に取り付けることを必要とする。更に、上記に実施の形態においては、剛体に取り付けられたセンサの最大感度軸は、整列されてはならない(つまり、それらは平行であることはできない)。剛体上のセンサは、剛体のすべての部分は、位置に無関係に同じ方位を有するので、同じ位置にあっても、なくてもよい。最適には、センサは、お互いに関して90度の方位を有するべきである。最適な結果を得るためには、剛体に取り付けられる第3センサは、第1および第2センサに直交すべきである。
【0017】
従来技術の傾斜感知は、傾斜センサを、WCSに関して既知の方位角に保持するための溝を有する特別な穿孔ケーシングを必要とした。傾斜センサを穿孔内に降下させ、ケーシング内において溝により一定の方位角回転に維持され、穿孔ケーシングの形状を推定するために、間隔をおいて表示値が読み込まれる。捩れないように制約された傾斜センサの較正アレイは、溝付き穿孔ケーシングなしで使用でき、間隔をおいて降下させる必要はない。そのような較正アレイに対する方法と装置を本明細書で説明する。
【0018】
帆船レースにおいては、帆の形状を最適にして、所与の風および海の条件において最大速度を得ることができることは望ましいことであり、そのため、帆形状を測定して記録することは望ましい。これは、以前には、帆上の光学目標を、甲板またはマストから撮像する試みによりなされていた。問題は、明るい日光と、較正の難しさ、および妨害する水滴である。本明細書において、帆形状、マストの捩れ、および帆桁の角度を、帆、マスト、および帆桁を含む基板上に搭載され、較正された加速度計を使用して測定する方法を説明する。これらの基板の形状と方位の三次元的測定は、基板が2自由度に制約され、センサが、搭載、較正、および計算方法においてここでの教示に準拠しているので、加速度計のみで行える。
【0019】
穿孔および帆形状測定に使用される方法は、センサのアレイが、自由度と幾何学的形状の範囲に関して、本発明の教示に準拠している限り、幾何学的形状の広いクラス(種類)の測定に一般化できる。従って、我々は、場センサをどのように使用して、不安定な傾斜を横切るほぼ水平な経路を含む非垂直経路の形状、椅子の座部および背もたれの形状を測定するかを示し、また、人間および他の形状の測定を、本発明の教示を含めることによりいかにして改善するかを示す。
【0020】
アレイが、広範囲の周波数応答を有するMEMs加速度センサから形成されると、センサは、重力のような静的加速度場に応答し、また、地震の振動のような急速に変化する場にも応答する。電子機器とソフトウェアを調整して、総合(全ての)信号の長期平均を表現する出力データ(緩速データ)、および急速に変化する成分のみを表現する他の出力データ(急速データ)を提供することができる。緩速データは、重力に対する応答を表現し、急速データは、重力場内のアレイの振動または他の急激な動きに対する応答を表現している。緩速データは、データの多数のフレームを平均し、それ以外は、標準フィルタ処理技術を使用して、急激に変化する信号を排除することにより得られる。急速データは、フィルタ処理されていない総合(全ての)データから緩速データを減算することにより得られる。緩速および急速データを得る従来技術の方法はよく知られている。急速データが、フィルタにおいて時間についての積分でゼロになる場合は、平均形状を表現する正確な緩速データが得られる。平均形状が不変、または非常に緩速にしか変化しない場合は、急速データは、アレイ内の各センサにおいて存在する振動を表現する。従って、アレイを使用して、WCS傾斜角度(緩速データ)から静的形状を得ることができ、一方、急速データは、各センサにおいてアレイに加えられる振動を定義するために使用される。
【0021】
急速に変化する形状を有することが可能であり、それにより、加速度は、アレイの要素の動きが原因となり、同時に重力場に関しての方位における変化(傾斜変化)が原因となる。全体的な振動場もあってもよい。これらの場合は、形状と振動は、加速度のみに基づいては、別々の出力データセットに分離できない。本発明の実施の形態において、角速度を測定するセンサは、これらの動的変化の際に専用に使用され、角速度の単一な時間積分を必要とする変化する形状を決定する。角速度とWCS角度センサの両者からの信号を使用して、静的形状から動的形状への遷移が起きたことを決定することもできる。最新の既知の静的形状は、最適開始形状を有する動的形状測定を開始するために使用できる。
【0022】
加速度センサのみが存在するときは(角速度センサなし)、静的および動的形状は、一般的には、動的形状が変化する間は、知ることができない。しかし、本発明は、場が時間的に変化しても、均一な加速度場が存在する場合は、加速度計のみで、有効な動的形状を提供する。このように、均一加速度場により、我々は、空間的に均一な加速度場を意味する。例としては、空間的に均一な水平方向の地震の振動を受けている均一岩床における穿孔内のセンサの垂直アレイがある。この場合、傾斜センサのすべては、振動からの同じ加速度と、重力からの一定の加速度を受け、それにより、ここで説明するように、その事象の間に、アレイから静的形状情報を抽出することができる。
【0023】
本発明の1つの実施の形態において、形状システム(装置)が提供され、システムは、間隔をおいて配置された2つ以上の剛体のアレイであって、隣接する剛体は、物体間方位の少なくとも2自由度を有し、組み合わされた方位と配置間隔値に対して、システムに操作可能に関連するアレイと、剛体と操作可能に関連する場測定センサのアレイであって、剛体はそれぞれ、お互いに非平行な方位を有していて且つ予め定義された基準に対して、剛体の絶対方位に関連する入力データを受信するように適合された、センサのアレイの内の少なくとも2つのセンサを有するアレイと、システムの形状特性の2自由度に関するデータを、入力データから決定し、システムの形状特性の2自由度を定義する出力信号を生成する手段と、出力信号を表示、送信、または記憶する出力手段と、を具備する。
【0024】
望ましくは、センサは、柔軟、または非柔軟対象物に搭載でき、対象物の形状を測定するように適合され、場測定センサは、加速度計であり、重力ベクトルに関しての物体間方位の自由度を有しておらず、システムは、場強度の所定の分布を有する場において利用されるように適合され、場測定センサは場内において、測定可能な方位数を超えない数の自由度で、且つ測定信号に何らの変化ももたらさない方位における変化を除く測定範囲の制約内で、方位に応答し、場測定センサは、磁気計であり、磁気ベクトルに関しての物体間方位の自由度を有していない。
【0025】
上記の実施の形態において、物体間方位の最大3自由度を、場の基準なしで、物体間方位を測定する非場測定センサから決定でき、非場測定センサは角速度センサであり、非場測定センサは、少なくとも1つの湾曲感知アレイを含み、システムは、少なくとも1自由度における角速度が、少なくとも1自由度における場測定に最小限の影響を与えるときに、同一剛体に操作可能に関連する非場測定方位センサからの方位データの少なくとも1自由度の精度を向上するために使用され、湾曲感知アレイは、同一剛体に操作可能に関連する非場測定センサからの方位データの少なくとも1自由度の精度を向上すると更に望ましい。
【0026】
更に、センサは、配置間隔値と組み合わされた物体間方位に関連する出力形状データを生成でき、形状特性は、曲線、表面、および立体から構成されるグループから選択されたいずれか1つ以上であり、システムは、最小捩れの影響を受け易く、システムは、湾曲の1自由度の影響を受け易いと望ましい。
【0027】
本発明の別の実施の形態において、方位付けられた場内に幾何学的形状を有する柔軟基板が提供され、基板は、柔軟基板に操作可能に関連する2つ以上の予め定義された非同一センサ位置を有し、基板は2自由度で湾曲でき、前記位置のそれぞれにおける少なくとも1対のセンサであって、少なくとも1対のセンサは、前記位置に操作可能に関連し、そこにおいてお互いに対して非平行方位に位置し、センサは、場の方向の周りの回転運動は除く、定義された移動範囲内の位置のそれぞれの、それぞれの方位を測定するように適合され、センサは、幾何学的形状を示す2つ以上のセンサ位置のそれぞれにおいて、少なくとも1対のセンサの測定された方位に対応して、出力信号を生成でき、センサは、幾何学的形状情報出力信号を表示、送信、または記憶するための手段に操作可能に関連する。
【0028】
好ましくは、各位置におけるセンサは、2軸または3軸加速度計であって、加速度計は振動および形状データを提供し、加速度計は、世界座標系における傾斜を感知し、振動加速度データと、一定重力加速度データを提供し、実質的に垂直方位に搭載されると、柔軟基板は最小限に捩れ、柔軟基板は、1自由度においてのみ湾曲し、実質的に水平方位に搭載されると、柔軟基板は、1自由度においてのみ湾曲し、1自由度においてのみ捩れる。
【0029】
少なくとも1対のセンサは、測定用に、曲線と表面上、および立体内の場に設置するために較正でき、曲線、表面、および立体は、地盤工学および構造土木工学システムであると更に好ましい。
【0030】
更に、上記の実施の形態において、加速度計は、柔軟チューブにより端部において接続された剛性で、実質的に垂直なパイプ内に搭載され、加速度計は、2自由度の傾斜と、垂直軸に対するパイプの長軸の移動に関連する加速度データを提供し、加速度計は、柔軟チューブにより接続された剛性で、実質的に水平なパイプ内に搭載され、実質的な水平な表面との整列のための整列表面を備え、加速度計は、2自由度の傾斜と、垂直軸に対する実質的に水平なパイプの実質的に水平な軸の移動に関連する加速度データを提供し、少なくとも1対のセンサは、立体内に曲線を描く、実質的な垂直または水平な湾曲内に配置され、各曲線からのデータは、共通収集点に送られ、立体の静的および動的形状についての出力データを収集し、出力データは、固定通信線により送信されると望ましい。
【0031】
少なくとも1対のセンサは、地震を測定するように適合され、センサは、地震の前、その間、およびその後に地面の動きを測定し、曲線、表面、および立体は、船の帆、人間および動物の胴体から構成されるグループから選択され、柔軟基板は、センサの対を含む剛性リンクを具備する多関節アームを具備し、センサの対は、回転可能接合部により接続された場測定センサであり、多関節アームは、1自由度において回転可能であって且つ回転センサを備えた、接合部により、固定基準表面に接続され、リンクは、場内で、多関節アームの位置と方位を測定するために、所定の範囲内に場測定センサを維持するように制約され、場測定センサに操作可能に関連する回転センサを更に含み、回転センサは、デジタルシャフトエンコーダーであると更に望ましい。
【0032】
本発明の別の実施の形態において、柔軟基板内に場測定センサを有するセンサアレイが提供され、場測定センサは、基板に対して方位データを提供でき、基板の隣接部分内の信号における差から、動的形状を定義するように適合される。
【0033】
本発明の更に別の実施の形態において、変形の静的および動的形状と加速度の測定方法が提供され、測定用に、ここで上述した基板を利用するステップを具備する。
【0034】
更に、本発明の別の実施の形態において、地盤工学体、構造体、および生体における静的および動的形状を測定するための、本発明のセンサアレイの使用法が提供される。
【0035】
本発明の更に別の実施の形態において、穿孔における使用に適切なセンサシステムが提供され、センサシステムは、柔軟基板に操作可能に関連していて且つ柔軟基板の少なくとも長さの部分に沿って延伸する、複数のセンサを具備するセンサアレイを具備し、センサは、柔軟基板の長さに沿って、離間する複数の場測定センサを具備し、場に対して、柔軟基板の長さに沿う方位データを具備する入力幾何学的形状を測定するように適合されており、場測定センサは、センサが、場の定義された値から逸脱する測定の動的または静的条件を検出すると、柔軟基板の動的および静的データの少なくとも1つを具備する出力方位データを生成し、センサシステムは、センサにより生成された出力データを表示、送信、または記憶する手段を更に具備する。
【0036】
本発明の更に別の実施の形態において、穿孔の特性を決定する方法が提供され、場の特性を決定する個々のセンサに関する入力方位データを取得するための、間隔をおいて配置された複数の場測定センサのセンサアレイを提供するステップと、センサアレイからデータを収集して、場の動的および静的データの少なくとも1つを具備するセンサ出力データを取得し、静的条件または定義された値から逸脱している測定値を反映する出力データを提供するステップと、センサから出力データを生成して、データを、穿孔の特性分析のために表示、送信、または記憶するステップと、を具備する。
【0037】
本発明の更に別の実施の形態において、穿孔の特性を決定する方法が提供され、基準方位に関しての方位を決定する個々のセンサに関する入力角速度データを取得するための、間隔をおいて配置された複数の慣性角速度測定センサのセンサアレイを提供するステップと、センサアレイからデータを収集して、場の動的および静的データの少なくとも1つを具備するセンサ出力データを取得し、静的条件または定義された値から逸脱している測定値を反映する出力データを提供するステップと、センサから出力データを生成して、データを、穿孔の特性分析のために表示、送信、または記憶するステップと、を具備する。
【0038】
更に、本発明の別の実施の形態において、お互いに関して移動可能な一対の剛体の位置と方位を決定する方法が提供され、予め定義された間隔でお互いに間隔をおいて配置され、その間を、少なくとも2自由度で移動可能な、少なくとも第1および第2剛体を提供するステップと、第1および第2剛体のそれぞれの上に一対のセンサを位置決めし、各センサは、お互いに操作可能に関連し、お互いに関して非平行方向に位置決めされるステップと、基準方位に関して、剛体の方位の2自由度における差を測定するステップと、第1剛体から第2剛体への、角度における測定された差を定義する出力信号を生成するステップと、測定された差を表示、送信、または記憶するステップと、を具備する。
【0039】
望ましくは、上記の実施の形態において、剛体のそれぞれは、予め定義された線の周りの回転を除く移動範囲を有し、第1および第2剛体は、衛星同士、束縛衛星同士、地球と空間エレベータの部分、束縛遠隔操作車両同士、接続荷船(バージ)同士、船の甲板と帆桁、船の甲板とマストヘッド、地球と超高層ビルのフロア、橋台と橋の路面、トンネル支持リングの隣接部分同士、および飛行機の胴体と翼端の内の1つ以上から選択され、少なくとも一対のセンサは、単軸、2軸、または3軸加速度計であり、方位における変化率が、低率とまったくない(ゼロ)状態の間で起きるときは、自由度において方位を測定するセンサの別のセットからのデータを補正するステップを更に具備する。
【0040】
望ましくは、上記の実施の形態において、補正されるセンサのセットは、角速度センサを具備する。
【0041】
望ましくは、上記の実施の形態において、補正されるセンサのセットは、角速度センサを具備し、角速度センサにより感知された少なくとも1自由度からのデータを補正するように適合された少なくとも1つの湾曲感知アレイが追加される。
【発明を実施するための最良の形態】
【0042】
図1は、デンマークの特許第’257号に詳細が記載されている、湾曲を感知可能なファイバー光学センサを示している。センサは、好ましくは、湾曲が感知される全長に沿って、損失ゾーン2を介して、一方の側において光を失うように処理されたファイバー1を具備する。光学的設計は、湾曲が、ファイバーの処理された部分に沿って積分されるようになっている。ファイバーを介して送信される光学強度は、経路に無関係に、処理された領域の端部間の正味の角度的変位に従って変調される。センサを、湾曲可能基板3に取り付けて、基板の湾曲を感知するようにもできる。
【0043】
図2は、図1の湾曲感知方法の拡大図を示しており、デンマークの特許第’672号に詳細が説明されている。光ファイバー4は、示されている波形のほぼ全長である感知領域において、基板に沿って波形状にされている。基板の長軸に対して約45度方位のファイバー5の部分上では、ファイバーは湾曲を感知するように処理されており、この場合は、この湾曲は、基板6の湾曲および捩れ成分を含む。基板の反対側の第2ファイバーは、逆の方法で波形状にされており、それにより、その約45度の部分は、第1ファイバーと共に、ほぼX形状を形成する。デンマークの特許第’672号においては、湾曲と捩れを、別々のデータとして一対のセンサから抽出する方法が記載されている。湾曲と捩れ感知基板を使用して、2つの剛体間の2自由度の湾曲を感知できる。ファイバー光学「ロープ」を、デンマークの特許第’107号に記載された方法を使用して、剛体間に接続することもできる。ロープは、2自由度における湾曲を感知するように、または合計3自由度に対する捩れを感知するように処理できる。2つの剛体を、それに制限されるわけではないが、導電ゴム、ポテンショメーター、回転式エンコーダー、角度計、およびxyアレイ上に入射する光ビームを含む他の湾曲感知技術を使用して接続することもできる。
【0044】
一般的に、剛体間の角度を感知する上記の方法はすべて、局所角度を感知する手段であり、局所角度は、用途に依存して、1自由度湾曲、2自由度湾曲、2自由度湾曲と捩れ、または捩れのみを含む種々の自由度において感知できる。これらすべてに全体として言及するために、我々は、湾曲と捩れの組合せ、またはそれぞれを単独に示すために「湾曲」という用語を使用する。
【0045】
WCS角度は、前述した一般的説明において触れたMEMs加速度計により感知できる。MEMsセンサは、半導体集積回路技術を使用して、シリコン内で微細機械加工したものである。図3は、MEMs加速度計の一般的物理原理を示す模式図である。実際の構成はこの記述とは異なるが、原理は同じである。導電性の、湾曲可能カンチレバー(片持ち梁)7が、図において、信号がそこに存在することを示すために「S」のマークが付けられている基準フレーム8に固定される。基準フレームは、センサのケース(図示せず)に機械的に取り付けられるが、導電性があり、カンチレバー上に存在する電荷を搬送する。カンチレバーの近くの、反対に帯電された2つのプレート9と10(それぞれ、「−」と「+」のマークが付けられている)間の容量場は、カンチレバーの動きにより非平衡であり、1つのプレートまたは他方に近接していることを示す、Sにおけるポテンシャルという結果になる。カンチレバーは、矢印12に示されるような重力場に起因する、またはセンサのケースの変化する速度に起因する、双方向矢印11により示されている円弧に沿う加速度により湾曲される。カンチレバーが、図示のように垂直の場合は、出力信号は、中間レベルである。カンチレバーが+プレートに接近するように傾斜すると、信号は増大する。カンチレバーが他方に傾斜すると、信号は減少する。重力場における出力sは
s=gain(ゲイン)*g*sinθ [方程式A]
であり、ここにおいてgain(ゲイン)は較正定数であり、典型的には0.0034であり、カンチレバーの質量、材料、および寸法と、回路の詳細に依存し、gは重力加速度(典型的には、9.8m/秒/秒)であり、θは垂直方向に対するラジアンによる角度である。
【0046】
図4は、同じMEMs加速度計の、上方から見た模式図を示している。
【0047】
図5は、2自由度における傾斜と角速度を感知するために、直交方向に配置された2つの模式的加速度センサの上面図を示している。両者のセンサは、典型的には、1辺が数ミリメートルの小さな表面搭載可能なケースである、同じケース15内にある。
【0048】
図3に示されているようなカンチレバーセンサは、それが垂直のとき(重力場12に整列しているとき)に、角度における変化を最大に感知可能である。カンチレバーセンサは、重力場に直交するように方位付けられたときに最大出力(正または負)を有するが、この条件では、角度についての変化は最小限となる。両者の効果は、ゼロクロッシングの近くでは急激であるが、極大値または極小値の近くでは低勾配である正弦関数の形状の結果である。
【0049】
垂直方向からの正または負の変化は、それらが中間の垂直状態から、それぞれ信号を増大または減少するので、カンチレバー加速度計により区別できるが、垂直方向から90度を越える角度は、垂直方向から90度未満の角度と区別できない。従って、直交する一対のセンサによっても、「上側が下を向く状態」は、「右側が上を向く状態」から区別されない。しかし、第3の直交加速度計が追加されて三つ組構成センサが形成されると、この曖昧さは解決される。
【0050】
3軸加速度計の最も一般的な形式は、直交軸に沿って搭載された3つの加速度計を具備する。それぞれは、その軸に沿う重力の場強度を報告する。加速度計の基準フレームに関する重力ベクトルを計算するために、3つの数を使用できる。加速度計はまた慣性センサなので、3軸加速度計はまた、その3軸に沿う非重力加速度も報告する。
【0051】
場測定センサの別の例は磁気計であり、磁場、通常は地球の磁場の強度を、1つ以上の軸に沿って測定する。3軸磁気計は、3つの直交する軸に沿って場の強度を測定し、磁気計の基準フレームに関する磁気ベクトルの計算が可能になる。
【0052】
純粋な慣性センサの例は、角速度センサである。3軸角速度センサは、その基準フレームに関する、3つの直交する軸に沿って、時間に関する方位の変化を測定する。
【0053】
柔軟体内の2つの剛体16と17に、加速度計、角速度センサ、および磁気計を取り付けてWCS角度を感知することができる。これは図6に示されており、曲線20は、湾曲および/または捩れを可能にする機械的接続を表現し、長方形18と19は、加速度計(単独、二つ組構成、または三つ組構成)を表現しており、オプションで角速度センサおよび/または磁気計を追加できる。
【0054】
剛体間の3D曲線20は、湾曲センサが直線状のときの、曲がっていない長さの合計長さを有するポリラインとしてモデル化できる。平面的な湾曲のみが存在するときは、正味の湾曲は、内挿法によりポリラインに沿って均一に分布され、円弧を形成する。湾曲と捩れが存在するときは、それらはポリラインに沿って均一に分布され、螺旋の一部を形成する。または、湾曲と捩れを分布させるために、スプラインまたは他の内挿関数を使用できる。
【0055】
図7は、ゴム製の直方体のような、変形可能な立体21内の、局所およびWCSセンサのより一般的な配置を示している。局所センサ23は、感知される自由度により要求される数と位置のWCSセンサ22間で延伸できるが、本特許の主題ではない。図において、これらのセンサのいくつかは、図を簡略にするために省略されている。WCSセンサは、その間に湾曲可能な材料を伴う小さな剛体としてモデル化できる。立体の湾曲と捩れは、局所およびWCS角度の変化として測定される。図8は、変形状態の例における立体を示している。WCSセンサは傾斜され、その間の経路は曲げられ、および/または捻られる。変形した立体の形状は、「経路計算」によりモデル化できる。ポリラインは、WCSセンサを接続する曲線に沿って形成される。穿孔内の、湾曲可能要素により接続されたセンサストリングは、まさに上述した一般的な立体センサのサブセット(小集団)である。伸張と圧縮が重要な場合は、圧縮および伸張センサを追加することによりそのいずれも感知でき、または、弾性率のような、材料の物理的特性が分かっている場合は計算できる。
【0056】
図9は、立体内の2つのWCSセンサ22を示しており、その間には、曲線経路23がある。WCSセンサを含む2つの剛体間の角度は、角度26で示されている。一般的に、WCSセンサのそれぞれは、WCSにおいて3自由度方位を有する剛体であり、方位間の差は、ロール、ピッチ、およびヨー値を使用して記述される。しかし、ロール、ピッチ、およびヨーは不確定な極条件に影響を受け易いので、図10に示すように、方位ベクトルを使用する方がより明確になる。各剛体は、3つの直交単位方位ベクトル28、29、および30のセット27により記述できる。剛体中心間の3D変位は、3D変位ベクトル31により、または内挿法を使用すれば、複数の3D変位ベクトルから構成されるポリラインにより記述できる。立体における各WCS剛体に対するそのような測定値を収集することにより、立体の形状を完全に記述できる。立体内の各剛体位置において、位置と方位は知られており、典型的には、合計の6自由度に対しては、WCSは、x、y、z変位およびrx、ry、およびrz方位として表わされる。rx、ry、およびrzはロール、ピッチ、およびヨーとして、または単位方位ベクトルの三つ組として表現できる(各三つ組は、9個の数を含み、そのうち3個は余分であるが、この9個で3自由度を表現している)。
【0057】
すべての自由度は、関心対象の形状に対して必要でなければ、そのすべてが、すべてのセンサ位置で感知される必要はない。従って、捻れが起きない機械的システムは、捻れセンサを必要とせず、または、別のシステムは、各局所角度センサ位置において湾曲の単一自由度のみを必要とすることもある。しばしば、地球の磁場における方位は知る必要はなく、または必要であっても、WCS内で形状の方位を確定するためには、非磁気的手段により測定される形状に沿う1点における単一の磁気センサ三つ組で十分なこともある。
【0058】
静的形状は、各剛体の局所角度変化を見出すことにより、WCS情報のみから決定できる。加速度センサが、経路に沿う、異なる点において、静的形状を決定するために使用される場合は、下記の条件が存在しなければならない。
1) 経路における各リンクは、その先行するリンクに関して、1つまたは2つの既知の回転角自由度のみを有するように制約されなければならない。
2) 如何なる回転角自由度も、純粋に重力ベクトルの周りで存在することはできない(つまり、水平面における回転は容認されない)。
3) 各感知位置に存在する動的加速度は、重力の大きさと比較して無視できるか、平均化によりフィルタ処理できるか、または経路に沿って均一(つまり、共通モード)のいずれかでなければならない。
【0059】
2つの隣接する剛体における基準座標フレームがRnおよびRn+1の場合、そして、Rn+1の方位が、局所xnおよびyn軸(この順番)の周りの回転で表現できると仮定すると、Rnは、下記のマトリックス方程式によりRn+1に関連付けられる。
Rn=[1 0 0][cos(ryn) 0 sin(ryn)]
[0 cos(rxn) −sin(rxn)]*[0 1 0]*
Rn+1
[0 sin(rxn) cos(rxn)][−sin(ryn) 0 cos(ryn)]
=[cos(ryn) 0 sin(ryn)]
[sin(rxn)sin(ryn) cos(rxn) −sin(rxn)cos(ryn)]*Rn+1
[−cos(rxn)sin(rxn) cos(rxn)*cos(ryn)]
[方程式1]
ここでrxnは局所xn軸の周りの回転であり、rynは、RnをRn+1と同一直線状にする位置「n」における局所yn軸の周りの回転である。各剛体の局所角度rxnおよびrynは、上記に定義したマトリックス関係を使用して、連続する剛体の加速度ベクトルを比較することにより計算できる。重力による加速度場は、測定されている経路に沿って均一と仮定されるので、局所加速度ベクトルanおよびan+1(nおよびn+1において、加速度計により測定されたもの)は次のように関連付けられる。
an=[cos(ryn) 0 sin(ryn)]*an+1
[sin(rxn)sin(ryn) cos(rxn) −sin(rxn)cos(ryn)]
[−cos(rxn)sin(rxn) sin(rxn)cos(rxn)*cos(ryn)] [方程式1.1]
【0060】
局所加速度ベクトルは、加速度計の出力から知られる。これにより、次の形式の方程式が得られる。
A=B*cos(ryn)+C*sin(ryn)
ここにおいて、A、B、およびCは、加速度計の出力から決定された既知の値である。特にAは、anのx成分であり、Bは、an+1のx成分であり、Cは、an+1のz成分である。一般的に、この方程式を解くには、数値的解法を使用する必要がある。rynが計算されれば、rxnは、同じ方法で計算できる。
【0061】
局所回転は、典型的には、角度またはマトリックスの形状で記憶され、測定された基板の形状を決定するために組み合わせることができる。
【0062】
上記の計算は、所与の制約(2つまたはそれより少ない自由度)においてのみ実行でき、純粋に重力ベクトルの周りの回転はないということに留意されたい。磁気感知に関しては、回転制限が磁場ベクトルに適用され、重力ベクトルには適用されないことを除いては、同じ規則が適用される。この方法は、既知の場強度分布と、場内の方位に応答する場センサと、測定可能な方位の数を越えない数の自由度と、測定された信号において何らの変化も引き起こさない方位における変化を排除する測定範囲の制約と、を有する任意の場に一般化できる。
【0063】
ここにおいて、本発明は以下のことを可能にすることが示される。
1. 2自由度で変形可能な形状の直接測定に対する場測定センサの使用。
2. 非場測定センサにより得られた方位データの2自由度の補正に対する場測定センサの使用。
3. 非場測定センサにより得られた方位データの第3自由度を補正するための、湾曲感知アレイの追加。
4. 上記のタイプ3のシステムであって、非場測定センサは湾曲感知アレイを具備する。
5. 3自由度の1つが無視できるほど小さいことが知られているときに、3自由度で変形可能な形状の2自由度の直接測定に対する場測定センサの使用。
【0064】
上記の実施の形態の多くにおいて、センサの出力におけるバラツキを生成する形状に対しての測定範囲の制限は、磁場と重力場を含む、多数の場の対称性により必要となる。例えば、地球の重力場は、地球の中心を指しているベクトルにより表現できる。地球の磁場は、磁極を指す、または磁極から離れるベクトルにより、通常は、地球の表面に関するある3D角度において表現できる。加速度センサの軸が、純粋に重力場の周りを回転すると、重力場ベクトルをその中心とする平面または円錐を描き、センサの出力には何らの変化もない。それが三つ組センサの1つである場合は、三つ組センサのいずれかにおける出力には変化がある。同様な議論が、磁気ベクトルの周りの磁気センサの回転についても当てはまる。同様な議論は、束縛されている剛体上に影響を与える水または気体の流れの力に対しても当てはまる。流れの方向に対する角度は、剛体の角度または力の測定値から測定できるが、流れの方向についての角度からは測定できない。同様な議論が、好ましい放射方向を有する非偏光照明場に関する角度の測定に対しても当てはまる。
【0065】
上記の実施の形態の多くにおいて、物体間方位の3自由度の測定を可能にするために非場測定センサの第1セットを含み、少なくとも1自由度における角速度が、その少なくとも1自由度における場測定に最小限に影響する場合に、非場測定センサの第1セットの少なくとも1自由度の精度を改善するために上記の実施の形態の場測定システムを使用し、および非場測定センサの第2セットを含むことは更に望ましく、第2セットは、場測定システムにより測定されない物体間方位のひとつの自由度の精度を改善するための湾曲感知アレイであり、第1セットは、加速度センサを具備する。
【0066】
更に、上記の非場測定センサの第1セットが、少なくとも1つの湾曲感知アレイを具備し、第2セットは含まれない、システムであって、少なくとも1自由度における角速度が、少なくとも1自由度における場測定に最小限に影響する場合、第1セットの少なくとも1自由度のデータは、前記場測定センサにより補正され、方位測定の残りの自由度が、湾曲感知アレイにより提供される、システムを設けることは望ましい。
【0067】
上記の柔軟性および移動範囲の制約に合致するように設計された、較正された構造は、広い範囲の用途において、高い測定能力を発揮する。
【0068】
加速度計に対して記述された上記の方法は、センサを、重力加速度と比較して意味のない程度にしか加速しない、形状における非常に緩速な変化に対しても機能する。
【0069】
より急激な変化に対しては、角速度センサもまた実装されていれば、角速度センサを、急激変化が開始する前の、WCSセンサにより感知された最後の有効な形状からの偏差として形状を計算するために使用できる。この場合は、積分された角速度は、剛体離間距離を満たすポリライン経路を計算するために使用される。
【0070】
WCSセンサが加速度計の場合は、加速度は、その時点での傾斜により変調された静的重力と、地震の振動または、センサが取り付けられる脚部の移動のような、加えられた加速度信号との組合せとして直接得られる。好適な実施の形態においては、加速度は、時間に関してのフィルタ処理なしの合計信号から、時間に関してフィルタ処理された信号を減算したものとして計算される。この加速度信号は、剛体における加速度計により測定された加速度であり、振動場の軸に関して傾斜している可能性もある。例えば、穿孔においては、所与の剛体は、垂直方向から10度の角度にあり、振動は水平方向であり得る。そのような場合は、傾斜が知られているときは、振動の水平成分を求めるために補正を実行できる。MEMS加速度計が、垂直方向に関して角度θだけ傾斜し、加速度aを受けると、その出力は下記のようになる。
s=gain(ゲイン)*g*sinθ+gain(ゲイン)*a*cosθ [方程式2]
【0071】
これは、θが、局所センサにより表わされる経路に沿う計算から知られる場合は、加速度aを求めるために解くことができる。
【0072】
共通の加速度は、ポリライン(ポリラインの第1頂点)に対する基準センサから得られる。例えば、センサストリングが穿孔内にある場合は、最上部センサは、地球の表面に垂直に固定され、計算の開始に対する基準として使用でき、地球の表面に平行なs波全体の加速度を示すためにも使用できる。加速度がすべてのセンサにおいて均一である限りは、動的形状の計算は正確であり、それを実行するために、湾曲または捻れ(局所)センサは必要ない。本発明のこの好適な実施の形態においては、較正されたアレイにおけるセンサのタイプおよび数の削減により、コストが削減される。
【0073】
加速度計技術においてよく知られている二重積分技術を使用して、加速度計信号から動的形状を計算することもできる。各動的加速度信号は、まず速度を求めるために積分され、その位置を求めるために再び積分できる。しかし、各自由度における各剛体の角度が知られていないときは、水平加速度を求める場合は、加速度は、垂直方向に関するカンチレバーの角度の余弦だけ削減される。
【0074】
改善された動的形状測定は、剛体の角速度を積分して角度位置を求めることにより行われる。
【0075】
アレイが、広い周波数応答範囲を有するMEMs加速度センサにより形成されている場合は、センサは、重力のような静加速度場に応答し、また、地震の振動のような急激に変化する場に対しても応答する。電子機器およびソフトウェアを、合計信号(緩速データ)の長期平均を表現する出力データ、および急激に変化する成分(急速データ)のみを表現する出力データを提供するために配置することができる。緩速データは、重力への応答を表現し、急速データは、重力場内のアレイの振動または他の急激な動きを表現する。緩速データは、多数のデータフレームを平均することにより、および標準フィルタ処理技術を使用して、他の急激に変化する信号を排除することにより得られる。急速データは、フィルタ未処理の合計データから、緩速データを減算することで得られる。緩速および急速データを得る従来の技術はよく知られている。フィルタにおいて、急速データの時間に関しての積分がゼロになる場合は、平均形状を表現する正確な緩速データが得られる。平均形状が不変、または非常に緩速にしか変化しない場合は、急速データは、アレイ内の各センサに存在する振動を表現している。従って、アレイを使用して、WCS傾斜角度(緩速データ)から静的形状を得ることができ、一方、急速データを使用して、各センサにおいてアレイに加えられた振動を定義することができる。
【0076】
急激に変化している形状を有することができ、それにより、加速度は、アレイの要素の動きと、同時に、重力場に関する方位の変化(傾斜変化)によることになる。また、全体的な振動場があってもよい。これらの場合は、形状と振動は、加速度だけに基づいては、分離した出力データセットに分離できない。本発明の実施の形態においては、動的変化の際は、角速度を測定するセンサが専用に使用されて、変化する形状を決定し、そのために、角速度の単一時間積分が必要となる。角速度とWCS角度センサ両者からの信号を使用して、静的から動的形状への遷移が起きたことを判断することができる。最終的に知られた形状は、最適な開始形状による、動的形状測定を開始するために使用できる。
【0077】
加速度センサのみが存在する場合は(角速度センサはない)、静的および動的形状は、一般的に、動的形状変化の間は知ることができない。しかし、本発明は、均一な加速度場が存在する場合は、場が時間的に変化しても、加速度計のみで有効な動的形状を提供する。このように、均一な加速度場により、我々は、空間的に均一な加速度場を意味している。例としては、空間的に均一な水平方向の地震の振動を受けている均一な岩床における穿孔内のセンサの垂直アレイである。この場合は、傾斜センサのすべてが、振動から同じ加速度と、重力からの一定の加速度を受けており、従って、静的形状情報をこの事象の間にアレイから抽出することができる。
【0078】
地震に対する穿孔感知および傾斜の監視において、および多数の構造的監視への適用に対しては、剛体内の加速度計のカンチレバーは通常、ほぼ垂直であり、垂直方向から45度以上は動かない。ほとんどの場合、捻れの測定は必要なく、そのため、本発明の好適な実施の形態は、短い柔軟なホースにより接続されたパイプ中における2軸加速度計と、捻れを削減または除去する要素を具備する。捻れが容認されない、または必要ない場合は、システムは、場に設置可能なユニットとして較正でき、また、輸送または格納のために巻いたり畳んだりできる単一の構造として構築できる。捻れを感知しなければならない場合は、剛体間の局所捻れセンサのいずれかが必要となり、または磁気計を追加しなければならない。
【0079】
図11は、捻れを最小化し、センサの数とタイプを最小化するように設計されたアレイの好適な実施の形態の図を示している。2軸加速度計15は、薄壁金属パイプ32内に搭載され、2自由度の傾斜と加速度の感知を含む剛体を形成している。12mm以下の内径を有するパイプは、センサと、連結された配線および回路を保持するには十分な大きさである。パイプはその端部間が、典型的には、その被覆内で45度の限度の湾曲を容認するために十分な距離だけ分離されている。典型的には、間隔は5−10mmである。被覆は、好ましくは、第1層として、一体的接着剤/シーリング剤を有する熱収縮可能チューブである、ぴったりと固定されている柔軟チューブ33の短部セクションを具備する。円形金属ブレード(編み状体)の第2層34は、図12に詳細に示されており、好ましくは熱収縮可能チューブである、柔軟チューブ35の第3層により金属チューブと接触して保持される全体的な電気シールド(絶縁)を提供する。柔軟チューブは、要素に対してシーリング(密封)を提供する。それぞれは、水密端部キャップ(図示せず)を備えることができる。金属ブレードは、被覆により、ほぼ円柱形に維持されているが、接合部における捻れを大幅に削減し、過湾曲に対する保護を提供する。二重柔軟チューブは、水分透過のための2つのバリアを提供する。好適な実施の形態においては、接着剤を使用してブレードを柔軟チューブに取り付けて、容易に湾曲するが、捻れモーメントにはほとんど影響されない複合構造を形成する。
【0080】
図13に示される代替実施の形態においては、パイプ32は、外側から各パイプに金属クランプ37により締め付けられた柔軟ホース36により覆われている。柔軟ホースは、好ましくは、金属またはポリマーブレードを含み、捻れを削減し、強度を与える。金属ブレードは、パイプと接触するホース内に含めることができ、電気シールドを提供する。
【0081】
図11と図13の実施の形態は、角速度センサおよび/または磁気計を含むことができる。
【0082】
アレイが水平、または水平方向から約45度以内でなければならないときは、図11と図13のアレイにおける加速度計は、パイプが水平のとき(角度の変化に対する信号の変化は小さく、正負が確定せず、垂直軸に関しての方位も分からない)は、適切に測定できないので、静的測定のためには、別の配置を使用しなければならない。この場合は、図14に示されているように、加速度計15は、パイプ32が水平のときはそのカンチレバーが垂直になるように搭載されるべきである。外部の取付け具を追加して、取付け具が水平表面上にあるときは、加速度計のカンチレバーが垂直になるように方位付けることもできる。この実施の形態は図15に示されており、クランプ37が、水平表面51を含むように変形されている。多くの場合、このタイプのセンサは平面内で作動できるため、各パイプのWCS角度の単一自由度を測定するためには、単一軸の加速度計のみを備える必要がある。水平センサへの適用は、ビルディング、および埋立地、傾斜地、鉱山、橋、およびトンネルの監視を含む。上記の平坦固定の締付けシステムは、垂直アレイを垂直壁に取り付けるなど、垂直アレイに対しても使用できる。
【0083】
別の実施の形態においては、加速度計を感知リボンに取り付けることができる。感知リボンとロープは、デンマークの特許第’672号とデンマークの特許第’107号に記載されている。リボン38への加速度計の追加は、図16に示されている。X形対象物39は、デンマークの特許第’672号に記載されているような、湾曲/捩れセンサ対を表現しており、ここでは完全に示されているが、それはこの出願の主題ではない。長方形40は、柔軟基板に沿って既知の間隔での単軸、2軸、または3軸加速度計を表わしており、3軸角速度センサを追加して動的形状を決定することも可能である。基板が動いていないときは、加速度計の信号を使用して、WCS方位を高い精度で計算することができる。WCS方位は、局所湾曲と捩れセンサからのデータを「初期状態に戻し」て、それにより、形状が動いているときにその精度を改善できる。角速度センサからの信号は、含まれているならば、形状が実際は静的であることを判定するために使用でき、それにより、静的条件が優勢であるときはいつでも、自動的に初期状態に戻すことを可能にする。角速度センサは、加速度計のいくつかが極の近くにあり、または上下逆さまであるようなときに、加速度計の不確定さを解消するためにも使用できる。磁気計を、重力ベクトルの周りの回転を分析するために追加できるが、多くの場合は、自由度のいくつかが「初期状態に戻る」だけで、精度は大幅に改善されるので、それらを追加する必要はない。
【0084】
デンマークの特許第’672号に記載されているようなリボン形状の基板を、単独の加速度計と共に(局所湾曲および捩れセンサなしで)使用することができ、垂直または水平感知アレイを形成できる。アレイは、図16においてX形状のセンサ対がないもののように見える。加速度計は、単軸、2軸、または3軸加速度計であってよい。リボンが垂直であり、磁気計または角速度センサが使用されないときは、重力ベクトルの周りの捻れは、磁気計または各速度センサなしでは分析できないので、平面的な湾曲を感知するために使用される。リボンが水平の場合は、カンチレバーが垂直な2軸加速度計は、WCS傾斜における差から、湾曲と捩れを決定できる。通常は、局所湾曲および捩れセンサを有するリボンと共に使用される数学は、WCSセンサから導出されたデータと共に使用できる。図17に示されているようにリボン38は、楕円状の断面41を有するホース内に格納でき、楕円の長軸内のそのエッジにおいて支持される。
【0085】
上記の、接続された剛体を使用する測定法においては、測定システムへの入力は、剛体間の接続の機械的な構成により決定される、定義された自由度内のセンサの方位を具備することが分かる。入力に対して計算が行われ、アレイの形状を決定する。形状が出力である。
【0086】
非常に深い穿孔に対しては、合計深度よりも長さの短いアレイを使用することが望ましい。アレイは、既知の量だけ穿孔内を降下され、測定値が取得され、アレイは既知の量だけ更に降下されて、別の測定値が取得される。この工程は、穿孔全体の形状のサンプリングが行われるまで、測定された部分間を随意的に重ねて繰り返すことができる。アレイ内では、捻れの整列は、ソフトウェアにより自動的に使用される較正表から知ることができる。隣接する測定ステーション間の捻れ関係を感知するために、磁気計をアレイの少なくとも1つの部分に取り付けて、地球の磁場内の絶対方位を測定することができる。穿孔の完全な形状は、サンプルを三次元で連結するソフトウェアにより計算できる。
【0087】
図18に示されているような、帆の測定への適用においては、加速度計を水上帆船50の帆に取り付けて、その静的および動的形状を測定して、それにより、帆のデザインまたは張り具合の制御を通して、セーリング性能を改善することができる。この実施の形態においては、加速度計は、好ましくは、三角形の帆47の頂点から、帆の底部におけるほぼ水平な帆桁52に沿う間隔を開けた点に向けて放射状に走る線に沿って搭載される2軸対15である。本発明において記載される他のセンサを、マスト51と帆桁に追加して、その形状と絶対方位を分析することもできる。例えば、磁気計、3軸加速度計、および角速度センサを備える方位センサ53を使用して、磁場を参照し、2垂直自由度におけるマストと帆桁の絶対方位を提供することができる。好ましくは、帆上およびマストと帆桁の多数の部分上で、磁気センサに優先して加速度計15を使用することにより、コストと重量を削減する。帆の上では、加速度計を使用して、帆に沿う前記線のそれぞれの静的および動的形状を計算する。帆が完全には張られていないときは、3D曲面を形成する線48をまとめると、帆の3D形状を描く。方位センサと組み合わせると、形状は、船のロール、ピッチ、およびヨーを説明する絶対3D座標に置き換えることができる。方位センサは、船が転覆して、いくつかのセンサが逆さまになった場合に起こる極を分析し、および他の未知の磁気的進路(heading)による不明確さも解消する。
【0088】
場測定加速度計だけでも、帆船に固有な、幾何学的制約を利用することにより、帆、マスト、および帆桁形状を測定することができる。マストが垂直な場合は、そこに取り付けられた加速度計は、マストの中心線の周りの回転についてのデータを生成しない。同様に、帆桁または帆上の加速度計は、マストの垂直中心線に関しての方位についてのデータも提供しない。しかし、航行中は、帆船のマストは、非垂直であることは回避できない。非垂直マストの上部および底部に搭載された2軸または3軸加速度計は、マストが湾曲しておらず、捻れてもいない場合は、同一の表示値を示す。非垂直マストが捻れていると(例えば、帆の力により)、加速度計は、その個々の軸から異なる信号を生成し、この信号を使用して、捻れの大きさと方向を計算することができる。マストもまた、既知の平面内(例えば、船の前後方向、または左右方向)で湾曲しているときは、個々の軸の表示値を使用して、湾曲の大きさと、捻れの大きさと方向を計算できる。
【0089】
マストは柔軟基板なので、計算の同じ原理が2つ以上のグループで帆上に搭載された多軸センサにも当てはまり、帆は、2自由度(それ自身の平面内では湾曲できない)に制限された柔軟基板である。同様に、帆桁は、ヒンジによりマストに取り付けられた剛体としてモデル化でき、そのデッキの平面における方位角(ヨー)がマストまたはデッキ上の多軸加速度計または帆桁上の別の加速度計から計算できる、柔軟基板である。方程式1と1.1と、それに関連する記述は、計算が、マストが非垂直という条件以外は、地球の表面に関するマストの角度に依存しないということを示しており、従って、マスト、帆、および帆桁の計算は、実際の適用の広い範囲にわたり、船のロール、ピッチ、およびヨーには依存しない。
【0090】
帆形状の測定の実際の例として、帆の弦(帆が静止しているときの、帆に沿うほぼ水平な線)に沿って搭載された2軸または3軸加速度計を考えてみる。この場合、帆は2自由度に湾曲可能であるが、その面内では湾曲できない基板である。弦に沿っては、これらの2自由度は、湾曲と捩れとして考えることができる。従って、弦に沿う帆の方位は、センサの既知の間隔と共に、入力に基づいて弦の3D形状を出力するために使用される、感知アレイへの入力である。所与の弦の上方および下方の他の弦も感知すると、帆表面の3D形状が出力となる。必要な条件は、センサ測定の自由度より多くの基板形状変化の自由度は容認されないということである(詳細は、上記の方程式1と1.1を参照)。
【0091】
帆形状測定に類似する適用は、椅子、自動車のシート形状、またはベッド形状の測定である。椅子の座部および椅子の背もたれのような、ほぼ水平またはほぼ垂直な表面上の既知の位置に分散された加速度計は、それらの表面の形状測定に使用できる。加速度計を、重力ベクトルの2つの主要成分を感知するように配置すべきである。ほぼ水平表面上では、傾斜が測定される。椅子の背もたれの測定は、帆の測定のように、椅子の背もたれが非垂直であり、変形は主に2自由度であることが必要である。非磁気表面上では、磁気計を使用して類似の測定を行うことができる。磁気ベクトルは非垂直であり、従って、垂直表面は測定可能であるが、磁気ベクトルについての測定が必要な幾何学的形状は回避しなければならない。
【0092】
図19に示されている別の例においては、加速度計の対15が、剛体アーム60上に搭載されている。アームは、垂直面内においてのみ回転自在の接合部59に取り付けられている。簡略化のために、2本のアームのみが示されている。アームは、垂直線の周りをベアリング57内で回転自在である、シャフト56に取り付けられている支持体55に取り付けられている。シャフトは、水平面内のシャフトの角度を測定する角度測定センサ(図示せず)に取り付けられている。適切な角度測定センサには、ポテンショメーター、シャフトエンコーダー、およびファイバー光学捻れまたは湾曲センサが含まれる。または、磁気計を使用して、磁場におけるシャフトの角度を測定することもできる。ベアリングは、測定の基準表面を形成する静止表面58に取り付けられる。アームの長さが既知の場合は、加速度計により測定される傾斜角度と、ベアリングの回転角は、滑らかなボールまたはピンのような表面62に沿って走査できる、端部ツール61のx、yおよびz座標を決定するには十分である。走査の結果としてのデータセットは、3次元で表面を表わすために使用できる。垂直面においてのみ回転する代わりに、接合部59を修正して、2自由度での回転を容認するようにして、ベアリングの表示値と組み合わされた加速度計の対の表示値を、端部ツールのx、yおよびz座標ばかりでなく、3次元空間における絶対傾斜を表わすために使用し、端部ツールに対して、6自由度データが利用できるようにすることも可能である。不明確さを回避するために、アームは水平状態を通過することを容認されてはならない、または、3軸加速度計または3軸角速度センサを使用して、上方または下方に向かうアームに関する不明確さを解消することができる。アームの静止姿勢に対しては、高精度なデータが得られ、アームが動いているときは、それよりは精度は落ちるが、依然として有効な精度のデータが得られる。アームのシステムは、表面の走査、または移動物体上の点の位置と方位の追尾に使用できる。例えば、システムは、手術の準備中の患者上の点の座標を測定し、または、患者上の点の位置と方位を追尾して、患者が呼吸をし、またはその位置を変える間に、患者の胸部または他の部位のX線、磁気共鳴、または他の医療画像を安定させるために使用できる。他の適用においては、システムは、プローブの端部またはプローブの一部の位置と方位を追尾するために、内視鏡または他のプローブの一部を形成することもできる。
【0093】
図19のシステムが、点の位置および/方位を追尾するために使用されると、多くの場合、動きは、中心点の周りの小さな動きを含む。例えば、呼吸をしている対象患者は、中心点の周りの小さな動きをし、それにより、測定システムの接合部は、呼吸サイクルの最中に、患者の胸部上の点を描く静止姿勢に対する修正として、わずかな距離のみを動く。これらの場合、動きによる加速度は、静止加速度から区別される繰返しパターンを形成し、それにより、加速度が全体的な共通場を表現しない場合でも、形状と位置の動的測定を可能にする。
【0094】
図11、13、および16のようなアレイ内のパイプは、それらを垂直に保持し、その出力を測定して、垂直を表現する中間電圧を求めることにより較正できる。温度センサがいくつかのパイプまたは全パイプ中に組み込まれると、パイプを、温度の較正因子を導出するために、異なる温度に晒すこともできる。パイプを水平表面上を回転させて、信号の最大および最小値を求めることができ、各パイプは、最大および最小に対応するxおよびy軸を示すようにマークを付けることができる(xとyは二次元においてポリラインを描く直交軸で任意に指定でき、zは、垂直アレイの垂直寸法を記述するために使用される)。パイプが完全なアレイに組み立てられた後、アレイを、第1パイプ内の第1加速度計が最大信号を有するまで、水平表面上を回転させることができる。そして、第1パイプは、x軸を示すようにマークが付けられる。そしてアレイは、第2パイプ中の第1加速度計が最大出力を有するまで回転させることができる。第1パイプのxおよびy出力は、この条件に対して記録される。そして、これを、第1パイプのxおよびy値の表が得られるまで各パイプに対して繰り返す。これらの値は、組み立て後に、その長軸についてのパイプの角度オフセットを計算するために使用できる。値は、各パイプにおけるxとy傾斜センサからのデータを、その軸の周りに、下記の回転補正方程式を使用して回転することにより、これらのオフセットを補正するために使用される。
sx’=sx*cos(roll(ロール))−sy*sin(roll(ロール)) [方程式6]
sy’=sy*cos(roll(ロール))+sx*sin(roll(ロール)) [方程式7]
ここにおいて、sx’とsy’は、補正された値であり、sxは、2軸加速度計のxセンサの出力であり、syは、2軸加速度計のyセンサの出力であり、「roll(ロール)」は、パイプの長軸の周りの角度オフセットである。この処理は、アレイを既知の速度で回転するか、回転中にその回転角を測定し、既知の回転角度において、センサの最大および最小、またはゼロクロッシングを測定することにより自動化できる。アレイが、図14におけるように水平方向で使用される場合は、中間電圧は、パイプを水平表面上で水平に設置し、それらを回転して最大および最小を求め、平均を使用して中間電圧を求める。「roll(ロール)」オフセットは、垂直アレイと同様な方法で求められる。
【0095】
連続するセンサ位置間の捻れの不整列(パイプの長軸の周りの「roll(ロール)」オフセット)は、アレイを直線状、非垂直線に保持することにより決定できる。連続するノード(節点)間のセンサの不整列のすべては、実際には捻れていると仮定することができるので、第n番目のノードで測定された重力加速度ベクトルは、下記のマトリックス方程式により、第n+1番目のセンサ位置により測定された重力ベクトルに関連付けられる。
[axn]=[cos(t) −sin(t) 0]*[axn+1]
[ayn] [sin(t) cos(t) 0] [axn+1]
[azn] [0 −0 0] [axn+1]
ここで、axn、ayn、aznは、第n番目のセンサ位置におけるセンサにより測定された加速度であり、axn+1、ayn+1、azn+1は、第n+1番目のセンサ位置におけるセンサにより測定された加速度であり、tは、第n番目のセンサ位置に関する第n+1番目の捻れの不整列である。
【0096】
tについて解くと、
t=acos((axn*axn+1+ayn*ayn+1)/(axn+12+ayn+12))
または
t=−acos((axn*axn+1+ayn*ayn+1)/(axn+12+ayn+12))
となり、どちらも上記のマトリックス方程式を満たす。
【0097】
上記の較正ステップと、上述の構成および計算方法の結果は、較正されたアレイであり該アレイは、場で携帯可能で、所与の作業に対して、最小の数とタイプを使用して、既知の軸に沿う加速度データを提供し、場において最小限の取付け具で使用できて、静的および動的条件において絶対形状データを提供できる。アレイは、センサから利用できるよりも多い自由度を容認しないという条件を満たす。
【0098】
アレイの好適な実施の形態は、図11、13、14、および17のアレイを含み、センサは、柔軟チューブ内に配置され、通常は、上端のような曲線の一端である基準点から開始する3D曲線上のデータを提供する。土、空気、または水の立体は、上記のアレイのようなアレイにより感知できる。各アレイからの信号は、アレイ内またはアレイ近傍のマイクロプロセッサにより収集できる。より大きな立体的なアレイ内のアレイは、そのすべてのデータを、ワイヤを使用して、またはワイヤレス通信により中心点に送ることができる。
【0099】
別の好適実施の形態は、人間または動物の脚部または胴体部を具備する剛体のそれぞれに搭載された、角速度センサと加速度計を具備する。人間上の剛体の例には、上腕、前腕、手の裏、および指の指節骨がある。剛体の形状は、角速度の時間積分により、既知の開始形状(「初期状態に戻された」形状)からの方位を生成することにより求めることができる。胴体の一部が動いていないときは、または角速度センサからのゼロ信号により示されるように最小限に動く(最小加速度で)ときは、加速度計からの加速度信号を使用して、方位の自由度のいくつかに対して方位を決定することができ(垂直線の周りの方位を含まないもの)、そのため、形状測定の精度を改善することができる。胴体が、既知の「初期状態に戻された」形状へ戻ることは、すべての自由度の再較正を可能にする。この方法は、形状または方位を決定する磁気感知に依存しない、携帯型動き捕捉システムを作成するために使用できる。単一の磁気センサは、WCSにおける胴体の方位を決定するために追加できる。角速度センサを使用して方位を決定する代わりに、上記のシステムは、加速度計により同様に補正される方位の選択された自由度で、方位を測定するために、湾曲感知アレイを使用できる。
【0100】
関連する構成において、角速度センサと加速度計は、上述のように、すべての剛体に取り付けることができ、肘や膝のような、方位の主な2自由度のみの接合部を測定するために使用される。臀部や肩のようなより難しい接合部は、方位の3自由度を有し、本明細書の前述した「位相的および移動測定ツール」のような、湾曲感知アレイを備えることができる。湾曲感知アレイの方位の単一自由度は、低角速度の期間中に、場測定センサにより補正できない自由度を供給または補正するために使用できる。湾曲感知アレイによる補正は、角速度に無関係に、随時行うことができる。この構成は、可能な場合はいつでも、センササイズとセンサ数を最小にでき、湾曲感知アレイにおけるエラーの影響は、全データの最小サブセットに対してそれに依存することにより、最小化することができるという利点を有している。追加データは、当然、湾曲感知アレイから使用して、胴体に関しての、肩に対する変位データを提供することなどもできる。
【0101】
当業者には容易に分かるように、本発明はまた、種々の形式での方位データを出力するための出力手段の使用も考慮している。例えば、従来のタイプは、モニターのように、出力を表示する任意の手段を含むが、信号処理ソフトウェア、1つ以上の記憶装置などの使用も考慮できる。
添付された図面を参照して、本発明の概要を上記に説明した。
【図面の簡単な説明】
【0102】
【図1】図1は、局所湾曲の従来技術において知られているファイバー光学センサを示している。
【図2】図2は、局所湾曲および捻れのファイバー光学従来技術センサを示している。
【図3】図3は、MEMs加速度計としての、本発明のカンチレバーセンサの部分的模式図を示している。
【図4】図4は、図3のカンチレバーセンサの上面模式図を示している。
【図5】図5は、MEMS加速度計の直交対を形成する一対のカンチレバーセンサを有する、本発明の代替実施の形態の上面模式図を示している。
【図6】図6は、加速度計を有していて且つ湾曲センサを有する湾曲可能領域により分離されている、2つの剛体を有する、本発明の別の実施の形態を示している。
【図7】図7は、湾曲および捻れが可能であり、非湾曲状態のときに、複数の湾曲センサにより接続される複数の加速度計を備える、柔軟材料の立体を示している。
【図8】図8は、湾曲状態のときの、図7における柔軟材料の立体を示している。
【図9】図9は、図8の2つの加速度感知ユニットの図であり、その間の距離と角度的方位を示している。
【図10】図10は、直交単位ベクトルの2つのセットと、2つの剛体間の方位および位置情報をそれぞれ表現する、その間の距離ベクトルを示している。
【図11】図11は、収縮可能チューブを使用する、垂直方向の測定のための柔軟容器内のセンサアレイを示している。
【図12】図12は、シールディング(絶縁)と捻れ耐性を提供するブレードを示している。
【図13】図13は、外側から締め付けられた柔軟容器内のセンサアレイを示している。
【図14】図14は、水平方向の測定に使用される柔軟容器内のセンサアレイを示している。
【図15】図15は、表面への整列を提供するように修正されたクランプを示している。
【図16】図16は、リボン状柔軟基板上のセンサアレイを示している。
【図17】図17は、楕円形保護ホースにおける、図16のリボンを示している。
【図18】図18は、帆船で使用される本発明を示している。
【図19】図19は、端点測定への適用として使用される本発明を示している。
【特許請求の範囲】
【請求項1】
形状システムであって、
間隔をおいて配置された2つ以上の剛体のアレイであって、隣接する剛体は、物体間方位の少なくとも2自由度を有し、組み合わされた方位と配置間隔値に対して、前記システムに操作可能に関連するアレイと、
前記剛体に操作可能に関連する場測定センサのアレイであって、前記剛体はそれぞれ、お互いに非平行な方位を有していて且つ予め定義された基準に対して、前記剛体の絶対方位に関連する入力データを受信するように適合された、センサのアレイの内の少なくとも2つのセンサを有するアレイと、
前記システムの形状特性の前記2自由度に関するデータを、前記入力データから決定し、前記システムの前記形状特性の前記2自由度を定義する出力信号を生成する手段と、
前記出力信号を表示、送信、または記憶する出力手段と、を具備するシステム。
【請求項2】
前記センサは対象物に搭載可能であり、前記対象物の形状を測定するように適合されることを特徴とする請求項1に記載のシステム。
【請求項3】
前記場測定センサは加速度計であって、重力ベクトルに関しての前記物体間方位の自由度を有しないことを特徴とする請求項1に記載のシステム。
【請求項4】
前記システムは、場強度の所定の分布を有する場において利用されるように適合され、
前記場測定センサは前記場内において、測定可能な方位数を超えない数の自由度で、且つ測定信号に何らの変化ももたらさない方位における変化を除く測定範囲の制約内で、方位に応答することを特徴とする請求項1に記載のシステム。
【請求項5】
前記場測定センサは磁気計であり、磁気ベクトルに関しての前記物体間方位の自由度を有しないことを特徴とする請求項1に記載のシステム。
【請求項6】
物体間方位の最大3自由度を、場の基準なしで、物体間方位を測定する非場測定センサから決定できることを特徴とする請求項1から4のいずれか1つに記載のシステム。
【請求項7】
前記非場測定センサは、角速度センサであることを特徴とする請求項6に記載のシステム。
【請求項8】
前記非場測定センサは、少なくとも1つの湾曲感知アレイを含むことを特徴とする請求項5に記載のシステム。
【請求項9】
前記システムは、少なくとも1自由度における角速度が、前記少なくとも1自由度における場測定に最小限の影響を与えるときに、前記同一剛体に操作可能に関連する非場測定方位センサからの方位データの少なくとも1自由度の精度を向上するために使用されることを特徴とする請求項1から8のいずれか1つに記載のシステム。
【請求項10】
前記湾曲感知アレイは、前記同一剛体に操作可能に関連する非場測定センサからの方位データの少なくとも1自由度の精度を向上することを特徴とする請求項8または9に記載のシステム。
【請求項11】
前記センサは、前記配置間隔値と組み合わされた前記物体間方位に関連する出力形状データを生成できることを特徴とする請求項1から10のいずれか1つに記載のシステム。
【請求項12】
前記形状特性は、曲線、表面、および立体から構成されるグループから選択されたいずれか1つ以上であることを特徴とする請求項1から11のいずれか1つに記載のシステム。
【請求項13】
前記システムは、最小捻れの影響を受けることを特徴とする請求項1から12のいずれか1つに記載のシステム。
【請求項14】
前記システムは、湾曲の1自由度の影響を受けることを特徴とする請求項1から13のいずれか1つに記載のシステム。
【請求項15】
方位付けられた場内に幾何学的形状を有する柔軟基板であって、前記基板は、前記柔軟基板に操作可能に関連する2つ以上の予め定義された非同一センサ位置を有し、前記基板は2自由度で湾曲でき、
前記位置のそれぞれにおける少なくとも1対のセンサであって、前記少なくとも1対のセンサは、前記センサ位置に操作可能に関連し、そこにおいてお互いに対して非平行方位に位置し、前記センサは、前記場の方向の周りの回転移動を除く、定義された移動範囲内の前記位置のそれぞれの、前記それぞれの方位を測定するように適合され、前記センサは、幾何学的形状を示す前記2つ以上のセンサ位置のそれぞれにおいて、前記少なくとも1対のセンサの測定された方位に対応する、出力信号を生成でき、
前記センサは、前記幾何学的形状情報出力信号を表示、送信、または記憶するための手段に操作可能に関連する基板。
【請求項16】
各位置における前記センサは、2軸または3軸加速度計であることを特徴とする請求項15に記載の基板。
【請求項17】
前記加速度計は、振動および形状データを提供することを特徴とする請求項15に記載の基板。
【請求項18】
前記加速度計は、世界座標系における傾斜を感知し、振動加速度データと、一定重力加速度データを提供することを特徴とする請求項16または17に記載の基板。
【請求項19】
前記柔軟基板は、最小限に捻れることを特徴とする請求項15から18のいずれか1つに記載の基板。
【請求項20】
前記柔軟基板は、1自由度においてのみ湾曲することを特徴とする請求項15から19のいずれか1つに記載の基板。
【請求項21】
前記少なくとも1対のセンサは、測定用に、曲線と表面上および立体内の場に設置するために較正できることを特徴とする請求項15から20のいずれか1つに記載の基板。
【請求項22】
前記曲線、前記表面、および前記立体は、地盤工学および構造土木工学システムであることを特徴とする請求項21に記載の基板。
【請求項23】
前記加速度計は、柔軟チューブにより端部において接続された剛性で、実質的に垂直なパイプ内に搭載され、前記加速度計は2自由度の傾斜と、垂直軸に対する前記パイプの長軸の移動に関連する加速度データを提供することを特徴とする請求項15から22のいずれか1つに記載の基板。
【請求項24】
前記加速度計は、柔軟チューブにより接続された剛性で、実質的に水平なパイプ内に搭載され、実質的に水平な表面との整列のための整列表面を備え、前記加速度計は2自由度の傾斜と、垂直軸に対する前記実質的に水平なパイプの前記実質的に水平な軸の移動に関連する加速度データを提供することを特徴とする請求項15から22のいずれか1つに記載の基板。
【請求項25】
前記センサの対は、前記立体内に曲線を描く、実質的に垂直または水平な湾曲内に配置され、各曲線からのデータは、共通収集点に送られ、前記立体の静的および動的形状についての出力データを収集することを特徴とする請求項15から22のいずれか1つに記載の基板。
【請求項26】
前記出力データは、固定通信線により送信されることを特徴とする請求項15から25のいずれか1つに記載の基板。
【請求項27】
前記少なくとも1対のセンサは、地震を測定するように適合され、前記センサは、前記地震の前、その間、およびその後に地面の動きを測定することを特徴とする請求項15から26のいずれか1つに記載の基板。
【請求項28】
前記曲線、表面、および立体は、船の帆、人間および動物の胴体から構成されるグループから選択されることを特徴とする請求項15から27のいずれか1つに記載の基板。
【請求項29】
前記柔軟基板は、前記センサの対を含む剛性リンクを具備する多関節アームを具備し、前記センサの対は、回転可能接合部により接続された場測定センサであり、前記多関節アームは、1自由度において回転可能であって且つ回転センサを備えた、接合部により、固定基準表面に接続され、
前記リンクは、前記場内で、前記多関節アームの位置と方位を測定するために、所定の範囲内に前記場測定センサを維持するように制約されることを特徴とする請求項15から27のいずれか1つに記載の基板。
【請求項30】
前記場測定センサに操作可能に関連する回転センサを更に含み、前記回転センサは、デジタルシャフトエンコーダーであることを特徴とする請求項15から29のいずれか1つに記載の基板。
【請求項31】
柔軟基板内に場測定センサを有するセンサアレイであって、前記場測定センサは、前記基板に対して方位データを提供でき、前記基板の隣接部分内の信号における差から、動的形状を定義するように適合されたセンサアレイ。
【請求項32】
変形の静的および動的形状と加速度の測定方法であって、測定のために、請求項15から30のいずれか1つの基板を利用するステップを具備する方法。
【請求項33】
地盤工学体、構造体、および生体における静的および動的形状を測定するための、本発明の前記センサアレイの使用法。
【請求項34】
穿孔における使用に適切なセンサシステムであって、
柔軟基板に操作可能に関連していて且つ前記柔軟基板の長さの少なくとも一部分に沿って延伸する、複数のセンサを具備するセンサアレイを具備する、センサシステムにおいて、
前記センサは、前記柔軟基板の長さに沿って、離間する複数の場測定センサを具備し、場に対して、前記柔軟基板の長さに沿う方位データを具備する入力幾何学的形状を測定するように適合されており、
前記場測定センサは、前記センサが、前記場の定義された値から逸脱する測定の動的または静的条件を検出すると、前記柔軟基板の動的および静的データの少なくとも1つを具備する出力方位データを生成し、
前記センサシステムは、
前記センサにより生成された前記出力データを表示、送信、または記憶する手段を更に具備するセンサシステム。
【請求項35】
穿孔の特性を決定する方法であって、
場の特性を決定する個々のセンサに関する入力方位データを取得するための、間隔をおいて配置された複数の場測定センサのセンサアレイを提供するステップと、
前記センサアレイからデータを収集して、前記場の動的および静的データの少なくとも1つを具備するセンサ出力データを取得し、静的条件または定義された値から逸脱している測定を反映する前記出力データを提供するステップと、
前記センサから前記出力データを生成して、前記データを、前記穿孔の特性分析のために表示、送信、または記憶するステップと、を具備する方法。
【請求項36】
穿孔の特性を決定する方法であって、
基準方位に関しての方位を決定する個々のセンサに関する入力角速度データを取得するための、間隔をおいて配置された複数の慣性角速度測定センサのセンサアレイを提供するステップと、
前記センサアレイからデータを収集して、前記場の動的および静的データの少なくとも1つを具備するセンサ出力データを取得し、静的条件または定義された値から逸脱している測定を反映する前記出力データを提供するステップと、
前記センサから前記出力データを生成して、前記データを、前記穿孔の特性分析のために表示、送信、または記憶するステップと、を具備する方法。
【請求項37】
お互いに関して移動可能な一対の剛体の位置と方位を決定する方法であって、
予め定義された間隔でお互いに間隔をおいて配置され、その間を、少なくとも2自由度で移動可能な、少なくとも第1および第2剛体を提供するステップと、
前記第1および第2剛体のそれぞれの上に一対のセンサを位置決めし、各センサは、お互いに操作可能に関連し、お互いに関して非平行方向に位置決めされるステップと、
基準方位に関して、前記剛体の方位の2自由度における差を測定するステップと、
前記第1剛体から前記第2剛体への、角度における測定された差を定義する出力信号を生成するステップと、
前記測定された差を表示、送信、または記憶するステップと、を具備する方法。
【請求項38】
前記剛体のそれぞれは、予め定義された線の周りの回転を除く移動範囲を有することを特徴とする請求項37に記載の方法。
【請求項39】
前記第1および第2剛体は、衛星同士、束縛衛星同士、地球と空間エレベータの部分、束縛遠隔操作車両同士、接続荷船同士、船の甲板と帆桁、船の甲板とマストヘッド、地球と超高層ビルのフロア、橋台と橋の路面、トンネル支持リングの隣接部分同士、および飛行機の胴体と翼端の内の1つ以上から選択されることを特徴とする請求項37または38に記載の方法。
【請求項40】
前記一対のセンサは、単軸、2軸、または3軸加速度計であることを特徴とする請求項37から39のいずれか1つに記載の方法。
【請求項41】
方位における変化率が、低率とまったくない(ゼロ)状態の間で起きるときは、自由度において方位を測定するセンサの別のセットからのデータを補正するステップを更に具備することを特徴とする請求項37から40のいずれか1つに記載の方法。
【請求項1】
形状システムであって、
間隔をおいて配置された2つ以上の剛体のアレイであって、隣接する剛体は、物体間方位の少なくとも2自由度を有し、組み合わされた方位と配置間隔値に対して、前記システムに操作可能に関連するアレイと、
前記剛体に操作可能に関連する場測定センサのアレイであって、前記剛体はそれぞれ、お互いに非平行な方位を有していて且つ予め定義された基準に対して、前記剛体の絶対方位に関連する入力データを受信するように適合された、センサのアレイの内の少なくとも2つのセンサを有するアレイと、
前記システムの形状特性の前記2自由度に関するデータを、前記入力データから決定し、前記システムの前記形状特性の前記2自由度を定義する出力信号を生成する手段と、
前記出力信号を表示、送信、または記憶する出力手段と、を具備するシステム。
【請求項2】
前記センサは対象物に搭載可能であり、前記対象物の形状を測定するように適合されることを特徴とする請求項1に記載のシステム。
【請求項3】
前記場測定センサは加速度計であって、重力ベクトルに関しての前記物体間方位の自由度を有しないことを特徴とする請求項1に記載のシステム。
【請求項4】
前記システムは、場強度の所定の分布を有する場において利用されるように適合され、
前記場測定センサは前記場内において、測定可能な方位数を超えない数の自由度で、且つ測定信号に何らの変化ももたらさない方位における変化を除く測定範囲の制約内で、方位に応答することを特徴とする請求項1に記載のシステム。
【請求項5】
前記場測定センサは磁気計であり、磁気ベクトルに関しての前記物体間方位の自由度を有しないことを特徴とする請求項1に記載のシステム。
【請求項6】
物体間方位の最大3自由度を、場の基準なしで、物体間方位を測定する非場測定センサから決定できることを特徴とする請求項1から4のいずれか1つに記載のシステム。
【請求項7】
前記非場測定センサは、角速度センサであることを特徴とする請求項6に記載のシステム。
【請求項8】
前記非場測定センサは、少なくとも1つの湾曲感知アレイを含むことを特徴とする請求項5に記載のシステム。
【請求項9】
前記システムは、少なくとも1自由度における角速度が、前記少なくとも1自由度における場測定に最小限の影響を与えるときに、前記同一剛体に操作可能に関連する非場測定方位センサからの方位データの少なくとも1自由度の精度を向上するために使用されることを特徴とする請求項1から8のいずれか1つに記載のシステム。
【請求項10】
前記湾曲感知アレイは、前記同一剛体に操作可能に関連する非場測定センサからの方位データの少なくとも1自由度の精度を向上することを特徴とする請求項8または9に記載のシステム。
【請求項11】
前記センサは、前記配置間隔値と組み合わされた前記物体間方位に関連する出力形状データを生成できることを特徴とする請求項1から10のいずれか1つに記載のシステム。
【請求項12】
前記形状特性は、曲線、表面、および立体から構成されるグループから選択されたいずれか1つ以上であることを特徴とする請求項1から11のいずれか1つに記載のシステム。
【請求項13】
前記システムは、最小捻れの影響を受けることを特徴とする請求項1から12のいずれか1つに記載のシステム。
【請求項14】
前記システムは、湾曲の1自由度の影響を受けることを特徴とする請求項1から13のいずれか1つに記載のシステム。
【請求項15】
方位付けられた場内に幾何学的形状を有する柔軟基板であって、前記基板は、前記柔軟基板に操作可能に関連する2つ以上の予め定義された非同一センサ位置を有し、前記基板は2自由度で湾曲でき、
前記位置のそれぞれにおける少なくとも1対のセンサであって、前記少なくとも1対のセンサは、前記センサ位置に操作可能に関連し、そこにおいてお互いに対して非平行方位に位置し、前記センサは、前記場の方向の周りの回転移動を除く、定義された移動範囲内の前記位置のそれぞれの、前記それぞれの方位を測定するように適合され、前記センサは、幾何学的形状を示す前記2つ以上のセンサ位置のそれぞれにおいて、前記少なくとも1対のセンサの測定された方位に対応する、出力信号を生成でき、
前記センサは、前記幾何学的形状情報出力信号を表示、送信、または記憶するための手段に操作可能に関連する基板。
【請求項16】
各位置における前記センサは、2軸または3軸加速度計であることを特徴とする請求項15に記載の基板。
【請求項17】
前記加速度計は、振動および形状データを提供することを特徴とする請求項15に記載の基板。
【請求項18】
前記加速度計は、世界座標系における傾斜を感知し、振動加速度データと、一定重力加速度データを提供することを特徴とする請求項16または17に記載の基板。
【請求項19】
前記柔軟基板は、最小限に捻れることを特徴とする請求項15から18のいずれか1つに記載の基板。
【請求項20】
前記柔軟基板は、1自由度においてのみ湾曲することを特徴とする請求項15から19のいずれか1つに記載の基板。
【請求項21】
前記少なくとも1対のセンサは、測定用に、曲線と表面上および立体内の場に設置するために較正できることを特徴とする請求項15から20のいずれか1つに記載の基板。
【請求項22】
前記曲線、前記表面、および前記立体は、地盤工学および構造土木工学システムであることを特徴とする請求項21に記載の基板。
【請求項23】
前記加速度計は、柔軟チューブにより端部において接続された剛性で、実質的に垂直なパイプ内に搭載され、前記加速度計は2自由度の傾斜と、垂直軸に対する前記パイプの長軸の移動に関連する加速度データを提供することを特徴とする請求項15から22のいずれか1つに記載の基板。
【請求項24】
前記加速度計は、柔軟チューブにより接続された剛性で、実質的に水平なパイプ内に搭載され、実質的に水平な表面との整列のための整列表面を備え、前記加速度計は2自由度の傾斜と、垂直軸に対する前記実質的に水平なパイプの前記実質的に水平な軸の移動に関連する加速度データを提供することを特徴とする請求項15から22のいずれか1つに記載の基板。
【請求項25】
前記センサの対は、前記立体内に曲線を描く、実質的に垂直または水平な湾曲内に配置され、各曲線からのデータは、共通収集点に送られ、前記立体の静的および動的形状についての出力データを収集することを特徴とする請求項15から22のいずれか1つに記載の基板。
【請求項26】
前記出力データは、固定通信線により送信されることを特徴とする請求項15から25のいずれか1つに記載の基板。
【請求項27】
前記少なくとも1対のセンサは、地震を測定するように適合され、前記センサは、前記地震の前、その間、およびその後に地面の動きを測定することを特徴とする請求項15から26のいずれか1つに記載の基板。
【請求項28】
前記曲線、表面、および立体は、船の帆、人間および動物の胴体から構成されるグループから選択されることを特徴とする請求項15から27のいずれか1つに記載の基板。
【請求項29】
前記柔軟基板は、前記センサの対を含む剛性リンクを具備する多関節アームを具備し、前記センサの対は、回転可能接合部により接続された場測定センサであり、前記多関節アームは、1自由度において回転可能であって且つ回転センサを備えた、接合部により、固定基準表面に接続され、
前記リンクは、前記場内で、前記多関節アームの位置と方位を測定するために、所定の範囲内に前記場測定センサを維持するように制約されることを特徴とする請求項15から27のいずれか1つに記載の基板。
【請求項30】
前記場測定センサに操作可能に関連する回転センサを更に含み、前記回転センサは、デジタルシャフトエンコーダーであることを特徴とする請求項15から29のいずれか1つに記載の基板。
【請求項31】
柔軟基板内に場測定センサを有するセンサアレイであって、前記場測定センサは、前記基板に対して方位データを提供でき、前記基板の隣接部分内の信号における差から、動的形状を定義するように適合されたセンサアレイ。
【請求項32】
変形の静的および動的形状と加速度の測定方法であって、測定のために、請求項15から30のいずれか1つの基板を利用するステップを具備する方法。
【請求項33】
地盤工学体、構造体、および生体における静的および動的形状を測定するための、本発明の前記センサアレイの使用法。
【請求項34】
穿孔における使用に適切なセンサシステムであって、
柔軟基板に操作可能に関連していて且つ前記柔軟基板の長さの少なくとも一部分に沿って延伸する、複数のセンサを具備するセンサアレイを具備する、センサシステムにおいて、
前記センサは、前記柔軟基板の長さに沿って、離間する複数の場測定センサを具備し、場に対して、前記柔軟基板の長さに沿う方位データを具備する入力幾何学的形状を測定するように適合されており、
前記場測定センサは、前記センサが、前記場の定義された値から逸脱する測定の動的または静的条件を検出すると、前記柔軟基板の動的および静的データの少なくとも1つを具備する出力方位データを生成し、
前記センサシステムは、
前記センサにより生成された前記出力データを表示、送信、または記憶する手段を更に具備するセンサシステム。
【請求項35】
穿孔の特性を決定する方法であって、
場の特性を決定する個々のセンサに関する入力方位データを取得するための、間隔をおいて配置された複数の場測定センサのセンサアレイを提供するステップと、
前記センサアレイからデータを収集して、前記場の動的および静的データの少なくとも1つを具備するセンサ出力データを取得し、静的条件または定義された値から逸脱している測定を反映する前記出力データを提供するステップと、
前記センサから前記出力データを生成して、前記データを、前記穿孔の特性分析のために表示、送信、または記憶するステップと、を具備する方法。
【請求項36】
穿孔の特性を決定する方法であって、
基準方位に関しての方位を決定する個々のセンサに関する入力角速度データを取得するための、間隔をおいて配置された複数の慣性角速度測定センサのセンサアレイを提供するステップと、
前記センサアレイからデータを収集して、前記場の動的および静的データの少なくとも1つを具備するセンサ出力データを取得し、静的条件または定義された値から逸脱している測定を反映する前記出力データを提供するステップと、
前記センサから前記出力データを生成して、前記データを、前記穿孔の特性分析のために表示、送信、または記憶するステップと、を具備する方法。
【請求項37】
お互いに関して移動可能な一対の剛体の位置と方位を決定する方法であって、
予め定義された間隔でお互いに間隔をおいて配置され、その間を、少なくとも2自由度で移動可能な、少なくとも第1および第2剛体を提供するステップと、
前記第1および第2剛体のそれぞれの上に一対のセンサを位置決めし、各センサは、お互いに操作可能に関連し、お互いに関して非平行方向に位置決めされるステップと、
基準方位に関して、前記剛体の方位の2自由度における差を測定するステップと、
前記第1剛体から前記第2剛体への、角度における測定された差を定義する出力信号を生成するステップと、
前記測定された差を表示、送信、または記憶するステップと、を具備する方法。
【請求項38】
前記剛体のそれぞれは、予め定義された線の周りの回転を除く移動範囲を有することを特徴とする請求項37に記載の方法。
【請求項39】
前記第1および第2剛体は、衛星同士、束縛衛星同士、地球と空間エレベータの部分、束縛遠隔操作車両同士、接続荷船同士、船の甲板と帆桁、船の甲板とマストヘッド、地球と超高層ビルのフロア、橋台と橋の路面、トンネル支持リングの隣接部分同士、および飛行機の胴体と翼端の内の1つ以上から選択されることを特徴とする請求項37または38に記載の方法。
【請求項40】
前記一対のセンサは、単軸、2軸、または3軸加速度計であることを特徴とする請求項37から39のいずれか1つに記載の方法。
【請求項41】
方位における変化率が、低率とまったくない(ゼロ)状態の間で起きるときは、自由度において方位を測定するセンサの別のセットからのデータを補正するステップを更に具備することを特徴とする請求項37から40のいずれか1つに記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公表番号】特表2009−517666(P2009−517666A)
【公表日】平成21年4月30日(2009.4.30)
【国際特許分類】
【出願番号】特願2008−542567(P2008−542567)
【出願日】平成17年12月2日(2005.12.2)
【国際出願番号】PCT/CA2005/001832
【国際公開番号】WO2007/062496
【国際公開日】平成19年6月7日(2007.6.7)
【出願人】(508164910)
【出願人】(508164921)
【出願人】(508164758)
【Fターム(参考)】
【公表日】平成21年4月30日(2009.4.30)
【国際特許分類】
【出願日】平成17年12月2日(2005.12.2)
【国際出願番号】PCT/CA2005/001832
【国際公開番号】WO2007/062496
【国際公開日】平成19年6月7日(2007.6.7)
【出願人】(508164910)
【出願人】(508164921)
【出願人】(508164758)
【Fターム(参考)】
[ Back to top ]