
往復流体機械の作動パラメータを取得、測定、および確認するためのシステム

【課題】往復流体機械のための検証システム(50)を提供すること。
【解決手段】システム(50)は、往復流体機械の少なくとも1つのフレーム(46)が取り外し可能に装着される基部プレートまたは土台(52)と、フレーム(46)の構成要素(12、14、24)を動かすために、基部プレート(52)に回転自在に連結された第1のシャフト(54)と、そのような構成要素(12、14、24)に動作可能に連結して配置され、伝達システム(58)によって、少なくとも1つの第2のシャフト(68)を介して回転する、負荷を発生させるための少なくとも1つのシステム(80)とを備える。負荷を発生させるためのシステム(80)は、往復流体機械のシリンダ(26)上の作動流体によって発生する負荷をシミュレートすることができる。
【解決手段】システム(50)は、往復流体機械の少なくとも1つのフレーム(46)が取り外し可能に装着される基部プレートまたは土台(52)と、フレーム(46)の構成要素(12、14、24)を動かすために、基部プレート(52)に回転自在に連結された第1のシャフト(54)と、そのような構成要素(12、14、24)に動作可能に連結して配置され、伝達システム(58)によって、少なくとも1つの第2のシャフト(68)を介して回転する、負荷を発生させるための少なくとも1つのシステム(80)とを備える。負荷を発生させるためのシステム(80)は、往復流体機械のシリンダ(26)上の作動流体によって発生する負荷をシミュレートすることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、往復流体機械を検証または確認するためのシステムに関し、詳細には、しかし限定しないが、クロスヘッドに連結された単動式のシリンダを備えたタイプの往復圧縮機に関する。
【背景技術】
【0002】
知られているように、圧縮機は、機械的エネルギーを使用して圧縮性流体(ガス)の圧力を上昇させることができる機械である。往復圧縮機では、流体の圧縮は、それぞれのシリンダの内側を往復運動で移動する1つまたは複数のピストンによって行われる。圧縮される流体は、1つまたは複数の吸気管を通してシリンダ内に取り込まれ、一方、圧縮された流体は、シリンダから1つまたは複数の送出管に向かって放出される。通常、往復圧縮機の1つのピストンまたは複数のピストンは、電気式モータによって、あるいは内燃機関によって、運動を伝達するためのクランクシャフトおよび従来のクランクと連接棒の機構を介して駆動される。
【0003】
たとえば、複動式の往復圧縮機では、各ピストンは、その両運動方向でガスを圧縮するので、「無負荷」のストロークは行わない。正確にはこの理由のため、密閉タイプのシリンダは連接棒が振動することを許容しないため、ピストン自体を、クランクの連接棒および連接棒の機構に直接的に連結することはできない。
【0004】
したがって、ピストンと連接棒の間には、「クロスヘッド」として知られている機構が配置される。ピストンは、直線的な運動だけで可動であるロッドに連結され、ロッドは、クロスヘッドに連結される。したがってステムは振動しないが、一方で、クロスヘッドの他方の側に連結された連接棒は、自由に振動することができる。
【0005】
クロスヘッドは、それに設けられたすべりブロックにより、「ランナ」と呼ばれる適切な固定ガイドの内側で摺動することができ、それによってクロスヘッドがピストンのストロークと同じ方向に移動することが可能になる。クロスヘッドのすべりブロックの外面は、関連するガイドの内面に対して移動することから、それらが互いに接触することを防ぐ潤滑油を導入することが必要である。注油システムは、強制タイプのものであり、クロスヘッドに主に静圧タイプの支持をもたらすことにより、関与する移動部分の摩耗を防止する。
【0006】
クロスヘッドの往復移動中には、たとえばピストンが低速で移動するとき、クロスヘッドが十分な量の潤滑油を供給することができない特殊な作動状態に陥る可能性がある。そのような状況では、潤滑油の層は極度に薄くなり、摩擦によって失われ、その結果、熱が生成され、潤滑油自体の温度が上昇して潤滑油の粘性を低下させ、さらには潤滑能力も低下させる可能性がある。最悪の状況では、表面同士が互いに接触する可能性もあり、その結果、流体機械に損傷を与えるおそれがある。
【0007】
したがって、往復圧縮機の寸法設定および設置はどちらも、単動式または複動式にかかわらず、圧縮機が限界の作動状態で作動するときに圧縮機自体において危険な状態が発生することを回避するために、特に正確に行わなければならない。その結果、往復圧縮機の作動パラメータを決定するステップが、極めて重要となり、前記パラメータとしては、ピストンのシャフトおよびクロスヘッドを押し下げる負荷、クロスヘッドを潤滑するための油の温度、圧力、および流速、クランクシャフトの回転速度、すべりブロックとランナの間の空隙などが挙げられる。
【0008】
文献WO 2005/108744 A1は、往復圧縮機の作動を確認するための機器および方法を例示している。機器は、たとえばクロスヘッドのような、圧縮機の移動する構成要素の1つに動作可能に連結された可動要素を備える。可動要素には、対象の1つのパラメータまたは複数のパラメータを検出することができるセンサが設けられ、そのパラメータは、次いで、必要な評価を行うために外部のデータ処理ユニットに送られる。往復圧縮機は、必要とされるパラメータを正しく提供することを可能にするために、そのすべての部分において完全な形でなければならない。
【0009】
文献WO 2008/157496 A1は、往復圧縮機の作動パラメータを算出するための方法を記載している。この方法は、圧縮機の作動状態をシミュレートすることができるプロセッサのためのプログラムを使用することを予見している。しかし、この場合でも、基本的なパラメータは、実際に作動する往復圧縮機から直接得られなければならない。
【0010】
したがって、知られている機器および方法は、その特徴的なパラメータを評価することを可能にするために、そのすべての部分および作動において完全な形である往復圧縮機を有し得る必要があることを予見している。これは、パラメータが正しくない、または予見したものに対応しない場合、たとえばその基礎的な構成要素の一部を取り替えるなどの、変更、さらには大幅な変更を機械に加えなければならいことを意味しており、その結果、コストおよび設置時間が増大する。
【0011】
さらに、圧縮機が通常モードで作動するときに必要ではあるが、シリンダ、ならびにガスを循環させ、冷却し、注油するためのその関連するシステムが存在することにより、パラメータを非常に複雑な試験環境で測定することが求められ、その結果、機械の通常の作動状態において発生するものと同等の高いエネルギーが圧縮機自体によって吸収され、その結果、適切な出力のモータが必要となる。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】WO 2008/157496 A1
【発明の概要】
【発明が解決しようとする課題】
【0013】
したがって、本発明の全体的な目的は、特に、しかし限定しないが、上述のタイプの往復圧縮機に適用される、作動パラメータを取得および監視するためのシステムを作製することであり、このシステムは、従来技術の上記で引用された欠点を、それぞれのシリンダの技術的特徴に関係なく、極めて簡単で、コスト効果の高い、特に機能的な方法で解決することができ、したがって、非常に多用途性のものである。
【0014】
本発明の別の目的は、往復流体機械の作動特性を把握するために完全な形のプロトタイプを準備する必要がない、往復流体機械の作動パラメータを取得、測定、および確認するためのシステムを作製することであり、このシステムは、たとえばシリンダ、ピストン、弁およびガスの回路、冷却回路および注油回路のような、分析される各機械上に通常存在する構成要素またはシステムの少なくとも一部を、より簡単でより置き換え可能な構成要素に取り替えることができる。
【0015】
本発明の別の目的は、製造が簡単で、作動を開始させるための複雑かつ高価な駆動システムを必要としない検証システムを作製することであり、その理由は、その検証システムの作動に必要とされるエネルギーは、完全な形の往復機械を機能させるのに必要なエネルギーよりかなり少なくてよいためである。
【課題を解決するための手段】
【0016】
本発明によるこれらの目的は、請求項1に要点を述べたように、往復流体機械、特に、しかし限定しないが、往復圧縮機のための検証システムを作製することによって達成される。
【0017】
本発明のさらなる特徴は、本発明の説明の一体部分である、従属請求項によって強調される。
【0018】
本発明による往復流体機械の作動パラメータを検証、測定、および確認するためのシステムの特徴および利点は、添付の概略図を参照して、限定する目的ではなく例として与えられる以下の説明からより明確になるであろう。
【図面の簡単な説明】
【0019】
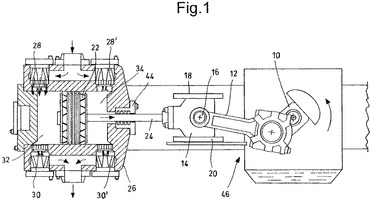
【図1】往復圧縮機の主要構成要素を示す概略断面図である。
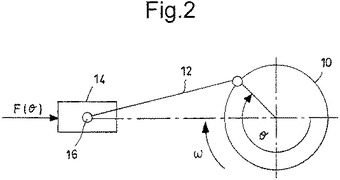
【図2】往復圧縮機の作動原理を示す概略図である。
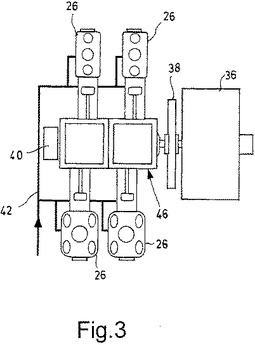
【図3】多くのシリンダを備えた構成における往復圧縮機を概略的に示す図である。
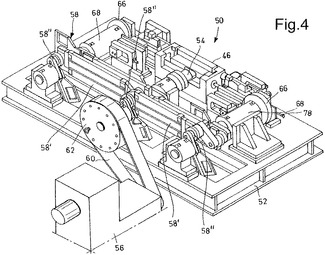
【図4】本発明による往復流体機械の作動パラメータを検証するためのシステムの非限定的な例の実施形態を示す斜視図(フライホイール側)である。
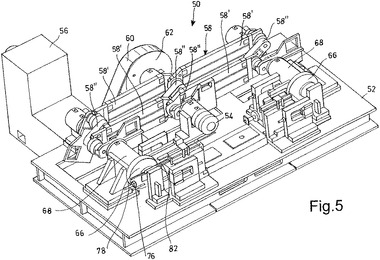
【図5】図4のシステムの別の斜視図(カム側)である。
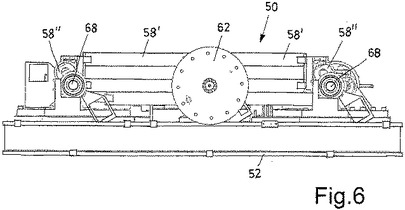
【図6】図4のシステムの側面図(フライホイール側)である。
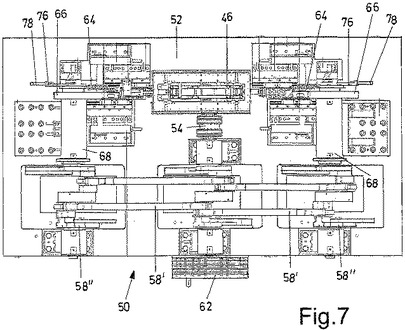
【図7】図4のシステムの上方からの平面図である。
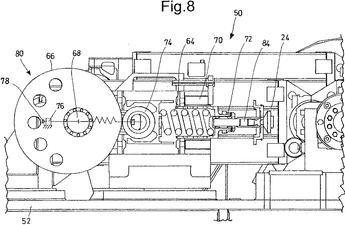
【図8】図4のシステムの拡大側面図(カム側)である。
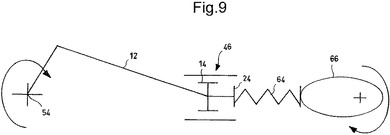
【図9】本発明によるシステムの作動原理を示す図である。
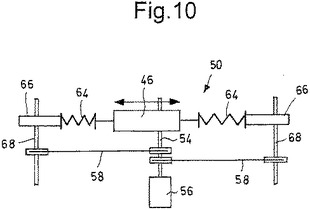
【図10】本発明によるシステムの作動原理を示す図である。
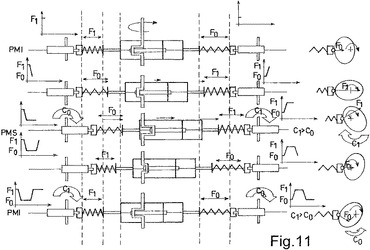
【図11】本発明によるシステムの作動原理を示す図である。
【発明を実施するための形態】
【0020】
各図において、同じ参照番号は、前のおよび/または後の図の同じシステムまたは構成要素に対応することに留意されたい。
【0021】
特に図1を参照すれば、この場合は複動式タイプの往復圧縮機によって表される往復流体機械の内側に存在する必須要素が、概略的に示されている。
【0022】
圧縮機は、連接棒12に連結された少なくとも1つのクランクを備えたシャフト10を備え、この連接棒12は、フライホイール38(図3)を介在させて、電気式または熱式の汎用モータ36によって駆動されるシャフト10の回転式運動を、ピン16を介してクロスヘッド14に伝達する。クロスヘッド14は、回転式運動を往復運動に変換する役割を有しており、クロスヘッド14がピストン22のストロークと同じ方向に移動することを可能にする適切な両側のガイドまたはランナ18および20の内側で強制的に移動させられる。スタッフィングボックスからなる封止システム44が設けられたシャフト24は、クロスヘッド14とピストン22を連結する。したがって、シリンダ26の内側で移動するピストン22は、ガスを圧縮することができる。
【0023】
圧縮されるガスが、ある吸気圧力で、1つまたは複数の吸気弁28および28’を通ってシリンダ26の内側に導入され、次いで、所望の最終圧力値に到達するようにピストン22によって圧縮される。ガスは、そのような最終圧力値に到達した後、シリンダ26から1つまたは複数の排出弁30および30’を通って放出される。図1に図式化されたもののような複動式シリンダ26では、2つの別個のチャンバ、言い換えれば、シリンダ26のヘッドの方を向くチャンバ32およびクロスヘッド14の方を向くチャンバ34の内側で圧縮が行われる。
【0024】
圧縮機は、単一シリンダタイプのものでよく、あるいはたとえば、図3に示すように水平かつ向かい合わせの多くのシリンダ26を有することができる。注油システム40および水作動式冷却システム42によって、圧縮機は完全な形となり、これらのシステムは、圧縮機がさまざまな回転速度で機能することを可能にする。
【0025】
圧縮機の機械的構成要素、言い換えればシャフト10、連接棒12、シャフト24、およびクロスヘッド14の組立体、ならびにそれに関連付けられた圧縮機の往復移動を確実にする要素は、圧縮機自体のフレーム46と見なすことができる。したがって、フレーム46内にはガスを循環させるための回路が存在しないため、フレーム46は、シリンダ26全体、すなわちシリンダ26に関連付けられた水路28、28’、30、30’、40および42のすべてが設けられたシリンダと区別することができる。
【0026】
次に、図4から10を参照すれば、本発明による往復流体機械の作動パラメータを検証、取得、測定および確認するためのシステムの好ましい実施形態が、その全体を参照番号50で示して図示されている。
【0027】
システム50は、好ましくは、システム50自体の作動に必要な構成要素が取り付けられる基部プレートまたは土台52を備える。したがって、基部プレート52は、これに取り外し可能に装着された、往復流体機械、特に往復圧縮機の少なくとも1つのフレーム46を有しており、ここでフレーム46とは、ガス用の回路を備えない機械の構成要素のすべての組立体を意味している(前の説明を参照)。より具体的には、フレーム46は、少なくとも1つの連接棒12およびクロスヘッド14を備え、クロスヘッド14は、往復運動で可動し、その2つの端部の少なくとも1つにおいて、さらに往復運動で可動であるシャフト24に固定して連結されている。
【0028】
フレーム46の構成要素12、14および24は、基部プレート52に回転自在に結合された第1のクランクシャフト54によって往復運動で移動する。同じく、シャフト54は、所定の、ただしいずれの場合も可変である角度速度に基づいて、好ましくは電気式の駆動モータ56によって、基部プレート52によって支持された駆動システム58を介在して固定されて回転する。
【0029】
図示する例となる実施形態では、駆動システム58は、剛性の連接棒58’と、ベルト60およびフライホイールプーリ62を介してモータ56によって駆動されるそれぞれのクランク棒58”とを有するシステムからなる。フライホイール62は、中央のクランクシャフト58”を介して第1のクランクシャフト54に連結される。
【0030】
本発明によれば、システム50の基部プレート52上には、実際の流体機械で起こるようなフレーム46上で作用するガスの負荷を複製するのに適した、負荷を発生させるための少なくとも1つのシステム80が取り付けられる。
【0031】
本発明の特に有利な実施形態では、負荷を発生させるためのシステム80は、機械式タイプのものである。負荷を発生させるためのそのようなシステム80は、たとえば水圧式、電気式、空気式、または他の方式などの任意の他のタイプのものとすることができることを除外してはならないことは明らかである。
【0032】
好ましい実施形態では、負荷を発生させるためのシステム80は、少なくとも1つの偏心器またはカム66と動作可能に連結して配置された弾性または降伏要素64を備える。
【0033】
より具体的には、各弾性要素64は、各シャフト24と各偏心器66(図10および11の線図を参照)の間に差し込まれ、フレーム46のシャフト24の往復運動およびそれと同時に起こる偏心器66の回転式運動に基づいて、圧縮および放出が順に行われる。したがって、弾性要素64および偏心器またはカム66からなる組立体は、以下でより明確に明記するが、一旦モータ56によって駆動され、適切に較正された後、たとえば以前に説明した往復圧縮機のような汎用の往復流体機械のシリンダ26の負荷をシミュレートすることができる。実際、図示する例となる実施形態では、圧縮によって作動するコイルばね形態で作製された各弾性要素64は、対象の作動状態において、往復圧縮機の構成要素上(特にクロスヘッド14およびそれぞれのピン16上)に作用する同じ力を再現することができる。
【0034】
降伏要素74は、有利にかつ好ましくは、カムとばねの間の摩擦を低減し、それらの接触を促進させるために、偏心器66とばね64の間に差し込まれる。
【0035】
有利な実施形態では、すべての作動状態において降伏要素64とカム66が接触することを確実にするために、別の弾性要素82(図5および8)が、カムのシャフト68および降伏要素74のシャフトに関連付けられる。この弾性要素82は、調整要素78を介して調整することができ、図に示す場合ではプレート76上に作用するねじ78を用いて行われる。
【0036】
このようにして、任意の回転速度に対して、(クロスヘッド14にかかる所望の負荷を得るように設計された)主ばね64の剛性を、降伏要素64とカム66との接触を維持するのに必要な剛性から切り離すことが可能になる。
【0037】
システム50には、有利には、フレーム46、およびシリンダ26を再現するばね64およびカム66からなる組立体の両方に対する作動パラメータを取得および測定することができる1つまたは複数のセンサ84が設けられる。そのようなパラメータは、
−クロスヘッド14のすべりブロックと関連するランナ18および20との間の空隙(千分の数ミリメートル)、
−クランク角度(θ)、
−クロスヘッド14上およびシャフト24上に作用する力(Fθ)、
−シャフト10の回転速度(ω)およびクロスヘッド14の線形速度(Vθ)、
−クロスヘッド14のすべりブロックと関連するランナ18および20との間の隙間に存在する潤滑油の温度、圧力、および流速
を含む。
【0038】
センサ84によって取得および測定されたパラメータのすべては、適切な無線通信ライン70によってまたはケーブルを介して、回転中央処理ユニット(図示せず)に送ることができ、この処理ユニットは、シャフト54の1回の回転ごとによるそのようなパラメータをリアルタイムで記録し、グラフに表すことができる。
【0039】
したがって、本発明によるシステム50は、相当な量のエネルギーを使い果たす、関連するガス送出/排除(gas delivery and expulsion)回路と共に機械の1つまたは複数のシリンダ26を作製および駆動させる必要もなく、たとえば全負荷または部分負荷として知られる作動状態において圧縮機などの往復流体機械の検証テストを行うことができる。実際に、システム50の利点の1つは、駆動モータ56が、完全な形の往復圧縮機の通常作動に使用することができる通常のモータ36に必要とされる出力に比べて実質的に低い出力を出すことができることである。これは、本質的には、システム50の作動中、ばね64がクロスヘッド14の戻りストローク中に解放されるとき、ばね64自体が、往路(outward)ストロークにおいて吸収したエネルギーを(図11の線図を参照)を戻して、駆動モータ56が送出しなければならない出力要件を低減することができることによるものである。
【0040】
(以前に述べ、たとえば図5に示したように)フレーム46をシステム50から取り外すことができることに加えて、さまざまな機械上でまたはさまざまな要求事項に対して、測定および/または検証を行う必要がある場合、ばね64および/またはカム66をシステム50から取り外して、それらを異なるタイプの他のばねおよび/またはカムに取り替えることも可能である。たとえば、異なる寸法および弾性係数を備えたばね64あるいは異なる設計のカム66を使用することが可能である。
【0041】
あるいはまたはそれに加えて、ここでも往復機械の試験条件を変更するために、システム50には、各ばね64上に作用する1つまたは複数の予圧装置72を設けることができる。詳細には、図示する例となる実施形態に基づくと、予圧装置72(図8)は、ねじ−ナット原理に従って作動し、フレーム46のシャフト24と関連するばね64との間に差し込まれた回転式リングナットシステムからなる。したがって、予圧装置72は、シャフト24をばね64自体に近づける、または遠ざけることによって、ばね64上の圧縮をそれぞれ増大または低減することができる。
【0042】
本発明によるシステム50は、図9〜11の線図に示す基本的な作動原理を依然として維持しながら、ここまでに説明し、図示したものとは異なる実施形態に基づいて作製することができる。たとえば、剛性の連接棒58’およびそれぞれのクランク58”とは異なる一連の連結機構58を介して、駆動モータ56からシャフト54および68に運動を伝達することができる。連結機構58は、実際に、技術的要求事項に従って、駆動モータ56とシャフト54および68との間に差し込まれたベルト、鎖および/またはギヤを有するシステム、あるいは他の等価のシステムからなることができる。同様に、さまざまな数のモータも予見することができる。しかし、剛性の連接棒58’およびそれぞれのクランクシャフト58”からなるシステムは、フレーム46の往復移動およびカム66の回転移動をそれぞれ制御するシャフト54および68が完全に位相を合わせて回転移動することを確実にするために好ましいと考えられていることを明記しなければならない。
【0043】
また、実際の圧縮機のフレームを原寸に比例して再現するフレーム46を作製することが可能であることにも留意されたい。このようにして、システム50は、その製造および取り付けコストを大幅に低減すると同時にその多用途性を高めて、実際の圧縮機の原寸に比例したプロトタイプ上で検証試験を行うことができる。
【0044】
本発明によるシステムは、たとえば約3500バールまでまたはそれ以上の圧力で機能する低密度ポリエチレンを生産するための産業プラントのような、ガス用の回路の作製が特に複雑で高価である産業システムまたはプラントにおける高パフォーマンス用の往復流体機械の作動パラメータを取得、測定、および確認するのに特に有用である。
【0045】
そのようなシステムを異なるタイプの往復機械または産業プラントで使用できることを除外してはならないことは明らかである。
【0046】
こうして考案された本発明の往復流体機械の作動パラメータを取得、測定、および確認するためのシステムには、いずれの場合も、数多くの変更および変形を施すことができ、その変更および変形のすべては、同じ本発明の概念によって包含され、さらに、その詳細のすべてを、技術的に等価の要素で置き換えることができる。実際には、使用される材料、ならびに形状およびサイズは、技術的要求事項に従ったどのようなものでもよい。
【0047】
したがって、本発明の保護の範囲は、添付の特許請求の範囲によって定義される。
【符号の説明】
【0048】
10 圧縮機のシャフト
12 連接棒
14 クロスヘッド
16 ピン
18、20 ランナ
22 ピストン
24 封止システムのシャフト
26 シリンダ
28、28’ 吸気弁
30、30’ 排出弁
32、34 チャンバ
36 通常のモータ
38 フライホイール
40 注油システム
42 水作動式冷却システム
44 封止システム
46 フレーム
50 往復流体機械の作動パラメータを検証、取得、測定および確認するためのシステム
52 土台
54 クランクシャフト
56 駆動モータ
58 駆動システム
60 ベルト
62 フライホイールプーリ
64、74、82 弾性または降伏要素
66 偏心器またはカム
68 カムのシャフト
70、84 センサ
72 予圧装置
76 プレート
78 調整要素
80 負荷を発生させるためのシステム
【技術分野】
【0001】
本発明は、往復流体機械を検証または確認するためのシステムに関し、詳細には、しかし限定しないが、クロスヘッドに連結された単動式のシリンダを備えたタイプの往復圧縮機に関する。
【背景技術】
【0002】
知られているように、圧縮機は、機械的エネルギーを使用して圧縮性流体(ガス)の圧力を上昇させることができる機械である。往復圧縮機では、流体の圧縮は、それぞれのシリンダの内側を往復運動で移動する1つまたは複数のピストンによって行われる。圧縮される流体は、1つまたは複数の吸気管を通してシリンダ内に取り込まれ、一方、圧縮された流体は、シリンダから1つまたは複数の送出管に向かって放出される。通常、往復圧縮機の1つのピストンまたは複数のピストンは、電気式モータによって、あるいは内燃機関によって、運動を伝達するためのクランクシャフトおよび従来のクランクと連接棒の機構を介して駆動される。
【0003】
たとえば、複動式の往復圧縮機では、各ピストンは、その両運動方向でガスを圧縮するので、「無負荷」のストロークは行わない。正確にはこの理由のため、密閉タイプのシリンダは連接棒が振動することを許容しないため、ピストン自体を、クランクの連接棒および連接棒の機構に直接的に連結することはできない。
【0004】
したがって、ピストンと連接棒の間には、「クロスヘッド」として知られている機構が配置される。ピストンは、直線的な運動だけで可動であるロッドに連結され、ロッドは、クロスヘッドに連結される。したがってステムは振動しないが、一方で、クロスヘッドの他方の側に連結された連接棒は、自由に振動することができる。
【0005】
クロスヘッドは、それに設けられたすべりブロックにより、「ランナ」と呼ばれる適切な固定ガイドの内側で摺動することができ、それによってクロスヘッドがピストンのストロークと同じ方向に移動することが可能になる。クロスヘッドのすべりブロックの外面は、関連するガイドの内面に対して移動することから、それらが互いに接触することを防ぐ潤滑油を導入することが必要である。注油システムは、強制タイプのものであり、クロスヘッドに主に静圧タイプの支持をもたらすことにより、関与する移動部分の摩耗を防止する。
【0006】
クロスヘッドの往復移動中には、たとえばピストンが低速で移動するとき、クロスヘッドが十分な量の潤滑油を供給することができない特殊な作動状態に陥る可能性がある。そのような状況では、潤滑油の層は極度に薄くなり、摩擦によって失われ、その結果、熱が生成され、潤滑油自体の温度が上昇して潤滑油の粘性を低下させ、さらには潤滑能力も低下させる可能性がある。最悪の状況では、表面同士が互いに接触する可能性もあり、その結果、流体機械に損傷を与えるおそれがある。
【0007】
したがって、往復圧縮機の寸法設定および設置はどちらも、単動式または複動式にかかわらず、圧縮機が限界の作動状態で作動するときに圧縮機自体において危険な状態が発生することを回避するために、特に正確に行わなければならない。その結果、往復圧縮機の作動パラメータを決定するステップが、極めて重要となり、前記パラメータとしては、ピストンのシャフトおよびクロスヘッドを押し下げる負荷、クロスヘッドを潤滑するための油の温度、圧力、および流速、クランクシャフトの回転速度、すべりブロックとランナの間の空隙などが挙げられる。
【0008】
文献WO 2005/108744 A1は、往復圧縮機の作動を確認するための機器および方法を例示している。機器は、たとえばクロスヘッドのような、圧縮機の移動する構成要素の1つに動作可能に連結された可動要素を備える。可動要素には、対象の1つのパラメータまたは複数のパラメータを検出することができるセンサが設けられ、そのパラメータは、次いで、必要な評価を行うために外部のデータ処理ユニットに送られる。往復圧縮機は、必要とされるパラメータを正しく提供することを可能にするために、そのすべての部分において完全な形でなければならない。
【0009】
文献WO 2008/157496 A1は、往復圧縮機の作動パラメータを算出するための方法を記載している。この方法は、圧縮機の作動状態をシミュレートすることができるプロセッサのためのプログラムを使用することを予見している。しかし、この場合でも、基本的なパラメータは、実際に作動する往復圧縮機から直接得られなければならない。
【0010】
したがって、知られている機器および方法は、その特徴的なパラメータを評価することを可能にするために、そのすべての部分および作動において完全な形である往復圧縮機を有し得る必要があることを予見している。これは、パラメータが正しくない、または予見したものに対応しない場合、たとえばその基礎的な構成要素の一部を取り替えるなどの、変更、さらには大幅な変更を機械に加えなければならいことを意味しており、その結果、コストおよび設置時間が増大する。
【0011】
さらに、圧縮機が通常モードで作動するときに必要ではあるが、シリンダ、ならびにガスを循環させ、冷却し、注油するためのその関連するシステムが存在することにより、パラメータを非常に複雑な試験環境で測定することが求められ、その結果、機械の通常の作動状態において発生するものと同等の高いエネルギーが圧縮機自体によって吸収され、その結果、適切な出力のモータが必要となる。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】WO 2008/157496 A1
【発明の概要】
【発明が解決しようとする課題】
【0013】
したがって、本発明の全体的な目的は、特に、しかし限定しないが、上述のタイプの往復圧縮機に適用される、作動パラメータを取得および監視するためのシステムを作製することであり、このシステムは、従来技術の上記で引用された欠点を、それぞれのシリンダの技術的特徴に関係なく、極めて簡単で、コスト効果の高い、特に機能的な方法で解決することができ、したがって、非常に多用途性のものである。
【0014】
本発明の別の目的は、往復流体機械の作動特性を把握するために完全な形のプロトタイプを準備する必要がない、往復流体機械の作動パラメータを取得、測定、および確認するためのシステムを作製することであり、このシステムは、たとえばシリンダ、ピストン、弁およびガスの回路、冷却回路および注油回路のような、分析される各機械上に通常存在する構成要素またはシステムの少なくとも一部を、より簡単でより置き換え可能な構成要素に取り替えることができる。
【0015】
本発明の別の目的は、製造が簡単で、作動を開始させるための複雑かつ高価な駆動システムを必要としない検証システムを作製することであり、その理由は、その検証システムの作動に必要とされるエネルギーは、完全な形の往復機械を機能させるのに必要なエネルギーよりかなり少なくてよいためである。
【課題を解決するための手段】
【0016】
本発明によるこれらの目的は、請求項1に要点を述べたように、往復流体機械、特に、しかし限定しないが、往復圧縮機のための検証システムを作製することによって達成される。
【0017】
本発明のさらなる特徴は、本発明の説明の一体部分である、従属請求項によって強調される。
【0018】
本発明による往復流体機械の作動パラメータを検証、測定、および確認するためのシステムの特徴および利点は、添付の概略図を参照して、限定する目的ではなく例として与えられる以下の説明からより明確になるであろう。
【図面の簡単な説明】
【0019】
【図1】往復圧縮機の主要構成要素を示す概略断面図である。
【図2】往復圧縮機の作動原理を示す概略図である。
【図3】多くのシリンダを備えた構成における往復圧縮機を概略的に示す図である。
【図4】本発明による往復流体機械の作動パラメータを検証するためのシステムの非限定的な例の実施形態を示す斜視図(フライホイール側)である。
【図5】図4のシステムの別の斜視図(カム側)である。
【図6】図4のシステムの側面図(フライホイール側)である。
【図7】図4のシステムの上方からの平面図である。
【図8】図4のシステムの拡大側面図(カム側)である。
【図9】本発明によるシステムの作動原理を示す図である。
【図10】本発明によるシステムの作動原理を示す図である。
【図11】本発明によるシステムの作動原理を示す図である。
【発明を実施するための形態】
【0020】
各図において、同じ参照番号は、前のおよび/または後の図の同じシステムまたは構成要素に対応することに留意されたい。
【0021】
特に図1を参照すれば、この場合は複動式タイプの往復圧縮機によって表される往復流体機械の内側に存在する必須要素が、概略的に示されている。
【0022】
圧縮機は、連接棒12に連結された少なくとも1つのクランクを備えたシャフト10を備え、この連接棒12は、フライホイール38(図3)を介在させて、電気式または熱式の汎用モータ36によって駆動されるシャフト10の回転式運動を、ピン16を介してクロスヘッド14に伝達する。クロスヘッド14は、回転式運動を往復運動に変換する役割を有しており、クロスヘッド14がピストン22のストロークと同じ方向に移動することを可能にする適切な両側のガイドまたはランナ18および20の内側で強制的に移動させられる。スタッフィングボックスからなる封止システム44が設けられたシャフト24は、クロスヘッド14とピストン22を連結する。したがって、シリンダ26の内側で移動するピストン22は、ガスを圧縮することができる。
【0023】
圧縮されるガスが、ある吸気圧力で、1つまたは複数の吸気弁28および28’を通ってシリンダ26の内側に導入され、次いで、所望の最終圧力値に到達するようにピストン22によって圧縮される。ガスは、そのような最終圧力値に到達した後、シリンダ26から1つまたは複数の排出弁30および30’を通って放出される。図1に図式化されたもののような複動式シリンダ26では、2つの別個のチャンバ、言い換えれば、シリンダ26のヘッドの方を向くチャンバ32およびクロスヘッド14の方を向くチャンバ34の内側で圧縮が行われる。
【0024】
圧縮機は、単一シリンダタイプのものでよく、あるいはたとえば、図3に示すように水平かつ向かい合わせの多くのシリンダ26を有することができる。注油システム40および水作動式冷却システム42によって、圧縮機は完全な形となり、これらのシステムは、圧縮機がさまざまな回転速度で機能することを可能にする。
【0025】
圧縮機の機械的構成要素、言い換えればシャフト10、連接棒12、シャフト24、およびクロスヘッド14の組立体、ならびにそれに関連付けられた圧縮機の往復移動を確実にする要素は、圧縮機自体のフレーム46と見なすことができる。したがって、フレーム46内にはガスを循環させるための回路が存在しないため、フレーム46は、シリンダ26全体、すなわちシリンダ26に関連付けられた水路28、28’、30、30’、40および42のすべてが設けられたシリンダと区別することができる。
【0026】
次に、図4から10を参照すれば、本発明による往復流体機械の作動パラメータを検証、取得、測定および確認するためのシステムの好ましい実施形態が、その全体を参照番号50で示して図示されている。
【0027】
システム50は、好ましくは、システム50自体の作動に必要な構成要素が取り付けられる基部プレートまたは土台52を備える。したがって、基部プレート52は、これに取り外し可能に装着された、往復流体機械、特に往復圧縮機の少なくとも1つのフレーム46を有しており、ここでフレーム46とは、ガス用の回路を備えない機械の構成要素のすべての組立体を意味している(前の説明を参照)。より具体的には、フレーム46は、少なくとも1つの連接棒12およびクロスヘッド14を備え、クロスヘッド14は、往復運動で可動し、その2つの端部の少なくとも1つにおいて、さらに往復運動で可動であるシャフト24に固定して連結されている。
【0028】
フレーム46の構成要素12、14および24は、基部プレート52に回転自在に結合された第1のクランクシャフト54によって往復運動で移動する。同じく、シャフト54は、所定の、ただしいずれの場合も可変である角度速度に基づいて、好ましくは電気式の駆動モータ56によって、基部プレート52によって支持された駆動システム58を介在して固定されて回転する。
【0029】
図示する例となる実施形態では、駆動システム58は、剛性の連接棒58’と、ベルト60およびフライホイールプーリ62を介してモータ56によって駆動されるそれぞれのクランク棒58”とを有するシステムからなる。フライホイール62は、中央のクランクシャフト58”を介して第1のクランクシャフト54に連結される。
【0030】
本発明によれば、システム50の基部プレート52上には、実際の流体機械で起こるようなフレーム46上で作用するガスの負荷を複製するのに適した、負荷を発生させるための少なくとも1つのシステム80が取り付けられる。
【0031】
本発明の特に有利な実施形態では、負荷を発生させるためのシステム80は、機械式タイプのものである。負荷を発生させるためのそのようなシステム80は、たとえば水圧式、電気式、空気式、または他の方式などの任意の他のタイプのものとすることができることを除外してはならないことは明らかである。
【0032】
好ましい実施形態では、負荷を発生させるためのシステム80は、少なくとも1つの偏心器またはカム66と動作可能に連結して配置された弾性または降伏要素64を備える。
【0033】
より具体的には、各弾性要素64は、各シャフト24と各偏心器66(図10および11の線図を参照)の間に差し込まれ、フレーム46のシャフト24の往復運動およびそれと同時に起こる偏心器66の回転式運動に基づいて、圧縮および放出が順に行われる。したがって、弾性要素64および偏心器またはカム66からなる組立体は、以下でより明確に明記するが、一旦モータ56によって駆動され、適切に較正された後、たとえば以前に説明した往復圧縮機のような汎用の往復流体機械のシリンダ26の負荷をシミュレートすることができる。実際、図示する例となる実施形態では、圧縮によって作動するコイルばね形態で作製された各弾性要素64は、対象の作動状態において、往復圧縮機の構成要素上(特にクロスヘッド14およびそれぞれのピン16上)に作用する同じ力を再現することができる。
【0034】
降伏要素74は、有利にかつ好ましくは、カムとばねの間の摩擦を低減し、それらの接触を促進させるために、偏心器66とばね64の間に差し込まれる。
【0035】
有利な実施形態では、すべての作動状態において降伏要素64とカム66が接触することを確実にするために、別の弾性要素82(図5および8)が、カムのシャフト68および降伏要素74のシャフトに関連付けられる。この弾性要素82は、調整要素78を介して調整することができ、図に示す場合ではプレート76上に作用するねじ78を用いて行われる。
【0036】
このようにして、任意の回転速度に対して、(クロスヘッド14にかかる所望の負荷を得るように設計された)主ばね64の剛性を、降伏要素64とカム66との接触を維持するのに必要な剛性から切り離すことが可能になる。
【0037】
システム50には、有利には、フレーム46、およびシリンダ26を再現するばね64およびカム66からなる組立体の両方に対する作動パラメータを取得および測定することができる1つまたは複数のセンサ84が設けられる。そのようなパラメータは、
−クロスヘッド14のすべりブロックと関連するランナ18および20との間の空隙(千分の数ミリメートル)、
−クランク角度(θ)、
−クロスヘッド14上およびシャフト24上に作用する力(Fθ)、
−シャフト10の回転速度(ω)およびクロスヘッド14の線形速度(Vθ)、
−クロスヘッド14のすべりブロックと関連するランナ18および20との間の隙間に存在する潤滑油の温度、圧力、および流速
を含む。
【0038】
センサ84によって取得および測定されたパラメータのすべては、適切な無線通信ライン70によってまたはケーブルを介して、回転中央処理ユニット(図示せず)に送ることができ、この処理ユニットは、シャフト54の1回の回転ごとによるそのようなパラメータをリアルタイムで記録し、グラフに表すことができる。
【0039】
したがって、本発明によるシステム50は、相当な量のエネルギーを使い果たす、関連するガス送出/排除(gas delivery and expulsion)回路と共に機械の1つまたは複数のシリンダ26を作製および駆動させる必要もなく、たとえば全負荷または部分負荷として知られる作動状態において圧縮機などの往復流体機械の検証テストを行うことができる。実際に、システム50の利点の1つは、駆動モータ56が、完全な形の往復圧縮機の通常作動に使用することができる通常のモータ36に必要とされる出力に比べて実質的に低い出力を出すことができることである。これは、本質的には、システム50の作動中、ばね64がクロスヘッド14の戻りストローク中に解放されるとき、ばね64自体が、往路(outward)ストロークにおいて吸収したエネルギーを(図11の線図を参照)を戻して、駆動モータ56が送出しなければならない出力要件を低減することができることによるものである。
【0040】
(以前に述べ、たとえば図5に示したように)フレーム46をシステム50から取り外すことができることに加えて、さまざまな機械上でまたはさまざまな要求事項に対して、測定および/または検証を行う必要がある場合、ばね64および/またはカム66をシステム50から取り外して、それらを異なるタイプの他のばねおよび/またはカムに取り替えることも可能である。たとえば、異なる寸法および弾性係数を備えたばね64あるいは異なる設計のカム66を使用することが可能である。
【0041】
あるいはまたはそれに加えて、ここでも往復機械の試験条件を変更するために、システム50には、各ばね64上に作用する1つまたは複数の予圧装置72を設けることができる。詳細には、図示する例となる実施形態に基づくと、予圧装置72(図8)は、ねじ−ナット原理に従って作動し、フレーム46のシャフト24と関連するばね64との間に差し込まれた回転式リングナットシステムからなる。したがって、予圧装置72は、シャフト24をばね64自体に近づける、または遠ざけることによって、ばね64上の圧縮をそれぞれ増大または低減することができる。
【0042】
本発明によるシステム50は、図9〜11の線図に示す基本的な作動原理を依然として維持しながら、ここまでに説明し、図示したものとは異なる実施形態に基づいて作製することができる。たとえば、剛性の連接棒58’およびそれぞれのクランク58”とは異なる一連の連結機構58を介して、駆動モータ56からシャフト54および68に運動を伝達することができる。連結機構58は、実際に、技術的要求事項に従って、駆動モータ56とシャフト54および68との間に差し込まれたベルト、鎖および/またはギヤを有するシステム、あるいは他の等価のシステムからなることができる。同様に、さまざまな数のモータも予見することができる。しかし、剛性の連接棒58’およびそれぞれのクランクシャフト58”からなるシステムは、フレーム46の往復移動およびカム66の回転移動をそれぞれ制御するシャフト54および68が完全に位相を合わせて回転移動することを確実にするために好ましいと考えられていることを明記しなければならない。
【0043】
また、実際の圧縮機のフレームを原寸に比例して再現するフレーム46を作製することが可能であることにも留意されたい。このようにして、システム50は、その製造および取り付けコストを大幅に低減すると同時にその多用途性を高めて、実際の圧縮機の原寸に比例したプロトタイプ上で検証試験を行うことができる。
【0044】
本発明によるシステムは、たとえば約3500バールまでまたはそれ以上の圧力で機能する低密度ポリエチレンを生産するための産業プラントのような、ガス用の回路の作製が特に複雑で高価である産業システムまたはプラントにおける高パフォーマンス用の往復流体機械の作動パラメータを取得、測定、および確認するのに特に有用である。
【0045】
そのようなシステムを異なるタイプの往復機械または産業プラントで使用できることを除外してはならないことは明らかである。
【0046】
こうして考案された本発明の往復流体機械の作動パラメータを取得、測定、および確認するためのシステムには、いずれの場合も、数多くの変更および変形を施すことができ、その変更および変形のすべては、同じ本発明の概念によって包含され、さらに、その詳細のすべてを、技術的に等価の要素で置き換えることができる。実際には、使用される材料、ならびに形状およびサイズは、技術的要求事項に従ったどのようなものでもよい。
【0047】
したがって、本発明の保護の範囲は、添付の特許請求の範囲によって定義される。
【符号の説明】
【0048】
10 圧縮機のシャフト
12 連接棒
14 クロスヘッド
16 ピン
18、20 ランナ
22 ピストン
24 封止システムのシャフト
26 シリンダ
28、28’ 吸気弁
30、30’ 排出弁
32、34 チャンバ
36 通常のモータ
38 フライホイール
40 注油システム
42 水作動式冷却システム
44 封止システム
46 フレーム
50 往復流体機械の作動パラメータを検証、取得、測定および確認するためのシステム
52 土台
54 クランクシャフト
56 駆動モータ
58 駆動システム
60 ベルト
62 フライホイールプーリ
64、74、82 弾性または降伏要素
66 偏心器またはカム
68 カムのシャフト
70、84 センサ
72 予圧装置
76 プレート
78 調整要素
80 負荷を発生させるためのシステム
【特許請求の範囲】
【請求項1】
往復流体機械のための検証システム(50)であって、
前記往復流体機械が取り外し可能に装着される基部プレートまたは土台(52)と、
前記フレーム(46)の構成要素(12、14、24)を動かすために前記基部プレート(52)に回転自在に結合された第1のシャフト(54)と、
前記構成要素(12、14、24)と動作可能に連結して配置され、駆動システム(58)によって回転し、前記往復流体機械のシリンダ(26)上の作動流体によって発生する負荷をシミュレートすることができる、負荷を発生させるための少なくとも1つのシステム(80)とを備える、システム(50)。
【請求項2】
前記往復流体機械が、高パフォーマンスタイプのものであることを特徴とする、請求項1記載のシステム(50)。
【請求項3】
負荷を発生させるための前記システム(80)が、機械式、空気式、水圧式、もしくは電気式のタイプ、または類似のタイプのものであることを特徴とする、請求項1記載のシステム(50)。
【請求項4】
負荷(80)を発生させるための前記システムが、前記構成要素(12、14、24)に動作可能に連結して配置され、前記駆動システム(58)の少なくとも1つの第2のシャフト(68)によって回転する少なくとも1つの偏心器(66)によってさらに回転する、少なくとも1つの第1の弾性要素(64)を備えることを特徴とする、請求項1乃至3のいずれか1項記載のシステム(50)。
【請求項5】
前記第1の弾性要素(64)の予圧を特定の応用例に従って調整するために前記第1の弾性要素(64)上で作用する1つまたは複数の予圧装置(72)を備えることを特徴とする、請求項4記載のシステム(50)。
【請求項6】
前記偏心器(66)と前記第1の弾性要素(64)の間の摩擦を低減し、前記偏心器(66)と前記第1の弾性要素(64)の間の接触を促進するために前記偏心器(66)と前記第1の弾性要素(64)の間に差し込まれた降伏要素(74)を備えることを特徴とする、請求項4または5記載のシステム(50)。
【請求項7】
任意の動作可能な状態において前記偏心器(66)と前記降伏要素(74)との接触を確実にし、前記第1の弾性要素(64)の剛性を、前記降伏要素(74)と前記偏心器(66)との接触を維持するのに必要な剛性から切り離すように、前記偏心器(66)および前記降伏要素(74)に関連付けられた第2の弾性要素(82)を備えることを特徴とする、請求項6記載のシステム(50)。
【請求項8】
特定の応用例に従って前記偏心器(66)と前記降伏要素(74)の間の前記接触をさらに促進するために、前記第2の弾性要素(82)の予圧を調整するのに適した調整要素(78)を備えることを特徴とする、請求項7記載のシステム(50)。
【請求項9】
前記第1の弾性要素(64)および前記少なくとも1つの偏心器(66)が、さまざまな往復流体機械上で、またはさまざまな要求事項に対して測定およびまたは検証を行わなければならない場合、前記システム(50)から取り外されて異なる種類の弾性要素および/または偏心器と取り替えるのに適していることを特徴とする、請求項4乃至8のいずれか1項記載のシステム(50)。
【請求項10】
前記駆動システム(58)が、少なくとも1つの駆動モータ(56)が設けられた機械式システムであり、戻りストローク中、往時ストロークにおいて吸収したエネルギーを少なくとも部分的に戻して、前記駆動モータ(56)が出さなければならない出力を低減するように構成されることを特徴とする、請求項1記載のシステム(50)。
【請求項11】
前記駆動システム(58)が、前記駆動モータ(56)によって駆動される剛性の連接棒(58’)およびクランク(58’’)を有するシステムからなることを特徴とする、請求項10記載のシステム(50)。
【請求項12】
前記フレーム(46)ならびに前記第1の弾性要素(64)および前記偏心器(66)からなる組立体の両方に対する前記作動パラメータを取得および測定することができる1つまたは複数のセンサ(70)を備えることを特徴とする、請求項4乃至11のいずれか1項記載のシステム(50)。
【請求項1】
往復流体機械のための検証システム(50)であって、
前記往復流体機械が取り外し可能に装着される基部プレートまたは土台(52)と、
前記フレーム(46)の構成要素(12、14、24)を動かすために前記基部プレート(52)に回転自在に結合された第1のシャフト(54)と、
前記構成要素(12、14、24)と動作可能に連結して配置され、駆動システム(58)によって回転し、前記往復流体機械のシリンダ(26)上の作動流体によって発生する負荷をシミュレートすることができる、負荷を発生させるための少なくとも1つのシステム(80)とを備える、システム(50)。
【請求項2】
前記往復流体機械が、高パフォーマンスタイプのものであることを特徴とする、請求項1記載のシステム(50)。
【請求項3】
負荷を発生させるための前記システム(80)が、機械式、空気式、水圧式、もしくは電気式のタイプ、または類似のタイプのものであることを特徴とする、請求項1記載のシステム(50)。
【請求項4】
負荷(80)を発生させるための前記システムが、前記構成要素(12、14、24)に動作可能に連結して配置され、前記駆動システム(58)の少なくとも1つの第2のシャフト(68)によって回転する少なくとも1つの偏心器(66)によってさらに回転する、少なくとも1つの第1の弾性要素(64)を備えることを特徴とする、請求項1乃至3のいずれか1項記載のシステム(50)。
【請求項5】
前記第1の弾性要素(64)の予圧を特定の応用例に従って調整するために前記第1の弾性要素(64)上で作用する1つまたは複数の予圧装置(72)を備えることを特徴とする、請求項4記載のシステム(50)。
【請求項6】
前記偏心器(66)と前記第1の弾性要素(64)の間の摩擦を低減し、前記偏心器(66)と前記第1の弾性要素(64)の間の接触を促進するために前記偏心器(66)と前記第1の弾性要素(64)の間に差し込まれた降伏要素(74)を備えることを特徴とする、請求項4または5記載のシステム(50)。
【請求項7】
任意の動作可能な状態において前記偏心器(66)と前記降伏要素(74)との接触を確実にし、前記第1の弾性要素(64)の剛性を、前記降伏要素(74)と前記偏心器(66)との接触を維持するのに必要な剛性から切り離すように、前記偏心器(66)および前記降伏要素(74)に関連付けられた第2の弾性要素(82)を備えることを特徴とする、請求項6記載のシステム(50)。
【請求項8】
特定の応用例に従って前記偏心器(66)と前記降伏要素(74)の間の前記接触をさらに促進するために、前記第2の弾性要素(82)の予圧を調整するのに適した調整要素(78)を備えることを特徴とする、請求項7記載のシステム(50)。
【請求項9】
前記第1の弾性要素(64)および前記少なくとも1つの偏心器(66)が、さまざまな往復流体機械上で、またはさまざまな要求事項に対して測定およびまたは検証を行わなければならない場合、前記システム(50)から取り外されて異なる種類の弾性要素および/または偏心器と取り替えるのに適していることを特徴とする、請求項4乃至8のいずれか1項記載のシステム(50)。
【請求項10】
前記駆動システム(58)が、少なくとも1つの駆動モータ(56)が設けられた機械式システムであり、戻りストローク中、往時ストロークにおいて吸収したエネルギーを少なくとも部分的に戻して、前記駆動モータ(56)が出さなければならない出力を低減するように構成されることを特徴とする、請求項1記載のシステム(50)。
【請求項11】
前記駆動システム(58)が、前記駆動モータ(56)によって駆動される剛性の連接棒(58’)およびクランク(58’’)を有するシステムからなることを特徴とする、請求項10記載のシステム(50)。
【請求項12】
前記フレーム(46)ならびに前記第1の弾性要素(64)および前記偏心器(66)からなる組立体の両方に対する前記作動パラメータを取得および測定することができる1つまたは複数のセンサ(70)を備えることを特徴とする、請求項4乃至11のいずれか1項記載のシステム(50)。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−75556(P2011−75556A)
【公開日】平成23年4月14日(2011.4.14)
【国際特許分類】
【外国語出願】
【出願番号】特願2010−214737(P2010−214737)
【出願日】平成22年9月27日(2010.9.27)
【出願人】(505347503)ヌオーヴォ ピニォーネ ソシエタ ペル アチオニ (112)
【Fターム(参考)】
【公開日】平成23年4月14日(2011.4.14)
【国際特許分類】
【出願番号】特願2010−214737(P2010−214737)
【出願日】平成22年9月27日(2010.9.27)
【出願人】(505347503)ヌオーヴォ ピニォーネ ソシエタ ペル アチオニ (112)
【Fターム(参考)】
[ Back to top ]