
後側方操舵支援技術
【課題】舵角比を可変に変更可能な機構を備えた車両において、運転者に違和感を生じさせることなく、周辺の物体に対する衝突リスクを確実に下げる。
【解決手段】車両周辺に存在する物体を検出し、該物体までの距離を算出すると共に、該物体の相対速度、車両が物体に到達するまでの余裕時間を推定する。車両には、該車両のステアリングホイールに入力される操舵角に対する操舵車輪の転舵角の比である舵角比を可変に制御する舵角比制御手段が備えられている。該舵角比制御手段は、1)前記距離が小さいほど、2)前記相対速度が大きいほど、または3)前記余裕時間が小さいほど、舵角比を小さくする。これにより、舵角比を可変に変更可能な車両において、車両の物体に対するリスクを確実に低減させる。
【解決手段】車両周辺に存在する物体を検出し、該物体までの距離を算出すると共に、該物体の相対速度、車両が物体に到達するまでの余裕時間を推定する。車両には、該車両のステアリングホイールに入力される操舵角に対する操舵車輪の転舵角の比である舵角比を可変に制御する舵角比制御手段が備えられている。該舵角比制御手段は、1)前記距離が小さいほど、2)前記相対速度が大きいほど、または3)前記余裕時間が小さいほど、舵角比を小さくする。これにより、舵角比を可変に変更可能な車両において、車両の物体に対するリスクを確実に低減させる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、車両周辺の物体を回避すべく、車両の運転者の操舵を支援するための装置に関する。
【背景技術】
【0002】
従来、後側方の死角を支援するものとしてミラーが車両に設けられており、また、最近においては、車両に取り付けられたレーダやカメラなどで、外界の他の車両等の物体を検知して運転者に通知することが提案されている。運転者への通知だけでなく、たとえばブレーキ制御を介して、物体を回避するために車両の走行を制御することも提案されている。
【0003】
他方、最近においては、舵角比(操舵比、ステアリングギヤ比等とも呼ばれる)を可変に制御可能な機構が提案されている。下記の特許文献1には、ステアリングギヤ比を可変に変更可能な手段を設け、車両が、前方の障害物に衝突するおそれがあると判定したときには、該ステアリングギヤ比を、走行路幅に基づいて変更される値よりも小さい値に制御することが記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−44427号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のような舵角比を可変に変更可能な機構を設けることにより、運転者による車両の操作性を向上させることができる。しかしながら、運転者の操舵によって周辺の物体と衝突する可能性がある場合に舵角比を変更すると、運転者の意思に反した操舵量を引き起こす可能性があり、物体に不用意に近づいてしまうおそれがある。特に、このような状況下で舵角比を大きくしてタイヤの切れ角(転舵角)を大きくすると、該物体との衝突までの時間が短くなってしまい、衝突リスクを高めてしまうおそれがある。
【0006】
したがって、舵角比を可変に変更可能な機構を備えた車両において、運転者に違和感を生じさせることなく、周辺の物体に対する衝突リスクを確実に下げることのできる手法が所望されている。
【課題を解決するための手段】
【0007】
この発明の一つの側面によると、車両周辺に存在する物体を検出する手段と、前記車両から前記物体までの距離を算出する手段と、前記物体の前記車両に対する相対速度を算出する手段と、前記車両が前記物体に到達するまでの余裕時間を推定する手段と、前記車両のステアリングホイールに入力される操舵角に対する操舵車輪の転舵角の比である舵角比を可変に制御する舵角比制御手段と、を備える運転支援装置において、前記舵角比制御手段は、1)前記距離が小さいほど、2)前記相対速度が大きいほど、または3)前記余裕時間が小さいほど、前記舵角比を小さくする。
【0008】
この発明によれば、物体に対する距離が小さいほど、物体の相対速度が大きいほど、または、物体に到達するまでの余裕時間が小さいほど、舵角比が小さくされるので、同じステアリング操作に対するタイヤの切れ角(転舵角)が小さくなる。したがって、実際の操舵よりもタイヤが切れなくなるので、物体に到達するまでの時間および距離を稼ぐことができ、その間に、運転者に、警報等で気付いてもらうことができる。また、運転者の操作意思(所望の方向に旋回する意思)を守りながら、衝突リスクを確実に低減させることができる。
【0009】
この発明の一実施形態によると、前記舵角比制御手段は、前記小さくされた舵角比を元に戻す場合に、前記車両が直進状態であると判定されたならば、該直進状態であると判定されない場合に比べて、該舵角比を戻す時間を短くする。
【0010】
衝突リスクが解消された後も、舵角比を戻すという自然な行為で、運転者に違和感を生じさせることなく、通常の走行状態に戻すことができる。また、車両が直進状態であれば、車両の旋回による衝突のリスクは存在しなくなるため、舵角比を即時に戻して、通常の走行状態に速やかに戻すことができる。
【0011】
本発明のその他の特徴及び利点については、以下の詳細な説明から明らかである。
【図面の簡単な説明】
【0012】
【図1】この発明の一実施例に従う、車両の運転支援装置の構成を示すブロック図。
【図2】この発明の一実施例に従う、運転支援装置が適用されうる状況の一例を示す図。
【図3】この発明の一実施例に従う、車両のリスク状態を表すパラメータに応じた入力操舵角、出力転舵角および舵角比の推移の一例を示す図。
【図4】この発明の一実施例に従う、運転支援プロセスのフローチャート。
【発明を実施するための形態】
【0013】
次に図面を参照してこの発明の実施の形態を説明する。図1は、この発明の一実施形態に従う、車両に搭載された運転支援装置の構成を示すブロック図である。
【0014】
外界センサ1は、車両周辺の所望の方向に存在する物体を検出するよう、車両の適切な場所に取り付けられる。この実施形態では、外界センサ1は、車両の左右側方(左右後側方でもよい)に存在する物体を検知するよう、車両の左右の側部(たとえば、ドアミラー近傍)に取り付けられている。
【0015】
外界センサ1は、たとえばミリ波やレーザなどの電磁波によるレーダ装置および(または)撮像装置を備えるよう構成されることができる。ここで、レーダ装置は、任意の既知の適切なレーダ装置で実現されることができる。レーダ装置は、たとえば、自車両の外界に設定された検出対象領域を走査するよう電磁波の発信信号を発信する。該発信信号が、自車両の外部の物体(たとえば、他車両や構造物など)によって反射されることで生じた反射信号を受信し、該物体までの距離および方位を示す信号を生成し、処理ユニット10に出力する。また、撮像装置は、任意の既知の適切な撮像装置で実現されることができる。撮像装置は、1または複数のカメラにより撮像された画像を取得し、該画像データを処理ユニット10に出力する。
【0016】
車速センサ3は、車両の走行速度(車速)を検出するセンサであり、ヨーレートセンサ5は、車両のヨーレートを検出するセンサであり、これらの検出値は、処理ユニット10に送られる。
【0017】
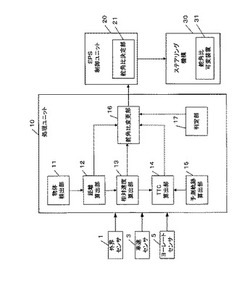
処理ユニット10およびEPS(電動パワーステアリング)制御ユニット20は、それぞれ、中央処理装置(CPU)およびメモリを備えるコンピュータである電子制御装置(ECU)に実現されることができる。図には、処理ユニット10およびEPS制御ユニット20によって実現される機能がブロックとして表されている。この実施形態では、処理ユニット10は、物体検出部11、距離算出部12、相対速度算出部13、TTC(余裕時間)算出部14、予測軌跡算出部15、舵角比変更部16、および判定部17を備える。EPS制御ユニット20は、舵角比決定部21を備える。
【0018】
車両には、ステアリングホイール(ハンドル)に入力される操舵角に対して操舵車輪の転舵角(タイヤの切れ角)の比(以下、舵角比と呼ぶ)を可変に変更可能な舵角比可変(VGS:Variable Gear Ratio Steering)装置31を備えた電動パワーステアリング機構30が設けられている。
【0019】
EPS制御ユニット20の舵角比決定部21は、既知の任意の手法により、舵角比を決定する。たとえば、車速に応じて舵角比を設定することができ、たとえば、高速走行時には、舵角比を小さく設定して、安定した旋回挙動を確保し、低速走行時には、舵角比を大きくして、俊敏な旋回挙動を確保することができる。EPS制御ユニット20は、こうして決定された舵角比を示す制御信号を、ステアリング機構30の舵角比可変装置31に送出し、これに応じて、舵角比可変装置31は、受け取った舵角比を実現する。こうして、運転者の操作によってステアリングホイールに入力された操舵角は、該舵角比に従って、操舵車輪の転舵角に変換され、該変換された転舵角に従って操舵車輪が駆動される。舵角比が大きくなるほど、同じステアリング操作でも、タイヤの切れ角(転舵角)が大きくなる。
【0020】
上記のような舵角比可変装置31は、たとえば、特開2010−167842号公報や特開2010−95153号公報に記載されている。なお、この実施例では、舵角比を変更するのに、舵角比可変装置を用いたが、代替的に、ステアリング系と操舵車輪とが機械的に分離され、ステアリングホイールに入力された操舵角に応じてアクチュエータ等で操舵車輪を転舵する、いわゆるステアバイワイヤ(SBW)装置を用いてもよい。この場合、たとえばEPS制御ユニットで決定された舵角比に従って操舵角が転舵角に変換され、これが、アクチュエータ等で操舵車輪に反映される。
【0021】
この実施形態では、上記のように決定された舵角比が、処理ユニット10による処理結果に応じて、変更される。この舵角比変更処理について、以下、具体的に説明する。
【0022】
物体検出部11は、外界センサ1の出力信号から、車両の周辺に存在する物体を検出する。たとえば、他の車両を、物体として検出することができる。たとえば、前述したレーダ装置からの出力信号および撮像装置からの画像データに基づいて、既知の手法により、他の車両等の物体を検出することができる。
【0023】
距離算出部12は、物体検出部11によって検出された物体までの自車両からの距離(相対距離)を算出する。相対速度算出部13は、該検出された物体の速度と自車両の速度に基づいて、物体の自車両に対する相対速度を算出する。物体の速度は、外界センサ1によって該物体を時間的に追跡することにより算出することができる。自車両の速度は、車速センサ3により検出されることができる。
【0024】
予測軌跡算出部15は、車速センサ3によって検出された自車両の速度とヨーレートセンサ5によって検出された自車両のヨーレートに基づき、自車両の今後の軌跡を推定(予測)する。具体的には、予測軌跡算出部15は、検出されたヨーレートおよび車速から、車両の旋回半径を算出し、自車両の現在の進行方向に、該算出した旋回半径の円弧を連ねることにより、自車両の将来の走行軌跡を予測することができる。
【0025】
TTC算出部14は、自車両の物体に到達するまでの時間(衝突余裕時間(TTC:time to collision)と呼ばれる)を算出する。たとえば、予測軌跡算出部15によって算出された予測軌跡と、検出された物体が現在の速度および方向を維持して走行したと仮定した場合の軌跡との交点を求め、自車両が該交点に到達するまでの時間を、余裕時間TTCとして求めることができる。
【0026】
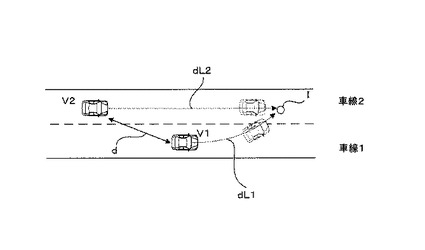
ここで図2の(a)を参照すると、本願発明が効果的に適用されうる、運転者の操舵(旋回)操作によって物体と衝突する可能性のある状況の一例が示されている。自車両V1が車線1を走行しており、他の車両V2が、車線1の隣にある車線2を走行している。自車両V1には、車両の左側方の物体を検出するよう外界センサ1が設けられており、よって、外界センサ1により、他の車両V2を検出することができる。これにより、他の車両V2への距離dおよび他の車両V2の相対速度veが算出される。
【0027】
車両V1は、車線1から車線2に車線変更する動作に入っており、予測軌跡算出部15は、前述したように、車両V1の車線2への軌跡を予測する。予測された軌跡が、点線dL1で示されている。他方、他の車両V2は、車線2を直進走行しており、点線dL2のように、軌跡が推定される。軌跡dL1とdL2の交点Iが算出され、車両V1の現在位置から交点Iまでの距離と、車両V1の現在の車速に基づいて、該交点Iに車両V1が到達するまでの時間TTCを算出することができる。代替的に、車両V1が、車線V2に侵入する地点までの時間を、余裕時間TTCとして算出するようにしてもよい。
【0028】
舵角比変更部16は、算出された距離d、相対速度ve、余裕時間TTCのうちの1つまたは複数に基づいて、舵角比を変更する。具体的には、距離dが所定値以下になったとき、相対速度veが所定値以上になったとき、または、余裕時間TTCが所定値以下になったとき、物体回避の支援をするため、舵角比変更処理が開始される。該舵角比変更処理の間、舵角比変更部16は、該舵角比変更処理に入ったときに舵角比決定部21によって決定された舵角比を基準として(この舵角比を、「元の舵角比」と呼ぶ)、距離dが小さくなるほど、相対速度veが大きくなるほど、または、余裕時間TTCが小さくなるほど、舵角比が小さくなるように、所定の舵角比変更信号をEPS制御ユニット20に送出する。該信号に応じて、舵角比決定部21は、舵角比を変更するよう舵角比可変装置31に指示する。これにより、ステアリングホイールの操舵角に対するタイヤの切れ角が小さくなる。同じ操舵でも、タイヤが切れにくくなるため、物体に到達するまでの距離および時間に余裕を持たせることができるようになり、その間に、たとえば警報で運転者に気付いてもらい、運転者の自発的な回避行動を促すことができる。
【0029】
また、舵角比を小さくするものの、運転者の操作意思(所望の方向への旋回意思)は維持され、強制的に操舵力を増減するものでもないので、運転者への違和感を回避しつつ、物体に対する回避行動を支援することができる。
【0030】
舵角比変更部16による舵角比の変更の程度は、任意の適切な手法で設定することができる。たとえば、舵角比を一度に変化させる程度(数値で表されることができる)を予め決定する。距離dが小さくなるほど(たとえば、距離dの今回値が前回値に比べて小さくなる度に)、該舵角比を所定値ずつ小さくしていくことができる。相対速度および余裕時間についても、同様の手法を取ることができる。
【0031】
舵角比変更部16は、物体に対する車両の衝突リスクの状態が低減ないし解消されたと判断したとき、上記のように変更された舵角比を、舵角比変更処理の開始時の元の舵角比に除々に(たとえば、所定値ずつ)戻す。衝突リスクの状態は、距離d、相対速度ve、余裕時間TTCによって表されることができる。たとえば、距離dが大きくなるにつれ、相対速度veが小さくなるにつれ、または余裕時間TTCが大きくなるにつれ、舵角比が除々に大きくなるように(すなわち、元の舵角比に戻すように)、舵角比変更信号をEPS制御ユニット20に送出することができる。
【0032】
好ましくは判定部17が設けられ、判定部17は、車両が直進走行状態にあるか否かを判定する。直進状態か否かの判定は、任意の適切な手法により行うことができ、たとえばステアリングホイールに取り付けられた操舵角センサに基づいて、判断することができる。舵角比変更部16は、上記の車両の衝突リスク状態が低減もしくは解消された判断したときに、該判定部17によって車両が直進状態にあると判定されたならば、舵角比を、上記のように除々に戻すのではなく、即時に戻すよう、舵角比変更信号をEPS制御ユニット20に送出する。これにより、舵角比決定部21は、舵角比変更処理が開始されたときの舵角比となるよう、舵角比可変装置31を制御する。このようなことを行うのは、車両が直進状態にあるときには、車両の操舵(旋回)操作によって物体に衝突する可能性は無いからである。
【0033】
元の舵角比に戻ったならば、舵角比変更処理は終了する。舵角比変更部16は、該変更処理の終了を、EPS制御ユニット20に知らせる。これに応じて、舵角比決定部21は、通常の手法で(前述したように、たとえば車速に基づいて)舵角比を決定し、これに応じて、舵角比可変装置31を制御する。
【0034】
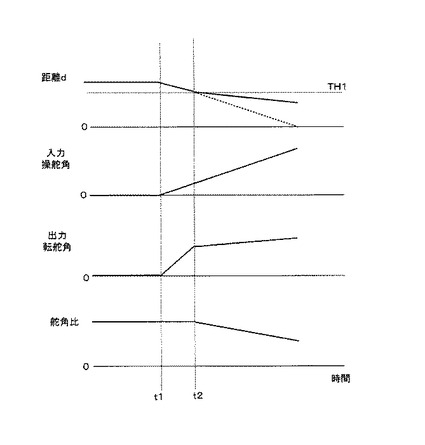
図3には、車両の衝突リスク状態を表すパラメータとして距離dを用いた場合の、舵角比の推移の一例が示されている。入力操舵角は、ステアリングホイールに入力される操舵角を示し、出力転舵角は、舵角比に従って該操舵角が変換された後の、タイヤの切れ角(転舵角)を示す。時間t1〜t2の間は、通常処理において舵角比が決定されており、ここでは、舵角比が所定値であり、該所定値の舵角比に従って、入力操舵角が、出力転舵角に変換されている。
【0035】
時間t2において、物体に対する距離dが所定値TH1以下になったことに応じて、舵角比変更処理が開始され、距離dが小さくなるほど、舵角比が小さくされる。結果として、入力操舵角に対する出力転舵角の比が小さくなるため、時間t1〜t2の間に比べて、時間t2以降は、出力転舵角の増大が抑制されている。そのため、入力操舵角の時間に対する増大量は一定しているにかかわらず、タイヤの動きが遅くなり、距離dの時間に対する減少量が抑制されている(実線)。
【0036】
仮に、上記のような舵角比の減少処理を行わないと、時間t1〜t2と同様の割合で、入力操舵角に比例して出力転舵角が増大していくため、点線で示すように、距離dは急速に減少していく。距離dがゼロに到達したところが、物体との衝突を示すが、舵角比の減少処理によって、物体に到達するまでの距離および時間に余裕を持たせることができるようになる。したがって、この間に運転者に警報を与えることによって気付かせて、自発的な回避行動を促すことが可能となる。
【0037】
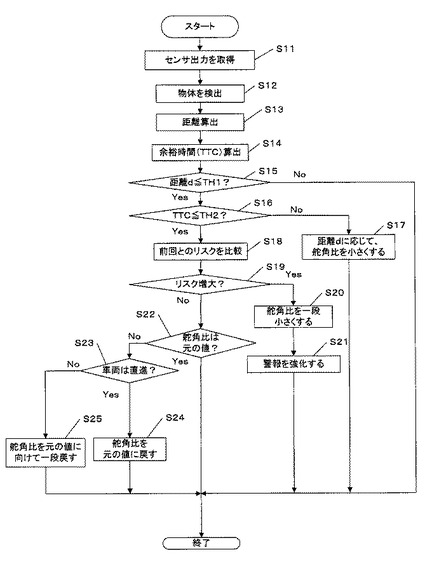
図4は、この発明の一実施形態に従う、運転支援装置によって実施されるプロセスのフローチャートを示す。該プロセスは、所定時間間隔で実行されることができる。この例では、車両のリスク状態を表すパラメータとして、余裕時間TTCと距離dを用いている。
【0038】
ステップS11において、外界センサ1、車速センサ3、ヨーレートセンサ5の出力を取得する。ステップS12において、外界センサ1の出力に基づいて、物体を検出する。ステップS13において、該検出された物体の自車両からの距離dを算出し、ステップS14において、前述したように、たとえば車速およびヨーレートに基づいて、車両の走行軌跡を予測すると共に、検出された物体が、現在の速度および方向を維持すると仮定して、該物体の走行軌跡を算出し、これと、自車両について予測された走行軌跡とに基づいて、自車両が該物体に到達するまでの時間を、余裕時間TTCとして算出する。
【0039】
ステップS15において、算出された距離dが所定値TH1以下かどうかを判断する。この判断がNoであれば、検出された物体は、比較的遠くに存在しており、舵角比変更を行う必要はないので、当該プロセスを終了する。この判断がYesであれば、ステップS16に進む。
【0040】
ステップS16において、算出された余裕時間TTCが所定値TH2以下かどうかを判断する。この判断がNoであるとき、距離dは小さいが、余裕時間TTCは大きいところに、物体が存在している。この場合には、ステップS17において、距離dの大きさに応じて、舵角比を小さくする。たとえば、距離dの大きさに応じて、舵角比を小さくする量を、たとえばマップ等に記憶しておくことによって、予め決めておくことができる。算出された距離dに基づいて、舵角比の対応する減少量を求め、該減少量を示す舵角比変更信号を、EPS制御ユニット20に送出する。こうして、通常処理で決定された舵角比が、該減少量に応じて小さくされ、その結果が、舵角比可変装置31を介して操舵車輪に反映されることとなる。たとえば、余裕時間TTCが大きいために衝突の危険性はないが、自車両周辺が混雑している状況等においては、ステップS17の処理により、予め舵角比を低減して、実際に操舵が行われた際に衝突のリスクが高まるのを抑制することができる。
【0041】
ステップS16の判断がYesならば、距離dが小さく、かつ余裕時間TTCが小さいところに、物体が存在していることを示す。ステップS18において、前回のリスクと今回のリスクを比較し、ステップS19において、比較の結果、リスクが増大しているか否かを判断する。たとえば、前回当該プロセスが実施されたときに算出された余裕時間TTCと、今回算出された余裕時間TTCとを比較し、今回値が前回値よりも小さければ、リスクが増大していると判断することができる。なお、最初に当該ステップを実行するときには、前回値が存在しないので、この判断結果をYesとすることができる。
【0042】
リスクが増大していると判断されたならば、ステップS20において、舵角比を、一段だけ小さくする。ここでの「段」は、予め決められた減少量であり、よって、ステップS20が実行されるたびに、舵角比は、所定量ずつ小さくされる。ステップS21において、強い警報を発し、運転者に、物体に近づいていることを気付かせる。警報は、任意の適切な手法で発することができ、たとえば、聴覚的、視覚的、および(または)触覚的に知らせることができる。
【0043】
ステップS19において、リスクが増大していないと判断されたならば、少なくとも、余裕時間TTCが小さくなっていないことを示す。ステップS22において、舵角比は、元の(通常の)舵角比かどうかを判断する。「元の舵角比」は、前述したように、舵角比変更処理が開始されたときの舵角比、言い換えれば、当該プロセスで最初にステップS20による変更が行われる直前の舵角比を示す。
【0044】
ステップS22の判断がNoであれば、ステップS23において、車両が直進状態かどうかを判断する。車両が直進状態でなければ、車両の旋回によって物体に近づくおそれが未だ残っているため、ステップS25において、舵角比を、元の舵角比に向けて一段だけ大きくする(すなわち、予め決められた増加量だけ大きくする)。こうして、リスクが増大していない状況下では、ステップS25が実行されるたびに、舵角比は所定量ずつ元の値に戻っていく。これにより、急に舵角比を戻したことによる車両の挙動の影響を回避することができる。舵角比が元の値に戻ったならば、ステップS22の判断がYesとなり、当該プロセスを終了する。
【0045】
他方、リスクが増大していない状況下で、車両が直進状態であれば、操舵操作に起因して物体と衝突する危険性は無い。したがって、ステップS24において、舵角比を、元の舵角比に即時に戻す。即時に戻しても、旋回していない限り、車両の挙動に影響は生じない。こうして、通常の走行状態に速やかに戻ることができる。
【0046】
このように、この例では、余裕時間TTCが小さくなるにつれて、舵角比を小さくしていく。余裕時間TTCが小さくならない状況に至ったときには、舵角比を元に戻す。運転者の操舵意思(どちらに旋回したいか)を尊重しつつ、舵角比によって物体回避を支援すると共に、リスクが解消されたならば通常の舵角比に自動的に戻るため、運転者に違和感を生じさせることを回避できる。
【0047】
さらに、この例では、距離dを用いて、危険の予兆を調べている。すなわち、距離dが小さくても、余裕時間TTCが大きければ、すぐに衝突の危険があるとは限らないが(たとえば、車両はほぼ直進走行しているが、側方に車両が存在している場合)、操舵した場合には一気に危険度が増加する。したがって、このような場合には、ステップS17に示すように、舵角比を予め下げておくことにより、このような危険に備えることができる。なお、図示していないが、ステップS17で舵角比を小さくした場合、その後、距離dが所定値TH1より大きくなったときに、該小さくした舵角比を元に戻すステップを入れてもよい。
【0048】
図4のフローチャートでは、余裕時間TTCが小さくなるほど舵角比を小さくするようにしているが、当然ながら、当該フローの余裕時間TTCに代えて、距離dや相対速度veを用いてもよい。また、当該フローでは、距離dを用い、リスクの予兆があるかどうかを調べて、予め舵角比を低減するようにしたが、該距離dに代えて、余裕時間TTCや相対速度veを用いてもよい。
【0049】
さらに、当該フローでは、ステップS18およびS19において、余裕時間TTCが小さくなる方向に変化しているという条件が満たされた場合に、舵角比を小さくしている(S20)が、代替的に、1)余裕時間TTCが小さくなる方向へ変化している、2)距離dが小さくなる方向へ変化している、3)相対速度veの大きさが大きくなる方向に変化している、という3つの条件のうちの1つまたは複数の条件が満たされたときに、舵角比を小さくするようにしてもよい。たとえば、A)距離dが前回値より小さくなったか、または余裕時間TTCが前回値より小さくなった場合に舵角比を小さくしたり、B)距離dが前回値より小さくなったか、または相対速度veが前回値より大きくなった場合に舵角比を小さくしたり、C)余裕時間TTCが前回値より小さくなったか、または相対速度veが前回値より大きくなった場合に舵角比を小さくしたりすることができる。そして、該複数の条件を用いる場合には、該複数の条件のすべてが満たされないときにステップS19がNoとなって、ステップS24またはS25の舵角比の戻しが行われることとなる。たとえば、上記A)のケースの場合、距離dが前回値以上となり、かつ余裕時間TTCが前回値以上となった場合に、ステップS24またはS25によって舵角比を戻す。上記B)およびC)のケースも同様である。
【0050】
なお、上記の実施形態では、物体として、図2に示すように他の車両を検出したが、物体は、車両に限定されず、たとえば自転車のような他の移動物体も含まれ、また、静止物体を含めることもできる。
【0051】
以上のように、この発明の特定の実施形態について説明したが、本願発明は、これら実施形態に限定されるものではない。
【符号の説明】
【0052】
1 外界センサ
10 処理ユニット
20 EPS制御ユニット
30 ステアリング機構
31 舵角比可変装置
【技術分野】
【0001】
この発明は、車両周辺の物体を回避すべく、車両の運転者の操舵を支援するための装置に関する。
【背景技術】
【0002】
従来、後側方の死角を支援するものとしてミラーが車両に設けられており、また、最近においては、車両に取り付けられたレーダやカメラなどで、外界の他の車両等の物体を検知して運転者に通知することが提案されている。運転者への通知だけでなく、たとえばブレーキ制御を介して、物体を回避するために車両の走行を制御することも提案されている。
【0003】
他方、最近においては、舵角比(操舵比、ステアリングギヤ比等とも呼ばれる)を可変に制御可能な機構が提案されている。下記の特許文献1には、ステアリングギヤ比を可変に変更可能な手段を設け、車両が、前方の障害物に衝突するおそれがあると判定したときには、該ステアリングギヤ比を、走行路幅に基づいて変更される値よりも小さい値に制御することが記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−44427号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のような舵角比を可変に変更可能な機構を設けることにより、運転者による車両の操作性を向上させることができる。しかしながら、運転者の操舵によって周辺の物体と衝突する可能性がある場合に舵角比を変更すると、運転者の意思に反した操舵量を引き起こす可能性があり、物体に不用意に近づいてしまうおそれがある。特に、このような状況下で舵角比を大きくしてタイヤの切れ角(転舵角)を大きくすると、該物体との衝突までの時間が短くなってしまい、衝突リスクを高めてしまうおそれがある。
【0006】
したがって、舵角比を可変に変更可能な機構を備えた車両において、運転者に違和感を生じさせることなく、周辺の物体に対する衝突リスクを確実に下げることのできる手法が所望されている。
【課題を解決するための手段】
【0007】
この発明の一つの側面によると、車両周辺に存在する物体を検出する手段と、前記車両から前記物体までの距離を算出する手段と、前記物体の前記車両に対する相対速度を算出する手段と、前記車両が前記物体に到達するまでの余裕時間を推定する手段と、前記車両のステアリングホイールに入力される操舵角に対する操舵車輪の転舵角の比である舵角比を可変に制御する舵角比制御手段と、を備える運転支援装置において、前記舵角比制御手段は、1)前記距離が小さいほど、2)前記相対速度が大きいほど、または3)前記余裕時間が小さいほど、前記舵角比を小さくする。
【0008】
この発明によれば、物体に対する距離が小さいほど、物体の相対速度が大きいほど、または、物体に到達するまでの余裕時間が小さいほど、舵角比が小さくされるので、同じステアリング操作に対するタイヤの切れ角(転舵角)が小さくなる。したがって、実際の操舵よりもタイヤが切れなくなるので、物体に到達するまでの時間および距離を稼ぐことができ、その間に、運転者に、警報等で気付いてもらうことができる。また、運転者の操作意思(所望の方向に旋回する意思)を守りながら、衝突リスクを確実に低減させることができる。
【0009】
この発明の一実施形態によると、前記舵角比制御手段は、前記小さくされた舵角比を元に戻す場合に、前記車両が直進状態であると判定されたならば、該直進状態であると判定されない場合に比べて、該舵角比を戻す時間を短くする。
【0010】
衝突リスクが解消された後も、舵角比を戻すという自然な行為で、運転者に違和感を生じさせることなく、通常の走行状態に戻すことができる。また、車両が直進状態であれば、車両の旋回による衝突のリスクは存在しなくなるため、舵角比を即時に戻して、通常の走行状態に速やかに戻すことができる。
【0011】
本発明のその他の特徴及び利点については、以下の詳細な説明から明らかである。
【図面の簡単な説明】
【0012】
【図1】この発明の一実施例に従う、車両の運転支援装置の構成を示すブロック図。
【図2】この発明の一実施例に従う、運転支援装置が適用されうる状況の一例を示す図。
【図3】この発明の一実施例に従う、車両のリスク状態を表すパラメータに応じた入力操舵角、出力転舵角および舵角比の推移の一例を示す図。
【図4】この発明の一実施例に従う、運転支援プロセスのフローチャート。
【発明を実施するための形態】
【0013】
次に図面を参照してこの発明の実施の形態を説明する。図1は、この発明の一実施形態に従う、車両に搭載された運転支援装置の構成を示すブロック図である。
【0014】
外界センサ1は、車両周辺の所望の方向に存在する物体を検出するよう、車両の適切な場所に取り付けられる。この実施形態では、外界センサ1は、車両の左右側方(左右後側方でもよい)に存在する物体を検知するよう、車両の左右の側部(たとえば、ドアミラー近傍)に取り付けられている。
【0015】
外界センサ1は、たとえばミリ波やレーザなどの電磁波によるレーダ装置および(または)撮像装置を備えるよう構成されることができる。ここで、レーダ装置は、任意の既知の適切なレーダ装置で実現されることができる。レーダ装置は、たとえば、自車両の外界に設定された検出対象領域を走査するよう電磁波の発信信号を発信する。該発信信号が、自車両の外部の物体(たとえば、他車両や構造物など)によって反射されることで生じた反射信号を受信し、該物体までの距離および方位を示す信号を生成し、処理ユニット10に出力する。また、撮像装置は、任意の既知の適切な撮像装置で実現されることができる。撮像装置は、1または複数のカメラにより撮像された画像を取得し、該画像データを処理ユニット10に出力する。
【0016】
車速センサ3は、車両の走行速度(車速)を検出するセンサであり、ヨーレートセンサ5は、車両のヨーレートを検出するセンサであり、これらの検出値は、処理ユニット10に送られる。
【0017】
処理ユニット10およびEPS(電動パワーステアリング)制御ユニット20は、それぞれ、中央処理装置(CPU)およびメモリを備えるコンピュータである電子制御装置(ECU)に実現されることができる。図には、処理ユニット10およびEPS制御ユニット20によって実現される機能がブロックとして表されている。この実施形態では、処理ユニット10は、物体検出部11、距離算出部12、相対速度算出部13、TTC(余裕時間)算出部14、予測軌跡算出部15、舵角比変更部16、および判定部17を備える。EPS制御ユニット20は、舵角比決定部21を備える。
【0018】
車両には、ステアリングホイール(ハンドル)に入力される操舵角に対して操舵車輪の転舵角(タイヤの切れ角)の比(以下、舵角比と呼ぶ)を可変に変更可能な舵角比可変(VGS:Variable Gear Ratio Steering)装置31を備えた電動パワーステアリング機構30が設けられている。
【0019】
EPS制御ユニット20の舵角比決定部21は、既知の任意の手法により、舵角比を決定する。たとえば、車速に応じて舵角比を設定することができ、たとえば、高速走行時には、舵角比を小さく設定して、安定した旋回挙動を確保し、低速走行時には、舵角比を大きくして、俊敏な旋回挙動を確保することができる。EPS制御ユニット20は、こうして決定された舵角比を示す制御信号を、ステアリング機構30の舵角比可変装置31に送出し、これに応じて、舵角比可変装置31は、受け取った舵角比を実現する。こうして、運転者の操作によってステアリングホイールに入力された操舵角は、該舵角比に従って、操舵車輪の転舵角に変換され、該変換された転舵角に従って操舵車輪が駆動される。舵角比が大きくなるほど、同じステアリング操作でも、タイヤの切れ角(転舵角)が大きくなる。
【0020】
上記のような舵角比可変装置31は、たとえば、特開2010−167842号公報や特開2010−95153号公報に記載されている。なお、この実施例では、舵角比を変更するのに、舵角比可変装置を用いたが、代替的に、ステアリング系と操舵車輪とが機械的に分離され、ステアリングホイールに入力された操舵角に応じてアクチュエータ等で操舵車輪を転舵する、いわゆるステアバイワイヤ(SBW)装置を用いてもよい。この場合、たとえばEPS制御ユニットで決定された舵角比に従って操舵角が転舵角に変換され、これが、アクチュエータ等で操舵車輪に反映される。
【0021】
この実施形態では、上記のように決定された舵角比が、処理ユニット10による処理結果に応じて、変更される。この舵角比変更処理について、以下、具体的に説明する。
【0022】
物体検出部11は、外界センサ1の出力信号から、車両の周辺に存在する物体を検出する。たとえば、他の車両を、物体として検出することができる。たとえば、前述したレーダ装置からの出力信号および撮像装置からの画像データに基づいて、既知の手法により、他の車両等の物体を検出することができる。
【0023】
距離算出部12は、物体検出部11によって検出された物体までの自車両からの距離(相対距離)を算出する。相対速度算出部13は、該検出された物体の速度と自車両の速度に基づいて、物体の自車両に対する相対速度を算出する。物体の速度は、外界センサ1によって該物体を時間的に追跡することにより算出することができる。自車両の速度は、車速センサ3により検出されることができる。
【0024】
予測軌跡算出部15は、車速センサ3によって検出された自車両の速度とヨーレートセンサ5によって検出された自車両のヨーレートに基づき、自車両の今後の軌跡を推定(予測)する。具体的には、予測軌跡算出部15は、検出されたヨーレートおよび車速から、車両の旋回半径を算出し、自車両の現在の進行方向に、該算出した旋回半径の円弧を連ねることにより、自車両の将来の走行軌跡を予測することができる。
【0025】
TTC算出部14は、自車両の物体に到達するまでの時間(衝突余裕時間(TTC:time to collision)と呼ばれる)を算出する。たとえば、予測軌跡算出部15によって算出された予測軌跡と、検出された物体が現在の速度および方向を維持して走行したと仮定した場合の軌跡との交点を求め、自車両が該交点に到達するまでの時間を、余裕時間TTCとして求めることができる。
【0026】
ここで図2の(a)を参照すると、本願発明が効果的に適用されうる、運転者の操舵(旋回)操作によって物体と衝突する可能性のある状況の一例が示されている。自車両V1が車線1を走行しており、他の車両V2が、車線1の隣にある車線2を走行している。自車両V1には、車両の左側方の物体を検出するよう外界センサ1が設けられており、よって、外界センサ1により、他の車両V2を検出することができる。これにより、他の車両V2への距離dおよび他の車両V2の相対速度veが算出される。
【0027】
車両V1は、車線1から車線2に車線変更する動作に入っており、予測軌跡算出部15は、前述したように、車両V1の車線2への軌跡を予測する。予測された軌跡が、点線dL1で示されている。他方、他の車両V2は、車線2を直進走行しており、点線dL2のように、軌跡が推定される。軌跡dL1とdL2の交点Iが算出され、車両V1の現在位置から交点Iまでの距離と、車両V1の現在の車速に基づいて、該交点Iに車両V1が到達するまでの時間TTCを算出することができる。代替的に、車両V1が、車線V2に侵入する地点までの時間を、余裕時間TTCとして算出するようにしてもよい。
【0028】
舵角比変更部16は、算出された距離d、相対速度ve、余裕時間TTCのうちの1つまたは複数に基づいて、舵角比を変更する。具体的には、距離dが所定値以下になったとき、相対速度veが所定値以上になったとき、または、余裕時間TTCが所定値以下になったとき、物体回避の支援をするため、舵角比変更処理が開始される。該舵角比変更処理の間、舵角比変更部16は、該舵角比変更処理に入ったときに舵角比決定部21によって決定された舵角比を基準として(この舵角比を、「元の舵角比」と呼ぶ)、距離dが小さくなるほど、相対速度veが大きくなるほど、または、余裕時間TTCが小さくなるほど、舵角比が小さくなるように、所定の舵角比変更信号をEPS制御ユニット20に送出する。該信号に応じて、舵角比決定部21は、舵角比を変更するよう舵角比可変装置31に指示する。これにより、ステアリングホイールの操舵角に対するタイヤの切れ角が小さくなる。同じ操舵でも、タイヤが切れにくくなるため、物体に到達するまでの距離および時間に余裕を持たせることができるようになり、その間に、たとえば警報で運転者に気付いてもらい、運転者の自発的な回避行動を促すことができる。
【0029】
また、舵角比を小さくするものの、運転者の操作意思(所望の方向への旋回意思)は維持され、強制的に操舵力を増減するものでもないので、運転者への違和感を回避しつつ、物体に対する回避行動を支援することができる。
【0030】
舵角比変更部16による舵角比の変更の程度は、任意の適切な手法で設定することができる。たとえば、舵角比を一度に変化させる程度(数値で表されることができる)を予め決定する。距離dが小さくなるほど(たとえば、距離dの今回値が前回値に比べて小さくなる度に)、該舵角比を所定値ずつ小さくしていくことができる。相対速度および余裕時間についても、同様の手法を取ることができる。
【0031】
舵角比変更部16は、物体に対する車両の衝突リスクの状態が低減ないし解消されたと判断したとき、上記のように変更された舵角比を、舵角比変更処理の開始時の元の舵角比に除々に(たとえば、所定値ずつ)戻す。衝突リスクの状態は、距離d、相対速度ve、余裕時間TTCによって表されることができる。たとえば、距離dが大きくなるにつれ、相対速度veが小さくなるにつれ、または余裕時間TTCが大きくなるにつれ、舵角比が除々に大きくなるように(すなわち、元の舵角比に戻すように)、舵角比変更信号をEPS制御ユニット20に送出することができる。
【0032】
好ましくは判定部17が設けられ、判定部17は、車両が直進走行状態にあるか否かを判定する。直進状態か否かの判定は、任意の適切な手法により行うことができ、たとえばステアリングホイールに取り付けられた操舵角センサに基づいて、判断することができる。舵角比変更部16は、上記の車両の衝突リスク状態が低減もしくは解消された判断したときに、該判定部17によって車両が直進状態にあると判定されたならば、舵角比を、上記のように除々に戻すのではなく、即時に戻すよう、舵角比変更信号をEPS制御ユニット20に送出する。これにより、舵角比決定部21は、舵角比変更処理が開始されたときの舵角比となるよう、舵角比可変装置31を制御する。このようなことを行うのは、車両が直進状態にあるときには、車両の操舵(旋回)操作によって物体に衝突する可能性は無いからである。
【0033】
元の舵角比に戻ったならば、舵角比変更処理は終了する。舵角比変更部16は、該変更処理の終了を、EPS制御ユニット20に知らせる。これに応じて、舵角比決定部21は、通常の手法で(前述したように、たとえば車速に基づいて)舵角比を決定し、これに応じて、舵角比可変装置31を制御する。
【0034】
図3には、車両の衝突リスク状態を表すパラメータとして距離dを用いた場合の、舵角比の推移の一例が示されている。入力操舵角は、ステアリングホイールに入力される操舵角を示し、出力転舵角は、舵角比に従って該操舵角が変換された後の、タイヤの切れ角(転舵角)を示す。時間t1〜t2の間は、通常処理において舵角比が決定されており、ここでは、舵角比が所定値であり、該所定値の舵角比に従って、入力操舵角が、出力転舵角に変換されている。
【0035】
時間t2において、物体に対する距離dが所定値TH1以下になったことに応じて、舵角比変更処理が開始され、距離dが小さくなるほど、舵角比が小さくされる。結果として、入力操舵角に対する出力転舵角の比が小さくなるため、時間t1〜t2の間に比べて、時間t2以降は、出力転舵角の増大が抑制されている。そのため、入力操舵角の時間に対する増大量は一定しているにかかわらず、タイヤの動きが遅くなり、距離dの時間に対する減少量が抑制されている(実線)。
【0036】
仮に、上記のような舵角比の減少処理を行わないと、時間t1〜t2と同様の割合で、入力操舵角に比例して出力転舵角が増大していくため、点線で示すように、距離dは急速に減少していく。距離dがゼロに到達したところが、物体との衝突を示すが、舵角比の減少処理によって、物体に到達するまでの距離および時間に余裕を持たせることができるようになる。したがって、この間に運転者に警報を与えることによって気付かせて、自発的な回避行動を促すことが可能となる。
【0037】
図4は、この発明の一実施形態に従う、運転支援装置によって実施されるプロセスのフローチャートを示す。該プロセスは、所定時間間隔で実行されることができる。この例では、車両のリスク状態を表すパラメータとして、余裕時間TTCと距離dを用いている。
【0038】
ステップS11において、外界センサ1、車速センサ3、ヨーレートセンサ5の出力を取得する。ステップS12において、外界センサ1の出力に基づいて、物体を検出する。ステップS13において、該検出された物体の自車両からの距離dを算出し、ステップS14において、前述したように、たとえば車速およびヨーレートに基づいて、車両の走行軌跡を予測すると共に、検出された物体が、現在の速度および方向を維持すると仮定して、該物体の走行軌跡を算出し、これと、自車両について予測された走行軌跡とに基づいて、自車両が該物体に到達するまでの時間を、余裕時間TTCとして算出する。
【0039】
ステップS15において、算出された距離dが所定値TH1以下かどうかを判断する。この判断がNoであれば、検出された物体は、比較的遠くに存在しており、舵角比変更を行う必要はないので、当該プロセスを終了する。この判断がYesであれば、ステップS16に進む。
【0040】
ステップS16において、算出された余裕時間TTCが所定値TH2以下かどうかを判断する。この判断がNoであるとき、距離dは小さいが、余裕時間TTCは大きいところに、物体が存在している。この場合には、ステップS17において、距離dの大きさに応じて、舵角比を小さくする。たとえば、距離dの大きさに応じて、舵角比を小さくする量を、たとえばマップ等に記憶しておくことによって、予め決めておくことができる。算出された距離dに基づいて、舵角比の対応する減少量を求め、該減少量を示す舵角比変更信号を、EPS制御ユニット20に送出する。こうして、通常処理で決定された舵角比が、該減少量に応じて小さくされ、その結果が、舵角比可変装置31を介して操舵車輪に反映されることとなる。たとえば、余裕時間TTCが大きいために衝突の危険性はないが、自車両周辺が混雑している状況等においては、ステップS17の処理により、予め舵角比を低減して、実際に操舵が行われた際に衝突のリスクが高まるのを抑制することができる。
【0041】
ステップS16の判断がYesならば、距離dが小さく、かつ余裕時間TTCが小さいところに、物体が存在していることを示す。ステップS18において、前回のリスクと今回のリスクを比較し、ステップS19において、比較の結果、リスクが増大しているか否かを判断する。たとえば、前回当該プロセスが実施されたときに算出された余裕時間TTCと、今回算出された余裕時間TTCとを比較し、今回値が前回値よりも小さければ、リスクが増大していると判断することができる。なお、最初に当該ステップを実行するときには、前回値が存在しないので、この判断結果をYesとすることができる。
【0042】
リスクが増大していると判断されたならば、ステップS20において、舵角比を、一段だけ小さくする。ここでの「段」は、予め決められた減少量であり、よって、ステップS20が実行されるたびに、舵角比は、所定量ずつ小さくされる。ステップS21において、強い警報を発し、運転者に、物体に近づいていることを気付かせる。警報は、任意の適切な手法で発することができ、たとえば、聴覚的、視覚的、および(または)触覚的に知らせることができる。
【0043】
ステップS19において、リスクが増大していないと判断されたならば、少なくとも、余裕時間TTCが小さくなっていないことを示す。ステップS22において、舵角比は、元の(通常の)舵角比かどうかを判断する。「元の舵角比」は、前述したように、舵角比変更処理が開始されたときの舵角比、言い換えれば、当該プロセスで最初にステップS20による変更が行われる直前の舵角比を示す。
【0044】
ステップS22の判断がNoであれば、ステップS23において、車両が直進状態かどうかを判断する。車両が直進状態でなければ、車両の旋回によって物体に近づくおそれが未だ残っているため、ステップS25において、舵角比を、元の舵角比に向けて一段だけ大きくする(すなわち、予め決められた増加量だけ大きくする)。こうして、リスクが増大していない状況下では、ステップS25が実行されるたびに、舵角比は所定量ずつ元の値に戻っていく。これにより、急に舵角比を戻したことによる車両の挙動の影響を回避することができる。舵角比が元の値に戻ったならば、ステップS22の判断がYesとなり、当該プロセスを終了する。
【0045】
他方、リスクが増大していない状況下で、車両が直進状態であれば、操舵操作に起因して物体と衝突する危険性は無い。したがって、ステップS24において、舵角比を、元の舵角比に即時に戻す。即時に戻しても、旋回していない限り、車両の挙動に影響は生じない。こうして、通常の走行状態に速やかに戻ることができる。
【0046】
このように、この例では、余裕時間TTCが小さくなるにつれて、舵角比を小さくしていく。余裕時間TTCが小さくならない状況に至ったときには、舵角比を元に戻す。運転者の操舵意思(どちらに旋回したいか)を尊重しつつ、舵角比によって物体回避を支援すると共に、リスクが解消されたならば通常の舵角比に自動的に戻るため、運転者に違和感を生じさせることを回避できる。
【0047】
さらに、この例では、距離dを用いて、危険の予兆を調べている。すなわち、距離dが小さくても、余裕時間TTCが大きければ、すぐに衝突の危険があるとは限らないが(たとえば、車両はほぼ直進走行しているが、側方に車両が存在している場合)、操舵した場合には一気に危険度が増加する。したがって、このような場合には、ステップS17に示すように、舵角比を予め下げておくことにより、このような危険に備えることができる。なお、図示していないが、ステップS17で舵角比を小さくした場合、その後、距離dが所定値TH1より大きくなったときに、該小さくした舵角比を元に戻すステップを入れてもよい。
【0048】
図4のフローチャートでは、余裕時間TTCが小さくなるほど舵角比を小さくするようにしているが、当然ながら、当該フローの余裕時間TTCに代えて、距離dや相対速度veを用いてもよい。また、当該フローでは、距離dを用い、リスクの予兆があるかどうかを調べて、予め舵角比を低減するようにしたが、該距離dに代えて、余裕時間TTCや相対速度veを用いてもよい。
【0049】
さらに、当該フローでは、ステップS18およびS19において、余裕時間TTCが小さくなる方向に変化しているという条件が満たされた場合に、舵角比を小さくしている(S20)が、代替的に、1)余裕時間TTCが小さくなる方向へ変化している、2)距離dが小さくなる方向へ変化している、3)相対速度veの大きさが大きくなる方向に変化している、という3つの条件のうちの1つまたは複数の条件が満たされたときに、舵角比を小さくするようにしてもよい。たとえば、A)距離dが前回値より小さくなったか、または余裕時間TTCが前回値より小さくなった場合に舵角比を小さくしたり、B)距離dが前回値より小さくなったか、または相対速度veが前回値より大きくなった場合に舵角比を小さくしたり、C)余裕時間TTCが前回値より小さくなったか、または相対速度veが前回値より大きくなった場合に舵角比を小さくしたりすることができる。そして、該複数の条件を用いる場合には、該複数の条件のすべてが満たされないときにステップS19がNoとなって、ステップS24またはS25の舵角比の戻しが行われることとなる。たとえば、上記A)のケースの場合、距離dが前回値以上となり、かつ余裕時間TTCが前回値以上となった場合に、ステップS24またはS25によって舵角比を戻す。上記B)およびC)のケースも同様である。
【0050】
なお、上記の実施形態では、物体として、図2に示すように他の車両を検出したが、物体は、車両に限定されず、たとえば自転車のような他の移動物体も含まれ、また、静止物体を含めることもできる。
【0051】
以上のように、この発明の特定の実施形態について説明したが、本願発明は、これら実施形態に限定されるものではない。
【符号の説明】
【0052】
1 外界センサ
10 処理ユニット
20 EPS制御ユニット
30 ステアリング機構
31 舵角比可変装置
【特許請求の範囲】
【請求項1】
車両周辺に存在する物体を検出する手段と、
前記車両から前記物体までの距離を算出する手段と、
前記物体の前記車両に対する相対速度を算出する手段と、
前記車両が前記物体に到達するまでの余裕時間を推定する手段と、
前記車両のステアリングホイールに入力される操舵角に対する操舵車輪の転舵角の比である舵角比を可変に制御する舵角比制御手段と、を備える運転支援装置において、
前記舵角比制御手段は、1)前記距離が小さいほど、2)前記相対速度が大きいほど、または3)前記余裕時間が小さいほど、前記舵角比を小さくする、ことを特徴とする運転支援装置。
【請求項2】
前記舵角比制御手段は、前記小さくされた舵角比を元に戻す場合に、前記車両が直進状態であると判定されたならば、該直進状態であると判定されない場合に比べて、該舵角比を戻す時間を短くする、
請求項1に記載の運転支援装置。
【請求項1】
車両周辺に存在する物体を検出する手段と、
前記車両から前記物体までの距離を算出する手段と、
前記物体の前記車両に対する相対速度を算出する手段と、
前記車両が前記物体に到達するまでの余裕時間を推定する手段と、
前記車両のステアリングホイールに入力される操舵角に対する操舵車輪の転舵角の比である舵角比を可変に制御する舵角比制御手段と、を備える運転支援装置において、
前記舵角比制御手段は、1)前記距離が小さいほど、2)前記相対速度が大きいほど、または3)前記余裕時間が小さいほど、前記舵角比を小さくする、ことを特徴とする運転支援装置。
【請求項2】
前記舵角比制御手段は、前記小さくされた舵角比を元に戻す場合に、前記車両が直進状態であると判定されたならば、該直進状態であると判定されない場合に比べて、該舵角比を戻す時間を短くする、
請求項1に記載の運転支援装置。
【図1】



【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−56399(P2012−56399A)
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願番号】特願2010−200161(P2010−200161)
【出願日】平成22年9月7日(2010.9.7)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願日】平成22年9月7日(2010.9.7)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]