
後処理機能を具備する画像形成装置及び画像形成装置における後処理方法
【課題】後処理装置内における媒体搬送速度を、画像形成処理装置内における媒体搬送速度よりも速くすることができるようにして、媒体に後処理を施す際に、次の媒体を後処理装置に搬入するための待ち時間を短縮することができ、低コストでスループットの低下を防止することができるようにする。
【解決手段】後処理装置30は、画像形成処理装置10と媒体搬送速度の同等の速度で媒体12を搬送する第1の搬送手段と、画像形成処理装置10の媒体搬送速度よりも速い速度に加速して媒体12を搬送する第2の搬送手段とを備え、第2の搬送手段は、画像形成処理装置10と後処理装置30とに媒体12が跨(またが)って搬送されている状態で、媒体12を画像形成処理装置10の媒体搬送速度よりも速い速度で搬送する。
【解決手段】後処理装置30は、画像形成処理装置10と媒体搬送速度の同等の速度で媒体12を搬送する第1の搬送手段と、画像形成処理装置10の媒体搬送速度よりも速い速度に加速して媒体12を搬送する第2の搬送手段とを備え、第2の搬送手段は、画像形成処理装置10と後処理装置30とに媒体12が跨(またが)って搬送されている状態で、媒体12を画像形成処理装置10の媒体搬送速度よりも速い速度で搬送する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、後処理機能を具備する画像形成装置及び画像形成装置における後処理方法に関するものである。
【背景技術】
【0002】
従来、画像形成が行われた媒体にパンチ処理やステープル処理を施すフィニッシャ機構を実装した画像形成装置が提案されている(例えば、特許文献1参照。)。
【特許文献1】特開2006−231828号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、前記従来の画像形成装置においては、パンチ処理やステープル処理に時間がかかるため、スループットが低下するという問題があった。
【0004】
本発明は、前記従来の画像形成装置の問題点を解決して、後処理装置内における媒体搬送速度を、画像形成処理装置内における媒体搬送速度よりも速くすることができるようにして、媒体に後処理を施す際に、次の媒体を後処理装置に搬入するための待ち時間を短縮することができ、低コストでスループットの低下を防止することができる後処理機能を具備する画像形成装置及び画像形成装置における後処理方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
そのために、本発明の後処理機能を具備する画像形成装置においては、印刷画像のデータを受信する受信部、該受信部が受信したデータによって画像を形成する画像形成部、該画像形成部が形成した画像を媒体に定着させる定着部を備える画像形成処理装置と、該画像形成処理装置から受け渡された媒体に、パンチ処理及びステープル処理を含む後処理を施す後処理装置とを有する後処理機能を具備する画像形成装置であって、前記画像形成処理装置は、媒体が前記画像形成処理装置内の搬送ローラにかかっている状態でも、前記画像形成処理装置の媒体搬送速度よりも速い速度で、前記画像形成処理装置から媒体を引き抜くことを可能とする駆動切断機構と、前記画像形成処理装置から媒体を引き抜くことが可能なタイミングを前記後処理装置に通知する通知手段とを備え、前記後処理装置は、前記画像形成処理装置の媒体搬送速度と同等の速度で媒体を搬送する第1の搬送手段と、前記画像形成処理装置の媒体搬送速度よりも速い速度に加速して媒体を搬送する第2の搬送手段とを備え、該第2の搬送手段は、前記画像形成処理装置と前記後処理装置とに媒体が跨(またが)って搬送されている状態で、媒体を前記画像形成処理装置の媒体搬送速度よりも速い速度で搬送する。
【発明の効果】
【0006】
本発明によれば、後処理機能を具備する画像形成装置においては、後処理装置内における媒体搬送速度を、画像形成処理装置内における媒体搬送速度よりも速くすることができる。これにより、媒体に後処理を施す際に、次の媒体を後処理装置に搬入するための待ち時間を短縮することができ、低コストでスループットの低下を防止することができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。
【0008】
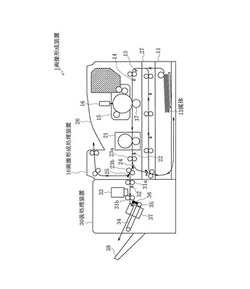
図1は本発明の第1の実施の形態における画像形成装置の概略図である。
【0009】
図において、1は本実施の形態における画像形成装置であり、該画像形成装置1は印刷指示や印刷設定などを行う後述される上位装置としてのホストコンピュータ40に接続されている。また、前記画像形成装置1は、大別すると、画像形成処理機能を備える画像形成処理装置10と後処理機能を備える後処理装置30とを有する。
【0010】
本実施の形態における画像形成処理装置10は、例えば、プリンタ、ファクシミリ機、複写機、各種の機能を併せ持つ複合機等であるが、いかなる種類のものであってもよい。また、前記画像形成処理装置10は、各色の画像を形成する画像形成部15を多段式に配設してカラー印刷を行うカラープリンタであってもよいが、ここでは、説明の都合上、単一の画像形成部15によって単色(例えば、黒色)の印刷を行うモノクロプリンタである場合について説明する。
【0011】
この場合、前記画像形成処理装置10は、給紙トレイ11と、該給紙トレイ11に格納された印刷媒体である媒体12と、給紙のタイミングの基準となる給紙センサ13、画像形成タイミングの基準となる書出しセンサ14と、電子写真プロセスによって感光体ドラム上に現像剤による画像を形成する画像形成部15と、該画像形成部15の感光体ドラム上に光線によって静電潜像を形成する印刷ヘッド部16と、前記画像形成部15の感光体ドラム上に形成された現像剤による画像を媒体12に転写する転写部17と、媒体12上に転写された現像剤による画像を熱によって媒体12に定着させる定着部21と、媒体12が定着部21を抜けたことを検出する排出センサ22と、媒体12を排出するか両面ユニット27へ吸入するかを切り替える両面セパレータ24と、媒体12を本体スタッカ26に排出するか後処理装置30へ排出するかを切り替える排出先切替セパレータ25と、媒体12を排出する本体スタッカ26と、両面印刷を行うために媒体12の表裏反転を行う両面ユニット27とを有する。
【0012】
図において、矢印は媒体搬送ルートと搬送方向を示し、媒体12は媒体搬送ルート上の各ローラによって搬送される。前記媒体搬送ルート上の各ローラのうち、定着部21の媒体搬送ルート後方にあるローラは総じて排出ロ−ラと称され、該排出ロ−ラのうち、第1排出ローラ23a及び第2排出ローラ23bのみがここでの説明に必要となるため、番号が付与されている。なお、前記第1排出ローラ23a及び第2排出ロ−ラ23bは、駆動切断機構としてのワンウェイギヤを介して駆動される。
【0013】
また、前記後処理装置30は、画像形成処理装置10から排出された媒体12に、後処理としてパンチ処理及びステープル処理を施す装置であり、第1搬送ローラ31aと、第2搬送ローラ31bと、媒体12が後処理装置30に吸入されたことを検出する吸入センサ32と、パンチユニット33と、ステープルスタッカ34と、排出ベルト35と、該排出ベルト35に固定された排出爪36と、ステープルユニット37と、排出スタッカ38とを有する。
【0014】
次に、前記画像形成装置1を機能の観点から説明する。
【0015】
図2は本発明の第1の実施の形態における画像形成装置の機能構成を示すブロック図である。
【0016】
図に示されるように、画像形成処理装置10は、機能の観点から、ホストコンピュータ40とデータの送受信を行う送受信部41と、媒体12の給紙制御を行う給紙制御部42と、画像形成、転写及び定着のプロセスを制御する画像形成制御部43と、媒体12の排出制御を行う排出制御部44と、両面ユニット27とのI/F(Inter Face)を行う両面ユニットI/F部45と、後処理装置30とのI/Fを行う後処理装置I/F部46とを有する。前記画像形成処理装置10は、CPU、MPU等の演算手段、磁気ディスク、半導体メモリ等の記憶手段等を備え、制御プログラムに従って動作し、図に示されるような機能を発揮する。
【0017】
ここで、前記ホストコンピュータ40は、画像形成装置1の上位装置であって、例えば、CPU、MPU等の演算手段、磁気ディスク、半導体メモリ等の記憶手段、キーボード、マウス、タッチパネル等の入力手段、CRT、液晶ディスプレイ等の表示手段、通信インターフェイス等を備えるコンピュータであるが、画像形成処理装置10で印刷するための印刷画像のデータを作成することができる装置であれば、パーソナルコンピュータ、サーバ、PDA(Personal Digital Assistant)、電子手帳、ゲーム機等であってもよく、いかなる種類の装置であってもよい。そして、前記ホストコンピュータ40と画像形成処理装置10とは、例えば、USB(Universal Serial Bus)ケーブル等の通信ケーブルや、インターネット、イントラネット、LAN(Local Area Network)、WAN(Wide Area Network)等の通信ネットワークのような通信回線を介して接続されている。
【0018】
また、後処理装置30は、機能の観点から、画像形成処理装置10とのI/Fを行う画像形成処理装置I/F部51と、媒体12の吸入制御を行う吸入制御部52と、パンチ動作及びパンチユニットの制御を行うパンチ制御部53と、ステープル動作、ステープルユニットの制御及び媒体12の排出制御を行うステープル/排出制御部54とを有する。前記後処理装置30は、CPU、MPU等の演算手段、磁気ディスク、半導体メモリ等の記憶手段等を備え、制御プログラムに従って動作し、図に示されるような機能を発揮する。
【0019】
なお、本実施の形態においては、両面ユニット27の詳細な説明を省略する。
【0020】
次に、前記構成の画像形成装置1の動作について説明する。
【0021】
図3は本発明の第1の実施の形態における画像形成処理装置と後処理装置との境界部分の拡大図、図4は本発明の第1の実施の形態における画像形成処理装置の給紙処理の動作を示すフローチャート、図5は本発明の第1の実施の形態における画像形成処理装置の給紙元決定処理の動作を示すフローチャート、図6は本発明の第1の実施の形態における画像形成処理装置の排出先決定処理の動作を示すフローチャート、図7は本発明の第1の実施の形態における画像形成処理装置の画像形成処理の動作を示すフローチャート、図8は本発明の第1の実施の形態における画像形成処理装置の排出処理の動作を示すフローチャート、図9は本発明の第1の実施の形態における後処理装置のI/F処理の動作を示すフローチャート、図10は本発明の第1の実施の形態における後処理装置の吸入処理の動作を示すフローチャート、図11は本発明の第1の実施の形態における後処理装置のパンチ処理の動作を示すフローチャート、図12は本発明の第1の実施の形態における後処理装置のステープル/排出処理の動作を示すフローチャートである。
【0022】
画像形成処理装置10の制御プログラムは、複数枚の媒体12の同時走行を実現するため、給紙処理、画像形成処理、及び、排出処理の各処理を平行して実行する。
【0023】
まず、ホストコンピュータ40より印刷データが送られてくると、送受信部41はそれを受信し(ステップS1)、給紙制御部42は給紙センサ13がOFFであれば給紙可能として(ステップS2)、給紙元を決定する(ステップS3)。
【0024】
ここで、受信したデータが片面印刷データであれば(ステップS3−1)、給紙元は給紙トレイ11となる(ステップS3−5)。
【0025】
なお、受領したデータが両面印刷データの場合、両面ユニット27を使用して媒体12の反転を行い、該媒体12の表裏に印刷を行うことになるが、1枚ずつ表裏を印刷していたのでは、表面の画像形成終了後、両面ユニット27によって媒体12が反転されて給紙可能となるまで、裏面の画像形成を開始することができないので、大幅にスループットが低下してしまう。したがって、次に示されるような順番で印刷を行い、極力スループットを低下させない制御が一般的に行われている。
<両面ユニットの収容上限枚数が2枚の場合>
1枚目裏面→2枚目裏面→1枚目表面→3枚目裏面→2枚目表面・・・n−1枚目表面→n枚目表面
<両面ユニットの収容上限枚数が3枚の場合>
1枚目裏面→2枚目裏面→3枚目裏面→1枚目表面→4枚目裏面→2枚目表面・・・n−2枚目表面→n−1枚目表面→n枚目表面
(裏面印刷時は給紙トレイ11から給紙が行われ、表面印刷時は両面ユニット27から給紙が行われる。)
このような制御を行い、両面ユニット27内に複数枚の媒体12を走行させることによって、極力スループットを低下させずに両面印刷を行うことが可能となる。
【0026】
そこで、受信したデータが両面印刷データの場合(ステップS3−1)、給紙トレイ11は媒体12があれば常に給紙可能であるので、両面ユニット27内の給紙可能な位置まで搬送されている媒体12があれば、両面ユニット27を優先的に給紙元とする(ステップS3−3)。なお、両面ユニット27内の給紙可能な位置まで搬送されている媒体12がない場合でも、両面ユニット27の収容上限枚数にすでに到達している場合は、それ以上媒体12を両面ユニット27に投入することはできないので、両面ユニット27を給紙元とする(ステップS3−4、ステップS3−3)。
【0027】
また、両面ユニット27内の給紙可能な位置まで搬送されている媒体12がなく、かつ、両面ユニット27の収容上限枚数に到達していない場合(ステップS3−2、ステップS3−4)、給紙元を給紙トレイ11とする(ステップS3−5)。
【0028】
次に、給紙制御部42は、排出先の決定を行う(ステップS4)。
【0029】
本実施の形態における後処理装置30のステープルユニット37は、下から上に向かってステープル針を打ち込むことを前提としているので、ステープル処理を行う場合は、印刷済み媒体12の表面を下にした状態で、後処理装置30に受け渡す必要がある。そして、受信したデータが両面印刷データの場合には、表面→裏面の順序で印刷すれば問題がない。しかし、受信したデータが片面印刷データの場合、表面を上にした状態となってしまうので、一旦(たん)媒体12を両面ユニット27に投入し、表裏反転してから後処理装置30へ受け渡す必要がある。
【0030】
そのため、受信したデータが片面印刷データであって(ステップS4−1)、かつ、ステープルが指定されている場合、給紙元が給紙トレイ11のときには、排出先が両面ユニット27となり(ステップS4−7)、両面ユニット27を通過して給紙元が両面ユニット27となったときには、排出先が後処理装置30となる(ステップS4−8)。
【0031】
また、受信したデータが片面印刷データであって、かつ、パンチのみが指定されている場合、又は、受信したデータが両面印刷データあって、かつ、パンチ又はステープルが指定されている場合、給紙元が両面ユニットのときには、排出先が後処理装置30となる(ステップS4−8)。
【0032】
さらに、受信したデータが片面印刷データの場合、又は、両面印刷データあってかつ給紙元が両面ユニット27の場合、パンチ及びステープルが指定されていないときには、排出先が本体スタッカ26となる(ステップS4−9)。
【0033】
さらに、受信したデータが両面印刷データであって、かつ、給紙元が給紙トレイ11の場合、排出先が両面ユニット27となる(ステップS4−3)。
【0034】
該両面ユニット27は、一般的のものと同様に、媒体吸入動作と反転動作とを同時には行うことができない構造なので、次の媒体12を吸入可能なタイミングを媒体長と搬送路長とから計算し、画像形成処理装置10に通知するようになっている。
【0035】
後処理装置30は、パンチ又はステープルが指定された場合、それらの実行に時間を要するため、所要時間を画像形成処理装置10に通知する。すると、該画像形成処理装置10は、通知された時間分、前の媒体12との間隔を開けてから、次の媒体12の搬送を開始するようになっている。
【0036】
画像形成処理装置10は、一旦媒体12の搬送を開始し、画像形成処理を開始してしまうと、その後媒体12を停止させておく手段を備えていない。そのため、画像形成処理開始前にこれらのタイミング調整を行う必要がある。なお、画像形成処理開始前であれば任意の位置で媒体12を停止させて調整を行うことが可能であるが、本実施の形態においては、給紙開始タイミングの調整によって行うものとする。
【0037】
給紙制御部42は、排出先を決定した(ステップS4)後、該排出先が両面ユニット27である場合(ステップS5)、該両面ユニット27が媒体12を吸入可能になるのを待って(ステップS6)、次の媒体12の媒体情報(媒体搬送速度、媒体長)を通知し(ステップS7)、給紙元から給紙を行い、媒体12の搬送を開始する(ステップS11)。また、排出先が後処理装置30である場合(ステップS8)、該後処理装置30より通知された、前の媒体12の後処理に必要な時間分の間隔を前の媒体12との間に確保した(ステップS9)後、次の媒体12の後処理情報(媒体搬送速度、媒体幅、媒体長、パンチ有無、ステープル有無、ステープル実行有無等)を後処理装置30に通知し(ステップS10)、給紙元から給紙を行い、媒体12の搬送を開始する(ステップS11)。
【0038】
そして、給紙開始後、一定時間内に給紙センサ13のONが検出された場合は、給紙成功として(ステップS12)画像形成処理に対する画像形成要求をセットし(ステップS13)、次の媒体12の給紙を行うためステップS1に戻る。また、一定時間内に給紙センサ13のONが検出されない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS14)。
【0039】
画像形成制御部43は、画像形成要求がセットされると(ステップS21、ステップ22)、書出しセンサ14のONによってタイミングを測って画像形成を開始し(ステップS23、ステップ24)、排出処理に対する排出要求をセットする(ステップS25)。そして、画像形成が終了すると(ステップS26)、次の媒体12の画像形成を行うためステップS21に戻る。
【0040】
排出制御部44は、排出要求がセットされると(ステップS31、ステップ32)、排出センサ22の監視を開始し(ステップS33)、一定距離搬送しても排出センサ22のONが検出されない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS47、ステップ48)。
【0041】
また、排出センサ22のONを検出した場合は排出先の判定を行い、排出先が両面ユニット27であれば(ステップS34)、媒体12を両面ユニット27に吸入するべく、両面セパレータ24を切り替え(ステップS35)、両面ユニット27に媒体吸入要求を通知する(ステップS36)。
【0042】
さらに、排出先が両面ユニット27でなければ、両面セパレータ24を排出側に切り替えて(ステップS40)、排出先が後処理装置30であるか否かの判定を行う(ステップS41)。そして、後処理装置30であれば媒体12を後処理装置30に吸入するべく、排出先切替セパレータ25を切り替え(ステップS42)、後処理装置30に媒体吸入要求を通知する(ステップS43)。また、排出先が後処理装置30でなければ、媒体12を本体スタッカ26に排出するべく、排出先切替セパレータ25を切り替える(ステップS44)。
【0043】
その後、排出制御部44は、排出センサ22がOFFになるのを監視し(ステップS37)、排出センサ22のOFFを検出した場合、次の媒体12の排出処理を行うためステップS31に戻るが、排出先が後処理装置30であるときには(ステップS38)、排出センサ22のOFFを検出した時点で後処理装置30に加速可能であることを通知してから(ステップS39)、ステップS31に戻る。なお、排出先が本体スタッカ26の場合、媒体12が本体スタッカ26に排出されて、印刷終了となる。
【0044】
また、排出センサ22がONになったところから媒体長+マージン分の搬送を行っても、排出センサ22のOFFを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS45、ステップ46)。
【0045】
次に、後処理装置30における処理について説明する。
【0046】
後処理装置30の制御プログラムは、画像形成処理装置10の制御プログラムと同様に、複数枚の媒体12の平行処理を実現するため、I/F処理、吸入処理、パンチ処理、及び、ステープル/排出処理の各処理を平行して実行する。
【0047】
後処理装置30の画像形成処理装置I/F部51は、画像形成処理装置10から後処理情報を受信すると(ステップS51)、そこに付加された媒体搬送速度、媒体幅、媒体長、パンチ有無、ステープル有無、ステープル実行有無等の情報に基づき、その後処理に要する時間を計算して、画像形成処理装置10に通知するようになっている(ステップS52)。また、画像形成処理装置10から媒体吸入要求を受信した場合は、媒体吸入要求あり情報をセットし(ステップS53)、加速可能を受信した場合は、加速可能情報をセットするようになっている(ステップS54)。
【0048】
媒体吸入要求あり情報がセットされる(ステップS61)と、吸入制御部52は、先に通知されている後処理情報に基づき、媒体12の受け入れ準備として、モータが回転中でなければ(ステップS62)、媒体搬送速度に基づいて図示されないモータを回転開始させる(ステップ63)。これにより、後処理装置30の第1搬送ローラ31a及び第2搬送ローラ31bが駆動される。このときの搬送速度は、画像形成処理装置10から媒体12が受け渡されるので、画像形成処理装置10の媒体搬送速度と等しい速度となり、該速度を第1速度とする。
【0049】
次に、吸入制御部52は、画像形成処理装置10から搬送されてくる媒体12によって、吸入センサ32がONになるのを待機する(ステップS64)。そして、画像形成処理装置10からの媒体吸入要求受信から一定時間経過しても吸入センサ32のONを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS65、ステップS79)。また、吸入センサ32のONを検出すると、次の媒体12の吸入要求に備えて媒体吸入要求あり情報をクリアし(ステップS66)、パンチ有無情報に基づいてパンチありであればパンチ要求をセットし(ステップS67、ステップS68)、ステープル有無情報に基づいてステープルありであればステープル要求をセットし(ステップS69、ステップS70)、ステープルなしであれば排出要求をセットし(ステップS73)、さらに、ステープル実行ページであればステープル実行要求をセットする(ステップS71、ステップS72)。
【0050】
その後、吸入制御部52は、吸入センサ32のOFFの待機に移行する(ステップS74)。なお、該吸入センサ32のOFFの待機中に画像形成処理装置I/F部51が画像形成処理装置10から加速可能を受信し、加速可能情報がセットされた場合(ステップS75)、モータを第2速度に加速し(ステップS76)、次の媒体12に備えて加速可能情報をクリアする(ステップS77)。
【0051】
後処理装置30は、画像形成のプロセスを行わないため、画像形成処理装置10よりも高速に媒体12を搬送することが可能であり、例えば、媒体12が完全に後処理装置30に受け渡された状態、すなわち、後処理装置30の吸入センサ32を媒体12が通過し、センサOFFを検出した状態から搬送速度の加速が可能である。本実施の形態においては、媒体12が画像形成処理装置10と後処理装置30とに跨った状態であって、かつ、画像形成処理装置10の排出ローラを媒体12が抜けていない状態から、後処理装置30における搬送速度の加速を行うことを特徴とする。
【0052】
これを実現するために、画像形成処理装置10の第1排出ローラ23a及び第2排出ローラ23bの駆動ギヤはワンウェイギヤとなっている。これにより、第1排出ローラ23a及び第2排出ローラ23bは、画像形成処理装置10の図示されないモータによって駆動されているときは、画像形成処理装置10の搬送速度で駆動されるが、後処理装置30がそれ以上の速度で画像形成処理装置10から媒体12を引き抜こうとしたときは、第1排出ローラ23a及び第2排出ローラ23bは、画像形成処理装置10のモータによる駆動から切断されて、引き抜かれようとする速度で回転することが可能となっている。
【0053】
さらに、この加速可能ポイントを後処理装置30へ通知するため、画像形成処理装置10は、図3に示されるように、媒体12を駆動ギヤがワンウェイギヤとなっている第1排出ローラ23a及び第2排出ローラ23bのみで保持していることを保証することができる時点、すなわち、排出センサ22のOFFを検出した時点で、後処理装置30へ加速可能を通知するようになっている。
【0054】
例えば、「背景技術」の項で説明したようなパンチ処理やステープル処理のような後処理を行う従来の画像形成装置と比較する。従来の画像形成装置において、後処理装置でパンチ処理を行う場合、媒体1枚ずつにパンチを行うので、1枚毎にパンチを実行するための時間が必要となる。また、ステープル処理を行う場合、1枚毎に媒体を揃(そろ)える動作のための時間と、最終的にステープルを実行するための時間とが必要となる。そして、これらの時間の合計が画像形成処理装置から後処理装置に搬送されてくる媒体と媒体との間隔の時間を超えるときには、正常な後処理を行うことができなくなくなるばかりか、媒体ジャムが発生する可能性もある。そこで、従来の画像形成装置における後処理装置は、後処理にかかる合計時間に、更にマージンを見込んだ時間を画像形成処理装置に通知し、該画像形成処理装置は通知された時間の分だけ媒体と媒体との間隔を確保した上で、後処理装置に媒体を投入する必要がある。そのため、その分生産性が当然に低下することになってしまう。
【0055】
これに対し、本実施の形態における画像形成装置1は、前述のような構成を有し、前述のように動作して、後処理装置30での加速ポイントを早めることによって、画像形成処理装置10の排出センサ22のOFFから、後処理装置30の吸入センサ32のOFFまでの距離分だけ通常よりも早く加速を行うことが可能となるので、後処理装置30は、前記距離分を高速な第2速度での搬送を前提とした後処理に必要な時間を画像形成処理装置10に通知し、該画像形成処理装置10はそれに従って媒体12を後処理装置30に投入することにより、その分生産性を向上することができる。
【0056】
一例を挙げると、
画像形成処理装置10の排出センサ22のOFFから後処理装置30の吸入センサ32のOFFまでの距離をD1=150〔mm〕とし、
画像形成処理装置10の媒体搬送速度をS1=150〔mm〕/秒とし、
後処理装置30の第2速度をS2=300〔mm〕/秒とした場合、
本実施の形態における媒体1枚あたりの生産性向上分は、
(D1÷S1)−(D1÷S2)→(150÷150)−(150÷300)=0.5秒、となる。
【0057】
通常、後処理動作で最も時間を要するのはステープルの実行であるが、該ステープルの実行はジョブ(Job)毎に1度であり、1ジョブの枚数が多ければ、それほど生産性の低下は起こらない。これに対し、パンチ動作及びステープル実行のための媒体揃え動作は、毎ページ実行する必要があるため、生産性に与える影響が大きい。
【0058】
本実施の形態においては、前述のような構成を有し、前述のように動作することによって、後処理を行う際の媒体1枚毎の生産性を向上することが可能である。また、パンチユニット33及び媒体揃え機構の性能にもよるが、パンチ動作及びステープル実行のための媒体揃え動作を行った場合でも、画像形成処理装置10と同等の生産性を実現することも可能である。
【0059】
なお、両面印刷の場合、又は、片面印刷であってもステープル処理を行う場合には、前述のように、片面を印刷した媒体12を一旦両面ユニット27に入れ、該両面ユニット27内で反転した後にもう片面の印刷を行うため、媒体12はジョブの開始及び終了時を除き、両面ユニット27と後処理装置30とに1枚ずつ交互に排出されることになるので、後処理装置30に受け渡される媒体12の間隔は、自ずと1ページ以上間隔が開くことになる。したがって、その間に後処理が終了するのであれば、格別の効果を期待することができないが、ステープル処理のように、後処理にかかる時間が長い場合は、大きな効果を期待することができる。
【0060】
また、吸入制御部52は、吸入センサ32のOFFの待機中に、吸入センサ32のONから媒体長+マージン分の搬送を行っても吸入センサ32のOFFを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS78、ステップ79)。なお、吸入センサ32のOFFを検出した場合には、次の媒体12の吸入に備えてステップS61に戻る。
【0061】
パンチ制御部53は、パンチ要求がセットされると(ステップS81)吸入センサ32のOFFを監視し、吸入センサ32のOFFを検出後パンチ実行位置まで媒体12が搬送されるのを待って(ステップS82)、図示されないモータの駆動を第2搬送ローラ31bに伝えている図示されない電磁クラッチをOFFにして、第2搬送ローラ31bを停止させる(ステップS83)。これにより、媒体12の搬送が一旦停止するので、パンチユニット33によって媒体12の後端にパンチを実行する(ステップS84)。パンチ実行後は直ちに図示されない電磁クラッチをONにして第2搬送ローラ31bを駆動し(ステップS85)、媒体12の搬送を再開する。そして、パンチ要求をクリアして(ステップS86)、次の媒体12のパンチに備えてステップS81に戻る。
【0062】
ステープル/排出制御部54は、排出要求又はステープル要求がセットされると(ステップS91)、媒体12がステープルトレイまで搬送されるのを待機する(ステップS92)。そして、モータ速度が第2速度である場合は、次の媒体12の吸入に備えて、モータ速度を画像形成処理装置10の媒体搬送速度と同等の第1速度に減速する(ステップS93、ステップS94)。続いて、ステープル実行要求がセットされている場合(ステップS95)、ステープル実行に備えて、図示されない媒体揃え機構によってステープルトレイ上に積載された媒体12を揃え(ステップS96)、ステープルユニット37によりステープルを実行し(ステップS97)、ステープル実行要求をクリアする(ステップS98)。
【0063】
ステープルトレイには、該ステープルトレイ上の媒体12又は該媒体12の束を排出するための排出ベルト35及び排出爪36が配設され、該排出爪36は、前記排出ベルト35に固定されて該排出ベルト35と一緒に回転するようになっている。したがって、ステープル実行後、ステープル済の媒体12の束の後端を排出爪36に引っ掛けた状態で排出ベルト35を図示されないモータによって回転させることにより、媒体12の束は排出スタッカ38上に排出されて積載される(ステップS99)。ステープル実行要求がセットされていない場合であって排出要求がセットされているときには(ステップS100)、排出実行要求をクリアして、前述のようにステープル済の媒体12の束を排出するのと同様の方法で、媒体12を排出スタッカ38上に排出して積載する(ステップS101、ステップS99)。
【0064】
また、ステープル実行要求がセットされていない場合であって排出要求がセットされていないときには、ステープルジョブの一部のページであるため、ステープルを行うために媒体12をステープルトレイ上に積載し、ステープル実行に備えて図示されない媒体揃え機構によって媒体揃えを行い(ステップS102)、ステープル要求をクリアする(ステップS103)。
【0065】
そして、ステープル/排出制御部54は、要求に対する一連の動作が終わると、次の媒体12の処理に備えてステップS91に戻る。
【0066】
次に、画像形成処理装置10の給紙処理のフローチャートについて説明する。
ステップS1 印刷データがあるか否かを判定する。印刷データがある場合はステップS2に進み、印刷データがない場合はそのまま待機する。
ステップS2 給紙センサ13がOFFであるか否かを判定する。OFFである場合はステップS3に進み、OFFでない場合はそのまま待機する。
ステップS3 給紙元決定処理を行う。
ステップS4 排出先決定処理を行う。
ステップS5 排出先が両面ユニット27であるか否かを判定する。排出先が両面ユニット27である場合はステップS6に進み、排出先が両面ユニット27でない場合はステップS8に進む。
ステップS6 両面ユニット27が媒体12を吸入可能であるか否かを判定する。媒体12を吸引可能である場合はステップS7に進み、媒体12を吸入可能でない場合はそのまま待機する。
ステップS7 両面ユニット27に媒体情報を通知する。
ステップS8 排出先が後処理装置30であるか否かを判定する。排出先が後処理装置30である場合はステップS9に進み、排出先が後処理装置30でない場合はステップS11に進む。
ステップS9 前の媒体12の後処理に必要な時間を確保済みか否かを判定する。時間を確保済みの場合はステップS10に進み、時間を確保していない場合はそのまま待機する。
ステップS10 後処理装置30に後処理情報を通知する。
ステップS11 給紙元から給紙を行う。
ステップS12 給紙成功であるか否かを判定する。給紙成功である場合はステップS13に進み、給紙成功でない場合はステップS14に進む。
ステップS13 画像形成要求をセットする。
ステップS14 用紙ジャムをセットし、処理を終了する。
【0067】
次に、給紙元決定処理のサブルーチンについて説明する。
ステップS3−1 受信したデータが両面印刷データであるか否かを判定する。両面印刷データである場合はステップS3−2に進み、両面印刷データでない場合はステップS3−5に進む。
ステップS3−2 両面ユニット27から給紙可能であるか否かを判定する。給紙可能である場合はステップS3−3に進み、給紙可能でない場合はステップS3−4に進む。
ステップS3−3 両面ユニット27を給紙元とし、処理を終了する。
ステップS3−4 両面ユニット27の収容上限枚数に到達しているか否かを判定する。収容上限数に到達している場合はステップS3−3に戻り、収容上限数に到達していない場合はステップS3−5に進む。
ステップS3−5 給紙トレイ11を給紙元とし、処理を終了する。
【0068】
次に、排出先決定処理のサブルーチンについて説明する。
ステップS4−1 受信したデータが両面印刷データであるか否かを判定する。両面印刷データである場合はステップS4−2に進み、両面印刷データでない場合はステップS4−4に進む。
ステップS4−2 給紙トレイ11が給紙元であるか否かを判定する。給紙元である場合はステップS4−3に進み、給紙元でない場合はステップS4−4に進む。
ステップS4−3 排出先を両面ユニット27とし、処理を終了する。
ステップS4−4 パンチ又はステープルが指定されているか否か判定する。パンチ又はステープルが指定されている場合はステップS4−5に進み、パンチ及びステープルが指定されていない場合はステップS4−9に進む。
ステップS4−5 ステープルが指定されているか否かを判定する。ステープルが指定されている場合はステップS4−6に進み、ステープルが指定されていない場合はステップS4−8に進む。
ステップS4−6 給紙トレイ11が給紙元であるか否かを判定する。給紙元である場合はステップS4−7に進み、給紙元でない場合はステップS4−8に進む。
ステップS4−7 排出先を両面ユニット27とし、処理を終了する。
ステップS4−8 排出先を後処理装置30とし、処理を終了する。
ステップS4−9 排出先を本体スタッカ26とし、処理を終了する。
【0069】
次に、画像形成処理装置10の画像形成処理のフローチャートについて説明する。
ステップS21 画像形成要求があるか否かを判定する。画像形成要求がある場合はステップS22に進み、画像形成要求がない場合はそのまま待機する。
ステップS22 画像形成要求をクリアする。
ステップS23 画像形成開始のタイミングであるか否かを判定する。画像形成開始のタイミングである場合はステップS24に進み、画像形成開始のタイミングでない場合はそのまま待機する。
ステップS24 画像形成を開始する。
ステップS25 排出要求をセットする。
ステップS26 画像形成を終了するか否かを判定する。画像形成を終了する場合は、次の媒体12の画像形成を行うため、ステップS21に戻り、画像形成を終了しない場合はそのまま待機する。
【0070】
次に、画像形成処理装置10の排出処理のフローチャートについて説明する。
ステップS31 排出要求があるか否かを判定する。排出要求がある場合はステップS32に進み、排出要求がない場合はそのまま待機する。
ステップS32 排出要求をクリアする。
ステップS33 排出センサ22がONであるか否かを判定する。ONである場合はステップS34に進み、ONでない場合はステップS47に進む。
ステップS34 排出先が両面ユニット27であるか否かを判定する。排出先が両面ユニット27である場合はステップS35に進み、排出先が両面ユニットでない場合はステップS40に進む。
ステップS35 両面セパレータ24を両面ユニット27側に切り替える。
ステップS36 両面ユニット27に媒体吸入要求を通知する。
ステップS37 排出センサ22がOFFであるか否かを判定する。OFFである場合はステップS38に進み、OFFでない場合はステップS45に進む。
ステップS38 排出先が後処理装置30であるか否かを判定する。排出先が後処理装置30である場合はステップS39に進み、排出先が後処理装置30でない場合はステップS31に戻る。
ステップS39 後処理装置30に加速可能を通知する。
ステップS40 両面セパレータ24を排出側に切り替える。
ステップS41 排出先が後処理装置30であるか否かを判定する。排出先が後処理装置30である場合はステップS42に進み、排出先が後処理装置30でない場合はステップS44に進む。
ステップS42 排出先切替セパレータ25を後処理装置30側に切り替える。
ステップS43 後処理装置30に媒体吸入要求を通知する。
ステップS44 排出先切替セパレータ25を本体スタッカ26側に切り替える。
ステップS45 媒体長+マージン分搬送されたか否かを判定する。媒体長+マージン分搬送された場合はステップS46に進み、媒体長+マージン分搬送されていない場合はステップS37に戻る。
ステップS46 用紙ジャムをセットし、処理を終了する。
ステップS47 一定距離搬送されたか否かを判定する。一定距離搬送された場合はステップS48に進み、一定距離搬送されていない場合はステップS33に戻る。
ステップS48 用紙ジャムをセットし、処理を終了する。
【0071】
次に、後処理装置30のI/F処理のフローチャートについて説明する。
ステップS51 画像形成処理装置10から受信情報があるか否かを判定する。後処理情報を受信した場合はステップS52に進み、媒体吸入要求を受信した場合はステップS53に進み、加速可能を受信した場合はステップS54に進み、受信情報がない場合はステップS55に進む。
ステップS52 前の媒体12の後処理に必要な時間を計算して、画像形成処理装置10に通知する。
ステップS53 媒体吸入要求あり情報をセットする。
ステップS54 加速可能情報をセットする。
ステップS55 エラーが発生したか否かを判定する。エラーが発生しない場合はステップS56に進み、エラーが発生した場合はステップS58に進む。
ステップS56 画像形成処理装置10にエラー通知済みであるか否かを判定する。エラー通知済みである場合はステップS57に進み、エラー通知していない場合はステップS51に戻る。
ステップS57 画像形成処理装置10にエラー解除を通知する。
ステップS58 画像形成処理装置10にエラー通知済みであるか否かを判定する。エラー通知していない場合はステップS59に進み、エラー通知済みの場合はステップS60に進む。
ステップS59 画像形成処理装置10にエラーを通知する。
ステップS60 媒体吸入要求あり情報をクリアする。
【0072】
次に、後処理装置30の媒体吸入処理のフローチャートについて説明する。
ステップS61 媒体吸入要求あり情報がセットされているか否かを判定する。セットされている場合はステップS62に進み、セットされていない場合はそのまま待機する。
ステップS62 モータが回転中であるか否かを判定する。モータが回転中でない場合はステップS63に進み、モータが回転中である場合はステップS64に進む。
ステップS63 第1速度でモータ回転を開始する。
ステップS64 吸入センサ32がONであるか否かを判定する。ONでない場合はステップS65に進み、ONである場合はステップS66に進む。
ステップS65 媒体吸入要求受信から一定時間経過したか否かを判定する。一定時間経過した場合はステップS79に進み、一定時間経過していない場合はステップS64に戻る。
ステップS66 媒体吸入要求あり情報をクリアする。
ステップS67 パンチありであるか否かを判定する。パンチありである場合はステップS68に進み、パンチなしである場合はステップS69に進む。
ステップS68 パンチ要求をセットする。
ステップS69 ステープルありであるか否かを判定する。ステープルありである場合はステップS70に進み、ステープルなしである場合はステップS73に進む。
ステップS70 ステープル要求をセットする。
ステップS71 ステープル実行ページであるか否かを判定する。ステープル実行ページである場合はステップS72に進み、ステープル実行ページでない場合はステップS74に進む。
ステップS72 ステープル実行要求をセットする。
ステップS73 排出要求をセットする。
ステップS74 吸入センサ32がOFFであるか否かを判定する。OFFでない場合はステップS75に進み、OFFである場合はステップS61に戻る。
ステップS75 加速可能情報がセットされているか否かを判定する。セットされている場合はステップS76に進み、セットされていない場合はステップS78に進む。
ステップS76 モータを第2速度に加速する。
ステップS77 加速可能情報をクリアする。
ステップS78 媒体長+マージン分搬送されたか否かを判定する。媒体長+マージン分搬送された場合はステップS79に進み、媒体長+マージン分搬送されていない場合はステップS74に戻る。
ステップS79 用紙ジャムをセットし、処理を終了する。
【0073】
次に、後処理装置30のパンチ処理のフローチャートについて説明する。
ステップS81 パンチ要求がセットされているか否かを判定する。セットされている場合はステップS82に進み、セットされていない場合はそのまま待機する。
ステップS82 吸入センサ32のOFFを検出後、パンチ実行位置まで媒体12を搬送済みであるか否かを判定する。搬送済みである場合はステップS83に進み、搬送済みでない場合はそのまま待機する。
ステップS83 第2搬送ローラ31bを停止させる。
ステップS84 パンチを実行する。
ステップS85 第2搬送ローラ31bを駆動する。
ステップS86 パンチ要求をクリアする。
【0074】
次に、後処理装置30のステープル/排出処理のフローチャートについて説明する。
ステップS91 排出要求又はステープル要求がセットされているか否かを判定する。セットされている場合はステップS92に進み、セットされていない場合はそのまま待機する。
ステップS92 吸入センサ32のOFFを検出後、ステープルトレイまで媒体12を搬送済みであるか否かを判定する。搬送済みである場合はステップS93に進み、搬送済みでない場合はそのまま待機する。
ステップS93 モータ速度が第2速度であるか否かを判定する。第2速度である場合はステップS94に進み、第2速度でない場合はステップS95に進む。
ステップS94 モータを第1速度に減速する。
ステップS95 ステープル実行要求がセットされているか否かを判定する。セットされている場合はステップS96に進み、セットされていない場合はステップS100に進む。
ステップS96 媒体揃え動作を実行する。
ステップS97 ステープルを実行する。
ステップS98 ステープル実行要求をクリアする。
ステップS99 媒体12を排出する。
ステップS100 排出要求がセットされているか否かを判定する。セットされている場合はステップS101に進み、セットされていない場合はステップS102に進む。
ステップS101 排出実行要求をクリアする。
ステップS102 媒体揃え動作を実行する。
ステップS103 ステープル要求をクリアする。
【0075】
このように、本実施の形態においては、ステープル処理やパンチ処理のような後処理を行う際に、次の媒体12を後処理装置30に投入する待ち時間を削減することができ、低コストで生産性の向上を図ることが可能となる。
【0076】
次に、本発明の第2の実施の形態について説明する。なお、第1の実施の形態と同じ構造を有するものについては、同じ符号を付与することによってその説明を省略する。また、前記第1の実施の形態と同じ動作及び同じ効果についても、その説明を省略する。
【0077】
図13は本発明の第2の実施の形態における画像形成装置の概略図、図14は本発明の第2の実施の形態における反転装置の要部拡大図である。
【0078】
本実施の形態における画像形成装置1は、図13に示されるように、画像形成処理装置10及び後処理装置30に加えて、反転装置60を有する。なお、本実施の形態における画像形成処理装置10は、給紙トレイ11が複数段装着されている点を除いて、前記第1の実施の形態における画像形成処理装置10と同様の構成を有するので、その説明を省略する。また、本実施の形態における後処理装置30も、前記第1の実施の形態における後処理装置30と同様の構成を有するので、その説明を省略する。
【0079】
反転装置60は、画像形成処理装置10から排出された媒体12を表裏反転して後処理装置30へ投入するための装置である。そして、前記反転装置60は、媒体12を反転せずに後処理装置30に排出するための媒体搬送路であるストレートパス61と、媒体12を反転して後処理装置30に排出するための媒体搬送路である反転パス62と、吸入センサ63と、前記ストレートパス61と反転パス62とを切り替える搬送路セパレータ64と、第1搬送ローラ65aと、第2搬送ローラ65bと、第3搬送ローラ65cと、第4搬送ロ−ラ65d、第5搬送ローラ65eと、第6搬送ローラ65fと、反転センサA66aと、反転センサB66bと、媒体ガイド67と、前記第2搬送ローラ65b及び第4搬送ローラ65dとペアとなる搬送ローラ68と、前記第1搬送ローラ65a、第2搬送ローラ65b及び第4搬送ローラ65d〜第6搬送ローラ65fを駆動するモータA69aと、第3搬送ローラ65cを駆動するモータB69bと、前記第3搬送ローラ65cの一対のローラを圧着及び分離させるソレノイド70とを有する。なお、前記第1搬送ローラ65a、第5搬送ローラ65e及び第6搬送ローラ65fは、駆動切断機構としてのワンウェイギヤを介して駆動される。
【0080】
次に、本実施の形態における画像形成装置1を機能の観点から説明する。
【0081】
図15は本発明の第2の実施の形態における画像形成装置の機能構成を示すブロック図である。
【0082】
図に示されるように、画像形成処理装置10は、機能の観点から、ホストコンピュータ40とデータの送受信を行う送受信部41と、媒体12の給紙制御を行う給紙制御部42と、画像形成、転写及び定着のプロセスを制御する画像形成制御部43と、媒体12の排出制御を行う排出制御部44と、両面ユニット27とのI/Fを行う両面ユニットI/F部45と、後処理装置30及び反転装置60とのI/Fを行う反転装置/後処理装置I/F部81とを有する。前記画像形成処理装置10は、CPU、MPU等の演算手段、磁気ディスク、半導体メモリ等の記憶手段等を備え、制御プログラムに従って動作し、図に示されるような機能を発揮する。
【0083】
また、後処理装置30は、機能の観点から、画像形成処理装置10及び反転装置60とのI/Fを行う画像形成処理装置/反転装置I/F部86と、媒体12の吸入制御を行う吸入制御部52と、パンチ動作及びパンチユニットの制御を行うパンチ制御部53と、ステープル動作、ステープルユニットの制御及び媒体12の排出制御を行うステープル/排出制御部54とを有する。前記後処理装置30は、CPU、MPU等の演算手段、磁気ディスク、半導体メモリ等の記憶手段等を備え、制御プログラムに従って動作し、図に示されるような機能を発揮する。
【0084】
さらに、反転装置60は、機能の観点から、媒体12の吸入制御を行う吸入制御部82と、媒体12の反転制御を行う反転制御部83と、媒体12の排出制御を行う排出制御部84と、画像形成処理装置10及び後処理装置30とのI/Fを行う画像形成処理装置/後処理装置I/F部85とを有する。前記反転装置60は、CPU、MPU等の演算手段、磁気ディスク、半導体メモリ等の記憶手段等を備え、制御プログラムに従って動作し、図に示されるような機能を発揮する。
【0085】
なお、その他の点の構成については、前記第1の実施の形態と同様であるので、説明を省略する。
【0086】
次に、前記構成の画像形成装置1の動作について説明する。
【0087】
図16は本発明の第2の実施の形態における反転装置の動作を示すタイムチャート、図17は本発明の第2の実施の形態におけるストレートパスの場合の反転装置の動作を示す図、図18は本発明の第2の実施の形態における反転パスの場合の反転装置の動作を示す図、図19は本発明の第2の実施の形態における画像形成処理装置の給紙処理の動作を示すフローチャート、図20は本発明の第2の実施の形態における画像形成処理装置の給紙元決定処理の動作を示すフローチャート、図21は本発明の第2の実施の形態における画像形成処理装置の排出先決定処理の動作を示すフローチャート、図22は本発明の第2の実施の形態における画像形成処理装置の画像形成処理の動作を示すフローチャート、図23は本発明の第2の実施の形態における画像形成処理装置の排出処理の動作を示すフローチャート、図24は本発明の第2の実施の形態における反転装置のI/F処理の動作を示すフローチャート、図25は本発明の第2の実施の形態における反転装置の吸入処理の動作を示すフローチャート、図26は本発明の第2の実施の形態における反転装置の反転処理Aの動作を示すフローチャート、図27は本発明の第2の実施の形態における反転装置の反転処理Bの動作を示すフローチャート、図28は本発明の第2の実施の形態における反転装置の排出処理の動作を示すフローチャート、図29は本発明の第2の実施の形態における後処理装置のI/F処理の動作を示すフローチャート、図30は本発明の第2の実施の形態における後処理装置の吸入処理の動作を示すフローチャート、図31は本発明の第2の実施の形態における後処理装置のパンチ処理の動作を示すフローチャート、図32は本発明の第2の実施の形態における後処理装置のステープル/排出処理の動作を示すフローチャートである。
【0088】
本実施の形態における後処理装置30のステープルユニット37は、下から上に向かってステープル針を打ち込むことを前提としているため、ステープル処理を行う場合は、印刷済み媒体12の表面を下にした状態で、後処理装置30に受け渡す必要がある。そこで、画像形成処理装置10と後処理装置30との間に反転装置60を配設することによって、必要に応じて、画像形成処理装置10より排出された媒体12の表裏を、反転装置60で反転し、後処理装置30に受け渡すようになっている。
【0089】
画像形成処理装置10の制御プログラムは、複数枚の媒体12の同時走行を実現するため、給紙処理、画像形成処理、及び、排出処理の各処理を平行して実行する。
【0090】
まず、ホストコンピュータ40より印刷データが送られてくると、送受信部41はそれを受信し(ステップS111)、給紙制御部42は給紙センサ13がOFFであれば給紙可能として(ステップS112)、給紙元を決定する(ステップS113)。
【0091】
ここで、受信したデータが片面印刷データであれば(ステップS113−1)、給紙元は給紙トレイ11となる(ステップS113−5)。
【0092】
なお、受信したデータが両面印刷データの場合、両面ユニット27を使用して媒体12の反転を行い、該媒体12の表裏に印刷を行うことになるが、1枚ずつ表裏を印刷していたのでは、表面の画像形成終了後、両面ユニット27によって媒体12が反転されて給紙可能となるまで、裏面の画像形成を開始することができないので、大幅にスループットが低下してしまう。したがって、前記第1の実施の形態において説明したような制御を行い、両面ユニット27内に複数枚の媒体12を走行させる。これにより、極カスループットを低下させずに両面印刷を行うことが可能となる。
【0093】
受信したデータが両面印刷データの場合(ステップS113−1)、給紙トレイ11は媒体12があれば常に給紙可能であるので、両面ユニット27内の給紙可能な位置まで搬送されている媒体12があれば、両面ユニット27を優先的に給紙元とする(ステップS113−3)。なお、両面ユニット27内の給紙可能な位置まで搬送されている媒体12がない場合でも、両面ユニット27の収容上限枚数にすでに到達している場合は、それ以上媒体12を両面ユニット27に投入することはできないので、両面ユニット27を給紙元とする(ステップS113−4、ステップS113−3)。
【0094】
また、両面ユニット27内の給紙可能な位置まで搬送されている媒体12がなく、かつ、両面ユニット27の収容上限枚数に到達していない場合(ステップS113−2、ステップS113−4)、給紙元を給紙トレイ11とする(ステップS113−5)。
【0095】
次に、給紙制御部42は、排出先の決定を行う(ステップS114)。
【0096】
受信したデータが両面印刷データであって(ステップS114−1)、かつ、給紙元が給紙トレイ11の場合(ステップS114−2)、排出先が両面ユニット27となる(ステップS114−3)。
【0097】
また、受信したデータが片面印刷データの場合、又は、受信したデータが両面印刷データであってかつ給紙元が両面ユニット27の場合、パンチ又はステープルが指定されているとき(ステップ114−4)は、排出先が反転装置60となる(ステップS114−5)。
【0098】
さらに、受信したデータが片面印刷データの場合、又は、両面印刷データあってかつ給紙元が両面ユニット27の場合、パンチ及びステープルが指定されていないときには、排出先が本体スタッカ26となる(ステップS114−6)。
【0099】
前記両面ユニット27は、一般的のものと同様に、媒体吸入動作と反転動作とを同時には行うことができない構造なので、次の媒体12を吸入可能なタイミングを媒体長と搬送路長とから計算し、画像形成処理装置10に通知するようになっている。
【0100】
後処理装置30は、パンチ又はステープルが指定された場合、それらの実行に時間を要するため、所要時間を画像形成処理装置10に通知する。すると、該画像形成処理装置10は、通知された時間分、前の媒体12との間隔を開けてから、次の媒体12の搬送を開始するようになっている。
【0101】
画像形成処理装置10は、一旦媒体12の搬送を開始し、画像形成処理を開始してしまうと、その後媒体12を停止させておく手段を備えていない。そのため、画像形成処理開始前にこれらのタイミング調整を行う必要がある。なお、画像形成処理開始前であれば任意の位置で媒体12を停止させて調整を行うことが可能であるが、本実施の形態においては、給紙開始タイミングの調整によって行うものとする。
【0102】
給紙制御部42は、排出先を決定した(ステップS114)後、該排出先が両面ユニット27である場合(ステップS115)、該両面ユニット27が媒体12を吸入可能になるのを待って(ステップS116)、次の媒体12の媒体情報(媒体搬送速度、媒体長)を通知し(ステップS117)、給紙元から給紙を行い、媒体12の搬送を開始する(ステップS122)。また、排出先が反転装置60である場合(ステップS118)、後処理装置30より通知された、前の媒体12の後処理に必要な時間分の間隔を前の媒体12との間に確保した(ステップS119)後、次の媒体12の媒体情報(媒体搬送速度、媒体長)を反転装置60に通知し(ステップS120)、さらに、次の媒体12の後処理情報(媒体搬送速度、媒体幅、媒体長、パンチ有無、ステープル有無、ステープル実行有無等)を後処理装置30に通知し(ステップS121)、給紙元から給紙を行い、媒体12の搬送を開始する(ステップS122)。
【0103】
そして、給紙開始後、一定時間内に給紙センサ13のONが検出された場合は、給紙成功として(ステップS123)画像形成処理に対する画像形成要求をセットし(ステップS124)、次の媒体12の給紙を行うためステップS111に戻る。また、一定時間内に給紙センサ13のONが検出されない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS125)。
【0104】
画像形成制御部43は、画像形成要求がセットされると(ステップS131、ステップS132)、書出しセンサ14のONによってタイミングを測って画像形成を開始し(ステップS133、ステップS134)、排出処理に対する排出要求をセットする(ステップS135)。そして、画像形成が終了すると(ステップS136)、次の媒体12の画像形成を行うためステップS131に戻る。
【0105】
排出制御部44は、排出要求がセットされると(ステップS141、ステップS142)、排出センサ22の監視を開始し(ステップS143)、一定距離搬送しても排出センサ22のONが検出されない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS155、ステップS156)。
【0106】
また、排出センサ22のONを検出した場合は排出先の判定を行い、排出先が両面ユニット27であれば(ステップS144)、媒体12を両面ユニット27に吸入するべく、両面セパレータ24を切り替え(ステップS145)、両面ユニット27に媒体吸入要求を通知する(ステップS146)。
【0107】
さらに、排出先が両面ユニット27でなければ、両面セパレータ24を排出側に切り替えて(ステップS148)、排出先が反転装置60であるか否かの判定を行う(ステップS149)。そして、反転装置60であれば媒体12を反転装置60に吸入するべく、排出先切替セパレータ25を切り替え(ステップS150)、反転装置60に媒体吸入要求を通知する(ステップS151)。また、排出先が反転装置60でなければ、媒体12を本体スタッカ26に排出するべく、排出先切替セパレータ25を切り替える(ステップS152)。
【0108】
その後、排出制御部44は、排出センサ22がOFFになるのを監視し(ステップS147)、排出センサ22のOFFを検出した場合、次の媒体12の排出処理を行うためステップS141に戻る。なお、排出先が本体スタッカ26の場合、媒体12が本体スタッカ26に排出されて、印刷終了となる。
【0109】
また、排出センサ22がONになったところから媒体長+マージン分の搬送を行っても、排出センサ22のOFFを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS153、ステップS154)。
【0110】
次に、反転装置60側における処理について説明する。
【0111】
反転装置60の制御プログラムは、画像形成処理装置10の制御プログラムと同様に、複数枚の媒体12の平行処理を実現するため、I/F処理、吸入処理、反転処理A、反転処理B、及び、排出処理の各処理を平行して実行する。
【0112】
反転装置60の画像形成処理装置/後処理装置I/F部85は、画像形成処理装置10から媒体情報を受信すると(ステップS161)、そこに付加された媒体搬送速度、媒体長、反転有無等の媒体情報を記憶する(ステップS162)。また、画像形成処理装置10から媒体吸入要求を受信した場合は、媒体吸入要求あり情報をセットするようになっている(ステップS163)。
【0113】
排出制御部84によって媒体吸入要求通知要求がセットされた場合、後処理装置30に媒体吸入要求を通知し(ステップS164、ステップS165)、加速可能通知要求がセットされた場合、後処理装置30に加速可能を通知するようになっている(ステップS166)。
【0114】
媒体吸入要求あり情報がセットされる(ステップS181)と、反転装置60の吸入制御部82は、媒体12の受け入れ準備として、モータA69aが回転中でなければ(ステップS182)、先に通知されている媒体搬送速度に基づいてモータA69aを回転開始させる(ステップS183)。このときの搬送速度は、画像形成処理装置10から媒体12が受け渡されるので、画像形成処理装置10の媒体搬送速度と等しい速度となる。
【0115】
次に、吸入制御部82は、先に画像形成処理装置10から通知されている反転有無の情報に基づき、反転ありであれば搬送路セパレータ64を反転パス側に切り替え、(ステップS184、ステップS185)、反転なしであれば搬送路セパレータ64をストレートパス側に切り替える(ステップS186)。そして、画像形成処理装置10から搬送されてくる媒体12によって、反転装置60の吸入センサ63がONになるのを待機する(ステップS187)。画像形成処理装置10からの媒体吸入要求受信から一定時間経過しても吸入センサ63のONを検出することができない場合には、媒体ジャム、すなわち、用紙ジャムとする(ステップS193、ステップS195)。また、吸入センサ63のONを検出すると、次の媒体12の吸入要求に備えて媒体吸入要求あり情報をクリアする(ステップS188)。そして、反転ありであれば反転要求をセットし(ステップS189、ステップS190)、反転なしであればストレート排出要求をセットする(ステップS191)。
【0116】
その後、吸入制御部82は、吸入センサ63のOFFの待機に移行する(ステップS192)。そして、吸入センサ63のONから媒体長+マージン分の搬送を行っても吸入センサ63のOFFを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS194、ステップS195)。また、吸入センサ63のOFFを検出した場合には、次の媒体12の吸入に備えてステップS181に戻る。
【0117】
前記反転装置60の反転制御部83の処理は、反転処理Aと反転処理Bとから成り、これら2つの処理は平行して実行される。
【0118】
反転処理Aでは、吸入制御部82によって反転要求1がセットされると(ステップS201)、該反転要求1をクリアして(ステップS202)、反転センサA66aのONの待機に移行する(ステップS203)。反転要求がセットされてから吸入センサ63のONから反転センサA66aのONまでの一定距離、すなわち、距離+マージン分の搬送をしても反転センサA66aのONを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS208、ステップS209)。
【0119】
そして、反転センサA66aのONを検出すると、反転処理Bに対する処理開始要求である反転要求2をセットし(ステップS204)、モータB69bが停止中でなければ、停止するのを待ってモータB69bを正転方向で駆動開始する(ステップS205、ステップS206)。前記モータB69bの駆動開始と同時に、ソレノイド70をOFFにして第3搬送ローラ65cを分離し(ステップS207)、次の媒体12の処理に備えてステップS201に戻る。この状態では、第3搬送ローラ65cは分離されているので、媒体12は第2搬送ローラ65b及び搬送ローラ68のみで搬送されている。
【0120】
また、反転処理Bでは、反転要求2がセットされると、該反転要求2をクリアし(ステップS211、ステップS212)、反転センサA66aのOFFの待機に移行する(ステップS213)。反転要求2がセットされてから媒体長+マージン分の搬送をしても反転センサA66aのOFFを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS223、ステップS225)。
【0121】
そして、反転センサA66aのOFFを検出すると、ソレノイド70をONにして第3搬送ローラ65cを圧着させ(ステップS214)、該第3搬送ローラ65cでの媒体12の搬送を開始して、媒体12の後端が媒体ガイド67を抜ける一定距離、すなわち、距離+マージン分の距離(L1)を搬送した後にモータB69bを停止させる(ステップS215、ステップS216)。この状態では、媒体12は第3搬送ローラ65cのみで保持されている。
【0122】
ここで、モータB69bを正転から逆転に切り替え、媒体12の上方向への搬送を再開するが、通常、モータの回転方向を切り替える際には一定時間の静定時間が必要なので、一定時間(T1)経過した後にモータB69bの逆転を開始し(ステップS217、ステップS218)、さらに、反転排出要求をセットする(ステップS219)。そして、媒体12は、媒体ガイド67によって第4搬送ローラ65d及び搬送ローラ68の方向に導かれる。このような一連の動作によって、媒体12の表裏反転が実現される。
【0123】
モータB69bの逆転によって媒体12の上方向に向かっての搬送が開始された後、反転センサB66bがONになるのを待機する(ステップS220)。モータB69bの逆転開始から一定距離搬送しても反転センサB66bのONを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS224、ステップS225)。また、反転センサB66bのONを検出すると(ステップS220)、次の媒体12の反転動作に備え、ソレノイド70をOFFにして第3搬送ローラ65cを分離する(ステップS221)。そして、モータB69bを停止させ(ステップS222)、次の媒体12の処理に備えてステップS201に戻る。
【0124】
第3搬送ローラ65cを分離しても、媒体12は第4搬送ローラ65dと搬送ローラ68とによって排出方向に搬送される。この時点では、既に反転処理Aが次の媒体12の処理を開始しており、反転済みの媒体12と、これから反転しようとする媒体12とが、分離している第3搬送ローラ65cのローラ間ですれ違うことになる。これらの機構と制御とによって、生産性を低下させることなく、媒体12の表裏反転が実現される。
【0125】
反転装置60の排出制御部84は、ストレート排出要求がセットされると(ステップS231)、後処理装置30への媒体吸入要求通知要求をセットし(ステップS232)、吸入センサ63のOFFの待機に移行する(ステップS233)。そして、吸入センサ63のOFFを検出すると、後処理装置30への加速可能通知要求をセットし(ステップS234)、次の媒体12の排出に備えてストレート排出要求をクリアして(ステップS235)、ステップS231に戻る。
【0126】
また、排出制御部84は、反転排出要求がセットされると(ステップS236)、反転センサB66bのONの待機に移行する(ステップS237)。そして、該反転センサB66bのONを検出すると、後処理装置30への媒体吸入要求通知要求をセットする(ステップS238)。
【0127】
続いて、排出制御部84は、反転センサB66bのOFFの待機に移行し(ステップS239)、反転センサB66bがONになってから媒体長+マージン分の搬送をしても反転センサB66bのOFFを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS240、ステップS241)。反転センサB66bのOFFを検出すると、後処理装置30への加速可能通知要求をセットし(ステップS242)、次の媒体12の排出に備えて反転排出要求をクリアして(ステップS243)、ステップS231に戻る。
【0128】
次に、後処理装置30における処理について説明する。
【0129】
後処理装置30の制御プログラムは、画像形成処理装置10の制御プログラムと同様に、複数枚の媒体12の平行処理を実現するため、I/F処理、吸入処理、パンチ処理、及び、ステープル/排出処理の各処理を平行して実行する。
【0130】
後処理装置30の画像形成処理装置/反転装置I/F部86は、画像形成処理装置10及び反転装置60から後処理情報を受信すると(ステップS251)、そこに付加された媒体搬送速度、媒体幅、媒体長、反転有無、パンチ有無、ステープル有無、ステープル実行有無等の情報に基づき、その後処理に要する時間を計算して、画像形成処理装置10に通知するようになっている(ステップS252)。また、反転装置60から媒体吸入要求を受信した場合は、媒体吸入要求あり情報をセットし(ステップS253)、加速可能を受信した場合は、加速可能情報をセットするようになっている(ステップS254)。
【0131】
媒体吸入要求あり情報がセットされる(ステップS261)と、吸入制御部52は、先に通知されている後処理情報に基づき、媒体12の受け入れ準備として、モータが回転中でなければ(ステップS262)、媒体搬送速度に基づいて図示されないモータを回転開始させる(ステップ263)。これにより、後処理装置30の第1搬送ローラ31a及び第2搬送ローラ31bが駆動される。このときの搬送速度は、反転装置60から媒体12が受け渡されるので、反転装置60の媒体搬送速度と等しい速度となり、該速度を第1速度とする。
【0132】
次に、吸入制御部52は、反転装置60から搬送されてくる媒体12によって、吸入センサ32がONになるのを待機する(ステップ264)。そして、反転装置60からの媒体吸入要求受信から一定時間経過しても吸入センサ32のONを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS265、ステップ279)。また、吸入センサ32のONを検出すると、次の媒体12の吸入要求に備えて媒体吸入要求あり情報をクリアし(ステップ266)、パンチ有無情報に基づいてパンチありであればパンチ要求をセットし(ステップS267、ステップ268)、ステープル有無情報に基づいてステープルありであればステープル要求をセットし(ステップS269、ステップ270)、ステープルなしであれば排出要求をセットし(ステップS273)、さらに、ステープル実行ページであればステープル実行要求をセットする(ステップS271、ステップ272)。
【0133】
その後、吸入制御部52は、吸入センサ32のOFFの待機に移行する(ステップS274)。なお、該吸入センサ32のOFFの待機中に画像形成処理装置/反転装置I/F部86が画像形成処理装置10から加速可能を受信し、加速可能情報がセットされた場合(ステップS275)、モータを第2速度に加速し(ステップS276)、次の媒体12に備えて加速可能情報をクリアする(ステップS277)。
【0134】
後処理装置30は、画像形成のプロセスを行わないため、画像形成処理装置10よりも高速に媒体12を搬送することが可能であり、例えば、媒体12が完全に後処理装置30に受け渡された状態、すなわち、後処理装置30の吸入センサ32を媒体12が通過し、センサOFFを検出した状態から搬送速度の加速が可能である。本実施の形態においては、媒体12が反転装置60と後処理装置30とに跨った状態であって、かつ、反転装置60のローラを媒体12が抜けていない状態から、後処理装置30における搬送速度の加速を行うことを特徴とする。
【0135】
これを実現するために、反転装置60の第1搬送ローラ65a、第5搬送ローラ65e及び第6搬送ローラ65fの駆動ギヤはワンウェイギヤとなっている。これにより、反転装置60の第1搬送ローラ65a、第5搬送ローラ65e及び第6搬送ローラ65fは、反転装置60のモータA69aによって駆動されているときは、反転装置60の搬送速度で駆動されるが、後処理装置30がそれ以上の速度で反転装置60から媒体12を引き抜こうとしたときは、第1搬送ローラ65a、第5搬送ローラ65e及び第6搬送ローラ65fは、モータA69aによる駆動から切断されて、引き抜かれようとする速度で回転することが可能となっている。
【0136】
さらに、この加速可能ポイントを後処理装置30へ通知するため、反転装置60は、図17に示されるように、ストレートパス61からの排出であれば、媒体12を第1搬送ローラ65a及び第6搬送ローラ65fのみで保持していることを保証することができる時点、すなわち、吸入センサ63のOFFを検出した時点で後処理装置30へ加速可能を通知する。また、図18に示されるように、反転パス62からの排出であれば、媒体12を第5搬送ローラ65e及び第6搬送ローラ65fのみで保持していることを保証することができる時点、すなわち、反転センサB66bのOFFを検出した時点で後処理装置30へ加速可能を通知するようになっている。
【0137】
例えば、「背景技術」の項で説明したようなパンチ処理やステープル処理のような後処理を行う従来の画像形成装置と比較する。従来の画像形成装置において、後処理装置でパンチ処理を行う場合、媒体1枚ずつにパンチを行うので、1枚毎にパンチを実行するための時間が必要となる。また、ステープル処理を行う場合、1枚毎に媒体を揃える動作のための時間と、最終的にステープルを実行するための時間とが必要となる。そして、これらの時間の合計が画像形成処理装置から後処理装置に搬送されてくる媒体と媒体との間隔の時間を超えるときには、正常な後処理を行うことができなくなるばかりか、媒体ジャムが発生する可能性もある。そこで、従来の画像形成装置における後処理装置は、後処理にかかる合計時間に、更にマージンを見込んだ時間を画像形成処理装置に通知し、該画像形成処理装置は通知された時間の分だけ媒体と媒体との間隔を確保した上で、後処理装置に媒体を投入する必要がある。そのため、その分生産性が当然に低下することになってしまう。
【0138】
これに対し、本実施の形態における画像形成装置1は、前述のような構成を有し、前述のように動作して、後処理装置30での加速ポイントを早めることによって、ストレートパス61からの排出であれば、反転装置60の吸入センサ63のOFFから後処理装置30の吸入センサ32のOFFまでの距離分だけ通常よりも早く加速を行うことが可能となり、また、反転パス62からの排出であれば、反転装置60の反転センサB66bのOFFから後処理装置30の吸入センサ32のOFFまでの距離分だけ通常よりも早く加速を行うことが可能となるので、後処理装置30は、前記距離分を高速な第2速度での搬送を前提とした後処理に必要な時間を画像形成処理装置10に通知し、該画像形成処理装置10はそれに従って媒体12を後処理装置30に投入することにより、その分生産性を向上することができる。
【0139】
このとき、反転装置60の吸入センサ63のOFFから後処理装置30の吸入センサ32のOFFまでの距離、及び、反転装置60の反転センサB66bのOFFから後処理装置30の吸入センサ32のOFFまでの距離は、あらかじめ後処理装置30に記憶されている。そして、画像形成処理装置10に通知する後処理に必要な時間は、画像形成処理装置10から通知された後処理情報中の反転有無情報に基づき、反転なしであれば反転装置60の吸入センサ63のOFFから後処理装置30の吸入センサ32のOFFまでの距離に基づいて、また、反転ありであれば反転装置60の反転センサB66bのOFFから後処理装置30の吸入センサ32のOFFまでの距離に基づいて計算される。
【0140】
一例を挙げると、反転なしの場合、
反転装置60の吸入センサ63のOFFから後処理装置30の吸入センサ32のOFFまでの距離をD2=150〔mm〕とし、
画像形成処理装置10の媒体搬送速度をS1=150〔mm〕/秒とし、
後処理装置30の第2速度をS2=300〔mm〕/秒とした場合、
本実施の形態における媒体1枚あたりの生産性向上分は、
(D2÷S1)−(D2÷S2)→(150÷150)−(150÷300)=0.5秒、となる。
【0141】
また、反転ありの場合も同様に、
反転装置60の反転センサB66bのOFFから後処理装置30の吸入センサ32のOFFまでの距離をD3=135〔mm〕とし、
画像形成処理装置10の媒体搬送速度をS1=150〔mm〕/秒とし、
後処理装置30の第2速度をS2=300〔mm〕/秒とした場合、
本実施の形態における媒体1枚あたりの生産性向上分は、
(D3÷S1)−(D3÷S2)→(135÷150)−(135÷300)=0.45秒、となる。
【0142】
通常、後処理動作で最も時間を要するのはステープルの実行であるが、該ステープルの実行はジョブ毎に1度であり、1ジョブの枚数が多ければ、それほど生産性の低下は起こらない。これに対し、パンチ動作及びステープル実行のための媒体揃え動作は、毎ページ実行する必要があるため、生産性に与える影響が大きい。
【0143】
本実施の形態においては、前述のような構成を有し、前述のように動作することによって、後処理を行う際の媒体1枚毎の生産性を向上することが可能である。パンチユニット33及び媒体揃え機構の性能にもよるが、パンチ動作及びステープル実行のための媒体揃え動作を行った場合でも、画像形成処理装置10と同等の生産性を実現することも可能である。
【0144】
なお、両面印刷の場合、又は、片面印刷であってもステープル処理を行う場合には、前述のように、片面を印刷した媒体12を一旦両面ユニット27に入れ、該両面ユニット27内で反転した後にもう片面の印刷を行うため、媒体12はジョブの開始及び終了時を除き、両面ユニット27と後処理装置30とに1枚ずつ交互に排出されることになるので、後処理装置30に受け渡される媒体12の間隔は、自ずと1ページ以上間隔が開くことになる。したがって、その間に後処理が終了するのであれば、格別の効果を期待することができないが、ステープル処理のように、後処理にかかる時間が長い場合は、大きな効果を期待することができる。
【0145】
また、吸入制御部52は、吸入センサ32のOFFの待機中に、吸入センサ32のONから媒体長+マージン分の搬送を行っても吸入センサ32のOFFを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS278、ステップS279)。なお、吸入センサ32のOFFを検出した場合には、次の媒体12の吸入に備えてステップS261に戻る。
【0146】
パンチ制御部53は、パンチ要求がセットされると(ステップS281)、吸入センサ32のOFFを監視し、吸入センサ32のOFFを検出後、パンチ実行位置まで媒体12が搬送されるのを待って(ステップS282)、図示されないモータの駆動を第2搬送ローラ31bに伝えている図示されない電磁クラッチをOFFにして、第2搬送ローラ31bを停止させる(ステップS283)。これにより、媒体12の搬送が一旦停止するので、パンチユニット33によって媒体12の後端にパンチを実行する(ステップS284)。パンチ実行後は直ちに図示されない電磁クラッチをONにして第2搬送ローラ31bを駆動し(ステップS285)、媒体12の搬送を再開する。そして、パンチ要求をクリアして(ステップS286)、次の媒体12のパンチに備えてステップS281に戻る。
【0147】
ステープル/排出制御部54は、排出要求又はステープル要求がセットされると(ステップS291)、媒体12がステープルトレイまで搬送されるのを待機する(ステップS292)。そして、モータ速度が第2速度である場合は、次の媒体12の吸入に備えて、モータ速度を画像形成処理装置10の媒体搬送速度と同等の第1速度に減速する(ステップS293、ステップS294)。続いて、ステープル実行要求がセットされている場合(ステップS295)、ステープル実行に備えて、図示されない媒体揃え機構によってステープルトレイ上に積載された媒体12を揃え(ステップS296)、ステープルユニット37によりステープルを実行し(ステップS297)、ステープル実行要求をクリアする(ステップS298)。
【0148】
ステープルトレイには、該ステープルトレイ上の媒体12又は該媒体12の束を排出するための排出ベルト35及び排出爪36が配設され、該排出爪36は、前記排出ベルト35に固定されて該排出ベルト35と一緒に回転するようになっている。したがって、ステープル実行後、ステープル済の媒体12の束の後端を排出爪36に引っ掛けた状態で排出ベルト35を図示されないモータによって回転させることにより、媒体12の束は排出スタッカ38上に排出されて積載される(ステップS299)。ステープル実行要求がセットされていない場合であって排出要求がセットされているときには(ステップS300)、排出実行要求をクリアして、前述のようにステープル済の媒体12の束を排出するのと同様の方法で、媒体12を排出スタッカ38上に排出して積載する(ステップS301、ステップS299)。
【0149】
また、ステープル実行要求がセットされていない場合であって排出要求がセットされていないときには、ステープルジョブの一部のページであるため、ステープルを行うために媒体12をステープルトレイ上に積載し、ステープル実行に備えて図示されない媒体揃え機構によって媒体揃えを行い(ステップS302)、ステープル要求をクリアする(ステップS303)。
【0150】
そして、ステープル/排出制御部54は、要求に対する一連の動作が終わると、次の媒体12の処理に備えてステップS291に戻る。
【0151】
次に、画像形成処理装置10の給紙処理のフローチャートについて説明する。
ステップS111 印刷データがあるか否かを判定する。印刷データがある場合はステップS112に進み、印刷データがない場合はそのまま待機する。
ステップS112 給紙センサ13がOFFであるか否かを判定する。OFFである場合はステップS113に進み、OFFでない場合はそのまま待機する。
ステップS113 給紙元決定処理を行う。
ステップS114 排出先決定処理を行う。
ステップS115 排出先が両面ユニット27であるか否かを判定する。排出先が両面ユニット27である場合はステップS116に進み、排出先が両面ユニット27でない場合はステップS118に進む。
ステップS116 両面ユニット27が媒体12を吸入可能であるか否かを判定する。媒体12を吸引可能である場合はステップS117に進み、媒体12を吸入可能でない場合はそのまま待機する。
ステップS117 両面ユニット27に媒体情報を通知する。
ステップS118 排出先が反転装置60であるか否かを判定する。排出先が反転装置60である場合はステップS119に進み、排出先が反転装置60でない場合はステップS122に進む。
ステップS119 前の媒体12の後処理に必要な時間を確保済みか否かを判定する。時間を確保済みの場合はステップS120に進み、時間を確保していない場合はそのまま待機する。
ステップS120 反転装置60に媒体情報を通知する。
ステップS121 後処理装置30に後処理情報を通知する。
ステップS122 給紙元から給紙を行う。
ステップS123 給紙成功であるか否かを判定する。給紙成功である場合はステップS124に進み、給紙成功でない場合はステップS125に進む。
ステップS124 画像形成要求をセットする。
ステップS125 用紙ジャムをセットし、処理を終了する。
【0152】
次に、給紙元決定処理のサブルーチンについて説明する。
ステップS113−1 受信したデータが両面印刷データであるか否かを判定する。両面印刷データである場合はステップS113−2に進み、両面印刷データでない場合はステップS113−5に進む。
ステップS113−2 両面ユニット27から給紙可能であるか否かを判定する。給紙可能である場合はステップS113−3に進み、給紙可能でない場合はステップS113−4に進む。
ステップS113−3 両面ユニット27を給紙元とし、処理を終了する。
ステップS113−4 両面ユニット27の収容上限枚数に到達しているか否かを判定する。収容上限数に到達している場合はステップS113−3に戻り、収容上限数に到達していない場合はステップS113−5に進む。
ステップS113−5 給紙トレイ11を給紙元とし、処理を終了する。
【0153】
次に、排出先決定処理のサブルーチンについて説明する。
ステップS114−1 受信したデータが両面印刷データであるか否かを判定する。両面印刷データである場合はステップS114−2に進み、両面印刷データでない場合はステップS114−4に進む。
ステップS114−2 給紙トレイ11が給紙元であるか否かを判定する。給紙元である場合はステップS114−3に進み、給紙元でない場合はステップS114−4に進む。
ステップS114−3 排出先を両面ユニット27とし、処理を終了する。
ステップS114−4 パンチ又はステープルが指定されているか否か判定する。パンチ又はステープルがされている場合はステップS114−5に進み、パンチ及びステープルが指定されていない場合はステップS114−6に進む。
ステップS114−5 排出先を反転装置60とし、処理を終了する。
ステップS114−6 排出先を本体スタッカ26とし、処理を終了する。
【0154】
次に、画像形成処理装置10の画像形成処理のフローチャートについて説明する。
ステップS131 画像形成要求があるか否かを判定する。画像形成要求がある場合はステップS132に進み、画像形成要求がない場合はそのまま待機する。
ステップS132 画像形成要求をクリアする。
ステップS133 画像形成開始のタイミングであるか否かを判定する。画像形成開始のタイミングである場合はステップS134に進み、画像形成開始のタイミングでない場合はそのまま待機する。
ステップS134 画像形成を開始する。
ステップS135 排出要求をセットする。
ステップS136 画像形成を終了するか否かを判定する。画像形成を終了する場合は、次の媒体12の画像形成を行うため、ステップS131に戻り、画像形成を終了しない場合はそのまま待機する。
【0155】
次に、画像形成処理装置10の排出処理のフローチャートについて説明する。
ステップS141 排出要求があるか否かを判定する。排出要求がある場合はステップS142に進み、排出要求がない場合はそのまま待機する。
ステップS142 排出要求をクリアする。
ステップS143 排出センサ22がONであるか否かを判定する。ONである場合はステップS144に進み、ONでない場合はステップS155に進む。
ステップS144 排出先が両面ユニット27であるか否かを判定する。排出先が両面ユニット27である場合はステップS145に進み、排出先が両面ユニットでない場合はステップS148に進む。
ステップS145 両面セパレータ24を両面ユニット27側に切り替える。
ステップS146 両面ユニット27に媒体吸入要求を通知する。
ステップS147 排出センサ22がOFFであるか否かを判定する。OFFでない場合はステップS153に進み、OFFである場合はステップS141に戻る。
ステップS148 両面セパレータ24を排出側に切り替える。
ステップS149 排出先が反転装置60であるか否かを判定する。排出先が反転装置60である場合はステップS150に進み、排出先が反転装置60でない場合はステップS152に進む。
ステップS150 排出先切替セパレータ25を反転装置60側に切り替える。
ステップS151 反転装置60に媒体吸入要求を通知する。
ステップS152 排出先切替セパレータ25を本体スタッカ26側に切り替える。
ステップS153 媒体長+マージン分搬送されたか否かを判定する。媒体長+マージン分搬送された場合はステップS154に進み、媒体長+マージン分搬送されていない場合はステップS147に戻る。
ステップS154 用紙ジャムをセットし、処理を終了する。
ステップS155 一定距離搬送されたか否かを判定する。一定距離搬送された場合はステップS156に進み、一定距離搬送されていない場合はステップS143に戻る。
ステップS156 用紙ジャムをセットし、処理を終了する。
【0156】
次に、反転装置60のI/F処理のフローチャートについて説明する。
ステップS161 画像形成処理装置10から受信情報があるか否かを判定する。媒体情報を受信した場合はステップS162に進み、媒体吸入要求を受信した場合はステップS163に進み、受信情報がない場合はステップS164に進む。
ステップS162 媒体情報を記憶する。
ステップS163 媒体吸入要求あり情報をセットする。
ステップS164 後処理装置30への送信情報があるか否かを判定する。媒体吸入要求通知を要求した場合はステップS165に進み、加速可能通知を要求した場合はステップS166に進み、送信情報がない場合はステップS167に進む。
ステップS165 後処理装置30に媒体吸入要求を通知する。
ステップS166 後処理装置30に加速可能を通知する。
ステップS167 エラーが発生したか否かを判定する。エラーが発生しない場合はステップS168に進み、エラーが発生した場合はステップS170に進む。
ステップS168 画像形成処理装置10にエラー通知済みであるか否かを判定する。エラー通知済みである場合はステップS169に進み、エラー通知していない場合はステップS161に戻る。
ステップS169 画像形成処理装置10にエラー解除を通知する。
ステップS170 画像形成処理装置10にエラー通知済みであるか否かを判定する。エラー通知していない場合はステップS171に進み、エラー通知済みである場合はステップS172に進む。
ステップS171 画像形成処理装置10にエラーを通知する。
ステップS172 媒体吸入要求あり情報をクリアする。
【0157】
次に、反転装置60の媒体吸入処理のフローチャートについて説明する。
ステップS181 媒体吸入あり情報がセットされているか否かを判定する。セットされている場合はステップS182に進み、セットされていない場合はそのまま待機する。
ステップS182 モータA69aが回転中であるか否かを判定する。モータA69aが回転中でない場合はステップS183に進み、モータA69aが回転中である場合はステップS184に進む。
ステップS183 モータA69aが回転を開始する。
ステップS184 反転があるか否かを判定する。反転がある場合はステップS185に進み、反転がない場合はステップS186に進む。
ステップS185 搬送路セパレータ64を反転パス側に切り替える。
ステップS186 搬送路セパレータ64をストレートパス側に切り替える。
ステップS187 吸入センサ63がONであるか否かを判定する。ONである場合はステップS188に進み、ONでない場合はステップS193に進む。
ステップS188 媒体吸入要求あり情報をクリアする。
ステップS189 反転があるか否かを判定する。反転がある場合はステップS190に進み、反転がない場合はステップS191に進む。
ステップS190 反転要求1をセットする。
ステップS191 ストレート排出要求をセットする。
ステップS192 吸入センサ63がOFFであるか否かを判定する。OFFでない場合はステップS194に進みOFFである場合はステップS181に戻る。
ステップS193 媒体吸入要求受信から一定時間経過したか否かを判定する。一定時間経過した場合はステップS195に進み、一定時間経過していない場合はステップS187に戻る。
ステップS194 媒体長+マージン分搬送されたか否かを判定する。媒体長+マージン分搬送された場合はステップS195に進み、媒体長+マージン分搬送されていない場合はステップS192に戻る。
ステップS195 用紙ジャムをセットし、処理を終了する。
【0158】
次に、反転装置60の反転処理Aのフローチャートについて説明する。
ステップS201 反転要求1がセットされているか否かを判定する。セットされている場合はステップS202に進み、セットされていない場合はそのまま待機する。
ステップS202 反転要求1をクリアする。
ステップS203 反転センサA66aがONであるか否かを判定する。ONである場合はステップS204に進み、ONでない場合はステップS208に進む。
ステップS204 反転要求2をセットする。
ステップS205 モータB69bが停止中であるか否かを判定する。停止中である場合はステップS206に進み、停止中でない場合はそのまま待機する。
ステップS206 モータB69bの正転を開始する。
ステップS207 第3搬送ローラ65cを分離する。
ステップS208 一定距離を搬送したか否かを判定する。一定距離を搬送した場合はステップS209に進み、一定距離を搬送していない場合はステップS203に戻る。
ステップS209 用紙ジャムをセットし、処理を終了する。
【0159】
次に、反転装置60の反転処理Bのフローチャートについて説明する。
ステップS211 反転要求2がセットされているか否かを判定する。セットされている場合はステップS212に進み、セットされていない場合はそのまま待機する。
ステップS212 反転要求2をクリアする。
ステップS213 反転センサA66aがOFFであるか否かを判定する。OFFである場合はステップS214に進み、OFFでない場合はステップS223に進む。
ステップS214 第3搬送ローラ65cを圧着する。
ステップS215 一定距離を搬送したか否かを判定する。一定距離を搬送した場合はステップS216に進み、一定距離を搬送していない場合はそのまま待機する。
ステップS216 モータB69bを停止する。
ステップS217 モータB69bが停止してから一定時間経過したか否かを判定する。一定時間経過した場合はステップS218に進み、一定時間経過していない場合はそのまま待機する。
ステップS218 モータB69bの逆転を開始する。
ステップS219 反転排出要求をセットする。
ステップS220 反転センサB66bがONであるか否かを判定する。ONである場合はステップS221に進み、ONでない場合はステップS224に進む。
ステップS221 第3搬送ローラ65cを分離する。
ステップS222 モータB69bを停止する。
ステップS223 媒体長+マージン分搬送されたか否かを判定する。媒体長+マージン分搬送された場合はステップS225に進み、媒体長+マージン分搬送されていない場合はステップS213に戻る。
ステップS224 一定距離を搬送したか否かを判定する。一定距離を搬送した場合はスステップS225に進み、一定距離を搬送していない場合はステップS220に戻る。
ステップS225 用紙ジャムをセットし、処理を終了する。
【0160】
次に、反転装置60の排出処理のフローチャートについて説明する。
ステップS231 ストレート排出要求がセットされているか否かを判定する。セットされている場合はステップS232に進み、セットされていない場合はステップS236に進む。
ステップS232 後処理装置30への媒体吸入要求通知要求をセットする。
ステップS233 吸入センサ63がOFFであるか否かを判定する。OFFである場合はステップS234に進み、OFFでない場合はそのまま待機する。
ステップS234 後処理装置30への加速可能通知要求をセットする。
ステップS235 ストレート排出要求をクリアする。
ステップS236 反転排出要求がセットされているか否かを判定する。セットされている場合はステップS237に進み、セットされていない場合はステップS231に戻る。
ステップS237 反転センサB66bがONであるか否かを判定する。ONである場合はステップS238に進み、ONでない場合はそのまま待機する。
ステップS238 後処理装置30への媒体吸入要求通知要求をセットする。
ステップS239 反転センサB66bがOFFであるか否かを判定する。OFFでない場合はステップS240に進み、OFFである場合はステップS242に進む。
ステップS240 媒体長+マージン分搬送されたか否かを判定する。媒体長+マージン分搬送された場合はステップS241に進み、媒体長+マージン分搬送されていない場合はステップS239に戻る。
ステップS241 用紙ジャムをセットし、処理を終了する。
ステップS242 後処理装置30への加速可能通知要求をセットする。
ステップS243 反転排出要求をクリアする。
【0161】
次に、後処理装置30のI/F処理のフローチャートについて説明する。
ステップS251 画像形成処理装置10及び反転装置60から受信情報があるか否かを判定する。後処理情報を受信した場合はステップS252に進み、媒体吸入要求を受信した場合はステップS253に進み、加速可能を受信した場合はステップS254に進み、受信情報がない場合はステップS255に進む。
ステップS252 前の媒体12の後処理に必要な時間を計算して、画像形成処理装置10に通知する。
ステップS253 媒体吸入要求あり情報をセットする。
ステップS254 加速可能情報をセットする。
ステップS255 エラーが発生したか否かを判定する。エラーが発生していない場合はステップS256に進み、エラーが発生した場合はステップS258に進む。
ステップS256 画像形成処理装置10にエラー通知済みであるか否かを判定する。エラー通知済みである場合はステップS257に進み、エラー通知していない場合はステップS251に戻る。
ステップS257 画像形成処理装置10にエラー解除を通知する。
ステップS258 画像形成処理装置10にエラー通知済みであるか否かを判定する。エラー通知していない場合はステップS259に進み、エラー通知済みである場合はステップS260に進む。
ステップS259 画像形成処理装置10にエラーを通知する。
ステップS260 媒体吸入要求あり情報をクリアする。
【0162】
次に、後処理装置30の媒体吸入処理のフローチャートについて説明する。
ステップS261 媒体吸入あり情報がセットされているか否かを判定する。セットされている場合はステップS262に進み、セットされていない場合はそのまま待機する。
ステップS262 モータが回転中であるか否かを判定する。モータが回転中でない場合はステップS263に進み、モータが回転中である場合はステップS264に進む。
ステップS263 第1速度でモータ回転を開始する。
ステップS264 吸入センサ32がONであるか否かを判定する。ONでない場合はステップS265に進み、ONである場合はステップS266に進む。
ステップS265 媒体吸入要求受信から一定時間経過したか否かを判定する。一定時間経過した場合はステップS279に進み、一定時間経過していない場合はステップS264に戻る。
ステップS266 媒体吸入要求あり情報をクリアする。
ステップS267 パンチありであるか否かを判定する。パンチありである場合はステップS268に進み、パンチなしである場合はステップS269に進む。
ステップS268 パンチ要求をセットする。
ステップS269 ステープルありである否かを判定する。ステープルありである場合はステップS270に進み、ステープルなしである場合はステップS273に進む。
ステップS270 ステープル要求をセットする。
ステップS271 ステープル実行ページであるか否かを判定する。ステープル実行ページである場合はステップS272に進み、ステープル実行ページでない場合はステップS74に進む。
ステップS272 ステープル実行要求をセットする。
ステップS273 排出要求をセットする。
ステップS74 吸入センサ32がOFFであるか否かを判定する。OFFでない場合はステップS275に進み、OFFである場合はステップS261に戻る。
ステップS275 加速可能情報がセットされているか否かを判定する。セットされている場合はステップS276に進み、セットされていない場合はステップS278に進む。
ステップS276 モータを第2速度に加速する。
ステップS277 加速可能情報をクリアする。
ステップS278 媒体長+マージン分搬送されたか否かを判定する。媒体長+マージン分搬送された場合はステップS279に進み、媒体長+マージン分搬送されていない場合はステップS274に戻る。
ステップS279 用紙ジャムをセットし、処理を終了する。
【0163】
次に、後処理装置30のパンチ処理のフローチャートについて説明する。
ステップS281 パンチ要求がセットされているか否かを判定する。セットされている場合はステップS282に進み、セットされていない場合はそのまま待機する。
ステップS282 吸入センサ32のOFFを検出後、パンチ実行位置まで媒体12を搬送済みであるか否かを判定する。搬送済みである場合はステップS283に進み、搬送済みでない場合はそのまま待機する。
ステップS283 第2搬送ローラ31bを停止させる。
ステップS284 パンチを実行する。
ステップS285 第2搬送ローラ31bを駆動する。
ステップS286 パンチ要求をクリアする。
【0164】
次に、後処理装置30のステープル/排出処理のフローチャートについて説明する。
ステップS291 排出要求又はステープル要求がセットされているか否かを判定する。セットされている場合はステップS292に進み、セットされていない場合はそのまま待機する。
ステップS292 吸入センサ32のOFFを検出後、ステープルトレイまで媒体12を搬送済みであるか否かを判定する。搬送済みである場合はステップS293に進み、搬送済みでない場合はそのまま待機する。
ステップS293 モータ速度が第2速度であるか否かを判定する。第2速度である場合はステップS294に進み、第2速度でない場合はステップS295に進む。
ステップS294 モータを第1速度に減速する。
ステップS295 ステープル実行要求がセットされているか否かを判定する。セットされている場合はステップS296に進み、セットされていない場合はステップS300に進む。
ステップS296 媒体揃え動作を実行する。
ステップS297 ステープルを実行する。
ステップS298 ステープル実行要求をクリアする。
ステップS299 媒体12を排出する。
ステップS300 排出要求がセットされているか否かを判定する。セットされている場合はステップS301に進み、セットされていない場合はステップS302に進む。
ステップS301 排出実行要求をクリアする。
ステップS302 媒体揃え動作を実行する。
ステップS303 ステープル要求をクリアする。
【0165】
このように、本実施の形態においては、ステープル処理やパンチ処理のような後処理を行う際に、次の媒体12を後処理装置30に投入する待ち時間を削減することができ、低コストで生産性の向上を図ることが可能となる。
【0166】
ところで、前記第1の実施の形態における画像形成装置1は、反転装置60を有していないので、片面印刷の場合には両面ユニット27によって媒体12の反転を行う。しかし、反転装置60では、2枚の媒体12をすれ違いにさせることによって、媒体12の間隔が短くても媒体12を反転させることができるのに対し、両面ユニット27では、2枚の媒体12をすれ違いにさせる機構が存在しないので、前の媒体12の反転が完了してから次の媒体12の吸入を行うこととなるので、媒体12の間隔を長くする必要がある。そのため、本実施の形態における画像形成装置1は、反転装置60を有することによって、スループットを向上させることができる。もっとも、両面印刷を行う場合には、媒体12が必ず両面ユニット27を通過するので、反転装置60の有無に係わらず、スループットは変化しない。
【0167】
なお、前記第1及び第2の実施の形態では、画像形成処理装置10がモノクロプリンタである場合について説明したが、前記画像形成処理装置10がカラープリンタであってもよい。さらに、前記画像形成処理装置10は、ファクシミリ機や複合機(MFP:Multi Function Printer)であってもよい。
【0168】
また、本発明は前記実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【図面の簡単な説明】
【0169】
【図1】本発明の第1の実施の形態における画像形成装置の概略図である。
【図2】本発明の第1の実施の形態における画像形成装置の機能構成を示すブロック図である。
【図3】本発明の第1の実施の形態における画像形成処理装置と後処理装置との境界部分の拡大図である。
【図4】本発明の第1の実施の形態における画像形成処理装置の給紙処理の動作を示すフローチャートである。
【図5】本発明の第1の実施の形態における画像形成処理装置の給紙元決定処理の動作を示すフローチャートである。
【図6】本発明の第1の実施の形態における画像形成処理装置の排出先決定処理の動作を示すフローチャートである。
【図7】本発明の第1の実施の形態における画像形成処理装置の画像形成処理の動作を示すフローチャートである。
【図8】本発明の第1の実施の形態における画像形成処理装置の排出処理の動作を示すフローチャートである。
【図9】本発明の第1の実施の形態における後処理装置のI/F処理の動作を示すフローチャートである。
【図10】本発明の第1の実施の形態における後処理装置の吸入処理の動作を示すフローチャートである。
【図11】本発明の第1の実施の形態における後処理装置のパンチ処理の動作を示すフローチャートである。
【図12】本発明の第1の実施の形態における後処理装置のステープル/排出処理の動作を示すフローチャートである。
【図13】本発明の第2の実施の形態における画像形成処理装置の概略図である。
【図14】本発明の第2の実施の形態における反転装置の要部拡大図である。
【図15】本発明の第2の実施の形態における画像形成装置の機能構成を示すブロック図である。
【図16】本発明の第2の実施の形態における反転装置の動作を示すタイムチャートである。
【図17】本発明の第2の実施の形態におけるストレートパスの場合の反転装置の動作を示す図である。
【図18】本発明の第2の実施の形態における反転パスの場合の反転装置の動作を示す図である。
【図19】本発明の第2の実施の形態における画像形成処理装置の給紙処理の動作を示すフローチャートである。
【図20】本発明の第2の実施の形態における画像形成処理装置の給紙元決定処理の動作を示すフローチャートである。
【図21】本発明の第2の実施の形態における画像形成処理装置の排出先決定処理の動作を示すフローチャートである。
【図22】本発明の第2の実施の形態における画像形成処理装置の画像形成処理の動作を示すフローチャートである。
【図23】本発明の第2の実施の形態における画像形成処理装置の排出処理の動作を示すフローチャートである。
【図24】本発明の第2の実施の形態における反転装置のI/F処理の動作を示すフローチャートである。
【図25】本発明の第2の実施の形態における反転装置の吸入処理の動作を示すフローチャートである。
【図26】本発明の第2の実施の形態における反転装置の反転処理Aの動作を示すフローチャートである。
【図27】本発明の第2の実施の形態における反転装置の反転処理Bの動作を示すフローチャートである。
【図28】本発明の第2の実施の形態における反転装置の排出処理の動作を示すフローチャートである。
【図29】本発明の第2の実施の形態における後処理装置のI/F処理の動作を示すフローチャートである。
【図30】本発明の第2の実施の形態における後処理装置の吸入処理の動作を示すフローチャートである。
【図31】本発明の第2の実施の形態における後処理装置のパンチ処理の動作を示すフローチャートである。
【図32】本発明の第2の実施の形態における後処理装置のステープル/排出処理の動作を示すフローチャートである。
【符号の説明】
【0170】
1 画像形成装置
10 画像形成処理装置
12 媒体
15 画像形成部
21 定着部
30 後処理装置
60 反転装置
68 搬送ローラ
【技術分野】
【0001】
本発明は、後処理機能を具備する画像形成装置及び画像形成装置における後処理方法に関するものである。
【背景技術】
【0002】
従来、画像形成が行われた媒体にパンチ処理やステープル処理を施すフィニッシャ機構を実装した画像形成装置が提案されている(例えば、特許文献1参照。)。
【特許文献1】特開2006−231828号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、前記従来の画像形成装置においては、パンチ処理やステープル処理に時間がかかるため、スループットが低下するという問題があった。
【0004】
本発明は、前記従来の画像形成装置の問題点を解決して、後処理装置内における媒体搬送速度を、画像形成処理装置内における媒体搬送速度よりも速くすることができるようにして、媒体に後処理を施す際に、次の媒体を後処理装置に搬入するための待ち時間を短縮することができ、低コストでスループットの低下を防止することができる後処理機能を具備する画像形成装置及び画像形成装置における後処理方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
そのために、本発明の後処理機能を具備する画像形成装置においては、印刷画像のデータを受信する受信部、該受信部が受信したデータによって画像を形成する画像形成部、該画像形成部が形成した画像を媒体に定着させる定着部を備える画像形成処理装置と、該画像形成処理装置から受け渡された媒体に、パンチ処理及びステープル処理を含む後処理を施す後処理装置とを有する後処理機能を具備する画像形成装置であって、前記画像形成処理装置は、媒体が前記画像形成処理装置内の搬送ローラにかかっている状態でも、前記画像形成処理装置の媒体搬送速度よりも速い速度で、前記画像形成処理装置から媒体を引き抜くことを可能とする駆動切断機構と、前記画像形成処理装置から媒体を引き抜くことが可能なタイミングを前記後処理装置に通知する通知手段とを備え、前記後処理装置は、前記画像形成処理装置の媒体搬送速度と同等の速度で媒体を搬送する第1の搬送手段と、前記画像形成処理装置の媒体搬送速度よりも速い速度に加速して媒体を搬送する第2の搬送手段とを備え、該第2の搬送手段は、前記画像形成処理装置と前記後処理装置とに媒体が跨(またが)って搬送されている状態で、媒体を前記画像形成処理装置の媒体搬送速度よりも速い速度で搬送する。
【発明の効果】
【0006】
本発明によれば、後処理機能を具備する画像形成装置においては、後処理装置内における媒体搬送速度を、画像形成処理装置内における媒体搬送速度よりも速くすることができる。これにより、媒体に後処理を施す際に、次の媒体を後処理装置に搬入するための待ち時間を短縮することができ、低コストでスループットの低下を防止することができる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。
【0008】
図1は本発明の第1の実施の形態における画像形成装置の概略図である。
【0009】
図において、1は本実施の形態における画像形成装置であり、該画像形成装置1は印刷指示や印刷設定などを行う後述される上位装置としてのホストコンピュータ40に接続されている。また、前記画像形成装置1は、大別すると、画像形成処理機能を備える画像形成処理装置10と後処理機能を備える後処理装置30とを有する。
【0010】
本実施の形態における画像形成処理装置10は、例えば、プリンタ、ファクシミリ機、複写機、各種の機能を併せ持つ複合機等であるが、いかなる種類のものであってもよい。また、前記画像形成処理装置10は、各色の画像を形成する画像形成部15を多段式に配設してカラー印刷を行うカラープリンタであってもよいが、ここでは、説明の都合上、単一の画像形成部15によって単色(例えば、黒色)の印刷を行うモノクロプリンタである場合について説明する。
【0011】
この場合、前記画像形成処理装置10は、給紙トレイ11と、該給紙トレイ11に格納された印刷媒体である媒体12と、給紙のタイミングの基準となる給紙センサ13、画像形成タイミングの基準となる書出しセンサ14と、電子写真プロセスによって感光体ドラム上に現像剤による画像を形成する画像形成部15と、該画像形成部15の感光体ドラム上に光線によって静電潜像を形成する印刷ヘッド部16と、前記画像形成部15の感光体ドラム上に形成された現像剤による画像を媒体12に転写する転写部17と、媒体12上に転写された現像剤による画像を熱によって媒体12に定着させる定着部21と、媒体12が定着部21を抜けたことを検出する排出センサ22と、媒体12を排出するか両面ユニット27へ吸入するかを切り替える両面セパレータ24と、媒体12を本体スタッカ26に排出するか後処理装置30へ排出するかを切り替える排出先切替セパレータ25と、媒体12を排出する本体スタッカ26と、両面印刷を行うために媒体12の表裏反転を行う両面ユニット27とを有する。
【0012】
図において、矢印は媒体搬送ルートと搬送方向を示し、媒体12は媒体搬送ルート上の各ローラによって搬送される。前記媒体搬送ルート上の各ローラのうち、定着部21の媒体搬送ルート後方にあるローラは総じて排出ロ−ラと称され、該排出ロ−ラのうち、第1排出ローラ23a及び第2排出ローラ23bのみがここでの説明に必要となるため、番号が付与されている。なお、前記第1排出ローラ23a及び第2排出ロ−ラ23bは、駆動切断機構としてのワンウェイギヤを介して駆動される。
【0013】
また、前記後処理装置30は、画像形成処理装置10から排出された媒体12に、後処理としてパンチ処理及びステープル処理を施す装置であり、第1搬送ローラ31aと、第2搬送ローラ31bと、媒体12が後処理装置30に吸入されたことを検出する吸入センサ32と、パンチユニット33と、ステープルスタッカ34と、排出ベルト35と、該排出ベルト35に固定された排出爪36と、ステープルユニット37と、排出スタッカ38とを有する。
【0014】
次に、前記画像形成装置1を機能の観点から説明する。
【0015】
図2は本発明の第1の実施の形態における画像形成装置の機能構成を示すブロック図である。
【0016】
図に示されるように、画像形成処理装置10は、機能の観点から、ホストコンピュータ40とデータの送受信を行う送受信部41と、媒体12の給紙制御を行う給紙制御部42と、画像形成、転写及び定着のプロセスを制御する画像形成制御部43と、媒体12の排出制御を行う排出制御部44と、両面ユニット27とのI/F(Inter Face)を行う両面ユニットI/F部45と、後処理装置30とのI/Fを行う後処理装置I/F部46とを有する。前記画像形成処理装置10は、CPU、MPU等の演算手段、磁気ディスク、半導体メモリ等の記憶手段等を備え、制御プログラムに従って動作し、図に示されるような機能を発揮する。
【0017】
ここで、前記ホストコンピュータ40は、画像形成装置1の上位装置であって、例えば、CPU、MPU等の演算手段、磁気ディスク、半導体メモリ等の記憶手段、キーボード、マウス、タッチパネル等の入力手段、CRT、液晶ディスプレイ等の表示手段、通信インターフェイス等を備えるコンピュータであるが、画像形成処理装置10で印刷するための印刷画像のデータを作成することができる装置であれば、パーソナルコンピュータ、サーバ、PDA(Personal Digital Assistant)、電子手帳、ゲーム機等であってもよく、いかなる種類の装置であってもよい。そして、前記ホストコンピュータ40と画像形成処理装置10とは、例えば、USB(Universal Serial Bus)ケーブル等の通信ケーブルや、インターネット、イントラネット、LAN(Local Area Network)、WAN(Wide Area Network)等の通信ネットワークのような通信回線を介して接続されている。
【0018】
また、後処理装置30は、機能の観点から、画像形成処理装置10とのI/Fを行う画像形成処理装置I/F部51と、媒体12の吸入制御を行う吸入制御部52と、パンチ動作及びパンチユニットの制御を行うパンチ制御部53と、ステープル動作、ステープルユニットの制御及び媒体12の排出制御を行うステープル/排出制御部54とを有する。前記後処理装置30は、CPU、MPU等の演算手段、磁気ディスク、半導体メモリ等の記憶手段等を備え、制御プログラムに従って動作し、図に示されるような機能を発揮する。
【0019】
なお、本実施の形態においては、両面ユニット27の詳細な説明を省略する。
【0020】
次に、前記構成の画像形成装置1の動作について説明する。
【0021】
図3は本発明の第1の実施の形態における画像形成処理装置と後処理装置との境界部分の拡大図、図4は本発明の第1の実施の形態における画像形成処理装置の給紙処理の動作を示すフローチャート、図5は本発明の第1の実施の形態における画像形成処理装置の給紙元決定処理の動作を示すフローチャート、図6は本発明の第1の実施の形態における画像形成処理装置の排出先決定処理の動作を示すフローチャート、図7は本発明の第1の実施の形態における画像形成処理装置の画像形成処理の動作を示すフローチャート、図8は本発明の第1の実施の形態における画像形成処理装置の排出処理の動作を示すフローチャート、図9は本発明の第1の実施の形態における後処理装置のI/F処理の動作を示すフローチャート、図10は本発明の第1の実施の形態における後処理装置の吸入処理の動作を示すフローチャート、図11は本発明の第1の実施の形態における後処理装置のパンチ処理の動作を示すフローチャート、図12は本発明の第1の実施の形態における後処理装置のステープル/排出処理の動作を示すフローチャートである。
【0022】
画像形成処理装置10の制御プログラムは、複数枚の媒体12の同時走行を実現するため、給紙処理、画像形成処理、及び、排出処理の各処理を平行して実行する。
【0023】
まず、ホストコンピュータ40より印刷データが送られてくると、送受信部41はそれを受信し(ステップS1)、給紙制御部42は給紙センサ13がOFFであれば給紙可能として(ステップS2)、給紙元を決定する(ステップS3)。
【0024】
ここで、受信したデータが片面印刷データであれば(ステップS3−1)、給紙元は給紙トレイ11となる(ステップS3−5)。
【0025】
なお、受領したデータが両面印刷データの場合、両面ユニット27を使用して媒体12の反転を行い、該媒体12の表裏に印刷を行うことになるが、1枚ずつ表裏を印刷していたのでは、表面の画像形成終了後、両面ユニット27によって媒体12が反転されて給紙可能となるまで、裏面の画像形成を開始することができないので、大幅にスループットが低下してしまう。したがって、次に示されるような順番で印刷を行い、極力スループットを低下させない制御が一般的に行われている。
<両面ユニットの収容上限枚数が2枚の場合>
1枚目裏面→2枚目裏面→1枚目表面→3枚目裏面→2枚目表面・・・n−1枚目表面→n枚目表面
<両面ユニットの収容上限枚数が3枚の場合>
1枚目裏面→2枚目裏面→3枚目裏面→1枚目表面→4枚目裏面→2枚目表面・・・n−2枚目表面→n−1枚目表面→n枚目表面
(裏面印刷時は給紙トレイ11から給紙が行われ、表面印刷時は両面ユニット27から給紙が行われる。)
このような制御を行い、両面ユニット27内に複数枚の媒体12を走行させることによって、極力スループットを低下させずに両面印刷を行うことが可能となる。
【0026】
そこで、受信したデータが両面印刷データの場合(ステップS3−1)、給紙トレイ11は媒体12があれば常に給紙可能であるので、両面ユニット27内の給紙可能な位置まで搬送されている媒体12があれば、両面ユニット27を優先的に給紙元とする(ステップS3−3)。なお、両面ユニット27内の給紙可能な位置まで搬送されている媒体12がない場合でも、両面ユニット27の収容上限枚数にすでに到達している場合は、それ以上媒体12を両面ユニット27に投入することはできないので、両面ユニット27を給紙元とする(ステップS3−4、ステップS3−3)。
【0027】
また、両面ユニット27内の給紙可能な位置まで搬送されている媒体12がなく、かつ、両面ユニット27の収容上限枚数に到達していない場合(ステップS3−2、ステップS3−4)、給紙元を給紙トレイ11とする(ステップS3−5)。
【0028】
次に、給紙制御部42は、排出先の決定を行う(ステップS4)。
【0029】
本実施の形態における後処理装置30のステープルユニット37は、下から上に向かってステープル針を打ち込むことを前提としているので、ステープル処理を行う場合は、印刷済み媒体12の表面を下にした状態で、後処理装置30に受け渡す必要がある。そして、受信したデータが両面印刷データの場合には、表面→裏面の順序で印刷すれば問題がない。しかし、受信したデータが片面印刷データの場合、表面を上にした状態となってしまうので、一旦(たん)媒体12を両面ユニット27に投入し、表裏反転してから後処理装置30へ受け渡す必要がある。
【0030】
そのため、受信したデータが片面印刷データであって(ステップS4−1)、かつ、ステープルが指定されている場合、給紙元が給紙トレイ11のときには、排出先が両面ユニット27となり(ステップS4−7)、両面ユニット27を通過して給紙元が両面ユニット27となったときには、排出先が後処理装置30となる(ステップS4−8)。
【0031】
また、受信したデータが片面印刷データであって、かつ、パンチのみが指定されている場合、又は、受信したデータが両面印刷データあって、かつ、パンチ又はステープルが指定されている場合、給紙元が両面ユニットのときには、排出先が後処理装置30となる(ステップS4−8)。
【0032】
さらに、受信したデータが片面印刷データの場合、又は、両面印刷データあってかつ給紙元が両面ユニット27の場合、パンチ及びステープルが指定されていないときには、排出先が本体スタッカ26となる(ステップS4−9)。
【0033】
さらに、受信したデータが両面印刷データであって、かつ、給紙元が給紙トレイ11の場合、排出先が両面ユニット27となる(ステップS4−3)。
【0034】
該両面ユニット27は、一般的のものと同様に、媒体吸入動作と反転動作とを同時には行うことができない構造なので、次の媒体12を吸入可能なタイミングを媒体長と搬送路長とから計算し、画像形成処理装置10に通知するようになっている。
【0035】
後処理装置30は、パンチ又はステープルが指定された場合、それらの実行に時間を要するため、所要時間を画像形成処理装置10に通知する。すると、該画像形成処理装置10は、通知された時間分、前の媒体12との間隔を開けてから、次の媒体12の搬送を開始するようになっている。
【0036】
画像形成処理装置10は、一旦媒体12の搬送を開始し、画像形成処理を開始してしまうと、その後媒体12を停止させておく手段を備えていない。そのため、画像形成処理開始前にこれらのタイミング調整を行う必要がある。なお、画像形成処理開始前であれば任意の位置で媒体12を停止させて調整を行うことが可能であるが、本実施の形態においては、給紙開始タイミングの調整によって行うものとする。
【0037】
給紙制御部42は、排出先を決定した(ステップS4)後、該排出先が両面ユニット27である場合(ステップS5)、該両面ユニット27が媒体12を吸入可能になるのを待って(ステップS6)、次の媒体12の媒体情報(媒体搬送速度、媒体長)を通知し(ステップS7)、給紙元から給紙を行い、媒体12の搬送を開始する(ステップS11)。また、排出先が後処理装置30である場合(ステップS8)、該後処理装置30より通知された、前の媒体12の後処理に必要な時間分の間隔を前の媒体12との間に確保した(ステップS9)後、次の媒体12の後処理情報(媒体搬送速度、媒体幅、媒体長、パンチ有無、ステープル有無、ステープル実行有無等)を後処理装置30に通知し(ステップS10)、給紙元から給紙を行い、媒体12の搬送を開始する(ステップS11)。
【0038】
そして、給紙開始後、一定時間内に給紙センサ13のONが検出された場合は、給紙成功として(ステップS12)画像形成処理に対する画像形成要求をセットし(ステップS13)、次の媒体12の給紙を行うためステップS1に戻る。また、一定時間内に給紙センサ13のONが検出されない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS14)。
【0039】
画像形成制御部43は、画像形成要求がセットされると(ステップS21、ステップ22)、書出しセンサ14のONによってタイミングを測って画像形成を開始し(ステップS23、ステップ24)、排出処理に対する排出要求をセットする(ステップS25)。そして、画像形成が終了すると(ステップS26)、次の媒体12の画像形成を行うためステップS21に戻る。
【0040】
排出制御部44は、排出要求がセットされると(ステップS31、ステップ32)、排出センサ22の監視を開始し(ステップS33)、一定距離搬送しても排出センサ22のONが検出されない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS47、ステップ48)。
【0041】
また、排出センサ22のONを検出した場合は排出先の判定を行い、排出先が両面ユニット27であれば(ステップS34)、媒体12を両面ユニット27に吸入するべく、両面セパレータ24を切り替え(ステップS35)、両面ユニット27に媒体吸入要求を通知する(ステップS36)。
【0042】
さらに、排出先が両面ユニット27でなければ、両面セパレータ24を排出側に切り替えて(ステップS40)、排出先が後処理装置30であるか否かの判定を行う(ステップS41)。そして、後処理装置30であれば媒体12を後処理装置30に吸入するべく、排出先切替セパレータ25を切り替え(ステップS42)、後処理装置30に媒体吸入要求を通知する(ステップS43)。また、排出先が後処理装置30でなければ、媒体12を本体スタッカ26に排出するべく、排出先切替セパレータ25を切り替える(ステップS44)。
【0043】
その後、排出制御部44は、排出センサ22がOFFになるのを監視し(ステップS37)、排出センサ22のOFFを検出した場合、次の媒体12の排出処理を行うためステップS31に戻るが、排出先が後処理装置30であるときには(ステップS38)、排出センサ22のOFFを検出した時点で後処理装置30に加速可能であることを通知してから(ステップS39)、ステップS31に戻る。なお、排出先が本体スタッカ26の場合、媒体12が本体スタッカ26に排出されて、印刷終了となる。
【0044】
また、排出センサ22がONになったところから媒体長+マージン分の搬送を行っても、排出センサ22のOFFを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS45、ステップ46)。
【0045】
次に、後処理装置30における処理について説明する。
【0046】
後処理装置30の制御プログラムは、画像形成処理装置10の制御プログラムと同様に、複数枚の媒体12の平行処理を実現するため、I/F処理、吸入処理、パンチ処理、及び、ステープル/排出処理の各処理を平行して実行する。
【0047】
後処理装置30の画像形成処理装置I/F部51は、画像形成処理装置10から後処理情報を受信すると(ステップS51)、そこに付加された媒体搬送速度、媒体幅、媒体長、パンチ有無、ステープル有無、ステープル実行有無等の情報に基づき、その後処理に要する時間を計算して、画像形成処理装置10に通知するようになっている(ステップS52)。また、画像形成処理装置10から媒体吸入要求を受信した場合は、媒体吸入要求あり情報をセットし(ステップS53)、加速可能を受信した場合は、加速可能情報をセットするようになっている(ステップS54)。
【0048】
媒体吸入要求あり情報がセットされる(ステップS61)と、吸入制御部52は、先に通知されている後処理情報に基づき、媒体12の受け入れ準備として、モータが回転中でなければ(ステップS62)、媒体搬送速度に基づいて図示されないモータを回転開始させる(ステップ63)。これにより、後処理装置30の第1搬送ローラ31a及び第2搬送ローラ31bが駆動される。このときの搬送速度は、画像形成処理装置10から媒体12が受け渡されるので、画像形成処理装置10の媒体搬送速度と等しい速度となり、該速度を第1速度とする。
【0049】
次に、吸入制御部52は、画像形成処理装置10から搬送されてくる媒体12によって、吸入センサ32がONになるのを待機する(ステップS64)。そして、画像形成処理装置10からの媒体吸入要求受信から一定時間経過しても吸入センサ32のONを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS65、ステップS79)。また、吸入センサ32のONを検出すると、次の媒体12の吸入要求に備えて媒体吸入要求あり情報をクリアし(ステップS66)、パンチ有無情報に基づいてパンチありであればパンチ要求をセットし(ステップS67、ステップS68)、ステープル有無情報に基づいてステープルありであればステープル要求をセットし(ステップS69、ステップS70)、ステープルなしであれば排出要求をセットし(ステップS73)、さらに、ステープル実行ページであればステープル実行要求をセットする(ステップS71、ステップS72)。
【0050】
その後、吸入制御部52は、吸入センサ32のOFFの待機に移行する(ステップS74)。なお、該吸入センサ32のOFFの待機中に画像形成処理装置I/F部51が画像形成処理装置10から加速可能を受信し、加速可能情報がセットされた場合(ステップS75)、モータを第2速度に加速し(ステップS76)、次の媒体12に備えて加速可能情報をクリアする(ステップS77)。
【0051】
後処理装置30は、画像形成のプロセスを行わないため、画像形成処理装置10よりも高速に媒体12を搬送することが可能であり、例えば、媒体12が完全に後処理装置30に受け渡された状態、すなわち、後処理装置30の吸入センサ32を媒体12が通過し、センサOFFを検出した状態から搬送速度の加速が可能である。本実施の形態においては、媒体12が画像形成処理装置10と後処理装置30とに跨った状態であって、かつ、画像形成処理装置10の排出ローラを媒体12が抜けていない状態から、後処理装置30における搬送速度の加速を行うことを特徴とする。
【0052】
これを実現するために、画像形成処理装置10の第1排出ローラ23a及び第2排出ローラ23bの駆動ギヤはワンウェイギヤとなっている。これにより、第1排出ローラ23a及び第2排出ローラ23bは、画像形成処理装置10の図示されないモータによって駆動されているときは、画像形成処理装置10の搬送速度で駆動されるが、後処理装置30がそれ以上の速度で画像形成処理装置10から媒体12を引き抜こうとしたときは、第1排出ローラ23a及び第2排出ローラ23bは、画像形成処理装置10のモータによる駆動から切断されて、引き抜かれようとする速度で回転することが可能となっている。
【0053】
さらに、この加速可能ポイントを後処理装置30へ通知するため、画像形成処理装置10は、図3に示されるように、媒体12を駆動ギヤがワンウェイギヤとなっている第1排出ローラ23a及び第2排出ローラ23bのみで保持していることを保証することができる時点、すなわち、排出センサ22のOFFを検出した時点で、後処理装置30へ加速可能を通知するようになっている。
【0054】
例えば、「背景技術」の項で説明したようなパンチ処理やステープル処理のような後処理を行う従来の画像形成装置と比較する。従来の画像形成装置において、後処理装置でパンチ処理を行う場合、媒体1枚ずつにパンチを行うので、1枚毎にパンチを実行するための時間が必要となる。また、ステープル処理を行う場合、1枚毎に媒体を揃(そろ)える動作のための時間と、最終的にステープルを実行するための時間とが必要となる。そして、これらの時間の合計が画像形成処理装置から後処理装置に搬送されてくる媒体と媒体との間隔の時間を超えるときには、正常な後処理を行うことができなくなくなるばかりか、媒体ジャムが発生する可能性もある。そこで、従来の画像形成装置における後処理装置は、後処理にかかる合計時間に、更にマージンを見込んだ時間を画像形成処理装置に通知し、該画像形成処理装置は通知された時間の分だけ媒体と媒体との間隔を確保した上で、後処理装置に媒体を投入する必要がある。そのため、その分生産性が当然に低下することになってしまう。
【0055】
これに対し、本実施の形態における画像形成装置1は、前述のような構成を有し、前述のように動作して、後処理装置30での加速ポイントを早めることによって、画像形成処理装置10の排出センサ22のOFFから、後処理装置30の吸入センサ32のOFFまでの距離分だけ通常よりも早く加速を行うことが可能となるので、後処理装置30は、前記距離分を高速な第2速度での搬送を前提とした後処理に必要な時間を画像形成処理装置10に通知し、該画像形成処理装置10はそれに従って媒体12を後処理装置30に投入することにより、その分生産性を向上することができる。
【0056】
一例を挙げると、
画像形成処理装置10の排出センサ22のOFFから後処理装置30の吸入センサ32のOFFまでの距離をD1=150〔mm〕とし、
画像形成処理装置10の媒体搬送速度をS1=150〔mm〕/秒とし、
後処理装置30の第2速度をS2=300〔mm〕/秒とした場合、
本実施の形態における媒体1枚あたりの生産性向上分は、
(D1÷S1)−(D1÷S2)→(150÷150)−(150÷300)=0.5秒、となる。
【0057】
通常、後処理動作で最も時間を要するのはステープルの実行であるが、該ステープルの実行はジョブ(Job)毎に1度であり、1ジョブの枚数が多ければ、それほど生産性の低下は起こらない。これに対し、パンチ動作及びステープル実行のための媒体揃え動作は、毎ページ実行する必要があるため、生産性に与える影響が大きい。
【0058】
本実施の形態においては、前述のような構成を有し、前述のように動作することによって、後処理を行う際の媒体1枚毎の生産性を向上することが可能である。また、パンチユニット33及び媒体揃え機構の性能にもよるが、パンチ動作及びステープル実行のための媒体揃え動作を行った場合でも、画像形成処理装置10と同等の生産性を実現することも可能である。
【0059】
なお、両面印刷の場合、又は、片面印刷であってもステープル処理を行う場合には、前述のように、片面を印刷した媒体12を一旦両面ユニット27に入れ、該両面ユニット27内で反転した後にもう片面の印刷を行うため、媒体12はジョブの開始及び終了時を除き、両面ユニット27と後処理装置30とに1枚ずつ交互に排出されることになるので、後処理装置30に受け渡される媒体12の間隔は、自ずと1ページ以上間隔が開くことになる。したがって、その間に後処理が終了するのであれば、格別の効果を期待することができないが、ステープル処理のように、後処理にかかる時間が長い場合は、大きな効果を期待することができる。
【0060】
また、吸入制御部52は、吸入センサ32のOFFの待機中に、吸入センサ32のONから媒体長+マージン分の搬送を行っても吸入センサ32のOFFを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS78、ステップ79)。なお、吸入センサ32のOFFを検出した場合には、次の媒体12の吸入に備えてステップS61に戻る。
【0061】
パンチ制御部53は、パンチ要求がセットされると(ステップS81)吸入センサ32のOFFを監視し、吸入センサ32のOFFを検出後パンチ実行位置まで媒体12が搬送されるのを待って(ステップS82)、図示されないモータの駆動を第2搬送ローラ31bに伝えている図示されない電磁クラッチをOFFにして、第2搬送ローラ31bを停止させる(ステップS83)。これにより、媒体12の搬送が一旦停止するので、パンチユニット33によって媒体12の後端にパンチを実行する(ステップS84)。パンチ実行後は直ちに図示されない電磁クラッチをONにして第2搬送ローラ31bを駆動し(ステップS85)、媒体12の搬送を再開する。そして、パンチ要求をクリアして(ステップS86)、次の媒体12のパンチに備えてステップS81に戻る。
【0062】
ステープル/排出制御部54は、排出要求又はステープル要求がセットされると(ステップS91)、媒体12がステープルトレイまで搬送されるのを待機する(ステップS92)。そして、モータ速度が第2速度である場合は、次の媒体12の吸入に備えて、モータ速度を画像形成処理装置10の媒体搬送速度と同等の第1速度に減速する(ステップS93、ステップS94)。続いて、ステープル実行要求がセットされている場合(ステップS95)、ステープル実行に備えて、図示されない媒体揃え機構によってステープルトレイ上に積載された媒体12を揃え(ステップS96)、ステープルユニット37によりステープルを実行し(ステップS97)、ステープル実行要求をクリアする(ステップS98)。
【0063】
ステープルトレイには、該ステープルトレイ上の媒体12又は該媒体12の束を排出するための排出ベルト35及び排出爪36が配設され、該排出爪36は、前記排出ベルト35に固定されて該排出ベルト35と一緒に回転するようになっている。したがって、ステープル実行後、ステープル済の媒体12の束の後端を排出爪36に引っ掛けた状態で排出ベルト35を図示されないモータによって回転させることにより、媒体12の束は排出スタッカ38上に排出されて積載される(ステップS99)。ステープル実行要求がセットされていない場合であって排出要求がセットされているときには(ステップS100)、排出実行要求をクリアして、前述のようにステープル済の媒体12の束を排出するのと同様の方法で、媒体12を排出スタッカ38上に排出して積載する(ステップS101、ステップS99)。
【0064】
また、ステープル実行要求がセットされていない場合であって排出要求がセットされていないときには、ステープルジョブの一部のページであるため、ステープルを行うために媒体12をステープルトレイ上に積載し、ステープル実行に備えて図示されない媒体揃え機構によって媒体揃えを行い(ステップS102)、ステープル要求をクリアする(ステップS103)。
【0065】
そして、ステープル/排出制御部54は、要求に対する一連の動作が終わると、次の媒体12の処理に備えてステップS91に戻る。
【0066】
次に、画像形成処理装置10の給紙処理のフローチャートについて説明する。
ステップS1 印刷データがあるか否かを判定する。印刷データがある場合はステップS2に進み、印刷データがない場合はそのまま待機する。
ステップS2 給紙センサ13がOFFであるか否かを判定する。OFFである場合はステップS3に進み、OFFでない場合はそのまま待機する。
ステップS3 給紙元決定処理を行う。
ステップS4 排出先決定処理を行う。
ステップS5 排出先が両面ユニット27であるか否かを判定する。排出先が両面ユニット27である場合はステップS6に進み、排出先が両面ユニット27でない場合はステップS8に進む。
ステップS6 両面ユニット27が媒体12を吸入可能であるか否かを判定する。媒体12を吸引可能である場合はステップS7に進み、媒体12を吸入可能でない場合はそのまま待機する。
ステップS7 両面ユニット27に媒体情報を通知する。
ステップS8 排出先が後処理装置30であるか否かを判定する。排出先が後処理装置30である場合はステップS9に進み、排出先が後処理装置30でない場合はステップS11に進む。
ステップS9 前の媒体12の後処理に必要な時間を確保済みか否かを判定する。時間を確保済みの場合はステップS10に進み、時間を確保していない場合はそのまま待機する。
ステップS10 後処理装置30に後処理情報を通知する。
ステップS11 給紙元から給紙を行う。
ステップS12 給紙成功であるか否かを判定する。給紙成功である場合はステップS13に進み、給紙成功でない場合はステップS14に進む。
ステップS13 画像形成要求をセットする。
ステップS14 用紙ジャムをセットし、処理を終了する。
【0067】
次に、給紙元決定処理のサブルーチンについて説明する。
ステップS3−1 受信したデータが両面印刷データであるか否かを判定する。両面印刷データである場合はステップS3−2に進み、両面印刷データでない場合はステップS3−5に進む。
ステップS3−2 両面ユニット27から給紙可能であるか否かを判定する。給紙可能である場合はステップS3−3に進み、給紙可能でない場合はステップS3−4に進む。
ステップS3−3 両面ユニット27を給紙元とし、処理を終了する。
ステップS3−4 両面ユニット27の収容上限枚数に到達しているか否かを判定する。収容上限数に到達している場合はステップS3−3に戻り、収容上限数に到達していない場合はステップS3−5に進む。
ステップS3−5 給紙トレイ11を給紙元とし、処理を終了する。
【0068】
次に、排出先決定処理のサブルーチンについて説明する。
ステップS4−1 受信したデータが両面印刷データであるか否かを判定する。両面印刷データである場合はステップS4−2に進み、両面印刷データでない場合はステップS4−4に進む。
ステップS4−2 給紙トレイ11が給紙元であるか否かを判定する。給紙元である場合はステップS4−3に進み、給紙元でない場合はステップS4−4に進む。
ステップS4−3 排出先を両面ユニット27とし、処理を終了する。
ステップS4−4 パンチ又はステープルが指定されているか否か判定する。パンチ又はステープルが指定されている場合はステップS4−5に進み、パンチ及びステープルが指定されていない場合はステップS4−9に進む。
ステップS4−5 ステープルが指定されているか否かを判定する。ステープルが指定されている場合はステップS4−6に進み、ステープルが指定されていない場合はステップS4−8に進む。
ステップS4−6 給紙トレイ11が給紙元であるか否かを判定する。給紙元である場合はステップS4−7に進み、給紙元でない場合はステップS4−8に進む。
ステップS4−7 排出先を両面ユニット27とし、処理を終了する。
ステップS4−8 排出先を後処理装置30とし、処理を終了する。
ステップS4−9 排出先を本体スタッカ26とし、処理を終了する。
【0069】
次に、画像形成処理装置10の画像形成処理のフローチャートについて説明する。
ステップS21 画像形成要求があるか否かを判定する。画像形成要求がある場合はステップS22に進み、画像形成要求がない場合はそのまま待機する。
ステップS22 画像形成要求をクリアする。
ステップS23 画像形成開始のタイミングであるか否かを判定する。画像形成開始のタイミングである場合はステップS24に進み、画像形成開始のタイミングでない場合はそのまま待機する。
ステップS24 画像形成を開始する。
ステップS25 排出要求をセットする。
ステップS26 画像形成を終了するか否かを判定する。画像形成を終了する場合は、次の媒体12の画像形成を行うため、ステップS21に戻り、画像形成を終了しない場合はそのまま待機する。
【0070】
次に、画像形成処理装置10の排出処理のフローチャートについて説明する。
ステップS31 排出要求があるか否かを判定する。排出要求がある場合はステップS32に進み、排出要求がない場合はそのまま待機する。
ステップS32 排出要求をクリアする。
ステップS33 排出センサ22がONであるか否かを判定する。ONである場合はステップS34に進み、ONでない場合はステップS47に進む。
ステップS34 排出先が両面ユニット27であるか否かを判定する。排出先が両面ユニット27である場合はステップS35に進み、排出先が両面ユニットでない場合はステップS40に進む。
ステップS35 両面セパレータ24を両面ユニット27側に切り替える。
ステップS36 両面ユニット27に媒体吸入要求を通知する。
ステップS37 排出センサ22がOFFであるか否かを判定する。OFFである場合はステップS38に進み、OFFでない場合はステップS45に進む。
ステップS38 排出先が後処理装置30であるか否かを判定する。排出先が後処理装置30である場合はステップS39に進み、排出先が後処理装置30でない場合はステップS31に戻る。
ステップS39 後処理装置30に加速可能を通知する。
ステップS40 両面セパレータ24を排出側に切り替える。
ステップS41 排出先が後処理装置30であるか否かを判定する。排出先が後処理装置30である場合はステップS42に進み、排出先が後処理装置30でない場合はステップS44に進む。
ステップS42 排出先切替セパレータ25を後処理装置30側に切り替える。
ステップS43 後処理装置30に媒体吸入要求を通知する。
ステップS44 排出先切替セパレータ25を本体スタッカ26側に切り替える。
ステップS45 媒体長+マージン分搬送されたか否かを判定する。媒体長+マージン分搬送された場合はステップS46に進み、媒体長+マージン分搬送されていない場合はステップS37に戻る。
ステップS46 用紙ジャムをセットし、処理を終了する。
ステップS47 一定距離搬送されたか否かを判定する。一定距離搬送された場合はステップS48に進み、一定距離搬送されていない場合はステップS33に戻る。
ステップS48 用紙ジャムをセットし、処理を終了する。
【0071】
次に、後処理装置30のI/F処理のフローチャートについて説明する。
ステップS51 画像形成処理装置10から受信情報があるか否かを判定する。後処理情報を受信した場合はステップS52に進み、媒体吸入要求を受信した場合はステップS53に進み、加速可能を受信した場合はステップS54に進み、受信情報がない場合はステップS55に進む。
ステップS52 前の媒体12の後処理に必要な時間を計算して、画像形成処理装置10に通知する。
ステップS53 媒体吸入要求あり情報をセットする。
ステップS54 加速可能情報をセットする。
ステップS55 エラーが発生したか否かを判定する。エラーが発生しない場合はステップS56に進み、エラーが発生した場合はステップS58に進む。
ステップS56 画像形成処理装置10にエラー通知済みであるか否かを判定する。エラー通知済みである場合はステップS57に進み、エラー通知していない場合はステップS51に戻る。
ステップS57 画像形成処理装置10にエラー解除を通知する。
ステップS58 画像形成処理装置10にエラー通知済みであるか否かを判定する。エラー通知していない場合はステップS59に進み、エラー通知済みの場合はステップS60に進む。
ステップS59 画像形成処理装置10にエラーを通知する。
ステップS60 媒体吸入要求あり情報をクリアする。
【0072】
次に、後処理装置30の媒体吸入処理のフローチャートについて説明する。
ステップS61 媒体吸入要求あり情報がセットされているか否かを判定する。セットされている場合はステップS62に進み、セットされていない場合はそのまま待機する。
ステップS62 モータが回転中であるか否かを判定する。モータが回転中でない場合はステップS63に進み、モータが回転中である場合はステップS64に進む。
ステップS63 第1速度でモータ回転を開始する。
ステップS64 吸入センサ32がONであるか否かを判定する。ONでない場合はステップS65に進み、ONである場合はステップS66に進む。
ステップS65 媒体吸入要求受信から一定時間経過したか否かを判定する。一定時間経過した場合はステップS79に進み、一定時間経過していない場合はステップS64に戻る。
ステップS66 媒体吸入要求あり情報をクリアする。
ステップS67 パンチありであるか否かを判定する。パンチありである場合はステップS68に進み、パンチなしである場合はステップS69に進む。
ステップS68 パンチ要求をセットする。
ステップS69 ステープルありであるか否かを判定する。ステープルありである場合はステップS70に進み、ステープルなしである場合はステップS73に進む。
ステップS70 ステープル要求をセットする。
ステップS71 ステープル実行ページであるか否かを判定する。ステープル実行ページである場合はステップS72に進み、ステープル実行ページでない場合はステップS74に進む。
ステップS72 ステープル実行要求をセットする。
ステップS73 排出要求をセットする。
ステップS74 吸入センサ32がOFFであるか否かを判定する。OFFでない場合はステップS75に進み、OFFである場合はステップS61に戻る。
ステップS75 加速可能情報がセットされているか否かを判定する。セットされている場合はステップS76に進み、セットされていない場合はステップS78に進む。
ステップS76 モータを第2速度に加速する。
ステップS77 加速可能情報をクリアする。
ステップS78 媒体長+マージン分搬送されたか否かを判定する。媒体長+マージン分搬送された場合はステップS79に進み、媒体長+マージン分搬送されていない場合はステップS74に戻る。
ステップS79 用紙ジャムをセットし、処理を終了する。
【0073】
次に、後処理装置30のパンチ処理のフローチャートについて説明する。
ステップS81 パンチ要求がセットされているか否かを判定する。セットされている場合はステップS82に進み、セットされていない場合はそのまま待機する。
ステップS82 吸入センサ32のOFFを検出後、パンチ実行位置まで媒体12を搬送済みであるか否かを判定する。搬送済みである場合はステップS83に進み、搬送済みでない場合はそのまま待機する。
ステップS83 第2搬送ローラ31bを停止させる。
ステップS84 パンチを実行する。
ステップS85 第2搬送ローラ31bを駆動する。
ステップS86 パンチ要求をクリアする。
【0074】
次に、後処理装置30のステープル/排出処理のフローチャートについて説明する。
ステップS91 排出要求又はステープル要求がセットされているか否かを判定する。セットされている場合はステップS92に進み、セットされていない場合はそのまま待機する。
ステップS92 吸入センサ32のOFFを検出後、ステープルトレイまで媒体12を搬送済みであるか否かを判定する。搬送済みである場合はステップS93に進み、搬送済みでない場合はそのまま待機する。
ステップS93 モータ速度が第2速度であるか否かを判定する。第2速度である場合はステップS94に進み、第2速度でない場合はステップS95に進む。
ステップS94 モータを第1速度に減速する。
ステップS95 ステープル実行要求がセットされているか否かを判定する。セットされている場合はステップS96に進み、セットされていない場合はステップS100に進む。
ステップS96 媒体揃え動作を実行する。
ステップS97 ステープルを実行する。
ステップS98 ステープル実行要求をクリアする。
ステップS99 媒体12を排出する。
ステップS100 排出要求がセットされているか否かを判定する。セットされている場合はステップS101に進み、セットされていない場合はステップS102に進む。
ステップS101 排出実行要求をクリアする。
ステップS102 媒体揃え動作を実行する。
ステップS103 ステープル要求をクリアする。
【0075】
このように、本実施の形態においては、ステープル処理やパンチ処理のような後処理を行う際に、次の媒体12を後処理装置30に投入する待ち時間を削減することができ、低コストで生産性の向上を図ることが可能となる。
【0076】
次に、本発明の第2の実施の形態について説明する。なお、第1の実施の形態と同じ構造を有するものについては、同じ符号を付与することによってその説明を省略する。また、前記第1の実施の形態と同じ動作及び同じ効果についても、その説明を省略する。
【0077】
図13は本発明の第2の実施の形態における画像形成装置の概略図、図14は本発明の第2の実施の形態における反転装置の要部拡大図である。
【0078】
本実施の形態における画像形成装置1は、図13に示されるように、画像形成処理装置10及び後処理装置30に加えて、反転装置60を有する。なお、本実施の形態における画像形成処理装置10は、給紙トレイ11が複数段装着されている点を除いて、前記第1の実施の形態における画像形成処理装置10と同様の構成を有するので、その説明を省略する。また、本実施の形態における後処理装置30も、前記第1の実施の形態における後処理装置30と同様の構成を有するので、その説明を省略する。
【0079】
反転装置60は、画像形成処理装置10から排出された媒体12を表裏反転して後処理装置30へ投入するための装置である。そして、前記反転装置60は、媒体12を反転せずに後処理装置30に排出するための媒体搬送路であるストレートパス61と、媒体12を反転して後処理装置30に排出するための媒体搬送路である反転パス62と、吸入センサ63と、前記ストレートパス61と反転パス62とを切り替える搬送路セパレータ64と、第1搬送ローラ65aと、第2搬送ローラ65bと、第3搬送ローラ65cと、第4搬送ロ−ラ65d、第5搬送ローラ65eと、第6搬送ローラ65fと、反転センサA66aと、反転センサB66bと、媒体ガイド67と、前記第2搬送ローラ65b及び第4搬送ローラ65dとペアとなる搬送ローラ68と、前記第1搬送ローラ65a、第2搬送ローラ65b及び第4搬送ローラ65d〜第6搬送ローラ65fを駆動するモータA69aと、第3搬送ローラ65cを駆動するモータB69bと、前記第3搬送ローラ65cの一対のローラを圧着及び分離させるソレノイド70とを有する。なお、前記第1搬送ローラ65a、第5搬送ローラ65e及び第6搬送ローラ65fは、駆動切断機構としてのワンウェイギヤを介して駆動される。
【0080】
次に、本実施の形態における画像形成装置1を機能の観点から説明する。
【0081】
図15は本発明の第2の実施の形態における画像形成装置の機能構成を示すブロック図である。
【0082】
図に示されるように、画像形成処理装置10は、機能の観点から、ホストコンピュータ40とデータの送受信を行う送受信部41と、媒体12の給紙制御を行う給紙制御部42と、画像形成、転写及び定着のプロセスを制御する画像形成制御部43と、媒体12の排出制御を行う排出制御部44と、両面ユニット27とのI/Fを行う両面ユニットI/F部45と、後処理装置30及び反転装置60とのI/Fを行う反転装置/後処理装置I/F部81とを有する。前記画像形成処理装置10は、CPU、MPU等の演算手段、磁気ディスク、半導体メモリ等の記憶手段等を備え、制御プログラムに従って動作し、図に示されるような機能を発揮する。
【0083】
また、後処理装置30は、機能の観点から、画像形成処理装置10及び反転装置60とのI/Fを行う画像形成処理装置/反転装置I/F部86と、媒体12の吸入制御を行う吸入制御部52と、パンチ動作及びパンチユニットの制御を行うパンチ制御部53と、ステープル動作、ステープルユニットの制御及び媒体12の排出制御を行うステープル/排出制御部54とを有する。前記後処理装置30は、CPU、MPU等の演算手段、磁気ディスク、半導体メモリ等の記憶手段等を備え、制御プログラムに従って動作し、図に示されるような機能を発揮する。
【0084】
さらに、反転装置60は、機能の観点から、媒体12の吸入制御を行う吸入制御部82と、媒体12の反転制御を行う反転制御部83と、媒体12の排出制御を行う排出制御部84と、画像形成処理装置10及び後処理装置30とのI/Fを行う画像形成処理装置/後処理装置I/F部85とを有する。前記反転装置60は、CPU、MPU等の演算手段、磁気ディスク、半導体メモリ等の記憶手段等を備え、制御プログラムに従って動作し、図に示されるような機能を発揮する。
【0085】
なお、その他の点の構成については、前記第1の実施の形態と同様であるので、説明を省略する。
【0086】
次に、前記構成の画像形成装置1の動作について説明する。
【0087】
図16は本発明の第2の実施の形態における反転装置の動作を示すタイムチャート、図17は本発明の第2の実施の形態におけるストレートパスの場合の反転装置の動作を示す図、図18は本発明の第2の実施の形態における反転パスの場合の反転装置の動作を示す図、図19は本発明の第2の実施の形態における画像形成処理装置の給紙処理の動作を示すフローチャート、図20は本発明の第2の実施の形態における画像形成処理装置の給紙元決定処理の動作を示すフローチャート、図21は本発明の第2の実施の形態における画像形成処理装置の排出先決定処理の動作を示すフローチャート、図22は本発明の第2の実施の形態における画像形成処理装置の画像形成処理の動作を示すフローチャート、図23は本発明の第2の実施の形態における画像形成処理装置の排出処理の動作を示すフローチャート、図24は本発明の第2の実施の形態における反転装置のI/F処理の動作を示すフローチャート、図25は本発明の第2の実施の形態における反転装置の吸入処理の動作を示すフローチャート、図26は本発明の第2の実施の形態における反転装置の反転処理Aの動作を示すフローチャート、図27は本発明の第2の実施の形態における反転装置の反転処理Bの動作を示すフローチャート、図28は本発明の第2の実施の形態における反転装置の排出処理の動作を示すフローチャート、図29は本発明の第2の実施の形態における後処理装置のI/F処理の動作を示すフローチャート、図30は本発明の第2の実施の形態における後処理装置の吸入処理の動作を示すフローチャート、図31は本発明の第2の実施の形態における後処理装置のパンチ処理の動作を示すフローチャート、図32は本発明の第2の実施の形態における後処理装置のステープル/排出処理の動作を示すフローチャートである。
【0088】
本実施の形態における後処理装置30のステープルユニット37は、下から上に向かってステープル針を打ち込むことを前提としているため、ステープル処理を行う場合は、印刷済み媒体12の表面を下にした状態で、後処理装置30に受け渡す必要がある。そこで、画像形成処理装置10と後処理装置30との間に反転装置60を配設することによって、必要に応じて、画像形成処理装置10より排出された媒体12の表裏を、反転装置60で反転し、後処理装置30に受け渡すようになっている。
【0089】
画像形成処理装置10の制御プログラムは、複数枚の媒体12の同時走行を実現するため、給紙処理、画像形成処理、及び、排出処理の各処理を平行して実行する。
【0090】
まず、ホストコンピュータ40より印刷データが送られてくると、送受信部41はそれを受信し(ステップS111)、給紙制御部42は給紙センサ13がOFFであれば給紙可能として(ステップS112)、給紙元を決定する(ステップS113)。
【0091】
ここで、受信したデータが片面印刷データであれば(ステップS113−1)、給紙元は給紙トレイ11となる(ステップS113−5)。
【0092】
なお、受信したデータが両面印刷データの場合、両面ユニット27を使用して媒体12の反転を行い、該媒体12の表裏に印刷を行うことになるが、1枚ずつ表裏を印刷していたのでは、表面の画像形成終了後、両面ユニット27によって媒体12が反転されて給紙可能となるまで、裏面の画像形成を開始することができないので、大幅にスループットが低下してしまう。したがって、前記第1の実施の形態において説明したような制御を行い、両面ユニット27内に複数枚の媒体12を走行させる。これにより、極カスループットを低下させずに両面印刷を行うことが可能となる。
【0093】
受信したデータが両面印刷データの場合(ステップS113−1)、給紙トレイ11は媒体12があれば常に給紙可能であるので、両面ユニット27内の給紙可能な位置まで搬送されている媒体12があれば、両面ユニット27を優先的に給紙元とする(ステップS113−3)。なお、両面ユニット27内の給紙可能な位置まで搬送されている媒体12がない場合でも、両面ユニット27の収容上限枚数にすでに到達している場合は、それ以上媒体12を両面ユニット27に投入することはできないので、両面ユニット27を給紙元とする(ステップS113−4、ステップS113−3)。
【0094】
また、両面ユニット27内の給紙可能な位置まで搬送されている媒体12がなく、かつ、両面ユニット27の収容上限枚数に到達していない場合(ステップS113−2、ステップS113−4)、給紙元を給紙トレイ11とする(ステップS113−5)。
【0095】
次に、給紙制御部42は、排出先の決定を行う(ステップS114)。
【0096】
受信したデータが両面印刷データであって(ステップS114−1)、かつ、給紙元が給紙トレイ11の場合(ステップS114−2)、排出先が両面ユニット27となる(ステップS114−3)。
【0097】
また、受信したデータが片面印刷データの場合、又は、受信したデータが両面印刷データであってかつ給紙元が両面ユニット27の場合、パンチ又はステープルが指定されているとき(ステップ114−4)は、排出先が反転装置60となる(ステップS114−5)。
【0098】
さらに、受信したデータが片面印刷データの場合、又は、両面印刷データあってかつ給紙元が両面ユニット27の場合、パンチ及びステープルが指定されていないときには、排出先が本体スタッカ26となる(ステップS114−6)。
【0099】
前記両面ユニット27は、一般的のものと同様に、媒体吸入動作と反転動作とを同時には行うことができない構造なので、次の媒体12を吸入可能なタイミングを媒体長と搬送路長とから計算し、画像形成処理装置10に通知するようになっている。
【0100】
後処理装置30は、パンチ又はステープルが指定された場合、それらの実行に時間を要するため、所要時間を画像形成処理装置10に通知する。すると、該画像形成処理装置10は、通知された時間分、前の媒体12との間隔を開けてから、次の媒体12の搬送を開始するようになっている。
【0101】
画像形成処理装置10は、一旦媒体12の搬送を開始し、画像形成処理を開始してしまうと、その後媒体12を停止させておく手段を備えていない。そのため、画像形成処理開始前にこれらのタイミング調整を行う必要がある。なお、画像形成処理開始前であれば任意の位置で媒体12を停止させて調整を行うことが可能であるが、本実施の形態においては、給紙開始タイミングの調整によって行うものとする。
【0102】
給紙制御部42は、排出先を決定した(ステップS114)後、該排出先が両面ユニット27である場合(ステップS115)、該両面ユニット27が媒体12を吸入可能になるのを待って(ステップS116)、次の媒体12の媒体情報(媒体搬送速度、媒体長)を通知し(ステップS117)、給紙元から給紙を行い、媒体12の搬送を開始する(ステップS122)。また、排出先が反転装置60である場合(ステップS118)、後処理装置30より通知された、前の媒体12の後処理に必要な時間分の間隔を前の媒体12との間に確保した(ステップS119)後、次の媒体12の媒体情報(媒体搬送速度、媒体長)を反転装置60に通知し(ステップS120)、さらに、次の媒体12の後処理情報(媒体搬送速度、媒体幅、媒体長、パンチ有無、ステープル有無、ステープル実行有無等)を後処理装置30に通知し(ステップS121)、給紙元から給紙を行い、媒体12の搬送を開始する(ステップS122)。
【0103】
そして、給紙開始後、一定時間内に給紙センサ13のONが検出された場合は、給紙成功として(ステップS123)画像形成処理に対する画像形成要求をセットし(ステップS124)、次の媒体12の給紙を行うためステップS111に戻る。また、一定時間内に給紙センサ13のONが検出されない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS125)。
【0104】
画像形成制御部43は、画像形成要求がセットされると(ステップS131、ステップS132)、書出しセンサ14のONによってタイミングを測って画像形成を開始し(ステップS133、ステップS134)、排出処理に対する排出要求をセットする(ステップS135)。そして、画像形成が終了すると(ステップS136)、次の媒体12の画像形成を行うためステップS131に戻る。
【0105】
排出制御部44は、排出要求がセットされると(ステップS141、ステップS142)、排出センサ22の監視を開始し(ステップS143)、一定距離搬送しても排出センサ22のONが検出されない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS155、ステップS156)。
【0106】
また、排出センサ22のONを検出した場合は排出先の判定を行い、排出先が両面ユニット27であれば(ステップS144)、媒体12を両面ユニット27に吸入するべく、両面セパレータ24を切り替え(ステップS145)、両面ユニット27に媒体吸入要求を通知する(ステップS146)。
【0107】
さらに、排出先が両面ユニット27でなければ、両面セパレータ24を排出側に切り替えて(ステップS148)、排出先が反転装置60であるか否かの判定を行う(ステップS149)。そして、反転装置60であれば媒体12を反転装置60に吸入するべく、排出先切替セパレータ25を切り替え(ステップS150)、反転装置60に媒体吸入要求を通知する(ステップS151)。また、排出先が反転装置60でなければ、媒体12を本体スタッカ26に排出するべく、排出先切替セパレータ25を切り替える(ステップS152)。
【0108】
その後、排出制御部44は、排出センサ22がOFFになるのを監視し(ステップS147)、排出センサ22のOFFを検出した場合、次の媒体12の排出処理を行うためステップS141に戻る。なお、排出先が本体スタッカ26の場合、媒体12が本体スタッカ26に排出されて、印刷終了となる。
【0109】
また、排出センサ22がONになったところから媒体長+マージン分の搬送を行っても、排出センサ22のOFFを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS153、ステップS154)。
【0110】
次に、反転装置60側における処理について説明する。
【0111】
反転装置60の制御プログラムは、画像形成処理装置10の制御プログラムと同様に、複数枚の媒体12の平行処理を実現するため、I/F処理、吸入処理、反転処理A、反転処理B、及び、排出処理の各処理を平行して実行する。
【0112】
反転装置60の画像形成処理装置/後処理装置I/F部85は、画像形成処理装置10から媒体情報を受信すると(ステップS161)、そこに付加された媒体搬送速度、媒体長、反転有無等の媒体情報を記憶する(ステップS162)。また、画像形成処理装置10から媒体吸入要求を受信した場合は、媒体吸入要求あり情報をセットするようになっている(ステップS163)。
【0113】
排出制御部84によって媒体吸入要求通知要求がセットされた場合、後処理装置30に媒体吸入要求を通知し(ステップS164、ステップS165)、加速可能通知要求がセットされた場合、後処理装置30に加速可能を通知するようになっている(ステップS166)。
【0114】
媒体吸入要求あり情報がセットされる(ステップS181)と、反転装置60の吸入制御部82は、媒体12の受け入れ準備として、モータA69aが回転中でなければ(ステップS182)、先に通知されている媒体搬送速度に基づいてモータA69aを回転開始させる(ステップS183)。このときの搬送速度は、画像形成処理装置10から媒体12が受け渡されるので、画像形成処理装置10の媒体搬送速度と等しい速度となる。
【0115】
次に、吸入制御部82は、先に画像形成処理装置10から通知されている反転有無の情報に基づき、反転ありであれば搬送路セパレータ64を反転パス側に切り替え、(ステップS184、ステップS185)、反転なしであれば搬送路セパレータ64をストレートパス側に切り替える(ステップS186)。そして、画像形成処理装置10から搬送されてくる媒体12によって、反転装置60の吸入センサ63がONになるのを待機する(ステップS187)。画像形成処理装置10からの媒体吸入要求受信から一定時間経過しても吸入センサ63のONを検出することができない場合には、媒体ジャム、すなわち、用紙ジャムとする(ステップS193、ステップS195)。また、吸入センサ63のONを検出すると、次の媒体12の吸入要求に備えて媒体吸入要求あり情報をクリアする(ステップS188)。そして、反転ありであれば反転要求をセットし(ステップS189、ステップS190)、反転なしであればストレート排出要求をセットする(ステップS191)。
【0116】
その後、吸入制御部82は、吸入センサ63のOFFの待機に移行する(ステップS192)。そして、吸入センサ63のONから媒体長+マージン分の搬送を行っても吸入センサ63のOFFを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS194、ステップS195)。また、吸入センサ63のOFFを検出した場合には、次の媒体12の吸入に備えてステップS181に戻る。
【0117】
前記反転装置60の反転制御部83の処理は、反転処理Aと反転処理Bとから成り、これら2つの処理は平行して実行される。
【0118】
反転処理Aでは、吸入制御部82によって反転要求1がセットされると(ステップS201)、該反転要求1をクリアして(ステップS202)、反転センサA66aのONの待機に移行する(ステップS203)。反転要求がセットされてから吸入センサ63のONから反転センサA66aのONまでの一定距離、すなわち、距離+マージン分の搬送をしても反転センサA66aのONを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS208、ステップS209)。
【0119】
そして、反転センサA66aのONを検出すると、反転処理Bに対する処理開始要求である反転要求2をセットし(ステップS204)、モータB69bが停止中でなければ、停止するのを待ってモータB69bを正転方向で駆動開始する(ステップS205、ステップS206)。前記モータB69bの駆動開始と同時に、ソレノイド70をOFFにして第3搬送ローラ65cを分離し(ステップS207)、次の媒体12の処理に備えてステップS201に戻る。この状態では、第3搬送ローラ65cは分離されているので、媒体12は第2搬送ローラ65b及び搬送ローラ68のみで搬送されている。
【0120】
また、反転処理Bでは、反転要求2がセットされると、該反転要求2をクリアし(ステップS211、ステップS212)、反転センサA66aのOFFの待機に移行する(ステップS213)。反転要求2がセットされてから媒体長+マージン分の搬送をしても反転センサA66aのOFFを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS223、ステップS225)。
【0121】
そして、反転センサA66aのOFFを検出すると、ソレノイド70をONにして第3搬送ローラ65cを圧着させ(ステップS214)、該第3搬送ローラ65cでの媒体12の搬送を開始して、媒体12の後端が媒体ガイド67を抜ける一定距離、すなわち、距離+マージン分の距離(L1)を搬送した後にモータB69bを停止させる(ステップS215、ステップS216)。この状態では、媒体12は第3搬送ローラ65cのみで保持されている。
【0122】
ここで、モータB69bを正転から逆転に切り替え、媒体12の上方向への搬送を再開するが、通常、モータの回転方向を切り替える際には一定時間の静定時間が必要なので、一定時間(T1)経過した後にモータB69bの逆転を開始し(ステップS217、ステップS218)、さらに、反転排出要求をセットする(ステップS219)。そして、媒体12は、媒体ガイド67によって第4搬送ローラ65d及び搬送ローラ68の方向に導かれる。このような一連の動作によって、媒体12の表裏反転が実現される。
【0123】
モータB69bの逆転によって媒体12の上方向に向かっての搬送が開始された後、反転センサB66bがONになるのを待機する(ステップS220)。モータB69bの逆転開始から一定距離搬送しても反転センサB66bのONを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS224、ステップS225)。また、反転センサB66bのONを検出すると(ステップS220)、次の媒体12の反転動作に備え、ソレノイド70をOFFにして第3搬送ローラ65cを分離する(ステップS221)。そして、モータB69bを停止させ(ステップS222)、次の媒体12の処理に備えてステップS201に戻る。
【0124】
第3搬送ローラ65cを分離しても、媒体12は第4搬送ローラ65dと搬送ローラ68とによって排出方向に搬送される。この時点では、既に反転処理Aが次の媒体12の処理を開始しており、反転済みの媒体12と、これから反転しようとする媒体12とが、分離している第3搬送ローラ65cのローラ間ですれ違うことになる。これらの機構と制御とによって、生産性を低下させることなく、媒体12の表裏反転が実現される。
【0125】
反転装置60の排出制御部84は、ストレート排出要求がセットされると(ステップS231)、後処理装置30への媒体吸入要求通知要求をセットし(ステップS232)、吸入センサ63のOFFの待機に移行する(ステップS233)。そして、吸入センサ63のOFFを検出すると、後処理装置30への加速可能通知要求をセットし(ステップS234)、次の媒体12の排出に備えてストレート排出要求をクリアして(ステップS235)、ステップS231に戻る。
【0126】
また、排出制御部84は、反転排出要求がセットされると(ステップS236)、反転センサB66bのONの待機に移行する(ステップS237)。そして、該反転センサB66bのONを検出すると、後処理装置30への媒体吸入要求通知要求をセットする(ステップS238)。
【0127】
続いて、排出制御部84は、反転センサB66bのOFFの待機に移行し(ステップS239)、反転センサB66bがONになってから媒体長+マージン分の搬送をしても反転センサB66bのOFFを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS240、ステップS241)。反転センサB66bのOFFを検出すると、後処理装置30への加速可能通知要求をセットし(ステップS242)、次の媒体12の排出に備えて反転排出要求をクリアして(ステップS243)、ステップS231に戻る。
【0128】
次に、後処理装置30における処理について説明する。
【0129】
後処理装置30の制御プログラムは、画像形成処理装置10の制御プログラムと同様に、複数枚の媒体12の平行処理を実現するため、I/F処理、吸入処理、パンチ処理、及び、ステープル/排出処理の各処理を平行して実行する。
【0130】
後処理装置30の画像形成処理装置/反転装置I/F部86は、画像形成処理装置10及び反転装置60から後処理情報を受信すると(ステップS251)、そこに付加された媒体搬送速度、媒体幅、媒体長、反転有無、パンチ有無、ステープル有無、ステープル実行有無等の情報に基づき、その後処理に要する時間を計算して、画像形成処理装置10に通知するようになっている(ステップS252)。また、反転装置60から媒体吸入要求を受信した場合は、媒体吸入要求あり情報をセットし(ステップS253)、加速可能を受信した場合は、加速可能情報をセットするようになっている(ステップS254)。
【0131】
媒体吸入要求あり情報がセットされる(ステップS261)と、吸入制御部52は、先に通知されている後処理情報に基づき、媒体12の受け入れ準備として、モータが回転中でなければ(ステップS262)、媒体搬送速度に基づいて図示されないモータを回転開始させる(ステップ263)。これにより、後処理装置30の第1搬送ローラ31a及び第2搬送ローラ31bが駆動される。このときの搬送速度は、反転装置60から媒体12が受け渡されるので、反転装置60の媒体搬送速度と等しい速度となり、該速度を第1速度とする。
【0132】
次に、吸入制御部52は、反転装置60から搬送されてくる媒体12によって、吸入センサ32がONになるのを待機する(ステップ264)。そして、反転装置60からの媒体吸入要求受信から一定時間経過しても吸入センサ32のONを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS265、ステップ279)。また、吸入センサ32のONを検出すると、次の媒体12の吸入要求に備えて媒体吸入要求あり情報をクリアし(ステップ266)、パンチ有無情報に基づいてパンチありであればパンチ要求をセットし(ステップS267、ステップ268)、ステープル有無情報に基づいてステープルありであればステープル要求をセットし(ステップS269、ステップ270)、ステープルなしであれば排出要求をセットし(ステップS273)、さらに、ステープル実行ページであればステープル実行要求をセットする(ステップS271、ステップ272)。
【0133】
その後、吸入制御部52は、吸入センサ32のOFFの待機に移行する(ステップS274)。なお、該吸入センサ32のOFFの待機中に画像形成処理装置/反転装置I/F部86が画像形成処理装置10から加速可能を受信し、加速可能情報がセットされた場合(ステップS275)、モータを第2速度に加速し(ステップS276)、次の媒体12に備えて加速可能情報をクリアする(ステップS277)。
【0134】
後処理装置30は、画像形成のプロセスを行わないため、画像形成処理装置10よりも高速に媒体12を搬送することが可能であり、例えば、媒体12が完全に後処理装置30に受け渡された状態、すなわち、後処理装置30の吸入センサ32を媒体12が通過し、センサOFFを検出した状態から搬送速度の加速が可能である。本実施の形態においては、媒体12が反転装置60と後処理装置30とに跨った状態であって、かつ、反転装置60のローラを媒体12が抜けていない状態から、後処理装置30における搬送速度の加速を行うことを特徴とする。
【0135】
これを実現するために、反転装置60の第1搬送ローラ65a、第5搬送ローラ65e及び第6搬送ローラ65fの駆動ギヤはワンウェイギヤとなっている。これにより、反転装置60の第1搬送ローラ65a、第5搬送ローラ65e及び第6搬送ローラ65fは、反転装置60のモータA69aによって駆動されているときは、反転装置60の搬送速度で駆動されるが、後処理装置30がそれ以上の速度で反転装置60から媒体12を引き抜こうとしたときは、第1搬送ローラ65a、第5搬送ローラ65e及び第6搬送ローラ65fは、モータA69aによる駆動から切断されて、引き抜かれようとする速度で回転することが可能となっている。
【0136】
さらに、この加速可能ポイントを後処理装置30へ通知するため、反転装置60は、図17に示されるように、ストレートパス61からの排出であれば、媒体12を第1搬送ローラ65a及び第6搬送ローラ65fのみで保持していることを保証することができる時点、すなわち、吸入センサ63のOFFを検出した時点で後処理装置30へ加速可能を通知する。また、図18に示されるように、反転パス62からの排出であれば、媒体12を第5搬送ローラ65e及び第6搬送ローラ65fのみで保持していることを保証することができる時点、すなわち、反転センサB66bのOFFを検出した時点で後処理装置30へ加速可能を通知するようになっている。
【0137】
例えば、「背景技術」の項で説明したようなパンチ処理やステープル処理のような後処理を行う従来の画像形成装置と比較する。従来の画像形成装置において、後処理装置でパンチ処理を行う場合、媒体1枚ずつにパンチを行うので、1枚毎にパンチを実行するための時間が必要となる。また、ステープル処理を行う場合、1枚毎に媒体を揃える動作のための時間と、最終的にステープルを実行するための時間とが必要となる。そして、これらの時間の合計が画像形成処理装置から後処理装置に搬送されてくる媒体と媒体との間隔の時間を超えるときには、正常な後処理を行うことができなくなるばかりか、媒体ジャムが発生する可能性もある。そこで、従来の画像形成装置における後処理装置は、後処理にかかる合計時間に、更にマージンを見込んだ時間を画像形成処理装置に通知し、該画像形成処理装置は通知された時間の分だけ媒体と媒体との間隔を確保した上で、後処理装置に媒体を投入する必要がある。そのため、その分生産性が当然に低下することになってしまう。
【0138】
これに対し、本実施の形態における画像形成装置1は、前述のような構成を有し、前述のように動作して、後処理装置30での加速ポイントを早めることによって、ストレートパス61からの排出であれば、反転装置60の吸入センサ63のOFFから後処理装置30の吸入センサ32のOFFまでの距離分だけ通常よりも早く加速を行うことが可能となり、また、反転パス62からの排出であれば、反転装置60の反転センサB66bのOFFから後処理装置30の吸入センサ32のOFFまでの距離分だけ通常よりも早く加速を行うことが可能となるので、後処理装置30は、前記距離分を高速な第2速度での搬送を前提とした後処理に必要な時間を画像形成処理装置10に通知し、該画像形成処理装置10はそれに従って媒体12を後処理装置30に投入することにより、その分生産性を向上することができる。
【0139】
このとき、反転装置60の吸入センサ63のOFFから後処理装置30の吸入センサ32のOFFまでの距離、及び、反転装置60の反転センサB66bのOFFから後処理装置30の吸入センサ32のOFFまでの距離は、あらかじめ後処理装置30に記憶されている。そして、画像形成処理装置10に通知する後処理に必要な時間は、画像形成処理装置10から通知された後処理情報中の反転有無情報に基づき、反転なしであれば反転装置60の吸入センサ63のOFFから後処理装置30の吸入センサ32のOFFまでの距離に基づいて、また、反転ありであれば反転装置60の反転センサB66bのOFFから後処理装置30の吸入センサ32のOFFまでの距離に基づいて計算される。
【0140】
一例を挙げると、反転なしの場合、
反転装置60の吸入センサ63のOFFから後処理装置30の吸入センサ32のOFFまでの距離をD2=150〔mm〕とし、
画像形成処理装置10の媒体搬送速度をS1=150〔mm〕/秒とし、
後処理装置30の第2速度をS2=300〔mm〕/秒とした場合、
本実施の形態における媒体1枚あたりの生産性向上分は、
(D2÷S1)−(D2÷S2)→(150÷150)−(150÷300)=0.5秒、となる。
【0141】
また、反転ありの場合も同様に、
反転装置60の反転センサB66bのOFFから後処理装置30の吸入センサ32のOFFまでの距離をD3=135〔mm〕とし、
画像形成処理装置10の媒体搬送速度をS1=150〔mm〕/秒とし、
後処理装置30の第2速度をS2=300〔mm〕/秒とした場合、
本実施の形態における媒体1枚あたりの生産性向上分は、
(D3÷S1)−(D3÷S2)→(135÷150)−(135÷300)=0.45秒、となる。
【0142】
通常、後処理動作で最も時間を要するのはステープルの実行であるが、該ステープルの実行はジョブ毎に1度であり、1ジョブの枚数が多ければ、それほど生産性の低下は起こらない。これに対し、パンチ動作及びステープル実行のための媒体揃え動作は、毎ページ実行する必要があるため、生産性に与える影響が大きい。
【0143】
本実施の形態においては、前述のような構成を有し、前述のように動作することによって、後処理を行う際の媒体1枚毎の生産性を向上することが可能である。パンチユニット33及び媒体揃え機構の性能にもよるが、パンチ動作及びステープル実行のための媒体揃え動作を行った場合でも、画像形成処理装置10と同等の生産性を実現することも可能である。
【0144】
なお、両面印刷の場合、又は、片面印刷であってもステープル処理を行う場合には、前述のように、片面を印刷した媒体12を一旦両面ユニット27に入れ、該両面ユニット27内で反転した後にもう片面の印刷を行うため、媒体12はジョブの開始及び終了時を除き、両面ユニット27と後処理装置30とに1枚ずつ交互に排出されることになるので、後処理装置30に受け渡される媒体12の間隔は、自ずと1ページ以上間隔が開くことになる。したがって、その間に後処理が終了するのであれば、格別の効果を期待することができないが、ステープル処理のように、後処理にかかる時間が長い場合は、大きな効果を期待することができる。
【0145】
また、吸入制御部52は、吸入センサ32のOFFの待機中に、吸入センサ32のONから媒体長+マージン分の搬送を行っても吸入センサ32のOFFを検出することができない場合は、媒体ジャム、すなわち、用紙ジャムとする(ステップS278、ステップS279)。なお、吸入センサ32のOFFを検出した場合には、次の媒体12の吸入に備えてステップS261に戻る。
【0146】
パンチ制御部53は、パンチ要求がセットされると(ステップS281)、吸入センサ32のOFFを監視し、吸入センサ32のOFFを検出後、パンチ実行位置まで媒体12が搬送されるのを待って(ステップS282)、図示されないモータの駆動を第2搬送ローラ31bに伝えている図示されない電磁クラッチをOFFにして、第2搬送ローラ31bを停止させる(ステップS283)。これにより、媒体12の搬送が一旦停止するので、パンチユニット33によって媒体12の後端にパンチを実行する(ステップS284)。パンチ実行後は直ちに図示されない電磁クラッチをONにして第2搬送ローラ31bを駆動し(ステップS285)、媒体12の搬送を再開する。そして、パンチ要求をクリアして(ステップS286)、次の媒体12のパンチに備えてステップS281に戻る。
【0147】
ステープル/排出制御部54は、排出要求又はステープル要求がセットされると(ステップS291)、媒体12がステープルトレイまで搬送されるのを待機する(ステップS292)。そして、モータ速度が第2速度である場合は、次の媒体12の吸入に備えて、モータ速度を画像形成処理装置10の媒体搬送速度と同等の第1速度に減速する(ステップS293、ステップS294)。続いて、ステープル実行要求がセットされている場合(ステップS295)、ステープル実行に備えて、図示されない媒体揃え機構によってステープルトレイ上に積載された媒体12を揃え(ステップS296)、ステープルユニット37によりステープルを実行し(ステップS297)、ステープル実行要求をクリアする(ステップS298)。
【0148】
ステープルトレイには、該ステープルトレイ上の媒体12又は該媒体12の束を排出するための排出ベルト35及び排出爪36が配設され、該排出爪36は、前記排出ベルト35に固定されて該排出ベルト35と一緒に回転するようになっている。したがって、ステープル実行後、ステープル済の媒体12の束の後端を排出爪36に引っ掛けた状態で排出ベルト35を図示されないモータによって回転させることにより、媒体12の束は排出スタッカ38上に排出されて積載される(ステップS299)。ステープル実行要求がセットされていない場合であって排出要求がセットされているときには(ステップS300)、排出実行要求をクリアして、前述のようにステープル済の媒体12の束を排出するのと同様の方法で、媒体12を排出スタッカ38上に排出して積載する(ステップS301、ステップS299)。
【0149】
また、ステープル実行要求がセットされていない場合であって排出要求がセットされていないときには、ステープルジョブの一部のページであるため、ステープルを行うために媒体12をステープルトレイ上に積載し、ステープル実行に備えて図示されない媒体揃え機構によって媒体揃えを行い(ステップS302)、ステープル要求をクリアする(ステップS303)。
【0150】
そして、ステープル/排出制御部54は、要求に対する一連の動作が終わると、次の媒体12の処理に備えてステップS291に戻る。
【0151】
次に、画像形成処理装置10の給紙処理のフローチャートについて説明する。
ステップS111 印刷データがあるか否かを判定する。印刷データがある場合はステップS112に進み、印刷データがない場合はそのまま待機する。
ステップS112 給紙センサ13がOFFであるか否かを判定する。OFFである場合はステップS113に進み、OFFでない場合はそのまま待機する。
ステップS113 給紙元決定処理を行う。
ステップS114 排出先決定処理を行う。
ステップS115 排出先が両面ユニット27であるか否かを判定する。排出先が両面ユニット27である場合はステップS116に進み、排出先が両面ユニット27でない場合はステップS118に進む。
ステップS116 両面ユニット27が媒体12を吸入可能であるか否かを判定する。媒体12を吸引可能である場合はステップS117に進み、媒体12を吸入可能でない場合はそのまま待機する。
ステップS117 両面ユニット27に媒体情報を通知する。
ステップS118 排出先が反転装置60であるか否かを判定する。排出先が反転装置60である場合はステップS119に進み、排出先が反転装置60でない場合はステップS122に進む。
ステップS119 前の媒体12の後処理に必要な時間を確保済みか否かを判定する。時間を確保済みの場合はステップS120に進み、時間を確保していない場合はそのまま待機する。
ステップS120 反転装置60に媒体情報を通知する。
ステップS121 後処理装置30に後処理情報を通知する。
ステップS122 給紙元から給紙を行う。
ステップS123 給紙成功であるか否かを判定する。給紙成功である場合はステップS124に進み、給紙成功でない場合はステップS125に進む。
ステップS124 画像形成要求をセットする。
ステップS125 用紙ジャムをセットし、処理を終了する。
【0152】
次に、給紙元決定処理のサブルーチンについて説明する。
ステップS113−1 受信したデータが両面印刷データであるか否かを判定する。両面印刷データである場合はステップS113−2に進み、両面印刷データでない場合はステップS113−5に進む。
ステップS113−2 両面ユニット27から給紙可能であるか否かを判定する。給紙可能である場合はステップS113−3に進み、給紙可能でない場合はステップS113−4に進む。
ステップS113−3 両面ユニット27を給紙元とし、処理を終了する。
ステップS113−4 両面ユニット27の収容上限枚数に到達しているか否かを判定する。収容上限数に到達している場合はステップS113−3に戻り、収容上限数に到達していない場合はステップS113−5に進む。
ステップS113−5 給紙トレイ11を給紙元とし、処理を終了する。
【0153】
次に、排出先決定処理のサブルーチンについて説明する。
ステップS114−1 受信したデータが両面印刷データであるか否かを判定する。両面印刷データである場合はステップS114−2に進み、両面印刷データでない場合はステップS114−4に進む。
ステップS114−2 給紙トレイ11が給紙元であるか否かを判定する。給紙元である場合はステップS114−3に進み、給紙元でない場合はステップS114−4に進む。
ステップS114−3 排出先を両面ユニット27とし、処理を終了する。
ステップS114−4 パンチ又はステープルが指定されているか否か判定する。パンチ又はステープルがされている場合はステップS114−5に進み、パンチ及びステープルが指定されていない場合はステップS114−6に進む。
ステップS114−5 排出先を反転装置60とし、処理を終了する。
ステップS114−6 排出先を本体スタッカ26とし、処理を終了する。
【0154】
次に、画像形成処理装置10の画像形成処理のフローチャートについて説明する。
ステップS131 画像形成要求があるか否かを判定する。画像形成要求がある場合はステップS132に進み、画像形成要求がない場合はそのまま待機する。
ステップS132 画像形成要求をクリアする。
ステップS133 画像形成開始のタイミングであるか否かを判定する。画像形成開始のタイミングである場合はステップS134に進み、画像形成開始のタイミングでない場合はそのまま待機する。
ステップS134 画像形成を開始する。
ステップS135 排出要求をセットする。
ステップS136 画像形成を終了するか否かを判定する。画像形成を終了する場合は、次の媒体12の画像形成を行うため、ステップS131に戻り、画像形成を終了しない場合はそのまま待機する。
【0155】
次に、画像形成処理装置10の排出処理のフローチャートについて説明する。
ステップS141 排出要求があるか否かを判定する。排出要求がある場合はステップS142に進み、排出要求がない場合はそのまま待機する。
ステップS142 排出要求をクリアする。
ステップS143 排出センサ22がONであるか否かを判定する。ONである場合はステップS144に進み、ONでない場合はステップS155に進む。
ステップS144 排出先が両面ユニット27であるか否かを判定する。排出先が両面ユニット27である場合はステップS145に進み、排出先が両面ユニットでない場合はステップS148に進む。
ステップS145 両面セパレータ24を両面ユニット27側に切り替える。
ステップS146 両面ユニット27に媒体吸入要求を通知する。
ステップS147 排出センサ22がOFFであるか否かを判定する。OFFでない場合はステップS153に進み、OFFである場合はステップS141に戻る。
ステップS148 両面セパレータ24を排出側に切り替える。
ステップS149 排出先が反転装置60であるか否かを判定する。排出先が反転装置60である場合はステップS150に進み、排出先が反転装置60でない場合はステップS152に進む。
ステップS150 排出先切替セパレータ25を反転装置60側に切り替える。
ステップS151 反転装置60に媒体吸入要求を通知する。
ステップS152 排出先切替セパレータ25を本体スタッカ26側に切り替える。
ステップS153 媒体長+マージン分搬送されたか否かを判定する。媒体長+マージン分搬送された場合はステップS154に進み、媒体長+マージン分搬送されていない場合はステップS147に戻る。
ステップS154 用紙ジャムをセットし、処理を終了する。
ステップS155 一定距離搬送されたか否かを判定する。一定距離搬送された場合はステップS156に進み、一定距離搬送されていない場合はステップS143に戻る。
ステップS156 用紙ジャムをセットし、処理を終了する。
【0156】
次に、反転装置60のI/F処理のフローチャートについて説明する。
ステップS161 画像形成処理装置10から受信情報があるか否かを判定する。媒体情報を受信した場合はステップS162に進み、媒体吸入要求を受信した場合はステップS163に進み、受信情報がない場合はステップS164に進む。
ステップS162 媒体情報を記憶する。
ステップS163 媒体吸入要求あり情報をセットする。
ステップS164 後処理装置30への送信情報があるか否かを判定する。媒体吸入要求通知を要求した場合はステップS165に進み、加速可能通知を要求した場合はステップS166に進み、送信情報がない場合はステップS167に進む。
ステップS165 後処理装置30に媒体吸入要求を通知する。
ステップS166 後処理装置30に加速可能を通知する。
ステップS167 エラーが発生したか否かを判定する。エラーが発生しない場合はステップS168に進み、エラーが発生した場合はステップS170に進む。
ステップS168 画像形成処理装置10にエラー通知済みであるか否かを判定する。エラー通知済みである場合はステップS169に進み、エラー通知していない場合はステップS161に戻る。
ステップS169 画像形成処理装置10にエラー解除を通知する。
ステップS170 画像形成処理装置10にエラー通知済みであるか否かを判定する。エラー通知していない場合はステップS171に進み、エラー通知済みである場合はステップS172に進む。
ステップS171 画像形成処理装置10にエラーを通知する。
ステップS172 媒体吸入要求あり情報をクリアする。
【0157】
次に、反転装置60の媒体吸入処理のフローチャートについて説明する。
ステップS181 媒体吸入あり情報がセットされているか否かを判定する。セットされている場合はステップS182に進み、セットされていない場合はそのまま待機する。
ステップS182 モータA69aが回転中であるか否かを判定する。モータA69aが回転中でない場合はステップS183に進み、モータA69aが回転中である場合はステップS184に進む。
ステップS183 モータA69aが回転を開始する。
ステップS184 反転があるか否かを判定する。反転がある場合はステップS185に進み、反転がない場合はステップS186に進む。
ステップS185 搬送路セパレータ64を反転パス側に切り替える。
ステップS186 搬送路セパレータ64をストレートパス側に切り替える。
ステップS187 吸入センサ63がONであるか否かを判定する。ONである場合はステップS188に進み、ONでない場合はステップS193に進む。
ステップS188 媒体吸入要求あり情報をクリアする。
ステップS189 反転があるか否かを判定する。反転がある場合はステップS190に進み、反転がない場合はステップS191に進む。
ステップS190 反転要求1をセットする。
ステップS191 ストレート排出要求をセットする。
ステップS192 吸入センサ63がOFFであるか否かを判定する。OFFでない場合はステップS194に進みOFFである場合はステップS181に戻る。
ステップS193 媒体吸入要求受信から一定時間経過したか否かを判定する。一定時間経過した場合はステップS195に進み、一定時間経過していない場合はステップS187に戻る。
ステップS194 媒体長+マージン分搬送されたか否かを判定する。媒体長+マージン分搬送された場合はステップS195に進み、媒体長+マージン分搬送されていない場合はステップS192に戻る。
ステップS195 用紙ジャムをセットし、処理を終了する。
【0158】
次に、反転装置60の反転処理Aのフローチャートについて説明する。
ステップS201 反転要求1がセットされているか否かを判定する。セットされている場合はステップS202に進み、セットされていない場合はそのまま待機する。
ステップS202 反転要求1をクリアする。
ステップS203 反転センサA66aがONであるか否かを判定する。ONである場合はステップS204に進み、ONでない場合はステップS208に進む。
ステップS204 反転要求2をセットする。
ステップS205 モータB69bが停止中であるか否かを判定する。停止中である場合はステップS206に進み、停止中でない場合はそのまま待機する。
ステップS206 モータB69bの正転を開始する。
ステップS207 第3搬送ローラ65cを分離する。
ステップS208 一定距離を搬送したか否かを判定する。一定距離を搬送した場合はステップS209に進み、一定距離を搬送していない場合はステップS203に戻る。
ステップS209 用紙ジャムをセットし、処理を終了する。
【0159】
次に、反転装置60の反転処理Bのフローチャートについて説明する。
ステップS211 反転要求2がセットされているか否かを判定する。セットされている場合はステップS212に進み、セットされていない場合はそのまま待機する。
ステップS212 反転要求2をクリアする。
ステップS213 反転センサA66aがOFFであるか否かを判定する。OFFである場合はステップS214に進み、OFFでない場合はステップS223に進む。
ステップS214 第3搬送ローラ65cを圧着する。
ステップS215 一定距離を搬送したか否かを判定する。一定距離を搬送した場合はステップS216に進み、一定距離を搬送していない場合はそのまま待機する。
ステップS216 モータB69bを停止する。
ステップS217 モータB69bが停止してから一定時間経過したか否かを判定する。一定時間経過した場合はステップS218に進み、一定時間経過していない場合はそのまま待機する。
ステップS218 モータB69bの逆転を開始する。
ステップS219 反転排出要求をセットする。
ステップS220 反転センサB66bがONであるか否かを判定する。ONである場合はステップS221に進み、ONでない場合はステップS224に進む。
ステップS221 第3搬送ローラ65cを分離する。
ステップS222 モータB69bを停止する。
ステップS223 媒体長+マージン分搬送されたか否かを判定する。媒体長+マージン分搬送された場合はステップS225に進み、媒体長+マージン分搬送されていない場合はステップS213に戻る。
ステップS224 一定距離を搬送したか否かを判定する。一定距離を搬送した場合はスステップS225に進み、一定距離を搬送していない場合はステップS220に戻る。
ステップS225 用紙ジャムをセットし、処理を終了する。
【0160】
次に、反転装置60の排出処理のフローチャートについて説明する。
ステップS231 ストレート排出要求がセットされているか否かを判定する。セットされている場合はステップS232に進み、セットされていない場合はステップS236に進む。
ステップS232 後処理装置30への媒体吸入要求通知要求をセットする。
ステップS233 吸入センサ63がOFFであるか否かを判定する。OFFである場合はステップS234に進み、OFFでない場合はそのまま待機する。
ステップS234 後処理装置30への加速可能通知要求をセットする。
ステップS235 ストレート排出要求をクリアする。
ステップS236 反転排出要求がセットされているか否かを判定する。セットされている場合はステップS237に進み、セットされていない場合はステップS231に戻る。
ステップS237 反転センサB66bがONであるか否かを判定する。ONである場合はステップS238に進み、ONでない場合はそのまま待機する。
ステップS238 後処理装置30への媒体吸入要求通知要求をセットする。
ステップS239 反転センサB66bがOFFであるか否かを判定する。OFFでない場合はステップS240に進み、OFFである場合はステップS242に進む。
ステップS240 媒体長+マージン分搬送されたか否かを判定する。媒体長+マージン分搬送された場合はステップS241に進み、媒体長+マージン分搬送されていない場合はステップS239に戻る。
ステップS241 用紙ジャムをセットし、処理を終了する。
ステップS242 後処理装置30への加速可能通知要求をセットする。
ステップS243 反転排出要求をクリアする。
【0161】
次に、後処理装置30のI/F処理のフローチャートについて説明する。
ステップS251 画像形成処理装置10及び反転装置60から受信情報があるか否かを判定する。後処理情報を受信した場合はステップS252に進み、媒体吸入要求を受信した場合はステップS253に進み、加速可能を受信した場合はステップS254に進み、受信情報がない場合はステップS255に進む。
ステップS252 前の媒体12の後処理に必要な時間を計算して、画像形成処理装置10に通知する。
ステップS253 媒体吸入要求あり情報をセットする。
ステップS254 加速可能情報をセットする。
ステップS255 エラーが発生したか否かを判定する。エラーが発生していない場合はステップS256に進み、エラーが発生した場合はステップS258に進む。
ステップS256 画像形成処理装置10にエラー通知済みであるか否かを判定する。エラー通知済みである場合はステップS257に進み、エラー通知していない場合はステップS251に戻る。
ステップS257 画像形成処理装置10にエラー解除を通知する。
ステップS258 画像形成処理装置10にエラー通知済みであるか否かを判定する。エラー通知していない場合はステップS259に進み、エラー通知済みである場合はステップS260に進む。
ステップS259 画像形成処理装置10にエラーを通知する。
ステップS260 媒体吸入要求あり情報をクリアする。
【0162】
次に、後処理装置30の媒体吸入処理のフローチャートについて説明する。
ステップS261 媒体吸入あり情報がセットされているか否かを判定する。セットされている場合はステップS262に進み、セットされていない場合はそのまま待機する。
ステップS262 モータが回転中であるか否かを判定する。モータが回転中でない場合はステップS263に進み、モータが回転中である場合はステップS264に進む。
ステップS263 第1速度でモータ回転を開始する。
ステップS264 吸入センサ32がONであるか否かを判定する。ONでない場合はステップS265に進み、ONである場合はステップS266に進む。
ステップS265 媒体吸入要求受信から一定時間経過したか否かを判定する。一定時間経過した場合はステップS279に進み、一定時間経過していない場合はステップS264に戻る。
ステップS266 媒体吸入要求あり情報をクリアする。
ステップS267 パンチありであるか否かを判定する。パンチありである場合はステップS268に進み、パンチなしである場合はステップS269に進む。
ステップS268 パンチ要求をセットする。
ステップS269 ステープルありである否かを判定する。ステープルありである場合はステップS270に進み、ステープルなしである場合はステップS273に進む。
ステップS270 ステープル要求をセットする。
ステップS271 ステープル実行ページであるか否かを判定する。ステープル実行ページである場合はステップS272に進み、ステープル実行ページでない場合はステップS74に進む。
ステップS272 ステープル実行要求をセットする。
ステップS273 排出要求をセットする。
ステップS74 吸入センサ32がOFFであるか否かを判定する。OFFでない場合はステップS275に進み、OFFである場合はステップS261に戻る。
ステップS275 加速可能情報がセットされているか否かを判定する。セットされている場合はステップS276に進み、セットされていない場合はステップS278に進む。
ステップS276 モータを第2速度に加速する。
ステップS277 加速可能情報をクリアする。
ステップS278 媒体長+マージン分搬送されたか否かを判定する。媒体長+マージン分搬送された場合はステップS279に進み、媒体長+マージン分搬送されていない場合はステップS274に戻る。
ステップS279 用紙ジャムをセットし、処理を終了する。
【0163】
次に、後処理装置30のパンチ処理のフローチャートについて説明する。
ステップS281 パンチ要求がセットされているか否かを判定する。セットされている場合はステップS282に進み、セットされていない場合はそのまま待機する。
ステップS282 吸入センサ32のOFFを検出後、パンチ実行位置まで媒体12を搬送済みであるか否かを判定する。搬送済みである場合はステップS283に進み、搬送済みでない場合はそのまま待機する。
ステップS283 第2搬送ローラ31bを停止させる。
ステップS284 パンチを実行する。
ステップS285 第2搬送ローラ31bを駆動する。
ステップS286 パンチ要求をクリアする。
【0164】
次に、後処理装置30のステープル/排出処理のフローチャートについて説明する。
ステップS291 排出要求又はステープル要求がセットされているか否かを判定する。セットされている場合はステップS292に進み、セットされていない場合はそのまま待機する。
ステップS292 吸入センサ32のOFFを検出後、ステープルトレイまで媒体12を搬送済みであるか否かを判定する。搬送済みである場合はステップS293に進み、搬送済みでない場合はそのまま待機する。
ステップS293 モータ速度が第2速度であるか否かを判定する。第2速度である場合はステップS294に進み、第2速度でない場合はステップS295に進む。
ステップS294 モータを第1速度に減速する。
ステップS295 ステープル実行要求がセットされているか否かを判定する。セットされている場合はステップS296に進み、セットされていない場合はステップS300に進む。
ステップS296 媒体揃え動作を実行する。
ステップS297 ステープルを実行する。
ステップS298 ステープル実行要求をクリアする。
ステップS299 媒体12を排出する。
ステップS300 排出要求がセットされているか否かを判定する。セットされている場合はステップS301に進み、セットされていない場合はステップS302に進む。
ステップS301 排出実行要求をクリアする。
ステップS302 媒体揃え動作を実行する。
ステップS303 ステープル要求をクリアする。
【0165】
このように、本実施の形態においては、ステープル処理やパンチ処理のような後処理を行う際に、次の媒体12を後処理装置30に投入する待ち時間を削減することができ、低コストで生産性の向上を図ることが可能となる。
【0166】
ところで、前記第1の実施の形態における画像形成装置1は、反転装置60を有していないので、片面印刷の場合には両面ユニット27によって媒体12の反転を行う。しかし、反転装置60では、2枚の媒体12をすれ違いにさせることによって、媒体12の間隔が短くても媒体12を反転させることができるのに対し、両面ユニット27では、2枚の媒体12をすれ違いにさせる機構が存在しないので、前の媒体12の反転が完了してから次の媒体12の吸入を行うこととなるので、媒体12の間隔を長くする必要がある。そのため、本実施の形態における画像形成装置1は、反転装置60を有することによって、スループットを向上させることができる。もっとも、両面印刷を行う場合には、媒体12が必ず両面ユニット27を通過するので、反転装置60の有無に係わらず、スループットは変化しない。
【0167】
なお、前記第1及び第2の実施の形態では、画像形成処理装置10がモノクロプリンタである場合について説明したが、前記画像形成処理装置10がカラープリンタであってもよい。さらに、前記画像形成処理装置10は、ファクシミリ機や複合機(MFP:Multi Function Printer)であってもよい。
【0168】
また、本発明は前記実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【図面の簡単な説明】
【0169】
【図1】本発明の第1の実施の形態における画像形成装置の概略図である。
【図2】本発明の第1の実施の形態における画像形成装置の機能構成を示すブロック図である。
【図3】本発明の第1の実施の形態における画像形成処理装置と後処理装置との境界部分の拡大図である。
【図4】本発明の第1の実施の形態における画像形成処理装置の給紙処理の動作を示すフローチャートである。
【図5】本発明の第1の実施の形態における画像形成処理装置の給紙元決定処理の動作を示すフローチャートである。
【図6】本発明の第1の実施の形態における画像形成処理装置の排出先決定処理の動作を示すフローチャートである。
【図7】本発明の第1の実施の形態における画像形成処理装置の画像形成処理の動作を示すフローチャートである。
【図8】本発明の第1の実施の形態における画像形成処理装置の排出処理の動作を示すフローチャートである。
【図9】本発明の第1の実施の形態における後処理装置のI/F処理の動作を示すフローチャートである。
【図10】本発明の第1の実施の形態における後処理装置の吸入処理の動作を示すフローチャートである。
【図11】本発明の第1の実施の形態における後処理装置のパンチ処理の動作を示すフローチャートである。
【図12】本発明の第1の実施の形態における後処理装置のステープル/排出処理の動作を示すフローチャートである。
【図13】本発明の第2の実施の形態における画像形成処理装置の概略図である。
【図14】本発明の第2の実施の形態における反転装置の要部拡大図である。
【図15】本発明の第2の実施の形態における画像形成装置の機能構成を示すブロック図である。
【図16】本発明の第2の実施の形態における反転装置の動作を示すタイムチャートである。
【図17】本発明の第2の実施の形態におけるストレートパスの場合の反転装置の動作を示す図である。
【図18】本発明の第2の実施の形態における反転パスの場合の反転装置の動作を示す図である。
【図19】本発明の第2の実施の形態における画像形成処理装置の給紙処理の動作を示すフローチャートである。
【図20】本発明の第2の実施の形態における画像形成処理装置の給紙元決定処理の動作を示すフローチャートである。
【図21】本発明の第2の実施の形態における画像形成処理装置の排出先決定処理の動作を示すフローチャートである。
【図22】本発明の第2の実施の形態における画像形成処理装置の画像形成処理の動作を示すフローチャートである。
【図23】本発明の第2の実施の形態における画像形成処理装置の排出処理の動作を示すフローチャートである。
【図24】本発明の第2の実施の形態における反転装置のI/F処理の動作を示すフローチャートである。
【図25】本発明の第2の実施の形態における反転装置の吸入処理の動作を示すフローチャートである。
【図26】本発明の第2の実施の形態における反転装置の反転処理Aの動作を示すフローチャートである。
【図27】本発明の第2の実施の形態における反転装置の反転処理Bの動作を示すフローチャートである。
【図28】本発明の第2の実施の形態における反転装置の排出処理の動作を示すフローチャートである。
【図29】本発明の第2の実施の形態における後処理装置のI/F処理の動作を示すフローチャートである。
【図30】本発明の第2の実施の形態における後処理装置の吸入処理の動作を示すフローチャートである。
【図31】本発明の第2の実施の形態における後処理装置のパンチ処理の動作を示すフローチャートである。
【図32】本発明の第2の実施の形態における後処理装置のステープル/排出処理の動作を示すフローチャートである。
【符号の説明】
【0170】
1 画像形成装置
10 画像形成処理装置
12 媒体
15 画像形成部
21 定着部
30 後処理装置
60 反転装置
68 搬送ローラ
【特許請求の範囲】
【請求項1】
(a)印刷画像のデータを受信する受信部、該受信部が受信したデータによって画像を形成する画像形成部、該画像形成部が形成した画像を媒体に定着させる定着部を備える画像形成処理装置と、
(b)該画像形成処理装置から受け渡された媒体に、パンチ処理及びステープル処理を含む後処理を施す後処理装置とを有する後処理機能を具備する画像形成装置であって、
(c)前記画像形成処理装置は、媒体が前記画像形成処理装置内の搬送ローラにかかっている状態でも、前記画像形成処理装置の媒体搬送速度よりも速い速度で、前記画像形成処理装置から媒体を引き抜くことを可能とする駆動切断機構と、前記画像形成処理装置から媒体を引き抜くことが可能なタイミングを前記後処理装置に通知する通知手段とを備え、
(d)前記後処理装置は、前記画像形成処理装置の媒体搬送速度と同等の速度で媒体を搬送する第1の搬送手段と、前記画像形成処理装置の媒体搬送速度よりも速い速度に加速して媒体を搬送する第2の搬送手段とを備え、
(e)該第2の搬送手段は、前記画像形成処理装置と前記後処理装置とに媒体が跨って搬送されている状態で、媒体を前記画像形成処理装置の媒体搬送速度よりも速い速度で搬送することを特徴とする後処理機能を具備する画像形成装置。
【請求項2】
(a)印刷画像のデータを受信する受信部、該受信部が受信したデータによって画像を形成する画像形成部、該画像形成部が形成した画像を媒体に定着させる定着部を備える画像形成処理装置と、
(b)前記画像形成処理装置から受け渡された媒体を反転する反転部を備えた反転装置と、
(c)該反転装置から受け渡された媒体に、パンチ処理及びステープル処理を含む後処理を施す後処理装置とを有する後処理機能を具備する画像形成装置であって、
(d)前記反転装置は、媒体が前記反転装置内の搬送ローラにかかっている状態でも、前記反転装置の媒体搬送速度よりも速い速度で、前記反転装置から媒体を引き抜くことを可能とする駆動切断機構と、前記反転装置から媒体を引き抜くことが可能なタイミングを前記後処理装置に通知する通知手段とを備え、
(e)前記後処理装置は前記反転装置の媒体搬送速度と同等の速度で媒体を搬送する第1の搬送手段と、前記反転装置の媒体搬送速度よりも速い速度に加速して媒体を搬送する第2の搬送手段とを備え、
(f)該第2の搬送手段は、前記反転装置と前記後処理装置とに媒体が跨って搬送されている状態で、媒体を前記反転装置の媒体搬送速度よりも速い速度で搬送することを特徴とする後処理機能を具備する画像形成装置。
【請求項3】
(a)印刷画像のデータを受信する受信部、該受信部が受信したデータによって画像を形成する画像形成部、該画像形成部が形成した画像を媒体に定着させる定着部を備える画像形成処理装置と、
(b)該画像形成処理装置から受け渡された媒体に、パンチ処理及びステープル処理を含む後処理を施す後処理装置とを有する画像形成装置における後処理方法であって、
(c)前記画像形成処理装置は、媒体が前記画像形成処理装置内の搬送ローラにかかっている状態でも、前記画像形成処理装置の媒体搬送速度よりも速い速度で、前記画像形成処理装置から媒体を引き抜くことを可能とするとともに、前記画像形成処理装置から媒体を引き抜くことが可能なタイミングを前記後処理装置に通知し、
(d)該後処理装置は、前記画像形成処理装置と前記後処理装置とに媒体が跨って搬送されている状態で、媒体を前記画像形成処理装置の媒体搬送速度よりも速い速度で搬送することを特徴とする画像形成装置における後処理方法。
【請求項4】
(a)印刷画像のデータを受信する受信部、該受信部が受信したデータによって画像を形成する画像形成部、該画像形成部が形成した画像を媒体に定着させる定着部を備える画像形成処理装置と、
(b)該画像形成処理装置から受け渡された媒体を反転する反転部を備えた反転装置と、
(c)該反転装置から受け渡された媒体に、パンチ処理及びステープル処理を含む後処理を施す後処理装置とを有する画像形成装置における後処理方法であって、
(d)前記反転装置は、媒体が前記反転装置内の搬送ローラにかかっている状態でも、前記反転装置の媒体搬送速度よりも速い速度で、前記反転装置から媒体を引き抜くことを可能とするとともに、前記反転装置から媒体を引き抜くことが可能なタイミングを前記後処理装置に通知し、
(e)該後処理装置は、前記反転装置と前記後処理装置とに媒体が跨って搬送されている状態で、媒体を前記反転装置の媒体搬送速度よりも速い速度で搬送することを特徴とする画像形成装置における後処理方法。
【請求項1】
(a)印刷画像のデータを受信する受信部、該受信部が受信したデータによって画像を形成する画像形成部、該画像形成部が形成した画像を媒体に定着させる定着部を備える画像形成処理装置と、
(b)該画像形成処理装置から受け渡された媒体に、パンチ処理及びステープル処理を含む後処理を施す後処理装置とを有する後処理機能を具備する画像形成装置であって、
(c)前記画像形成処理装置は、媒体が前記画像形成処理装置内の搬送ローラにかかっている状態でも、前記画像形成処理装置の媒体搬送速度よりも速い速度で、前記画像形成処理装置から媒体を引き抜くことを可能とする駆動切断機構と、前記画像形成処理装置から媒体を引き抜くことが可能なタイミングを前記後処理装置に通知する通知手段とを備え、
(d)前記後処理装置は、前記画像形成処理装置の媒体搬送速度と同等の速度で媒体を搬送する第1の搬送手段と、前記画像形成処理装置の媒体搬送速度よりも速い速度に加速して媒体を搬送する第2の搬送手段とを備え、
(e)該第2の搬送手段は、前記画像形成処理装置と前記後処理装置とに媒体が跨って搬送されている状態で、媒体を前記画像形成処理装置の媒体搬送速度よりも速い速度で搬送することを特徴とする後処理機能を具備する画像形成装置。
【請求項2】
(a)印刷画像のデータを受信する受信部、該受信部が受信したデータによって画像を形成する画像形成部、該画像形成部が形成した画像を媒体に定着させる定着部を備える画像形成処理装置と、
(b)前記画像形成処理装置から受け渡された媒体を反転する反転部を備えた反転装置と、
(c)該反転装置から受け渡された媒体に、パンチ処理及びステープル処理を含む後処理を施す後処理装置とを有する後処理機能を具備する画像形成装置であって、
(d)前記反転装置は、媒体が前記反転装置内の搬送ローラにかかっている状態でも、前記反転装置の媒体搬送速度よりも速い速度で、前記反転装置から媒体を引き抜くことを可能とする駆動切断機構と、前記反転装置から媒体を引き抜くことが可能なタイミングを前記後処理装置に通知する通知手段とを備え、
(e)前記後処理装置は前記反転装置の媒体搬送速度と同等の速度で媒体を搬送する第1の搬送手段と、前記反転装置の媒体搬送速度よりも速い速度に加速して媒体を搬送する第2の搬送手段とを備え、
(f)該第2の搬送手段は、前記反転装置と前記後処理装置とに媒体が跨って搬送されている状態で、媒体を前記反転装置の媒体搬送速度よりも速い速度で搬送することを特徴とする後処理機能を具備する画像形成装置。
【請求項3】
(a)印刷画像のデータを受信する受信部、該受信部が受信したデータによって画像を形成する画像形成部、該画像形成部が形成した画像を媒体に定着させる定着部を備える画像形成処理装置と、
(b)該画像形成処理装置から受け渡された媒体に、パンチ処理及びステープル処理を含む後処理を施す後処理装置とを有する画像形成装置における後処理方法であって、
(c)前記画像形成処理装置は、媒体が前記画像形成処理装置内の搬送ローラにかかっている状態でも、前記画像形成処理装置の媒体搬送速度よりも速い速度で、前記画像形成処理装置から媒体を引き抜くことを可能とするとともに、前記画像形成処理装置から媒体を引き抜くことが可能なタイミングを前記後処理装置に通知し、
(d)該後処理装置は、前記画像形成処理装置と前記後処理装置とに媒体が跨って搬送されている状態で、媒体を前記画像形成処理装置の媒体搬送速度よりも速い速度で搬送することを特徴とする画像形成装置における後処理方法。
【請求項4】
(a)印刷画像のデータを受信する受信部、該受信部が受信したデータによって画像を形成する画像形成部、該画像形成部が形成した画像を媒体に定着させる定着部を備える画像形成処理装置と、
(b)該画像形成処理装置から受け渡された媒体を反転する反転部を備えた反転装置と、
(c)該反転装置から受け渡された媒体に、パンチ処理及びステープル処理を含む後処理を施す後処理装置とを有する画像形成装置における後処理方法であって、
(d)前記反転装置は、媒体が前記反転装置内の搬送ローラにかかっている状態でも、前記反転装置の媒体搬送速度よりも速い速度で、前記反転装置から媒体を引き抜くことを可能とするとともに、前記反転装置から媒体を引き抜くことが可能なタイミングを前記後処理装置に通知し、
(e)該後処理装置は、前記反転装置と前記後処理装置とに媒体が跨って搬送されている状態で、媒体を前記反転装置の媒体搬送速度よりも速い速度で搬送することを特徴とする画像形成装置における後処理方法。
【図1】


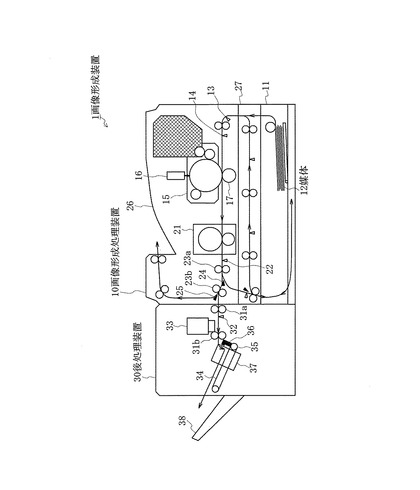
【図2】
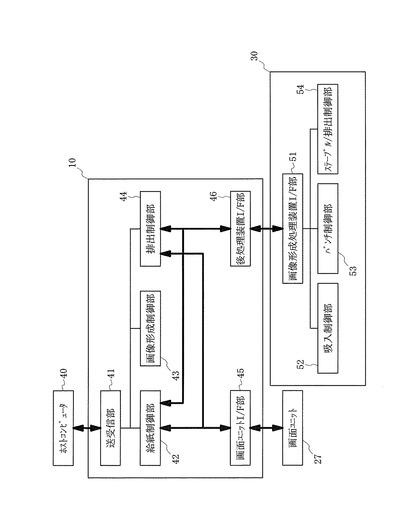
【図3】
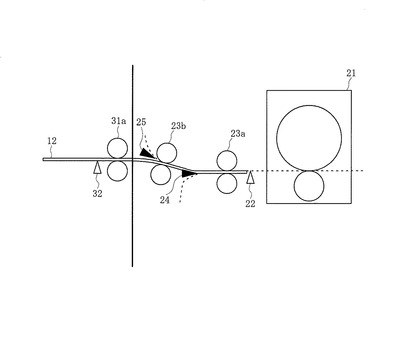
【図4】
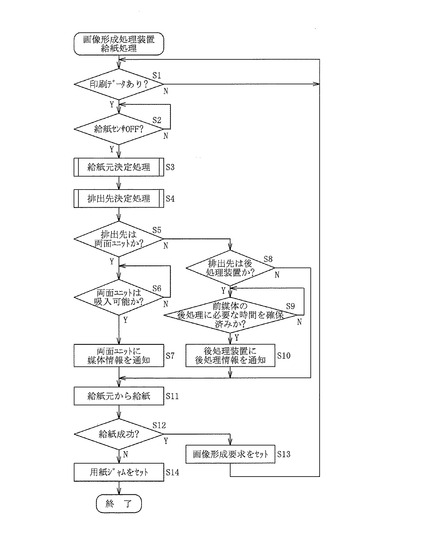
【図5】
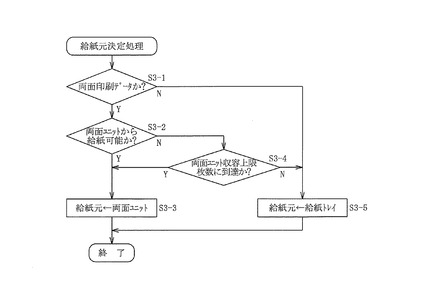
【図6】
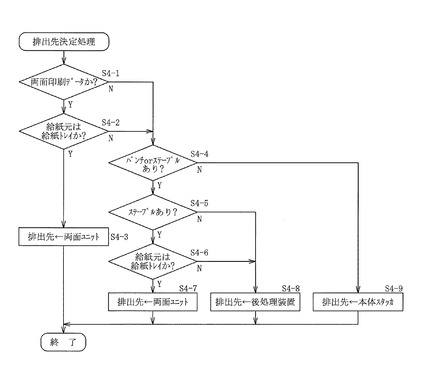
【図7】
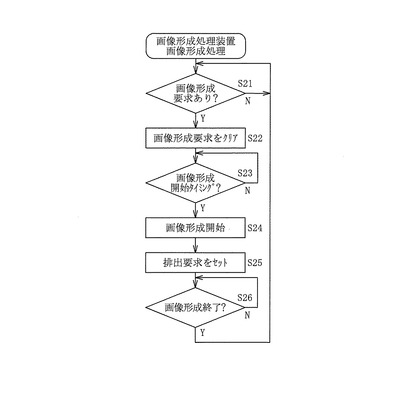
【図8】
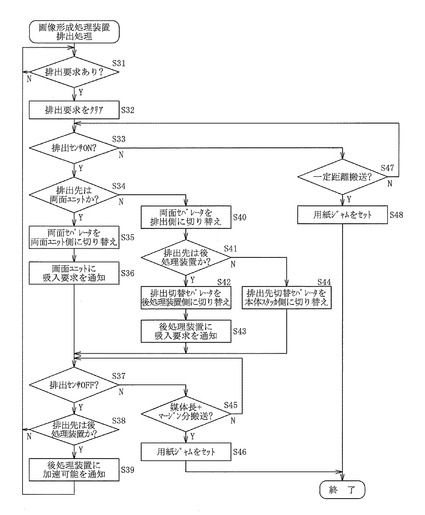
【図9】
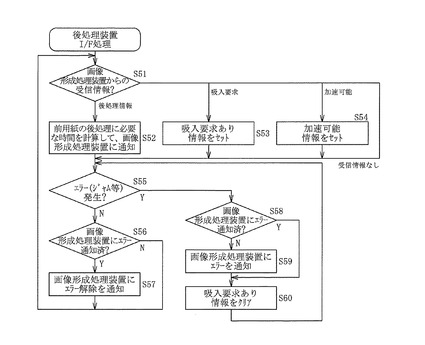
【図10】
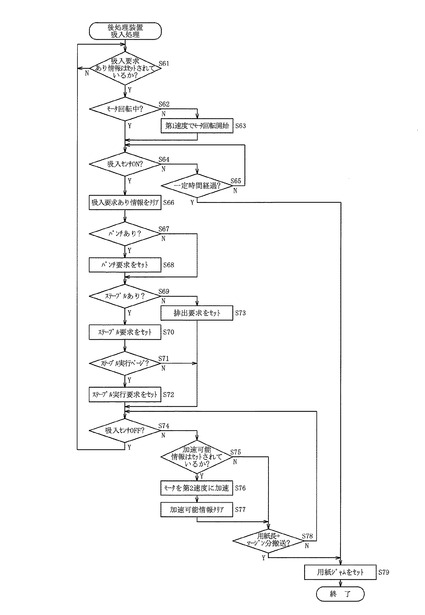
【図11】
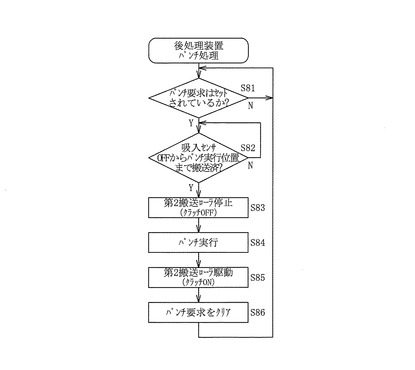
【図12】
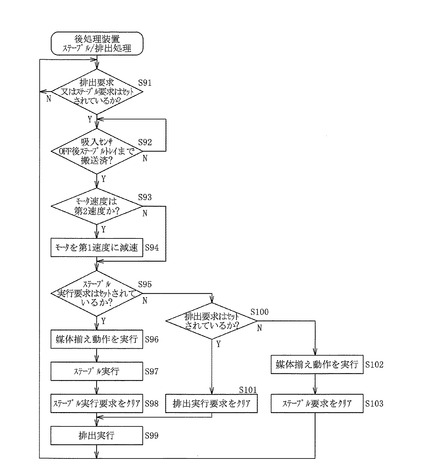
【図13】
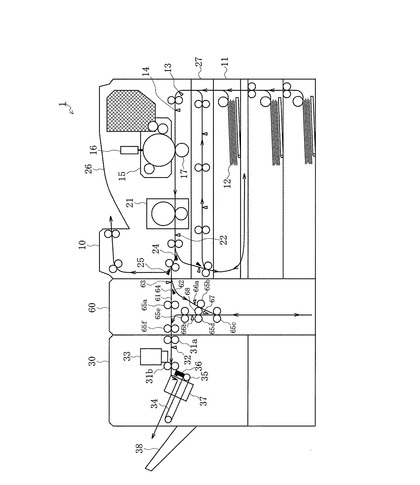
【図14】
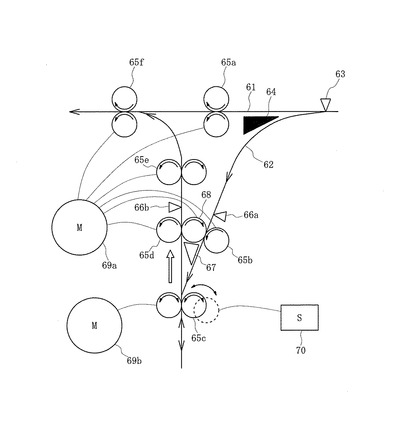
【図15】
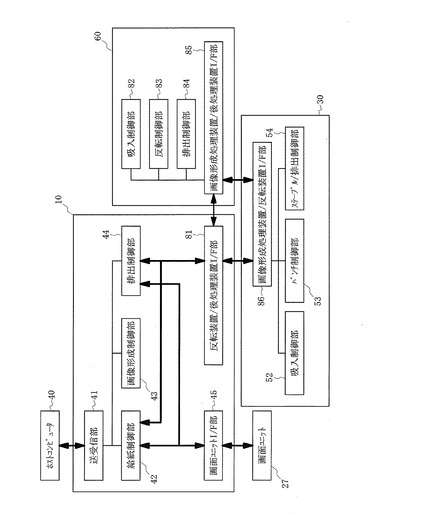
【図16】
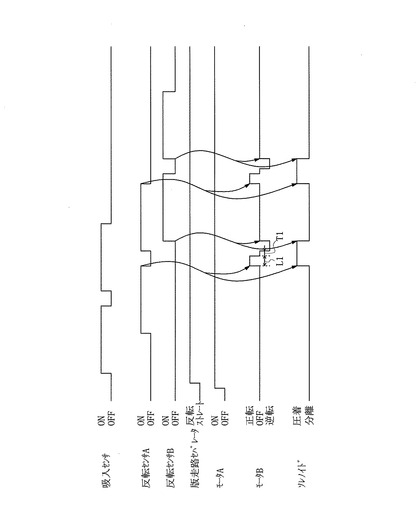
【図17】
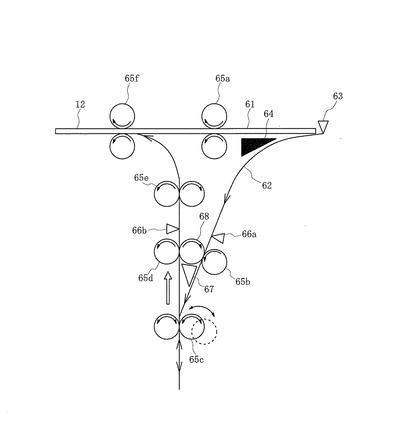
【図18】
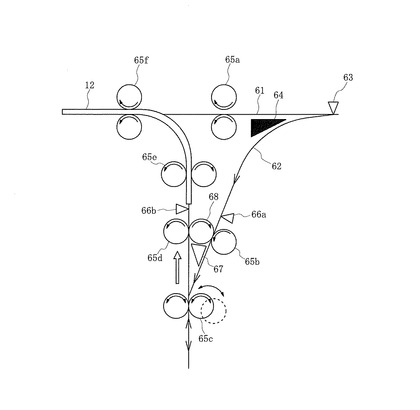
【図19】
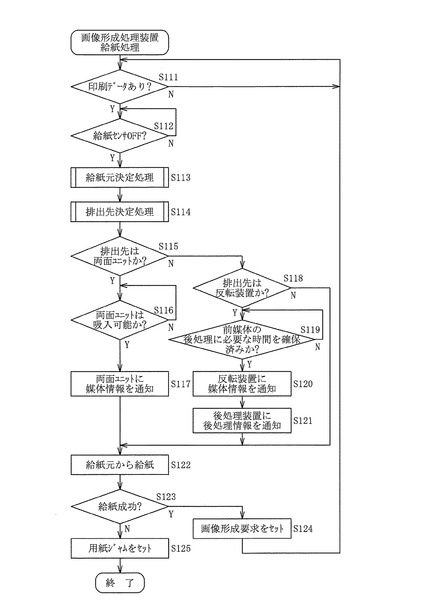
【図20】
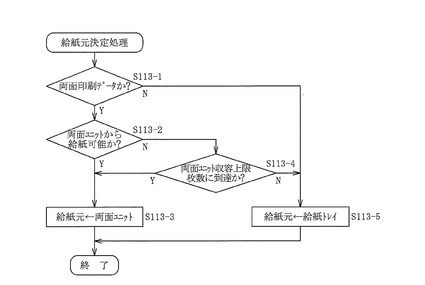
【図21】
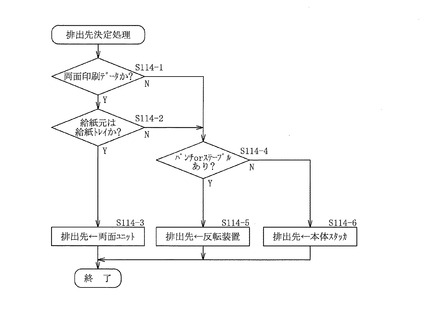
【図22】
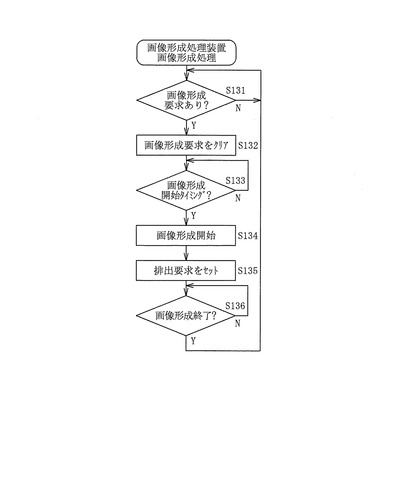
【図23】
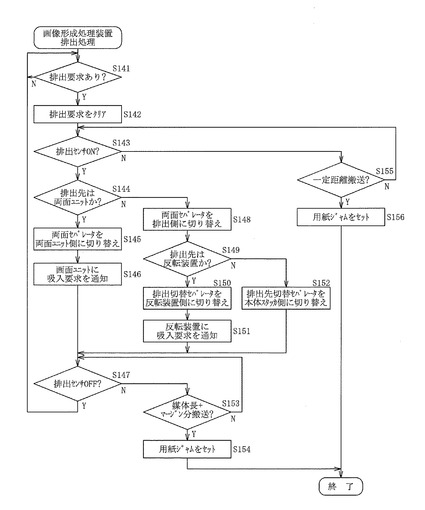
【図24】
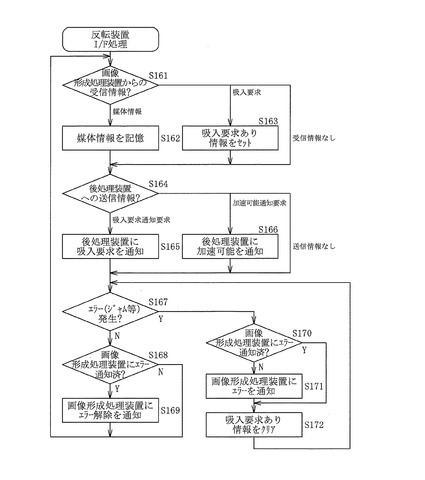
【図25】
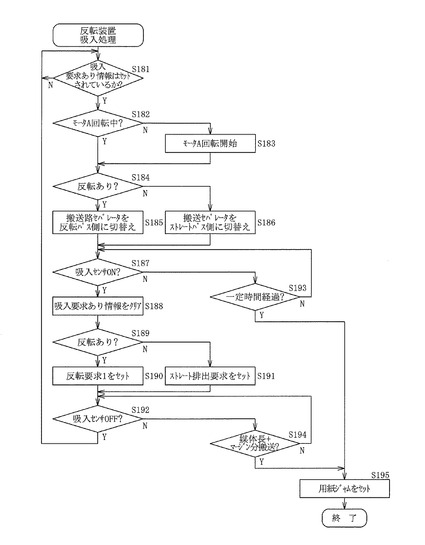
【図26】
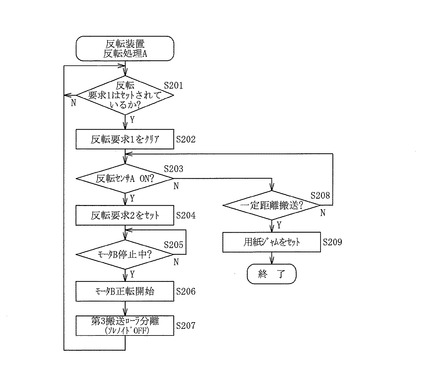
【図27】
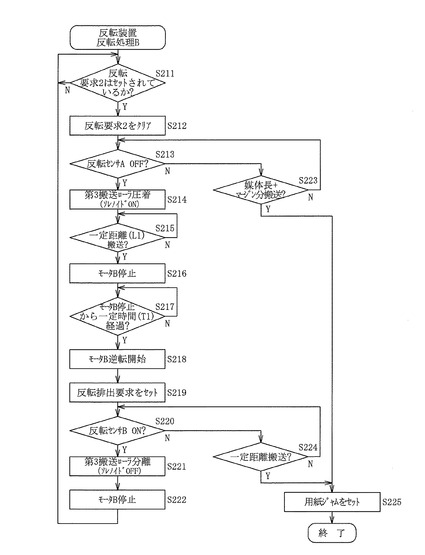
【図28】
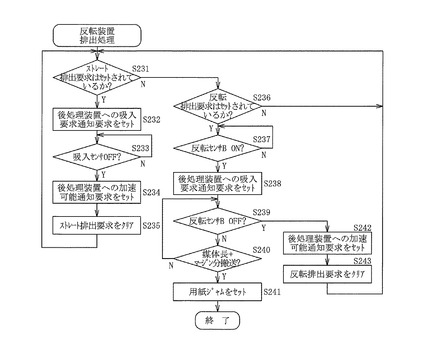
【図29】
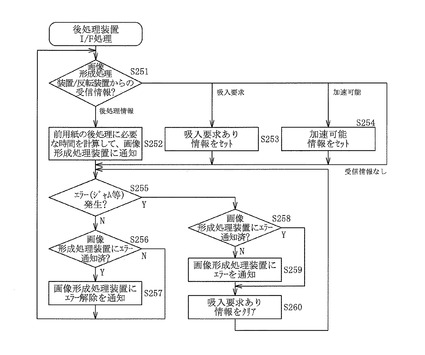
【図30】
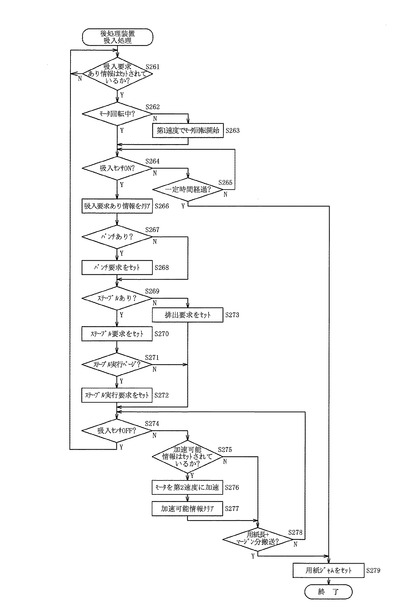
【図31】
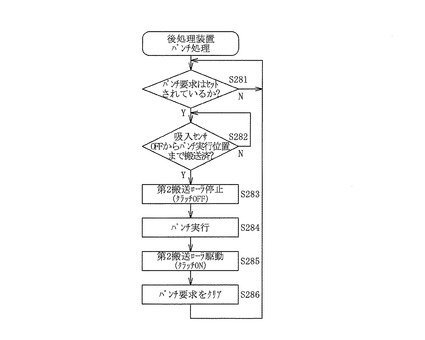
【図32】
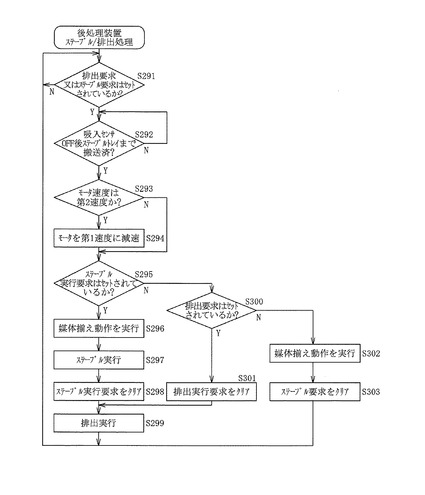
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【公開番号】特開2010−49130(P2010−49130A)
【公開日】平成22年3月4日(2010.3.4)
【国際特許分類】
【出願番号】特願2008−214888(P2008−214888)
【出願日】平成20年8月25日(2008.8.25)
【出願人】(591044164)株式会社沖データ (2,444)
【出願人】(594202361)株式会社沖データシステムズ (259)
【Fターム(参考)】
【公開日】平成22年3月4日(2010.3.4)
【国際特許分類】
【出願日】平成20年8月25日(2008.8.25)
【出願人】(591044164)株式会社沖データ (2,444)
【出願人】(594202361)株式会社沖データシステムズ (259)
【Fターム(参考)】
[ Back to top ]