
復号方法及び復号装置

【課題】航法メッセージを搬送する衛星信号を受信した信号の復号の正否を判定するための新しい手法の提案。
【解決手段】航法メッセージを搬送するGPS衛星信号を受信した信号を復号する。そして、パリティチェックが可能に規定された航法メッセージのワード単位で、復号されたデータをパリティチェック処理する。一方、パリティチェック処理でエラーが検出されなかったワードについて、復号データの妥当性を判定する所定の妥当性判定処理を行う。そして、GPS衛星の固有情報が格納されたワードであり、且つ、妥当性判定処理で妥当性がないと判定されたワードの復号データ同士を照合する。そして、その照合の結果に基づいて、受信信号の復号の正否を判定する。
【解決手段】航法メッセージを搬送するGPS衛星信号を受信した信号を復号する。そして、パリティチェックが可能に規定された航法メッセージのワード単位で、復号されたデータをパリティチェック処理する。一方、パリティチェック処理でエラーが検出されなかったワードについて、復号データの妥当性を判定する所定の妥当性判定処理を行う。そして、GPS衛星の固有情報が格納されたワードであり、且つ、妥当性判定処理で妥当性がないと判定されたワードの復号データ同士を照合する。そして、その照合の結果に基づいて、受信信号の復号の正否を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、受信した衛星信号を復号する方法等に関する。
【背景技術】
【0002】
測位用信号を利用した測位システムとしては、GPS(Global Positioning System)が広く知られており、携帯型電話機やカーナビゲーション装置等に内蔵された受信装置に利用されている。GPSでは、GPS受信機の計時時刻を用いて、複数のGPS衛星の位置や各GPS衛星から受信装置までの擬似距離等を求め、最終的に位置計算を行う。
【0003】
GPS衛星は、衛星軌道や時刻等に関する情報を、航法メッセージに含めて50bps(bit per second)のビットレートで送信している。1つの航法メッセージは1つのマスターフレームで構成されており、1つのマスターフレームは1500ビットの25個のフレームで構成される。全ての航法メッセージを取得するためにはマスターフレームである25フレームを受信する必要があり、それには12.5分の時間を要する。
【0004】
GPS衛星信号の受信環境は、受信装置の位置等によって変化する。弱電界環境では、受信信号の信号強度が微弱となるために、航法メッセージのビット値の変化(ビット変化)を正確に検知できず、受信信号の復号を誤る可能性がある。そこで、GPS衛星信号を受信した信号の復号の正否を判定する手法が考案されている(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−170435号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1にも開示されているが、復号データの誤り検出の1つとして、パリティチェック処理が知られている。パリティチェック処理では、航法メッセージの各サブフレームに含まれる各ワードについて、その末尾に格納される6ビットのパリティビットを利用して、予め規約された演算式に従ってパリティチェックを行う。
【0007】
しかし、誤って復号されたビットの位置及び個数の組合せによっては、実際には復号エラーが生じているにも関わらず、パリティチェックを通過してしまう場合がある。具体的には、弱電界環境では、1.5%程度の確率でパリティチェックに誤判定が発生し得る。このようにパリティチェックを偶然通過した航法メッセージの復号データに基づいて位置算出を行うと、実際の位置(真位置)から大きく乖離した位置が算出結果として得られる、いわゆる位置飛びの要因となる。
【0008】
本発明は上述した課題に鑑みて為されたものであり、その目的とするところは、航法メッセージを搬送する衛星信号を受信した信号の復号の正否を判定するための新しい手法を提案することにある。
【課題を解決するための手段】
【0009】
以上の課題を解決するための第1の形態は、航法メッセージを搬送する衛星信号を受信することと、前記受信した信号を復号することと、前記航法メッセージの搬送データ単位で、前記復号したデータを誤り検出処理することと、前記復号したデータのうち、衛星固有情報が繰り返し搬送されるデータ部分に関する前記誤り検出処理の結果を、当該繰り返し搬送されるデータ部分同士で照合することと、前記照合の結果に基づいて、前記復号の正否を判定することと、を含む復号方法である。
【0010】
また、他の形態として、航法メッセージを搬送する衛星信号を受信した信号を復号する復号部と、前記航法メッセージの搬送データ単位で、前記復号したデータを誤り検出処理する誤り検出処理部と、前記復号したデータのうち、衛星固有情報が繰り返し搬送されるデータ部分に関する前記誤り検出処理の結果を、当該繰り返し搬送されるデータ部分同士で照合する照合部と、前記照合の結果に基づいて、前記復号の正否を判定する復号正否判定部と、を備えた復号装置を構成することとしてもよい。
【0011】
この第1の形態等によれば、航法メッセージを搬送する衛星信号を受信した信号を復号する。そして、航法メッセージの搬送データ単位で、復号したデータを誤り検出処理する。誤り検出処理としては、例えば、誤り検出符号の一種であるパリティビットを利用したパリティチェック処理を適用できる。
【0012】
復号したデータのうち、衛星固有情報が繰り返し搬送されるデータ部分に関する誤り検出処理の結果を、当該繰り返し搬送されるデータ部分同士で照合する。衛星固有情報が繰り返し搬送されるデータ部分は、当該衛星に関する同一内容の情報が繰り返し搬送される。従って、当該データ部分に関する誤り検出処理の結果を繰り返し搬送されるデータ部分同士で照合した結果、一致しているのであれば、受信信号の復号が正しく行われたと推定することができる。これにより、航法メッセージを搬送する衛星信号を受信した信号の復号の正否を判定することができる。
【0013】
また、第2の形態として、第1の形態の復号方法において、前記復号したデータのうち、前記誤り検出処理で誤りが検出されなかったデータ部分について、妥当性を判定する所定の妥当性判定処理を行うことを更に含み、前記照合することは、前記衛星固有情報が繰り返し搬送されるデータ部分であり、且つ、前記妥当性判定処理で妥当性がないと判定されたデータ部分同士を照合することを含む、復号方法を構成することとしてもよい。
【0014】
弱電界環境等においては、実際には復号エラーが生じているにも関わらず、誤り検出処理で誤りが検出されずに、偶然すり抜けてしまう場合がある。そこで、第2の形態によれば、復号したデータのうち、誤り検出処理で誤りが検出されなかったデータ部分について、妥当性を判定する所定の妥当性判定処理を行う。そして、衛星固有情報が繰り返し搬送されるデータ部分であり、且つ、妥当性判定処理で妥当性がないと判定されたデータ部分同士を照合する。これにより、受信信号の復号の正否を高い確度で判定することができる。
【0015】
また、第3の形態として、第2の形態の復号方法において、前記照合することは、前記衛星固有情報が繰り返し搬送されるデータ部分について、前記誤り検出処理で誤りが検出されたデータ部分と前記妥当性判定処理で妥当性がないと判定されたデータ部分とを照合することを含む、復号方法を構成することとしてもよい。
【0016】
この第3の形態によれば、衛星固有情報が繰り返し搬送されるデータ部分について、誤り検出処理で誤りが検出されたデータ部分と妥当性判定処理で妥当性がないと判定されたデータ部分とを照合する。この場合も、第2の形態と同様に、受信信号の復号の正否を高い確度で判定することができる。
【0017】
また、第4の形態として、第2又は第3の形態の復号方法における前記妥当性判定処理は、前記誤り検出処理で誤りが検出されなかったデータ部分に隣り合う前記搬送データ単位のデータ部分に係る前記誤り検出処理の結果に基づいて、前記妥当性を判定する処理である、復号方法を構成することとしてもよい。
【0018】
この第4の形態によれば、隣り合う搬送データ単位のデータ部分に係る誤り検出処理の結果に基づくことで、誤り検出処理で誤りが検出されなかったデータ部分について、復号データの妥当性を簡易に判定することができる。
【0019】
また、第5の形態として、第1〜第4の何れかの形態の復号方法において、前記搬送データ単位には、誤り検出符号が含まれており、前記照合することは、前記誤り検出符号を除外したデータ部分同士を照合することを含む、復号方法を構成することとしてもよい。
【0020】
この第5の形態によれば、誤り検出符号を除外したデータ部分同士を照合することで、誤り検出符号のビットに復号エラーが生じた場合であっても、受信信号の復号の正否を的確に判定することができる。
【0021】
また、第6の形態として、第1〜第5の何れかの形態の復号方法において、前記照合することは、前記衛星固有情報が繰り返し搬送されるデータ部分のうち一方のビット列を反転して照合することを含む、復号方法を構成することとしてもよい。
【0022】
この第6の形態によれば、衛星固有情報が繰り返し搬送されるデータ部分のうち一方のビット列を反転して照合することで、ビット反転に係る航法メッセージの符号化規約に関わらず、受信信号の復号の正否を的確に判定することができる。
【0023】
また、第7の形態として、第1〜第6の何れかの形態の復号方法において、前記誤り検出処理は、誤りを検出したビットについて誤りを訂正することを含む、復号方法を構成することとしてもよい。
【0024】
この第7の形態によれば、誤り検出処理では、誤りを検出したビットについて誤りを訂正する。これにより、上記の形態と相まって、ビット値の誤りが訂正されたデータ部分を用いて照合を行うことが可能となり、復号の正否判定の確実性を高めることができる。
【図面の簡単な説明】
【0025】
【図1】携帯型電話機の機能構成の一例を示すブロック図。
【図2】ベースバンド処理回路部の回路構成の一例を示す図。
【図3】航法メッセージの説明図。
【図4】復号正否判定の具体例の説明図。
【図5】衛星別復号正否判定用データのデータ構成の一例を示す図。
【図6】受信信号復号処理の流れを示すフローチャート。
【図7】第2の受信信号復号処理の流れを示すフローチャート。
【図8】航法メッセージの符号化規約の説明図。
【図9】第3の受信信号復号処理の流れを示すフローチャート。
【発明を実施するための形態】
【0026】
以下、本発明を適用した好適な実施形態の一例について説明する。本実施形態は、衛星測位システムの一種であるGPS(Global Positioning System)を適用した実施形態である。本実施形態では、復号装置を具備する電子機器の一例として、携帯型電話機に本発明を適用した場合の形態について説明する。但し、本発明を適用可能な形態が以下説明する実施形態に限定されるわけでないことは勿論である。
【0027】
1.構成
1−1.携帯型電話機の構成
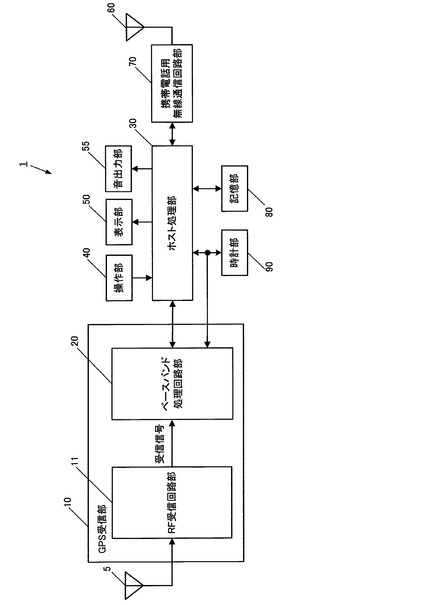
図1は、本実施形態における携帯型電話機1の機能構成の一例を示すブロック図である。携帯型電話機1は、GPSアンテナ5と、GPS受信部10と、ホスト処理部30と、操作部40と、表示部50と、音出力部55と、携帯電話用アンテナ60と、携帯電話用無線通信回路部70と、記憶部80と、時計部90とを備えて構成される。
【0028】
GPSアンテナ5は、GPS衛星から発信されているGPS衛星信号を含むRF(Radio Frequency)信号を受信するアンテナであり、受信信号をGPS受信部10に出力する。GPS衛星信号は、拡散符号の一種であるC/A(Coarse and Acquisition)コードによって、スペクトラム拡散方式として知られるCDMA(Code Division Multiple Access)方式によって変調された1.57542[GHz]の通信信号である。C/Aコードは、コード長1023チップを1PNフレームとする繰返し周期1msの擬似ランダム雑音符号であり、各GPS衛星に固有のコードである。
【0029】
GPS受信部10は、GPSアンテナ5から出力された信号に基づいて携帯型電話機1の位置を算出する回路或いは装置であり、いわゆるGPS受信機に相当する機能ブロックである。本実施形態では、GPS受信部10が復号装置に相当する。
【0030】
GPS受信部10は、RF受信回路部11と、ベースバンド処理回路部20とを備えて構成される。なお、RF受信回路部11と、ベースバンド処理回路部20とは、それぞれ別のLSI(Large Scale Integration)として製造することも、1チップとして製造することも可能である。
【0031】
RF受信回路部11は、RF信号の受信回路である。回路構成としては、例えば、GPSアンテナ5から出力されたRF信号をA/D変換器でデジタル信号に変換し、デジタル信号を処理する受信回路を構成してもよい。また、GPSアンテナ5から出力されたRF信号をアナログ信号のまま信号処理し、最終的にA/D変換することでデジタル信号をベースバンド処理回路部20に出力する構成としてもよい。
【0032】
後者の場合には、例えば、次のようにRF受信回路部11を構成することができる。すなわち、所定の発振信号を分周或いは逓倍することで、RF信号乗算用の発振信号を生成する。そして、生成した発振信号を、GPSアンテナ5から出力されたRF信号に乗算することで、RF信号を中間周波数の信号(以下、「IF(Intermediate Frequency)信号」と称す。)にダウンコンバートし、IF信号を増幅等した後、A/D変換器でデジタル信号に変換して、ベースバンド処理回路部20に出力する。
【0033】
ベースバンド処理回路部20は、RF受信回路部11から出力された受信信号に対して、キャリア除去や相関演算等を行ってGPS衛星信号を捕捉し、GPS衛星信号から抽出した時刻情報や衛星軌道情報等を利用して、携帯型電話機1の位置及び時計誤差を算出する。
【0034】
ホスト処理部30は、記憶部80に記憶されているシステムプログラム等の各種プログラムに従って携帯型電話機1の各部を統括的に制御するプロセッサーであり、CPU(Central Processing Unit)等のプロセッサーを有して構成される。ホスト処理部30は、ベースバンド処理回路部20から取得した位置座標を元に、表示部50に現在位置を指し示した地図を表示させたり、その位置座標を各種のアプリケーション処理に利用する。
【0035】
操作部40は、例えばタッチパネルやボタンスイッチ等を有して構成される入力装置であり、押下されたキーやボタンの信号をホスト処理部30に出力する。この操作部40の操作により、通話要求やメール送受信要求、各種アプリケーション実行要求、位置算出要求等の各種指示入力がなされる。
【0036】
表示部50は、LCD(Liquid Crystal Display)等を有して構成される表示装置であり、ホスト処理部30から出力される表示信号に基づいた各種表示を行う。表示部50には、位置表示画面や時刻情報等が表示される。
【0037】
音出力部55は、スピーカー等を有して構成される音出力装置であり、ホスト処理部30から出力される音出力信号に基づいた各種音出力を行う。音出力部55からは、通話中の音声や、各種アプリケーションに係る音声ガイダンス等が音出力される。
【0038】
携帯電話用アンテナ60は、携帯型電話機1の通信サービス事業者が設置した無線基地局との間で携帯電話用無線信号の送受信を行うアンテナである。
【0039】
携帯電話用無線通信回路部70は、RF変換回路、ベースバンド処理回路等によって構成される携帯電話の通信回路部であり、携帯電話用無線信号の変調・復調等を行うことで、通話やメールの送受信等を実現する。
【0040】
記憶部80は、ROM(Read Only Memory)やフラッシュROM、RAM(Random Access Memory)等の記憶装置を有して構成され、ホスト処理部30が携帯型電話機1を制御するためのシステムプログラムや、各種アプリケーション処理を実行するための各種プログラムやデータ等を記憶する。
【0041】
時計部90は、携帯型電話機1の内部時計であり、水晶振動子及び発振回路でなる水晶発振器等を有して構成される。時計部90の計時時刻は、ベースバンド処理回路部20及びホスト処理部30に随時出力される。時計部90の計時時刻は、ベースバンド処理回路部20によって算出された時計誤差に基づき補正される。
【0042】
1−2.ベースバンド処理回路部の回路構成
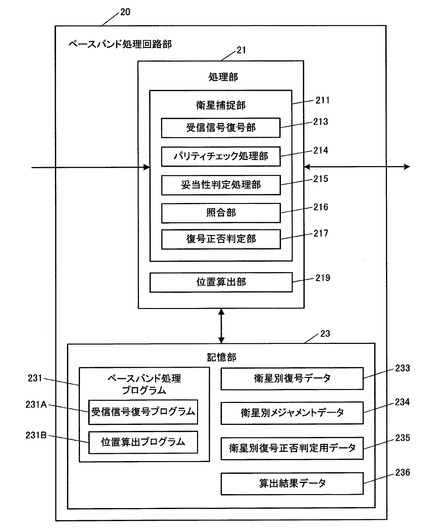
図2は、ベースバンド処理回路部20の回路構成の一例を示す図であり、本実施例に係わる回路ブロックを中心に記載した図である。ベースバンド処理回路部20は、主要な構成として、処理部21と、記憶部23とを備える。
【0043】
処理部21は、ベースバンド処理回路部20の各機能部を統括的に制御する制御装置及び演算装置であり、CPUやDSP(Digital Signal Processor)等のプロセッサーを有して構成される。処理部21は、主要な機能部として、衛星捕捉部211と、位置算出部219とを有する。
【0044】
衛星捕捉部211は、GPS衛星(GPS衛星信号)の捕捉を行う機能部である。具体的には、RF受信回路部11から出力されるデジタル化された受信信号に対して、キャリア除去や相関演算等のデジタル信号処理を実行し、そのデジタル信号処理の結果に基づいてGPS衛星を捕捉する。
【0045】
本実施形態において、衛星捕捉部211は、受信信号復号部213と、パリティチェック処理部214と、妥当性判定処理部215と、照合部216と、復号正否判定部217とを機能部として有する。但し、これらの機能部は、一実施例として記載したものに過ぎず、必ずしもこれら全ての機能部を必須構成要件としなければならないわけではない。
【0046】
受信信号復号部213は、記憶部23に記憶された受信信号復号プログラム231Aに従って、航法メッセージを搬送するGPS衛星信号を受信した信号を復号する復号部である。本実施形態では、受信信号復号部213が復号したデータのことを「復号データ」と称して説明する。受信信号を正しく復号できた場合には、復号データは、航法メッセージのデータとなる。復号データのうち、航法メッセージのワードに相当する部分の復号データのことを、特に「復号ワードデータ」と称して説明する。ワードは、誤り検出の一種であるパリティチェックが可能に規定された航法メッセージの搬送データ単位の一種である。
【0047】
パリティチェック処理部214は、受信信号復号部213によって復号された復号データに対する誤り検出処理の一種として、パリティチェック処理を行う。パリティチェック処理部214は、誤り検出が可能に規定された航法メッセージの搬送データ単位で、復号したデータを誤り検出処理する誤り検出処理部に相当する。
【0048】
具体的には、パリティチェック処理部214は、航法メッセージのワード単位で、予め規約されたパリティチェック用の演算式に従って、復号ワードデータに対するパリティチェックを行う。なお、GPSで規約されたパリティチェックの演算式は公知であるため、詳細な説明を省略する。
【0049】
妥当性判定処理部215は、受信信号復号部213によって復号されたデータのうち、パリティチェック処理で誤り(エラー)が検出されなかったワードについて、当該ワードの復号データの妥当性を判定する所定の妥当性判定処理を行う。
【0050】
本実施形態において、妥当性判定処理部215が実行する妥当性判定処理は、パリティチェック処理で誤りが検出されなかったワードについて、当該ワードに隣り合うワードの復号データに係るパリティチェック処理の結果に基づいて、復号ワードデータの妥当性を判定する処理である。これは、誤り検出処理で誤りが検出されなかったデータ部分に隣り合う搬送データ単位のデータ部分に係る誤り検出処理の結果に基づく妥当性判定処理に相当する。この妥当性判定処理に適用可能な妥当性判定方法として、以下の2種類の妥当性判定方法を例示する。
【0051】
(1)第1の妥当性判定方法は、当該ワードの前後のワードに係るパリティチェック処理の結果に基づいて、当該ワードに係る復号ワードデータの妥当性を判定する方法である。具体的には、当該ワードの前後のワードに係るパリティチェック結果が何れも「エラー」である場合は、当該ワードに係る復号ワードデータは妥当性無し(NG)と判定する。
【0052】
(2)第2の妥当性判定方法は、当該ワードの直前複数ワードに係るパリティチェック処理の結果に基づいて、当該ワードに係る復号ワードデータの妥当性を判定する方法である。具体的には、当該ワードの直前Nワード(例えばN=2)に係るパリティチェック結果が何れも「エラー」である場合は、当該ワードに係る復号ワードデータは妥当性無し(NG)と判定する。
【0053】
照合部216は、受信信号復号部213によって復号された復号データのうち、航法メッセージの構造として規定された衛星固有情報が繰り返し搬送されるデータ部分に関するパリティチェック処理(誤り検出処理)の結果を、当該繰り返し搬送されるデータ部分同士で照合する。
【0054】
衛星固有情報は、例えば、衛星クロック補正用係数や衛星健康状態、衛星軌道暦パラメーター値(エフェメリスパラメーター値)といった、各GPS衛星に固有の情報である。また、衛星固有情報が繰り返し搬送されるデータ部分とは、航法メッセージのうち、上記の各衛星固有情報が格納された各サブフレームの各ワードに相当するデータ部分である。
【0055】
以下の説明では、復号の正否の判定対象とするワードのことを「判定対象ワード」と称して説明する。また、判定対象ワードが含まれるフレームの1つ前のフレーム(以下、「直前フレーム」と称す。)において、判定対象ワードとサブフレーム番号及びワード番号が等しいワードのことを「対応ワード」と称して説明する。
【0056】
この場合、照合部216は、判定対象ワードが衛星固有情報が格納されたワードであり、且つ、妥当性判定処理で妥当性無しと判定されたワードである場合に、判定対象ワードの復号ワードデータと、対応ワードの復号ワードデータとを照合する。これは、衛星固有情報が繰り返し搬送されるデータ部分であり、且つ、妥当性判定処理で妥当性がないと判定されたデータ部分同士を照合することに相当する。
【0057】
復号正否判定部217は、照合部216による照合の結果に基づいて、受信信号復号部213による受信信号の復号の正否を判定する。照合部216の照合の結果が「一致」である場合は、ワードデータが正しく復号されたと判定する。他方、照合部216の照合の結果が「不一致」である場合は、ワードデータが正しく復号されなかったと判定する。
【0058】
図3は、航法メッセージの説明図である。GPS衛星は、航法メッセージを50bps(bit per second)のビットレートで送信している。1つの航法メッセージは1つのマスターフレームで構成されており、1つのマスターフレームは1500ビットの25個のフレームで構成される。ビットレートが50bpsであるため、航法メッセージ1ビットの受信には20ミリ秒を要する。そのため、1つのフレームを受信するには30秒の時間を要する。
【0059】
各フレームは、5つのサブフレーム(第1サブフレーム〜第5サブフレーム)で構成される。第1サブフレーム〜第3サブフレームには、各フレーム共に同じ情報が格納されており、第4サブフレーム及び第5サブフレームには、各フレームで異なる情報が格納されている。第4サブフレーム及び第5サブフレームに格納されるのは、航法メッセージの異なるページの情報である。そのため、全ての航法メッセージを取得するためにはマスターフレームである25フレームを受信する必要があり、これには12.5分の時間を要する。
【0060】
各サブフレームは、10個のワード(第1ワード〜第10ワード)で構成される。各サブフレームにおいて、第1ワードは、特にテレメトリー(TLM(TeLeMetry))ワードと呼ばれる。また、第2ワードは、特にハンドオーバーワード(HOW(Hand Over Word))と呼ばれる。
【0061】
第1サブフレームには、衛星クロック補正用係数や衛星健康状態等が格納されている。第2及び第3サブフレームには、衛星軌道暦パラメーター(エフェメリスパラメーター)の値が格納されている。これらの各サブフレームの各ワードは、GPS衛星の固有情報が格納されたデータ部分である。
【0062】
但し、第1〜第3サブフレームを構成する第1〜第10ワードのうち、TLMワード(第1ワード)及びHOW(第2ワード)については、搬送されるデータ内容がフレーム毎に異なり得る。つまり、TLMワード及びHOWについては、必ずしも同一内容の情報が繰り返し搬送されるとは限らない。そこで、本実施形態では、第1〜第3サブフレームを構成する10個のワードのうち、TLMワード及びHOWを除外した第3〜第10ワードを利用して復号正否判定を行う。
【0063】
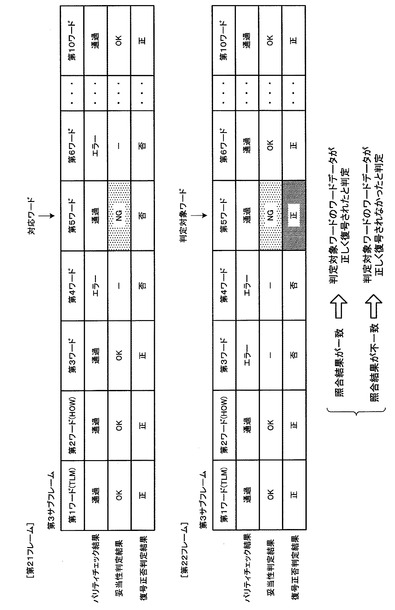
図4は、本実施形態における復号正否判定の具体例の説明図である。図4では、航法メッセージを構成する第1〜第25フレームのうち、第21フレーム及び第22フレームの第3サブフレームに着目した図を例示している。図4の上段及び下段には、第21フレーム及び第22フレームの第3サブフレームそれぞれについて、第1〜第10ワードそれぞれの復号ワードデータに対するパリティチェック結果と、妥当性判定結果と、復号正否判定結果とをテーブル形式で示している。
【0064】
また、図4のテーブルにおいて、パリティチェック処理でエラーが検出されなかったワードは「通過」と記載し、エラーが検出されたワードは「エラー」と記載している。妥当性判定処理で妥当性が肯定されたワードは「OK」と記載し、妥当性が否定されたワードは「NG」と記載している。なお、パリティチェック結果が「エラー」であるワードについては妥当性判定処理が行われないため、「−(無し)」と記載している。また、正否判定の結果、復号が正しく行われたと判定されたワードは「正」と記載し、復号が正しく行われなかったと判定されたワードは「否」と記載している。
【0065】
下段に示す第22フレームの第3サブフレームの第5ワードを判定対象ワードとする場合を例に挙げて説明する。判定対象ワードに対するパリティチェック結果は「通過」となっている。しかし、判定対象ワードの直前の第3及び第4ワードに対するパリティチェック結果は、何れも「エラー」となっている。この場合、判定対象ワードの直前2ワードに対するパリティチェック結果が「エラー」であるため、上記の(2)第2の妥当性判定方法が適用されて、判定対象ワードの妥当性判定結果は「NG」となる。
【0066】
ここで、判定対象ワードの対応ワードの判定結果に着目する。この場合、対応ワードは、1つ前のフレームである第21フレームの第3サブフレームの第5ワードとなる。対応ワードに対するパリティチェック結果は「通過」となっている。しかし、その前後のワードである第4及び第6ワードに対するパリティチェック結果が何れも「エラー」であるため、上記の(1)第1の妥当性判定方法が適用されて、対応ワードの妥当性判定結果は「NG」となっている。
【0067】
この場合、連続する2つのフレームについて、同一サブフレームの同一ワードに対する妥当性判定結果が何れも否定判定となっている。そのため、判定対象ワードの復号ワードデータと、対応ワードの復号ワードデータとを照合する。その結果、照合結果が一致であれば、判定対象ワードのワードデータが正しく復号された(正)と判定する。他方、照合結果が不一致であれば、判定対象ワードのワードデータが正しく復号されなかった(否)と判定する。
【0068】
図2の説明に戻り、位置算出部219は、各GPS衛星について復号された航法メッセージと、各GPS衛星について取得されたメジャメント情報とを用いて、所定の位置算出処理を行って、携帯型電話機1の位置(位置座標)及び時計誤差(クロックバイアス)を算出する。位置算出処理は、例えば、最小二乗法やカルマンフィルター等の手法を適用した処理として実現可能である。
【0069】
記憶部23は、ベースバンド処理回路部20のシステムプログラムや、衛星捕捉機能、受信信号復号機能、位置算出機能といった各種機能を実現するための各種プログラム、データ等を記憶する。また、各種処理の処理中データ、処理結果などを一時的に記憶するワークエリアを有する。
【0070】
記憶部23には、プログラムとして、処理部21により読み出され、ベースバンド処理として実行されるベースバンド処理プログラム231が記憶されている。ベースバンド処理プログラム231は、受信信号復号処理(図6参照)として実行される受信信号復号プログラム231Aと、位置算出処理として実行される位置算出プログラム231Bとをサブルーチンとして含む。なお、位置算出処理については公知であるため、フローチャートを用いた説明を省略する。
【0071】
また、記憶部23には、主要なデータとして、衛星別復号データ233と、衛星別メジャメントデータ234と、衛星別復号正否判定用データ235と、算出結果データ236とが記憶される。
【0072】
衛星別復号データ233は、受信信号復号部213によって復号された復号データが、GPS衛星別に記憶されたデータである。衛星別復号データ233から、航法メッセージの復号データ及び航法メッセージに搬送された情報が取得される。
【0073】
衛星別メジャメントデータ234は、衛星捕捉部211が相関演算を行うことで取得したメジャメント情報が、GPS衛星別に記憶されたデータである。メジャメント情報には、コード位相やドップラー周波数、擬似距離(シュードレンジ)、擬似距離変化率(レンジレート)といった情報が含まれる。
【0074】
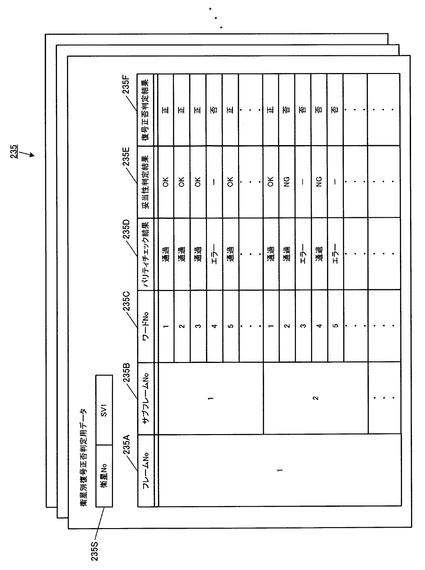
衛星別復号正否判定用データ235は、受信信号復号部213による復号の正否を判定するためのデータであり、そのデータ構成の一例を図5に示す。衛星別復号正否判定用データ235には、各GPS衛星の衛星番号(No)235Sと対応付けて、復号正否判定用テーブルが記憶されている。
【0075】
各復号正否判定用テーブルには、航法メッセージのフレーム番号235Aと、サブフレーム番号235Bと、ワード番号235Cと、パリティチェック結果235Dと、妥当性判定結果235Eと、復号正否判定結果235Fとが対応付けて記憶されている。この復号正否判定用テーブルの各欄は、後述する受信信号復号処理において随時更新される。
【0076】
算出結果データ236は、位置算出部219が位置算出処理を行うことで取得した算出結果のデータであり、算出した携帯型電話機1の位置(位置座標)や時計誤差(クロックバイアス)がこれに含まれる。
【0077】
2.処理の流れ
図6は、記憶部23に記憶されている受信信号復号プログラム231Aに従って、ベースバンド処理回路部20の処理部21が実行する受信信号復号処理(復号方法)の流れを示すフローチャートである。この受信信号復号処理は、捕捉対象とする各GPS衛星を対象として行われる処理である。
【0078】
受信信号復号部213は、GPS衛星信号を受信した信号の復号を開始し、衛星別復号データ233として記憶部23に記憶させる(ステップA1)。そして、受信信号復号部213は、航法メッセージの1フレーム分のデータの復号が完了するまで待機する(ステップA3;No)。航法メッセージの1フレーム分のデータの復号が完了すると(ステップA3;Yes)、衛星捕捉部211は、各サブフレームについて、ループAの処理を行う(ステップA5〜A37)。
【0079】
ループAの処理では、衛星捕捉部211は、当該サブフレームに含まれる各ワードについて、ループBの処理を行う(ステップA7〜A15)。具体的には、パリティチェック処理部214が、当該ワードについて復号された復号ワードデータに対するパリティチェック処理を行い、その結果を衛星別復号正否判定用データ235のパリティチェック結果235Dに記憶させる(ステップA9)。
【0080】
当該ワードのパリティチェック結果235Dが「通過」であった場合(ステップA11;通過)、衛星捕捉部211は、次のワードへと処理を移行する。他方、当該ワードのパリティチェック結果235Dが「エラー」であった場合(ステップA11;エラー)、復号正否判定部217が、復号ワードデータの復号を誤りと判定し、衛星別復号正否判定用データ235の復号正否判定結果235Fに記憶させる(ステップA13)。そして、次のワードへと処理を移行する。
【0081】
当該サブフレームの全てのワードについてステップA9〜A13の処理を行った後、衛星捕捉部211は、ループBの処理を終了する(ステップA15)。次いで、衛星捕捉部211は、当該サブフレームにおいて、パリティチェックを通過した各ワード(以下、「パリティ通過ワード」と称す。)について、ループCの処理を行う(ステップA17〜A35)。
【0082】
ループCの処理では、妥当性判定処理部215が、当該パリティ通過ワードの復号ワードデータに対する妥当性判定処理を行い、その結果を衛星別復号正否判定用データ235の妥当性判定結果235Eに記憶させる(ステップA19)。当該パリティ通過ワードの妥当性判定結果235Eが「OK」であった場合(ステップA21;OK)、復号正否判定部217は、復号ワードデータの復号を正しいと判定し、衛星別復号正否判定用データ235の復号正否判定結果235Fに記憶させる(ステップA23)。そして、次のパリティ通過ワードへと処理を移行する。
【0083】
一方、当該パリティ通過ワードの妥当性判定結果235Eが「NG」であった場合(ステップA21;NG)、衛星捕捉部211は、当該パリティ通過ワードが第1〜第3サブフレームの第3〜第10ワードの何れかのワードに該当するか否かを判定する(ステップA25)。そして、この条件を満たす場合は(ステップA25;Yes)、対応ワードの妥当性判定結果235Eが「NG」であったか否かを判定する(ステップA27)。
【0084】
ステップA27において条件を満たす場合(ステップA27;Yes)、照合部216が、当該パリティ通過ワードの復号ワードデータと、対応ワードの復号ワードデータとを照合する照合処理を行う(ステップA29)。照合結果が「一致」であれば(ステップA31;一致)、復号正否判定部217は、ステップA23へと移行する。つまり、妥当性判定結果235Eは「NG」であったが、照合の結果は「一致」であったため、復号ワードデータの復号を正しいと判定する。
【0085】
一方、照合処理の結果が「不一致」であった場合(ステップA31;不一致)、復号正否判定部217は、復号ワードデータの復号を誤りと判定し、衛星別復号正否判定用データ235の復号正否判定結果235Fに記憶させる(ステップA33)。そして、次のパリティ通過ワードへと処理を移行する。
【0086】
また、ステップA25において条件を満たさないと判定した場合(ステップA25;No)、又は、ステップA27において条件を満たさないと判定した場合(ステップA27;No)についても、復号正否判定部217は、復号ワードデータの復号を誤りと判定する(ステップA33)。
【0087】
全てのパリティ通過ワードについてステップA19〜A33の処理を行った後、衛星捕捉部211は、ループCの処理を終了する(ステップA35)。そして、全てのサブフレームについてステップA7〜A35の処理を行った後、衛星捕捉部211は、ループAの処理を終了する(ステップA37)。そして、ステップA3に戻る。
【0088】
3.作用効果
ベースバンド処理回路部20において、受信信号復号部213は、航法メッセージを搬送するGPS衛星信号を受信した信号を復号する。そして、パリティチェック処理部214が、パリティチェックが可能に規定された航法メッセージのワード単位で、復号されたデータをパリティチェック処理する。妥当性判定処理部215は、パリティチェック処理でエラーが検出されなかったワードについて、復号データの妥当性を判定する所定の妥当性判定処理を行う。照合部216は、GPS衛星の固有情報が格納されたワードであり、且つ、妥当性判定処理で妥当性がないと判定されたワードの復号データ同士を照合する。そして、復号正否判定部217は、照合部216による照合の結果に基づいて、受信信号復号部213による受信信号の復号の正否を判定する。
【0089】
GPS衛星信号に搬送される航法メッセージのうち、第1〜第3サブフレームの第3〜第10ワードについては、フレーム毎に同一内容の情報が繰り返し搬送される。従って、これらのデータ部分について、妥当性判定処理で妥当性がないと判定された復号データ同士を照合した結果、一致しているのであれば、当該復号データは正しく復号されたデータである可能性が高い。従って、本実施形態では、衛星固有情報が繰り返し搬送されるデータ部分について、妥当性判定処理で妥当性がないと判定されたデータ部分同士を照合するといった簡易な方法によって、受信信号の復号の正否を的確に判定することができる。
【0090】
4.変形例
本発明を適用可能な実施例は、上記の実施例に限定されることなく、本発明の趣旨を逸脱しない範囲で適宜変更可能であることは勿論である。以下、変形例について説明するが、上記の実施形態と同一の構成要素や、フローチャートの同一のステップについては、同一の符号を付して再度の説明を省略する。
【0091】
4−1.復号正否判定
(A)誤り検出処理で誤りが検出されたデータ部分と妥当性判定処理で妥当性がないと判定されたデータ部分との照合
判定対象ワードに対する妥当性判定結果が「NG」となった場合において、対応ワードのパリティチェック結果が「エラー」であった場合に、判定対象ワードの復号ワードデータと対応ワードの復号ワードデータとの照合を行うこととしてもよい。つまり、衛星固有情報が繰り返し搬送されるデータ部分であり、且つ、誤り検出処理で誤りが検出されたデータ部分と妥当性判定処理で妥当性がないと判定されたデータ部分とを照合することとしてもよい。
【0092】
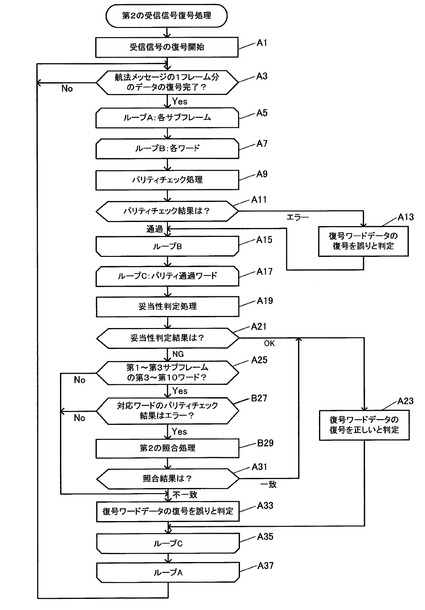
図7は、この場合にベースバンド処理回路部20の処理部21が、図6の受信信号復号処理に代えて実行する第2の受信信号復号処理の流れを示すフローチャートである。
ステップA25において、当該パリティ通過ワードが第1〜第3サブフレームの第3〜〜第10ワードの何れかのワードに該当すると判定した場合(ステップA25;Yes)、衛星捕捉部211は、対応ワードのパリティチェック結果235Dは「エラー」であったか否かを判定する(ステップB27)。
【0093】
そして、この条件を満たす場合は(ステップB27;Yes)、照合部216が、第2の照合処理を行う(ステップB29)。第2の照合処理では、妥当性判定処理で妥当性がないと判定された判定対象ワードの復号ワードデータと、直前フレームにおいてパリティチェック処理でエラーとなった対応ワードの復号ワードデータとを照合する。
【0094】
この場合、ワード内の全てのビットについて照合を行ってもよいが、パリティビットを除外したビット列同士を照合することにすると効果的である。これは、誤り検出符号のビットを除外したビット列同士を照合することに相当する。その理由について説明する。
【0095】
上記の場面では、判定対象ワードのパリティチェック結果は「通過」であるが、妥当性判定結果は「NG」である。それに対し、対応ワードのパリティチェック結果は「エラー」である。従って、対応ワードでは、30ビットのうちの一部のビットに復号エラーが生じていたことになる。しかし、パリティビットにのみ復号エラーが生じていたのであれば、パリティビットを除外した残余のビット列同士を照合することで、その照合結果が一致する場合がある。従って、ワードを構成するビットのうち、末尾の6ビットのパリティビットを除外した残余の24ビットについて、ビット列同士をビット単位で照合することで、復号の正否を適切に判定することができる。
【0096】
上記に加えて、第2の照合処理では、判定対象ワード及び対応ワードのビット反転を考慮してビット列同士の照合を行うと効果的である。GPSにおける航法メッセージの符号化規約では、あるワードについてGPS衛星から送信されるビットの値(以下、「送信ビット値」と称す。)の反転/非反転が、当該ワードの直前のワード(以下、「直前ワード」と称す。)の末尾ビットの値(以下、「末尾ビット値」と称す。)によって決定付けられる。
【0097】
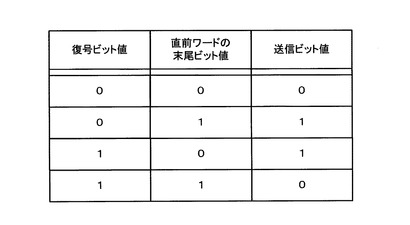
図8は、航法メッセージの符号化規約の説明図である。各ワードの第1〜第24番目のビット値に関して、復号ビット値と、直前ワードの末尾ビット値と、送信ビット値との対応関係を定めたテーブルを図示している。各ワードの第1番目〜第24番目の送信ビット値は、復号ビット値と、直前ワードの末尾ビット値との排他的論理和(EXOR(EXclusive OR))を演算することで求められる。つまり、直前ワードの末尾ビット値が「0」であれば、当該ワードにおける復号ビット値と送信ビット値とは一致する。しかし、直前ワードの末尾ビット値が「1」であれば、当該ワードにおける復号ビット値と送信ビット値とは反転した関係となる。
【0098】
上記の符号化規約を考慮し、第2の照合処理では、パリティビットを除外したビット列同士を照合する際に、照合対象のワードの一方の復号データのビット列を反転して照合を行うと効果的である。これは、衛星固有情報が繰り返し搬送されるデータ部分同士の一方のビット列を反転して照合することに相当する。
【0099】
具体的には、(a)照合対象の2つのワードの何れもビット列の反転無し、(b)照合対象の2つのワードのうち一方のワードのビット列を反転、の2通りの組合せについて、ビット列の照合をそれぞれ行う。そして、(a)及び(b)の何れかの組合せについて照合結果が「一致」となった場合に、判定対象ワードのワードデータの復号が正しく行われたと判定する。
【0100】
(B)ビットの誤り訂正を考慮したデータ部分同士の照合
パリティチェック結果が「エラー」となったワードの復号ワードデータについて、ビットの誤り訂正を行い、誤りが訂正された復号ワードデータを利用して照合を行うこととしてもよい。
【0101】
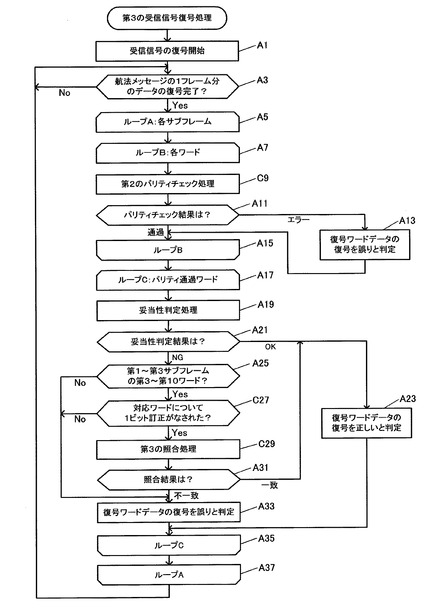
図9は、この場合にベースバンド処理回路部20の処理部21が、図6の受信信号復号処理に代えて実行する第3の受信信号復号処理の流れを示すフローチャートである。
各ワードについて行うループBの処理において、パリティチェック処理部214は、第2のパリティチェック処理を行う(ステップC9)。第2のパリティチェック処理では、パリティチェック処理部214は、パリティチェックで誤りを検出したビットについて誤り訂正を行う。
【0102】
ここでは、ビットの誤り訂正として、1ビット訂正を行う場合を例示する。以下では、GPS規約に基づくパリティビットの演算式に従って算定したパリティビットのビット値のことを「算定パリティビット値」と称し、GPS衛星から送信されているパリティビット値のことを「送信パリティビット値」と称して説明する。
【0103】
復号ワードデータに復号エラーが生じていなければ、算定パリティビット値と送信パリティビット値とは全て一致する。しかし、ワード内に1ビットの復号エラーが含まれている場合は、ワード内で復号エラーが生じたビットの位置を特定でき、当該ビットの値を訂正することができる。これは、“IS−GPS−200E”、p.125−127、[online]、2010年6月8日、Global Positioning Systems Wing、インターネット<URL:http://www.losangeles.af.mil/shared/media/document/AFD-100813-045.pdf>に記載してある(32,26)−Hamming Codeに基づいている。
【0104】
ステップA25において条件を満たすと判定した場合(ステップA25;Yes)、衛星捕捉部211は、判定対象ワードである当該パリティ通過ワードの対応ワードについて、1ビット訂正がなされたか否かを判定する(ステップC27)。そして、この条件を満たす場合は(ステップC27;Yes)、照合部216が、第3の照合処理を行う(ステップC29)。
【0105】
第3の照合処理では、照合部216は、当該パリティ通過ワードの復号ワードデータと、対応ワードの1ビット訂正がなされた復号ワードデータとを照合する。そして、その照合結果が「一致」であれば、復号正否判定部217が、当該パリティ通過ワードの復号が正しく行われたと判定する。
【0106】
(C)対応ワード
上記の実施形態では、判定対象ワードが含まれるフレームの直前フレームにおいて、サブフレーム番号及びワード番号が等しいワードを対応ワードとして、判定対象ワードの復号ワードデータと対応ワードの復号ワードデータとを照合した。しかし、対応ワードとして照合に利用可能なワードは、何もこれに限られるわけではない。
【0107】
例えば、直前フレームではなく、判定対象ワードを含むフレームの2つ前や3つ前のフレームにおいて、サブフレーム番号及びワード番号が等しいワードを対応ワードとして、照合に利用することとしてもよい。つまり、連続する2つのフレームについて相互に対応するワードのデータ部分同士ではなく、所定フレームだけ離れた2つのフレームについて相互に対応するワードのデータ部分同士を照合することとしてもよい。
【0108】
(D)妥当性判定処理の省略
上記の実施形態では、妥当性判定処理を必須の処理としたが、妥当性判定処理を省略することも可能である。この場合は、例えば、パリティチェック処理でエラーが検出されなかったワードについて、対応ワードの復号データとの照合を行って、復号データの正否を判定することとしてもよい。
【0109】
具体的には、復号したデータのうち、航法メッセージの構造として規定された衛星固有情報が繰り返し搬送されるワード(データ部分)を対象とする。そして、判定対象ワードについてパリティチェック処理でエラーが検出されなかった場合に、対応ワードについてもパリティチェック処理でエラーが検出されなかったか否かを判定する。この条件を満たす場合は、判定対象ワードと対応ワードとで復号データ同士を照合する。そして、照合の結果が一致である場合に、判定対象ワードの復号が正しく行われたと判定する。これは、衛星固有情報が繰り返し搬送されるデータ部分であり、且つ、誤り検出処理で誤りが検出されなかったデータ部分同士を照合することを意味する。
【0110】
なお、この場合に照合に利用可能な対応ワードとしては、上記の変形例の(C)でも説明したように、直前フレームや2つ前のフレーム、3つ前のフレームといった過去の何れかのフレームにおいて、判定対象ワードに対応するワードとすることができる。
【0111】
上記の変形例の(C)及び(D)の内容は、図6の受信信号復号処理、図7の第2の受信信号復号処理、及び、図9の第3の受信信号復号処理の何れの処理に対しても、それぞれ同様に適用可能である。つまり、上記の実施形態及び変形例を包括する概念として、航法メッセージの構造として規定された衛星固有情報が繰り返し搬送されるデータ部分に関する誤り検出処理の結果を、当該繰り返し搬送されるデータ部分同士で照合し、その照合の結果に基づいて、受信信号の復号の正否を判定することになる。
【0112】
4−2.電子機器
上記の実施例では、電子機器の一種である携帯型電話機に本発明を適用した場合を例に挙げて説明したが、本発明を適用可能な電子機器はこれに限られるわけではない。例えば、カーナビゲーション装置や携帯型ナビゲーション装置、パソコン、PDA(Personal Digital Assistant)、腕時計といった他の電子機器についても同様に適用することが可能である。
【0113】
4−3.処理の主体
上記の実施例では、受信信号の復号をベースバンド処理回路部の処理部が実行するものとして説明したが、これを電子機器のホスト処理部が実行することとしてもよい。この場合は、GPS受信部が受信信号の復号装置となるのではなく、電子機器自体が受信信号の復号装置となる。また、受信信号の復号はベースバンド処理回路部の処理部が実行し、復号データの正否判定は電子機器のホスト処理部が実行するといったように、ベースバンド処理回路部20とホスト処理部30とで処理を分散させることとしてもよい。
【0114】
4−4.衛星測位システム
また、上記の実施形態では、衛星測位システムとしてGPSを例に挙げて説明したが、WAAS(Wide Area Augmentation System)、QZSS(Quasi Zenith Satellite System)、GLONASS(GLObal NAvigation Satellite System)、GALILEO等の他の衛星測位システムであってもよい。
【符号の説明】
【0115】
1 携帯型電話機、 10 GPS受信部、 11 RF受信回路部、 20 ベースバンド処理回路部、 21 処理部、 211 衛星捕捉部、 213 受信信号復号部、 214 パリティチェック処理部、215 妥当性判定処理部、 216 照合部、 217 復号正否判定部、 219 位置算出部、 23 記憶部、 30 ホスト処理部、 40 操作部、 50 表示部、 55 音出力部、 60 携帯電話用アンテナ、 70 携帯電話用無線通信回路部、 80 記憶部、 90 時計部
【技術分野】
【0001】
本発明は、受信した衛星信号を復号する方法等に関する。
【背景技術】
【0002】
測位用信号を利用した測位システムとしては、GPS(Global Positioning System)が広く知られており、携帯型電話機やカーナビゲーション装置等に内蔵された受信装置に利用されている。GPSでは、GPS受信機の計時時刻を用いて、複数のGPS衛星の位置や各GPS衛星から受信装置までの擬似距離等を求め、最終的に位置計算を行う。
【0003】
GPS衛星は、衛星軌道や時刻等に関する情報を、航法メッセージに含めて50bps(bit per second)のビットレートで送信している。1つの航法メッセージは1つのマスターフレームで構成されており、1つのマスターフレームは1500ビットの25個のフレームで構成される。全ての航法メッセージを取得するためにはマスターフレームである25フレームを受信する必要があり、それには12.5分の時間を要する。
【0004】
GPS衛星信号の受信環境は、受信装置の位置等によって変化する。弱電界環境では、受信信号の信号強度が微弱となるために、航法メッセージのビット値の変化(ビット変化)を正確に検知できず、受信信号の復号を誤る可能性がある。そこで、GPS衛星信号を受信した信号の復号の正否を判定する手法が考案されている(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2008−170435号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1にも開示されているが、復号データの誤り検出の1つとして、パリティチェック処理が知られている。パリティチェック処理では、航法メッセージの各サブフレームに含まれる各ワードについて、その末尾に格納される6ビットのパリティビットを利用して、予め規約された演算式に従ってパリティチェックを行う。
【0007】
しかし、誤って復号されたビットの位置及び個数の組合せによっては、実際には復号エラーが生じているにも関わらず、パリティチェックを通過してしまう場合がある。具体的には、弱電界環境では、1.5%程度の確率でパリティチェックに誤判定が発生し得る。このようにパリティチェックを偶然通過した航法メッセージの復号データに基づいて位置算出を行うと、実際の位置(真位置)から大きく乖離した位置が算出結果として得られる、いわゆる位置飛びの要因となる。
【0008】
本発明は上述した課題に鑑みて為されたものであり、その目的とするところは、航法メッセージを搬送する衛星信号を受信した信号の復号の正否を判定するための新しい手法を提案することにある。
【課題を解決するための手段】
【0009】
以上の課題を解決するための第1の形態は、航法メッセージを搬送する衛星信号を受信することと、前記受信した信号を復号することと、前記航法メッセージの搬送データ単位で、前記復号したデータを誤り検出処理することと、前記復号したデータのうち、衛星固有情報が繰り返し搬送されるデータ部分に関する前記誤り検出処理の結果を、当該繰り返し搬送されるデータ部分同士で照合することと、前記照合の結果に基づいて、前記復号の正否を判定することと、を含む復号方法である。
【0010】
また、他の形態として、航法メッセージを搬送する衛星信号を受信した信号を復号する復号部と、前記航法メッセージの搬送データ単位で、前記復号したデータを誤り検出処理する誤り検出処理部と、前記復号したデータのうち、衛星固有情報が繰り返し搬送されるデータ部分に関する前記誤り検出処理の結果を、当該繰り返し搬送されるデータ部分同士で照合する照合部と、前記照合の結果に基づいて、前記復号の正否を判定する復号正否判定部と、を備えた復号装置を構成することとしてもよい。
【0011】
この第1の形態等によれば、航法メッセージを搬送する衛星信号を受信した信号を復号する。そして、航法メッセージの搬送データ単位で、復号したデータを誤り検出処理する。誤り検出処理としては、例えば、誤り検出符号の一種であるパリティビットを利用したパリティチェック処理を適用できる。
【0012】
復号したデータのうち、衛星固有情報が繰り返し搬送されるデータ部分に関する誤り検出処理の結果を、当該繰り返し搬送されるデータ部分同士で照合する。衛星固有情報が繰り返し搬送されるデータ部分は、当該衛星に関する同一内容の情報が繰り返し搬送される。従って、当該データ部分に関する誤り検出処理の結果を繰り返し搬送されるデータ部分同士で照合した結果、一致しているのであれば、受信信号の復号が正しく行われたと推定することができる。これにより、航法メッセージを搬送する衛星信号を受信した信号の復号の正否を判定することができる。
【0013】
また、第2の形態として、第1の形態の復号方法において、前記復号したデータのうち、前記誤り検出処理で誤りが検出されなかったデータ部分について、妥当性を判定する所定の妥当性判定処理を行うことを更に含み、前記照合することは、前記衛星固有情報が繰り返し搬送されるデータ部分であり、且つ、前記妥当性判定処理で妥当性がないと判定されたデータ部分同士を照合することを含む、復号方法を構成することとしてもよい。
【0014】
弱電界環境等においては、実際には復号エラーが生じているにも関わらず、誤り検出処理で誤りが検出されずに、偶然すり抜けてしまう場合がある。そこで、第2の形態によれば、復号したデータのうち、誤り検出処理で誤りが検出されなかったデータ部分について、妥当性を判定する所定の妥当性判定処理を行う。そして、衛星固有情報が繰り返し搬送されるデータ部分であり、且つ、妥当性判定処理で妥当性がないと判定されたデータ部分同士を照合する。これにより、受信信号の復号の正否を高い確度で判定することができる。
【0015】
また、第3の形態として、第2の形態の復号方法において、前記照合することは、前記衛星固有情報が繰り返し搬送されるデータ部分について、前記誤り検出処理で誤りが検出されたデータ部分と前記妥当性判定処理で妥当性がないと判定されたデータ部分とを照合することを含む、復号方法を構成することとしてもよい。
【0016】
この第3の形態によれば、衛星固有情報が繰り返し搬送されるデータ部分について、誤り検出処理で誤りが検出されたデータ部分と妥当性判定処理で妥当性がないと判定されたデータ部分とを照合する。この場合も、第2の形態と同様に、受信信号の復号の正否を高い確度で判定することができる。
【0017】
また、第4の形態として、第2又は第3の形態の復号方法における前記妥当性判定処理は、前記誤り検出処理で誤りが検出されなかったデータ部分に隣り合う前記搬送データ単位のデータ部分に係る前記誤り検出処理の結果に基づいて、前記妥当性を判定する処理である、復号方法を構成することとしてもよい。
【0018】
この第4の形態によれば、隣り合う搬送データ単位のデータ部分に係る誤り検出処理の結果に基づくことで、誤り検出処理で誤りが検出されなかったデータ部分について、復号データの妥当性を簡易に判定することができる。
【0019】
また、第5の形態として、第1〜第4の何れかの形態の復号方法において、前記搬送データ単位には、誤り検出符号が含まれており、前記照合することは、前記誤り検出符号を除外したデータ部分同士を照合することを含む、復号方法を構成することとしてもよい。
【0020】
この第5の形態によれば、誤り検出符号を除外したデータ部分同士を照合することで、誤り検出符号のビットに復号エラーが生じた場合であっても、受信信号の復号の正否を的確に判定することができる。
【0021】
また、第6の形態として、第1〜第5の何れかの形態の復号方法において、前記照合することは、前記衛星固有情報が繰り返し搬送されるデータ部分のうち一方のビット列を反転して照合することを含む、復号方法を構成することとしてもよい。
【0022】
この第6の形態によれば、衛星固有情報が繰り返し搬送されるデータ部分のうち一方のビット列を反転して照合することで、ビット反転に係る航法メッセージの符号化規約に関わらず、受信信号の復号の正否を的確に判定することができる。
【0023】
また、第7の形態として、第1〜第6の何れかの形態の復号方法において、前記誤り検出処理は、誤りを検出したビットについて誤りを訂正することを含む、復号方法を構成することとしてもよい。
【0024】
この第7の形態によれば、誤り検出処理では、誤りを検出したビットについて誤りを訂正する。これにより、上記の形態と相まって、ビット値の誤りが訂正されたデータ部分を用いて照合を行うことが可能となり、復号の正否判定の確実性を高めることができる。
【図面の簡単な説明】
【0025】
【図1】携帯型電話機の機能構成の一例を示すブロック図。
【図2】ベースバンド処理回路部の回路構成の一例を示す図。
【図3】航法メッセージの説明図。
【図4】復号正否判定の具体例の説明図。
【図5】衛星別復号正否判定用データのデータ構成の一例を示す図。
【図6】受信信号復号処理の流れを示すフローチャート。
【図7】第2の受信信号復号処理の流れを示すフローチャート。
【図8】航法メッセージの符号化規約の説明図。
【図9】第3の受信信号復号処理の流れを示すフローチャート。
【発明を実施するための形態】
【0026】
以下、本発明を適用した好適な実施形態の一例について説明する。本実施形態は、衛星測位システムの一種であるGPS(Global Positioning System)を適用した実施形態である。本実施形態では、復号装置を具備する電子機器の一例として、携帯型電話機に本発明を適用した場合の形態について説明する。但し、本発明を適用可能な形態が以下説明する実施形態に限定されるわけでないことは勿論である。
【0027】
1.構成
1−1.携帯型電話機の構成
図1は、本実施形態における携帯型電話機1の機能構成の一例を示すブロック図である。携帯型電話機1は、GPSアンテナ5と、GPS受信部10と、ホスト処理部30と、操作部40と、表示部50と、音出力部55と、携帯電話用アンテナ60と、携帯電話用無線通信回路部70と、記憶部80と、時計部90とを備えて構成される。
【0028】
GPSアンテナ5は、GPS衛星から発信されているGPS衛星信号を含むRF(Radio Frequency)信号を受信するアンテナであり、受信信号をGPS受信部10に出力する。GPS衛星信号は、拡散符号の一種であるC/A(Coarse and Acquisition)コードによって、スペクトラム拡散方式として知られるCDMA(Code Division Multiple Access)方式によって変調された1.57542[GHz]の通信信号である。C/Aコードは、コード長1023チップを1PNフレームとする繰返し周期1msの擬似ランダム雑音符号であり、各GPS衛星に固有のコードである。
【0029】
GPS受信部10は、GPSアンテナ5から出力された信号に基づいて携帯型電話機1の位置を算出する回路或いは装置であり、いわゆるGPS受信機に相当する機能ブロックである。本実施形態では、GPS受信部10が復号装置に相当する。
【0030】
GPS受信部10は、RF受信回路部11と、ベースバンド処理回路部20とを備えて構成される。なお、RF受信回路部11と、ベースバンド処理回路部20とは、それぞれ別のLSI(Large Scale Integration)として製造することも、1チップとして製造することも可能である。
【0031】
RF受信回路部11は、RF信号の受信回路である。回路構成としては、例えば、GPSアンテナ5から出力されたRF信号をA/D変換器でデジタル信号に変換し、デジタル信号を処理する受信回路を構成してもよい。また、GPSアンテナ5から出力されたRF信号をアナログ信号のまま信号処理し、最終的にA/D変換することでデジタル信号をベースバンド処理回路部20に出力する構成としてもよい。
【0032】
後者の場合には、例えば、次のようにRF受信回路部11を構成することができる。すなわち、所定の発振信号を分周或いは逓倍することで、RF信号乗算用の発振信号を生成する。そして、生成した発振信号を、GPSアンテナ5から出力されたRF信号に乗算することで、RF信号を中間周波数の信号(以下、「IF(Intermediate Frequency)信号」と称す。)にダウンコンバートし、IF信号を増幅等した後、A/D変換器でデジタル信号に変換して、ベースバンド処理回路部20に出力する。
【0033】
ベースバンド処理回路部20は、RF受信回路部11から出力された受信信号に対して、キャリア除去や相関演算等を行ってGPS衛星信号を捕捉し、GPS衛星信号から抽出した時刻情報や衛星軌道情報等を利用して、携帯型電話機1の位置及び時計誤差を算出する。
【0034】
ホスト処理部30は、記憶部80に記憶されているシステムプログラム等の各種プログラムに従って携帯型電話機1の各部を統括的に制御するプロセッサーであり、CPU(Central Processing Unit)等のプロセッサーを有して構成される。ホスト処理部30は、ベースバンド処理回路部20から取得した位置座標を元に、表示部50に現在位置を指し示した地図を表示させたり、その位置座標を各種のアプリケーション処理に利用する。
【0035】
操作部40は、例えばタッチパネルやボタンスイッチ等を有して構成される入力装置であり、押下されたキーやボタンの信号をホスト処理部30に出力する。この操作部40の操作により、通話要求やメール送受信要求、各種アプリケーション実行要求、位置算出要求等の各種指示入力がなされる。
【0036】
表示部50は、LCD(Liquid Crystal Display)等を有して構成される表示装置であり、ホスト処理部30から出力される表示信号に基づいた各種表示を行う。表示部50には、位置表示画面や時刻情報等が表示される。
【0037】
音出力部55は、スピーカー等を有して構成される音出力装置であり、ホスト処理部30から出力される音出力信号に基づいた各種音出力を行う。音出力部55からは、通話中の音声や、各種アプリケーションに係る音声ガイダンス等が音出力される。
【0038】
携帯電話用アンテナ60は、携帯型電話機1の通信サービス事業者が設置した無線基地局との間で携帯電話用無線信号の送受信を行うアンテナである。
【0039】
携帯電話用無線通信回路部70は、RF変換回路、ベースバンド処理回路等によって構成される携帯電話の通信回路部であり、携帯電話用無線信号の変調・復調等を行うことで、通話やメールの送受信等を実現する。
【0040】
記憶部80は、ROM(Read Only Memory)やフラッシュROM、RAM(Random Access Memory)等の記憶装置を有して構成され、ホスト処理部30が携帯型電話機1を制御するためのシステムプログラムや、各種アプリケーション処理を実行するための各種プログラムやデータ等を記憶する。
【0041】
時計部90は、携帯型電話機1の内部時計であり、水晶振動子及び発振回路でなる水晶発振器等を有して構成される。時計部90の計時時刻は、ベースバンド処理回路部20及びホスト処理部30に随時出力される。時計部90の計時時刻は、ベースバンド処理回路部20によって算出された時計誤差に基づき補正される。
【0042】
1−2.ベースバンド処理回路部の回路構成
図2は、ベースバンド処理回路部20の回路構成の一例を示す図であり、本実施例に係わる回路ブロックを中心に記載した図である。ベースバンド処理回路部20は、主要な構成として、処理部21と、記憶部23とを備える。
【0043】
処理部21は、ベースバンド処理回路部20の各機能部を統括的に制御する制御装置及び演算装置であり、CPUやDSP(Digital Signal Processor)等のプロセッサーを有して構成される。処理部21は、主要な機能部として、衛星捕捉部211と、位置算出部219とを有する。
【0044】
衛星捕捉部211は、GPS衛星(GPS衛星信号)の捕捉を行う機能部である。具体的には、RF受信回路部11から出力されるデジタル化された受信信号に対して、キャリア除去や相関演算等のデジタル信号処理を実行し、そのデジタル信号処理の結果に基づいてGPS衛星を捕捉する。
【0045】
本実施形態において、衛星捕捉部211は、受信信号復号部213と、パリティチェック処理部214と、妥当性判定処理部215と、照合部216と、復号正否判定部217とを機能部として有する。但し、これらの機能部は、一実施例として記載したものに過ぎず、必ずしもこれら全ての機能部を必須構成要件としなければならないわけではない。
【0046】
受信信号復号部213は、記憶部23に記憶された受信信号復号プログラム231Aに従って、航法メッセージを搬送するGPS衛星信号を受信した信号を復号する復号部である。本実施形態では、受信信号復号部213が復号したデータのことを「復号データ」と称して説明する。受信信号を正しく復号できた場合には、復号データは、航法メッセージのデータとなる。復号データのうち、航法メッセージのワードに相当する部分の復号データのことを、特に「復号ワードデータ」と称して説明する。ワードは、誤り検出の一種であるパリティチェックが可能に規定された航法メッセージの搬送データ単位の一種である。
【0047】
パリティチェック処理部214は、受信信号復号部213によって復号された復号データに対する誤り検出処理の一種として、パリティチェック処理を行う。パリティチェック処理部214は、誤り検出が可能に規定された航法メッセージの搬送データ単位で、復号したデータを誤り検出処理する誤り検出処理部に相当する。
【0048】
具体的には、パリティチェック処理部214は、航法メッセージのワード単位で、予め規約されたパリティチェック用の演算式に従って、復号ワードデータに対するパリティチェックを行う。なお、GPSで規約されたパリティチェックの演算式は公知であるため、詳細な説明を省略する。
【0049】
妥当性判定処理部215は、受信信号復号部213によって復号されたデータのうち、パリティチェック処理で誤り(エラー)が検出されなかったワードについて、当該ワードの復号データの妥当性を判定する所定の妥当性判定処理を行う。
【0050】
本実施形態において、妥当性判定処理部215が実行する妥当性判定処理は、パリティチェック処理で誤りが検出されなかったワードについて、当該ワードに隣り合うワードの復号データに係るパリティチェック処理の結果に基づいて、復号ワードデータの妥当性を判定する処理である。これは、誤り検出処理で誤りが検出されなかったデータ部分に隣り合う搬送データ単位のデータ部分に係る誤り検出処理の結果に基づく妥当性判定処理に相当する。この妥当性判定処理に適用可能な妥当性判定方法として、以下の2種類の妥当性判定方法を例示する。
【0051】
(1)第1の妥当性判定方法は、当該ワードの前後のワードに係るパリティチェック処理の結果に基づいて、当該ワードに係る復号ワードデータの妥当性を判定する方法である。具体的には、当該ワードの前後のワードに係るパリティチェック結果が何れも「エラー」である場合は、当該ワードに係る復号ワードデータは妥当性無し(NG)と判定する。
【0052】
(2)第2の妥当性判定方法は、当該ワードの直前複数ワードに係るパリティチェック処理の結果に基づいて、当該ワードに係る復号ワードデータの妥当性を判定する方法である。具体的には、当該ワードの直前Nワード(例えばN=2)に係るパリティチェック結果が何れも「エラー」である場合は、当該ワードに係る復号ワードデータは妥当性無し(NG)と判定する。
【0053】
照合部216は、受信信号復号部213によって復号された復号データのうち、航法メッセージの構造として規定された衛星固有情報が繰り返し搬送されるデータ部分に関するパリティチェック処理(誤り検出処理)の結果を、当該繰り返し搬送されるデータ部分同士で照合する。
【0054】
衛星固有情報は、例えば、衛星クロック補正用係数や衛星健康状態、衛星軌道暦パラメーター値(エフェメリスパラメーター値)といった、各GPS衛星に固有の情報である。また、衛星固有情報が繰り返し搬送されるデータ部分とは、航法メッセージのうち、上記の各衛星固有情報が格納された各サブフレームの各ワードに相当するデータ部分である。
【0055】
以下の説明では、復号の正否の判定対象とするワードのことを「判定対象ワード」と称して説明する。また、判定対象ワードが含まれるフレームの1つ前のフレーム(以下、「直前フレーム」と称す。)において、判定対象ワードとサブフレーム番号及びワード番号が等しいワードのことを「対応ワード」と称して説明する。
【0056】
この場合、照合部216は、判定対象ワードが衛星固有情報が格納されたワードであり、且つ、妥当性判定処理で妥当性無しと判定されたワードである場合に、判定対象ワードの復号ワードデータと、対応ワードの復号ワードデータとを照合する。これは、衛星固有情報が繰り返し搬送されるデータ部分であり、且つ、妥当性判定処理で妥当性がないと判定されたデータ部分同士を照合することに相当する。
【0057】
復号正否判定部217は、照合部216による照合の結果に基づいて、受信信号復号部213による受信信号の復号の正否を判定する。照合部216の照合の結果が「一致」である場合は、ワードデータが正しく復号されたと判定する。他方、照合部216の照合の結果が「不一致」である場合は、ワードデータが正しく復号されなかったと判定する。
【0058】
図3は、航法メッセージの説明図である。GPS衛星は、航法メッセージを50bps(bit per second)のビットレートで送信している。1つの航法メッセージは1つのマスターフレームで構成されており、1つのマスターフレームは1500ビットの25個のフレームで構成される。ビットレートが50bpsであるため、航法メッセージ1ビットの受信には20ミリ秒を要する。そのため、1つのフレームを受信するには30秒の時間を要する。
【0059】
各フレームは、5つのサブフレーム(第1サブフレーム〜第5サブフレーム)で構成される。第1サブフレーム〜第3サブフレームには、各フレーム共に同じ情報が格納されており、第4サブフレーム及び第5サブフレームには、各フレームで異なる情報が格納されている。第4サブフレーム及び第5サブフレームに格納されるのは、航法メッセージの異なるページの情報である。そのため、全ての航法メッセージを取得するためにはマスターフレームである25フレームを受信する必要があり、これには12.5分の時間を要する。
【0060】
各サブフレームは、10個のワード(第1ワード〜第10ワード)で構成される。各サブフレームにおいて、第1ワードは、特にテレメトリー(TLM(TeLeMetry))ワードと呼ばれる。また、第2ワードは、特にハンドオーバーワード(HOW(Hand Over Word))と呼ばれる。
【0061】
第1サブフレームには、衛星クロック補正用係数や衛星健康状態等が格納されている。第2及び第3サブフレームには、衛星軌道暦パラメーター(エフェメリスパラメーター)の値が格納されている。これらの各サブフレームの各ワードは、GPS衛星の固有情報が格納されたデータ部分である。
【0062】
但し、第1〜第3サブフレームを構成する第1〜第10ワードのうち、TLMワード(第1ワード)及びHOW(第2ワード)については、搬送されるデータ内容がフレーム毎に異なり得る。つまり、TLMワード及びHOWについては、必ずしも同一内容の情報が繰り返し搬送されるとは限らない。そこで、本実施形態では、第1〜第3サブフレームを構成する10個のワードのうち、TLMワード及びHOWを除外した第3〜第10ワードを利用して復号正否判定を行う。
【0063】
図4は、本実施形態における復号正否判定の具体例の説明図である。図4では、航法メッセージを構成する第1〜第25フレームのうち、第21フレーム及び第22フレームの第3サブフレームに着目した図を例示している。図4の上段及び下段には、第21フレーム及び第22フレームの第3サブフレームそれぞれについて、第1〜第10ワードそれぞれの復号ワードデータに対するパリティチェック結果と、妥当性判定結果と、復号正否判定結果とをテーブル形式で示している。
【0064】
また、図4のテーブルにおいて、パリティチェック処理でエラーが検出されなかったワードは「通過」と記載し、エラーが検出されたワードは「エラー」と記載している。妥当性判定処理で妥当性が肯定されたワードは「OK」と記載し、妥当性が否定されたワードは「NG」と記載している。なお、パリティチェック結果が「エラー」であるワードについては妥当性判定処理が行われないため、「−(無し)」と記載している。また、正否判定の結果、復号が正しく行われたと判定されたワードは「正」と記載し、復号が正しく行われなかったと判定されたワードは「否」と記載している。
【0065】
下段に示す第22フレームの第3サブフレームの第5ワードを判定対象ワードとする場合を例に挙げて説明する。判定対象ワードに対するパリティチェック結果は「通過」となっている。しかし、判定対象ワードの直前の第3及び第4ワードに対するパリティチェック結果は、何れも「エラー」となっている。この場合、判定対象ワードの直前2ワードに対するパリティチェック結果が「エラー」であるため、上記の(2)第2の妥当性判定方法が適用されて、判定対象ワードの妥当性判定結果は「NG」となる。
【0066】
ここで、判定対象ワードの対応ワードの判定結果に着目する。この場合、対応ワードは、1つ前のフレームである第21フレームの第3サブフレームの第5ワードとなる。対応ワードに対するパリティチェック結果は「通過」となっている。しかし、その前後のワードである第4及び第6ワードに対するパリティチェック結果が何れも「エラー」であるため、上記の(1)第1の妥当性判定方法が適用されて、対応ワードの妥当性判定結果は「NG」となっている。
【0067】
この場合、連続する2つのフレームについて、同一サブフレームの同一ワードに対する妥当性判定結果が何れも否定判定となっている。そのため、判定対象ワードの復号ワードデータと、対応ワードの復号ワードデータとを照合する。その結果、照合結果が一致であれば、判定対象ワードのワードデータが正しく復号された(正)と判定する。他方、照合結果が不一致であれば、判定対象ワードのワードデータが正しく復号されなかった(否)と判定する。
【0068】
図2の説明に戻り、位置算出部219は、各GPS衛星について復号された航法メッセージと、各GPS衛星について取得されたメジャメント情報とを用いて、所定の位置算出処理を行って、携帯型電話機1の位置(位置座標)及び時計誤差(クロックバイアス)を算出する。位置算出処理は、例えば、最小二乗法やカルマンフィルター等の手法を適用した処理として実現可能である。
【0069】
記憶部23は、ベースバンド処理回路部20のシステムプログラムや、衛星捕捉機能、受信信号復号機能、位置算出機能といった各種機能を実現するための各種プログラム、データ等を記憶する。また、各種処理の処理中データ、処理結果などを一時的に記憶するワークエリアを有する。
【0070】
記憶部23には、プログラムとして、処理部21により読み出され、ベースバンド処理として実行されるベースバンド処理プログラム231が記憶されている。ベースバンド処理プログラム231は、受信信号復号処理(図6参照)として実行される受信信号復号プログラム231Aと、位置算出処理として実行される位置算出プログラム231Bとをサブルーチンとして含む。なお、位置算出処理については公知であるため、フローチャートを用いた説明を省略する。
【0071】
また、記憶部23には、主要なデータとして、衛星別復号データ233と、衛星別メジャメントデータ234と、衛星別復号正否判定用データ235と、算出結果データ236とが記憶される。
【0072】
衛星別復号データ233は、受信信号復号部213によって復号された復号データが、GPS衛星別に記憶されたデータである。衛星別復号データ233から、航法メッセージの復号データ及び航法メッセージに搬送された情報が取得される。
【0073】
衛星別メジャメントデータ234は、衛星捕捉部211が相関演算を行うことで取得したメジャメント情報が、GPS衛星別に記憶されたデータである。メジャメント情報には、コード位相やドップラー周波数、擬似距離(シュードレンジ)、擬似距離変化率(レンジレート)といった情報が含まれる。
【0074】
衛星別復号正否判定用データ235は、受信信号復号部213による復号の正否を判定するためのデータであり、そのデータ構成の一例を図5に示す。衛星別復号正否判定用データ235には、各GPS衛星の衛星番号(No)235Sと対応付けて、復号正否判定用テーブルが記憶されている。
【0075】
各復号正否判定用テーブルには、航法メッセージのフレーム番号235Aと、サブフレーム番号235Bと、ワード番号235Cと、パリティチェック結果235Dと、妥当性判定結果235Eと、復号正否判定結果235Fとが対応付けて記憶されている。この復号正否判定用テーブルの各欄は、後述する受信信号復号処理において随時更新される。
【0076】
算出結果データ236は、位置算出部219が位置算出処理を行うことで取得した算出結果のデータであり、算出した携帯型電話機1の位置(位置座標)や時計誤差(クロックバイアス)がこれに含まれる。
【0077】
2.処理の流れ
図6は、記憶部23に記憶されている受信信号復号プログラム231Aに従って、ベースバンド処理回路部20の処理部21が実行する受信信号復号処理(復号方法)の流れを示すフローチャートである。この受信信号復号処理は、捕捉対象とする各GPS衛星を対象として行われる処理である。
【0078】
受信信号復号部213は、GPS衛星信号を受信した信号の復号を開始し、衛星別復号データ233として記憶部23に記憶させる(ステップA1)。そして、受信信号復号部213は、航法メッセージの1フレーム分のデータの復号が完了するまで待機する(ステップA3;No)。航法メッセージの1フレーム分のデータの復号が完了すると(ステップA3;Yes)、衛星捕捉部211は、各サブフレームについて、ループAの処理を行う(ステップA5〜A37)。
【0079】
ループAの処理では、衛星捕捉部211は、当該サブフレームに含まれる各ワードについて、ループBの処理を行う(ステップA7〜A15)。具体的には、パリティチェック処理部214が、当該ワードについて復号された復号ワードデータに対するパリティチェック処理を行い、その結果を衛星別復号正否判定用データ235のパリティチェック結果235Dに記憶させる(ステップA9)。
【0080】
当該ワードのパリティチェック結果235Dが「通過」であった場合(ステップA11;通過)、衛星捕捉部211は、次のワードへと処理を移行する。他方、当該ワードのパリティチェック結果235Dが「エラー」であった場合(ステップA11;エラー)、復号正否判定部217が、復号ワードデータの復号を誤りと判定し、衛星別復号正否判定用データ235の復号正否判定結果235Fに記憶させる(ステップA13)。そして、次のワードへと処理を移行する。
【0081】
当該サブフレームの全てのワードについてステップA9〜A13の処理を行った後、衛星捕捉部211は、ループBの処理を終了する(ステップA15)。次いで、衛星捕捉部211は、当該サブフレームにおいて、パリティチェックを通過した各ワード(以下、「パリティ通過ワード」と称す。)について、ループCの処理を行う(ステップA17〜A35)。
【0082】
ループCの処理では、妥当性判定処理部215が、当該パリティ通過ワードの復号ワードデータに対する妥当性判定処理を行い、その結果を衛星別復号正否判定用データ235の妥当性判定結果235Eに記憶させる(ステップA19)。当該パリティ通過ワードの妥当性判定結果235Eが「OK」であった場合(ステップA21;OK)、復号正否判定部217は、復号ワードデータの復号を正しいと判定し、衛星別復号正否判定用データ235の復号正否判定結果235Fに記憶させる(ステップA23)。そして、次のパリティ通過ワードへと処理を移行する。
【0083】
一方、当該パリティ通過ワードの妥当性判定結果235Eが「NG」であった場合(ステップA21;NG)、衛星捕捉部211は、当該パリティ通過ワードが第1〜第3サブフレームの第3〜第10ワードの何れかのワードに該当するか否かを判定する(ステップA25)。そして、この条件を満たす場合は(ステップA25;Yes)、対応ワードの妥当性判定結果235Eが「NG」であったか否かを判定する(ステップA27)。
【0084】
ステップA27において条件を満たす場合(ステップA27;Yes)、照合部216が、当該パリティ通過ワードの復号ワードデータと、対応ワードの復号ワードデータとを照合する照合処理を行う(ステップA29)。照合結果が「一致」であれば(ステップA31;一致)、復号正否判定部217は、ステップA23へと移行する。つまり、妥当性判定結果235Eは「NG」であったが、照合の結果は「一致」であったため、復号ワードデータの復号を正しいと判定する。
【0085】
一方、照合処理の結果が「不一致」であった場合(ステップA31;不一致)、復号正否判定部217は、復号ワードデータの復号を誤りと判定し、衛星別復号正否判定用データ235の復号正否判定結果235Fに記憶させる(ステップA33)。そして、次のパリティ通過ワードへと処理を移行する。
【0086】
また、ステップA25において条件を満たさないと判定した場合(ステップA25;No)、又は、ステップA27において条件を満たさないと判定した場合(ステップA27;No)についても、復号正否判定部217は、復号ワードデータの復号を誤りと判定する(ステップA33)。
【0087】
全てのパリティ通過ワードについてステップA19〜A33の処理を行った後、衛星捕捉部211は、ループCの処理を終了する(ステップA35)。そして、全てのサブフレームについてステップA7〜A35の処理を行った後、衛星捕捉部211は、ループAの処理を終了する(ステップA37)。そして、ステップA3に戻る。
【0088】
3.作用効果
ベースバンド処理回路部20において、受信信号復号部213は、航法メッセージを搬送するGPS衛星信号を受信した信号を復号する。そして、パリティチェック処理部214が、パリティチェックが可能に規定された航法メッセージのワード単位で、復号されたデータをパリティチェック処理する。妥当性判定処理部215は、パリティチェック処理でエラーが検出されなかったワードについて、復号データの妥当性を判定する所定の妥当性判定処理を行う。照合部216は、GPS衛星の固有情報が格納されたワードであり、且つ、妥当性判定処理で妥当性がないと判定されたワードの復号データ同士を照合する。そして、復号正否判定部217は、照合部216による照合の結果に基づいて、受信信号復号部213による受信信号の復号の正否を判定する。
【0089】
GPS衛星信号に搬送される航法メッセージのうち、第1〜第3サブフレームの第3〜第10ワードについては、フレーム毎に同一内容の情報が繰り返し搬送される。従って、これらのデータ部分について、妥当性判定処理で妥当性がないと判定された復号データ同士を照合した結果、一致しているのであれば、当該復号データは正しく復号されたデータである可能性が高い。従って、本実施形態では、衛星固有情報が繰り返し搬送されるデータ部分について、妥当性判定処理で妥当性がないと判定されたデータ部分同士を照合するといった簡易な方法によって、受信信号の復号の正否を的確に判定することができる。
【0090】
4.変形例
本発明を適用可能な実施例は、上記の実施例に限定されることなく、本発明の趣旨を逸脱しない範囲で適宜変更可能であることは勿論である。以下、変形例について説明するが、上記の実施形態と同一の構成要素や、フローチャートの同一のステップについては、同一の符号を付して再度の説明を省略する。
【0091】
4−1.復号正否判定
(A)誤り検出処理で誤りが検出されたデータ部分と妥当性判定処理で妥当性がないと判定されたデータ部分との照合
判定対象ワードに対する妥当性判定結果が「NG」となった場合において、対応ワードのパリティチェック結果が「エラー」であった場合に、判定対象ワードの復号ワードデータと対応ワードの復号ワードデータとの照合を行うこととしてもよい。つまり、衛星固有情報が繰り返し搬送されるデータ部分であり、且つ、誤り検出処理で誤りが検出されたデータ部分と妥当性判定処理で妥当性がないと判定されたデータ部分とを照合することとしてもよい。
【0092】
図7は、この場合にベースバンド処理回路部20の処理部21が、図6の受信信号復号処理に代えて実行する第2の受信信号復号処理の流れを示すフローチャートである。
ステップA25において、当該パリティ通過ワードが第1〜第3サブフレームの第3〜〜第10ワードの何れかのワードに該当すると判定した場合(ステップA25;Yes)、衛星捕捉部211は、対応ワードのパリティチェック結果235Dは「エラー」であったか否かを判定する(ステップB27)。
【0093】
そして、この条件を満たす場合は(ステップB27;Yes)、照合部216が、第2の照合処理を行う(ステップB29)。第2の照合処理では、妥当性判定処理で妥当性がないと判定された判定対象ワードの復号ワードデータと、直前フレームにおいてパリティチェック処理でエラーとなった対応ワードの復号ワードデータとを照合する。
【0094】
この場合、ワード内の全てのビットについて照合を行ってもよいが、パリティビットを除外したビット列同士を照合することにすると効果的である。これは、誤り検出符号のビットを除外したビット列同士を照合することに相当する。その理由について説明する。
【0095】
上記の場面では、判定対象ワードのパリティチェック結果は「通過」であるが、妥当性判定結果は「NG」である。それに対し、対応ワードのパリティチェック結果は「エラー」である。従って、対応ワードでは、30ビットのうちの一部のビットに復号エラーが生じていたことになる。しかし、パリティビットにのみ復号エラーが生じていたのであれば、パリティビットを除外した残余のビット列同士を照合することで、その照合結果が一致する場合がある。従って、ワードを構成するビットのうち、末尾の6ビットのパリティビットを除外した残余の24ビットについて、ビット列同士をビット単位で照合することで、復号の正否を適切に判定することができる。
【0096】
上記に加えて、第2の照合処理では、判定対象ワード及び対応ワードのビット反転を考慮してビット列同士の照合を行うと効果的である。GPSにおける航法メッセージの符号化規約では、あるワードについてGPS衛星から送信されるビットの値(以下、「送信ビット値」と称す。)の反転/非反転が、当該ワードの直前のワード(以下、「直前ワード」と称す。)の末尾ビットの値(以下、「末尾ビット値」と称す。)によって決定付けられる。
【0097】
図8は、航法メッセージの符号化規約の説明図である。各ワードの第1〜第24番目のビット値に関して、復号ビット値と、直前ワードの末尾ビット値と、送信ビット値との対応関係を定めたテーブルを図示している。各ワードの第1番目〜第24番目の送信ビット値は、復号ビット値と、直前ワードの末尾ビット値との排他的論理和(EXOR(EXclusive OR))を演算することで求められる。つまり、直前ワードの末尾ビット値が「0」であれば、当該ワードにおける復号ビット値と送信ビット値とは一致する。しかし、直前ワードの末尾ビット値が「1」であれば、当該ワードにおける復号ビット値と送信ビット値とは反転した関係となる。
【0098】
上記の符号化規約を考慮し、第2の照合処理では、パリティビットを除外したビット列同士を照合する際に、照合対象のワードの一方の復号データのビット列を反転して照合を行うと効果的である。これは、衛星固有情報が繰り返し搬送されるデータ部分同士の一方のビット列を反転して照合することに相当する。
【0099】
具体的には、(a)照合対象の2つのワードの何れもビット列の反転無し、(b)照合対象の2つのワードのうち一方のワードのビット列を反転、の2通りの組合せについて、ビット列の照合をそれぞれ行う。そして、(a)及び(b)の何れかの組合せについて照合結果が「一致」となった場合に、判定対象ワードのワードデータの復号が正しく行われたと判定する。
【0100】
(B)ビットの誤り訂正を考慮したデータ部分同士の照合
パリティチェック結果が「エラー」となったワードの復号ワードデータについて、ビットの誤り訂正を行い、誤りが訂正された復号ワードデータを利用して照合を行うこととしてもよい。
【0101】
図9は、この場合にベースバンド処理回路部20の処理部21が、図6の受信信号復号処理に代えて実行する第3の受信信号復号処理の流れを示すフローチャートである。
各ワードについて行うループBの処理において、パリティチェック処理部214は、第2のパリティチェック処理を行う(ステップC9)。第2のパリティチェック処理では、パリティチェック処理部214は、パリティチェックで誤りを検出したビットについて誤り訂正を行う。
【0102】
ここでは、ビットの誤り訂正として、1ビット訂正を行う場合を例示する。以下では、GPS規約に基づくパリティビットの演算式に従って算定したパリティビットのビット値のことを「算定パリティビット値」と称し、GPS衛星から送信されているパリティビット値のことを「送信パリティビット値」と称して説明する。
【0103】
復号ワードデータに復号エラーが生じていなければ、算定パリティビット値と送信パリティビット値とは全て一致する。しかし、ワード内に1ビットの復号エラーが含まれている場合は、ワード内で復号エラーが生じたビットの位置を特定でき、当該ビットの値を訂正することができる。これは、“IS−GPS−200E”、p.125−127、[online]、2010年6月8日、Global Positioning Systems Wing、インターネット<URL:http://www.losangeles.af.mil/shared/media/document/AFD-100813-045.pdf>に記載してある(32,26)−Hamming Codeに基づいている。
【0104】
ステップA25において条件を満たすと判定した場合(ステップA25;Yes)、衛星捕捉部211は、判定対象ワードである当該パリティ通過ワードの対応ワードについて、1ビット訂正がなされたか否かを判定する(ステップC27)。そして、この条件を満たす場合は(ステップC27;Yes)、照合部216が、第3の照合処理を行う(ステップC29)。
【0105】
第3の照合処理では、照合部216は、当該パリティ通過ワードの復号ワードデータと、対応ワードの1ビット訂正がなされた復号ワードデータとを照合する。そして、その照合結果が「一致」であれば、復号正否判定部217が、当該パリティ通過ワードの復号が正しく行われたと判定する。
【0106】
(C)対応ワード
上記の実施形態では、判定対象ワードが含まれるフレームの直前フレームにおいて、サブフレーム番号及びワード番号が等しいワードを対応ワードとして、判定対象ワードの復号ワードデータと対応ワードの復号ワードデータとを照合した。しかし、対応ワードとして照合に利用可能なワードは、何もこれに限られるわけではない。
【0107】
例えば、直前フレームではなく、判定対象ワードを含むフレームの2つ前や3つ前のフレームにおいて、サブフレーム番号及びワード番号が等しいワードを対応ワードとして、照合に利用することとしてもよい。つまり、連続する2つのフレームについて相互に対応するワードのデータ部分同士ではなく、所定フレームだけ離れた2つのフレームについて相互に対応するワードのデータ部分同士を照合することとしてもよい。
【0108】
(D)妥当性判定処理の省略
上記の実施形態では、妥当性判定処理を必須の処理としたが、妥当性判定処理を省略することも可能である。この場合は、例えば、パリティチェック処理でエラーが検出されなかったワードについて、対応ワードの復号データとの照合を行って、復号データの正否を判定することとしてもよい。
【0109】
具体的には、復号したデータのうち、航法メッセージの構造として規定された衛星固有情報が繰り返し搬送されるワード(データ部分)を対象とする。そして、判定対象ワードについてパリティチェック処理でエラーが検出されなかった場合に、対応ワードについてもパリティチェック処理でエラーが検出されなかったか否かを判定する。この条件を満たす場合は、判定対象ワードと対応ワードとで復号データ同士を照合する。そして、照合の結果が一致である場合に、判定対象ワードの復号が正しく行われたと判定する。これは、衛星固有情報が繰り返し搬送されるデータ部分であり、且つ、誤り検出処理で誤りが検出されなかったデータ部分同士を照合することを意味する。
【0110】
なお、この場合に照合に利用可能な対応ワードとしては、上記の変形例の(C)でも説明したように、直前フレームや2つ前のフレーム、3つ前のフレームといった過去の何れかのフレームにおいて、判定対象ワードに対応するワードとすることができる。
【0111】
上記の変形例の(C)及び(D)の内容は、図6の受信信号復号処理、図7の第2の受信信号復号処理、及び、図9の第3の受信信号復号処理の何れの処理に対しても、それぞれ同様に適用可能である。つまり、上記の実施形態及び変形例を包括する概念として、航法メッセージの構造として規定された衛星固有情報が繰り返し搬送されるデータ部分に関する誤り検出処理の結果を、当該繰り返し搬送されるデータ部分同士で照合し、その照合の結果に基づいて、受信信号の復号の正否を判定することになる。
【0112】
4−2.電子機器
上記の実施例では、電子機器の一種である携帯型電話機に本発明を適用した場合を例に挙げて説明したが、本発明を適用可能な電子機器はこれに限られるわけではない。例えば、カーナビゲーション装置や携帯型ナビゲーション装置、パソコン、PDA(Personal Digital Assistant)、腕時計といった他の電子機器についても同様に適用することが可能である。
【0113】
4−3.処理の主体
上記の実施例では、受信信号の復号をベースバンド処理回路部の処理部が実行するものとして説明したが、これを電子機器のホスト処理部が実行することとしてもよい。この場合は、GPS受信部が受信信号の復号装置となるのではなく、電子機器自体が受信信号の復号装置となる。また、受信信号の復号はベースバンド処理回路部の処理部が実行し、復号データの正否判定は電子機器のホスト処理部が実行するといったように、ベースバンド処理回路部20とホスト処理部30とで処理を分散させることとしてもよい。
【0114】
4−4.衛星測位システム
また、上記の実施形態では、衛星測位システムとしてGPSを例に挙げて説明したが、WAAS(Wide Area Augmentation System)、QZSS(Quasi Zenith Satellite System)、GLONASS(GLObal NAvigation Satellite System)、GALILEO等の他の衛星測位システムであってもよい。
【符号の説明】
【0115】
1 携帯型電話機、 10 GPS受信部、 11 RF受信回路部、 20 ベースバンド処理回路部、 21 処理部、 211 衛星捕捉部、 213 受信信号復号部、 214 パリティチェック処理部、215 妥当性判定処理部、 216 照合部、 217 復号正否判定部、 219 位置算出部、 23 記憶部、 30 ホスト処理部、 40 操作部、 50 表示部、 55 音出力部、 60 携帯電話用アンテナ、 70 携帯電話用無線通信回路部、 80 記憶部、 90 時計部
【特許請求の範囲】
【請求項1】
航法メッセージを搬送する衛星信号を受信することと、
前記受信した信号を復号することと、
前記航法メッセージの搬送データ単位で、前記復号したデータを誤り検出処理することと、
前記復号したデータのうち、衛星固有情報が繰り返し搬送されるデータ部分に関する前記誤り検出処理の結果を、当該繰り返し搬送されるデータ部分同士で照合することと、
前記照合の結果に基づいて、前記復号の正否を判定することと、
を含む復号方法。
【請求項2】
前記復号したデータのうち、前記誤り検出処理で誤りが検出されなかったデータ部分について、妥当性を判定する所定の妥当性判定処理を行うことを更に含み、
前記照合することは、前記衛星固有情報が繰り返し搬送されるデータ部分であり、且つ、前記妥当性判定処理で妥当性がないと判定されたデータ部分同士を照合することを含む、
請求項1に記載の復号方法。
【請求項3】
前記照合することは、前記衛星固有情報が繰り返し搬送されるデータ部分について、前記誤り検出処理で誤りが検出されたデータ部分と前記妥当性判定処理で妥当性がないと判定されたデータ部分とを照合することを含む、
請求項2に記載の復号方法。
【請求項4】
前記妥当性判定処理は、前記誤り検出処理で誤りが検出されなかったデータ部分に隣り合う前記搬送データ単位のデータ部分に係る前記誤り検出処理の結果に基づいて、前記妥当性を判定する処理である、
請求項2又は3に記載の復号方法。
【請求項5】
前記搬送データ単位には、誤り検出符号が含まれており、
前記照合することは、前記誤り検出符号を除外したデータ部分同士を照合することを含む、
請求項1〜4の何れか一項に記載の復号方法。
【請求項6】
前記照合することは、前記衛星固有情報が繰り返し搬送されるデータ部分のうち一方のビット列を反転して照合することを含む、
請求項1〜5の何れか一項に記載の復号方法。
【請求項7】
前記誤り検出処理は、誤りを検出したビットについて誤りを訂正することを含む、
請求項1〜6の何れか一項に記載の復号方法。
【請求項8】
航法メッセージを搬送する衛星信号を受信した信号を復号する復号部と、
前記航法メッセージの搬送データ単位で、前記復号したデータを誤り検出処理する誤り検出処理部と、
前記復号したデータのうち、衛星固有情報が繰り返し搬送されるデータ部分に関する前記誤り検出処理の結果を、当該繰り返し搬送されるデータ部分同士で照合する照合部と、
前記照合の結果に基づいて、前記復号の正否を判定する復号正否判定部と、
を備えた復号装置。
【請求項1】
航法メッセージを搬送する衛星信号を受信することと、
前記受信した信号を復号することと、
前記航法メッセージの搬送データ単位で、前記復号したデータを誤り検出処理することと、
前記復号したデータのうち、衛星固有情報が繰り返し搬送されるデータ部分に関する前記誤り検出処理の結果を、当該繰り返し搬送されるデータ部分同士で照合することと、
前記照合の結果に基づいて、前記復号の正否を判定することと、
を含む復号方法。
【請求項2】
前記復号したデータのうち、前記誤り検出処理で誤りが検出されなかったデータ部分について、妥当性を判定する所定の妥当性判定処理を行うことを更に含み、
前記照合することは、前記衛星固有情報が繰り返し搬送されるデータ部分であり、且つ、前記妥当性判定処理で妥当性がないと判定されたデータ部分同士を照合することを含む、
請求項1に記載の復号方法。
【請求項3】
前記照合することは、前記衛星固有情報が繰り返し搬送されるデータ部分について、前記誤り検出処理で誤りが検出されたデータ部分と前記妥当性判定処理で妥当性がないと判定されたデータ部分とを照合することを含む、
請求項2に記載の復号方法。
【請求項4】
前記妥当性判定処理は、前記誤り検出処理で誤りが検出されなかったデータ部分に隣り合う前記搬送データ単位のデータ部分に係る前記誤り検出処理の結果に基づいて、前記妥当性を判定する処理である、
請求項2又は3に記載の復号方法。
【請求項5】
前記搬送データ単位には、誤り検出符号が含まれており、
前記照合することは、前記誤り検出符号を除外したデータ部分同士を照合することを含む、
請求項1〜4の何れか一項に記載の復号方法。
【請求項6】
前記照合することは、前記衛星固有情報が繰り返し搬送されるデータ部分のうち一方のビット列を反転して照合することを含む、
請求項1〜5の何れか一項に記載の復号方法。
【請求項7】
前記誤り検出処理は、誤りを検出したビットについて誤りを訂正することを含む、
請求項1〜6の何れか一項に記載の復号方法。
【請求項8】
航法メッセージを搬送する衛星信号を受信した信号を復号する復号部と、
前記航法メッセージの搬送データ単位で、前記復号したデータを誤り検出処理する誤り検出処理部と、
前記復号したデータのうち、衛星固有情報が繰り返し搬送されるデータ部分に関する前記誤り検出処理の結果を、当該繰り返し搬送されるデータ部分同士で照合する照合部と、
前記照合の結果に基づいて、前記復号の正否を判定する復号正否判定部と、
を備えた復号装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−57525(P2013−57525A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−194657(P2011−194657)
【出願日】平成23年9月7日(2011.9.7)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月7日(2011.9.7)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]