
復調装置、ディスクドライブ装置、復調方法
【課題】位相変動に関わらず良好なMSK復調を行う。
【解決手段】
所定の変調信号(MSK変調信号)の復調の際に、内部基準波と入力信号(ウォブル信号)を乗算するが、その際の内部基準波と入力信号の相互位相状態を位相ズレが無い状態に収束するように調整する。このため複数の演算手段(第1〜第3乗算積分器31A,31B,31C)で、それぞれ相互位相状態が異なる状態で演算を行い、演算結果から最適な相互位相状態にある系を判定し(38)、その相互位相状態が、特定の演算手段に与えられるように内部基準波の位相調整を行う(39,36,42)。特に最適位相判定は、入力信号のSTW変調区間やモノトーン区間(無変調区間)での演算結果(積分結果)を用いることで、適切な判定を行う。
【解決手段】
所定の変調信号(MSK変調信号)の復調の際に、内部基準波と入力信号(ウォブル信号)を乗算するが、その際の内部基準波と入力信号の相互位相状態を位相ズレが無い状態に収束するように調整する。このため複数の演算手段(第1〜第3乗算積分器31A,31B,31C)で、それぞれ相互位相状態が異なる状態で演算を行い、演算結果から最適な相互位相状態にある系を判定し(38)、その相互位相状態が、特定の演算手段に与えられるように内部基準波の位相調整を行う(39,36,42)。特に最適位相判定は、入力信号のSTW変調区間やモノトーン区間(無変調区間)での演算結果(積分結果)を用いることで、適切な判定を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は所定の変調信号を含む信号に対する復調装置、復調装置を備えたディスクドライブ装置、及び復調方法に関し、例えば所定の変調信号としてのMSK(Minimum Shift Keying)変調信号の復調に好適なものである。
【背景技術】
【0002】
【特許文献1】特開2003−123249号公報
【特許文献2】特開平11−306686号公報
【特許文献3】特開2002−74660号公報
【0003】
デジタルデータを記録・再生するための技術として、例えば、CD(Compact Disk),MD(Mini-Disk),DVD(Digital Versatile Disk)などの、光ディスク(光磁気ディスクを含む)を記録メディアに用いたデータ記録技術がある。光ディスクとは、金属薄板をプラスチックで保護した円盤に、レーザ光を照射し、その反射光の変化で信号を読み取る記録メディアの総称である。
光ディスクには、例えばCD、CD−ROM、DVD−ROMなどとして知られているように再生専用タイプのものと、MD、CD−R、CD−RW、DVD−R、DVD−RW、DVD+RW、DVD−RAMなどで知られているようにユーザーデータが記録可能なタイプがある。記録可能タイプのものは、光磁気記録方式、相変化記録方式、色素膜変化記録方式などが利用されることで、データが記録可能とされる。色素膜変化記録方式はライトワンス記録方式とも呼ばれ、一度だけデータ記録が可能で書換不能であるため、データ保存用途などに好適とされる。一方、光磁気記録方式や相変化記録方式は、データの書換が可能であり音楽、映像、ゲーム、アプリケーションプログラム等の各種コンテンツデータの記録を始めとして各種用途に利用される。
更に近年、ブルーレイディスク(Blu-Ray Disc)と呼ばれる高密度光ディスクが開発され、著しい大容量化が図られている。
【0004】
光磁気記録方式、色素膜変化記録方式、相変化記録方式などの記録可能なディスクに対してデータを記録するには、データトラックに対するトラッキングを行うための案内手段が必要になり、このために、プリグルーブとして予め溝(グルーブ)を形成し、そのグルーブもしくはランド(グルーブとグルーブに挟まれる断面台地状の部位)をデータトラックとすることが行われている。
またデータトラック上の所定の位置にデータを記録することができるようにアドレス情報を記録する必要もあるが、このアドレス情報は、グルーブをウォブリング(蛇行)させることで記録される場合がある。
【0005】
すなわち、データを記録するトラックが例えばプリグループとして予め形成されるが、このプリグループの側壁をアドレス情報に対応してウォブリングさせる。
このようにすると、記録時や再生時に、反射光情報として得られるウォブリング情報からアドレスを読み取ることができ、例えばアドレスを示すピットデータ等を予めトラック上に形成しておかなくても、所望の位置にデータを記録再生することができる。
このようにウォブリンググルーブとしてアドレス情報を付加することで、例えばトラック上に離散的にアドレスエリアを設けて例えばピットデータとしてアドレスを記録することが不要となり、そのアドレスエリアが不要となる分、実データの記録容量を増大させることができる。
なお、このようなウォブリングされたグルーブにより表現される絶対時間(アドレス)情報は、ATIP(Absolute Time In Pregroove)又はADIP(Adress In Pregroove)と呼ばれる。
【0006】
上記ブルーレイディスクの場合、MSK(Minimum Shift Keying)変調とSTW(Saw Tooth Wobble)変調を組み合わせた変調波形に基づいてグルーブがウォブリングされる。
このMSK変調とSTW変調、及びこれらを組み合わせて形成されるADIP情報について詳しくは後述するが、MSK変調は、位相が連続したFSK(Frequency Shift Keying)変調のうちの変調指数が0.5のものである。
またSTW変調は、ウォブル基本波に対して2倍の高調波を加算又は減算することで、鋸歯状波形のような変調波形を生成する変調方式である。
ブルーレイディスクに対応するディスクドライブ装置では、このようなADIP情報を再生するために、MSK復調器、STW復調器が搭載されることになる。
特にMSK/STW変調信号の復調及びADIP情報のデコードに関する技術は上記特許文献1,2,3に開示されている。
【0007】
図17に、ADIP情報をデコードするために、その前段の処理として必要となるMSK復調/STW復調を行う回路例を示す。これは、ディスクのウォブリンググルーブによる反射光情報としてのプッシュプル信号P/P(ウォブル信号)について、MSK復調/STW復調を行い、その復調信号を後段のADIPデコーダに供給する回路である。
【0008】
ウォブル信号として供給されるプッシュプル信号P/Pは、図17のMSK復調器110において、A/D変換器111及びコンパレータ112に供給される。
コンパレータ112は、プッシュプル信号P/Pを2値化し、PLL回路113に供給する。PLL回路113では、2値化信号に基づいてプッシュプル信号P/P、つまりウォブリンググルーブの変調信号の周波数(ウォブル周波数)のクロック(以下、ウォブルクロックWCKという)を生成する。
またPLL回路113から出力されるウォブルクロックWCKは、PLL回路114及び遅延回路116に供給される。
PLL回路114では、ウォブルクロックWCKを逓倍し、マスタークロックMCKを生成する。このマスタークロックMCKは、A/D変換器111のサンプリングクロックとされ、また、遅延回路116、カウンタ117など、各部で用いられる。
【0009】
遅延回路116は、ウォブルクロックWCKに対して、マスタークロックMCKの単位で所定の遅延時間を与え、カウンタ117に供給する。遅延時間はCPU100によって設定される。
カウンタ117は、マスタークロックMCKをカウントする動作を行うが、遅延回路116を介したウォブルクロックWCKの立ち上がりをリセットタイミング信号として入力し、カウントリセットを行う。つまりカウンタ117は、ウォブルクロックWCKによるリセットタイミングからマスタークロックMCKをカウントしていき、そのカウント値をcosテーブル121に出力する。
cosテーブル121は、内部基準波となる波形データを記憶したテーブルであり、各データがカウンタ117のカウント値に応じて読み出される。
例えばマスタークロックMCKが、ウォブル基本波形の1周期(ウォブルクロックWCK単位)において23クロックとなる周波数であるとする。カウンタ117は、ウォブル基本波形の1周期間隔でリセットされるため、この場合カウンタ117は0〜22のカウント値を繰り返し発生させることになる。
cosテーブル121では、内部基準波となるcos波形データとして、TD0〜TD22のデータを記憶しており、これがカウント値に応じて順次読み出されていく。これによってウォブル基本波形と同一周波数の内部基準波が発生され、乗算器118に供給される。
【0010】
一方、入力されたプッシュプル信号P/PはA/D変換器111でマスタークロックMCKでサンプリングされてデジタルデータ化(ウォブルデータ)され、乗算器118に供給される。
従って乗算器118においては、ウォブルデータと、内部基準波データが乗算される。この乗算値は積算器119に供給されて積算される。積算器119は、遅延回路116からのウォブルクロックWCKの立ち上がりタイミングでリセットされる。つまり積算器119はカウンタ117と同タイミングでリセットされる。従って積算器119では、1ウォブル基本波形周期の間で乗算値の積算を行うことになる。例えば23サンプルの乗算結果を積算する動作を繰り返す。
するとその積算値(乗算後加算値)は、入力されるウォブル信号においてウォブル基本波の区間では正方向に推移し、一方、MSK変調された区間では負方向に推移する。従って、これを正負判定回路120で正負判定することでMSKマークと基本波を判別する復調信号が得られる。
【0011】
STW復調器130については、ここでの詳細な説明は略すが、MSK復調器110とほぼ同様の構成となる。即ち変調信号であるプッシュプル信号P/Pをデジタルデータ化し、それに対して内部基準波を乗算し、乗算結果の積算値を正負判定することでSTW復調信号が得られる。但しSTW復調器130の場合、内部基準波はウォブル基本波形の二次高調波の信号となる。また積算は、1ウォブル基本波形の期間ではなく、ウォブル信号においてSTW変調がなされている複数ウォブル期間において行われる。
【発明の開示】
【発明が解決しようとする課題】
【0012】
ところで、ディスク上の隣接トラックからのクロストークや、記録前と記録後の出力振幅の違い、さらにはディスクの品質ばらつきなどにより、ウォブル信号は変動している。このウォブルの振幅変化を避ける方式としてAGC回路方式やウォブル信号の振幅を制限させる方式が考えられ、例えば上記特許文献2,3等において提案されているが、ウォブル信号波形は振幅だけでなく、時間軸(位相)方向にも外乱を受けている。
ところが、MSK変調信号の復調に関しては、従来、外乱による位相変動を検出する機能は設けられていないため、外乱による位相変動が大きくなってきたときのMSK変調信号の復調が困難であった。
【0013】
上記図17の復調回路構成からわかるように、ウォブル信号(プッシュプル信号P/P)は、内部基準波と乗算された後、所定期間積算される。そして積算値が正負判定されてMSK復調信号、STW復調信号が得られる。
この場合の入力されるウォブル信号と積算器119の出力(積算値)としてのMSK復調信号波形を図18(a)に示す。また図18(b)は、図18(a)の波形を時間軸方向に縮小した波形を示している。
外乱による位相変動が大きくなると、図18(b)にみられるように、MSK復調信号波形(積算値)は周期的に振幅が変動する。この場合、信号の振幅が小さくなった部分でMSK復調が困難になる。このため例えば、ビートの大きいディスクを再生した場合や、フォーカスオフセット或いはメディア傾きの大きなディスクを再生した場合、MSK復調が困難になる。
【課題を解決するための手段】
【0014】
本発明はこのような問題に鑑み、外乱による位相変動にも対応して安定した復調動作が実現されるようにすることを目的とする。
【0015】
本発明の復調装置は、所定の変調信号を含む入力信号が入力されて復調を行う復調装置であり、上記所定の変調信号に対する内部基準波を出力する内部基準波発生手段と、上記内部基準波と上記入力信号とを乗算し、乗算結果を積分する演算処理を、それぞれが異なる上記内部基準波と上記入力信号の相互位相状態において行う複数の演算手段と、上記複数の演算手段のうちの特定の演算手段の出力を用いて上記変調信号の復調信号を生成する復調信号生成手段と、上記入力信号における上記変調信号の区間以外での、上記複数の演算手段のそれぞれの出力から、上記複数の演算手段での各相互位相状態のうちでの最適な相互位相状態を判定する最適位相判定手段と、上記最適位相判定手段の判定結果に基づいて、上記特定の演算手段における上記相互位相状態が最適化される方向に、上記各演算手段に供給する上記内部基準波の位相を調整する位相調整手段とを備える。
また上記複数の演算手段として、第1,第2,第3の演算手段を備え、上記特定の演算手段は、上記第2の演算手段であるとする。そして上記第1の演算手段は、上記第2の演算手段における上記内部基準波と上記入力信号の相互位相状態よりも、上記内部基準波と上記入力信号の一方の位相が進んでいる相互位相状態で乗算を行い、上記第3の演算手段は、上記第2の演算手段における上記内部基準波と上記入力信号の相互位相状態よりも、上記一方の位相が遅れている相互位相状態で乗算を行う構成とする。
また上記入力信号における上記変調信号の区間以外とは、上記所定の変調信号とは異なる変調方式の変調信号が含まれている区間である。例えば上記所定の変調信号とはMSK変調方式の変調信号であり、上記所定の変調信号とは異なる変調方式の変調信号とは、STW変調方式の変調信号である。
或いは、上記入力信号における上記変調信号の区間以外とは、無変調区間であるとする。
また、上記構成に加えて、上記演算手段の出力もしくは上記入力信号についてノイズ判定を行うノイズ判定手段を備え、上記最適位相判定手段は、上記ノイズ判定手段のノイズ判定結果に応じて最適位相判定処理を中断するようにする。
【0016】
本発明のディスクドライブ装置は、ディスク記録媒体上でウォブリンググルーブとして記録された、所定の変調信号を含むウォブル信号を読み出す読出手段と、ウォブル信号の復調信号に対してデコード処理を行い、上記ウォブリンググルーブとして記録された情報を得るデコード手段を備える。そしてウォブル信号の復調信号を得る構成として上記復調装置の構成を備えるものとする。
【0017】
本発明の復調方法は、所定の変調信号を含む入力信号が入力されて復調を行う復調装置の復調方法である。そして、内部基準波と上記入力信号とを乗算し、乗算結果を積分する演算処理を、それぞれが異なる上記内部基準波と上記入力信号の相互位相状態において複数系統で行う演算ステップと、上記複数系統の演算処理のうちの特定の演算処理の出力を用いて上記変調信号の復調信号を生成する復調信号生成ステップと、上記入力信号における上記変調信号の区間以外での、上記複数系統の演算処理のそれぞれの出力から、上記複数系統の演算処理での各相互位相状態のうちでの最適な相互位相状態を判定する最適位相判定ステップと、上記最適位相判定ステップの判定結果に基づいて、上記特定の演算処理における上記相互位相状態が最適化される方向に、上記複数系統の演算処理に与える上記内部基準波の位相を可変する位相調整ステップとを備える。
【0018】
即ち以上の本発明は、所定の変調信号、例えばMSK変調信号の復調の際に、内部基準波と入力信号(ウォブル信号)を乗算するが、その際の内部基準波と入力信号の相互位相状態を位相ズレが無い状態に収束するように調整するものである。このため複数の演算手段で、それぞれ相互位相状態が異なる状態で演算を行い、演算結果から最適な相互位相状態にある系を判定し、その相互位相状態が、特定の演算手段に与えられるように内部基準波の位相調整を行う。
ここで、特に最適位相判定は、入力信号のSTW変調区間やモノトーン区間(無変調区間)での演算結果(積分結果)を用いることで、適切な判定を行う。
【発明の効果】
【0019】
本発明によれば、所定の変調信号(特にMSK変調信号)に対する復調処理において、内部基準波と入力信号(ウォブル信号)の乗算するが、その際の内部基準波と入力信号の相互位相状態を位相ズレが無い状態に収束するように自動調整する。その自動調整のためには、位相状態の判定が必要となるが、このため複数の演算手段で、それぞれ入力信号と内部基準波の相互位相状態が異なる状態で演算を行い、演算結果から最適な相互位相状態にある系(演算手段)を判定する。特にこの最適位相判定は、入力信号のSTW変調区間やモノトーン区間(無変調区間)での演算結果(積分結果)を用いる。そして、この判定に基づいて、内部基準波の位相調整を行うことで、特定の演算手段(後段の復調信号生成手段に演算結果を受け渡す演算手段)における相互位相状態が最適な状態になるように収束していくようにする。
これにより、例えば隣接トラックからのクロストーク、書き込み後の反射率の低下による変調信号振幅の低下、ディスクスキュー等の外乱により、入力信号(ウォブル信号)の位相変動が発生しても、十分に復調できるようになる。ディスクドライブ装置の場合、このような復調性能の向上により、アドレスエラーが低減し、記録再生動作性能が向上される。例えば物理特性や記録再生特性のバラツキの大きい記録再生メディアに対しても安定した記録再生を行えるようになる。
また、自動的な位相調整によりMSK変調に対する復調能力が上がることは、ピックアップ部の特性のばらつきに対しても、ウォブルアドレス復調能力を維持できることになるため、ピックアップ部の歩留まりを改善することもできる。
【0020】
また入力信号のSTW変調区間やモノトーン区間(無変調区間)での演算結果(積分結果)を用いて、複数系統の演算処理の中での最適位相を判定することで、明確に最適位相を判定できる。
また、ノイズ判定手段のノイズ判定結果に応じて最適位相判定処理を中断することで、ノイズによる誤判定を避けることができ、位相の自動調整性能を向上させることができる。
【発明を実施するための最良の形態】
【0021】
以下、本発明の実施の形態を次の順序で説明する。
1.MSK変調、STW変調、及びADIP
2.ディスクドライブ装置の構成
3.ADIP復調系の構成
4.変形例
【0022】
1.MSK変調、STW変調、及びADIP
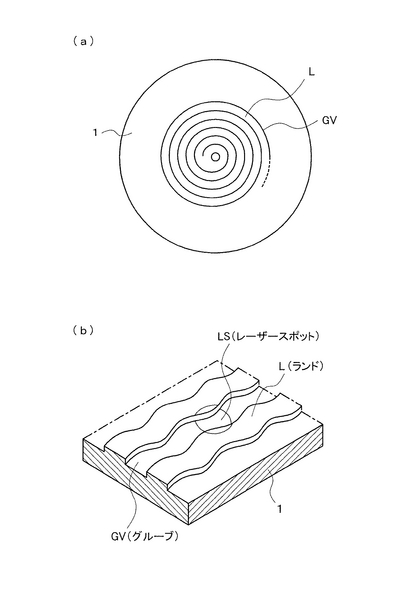
本発明の実施の形態に対応する光ディスク1は、図1(a)に示すように、記録トラックとなるグルーブGVが形成されている。このグルーブGVは、内周側から外周側へスパイラル状に形成されている。そのため、この光ディスク1の半径方向の切断面を見ると、図1(b)に示すように、凸状のランドLと、凹状のグルーブGVとが交互に形成されることとなる。なお、図1(a)のスパイラル方向は、光ディスク1を記録面側から見た状態であり、複数の記録層を有するディスクの場合、各記録層でスパイラル状態が異なる場合がある。
【0023】
光ディスク1のグルーブGVは、図1(b)に示すように、接線方向に対して蛇行形成されている。このグルーブGVの蛇行形状は、ウォブル信号に応じた形状となっている。そのため、光ディスクドライブでは、グルーブGVに照射したレーザスポットLSの反射光からそのグルーブGVの両エッジ位置を検出し、レーザスポットLSを記録トラックに沿って移動させていった際におけるその両エッジ位置のディスク半径方向に対する変動成分を抽出することにより、ウォブル信号を再生することができる。
このウォブル信号には、その記録位置における記録トラックのアドレス情報(物理アドレスやその他の付加情報等)が変調されている。そのため、光ディスクドライブでは、このウォブル信号からアドレス情報等を復調することによって、データの記録や再生の際のアドレス制御等を行うことができる。
【0024】
なお、本発明の実施の形態では、グルーブ記録がされる光ディスクについて説明をするが、本発明はこのようなグルーブ記録の光ディスクに限らず、ランドにデータを記録するランド記録を行う光ディスクに適用することも可能であるし、また、グルーブ及びランドにデータを記録するランドグルーブ記録の光ディスクにも適用することも可能である。
【0025】
ここで、本実施の形態の光ディスク1では、2つの変調方式を用いて、ウォブル信号に対してアドレス情報を変調している。一つは、MSK(Minimum Shift Keying)変調方式である。もう一つは、正弦波のキャリア信号に対して偶数次の高調波信号を付加し、被変調データの符号に応じて当該高調波信号の極性を変化させることによって変調するSTW(Saw Tooth Wobble)変調方式である。
【0026】
本実施の形態の光ディスク1では、図3(a)に示すように、所定周波数の正弦波の基準キャリア信号波形が所定周期連続したブロックを構成し、このブロック内に、MSK変調されたアドレス情報が挿入されるMSK変調部と、STW変調されたアドレス情報が挿入されるSTW変調部とを設けたウォブル信号を生成する。すなわち、MSK変調されたアドレス情報と、STW変調されたアドレス情報とを、ブロック内の異なる位置に挿入している。さらに、MSK変調で用いられる2つの正弦波のキャリア信号のうちの一方のキャリア信号と、STW変調のキャリア信号とを、上記の基準キャリア信号としている。また、MSK変調部とSTW変調部とは、それぞれブロック内の異なる位置に配置するものとし、MSK変調部とSTW変調部との間には、1周期以上の基準キャリア信号が配置されるものとしている。
【0027】
なお、なんらデータの変調がされておらず、基準キャリア信号の周波数成分だけが現れる無変調部分を、以下モノトーンウォブルと呼ぶ。また、以下では、基準キャリア信号として用いる正弦波信号は、Cos(ωt)であるものとする。また、基準キャリア信号の1周期を1ウォブル周期と呼ぶ。また、基準キャリア信号の周波数は、光ディスク1の内周から外周まで一定であり、レーザスポットが記録トラックに沿って移動する際の線速度との関係に応じて定まる。
【0028】
以下、MSK変調及びSTW変調の変調方法についてさらに詳細に説明をする。まず、MSK変調方式を用いたアドレス情報の変調方式について説明をする。
MSK変調は、位相が連続したFSK(Frequency Shift Keying)変調のうちの変調指数が0.5のものである。FSK変調は、周波数f1と周波数f2の2つのキャリア信号に対して、被変調データの符号の“0”,“1”をそれぞれ対応させて変調する方式である。つまり、被変調データが“0”であれば周波数f1の正弦波波形を出力し、被変調データが“1”であれば周波数f1の正弦波波形を出力する変調方式である。さらに、位相が連続したFSK変調の場合には、被変調データの符号の切り換えタイミングにおいて、2つのキャリア信号の位相が連続する。
このFSK変調では、変調指数mというものが定義される。この変調指数mは、
m=|f1−f2|T
で定義される。ここで、Tは、被変調データの伝送速度(1/最短の符号長の時間)である。このmが0.5の場合の位相連続FSK変調のことを、MSK変調という。
【0029】
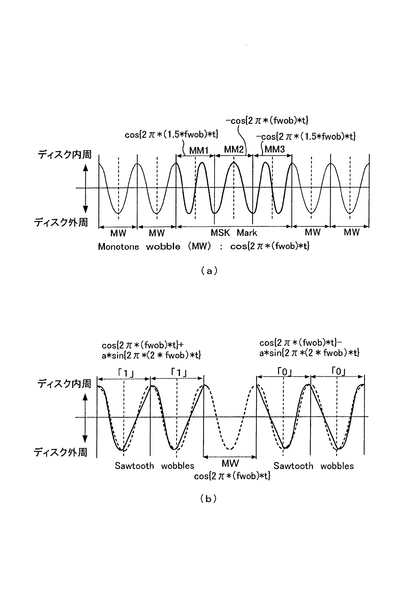
MSK変調波形を図2(a)に示す。図2(a)においては、モノトーンウォブルMWに挟まれた3ウォブル周期の領域にMSK変調波形(MM1,MM2,MM3)が存在している状態を示している。
上記のようにモノトーンウォブルをCos(ωt)と表現すると、MSK変調に用いられる2つの周波数は、一方を基準キャリア信号と同一の周波数とし、他方を基準キャリア信号の1.5倍の周波数とするため、MSK変調に用いられる信号波形は、一方がCos(ωt)又は−Cos(ωt)となり、他方がCos(1.5ωt)又は−Cos(1.5ωt)となる。
そして図2(a)の波形では、2つのモノトーンウォブルと、MSK変調領域と、2つのモノトーンウォブルを示しており、その場合、MSKストリームの信号波形は、1ウォブル周期毎に、Cos(wt),Cos(wt),Cos(1.5wt),-Cos(wt),-Cos(1.5wt),Cos(wt)といった波形となる。なお図面では、モノトーンウォブルのCos(ωt)=cos{2π・(fwob)・t}として示しており(fwobは基準キャリア周波数)、従って、MSK変調領域としての3ウォブル期間は、MM1=cos{2π・(1.5・fwob)・t}、MM2=−cos{2π・(fwob)・t}、MM3=−cos{2π・(1.5・fwob)・t}となる。
このように1個目のウォブル周期期間(MM1)はモノトーンウォブルの1.5倍の周波数、2個目(MM2)はモノトーンウォブルと同じ周波数、3個目(MM3)はモノトーンウォブルの1.5倍の周波数とされ、この3ウォブル期間で位相が戻る。つまり前後のモノトーンウォブルと位相が連続した状態であり、しかも2個目のウォブル(MM2)はモノトーンウォブルに対して極性が反転したものとなる。
【0030】
光ディスク1では、ウォブル信号を以上のようなMSKストリームとすることによって、ウォブル信号にアドレス情報を変調しており、このMSK変調信号は以下の理由により同期検波が可能なものとなる。
光ディスク1のウォブル信号にMSK変調方式で被変調データを挿入する場合、まず、被変調データのデータストリームに対して、ウォブル周期に対応するクロック単位で差動符号化処理をする。すなわち、被変調データのストリームと、基準キャリア信号の1周期分遅延させた遅延データとを差分演算する。この差動符号化処理をしたデータを、プリコードデータとする。続いて、このプリコードデータをMSK変調して、上記のようなMSKストリームを生成する。
【0031】
上記差動符号化データ(プリコードデータ)は、被変調データの符号変化点でビットが立つ(“1”となる)。被変調データの符号長がウォブル周期の2倍以上とされているので、被変調データの符号長の後半部分には、必ず基準キャリア信号(Cos(ωt))又はその反転信号(−Cos(ωt))が挿入されることとなる。プリコードデータのビットが“1”となると、基準キャリア信号に対して1.5倍の周波数の波形が挿入され、さらに、符号の切り換え点においては位相を合わせて波形が接続される。従って、被変調データの符号長の後半部分に挿入される信号波形は、被変調データが“0”であれば、必ず基準キャリア信号波形(Cos(ωt))となり、被変調データが“1”であれば必ずその反転信号波形(−Cos(ωt))となる。同期検波出力は、キャリア信号に対して位相が合っていれば、プラス側の値になり、位相が反転していればマイナス側の値となるので、以上のようなMSK変調した信号を基準キャリア信号により同期検波すれば、被変調データの復調が可能となるものである。
【0032】
続いてSTW変調について説明する。
STW変調は、上述のように正弦波のキャリア信号に対して偶数次の高調波信号を付加し、当該高調波信号の極性を被変調データの符号に応じて変化させることによってデジタル符号を変調する変調方式である。
光ディスク1では、STW変調のキャリア信号は、上記MSK変調のキャリア信号である基準キャリア信号(Cos(ωt))と同一周波数及び位相の信号としている。付加する偶数次の高調波信号は、基準キャリア信号(Cos(ωt))の2次高調波であるSin(2ωt)、−Sin(2ωt)とし、その振幅は、基準キャリア信号の振幅に対して−12dBの振幅としている。被変調データの最小符号長は、ウォブル周期(基準キャリア信号の周期)の2倍としている。
そして、被変調データの符号が“1”のときにはSin(2ωt)をキャリア信号に付加し、“0”のときには−Sin(2ωt)をキャリア信号に付加して変調を行うものとする。
【0033】
以上のような方式でウォブル信号を変調した場合の信号波形を図2(b)に示す。図2(b)においては、中央のウォブル期間に基準キャリア信号(Cos(ωt))のモノトーンウォブルMWの信号波形を示している。そしてその前の2つのウォブル期間において、基準キャリア信号(Cos(ωt))に対してSin(2ωt)が付加された信号波形、即ち、被変調データが“1”のときの信号波形を示している。またモノトーンウォブルMWの後の2ウォブル期間において、基準キャリア信号(Cos(ωt))に対して−Sin(2ωt)が付加された信号波形、即ち、被変調データが“0”のときの信号波形を示している。
なお図面では、モノトーンウォブルのCos(ωt)=cos{2π・(fwob)・t}として示しており、従って、STW変調信号は、被変調データが“1”の場合、cos{2π・(fwob)・t}+a・sin{2π・(2・fwob)・t}となり、被変調データが“0”の場合、cos{2π・(fwob)・t}−a・sin{2π・(2・fwob)・t}となるとして示している。
図からわかるように、このSTW信号波形は、ディスク外周側に急峻に立ち上がり、内周側に緩やかに戻る波形と、その逆にディスク外周側に緩い傾斜で立ち上がって急峻に戻る波形となり、これによって「1」「0」の値が表現される。またどちらの波形の場合も、破線で示すモノトーンウォブルMWと共通のゼロクロスポイントを有するものとなる。従ってMSK方式のモノトーンウォブルMWの部分と共通の基本波成分からクロックを抽出するに当たって、その位相に影響を与えない。
【0034】
そしてこのように基準キャリア信号に対して正負の偶数次の高調波信号を付加した場合には、その生成波形の特性から、この高調波信号により同期検波して、被変調データの符号長時間その同期検波出力を積分することによって、被変調データを復調することが可能である。
なお、光ディスク1では、キャリア信号に加える高調波信号を2次高調波としているが、2次高調波に限らず、偶数次の高調波であればどのような信号を加算してもよい。また光ディスク1では、2次高調波のみを加算しているが、2次高調波と4次高調波との両者を同時に加算するといったように複数の高調波信号を同時に加算しても良い。
【0035】
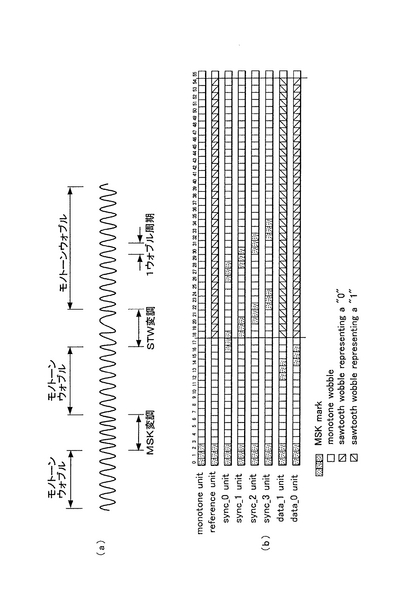
以上のようなMSK変調、STW変調を含むADIP構造を説明する。ADIP情報としての1つのユニット(ADIPユニット)は、56ウォブルから構成される。
図3(b)に8種類のADIPユニットを示す。8種類とは、モノトーンユニット、リファレンスユニット、シンク0ユニット、シンク1ユニット、シンク2ユニット、シンク3ユニット、データ1ユニット、データ0ユニットである。
8種類の全てのADIPユニットでは、先頭のウォブル番号0,1,2はMSKマークとされる。
モノトーンユニットは、MSKマークに続くウォブル番号4〜55が全てモノトーンウォブルで構成される。
リファレンスユニットは、ウォブル番号18〜54が、0値を示すSTW変調ウォブルとなる。
シンク0ユニット、シンク1ユニット、シンク2ユニット、シンク3ユニットは、それぞれシンク情報の為のADIPユニットであり、図示するようにそれぞれ所定ウォブル番号位置にMSKマークが配置される。
データ1ユニットは値「1」を表現し、またデータ0ユニットは値「0」を表現するユニットである。データ1ユニットの場合、ウォブル番号12〜14にMSKマークが配され、またウォブル番号18〜54が、値「1」のSTW変調ウォブルとされる。データ0ユニットの場合、ウォブル番号14〜16にMSKマークが配され、またウォブル番号18〜54が、値「0」のSTW変調ウォブルとされる。
【0036】
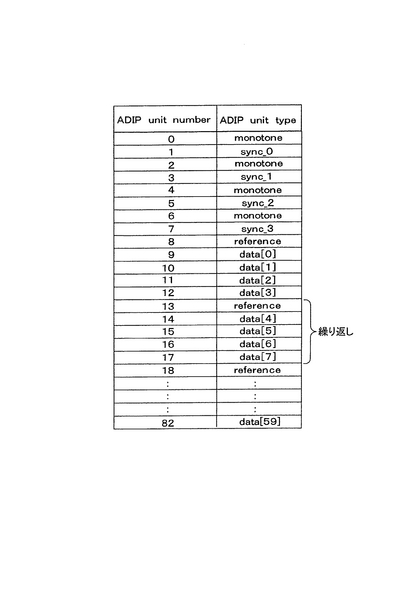
このようなADIPユニットが83個集められることによって、1つのADIP情報(アドレス情報)が形成される。
即ち図4に示すように、ADIP情報の1単位は、ADIPユニット0〜82により形成される。そしてADIPユニットナンバ0から7が、モノトーンユニット、シンク0ユニット、モノトーンユニット、シンク1ユニット、モノトーンユニット、シンク2ユニット、モノトーンユニット、シンク3ユニットとされる。
ADIPユニットナンバ8以降は、リファレンスユニット及び4ビット分のデータユニットとしての5つのユニットが繰り返し配される。そして各データユニット(例えばdata[0]、data[1]、data[2]、data[3]・・・data[59])は、上記データ1ユニット、データ0ユニットのいずれかとされることで、ADIP情報としての60ビットの値が示される。この60ビットには、アドレス値、付加情報、ECCパリティ等が含まれる。
【0037】
2.ディスクドライブ装置の構成
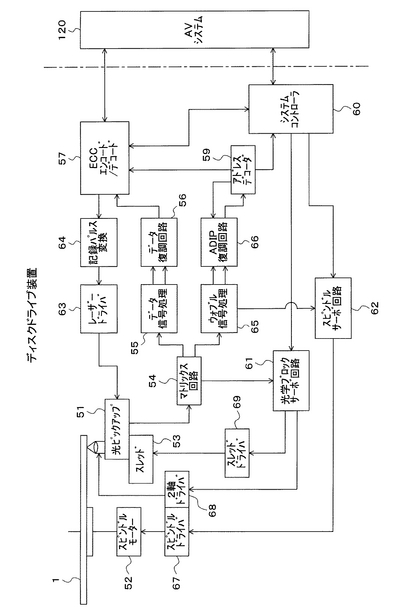
次に、上記のようなディスク1に対応して記録/再生を行うことのできるディスクドライブ装置を説明する。図5はディスクドライブ装置の構成を示す。
ディスク1は、図示しないターンテーブルに積載され、記録/再生動作時においてスピンドルモータ52によって一定線速度(CLV)で回転駆動される。
そして光学ピックアップ(光学ヘッド)51によってディスク1上のグルーブトラックのウォブリングとして埋め込まれたADIP情報の読み出しがおこなわれる。
なお、ディスク1上には、再生専用の管理情報として例えばディスクの物理情報等がエンボスピット又はウォブリンググルーブによって記録されるが、これらの情報の読出もピックアップ51により行われる。
またデータ記録時には光学ピックアップによってトラックにユーザーデータがフェイズチェンジマークとして記録され、再生時には光学ピックアップによって記録されたマークの読出が行われる。
【0038】
ピックアップ51内には、レーザ光源となるレーザダイオードや、反射光を検出するためのフォトディテクタ、レーザ光の出力端となる対物レンズ、レーザ光を対物レンズを介してディスク記録面に照射し、またその反射光をフォトディテクタに導く光学系(図示せず)が形成される。レーザダイオードは、例えば波長405nmのいわゆる青色レーザを出力する。また光学系によるNAは0.85である。
【0039】
ピックアップ51内において対物レンズは二軸機構によってトラッキング方向及びフォーカス方向に移動可能に保持されている。
またピックアップ51全体はスレッド機構53によりディスク半径方向に移動可能とされている。
またピックアップ51におけるレーザダイオードはレーザドライバ63からのドライブ信号(ドライブ電流)によってレーザ発光駆動される。
【0040】
ディスク1からの反射光情報はフォトディテクタによって検出され、受光光量に応じた電気信号とされてマトリクス回路54に供給される。
マトリクス回路54には、フォトディテクタとしての複数の受光素子からの出力電流に対応して電流電圧変換回路、マトリクス演算/増幅回路等を備え、マトリクス演算処理により必要な信号を生成する。
例えば再生データに相当する高周波信号(再生データ信号)、サーボ制御のためのフォーカスエラー信号、トラッキングエラー信号などを生成する。
さらに、グルーブのウォブリングに係る信号、即ちウォブリングを検出する信号としてプッシュプル信号を生成する。
マトリクス回路54から出力される再生データ信号はデータ信号処理回路55へ、フォーカスエラー信号及びトラッキングエラー信号は光学ブロックサーボ回路61へ、プッシュプル信号はウォブル信号処理回路65へ、それぞれ供給される。
【0041】
データ信号処理回路55は、再生データ信号に対して2値化処理、PLLによる再生クロック生成処理等を行い、例えばフェイズチェンジマークとして読み出されたデータを再生して、データ復調回路56に供給する。
データ復調回路56は、再生時におけるデコード処理として、再生クロックに基づいてランレングスリミテッドコードの復調処理を行う。復調処理されたデータはECCエンコーダ/デコーダ57に供給される。
ECCエンコーダ/デコーダ57は、記録時にエラー訂正コードを付加するECCエンコード処理と、再生時にエラー訂正を行うECCデコード処理を行う。
再生時には、データ復調回路56で復調されたデータを内部メモリに取り込んで、エラー検出/訂正処理及びデインターリーブ等の処理を行い、再生データを得る。
ECCエンコーダ/デコーダ57で再生データにまでデコードされたデータは、システムコントローラ60の指示に基づいて読み出され、AV(Audio-Visual)システム120に転送される。
【0042】
グルーブのウォブリングに係る信号としてマトリクス回路54から出力されるプッシュプル信号は、ウォブル信号処理回路65においてデジタル化されたウォブルデータとされる。またPLL処理によりプッシュプル信号に同期したクロック(後述するウォブルクロックWCK、マスタークロックMCK)が生成される。
ウォブルデータはADIP復調回路66でMSK復調、STW復調され、ADIPアドレスを構成するデータストリームに復調されてアドレスデコーダ59に供給される。
アドレスデコーダ59は、供給されるデータについてのデコードを行い、アドレス値を得て、システムコントローラ60に供給する。
なおADIP復調回路66におけるMSK復調、STW復調を行う構成は後述する。
【0043】
記録時には、AVシステム120から記録データが転送されてくるが、その記録データはECCエンコーダ/デコーダ57におけるメモリに送られてバッファリングされる。
この場合ECCエンコーダ/デコーダ57は、バファリングされた記録データのエンコード処理として、エラー訂正コード付加やインターリーブ、サブコード等の付加を行う。
またECCエンコードされたデータは、記録パルス変換回路64においてRLL(1−7)PP方式(RLL;Run Length Limited、PP:Parity preserve/Prohibit rmtr(repeated minimum transition runlength))の変調が施される。なお、記録時においてこれらのエンコード処理のための基準クロックとなるエンコードクロックはウォブル信号から生成したクロックを用いる。
【0044】
記録パルス変換回路64でのエンコード処理により生成された記録データは、レーザドライバ63で、記録補償処理として、記録層の特性、レーザー光のスポット形状、記録線速度等に対する最適記録パワーの微調整やレーザドライブパルス波形の調整などが行われる。そしてレーザドライバ63は、記録補償処理したレーザドライブパルスをピックアップ51内のレーザダイオードに与えてレーザ発光駆動を実行させる。これによりディスク1に記録データに応じたピット(フェイズチェンジマーク)が形成されることになる。
【0045】
なお、レーザドライバ63は、いわゆるAPC回路(Auto Power Control)を備え、ピックアップ51内に設けられたレーザパワーのモニタ用ディテクタの出力によりレーザ出力パワーをモニターしながらレーザーの出力が温度などによらず一定になるように制御する。記録時及び再生時のレーザー出力の目標値はシステムコントローラ60から与えられ、記録時及び再生時にはそれぞれレーザ出力レベルが、その目標値になるように制御する。
【0046】
光学ブロックサーボ回路61は、マトリクス回路54からのフォーカスエラー信号、トラッキングエラー信号から、フォーカス、トラッキング、スレッドの各種サーボドライブ信号を生成しサーボ動作を実行させる。
即ちフォーカスエラー信号、トラッキングエラー信号に応じてフォーカスドライブ信号、トラッキングドライブ信号を生成し、二軸ドライバ68によりピックアップ51内の二軸機構のフォーカスコイル、トラッキングコイルを駆動することになる。これによってピックアップ51、マトリクス回路54、光学ブロックサーボ回路61、二軸ドライバ68、二軸機構によるトラッキングサーボループ及びフォーカスサーボループが形成される。
また光学ブロックサーボ回路61は、システムコントローラ60からのトラックジャンプ指令に応じて、トラッキングサーボループをオフとし、ジャンプドライブ信号を出力することで、トラックジャンプ動作を実行させる。
また光学ブロックサーボ回路61は、トラッキングエラー信号の低域成分として得られるスレッドエラー信号や、システムコントローラ60からのアクセス実行制御などに基づいてスレッドドライブ信号を生成し、スレッドドライバ69によりスレッド機構53を駆動する。スレッド機構53には、図示しないが、ピックアップ51を保持するメインシャフト、スレッドモータ、伝達ギア等による機構を有し、スレッドドライブ信号に応じてスレッドモータを駆動することで、ピックアップ51の所要のスライド移動が行なわれる。
【0047】
スピンドルサーボ回路62はスピンドルモータ52をCLV回転させる制御を行う。
スピンドルサーボ回路62は、ウォブル信号に対するPLL処理で生成されるクロックを、現在のスピンドルモータ52の回転速度情報として得、これを所定のCLV基準速度情報と比較することで、スピンドルエラー信号を生成する。
またデータ再生時においては、データ信号処理回路55内のPLLによって生成される再生クロック(デコード処理の基準となるクロック)が、現在のスピンドルモータ52の回転速度情報となるため、これを所定のCLV基準速度情報と比較することでスピンドルエラー信号を生成することもできる。
そしてスピンドルサーボ回路62は、スピンドルエラー信号に応じて生成したスピンドルドライブ信号を出力し、スピンドルドライバ67によりスピンドルモータ52のCLV回転を実行させる。
またスピンドルサーボ回路62は、システムコントローラ60からのスピンドルキック/ブレーキ制御信号に応じてスピンドルドライブ信号を発生させ、スピンドルモータ52の起動、停止、加速、減速などの動作も実行させる。
【0048】
以上のようなサーボ系及び記録再生系の各種動作はマイクロコンピュータによって形成されたシステムコントローラ60により制御される。
システムコントローラ60は、AVシステム120からのコマンドに応じて各種処理を実行する。
例えばAVシステム120から書込命令(ライトコマンド)が出されると、システムコントローラ60は、まず書き込むべきアドレスにピックアップ51を移動させる。そしてECCエンコーダ/デコーダ57、記録パルス変換回路64により、AVシステム120から転送されてきたデータ(例えばMPEG2などの各種方式のビデオデータや、オーディオデータ等)について上述したようにエンコード処理を実行させる。そして上記のようにエンコードされたデータに応じてレーザドライバ63がレーザ発光駆動することで記録が実行される。
【0049】
また例えばAVシステム120から、ディスク1に記録されている或るデータ(MPEG2ビデオデータ等)の転送を求めるリードコマンドが供給された場合は、まず指示されたアドレスを目的としてシーク動作制御を行う。即ち光学ブロックサーボ回路61に指令を出し、シークコマンドにより指定されたアドレスをターゲットとするピックアップ51のアクセス動作を実行させる。
その後、その指示されたデータ区間のデータをAVシステム120に転送するために必要な動作制御を行う。即ちディスク1からのデータ読出を行い、データ信号処理回路55、データ復調回路56、ECCエンコーダ/デコーダ57におけるデコード/バファリング等を実行させ、要求されたデータを転送する。
【0050】
なお、これらのフェイズチェンジマークによるデータの記録再生時には、システムコントローラ60は、ウォブル信号処理回路65,ADIP復調回路66、及びアドレスデコーダ59によって検出されるADIPアドレスを用いてアクセスや記録再生動作の制御を行う。
【0051】
ところで、この図5の例は、AVシステム120に接続されるディスクドライブ装置としたが、本発明のディスクドライブ装置としては例えばパーソナルコンピュータ等と接続されるものとしてもよい。
さらには他の機器に接続されない形態もあり得る。その場合は、操作部や表示部が設けられたり、データ入出力のインターフェース部位の構成が、図5とは異なるものとなる。つまり、ユーザーの操作に応じて記録や再生が行われるとともに、各種データの入出力のための端子部が形成されればよい。
もちろん構成例としては他にも多様に考えられ、例えば記録専用装置、再生専用装置としての例も考えられる。
【0052】
3.ADIP復調系の構成
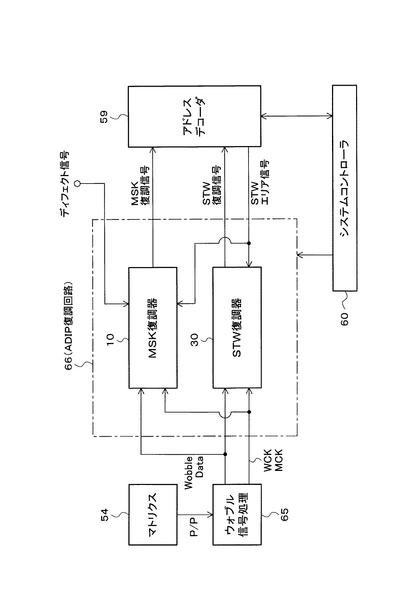
図6は、上記図5の構成の内で、ウォブル信号を復調しADIP情報を得るための回路系のみを示している。上記もしたようにマトリクス回路54からのプッシュプル信号P/Pがウォブル信号処理回路65に供給される。
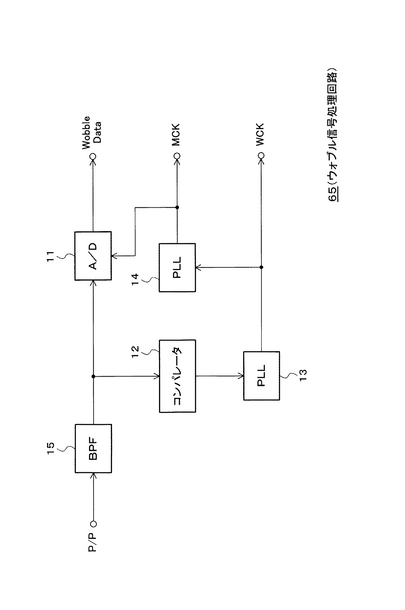
ウォブル信号処理回路65は、例えば図7のように構成されている。
【0053】
ウォブリンググルーブの変調信号(ウォブル信号)として上述したマトリクス回路54から入力される、図9(a)のようなプッシュプル信号P/Pは、図7のウォブル信号処理回路65において、バンドパスフィルタ15で帯域制限された後、A/D変換器11及びコンパレータ12に供給される。A/D変換器11は、プッシュプル信号をデジタルデータに変換して出力する。
コンパレータ12は、オペアンプ、コンパレータアンプで構成され、プッシュプル信号P/Pを2値化する。そして2値化したプッシュプル信号P/PをPLL回路13に供給する。
PLL回路13では、2値化信号に基づいて図9(b)のように、プッシュプル信号P/P、つまりウォブリンググルーブの変調信号の周波数(ウォブル周波数)のクロック(ウォブルクロックWCK)を生成する。なおPLL回路13はデジタル回路を用いてもよい。
PLL回路13から出力されるウォブルクロックWCKは、PLL回路14に供給される。PLL回路14では、ウォブルクロックWCKを逓倍し、マスタークロックMCKを生成する。このマスタークロックMCKは、A/D変換器11のサンプリングクロックとされる。なおPLL回路14も、アナログ回路、デジタル回路のいずれで構成しても良い。
そして、この図7のようなウォブル信号処理回路65から出力されるウォブルデータ、及びクロック(ウォブルクロックWCKとマスタークロックMCK)が、図6に示すようにADIP復調回路66におけるMSK復調器10,STW復調器30に供給される。
【0054】
ADIP復調回路66において、MSK復調器10は、プッシュプル信号P/Pをデジタルデータ化したウォブルデータについて、ウォブルクロックWCKとマスタークロックMCKを用いて復調し、MSK復調信号を出力する。
STW復調器30には同じくプッシュプル信号P/Pをデジタルデータ化したウォブルデータを復調し、STW復調信号を出力する。
このMSK復調信号及びSTW復調信号がアドレスデコーダ59に供給される。そしてアドレスデコーダ59によってADIP情報がデコードされ、システムコントローラ60に供給される。
【0055】
なお、アドレスデコーダ59からSTW復調器30には、図3で示したSTW変調区間を示すSTWエリア信号が供給され、STW復調器30は、そのSTWエリア信号に基づいてSTW変調データの復調を行う。また本例の場合、そのSTWエリア信号は、MSK復調器10でも用いられる。
アドレスデコーダ59は、MSK復調信号に基づいて図3(b)の各ユニットの同期(ビットシンク)をとり、その後、シンク0ユニット〜シンク3ユニットのワードシンクを確認して同期を確立する。つまり各ユニットの先頭のMSK復調信号(ウォブル番号0,1,2)を検出することで、各ユニットの同期をとった後、シンク0ユニット〜シンク3ユニットを検出して図4の83ユニットのADIP情報の同期を確立する。この同期が確立されることで、STW変調区間がわかり、STWエリア信号を発生できる。
また、例えばデータ信号処理回路55でデータ信号のディフェクト検出(ディスク上の傷や汚れなどによるRF信号欠落の検出)が行われるが、そのディフェクト信号がMSK復調器10にも供給される。
【0056】
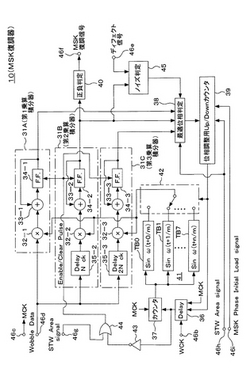
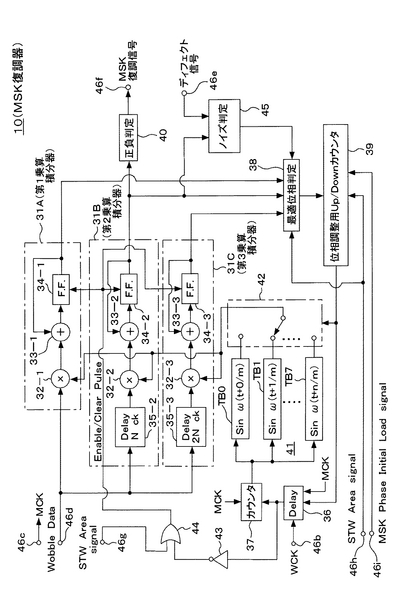
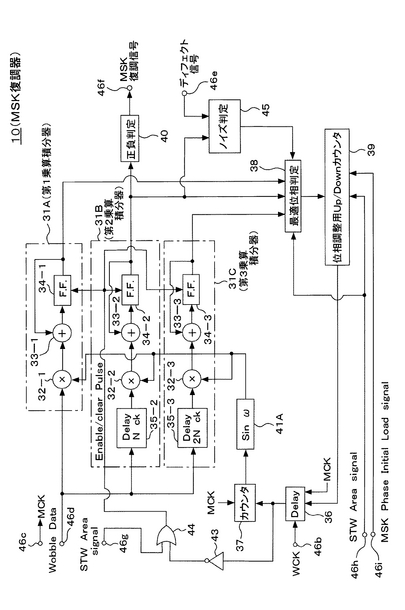
本例では、特にMSK復調器10の構成に特徴を有する。MSK復調器10について、その構成を図8に挙げ、図9〜図15を参照しながら説明する。
上述のように図7のウォブル信号処理回路65におけるA/D変換器11で得られるウォブルデータは、図8のMSK復調器10において端子46dに入力される。
MSK復調器10では、このウォブルデータに対する復調回路系として、第1乗算積分器31A,第2乗算積分器31B,第3乗算積分器31Cを備えている。
【0057】
各乗算積分器31A,31B,31Cは、それぞれ乗算器(32−1,32−2,32−3)、加算器(33−1,33−2,33−3)、積算器(34−1,34−2,34−3)を備えている。
また第2乗算積分器31BはマスタークロックMCKのNクロック時間の遅延回路35−2を備え、第3乗算積分器31Cは2Nクロック時間の遅延回路35−3を備えている。(Nは0以外の設定値)
そして、入力されたウォブルデータは、第1乗算積分器31Aではそのまま乗算器32−1に供給され、また第2乗算積分器31BにおいてはNクロック時間遅延されて乗算器32−2に供給され、第3乗算積分器31Cにおいては2Nクロック時間遅延されて乗算器32−3に供給されることになる。
乗算器32−1,32−2,32−3には、後述するセレクタ42を介して内部基準波が供給される。なお、内部基準波は図9(c)に示すように、ウォブル基本波形と同一周波数のsin波又はcos波とされる。
【0058】
また、上述したウォブル信号処理回路65から出力されるウォブルクロックWCKは、MSK復調器10の端子46bに入力される。また同じくウォブル信号処理回路65から出力されるマスタークロックMCKは、端子46cから入力され、MSK復調器10内の各部で基準クロックとして用いられる。
端子46bからのウォブルクロックWCKは、遅延回路36に供給される。遅延回路36ではウォブルクロックWCKに対して、マスタークロックMCKの単位で所定の遅延時間が与え、カウンタ36に供給する。
この場合の遅延時間は、後述するアップダウンカウンタ39から出力される位相調整値に基づいて設定される。
この遅延回路36は、ウォブルクロックWCKを遅延させて、例えばその立ち上がりエッジ(又は立ち下がりエッジ)を、カウンタ37のリセット/スタートタイミング、及び積算器34−1,34−2,34−3のクリアタイミングとしての基準タイミング信号とするものである。後述するが、遅延回路36の遅延時間の調整により、復調用の内部基準波の位相を、ウォブルデータの位相に一致させるように調整できる。
なお遅延回路36は、例えばフリップフロップにより構成されるシフトレジスタとセレクタにより構成できる。もちろん他の構成でも良い。例えばデジタルカウンタを用いても実現でき、或いはCR構成のアナログ回路を用いてもよい。さらにはバッファとセレクタを用いた遅延回路を用いてもよい。
【0059】
遅延回路36を介したウォブルクロックWCKは、リセット/スタート信号としてカウンタ37に供給される。
カウンタ37は、マスタークロックMCKをカウントする動作を行うが、遅延回路36からのリセット/スタート信号が供給されたタイミングでカウントリセットを行う。つまりカウンタ37は、遅延されたウォブルクロックWCKのエッジタイミングでカウント値をリセットしながらマスタークロックMCKのカウントを行っていき、そのカウント値をテーブル群41に対してテーブルのアドレスとして出力する。
例えばマスタークロックMCKは、ウォブル基本波形の1周期が23クロックとなる周波数であるとする。そしてカウンタ37は、ウォブル基本波形の1周期間隔でリセットされることになるため、0〜22のカウント値を繰り返し発生させることになる。
【0060】
テーブル群41は、例えばテーブルTB0〜TB7として8個のテーブルを有する。なお、テーブルを8個とするのは一例である。
そして各テーブルTB0〜TB7は、それぞれが内部基準波となる波形データを記憶したテーブル(ROM)であり、各データがカウンタ37のカウント値に応じて読み出されるものである。
各テーブルTB0〜TB7の波形データとしては、例えばTD0〜TD22の23個のデータが記憶されている。これが上記0〜22のカウント値に応じて順次読み出されていくことで、図9(c)のように、ウォブル基本波形と同一周波数の内部基準波が発生される。
ただし、各テーブルTB0〜TB7に記憶されている内部基準波の波形は、それぞれが少しづつ位相がずらされたsin波形(又はcos波形)とされている。つまり各テーブルTB0〜TB7のデータTD0〜TD22は、それぞれ位相をずらしたウォブル1周期の波形を示すデータとされている。各テーブルTB0〜TB7の位相差については後述する。
【0061】
選択回路42は、テーブルTB0〜TB7の内の1つを選択する。選択回路42はアップダウンカウンタ39からの位相調整値に基づいて1つのテーブルを選択する。
なお、アップダウンカウンタ39から出力される位相調整値は、例えば8ビット値とされ、上位5ビットが遅延回路36での23段階の遅延量を指示し、下位3ビットが選択回路42でのテーブルTB0〜TB7の選択値を指示するものとされる。
各テーブルTB0〜TB7は、カウンタ37からのカウント値に応じて内部基準波となる波形データが順次出力されるが、選択回路42で選択されたテーブルTBxからの内部基準波が乗算器32−1,32−2,32−3に供給されることになる。
【0062】
なおテーブル群41は内部基準波を発生させるものであるが、波形データを出力するものであればテーブル群以外の構成のものでもよく、RAMを用いてシステムコントローラ60から設定してもよいし、組み合わせ回路で構成してもよい。また、データ列を順番に出力するシフトレジスタを採用しても良いし、発振器を用いたアナログ回路でもよい。また発生する信号はsin信号、cos信号のいずれでもよく、さらには矩形波を発生する回路でも良い。
また、カウンタ37,テーブル群41、選択回路42は、後述するように多様な位相状態で内部基準波を発生する構成例の1つであるが、同様の動作が実行されれば構成は限定されず、例えばカウンタ37をシステムコントローラ60からの設定により1の増減ではなくn個の増減で動作させ、n個のテーブルを融合して1つのテーブルとする構成も考えられる。
【0063】
一方、第1,第2,第3乗算積分器31A,31B,31Cにおいては、乗算器32−1、32−2,32−3のそれぞれに、Nクロック時間ずつずれたタイミングでウォブルデータが供給されるが、このタイミングのずれた3系統のウォブルデータが、それぞれ乗算器32−1、32−2,32−3で内部基準波と乗算される。そして第1,第2,第3乗算積分器31A,31B,31Cは、それぞれ乗算結果を加算器(33−1,33−2,33−3)及び積算器(34−1,34−2,34−3)により積算する。
つまり、第1,第2,第3乗算積分器31A,31B,31Cは、内部基準波とウォブルデータとを乗算し、乗算結果を積分する演算処理を、それぞれが異なる内部基準波とウォブルデータの相互位相状態において行うものとなっている。
【0064】
ここで、第1,第2,第3乗算積分器31A,31B,31Cのうち、第2乗算積分器31Bが、実際のMSK復調のための乗算積分器とされている。
そして、乗算器32−1、32−2,32−3に供給されるウォブルデータは、遅延回路35−2,35−3によって、位相がずれたものとされている。即ち、MSK復調のための乗算積分を行う第2乗算積分器31Bを中心にみると、第1乗算積分器31Aの乗算器32−1には、位相の進んだウォブルデータが供給され、また第3乗算積分器31Cの乗算器32−3には、位相の遅れたウォブルデータが供給されることになる。
【0065】
主たる乗算積分系である第2乗算積分器31Bにおいては、乗算器32−2で、ウォブルデータと、選択回路42で選択されたテーブルTBxからの内部基準波データが乗算される。この乗算値は例えば図9(d)のようになる。そして乗算値は加算器33−2に供給される。
加算器33−2は、乗算器32−2からの乗算値と、フリップフロップにより構成される積算器34−2の出力を加算し、加算値を積算器34−2に供給する。
ここで、積算器34−2は、遅延回路36からのタイミング信号がインバータ43及びオアゲート44を介して、イネーブル/クリアパルスとして供給されることでクリアされる。
つまり積算器34−2はカウンタ37と同タイミングでリセットされる。従って積算器34−2では、1ウォブル基本波形周期の間で乗算値の積算を行うことになる。例えば23サンプルの乗算結果を積算する動作を繰り返す。
するとその積算値(乗算後加算値)は、図9(e)のように推移する。このような積算器34−2の出力は正負判定回路40で正負判定され、判定結果がMSK復調信号となる。そしてそのMSK復調信号が端子34fからアドレスデコーダ59に出力される。
積算器34−2が2の補数表現で積算値を出力する場合は、正負判定回路40は、その最上位ビットを出力する構成とされれば良い。もちろん数値の正負を判定するものであれば他のものでもよく正負の判定はコンパレータ回路を用いてもよい。
また加算器33−2,積算器34−2による構成は、乗算器32−2の乗算値を1ウォブル期間で積分する回路であればどのようなものでも良く、各種のデジタル回路またはアナログ回路を用いることができる。
【0066】
第1,第3乗算積分器31A,31Cにおいても、それぞれ乗算器32−1,32−3、加算器33−1,33−3、積算器34−1、34−3で、同様の動作が行われる。ただし、その第1,第3乗算積分器31,33の積算値は正負判定回路40に供給されない。つまり実際の復調処理には用いられない。この第1,第3乗算積分器31A,31Cの積算値出力は、上記第2乗算積分器31Bの積算値出力とともに、最適位相判定部38に供給される。
【0067】
ところで、各積算器34−1、34−2、34−3に対するイネーブル/クリアパルスは、上記のようにオアゲート44を介して供給されるが、オアゲート44によってSTWエリア信号もイネーブル/クリアパルスとして供給される。
STWエリア信号は、上述したように、アドレスデコーダ59から供給される信号であり、これはSTW変調期間を示すパルスである。
つまりこの場合、積算器34−1,34−2,34−3は、例えば図3(b)に示したADIPユニットのSTW変調信号の範囲以外では、上記のように、遅延回路36からのタイミング信号がイネーブル/クリアパルスとして供給されることで、1ウォブル基本波形周期の間で乗算値の積算を行うが、STW変調信号の範囲に相当する期間では、その1ウォブル期間でなく、そのSTW変調区間での積算を行うことになる。例えば図3(b)のレファレンスユニット、データ1ユニット、データ0ユニットにおけるウォブル番号18〜54の区間においては、継続して積算を行うことになる。
【0068】
本例のMSK復調器10は、ウォブル信号と内部基準波の位相調整を自動的に実行する機能を有するものであり、そのために、第2乗算積分器31B以外に、実際には復調処理に供しない積算値を得る第1,第3乗算積分器31A,31Cを設け、また最適位相判定部38及びアップダウンカウンタ39を設けている。
ここで、最適位相判定部38及びアップダウンカウンタ39の動作説明に先だって、位相調整の必要性及び内部基準波の位相を変化させる手法について説明しておく。
【0069】
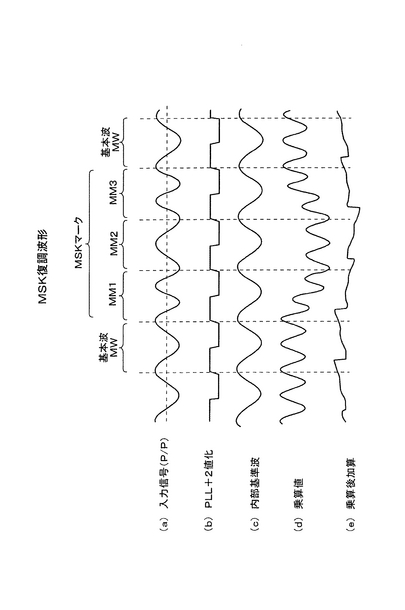
MSK復調器10の処理においては、図9からわかるように、入力されるウォブル信号においてウォブル基本波(モノトーンウォブルMW)の区間では乗算後加算値は正方向に推移する。一方、MSKマークの区間では乗算後加算値が負方向に推移する。従って、これを正負判定回路40で正負判定することでMSKマークと基本波を判別する復調信号が得られる。
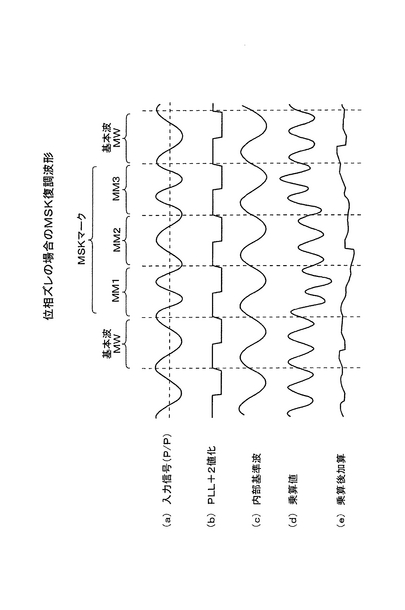
但し、この図9は、乗算器32−2に与えられるウォブルデータと内部基準波の位相が一致している状態である。即ち位相が一致しているときに一番よい復調結果が得られる。一方、図10にはプッシュプル信号P/P(ウォブルデータ)と内部基準波の位相がずれた場合を示しているが、この図10(e)の乗算後加算値は、位相が合っている場合の図9(e)の乗算後加算値と比較してわかるように、正負判定の際にエラーの生じやすい状態となっている。つまりウォブルデータと内部基準波の位相ズレによって復調精度が悪化する。
【0070】
そこでMSK復調器10では、遅延回路36の遅延量及び選択回路42でのテーブルの選択により、内部基準波の位相を調整できるようにしている。
例えばアップダウンカウンタ39が後述する動作により、例えば8ビットの位相調整値を発生させ、その上位5ビットで、遅延回路36での遅延量を調整することによっては、内部基準波の位相をマスタークロックCK単位で可変設定できるものとなる。
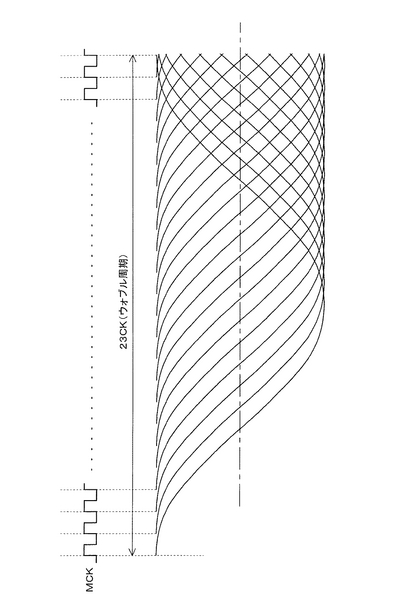
例えば上記のようにマスタークロックMCKは、1ウォブル基本波形周期において23クロックとなる周波数であるとするとき、遅延回路16での遅延量を変更することで、1/23周期単位で内部基準波の位相を調整できることになる。つまり遅延回路36から出力されるウォブルクロックWCKのエッジタイミングでカウンタ37がリセットされるため、遅延量を変えれば、1ウォブル周期においてカウンタ37のリセットタイミングを23段階に変化させることができる。カウンタ37のリセットタイミングは、或るテーブルTBxのデータTD0〜TD22における先頭のデータTD0の出力タイミングとなるため、遅延量を23段階で可変とすることで、テーブルTBxから出力される内部基準波の位相を1ウォブル周期内で23段階に可変できる。
例えば図11は、或るテーブルTBxから出力される内部基準波として、遅延時間調整によって1/23周期単位で位相調整できる様子を示している。
【0071】
また、このような遅延回路36による位相調整に加えて、テーブルTB0〜TB7を選択することでさらに精細な位相調整ができる。
入力されるプッシュプル信号P/Pの位相が、マスタークロックMCKの位置で常にゼロクロスする波形であれば、遅延回路36による位相調整のみで問題ないが、回路動作の遅延等で内部動作クロックサンプリングのタイミングにより位相がずれる事がある。また動作周波数を下げるとサンプリングの間隔が大きくなり位相差が大きくなる。特に高転送レート時においてはサンプリング周波数が相対的に低くなるため、ウォブル信号波形と、内部基本波との位相が大きく異なる場合がある。従ってマスタークロック単位よりさらに精細な位相調整を行う必要が生ずる。
【0072】
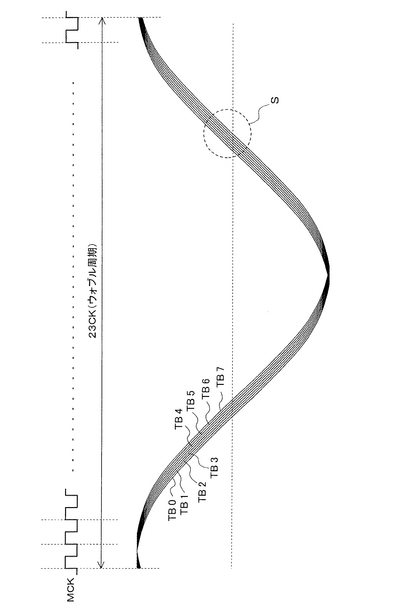
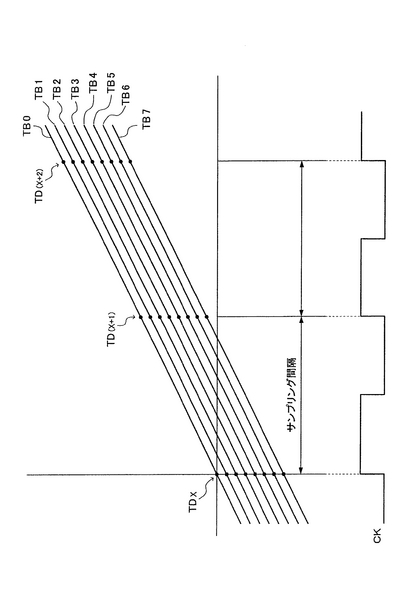
テーブルTB0〜TB7は、このようにマスタークロック単位よりも細かい位相調整を行うために設けられている。例えば8個とされるテーブルTB0〜TB7により1クロック期間の1/8期間単位で位相をずらした内部基準波形を用意する。
図12に、各テーブルTB0〜TB7に記憶される波形データ例を示している。図示するように、各テーブルTB0〜TB7に記憶されるデータは、それぞれが1/8MCK期間だけ位相がずれたデータとなっている。特に図12の破線Sの部分を拡大して図13に示しているが、図13に明瞭に示されるように、マスタークロックMCKによるサンプリング間隔の内で位相がずれるように、各テーブルTB0〜TB7のデータTDが設定されている。
【0073】
つまり、アップダウンカウンタ39が発生する8ビットの位相調整値の下位3ビットで、選択回路42が制御され、テーブル群21の内の1つのテーブルを選択することで、より精細な位相調整が可能となる。換言すれば、8個のテーブルTB0〜TB7を備える場合、サンプリング周波数(マスタークロック周波数)を上げることなしに、サンプリング周波数を8倍上げた場合と同じ精度での位相調整を実現できる。
【0074】
なお、テーブル数は次の様に計算する事ができる。
テーブル数=(1/2)・2ADB×Sin(2π/S)
但し、ADBはA/D変換器11のビット数、Sは入力信号1周期のサンプル数である。
例えばA/D変換器11のビット数が6ビットで、入力信号1周期のサンプル数が上記のように23個である場合、上記式によるテーブル数は8.6となり、テーブル数は8個ないし9個が適正であるといえる。
【0075】
このように本例では、内部基準波について、遅延回路36の遅延時間の調整、及び選択回路42でのテーブルTB0〜TB15の選択によって、精細な位相調整が実行できるが、上記のように主たる復調回路系である第2乗算積分器31Bに加えて、第1,第3乗算積分器31A,31Cを設けることと、最適位相判定部38、アップダウンカウンタ39を設けることで、第2乗算積分器31Bの乗算器32−2に与えられるウォブルデータと内部基準波の位相を自動調整できるようにしている。
【0076】
最適位相判定部38は、端子46hから入力されるSTWエリア信号で規定される期間において 第1,第2,第3乗算積分器31A,31B,31Cの各積算器34−1,34−2,34−3の積算結果をみて、どの乗算積分器において位相が最適であったかを判定する。そしてその判定結果により、アップダウンカウンタ39に対して、カウントアップ/カウントダウン/ホールド(カウント変更せず)を指示する。
上記のように、積算器34−1、34−2,34−3は、同じくSTWエリア信号によってウォブルデータのSTW変調区間では継続的に積分処理をしているため、最適位相判定部38は、そのSTW変調区間での積分値を比較して、最適位相を判定することになる。
【0077】
アップダウンカウンタ39は、最適位相判定部38からの指示に応じて、カウント値をアップ/カウントダウン/ホールドする。
このアップダウンカウンタ39のカウント値は、位相調整値として遅延回路36、及び選択回路42に供給される。
なお、アップダウンカウンタ39の初期値、つまり位相調整値としての初期値は、例えばシステムコントローラ60から端子46iにMSK位相初期値ロード信号が供給されることで設定される。
【0078】
上記のように遅延回路36では、アップダウンカウンタ39から供給されるカウント値(位相調整値)の上位ビットに応じて遅延時間を設定する。また選択回路42は、アップダウンカウンタ39から供給されるカウント値(位相調整値)の下位ビットに応じてテーブルTB0〜TB7のうちの1つを選択する。上記のように、遅延回路36での遅延時間を調整することで、内部基準波の位相をマスタークロックMCK単位で調整でき、またテーブルTB0〜TB7を選択することで、マスタークロックMCKの1/8単位で調整できることになる。
【0079】
つまりこのMSK復調器10の自動位相調整は、3つの演算系である第1,第2,第3乗算積分器31A,31B,31Cの復調結果を監視しながら、内部基準波の位相を最適状態に追い込んでいくものである。
上述のように、3つの各乗算器32−1,32−2,32−3には、タイミングのずれたウォブルデータが供給される。従って各乗算器32−1,32−2,32−3でのウォブルデータと内部基準波の位相ズレ状態は異なるものとなる。このため、最適位相判定部38で、どの乗算積分器が最適な位相状態かを判別することで、第2乗算積分器31Bでの位相状態を最適化させる方向に追い込むことができる。
【0080】
即ち最適位相判定部38は、アドレスデコーダ59からのSTWエリア信号によってSTW変調区間が終了したことを合図に第1、第2、第3乗算積分器31,32,33の積算結果で一番よい結果を示した方向にアップダウンカウンタ39を加減させる。
例えば、内部基準波に対するウォブルデータの位相が最も進んでいる第1乗算積分器31Aでの位相状態が最適である場合は、アップダウンカウンタ39を例えばカウントダウンさせる。すると、内部基準波の位相が進む方向、つまり第2乗算積分器31Bでの位相状態を合致させる方向に調整される。また内部基準波に対するウォブルデータの位相が最も遅れている第3乗算積分器31Cでの位相状態が最適である場合は、アップダウンカウンタ39を例えばカウントアップさせる。すると、内部基準波の位相が遅れる方向、つまり第2乗算積分器31Bでの位相状態を合致させる方向に調整される。第2乗算積分器31Bでの位相状態が最適である場合は、アップダウンカウンタ39をホールドさせる。つまり第2乗算積分器31Bでの位相状態が適切である場合は、内部基準波の位相を変化させない。
【0081】
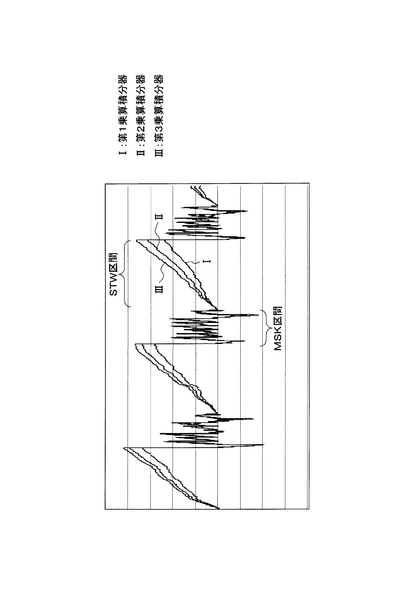
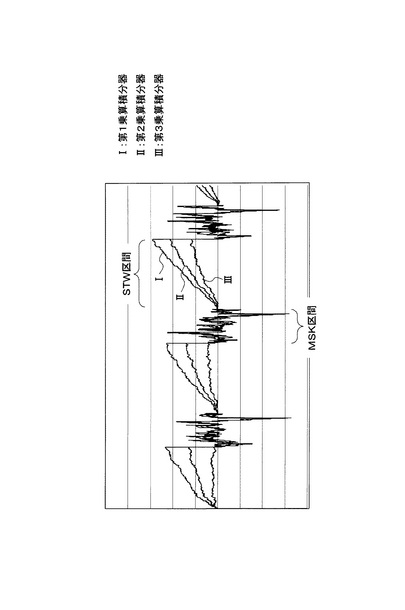
図14,図15に、波形I,II,IIIとして、各積算器34−1、34−2、34−3からの積分結果波形を示している。
これらの図においてSTW区間として示す部分は、STW変調区間における積分結果である。またMSK区間として示す部分は、MSK変調区間である。
MSK変調区間では、1ウォブル周期毎に各積算器34−1、34−2、34−3がリセットされており、このMSK区間の波形を時間軸方向に拡大すると、図9(e)のようになっているものである。
一方、STW区間では、STWエリア信号で規定される区間、積算が続けられていく(リセットされない)ため、図示するように積算値は増大していく。そしてウォブルデータと内部基準波の相互位相状態が合っている程、積分結果は高くなる。
図14においては第3乗算積分器31CのSTW区間の積算結果IIIが最も良いことを表しており、この場合は、最適位相判定部38はアップダウンカウンタ39をカウントアップさせることになる。
一方、図15においては第1乗算積分器31AのSTW区間の積算結果Iが最も良いことを表しており、この場合は、最適位相判定部38はアップダウンカウンタ39をカウントダウンさせることになる。
【0082】
このようにSTW区間を3つの乗算積分器31A,31B,31Cで積分し、その結果を位相調整用のアップダウンカウンタ39にフィードバックして位相調整値を変化させることでMSK復調器10の内部基準波の位相を入力されるウォブルデータに対して最適に保つことができる。
そして、第2乗算積分器31Bでの内部基準波とウォブルデータの相互位相状態が自動的に最適状態(位相が合った状態)に追い込まれることで、MSK復調性能を向上させることができる。
つまり、ディスク1の隣接トラックからのクロストーク、書き込み後の反射率の低下、ディスクスキュー等の外乱要因に加え、メディアの違いによる外乱発生時などの位相ズレが生じても、これを補正し、十分にMSK復調ができることとなるため、ADIPアドレスエラーも低減する。
さらにアドレスエラーが低減することにより、メーカーが異なる事などによるメディア特性のばらつきが大きい記録再生メディアに対しても安定して記録再生することができる。
また、MSK復調能力が上がるのでピックアップ部のばらつきによる歩留まりを改善することもできる。
【0083】
また本例では、遅延回路36での遅延時間だけでなく、テーブル群41でのテーブル選択によって位相調整が行われるため、サンプリング周波数(マスタークロックMCK)を高周波数化しなくても、高精度な位相の自動調整が可能となる。
なお、本例の自動調整の調整精度(分解能)は、マスタークロックMCK周波数と、テーブル群41のテーブル数と、遅延回路35−2、35−3での遅延時間(N)の設定によるものとなるため、必要とする調整精度を考慮して、これらが適切に設計されればよい。
また、図8の例では、第2,第3復調器31B,31Cにおいて遅延回路35−2、35−3でウォブルデータを遅延させるようにしているが、ウォブルデータについては遅延させずに、乗算器32−2、32−3に与える内部基準波を遅延させるように構成しても、同様の動作が可能である。
【0084】
ところで図8の構成ではノイズ判定部45が設けられている。ノイズ判定部45は、第2乗算積分器31Bの積分結果を監視すると共に、例えばデータ信号処理回路55からのディフェクト信号も監視している。
そして、何らかの外乱、ディスク反射率のばらつき等により、図14,図15のような積分結果(第2乗算積分器32の積分結果II)がある一定値を下回ったとき、及びディフェクト信号によりディフェクト有りが知らされた場合に、最適位相判定部38の動作を中断させるようにしており、これによって自動位相調整が誤動作するのを防いでいる。
これによってディフェクトの影響で位相調整動作が不適切な位相調整を行ってしまうことが防止される。
なお、ノイズ判定部45は、第2乗算積分器31Bの積分結果のみを監視する例や、或いはディフェクト信号のみを監視する例も考えられる。
【0085】
4.変形例
以上、実施の形態について説明したが、本発明の変形例は多様に考えられる。
例えば実施の形態でのMSK復調器10では、テーブル群41を用いて精細な位相調整ができるようにしたが、例えば図16のようにテーブル群を備えない構成としても良い。
図16については上記図8と同一部分に同一符号を付し、詳細な説明は省略するが、図16のMSK復調器10では、内部基準波を発生させる1つのテーブル41Aのみを有している。
この場合、内部基準波の位相調整は遅延回路36での遅延時間調整によるもののみとなる。従ってアップダウンカウンタ39からの位相調整値は遅延回路16のみに供給される。
【0086】
上記図8の構成においては、テーブル群41の選択により、マスタークロックMCK単位よりも精細な位相調整ができると説明したが、マスタークロックMCKを十分に高周波数化できるのであれば、遅延回路16のみでの位相調整で十分に精細な位相調整が可能となる。
つまり遅延回路36の動作周波数を上げることができる場合は、この図16のような構成で、性能上問題のない位相調整が可能となるものである。
【0087】
また、上記実施の形態では、最適位相判定部38はSTW区間での積分値をみて最適位相判定を行うようにしたが、STW区間ではなく、モノトーンウォブル区間であっても良い。その場合、図8の端子46g、46hにはSTWエリア信号ではなく、モノトーンウォブル区間を示す信号を与えればよい。
モノトーンウォブル区間の積算値でも、相互位相状態によって積分値は図14,図15のようになり、上記同様に最適位相判定を行うことができる。
さらには、STW変調区間とモノトーンウォブル区間の両方で最適位相判定を行うことも考えられる。
【0088】
また上記例では相変化記録方式のディスクのウォブリンググルーブによる情報の復調装置としての例を挙げたが、本発明は、色素膜変化方式、光磁気記録方式など、他の記録方式のディスクのウォブリンググルーブ復調にも適用できる。
また、本例で示した復調方式は多様な装置に適用できる。即ち上記のように光ディスクのウォブルアドレス復調に応用できるだけでなく、MSK変調を用いた信号伝送復調装置などにも適用できる。
【図面の簡単な説明】
【0089】
【図1】ディスクのウォブリンググルーブの説明図である。
【図2】ウォブル信号のMSK変調波及びSTW変調波の説明図である。
【図3】ADIPユニットの説明図である。
【図4】ADIPユニットから形成されるADIP情報の説明図である。
【図5】実施の形態のディスクドライブ装置のブロック図である。
【図6】実施の形態のディスクドライブ装置のウォブル復調系のブロック図である。
【図7】実施の形態のウォブル信号処理回路のブロック図である。
【図8】実施の形態のMSK復調器のブロック図である。
【図9】MSK復調波形の説明図である。
【図10】位相ズレの場合のMSK復調波形の説明図である。
【図11】実施の形態の遅延時間による位相調整の説明図である。
【図12】実施の形態のテーブル選択による位相調整の説明図である。
【図13】実施の形態の各テーブルの位相の説明図である。
【図14】実施の形態のSTW区間の積分値の説明図である。
【図15】実施の形態のSTW区間の積分値の説明図である。
【図16】実施の形態のMSK復調器の他の構成のブロック図である。
【図17】従来の復調回路のブロック図である。
【図18】位相変動に影響されたMSK変調信号の説明図である。
【符号の説明】
【0090】
1 ディスク、10 MSK復調器、11 A/D変換器、12 コンパレータ、13,14 PLL回路、40 正負判定回路、41 テーブル群、42 選択回路、30 STW復調器、31A 第1乗算積分器、31B 第2乗算積分器、31C 第3乗算積分器、36,35−2,35−3 遅延回路、37 カウンタ、32−1,32−2,32−3 乗算器、33−1,33−2,33−3 加算器、34−1,34−2,34−3 積算器、38 最適位相判定部、39 アップダウンカウンタ、51 ピックアップ、52 スピンドルモータ、53 スレッド機構、54 マトリクス回路、59 アドレスデコーダ、65 ウォブル信号処理回路、66 ADIP復調回路、60 システムコントローラ
【技術分野】
【0001】
本発明は所定の変調信号を含む信号に対する復調装置、復調装置を備えたディスクドライブ装置、及び復調方法に関し、例えば所定の変調信号としてのMSK(Minimum Shift Keying)変調信号の復調に好適なものである。
【背景技術】
【0002】
【特許文献1】特開2003−123249号公報
【特許文献2】特開平11−306686号公報
【特許文献3】特開2002−74660号公報
【0003】
デジタルデータを記録・再生するための技術として、例えば、CD(Compact Disk),MD(Mini-Disk),DVD(Digital Versatile Disk)などの、光ディスク(光磁気ディスクを含む)を記録メディアに用いたデータ記録技術がある。光ディスクとは、金属薄板をプラスチックで保護した円盤に、レーザ光を照射し、その反射光の変化で信号を読み取る記録メディアの総称である。
光ディスクには、例えばCD、CD−ROM、DVD−ROMなどとして知られているように再生専用タイプのものと、MD、CD−R、CD−RW、DVD−R、DVD−RW、DVD+RW、DVD−RAMなどで知られているようにユーザーデータが記録可能なタイプがある。記録可能タイプのものは、光磁気記録方式、相変化記録方式、色素膜変化記録方式などが利用されることで、データが記録可能とされる。色素膜変化記録方式はライトワンス記録方式とも呼ばれ、一度だけデータ記録が可能で書換不能であるため、データ保存用途などに好適とされる。一方、光磁気記録方式や相変化記録方式は、データの書換が可能であり音楽、映像、ゲーム、アプリケーションプログラム等の各種コンテンツデータの記録を始めとして各種用途に利用される。
更に近年、ブルーレイディスク(Blu-Ray Disc)と呼ばれる高密度光ディスクが開発され、著しい大容量化が図られている。
【0004】
光磁気記録方式、色素膜変化記録方式、相変化記録方式などの記録可能なディスクに対してデータを記録するには、データトラックに対するトラッキングを行うための案内手段が必要になり、このために、プリグルーブとして予め溝(グルーブ)を形成し、そのグルーブもしくはランド(グルーブとグルーブに挟まれる断面台地状の部位)をデータトラックとすることが行われている。
またデータトラック上の所定の位置にデータを記録することができるようにアドレス情報を記録する必要もあるが、このアドレス情報は、グルーブをウォブリング(蛇行)させることで記録される場合がある。
【0005】
すなわち、データを記録するトラックが例えばプリグループとして予め形成されるが、このプリグループの側壁をアドレス情報に対応してウォブリングさせる。
このようにすると、記録時や再生時に、反射光情報として得られるウォブリング情報からアドレスを読み取ることができ、例えばアドレスを示すピットデータ等を予めトラック上に形成しておかなくても、所望の位置にデータを記録再生することができる。
このようにウォブリンググルーブとしてアドレス情報を付加することで、例えばトラック上に離散的にアドレスエリアを設けて例えばピットデータとしてアドレスを記録することが不要となり、そのアドレスエリアが不要となる分、実データの記録容量を増大させることができる。
なお、このようなウォブリングされたグルーブにより表現される絶対時間(アドレス)情報は、ATIP(Absolute Time In Pregroove)又はADIP(Adress In Pregroove)と呼ばれる。
【0006】
上記ブルーレイディスクの場合、MSK(Minimum Shift Keying)変調とSTW(Saw Tooth Wobble)変調を組み合わせた変調波形に基づいてグルーブがウォブリングされる。
このMSK変調とSTW変調、及びこれらを組み合わせて形成されるADIP情報について詳しくは後述するが、MSK変調は、位相が連続したFSK(Frequency Shift Keying)変調のうちの変調指数が0.5のものである。
またSTW変調は、ウォブル基本波に対して2倍の高調波を加算又は減算することで、鋸歯状波形のような変調波形を生成する変調方式である。
ブルーレイディスクに対応するディスクドライブ装置では、このようなADIP情報を再生するために、MSK復調器、STW復調器が搭載されることになる。
特にMSK/STW変調信号の復調及びADIP情報のデコードに関する技術は上記特許文献1,2,3に開示されている。
【0007】
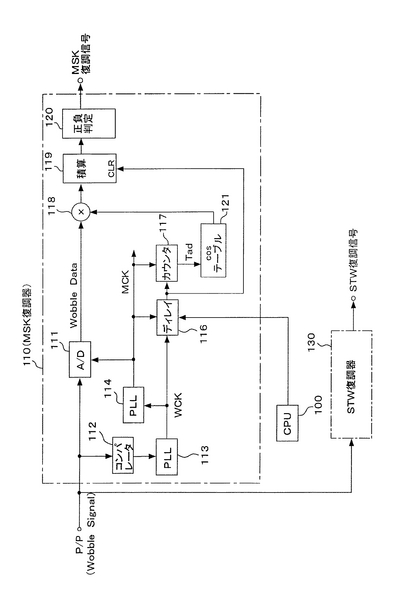
図17に、ADIP情報をデコードするために、その前段の処理として必要となるMSK復調/STW復調を行う回路例を示す。これは、ディスクのウォブリンググルーブによる反射光情報としてのプッシュプル信号P/P(ウォブル信号)について、MSK復調/STW復調を行い、その復調信号を後段のADIPデコーダに供給する回路である。
【0008】
ウォブル信号として供給されるプッシュプル信号P/Pは、図17のMSK復調器110において、A/D変換器111及びコンパレータ112に供給される。
コンパレータ112は、プッシュプル信号P/Pを2値化し、PLL回路113に供給する。PLL回路113では、2値化信号に基づいてプッシュプル信号P/P、つまりウォブリンググルーブの変調信号の周波数(ウォブル周波数)のクロック(以下、ウォブルクロックWCKという)を生成する。
またPLL回路113から出力されるウォブルクロックWCKは、PLL回路114及び遅延回路116に供給される。
PLL回路114では、ウォブルクロックWCKを逓倍し、マスタークロックMCKを生成する。このマスタークロックMCKは、A/D変換器111のサンプリングクロックとされ、また、遅延回路116、カウンタ117など、各部で用いられる。
【0009】
遅延回路116は、ウォブルクロックWCKに対して、マスタークロックMCKの単位で所定の遅延時間を与え、カウンタ117に供給する。遅延時間はCPU100によって設定される。
カウンタ117は、マスタークロックMCKをカウントする動作を行うが、遅延回路116を介したウォブルクロックWCKの立ち上がりをリセットタイミング信号として入力し、カウントリセットを行う。つまりカウンタ117は、ウォブルクロックWCKによるリセットタイミングからマスタークロックMCKをカウントしていき、そのカウント値をcosテーブル121に出力する。
cosテーブル121は、内部基準波となる波形データを記憶したテーブルであり、各データがカウンタ117のカウント値に応じて読み出される。
例えばマスタークロックMCKが、ウォブル基本波形の1周期(ウォブルクロックWCK単位)において23クロックとなる周波数であるとする。カウンタ117は、ウォブル基本波形の1周期間隔でリセットされるため、この場合カウンタ117は0〜22のカウント値を繰り返し発生させることになる。
cosテーブル121では、内部基準波となるcos波形データとして、TD0〜TD22のデータを記憶しており、これがカウント値に応じて順次読み出されていく。これによってウォブル基本波形と同一周波数の内部基準波が発生され、乗算器118に供給される。
【0010】
一方、入力されたプッシュプル信号P/PはA/D変換器111でマスタークロックMCKでサンプリングされてデジタルデータ化(ウォブルデータ)され、乗算器118に供給される。
従って乗算器118においては、ウォブルデータと、内部基準波データが乗算される。この乗算値は積算器119に供給されて積算される。積算器119は、遅延回路116からのウォブルクロックWCKの立ち上がりタイミングでリセットされる。つまり積算器119はカウンタ117と同タイミングでリセットされる。従って積算器119では、1ウォブル基本波形周期の間で乗算値の積算を行うことになる。例えば23サンプルの乗算結果を積算する動作を繰り返す。
するとその積算値(乗算後加算値)は、入力されるウォブル信号においてウォブル基本波の区間では正方向に推移し、一方、MSK変調された区間では負方向に推移する。従って、これを正負判定回路120で正負判定することでMSKマークと基本波を判別する復調信号が得られる。
【0011】
STW復調器130については、ここでの詳細な説明は略すが、MSK復調器110とほぼ同様の構成となる。即ち変調信号であるプッシュプル信号P/Pをデジタルデータ化し、それに対して内部基準波を乗算し、乗算結果の積算値を正負判定することでSTW復調信号が得られる。但しSTW復調器130の場合、内部基準波はウォブル基本波形の二次高調波の信号となる。また積算は、1ウォブル基本波形の期間ではなく、ウォブル信号においてSTW変調がなされている複数ウォブル期間において行われる。
【発明の開示】
【発明が解決しようとする課題】
【0012】
ところで、ディスク上の隣接トラックからのクロストークや、記録前と記録後の出力振幅の違い、さらにはディスクの品質ばらつきなどにより、ウォブル信号は変動している。このウォブルの振幅変化を避ける方式としてAGC回路方式やウォブル信号の振幅を制限させる方式が考えられ、例えば上記特許文献2,3等において提案されているが、ウォブル信号波形は振幅だけでなく、時間軸(位相)方向にも外乱を受けている。
ところが、MSK変調信号の復調に関しては、従来、外乱による位相変動を検出する機能は設けられていないため、外乱による位相変動が大きくなってきたときのMSK変調信号の復調が困難であった。
【0013】
上記図17の復調回路構成からわかるように、ウォブル信号(プッシュプル信号P/P)は、内部基準波と乗算された後、所定期間積算される。そして積算値が正負判定されてMSK復調信号、STW復調信号が得られる。
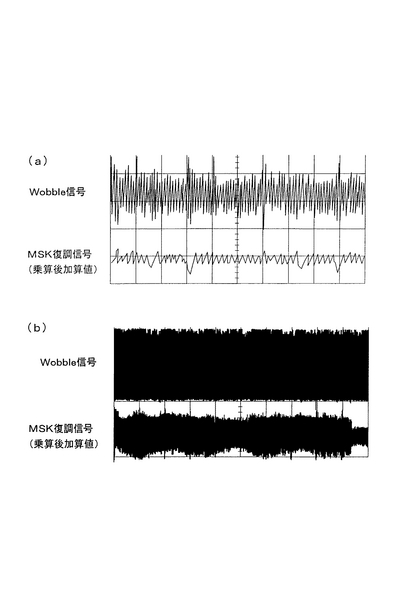
この場合の入力されるウォブル信号と積算器119の出力(積算値)としてのMSK復調信号波形を図18(a)に示す。また図18(b)は、図18(a)の波形を時間軸方向に縮小した波形を示している。
外乱による位相変動が大きくなると、図18(b)にみられるように、MSK復調信号波形(積算値)は周期的に振幅が変動する。この場合、信号の振幅が小さくなった部分でMSK復調が困難になる。このため例えば、ビートの大きいディスクを再生した場合や、フォーカスオフセット或いはメディア傾きの大きなディスクを再生した場合、MSK復調が困難になる。
【課題を解決するための手段】
【0014】
本発明はこのような問題に鑑み、外乱による位相変動にも対応して安定した復調動作が実現されるようにすることを目的とする。
【0015】
本発明の復調装置は、所定の変調信号を含む入力信号が入力されて復調を行う復調装置であり、上記所定の変調信号に対する内部基準波を出力する内部基準波発生手段と、上記内部基準波と上記入力信号とを乗算し、乗算結果を積分する演算処理を、それぞれが異なる上記内部基準波と上記入力信号の相互位相状態において行う複数の演算手段と、上記複数の演算手段のうちの特定の演算手段の出力を用いて上記変調信号の復調信号を生成する復調信号生成手段と、上記入力信号における上記変調信号の区間以外での、上記複数の演算手段のそれぞれの出力から、上記複数の演算手段での各相互位相状態のうちでの最適な相互位相状態を判定する最適位相判定手段と、上記最適位相判定手段の判定結果に基づいて、上記特定の演算手段における上記相互位相状態が最適化される方向に、上記各演算手段に供給する上記内部基準波の位相を調整する位相調整手段とを備える。
また上記複数の演算手段として、第1,第2,第3の演算手段を備え、上記特定の演算手段は、上記第2の演算手段であるとする。そして上記第1の演算手段は、上記第2の演算手段における上記内部基準波と上記入力信号の相互位相状態よりも、上記内部基準波と上記入力信号の一方の位相が進んでいる相互位相状態で乗算を行い、上記第3の演算手段は、上記第2の演算手段における上記内部基準波と上記入力信号の相互位相状態よりも、上記一方の位相が遅れている相互位相状態で乗算を行う構成とする。
また上記入力信号における上記変調信号の区間以外とは、上記所定の変調信号とは異なる変調方式の変調信号が含まれている区間である。例えば上記所定の変調信号とはMSK変調方式の変調信号であり、上記所定の変調信号とは異なる変調方式の変調信号とは、STW変調方式の変調信号である。
或いは、上記入力信号における上記変調信号の区間以外とは、無変調区間であるとする。
また、上記構成に加えて、上記演算手段の出力もしくは上記入力信号についてノイズ判定を行うノイズ判定手段を備え、上記最適位相判定手段は、上記ノイズ判定手段のノイズ判定結果に応じて最適位相判定処理を中断するようにする。
【0016】
本発明のディスクドライブ装置は、ディスク記録媒体上でウォブリンググルーブとして記録された、所定の変調信号を含むウォブル信号を読み出す読出手段と、ウォブル信号の復調信号に対してデコード処理を行い、上記ウォブリンググルーブとして記録された情報を得るデコード手段を備える。そしてウォブル信号の復調信号を得る構成として上記復調装置の構成を備えるものとする。
【0017】
本発明の復調方法は、所定の変調信号を含む入力信号が入力されて復調を行う復調装置の復調方法である。そして、内部基準波と上記入力信号とを乗算し、乗算結果を積分する演算処理を、それぞれが異なる上記内部基準波と上記入力信号の相互位相状態において複数系統で行う演算ステップと、上記複数系統の演算処理のうちの特定の演算処理の出力を用いて上記変調信号の復調信号を生成する復調信号生成ステップと、上記入力信号における上記変調信号の区間以外での、上記複数系統の演算処理のそれぞれの出力から、上記複数系統の演算処理での各相互位相状態のうちでの最適な相互位相状態を判定する最適位相判定ステップと、上記最適位相判定ステップの判定結果に基づいて、上記特定の演算処理における上記相互位相状態が最適化される方向に、上記複数系統の演算処理に与える上記内部基準波の位相を可変する位相調整ステップとを備える。
【0018】
即ち以上の本発明は、所定の変調信号、例えばMSK変調信号の復調の際に、内部基準波と入力信号(ウォブル信号)を乗算するが、その際の内部基準波と入力信号の相互位相状態を位相ズレが無い状態に収束するように調整するものである。このため複数の演算手段で、それぞれ相互位相状態が異なる状態で演算を行い、演算結果から最適な相互位相状態にある系を判定し、その相互位相状態が、特定の演算手段に与えられるように内部基準波の位相調整を行う。
ここで、特に最適位相判定は、入力信号のSTW変調区間やモノトーン区間(無変調区間)での演算結果(積分結果)を用いることで、適切な判定を行う。
【発明の効果】
【0019】
本発明によれば、所定の変調信号(特にMSK変調信号)に対する復調処理において、内部基準波と入力信号(ウォブル信号)の乗算するが、その際の内部基準波と入力信号の相互位相状態を位相ズレが無い状態に収束するように自動調整する。その自動調整のためには、位相状態の判定が必要となるが、このため複数の演算手段で、それぞれ入力信号と内部基準波の相互位相状態が異なる状態で演算を行い、演算結果から最適な相互位相状態にある系(演算手段)を判定する。特にこの最適位相判定は、入力信号のSTW変調区間やモノトーン区間(無変調区間)での演算結果(積分結果)を用いる。そして、この判定に基づいて、内部基準波の位相調整を行うことで、特定の演算手段(後段の復調信号生成手段に演算結果を受け渡す演算手段)における相互位相状態が最適な状態になるように収束していくようにする。
これにより、例えば隣接トラックからのクロストーク、書き込み後の反射率の低下による変調信号振幅の低下、ディスクスキュー等の外乱により、入力信号(ウォブル信号)の位相変動が発生しても、十分に復調できるようになる。ディスクドライブ装置の場合、このような復調性能の向上により、アドレスエラーが低減し、記録再生動作性能が向上される。例えば物理特性や記録再生特性のバラツキの大きい記録再生メディアに対しても安定した記録再生を行えるようになる。
また、自動的な位相調整によりMSK変調に対する復調能力が上がることは、ピックアップ部の特性のばらつきに対しても、ウォブルアドレス復調能力を維持できることになるため、ピックアップ部の歩留まりを改善することもできる。
【0020】
また入力信号のSTW変調区間やモノトーン区間(無変調区間)での演算結果(積分結果)を用いて、複数系統の演算処理の中での最適位相を判定することで、明確に最適位相を判定できる。
また、ノイズ判定手段のノイズ判定結果に応じて最適位相判定処理を中断することで、ノイズによる誤判定を避けることができ、位相の自動調整性能を向上させることができる。
【発明を実施するための最良の形態】
【0021】
以下、本発明の実施の形態を次の順序で説明する。
1.MSK変調、STW変調、及びADIP
2.ディスクドライブ装置の構成
3.ADIP復調系の構成
4.変形例
【0022】
1.MSK変調、STW変調、及びADIP
本発明の実施の形態に対応する光ディスク1は、図1(a)に示すように、記録トラックとなるグルーブGVが形成されている。このグルーブGVは、内周側から外周側へスパイラル状に形成されている。そのため、この光ディスク1の半径方向の切断面を見ると、図1(b)に示すように、凸状のランドLと、凹状のグルーブGVとが交互に形成されることとなる。なお、図1(a)のスパイラル方向は、光ディスク1を記録面側から見た状態であり、複数の記録層を有するディスクの場合、各記録層でスパイラル状態が異なる場合がある。
【0023】
光ディスク1のグルーブGVは、図1(b)に示すように、接線方向に対して蛇行形成されている。このグルーブGVの蛇行形状は、ウォブル信号に応じた形状となっている。そのため、光ディスクドライブでは、グルーブGVに照射したレーザスポットLSの反射光からそのグルーブGVの両エッジ位置を検出し、レーザスポットLSを記録トラックに沿って移動させていった際におけるその両エッジ位置のディスク半径方向に対する変動成分を抽出することにより、ウォブル信号を再生することができる。
このウォブル信号には、その記録位置における記録トラックのアドレス情報(物理アドレスやその他の付加情報等)が変調されている。そのため、光ディスクドライブでは、このウォブル信号からアドレス情報等を復調することによって、データの記録や再生の際のアドレス制御等を行うことができる。
【0024】
なお、本発明の実施の形態では、グルーブ記録がされる光ディスクについて説明をするが、本発明はこのようなグルーブ記録の光ディスクに限らず、ランドにデータを記録するランド記録を行う光ディスクに適用することも可能であるし、また、グルーブ及びランドにデータを記録するランドグルーブ記録の光ディスクにも適用することも可能である。
【0025】
ここで、本実施の形態の光ディスク1では、2つの変調方式を用いて、ウォブル信号に対してアドレス情報を変調している。一つは、MSK(Minimum Shift Keying)変調方式である。もう一つは、正弦波のキャリア信号に対して偶数次の高調波信号を付加し、被変調データの符号に応じて当該高調波信号の極性を変化させることによって変調するSTW(Saw Tooth Wobble)変調方式である。
【0026】
本実施の形態の光ディスク1では、図3(a)に示すように、所定周波数の正弦波の基準キャリア信号波形が所定周期連続したブロックを構成し、このブロック内に、MSK変調されたアドレス情報が挿入されるMSK変調部と、STW変調されたアドレス情報が挿入されるSTW変調部とを設けたウォブル信号を生成する。すなわち、MSK変調されたアドレス情報と、STW変調されたアドレス情報とを、ブロック内の異なる位置に挿入している。さらに、MSK変調で用いられる2つの正弦波のキャリア信号のうちの一方のキャリア信号と、STW変調のキャリア信号とを、上記の基準キャリア信号としている。また、MSK変調部とSTW変調部とは、それぞれブロック内の異なる位置に配置するものとし、MSK変調部とSTW変調部との間には、1周期以上の基準キャリア信号が配置されるものとしている。
【0027】
なお、なんらデータの変調がされておらず、基準キャリア信号の周波数成分だけが現れる無変調部分を、以下モノトーンウォブルと呼ぶ。また、以下では、基準キャリア信号として用いる正弦波信号は、Cos(ωt)であるものとする。また、基準キャリア信号の1周期を1ウォブル周期と呼ぶ。また、基準キャリア信号の周波数は、光ディスク1の内周から外周まで一定であり、レーザスポットが記録トラックに沿って移動する際の線速度との関係に応じて定まる。
【0028】
以下、MSK変調及びSTW変調の変調方法についてさらに詳細に説明をする。まず、MSK変調方式を用いたアドレス情報の変調方式について説明をする。
MSK変調は、位相が連続したFSK(Frequency Shift Keying)変調のうちの変調指数が0.5のものである。FSK変調は、周波数f1と周波数f2の2つのキャリア信号に対して、被変調データの符号の“0”,“1”をそれぞれ対応させて変調する方式である。つまり、被変調データが“0”であれば周波数f1の正弦波波形を出力し、被変調データが“1”であれば周波数f1の正弦波波形を出力する変調方式である。さらに、位相が連続したFSK変調の場合には、被変調データの符号の切り換えタイミングにおいて、2つのキャリア信号の位相が連続する。
このFSK変調では、変調指数mというものが定義される。この変調指数mは、
m=|f1−f2|T
で定義される。ここで、Tは、被変調データの伝送速度(1/最短の符号長の時間)である。このmが0.5の場合の位相連続FSK変調のことを、MSK変調という。
【0029】
MSK変調波形を図2(a)に示す。図2(a)においては、モノトーンウォブルMWに挟まれた3ウォブル周期の領域にMSK変調波形(MM1,MM2,MM3)が存在している状態を示している。
上記のようにモノトーンウォブルをCos(ωt)と表現すると、MSK変調に用いられる2つの周波数は、一方を基準キャリア信号と同一の周波数とし、他方を基準キャリア信号の1.5倍の周波数とするため、MSK変調に用いられる信号波形は、一方がCos(ωt)又は−Cos(ωt)となり、他方がCos(1.5ωt)又は−Cos(1.5ωt)となる。
そして図2(a)の波形では、2つのモノトーンウォブルと、MSK変調領域と、2つのモノトーンウォブルを示しており、その場合、MSKストリームの信号波形は、1ウォブル周期毎に、Cos(wt),Cos(wt),Cos(1.5wt),-Cos(wt),-Cos(1.5wt),Cos(wt)といった波形となる。なお図面では、モノトーンウォブルのCos(ωt)=cos{2π・(fwob)・t}として示しており(fwobは基準キャリア周波数)、従って、MSK変調領域としての3ウォブル期間は、MM1=cos{2π・(1.5・fwob)・t}、MM2=−cos{2π・(fwob)・t}、MM3=−cos{2π・(1.5・fwob)・t}となる。
このように1個目のウォブル周期期間(MM1)はモノトーンウォブルの1.5倍の周波数、2個目(MM2)はモノトーンウォブルと同じ周波数、3個目(MM3)はモノトーンウォブルの1.5倍の周波数とされ、この3ウォブル期間で位相が戻る。つまり前後のモノトーンウォブルと位相が連続した状態であり、しかも2個目のウォブル(MM2)はモノトーンウォブルに対して極性が反転したものとなる。
【0030】
光ディスク1では、ウォブル信号を以上のようなMSKストリームとすることによって、ウォブル信号にアドレス情報を変調しており、このMSK変調信号は以下の理由により同期検波が可能なものとなる。
光ディスク1のウォブル信号にMSK変調方式で被変調データを挿入する場合、まず、被変調データのデータストリームに対して、ウォブル周期に対応するクロック単位で差動符号化処理をする。すなわち、被変調データのストリームと、基準キャリア信号の1周期分遅延させた遅延データとを差分演算する。この差動符号化処理をしたデータを、プリコードデータとする。続いて、このプリコードデータをMSK変調して、上記のようなMSKストリームを生成する。
【0031】
上記差動符号化データ(プリコードデータ)は、被変調データの符号変化点でビットが立つ(“1”となる)。被変調データの符号長がウォブル周期の2倍以上とされているので、被変調データの符号長の後半部分には、必ず基準キャリア信号(Cos(ωt))又はその反転信号(−Cos(ωt))が挿入されることとなる。プリコードデータのビットが“1”となると、基準キャリア信号に対して1.5倍の周波数の波形が挿入され、さらに、符号の切り換え点においては位相を合わせて波形が接続される。従って、被変調データの符号長の後半部分に挿入される信号波形は、被変調データが“0”であれば、必ず基準キャリア信号波形(Cos(ωt))となり、被変調データが“1”であれば必ずその反転信号波形(−Cos(ωt))となる。同期検波出力は、キャリア信号に対して位相が合っていれば、プラス側の値になり、位相が反転していればマイナス側の値となるので、以上のようなMSK変調した信号を基準キャリア信号により同期検波すれば、被変調データの復調が可能となるものである。
【0032】
続いてSTW変調について説明する。
STW変調は、上述のように正弦波のキャリア信号に対して偶数次の高調波信号を付加し、当該高調波信号の極性を被変調データの符号に応じて変化させることによってデジタル符号を変調する変調方式である。
光ディスク1では、STW変調のキャリア信号は、上記MSK変調のキャリア信号である基準キャリア信号(Cos(ωt))と同一周波数及び位相の信号としている。付加する偶数次の高調波信号は、基準キャリア信号(Cos(ωt))の2次高調波であるSin(2ωt)、−Sin(2ωt)とし、その振幅は、基準キャリア信号の振幅に対して−12dBの振幅としている。被変調データの最小符号長は、ウォブル周期(基準キャリア信号の周期)の2倍としている。
そして、被変調データの符号が“1”のときにはSin(2ωt)をキャリア信号に付加し、“0”のときには−Sin(2ωt)をキャリア信号に付加して変調を行うものとする。
【0033】
以上のような方式でウォブル信号を変調した場合の信号波形を図2(b)に示す。図2(b)においては、中央のウォブル期間に基準キャリア信号(Cos(ωt))のモノトーンウォブルMWの信号波形を示している。そしてその前の2つのウォブル期間において、基準キャリア信号(Cos(ωt))に対してSin(2ωt)が付加された信号波形、即ち、被変調データが“1”のときの信号波形を示している。またモノトーンウォブルMWの後の2ウォブル期間において、基準キャリア信号(Cos(ωt))に対して−Sin(2ωt)が付加された信号波形、即ち、被変調データが“0”のときの信号波形を示している。
なお図面では、モノトーンウォブルのCos(ωt)=cos{2π・(fwob)・t}として示しており、従って、STW変調信号は、被変調データが“1”の場合、cos{2π・(fwob)・t}+a・sin{2π・(2・fwob)・t}となり、被変調データが“0”の場合、cos{2π・(fwob)・t}−a・sin{2π・(2・fwob)・t}となるとして示している。
図からわかるように、このSTW信号波形は、ディスク外周側に急峻に立ち上がり、内周側に緩やかに戻る波形と、その逆にディスク外周側に緩い傾斜で立ち上がって急峻に戻る波形となり、これによって「1」「0」の値が表現される。またどちらの波形の場合も、破線で示すモノトーンウォブルMWと共通のゼロクロスポイントを有するものとなる。従ってMSK方式のモノトーンウォブルMWの部分と共通の基本波成分からクロックを抽出するに当たって、その位相に影響を与えない。
【0034】
そしてこのように基準キャリア信号に対して正負の偶数次の高調波信号を付加した場合には、その生成波形の特性から、この高調波信号により同期検波して、被変調データの符号長時間その同期検波出力を積分することによって、被変調データを復調することが可能である。
なお、光ディスク1では、キャリア信号に加える高調波信号を2次高調波としているが、2次高調波に限らず、偶数次の高調波であればどのような信号を加算してもよい。また光ディスク1では、2次高調波のみを加算しているが、2次高調波と4次高調波との両者を同時に加算するといったように複数の高調波信号を同時に加算しても良い。
【0035】
以上のようなMSK変調、STW変調を含むADIP構造を説明する。ADIP情報としての1つのユニット(ADIPユニット)は、56ウォブルから構成される。
図3(b)に8種類のADIPユニットを示す。8種類とは、モノトーンユニット、リファレンスユニット、シンク0ユニット、シンク1ユニット、シンク2ユニット、シンク3ユニット、データ1ユニット、データ0ユニットである。
8種類の全てのADIPユニットでは、先頭のウォブル番号0,1,2はMSKマークとされる。
モノトーンユニットは、MSKマークに続くウォブル番号4〜55が全てモノトーンウォブルで構成される。
リファレンスユニットは、ウォブル番号18〜54が、0値を示すSTW変調ウォブルとなる。
シンク0ユニット、シンク1ユニット、シンク2ユニット、シンク3ユニットは、それぞれシンク情報の為のADIPユニットであり、図示するようにそれぞれ所定ウォブル番号位置にMSKマークが配置される。
データ1ユニットは値「1」を表現し、またデータ0ユニットは値「0」を表現するユニットである。データ1ユニットの場合、ウォブル番号12〜14にMSKマークが配され、またウォブル番号18〜54が、値「1」のSTW変調ウォブルとされる。データ0ユニットの場合、ウォブル番号14〜16にMSKマークが配され、またウォブル番号18〜54が、値「0」のSTW変調ウォブルとされる。
【0036】
このようなADIPユニットが83個集められることによって、1つのADIP情報(アドレス情報)が形成される。
即ち図4に示すように、ADIP情報の1単位は、ADIPユニット0〜82により形成される。そしてADIPユニットナンバ0から7が、モノトーンユニット、シンク0ユニット、モノトーンユニット、シンク1ユニット、モノトーンユニット、シンク2ユニット、モノトーンユニット、シンク3ユニットとされる。
ADIPユニットナンバ8以降は、リファレンスユニット及び4ビット分のデータユニットとしての5つのユニットが繰り返し配される。そして各データユニット(例えばdata[0]、data[1]、data[2]、data[3]・・・data[59])は、上記データ1ユニット、データ0ユニットのいずれかとされることで、ADIP情報としての60ビットの値が示される。この60ビットには、アドレス値、付加情報、ECCパリティ等が含まれる。
【0037】
2.ディスクドライブ装置の構成
次に、上記のようなディスク1に対応して記録/再生を行うことのできるディスクドライブ装置を説明する。図5はディスクドライブ装置の構成を示す。
ディスク1は、図示しないターンテーブルに積載され、記録/再生動作時においてスピンドルモータ52によって一定線速度(CLV)で回転駆動される。
そして光学ピックアップ(光学ヘッド)51によってディスク1上のグルーブトラックのウォブリングとして埋め込まれたADIP情報の読み出しがおこなわれる。
なお、ディスク1上には、再生専用の管理情報として例えばディスクの物理情報等がエンボスピット又はウォブリンググルーブによって記録されるが、これらの情報の読出もピックアップ51により行われる。
またデータ記録時には光学ピックアップによってトラックにユーザーデータがフェイズチェンジマークとして記録され、再生時には光学ピックアップによって記録されたマークの読出が行われる。
【0038】
ピックアップ51内には、レーザ光源となるレーザダイオードや、反射光を検出するためのフォトディテクタ、レーザ光の出力端となる対物レンズ、レーザ光を対物レンズを介してディスク記録面に照射し、またその反射光をフォトディテクタに導く光学系(図示せず)が形成される。レーザダイオードは、例えば波長405nmのいわゆる青色レーザを出力する。また光学系によるNAは0.85である。
【0039】
ピックアップ51内において対物レンズは二軸機構によってトラッキング方向及びフォーカス方向に移動可能に保持されている。
またピックアップ51全体はスレッド機構53によりディスク半径方向に移動可能とされている。
またピックアップ51におけるレーザダイオードはレーザドライバ63からのドライブ信号(ドライブ電流)によってレーザ発光駆動される。
【0040】
ディスク1からの反射光情報はフォトディテクタによって検出され、受光光量に応じた電気信号とされてマトリクス回路54に供給される。
マトリクス回路54には、フォトディテクタとしての複数の受光素子からの出力電流に対応して電流電圧変換回路、マトリクス演算/増幅回路等を備え、マトリクス演算処理により必要な信号を生成する。
例えば再生データに相当する高周波信号(再生データ信号)、サーボ制御のためのフォーカスエラー信号、トラッキングエラー信号などを生成する。
さらに、グルーブのウォブリングに係る信号、即ちウォブリングを検出する信号としてプッシュプル信号を生成する。
マトリクス回路54から出力される再生データ信号はデータ信号処理回路55へ、フォーカスエラー信号及びトラッキングエラー信号は光学ブロックサーボ回路61へ、プッシュプル信号はウォブル信号処理回路65へ、それぞれ供給される。
【0041】
データ信号処理回路55は、再生データ信号に対して2値化処理、PLLによる再生クロック生成処理等を行い、例えばフェイズチェンジマークとして読み出されたデータを再生して、データ復調回路56に供給する。
データ復調回路56は、再生時におけるデコード処理として、再生クロックに基づいてランレングスリミテッドコードの復調処理を行う。復調処理されたデータはECCエンコーダ/デコーダ57に供給される。
ECCエンコーダ/デコーダ57は、記録時にエラー訂正コードを付加するECCエンコード処理と、再生時にエラー訂正を行うECCデコード処理を行う。
再生時には、データ復調回路56で復調されたデータを内部メモリに取り込んで、エラー検出/訂正処理及びデインターリーブ等の処理を行い、再生データを得る。
ECCエンコーダ/デコーダ57で再生データにまでデコードされたデータは、システムコントローラ60の指示に基づいて読み出され、AV(Audio-Visual)システム120に転送される。
【0042】
グルーブのウォブリングに係る信号としてマトリクス回路54から出力されるプッシュプル信号は、ウォブル信号処理回路65においてデジタル化されたウォブルデータとされる。またPLL処理によりプッシュプル信号に同期したクロック(後述するウォブルクロックWCK、マスタークロックMCK)が生成される。
ウォブルデータはADIP復調回路66でMSK復調、STW復調され、ADIPアドレスを構成するデータストリームに復調されてアドレスデコーダ59に供給される。
アドレスデコーダ59は、供給されるデータについてのデコードを行い、アドレス値を得て、システムコントローラ60に供給する。
なおADIP復調回路66におけるMSK復調、STW復調を行う構成は後述する。
【0043】
記録時には、AVシステム120から記録データが転送されてくるが、その記録データはECCエンコーダ/デコーダ57におけるメモリに送られてバッファリングされる。
この場合ECCエンコーダ/デコーダ57は、バファリングされた記録データのエンコード処理として、エラー訂正コード付加やインターリーブ、サブコード等の付加を行う。
またECCエンコードされたデータは、記録パルス変換回路64においてRLL(1−7)PP方式(RLL;Run Length Limited、PP:Parity preserve/Prohibit rmtr(repeated minimum transition runlength))の変調が施される。なお、記録時においてこれらのエンコード処理のための基準クロックとなるエンコードクロックはウォブル信号から生成したクロックを用いる。
【0044】
記録パルス変換回路64でのエンコード処理により生成された記録データは、レーザドライバ63で、記録補償処理として、記録層の特性、レーザー光のスポット形状、記録線速度等に対する最適記録パワーの微調整やレーザドライブパルス波形の調整などが行われる。そしてレーザドライバ63は、記録補償処理したレーザドライブパルスをピックアップ51内のレーザダイオードに与えてレーザ発光駆動を実行させる。これによりディスク1に記録データに応じたピット(フェイズチェンジマーク)が形成されることになる。
【0045】
なお、レーザドライバ63は、いわゆるAPC回路(Auto Power Control)を備え、ピックアップ51内に設けられたレーザパワーのモニタ用ディテクタの出力によりレーザ出力パワーをモニターしながらレーザーの出力が温度などによらず一定になるように制御する。記録時及び再生時のレーザー出力の目標値はシステムコントローラ60から与えられ、記録時及び再生時にはそれぞれレーザ出力レベルが、その目標値になるように制御する。
【0046】
光学ブロックサーボ回路61は、マトリクス回路54からのフォーカスエラー信号、トラッキングエラー信号から、フォーカス、トラッキング、スレッドの各種サーボドライブ信号を生成しサーボ動作を実行させる。
即ちフォーカスエラー信号、トラッキングエラー信号に応じてフォーカスドライブ信号、トラッキングドライブ信号を生成し、二軸ドライバ68によりピックアップ51内の二軸機構のフォーカスコイル、トラッキングコイルを駆動することになる。これによってピックアップ51、マトリクス回路54、光学ブロックサーボ回路61、二軸ドライバ68、二軸機構によるトラッキングサーボループ及びフォーカスサーボループが形成される。
また光学ブロックサーボ回路61は、システムコントローラ60からのトラックジャンプ指令に応じて、トラッキングサーボループをオフとし、ジャンプドライブ信号を出力することで、トラックジャンプ動作を実行させる。
また光学ブロックサーボ回路61は、トラッキングエラー信号の低域成分として得られるスレッドエラー信号や、システムコントローラ60からのアクセス実行制御などに基づいてスレッドドライブ信号を生成し、スレッドドライバ69によりスレッド機構53を駆動する。スレッド機構53には、図示しないが、ピックアップ51を保持するメインシャフト、スレッドモータ、伝達ギア等による機構を有し、スレッドドライブ信号に応じてスレッドモータを駆動することで、ピックアップ51の所要のスライド移動が行なわれる。
【0047】
スピンドルサーボ回路62はスピンドルモータ52をCLV回転させる制御を行う。
スピンドルサーボ回路62は、ウォブル信号に対するPLL処理で生成されるクロックを、現在のスピンドルモータ52の回転速度情報として得、これを所定のCLV基準速度情報と比較することで、スピンドルエラー信号を生成する。
またデータ再生時においては、データ信号処理回路55内のPLLによって生成される再生クロック(デコード処理の基準となるクロック)が、現在のスピンドルモータ52の回転速度情報となるため、これを所定のCLV基準速度情報と比較することでスピンドルエラー信号を生成することもできる。
そしてスピンドルサーボ回路62は、スピンドルエラー信号に応じて生成したスピンドルドライブ信号を出力し、スピンドルドライバ67によりスピンドルモータ52のCLV回転を実行させる。
またスピンドルサーボ回路62は、システムコントローラ60からのスピンドルキック/ブレーキ制御信号に応じてスピンドルドライブ信号を発生させ、スピンドルモータ52の起動、停止、加速、減速などの動作も実行させる。
【0048】
以上のようなサーボ系及び記録再生系の各種動作はマイクロコンピュータによって形成されたシステムコントローラ60により制御される。
システムコントローラ60は、AVシステム120からのコマンドに応じて各種処理を実行する。
例えばAVシステム120から書込命令(ライトコマンド)が出されると、システムコントローラ60は、まず書き込むべきアドレスにピックアップ51を移動させる。そしてECCエンコーダ/デコーダ57、記録パルス変換回路64により、AVシステム120から転送されてきたデータ(例えばMPEG2などの各種方式のビデオデータや、オーディオデータ等)について上述したようにエンコード処理を実行させる。そして上記のようにエンコードされたデータに応じてレーザドライバ63がレーザ発光駆動することで記録が実行される。
【0049】
また例えばAVシステム120から、ディスク1に記録されている或るデータ(MPEG2ビデオデータ等)の転送を求めるリードコマンドが供給された場合は、まず指示されたアドレスを目的としてシーク動作制御を行う。即ち光学ブロックサーボ回路61に指令を出し、シークコマンドにより指定されたアドレスをターゲットとするピックアップ51のアクセス動作を実行させる。
その後、その指示されたデータ区間のデータをAVシステム120に転送するために必要な動作制御を行う。即ちディスク1からのデータ読出を行い、データ信号処理回路55、データ復調回路56、ECCエンコーダ/デコーダ57におけるデコード/バファリング等を実行させ、要求されたデータを転送する。
【0050】
なお、これらのフェイズチェンジマークによるデータの記録再生時には、システムコントローラ60は、ウォブル信号処理回路65,ADIP復調回路66、及びアドレスデコーダ59によって検出されるADIPアドレスを用いてアクセスや記録再生動作の制御を行う。
【0051】
ところで、この図5の例は、AVシステム120に接続されるディスクドライブ装置としたが、本発明のディスクドライブ装置としては例えばパーソナルコンピュータ等と接続されるものとしてもよい。
さらには他の機器に接続されない形態もあり得る。その場合は、操作部や表示部が設けられたり、データ入出力のインターフェース部位の構成が、図5とは異なるものとなる。つまり、ユーザーの操作に応じて記録や再生が行われるとともに、各種データの入出力のための端子部が形成されればよい。
もちろん構成例としては他にも多様に考えられ、例えば記録専用装置、再生専用装置としての例も考えられる。
【0052】
3.ADIP復調系の構成
図6は、上記図5の構成の内で、ウォブル信号を復調しADIP情報を得るための回路系のみを示している。上記もしたようにマトリクス回路54からのプッシュプル信号P/Pがウォブル信号処理回路65に供給される。
ウォブル信号処理回路65は、例えば図7のように構成されている。
【0053】
ウォブリンググルーブの変調信号(ウォブル信号)として上述したマトリクス回路54から入力される、図9(a)のようなプッシュプル信号P/Pは、図7のウォブル信号処理回路65において、バンドパスフィルタ15で帯域制限された後、A/D変換器11及びコンパレータ12に供給される。A/D変換器11は、プッシュプル信号をデジタルデータに変換して出力する。
コンパレータ12は、オペアンプ、コンパレータアンプで構成され、プッシュプル信号P/Pを2値化する。そして2値化したプッシュプル信号P/PをPLL回路13に供給する。
PLL回路13では、2値化信号に基づいて図9(b)のように、プッシュプル信号P/P、つまりウォブリンググルーブの変調信号の周波数(ウォブル周波数)のクロック(ウォブルクロックWCK)を生成する。なおPLL回路13はデジタル回路を用いてもよい。
PLL回路13から出力されるウォブルクロックWCKは、PLL回路14に供給される。PLL回路14では、ウォブルクロックWCKを逓倍し、マスタークロックMCKを生成する。このマスタークロックMCKは、A/D変換器11のサンプリングクロックとされる。なおPLL回路14も、アナログ回路、デジタル回路のいずれで構成しても良い。
そして、この図7のようなウォブル信号処理回路65から出力されるウォブルデータ、及びクロック(ウォブルクロックWCKとマスタークロックMCK)が、図6に示すようにADIP復調回路66におけるMSK復調器10,STW復調器30に供給される。
【0054】
ADIP復調回路66において、MSK復調器10は、プッシュプル信号P/Pをデジタルデータ化したウォブルデータについて、ウォブルクロックWCKとマスタークロックMCKを用いて復調し、MSK復調信号を出力する。
STW復調器30には同じくプッシュプル信号P/Pをデジタルデータ化したウォブルデータを復調し、STW復調信号を出力する。
このMSK復調信号及びSTW復調信号がアドレスデコーダ59に供給される。そしてアドレスデコーダ59によってADIP情報がデコードされ、システムコントローラ60に供給される。
【0055】
なお、アドレスデコーダ59からSTW復調器30には、図3で示したSTW変調区間を示すSTWエリア信号が供給され、STW復調器30は、そのSTWエリア信号に基づいてSTW変調データの復調を行う。また本例の場合、そのSTWエリア信号は、MSK復調器10でも用いられる。
アドレスデコーダ59は、MSK復調信号に基づいて図3(b)の各ユニットの同期(ビットシンク)をとり、その後、シンク0ユニット〜シンク3ユニットのワードシンクを確認して同期を確立する。つまり各ユニットの先頭のMSK復調信号(ウォブル番号0,1,2)を検出することで、各ユニットの同期をとった後、シンク0ユニット〜シンク3ユニットを検出して図4の83ユニットのADIP情報の同期を確立する。この同期が確立されることで、STW変調区間がわかり、STWエリア信号を発生できる。
また、例えばデータ信号処理回路55でデータ信号のディフェクト検出(ディスク上の傷や汚れなどによるRF信号欠落の検出)が行われるが、そのディフェクト信号がMSK復調器10にも供給される。
【0056】
本例では、特にMSK復調器10の構成に特徴を有する。MSK復調器10について、その構成を図8に挙げ、図9〜図15を参照しながら説明する。
上述のように図7のウォブル信号処理回路65におけるA/D変換器11で得られるウォブルデータは、図8のMSK復調器10において端子46dに入力される。
MSK復調器10では、このウォブルデータに対する復調回路系として、第1乗算積分器31A,第2乗算積分器31B,第3乗算積分器31Cを備えている。
【0057】
各乗算積分器31A,31B,31Cは、それぞれ乗算器(32−1,32−2,32−3)、加算器(33−1,33−2,33−3)、積算器(34−1,34−2,34−3)を備えている。
また第2乗算積分器31BはマスタークロックMCKのNクロック時間の遅延回路35−2を備え、第3乗算積分器31Cは2Nクロック時間の遅延回路35−3を備えている。(Nは0以外の設定値)
そして、入力されたウォブルデータは、第1乗算積分器31Aではそのまま乗算器32−1に供給され、また第2乗算積分器31BにおいてはNクロック時間遅延されて乗算器32−2に供給され、第3乗算積分器31Cにおいては2Nクロック時間遅延されて乗算器32−3に供給されることになる。
乗算器32−1,32−2,32−3には、後述するセレクタ42を介して内部基準波が供給される。なお、内部基準波は図9(c)に示すように、ウォブル基本波形と同一周波数のsin波又はcos波とされる。
【0058】
また、上述したウォブル信号処理回路65から出力されるウォブルクロックWCKは、MSK復調器10の端子46bに入力される。また同じくウォブル信号処理回路65から出力されるマスタークロックMCKは、端子46cから入力され、MSK復調器10内の各部で基準クロックとして用いられる。
端子46bからのウォブルクロックWCKは、遅延回路36に供給される。遅延回路36ではウォブルクロックWCKに対して、マスタークロックMCKの単位で所定の遅延時間が与え、カウンタ36に供給する。
この場合の遅延時間は、後述するアップダウンカウンタ39から出力される位相調整値に基づいて設定される。
この遅延回路36は、ウォブルクロックWCKを遅延させて、例えばその立ち上がりエッジ(又は立ち下がりエッジ)を、カウンタ37のリセット/スタートタイミング、及び積算器34−1,34−2,34−3のクリアタイミングとしての基準タイミング信号とするものである。後述するが、遅延回路36の遅延時間の調整により、復調用の内部基準波の位相を、ウォブルデータの位相に一致させるように調整できる。
なお遅延回路36は、例えばフリップフロップにより構成されるシフトレジスタとセレクタにより構成できる。もちろん他の構成でも良い。例えばデジタルカウンタを用いても実現でき、或いはCR構成のアナログ回路を用いてもよい。さらにはバッファとセレクタを用いた遅延回路を用いてもよい。
【0059】
遅延回路36を介したウォブルクロックWCKは、リセット/スタート信号としてカウンタ37に供給される。
カウンタ37は、マスタークロックMCKをカウントする動作を行うが、遅延回路36からのリセット/スタート信号が供給されたタイミングでカウントリセットを行う。つまりカウンタ37は、遅延されたウォブルクロックWCKのエッジタイミングでカウント値をリセットしながらマスタークロックMCKのカウントを行っていき、そのカウント値をテーブル群41に対してテーブルのアドレスとして出力する。
例えばマスタークロックMCKは、ウォブル基本波形の1周期が23クロックとなる周波数であるとする。そしてカウンタ37は、ウォブル基本波形の1周期間隔でリセットされることになるため、0〜22のカウント値を繰り返し発生させることになる。
【0060】
テーブル群41は、例えばテーブルTB0〜TB7として8個のテーブルを有する。なお、テーブルを8個とするのは一例である。
そして各テーブルTB0〜TB7は、それぞれが内部基準波となる波形データを記憶したテーブル(ROM)であり、各データがカウンタ37のカウント値に応じて読み出されるものである。
各テーブルTB0〜TB7の波形データとしては、例えばTD0〜TD22の23個のデータが記憶されている。これが上記0〜22のカウント値に応じて順次読み出されていくことで、図9(c)のように、ウォブル基本波形と同一周波数の内部基準波が発生される。
ただし、各テーブルTB0〜TB7に記憶されている内部基準波の波形は、それぞれが少しづつ位相がずらされたsin波形(又はcos波形)とされている。つまり各テーブルTB0〜TB7のデータTD0〜TD22は、それぞれ位相をずらしたウォブル1周期の波形を示すデータとされている。各テーブルTB0〜TB7の位相差については後述する。
【0061】
選択回路42は、テーブルTB0〜TB7の内の1つを選択する。選択回路42はアップダウンカウンタ39からの位相調整値に基づいて1つのテーブルを選択する。
なお、アップダウンカウンタ39から出力される位相調整値は、例えば8ビット値とされ、上位5ビットが遅延回路36での23段階の遅延量を指示し、下位3ビットが選択回路42でのテーブルTB0〜TB7の選択値を指示するものとされる。
各テーブルTB0〜TB7は、カウンタ37からのカウント値に応じて内部基準波となる波形データが順次出力されるが、選択回路42で選択されたテーブルTBxからの内部基準波が乗算器32−1,32−2,32−3に供給されることになる。
【0062】
なおテーブル群41は内部基準波を発生させるものであるが、波形データを出力するものであればテーブル群以外の構成のものでもよく、RAMを用いてシステムコントローラ60から設定してもよいし、組み合わせ回路で構成してもよい。また、データ列を順番に出力するシフトレジスタを採用しても良いし、発振器を用いたアナログ回路でもよい。また発生する信号はsin信号、cos信号のいずれでもよく、さらには矩形波を発生する回路でも良い。
また、カウンタ37,テーブル群41、選択回路42は、後述するように多様な位相状態で内部基準波を発生する構成例の1つであるが、同様の動作が実行されれば構成は限定されず、例えばカウンタ37をシステムコントローラ60からの設定により1の増減ではなくn個の増減で動作させ、n個のテーブルを融合して1つのテーブルとする構成も考えられる。
【0063】
一方、第1,第2,第3乗算積分器31A,31B,31Cにおいては、乗算器32−1、32−2,32−3のそれぞれに、Nクロック時間ずつずれたタイミングでウォブルデータが供給されるが、このタイミングのずれた3系統のウォブルデータが、それぞれ乗算器32−1、32−2,32−3で内部基準波と乗算される。そして第1,第2,第3乗算積分器31A,31B,31Cは、それぞれ乗算結果を加算器(33−1,33−2,33−3)及び積算器(34−1,34−2,34−3)により積算する。
つまり、第1,第2,第3乗算積分器31A,31B,31Cは、内部基準波とウォブルデータとを乗算し、乗算結果を積分する演算処理を、それぞれが異なる内部基準波とウォブルデータの相互位相状態において行うものとなっている。
【0064】
ここで、第1,第2,第3乗算積分器31A,31B,31Cのうち、第2乗算積分器31Bが、実際のMSK復調のための乗算積分器とされている。
そして、乗算器32−1、32−2,32−3に供給されるウォブルデータは、遅延回路35−2,35−3によって、位相がずれたものとされている。即ち、MSK復調のための乗算積分を行う第2乗算積分器31Bを中心にみると、第1乗算積分器31Aの乗算器32−1には、位相の進んだウォブルデータが供給され、また第3乗算積分器31Cの乗算器32−3には、位相の遅れたウォブルデータが供給されることになる。
【0065】
主たる乗算積分系である第2乗算積分器31Bにおいては、乗算器32−2で、ウォブルデータと、選択回路42で選択されたテーブルTBxからの内部基準波データが乗算される。この乗算値は例えば図9(d)のようになる。そして乗算値は加算器33−2に供給される。
加算器33−2は、乗算器32−2からの乗算値と、フリップフロップにより構成される積算器34−2の出力を加算し、加算値を積算器34−2に供給する。
ここで、積算器34−2は、遅延回路36からのタイミング信号がインバータ43及びオアゲート44を介して、イネーブル/クリアパルスとして供給されることでクリアされる。
つまり積算器34−2はカウンタ37と同タイミングでリセットされる。従って積算器34−2では、1ウォブル基本波形周期の間で乗算値の積算を行うことになる。例えば23サンプルの乗算結果を積算する動作を繰り返す。
するとその積算値(乗算後加算値)は、図9(e)のように推移する。このような積算器34−2の出力は正負判定回路40で正負判定され、判定結果がMSK復調信号となる。そしてそのMSK復調信号が端子34fからアドレスデコーダ59に出力される。
積算器34−2が2の補数表現で積算値を出力する場合は、正負判定回路40は、その最上位ビットを出力する構成とされれば良い。もちろん数値の正負を判定するものであれば他のものでもよく正負の判定はコンパレータ回路を用いてもよい。
また加算器33−2,積算器34−2による構成は、乗算器32−2の乗算値を1ウォブル期間で積分する回路であればどのようなものでも良く、各種のデジタル回路またはアナログ回路を用いることができる。
【0066】
第1,第3乗算積分器31A,31Cにおいても、それぞれ乗算器32−1,32−3、加算器33−1,33−3、積算器34−1、34−3で、同様の動作が行われる。ただし、その第1,第3乗算積分器31,33の積算値は正負判定回路40に供給されない。つまり実際の復調処理には用いられない。この第1,第3乗算積分器31A,31Cの積算値出力は、上記第2乗算積分器31Bの積算値出力とともに、最適位相判定部38に供給される。
【0067】
ところで、各積算器34−1、34−2、34−3に対するイネーブル/クリアパルスは、上記のようにオアゲート44を介して供給されるが、オアゲート44によってSTWエリア信号もイネーブル/クリアパルスとして供給される。
STWエリア信号は、上述したように、アドレスデコーダ59から供給される信号であり、これはSTW変調期間を示すパルスである。
つまりこの場合、積算器34−1,34−2,34−3は、例えば図3(b)に示したADIPユニットのSTW変調信号の範囲以外では、上記のように、遅延回路36からのタイミング信号がイネーブル/クリアパルスとして供給されることで、1ウォブル基本波形周期の間で乗算値の積算を行うが、STW変調信号の範囲に相当する期間では、その1ウォブル期間でなく、そのSTW変調区間での積算を行うことになる。例えば図3(b)のレファレンスユニット、データ1ユニット、データ0ユニットにおけるウォブル番号18〜54の区間においては、継続して積算を行うことになる。
【0068】
本例のMSK復調器10は、ウォブル信号と内部基準波の位相調整を自動的に実行する機能を有するものであり、そのために、第2乗算積分器31B以外に、実際には復調処理に供しない積算値を得る第1,第3乗算積分器31A,31Cを設け、また最適位相判定部38及びアップダウンカウンタ39を設けている。
ここで、最適位相判定部38及びアップダウンカウンタ39の動作説明に先だって、位相調整の必要性及び内部基準波の位相を変化させる手法について説明しておく。
【0069】
MSK復調器10の処理においては、図9からわかるように、入力されるウォブル信号においてウォブル基本波(モノトーンウォブルMW)の区間では乗算後加算値は正方向に推移する。一方、MSKマークの区間では乗算後加算値が負方向に推移する。従って、これを正負判定回路40で正負判定することでMSKマークと基本波を判別する復調信号が得られる。
但し、この図9は、乗算器32−2に与えられるウォブルデータと内部基準波の位相が一致している状態である。即ち位相が一致しているときに一番よい復調結果が得られる。一方、図10にはプッシュプル信号P/P(ウォブルデータ)と内部基準波の位相がずれた場合を示しているが、この図10(e)の乗算後加算値は、位相が合っている場合の図9(e)の乗算後加算値と比較してわかるように、正負判定の際にエラーの生じやすい状態となっている。つまりウォブルデータと内部基準波の位相ズレによって復調精度が悪化する。
【0070】
そこでMSK復調器10では、遅延回路36の遅延量及び選択回路42でのテーブルの選択により、内部基準波の位相を調整できるようにしている。
例えばアップダウンカウンタ39が後述する動作により、例えば8ビットの位相調整値を発生させ、その上位5ビットで、遅延回路36での遅延量を調整することによっては、内部基準波の位相をマスタークロックCK単位で可変設定できるものとなる。
例えば上記のようにマスタークロックMCKは、1ウォブル基本波形周期において23クロックとなる周波数であるとするとき、遅延回路16での遅延量を変更することで、1/23周期単位で内部基準波の位相を調整できることになる。つまり遅延回路36から出力されるウォブルクロックWCKのエッジタイミングでカウンタ37がリセットされるため、遅延量を変えれば、1ウォブル周期においてカウンタ37のリセットタイミングを23段階に変化させることができる。カウンタ37のリセットタイミングは、或るテーブルTBxのデータTD0〜TD22における先頭のデータTD0の出力タイミングとなるため、遅延量を23段階で可変とすることで、テーブルTBxから出力される内部基準波の位相を1ウォブル周期内で23段階に可変できる。
例えば図11は、或るテーブルTBxから出力される内部基準波として、遅延時間調整によって1/23周期単位で位相調整できる様子を示している。
【0071】
また、このような遅延回路36による位相調整に加えて、テーブルTB0〜TB7を選択することでさらに精細な位相調整ができる。
入力されるプッシュプル信号P/Pの位相が、マスタークロックMCKの位置で常にゼロクロスする波形であれば、遅延回路36による位相調整のみで問題ないが、回路動作の遅延等で内部動作クロックサンプリングのタイミングにより位相がずれる事がある。また動作周波数を下げるとサンプリングの間隔が大きくなり位相差が大きくなる。特に高転送レート時においてはサンプリング周波数が相対的に低くなるため、ウォブル信号波形と、内部基本波との位相が大きく異なる場合がある。従ってマスタークロック単位よりさらに精細な位相調整を行う必要が生ずる。
【0072】
テーブルTB0〜TB7は、このようにマスタークロック単位よりも細かい位相調整を行うために設けられている。例えば8個とされるテーブルTB0〜TB7により1クロック期間の1/8期間単位で位相をずらした内部基準波形を用意する。
図12に、各テーブルTB0〜TB7に記憶される波形データ例を示している。図示するように、各テーブルTB0〜TB7に記憶されるデータは、それぞれが1/8MCK期間だけ位相がずれたデータとなっている。特に図12の破線Sの部分を拡大して図13に示しているが、図13に明瞭に示されるように、マスタークロックMCKによるサンプリング間隔の内で位相がずれるように、各テーブルTB0〜TB7のデータTDが設定されている。
【0073】
つまり、アップダウンカウンタ39が発生する8ビットの位相調整値の下位3ビットで、選択回路42が制御され、テーブル群21の内の1つのテーブルを選択することで、より精細な位相調整が可能となる。換言すれば、8個のテーブルTB0〜TB7を備える場合、サンプリング周波数(マスタークロック周波数)を上げることなしに、サンプリング周波数を8倍上げた場合と同じ精度での位相調整を実現できる。
【0074】
なお、テーブル数は次の様に計算する事ができる。
テーブル数=(1/2)・2ADB×Sin(2π/S)
但し、ADBはA/D変換器11のビット数、Sは入力信号1周期のサンプル数である。
例えばA/D変換器11のビット数が6ビットで、入力信号1周期のサンプル数が上記のように23個である場合、上記式によるテーブル数は8.6となり、テーブル数は8個ないし9個が適正であるといえる。
【0075】
このように本例では、内部基準波について、遅延回路36の遅延時間の調整、及び選択回路42でのテーブルTB0〜TB15の選択によって、精細な位相調整が実行できるが、上記のように主たる復調回路系である第2乗算積分器31Bに加えて、第1,第3乗算積分器31A,31Cを設けることと、最適位相判定部38、アップダウンカウンタ39を設けることで、第2乗算積分器31Bの乗算器32−2に与えられるウォブルデータと内部基準波の位相を自動調整できるようにしている。
【0076】
最適位相判定部38は、端子46hから入力されるSTWエリア信号で規定される期間において 第1,第2,第3乗算積分器31A,31B,31Cの各積算器34−1,34−2,34−3の積算結果をみて、どの乗算積分器において位相が最適であったかを判定する。そしてその判定結果により、アップダウンカウンタ39に対して、カウントアップ/カウントダウン/ホールド(カウント変更せず)を指示する。
上記のように、積算器34−1、34−2,34−3は、同じくSTWエリア信号によってウォブルデータのSTW変調区間では継続的に積分処理をしているため、最適位相判定部38は、そのSTW変調区間での積分値を比較して、最適位相を判定することになる。
【0077】
アップダウンカウンタ39は、最適位相判定部38からの指示に応じて、カウント値をアップ/カウントダウン/ホールドする。
このアップダウンカウンタ39のカウント値は、位相調整値として遅延回路36、及び選択回路42に供給される。
なお、アップダウンカウンタ39の初期値、つまり位相調整値としての初期値は、例えばシステムコントローラ60から端子46iにMSK位相初期値ロード信号が供給されることで設定される。
【0078】
上記のように遅延回路36では、アップダウンカウンタ39から供給されるカウント値(位相調整値)の上位ビットに応じて遅延時間を設定する。また選択回路42は、アップダウンカウンタ39から供給されるカウント値(位相調整値)の下位ビットに応じてテーブルTB0〜TB7のうちの1つを選択する。上記のように、遅延回路36での遅延時間を調整することで、内部基準波の位相をマスタークロックMCK単位で調整でき、またテーブルTB0〜TB7を選択することで、マスタークロックMCKの1/8単位で調整できることになる。
【0079】
つまりこのMSK復調器10の自動位相調整は、3つの演算系である第1,第2,第3乗算積分器31A,31B,31Cの復調結果を監視しながら、内部基準波の位相を最適状態に追い込んでいくものである。
上述のように、3つの各乗算器32−1,32−2,32−3には、タイミングのずれたウォブルデータが供給される。従って各乗算器32−1,32−2,32−3でのウォブルデータと内部基準波の位相ズレ状態は異なるものとなる。このため、最適位相判定部38で、どの乗算積分器が最適な位相状態かを判別することで、第2乗算積分器31Bでの位相状態を最適化させる方向に追い込むことができる。
【0080】
即ち最適位相判定部38は、アドレスデコーダ59からのSTWエリア信号によってSTW変調区間が終了したことを合図に第1、第2、第3乗算積分器31,32,33の積算結果で一番よい結果を示した方向にアップダウンカウンタ39を加減させる。
例えば、内部基準波に対するウォブルデータの位相が最も進んでいる第1乗算積分器31Aでの位相状態が最適である場合は、アップダウンカウンタ39を例えばカウントダウンさせる。すると、内部基準波の位相が進む方向、つまり第2乗算積分器31Bでの位相状態を合致させる方向に調整される。また内部基準波に対するウォブルデータの位相が最も遅れている第3乗算積分器31Cでの位相状態が最適である場合は、アップダウンカウンタ39を例えばカウントアップさせる。すると、内部基準波の位相が遅れる方向、つまり第2乗算積分器31Bでの位相状態を合致させる方向に調整される。第2乗算積分器31Bでの位相状態が最適である場合は、アップダウンカウンタ39をホールドさせる。つまり第2乗算積分器31Bでの位相状態が適切である場合は、内部基準波の位相を変化させない。
【0081】
図14,図15に、波形I,II,IIIとして、各積算器34−1、34−2、34−3からの積分結果波形を示している。
これらの図においてSTW区間として示す部分は、STW変調区間における積分結果である。またMSK区間として示す部分は、MSK変調区間である。
MSK変調区間では、1ウォブル周期毎に各積算器34−1、34−2、34−3がリセットされており、このMSK区間の波形を時間軸方向に拡大すると、図9(e)のようになっているものである。
一方、STW区間では、STWエリア信号で規定される区間、積算が続けられていく(リセットされない)ため、図示するように積算値は増大していく。そしてウォブルデータと内部基準波の相互位相状態が合っている程、積分結果は高くなる。
図14においては第3乗算積分器31CのSTW区間の積算結果IIIが最も良いことを表しており、この場合は、最適位相判定部38はアップダウンカウンタ39をカウントアップさせることになる。
一方、図15においては第1乗算積分器31AのSTW区間の積算結果Iが最も良いことを表しており、この場合は、最適位相判定部38はアップダウンカウンタ39をカウントダウンさせることになる。
【0082】
このようにSTW区間を3つの乗算積分器31A,31B,31Cで積分し、その結果を位相調整用のアップダウンカウンタ39にフィードバックして位相調整値を変化させることでMSK復調器10の内部基準波の位相を入力されるウォブルデータに対して最適に保つことができる。
そして、第2乗算積分器31Bでの内部基準波とウォブルデータの相互位相状態が自動的に最適状態(位相が合った状態)に追い込まれることで、MSK復調性能を向上させることができる。
つまり、ディスク1の隣接トラックからのクロストーク、書き込み後の反射率の低下、ディスクスキュー等の外乱要因に加え、メディアの違いによる外乱発生時などの位相ズレが生じても、これを補正し、十分にMSK復調ができることとなるため、ADIPアドレスエラーも低減する。
さらにアドレスエラーが低減することにより、メーカーが異なる事などによるメディア特性のばらつきが大きい記録再生メディアに対しても安定して記録再生することができる。
また、MSK復調能力が上がるのでピックアップ部のばらつきによる歩留まりを改善することもできる。
【0083】
また本例では、遅延回路36での遅延時間だけでなく、テーブル群41でのテーブル選択によって位相調整が行われるため、サンプリング周波数(マスタークロックMCK)を高周波数化しなくても、高精度な位相の自動調整が可能となる。
なお、本例の自動調整の調整精度(分解能)は、マスタークロックMCK周波数と、テーブル群41のテーブル数と、遅延回路35−2、35−3での遅延時間(N)の設定によるものとなるため、必要とする調整精度を考慮して、これらが適切に設計されればよい。
また、図8の例では、第2,第3復調器31B,31Cにおいて遅延回路35−2、35−3でウォブルデータを遅延させるようにしているが、ウォブルデータについては遅延させずに、乗算器32−2、32−3に与える内部基準波を遅延させるように構成しても、同様の動作が可能である。
【0084】
ところで図8の構成ではノイズ判定部45が設けられている。ノイズ判定部45は、第2乗算積分器31Bの積分結果を監視すると共に、例えばデータ信号処理回路55からのディフェクト信号も監視している。
そして、何らかの外乱、ディスク反射率のばらつき等により、図14,図15のような積分結果(第2乗算積分器32の積分結果II)がある一定値を下回ったとき、及びディフェクト信号によりディフェクト有りが知らされた場合に、最適位相判定部38の動作を中断させるようにしており、これによって自動位相調整が誤動作するのを防いでいる。
これによってディフェクトの影響で位相調整動作が不適切な位相調整を行ってしまうことが防止される。
なお、ノイズ判定部45は、第2乗算積分器31Bの積分結果のみを監視する例や、或いはディフェクト信号のみを監視する例も考えられる。
【0085】
4.変形例
以上、実施の形態について説明したが、本発明の変形例は多様に考えられる。
例えば実施の形態でのMSK復調器10では、テーブル群41を用いて精細な位相調整ができるようにしたが、例えば図16のようにテーブル群を備えない構成としても良い。
図16については上記図8と同一部分に同一符号を付し、詳細な説明は省略するが、図16のMSK復調器10では、内部基準波を発生させる1つのテーブル41Aのみを有している。
この場合、内部基準波の位相調整は遅延回路36での遅延時間調整によるもののみとなる。従ってアップダウンカウンタ39からの位相調整値は遅延回路16のみに供給される。
【0086】
上記図8の構成においては、テーブル群41の選択により、マスタークロックMCK単位よりも精細な位相調整ができると説明したが、マスタークロックMCKを十分に高周波数化できるのであれば、遅延回路16のみでの位相調整で十分に精細な位相調整が可能となる。
つまり遅延回路36の動作周波数を上げることができる場合は、この図16のような構成で、性能上問題のない位相調整が可能となるものである。
【0087】
また、上記実施の形態では、最適位相判定部38はSTW区間での積分値をみて最適位相判定を行うようにしたが、STW区間ではなく、モノトーンウォブル区間であっても良い。その場合、図8の端子46g、46hにはSTWエリア信号ではなく、モノトーンウォブル区間を示す信号を与えればよい。
モノトーンウォブル区間の積算値でも、相互位相状態によって積分値は図14,図15のようになり、上記同様に最適位相判定を行うことができる。
さらには、STW変調区間とモノトーンウォブル区間の両方で最適位相判定を行うことも考えられる。
【0088】
また上記例では相変化記録方式のディスクのウォブリンググルーブによる情報の復調装置としての例を挙げたが、本発明は、色素膜変化方式、光磁気記録方式など、他の記録方式のディスクのウォブリンググルーブ復調にも適用できる。
また、本例で示した復調方式は多様な装置に適用できる。即ち上記のように光ディスクのウォブルアドレス復調に応用できるだけでなく、MSK変調を用いた信号伝送復調装置などにも適用できる。
【図面の簡単な説明】
【0089】
【図1】ディスクのウォブリンググルーブの説明図である。
【図2】ウォブル信号のMSK変調波及びSTW変調波の説明図である。
【図3】ADIPユニットの説明図である。
【図4】ADIPユニットから形成されるADIP情報の説明図である。
【図5】実施の形態のディスクドライブ装置のブロック図である。
【図6】実施の形態のディスクドライブ装置のウォブル復調系のブロック図である。
【図7】実施の形態のウォブル信号処理回路のブロック図である。
【図8】実施の形態のMSK復調器のブロック図である。
【図9】MSK復調波形の説明図である。
【図10】位相ズレの場合のMSK復調波形の説明図である。
【図11】実施の形態の遅延時間による位相調整の説明図である。
【図12】実施の形態のテーブル選択による位相調整の説明図である。
【図13】実施の形態の各テーブルの位相の説明図である。
【図14】実施の形態のSTW区間の積分値の説明図である。
【図15】実施の形態のSTW区間の積分値の説明図である。
【図16】実施の形態のMSK復調器の他の構成のブロック図である。
【図17】従来の復調回路のブロック図である。
【図18】位相変動に影響されたMSK変調信号の説明図である。
【符号の説明】
【0090】
1 ディスク、10 MSK復調器、11 A/D変換器、12 コンパレータ、13,14 PLL回路、40 正負判定回路、41 テーブル群、42 選択回路、30 STW復調器、31A 第1乗算積分器、31B 第2乗算積分器、31C 第3乗算積分器、36,35−2,35−3 遅延回路、37 カウンタ、32−1,32−2,32−3 乗算器、33−1,33−2,33−3 加算器、34−1,34−2,34−3 積算器、38 最適位相判定部、39 アップダウンカウンタ、51 ピックアップ、52 スピンドルモータ、53 スレッド機構、54 マトリクス回路、59 アドレスデコーダ、65 ウォブル信号処理回路、66 ADIP復調回路、60 システムコントローラ
【特許請求の範囲】
【請求項1】
所定の変調信号を含む入力信号が入力されて復調を行う復調装置において、
上記所定の変調信号に対する内部基準波を出力する内部基準波発生手段と、
上記内部基準波と上記入力信号とを乗算し、乗算結果を積分する演算処理を、それぞれが異なる上記内部基準波と上記入力信号の相互位相状態において行う複数の演算手段と、
上記複数の演算手段のうちの特定の演算手段の出力を用いて上記変調信号の復調信号を生成する復調信号生成手段と、
上記入力信号における上記変調信号の区間以外での、上記複数の演算手段のそれぞれの出力から、上記複数の演算手段での各相互位相状態のうちでの最適な相互位相状態を判定する最適位相判定手段と、
上記最適位相判定手段の判定結果に基づいて、上記特定の演算手段における上記相互位相状態が最適化される方向に、上記各演算手段に供給する上記内部基準波の位相を調整する位相調整手段と、
を備えたことを特徴とする復調装置。
【請求項2】
上記複数の演算手段として、第1,第2,第3の演算手段を備え、
上記特定の演算手段は、上記第2の演算手段であり、
上記第1の演算手段は、上記第2の演算手段における上記内部基準波と上記入力信号の相互位相状態よりも、上記内部基準波と上記入力信号の一方の位相が進んでいる相互位相状態で乗算を行い、
上記第3の演算手段は、上記第2の演算手段における上記内部基準波と上記入力信号の相互位相状態よりも、上記一方の位相が遅れている相互位相状態で乗算を行う構成とされていることを特徴とする請求項1に記載の復調装置。
【請求項3】
上記入力信号における上記変調信号の区間以外とは、上記所定の変調信号とは異なる変調方式の変調信号が含まれている区間であることを特徴とする請求項1に記載の復調装置。
【請求項4】
上記所定の変調信号とはMSK変調方式の変調信号であり、上記所定の変調信号とは異なる変調方式の変調信号とは、STW変調方式の変調信号であることを特徴とする請求項3に記載の復調装置。
【請求項5】
上記入力信号における上記変調信号の区間以外とは、無変調区間であることを特徴とする請求項1に記載の復調装置。
【請求項6】
上記演算手段の出力もしくは上記入力信号についてノイズ判定を行うノイズ判定手段をさらに備え、
上記最適位相判定手段は、上記ノイズ判定手段のノイズ判定結果に応じて最適位相判定処理を中断することを特徴とする請求項1に記載の復調装置。
【請求項7】
ディスク記録媒体上でウォブリンググルーブとして記録された、所定の変調信号を含むウォブル信号を読み出す読出手段と、
上記所定の変調信号に対する内部基準波を出力する内部基準波発生手段と、
上記内部基準波と上記ウォブル信号とを乗算し、乗算結果を積分する演算処理を、それぞれが異なる上記内部基準波と上記入力信号の相互位相状態において行う複数の演算手段と、
上記複数の演算手段のうちの特定の演算手段の出力を用いて上記変調信号の復調信号を生成する復調信号生成手段と、
上記ウォブル信号における上記変調信号の区間以外での、上記複数の演算手段のそれぞれの出力から、上記複数の演算手段での各相互位相状態のうちでの最適な相互位相状態を判定する最適位相判定手段と、
上記最適位相判定手段の判定結果に基づいて、上記特定の演算手段における上記相互位相状態が最適化される方向に、上記各演算手段に供給する上記内部基準波の位相を調整する位相調整手段と、
上記復調信号生成手段で得られた復調信号に対してデコード処理を行い、上記ウォブリンググルーブとして記録された情報を得るデコード手段と、
を備えたことを特徴とするディスクドライブ装置。
【請求項8】
上記デコード手段は、上記ウォブリンググルーブとして記録された情報として、ディスク記録媒体上のアドレス情報を得ることを特徴とする請求項7に記載のディスクドライブ装置。
【請求項9】
上記複数の演算手段として、第1,第2,第3の演算手段を備え、
上記特定の演算手段は、上記第2の演算手段であり、
上記第1の演算手段は、上記第2の演算手段における上記内部基準波と上記ウォブル信号の相互位相状態よりも、上記内部基準波と上記ウォブル信号の一方の位相が進んでいる相互位相状態で乗算を行い、
上記第3の演算手段は、上記第2の演算手段における上記内部基準波と上記ウォブル信号の相互位相状態よりも、上記一方の位相が遅れている相互位相状態で乗算を行う構成とされていることを特徴とする請求項7に記載のディスクドライブ装置。
【請求項10】
上記ウォブル信号における上記変調信号の区間以外とは、上記所定の変調信号とは異なる変調方式の変調信号が含まれている区間であることを特徴とする請求項7に記載のディスクドライブ装置。
【請求項11】
上記所定の変調信号とはMSK変調方式の変調信号であり、上記所定の変調信号とは異なる変調方式の変調信号とは、STW変調方式の変調信号であることを特徴とする請求項10に記載のディスクドライブ装置。
【請求項12】
上記ウォブル信号における上記変調信号の区間以外とは、無変調区間であることを特徴とする請求項7に記載のディスクドライブ装置。
【請求項13】
上記演算手段の出力もしくは上記ウォブル信号についてノイズ判定を行うノイズ判定手段をさらに備え、
上記最適位相判定手段は、上記ノイズ判定手段のノイズ判定結果に応じて最適位相判定処理を中断することを特徴とする請求項7に記載のディスクドライブ装置。
【請求項14】
所定の変調信号を含む入力信号が入力されて復調を行う復調装置の復調方法として、
内部基準波と上記入力信号とを乗算し、乗算結果を積分する演算処理を、それぞれが異なる上記内部基準波と上記入力信号の相互位相状態において複数系統で行う演算ステップと、
上記複数系統の演算処理のうちの特定の演算処理の出力を用いて上記変調信号の復調信号を生成する復調信号生成ステップと、
上記入力信号における上記変調信号の区間以外での、上記複数系統の演算処理のそれぞれの出力から、上記複数系統の演算処理での各相互位相状態のうちでの最適な相互位相状態を判定する最適位相判定ステップと、
上記最適位相判定ステップの判定結果に基づいて、上記特定の演算処理における上記相互位相状態が最適化される方向に、上記複数系統の演算処理に与える上記内部基準波の位相を可変する位相調整ステップと、
を備えたことを特徴とする復調方法。
【請求項1】
所定の変調信号を含む入力信号が入力されて復調を行う復調装置において、
上記所定の変調信号に対する内部基準波を出力する内部基準波発生手段と、
上記内部基準波と上記入力信号とを乗算し、乗算結果を積分する演算処理を、それぞれが異なる上記内部基準波と上記入力信号の相互位相状態において行う複数の演算手段と、
上記複数の演算手段のうちの特定の演算手段の出力を用いて上記変調信号の復調信号を生成する復調信号生成手段と、
上記入力信号における上記変調信号の区間以外での、上記複数の演算手段のそれぞれの出力から、上記複数の演算手段での各相互位相状態のうちでの最適な相互位相状態を判定する最適位相判定手段と、
上記最適位相判定手段の判定結果に基づいて、上記特定の演算手段における上記相互位相状態が最適化される方向に、上記各演算手段に供給する上記内部基準波の位相を調整する位相調整手段と、
を備えたことを特徴とする復調装置。
【請求項2】
上記複数の演算手段として、第1,第2,第3の演算手段を備え、
上記特定の演算手段は、上記第2の演算手段であり、
上記第1の演算手段は、上記第2の演算手段における上記内部基準波と上記入力信号の相互位相状態よりも、上記内部基準波と上記入力信号の一方の位相が進んでいる相互位相状態で乗算を行い、
上記第3の演算手段は、上記第2の演算手段における上記内部基準波と上記入力信号の相互位相状態よりも、上記一方の位相が遅れている相互位相状態で乗算を行う構成とされていることを特徴とする請求項1に記載の復調装置。
【請求項3】
上記入力信号における上記変調信号の区間以外とは、上記所定の変調信号とは異なる変調方式の変調信号が含まれている区間であることを特徴とする請求項1に記載の復調装置。
【請求項4】
上記所定の変調信号とはMSK変調方式の変調信号であり、上記所定の変調信号とは異なる変調方式の変調信号とは、STW変調方式の変調信号であることを特徴とする請求項3に記載の復調装置。
【請求項5】
上記入力信号における上記変調信号の区間以外とは、無変調区間であることを特徴とする請求項1に記載の復調装置。
【請求項6】
上記演算手段の出力もしくは上記入力信号についてノイズ判定を行うノイズ判定手段をさらに備え、
上記最適位相判定手段は、上記ノイズ判定手段のノイズ判定結果に応じて最適位相判定処理を中断することを特徴とする請求項1に記載の復調装置。
【請求項7】
ディスク記録媒体上でウォブリンググルーブとして記録された、所定の変調信号を含むウォブル信号を読み出す読出手段と、
上記所定の変調信号に対する内部基準波を出力する内部基準波発生手段と、
上記内部基準波と上記ウォブル信号とを乗算し、乗算結果を積分する演算処理を、それぞれが異なる上記内部基準波と上記入力信号の相互位相状態において行う複数の演算手段と、
上記複数の演算手段のうちの特定の演算手段の出力を用いて上記変調信号の復調信号を生成する復調信号生成手段と、
上記ウォブル信号における上記変調信号の区間以外での、上記複数の演算手段のそれぞれの出力から、上記複数の演算手段での各相互位相状態のうちでの最適な相互位相状態を判定する最適位相判定手段と、
上記最適位相判定手段の判定結果に基づいて、上記特定の演算手段における上記相互位相状態が最適化される方向に、上記各演算手段に供給する上記内部基準波の位相を調整する位相調整手段と、
上記復調信号生成手段で得られた復調信号に対してデコード処理を行い、上記ウォブリンググルーブとして記録された情報を得るデコード手段と、
を備えたことを特徴とするディスクドライブ装置。
【請求項8】
上記デコード手段は、上記ウォブリンググルーブとして記録された情報として、ディスク記録媒体上のアドレス情報を得ることを特徴とする請求項7に記載のディスクドライブ装置。
【請求項9】
上記複数の演算手段として、第1,第2,第3の演算手段を備え、
上記特定の演算手段は、上記第2の演算手段であり、
上記第1の演算手段は、上記第2の演算手段における上記内部基準波と上記ウォブル信号の相互位相状態よりも、上記内部基準波と上記ウォブル信号の一方の位相が進んでいる相互位相状態で乗算を行い、
上記第3の演算手段は、上記第2の演算手段における上記内部基準波と上記ウォブル信号の相互位相状態よりも、上記一方の位相が遅れている相互位相状態で乗算を行う構成とされていることを特徴とする請求項7に記載のディスクドライブ装置。
【請求項10】
上記ウォブル信号における上記変調信号の区間以外とは、上記所定の変調信号とは異なる変調方式の変調信号が含まれている区間であることを特徴とする請求項7に記載のディスクドライブ装置。
【請求項11】
上記所定の変調信号とはMSK変調方式の変調信号であり、上記所定の変調信号とは異なる変調方式の変調信号とは、STW変調方式の変調信号であることを特徴とする請求項10に記載のディスクドライブ装置。
【請求項12】
上記ウォブル信号における上記変調信号の区間以外とは、無変調区間であることを特徴とする請求項7に記載のディスクドライブ装置。
【請求項13】
上記演算手段の出力もしくは上記ウォブル信号についてノイズ判定を行うノイズ判定手段をさらに備え、
上記最適位相判定手段は、上記ノイズ判定手段のノイズ判定結果に応じて最適位相判定処理を中断することを特徴とする請求項7に記載のディスクドライブ装置。
【請求項14】
所定の変調信号を含む入力信号が入力されて復調を行う復調装置の復調方法として、
内部基準波と上記入力信号とを乗算し、乗算結果を積分する演算処理を、それぞれが異なる上記内部基準波と上記入力信号の相互位相状態において複数系統で行う演算ステップと、
上記複数系統の演算処理のうちの特定の演算処理の出力を用いて上記変調信号の復調信号を生成する復調信号生成ステップと、
上記入力信号における上記変調信号の区間以外での、上記複数系統の演算処理のそれぞれの出力から、上記複数系統の演算処理での各相互位相状態のうちでの最適な相互位相状態を判定する最適位相判定ステップと、
上記最適位相判定ステップの判定結果に基づいて、上記特定の演算処理における上記相互位相状態が最適化される方向に、上記複数系統の演算処理に与える上記内部基準波の位相を可変する位相調整ステップと、
を備えたことを特徴とする復調方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2006−12348(P2006−12348A)
【公開日】平成18年1月12日(2006.1.12)
【国際特許分類】
【出願番号】特願2004−190909(P2004−190909)
【出願日】平成16年6月29日(2004.6.29)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成18年1月12日(2006.1.12)
【国際特許分類】
【出願日】平成16年6月29日(2004.6.29)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]