
微小機械振動子とその製造方法
【課題】振動子内に共振周波数制御機構を組み込むことが容易で、かつ広い周波数帯域での共振周波数制御が可能な微小機械振動子を提供する。
【解決手段】微小機械振動子は、シリコン基板1上に形成されたシリコン酸化膜2と、シリコン酸化膜2上に形成された電極4,5と、一端が電極4に接続され、電極4およびシリコン酸化膜2で固定されていない一部が開口部6内に突出するように形成される振動子部7と、一端が電極5に接続され、電極5およびシリコン酸化膜2で固定されていない方の先端部が開口部6内に突出した振動子部7の先端部と対向するように形成される制御極部8とを備える。
【解決手段】微小機械振動子は、シリコン基板1上に形成されたシリコン酸化膜2と、シリコン酸化膜2上に形成された電極4,5と、一端が電極4に接続され、電極4およびシリコン酸化膜2で固定されていない一部が開口部6内に突出するように形成される振動子部7と、一端が電極5に接続され、電極5およびシリコン酸化膜2で固定されていない方の先端部が開口部6内に突出した振動子部7の先端部と対向するように形成される制御極部8とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、共振周波数を可逆的に制御することが可能な微小機械振動子とその製造方法に関するものである。
【背景技術】
【0002】
微小機械振動子の共振周波数の可逆的な制御手法として、これまでのところ機械振動子加振時に付加デバイスを用いて静電吸引力を作用させ歪印加することにより電気的に周波数を制御する手法(非特許文献1)が報告されている。このような手法に加え、微小機械振動子の共振周波数の可逆的な制御手法として、探針を用いて振動子の実効的な長さを変化させ共振周波数を制御する手法(非特許文献2)や、カーボンナノチューブの構造特性を利用して共振周波数を制御する手法(非特許文献3)等が用いられていた。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】W.Y.Fung,E.N.Dattoli,and W.Lu,“Radio frequency nanowire resonators and in situ frequency tuning”,Appl.Phys.Lett.94,p.203104,2009
【非特許文献2】M.Zalalutdinov,B.Ilic,D.Czaplewski,A.Zehnder,H.G.Craighead,and J.M.Parpia,“Frequency-tunable micromechanical oscillator”,Appl.Phys.Lett.,Vol.77,No.20,p.3287-3289,2000
【非特許文献3】K.Jensen,C.Girit,W.Mickelson,and A.Zettl,“Tunable Nanoresonators Constructed from Telescoping Nanotubes”,PRL 96,p.215503,2006
【発明の概要】
【発明が解決しようとする課題】
【0004】
非特許文献2、非特許文献3に開示された手法では、共振周波数変化率が数100%に達する周波数制御が実現されているものの、センサ等のデバイスへ組み込むことが難しいという問題点があった。その理由は、振動子の実効的な長さを変化させたり振動子の構造を変化させたりする手法では大きな可動構造が必要であり、一つのデバイスとして作製するためには複雑な加工プロセスが必要となり、センサに組み込むことが難しくなるからである。特に、カーボンナノチューブを用いる場合には、カーボンナノチューブを選択的に配置することが難しく、作製はより困難となる。
【0005】
また、非特許文献1に開示された手法では、デバイスへ組み込むことが容易であるものの、微小機械振動子の共振周波数変化率が数10%程度であり、変化率100%を超える広帯域の共振周波数制御は達成されていなかった。
デバイスに組み込んだ微小機械振動子の作製誤差を補正する場合や、微小機械振動子をセンシングデバイスに応用する場合には、デバイスに組み込むことが容易な電気的な手法でより広い周波数帯域の共振周波数制御を実現できることが必要である。
【0006】
本発明は、上記課題を解決するためになされたもので、振動子内に共振周波数制御機構を組み込むことが容易で、かつ広い周波数帯域での共振周波数制御が可能な微小機械振動子を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の微小機械振動子は、基板上に形成された絶縁層と、この絶縁層上に形成された第1の電極と、前記絶縁層上に形成された第2の電極と、両端もしくは一端が前記第1の電極に接続され、この第1の電極で固定されていない一部が前記絶縁層に形成された開口部内に突出するように前記絶縁層上に形成される振動子部と、一端が前記第2の電極に接続され、この第2の電極で固定されていない方の縁部が前記開口部内に突出した振動子部の縁部と対向するように前記絶縁層上に形成される制御極部とを備えることを特徴とするものである。
【0008】
また、本発明の微小機械振動子は、基板上に形成された絶縁層と、前記基板上に形成された第1の電極と、前記絶縁層上に形成された第2の電極と、下面の一部が前記第1の電極に接続され、この第1の電極で固定されていない一部が前記第1の電極の周囲の絶縁層に形成された開口部内に突出するように前記第1の電極上に形成される振動子部と、一端が前記第2の電極に接続され、この第2の電極で固定されていない方の縁部が前記開口部内に突出した振動子部の縁部と対向するように前記絶縁層上に形成される制御極部とを備えることを特徴とするものである。
【0009】
また、本発明の微小機械振動子の製造方法は、基板上に形成された絶縁層の上に第1、第2の電極を形成する電極形成工程と、前記第1、第2の電極間の領域もしくは前記第1、第2の電極で囲まれた領域の絶縁層をエッチングして開口部を形成する開口部形成工程と、両端もしくは一端が前記第1の電極に接続され、この第1の電極で固定されていない一部が前記絶縁層に形成された開口部内に突出する振動子部を前記開口部に露出した基板上に形成すると共に、一端が前記第2の電極に接続され、この第2の電極で固定されていない方の縁部が前記開口部内に突出した振動子部の縁部と対向する制御極部を前記開口部に露出した基板上に形成する振動子部および制御極部形成工程と、前記開口部内の露出している基板をエッチングして、前記開口部内に突出している振動子部と制御極部とが前記基板から浮いた状態になるように前記基板に凹部を形成する凹部形成工程とを備えることを特徴とするものである。
また、本発明の微小機械振動子の製造方法の1構成例において、前記振動子部および制御極部形成工程は、前記振動子部と前記制御極部とを連結する連結部を形成する工程を含み、さらに、前記凹部形成工程の後に、前記連結部を除去する連結部除去工程を備えることを特徴とするものである。
【0010】
また、本発明の微小機械振動子の製造方法は、基板上に形成された絶縁層の上に第1、第2の電極を形成する電極形成工程と、両端もしくは一端が前記第1の電極に接続された振動子部を前記絶縁層上に形成すると共に、一端が前記第2の電極に接続され、この第2の電極に接続されていない方の縁部が前記振動子部の縁部と対向する制御極部を前記絶縁層上に形成する振動子部および制御極部形成工程と、前記第1、第2の電極間の領域もしくは前記第1、第2の電極で囲まれた領域の絶縁層をエッチングして、前記振動子部の前記第1の電極で固定されていない方の一部と前記制御極部の前記第2の電極で固定されていない方の一部とが前記基板から浮いた状態になるように前記絶縁層に開口部を形成する開口部形成工程とを備えることを特徴とするものである。
また、本発明の微小機械振動子の製造方法の1構成例において、前記振動子部および制御極部形成工程は、前記振動子部と前記制御極部とを連結する連結部を形成する工程を含み、さらに、前記開口部形成工程の後に、前記連結部を除去する連結部除去工程を備えることを特徴とするものである。
【発明の効果】
【0011】
本発明によれば、絶縁層上に形成された第1、第2の電極と、両端もしくは一端が第1の電極に接続され、この第1の電極で固定されていない一部が絶縁層に形成された開口部内に突出するように絶縁層上に形成される振動子部と、一端が第2の電極に接続され、この第2の電極で固定されていない方の縁部が開口部内に突出した振動子部の縁部と対向するように絶縁層上に形成される制御極部とを設けることにより、電気的な共振周波数制御を実現できるので、広い周波数帯域での微小機械振動子の共振周波数制御が可能となる。また、本発明では、微小機械振動子内に共振周波数制御機構を組み込むことが可能であり、広い周波数帯域での共振周波数制御が可能なナノ・マイクロスケールの微小機械振動子が作製可能となる。
【0012】
また、本発明では、基板上に形成された第1の電極と、絶縁層上に形成された第2の電極と、下面の一部が第1の電極に接続され、この第1の電極で固定されていない一部が第1の電極の周囲の絶縁層に形成された開口部内に突出するように第1の電極上に形成される振動子部と、一端が第2の電極に接続され、この第2の電極で固定されていない方の縁部が開口部内に突出した振動子部の縁部と対向するように絶縁層上に形成される制御極部とを設けることにより、電気的な共振周波数制御を実現できるので、広い周波数帯域での微小機械振動子の共振周波数制御が可能となる。また、本発明では、微小機械振動子内に共振周波数制御機構を組み込むことが可能であり、広い周波数帯域での共振周波数制御が可能なナノ・マイクロスケールの微小機械振動子が作製可能となる。
【図面の簡単な説明】
【0013】
【図1】本発明の第1の実施の形態に係る微小機械振動子の作製プロセスを説明する平面図および断面図である。
【図2】本発明の第1の実施の形態に係る微小機械振動子の作製プロセスを説明する平面図および断面図である。
【図3】本発明の第1の実施の形態に係る微小機械振動子を斜め上方から撮影した電子顕微鏡写真である。
【図4】本発明の第1の実施の形態に係る微小機械振動子の共振周波数制御原理を説明する模式図および微小機械振動子の設計パラメータの定義を説明する図である。
【図5】本発明の第1の実施の形態に係る微小機械振動子の設計パラメータの定義を説明する平面図である。
【図6】本発明の第1の実施の形態に係る微小機械振動子の共振周波数の測定結果を示す図である。
【図7】本発明の第2の実施の形態に係る微小機械振動子の斜視図、平面図および断面図である。
【図8】本発明の第3の実施の形態に係る微小機械振動子の斜視図、平面図および断面図である。
【図9】本発明の第4の実施の形態に係る微小機械振動子の斜視図、平面図および断面図である。
【図10】本発明の第5の実施の形態に係る微小機械振動子の斜視図、平面図および断面図である。
【発明を実施するための形態】
【0014】
[第1の実施の形態]
以下、本発明を用いた実施の形態について詳細に説明する。本実施の形態では、電子ビーム露光技術、集束イオンビーム化学気相成長法(focused-ion-beam chemical vapor deposition:FIB−CVD)、及びウェットエッチング等の微細加工技術を用いて、ダイアモンドライクカーボン(diamond-like carbon:DLC)からなる共振周波数可変振動子を作製した。
【0015】
FIB−CVDは、CVDの原料となるガスをガスノズルより噴射し、原料ガス分子を基板等に吸着させ、その吸着原料分子にガリウム集束イオンビームを照射することで原料分子を解離、堆積させ、微小構造を形成するものである(特開2001−107252号公報、文献「S.Matsui,et.al.,“Three-dimensional nanostrecture fabrication by focused-ion-beam chemical vapor deposition”,J.Vac.Sci.Tech.B,Vol.18,No.6,p.3181-3184,2000」)。
【0016】
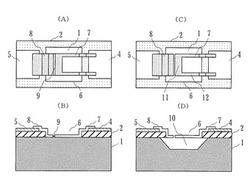
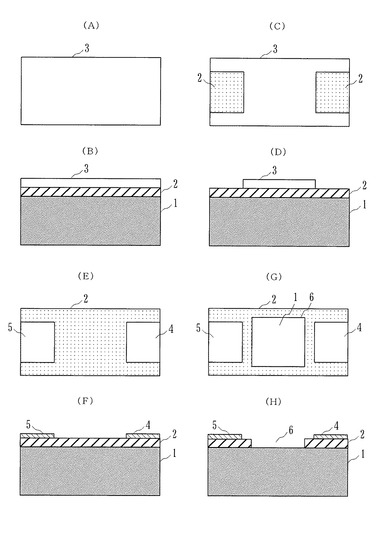
本実施の形態における微小機械振動子の作製プロセスを、図1(A)、図1(C)、図1(E)、図1(G)、図2(A)、図2(C)の平面図および図1(B)、図1(D)、図1(F)、図1(H)、図2(B)、図2(D)の断面図で説明する。
まず、表面に厚さ280nmのシリコン酸化膜2(絶縁層)が形成されたシリコン基板1上にレジスト3を塗布し(図1(A)、図1(B))、電子ビーム露光によりレジスト3を図1(C)、図1(D)に示すような形状に加工する。そして、真空蒸着およびリフトオフプロセスを用いて、Tiからなる2つの電極4,5をシリコン酸化膜2上に形成する(図1(E)、図1(F))。この電極4,5の厚さは、240nmである。
【0017】
続いて、電極4,5間のシリコン酸化膜2を集束イオンビームによりエッチングして開口部6を形成し、シリコン酸化膜2の下のシリコン基板1の表面を露出させる(図1(G)、図1(H))。次に、一方の側の端部がシリコン酸化膜2および電極4上に形成され他方の側が開口部6内に突出するようにシリコン基板1上に形成される振動子部7と、一方の側が開口部6内に突出した振動子部7の先端と近接するようにシリコン基板1上に形成され他方の側の端部がシリコン酸化膜2および電極5上に形成される制御極部8と、振動子部7と制御極部8とを連結するようにシリコン基板1上に形成される連結部9とからなる構造を、FIB−CVDにより作製する(図2(A)、図2(B))。このとき、振動子部7と制御極部8と連結部9とは、電極4,5間に架けられた架橋構造となる。
【0018】
このFIB−CVDにより堆積・形成した振動子部7と制御極部8と連結部9の材料は、FIB−CVDにおける原料ガスとしてフェナントレン(phenanthrene:C14H10)を用いたためDLCである(文献「K.Kanda,et al.,“NEXAFS study on carbon-based material formed by focused-ion-beam chemical-vapor-deposition”,Radiation Physics and Chemistry 75,p.1850-1854,2006」)。なお、連結部9を後の工程で除去する必要があるため、加工のし易さを考慮して、連結部9を振動子部7および制御極部8よりも薄く形成している。
【0019】
次に、水酸化テトラメチルアンモニウム(Tetramethylammonium hydroxide:TMAH)系ウェットエッチング溶液を用いて、開口部6内の露出しているシリコン基板1をウェットエッチングし、開口部6内に突出している振動子部7と制御極部8と連結部9とがシリコン基板1から浮いた状態になるようにシリコン基板1に凹部10を形成する。そして、最後に連結部9を集束イオンビームを用いてエッチングし、振動子部7と制御極部8とを切り離す(図2(C)、図2(D))。
【0020】
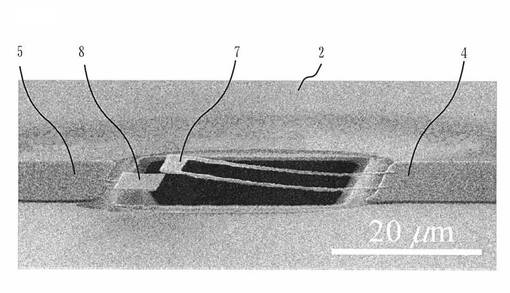
こうして、シリコン酸化膜2上に形成された2つの電極4,5と、一端が電極4に接続され、電極4およびシリコン酸化膜2で固定されていない一部が開口部6内に突出する振動子部7と、一端が電極5に接続され、電極5およびシリコン酸化膜2で固定されていない方の先端部が開口部6内に突出した振動子部7の先端部と対向する制御極部8とを備えた微小機械振動子が完成する。作製した微小機械振動子の電子顕微鏡写真を図3に示す。
【0021】
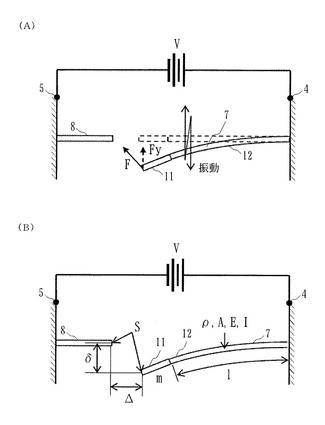
図4(A)は本実施の形態の微小機械振動子の共振周波数制御原理を説明する模式図である。本実施の形態の共振周波数制御原理は次のとおりである。外部から加えられた力に応じて振動する振動子部7とこれに対向する制御極部8との間に電極4,5を通じて電圧Vを印加し、振動子部7と制御極部8との間に静電引力Fを発生させる。これにより、静電引力Fの鉛直方向成分Fyが振動子部7の振動の復元力に加算されるので、振動子部7の共振周波数が変化する。この原理に基づくと、振動子部7の振動振幅が十分小さい線形振動領域では、静電引力が作用する振動子部7の1次の共振周波数fは、近似的には次式(1)で表すことができる。
【0022】
【数1】

【0023】
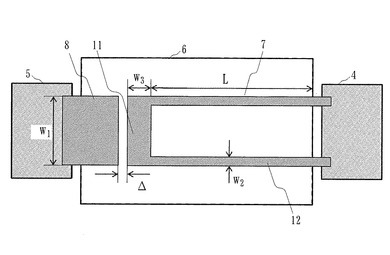
ここで、図4(B)に示すように、Vは印加電圧、Sは振動子部7の先端部11と対向する制御極部8の端面の面積、ε0は真空の誘電率、ρは振動子部7の密度、Aは振動子部7の断面積、Eは振動子部7の構成材料のヤング率、Iは振動子部7の断面二次モーメント、lは振動子部7の先端部11を除く梁部12の長さ、mは振動子部7の先端部の質量、Δは振動子部7と制御極部8間の水平距離である。なお、式(1)は、梁部12が1本の構成の場合を示している。
【0024】
上記した式(1)に基づくと、本実施の形態のように2本の梁部12が先端部11によって連結されている形状の振動子部7の場合、振動子部7の1次の共振周波数fは次式(2)のように表される。
【0025】
【数2】
【0026】
ここで、VFは作製過程において生じた振動子部7の梁部12の反り返りを戻し、先端部11を制御極部8に対向させるために必要な印加電圧である。また、図5に示すように、w1は制御極部8および振動子部7の先端部11の幅、w2は振動子部7の梁部12の幅、w3は振動子部7の先端部11の長さ、Lは振動子部7の梁部12の長さ、tは振動子部7および制御極部8の厚さである。上記の面積Sはw1×tに相当する。なお、図3の電子顕微鏡写真に示した振動子のw1,w2,w3,L,t,Δは、それぞれ8.8μm,900nm,3μm,23μm,130nm,300nmであった。
【0027】
次に、本実施の形態の微小機械振動子の共振周波数を、電子ビーム法により評価した。電子ビーム法については、文献「H.Ashiba,et al.,“Evaluation Method of the Quality Factor of Micromechanical Resonators Using Electron Beams”,Jpn.J.Appl.Phys.,48,06FG08,2009」に開示されている。本実施の形態では、微小機械振動子の振動子部7の励振を、ピエゾ素子を用いて行った。また、微小機械振動子の電極4,5への電圧印加を、ソースメータを用いて行った。
【0028】
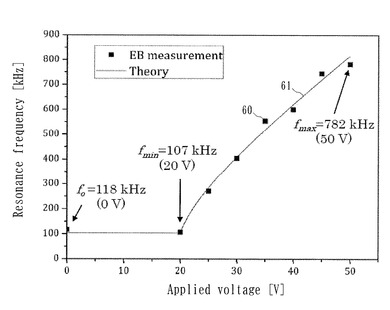
図6は測定結果を示す図であり、横軸は印加電圧V、縦軸は共振周波数である。なお、図6における60は測定データ、61は印加電圧−共振周波数特性の理論線である。本実施の形態の微小機械振動子のVF値は20Vであった。V=20Vの電圧印加により振動子部7の梁部12の反りが修正され、振動子部7の先端部11と制御極部8とが対向した後、微小機械振動子の共振周波数は、上記した式(2)に従い、107kHz(V=20V)から782kHz(V=50V)の周波数帯域で調整可能であった。したがって、本実施の形態の微小機械振動子の共振周波数の変化率は、およそ570%であった。本実施の形態では、50Vまでの電圧印加を行ったが、より大きな電圧印加により、より広い帯域での共振周波数制御が可能である。以上のように、上記の原理に基づく電気的な共振周波数制御法により、広い周波数帯域での微小機械振動子の共振周波数制御が可能であることを確認できた。
【0029】
以上、詳細に説明したように、本実施の形態によれば、高精度な制御と高い応答性が期待できる電気的な共振周波数制御手法により、広い周波数帯域(周波数変化率500%以上)での微小機械振動子の共振周波数制御が可能となる。また、本実施の形態では、電気的な共振周波数制御手法を用いるため、微小機械振動子内に共振周波数制御機構を組み込むことが可能であり、広い周波数帯域での共振周波数制御が可能なナノ・マイクロスケールの微小機械振動子が作製可能となる。
【0030】
微小機械振動子は、その高速応答特性、高感度特性から次世代センサや次世代演算回路等の中核デバイスとして期待され、研究開発が進められている。それらの微小機械振動子を利用した次世代デバイス作製においては、微小機械振動子の動特性を制御し、作製誤差の補正(共振周波数のチューニング)や機能的な振動モードの励起が必要となる。デバイス中に組み込み可能な、本実施の形態の共振周波数制御機構は、上記した次世代デバイス実現の重要な要素技術となる可能性がある。
【0031】
なお、微小機械振動子の動作特性(共振周波数、共振周波数制御帯域、共振周波数変化率)は、微小機械振動子の形状、寸法だけでなく、微小機械振動子の構造材料の機械材料物性(ヤング率および密度)によっても決定される。本実施の形態では、振動子部7および制御極部8の材料としてDLCを用いているが、DLCに限るものではなく、微小機械振動子として使用し得る硬さの導電性材料であれば他の材料でも利用可能である。利用可能な材料としては、例えばダイヤモンド、グラファイト、シリコン(Si)、二酸化シリコン(SiO2)、ガリウム砒素(GaAs)、炭化シリコン(SiC)、窒化シリコン(SiN)等が考えられる。
【0032】
なお、既存の超微細加工技術(電子ビーム露光技術、フォトリソグラフィー、ナノインプリント技術、ドライエッチング、ウェットエッチング、蒸着、スパッタリング、化学気相成長法等製膜技術など)を複数組み合わせて微小機械振動子を作製することも可能であり、微小機械振動子の作製方法は本実施の形態に限定するものではない。例えば、電子ビーム露光技術、フォトリソグラフィー、ナノインプリント技術等のリソグラフィーを利用し、本実施の形態で説明した電極4,5と振動子部7と制御極部8と連結部9の形状のパターニングを行うことが可能である。また、電極4,5と振動子部7と制御極部8と連結部9の構造材料となる金属薄膜やカーボン膜は、蒸着、スパッタリング、化学気相成長法などの製膜技術を用いても行うことができる。加えて、電極構造作製および振動子構造作製は、ドライエッチング、或いは本実施の形態とは異なる試薬を用いたウェットエッチングを用いても可能である。
【0033】
なお、本実施の形態では、シリコン基板1に凹部10を設けているが、凹部10は必須の構成要件ではない。シリコン基板1上のシリコン酸化膜2などの絶縁層に振動子部7の動きを妨げないだけの十分な厚さがある場合には、絶縁層に開口部を設けるだけでよい。この場合には、振動子部7と制御極部8と連結部9とを設ける前に絶縁層に開口部を設けるのではなく、絶縁層上に電極4,5と振動子部7と制御極部8と連結部9とを形成した後に、電極4,5間の領域の絶縁層を例えばウェットエッチングして、振動子部7の電極4で固定されていない方の一部と制御極部8の電極5で固定されていない方の一部とがシリコン基板1から浮いた状態になるように絶縁層に開口部を形成し、開口部を形成した後に連結部9を除去すればよい。
【0034】
また、本実施の形態では、振動子部7と制御極部8とを連結部9で連結した架橋構造を作製し、シリコン基板1に凹部10を形成した後に連結部9を削除するようにしている。その理由は、凹部10を形成するウェットエッチング工程の後でシリコン基板1を乾燥させる際に、ウェットエッチングで用いた液体の表面張力により振動子部7とシリコン基板1とが固着してしまう可能性があるからである。そこで、本実施の形態では、ウェットエッチングのときには振動子部7と制御極部8とを連結しておくようにしている。これに対して、ウェットエッチング後の乾燥工程において超臨界乾燥を用いるようにすれば、はじめから振動子部7と制御極部8とを分離した形で作製することが可能である。
【0035】
[第2の実施の形態]
次に、本発明の第2の実施の形態について説明する。第1の実施の形態では、本発明の微小機械振動子の例として振動子部7および制御極部8を有する形状の振動子について説明したが、本発明は、第1の実施の形態の振動子構造に限定されるものではなく、本発明の趣旨に基づいて種々の変形・応用が可能である。本実施の形態では、微小機械振動子の別の例について説明する。
【0036】
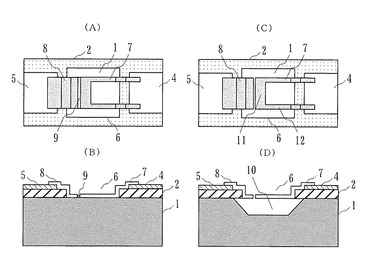
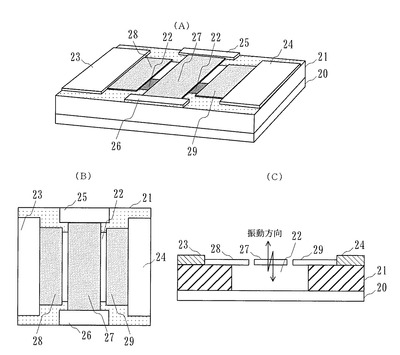
図7(A)は本実施の形態に係る微小機械振動子の斜視図、図7(B)は図7(A)の微小機械振動子の平面図、図7(C)は図7(A)の微小機械振動子の断面図である。
本実施の形態の微小機械振動子は、基板である導電層20と、導電層20に上に形成された二酸化シリコン等からなる絶縁層21と、絶縁層21に形成された開口部22と、絶縁層21上に形成された電極23,24,25,26と、両端が電極25,26および絶縁層21で固定されることによって導電層20から浮いた状態で支持される振動子部27と、一端が電極23,24および絶縁層21で固定されることによって導電層20から浮いた状態で支持される制御極部28,29とを有する。
【0037】
本実施の形態は、両持ち梁型の振動子部27を有し、振動子部27が外部から加えられた力に応じて図7(C)のように垂直方向に振動する例を示す。振動子部27に電極25,26を通じて電圧を印加すると共に、制御極部28,29に電極23,24を通じて電圧を印加し、振動子部27と制御極部28との間および振動子部27と制御極部29との間に静電引力を発生させる。これにより、静電引力の鉛直方向成分が振動子部27の振動の復元力に加算されるので、振動子部27の共振周波数が変化する。こうして、本実施の形態では、第1の実施の形態と同様の効果を得ることができる。
【0038】
[第3の実施の形態]
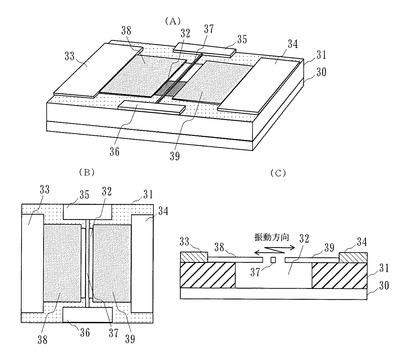
次に、本発明の第3の実施の形態について説明する。図8(A)は本実施の形態に係る微小機械振動子の斜視図、図8(B)は図8(A)の微小機械振動子の平面図、図8(C)は図8(A)の微小機械振動子の断面図である。
本実施の形態の微小機械振動子は、基板である導電層30と、導電層30に上に形成された二酸化シリコン等からなる絶縁層31と、絶縁層31に形成された開口部32と、絶縁層31上に形成された電極33,34,35,36と、両端が電極35,36および絶縁層31で固定されることによって導電層30から浮いた状態で支持される振動子部37と、一端が電極33,34および絶縁層31で固定されることによって導電層30から浮いた状態で支持される制御極部38,39とを有する。
【0039】
本実施の形態は、両持ち梁型の振動子部37を有し、振動子部37が外部から加えられた力に応じて図8(C)のように水平方向に振動する例を示す。振動子部37に電極35,36を通じて電圧を印加すると共に、制御極部38,39に電極33,34を通じて電圧を印加し、振動子部37と制御極部38との間および振動子部37と制御極部39との間に静電引力を発生させる。これにより、静電引力が振動子部37の振動の復元力に加算されるので、振動子部37の共振周波数が変化する。こうして、本実施の形態では、第1の実施の形態と同様の効果を得ることができる。
【0040】
[第4の実施の形態]
次に、本発明の第4の実施の形態について説明する。図9(A)は本実施の形態に係る微小機械振動子の斜視図、図9(B)は図9(A)の微小機械振動子の平面図、図9(C)は図9(A)の微小機械振動子の断面図である。
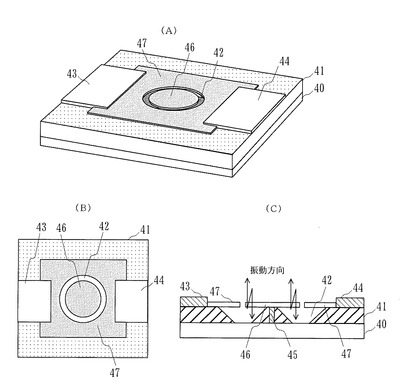
本実施の形態の微小機械振動子は、基板である導電層40と、導電層40に上に形成された二酸化シリコン等からなる絶縁層41と、絶縁層41に形成された開口部42と、絶縁層41上に形成された電極43,44と、導電層40上に形成された電極45と、下面の一部が電極45に接続され、絶縁層41および電極45で支えられることによって導電層40から浮いた状態で支持される振動子部46と、周辺部が電極43,44および絶縁層41で固定されることによって導電層40から浮いた状態で支持される制御極部47とを有する。
【0041】
本実施の形態は、絶縁層41および電極45によって支持される円盤状の振動子部46を有し、振動子部46が外部から加えられた力に応じて図9(C)のように振動する例を示す。振動子部46に導電層40と電極45を通じて電圧を印加すると共に、制御極部47に電極43,44を通じて電圧を印加し、振動子部46と制御極部47との間に静電引力を発生させる。これにより、静電引力の鉛直方向成分が振動子部46の振動の復元力に加算されるので、振動子部46の共振周波数が変化する。こうして、本実施の形態では、第1の実施の形態と同様の効果を得ることができる。
【0042】
[第5の実施の形態]
次に、本発明の第5の実施の形態について説明する。図10(A)は本実施の形態に係る微小機械振動子の斜視図、図10(B)は図10(A)の微小機械振動子の平面図、図10(C)は図10(A)の微小機械振動子の断面図である。
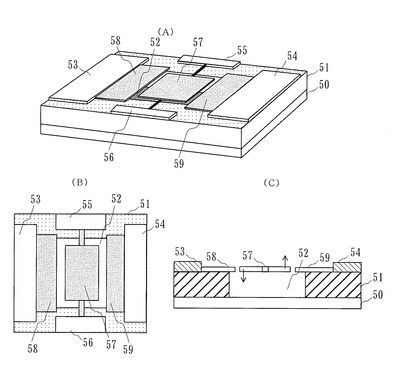
本実施の形態の微小機械振動子は、基板である導電層50と、導電層50に上に形成された二酸化シリコン等からなる絶縁層51と、絶縁層51に形成された開口部52と、絶縁層51上に形成された電極53,54,55,56と、両端が電極55,56および絶縁層51で固定されることによって導電層50から浮いた状態で支持される振動子部57と、一端が電極53,54および絶縁層51で固定されることによって導電層50から浮いた状態で支持される制御極部58,59とを有する。
【0043】
本実施の形態は、両持ち梁型の振動子部57を有し、振動子部57が外部から加えられた力に応じて図10(C)のように捩じれるようにして振動する例を示す。振動子部57に電極55,56を通じて電圧を印加すると共に、制御極部58,59に電極53,54を通じて電圧を印加し、振動子部57と制御極部58との間および振動子部57と制御極部59との間に静電引力を発生させる。これにより、静電引力の鉛直方向成分が振動子部57の振動の復元力に加算されるので、振動子部57の共振周波数が変化する。こうして、本実施の形態では、第1の実施の形態と同様の効果を得ることができる。
【産業上の利用可能性】
【0044】
本発明は、センサ等に使用される微小機械振動子に適用することができる。
【符号の説明】
【0045】
1…シリコン基板、2…シリコン酸化膜、3…レジスト、4,5,23,24,25,26,33,34,35,36,43,44,45,53,54,55,56…電極、6,22,32,42,52…開口部、7,27,37,46,57…振動子部、8,28,29,38,39,47,58,59…制御極部、9…連結部、10…凹部、11…先端部、12…梁部、20,30,40,50…導電層、21,31,41,51…絶縁層。
【技術分野】
【0001】
本発明は、共振周波数を可逆的に制御することが可能な微小機械振動子とその製造方法に関するものである。
【背景技術】
【0002】
微小機械振動子の共振周波数の可逆的な制御手法として、これまでのところ機械振動子加振時に付加デバイスを用いて静電吸引力を作用させ歪印加することにより電気的に周波数を制御する手法(非特許文献1)が報告されている。このような手法に加え、微小機械振動子の共振周波数の可逆的な制御手法として、探針を用いて振動子の実効的な長さを変化させ共振周波数を制御する手法(非特許文献2)や、カーボンナノチューブの構造特性を利用して共振周波数を制御する手法(非特許文献3)等が用いられていた。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】W.Y.Fung,E.N.Dattoli,and W.Lu,“Radio frequency nanowire resonators and in situ frequency tuning”,Appl.Phys.Lett.94,p.203104,2009
【非特許文献2】M.Zalalutdinov,B.Ilic,D.Czaplewski,A.Zehnder,H.G.Craighead,and J.M.Parpia,“Frequency-tunable micromechanical oscillator”,Appl.Phys.Lett.,Vol.77,No.20,p.3287-3289,2000
【非特許文献3】K.Jensen,C.Girit,W.Mickelson,and A.Zettl,“Tunable Nanoresonators Constructed from Telescoping Nanotubes”,PRL 96,p.215503,2006
【発明の概要】
【発明が解決しようとする課題】
【0004】
非特許文献2、非特許文献3に開示された手法では、共振周波数変化率が数100%に達する周波数制御が実現されているものの、センサ等のデバイスへ組み込むことが難しいという問題点があった。その理由は、振動子の実効的な長さを変化させたり振動子の構造を変化させたりする手法では大きな可動構造が必要であり、一つのデバイスとして作製するためには複雑な加工プロセスが必要となり、センサに組み込むことが難しくなるからである。特に、カーボンナノチューブを用いる場合には、カーボンナノチューブを選択的に配置することが難しく、作製はより困難となる。
【0005】
また、非特許文献1に開示された手法では、デバイスへ組み込むことが容易であるものの、微小機械振動子の共振周波数変化率が数10%程度であり、変化率100%を超える広帯域の共振周波数制御は達成されていなかった。
デバイスに組み込んだ微小機械振動子の作製誤差を補正する場合や、微小機械振動子をセンシングデバイスに応用する場合には、デバイスに組み込むことが容易な電気的な手法でより広い周波数帯域の共振周波数制御を実現できることが必要である。
【0006】
本発明は、上記課題を解決するためになされたもので、振動子内に共振周波数制御機構を組み込むことが容易で、かつ広い周波数帯域での共振周波数制御が可能な微小機械振動子を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の微小機械振動子は、基板上に形成された絶縁層と、この絶縁層上に形成された第1の電極と、前記絶縁層上に形成された第2の電極と、両端もしくは一端が前記第1の電極に接続され、この第1の電極で固定されていない一部が前記絶縁層に形成された開口部内に突出するように前記絶縁層上に形成される振動子部と、一端が前記第2の電極に接続され、この第2の電極で固定されていない方の縁部が前記開口部内に突出した振動子部の縁部と対向するように前記絶縁層上に形成される制御極部とを備えることを特徴とするものである。
【0008】
また、本発明の微小機械振動子は、基板上に形成された絶縁層と、前記基板上に形成された第1の電極と、前記絶縁層上に形成された第2の電極と、下面の一部が前記第1の電極に接続され、この第1の電極で固定されていない一部が前記第1の電極の周囲の絶縁層に形成された開口部内に突出するように前記第1の電極上に形成される振動子部と、一端が前記第2の電極に接続され、この第2の電極で固定されていない方の縁部が前記開口部内に突出した振動子部の縁部と対向するように前記絶縁層上に形成される制御極部とを備えることを特徴とするものである。
【0009】
また、本発明の微小機械振動子の製造方法は、基板上に形成された絶縁層の上に第1、第2の電極を形成する電極形成工程と、前記第1、第2の電極間の領域もしくは前記第1、第2の電極で囲まれた領域の絶縁層をエッチングして開口部を形成する開口部形成工程と、両端もしくは一端が前記第1の電極に接続され、この第1の電極で固定されていない一部が前記絶縁層に形成された開口部内に突出する振動子部を前記開口部に露出した基板上に形成すると共に、一端が前記第2の電極に接続され、この第2の電極で固定されていない方の縁部が前記開口部内に突出した振動子部の縁部と対向する制御極部を前記開口部に露出した基板上に形成する振動子部および制御極部形成工程と、前記開口部内の露出している基板をエッチングして、前記開口部内に突出している振動子部と制御極部とが前記基板から浮いた状態になるように前記基板に凹部を形成する凹部形成工程とを備えることを特徴とするものである。
また、本発明の微小機械振動子の製造方法の1構成例において、前記振動子部および制御極部形成工程は、前記振動子部と前記制御極部とを連結する連結部を形成する工程を含み、さらに、前記凹部形成工程の後に、前記連結部を除去する連結部除去工程を備えることを特徴とするものである。
【0010】
また、本発明の微小機械振動子の製造方法は、基板上に形成された絶縁層の上に第1、第2の電極を形成する電極形成工程と、両端もしくは一端が前記第1の電極に接続された振動子部を前記絶縁層上に形成すると共に、一端が前記第2の電極に接続され、この第2の電極に接続されていない方の縁部が前記振動子部の縁部と対向する制御極部を前記絶縁層上に形成する振動子部および制御極部形成工程と、前記第1、第2の電極間の領域もしくは前記第1、第2の電極で囲まれた領域の絶縁層をエッチングして、前記振動子部の前記第1の電極で固定されていない方の一部と前記制御極部の前記第2の電極で固定されていない方の一部とが前記基板から浮いた状態になるように前記絶縁層に開口部を形成する開口部形成工程とを備えることを特徴とするものである。
また、本発明の微小機械振動子の製造方法の1構成例において、前記振動子部および制御極部形成工程は、前記振動子部と前記制御極部とを連結する連結部を形成する工程を含み、さらに、前記開口部形成工程の後に、前記連結部を除去する連結部除去工程を備えることを特徴とするものである。
【発明の効果】
【0011】
本発明によれば、絶縁層上に形成された第1、第2の電極と、両端もしくは一端が第1の電極に接続され、この第1の電極で固定されていない一部が絶縁層に形成された開口部内に突出するように絶縁層上に形成される振動子部と、一端が第2の電極に接続され、この第2の電極で固定されていない方の縁部が開口部内に突出した振動子部の縁部と対向するように絶縁層上に形成される制御極部とを設けることにより、電気的な共振周波数制御を実現できるので、広い周波数帯域での微小機械振動子の共振周波数制御が可能となる。また、本発明では、微小機械振動子内に共振周波数制御機構を組み込むことが可能であり、広い周波数帯域での共振周波数制御が可能なナノ・マイクロスケールの微小機械振動子が作製可能となる。
【0012】
また、本発明では、基板上に形成された第1の電極と、絶縁層上に形成された第2の電極と、下面の一部が第1の電極に接続され、この第1の電極で固定されていない一部が第1の電極の周囲の絶縁層に形成された開口部内に突出するように第1の電極上に形成される振動子部と、一端が第2の電極に接続され、この第2の電極で固定されていない方の縁部が開口部内に突出した振動子部の縁部と対向するように絶縁層上に形成される制御極部とを設けることにより、電気的な共振周波数制御を実現できるので、広い周波数帯域での微小機械振動子の共振周波数制御が可能となる。また、本発明では、微小機械振動子内に共振周波数制御機構を組み込むことが可能であり、広い周波数帯域での共振周波数制御が可能なナノ・マイクロスケールの微小機械振動子が作製可能となる。
【図面の簡単な説明】
【0013】
【図1】本発明の第1の実施の形態に係る微小機械振動子の作製プロセスを説明する平面図および断面図である。
【図2】本発明の第1の実施の形態に係る微小機械振動子の作製プロセスを説明する平面図および断面図である。
【図3】本発明の第1の実施の形態に係る微小機械振動子を斜め上方から撮影した電子顕微鏡写真である。
【図4】本発明の第1の実施の形態に係る微小機械振動子の共振周波数制御原理を説明する模式図および微小機械振動子の設計パラメータの定義を説明する図である。
【図5】本発明の第1の実施の形態に係る微小機械振動子の設計パラメータの定義を説明する平面図である。
【図6】本発明の第1の実施の形態に係る微小機械振動子の共振周波数の測定結果を示す図である。
【図7】本発明の第2の実施の形態に係る微小機械振動子の斜視図、平面図および断面図である。
【図8】本発明の第3の実施の形態に係る微小機械振動子の斜視図、平面図および断面図である。
【図9】本発明の第4の実施の形態に係る微小機械振動子の斜視図、平面図および断面図である。
【図10】本発明の第5の実施の形態に係る微小機械振動子の斜視図、平面図および断面図である。
【発明を実施するための形態】
【0014】
[第1の実施の形態]
以下、本発明を用いた実施の形態について詳細に説明する。本実施の形態では、電子ビーム露光技術、集束イオンビーム化学気相成長法(focused-ion-beam chemical vapor deposition:FIB−CVD)、及びウェットエッチング等の微細加工技術を用いて、ダイアモンドライクカーボン(diamond-like carbon:DLC)からなる共振周波数可変振動子を作製した。
【0015】
FIB−CVDは、CVDの原料となるガスをガスノズルより噴射し、原料ガス分子を基板等に吸着させ、その吸着原料分子にガリウム集束イオンビームを照射することで原料分子を解離、堆積させ、微小構造を形成するものである(特開2001−107252号公報、文献「S.Matsui,et.al.,“Three-dimensional nanostrecture fabrication by focused-ion-beam chemical vapor deposition”,J.Vac.Sci.Tech.B,Vol.18,No.6,p.3181-3184,2000」)。
【0016】
本実施の形態における微小機械振動子の作製プロセスを、図1(A)、図1(C)、図1(E)、図1(G)、図2(A)、図2(C)の平面図および図1(B)、図1(D)、図1(F)、図1(H)、図2(B)、図2(D)の断面図で説明する。
まず、表面に厚さ280nmのシリコン酸化膜2(絶縁層)が形成されたシリコン基板1上にレジスト3を塗布し(図1(A)、図1(B))、電子ビーム露光によりレジスト3を図1(C)、図1(D)に示すような形状に加工する。そして、真空蒸着およびリフトオフプロセスを用いて、Tiからなる2つの電極4,5をシリコン酸化膜2上に形成する(図1(E)、図1(F))。この電極4,5の厚さは、240nmである。
【0017】
続いて、電極4,5間のシリコン酸化膜2を集束イオンビームによりエッチングして開口部6を形成し、シリコン酸化膜2の下のシリコン基板1の表面を露出させる(図1(G)、図1(H))。次に、一方の側の端部がシリコン酸化膜2および電極4上に形成され他方の側が開口部6内に突出するようにシリコン基板1上に形成される振動子部7と、一方の側が開口部6内に突出した振動子部7の先端と近接するようにシリコン基板1上に形成され他方の側の端部がシリコン酸化膜2および電極5上に形成される制御極部8と、振動子部7と制御極部8とを連結するようにシリコン基板1上に形成される連結部9とからなる構造を、FIB−CVDにより作製する(図2(A)、図2(B))。このとき、振動子部7と制御極部8と連結部9とは、電極4,5間に架けられた架橋構造となる。
【0018】
このFIB−CVDにより堆積・形成した振動子部7と制御極部8と連結部9の材料は、FIB−CVDにおける原料ガスとしてフェナントレン(phenanthrene:C14H10)を用いたためDLCである(文献「K.Kanda,et al.,“NEXAFS study on carbon-based material formed by focused-ion-beam chemical-vapor-deposition”,Radiation Physics and Chemistry 75,p.1850-1854,2006」)。なお、連結部9を後の工程で除去する必要があるため、加工のし易さを考慮して、連結部9を振動子部7および制御極部8よりも薄く形成している。
【0019】
次に、水酸化テトラメチルアンモニウム(Tetramethylammonium hydroxide:TMAH)系ウェットエッチング溶液を用いて、開口部6内の露出しているシリコン基板1をウェットエッチングし、開口部6内に突出している振動子部7と制御極部8と連結部9とがシリコン基板1から浮いた状態になるようにシリコン基板1に凹部10を形成する。そして、最後に連結部9を集束イオンビームを用いてエッチングし、振動子部7と制御極部8とを切り離す(図2(C)、図2(D))。
【0020】
こうして、シリコン酸化膜2上に形成された2つの電極4,5と、一端が電極4に接続され、電極4およびシリコン酸化膜2で固定されていない一部が開口部6内に突出する振動子部7と、一端が電極5に接続され、電極5およびシリコン酸化膜2で固定されていない方の先端部が開口部6内に突出した振動子部7の先端部と対向する制御極部8とを備えた微小機械振動子が完成する。作製した微小機械振動子の電子顕微鏡写真を図3に示す。
【0021】
図4(A)は本実施の形態の微小機械振動子の共振周波数制御原理を説明する模式図である。本実施の形態の共振周波数制御原理は次のとおりである。外部から加えられた力に応じて振動する振動子部7とこれに対向する制御極部8との間に電極4,5を通じて電圧Vを印加し、振動子部7と制御極部8との間に静電引力Fを発生させる。これにより、静電引力Fの鉛直方向成分Fyが振動子部7の振動の復元力に加算されるので、振動子部7の共振周波数が変化する。この原理に基づくと、振動子部7の振動振幅が十分小さい線形振動領域では、静電引力が作用する振動子部7の1次の共振周波数fは、近似的には次式(1)で表すことができる。
【0022】
【数1】
【0023】
ここで、図4(B)に示すように、Vは印加電圧、Sは振動子部7の先端部11と対向する制御極部8の端面の面積、ε0は真空の誘電率、ρは振動子部7の密度、Aは振動子部7の断面積、Eは振動子部7の構成材料のヤング率、Iは振動子部7の断面二次モーメント、lは振動子部7の先端部11を除く梁部12の長さ、mは振動子部7の先端部の質量、Δは振動子部7と制御極部8間の水平距離である。なお、式(1)は、梁部12が1本の構成の場合を示している。
【0024】
上記した式(1)に基づくと、本実施の形態のように2本の梁部12が先端部11によって連結されている形状の振動子部7の場合、振動子部7の1次の共振周波数fは次式(2)のように表される。
【0025】
【数2】
【0026】
ここで、VFは作製過程において生じた振動子部7の梁部12の反り返りを戻し、先端部11を制御極部8に対向させるために必要な印加電圧である。また、図5に示すように、w1は制御極部8および振動子部7の先端部11の幅、w2は振動子部7の梁部12の幅、w3は振動子部7の先端部11の長さ、Lは振動子部7の梁部12の長さ、tは振動子部7および制御極部8の厚さである。上記の面積Sはw1×tに相当する。なお、図3の電子顕微鏡写真に示した振動子のw1,w2,w3,L,t,Δは、それぞれ8.8μm,900nm,3μm,23μm,130nm,300nmであった。
【0027】
次に、本実施の形態の微小機械振動子の共振周波数を、電子ビーム法により評価した。電子ビーム法については、文献「H.Ashiba,et al.,“Evaluation Method of the Quality Factor of Micromechanical Resonators Using Electron Beams”,Jpn.J.Appl.Phys.,48,06FG08,2009」に開示されている。本実施の形態では、微小機械振動子の振動子部7の励振を、ピエゾ素子を用いて行った。また、微小機械振動子の電極4,5への電圧印加を、ソースメータを用いて行った。
【0028】
図6は測定結果を示す図であり、横軸は印加電圧V、縦軸は共振周波数である。なお、図6における60は測定データ、61は印加電圧−共振周波数特性の理論線である。本実施の形態の微小機械振動子のVF値は20Vであった。V=20Vの電圧印加により振動子部7の梁部12の反りが修正され、振動子部7の先端部11と制御極部8とが対向した後、微小機械振動子の共振周波数は、上記した式(2)に従い、107kHz(V=20V)から782kHz(V=50V)の周波数帯域で調整可能であった。したがって、本実施の形態の微小機械振動子の共振周波数の変化率は、およそ570%であった。本実施の形態では、50Vまでの電圧印加を行ったが、より大きな電圧印加により、より広い帯域での共振周波数制御が可能である。以上のように、上記の原理に基づく電気的な共振周波数制御法により、広い周波数帯域での微小機械振動子の共振周波数制御が可能であることを確認できた。
【0029】
以上、詳細に説明したように、本実施の形態によれば、高精度な制御と高い応答性が期待できる電気的な共振周波数制御手法により、広い周波数帯域(周波数変化率500%以上)での微小機械振動子の共振周波数制御が可能となる。また、本実施の形態では、電気的な共振周波数制御手法を用いるため、微小機械振動子内に共振周波数制御機構を組み込むことが可能であり、広い周波数帯域での共振周波数制御が可能なナノ・マイクロスケールの微小機械振動子が作製可能となる。
【0030】
微小機械振動子は、その高速応答特性、高感度特性から次世代センサや次世代演算回路等の中核デバイスとして期待され、研究開発が進められている。それらの微小機械振動子を利用した次世代デバイス作製においては、微小機械振動子の動特性を制御し、作製誤差の補正(共振周波数のチューニング)や機能的な振動モードの励起が必要となる。デバイス中に組み込み可能な、本実施の形態の共振周波数制御機構は、上記した次世代デバイス実現の重要な要素技術となる可能性がある。
【0031】
なお、微小機械振動子の動作特性(共振周波数、共振周波数制御帯域、共振周波数変化率)は、微小機械振動子の形状、寸法だけでなく、微小機械振動子の構造材料の機械材料物性(ヤング率および密度)によっても決定される。本実施の形態では、振動子部7および制御極部8の材料としてDLCを用いているが、DLCに限るものではなく、微小機械振動子として使用し得る硬さの導電性材料であれば他の材料でも利用可能である。利用可能な材料としては、例えばダイヤモンド、グラファイト、シリコン(Si)、二酸化シリコン(SiO2)、ガリウム砒素(GaAs)、炭化シリコン(SiC)、窒化シリコン(SiN)等が考えられる。
【0032】
なお、既存の超微細加工技術(電子ビーム露光技術、フォトリソグラフィー、ナノインプリント技術、ドライエッチング、ウェットエッチング、蒸着、スパッタリング、化学気相成長法等製膜技術など)を複数組み合わせて微小機械振動子を作製することも可能であり、微小機械振動子の作製方法は本実施の形態に限定するものではない。例えば、電子ビーム露光技術、フォトリソグラフィー、ナノインプリント技術等のリソグラフィーを利用し、本実施の形態で説明した電極4,5と振動子部7と制御極部8と連結部9の形状のパターニングを行うことが可能である。また、電極4,5と振動子部7と制御極部8と連結部9の構造材料となる金属薄膜やカーボン膜は、蒸着、スパッタリング、化学気相成長法などの製膜技術を用いても行うことができる。加えて、電極構造作製および振動子構造作製は、ドライエッチング、或いは本実施の形態とは異なる試薬を用いたウェットエッチングを用いても可能である。
【0033】
なお、本実施の形態では、シリコン基板1に凹部10を設けているが、凹部10は必須の構成要件ではない。シリコン基板1上のシリコン酸化膜2などの絶縁層に振動子部7の動きを妨げないだけの十分な厚さがある場合には、絶縁層に開口部を設けるだけでよい。この場合には、振動子部7と制御極部8と連結部9とを設ける前に絶縁層に開口部を設けるのではなく、絶縁層上に電極4,5と振動子部7と制御極部8と連結部9とを形成した後に、電極4,5間の領域の絶縁層を例えばウェットエッチングして、振動子部7の電極4で固定されていない方の一部と制御極部8の電極5で固定されていない方の一部とがシリコン基板1から浮いた状態になるように絶縁層に開口部を形成し、開口部を形成した後に連結部9を除去すればよい。
【0034】
また、本実施の形態では、振動子部7と制御極部8とを連結部9で連結した架橋構造を作製し、シリコン基板1に凹部10を形成した後に連結部9を削除するようにしている。その理由は、凹部10を形成するウェットエッチング工程の後でシリコン基板1を乾燥させる際に、ウェットエッチングで用いた液体の表面張力により振動子部7とシリコン基板1とが固着してしまう可能性があるからである。そこで、本実施の形態では、ウェットエッチングのときには振動子部7と制御極部8とを連結しておくようにしている。これに対して、ウェットエッチング後の乾燥工程において超臨界乾燥を用いるようにすれば、はじめから振動子部7と制御極部8とを分離した形で作製することが可能である。
【0035】
[第2の実施の形態]
次に、本発明の第2の実施の形態について説明する。第1の実施の形態では、本発明の微小機械振動子の例として振動子部7および制御極部8を有する形状の振動子について説明したが、本発明は、第1の実施の形態の振動子構造に限定されるものではなく、本発明の趣旨に基づいて種々の変形・応用が可能である。本実施の形態では、微小機械振動子の別の例について説明する。
【0036】
図7(A)は本実施の形態に係る微小機械振動子の斜視図、図7(B)は図7(A)の微小機械振動子の平面図、図7(C)は図7(A)の微小機械振動子の断面図である。
本実施の形態の微小機械振動子は、基板である導電層20と、導電層20に上に形成された二酸化シリコン等からなる絶縁層21と、絶縁層21に形成された開口部22と、絶縁層21上に形成された電極23,24,25,26と、両端が電極25,26および絶縁層21で固定されることによって導電層20から浮いた状態で支持される振動子部27と、一端が電極23,24および絶縁層21で固定されることによって導電層20から浮いた状態で支持される制御極部28,29とを有する。
【0037】
本実施の形態は、両持ち梁型の振動子部27を有し、振動子部27が外部から加えられた力に応じて図7(C)のように垂直方向に振動する例を示す。振動子部27に電極25,26を通じて電圧を印加すると共に、制御極部28,29に電極23,24を通じて電圧を印加し、振動子部27と制御極部28との間および振動子部27と制御極部29との間に静電引力を発生させる。これにより、静電引力の鉛直方向成分が振動子部27の振動の復元力に加算されるので、振動子部27の共振周波数が変化する。こうして、本実施の形態では、第1の実施の形態と同様の効果を得ることができる。
【0038】
[第3の実施の形態]
次に、本発明の第3の実施の形態について説明する。図8(A)は本実施の形態に係る微小機械振動子の斜視図、図8(B)は図8(A)の微小機械振動子の平面図、図8(C)は図8(A)の微小機械振動子の断面図である。
本実施の形態の微小機械振動子は、基板である導電層30と、導電層30に上に形成された二酸化シリコン等からなる絶縁層31と、絶縁層31に形成された開口部32と、絶縁層31上に形成された電極33,34,35,36と、両端が電極35,36および絶縁層31で固定されることによって導電層30から浮いた状態で支持される振動子部37と、一端が電極33,34および絶縁層31で固定されることによって導電層30から浮いた状態で支持される制御極部38,39とを有する。
【0039】
本実施の形態は、両持ち梁型の振動子部37を有し、振動子部37が外部から加えられた力に応じて図8(C)のように水平方向に振動する例を示す。振動子部37に電極35,36を通じて電圧を印加すると共に、制御極部38,39に電極33,34を通じて電圧を印加し、振動子部37と制御極部38との間および振動子部37と制御極部39との間に静電引力を発生させる。これにより、静電引力が振動子部37の振動の復元力に加算されるので、振動子部37の共振周波数が変化する。こうして、本実施の形態では、第1の実施の形態と同様の効果を得ることができる。
【0040】
[第4の実施の形態]
次に、本発明の第4の実施の形態について説明する。図9(A)は本実施の形態に係る微小機械振動子の斜視図、図9(B)は図9(A)の微小機械振動子の平面図、図9(C)は図9(A)の微小機械振動子の断面図である。
本実施の形態の微小機械振動子は、基板である導電層40と、導電層40に上に形成された二酸化シリコン等からなる絶縁層41と、絶縁層41に形成された開口部42と、絶縁層41上に形成された電極43,44と、導電層40上に形成された電極45と、下面の一部が電極45に接続され、絶縁層41および電極45で支えられることによって導電層40から浮いた状態で支持される振動子部46と、周辺部が電極43,44および絶縁層41で固定されることによって導電層40から浮いた状態で支持される制御極部47とを有する。
【0041】
本実施の形態は、絶縁層41および電極45によって支持される円盤状の振動子部46を有し、振動子部46が外部から加えられた力に応じて図9(C)のように振動する例を示す。振動子部46に導電層40と電極45を通じて電圧を印加すると共に、制御極部47に電極43,44を通じて電圧を印加し、振動子部46と制御極部47との間に静電引力を発生させる。これにより、静電引力の鉛直方向成分が振動子部46の振動の復元力に加算されるので、振動子部46の共振周波数が変化する。こうして、本実施の形態では、第1の実施の形態と同様の効果を得ることができる。
【0042】
[第5の実施の形態]
次に、本発明の第5の実施の形態について説明する。図10(A)は本実施の形態に係る微小機械振動子の斜視図、図10(B)は図10(A)の微小機械振動子の平面図、図10(C)は図10(A)の微小機械振動子の断面図である。
本実施の形態の微小機械振動子は、基板である導電層50と、導電層50に上に形成された二酸化シリコン等からなる絶縁層51と、絶縁層51に形成された開口部52と、絶縁層51上に形成された電極53,54,55,56と、両端が電極55,56および絶縁層51で固定されることによって導電層50から浮いた状態で支持される振動子部57と、一端が電極53,54および絶縁層51で固定されることによって導電層50から浮いた状態で支持される制御極部58,59とを有する。
【0043】
本実施の形態は、両持ち梁型の振動子部57を有し、振動子部57が外部から加えられた力に応じて図10(C)のように捩じれるようにして振動する例を示す。振動子部57に電極55,56を通じて電圧を印加すると共に、制御極部58,59に電極53,54を通じて電圧を印加し、振動子部57と制御極部58との間および振動子部57と制御極部59との間に静電引力を発生させる。これにより、静電引力の鉛直方向成分が振動子部57の振動の復元力に加算されるので、振動子部57の共振周波数が変化する。こうして、本実施の形態では、第1の実施の形態と同様の効果を得ることができる。
【産業上の利用可能性】
【0044】
本発明は、センサ等に使用される微小機械振動子に適用することができる。
【符号の説明】
【0045】
1…シリコン基板、2…シリコン酸化膜、3…レジスト、4,5,23,24,25,26,33,34,35,36,43,44,45,53,54,55,56…電極、6,22,32,42,52…開口部、7,27,37,46,57…振動子部、8,28,29,38,39,47,58,59…制御極部、9…連結部、10…凹部、11…先端部、12…梁部、20,30,40,50…導電層、21,31,41,51…絶縁層。
【特許請求の範囲】
【請求項1】
基板上に形成された絶縁層と、
この絶縁層上に形成された第1の電極と、
前記絶縁層上に形成された第2の電極と、
両端もしくは一端が前記第1の電極に接続され、この第1の電極で固定されていない一部が前記絶縁層に形成された開口部内に突出するように前記絶縁層上に形成される振動子部と、
一端が前記第2の電極に接続され、この第2の電極で固定されていない方の縁部が前記開口部内に突出した振動子部の縁部と対向するように前記絶縁層上に形成される制御極部とを備えることを特徴とする微小機械振動子。
【請求項2】
基板上に形成された絶縁層と、
前記基板上に形成された第1の電極と、
前記絶縁層上に形成された第2の電極と、
下面の一部が前記第1の電極に接続され、この第1の電極で固定されていない一部が前記第1の電極の周囲の絶縁層に形成された開口部内に突出するように前記第1の電極上に形成される振動子部と、
一端が前記第2の電極に接続され、この第2の電極で固定されていない方の縁部が前記開口部内に突出した振動子部の縁部と対向するように前記絶縁層上に形成される制御極部とを備えることを特徴とする微小機械振動子。
【請求項3】
基板上に形成された絶縁層の上に第1、第2の電極を形成する電極形成工程と、
前記第1、第2の電極間の領域もしくは前記第1、第2の電極で囲まれた領域の絶縁層をエッチングして開口部を形成する開口部形成工程と、
両端もしくは一端が前記第1の電極に接続され、この第1の電極で固定されていない一部が前記絶縁層に形成された開口部内に突出する振動子部を前記開口部に露出した基板上に形成すると共に、一端が前記第2の電極に接続され、この第2の電極で固定されていない方の縁部が前記開口部内に突出した振動子部の縁部と対向する制御極部を前記開口部に露出した基板上に形成する振動子部および制御極部形成工程と、
前記開口部内の露出している基板をエッチングして、前記開口部内に突出している振動子部と制御極部とが前記基板から浮いた状態になるように前記基板に凹部を形成する凹部形成工程とを備えることを特徴とする微小機械振動子の製造方法。
【請求項4】
請求項3記載の微小機械振動子の製造方法において、
前記振動子部および制御極部形成工程は、前記振動子部と前記制御極部とを連結する連結部を形成する工程を含み、
さらに、前記凹部形成工程の後に、前記連結部を除去する連結部除去工程を備えることを特徴とする微小機械振動子の製造方法。
【請求項5】
基板上に形成された絶縁層の上に第1、第2の電極を形成する電極形成工程と、
両端もしくは一端が前記第1の電極に接続された振動子部を前記絶縁層上に形成すると共に、一端が前記第2の電極に接続され、この第2の電極に接続されていない方の縁部が前記振動子部の縁部と対向する制御極部を前記絶縁層上に形成する振動子部および制御極部形成工程と、
前記第1、第2の電極間の領域もしくは前記第1、第2の電極で囲まれた領域の絶縁層をエッチングして、前記振動子部の前記第1の電極で固定されていない方の一部と前記制御極部の前記第2の電極で固定されていない方の一部とが前記基板から浮いた状態になるように前記絶縁層に開口部を形成する開口部形成工程とを備えることを特徴とする微小機械振動子の製造方法。
【請求項6】
請求項5記載の微小機械振動子の製造方法において、
前記振動子部および制御極部形成工程は、前記振動子部と前記制御極部とを連結する連結部を形成する工程を含み、
さらに、前記開口部形成工程の後に、前記連結部を除去する連結部除去工程を備えることを特徴とする微小機械振動子の製造方法。
【請求項1】
基板上に形成された絶縁層と、
この絶縁層上に形成された第1の電極と、
前記絶縁層上に形成された第2の電極と、
両端もしくは一端が前記第1の電極に接続され、この第1の電極で固定されていない一部が前記絶縁層に形成された開口部内に突出するように前記絶縁層上に形成される振動子部と、
一端が前記第2の電極に接続され、この第2の電極で固定されていない方の縁部が前記開口部内に突出した振動子部の縁部と対向するように前記絶縁層上に形成される制御極部とを備えることを特徴とする微小機械振動子。
【請求項2】
基板上に形成された絶縁層と、
前記基板上に形成された第1の電極と、
前記絶縁層上に形成された第2の電極と、
下面の一部が前記第1の電極に接続され、この第1の電極で固定されていない一部が前記第1の電極の周囲の絶縁層に形成された開口部内に突出するように前記第1の電極上に形成される振動子部と、
一端が前記第2の電極に接続され、この第2の電極で固定されていない方の縁部が前記開口部内に突出した振動子部の縁部と対向するように前記絶縁層上に形成される制御極部とを備えることを特徴とする微小機械振動子。
【請求項3】
基板上に形成された絶縁層の上に第1、第2の電極を形成する電極形成工程と、
前記第1、第2の電極間の領域もしくは前記第1、第2の電極で囲まれた領域の絶縁層をエッチングして開口部を形成する開口部形成工程と、
両端もしくは一端が前記第1の電極に接続され、この第1の電極で固定されていない一部が前記絶縁層に形成された開口部内に突出する振動子部を前記開口部に露出した基板上に形成すると共に、一端が前記第2の電極に接続され、この第2の電極で固定されていない方の縁部が前記開口部内に突出した振動子部の縁部と対向する制御極部を前記開口部に露出した基板上に形成する振動子部および制御極部形成工程と、
前記開口部内の露出している基板をエッチングして、前記開口部内に突出している振動子部と制御極部とが前記基板から浮いた状態になるように前記基板に凹部を形成する凹部形成工程とを備えることを特徴とする微小機械振動子の製造方法。
【請求項4】
請求項3記載の微小機械振動子の製造方法において、
前記振動子部および制御極部形成工程は、前記振動子部と前記制御極部とを連結する連結部を形成する工程を含み、
さらに、前記凹部形成工程の後に、前記連結部を除去する連結部除去工程を備えることを特徴とする微小機械振動子の製造方法。
【請求項5】
基板上に形成された絶縁層の上に第1、第2の電極を形成する電極形成工程と、
両端もしくは一端が前記第1の電極に接続された振動子部を前記絶縁層上に形成すると共に、一端が前記第2の電極に接続され、この第2の電極に接続されていない方の縁部が前記振動子部の縁部と対向する制御極部を前記絶縁層上に形成する振動子部および制御極部形成工程と、
前記第1、第2の電極間の領域もしくは前記第1、第2の電極で囲まれた領域の絶縁層をエッチングして、前記振動子部の前記第1の電極で固定されていない方の一部と前記制御極部の前記第2の電極で固定されていない方の一部とが前記基板から浮いた状態になるように前記絶縁層に開口部を形成する開口部形成工程とを備えることを特徴とする微小機械振動子の製造方法。
【請求項6】
請求項5記載の微小機械振動子の製造方法において、
前記振動子部および制御極部形成工程は、前記振動子部と前記制御極部とを連結する連結部を形成する工程を含み、
さらに、前記開口部形成工程の後に、前記連結部を除去する連結部除去工程を備えることを特徴とする微小機械振動子の製造方法。
【図1】

【図2】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図3】
【図2】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図3】
【公開番号】特開2012−244349(P2012−244349A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−111521(P2011−111521)
【出願日】平成23年5月18日(2011.5.18)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【出願人】(504137912)国立大学法人 東京大学 (1,942)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月18日(2011.5.18)
【出願人】(000004226)日本電信電話株式会社 (13,992)
【出願人】(504137912)国立大学法人 東京大学 (1,942)
【Fターム(参考)】
[ Back to top ]