
微小物体の飛翔状態検出装置、及び微小物体の飛翔状態検出方法
【課題】 微小物体吐出装置から吐出された微小物体の飛翔状態を良好に検出し得る、飛翔中の微小物体の飛翔状態検出方法、及び簡略かつ安価な装置構成の飛翔状態検出装置を提供する。
【解決手段】 飛翔状態検出装置300は、センサ基板310と、圧電/電歪素子320と、アパチャープレート330とを備えている。センサ基板310は、厚肉支持部311と、当該圧肉支持部311からカンチレバー状に支持された振動板312とから構成されている。振動板312の固定端側には圧電/電歪素子320が着接されている。振動板312の自由端側のターゲット部312cと対向するように、アパチャープレート330にアパチャー331が形成されている。アパチャー331を通過してターゲット部312cに微小物体が衝突すると、振動板312が振動し、この振動の状態に応じた起電力が圧電/電歪素子320に発生する。
【解決手段】 飛翔状態検出装置300は、センサ基板310と、圧電/電歪素子320と、アパチャープレート330とを備えている。センサ基板310は、厚肉支持部311と、当該圧肉支持部311からカンチレバー状に支持された振動板312とから構成されている。振動板312の固定端側には圧電/電歪素子320が着接されている。振動板312の自由端側のターゲット部312cと対向するように、アパチャープレート330にアパチャー331が形成されている。アパチャー331を通過してターゲット部312cに微小物体が衝突すると、振動板312が振動し、この振動の状態に応じた起電力が圧電/電歪素子320に発生する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、飛翔中の微小物体の飛翔状態を検出し得る飛翔状態検出装置及び飛翔状態検出方法に関する。
【背景技術】
【0002】
例えば、いわゆるDNAチップ(DNAマイクロアレイ)を製造するための製造方法として、様々なものが知られている。このDNAチップは、数千から一万種類以上の異なる種類のDNA断片の微小スポットを、顕微鏡スライドグラス等の基板上に高密度に整列・固定させることによって構成されている。
【0003】
このDNAチップの製造方法として、微小体積の液滴を吐出し得るマイクロピペットを用いた方法が知られている(例えば下記特許文献1,2参照)。このマイクロピペットは、外部から試料を注入するための注入口と、その注入口から注入された試料が充填されるキャビティと、そのキャビティと連通する吐出口と、その吐出口から試料を吐出させるためにキャビティ内の体積を変化させ得るように構成された圧電/電歪素子と、を備えている。
【0004】
上述のDNAチップの製造方法によれば、圧電/電歪素子が駆動されることにより、キャビティ内の体積が変化する。このキャビティ内の体積変化により、試料溶液が、キャビティから吐出口に向かって層流で移動する。すなわち、一定量の試料溶液が、キャビティから吐出口に向けて送られる。この一定量の試料が当該吐出口から吐出されることで、試料溶液の微小液滴が発生する。このようにしてマイクロピペットから吐出された試料溶液の微小液滴が、基板上に付着して、当該基板上に微小スポットとして整列・固定されることによって、DNAチップを作製することができる。
【0005】
上述のような、DNAチップの製造方法に用いられるマイクロピペット等のように、微小物体を吐出し得るように構成された装置(以下、単に「微小物体吐出装置」と称する。)は、様々な技術分野にて利用可能である。
【0006】
なお、この種の微小物体の質量を測定可能に構成された質量センサが広く知られている(例えば下記特許文献3参照)。この質量センサは、圧電/電歪素子が配設された振動板の上に微小物体が付着した場合に、当該微小物体の付着による振動板の質量変化によって変化する当該振動板の共振周波数の変化を測定することで、当該振動板の質量変化(すなわち当該微小物体の質量)を測定し得るように構成されている。
【特許文献1】特開2001−124789号公報
【特許文献2】特開2001−186881号公報
【特許文献3】特開2000−180250号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
この種の微小物体吐出装置においては、前記微小物体の乾燥・固化物や、異物等が、吐出口の周辺に付着したり、吐出口を塞いだりする場合がある。このような場合、当該微小物体が吐出対象物における所定の位置に向けて正しく吐出されないという、不具合が生じる(例えば、特許文献1の段落[0010]や[0019]等参照)。
【0008】
また、前記特許文献3に記載されているような質量センサを用いて、微小物体の飛翔状態を検出しようとしても、当該質量センサによる飛翔状態検出は、上述の振動板に或る程度の(共振周波数の変化が測定され得る程度の)時間にわたって付着し得るような性質の微小物体に対してしか適用され得ない。また、当該質量センサによる飛翔状態検出によれば、同一の微小物体吐出装置から一定周期で断続的に微小物体が吐出される場合に、当該微小物体の飛翔状態を同一のセンサによって連続的に検出することが困難であった。
【0009】
本発明は、上述した問題に鑑みてなされたものであり、その目的は、前記微小物体吐出装置から吐出された微小物体の飛翔状態(当該吐出装置における吐出状態)を良好に検出し得る、飛翔中の微小物体の飛翔状態検出方法、及び簡略かつ安価な装置構成の飛翔状態検出装置を提供することにある。
【課題を解決するための手段】
【0010】
(A)かかる目的を達成するために、本発明の、微小物体の飛翔状態検出装置(以下、単に「飛翔状態検出装置」と称する)は、飛翔中の微小物体の飛翔状態を検出し得るように、以下の構成を備えている。
【0011】
(A01)本発明の飛翔状態検出装置は、振動発生部と、その振動発生部にて発生した前記振動を電気信号に変換するように構成された圧電/電歪素子と、を備えている。前記振動発生部は、前記微小物体が衝突するターゲット部を備えていて、当該ターゲット部に前記微小物体が衝突することで振動が発生するように構成されている。
【0012】
かかる構成を有する本発明の飛翔状態検出装置においては、飛翔中の前記微小物体が前記ターゲット部に衝突すると、前記振動発生部が振動する。この振動は、前記圧電/電歪素子によって電気信号に変換される。この電気信号に基づいて、微小物体の飛翔状態が検出され得る。
【0013】
(A02)前記構成A01において、単一の前記振動発生部に対して複数の前記ターゲット部が設けられていてもよい。例えば、複数の前記ターゲット部に対して、当該ターゲット部の数と同数の前記微小物体が同時に衝突するように微小物体吐出装置を制御することで、複数の微小物体飛翔経路の各々における前記微小物体の飛翔状態を同時に検出することができる。これにより、飛翔状態検出のための時間を短縮することができる。また、飛翔状態検出のための回路構成を簡略化することができる。
【0014】
(A03)前記構成A01又はA02において、複数の前記圧電/電歪素子が、互いに電気回路的に接続されていてもよい。かかる構成によれば、前記微小物体と前記ターゲット部との1回の衝突によって、複数の前記圧電/電歪素子にて前記電気信号が発生し、これらの電気信号が合算され得る。これにより、当該飛翔状態検出装置の感度が向上する。したがって、本構成によれば、より小さい質量の微小物体に対して良好な飛翔状態検出が行われ得る。
【0015】
また、かかる構成によれば、前記微小物体と前記ターゲット部との1回の衝突によって、複数の前記圧電/電歪素子にて前記電気信号が発生し、これらの電気信号が比較され得る。例えば、前記微小物体と前記ターゲット部との衝突の態様に応じて、前記振動発生部に特定のモード(撓みやねじれ)の振動が発生し得る。ここで、複数の前記圧電/電歪素子のそれぞれにて発生する電気信号を比較することで、当該振動モードが判定され得る。これにより、前記微小物体における多様な飛翔状態の検出が行われ得る。例えば、単に微小物体の飛翔の有無だけでなく、所定の飛翔経路からの逸脱の有無も判定され得る。
ここで、複数の前記圧電/電歪素子同士の電気回路的な接続は、直接なされてもよいし、演算・制御回路を介してなされてもよい。特に、複数の前記圧電/電歪素子同士が電気回路的に直接に接続された場合、当該複数の前記圧電/電歪素子同士の出力の比較等の処理が、当該複数の前記圧電/電歪素子同士の接続回路自体によって行われる。したがって、当該演算・制御回路の構成が単純化され、前記微小物体の判定が簡略に行われ得る。
【0016】
(A04)前記構成A01ないしA03において、前記ターゲット部の表面には、コーティング層が形成されていてもよい。これにより、前記ターゲット部に前記微小物体が残留することによる前記振動発生部の振動特性の変化が抑制され得る。また、当該微小物体が液体である場合に、前記ターゲット部の周囲の雰囲気中の異物(埃等)が付着することで当該ターゲット部が汚れることが抑制され得る。
【0017】
(A05)前記構成A01ないしA04において、前記圧電/電歪素子を駆動するための駆動電圧を発生する駆動部をさらに備えていてもよい。この駆動部によって前記圧電/電歪素子が駆動されることで、前記振動発生部が外部から強制的に振動させられる。この振動発生部の強制的な振動によって、例えば、前記ターゲット部に付着した物体(前記微小物体の残留物や異物等)が除去され得る。あるいは、前記振動発生部を強制的に振動させたときの振動状態に基づいて、前記振動発生部における共振周波数の変化が取得され得る。
【0018】
(A06)前記構成A05において、前記振動発生部の共振周波数を取得する共振周波数取得部をさらに備えていて、前記駆動部が、前記共振周波数取得部によって取得された前記共振周波数に基づいて前記圧電/電歪素子を駆動するように構成されていてもよい。
【0019】
かかる構成においては、例えば、前記駆動部による駆動電圧(この場合の駆動電圧は、例えば、直流電圧や、前回取得された共振周波数の交流電圧や、既定値としての特定の周波数の交番電圧、等が含まれ得る。)の印加によって、前記振動発生部が強制的に振動させられる。この振動に基づいて、前記共振周波数取得部は、当該振動発生部の共振周波数を取得する。次回に前記振動発生部が前記駆動部によって強制的に振動される際には、当該駆動部は、この取得された共振周波数に基づいて、前記振動発生部を駆動する。
【0020】
かかる構成によれば、前記ターゲット部に対する付着物が、より効率的に除去され得る。あるいは、当該飛翔状態検出装置の異常(例えば、前記振動発生部における破損や、前記付着物の過剰な付着)が検知され得る。
【0021】
(A07)前記構成A06において、前記共振周波数取得部は、前記駆動部による前記駆動電圧の出力が遮断された後に、前記共振周波数を取得するように構成されていてもよい。
【0022】
かかる構成においては、例えば、以下のようにして前記共振周波数が取得され得る。まず、前記圧電/電歪素子に対して直流電圧を所定時間(予想される共振周波数に相当する周期よりも充分に長い時間)印加した後、当該直流電圧の印加を遮断する。これにより、当該圧電/電歪素子にて減衰自由振動が生じる。この減衰自由振動によって、当該圧電/電歪素子に交流の電圧が発生する。この発生電圧の周波数等を、前記共振周波数取得部によって取得することで、前記振動発生部の前記共振周波数が取得され得る。
【0023】
(A08)記構成A06において、前記駆動部は、複数の前記圧電/電歪素子の一部に対して前記駆動電圧を出力するように構成されていて、前記共振周波数取得部は、前記駆動部による前記駆動電圧の出力先とは異なる前記圧電/電歪素子からの前記電気信号に基づいて、前記共振周波数を取得するように構成されていてもよい。
【0024】
かかる構成によれば、前記駆動部による前記振動発生部の強制的な振動と、前記共振周波数取得部による前記共振周波数の取得とが、ほぼ同時に行われ得る。
【0025】
(A09)前記構成A01ないしA08において、前記電気信号に基づいて、前記振動発生部の振動モードを判別する振動モード判定部をさらに備えていてもよい。
【0026】
すなわち、前記微小物体と前記ターゲット部との衝突の態様に応じて、前記振動発生部に特定のモード(撓みやねじれ)の振動が発生し得る。ここで、本構成によれば、前記振動モード判定部によって、当該振動モードが判定され得る。例えば、前記圧電/電歪素子によって発生する電気信号の振幅等に基づいて、当該振動モードが判定され得る。あるいは、複数の前記圧電/電歪素子のそれぞれにて発生する電気信号を比較することで、当該振動モードが判定され得る。あるいは、複数の前記圧電/電歪素子を電気回路的に接続して、両者の電気信号を重畳した後、振幅等を取得することで、当該振動モードが判定され得る。
本構成によれば、前記微小物体における多様な飛翔状態の検出が行われ得る。例えば、単に微小物体の飛翔の有無だけでなく、所定の飛翔経路からの逸脱の有無も判定され得る。
【0027】
(A10)前記構成A01ないしA09において、前記振動発生部が長手方向を有する板状部材から構成されていて、当該板状部材の前記長手方向における一端側に前記ターゲット部が設けられ、他端側の表面上に前記圧電/電歪素子が固着して設けられていてもよい。この場合、前記圧電/電歪素子は、前記ターゲット部が設けられている側の表面に設けられていてもよい。あるいは、前記圧電/電歪素子は、前記ターゲット部が設けられている面と反対側の面に設けられていてもよい。
【0028】
かかる構成によれば、前記ターゲット部と前記圧電/電歪素子との距離が充分長く設定される。これにより、当該ターゲット部に対する前記微小物体の衝突により前記ターゲット部に与えられたエネルギーによる力が、テコの原理により増幅され、前記圧電/電歪素子に大きな応力を発生する。よって、前記圧電/電歪素子にて大きな電気信号が得られる。したがって、当該飛翔状態検出装置の感度が向上し、より小さい質量の微小物体に対して良好な飛翔状態検出が行われ得る。
【0029】
(A11)前記構成A10において、前記板状部材における前記他端側の剛性が、前記一端側の剛性よりも低くなるように、当該板状部材が構成されていることが好ましい。
【0030】
かかる構成によれば、前記微小物体が前記ターゲット部に衝突した際に、前記振動発生部を構成する前記板状部材の、剛性の低い前記他端側(前記圧電/電歪素子が設けられている側)に応力が集中する。よって、前記圧電/電歪素子にて大きな電気信号が得られる。これにより、当該飛翔状態検出装置の感度が向上する。したがって、本構成によれば、より小さい質量の微小物体に対して良好な飛翔状態検出が行われ得る。
【0031】
(A12)前記構成A10又はA11において、複数の前記圧電/電歪素子が、前記板状部材の一方の表面と、当該一方の表面の裏側の他方の表面との上に固着して設けられていてもよい。この場合、前記一方の表面上に設けられた前記圧電/電歪素子と、前記他方の表面上に設けられた前記圧電/電歪素子とは、互いに電気回路的に接続され得る。
【0032】
(A13)前記構成A01ないしA12において、前記微小物体を吐出し得るように構成された微小物体吐出部と、前記微小物体吐出部を制御する制御部と、をさらに備えていてもよい。この場合、前記制御部は、前記振動発生部の共振周波数に近い特定周波数で前記微小物体の吐出が行われるように、前記微小物体吐出部を制御する。
【0033】
かかる構成によれば、前記微小物体吐出部によって、前記微小物体が、前記振動発生部の共振周波数に近い特定周波数で吐出される。吐出された前記微小物体は、前記ターゲット部と、前記特定周波数に対応する周期で断続的に衝突する。これにより、前記振動発生部が、前記共振周波数に略等しい周波数にて励振され得る。したがって、当該振動発生部がより効率的に励振され、当該飛翔状態検出装置の感度が向上する。
【0034】
(A14)前記構成A13において、前記制御部は、以下の条件で前記微小物体吐出部を制御するように構成されていてもよい。
【0035】
前記共振周波数をf0、前記特定周波数をf1とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
【0036】
かかる構成によれば、前記振動発生部がより効率的に励振され、当該飛翔状態検出装置の感度が向上する。
【0037】
(A15)前記構成A13又はA14において、前記制御部は、以下の条件で前記微小物体吐出部を制御するように構成されていてもよい。
【0038】
前記ターゲット部に前記微小物体が衝突した際に、前記振動発生部によって当該微小物体の運動エネルギーを吸収するために要する時間をT1、前記振動発生部の前記共振周波数に相当する固有周期をT0とした場合に、
T1≦0.2T0
【0039】
例えば、前記微小物体の飛翔速度や、前記微小物体の状態(質量、体積、形状、固体か流体か或いは気体か、等)に基づいて、上述の関係が満たされるように、前記振動発生部の構造(材質や寸法等)が設定され得る。
【0040】
かかる構成によれば、前記振動発生部がより効率的に励振され、当該飛翔状態検出装置の感度が向上する。
【0041】
(A16)前記構成A01ないしA15において、前記微小物体の飛翔方向と交差する平板状のアパチャープレートをさらに備えていて、そのアパチャープレートには、前記微小物体が通過可能な貫通孔であるアパチャーが形成されていてもよい。このアパチャープレートは、前記ターゲット部よりも、前記微小物体の飛翔方向における上流側に配置されている。
【0042】
かかる構成によれば、例えば、微小物体吐出装置から吐出された微小物体が所定の飛翔方向に沿った所定の飛翔経路上を飛翔した場合に、当該微小物体がアパチャーを通過し得るように、当該アパチャープレートが配置され得る。これにより、当該微小物体の前記飛翔経路からの逸脱が、きわめて簡略な装置構成によって検出され得る。
また、かかる構成によれば、アパチャーの位置を適宜設定することにより、前記振動発生部に所定の振動モードのみを選択的に発生させることが可能になる。
【0043】
(C)上述の目的を達成するために、本発明の、微小物体の飛翔状態検出方法(以下、単に「飛翔状態検出方法」と称する)は、飛翔中の微小物体の飛翔状態を検出し得るように、以下のステップを含む。
【0044】
(C01)本発明の飛翔状態検出方法は、以下の(s1)ないし(s4)のステップを含む。(s1)前記微小物体吐出部から前記微小物体を吐出させ、(s2)吐出された前記微小物体を、ターゲット部に衝突させることで、当該ターゲット部を備えた振動発生部を振動させ、(s3)圧電/電歪素子を用いて、前記振動発生部の振動を電気信号に変換し、(s4)前記電気信号に基づいて、前記微小物体の飛翔状態を検出する。
【0045】
かかる方法によれば、同一の微小物体吐出装置から一定周期で断続的に微小物体が吐出されている場合に、当該微小物体の飛翔状態を同一の飛翔状態検出装置によって連続的に検出することが容易に行われ得る。
【0046】
(C02)前記C01に記載の方法において、前記微小物体を吐出させる前記ステップ(s1)は、前記振動発生部の共振周波数に近い特定周波数で前記微小物体を吐出させるステップであってもよい。
【0047】
かかる方法によれば、前記振動発生部を振動させる前記ステップ(s2)にて、前記振動発生部が、前記共振周波数に略等しい周波数にて励振され得る。したがって、当該振動発生部がより効率的に励振され、前記微小物体の飛翔状態を検出する前記ステップ(s4)による飛翔状態検出の感度が向上する。
【0048】
(C03)前記C02に記載の方法において、前記微小物体を吐出させる前記ステップ(s1)は、前記共振周波数をf0、前記特定周波数をf1とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
を満たすような前記特定周波数で前記微小物体を吐出させるステップであってもよい。
【0049】
かかる方法によれば、前記振動発生部を振動させる前記ステップ(s2)にて、前記振動発生部がより効率的に励振される。よって、前記微小物体の飛翔状態を検出する前記ステップ(s4)による飛翔状態検出の感度が向上する。
【0050】
(C04)前記C01ないしC04に記載の方法において、前記微小物体を吐出させる前記ステップ(s1)は、前記ターゲット部に前記微小物体が衝突した際に、前記振動発生部によって当該微小物体の運動エネルギーを吸収するために要する時間をT1、前記振動発生部の前記共振周波数に相当する固有周期をT0とした場合に、
T1≦0.2T0
を満たすような条件で前記微小物体を吐出させるステップであってもよい。
【0051】
かかる方法によれば、前記振動発生部を振動させる前記ステップ(s2)にて、前記振動発生部がより効率的に励振され、前記微小物体の飛翔状態を検出する前記ステップ(s4)による飛翔状態検出の感度が向上する。
【0052】
(C05)前記C01ないしC04に記載の方法において、前記微小物体の飛翔状態を検出する前記ステップ(s4)は、前記電気信号に基づいて、前記振動発生部の振動モードを判別するステップを含んでいてもよい。
【0053】
例えば、前記ステップ(s3)にて発生した、前記圧電/電歪素子の出力である電気信号の振幅等に基づいて、当該ステップ(s4)にて振動モードが判定され得る。あるいは、前記ステップ(s3)にて、複数の前記圧電/電歪素子からの出力としての電気信号の各々を比較することで、当該ステップ(s4)にて振動モードが判定され得る。あるいは、当該ステップ(s4)にて、複数の前記圧電/電歪素子の電気信号を重畳した信号に基づいて、当該振動モードが判定され得る。
【0054】
かかる方法によれば、前記微小物体における多様な飛翔状態の検出が行われ得る。例えば、単に微小物体の飛翔の有無だけでなく、所定の飛翔経路からの逸脱の有無も判定され得る。
【0055】
(C06)前記C05に記載の方法において、前記微小物体の飛翔状態を検出する前記ステップ(s4)は、互いに電気回路的に接続された第1の圧電/電歪素子及び第2の圧電/電歪素子が出力する電気信号に基づいて、前記振動発生部の振動モードを判別するステップを含んでいてもよい。
【0056】
かかる方法においては、前記振動発生部の振動を電気信号に変換する前記ステップ(s3)にて、互いに電気回路的に接続された前記第1の圧電/電歪素子及び第2の圧電/電歪素子から、それぞれ電気信号が出力される。このステップ(s3)に続く前記ステップ(s4)において、前記第1の圧電/電歪素子及び第2の圧電/電歪素子からの各電気信号に基づいて、前記振動発生部の振動モードが判別される。
【0057】
かかる方法によれば、前記微小物体と前記ターゲット部との衝突の態様に応じて前記振動発生部に生じる特定の振動モード(撓みやねじれ)が判別されることで、前記微小物体における多様な飛翔状態の検出が行われ得る。例えば、単に微小物体の飛翔の有無だけでなく、所定の飛翔経路からの逸脱の有無も判定され得る。
特に、複数の前記圧電/電歪素子同士が電気回路的に直接に接続された回路構成が用いられる場合、本方法によれば、当該複数の前記圧電/電歪素子同士の出力の比較等の処理が、当該複数の前記圧電/電歪素子同士の接続回路自体によって行われる。したがって、前記微小物体の飛翔状態を検出する前記ステップ(s4)の処理が簡略化され得る。
【0058】
(C07)前記C01ないしC06に記載の方法において、さらに以下のステップを含んでいてもよい。(s11)前記振動発生部の共振周波数を取得し、(s12)取得された前記共振周波数に基づいて、前記圧電/電歪素子を駆動する。
【0059】
かかる方法においては、前記共振周波数を取得するステップ(s11)、及び前記圧電/電歪素子を駆動するステップ(s12)は、上述の各ステップ(s1)ないし(s4)とは独立に行われ得る。すなわち、当該ステップ(s11)及び(s12)は、必ずしも前記微小物体の飛翔状態を検出する前記ステップ(s4)に続いて行われるものではない。
【0060】
かかる方法によれば、前記ターゲット部に対する付着物が、より効率的に除去され得る。あるいは、当該方法に用いられる飛翔状態検出装置の異常(例えば、前記振動発生部における破損や、前記付着物の過剰な付着)が検知され得る。
【0061】
(C08)前記C07に記載の方法において、前記振動発生部の共振周波数を取得する前記ステップ(s12)は、前記圧電/電歪素子を駆動する前記ステップ(s11)の終了後に行われることが好適である。
【0062】
かかる方法においては、例えば、以下のようにして前記共振周波数が取得され得る。まず、前記ステップ(s11)にて、前記圧電/電歪素子に対して直流電圧を所定時間(予想される共振周波数に相当する周期よりも充分に長い時間)印加した後、当該直流電圧の印加を遮断する。これにより、当該圧電/電歪素子にて減衰自由振動が生じる。この減衰自由振動によって、当該圧電/電歪素子に交流の電圧が発生する。この発生電圧の周波数等を、前記ステップ(s12)にて取得することで、前記振動発生部の前記共振周波数が取得され得る。
【0063】
(C09)前記C07に記載の方法において、前記圧電/電歪素子を駆動する前記ステップ(s11)は、複数の前記圧電/電歪素子の一部に対して前記駆動電圧を出力するステップであり、前記振動発生部の共振周波数を取得する前記ステップ(s12)は、前記駆動電圧の出力先とは異なる前記圧電/電歪素子からの前記電気信号に基づいて、前記共振周波数を取得するステップであってもよい。
【0064】
これにより、前記駆動部による前記振動発生部の強制的な振動と、前記共振周波数の取得とが、ほぼ同時に行われ得る。
(C10)前記C01ないし09に記載の方法において、前記微小物体を吐出する前記ステップ(s1)は、前記微小物体を前記ターゲット部の所定の位置に所定の周波数で衝突させることで、前記ステップ(s2)にて前記振動発生部を所定の振動モードで振動させるように、当該微小物体を吐出するステップであってもよい。
これにより、前記振動発生部にて、所定のモードの振動が選択的に発生する。よって、前記微小物体の様々な飛翔状態の検出が行われ得る。例えば、前記振動発生部にて、1次撓みモードの振動を選択的に発生させることにより、極めて小さい質量の微小物体に対して良好な飛翔状態検出が行われ得る。
【発明の効果】
【0065】
以上の通り、本発明の飛翔状態検出装置、及び飛翔状態検出方法においては、飛翔中の前記微小物体の飛翔経路中に前記ターゲット部を介在させ、前記圧電/電歪素子を用いて前記ターゲット部に対する前記微小物体の衝突の状態を検知するだけで、衝突微小物体の飛翔状態が検出され得る。すなわち、本発明によれば、前記微小物体を吐出する微小物体吐出装置から吐出された前記微小物体の飛翔状態(当該吐出装置における吐出状態)が、簡略かつ安価な装置構成によって良好に検出され得る。
【発明を実施するための最良の形態】
【0066】
以下、本発明の好適な実施の形態を、図面を参照しながら説明する。
【0067】
<DNAチップの構成>
図1は、DNAチップの概略構成を示す外観図(斜視図)である。図2は、図1に示されているDNAチップを拡大した断面図である。
【0068】
図1に示されているように、DNAチップ10は、顕微鏡スライドグラスからなるDNAチップ基板12上に、試料溶液の微小液滴による微小スポットSが多数配列されることによって構成されている。
【0069】
図2に示されているように、このDNAチップ基板12上における、微小スポットSが形成されるべき位置には、突起12aが形成されている。この突起12aは、微小スポットSが規定の位置からずれて滴下された場合に、その位置ずれを補正するために形成されている。すなわち、図2に示されているように、微小スポットSの一部が突起12aにかかることで(二点鎖線参照)、当該微小スポットSの表面張力によって、当該微小スポットSが正規の位置に移動するようになっている。
【0070】
また、DNAチップ基板12の表面には、親水性を有するpoly-L-lysine層からなる試料担持層14が形成されている。
【0071】
<マイクロピペットの構成>
以下、上述のDNAチップ10を製造するために用いられるマイクロピペット(微小物体吐出部)の構成について説明する。図3は、当該マイクロピペットを拡大した断面図である。図4は、当該マイクロピペットにおける試料溶液の流路の構成を透視して示す斜視図である。図5は、当該マイクロピペットの平面図である。
【0072】
図3を参照すると、マイクロピペット100は、ノズルプレート110と、そのノズルプレート110の上面に固定されたキャビティユニット120と、そのキャビティユニット120の上面に固定されたアクチュエータユニット130とから構成されている。ノズルプレート110には、試料液体が通過可能な貫通孔であるノズル112が形成されている。
【0073】
ノズルプレート110は、セラミックス製の薄板から構成されている。ノズルプレート110を構成する材料としては、例えば、酸化ジルコニウム、酸化アルミニウム、酸化マグネシウム、窒化アルミニウム、窒化珪素が、好適に用いられ得る。また、酸化ジルコニウムの中でも、完全安定化酸化ジルコニウムを主成分とする材料、及び部分安定化酸化ジルコニウムを主成分とする材料が、機械的強度の観点、及び圧電/電歪膜や電極膜の材料との反応性の観点から、最も好適に用いられ得る。
【0074】
キャビティユニット120は、接続プレート121と、流路プレート122と、オリフィスプレート123と、キャビティプレート124と、注入口プレート125とから構成されている。これらの接続プレート121、流路プレート122、オリフィスプレート123、キャビティプレート124、及び注入口プレート125は、セラミックス製の薄板から構成されている。接続プレート121と、流路プレート122と、オリフィスプレート123と、キャビティプレート124と、注入口プレート125と、ノズルプレート110とは、この順に上から積層された状態で焼成されることで、一体に形成されている。
【0075】
接続プレート121は、当該キャビティユニット120とノズルプレート110との接続部に配置されていて、ノズルプレート110の上面に接合されている。この接続プレート121には、ノズル112と同じ径の貫通孔であるノズル連通孔121aが形成されている。このノズル連通孔121aは、キャビティプレート124に形成されたキャビティ124aと、試料送出孔126を介して接続されている。この試料送出孔126は、ノズル連通孔121aよりも大きな径の貫通孔であり、流路プレート122及びオリフィスプレート123を貫通するように形成されている。
【0076】
流路プレート122には、キャビティ124aに向けて試料溶液を供給するための試料供給流路122aが形成されている。この試料供給流路122aとキャビティ124aとは、オリフィスプレート123に形成された小径の貫通孔であるオリフィス123aを介して接続されている。
【0077】
注入口プレート125は、キャビティユニット120の最上層に配置されている。この注入口プレート125には、流路プレート122に形成された試料供給流路122aに向けて試料溶液を注入するための貫通孔である試料注入口125aが形成されている。この試料注入口125aと、流路プレート122に形成された試料供給流路122aとは、貫通孔である試料導入孔127を介して接続されている。この試料導入孔127は、オリフィスプレート123及びキャビティプレート124を貫通するように形成されている。
【0078】
上述の通りに構成されたキャビティユニット120においては、図4に示されているような、試料注入口125aからノズル112に至る試料溶液の流路が形成されている。すなわち、キャビティ124aが加圧されることで、当該キャビティ124a内の試料溶液が、小径のオリフィス123aを介して試料供給流路122aに逆流することなく、試料送出孔126を介してノズル112に向けて送出され、当該ノズル112から試料溶液の微小液滴が外部に吐出されるように、オリフィス123aの寸法が設定されている。
【0079】
再び図3を参照すると、アクチュエータユニット130は、圧電/電歪層131と、その圧電/電歪層131の下面に固着して設けられた下部電極132と、圧電/電歪層131の上面に固着して設けられた上部電極133とを備えている。圧電/電歪層131は、キャビティ124aに対応する位置(真上)に配置されている。下部電極132が注入口プレート125の上面に固着されることで、アクチュエータユニット130は、キャビティユニット120の上面に固定されている。このアクチュエータユニット130は、下部電極132と上部電極133との間に駆動電圧が印加されることで、キャビティ124a内の体積を変化させ、所定量の試料溶液をノズル112から吐出させ得るように構成されている。
【0080】
下部電極132は、注入口プレート125の上面に形成された導電膜である下部電極配線パターン132aと接続されている。上部電極133は、注入口プレート125の上面に形成された導電膜である上部電極配線パターン133aと接続されている。
【0081】
図5に示されているように、注入口プレート125の上面には、下部電極配線パターン132aと接続された下部電極入力端子141が形成されている。また、注入口プレート125の上面には、上部電極配線パターン133aと接続された上部電極入力端子142が形成されている。これらの下部電極入力端子141及び上部電極入力端子142は、アクチュエータユニット130を駆動するための外部機器と接続され得るように構成されていて、当該外部機器を介して下部電極入力端子141と上部電極入力端子142との間に駆動電圧が印加されることでアクチュエータユニット130が駆動されるようになっている。
【0082】
<分注装置の構成>
次に、上述の構成を有するマイクロピペット100を備えた分注装置の構成について説明する。図6は、当該分注装置の外観図であり、図6(a)が平面図、図6(b)が側面図である。図7は、当該分注装置を分解した斜視図である。
【0083】
図6(a)に示されているように、分注装置200は、複数個(図中では10個)のマイクロピペット100が2次元的に配列されることによって構成されている。これら複数のマイクロピペット100における、上述のノズルプレート110は、1枚のセラミック板として一体に成形されている。
【0084】
分注装置200は、マイクロピペット100における各試料注入口125a(図5参照)に試料溶液を導入するための試料導入部材210を備えている。この試料導入部材210は、図6(a)及び図6(b)に示されているように、2次元的に配列されたマイクロピペット100の上面に接続されている。試料導入部材210は、図7に示されているように、ノズルプレート110に形成されたネジ穴114、及び固定ボルト212によって、当該ノズルプレート110の上面にて固定されている。
【0085】
図6(b)を参照すると、試料導入部材210には、貫通孔からなる試料注入流路214が形成されている。この試料注入流路214の下端における開口は、マイクロピペット100における各試料注入口125a(図5参照)と接続されている。また、試料注入流路214の上端における開口は、上方に向けて広がるラッパ状の管からなる導入チューブ216の下端と接続されている。
【0086】
図7を参照すると、2次元的に配列された複数の導入チューブ216は、試料溶液を貯留するためのカートリッジ220にて下方に突出するように形成された複数の試料貯留部222と係合し得るように配置及び形成されている。カートリッジ220は、柔らかい合成樹脂を射出成形することで形成されている。このカートリッジ220は、試料貯留部222の底部に針等で孔を開けることで、当該試料貯留部222に貯留された試料溶液が導入チューブ216内に流入し、各試料注入口125aに対してそれぞれ種類の異なる試料溶液が供給され得るように構成されている。
【0087】
<実施形態の飛翔状態検出装置の概略構成>
次に、本発明の実施形態である飛翔状態検出装置の概略構成について説明する。図8は、上述の分注装置200における試料溶液の吐出口を有するノズルプレート110の下方に、飛翔状態検出装置300が配置された状態を示す側面図である。例えば、図1に示されているDNAチップ基板12と、当該飛翔状態検出装置300とが、図示しないX−Yステージ上に配置されていて、当該X−Yステージを駆動することで、当該飛翔状態検出装置300がノズルプレート110の下方に所定の位置関係で配置されるようになっている。
【0088】
図8を参照すると、この飛翔状態検出装置300は、分注装置200における各マイクロピペット100から試料溶液が正しく吐出されたか否かを検出し得るように構成されている。以下、本発明の飛翔状態検出装置300の具体的な構成について説明する。
【0089】
<第1実施形態の飛翔状態検出装置の構成>
図9(a)は、第1の実施形態の飛翔状態検出装置300を拡大した断面図である。
【0090】
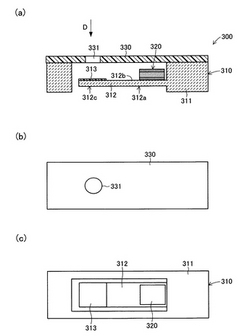
図9(a)に示されているように、飛翔状態検出装置300は、センサ基板310と、圧電/電歪素子320と、アパチャープレート330とを備えている。
【0091】
センサ基板310は、板状部材から構成されている。このセンサ基板310は、セラミックスから形成されていることが好ましい。このセラミックとしては、例えば、完全安定化ジルコニアや部分安定化ジルコニア、アルミナ、マグネシア、窒化珪素等が用いられ得る。このうち、完全安定化/部分安定化ジルコニアは、薄板状に構成しても靭性が高く機械的強度が大きいこと、圧電/電歪素子を構成する圧電/電歪膜や電極材料との反応性が小さいことから、最も好適に採用され得る。
【0092】
センサ基板310は、厚肉支持部311と、振動板(振動発生部)312とから構成されていて、当該厚肉支持部311と振動板312とは一体に成形されている。厚肉支持部311は、平板状部材からなる振動板312よりも厚く形成されている。振動板312は、長手方向(図中左右方向)を有する平板状部材であって、厚肉支持部311によって片持ち梁(カンチレバー)状に支持されている。
【0093】
振動板312の固定端側である検知部312aには、圧電/電歪素子320が着接されている。本実施形態においては、圧電/電歪素子320は、振動板312における図中上側の表面である内側表面312b上に固着して設けられている。この圧電/電歪素子320は、片持ち梁である振動板312にて発生した振動を電気信号に変換し得るように構成されている。なお、圧電/電歪素子320の厚さは、振動板312に比べて充分に薄く形成されている(図9(a)においては、説明の便宜のため、圧電/電歪素子320の厚さが誇張されて図示されているものとする。以下の図10ないし図22においても同様である。)。
【0094】
振動板312の自由端側(前記長手方向における一端側)であるターゲット部312cにおける、内側表面312b上には、コーティング層313が形成されている。このコーティング層313は、前記試料溶液の微小液滴との間の親和性(濡れ性)が低い材質からなる薄膜によって構成されている。例えば、上述のDNAチップ10(図1及び図2参照)を形成するための前記試料溶液は水系の溶液であるため、コーティング層313の材質としては撥水性の材質(フッ素系合成樹脂等)が選択され得る。
【0095】
センサ基板310の上方には、前記振動板312の前記内側表面312bと対向するようにアパチャープレート330が配置されている。このアパチャープレート330には、前記微小液滴が通過可能な貫通孔であるアパチャー331が形成されている。このアパチャー331が、マイクロピペット100のノズルプレート110(図8参照)に形成されたノズル112(図3参照)と対向するように、アパチャープレート330が配置されている。
【0096】
図9(b)は、当該飛翔状態検出装置300の平面図(上述の図8における、マイクロピペット100のノズルプレート110側から当該飛翔状態検出装置300を見た図)である。図9(c)は、アパチャープレート330を取り除いた場合の平面図である。図9(a)ないし(c)に示されているように、アパチャー331は、ターゲット部312cに形成されたコーティング層313と対向するように形成されている。また、図9(a)に示されているように、アパチャー331は、ターゲット部312cに形成されたコーティング層313よりも上方、すなわち、前記微小液滴の飛翔方向Dにおける上流側に形成されている。
【0097】
上述の通り、この飛翔状態検出装置300は、前記飛翔方向Dに沿った所定の飛翔経路上を飛翔中の前記微小液滴がアパチャー331を通過してターゲット部312c(コーティング層313)に衝突し、この衝突によって振動板312に発生した振動が圧電/電歪素子320によって電気信号に変換されるように構成されている。
【0098】
<<圧電/電歪素子の構成>>
図10(a)は、前記振動板312の周囲を拡大した断面図である。図10(a)に示されているように、圧電/電歪素子320は、圧電/電歪層321と、この圧電/電歪層321の一方の面に形成された下部電極322と、当該圧電/電歪層321の他方の面に形成された上部電極323と、から構成されている。圧電/電歪層321は、圧電効果及び圧電逆効果を示すいわゆる圧電/電歪材料(PZT等)の薄板から構成されている。下部電極322及び上部電極323は、金属膜から構成されている。
【0099】
<<振動板の構成>>
図10(b)は、前記振動板312の周囲を拡大した平面図である。
【0100】
図10(b)に示されているように、振動板312における検知部312aは、他の部分よりも狭い幅に形成されている。すなわち、前記試料溶液の微小液滴が上方(図10(a)における上方)から飛翔してきてターゲット部312c(コーティング層313)に衝突して、振動板312に振動が発生した場合に、検知部312aに応力が集中し、この応力集中により圧電/電歪素子320にて大きな電圧が発生し得るように、振動板312の平面形状が設定されている。
【0101】
図10(c)は、前記センサ基板310の平面図である。図10(c)に示されているように、センサ基板310においては、複数の振動板312が、厚肉支持部311から略水平に延びるように形成されている。
【0102】
<飛翔状態検出のための回路構成>
次に、上述の装置構成を用いて、マイクロピペット100(図8参照)からの試料溶液の微小液滴の吐出状態を判定するための回路構成について、図11を用いて説明する。
【0103】
制御回路340は、圧電/電歪素子320にて生じた電圧を取得する電圧取得部341と、圧電/電歪素子320に対して駆動電圧を与える駆動部342と、前記電圧取得部341及び前記駆動部342と接続された演算・制御部343と、各マイクロピペット100に対して駆動電圧を与える駆動部344と、を備えている。
【0104】
電圧取得部341は、ターゲット部312c(図10(a)参照)に試料溶液の微小液滴が衝突した場合に圧電/電歪素子320に生じる起電力を取得し得るように、圧電/電歪素子320と電気的に接続されている。駆動部342は、圧電/電歪素子320に対して駆動電圧を与えて当該圧電/電歪素子320を駆動することで、振動板312(図10参照)を強制的に振動させ得るように、圧電/電歪素子320と電気的に接続されている。
駆動部342は、演算・制御部343の制御下で、任意の波形(直流を含む。また、交流であってもサイン波、矩形波、パルス波等の種々の波形を含む。)の電圧を圧電/電歪素子320に印加し得るように構成されている。
【0105】
演算・制御部343は、電圧取得部341から信号を受け取って適宜演算処理することで、振動板312(図10参照)の振動状態(振動の大きさ、振動モード、共振周波数を含む)を検出し得るように構成されている。また、演算・制御部343は、駆動部342に対して駆動信号を与えることで、圧電/電歪素子320の駆動を制御し得るように構成されている。さらに、演算・制御部343は、各マイクロピペット100における試料溶液の吐出を制御し得るように、駆動部344を介して各マイクロピペット100と接続されている。
【0106】
<第1実施形態の装置の動作説明>
次に、上述した構成を有する第1の実施形態の飛翔状態検出装置300による動作について、図面を参照しつつ説明する。
【0107】
<<DNAチップの製造工程>>
最初に、図1に示されているDNAチップ10の製造工程について説明する。この製造工程は、DNAチップ基板12の表面にpoly-L-lysine層からなる試料担持層14(図2参照)を形成する前処理工程と、DNA断片を含む試料溶液を調製する試料調製工程と、得られた試料溶液をDNAチップ基板12上に供給する供給工程と、からなる。
【0108】
前処理工程は、以下のように行われる。まず、DNAチップ基板12は、室温で少なくとも2時間、所定のアルカリ溶液に浸される。このアルカリ溶液としては、例えば、NaOHを蒸留水に溶かした後、更にエタノールを加えて、完全に透明になるまで攪拌することによって得られた溶液が用いられ得る。その後、DNAチップ基板12は、当該アルカリ溶液から取り出されて蒸留水中で洗浄される。続いて、DNAチップ基板12は、蒸留水中にpoly-L-lysineを加えることにより調製されたpoly-L-lysine液中に1時間程度浸される。その後、DNAチップ基板12がpoly-L-lysine液から取り出され、遠心分離によって余分なpoly-L-lysine液がDNAチップ基板12から除去される。続いて、DNAチップ基板12は、40℃にて5分程度ほど乾燥される。これにより、表面にpoly-L-lysine試料担持層14が形成されたDNAチップ基板12が得られる。
【0109】
試料調製工程は、ポリメラーゼ連鎖反応(PCR)法によってDNA断片の塩基配列を増幅することでPCR産物を得る増幅工程と、得られたPCR産物を乾燥してDNA粉末を得る粉末生成工程と、得られたDNA粉末を緩衝液に溶かす混合工程とを含む。粉末生成工程においては、まず、PCR産物に、3M(=3mol/l)の酢酸ナトリウムとイソプロパノールとが加えられ、数時間放置される。その後、この溶液が遠心分離されることで、DNA断片が沈殿する。この沈殿したDNA断片がエタノールでリンスされ、遠心分離された後、乾燥されることで、DNA粉末が生成される。混合工程においては、DNA粉末にトリス−EDTA(TE)緩衝液が加えられ、完全に溶解するまで数時間放置される。これにより、試料溶液が調製される。この段階での試料溶液の濃度は1〜10μg/μlである。
【0110】
こうして得られた試料溶液は、図7に示されているカートリッジ220の試料貯留部222に貯留される。このカートリッジ220が、図6に示されている分注装置200に装着されることによって、試料溶液が当該分注装置200における各マイクロピペット100に供給される。そして、試料溶液の微小液滴が各マイクロピペット100からDNAチップ基板12(図1参照)に向けて吐出されることで、当該DNAチップ基板12上に試料溶液の微小液滴が供給され、当該DNAチップ基板12上に、多数個の試料溶液の微小スポットSが、所定の配列となるように形成される。このようにして、DNAチップ10が製造される。
【0111】
ここで、試料溶液の微小液滴は、通常、目視が困難である。よって、当該微小液滴がDNAチップ基板12上に所定の配列で正しく形成されているか否か(特定のマイクロピペット100における不吐出等の吐出不良がないかどうか)は、目視では判定できない。一方、当該微小液滴の吐出経路の途中をレーザー光等でスキャンすることで、当該不吐出を判定することは可能である。しかし、そのようにレーザー光をスキャンして各マイクロピペット100における吐出不良を判定するための装置構成は、非常に高価である。
【0112】
そこで、図8に示されているように、本実施形態の飛翔状態検出装置300を用いることによって、分注装置200における各マイクロピペット100の吐出不良が判定される。この飛翔状態検出装置300は、上述したような、きわめて簡略で製造コストが低廉となり得る構成を有している。もっとも、このような簡略な構成を有するにもかかわらず、当該飛翔状態検出装置300による吐出不良の判定は確実に行われ得る。
【0113】
<<第1実施形態における飛翔状態検出の動作説明>>
次に、本実施形態(上述の各実施例を含む)の飛翔状態検出装置300を用いた、マイクロピペット100における試料溶液の微小液滴の吐出状態の判定動作について、図8ないし図12を適宜参照しつつ説明する。ここで、図12は、振動板312(図9、図10参照)の振動の様子を示した図である。
【0114】
図8に示されているように、飛翔状態検出装置300は、マイクロピペット100におけるノズルプレート110の下方に配置される。そして、分注装置200の駆動が、図11における演算・制御部343及び駆動部344によって制御される。すなわち、演算・制御部343の制御下で、分注装置200に備えられた各マイクロピペット100におけるアクチュエータユニット130(図5参照)に対して駆動部344から駆動電圧が印加されることで、各マイクロピペット100が駆動される。これにより、各マイクロピペット100にて、前記試料溶液の微小液滴が、飛翔状態検出装置300に向けて吐出される。
【0115】
図9を参照すると、上述のように前記微小液滴が吐出されることにより、当該微小液滴はアパチャー331を通過して、振動板312におけるターゲット部312c(コーティング層313)に次々と衝突する。この衝突によって、振動板312が振動する。そして、当該振動に応じて、圧電/電歪素子320に起電力が生じる。すなわち、図10における下部電極322と上部電極323との間に、振動板312の振動状態に応じた電圧が生じる。
【0116】
例えば、前記微小液滴が、ターゲット部312cの幅方向における中央部に衝突した場合(当該微小液滴の飛翔方向が所定方向Dと一致する場合)、図12(a)に示されているように、振動板312が撓むように振動する(1次撓みモード)。これにより、検知部312aに応力が生じる。この応力が、圧電/電歪素子320(図10参照)によって起電力に変換される。
【0117】
一方、前記微小液滴が、ターゲット部312cの幅方向における中央部からオフセットした位置に衝突した場合(当該微小液滴の飛翔方向が所定方向Dから逸脱した場合)、図12(b)に示されているように、振動板312が捩れるように振動する(捩れモード)。これにより、検知部312aに、図12(a)における撓み変形の場合よりも小さな応力が生じる。これにより、圧電/電歪素子320(図10参照)にて、上述の撓み変形の場合よりも小さな起電力が生じる。
【0118】
前記微小液滴の飛翔経路が所定の飛翔経路よりもさらに逸脱した場合、当該微小液滴は、アパチャー331を通過することなく、アパチャープレート330の上面と衝突する。この場合、当該微小液滴はターゲット部312cと衝突しないので、振動板312における振動が生じない(あるいは振幅がゼロに向かって収束する)。
【0119】
このように、圧電/電歪素子320にて、振動板312の振動状態(すなわち微小液滴のターゲット部312cに対する衝突状態)に応じた電圧が発生する。
【0120】
図11を参照すると、圧電/電歪素子320にて発生した電圧が、電圧取得部341によって取得され、この電圧取得部341によって取得された起電力が演算・制御部343によって演算処理されることで、振動板312における振動状態が検出される。
【0121】
ここで、図10及び図11を参照すると、演算・制御部343は、振動板312の共振周波数をf0とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
を満たすような特定周波数f1で、マイクロピペット100を駆動させる。これにより、当該特定周波数f1に対応する周期Tで、前記試料溶液の微小液滴が次々と吐出される。
【0122】
また、振動板312によって当該微小液滴の運動エネルギーを吸収するために要する時間をT1、前記共振周波数f0に相当する固有周期をT0とした場合に、
T1≦0.2T0
を満たすような条件で、前記微小液滴の吐出が行われるように、前記マイクロピペット100の駆動が制御される。
【0123】
これにより、振動板312の共振周波数と略等しい周波数で当該振動板312が振動する。そして、この振動に同期した状態で、ターゲット部312cに対して前記微小液滴が次々に衝突する。よって、振動板312の振動が、当該微小液滴の衝突によって乱されることが抑制され得る。
【0124】
本実施形態の構成によれば、図10(b)及び図12に示されているように、振動板312における検知部312aは、他の部分よりも狭い幅に形成されている。これにより、前記試料溶液の微小液滴がターゲット部312cに衝突して、振動板312に振動が発生した場合に、検知部312aに応力が集中する。この応力集中により、圧電/電歪素子320にて大きな電圧が発生し得る。
【0125】
<<第1実施形態における試料溶液の飛沫処理動作の説明>>
再び図9を参照すると、コーティング層313に衝突することで発生した前記試料溶液の飛沫のほとんどは、当該コーティング層313の表面上に長時間付着することなく、重力の作用で下方に落下する。これにより、振動板312の内側表面312b上から前記試料溶液のほとんどが除去され得る。もっとも、前記飛沫の一部は、振動板312の内側表面312b上から完全に除去されることなく、当該内側表面312b上に残留し得る。
【0126】
そこで、以下のように、振動板312を外部的に強制振動させることで、前記飛沫を振動板312の内側表面312b上から可及的に除去させ得る。
【0127】
図11を参照すると、マイクロピペット100の駆動停止中(前記試料溶液の微小液滴の吐出の停止中)に、駆動部342は、演算・制御部343の制御下で、圧電/電歪素子320に対して、前記共振周波数f0の駆動電圧を印加する。これにより、圧電/電歪素子320が駆動され、振動板312(図9参照)が強制的に振動させられる。これにより、当該振動板312上に残留した前記試料溶液の飛沫が可及的に除去され得る。
【0128】
<<第1実施形態における共振周波数の取得動作の一例>>
もっとも、この振動板312の強制振動によっても、前記試料溶液が微量ながら当該振動板312上に残留して固化し得る。これにより、当該振動板312の共振周波数が変動し得る。そこで、図11に示されている制御回路340によって、以下に説明するように、変動後の前記共振周波数を取得し得る。
【0129】
まず、駆動部342は、演算・制御部343の制御下で、圧電/電歪素子320に対して直流電圧を所定時間(予想される共振周波数に相当する周期よりも充分に長い時間)印加した後、当該直流電圧の印加を遮断する。これにより、圧電/電歪素子320にて減衰自由振動が生じる。この減衰自由振動によって、圧電/電歪素子320に交流の電圧が発生する。このようにして圧電/電歪素子320にて発生した電圧波形は、電圧取得部341を介して、演算・制御部343によって取得される。演算・制御部343は、この電圧波形の周波数を取得することで、変動後の前記共振周波数が取得され得る。この取得された新たな共振周波数は、以降の駆動部342による圧電/電歪素子320の駆動のために用いられ得る。
【0130】
<第2実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第2の実施形態について、図13を用いて説明する。なお、本実施形態において、上述の第1実施形態と同様の作用・機能を有する構成要素については、図示が省略され、又は上述の第1実施形態と同一の符号が付され、上述の第1実施形態における説明が援用され得るものとする(以降の他の実施形態及び変形例についても同様である)。
【0131】
図13(a)は、第2の実施形態に係る振動板312の周辺を拡大した平面図である。図13(b)は、当該振動板312の振動の様子を示した図である。
【0132】
図13(a)に示されているように、振動板312における検知部312aには、2つの圧電/電歪素子320a及び320bが設けられている。これらの圧電/電歪素子320a及び320bは、演算・制御部343(図11参照)に対してそれぞれ電気回路的に接続されている。また、2つの圧電/電歪素子320a及び320bは、図10(a)に示されている圧電/電歪素子320と同様の構成を有していて、圧電/電歪素子320a及び320bの圧電/電歪層(図10(a)における圧電/電歪層321参照)の分極方向は同一であるものとする。
【0133】
かかる構成によれば、図13(b)に示されているように、振動板312にて捩れモードの振動が生じた場合、圧電/電歪素子320aの出力電圧波形と圧電/電歪素子320bの出力電圧波形との間で、半周期分の位相差が生じる。一方、振動板312にて1次撓みモードの振動が生じた場合、圧電/電歪素子320aの出力電圧波形と圧電/電歪素子320bの出力電圧波形との間の位相差が生じなくなる。よって、圧電/電歪素子320aの出力電圧波形と圧電/電歪素子320bの出力電圧波形とを比較することで、振動板312に生じている振動モードが判定される。これにより、振動板312のターゲット部312cに対する前記微小液滴の衝突状態、すなわち当該微小液滴の飛翔状態が判定され得る。
【0134】
<第3実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第3の実施形態について、図14を用いて説明する。
【0135】
図14(a)においては、1枚の振動板312に2つの圧電/電歪素子320a及び320bが設けられている。一方の圧電/電歪素子320aは、駆動部342と接続されている。また、他方の圧電/電歪素子320bは、電圧取得部341と接続されている。この駆動部342は、上述の通り、演算・制御部343(図11参照)の制御下で、任意の波形(直流を含む。また、交流であってもサイン波、矩形波、パルス波等の種々の波形を含む。)の電圧を圧電/電歪素子320aに印加し得るように構成されている(後述する図14(b),図14(c),図15(a)〜(c)における駆動部342も同様である)。
【0136】
かかる構成によれば、上述の第1実施形態と同様に、駆動部342によって、圧電/電歪素子320aに対して直流電圧が所定時間(予想される共振周波数に相当する周期よりも充分に長い時間)印加され、その後、当該直流電圧の印加が遮断される。これにより、振動板312と、圧電/電歪素子320aと、圧電/電歪素子320bとからなる振動系において減衰自由振動が生じる。この減衰自由振動によって、圧電/電歪素子320bに交流の電圧が発生する。このようにして圧電/電歪素子320bにて発生した電圧波形に基づいて、振動板312の共振周波数が取得され得る。この取得された新たな共振周波数は、以降の駆動部342による圧電/電歪素子320の駆動のために用いられ得る。
【0137】
また、かかる構成によれば、上述の第1実施形態とは異なり、駆動部342から一方の圧電/電歪素子320aに対して交流電圧を印加しつつ、他方の圧電/電歪素子320bにて生じた起電力の波形を電圧取得部341により取得することで、短時間で振動板312の共振周波数が取得され得る。この場合、駆動部342は、時間の経過とともに周波数が変化するような波形の交流電圧を出力する。そして、電圧取得部341によって取得された電圧が極大値となった場合、あるいは、インピーダンスや位相が急激に変化した場合の周波数が、共振周波数の取得値として採択され得る。
【0138】
さらに、前記構成によれば、上述の第2の実施形態と同様に、圧電/電歪素子320bの出力に基づいて捩れモードの判定を行うことができる。なお、一方の圧電/電歪素子320aを、電圧取得部341にも接続する(すなわち、圧電/電歪素子320a及び320bを電圧取得部341に接続する)ことによっても、上述の第2の実施形態と同様な構成にて捩れモードの判定が行われ得る。
【0139】
図14(b)においては、1枚の振動板312に4つの圧電/電歪素子320aないし320dが設けられている。圧電/電歪素子320aと圧電/電歪素子320dとは、振動板312の幅方向における中心線Cを挟んで対称に配置されている。同様に、圧電/電歪素子320bと圧電/電歪素子320cとは、前記中心線Cを挟んで対称に配置されている。圧電/電歪素子320a及び320bは、駆動部342と接続されている。圧電/電歪素子320c及び320dは、電圧取得部341と接続されている。
【0140】
かかる構成によれば、上述の図14(a)における構成と同様に、直流電圧印加による共振周波数の取得、交流電圧印加による共振周波数の取得、及び捩れモードの判定が行われ得る。
【0141】
図14(c)においては、1枚の振動板312に3つの圧電/電歪素子320aないし320cが設けられている。圧電/電歪素子320aと圧電/電歪素子320cとは、振動板312の幅方向における中心線Cを挟んで対称に配置されている。圧電/電歪素子320bは、前記中心線C上に配置されている。圧電/電歪素子320aは、駆動部342と接続されている。圧電/電歪素子320b及び320cは、電圧取得部341と接続されている。
【0142】
かかる構成によれば、上述の図14(a)や図14(b)における構成と同様に、直流電圧印加による共振周波数の取得、交流電圧印加による共振周波数の取得、及び捩れモードの判定が行われ得る。すなわち、例えば、圧電/電歪素子320bの出力によって撓みモードの検出を行いつつ、圧電/電歪素子320cの出力によって捩れモードの検出が行われ得る。これにより、振動板312の振動状態の判定がより明確に行われ得る。
なお、本実施形態の構成においては、撓みモード及び捩れモードの共振周波数の比を、実験や有限要素法等によるシミュレーション等によって得ておくことで、捩れモードの共振周波数から撓みモードの共振周波数を算出し得る。これにより、撓みモード及び捩れモードの双方を利用して前記微小液滴の飛翔状態を検出することが可能になる。
【0143】
<第4実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第4の実施形態について、図15を用いて説明する。
【0144】
図15(a)においては、1枚の振動板312に4つの圧電/電歪素子320aないし320dが設けられている。振動板312の幅方向について対称の位置にある圧電/電歪素子320aと圧電/電歪素子320dとは、駆動部342と接続されている。また、振動板312の幅方向について対称の位置にある圧電/電歪素子320bと圧電/電歪素子320cとは、電圧取得部341と接続されている。
【0145】
図15(b)においては、1枚の振動板312に3つの圧電/電歪素子320aないし320cが設けられている。振動板312の幅方向について対称の位置にある圧電/電歪素子320aと圧電/電歪素子320cとは、駆動部342と接続されている。また、振動板312の幅方向における中央に位置する圧電/電歪素子320bは、電圧取得部341と接続されている。
【0146】
図15(c)においては、1枚の振動板312に3つの圧電/電歪素子320aないし320cが設けられている。振動板312の幅方向について対称の位置にある圧電/電歪素子320aと圧電/電歪素子320cとは、電圧取得部341と接続されている。また、振動板312の幅方向における中央に位置する圧電/電歪素子320bは、駆動部342と接続されている。
【0147】
すなわち、上述の図15(a)ないし図15(c)の構成においては、振動板312の幅方向について対称の位置にある圧電/電歪素子に対して、電圧印加又は起電力測定が行われ得るようになっている。なお、いずれの場合においても、各圧電/電歪素子320a,320b・・・は、振動板312の一方の表面上にて、圧電/電歪層の方向が同一となるように配置されているものとする。
【0148】
かかる構成によれば、各圧電/電歪素子の接続の組み合わせにより、振動板312が1次撓みモード及び捩れモードで強制的に振動され得る。また、各圧電/電歪素子の接続の組み合わせにより、振動板312における1次撓みモード及び捩れモードの共振周波数が取得され得る。
【0149】
例えば、電圧印加する圧電/電歪素子が2つある場合、(図15(a)又は図15(c)参照)、当該2つの圧電/電歪素子における圧電/電歪層の分極方向が同一であり、当該2つの圧電/電歪素子における下部電極をともに接地し、当該2つの圧電/電歪素子における上部電極に同位相の交流電圧を印加することで、振動板312に1次撓みモードの振動が発生する。
【0150】
また、電圧印加する圧電/電歪素子が2つある場合、(図15(a)又は図15(c)参照)、当該2つの圧電/電歪素子における圧電/電歪層の分極方向が同一であり、一方の圧電/電歪素子における下部電極と他方の圧電/電歪素子の上部電極を接地し、残りの電極に同位相の交流電圧を印加することで、振動板312に捩れモードの振動が発生する。
【0151】
また、起電力測定が行われる圧電/電歪素子が2つある場合、(図15(a)又は図15(b)参照)、当該2つの圧電/電歪素子における圧電/電歪層の分極方向が同一であり、一方の圧電/電歪素子における下部電極と他方の圧電/電歪素子の上部電極とを接続し、残りの電極間の起電力を測定することで、振動板312における1次撓みモードの振動の共振周波数を取得することができる。
【0152】
また、起電力測定が行われる圧電/電歪素子が2つある場合、(図15(a)又は図15(b)参照)、当該2つの圧電/電歪素子における圧電/電歪層の分極方向が同一であり、当該2つの圧電/電歪素子における下部電極同士を接続し、当該2つの圧電/電歪素子における上部電極間の起電力を測定することで、振動板312における捩れモードの振動の共振周波数を取得することができる。
【0153】
<第5実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第5の実施形態について、図16を用いて説明する。図16(a)は、本実施形態の構成を拡大した平面図である。図16(b)及び(c)は、本実施形態における圧電/電歪素子の電気回路的な接続構成を示した図である。
【0154】
図16(a)に示されているように、本実施形態においては、1枚の振動板312上に4つの圧電/電歪素子320aないし320dが、当該振動板312の幅方向について対称に配置されている。これら4つの圧電/電歪素子320aないし320dは、例えば、図16(b)や(c)に示されているように相互に接続され得る。
【0155】
図16(b)に示されている接続状態においては、圧電/電歪素子320aの下部電極322aと、圧電/電歪素子320bの上部電極323bとが接続されている。また、圧電/電歪素子320bの下部電極322bと、圧電/電歪素子320cの上部電極323cとが接続されている。また、圧電/電歪素子320cの下部電極322cと、圧電/電歪素子320dの上部電極323dとが接続されている。そして、圧電/電歪素子320aの上部電極323aと、圧電/電歪素子320dの下部電極322dとの間に、振動状態に応じた出力電圧が生じるようになっている。すなわち、各圧電/電歪素子320aないし320dがすべて電気回路的に直接に接続されている。
【0156】
図16(c)に示されている接続状態においては、圧電/電歪素子320aの上部電極323aと、圧電/電歪素子320bの下部電極322bとが接続されている。また、圧電/電歪素子320dの上部電極323dと、圧電/電歪素子320cの下部電極322cとが接続されている。すなわち、圧電/電歪素子320aと圧電/電歪素子320bとが電気回路的に接続されている。また、圧電/電歪素子320cと圧電/電歪素子320dとが電気回路的に接続されている。
【0157】
電気回路的に接続された圧電/電歪素子320a及び320bにおける一方の出力端は、圧電/電歪素子320bの上部電極323bから構成され、他方の出力端は、圧電/電歪素子320aの下部電極322aから構成されている。また、電気回路的に接続された圧電/電歪素子320c及び320dにおける一方の出力端は、圧電/電歪素子320cの上部電極323cから構成され、他方の出力端は、圧電/電歪素子320dの下部電極322dから構成されている。そして、前記一方の出力端同士が短絡されていて、前記他方の出力端の間に、振動状態に応じた出力電圧が生じるようになっている。
【0158】
ここで、以下の動作説明を単純化するために、図16(a)の構成の振動板312におけるターゲット部312cに前記試料溶液の微小液滴が衝突した場合に、上述の2つの振動モード(1次撓みモード及び捩れモード)のいずれか一方が現れるものとし、当該振動によって、各圧電/電歪素子320a,320b,320c,320dに以下のような振幅の起電力が生じるものとする。
【0159】
1次撓みモード:V1,V1,V1,V1
捩れモード:V1,0.5V1,0.5V1,V1
【0160】
すなわち、捩れモードの場合、振動板312の幅方向における両端部に位置する圧電/電歪素子320a及び320dには、中央寄りに位置する圧電/電歪素子320b及び320cよりも大きな起電力が生じる。
【0161】
図16(b)に示されている接続状態においては、振動板312に完全な1次撓みモードの振動が生じた場合、各圧電/電歪素子320a,320b,320c,320dの出力V1が合算されることで、4V1の出力が生じる。これにより、当該1次撓みモードの振動による出力電圧が大きくなる。よって、きわめて微小な液滴がターゲット部312cに衝突した場合であっても、高感度で当該衝突が検出され得る。
【0162】
また、図16(b)に示されている接続状態においては、振動板312における捩れモードの振動により、当該振動板312の幅方向について対称の位置にある圧電/電歪素子320aと圧電/電歪素子320dとに、絶対値が等しく位相が半波長ずれた起電力±V1が生じる。同様に、振動板312の幅方向について対称の位置にある圧電/電歪素子320bと圧電/電歪素子320cとに、絶対値が等しく位相が半波長ずれた起電力±0.5V1が生じる。そして、各圧電/電歪素子320a,320b,320c,320dの出力が合算されると、出力電圧は0になる。すなわち、振動板312に完全な捩れモードの振動が生じた場合、図16(b)に示されている回路の出力電圧が0になる。
【0163】
図16(c)に示されている接続状態においては、振動板312における1次撓みモードの振動により、電気回路的に接続された圧電/電歪素子320a及び320bにおける出力端である上部電極323bと下部電極322aとの間には2V1の起電力が生じる。また、電気回路的に接続された圧電/電歪素子320c及び320dにおける出力端である上部電極323cと下部電極322dとの間にも2V1の起電力が生じる。そして、上部電極323bと上部電極323cとは短絡されている。よって、振動板312に完全な1次撓みモードの振動が生じた場合、図16(c)に示されている回路の出力電圧は0になる。
【0164】
また、図16(c)に示されている接続状態においては、振動板312における捩れモードの振動により、圧電/電歪素子320a及び320bにおける出力端である上部電極323bと下部電極322aとの間には+1.5V1の起電力が生じる。これと同時に、圧電/電歪素子320c及び320dにおける出力端である上部電極323cと下部電極322dとの間には、−1.5V1の起電力が生じる。よって、振動板312に完全な捩れモードの振動が生じた場合、図16(b)に示されている回路の出力電圧が3V1になる。
【0165】
このように、振動板312に複数の圧電/電歪素子320a,320b・・・を配置し、これらの電気回路的な接続状態を適宜設定することにより、前記微小液滴の飛翔状態の検出がより高感度で行われ、振動モードの判定がより容易に行われ得る。
また、本実施形態においては、複数の圧電/電歪素子320a,320b・・・が、それぞれ直列的に(図11における演算・制御部343を介さずに)電気回路的に接続されることで、図16(b)及び(c)の回路構成が形成されている。したがって、本実施形態によれば、図11における演算・制御部343の内部の回路構成が単純化され、当該演算・制御部343における信号処理が簡略化され得る。
【0166】
<第6実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第6の実施形態について、図17を用いて説明する。図17(a)は、本実施形態の構成を拡大した側断面図である。図17(b)は、本実施形態における圧電/電歪素子の電気回路的な接続構成を示した図である。
【0167】
図17(a)に示されているように、本実施形態においては、振動板312の検知部312aにおける内側表面312b上に、圧電/電歪素子320aが設けられている。また、振動板312の検知部312aにおける外側表面312d上に、圧電/電歪素子320bが設けられている。すなわち、振動板312の両面にそれぞれ圧電/電歪素子320a及び320bが配置されている。なお、振動板312の外側表面312d上に配置された圧電/電歪素子320bの「下部電極」322bは、振動板312に近接する側の電極を指すものとする。
【0168】
図17(b)に示されているように、本実施形態においては、圧電/電歪素子320aの下部電極322aと、圧電/電歪素子320bの下部電極322bとが短絡されている。そして、圧電/電歪素子320aの上部電極323aと、圧電/電歪素子320bの上部電極323bとの間に、振動状態に応じた出力電圧が生じるようになっている。
【0169】
かかる構成において、振動板312に振動が発生すると、当該振動板312の内側表面312b上の圧電/電歪素子320aと、当該振動板312の外側表面312d上の圧電/電歪素子320bとには、当該振動板312の振動状態に応じた起電力が発生する。ここで、例えば、振動板312のターゲット部312cが図中下方に変位している場合、圧電/電歪素子320aの圧電/電歪層321aには引張応力が生じ、圧電/電歪素子320bの圧電/電歪層321bには圧縮応力が生じる。よって、当該振動板312の内側表面312b上の圧電/電歪素子320aと、当該振動板312の外側表面312d上の圧電/電歪素子320bとには、絶対値が略同一で位相が半波長ずれた起電力の波形が生じる。そして、図17(b)に示されている回路の出力は、圧電/電歪素子320aしかない場合(圧電/電歪素子320bがない場合)の2倍となる。これにより、きわめて微小な液滴がターゲット部312cに衝突した場合であっても、高感度で当該衝突が検出され得る。
【0170】
<第7実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第7の実施形態について、図18を用いて説明する。図18(a)は、本実施形態の構成を拡大した側断面図である。図18(b)は、本実施形態における圧電/電歪素子の電気回路的な接続構成を示した図である。
【0171】
図18(a)に示されているように、本実施形態においては、振動板312の検知部312aにおける内側表面312b上に、圧電/電歪素子320aが設けられている。また、圧電/電歪素子320bは、絶縁層324を挟んで圧電/電歪素子320aの上側に配置されている。圧電/電歪素子320a、絶縁層324、及び圧電/電歪素子320bは、焼成により一体に形成されている。
【0172】
図18(b)に示されているように、本実施形態においては、圧電/電歪素子320aにおける圧電/電歪層321aの分極方向が、圧電/電歪素子320bにおける圧電/電歪層321bの分極方向と反対になるように、圧電/電歪素子320a及び320bが構成されている。圧電/電歪素子320aの下部電極322aと、圧電/電歪素子320bの下部電極322bとは、短絡されている。そして、圧電/電歪素子320aの上部電極323aと、圧電/電歪素子320bの上部電極323bとの間に、振動状態に応じた出力電圧が生じるようになっている。すなわち、圧電/電歪素子320aと圧電/電歪素子320bとが電気回路的に接続されている。
【0173】
かかる構成によれば、図18(b)に示されている回路の出力は、圧電/電歪素子320aしかない場合(圧電/電歪素子320bがない場合)の2倍となる。これにより、きわめて微小な液滴がターゲット部312cに衝突した場合であっても、高感度で当該衝突が検出され得る。
【0174】
<変形例の示唆>
なお、上述の各実施形態は、上述した通り、出願人が取り敢えず本願の出願時点において最良であると考えた本発明の代表的な実施形態を単に例示したものにすぎない。よって、本発明はもとより上述の実施形態に何ら限定されるものではなく、本発明の本質的部分を変更しない範囲内において種々の変形を施すことができることは当然である。
【0175】
以下、先願主義の下で本願の出願の際に追記し得る程度(時間の許す限り)で、変形例について幾つか例示する。しかしながら、変形例とてこれらに限定されるものではないことはいうまでもない。本願発明を、上述の実施形態、及び下記変形例の記載に基づき限定解釈すること(特に、本発明の課題を解決するための手段を構成する各要素における、作用・機能的に表現されている要素を、実施形態等の記載に基づき限定解釈すること)は、先願主義の下で出願を急ぐ出願人の利益を不当に害する反面、模倣者を不当に利するものであって、発明の保護及び利用を目的とする特許法の目的に反し、許されない。また、下記変形例が、互いに矛盾しない範囲で、それぞれ適宜組み合わされ得ることはいうまでもない。
【0176】
(i)本発明は、上述の実施形態のような、マイクロピペットによって吐出された微小液滴の飛翔状態の検出に限定されない。また、本発明によって飛翔状態が検出し得る微小物体の種類も、微小液滴に限定されない。また、微小物体の飛翔方向も、鉛直下方に限定されない。さらに、微小物体の飛翔状態の検出の際に行われる電気信号の処理にあたっては、上述の実施形態のような電圧の他、電流、周波数、位相等も用いられ得る。
【0177】
(ii)例えば、図9におけるアパチャープレート330は省略可能である。また、コーティング層313も省略可能である。さらに、コーティング層313の形成方法も、ペースト塗布やスクリーン印刷等の厚膜形成法の他、蒸着等の薄膜形成法が用いられ得る。さらに、コーティング層313によって、振動板312の内側表面312bの全体が覆われていてもよい。
【0178】
(iii)図9ないし図16に示されている構成において、圧電/電歪素子320(320a・・・)が、図17に示されている両面構成や、図18に示されている多層構成であってもよい。もちろん、両面かつ多層構成であってもよい。
【0179】
(iv)図16ないし図18における、圧電/電歪素子の個数、分極方向及び各電極間の接続関係は、任意に変更され得る。ここで、各圧電/電歪素子320a,320b・・・の間の接続は、配線パターン等によって直接に行われてもよい。あるいは、各圧電/電歪素子320a等がそれぞれ個別に電圧取得部341(図11参照)に接続されていて、演算・制御部343における信号の処理によって、各圧電/電歪素子320a等が実質的に電気回路的に接続されているような状態であってもよい。
【0180】
(v)図18において、圧電/電歪素子320aにおける圧電/電歪層321aの分極方向と、圧電/電歪素子320bにおける圧電/電歪層321bの分極方向とが同一であってもよい。この場合、絶縁層324を省略して、圧電/電歪素子320aの上部電極323aと圧電/電歪素子320bの下部電極322bとを一体に成形することで、振動状態に応じた電圧が圧電/電歪素子320aの下部電極322aと圧電/電歪素子320bの上部電極323bとの間に生じるようにしてもよい。
【0181】
(vi)図19に示されているように、振動板312が円盤形状に形成されていてもよい。この場合、厚肉支持部311は、振動板312よりも小さな半径の円盤状に形成され、当該振動板312の略中央に配置される。また、圧電/電歪素子320は平面視にて略ドーナツ状に形成される。
【0182】
(vii)図20に示されているように、検知部312a及びターゲット部312cが、長方形状の板状部材から構成されていて、当該ターゲット部312cが検知部312aの長手方向に沿った中心軸を中心としてシーソー状に配置されていてもよい。
【0183】
(viii)図21に示されているように、振動板312の構造としては、検知部312aにて応力集中が生じるような様々な構造が採用され得る。
【0184】
例えば、図21(a)に示されているように、ターゲット部312cから検知部312aに向かうにつれて振動板312の幅が連続的に狭くなるように、振動板312が形成されていてもよい。
【0185】
また、図21(b)に示されているように、検知部312aの厚さが他の部分よりも薄くなるように、振動板312が形成されていてもよい。かかる構成においては、ターゲット部312cに微小物体が衝突した場合、当該ターゲット部312cを含む部分(検知部312a以外の部分)には撓みがほとんど生じない。また、当該ターゲット部312cを含む部分の質量は検知部312aに比べて非常に大きい。
【0186】
したがって、図21(b)に示されている構成によれば、ターゲット部312cに微小物体が衝突することで、当該衝突の影響による応力が検知部312aにて効率よく発生する。また、振動板312のターゲット部312cに異物等が付着しても、当該振動板312の共振周波数のシフトを小さく抑えることができる。
【0187】
さらに、図21(c)に示されているように、検知部312aの弾性率を、それ以外の部分の弾性率よりも小さくすることによって、図21(b)の場合と同様の作用・効果を得ることができる。なお、図21(c)に示されている構成において、振動板312の幅は、一様でもよいし、図10(b)や図21(a)に示されているように、検知部312aの幅がそれ以外の部分よりも狭く形成されていてもよい。さらに、振動板312の厚さも、図21(b)に示されているように、検知部312aの厚さが他の部分よりも薄くなるようにしてもよい。
【0188】
(ix)図22に示されているように、圧電/電歪素子320は、振動板312の内側表面312bの裏側に形成されていてもよい。
【0189】
(x)図23(a)に示されているように、アパチャープレート330に複数のアパチャー331を形成し、図23(b)に示されているように、当該複数のアパチャー331を通過した微小物体が同時に振動板312に衝突するように、当該振動板312の幅寸法が設定されていてもよい。なお、図23(b)に示されている構成において、図23(a)に示されているアパチャープレート330を省略することも可能である。
【0190】
(xi)図9ないし図23に示されている構成において、振動板312の自由端側(ターゲット部312c及びコーティング層313側)が、当該振動板312の固定端側(検知部312a側)よりも低くなるように、振動板312(センサ基板310)を水平面と交差して配置してもよい。これにより、振動板(ターゲット部312c及びコーティング層313)に衝突した前記試料溶液の微小液滴の飛沫が重力により振動板312の下方に流出し得る。
【0191】
(xii)その他、本発明の課題を解決するための手段を構成する各要素における、作用・機能的に表現されている要素は、上述の実施形態・実施例や変形例にて開示されている具体的構造の他、当該作用・機能を実現可能な、いかなる構造をも含む。
【図面の簡単な説明】
【0192】
【図1】DNAチップの概略構成を示す外観図(斜視図)である。
【図2】図1に示したDNAチップを拡大した断面図である。
【図3】マイクロピペットを拡大した断面図である。
【図4】図3に示したマイクロピペットにおける試料溶液の流路の構成を拡大しつつ透視して示す斜視図である。
【図5】図3に示したマイクロピペットを拡大した平面図である。
【図6】図3に示したマイクロピペットを備えた分注装置の外観を示す概略構成図である。図6(a)が平面図であり、図6(b)が側面図である。
【図7】図6に示した分注装置を分解した斜視図である。
【図8】本発明の一実施形態に係る飛翔状態検出装置が、図6に示した分注装置に装着された状態を示す側面図である。
【図9】図8に示した飛翔状態検出装置の第1の実施形態の構成を拡大した図である。図9(a)が側断面図であり、図9(b)が平面図であり、図9(c)が当該飛翔状態検出装置の内部構成を露出した平面図である。
【図10】図9に示した飛翔状態検出装置の要部を示す図である。図10(a)が側断面図であり、図10(b)が平面図であり、図10(c)が複数の微小物体の飛翔状態を同時に検出し得る構成の一例を示す平面図である。
【図11】図9に示した飛翔状態検出装置を用いて試料溶液の微小液滴の吐出状態を判定するための回路構成図である。
【図12】図9及び図10に示した振動板の振動の様子を示した斜視図である。図12(a)が1次撓みモードの振動の様子を示した図であり、図12(b)が捩れモードの振動の様子を示した図である。
【図13】図8に示した飛翔状態検出装置の第2の実施形態の構成を拡大した図である。図13(a)が平面図であり、図13(b)が振動板の振動の様子を示す斜視図である。
【図14】図8に示した飛翔状態検出装置の第3の実施形態の構成を拡大した図である。
【図15】図8に示した飛翔状態検出装置の第4の実施形態の構成を拡大した図である。
【図16】図8に示した飛翔状態検出装置の第5の実施形態の構成を拡大した図である。
【図17】図8に示した飛翔状態検出装置の第6の実施形態の構成を拡大した図である。
【図18】図8に示した飛翔状態検出装置の第7の実施形態の構成を拡大した図である。
【図19】図9ないし図18に示した飛翔状態検出装置の変形例を示す拡大平面図である。
【図20】図9ないし図18に示した飛翔状態検出装置の、他の変形例を示す拡大平面図である。
【図21】図9ないし図18に示した飛翔状態検出装置の変形例を示す拡大図である。
【図22】図9ないし図18に示した飛翔状態検出装置の変形例を示す拡大断面図である。
【図23】図9ないし図18に示した飛翔状態検出装置の変形例を示す拡大平面図である。
【符号の説明】
【0193】
100…マイクロピペット、 110…ノズルプレート、 112…ノズル、
120…キャビティユニット、124a…キャビティ、 125a…試料注入口、
130…アクチュエータユニット、200…分注装置、 210…試料導入部材、
214…試料注入流路、 216…導入チューブ、 220…カートリッジ、
222…試料貯留部、 300…飛翔状態検出装置、310…センサ基板、
311…厚肉支持部、 312…振動板、 312a…検知部、
312b…内側表面、 312c…ターゲット部、 312d…外側表面、
313…コーティング層、
320,320a,320a1,320a2,320b,320c,320d…圧電/電歪素子、
321,321a,321b,321c,321d…圧電/電歪層、
322,322a,322b,322c,322d…下部電極、
323,323a,323b,323c,323d…上部電極、
324…絶縁層、 330…アパチャープレート、331…アパチャー、
340…制御回路、 341…電圧取得部、 342…駆動部、
343…演算・制御部、 D…飛翔方向、 S…微小スポット
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、飛翔中の微小物体の飛翔状態を検出し得る飛翔状態検出装置及び飛翔状態検出方法に関する。
【背景技術】
【0002】
例えば、いわゆるDNAチップ(DNAマイクロアレイ)を製造するための製造方法として、様々なものが知られている。このDNAチップは、数千から一万種類以上の異なる種類のDNA断片の微小スポットを、顕微鏡スライドグラス等の基板上に高密度に整列・固定させることによって構成されている。
【0003】
このDNAチップの製造方法として、微小体積の液滴を吐出し得るマイクロピペットを用いた方法が知られている(例えば下記特許文献1,2参照)。このマイクロピペットは、外部から試料を注入するための注入口と、その注入口から注入された試料が充填されるキャビティと、そのキャビティと連通する吐出口と、その吐出口から試料を吐出させるためにキャビティ内の体積を変化させ得るように構成された圧電/電歪素子と、を備えている。
【0004】
上述のDNAチップの製造方法によれば、圧電/電歪素子が駆動されることにより、キャビティ内の体積が変化する。このキャビティ内の体積変化により、試料溶液が、キャビティから吐出口に向かって層流で移動する。すなわち、一定量の試料溶液が、キャビティから吐出口に向けて送られる。この一定量の試料が当該吐出口から吐出されることで、試料溶液の微小液滴が発生する。このようにしてマイクロピペットから吐出された試料溶液の微小液滴が、基板上に付着して、当該基板上に微小スポットとして整列・固定されることによって、DNAチップを作製することができる。
【0005】
上述のような、DNAチップの製造方法に用いられるマイクロピペット等のように、微小物体を吐出し得るように構成された装置(以下、単に「微小物体吐出装置」と称する。)は、様々な技術分野にて利用可能である。
【0006】
なお、この種の微小物体の質量を測定可能に構成された質量センサが広く知られている(例えば下記特許文献3参照)。この質量センサは、圧電/電歪素子が配設された振動板の上に微小物体が付着した場合に、当該微小物体の付着による振動板の質量変化によって変化する当該振動板の共振周波数の変化を測定することで、当該振動板の質量変化(すなわち当該微小物体の質量)を測定し得るように構成されている。
【特許文献1】特開2001−124789号公報
【特許文献2】特開2001−186881号公報
【特許文献3】特開2000−180250号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
この種の微小物体吐出装置においては、前記微小物体の乾燥・固化物や、異物等が、吐出口の周辺に付着したり、吐出口を塞いだりする場合がある。このような場合、当該微小物体が吐出対象物における所定の位置に向けて正しく吐出されないという、不具合が生じる(例えば、特許文献1の段落[0010]や[0019]等参照)。
【0008】
また、前記特許文献3に記載されているような質量センサを用いて、微小物体の飛翔状態を検出しようとしても、当該質量センサによる飛翔状態検出は、上述の振動板に或る程度の(共振周波数の変化が測定され得る程度の)時間にわたって付着し得るような性質の微小物体に対してしか適用され得ない。また、当該質量センサによる飛翔状態検出によれば、同一の微小物体吐出装置から一定周期で断続的に微小物体が吐出される場合に、当該微小物体の飛翔状態を同一のセンサによって連続的に検出することが困難であった。
【0009】
本発明は、上述した問題に鑑みてなされたものであり、その目的は、前記微小物体吐出装置から吐出された微小物体の飛翔状態(当該吐出装置における吐出状態)を良好に検出し得る、飛翔中の微小物体の飛翔状態検出方法、及び簡略かつ安価な装置構成の飛翔状態検出装置を提供することにある。
【課題を解決するための手段】
【0010】
(A)かかる目的を達成するために、本発明の、微小物体の飛翔状態検出装置(以下、単に「飛翔状態検出装置」と称する)は、飛翔中の微小物体の飛翔状態を検出し得るように、以下の構成を備えている。
【0011】
(A01)本発明の飛翔状態検出装置は、振動発生部と、その振動発生部にて発生した前記振動を電気信号に変換するように構成された圧電/電歪素子と、を備えている。前記振動発生部は、前記微小物体が衝突するターゲット部を備えていて、当該ターゲット部に前記微小物体が衝突することで振動が発生するように構成されている。
【0012】
かかる構成を有する本発明の飛翔状態検出装置においては、飛翔中の前記微小物体が前記ターゲット部に衝突すると、前記振動発生部が振動する。この振動は、前記圧電/電歪素子によって電気信号に変換される。この電気信号に基づいて、微小物体の飛翔状態が検出され得る。
【0013】
(A02)前記構成A01において、単一の前記振動発生部に対して複数の前記ターゲット部が設けられていてもよい。例えば、複数の前記ターゲット部に対して、当該ターゲット部の数と同数の前記微小物体が同時に衝突するように微小物体吐出装置を制御することで、複数の微小物体飛翔経路の各々における前記微小物体の飛翔状態を同時に検出することができる。これにより、飛翔状態検出のための時間を短縮することができる。また、飛翔状態検出のための回路構成を簡略化することができる。
【0014】
(A03)前記構成A01又はA02において、複数の前記圧電/電歪素子が、互いに電気回路的に接続されていてもよい。かかる構成によれば、前記微小物体と前記ターゲット部との1回の衝突によって、複数の前記圧電/電歪素子にて前記電気信号が発生し、これらの電気信号が合算され得る。これにより、当該飛翔状態検出装置の感度が向上する。したがって、本構成によれば、より小さい質量の微小物体に対して良好な飛翔状態検出が行われ得る。
【0015】
また、かかる構成によれば、前記微小物体と前記ターゲット部との1回の衝突によって、複数の前記圧電/電歪素子にて前記電気信号が発生し、これらの電気信号が比較され得る。例えば、前記微小物体と前記ターゲット部との衝突の態様に応じて、前記振動発生部に特定のモード(撓みやねじれ)の振動が発生し得る。ここで、複数の前記圧電/電歪素子のそれぞれにて発生する電気信号を比較することで、当該振動モードが判定され得る。これにより、前記微小物体における多様な飛翔状態の検出が行われ得る。例えば、単に微小物体の飛翔の有無だけでなく、所定の飛翔経路からの逸脱の有無も判定され得る。
ここで、複数の前記圧電/電歪素子同士の電気回路的な接続は、直接なされてもよいし、演算・制御回路を介してなされてもよい。特に、複数の前記圧電/電歪素子同士が電気回路的に直接に接続された場合、当該複数の前記圧電/電歪素子同士の出力の比較等の処理が、当該複数の前記圧電/電歪素子同士の接続回路自体によって行われる。したがって、当該演算・制御回路の構成が単純化され、前記微小物体の判定が簡略に行われ得る。
【0016】
(A04)前記構成A01ないしA03において、前記ターゲット部の表面には、コーティング層が形成されていてもよい。これにより、前記ターゲット部に前記微小物体が残留することによる前記振動発生部の振動特性の変化が抑制され得る。また、当該微小物体が液体である場合に、前記ターゲット部の周囲の雰囲気中の異物(埃等)が付着することで当該ターゲット部が汚れることが抑制され得る。
【0017】
(A05)前記構成A01ないしA04において、前記圧電/電歪素子を駆動するための駆動電圧を発生する駆動部をさらに備えていてもよい。この駆動部によって前記圧電/電歪素子が駆動されることで、前記振動発生部が外部から強制的に振動させられる。この振動発生部の強制的な振動によって、例えば、前記ターゲット部に付着した物体(前記微小物体の残留物や異物等)が除去され得る。あるいは、前記振動発生部を強制的に振動させたときの振動状態に基づいて、前記振動発生部における共振周波数の変化が取得され得る。
【0018】
(A06)前記構成A05において、前記振動発生部の共振周波数を取得する共振周波数取得部をさらに備えていて、前記駆動部が、前記共振周波数取得部によって取得された前記共振周波数に基づいて前記圧電/電歪素子を駆動するように構成されていてもよい。
【0019】
かかる構成においては、例えば、前記駆動部による駆動電圧(この場合の駆動電圧は、例えば、直流電圧や、前回取得された共振周波数の交流電圧や、既定値としての特定の周波数の交番電圧、等が含まれ得る。)の印加によって、前記振動発生部が強制的に振動させられる。この振動に基づいて、前記共振周波数取得部は、当該振動発生部の共振周波数を取得する。次回に前記振動発生部が前記駆動部によって強制的に振動される際には、当該駆動部は、この取得された共振周波数に基づいて、前記振動発生部を駆動する。
【0020】
かかる構成によれば、前記ターゲット部に対する付着物が、より効率的に除去され得る。あるいは、当該飛翔状態検出装置の異常(例えば、前記振動発生部における破損や、前記付着物の過剰な付着)が検知され得る。
【0021】
(A07)前記構成A06において、前記共振周波数取得部は、前記駆動部による前記駆動電圧の出力が遮断された後に、前記共振周波数を取得するように構成されていてもよい。
【0022】
かかる構成においては、例えば、以下のようにして前記共振周波数が取得され得る。まず、前記圧電/電歪素子に対して直流電圧を所定時間(予想される共振周波数に相当する周期よりも充分に長い時間)印加した後、当該直流電圧の印加を遮断する。これにより、当該圧電/電歪素子にて減衰自由振動が生じる。この減衰自由振動によって、当該圧電/電歪素子に交流の電圧が発生する。この発生電圧の周波数等を、前記共振周波数取得部によって取得することで、前記振動発生部の前記共振周波数が取得され得る。
【0023】
(A08)記構成A06において、前記駆動部は、複数の前記圧電/電歪素子の一部に対して前記駆動電圧を出力するように構成されていて、前記共振周波数取得部は、前記駆動部による前記駆動電圧の出力先とは異なる前記圧電/電歪素子からの前記電気信号に基づいて、前記共振周波数を取得するように構成されていてもよい。
【0024】
かかる構成によれば、前記駆動部による前記振動発生部の強制的な振動と、前記共振周波数取得部による前記共振周波数の取得とが、ほぼ同時に行われ得る。
【0025】
(A09)前記構成A01ないしA08において、前記電気信号に基づいて、前記振動発生部の振動モードを判別する振動モード判定部をさらに備えていてもよい。
【0026】
すなわち、前記微小物体と前記ターゲット部との衝突の態様に応じて、前記振動発生部に特定のモード(撓みやねじれ)の振動が発生し得る。ここで、本構成によれば、前記振動モード判定部によって、当該振動モードが判定され得る。例えば、前記圧電/電歪素子によって発生する電気信号の振幅等に基づいて、当該振動モードが判定され得る。あるいは、複数の前記圧電/電歪素子のそれぞれにて発生する電気信号を比較することで、当該振動モードが判定され得る。あるいは、複数の前記圧電/電歪素子を電気回路的に接続して、両者の電気信号を重畳した後、振幅等を取得することで、当該振動モードが判定され得る。
本構成によれば、前記微小物体における多様な飛翔状態の検出が行われ得る。例えば、単に微小物体の飛翔の有無だけでなく、所定の飛翔経路からの逸脱の有無も判定され得る。
【0027】
(A10)前記構成A01ないしA09において、前記振動発生部が長手方向を有する板状部材から構成されていて、当該板状部材の前記長手方向における一端側に前記ターゲット部が設けられ、他端側の表面上に前記圧電/電歪素子が固着して設けられていてもよい。この場合、前記圧電/電歪素子は、前記ターゲット部が設けられている側の表面に設けられていてもよい。あるいは、前記圧電/電歪素子は、前記ターゲット部が設けられている面と反対側の面に設けられていてもよい。
【0028】
かかる構成によれば、前記ターゲット部と前記圧電/電歪素子との距離が充分長く設定される。これにより、当該ターゲット部に対する前記微小物体の衝突により前記ターゲット部に与えられたエネルギーによる力が、テコの原理により増幅され、前記圧電/電歪素子に大きな応力を発生する。よって、前記圧電/電歪素子にて大きな電気信号が得られる。したがって、当該飛翔状態検出装置の感度が向上し、より小さい質量の微小物体に対して良好な飛翔状態検出が行われ得る。
【0029】
(A11)前記構成A10において、前記板状部材における前記他端側の剛性が、前記一端側の剛性よりも低くなるように、当該板状部材が構成されていることが好ましい。
【0030】
かかる構成によれば、前記微小物体が前記ターゲット部に衝突した際に、前記振動発生部を構成する前記板状部材の、剛性の低い前記他端側(前記圧電/電歪素子が設けられている側)に応力が集中する。よって、前記圧電/電歪素子にて大きな電気信号が得られる。これにより、当該飛翔状態検出装置の感度が向上する。したがって、本構成によれば、より小さい質量の微小物体に対して良好な飛翔状態検出が行われ得る。
【0031】
(A12)前記構成A10又はA11において、複数の前記圧電/電歪素子が、前記板状部材の一方の表面と、当該一方の表面の裏側の他方の表面との上に固着して設けられていてもよい。この場合、前記一方の表面上に設けられた前記圧電/電歪素子と、前記他方の表面上に設けられた前記圧電/電歪素子とは、互いに電気回路的に接続され得る。
【0032】
(A13)前記構成A01ないしA12において、前記微小物体を吐出し得るように構成された微小物体吐出部と、前記微小物体吐出部を制御する制御部と、をさらに備えていてもよい。この場合、前記制御部は、前記振動発生部の共振周波数の1/n倍(nは自然数)に近い特定周波数で前記微小物体の吐出が行われるように、前記微小物体吐出部を制御する。
【0033】
かかる構成によれば、前記微小物体吐出部によって、前記微小物体が、前記振動発生部の共振周波数の1/n倍(nは自然数)に近い特定周波数で吐出される。吐出された前記微小物体は、前記ターゲット部と、前記特定周波数に対応する周期で断続的に衝突する。これにより、前記振動発生部が、前記共振周波数に略等しい周波数にて励振され得る。したがって、当該振動発生部がより効率的に励振され、当該飛翔状態検出装置の感度が向上する。
【0034】
(A14)前記構成A13において、前記制御部は、以下の条件で前記微小物体吐出部を制御するように構成されていてもよい。
【0035】
前記共振周波数をf0、前記特定周波数をf1とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
【0036】
かかる構成によれば、前記振動発生部がより効率的に励振され、当該飛翔状態検出装置の感度が向上する。
【0037】
(A15)前記構成A13又はA14において、前記制御部は、以下の条件で前記微小物体吐出部を制御するように構成されていてもよい。
【0038】
前記ターゲット部に前記微小物体が衝突した際に、前記振動発生部によって当該微小物体の運動エネルギーを吸収するために要する時間をT1、前記振動発生部の前記共振周波数に相当する固有周期をT0とした場合に、
T1≦0.2T0
【0039】
例えば、前記微小物体の飛翔速度や、前記微小物体の状態(質量、体積、形状、固体か流体か或いは気体か、等)に基づいて、上述の関係が満たされるように、前記振動発生部の構造(材質や寸法等)が設定され得る。
【0040】
かかる構成によれば、前記振動発生部がより効率的に励振され、当該飛翔状態検出装置の感度が向上する。
【0041】
(A16)前記構成A01ないしA15において、前記微小物体の飛翔方向と交差する平板状のアパチャープレートをさらに備えていて、そのアパチャープレートには、前記微小物体が通過可能な貫通孔であるアパチャーが形成されていてもよい。このアパチャープレートは、前記ターゲット部よりも、前記微小物体の飛翔方向における上流側に配置されている。
【0042】
かかる構成によれば、例えば、微小物体吐出装置から吐出された微小物体が所定の飛翔方向に沿った所定の飛翔経路上を飛翔した場合に、当該微小物体がアパチャーを通過し得るように、当該アパチャープレートが配置され得る。これにより、当該微小物体の前記飛翔経路からの逸脱が、きわめて簡略な装置構成によって検出され得る。
また、かかる構成によれば、アパチャーの位置を適宜設定することにより、前記振動発生部に所定の振動モードのみを選択的に発生させることが可能になる。
【0043】
(C)上述の目的を達成するために、本発明の、微小物体の飛翔状態検出方法(以下、単に「飛翔状態検出方法」と称する)は、飛翔中の微小物体の飛翔状態を検出し得るように、以下のステップを含む。
【0044】
(C01)本発明の飛翔状態検出方法は、以下の(s1)ないし(s4)のステップを含む。(s1)前記微小物体吐出部から前記微小物体を吐出させ、(s2)吐出された前記微小物体を、ターゲット部に衝突させることで、当該ターゲット部を備えた振動発生部を振動させ、(s3)圧電/電歪素子を用いて、前記振動発生部の振動を電気信号に変換し、(s4)前記電気信号に基づいて、前記微小物体の飛翔状態を検出する。
【0045】
かかる方法によれば、同一の微小物体吐出装置から一定周期で断続的に微小物体が吐出されている場合に、当該微小物体の飛翔状態を同一の飛翔状態検出装置によって連続的に検出することが容易に行われ得る。
【0046】
(C02)前記C01に記載の方法において、前記微小物体を吐出させる前記ステップ(s1)は、前記振動発生部の共振周波数の1/n倍(nは自然数)に近い特定周波数で前記微小物体を吐出させるステップであってもよい。
【0047】
かかる方法によれば、前記振動発生部を振動させる前記ステップ(s2)にて、前記振動発生部が、前記共振周波数の1/n倍(nは自然数)に略等しい周波数にて励振され得る。したがって、当該振動発生部がより効率的に励振され、前記微小物体の飛翔状態を検出する前記ステップ(s4)による飛翔状態検出の感度が向上する。
【0048】
(C03)前記C02に記載の方法において、前記微小物体を吐出させる前記ステップ(s1)は、前記共振周波数をf0、前記特定周波数をf1とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
を満たすような前記特定周波数で前記微小物体を吐出させるステップであってもよい。
【0049】
かかる方法によれば、前記振動発生部を振動させる前記ステップ(s2)にて、前記振動発生部がより効率的に励振される。よって、前記微小物体の飛翔状態を検出する前記ステップ(s4)による飛翔状態検出の感度が向上する。
【0050】
(C04)前記C01ないしC04に記載の方法において、前記微小物体を吐出させる前記ステップ(s1)は、前記ターゲット部に前記微小物体が衝突した際に、前記振動発生部によって当該微小物体の運動エネルギーを吸収するために要する時間をT1、前記振動発生部の前記共振周波数に相当する固有周期をT0とした場合に、
T1≦0.2T0
を満たすような条件で前記微小物体を吐出させるステップであってもよい。
【0051】
かかる方法によれば、前記振動発生部を振動させる前記ステップ(s2)にて、前記振動発生部がより効率的に励振され、前記微小物体の飛翔状態を検出する前記ステップ(s4)による飛翔状態検出の感度が向上する。
【0052】
(C05)前記C01ないしC04に記載の方法において、前記微小物体の飛翔状態を検出する前記ステップ(s4)は、前記電気信号に基づいて、前記振動発生部の振動モードを判別するステップを含んでいてもよい。
【0053】
例えば、前記ステップ(s3)にて発生した、前記圧電/電歪素子の出力である電気信号の振幅等に基づいて、当該ステップ(s4)にて振動モードが判定され得る。あるいは、前記ステップ(s3)にて、複数の前記圧電/電歪素子からの出力としての電気信号の各々を比較することで、当該ステップ(s4)にて振動モードが判定され得る。あるいは、当該ステップ(s4)にて、複数の前記圧電/電歪素子の電気信号を重畳した信号に基づいて、当該振動モードが判定され得る。
【0054】
かかる方法によれば、前記微小物体における多様な飛翔状態の検出が行われ得る。例えば、単に微小物体の飛翔の有無だけでなく、所定の飛翔経路からの逸脱の有無も判定され得る。
【0055】
(C06)前記C05に記載の方法において、前記微小物体の飛翔状態を検出する前記ステップ(s4)は、互いに電気回路的に接続された第1の圧電/電歪素子及び第2の圧電/電歪素子が出力する電気信号に基づいて、前記振動発生部の振動モードを判別するステップを含んでいてもよい。
【0056】
かかる方法においては、前記振動発生部の振動を電気信号に変換する前記ステップ(s3)にて、互いに電気回路的に接続された前記第1の圧電/電歪素子及び第2の圧電/電歪素子から、それぞれ電気信号が出力される。このステップ(s3)に続く前記ステップ(s4)において、前記第1の圧電/電歪素子及び第2の圧電/電歪素子からの各電気信号に基づいて、前記振動発生部の振動モードが判別される。
【0057】
かかる方法によれば、前記微小物体と前記ターゲット部との衝突の態様に応じて前記振動発生部に生じる特定の振動モード(撓みやねじれ)が判別されることで、前記微小物体における多様な飛翔状態の検出が行われ得る。例えば、単に微小物体の飛翔の有無だけでなく、所定の飛翔経路からの逸脱の有無も判定され得る。
特に、複数の前記圧電/電歪素子同士が電気回路的に直接に接続された回路構成が用いられる場合、本方法によれば、当該複数の前記圧電/電歪素子同士の出力の比較等の処理が、当該複数の前記圧電/電歪素子同士の接続回路自体によって行われる。したがって、前記微小物体の飛翔状態を検出する前記ステップ(s4)の処理が簡略化され得る。
【0058】
(C07)前記C01ないしC06に記載の方法において、さらに以下のステップを含んでいてもよい。(s11)前記振動発生部の共振周波数を取得し、(s12)取得された前記共振周波数に基づいて、前記圧電/電歪素子を駆動する。
【0059】
かかる方法においては、前記共振周波数を取得するステップ(s11)、及び前記圧電/電歪素子を駆動するステップ(s12)は、上述の各ステップ(s1)ないし(s4)とは独立に行われ得る。すなわち、当該ステップ(s11)及び(s12)は、必ずしも前記微小物体の飛翔状態を検出する前記ステップ(s4)に続いて行われるものではない。
【0060】
かかる方法によれば、前記ターゲット部に対する付着物が、より効率的に除去され得る。あるいは、当該方法に用いられる飛翔状態検出装置の異常(例えば、前記振動発生部における破損や、前記付着物の過剰な付着)が検知され得る。
【0061】
(C08)前記C07に記載の方法において、前記振動発生部の共振周波数を取得する前記ステップ(s12)は、前記圧電/電歪素子を駆動する前記ステップ(s11)の終了後に行われることが好適である。
【0062】
かかる方法においては、例えば、以下のようにして前記共振周波数が取得され得る。まず、前記ステップ(s11)にて、前記圧電/電歪素子に対して直流電圧を所定時間(予想される共振周波数に相当する周期よりも充分に長い時間)印加した後、当該直流電圧の印加を遮断する。これにより、当該圧電/電歪素子にて減衰自由振動が生じる。この減衰自由振動によって、当該圧電/電歪素子に交流の電圧が発生する。この発生電圧の周波数等を、前記ステップ(s12)にて取得することで、前記振動発生部の前記共振周波数が取得され得る。
【0063】
(C09)前記C07に記載の方法において、前記圧電/電歪素子を駆動する前記ステップ(s11)は、複数の前記圧電/電歪素子の一部に対して前記駆動電圧を出力するステップであり、前記振動発生部の共振周波数を取得する前記ステップ(s12)は、前記駆動電圧の出力先とは異なる前記圧電/電歪素子からの前記電気信号に基づいて、前記共振周波数を取得するステップであってもよい。
【0064】
これにより、前記駆動部による前記振動発生部の強制的な振動と、前記共振周波数の取得とが、ほぼ同時に行われ得る。
(C10)前記C01ないし09に記載の方法において、前記微小物体を吐出する前記ステップ(s1)は、前記微小物体を前記ターゲット部の所定の位置に所定の周波数で衝突させることで、前記ステップ(s2)にて前記振動発生部を所定の振動モードで振動させるように、当該微小物体を吐出するステップであってもよい。
これにより、前記振動発生部にて、所定のモードの振動が選択的に発生する。よって、前記微小物体の様々な飛翔状態の検出が行われ得る。例えば、前記振動発生部にて、1次撓みモードの振動を選択的に発生させることにより、極めて小さい質量の微小物体に対して良好な飛翔状態検出が行われ得る。
【発明の効果】
【0065】
以上の通り、本発明の飛翔状態検出装置、及び飛翔状態検出方法においては、飛翔中の前記微小物体の飛翔経路中に前記ターゲット部を介在させ、前記圧電/電歪素子を用いて前記ターゲット部に対する前記微小物体の衝突の状態を検知するだけで、衝突微小物体の飛翔状態が検出され得る。すなわち、本発明によれば、前記微小物体を吐出する微小物体吐出装置から吐出された前記微小物体の飛翔状態(当該吐出装置における吐出状態)が、簡略かつ安価な装置構成によって良好に検出され得る。
【発明を実施するための最良の形態】
【0066】
以下、本発明の好適な実施の形態を、図面を参照しながら説明する。
【0067】
<DNAチップの構成>
図1は、DNAチップの概略構成を示す外観図(斜視図)である。図2は、図1に示されているDNAチップを拡大した断面図である。
【0068】
図1に示されているように、DNAチップ10は、顕微鏡スライドグラスからなるDNAチップ基板12上に、試料溶液の微小液滴による微小スポットSが多数配列されることによって構成されている。
【0069】
図2に示されているように、このDNAチップ基板12上における、微小スポットSが形成されるべき位置には、突起12aが形成されている。この突起12aは、微小スポットSが規定の位置からずれて滴下された場合に、その位置ずれを補正するために形成されている。すなわち、図2に示されているように、微小スポットSの一部が突起12aにかかることで(二点鎖線参照)、当該微小スポットSの表面張力によって、当該微小スポットSが正規の位置に移動するようになっている。
【0070】
また、DNAチップ基板12の表面には、親水性を有するpoly-L-lysine層からなる試料担持層14が形成されている。
【0071】
<マイクロピペットの構成>
以下、上述のDNAチップ10を製造するために用いられるマイクロピペット(微小物体吐出部)の構成について説明する。図3は、当該マイクロピペットを拡大した断面図である。図4は、当該マイクロピペットにおける試料溶液の流路の構成を透視して示す斜視図である。図5は、当該マイクロピペットの平面図である。
【0072】
図3を参照すると、マイクロピペット100は、ノズルプレート110と、そのノズルプレート110の上面に固定されたキャビティユニット120と、そのキャビティユニット120の上面に固定されたアクチュエータユニット130とから構成されている。ノズルプレート110には、試料液体が通過可能な貫通孔であるノズル112が形成されている。
【0073】
ノズルプレート110は、セラミックス製の薄板から構成されている。ノズルプレート110を構成する材料としては、例えば、酸化ジルコニウム、酸化アルミニウム、酸化マグネシウム、窒化アルミニウム、窒化珪素が、好適に用いられ得る。また、酸化ジルコニウムの中でも、完全安定化酸化ジルコニウムを主成分とする材料、及び部分安定化酸化ジルコニウムを主成分とする材料が、機械的強度の観点、及び圧電/電歪膜や電極膜の材料との反応性の観点から、最も好適に用いられ得る。
【0074】
キャビティユニット120は、接続プレート121と、流路プレート122と、オリフィスプレート123と、キャビティプレート124と、注入口プレート125とから構成されている。これらの接続プレート121、流路プレート122、オリフィスプレート123、キャビティプレート124、及び注入口プレート125は、セラミックス製の薄板から構成されている。接続プレート121と、流路プレート122と、オリフィスプレート123と、キャビティプレート124と、注入口プレート125と、ノズルプレート110とは、この順に上から積層された状態で焼成されることで、一体に形成されている。
【0075】
接続プレート121は、当該キャビティユニット120とノズルプレート110との接続部に配置されていて、ノズルプレート110の上面に接合されている。この接続プレート121には、ノズル112と同じ径の貫通孔であるノズル連通孔121aが形成されている。このノズル連通孔121aは、キャビティプレート124に形成されたキャビティ124aと、試料送出孔126を介して接続されている。この試料送出孔126は、ノズル連通孔121aよりも大きな径の貫通孔であり、流路プレート122及びオリフィスプレート123を貫通するように形成されている。
【0076】
流路プレート122には、キャビティ124aに向けて試料溶液を供給するための試料供給流路122aが形成されている。この試料供給流路122aとキャビティ124aとは、オリフィスプレート123に形成された小径の貫通孔であるオリフィス123aを介して接続されている。
【0077】
注入口プレート125は、キャビティユニット120の最上層に配置されている。この注入口プレート125には、流路プレート122に形成された試料供給流路122aに向けて試料溶液を注入するための貫通孔である試料注入口125aが形成されている。この試料注入口125aと、流路プレート122に形成された試料供給流路122aとは、貫通孔である試料導入孔127を介して接続されている。この試料導入孔127は、オリフィスプレート123及びキャビティプレート124を貫通するように形成されている。
【0078】
上述の通りに構成されたキャビティユニット120においては、図4に示されているような、試料注入口125aからノズル112に至る試料溶液の流路が形成されている。すなわち、キャビティ124aが加圧されることで、当該キャビティ124a内の試料溶液が、小径のオリフィス123aを介して試料供給流路122aに逆流することなく、試料送出孔126を介してノズル112に向けて送出され、当該ノズル112から試料溶液の微小液滴が外部に吐出されるように、オリフィス123aの寸法が設定されている。
【0079】
再び図3を参照すると、アクチュエータユニット130は、圧電/電歪層131と、その圧電/電歪層131の下面に固着して設けられた下部電極132と、圧電/電歪層131の上面に固着して設けられた上部電極133とを備えている。圧電/電歪層131は、キャビティ124aに対応する位置(真上)に配置されている。下部電極132が注入口プレート125の上面に固着されることで、アクチュエータユニット130は、キャビティユニット120の上面に固定されている。このアクチュエータユニット130は、下部電極132と上部電極133との間に駆動電圧が印加されることで、キャビティ124a内の体積を変化させ、所定量の試料溶液をノズル112から吐出させ得るように構成されている。
【0080】
下部電極132は、注入口プレート125の上面に形成された導電膜である下部電極配線パターン132aと接続されている。上部電極133は、注入口プレート125の上面に形成された導電膜である上部電極配線パターン133aと接続されている。
【0081】
図5に示されているように、注入口プレート125の上面には、下部電極配線パターン132aと接続された下部電極入力端子141が形成されている。また、注入口プレート125の上面には、上部電極配線パターン133aと接続された上部電極入力端子142が形成されている。これらの下部電極入力端子141及び上部電極入力端子142は、アクチュエータユニット130を駆動するための外部機器と接続され得るように構成されていて、当該外部機器を介して下部電極入力端子141と上部電極入力端子142との間に駆動電圧が印加されることでアクチュエータユニット130が駆動されるようになっている。
【0082】
<分注装置の構成>
次に、上述の構成を有するマイクロピペット100を備えた分注装置の構成について説明する。図6は、当該分注装置の外観図であり、図6(a)が平面図、図6(b)が側面図である。図7は、当該分注装置を分解した斜視図である。
【0083】
図6(a)に示されているように、分注装置200は、複数個(図中では10個)のマイクロピペット100が2次元的に配列されることによって構成されている。これら複数のマイクロピペット100における、上述のノズルプレート110は、1枚のセラミック板として一体に成形されている。
【0084】
分注装置200は、マイクロピペット100における各試料注入口125a(図5参照)に試料溶液を導入するための試料導入部材210を備えている。この試料導入部材210は、図6(a)及び図6(b)に示されているように、2次元的に配列されたマイクロピペット100の上面に接続されている。試料導入部材210は、図7に示されているように、ノズルプレート110に形成されたネジ穴114、及び固定ボルト212によって、当該ノズルプレート110の上面にて固定されている。
【0085】
図6(b)を参照すると、試料導入部材210には、貫通孔からなる試料注入流路214が形成されている。この試料注入流路214の下端における開口は、マイクロピペット100における各試料注入口125a(図5参照)と接続されている。また、試料注入流路214の上端における開口は、上方に向けて広がるラッパ状の管からなる導入チューブ216の下端と接続されている。
【0086】
図7を参照すると、2次元的に配列された複数の導入チューブ216は、試料溶液を貯留するためのカートリッジ220にて下方に突出するように形成された複数の試料貯留部222と係合し得るように配置及び形成されている。カートリッジ220は、柔らかい合成樹脂を射出成形することで形成されている。このカートリッジ220は、試料貯留部222の底部に針等で孔を開けることで、当該試料貯留部222に貯留された試料溶液が導入チューブ216内に流入し、各試料注入口125aに対してそれぞれ種類の異なる試料溶液が供給され得るように構成されている。
【0087】
<実施形態の飛翔状態検出装置の概略構成>
次に、本発明の実施形態である飛翔状態検出装置の概略構成について説明する。図8は、上述の分注装置200における試料溶液の吐出口を有するノズルプレート110の下方に、飛翔状態検出装置300が配置された状態を示す側面図である。例えば、図1に示されているDNAチップ基板12と、当該飛翔状態検出装置300とが、図示しないX−Yステージ上に配置されていて、当該X−Yステージを駆動することで、当該飛翔状態検出装置300がノズルプレート110の下方に所定の位置関係で配置されるようになっている。
【0088】
図8を参照すると、この飛翔状態検出装置300は、分注装置200における各マイクロピペット100から試料溶液が正しく吐出されたか否かを検出し得るように構成されている。以下、本発明の飛翔状態検出装置300の具体的な構成について説明する。
【0089】
<第1実施形態の飛翔状態検出装置の構成>
図9(a)は、第1の実施形態の飛翔状態検出装置300を拡大した断面図である。
【0090】
図9(a)に示されているように、飛翔状態検出装置300は、センサ基板310と、圧電/電歪素子320と、アパチャープレート330とを備えている。
【0091】
センサ基板310は、板状部材から構成されている。このセンサ基板310は、セラミックスから形成されていることが好ましい。このセラミックとしては、例えば、完全安定化ジルコニアや部分安定化ジルコニア、アルミナ、マグネシア、窒化珪素等が用いられ得る。このうち、完全安定化/部分安定化ジルコニアは、薄板状に構成しても靭性が高く機械的強度が大きいこと、圧電/電歪素子を構成する圧電/電歪膜や電極材料との反応性が小さいことから、最も好適に採用され得る。
【0092】
センサ基板310は、厚肉支持部311と、振動板(振動発生部)312とから構成されていて、当該厚肉支持部311と振動板312とは一体に成形されている。厚肉支持部311は、平板状部材からなる振動板312よりも厚く形成されている。振動板312は、長手方向(図中左右方向)を有する平板状部材であって、厚肉支持部311によって片持ち梁(カンチレバー)状に支持されている。
【0093】
振動板312の固定端側である検知部312aには、圧電/電歪素子320が着接されている。本実施形態においては、圧電/電歪素子320は、振動板312における図中上側の表面である内側表面312b上に固着して設けられている。この圧電/電歪素子320は、片持ち梁である振動板312にて発生した振動を電気信号に変換し得るように構成されている。なお、圧電/電歪素子320の厚さは、振動板312に比べて充分に薄く形成されている(図9(a)においては、説明の便宜のため、圧電/電歪素子320の厚さが誇張されて図示されているものとする。以下の図10ないし図22においても同様である。)。
【0094】
振動板312の自由端側(前記長手方向における一端側)であるターゲット部312cにおける、内側表面312b上には、コーティング層313が形成されている。このコーティング層313は、前記試料溶液の微小液滴との間の親和性(濡れ性)が低い材質からなる薄膜によって構成されている。例えば、上述のDNAチップ10(図1及び図2参照)を形成するための前記試料溶液は水系の溶液であるため、コーティング層313の材質としては撥水性の材質(フッ素系合成樹脂等)が選択され得る。
【0095】
センサ基板310の上方には、前記振動板312の前記内側表面312bと対向するようにアパチャープレート330が配置されている。このアパチャープレート330には、前記微小液滴が通過可能な貫通孔であるアパチャー331が形成されている。このアパチャー331が、マイクロピペット100のノズルプレート110(図8参照)に形成されたノズル112(図3参照)と対向するように、アパチャープレート330が配置されている。
【0096】
図9(b)は、当該飛翔状態検出装置300の平面図(上述の図8における、マイクロピペット100のノズルプレート110側から当該飛翔状態検出装置300を見た図)である。図9(c)は、アパチャープレート330を取り除いた場合の平面図である。図9(a)ないし(c)に示されているように、アパチャー331は、ターゲット部312cに形成されたコーティング層313と対向するように形成されている。また、図9(a)に示されているように、アパチャー331は、ターゲット部312cに形成されたコーティング層313よりも上方、すなわち、前記微小液滴の飛翔方向Dにおける上流側に形成されている。
【0097】
上述の通り、この飛翔状態検出装置300は、前記飛翔方向Dに沿った所定の飛翔経路上を飛翔中の前記微小液滴がアパチャー331を通過してターゲット部312c(コーティング層313)に衝突し、この衝突によって振動板312に発生した振動が圧電/電歪素子320によって電気信号に変換されるように構成されている。
【0098】
<<圧電/電歪素子の構成>>
図10(a)は、前記振動板312の周囲を拡大した断面図である。図10(a)に示されているように、圧電/電歪素子320は、圧電/電歪層321と、この圧電/電歪層321の一方の面に形成された下部電極322と、当該圧電/電歪層321の他方の面に形成された上部電極323と、から構成されている。圧電/電歪層321は、圧電効果及び圧電逆効果を示すいわゆる圧電/電歪材料(PZT等)の薄板から構成されている。下部電極322及び上部電極323は、金属膜から構成されている。
【0099】
<<振動板の構成>>
図10(b)は、前記振動板312の周囲を拡大した平面図である。
【0100】
図10(b)に示されているように、振動板312における検知部312aは、他の部分よりも狭い幅に形成されている。すなわち、前記試料溶液の微小液滴が上方(図10(a)における上方)から飛翔してきてターゲット部312c(コーティング層313)に衝突して、振動板312に振動が発生した場合に、検知部312aに応力が集中し、この応力集中により圧電/電歪素子320にて大きな電圧が発生し得るように、振動板312の平面形状が設定されている。
【0101】
図10(c)は、前記センサ基板310の平面図である。図10(c)に示されているように、センサ基板310においては、複数の振動板312が、厚肉支持部311から略水平に延びるように形成されている。
【0102】
<飛翔状態検出のための回路構成>
次に、上述の装置構成を用いて、マイクロピペット100(図8参照)からの試料溶液の微小液滴の吐出状態を判定するための回路構成について、図11を用いて説明する。
【0103】
制御回路340は、圧電/電歪素子320にて生じた電圧を取得する電圧取得部341と、圧電/電歪素子320に対して駆動電圧を与える駆動部342と、前記電圧取得部341及び前記駆動部342と接続された演算・制御部343と、各マイクロピペット100に対して駆動電圧を与える駆動部344と、を備えている。
【0104】
電圧取得部341は、ターゲット部312c(図10(a)参照)に試料溶液の微小液滴が衝突した場合に圧電/電歪素子320に生じる起電力を取得し得るように、圧電/電歪素子320と電気的に接続されている。駆動部342は、圧電/電歪素子320に対して駆動電圧を与えて当該圧電/電歪素子320を駆動することで、振動板312(図10参照)を強制的に振動させ得るように、圧電/電歪素子320と電気的に接続されている。
駆動部342は、演算・制御部343の制御下で、任意の波形(直流を含む。また、交流であってもサイン波、矩形波、パルス波等の種々の波形を含む。)の電圧を圧電/電歪素子320に印加し得るように構成されている。
【0105】
演算・制御部343は、電圧取得部341から信号を受け取って適宜演算処理することで、振動板312(図10参照)の振動状態(振動の大きさ、振動モード、共振周波数を含む)を検出し得るように構成されている。また、演算・制御部343は、駆動部342に対して駆動信号を与えることで、圧電/電歪素子320の駆動を制御し得るように構成されている。さらに、演算・制御部343は、各マイクロピペット100における試料溶液の吐出を制御し得るように、駆動部344を介して各マイクロピペット100と接続されている。
【0106】
<第1実施形態の装置の動作説明>
次に、上述した構成を有する第1の実施形態の飛翔状態検出装置300による動作について、図面を参照しつつ説明する。
【0107】
<<DNAチップの製造工程>>
最初に、図1に示されているDNAチップ10の製造工程について説明する。この製造工程は、DNAチップ基板12の表面にpoly-L-lysine層からなる試料担持層14(図2参照)を形成する前処理工程と、DNA断片を含む試料溶液を調製する試料調製工程と、得られた試料溶液をDNAチップ基板12上に供給する供給工程と、からなる。
【0108】
前処理工程は、以下のように行われる。まず、DNAチップ基板12は、室温で少なくとも2時間、所定のアルカリ溶液に浸される。このアルカリ溶液としては、例えば、NaOHを蒸留水に溶かした後、更にエタノールを加えて、完全に透明になるまで攪拌することによって得られた溶液が用いられ得る。その後、DNAチップ基板12は、当該アルカリ溶液から取り出されて蒸留水中で洗浄される。続いて、DNAチップ基板12は、蒸留水中にpoly-L-lysineを加えることにより調製されたpoly-L-lysine液中に1時間程度浸される。その後、DNAチップ基板12がpoly-L-lysine液から取り出され、遠心分離によって余分なpoly-L-lysine液がDNAチップ基板12から除去される。続いて、DNAチップ基板12は、40℃にて5分程度ほど乾燥される。これにより、表面にpoly-L-lysine試料担持層14が形成されたDNAチップ基板12が得られる。
【0109】
試料調製工程は、ポリメラーゼ連鎖反応(PCR)法によってDNA断片の塩基配列を増幅することでPCR産物を得る増幅工程と、得られたPCR産物を乾燥してDNA粉末を得る粉末生成工程と、得られたDNA粉末を緩衝液に溶かす混合工程とを含む。粉末生成工程においては、まず、PCR産物に、3M(=3mol/l)の酢酸ナトリウムとイソプロパノールとが加えられ、数時間放置される。その後、この溶液が遠心分離されることで、DNA断片が沈殿する。この沈殿したDNA断片がエタノールでリンスされ、遠心分離された後、乾燥されることで、DNA粉末が生成される。混合工程においては、DNA粉末にトリス−EDTA(TE)緩衝液が加えられ、完全に溶解するまで数時間放置される。これにより、試料溶液が調製される。この段階での試料溶液の濃度は1〜10μg/μlである。
【0110】
こうして得られた試料溶液は、図7に示されているカートリッジ220の試料貯留部222に貯留される。このカートリッジ220が、図6に示されている分注装置200に装着されることによって、試料溶液が当該分注装置200における各マイクロピペット100に供給される。そして、試料溶液の微小液滴が各マイクロピペット100からDNAチップ基板12(図1参照)に向けて吐出されることで、当該DNAチップ基板12上に試料溶液の微小液滴が供給され、当該DNAチップ基板12上に、多数個の試料溶液の微小スポットSが、所定の配列となるように形成される。このようにして、DNAチップ10が製造される。
【0111】
ここで、試料溶液の微小液滴は、通常、目視が困難である。よって、当該微小液滴がDNAチップ基板12上に所定の配列で正しく形成されているか否か(特定のマイクロピペット100における不吐出等の吐出不良がないかどうか)は、目視では判定できない。一方、当該微小液滴の吐出経路の途中をレーザー光等でスキャンすることで、当該不吐出を判定することは可能である。しかし、そのようにレーザー光をスキャンして各マイクロピペット100における吐出不良を判定するための装置構成は、非常に高価である。
【0112】
そこで、図8に示されているように、本実施形態の飛翔状態検出装置300を用いることによって、分注装置200における各マイクロピペット100の吐出不良が判定される。この飛翔状態検出装置300は、上述したような、きわめて簡略で製造コストが低廉となり得る構成を有している。もっとも、このような簡略な構成を有するにもかかわらず、当該飛翔状態検出装置300による吐出不良の判定は確実に行われ得る。
【0113】
<<第1実施形態における飛翔状態検出の動作説明>>
次に、本実施形態(上述の各実施例を含む)の飛翔状態検出装置300を用いた、マイクロピペット100における試料溶液の微小液滴の吐出状態の判定動作について、図8ないし図12を適宜参照しつつ説明する。ここで、図12は、振動板312(図9、図10参照)の振動の様子を示した図である。
【0114】
図8に示されているように、飛翔状態検出装置300は、マイクロピペット100におけるノズルプレート110の下方に配置される。そして、分注装置200の駆動が、図11における演算・制御部343及び駆動部344によって制御される。すなわち、演算・制御部343の制御下で、分注装置200に備えられた各マイクロピペット100におけるアクチュエータユニット130(図5参照)に対して駆動部344から駆動電圧が印加されることで、各マイクロピペット100が駆動される。これにより、各マイクロピペット100にて、前記試料溶液の微小液滴が、飛翔状態検出装置300に向けて吐出される。
【0115】
図9を参照すると、上述のように前記微小液滴が吐出されることにより、当該微小液滴はアパチャー331を通過して、振動板312におけるターゲット部312c(コーティング層313)に次々と衝突する。この衝突によって、振動板312が振動する。そして、当該振動に応じて、圧電/電歪素子320に起電力が生じる。すなわち、図10における下部電極322と上部電極323との間に、振動板312の振動状態に応じた電圧が生じる。
【0116】
例えば、前記微小液滴が、ターゲット部312cの幅方向における中央部に衝突した場合(当該微小液滴の飛翔方向が所定方向Dと一致する場合)、図12(a)に示されているように、振動板312が撓むように振動する(1次撓みモード)。これにより、検知部312aに応力が生じる。この応力が、圧電/電歪素子320(図10参照)によって起電力に変換される。
【0117】
一方、前記微小液滴が、ターゲット部312cの幅方向における中央部からオフセットした位置に衝突した場合(当該微小液滴の飛翔方向が所定方向Dから逸脱した場合)、図12(b)に示されているように、振動板312が捩れるように振動する(捩れモード)。これにより、検知部312aに、図12(a)における撓み変形の場合よりも小さな応力が生じる。これにより、圧電/電歪素子320(図10参照)にて、上述の撓み変形の場合よりも小さな起電力が生じる。
【0118】
前記微小液滴の飛翔経路が所定の飛翔経路よりもさらに逸脱した場合、当該微小液滴は、アパチャー331を通過することなく、アパチャープレート330の上面と衝突する。この場合、当該微小液滴はターゲット部312cと衝突しないので、振動板312における振動が生じない(あるいは振幅がゼロに向かって収束する)。
【0119】
このように、圧電/電歪素子320にて、振動板312の振動状態(すなわち微小液滴のターゲット部312cに対する衝突状態)に応じた電圧が発生する。
【0120】
図11を参照すると、圧電/電歪素子320にて発生した電圧が、電圧取得部341によって取得され、この電圧取得部341によって取得された起電力が演算・制御部343によって演算処理されることで、振動板312における振動状態が検出される。
【0121】
ここで、図10及び図11を参照すると、演算・制御部343は、振動板312の共振周波数をf0とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
を満たすような特定周波数f1で、マイクロピペット100を駆動させる。これにより、当該特定周波数f1に対応する周期Tで、前記試料溶液の微小液滴が次々と吐出される。
【0122】
また、振動板312によって当該微小液滴の運動エネルギーを吸収するために要する時間をT1、前記共振周波数f0に相当する固有周期をT0とした場合に、
T1≦0.2T0
を満たすような条件で、前記微小液滴の吐出が行われるように、前記マイクロピペット100の駆動が制御される。
【0123】
これにより、振動板312の共振周波数と略等しい周波数で当該振動板312が振動する。そして、この振動に同期した状態で、ターゲット部312cに対して前記微小液滴が次々に衝突する。よって、振動板312の振動が、当該微小液滴の衝突によって乱されることが抑制され得る。
【0124】
本実施形態の構成によれば、図10(b)及び図12に示されているように、振動板312における検知部312aは、他の部分よりも狭い幅に形成されている。これにより、前記試料溶液の微小液滴がターゲット部312cに衝突して、振動板312に振動が発生した場合に、検知部312aに応力が集中する。この応力集中により、圧電/電歪素子320にて大きな電圧が発生し得る。
【0125】
<<第1実施形態における試料溶液の飛沫処理動作の説明>>
再び図9を参照すると、コーティング層313に衝突することで発生した前記試料溶液の飛沫のほとんどは、当該コーティング層313の表面上に長時間付着することなく、重力の作用で下方に落下する。これにより、振動板312の内側表面312b上から前記試料溶液のほとんどが除去され得る。もっとも、前記飛沫の一部は、振動板312の内側表面312b上から完全に除去されることなく、当該内側表面312b上に残留し得る。
【0126】
そこで、以下のように、振動板312を外部的に強制振動させることで、前記飛沫を振動板312の内側表面312b上から可及的に除去させ得る。
【0127】
図11を参照すると、マイクロピペット100の駆動停止中(前記試料溶液の微小液滴の吐出の停止中)に、駆動部342は、演算・制御部343の制御下で、圧電/電歪素子320に対して、前記共振周波数f0の駆動電圧を印加する。これにより、圧電/電歪素子320が駆動され、振動板312(図9参照)が強制的に振動させられる。これにより、当該振動板312上に残留した前記試料溶液の飛沫が可及的に除去され得る。
【0128】
<<第1実施形態における共振周波数の取得動作の一例>>
もっとも、この振動板312の強制振動によっても、前記試料溶液が微量ながら当該振動板312上に残留して固化し得る。これにより、当該振動板312の共振周波数が変動し得る。そこで、図11に示されている制御回路340によって、以下に説明するように、変動後の前記共振周波数を取得し得る。
【0129】
まず、駆動部342は、演算・制御部343の制御下で、圧電/電歪素子320に対して直流電圧を所定時間(予想される共振周波数に相当する周期よりも充分に長い時間)印加した後、当該直流電圧の印加を遮断する。これにより、圧電/電歪素子320にて減衰自由振動が生じる。この減衰自由振動によって、圧電/電歪素子320に交流の電圧が発生する。このようにして圧電/電歪素子320にて発生した電圧波形は、電圧取得部341を介して、演算・制御部343によって取得される。演算・制御部343は、この電圧波形の周波数を取得することで、変動後の前記共振周波数が取得され得る。この取得された新たな共振周波数は、以降の駆動部342による圧電/電歪素子320の駆動のために用いられ得る。
【0130】
<第2実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第2の実施形態について、図13を用いて説明する。なお、本実施形態において、上述の第1実施形態と同様の作用・機能を有する構成要素については、図示が省略され、又は上述の第1実施形態と同一の符号が付され、上述の第1実施形態における説明が援用され得るものとする(以降の他の実施形態及び変形例についても同様である)。
【0131】
図13(a)は、第2の実施形態に係る振動板312の周辺を拡大した平面図である。図13(b)は、当該振動板312の振動の様子を示した図である。
【0132】
図13(a)に示されているように、振動板312における検知部312aには、2つの圧電/電歪素子320a及び320bが設けられている。これらの圧電/電歪素子320a及び320bは、演算・制御部343(図11参照)に対してそれぞれ電気回路的に接続されている。また、2つの圧電/電歪素子320a及び320bは、図10(a)に示されている圧電/電歪素子320と同様の構成を有していて、圧電/電歪素子320a及び320bの圧電/電歪層(図10(a)における圧電/電歪層321参照)の分極方向は同一であるものとする。
【0133】
かかる構成によれば、図13(b)に示されているように、振動板312にて捩れモードの振動が生じた場合、圧電/電歪素子320aの出力電圧波形と圧電/電歪素子320bの出力電圧波形との間で、半周期分の位相差が生じる。一方、振動板312にて1次撓みモードの振動が生じた場合、圧電/電歪素子320aの出力電圧波形と圧電/電歪素子320bの出力電圧波形との間の位相差が生じなくなる。よって、圧電/電歪素子320aの出力電圧波形と圧電/電歪素子320bの出力電圧波形とを比較することで、振動板312に生じている振動モードが判定される。これにより、振動板312のターゲット部312cに対する前記微小液滴の衝突状態、すなわち当該微小液滴の飛翔状態が判定され得る。
【0134】
<第3実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第3の実施形態について、図14を用いて説明する。
【0135】
図14(a)においては、1枚の振動板312に2つの圧電/電歪素子320a及び320bが設けられている。一方の圧電/電歪素子320aは、駆動部342と接続されている。また、他方の圧電/電歪素子320bは、電圧取得部341と接続されている。この駆動部342は、上述の通り、演算・制御部343(図11参照)の制御下で、任意の波形(直流を含む。また、交流であってもサイン波、矩形波、パルス波等の種々の波形を含む。)の電圧を圧電/電歪素子320aに印加し得るように構成されている(後述する図14(b),図14(c),図15(a)〜(c)における駆動部342も同様である)。
【0136】
かかる構成によれば、上述の第1実施形態と同様に、駆動部342によって、圧電/電歪素子320aに対して直流電圧が所定時間(予想される共振周波数に相当する周期よりも充分に長い時間)印加され、その後、当該直流電圧の印加が遮断される。これにより、振動板312と、圧電/電歪素子320aと、圧電/電歪素子320bとからなる振動系において減衰自由振動が生じる。この減衰自由振動によって、圧電/電歪素子320bに交流の電圧が発生する。このようにして圧電/電歪素子320bにて発生した電圧波形に基づいて、振動板312の共振周波数が取得され得る。この取得された新たな共振周波数は、以降の駆動部342による圧電/電歪素子320の駆動のために用いられ得る。
【0137】
また、かかる構成によれば、上述の第1実施形態とは異なり、駆動部342から一方の圧電/電歪素子320aに対して交流電圧を印加しつつ、他方の圧電/電歪素子320bにて生じた起電力の波形を電圧取得部341により取得することで、短時間で振動板312の共振周波数が取得され得る。この場合、駆動部342は、時間の経過とともに周波数が変化するような波形の交流電圧を出力する。そして、電圧取得部341によって取得された電圧が極大値となった場合、あるいは、インピーダンスや位相が急激に変化した場合の周波数が、共振周波数の取得値として採択され得る。
【0138】
さらに、前記構成によれば、上述の第2の実施形態と同様に、圧電/電歪素子320bの出力に基づいて捩れモードの判定を行うことができる。なお、一方の圧電/電歪素子320aを、電圧取得部341にも接続する(すなわち、圧電/電歪素子320a及び320bを電圧取得部341に接続する)ことによっても、上述の第2の実施形態と同様な構成にて捩れモードの判定が行われ得る。
【0139】
図14(b)においては、1枚の振動板312に4つの圧電/電歪素子320aないし320dが設けられている。圧電/電歪素子320aと圧電/電歪素子320dとは、振動板312の幅方向における中心線Cを挟んで対称に配置されている。同様に、圧電/電歪素子320bと圧電/電歪素子320cとは、前記中心線Cを挟んで対称に配置されている。圧電/電歪素子320a及び320bは、駆動部342と接続されている。圧電/電歪素子320c及び320dは、電圧取得部341と接続されている。
【0140】
かかる構成によれば、上述の図14(a)における構成と同様に、直流電圧印加による共振周波数の取得、交流電圧印加による共振周波数の取得、及び捩れモードの判定が行われ得る。
【0141】
図14(c)においては、1枚の振動板312に3つの圧電/電歪素子320aないし320cが設けられている。圧電/電歪素子320aと圧電/電歪素子320cとは、振動板312の幅方向における中心線Cを挟んで対称に配置されている。圧電/電歪素子320bは、前記中心線C上に配置されている。圧電/電歪素子320aは、駆動部342と接続されている。圧電/電歪素子320b及び320cは、電圧取得部341と接続されている。
【0142】
かかる構成によれば、上述の図14(a)や図14(b)における構成と同様に、直流電圧印加による共振周波数の取得、交流電圧印加による共振周波数の取得、及び捩れモードの判定が行われ得る。すなわち、例えば、圧電/電歪素子320bの出力によって撓みモードの検出を行いつつ、圧電/電歪素子320cの出力によって捩れモードの検出が行われ得る。これにより、振動板312の振動状態の判定がより明確に行われ得る。
なお、本実施形態の構成においては、撓みモード及び捩れモードの共振周波数の比を、実験や有限要素法等によるシミュレーション等によって得ておくことで、捩れモードの共振周波数から撓みモードの共振周波数を算出し得る。これにより、撓みモード及び捩れモードの双方を利用して前記微小液滴の飛翔状態を検出することが可能になる。
【0143】
<第4実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第4の実施形態について、図15を用いて説明する。
【0144】
図15(a)においては、1枚の振動板312に4つの圧電/電歪素子320aないし320dが設けられている。振動板312の幅方向について対称の位置にある圧電/電歪素子320aと圧電/電歪素子320dとは、駆動部342と接続されている。また、振動板312の幅方向について対称の位置にある圧電/電歪素子320bと圧電/電歪素子320cとは、電圧取得部341と接続されている。
【0145】
図15(b)においては、1枚の振動板312に3つの圧電/電歪素子320aないし320cが設けられている。振動板312の幅方向について対称の位置にある圧電/電歪素子320aと圧電/電歪素子320cとは、駆動部342と接続されている。また、振動板312の幅方向における中央に位置する圧電/電歪素子320bは、電圧取得部341と接続されている。
【0146】
図15(c)においては、1枚の振動板312に3つの圧電/電歪素子320aないし320cが設けられている。振動板312の幅方向について対称の位置にある圧電/電歪素子320aと圧電/電歪素子320cとは、電圧取得部341と接続されている。また、振動板312の幅方向における中央に位置する圧電/電歪素子320bは、駆動部342と接続されている。
【0147】
すなわち、上述の図15(a)ないし図15(c)の構成においては、振動板312の幅方向について対称の位置にある圧電/電歪素子に対して、電圧印加又は起電力測定が行われ得るようになっている。なお、いずれの場合においても、各圧電/電歪素子320a,320b・・・は、振動板312の一方の表面上にて、圧電/電歪層の方向が同一となるように配置されているものとする。
【0148】
かかる構成によれば、各圧電/電歪素子の接続の組み合わせにより、振動板312が1次撓みモード及び捩れモードで強制的に振動され得る。また、各圧電/電歪素子の接続の組み合わせにより、振動板312における1次撓みモード及び捩れモードの共振周波数が取得され得る。
【0149】
例えば、電圧印加する圧電/電歪素子が2つある場合、(図15(a)又は図15(b)参照)、当該2つの圧電/電歪素子における圧電/電歪層の分極方向が同一であり、当該2つの圧電/電歪素子における下部電極をともに接地し、当該2つの圧電/電歪素子における上部電極に同位相の交流電圧を印加することで、振動板312に1次撓みモードの振動が発生する。
【0150】
また、電圧印加する圧電/電歪素子が2つある場合、(図15(a)又は図15(b)参照)、当該2つの圧電/電歪素子における圧電/電歪層の分極方向が同一であり、一方の圧電/電歪素子における下部電極と他方の圧電/電歪素子の上部電極を接地し、残りの電極に同位相の交流電圧を印加することで、振動板312に捩れモードの振動が発生する。
【0151】
また、起電力測定が行われる圧電/電歪素子が2つある場合、(図15(a)又は図15(c)参照)、当該2つの圧電/電歪素子における圧電/電歪層の分極方向が同一であり、一方の圧電/電歪素子における下部電極と他方の圧電/電歪素子の上部電極とを接続し、残りの電極間の起電力を測定することで、振動板312における1次撓みモードの振動の共振周波数を取得することができる。
【0152】
また、起電力測定が行われる圧電/電歪素子が2つある場合、(図15(a)又は図15(c)参照)、当該2つの圧電/電歪素子における圧電/電歪層の分極方向が同一であり、当該2つの圧電/電歪素子における下部電極同士を接続し、当該2つの圧電/電歪素子における上部電極間の起電力を測定することで、振動板312における捩れモードの振動の共振周波数を取得することができる。
【0153】
<第5実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第5の実施形態について、図16を用いて説明する。図16(a)は、本実施形態の構成を拡大した平面図である。図16(b)及び(c)は、本実施形態における圧電/電歪素子の電気回路的な接続構成を示した図である。
【0154】
図16(a)に示されているように、本実施形態においては、1枚の振動板312上に4つの圧電/電歪素子320aないし320dが、当該振動板312の幅方向について対称に配置されている。これら4つの圧電/電歪素子320aないし320dは、例えば、図16(b)や(c)に示されているように相互に接続され得る。
【0155】
図16(b)に示されている接続状態においては、圧電/電歪素子320aの下部電極322aと、圧電/電歪素子320bの上部電極323bとが接続されている。また、圧電/電歪素子320bの下部電極322bと、圧電/電歪素子320cの上部電極323cとが接続されている。また、圧電/電歪素子320cの下部電極322cと、圧電/電歪素子320dの上部電極323dとが接続されている。そして、圧電/電歪素子320aの上部電極323aと、圧電/電歪素子320dの下部電極322dとの間に、振動状態に応じた出力電圧が生じるようになっている。すなわち、各圧電/電歪素子320aないし320dがすべて電気回路的に直接に接続されている。
【0156】
図16(c)に示されている接続状態においては、圧電/電歪素子320aの上部電極323aと、圧電/電歪素子320bの下部電極322bとが接続されている。また、圧電/電歪素子320dの上部電極323dと、圧電/電歪素子320cの下部電極322cとが接続されている。すなわち、圧電/電歪素子320aと圧電/電歪素子320bとが電気回路的に接続されている。また、圧電/電歪素子320cと圧電/電歪素子320dとが電気回路的に接続されている。
【0157】
電気回路的に接続された圧電/電歪素子320a及び320bにおける一方の出力端は、圧電/電歪素子320bの上部電極323bから構成され、他方の出力端は、圧電/電歪素子320aの下部電極322aから構成されている。また、電気回路的に接続された圧電/電歪素子320c及び320dにおける一方の出力端は、圧電/電歪素子320cの上部電極323cから構成され、他方の出力端は、圧電/電歪素子320dの下部電極322dから構成されている。そして、前記一方の出力端同士が短絡されていて、前記他方の出力端の間に、振動状態に応じた出力電圧が生じるようになっている。
【0158】
ここで、以下の動作説明を単純化するために、図16(a)の構成の振動板312におけるターゲット部312cに前記試料溶液の微小液滴が衝突した場合に、上述の2つの振動モード(1次撓みモード及び捩れモード)のいずれか一方が現れるものとし、当該振動によって、各圧電/電歪素子320a,320b,320c,320dに以下のような振幅の起電力が生じるものとする。
【0159】
1次撓みモード:V1,V1,V1,V1
捩れモード:V1,0.5V1,0.5V1,V1
【0160】
すなわち、捩れモードの場合、振動板312の幅方向における両端部に位置する圧電/電歪素子320a及び320dには、中央寄りに位置する圧電/電歪素子320b及び320cよりも大きな起電力が生じる。
【0161】
図16(b)に示されている接続状態においては、振動板312に完全な1次撓みモードの振動が生じた場合、各圧電/電歪素子320a,320b,320c,320dの出力V1が合算されることで、4V1の出力が生じる。これにより、当該1次撓みモードの振動による出力電圧が大きくなる。よって、きわめて微小な液滴がターゲット部312cに衝突した場合であっても、高感度で当該衝突が検出され得る。
【0162】
また、図16(b)に示されている接続状態においては、振動板312における捩れモードの振動により、当該振動板312の幅方向について対称の位置にある圧電/電歪素子320aと圧電/電歪素子320dとに、絶対値が等しく位相が半波長ずれた起電力±V1が生じる。同様に、振動板312の幅方向について対称の位置にある圧電/電歪素子320bと圧電/電歪素子320cとに、絶対値が等しく位相が半波長ずれた起電力±0.5V1が生じる。そして、各圧電/電歪素子320a,320b,320c,320dの出力が合算されると、出力電圧は0になる。すなわち、振動板312に完全な捩れモードの振動が生じた場合、図16(b)に示されている回路の出力電圧が0になる。
【0163】
図16(c)に示されている接続状態においては、振動板312における1次撓みモードの振動により、電気回路的に接続された圧電/電歪素子320a及び320bにおける出力端である上部電極323bと下部電極322aとの間には2V1の起電力が生じる。また、電気回路的に接続された圧電/電歪素子320c及び320dにおける出力端である上部電極323cと下部電極322dとの間にも2V1の起電力が生じる。そして、上部電極323bと上部電極323cとは短絡されている。よって、振動板312に完全な1次撓みモードの振動が生じた場合、図16(c)に示されている回路の出力電圧は0になる。
【0164】
また、図16(c)に示されている接続状態においては、振動板312における捩れモードの振動により、圧電/電歪素子320a及び320bにおける出力端である上部電極323bと下部電極322aとの間には+1.5V1の起電力が生じる。これと同時に、圧電/電歪素子320c及び320dにおける出力端である上部電極323cと下部電極322dとの間には、−1.5V1の起電力が生じる。よって、振動板312に完全な捩れモードの振動が生じた場合、図16(b)に示されている回路の出力電圧が3V1になる。
【0165】
このように、振動板312に複数の圧電/電歪素子320a,320b・・・を配置し、これらの電気回路的な接続状態を適宜設定することにより、前記微小液滴の飛翔状態の検出がより高感度で行われ、振動モードの判定がより容易に行われ得る。
また、本実施形態においては、複数の圧電/電歪素子320a,320b・・・が、それぞれ直列的に(図11における演算・制御部343を介さずに)電気回路的に接続されることで、図16(b)及び(c)の回路構成が形成されている。したがって、本実施形態によれば、図11における演算・制御部343の内部の回路構成が単純化され、当該演算・制御部343における信号処理が簡略化され得る。
【0166】
<第6実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第6の実施形態について、図17を用いて説明する。図17(a)は、本実施形態の構成を拡大した側断面図である。図17(b)は、本実施形態における圧電/電歪素子の電気回路的な接続構成を示した図である。
【0167】
図17(a)に示されているように、本実施形態においては、振動板312の検知部312aにおける内側表面312b上に、圧電/電歪素子320aが設けられている。また、振動板312の検知部312aにおける外側表面312d上に、圧電/電歪素子320bが設けられている。すなわち、振動板312の両面にそれぞれ圧電/電歪素子320a及び320bが配置されている。なお、振動板312の外側表面312d上に配置された圧電/電歪素子320bの「下部電極」322bは、振動板312に近接する側の電極を指すものとする。
【0168】
図17(b)に示されているように、本実施形態においては、圧電/電歪素子320aの下部電極322aと、圧電/電歪素子320bの下部電極322bとが短絡されている。そして、圧電/電歪素子320aの上部電極323aと、圧電/電歪素子320bの上部電極323bとの間に、振動状態に応じた出力電圧が生じるようになっている。
【0169】
かかる構成において、振動板312に振動が発生すると、当該振動板312の内側表面312b上の圧電/電歪素子320aと、当該振動板312の外側表面312d上の圧電/電歪素子320bとには、当該振動板312の振動状態に応じた起電力が発生する。ここで、例えば、振動板312のターゲット部312cが図中下方に変位している場合、圧電/電歪素子320aの圧電/電歪層321aには引張応力が生じ、圧電/電歪素子320bの圧電/電歪層321bには圧縮応力が生じる。よって、当該振動板312の内側表面312b上の圧電/電歪素子320aと、当該振動板312の外側表面312d上の圧電/電歪素子320bとには、絶対値が略同一で位相が半波長ずれた起電力の波形が生じる。そして、図17(b)に示されている回路の出力は、圧電/電歪素子320aしかない場合(圧電/電歪素子320bがない場合)の2倍となる。これにより、きわめて微小な液滴がターゲット部312cに衝突した場合であっても、高感度で当該衝突が検出され得る。
【0170】
<第7実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第7の実施形態について、図18を用いて説明する。図18(a)は、本実施形態の構成を拡大した側断面図である。図18(b)は、本実施形態における圧電/電歪素子の電気回路的な接続構成を示した図である。
【0171】
図18(a)に示されているように、本実施形態においては、振動板312の検知部312aにおける内側表面312b上に、圧電/電歪素子320aが設けられている。また、圧電/電歪素子320bは、絶縁層324を挟んで圧電/電歪素子320aの上側に配置されている。圧電/電歪素子320a、絶縁層324、及び圧電/電歪素子320bは、焼成により一体に形成されている。
【0172】
図18(b)に示されているように、本実施形態においては、圧電/電歪素子320aにおける圧電/電歪層321aの分極方向が、圧電/電歪素子320bにおける圧電/電歪層321bの分極方向と反対になるように、圧電/電歪素子320a及び320bが構成されている。圧電/電歪素子320aの下部電極322aと、圧電/電歪素子320bの下部電極322bとは、短絡されている。そして、圧電/電歪素子320aの上部電極323aと、圧電/電歪素子320bの上部電極323bとの間に、振動状態に応じた出力電圧が生じるようになっている。すなわち、圧電/電歪素子320aと圧電/電歪素子320bとが電気回路的に接続されている。
【0173】
かかる構成によれば、図18(b)に示されている回路の出力は、圧電/電歪素子320aしかない場合(圧電/電歪素子320bがない場合)の2倍となる。これにより、きわめて微小な液滴がターゲット部312cに衝突した場合であっても、高感度で当該衝突が検出され得る。
【0174】
<変形例の示唆>
なお、上述の各実施形態は、上述した通り、出願人が取り敢えず本願の出願時点において最良であると考えた本発明の代表的な実施形態を単に例示したものにすぎない。よって、本発明はもとより上述の実施形態に何ら限定されるものではなく、本発明の本質的部分を変更しない範囲内において種々の変形を施すことができることは当然である。
【0175】
以下、先願主義の下で本願の出願の際に追記し得る程度(時間の許す限り)で、変形例について幾つか例示する。しかしながら、変形例とてこれらに限定されるものではないことはいうまでもない。本願発明を、上述の実施形態、及び下記変形例の記載に基づき限定解釈すること(特に、本発明の課題を解決するための手段を構成する各要素における、作用・機能的に表現されている要素を、実施形態等の記載に基づき限定解釈すること)は、先願主義の下で出願を急ぐ出願人の利益を不当に害する反面、模倣者を不当に利するものであって、発明の保護及び利用を目的とする特許法の目的に反し、許されない。また、下記変形例が、互いに矛盾しない範囲で、それぞれ適宜組み合わされ得ることはいうまでもない。
【0176】
(i)本発明は、上述の実施形態のような、マイクロピペットによって吐出された微小液滴の飛翔状態の検出に限定されない。また、本発明によって飛翔状態が検出し得る微小物体の種類も、微小液滴に限定されない。また、微小物体の飛翔方向も、鉛直下方に限定されない。さらに、微小物体の飛翔状態の検出の際に行われる電気信号の処理にあたっては、上述の実施形態のような電圧の他、電流、周波数、位相等も用いられ得る。
【0177】
(ii)例えば、図9におけるアパチャープレート330は省略可能である。また、コーティング層313も省略可能である。さらに、コーティング層313の形成方法も、ペースト塗布やスクリーン印刷等の厚膜形成法の他、蒸着等の薄膜形成法が用いられ得る。さらに、コーティング層313によって、振動板312の内側表面312bの全体が覆われていてもよい。
【0178】
(iii)図9ないし図16に示されている構成において、圧電/電歪素子320(320a・・・)が、図17に示されている両面構成や、図18に示されている多層構成であってもよい。もちろん、両面かつ多層構成であってもよい。
【0179】
(iv)図16ないし図18における、圧電/電歪素子の個数、分極方向及び各電極間の接続関係は、任意に変更され得る。ここで、各圧電/電歪素子320a,320b・・・の間の接続は、配線パターン等によって直接に行われてもよい。あるいは、各圧電/電歪素子320a等がそれぞれ個別に電圧取得部341(図11参照)に接続されていて、演算・制御部343における信号の処理によって、各圧電/電歪素子320a等が実質的に電気回路的に接続されているような状態であってもよい。
【0180】
(v)図18において、圧電/電歪素子320aにおける圧電/電歪層321aの分極方向と、圧電/電歪素子320bにおける圧電/電歪層321bの分極方向とが同一であってもよい。この場合、絶縁層324を省略して、圧電/電歪素子320aの上部電極323aと圧電/電歪素子320bの下部電極322bとを一体に成形することで、振動状態に応じた電圧が圧電/電歪素子320aの下部電極322aと圧電/電歪素子320bの上部電極323bとの間に生じるようにしてもよい。
【0181】
(vi)図19に示されているように、振動板312が円盤形状に形成されていてもよい。この場合、厚肉支持部311は、振動板312よりも小さな半径の円盤状に形成され、当該振動板312の略中央に配置される。また、圧電/電歪素子320は平面視にて略ドーナツ状に形成される。
【0182】
(vii)図20に示されているように、検知部312a及びターゲット部312cが、長方形状の板状部材から構成されていて、当該ターゲット部312cが検知部312aの長手方向に沿った中心軸を中心としてシーソー状に配置されていてもよい。
【0183】
(viii)図21に示されているように、振動板312の構造としては、検知部312aにて応力集中が生じるような様々な構造が採用され得る。
【0184】
例えば、図21(a)に示されているように、ターゲット部312cから検知部312aに向かうにつれて振動板312の幅が連続的に狭くなるように、振動板312が形成されていてもよい。
【0185】
また、図21(b)に示されているように、検知部312aの厚さが他の部分よりも薄くなるように、振動板312が形成されていてもよい。かかる構成においては、ターゲット部312cに微小物体が衝突した場合、当該ターゲット部312cを含む部分(検知部312a以外の部分)には撓みがほとんど生じない。また、当該ターゲット部312cを含む部分の質量は検知部312aに比べて非常に大きい。
【0186】
したがって、図21(b)に示されている構成によれば、ターゲット部312cに微小物体が衝突することで、当該衝突の影響による応力が検知部312aにて効率よく発生する。また、振動板312のターゲット部312cに異物等が付着しても、当該振動板312の共振周波数のシフトを小さく抑えることができる。
【0187】
さらに、図21(c)に示されているように、検知部312aの弾性率を、それ以外の部分の弾性率よりも小さくすることによって、図21(b)の場合と同様の作用・効果を得ることができる。なお、図21(c)に示されている構成において、振動板312の幅は、一様でもよいし、図10(b)や図21(a)に示されているように、検知部312aの幅がそれ以外の部分よりも狭く形成されていてもよい。さらに、振動板312の厚さも、図21(b)に示されているように、検知部312aの厚さが他の部分よりも薄くなるようにしてもよい。
【0188】
(ix)図22に示されているように、圧電/電歪素子320は、振動板312の内側表面312bの裏側に形成されていてもよい。
【0189】
(x)図23(a)に示されているように、アパチャープレート330に複数のアパチャー331を形成し、図23(b)に示されているように、当該複数のアパチャー331を通過した微小物体が同時に振動板312に衝突するように、当該振動板312の幅寸法が設定されていてもよい。なお、図23(b)に示されている構成において、図23(a)に示されているアパチャープレート330を省略することも可能である。
【0190】
(xi)図9ないし図23に示されている構成において、振動板312の自由端側(ターゲット部312c及びコーティング層313側)が、当該振動板312の固定端側(検知部312a側)よりも低くなるように、振動板312(センサ基板310)を水平面と交差して配置してもよい。これにより、振動板(ターゲット部312c及びコーティング層313)に衝突した前記試料溶液の微小液滴の飛沫が重力により振動板312の下方に流出し得る。
【0191】
(xii)その他、本発明の課題を解決するための手段を構成する各要素における、作用・機能的に表現されている要素は、上述の実施形態・実施例や変形例にて開示されている具体的構造の他、当該作用・機能を実現可能な、いかなる構造をも含む。
【図面の簡単な説明】
【0192】
【図1】DNAチップの概略構成を示す外観図(斜視図)である。
【図2】図1に示したDNAチップを拡大した断面図である。
【図3】マイクロピペットを拡大した断面図である。
【図4】図3に示したマイクロピペットにおける試料溶液の流路の構成を拡大しつつ透視して示す斜視図である。
【図5】図3に示したマイクロピペットを拡大した平面図である。
【図6】図3に示したマイクロピペットを備えた分注装置の外観を示す概略構成図である。図6(a)が平面図であり、図6(b)が側面図である。
【図7】図6に示した分注装置を分解した斜視図である。
【図8】本発明の一実施形態に係る飛翔状態検出装置が、図6に示した分注装置に装着された状態を示す側面図である。
【図9】図8に示した飛翔状態検出装置の第1の実施形態の構成を拡大した図である。図9(a)が側断面図であり、図9(b)が平面図であり、図9(c)が当該飛翔状態検出装置の内部構成を露出した平面図である。
【図10】図9に示した飛翔状態検出装置の要部を示す図である。図10(a)が側断面図であり、図10(b)が平面図であり、図10(c)が複数の微小物体の飛翔状態を同時に検出し得る構成の一例を示す平面図である。
【図11】図9に示した飛翔状態検出装置を用いて試料溶液の微小液滴の吐出状態を判定するための回路構成図である。
【図12】図9及び図10に示した振動板の振動の様子を示した斜視図である。図12(a)が1次撓みモードの振動の様子を示した図であり、図12(b)が捩れモードの振動の様子を示した図である。
【図13】図8に示した飛翔状態検出装置の第2の実施形態の構成を拡大した図である。図13(a)が平面図であり、図13(b)が振動板の振動の様子を示す斜視図である。
【図14】図8に示した飛翔状態検出装置の第3の実施形態の構成を拡大した図である。
【図15】図8に示した飛翔状態検出装置の第4の実施形態の構成を拡大した図である。
【図16】図8に示した飛翔状態検出装置の第5の実施形態の構成を拡大した図である。
【図17】図8に示した飛翔状態検出装置の第6の実施形態の構成を拡大した図である。
【図18】図8に示した飛翔状態検出装置の第7の実施形態の構成を拡大した図である。
【図19】図9ないし図18に示した飛翔状態検出装置の変形例を示す拡大平面図である。
【図20】図9ないし図18に示した飛翔状態検出装置の、他の変形例を示す拡大平面図である。
【図21】図9ないし図18に示した飛翔状態検出装置の変形例を示す拡大図である。
【図22】図9ないし図18に示した飛翔状態検出装置の変形例を示す拡大断面図である。
【図23】図9ないし図18に示した飛翔状態検出装置の変形例を示す拡大平面図である。
【符号の説明】
【0193】
100…マイクロピペット、 110…ノズルプレート、 112…ノズル、
120…キャビティユニット、124a…キャビティ、 125a…試料注入口、
130…アクチュエータユニット、200…分注装置、 210…試料導入部材、
214…試料注入流路、 216…導入チューブ、 220…カートリッジ、
222…試料貯留部、 300…飛翔状態検出装置、310…センサ基板、
311…厚肉支持部、 312…振動板、 312a…検知部、
312b…内側表面、 312c…ターゲット部、 312d…外側表面、
313…コーティング層、
320,320a,320a1,320a2,320b,320c,320d…圧電/電歪素子、
321,321a,321b,321c,321d…圧電/電歪層、
322,322a,322b,322c,322d…下部電極、
323,323a,323b,323c,323d…上部電極、
324…絶縁層、 330…アパチャープレート、331…アパチャー、
340…制御回路、 341…電圧取得部、 342…駆動部、
343…演算・制御部、 D…飛翔方向、 S…微小スポット
【技術分野】
【0001】
本発明は、飛翔中の微小物体の飛翔状態を検出し得る飛翔状態検出装置及び飛翔状態検出方法に関する。
【背景技術】
【0002】
例えば、いわゆるDNAチップ(DNAマイクロアレイ)を製造するための製造方法として、様々なものが知られている。このDNAチップは、数千から一万種類以上の異なる種類のDNA断片の微小スポットを、顕微鏡スライドグラス等の基板上に高密度に整列・固定させることによって構成されている。
【0003】
このDNAチップの製造方法として、微小体積の液滴を吐出し得るマイクロピペットを用いた方法が知られている(例えば下記特許文献1,2参照)。このマイクロピペットは、外部から試料を注入するための注入口と、その注入口から注入された試料が充填されるキャビティと、そのキャビティと連通する吐出口と、その吐出口から試料を吐出させるためにキャビティ内の体積を変化させ得るように構成された圧電/電歪素子と、を備えている。
【0004】
上述のDNAチップの製造方法によれば、圧電/電歪素子が駆動されることにより、キャビティ内の体積が変化する。このキャビティ内の体積変化により、試料溶液が、キャビティから吐出口に向かって層流で移動する。すなわち、一定量の試料溶液が、キャビティから吐出口に向けて送られる。この一定量の試料が当該吐出口から吐出されることで、試料溶液の微小液滴が発生する。このようにしてマイクロピペットから吐出された試料溶液の微小液滴が、基板上に付着して、当該基板上に微小スポットとして整列・固定されることによって、DNAチップを作製することができる。
【0005】
上述のような、DNAチップの製造方法に用いられるマイクロピペット等のように、微小物体を吐出し得るように構成された装置(以下、単に「微小物体吐出装置」と称する。)は、様々な技術分野にて利用可能である。
【0006】
なお、この種の微小物体の質量を測定可能に構成された質量センサが広く知られている(例えば下記特許文献3参照)。この質量センサは、圧電/電歪素子が配設された振動板の上に微小物体が付着した場合に、当該微小物体の付着による振動板の質量変化によって変化する当該振動板の共振周波数の変化を測定することで、当該振動板の質量変化(すなわち当該微小物体の質量)を測定し得るように構成されている。
【特許文献1】特開2001−124789号公報
【特許文献2】特開2001−186881号公報
【特許文献3】特開2000−180250号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
この種の微小物体吐出装置においては、前記微小物体の乾燥・固化物や、異物等が、吐出口の周辺に付着したり、吐出口を塞いだりする場合がある。このような場合、当該微小物体が吐出対象物における所定の位置に向けて正しく吐出されないという、不具合が生じる(例えば、特許文献1の段落[0010]や[0019]等参照)。
【0008】
また、前記特許文献3に記載されているような質量センサを用いて、微小物体の飛翔状態を検出しようとしても、当該質量センサによる飛翔状態検出は、上述の振動板に或る程度の(共振周波数の変化が測定され得る程度の)時間にわたって付着し得るような性質の微小物体に対してしか適用され得ない。また、当該質量センサによる飛翔状態検出によれば、同一の微小物体吐出装置から一定周期で断続的に微小物体が吐出される場合に、当該微小物体の飛翔状態を同一のセンサによって連続的に検出することが困難であった。
【0009】
本発明は、上述した問題に鑑みてなされたものであり、その目的は、前記微小物体吐出装置から吐出された微小物体の飛翔状態(当該吐出装置における吐出状態)を良好に検出し得る、飛翔中の微小物体の飛翔状態検出方法、及び簡略かつ安価な装置構成の飛翔状態検出装置を提供することにある。
【課題を解決するための手段】
【0010】
(A)かかる目的を達成するために、本発明の、微小物体の飛翔状態検出装置(以下、単に「飛翔状態検出装置」と称する)は、飛翔中の微小物体の飛翔状態を検出し得るように、以下の構成を備えている。
【0011】
(A01)本発明の飛翔状態検出装置は、振動発生部と、その振動発生部にて発生した前記振動を電気信号に変換するように構成された圧電/電歪素子と、を備えている。前記振動発生部は、前記微小物体が衝突するターゲット部を備えていて、当該ターゲット部に前記微小物体が衝突することで振動が発生するように構成されている。
【0012】
かかる構成を有する本発明の飛翔状態検出装置においては、飛翔中の前記微小物体が前記ターゲット部に衝突すると、前記振動発生部が振動する。この振動は、前記圧電/電歪素子によって電気信号に変換される。この電気信号に基づいて、微小物体の飛翔状態が検出され得る。
【0013】
(A02)前記構成A01において、単一の前記振動発生部に対して複数の前記ターゲット部が設けられていてもよい。例えば、複数の前記ターゲット部に対して、当該ターゲット部の数と同数の前記微小物体が同時に衝突するように微小物体吐出装置を制御することで、複数の微小物体飛翔経路の各々における前記微小物体の飛翔状態を同時に検出することができる。これにより、飛翔状態検出のための時間を短縮することができる。また、飛翔状態検出のための回路構成を簡略化することができる。
【0014】
(A03)前記構成A01又はA02において、複数の前記圧電/電歪素子が、互いに電気回路的に接続されていてもよい。かかる構成によれば、前記微小物体と前記ターゲット部との1回の衝突によって、複数の前記圧電/電歪素子にて前記電気信号が発生し、これらの電気信号が合算され得る。これにより、当該飛翔状態検出装置の感度が向上する。したがって、本構成によれば、より小さい質量の微小物体に対して良好な飛翔状態検出が行われ得る。
【0015】
また、かかる構成によれば、前記微小物体と前記ターゲット部との1回の衝突によって、複数の前記圧電/電歪素子にて前記電気信号が発生し、これらの電気信号が比較され得る。例えば、前記微小物体と前記ターゲット部との衝突の態様に応じて、前記振動発生部に特定のモード(撓みやねじれ)の振動が発生し得る。ここで、複数の前記圧電/電歪素子のそれぞれにて発生する電気信号を比較することで、当該振動モードが判定され得る。これにより、前記微小物体における多様な飛翔状態の検出が行われ得る。例えば、単に微小物体の飛翔の有無だけでなく、所定の飛翔経路からの逸脱の有無も判定され得る。
ここで、複数の前記圧電/電歪素子同士の電気回路的な接続は、直接なされてもよいし、演算・制御回路を介してなされてもよい。特に、複数の前記圧電/電歪素子同士が電気回路的に直接に接続された場合、当該複数の前記圧電/電歪素子同士の出力の比較等の処理が、当該複数の前記圧電/電歪素子同士の接続回路自体によって行われる。したがって、当該演算・制御回路の構成が単純化され、前記微小物体の判定が簡略に行われ得る。
【0016】
(A04)前記構成A01ないしA03において、前記ターゲット部の表面には、コーティング層が形成されていてもよい。これにより、前記ターゲット部に前記微小物体が残留することによる前記振動発生部の振動特性の変化が抑制され得る。また、当該微小物体が液体である場合に、前記ターゲット部の周囲の雰囲気中の異物(埃等)が付着することで当該ターゲット部が汚れることが抑制され得る。
【0017】
(A05)前記構成A01ないしA04において、前記圧電/電歪素子を駆動するための駆動電圧を発生する駆動部をさらに備えていてもよい。この駆動部によって前記圧電/電歪素子が駆動されることで、前記振動発生部が外部から強制的に振動させられる。この振動発生部の強制的な振動によって、例えば、前記ターゲット部に付着した物体(前記微小物体の残留物や異物等)が除去され得る。あるいは、前記振動発生部を強制的に振動させたときの振動状態に基づいて、前記振動発生部における共振周波数の変化が取得され得る。
【0018】
(A06)前記構成A05において、前記振動発生部の共振周波数を取得する共振周波数取得部をさらに備えていて、前記駆動部が、前記共振周波数取得部によって取得された前記共振周波数に基づいて前記圧電/電歪素子を駆動するように構成されていてもよい。
【0019】
かかる構成においては、例えば、前記駆動部による駆動電圧(この場合の駆動電圧は、例えば、直流電圧や、前回取得された共振周波数の交流電圧や、既定値としての特定の周波数の交番電圧、等が含まれ得る。)の印加によって、前記振動発生部が強制的に振動させられる。この振動に基づいて、前記共振周波数取得部は、当該振動発生部の共振周波数を取得する。次回に前記振動発生部が前記駆動部によって強制的に振動される際には、当該駆動部は、この取得された共振周波数に基づいて、前記振動発生部を駆動する。
【0020】
かかる構成によれば、前記ターゲット部に対する付着物が、より効率的に除去され得る。あるいは、当該飛翔状態検出装置の異常(例えば、前記振動発生部における破損や、前記付着物の過剰な付着)が検知され得る。
【0021】
(A07)前記構成A06において、前記共振周波数取得部は、前記駆動部による前記駆動電圧の出力が遮断された後に、前記共振周波数を取得するように構成されていてもよい。
【0022】
かかる構成においては、例えば、以下のようにして前記共振周波数が取得され得る。まず、前記圧電/電歪素子に対して直流電圧を所定時間(予想される共振周波数に相当する周期よりも充分に長い時間)印加した後、当該直流電圧の印加を遮断する。これにより、当該圧電/電歪素子にて減衰自由振動が生じる。この減衰自由振動によって、当該圧電/電歪素子に交流の電圧が発生する。この発生電圧の周波数等を、前記共振周波数取得部によって取得することで、前記振動発生部の前記共振周波数が取得され得る。
【0023】
(A08)記構成A06において、前記駆動部は、複数の前記圧電/電歪素子の一部に対して前記駆動電圧を出力するように構成されていて、前記共振周波数取得部は、前記駆動部による前記駆動電圧の出力先とは異なる前記圧電/電歪素子からの前記電気信号に基づいて、前記共振周波数を取得するように構成されていてもよい。
【0024】
かかる構成によれば、前記駆動部による前記振動発生部の強制的な振動と、前記共振周波数取得部による前記共振周波数の取得とが、ほぼ同時に行われ得る。
【0025】
(A09)前記構成A01ないしA08において、前記電気信号に基づいて、前記振動発生部の振動モードを判別する振動モード判定部をさらに備えていてもよい。
【0026】
すなわち、前記微小物体と前記ターゲット部との衝突の態様に応じて、前記振動発生部に特定のモード(撓みやねじれ)の振動が発生し得る。ここで、本構成によれば、前記振動モード判定部によって、当該振動モードが判定され得る。例えば、前記圧電/電歪素子によって発生する電気信号の振幅等に基づいて、当該振動モードが判定され得る。あるいは、複数の前記圧電/電歪素子のそれぞれにて発生する電気信号を比較することで、当該振動モードが判定され得る。あるいは、複数の前記圧電/電歪素子を電気回路的に接続して、両者の電気信号を重畳した後、振幅等を取得することで、当該振動モードが判定され得る。
本構成によれば、前記微小物体における多様な飛翔状態の検出が行われ得る。例えば、単に微小物体の飛翔の有無だけでなく、所定の飛翔経路からの逸脱の有無も判定され得る。
【0027】
(A10)前記構成A01ないしA09において、前記振動発生部が長手方向を有する板状部材から構成されていて、当該板状部材の前記長手方向における一端側に前記ターゲット部が設けられ、他端側の表面上に前記圧電/電歪素子が固着して設けられていてもよい。この場合、前記圧電/電歪素子は、前記ターゲット部が設けられている側の表面に設けられていてもよい。あるいは、前記圧電/電歪素子は、前記ターゲット部が設けられている面と反対側の面に設けられていてもよい。
【0028】
かかる構成によれば、前記ターゲット部と前記圧電/電歪素子との距離が充分長く設定される。これにより、当該ターゲット部に対する前記微小物体の衝突により前記ターゲット部に与えられたエネルギーによる力が、テコの原理により増幅され、前記圧電/電歪素子に大きな応力を発生する。よって、前記圧電/電歪素子にて大きな電気信号が得られる。したがって、当該飛翔状態検出装置の感度が向上し、より小さい質量の微小物体に対して良好な飛翔状態検出が行われ得る。
【0029】
(A11)前記構成A10において、前記板状部材における前記他端側の剛性が、前記一端側の剛性よりも低くなるように、当該板状部材が構成されていることが好ましい。
【0030】
かかる構成によれば、前記微小物体が前記ターゲット部に衝突した際に、前記振動発生部を構成する前記板状部材の、剛性の低い前記他端側(前記圧電/電歪素子が設けられている側)に応力が集中する。よって、前記圧電/電歪素子にて大きな電気信号が得られる。これにより、当該飛翔状態検出装置の感度が向上する。したがって、本構成によれば、より小さい質量の微小物体に対して良好な飛翔状態検出が行われ得る。
【0031】
(A12)前記構成A10又はA11において、複数の前記圧電/電歪素子が、前記板状部材の一方の表面と、当該一方の表面の裏側の他方の表面との上に固着して設けられていてもよい。この場合、前記一方の表面上に設けられた前記圧電/電歪素子と、前記他方の表面上に設けられた前記圧電/電歪素子とは、互いに電気回路的に接続され得る。
【0032】
(A13)前記構成A01ないしA12において、前記微小物体を吐出し得るように構成された微小物体吐出部と、前記微小物体吐出部を制御する制御部と、をさらに備えていてもよい。この場合、前記制御部は、前記振動発生部の共振周波数に近い特定周波数で前記微小物体の吐出が行われるように、前記微小物体吐出部を制御する。
【0033】
かかる構成によれば、前記微小物体吐出部によって、前記微小物体が、前記振動発生部の共振周波数に近い特定周波数で吐出される。吐出された前記微小物体は、前記ターゲット部と、前記特定周波数に対応する周期で断続的に衝突する。これにより、前記振動発生部が、前記共振周波数に略等しい周波数にて励振され得る。したがって、当該振動発生部がより効率的に励振され、当該飛翔状態検出装置の感度が向上する。
【0034】
(A14)前記構成A13において、前記制御部は、以下の条件で前記微小物体吐出部を制御するように構成されていてもよい。
【0035】
前記共振周波数をf0、前記特定周波数をf1とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
【0036】
かかる構成によれば、前記振動発生部がより効率的に励振され、当該飛翔状態検出装置の感度が向上する。
【0037】
(A15)前記構成A13又はA14において、前記制御部は、以下の条件で前記微小物体吐出部を制御するように構成されていてもよい。
【0038】
前記ターゲット部に前記微小物体が衝突した際に、前記振動発生部によって当該微小物体の運動エネルギーを吸収するために要する時間をT1、前記振動発生部の前記共振周波数に相当する固有周期をT0とした場合に、
T1≦0.2T0
【0039】
例えば、前記微小物体の飛翔速度や、前記微小物体の状態(質量、体積、形状、固体か流体か或いは気体か、等)に基づいて、上述の関係が満たされるように、前記振動発生部の構造(材質や寸法等)が設定され得る。
【0040】
かかる構成によれば、前記振動発生部がより効率的に励振され、当該飛翔状態検出装置の感度が向上する。
【0041】
(A16)前記構成A01ないしA15において、前記微小物体の飛翔方向と交差する平板状のアパチャープレートをさらに備えていて、そのアパチャープレートには、前記微小物体が通過可能な貫通孔であるアパチャーが形成されていてもよい。このアパチャープレートは、前記ターゲット部よりも、前記微小物体の飛翔方向における上流側に配置されている。
【0042】
かかる構成によれば、例えば、微小物体吐出装置から吐出された微小物体が所定の飛翔方向に沿った所定の飛翔経路上を飛翔した場合に、当該微小物体がアパチャーを通過し得るように、当該アパチャープレートが配置され得る。これにより、当該微小物体の前記飛翔経路からの逸脱が、きわめて簡略な装置構成によって検出され得る。
また、かかる構成によれば、アパチャーの位置を適宜設定することにより、前記振動発生部に所定の振動モードのみを選択的に発生させることが可能になる。
【0043】
(C)上述の目的を達成するために、本発明の、微小物体の飛翔状態検出方法(以下、単に「飛翔状態検出方法」と称する)は、飛翔中の微小物体の飛翔状態を検出し得るように、以下のステップを含む。
【0044】
(C01)本発明の飛翔状態検出方法は、以下の(s1)ないし(s4)のステップを含む。(s1)前記微小物体吐出部から前記微小物体を吐出させ、(s2)吐出された前記微小物体を、ターゲット部に衝突させることで、当該ターゲット部を備えた振動発生部を振動させ、(s3)圧電/電歪素子を用いて、前記振動発生部の振動を電気信号に変換し、(s4)前記電気信号に基づいて、前記微小物体の飛翔状態を検出する。
【0045】
かかる方法によれば、同一の微小物体吐出装置から一定周期で断続的に微小物体が吐出されている場合に、当該微小物体の飛翔状態を同一の飛翔状態検出装置によって連続的に検出することが容易に行われ得る。
【0046】
(C02)前記C01に記載の方法において、前記微小物体を吐出させる前記ステップ(s1)は、前記振動発生部の共振周波数に近い特定周波数で前記微小物体を吐出させるステップであってもよい。
【0047】
かかる方法によれば、前記振動発生部を振動させる前記ステップ(s2)にて、前記振動発生部が、前記共振周波数に略等しい周波数にて励振され得る。したがって、当該振動発生部がより効率的に励振され、前記微小物体の飛翔状態を検出する前記ステップ(s4)による飛翔状態検出の感度が向上する。
【0048】
(C03)前記C02に記載の方法において、前記微小物体を吐出させる前記ステップ(s1)は、前記共振周波数をf0、前記特定周波数をf1とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
を満たすような前記特定周波数で前記微小物体を吐出させるステップであってもよい。
【0049】
かかる方法によれば、前記振動発生部を振動させる前記ステップ(s2)にて、前記振動発生部がより効率的に励振される。よって、前記微小物体の飛翔状態を検出する前記ステップ(s4)による飛翔状態検出の感度が向上する。
【0050】
(C04)前記C01ないしC04に記載の方法において、前記微小物体を吐出させる前記ステップ(s1)は、前記ターゲット部に前記微小物体が衝突した際に、前記振動発生部によって当該微小物体の運動エネルギーを吸収するために要する時間をT1、前記振動発生部の前記共振周波数に相当する固有周期をT0とした場合に、
T1≦0.2T0
を満たすような条件で前記微小物体を吐出させるステップであってもよい。
【0051】
かかる方法によれば、前記振動発生部を振動させる前記ステップ(s2)にて、前記振動発生部がより効率的に励振され、前記微小物体の飛翔状態を検出する前記ステップ(s4)による飛翔状態検出の感度が向上する。
【0052】
(C05)前記C01ないしC04に記載の方法において、前記微小物体の飛翔状態を検出する前記ステップ(s4)は、前記電気信号に基づいて、前記振動発生部の振動モードを判別するステップを含んでいてもよい。
【0053】
例えば、前記ステップ(s3)にて発生した、前記圧電/電歪素子の出力である電気信号の振幅等に基づいて、当該ステップ(s4)にて振動モードが判定され得る。あるいは、前記ステップ(s3)にて、複数の前記圧電/電歪素子からの出力としての電気信号の各々を比較することで、当該ステップ(s4)にて振動モードが判定され得る。あるいは、当該ステップ(s4)にて、複数の前記圧電/電歪素子の電気信号を重畳した信号に基づいて、当該振動モードが判定され得る。
【0054】
かかる方法によれば、前記微小物体における多様な飛翔状態の検出が行われ得る。例えば、単に微小物体の飛翔の有無だけでなく、所定の飛翔経路からの逸脱の有無も判定され得る。
【0055】
(C06)前記C05に記載の方法において、前記微小物体の飛翔状態を検出する前記ステップ(s4)は、互いに電気回路的に接続された第1の圧電/電歪素子及び第2の圧電/電歪素子が出力する電気信号に基づいて、前記振動発生部の振動モードを判別するステップを含んでいてもよい。
【0056】
かかる方法においては、前記振動発生部の振動を電気信号に変換する前記ステップ(s3)にて、互いに電気回路的に接続された前記第1の圧電/電歪素子及び第2の圧電/電歪素子から、それぞれ電気信号が出力される。このステップ(s3)に続く前記ステップ(s4)において、前記第1の圧電/電歪素子及び第2の圧電/電歪素子からの各電気信号に基づいて、前記振動発生部の振動モードが判別される。
【0057】
かかる方法によれば、前記微小物体と前記ターゲット部との衝突の態様に応じて前記振動発生部に生じる特定の振動モード(撓みやねじれ)が判別されることで、前記微小物体における多様な飛翔状態の検出が行われ得る。例えば、単に微小物体の飛翔の有無だけでなく、所定の飛翔経路からの逸脱の有無も判定され得る。
特に、複数の前記圧電/電歪素子同士が電気回路的に直接に接続された回路構成が用いられる場合、本方法によれば、当該複数の前記圧電/電歪素子同士の出力の比較等の処理が、当該複数の前記圧電/電歪素子同士の接続回路自体によって行われる。したがって、前記微小物体の飛翔状態を検出する前記ステップ(s4)の処理が簡略化され得る。
【0058】
(C07)前記C01ないしC06に記載の方法において、さらに以下のステップを含んでいてもよい。(s11)前記振動発生部の共振周波数を取得し、(s12)取得された前記共振周波数に基づいて、前記圧電/電歪素子を駆動する。
【0059】
かかる方法においては、前記共振周波数を取得するステップ(s11)、及び前記圧電/電歪素子を駆動するステップ(s12)は、上述の各ステップ(s1)ないし(s4)とは独立に行われ得る。すなわち、当該ステップ(s11)及び(s12)は、必ずしも前記微小物体の飛翔状態を検出する前記ステップ(s4)に続いて行われるものではない。
【0060】
かかる方法によれば、前記ターゲット部に対する付着物が、より効率的に除去され得る。あるいは、当該方法に用いられる飛翔状態検出装置の異常(例えば、前記振動発生部における破損や、前記付着物の過剰な付着)が検知され得る。
【0061】
(C08)前記C07に記載の方法において、前記振動発生部の共振周波数を取得する前記ステップ(s12)は、前記圧電/電歪素子を駆動する前記ステップ(s11)の終了後に行われることが好適である。
【0062】
かかる方法においては、例えば、以下のようにして前記共振周波数が取得され得る。まず、前記ステップ(s11)にて、前記圧電/電歪素子に対して直流電圧を所定時間(予想される共振周波数に相当する周期よりも充分に長い時間)印加した後、当該直流電圧の印加を遮断する。これにより、当該圧電/電歪素子にて減衰自由振動が生じる。この減衰自由振動によって、当該圧電/電歪素子に交流の電圧が発生する。この発生電圧の周波数等を、前記ステップ(s12)にて取得することで、前記振動発生部の前記共振周波数が取得され得る。
【0063】
(C09)前記C07に記載の方法において、前記圧電/電歪素子を駆動する前記ステップ(s11)は、複数の前記圧電/電歪素子の一部に対して前記駆動電圧を出力するステップであり、前記振動発生部の共振周波数を取得する前記ステップ(s12)は、前記駆動電圧の出力先とは異なる前記圧電/電歪素子からの前記電気信号に基づいて、前記共振周波数を取得するステップであってもよい。
【0064】
これにより、前記駆動部による前記振動発生部の強制的な振動と、前記共振周波数の取得とが、ほぼ同時に行われ得る。
(C10)前記C01ないし09に記載の方法において、前記微小物体を吐出する前記ステップ(s1)は、前記微小物体を前記ターゲット部の所定の位置に所定の周波数で衝突させることで、前記ステップ(s2)にて前記振動発生部を所定の振動モードで振動させるように、当該微小物体を吐出するステップであってもよい。
これにより、前記振動発生部にて、所定のモードの振動が選択的に発生する。よって、前記微小物体の様々な飛翔状態の検出が行われ得る。例えば、前記振動発生部にて、1次撓みモードの振動を選択的に発生させることにより、極めて小さい質量の微小物体に対して良好な飛翔状態検出が行われ得る。
【発明の効果】
【0065】
以上の通り、本発明の飛翔状態検出装置、及び飛翔状態検出方法においては、飛翔中の前記微小物体の飛翔経路中に前記ターゲット部を介在させ、前記圧電/電歪素子を用いて前記ターゲット部に対する前記微小物体の衝突の状態を検知するだけで、衝突微小物体の飛翔状態が検出され得る。すなわち、本発明によれば、前記微小物体を吐出する微小物体吐出装置から吐出された前記微小物体の飛翔状態(当該吐出装置における吐出状態)が、簡略かつ安価な装置構成によって良好に検出され得る。
【発明を実施するための最良の形態】
【0066】
以下、本発明の好適な実施の形態を、図面を参照しながら説明する。
【0067】
<DNAチップの構成>
図1は、DNAチップの概略構成を示す外観図(斜視図)である。図2は、図1に示されているDNAチップを拡大した断面図である。
【0068】
図1に示されているように、DNAチップ10は、顕微鏡スライドグラスからなるDNAチップ基板12上に、試料溶液の微小液滴による微小スポットSが多数配列されることによって構成されている。
【0069】
図2に示されているように、このDNAチップ基板12上における、微小スポットSが形成されるべき位置には、突起12aが形成されている。この突起12aは、微小スポットSが規定の位置からずれて滴下された場合に、その位置ずれを補正するために形成されている。すなわち、図2に示されているように、微小スポットSの一部が突起12aにかかることで(二点鎖線参照)、当該微小スポットSの表面張力によって、当該微小スポットSが正規の位置に移動するようになっている。
【0070】
また、DNAチップ基板12の表面には、親水性を有するpoly-L-lysine層からなる試料担持層14が形成されている。
【0071】
<マイクロピペットの構成>
以下、上述のDNAチップ10を製造するために用いられるマイクロピペット(微小物体吐出部)の構成について説明する。図3は、当該マイクロピペットを拡大した断面図である。図4は、当該マイクロピペットにおける試料溶液の流路の構成を透視して示す斜視図である。図5は、当該マイクロピペットの平面図である。
【0072】
図3を参照すると、マイクロピペット100は、ノズルプレート110と、そのノズルプレート110の上面に固定されたキャビティユニット120と、そのキャビティユニット120の上面に固定されたアクチュエータユニット130とから構成されている。ノズルプレート110には、試料液体が通過可能な貫通孔であるノズル112が形成されている。
【0073】
ノズルプレート110は、セラミックス製の薄板から構成されている。ノズルプレート110を構成する材料としては、例えば、酸化ジルコニウム、酸化アルミニウム、酸化マグネシウム、窒化アルミニウム、窒化珪素が、好適に用いられ得る。また、酸化ジルコニウムの中でも、完全安定化酸化ジルコニウムを主成分とする材料、及び部分安定化酸化ジルコニウムを主成分とする材料が、機械的強度の観点、及び圧電/電歪膜や電極膜の材料との反応性の観点から、最も好適に用いられ得る。
【0074】
キャビティユニット120は、接続プレート121と、流路プレート122と、オリフィスプレート123と、キャビティプレート124と、注入口プレート125とから構成されている。これらの接続プレート121、流路プレート122、オリフィスプレート123、キャビティプレート124、及び注入口プレート125は、セラミックス製の薄板から構成されている。接続プレート121と、流路プレート122と、オリフィスプレート123と、キャビティプレート124と、注入口プレート125と、ノズルプレート110とは、この順に上から積層された状態で焼成されることで、一体に形成されている。
【0075】
接続プレート121は、当該キャビティユニット120とノズルプレート110との接続部に配置されていて、ノズルプレート110の上面に接合されている。この接続プレート121には、ノズル112と同じ径の貫通孔であるノズル連通孔121aが形成されている。このノズル連通孔121aは、キャビティプレート124に形成されたキャビティ124aと、試料送出孔126を介して接続されている。この試料送出孔126は、ノズル連通孔121aよりも大きな径の貫通孔であり、流路プレート122及びオリフィスプレート123を貫通するように形成されている。
【0076】
流路プレート122には、キャビティ124aに向けて試料溶液を供給するための試料供給流路122aが形成されている。この試料供給流路122aとキャビティ124aとは、オリフィスプレート123に形成された小径の貫通孔であるオリフィス123aを介して接続されている。
【0077】
注入口プレート125は、キャビティユニット120の最上層に配置されている。この注入口プレート125には、流路プレート122に形成された試料供給流路122aに向けて試料溶液を注入するための貫通孔である試料注入口125aが形成されている。この試料注入口125aと、流路プレート122に形成された試料供給流路122aとは、貫通孔である試料導入孔127を介して接続されている。この試料導入孔127は、オリフィスプレート123及びキャビティプレート124を貫通するように形成されている。
【0078】
上述の通りに構成されたキャビティユニット120においては、図4に示されているような、試料注入口125aからノズル112に至る試料溶液の流路が形成されている。すなわち、キャビティ124aが加圧されることで、当該キャビティ124a内の試料溶液が、小径のオリフィス123aを介して試料供給流路122aに逆流することなく、試料送出孔126を介してノズル112に向けて送出され、当該ノズル112から試料溶液の微小液滴が外部に吐出されるように、オリフィス123aの寸法が設定されている。
【0079】
再び図3を参照すると、アクチュエータユニット130は、圧電/電歪層131と、その圧電/電歪層131の下面に固着して設けられた下部電極132と、圧電/電歪層131の上面に固着して設けられた上部電極133とを備えている。圧電/電歪層131は、キャビティ124aに対応する位置(真上)に配置されている。下部電極132が注入口プレート125の上面に固着されることで、アクチュエータユニット130は、キャビティユニット120の上面に固定されている。このアクチュエータユニット130は、下部電極132と上部電極133との間に駆動電圧が印加されることで、キャビティ124a内の体積を変化させ、所定量の試料溶液をノズル112から吐出させ得るように構成されている。
【0080】
下部電極132は、注入口プレート125の上面に形成された導電膜である下部電極配線パターン132aと接続されている。上部電極133は、注入口プレート125の上面に形成された導電膜である上部電極配線パターン133aと接続されている。
【0081】
図5に示されているように、注入口プレート125の上面には、下部電極配線パターン132aと接続された下部電極入力端子141が形成されている。また、注入口プレート125の上面には、上部電極配線パターン133aと接続された上部電極入力端子142が形成されている。これらの下部電極入力端子141及び上部電極入力端子142は、アクチュエータユニット130を駆動するための外部機器と接続され得るように構成されていて、当該外部機器を介して下部電極入力端子141と上部電極入力端子142との間に駆動電圧が印加されることでアクチュエータユニット130が駆動されるようになっている。
【0082】
<分注装置の構成>
次に、上述の構成を有するマイクロピペット100を備えた分注装置の構成について説明する。図6は、当該分注装置の外観図であり、図6(a)が平面図、図6(b)が側面図である。図7は、当該分注装置を分解した斜視図である。
【0083】
図6(a)に示されているように、分注装置200は、複数個(図中では10個)のマイクロピペット100が2次元的に配列されることによって構成されている。これら複数のマイクロピペット100における、上述のノズルプレート110は、1枚のセラミック板として一体に成形されている。
【0084】
分注装置200は、マイクロピペット100における各試料注入口125a(図5参照)に試料溶液を導入するための試料導入部材210を備えている。この試料導入部材210は、図6(a)及び図6(b)に示されているように、2次元的に配列されたマイクロピペット100の上面に接続されている。試料導入部材210は、図7に示されているように、ノズルプレート110に形成されたネジ穴114、及び固定ボルト212によって、当該ノズルプレート110の上面にて固定されている。
【0085】
図6(b)を参照すると、試料導入部材210には、貫通孔からなる試料注入流路214が形成されている。この試料注入流路214の下端における開口は、マイクロピペット100における各試料注入口125a(図5参照)と接続されている。また、試料注入流路214の上端における開口は、上方に向けて広がるラッパ状の管からなる導入チューブ216の下端と接続されている。
【0086】
図7を参照すると、2次元的に配列された複数の導入チューブ216は、試料溶液を貯留するためのカートリッジ220にて下方に突出するように形成された複数の試料貯留部222と係合し得るように配置及び形成されている。カートリッジ220は、柔らかい合成樹脂を射出成形することで形成されている。このカートリッジ220は、試料貯留部222の底部に針等で孔を開けることで、当該試料貯留部222に貯留された試料溶液が導入チューブ216内に流入し、各試料注入口125aに対してそれぞれ種類の異なる試料溶液が供給され得るように構成されている。
【0087】
<実施形態の飛翔状態検出装置の概略構成>
次に、本発明の実施形態である飛翔状態検出装置の概略構成について説明する。図8は、上述の分注装置200における試料溶液の吐出口を有するノズルプレート110の下方に、飛翔状態検出装置300が配置された状態を示す側面図である。例えば、図1に示されているDNAチップ基板12と、当該飛翔状態検出装置300とが、図示しないX−Yステージ上に配置されていて、当該X−Yステージを駆動することで、当該飛翔状態検出装置300がノズルプレート110の下方に所定の位置関係で配置されるようになっている。
【0088】
図8を参照すると、この飛翔状態検出装置300は、分注装置200における各マイクロピペット100から試料溶液が正しく吐出されたか否かを検出し得るように構成されている。以下、本発明の飛翔状態検出装置300の具体的な構成について説明する。
【0089】
<第1実施形態の飛翔状態検出装置の構成>
図9(a)は、第1の実施形態の飛翔状態検出装置300を拡大した断面図である。
【0090】
図9(a)に示されているように、飛翔状態検出装置300は、センサ基板310と、圧電/電歪素子320と、アパチャープレート330とを備えている。
【0091】
センサ基板310は、板状部材から構成されている。このセンサ基板310は、セラミックスから形成されていることが好ましい。このセラミックとしては、例えば、完全安定化ジルコニアや部分安定化ジルコニア、アルミナ、マグネシア、窒化珪素等が用いられ得る。このうち、完全安定化/部分安定化ジルコニアは、薄板状に構成しても靭性が高く機械的強度が大きいこと、圧電/電歪素子を構成する圧電/電歪膜や電極材料との反応性が小さいことから、最も好適に採用され得る。
【0092】
センサ基板310は、厚肉支持部311と、振動板(振動発生部)312とから構成されていて、当該厚肉支持部311と振動板312とは一体に成形されている。厚肉支持部311は、平板状部材からなる振動板312よりも厚く形成されている。振動板312は、長手方向(図中左右方向)を有する平板状部材であって、厚肉支持部311によって片持ち梁(カンチレバー)状に支持されている。
【0093】
振動板312の固定端側である検知部312aには、圧電/電歪素子320が着接されている。本実施形態においては、圧電/電歪素子320は、振動板312における図中上側の表面である内側表面312b上に固着して設けられている。この圧電/電歪素子320は、片持ち梁である振動板312にて発生した振動を電気信号に変換し得るように構成されている。なお、圧電/電歪素子320の厚さは、振動板312に比べて充分に薄く形成されている(図9(a)においては、説明の便宜のため、圧電/電歪素子320の厚さが誇張されて図示されているものとする。以下の図10ないし図22においても同様である。)。
【0094】
振動板312の自由端側(前記長手方向における一端側)であるターゲット部312cにおける、内側表面312b上には、コーティング層313が形成されている。このコーティング層313は、前記試料溶液の微小液滴との間の親和性(濡れ性)が低い材質からなる薄膜によって構成されている。例えば、上述のDNAチップ10(図1及び図2参照)を形成するための前記試料溶液は水系の溶液であるため、コーティング層313の材質としては撥水性の材質(フッ素系合成樹脂等)が選択され得る。
【0095】
センサ基板310の上方には、前記振動板312の前記内側表面312bと対向するようにアパチャープレート330が配置されている。このアパチャープレート330には、前記微小液滴が通過可能な貫通孔であるアパチャー331が形成されている。このアパチャー331が、マイクロピペット100のノズルプレート110(図8参照)に形成されたノズル112(図3参照)と対向するように、アパチャープレート330が配置されている。
【0096】
図9(b)は、当該飛翔状態検出装置300の平面図(上述の図8における、マイクロピペット100のノズルプレート110側から当該飛翔状態検出装置300を見た図)である。図9(c)は、アパチャープレート330を取り除いた場合の平面図である。図9(a)ないし(c)に示されているように、アパチャー331は、ターゲット部312cに形成されたコーティング層313と対向するように形成されている。また、図9(a)に示されているように、アパチャー331は、ターゲット部312cに形成されたコーティング層313よりも上方、すなわち、前記微小液滴の飛翔方向Dにおける上流側に形成されている。
【0097】
上述の通り、この飛翔状態検出装置300は、前記飛翔方向Dに沿った所定の飛翔経路上を飛翔中の前記微小液滴がアパチャー331を通過してターゲット部312c(コーティング層313)に衝突し、この衝突によって振動板312に発生した振動が圧電/電歪素子320によって電気信号に変換されるように構成されている。
【0098】
<<圧電/電歪素子の構成>>
図10(a)は、前記振動板312の周囲を拡大した断面図である。図10(a)に示されているように、圧電/電歪素子320は、圧電/電歪層321と、この圧電/電歪層321の一方の面に形成された下部電極322と、当該圧電/電歪層321の他方の面に形成された上部電極323と、から構成されている。圧電/電歪層321は、圧電効果及び圧電逆効果を示すいわゆる圧電/電歪材料(PZT等)の薄板から構成されている。下部電極322及び上部電極323は、金属膜から構成されている。
【0099】
<<振動板の構成>>
図10(b)は、前記振動板312の周囲を拡大した平面図である。
【0100】
図10(b)に示されているように、振動板312における検知部312aは、他の部分よりも狭い幅に形成されている。すなわち、前記試料溶液の微小液滴が上方(図10(a)における上方)から飛翔してきてターゲット部312c(コーティング層313)に衝突して、振動板312に振動が発生した場合に、検知部312aに応力が集中し、この応力集中により圧電/電歪素子320にて大きな電圧が発生し得るように、振動板312の平面形状が設定されている。
【0101】
図10(c)は、前記センサ基板310の平面図である。図10(c)に示されているように、センサ基板310においては、複数の振動板312が、厚肉支持部311から略水平に延びるように形成されている。
【0102】
<飛翔状態検出のための回路構成>
次に、上述の装置構成を用いて、マイクロピペット100(図8参照)からの試料溶液の微小液滴の吐出状態を判定するための回路構成について、図11を用いて説明する。
【0103】
制御回路340は、圧電/電歪素子320にて生じた電圧を取得する電圧取得部341と、圧電/電歪素子320に対して駆動電圧を与える駆動部342と、前記電圧取得部341及び前記駆動部342と接続された演算・制御部343と、各マイクロピペット100に対して駆動電圧を与える駆動部344と、を備えている。
【0104】
電圧取得部341は、ターゲット部312c(図10(a)参照)に試料溶液の微小液滴が衝突した場合に圧電/電歪素子320に生じる起電力を取得し得るように、圧電/電歪素子320と電気的に接続されている。駆動部342は、圧電/電歪素子320に対して駆動電圧を与えて当該圧電/電歪素子320を駆動することで、振動板312(図10参照)を強制的に振動させ得るように、圧電/電歪素子320と電気的に接続されている。
駆動部342は、演算・制御部343の制御下で、任意の波形(直流を含む。また、交流であってもサイン波、矩形波、パルス波等の種々の波形を含む。)の電圧を圧電/電歪素子320に印加し得るように構成されている。
【0105】
演算・制御部343は、電圧取得部341から信号を受け取って適宜演算処理することで、振動板312(図10参照)の振動状態(振動の大きさ、振動モード、共振周波数を含む)を検出し得るように構成されている。また、演算・制御部343は、駆動部342に対して駆動信号を与えることで、圧電/電歪素子320の駆動を制御し得るように構成されている。さらに、演算・制御部343は、各マイクロピペット100における試料溶液の吐出を制御し得るように、駆動部344を介して各マイクロピペット100と接続されている。
【0106】
<第1実施形態の装置の動作説明>
次に、上述した構成を有する第1の実施形態の飛翔状態検出装置300による動作について、図面を参照しつつ説明する。
【0107】
<<DNAチップの製造工程>>
最初に、図1に示されているDNAチップ10の製造工程について説明する。この製造工程は、DNAチップ基板12の表面にpoly-L-lysine層からなる試料担持層14(図2参照)を形成する前処理工程と、DNA断片を含む試料溶液を調製する試料調製工程と、得られた試料溶液をDNAチップ基板12上に供給する供給工程と、からなる。
【0108】
前処理工程は、以下のように行われる。まず、DNAチップ基板12は、室温で少なくとも2時間、所定のアルカリ溶液に浸される。このアルカリ溶液としては、例えば、NaOHを蒸留水に溶かした後、更にエタノールを加えて、完全に透明になるまで攪拌することによって得られた溶液が用いられ得る。その後、DNAチップ基板12は、当該アルカリ溶液から取り出されて蒸留水中で洗浄される。続いて、DNAチップ基板12は、蒸留水中にpoly-L-lysineを加えることにより調製されたpoly-L-lysine液中に1時間程度浸される。その後、DNAチップ基板12がpoly-L-lysine液から取り出され、遠心分離によって余分なpoly-L-lysine液がDNAチップ基板12から除去される。続いて、DNAチップ基板12は、40℃にて5分程度ほど乾燥される。これにより、表面にpoly-L-lysine試料担持層14が形成されたDNAチップ基板12が得られる。
【0109】
試料調製工程は、ポリメラーゼ連鎖反応(PCR)法によってDNA断片の塩基配列を増幅することでPCR産物を得る増幅工程と、得られたPCR産物を乾燥してDNA粉末を得る粉末生成工程と、得られたDNA粉末を緩衝液に溶かす混合工程とを含む。粉末生成工程においては、まず、PCR産物に、3M(=3mol/l)の酢酸ナトリウムとイソプロパノールとが加えられ、数時間放置される。その後、この溶液が遠心分離されることで、DNA断片が沈殿する。この沈殿したDNA断片がエタノールでリンスされ、遠心分離された後、乾燥されることで、DNA粉末が生成される。混合工程においては、DNA粉末にトリス−EDTA(TE)緩衝液が加えられ、完全に溶解するまで数時間放置される。これにより、試料溶液が調製される。この段階での試料溶液の濃度は1〜10μg/μlである。
【0110】
こうして得られた試料溶液は、図7に示されているカートリッジ220の試料貯留部222に貯留される。このカートリッジ220が、図6に示されている分注装置200に装着されることによって、試料溶液が当該分注装置200における各マイクロピペット100に供給される。そして、試料溶液の微小液滴が各マイクロピペット100からDNAチップ基板12(図1参照)に向けて吐出されることで、当該DNAチップ基板12上に試料溶液の微小液滴が供給され、当該DNAチップ基板12上に、多数個の試料溶液の微小スポットSが、所定の配列となるように形成される。このようにして、DNAチップ10が製造される。
【0111】
ここで、試料溶液の微小液滴は、通常、目視が困難である。よって、当該微小液滴がDNAチップ基板12上に所定の配列で正しく形成されているか否か(特定のマイクロピペット100における不吐出等の吐出不良がないかどうか)は、目視では判定できない。一方、当該微小液滴の吐出経路の途中をレーザー光等でスキャンすることで、当該不吐出を判定することは可能である。しかし、そのようにレーザー光をスキャンして各マイクロピペット100における吐出不良を判定するための装置構成は、非常に高価である。
【0112】
そこで、図8に示されているように、本実施形態の飛翔状態検出装置300を用いることによって、分注装置200における各マイクロピペット100の吐出不良が判定される。この飛翔状態検出装置300は、上述したような、きわめて簡略で製造コストが低廉となり得る構成を有している。もっとも、このような簡略な構成を有するにもかかわらず、当該飛翔状態検出装置300による吐出不良の判定は確実に行われ得る。
【0113】
<<第1実施形態における飛翔状態検出の動作説明>>
次に、本実施形態(上述の各実施例を含む)の飛翔状態検出装置300を用いた、マイクロピペット100における試料溶液の微小液滴の吐出状態の判定動作について、図8ないし図12を適宜参照しつつ説明する。ここで、図12は、振動板312(図9、図10参照)の振動の様子を示した図である。
【0114】
図8に示されているように、飛翔状態検出装置300は、マイクロピペット100におけるノズルプレート110の下方に配置される。そして、分注装置200の駆動が、図11における演算・制御部343及び駆動部344によって制御される。すなわち、演算・制御部343の制御下で、分注装置200に備えられた各マイクロピペット100におけるアクチュエータユニット130(図5参照)に対して駆動部344から駆動電圧が印加されることで、各マイクロピペット100が駆動される。これにより、各マイクロピペット100にて、前記試料溶液の微小液滴が、飛翔状態検出装置300に向けて吐出される。
【0115】
図9を参照すると、上述のように前記微小液滴が吐出されることにより、当該微小液滴はアパチャー331を通過して、振動板312におけるターゲット部312c(コーティング層313)に次々と衝突する。この衝突によって、振動板312が振動する。そして、当該振動に応じて、圧電/電歪素子320に起電力が生じる。すなわち、図10における下部電極322と上部電極323との間に、振動板312の振動状態に応じた電圧が生じる。
【0116】
例えば、前記微小液滴が、ターゲット部312cの幅方向における中央部に衝突した場合(当該微小液滴の飛翔方向が所定方向Dと一致する場合)、図12(a)に示されているように、振動板312が撓むように振動する(1次撓みモード)。これにより、検知部312aに応力が生じる。この応力が、圧電/電歪素子320(図10参照)によって起電力に変換される。
【0117】
一方、前記微小液滴が、ターゲット部312cの幅方向における中央部からオフセットした位置に衝突した場合(当該微小液滴の飛翔方向が所定方向Dから逸脱した場合)、図12(b)に示されているように、振動板312が捩れるように振動する(捩れモード)。これにより、検知部312aに、図12(a)における撓み変形の場合よりも小さな応力が生じる。これにより、圧電/電歪素子320(図10参照)にて、上述の撓み変形の場合よりも小さな起電力が生じる。
【0118】
前記微小液滴の飛翔経路が所定の飛翔経路よりもさらに逸脱した場合、当該微小液滴は、アパチャー331を通過することなく、アパチャープレート330の上面と衝突する。この場合、当該微小液滴はターゲット部312cと衝突しないので、振動板312における振動が生じない(あるいは振幅がゼロに向かって収束する)。
【0119】
このように、圧電/電歪素子320にて、振動板312の振動状態(すなわち微小液滴のターゲット部312cに対する衝突状態)に応じた電圧が発生する。
【0120】
図11を参照すると、圧電/電歪素子320にて発生した電圧が、電圧取得部341によって取得され、この電圧取得部341によって取得された起電力が演算・制御部343によって演算処理されることで、振動板312における振動状態が検出される。
【0121】
ここで、図10及び図11を参照すると、演算・制御部343は、振動板312の共振周波数をf0とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
を満たすような特定周波数f1で、マイクロピペット100を駆動させる。これにより、当該特定周波数f1に対応する周期Tで、前記試料溶液の微小液滴が次々と吐出される。
【0122】
また、振動板312によって当該微小液滴の運動エネルギーを吸収するために要する時間をT1、前記共振周波数f0に相当する固有周期をT0とした場合に、
T1≦0.2T0
を満たすような条件で、前記微小液滴の吐出が行われるように、前記マイクロピペット100の駆動が制御される。
【0123】
これにより、振動板312の共振周波数と略等しい周波数で当該振動板312が振動する。そして、この振動に同期した状態で、ターゲット部312cに対して前記微小液滴が次々に衝突する。よって、振動板312の振動が、当該微小液滴の衝突によって乱されることが抑制され得る。
【0124】
本実施形態の構成によれば、図10(b)及び図12に示されているように、振動板312における検知部312aは、他の部分よりも狭い幅に形成されている。これにより、前記試料溶液の微小液滴がターゲット部312cに衝突して、振動板312に振動が発生した場合に、検知部312aに応力が集中する。この応力集中により、圧電/電歪素子320にて大きな電圧が発生し得る。
【0125】
<<第1実施形態における試料溶液の飛沫処理動作の説明>>
再び図9を参照すると、コーティング層313に衝突することで発生した前記試料溶液の飛沫のほとんどは、当該コーティング層313の表面上に長時間付着することなく、重力の作用で下方に落下する。これにより、振動板312の内側表面312b上から前記試料溶液のほとんどが除去され得る。もっとも、前記飛沫の一部は、振動板312の内側表面312b上から完全に除去されることなく、当該内側表面312b上に残留し得る。
【0126】
そこで、以下のように、振動板312を外部的に強制振動させることで、前記飛沫を振動板312の内側表面312b上から可及的に除去させ得る。
【0127】
図11を参照すると、マイクロピペット100の駆動停止中(前記試料溶液の微小液滴の吐出の停止中)に、駆動部342は、演算・制御部343の制御下で、圧電/電歪素子320に対して、前記共振周波数f0の駆動電圧を印加する。これにより、圧電/電歪素子320が駆動され、振動板312(図9参照)が強制的に振動させられる。これにより、当該振動板312上に残留した前記試料溶液の飛沫が可及的に除去され得る。
【0128】
<<第1実施形態における共振周波数の取得動作の一例>>
もっとも、この振動板312の強制振動によっても、前記試料溶液が微量ながら当該振動板312上に残留して固化し得る。これにより、当該振動板312の共振周波数が変動し得る。そこで、図11に示されている制御回路340によって、以下に説明するように、変動後の前記共振周波数を取得し得る。
【0129】
まず、駆動部342は、演算・制御部343の制御下で、圧電/電歪素子320に対して直流電圧を所定時間(予想される共振周波数に相当する周期よりも充分に長い時間)印加した後、当該直流電圧の印加を遮断する。これにより、圧電/電歪素子320にて減衰自由振動が生じる。この減衰自由振動によって、圧電/電歪素子320に交流の電圧が発生する。このようにして圧電/電歪素子320にて発生した電圧波形は、電圧取得部341を介して、演算・制御部343によって取得される。演算・制御部343は、この電圧波形の周波数を取得することで、変動後の前記共振周波数が取得され得る。この取得された新たな共振周波数は、以降の駆動部342による圧電/電歪素子320の駆動のために用いられ得る。
【0130】
<第2実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第2の実施形態について、図13を用いて説明する。なお、本実施形態において、上述の第1実施形態と同様の作用・機能を有する構成要素については、図示が省略され、又は上述の第1実施形態と同一の符号が付され、上述の第1実施形態における説明が援用され得るものとする(以降の他の実施形態及び変形例についても同様である)。
【0131】
図13(a)は、第2の実施形態に係る振動板312の周辺を拡大した平面図である。図13(b)は、当該振動板312の振動の様子を示した図である。
【0132】
図13(a)に示されているように、振動板312における検知部312aには、2つの圧電/電歪素子320a及び320bが設けられている。これらの圧電/電歪素子320a及び320bは、演算・制御部343(図11参照)に対してそれぞれ電気回路的に接続されている。また、2つの圧電/電歪素子320a及び320bは、図10(a)に示されている圧電/電歪素子320と同様の構成を有していて、圧電/電歪素子320a及び320bの圧電/電歪層(図10(a)における圧電/電歪層321参照)の分極方向は同一であるものとする。
【0133】
かかる構成によれば、図13(b)に示されているように、振動板312にて捩れモードの振動が生じた場合、圧電/電歪素子320aの出力電圧波形と圧電/電歪素子320bの出力電圧波形との間で、半周期分の位相差が生じる。一方、振動板312にて1次撓みモードの振動が生じた場合、圧電/電歪素子320aの出力電圧波形と圧電/電歪素子320bの出力電圧波形との間の位相差が生じなくなる。よって、圧電/電歪素子320aの出力電圧波形と圧電/電歪素子320bの出力電圧波形とを比較することで、振動板312に生じている振動モードが判定される。これにより、振動板312のターゲット部312cに対する前記微小液滴の衝突状態、すなわち当該微小液滴の飛翔状態が判定され得る。
【0134】
<第3実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第3の実施形態について、図14を用いて説明する。
【0135】
図14(a)においては、1枚の振動板312に2つの圧電/電歪素子320a及び320bが設けられている。一方の圧電/電歪素子320aは、駆動部342と接続されている。また、他方の圧電/電歪素子320bは、電圧取得部341と接続されている。この駆動部342は、上述の通り、演算・制御部343(図11参照)の制御下で、任意の波形(直流を含む。また、交流であってもサイン波、矩形波、パルス波等の種々の波形を含む。)の電圧を圧電/電歪素子320aに印加し得るように構成されている(後述する図14(b),図14(c),図15(a)〜(c)における駆動部342も同様である)。
【0136】
かかる構成によれば、上述の第1実施形態と同様に、駆動部342によって、圧電/電歪素子320aに対して直流電圧が所定時間(予想される共振周波数に相当する周期よりも充分に長い時間)印加され、その後、当該直流電圧の印加が遮断される。これにより、振動板312と、圧電/電歪素子320aと、圧電/電歪素子320bとからなる振動系において減衰自由振動が生じる。この減衰自由振動によって、圧電/電歪素子320bに交流の電圧が発生する。このようにして圧電/電歪素子320bにて発生した電圧波形に基づいて、振動板312の共振周波数が取得され得る。この取得された新たな共振周波数は、以降の駆動部342による圧電/電歪素子320の駆動のために用いられ得る。
【0137】
また、かかる構成によれば、上述の第1実施形態とは異なり、駆動部342から一方の圧電/電歪素子320aに対して交流電圧を印加しつつ、他方の圧電/電歪素子320bにて生じた起電力の波形を電圧取得部341により取得することで、短時間で振動板312の共振周波数が取得され得る。この場合、駆動部342は、時間の経過とともに周波数が変化するような波形の交流電圧を出力する。そして、電圧取得部341によって取得された電圧が極大値となった場合、あるいは、インピーダンスや位相が急激に変化した場合の周波数が、共振周波数の取得値として採択され得る。
【0138】
さらに、前記構成によれば、上述の第2の実施形態と同様に、圧電/電歪素子320bの出力に基づいて捩れモードの判定を行うことができる。なお、一方の圧電/電歪素子320aを、電圧取得部341にも接続する(すなわち、圧電/電歪素子320a及び320bを電圧取得部341に接続する)ことによっても、上述の第2の実施形態と同様な構成にて捩れモードの判定が行われ得る。
【0139】
図14(b)においては、1枚の振動板312に4つの圧電/電歪素子320aないし320dが設けられている。圧電/電歪素子320aと圧電/電歪素子320dとは、振動板312の幅方向における中心線Cを挟んで対称に配置されている。同様に、圧電/電歪素子320bと圧電/電歪素子320cとは、前記中心線Cを挟んで対称に配置されている。圧電/電歪素子320a及び320bは、駆動部342と接続されている。圧電/電歪素子320c及び320dは、電圧取得部341と接続されている。
【0140】
かかる構成によれば、上述の図14(a)における構成と同様に、直流電圧印加による共振周波数の取得、交流電圧印加による共振周波数の取得、及び捩れモードの判定が行われ得る。
【0141】
図14(c)においては、1枚の振動板312に3つの圧電/電歪素子320aないし320cが設けられている。圧電/電歪素子320aと圧電/電歪素子320cとは、振動板312の幅方向における中心線Cを挟んで対称に配置されている。圧電/電歪素子320bは、前記中心線C上に配置されている。圧電/電歪素子320aは、駆動部342と接続されている。圧電/電歪素子320b及び320cは、電圧取得部341と接続されている。
【0142】
かかる構成によれば、上述の図14(a)や図14(b)における構成と同様に、直流電圧印加による共振周波数の取得、交流電圧印加による共振周波数の取得、及び捩れモードの判定が行われ得る。すなわち、例えば、圧電/電歪素子320bの出力によって撓みモードの検出を行いつつ、圧電/電歪素子320cの出力によって捩れモードの検出が行われ得る。これにより、振動板312の振動状態の判定がより明確に行われ得る。
なお、本実施形態の構成においては、撓みモード及び捩れモードの共振周波数の比を、実験や有限要素法等によるシミュレーション等によって得ておくことで、捩れモードの共振周波数から撓みモードの共振周波数を算出し得る。これにより、撓みモード及び捩れモードの双方を利用して前記微小液滴の飛翔状態を検出することが可能になる。
【0143】
<第4実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第4の実施形態について、図15を用いて説明する。
【0144】
図15(a)においては、1枚の振動板312に4つの圧電/電歪素子320aないし320dが設けられている。振動板312の幅方向について対称の位置にある圧電/電歪素子320aと圧電/電歪素子320dとは、駆動部342と接続されている。また、振動板312の幅方向について対称の位置にある圧電/電歪素子320bと圧電/電歪素子320cとは、電圧取得部341と接続されている。
【0145】
図15(b)においては、1枚の振動板312に3つの圧電/電歪素子320aないし320cが設けられている。振動板312の幅方向について対称の位置にある圧電/電歪素子320aと圧電/電歪素子320cとは、駆動部342と接続されている。また、振動板312の幅方向における中央に位置する圧電/電歪素子320bは、電圧取得部341と接続されている。
【0146】
図15(c)においては、1枚の振動板312に3つの圧電/電歪素子320aないし320cが設けられている。振動板312の幅方向について対称の位置にある圧電/電歪素子320aと圧電/電歪素子320cとは、電圧取得部341と接続されている。また、振動板312の幅方向における中央に位置する圧電/電歪素子320bは、駆動部342と接続されている。
【0147】
すなわち、上述の図15(a)ないし図15(c)の構成においては、振動板312の幅方向について対称の位置にある圧電/電歪素子に対して、電圧印加又は起電力測定が行われ得るようになっている。なお、いずれの場合においても、各圧電/電歪素子320a,320b・・・は、振動板312の一方の表面上にて、圧電/電歪層の方向が同一となるように配置されているものとする。
【0148】
かかる構成によれば、各圧電/電歪素子の接続の組み合わせにより、振動板312が1次撓みモード及び捩れモードで強制的に振動され得る。また、各圧電/電歪素子の接続の組み合わせにより、振動板312における1次撓みモード及び捩れモードの共振周波数が取得され得る。
【0149】
例えば、電圧印加する圧電/電歪素子が2つある場合、(図15(a)又は図15(c)参照)、当該2つの圧電/電歪素子における圧電/電歪層の分極方向が同一であり、当該2つの圧電/電歪素子における下部電極をともに接地し、当該2つの圧電/電歪素子における上部電極に同位相の交流電圧を印加することで、振動板312に1次撓みモードの振動が発生する。
【0150】
また、電圧印加する圧電/電歪素子が2つある場合、(図15(a)又は図15(c)参照)、当該2つの圧電/電歪素子における圧電/電歪層の分極方向が同一であり、一方の圧電/電歪素子における下部電極と他方の圧電/電歪素子の上部電極を接地し、残りの電極に同位相の交流電圧を印加することで、振動板312に捩れモードの振動が発生する。
【0151】
また、起電力測定が行われる圧電/電歪素子が2つある場合、(図15(a)又は図15(b)参照)、当該2つの圧電/電歪素子における圧電/電歪層の分極方向が同一であり、一方の圧電/電歪素子における下部電極と他方の圧電/電歪素子の上部電極とを接続し、残りの電極間の起電力を測定することで、振動板312における1次撓みモードの振動の共振周波数を取得することができる。
【0152】
また、起電力測定が行われる圧電/電歪素子が2つある場合、(図15(a)又は図15(b)参照)、当該2つの圧電/電歪素子における圧電/電歪層の分極方向が同一であり、当該2つの圧電/電歪素子における下部電極同士を接続し、当該2つの圧電/電歪素子における上部電極間の起電力を測定することで、振動板312における捩れモードの振動の共振周波数を取得することができる。
【0153】
<第5実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第5の実施形態について、図16を用いて説明する。図16(a)は、本実施形態の構成を拡大した平面図である。図16(b)及び(c)は、本実施形態における圧電/電歪素子の電気回路的な接続構成を示した図である。
【0154】
図16(a)に示されているように、本実施形態においては、1枚の振動板312上に4つの圧電/電歪素子320aないし320dが、当該振動板312の幅方向について対称に配置されている。これら4つの圧電/電歪素子320aないし320dは、例えば、図16(b)や(c)に示されているように相互に接続され得る。
【0155】
図16(b)に示されている接続状態においては、圧電/電歪素子320aの下部電極322aと、圧電/電歪素子320bの上部電極323bとが接続されている。また、圧電/電歪素子320bの下部電極322bと、圧電/電歪素子320cの上部電極323cとが接続されている。また、圧電/電歪素子320cの下部電極322cと、圧電/電歪素子320dの上部電極323dとが接続されている。そして、圧電/電歪素子320aの上部電極323aと、圧電/電歪素子320dの下部電極322dとの間に、振動状態に応じた出力電圧が生じるようになっている。すなわち、各圧電/電歪素子320aないし320dがすべて電気回路的に直接に接続されている。
【0156】
図16(c)に示されている接続状態においては、圧電/電歪素子320aの上部電極323aと、圧電/電歪素子320bの下部電極322bとが接続されている。また、圧電/電歪素子320dの上部電極323dと、圧電/電歪素子320cの下部電極322cとが接続されている。すなわち、圧電/電歪素子320aと圧電/電歪素子320bとが電気回路的に接続されている。また、圧電/電歪素子320cと圧電/電歪素子320dとが電気回路的に接続されている。
【0157】
電気回路的に接続された圧電/電歪素子320a及び320bにおける一方の出力端は、圧電/電歪素子320bの上部電極323bから構成され、他方の出力端は、圧電/電歪素子320aの下部電極322aから構成されている。また、電気回路的に接続された圧電/電歪素子320c及び320dにおける一方の出力端は、圧電/電歪素子320cの上部電極323cから構成され、他方の出力端は、圧電/電歪素子320dの下部電極322dから構成されている。そして、前記一方の出力端同士が短絡されていて、前記他方の出力端の間に、振動状態に応じた出力電圧が生じるようになっている。
【0158】
ここで、以下の動作説明を単純化するために、図16(a)の構成の振動板312におけるターゲット部312cに前記試料溶液の微小液滴が衝突した場合に、上述の2つの振動モード(1次撓みモード及び捩れモード)のいずれか一方が現れるものとし、当該振動によって、各圧電/電歪素子320a,320b,320c,320dに以下のような振幅の起電力が生じるものとする。
【0159】
1次撓みモード:V1,V1,V1,V1
捩れモード:V1,0.5V1,0.5V1,V1
【0160】
すなわち、捩れモードの場合、振動板312の幅方向における両端部に位置する圧電/電歪素子320a及び320dには、中央寄りに位置する圧電/電歪素子320b及び320cよりも大きな起電力が生じる。
【0161】
図16(b)に示されている接続状態においては、振動板312に完全な1次撓みモードの振動が生じた場合、各圧電/電歪素子320a,320b,320c,320dの出力V1が合算されることで、4V1の出力が生じる。これにより、当該1次撓みモードの振動による出力電圧が大きくなる。よって、きわめて微小な液滴がターゲット部312cに衝突した場合であっても、高感度で当該衝突が検出され得る。
【0162】
また、図16(b)に示されている接続状態においては、振動板312における捩れモードの振動により、当該振動板312の幅方向について対称の位置にある圧電/電歪素子320aと圧電/電歪素子320dとに、絶対値が等しく位相が半波長ずれた起電力±V1が生じる。同様に、振動板312の幅方向について対称の位置にある圧電/電歪素子320bと圧電/電歪素子320cとに、絶対値が等しく位相が半波長ずれた起電力±0.5V1が生じる。そして、各圧電/電歪素子320a,320b,320c,320dの出力が合算されると、出力電圧は0になる。すなわち、振動板312に完全な捩れモードの振動が生じた場合、図16(b)に示されている回路の出力電圧が0になる。
【0163】
図16(c)に示されている接続状態においては、振動板312における1次撓みモードの振動により、電気回路的に接続された圧電/電歪素子320a及び320bにおける出力端である上部電極323bと下部電極322aとの間には2V1の起電力が生じる。また、電気回路的に接続された圧電/電歪素子320c及び320dにおける出力端である上部電極323cと下部電極322dとの間にも2V1の起電力が生じる。そして、上部電極323bと上部電極323cとは短絡されている。よって、振動板312に完全な1次撓みモードの振動が生じた場合、図16(c)に示されている回路の出力電圧は0になる。
【0164】
また、図16(c)に示されている接続状態においては、振動板312における捩れモードの振動により、圧電/電歪素子320a及び320bにおける出力端である上部電極323bと下部電極322aとの間には+1.5V1の起電力が生じる。これと同時に、圧電/電歪素子320c及び320dにおける出力端である上部電極323cと下部電極322dとの間には、−1.5V1の起電力が生じる。よって、振動板312に完全な捩れモードの振動が生じた場合、図16(b)に示されている回路の出力電圧が3V1になる。
【0165】
このように、振動板312に複数の圧電/電歪素子320a,320b・・・を配置し、これらの電気回路的な接続状態を適宜設定することにより、前記微小液滴の飛翔状態の検出がより高感度で行われ、振動モードの判定がより容易に行われ得る。
また、本実施形態においては、複数の圧電/電歪素子320a,320b・・・が、それぞれ直列的に(図11における演算・制御部343を介さずに)電気回路的に接続されることで、図16(b)及び(c)の回路構成が形成されている。したがって、本実施形態によれば、図11における演算・制御部343の内部の回路構成が単純化され、当該演算・制御部343における信号処理が簡略化され得る。
【0166】
<第6実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第6の実施形態について、図17を用いて説明する。図17(a)は、本実施形態の構成を拡大した側断面図である。図17(b)は、本実施形態における圧電/電歪素子の電気回路的な接続構成を示した図である。
【0167】
図17(a)に示されているように、本実施形態においては、振動板312の検知部312aにおける内側表面312b上に、圧電/電歪素子320aが設けられている。また、振動板312の検知部312aにおける外側表面312d上に、圧電/電歪素子320bが設けられている。すなわち、振動板312の両面にそれぞれ圧電/電歪素子320a及び320bが配置されている。なお、振動板312の外側表面312d上に配置された圧電/電歪素子320bの「下部電極」322bは、振動板312に近接する側の電極を指すものとする。
【0168】
図17(b)に示されているように、本実施形態においては、圧電/電歪素子320aの下部電極322aと、圧電/電歪素子320bの下部電極322bとが短絡されている。そして、圧電/電歪素子320aの上部電極323aと、圧電/電歪素子320bの上部電極323bとの間に、振動状態に応じた出力電圧が生じるようになっている。
【0169】
かかる構成において、振動板312に振動が発生すると、当該振動板312の内側表面312b上の圧電/電歪素子320aと、当該振動板312の外側表面312d上の圧電/電歪素子320bとには、当該振動板312の振動状態に応じた起電力が発生する。ここで、例えば、振動板312のターゲット部312cが図中下方に変位している場合、圧電/電歪素子320aの圧電/電歪層321aには引張応力が生じ、圧電/電歪素子320bの圧電/電歪層321bには圧縮応力が生じる。よって、当該振動板312の内側表面312b上の圧電/電歪素子320aと、当該振動板312の外側表面312d上の圧電/電歪素子320bとには、絶対値が略同一で位相が半波長ずれた起電力の波形が生じる。そして、図17(b)に示されている回路の出力は、圧電/電歪素子320aしかない場合(圧電/電歪素子320bがない場合)の2倍となる。これにより、きわめて微小な液滴がターゲット部312cに衝突した場合であっても、高感度で当該衝突が検出され得る。
【0170】
<第7実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第7の実施形態について、図18を用いて説明する。図18(a)は、本実施形態の構成を拡大した側断面図である。図18(b)は、本実施形態における圧電/電歪素子の電気回路的な接続構成を示した図である。
【0171】
図18(a)に示されているように、本実施形態においては、振動板312の検知部312aにおける内側表面312b上に、圧電/電歪素子320aが設けられている。また、圧電/電歪素子320bは、絶縁層324を挟んで圧電/電歪素子320aの上側に配置されている。圧電/電歪素子320a、絶縁層324、及び圧電/電歪素子320bは、焼成により一体に形成されている。
【0172】
図18(b)に示されているように、本実施形態においては、圧電/電歪素子320aにおける圧電/電歪層321aの分極方向が、圧電/電歪素子320bにおける圧電/電歪層321bの分極方向と反対になるように、圧電/電歪素子320a及び320bが構成されている。圧電/電歪素子320aの下部電極322aと、圧電/電歪素子320bの下部電極322bとは、短絡されている。そして、圧電/電歪素子320aの上部電極323aと、圧電/電歪素子320bの上部電極323bとの間に、振動状態に応じた出力電圧が生じるようになっている。すなわち、圧電/電歪素子320aと圧電/電歪素子320bとが電気回路的に接続されている。
【0173】
かかる構成によれば、図18(b)に示されている回路の出力は、圧電/電歪素子320aしかない場合(圧電/電歪素子320bがない場合)の2倍となる。これにより、きわめて微小な液滴がターゲット部312cに衝突した場合であっても、高感度で当該衝突が検出され得る。
【0174】
<変形例の示唆>
なお、上述の各実施形態は、上述した通り、出願人が取り敢えず本願の出願時点において最良であると考えた本発明の代表的な実施形態を単に例示したものにすぎない。よって、本発明はもとより上述の実施形態に何ら限定されるものではなく、本発明の本質的部分を変更しない範囲内において種々の変形を施すことができることは当然である。
【0175】
以下、先願主義の下で本願の出願の際に追記し得る程度(時間の許す限り)で、変形例について幾つか例示する。しかしながら、変形例とてこれらに限定されるものではないことはいうまでもない。本願発明を、上述の実施形態、及び下記変形例の記載に基づき限定解釈すること(特に、本発明の課題を解決するための手段を構成する各要素における、作用・機能的に表現されている要素を、実施形態等の記載に基づき限定解釈すること)は、先願主義の下で出願を急ぐ出願人の利益を不当に害する反面、模倣者を不当に利するものであって、発明の保護及び利用を目的とする特許法の目的に反し、許されない。また、下記変形例が、互いに矛盾しない範囲で、それぞれ適宜組み合わされ得ることはいうまでもない。
【0176】
(i)本発明は、上述の実施形態のような、マイクロピペットによって吐出された微小液滴の飛翔状態の検出に限定されない。また、本発明によって飛翔状態が検出し得る微小物体の種類も、微小液滴に限定されない。また、微小物体の飛翔方向も、鉛直下方に限定されない。さらに、微小物体の飛翔状態の検出の際に行われる電気信号の処理にあたっては、上述の実施形態のような電圧の他、電流、周波数、位相等も用いられ得る。
【0177】
(ii)例えば、図9におけるアパチャープレート330は省略可能である。また、コーティング層313も省略可能である。さらに、コーティング層313の形成方法も、ペースト塗布やスクリーン印刷等の厚膜形成法の他、蒸着等の薄膜形成法が用いられ得る。さらに、コーティング層313によって、振動板312の内側表面312bの全体が覆われていてもよい。
【0178】
(iii)図9ないし図16に示されている構成において、圧電/電歪素子320(320a・・・)が、図17に示されている両面構成や、図18に示されている多層構成であってもよい。もちろん、両面かつ多層構成であってもよい。
【0179】
(iv)図16ないし図18における、圧電/電歪素子の個数、分極方向及び各電極間の接続関係は、任意に変更され得る。ここで、各圧電/電歪素子320a,320b・・・の間の接続は、配線パターン等によって直接に行われてもよい。あるいは、各圧電/電歪素子320a等がそれぞれ個別に電圧取得部341(図11参照)に接続されていて、演算・制御部343における信号の処理によって、各圧電/電歪素子320a等が実質的に電気回路的に接続されているような状態であってもよい。
【0180】
(v)図18において、圧電/電歪素子320aにおける圧電/電歪層321aの分極方向と、圧電/電歪素子320bにおける圧電/電歪層321bの分極方向とが同一であってもよい。この場合、絶縁層324を省略して、圧電/電歪素子320aの上部電極323aと圧電/電歪素子320bの下部電極322bとを一体に成形することで、振動状態に応じた電圧が圧電/電歪素子320aの下部電極322aと圧電/電歪素子320bの上部電極323bとの間に生じるようにしてもよい。
【0181】
(vi)図19に示されているように、振動板312が円盤形状に形成されていてもよい。この場合、厚肉支持部311は、振動板312よりも小さな半径の円盤状に形成され、当該振動板312の略中央に配置される。また、圧電/電歪素子320は平面視にて略ドーナツ状に形成される。
【0182】
(vii)図20に示されているように、検知部312a及びターゲット部312cが、長方形状の板状部材から構成されていて、当該ターゲット部312cが検知部312aの長手方向に沿った中心軸を中心としてシーソー状に配置されていてもよい。
【0183】
(viii)図21に示されているように、振動板312の構造としては、検知部312aにて応力集中が生じるような様々な構造が採用され得る。
【0184】
例えば、図21(a)に示されているように、ターゲット部312cから検知部312aに向かうにつれて振動板312の幅が連続的に狭くなるように、振動板312が形成されていてもよい。
【0185】
また、図21(b)に示されているように、検知部312aの厚さが他の部分よりも薄くなるように、振動板312が形成されていてもよい。かかる構成においては、ターゲット部312cに微小物体が衝突した場合、当該ターゲット部312cを含む部分(検知部312a以外の部分)には撓みがほとんど生じない。また、当該ターゲット部312cを含む部分の質量は検知部312aに比べて非常に大きい。
【0186】
したがって、図21(b)に示されている構成によれば、ターゲット部312cに微小物体が衝突することで、当該衝突の影響による応力が検知部312aにて効率よく発生する。また、振動板312のターゲット部312cに異物等が付着しても、当該振動板312の共振周波数のシフトを小さく抑えることができる。
【0187】
さらに、図21(c)に示されているように、検知部312aの弾性率を、それ以外の部分の弾性率よりも小さくすることによって、図21(b)の場合と同様の作用・効果を得ることができる。なお、図21(c)に示されている構成において、振動板312の幅は、一様でもよいし、図10(b)や図21(a)に示されているように、検知部312aの幅がそれ以外の部分よりも狭く形成されていてもよい。さらに、振動板312の厚さも、図21(b)に示されているように、検知部312aの厚さが他の部分よりも薄くなるようにしてもよい。
【0188】
(ix)図22に示されているように、圧電/電歪素子320は、振動板312の内側表面312bの裏側に形成されていてもよい。
【0189】
(x)図23(a)に示されているように、アパチャープレート330に複数のアパチャー331を形成し、図23(b)に示されているように、当該複数のアパチャー331を通過した微小物体が同時に振動板312に衝突するように、当該振動板312の幅寸法が設定されていてもよい。なお、図23(b)に示されている構成において、図23(a)に示されているアパチャープレート330を省略することも可能である。
【0190】
(xi)図9ないし図23に示されている構成において、振動板312の自由端側(ターゲット部312c及びコーティング層313側)が、当該振動板312の固定端側(検知部312a側)よりも低くなるように、振動板312(センサ基板310)を水平面と交差して配置してもよい。これにより、振動板(ターゲット部312c及びコーティング層313)に衝突した前記試料溶液の微小液滴の飛沫が重力により振動板312の下方に流出し得る。
【0191】
(xii)その他、本発明の課題を解決するための手段を構成する各要素における、作用・機能的に表現されている要素は、上述の実施形態・実施例や変形例にて開示されている具体的構造の他、当該作用・機能を実現可能な、いかなる構造をも含む。
【図面の簡単な説明】
【0192】
【図1】DNAチップの概略構成を示す外観図(斜視図)である。
【図2】図1に示したDNAチップを拡大した断面図である。
【図3】マイクロピペットを拡大した断面図である。
【図4】図3に示したマイクロピペットにおける試料溶液の流路の構成を拡大しつつ透視して示す斜視図である。
【図5】図3に示したマイクロピペットを拡大した平面図である。
【図6】図3に示したマイクロピペットを備えた分注装置の外観を示す概略構成図である。図6(a)が平面図であり、図6(b)が側面図である。
【図7】図6に示した分注装置を分解した斜視図である。
【図8】本発明の一実施形態に係る飛翔状態検出装置が、図6に示した分注装置に装着された状態を示す側面図である。
【図9】図8に示した飛翔状態検出装置の第1の実施形態の構成を拡大した図である。図9(a)が側断面図であり、図9(b)が平面図であり、図9(c)が当該飛翔状態検出装置の内部構成を露出した平面図である。
【図10】図9に示した飛翔状態検出装置の要部を示す図である。図10(a)が側断面図であり、図10(b)が平面図であり、図10(c)が複数の微小物体の飛翔状態を同時に検出し得る構成の一例を示す平面図である。
【図11】図9に示した飛翔状態検出装置を用いて試料溶液の微小液滴の吐出状態を判定するための回路構成図である。
【図12】図9及び図10に示した振動板の振動の様子を示した斜視図である。図12(a)が1次撓みモードの振動の様子を示した図であり、図12(b)が捩れモードの振動の様子を示した図である。
【図13】図8に示した飛翔状態検出装置の第2の実施形態の構成を拡大した図である。図13(a)が平面図であり、図13(b)が振動板の振動の様子を示す斜視図である。
【図14】図8に示した飛翔状態検出装置の第3の実施形態の構成を拡大した図である。
【図15】図8に示した飛翔状態検出装置の第4の実施形態の構成を拡大した図である。
【図16】図8に示した飛翔状態検出装置の第5の実施形態の構成を拡大した図である。
【図17】図8に示した飛翔状態検出装置の第6の実施形態の構成を拡大した図である。
【図18】図8に示した飛翔状態検出装置の第7の実施形態の構成を拡大した図である。
【図19】図9ないし図18に示した飛翔状態検出装置の変形例を示す拡大平面図である。
【図20】図9ないし図18に示した飛翔状態検出装置の、他の変形例を示す拡大平面図である。
【図21】図9ないし図18に示した飛翔状態検出装置の変形例を示す拡大図である。
【図22】図9ないし図18に示した飛翔状態検出装置の変形例を示す拡大断面図である。
【図23】図9ないし図18に示した飛翔状態検出装置の変形例を示す拡大平面図である。
【符号の説明】
【0193】
100…マイクロピペット、 110…ノズルプレート、 112…ノズル、
120…キャビティユニット、124a…キャビティ、 125a…試料注入口、
130…アクチュエータユニット、200…分注装置、 210…試料導入部材、
214…試料注入流路、 216…導入チューブ、 220…カートリッジ、
222…試料貯留部、 300…飛翔状態検出装置、310…センサ基板、
311…厚肉支持部、 312…振動板、 312a…検知部、
312b…内側表面、 312c…ターゲット部、 312d…外側表面、
313…コーティング層、
320,320a,320a1,320a2,320b,320c,320d…圧電/電歪素子、
321,321a,321b,321c,321d…圧電/電歪層、
322,322a,322b,322c,322d…下部電極、
323,323a,323b,323c,323d…上部電極、
324…絶縁層、 330…アパチャープレート、331…アパチャー、
340…制御回路、 341…電圧取得部、 342…駆動部、
343…演算・制御部、 D…飛翔方向、 S…微小スポット
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、飛翔中の微小物体の飛翔状態を検出し得る飛翔状態検出装置及び飛翔状態検出方法に関する。
【背景技術】
【0002】
例えば、いわゆるDNAチップ(DNAマイクロアレイ)を製造するための製造方法として、様々なものが知られている。このDNAチップは、数千から一万種類以上の異なる種類のDNA断片の微小スポットを、顕微鏡スライドグラス等の基板上に高密度に整列・固定させることによって構成されている。
【0003】
このDNAチップの製造方法として、微小体積の液滴を吐出し得るマイクロピペットを用いた方法が知られている(例えば下記特許文献1,2参照)。このマイクロピペットは、外部から試料を注入するための注入口と、その注入口から注入された試料が充填されるキャビティと、そのキャビティと連通する吐出口と、その吐出口から試料を吐出させるためにキャビティ内の体積を変化させ得るように構成された圧電/電歪素子と、を備えている。
【0004】
上述のDNAチップの製造方法によれば、圧電/電歪素子が駆動されることにより、キャビティ内の体積が変化する。このキャビティ内の体積変化により、試料溶液が、キャビティから吐出口に向かって層流で移動する。すなわち、一定量の試料溶液が、キャビティから吐出口に向けて送られる。この一定量の試料が当該吐出口から吐出されることで、試料溶液の微小液滴が発生する。このようにしてマイクロピペットから吐出された試料溶液の微小液滴が、基板上に付着して、当該基板上に微小スポットとして整列・固定されることによって、DNAチップを作製することができる。
【0005】
上述のような、DNAチップの製造方法に用いられるマイクロピペット等のように、微小物体を吐出し得るように構成された装置(以下、単に「微小物体吐出装置」と称する。)は、様々な技術分野にて利用可能である。
【0006】
なお、この種の微小物体の質量を測定可能に構成された質量センサが広く知られている(例えば下記特許文献3参照)。この質量センサは、圧電/電歪素子が配設された振動板の上に微小物体が付着した場合に、当該微小物体の付着による振動板の質量変化によって変化する当該振動板の共振周波数の変化を測定することで、当該振動板の質量変化(すなわち当該微小物体の質量)を測定し得るように構成されている。
【特許文献1】特開2001−124789号公報
【特許文献2】特開2001−186881号公報
【特許文献3】特開2000−180250号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
この種の微小物体吐出装置においては、前記微小物体の乾燥・固化物や、異物等が、吐出口の周辺に付着したり、吐出口を塞いだりする場合がある。このような場合、当該微小物体が吐出対象物における所定の位置に向けて正しく吐出されないという、不具合が生じる(例えば、特許文献1の段落[0010]や[0019]等参照)。
【0008】
また、前記特許文献3に記載されているような質量センサを用いて、微小物体の飛翔状態を検出しようとしても、当該質量センサによる飛翔状態検出は、上述の振動板に或る程度の(共振周波数の変化が測定され得る程度の)時間にわたって付着し得るような性質の微小物体に対してしか適用され得ない。また、当該質量センサによる飛翔状態検出によれば、同一の微小物体吐出装置から一定周期で断続的に微小物体が吐出される場合に、当該微小物体の飛翔状態を同一のセンサによって連続的に検出することが困難であった。
【0009】
本発明は、上述した問題に鑑みてなされたものであり、その目的は、前記微小物体吐出装置から吐出された微小物体の飛翔状態(当該吐出装置における吐出状態)を良好に検出し得る、飛翔中の微小物体の飛翔状態検出方法、及び簡略かつ安価な装置構成の飛翔状態検出装置を提供することにある。
【課題を解決するための手段】
【0010】
(A)かかる目的を達成するために、本発明の、微小物体の飛翔状態検出装置(以下、単に「飛翔状態検出装置」と称する)は、飛翔中の微小物体の飛翔状態を検出し得るように、以下の構成を備えている。
【0011】
(A01)本発明の飛翔状態検出装置は、振動発生部と、その振動発生部にて発生した前記振動を電気信号に変換するように構成された圧電/電歪素子と、を備えている。前記振動発生部は、前記微小物体が衝突するターゲット部を備えていて、当該ターゲット部に前記微小物体が衝突することで振動が発生するように構成されている。
【0012】
かかる構成を有する本発明の飛翔状態検出装置においては、飛翔中の前記微小物体が前記ターゲット部に衝突すると、前記振動発生部が振動する。この振動は、前記圧電/電歪素子によって電気信号に変換される。この電気信号に基づいて、微小物体の飛翔状態が検出され得る。
【0013】
(A02)前記構成A01において、単一の前記振動発生部に対して複数の前記ターゲット部が設けられていてもよい。例えば、複数の前記ターゲット部に対して、当該ターゲット部の数と同数の前記微小物体が同時に衝突するように微小物体吐出装置を制御することで、複数の微小物体飛翔経路の各々における前記微小物体の飛翔状態を同時に検出することができる。これにより、飛翔状態検出のための時間を短縮することができる。また、飛翔状態検出のための回路構成を簡略化することができる。
【0014】
(A03)前記構成A01又はA02において、複数の前記圧電/電歪素子が、互いに電気回路的に接続されていてもよい。かかる構成によれば、前記微小物体と前記ターゲット部との1回の衝突によって、複数の前記圧電/電歪素子にて前記電気信号が発生し、これらの電気信号が合算され得る。これにより、当該飛翔状態検出装置の感度が向上する。したがって、本構成によれば、より小さい質量の微小物体に対して良好な飛翔状態検出が行われ得る。
【0015】
また、かかる構成によれば、前記微小物体と前記ターゲット部との1回の衝突によって、複数の前記圧電/電歪素子にて前記電気信号が発生し、これらの電気信号が比較され得る。例えば、前記微小物体と前記ターゲット部との衝突の態様に応じて、前記振動発生部に特定のモード(撓みやねじれ)の振動が発生し得る。ここで、複数の前記圧電/電歪素子のそれぞれにて発生する電気信号を比較することで、当該振動モードが判定され得る。これにより、前記微小物体における多様な飛翔状態の検出が行われ得る。例えば、単に微小物体の飛翔の有無だけでなく、所定の飛翔経路からの逸脱の有無も判定され得る。
ここで、複数の前記圧電/電歪素子同士の電気回路的な接続は、直接なされてもよいし、演算・制御回路を介してなされてもよい。特に、複数の前記圧電/電歪素子同士が電気回路的に直接に接続された場合、当該複数の前記圧電/電歪素子同士の出力の比較等の処理が、当該複数の前記圧電/電歪素子同士の接続回路自体によって行われる。したがって、当該演算・制御回路の構成が単純化され、前記微小物体の判定が簡略に行われ得る。
【0016】
(A04)前記構成A01ないしA03において、前記ターゲット部の表面には、コーティング層が形成されていてもよい。これにより、前記ターゲット部に前記微小物体が残留することによる前記振動発生部の振動特性の変化が抑制され得る。また、当該微小物体が液体である場合に、前記ターゲット部の周囲の雰囲気中の異物(埃等)が付着することで当該ターゲット部が汚れることが抑制され得る。
【0017】
(A05)前記構成A01ないしA04において、前記圧電/電歪素子を駆動するための駆動電圧を発生する駆動部をさらに備えていてもよい。この駆動部によって前記圧電/電歪素子が駆動されることで、前記振動発生部が外部から強制的に振動させられる。この振動発生部の強制的な振動によって、例えば、前記ターゲット部に付着した物体(前記微小物体の残留物や異物等)が除去され得る。あるいは、前記振動発生部を強制的に振動させたときの振動状態に基づいて、前記振動発生部における共振周波数の変化が取得され得る。
【0018】
(A06)前記構成A05において、前記振動発生部の共振周波数を取得する共振周波数取得部をさらに備えていて、前記駆動部が、前記共振周波数取得部によって取得された前記共振周波数に基づいて前記圧電/電歪素子を駆動するように構成されていてもよい。
【0019】
かかる構成においては、例えば、前記駆動部による駆動電圧(この場合の駆動電圧は、例えば、直流電圧や、前回取得された共振周波数の交流電圧や、既定値としての特定の周波数の交番電圧、等が含まれ得る。)の印加によって、前記振動発生部が強制的に振動させられる。この振動に基づいて、前記共振周波数取得部は、当該振動発生部の共振周波数を取得する。次回に前記振動発生部が前記駆動部によって強制的に振動される際には、当該駆動部は、この取得された共振周波数に基づいて、前記振動発生部を駆動する。
【0020】
かかる構成によれば、前記ターゲット部に対する付着物が、より効率的に除去され得る。あるいは、当該飛翔状態検出装置の異常(例えば、前記振動発生部における破損や、前記付着物の過剰な付着)が検知され得る。
【0021】
(A07)前記構成A06において、前記共振周波数取得部は、前記駆動部による前記駆動電圧の出力が遮断された後に、前記共振周波数を取得するように構成されていてもよい。
【0022】
かかる構成においては、例えば、以下のようにして前記共振周波数が取得され得る。まず、前記圧電/電歪素子に対して直流電圧を所定時間(予想される共振周波数に相当する周期よりも充分に長い時間)印加した後、当該直流電圧の印加を遮断する。これにより、当該圧電/電歪素子にて減衰自由振動が生じる。この減衰自由振動によって、当該圧電/電歪素子に交流の電圧が発生する。この発生電圧の周波数等を、前記共振周波数取得部によって取得することで、前記振動発生部の前記共振周波数が取得され得る。
【0023】
(A08)記構成A06において、前記駆動部は、複数の前記圧電/電歪素子の一部に対して前記駆動電圧を出力するように構成されていて、前記共振周波数取得部は、前記駆動部による前記駆動電圧の出力先とは異なる前記圧電/電歪素子からの前記電気信号に基づいて、前記共振周波数を取得するように構成されていてもよい。
【0024】
かかる構成によれば、前記駆動部による前記振動発生部の強制的な振動と、前記共振周波数取得部による前記共振周波数の取得とが、ほぼ同時に行われ得る。
【0025】
(A09)前記構成A01ないしA08において、前記電気信号に基づいて、前記振動発生部の振動モードを判別する振動モード判定部をさらに備えていてもよい。
【0026】
すなわち、前記微小物体と前記ターゲット部との衝突の態様に応じて、前記振動発生部に特定のモード(撓みやねじれ)の振動が発生し得る。ここで、本構成によれば、前記振動モード判定部によって、当該振動モードが判定され得る。例えば、前記圧電/電歪素子によって発生する電気信号の振幅等に基づいて、当該振動モードが判定され得る。あるいは、複数の前記圧電/電歪素子のそれぞれにて発生する電気信号を比較することで、当該振動モードが判定され得る。あるいは、複数の前記圧電/電歪素子を電気回路的に接続して、両者の電気信号を重畳した後、振幅等を取得することで、当該振動モードが判定され得る。
本構成によれば、前記微小物体における多様な飛翔状態の検出が行われ得る。例えば、単に微小物体の飛翔の有無だけでなく、所定の飛翔経路からの逸脱の有無も判定され得る。
【0027】
(A10)前記構成A01ないしA09において、前記振動発生部が長手方向を有する板状部材から構成されていて、当該板状部材の前記長手方向における一端側に前記ターゲット部が設けられ、他端側の表面上に前記圧電/電歪素子が固着して設けられていてもよい。この場合、前記圧電/電歪素子は、前記ターゲット部が設けられている側の表面に設けられていてもよい。あるいは、前記圧電/電歪素子は、前記ターゲット部が設けられている面と反対側の面に設けられていてもよい。
【0028】
かかる構成によれば、前記ターゲット部と前記圧電/電歪素子との距離が充分長く設定される。これにより、当該ターゲット部に対する前記微小物体の衝突により前記ターゲット部に与えられたエネルギーによる力が、テコの原理により増幅され、前記圧電/電歪素子に大きな応力を発生する。よって、前記圧電/電歪素子にて大きな電気信号が得られる。したがって、当該飛翔状態検出装置の感度が向上し、より小さい質量の微小物体に対して良好な飛翔状態検出が行われ得る。
【0029】
(A11)前記構成A10において、前記板状部材における前記他端側の剛性が、前記一端側の剛性よりも低くなるように、当該板状部材が構成されていることが好ましい。
【0030】
かかる構成によれば、前記微小物体が前記ターゲット部に衝突した際に、前記振動発生部を構成する前記板状部材の、剛性の低い前記他端側(前記圧電/電歪素子が設けられている側)に応力が集中する。よって、前記圧電/電歪素子にて大きな電気信号が得られる。これにより、当該飛翔状態検出装置の感度が向上する。したがって、本構成によれば、より小さい質量の微小物体に対して良好な飛翔状態検出が行われ得る。
【0031】
(A12)前記構成A10又はA11において、複数の前記圧電/電歪素子が、前記板状部材の一方の表面と、当該一方の表面の裏側の他方の表面との上に固着して設けられていてもよい。この場合、前記一方の表面上に設けられた前記圧電/電歪素子と、前記他方の表面上に設けられた前記圧電/電歪素子とは、互いに電気回路的に接続され得る。
【0032】
(A13)前記構成A01ないしA12において、前記微小物体を吐出し得るように構成された微小物体吐出部と、前記微小物体吐出部を制御する制御部と、をさらに備えていてもよい。この場合、前記制御部は、前記振動発生部の共振周波数の1/n倍(nは自然数)に近い特定周波数で前記微小物体の吐出が行われるように、前記微小物体吐出部を制御する。
【0033】
かかる構成によれば、前記微小物体吐出部によって、前記微小物体が、前記振動発生部の共振周波数の1/n倍(nは自然数)に近い特定周波数で吐出される。吐出された前記微小物体は、前記ターゲット部と、前記特定周波数に対応する周期で断続的に衝突する。これにより、前記振動発生部が、前記共振周波数に略等しい周波数にて励振され得る。したがって、当該振動発生部がより効率的に励振され、当該飛翔状態検出装置の感度が向上する。
【0034】
(A14)前記構成A13において、前記制御部は、以下の条件で前記微小物体吐出部を制御するように構成されていてもよい。
【0035】
前記共振周波数をf0、前記特定周波数をf1とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
【0036】
かかる構成によれば、前記振動発生部がより効率的に励振され、当該飛翔状態検出装置の感度が向上する。
【0037】
(A15)前記構成A13又はA14において、前記制御部は、以下の条件で前記微小物体吐出部を制御するように構成されていてもよい。
【0038】
前記ターゲット部に前記微小物体が衝突した際に、前記振動発生部によって当該微小物体の運動エネルギーを吸収するために要する時間をT1、前記振動発生部の前記共振周波数に相当する固有周期をT0とした場合に、
T1≦0.2T0
【0039】
例えば、前記微小物体の飛翔速度や、前記微小物体の状態(質量、体積、形状、固体か流体か或いは気体か、等)に基づいて、上述の関係が満たされるように、前記振動発生部の構造(材質や寸法等)が設定され得る。
【0040】
かかる構成によれば、前記振動発生部がより効率的に励振され、当該飛翔状態検出装置の感度が向上する。
【0041】
(A16)前記構成A01ないしA15において、前記微小物体の飛翔方向と交差する平板状のアパチャープレートをさらに備えていて、そのアパチャープレートには、前記微小物体が通過可能な貫通孔であるアパチャーが形成されていてもよい。このアパチャープレートは、前記ターゲット部よりも、前記微小物体の飛翔方向における上流側に配置されている。
【0042】
かかる構成によれば、例えば、微小物体吐出装置から吐出された微小物体が所定の飛翔方向に沿った所定の飛翔経路上を飛翔した場合に、当該微小物体がアパチャーを通過し得るように、当該アパチャープレートが配置され得る。これにより、当該微小物体の前記飛翔経路からの逸脱が、きわめて簡略な装置構成によって検出され得る。
また、かかる構成によれば、アパチャーの位置を適宜設定することにより、前記振動発生部に所定の振動モードのみを選択的に発生させることが可能になる。
【0043】
(C)上述の目的を達成するために、本発明の、微小物体の飛翔状態検出方法(以下、単に「飛翔状態検出方法」と称する)は、飛翔中の微小物体の飛翔状態を検出し得るように、以下のステップを含む。
【0044】
(C01)本発明の飛翔状態検出方法は、以下の(s1)ないし(s4)のステップを含む。(s1)前記微小物体吐出部から前記微小物体を吐出させ、(s2)吐出された前記微小物体を、ターゲット部に衝突させることで、当該ターゲット部を備えた振動発生部を振動させ、(s3)圧電/電歪素子を用いて、前記振動発生部の振動を電気信号に変換し、(s4)前記電気信号に基づいて、前記微小物体の飛翔状態を検出する。
【0045】
かかる方法によれば、同一の微小物体吐出装置から一定周期で断続的に微小物体が吐出されている場合に、当該微小物体の飛翔状態を同一の飛翔状態検出装置によって連続的に検出することが容易に行われ得る。
【0046】
(C02)前記C01に記載の方法において、前記微小物体を吐出させる前記ステップ(s1)は、前記振動発生部の共振周波数の1/n倍(nは自然数)に近い特定周波数で前記微小物体を吐出させるステップであってもよい。
【0047】
かかる方法によれば、前記振動発生部を振動させる前記ステップ(s2)にて、前記振動発生部が、前記共振周波数の1/n倍(nは自然数)に略等しい周波数にて励振され得る。したがって、当該振動発生部がより効率的に励振され、前記微小物体の飛翔状態を検出する前記ステップ(s4)による飛翔状態検出の感度が向上する。
【0048】
(C03)前記C02に記載の方法において、前記微小物体を吐出させる前記ステップ(s1)は、前記共振周波数をf0、前記特定周波数をf1とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
を満たすような前記特定周波数で前記微小物体を吐出させるステップであってもよい。
【0049】
かかる方法によれば、前記振動発生部を振動させる前記ステップ(s2)にて、前記振動発生部がより効率的に励振される。よって、前記微小物体の飛翔状態を検出する前記ステップ(s4)による飛翔状態検出の感度が向上する。
【0050】
(C04)前記C01ないしC04に記載の方法において、前記微小物体を吐出させる前記ステップ(s1)は、前記ターゲット部に前記微小物体が衝突した際に、前記振動発生部によって当該微小物体の運動エネルギーを吸収するために要する時間をT1、前記振動発生部の前記共振周波数に相当する固有周期をT0とした場合に、
T1≦0.2T0
を満たすような条件で前記微小物体を吐出させるステップであってもよい。
【0051】
かかる方法によれば、前記振動発生部を振動させる前記ステップ(s2)にて、前記振動発生部がより効率的に励振され、前記微小物体の飛翔状態を検出する前記ステップ(s4)による飛翔状態検出の感度が向上する。
【0052】
(C05)前記C01ないしC04に記載の方法において、前記微小物体の飛翔状態を検出する前記ステップ(s4)は、前記電気信号に基づいて、前記振動発生部の振動モードを判別するステップを含んでいてもよい。
【0053】
例えば、前記ステップ(s3)にて発生した、前記圧電/電歪素子の出力である電気信号の振幅等に基づいて、当該ステップ(s4)にて振動モードが判定され得る。あるいは、前記ステップ(s3)にて、複数の前記圧電/電歪素子からの出力としての電気信号の各々を比較することで、当該ステップ(s4)にて振動モードが判定され得る。あるいは、当該ステップ(s4)にて、複数の前記圧電/電歪素子の電気信号を重畳した信号に基づいて、当該振動モードが判定され得る。
【0054】
かかる方法によれば、前記微小物体における多様な飛翔状態の検出が行われ得る。例えば、単に微小物体の飛翔の有無だけでなく、所定の飛翔経路からの逸脱の有無も判定され得る。
【0055】
(C06)前記C05に記載の方法において、前記微小物体の飛翔状態を検出する前記ステップ(s4)は、互いに電気回路的に接続された第1の圧電/電歪素子及び第2の圧電/電歪素子が出力する電気信号に基づいて、前記振動発生部の振動モードを判別するステップを含んでいてもよい。
【0056】
かかる方法においては、前記振動発生部の振動を電気信号に変換する前記ステップ(s3)にて、互いに電気回路的に接続された前記第1の圧電/電歪素子及び第2の圧電/電歪素子から、それぞれ電気信号が出力される。このステップ(s3)に続く前記ステップ(s4)において、前記第1の圧電/電歪素子及び第2の圧電/電歪素子からの各電気信号に基づいて、前記振動発生部の振動モードが判別される。
【0057】
かかる方法によれば、前記微小物体と前記ターゲット部との衝突の態様に応じて前記振動発生部に生じる特定の振動モード(撓みやねじれ)が判別されることで、前記微小物体における多様な飛翔状態の検出が行われ得る。例えば、単に微小物体の飛翔の有無だけでなく、所定の飛翔経路からの逸脱の有無も判定され得る。
特に、複数の前記圧電/電歪素子同士が電気回路的に直接に接続された回路構成が用いられる場合、本方法によれば、当該複数の前記圧電/電歪素子同士の出力の比較等の処理が、当該複数の前記圧電/電歪素子同士の接続回路自体によって行われる。したがって、前記微小物体の飛翔状態を検出する前記ステップ(s4)の処理が簡略化され得る。
【0058】
(C07)前記C01ないしC06に記載の方法において、さらに以下のステップを含んでいてもよい。(s11)前記振動発生部の共振周波数を取得し、(s12)取得された前記共振周波数に基づいて、前記圧電/電歪素子を駆動する。
【0059】
かかる方法においては、前記共振周波数を取得するステップ(s11)、及び前記圧電/電歪素子を駆動するステップ(s12)は、上述の各ステップ(s1)ないし(s4)とは独立に行われ得る。すなわち、当該ステップ(s11)及び(s12)は、必ずしも前記微小物体の飛翔状態を検出する前記ステップ(s4)に続いて行われるものではない。
【0060】
かかる方法によれば、前記ターゲット部に対する付着物が、より効率的に除去され得る。あるいは、当該方法に用いられる飛翔状態検出装置の異常(例えば、前記振動発生部における破損や、前記付着物の過剰な付着)が検知され得る。
【0061】
(C08)前記C07に記載の方法において、前記振動発生部の共振周波数を取得する前記ステップ(s12)は、前記圧電/電歪素子を駆動する前記ステップ(s11)の終了後に行われることが好適である。
【0062】
かかる方法においては、例えば、以下のようにして前記共振周波数が取得され得る。まず、前記ステップ(s11)にて、前記圧電/電歪素子に対して直流電圧を所定時間(予想される共振周波数に相当する周期よりも充分に長い時間)印加した後、当該直流電圧の印加を遮断する。これにより、当該圧電/電歪素子にて減衰自由振動が生じる。この減衰自由振動によって、当該圧電/電歪素子に交流の電圧が発生する。この発生電圧の周波数等を、前記ステップ(s12)にて取得することで、前記振動発生部の前記共振周波数が取得され得る。
【0063】
(C09)前記C07に記載の方法において、前記圧電/電歪素子を駆動する前記ステップ(s11)は、複数の前記圧電/電歪素子の一部に対して前記駆動電圧を出力するステップであり、前記振動発生部の共振周波数を取得する前記ステップ(s12)は、前記駆動電圧の出力先とは異なる前記圧電/電歪素子からの前記電気信号に基づいて、前記共振周波数を取得するステップであってもよい。
【0064】
これにより、前記駆動部による前記振動発生部の強制的な振動と、前記共振周波数の取得とが、ほぼ同時に行われ得る。
(C10)前記C01ないし09に記載の方法において、前記微小物体を吐出する前記ステップ(s1)は、前記微小物体を前記ターゲット部の所定の位置に所定の周波数で衝突させることで、前記ステップ(s2)にて前記振動発生部を所定の振動モードで振動させるように、当該微小物体を吐出するステップであってもよい。
これにより、前記振動発生部にて、所定のモードの振動が選択的に発生する。よって、前記微小物体の様々な飛翔状態の検出が行われ得る。例えば、前記振動発生部にて、1次撓みモードの振動を選択的に発生させることにより、極めて小さい質量の微小物体に対して良好な飛翔状態検出が行われ得る。
【発明の効果】
【0065】
以上の通り、本発明の飛翔状態検出装置、及び飛翔状態検出方法においては、飛翔中の前記微小物体の飛翔経路中に前記ターゲット部を介在させ、前記圧電/電歪素子を用いて前記ターゲット部に対する前記微小物体の衝突の状態を検知するだけで、衝突微小物体の飛翔状態が検出され得る。すなわち、本発明によれば、前記微小物体を吐出する微小物体吐出装置から吐出された前記微小物体の飛翔状態(当該吐出装置における吐出状態)が、簡略かつ安価な装置構成によって良好に検出され得る。
【発明を実施するための最良の形態】
【0066】
以下、本発明の好適な実施の形態を、図面を参照しながら説明する。
【0067】
<DNAチップの構成>
図1は、DNAチップの概略構成を示す外観図(斜視図)である。図2は、図1に示されているDNAチップを拡大した断面図である。
【0068】
図1に示されているように、DNAチップ10は、顕微鏡スライドグラスからなるDNAチップ基板12上に、試料溶液の微小液滴による微小スポットSが多数配列されることによって構成されている。
【0069】
図2に示されているように、このDNAチップ基板12上における、微小スポットSが形成されるべき位置には、突起12aが形成されている。この突起12aは、微小スポットSが規定の位置からずれて滴下された場合に、その位置ずれを補正するために形成されている。すなわち、図2に示されているように、微小スポットSの一部が突起12aにかかることで(二点鎖線参照)、当該微小スポットSの表面張力によって、当該微小スポットSが正規の位置に移動するようになっている。
【0070】
また、DNAチップ基板12の表面には、親水性を有するpoly-L-lysine層からなる試料担持層14が形成されている。
【0071】
<マイクロピペットの構成>
以下、上述のDNAチップ10を製造するために用いられるマイクロピペット(微小物体吐出部)の構成について説明する。図3は、当該マイクロピペットを拡大した断面図である。図4は、当該マイクロピペットにおける試料溶液の流路の構成を透視して示す斜視図である。図5は、当該マイクロピペットの平面図である。
【0072】
図3を参照すると、マイクロピペット100は、ノズルプレート110と、そのノズルプレート110の上面に固定されたキャビティユニット120と、そのキャビティユニット120の上面に固定されたアクチュエータユニット130とから構成されている。ノズルプレート110には、試料液体が通過可能な貫通孔であるノズル112が形成されている。
【0073】
ノズルプレート110は、セラミックス製の薄板から構成されている。ノズルプレート110を構成する材料としては、例えば、酸化ジルコニウム、酸化アルミニウム、酸化マグネシウム、窒化アルミニウム、窒化珪素が、好適に用いられ得る。また、酸化ジルコニウムの中でも、完全安定化酸化ジルコニウムを主成分とする材料、及び部分安定化酸化ジルコニウムを主成分とする材料が、機械的強度の観点、及び圧電/電歪膜や電極膜の材料との反応性の観点から、最も好適に用いられ得る。
【0074】
キャビティユニット120は、接続プレート121と、流路プレート122と、オリフィスプレート123と、キャビティプレート124と、注入口プレート125とから構成されている。これらの接続プレート121、流路プレート122、オリフィスプレート123、キャビティプレート124、及び注入口プレート125は、セラミックス製の薄板から構成されている。接続プレート121と、流路プレート122と、オリフィスプレート123と、キャビティプレート124と、注入口プレート125と、ノズルプレート110とは、この順に上から積層された状態で焼成されることで、一体に形成されている。
【0075】
接続プレート121は、当該キャビティユニット120とノズルプレート110との接続部に配置されていて、ノズルプレート110の上面に接合されている。この接続プレート121には、ノズル112と同じ径の貫通孔であるノズル連通孔121aが形成されている。このノズル連通孔121aは、キャビティプレート124に形成されたキャビティ124aと、試料送出孔126を介して接続されている。この試料送出孔126は、ノズル連通孔121aよりも大きな径の貫通孔であり、流路プレート122及びオリフィスプレート123を貫通するように形成されている。
【0076】
流路プレート122には、キャビティ124aに向けて試料溶液を供給するための試料供給流路122aが形成されている。この試料供給流路122aとキャビティ124aとは、オリフィスプレート123に形成された小径の貫通孔であるオリフィス123aを介して接続されている。
【0077】
注入口プレート125は、キャビティユニット120の最上層に配置されている。この注入口プレート125には、流路プレート122に形成された試料供給流路122aに向けて試料溶液を注入するための貫通孔である試料注入口125aが形成されている。この試料注入口125aと、流路プレート122に形成された試料供給流路122aとは、貫通孔である試料導入孔127を介して接続されている。この試料導入孔127は、オリフィスプレート123及びキャビティプレート124を貫通するように形成されている。
【0078】
上述の通りに構成されたキャビティユニット120においては、図4に示されているような、試料注入口125aからノズル112に至る試料溶液の流路が形成されている。すなわち、キャビティ124aが加圧されることで、当該キャビティ124a内の試料溶液が、小径のオリフィス123aを介して試料供給流路122aに逆流することなく、試料送出孔126を介してノズル112に向けて送出され、当該ノズル112から試料溶液の微小液滴が外部に吐出されるように、オリフィス123aの寸法が設定されている。
【0079】
再び図3を参照すると、アクチュエータユニット130は、圧電/電歪層131と、その圧電/電歪層131の下面に固着して設けられた下部電極132と、圧電/電歪層131の上面に固着して設けられた上部電極133とを備えている。圧電/電歪層131は、キャビティ124aに対応する位置(真上)に配置されている。下部電極132が注入口プレート125の上面に固着されることで、アクチュエータユニット130は、キャビティユニット120の上面に固定されている。このアクチュエータユニット130は、下部電極132と上部電極133との間に駆動電圧が印加されることで、キャビティ124a内の体積を変化させ、所定量の試料溶液をノズル112から吐出させ得るように構成されている。
【0080】
下部電極132は、注入口プレート125の上面に形成された導電膜である下部電極配線パターン132aと接続されている。上部電極133は、注入口プレート125の上面に形成された導電膜である上部電極配線パターン133aと接続されている。
【0081】
図5に示されているように、注入口プレート125の上面には、下部電極配線パターン132aと接続された下部電極入力端子141が形成されている。また、注入口プレート125の上面には、上部電極配線パターン133aと接続された上部電極入力端子142が形成されている。これらの下部電極入力端子141及び上部電極入力端子142は、アクチュエータユニット130を駆動するための外部機器と接続され得るように構成されていて、当該外部機器を介して下部電極入力端子141と上部電極入力端子142との間に駆動電圧が印加されることでアクチュエータユニット130が駆動されるようになっている。
【0082】
<分注装置の構成>
次に、上述の構成を有するマイクロピペット100を備えた分注装置の構成について説明する。図6は、当該分注装置の外観図であり、図6(a)が平面図、図6(b)が側面図である。図7は、当該分注装置を分解した斜視図である。
【0083】
図6(a)に示されているように、分注装置200は、複数個(図中では10個)のマイクロピペット100が2次元的に配列されることによって構成されている。これら複数のマイクロピペット100における、上述のノズルプレート110は、1枚のセラミック板として一体に成形されている。
【0084】
分注装置200は、マイクロピペット100における各試料注入口125a(図5参照)に試料溶液を導入するための試料導入部材210を備えている。この試料導入部材210は、図6(a)及び図6(b)に示されているように、2次元的に配列されたマイクロピペット100の上面に接続されている。試料導入部材210は、図7に示されているように、ノズルプレート110に形成されたネジ穴114、及び固定ボルト212によって、当該ノズルプレート110の上面にて固定されている。
【0085】
図6(b)を参照すると、試料導入部材210には、貫通孔からなる試料注入流路214が形成されている。この試料注入流路214の下端における開口は、マイクロピペット100における各試料注入口125a(図5参照)と接続されている。また、試料注入流路214の上端における開口は、上方に向けて広がるラッパ状の管からなる導入チューブ216の下端と接続されている。
【0086】
図7を参照すると、2次元的に配列された複数の導入チューブ216は、試料溶液を貯留するためのカートリッジ220にて下方に突出するように形成された複数の試料貯留部222と係合し得るように配置及び形成されている。カートリッジ220は、柔らかい合成樹脂を射出成形することで形成されている。このカートリッジ220は、試料貯留部222の底部に針等で孔を開けることで、当該試料貯留部222に貯留された試料溶液が導入チューブ216内に流入し、各試料注入口125aに対してそれぞれ種類の異なる試料溶液が供給され得るように構成されている。
【0087】
<実施形態の飛翔状態検出装置の概略構成>
次に、本発明の実施形態である飛翔状態検出装置の概略構成について説明する。図8は、上述の分注装置200における試料溶液の吐出口を有するノズルプレート110の下方に、飛翔状態検出装置300が配置された状態を示す側面図である。例えば、図1に示されているDNAチップ基板12と、当該飛翔状態検出装置300とが、図示しないX−Yステージ上に配置されていて、当該X−Yステージを駆動することで、当該飛翔状態検出装置300がノズルプレート110の下方に所定の位置関係で配置されるようになっている。
【0088】
図8を参照すると、この飛翔状態検出装置300は、分注装置200における各マイクロピペット100から試料溶液が正しく吐出されたか否かを検出し得るように構成されている。以下、本発明の飛翔状態検出装置300の具体的な構成について説明する。
【0089】
<第1実施形態の飛翔状態検出装置の構成>
図9(a)は、第1の実施形態の飛翔状態検出装置300を拡大した断面図である。
【0090】
図9(a)に示されているように、飛翔状態検出装置300は、センサ基板310と、圧電/電歪素子320と、アパチャープレート330とを備えている。
【0091】
センサ基板310は、板状部材から構成されている。このセンサ基板310は、セラミックスから形成されていることが好ましい。このセラミックとしては、例えば、完全安定化ジルコニアや部分安定化ジルコニア、アルミナ、マグネシア、窒化珪素等が用いられ得る。このうち、完全安定化/部分安定化ジルコニアは、薄板状に構成しても靭性が高く機械的強度が大きいこと、圧電/電歪素子を構成する圧電/電歪膜や電極材料との反応性が小さいことから、最も好適に採用され得る。
【0092】
センサ基板310は、厚肉支持部311と、振動板(振動発生部)312とから構成されていて、当該厚肉支持部311と振動板312とは一体に成形されている。厚肉支持部311は、平板状部材からなる振動板312よりも厚く形成されている。振動板312は、長手方向(図中左右方向)を有する平板状部材であって、厚肉支持部311によって片持ち梁(カンチレバー)状に支持されている。
【0093】
振動板312の固定端側である検知部312aには、圧電/電歪素子320が着接されている。本実施形態においては、圧電/電歪素子320は、振動板312における図中上側の表面である内側表面312b上に固着して設けられている。この圧電/電歪素子320は、片持ち梁である振動板312にて発生した振動を電気信号に変換し得るように構成されている。なお、圧電/電歪素子320の厚さは、振動板312に比べて充分に薄く形成されている(図9(a)においては、説明の便宜のため、圧電/電歪素子320の厚さが誇張されて図示されているものとする。以下の図10ないし図22においても同様である。)。
【0094】
振動板312の自由端側(前記長手方向における一端側)であるターゲット部312cにおける、内側表面312b上には、コーティング層313が形成されている。このコーティング層313は、前記試料溶液の微小液滴との間の親和性(濡れ性)が低い材質からなる薄膜によって構成されている。例えば、上述のDNAチップ10(図1及び図2参照)を形成するための前記試料溶液は水系の溶液であるため、コーティング層313の材質としては撥水性の材質(フッ素系合成樹脂等)が選択され得る。
【0095】
センサ基板310の上方には、前記振動板312の前記内側表面312bと対向するようにアパチャープレート330が配置されている。このアパチャープレート330には、前記微小液滴が通過可能な貫通孔であるアパチャー331が形成されている。このアパチャー331が、マイクロピペット100のノズルプレート110(図8参照)に形成されたノズル112(図3参照)と対向するように、アパチャープレート330が配置されている。
【0096】
図9(b)は、当該飛翔状態検出装置300の平面図(上述の図8における、マイクロピペット100のノズルプレート110側から当該飛翔状態検出装置300を見た図)である。図9(c)は、アパチャープレート330を取り除いた場合の平面図である。図9(a)ないし(c)に示されているように、アパチャー331は、ターゲット部312cに形成されたコーティング層313と対向するように形成されている。また、図9(a)に示されているように、アパチャー331は、ターゲット部312cに形成されたコーティング層313よりも上方、すなわち、前記微小液滴の飛翔方向Dにおける上流側に形成されている。
【0097】
上述の通り、この飛翔状態検出装置300は、前記飛翔方向Dに沿った所定の飛翔経路上を飛翔中の前記微小液滴がアパチャー331を通過してターゲット部312c(コーティング層313)に衝突し、この衝突によって振動板312に発生した振動が圧電/電歪素子320によって電気信号に変換されるように構成されている。
【0098】
<<圧電/電歪素子の構成>>
図10(a)は、前記振動板312の周囲を拡大した断面図である。図10(a)に示されているように、圧電/電歪素子320は、圧電/電歪層321と、この圧電/電歪層321の一方の面に形成された下部電極322と、当該圧電/電歪層321の他方の面に形成された上部電極323と、から構成されている。圧電/電歪層321は、圧電効果及び圧電逆効果を示すいわゆる圧電/電歪材料(PZT等)の薄板から構成されている。下部電極322及び上部電極323は、金属膜から構成されている。
【0099】
<<振動板の構成>>
図10(b)は、前記振動板312の周囲を拡大した平面図である。
【0100】
図10(b)に示されているように、振動板312における検知部312aは、他の部分よりも狭い幅に形成されている。すなわち、前記試料溶液の微小液滴が上方(図10(a)における上方)から飛翔してきてターゲット部312c(コーティング層313)に衝突して、振動板312に振動が発生した場合に、検知部312aに応力が集中し、この応力集中により圧電/電歪素子320にて大きな電圧が発生し得るように、振動板312の平面形状が設定されている。
【0101】
図10(c)は、前記センサ基板310の平面図である。図10(c)に示されているように、センサ基板310においては、複数の振動板312が、厚肉支持部311から略水平に延びるように形成されている。
【0102】
<飛翔状態検出のための回路構成>
次に、上述の装置構成を用いて、マイクロピペット100(図8参照)からの試料溶液の微小液滴の吐出状態を判定するための回路構成について、図11を用いて説明する。
【0103】
制御回路340は、圧電/電歪素子320にて生じた電圧を取得する電圧取得部341と、圧電/電歪素子320に対して駆動電圧を与える駆動部342と、前記電圧取得部341及び前記駆動部342と接続された演算・制御部343と、各マイクロピペット100に対して駆動電圧を与える駆動部344と、を備えている。
【0104】
電圧取得部341は、ターゲット部312c(図10(a)参照)に試料溶液の微小液滴が衝突した場合に圧電/電歪素子320に生じる起電力を取得し得るように、圧電/電歪素子320と電気的に接続されている。駆動部342は、圧電/電歪素子320に対して駆動電圧を与えて当該圧電/電歪素子320を駆動することで、振動板312(図10参照)を強制的に振動させ得るように、圧電/電歪素子320と電気的に接続されている。
駆動部342は、演算・制御部343の制御下で、任意の波形(直流を含む。また、交流であってもサイン波、矩形波、パルス波等の種々の波形を含む。)の電圧を圧電/電歪素子320に印加し得るように構成されている。
【0105】
演算・制御部343は、電圧取得部341から信号を受け取って適宜演算処理することで、振動板312(図10参照)の振動状態(振動の大きさ、振動モード、共振周波数を含む)を検出し得るように構成されている。また、演算・制御部343は、駆動部342に対して駆動信号を与えることで、圧電/電歪素子320の駆動を制御し得るように構成されている。さらに、演算・制御部343は、各マイクロピペット100における試料溶液の吐出を制御し得るように、駆動部344を介して各マイクロピペット100と接続されている。
【0106】
<第1実施形態の装置の動作説明>
次に、上述した構成を有する第1の実施形態の飛翔状態検出装置300による動作について、図面を参照しつつ説明する。
【0107】
<<DNAチップの製造工程>>
最初に、図1に示されているDNAチップ10の製造工程について説明する。この製造工程は、DNAチップ基板12の表面にpoly-L-lysine層からなる試料担持層14(図2参照)を形成する前処理工程と、DNA断片を含む試料溶液を調製する試料調製工程と、得られた試料溶液をDNAチップ基板12上に供給する供給工程と、からなる。
【0108】
前処理工程は、以下のように行われる。まず、DNAチップ基板12は、室温で少なくとも2時間、所定のアルカリ溶液に浸される。このアルカリ溶液としては、例えば、NaOHを蒸留水に溶かした後、更にエタノールを加えて、完全に透明になるまで攪拌することによって得られた溶液が用いられ得る。その後、DNAチップ基板12は、当該アルカリ溶液から取り出されて蒸留水中で洗浄される。続いて、DNAチップ基板12は、蒸留水中にpoly-L-lysineを加えることにより調製されたpoly-L-lysine液中に1時間程度浸される。その後、DNAチップ基板12がpoly-L-lysine液から取り出され、遠心分離によって余分なpoly-L-lysine液がDNAチップ基板12から除去される。続いて、DNAチップ基板12は、40℃にて5分程度ほど乾燥される。これにより、表面にpoly-L-lysine試料担持層14が形成されたDNAチップ基板12が得られる。
【0109】
試料調製工程は、ポリメラーゼ連鎖反応(PCR)法によってDNA断片の塩基配列を増幅することでPCR産物を得る増幅工程と、得られたPCR産物を乾燥してDNA粉末を得る粉末生成工程と、得られたDNA粉末を緩衝液に溶かす混合工程とを含む。粉末生成工程においては、まず、PCR産物に、3M(=3mol/l)の酢酸ナトリウムとイソプロパノールとが加えられ、数時間放置される。その後、この溶液が遠心分離されることで、DNA断片が沈殿する。この沈殿したDNA断片がエタノールでリンスされ、遠心分離された後、乾燥されることで、DNA粉末が生成される。混合工程においては、DNA粉末にトリス−EDTA(TE)緩衝液が加えられ、完全に溶解するまで数時間放置される。これにより、試料溶液が調製される。この段階での試料溶液の濃度は1〜10μg/μlである。
【0110】
こうして得られた試料溶液は、図7に示されているカートリッジ220の試料貯留部222に貯留される。このカートリッジ220が、図6に示されている分注装置200に装着されることによって、試料溶液が当該分注装置200における各マイクロピペット100に供給される。そして、試料溶液の微小液滴が各マイクロピペット100からDNAチップ基板12(図1参照)に向けて吐出されることで、当該DNAチップ基板12上に試料溶液の微小液滴が供給され、当該DNAチップ基板12上に、多数個の試料溶液の微小スポットSが、所定の配列となるように形成される。このようにして、DNAチップ10が製造される。
【0111】
ここで、試料溶液の微小液滴は、通常、目視が困難である。よって、当該微小液滴がDNAチップ基板12上に所定の配列で正しく形成されているか否か(特定のマイクロピペット100における不吐出等の吐出不良がないかどうか)は、目視では判定できない。一方、当該微小液滴の吐出経路の途中をレーザー光等でスキャンすることで、当該不吐出を判定することは可能である。しかし、そのようにレーザー光をスキャンして各マイクロピペット100における吐出不良を判定するための装置構成は、非常に高価である。
【0112】
そこで、図8に示されているように、本実施形態の飛翔状態検出装置300を用いることによって、分注装置200における各マイクロピペット100の吐出不良が判定される。この飛翔状態検出装置300は、上述したような、きわめて簡略で製造コストが低廉となり得る構成を有している。もっとも、このような簡略な構成を有するにもかかわらず、当該飛翔状態検出装置300による吐出不良の判定は確実に行われ得る。
【0113】
<<第1実施形態における飛翔状態検出の動作説明>>
次に、本実施形態(上述の各実施例を含む)の飛翔状態検出装置300を用いた、マイクロピペット100における試料溶液の微小液滴の吐出状態の判定動作について、図8ないし図12を適宜参照しつつ説明する。ここで、図12は、振動板312(図9、図10参照)の振動の様子を示した図である。
【0114】
図8に示されているように、飛翔状態検出装置300は、マイクロピペット100におけるノズルプレート110の下方に配置される。そして、分注装置200の駆動が、図11における演算・制御部343及び駆動部344によって制御される。すなわち、演算・制御部343の制御下で、分注装置200に備えられた各マイクロピペット100におけるアクチュエータユニット130(図5参照)に対して駆動部344から駆動電圧が印加されることで、各マイクロピペット100が駆動される。これにより、各マイクロピペット100にて、前記試料溶液の微小液滴が、飛翔状態検出装置300に向けて吐出される。
【0115】
図9を参照すると、上述のように前記微小液滴が吐出されることにより、当該微小液滴はアパチャー331を通過して、振動板312におけるターゲット部312c(コーティング層313)に次々と衝突する。この衝突によって、振動板312が振動する。そして、当該振動に応じて、圧電/電歪素子320に起電力が生じる。すなわち、図10における下部電極322と上部電極323との間に、振動板312の振動状態に応じた電圧が生じる。
【0116】
例えば、前記微小液滴が、ターゲット部312cの幅方向における中央部に衝突した場合(当該微小液滴の飛翔方向が所定方向Dと一致する場合)、図12(a)に示されているように、振動板312が撓むように振動する(1次撓みモード)。これにより、検知部312aに応力が生じる。この応力が、圧電/電歪素子320(図10参照)によって起電力に変換される。
【0117】
一方、前記微小液滴が、ターゲット部312cの幅方向における中央部からオフセットした位置に衝突した場合(当該微小液滴の飛翔方向が所定方向Dから逸脱した場合)、図12(b)に示されているように、振動板312が捩れるように振動する(捩れモード)。これにより、検知部312aに、図12(a)における撓み変形の場合よりも小さな応力が生じる。これにより、圧電/電歪素子320(図10参照)にて、上述の撓み変形の場合よりも小さな起電力が生じる。
【0118】
前記微小液滴の飛翔経路が所定の飛翔経路よりもさらに逸脱した場合、当該微小液滴は、アパチャー331を通過することなく、アパチャープレート330の上面と衝突する。この場合、当該微小液滴はターゲット部312cと衝突しないので、振動板312における振動が生じない(あるいは振幅がゼロに向かって収束する)。
【0119】
このように、圧電/電歪素子320にて、振動板312の振動状態(すなわち微小液滴のターゲット部312cに対する衝突状態)に応じた電圧が発生する。
【0120】
図11を参照すると、圧電/電歪素子320にて発生した電圧が、電圧取得部341によって取得され、この電圧取得部341によって取得された起電力が演算・制御部343によって演算処理されることで、振動板312における振動状態が検出される。
【0121】
ここで、図10及び図11を参照すると、演算・制御部343は、振動板312の共振周波数をf0とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
を満たすような特定周波数f1で、マイクロピペット100を駆動させる。これにより、当該特定周波数f1に対応する周期Tで、前記試料溶液の微小液滴が次々と吐出される。
【0122】
また、振動板312によって当該微小液滴の運動エネルギーを吸収するために要する時間をT1、前記共振周波数f0に相当する固有周期をT0とした場合に、
T1≦0.2T0
を満たすような条件で、前記微小液滴の吐出が行われるように、前記マイクロピペット100の駆動が制御される。
【0123】
これにより、振動板312の共振周波数と略等しい周波数で当該振動板312が振動する。そして、この振動に同期した状態で、ターゲット部312cに対して前記微小液滴が次々に衝突する。よって、振動板312の振動が、当該微小液滴の衝突によって乱されることが抑制され得る。
【0124】
本実施形態の構成によれば、図10(b)及び図12に示されているように、振動板312における検知部312aは、他の部分よりも狭い幅に形成されている。これにより、前記試料溶液の微小液滴がターゲット部312cに衝突して、振動板312に振動が発生した場合に、検知部312aに応力が集中する。この応力集中により、圧電/電歪素子320にて大きな電圧が発生し得る。
【0125】
<<第1実施形態における試料溶液の飛沫処理動作の説明>>
再び図9を参照すると、コーティング層313に衝突することで発生した前記試料溶液の飛沫のほとんどは、当該コーティング層313の表面上に長時間付着することなく、重力の作用で下方に落下する。これにより、振動板312の内側表面312b上から前記試料溶液のほとんどが除去され得る。もっとも、前記飛沫の一部は、振動板312の内側表面312b上から完全に除去されることなく、当該内側表面312b上に残留し得る。
【0126】
そこで、以下のように、振動板312を外部的に強制振動させることで、前記飛沫を振動板312の内側表面312b上から可及的に除去させ得る。
【0127】
図11を参照すると、マイクロピペット100の駆動停止中(前記試料溶液の微小液滴の吐出の停止中)に、駆動部342は、演算・制御部343の制御下で、圧電/電歪素子320に対して、前記共振周波数f0の駆動電圧を印加する。これにより、圧電/電歪素子320が駆動され、振動板312(図9参照)が強制的に振動させられる。これにより、当該振動板312上に残留した前記試料溶液の飛沫が可及的に除去され得る。
【0128】
<<第1実施形態における共振周波数の取得動作の一例>>
もっとも、この振動板312の強制振動によっても、前記試料溶液が微量ながら当該振動板312上に残留して固化し得る。これにより、当該振動板312の共振周波数が変動し得る。そこで、図11に示されている制御回路340によって、以下に説明するように、変動後の前記共振周波数を取得し得る。
【0129】
まず、駆動部342は、演算・制御部343の制御下で、圧電/電歪素子320に対して直流電圧を所定時間(予想される共振周波数に相当する周期よりも充分に長い時間)印加した後、当該直流電圧の印加を遮断する。これにより、圧電/電歪素子320にて減衰自由振動が生じる。この減衰自由振動によって、圧電/電歪素子320に交流の電圧が発生する。このようにして圧電/電歪素子320にて発生した電圧波形は、電圧取得部341を介して、演算・制御部343によって取得される。演算・制御部343は、この電圧波形の周波数を取得することで、変動後の前記共振周波数が取得され得る。この取得された新たな共振周波数は、以降の駆動部342による圧電/電歪素子320の駆動のために用いられ得る。
【0130】
<第2実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第2の実施形態について、図13を用いて説明する。なお、本実施形態において、上述の第1実施形態と同様の作用・機能を有する構成要素については、図示が省略され、又は上述の第1実施形態と同一の符号が付され、上述の第1実施形態における説明が援用され得るものとする(以降の他の実施形態及び変形例についても同様である)。
【0131】
図13(a)は、第2の実施形態に係る振動板312の周辺を拡大した平面図である。図13(b)は、当該振動板312の振動の様子を示した図である。
【0132】
図13(a)に示されているように、振動板312における検知部312aには、2つの圧電/電歪素子320a及び320bが設けられている。これらの圧電/電歪素子320a及び320bは、演算・制御部343(図11参照)に対してそれぞれ電気回路的に接続されている。また、2つの圧電/電歪素子320a及び320bは、図10(a)に示されている圧電/電歪素子320と同様の構成を有していて、圧電/電歪素子320a及び320bの圧電/電歪層(図10(a)における圧電/電歪層321参照)の分極方向は同一であるものとする。
【0133】
かかる構成によれば、図13(b)に示されているように、振動板312にて捩れモードの振動が生じた場合、圧電/電歪素子320aの出力電圧波形と圧電/電歪素子320bの出力電圧波形との間で、半周期分の位相差が生じる。一方、振動板312にて1次撓みモードの振動が生じた場合、圧電/電歪素子320aの出力電圧波形と圧電/電歪素子320bの出力電圧波形との間の位相差が生じなくなる。よって、圧電/電歪素子320aの出力電圧波形と圧電/電歪素子320bの出力電圧波形とを比較することで、振動板312に生じている振動モードが判定される。これにより、振動板312のターゲット部312cに対する前記微小液滴の衝突状態、すなわち当該微小液滴の飛翔状態が判定され得る。
【0134】
<第3実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第3の実施形態について、図14を用いて説明する。
【0135】
図14(a)においては、1枚の振動板312に2つの圧電/電歪素子320a及び320bが設けられている。一方の圧電/電歪素子320aは、駆動部342と接続されている。また、他方の圧電/電歪素子320bは、電圧取得部341と接続されている。この駆動部342は、上述の通り、演算・制御部343(図11参照)の制御下で、任意の波形(直流を含む。また、交流であってもサイン波、矩形波、パルス波等の種々の波形を含む。)の電圧を圧電/電歪素子320aに印加し得るように構成されている(後述する図14(b),図14(c),図15(a)〜(c)における駆動部342も同様である)。
【0136】
かかる構成によれば、上述の第1実施形態と同様に、駆動部342によって、圧電/電歪素子320aに対して直流電圧が所定時間(予想される共振周波数に相当する周期よりも充分に長い時間)印加され、その後、当該直流電圧の印加が遮断される。これにより、振動板312と、圧電/電歪素子320aと、圧電/電歪素子320bとからなる振動系において減衰自由振動が生じる。この減衰自由振動によって、圧電/電歪素子320bに交流の電圧が発生する。このようにして圧電/電歪素子320bにて発生した電圧波形に基づいて、振動板312の共振周波数が取得され得る。この取得された新たな共振周波数は、以降の駆動部342による圧電/電歪素子320の駆動のために用いられ得る。
【0137】
また、かかる構成によれば、上述の第1実施形態とは異なり、駆動部342から一方の圧電/電歪素子320aに対して交流電圧を印加しつつ、他方の圧電/電歪素子320bにて生じた起電力の波形を電圧取得部341により取得することで、短時間で振動板312の共振周波数が取得され得る。この場合、駆動部342は、時間の経過とともに周波数が変化するような波形の交流電圧を出力する。そして、電圧取得部341によって取得された電圧が極大値となった場合、あるいは、インピーダンスや位相が急激に変化した場合の周波数が、共振周波数の取得値として採択され得る。
【0138】
さらに、前記構成によれば、上述の第2の実施形態と同様に、圧電/電歪素子320bの出力に基づいて捩れモードの判定を行うことができる。なお、一方の圧電/電歪素子320aを、電圧取得部341にも接続する(すなわち、圧電/電歪素子320a及び320bを電圧取得部341に接続する)ことによっても、上述の第2の実施形態と同様な構成にて捩れモードの判定が行われ得る。
【0139】
図14(b)においては、1枚の振動板312に4つの圧電/電歪素子320aないし320dが設けられている。圧電/電歪素子320aと圧電/電歪素子320dとは、振動板312の幅方向における中心線Cを挟んで対称に配置されている。同様に、圧電/電歪素子320bと圧電/電歪素子320cとは、前記中心線Cを挟んで対称に配置されている。圧電/電歪素子320a及び320bは、駆動部342と接続されている。圧電/電歪素子320c及び320dは、電圧取得部341と接続されている。
【0140】
かかる構成によれば、上述の図14(a)における構成と同様に、直流電圧印加による共振周波数の取得、交流電圧印加による共振周波数の取得、及び捩れモードの判定が行われ得る。
【0141】
図14(c)においては、1枚の振動板312に3つの圧電/電歪素子320aないし320cが設けられている。圧電/電歪素子320aと圧電/電歪素子320cとは、振動板312の幅方向における中心線Cを挟んで対称に配置されている。圧電/電歪素子320bは、前記中心線C上に配置されている。圧電/電歪素子320aは、駆動部342と接続されている。圧電/電歪素子320b及び320cは、電圧取得部341と接続されている。
【0142】
かかる構成によれば、上述の図14(a)や図14(b)における構成と同様に、直流電圧印加による共振周波数の取得、交流電圧印加による共振周波数の取得、及び捩れモードの判定が行われ得る。すなわち、例えば、圧電/電歪素子320bの出力によって撓みモードの検出を行いつつ、圧電/電歪素子320cの出力によって捩れモードの検出が行われ得る。これにより、振動板312の振動状態の判定がより明確に行われ得る。
なお、本実施形態の構成においては、撓みモード及び捩れモードの共振周波数の比を、実験や有限要素法等によるシミュレーション等によって得ておくことで、捩れモードの共振周波数から撓みモードの共振周波数を算出し得る。これにより、撓みモード及び捩れモードの双方を利用して前記微小液滴の飛翔状態を検出することが可能になる。
【0143】
<第4実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第4の実施形態について、図15を用いて説明する。
【0144】
図15(a)においては、1枚の振動板312に4つの圧電/電歪素子320aないし320dが設けられている。振動板312の幅方向について対称の位置にある圧電/電歪素子320aと圧電/電歪素子320dとは、駆動部342と接続されている。また、振動板312の幅方向について対称の位置にある圧電/電歪素子320bと圧電/電歪素子320cとは、電圧取得部341と接続されている。
【0145】
図15(b)においては、1枚の振動板312に3つの圧電/電歪素子320aないし320cが設けられている。振動板312の幅方向について対称の位置にある圧電/電歪素子320aと圧電/電歪素子320cとは、駆動部342と接続されている。また、振動板312の幅方向における中央に位置する圧電/電歪素子320bは、電圧取得部341と接続されている。
【0146】
図15(c)においては、1枚の振動板312に3つの圧電/電歪素子320aないし320cが設けられている。振動板312の幅方向について対称の位置にある圧電/電歪素子320aと圧電/電歪素子320cとは、電圧取得部341と接続されている。また、振動板312の幅方向における中央に位置する圧電/電歪素子320bは、駆動部342と接続されている。
【0147】
すなわち、上述の図15(a)ないし図15(c)の構成においては、振動板312の幅方向について対称の位置にある圧電/電歪素子に対して、電圧印加又は起電力測定が行われ得るようになっている。なお、いずれの場合においても、各圧電/電歪素子320a,320b・・・は、振動板312の一方の表面上にて、圧電/電歪層の方向が同一となるように配置されているものとする。
【0148】
かかる構成によれば、各圧電/電歪素子の接続の組み合わせにより、振動板312が1次撓みモード及び捩れモードで強制的に振動され得る。また、各圧電/電歪素子の接続の組み合わせにより、振動板312における1次撓みモード及び捩れモードの共振周波数が取得され得る。
【0149】
例えば、電圧印加する圧電/電歪素子が2つある場合、(図15(a)又は図15(b)参照)、当該2つの圧電/電歪素子における圧電/電歪層の分極方向が同一であり、当該2つの圧電/電歪素子における下部電極をともに接地し、当該2つの圧電/電歪素子における上部電極に同位相の交流電圧を印加することで、振動板312に1次撓みモードの振動が発生する。
【0150】
また、電圧印加する圧電/電歪素子が2つある場合、(図15(a)又は図15(b)参照)、当該2つの圧電/電歪素子における圧電/電歪層の分極方向が同一であり、一方の圧電/電歪素子における下部電極と他方の圧電/電歪素子の上部電極を接地し、残りの電極に同位相の交流電圧を印加することで、振動板312に捩れモードの振動が発生する。
【0151】
また、起電力測定が行われる圧電/電歪素子が2つある場合、(図15(a)又は図15(c)参照)、当該2つの圧電/電歪素子における圧電/電歪層の分極方向が同一であり、一方の圧電/電歪素子における下部電極と他方の圧電/電歪素子の上部電極とを接続し、残りの電極間の起電力を測定することで、振動板312における1次撓みモードの振動の共振周波数を取得することができる。
【0152】
また、起電力測定が行われる圧電/電歪素子が2つある場合、(図15(a)又は図15(c)参照)、当該2つの圧電/電歪素子における圧電/電歪層の分極方向が同一であり、当該2つの圧電/電歪素子における下部電極同士を接続し、当該2つの圧電/電歪素子における上部電極間の起電力を測定することで、振動板312における捩れモードの振動の共振周波数を取得することができる。
【0153】
<第5実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第5の実施形態について、図16を用いて説明する。図16(a)は、本実施形態の構成を拡大した平面図である。図16(b)及び(c)は、本実施形態における圧電/電歪素子の電気回路的な接続構成を示した図である。
【0154】
図16(a)に示されているように、本実施形態においては、1枚の振動板312上に4つの圧電/電歪素子320aないし320dが、当該振動板312の幅方向について対称に配置されている。これら4つの圧電/電歪素子320aないし320dは、例えば、図16(b)や(c)に示されているように相互に接続され得る。
【0155】
図16(b)に示されている接続状態においては、圧電/電歪素子320aの下部電極322aと、圧電/電歪素子320bの上部電極323bとが接続されている。また、圧電/電歪素子320bの下部電極322bと、圧電/電歪素子320cの上部電極323cとが接続されている。また、圧電/電歪素子320cの下部電極322cと、圧電/電歪素子320dの上部電極323dとが接続されている。そして、圧電/電歪素子320aの上部電極323aと、圧電/電歪素子320dの下部電極322dとの間に、振動状態に応じた出力電圧が生じるようになっている。すなわち、各圧電/電歪素子320aないし320dがすべて電気回路的に直接に接続されている。
【0156】
図16(c)に示されている接続状態においては、圧電/電歪素子320aの上部電極323aと、圧電/電歪素子320bの下部電極322bとが接続されている。また、圧電/電歪素子320dの上部電極323dと、圧電/電歪素子320cの下部電極322cとが接続されている。すなわち、圧電/電歪素子320aと圧電/電歪素子320bとが電気回路的に接続されている。また、圧電/電歪素子320cと圧電/電歪素子320dとが電気回路的に接続されている。
【0157】
電気回路的に接続された圧電/電歪素子320a及び320bにおける一方の出力端は、圧電/電歪素子320bの上部電極323bから構成され、他方の出力端は、圧電/電歪素子320aの下部電極322aから構成されている。また、電気回路的に接続された圧電/電歪素子320c及び320dにおける一方の出力端は、圧電/電歪素子320cの上部電極323cから構成され、他方の出力端は、圧電/電歪素子320dの下部電極322dから構成されている。そして、前記一方の出力端同士が短絡されていて、前記他方の出力端の間に、振動状態に応じた出力電圧が生じるようになっている。
【0158】
ここで、以下の動作説明を単純化するために、図16(a)の構成の振動板312におけるターゲット部312cに前記試料溶液の微小液滴が衝突した場合に、上述の2つの振動モード(1次撓みモード及び捩れモード)のいずれか一方が現れるものとし、当該振動によって、各圧電/電歪素子320a,320b,320c,320dに以下のような振幅の起電力が生じるものとする。
【0159】
1次撓みモード:V1,V1,V1,V1
捩れモード:V1,0.5V1,0.5V1,V1
【0160】
すなわち、捩れモードの場合、振動板312の幅方向における両端部に位置する圧電/電歪素子320a及び320dには、中央寄りに位置する圧電/電歪素子320b及び320cよりも大きな起電力が生じる。
【0161】
図16(b)に示されている接続状態においては、振動板312に完全な1次撓みモードの振動が生じた場合、各圧電/電歪素子320a,320b,320c,320dの出力V1が合算されることで、4V1の出力が生じる。これにより、当該1次撓みモードの振動による出力電圧が大きくなる。よって、きわめて微小な液滴がターゲット部312cに衝突した場合であっても、高感度で当該衝突が検出され得る。
【0162】
また、図16(b)に示されている接続状態においては、振動板312における捩れモードの振動により、当該振動板312の幅方向について対称の位置にある圧電/電歪素子320aと圧電/電歪素子320dとに、絶対値が等しく位相が半波長ずれた起電力±V1が生じる。同様に、振動板312の幅方向について対称の位置にある圧電/電歪素子320bと圧電/電歪素子320cとに、絶対値が等しく位相が半波長ずれた起電力±0.5V1が生じる。そして、各圧電/電歪素子320a,320b,320c,320dの出力が合算されると、出力電圧は0になる。すなわち、振動板312に完全な捩れモードの振動が生じた場合、図16(b)に示されている回路の出力電圧が0になる。
【0163】
図16(c)に示されている接続状態においては、振動板312における1次撓みモードの振動により、電気回路的に接続された圧電/電歪素子320a及び320bにおける出力端である上部電極323bと下部電極322aとの間には2V1の起電力が生じる。また、電気回路的に接続された圧電/電歪素子320c及び320dにおける出力端である上部電極323cと下部電極322dとの間にも2V1の起電力が生じる。そして、上部電極323bと上部電極323cとは短絡されている。よって、振動板312に完全な1次撓みモードの振動が生じた場合、図16(c)に示されている回路の出力電圧は0になる。
【0164】
また、図16(c)に示されている接続状態においては、振動板312における捩れモードの振動により、圧電/電歪素子320a及び320bにおける出力端である上部電極323bと下部電極322aとの間には+1.5V1の起電力が生じる。これと同時に、圧電/電歪素子320c及び320dにおける出力端である上部電極323cと下部電極322dとの間には、−1.5V1の起電力が生じる。よって、振動板312に完全な捩れモードの振動が生じた場合、図16(b)に示されている回路の出力電圧が3V1になる。
【0165】
このように、振動板312に複数の圧電/電歪素子320a,320b・・・を配置し、これらの電気回路的な接続状態を適宜設定することにより、前記微小液滴の飛翔状態の検出がより高感度で行われ、振動モードの判定がより容易に行われ得る。
また、本実施形態においては、複数の圧電/電歪素子320a,320b・・・が、それぞれ直列的に(図11における演算・制御部343を介さずに)電気回路的に接続されることで、図16(b)及び(c)の回路構成が形成されている。したがって、本実施形態によれば、図11における演算・制御部343の内部の回路構成が単純化され、当該演算・制御部343における信号処理が簡略化され得る。
【0166】
<第6実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第6の実施形態について、図17を用いて説明する。図17(a)は、本実施形態の構成を拡大した側断面図である。図17(b)は、本実施形態における圧電/電歪素子の電気回路的な接続構成を示した図である。
【0167】
図17(a)に示されているように、本実施形態においては、振動板312の検知部312aにおける内側表面312b上に、圧電/電歪素子320aが設けられている。また、振動板312の検知部312aにおける外側表面312d上に、圧電/電歪素子320bが設けられている。すなわち、振動板312の両面にそれぞれ圧電/電歪素子320a及び320bが配置されている。なお、振動板312の外側表面312d上に配置された圧電/電歪素子320bの「下部電極」322bは、振動板312に近接する側の電極を指すものとする。
【0168】
図17(b)に示されているように、本実施形態においては、圧電/電歪素子320aの下部電極322aと、圧電/電歪素子320bの下部電極322bとが短絡されている。そして、圧電/電歪素子320aの上部電極323aと、圧電/電歪素子320bの上部電極323bとの間に、振動状態に応じた出力電圧が生じるようになっている。
【0169】
かかる構成において、振動板312に振動が発生すると、当該振動板312の内側表面312b上の圧電/電歪素子320aと、当該振動板312の外側表面312d上の圧電/電歪素子320bとには、当該振動板312の振動状態に応じた起電力が発生する。ここで、例えば、振動板312のターゲット部312cが図中下方に変位している場合、圧電/電歪素子320aの圧電/電歪層321aには引張応力が生じ、圧電/電歪素子320bの圧電/電歪層321bには圧縮応力が生じる。よって、当該振動板312の内側表面312b上の圧電/電歪素子320aと、当該振動板312の外側表面312d上の圧電/電歪素子320bとには、絶対値が略同一で位相が半波長ずれた起電力の波形が生じる。そして、図17(b)に示されている回路の出力は、圧電/電歪素子320aしかない場合(圧電/電歪素子320bがない場合)の2倍となる。これにより、きわめて微小な液滴がターゲット部312cに衝突した場合であっても、高感度で当該衝突が検出され得る。
【0170】
<第7実施形態の飛翔状態検出装置>
次に、本発明の飛翔状態検出装置の第7の実施形態について、図18を用いて説明する。図18(a)は、本実施形態の構成を拡大した側断面図である。図18(b)は、本実施形態における圧電/電歪素子の電気回路的な接続構成を示した図である。
【0171】
図18(a)に示されているように、本実施形態においては、振動板312の検知部312aにおける内側表面312b上に、圧電/電歪素子320aが設けられている。また、圧電/電歪素子320bは、絶縁層324を挟んで圧電/電歪素子320aの上側に配置されている。圧電/電歪素子320a、絶縁層324、及び圧電/電歪素子320bは、焼成により一体に形成されている。
【0172】
図18(b)に示されているように、本実施形態においては、圧電/電歪素子320aにおける圧電/電歪層321aの分極方向が、圧電/電歪素子320bにおける圧電/電歪層321bの分極方向と反対になるように、圧電/電歪素子320a及び320bが構成されている。圧電/電歪素子320aの下部電極322aと、圧電/電歪素子320bの下部電極322bとは、短絡されている。そして、圧電/電歪素子320aの上部電極323aと、圧電/電歪素子320bの上部電極323bとの間に、振動状態に応じた出力電圧が生じるようになっている。すなわち、圧電/電歪素子320aと圧電/電歪素子320bとが電気回路的に接続されている。
【0173】
かかる構成によれば、図18(b)に示されている回路の出力は、圧電/電歪素子320aしかない場合(圧電/電歪素子320bがない場合)の2倍となる。これにより、きわめて微小な液滴がターゲット部312cに衝突した場合であっても、高感度で当該衝突が検出され得る。
【0174】
<変形例の示唆>
なお、上述の各実施形態は、上述した通り、出願人が取り敢えず本願の出願時点において最良であると考えた本発明の代表的な実施形態を単に例示したものにすぎない。よって、本発明はもとより上述の実施形態に何ら限定されるものではなく、本発明の本質的部分を変更しない範囲内において種々の変形を施すことができることは当然である。
【0175】
以下、先願主義の下で本願の出願の際に追記し得る程度(時間の許す限り)で、変形例について幾つか例示する。しかしながら、変形例とてこれらに限定されるものではないことはいうまでもない。本願発明を、上述の実施形態、及び下記変形例の記載に基づき限定解釈すること(特に、本発明の課題を解決するための手段を構成する各要素における、作用・機能的に表現されている要素を、実施形態等の記載に基づき限定解釈すること)は、先願主義の下で出願を急ぐ出願人の利益を不当に害する反面、模倣者を不当に利するものであって、発明の保護及び利用を目的とする特許法の目的に反し、許されない。また、下記変形例が、互いに矛盾しない範囲で、それぞれ適宜組み合わされ得ることはいうまでもない。
【0176】
(i)本発明は、上述の実施形態のような、マイクロピペットによって吐出された微小液滴の飛翔状態の検出に限定されない。また、本発明によって飛翔状態が検出し得る微小物体の種類も、微小液滴に限定されない。また、微小物体の飛翔方向も、鉛直下方に限定されない。さらに、微小物体の飛翔状態の検出の際に行われる電気信号の処理にあたっては、上述の実施形態のような電圧の他、電流、周波数、位相等も用いられ得る。
【0177】
(ii)例えば、図9におけるアパチャープレート330は省略可能である。また、コーティング層313も省略可能である。さらに、コーティング層313の形成方法も、ペースト塗布やスクリーン印刷等の厚膜形成法の他、蒸着等の薄膜形成法が用いられ得る。さらに、コーティング層313によって、振動板312の内側表面312bの全体が覆われていてもよい。
【0178】
(iii)図9ないし図16に示されている構成において、圧電/電歪素子320(320a・・・)が、図17に示されている両面構成や、図18に示されている多層構成であってもよい。もちろん、両面かつ多層構成であってもよい。
【0179】
(iv)図16ないし図18における、圧電/電歪素子の個数、分極方向及び各電極間の接続関係は、任意に変更され得る。ここで、各圧電/電歪素子320a,320b・・・の間の接続は、配線パターン等によって直接に行われてもよい。あるいは、各圧電/電歪素子320a等がそれぞれ個別に電圧取得部341(図11参照)に接続されていて、演算・制御部343における信号の処理によって、各圧電/電歪素子320a等が実質的に電気回路的に接続されているような状態であってもよい。
【0180】
(v)図18において、圧電/電歪素子320aにおける圧電/電歪層321aの分極方向と、圧電/電歪素子320bにおける圧電/電歪層321bの分極方向とが同一であってもよい。この場合、絶縁層324を省略して、圧電/電歪素子320aの上部電極323aと圧電/電歪素子320bの下部電極322bとを一体に成形することで、振動状態に応じた電圧が圧電/電歪素子320aの下部電極322aと圧電/電歪素子320bの上部電極323bとの間に生じるようにしてもよい。
【0181】
(vi)図19に示されているように、振動板312が円盤形状に形成されていてもよい。この場合、厚肉支持部311は、振動板312よりも小さな半径の円盤状に形成され、当該振動板312の略中央に配置される。また、圧電/電歪素子320は平面視にて略ドーナツ状に形成される。
【0182】
(vii)図20に示されているように、検知部312a及びターゲット部312cが、長方形状の板状部材から構成されていて、当該ターゲット部312cが検知部312aの長手方向に沿った中心軸を中心としてシーソー状に配置されていてもよい。
【0183】
(viii)図21に示されているように、振動板312の構造としては、検知部312aにて応力集中が生じるような様々な構造が採用され得る。
【0184】
例えば、図21(a)に示されているように、ターゲット部312cから検知部312aに向かうにつれて振動板312の幅が連続的に狭くなるように、振動板312が形成されていてもよい。
【0185】
また、図21(b)に示されているように、検知部312aの厚さが他の部分よりも薄くなるように、振動板312が形成されていてもよい。かかる構成においては、ターゲット部312cに微小物体が衝突した場合、当該ターゲット部312cを含む部分(検知部312a以外の部分)には撓みがほとんど生じない。また、当該ターゲット部312cを含む部分の質量は検知部312aに比べて非常に大きい。
【0186】
したがって、図21(b)に示されている構成によれば、ターゲット部312cに微小物体が衝突することで、当該衝突の影響による応力が検知部312aにて効率よく発生する。また、振動板312のターゲット部312cに異物等が付着しても、当該振動板312の共振周波数のシフトを小さく抑えることができる。
【0187】
さらに、図21(c)に示されているように、検知部312aの弾性率を、それ以外の部分の弾性率よりも小さくすることによって、図21(b)の場合と同様の作用・効果を得ることができる。なお、図21(c)に示されている構成において、振動板312の幅は、一様でもよいし、図10(b)や図21(a)に示されているように、検知部312aの幅がそれ以外の部分よりも狭く形成されていてもよい。さらに、振動板312の厚さも、図21(b)に示されているように、検知部312aの厚さが他の部分よりも薄くなるようにしてもよい。
【0188】
(ix)図22に示されているように、圧電/電歪素子320は、振動板312の内側表面312bの裏側に形成されていてもよい。
【0189】
(x)図23(a)に示されているように、アパチャープレート330に複数のアパチャー331を形成し、図23(b)に示されているように、当該複数のアパチャー331を通過した微小物体が同時に振動板312に衝突するように、当該振動板312の幅寸法が設定されていてもよい。なお、図23(b)に示されている構成において、図23(a)に示されているアパチャープレート330を省略することも可能である。
【0190】
(xi)図9ないし図23に示されている構成において、振動板312の自由端側(ターゲット部312c及びコーティング層313側)が、当該振動板312の固定端側(検知部312a側)よりも低くなるように、振動板312(センサ基板310)を水平面と交差して配置してもよい。これにより、振動板(ターゲット部312c及びコーティング層313)に衝突した前記試料溶液の微小液滴の飛沫が重力により振動板312の下方に流出し得る。
【0191】
(xii)その他、本発明の課題を解決するための手段を構成する各要素における、作用・機能的に表現されている要素は、上述の実施形態・実施例や変形例にて開示されている具体的構造の他、当該作用・機能を実現可能な、いかなる構造をも含む。
【図面の簡単な説明】
【0192】
【図1】DNAチップの概略構成を示す外観図(斜視図)である。
【図2】図1に示したDNAチップを拡大した断面図である。
【図3】マイクロピペットを拡大した断面図である。
【図4】図3に示したマイクロピペットにおける試料溶液の流路の構成を拡大しつつ透視して示す斜視図である。
【図5】図3に示したマイクロピペットを拡大した平面図である。
【図6】図3に示したマイクロピペットを備えた分注装置の外観を示す概略構成図である。図6(a)が平面図であり、図6(b)が側面図である。
【図7】図6に示した分注装置を分解した斜視図である。
【図8】本発明の一実施形態に係る飛翔状態検出装置が、図6に示した分注装置に装着された状態を示す側面図である。
【図9】図8に示した飛翔状態検出装置の第1の実施形態の構成を拡大した図である。図9(a)が側断面図であり、図9(b)が平面図であり、図9(c)が当該飛翔状態検出装置の内部構成を露出した平面図である。
【図10】図9に示した飛翔状態検出装置の要部を示す図である。図10(a)が側断面図であり、図10(b)が平面図であり、図10(c)が複数の微小物体の飛翔状態を同時に検出し得る構成の一例を示す平面図である。
【図11】図9に示した飛翔状態検出装置を用いて試料溶液の微小液滴の吐出状態を判定するための回路構成図である。
【図12】図9及び図10に示した振動板の振動の様子を示した斜視図である。図12(a)が1次撓みモードの振動の様子を示した図であり、図12(b)が捩れモードの振動の様子を示した図である。
【図13】図8に示した飛翔状態検出装置の第2の実施形態の構成を拡大した図である。図13(a)が平面図であり、図13(b)が振動板の振動の様子を示す斜視図である。
【図14】図8に示した飛翔状態検出装置の第3の実施形態の構成を拡大した図である。
【図15】図8に示した飛翔状態検出装置の第4の実施形態の構成を拡大した図である。
【図16】図8に示した飛翔状態検出装置の第5の実施形態の構成を拡大した図である。
【図17】図8に示した飛翔状態検出装置の第6の実施形態の構成を拡大した図である。
【図18】図8に示した飛翔状態検出装置の第7の実施形態の構成を拡大した図である。
【図19】図9ないし図18に示した飛翔状態検出装置の変形例を示す拡大平面図である。
【図20】図9ないし図18に示した飛翔状態検出装置の、他の変形例を示す拡大平面図である。
【図21】図9ないし図18に示した飛翔状態検出装置の変形例を示す拡大図である。
【図22】図9ないし図18に示した飛翔状態検出装置の変形例を示す拡大断面図である。
【図23】図9ないし図18に示した飛翔状態検出装置の変形例を示す拡大平面図である。
【符号の説明】
【0193】
100…マイクロピペット、 110…ノズルプレート、 112…ノズル、
120…キャビティユニット、124a…キャビティ、 125a…試料注入口、
130…アクチュエータユニット、200…分注装置、 210…試料導入部材、
214…試料注入流路、 216…導入チューブ、 220…カートリッジ、
222…試料貯留部、 300…飛翔状態検出装置、310…センサ基板、
311…厚肉支持部、 312…振動板、 312a…検知部、
312b…内側表面、 312c…ターゲット部、 312d…外側表面、
313…コーティング層、
320,320a,320a1,320a2,320b,320c,320d…圧電/電歪素子、
321,321a,321b,321c,321d…圧電/電歪層、
322,322a,322b,322c,322d…下部電極、
323,323a,323b,323c,323d…上部電極、
324…絶縁層、 330…アパチャープレート、331…アパチャー、
340…制御回路、 341…電圧取得部、 342…駆動部、
343…演算・制御部、 D…飛翔方向、 S…微小スポット
【特許請求の範囲】
【請求項1】
飛翔中の微小物体の飛翔状態を検出し得る飛翔状態検出装置であって、
前記微小物体が衝突するターゲット部を備え、当該ターゲット部に前記微小物体が衝突することで振動が発生するように構成された振動発生部と、
その振動発生部にて発生した前記振動を電気信号に変換するように構成された圧電/電歪素子と、
を備えたことを特徴とする飛翔状態検出装置。
【請求項2】
請求項1に記載の飛翔状態検出装置であって、
単一の前記振動発生部に対して前記ターゲット部が複数設けられていることを特徴とする飛翔状態検出装置。
【請求項3】
請求項1又は2に記載の飛翔状態検出装置であって、
複数の前記圧電/電歪素子が、互いに電気回路的に接続されていることを特徴とする飛翔状態検出装置。
【請求項4】
請求項1ないし3のいずれかに記載の飛翔状態検出装置であって、
前記ターゲット部の表面には、コーティング層が形成されていることを特徴とする飛翔状態検出装置。
【請求項5】
請求項1ないし4のいずれかに記載の飛翔状態検出装置において、
前記圧電/電歪素子を駆動するための駆動電圧を発生する駆動部をさらに備えたことを特徴とする飛翔状態検出装置。
【請求項6】
請求項5に記載の飛翔状態検出装置において、
前記振動発生部の共振周波数を取得する共振周波数取得部をさらに備え、
前記駆動部は、前記共振周波数取得部によって取得された前記共振周波数に基づいて、前記圧電/電歪素子を駆動するように構成されたことを特徴とする飛翔状態検出装置。
【請求項7】
請求項6に記載の飛翔状態検出装置であって、
前記共振周波数取得部は、前記駆動部による前記駆動電圧の出力が遮断された後に、前記共振周波数を取得するように構成されたことを特徴とする飛翔状態検出装置。
【請求項8】
請求項6に記載の飛翔状態検出装置であって、
前記駆動部は、複数の前記圧電/電歪素子の一部に対して前記駆動電圧を出力するように構成され、
前記共振周波数取得部は、前記駆動部による前記駆動電圧の出力先とは異なる前記圧電/電歪素子からの前記電気信号に基づいて、前記共振周波数を取得するように構成されたことを特徴とする飛翔状態検出装置。
【請求項9】
請求項1ないし8のいずれかに記載の飛翔状態検出装置において、
前記電気信号に基づいて、前記振動発生部の振動モードを判別する振動モード判定部をさらに備えたことを特徴とする飛翔状態検出装置。
【請求項10】
請求項1ないし9のいずれかに記載の飛翔状態検出装置であって、
前記振動発生部は、長手方向を有する板状部材から構成され、
前記ターゲット部は、前記板状部材の前記長手方向における一端側に設けられ、
前記圧電/電歪素子は、前記板状部材の前記一端側と反対側の他端側の表面上に固着して設けられたことを特徴とする飛翔状態検出装置。
【請求項11】
請求項10に記載の飛翔状態検出装置であって、
前記板状部材における前記他端側の剛性が、前記一端側の剛性よりも低くなるように、当該板状部材が構成されていることを特徴とする飛翔状態検出装置。
【請求項12】
請求項10又は11に記載の飛翔状態検出装置であって、
複数の前記圧電/電歪素子は、前記板状部材の一方の表面と、当該一方の表面の裏側の他方の表面との上に固着して設けられたことを特徴とする飛翔状態検出装置。
【請求項13】
請求項1ないし12のいずれかに記載の飛翔状態検出装置において、
前記微小物体を吐出し得るように構成された微小物体吐出部と、
前記振動発生部の共振周波数に近い特定周波数で前記微小物体の吐出が行われるように、前記微小物体吐出部を制御する制御部と、
をさらに備えたことを特徴とする飛翔状態検出装置。
【請求項14】
請求項13に記載の飛翔状態検出装置であって、
前記制御部は、
前記共振周波数をf0、前記特定周波数をf1とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
を満たすような前記特定周波数で前記微小物体の吐出が行われるように、前記微小物体吐出部を制御するように構成されていることを特徴とする飛翔状態検出装置。
【請求項15】
請求項13又は14に記載の飛翔状態検出装置であって、
前記制御部は、
前記ターゲット部に前記微小物体が衝突した際に、前記振動発生部によって当該微小物体の運動エネルギーを吸収するために要する時間をT1、前記振動発生部の前記共振周波数に相当する固有周期をT0とした場合に、
T1≦0.2T0
を満たすような条件で前記微小物体の吐出が行われるように、前記微小物体吐出部を制御するように構成されていることを特徴とする飛翔状態検出装置。
【請求項16】
請求項1ないし15のいずれかに記載の飛翔状態検出装置において、
前記ターゲット部よりも前記微小物体の飛翔方向における上流側に配置されていて、当該飛翔方向と交差する平板状のアパチャープレートをさらに備え、
そのアパチャープレートには、前記微小物体が通過可能な貫通孔であるアパチャーが形成されていることを特徴とする、物体の通過検出装置。
【請求項17】
微小物体吐出部から吐出された微小物体の飛翔状態を検出する飛翔状態検出方法であって、
前記微小物体吐出部から前記微小物体を吐出させ、
吐出された前記微小物体を、ターゲット部に衝突させることで、当該ターゲット部を備えた振動発生部を振動させ、
圧電/電歪素子を用いて、前記振動発生部の振動を電気信号に変換し、
前記電気信号に基づいて、前記微小物体の飛翔状態を検出する、
ステップを含んでなる飛翔状態検出方法。
【請求項18】
請求項17に記載の飛翔状態検出方法であって、
前記微小物体を吐出させるステップは、前記振動発生部の共振周波数に近い特定周波数で前記微小物体を吐出させるステップであることを特徴とする飛翔状態検出方法。
【請求項19】
請求項18に記載の飛翔状態検出方法であって、
前記微小物体を吐出させるステップは、
前記共振周波数をf0、前記特定周波数をf1とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
を満たすような前記特定周波数で前記微小物体を吐出させるステップであることを特徴とする飛翔状態検出方法。
【請求項20】
請求項17ないし19に記載の飛翔状態検出方法であって、
前記微小物体を吐出させるステップは、
前記ターゲット部に前記微小物体が衝突した際に、前記振動発生部によって当該微小物体の運動エネルギーを吸収するために要する時間をT1、前記振動発生部の前記共振周波数に相当する固有周期をT0とした場合に、
T1≦0.2T0
を満たすような条件で前記微小物体を吐出させるステップであることを特徴とする飛翔状態検出方法。
【請求項21】
請求項17ないし20のいずれかに記載の飛翔状態検出方法であって、
前記微小物体の飛翔状態を検出するステップは、
前記電気信号に基づいて、前記振動発生部の振動モードを判別するステップを含むことを特徴とする飛翔状態検出方法。
【請求項22】
請求項21に記載の飛翔状態検出方法であって、
前記微小物体の飛翔状態を検出するステップは、
互いに電気回路的に接続された第1の圧電/電歪素子及び第2の圧電/電歪素子が出力する電気信号に基づいて、前記振動発生部の振動モードを判別するステップを含むことを特徴とする飛翔状態検出方法。
【請求項23】
請求項17ないし22のいずれかに記載の飛翔状態検出方法において、
前記振動発生部の共振周波数を取得し、
取得された前記共振周波数に基づいて、前記圧電/電歪素子を駆動する、
ステップをさらに含むことを特徴とする飛翔状態検出方法。
【請求項24】
請求項23に記載の飛翔状態検出方法であって、
前記振動発生部の共振周波数を取得するステップは、前記圧電/電歪素子を駆動するステップの終了後に行われることを特徴とする飛翔状態検出方法。
【請求項25】
請求項23に記載の飛翔状態検出方法であって、
前記圧電/電歪素子を駆動するステップは、複数の前記圧電/電歪素子の一部に対して前記駆動電圧を出力し、
前記振動発生部の共振周波数を取得するステップは、前記駆動電圧の出力先とは異なる前記圧電/電歪素子からの前記電気信号に基づいて、前記共振周波数を取得する、
ステップであることを特徴とする飛翔状態検出方法。
【請求項26】
請求項17ないし23のいずれかに記載の飛翔状態検出方法であって、
前記微小物体を吐出するステップは、前記微小物体を前記ターゲット部の所定の位置に所定の周波数で衝突させることで、前記振動発生部を所定の振動モードで振動させるように、当該微小物体を吐出するステップであることを特徴とする飛翔状態検出方法。
【特許請求の範囲】
【請求項1】
飛翔中の微小物体の飛翔状態を検出し得る飛翔状態検出装置であって、
前記微小物体が衝突するターゲット部を備え、当該ターゲット部に前記微小物体が衝突することで振動が発生するように構成された振動発生部と、
その振動発生部にて発生した前記振動を電気信号に変換するように構成された圧電/電歪素子と、
を備えたことを特徴とする飛翔状態検出装置。
【請求項2】
請求項1に記載の飛翔状態検出装置であって、
単一の前記振動発生部に対して前記ターゲット部が複数設けられていることを特徴とする飛翔状態検出装置。
【請求項3】
請求項1又は2に記載の飛翔状態検出装置であって、
複数の前記圧電/電歪素子が、互いに電気回路的に接続されていることを特徴とする飛翔状態検出装置。
【請求項4】
請求項1ないし3のいずれかに記載の飛翔状態検出装置であって、
前記ターゲット部の表面には、コーティング層が形成されていることを特徴とする飛翔状態検出装置。
【請求項5】
請求項1ないし4のいずれかに記載の飛翔状態検出装置において、
前記圧電/電歪素子を駆動するための駆動電圧を発生する駆動部をさらに備えたことを特徴とする飛翔状態検出装置。
【請求項6】
請求項5に記載の飛翔状態検出装置において、
前記振動発生部の共振周波数を取得する共振周波数取得部をさらに備え、
前記駆動部は、前記共振周波数取得部によって取得された前記共振周波数に基づいて、前記圧電/電歪素子を駆動するように構成されたことを特徴とする飛翔状態検出装置。
【請求項7】
請求項6に記載の飛翔状態検出装置であって、
前記共振周波数取得部は、前記駆動部による前記駆動電圧の出力が遮断された後に、前記共振周波数を取得するように構成されたことを特徴とする飛翔状態検出装置。
【請求項8】
請求項6に記載の飛翔状態検出装置であって、
前記駆動部は、複数の前記圧電/電歪素子の一部に対して前記駆動電圧を出力するように構成され、
前記共振周波数取得部は、前記駆動部による前記駆動電圧の出力先とは異なる前記圧電/電歪素子からの前記電気信号に基づいて、前記共振周波数を取得するように構成されたことを特徴とする飛翔状態検出装置。
【請求項9】
請求項1ないし8のいずれかに記載の飛翔状態検出装置において、
前記電気信号に基づいて、前記振動発生部の振動モードを判別する振動モード判定部をさらに備えたことを特徴とする飛翔状態検出装置。
【請求項10】
請求項1ないし9のいずれかに記載の飛翔状態検出装置であって、
前記振動発生部は、長手方向を有する板状部材から構成され、
前記ターゲット部は、前記板状部材の前記長手方向における一端側に設けられ、
前記圧電/電歪素子は、前記板状部材の前記一端側と反対側の他端側の表面上に固着して設けられたことを特徴とする飛翔状態検出装置。
【請求項11】
請求項10に記載の飛翔状態検出装置であって、
前記板状部材における前記他端側の剛性が、前記一端側の剛性よりも低くなるように、当該板状部材が構成されていることを特徴とする飛翔状態検出装置。
【請求項12】
請求項10又は11に記載の飛翔状態検出装置であって、
複数の前記圧電/電歪素子は、前記板状部材の一方の表面と、当該一方の表面の裏側の他方の表面との上に固着して設けられたことを特徴とする飛翔状態検出装置。
【請求項13】
請求項1ないし12のいずれかに記載の飛翔状態検出装置において、
前記微小物体を吐出し得るように構成された微小物体吐出部と、
前記振動発生部の共振周波数の1/n倍(nは自然数)に近い特定周波数で前記微小物体の吐出が行われるように、前記微小物体吐出部を制御する制御部と、
をさらに備えたことを特徴とする飛翔状態検出装置。
【請求項14】
請求項13に記載の飛翔状態検出装置であって、
前記制御部は、
前記共振周波数をf0、前記特定周波数をf1とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
を満たすような前記特定周波数で前記微小物体の吐出が行われるように、前記微小物体吐出部を制御するように構成されていることを特徴とする飛翔状態検出装置。
【請求項15】
請求項13又は14に記載の飛翔状態検出装置であって、
前記制御部は、
前記ターゲット部に前記微小物体が衝突した際に、前記振動発生部によって当該微小物体の運動エネルギーを吸収するために要する時間をT1、前記振動発生部の前記共振周波数に相当する固有周期をT0とした場合に、
T1≦0.2T0
を満たすような条件で前記微小物体の吐出が行われるように、前記微小物体吐出部を制御するように構成されていることを特徴とする飛翔状態検出装置。
【請求項16】
請求項1ないし15のいずれかに記載の飛翔状態検出装置において、
前記ターゲット部よりも前記微小物体の飛翔方向における上流側に配置されていて、当該飛翔方向と交差する平板状のアパチャープレートをさらに備え、
そのアパチャープレートには、前記微小物体が通過可能な貫通孔であるアパチャーが形成されていることを特徴とする、物体の通過検出装置。
【請求項17】
微小物体吐出部から吐出された微小物体の飛翔状態を検出する飛翔状態検出方法であって、
前記微小物体吐出部から前記微小物体を吐出させ、
吐出された前記微小物体を、ターゲット部に衝突させることで、当該ターゲット部を備えた振動発生部を振動させ、
圧電/電歪素子を用いて、前記振動発生部の振動を電気信号に変換し、
前記電気信号に基づいて、前記微小物体の飛翔状態を検出する、
ステップを含んでなる飛翔状態検出方法。
【請求項18】
請求項17に記載の飛翔状態検出方法であって、
前記微小物体を吐出させるステップは、前記振動発生部の共振周波数の1/n倍(nは自然数)に近い特定周波数で前記微小物体を吐出させるステップであることを特徴とする飛翔状態検出方法。
【請求項19】
請求項18に記載の飛翔状態検出方法であって、
前記微小物体を吐出させるステップは、
前記共振周波数をf0、前記特定周波数をf1とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
を満たすような前記特定周波数で前記微小物体を吐出させるステップであることを特徴とする飛翔状態検出方法。
【請求項20】
請求項17ないし19に記載の飛翔状態検出方法であって、
前記微小物体を吐出させるステップは、
前記ターゲット部に前記微小物体が衝突した際に、前記振動発生部によって当該微小物体の運動エネルギーを吸収するために要する時間をT1、前記振動発生部の前記共振周波数に相当する固有周期をT0とした場合に、
T1≦0.2T0
を満たすような条件で前記微小物体を吐出させるステップであることを特徴とする飛翔状態検出方法。
【請求項21】
請求項17ないし20のいずれかに記載の飛翔状態検出方法であって、
前記微小物体の飛翔状態を検出するステップは、
前記電気信号に基づいて、前記振動発生部の振動モードを判別するステップを含むことを特徴とする飛翔状態検出方法。
【請求項22】
請求項21に記載の飛翔状態検出方法であって、
前記微小物体の飛翔状態を検出するステップは、
互いに電気回路的に接続された第1の圧電/電歪素子及び第2の圧電/電歪素子が出力する電気信号に基づいて、前記振動発生部の振動モードを判別するステップを含むことを特徴とする飛翔状態検出方法。
【請求項23】
請求項17ないし22のいずれかに記載の飛翔状態検出方法において、
前記振動発生部の共振周波数を取得し、
取得された前記共振周波数に基づいて、前記圧電/電歪素子を駆動する、
ステップをさらに含むことを特徴とする飛翔状態検出方法。
【請求項24】
請求項23に記載の飛翔状態検出方法であって、
前記振動発生部の共振周波数を取得するステップは、前記圧電/電歪素子を駆動するステップの終了後に行われることを特徴とする飛翔状態検出方法。
【請求項25】
請求項23に記載の飛翔状態検出方法であって、
前記圧電/電歪素子を駆動するステップは、複数の前記圧電/電歪素子の一部に対して前記駆動電圧を出力し、
前記振動発生部の共振周波数を取得するステップは、前記駆動電圧の出力先とは異なる前記圧電/電歪素子からの前記電気信号に基づいて、前記共振周波数を取得する、
ステップであることを特徴とする飛翔状態検出方法。
【請求項26】
請求項17ないし23のいずれかに記載の飛翔状態検出方法であって、
前記微小物体を吐出するステップは、前記微小物体を前記ターゲット部の所定の位置に所定の周波数で衝突させることで、前記振動発生部を所定の振動モードで振動させるように、当該微小物体を吐出するステップであることを特徴とする飛翔状態検出方法。
【請求項1】
飛翔中の微小物体の飛翔状態を検出し得る飛翔状態検出装置であって、
前記微小物体が衝突するターゲット部を備え、当該ターゲット部に前記微小物体が衝突することで振動が発生するように構成された振動発生部と、
その振動発生部にて発生した前記振動を電気信号に変換するように構成された圧電/電歪素子と、
を備えたことを特徴とする飛翔状態検出装置。
【請求項2】
請求項1に記載の飛翔状態検出装置であって、
単一の前記振動発生部に対して前記ターゲット部が複数設けられていることを特徴とする飛翔状態検出装置。
【請求項3】
請求項1又は2に記載の飛翔状態検出装置であって、
複数の前記圧電/電歪素子が、互いに電気回路的に接続されていることを特徴とする飛翔状態検出装置。
【請求項4】
請求項1ないし3のいずれかに記載の飛翔状態検出装置であって、
前記ターゲット部の表面には、コーティング層が形成されていることを特徴とする飛翔状態検出装置。
【請求項5】
請求項1ないし4のいずれかに記載の飛翔状態検出装置において、
前記圧電/電歪素子を駆動するための駆動電圧を発生する駆動部をさらに備えたことを特徴とする飛翔状態検出装置。
【請求項6】
請求項5に記載の飛翔状態検出装置において、
前記振動発生部の共振周波数を取得する共振周波数取得部をさらに備え、
前記駆動部は、前記共振周波数取得部によって取得された前記共振周波数に基づいて、前記圧電/電歪素子を駆動するように構成されたことを特徴とする飛翔状態検出装置。
【請求項7】
請求項6に記載の飛翔状態検出装置であって、
前記共振周波数取得部は、前記駆動部による前記駆動電圧の出力が遮断された後に、前記共振周波数を取得するように構成されたことを特徴とする飛翔状態検出装置。
【請求項8】
請求項6に記載の飛翔状態検出装置であって、
前記駆動部は、複数の前記圧電/電歪素子の一部に対して前記駆動電圧を出力するように構成され、
前記共振周波数取得部は、前記駆動部による前記駆動電圧の出力先とは異なる前記圧電/電歪素子からの前記電気信号に基づいて、前記共振周波数を取得するように構成されたことを特徴とする飛翔状態検出装置。
【請求項9】
請求項1ないし8のいずれかに記載の飛翔状態検出装置において、
前記電気信号に基づいて、前記振動発生部の振動モードを判別する振動モード判定部をさらに備えたことを特徴とする飛翔状態検出装置。
【請求項10】
請求項1ないし9のいずれかに記載の飛翔状態検出装置であって、
前記振動発生部は、長手方向を有する板状部材から構成され、
前記ターゲット部は、前記板状部材の前記長手方向における一端側に設けられ、
前記圧電/電歪素子は、前記板状部材の前記一端側と反対側の他端側の表面上に固着して設けられたことを特徴とする飛翔状態検出装置。
【請求項11】
請求項10に記載の飛翔状態検出装置であって、
前記板状部材における前記他端側の剛性が、前記一端側の剛性よりも低くなるように、当該板状部材が構成されていることを特徴とする飛翔状態検出装置。
【請求項12】
請求項10又は11に記載の飛翔状態検出装置であって、
複数の前記圧電/電歪素子は、前記板状部材の一方の表面と、当該一方の表面の裏側の他方の表面との上に固着して設けられたことを特徴とする飛翔状態検出装置。
【請求項13】
請求項1ないし12のいずれかに記載の飛翔状態検出装置において、
前記微小物体を吐出し得るように構成された微小物体吐出部と、
前記振動発生部の共振周波数に近い特定周波数で前記微小物体の吐出が行われるように、前記微小物体吐出部を制御する制御部と、
をさらに備えたことを特徴とする飛翔状態検出装置。
【請求項14】
請求項13に記載の飛翔状態検出装置であって、
前記制御部は、
前記共振周波数をf0、前記特定周波数をf1とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
を満たすような前記特定周波数で前記微小物体の吐出が行われるように、前記微小物体吐出部を制御するように構成されていることを特徴とする飛翔状態検出装置。
【請求項15】
請求項13又は14に記載の飛翔状態検出装置であって、
前記制御部は、
前記ターゲット部に前記微小物体が衝突した際に、前記振動発生部によって当該微小物体の運動エネルギーを吸収するために要する時間をT1、前記振動発生部の前記共振周波数に相当する固有周期をT0とした場合に、
T1≦0.2T0
を満たすような条件で前記微小物体の吐出が行われるように、前記微小物体吐出部を制御するように構成されていることを特徴とする飛翔状態検出装置。
【請求項16】
請求項1ないし15のいずれかに記載の飛翔状態検出装置において、
前記ターゲット部よりも前記微小物体の飛翔方向における上流側に配置されていて、当該飛翔方向と交差する平板状のアパチャープレートをさらに備え、
そのアパチャープレートには、前記微小物体が通過可能な貫通孔であるアパチャーが形成されていることを特徴とする、物体の通過検出装置。
【請求項17】
微小物体吐出部から吐出された微小物体の飛翔状態を検出する飛翔状態検出方法であって、
前記微小物体吐出部から前記微小物体を吐出させ、
吐出された前記微小物体を、ターゲット部に衝突させることで、当該ターゲット部を備えた振動発生部を振動させ、
圧電/電歪素子を用いて、前記振動発生部の振動を電気信号に変換し、
前記電気信号に基づいて、前記微小物体の飛翔状態を検出する、
ステップを含んでなる飛翔状態検出方法。
【請求項18】
請求項17に記載の飛翔状態検出方法であって、
前記微小物体を吐出させるステップは、前記振動発生部の共振周波数に近い特定周波数で前記微小物体を吐出させるステップであることを特徴とする飛翔状態検出方法。
【請求項19】
請求項18に記載の飛翔状態検出方法であって、
前記微小物体を吐出させるステップは、
前記共振周波数をf0、前記特定周波数をf1とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
を満たすような前記特定周波数で前記微小物体を吐出させるステップであることを特徴とする飛翔状態検出方法。
【請求項20】
請求項17ないし19に記載の飛翔状態検出方法であって、
前記微小物体を吐出させるステップは、
前記ターゲット部に前記微小物体が衝突した際に、前記振動発生部によって当該微小物体の運動エネルギーを吸収するために要する時間をT1、前記振動発生部の前記共振周波数に相当する固有周期をT0とした場合に、
T1≦0.2T0
を満たすような条件で前記微小物体を吐出させるステップであることを特徴とする飛翔状態検出方法。
【請求項21】
請求項17ないし20のいずれかに記載の飛翔状態検出方法であって、
前記微小物体の飛翔状態を検出するステップは、
前記電気信号に基づいて、前記振動発生部の振動モードを判別するステップを含むことを特徴とする飛翔状態検出方法。
【請求項22】
請求項21に記載の飛翔状態検出方法であって、
前記微小物体の飛翔状態を検出するステップは、
互いに電気回路的に接続された第1の圧電/電歪素子及び第2の圧電/電歪素子が出力する電気信号に基づいて、前記振動発生部の振動モードを判別するステップを含むことを特徴とする飛翔状態検出方法。
【請求項23】
請求項17ないし22のいずれかに記載の飛翔状態検出方法において、
前記振動発生部の共振周波数を取得し、
取得された前記共振周波数に基づいて、前記圧電/電歪素子を駆動する、
ステップをさらに含むことを特徴とする飛翔状態検出方法。
【請求項24】
請求項23に記載の飛翔状態検出方法であって、
前記振動発生部の共振周波数を取得するステップは、前記圧電/電歪素子を駆動するステップの終了後に行われることを特徴とする飛翔状態検出方法。
【請求項25】
請求項23に記載の飛翔状態検出方法であって、
前記圧電/電歪素子を駆動するステップは、複数の前記圧電/電歪素子の一部に対して前記駆動電圧を出力し、
前記振動発生部の共振周波数を取得するステップは、前記駆動電圧の出力先とは異なる前記圧電/電歪素子からの前記電気信号に基づいて、前記共振周波数を取得する、
ステップであることを特徴とする飛翔状態検出方法。
【請求項26】
請求項17ないし23のいずれかに記載の飛翔状態検出方法であって、
前記微小物体を吐出するステップは、前記微小物体を前記ターゲット部の所定の位置に所定の周波数で衝突させることで、前記振動発生部を所定の振動モードで振動させるように、当該微小物体を吐出するステップであることを特徴とする飛翔状態検出方法。
【特許請求の範囲】
【請求項1】
飛翔中の微小物体の飛翔状態を検出し得る飛翔状態検出装置であって、
前記微小物体が衝突するターゲット部を備え、当該ターゲット部に前記微小物体が衝突することで振動が発生するように構成された振動発生部と、
その振動発生部にて発生した前記振動を電気信号に変換するように構成された圧電/電歪素子と、
を備えたことを特徴とする飛翔状態検出装置。
【請求項2】
請求項1に記載の飛翔状態検出装置であって、
単一の前記振動発生部に対して前記ターゲット部が複数設けられていることを特徴とする飛翔状態検出装置。
【請求項3】
請求項1又は2に記載の飛翔状態検出装置であって、
複数の前記圧電/電歪素子が、互いに電気回路的に接続されていることを特徴とする飛翔状態検出装置。
【請求項4】
請求項1ないし3のいずれかに記載の飛翔状態検出装置であって、
前記ターゲット部の表面には、コーティング層が形成されていることを特徴とする飛翔状態検出装置。
【請求項5】
請求項1ないし4のいずれかに記載の飛翔状態検出装置において、
前記圧電/電歪素子を駆動するための駆動電圧を発生する駆動部をさらに備えたことを特徴とする飛翔状態検出装置。
【請求項6】
請求項5に記載の飛翔状態検出装置において、
前記振動発生部の共振周波数を取得する共振周波数取得部をさらに備え、
前記駆動部は、前記共振周波数取得部によって取得された前記共振周波数に基づいて、前記圧電/電歪素子を駆動するように構成されたことを特徴とする飛翔状態検出装置。
【請求項7】
請求項6に記載の飛翔状態検出装置であって、
前記共振周波数取得部は、前記駆動部による前記駆動電圧の出力が遮断された後に、前記共振周波数を取得するように構成されたことを特徴とする飛翔状態検出装置。
【請求項8】
請求項6に記載の飛翔状態検出装置であって、
前記駆動部は、複数の前記圧電/電歪素子の一部に対して前記駆動電圧を出力するように構成され、
前記共振周波数取得部は、前記駆動部による前記駆動電圧の出力先とは異なる前記圧電/電歪素子からの前記電気信号に基づいて、前記共振周波数を取得するように構成されたことを特徴とする飛翔状態検出装置。
【請求項9】
請求項1ないし8のいずれかに記載の飛翔状態検出装置において、
前記電気信号に基づいて、前記振動発生部の振動モードを判別する振動モード判定部をさらに備えたことを特徴とする飛翔状態検出装置。
【請求項10】
請求項1ないし9のいずれかに記載の飛翔状態検出装置であって、
前記振動発生部は、長手方向を有する板状部材から構成され、
前記ターゲット部は、前記板状部材の前記長手方向における一端側に設けられ、
前記圧電/電歪素子は、前記板状部材の前記一端側と反対側の他端側の表面上に固着して設けられたことを特徴とする飛翔状態検出装置。
【請求項11】
請求項10に記載の飛翔状態検出装置であって、
前記板状部材における前記他端側の剛性が、前記一端側の剛性よりも低くなるように、当該板状部材が構成されていることを特徴とする飛翔状態検出装置。
【請求項12】
請求項10又は11に記載の飛翔状態検出装置であって、
複数の前記圧電/電歪素子は、前記板状部材の一方の表面と、当該一方の表面の裏側の他方の表面との上に固着して設けられたことを特徴とする飛翔状態検出装置。
【請求項13】
請求項1ないし12のいずれかに記載の飛翔状態検出装置において、
前記微小物体を吐出し得るように構成された微小物体吐出部と、
前記振動発生部の共振周波数の1/n倍(nは自然数)に近い特定周波数で前記微小物体の吐出が行われるように、前記微小物体吐出部を制御する制御部と、
をさらに備えたことを特徴とする飛翔状態検出装置。
【請求項14】
請求項13に記載の飛翔状態検出装置であって、
前記制御部は、
前記共振周波数をf0、前記特定周波数をf1とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
を満たすような前記特定周波数で前記微小物体の吐出が行われるように、前記微小物体吐出部を制御するように構成されていることを特徴とする飛翔状態検出装置。
【請求項15】
請求項13又は14に記載の飛翔状態検出装置であって、
前記制御部は、
前記ターゲット部に前記微小物体が衝突した際に、前記振動発生部によって当該微小物体の運動エネルギーを吸収するために要する時間をT1、前記振動発生部の前記共振周波数に相当する固有周期をT0とした場合に、
T1≦0.2T0
を満たすような条件で前記微小物体の吐出が行われるように、前記微小物体吐出部を制御するように構成されていることを特徴とする飛翔状態検出装置。
【請求項16】
請求項1ないし15のいずれかに記載の飛翔状態検出装置において、
前記ターゲット部よりも前記微小物体の飛翔方向における上流側に配置されていて、当該飛翔方向と交差する平板状のアパチャープレートをさらに備え、
そのアパチャープレートには、前記微小物体が通過可能な貫通孔であるアパチャーが形成されていることを特徴とする、物体の通過検出装置。
【請求項17】
微小物体吐出部から吐出された微小物体の飛翔状態を検出する飛翔状態検出方法であって、
前記微小物体吐出部から前記微小物体を吐出させ、
吐出された前記微小物体を、ターゲット部に衝突させることで、当該ターゲット部を備えた振動発生部を振動させ、
圧電/電歪素子を用いて、前記振動発生部の振動を電気信号に変換し、
前記電気信号に基づいて、前記微小物体の飛翔状態を検出する、
ステップを含んでなる飛翔状態検出方法。
【請求項18】
請求項17に記載の飛翔状態検出方法であって、
前記微小物体を吐出させるステップは、前記振動発生部の共振周波数の1/n倍(nは自然数)に近い特定周波数で前記微小物体を吐出させるステップであることを特徴とする飛翔状態検出方法。
【請求項19】
請求項18に記載の飛翔状態検出方法であって、
前記微小物体を吐出させるステップは、
前記共振周波数をf0、前記特定周波数をf1とした場合に、
(n−0.2)f1≦f0≦(n+0.25)f1[nは自然数]
を満たすような前記特定周波数で前記微小物体を吐出させるステップであることを特徴とする飛翔状態検出方法。
【請求項20】
請求項17ないし19に記載の飛翔状態検出方法であって、
前記微小物体を吐出させるステップは、
前記ターゲット部に前記微小物体が衝突した際に、前記振動発生部によって当該微小物体の運動エネルギーを吸収するために要する時間をT1、前記振動発生部の前記共振周波数に相当する固有周期をT0とした場合に、
T1≦0.2T0
を満たすような条件で前記微小物体を吐出させるステップであることを特徴とする飛翔状態検出方法。
【請求項21】
請求項17ないし20のいずれかに記載の飛翔状態検出方法であって、
前記微小物体の飛翔状態を検出するステップは、
前記電気信号に基づいて、前記振動発生部の振動モードを判別するステップを含むことを特徴とする飛翔状態検出方法。
【請求項22】
請求項21に記載の飛翔状態検出方法であって、
前記微小物体の飛翔状態を検出するステップは、
互いに電気回路的に接続された第1の圧電/電歪素子及び第2の圧電/電歪素子が出力する電気信号に基づいて、前記振動発生部の振動モードを判別するステップを含むことを特徴とする飛翔状態検出方法。
【請求項23】
請求項17ないし22のいずれかに記載の飛翔状態検出方法において、
前記振動発生部の共振周波数を取得し、
取得された前記共振周波数に基づいて、前記圧電/電歪素子を駆動する、
ステップをさらに含むことを特徴とする飛翔状態検出方法。
【請求項24】
請求項23に記載の飛翔状態検出方法であって、
前記振動発生部の共振周波数を取得するステップは、前記圧電/電歪素子を駆動するステップの終了後に行われることを特徴とする飛翔状態検出方法。
【請求項25】
請求項23に記載の飛翔状態検出方法であって、
前記圧電/電歪素子を駆動するステップは、複数の前記圧電/電歪素子の一部に対して前記駆動電圧を出力し、
前記振動発生部の共振周波数を取得するステップは、前記駆動電圧の出力先とは異なる前記圧電/電歪素子からの前記電気信号に基づいて、前記共振周波数を取得する、
ステップであることを特徴とする飛翔状態検出方法。
【請求項26】
請求項17ないし23のいずれかに記載の飛翔状態検出方法であって、
前記微小物体を吐出するステップは、前記微小物体を前記ターゲット部の所定の位置に所定の周波数で衝突させることで、前記振動発生部を所定の振動モードで振動させるように、当該微小物体を吐出するステップであることを特徴とする飛翔状態検出方法。
【図1】


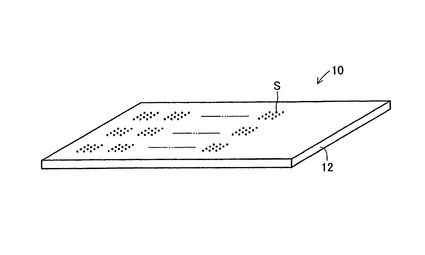
【図2】
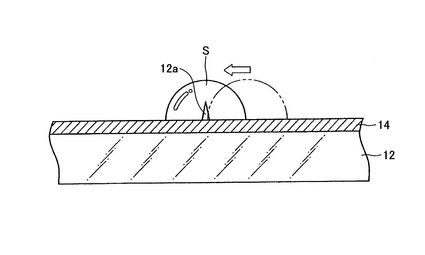
【図3】
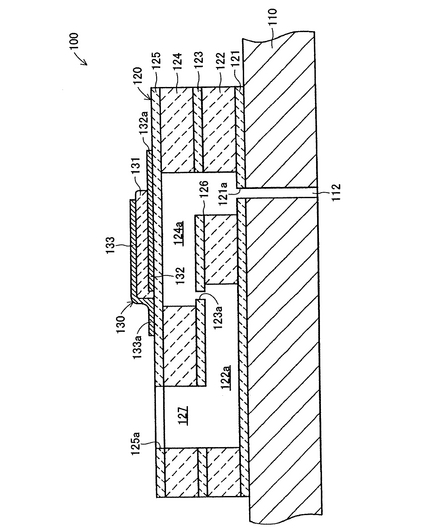
【図4】
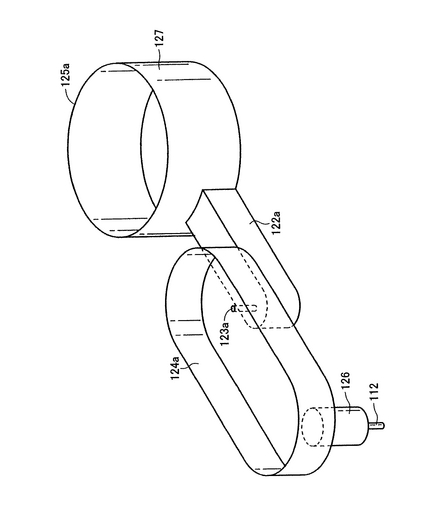
【図5】
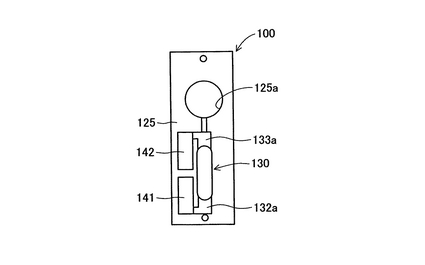
【図6】
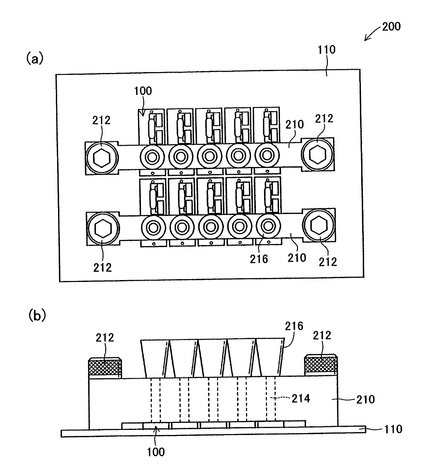
【図7】
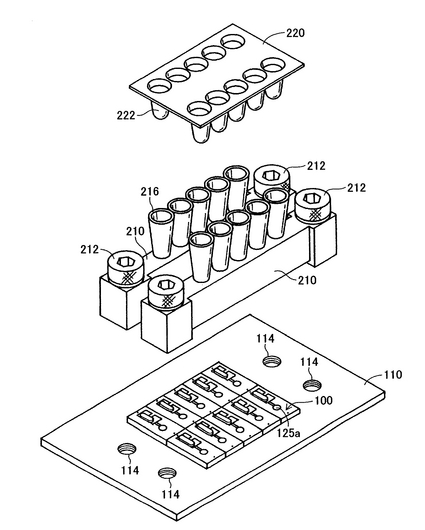
【図8】
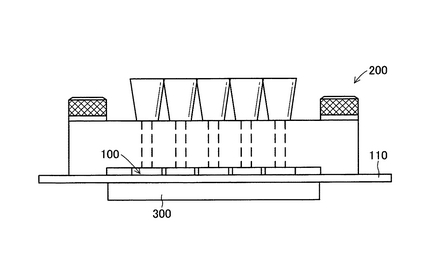
【図9】
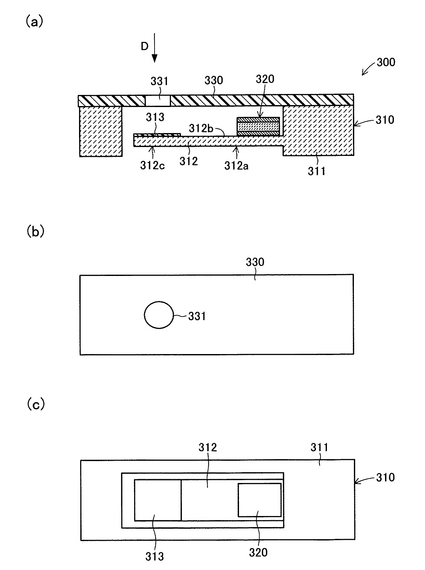
【図10】
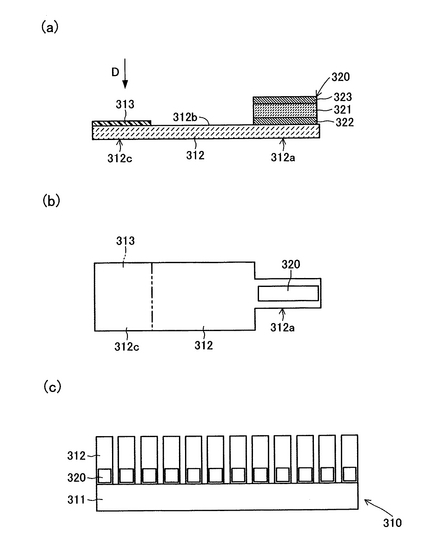
【図11】
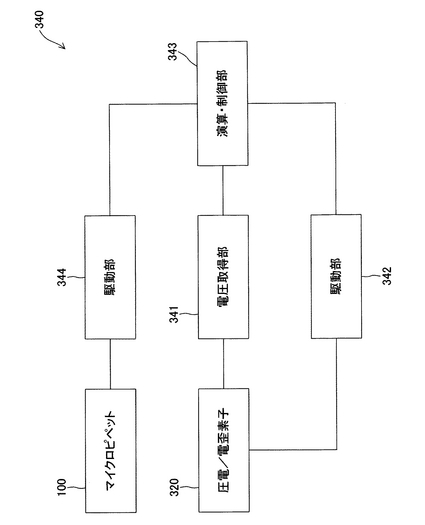
【図12】
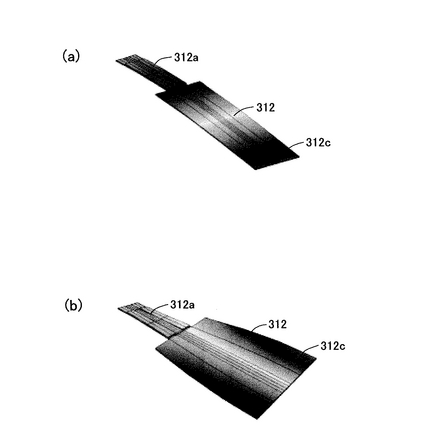
【図13】
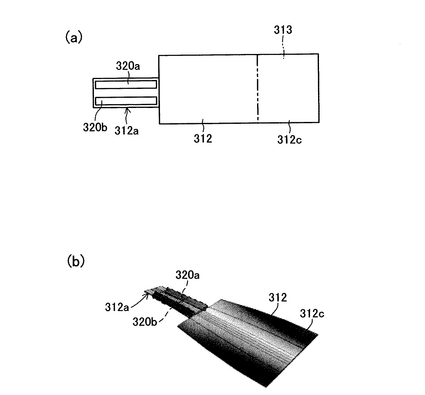
【図14】
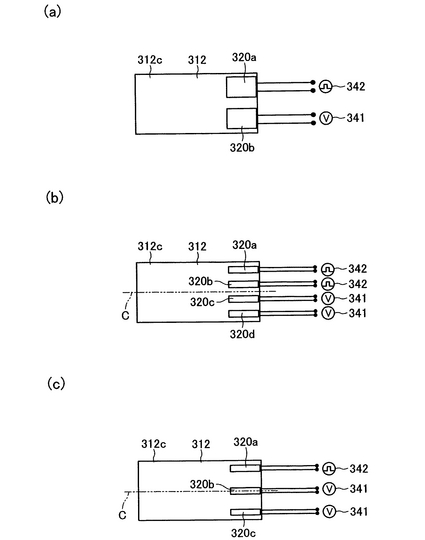
【図15】
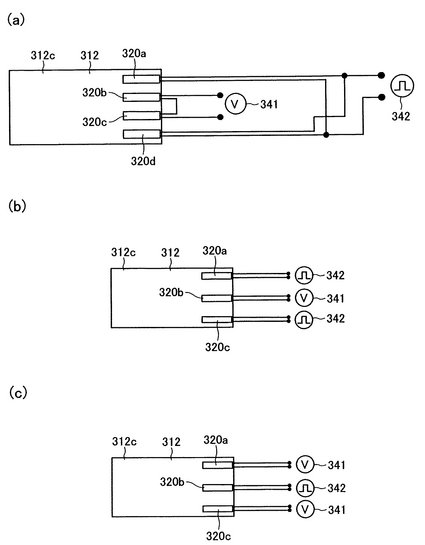
【図16】
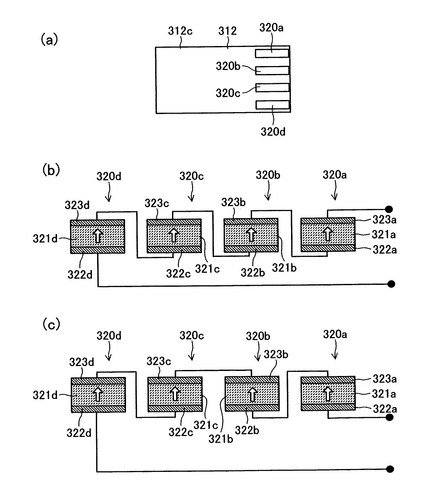
【図17】
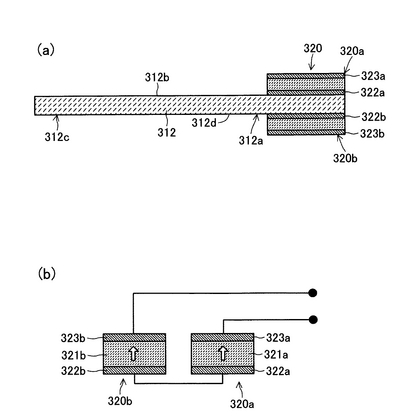
【図18】
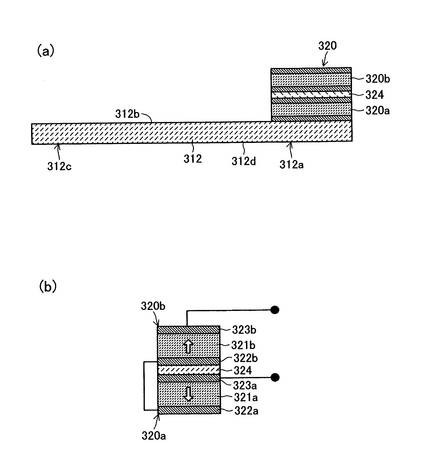
【図19】
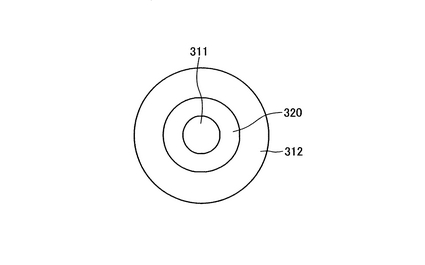
【図20】
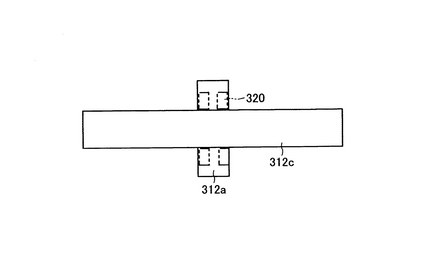
【図21】
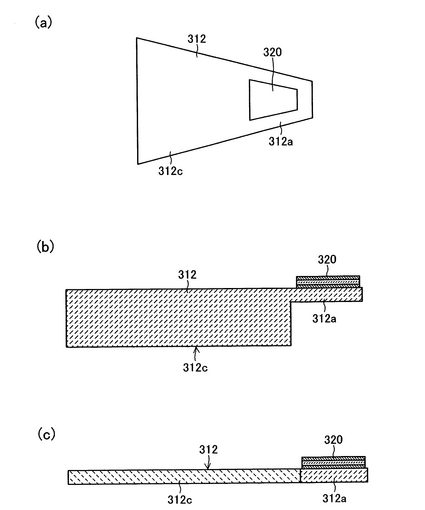
【図22】
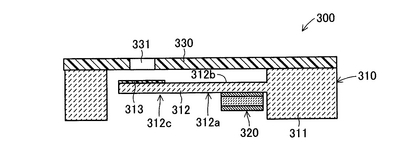
【図23】
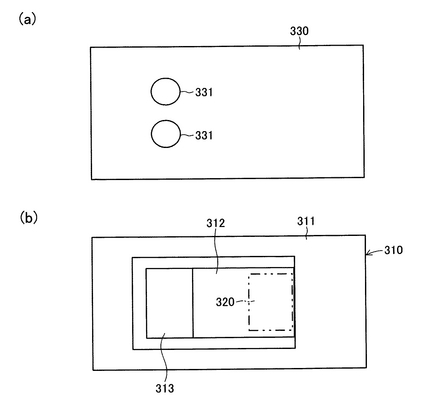
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2006−337095(P2006−337095A)
【公開日】平成18年12月14日(2006.12.14)
【国際特許分類】
【出願番号】特願2005−159799(P2005−159799)
【出願日】平成17年5月31日(2005.5.31)
【出願人】(000004064)日本碍子株式会社 (2,325)
【Fターム(参考)】
【公開日】平成18年12月14日(2006.12.14)
【国際特許分類】
【出願日】平成17年5月31日(2005.5.31)
【出願人】(000004064)日本碍子株式会社 (2,325)
【Fターム(参考)】
[ Back to top ]