
微生物の自動検出装置
本発明は,試料中の生物活性物質を迅速かつ非侵襲的に検出するための検出方法及び自動検出装置を提供する。自動検出装置は,試料容器の自動装填,自動搬送及び/又は自動取り外しを行う手段を含み,生物学的な試料及び培養媒体を収めた検出容器(バイアルボトル等)を受け入れる検出システムを更に含む。検出システムは,加熱源,保持構造又は保持ラック,及び/又は検出ユニットを含む。この検出ユニットは,試料容器をモニタし又は検査することにより,その容器が容器内部における生物活性物質の存在について陽性か否かを検出するものである。他の実施形態に係る自動検出装置は,システム内の試料容器について走査,読取,撮像及び計量を行うためのバーコードリーダ,スキャナ,カメラ及び/又は計量ステーションを含む。

【発明の詳細な説明】
【技術分野】
【0001】
[関連発明の相互参照]
本願は,(1) 2009年 5月15日付の米国特許仮出願第61/216339号(発明の名称「迅速かつ非侵襲的な血液培養検出システムと,微生物の侵襲的な分離及び特徴付けシステムとの統合システム」);(2) 2009年 9月30日付の米国特許仮出願第61/277862号(発明の名称「微生物検出装置用の自動装填機構」);及び (3) 2010年 2月 8日付の米国特許仮出願第61/337597号(発明の名称「微生物の自動検出装置」)の優先権を主張するものである。
【0002】
本発明は,生物学的サンプル等の試料中における微生物又は生物活性物質の存在を検出するための自動システムに関するものである。この自動システムは,培養ボトル等の試料容器を処理するための既存の検出システムを基盤として,その改良を図るものである。
【背景技術】
【0003】
生物学的流体中における病原性微生物の検出は,特に敗血症の場合には最短可能時間内に実行する必要がある。敗血症は,医師が広範な抗生物質を利用できるにも拘らず,致死率が依然として高いからである。患者の体液,特に血液中における微生物等の生物活性物質の存在は,通常は血液培養ボトルを使用して検出する。この場合,培養媒体を収めた減菌ボトル内に少量の血液を,ゴム製隔膜を通して注入し,そのボトル内において37℃の温度下で培養を行いながら微生物増殖をモニタする。
【0004】
生物学的試料中における微生物の増殖を検出する装置は,米国の国内市場で販売されている。そのような装置の一例は,本出願人(bioMerieux Inc.)の製造販売に係るBacT/ALERT3D装置(商標)であり,同装置は,例えば患者から採取した血液試料を収めた血液培養ボトルを受け入れるものである。この装置においては,ボトル内で培養を行い,培養中のボトルを,培養装置における光学的検出ユニットとしてボトル内に組み込まれた比色センサにより周期的に検査して,ボトル内で微生物が増殖しているか否かを検出する。光学的検出ユニット,ボトル及びセンサに関する先行技術としては,米国特許第4945060号,第5094955号,第5162229号,第5164796号,第5217876号,第5795773号及び第5856175号が挙げられ,これら特許の開示全体を参照により組み込むものとする。また,生物学的試料中における微生物の検出に関する先行技術としては,米国特許第5770394号,第5518923号,第5498543号,第5432061号,第5371016号,第5397709号,第 5344417号,第5374264号,第6709857号及び第7211430号が挙げられ,これら特許の開示全体も参照により組み込むものとする。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第4945060号明細書
【特許文献2】米国特許第5094955号明細書
【特許文献3】米国特許第5162229号明細書
【特許文献4】米国特許第5164796号明細書
【特許文献5】米国特許第5217876号明細書
【特許文献6】米国特許第5795773号明細書
【特許文献7】米国特許第5856175号明細書
【特許文献8】米国特許第5770394号明細書
【特許文献9】米国特許第5518923号明細書
【特許文献10】米国特許第5498543号明細書
【特許文献11】米国特許第5432061号明細書
【特許文献12】米国特許第5371016号明細書
【特許文献13】米国特許第5397709号明細書
【特許文献14】米国特許第5344417号明細書
【特許文献15】米国特許第5374264号明細書
【特許文献16】米国特許第6709857号明細書
【特許文献17】米国特許第7211430号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
血液サンプル中の生物活性物質を検出し,かつ,検出結果を臨床医に報告するに要する時間を短縮することができれば,実質的又は潜在的な救命を図ることができ,患者にとっての臨床的な利点が達成される。このようなニーズに適合するシステムは,従来技術では未だ提案されていない。本発明に係る装置は,血液等の生物学的試料中における生物活性物質を迅速に検出可能とするものである。
【課題を解決するための手段】
【0007】
本発明に係るシステム及び方法は,生物活性物質の存在に関して陽性である試料(すなわち,生物学的試料)を含む容器を検出するように作動する検出システムを組み合わせるものである。本発明に係るシステム及び方法は,(a) 検査室内での人的作業及び人為的エラーを減らし,(b) 試料のトラッキング及びトレーサビリティや情報管理機能を向上し,(c) 検査室における自動システムとのインターフェースを提供し,(d) ワークフロー及びエルゴノミクスを向上し,(e) 臨床的に関連する情報を提供し;(f) 検査結果をより迅速に提示できるものである。
【0008】
本発明により達成される更なる利点及び効果は,以下に詳述するとおりである。
【0009】
本発明は,試料容器内に収められた試料中における生物活性物質(例えば微生物)の存在を自動的に検出するため自動検出システム及び装置構造を提供するものである。一実施形態において,自動検出装置は,試料に含まれており又は含まれるものと疑われる生物活性物質の増殖を検出するための自動培養装置であり,試料は培養ボトル等の試料容器内で培養される。
【0010】
自動検出システムは,培養媒体と,微生物を含むものと疑われる試料(すなわち血液サンプル)を収めた試料容器(すなわち培養ボトル)を受ける。検出システムは,ハウジング,微生物増殖を促進し,又は増強するために試料容器を保持し,及び/又は撹拌するための保持構造,及び/又は撹拌アセンブリを備え,更に,エンクロージャ又は培養チャンバを加熱するための加熱要素を任意的に備えることができる。自動検出システムは,容器が試料中の生物活性物質の存在に関して陽性か否かを検出する少なくとも1つの検出ユニットを含むことができる。更に,検出ユニットは,米国特許第4945060号,第5094955号,第5162229号,第5164796号,第5217876号,第5795773号及び第5856175号の特徴を備えることができ,試料中における生物活性物質の存在を検出するための他の技術を採用することもできる。ここに,生物活性物質の存在が検出された試料容器(例えばボトル)は,「陽性」と判定する。
【0011】
一実施形態において,本発明は,試料中の微生物を迅速かつ非侵襲的に検出するために,以下の構成要素 (a)〜(f) の少なくとも1つを含む自動検出装置を提供する:(a) 試料容器内に存在する可能性のある微生物を培養するための培養媒体を収める内部チャンバを有する密封可能な試料容器;(b) 微生物増殖を促進し,及び/又は増強するための内部チャンバ(例えば,培養チャンバ)を包囲するハウジング;(c) 容器を保持するための複数のウェルを備え,微生物の増殖を促進し,及び/又は増強するように試料容器を撹拌するためにハウジング内に配置された撹拌アセンブリ(例えば保持・撹拌ラック)を任意的に備える保持構造又は保持ラック;(d) 試料容器を少なくとも1つの容器ワークフローステーションまで移動させるための容器ロケータ手段;(e) 試料容器を内部チャンバ内に自動装填するための自動装填機構;(f) 入口位置から保持構造まで試料容器を自動搬送するため,及び/又は試料容器をハウジング内で自動搬送するためにハウジング内に配置された自動搬送機構; (g) 試料容器内における微生物増殖をモニタし,及び/又は検出するためにハウジング内に配置された検出ユニット。
【0012】
他の実施形態において,本発明は,自動検出装置における微生物増殖を検出するために,以下のステップ (a)〜(f) の少なくとも1つを備える方法を提供する:(a) 微生物の増殖を促進し,及び/又は増強するための培養媒体を収めた試料容器を準備する;(b) 微生物の存在を検査すべき試料を,試料容器に接種する;(c) 微生物増殖を検出するための自動検出装置として,微生物増殖を促進し,及び/又は増強するための培養チャンバを包囲するハウジングと,該ハウジング内に位置する保持構造とを備え,該保持構造が,少なくとも1つの容器を保持するための複数のウェル,自動検出装置内に試料容器を自動装填するための自動装填機構と,試料容器を少なくとも1つの容器ワークフローステーションまで移動させるための容器ロケータ装置と,ハウジング内の試料容器を保持構造まで自動搬送するための自動搬送機構,試料容器内における微生物増殖の副産物を検出するための検出ユニットを備える自動検出装置を準備する;(d) 接種された試料容器を,自動装填機構により検出システム内に装填する;(e) 自動搬送機構により試料容器を,検出システム内に位置する保持構造まで搬送する;(f) 培養チャンバ内の試料容器で培養する;及び/又は (g) 微生物増殖の副産物の少なくとも1つを検出するために試料容器を周期的にモニタし,微生物増殖の少なくとも1つの副産物が検出された場合にその試料容器を,微生物増殖に関して陽性と判定する。
【0013】
更に他の実施形態において,自動検出装置は,試料容器における測定又は読み取りを行うことにより,容器の種類,容器ロット番号,容器使用期限,患者情報,試料種類,検査種類,充填レベル,重量測定値等の情報を提供するための少なくとも1つのワークフローステーションを含むことができる。例えば,自動検出装置は以下のステーションの少なくとも1つを含むことができる:(1) バーコード読み取りステーション,(2) 容器走査ステーション,(3) 容器撮像ステーション,(4) 容器計量ステーション,(5) 容器収容ステーション,及び/又は (6) 容器搬送ステーション。この実施形態において,自動検出装置は,試料容器を検出装置における様々なステーション間で移動させ,及び/又は位置決めする容器管理装置又は容器ロケータ装置を更に含むことができる。
【0014】
更に他の実施形態において,検出装置は,保持構造における容器を保持するための保持機構を更に備えることができ,該保持機構は,以下の構成要素 (a)〜(c) を備えている:(a) 少なくとも1つの容器を保持するための少なくとも1つの保持ウェル;(b) 保持ウェルに隣接して配置された傾斜コイルばね;及び (c) 傾斜コイルばねに隣接して配置され,傾斜コイルばねを保持ウェルに隣接するように保持するためのV溝を有する保持プレート。
【0015】
他の実施形態において,本発明は,試料を保管及び/又は検査するために,以下の構成要素 (a)〜(c) を備える保管/検査装置を提供する:(a) 試料を収めた試料容器;(b) 内部チャンバを包囲するハウジング;及び (c) 少なくとも1つの試料容器を保持するための複数の受入ウェルを備える容器ロケータ装置。
【0016】
更に他の実施形態において,本発明は,試料中の微生物増殖の迅速で非侵襲的に検出するために,以下の構成要素 (a)〜(d) を備える自動検出装置を提供する:(a) 試料中に存在する可能性のある微生物を培養するために培養媒体を収める内部チャンバを有する密閉可能な試料容器;(b) 内部チャンバを包囲するハウジング;(c) 試料容器を受け入れるための少なくとも1つのロケータウェルを備え,試料容器を内部チャンバ内における少なくとも1つのワークステーションまで移動させるための試料容器ロケータ装置;及び (d) 試料容器内における微生物増殖を検出するために内部チャンバ内に配置した検出手段。
【0017】
更に他の実施形態において,本発明は,保管/検査装置内で少なくとも1つの容器を自動的に管理するために,以下のステップ (a)〜(c) を備える方法を提供する:(a) 少なくとも1つの容器を準備する;(b) 入口位置を備え,内部チャンバを包囲するハウジングと,試料容器を保持するための複数のロケータウェルを備え,少なくとも1つの試料容器を内部チャンバ内における少なくとも1つのワークフローステーションまで移動させるための容器ロケータ装置とを備える保管/検査装置を準備する;(c) 少なくとも1つの試料容器について少なくとも1つの測定又は読み取りを行うように,試料容器を少なくとも1つのワークステーションまで移動させる。
【0018】
本発明の様々な観点について,添付図面に沿って後述する様々な実施形態についての詳細説明により更に明確にする。
【図面の簡単な説明】
【0019】
【図1】試料中における生物活性物質を迅速かつ非侵襲的に検出するための自動システムの斜視図である。図示のように,システムは自動装填機構を含む。
【図2】図1の検出システムにおける自動装填機構を拡大して示す斜視図である。
【図3】図1の検出システムにおける自動装填機構と,生物活性物質の存在について陰性と判定された容器のための廃棄物容器を明示するために引き出した引出しを示す斜視図である。
【図4】図1〜3の検出システムにより処理された試料容器を示す側面図である。検出容器は種々の形状であり得るが,一実施形態では血液培養ボトルである。
【図5A】図1の検出システムの一実施形態を示す側面図である。
【図5B】図5Aに示す検出システムの斜視図であり,図4に示す複数の容器を保持するための内部チャンバ及びラックを示すように上下のドアを開放して示す斜視図である。
【図6】図5A及び5Bに示す搬送機構における水平及び垂直支持レールと,搬送機構を1以上の軸に対して回転操作可能にする第1及び第2回転機構とを示す斜視図である。
【図7A】図5A,5Bにおけるロボット頭部及び垂直支持レールを示す斜視図である。図7Aに示すように,ロボット頭部は垂直方向に変位し,ロボット頭部内に保持される試用容器も垂直方向に変位するように構成される。
【図7B】図5A,5Bにおけるロボット頭部及び垂直支持レールを異なる位置で示す斜視図である。図7Bに示すように,ロボット頭部は水平方向に変位し,ロボット頭部内に保持される容器も水平方向に変異するように構成される。
【図8A】図5A及び5Bにおけるロボット頭部の保持チャンバ内に試料容器を装填する際の経時変化図である。図8Aは,容器の頂部又はキャップを把握機構により把握した状態を示す斜視図である。
【図8B】図5A及び5Bにおけるロボット頭部の保持チャンバ内に試料容器を装填する際の経時変化図である。図8Bは,装填プロセスの中間位置にある容器を示す斜視図である。
【図8C】図5A及び5Bにおけるロボット頭部の保持チャンバ内に試料容器を装填する際の経時変化図である。図8Cは,ロボット頭部内に装填した後の容器を示す斜視図である。
【図9A】図1〜3及び図5A,5Bの検出システムの他の実施形態を示す斜視図である。図9Aにおいて,容器保持構造の変更態様を示すように上下のドアを開放して図示する。図示の態様では,ラックはドラム型またはシリンダ型である。
【図9B】図9Aの検出システムの側面図である。
【図10】自動装填機構の他の実施形態を示す斜視図であり,水平平面上で動作可能な第1コンベアベルトと,垂直平面上動作可能な第2コンベアベルトとを示す。
【図11】自動装填機構の更に他の実施形態を示す斜視図であり,水平面上で動作可能な第1コンベアベルトと,垂直平面上で動作可能な複数のパドルを有する第2コンベアベルトとを示す。
【図12】自動装填機構を設けたケース及びカバーの斜視図である。
【図13】検出システムから取り出した自動装填機構の一実施形態を示す斜視図である。この実施形態によれば,自動装填機構は,装填ステーションすなわち装填領域,搬送機構および入口位置を備え,試料容器を完全に自動装填可能である。装填領域の片側を省略して,本実施形態にかかる自動装填機構を更に詳細に示す。
【図14】図13の自動装填機構を異なる作動状態で示す斜視図である。容器装填領域をシースルーで示して,本明細書に記載の自動装填機構の他の特徴を明示する。
【図15】図14におけるドラム状の装填機構,垂直シュート,ロケータ装置及び搬送機構を示す斜視図である。ドラム状の装填機構,垂直シュート,ロケータ装置及び搬送機構を検出システムから分離して示す。
【図16】図14,15に示す自動装填機構の断面図である。更に具体的には,ドラム状の装填機構および垂直シュートの断面図であり,試料容器がシュートを落下する様子を示す。図16に示すように,試料容器の頂部又はキャップは先細レッジで短時間所定位置に保持され,容易底部がシュートを落下する際に試料容器を直立させる。
【図17】図14の自動装填機構を設けた自動検出装置の斜視図である。自動装填機構の容器装填領域を,生物活性物質を迅速かつ非侵襲的に検出するための自動システムの前の使用者の手が届く位置に示す。自動検出システム及び容器装填領域は,本明細書に記載した他の特徴を明らかにするために省略および/またはシースルーで示したサイドパネルと共に示す。
【図18】代替的な装填機構を設けた自動検出装置の斜視図である。自動装填機構の容器装填領域を,生物活性物質を迅速かつ非侵襲的に検出するための自動システムの前の使用者の手が届く位置に示す。自動検出システム及び容器装填領域は,本明細書に記載した他の特徴を明らかにするために省略および/またはシースルーで示したサイドパネルと共に示す。
【図19】生物活性物質を迅速かつ非侵襲的に検出するための図17の自動検出システムの下側を示す側面図である。本明細書に記載した他の特徴を明らかにするために,自動検出システムをサイドパネルを除外して示す。
【図20】図17〜19に示す保持構造及び自動搬送機構の斜視図である。図示したように,本実施形態では,自動搬送機構は下側水平支持手段,垂直支持手段,旋回プレート,およびロボット頭部を備え,検査装置内の試料容器を搬送する。明確のため,保持構造及び自動搬送機構は検査装置から分離して示す。
【図21A】図20の自動搬送機構における旋回プレート及びロボット頭部を示す斜視図である。把持機構の特徴を明示するために,ロボット頭部は把持機構及び試料容器の断面として図示する。図示のように,ロボット頭部は旋回プレートの一端に水平方向に位置して,試料容器を水平方向に向ける。
【図21B】旋回プレート及びロボット頭部を図21Aとは異なる作動位置で示す斜視図である。図示のように,ロボット頭部は旋回プレートの他端に垂直方向に位置して,試料容器を垂直方向に向ける。
【図22】自動検出装置の他の実施形態におけるユーザインターフェース,表示スクリーン,ロケータ装置のカバー及び陽性容器ポートを示す斜視図である。
【図23】第1及び第2の検出装置を備える自動検出システムの一実施形態を示す斜視図である。
【図24】自動検出システムの他の実施形態を示す斜視図である。図示のように,自動検出システムは,自動装填機構を有する第1検出装置,ならびに,当該第1検出装置に対して,接続すなわちデイジーチェーン接続された第2又は更に下流の他の検出装置を備える。
【図25A】試料容器を第1検出装置から下流側の第2検出装置まで押すためのプッシャアーム機構の一作動位置を示す斜視図である。
【図25B】図25Aのプッシャアーム機構の他の作動位置を示す斜視図である。
【図25C】図25Aのプッシャアーム機構の更に他の作動位置を示す斜視図である。
【図26】検出システムから分離した保持構造及び撹拌アセンブリを示す斜視図である。
【図27A】ラック保持構造と,ラック保持構造内で試料容器を保持するための保持機構を示す斜視図である。
【図27B】図27Aにおけるラック保持構造の断面図である。
【図27C】図27Aにおけるラック保持構造の頂部断面図であり,傾斜コイルばねを概略図示する。
【図28A】複数の試料容器を検出装置まで搬送するためのキャリアを示す斜視図である。キャリアは複数の試料容器を保持するための複数の保持ウェルを備える。また,2つの対向する把持手段(ハンドル)および装填ステーションで複数の試料容器を解放するための解放機構を示す。
【図28B】図28Aのキャリアを異なる方向から見た斜視図である。
【図29】検出システムの更に他の実施形態を示す斜視図である。検出機構は図28A〜Bに示したキャリアから1つ以上の試料容器を解放するための解放機構を含む。
【図30】検出システムの作動時に実行されるステップを示すフローチャートである。
【発明を実施するための形態】
【0020】
以下,本発明を図示の好適な実施形態に基づいて更に記述する。
【0021】
本発明は,培養ボトル等の検査容器に収められた試料中における生物活性物質(例えば微生物)の存在を迅速かつ非侵襲的に検出するための自動検出システム又は検出装置を提供するものである。自動検出システム又は装置の一実施形態は,図1〜図8Cに関連して記載されている。また,他の実施形態及び変形態様は,図9A〜図30に関連して記載されている。自動検出システムは,以下の構成要素 (1)〜(7) の少なくとも1つを含むことができる。(1) 内部チャンバを包囲するハウジング;(2) システムの内部チャンバ内に少なくとも1つの容器を装填するための自動装填機構;(3) システム内における異なるワークフローステーション間で容器を移動させ,又は配置するための自動容器管理機構又はロケータ装置;(4) システム内で容器を搬送するための自動搬送機構;(5) 複数の試料容器を保持するための少なくとも1つの保持構造(任意的に撹拌アセンブリを設けたものを含む。);(6) 微生物の増殖を検出するための検出ユニット;及び/又は (7) 試料容器をシステムから自動的に排出するための機構。図示の検出システムの機能を容易に理解可能とするため,本明細書は,特定の検出装置(血液培養装置)及び試料容器(血液培養ボトル)に適用した形態で自動検出装置を開示するものである。しかしながら,検出装置は他の形態で実施することもでき,ここで開示された特定の実施形態からの適宜の変更が可能であり,本発明の好適な実施形態及び最良の実施形態についての記載は,本発明を限定するものではない。
(システムの概要)
【0022】
本発明に係る自動検出システム100は,例えば図1〜3及び図5A,5Bに図示されており,試料又は試料中に存在する可能性のある生物活性物質(例えば微生物)を自動的に検出するための新規な構成及び方法を提供するものである。一般的に,既知の任意の試料(例えば生物学的試料)を検査することができる。例えば,試料は,少なくとも1つの生物活性物質を含むものと疑われる臨床的又は非臨床的な試料で構成することができる。検査対象の臨床的試料は,血液,血清,血漿,血液分画物,関節液,尿,精液,唾液,糞便,脳脊髄液,胃内容物,膣分泌物,組織ホモジネート,骨髄穿刺液,骨ホモジネート,痰,吸引液,スワッブ及びスワッブ洗浄廃水,他の体液等を非限定的に含む。検査対象の非臨床的試料は,食品,飲料,医薬品,化粧品,水(例えば飲料水,非飲用水及び廃水),海水バラスト,空気,土壌,下水,植物材料(例えば種子,葉,幹,根,花,果実等),血液成分(例えば血小板,血清,血漿,白血球分画等),ドナー臓器又は組織試料,細菌戦用試料等を非限定的に含む。一実施形態において,検査対象の生物学的試料は血液サンプルである。
【0023】
図面を参照すると,検出システム100については多くの実施形態が可能である。例えば,図1〜3及び図5A,5Bに示すように,自動検出システム100は,ハウジング102と,少なくとも1つの自動機構,例えば検出システム100内における試料容器500の装填機構(図1に例示する要素200を参照),移動又は位置決め機構(図示せず),搬送機構(図5A,5Bに例示する要素650を参照),撹拌機構(図示せず)又は検出システムからの試料容器の排出機構を備える。ハウジング102は,前部パネル104A,後部パネル104B,左右のサイドパネル106A,106B,頂部パネル108A及び底部パネル108Bを備え,これらパネルは検出システム100の内部チャンバ620(例えば図5A〜5B参照)を包囲するエンクロージャを形成している。一実施形態において,検出システム100における内部チャンバ620は,微生物の増殖を促進し,又は増強するように気候制御されたチャンバ(例えば温度を37℃前後に保つように温度制御された培養チャンバ)として構成されている。図1〜3に示すように,ハウジング102は,第1ポート又は容器入口位置110,第2ポート又は誤読/エラー位置120,第3ポート又は陽性容器出口位置130,下側アクセスパネル140(図1)又は引き出し142(図3),及び/又はユーザインターフェースとしてのディスプレー150を含むことができる。下側アクセスパネル140又は引き出し142は,ハンドル144を含むことができる。図1に更に示すように,ハウジング120は上側セクション160及び下側セクション170を備えることができ,各セクションは開閉操作可能なドア(上側及び下側ドア)162,172(例えば図5Bを参照)を任意的に備える。上側ドア162及び下側ドア172は,検出システム100の内部チャンバ620に対するアクセスのために開放可能である。しかし,他の実施形態も可能である。例えば,前部パネルの全体が単一のドア(図示せず)を備える実施形態とすることもできる。
【0024】
一実施形態として,図1〜3に例示するように,下側セクション170に上側セクション160よりも大きい輪郭又は設置面積を持たせることができる。この実施形態において,より大きい下側セクション170のハウジングは,下側セクション170の頂面に,上側セクション160に隣接し,又はその前方に位置するシェルフ180を形成する。このシェルフ180は,検出システム100に対するユーザワークステーション及び/又はワークフローアクセスポイントとして使用可能である。シェルフ180は,自動装填のための手段又は機構200を備えることができる。シェルフ180には,第1ポート又は容器入口位置110,第2ポート又は誤読/エラー位置120,及び第3ポート又は陽性容器出口位置130のそれぞれに対応するアクセス位置を更に設けることができる。
【0025】
一実施形態において,図1〜3及び図5A,5Bに例示するように,検出システム100は,検出システム100内に試料容器500を自動的に装填するための自動装填機構200を備えることができる。自動装填機構200は,容器の装填ステーション又は装填領域202と,搬送機構204と,第1ポート又は容器入口位置110とを備えることができる。使用にあたり,ユーザ又は検査技師は,少なくとも1つの試料容器500(例えば図4参照)を装填ステーション又は装填領域202にセットすることができる。搬送機構204は,例えばコンベアベルト206で構成されており,試料容器を第1ポート又は容器入口位置110まで搬送し,引き続いて入口位置110を経て検出システム100内まで搬送することにより,試料容器をシステム内に装填する。自動装填機構200の詳細については,後述する。
【0026】
次に,自動装填機構の他の実施形態について記載する。代替的な自動装填機構は,例えば図10〜16に示す構成を有している。一実施形態において,図13〜16に例示するように,検出システム100は,容器装填領域又はリザーバ302と,検出システム100内に試料容器を自動装填するためのドラム状の装填デバイス308とを備えることができる。
【0027】
他の実施形態において,図14,15及び18に例示するように,自動検出システム100は,試料容器について少なくとも1回の測定,読み取り,走査及び/又は撮像を行い,これにより容器の種類,容器ロット番号,容器使用期限,患者情報,試料種類,検査種類,充填レベル,重量測定等の情報を提供している。更に,少なくとも1つのワークフローステーション404は少なくとも1つの容器管理ステーション,例えば容器収容ステーション又は容器搬送ステーションを備えることができる。例えば,自動検出システムは,以下のワークフローステーションの少なくとも1つを含むことができる。(1) バーコード読み取りステーション;(2) 容器走査ステーション;(3) 容器撮像ステーション;(4) 容器計量ステーション;(5) 容器収容ステーション;及び/又は(6) 容器搬送ステーション。この実施形態において,検出システム100は,図13〜15,図18及び図24に例示するように,容器管理手段又は容器ロケータ装置400を更に有することができる。容器管理手段又はロケータ装置400は,試料容器500を少なくとも1つのワークフローステーション404まで移動させ,又は位置決めするように作動する。一実施形態においては,少なくとも1つのワークフローステーションが検出システム100のハウジング102内に含まれている。一実施形態においては,図14及び図15に示すように,自動装填機構300におけるドラム又はドラム状の装填デバイス308と,垂直に配置されたシュート332を作動させて試料容器をロケータウェル402内に装填することができる。図18及び図24に示す他の実施形態においては,自動装填機構200における搬送機構204又はコンベアベルト206を作動させて試料容器をロケータウェル402内に装填することができる。検出システム100は,ロケータウェル402内まで試料容器を案内するための少なくとも1つのガイドレール(図示せず)を更に備えることができる。これら両実施形態において,容器管理装置又はロケータ装置400は,例えばバーコード読み取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容器収容ステーション,及び/又は容器搬送ステーション等の,システム内における様々なワークフローステーション404の間において試料容器を移動させ,又は配置するよう回転させることができる。容器管理装置又はロケータ装置400については,更に詳述する。
【0028】
図5A〜8Cに例示するように,検出システム100は,試料容器500を検出システム100のハウジング102内で搬送するための自動搬送手段又は機構650を備えることができる。例えば,搬送機構650は,試料容器500を入口位置又はポート110(例えば図1〜3を参照)から検出システム100の内部チャンバ620内まで搬送し,その試料容器500を所定の保持構造又はラック600に含まれる所定の受け構造又はウェル602内に装填することができる。他の実施形態として,搬送機構650は,システム内における試料容器500の再配置,搬送又は別の態様での管理を行うように使用することもできる。例えば,一実施形態において,搬送機構650は,微生物の増殖に関して陽性と判定された試料容器(「陽性容器」とも称する。)500を,保持構造又はラック600から陽性容器位置まで,例えば陽性容器出口位置又はポート130(例えば図1参照)まで搬送するように作動させ,当該位置においてユーザ又は検査技師は陽性容器500を検出システム100から容易に取り除くことができる。他の実施形態において,搬送機構650は,所定時間の経過後に微生物増殖に関して陰性と判定された容器500(「陰性容器」とも称する。)を保持構造又はラック600からシステム内の陰性容器位置まで,例えば陰性容器用の廃棄ビン146(例えば,図1参照)まで搬送するように作動させ,当該位置においてユーザ又は検査技師は容器500の除去又は処理のために廃棄ビン146に容易にアクセスすることができる。次に,自動搬送機構については,更に他の実施形態も採択可能である。例えば,他の実施形態は図17〜21Bに関連して記載するとおりである。
【0029】
検出システム100は,試料容器500(例えば図27参照)内における増殖を検出するための手段(例えば検出ユニット)を含む。一般的に,容器内における微生物の増殖を検出するための既知の手段を適宜に使用することができる。例えば,各保持ステーション又はラック600は,各試料容器500内における微生物増殖を非侵襲的にモニタすることのできるリニア走査型の光学システムを含むことができ,このような光学システムは当業者間で周知である。一実施形態において,光学システムは,容器500内に配置され,容器内における微生物の増殖を検出することのできるセンサ514,例えば液状エマルジョンセンサ(LESセンサ)を含むことができる(図4参照)。
【0030】
検出システム100は,陽性及び/又は陰性の試料容器500を排出するための自動排出機構を含むことができる。この自動排出機構は,各試料容器500について陽性又は陰性としての読み取りが行われたら,その容器500を保持構造又はウェル602(例えば図5A及び5B参照)から排出することにより,新たな資料容器を装填するための空間を形成し,これによってシステムの処理量を増加させるように作動させることができる。
(試料容器)
【0031】
試料容器500は,図4及び図27Bに例示するように,標準的な培養ボトル(例えば血液培養ボトル)で構成することができる。しかしながら,培養ボトル(例えば血液培養ボトル)についての記載は単なる例示に過ぎず,限定的なものではない。図4に示すように,試料容器500は頂部502,本体504及び底部506を備える。容器500は,検出システム内又はオフライン装置内で容器500の自動読み取りを行うために,バーコードラベル508を含むことができる。図4及び図27Bに示すように,容器500の頂部502は,狭さく部又はネック510を貫通する開口516により,その内部チャンバ518に連通している。図27Bに示すように,容器500は,穿刺可能な隔膜を任意的に有する閉塞手段512(ストッパ等)を含み,容器500内での微生物増殖の存在を比色検出する目的で,容器500底部に適宜のセンサ514(LESセンサ等)を配置した構成とすることができる。容器500の具体的形態は特に重要なものではなく,本発明に係るシステム及び方法は,試料(生物学的試料等)を培養するに適当な各種の容器に適応させることができる。図4及び図27Bに示す形式の容器500は当業者間で周知であり,前掲の特許文献にも開示されている。
【0032】
一実施形態において,試料容器500は試料(例えば臨床的又は非臨床的な生物学的試料)が接種され,検出システム100に装填され,又は検出システムから排出される。容器500は,菌又は微生物の増殖を促進し,及び/又は増強するための増殖又は培養媒体(図示せず)を収めることができる。微生物培養のための増殖又は培養媒体の使用は,周知である。増殖又は培養媒体は,微生物増殖に適した富栄養的な環境条件を提供するものであり,試料容器500内で培養すべき微生物が必要とする全ての栄養素を含むべきである。微生物の自然増幅が行われるに十分な時間(種に応じて異なる)の経過後,容器500は微生物等の増殖の存否を検出システム100内で検査する。容器を可及的速やかに微生物増殖に関して陽性と認定できるよう,検査は連続的又は周期的に行うことができる。
【0033】
一実施形態において,試料容器500が検出システム100により陽性と判定されると,システムは,視覚的プロンプト等の表示器手段90を通して,及び/又はユーザインターフェースディスプレー150における表示を介して操作員の注意を喚起する。
(自動装填機構)
【0034】
検出システム100は,試料容器500を検出システム100内に自動装填するための手段又は機構を含むことができる。一実施形態において,図1〜3及び図5A,5Bに例示するように,自動装填機構200は,容器装填ステーション又は領域202と,搬送機構204と,入口位置又はポート110とを含むことができる。しかしながら,自動装填機構は多くの異なる実施形態をもって実施することができる。自動装填機構300に関する他の実施形態を,図13〜16を参照して説明する。ここに開示する種々の実施形態は例示的なものであり,本発明を限定するものではない。例えば,図1〜3,図5A,5B及び図13〜16に示す自動装填機構は,縮尺不定として図式的に表わしたものである。
【0035】
ユーザ又は検査技師は,適宜の手段によって少なくとも1つの試料容器500を検出システム100まで搬送して,容器500を容器装填ステーション又は領域202にセットすることができる。例えば,一実施形態において,ユーザ又は検査技師は,複数の試料容器を検出システム100における装填ステーション又は領域202まで搬送するよう設計されたキャリアを使用することができる。
【0036】
そのようなキャリア350の一実施形態を,図28A,28Bに示す。キャリア350は,図28A,28Bに示すように,頂面352A,底面352B,前面354A,背面354B及び対向側面356A,356B(例えば左右の側面)を有する本体351と,それぞれ側面356A,356Bに取り付けた一対のユーザハンドル358A,358Bとを備える。本体351には,それぞれ1つの試料容器500を保持するよう構成された複数の貫通孔360が設けられている。本体351は,キャリア350内に装填された試料容器500を保持する閉鎖位置と,試料容器500をキャリア350から解放して自動装填機構にセット可能とするための開放位置との間で前後方向(図28Aの矢印366参照)に摺動するようにスライドジョイント364内で作動可能としたスライドプレート362を備えることができる。スライドジョイント364は,ユーザによる検出システムへの搬送の間にスライドプレート362を閉鎖位置に固定するためのばね等のロック手段を更に備えることができる。
【0037】
図28A〜29に示すように,キャリア350は,一対の整列アーム368A,368Bと,解放タブ370とを備えることができ,この解放タブは,試料容器500を検出システム100の自動装填機構200において解放するための解放機構372と協働するものである。解放機構372は,整列アーム368A,368Bに対応する一対のスロット374を備え,これにより試料容器500をセットするためにキャリア350を装填ステーション又は領域202に対して適切に整列させるものであり,更に,解放バー376を備えている。作業中に検査技師は,少なくとも1つの試料容器をセットしたキャリア350を自動装填機構200まで搬送し,整列アーム368A,368Bを解放機構372におけるスロット374と整列させた状態で,キャリア350を解放バー376に対して押圧する。キャリア350を解放バー376に対して押圧すると,解放タブ370が押し込まれ又は押し下げられてスライドプレート362を開放位置まで移動させ,試料容器500を貫通孔360から装填ステーション又は領域202上まで落下可能とする。その時点で検査技師は,キャリア本体351と複数の貫通孔360が試料容器から分離されるまでキャリア350を上昇させることによって容器を自走装填機構に装填し,検出システム100内への自動装填を達成することができる。その他の実施形態も採択可能であることは,言うまでもない。
【0038】
図1〜3に示すように,装填ステーション又は領域202は,一般的に自動装填機構200において容易にアクセス可能な位置又は領域であり,当該位置又は領域では,検出システム100内に装填するための少なくとも1つの試料容器を,ユーザ又は検査技師がセットすることができる。装填ステーション202にセットされた後,容器500は搬送機構204を使用して装填ステーション又は領域202から入り口位置又はポート110まで,引き続いて入り口位置又はポート110を通して検出システム内まで,搬送機構204により搬送される。したがって,ユーザ又は検査技師は,少なくとも1つの試料容器を装填ステーション又は領域202において単にセットしただけで立ち去ることができ,その後は容器500が自動的に検出システム100内に装填される。試料容器500がシステム内に搬送されると,容器は容器管理デバイス又はロケータ装置により少なくとも1つのワークフローステーションまで移動させ,及び/又は保持構造又はラックまで搬送することができる。
【0039】
一実施形態において,図1〜3及び図5A,5Bに示すように,搬送機構204は,容器500を入り口位置又はポート110まで,引き続いて入り口位置又はポート110を経て検出システム100内まで搬送するためのコンベアベルト206である。しかしながら,試料容器500を装填ステーション又は領域202から入口位置又はポート110まで搬送するための他の手段又は機構も採択可能であり,限定されるものではないが,送りねじや,みぞ又はモールドプレートを設けたタイミングベルト等を使用することもできる。他の実施形態において,試料容器500を検出システム100内に自動装填するプロセスは,搬送機構650を使用して容器を保持構造又はラックまで搬送すること,又は容器ロケータ装置(図24の要素400A参照)を使用して容器を少なくとも1つのワークフローステーションまで移動させることを含むことができる。
【0040】
図1〜3,5A及び5Bに示すように,装填ステーション又は領域202と搬送機構204は,コンベアベルト206を備える。この実施形態において,ユーザ又は検査技師は,検出システム100内に容器500を自動装填するためのコンベアベルト206における特定の位置又は領域(すなわち装填ステーション又は領域202)に,少なくとも1つの試料容器500をセットすることができる。コンベアベルト206は連続的に作動させることができ,また,容器500が装填ステーション又は領域202に物理的に存在することを検知したときに作動させることもできる。例えば,システムコントローラを使用してコンベアベルト206を,少なくとも1つの試料容器が装填ステーション202に存在するか否かを表示する信号(光センサの出力信号等)に基づいて操作(オン・オフ切り替え等)することができる。同様に,入口位置又はポート110において少なくとも1つのセンサを使用し,容器が不適切に装填されたか否か,及び/又は落下して詰まりを生じているか否か表示することができる。コンベアベルト206は,装填ステーション又は領域202(例えば,図1で示すコンベアベルト206の左側部位)から入口位置又はポート110まで容器を移動させ,又は搬送するように作動し,これにより少なくとも1つの容器500を入口位置又はポート110に蓄積し,検出システム100内への装填待機状態とすることができる。一般的には,図1〜3及び図5A,5Bに示すように,装填ステーション又は領域202と,搬送機構204又はコンベアベルト206と,入口位置又はポート110が検出システム100のハウジング102の外側又は上側に配置される。一実施形態において,自動装填機構200は,システム100の下側セクション170上におけるシェルフ180上に,上側セクション160と隣接させて配置する。更に,図示のとおり,搬送機構又はコンベアベルト206は,一般的に水平面内で作動することにより試料容器500を,検出システム100(例えば図1〜3及び図5A,5B参照)内への装填のために頂部506が上側に向く垂直状態又は直立状態で保持する。図1〜3に示すように,例えば,搬送機構又はコンベアベルト206は,少なくとも1つの直立した容器500を装填ステーション又は領域202から入口位置又はポート110に向けて,例えば左側から右向きに(図2の矢印208を参照)搬送するように移動する。
【0041】
一実施形態において,例えば図1〜3及び図10,11に示すように,自動装填機構200は,搬送機構又はコンベアベルト206の片側又は両側に併置される少なくとも1本のガイドレール210を更に備える。このガイドレール210は,搬送機構又はコンベアベルト206の作動中に,試料容器500を入口位置又はポート110に向け,又はそこまで案内するものである。一実施形態において,ガイドレールは,自動装填機構200の後部における単一のファイル行に案内するように作動し,そこで容器を一度に1つずつ検出システム100内に装填するように順番待ちさせる。他の実施形態において,図22に例示するように,検出システムは,ロケータ装置を覆い,ロケータ装置用の内部チャンバ(図示せず)を包囲するロケータ装置カバー460を更に備えることができる。ロケータ装置カバー460は,試料容器500を自動装填機構200から入口位置又はポート110を経て内部チャンバ内まで搬送し,これによりシステム内に自動的に装填する際に試料容器を案内するための少なくとも1本の容器ガイドレール462を備えることができる。この実施形態において,ロケータ装置用の内部チャンバ(図示せず)は,前述した内部チャンバの一部を構成するものである。
【0042】
更に他の実施形態において,自動装填機構200は,試料容器が検出システム100に入る際に容器を読み取り,又は特定する手段又はデバイスを更に備えることができる。例えば,試料容器500を容器500は,容器の識別又はシステム内におけるトラッキングのために読み取ることができるバーコードラベル508を含むことができる。この実施形態において,検出システム100は,システム内における少なくとも1つの位置において,少なくとも1つのバーコードリーダ(図14,15の要素410参照)を含むことができる。例えば,検出システム100は,入口位置又はポート110において個々の試料容器500を容器500を識別して検出システムコントローラでログを取るためのバーコードリーダを含むことができる。他の実施形態において,入口位置又はポート110は,バーコードラベル508を読み取り可能とするように試料容器500を容器を,入口位置又はポート110内で回転させるための手段(例えば,図示の容器ロテータ又はターンテーブル)を含むことができる。他の実施形態においては,試料容器500を,バーコードラベル508を読み取り可能とするために搬送機構(図5Bの要素650参照)によって回転させることができる。バーコードを読み取った後,試料容器500を搬送機構により,一般的には入口位置又はポート110から複数の保持構造又はラック600の1つにおける複数の受け構造又はウェル602の1つまで搬送する。
【0043】
更に他の実施形態において,バーコード508が適切に読みとれない場合(例えばラベルが誤読され,又は読み取りエラーが生じた場合),検出システムコントローラ(図示せず)は,容器500を,読取不可又は誤読容器500に対するユーザアクセスのために,誤読又はエラー位置120に向かわせることができる。ユーザは,自動装填機構200により,及び/又はユーザの裁量で容器を再装填することができ,また,任意的に手動で容器500を装填し,かつ,容器500の情報をユーザインターフェース150等でシステムコントローラに手動入力することができる。他の実施形態において,検出システム100は最優先容器の装填及び/又はラベルは誤読された又は読み取りエラーが生じた容器の手動装填のための最優先(又はSTAT)装填位置(図示せず)を含むことができる。
【0044】
自動装填機構の他の実施形態を図10に示す。自動装填機構200は,図10に示すように,装填ステーション又は領域202と,第1コンベアベルト206と,入口位置又はポート110とを備える。コンベアベルト206は試料容器500を,システム100の左端(装填ステーション位置202)から入口位置又はポート110まで搬送するよう作動する。本実施形態において,図10における矢印220で示すとおり,動作は左側から右側に向かうものである。自動装填機構200は,ガイドレール210と,一組のギヤ214又はホイール216間に掛け渡された第2コンベアベルト212を更に備えることができる。本実施形態において関して,第2コンベアベルト212は,第1水平コンベアベルト206の上方で垂直面内において作動可能であり,時計方向又は反時計方向に,すなわちベルトを左側から右向きに,又は右側から左向きに移動させるように配置されている。第2垂直方向コンベアベルト212の時計方向又は反時計方向の作動により試料容器500を,垂直軸周りでの反時計方向又は時計方向の回転をもって供給することができる。発明者らは,試料容器500を反時計方向又は時計方向の回転をもって供給することが,複数の試料容器500を入口位置又はポート110に蓄積させる際に自動装填機構200における詰まり又は閉塞を防止し,又は緩和する上で有効であることを見出した。試料容器500は,入口位置又はポート110に達した後,検出システム100内まで移動させることができる。
【0045】
更に他の実施形態において,自動装填機構200は,第1コンベアベルト206の下側で水平面内に配置された支持ボード(図示せず)を含むことができる。コンベアベルト206はある程度の柔軟性を有し,弾性部材と考えることができる。コンベアベルト206の弾性は,試料容器500が装填ステーション又は領域202から第1ポート又は入口位置110までコンベアベルト206を横切って搬送される際に試料容器500を不安定とし,試料容器500の傾斜又は横倒しにつながりかねない。発明者らは,コンベアベルト206の下側に剛性又は半剛性の支持ボードを配置することにより,このような問題を全て解消することができ,これによって装填機構200における,例えば横倒し状態の試料容器500による詰まり又は閉塞を回避し,及び/又は緩和できることを見出した。一般的に,既知の適宜の支持ボードを使用することができる。例えば,支持ボードは,プラスチック製,木製又は金属製の剛性又は半剛性ボードで構成することができる。
【0046】
自動装填機構の更に他の配置を図11に示す。自動装填機構200は,図11に示すように,装填ステーション又は領域202と,コンベアベルト206と,入口位置又はポート110とを備えることができる。コンベアベルト206は,試料容器500をシステムの前端(装填ステーション202)から入口位置又はポート110まで搬送するように作動することができる。本実施形態において,図11の矢印240で示すように,装填機構200は,前側から後向きに(装置前端側から装填ポート110に向けて)作動する。自動装填機構200は,少なくとも1つの試料容器500をコンベアベルト206によって搬送する際,当該容器を入口位置又はポート110まで案内するための少なくとも1本のガイドレール210を更に備えることができる。
【0047】
本実施形態に係る自動装填機構200は,図11に示すように第2搬送機構200を更に含むことができる。一実施形態において,第2搬送機構230は,第1コンベアベルト206の上方で,垂直面内において作動可能とした第2コンベアベルト232を備えることができる。第2搬送機構230は,第2コンベアベルト232に取り付けた複数のパドル又はプレート236を更に備えることができる。本実施形態において,第1コンベアベルト206は少なくとも1つの試料容器500を,装填ステーション又は領域202から第2搬送機構230まで移動させ又は搬送するように作動し,さらに,第2搬送機構230により個々の容器500をパドル間又はプレート236間におけるウェル又はスペース234内まで移動させ又は搬送する。第2コンベアベルト232は,1組のギヤ又は駆動ホイール(図示せず)間に掛け渡され,例えば自動装填機構200の後端を越えて左側から右向きに移動することにより,容器500を自動装填機構200の後部に沿って左側から右向きに入口位置又はポート110まで搬送する(矢印250参照)。試料容器500は,入口位置又はポート110に達した後,検出システム100内まで移動させることができる。
【0048】
更に他の実施形態において,自動装填機構200は,図12に例示するように保護ハウジング又はケース260により包囲又は封止することができる。この実施形態において,自動装填機構200又はその構成要素の少なくとも1つ(例えば,装填領域,搬送手段(コンベアベルト206等)及び/又は入口位置又はポート(図示せず))は,保護ハウジング又はケース260により包囲又は封止することができる。保護ハウジング又はケース260は,その内部に配置された自動装填機構200に試料容器500を装填するためのアクセスを許容する開口262を有する。任意的に,保護ハウジング又はケース260は,その内部に配置された自動装填機構200及び/又は試料容器500を保護する目的で閉鎖可能としたカバー手段264を備えることができる。カバーは,図示例における閉鎖可能な蓋266で構成することができ,ハウジング又はケース260を閉じるための他の構造又は手段で構成することも可能である。例えば,他の実施形態において,カバー264は,開口262上を閉めるように引き出すことのできる軽量カーテン(図示せず)で構成することができる。保護ハウジング又はケース260には,最優先容器(すなわちSTAT容器)及び/又は誤読容器を装填するための優先容器装填ポート270を設けることもできる。一実施形態においては,試料容器500を優先ポート270に手動装填可能とする。
【0049】
自動装填機構の他の実施形態を図13〜15に示す。前述した自動装填機構と同様,図13〜図15に示す自動装填機構300は,容器の装填ステーション又は装填領域302と,搬送機構304と,容器入口位置306とを備え,少なくとも1つの試料容器500を検出システム100内に完全に自動装填可能としたものである。
【0050】
容器装填領域302は,検出システム100における容易なアクセス可能位置にあるため,例えば図17に示すように,ユーザが少なくとも1つの試料容器500を容易に配置することが可能である。この実施形態において,試料容器500は,図13に例示するように,水平姿勢で装填され,側面をもって横置きとされる。容器装填領域302に達した後,試料容器500を搬送機構304によって容器装填領域302から入口位置306まで搬送し,ここで容器500を検出システム100内に投入することができる。驚くべきことに,本実施形態に係る自動装填機構300は,装填領域302における試料容器500の向きに関わらず,すなわち試料容器500の頂部が検出システム100に対向しているか,図14に示すように検出システム100から離反しているかに関わらず,試料容器500を検出システム100内に装填可能とするものである。
【0051】
一実施形態において,容器装填ステーション又は領域302は,例えば図13に示すように,少なくとも1つの試料容器500を保持可能な装填リザーバ303を備える。装填リザーバ303は,1個〜100個の試料容器,1個〜80個の試料容器又は1個〜50個の試料容器を保持する構成とすることができる。他の実施形態において,装填リザーバは,100個以上の試料容器500を保持する構成とすることができる。本実施形態の自動装填機構300は,ユーザ又は検査技師が装填リザーバ303及び装填領域302を任意的にカバーするよう閉鎖可能とした蓋又はカバー(図示せず)を更に備えることができる。蓋又はカバーは,種々の形態をもって具体化することができる。
【0052】
図13,14に示すように,装填リザーバ303は,試料容器500を装填領域302から入口位置306まで搬送するための搬送機構304として,例えば入口位置306に向けて下方に傾斜した傾斜ランプを備えることができる。この実施形態において,傾斜ランプは,試料容器を入口位置306まで転動又は滑降させるものである。しかし,傾斜ランプは,試料容器を入口位置306まで搬送する手段の一例に過ぎず,搬送手段又は機構304のための他の実施形態も可能である。例えば,代替的な実施形態において,搬送機構304はコンベアベルト(図示せず)を備えることができる。この実施形態において,コンベアベルトは,少なくとも1つの試料容器を保持する構成とすることができ,任意的に,コンベアベルトを入口位置306へ向けて下方へ傾斜させた配置とすることもできる。
【0053】
ドラム又はドラム状の装填デバイス308は,入口位置306において,試料容器500を検出システム100内に装填するように使用する。ドラム状装填デバイス308は,少なくとも1つの試料容器を保持するために,少なくとも1つの水平方向スロット310を有する。各スロット310につき,1つの試料容器500が保持可能とされている。一実施形態において,ドラム状の装填デバイス308は試料容器500を保持するために複数のスロット,例えば1個〜10個のスロット,1個〜8個のスロット,1個〜5個のスロット,1個〜4個のスロット又は1個〜3個のスロットを有する。他の実施形態において,ドラム状の装填デバイス308は,1つの試料容器500を保持可能とする1つのスロットを設けた構成とすることができる。
【0054】
ドラム状装填デバイス308は,水平軸周り(時計方向又は反時計方向)に回転することにより,検出システム100内で各試料容器500を個別的に取外し,又は装填可能に構成されている。作動中,ドラム又はドラム状装填デバイス308の回転により,複数の水平方向スロット310のうち1つのスロット内で水平に向けられた試料容器500が取り外され,その容器500はタンブラデバイス330(図16参照)に向けて移動される。ドラム又はドラム状装填デバイス308を回転させるための手段として,既知の適宜手段を使用することができる。例えば,システムにおいてドラム状装填デバイス308を回転させる手段として,モータ(図示せず)及び駆動ベルト316を使用することができる。
【0055】
他の実施形態において,自動装填機構300は,図13に示すように,1つの装填ポート312を更に備えることができる。作動中,ユーザ又は検査技師は1つの試料容器,例えばSTAT試料容器を迅速又は即時的な装填のために1つの容器装填ポート312内に配置することができる。その1つの容器装填ポート312内に配置された試料容器は,重力作用で第2搬送機構314上まで降下又は落下する。第2搬送機構314は,例えば,検出システム100内で試料容器を迅速に,又は即時的に自動装填するために,ドラム状装填デバイス308に向けて下方に傾斜した傾斜ランプで構成されている。
【0056】
図13〜16に示すように,ドラム又はドラム状装填デバイス308は,垂直面内(水平軸周り)で回転することにより,試料容器500を入口位置306からタンブラーデバイス330まで移動させる。タンブラーデバイスは,垂直に向けられたシュート332の頂部において,開放スロットを備える。タンブラーデバイス330まで移動した後,試料容器はカム機構及び垂直シュート332によって直立させる(すなわち,試料容器を水平状態から垂直な直立状態に再配向させる)。作動中,カム機構(図示せず)は,試料容器500の頂部及び/又は底部を感知し,試料容器をその底部から水平方向に押し出すことにより,垂直シュート332の開口を通して底部側から降下又は落下させることが可能である。したがって,タンブラーデバイス330は,試料容器500を,垂直シュート332を通して底部側から,容器ロケータ装置400における第1ロケータウェル内まで(重力作用で)落下させるように作動し,これにより容器を垂直な直立状態に再配向する。
【0057】
図16に例示するように,タンブラーデバイス330は,ドラムの各側に1つずつ配置した2つのテーパ付レッジ334を有し,各レッジはそれぞれ前端が先細りとされ,後端がより広く形成されている。レッジ334は,ドラムの回転に際してレッジが容器500のキャップ部502を捕捉又は保持するように整列している(すなわち,キャップ部は,レッジ334の頂部側まで移動して頂部側に留まる)。容器500が底部側から垂直シュート332を通して落下する際,容器500のキャップ部502はレッジ334のみにより所定位置に保持される。更に,容器の底部又は基部506は,レッジによって捕捉又は保持されない。むしろ,テーパ付レッジ334は,ドラム又はドラム状装填デバイス308の回転に際して,容器500の底部又は基部506を水平に,すなわち容器の頂部又はキャップ部(図4参照)に向けて押し込み,又は摺動させるように作動する。この作動により,容器のキャップ端502がレッジ334の頂部において保持され,それにより容器500の底部506を垂直シュート332を通して容器ロケータ装置400内まで自由落下させることができる。ドラム又はドラム状装填デバイス308における各側にレッジ334を配置したことにより,回転ドラム内における容器500の向きは本質的ではなくなる。容器500は,容器のキャップ端502がドラム状装填デバイス308の右側に位置するか,又は左側に位置するかに関わらず,タンブラーデバイス330によって直立状態とされる。これは,底部406が垂直シュート332を通して落下する際に対応するレッジ334が容器のキャップ又は頂部502を保持する機能を発揮するからである。他の実施形態において,垂直シュート332は,落下する容器500を容器ロケータ装置400内に向けさせるための狭小部333を更に備えることができる。作動中,ドラム又はドラム状装填デバイス308が垂直方向シュート332の頂部において開放スロットを超えて回転すると,容器500のキャップ又は頂部502は,少なくとも1つのレッジ334によってドラムの外端において保持される(図16参照)。レッジ334は,容器500のキャップ又は頂部502を所定位置に保持すると共に,容器の底部506をドラム又はドラム状装填デバイス308から垂直シュート332内に自由に垂下させ,又は落下させることにより,前述したように容器が垂直方向シュート332を通して底部側から重力作用で降下し,又は落下する際に容器を直立状態又は垂直状態とするものである。
(容器管理手段又はロケータ装置)
【0058】
図13〜15,図18及び図25A〜25Cに例示するように,検出システムは容器管理デバイス又はロケータ装置400を更に備えることができる。容器管理デバイス又はロケータ装置400は,検出システム100のハウジング102内で容器500を,種々のワークフローステーション間404において管理し,移動させ,又は位置決めするように使用することができる。一実施形態において,容器管理デバイス又はロケータ装置400は,図13〜15に示す自動装填機構300と使用することができる。他の実施形態において,容器管理デバイス又はロケータ装置400は,例えば図18に示す自動装填機構200と組み合わせて使用することができる。図13〜15及び図18における容器管理デバイス又はロケータ装置400は,縮尺不定として図式的に表わされている。
【0059】
容器管理デバイス又はロケータ装置400は回転ホイール状のデバイス又は回転ディスクを備え,この回転ホイール状のデバイス又は回転ディスクは少なくとも1個のロケータウェル402,例えば1個〜10個のロケータウェル,1個〜8個のロケータウェル,1個〜5個のロケータウェル,1個〜4個のロケータウェル又は1個〜3個のロケータウェルを含む。一実施形態において,ロケータ装置は,互いに対向可能とした平行なプレート又はディスク(図25A〜25C参照)を備える。各ロケータウェル402は1つの試料容器500を保持することが可能である。作動にあたり,ロケータ装置400は,各容器500を種々のワークフローステーション404間で移動させるために,容器を水平面内で,すなわち垂直軸周りで回転させる(時計方向又は反時計方向)。一実施形態において,ワークフローステーション404は,試料容器における少なくとも1つの測定又は読み取りを行い,これにより容器についての情報,例えば容器のロット番号,容器の使用期限,患者情報,試料の種類,充填レベル等の情報を提供するように作動することが可能である。他の実施形態において,少なくとも1つのワークフローステーション404は少なくとも1つの容器管理ステーション,例えば容器収容ステーション又は容器搬送ステーションを備えることができる。例えば,ロケータ装置400は,各試料容器500を少なくとも1つのワークフローステーション404まで移動可能とするものである。このようなワークステーションは,(1) バーコード読み取りステーション;(2) 容器走査ステーション;(3) 容器撮像ステーション;(4) 容器計量ステーション;(5) 容器収容ステーション;及び/又は (6) 容器搬送ステーションである。他の実施形態においては,1つ以上の測定及び/又は読み取りを同一ステーションで実施可能とする。例えば,容器計量,走査,撮像,及び/又は収容を単一のステーションにおいて行うことができる。更に他の実施形態において,検出システムは,異なる収容ステーションを含むことができる。容器は,収容位置において,搬送機構によって収容し,検出システム100内における他の位置,例えば保持構造及び/又は撹拌アセンブリまで搬送することができる。更に他の実施形態において,検出システム100は,試料容器500を別の装置,例えば第2自動検出装置まで搬送するための搬送ステーションを含むことができる。この実施形態において,搬送ステーションは,システム搬送デバイス440に接続させることができる。例えば,システム搬送デバイス440をコンベアベルトで構成し,試料容器を図示のとおり検出システム100内における別の位置まで搬送可能とし,又は他の実施形態において別の装置まで(例えば図24に例示する第2検出システムまで)搬送可能とすることができる。図14,15に示すように,ロケータ装置400は:(1) 入口ステーション412;(2) バーコード読み取り及び/又は走査ステーション414;(3) 容器計量ステーション416;(4) 容器収容ステーション418;及び (5) 容器を別の装置まで搬送するためのシステム搬送ステーション420を備える。ロケータ装置は,これによりバーコード読み取り,及び/又は容器走査,及び/又は容器計量を行う際に容器を回転させるための,回転可能なターンテーブルデバイス406を更に備えることができことができる。
【0060】
前述したとおり,作動中に,容器管理デバイス又はロケータ装置400は,所定の試料容器500を所定のワークフローステーション404まで移動させ,又は位置決めするように作動する。一実施形態において,これらのワークフローステーション404は検出システム100のハウジング102内に配置することができる。例えば,図13〜15及び図18に示すように,自動装填機構は,ロケータウェル402内に試料容器500をセットし,又は配置することができる。その状態で容器管理手段又はロケータ装置400は,システム内における種々のワークフローステーション間で,例えばバーコード読み取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容器収容ステーション及び/又は容器搬送ステーション間で試料容器を移動させ,又は位置決めするように回転させることができる。
(搬送機構)
【0061】
例えば図5〜9B及び図17〜21に示すように,自動検出システム100は,システム内における試料容器500の搬送のため,及び/又は容器管理のために作動可能な自動搬送手段又は機構を備えることができる。前述したとおり,入口位置又はポート110は,例えば図1〜3に明示するコンベアシステム206から容器を受け入れる。容器が入口位置又はポート110に蓄積される際,容器は検出システム100内で移動され,これにより搬送機構(例えば容器把持手段を有する搬送ロボットアーム)が個々の試料容器500を収容し又は受け入れ,その容器を検出システム100内において保持構造又はラック60内まで搬送してセットする。搬送機構は,視覚システム(カメラ等),予めプログラムされた3次元座標及び/又は精密作動手段を使用して制御することにより,試料容器を保持構造又はラック600まで搬送し,かつ,保持構造又はラック600内に装填する。
【0062】
図1〜3及び図13〜15に示すように,試料容器500は,自動装填機構200(図1〜3)又は300(図13〜15)を使用して検出システム内に装填され,及び/又は搬送される。容器500は,一般的には垂直状態(容器500の頂部又はキャップ502が直立する状態)で検出システム100内に装填される。一実施形態において,容器500は,複数の保持構造又はラック600内に保持されており,微生物増殖を増強するように任意的に撹拌されるものである。図5A,5Bに例示するように,保持構造又はラック600における受け構造又はウェル602は,水平軸線方向に配向することができる。したがって,本実施形態において,自動搬送機構(図5Bの要素650参照)は,自動装填機構300,300から受け構造又はウェル602まで容器500を搬送する間,容器500を垂直状態から水平状態に再配向する必要がある。
【0063】
作動中,自動搬送機構(例えば図5Bにおける要素650,又は図20における要素700)は,検出システム100における内部チャンバ600内の試料容器500を搬送し,移動させ,又は再配向するように作動させることができる。例えば,一実施形態において,搬送機構は,試料容器500を入口位置又はポート110から複数の保持構造又はラック600の1つまで搬送することができる。他の実施形態において,搬送機構は,容器ロケータ装置400のウェル400から試料容器500を収容し,保持構造又はラック600における保持構造又はウェル602まで容器を搬送することができる。搬送機構は,複数の保持構造又はラック600のうちの1つに設けられている複数の容器受け構造又はウェル602のうちの1つに容器500を配置するように作動させることができる。他の実施形態において,搬送機構は,保持構造又はラック600から陽性容器及び陰性容器を取り除き又は排出するように作動させることができる。自動排出機構は,試料容器500について陽性又は陰性の判定が行われた後に当該容器500を容器受け構造又はウェル602から除去し,検出システム内に新たな容器を装填するためのスペースを形成し,これによりシステム処理量を増加可能とするように作動させることができる。
【0064】
一実施形態において,搬送機構は,搬送ロボットアームで構成することができる。一般的に,既知の適宜の搬送ロボットアームを使用することができる。例えば,搬送ロボットアームは多軸ロボットアーム(例えば2軸,3軸,4軸,5軸又は6軸ロボットアーム)で構成することができる。搬送ロボットアームは,試料容器500(例えば血液培養ボトル)を収容し,入口位置又はポート110から複数の保持構造又はラック600(任意的に撹拌アセンブリを有する)のうちの1つにおける複数の容器受け構造又はウェル602のうちの1つまで搬送するように作動させることができる。更に,搬送機構又は搬送ロボットアームの所要の動作を支援するように,検出システム100の内部チャンバ620に,搬送ロボットアームのための少なくとも1つの支持手段を設けることができる。例えば,少なくとも1つの垂直支持手段及び/又は少なくとも1つの水平支持手段を設けることができる。搬送機構,又は搬送ロボットアームは,保持構造又はラック600における任意の受け構造又はウェル602にアクセスする必要があるとき,支持手段を横切って上下に摺動する。前述したように,搬送ロボットアームは試料容器の姿勢を,垂直姿勢(容器500の頂部502が上向きの直立姿勢)から水平姿勢(容器500が側面で横たわる姿勢)まで変化させることにより,例えば容器の装填ステーション又は位置からの搬送又は保持構造及び/又は撹拌アセンブリ内における位置決めを容易とするように作動させることができる。
【0065】
一実施形態において,搬送ロボットアームは2軸又は3軸ロボットアームで構成され,少なくとも1つの水平軸(例えば,x軸及び/又はz軸)と,任意的な垂直軸(y軸)に規定される運動をもって容器500を,容器受け構造又はウェル602等の特定の位置まで搬送することが可能である。本実施形態において,2軸ロボットアームは2軸(例えば,x軸及びz軸)に規定される運動を行い,3軸ロボットアームは3軸(例えばx軸,y軸及びz軸)に規定される運動を行うものである。
【0066】
他の実施形態において,2軸又は3軸のロボットアームは,少なくとも1軸周りでの回転運動を行うことにより試料容器500を少なくとも1軸周りで回転させながら搬送し,又は移動させることが可能である。この回転運動により搬送ロボットアームは,試料容器500を垂直な装填状態から水平状態まで搬送するものである。例えば,搬送ロボットアームは,試料容器を水平軸周りに回転させながら移動させるための回転運動を行うことができる。この種類の搬送ロボットアームは,3軸又は4軸ロボットアームとして定義される。例えば,1つの水平軸(x軸),1つの垂直軸(例えばy軸)及び1つの回転軸に規定される動作を可能にするロボットアームは,3軸ロボットアームと定義される。これに対して,2つの水平軸(例えばx軸及びz軸),1つの垂直軸(y軸)及び1つの回転軸に規定される動作を可能にするロボットアームは,4軸ロボットアームと定義される。同様に,1つの水平軸(例えばx軸),垂直軸(y軸)及び2つの回転軸に規定される運動を行うロボットアームも,4軸ロボットアームと定義される。更に他の実施形態において,搬送ロボットアーム700は4軸,5軸又は6軸ロボットアームで構成することができ,これによりx軸,y軸及びz軸に沿う軸線方向運動を行わせると共に,4軸ロボットアームの場合に1軸周りでの,5軸ロボットアームの場合に2軸周りでの,そして6軸ロボットアームの場合には水平軸(x及びy軸)及び垂直軸(y軸)の3軸周りでの回転運動を行わせることが可能である。
【0067】
更に他の実施形態において,搬送ロボットアームは,試料容器500についての測定,走査及び/又は読み取りを行うための少なくとも1つの手段を含むことができる。例えば,搬送ロボットアームは,少なくとも1つのビデオカメラ,センサ,走査,及び/又はバーコードリーダを含むことができる。本実施形態において,ビデオカメラ,センサ,走査,及び/又はバーコードリーダは,容器位置,容器ラベル(例えばバーコード)の読み取り,容器走査,システムの現場使用における遠隔操作,及び/又はシステム内における容器の漏れ検出を支援することができる。更に他の実施形態において,搬送ロボットアームは,所要に応じて除染を支援するUV光源を含むことができる。
【0068】
図6〜8Cは,搬送機構の一実施形態を示す。図6に示すように,搬送機構は搬送ロボットアーム650を備え,この搬送ロボットアーム650は,上側水平支持レール652Aと,下側水平支持レール652Bと,1本の垂直支持レール654と,試料容器500を収容し,把持し,又は保持するための把持機構(図示せず)を設けたロボット頭部656とを含んでいる。図6〜8Cに示す搬送機構は,縮尺不定として図式的に表わされている。例えば,図示の水平支持レール652A,652B,垂直支持レール及びロボット頭部656は一定縮尺で表されたものではない。水平支持レール652A,652B及び垂直支持レールは,必要に応じて長さの増減が可能である。ロボット頭部656は,垂直支持レール654によって支持されると共に垂直支持レール654に結合し又は取り付けられており,垂直支持レール654は水平支持レール652A及び652Bによって支持されている。図6に示すように,搬送機構は,搬送機構を検出システム内に実装するために使用される少なくとも1つの実装支持手段696を備えることができる。
【0069】
作動中,垂直支持レール654を水平支持レール652A,652Bに沿って移動さることにより,垂直支持レール654及びロボット頭部656を水平軸(例えばx軸)に沿って移動させることができる。一般的に,垂直支持レール654を水平支持レール652A,652Bに沿って移動させるためには既知の適宜手段を使用することができる。図6に示すように,上側支持レール652A及び下側支持レール652Bは,それぞれ上側水平スライダ659A及び下側水平スライダ659Bを駆動するよう作動可能とした上側及び下側のねじシャフト(図示せず)を備えることができる。更に,図6に示すように,上側シャフト652A及び下側シャフト652Bは,それぞれ上側及び下側のねじ状ボルトを包囲するように上側支持レール652A及び下側支持レール652Bを延長するための中空補強スリーブ管653A,653Bを含むことができる(例えば米国特許第6467362号参照)。各スリーブ管653A,653Bは,上側支持レール652A及び下側支持レール652Bを延長するスリーブ管653A,653B内においてスロット(例えば653C参照)を含むことができる。ねじ付タング(図示せず)は,スロット(例えば要素653C参照)を通して延在し,かつ,補強スリーブ管653A,653B内に配置されたねじシャフト(図示せず)と係合可能なねじが設けられている。上側支持レール652A及び下側支持レール652Bにおけるねじシャフト(図示せず)を第1モータ657により回転させると,ねじ付タング(図示せず)は水平スライダ659A,659Bを上側支持レール652A及び下側支持レール652Bの長手方向に移動させ,これによりロボット頭部656を水平軸(例えばx軸)に沿って移動させる(例えば米国特許第6467362号参照)。第1モータ657は,上側及び下側のねじシャフト(図示せず)を回転させ,これにより上側水平スライダ659A及び下側水平スライダ659B(それぞれ,ねじシャフトと係合する内ねじを有する)を上側及び下側ねじシャフトに沿って水平方向に駆動するように作動可能である。一実施形態においては,第1モータ657により上側及び下側のねじシャフトを回転させる。そのために駆動ベルト660と,1組のプーリ662を設け,第1ねじシャフトをモータ657によって回転させる際に,第1ねじシャフトと平行なねじシャフトの一方(例えば下側ねじシャフト)を回転させるものである。
【0070】
図6に示すように,垂直支持レール654は垂直なねじ付駆動シャフト(図示せず)を更に備え,この駆動シャフトを,垂直スライダ655を駆動するように作動可能とし,これによりロボット頭部656を垂直軸(例えばy軸)に沿って移動させることができる。作動にあたり,第2モータ658により垂直ねじシャフト(図示せず)を回転させ,これにより垂直スライダ655を垂直ねじシャフトに沿って垂直方向に駆動する。他の実施形態において,図6〜7Bに示すように,垂直ねじシャフトは,垂直ねじシャフト(図示せず)を包囲するように垂直支持レール654を延長するための中空の補強スリーブ管654Aを更に備えることができる。スリーブ管654Aは,垂直支持レール654の長さ方向に延在するスロット654Bを更に含む。ねじシャフト(図示せず)と係合可能なねじを有し,スロット(図示せず)を通して延在するねじ付タング(図示せず)を設ける。ねじ付シャフト(図示せず)がモータ658によって回転されると,ねじ付タング(図示せず)が垂直スライダ655を移動させ,これによりロボット頭部656を垂直軸(例えばy軸)に沿って移動させる(例えば米国特許第6467362号参照)。垂直スライダ655は,ロボット頭部656に直接取り付けることができ,又は図6に示すように,第1回転機構664に取り付けることができる。この垂直スライダ655は,ねじ状垂直シャフトと係合する内ねじ(図示せず)を有し,垂直スライダを,したがってロボット頭部656を,ねじ状垂直シャフトに沿って垂直方向に駆動するよう作動する。
【0071】
搬送機構650は,少なくとも1つの軸周りにおける回転動作を行うように作動可能とした少なくとも1つの回転機構を更に含むことができる。例えば,図6に示すように,ロボット頭部は,y軸周りでの回転動作を行う第1回転機構654と,x軸周りでの回転動作を行う第2回転機構665とを含むことができる。第1回転機構664は,ロボット頭部656に取り付け可能な第1回転プレート667を備える。第1回転機構664は,第1回転プレート667を,したがってロボット頭部656を垂直軸(例えばy軸)周りで回転させるように,第1回転モータ668と,第1ピニオンギヤ670及び第1対向リングギヤ672とを更に備える。一実施形態において,第1ピニオンギヤ670及び第1リングギヤ672には,把持歯車等の把持手段(図示せず)を設けることができる。第1回転プレート667は,ロボット頭部656に直接的に取り付けることができ,図6に示すように第2回転機構665に取り付けることもできる。図6に示すように,第1回転プレート667は,第2回転機構665への取り付けを容易とするためのベントプレートを備えることができる。第1回転機構664と同様,第2回転機構665は第2回転プレート674を備える。図6に示すように,第2回転プレート674はロボット頭部656に取り付けられている。第2回転機構665は,第2回転プレート674を,したがってロボット頭部656を水平軸(例えばx軸)周りで回転させるように,第2回転モータ678と,第2ピニオンギヤ680及び第2対向リングギヤ682とを更に備える。一実施形態において,第2ピニオンギヤ680及び第2リングギヤ682には,把持歯車等の把持手段(図示せず)を設けることができる。
【0072】
ロボット頭部656は,図7Bに明示するように,1つの試料容器500を保持するための保持チャンバ685を包囲するハウジング684を備える。
ロボット頭部は,把持機構686と,把持機構686を移動させることにより1つの試料容器500をハウジング684及び保持チャンバ685内まで,又はハウジング684及び保持チャンバ685外に移動させるための駆動機構688とを更に備える。把持機構686は,図7Bに示すように,試料容器500のリップを超えてスナップ作動可能としたばねクリップ687を備えることができる。試料容器500を保持構造600まで搬送した後,ロボット頭部656,したがって把持機構686は,試料容器500を解放するために保持構造600に対して上下に移動させることができる。駆動機構688は,図7Bに示すように,モータ690と,ガイドレール692と,ねじ付把持シャフト694と,把持駆動ブロック696とを更に備える。作動にあたり,モータ690はねじ状把持シャフト694を回転させ,これにより把持駆動ブロック696,したがって把持機構686をガイドレール692に沿って移動させる。
【0073】
搬送機構についての他の実施形態を図9A,9Bに示す。図9A,9Bに示すように,自動搬送機構820は,頂部又は底部ドラム保持構造800における入口位置又はポート110から容器500を把持又は収容するため,及び容器500を所定の受け構造又はウェル802まで移動又は搬送するため,図9A,9Bに示す検出システム100に組み込まれている。この実施形態における自動搬送機構820は,陰性容器500を廃棄位置まで移動させて廃棄ビン146内に落下又は堆積させ,又は陽性容器を陽性容器位置(例えば図1の要素130を参照)まで移動させるように作動可能である。このような動作を実現するため,搬送機構820はロボット頭部824を備え,このロボット頭部824は,容器500を収容し,かつ保持するための把持機構826と,システム100の内部チャンバ850を横切って延在する回転支持ロッド828とを含むことができる。ロボット頭部824は回転支持ロッド828により結合状態で支持されている。一般的に,把持機構は,既知の把持手段で適宜に構成することができる。一実施形態において,把持機構は,図6〜8Cに関連して上述した把持機構及び駆動機構で構成することができる。ロボット頭部824は,回転支持ロッド828に沿う任意の位置まで移動可能である。作動にあたり,支持ロッド828は長手方向軸周りに回転してロボット頭部824を,上側又は下側のシリンダ又はドラム保持構造800A,800Bに向けることができる。
【0074】
一実施形態において,ロボット頭部820は,容器500を入口位置又はポート110から収容し,その容器500を頂部502側からドラム保持構造800A,800Bにおける受け構造又はウェル800内に装填するように作動可能である。この方位により容器500の底部又は基部506が検出ユニット810に露呈され,この検出ユニットは,容器内における微生物の増殖を検出するために容器500底部に配置したセンサ514を読み取ることが可能である。
【0075】
搬送機構についての更に他の実施形態を図17〜21Bに示す。図17〜21Bに示すように,搬送ロボットアーム700は,少なくとも1つの水平支持部材702と,少なくとも1つの垂直支持部材704と,試料容器を収容し,把持し,及び/又は保持するための少なくとも1つの装置又は手段(例えば把持機構)とを含むロボット頭部710を備える。ロボット頭部710は,水平支持部材及び/又は垂直支持部材の1つに支えられ,結合し,及び/又は取り付けることができる。例えば,一実施形態において,図17〜21Bに示すように,搬送ロボットアーム700は,下側水平支持部材702Bと,1つの垂直支持部材704を備える。しかしながら,図示しないが,上側水平支持部材(図示せず)又は垂直支持部材を更に支持し,又は案内するための他の類似手段も使用可能である。一般的に,ロボット頭部710を垂直支持レール704(図18の矢印726)に沿って上下に移動させ,垂直支持レール704を水平支持部材702B(図20の矢印736)に沿って前後に移動させるために,既知の手段を適宜に使用することができる。例えば,図20に示すように,搬送ロボットアーム700は,ロボット頭部710を垂直軸(y軸)に沿って上下に搬送し又は移動させることにより,容器500を垂直支持レール704の上下(矢印726)に搬送し又は移動させるための垂直駆動モータ720及び垂直駆動ベルト722を更に備える。垂直支持部材704は,図20に示すように,垂直ガイドレール728と,ロボット頭部支持ブロック708とを更に備えることができる。この場合,垂直支持部材704,垂直ガイドレール728,垂直駆動モータ720及び垂直駆動ベルト722は,搬送ロボットアーム700がロボット頭部支持ブロック708を,したがってロボット頭部710及び試料容器500をy軸に沿って移動又は搬送可能とする。同様に,図20に示すように,搬送ロボットアーム700は,第1水平駆動モータ730と,第1水平駆動ベルト732と,水平ガイドレール738とを更に備え,これにより垂直支持部材704を,水平ガイドレール738に沿って前後に(左側から右向き,又は右側から左向きに)移動させ,したがって検出システム100のハウジング102内における第1水平軸(x軸)に沿って移動させることができる(矢印736参照)。
したがって,水平支持部材702B,第1水平駆動モータ730,第1水平駆動ベルト732及び水平ガイドレール738は,搬送ロボットアーム700により試料容器500をx軸に沿って移動又は搬送可能とするものである。発明者らは,搬送ロボットアームが装置内の増大領域を超えて移動可能であるため,水平軸に沿って移動可能な垂直支持部材を設けることにより検出システム内の容量が増大可能となることを発見した。更に,発明者らは,移動可能な垂直支持部材を有する搬送ロボットアームが,搬送ロボットアームの信頼性を向上するものと考えている。
【0076】
図17〜21Bに示すように,自動搬送機構又は搬送ロボットアーム700は,直線又は水平スライド706と,旋回プレート750とを更に備えることができる。例えば図17〜20に示すように,直線又は水平スライド706は,ロボット頭部710及び把持機構712を支持する。直線又は水平スライド706と,ロボット頭部710は,ロボット頭部支持ブロック708及び垂直ガイドレール728に支持され,結合し,及び/又は取り付けることができる。この実施形態において,直線又は水平スライド706は,ロボット頭部支持ブロック708及び垂直ガイドレール728を介して,垂直軸(すなわちy軸)に沿って上下に(図18矢印726参照)移動することにより,ロボット頭部710及び/又は試料容器500を検出システム100のハウジング102内において上下に,すなわち垂直軸(y軸)に沿って移動又は搬送可能とするものである。図21A,21Bに示すように,直線又は水平スライド706は,旋回プレートガイドレール752,旋回スロット754及び旋回スロットカムフォロワ756を備える旋回プレート750を更に備え,ロボット頭部710を直線又は水平スライド706に沿って前方から後方に,又は後方から前方に(図18矢印746参照)摺動又は移動させることにより容器500を,第2水平軸(z軸)に沿って搬送又は移動させる構成とすることができる。この実施形態において,ロボット頭部をz軸に沿って移動させるために,第2水平駆動モータ又は水平スライドモータ760及びスライドベルト(図示せず)を使用することができる。すなわち,直線又は水平スライド706,水平スライドモータ及びスライドベルトによりロボット頭部710は,試料容器500をz軸に沿って移動又は搬送することが可能である。直線又は水平スライド706上に,ロボット頭部710の位置を示すために,少なくとも1つのセンサ(例えば図21Aにおける要素764)を使用することができることは言うまでもない。
【0077】
図21A,21Bに示すように,ロボット頭部710が直線又は水平スライド706に沿って移動する際に,旋回プレート750及び旋回プレートガイドレール752と,旋回プレートスロット754及び旋回スロットカムフォロワ756は,旋回キャリッジ758を水平軸(z軸)周りで回転させ,これによりロボット頭部710を水平状態(図21A)から垂直状態(図21B)まで,又は垂直状態から水平状態まで回転させる。容器500の垂直入口状態から水平状態までの搬送は,容器を保持構造又はラック600における水平に向けられた受け構造又はウェル602に配置し,又はセットするために必要な場合がある。すなわち,旋回プレート750,旋回スロット754及び旋回キャリッジ758は,ロボット頭部710が試料容器500を装填時(図18)の垂直姿勢から水平状態(図21A)まで再配向し,これにより試料容器500を自動装填機構(図18の要素200参照)から保持構造におけるウェル(図18における要素602,600参照)まで搬送可能とするものである。
図20に示すように,自動搬送機校は,検出システム100内におけるケーブルを管理するための少なくとも1つのケーブル管理チェーン782と,ロボット搬送機構を制御するための回路ボード784とを備えることができる。更に他の実施形態において,搬送ロボットアーム700は,垂直駆動ベルト722を遮断するための遮断機構786を更に備え,これにより(例えば電源異常による)装置底部への落下を防止することができる。
【0078】
搬送ロボットアーム700は,試料容器500を収容し,把持し,又は保持するための把持機構712を更に備えることができる。図21A,21Bに例示するように,把持機構は2つ以上の把持フィンガ714を備えることができる。更に,把持機構712は,把持フィンガ714を開閉するためのリニアアクチュエータ716と,リニアアクチュエータ716を移動させるためのモータ718とを更に備えることができる。作動にあたり,アクチュエータモータ718により把持機構712におけるリニアアクチュエータ716を駆動して把持フィンガ714を移動させることができる。例えば,リニアアクチュエータは,把持フィンガ714を閉じて容器500を把持するように,例えばモータに向けて第1方向に移動させることができる。逆に,リニアアクチュエータは,把持フィンガ714を開けて容器500を解放するように,モータから離間する第2方向に移動させることもできる。発明者らは,想定外ではあるが,1つ以上の把持フィンガ714を使用することにより,把持機構712を多種の異なる試料容器500に適応(収容及び/又は保持)させることが可能であることを発見した。更に,発明者らは,試料容器500の約1/4〜約1/2の長さを有する把持フィンガ714を使用することにより把持フィンガが,当該技術分野において周知である多種の容器(例えばロングネック血液培養ボトル)に適応(収容及び/又は保持))させることが可能であることを発見した。
【0079】
自動搬送機構又は搬送ロボットアーム700は,システムコントローラ(図示せず)の制御下におかれ,試料容器500の管理(回収,搬送,装填及び/又は排出)のためにプログラム可能とすることができる。
【0080】
更に他の実施形態において,後述するように,搬送機構700は陽性及び陰性の試料容器500を自動排出するために使用することができる。
(保持構造及び撹拌手段)
【0081】
検出システム100における保持機構又は構造は,複数の試料容器500を個別的に処理するために種々の物理的形態とすることができ,したがって多数の容器(使用される特定の保持構造に応じて,例えば200個又は400個の容器)を同時処理することが可能である。保持機構又は構造は,試料容器500についての保管,撹拌及び/又は培養を行うために使用することができる。その一実施形態は図5A,5Bに,他の実施形態は図9A,9Bに示されている。これらの実施形態は,例示に過ぎず,限定的なものではない。他の実施形態も可能である。
【0082】
図5A,5B及び図17〜20に示すように,一実施形態において,垂直に積み重ねられた複数の容器保持構造又はラック600を使用し,各容器保持構造又はラック600に,個々の試料容器500をそれぞれ保持するための多数の試料容器受け構造又はウェル602を設けておくことができる。この実施形態において,2段以上の垂直に積み重ねられた保持構造又はラック600を使用することができる。例えば,2段〜40段,2段〜30段,2段〜20段又は2段〜15段の,垂直に積み重ねられた保持構造又はラックを使用することができる。図5A,5B及び図17〜図20を参照すると,この実施形態において,検出システムは,気候制御された上側内部チャンバ622及び下側内部チャンバ624を含む内部チャンバ620と,複数の容器受け構造又はウェル602をそれぞれ有し,垂直に配置された複数段の保持構造又はラック600(例えば図5A,5B及び図15に示すように垂直に積み重ねられた保持構造又はラック600)とを備える。各保持構造又はラック600は,ウェル602で構成された容器受け構造を2つ以上備えることができる。例えば,各保持構造又はラック600は,2個〜40個,2個〜30個又は2個〜20個のウェル602で構成した受け構造を備えることができる。一実施形態において,図5A,5Bに示すように,受け構造又はウェル602は,垂直方向に整列した2列の受け構造又はウェル602を備えることができる。
他の実施形態において,受け構造又はウェル602を交互に配置して各保持構造又はラック600(例えば図20参照)の垂直方向における高さを減少させ,これにより培養チャンバ620内における所定の垂直スペース内に配置できる保持構造又はラック600の総数を増加させることが可能である。図5A,5Bに例示する検出システムは,10個の容器受け構造又はウェル602を2列に配置した保持構造又はラック600を15個備え,これにより300個の容器容量を有するシステムを構成している。他の実施形態において,検出装置は,それぞれ25個の受け構造又はウェルを含むラックを16段垂直に積み重ねて,400個の容器容量とすることができる。
【0083】
更に,各容器受け構造又はウェル602は特定のXY座標位置又はアドレスを有しており,この場合にXは容器受け構造又はウェル602の水平位置,Yは垂直位置である。図17〜21について前述したとおり,各ウェル602は搬送ロボットアーム等の搬送機構によってアクセス可能である。図17〜21に示すように,自動搬送機構700はロボット頭部710,したがって試料容器500を,ラック600における特定のXY座標まで移動させて配置するように作動可能である。作動にあたり,自動搬送機構700は,試料容器500を容器ロケータ装置400における入口ステーション110又は収容ステーション418において収容し,微生物増殖に関して確定的に陽性である試料容器500を陽性容器又は出口位置130まで移動させ,及び/又は微生物増殖に関して確定的に陰性である容器500を陰性容器位置又は廃棄ビン146まで移動させることができる。
【0084】
一実施形態において,保持構造又はラック600全体を,微生物の増殖を促進又は増強するために,撹拌アセンブリ(図示せず)によって撹拌することができる。撹拌アセンブリは,保持構造又はラック600を撹拌(例えば前後揺動)可能とする既知の手段又は機構で適宜に構成することができる。他の実施形態において,保持構造又はラック600は,容器内に含まれる液体を撹拌するために前後に揺動させることができる。例えば,保持構造又はラック600を実質的に垂直位置から水平位置まで反復的に前後揺動させて,容器内に含まれる液体を撹拌することができる。更に他の実施形態において,保持構造又はラック600は,実質的に水平位置から,水平面に対して10°,15°,30°,45°又は60°の位置まで,或いは垂直位置まで反復的に揺動させて容器内の液体を撹拌することができる。一実施形態において,実質的に水平位置,すなわち水平面に対して約10°〜約15°度の位置から垂直位置まで揺動させるのが好適である。更に他の実施形態において,保持構造又はラック600は,容器内に含まれる液体を撹拌するために,直線的又は水平方向の運動をもって前後に揺動させことができる。この実施形態において,保持構造又はラック600と,受け構造又はウェル602は,垂直位置に向け,又は水平位置に向けることができる。発明者らは,保持構造600についての,したがって受け構造又はウェル602と,水平状態の試料容器500とについての直線的な,又は水平方向からの撹拌動作により,比較的に最少のエネルギ入力で効果的な撹拌を行えることを発見した。すなわち,幾つかの実施形態においては,保持構造又はラック600の水平方位と直線又は水平撹拌動作の組み合わせが好適である。保持構造又はラック600を撹拌し,したがって試料容器500内の液体を撹拌するために,他の適宜の手段を使用することもできる。このような前後揺動,直線揺動及び/又は水平揺動は,容器内の液体を十分に撹拌するよう,所要に(例えば種々のサイクル及び/又は速度で)反復させることができる。
【0085】
撹拌アセンブリについての一実施形態を図26に示す。撹拌アセンブリ626は,図26に示すように,複数の試料容器500を保持するために複数の保持ウェル602を設けた少なくとも1つの保持構造600を備える。撹拌アセンブリ626は,撹拌モータ628と,偏心継手630と,第1回転アーム632と,第2回転アーム又は連結アーム634と,ラック撹拌軸受アセンブリ636とを更に備える。作動にあたり,撹拌モータ628は,偏心継手630を偏心回転させ,これにより第1回転アーム632を偏心円周運動又は偏心回転運動させる。第1回転アーム632の偏心回転運動により,第2回転アーム又は連結アーム634は直線運動する(矢印635)。第2回転アーム又は連結アーム634の直線運動によりラック撹拌軸受アセンブリ636を前後に揺動させ,これにより保持構造600を前後に揺動させる(図26の矢印638)。
【0086】
他の実施形態において,図9A,9Bに示すように,検出システム100は上側保持構造800A及び下側保持構造800Bを含み,これらの保持構造を,容器500を受け入れるための試料容器受け構造又はウェル802が多数収められるシリンダ状又はドラム状構造とすることができる。この実施形態において,シリンダ状保持構造800A又はドラム保持構造800Bをそれぞれ水平軸周りで回転させて,容器500を撹拌する。この実施形態において,各ドラム状保持構造は8列〜20列(例えば8列〜20列,8列〜18列又は10列〜16列)に配置し,各列に8個〜20個(例えば8個〜20個,8個〜18個又は10個〜16個)の容器受け構造又はウェル802を配置することができる。
【0087】
前述したとおり,図9A,9Bの検出システム100内には,容器500を入口位置又はポート110から把持又は収容し,所定の受け構造又はウェル802まで移動又は搬送し,上側又は下側のドラム状保持構造800の何れかにセットするために自動搬送機構820が組み込まれている。この実施形態における自動搬送機構820は,図1に例示するように,陰性容器500を廃棄ビン146まで移動させ,又は陽性容器を陽性容器位置130に移動させるように作動可能である。更に,図9A,9Bに示すロボット頭部820は,容器500を入口位置又はポート110から収容し,ドラム状保持構造800A,800Bの受け構造又はウェル802内まで頂部520側から装填することができる。この方位により容器500の底部又は基部806が検出ユニット810に露呈され,この検出ユニットは,容器内における微生物の増殖を検出するために容器500底部に配置したセンサ514を読み取ることが可能である。
【0088】
陽性又は陰性と判定された容器は,搬送ロボットアームによって回収し,システム内における他の位置まで搬送することができる。例えば,微生物増殖に関して陽性と判定された容器は,搬送機構により陽性容器位置又はポートまで搬送し,ここでユーザ又は検査技師は陽性容器を容易に除去することができる。同様に,指定時間の経過後に微生物増殖に関して陰性と判定された容器は,搬送機構によって陰性容器位置まで,又は廃棄処理のための廃棄ビンまで搬送することができる。
【0089】
一実施形態において,保持構造又はラック600は,受け構造又はラック600のウェル602内に試料容器500を保持するように作動可能とした保持機構を更に備えることができる。図27A〜27Cに示すように,保持装置860は,傾斜コイルばね864及びV字形保持プレート862を備える。この実施形態において,傾斜コイルばね868を使用することにより,コイルばねは複数の接触点において容器表面に接触して容器をラックウェル602内に保持する。傾斜ばね864のコイルは容器の垂直軸に対して角度をなしており,図27Cは容器の垂直軸に対して大きな角度で配置されたコイルを示すものである。しかしながら,一般的に傾斜ばね864は,緊密に巻かれたコイルばねである。例えば傾斜ばね864は,容器の垂直軸に対して約10°約50°,好適には約20°〜約40°,更に好適には約30°(図27C)の角度で配置することができる。V字形保持プレート862は,傾斜コイルばね864を保持構造600に対して,又は隣接させて保持することができる。保持プレート862は,傾斜コイルばね864を保持するためのV溝付保持プレートを備える。V溝付保持プレート864は,容器500及び/又は保持構造600に対するばね864の相対運動を防止するものである。したがって,一般的に一点で容器と接触する伝統的なエクステンションスプリング(例えば平板ばね)と異なり,傾斜コイルばね864は,コイルが圧力下で撓む際にV溝862によって強固に保持することができる。傾斜ばね864を使用すれば,荷重を拡散して,撓み特性を均一化することが可能である。
【0090】
図27A及び図27Cに例示するように,受け構造又はウェル602は,少なくとも1つのリブ868を更に備える。一実施形態において,図27Cに示すように,これらリブ868の2つは,傾斜コイルばね864に直接対向させて配置する。これら2つのリブ868は,容器500をウェル602内で垂直中心線(図示せず)に沿って自己調心させるように機能する溝を形成する。作動にあたり,傾斜コイルばね864は,容器500ウォールに力を適用し,これにより容器をラック600のウェル602内に確実に保持する。一実施形態において,コイルばね864に対向する2つのリブ868は,互いに約30°〜約90°又は約40°〜約80°離間させて配置することができる。他の実施形態において,コイルばね864に対向する2つのリブ868は,互いに約60°離間させて配置することができる。図27Cに示すように,保持構造は,それぞれ複数の容器を保持することができる第1列及び第2列の平行保持ウェル列と,第1列及び第2列にそれぞれ隣接する第1傾斜コイルばね及び第2傾斜コイルばねとを備え,これらの傾斜コイルばねが保持ウェルにおける複数の容器を保持する構成とすることが可能である。
【0091】
傾斜コイルばね864,V溝保持862及び前記傾斜コイルばねに対向して位置する2つのリブ868を使用することにより,撹拌時又はラックセル挿入時に作用する側面荷重に関係なく,ボトルを常にウェル602内における定位置に確実に保持することができる。
傾斜コイルばね864及びV溝保持862は,深さの小さい保持ウェル602及び保持構造600を使用可能とする。深さの小さい保持構造ウェル602は,多様な構造及び長さの容器を保持可能とし,より大面積の容器表面をシステム内の培養気流に露呈可能とするものである。
【0092】
保持構造600及び/又は撹拌アセンブリを保持するための他の実施形態も可能であり,これも本発明の技術的範囲に含まれるものであることは言うまでもない。
(検出ユニット)
【0093】
検出システム100についての多様な実施形態は,図1〜6,図9A,9B,図21A,21B及び図27に示すように,同様の検出手段の使用を含むことができる。一般的に,微生物の検出を目的として試料容器をモニタし,及び/又は検査するために,既知の適宜の手段を使用することができる。前述したように,検出システム100内での試料容器500の培養中における微生物増殖の陽性検出のため,容器500は連続的又は周期的に,モニタすることができる。例えば,一実施形態において,検出ユニット(例えば図9Bの810)は,容器500の底部又は基部506内に組み込まれたセンサ514を読み取る。各種のセンサ技術が適用可能であり,好適である。一実施形態において,検出ユニットは,米国特許第4945060号,第5094955号,第5162229号,第5164796号,第5217876号,第5795773号及び第5856175号に開示するように,比色測定を行うことができ,これら米国特許の開示は参照として組み込まれている。これら特許に記載されているように,陽性容器は比色測定結果に応じて表示される。代替的に,微生物の内部蛍光及び/又はメディアの光散乱における変化の検出技術(例えば,同時係属中の米国特許出願第12/460,607号〔発明の名称「試料中の生物学的粒子の検出及び/又は特徴表示のための方法及びシステム」,2009年7月22日付〕参照)を使用して検出を行うこともできる。更に他の実施形態において,検出は,容器のメディア又はヘッドスペースにおける揮発性有機化合物の生成を検出し,又は感知することによって達成することができる。多様な形態の検出ユニットを,検出システム内において採用することができる。例えば,一検出ユニットをラック又はトレイ全体のために配置することができ,また,複数の検出ユニットをラック毎,又はトレイ毎に配置することができる。
(気候制御された内部チャンバ)
【0094】
前述したように,試料容器500に存在する可能性のある生物活性物質(例えば微生物)の増殖を促進し,及び/又は増強する環境条件を保つため,検出システム100は気候制御された内部チャンバ(又は培養チャンバ)を備えることができる。この実施形態において,検出システム100は,内部チャンバ内の容器温度を維持するための加熱要素又は温風送風機を含むことができる。例えば,一実施形態においては加熱要素又は温風送風機により内部チャンバを高温(室温以上の温度)に維持する。他の実施形態において,検出システム100は,室温以下の温度において内部チャンバを保つよう冷却要素又は冷風送風機(図示せず)を含むことができる。この実施形態に関して,内部チャンバ又は培養チャンバは,約18℃〜約45℃の温度である。一実施形態において,内部チャンバは培養チャンバとして機能するものであり,約35℃〜約40℃,好適には約37℃の温度に維持することができる。他の実施形態において,内部チャンバは室温以下の温度,例えば約18℃〜約25℃,好適には約22.5℃に維持することができる。この場合の特別な利点は,試料容器500内の微生物増殖を促進し,及び/又は増強するためのより一定な温度環境を提供する能力である。これを検出システム100は閉鎖システムによって達成し,この閉鎖システムにおいては試料容器500についての自動的な装填,搬送及び排出は,アクセスパネルを開けて内部チャンバ620の培養温度(約30℃〜約40℃,好適には約37℃)を乱すことなく実行することができる。
【0095】
一般的に,検出システム100は,微生物増殖を促進し,又は増強するようにチャンバを気候制御状態に維持する,当該技術分野において既知の手段を用いることができる。例えば,チャンバを温度制御状態に保つために,少なくとも1つの加熱要素又は温風送風機,バッフル板及び/又は既知の他の適当な器材を使用して検出システム100の内部を,容器を培養するため,そして生物増殖を促進し,及び/又は増強するために適した温度に保つことができる。
【0096】
一般的に,システムコントローラの制御下にある少なくとも1つの加熱要素又は熱風送風機を使用して,検出システム100の内部チャンバ620内における温度を一定に保持する。加熱要素又は温風送風機は,内部容器内における複数の位置に配置することができる。例えば,図5及び6に示すように,少なくとも1つの加熱要素又は温風送風機740を保持構造又はラック600の基部に配置して,複数の保持構造又はラック600に対して温風を供給することができる。同様の配列は,図9A及び9B(例えば,840参照)の実施形態においても採用することができる。培養構造の詳細は,本発明の本質に特に関連するものではなく,当該技術分野において既知であるため,詳細な開示を省略する。
(コントローラ及びユーザインターフェース)
【0097】
検出システム100は,システムの多様な操作及び機構を制御するためのシステムコントローラ,例えばコンピュータコントローラシステム(図示せず)と,ファームウェアとを含むことができる。一般的に,システムの多様な操作及び機構を制御するためのシステムコントローラ及びファームウェアは,既知の適宜のコントローラ及びファームウェアで構成することができる。一実施形態において,コントローラ及びファームウェアは,システム内の試料容器についての自動装填,自動搬送,自動検出及び/又は自動取り外しを含むシステムの多様な機能を制御するために必要とされる全ての操作を実行する。コントローラ及びファームウェアは,システム内の試料容器の識別とトラッキングも行う。
【0098】
検出システム100は,ユーザインターフェース150と,装填機構,搬送機構,ラック,撹拌装備,培養装置等を作動させると共に検出ユニットからの測定データを受け入れるためのコンピュータ制御システムとを含むこともできる。これらの詳細は特別に重要ではなく,広範に変更することができる。容器が陽性と判定されると,ユーザインターフェース150を介して及び/又は活性化する(すなわち表示器の光をつける)容器表示器190(例えば図1参照)によってユーザに警告を発することができる。上述したように,容器を陽性と判定した場合,陽性容器は,例えば図1〜3,10〜11及び22〜24に示す陽性容器位置130まで自動的に移動させることができる。
【0099】
ユーザインターフェース150は,検出システム内に装填される容器に関するステータス情報をオペレータ又は検査技師に提供することができる。ユーザインターフェースは,以下の構成要素の少なくとも1つを含むことができる:(1) タッチスクリーンディスプレイ;(2) タッチスクリーン上のキーボード;(3) システムステータス手段;(4) 陽性警告手段;(5) 他のシステム(DMS, LIS,BCES及び他の検出又は識別装置)との通信手段;(6) 容器又はボトルの状態;(7) 容器又はボトルの検索手段;(8) 視聴覚的な陽性表示手段;(9) USBアクセス手段(バックアップ用及び外部システムアクセス用);(10) 陽性通知,システム状態及びエラーメッセージの遠隔操作手段。他の実施形態において,図22〜23に示すように,ステータスアップデートスクリーン152を使用することもできる。このステータスアップデートスクリーン152は,例えば,(1) システム内の容器位置;(2) 患者情報,試料種類,入力時間等の容器情報;(3) 陽性又は陰性容器警告;(4) 内部チャンバ温度;及び (5) 廃棄ビンが満杯で空にする必要がある旨の表示等の,検出システム内に装填された容器についてのステータス情報を提供するように使用することができる。
【0100】
検出システムと,ユーザインターフェース150及び/又はステータススアップデートスクリーン152についての特定の外観又はレイアウトは特に重要なものでなく,広範に変更できるものである。
図1,2は一実施形態を図式的かつ非限定的に示すものである。また,図22〜23は他の実施形態を図式的かつ非限定的に示すものである。
(自動排出)
【0101】
検出システム100は,陽性又は陰性の試料容器500についての自動搬送又は自動排出も行うことができる。前述したように,生物活性物質が存在する容器は陽性容器と称され,所定時間の経過後に微生物の増殖が検出されない容器は陰性容器と称される。
【0102】
容器が陽性と判定されたら,検出システムは表示器(例えば視覚的プロンプト190)を介して,及び/又はユーザインターフェース150における通知を介して,判定結果をオペレータに通知する。図1〜3及び図5A,5Bに示すように,陽性ボトルは搬送機構650(例えば搬送ロボットアーム)により自動的に回収されて所定の陽性容器領域,例えば陽性容器位置又は出口ポート130等に移送することができる。陽性容器領域は,ユーザの容器へのアクセスを容易にするため,装置ハウジング外に配置する。一実施形態において,容器は陽性容器領域内で垂直位置に配置する。一実施形態において,陽性容器(ば陽性血液培養ボトル等)の自動排出は,陽性容器を所定の陽性容器位置又は出口ポート130に再配置するように搬送するための搬送チューブ(図示せず)を使用して行う。この実施形態において,搬送機構(例えば搬送ロボットアーム)は陽性試料容器を搬送チューブの上端部内まで落下させ,又は配置することができ,容器は重力作用により搬送チューブを経て陽性容器位置又はポート130まで搬送される。一実施形態において,搬送チューブ(図示せず)は,少なくとも1つの陽性容器を保持することができる。例えば,搬送チューブ(図示せず)は1個〜5個,1個〜4個又は1個〜3個の陽性試料容器を保持することができる。他の実施形態において,例えば図22〜24に示すように,陽性容器位置又は出口ポート130は,少なくとも1つの陽性試料容器のための保持ウェル,例えば2つの陽性試料容器を分離して保持するための2つの保持ウェルを備えることができる。
【0103】
検出システム100に係る他の実施形態において,陰性容器は,保持構造又はラック600から,廃棄ビン146等の陽性容器位置まで,搬送機構700(例えば搬送ロボットアーム)によって搬送することができる。一般的に,容器は,搬送ロボットアームから解放され,廃棄ビン146内に落下されるものである。しかしながら,他の実施形態も可能であることは,言うまでもない。一実施形態において,陰性容器(陰性血液培養ボトル等)は,陰性容器を,廃棄ビン146等の所定の陰性容器位置において再配置するように搬送する搬送チューブ(図示せず)により自動的に搬送する。この実施形態においては,搬送機構(例えば搬送ロボットアーム)により搬送チューブの上端部内に陰性試料容器を落下させ又は配置し,その容器を重力作用により搬送チューブを通して陰性容器位置又は廃棄ビン146まで搬送する。検出システム100は陰性容器位置,例えば陰性容器用の廃棄ビン146へのユーザアクセスを許容するように開放するアクセスドア140又はドロワ142も含むことができる。他の実施形態において,廃棄ビン146は,廃棄ビン146を計量するための計量スケールを含むことができる。システムコントローラ(図示せず)は,廃棄ビン146の重量をモニタすることにより,廃棄ビン146が満杯であるか否かを検出することができ,任意的に,廃棄ビン146が満杯であり,ゆえに空にする必要がある旨をユーザ又は検査技師に表示する信号を(例えばユーザインターフェース150において)出力することができる。
(自動検査室システム)
【0104】
前述したとおり,本発明に係る検出システム100は多種多様の実施形態をもって具体化することができる。高容量での実装に特に適する一実施形態を図24に示す。図24に示すように,検出システム100Aは,自動微生物検査室システムにおいて用いることができる。例えば,検出装置100は,自動検査室システムの一要素として含ませることができる。本実施形態において,検出装置100Aは,少なくとも1つの付加的な他の分析的モジュール又は付加的テストのための装置に対して,例えばいわゆる「デイジーチェーン」態様で接続することができる。例えば,図24に示すように,検出システム100Aは,第2検出ユニット100Bに対してデイシーチェーン接続することができる。しかしながら,他の実施形態において,検出装置は,少なくとも1つの他のシステム又はモジュールに対してデイシーチェーン接続することができる。これらのシステム又はモジュールは,例えば,本出願人(bioMerieux Inc.)の製造販売に係るVITEKシステム又はVIDASシステム等の識別検査システムや,グラム染色液,質量分析ユニット,分子診断テストシステム,プレートストリーカ,自動特徴表示及び/又は識別システム(同時係属中の米国特許仮出願第60/216,339号〔発明の名称「微生物試料中の生物活性物質を迅速かつ非侵襲的に検出し,該物質を識別及び又は特徴表示するための自動検出装置」,2009年 5月15日付〕を参照)等を含むことができる。
【0105】
図24を参照すると,自動検査室システムは,第1検出システム100A及び第2検出システム100Bを備えることができる。他の実施形態において,自動検査室システムは,第1検出システム100Aと,第2検出システム100Bと,自動特徴表示/識別システム(図示せず)とを備えることができる。この実施形態においては,システム搬送装置440を使用して陽性容器を第1検出システム100Aから第2検出システム100Bまで,及び/又は引き続いて自動特徴表示/識別システムまで移動させ,又は搬送することができる。他の実施形態において,第1検出システム100Aは,微生物識別モジュール又は抗菌感受性モジュール(図示せず)と接続することができる。
【0106】
容器を第1装置から第2装置まで搬送するためのシステム搬送装置又は機構は:(a) 第1装置,第2装置,及び第1装置内に配置した容器と;(b) 第1装置に結合し,容器を少なくとも1つのワークフローステーションまで移動させるように作動可能な第1ロケータ手段と;(c) 第1ロケータ手段に並置されるように第2装置に結合した搬送機構又はコンベアベルトと;(d) 容器を第1ロケータ手段から搬送機構まで移動させ,又は押すことによって,容器を第1装置から第2装置まで搬送するプッシャアームとを備えることができる。他の実施形態においては,第1装置及び第2装置を培養装置で構成し,容器は試料容器で構成することができる。他の実施形態において,搬送機構は,第1装置に結合する第1搬送機構又はコンベアベルトと,第1装置に結合する第1ロケータ装置と,第2装置に結合する第2ロケータ装置と,容器を第1ロケータ装置から第2搬送機構又はコンベアベルトまで搬送するためのプッシャアームとを備え,これによって容器を第1装置から第2装置まで搬送することもできる。更に他の実施形態において,搬送機構は,第1装置及び第2装置に結合する搬送ブリッジを備え,この搬送ブリッジによって第1装置及び第2装置を互いに結合し又は連結することができる。この場合に搬送ブリッジは,第1ロケータ装置に並置される第1端と,第2搬送機構又はコンベアベルトに並置される第2端を備えることとなる。搬送ブリッジは,第1装置及び第2装置に連結し,容器を第1装置から第2装置まで搬送するための機構又は手段を提供する。したがって,上記の実施形態において,搬送機構は,第1装置を第2装置に連結する搬送ブリッジを更に備え,搬送ブリッジが,第1ロケータ装置に並置される第1端と,第2搬送機構に並置される第2端とを備え,搬送ブリッジによって第1ロケータ装置と第2搬送機構とを互いに連結し,プッシャアームは搬送ブリッジを越えて容器を押すことによって容器を第1装置から第2装置まで搬送するように作動可能とすることができる。
【0107】
図24〜図25Cに示すように,2つの検出システム100A及び100Bがシステム搬送機構441によって互いに「デイジーチェーン」接続されている。その結果,最初のシステムが満杯の場合に容器を,一方の検出システムから他方まで搬送することが可能である。同様のシステム搬送機構を追加して試料容器500を,第2検出システム100Bから次のシステム又はモジュールまで引き続いて搬送可能とすることもできる。システム搬送機構441は,容器を第2の,又は下流側の装置へ搬送するための搬送ステーション420を有する第1容器ロケータ装置400Aを備える。システム搬送機構441は,図24〜25Cに示すように,プッシャモータ442によって制御されるプッシャアーム444と,搬送ブリッジ446を備える。図示のとおり,プッシャアーム444は一対の平行アームを備えることができる。作動にあたり,搬送された容器を第1容器ロケータ装置400Aの搬送ステーション420によって移動させる際に,プッシャアーム444は,容器を,搬送ステーション420から,搬送ブリッジ446を越えて,下流側の検出システム100Bに向けて押し,又は移動させるよう作動する。図示のとおり,プッシャアーム444は,プッシャアーム支持部材445を介してプッシャモータ442に結合している。図25A〜図25Cは,容器を第1検出システム100Aにおける搬送ステーション420から第2検出システム100Bにおけるコンベアベルト206B(図24参照)まで搬送するにあたり,以下 (1)〜(3) の状態における容器を示している。(1) プッシャアーム444が容器を,搬送ブリッジ446を横切るように押し始める第1状態(図25A);(2) 容器が搬送ブリッジ446と交差する第2状態又は作動状態(図25B);(3) 容器が下流側の検出システム100Bにおけるコンベアベルト(図示せず)に達した最終状態(図25C)。更に,図25A〜25Cに示すように,システム搬送機構441は,少なくとも1つのガイドレール支持部材452を介してロケータ装置404の基板に取り付けられた少なくとも1つのロケータ装置ガイドレール450,及び/又は,容器を第1ロケータ装置400Aからブリッジ446を横切って下流側検の出システム100Bにおける自動装填機構200Bに含まれるコンベアベルト206B(図24参照)まで案内するブリッジガイドレール446,448を,更に備えることができる。第1検出システム100Aから下流側の第2検出システム100Bまでの容器の搬送は,第1容器ロケータ装置400A及びプッシャアーム444の作動を介して,システムコントローラによって制御することができる。一般的に,第1検出システム100Aは,図24に示すようにユーザインターフェース150を含む必要がある。第1検出システム100A及び第2検出システム100Bは,ステータススクリーン152A,152B,陽性容器ポート130A,0B,下側アクセスパネル140A,140B,自動装填機構200A,200B及びコンベアルト206A,206Bを更に含むことができる。
【0108】
更に,本実施形態において,陽性容器は,自動検査室システムにおける他のシステムまで搬送することができる。例えば,図24に示すように,第1検出システム100Aにおいて陽性と検出された容器は,第2検出システム100B及び/又は微生物の自動的な特徴付け及び/又は識別のための自動特徴付け/識別システム(図示せず)まで搬送することができる。
【0109】
自動検査室システムについて,本発明の技術的範囲を逸脱することなく他の実施形態や変形例が可能であることは,言うまでもない。
(作動方法)
【0110】
一実施形態において,自動検出システムにおける微生物の増殖を検出する方法は,以下のステップ(a)〜(f)を備える:(a) 微生物の増殖を促進し,及び/又は増強するための培養媒体を収めた試料容器を準備する;(b) 微生物の存否を検査すべき試料を,試料容器に接種する;(c) 自動装填機構を使用して,接種された試料容器を検出システム内に装填する;(d) 少なくとも1つの試料容器を保持するための複数のウェルを備え,任意的に,微生物の増殖を促進し,及び/又は増強するように試料容器を撹拌するように検出システム内に配置された保持構造を準備し,自動搬送機構を使用して試料容器を保持構造まで搬送する;(e) 容器内における微生物の増殖の少なくとも1つの副産物を検出することによって,容器内の微生物増殖を検出するための検出ユニットを準備する;(f) 検出ユニットを使用して微生物の増殖を検出し,これにより容器を微生物の増殖に関して陽性であると判定する。
【0111】
検出システム100の作動方法を,図30を参照して説明する。検査すべき試料を(例えば検査技師又は医師によって)試料容器500に接種した後,試料容器500を自動装填機構200まで移送する。検出システム100内に試料容器500を自動装填するためである。
【0112】
ステップ540において,試料容器500を検出システム100内に自動的に装填する。そのために,例えば図1に示すように,試料容器500を搬送機構204における装填ステーション又は領域202上に配置する。次に,試料容器500を搬送機構204(例えばコンベアベルト)によって入口位置又はポート110まで,引き続いて入口位置又はポート110を経て検出システム100内まで移動させ,これにより試料容器500を検出システム100内に自動的に装填する。
【0113】
ステップ550において,自動搬送機構700(例えば図5A,5Bに示す搬送ロボットアーム)を使用して,容器500を検出システム100の内部チャンバ620内における保持構造又はラック600まで搬送し,保持構造又はラック600に容器をセットする。
【0114】
ステップ560において,試料容器500について検出システム100内で培養を行う。検出システム100は,任意的に,保持構造又はラック600を撹拌するための撹拌装置により,及び/又は温度制御された環境を提供するための少なくとも1つの温風送風機(例えば,図5A〜5Bの740参照)により,試料容器500内の微生物増殖を促進し,及び/又は増強する。
【0115】
試料容器500が微生物増殖に関して陽性であるか否かを判定するため,ステップ570において,試料容器500を検出ユニット(例えば,図9A及び9Bの要素810参照)によって読み取る。
【0116】
ステップ580において,試料容器の読み取りデータを分析し,容器が生物活性物質(例えば微生物)の増殖に関して陽性であるか否かを判定する。陰性であれば,プロセスをNOブランチ582に沿って進め,タイマが終了したか否かを検査する。試料容器500は,タイマが終了した場合に陰性と判定され,ステップ586における廃棄ビン146(例えば図1参照)まで搬送され,又は培養を継続しながら容器の読み取り(ステップ580)を周期的に継続する。
【0117】
ステップ580において試料容器500が陽性と判定された場合,プロセスはYESブランチ590に進む。一実施形態では,試料容器500に対するユーザアクセス及び/又は更なる処理(例えば,容器の自動排出)のため,ステップ594において,試料容器500を自動搬送機構を使って陽性容器位置又はポート130(例えば図1参照)まで搬送する。他の実施形態において,試料容器は,更なる処理を行う目的で,システム搬送装置により別の検出装置及び/又は別の分析システム(例えば自動特徴付け/識別システム)まで搬送することができる。
【技術分野】
【0001】
[関連発明の相互参照]
本願は,(1) 2009年 5月15日付の米国特許仮出願第61/216339号(発明の名称「迅速かつ非侵襲的な血液培養検出システムと,微生物の侵襲的な分離及び特徴付けシステムとの統合システム」);(2) 2009年 9月30日付の米国特許仮出願第61/277862号(発明の名称「微生物検出装置用の自動装填機構」);及び (3) 2010年 2月 8日付の米国特許仮出願第61/337597号(発明の名称「微生物の自動検出装置」)の優先権を主張するものである。
【0002】
本発明は,生物学的サンプル等の試料中における微生物又は生物活性物質の存在を検出するための自動システムに関するものである。この自動システムは,培養ボトル等の試料容器を処理するための既存の検出システムを基盤として,その改良を図るものである。
【背景技術】
【0003】
生物学的流体中における病原性微生物の検出は,特に敗血症の場合には最短可能時間内に実行する必要がある。敗血症は,医師が広範な抗生物質を利用できるにも拘らず,致死率が依然として高いからである。患者の体液,特に血液中における微生物等の生物活性物質の存在は,通常は血液培養ボトルを使用して検出する。この場合,培養媒体を収めた減菌ボトル内に少量の血液を,ゴム製隔膜を通して注入し,そのボトル内において37℃の温度下で培養を行いながら微生物増殖をモニタする。
【0004】
生物学的試料中における微生物の増殖を検出する装置は,米国の国内市場で販売されている。そのような装置の一例は,本出願人(bioMerieux Inc.)の製造販売に係るBacT/ALERT3D装置(商標)であり,同装置は,例えば患者から採取した血液試料を収めた血液培養ボトルを受け入れるものである。この装置においては,ボトル内で培養を行い,培養中のボトルを,培養装置における光学的検出ユニットとしてボトル内に組み込まれた比色センサにより周期的に検査して,ボトル内で微生物が増殖しているか否かを検出する。光学的検出ユニット,ボトル及びセンサに関する先行技術としては,米国特許第4945060号,第5094955号,第5162229号,第5164796号,第5217876号,第5795773号及び第5856175号が挙げられ,これら特許の開示全体を参照により組み込むものとする。また,生物学的試料中における微生物の検出に関する先行技術としては,米国特許第5770394号,第5518923号,第5498543号,第5432061号,第5371016号,第5397709号,第 5344417号,第5374264号,第6709857号及び第7211430号が挙げられ,これら特許の開示全体も参照により組み込むものとする。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】米国特許第4945060号明細書
【特許文献2】米国特許第5094955号明細書
【特許文献3】米国特許第5162229号明細書
【特許文献4】米国特許第5164796号明細書
【特許文献5】米国特許第5217876号明細書
【特許文献6】米国特許第5795773号明細書
【特許文献7】米国特許第5856175号明細書
【特許文献8】米国特許第5770394号明細書
【特許文献9】米国特許第5518923号明細書
【特許文献10】米国特許第5498543号明細書
【特許文献11】米国特許第5432061号明細書
【特許文献12】米国特許第5371016号明細書
【特許文献13】米国特許第5397709号明細書
【特許文献14】米国特許第5344417号明細書
【特許文献15】米国特許第5374264号明細書
【特許文献16】米国特許第6709857号明細書
【特許文献17】米国特許第7211430号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
血液サンプル中の生物活性物質を検出し,かつ,検出結果を臨床医に報告するに要する時間を短縮することができれば,実質的又は潜在的な救命を図ることができ,患者にとっての臨床的な利点が達成される。このようなニーズに適合するシステムは,従来技術では未だ提案されていない。本発明に係る装置は,血液等の生物学的試料中における生物活性物質を迅速に検出可能とするものである。
【課題を解決するための手段】
【0007】
本発明に係るシステム及び方法は,生物活性物質の存在に関して陽性である試料(すなわち,生物学的試料)を含む容器を検出するように作動する検出システムを組み合わせるものである。本発明に係るシステム及び方法は,(a) 検査室内での人的作業及び人為的エラーを減らし,(b) 試料のトラッキング及びトレーサビリティや情報管理機能を向上し,(c) 検査室における自動システムとのインターフェースを提供し,(d) ワークフロー及びエルゴノミクスを向上し,(e) 臨床的に関連する情報を提供し;(f) 検査結果をより迅速に提示できるものである。
【0008】
本発明により達成される更なる利点及び効果は,以下に詳述するとおりである。
【0009】
本発明は,試料容器内に収められた試料中における生物活性物質(例えば微生物)の存在を自動的に検出するため自動検出システム及び装置構造を提供するものである。一実施形態において,自動検出装置は,試料に含まれており又は含まれるものと疑われる生物活性物質の増殖を検出するための自動培養装置であり,試料は培養ボトル等の試料容器内で培養される。
【0010】
自動検出システムは,培養媒体と,微生物を含むものと疑われる試料(すなわち血液サンプル)を収めた試料容器(すなわち培養ボトル)を受ける。検出システムは,ハウジング,微生物増殖を促進し,又は増強するために試料容器を保持し,及び/又は撹拌するための保持構造,及び/又は撹拌アセンブリを備え,更に,エンクロージャ又は培養チャンバを加熱するための加熱要素を任意的に備えることができる。自動検出システムは,容器が試料中の生物活性物質の存在に関して陽性か否かを検出する少なくとも1つの検出ユニットを含むことができる。更に,検出ユニットは,米国特許第4945060号,第5094955号,第5162229号,第5164796号,第5217876号,第5795773号及び第5856175号の特徴を備えることができ,試料中における生物活性物質の存在を検出するための他の技術を採用することもできる。ここに,生物活性物質の存在が検出された試料容器(例えばボトル)は,「陽性」と判定する。
【0011】
一実施形態において,本発明は,試料中の微生物を迅速かつ非侵襲的に検出するために,以下の構成要素 (a)〜(f) の少なくとも1つを含む自動検出装置を提供する:(a) 試料容器内に存在する可能性のある微生物を培養するための培養媒体を収める内部チャンバを有する密封可能な試料容器;(b) 微生物増殖を促進し,及び/又は増強するための内部チャンバ(例えば,培養チャンバ)を包囲するハウジング;(c) 容器を保持するための複数のウェルを備え,微生物の増殖を促進し,及び/又は増強するように試料容器を撹拌するためにハウジング内に配置された撹拌アセンブリ(例えば保持・撹拌ラック)を任意的に備える保持構造又は保持ラック;(d) 試料容器を少なくとも1つの容器ワークフローステーションまで移動させるための容器ロケータ手段;(e) 試料容器を内部チャンバ内に自動装填するための自動装填機構;(f) 入口位置から保持構造まで試料容器を自動搬送するため,及び/又は試料容器をハウジング内で自動搬送するためにハウジング内に配置された自動搬送機構; (g) 試料容器内における微生物増殖をモニタし,及び/又は検出するためにハウジング内に配置された検出ユニット。
【0012】
他の実施形態において,本発明は,自動検出装置における微生物増殖を検出するために,以下のステップ (a)〜(f) の少なくとも1つを備える方法を提供する:(a) 微生物の増殖を促進し,及び/又は増強するための培養媒体を収めた試料容器を準備する;(b) 微生物の存在を検査すべき試料を,試料容器に接種する;(c) 微生物増殖を検出するための自動検出装置として,微生物増殖を促進し,及び/又は増強するための培養チャンバを包囲するハウジングと,該ハウジング内に位置する保持構造とを備え,該保持構造が,少なくとも1つの容器を保持するための複数のウェル,自動検出装置内に試料容器を自動装填するための自動装填機構と,試料容器を少なくとも1つの容器ワークフローステーションまで移動させるための容器ロケータ装置と,ハウジング内の試料容器を保持構造まで自動搬送するための自動搬送機構,試料容器内における微生物増殖の副産物を検出するための検出ユニットを備える自動検出装置を準備する;(d) 接種された試料容器を,自動装填機構により検出システム内に装填する;(e) 自動搬送機構により試料容器を,検出システム内に位置する保持構造まで搬送する;(f) 培養チャンバ内の試料容器で培養する;及び/又は (g) 微生物増殖の副産物の少なくとも1つを検出するために試料容器を周期的にモニタし,微生物増殖の少なくとも1つの副産物が検出された場合にその試料容器を,微生物増殖に関して陽性と判定する。
【0013】
更に他の実施形態において,自動検出装置は,試料容器における測定又は読み取りを行うことにより,容器の種類,容器ロット番号,容器使用期限,患者情報,試料種類,検査種類,充填レベル,重量測定値等の情報を提供するための少なくとも1つのワークフローステーションを含むことができる。例えば,自動検出装置は以下のステーションの少なくとも1つを含むことができる:(1) バーコード読み取りステーション,(2) 容器走査ステーション,(3) 容器撮像ステーション,(4) 容器計量ステーション,(5) 容器収容ステーション,及び/又は (6) 容器搬送ステーション。この実施形態において,自動検出装置は,試料容器を検出装置における様々なステーション間で移動させ,及び/又は位置決めする容器管理装置又は容器ロケータ装置を更に含むことができる。
【0014】
更に他の実施形態において,検出装置は,保持構造における容器を保持するための保持機構を更に備えることができ,該保持機構は,以下の構成要素 (a)〜(c) を備えている:(a) 少なくとも1つの容器を保持するための少なくとも1つの保持ウェル;(b) 保持ウェルに隣接して配置された傾斜コイルばね;及び (c) 傾斜コイルばねに隣接して配置され,傾斜コイルばねを保持ウェルに隣接するように保持するためのV溝を有する保持プレート。
【0015】
他の実施形態において,本発明は,試料を保管及び/又は検査するために,以下の構成要素 (a)〜(c) を備える保管/検査装置を提供する:(a) 試料を収めた試料容器;(b) 内部チャンバを包囲するハウジング;及び (c) 少なくとも1つの試料容器を保持するための複数の受入ウェルを備える容器ロケータ装置。
【0016】
更に他の実施形態において,本発明は,試料中の微生物増殖の迅速で非侵襲的に検出するために,以下の構成要素 (a)〜(d) を備える自動検出装置を提供する:(a) 試料中に存在する可能性のある微生物を培養するために培養媒体を収める内部チャンバを有する密閉可能な試料容器;(b) 内部チャンバを包囲するハウジング;(c) 試料容器を受け入れるための少なくとも1つのロケータウェルを備え,試料容器を内部チャンバ内における少なくとも1つのワークステーションまで移動させるための試料容器ロケータ装置;及び (d) 試料容器内における微生物増殖を検出するために内部チャンバ内に配置した検出手段。
【0017】
更に他の実施形態において,本発明は,保管/検査装置内で少なくとも1つの容器を自動的に管理するために,以下のステップ (a)〜(c) を備える方法を提供する:(a) 少なくとも1つの容器を準備する;(b) 入口位置を備え,内部チャンバを包囲するハウジングと,試料容器を保持するための複数のロケータウェルを備え,少なくとも1つの試料容器を内部チャンバ内における少なくとも1つのワークフローステーションまで移動させるための容器ロケータ装置とを備える保管/検査装置を準備する;(c) 少なくとも1つの試料容器について少なくとも1つの測定又は読み取りを行うように,試料容器を少なくとも1つのワークステーションまで移動させる。
【0018】
本発明の様々な観点について,添付図面に沿って後述する様々な実施形態についての詳細説明により更に明確にする。
【図面の簡単な説明】
【0019】
【図1】試料中における生物活性物質を迅速かつ非侵襲的に検出するための自動システムの斜視図である。図示のように,システムは自動装填機構を含む。
【図2】図1の検出システムにおける自動装填機構を拡大して示す斜視図である。
【図3】図1の検出システムにおける自動装填機構と,生物活性物質の存在について陰性と判定された容器のための廃棄物容器を明示するために引き出した引出しを示す斜視図である。
【図4】図1〜3の検出システムにより処理された試料容器を示す側面図である。検出容器は種々の形状であり得るが,一実施形態では血液培養ボトルである。
【図5A】図1の検出システムの一実施形態を示す側面図である。
【図5B】図5Aに示す検出システムの斜視図であり,図4に示す複数の容器を保持するための内部チャンバ及びラックを示すように上下のドアを開放して示す斜視図である。
【図6】図5A及び5Bに示す搬送機構における水平及び垂直支持レールと,搬送機構を1以上の軸に対して回転操作可能にする第1及び第2回転機構とを示す斜視図である。
【図7A】図5A,5Bにおけるロボット頭部及び垂直支持レールを示す斜視図である。図7Aに示すように,ロボット頭部は垂直方向に変位し,ロボット頭部内に保持される試用容器も垂直方向に変位するように構成される。
【図7B】図5A,5Bにおけるロボット頭部及び垂直支持レールを異なる位置で示す斜視図である。図7Bに示すように,ロボット頭部は水平方向に変位し,ロボット頭部内に保持される容器も水平方向に変異するように構成される。
【図8A】図5A及び5Bにおけるロボット頭部の保持チャンバ内に試料容器を装填する際の経時変化図である。図8Aは,容器の頂部又はキャップを把握機構により把握した状態を示す斜視図である。
【図8B】図5A及び5Bにおけるロボット頭部の保持チャンバ内に試料容器を装填する際の経時変化図である。図8Bは,装填プロセスの中間位置にある容器を示す斜視図である。
【図8C】図5A及び5Bにおけるロボット頭部の保持チャンバ内に試料容器を装填する際の経時変化図である。図8Cは,ロボット頭部内に装填した後の容器を示す斜視図である。
【図9A】図1〜3及び図5A,5Bの検出システムの他の実施形態を示す斜視図である。図9Aにおいて,容器保持構造の変更態様を示すように上下のドアを開放して図示する。図示の態様では,ラックはドラム型またはシリンダ型である。
【図9B】図9Aの検出システムの側面図である。
【図10】自動装填機構の他の実施形態を示す斜視図であり,水平平面上で動作可能な第1コンベアベルトと,垂直平面上動作可能な第2コンベアベルトとを示す。
【図11】自動装填機構の更に他の実施形態を示す斜視図であり,水平面上で動作可能な第1コンベアベルトと,垂直平面上で動作可能な複数のパドルを有する第2コンベアベルトとを示す。
【図12】自動装填機構を設けたケース及びカバーの斜視図である。
【図13】検出システムから取り出した自動装填機構の一実施形態を示す斜視図である。この実施形態によれば,自動装填機構は,装填ステーションすなわち装填領域,搬送機構および入口位置を備え,試料容器を完全に自動装填可能である。装填領域の片側を省略して,本実施形態にかかる自動装填機構を更に詳細に示す。
【図14】図13の自動装填機構を異なる作動状態で示す斜視図である。容器装填領域をシースルーで示して,本明細書に記載の自動装填機構の他の特徴を明示する。
【図15】図14におけるドラム状の装填機構,垂直シュート,ロケータ装置及び搬送機構を示す斜視図である。ドラム状の装填機構,垂直シュート,ロケータ装置及び搬送機構を検出システムから分離して示す。
【図16】図14,15に示す自動装填機構の断面図である。更に具体的には,ドラム状の装填機構および垂直シュートの断面図であり,試料容器がシュートを落下する様子を示す。図16に示すように,試料容器の頂部又はキャップは先細レッジで短時間所定位置に保持され,容易底部がシュートを落下する際に試料容器を直立させる。
【図17】図14の自動装填機構を設けた自動検出装置の斜視図である。自動装填機構の容器装填領域を,生物活性物質を迅速かつ非侵襲的に検出するための自動システムの前の使用者の手が届く位置に示す。自動検出システム及び容器装填領域は,本明細書に記載した他の特徴を明らかにするために省略および/またはシースルーで示したサイドパネルと共に示す。
【図18】代替的な装填機構を設けた自動検出装置の斜視図である。自動装填機構の容器装填領域を,生物活性物質を迅速かつ非侵襲的に検出するための自動システムの前の使用者の手が届く位置に示す。自動検出システム及び容器装填領域は,本明細書に記載した他の特徴を明らかにするために省略および/またはシースルーで示したサイドパネルと共に示す。
【図19】生物活性物質を迅速かつ非侵襲的に検出するための図17の自動検出システムの下側を示す側面図である。本明細書に記載した他の特徴を明らかにするために,自動検出システムをサイドパネルを除外して示す。
【図20】図17〜19に示す保持構造及び自動搬送機構の斜視図である。図示したように,本実施形態では,自動搬送機構は下側水平支持手段,垂直支持手段,旋回プレート,およびロボット頭部を備え,検査装置内の試料容器を搬送する。明確のため,保持構造及び自動搬送機構は検査装置から分離して示す。
【図21A】図20の自動搬送機構における旋回プレート及びロボット頭部を示す斜視図である。把持機構の特徴を明示するために,ロボット頭部は把持機構及び試料容器の断面として図示する。図示のように,ロボット頭部は旋回プレートの一端に水平方向に位置して,試料容器を水平方向に向ける。
【図21B】旋回プレート及びロボット頭部を図21Aとは異なる作動位置で示す斜視図である。図示のように,ロボット頭部は旋回プレートの他端に垂直方向に位置して,試料容器を垂直方向に向ける。
【図22】自動検出装置の他の実施形態におけるユーザインターフェース,表示スクリーン,ロケータ装置のカバー及び陽性容器ポートを示す斜視図である。
【図23】第1及び第2の検出装置を備える自動検出システムの一実施形態を示す斜視図である。
【図24】自動検出システムの他の実施形態を示す斜視図である。図示のように,自動検出システムは,自動装填機構を有する第1検出装置,ならびに,当該第1検出装置に対して,接続すなわちデイジーチェーン接続された第2又は更に下流の他の検出装置を備える。
【図25A】試料容器を第1検出装置から下流側の第2検出装置まで押すためのプッシャアーム機構の一作動位置を示す斜視図である。
【図25B】図25Aのプッシャアーム機構の他の作動位置を示す斜視図である。
【図25C】図25Aのプッシャアーム機構の更に他の作動位置を示す斜視図である。
【図26】検出システムから分離した保持構造及び撹拌アセンブリを示す斜視図である。
【図27A】ラック保持構造と,ラック保持構造内で試料容器を保持するための保持機構を示す斜視図である。
【図27B】図27Aにおけるラック保持構造の断面図である。
【図27C】図27Aにおけるラック保持構造の頂部断面図であり,傾斜コイルばねを概略図示する。
【図28A】複数の試料容器を検出装置まで搬送するためのキャリアを示す斜視図である。キャリアは複数の試料容器を保持するための複数の保持ウェルを備える。また,2つの対向する把持手段(ハンドル)および装填ステーションで複数の試料容器を解放するための解放機構を示す。
【図28B】図28Aのキャリアを異なる方向から見た斜視図である。
【図29】検出システムの更に他の実施形態を示す斜視図である。検出機構は図28A〜Bに示したキャリアから1つ以上の試料容器を解放するための解放機構を含む。
【図30】検出システムの作動時に実行されるステップを示すフローチャートである。
【発明を実施するための形態】
【0020】
以下,本発明を図示の好適な実施形態に基づいて更に記述する。
【0021】
本発明は,培養ボトル等の検査容器に収められた試料中における生物活性物質(例えば微生物)の存在を迅速かつ非侵襲的に検出するための自動検出システム又は検出装置を提供するものである。自動検出システム又は装置の一実施形態は,図1〜図8Cに関連して記載されている。また,他の実施形態及び変形態様は,図9A〜図30に関連して記載されている。自動検出システムは,以下の構成要素 (1)〜(7) の少なくとも1つを含むことができる。(1) 内部チャンバを包囲するハウジング;(2) システムの内部チャンバ内に少なくとも1つの容器を装填するための自動装填機構;(3) システム内における異なるワークフローステーション間で容器を移動させ,又は配置するための自動容器管理機構又はロケータ装置;(4) システム内で容器を搬送するための自動搬送機構;(5) 複数の試料容器を保持するための少なくとも1つの保持構造(任意的に撹拌アセンブリを設けたものを含む。);(6) 微生物の増殖を検出するための検出ユニット;及び/又は (7) 試料容器をシステムから自動的に排出するための機構。図示の検出システムの機能を容易に理解可能とするため,本明細書は,特定の検出装置(血液培養装置)及び試料容器(血液培養ボトル)に適用した形態で自動検出装置を開示するものである。しかしながら,検出装置は他の形態で実施することもでき,ここで開示された特定の実施形態からの適宜の変更が可能であり,本発明の好適な実施形態及び最良の実施形態についての記載は,本発明を限定するものではない。
(システムの概要)
【0022】
本発明に係る自動検出システム100は,例えば図1〜3及び図5A,5Bに図示されており,試料又は試料中に存在する可能性のある生物活性物質(例えば微生物)を自動的に検出するための新規な構成及び方法を提供するものである。一般的に,既知の任意の試料(例えば生物学的試料)を検査することができる。例えば,試料は,少なくとも1つの生物活性物質を含むものと疑われる臨床的又は非臨床的な試料で構成することができる。検査対象の臨床的試料は,血液,血清,血漿,血液分画物,関節液,尿,精液,唾液,糞便,脳脊髄液,胃内容物,膣分泌物,組織ホモジネート,骨髄穿刺液,骨ホモジネート,痰,吸引液,スワッブ及びスワッブ洗浄廃水,他の体液等を非限定的に含む。検査対象の非臨床的試料は,食品,飲料,医薬品,化粧品,水(例えば飲料水,非飲用水及び廃水),海水バラスト,空気,土壌,下水,植物材料(例えば種子,葉,幹,根,花,果実等),血液成分(例えば血小板,血清,血漿,白血球分画等),ドナー臓器又は組織試料,細菌戦用試料等を非限定的に含む。一実施形態において,検査対象の生物学的試料は血液サンプルである。
【0023】
図面を参照すると,検出システム100については多くの実施形態が可能である。例えば,図1〜3及び図5A,5Bに示すように,自動検出システム100は,ハウジング102と,少なくとも1つの自動機構,例えば検出システム100内における試料容器500の装填機構(図1に例示する要素200を参照),移動又は位置決め機構(図示せず),搬送機構(図5A,5Bに例示する要素650を参照),撹拌機構(図示せず)又は検出システムからの試料容器の排出機構を備える。ハウジング102は,前部パネル104A,後部パネル104B,左右のサイドパネル106A,106B,頂部パネル108A及び底部パネル108Bを備え,これらパネルは検出システム100の内部チャンバ620(例えば図5A〜5B参照)を包囲するエンクロージャを形成している。一実施形態において,検出システム100における内部チャンバ620は,微生物の増殖を促進し,又は増強するように気候制御されたチャンバ(例えば温度を37℃前後に保つように温度制御された培養チャンバ)として構成されている。図1〜3に示すように,ハウジング102は,第1ポート又は容器入口位置110,第2ポート又は誤読/エラー位置120,第3ポート又は陽性容器出口位置130,下側アクセスパネル140(図1)又は引き出し142(図3),及び/又はユーザインターフェースとしてのディスプレー150を含むことができる。下側アクセスパネル140又は引き出し142は,ハンドル144を含むことができる。図1に更に示すように,ハウジング120は上側セクション160及び下側セクション170を備えることができ,各セクションは開閉操作可能なドア(上側及び下側ドア)162,172(例えば図5Bを参照)を任意的に備える。上側ドア162及び下側ドア172は,検出システム100の内部チャンバ620に対するアクセスのために開放可能である。しかし,他の実施形態も可能である。例えば,前部パネルの全体が単一のドア(図示せず)を備える実施形態とすることもできる。
【0024】
一実施形態として,図1〜3に例示するように,下側セクション170に上側セクション160よりも大きい輪郭又は設置面積を持たせることができる。この実施形態において,より大きい下側セクション170のハウジングは,下側セクション170の頂面に,上側セクション160に隣接し,又はその前方に位置するシェルフ180を形成する。このシェルフ180は,検出システム100に対するユーザワークステーション及び/又はワークフローアクセスポイントとして使用可能である。シェルフ180は,自動装填のための手段又は機構200を備えることができる。シェルフ180には,第1ポート又は容器入口位置110,第2ポート又は誤読/エラー位置120,及び第3ポート又は陽性容器出口位置130のそれぞれに対応するアクセス位置を更に設けることができる。
【0025】
一実施形態において,図1〜3及び図5A,5Bに例示するように,検出システム100は,検出システム100内に試料容器500を自動的に装填するための自動装填機構200を備えることができる。自動装填機構200は,容器の装填ステーション又は装填領域202と,搬送機構204と,第1ポート又は容器入口位置110とを備えることができる。使用にあたり,ユーザ又は検査技師は,少なくとも1つの試料容器500(例えば図4参照)を装填ステーション又は装填領域202にセットすることができる。搬送機構204は,例えばコンベアベルト206で構成されており,試料容器を第1ポート又は容器入口位置110まで搬送し,引き続いて入口位置110を経て検出システム100内まで搬送することにより,試料容器をシステム内に装填する。自動装填機構200の詳細については,後述する。
【0026】
次に,自動装填機構の他の実施形態について記載する。代替的な自動装填機構は,例えば図10〜16に示す構成を有している。一実施形態において,図13〜16に例示するように,検出システム100は,容器装填領域又はリザーバ302と,検出システム100内に試料容器を自動装填するためのドラム状の装填デバイス308とを備えることができる。
【0027】
他の実施形態において,図14,15及び18に例示するように,自動検出システム100は,試料容器について少なくとも1回の測定,読み取り,走査及び/又は撮像を行い,これにより容器の種類,容器ロット番号,容器使用期限,患者情報,試料種類,検査種類,充填レベル,重量測定等の情報を提供している。更に,少なくとも1つのワークフローステーション404は少なくとも1つの容器管理ステーション,例えば容器収容ステーション又は容器搬送ステーションを備えることができる。例えば,自動検出システムは,以下のワークフローステーションの少なくとも1つを含むことができる。(1) バーコード読み取りステーション;(2) 容器走査ステーション;(3) 容器撮像ステーション;(4) 容器計量ステーション;(5) 容器収容ステーション;及び/又は(6) 容器搬送ステーション。この実施形態において,検出システム100は,図13〜15,図18及び図24に例示するように,容器管理手段又は容器ロケータ装置400を更に有することができる。容器管理手段又はロケータ装置400は,試料容器500を少なくとも1つのワークフローステーション404まで移動させ,又は位置決めするように作動する。一実施形態においては,少なくとも1つのワークフローステーションが検出システム100のハウジング102内に含まれている。一実施形態においては,図14及び図15に示すように,自動装填機構300におけるドラム又はドラム状の装填デバイス308と,垂直に配置されたシュート332を作動させて試料容器をロケータウェル402内に装填することができる。図18及び図24に示す他の実施形態においては,自動装填機構200における搬送機構204又はコンベアベルト206を作動させて試料容器をロケータウェル402内に装填することができる。検出システム100は,ロケータウェル402内まで試料容器を案内するための少なくとも1つのガイドレール(図示せず)を更に備えることができる。これら両実施形態において,容器管理装置又はロケータ装置400は,例えばバーコード読み取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容器収容ステーション,及び/又は容器搬送ステーション等の,システム内における様々なワークフローステーション404の間において試料容器を移動させ,又は配置するよう回転させることができる。容器管理装置又はロケータ装置400については,更に詳述する。
【0028】
図5A〜8Cに例示するように,検出システム100は,試料容器500を検出システム100のハウジング102内で搬送するための自動搬送手段又は機構650を備えることができる。例えば,搬送機構650は,試料容器500を入口位置又はポート110(例えば図1〜3を参照)から検出システム100の内部チャンバ620内まで搬送し,その試料容器500を所定の保持構造又はラック600に含まれる所定の受け構造又はウェル602内に装填することができる。他の実施形態として,搬送機構650は,システム内における試料容器500の再配置,搬送又は別の態様での管理を行うように使用することもできる。例えば,一実施形態において,搬送機構650は,微生物の増殖に関して陽性と判定された試料容器(「陽性容器」とも称する。)500を,保持構造又はラック600から陽性容器位置まで,例えば陽性容器出口位置又はポート130(例えば図1参照)まで搬送するように作動させ,当該位置においてユーザ又は検査技師は陽性容器500を検出システム100から容易に取り除くことができる。他の実施形態において,搬送機構650は,所定時間の経過後に微生物増殖に関して陰性と判定された容器500(「陰性容器」とも称する。)を保持構造又はラック600からシステム内の陰性容器位置まで,例えば陰性容器用の廃棄ビン146(例えば,図1参照)まで搬送するように作動させ,当該位置においてユーザ又は検査技師は容器500の除去又は処理のために廃棄ビン146に容易にアクセスすることができる。次に,自動搬送機構については,更に他の実施形態も採択可能である。例えば,他の実施形態は図17〜21Bに関連して記載するとおりである。
【0029】
検出システム100は,試料容器500(例えば図27参照)内における増殖を検出するための手段(例えば検出ユニット)を含む。一般的に,容器内における微生物の増殖を検出するための既知の手段を適宜に使用することができる。例えば,各保持ステーション又はラック600は,各試料容器500内における微生物増殖を非侵襲的にモニタすることのできるリニア走査型の光学システムを含むことができ,このような光学システムは当業者間で周知である。一実施形態において,光学システムは,容器500内に配置され,容器内における微生物の増殖を検出することのできるセンサ514,例えば液状エマルジョンセンサ(LESセンサ)を含むことができる(図4参照)。
【0030】
検出システム100は,陽性及び/又は陰性の試料容器500を排出するための自動排出機構を含むことができる。この自動排出機構は,各試料容器500について陽性又は陰性としての読み取りが行われたら,その容器500を保持構造又はウェル602(例えば図5A及び5B参照)から排出することにより,新たな資料容器を装填するための空間を形成し,これによってシステムの処理量を増加させるように作動させることができる。
(試料容器)
【0031】
試料容器500は,図4及び図27Bに例示するように,標準的な培養ボトル(例えば血液培養ボトル)で構成することができる。しかしながら,培養ボトル(例えば血液培養ボトル)についての記載は単なる例示に過ぎず,限定的なものではない。図4に示すように,試料容器500は頂部502,本体504及び底部506を備える。容器500は,検出システム内又はオフライン装置内で容器500の自動読み取りを行うために,バーコードラベル508を含むことができる。図4及び図27Bに示すように,容器500の頂部502は,狭さく部又はネック510を貫通する開口516により,その内部チャンバ518に連通している。図27Bに示すように,容器500は,穿刺可能な隔膜を任意的に有する閉塞手段512(ストッパ等)を含み,容器500内での微生物増殖の存在を比色検出する目的で,容器500底部に適宜のセンサ514(LESセンサ等)を配置した構成とすることができる。容器500の具体的形態は特に重要なものではなく,本発明に係るシステム及び方法は,試料(生物学的試料等)を培養するに適当な各種の容器に適応させることができる。図4及び図27Bに示す形式の容器500は当業者間で周知であり,前掲の特許文献にも開示されている。
【0032】
一実施形態において,試料容器500は試料(例えば臨床的又は非臨床的な生物学的試料)が接種され,検出システム100に装填され,又は検出システムから排出される。容器500は,菌又は微生物の増殖を促進し,及び/又は増強するための増殖又は培養媒体(図示せず)を収めることができる。微生物培養のための増殖又は培養媒体の使用は,周知である。増殖又は培養媒体は,微生物増殖に適した富栄養的な環境条件を提供するものであり,試料容器500内で培養すべき微生物が必要とする全ての栄養素を含むべきである。微生物の自然増幅が行われるに十分な時間(種に応じて異なる)の経過後,容器500は微生物等の増殖の存否を検出システム100内で検査する。容器を可及的速やかに微生物増殖に関して陽性と認定できるよう,検査は連続的又は周期的に行うことができる。
【0033】
一実施形態において,試料容器500が検出システム100により陽性と判定されると,システムは,視覚的プロンプト等の表示器手段90を通して,及び/又はユーザインターフェースディスプレー150における表示を介して操作員の注意を喚起する。
(自動装填機構)
【0034】
検出システム100は,試料容器500を検出システム100内に自動装填するための手段又は機構を含むことができる。一実施形態において,図1〜3及び図5A,5Bに例示するように,自動装填機構200は,容器装填ステーション又は領域202と,搬送機構204と,入口位置又はポート110とを含むことができる。しかしながら,自動装填機構は多くの異なる実施形態をもって実施することができる。自動装填機構300に関する他の実施形態を,図13〜16を参照して説明する。ここに開示する種々の実施形態は例示的なものであり,本発明を限定するものではない。例えば,図1〜3,図5A,5B及び図13〜16に示す自動装填機構は,縮尺不定として図式的に表わしたものである。
【0035】
ユーザ又は検査技師は,適宜の手段によって少なくとも1つの試料容器500を検出システム100まで搬送して,容器500を容器装填ステーション又は領域202にセットすることができる。例えば,一実施形態において,ユーザ又は検査技師は,複数の試料容器を検出システム100における装填ステーション又は領域202まで搬送するよう設計されたキャリアを使用することができる。
【0036】
そのようなキャリア350の一実施形態を,図28A,28Bに示す。キャリア350は,図28A,28Bに示すように,頂面352A,底面352B,前面354A,背面354B及び対向側面356A,356B(例えば左右の側面)を有する本体351と,それぞれ側面356A,356Bに取り付けた一対のユーザハンドル358A,358Bとを備える。本体351には,それぞれ1つの試料容器500を保持するよう構成された複数の貫通孔360が設けられている。本体351は,キャリア350内に装填された試料容器500を保持する閉鎖位置と,試料容器500をキャリア350から解放して自動装填機構にセット可能とするための開放位置との間で前後方向(図28Aの矢印366参照)に摺動するようにスライドジョイント364内で作動可能としたスライドプレート362を備えることができる。スライドジョイント364は,ユーザによる検出システムへの搬送の間にスライドプレート362を閉鎖位置に固定するためのばね等のロック手段を更に備えることができる。
【0037】
図28A〜29に示すように,キャリア350は,一対の整列アーム368A,368Bと,解放タブ370とを備えることができ,この解放タブは,試料容器500を検出システム100の自動装填機構200において解放するための解放機構372と協働するものである。解放機構372は,整列アーム368A,368Bに対応する一対のスロット374を備え,これにより試料容器500をセットするためにキャリア350を装填ステーション又は領域202に対して適切に整列させるものであり,更に,解放バー376を備えている。作業中に検査技師は,少なくとも1つの試料容器をセットしたキャリア350を自動装填機構200まで搬送し,整列アーム368A,368Bを解放機構372におけるスロット374と整列させた状態で,キャリア350を解放バー376に対して押圧する。キャリア350を解放バー376に対して押圧すると,解放タブ370が押し込まれ又は押し下げられてスライドプレート362を開放位置まで移動させ,試料容器500を貫通孔360から装填ステーション又は領域202上まで落下可能とする。その時点で検査技師は,キャリア本体351と複数の貫通孔360が試料容器から分離されるまでキャリア350を上昇させることによって容器を自走装填機構に装填し,検出システム100内への自動装填を達成することができる。その他の実施形態も採択可能であることは,言うまでもない。
【0038】
図1〜3に示すように,装填ステーション又は領域202は,一般的に自動装填機構200において容易にアクセス可能な位置又は領域であり,当該位置又は領域では,検出システム100内に装填するための少なくとも1つの試料容器を,ユーザ又は検査技師がセットすることができる。装填ステーション202にセットされた後,容器500は搬送機構204を使用して装填ステーション又は領域202から入り口位置又はポート110まで,引き続いて入り口位置又はポート110を通して検出システム内まで,搬送機構204により搬送される。したがって,ユーザ又は検査技師は,少なくとも1つの試料容器を装填ステーション又は領域202において単にセットしただけで立ち去ることができ,その後は容器500が自動的に検出システム100内に装填される。試料容器500がシステム内に搬送されると,容器は容器管理デバイス又はロケータ装置により少なくとも1つのワークフローステーションまで移動させ,及び/又は保持構造又はラックまで搬送することができる。
【0039】
一実施形態において,図1〜3及び図5A,5Bに示すように,搬送機構204は,容器500を入り口位置又はポート110まで,引き続いて入り口位置又はポート110を経て検出システム100内まで搬送するためのコンベアベルト206である。しかしながら,試料容器500を装填ステーション又は領域202から入口位置又はポート110まで搬送するための他の手段又は機構も採択可能であり,限定されるものではないが,送りねじや,みぞ又はモールドプレートを設けたタイミングベルト等を使用することもできる。他の実施形態において,試料容器500を検出システム100内に自動装填するプロセスは,搬送機構650を使用して容器を保持構造又はラックまで搬送すること,又は容器ロケータ装置(図24の要素400A参照)を使用して容器を少なくとも1つのワークフローステーションまで移動させることを含むことができる。
【0040】
図1〜3,5A及び5Bに示すように,装填ステーション又は領域202と搬送機構204は,コンベアベルト206を備える。この実施形態において,ユーザ又は検査技師は,検出システム100内に容器500を自動装填するためのコンベアベルト206における特定の位置又は領域(すなわち装填ステーション又は領域202)に,少なくとも1つの試料容器500をセットすることができる。コンベアベルト206は連続的に作動させることができ,また,容器500が装填ステーション又は領域202に物理的に存在することを検知したときに作動させることもできる。例えば,システムコントローラを使用してコンベアベルト206を,少なくとも1つの試料容器が装填ステーション202に存在するか否かを表示する信号(光センサの出力信号等)に基づいて操作(オン・オフ切り替え等)することができる。同様に,入口位置又はポート110において少なくとも1つのセンサを使用し,容器が不適切に装填されたか否か,及び/又は落下して詰まりを生じているか否か表示することができる。コンベアベルト206は,装填ステーション又は領域202(例えば,図1で示すコンベアベルト206の左側部位)から入口位置又はポート110まで容器を移動させ,又は搬送するように作動し,これにより少なくとも1つの容器500を入口位置又はポート110に蓄積し,検出システム100内への装填待機状態とすることができる。一般的には,図1〜3及び図5A,5Bに示すように,装填ステーション又は領域202と,搬送機構204又はコンベアベルト206と,入口位置又はポート110が検出システム100のハウジング102の外側又は上側に配置される。一実施形態において,自動装填機構200は,システム100の下側セクション170上におけるシェルフ180上に,上側セクション160と隣接させて配置する。更に,図示のとおり,搬送機構又はコンベアベルト206は,一般的に水平面内で作動することにより試料容器500を,検出システム100(例えば図1〜3及び図5A,5B参照)内への装填のために頂部506が上側に向く垂直状態又は直立状態で保持する。図1〜3に示すように,例えば,搬送機構又はコンベアベルト206は,少なくとも1つの直立した容器500を装填ステーション又は領域202から入口位置又はポート110に向けて,例えば左側から右向きに(図2の矢印208を参照)搬送するように移動する。
【0041】
一実施形態において,例えば図1〜3及び図10,11に示すように,自動装填機構200は,搬送機構又はコンベアベルト206の片側又は両側に併置される少なくとも1本のガイドレール210を更に備える。このガイドレール210は,搬送機構又はコンベアベルト206の作動中に,試料容器500を入口位置又はポート110に向け,又はそこまで案内するものである。一実施形態において,ガイドレールは,自動装填機構200の後部における単一のファイル行に案内するように作動し,そこで容器を一度に1つずつ検出システム100内に装填するように順番待ちさせる。他の実施形態において,図22に例示するように,検出システムは,ロケータ装置を覆い,ロケータ装置用の内部チャンバ(図示せず)を包囲するロケータ装置カバー460を更に備えることができる。ロケータ装置カバー460は,試料容器500を自動装填機構200から入口位置又はポート110を経て内部チャンバ内まで搬送し,これによりシステム内に自動的に装填する際に試料容器を案内するための少なくとも1本の容器ガイドレール462を備えることができる。この実施形態において,ロケータ装置用の内部チャンバ(図示せず)は,前述した内部チャンバの一部を構成するものである。
【0042】
更に他の実施形態において,自動装填機構200は,試料容器が検出システム100に入る際に容器を読み取り,又は特定する手段又はデバイスを更に備えることができる。例えば,試料容器500を容器500は,容器の識別又はシステム内におけるトラッキングのために読み取ることができるバーコードラベル508を含むことができる。この実施形態において,検出システム100は,システム内における少なくとも1つの位置において,少なくとも1つのバーコードリーダ(図14,15の要素410参照)を含むことができる。例えば,検出システム100は,入口位置又はポート110において個々の試料容器500を容器500を識別して検出システムコントローラでログを取るためのバーコードリーダを含むことができる。他の実施形態において,入口位置又はポート110は,バーコードラベル508を読み取り可能とするように試料容器500を容器を,入口位置又はポート110内で回転させるための手段(例えば,図示の容器ロテータ又はターンテーブル)を含むことができる。他の実施形態においては,試料容器500を,バーコードラベル508を読み取り可能とするために搬送機構(図5Bの要素650参照)によって回転させることができる。バーコードを読み取った後,試料容器500を搬送機構により,一般的には入口位置又はポート110から複数の保持構造又はラック600の1つにおける複数の受け構造又はウェル602の1つまで搬送する。
【0043】
更に他の実施形態において,バーコード508が適切に読みとれない場合(例えばラベルが誤読され,又は読み取りエラーが生じた場合),検出システムコントローラ(図示せず)は,容器500を,読取不可又は誤読容器500に対するユーザアクセスのために,誤読又はエラー位置120に向かわせることができる。ユーザは,自動装填機構200により,及び/又はユーザの裁量で容器を再装填することができ,また,任意的に手動で容器500を装填し,かつ,容器500の情報をユーザインターフェース150等でシステムコントローラに手動入力することができる。他の実施形態において,検出システム100は最優先容器の装填及び/又はラベルは誤読された又は読み取りエラーが生じた容器の手動装填のための最優先(又はSTAT)装填位置(図示せず)を含むことができる。
【0044】
自動装填機構の他の実施形態を図10に示す。自動装填機構200は,図10に示すように,装填ステーション又は領域202と,第1コンベアベルト206と,入口位置又はポート110とを備える。コンベアベルト206は試料容器500を,システム100の左端(装填ステーション位置202)から入口位置又はポート110まで搬送するよう作動する。本実施形態において,図10における矢印220で示すとおり,動作は左側から右側に向かうものである。自動装填機構200は,ガイドレール210と,一組のギヤ214又はホイール216間に掛け渡された第2コンベアベルト212を更に備えることができる。本実施形態において関して,第2コンベアベルト212は,第1水平コンベアベルト206の上方で垂直面内において作動可能であり,時計方向又は反時計方向に,すなわちベルトを左側から右向きに,又は右側から左向きに移動させるように配置されている。第2垂直方向コンベアベルト212の時計方向又は反時計方向の作動により試料容器500を,垂直軸周りでの反時計方向又は時計方向の回転をもって供給することができる。発明者らは,試料容器500を反時計方向又は時計方向の回転をもって供給することが,複数の試料容器500を入口位置又はポート110に蓄積させる際に自動装填機構200における詰まり又は閉塞を防止し,又は緩和する上で有効であることを見出した。試料容器500は,入口位置又はポート110に達した後,検出システム100内まで移動させることができる。
【0045】
更に他の実施形態において,自動装填機構200は,第1コンベアベルト206の下側で水平面内に配置された支持ボード(図示せず)を含むことができる。コンベアベルト206はある程度の柔軟性を有し,弾性部材と考えることができる。コンベアベルト206の弾性は,試料容器500が装填ステーション又は領域202から第1ポート又は入口位置110までコンベアベルト206を横切って搬送される際に試料容器500を不安定とし,試料容器500の傾斜又は横倒しにつながりかねない。発明者らは,コンベアベルト206の下側に剛性又は半剛性の支持ボードを配置することにより,このような問題を全て解消することができ,これによって装填機構200における,例えば横倒し状態の試料容器500による詰まり又は閉塞を回避し,及び/又は緩和できることを見出した。一般的に,既知の適宜の支持ボードを使用することができる。例えば,支持ボードは,プラスチック製,木製又は金属製の剛性又は半剛性ボードで構成することができる。
【0046】
自動装填機構の更に他の配置を図11に示す。自動装填機構200は,図11に示すように,装填ステーション又は領域202と,コンベアベルト206と,入口位置又はポート110とを備えることができる。コンベアベルト206は,試料容器500をシステムの前端(装填ステーション202)から入口位置又はポート110まで搬送するように作動することができる。本実施形態において,図11の矢印240で示すように,装填機構200は,前側から後向きに(装置前端側から装填ポート110に向けて)作動する。自動装填機構200は,少なくとも1つの試料容器500をコンベアベルト206によって搬送する際,当該容器を入口位置又はポート110まで案内するための少なくとも1本のガイドレール210を更に備えることができる。
【0047】
本実施形態に係る自動装填機構200は,図11に示すように第2搬送機構200を更に含むことができる。一実施形態において,第2搬送機構230は,第1コンベアベルト206の上方で,垂直面内において作動可能とした第2コンベアベルト232を備えることができる。第2搬送機構230は,第2コンベアベルト232に取り付けた複数のパドル又はプレート236を更に備えることができる。本実施形態において,第1コンベアベルト206は少なくとも1つの試料容器500を,装填ステーション又は領域202から第2搬送機構230まで移動させ又は搬送するように作動し,さらに,第2搬送機構230により個々の容器500をパドル間又はプレート236間におけるウェル又はスペース234内まで移動させ又は搬送する。第2コンベアベルト232は,1組のギヤ又は駆動ホイール(図示せず)間に掛け渡され,例えば自動装填機構200の後端を越えて左側から右向きに移動することにより,容器500を自動装填機構200の後部に沿って左側から右向きに入口位置又はポート110まで搬送する(矢印250参照)。試料容器500は,入口位置又はポート110に達した後,検出システム100内まで移動させることができる。
【0048】
更に他の実施形態において,自動装填機構200は,図12に例示するように保護ハウジング又はケース260により包囲又は封止することができる。この実施形態において,自動装填機構200又はその構成要素の少なくとも1つ(例えば,装填領域,搬送手段(コンベアベルト206等)及び/又は入口位置又はポート(図示せず))は,保護ハウジング又はケース260により包囲又は封止することができる。保護ハウジング又はケース260は,その内部に配置された自動装填機構200に試料容器500を装填するためのアクセスを許容する開口262を有する。任意的に,保護ハウジング又はケース260は,その内部に配置された自動装填機構200及び/又は試料容器500を保護する目的で閉鎖可能としたカバー手段264を備えることができる。カバーは,図示例における閉鎖可能な蓋266で構成することができ,ハウジング又はケース260を閉じるための他の構造又は手段で構成することも可能である。例えば,他の実施形態において,カバー264は,開口262上を閉めるように引き出すことのできる軽量カーテン(図示せず)で構成することができる。保護ハウジング又はケース260には,最優先容器(すなわちSTAT容器)及び/又は誤読容器を装填するための優先容器装填ポート270を設けることもできる。一実施形態においては,試料容器500を優先ポート270に手動装填可能とする。
【0049】
自動装填機構の他の実施形態を図13〜15に示す。前述した自動装填機構と同様,図13〜図15に示す自動装填機構300は,容器の装填ステーション又は装填領域302と,搬送機構304と,容器入口位置306とを備え,少なくとも1つの試料容器500を検出システム100内に完全に自動装填可能としたものである。
【0050】
容器装填領域302は,検出システム100における容易なアクセス可能位置にあるため,例えば図17に示すように,ユーザが少なくとも1つの試料容器500を容易に配置することが可能である。この実施形態において,試料容器500は,図13に例示するように,水平姿勢で装填され,側面をもって横置きとされる。容器装填領域302に達した後,試料容器500を搬送機構304によって容器装填領域302から入口位置306まで搬送し,ここで容器500を検出システム100内に投入することができる。驚くべきことに,本実施形態に係る自動装填機構300は,装填領域302における試料容器500の向きに関わらず,すなわち試料容器500の頂部が検出システム100に対向しているか,図14に示すように検出システム100から離反しているかに関わらず,試料容器500を検出システム100内に装填可能とするものである。
【0051】
一実施形態において,容器装填ステーション又は領域302は,例えば図13に示すように,少なくとも1つの試料容器500を保持可能な装填リザーバ303を備える。装填リザーバ303は,1個〜100個の試料容器,1個〜80個の試料容器又は1個〜50個の試料容器を保持する構成とすることができる。他の実施形態において,装填リザーバは,100個以上の試料容器500を保持する構成とすることができる。本実施形態の自動装填機構300は,ユーザ又は検査技師が装填リザーバ303及び装填領域302を任意的にカバーするよう閉鎖可能とした蓋又はカバー(図示せず)を更に備えることができる。蓋又はカバーは,種々の形態をもって具体化することができる。
【0052】
図13,14に示すように,装填リザーバ303は,試料容器500を装填領域302から入口位置306まで搬送するための搬送機構304として,例えば入口位置306に向けて下方に傾斜した傾斜ランプを備えることができる。この実施形態において,傾斜ランプは,試料容器を入口位置306まで転動又は滑降させるものである。しかし,傾斜ランプは,試料容器を入口位置306まで搬送する手段の一例に過ぎず,搬送手段又は機構304のための他の実施形態も可能である。例えば,代替的な実施形態において,搬送機構304はコンベアベルト(図示せず)を備えることができる。この実施形態において,コンベアベルトは,少なくとも1つの試料容器を保持する構成とすることができ,任意的に,コンベアベルトを入口位置306へ向けて下方へ傾斜させた配置とすることもできる。
【0053】
ドラム又はドラム状の装填デバイス308は,入口位置306において,試料容器500を検出システム100内に装填するように使用する。ドラム状装填デバイス308は,少なくとも1つの試料容器を保持するために,少なくとも1つの水平方向スロット310を有する。各スロット310につき,1つの試料容器500が保持可能とされている。一実施形態において,ドラム状の装填デバイス308は試料容器500を保持するために複数のスロット,例えば1個〜10個のスロット,1個〜8個のスロット,1個〜5個のスロット,1個〜4個のスロット又は1個〜3個のスロットを有する。他の実施形態において,ドラム状の装填デバイス308は,1つの試料容器500を保持可能とする1つのスロットを設けた構成とすることができる。
【0054】
ドラム状装填デバイス308は,水平軸周り(時計方向又は反時計方向)に回転することにより,検出システム100内で各試料容器500を個別的に取外し,又は装填可能に構成されている。作動中,ドラム又はドラム状装填デバイス308の回転により,複数の水平方向スロット310のうち1つのスロット内で水平に向けられた試料容器500が取り外され,その容器500はタンブラデバイス330(図16参照)に向けて移動される。ドラム又はドラム状装填デバイス308を回転させるための手段として,既知の適宜手段を使用することができる。例えば,システムにおいてドラム状装填デバイス308を回転させる手段として,モータ(図示せず)及び駆動ベルト316を使用することができる。
【0055】
他の実施形態において,自動装填機構300は,図13に示すように,1つの装填ポート312を更に備えることができる。作動中,ユーザ又は検査技師は1つの試料容器,例えばSTAT試料容器を迅速又は即時的な装填のために1つの容器装填ポート312内に配置することができる。その1つの容器装填ポート312内に配置された試料容器は,重力作用で第2搬送機構314上まで降下又は落下する。第2搬送機構314は,例えば,検出システム100内で試料容器を迅速に,又は即時的に自動装填するために,ドラム状装填デバイス308に向けて下方に傾斜した傾斜ランプで構成されている。
【0056】
図13〜16に示すように,ドラム又はドラム状装填デバイス308は,垂直面内(水平軸周り)で回転することにより,試料容器500を入口位置306からタンブラーデバイス330まで移動させる。タンブラーデバイスは,垂直に向けられたシュート332の頂部において,開放スロットを備える。タンブラーデバイス330まで移動した後,試料容器はカム機構及び垂直シュート332によって直立させる(すなわち,試料容器を水平状態から垂直な直立状態に再配向させる)。作動中,カム機構(図示せず)は,試料容器500の頂部及び/又は底部を感知し,試料容器をその底部から水平方向に押し出すことにより,垂直シュート332の開口を通して底部側から降下又は落下させることが可能である。したがって,タンブラーデバイス330は,試料容器500を,垂直シュート332を通して底部側から,容器ロケータ装置400における第1ロケータウェル内まで(重力作用で)落下させるように作動し,これにより容器を垂直な直立状態に再配向する。
【0057】
図16に例示するように,タンブラーデバイス330は,ドラムの各側に1つずつ配置した2つのテーパ付レッジ334を有し,各レッジはそれぞれ前端が先細りとされ,後端がより広く形成されている。レッジ334は,ドラムの回転に際してレッジが容器500のキャップ部502を捕捉又は保持するように整列している(すなわち,キャップ部は,レッジ334の頂部側まで移動して頂部側に留まる)。容器500が底部側から垂直シュート332を通して落下する際,容器500のキャップ部502はレッジ334のみにより所定位置に保持される。更に,容器の底部又は基部506は,レッジによって捕捉又は保持されない。むしろ,テーパ付レッジ334は,ドラム又はドラム状装填デバイス308の回転に際して,容器500の底部又は基部506を水平に,すなわち容器の頂部又はキャップ部(図4参照)に向けて押し込み,又は摺動させるように作動する。この作動により,容器のキャップ端502がレッジ334の頂部において保持され,それにより容器500の底部506を垂直シュート332を通して容器ロケータ装置400内まで自由落下させることができる。ドラム又はドラム状装填デバイス308における各側にレッジ334を配置したことにより,回転ドラム内における容器500の向きは本質的ではなくなる。容器500は,容器のキャップ端502がドラム状装填デバイス308の右側に位置するか,又は左側に位置するかに関わらず,タンブラーデバイス330によって直立状態とされる。これは,底部406が垂直シュート332を通して落下する際に対応するレッジ334が容器のキャップ又は頂部502を保持する機能を発揮するからである。他の実施形態において,垂直シュート332は,落下する容器500を容器ロケータ装置400内に向けさせるための狭小部333を更に備えることができる。作動中,ドラム又はドラム状装填デバイス308が垂直方向シュート332の頂部において開放スロットを超えて回転すると,容器500のキャップ又は頂部502は,少なくとも1つのレッジ334によってドラムの外端において保持される(図16参照)。レッジ334は,容器500のキャップ又は頂部502を所定位置に保持すると共に,容器の底部506をドラム又はドラム状装填デバイス308から垂直シュート332内に自由に垂下させ,又は落下させることにより,前述したように容器が垂直方向シュート332を通して底部側から重力作用で降下し,又は落下する際に容器を直立状態又は垂直状態とするものである。
(容器管理手段又はロケータ装置)
【0058】
図13〜15,図18及び図25A〜25Cに例示するように,検出システムは容器管理デバイス又はロケータ装置400を更に備えることができる。容器管理デバイス又はロケータ装置400は,検出システム100のハウジング102内で容器500を,種々のワークフローステーション間404において管理し,移動させ,又は位置決めするように使用することができる。一実施形態において,容器管理デバイス又はロケータ装置400は,図13〜15に示す自動装填機構300と使用することができる。他の実施形態において,容器管理デバイス又はロケータ装置400は,例えば図18に示す自動装填機構200と組み合わせて使用することができる。図13〜15及び図18における容器管理デバイス又はロケータ装置400は,縮尺不定として図式的に表わされている。
【0059】
容器管理デバイス又はロケータ装置400は回転ホイール状のデバイス又は回転ディスクを備え,この回転ホイール状のデバイス又は回転ディスクは少なくとも1個のロケータウェル402,例えば1個〜10個のロケータウェル,1個〜8個のロケータウェル,1個〜5個のロケータウェル,1個〜4個のロケータウェル又は1個〜3個のロケータウェルを含む。一実施形態において,ロケータ装置は,互いに対向可能とした平行なプレート又はディスク(図25A〜25C参照)を備える。各ロケータウェル402は1つの試料容器500を保持することが可能である。作動にあたり,ロケータ装置400は,各容器500を種々のワークフローステーション404間で移動させるために,容器を水平面内で,すなわち垂直軸周りで回転させる(時計方向又は反時計方向)。一実施形態において,ワークフローステーション404は,試料容器における少なくとも1つの測定又は読み取りを行い,これにより容器についての情報,例えば容器のロット番号,容器の使用期限,患者情報,試料の種類,充填レベル等の情報を提供するように作動することが可能である。他の実施形態において,少なくとも1つのワークフローステーション404は少なくとも1つの容器管理ステーション,例えば容器収容ステーション又は容器搬送ステーションを備えることができる。例えば,ロケータ装置400は,各試料容器500を少なくとも1つのワークフローステーション404まで移動可能とするものである。このようなワークステーションは,(1) バーコード読み取りステーション;(2) 容器走査ステーション;(3) 容器撮像ステーション;(4) 容器計量ステーション;(5) 容器収容ステーション;及び/又は (6) 容器搬送ステーションである。他の実施形態においては,1つ以上の測定及び/又は読み取りを同一ステーションで実施可能とする。例えば,容器計量,走査,撮像,及び/又は収容を単一のステーションにおいて行うことができる。更に他の実施形態において,検出システムは,異なる収容ステーションを含むことができる。容器は,収容位置において,搬送機構によって収容し,検出システム100内における他の位置,例えば保持構造及び/又は撹拌アセンブリまで搬送することができる。更に他の実施形態において,検出システム100は,試料容器500を別の装置,例えば第2自動検出装置まで搬送するための搬送ステーションを含むことができる。この実施形態において,搬送ステーションは,システム搬送デバイス440に接続させることができる。例えば,システム搬送デバイス440をコンベアベルトで構成し,試料容器を図示のとおり検出システム100内における別の位置まで搬送可能とし,又は他の実施形態において別の装置まで(例えば図24に例示する第2検出システムまで)搬送可能とすることができる。図14,15に示すように,ロケータ装置400は:(1) 入口ステーション412;(2) バーコード読み取り及び/又は走査ステーション414;(3) 容器計量ステーション416;(4) 容器収容ステーション418;及び (5) 容器を別の装置まで搬送するためのシステム搬送ステーション420を備える。ロケータ装置は,これによりバーコード読み取り,及び/又は容器走査,及び/又は容器計量を行う際に容器を回転させるための,回転可能なターンテーブルデバイス406を更に備えることができことができる。
【0060】
前述したとおり,作動中に,容器管理デバイス又はロケータ装置400は,所定の試料容器500を所定のワークフローステーション404まで移動させ,又は位置決めするように作動する。一実施形態において,これらのワークフローステーション404は検出システム100のハウジング102内に配置することができる。例えば,図13〜15及び図18に示すように,自動装填機構は,ロケータウェル402内に試料容器500をセットし,又は配置することができる。その状態で容器管理手段又はロケータ装置400は,システム内における種々のワークフローステーション間で,例えばバーコード読み取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容器収容ステーション及び/又は容器搬送ステーション間で試料容器を移動させ,又は位置決めするように回転させることができる。
(搬送機構)
【0061】
例えば図5〜9B及び図17〜21に示すように,自動検出システム100は,システム内における試料容器500の搬送のため,及び/又は容器管理のために作動可能な自動搬送手段又は機構を備えることができる。前述したとおり,入口位置又はポート110は,例えば図1〜3に明示するコンベアシステム206から容器を受け入れる。容器が入口位置又はポート110に蓄積される際,容器は検出システム100内で移動され,これにより搬送機構(例えば容器把持手段を有する搬送ロボットアーム)が個々の試料容器500を収容し又は受け入れ,その容器を検出システム100内において保持構造又はラック60内まで搬送してセットする。搬送機構は,視覚システム(カメラ等),予めプログラムされた3次元座標及び/又は精密作動手段を使用して制御することにより,試料容器を保持構造又はラック600まで搬送し,かつ,保持構造又はラック600内に装填する。
【0062】
図1〜3及び図13〜15に示すように,試料容器500は,自動装填機構200(図1〜3)又は300(図13〜15)を使用して検出システム内に装填され,及び/又は搬送される。容器500は,一般的には垂直状態(容器500の頂部又はキャップ502が直立する状態)で検出システム100内に装填される。一実施形態において,容器500は,複数の保持構造又はラック600内に保持されており,微生物増殖を増強するように任意的に撹拌されるものである。図5A,5Bに例示するように,保持構造又はラック600における受け構造又はウェル602は,水平軸線方向に配向することができる。したがって,本実施形態において,自動搬送機構(図5Bの要素650参照)は,自動装填機構300,300から受け構造又はウェル602まで容器500を搬送する間,容器500を垂直状態から水平状態に再配向する必要がある。
【0063】
作動中,自動搬送機構(例えば図5Bにおける要素650,又は図20における要素700)は,検出システム100における内部チャンバ600内の試料容器500を搬送し,移動させ,又は再配向するように作動させることができる。例えば,一実施形態において,搬送機構は,試料容器500を入口位置又はポート110から複数の保持構造又はラック600の1つまで搬送することができる。他の実施形態において,搬送機構は,容器ロケータ装置400のウェル400から試料容器500を収容し,保持構造又はラック600における保持構造又はウェル602まで容器を搬送することができる。搬送機構は,複数の保持構造又はラック600のうちの1つに設けられている複数の容器受け構造又はウェル602のうちの1つに容器500を配置するように作動させることができる。他の実施形態において,搬送機構は,保持構造又はラック600から陽性容器及び陰性容器を取り除き又は排出するように作動させることができる。自動排出機構は,試料容器500について陽性又は陰性の判定が行われた後に当該容器500を容器受け構造又はウェル602から除去し,検出システム内に新たな容器を装填するためのスペースを形成し,これによりシステム処理量を増加可能とするように作動させることができる。
【0064】
一実施形態において,搬送機構は,搬送ロボットアームで構成することができる。一般的に,既知の適宜の搬送ロボットアームを使用することができる。例えば,搬送ロボットアームは多軸ロボットアーム(例えば2軸,3軸,4軸,5軸又は6軸ロボットアーム)で構成することができる。搬送ロボットアームは,試料容器500(例えば血液培養ボトル)を収容し,入口位置又はポート110から複数の保持構造又はラック600(任意的に撹拌アセンブリを有する)のうちの1つにおける複数の容器受け構造又はウェル602のうちの1つまで搬送するように作動させることができる。更に,搬送機構又は搬送ロボットアームの所要の動作を支援するように,検出システム100の内部チャンバ620に,搬送ロボットアームのための少なくとも1つの支持手段を設けることができる。例えば,少なくとも1つの垂直支持手段及び/又は少なくとも1つの水平支持手段を設けることができる。搬送機構,又は搬送ロボットアームは,保持構造又はラック600における任意の受け構造又はウェル602にアクセスする必要があるとき,支持手段を横切って上下に摺動する。前述したように,搬送ロボットアームは試料容器の姿勢を,垂直姿勢(容器500の頂部502が上向きの直立姿勢)から水平姿勢(容器500が側面で横たわる姿勢)まで変化させることにより,例えば容器の装填ステーション又は位置からの搬送又は保持構造及び/又は撹拌アセンブリ内における位置決めを容易とするように作動させることができる。
【0065】
一実施形態において,搬送ロボットアームは2軸又は3軸ロボットアームで構成され,少なくとも1つの水平軸(例えば,x軸及び/又はz軸)と,任意的な垂直軸(y軸)に規定される運動をもって容器500を,容器受け構造又はウェル602等の特定の位置まで搬送することが可能である。本実施形態において,2軸ロボットアームは2軸(例えば,x軸及びz軸)に規定される運動を行い,3軸ロボットアームは3軸(例えばx軸,y軸及びz軸)に規定される運動を行うものである。
【0066】
他の実施形態において,2軸又は3軸のロボットアームは,少なくとも1軸周りでの回転運動を行うことにより試料容器500を少なくとも1軸周りで回転させながら搬送し,又は移動させることが可能である。この回転運動により搬送ロボットアームは,試料容器500を垂直な装填状態から水平状態まで搬送するものである。例えば,搬送ロボットアームは,試料容器を水平軸周りに回転させながら移動させるための回転運動を行うことができる。この種類の搬送ロボットアームは,3軸又は4軸ロボットアームとして定義される。例えば,1つの水平軸(x軸),1つの垂直軸(例えばy軸)及び1つの回転軸に規定される動作を可能にするロボットアームは,3軸ロボットアームと定義される。これに対して,2つの水平軸(例えばx軸及びz軸),1つの垂直軸(y軸)及び1つの回転軸に規定される動作を可能にするロボットアームは,4軸ロボットアームと定義される。同様に,1つの水平軸(例えばx軸),垂直軸(y軸)及び2つの回転軸に規定される運動を行うロボットアームも,4軸ロボットアームと定義される。更に他の実施形態において,搬送ロボットアーム700は4軸,5軸又は6軸ロボットアームで構成することができ,これによりx軸,y軸及びz軸に沿う軸線方向運動を行わせると共に,4軸ロボットアームの場合に1軸周りでの,5軸ロボットアームの場合に2軸周りでの,そして6軸ロボットアームの場合には水平軸(x及びy軸)及び垂直軸(y軸)の3軸周りでの回転運動を行わせることが可能である。
【0067】
更に他の実施形態において,搬送ロボットアームは,試料容器500についての測定,走査及び/又は読み取りを行うための少なくとも1つの手段を含むことができる。例えば,搬送ロボットアームは,少なくとも1つのビデオカメラ,センサ,走査,及び/又はバーコードリーダを含むことができる。本実施形態において,ビデオカメラ,センサ,走査,及び/又はバーコードリーダは,容器位置,容器ラベル(例えばバーコード)の読み取り,容器走査,システムの現場使用における遠隔操作,及び/又はシステム内における容器の漏れ検出を支援することができる。更に他の実施形態において,搬送ロボットアームは,所要に応じて除染を支援するUV光源を含むことができる。
【0068】
図6〜8Cは,搬送機構の一実施形態を示す。図6に示すように,搬送機構は搬送ロボットアーム650を備え,この搬送ロボットアーム650は,上側水平支持レール652Aと,下側水平支持レール652Bと,1本の垂直支持レール654と,試料容器500を収容し,把持し,又は保持するための把持機構(図示せず)を設けたロボット頭部656とを含んでいる。図6〜8Cに示す搬送機構は,縮尺不定として図式的に表わされている。例えば,図示の水平支持レール652A,652B,垂直支持レール及びロボット頭部656は一定縮尺で表されたものではない。水平支持レール652A,652B及び垂直支持レールは,必要に応じて長さの増減が可能である。ロボット頭部656は,垂直支持レール654によって支持されると共に垂直支持レール654に結合し又は取り付けられており,垂直支持レール654は水平支持レール652A及び652Bによって支持されている。図6に示すように,搬送機構は,搬送機構を検出システム内に実装するために使用される少なくとも1つの実装支持手段696を備えることができる。
【0069】
作動中,垂直支持レール654を水平支持レール652A,652Bに沿って移動さることにより,垂直支持レール654及びロボット頭部656を水平軸(例えばx軸)に沿って移動させることができる。一般的に,垂直支持レール654を水平支持レール652A,652Bに沿って移動させるためには既知の適宜手段を使用することができる。図6に示すように,上側支持レール652A及び下側支持レール652Bは,それぞれ上側水平スライダ659A及び下側水平スライダ659Bを駆動するよう作動可能とした上側及び下側のねじシャフト(図示せず)を備えることができる。更に,図6に示すように,上側シャフト652A及び下側シャフト652Bは,それぞれ上側及び下側のねじ状ボルトを包囲するように上側支持レール652A及び下側支持レール652Bを延長するための中空補強スリーブ管653A,653Bを含むことができる(例えば米国特許第6467362号参照)。各スリーブ管653A,653Bは,上側支持レール652A及び下側支持レール652Bを延長するスリーブ管653A,653B内においてスロット(例えば653C参照)を含むことができる。ねじ付タング(図示せず)は,スロット(例えば要素653C参照)を通して延在し,かつ,補強スリーブ管653A,653B内に配置されたねじシャフト(図示せず)と係合可能なねじが設けられている。上側支持レール652A及び下側支持レール652Bにおけるねじシャフト(図示せず)を第1モータ657により回転させると,ねじ付タング(図示せず)は水平スライダ659A,659Bを上側支持レール652A及び下側支持レール652Bの長手方向に移動させ,これによりロボット頭部656を水平軸(例えばx軸)に沿って移動させる(例えば米国特許第6467362号参照)。第1モータ657は,上側及び下側のねじシャフト(図示せず)を回転させ,これにより上側水平スライダ659A及び下側水平スライダ659B(それぞれ,ねじシャフトと係合する内ねじを有する)を上側及び下側ねじシャフトに沿って水平方向に駆動するように作動可能である。一実施形態においては,第1モータ657により上側及び下側のねじシャフトを回転させる。そのために駆動ベルト660と,1組のプーリ662を設け,第1ねじシャフトをモータ657によって回転させる際に,第1ねじシャフトと平行なねじシャフトの一方(例えば下側ねじシャフト)を回転させるものである。
【0070】
図6に示すように,垂直支持レール654は垂直なねじ付駆動シャフト(図示せず)を更に備え,この駆動シャフトを,垂直スライダ655を駆動するように作動可能とし,これによりロボット頭部656を垂直軸(例えばy軸)に沿って移動させることができる。作動にあたり,第2モータ658により垂直ねじシャフト(図示せず)を回転させ,これにより垂直スライダ655を垂直ねじシャフトに沿って垂直方向に駆動する。他の実施形態において,図6〜7Bに示すように,垂直ねじシャフトは,垂直ねじシャフト(図示せず)を包囲するように垂直支持レール654を延長するための中空の補強スリーブ管654Aを更に備えることができる。スリーブ管654Aは,垂直支持レール654の長さ方向に延在するスロット654Bを更に含む。ねじシャフト(図示せず)と係合可能なねじを有し,スロット(図示せず)を通して延在するねじ付タング(図示せず)を設ける。ねじ付シャフト(図示せず)がモータ658によって回転されると,ねじ付タング(図示せず)が垂直スライダ655を移動させ,これによりロボット頭部656を垂直軸(例えばy軸)に沿って移動させる(例えば米国特許第6467362号参照)。垂直スライダ655は,ロボット頭部656に直接取り付けることができ,又は図6に示すように,第1回転機構664に取り付けることができる。この垂直スライダ655は,ねじ状垂直シャフトと係合する内ねじ(図示せず)を有し,垂直スライダを,したがってロボット頭部656を,ねじ状垂直シャフトに沿って垂直方向に駆動するよう作動する。
【0071】
搬送機構650は,少なくとも1つの軸周りにおける回転動作を行うように作動可能とした少なくとも1つの回転機構を更に含むことができる。例えば,図6に示すように,ロボット頭部は,y軸周りでの回転動作を行う第1回転機構654と,x軸周りでの回転動作を行う第2回転機構665とを含むことができる。第1回転機構664は,ロボット頭部656に取り付け可能な第1回転プレート667を備える。第1回転機構664は,第1回転プレート667を,したがってロボット頭部656を垂直軸(例えばy軸)周りで回転させるように,第1回転モータ668と,第1ピニオンギヤ670及び第1対向リングギヤ672とを更に備える。一実施形態において,第1ピニオンギヤ670及び第1リングギヤ672には,把持歯車等の把持手段(図示せず)を設けることができる。第1回転プレート667は,ロボット頭部656に直接的に取り付けることができ,図6に示すように第2回転機構665に取り付けることもできる。図6に示すように,第1回転プレート667は,第2回転機構665への取り付けを容易とするためのベントプレートを備えることができる。第1回転機構664と同様,第2回転機構665は第2回転プレート674を備える。図6に示すように,第2回転プレート674はロボット頭部656に取り付けられている。第2回転機構665は,第2回転プレート674を,したがってロボット頭部656を水平軸(例えばx軸)周りで回転させるように,第2回転モータ678と,第2ピニオンギヤ680及び第2対向リングギヤ682とを更に備える。一実施形態において,第2ピニオンギヤ680及び第2リングギヤ682には,把持歯車等の把持手段(図示せず)を設けることができる。
【0072】
ロボット頭部656は,図7Bに明示するように,1つの試料容器500を保持するための保持チャンバ685を包囲するハウジング684を備える。
ロボット頭部は,把持機構686と,把持機構686を移動させることにより1つの試料容器500をハウジング684及び保持チャンバ685内まで,又はハウジング684及び保持チャンバ685外に移動させるための駆動機構688とを更に備える。把持機構686は,図7Bに示すように,試料容器500のリップを超えてスナップ作動可能としたばねクリップ687を備えることができる。試料容器500を保持構造600まで搬送した後,ロボット頭部656,したがって把持機構686は,試料容器500を解放するために保持構造600に対して上下に移動させることができる。駆動機構688は,図7Bに示すように,モータ690と,ガイドレール692と,ねじ付把持シャフト694と,把持駆動ブロック696とを更に備える。作動にあたり,モータ690はねじ状把持シャフト694を回転させ,これにより把持駆動ブロック696,したがって把持機構686をガイドレール692に沿って移動させる。
【0073】
搬送機構についての他の実施形態を図9A,9Bに示す。図9A,9Bに示すように,自動搬送機構820は,頂部又は底部ドラム保持構造800における入口位置又はポート110から容器500を把持又は収容するため,及び容器500を所定の受け構造又はウェル802まで移動又は搬送するため,図9A,9Bに示す検出システム100に組み込まれている。この実施形態における自動搬送機構820は,陰性容器500を廃棄位置まで移動させて廃棄ビン146内に落下又は堆積させ,又は陽性容器を陽性容器位置(例えば図1の要素130を参照)まで移動させるように作動可能である。このような動作を実現するため,搬送機構820はロボット頭部824を備え,このロボット頭部824は,容器500を収容し,かつ保持するための把持機構826と,システム100の内部チャンバ850を横切って延在する回転支持ロッド828とを含むことができる。ロボット頭部824は回転支持ロッド828により結合状態で支持されている。一般的に,把持機構は,既知の把持手段で適宜に構成することができる。一実施形態において,把持機構は,図6〜8Cに関連して上述した把持機構及び駆動機構で構成することができる。ロボット頭部824は,回転支持ロッド828に沿う任意の位置まで移動可能である。作動にあたり,支持ロッド828は長手方向軸周りに回転してロボット頭部824を,上側又は下側のシリンダ又はドラム保持構造800A,800Bに向けることができる。
【0074】
一実施形態において,ロボット頭部820は,容器500を入口位置又はポート110から収容し,その容器500を頂部502側からドラム保持構造800A,800Bにおける受け構造又はウェル800内に装填するように作動可能である。この方位により容器500の底部又は基部506が検出ユニット810に露呈され,この検出ユニットは,容器内における微生物の増殖を検出するために容器500底部に配置したセンサ514を読み取ることが可能である。
【0075】
搬送機構についての更に他の実施形態を図17〜21Bに示す。図17〜21Bに示すように,搬送ロボットアーム700は,少なくとも1つの水平支持部材702と,少なくとも1つの垂直支持部材704と,試料容器を収容し,把持し,及び/又は保持するための少なくとも1つの装置又は手段(例えば把持機構)とを含むロボット頭部710を備える。ロボット頭部710は,水平支持部材及び/又は垂直支持部材の1つに支えられ,結合し,及び/又は取り付けることができる。例えば,一実施形態において,図17〜21Bに示すように,搬送ロボットアーム700は,下側水平支持部材702Bと,1つの垂直支持部材704を備える。しかしながら,図示しないが,上側水平支持部材(図示せず)又は垂直支持部材を更に支持し,又は案内するための他の類似手段も使用可能である。一般的に,ロボット頭部710を垂直支持レール704(図18の矢印726)に沿って上下に移動させ,垂直支持レール704を水平支持部材702B(図20の矢印736)に沿って前後に移動させるために,既知の手段を適宜に使用することができる。例えば,図20に示すように,搬送ロボットアーム700は,ロボット頭部710を垂直軸(y軸)に沿って上下に搬送し又は移動させることにより,容器500を垂直支持レール704の上下(矢印726)に搬送し又は移動させるための垂直駆動モータ720及び垂直駆動ベルト722を更に備える。垂直支持部材704は,図20に示すように,垂直ガイドレール728と,ロボット頭部支持ブロック708とを更に備えることができる。この場合,垂直支持部材704,垂直ガイドレール728,垂直駆動モータ720及び垂直駆動ベルト722は,搬送ロボットアーム700がロボット頭部支持ブロック708を,したがってロボット頭部710及び試料容器500をy軸に沿って移動又は搬送可能とする。同様に,図20に示すように,搬送ロボットアーム700は,第1水平駆動モータ730と,第1水平駆動ベルト732と,水平ガイドレール738とを更に備え,これにより垂直支持部材704を,水平ガイドレール738に沿って前後に(左側から右向き,又は右側から左向きに)移動させ,したがって検出システム100のハウジング102内における第1水平軸(x軸)に沿って移動させることができる(矢印736参照)。
したがって,水平支持部材702B,第1水平駆動モータ730,第1水平駆動ベルト732及び水平ガイドレール738は,搬送ロボットアーム700により試料容器500をx軸に沿って移動又は搬送可能とするものである。発明者らは,搬送ロボットアームが装置内の増大領域を超えて移動可能であるため,水平軸に沿って移動可能な垂直支持部材を設けることにより検出システム内の容量が増大可能となることを発見した。更に,発明者らは,移動可能な垂直支持部材を有する搬送ロボットアームが,搬送ロボットアームの信頼性を向上するものと考えている。
【0076】
図17〜21Bに示すように,自動搬送機構又は搬送ロボットアーム700は,直線又は水平スライド706と,旋回プレート750とを更に備えることができる。例えば図17〜20に示すように,直線又は水平スライド706は,ロボット頭部710及び把持機構712を支持する。直線又は水平スライド706と,ロボット頭部710は,ロボット頭部支持ブロック708及び垂直ガイドレール728に支持され,結合し,及び/又は取り付けることができる。この実施形態において,直線又は水平スライド706は,ロボット頭部支持ブロック708及び垂直ガイドレール728を介して,垂直軸(すなわちy軸)に沿って上下に(図18矢印726参照)移動することにより,ロボット頭部710及び/又は試料容器500を検出システム100のハウジング102内において上下に,すなわち垂直軸(y軸)に沿って移動又は搬送可能とするものである。図21A,21Bに示すように,直線又は水平スライド706は,旋回プレートガイドレール752,旋回スロット754及び旋回スロットカムフォロワ756を備える旋回プレート750を更に備え,ロボット頭部710を直線又は水平スライド706に沿って前方から後方に,又は後方から前方に(図18矢印746参照)摺動又は移動させることにより容器500を,第2水平軸(z軸)に沿って搬送又は移動させる構成とすることができる。この実施形態において,ロボット頭部をz軸に沿って移動させるために,第2水平駆動モータ又は水平スライドモータ760及びスライドベルト(図示せず)を使用することができる。すなわち,直線又は水平スライド706,水平スライドモータ及びスライドベルトによりロボット頭部710は,試料容器500をz軸に沿って移動又は搬送することが可能である。直線又は水平スライド706上に,ロボット頭部710の位置を示すために,少なくとも1つのセンサ(例えば図21Aにおける要素764)を使用することができることは言うまでもない。
【0077】
図21A,21Bに示すように,ロボット頭部710が直線又は水平スライド706に沿って移動する際に,旋回プレート750及び旋回プレートガイドレール752と,旋回プレートスロット754及び旋回スロットカムフォロワ756は,旋回キャリッジ758を水平軸(z軸)周りで回転させ,これによりロボット頭部710を水平状態(図21A)から垂直状態(図21B)まで,又は垂直状態から水平状態まで回転させる。容器500の垂直入口状態から水平状態までの搬送は,容器を保持構造又はラック600における水平に向けられた受け構造又はウェル602に配置し,又はセットするために必要な場合がある。すなわち,旋回プレート750,旋回スロット754及び旋回キャリッジ758は,ロボット頭部710が試料容器500を装填時(図18)の垂直姿勢から水平状態(図21A)まで再配向し,これにより試料容器500を自動装填機構(図18の要素200参照)から保持構造におけるウェル(図18における要素602,600参照)まで搬送可能とするものである。
図20に示すように,自動搬送機校は,検出システム100内におけるケーブルを管理するための少なくとも1つのケーブル管理チェーン782と,ロボット搬送機構を制御するための回路ボード784とを備えることができる。更に他の実施形態において,搬送ロボットアーム700は,垂直駆動ベルト722を遮断するための遮断機構786を更に備え,これにより(例えば電源異常による)装置底部への落下を防止することができる。
【0078】
搬送ロボットアーム700は,試料容器500を収容し,把持し,又は保持するための把持機構712を更に備えることができる。図21A,21Bに例示するように,把持機構は2つ以上の把持フィンガ714を備えることができる。更に,把持機構712は,把持フィンガ714を開閉するためのリニアアクチュエータ716と,リニアアクチュエータ716を移動させるためのモータ718とを更に備えることができる。作動にあたり,アクチュエータモータ718により把持機構712におけるリニアアクチュエータ716を駆動して把持フィンガ714を移動させることができる。例えば,リニアアクチュエータは,把持フィンガ714を閉じて容器500を把持するように,例えばモータに向けて第1方向に移動させることができる。逆に,リニアアクチュエータは,把持フィンガ714を開けて容器500を解放するように,モータから離間する第2方向に移動させることもできる。発明者らは,想定外ではあるが,1つ以上の把持フィンガ714を使用することにより,把持機構712を多種の異なる試料容器500に適応(収容及び/又は保持)させることが可能であることを発見した。更に,発明者らは,試料容器500の約1/4〜約1/2の長さを有する把持フィンガ714を使用することにより把持フィンガが,当該技術分野において周知である多種の容器(例えばロングネック血液培養ボトル)に適応(収容及び/又は保持))させることが可能であることを発見した。
【0079】
自動搬送機構又は搬送ロボットアーム700は,システムコントローラ(図示せず)の制御下におかれ,試料容器500の管理(回収,搬送,装填及び/又は排出)のためにプログラム可能とすることができる。
【0080】
更に他の実施形態において,後述するように,搬送機構700は陽性及び陰性の試料容器500を自動排出するために使用することができる。
(保持構造及び撹拌手段)
【0081】
検出システム100における保持機構又は構造は,複数の試料容器500を個別的に処理するために種々の物理的形態とすることができ,したがって多数の容器(使用される特定の保持構造に応じて,例えば200個又は400個の容器)を同時処理することが可能である。保持機構又は構造は,試料容器500についての保管,撹拌及び/又は培養を行うために使用することができる。その一実施形態は図5A,5Bに,他の実施形態は図9A,9Bに示されている。これらの実施形態は,例示に過ぎず,限定的なものではない。他の実施形態も可能である。
【0082】
図5A,5B及び図17〜20に示すように,一実施形態において,垂直に積み重ねられた複数の容器保持構造又はラック600を使用し,各容器保持構造又はラック600に,個々の試料容器500をそれぞれ保持するための多数の試料容器受け構造又はウェル602を設けておくことができる。この実施形態において,2段以上の垂直に積み重ねられた保持構造又はラック600を使用することができる。例えば,2段〜40段,2段〜30段,2段〜20段又は2段〜15段の,垂直に積み重ねられた保持構造又はラックを使用することができる。図5A,5B及び図17〜図20を参照すると,この実施形態において,検出システムは,気候制御された上側内部チャンバ622及び下側内部チャンバ624を含む内部チャンバ620と,複数の容器受け構造又はウェル602をそれぞれ有し,垂直に配置された複数段の保持構造又はラック600(例えば図5A,5B及び図15に示すように垂直に積み重ねられた保持構造又はラック600)とを備える。各保持構造又はラック600は,ウェル602で構成された容器受け構造を2つ以上備えることができる。例えば,各保持構造又はラック600は,2個〜40個,2個〜30個又は2個〜20個のウェル602で構成した受け構造を備えることができる。一実施形態において,図5A,5Bに示すように,受け構造又はウェル602は,垂直方向に整列した2列の受け構造又はウェル602を備えることができる。
他の実施形態において,受け構造又はウェル602を交互に配置して各保持構造又はラック600(例えば図20参照)の垂直方向における高さを減少させ,これにより培養チャンバ620内における所定の垂直スペース内に配置できる保持構造又はラック600の総数を増加させることが可能である。図5A,5Bに例示する検出システムは,10個の容器受け構造又はウェル602を2列に配置した保持構造又はラック600を15個備え,これにより300個の容器容量を有するシステムを構成している。他の実施形態において,検出装置は,それぞれ25個の受け構造又はウェルを含むラックを16段垂直に積み重ねて,400個の容器容量とすることができる。
【0083】
更に,各容器受け構造又はウェル602は特定のXY座標位置又はアドレスを有しており,この場合にXは容器受け構造又はウェル602の水平位置,Yは垂直位置である。図17〜21について前述したとおり,各ウェル602は搬送ロボットアーム等の搬送機構によってアクセス可能である。図17〜21に示すように,自動搬送機構700はロボット頭部710,したがって試料容器500を,ラック600における特定のXY座標まで移動させて配置するように作動可能である。作動にあたり,自動搬送機構700は,試料容器500を容器ロケータ装置400における入口ステーション110又は収容ステーション418において収容し,微生物増殖に関して確定的に陽性である試料容器500を陽性容器又は出口位置130まで移動させ,及び/又は微生物増殖に関して確定的に陰性である容器500を陰性容器位置又は廃棄ビン146まで移動させることができる。
【0084】
一実施形態において,保持構造又はラック600全体を,微生物の増殖を促進又は増強するために,撹拌アセンブリ(図示せず)によって撹拌することができる。撹拌アセンブリは,保持構造又はラック600を撹拌(例えば前後揺動)可能とする既知の手段又は機構で適宜に構成することができる。他の実施形態において,保持構造又はラック600は,容器内に含まれる液体を撹拌するために前後に揺動させることができる。例えば,保持構造又はラック600を実質的に垂直位置から水平位置まで反復的に前後揺動させて,容器内に含まれる液体を撹拌することができる。更に他の実施形態において,保持構造又はラック600は,実質的に水平位置から,水平面に対して10°,15°,30°,45°又は60°の位置まで,或いは垂直位置まで反復的に揺動させて容器内の液体を撹拌することができる。一実施形態において,実質的に水平位置,すなわち水平面に対して約10°〜約15°度の位置から垂直位置まで揺動させるのが好適である。更に他の実施形態において,保持構造又はラック600は,容器内に含まれる液体を撹拌するために,直線的又は水平方向の運動をもって前後に揺動させことができる。この実施形態において,保持構造又はラック600と,受け構造又はウェル602は,垂直位置に向け,又は水平位置に向けることができる。発明者らは,保持構造600についての,したがって受け構造又はウェル602と,水平状態の試料容器500とについての直線的な,又は水平方向からの撹拌動作により,比較的に最少のエネルギ入力で効果的な撹拌を行えることを発見した。すなわち,幾つかの実施形態においては,保持構造又はラック600の水平方位と直線又は水平撹拌動作の組み合わせが好適である。保持構造又はラック600を撹拌し,したがって試料容器500内の液体を撹拌するために,他の適宜の手段を使用することもできる。このような前後揺動,直線揺動及び/又は水平揺動は,容器内の液体を十分に撹拌するよう,所要に(例えば種々のサイクル及び/又は速度で)反復させることができる。
【0085】
撹拌アセンブリについての一実施形態を図26に示す。撹拌アセンブリ626は,図26に示すように,複数の試料容器500を保持するために複数の保持ウェル602を設けた少なくとも1つの保持構造600を備える。撹拌アセンブリ626は,撹拌モータ628と,偏心継手630と,第1回転アーム632と,第2回転アーム又は連結アーム634と,ラック撹拌軸受アセンブリ636とを更に備える。作動にあたり,撹拌モータ628は,偏心継手630を偏心回転させ,これにより第1回転アーム632を偏心円周運動又は偏心回転運動させる。第1回転アーム632の偏心回転運動により,第2回転アーム又は連結アーム634は直線運動する(矢印635)。第2回転アーム又は連結アーム634の直線運動によりラック撹拌軸受アセンブリ636を前後に揺動させ,これにより保持構造600を前後に揺動させる(図26の矢印638)。
【0086】
他の実施形態において,図9A,9Bに示すように,検出システム100は上側保持構造800A及び下側保持構造800Bを含み,これらの保持構造を,容器500を受け入れるための試料容器受け構造又はウェル802が多数収められるシリンダ状又はドラム状構造とすることができる。この実施形態において,シリンダ状保持構造800A又はドラム保持構造800Bをそれぞれ水平軸周りで回転させて,容器500を撹拌する。この実施形態において,各ドラム状保持構造は8列〜20列(例えば8列〜20列,8列〜18列又は10列〜16列)に配置し,各列に8個〜20個(例えば8個〜20個,8個〜18個又は10個〜16個)の容器受け構造又はウェル802を配置することができる。
【0087】
前述したとおり,図9A,9Bの検出システム100内には,容器500を入口位置又はポート110から把持又は収容し,所定の受け構造又はウェル802まで移動又は搬送し,上側又は下側のドラム状保持構造800の何れかにセットするために自動搬送機構820が組み込まれている。この実施形態における自動搬送機構820は,図1に例示するように,陰性容器500を廃棄ビン146まで移動させ,又は陽性容器を陽性容器位置130に移動させるように作動可能である。更に,図9A,9Bに示すロボット頭部820は,容器500を入口位置又はポート110から収容し,ドラム状保持構造800A,800Bの受け構造又はウェル802内まで頂部520側から装填することができる。この方位により容器500の底部又は基部806が検出ユニット810に露呈され,この検出ユニットは,容器内における微生物の増殖を検出するために容器500底部に配置したセンサ514を読み取ることが可能である。
【0088】
陽性又は陰性と判定された容器は,搬送ロボットアームによって回収し,システム内における他の位置まで搬送することができる。例えば,微生物増殖に関して陽性と判定された容器は,搬送機構により陽性容器位置又はポートまで搬送し,ここでユーザ又は検査技師は陽性容器を容易に除去することができる。同様に,指定時間の経過後に微生物増殖に関して陰性と判定された容器は,搬送機構によって陰性容器位置まで,又は廃棄処理のための廃棄ビンまで搬送することができる。
【0089】
一実施形態において,保持構造又はラック600は,受け構造又はラック600のウェル602内に試料容器500を保持するように作動可能とした保持機構を更に備えることができる。図27A〜27Cに示すように,保持装置860は,傾斜コイルばね864及びV字形保持プレート862を備える。この実施形態において,傾斜コイルばね868を使用することにより,コイルばねは複数の接触点において容器表面に接触して容器をラックウェル602内に保持する。傾斜ばね864のコイルは容器の垂直軸に対して角度をなしており,図27Cは容器の垂直軸に対して大きな角度で配置されたコイルを示すものである。しかしながら,一般的に傾斜ばね864は,緊密に巻かれたコイルばねである。例えば傾斜ばね864は,容器の垂直軸に対して約10°約50°,好適には約20°〜約40°,更に好適には約30°(図27C)の角度で配置することができる。V字形保持プレート862は,傾斜コイルばね864を保持構造600に対して,又は隣接させて保持することができる。保持プレート862は,傾斜コイルばね864を保持するためのV溝付保持プレートを備える。V溝付保持プレート864は,容器500及び/又は保持構造600に対するばね864の相対運動を防止するものである。したがって,一般的に一点で容器と接触する伝統的なエクステンションスプリング(例えば平板ばね)と異なり,傾斜コイルばね864は,コイルが圧力下で撓む際にV溝862によって強固に保持することができる。傾斜ばね864を使用すれば,荷重を拡散して,撓み特性を均一化することが可能である。
【0090】
図27A及び図27Cに例示するように,受け構造又はウェル602は,少なくとも1つのリブ868を更に備える。一実施形態において,図27Cに示すように,これらリブ868の2つは,傾斜コイルばね864に直接対向させて配置する。これら2つのリブ868は,容器500をウェル602内で垂直中心線(図示せず)に沿って自己調心させるように機能する溝を形成する。作動にあたり,傾斜コイルばね864は,容器500ウォールに力を適用し,これにより容器をラック600のウェル602内に確実に保持する。一実施形態において,コイルばね864に対向する2つのリブ868は,互いに約30°〜約90°又は約40°〜約80°離間させて配置することができる。他の実施形態において,コイルばね864に対向する2つのリブ868は,互いに約60°離間させて配置することができる。図27Cに示すように,保持構造は,それぞれ複数の容器を保持することができる第1列及び第2列の平行保持ウェル列と,第1列及び第2列にそれぞれ隣接する第1傾斜コイルばね及び第2傾斜コイルばねとを備え,これらの傾斜コイルばねが保持ウェルにおける複数の容器を保持する構成とすることが可能である。
【0091】
傾斜コイルばね864,V溝保持862及び前記傾斜コイルばねに対向して位置する2つのリブ868を使用することにより,撹拌時又はラックセル挿入時に作用する側面荷重に関係なく,ボトルを常にウェル602内における定位置に確実に保持することができる。
傾斜コイルばね864及びV溝保持862は,深さの小さい保持ウェル602及び保持構造600を使用可能とする。深さの小さい保持構造ウェル602は,多様な構造及び長さの容器を保持可能とし,より大面積の容器表面をシステム内の培養気流に露呈可能とするものである。
【0092】
保持構造600及び/又は撹拌アセンブリを保持するための他の実施形態も可能であり,これも本発明の技術的範囲に含まれるものであることは言うまでもない。
(検出ユニット)
【0093】
検出システム100についての多様な実施形態は,図1〜6,図9A,9B,図21A,21B及び図27に示すように,同様の検出手段の使用を含むことができる。一般的に,微生物の検出を目的として試料容器をモニタし,及び/又は検査するために,既知の適宜の手段を使用することができる。前述したように,検出システム100内での試料容器500の培養中における微生物増殖の陽性検出のため,容器500は連続的又は周期的に,モニタすることができる。例えば,一実施形態において,検出ユニット(例えば図9Bの810)は,容器500の底部又は基部506内に組み込まれたセンサ514を読み取る。各種のセンサ技術が適用可能であり,好適である。一実施形態において,検出ユニットは,米国特許第4945060号,第5094955号,第5162229号,第5164796号,第5217876号,第5795773号及び第5856175号に開示するように,比色測定を行うことができ,これら米国特許の開示は参照として組み込まれている。これら特許に記載されているように,陽性容器は比色測定結果に応じて表示される。代替的に,微生物の内部蛍光及び/又はメディアの光散乱における変化の検出技術(例えば,同時係属中の米国特許出願第12/460,607号〔発明の名称「試料中の生物学的粒子の検出及び/又は特徴表示のための方法及びシステム」,2009年7月22日付〕参照)を使用して検出を行うこともできる。更に他の実施形態において,検出は,容器のメディア又はヘッドスペースにおける揮発性有機化合物の生成を検出し,又は感知することによって達成することができる。多様な形態の検出ユニットを,検出システム内において採用することができる。例えば,一検出ユニットをラック又はトレイ全体のために配置することができ,また,複数の検出ユニットをラック毎,又はトレイ毎に配置することができる。
(気候制御された内部チャンバ)
【0094】
前述したように,試料容器500に存在する可能性のある生物活性物質(例えば微生物)の増殖を促進し,及び/又は増強する環境条件を保つため,検出システム100は気候制御された内部チャンバ(又は培養チャンバ)を備えることができる。この実施形態において,検出システム100は,内部チャンバ内の容器温度を維持するための加熱要素又は温風送風機を含むことができる。例えば,一実施形態においては加熱要素又は温風送風機により内部チャンバを高温(室温以上の温度)に維持する。他の実施形態において,検出システム100は,室温以下の温度において内部チャンバを保つよう冷却要素又は冷風送風機(図示せず)を含むことができる。この実施形態に関して,内部チャンバ又は培養チャンバは,約18℃〜約45℃の温度である。一実施形態において,内部チャンバは培養チャンバとして機能するものであり,約35℃〜約40℃,好適には約37℃の温度に維持することができる。他の実施形態において,内部チャンバは室温以下の温度,例えば約18℃〜約25℃,好適には約22.5℃に維持することができる。この場合の特別な利点は,試料容器500内の微生物増殖を促進し,及び/又は増強するためのより一定な温度環境を提供する能力である。これを検出システム100は閉鎖システムによって達成し,この閉鎖システムにおいては試料容器500についての自動的な装填,搬送及び排出は,アクセスパネルを開けて内部チャンバ620の培養温度(約30℃〜約40℃,好適には約37℃)を乱すことなく実行することができる。
【0095】
一般的に,検出システム100は,微生物増殖を促進し,又は増強するようにチャンバを気候制御状態に維持する,当該技術分野において既知の手段を用いることができる。例えば,チャンバを温度制御状態に保つために,少なくとも1つの加熱要素又は温風送風機,バッフル板及び/又は既知の他の適当な器材を使用して検出システム100の内部を,容器を培養するため,そして生物増殖を促進し,及び/又は増強するために適した温度に保つことができる。
【0096】
一般的に,システムコントローラの制御下にある少なくとも1つの加熱要素又は熱風送風機を使用して,検出システム100の内部チャンバ620内における温度を一定に保持する。加熱要素又は温風送風機は,内部容器内における複数の位置に配置することができる。例えば,図5及び6に示すように,少なくとも1つの加熱要素又は温風送風機740を保持構造又はラック600の基部に配置して,複数の保持構造又はラック600に対して温風を供給することができる。同様の配列は,図9A及び9B(例えば,840参照)の実施形態においても採用することができる。培養構造の詳細は,本発明の本質に特に関連するものではなく,当該技術分野において既知であるため,詳細な開示を省略する。
(コントローラ及びユーザインターフェース)
【0097】
検出システム100は,システムの多様な操作及び機構を制御するためのシステムコントローラ,例えばコンピュータコントローラシステム(図示せず)と,ファームウェアとを含むことができる。一般的に,システムの多様な操作及び機構を制御するためのシステムコントローラ及びファームウェアは,既知の適宜のコントローラ及びファームウェアで構成することができる。一実施形態において,コントローラ及びファームウェアは,システム内の試料容器についての自動装填,自動搬送,自動検出及び/又は自動取り外しを含むシステムの多様な機能を制御するために必要とされる全ての操作を実行する。コントローラ及びファームウェアは,システム内の試料容器の識別とトラッキングも行う。
【0098】
検出システム100は,ユーザインターフェース150と,装填機構,搬送機構,ラック,撹拌装備,培養装置等を作動させると共に検出ユニットからの測定データを受け入れるためのコンピュータ制御システムとを含むこともできる。これらの詳細は特別に重要ではなく,広範に変更することができる。容器が陽性と判定されると,ユーザインターフェース150を介して及び/又は活性化する(すなわち表示器の光をつける)容器表示器190(例えば図1参照)によってユーザに警告を発することができる。上述したように,容器を陽性と判定した場合,陽性容器は,例えば図1〜3,10〜11及び22〜24に示す陽性容器位置130まで自動的に移動させることができる。
【0099】
ユーザインターフェース150は,検出システム内に装填される容器に関するステータス情報をオペレータ又は検査技師に提供することができる。ユーザインターフェースは,以下の構成要素の少なくとも1つを含むことができる:(1) タッチスクリーンディスプレイ;(2) タッチスクリーン上のキーボード;(3) システムステータス手段;(4) 陽性警告手段;(5) 他のシステム(DMS, LIS,BCES及び他の検出又は識別装置)との通信手段;(6) 容器又はボトルの状態;(7) 容器又はボトルの検索手段;(8) 視聴覚的な陽性表示手段;(9) USBアクセス手段(バックアップ用及び外部システムアクセス用);(10) 陽性通知,システム状態及びエラーメッセージの遠隔操作手段。他の実施形態において,図22〜23に示すように,ステータスアップデートスクリーン152を使用することもできる。このステータスアップデートスクリーン152は,例えば,(1) システム内の容器位置;(2) 患者情報,試料種類,入力時間等の容器情報;(3) 陽性又は陰性容器警告;(4) 内部チャンバ温度;及び (5) 廃棄ビンが満杯で空にする必要がある旨の表示等の,検出システム内に装填された容器についてのステータス情報を提供するように使用することができる。
【0100】
検出システムと,ユーザインターフェース150及び/又はステータススアップデートスクリーン152についての特定の外観又はレイアウトは特に重要なものでなく,広範に変更できるものである。
図1,2は一実施形態を図式的かつ非限定的に示すものである。また,図22〜23は他の実施形態を図式的かつ非限定的に示すものである。
(自動排出)
【0101】
検出システム100は,陽性又は陰性の試料容器500についての自動搬送又は自動排出も行うことができる。前述したように,生物活性物質が存在する容器は陽性容器と称され,所定時間の経過後に微生物の増殖が検出されない容器は陰性容器と称される。
【0102】
容器が陽性と判定されたら,検出システムは表示器(例えば視覚的プロンプト190)を介して,及び/又はユーザインターフェース150における通知を介して,判定結果をオペレータに通知する。図1〜3及び図5A,5Bに示すように,陽性ボトルは搬送機構650(例えば搬送ロボットアーム)により自動的に回収されて所定の陽性容器領域,例えば陽性容器位置又は出口ポート130等に移送することができる。陽性容器領域は,ユーザの容器へのアクセスを容易にするため,装置ハウジング外に配置する。一実施形態において,容器は陽性容器領域内で垂直位置に配置する。一実施形態において,陽性容器(ば陽性血液培養ボトル等)の自動排出は,陽性容器を所定の陽性容器位置又は出口ポート130に再配置するように搬送するための搬送チューブ(図示せず)を使用して行う。この実施形態において,搬送機構(例えば搬送ロボットアーム)は陽性試料容器を搬送チューブの上端部内まで落下させ,又は配置することができ,容器は重力作用により搬送チューブを経て陽性容器位置又はポート130まで搬送される。一実施形態において,搬送チューブ(図示せず)は,少なくとも1つの陽性容器を保持することができる。例えば,搬送チューブ(図示せず)は1個〜5個,1個〜4個又は1個〜3個の陽性試料容器を保持することができる。他の実施形態において,例えば図22〜24に示すように,陽性容器位置又は出口ポート130は,少なくとも1つの陽性試料容器のための保持ウェル,例えば2つの陽性試料容器を分離して保持するための2つの保持ウェルを備えることができる。
【0103】
検出システム100に係る他の実施形態において,陰性容器は,保持構造又はラック600から,廃棄ビン146等の陽性容器位置まで,搬送機構700(例えば搬送ロボットアーム)によって搬送することができる。一般的に,容器は,搬送ロボットアームから解放され,廃棄ビン146内に落下されるものである。しかしながら,他の実施形態も可能であることは,言うまでもない。一実施形態において,陰性容器(陰性血液培養ボトル等)は,陰性容器を,廃棄ビン146等の所定の陰性容器位置において再配置するように搬送する搬送チューブ(図示せず)により自動的に搬送する。この実施形態においては,搬送機構(例えば搬送ロボットアーム)により搬送チューブの上端部内に陰性試料容器を落下させ又は配置し,その容器を重力作用により搬送チューブを通して陰性容器位置又は廃棄ビン146まで搬送する。検出システム100は陰性容器位置,例えば陰性容器用の廃棄ビン146へのユーザアクセスを許容するように開放するアクセスドア140又はドロワ142も含むことができる。他の実施形態において,廃棄ビン146は,廃棄ビン146を計量するための計量スケールを含むことができる。システムコントローラ(図示せず)は,廃棄ビン146の重量をモニタすることにより,廃棄ビン146が満杯であるか否かを検出することができ,任意的に,廃棄ビン146が満杯であり,ゆえに空にする必要がある旨をユーザ又は検査技師に表示する信号を(例えばユーザインターフェース150において)出力することができる。
(自動検査室システム)
【0104】
前述したとおり,本発明に係る検出システム100は多種多様の実施形態をもって具体化することができる。高容量での実装に特に適する一実施形態を図24に示す。図24に示すように,検出システム100Aは,自動微生物検査室システムにおいて用いることができる。例えば,検出装置100は,自動検査室システムの一要素として含ませることができる。本実施形態において,検出装置100Aは,少なくとも1つの付加的な他の分析的モジュール又は付加的テストのための装置に対して,例えばいわゆる「デイジーチェーン」態様で接続することができる。例えば,図24に示すように,検出システム100Aは,第2検出ユニット100Bに対してデイシーチェーン接続することができる。しかしながら,他の実施形態において,検出装置は,少なくとも1つの他のシステム又はモジュールに対してデイシーチェーン接続することができる。これらのシステム又はモジュールは,例えば,本出願人(bioMerieux Inc.)の製造販売に係るVITEKシステム又はVIDASシステム等の識別検査システムや,グラム染色液,質量分析ユニット,分子診断テストシステム,プレートストリーカ,自動特徴表示及び/又は識別システム(同時係属中の米国特許仮出願第60/216,339号〔発明の名称「微生物試料中の生物活性物質を迅速かつ非侵襲的に検出し,該物質を識別及び又は特徴表示するための自動検出装置」,2009年 5月15日付〕を参照)等を含むことができる。
【0105】
図24を参照すると,自動検査室システムは,第1検出システム100A及び第2検出システム100Bを備えることができる。他の実施形態において,自動検査室システムは,第1検出システム100Aと,第2検出システム100Bと,自動特徴表示/識別システム(図示せず)とを備えることができる。この実施形態においては,システム搬送装置440を使用して陽性容器を第1検出システム100Aから第2検出システム100Bまで,及び/又は引き続いて自動特徴表示/識別システムまで移動させ,又は搬送することができる。他の実施形態において,第1検出システム100Aは,微生物識別モジュール又は抗菌感受性モジュール(図示せず)と接続することができる。
【0106】
容器を第1装置から第2装置まで搬送するためのシステム搬送装置又は機構は:(a) 第1装置,第2装置,及び第1装置内に配置した容器と;(b) 第1装置に結合し,容器を少なくとも1つのワークフローステーションまで移動させるように作動可能な第1ロケータ手段と;(c) 第1ロケータ手段に並置されるように第2装置に結合した搬送機構又はコンベアベルトと;(d) 容器を第1ロケータ手段から搬送機構まで移動させ,又は押すことによって,容器を第1装置から第2装置まで搬送するプッシャアームとを備えることができる。他の実施形態においては,第1装置及び第2装置を培養装置で構成し,容器は試料容器で構成することができる。他の実施形態において,搬送機構は,第1装置に結合する第1搬送機構又はコンベアベルトと,第1装置に結合する第1ロケータ装置と,第2装置に結合する第2ロケータ装置と,容器を第1ロケータ装置から第2搬送機構又はコンベアベルトまで搬送するためのプッシャアームとを備え,これによって容器を第1装置から第2装置まで搬送することもできる。更に他の実施形態において,搬送機構は,第1装置及び第2装置に結合する搬送ブリッジを備え,この搬送ブリッジによって第1装置及び第2装置を互いに結合し又は連結することができる。この場合に搬送ブリッジは,第1ロケータ装置に並置される第1端と,第2搬送機構又はコンベアベルトに並置される第2端を備えることとなる。搬送ブリッジは,第1装置及び第2装置に連結し,容器を第1装置から第2装置まで搬送するための機構又は手段を提供する。したがって,上記の実施形態において,搬送機構は,第1装置を第2装置に連結する搬送ブリッジを更に備え,搬送ブリッジが,第1ロケータ装置に並置される第1端と,第2搬送機構に並置される第2端とを備え,搬送ブリッジによって第1ロケータ装置と第2搬送機構とを互いに連結し,プッシャアームは搬送ブリッジを越えて容器を押すことによって容器を第1装置から第2装置まで搬送するように作動可能とすることができる。
【0107】
図24〜図25Cに示すように,2つの検出システム100A及び100Bがシステム搬送機構441によって互いに「デイジーチェーン」接続されている。その結果,最初のシステムが満杯の場合に容器を,一方の検出システムから他方まで搬送することが可能である。同様のシステム搬送機構を追加して試料容器500を,第2検出システム100Bから次のシステム又はモジュールまで引き続いて搬送可能とすることもできる。システム搬送機構441は,容器を第2の,又は下流側の装置へ搬送するための搬送ステーション420を有する第1容器ロケータ装置400Aを備える。システム搬送機構441は,図24〜25Cに示すように,プッシャモータ442によって制御されるプッシャアーム444と,搬送ブリッジ446を備える。図示のとおり,プッシャアーム444は一対の平行アームを備えることができる。作動にあたり,搬送された容器を第1容器ロケータ装置400Aの搬送ステーション420によって移動させる際に,プッシャアーム444は,容器を,搬送ステーション420から,搬送ブリッジ446を越えて,下流側の検出システム100Bに向けて押し,又は移動させるよう作動する。図示のとおり,プッシャアーム444は,プッシャアーム支持部材445を介してプッシャモータ442に結合している。図25A〜図25Cは,容器を第1検出システム100Aにおける搬送ステーション420から第2検出システム100Bにおけるコンベアベルト206B(図24参照)まで搬送するにあたり,以下 (1)〜(3) の状態における容器を示している。(1) プッシャアーム444が容器を,搬送ブリッジ446を横切るように押し始める第1状態(図25A);(2) 容器が搬送ブリッジ446と交差する第2状態又は作動状態(図25B);(3) 容器が下流側の検出システム100Bにおけるコンベアベルト(図示せず)に達した最終状態(図25C)。更に,図25A〜25Cに示すように,システム搬送機構441は,少なくとも1つのガイドレール支持部材452を介してロケータ装置404の基板に取り付けられた少なくとも1つのロケータ装置ガイドレール450,及び/又は,容器を第1ロケータ装置400Aからブリッジ446を横切って下流側検の出システム100Bにおける自動装填機構200Bに含まれるコンベアベルト206B(図24参照)まで案内するブリッジガイドレール446,448を,更に備えることができる。第1検出システム100Aから下流側の第2検出システム100Bまでの容器の搬送は,第1容器ロケータ装置400A及びプッシャアーム444の作動を介して,システムコントローラによって制御することができる。一般的に,第1検出システム100Aは,図24に示すようにユーザインターフェース150を含む必要がある。第1検出システム100A及び第2検出システム100Bは,ステータススクリーン152A,152B,陽性容器ポート130A,0B,下側アクセスパネル140A,140B,自動装填機構200A,200B及びコンベアルト206A,206Bを更に含むことができる。
【0108】
更に,本実施形態において,陽性容器は,自動検査室システムにおける他のシステムまで搬送することができる。例えば,図24に示すように,第1検出システム100Aにおいて陽性と検出された容器は,第2検出システム100B及び/又は微生物の自動的な特徴付け及び/又は識別のための自動特徴付け/識別システム(図示せず)まで搬送することができる。
【0109】
自動検査室システムについて,本発明の技術的範囲を逸脱することなく他の実施形態や変形例が可能であることは,言うまでもない。
(作動方法)
【0110】
一実施形態において,自動検出システムにおける微生物の増殖を検出する方法は,以下のステップ(a)〜(f)を備える:(a) 微生物の増殖を促進し,及び/又は増強するための培養媒体を収めた試料容器を準備する;(b) 微生物の存否を検査すべき試料を,試料容器に接種する;(c) 自動装填機構を使用して,接種された試料容器を検出システム内に装填する;(d) 少なくとも1つの試料容器を保持するための複数のウェルを備え,任意的に,微生物の増殖を促進し,及び/又は増強するように試料容器を撹拌するように検出システム内に配置された保持構造を準備し,自動搬送機構を使用して試料容器を保持構造まで搬送する;(e) 容器内における微生物の増殖の少なくとも1つの副産物を検出することによって,容器内の微生物増殖を検出するための検出ユニットを準備する;(f) 検出ユニットを使用して微生物の増殖を検出し,これにより容器を微生物の増殖に関して陽性であると判定する。
【0111】
検出システム100の作動方法を,図30を参照して説明する。検査すべき試料を(例えば検査技師又は医師によって)試料容器500に接種した後,試料容器500を自動装填機構200まで移送する。検出システム100内に試料容器500を自動装填するためである。
【0112】
ステップ540において,試料容器500を検出システム100内に自動的に装填する。そのために,例えば図1に示すように,試料容器500を搬送機構204における装填ステーション又は領域202上に配置する。次に,試料容器500を搬送機構204(例えばコンベアベルト)によって入口位置又はポート110まで,引き続いて入口位置又はポート110を経て検出システム100内まで移動させ,これにより試料容器500を検出システム100内に自動的に装填する。
【0113】
ステップ550において,自動搬送機構700(例えば図5A,5Bに示す搬送ロボットアーム)を使用して,容器500を検出システム100の内部チャンバ620内における保持構造又はラック600まで搬送し,保持構造又はラック600に容器をセットする。
【0114】
ステップ560において,試料容器500について検出システム100内で培養を行う。検出システム100は,任意的に,保持構造又はラック600を撹拌するための撹拌装置により,及び/又は温度制御された環境を提供するための少なくとも1つの温風送風機(例えば,図5A〜5Bの740参照)により,試料容器500内の微生物増殖を促進し,及び/又は増強する。
【0115】
試料容器500が微生物増殖に関して陽性であるか否かを判定するため,ステップ570において,試料容器500を検出ユニット(例えば,図9A及び9Bの要素810参照)によって読み取る。
【0116】
ステップ580において,試料容器の読み取りデータを分析し,容器が生物活性物質(例えば微生物)の増殖に関して陽性であるか否かを判定する。陰性であれば,プロセスをNOブランチ582に沿って進め,タイマが終了したか否かを検査する。試料容器500は,タイマが終了した場合に陰性と判定され,ステップ586における廃棄ビン146(例えば図1参照)まで搬送され,又は培養を継続しながら容器の読み取り(ステップ580)を周期的に継続する。
【0117】
ステップ580において試料容器500が陽性と判定された場合,プロセスはYESブランチ590に進む。一実施形態では,試料容器500に対するユーザアクセス及び/又は更なる処理(例えば,容器の自動排出)のため,ステップ594において,試料容器500を自動搬送機構を使って陽性容器位置又はポート130(例えば図1参照)まで搬送する。他の実施形態において,試料容器は,更なる処理を行う目的で,システム搬送装置により別の検出装置及び/又は別の分析システム(例えば自動特徴付け/識別システム)まで搬送することができる。
【特許請求の範囲】
【請求項1】
試料中における微生物の増殖を迅速かつ非侵襲的に検出するための自動検出装置であって;
(a) 前記試料中に存在する可能性のある微生物を培養するための,培養媒体を収めた内部チャンバを有する密封可能な試料容器;
(b) 内部チャンバを包囲するハウジング;
(c) 前記内部チャンバ内に含まれ,少なくとも1つの試料容器を保持するための複数のウェルを備える保持構造;
(d) 試料容器を少なくとも1つの容器ワークフローステーションまで移動させるよう作動可能である容器ロケータ装置;
(e) 試料容器を前記内部チャンバ内に自動装填するための自動装填機構;
(f) 試料容器を前記内部チャンバ内で自動搬送するために前記内部チャンバ内に配置した自動搬送機構;及び,
(g) 試料容器中の微生物の増殖を検出するために前記内部チャンバ内に配置した検出ユニット;
を備える自動検出装置。
【請求項2】
請求項1記載の自動検出装置において,前記検出装置から試料容器を自動的に排出するための自動排出機構を更に備える自動検出装置。
【請求項3】
請求項2記載の自動検出装置において,前記自動排出機構は,微生物増殖に関して陽性と検出された試料容器を,陽性容器位置まで搬送する自動検出装置。
【請求項4】
請求項2記載の自動検出装置において,前記自動排出機構は,微生物増殖に関して陰性と検出された試料容器を,陰性容器位置まで搬送する自動検出装置。
【請求項5】
請求項2記載の自動検出装置において,前記自動排出機構は,前記搬送機構である自動検出装置。
【請求項6】
請求項1記載の自動検出装置において,前記自動搬送機構は,搬送ロボットアームを備え,該搬送ロボットアームは多軸搬送ロボットアームを備える自動検出装置。
【請求項7】
請求項1記載の自動検出装置において,前記保持構造は,積み上げられた複数のラックと,少なくとも1つの円筒形ドラムとから成る群から選ばれている自動検出装置。
【請求項8】
請求項1記載の自動検出装置において,前記保持構造は,ここでの微生物増殖を促進し,及び/又は増やす試料容器の撹拌のための撹拌アセンブリを更に備える自動検出装置。
【請求項9】
請求項1記載の自動検出装置において,前記内部チャンバは,培養チャンバを備え,前記培養チャンバは,ここでの微生物増殖を促進する,及び/又は増やすための気候制御された内部チャンバを準備する,及び/又は保つ少なくとも1つの加熱要素を備える自動検出装置。
【請求項10】
請求項10記載の自動検出装置において,前記気候制御された内部チャンバは,約30℃から約40℃の温度に保たれている自動検出装置。
【請求項11】
請求項11記載の自動検出装置において,前記少なくとも1つのワークステーションは,バーコード読み取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容器収容ステーション,容器搬送ステーション又はそれらの組み合わせから成る群から選ばれている自動検出装置。
【請求項12】
請求項1記載の自動検出装置において,前記自動装填機構は,容器装填ステーション,搬送機構及び容器入口位置を備え,前記搬送機構は,前記検出装置内に試料容器を自動装填するために,前記装填ステーションから前記入口位置まで試料容器を搬送するよう作動可能である自動検出装置。
【請求項13】
請求項1記載の自動検出装置において,前記搬送機構はコンベアベルトを備える自動検出装置。
【請求項14】
請求項1記載の自動検出装置において,バーコードリーダを更に備える自動検出装置。
【請求項15】
請求項1記載の自動検出装置において,前記自動装填機構,前記容器ロケータ装置及び/又は前記自動搬送機構を制御することにより,迅速かつ非侵襲的な検出を完全に自動化するよう作動可能としたコントローラを更に備える自動検出装置。
【請求項16】
請求項15記載の自動検出装置において,前記コントローラは,微生物増殖に関して陽性と検出された試料容器を,前記ハウジング上の陽性表示プロンプトを有する信号で知らせる自動検出装置。
【請求項17】
自動検出装置における微生物増殖の検出方法であって,以下のステップ (a)〜(g) を備える検出方法。
(a) 微生物の増殖を促進し又は増強するための培養媒体を収めた試料容器を準備する;
(b) 微生物の存在を確認するために検査すべき試料を試料容器に接種する;
(c) 微生物増殖の検出のために,以下の構成要素 (i)〜(vi) を備える自動検出装置を準備する;
(i) 内部チャンバを包囲するハウジング;
(ii) 前記ハウジング内に配置され,少なくとも1つの試料容器を保持するための複数のウェルを備える保持構造;
(iii) 前記自動検出装置内に試料容器を自動装填するための自動装填機構;
(iv) 試料容器を少なくとも1つの容器ワークフローステーションまで移動させるための容器ロケータ装置;
(v) 試料容器を前記ハウジング内で前記保持構造まで自動搬送するための自動搬送機構;
(vi) 試料容器内における微生物増殖に由来する少なくとも1つの副産物を検出するための検出ユニット;
(d) 前記自動装填機構を使用して前記接種済み試料容器を前記検出装置内に装填する;
(e) 前記自動搬送機構を使用して,前記検出装置内に位置する前記保持構造まで前記接種済み試料容器を搬送する;
(f) 前記培養チャンバ内の試料容器に培養する;及び
(g) 微生物増殖に由来する前記少なくとも1つの副産物を検出するために試料容器を周期的にモニタし,微生物増殖に由来する前記少なくとも1つの副産物を検出した資料容器を微生物増殖に関して陽性と判定する。
【請求項18】
請求項17記載の方法において,前記内部チャンバは培養チャンバを備え,該培養チャンバは,その内部での微生物増殖を促進し及び/又は増強するように内部チャンバを気候制御するための少なくとも1つの加熱要素を備える方法。
【請求項19】
請求項17記載の方法において,前記内部チャンバは冷却チャンバを備え,該冷却チャンバは,その内部を室温以下の温度に保つための少なくとも1つの冷却要素を備える方法。
【請求項20】
請求項17記載の方法において,前記自動検出システムは,試料容器について少なくとも1つの測定又は読取を行うために該試料容器を前記ワークステーション間で移動させるように作動可能な容器ロケータ装置を更に備え,前記方法は,ステップ (d)(1) として,該容器ロケータ装置を使用して試料容器を前記ワークステーション間で移動させることを更に備える方法。
【請求項21】
請求項20記載の方法において,前記ワークステーションは,バーコード読み取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容器収容ステーション,容器搬送ステーション又はそれらの組み合わせから成る群から選ばれている方法。
【請求項22】
請求項20記載の方法において,前記ステップ (d)(1) は,試料容器を前記収容ステーションまで移動させることを含み,前記方法は,前記自動搬送機構を使用して試料容器を前記収容ステーションから収容するステップ (d)(2) を更に備える方法。
【請求項23】
請求項17記載の方法において,前記検出装置は,微生物増殖を促進し,及び/又は増強するために前記保持構造及び試料容器を撹拌するための撹拌アセンブリを更に備え,前記方法は,該撹拌アセンブリを使用して前記保持構造を撹拌するステップ (e)(i) を更に備える方法。
【請求項24】
請求項18記載の方法において,前記自動検出システムは,試料容器を自動排出するための自動排出機構を更に備え,前記方法は,ステップ (h) として,微生物増殖に関して陽性と判定された試料容器を,前記排出機構により陽性容器位置まで搬送することを更に含む方法。
【請求項25】
請求項17記載の方法において,前記自動検出システムが,試料容器を自動排出するための自動排出機構を更に備え,前記方法は,ステップ (h) として,微生物増殖に関して陰性と判定された試料容器を,前記自動排出機構により陰性容器位置まで搬送することを更に含む方法。
【請求項26】
請求項17記載の方法において,前記自動検出システムがコントローラを更に備え,該コントローラにより前記方法における少なくとも1つのステップを制御する方法。
【請求項27】
保持構造内で容器を保持するための保持機構であって;
(a) 少なくとも1つの容器を保持するための少なくとも1つの保持ウェルと;
(b) 該保持ウェルに隣接して配置された傾斜コイルばねと;
(c) 該傾斜コイルばねに隣接して配置され,前記傾斜コイルばねを前記保持ウェルに隣接するように保持するためのV溝を有する保持プレートと;
を備え,前記傾斜コイルばねにより前記保持ウェル内で少なくとも1つの前記容器を保持する保持機構。
【請求項28】
請求項27記載の保持機構において,前記保持ウェルが1つ以上のリブを更に備え,該1つ以上のリブは,前記保持ウェル内で前記傾斜コイルばねに対向するように配向された一対のリブを含み,該一対のリブは,前記容器を前記保持ウェルの垂直中心線に沿って前記ウェル内で自己整合させるように作動可能である保持機構。
【請求項29】
請求項27記載の保持機構において,該保持機構は平行な保持ウェルの第1列及び第2列を更に備え,該平行保持列は複数の容器を保持可能であり,前記保持機構は,前記第1列に隣接して配置された第1傾斜コイルばねと,前記第2列に隣接して配置された第2傾斜コイルばねとを更に備え,前記の各傾斜コイルばねは前記複数の容器を前記保持ウェル内に保持するように作動可能である保持機構。
【請求項30】
請求項29記載の保持機構において,該保持機構は,前記第1傾斜コイルばねに隣接して配置された第1保持プレートと,前記第2傾斜コイルばねに隣接して配置された第2保持プレートとを更に備え,前記第1及び第2保持プレートは前記第1及び第2傾斜スプリングばねをそれぞれ前記保持ウェルに隣接して保持することにより,前記ウェル内において前記複数の容器を保持するように作動可能である保持機構。
【請求項31】
試料容器を保管及び/又は検査するための保管・検査装置であって;
(a) 試料を収める試料容器と;
(b) 内部チャンバを包囲するハウジングと;
(c) 少なくとも1つの試料容器を保持するための複数の受入ウェルを有する容器ロケータ装置と;
を備え,前記ロケータ装置は,少なくとも1つの試料容器を前記内部チャンバ内における少なくとも1つのワークフローステーションまで移動させるよう作動可能である保管・検査装置。
【請求項32】
請求項31記載の保管・検査装置において,前記少なくとも1つのワークフローステーションは,バーコード読み取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容器収容ステーション,容器搬送ステーション又はそれらの組み合わせから成る群から選ばれている保管・検査装置。
【請求項33】
請求項31記載の保管・検査装置において,前記容器ロケータ装置は回転可能なディスクを備え,前記容器ロケータ装置は,前記ディスクを垂直軸周りの水平面において回転させることにより,少なくとも1つの試料容器を少なくとも1つのワークフローステーションまで移動させるように作動可能とした駆動ベルト及びモータを更に備える保管・検査装置。
【請求項34】
請求項31記載の保管・検査装置において,該装置は,バーコード読み取りステーション及びバーコードリーダを備え,試料容器はバーコードを含み,前記容器ロケータ装置は,試料容器のバーコードを前記バーコードリーダで読み取らせるために,該試料容器を前記バーコード読み取りステーションまで移動させるように作動可能である保管・検査装置。
【請求項35】
請求項34記載の保管・検査装置において,前記バーコード読み取りステーションは,前記受入ウェル内において試料容器を水平面内で垂直軸周りに回転させるように回転可能なターンテーブルを更に備え,その回転により前記バーコードラベルを前記バーコードリーダで読み取らせる保管・検査装置。
【請求項36】
請求項31記載の保管・検査装置において,前記装置は,試料容器を計量する容器計量ステーションを更に備え,前記容器ロケータ装置は,試料容器を計量させるために該試料容器を前記計量ステーションまで移動させるように作動可能である保管・検査装置。
【請求項37】
試料中における微生物の増殖を迅速かつ非侵襲的に検出するための自動検出装置であって;
(a) 前記試料中に存在する可能性のある微生物を培養するために培養媒体を収めた内部チャンバを有する密封可能な試料容器と;
(b) 内部チャンバを包囲するハウジングと;
(c) 試料容器を受け入れると共に,試料容器を前記内部チャンバ内における少なくとも1つのワークフローステーションまで移動させるために少なくとも1つのロケータウェルを含む試料容器ロケータ装置と;
(d) 試料容器内における微生物の増殖を検出するために前記内部チャンバ内に配置した検出ユニットと;
を備える自動検出装置。
【請求項38】
請求項37記載の自動検出装置において,前記内部チャンバは培養チャンバを含み,該培養チャンバは,その内部での微生物増殖を促進し及び/又は増強するように培養チャンバを気候制御するための少なくとも1つの加熱要素を備える自動検出装置。
【請求項39】
請求項37記載の自動検出装置において,前記少なくとも1つのワークフローステーションは,バーコード読み取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容器収容ステーション,容器搬送ステーション又はそれらの組み合わせから成る群から選ばれている自動検出装置。
【請求項40】
請求項37記載の自動検出装置において,該検出装置は,試料容器を前記内部チャンバ内に自動装填するように作動可能な自動装填機構を更に備え,該自動装填機構は搬送機構及び容器入口位置を備え,該搬送機構は試料容器を前記入口位置まで搬送し,前記入口位置を通して,前記ロケータ装置における前記ロケータウェルの1つまで搬送し,これにより試料容器を前記検出装置内に自動的に装填する自動検出装置。
【請求項41】
請求項37記載の自動検出装置において,前記検出装置は,バーコード読み取りステーションと,該バーコード読み取りステーションに配置したバーコードリーダを更に備え,前記容器ロケータ装置は試料容器を前記バーコード読み取りステーションまで移動させ,これにより試料容器上のバーコードを前記バーコードリーダに読み取らせるように作動可能である自動検出装置。
【請求項42】
請求項41記載の自動検出装置において,前記バーコード読み取りステーションは,前前記受入ウェル内において試料容器を水平面内で垂直軸周りに回転させるように回転可能なターンテーブルを更に備え,その回転により前記バーコードラベルを前記バーコードリーダで読み取らせる自動検出装置。
【請求項43】
請求項37記載の自動検出装置において,前記検出装置は前記容器を計量する容器計量ステーションを更に備え,前記容器装填装置は,試料容器を試料容器を計量するために該試料容器を前記容器計量ステーションまで移動させるよう作動可能である自動検出装置。
【請求項44】
請求項37記載の自動検出装置において,前記装置は,容器収容ステーションと,前記内部チャンバ内の試料容器を搬送するための搬送機構とを更に備え,前記容器ロケータ装置は,試料容器を前記収容ステーションまで移動させるように作動可能であり,前記搬送手段は,試料容器を前記収容ステーションから収容するよう作動可能である自動検出装置。
【請求項45】
保管・検査装置内において少なくとも1つの容器を自動的に管理するために,以下 (a)〜(c) のステップを備える自動容器管理方法。
(a) 少なくとも1つの容器を準備する。
(b) 以下 (i)〜(ii) を備える保管・検査装置を準備する。
(i) 内部チャンバを囲み,入口位置を備えるハウジング;
(ii) 試料容器を保持するための複数のロケータウェルを含み,少なくとも1つの試料容器を前記内部チャンバ内における少なくとも1つのワークフローステーションまで移動させるための容器ロケータ装置;
(c) 前記少なくとも1つの試料容器を,前記内部チャンバにおける少なくとも1つのワークフローステーションまで移動させる。
【請求項46】
請求項45記載の方法において,前記少なくとも1つのワークフローステーションは,バーコード読み取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容器収容ステーション,容器搬送ステーション又はそれらの組み合わせから成る群から選ばれる方法。
【請求項47】
請求項45記載の方法において,前記容器ロケータ装置は,1〜10個のロケータウェルを有する回転可能ディスクを備え,前記方法は,前記ディスクを垂直軸周りで回転させることにより,前記ロケータウェル内に含まれる少なくとも1つの試料容器を,前記内部チャンバ内における少なくとも1つのワークフローステーションまで移動させることを含む方法。
【請求項48】
請求項47記載の方法において,前記保管/検査装置は,バーコード読み取りステーションと,前記バーコード読み取りステーションに配置したバーコードリーダとを更に備え,前記容器ロケータ装置は,試料容器を前記バーコード読み取りステーションまで移動させるように作動可能であり,前記方法は,前記容器上の前記バーコードを読み取るステップを更に備える方法。
【請求項49】
請求項45記載の方法において,前記保管・検査装置は,容器収容ステーションと,前記内部チャンバ内の試料容器を搬送するための搬送機構とを更に備え,前記容器ロケータ装置は,試料容器を前記収容ステーションまで移動させるよう作動可能であり,前記方法は,前記搬送機構を使用して前記容器を前記収容ステーションから収容するステップを更に備える方法。
【請求項50】
請求項45記載の方法において,前記保管及び検査装置はコントローラを更に備え,該コントローラは,前記容器ロケータ装置が前記内部チャンバ内における少なくとも1つの前記ワークフローステーションまで移動する際に,前記容器ロケータ装置を制御する方法。
【請求項51】
容器を第1装置から第2装置まで搬送するための搬送機構であって:
(a) 第1装置,第2装置及び前記第1装置内に位置する容器と;
(b) 前記第1装置に結合し,前記容器を少なくとも1つのワークフローステーションまで移動可能とする第1ロケータ装置と;
(c) 前記第2装置に結合し,前記第1ロケータ装置と並置される搬送機構又はコンベアベルトと;
(d) 前記第1ロケータ装置から前記搬送機構まで前記容器を移動させ,又は押すように作動可能であり,これにより前記第1装置から前記第2装置へ前記容器を搬送するプッシャアームと;
を備える搬送機構。
【請求項52】
請求項51記載の搬送機構において,前記第1ロケータ装置は前記容器を搬送ステーションまで移動させ,前記プッシャアームは前記容器を前記搬送ステーションから前記搬送機構又はコンベアベルトまで押すよう作動可能である搬送機構。
【請求項53】
請求項51記載の搬送機構において,前記搬送機構は前記第1装置及び前記第2装置を繋ぐ搬送ブリッジを更に備え,該搬送ブリッジは,前記第1ロケータ装置と並置する第1端と,前記第2搬送機構と並置する第2端とによって前記第1ロケータ装置及び前記第2搬送機構を繋ぎ,前記プッシャアームは前記搬送ブリッジを越えて前記容器を押すよう作動することにより前記容器を前記第1装置から前記第2装置まで搬送する搬送機構。
【請求項1】
試料中における微生物の増殖を迅速かつ非侵襲的に検出するための自動検出装置であって;
(a) 前記試料中に存在する可能性のある微生物を培養するための,培養媒体を収めた内部チャンバを有する密封可能な試料容器;
(b) 内部チャンバを包囲するハウジング;
(c) 前記内部チャンバ内に含まれ,少なくとも1つの試料容器を保持するための複数のウェルを備える保持構造;
(d) 試料容器を少なくとも1つの容器ワークフローステーションまで移動させるよう作動可能である容器ロケータ装置;
(e) 試料容器を前記内部チャンバ内に自動装填するための自動装填機構;
(f) 試料容器を前記内部チャンバ内で自動搬送するために前記内部チャンバ内に配置した自動搬送機構;及び,
(g) 試料容器中の微生物の増殖を検出するために前記内部チャンバ内に配置した検出ユニット;
を備える自動検出装置。
【請求項2】
請求項1記載の自動検出装置において,前記検出装置から試料容器を自動的に排出するための自動排出機構を更に備える自動検出装置。
【請求項3】
請求項2記載の自動検出装置において,前記自動排出機構は,微生物増殖に関して陽性と検出された試料容器を,陽性容器位置まで搬送する自動検出装置。
【請求項4】
請求項2記載の自動検出装置において,前記自動排出機構は,微生物増殖に関して陰性と検出された試料容器を,陰性容器位置まで搬送する自動検出装置。
【請求項5】
請求項2記載の自動検出装置において,前記自動排出機構は,前記搬送機構である自動検出装置。
【請求項6】
請求項1記載の自動検出装置において,前記自動搬送機構は,搬送ロボットアームを備え,該搬送ロボットアームは多軸搬送ロボットアームを備える自動検出装置。
【請求項7】
請求項1記載の自動検出装置において,前記保持構造は,積み上げられた複数のラックと,少なくとも1つの円筒形ドラムとから成る群から選ばれている自動検出装置。
【請求項8】
請求項1記載の自動検出装置において,前記保持構造は,ここでの微生物増殖を促進し,及び/又は増やす試料容器の撹拌のための撹拌アセンブリを更に備える自動検出装置。
【請求項9】
請求項1記載の自動検出装置において,前記内部チャンバは,培養チャンバを備え,前記培養チャンバは,ここでの微生物増殖を促進する,及び/又は増やすための気候制御された内部チャンバを準備する,及び/又は保つ少なくとも1つの加熱要素を備える自動検出装置。
【請求項10】
請求項10記載の自動検出装置において,前記気候制御された内部チャンバは,約30℃から約40℃の温度に保たれている自動検出装置。
【請求項11】
請求項11記載の自動検出装置において,前記少なくとも1つのワークステーションは,バーコード読み取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容器収容ステーション,容器搬送ステーション又はそれらの組み合わせから成る群から選ばれている自動検出装置。
【請求項12】
請求項1記載の自動検出装置において,前記自動装填機構は,容器装填ステーション,搬送機構及び容器入口位置を備え,前記搬送機構は,前記検出装置内に試料容器を自動装填するために,前記装填ステーションから前記入口位置まで試料容器を搬送するよう作動可能である自動検出装置。
【請求項13】
請求項1記載の自動検出装置において,前記搬送機構はコンベアベルトを備える自動検出装置。
【請求項14】
請求項1記載の自動検出装置において,バーコードリーダを更に備える自動検出装置。
【請求項15】
請求項1記載の自動検出装置において,前記自動装填機構,前記容器ロケータ装置及び/又は前記自動搬送機構を制御することにより,迅速かつ非侵襲的な検出を完全に自動化するよう作動可能としたコントローラを更に備える自動検出装置。
【請求項16】
請求項15記載の自動検出装置において,前記コントローラは,微生物増殖に関して陽性と検出された試料容器を,前記ハウジング上の陽性表示プロンプトを有する信号で知らせる自動検出装置。
【請求項17】
自動検出装置における微生物増殖の検出方法であって,以下のステップ (a)〜(g) を備える検出方法。
(a) 微生物の増殖を促進し又は増強するための培養媒体を収めた試料容器を準備する;
(b) 微生物の存在を確認するために検査すべき試料を試料容器に接種する;
(c) 微生物増殖の検出のために,以下の構成要素 (i)〜(vi) を備える自動検出装置を準備する;
(i) 内部チャンバを包囲するハウジング;
(ii) 前記ハウジング内に配置され,少なくとも1つの試料容器を保持するための複数のウェルを備える保持構造;
(iii) 前記自動検出装置内に試料容器を自動装填するための自動装填機構;
(iv) 試料容器を少なくとも1つの容器ワークフローステーションまで移動させるための容器ロケータ装置;
(v) 試料容器を前記ハウジング内で前記保持構造まで自動搬送するための自動搬送機構;
(vi) 試料容器内における微生物増殖に由来する少なくとも1つの副産物を検出するための検出ユニット;
(d) 前記自動装填機構を使用して前記接種済み試料容器を前記検出装置内に装填する;
(e) 前記自動搬送機構を使用して,前記検出装置内に位置する前記保持構造まで前記接種済み試料容器を搬送する;
(f) 前記培養チャンバ内の試料容器に培養する;及び
(g) 微生物増殖に由来する前記少なくとも1つの副産物を検出するために試料容器を周期的にモニタし,微生物増殖に由来する前記少なくとも1つの副産物を検出した資料容器を微生物増殖に関して陽性と判定する。
【請求項18】
請求項17記載の方法において,前記内部チャンバは培養チャンバを備え,該培養チャンバは,その内部での微生物増殖を促進し及び/又は増強するように内部チャンバを気候制御するための少なくとも1つの加熱要素を備える方法。
【請求項19】
請求項17記載の方法において,前記内部チャンバは冷却チャンバを備え,該冷却チャンバは,その内部を室温以下の温度に保つための少なくとも1つの冷却要素を備える方法。
【請求項20】
請求項17記載の方法において,前記自動検出システムは,試料容器について少なくとも1つの測定又は読取を行うために該試料容器を前記ワークステーション間で移動させるように作動可能な容器ロケータ装置を更に備え,前記方法は,ステップ (d)(1) として,該容器ロケータ装置を使用して試料容器を前記ワークステーション間で移動させることを更に備える方法。
【請求項21】
請求項20記載の方法において,前記ワークステーションは,バーコード読み取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容器収容ステーション,容器搬送ステーション又はそれらの組み合わせから成る群から選ばれている方法。
【請求項22】
請求項20記載の方法において,前記ステップ (d)(1) は,試料容器を前記収容ステーションまで移動させることを含み,前記方法は,前記自動搬送機構を使用して試料容器を前記収容ステーションから収容するステップ (d)(2) を更に備える方法。
【請求項23】
請求項17記載の方法において,前記検出装置は,微生物増殖を促進し,及び/又は増強するために前記保持構造及び試料容器を撹拌するための撹拌アセンブリを更に備え,前記方法は,該撹拌アセンブリを使用して前記保持構造を撹拌するステップ (e)(i) を更に備える方法。
【請求項24】
請求項18記載の方法において,前記自動検出システムは,試料容器を自動排出するための自動排出機構を更に備え,前記方法は,ステップ (h) として,微生物増殖に関して陽性と判定された試料容器を,前記排出機構により陽性容器位置まで搬送することを更に含む方法。
【請求項25】
請求項17記載の方法において,前記自動検出システムが,試料容器を自動排出するための自動排出機構を更に備え,前記方法は,ステップ (h) として,微生物増殖に関して陰性と判定された試料容器を,前記自動排出機構により陰性容器位置まで搬送することを更に含む方法。
【請求項26】
請求項17記載の方法において,前記自動検出システムがコントローラを更に備え,該コントローラにより前記方法における少なくとも1つのステップを制御する方法。
【請求項27】
保持構造内で容器を保持するための保持機構であって;
(a) 少なくとも1つの容器を保持するための少なくとも1つの保持ウェルと;
(b) 該保持ウェルに隣接して配置された傾斜コイルばねと;
(c) 該傾斜コイルばねに隣接して配置され,前記傾斜コイルばねを前記保持ウェルに隣接するように保持するためのV溝を有する保持プレートと;
を備え,前記傾斜コイルばねにより前記保持ウェル内で少なくとも1つの前記容器を保持する保持機構。
【請求項28】
請求項27記載の保持機構において,前記保持ウェルが1つ以上のリブを更に備え,該1つ以上のリブは,前記保持ウェル内で前記傾斜コイルばねに対向するように配向された一対のリブを含み,該一対のリブは,前記容器を前記保持ウェルの垂直中心線に沿って前記ウェル内で自己整合させるように作動可能である保持機構。
【請求項29】
請求項27記載の保持機構において,該保持機構は平行な保持ウェルの第1列及び第2列を更に備え,該平行保持列は複数の容器を保持可能であり,前記保持機構は,前記第1列に隣接して配置された第1傾斜コイルばねと,前記第2列に隣接して配置された第2傾斜コイルばねとを更に備え,前記の各傾斜コイルばねは前記複数の容器を前記保持ウェル内に保持するように作動可能である保持機構。
【請求項30】
請求項29記載の保持機構において,該保持機構は,前記第1傾斜コイルばねに隣接して配置された第1保持プレートと,前記第2傾斜コイルばねに隣接して配置された第2保持プレートとを更に備え,前記第1及び第2保持プレートは前記第1及び第2傾斜スプリングばねをそれぞれ前記保持ウェルに隣接して保持することにより,前記ウェル内において前記複数の容器を保持するように作動可能である保持機構。
【請求項31】
試料容器を保管及び/又は検査するための保管・検査装置であって;
(a) 試料を収める試料容器と;
(b) 内部チャンバを包囲するハウジングと;
(c) 少なくとも1つの試料容器を保持するための複数の受入ウェルを有する容器ロケータ装置と;
を備え,前記ロケータ装置は,少なくとも1つの試料容器を前記内部チャンバ内における少なくとも1つのワークフローステーションまで移動させるよう作動可能である保管・検査装置。
【請求項32】
請求項31記載の保管・検査装置において,前記少なくとも1つのワークフローステーションは,バーコード読み取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容器収容ステーション,容器搬送ステーション又はそれらの組み合わせから成る群から選ばれている保管・検査装置。
【請求項33】
請求項31記載の保管・検査装置において,前記容器ロケータ装置は回転可能なディスクを備え,前記容器ロケータ装置は,前記ディスクを垂直軸周りの水平面において回転させることにより,少なくとも1つの試料容器を少なくとも1つのワークフローステーションまで移動させるように作動可能とした駆動ベルト及びモータを更に備える保管・検査装置。
【請求項34】
請求項31記載の保管・検査装置において,該装置は,バーコード読み取りステーション及びバーコードリーダを備え,試料容器はバーコードを含み,前記容器ロケータ装置は,試料容器のバーコードを前記バーコードリーダで読み取らせるために,該試料容器を前記バーコード読み取りステーションまで移動させるように作動可能である保管・検査装置。
【請求項35】
請求項34記載の保管・検査装置において,前記バーコード読み取りステーションは,前記受入ウェル内において試料容器を水平面内で垂直軸周りに回転させるように回転可能なターンテーブルを更に備え,その回転により前記バーコードラベルを前記バーコードリーダで読み取らせる保管・検査装置。
【請求項36】
請求項31記載の保管・検査装置において,前記装置は,試料容器を計量する容器計量ステーションを更に備え,前記容器ロケータ装置は,試料容器を計量させるために該試料容器を前記計量ステーションまで移動させるように作動可能である保管・検査装置。
【請求項37】
試料中における微生物の増殖を迅速かつ非侵襲的に検出するための自動検出装置であって;
(a) 前記試料中に存在する可能性のある微生物を培養するために培養媒体を収めた内部チャンバを有する密封可能な試料容器と;
(b) 内部チャンバを包囲するハウジングと;
(c) 試料容器を受け入れると共に,試料容器を前記内部チャンバ内における少なくとも1つのワークフローステーションまで移動させるために少なくとも1つのロケータウェルを含む試料容器ロケータ装置と;
(d) 試料容器内における微生物の増殖を検出するために前記内部チャンバ内に配置した検出ユニットと;
を備える自動検出装置。
【請求項38】
請求項37記載の自動検出装置において,前記内部チャンバは培養チャンバを含み,該培養チャンバは,その内部での微生物増殖を促進し及び/又は増強するように培養チャンバを気候制御するための少なくとも1つの加熱要素を備える自動検出装置。
【請求項39】
請求項37記載の自動検出装置において,前記少なくとも1つのワークフローステーションは,バーコード読み取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容器収容ステーション,容器搬送ステーション又はそれらの組み合わせから成る群から選ばれている自動検出装置。
【請求項40】
請求項37記載の自動検出装置において,該検出装置は,試料容器を前記内部チャンバ内に自動装填するように作動可能な自動装填機構を更に備え,該自動装填機構は搬送機構及び容器入口位置を備え,該搬送機構は試料容器を前記入口位置まで搬送し,前記入口位置を通して,前記ロケータ装置における前記ロケータウェルの1つまで搬送し,これにより試料容器を前記検出装置内に自動的に装填する自動検出装置。
【請求項41】
請求項37記載の自動検出装置において,前記検出装置は,バーコード読み取りステーションと,該バーコード読み取りステーションに配置したバーコードリーダを更に備え,前記容器ロケータ装置は試料容器を前記バーコード読み取りステーションまで移動させ,これにより試料容器上のバーコードを前記バーコードリーダに読み取らせるように作動可能である自動検出装置。
【請求項42】
請求項41記載の自動検出装置において,前記バーコード読み取りステーションは,前前記受入ウェル内において試料容器を水平面内で垂直軸周りに回転させるように回転可能なターンテーブルを更に備え,その回転により前記バーコードラベルを前記バーコードリーダで読み取らせる自動検出装置。
【請求項43】
請求項37記載の自動検出装置において,前記検出装置は前記容器を計量する容器計量ステーションを更に備え,前記容器装填装置は,試料容器を試料容器を計量するために該試料容器を前記容器計量ステーションまで移動させるよう作動可能である自動検出装置。
【請求項44】
請求項37記載の自動検出装置において,前記装置は,容器収容ステーションと,前記内部チャンバ内の試料容器を搬送するための搬送機構とを更に備え,前記容器ロケータ装置は,試料容器を前記収容ステーションまで移動させるように作動可能であり,前記搬送手段は,試料容器を前記収容ステーションから収容するよう作動可能である自動検出装置。
【請求項45】
保管・検査装置内において少なくとも1つの容器を自動的に管理するために,以下 (a)〜(c) のステップを備える自動容器管理方法。
(a) 少なくとも1つの容器を準備する。
(b) 以下 (i)〜(ii) を備える保管・検査装置を準備する。
(i) 内部チャンバを囲み,入口位置を備えるハウジング;
(ii) 試料容器を保持するための複数のロケータウェルを含み,少なくとも1つの試料容器を前記内部チャンバ内における少なくとも1つのワークフローステーションまで移動させるための容器ロケータ装置;
(c) 前記少なくとも1つの試料容器を,前記内部チャンバにおける少なくとも1つのワークフローステーションまで移動させる。
【請求項46】
請求項45記載の方法において,前記少なくとも1つのワークフローステーションは,バーコード読み取りステーション,容器走査ステーション,容器撮像ステーション,容器計量ステーション,容器収容ステーション,容器搬送ステーション又はそれらの組み合わせから成る群から選ばれる方法。
【請求項47】
請求項45記載の方法において,前記容器ロケータ装置は,1〜10個のロケータウェルを有する回転可能ディスクを備え,前記方法は,前記ディスクを垂直軸周りで回転させることにより,前記ロケータウェル内に含まれる少なくとも1つの試料容器を,前記内部チャンバ内における少なくとも1つのワークフローステーションまで移動させることを含む方法。
【請求項48】
請求項47記載の方法において,前記保管/検査装置は,バーコード読み取りステーションと,前記バーコード読み取りステーションに配置したバーコードリーダとを更に備え,前記容器ロケータ装置は,試料容器を前記バーコード読み取りステーションまで移動させるように作動可能であり,前記方法は,前記容器上の前記バーコードを読み取るステップを更に備える方法。
【請求項49】
請求項45記載の方法において,前記保管・検査装置は,容器収容ステーションと,前記内部チャンバ内の試料容器を搬送するための搬送機構とを更に備え,前記容器ロケータ装置は,試料容器を前記収容ステーションまで移動させるよう作動可能であり,前記方法は,前記搬送機構を使用して前記容器を前記収容ステーションから収容するステップを更に備える方法。
【請求項50】
請求項45記載の方法において,前記保管及び検査装置はコントローラを更に備え,該コントローラは,前記容器ロケータ装置が前記内部チャンバ内における少なくとも1つの前記ワークフローステーションまで移動する際に,前記容器ロケータ装置を制御する方法。
【請求項51】
容器を第1装置から第2装置まで搬送するための搬送機構であって:
(a) 第1装置,第2装置及び前記第1装置内に位置する容器と;
(b) 前記第1装置に結合し,前記容器を少なくとも1つのワークフローステーションまで移動可能とする第1ロケータ装置と;
(c) 前記第2装置に結合し,前記第1ロケータ装置と並置される搬送機構又はコンベアベルトと;
(d) 前記第1ロケータ装置から前記搬送機構まで前記容器を移動させ,又は押すように作動可能であり,これにより前記第1装置から前記第2装置へ前記容器を搬送するプッシャアームと;
を備える搬送機構。
【請求項52】
請求項51記載の搬送機構において,前記第1ロケータ装置は前記容器を搬送ステーションまで移動させ,前記プッシャアームは前記容器を前記搬送ステーションから前記搬送機構又はコンベアベルトまで押すよう作動可能である搬送機構。
【請求項53】
請求項51記載の搬送機構において,前記搬送機構は前記第1装置及び前記第2装置を繋ぐ搬送ブリッジを更に備え,該搬送ブリッジは,前記第1ロケータ装置と並置する第1端と,前記第2搬送機構と並置する第2端とによって前記第1ロケータ装置及び前記第2搬送機構を繋ぎ,前記プッシャアームは前記搬送ブリッジを越えて前記容器を押すよう作動することにより前記容器を前記第1装置から前記第2装置まで搬送する搬送機構。
【図1】

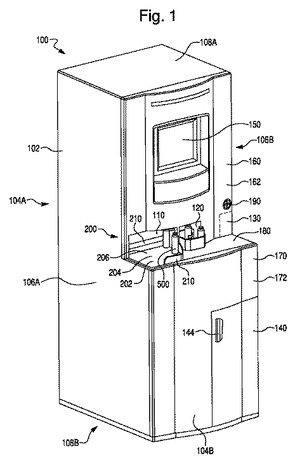
【図2】
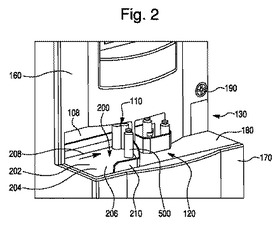
【図3】

【図4】
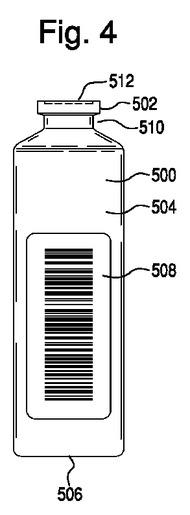
【図5A】
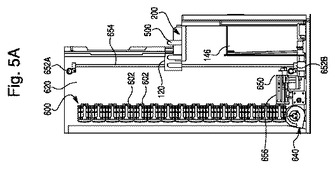
【図5B】
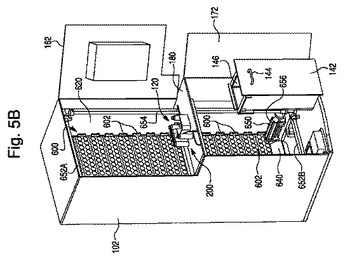
【図6】
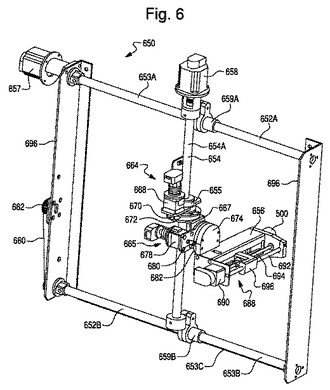
【図7A】

【図7B】

【図8A】
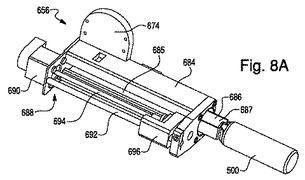
【図8B】
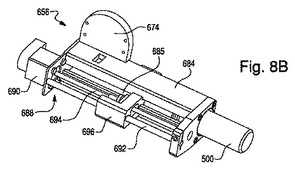
【図8C】
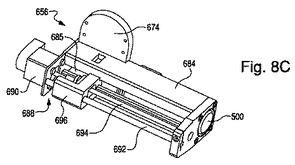
【図9A】
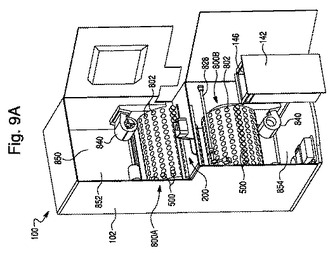
【図9B】

【図10】
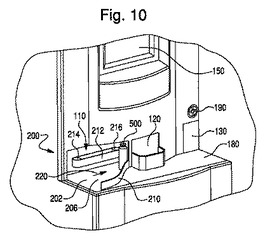
【図11】
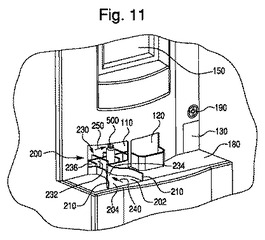
【図12】

【図13】

【図14】
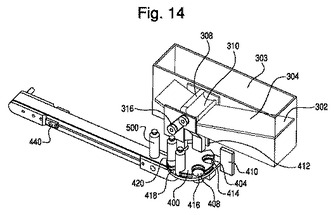
【図15】
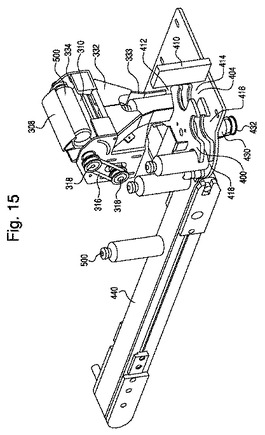
【図16】
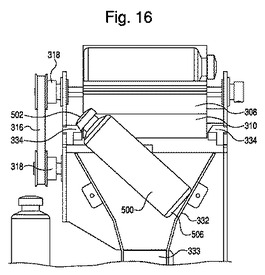
【図17】
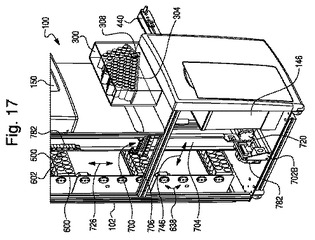
【図18】
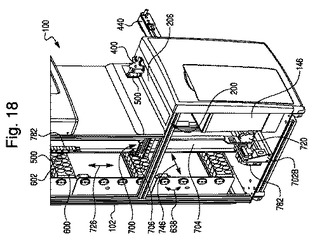
【図19】

【図20】

【図21A】
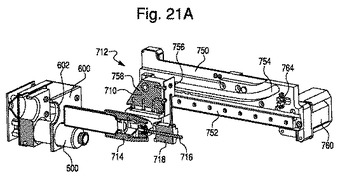
【図21B】
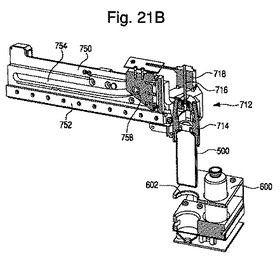
【図22】
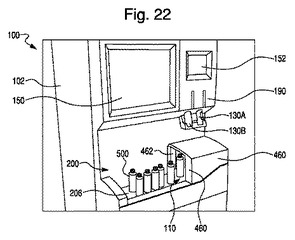
【図23】
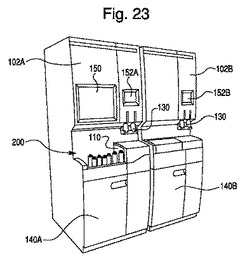
【図24】
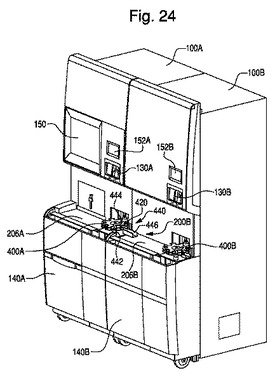
【図25A】
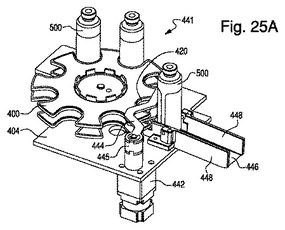
【図25B】

【図25C】
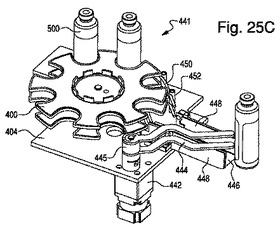
【図26】

【図27A】
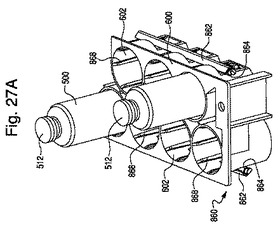
【図27B】
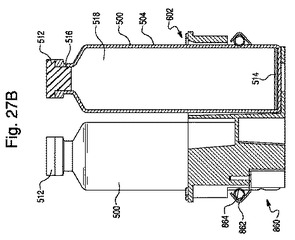
【図27C】
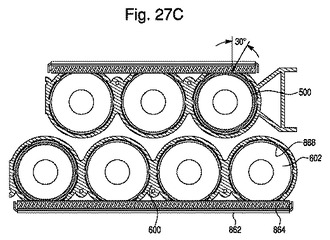
【図28A】

【図28B】
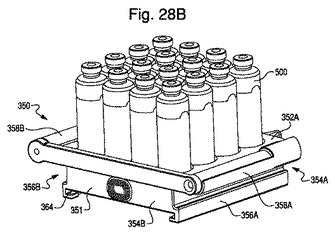
【図29】
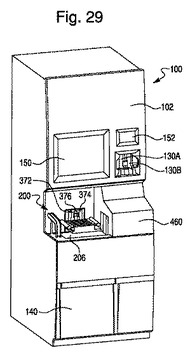
【図30】
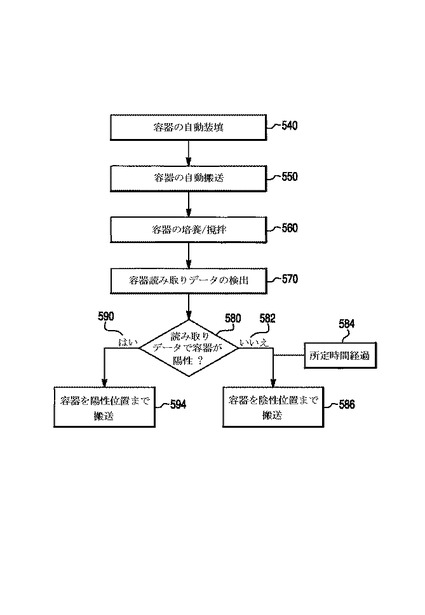
【図2】
【図3】
【図4】
【図5A】
【図5B】
【図6】
【図7A】
【図7B】
【図8A】
【図8B】
【図8C】
【図9A】
【図9B】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21A】
【図21B】
【図22】
【図23】
【図24】
【図25A】
【図25B】
【図25C】
【図26】
【図27A】
【図27B】
【図27C】
【図28A】
【図28B】
【図29】
【図30】
【公表番号】特表2012−526559(P2012−526559A)
【公表日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願番号】特願2012−511036(P2012−511036)
【出願日】平成22年5月14日(2010.5.14)
【国際出願番号】PCT/US2010/034857
【国際公開番号】WO2010/132741
【国際公開日】平成22年11月18日(2010.11.18)
【出願人】(502073946)ビオメリュー・インコーポレイテッド (28)
【Fターム(参考)】
【公表日】平成24年11月1日(2012.11.1)
【国際特許分類】
【出願日】平成22年5月14日(2010.5.14)
【国際出願番号】PCT/US2010/034857
【国際公開番号】WO2010/132741
【国際公開日】平成22年11月18日(2010.11.18)
【出願人】(502073946)ビオメリュー・インコーポレイテッド (28)
【Fターム(参考)】
[ Back to top ]