
微量流体処理装置
【課題】対応する圧力変化を測定することにより、分配される微量の移送流体を正しく測定することができる微量流体処理装置の提供。
【解決手段】微量流体処理装置10は、ガラス毛細管に取り付けられた圧電変換器を使用するマイクロディスペンサ16と、マイクロディスペンサに移送流体を充填し且つ同マイクロディスペンサから移送流体を吸引し、システム流体の圧力を制御し、移送と移送との間にマイクロディスペンサを洗浄する容積式ポンプ12と、システム流体の圧力を測定し且つ対応する電気信号を発する圧力センサ14と、を含んでいる。圧力信号は、分配される移送流体の体積を点検し且つ測定するため、及びマイクロディスペンサの自動化された調整及び診断のために使用される。
【解決手段】微量流体処理装置10は、ガラス毛細管に取り付けられた圧電変換器を使用するマイクロディスペンサ16と、マイクロディスペンサに移送流体を充填し且つ同マイクロディスペンサから移送流体を吸引し、システム流体の圧力を制御し、移送と移送との間にマイクロディスペンサを洗浄する容積式ポンプ12と、システム流体の圧力を測定し且つ対応する電気信号を発する圧力センサ14と、を含んでいる。圧力信号は、分配される移送流体の体積を点検し且つ測定するため、及びマイクロディスペンサの自動化された調整及び診断のために使用される。
【発明の詳細な説明】
【発明の詳細な説明】
【0001】
[発明の属する技術分野]
本発明は、少量の流体を制御し、分配し、測定するための装置及び方法に関する。より特定すると、本発明は、分配される流体の容積と適正な装置の機能とを確実なものとし且つ確保するために圧力の変化を検知する。
【従来の技術】
【0002】
化学的及び生物学的プロセスを採用する工業における進歩により、営業的又は実験的な使用のために化学的又は生物学的に活性な物質を含む少量の流体を正しく且つ自動的に分配する能力の必要性が生じてきた。分配される流体の量が正しいことは、所望の反応を生じさせる観点及び使用される物質の量を最小限にする観点の両方において重要である。
【0003】
微量の流体を分配するための装置は、インクジェットの用途のために開発されたもののような技術によって実証されてきた。しかしながら、インクジェット装置は、公知で且つ基本的には一定の粘度及びその他の物理学的特性の特定のインク(又はインクのセット)と共に動作するという利点を有する。従って、使用されるインクの特性が知られているので、自動インクジェット装置は、特定された特定のインク用に設計することができる。インクジェットにおける技術を関心のある特定の化学的及び生物学的物質を含む流体(以下、“移送流体”という)と共に直接使用することはより多くの問題を有する。このような移送流体は、種々の粘度を有し且つ正しい微量分配を困難にさせるその他の物理学的特性を有している。自動微量流体処理装置は、これらが分配しなければならない広範囲の物質に対応するために種々の粘度及びその他の特性の流体を処理できなければならない。この問題の別の点は、はるかに少量の移送流体を正しく分配することを許容する必要があることである。特に、生物学的物質の利用及び試験においては、コストを節約し且つ利用可能な少量の物質をより効率良く使用するためには、分配される移送流体の量を最小限にすることが望ましい。生物学的物質を含む流体を微量だけ移送することが望ましいことは多いけれどもこれは難しい。移送流体の各射出毎に分配された移送流体の量を知ることは、自動化された装置にとって有利である。
【0004】
微量の移送量を分配することに対する別の困難な点は、流体を押し出すために採用される例えば直径が20〜80マイクロメータのような小さい孔によって起こる。ノズルの苛酷な使用は、分配される流体内の物質によって望ましくない詰まりを促進する。詰まりの問題を更に促進させることは、移送流体内において時々使用される物質の特性である。押し出される孔に移送流体内の物質が詰まると、分配動作を停止させ又は正確さを著しく低下させる。従って、詰まりを防止するか又は最小限にし、このような状態が起こっているときを検知し、且つこのような状態から自動的に回復できることが望ましい。マイクロディスペンサ(微量分配器)の移送流体の正確な分配の不能状態は、他の要素、例えば分配ユニット内に存在する空気又はその他の圧縮可能なガスのような他の要素によって生じ得る。微量の分配が全くなされないか又は所望する微量の分配がなされないとき(不発(misfiring))を検知し且つ指示することは望ましい。
【0005】
種々の混合液又は溶液を分配のためにマイクロディスペンサ内に吸引することは常に必要であるかもしれない。各流体は、後に使用される流体に対してマイクロディスペンサを汚染するかもしれないので、流体の種類が変更されたときにはマイクロディスペンサを完全に洗浄することが好ましい。流体が充填されないときでさえ、マイクロディスペンサ内に物質の堆積を防止するために洗浄は必要である。不幸にも、マイクロディスペンサを洗い流すためにポンプを使用することは常に100%効果的であるという訳ではない。従って、常に容易に且つ完全にマイクロディスペンサを洗浄できることが望ましい。
【0006】
自動化された微量分配装置を実現するためには、ほぼ均一な移送液滴を迅速且つ正確に分配するために移送流体が関連あるシステム要素の何らかの所定の範囲内にあることを常に確保することが望ましい。例えば、移送流体が目標表面に正しく蓄積されることを確保することが望ましい。工業は、微量の移送流体を迅速に分配することを必要とするので、分配される移送流体の量を確認することができること、及びリアルタイムで分配において問題が生じたか否かを検知し且つ復帰できることも望ましい。
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明の主たる目的は、微量流体処理装置内の圧力の対応する変化を検知することによって、分配される微量の移送流体を正しく測定することができる微量流体処理装置を提供することである。
【0008】
本発明はまた、粘度のような移送流体の特性に関係なく、分配された流体の量を正しく測定することができる微量流体処理装置を提供することを目的とする。
本発明の更に別の目的は、化学的又は生物学的活性物質を含む流体を、微量だけ移送することができる微量流体処理装置を提供することである。
【0009】
本発明の更に別の目的は、詰まりを防止又は最小限にする微量流体処理装置を提供することである。
本発明の更に別の目的は、詰まり及び移送の失敗に伴う圧力変化を検知して、このような不適当な動作を指示することができる、微量流体処理装置を提供することである。
【0010】
本発明の更に別の目的は、移送流体の微量を正しく分配し且つマイクロディスペンサの動作を理想的にするために、移送が雰囲気圧に対して所定の範囲の負の圧力に維持されていることを点検することができる、微量流体処理装置を提供することである。
【0011】
本範囲のその他の目的及び利点は、以下の詳細な説明から明らかとなるであろう。
【課題を解決するための手段】
【0012】
上記の目的は、本発明による装置を提供することによって、第1の好ましい実施形態において実現される。本発明による装置は、ステッピングモーターによって作動される容積式ポンプ(positive displacement pump)と、ピエゾ抵抗圧力センサと、ガラス毛細管に結合された圧電変換器を利用した電気制御マイクロディスペンサと、を含む。このマイクロディスペンサは、1ナノリットル(nl)以下の大きさの液滴を小さなノズルから強制的に射出させることによって迅速且つ正確に分配することができる。この方法は、ドロップーオンーディマンド(drop−on−demand:必要に応じて滴下する)方法として知られている。第1の実施形態は、4つの又は2〜3個のマイクロディスペンサが各々単一の容積式ポンプ及び圧力センサに結合されている場合により好ましい。
【0013】
採用されているマイクロディスペンサの数が8個以上である場合により好ましい微量流体処理装置の第2の実施形態もまた、上記の目的を達成することができる。この第2の好ましい実施形態は、(以下に述べる弁を含む)容積式ポンプ、ステッピングモーター及びピエゾ抵抗圧力センサが、システム流体を供給し且つシステム流体圧を制御するための圧力制御装置、流体の流れのみならず各マイクロディスペンサに結合されている接続管内に存在するシステム流体の圧力をも検知するための複数の流量センサ、各々が圧力制御装置内で各マイクロディスペンサをシステム流体貯蔵器に結合している複数の細かく組み立てられた弁によって置き換えられている以外は、第1の実施形態と類似している。
【0014】
自動化された流体処理装置の機能を提供するために、第1及び第2の好ましい実施形態の両方におけるマイクロディスペンサが、所望の流体移送プロトコルを実行するのに必要とされる特定の位置にマイクロディスペンサを位置決めするのに使用される3軸ロボットシステム上に取り付けられる。
【0015】
本発明は、システム流体と移送流体とを含み、移送流体は、システム流体内の圧力の小さな変化の測定を容易にして、分配される移送流体の体積と関連する公知の量の空気(“エアーギャップ”)によって分離される。移送流体は分離される物質を含んでおり、一方、1つの好ましい実施形態においては、システム流体は脱イオン水である。微量分配範囲の液滴が分配される毎に、移送流体は、毛管作用によってマイクロディスペンサの内部の以前の位置へと戻り、エアーギャップの特定の体積は、分配される移送流体の量に対応して増加するであろう。このことは、感度の高いピエゾ抵抗圧力センサによって測定されるシステム流体ライン内の圧力を低下させる効果がある。この圧力センサは、電気信号を制御回路に送り、制御回路は、電気信号をデジタル形式に変換し且つ分配される移送流体の対応する体積を示す指示値を発する。本発明の利点は、移送流体の粘度に影響されないことである。これは、分配される流体の粘度に依存することなく、システム流体内の圧力変化が分配される微量に対応するからである。本発明は、微量流体処理における特有の機能を有する。この装置は、自動的に、流体の表面を検知し、移送されるべき流体を吸引し、次いで、高い正確さ、速度及び確実さにより少量の流体を分配することができる。この分配は、ディスペンサが目的容器又は内容物に触れることなく行われる。本発明の特徴は、リアルタイム動作中に分配された流体の微少量を確実に検査することができることである。
【0016】
本発明のもう一つの特徴は、マイクロディスペンサによって超音波周波数共鳴によって圧電変換器を作動させることによって、詰まりを防止し又は最小限にすることである。移送流体をガラス毛細管内に吸引する際に、共鳴超音波周波数でマイクロディスペンサを振動させることによって、詰まりが防止され又は最小限にされる。圧電変換器はまた、毛細管が洗浄されつつあるときに、同一の超音波共鳴周波数で作動せしめられる。洗浄中に毛細管を共鳴振動させることによって、従来なされたよりもより清浄なガラス毛細管内部を達成できる。詰まりを防止し、存在する詰まりを破壊し、及びマイクロディスペンサを洗浄するために、同じ構造が使用されるので、従来に可能であったよりもより高い効率が達成される。
【0017】
本発明の更に別の特徴は、マイクロディスペンサを、微量滴定プレートのウエル(凹部)に対して高いレベルの正確さで位置決めすることができることである。可視光線又は赤外線が、列状またはコラム状に整列されたウエルを含む微量滴定プレートの透明な底半分を介して伝達される。光は、微量滴定プレートの不透明な頂半分を通過しない。特定のマイクロディスペンサが、微量滴定プレートの不透明な頂半分より上方の位置から、同微量滴定プレートの透明な底半分の上方の位置まで移動せしめられると、光は、マイクロディスペンサ内のガラス毛細管の中を通過し、光は、そこで、ガラス毛細管と光学的に接触している光検知器によって検知される。光検知器は、受け取った光の量に対応する電気信号を発する。光検知器からの信号は、コンピュータに接続され、コンピュータは、この信号を利用してマイクロディスペンサを配置し且つ位置を検知する助けとする。
【発明の実施の形態】
【0018】
本発明は種々の変形を施すこと及び代替的な形態とすることができるけれども、ここでは、例示として特定の実施形態を図面に示し且つ以下において詳細に説明する。しかしながら、本発明をここに開示した特定の形態に限定することは意図していないことは理解されるべきである。本発明は、特許請求の範囲によって規定されている本発明の精神及び範囲に含まれる全ての変形例、等価物及び代替例を包含するものである。
【0019】
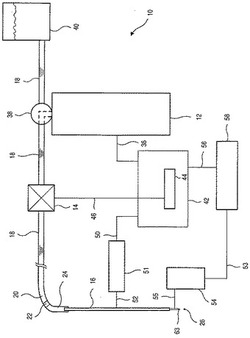
図面に目を転じ、まず図1を参照すると、微量流体処理装置10の第1の実施形態が図示されている。微量流体処理装置10は、容積式ポンプ12、圧力センサ14及びマイクロディスペンサ16を含んでいる。管18は、容積式ポンプ12を圧力センサ14に接続し、且つ圧力センサ14をマイクロディスペンサ16に接続している。容積式ポンプ12は、システム流体20を圧力センサ14及びマイクロディスペンサ16内を移動させる。微量流体処理装置10にシステム流体20が装荷された後、公知の容積のエアーギャップ22とある量の移送流体24とが、以下に説明する方法でマイクロディスペンサ16内に抜き取られる。移送流体24は、関心のある1以上の生物学的又は化学的活性物質を含んでいる。1つの好ましい実施形態においては、マイクロディスペンサ16は、極めて再現可能な1ナノリットル以下の大きさの液滴26を押し出す(すなわち射出する)。移送流体24の押し出された液滴26は、好ましい1つの実施形態においては液滴1つが0.45ナノリットル程度であるが、5ピコリットルの大きさであってもよい。例えば、移送流体24を全体として9ナノリットルだけ押し出すことを望む場合には、マイクロディスペンサ16は、20個の液滴26を押し出すように指示されるであろう。液滴26の大きさは、マイクロディスペンサ16に適用される電気信号の大きさ及び印加時間を替えることによって変更することができる。液滴の大きさに影響を与える他の要素としては、マイクロディスペンサの底部に設けられたノズル開口の大きさ、マイクロディスペンサ入口の圧力、及び移送流体の特性がある。
【0020】
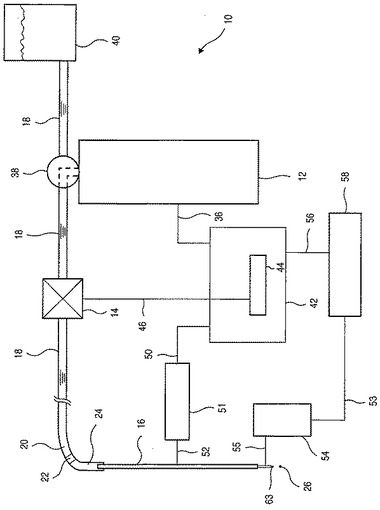
図1及び2を参照すると、1つの好ましい実施形態においては、容積式ポンプ12は、カリフォルニア州、サニーヴェイル、ハンボルコート242にある、カーボ・サイエンティフィック・インストルメント・インク(Carvo Scientific Instrument, Inc.,)によって製造されたモジュラー型のデジタルポンプXL300である。容積式ポンプ12は、ステッピングモータ28及び29と、注射器30とを含んでいる。注射器30は、ホウ珪酸ガラス管32と、一連のギヤとベルト(図示せず)とを介してステッピングモータ28に機械的に結合されているプランジャ34とを含んでいる。ステッピングモータ28の動きは、ガラス管32の内側において、プランジャ34を特定の数の不連続なステップで上方又は下方へ移動させる。プランジャ34は、ガラス管32と共に液密シールを形成している。1つの好ましい実施形態においては、注射器30は、プランジャ34が一回の全ストロークにおいて送り出すことができるシステム流体20の量である250マイクロリットルの使用可能な容量を有する。選択された動作モードに応じて、ステッピングモータ28は、プランジャ34の全ストローク毎に3,000又は12,000の不連続なストロークを形成することができる。1つの好ましい実施形態においては、ステッピングモータ28は、プランジャ34の全ストローク毎に12,000のステップを作るようになされており、各ステップ毎に、約20.83ナノリットルのシステム流体20を送り出す。1つの好ましい実施形態においては、使用されるシステム流体は、脱イオン水である。
【0021】
デジタルコード化されたコマンド(命令信号)が、容積式ポンプ12内のステッピングモータ28に、不連続な量の流体をマイクロディスペンサ16内に吸引させ、流体の移送と移送との間にマイクロディスペンサ16を洗浄させ、微量流体処理装置10の動作のためのシステム流体20のライン内の圧力を制御させる。容積式ポンプ12はまた、微量流体処理装置10にシステム流体20を充填し及びマイクロディスペンサ16を介して多量の流体を分配して、希釈液を作ることができるようにするために使用される。容積式ポンプ12は、移送流体24に直に作用することができる。このように、所望ならば、移送流体24は、微量流体処理装置10全体を通してシステム流体20として使用することができる。
【0022】
微量流体処理装置10に充填するために、制御論理42は、最初に、電線56を介して3軸ロボットシステム58に、マイクロディスペンサ16をロボットシステム58上に含まれる洗浄ステーションの上に位置決めさせる。1つの好ましい実施形態においては、微量流体処理装置10が含み且つ同装置に装着される3軸ロボットシステムは、イリノイ州、ドウナーグローブにあるパッカード・インストルメント・カンパニー(Packard Instrument Company)によって製造されているマルチプローブCR10100(MultiPROBE CR10100)である。容積式ポンプ12は、システム流体貯蔵器40を注射器30に接続するための弁38を含んでいる。弁38を回転させる制御論理42によって、初期化制御信号が電線36を介してポンプ12に伝えられ、注射器30をシステム流体貯蔵器40に接続する。制御信号はまた、ステッピングモータ28にプランジャ34をその最大上方位置(図2における位置1)まで移動させて、ホウ珪酸ガラス管32内に位置させる。制御論理42からの次のコマンドによって、ステッピングモータ28がプランジャ34をガラス管32の内側の最大下方位置(図2の位置2)まで移動させて、システム流体20をシステム流体貯蔵器40から抜き取る。制御論理42からの別のコマンドは、弁38を再び回転させ、注射器30を圧力センサ14に接続された管18と接続させる。1つの好ましい実施形態においては、微量流体処理装置10において採用されている管18は、ニュージャージ州、ラリタンにあるゼウス・インダストリアル・プロダクツ・インク(Zeus Industrial Products, Inc.,)によって作られた、内径が1.4986ミリメートル(0.059インチ)であり、外径が2.4892ミリメートル(0.098インチ)である、自然色のテフロンチューブである。制御論理42からの容積式ポンプ12への次のコマンドによって、注射器30の内側のシステム流体20が、微量流体処理装置10内へと圧力センサ14に向かって押し出される。微量流体処理装置10は、典型的には、約4ミリリットルのシステム流体が充填されることを必要とするので、微量流体処理装置10を完全に充填するためには、上記した一連のステップが約16回繰り返されなければならない。
【0023】
制御論理42は、電線46を介して圧力センサ14から信号を受け取る。この信号は、A/D(アナログ/デジタル)コンバータ44によってアナログ形式からデジタル形式へと変換され、処理及び分析のために制御論理42によって使用される。1つの好ましい実施形態においては、A/Dコンバータは、テキサス州、オースチンにあるナショナル・インストルメント・コーポレーション(National Instrument Corporation)によって製造されたPC−LPM−16マルチファンクションI/Oボード(PC−LPM−16 Multifunction I/O Board)である。ここに記載した流体移送プロセスにおける種々の点において、制御論理42は、圧力センサ14から信号を受け取り、コマンド信号を、ポンプ12、マイクロディスペンサ電子回路51、及び3軸ロボットシステム58へ送る。制御論理42内には、ここに記載した特定の流体移送プロトコルのためのハードウエア(ロボットシステム58、ポンプ12及びマイクロディスペンサ電子回路51)をシーケンス制御するコード化されたアルゴリズムが設けられている。制御論理42内にはまた、測定された圧力信号を処理して、マイクロディスペンサを点検し且つ測定し、微量流体処理装置の状態を診断し、選択された移送流体24のためのマイクロディスペンサの調整を自動的に行う、コード化されたアルゴリズムも設けられている。
【0024】
圧力センサ14は、微量流体処理装置10を充填し、ポンプ12によって移送流体24を吸引し、マイクロディスペンサ16によって液滴26を分配し、ポンプ12を使用してマイクロディスペンサ16を洗浄する際に生じる圧力の脈動を検知する。1つの実施形態においては、圧力センサ14は、イリノイ州、フリーポート、ウエストスプリングストリート11にある、ハネウエル・インク(Honeywell, Inc.,)の一部であるマイクロスイッチ・インク(Microswitch, Inc.,)によって製造されたピエゾ抵抗圧力センサの部品番号26PCDFG6Gである。図1のブロック図に示された圧力センサ14にはまた、圧力センサからのアナログ圧力信号を増幅するための電気回路も含まれている。圧力センサ14は、圧力を電気信号に変え、この電気信号は、A/Dコンバータ44へと送られて制御論理42によって使用される。例えば、微量流体処理装置10が充填されると、圧力センサ14は電気信号を制御論理42に送り、この電気信号は、制御論理42によって分析されて、マイクロディスペンサ16内に部分的又は完全な閉塞のような何らかの問題が生じたことを指示するべきか否かを判断する。
【0025】
微量流体処理装置10が一度充填されると、制御論理42は、電線56を介してロボットシステム58に信号を送り、同ロボットシステムに移送流体24の上方の空気内にマイクロディスペンサ16を位置決めさせるように指示する。制御論理42は、ステッピングモータ28に指示して、プランジャ34を下方に移動させ、不連続な量の空気(エアーギャップ)例えば50マイクロリットルの空気をマイクロディスペンサ16内に吸引させる。制御論理42は、次いで、ロボットシステム58に指示して、マイクロディスペンサ16を同マイクロディスペンサ16が移送流体24の表面(図示せず)と接触するまで下方に移動させる。マイクロディスペンサ16の移送流体24の表面との接触は、容量式の流体液面検知装置(米国特許第5,365,783号)によって判断される。マイクロディスペンサは、電線55によって流体液面検知電子回路54に接続されている。流体液面検知電子回路54がマイクロディスペンサ16が移送流体24の表面と接触したことを検知すると、電線53を介してロボットシステム58に信号が送られて下方への移動が停止される。
【0026】
制御論理42は、次いで、ポンプ12に指示して、移送流体24をマイクロディスペンサ16内へ吸引するために、プランジャ34を下方へ移動させる。吸引中に制御論理42によって圧力信号が監視されて、移送流体24がマイクロディスペンサ16内へと十分に抜き取られつつあることが確認される。マイクロディスペンサの部分的又は完全な詰まりによる異常な圧力低下のような問題が生じたことが検知されると、制御論理42は、動作停止コマンドをポンプ12に送る。制御論理42は、次いで、コード化された復帰アルゴリズムを作動させるであろう。移送流体24は、圧力センサ14を汚染するおそれなく微量流体処理装置10内の圧力センサ14まで吸引される。移送流体24の毛管作用を増すために付加的な管を追加することができる。一度、移送流体24がマイクロディスペンサ16内へ吸引されると、制御論理42は、ロボットシステム58に指示して、マイクロディスペンサ16を選ばれた目標、例えば微量滴定プレートの上に再度位置決めさせる。
【0027】
1つの好ましい実施形態においては、マイクロディスペンサ16は、ドイツのノルダーステット(Norderstedt)D−22844、ミューレンヴェグ(Muhlenweg)143にあるマイクロドロップ・ゲーエムベーハー(MIcrodrop GmbH)によって製造されたMD−K−130マイクロディスペンサ・ヘッドである。
【0028】
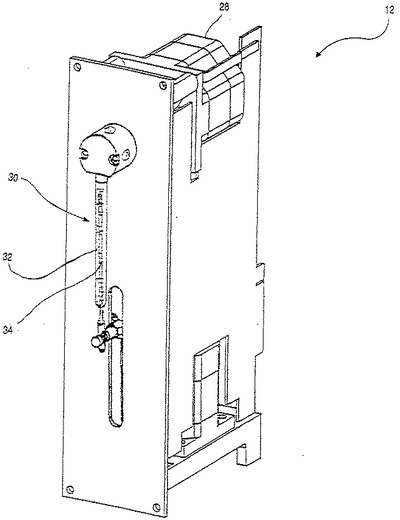
図3に示されているように、マイクロディスペンサ16は、ガラス毛細管62に結合された圧電セラミック管60からなる。この圧電セラミック管は、圧電セラミック管を収縮させるためのアナログ電圧パルスを受け取るための内側電極66と外側電極68とを備えている。一度、ガラス毛細管62が移送流体24によって充填されると、制御論理42は、電線50を介してマイクロディスペンサ電子回路51に指示し、電線52によって圧電変換器60にアナログ電圧パルスを送る。好ましい実施形態においては、マイクロディスペンサ電子回路51は、ドイツのノルダーステット(Norderstedt)D−22844、ミューレンヴェグ(Muhlenweg)143にあるマイクロドロップ・ゲーエムベーハーによって製造されたMD−E−201駆動電子回路である。マイクロディスペンサ電子回路51は、アナログ電圧パルスの大きさと持続時間とを制御し、また、パルスがマイクロディスペンサ16に送られる周波数をも制御する。電圧パルスの各々は、圧電変換器60の収縮を生じさせ、この収縮は、次いでガラス毛細管62を変形させる。ガラス毛細管62の変形によって、移送流体24の中を進んでマイクロディスペンサのノズル63に到達する圧力波が形成され、ノズル63において、移送流体24の一つの液滴26が極めて高い加速度で射出される。これらの液滴26の大きさは、極めて再度製造可能なものとして示されたものである。移送流体24の高い加速度は、上記において移送流体24の表面張力及び粘度によって生じる問題を最小限にするか又は排除して、極めて小さい液滴26がノズルから射出されるのを可能にする。例えば5ピコリットルの液滴26が実証されている。液滴26をノズルから押し出すためにマイクロディスペンサ16を使用することにより、非接触(touchoff)と称される流体移送技術において生じる問題をも排除する。非接触技術においては、液滴26は、ノズルの端部に保持され、液滴がマイクロディスペンサ16からぶら下がっている間にこの液滴を目標表面と接触させることによって目標表面に堆積される。このような接触過程は、目標表面の許容できない体積の変動を生じさせる、表面張力、粘度及びマイクロディスペンサ16の濡れ特性により、難しいものとなる。本発明は、液滴26が秒速数メートルの速度でマイクロディスペンサ16から射出されるので、このような接触過程における問題点を排除する。本発明によれば、射出されるべき液滴26の数を特定することにより、所望の合計体積の流体を分配することができる。マイクロディスペンサ16から一秒間に数千個の液滴26を射出することができるので、所望の微量体積の移送流体24が迅速に分配できる。
【0029】
一つの好適な実施の形態においてハ、圧電変換器60とノズル63との間におけるガラス毛細管62の下方部分は、白金又は金の何れかによる導電性材料でめっきされている。このため、マイクロディスペンサ16と流体液面検知回路54との間に導電経路が形成される。一つの好適な実施の形態においては、このガラス毛細管62は、全長が73mmであり、ノズル63の内径は75μmである。
【0030】
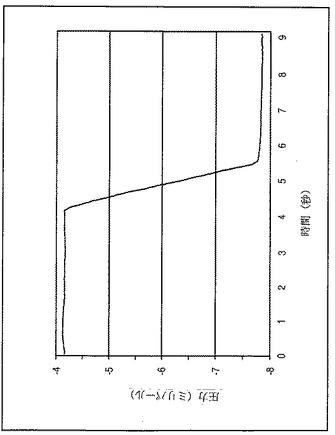
極少量の移送流体24を分配するため、アナログ電圧パルスがマイクロディスペンサ16に送られて、液滴26を発生させる。移送流体24に作用する毛管力によって、マイクロディスペンサ16から供給されたある量の移送流体24が管18からの液体と置き換えられる。しかしながら、移送流体/エアーギャップ・システムの液柱が容積式ポンプ内の閉塞端にて終端となっているため、エアーギャップ22が膨張するに伴って、システム液体20のライン内の圧力が低下する。500ナノリットルの極少量の分配を行う間に測定される圧力プロファイルを示す、図4にこの状態が図示されている。本発明にとって重要なことは、圧力低下の程度がエアーギャップ22の寸法、及び分配される液体量の関数である点である。
【0031】
既知の容積のエアーギャップ22である場合、圧力センサ14により検出される圧力変化は、分配される量に関係する。このため、制御論理42は、圧力センサ14により測定された圧力変化を基にして分配された移送流体24の量を判断する。本発明の一つの好適な実施の形態においては、移送流体24の特性に対応して、外気圧よりも約30乃至40ミリバール以上圧力が低下しないようにすることが好ましい。分配された移送流体24の量が30乃至40ミリバールを越える圧力低下を起こすのに十分である場合には、マイクロディスペンサ16の両端における圧力差、即ち、ノズル63に作用する外気圧と毛細管62に作用する圧力との差は、移送流体24を管18内に上方に押し上げるのに十分なものとなる。このことは、更なる分配を防止するであろう。圧力の低下を補償すべく制御論理42がポンプ12に命令してプランジャ34を前進させることが必要となる前に、分配することのできる移送流体24の量が最大となる。この最大の量は、所望の分配量、及びエアーギャップ22の寸法により決まる。これと逆に、エアーギャップ22の寸法は、外気圧よりも30乃至40ミリバール以上低い圧力低下が生じないようにするため、所望の分配量に基づいて選択することができる。また、マイクロディスペンサ16が分配している間に、プランジャ34を前進させて、これにより、マイクロディスペンサ16が連続的に作用し得るようにシステム液体20の管圧を再設定することも本発明の範囲に属する。
【0032】
所望の量の移送流体24が分配されたことを判断するために、システム流体20の圧力変化が利用される。分配された移送流体24の量を確認する第二の方法は、注射器のプランジャ34を位置1に向けて上方に進めるべくポンプ12に命令する間に、制御論理42がシステム流体20のライン圧力を監視することにより行われる。システム流体20のライン圧が(分配前の)初期値に戻るまで、注射器のプランジャ34を前進させる。プランジャ34が押し出す排出容積(ステッピンジモータ28が1ステップ作動する毎に20.83ナノリットル)を追跡する制御論理42により、分配された量の第二の確認が為され、このことは、システムの信頼性を更に高める。このとき、多数回の分配手順が指定されるならば、システム流体20のライン圧は、マイクロディスペンサ16の次の正確な分配量に合ったものとなる。
【0033】
移送流体の分配が完了したならば、制御論理42は、ロボットシステム58に命令して、マイクロディスペンサ16を洗浄ステーションの上方の位置に位置決めする。次に、この制御論理42は、ポンプ12及びロボットシステム58に洗浄手順を命令する。この手順において、マイクロディスペンサ16内に残った全ての移送流体24が排出され、ガラス毛細管62の内面、及びノズル63の外面(移送流体24に露呈された面)が洗浄される。この洗浄流体は、ロボットシステム58のデッキ上に配分されたシステム流体20、又はその他の任意の液体を使用することができる。この洗浄手順は、その後の移送流体24がその前に処理された移送流体で汚染されるのを最小にすることを目的とするものである。この目的のため、マイクロディスペンサ16を超音波洗浄することも可能である。これは、制御論理42によりマイクロディスペンサの電子回路51に命令して、マイクロディスペンサに対して超音波の範囲の周波数の電気パルスを送るようにすることで行われる。この周波数は、例えば、マイクロディスペンサ16/移送流体24のシステムの共鳴周波数に一致する、12−15キロヘルツ(好適な共鳴周波数は、約12キロヘルツであると考えられる)とする。圧電変換器60をマイクロディスペンサ16のガラス毛細管62と共に共鳴超音波周波数にて作動させると、ガラス毛細管62の内面が激しく振動する。第一及び第二の実施形態の双方において、圧電変換器60が共鳴周波数にて作動される間に、システム流体20、又は特殊な洗浄流体及び/又は中立化流体を使用して、マイクロディスペンサ16の洗浄を行う。共鳴超音波励起により洗浄する方法は、マイクロディスペンサ16に付着する物質を遥かに効果的に分離し且つ除去するという効果がある。例えば、多数の試験ケースにおいて、超音波の励起は、超音波励起を利用せずに洗浄する場合と比べて、マイクロディスペンサ16内に残る物質量が(汚染の程度によって)200%乃至500%、減少することが確認されている。
【0034】
また、マイクロディスペンサのノズルの詰まりを最小にし、又は緩和するためにもこのマイクロディスペンサ16の共鳴超音波励起が使用される。例えば、移送流体がマイクロディスペンサ16内に吸引されつつあるとき、この移送流体は、ガラス毛細管62の比較的細いノズル63を通らなければならない。移送流体24内の物質がノズル63の表面と接触して、その接触の性質に対応して、その物質がノズル63に付着する可能性がある。生物化学の適用例においては、移送流体24への添加物に広く採用されている物質は、ポリスチレン球である。これらの球は、典型的に、1μm乃至30μmであり、磁性フェライト、抗原又はその他の物質で被覆されることもあるが、被覆されない場合もある。ノズル63の直径に対してポリスチレン球は比較的大径であるため、時として粘着性である被覆と組み合わさって作用し、それらの球がノズル63に付着する可能性がある。マイクロディスペンサ16が充填される間に(即ち、移送流体24がマイクロディスペンサ16内に吸引されるとき)、圧電変換器60をマイクロディスペンサ16の超音波共鳴周波数で励起させるならば、ノズルの詰まりが防止され、又は詰まる可能性が少なくなることが確認されている。このように、マイクロディスペンサ16の超音波励起は、移送流体24内の物質がノズル63に詰まるのを防止し、又は少なくする働きをする。
【0035】
溶融し又は懸濁した物質を含む移送流体24がノズル63を通り抜けるとき、詰まりが生じる可能性がある。従って、上述したように、移送流体24をマイクロディスペンサ16内に吸引する間の詰まりが問題となるのみならず、マイクロディスペンサ16から移送流体を分配するときにも問題が生じる。圧電変換器により液滴を分配する間に、マイクロディスペンサ16を共鳴超音波で周期的に励起させると、ノズル63に対する物質の堆積量を少なくし、場合によって、詰まりを防止できることも分かった。相当な詰まりが生じた場合であっても、圧電変換器60によってマイクロディスペンサ16を共鳴超音波励起させれば、ノズル63に詰まった物質を実質的に除去することができる。この場合の重要な利点は、ノズル63の詰まりを防止し又は解消することにより、余分な洗浄工程及びその工程に伴う遅れを生じることなく、微量流体処理装置10がその作用を続けることができることである。要するに、装置の不稼働時間が短くなり、これにより、この微量流体処理装置10がより効率的なものとなるのである。
【0036】
本発明の上記の説明において、このマイクロディスペンサ16の制御は、各々が移送流体24の液滴26を発生させることができる特定数の電気パルスを、マイクロディスペンサの電子回路51送ることにより行われる。また、リアルタイムにて圧力センサ14の信号を監視し且つ所望の圧力変化になる迄、電気パルスを送り続けることにより、マイクロディスペンサ16を制御することも本発明の範囲に属する。この動作モードにおいては、A/Dコンバータ44を内蔵するPC−LPM−16マルチファンクションI/Oボードが制御論理42により命令されて、マイクロディスペンサの電子回路51に電気パルスを送る。マルチファンクションI/Oボードによって送られた一つのパルスにより、1つの電気パルスがマイクロディスペンサの電子回路51によりマイクロディスペンサ16に送られ、移送流体24の1つの液滴26を放出させる。この制御論理42は、マイクロディスペンサ16による分配が行われる間に、圧力センサ14の信号を検出し、所望の圧力変化が達成されたならば、この制御論理42は、マルチファンクションI/Oボードに命令して、電気パルスの供給を停止させる。この動作モードは、制御論理42によりマイクロディスペンサ16の「誤作動(misfiring)」が検出されたときに、採用される。
【0037】
微量流体処理装置10はまた、性質の異なる移送流体24を移送するため、放出される液滴26のサイズを自動的に設定(較正)することも、本発明の範囲に属する。上述したように、放出された液滴26のサイズは、移送流体24の性質により影響を受ける。このため、ユーザが移送量の全量を特定し、また、装置10がユーザの要求を満足させるのに十分な数の放出液滴を設定し得るようにするため、放出される液滴26のサイズを自動的に設定することが望ましい。コード化した自動較正アルゴリズムにおいて、装置10が励起され、エアーギャップ22及び移送流体24が吸引されたならば、制御論理42は、マイクロディスペンサの電子回路51に命令して、例えば、1000といった特定数の電気パルスをマイクロディスペンサ16に送ることができる。制御論理42が圧力センサ14からの信号の低下を利用して、分配された移送流体24の量が測定される。この分配された量の測定は、制御論理42がプランジャ34の動きにより押し出された容積を追跡し、装置の液体20の管圧を分配前の値に回復させることにより行われる。
【0038】
図1に図示した微量流体処理装置10は、単一のマイクロディスペンサ16と、圧力センサ14と、ポンプ12とを備えている状態で図示されている。多数(例えば、4、8、96個)のマイクロディスペンサ16と、圧力センサ14と、ポンプ12とを有する微量流体処理装置の実施の形態を含めることも本発明の範囲に属するものである。また、多数のマイクロディスペンサ16と、圧力センサ14と、弁38と、1つ又は2以上のポンプ12とを備える微量流体処理装置の実施の形態を含むことも本発明の精神及び範囲に属するものである。
【0039】
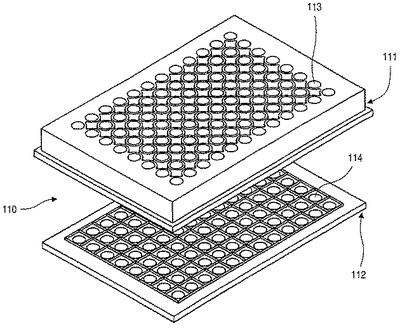
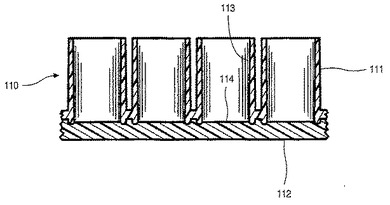
次に、図5、図6、図7を参照すると、正確な量の移送流体24を微量滴定プレート110のウエル列(その内容を引用して本発明の一部に含めた、米国特許第5,457,527号に記載されているウエル列)内に滴下する、ドロップ・オン・ディマンド型の極少量流体分配の1つの用途が示されている。この微量滴定プレート110は、2つの成形プラスチックプレート111、112により形成される。上方プレート111は、微量滴定プレートの多数ウエルの側壁113を形成し、図示した実施例において、これらのウエルは、その他の寸法のマトリックスも本発明に関して作用可能ではあるが、8×12のマトリックスにて配置されている。底部プレート112は、マトリックスウェブの底部ウエル114を形成し、その2つのプレートを相互に溶着させることにより、上方プレートの下面に取り付けられる。この上方プレート111は、光が透過し得ないように不透明のポリマー材料で形成されている。上方プレート111と異なり、下方プレート112は、透明なポリマー材料で形成されており、各試料ウエルのための透明な底部壁114を形成する。このことは、底部壁114を通じて試料材料を観察することを可能にし、また、放出される光を底部壁を通じて測定することも可能にする。また、この透明な底部壁114は、最大の検出面積が得られるように、ウエルの頂部は遮蔽されずに、試料を外部励起源からの光に露呈させることを可能にする。
【0040】
本発明の微量流体処理装置10は、極く少量の流体を分配することができることを1つの理由として、対応して小さい寸法の微量滴定アレー110を利用することが可能である。ウエルの寸法が1mm程度に近づくにつれて、各ウエルの真上にノズル63を位置決めすることが益々難しくなる。1mmの直径のウエルの場合、正確な液滴の注入が可能であるようにノズル63をウエルの中心から150μmの範囲内に位置決めすることが望ましい。本発明は、微量滴定プレートアレー110の透明な底部分112を利用する。このことは、微量滴定プレートアレー111の不透明な側壁113と、透明な底部アレー112の透明な底部壁114とにより形成されたウエル内に可視範囲の赤外光が微量滴定アレー110の底部を貫通して進むことを可能にする。一つの実施の形態において、赤外光は、微量滴定プレートアレー110の透明な底部分112を貫通してマイクロディスペンサ16のガラス毛細管62に達する。このマイクロディスペンサ16で受け取った光は、ガラス毛細管62を通って進み、ガラス毛細管62に取り付けられた適当な赤外線検出器(図示せず)に達する。この赤外線の光源は、細いウエル構造体と組合わさって、細い赤外線ビーム(各ウエルを貫通して上方に進むが、ウエルの間の不透明な材料は貫通しないビーム)を発生させる。マイクロディスペンサが一方のウエルから他方ウェルに動かされるとき、そのマイクロディスペンサは、ディスペンサがウエルの間の位置にあることを示す比較的暗い領域に出会い、その後、次のウエルの端縁がその真下にあることを示す比較的明るい領域に出会う。次に、位置決めロボットがこれらの案内手段を使用して、マイクロディスペンサに達し且つその位置を確認する。
【0041】
別の好適な実施の形態においては、上述した赤外線光に代えて可視光が使用される。例えば、ウエルに液体が無い場合又は透明な液体を有する場合、任意の可視波長の光を使用することができ、また、赤外線検出器に代えて、マッチング検出器が使用される。ウエル内に濁った液体又は不透明な液体が存在する場合、微量滴定プレート110を通じて300nMの緑色光をその濁り液体に導入することができる。ウエル中に存在する液体に添加された陰性化合物がその緑色光による励起に応答して蛍光を発する。この陰性物質は、赤色光に相当する約620乃至650nMの蛍光を発する。赤外線検出器に代えて、こうした赤色波長を検出する検出器が使用される。
【0042】
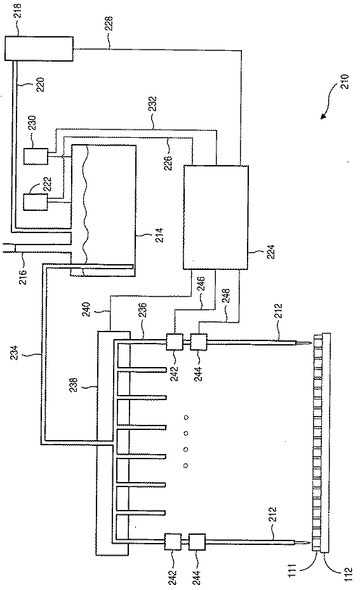
次に、図7を参照すると、微量流体処理装置の第二の好適な実施形態210が図示されている。マイクロディスペンサ212の数が増すに伴いより経済的となるから、この第二の好適な実施形態は、8つ又はそれ以上の数のマイクロディスペンサ212を使用する場合により望ましい。採用されるマイクロディスペンサ212の数が少ない場合には第一の実施形態の方がより経済的であるので、採用されるマイクロディスペンサ212の数が4つ又はそれ以下である場合、第一の好適な実施形態の方が第二の好適な実施形態よりも好ましい。第二の好適な実施形態においては、全てのマイクロディスペンサ212にシステム流体20を供給するために一つのシステム流体貯蔵器214が使用されるためにバランスが採られており、これにより、第一の好適な実施形態における各マイクロディスペンサ212に対する別個のポンプ及び圧力センサが不要となる。しかしながら、このシステム流体貯蔵器214を採用することは、より費用がかかるので、4つ又はそれより少ない数のマイクロディスペンサが採用されるとき、第一の実施形態を採用する方がより経済的である。本明細書に記載した点以外の、構造及び作用の点では第一及び第二の好適な実施形態は同一である。採用されるマイクロディスペンサの正確な数は、ユーザの分配の必要性に応じた関数である。
【0043】
第二の好適な実施形態に関して、システム流体貯蔵器214は、キャップ(特に図示せず)を保持する吸入管216を通じてシステム流体20(典型的に、脱イオン水)を受け取る。吸入管216のキャップを取り外したとき、密封したシステム流体貯蔵器214がシステム流体20を受け取り、また、キャップを取り付けたとき、システム流体貯蔵器214を密封して、システム流体貯蔵器214を所望の圧力に保つことができる。システム流体貯蔵器214内の圧力は、圧力制御管220を通じて圧力制御システム218により保たれる。この圧力制御システム218は、システム流体貯蔵器214内の圧力を正確に増圧し又は減圧することができる電気制御ポンプを含む。システム流体貯蔵器214に取り付けられた圧力センサ222がシステム流体貯蔵器214内の圧力を検出し、その圧力を示す電気信号を導電体226を通じてシステム制御装置224に送る。システム制御装置224は、デジタル信号処理装置と、各種の電気信号の監視、制御ソフトウェアコードの実行、微量流体処理装置210の制御を可能にする、その他の電子機器(図示せず)とを内蔵している。システム制御装置224は、導電体228を通じて圧力制御装置218を電気的に制御しシステム流体20の圧力を調節し、これに応じて、移送流体24の圧力を調節する。圧力逃がし弁230がシステム流体のリザーバ214に取り付けられている。該圧力逃がし弁230は、圧力が所定の安全な閾値を越えたときに、システム流体のリザーバ214から圧力を逃がす。一つの実施形態においては、圧力逃がし弁230は、ライン232によリ圧力逃がし弁230に接続されたシステム制御装置224により開くこともできる。
【0044】
作動中、システム制御装置224は、システム流体貯蔵器214内にて外気圧力に関して3つの異なる圧力を保ち得るように圧力制御装置218に命令する。これらの3つの圧力値の各々が、微量流体処理装置210の作動の異なる段階に対応する。これらの3つの異なる圧力値は、正圧力、高負圧、及び低負圧である。分配する前に、上述した方法にてマイクロディスペンサ212を共鳴超音波励起させることと組み合わせて、マイクロディスペンサからあらゆる異物を洗い流すため、正圧力値を使用して洗浄を行う。マイクロディスペンサ212が比較的清浄になったならば、外気圧力よりも約200ミリバール低い高負圧を使用して、移送流体24をマイクロディスペンサ212内に吸引する。移送流体24がマイクロディスペンサ212内に吸引されたならば、約マイナス15ミリバールの低負圧を使用して、マイクロディスペンサ212内の移送流体24に背圧を供給して、液滴が分配され、それ以上、マイクロディスペンサ212から出て行く移送流体24がないようにする。
【0045】
システム流体貯蔵器214内のシステム流体20は、図7に示すように、複数の部分236に仕切られた分配管234(その1つの部分236は、各マイクロディスペンサ212に接続されている)を通じて、マイクロディスペンサ212に結合されている。マイクロ弁242及び流量センサ244が分配管の部分236の各々に取り付けられている。該マイクロ弁242は、微量流体処理装置210に容易に嵌まるのに十分に小さい寸法であるという主たる利点を有するマイクロ電子機械式マシーン(「MEMS」)である。マイクロ弁242は、システム流体20の動き、従って、分配される移送流体24の量を制御するために使用される高精密弁である。システム制御装置224は、電気接続部246を通じてマイクロ弁242を制御する電気信号を送る。流量センサ244と関係付けられた各マイクロディスペンサに吸引される液体の量を判断するため、各分配管の部分236に流量センサ244が取り付けられている。この流量センサ244は、各マイクロディスペンサ212に出入りするシステム流体20の量を検出する。流量センサ244の各々は、導電体248を通じてシステム制御装置244に接続されている。導電体248は、液体の流量のみならず、分配管234内の圧力をも表示する電気信号を各流量センサ244から送る。また、これらの流量センサ244は、微量流体処理装置210に容易に嵌まるのに十分に小さい寸法であるという主たる利点を有するMEMSである。該センサは、例えば、その内容を引用して本明細書に加えた、M.ボイラット(Boillat)及びその他の者による「流量の調節及び投与装置に対する差圧液体流量センサ(A Differential Pressure Liquid Flow Sensor For Flow Regulation and Dosing Systems)」という表題の出版番号0−7803−2503−6のIEEE論文、MEMS1995に記載された、流量センサ244とすることができる。
【0046】
第一の好適な実施形態におけるように、マイクロディスペンサ212に物理的に接続された分配管234を3軸線ロボット238に取り付け、該ロボットは、これに対応してマイクロディスペンサ212を異なる微量滴定プレート110のウエルの上方の位置に再配置する。各ウエル内に所望の数の液滴が分配された後、ロボット238は、更に分配を行うため、マイクロディスペンサ212を次の組のウエルまで動かす。ロボット238の動きを正確に調和させることは、底部の微量滴定プレート112を透過する光を使用することに関して上述した方法にて行われる。
【図面の簡単な説明】
【0047】
【図1】本発明の微量流体処理装置の第1の実施形態を示したブロック図である。
【図2】本発明の第1の実施形態の特徴を示す容積式ポンプの斜視図である。
【図3】圧電変換器を含むマイクロディスペンサの側面図である。
【図4】本発明の動作を示すマイクロディスペンサによる分配中の装置ラインの圧力を示すグラフである。
【図5】本発明において使用されている、結合される前の滴定プレートの2つの半部分を示す分解斜視図である。
【図6】本発明によって結合された後の滴定プレートの2つの半部分を示す側方断面図である。
【図7】本発明の微量流体処理装置の第2の実施形態を示すブロック図である。
【符号の説明】
【0048】
10 微量流体処理装置、 12 容積式ポンプ、 14 圧力センサ、
16 マイクロディスペンサ、 18 管、 20 システム流体、
22 エアーギャップ、 24 移送流体、 26 液滴、
28 ステッピングモータ、 38 弁、 40 システム流体貯蔵器、
42 制御論理、 44 A/Dコンバータ、
46,50,52,53,55,56 電線、
51 マイクロディスペンサ電子回路、 54 流体液面検知回路、
58 ロボットシステム
【発明の詳細な説明】
【0001】
[発明の属する技術分野]
本発明は、少量の流体を制御し、分配し、測定するための装置及び方法に関する。より特定すると、本発明は、分配される流体の容積と適正な装置の機能とを確実なものとし且つ確保するために圧力の変化を検知する。
【従来の技術】
【0002】
化学的及び生物学的プロセスを採用する工業における進歩により、営業的又は実験的な使用のために化学的又は生物学的に活性な物質を含む少量の流体を正しく且つ自動的に分配する能力の必要性が生じてきた。分配される流体の量が正しいことは、所望の反応を生じさせる観点及び使用される物質の量を最小限にする観点の両方において重要である。
【0003】
微量の流体を分配するための装置は、インクジェットの用途のために開発されたもののような技術によって実証されてきた。しかしながら、インクジェット装置は、公知で且つ基本的には一定の粘度及びその他の物理学的特性の特定のインク(又はインクのセット)と共に動作するという利点を有する。従って、使用されるインクの特性が知られているので、自動インクジェット装置は、特定された特定のインク用に設計することができる。インクジェットにおける技術を関心のある特定の化学的及び生物学的物質を含む流体(以下、“移送流体”という)と共に直接使用することはより多くの問題を有する。このような移送流体は、種々の粘度を有し且つ正しい微量分配を困難にさせるその他の物理学的特性を有している。自動微量流体処理装置は、これらが分配しなければならない広範囲の物質に対応するために種々の粘度及びその他の特性の流体を処理できなければならない。この問題の別の点は、はるかに少量の移送流体を正しく分配することを許容する必要があることである。特に、生物学的物質の利用及び試験においては、コストを節約し且つ利用可能な少量の物質をより効率良く使用するためには、分配される移送流体の量を最小限にすることが望ましい。生物学的物質を含む流体を微量だけ移送することが望ましいことは多いけれどもこれは難しい。移送流体の各射出毎に分配された移送流体の量を知ることは、自動化された装置にとって有利である。
【0004】
微量の移送量を分配することに対する別の困難な点は、流体を押し出すために採用される例えば直径が20〜80マイクロメータのような小さい孔によって起こる。ノズルの苛酷な使用は、分配される流体内の物質によって望ましくない詰まりを促進する。詰まりの問題を更に促進させることは、移送流体内において時々使用される物質の特性である。押し出される孔に移送流体内の物質が詰まると、分配動作を停止させ又は正確さを著しく低下させる。従って、詰まりを防止するか又は最小限にし、このような状態が起こっているときを検知し、且つこのような状態から自動的に回復できることが望ましい。マイクロディスペンサ(微量分配器)の移送流体の正確な分配の不能状態は、他の要素、例えば分配ユニット内に存在する空気又はその他の圧縮可能なガスのような他の要素によって生じ得る。微量の分配が全くなされないか又は所望する微量の分配がなされないとき(不発(misfiring))を検知し且つ指示することは望ましい。
【0005】
種々の混合液又は溶液を分配のためにマイクロディスペンサ内に吸引することは常に必要であるかもしれない。各流体は、後に使用される流体に対してマイクロディスペンサを汚染するかもしれないので、流体の種類が変更されたときにはマイクロディスペンサを完全に洗浄することが好ましい。流体が充填されないときでさえ、マイクロディスペンサ内に物質の堆積を防止するために洗浄は必要である。不幸にも、マイクロディスペンサを洗い流すためにポンプを使用することは常に100%効果的であるという訳ではない。従って、常に容易に且つ完全にマイクロディスペンサを洗浄できることが望ましい。
【0006】
自動化された微量分配装置を実現するためには、ほぼ均一な移送液滴を迅速且つ正確に分配するために移送流体が関連あるシステム要素の何らかの所定の範囲内にあることを常に確保することが望ましい。例えば、移送流体が目標表面に正しく蓄積されることを確保することが望ましい。工業は、微量の移送流体を迅速に分配することを必要とするので、分配される移送流体の量を確認することができること、及びリアルタイムで分配において問題が生じたか否かを検知し且つ復帰できることも望ましい。
【発明の開示】
【発明が解決しようとする課題】
【0007】
本発明の主たる目的は、微量流体処理装置内の圧力の対応する変化を検知することによって、分配される微量の移送流体を正しく測定することができる微量流体処理装置を提供することである。
【0008】
本発明はまた、粘度のような移送流体の特性に関係なく、分配された流体の量を正しく測定することができる微量流体処理装置を提供することを目的とする。
本発明の更に別の目的は、化学的又は生物学的活性物質を含む流体を、微量だけ移送することができる微量流体処理装置を提供することである。
【0009】
本発明の更に別の目的は、詰まりを防止又は最小限にする微量流体処理装置を提供することである。
本発明の更に別の目的は、詰まり及び移送の失敗に伴う圧力変化を検知して、このような不適当な動作を指示することができる、微量流体処理装置を提供することである。
【0010】
本発明の更に別の目的は、移送流体の微量を正しく分配し且つマイクロディスペンサの動作を理想的にするために、移送が雰囲気圧に対して所定の範囲の負の圧力に維持されていることを点検することができる、微量流体処理装置を提供することである。
【0011】
本範囲のその他の目的及び利点は、以下の詳細な説明から明らかとなるであろう。
【課題を解決するための手段】
【0012】
上記の目的は、本発明による装置を提供することによって、第1の好ましい実施形態において実現される。本発明による装置は、ステッピングモーターによって作動される容積式ポンプ(positive displacement pump)と、ピエゾ抵抗圧力センサと、ガラス毛細管に結合された圧電変換器を利用した電気制御マイクロディスペンサと、を含む。このマイクロディスペンサは、1ナノリットル(nl)以下の大きさの液滴を小さなノズルから強制的に射出させることによって迅速且つ正確に分配することができる。この方法は、ドロップーオンーディマンド(drop−on−demand:必要に応じて滴下する)方法として知られている。第1の実施形態は、4つの又は2〜3個のマイクロディスペンサが各々単一の容積式ポンプ及び圧力センサに結合されている場合により好ましい。
【0013】
採用されているマイクロディスペンサの数が8個以上である場合により好ましい微量流体処理装置の第2の実施形態もまた、上記の目的を達成することができる。この第2の好ましい実施形態は、(以下に述べる弁を含む)容積式ポンプ、ステッピングモーター及びピエゾ抵抗圧力センサが、システム流体を供給し且つシステム流体圧を制御するための圧力制御装置、流体の流れのみならず各マイクロディスペンサに結合されている接続管内に存在するシステム流体の圧力をも検知するための複数の流量センサ、各々が圧力制御装置内で各マイクロディスペンサをシステム流体貯蔵器に結合している複数の細かく組み立てられた弁によって置き換えられている以外は、第1の実施形態と類似している。
【0014】
自動化された流体処理装置の機能を提供するために、第1及び第2の好ましい実施形態の両方におけるマイクロディスペンサが、所望の流体移送プロトコルを実行するのに必要とされる特定の位置にマイクロディスペンサを位置決めするのに使用される3軸ロボットシステム上に取り付けられる。
【0015】
本発明は、システム流体と移送流体とを含み、移送流体は、システム流体内の圧力の小さな変化の測定を容易にして、分配される移送流体の体積と関連する公知の量の空気(“エアーギャップ”)によって分離される。移送流体は分離される物質を含んでおり、一方、1つの好ましい実施形態においては、システム流体は脱イオン水である。微量分配範囲の液滴が分配される毎に、移送流体は、毛管作用によってマイクロディスペンサの内部の以前の位置へと戻り、エアーギャップの特定の体積は、分配される移送流体の量に対応して増加するであろう。このことは、感度の高いピエゾ抵抗圧力センサによって測定されるシステム流体ライン内の圧力を低下させる効果がある。この圧力センサは、電気信号を制御回路に送り、制御回路は、電気信号をデジタル形式に変換し且つ分配される移送流体の対応する体積を示す指示値を発する。本発明の利点は、移送流体の粘度に影響されないことである。これは、分配される流体の粘度に依存することなく、システム流体内の圧力変化が分配される微量に対応するからである。本発明は、微量流体処理における特有の機能を有する。この装置は、自動的に、流体の表面を検知し、移送されるべき流体を吸引し、次いで、高い正確さ、速度及び確実さにより少量の流体を分配することができる。この分配は、ディスペンサが目的容器又は内容物に触れることなく行われる。本発明の特徴は、リアルタイム動作中に分配された流体の微少量を確実に検査することができることである。
【0016】
本発明のもう一つの特徴は、マイクロディスペンサによって超音波周波数共鳴によって圧電変換器を作動させることによって、詰まりを防止し又は最小限にすることである。移送流体をガラス毛細管内に吸引する際に、共鳴超音波周波数でマイクロディスペンサを振動させることによって、詰まりが防止され又は最小限にされる。圧電変換器はまた、毛細管が洗浄されつつあるときに、同一の超音波共鳴周波数で作動せしめられる。洗浄中に毛細管を共鳴振動させることによって、従来なされたよりもより清浄なガラス毛細管内部を達成できる。詰まりを防止し、存在する詰まりを破壊し、及びマイクロディスペンサを洗浄するために、同じ構造が使用されるので、従来に可能であったよりもより高い効率が達成される。
【0017】
本発明の更に別の特徴は、マイクロディスペンサを、微量滴定プレートのウエル(凹部)に対して高いレベルの正確さで位置決めすることができることである。可視光線又は赤外線が、列状またはコラム状に整列されたウエルを含む微量滴定プレートの透明な底半分を介して伝達される。光は、微量滴定プレートの不透明な頂半分を通過しない。特定のマイクロディスペンサが、微量滴定プレートの不透明な頂半分より上方の位置から、同微量滴定プレートの透明な底半分の上方の位置まで移動せしめられると、光は、マイクロディスペンサ内のガラス毛細管の中を通過し、光は、そこで、ガラス毛細管と光学的に接触している光検知器によって検知される。光検知器は、受け取った光の量に対応する電気信号を発する。光検知器からの信号は、コンピュータに接続され、コンピュータは、この信号を利用してマイクロディスペンサを配置し且つ位置を検知する助けとする。
【発明の実施の形態】
【0018】
本発明は種々の変形を施すこと及び代替的な形態とすることができるけれども、ここでは、例示として特定の実施形態を図面に示し且つ以下において詳細に説明する。しかしながら、本発明をここに開示した特定の形態に限定することは意図していないことは理解されるべきである。本発明は、特許請求の範囲によって規定されている本発明の精神及び範囲に含まれる全ての変形例、等価物及び代替例を包含するものである。
【0019】
図面に目を転じ、まず図1を参照すると、微量流体処理装置10の第1の実施形態が図示されている。微量流体処理装置10は、容積式ポンプ12、圧力センサ14及びマイクロディスペンサ16を含んでいる。管18は、容積式ポンプ12を圧力センサ14に接続し、且つ圧力センサ14をマイクロディスペンサ16に接続している。容積式ポンプ12は、システム流体20を圧力センサ14及びマイクロディスペンサ16内を移動させる。微量流体処理装置10にシステム流体20が装荷された後、公知の容積のエアーギャップ22とある量の移送流体24とが、以下に説明する方法でマイクロディスペンサ16内に抜き取られる。移送流体24は、関心のある1以上の生物学的又は化学的活性物質を含んでいる。1つの好ましい実施形態においては、マイクロディスペンサ16は、極めて再現可能な1ナノリットル以下の大きさの液滴26を押し出す(すなわち射出する)。移送流体24の押し出された液滴26は、好ましい1つの実施形態においては液滴1つが0.45ナノリットル程度であるが、5ピコリットルの大きさであってもよい。例えば、移送流体24を全体として9ナノリットルだけ押し出すことを望む場合には、マイクロディスペンサ16は、20個の液滴26を押し出すように指示されるであろう。液滴26の大きさは、マイクロディスペンサ16に適用される電気信号の大きさ及び印加時間を替えることによって変更することができる。液滴の大きさに影響を与える他の要素としては、マイクロディスペンサの底部に設けられたノズル開口の大きさ、マイクロディスペンサ入口の圧力、及び移送流体の特性がある。
【0020】
図1及び2を参照すると、1つの好ましい実施形態においては、容積式ポンプ12は、カリフォルニア州、サニーヴェイル、ハンボルコート242にある、カーボ・サイエンティフィック・インストルメント・インク(Carvo Scientific Instrument, Inc.,)によって製造されたモジュラー型のデジタルポンプXL300である。容積式ポンプ12は、ステッピングモータ28及び29と、注射器30とを含んでいる。注射器30は、ホウ珪酸ガラス管32と、一連のギヤとベルト(図示せず)とを介してステッピングモータ28に機械的に結合されているプランジャ34とを含んでいる。ステッピングモータ28の動きは、ガラス管32の内側において、プランジャ34を特定の数の不連続なステップで上方又は下方へ移動させる。プランジャ34は、ガラス管32と共に液密シールを形成している。1つの好ましい実施形態においては、注射器30は、プランジャ34が一回の全ストロークにおいて送り出すことができるシステム流体20の量である250マイクロリットルの使用可能な容量を有する。選択された動作モードに応じて、ステッピングモータ28は、プランジャ34の全ストローク毎に3,000又は12,000の不連続なストロークを形成することができる。1つの好ましい実施形態においては、ステッピングモータ28は、プランジャ34の全ストローク毎に12,000のステップを作るようになされており、各ステップ毎に、約20.83ナノリットルのシステム流体20を送り出す。1つの好ましい実施形態においては、使用されるシステム流体は、脱イオン水である。
【0021】
デジタルコード化されたコマンド(命令信号)が、容積式ポンプ12内のステッピングモータ28に、不連続な量の流体をマイクロディスペンサ16内に吸引させ、流体の移送と移送との間にマイクロディスペンサ16を洗浄させ、微量流体処理装置10の動作のためのシステム流体20のライン内の圧力を制御させる。容積式ポンプ12はまた、微量流体処理装置10にシステム流体20を充填し及びマイクロディスペンサ16を介して多量の流体を分配して、希釈液を作ることができるようにするために使用される。容積式ポンプ12は、移送流体24に直に作用することができる。このように、所望ならば、移送流体24は、微量流体処理装置10全体を通してシステム流体20として使用することができる。
【0022】
微量流体処理装置10に充填するために、制御論理42は、最初に、電線56を介して3軸ロボットシステム58に、マイクロディスペンサ16をロボットシステム58上に含まれる洗浄ステーションの上に位置決めさせる。1つの好ましい実施形態においては、微量流体処理装置10が含み且つ同装置に装着される3軸ロボットシステムは、イリノイ州、ドウナーグローブにあるパッカード・インストルメント・カンパニー(Packard Instrument Company)によって製造されているマルチプローブCR10100(MultiPROBE CR10100)である。容積式ポンプ12は、システム流体貯蔵器40を注射器30に接続するための弁38を含んでいる。弁38を回転させる制御論理42によって、初期化制御信号が電線36を介してポンプ12に伝えられ、注射器30をシステム流体貯蔵器40に接続する。制御信号はまた、ステッピングモータ28にプランジャ34をその最大上方位置(図2における位置1)まで移動させて、ホウ珪酸ガラス管32内に位置させる。制御論理42からの次のコマンドによって、ステッピングモータ28がプランジャ34をガラス管32の内側の最大下方位置(図2の位置2)まで移動させて、システム流体20をシステム流体貯蔵器40から抜き取る。制御論理42からの別のコマンドは、弁38を再び回転させ、注射器30を圧力センサ14に接続された管18と接続させる。1つの好ましい実施形態においては、微量流体処理装置10において採用されている管18は、ニュージャージ州、ラリタンにあるゼウス・インダストリアル・プロダクツ・インク(Zeus Industrial Products, Inc.,)によって作られた、内径が1.4986ミリメートル(0.059インチ)であり、外径が2.4892ミリメートル(0.098インチ)である、自然色のテフロンチューブである。制御論理42からの容積式ポンプ12への次のコマンドによって、注射器30の内側のシステム流体20が、微量流体処理装置10内へと圧力センサ14に向かって押し出される。微量流体処理装置10は、典型的には、約4ミリリットルのシステム流体が充填されることを必要とするので、微量流体処理装置10を完全に充填するためには、上記した一連のステップが約16回繰り返されなければならない。
【0023】
制御論理42は、電線46を介して圧力センサ14から信号を受け取る。この信号は、A/D(アナログ/デジタル)コンバータ44によってアナログ形式からデジタル形式へと変換され、処理及び分析のために制御論理42によって使用される。1つの好ましい実施形態においては、A/Dコンバータは、テキサス州、オースチンにあるナショナル・インストルメント・コーポレーション(National Instrument Corporation)によって製造されたPC−LPM−16マルチファンクションI/Oボード(PC−LPM−16 Multifunction I/O Board)である。ここに記載した流体移送プロセスにおける種々の点において、制御論理42は、圧力センサ14から信号を受け取り、コマンド信号を、ポンプ12、マイクロディスペンサ電子回路51、及び3軸ロボットシステム58へ送る。制御論理42内には、ここに記載した特定の流体移送プロトコルのためのハードウエア(ロボットシステム58、ポンプ12及びマイクロディスペンサ電子回路51)をシーケンス制御するコード化されたアルゴリズムが設けられている。制御論理42内にはまた、測定された圧力信号を処理して、マイクロディスペンサを点検し且つ測定し、微量流体処理装置の状態を診断し、選択された移送流体24のためのマイクロディスペンサの調整を自動的に行う、コード化されたアルゴリズムも設けられている。
【0024】
圧力センサ14は、微量流体処理装置10を充填し、ポンプ12によって移送流体24を吸引し、マイクロディスペンサ16によって液滴26を分配し、ポンプ12を使用してマイクロディスペンサ16を洗浄する際に生じる圧力の脈動を検知する。1つの実施形態においては、圧力センサ14は、イリノイ州、フリーポート、ウエストスプリングストリート11にある、ハネウエル・インク(Honeywell, Inc.,)の一部であるマイクロスイッチ・インク(Microswitch, Inc.,)によって製造されたピエゾ抵抗圧力センサの部品番号26PCDFG6Gである。図1のブロック図に示された圧力センサ14にはまた、圧力センサからのアナログ圧力信号を増幅するための電気回路も含まれている。圧力センサ14は、圧力を電気信号に変え、この電気信号は、A/Dコンバータ44へと送られて制御論理42によって使用される。例えば、微量流体処理装置10が充填されると、圧力センサ14は電気信号を制御論理42に送り、この電気信号は、制御論理42によって分析されて、マイクロディスペンサ16内に部分的又は完全な閉塞のような何らかの問題が生じたことを指示するべきか否かを判断する。
【0025】
微量流体処理装置10が一度充填されると、制御論理42は、電線56を介してロボットシステム58に信号を送り、同ロボットシステムに移送流体24の上方の空気内にマイクロディスペンサ16を位置決めさせるように指示する。制御論理42は、ステッピングモータ28に指示して、プランジャ34を下方に移動させ、不連続な量の空気(エアーギャップ)例えば50マイクロリットルの空気をマイクロディスペンサ16内に吸引させる。制御論理42は、次いで、ロボットシステム58に指示して、マイクロディスペンサ16を同マイクロディスペンサ16が移送流体24の表面(図示せず)と接触するまで下方に移動させる。マイクロディスペンサ16の移送流体24の表面との接触は、容量式の流体液面検知装置(米国特許第5,365,783号)によって判断される。マイクロディスペンサは、電線55によって流体液面検知電子回路54に接続されている。流体液面検知電子回路54がマイクロディスペンサ16が移送流体24の表面と接触したことを検知すると、電線53を介してロボットシステム58に信号が送られて下方への移動が停止される。
【0026】
制御論理42は、次いで、ポンプ12に指示して、移送流体24をマイクロディスペンサ16内へ吸引するために、プランジャ34を下方へ移動させる。吸引中に制御論理42によって圧力信号が監視されて、移送流体24がマイクロディスペンサ16内へと十分に抜き取られつつあることが確認される。マイクロディスペンサの部分的又は完全な詰まりによる異常な圧力低下のような問題が生じたことが検知されると、制御論理42は、動作停止コマンドをポンプ12に送る。制御論理42は、次いで、コード化された復帰アルゴリズムを作動させるであろう。移送流体24は、圧力センサ14を汚染するおそれなく微量流体処理装置10内の圧力センサ14まで吸引される。移送流体24の毛管作用を増すために付加的な管を追加することができる。一度、移送流体24がマイクロディスペンサ16内へ吸引されると、制御論理42は、ロボットシステム58に指示して、マイクロディスペンサ16を選ばれた目標、例えば微量滴定プレートの上に再度位置決めさせる。
【0027】
1つの好ましい実施形態においては、マイクロディスペンサ16は、ドイツのノルダーステット(Norderstedt)D−22844、ミューレンヴェグ(Muhlenweg)143にあるマイクロドロップ・ゲーエムベーハー(MIcrodrop GmbH)によって製造されたMD−K−130マイクロディスペンサ・ヘッドである。
【0028】
図3に示されているように、マイクロディスペンサ16は、ガラス毛細管62に結合された圧電セラミック管60からなる。この圧電セラミック管は、圧電セラミック管を収縮させるためのアナログ電圧パルスを受け取るための内側電極66と外側電極68とを備えている。一度、ガラス毛細管62が移送流体24によって充填されると、制御論理42は、電線50を介してマイクロディスペンサ電子回路51に指示し、電線52によって圧電変換器60にアナログ電圧パルスを送る。好ましい実施形態においては、マイクロディスペンサ電子回路51は、ドイツのノルダーステット(Norderstedt)D−22844、ミューレンヴェグ(Muhlenweg)143にあるマイクロドロップ・ゲーエムベーハーによって製造されたMD−E−201駆動電子回路である。マイクロディスペンサ電子回路51は、アナログ電圧パルスの大きさと持続時間とを制御し、また、パルスがマイクロディスペンサ16に送られる周波数をも制御する。電圧パルスの各々は、圧電変換器60の収縮を生じさせ、この収縮は、次いでガラス毛細管62を変形させる。ガラス毛細管62の変形によって、移送流体24の中を進んでマイクロディスペンサのノズル63に到達する圧力波が形成され、ノズル63において、移送流体24の一つの液滴26が極めて高い加速度で射出される。これらの液滴26の大きさは、極めて再度製造可能なものとして示されたものである。移送流体24の高い加速度は、上記において移送流体24の表面張力及び粘度によって生じる問題を最小限にするか又は排除して、極めて小さい液滴26がノズルから射出されるのを可能にする。例えば5ピコリットルの液滴26が実証されている。液滴26をノズルから押し出すためにマイクロディスペンサ16を使用することにより、非接触(touchoff)と称される流体移送技術において生じる問題をも排除する。非接触技術においては、液滴26は、ノズルの端部に保持され、液滴がマイクロディスペンサ16からぶら下がっている間にこの液滴を目標表面と接触させることによって目標表面に堆積される。このような接触過程は、目標表面の許容できない体積の変動を生じさせる、表面張力、粘度及びマイクロディスペンサ16の濡れ特性により、難しいものとなる。本発明は、液滴26が秒速数メートルの速度でマイクロディスペンサ16から射出されるので、このような接触過程における問題点を排除する。本発明によれば、射出されるべき液滴26の数を特定することにより、所望の合計体積の流体を分配することができる。マイクロディスペンサ16から一秒間に数千個の液滴26を射出することができるので、所望の微量体積の移送流体24が迅速に分配できる。
【0029】
一つの好適な実施の形態においてハ、圧電変換器60とノズル63との間におけるガラス毛細管62の下方部分は、白金又は金の何れかによる導電性材料でめっきされている。このため、マイクロディスペンサ16と流体液面検知回路54との間に導電経路が形成される。一つの好適な実施の形態においては、このガラス毛細管62は、全長が73mmであり、ノズル63の内径は75μmである。
【0030】
極少量の移送流体24を分配するため、アナログ電圧パルスがマイクロディスペンサ16に送られて、液滴26を発生させる。移送流体24に作用する毛管力によって、マイクロディスペンサ16から供給されたある量の移送流体24が管18からの液体と置き換えられる。しかしながら、移送流体/エアーギャップ・システムの液柱が容積式ポンプ内の閉塞端にて終端となっているため、エアーギャップ22が膨張するに伴って、システム液体20のライン内の圧力が低下する。500ナノリットルの極少量の分配を行う間に測定される圧力プロファイルを示す、図4にこの状態が図示されている。本発明にとって重要なことは、圧力低下の程度がエアーギャップ22の寸法、及び分配される液体量の関数である点である。
【0031】
既知の容積のエアーギャップ22である場合、圧力センサ14により検出される圧力変化は、分配される量に関係する。このため、制御論理42は、圧力センサ14により測定された圧力変化を基にして分配された移送流体24の量を判断する。本発明の一つの好適な実施の形態においては、移送流体24の特性に対応して、外気圧よりも約30乃至40ミリバール以上圧力が低下しないようにすることが好ましい。分配された移送流体24の量が30乃至40ミリバールを越える圧力低下を起こすのに十分である場合には、マイクロディスペンサ16の両端における圧力差、即ち、ノズル63に作用する外気圧と毛細管62に作用する圧力との差は、移送流体24を管18内に上方に押し上げるのに十分なものとなる。このことは、更なる分配を防止するであろう。圧力の低下を補償すべく制御論理42がポンプ12に命令してプランジャ34を前進させることが必要となる前に、分配することのできる移送流体24の量が最大となる。この最大の量は、所望の分配量、及びエアーギャップ22の寸法により決まる。これと逆に、エアーギャップ22の寸法は、外気圧よりも30乃至40ミリバール以上低い圧力低下が生じないようにするため、所望の分配量に基づいて選択することができる。また、マイクロディスペンサ16が分配している間に、プランジャ34を前進させて、これにより、マイクロディスペンサ16が連続的に作用し得るようにシステム液体20の管圧を再設定することも本発明の範囲に属する。
【0032】
所望の量の移送流体24が分配されたことを判断するために、システム流体20の圧力変化が利用される。分配された移送流体24の量を確認する第二の方法は、注射器のプランジャ34を位置1に向けて上方に進めるべくポンプ12に命令する間に、制御論理42がシステム流体20のライン圧力を監視することにより行われる。システム流体20のライン圧が(分配前の)初期値に戻るまで、注射器のプランジャ34を前進させる。プランジャ34が押し出す排出容積(ステッピンジモータ28が1ステップ作動する毎に20.83ナノリットル)を追跡する制御論理42により、分配された量の第二の確認が為され、このことは、システムの信頼性を更に高める。このとき、多数回の分配手順が指定されるならば、システム流体20のライン圧は、マイクロディスペンサ16の次の正確な分配量に合ったものとなる。
【0033】
移送流体の分配が完了したならば、制御論理42は、ロボットシステム58に命令して、マイクロディスペンサ16を洗浄ステーションの上方の位置に位置決めする。次に、この制御論理42は、ポンプ12及びロボットシステム58に洗浄手順を命令する。この手順において、マイクロディスペンサ16内に残った全ての移送流体24が排出され、ガラス毛細管62の内面、及びノズル63の外面(移送流体24に露呈された面)が洗浄される。この洗浄流体は、ロボットシステム58のデッキ上に配分されたシステム流体20、又はその他の任意の液体を使用することができる。この洗浄手順は、その後の移送流体24がその前に処理された移送流体で汚染されるのを最小にすることを目的とするものである。この目的のため、マイクロディスペンサ16を超音波洗浄することも可能である。これは、制御論理42によりマイクロディスペンサの電子回路51に命令して、マイクロディスペンサに対して超音波の範囲の周波数の電気パルスを送るようにすることで行われる。この周波数は、例えば、マイクロディスペンサ16/移送流体24のシステムの共鳴周波数に一致する、12−15キロヘルツ(好適な共鳴周波数は、約12キロヘルツであると考えられる)とする。圧電変換器60をマイクロディスペンサ16のガラス毛細管62と共に共鳴超音波周波数にて作動させると、ガラス毛細管62の内面が激しく振動する。第一及び第二の実施形態の双方において、圧電変換器60が共鳴周波数にて作動される間に、システム流体20、又は特殊な洗浄流体及び/又は中立化流体を使用して、マイクロディスペンサ16の洗浄を行う。共鳴超音波励起により洗浄する方法は、マイクロディスペンサ16に付着する物質を遥かに効果的に分離し且つ除去するという効果がある。例えば、多数の試験ケースにおいて、超音波の励起は、超音波励起を利用せずに洗浄する場合と比べて、マイクロディスペンサ16内に残る物質量が(汚染の程度によって)200%乃至500%、減少することが確認されている。
【0034】
また、マイクロディスペンサのノズルの詰まりを最小にし、又は緩和するためにもこのマイクロディスペンサ16の共鳴超音波励起が使用される。例えば、移送流体がマイクロディスペンサ16内に吸引されつつあるとき、この移送流体は、ガラス毛細管62の比較的細いノズル63を通らなければならない。移送流体24内の物質がノズル63の表面と接触して、その接触の性質に対応して、その物質がノズル63に付着する可能性がある。生物化学の適用例においては、移送流体24への添加物に広く採用されている物質は、ポリスチレン球である。これらの球は、典型的に、1μm乃至30μmであり、磁性フェライト、抗原又はその他の物質で被覆されることもあるが、被覆されない場合もある。ノズル63の直径に対してポリスチレン球は比較的大径であるため、時として粘着性である被覆と組み合わさって作用し、それらの球がノズル63に付着する可能性がある。マイクロディスペンサ16が充填される間に(即ち、移送流体24がマイクロディスペンサ16内に吸引されるとき)、圧電変換器60をマイクロディスペンサ16の超音波共鳴周波数で励起させるならば、ノズルの詰まりが防止され、又は詰まる可能性が少なくなることが確認されている。このように、マイクロディスペンサ16の超音波励起は、移送流体24内の物質がノズル63に詰まるのを防止し、又は少なくする働きをする。
【0035】
溶融し又は懸濁した物質を含む移送流体24がノズル63を通り抜けるとき、詰まりが生じる可能性がある。従って、上述したように、移送流体24をマイクロディスペンサ16内に吸引する間の詰まりが問題となるのみならず、マイクロディスペンサ16から移送流体を分配するときにも問題が生じる。圧電変換器により液滴を分配する間に、マイクロディスペンサ16を共鳴超音波で周期的に励起させると、ノズル63に対する物質の堆積量を少なくし、場合によって、詰まりを防止できることも分かった。相当な詰まりが生じた場合であっても、圧電変換器60によってマイクロディスペンサ16を共鳴超音波励起させれば、ノズル63に詰まった物質を実質的に除去することができる。この場合の重要な利点は、ノズル63の詰まりを防止し又は解消することにより、余分な洗浄工程及びその工程に伴う遅れを生じることなく、微量流体処理装置10がその作用を続けることができることである。要するに、装置の不稼働時間が短くなり、これにより、この微量流体処理装置10がより効率的なものとなるのである。
【0036】
本発明の上記の説明において、このマイクロディスペンサ16の制御は、各々が移送流体24の液滴26を発生させることができる特定数の電気パルスを、マイクロディスペンサの電子回路51送ることにより行われる。また、リアルタイムにて圧力センサ14の信号を監視し且つ所望の圧力変化になる迄、電気パルスを送り続けることにより、マイクロディスペンサ16を制御することも本発明の範囲に属する。この動作モードにおいては、A/Dコンバータ44を内蔵するPC−LPM−16マルチファンクションI/Oボードが制御論理42により命令されて、マイクロディスペンサの電子回路51に電気パルスを送る。マルチファンクションI/Oボードによって送られた一つのパルスにより、1つの電気パルスがマイクロディスペンサの電子回路51によりマイクロディスペンサ16に送られ、移送流体24の1つの液滴26を放出させる。この制御論理42は、マイクロディスペンサ16による分配が行われる間に、圧力センサ14の信号を検出し、所望の圧力変化が達成されたならば、この制御論理42は、マルチファンクションI/Oボードに命令して、電気パルスの供給を停止させる。この動作モードは、制御論理42によりマイクロディスペンサ16の「誤作動(misfiring)」が検出されたときに、採用される。
【0037】
微量流体処理装置10はまた、性質の異なる移送流体24を移送するため、放出される液滴26のサイズを自動的に設定(較正)することも、本発明の範囲に属する。上述したように、放出された液滴26のサイズは、移送流体24の性質により影響を受ける。このため、ユーザが移送量の全量を特定し、また、装置10がユーザの要求を満足させるのに十分な数の放出液滴を設定し得るようにするため、放出される液滴26のサイズを自動的に設定することが望ましい。コード化した自動較正アルゴリズムにおいて、装置10が励起され、エアーギャップ22及び移送流体24が吸引されたならば、制御論理42は、マイクロディスペンサの電子回路51に命令して、例えば、1000といった特定数の電気パルスをマイクロディスペンサ16に送ることができる。制御論理42が圧力センサ14からの信号の低下を利用して、分配された移送流体24の量が測定される。この分配された量の測定は、制御論理42がプランジャ34の動きにより押し出された容積を追跡し、装置の液体20の管圧を分配前の値に回復させることにより行われる。
【0038】
図1に図示した微量流体処理装置10は、単一のマイクロディスペンサ16と、圧力センサ14と、ポンプ12とを備えている状態で図示されている。多数(例えば、4、8、96個)のマイクロディスペンサ16と、圧力センサ14と、ポンプ12とを有する微量流体処理装置の実施の形態を含めることも本発明の範囲に属するものである。また、多数のマイクロディスペンサ16と、圧力センサ14と、弁38と、1つ又は2以上のポンプ12とを備える微量流体処理装置の実施の形態を含むことも本発明の精神及び範囲に属するものである。
【0039】
次に、図5、図6、図7を参照すると、正確な量の移送流体24を微量滴定プレート110のウエル列(その内容を引用して本発明の一部に含めた、米国特許第5,457,527号に記載されているウエル列)内に滴下する、ドロップ・オン・ディマンド型の極少量流体分配の1つの用途が示されている。この微量滴定プレート110は、2つの成形プラスチックプレート111、112により形成される。上方プレート111は、微量滴定プレートの多数ウエルの側壁113を形成し、図示した実施例において、これらのウエルは、その他の寸法のマトリックスも本発明に関して作用可能ではあるが、8×12のマトリックスにて配置されている。底部プレート112は、マトリックスウェブの底部ウエル114を形成し、その2つのプレートを相互に溶着させることにより、上方プレートの下面に取り付けられる。この上方プレート111は、光が透過し得ないように不透明のポリマー材料で形成されている。上方プレート111と異なり、下方プレート112は、透明なポリマー材料で形成されており、各試料ウエルのための透明な底部壁114を形成する。このことは、底部壁114を通じて試料材料を観察することを可能にし、また、放出される光を底部壁を通じて測定することも可能にする。また、この透明な底部壁114は、最大の検出面積が得られるように、ウエルの頂部は遮蔽されずに、試料を外部励起源からの光に露呈させることを可能にする。
【0040】
本発明の微量流体処理装置10は、極く少量の流体を分配することができることを1つの理由として、対応して小さい寸法の微量滴定アレー110を利用することが可能である。ウエルの寸法が1mm程度に近づくにつれて、各ウエルの真上にノズル63を位置決めすることが益々難しくなる。1mmの直径のウエルの場合、正確な液滴の注入が可能であるようにノズル63をウエルの中心から150μmの範囲内に位置決めすることが望ましい。本発明は、微量滴定プレートアレー110の透明な底部分112を利用する。このことは、微量滴定プレートアレー111の不透明な側壁113と、透明な底部アレー112の透明な底部壁114とにより形成されたウエル内に可視範囲の赤外光が微量滴定アレー110の底部を貫通して進むことを可能にする。一つの実施の形態において、赤外光は、微量滴定プレートアレー110の透明な底部分112を貫通してマイクロディスペンサ16のガラス毛細管62に達する。このマイクロディスペンサ16で受け取った光は、ガラス毛細管62を通って進み、ガラス毛細管62に取り付けられた適当な赤外線検出器(図示せず)に達する。この赤外線の光源は、細いウエル構造体と組合わさって、細い赤外線ビーム(各ウエルを貫通して上方に進むが、ウエルの間の不透明な材料は貫通しないビーム)を発生させる。マイクロディスペンサが一方のウエルから他方ウェルに動かされるとき、そのマイクロディスペンサは、ディスペンサがウエルの間の位置にあることを示す比較的暗い領域に出会い、その後、次のウエルの端縁がその真下にあることを示す比較的明るい領域に出会う。次に、位置決めロボットがこれらの案内手段を使用して、マイクロディスペンサに達し且つその位置を確認する。
【0041】
別の好適な実施の形態においては、上述した赤外線光に代えて可視光が使用される。例えば、ウエルに液体が無い場合又は透明な液体を有する場合、任意の可視波長の光を使用することができ、また、赤外線検出器に代えて、マッチング検出器が使用される。ウエル内に濁った液体又は不透明な液体が存在する場合、微量滴定プレート110を通じて300nMの緑色光をその濁り液体に導入することができる。ウエル中に存在する液体に添加された陰性化合物がその緑色光による励起に応答して蛍光を発する。この陰性物質は、赤色光に相当する約620乃至650nMの蛍光を発する。赤外線検出器に代えて、こうした赤色波長を検出する検出器が使用される。
【0042】
次に、図7を参照すると、微量流体処理装置の第二の好適な実施形態210が図示されている。マイクロディスペンサ212の数が増すに伴いより経済的となるから、この第二の好適な実施形態は、8つ又はそれ以上の数のマイクロディスペンサ212を使用する場合により望ましい。採用されるマイクロディスペンサ212の数が少ない場合には第一の実施形態の方がより経済的であるので、採用されるマイクロディスペンサ212の数が4つ又はそれ以下である場合、第一の好適な実施形態の方が第二の好適な実施形態よりも好ましい。第二の好適な実施形態においては、全てのマイクロディスペンサ212にシステム流体20を供給するために一つのシステム流体貯蔵器214が使用されるためにバランスが採られており、これにより、第一の好適な実施形態における各マイクロディスペンサ212に対する別個のポンプ及び圧力センサが不要となる。しかしながら、このシステム流体貯蔵器214を採用することは、より費用がかかるので、4つ又はそれより少ない数のマイクロディスペンサが採用されるとき、第一の実施形態を採用する方がより経済的である。本明細書に記載した点以外の、構造及び作用の点では第一及び第二の好適な実施形態は同一である。採用されるマイクロディスペンサの正確な数は、ユーザの分配の必要性に応じた関数である。
【0043】
第二の好適な実施形態に関して、システム流体貯蔵器214は、キャップ(特に図示せず)を保持する吸入管216を通じてシステム流体20(典型的に、脱イオン水)を受け取る。吸入管216のキャップを取り外したとき、密封したシステム流体貯蔵器214がシステム流体20を受け取り、また、キャップを取り付けたとき、システム流体貯蔵器214を密封して、システム流体貯蔵器214を所望の圧力に保つことができる。システム流体貯蔵器214内の圧力は、圧力制御管220を通じて圧力制御システム218により保たれる。この圧力制御システム218は、システム流体貯蔵器214内の圧力を正確に増圧し又は減圧することができる電気制御ポンプを含む。システム流体貯蔵器214に取り付けられた圧力センサ222がシステム流体貯蔵器214内の圧力を検出し、その圧力を示す電気信号を導電体226を通じてシステム制御装置224に送る。システム制御装置224は、デジタル信号処理装置と、各種の電気信号の監視、制御ソフトウェアコードの実行、微量流体処理装置210の制御を可能にする、その他の電子機器(図示せず)とを内蔵している。システム制御装置224は、導電体228を通じて圧力制御装置218を電気的に制御しシステム流体20の圧力を調節し、これに応じて、移送流体24の圧力を調節する。圧力逃がし弁230がシステム流体のリザーバ214に取り付けられている。該圧力逃がし弁230は、圧力が所定の安全な閾値を越えたときに、システム流体のリザーバ214から圧力を逃がす。一つの実施形態においては、圧力逃がし弁230は、ライン232によリ圧力逃がし弁230に接続されたシステム制御装置224により開くこともできる。
【0044】
作動中、システム制御装置224は、システム流体貯蔵器214内にて外気圧力に関して3つの異なる圧力を保ち得るように圧力制御装置218に命令する。これらの3つの圧力値の各々が、微量流体処理装置210の作動の異なる段階に対応する。これらの3つの異なる圧力値は、正圧力、高負圧、及び低負圧である。分配する前に、上述した方法にてマイクロディスペンサ212を共鳴超音波励起させることと組み合わせて、マイクロディスペンサからあらゆる異物を洗い流すため、正圧力値を使用して洗浄を行う。マイクロディスペンサ212が比較的清浄になったならば、外気圧力よりも約200ミリバール低い高負圧を使用して、移送流体24をマイクロディスペンサ212内に吸引する。移送流体24がマイクロディスペンサ212内に吸引されたならば、約マイナス15ミリバールの低負圧を使用して、マイクロディスペンサ212内の移送流体24に背圧を供給して、液滴が分配され、それ以上、マイクロディスペンサ212から出て行く移送流体24がないようにする。
【0045】
システム流体貯蔵器214内のシステム流体20は、図7に示すように、複数の部分236に仕切られた分配管234(その1つの部分236は、各マイクロディスペンサ212に接続されている)を通じて、マイクロディスペンサ212に結合されている。マイクロ弁242及び流量センサ244が分配管の部分236の各々に取り付けられている。該マイクロ弁242は、微量流体処理装置210に容易に嵌まるのに十分に小さい寸法であるという主たる利点を有するマイクロ電子機械式マシーン(「MEMS」)である。マイクロ弁242は、システム流体20の動き、従って、分配される移送流体24の量を制御するために使用される高精密弁である。システム制御装置224は、電気接続部246を通じてマイクロ弁242を制御する電気信号を送る。流量センサ244と関係付けられた各マイクロディスペンサに吸引される液体の量を判断するため、各分配管の部分236に流量センサ244が取り付けられている。この流量センサ244は、各マイクロディスペンサ212に出入りするシステム流体20の量を検出する。流量センサ244の各々は、導電体248を通じてシステム制御装置244に接続されている。導電体248は、液体の流量のみならず、分配管234内の圧力をも表示する電気信号を各流量センサ244から送る。また、これらの流量センサ244は、微量流体処理装置210に容易に嵌まるのに十分に小さい寸法であるという主たる利点を有するMEMSである。該センサは、例えば、その内容を引用して本明細書に加えた、M.ボイラット(Boillat)及びその他の者による「流量の調節及び投与装置に対する差圧液体流量センサ(A Differential Pressure Liquid Flow Sensor For Flow Regulation and Dosing Systems)」という表題の出版番号0−7803−2503−6のIEEE論文、MEMS1995に記載された、流量センサ244とすることができる。
【0046】
第一の好適な実施形態におけるように、マイクロディスペンサ212に物理的に接続された分配管234を3軸線ロボット238に取り付け、該ロボットは、これに対応してマイクロディスペンサ212を異なる微量滴定プレート110のウエルの上方の位置に再配置する。各ウエル内に所望の数の液滴が分配された後、ロボット238は、更に分配を行うため、マイクロディスペンサ212を次の組のウエルまで動かす。ロボット238の動きを正確に調和させることは、底部の微量滴定プレート112を透過する光を使用することに関して上述した方法にて行われる。
【図面の簡単な説明】
【0047】
【図1】本発明の微量流体処理装置の第1の実施形態を示したブロック図である。
【図2】本発明の第1の実施形態の特徴を示す容積式ポンプの斜視図である。
【図3】圧電変換器を含むマイクロディスペンサの側面図である。
【図4】本発明の動作を示すマイクロディスペンサによる分配中の装置ラインの圧力を示すグラフである。
【図5】本発明において使用されている、結合される前の滴定プレートの2つの半部分を示す分解斜視図である。
【図6】本発明によって結合された後の滴定プレートの2つの半部分を示す側方断面図である。
【図7】本発明の微量流体処理装置の第2の実施形態を示すブロック図である。
【符号の説明】
【0048】
10 微量流体処理装置、 12 容積式ポンプ、 14 圧力センサ、
16 マイクロディスペンサ、 18 管、 20 システム流体、
22 エアーギャップ、 24 移送流体、 26 液滴、
28 ステッピングモータ、 38 弁、 40 システム流体貯蔵器、
42 制御論理、 44 A/Dコンバータ、
46,50,52,53,55,56 電線、
51 マイクロディスペンサ電子回路、 54 流体液面検知回路、
58 ロボットシステム
【特許請求の範囲】
【請求項1】
少量の流体を分配するための微量流体処理装置であって、
第1の流体を供給するポンプ装置と、
微量の第2の流体を分配するためのマイクロディスペンサ装置と、
前記第1及び第2の流体のうちの少なくとも一つにおける圧力変化を信号に変換するための圧力センサと、
前記ポンプを前記圧力センサに接続し且つ同圧力センサを前記マイクロディスペンサ装置に接続するための管装置と、
前記信号を、分配される流体の量を示す指示値に変換するための装置と、を含み、
前記第1の流体と第2の流体とは、圧縮領域によって分離されているようになされた装置。
【請求項2】
請求項1に記載の微量流体処理装置であって、
前記マイクロディスペンサ装置は、容積が1ナノリットル未満の不連続で実質的に再現可能な大きさの液滴を形成することができる、装置。
【請求項3】
請求項1に記載の微量流体処理装置であって、
前記ポンプ装置が、前記圧力センサを注射器に接続するための弁を更に含み、同注射器は、前記第1の流体を前記圧力センサ及び前記マイクロディスペンサ装置内へ注入することができる、装置。
【請求項4】
請求項1に記載の微量流体処理装置であって、
前記圧力センサが、圧力を電気信号に変換することができるピエゾ抵抗要素を含む、装置。
【請求項5】
請求項1に記載の微量流体処理装置であって、
前記マイクロディスペンサ装置が、毛細管と、同毛細管の一部分にほぼ径方向で接触している圧電変換器とを更に含む、装置。
【請求項6】
液滴を分配するための装置であって、
毛細管と、同毛細管の射出端部に設けられた射出ノズルと、前記射出端部と反対側の入口端部と、前記ガラス毛細管に取り付けられ圧電セラミックと、を含むマイクロディスペンサと、
圧力センサと、
前記マイクロディスペンサの前記入口端部を前記圧力センサに接続するための第1の管と、
第2の管と、
前記第2の管によって前記圧力センサに接続し、且つポンプへの前記圧力センサの接続及びシステム流体貯蔵器への前記ポンプの接続を択一的に行う弁と、
制御論理と、を含み、
前記圧力センサは、同圧力センサ内に存在する流体の圧力に比例するアナログ信号を形成することができる少なくとも一つのピエゾ抵抗要素を更に含み、同アナログ信号は前記制御論理に送られ、
前記制御論理は、前記アナログ信号をデジタル信号に変換するアナログ/デジタル・コンバータを含み、且つ前記デジタル信号によって、前記マイクロディスペンサから分配される流体の容積の指示値を形成する、装置。
【請求項7】
少量の流体を分配するための微量流体処理装置であって、
第1の流体の圧力及び流量を制御するためのポンプ装置と、
微量の第2の流体を分配するためのマイクロディスペンサ装置と、
前記第1の流体及び前記第2の流体のうちの少なくとも一つの中の圧力の変化を信号に変換するためのセンサと、
前記ポンプ装置を前記センサに接続し、且つ同センサを前記マイクロディスペンサ装置に接続するための管装置と、
前記信号を、分配される流体の容積を指示する指示値に変換する装置と、含み、
前記第1の流体と前記第2の流体とは圧縮可能な領域によって互いに分離されており、
前記マイクロディスペンサ装置は、同マイクロディスペンサ装置を、同マイクロディスペンサ装置に付着した異物を脱離させるのに十分な高さの周波数で振動させる振動装置を更に含む、装置。
【請求項8】
請求項7に記載の微量流体処理装置であって、
前記周波数が超音波周波数である、装置。
【請求項9】
請求項7に記載の微量流体処理装置であって、
前記周波数が、前記マイクロディスペンサ装置の共鳴周波数である、装置。
【請求項10】
液滴を分配するための毛細管部分と、同毛細管部分を収縮させる収縮部分と、を有するマイクロディスペンサを含む微量流体処理装置を洗浄する方法であって、
前記収縮部分を、前記毛細管部分の内面に付着している異物が前記毛細管部分の中の流体内へと脱離されるのに十分な超音波周波数で作動させる、段階と、
前記毛細管部分の中の前記流体に正圧をかけて、前記脱離された異物を前記マイクロディスペンサの前記毛細管部分から前記流体内へ洗い流す段階と、
を含む方法。
【請求項11】
ノズルから液滴を分配するための毛細管部分と、同毛細管部分を収縮させる収縮部分と、を含む微量流体処理装置の詰まりを防止する方法であって、
前記ノズルと、異物を含む移送流体の供給源と、を作動可能な接触状態にする段階と、
前記ノズルから、前記移送流体を前記マイクロディスペンサ装置の前記毛細管部分内へと吸引する段階と、
前記収縮部分を、前記毛細管部分の前記ノズルに付着しつつある前記異物を脱離させるのに十分な超音波周波数で作動させる段階と、
を含む方法。
【請求項12】
ノズルから液滴を分配するための毛細管部分と、同毛細管部分を収縮させる収縮部分と、を含む微量流体処理装置の詰まりを防止する方法であって、
前記収縮部分を、前記毛細管部分の前記ノズルに付着しつつある前記異物を脱離させるのに十分な共鳴周波数で作動させる段階を含む方法。
【請求項13】
少量の流体を分配するための微量流体処理装置であって、 システム流体を含むシステム流体貯蔵器と、
同システム流体貯蔵器内の前記システム流体の圧力を増加させ又は減少させることができるポンプを備えた圧力制御装置と、
前記圧力制御装置を前記システム流体貯蔵器に接続している中空の管と、
少なくとも一つの部分を有する分配管と、
ノズルから移送流体の液滴を分配するための毛細管部分と、同毛細管部分を収縮させるための収縮部分と、を有するマイクロディスペンサと、
第1の端部が前記分配管の前記一つの部分を介して前記システム流体貯蔵器に接続され、第2の端部が前記マイクロディスペンサに接続されている弁と、
前記分配管の前記一つの部分に結合されて、前記分配管の中のシステム流体の圧力又は流量の少なくともどちらか一方を検知し、それに対応する信号を発生するセンサと、
前記弁に結合されて同弁を制御し、且つ前記センサに結合されて前記信号を受け取り、且つ前記圧力制御装置に結合されて同圧力制御装置に前記システム流体内の圧力を増加させ又は減少させるように指示し、且つ前記収縮部分に結合されて同収縮部分を作動させる、システムコントローラと、
を含む装置。
【請求項14】
少量の流体を分配するための微量流体処理装置であって、
ウエル(凹部)の列が内部に配設された微量滴下プレートであって、同ウエルは、同ウエルの底壁を形成しており且つ光を透過させる底部分と、前記ウエルの側壁を形成している空隙を有し且つ光を透過させない頂部分とを有する、微量滴下プレートと、
前記微量滴下プレートの前記底部分に隣接した位置に光を射出して、同光が前記透明な底部分の中を通り且つ前記微量滴下プレートの前記頂部分内の前記空隙の中を通るようにする、光源と、
ノズルを介して移送流体の液滴を分配するための毛細管部分と、同毛細管部分を収縮させる収縮部分と、を有するマイクロディスペンサと、
前記マイクロディスペンサに結合され、同マイクロディスペンサを前記微量滴下プレートの前記頂部分に隣接した位置へと移動させるロボットと、
前記微量滴下プレートの前記ウエルの中を通過する前記光を検知して、検知した光に対応する光信号を形成する光センサと、
同光センサに電気的に結合されて前記光信号を受け取り、前記ロボットに電気的に結合され、前記光信号に応答して同ロボットに命令し、前記マイクロディスペンサを前記微量滴下プレートの前記頂部分の上方の所望の位置に位置決めさせ、前記マイクロディスペンサの前記ノズルから1以上の液滴を前記ウエルのうちの一つ内へと分配する、システムコントローラと、を含む装置。
【請求項1】
少量の流体を分配するための微量流体処理装置であって、
第1の流体を供給するポンプ装置と、
微量の第2の流体を分配するためのマイクロディスペンサ装置と、
前記第1及び第2の流体のうちの少なくとも一つにおける圧力変化を信号に変換するための圧力センサと、
前記ポンプを前記圧力センサに接続し且つ同圧力センサを前記マイクロディスペンサ装置に接続するための管装置と、
前記信号を、分配される流体の量を示す指示値に変換するための装置と、を含み、
前記第1の流体と第2の流体とは、圧縮領域によって分離されているようになされた装置。
【請求項2】
請求項1に記載の微量流体処理装置であって、
前記マイクロディスペンサ装置は、容積が1ナノリットル未満の不連続で実質的に再現可能な大きさの液滴を形成することができる、装置。
【請求項3】
請求項1に記載の微量流体処理装置であって、
前記ポンプ装置が、前記圧力センサを注射器に接続するための弁を更に含み、同注射器は、前記第1の流体を前記圧力センサ及び前記マイクロディスペンサ装置内へ注入することができる、装置。
【請求項4】
請求項1に記載の微量流体処理装置であって、
前記圧力センサが、圧力を電気信号に変換することができるピエゾ抵抗要素を含む、装置。
【請求項5】
請求項1に記載の微量流体処理装置であって、
前記マイクロディスペンサ装置が、毛細管と、同毛細管の一部分にほぼ径方向で接触している圧電変換器とを更に含む、装置。
【請求項6】
液滴を分配するための装置であって、
毛細管と、同毛細管の射出端部に設けられた射出ノズルと、前記射出端部と反対側の入口端部と、前記ガラス毛細管に取り付けられ圧電セラミックと、を含むマイクロディスペンサと、
圧力センサと、
前記マイクロディスペンサの前記入口端部を前記圧力センサに接続するための第1の管と、
第2の管と、
前記第2の管によって前記圧力センサに接続し、且つポンプへの前記圧力センサの接続及びシステム流体貯蔵器への前記ポンプの接続を択一的に行う弁と、
制御論理と、を含み、
前記圧力センサは、同圧力センサ内に存在する流体の圧力に比例するアナログ信号を形成することができる少なくとも一つのピエゾ抵抗要素を更に含み、同アナログ信号は前記制御論理に送られ、
前記制御論理は、前記アナログ信号をデジタル信号に変換するアナログ/デジタル・コンバータを含み、且つ前記デジタル信号によって、前記マイクロディスペンサから分配される流体の容積の指示値を形成する、装置。
【請求項7】
少量の流体を分配するための微量流体処理装置であって、
第1の流体の圧力及び流量を制御するためのポンプ装置と、
微量の第2の流体を分配するためのマイクロディスペンサ装置と、
前記第1の流体及び前記第2の流体のうちの少なくとも一つの中の圧力の変化を信号に変換するためのセンサと、
前記ポンプ装置を前記センサに接続し、且つ同センサを前記マイクロディスペンサ装置に接続するための管装置と、
前記信号を、分配される流体の容積を指示する指示値に変換する装置と、含み、
前記第1の流体と前記第2の流体とは圧縮可能な領域によって互いに分離されており、
前記マイクロディスペンサ装置は、同マイクロディスペンサ装置を、同マイクロディスペンサ装置に付着した異物を脱離させるのに十分な高さの周波数で振動させる振動装置を更に含む、装置。
【請求項8】
請求項7に記載の微量流体処理装置であって、
前記周波数が超音波周波数である、装置。
【請求項9】
請求項7に記載の微量流体処理装置であって、
前記周波数が、前記マイクロディスペンサ装置の共鳴周波数である、装置。
【請求項10】
液滴を分配するための毛細管部分と、同毛細管部分を収縮させる収縮部分と、を有するマイクロディスペンサを含む微量流体処理装置を洗浄する方法であって、
前記収縮部分を、前記毛細管部分の内面に付着している異物が前記毛細管部分の中の流体内へと脱離されるのに十分な超音波周波数で作動させる、段階と、
前記毛細管部分の中の前記流体に正圧をかけて、前記脱離された異物を前記マイクロディスペンサの前記毛細管部分から前記流体内へ洗い流す段階と、
を含む方法。
【請求項11】
ノズルから液滴を分配するための毛細管部分と、同毛細管部分を収縮させる収縮部分と、を含む微量流体処理装置の詰まりを防止する方法であって、
前記ノズルと、異物を含む移送流体の供給源と、を作動可能な接触状態にする段階と、
前記ノズルから、前記移送流体を前記マイクロディスペンサ装置の前記毛細管部分内へと吸引する段階と、
前記収縮部分を、前記毛細管部分の前記ノズルに付着しつつある前記異物を脱離させるのに十分な超音波周波数で作動させる段階と、
を含む方法。
【請求項12】
ノズルから液滴を分配するための毛細管部分と、同毛細管部分を収縮させる収縮部分と、を含む微量流体処理装置の詰まりを防止する方法であって、
前記収縮部分を、前記毛細管部分の前記ノズルに付着しつつある前記異物を脱離させるのに十分な共鳴周波数で作動させる段階を含む方法。
【請求項13】
少量の流体を分配するための微量流体処理装置であって、 システム流体を含むシステム流体貯蔵器と、
同システム流体貯蔵器内の前記システム流体の圧力を増加させ又は減少させることができるポンプを備えた圧力制御装置と、
前記圧力制御装置を前記システム流体貯蔵器に接続している中空の管と、
少なくとも一つの部分を有する分配管と、
ノズルから移送流体の液滴を分配するための毛細管部分と、同毛細管部分を収縮させるための収縮部分と、を有するマイクロディスペンサと、
第1の端部が前記分配管の前記一つの部分を介して前記システム流体貯蔵器に接続され、第2の端部が前記マイクロディスペンサに接続されている弁と、
前記分配管の前記一つの部分に結合されて、前記分配管の中のシステム流体の圧力又は流量の少なくともどちらか一方を検知し、それに対応する信号を発生するセンサと、
前記弁に結合されて同弁を制御し、且つ前記センサに結合されて前記信号を受け取り、且つ前記圧力制御装置に結合されて同圧力制御装置に前記システム流体内の圧力を増加させ又は減少させるように指示し、且つ前記収縮部分に結合されて同収縮部分を作動させる、システムコントローラと、
を含む装置。
【請求項14】
少量の流体を分配するための微量流体処理装置であって、
ウエル(凹部)の列が内部に配設された微量滴下プレートであって、同ウエルは、同ウエルの底壁を形成しており且つ光を透過させる底部分と、前記ウエルの側壁を形成している空隙を有し且つ光を透過させない頂部分とを有する、微量滴下プレートと、
前記微量滴下プレートの前記底部分に隣接した位置に光を射出して、同光が前記透明な底部分の中を通り且つ前記微量滴下プレートの前記頂部分内の前記空隙の中を通るようにする、光源と、
ノズルを介して移送流体の液滴を分配するための毛細管部分と、同毛細管部分を収縮させる収縮部分と、を有するマイクロディスペンサと、
前記マイクロディスペンサに結合され、同マイクロディスペンサを前記微量滴下プレートの前記頂部分に隣接した位置へと移動させるロボットと、
前記微量滴下プレートの前記ウエルの中を通過する前記光を検知して、検知した光に対応する光信号を形成する光センサと、
同光センサに電気的に結合されて前記光信号を受け取り、前記ロボットに電気的に結合され、前記光信号に応答して同ロボットに命令し、前記マイクロディスペンサを前記微量滴下プレートの前記頂部分の上方の所望の位置に位置決めさせ、前記マイクロディスペンサの前記ノズルから1以上の液滴を前記ウエルのうちの一つ内へと分配する、システムコントローラと、を含む装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−145434(P2008−145434A)
【公開日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願番号】特願2007−307569(P2007−307569)
【出願日】平成19年11月28日(2007.11.28)
【分割の表示】特願平9−143921の分割
【原出願日】平成9年6月2日(1997.6.2)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.テフロン
【出願人】(594027351)パッカード・インストルメント・カンパニー・インコーポレーテッド (1)
【氏名又は名称原語表記】Packard Instrument Company Inc
【Fターム(参考)】
【公開日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願日】平成19年11月28日(2007.11.28)
【分割の表示】特願平9−143921の分割
【原出願日】平成9年6月2日(1997.6.2)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.テフロン
【出願人】(594027351)パッカード・インストルメント・カンパニー・インコーポレーテッド (1)
【氏名又は名称原語表記】Packard Instrument Company Inc
【Fターム(参考)】
[ Back to top ]