
心肺蘇生術用モニタリング装置
【課題】救助者等が最適な心臓マッサージ手技を行うことが可能なようにモニタリングできる。
【解決手段】生体における胸部圧迫時の力と変位と速度の各情報を取得する情報取得手段10と、前記情報取得手段10により取得された力と変位と速度の各情報に基づき、胸部の粘弾性情報を算出する粘弾性推定処理モジュール20と、前記粘弾性推定処理モジュール20により算出された粘弾性情報を用いて心肺蘇生術に関する評価を行う適否判定モジュール30と、前記適否判定モジュール30による評価を示す出力を行う表示装置40とを具備する。
【解決手段】生体における胸部圧迫時の力と変位と速度の各情報を取得する情報取得手段10と、前記情報取得手段10により取得された力と変位と速度の各情報に基づき、胸部の粘弾性情報を算出する粘弾性推定処理モジュール20と、前記粘弾性推定処理モジュール20により算出された粘弾性情報を用いて心肺蘇生術に関する評価を行う適否判定モジュール30と、前記適否判定モジュール30による評価を示す出力を行う表示装置40とを具備する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、心肺蘇生術を実行する際などに、救助者等が最適な心臓マッサージ手技を行うことが可能なようにモニタリングする心肺蘇生術用モニタリング装置に関するものである。
【背景技術】
【0002】
従来、心肺蘇生術において実行される心臓マッサージでは、約4〜5cmの圧迫変位が適当であるとされており、これが至適に行われているか否かを判断し、救助者等に報知する装置が知られている。幾つかの装置においては、力、変位、速度、加速度の各センサから得られる信号の1つ或いは1つ以上の組み合わせを用いる。例えば、加速度の2階積分により圧迫変位を求め、力との関係により圧迫変位に重畳するコモンモードノイズの影響を除去する技術が知られている(特許文献1参照)。
【0003】
また、力と変位から剛性関数を求めて、その非直線性により圧迫変位が妥当であるか否かを判断する技術も知られている(特許文献2参照)。この技術においては、剛性関数を正確に求めるために、予め速度に比例する減衰力成分(粘性成分)を減算するものである。
【0004】
一方、実行される心臓マッサージの際における圧迫対象となる胸郭は、粘弾性特性を有していることが知られている(Bankman et al IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING, VOL. 37, NO.2, FEBRUARY 1990, P211-217)。ここに、粘性は圧迫による胸郭内臓器の移動に起因するものであり、妥当な圧迫が行われている場合には、弾性に加えて粘性が生じるものである。
【0005】
しかしながら、上記特許文献1に開示の技術においては、変位と力の関係において適切な心臓マッサージ手技が行われているか否かの判断に当たって、圧迫対象である胸部の粘性は考慮されていない。また、上記特許文献2の技術では、粘性成分を減算することから、心臓マッサージ手技が行われているか否かの判断の際に胸部粘性は考慮されない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−509014号公報
【特許文献2】欧州特許出願公開第EP1977469A1号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記の通り、圧迫対象となる胸郭が粘弾性特性を有していることから、これを考慮に入れない判定は不正確とならざるを得ない。例えば、柔らかいベッド上や振動する車内において心肺蘇生のために心臓マッサージを施した場合には、変位と力の関係について妥当性の判断ができない虞がある。
【0008】
本発明は、心肺蘇生術を実行する際などにおける、心臓マッサージ手技に関する上記のようなモニタ技術の現状に鑑みてなされたもので、その目的は、救助者等が最適な心臓マッサージ手技を行うことが可能なようにモニタリングできる心肺蘇生術用モニタリング装置を提供することである。
【課題を解決するための手段】
【0009】
本発明に係る心肺蘇生術用モニタリング装置は、生体における胸部圧迫時の力と変位と速度の各情報を取得する情報取得手段と、前記情報取得手段により取得された力と変位と速度の各情報に基づき、胸部の粘弾性情報を算出する算出手段と、前記算出手段により算出された粘弾性情報を用いて心肺蘇生術に関する評価を行う評価手段と、前記評価手段による評価を示す出力を行う出力手段とを具備することを特徴とする。
【0010】
本発明に係る心肺蘇生術用モニタリング装置では、算出手段は、粘弾性情報を次の(式1)に示すVoigt (フォークト)モデルを用いて算出することを特徴とする。
f=Kx+Bx´+e・・・(式1)
但し、f:力、x:変位、x´:速度、K:剛性係数、B:粘性係数、e:外乱
【0011】
本発明に係る心肺蘇生術用モニタリング装置では、算出手段は、KとBを回帰計算により求めることを特徴とする。
【0012】
本発明に係る心肺蘇生術用モニタリング装置では、情報取得手段は力センサと加速度センサを具備し、力センサにより力の情報を取得し、加速度センサにより得られた加速度を1階積分して速度の情報を取得し、前記加速度を2階積分して変位の情報を求めることを特徴とする。
【0013】
本発明に係る心肺蘇生術用モニタリング装置では、情報取得手段は力センサと速度センサを具備し、力センサにより力の情報を取得し、速度センサにより速度の情報を取得し、前記速度を1階積分して変位の情報を求めることを特徴とする。
【0014】
本発明に係る心肺蘇生術用モニタリング装置では、情報取得手段は力センサと変位センサを具備し、力センサにより力の情報を取得し、変位センサにより変位の情報を取得し、前記変位を1階微分して速度の情報を求めることを特徴とする。
【0015】
本発明に係る心肺蘇生術用モニタリング装置では、算出手段は、粘弾性情報として、粘性係数Bと時定数B/Kの少なくとも1つを算出し、評価手段は、算出手段により算出された上記粘弾性情報を用いると共に、剛性係数Kと外乱eの少なくとも1つを必要により用いて心肺蘇生術の適否を評価することを特徴とする。
【0016】
本発明に係る心肺蘇生術用モニタリング装置では、算出手段は、加速度の積分により変位あるいは速度を求める際に、外乱e が最小になるよう加速度センサにより得られる信号のオフセットを補正し、加速度センサにより得られる信号に含まれる不要なオフセットの積分によるドリフトを除去することを特徴とする。
【0017】
本発明に係る心肺蘇生術用モニタリング装置は、オフセットを補正する際に、力が極大あるいは極小となる近傍のデータを用いることにより、力と変位の相関が最大となり、外乱e が最小になるように処理することを特徴とする。
【0018】
本発明に係る心肺蘇生術用モニタリング装置は、剛性K、粘性項B、時定数B/K、外乱eの少なくとも一つが所定の判定基準を超えていたときに、力のみにより心肺蘇生術の適否を評価することを特徴とする。
【発明の効果】
【0019】
本発明に係る心肺蘇生術用モニタリング装置によれば、力と変位と速度の各情報に基づき、胸部の粘弾性情報を算出し、算出された粘弾性情報を用いて心肺蘇生術に関する評価を行うので、圧迫対象となる胸郭が粘弾性特性を有していることが考慮された適切な評価となり、救助者等による心臓マッサージ手技が適正に行われるように導くことが可能である。
【0020】
本発明に係る心肺蘇生術用モニタリング装置によれば、KとBを回帰計算により求めるので、車の振動など圧迫に相関のない外乱eの影響を排除することができ、K、Bを求めることが可能である。更にeの大きさから、測定信頼性を通知することも可能である。
【0021】
本発明に係る心肺蘇生術用モニタリング装置によれば、粘弾性情報として、粘性係数Bと時定数B/Kの少なくとも1つを算出するので、柔らかいベッド上で心臓マッサージを行った場合に算出される剛性係数K、粘性係数B、時定数B/Kが、生体の剛性係数K、粘性係数B、時定数B/Kと大きく異なることを利用し、柔らかいベッド上で心臓マッサージであることを検出し、更に誤った変位を救助者等に伝えなくするなど必要な報知を行うことができる。
【0022】
本発明に係る心肺蘇生術用モニタリング装置によれば、eを最小化するように、加速度信号にオフセットノイズ補正を加えることにより、ドリフトを抑制することが可能となる。加速度を積分し速度と変位を求める場合に適切な値を算出することができる。
【0023】
本発明に係る心肺蘇生術用モニタリング装置によれば、剛性K、粘性項B、時定数B/K、外乱eの少なくとも一つが所定の判定基準を超えていたときに、力のみにより心肺蘇生術の適否を評価することにより、柔らかいベッドの上で心臓マッサージを行った場合にも、心肺蘇生術の効果を適切に評価することができる。
【図面の簡単な説明】
【0024】
【図1】本発明に係る心肺蘇生術用モニタリング装置の実施形態を示すブロック図。
【図2】本発明に係る心肺蘇生術用モニタリング装置の実施形態の要部構成の第一の例を示すブロック図。
【図3】本発明に係る心肺蘇生術用モニタリング装置の実施形態の要部構成の第二の例を示すブロック図。
【図4】本発明に係る心肺蘇生術用モニタリング装置の実施形態の要部構成の第三の例を示すブロック図。
【図5】本発明に係る心肺蘇生術用モニタリング装置の実施形態の加速度センサにより得られる信号のオフセットを補正する構成例を示すブロック図。
【図6】本発明に係る心肺蘇生術用モニタリング装置の実施形態の動作を示すフローチャート。
【発明を実施するための形態】
【0025】
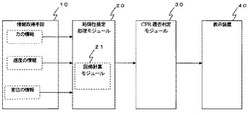
以下添付図面を参照して、本発明に係る心肺蘇生術用モニタリング装置の実施形態を説明する。各図において同一の構成要素には、同一の符号を付して重複する説明を省略する。実施形態に係る心肺蘇生術用モニタリング装置は、図1に示すように構成することができる。この心肺蘇生術用モニタリング装置は、情報取得手段10、算出手段である粘弾性推定処理モジュール20、評価手段であるCPR(心肺蘇生術)適否判定モジュール30及び出力手段の一例である表示装置40を備えている。表示装置40は、LEDなどのディスプレイにより文字を表示するものの他、単に光点灯などによりメッセージを出力するもの、音声によりメッセージを出力するもの、或いはこれらの必要な組み合わせによりメッセージを出力するものであり、評価手段であるCPR適否判定モジュール30による評価を示す出力を行うものであればよい。
【0026】
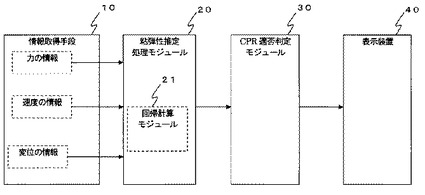
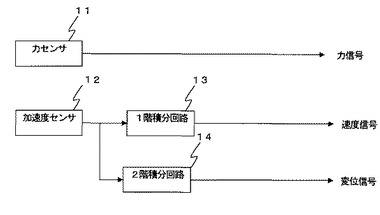
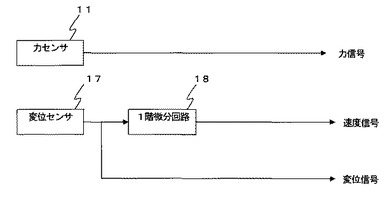
情報取得手段10は、生体における例えば胸部圧迫位置に配置されて胸部圧迫時の力と変位と速度の各情報を取得するものであり、例えば図2〜図4のいずれかの構成により実現することができる。まず、図2の構成では、生体の胸部圧迫時に胸部に加わる力を検出する力センサ11と、加速度を検出する加速度センサ12と、1階積分回路13と、2階積分回路14とを備える。力センサ11は、検出した力の信号を出力する。加速度センサ12は加速度信号を出力し、1階積分回路13は加速度の1階積分を行って速度信号を出力し、2階積分回路14は加速度の2階積分を行って変位信号を出力する。
【0027】
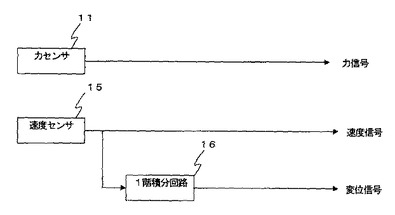
図3に示す構成では、力センサ11と、速度を検出する速度センサ15と、1階積分回路16とを備える。速度センサ15は速度信号を出力し、1階積分回路16は速度の1階積分を行って変位信号を出力する。
【0028】
図4に示す構成では、力センサ11と、変位を検出する変位センサ17と、1階微分回路18とを備える。変位センサ17は変位信号を出力し、1階微分回路18は変位の1階微分を行って速度信号を出力する。いずれの構成においても、情報取得手段10から粘弾性推定処理モジュール20への送出の際には、ディジタル情報とされ、コンピュータである粘弾性推定処理モジュール20による処理が可能な形態に変更することができる。
【0029】
算出手段である粘弾性推定処理モジュール20は、情報取得手段10により取得された力と変位と速度の各情報に基づき、胸部の粘弾性情報を算出するものであり、例えば、コンピュータによって構成することができる。具体的には、粘弾性推定処理モジュール20は、粘弾性情報を次の(式1)に示すVoigt (フォークト)モデルを用いて算出する。
f=Kx+Bx´+e・・・(式1)
但し、f:力、x:変位、x´:速度、K:剛性係数、B:粘性係数、e:外乱
【0030】
粘弾性推定処理モジュール20は、回帰計算モジュール21を備えており、剛性係数K、粘性係数B、時定数B/K及び外乱eを回帰計算により求める。例えば、力fに対して変位xと速度x´の重回帰計算を行い、最適な剛性係数Kと粘性係数Bを求める。求めた剛性係数Kと粘性係数Bにより推定した力と、実測した力fとの差を外乱eとして算出する。
【0031】
上記図2の構成を採用した場合には、加速度信号の1階積分により速度信号を求め、加速度信号の2階積分により変位信号を求めることになる。この場合において、加速度信号に含まれる不要なオフセットノイズも積分され、ドリフトが生じる。加速度信号のオフセットを積分した際のドリフトを抑制するために、加速度の積分開始タイミングを力センサの出力により決定する技術が知られている(欧州特許第EP1057451B1号明細書)。しかしながら、加速度の積分開始タイミングを力センサの出力により決定しても、一回の圧迫中にドリフトが生じてしまうことを解決することはできない。
【0032】
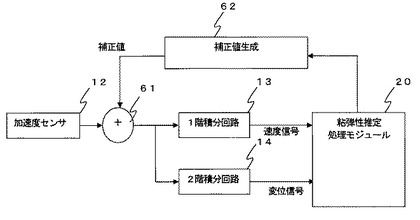
本実施形態では、ドリフトは外乱eとして現れるので、この外乱eが最小となるように、加速度センサ12の出力に補正を行う。この補正手段の構成を図5に示す。加速度センサ12の出力側に加算回路(加算手段)61を設け、この加算回路61の出力を1階積分回路13及び2階積分回路14へ与える。補正値生成回路62を設け、補正値生成回路62によって粘弾性推定処理モジュール20から外乱eを取り込み、外乱eが最小となるように補正値を生成して加算回路61へ与える。補正値生成回路62は、補正値を変更(大小)して外乱eが最小となると補正値を保持する。この処理は、加速度センサ12の1サンプリング毎に行うようにすることができる。
【0033】
ところで、胸部圧迫時において、力が極大或いは極小となる近傍においては速度が小さくなるため、粘性項であるBx´の影響は小さい。粘性を無視した場合に、(式1)は次の(式2)となる。
f=Kx+e・・・(式2)
【0034】
力が極大或いは極小となる近傍における測定信号を用い、力fと変位xの相関が最大となるときには、外乱eが最小になることが分かる。これにより、上記図5に示した構成による処理を行う場合には、力が極大或いは極小となる近傍における測定信号を用い、補正値生成回路62は、補正値を変更(大小)して外乱eが最小となると補正値を保持するように動作することができる。これによって、粘性を考慮した上で精度向上を容易に実現できる。
【0035】
上記のようにしては、粘弾性推定処理モジュール20は、粘弾性情報として、粘性係数Bと時定数B/Kの少なくとも1つを算出し、評価手段であるCPR適否判定モジュール30は、粘弾性推定処理モジュール20により算出された上記粘弾性情報を用いると共に、剛性係数Kと外乱eの少なくとも1つを必要により用いて心肺蘇生術の適否を評価する。
【0036】
CPR適否判定モジュール30は、剛性係数K、粘性係数B、時定数B/Kに関し、生体から得られる範囲を規定する上限閾値及び下限閾値を有し、また、外乱eに関し上限閾値を有している。更に、CPR適否判定モジュール30は、心肺蘇生術において実行される心臓マッサージにおいて、圧迫の際の変位が適当であるとされる変位xの上限閾値と下限閾値を有している。
【0037】
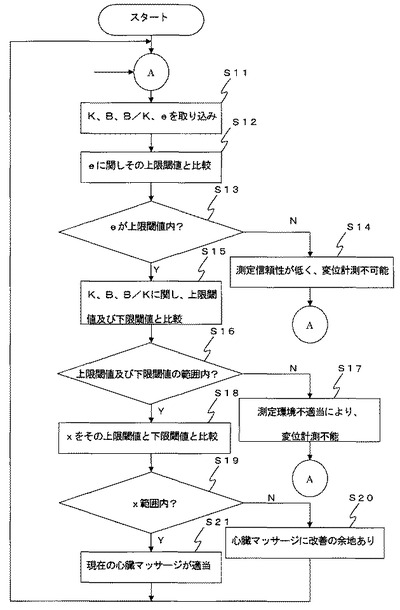
CPR適否判定モジュール30は、図6に示されるフローチャートに対応するプログラム基づき動作するので、このフローチャートを参照して動作説明を行う。CPR適否判定モジュール30は、剛性係数K、粘性係数B、時定数B/K及び外乱eを粘弾性推定処理モジュール20から受け取り(S11)、外乱eに関しその上限閾値と比較を行って(S12)、CPR適否判定のための当該測定が信頼できる範囲内において行われているかを判定する(S13)。この判定の結果、NOへ分岐すると「測定信頼性が低く、変位計測不可能」と判定し、これに対応するメッセージの表示情報を表示装置40へ送出する(S14)。
【0038】
一方、ステップS13においてYESへ分岐した場合には、剛性係数K、粘性係数B、時定数B/Kに関し、生体から得られる範囲を規定する上限閾値及び下限閾値と比較し(S15)、この上限閾値及び下限閾値の範囲に入っているかを判定する(S16)。この判定の結果、NOへ分岐すると「測定環境不適当により、変位計測不能」と判定し、これに対応するメッセージの表示情報を表示装置40へ送出する(S17)。
【0039】
また、ステップS16においてYESへ分岐した場合には、変位xに関し、その上限閾値と下限閾値と比較し(S18)、変位xが適当な範囲に入っているか否かを判定する(S19)。判定の結果、NOへ分岐した場合には、「心臓マッサージに改善の余地あり」と判定し、これに対応するメッセージの表示情報を表示装置40へ送出する(S20)。
【0040】
一方、上記ステップS19においてYESへ分岐すると、「現在の心臓マッサージが適当である」と判定し、これに対応するメッセージの表示情報を表示装置40へ送出する(S21)。
【0041】
以上のようにして、本実施形態では、例えば柔らかいベッドの上での心臓マッサージ実施時にあっては、剛性係数Kと粘性係数Bおよび時定数B/Kが本来の生体における剛性係数Kと粘性係数Bおよび時定数B/Kとは大きく異なることを利用し、柔らかいベッド上での心臓マッサージであることを自動的に検出することが可能である。従って、心臓マッサージに不向きなベッド上での心臓マッサージであることが検出された場合には、変位計測を抑制し、誤った情報を救助者に与えることを防ぐことができる。上記実施形態では「測定環境不適当」と表現したが、より具体的に、ベッドを変えるなどの示唆を行うようにしても良い。
更に、ベッド上での心臓マッサージであることを検出した場合には、変位に関する情報を用いず力のみによる適否判断を行うことも可能である。
【0042】
また、外乱eの大きさから、測定信頼性を通知することも可能となる。さらに、振動など圧迫に相関のない外乱eの影響を受けることなく、K、Bを求めることが可能であり、より正確指示を救助者等に与えることができる。
【符号の説明】
【0043】
10 情報取得手段 11 力センサ
12 加速度センサ 13 2階積分回路
14 1階積分回路 15 速度センサ
16 1階積分回路 17 変位センサ
18 1階微分回路 20 粘弾性推定処理モジュール
21 回帰計算モジュール 30 適否判定モジュール
40 表示装置 61 加算回路
62 補正値生成回路
【技術分野】
【0001】
この発明は、心肺蘇生術を実行する際などに、救助者等が最適な心臓マッサージ手技を行うことが可能なようにモニタリングする心肺蘇生術用モニタリング装置に関するものである。
【背景技術】
【0002】
従来、心肺蘇生術において実行される心臓マッサージでは、約4〜5cmの圧迫変位が適当であるとされており、これが至適に行われているか否かを判断し、救助者等に報知する装置が知られている。幾つかの装置においては、力、変位、速度、加速度の各センサから得られる信号の1つ或いは1つ以上の組み合わせを用いる。例えば、加速度の2階積分により圧迫変位を求め、力との関係により圧迫変位に重畳するコモンモードノイズの影響を除去する技術が知られている(特許文献1参照)。
【0003】
また、力と変位から剛性関数を求めて、その非直線性により圧迫変位が妥当であるか否かを判断する技術も知られている(特許文献2参照)。この技術においては、剛性関数を正確に求めるために、予め速度に比例する減衰力成分(粘性成分)を減算するものである。
【0004】
一方、実行される心臓マッサージの際における圧迫対象となる胸郭は、粘弾性特性を有していることが知られている(Bankman et al IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING, VOL. 37, NO.2, FEBRUARY 1990, P211-217)。ここに、粘性は圧迫による胸郭内臓器の移動に起因するものであり、妥当な圧迫が行われている場合には、弾性に加えて粘性が生じるものである。
【0005】
しかしながら、上記特許文献1に開示の技術においては、変位と力の関係において適切な心臓マッサージ手技が行われているか否かの判断に当たって、圧迫対象である胸部の粘性は考慮されていない。また、上記特許文献2の技術では、粘性成分を減算することから、心臓マッサージ手技が行われているか否かの判断の際に胸部粘性は考慮されない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−509014号公報
【特許文献2】欧州特許出願公開第EP1977469A1号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記の通り、圧迫対象となる胸郭が粘弾性特性を有していることから、これを考慮に入れない判定は不正確とならざるを得ない。例えば、柔らかいベッド上や振動する車内において心肺蘇生のために心臓マッサージを施した場合には、変位と力の関係について妥当性の判断ができない虞がある。
【0008】
本発明は、心肺蘇生術を実行する際などにおける、心臓マッサージ手技に関する上記のようなモニタ技術の現状に鑑みてなされたもので、その目的は、救助者等が最適な心臓マッサージ手技を行うことが可能なようにモニタリングできる心肺蘇生術用モニタリング装置を提供することである。
【課題を解決するための手段】
【0009】
本発明に係る心肺蘇生術用モニタリング装置は、生体における胸部圧迫時の力と変位と速度の各情報を取得する情報取得手段と、前記情報取得手段により取得された力と変位と速度の各情報に基づき、胸部の粘弾性情報を算出する算出手段と、前記算出手段により算出された粘弾性情報を用いて心肺蘇生術に関する評価を行う評価手段と、前記評価手段による評価を示す出力を行う出力手段とを具備することを特徴とする。
【0010】
本発明に係る心肺蘇生術用モニタリング装置では、算出手段は、粘弾性情報を次の(式1)に示すVoigt (フォークト)モデルを用いて算出することを特徴とする。
f=Kx+Bx´+e・・・(式1)
但し、f:力、x:変位、x´:速度、K:剛性係数、B:粘性係数、e:外乱
【0011】
本発明に係る心肺蘇生術用モニタリング装置では、算出手段は、KとBを回帰計算により求めることを特徴とする。
【0012】
本発明に係る心肺蘇生術用モニタリング装置では、情報取得手段は力センサと加速度センサを具備し、力センサにより力の情報を取得し、加速度センサにより得られた加速度を1階積分して速度の情報を取得し、前記加速度を2階積分して変位の情報を求めることを特徴とする。
【0013】
本発明に係る心肺蘇生術用モニタリング装置では、情報取得手段は力センサと速度センサを具備し、力センサにより力の情報を取得し、速度センサにより速度の情報を取得し、前記速度を1階積分して変位の情報を求めることを特徴とする。
【0014】
本発明に係る心肺蘇生術用モニタリング装置では、情報取得手段は力センサと変位センサを具備し、力センサにより力の情報を取得し、変位センサにより変位の情報を取得し、前記変位を1階微分して速度の情報を求めることを特徴とする。
【0015】
本発明に係る心肺蘇生術用モニタリング装置では、算出手段は、粘弾性情報として、粘性係数Bと時定数B/Kの少なくとも1つを算出し、評価手段は、算出手段により算出された上記粘弾性情報を用いると共に、剛性係数Kと外乱eの少なくとも1つを必要により用いて心肺蘇生術の適否を評価することを特徴とする。
【0016】
本発明に係る心肺蘇生術用モニタリング装置では、算出手段は、加速度の積分により変位あるいは速度を求める際に、外乱e が最小になるよう加速度センサにより得られる信号のオフセットを補正し、加速度センサにより得られる信号に含まれる不要なオフセットの積分によるドリフトを除去することを特徴とする。
【0017】
本発明に係る心肺蘇生術用モニタリング装置は、オフセットを補正する際に、力が極大あるいは極小となる近傍のデータを用いることにより、力と変位の相関が最大となり、外乱e が最小になるように処理することを特徴とする。
【0018】
本発明に係る心肺蘇生術用モニタリング装置は、剛性K、粘性項B、時定数B/K、外乱eの少なくとも一つが所定の判定基準を超えていたときに、力のみにより心肺蘇生術の適否を評価することを特徴とする。
【発明の効果】
【0019】
本発明に係る心肺蘇生術用モニタリング装置によれば、力と変位と速度の各情報に基づき、胸部の粘弾性情報を算出し、算出された粘弾性情報を用いて心肺蘇生術に関する評価を行うので、圧迫対象となる胸郭が粘弾性特性を有していることが考慮された適切な評価となり、救助者等による心臓マッサージ手技が適正に行われるように導くことが可能である。
【0020】
本発明に係る心肺蘇生術用モニタリング装置によれば、KとBを回帰計算により求めるので、車の振動など圧迫に相関のない外乱eの影響を排除することができ、K、Bを求めることが可能である。更にeの大きさから、測定信頼性を通知することも可能である。
【0021】
本発明に係る心肺蘇生術用モニタリング装置によれば、粘弾性情報として、粘性係数Bと時定数B/Kの少なくとも1つを算出するので、柔らかいベッド上で心臓マッサージを行った場合に算出される剛性係数K、粘性係数B、時定数B/Kが、生体の剛性係数K、粘性係数B、時定数B/Kと大きく異なることを利用し、柔らかいベッド上で心臓マッサージであることを検出し、更に誤った変位を救助者等に伝えなくするなど必要な報知を行うことができる。
【0022】
本発明に係る心肺蘇生術用モニタリング装置によれば、eを最小化するように、加速度信号にオフセットノイズ補正を加えることにより、ドリフトを抑制することが可能となる。加速度を積分し速度と変位を求める場合に適切な値を算出することができる。
【0023】
本発明に係る心肺蘇生術用モニタリング装置によれば、剛性K、粘性項B、時定数B/K、外乱eの少なくとも一つが所定の判定基準を超えていたときに、力のみにより心肺蘇生術の適否を評価することにより、柔らかいベッドの上で心臓マッサージを行った場合にも、心肺蘇生術の効果を適切に評価することができる。
【図面の簡単な説明】
【0024】
【図1】本発明に係る心肺蘇生術用モニタリング装置の実施形態を示すブロック図。
【図2】本発明に係る心肺蘇生術用モニタリング装置の実施形態の要部構成の第一の例を示すブロック図。
【図3】本発明に係る心肺蘇生術用モニタリング装置の実施形態の要部構成の第二の例を示すブロック図。
【図4】本発明に係る心肺蘇生術用モニタリング装置の実施形態の要部構成の第三の例を示すブロック図。
【図5】本発明に係る心肺蘇生術用モニタリング装置の実施形態の加速度センサにより得られる信号のオフセットを補正する構成例を示すブロック図。
【図6】本発明に係る心肺蘇生術用モニタリング装置の実施形態の動作を示すフローチャート。
【発明を実施するための形態】
【0025】
以下添付図面を参照して、本発明に係る心肺蘇生術用モニタリング装置の実施形態を説明する。各図において同一の構成要素には、同一の符号を付して重複する説明を省略する。実施形態に係る心肺蘇生術用モニタリング装置は、図1に示すように構成することができる。この心肺蘇生術用モニタリング装置は、情報取得手段10、算出手段である粘弾性推定処理モジュール20、評価手段であるCPR(心肺蘇生術)適否判定モジュール30及び出力手段の一例である表示装置40を備えている。表示装置40は、LEDなどのディスプレイにより文字を表示するものの他、単に光点灯などによりメッセージを出力するもの、音声によりメッセージを出力するもの、或いはこれらの必要な組み合わせによりメッセージを出力するものであり、評価手段であるCPR適否判定モジュール30による評価を示す出力を行うものであればよい。
【0026】
情報取得手段10は、生体における例えば胸部圧迫位置に配置されて胸部圧迫時の力と変位と速度の各情報を取得するものであり、例えば図2〜図4のいずれかの構成により実現することができる。まず、図2の構成では、生体の胸部圧迫時に胸部に加わる力を検出する力センサ11と、加速度を検出する加速度センサ12と、1階積分回路13と、2階積分回路14とを備える。力センサ11は、検出した力の信号を出力する。加速度センサ12は加速度信号を出力し、1階積分回路13は加速度の1階積分を行って速度信号を出力し、2階積分回路14は加速度の2階積分を行って変位信号を出力する。
【0027】
図3に示す構成では、力センサ11と、速度を検出する速度センサ15と、1階積分回路16とを備える。速度センサ15は速度信号を出力し、1階積分回路16は速度の1階積分を行って変位信号を出力する。
【0028】
図4に示す構成では、力センサ11と、変位を検出する変位センサ17と、1階微分回路18とを備える。変位センサ17は変位信号を出力し、1階微分回路18は変位の1階微分を行って速度信号を出力する。いずれの構成においても、情報取得手段10から粘弾性推定処理モジュール20への送出の際には、ディジタル情報とされ、コンピュータである粘弾性推定処理モジュール20による処理が可能な形態に変更することができる。
【0029】
算出手段である粘弾性推定処理モジュール20は、情報取得手段10により取得された力と変位と速度の各情報に基づき、胸部の粘弾性情報を算出するものであり、例えば、コンピュータによって構成することができる。具体的には、粘弾性推定処理モジュール20は、粘弾性情報を次の(式1)に示すVoigt (フォークト)モデルを用いて算出する。
f=Kx+Bx´+e・・・(式1)
但し、f:力、x:変位、x´:速度、K:剛性係数、B:粘性係数、e:外乱
【0030】
粘弾性推定処理モジュール20は、回帰計算モジュール21を備えており、剛性係数K、粘性係数B、時定数B/K及び外乱eを回帰計算により求める。例えば、力fに対して変位xと速度x´の重回帰計算を行い、最適な剛性係数Kと粘性係数Bを求める。求めた剛性係数Kと粘性係数Bにより推定した力と、実測した力fとの差を外乱eとして算出する。
【0031】
上記図2の構成を採用した場合には、加速度信号の1階積分により速度信号を求め、加速度信号の2階積分により変位信号を求めることになる。この場合において、加速度信号に含まれる不要なオフセットノイズも積分され、ドリフトが生じる。加速度信号のオフセットを積分した際のドリフトを抑制するために、加速度の積分開始タイミングを力センサの出力により決定する技術が知られている(欧州特許第EP1057451B1号明細書)。しかしながら、加速度の積分開始タイミングを力センサの出力により決定しても、一回の圧迫中にドリフトが生じてしまうことを解決することはできない。
【0032】
本実施形態では、ドリフトは外乱eとして現れるので、この外乱eが最小となるように、加速度センサ12の出力に補正を行う。この補正手段の構成を図5に示す。加速度センサ12の出力側に加算回路(加算手段)61を設け、この加算回路61の出力を1階積分回路13及び2階積分回路14へ与える。補正値生成回路62を設け、補正値生成回路62によって粘弾性推定処理モジュール20から外乱eを取り込み、外乱eが最小となるように補正値を生成して加算回路61へ与える。補正値生成回路62は、補正値を変更(大小)して外乱eが最小となると補正値を保持する。この処理は、加速度センサ12の1サンプリング毎に行うようにすることができる。
【0033】
ところで、胸部圧迫時において、力が極大或いは極小となる近傍においては速度が小さくなるため、粘性項であるBx´の影響は小さい。粘性を無視した場合に、(式1)は次の(式2)となる。
f=Kx+e・・・(式2)
【0034】
力が極大或いは極小となる近傍における測定信号を用い、力fと変位xの相関が最大となるときには、外乱eが最小になることが分かる。これにより、上記図5に示した構成による処理を行う場合には、力が極大或いは極小となる近傍における測定信号を用い、補正値生成回路62は、補正値を変更(大小)して外乱eが最小となると補正値を保持するように動作することができる。これによって、粘性を考慮した上で精度向上を容易に実現できる。
【0035】
上記のようにしては、粘弾性推定処理モジュール20は、粘弾性情報として、粘性係数Bと時定数B/Kの少なくとも1つを算出し、評価手段であるCPR適否判定モジュール30は、粘弾性推定処理モジュール20により算出された上記粘弾性情報を用いると共に、剛性係数Kと外乱eの少なくとも1つを必要により用いて心肺蘇生術の適否を評価する。
【0036】
CPR適否判定モジュール30は、剛性係数K、粘性係数B、時定数B/Kに関し、生体から得られる範囲を規定する上限閾値及び下限閾値を有し、また、外乱eに関し上限閾値を有している。更に、CPR適否判定モジュール30は、心肺蘇生術において実行される心臓マッサージにおいて、圧迫の際の変位が適当であるとされる変位xの上限閾値と下限閾値を有している。
【0037】
CPR適否判定モジュール30は、図6に示されるフローチャートに対応するプログラム基づき動作するので、このフローチャートを参照して動作説明を行う。CPR適否判定モジュール30は、剛性係数K、粘性係数B、時定数B/K及び外乱eを粘弾性推定処理モジュール20から受け取り(S11)、外乱eに関しその上限閾値と比較を行って(S12)、CPR適否判定のための当該測定が信頼できる範囲内において行われているかを判定する(S13)。この判定の結果、NOへ分岐すると「測定信頼性が低く、変位計測不可能」と判定し、これに対応するメッセージの表示情報を表示装置40へ送出する(S14)。
【0038】
一方、ステップS13においてYESへ分岐した場合には、剛性係数K、粘性係数B、時定数B/Kに関し、生体から得られる範囲を規定する上限閾値及び下限閾値と比較し(S15)、この上限閾値及び下限閾値の範囲に入っているかを判定する(S16)。この判定の結果、NOへ分岐すると「測定環境不適当により、変位計測不能」と判定し、これに対応するメッセージの表示情報を表示装置40へ送出する(S17)。
【0039】
また、ステップS16においてYESへ分岐した場合には、変位xに関し、その上限閾値と下限閾値と比較し(S18)、変位xが適当な範囲に入っているか否かを判定する(S19)。判定の結果、NOへ分岐した場合には、「心臓マッサージに改善の余地あり」と判定し、これに対応するメッセージの表示情報を表示装置40へ送出する(S20)。
【0040】
一方、上記ステップS19においてYESへ分岐すると、「現在の心臓マッサージが適当である」と判定し、これに対応するメッセージの表示情報を表示装置40へ送出する(S21)。
【0041】
以上のようにして、本実施形態では、例えば柔らかいベッドの上での心臓マッサージ実施時にあっては、剛性係数Kと粘性係数Bおよび時定数B/Kが本来の生体における剛性係数Kと粘性係数Bおよび時定数B/Kとは大きく異なることを利用し、柔らかいベッド上での心臓マッサージであることを自動的に検出することが可能である。従って、心臓マッサージに不向きなベッド上での心臓マッサージであることが検出された場合には、変位計測を抑制し、誤った情報を救助者に与えることを防ぐことができる。上記実施形態では「測定環境不適当」と表現したが、より具体的に、ベッドを変えるなどの示唆を行うようにしても良い。
更に、ベッド上での心臓マッサージであることを検出した場合には、変位に関する情報を用いず力のみによる適否判断を行うことも可能である。
【0042】
また、外乱eの大きさから、測定信頼性を通知することも可能となる。さらに、振動など圧迫に相関のない外乱eの影響を受けることなく、K、Bを求めることが可能であり、より正確指示を救助者等に与えることができる。
【符号の説明】
【0043】
10 情報取得手段 11 力センサ
12 加速度センサ 13 2階積分回路
14 1階積分回路 15 速度センサ
16 1階積分回路 17 変位センサ
18 1階微分回路 20 粘弾性推定処理モジュール
21 回帰計算モジュール 30 適否判定モジュール
40 表示装置 61 加算回路
62 補正値生成回路
【特許請求の範囲】
【請求項1】
生体における胸部圧迫時の力と変位と速度の各情報を取得する情報取得手段と、
前記情報取得手段により取得された力と変位と速度の各情報に基づき、胸部の粘弾性情報を算出する算出手段と、
前記算出手段により算出された粘弾性情報を用いて心肺蘇生術に関する評価を行う評価手段と、
前記評価手段による評価を示す出力を行う出力手段と
を具備することを特徴とする心肺蘇生術用モニタリング装置。
【請求項2】
算出手段は、粘弾性情報を次の(式1)に示すVoigt (フォークト)モデルを用いて算出することを特徴とする請求項1に記載の心肺蘇生術用モニタリング装置。
f=Kx+Bx´+e・・・(式1)
但し、f:力、x:変位、x´:速度、K:剛性係数、B:粘性係数、e:外乱
【請求項3】
算出手段は、KとBを回帰計算により求めることを特徴とする請求項2に記載の心肺蘇生術用モニタリング装置。
【請求項4】
情報取得手段は力センサと加速度センサを具備し、力センサにより力の情報を取得し、加速度センサにより得られた加速度を1階積分して速度の情報を取得し、前記加速度を2階積分して変位の情報を求めることを特徴とする請求項1乃至3のいずれか1項に記載の心肺蘇生術用モニタリング装置。
【請求項5】
情報取得手段は力センサと速度センサを具備し、力センサにより力の情報を取得し、速度センサにより速度の情報を取得し、前記速度を1階積分して変位の情報を求めることを特徴とする請求項1乃至3のいずれか1項に記載の心肺蘇生術用モニタリング装置。
【請求項6】
情報取得手段は力センサと変位センサを具備し、力センサにより力の情報を取得し、変位センサにより変位の情報を取得し、前記変位を1階微分して速度の情報を求めることを特徴とする請求項1乃至3のいずれか1項に記載の心肺蘇生術用モニタリング装置。
【請求項7】
算出手段は、粘弾性情報として、粘性係数Bと時定数B/Kの少なくとも1つを算出し、
評価手段は、算出手段により算出された上記粘弾性情報を用いると共に、剛性係数Kと外乱eの少なくとも1つを必要により用いて心肺蘇生術の適否を評価することを特徴とする請求項1乃至6のいずれか1項に記載の心肺蘇生術用モニタリング装置。
【請求項8】
算出手段は、加速度の積分により変位あるいは速度を求める際に、外乱eが最小になるよう加速度センサにより得られる信号のオフセットを補正し、加速度センサにより得られる信号に含まれる不要なオフセットの積分によるドリフトを除去することを特徴とする請求項4に記載の心肺蘇生術用モニタリング装置。
【請求項9】
オフセットを補正する際に、力が極大あるいは極小となる近傍のデータを用いることにより、力と変位の相関が最大となり、外乱eが最小になるように処理することを特徴とする請求項8に記載の心肺蘇生術用モニタリング装置。
【請求項10】
剛性K、粘性項B、時定数B/K、外乱eの少なくとも一つが所定の判定基準を超えていたときに、力のみにより心肺蘇生術の適否を評価することを特徴とする請求項7に記載の心肺蘇生術用モニタリング装置。
【請求項1】
生体における胸部圧迫時の力と変位と速度の各情報を取得する情報取得手段と、
前記情報取得手段により取得された力と変位と速度の各情報に基づき、胸部の粘弾性情報を算出する算出手段と、
前記算出手段により算出された粘弾性情報を用いて心肺蘇生術に関する評価を行う評価手段と、
前記評価手段による評価を示す出力を行う出力手段と
を具備することを特徴とする心肺蘇生術用モニタリング装置。
【請求項2】
算出手段は、粘弾性情報を次の(式1)に示すVoigt (フォークト)モデルを用いて算出することを特徴とする請求項1に記載の心肺蘇生術用モニタリング装置。
f=Kx+Bx´+e・・・(式1)
但し、f:力、x:変位、x´:速度、K:剛性係数、B:粘性係数、e:外乱
【請求項3】
算出手段は、KとBを回帰計算により求めることを特徴とする請求項2に記載の心肺蘇生術用モニタリング装置。
【請求項4】
情報取得手段は力センサと加速度センサを具備し、力センサにより力の情報を取得し、加速度センサにより得られた加速度を1階積分して速度の情報を取得し、前記加速度を2階積分して変位の情報を求めることを特徴とする請求項1乃至3のいずれか1項に記載の心肺蘇生術用モニタリング装置。
【請求項5】
情報取得手段は力センサと速度センサを具備し、力センサにより力の情報を取得し、速度センサにより速度の情報を取得し、前記速度を1階積分して変位の情報を求めることを特徴とする請求項1乃至3のいずれか1項に記載の心肺蘇生術用モニタリング装置。
【請求項6】
情報取得手段は力センサと変位センサを具備し、力センサにより力の情報を取得し、変位センサにより変位の情報を取得し、前記変位を1階微分して速度の情報を求めることを特徴とする請求項1乃至3のいずれか1項に記載の心肺蘇生術用モニタリング装置。
【請求項7】
算出手段は、粘弾性情報として、粘性係数Bと時定数B/Kの少なくとも1つを算出し、
評価手段は、算出手段により算出された上記粘弾性情報を用いると共に、剛性係数Kと外乱eの少なくとも1つを必要により用いて心肺蘇生術の適否を評価することを特徴とする請求項1乃至6のいずれか1項に記載の心肺蘇生術用モニタリング装置。
【請求項8】
算出手段は、加速度の積分により変位あるいは速度を求める際に、外乱eが最小になるよう加速度センサにより得られる信号のオフセットを補正し、加速度センサにより得られる信号に含まれる不要なオフセットの積分によるドリフトを除去することを特徴とする請求項4に記載の心肺蘇生術用モニタリング装置。
【請求項9】
オフセットを補正する際に、力が極大あるいは極小となる近傍のデータを用いることにより、力と変位の相関が最大となり、外乱eが最小になるように処理することを特徴とする請求項8に記載の心肺蘇生術用モニタリング装置。
【請求項10】
剛性K、粘性項B、時定数B/K、外乱eの少なくとも一つが所定の判定基準を超えていたときに、力のみにより心肺蘇生術の適否を評価することを特徴とする請求項7に記載の心肺蘇生術用モニタリング装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−170764(P2012−170764A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−38166(P2011−38166)
【出願日】平成23年2月24日(2011.2.24)
【出願人】(000230962)日本光電工業株式会社 (179)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月24日(2011.2.24)
【出願人】(000230962)日本光電工業株式会社 (179)
【Fターム(参考)】
[ Back to top ]