
性能を最適化した圧力制御システム
チェンバ(105)内における流体の圧力を制御する圧力制御システムは、チェンバ内における流体の圧力を測定するように構成されている圧力センサ(110)と、チェンバから流出する流体の流量を規制することによって、チェンバにおける流体の圧力を制御するように構成されている弁(120)とを含む。圧力制御システムは、更に、コントローラ(140)も含む。コントローラは、チェンバの容積を推定し、弁の圧出速度曲線を発生するように構成されている。更に、コントローラは、圧出速度曲線の傾きを少なくとも最小値に維持するように、圧出速度曲線を監視し修正し、チェンバにおける圧力を所望の圧力設定点に維持するように、圧力センサによる圧力測定に応答して、弁の位置を調節するために、修正した圧出速度曲線を用いるように構成されている。
【発明の詳細な説明】
【背景技術】
【0001】
半導体処理のような用途では、圧力制御システムを用いて、チェンバ内の圧力を制御する場合がある。通例用いられる圧力制御弁には、振り子弁、バタフライ弁、およびスロットル弁が含まれるが、これらに限定されるものではない。
【0002】
これらの弁は、異なる制御アルゴリズムを用いるコントローラによって制御される場合がある。即ち、圧力設定点軌道に基づいて弁を制御するモデル主導制御アルゴリズム(model-based control algorithm)を用いて、弁位置に対する補償を行い、実際の圧力が圧力設定点軌跡を辿ることを確保することができる。弁コントローラがモデル主導制御アルゴリズムを用いる場合、圧力制御性能を最適化するためには、種々のシステム・パラメータが分かっていなければならない場合がある。限定ではないが、これらのシステム・パラメータには、圧力を制御している流体を封鎖するチェンバの容積、およびシステムの圧出速度(弁によって制御する)を弁位置の関数として描く、弁の圧出速度曲線を含むとよい。
【0003】
圧力制御システムでは、通例、エンド・ユーザが手作業でチェンバの容積を入力しなければいけない場合もある。しかしながら、ユーザはチェンバ容積の正確な値を知らない場合もある。不正確なチェンバ容積がユーザによって入力されると、圧力制御性能が悪化する虞れがある。静定時間の延長、およびオーバーシュートまたはアンダーシュートの増加を含む、最適でない圧力制御性能が生ずる可能性がある。
【0004】
弁コントローラは、既存のアルゴリズムを修正せずに用いて、実際の圧出速度曲線を収集することがあるが、そのために、圧出速度曲線がゼロ付近で傾きを有する結果となる場合がある。ゼロ付近に傾きが生ずると、弁運動コントローラの帯域幅を大きくしなければならないこともあり得る。しかしながら、弁運動コントローラの実際の帯域幅は制限されており、不適当な発振応答が生ずる虞れがある。
【発明の開示】
【発明が解決しようとする課題】
【0005】
したがって、適正なチェンバ容積を推定し、圧出速度曲線を最適化して圧力制御性能を改善するシステムおよび方法が求められている。
【課題を解決するための手段】
【0006】
チェンバ内における流体の圧力を制御する圧力制御システムは、チェンバ内における流体の圧力を測定するように構成されている圧力センサと、チェンバから流出する流体の流量を規制することによって、チェンバにおける流体の圧力を制御するように構成されている弁とを含む。圧力制御システムは、更に、コントローラも含む。コントローラは、チェンバの容積を推定し、弁の圧出速度曲線を発生するように構成されている。更に、コントローラは、圧出速度曲線の傾きを少なくとも最小値に維持するように、圧出速度曲線を監視し修正し、チェンバにおける圧力を所望の圧力設定点に維持するように、圧力センサによる圧力測定に応答して、弁の位置を調節するために、修正した圧出速度曲線を用いるように構成されている。
【0007】
チェンバにおける圧力を制御する圧力制御弁について記載する。チェンバにおける圧力を所望の圧力設定点に維持するために必要な最小値に、圧出速度曲線の傾きを少なくとも維持するように、弁の圧出速度曲線がコントローラによって調節可能とすることができる。
【0008】
チェンバ内における流体の圧力を制御する圧力制御システムの性能を最適化する方法について記載する。圧力制御システムは、チェンバ内における流体の圧力を測定するように構成されている圧力センサと、チェンバから流出する流体の流量を規制することによって、チェンバにおける流体の圧力を制御するように構成されている弁と、弁のコントローラとを含む。この方法は、更に、チェンバの容積を推定するステップと、推定した容積を、弁の複数の位置において圧力センサが取り込んだ圧力測定値と共に用いて、圧出速度曲線を発生するステップとを含むことができる。更に、この方法は、圧出速度曲線の傾きが計算した最小値を有するように、圧出速度曲線を修正するステップを含むことができる。更に、この方法は、チェンバにおける圧力を所望の圧力設定点に維持するために必要に応じて弁の位置を調節するために修正した圧出速度曲線を用いるステップも含むことができる。
【発明を実施するための最良の形態】
【0009】
圧力制御システムの圧力制御性能を最適化する。チェンバの容積を正確に推定し、圧力制御弁の圧出速度曲線を修正し、ゼロ付近の傾きを最小傾き値に増大させる。
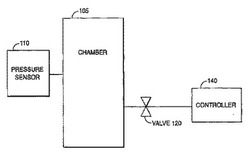
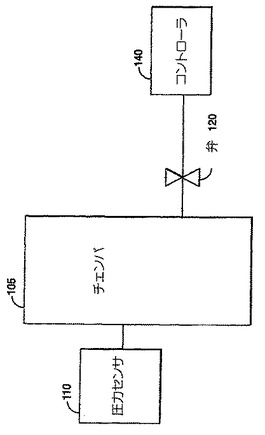
図1は、チェンバ105における流体の圧力を制御する圧力制御システムの一実施形態の模式図である。概略的には、圧力制御システム100は、チェンバ105における流体の圧力を測定するように構成されている圧力センサ110、チェンバ105からの流体の流量を規制することによって、チェンバ105における流体の圧力を制御するように構成されている弁120、および弁120のコントローラ140を含む。弁120は、弁位置を変化させることによって、即ち、全閉位置(最小流体スループット)および全開位置(最大流体スループット)の間で移動することによって、チェンバ105からの流体の流量を規制する。圧出システム(図示せず)が、流体を弁を通じてチェンバ105から圧出することができる。
【0010】
多くの異なる種類の圧力制御弁を用いることができ、限定ではなく、振り子弁、バタフライ弁、およびスロットル弁を含む。振り子弁については、例えば、"Pendulum Valve Assembly"(振り子弁構造体)と題する米国特許第6,776,394号に記載されている。この特許は、本願と同じ譲受人が所有し、ここで引用したことによりその内容全体が本願にも含まれるものとする。
【0011】
コントローラ140は、圧力制御システム100の圧力制御性能を最適化するように構成されており、その際、1)チェンバ105の容積を正確に推定し、2)弁120の圧出速度曲線を発生し、3)圧出速度曲線を最適化する。即ち、コントローラ140は、チェンバ内の圧力を所望の圧力設定点に維持するために必要な圧出速度曲線の最小傾きの値を計算するように構成されている。コントローラ140は、その最小傾き位置に圧出速度曲線の傾きを維持するように、圧出速度曲線を監視し修正する。
【0012】
圧出速度曲線は、弁のスループットを、弁の位置、即ち、弁開度の関数として図示する。通例、弁はゲート型弁とするとよく、その場合、弁ゲートの位置は、記号Θi、i=1,...maxで表すことができ、Θ1は弁の全閉位置を表し、Θmaxは弁の全開位置を表す。
【0013】
圧出速度曲線の細目は、システム毎に変化する可能性がある。例えば、圧出速度曲線は、用いるポンプが大きいかまたは小さいかによって変化する可能性がある。通例、圧力制御システムは学習機能を提供し、これによって顧客は、弁が当該システムに特定の圧出速度曲線を発生するように、制御システムを稼動させる前にコマンドを発行することができる。
容積の推定
圧力制御システムにおいて、ユーザが手作業でチェンバ容積を入力しなければならない場合、ユーザがチェンバ容積を知らないと性能が低下する虞れがあり、更にチェンバ容積はチェンバと弁との間配管容積も含み、不正確な予測が行われる。圧力制御システム100はこの問題を回避するにあたり、前述の学習機能を必要とせずに、チェンバ105における圧力動力学に基づいてチェンバ容積を正確に推定する。
【0014】
最初に、コントローラ140は、閉鎖位置(Θ=Θ1)にある弁を用いて容積Vを計算する。何故なら、閉鎖位置における圧出速度(即ち、弁が制御するシステムの圧出速度)C(Θ1)は既知の値であるからである。C(Θ1)は、一例として、機械的設計および許容度のような、設計によって決定される。C(Θ1)は、通例、小さな非ゼロ値(軟閉鎖弁)を有する。あるいは、C(Θ1)はゼロであってもよい(硬密閉弁)。次いで、コントローラ140は、チェンバ105における圧力動力学を記述する方程式を用いて、圧出速度が分かっていない他の弁位置(Θi、i=1,...,max)について容積を計算する。即ち、チェンバ容積は、以下のように記述した圧力動力学に基づいて推定することができる。
【0015】
【数1】

【0016】
ここで、Pはチェンバにおける流体の圧力(例えば、単位はTorr)を示す。
dP/dtは、圧力の時間微分を示す。
Vは、チャンバの容積を示す。
【0017】
Qiは、チェンバに流入する流体の質量流量を示す。
Θは、弁の位置を示し、弁を全閉したときのΘ=Θ1から弁を全開したときのΘ=Θmaxまでの範囲を取る。
【0018】
C(Θ)は、弁の位置Θの関数として圧出速度(例えば、単位はリットル/秒)を示す。
C(Θ)*Pは、チェンバから流出する流体の質量流量を示す。
【0019】
コントローラ140は、圧力の時間微分dP/dtの代わりに離散時間間隔Δtにおける圧力差分ΔPを用いることによって、圧力動力学方程式を近似する。ここで、ΔP=Pn−Pn−1、Pn=時点tnにおいて圧力センサが測定した圧力、Pn−1=時点tn−1において圧力センサが測定した圧力、そしてΔt=tn−tn−1である。
【0020】
コントローラ140は、近似式を用いて容積Vを推定する。このとき、弁の全閉位置における弁の圧出速度の既知値C(Θ1)を、圧力センサが供給する圧力測定値PnおよびPn−1と共に用い、以下の式に応じて容積を計算する。
【0021】
【数2】
【0022】
上の式において、下付き文字nは、n番目の時点において取り込んだ読み取り値に対応する。前述の容積推定は、Δt=100刻みでデータ・サンプルを取って平均化すると、一層正確にすることができる。10ms刻みの20個のデータ・サンプルでは、これは、差をP11−P1、P12−P2等として計算することを意味する。
圧出速度曲線の発生
推定したチェンバ容積を用いて、コントローラ140は弁120の圧出速度曲線を発生することができる。最初に、弁120を全開位置に移動させて、チャンバにおける圧力を安定させるとよい。次いで、ゲートを全閉位置に移動させればよい。即ち、弁位置は0%開放となる。この初期位置において、コントローラ140は、弁を閉じたチェンバにおいて圧力が上昇するに連れて、圧力センサに、複数の(例えば、11個の)圧力測定値を取り込ませる。圧力データを格納する。
【0023】
次いで、ゲートを徐々に移動させればよい。例えば、最初にゲートを1%刻みで20%まで、次いで2%刻み、更に5%および10%刻みで移動させるとよい。勿論、多くの異なる刻み幅で弁位置を移動させることができる。つまり、ゲート弁は全閉位置から全開位置まで移動する。各弁位置において、圧力が動的に変化していくに連れて、圧力センサは圧力データを取り込む。次いで、圧力データをメモリに格納する。
【0024】
次いで、コントローラ140は各弁位置Θiにおいて圧出速度C(Θi)を計算することによって、実際の圧出速度曲線を発生することができる。即ち、コントローラ140は、複数の時点tn(n=1,...N)の各々において初力測定値Pn(n=1,...N)を圧力センサに発生させ、次いで各時点tnにおいて、以下に示す式を用いて、tnにおける圧出速度C(Θi)nを計算することによって、Θi毎にC(Θi)を計算するように構成することができる。
【0025】
【数3】
【0026】
最後に、コントローラは、N個全ての時点tn(n=1,...N)の圧出速度の値を平均して、次のようにC(Θi)を求めることができる。
【0027】
【数4】
【0028】
圧出速度曲線の修正
弁圧出速度曲線を求めた後、コントローラ140は、圧出速度曲線を修正して、圧力制御システム100による圧力制御性能を最適化することができる。即ち、コントローラ140は圧出速度曲線を修正して、軟閉(即ちゼロ付近C(Θ1))圧出速度の最小値を保証し、更に制御性能を一層高めるために最小曲線傾きを保証することができる。
【0029】
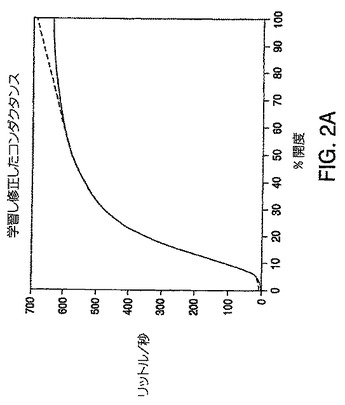
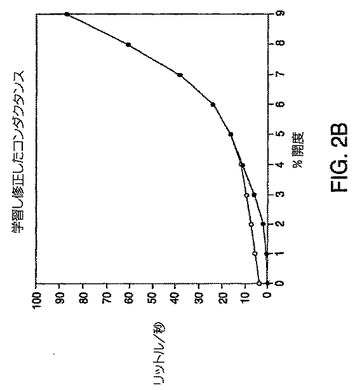
図2Aおよび図2Bは、本開示に記載したシステムおよび方法の一実施形態にしたがって修正した弁圧出速度曲線を示す。
通例、弁の位置が全閉位置から全開位置まで進む際、圧出速度曲線は単調に変化する、単調増加曲線となるはずである。しかしながら、ポンプの限界またはその他の測定の不正確さのために、圧出速度曲線が実際には飽和して、ゼロ付近傾きに対してほぼ水平にまでなる場合もある。
【0030】
コントローラ140は、特定のモデル主導制御アルゴリズムによって決定した圧力設定点にある圧力値が得られる弁の位置を計算するように構成されている。通例、エンド・ユーザは圧力設定点を設定し、コントローラ140は、実際の圧力がエンド・ユーザによって設定された圧力設定点と一致するように、弁の位置を調節する。
【0031】
ゲート弁を移動させる速度には実用上の制限がある。これらの制限には、モータが生成可能な最大トルク、およびゲートの重量を含むことができるが、これらに限定されるのではない。これらの制限のために、圧力制御システムが偶然にむしろ平坦な圧出速度曲線の領域で動作することになると、満足のいく性能が得られない虞れがある。弁は、単に前後に移動し、ある定常位置に到達しようとするが、弁の移動に必要な帯域幅は、弁が辛うじて移動できる幅よりも広いので、不達に終わる。
【0032】
これらの問題を克服するために、コントローラ140は、圧出速度曲線の傾きを少なくとも、コントローラ140が計算する最小傾き値に増加させることによって、圧出速度曲線を修正する。圧出速度曲線の傾斜を増加させることによって、弁が圧力設定点に近づくに連れて、その動きを一層円滑かつ緩やかにする。
【0033】
曲線が水平になると、圧出速度の非常に小さい変化であっても、巨大な弁移動に変換され、弁がオーバーシュートする原因となる。ゲートは遥かに多く移動し過ぎることになり、圧力は圧力設定点を中心に発振する虞れがある。大型の弁が過度に移動しようとすると、同様および振動が生ずる可能性がある。
【0034】
なんらかの傾きを曲線に導入することによって、弁の速度が抑えられるので、ゲートの移動を減少させることができる。その結果、遥かに安定性が向上した制御を達成することができる。前述の最小傾き規準を適用した後、コントローラ140は、修正した圧出速度曲線をメモリに保存することができる。
【0035】
一実施形態では、コントローラ140は、圧出速度曲線の最小傾きを計算することができ、これは全開および全閉における2つの圧出速度の差に比例すると考えられる。コントローラ140は、最小傾きmminを次の式を用いて計算することができる。
【0036】
【数5】
【0037】
上の式において、係数kは、経験的係数とすればよく、圧力制御システムの既存の帯域幅に関係があると考えられる。
次いで、コントローラ140は、曲線の傾きが、コントローラ140が前述のように計算した最小傾きよりも大きいか否か、弁圧出速度の0%値および100%値に基づいてチェックする。逐次進んで行き、コントローラ140は圧出速度曲線の傾きを検証する。傾きが最小傾きよりも大きい場合、曲線を修正しない。傾きの方が小さい場合、その点における傾きを増加させるように曲線を修正する。
【0038】
言い換えると、位置Θi毎に、コントローラ140は圧出速度C(Θi)を既知の値C(Θ1)と比較することができ、C(Θi)がC(Θ1)よりも小さい場合、C(Θi)=C(Θ1)と設定する。ここで、iはi=1からi=maxまでの範囲を取る。
【0039】
位置Θi毎に、コントローラ140はその位置における圧出速度曲線の傾きを計算することができる。ここで、iはi=2からi=maxまでの範囲を取る。計算した傾きが最小値mminよりも小さい場合、C(Θi)=C(Θi−1)+mmin*(Θi−Θi−1)と設定する。圧出速度曲線の傾き(slope)は、以下の式を用いて計算することができる。
【0040】
【数6】
【0041】
圧力設定点を固定してもよい。その場合、圧力制御システムは定常状態で動作する。定常状態では、傾斜が急な程、弁の移動を少なくすることができ、効果的となることもある。
【0042】
あるいは、所望の圧力設定点を可変としてもよい。その場合、圧力制御システムは、設定点が変化するに連れて、チェンバにおける流体の圧力の過渡応答を監視することができる。この場合、傾きが急過ぎると、圧力制御システムが遅くなる可能性がある。
【0043】
要約すれば、チェンバ内における流体の圧力を制御する圧力制御システムの性能の最適化について記載した。チェンバの容積を推定し、推定した容積を、弁の複数の位置において取り込んだ圧力測定値と共に用いて、弁の圧出速度曲線を発生する。弁速度曲線の傾きの最小値を計算する。これは、所望の圧力設定点にチェンバ内の圧力を維持するのに必要となる。圧出速度曲線を監視し、圧出速度曲線の傾きを少なくとも最小値に維持するように修正する。これによって、圧力制御性能を安定化し最適化する。
【0044】
以上、圧力コントローラの圧力制御性能を最適化するシステムおよび方法のある種の実施形態について説明したが、これらの実施形態において暗示される概念は、他の実施形態においても同様に用いられることは言うまでもない。本願の保護は、以下に続く特許請求の範囲のみに限定されるものとする。
【0045】
これらの特許請求の範囲において、単数とした要素に言及する場合、具体的にそのように述べられていない限り、「1つのみ」を意味することを意図しているのではなく、「1つ以上」を意味するものとする。本開示全体を通じて記載されている種々の実施形態の要素と構造的および機能的に等価であり、当業者には周知であるまたは今後周知になる要素は、ここで引用したことにより、明示的に本願にも含まれるものとし、特許請求の範囲に包含されることを意図する。更に、ここに開示したいずれもが、かかる開示が明示的に特許請求の範囲に明記されているか否かには係わらず、公衆(the public)に献呈されることは意図していない。いずれの特許請求の範囲の要素も、当該要素が「するための手段」という句を用いて明示的に明記されていなければ、または方法の請求項の場合、当該要素が「するためのステップ」という句を用いて明記されていなければ、35U.S.C.§112、第6節の規定にしたがって解釈しないこととする。
【図面の簡単な説明】
【0046】
【図1】図1は、圧力制御システムの一実施形態の模式図である。
【図2A】図2Aは、本開示において記載するシステムおよび方法の一実施形態にしたがって修正した弁圧出速度曲線を示す。
【図2B】図2Bは、本開示において記載するシステムおよび方法の一実施形態にしたがって修正した弁圧出速度曲線を示す。
【背景技術】
【0001】
半導体処理のような用途では、圧力制御システムを用いて、チェンバ内の圧力を制御する場合がある。通例用いられる圧力制御弁には、振り子弁、バタフライ弁、およびスロットル弁が含まれるが、これらに限定されるものではない。
【0002】
これらの弁は、異なる制御アルゴリズムを用いるコントローラによって制御される場合がある。即ち、圧力設定点軌道に基づいて弁を制御するモデル主導制御アルゴリズム(model-based control algorithm)を用いて、弁位置に対する補償を行い、実際の圧力が圧力設定点軌跡を辿ることを確保することができる。弁コントローラがモデル主導制御アルゴリズムを用いる場合、圧力制御性能を最適化するためには、種々のシステム・パラメータが分かっていなければならない場合がある。限定ではないが、これらのシステム・パラメータには、圧力を制御している流体を封鎖するチェンバの容積、およびシステムの圧出速度(弁によって制御する)を弁位置の関数として描く、弁の圧出速度曲線を含むとよい。
【0003】
圧力制御システムでは、通例、エンド・ユーザが手作業でチェンバの容積を入力しなければいけない場合もある。しかしながら、ユーザはチェンバ容積の正確な値を知らない場合もある。不正確なチェンバ容積がユーザによって入力されると、圧力制御性能が悪化する虞れがある。静定時間の延長、およびオーバーシュートまたはアンダーシュートの増加を含む、最適でない圧力制御性能が生ずる可能性がある。
【0004】
弁コントローラは、既存のアルゴリズムを修正せずに用いて、実際の圧出速度曲線を収集することがあるが、そのために、圧出速度曲線がゼロ付近で傾きを有する結果となる場合がある。ゼロ付近に傾きが生ずると、弁運動コントローラの帯域幅を大きくしなければならないこともあり得る。しかしながら、弁運動コントローラの実際の帯域幅は制限されており、不適当な発振応答が生ずる虞れがある。
【発明の開示】
【発明が解決しようとする課題】
【0005】
したがって、適正なチェンバ容積を推定し、圧出速度曲線を最適化して圧力制御性能を改善するシステムおよび方法が求められている。
【課題を解決するための手段】
【0006】
チェンバ内における流体の圧力を制御する圧力制御システムは、チェンバ内における流体の圧力を測定するように構成されている圧力センサと、チェンバから流出する流体の流量を規制することによって、チェンバにおける流体の圧力を制御するように構成されている弁とを含む。圧力制御システムは、更に、コントローラも含む。コントローラは、チェンバの容積を推定し、弁の圧出速度曲線を発生するように構成されている。更に、コントローラは、圧出速度曲線の傾きを少なくとも最小値に維持するように、圧出速度曲線を監視し修正し、チェンバにおける圧力を所望の圧力設定点に維持するように、圧力センサによる圧力測定に応答して、弁の位置を調節するために、修正した圧出速度曲線を用いるように構成されている。
【0007】
チェンバにおける圧力を制御する圧力制御弁について記載する。チェンバにおける圧力を所望の圧力設定点に維持するために必要な最小値に、圧出速度曲線の傾きを少なくとも維持するように、弁の圧出速度曲線がコントローラによって調節可能とすることができる。
【0008】
チェンバ内における流体の圧力を制御する圧力制御システムの性能を最適化する方法について記載する。圧力制御システムは、チェンバ内における流体の圧力を測定するように構成されている圧力センサと、チェンバから流出する流体の流量を規制することによって、チェンバにおける流体の圧力を制御するように構成されている弁と、弁のコントローラとを含む。この方法は、更に、チェンバの容積を推定するステップと、推定した容積を、弁の複数の位置において圧力センサが取り込んだ圧力測定値と共に用いて、圧出速度曲線を発生するステップとを含むことができる。更に、この方法は、圧出速度曲線の傾きが計算した最小値を有するように、圧出速度曲線を修正するステップを含むことができる。更に、この方法は、チェンバにおける圧力を所望の圧力設定点に維持するために必要に応じて弁の位置を調節するために修正した圧出速度曲線を用いるステップも含むことができる。
【発明を実施するための最良の形態】
【0009】
圧力制御システムの圧力制御性能を最適化する。チェンバの容積を正確に推定し、圧力制御弁の圧出速度曲線を修正し、ゼロ付近の傾きを最小傾き値に増大させる。
図1は、チェンバ105における流体の圧力を制御する圧力制御システムの一実施形態の模式図である。概略的には、圧力制御システム100は、チェンバ105における流体の圧力を測定するように構成されている圧力センサ110、チェンバ105からの流体の流量を規制することによって、チェンバ105における流体の圧力を制御するように構成されている弁120、および弁120のコントローラ140を含む。弁120は、弁位置を変化させることによって、即ち、全閉位置(最小流体スループット)および全開位置(最大流体スループット)の間で移動することによって、チェンバ105からの流体の流量を規制する。圧出システム(図示せず)が、流体を弁を通じてチェンバ105から圧出することができる。
【0010】
多くの異なる種類の圧力制御弁を用いることができ、限定ではなく、振り子弁、バタフライ弁、およびスロットル弁を含む。振り子弁については、例えば、"Pendulum Valve Assembly"(振り子弁構造体)と題する米国特許第6,776,394号に記載されている。この特許は、本願と同じ譲受人が所有し、ここで引用したことによりその内容全体が本願にも含まれるものとする。
【0011】
コントローラ140は、圧力制御システム100の圧力制御性能を最適化するように構成されており、その際、1)チェンバ105の容積を正確に推定し、2)弁120の圧出速度曲線を発生し、3)圧出速度曲線を最適化する。即ち、コントローラ140は、チェンバ内の圧力を所望の圧力設定点に維持するために必要な圧出速度曲線の最小傾きの値を計算するように構成されている。コントローラ140は、その最小傾き位置に圧出速度曲線の傾きを維持するように、圧出速度曲線を監視し修正する。
【0012】
圧出速度曲線は、弁のスループットを、弁の位置、即ち、弁開度の関数として図示する。通例、弁はゲート型弁とするとよく、その場合、弁ゲートの位置は、記号Θi、i=1,...maxで表すことができ、Θ1は弁の全閉位置を表し、Θmaxは弁の全開位置を表す。
【0013】
圧出速度曲線の細目は、システム毎に変化する可能性がある。例えば、圧出速度曲線は、用いるポンプが大きいかまたは小さいかによって変化する可能性がある。通例、圧力制御システムは学習機能を提供し、これによって顧客は、弁が当該システムに特定の圧出速度曲線を発生するように、制御システムを稼動させる前にコマンドを発行することができる。
容積の推定
圧力制御システムにおいて、ユーザが手作業でチェンバ容積を入力しなければならない場合、ユーザがチェンバ容積を知らないと性能が低下する虞れがあり、更にチェンバ容積はチェンバと弁との間配管容積も含み、不正確な予測が行われる。圧力制御システム100はこの問題を回避するにあたり、前述の学習機能を必要とせずに、チェンバ105における圧力動力学に基づいてチェンバ容積を正確に推定する。
【0014】
最初に、コントローラ140は、閉鎖位置(Θ=Θ1)にある弁を用いて容積Vを計算する。何故なら、閉鎖位置における圧出速度(即ち、弁が制御するシステムの圧出速度)C(Θ1)は既知の値であるからである。C(Θ1)は、一例として、機械的設計および許容度のような、設計によって決定される。C(Θ1)は、通例、小さな非ゼロ値(軟閉鎖弁)を有する。あるいは、C(Θ1)はゼロであってもよい(硬密閉弁)。次いで、コントローラ140は、チェンバ105における圧力動力学を記述する方程式を用いて、圧出速度が分かっていない他の弁位置(Θi、i=1,...,max)について容積を計算する。即ち、チェンバ容積は、以下のように記述した圧力動力学に基づいて推定することができる。
【0015】
【数1】
【0016】
ここで、Pはチェンバにおける流体の圧力(例えば、単位はTorr)を示す。
dP/dtは、圧力の時間微分を示す。
Vは、チャンバの容積を示す。
【0017】
Qiは、チェンバに流入する流体の質量流量を示す。
Θは、弁の位置を示し、弁を全閉したときのΘ=Θ1から弁を全開したときのΘ=Θmaxまでの範囲を取る。
【0018】
C(Θ)は、弁の位置Θの関数として圧出速度(例えば、単位はリットル/秒)を示す。
C(Θ)*Pは、チェンバから流出する流体の質量流量を示す。
【0019】
コントローラ140は、圧力の時間微分dP/dtの代わりに離散時間間隔Δtにおける圧力差分ΔPを用いることによって、圧力動力学方程式を近似する。ここで、ΔP=Pn−Pn−1、Pn=時点tnにおいて圧力センサが測定した圧力、Pn−1=時点tn−1において圧力センサが測定した圧力、そしてΔt=tn−tn−1である。
【0020】
コントローラ140は、近似式を用いて容積Vを推定する。このとき、弁の全閉位置における弁の圧出速度の既知値C(Θ1)を、圧力センサが供給する圧力測定値PnおよびPn−1と共に用い、以下の式に応じて容積を計算する。
【0021】
【数2】
【0022】
上の式において、下付き文字nは、n番目の時点において取り込んだ読み取り値に対応する。前述の容積推定は、Δt=100刻みでデータ・サンプルを取って平均化すると、一層正確にすることができる。10ms刻みの20個のデータ・サンプルでは、これは、差をP11−P1、P12−P2等として計算することを意味する。
圧出速度曲線の発生
推定したチェンバ容積を用いて、コントローラ140は弁120の圧出速度曲線を発生することができる。最初に、弁120を全開位置に移動させて、チャンバにおける圧力を安定させるとよい。次いで、ゲートを全閉位置に移動させればよい。即ち、弁位置は0%開放となる。この初期位置において、コントローラ140は、弁を閉じたチェンバにおいて圧力が上昇するに連れて、圧力センサに、複数の(例えば、11個の)圧力測定値を取り込ませる。圧力データを格納する。
【0023】
次いで、ゲートを徐々に移動させればよい。例えば、最初にゲートを1%刻みで20%まで、次いで2%刻み、更に5%および10%刻みで移動させるとよい。勿論、多くの異なる刻み幅で弁位置を移動させることができる。つまり、ゲート弁は全閉位置から全開位置まで移動する。各弁位置において、圧力が動的に変化していくに連れて、圧力センサは圧力データを取り込む。次いで、圧力データをメモリに格納する。
【0024】
次いで、コントローラ140は各弁位置Θiにおいて圧出速度C(Θi)を計算することによって、実際の圧出速度曲線を発生することができる。即ち、コントローラ140は、複数の時点tn(n=1,...N)の各々において初力測定値Pn(n=1,...N)を圧力センサに発生させ、次いで各時点tnにおいて、以下に示す式を用いて、tnにおける圧出速度C(Θi)nを計算することによって、Θi毎にC(Θi)を計算するように構成することができる。
【0025】
【数3】
【0026】
最後に、コントローラは、N個全ての時点tn(n=1,...N)の圧出速度の値を平均して、次のようにC(Θi)を求めることができる。
【0027】
【数4】
【0028】
圧出速度曲線の修正
弁圧出速度曲線を求めた後、コントローラ140は、圧出速度曲線を修正して、圧力制御システム100による圧力制御性能を最適化することができる。即ち、コントローラ140は圧出速度曲線を修正して、軟閉(即ちゼロ付近C(Θ1))圧出速度の最小値を保証し、更に制御性能を一層高めるために最小曲線傾きを保証することができる。
【0029】
図2Aおよび図2Bは、本開示に記載したシステムおよび方法の一実施形態にしたがって修正した弁圧出速度曲線を示す。
通例、弁の位置が全閉位置から全開位置まで進む際、圧出速度曲線は単調に変化する、単調増加曲線となるはずである。しかしながら、ポンプの限界またはその他の測定の不正確さのために、圧出速度曲線が実際には飽和して、ゼロ付近傾きに対してほぼ水平にまでなる場合もある。
【0030】
コントローラ140は、特定のモデル主導制御アルゴリズムによって決定した圧力設定点にある圧力値が得られる弁の位置を計算するように構成されている。通例、エンド・ユーザは圧力設定点を設定し、コントローラ140は、実際の圧力がエンド・ユーザによって設定された圧力設定点と一致するように、弁の位置を調節する。
【0031】
ゲート弁を移動させる速度には実用上の制限がある。これらの制限には、モータが生成可能な最大トルク、およびゲートの重量を含むことができるが、これらに限定されるのではない。これらの制限のために、圧力制御システムが偶然にむしろ平坦な圧出速度曲線の領域で動作することになると、満足のいく性能が得られない虞れがある。弁は、単に前後に移動し、ある定常位置に到達しようとするが、弁の移動に必要な帯域幅は、弁が辛うじて移動できる幅よりも広いので、不達に終わる。
【0032】
これらの問題を克服するために、コントローラ140は、圧出速度曲線の傾きを少なくとも、コントローラ140が計算する最小傾き値に増加させることによって、圧出速度曲線を修正する。圧出速度曲線の傾斜を増加させることによって、弁が圧力設定点に近づくに連れて、その動きを一層円滑かつ緩やかにする。
【0033】
曲線が水平になると、圧出速度の非常に小さい変化であっても、巨大な弁移動に変換され、弁がオーバーシュートする原因となる。ゲートは遥かに多く移動し過ぎることになり、圧力は圧力設定点を中心に発振する虞れがある。大型の弁が過度に移動しようとすると、同様および振動が生ずる可能性がある。
【0034】
なんらかの傾きを曲線に導入することによって、弁の速度が抑えられるので、ゲートの移動を減少させることができる。その結果、遥かに安定性が向上した制御を達成することができる。前述の最小傾き規準を適用した後、コントローラ140は、修正した圧出速度曲線をメモリに保存することができる。
【0035】
一実施形態では、コントローラ140は、圧出速度曲線の最小傾きを計算することができ、これは全開および全閉における2つの圧出速度の差に比例すると考えられる。コントローラ140は、最小傾きmminを次の式を用いて計算することができる。
【0036】
【数5】
【0037】
上の式において、係数kは、経験的係数とすればよく、圧力制御システムの既存の帯域幅に関係があると考えられる。
次いで、コントローラ140は、曲線の傾きが、コントローラ140が前述のように計算した最小傾きよりも大きいか否か、弁圧出速度の0%値および100%値に基づいてチェックする。逐次進んで行き、コントローラ140は圧出速度曲線の傾きを検証する。傾きが最小傾きよりも大きい場合、曲線を修正しない。傾きの方が小さい場合、その点における傾きを増加させるように曲線を修正する。
【0038】
言い換えると、位置Θi毎に、コントローラ140は圧出速度C(Θi)を既知の値C(Θ1)と比較することができ、C(Θi)がC(Θ1)よりも小さい場合、C(Θi)=C(Θ1)と設定する。ここで、iはi=1からi=maxまでの範囲を取る。
【0039】
位置Θi毎に、コントローラ140はその位置における圧出速度曲線の傾きを計算することができる。ここで、iはi=2からi=maxまでの範囲を取る。計算した傾きが最小値mminよりも小さい場合、C(Θi)=C(Θi−1)+mmin*(Θi−Θi−1)と設定する。圧出速度曲線の傾き(slope)は、以下の式を用いて計算することができる。
【0040】
【数6】
【0041】
圧力設定点を固定してもよい。その場合、圧力制御システムは定常状態で動作する。定常状態では、傾斜が急な程、弁の移動を少なくすることができ、効果的となることもある。
【0042】
あるいは、所望の圧力設定点を可変としてもよい。その場合、圧力制御システムは、設定点が変化するに連れて、チェンバにおける流体の圧力の過渡応答を監視することができる。この場合、傾きが急過ぎると、圧力制御システムが遅くなる可能性がある。
【0043】
要約すれば、チェンバ内における流体の圧力を制御する圧力制御システムの性能の最適化について記載した。チェンバの容積を推定し、推定した容積を、弁の複数の位置において取り込んだ圧力測定値と共に用いて、弁の圧出速度曲線を発生する。弁速度曲線の傾きの最小値を計算する。これは、所望の圧力設定点にチェンバ内の圧力を維持するのに必要となる。圧出速度曲線を監視し、圧出速度曲線の傾きを少なくとも最小値に維持するように修正する。これによって、圧力制御性能を安定化し最適化する。
【0044】
以上、圧力コントローラの圧力制御性能を最適化するシステムおよび方法のある種の実施形態について説明したが、これらの実施形態において暗示される概念は、他の実施形態においても同様に用いられることは言うまでもない。本願の保護は、以下に続く特許請求の範囲のみに限定されるものとする。
【0045】
これらの特許請求の範囲において、単数とした要素に言及する場合、具体的にそのように述べられていない限り、「1つのみ」を意味することを意図しているのではなく、「1つ以上」を意味するものとする。本開示全体を通じて記載されている種々の実施形態の要素と構造的および機能的に等価であり、当業者には周知であるまたは今後周知になる要素は、ここで引用したことにより、明示的に本願にも含まれるものとし、特許請求の範囲に包含されることを意図する。更に、ここに開示したいずれもが、かかる開示が明示的に特許請求の範囲に明記されているか否かには係わらず、公衆(the public)に献呈されることは意図していない。いずれの特許請求の範囲の要素も、当該要素が「するための手段」という句を用いて明示的に明記されていなければ、または方法の請求項の場合、当該要素が「するためのステップ」という句を用いて明記されていなければ、35U.S.C.§112、第6節の規定にしたがって解釈しないこととする。
【図面の簡単な説明】
【0046】
【図1】図1は、圧力制御システムの一実施形態の模式図である。
【図2A】図2Aは、本開示において記載するシステムおよび方法の一実施形態にしたがって修正した弁圧出速度曲線を示す。
【図2B】図2Bは、本開示において記載するシステムおよび方法の一実施形態にしたがって修正した弁圧出速度曲線を示す。
【特許請求の範囲】
【請求項1】
チェンバ内における流体の圧力を制御する圧力制御システムであって、
前記チェンバ内における流体の圧力を測定するように構成されている圧力センサと、
前記チェンバから流出する流体の流量を規制することによって、前記チェンバにおける流体の圧力を制御するように構成されている弁と、
前記弁の圧出速度曲線を発生し、前記圧出速度曲線の傾きを少なくとも最小値に維持するように、前記圧出速度曲線を監視し修正するように構成されているコントローラであって、更に、前記チェンバにおける圧力を所望の圧力設定点に維持するように、前記圧力センサによる圧力測定に応答して、前記弁の位置を調節するために、前記修正した圧出速度曲線を用いるように構成されている、コントローラと、
を備えている、圧力制御システム。
【請求項2】
請求項1記載の圧力制御システムにおいて、
前記圧出速度曲線は、前記弁によって、当該弁の位置Θの関数として制御される、前記システムの圧出速度Cを示し、
前記コントローラは、更に、前記チェンバの容積を推定し、該推定した容積を、前記弁の複数の位置において前記圧力センサが取り込んだ圧力測定値と共に用いて、前記圧出速度曲線を発生するように構成されている、圧力制御システム。
【請求項3】
前記コントローラは、更に、前記チェンバにおける圧力動力学に基づいて、前記チェンバの容積を推定するように構成されており、前記圧力動力学は、
【数1】
によって記述され、
ここで、Pはチェンバにおける流体の圧力(例えば、単位はTorr)を示し、
dP/dtは、圧力の時間微分を示し、
Vは、チャンバの容積を示し、
Qiは、チェンバに流入する流体の質量流量を示し、
Θは、弁の位置を示し、弁を全閉したときのΘ=Θ1から弁を全開したときのΘ=Θmaxまでの範囲を取る。
C(Θ)は、弁の位置Θの関数として圧出速度(例えば、単位はリットル/秒)を示し、
C(Θ)*Pは、チェンバから流出する流体の質量流量を示す、圧力制御システム。
【請求項4】
請求項3記載の圧力制御システムにおいて、
前記コントローラは、更に、圧力の時間微分dP/dtの代わりに離散時間間隔Δtにおける圧力差分ΔPを用いることによって、圧力動力学方程式を近似し、ここで、ΔP=Pn−Pn−1、Pn=時点tnにおいて圧力センサが測定した圧力、Pn−1=時点tn−1において圧力センサが測定した圧力、そしてΔt=tn−tn−1であり、
前記コントローラは、更に、前記弁の全閉位置における前記弁の圧出速度の既知値C(Θ1)を、前記圧力センサが供給する圧力測定値PnおよびPn−1と共に用い、以下の式に応じて容積Vを計算する、圧力制御システム。
【数2】
【請求項5】
請求項4記載の圧力制御システムにおいて、
前記コントローラは、更に、
複数の弁位置Θi(i=1,...max)の各々に前記弁を位置づけ、Θ1は弁の全閉位置を表し、Θmaxは弁の全開位置を表し、
弁位置Θi毎に、前記圧出速度C(Θi)を当該弁位置において計算することによって前記圧出速度曲線を発生するように構成されている、圧力制御システム。
【請求項6】
請求項5記載の圧力制御システムにおいて、前記コントローラは、
前記圧力センサに、複数Nの時点tn(n=1,...N)の各々において、圧力測定値Pn(n=1,...N)を発生させ、
各時点tnにおいて、
【数3】
によって示される式を用いて、tnにおける圧出速度C(Θi)nの値を計算し、
前記時点tn(n=1,...N)の全てNの圧出速度の値を平均することによって、
Θi毎に、
【数4】
で示されるC(Θi)を計算するように構成されている、圧力制御システム。
【請求項7】
請求項1記載の圧力制御システムにおいて、前記コントローラは、更に、前記チェンバ内の圧力を前記所望の圧力設定.に維持するために必要な前記圧出速度曲線の最小値を計算するように構成されている、圧力制御システム。
【請求項8】
請求項7記載の圧力制御システムにおいて、前記コントローラは、更に、
【数5】
で示される式を用いて、前記傾きの最小値を計算するように構成されており、kは経験的係数である、圧力制御システム。
【請求項9】
請求項8記載の圧力制御システムにおいて、前記コントローラは、更に、
位置Θi毎に、圧出速度C(Θi)を既知の値C(Θ1)と比較し、C(Θi)がC(Θ1)よりも小さい場合、C(Θi)=C(Θ1)と設定し、iはi=1からi=maxまでの範囲を取り、
位置Θi毎に、当該位置における圧出速度曲線の傾きを計算し、iはi=2からi=maxまでの範囲を取り、計算した傾きが最小値mminよりも小さい場合、C(Θi)=C(Θi−1)+mmin*(Θi−Θi−1)と設定し、
圧出速度曲線の傾き(slope)は、以下の式を用いて計算する、
【数6】
ことによって前記圧出速度曲線を監視し修正するように構成されている、圧力制御システム。
【請求項10】
請求項4記載の圧力制御システムにおいて、C(Θ1)の既知の値はゼロである、圧力制御システム。
【請求項11】
請求項4記載の圧力制御システムにおいて、C(Θ1)の既知の値は非ゼロである、圧力制御システム。
【請求項12】
請求項1記載の圧力制御システムにおいて、前記所望の圧力設定点を固定し、前記圧力制御システムは前記圧力設定点に追従する、圧力制御システム。
【請求項13】
請求項1記載の圧力制御システムにおいて、前記所望の圧力設定点は可変であり、前記圧力制御システムは前記圧力設定点に追従する、圧力制御システム。
【請求項14】
チェンバにおける圧力を制御する圧力制御弁であって、前記チェンバにおける圧力を所望の圧力設定点に維持するために必要な最小値に、圧出速度曲線の傾きを少なくとも維持するように、前記弁の圧出速度曲線がコントローラによって調節可能である、圧力制御弁。
【請求項15】
チェンバ内における流体の圧力を制御する圧力制御システムの性能を最適化する方法であって、前記圧力制御システムは、前記チェンバ内における流体の圧力を測定するように構成されている圧力センサと、前記チェンバから流出する流体の流量を規制することによって、前記チェンバにおける流体の圧力を制御するように構成されている弁と、前記弁のコントローラとを含み、
前記チェンバの容積を推定するステップと、
前記推定した容積を、前記弁の複数の位置において前記圧力センサが取り込んだ圧力測定値と共に用いて、前記圧出速度曲線を発生するステップと、
前記圧出速度曲線の傾きが計算した最小値を有するように、前記圧出速度曲線を修正するステップと、
前記チェンバにおける圧力を所望の圧力設定点に維持するために必要に応じて前記弁の位置を調節するために前記修正した圧出速度曲線を用いるステップと、
を備えている、方法。
【請求項1】
チェンバ内における流体の圧力を制御する圧力制御システムであって、
前記チェンバ内における流体の圧力を測定するように構成されている圧力センサと、
前記チェンバから流出する流体の流量を規制することによって、前記チェンバにおける流体の圧力を制御するように構成されている弁と、
前記弁の圧出速度曲線を発生し、前記圧出速度曲線の傾きを少なくとも最小値に維持するように、前記圧出速度曲線を監視し修正するように構成されているコントローラであって、更に、前記チェンバにおける圧力を所望の圧力設定点に維持するように、前記圧力センサによる圧力測定に応答して、前記弁の位置を調節するために、前記修正した圧出速度曲線を用いるように構成されている、コントローラと、
を備えている、圧力制御システム。
【請求項2】
請求項1記載の圧力制御システムにおいて、
前記圧出速度曲線は、前記弁によって、当該弁の位置Θの関数として制御される、前記システムの圧出速度Cを示し、
前記コントローラは、更に、前記チェンバの容積を推定し、該推定した容積を、前記弁の複数の位置において前記圧力センサが取り込んだ圧力測定値と共に用いて、前記圧出速度曲線を発生するように構成されている、圧力制御システム。
【請求項3】
前記コントローラは、更に、前記チェンバにおける圧力動力学に基づいて、前記チェンバの容積を推定するように構成されており、前記圧力動力学は、
【数1】
によって記述され、
ここで、Pはチェンバにおける流体の圧力(例えば、単位はTorr)を示し、
dP/dtは、圧力の時間微分を示し、
Vは、チャンバの容積を示し、
Qiは、チェンバに流入する流体の質量流量を示し、
Θは、弁の位置を示し、弁を全閉したときのΘ=Θ1から弁を全開したときのΘ=Θmaxまでの範囲を取る。
C(Θ)は、弁の位置Θの関数として圧出速度(例えば、単位はリットル/秒)を示し、
C(Θ)*Pは、チェンバから流出する流体の質量流量を示す、圧力制御システム。
【請求項4】
請求項3記載の圧力制御システムにおいて、
前記コントローラは、更に、圧力の時間微分dP/dtの代わりに離散時間間隔Δtにおける圧力差分ΔPを用いることによって、圧力動力学方程式を近似し、ここで、ΔP=Pn−Pn−1、Pn=時点tnにおいて圧力センサが測定した圧力、Pn−1=時点tn−1において圧力センサが測定した圧力、そしてΔt=tn−tn−1であり、
前記コントローラは、更に、前記弁の全閉位置における前記弁の圧出速度の既知値C(Θ1)を、前記圧力センサが供給する圧力測定値PnおよびPn−1と共に用い、以下の式に応じて容積Vを計算する、圧力制御システム。
【数2】
【請求項5】
請求項4記載の圧力制御システムにおいて、
前記コントローラは、更に、
複数の弁位置Θi(i=1,...max)の各々に前記弁を位置づけ、Θ1は弁の全閉位置を表し、Θmaxは弁の全開位置を表し、
弁位置Θi毎に、前記圧出速度C(Θi)を当該弁位置において計算することによって前記圧出速度曲線を発生するように構成されている、圧力制御システム。
【請求項6】
請求項5記載の圧力制御システムにおいて、前記コントローラは、
前記圧力センサに、複数Nの時点tn(n=1,...N)の各々において、圧力測定値Pn(n=1,...N)を発生させ、
各時点tnにおいて、
【数3】
によって示される式を用いて、tnにおける圧出速度C(Θi)nの値を計算し、
前記時点tn(n=1,...N)の全てNの圧出速度の値を平均することによって、
Θi毎に、
【数4】
で示されるC(Θi)を計算するように構成されている、圧力制御システム。
【請求項7】
請求項1記載の圧力制御システムにおいて、前記コントローラは、更に、前記チェンバ内の圧力を前記所望の圧力設定.に維持するために必要な前記圧出速度曲線の最小値を計算するように構成されている、圧力制御システム。
【請求項8】
請求項7記載の圧力制御システムにおいて、前記コントローラは、更に、
【数5】
で示される式を用いて、前記傾きの最小値を計算するように構成されており、kは経験的係数である、圧力制御システム。
【請求項9】
請求項8記載の圧力制御システムにおいて、前記コントローラは、更に、
位置Θi毎に、圧出速度C(Θi)を既知の値C(Θ1)と比較し、C(Θi)がC(Θ1)よりも小さい場合、C(Θi)=C(Θ1)と設定し、iはi=1からi=maxまでの範囲を取り、
位置Θi毎に、当該位置における圧出速度曲線の傾きを計算し、iはi=2からi=maxまでの範囲を取り、計算した傾きが最小値mminよりも小さい場合、C(Θi)=C(Θi−1)+mmin*(Θi−Θi−1)と設定し、
圧出速度曲線の傾き(slope)は、以下の式を用いて計算する、
【数6】
ことによって前記圧出速度曲線を監視し修正するように構成されている、圧力制御システム。
【請求項10】
請求項4記載の圧力制御システムにおいて、C(Θ1)の既知の値はゼロである、圧力制御システム。
【請求項11】
請求項4記載の圧力制御システムにおいて、C(Θ1)の既知の値は非ゼロである、圧力制御システム。
【請求項12】
請求項1記載の圧力制御システムにおいて、前記所望の圧力設定点を固定し、前記圧力制御システムは前記圧力設定点に追従する、圧力制御システム。
【請求項13】
請求項1記載の圧力制御システムにおいて、前記所望の圧力設定点は可変であり、前記圧力制御システムは前記圧力設定点に追従する、圧力制御システム。
【請求項14】
チェンバにおける圧力を制御する圧力制御弁であって、前記チェンバにおける圧力を所望の圧力設定点に維持するために必要な最小値に、圧出速度曲線の傾きを少なくとも維持するように、前記弁の圧出速度曲線がコントローラによって調節可能である、圧力制御弁。
【請求項15】
チェンバ内における流体の圧力を制御する圧力制御システムの性能を最適化する方法であって、前記圧力制御システムは、前記チェンバ内における流体の圧力を測定するように構成されている圧力センサと、前記チェンバから流出する流体の流量を規制することによって、前記チェンバにおける流体の圧力を制御するように構成されている弁と、前記弁のコントローラとを含み、
前記チェンバの容積を推定するステップと、
前記推定した容積を、前記弁の複数の位置において前記圧力センサが取り込んだ圧力測定値と共に用いて、前記圧出速度曲線を発生するステップと、
前記圧出速度曲線の傾きが計算した最小値を有するように、前記圧出速度曲線を修正するステップと、
前記チェンバにおける圧力を所望の圧力設定点に維持するために必要に応じて前記弁の位置を調節するために前記修正した圧出速度曲線を用いるステップと、
を備えている、方法。
【図1】

【図2A】
【図2B】
【図2A】
【図2B】
【公表番号】特表2009−530737(P2009−530737A)
【公表日】平成21年8月27日(2009.8.27)
【国際特許分類】
【出願番号】特願2009−501421(P2009−501421)
【出願日】平成19年2月12日(2007.2.12)
【国際出願番号】PCT/US2007/003851
【国際公開番号】WO2007/108871
【国際公開日】平成19年9月27日(2007.9.27)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
【公表日】平成21年8月27日(2009.8.27)
【国際特許分類】
【出願日】平成19年2月12日(2007.2.12)
【国際出願番号】PCT/US2007/003851
【国際公開番号】WO2007/108871
【国際公開日】平成19年9月27日(2007.9.27)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
[ Back to top ]