
性能線表示装置
【課題】吊荷を実際にどの位置まで移動させることができるかを把握することのできる性能線表示装置を提供する。
【解決手段】車体に旋回自在に設置された旋回台と、この旋回台に起伏自在に設置された伸縮可能なブームとを有するクレーンにおいて、前記ブームの先端近傍に取り付けられる吊荷監視カメラ30と、この吊荷監視カメラ30によって撮像された画像を表示するモニタ33とを備えた性能線表示装置であって、クレーンの性能線を、この性能線に対応するモニタ33の画像の位置に重ねて表示する。
【解決手段】車体に旋回自在に設置された旋回台と、この旋回台に起伏自在に設置された伸縮可能なブームとを有するクレーンにおいて、前記ブームの先端近傍に取り付けられる吊荷監視カメラ30と、この吊荷監視カメラ30によって撮像された画像を表示するモニタ33とを備えた性能線表示装置であって、クレーンの性能線を、この性能線に対応するモニタ33の画像の位置に重ねて表示する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、クレーンのブームの先端近傍に取り付けた撮像手段で撮影した画像に、クレーンの性能線を重ねて表示する性能線表示装置に関する。
【背景技術】
【0002】
従来から、クレーン機械装置の周辺を撮影するカメラを設け、このカメラが撮影した画像にブーム先端部の移動範囲を示すガイドラインを重ねて表示するカメラシステムが知られている(特許文献1参照)。
【0003】
また、ブームの旋回中心位置を中心にして安定区間と不安定区間とを表示装置に表示するクレーンの安全装置が知られている(特許文献2参照)。
【0004】
前者のカメラシステムは、現在のブームの長さのとき、このときの起伏角度でブームが旋回運動した場合、そのブームの先端部が描く円の半径を求め、この半径に基づいて円の世界座標系上における位置を求め、この円の位置をカメラの撮像面の座標系に投影変換し、この投影変換した円をガイドラインとして表示装置の撮影画像上に重ねて表示するものである。
【0005】
そして、表示装置に表示されるガイドラインよりクレーン機械装置側に近い領域が安全確認領域となり、オペレータが安全確認領域内に障害物があるか否かを注視してブームの旋回操作を行うものである。
【0006】
後者のクレーンの安全装置は、表示画面にクレーンの旋回中心と、各アウトリガジャッキの位置と、各吊り上げ荷重Wに応じた限界作業領域とを表示するものである。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2008−312004号公報
【特許文献2】特公平8−29917号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
前者のカメラシステムにあっては、現在のブームの長さで現在の起伏角度のときの吊荷の移動範囲を示すものであるから、ブームを伸長させたときや起伏角度を小さくしたときに、クレーンの限界性能内でどこまで吊荷を移動させることができるか否かが分からないという問題がある。
【0009】
また、後者のクレーンの安全装置にあっては、クレーンの旋回中心位置と、この旋回中心位置を中心にした限界作業ラインとを表示画面に表示するだけなので、実際に撮影した画像上で吊荷をどの位置まで移動させることができるかどうかを把握することができないという問題がある。
【0010】
この発明の目的は、撮影した画像上で吊荷を実際にどの位置まで移動させることができるかを把握することのできる性能線表示装置を提供することにある。
【課題を解決するための手段】
【0011】
請求項1の発明は、 車体に旋回自在に設置された旋回台と、この旋回台に起伏自在に設置された伸縮可能なブームとを有するクレーンにおいて、前記ブームの先端近傍に取り付けられる撮像手段と、この撮像手段によって撮像された画像を表示する表示部とを備えた性能線表示装置であって、
クレーンの吊荷最大性能に関わる性能線を前記表示部の画像に重ねて表示することを特徴とする。
【発明の効果】
【0012】
この発明によれば、撮像手段によって撮像された画像に、クレーンの性能線を対応した画像の位置に重ねて表示するものであるから、吊荷を実際にどの位置まで移動させることができるかを把握することができる。
【図面の簡単な説明】
【0013】
【図1】この発明に係る性能線表示装置を搭載した移動式クレーンを示した側面図である。
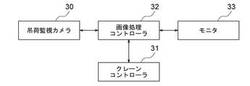
【図2】性能線表示装置の構成を示したブロック図である。
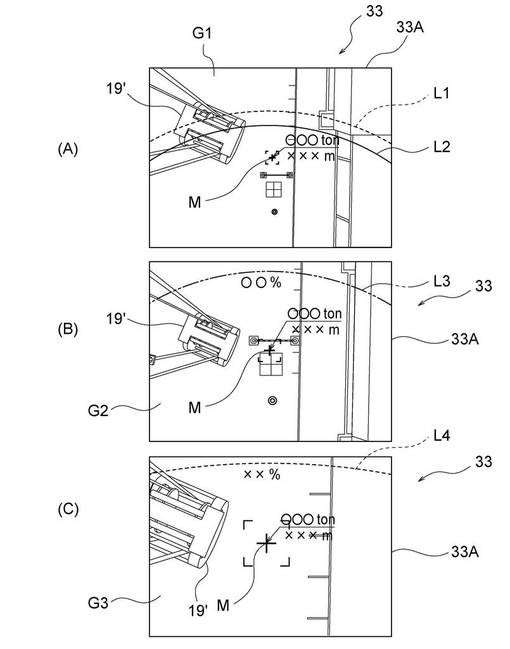
【図3】(A)は撮像した撮像画像に限界性能線を重畳してモニタに表示した画像の説明図、(B),(C)は撮像画像に表示できる最大作業半径を示す性能線を示した説明図である。
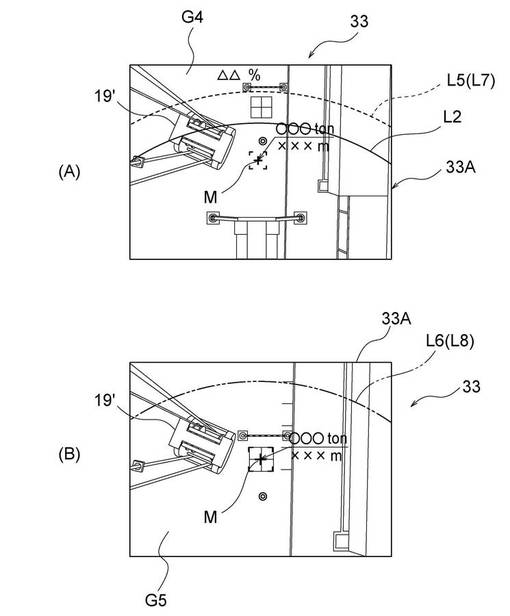
【図4】(A)は撮像した撮像画像に最大作業半径の性能線を重畳してモニタに表示した画像の説明図、(B)は撮像画像に表示できる最大作業半径を示す性能線を示した説明図である。
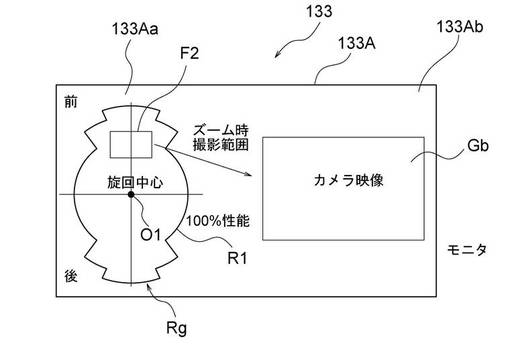
【図5】第2実施例のモニタの画面を示した説明図である。
【図6】第2実施例のモニタの画面の他の例を示した説明図である。
【図7】第2実施例のモニタの画面の他の例の表示方法を示した説明図である。
【図8】限界性能線と構造物との関係を示した説明図である。
【図9】構造物上で限界性能線を補正して表示した画面を示した説明図である。
【図10】(A)は吊荷がない場合の第3実施例のモニタの画面を示した説明図、(B)は吊荷がない場合の第3実施例のモニタの画面の他の例を示した説明図である。
【図11】(A)は吊荷がある場合の第3実施例のモニタの画面を示した説明図、(B)は吊荷がある場合の第3実施例のモニタの画面の他の例を示した説明図である。
【発明を実施するための最良の形態】
【0014】
以下、この発明に係る性能線表示装置の実施の形態である実施例を図面に基づいて説明する。
【実施例】
【0015】
[第1実施例]
図1に性能線表示装置を搭載したクレーンとしてラフテレーンクレーン10を示す。このラフテレーンクレーン10は、走行機能を有する車両の本体部分となるキャリア11と、このキャリア11の前側に設けられた左右一対の前側アウトリガ12と、キャリア11の後側に設けられた左右一対の後側アウトリガ13と、キャリア11の上部に水平旋回可能に取り付けられた旋回台14と、旋回台14に設けたキャビン20と、旋回台14に固定されたブラケット15に取り付けられた伸縮ブーム16等とを備えている。
【0016】
伸縮ブーム16は、その基端部が支持軸17を介して取り付けられており、支持軸17を中心に起伏可能となっている。ブラケット15と伸縮ブーム16との間には起伏用シリンダ18が介装され、この起伏用シリンダ18の伸縮により伸縮ブーム16が起伏される。
【0017】
伸縮ブーム16は、ベースブーム16Aと中間ブーム16Bと先端ブーム16Cとを有し、この順序でベースブーム16A内に外側から内側に入れ子式に組み合わされて構成されている。また、伸縮ブーム16は伸縮シリンダ(図示せず)によって伸縮するようになっている。
【0018】
先端ブーム16Cの先端部にはシーブ(図示せず)が設けられており、このシーブにワイヤWが掛けられ、このワイヤWによってフックブロック19が吊されている。フックブロック19にはフック21が取り付けられている。
【0019】
ワイヤWは、図示しないウインチによって巻き取られたり、送り出されたりする。
【0020】
先端ブーム16Cの先端部には、TVカメラなどの吊荷監視カメラ(撮像手段)30が真下に向けて取り付けられており、この吊荷監視カメラ30はチルト方向とパン方向へ垂直軸線に対して任意の角度に傾斜可能となっている。吊荷監視カメラ30の傾斜(向き)はキャビン20内に設けた操作部(図示せず)によって行われる。吊荷監視カメラ30の傾斜角度は、チルト角検出センサS1とパン角検出センサS2とで検出する。
【0021】
図2は、ラフテレーンクレーン10の制御系の構成を示したブロック図である。
【0022】
図2において、31はクレーンコントローラであり、このクレーンコントローラ31は、キャビン20内に設けた操作部(図示せず)の操作に基づいて各アウトリガ12,13の張出や旋回台14の旋回や伸縮ブーム16の伸縮や伸縮ブーム16の起伏などの各種の制御を行う。
【0023】
32は画像処理コントローラであり、この画像処理コントローラ32は、クレーン10が吊荷を吊っている場合、クレーンコントローラ31が取得する実荷重に基づいて伸縮ブーム16の先端部が移動できる限界性能線を求める。この限界性能線は、伸縮ブーム16の旋回中心を中心にした最大作業半径の領域を示すものである。
【0024】
また、画像処理コントローラ32は、クレーン10が吊荷を吊っていない場合、クレーンコントローラ31が取得する伸縮ブーム16の長さで吊荷の移動可能な最大作業半径を求め、この最大作業半径の領域を示す曲線を性能線として求めたり、入力される仮想荷重における最大作業半径とこの最大作業半径の領域を示す曲線を性能線として求めたりする。仮想荷重の入力はキャビン20内に設けられた操作部のキー操作によって入力する。
【0025】
なお、クレーン10の性能線は、クレーン10の吊荷限界性能線に対して一定の割合となる領域を線として示すものであり、前述したもの以外の線も含まれる。
【0026】
クレーンコントローラ31は、起伏シリンダの圧力センサ(図示せず)によって検出されるシリンダ圧力とブーム起伏角度とブーム長さとに基づいて吊荷の実荷重を算出したり、各アウトリガ張出センサ(図示せず)の検出信号と実荷重などとに基づいてクレーンに対する限界性能線や性能線等の位置を算出する。
【0027】
さらに、画像処理コントローラ32は、クレーンコントローラ31が算出した位置に基づいて吊荷監視カメラ30が撮像した画像に、求めた限界性能線や性能線を重ねてモニタ33の画面(表示部)33A(図3参照)に表示する。
【0028】
そして、吊荷監視カメラ30と画像処理コントローラ32とモニタ33とで性能線表示装置が構成される。
[動 作]
次に、上記のように構成される性能線表示装置の動作について説明する。
[吊荷のある場合]
先ず、ラフテレーンクレーン10が吊荷を吊っている場合について説明する。
【0029】
吊荷を吊っている場合、ラフテレーンクレーン10のクレーンコントローラ31が吊荷の実荷重を求める。また、吊荷監視カメラ30がその吊荷を吊っているフックブロック19に向けて上方から撮像する。この撮像画像G1が図3(A)に示すようにモニタ33の画面33Aに表示される。
【0030】
画像処理コントローラ32は、クレーンコントローラ31が取得する実荷重とアウトリガ張出センサが検出する各一対のアウトリガ12,13のそれぞれの張出量とに基づいて、伸縮ブーム16の旋回中心を中心にした最大作業半径をその中心回りに求めていく。すなわち、最大作業半径の領域を示す曲線(境界線)を限界性能線L1として求める。この限界性能線L1の位置を、旋回中心を原点として求める。
【0031】
また、画像処理コントローラ32は、吊荷監視カメラ30のズーム倍率、チルトやパン、吊荷監視カメラ30の高さ位置とに基づいて、旋回中心を原点にして撮像されている地面の範囲の各位置(座標位置)を求める。吊荷監視カメラ30の高さ位置は、クレーンコントローラ31が取得する伸縮ブーム16の長さと起伏角度とに基づいて求める。伸縮ブーム16の長さは図示しないブーム長センサが検出する検出出力によって、伸縮ブーム16の起伏角度は図示しないブーム角センサが検出する検出出力によってクレーンコントローラ31がそれぞれ求める。
【0032】
画像処理コントローラ32は、図3(A)に示すように、求めた限界性能線L1を対応した撮像画像G1の位置に重ねて表示する。つまり、限界性能線L1の位置と撮像画像G1の座標位置とを一致させて限界性能線L1と撮像画像G1とを重ねて表示するものである。限界性能線L1は例えば赤色の線で表示する。また、画面33Aには、実荷重の値と最大作業半径の値も表示する。なお、前述の実荷重の値に変えて現作業姿勢における実負荷率を表示してもよい。また、19′は撮像されたフックブロック像である。
【0033】
このように、モニタ33の画面33Aに表示される撮像画像G1は実画像なので、限界性能線L1の実際の位置を把握することができ、吊荷を移動させることのできる実際の範囲を確認することができる。このため、伸縮ブーム16の操作が行い易いものとなる。
【0034】
また、吊り上げている荷物を目標位置まで移動させることができるか否かが分かることになる。
【0035】
画像処理コントローラ32は、90%の負荷率の性能線L2を求め、上記と同様にして撮像画像G1に重ねて表示する。性能線L2は例えば黄色の線で表示する。この性能線L2の表示により、安全領域の範囲が明確となり、伸縮ブーム16の操作が行い易くなる。
【0036】
モニタ33の画面33Aには、性能線L1,L2の他に吊荷の実荷重や伸縮ブーム16の現在の長さやフックの真下の地面上の位置を示す+字マークM1なども表示する。このため、伸縮ブーム16の操作がさらに行い易いものとなる。
【0037】
伸縮ブーム16の起伏角度や吊荷監視カメラ30のズーム倍率などによって、モニタ33の画面33Aに限界性能線L1が表示されない場合、すなわち、モニタ33の画面33A外に限界性能線L1が位置してしまう場合、図3(B),(C)に示すように、画面33A内の画像G2,G3に表示できる作業半径(モニタ33に表示できる最大の画像よりも少し小さい画像枠に接する半径)を性能線L3,L4として表示し、この性能線L3,L4の負荷率を表示する。この性能線L3,L4の負荷率が例えば90%未満であれば緑色の線で表示する。
【0038】
モニタ33の画面33Aを拡大した場合や吊荷監視カメラ30をパンやチルトさせた場合、画面33Aに限界性能線L1が表示されなくなっても性能線L3,L4が表示されるので、吊荷の性能線L3,L4の状態を把握することができる。
[吊荷のない場合]
ラフテレーンクレーン10が吊荷を吊っていない場合、画像処理コントローラ32は、いま現在の伸縮ブーム16の長さでの旋回中心を中心にした最大作業半径と、この最大作業半径の円(境界線)を性能線L5として求める。この性能線L5の位置は上記と同様に旋回中心を原点として求める。なお、吊荷監視カメラ30は、フックブロック19に向けて上方から撮像し、この撮像画像G4が図4(A)に示すようにモニタ33の画面33Aに表示されているとする。
【0039】
画像処理コントローラ32は、求めた性能線L5の位置と撮像画像G4の座標位置とを一致させて性能線L5と撮像画像G4とを重ねて、図4(A)に示すようにモニタ33の画面33Aに表示する。この場合、性能線L5を例えば赤線で表示し、最大作業半径の値と、この最大作業半径で吊すことが可能な最大荷重の値とを表示する。
【0040】
また、画像処理コントローラ32は、その最大荷重における90%の負荷率の性能線L5aを求め、この性能線L5aを上記と同様にして表示する。
【0041】
オペレータは、このモニタ33の画面33Aに表示されている撮像画像G4と性能線L5とから、吊荷を吊り上げる前に、吊荷の移動範囲が一目で分かり、しかも撮影画像G4が実画像なので、実際にどの位置まで吊荷を移動させることができるかが分かる。
【0042】
伸縮ブーム16の起伏角度や吊荷監視カメラ30のズーム倍率などによって、モニタ30の画面33Aに性能線L5が表示されない場合、図4(B)に示すように、画面33A内の画像G5に表示できる作業半径(モニタ33に表示できる最大の画像よりも少し小さい画像枠に接する半径)を性能線L6として画像G5に重ねて表示し、この性能線L6の負荷率を表示する。この性能線L6の負荷率が例えば90%未満であれば緑色の線で表示する。また、その最大作業半径と、この最大作業半径で吊すことのできる最大荷重の値も表示する。
【0043】
このため、モニタ33の画面33Aを拡大した場合や吊荷監視カメラ30をパンやチルトさせた場合に、画面33Aに性能線L5が表示されなくなっても性能線L6が表示されるので、吊荷を吊り上げる前に吊荷の性能線L6の状態を把握することができる。
【0044】
なお、前述の図4(B)の表示の場合、画面33内に表示できる作業半径とその作業半径で吊り上げることができる最大荷重を表示してもよい。
[仮想荷重の入力]
吊荷がない場合にキャビン20内に設けた操作部を操作して仮想荷重を入力すると、画像処理コントローラ32は、この仮想荷重における最大作業半径を求める。
【0045】
画像処理コントローラ32は、入力された仮想荷重と各アウトリガ張出センサが検出する各アウトリガ12,13のそれぞれの張出量とに基づいて、伸縮ブーム16の旋回中心を中心にした最大作業半径をその中心回りに求めていく。すなわち、最大作業半径の領域を示す曲線(境界線)を限界性能線L7として求める。この限界性能線L7の位置を、旋回中心を原点として求める。
【0046】
そして、画像処理コントローラ32は、求めた限界性能線L7の位置と撮像画像G4の座標位置とを一致させて限界性能線L7と撮像画像G4とを重ねて、図4(A)に示すようにモニタ33の画面33Aに表示する。
【0047】
オペレータは、このモニタ33の画面33Aに表示されている撮像画像G4と性能線L7とから、吊荷を吊り上げなくても吊荷の実際の移動範囲を把握することができる。
【0048】
伸縮ブーム36の起伏角度や吊荷監視カメラ30のズーム倍率などによって、モニタ33の画面33Aに限界性能線L7が表示されない場合、図4(B)に示すように、画面33A内に表示できる作業半径(モニタ33に表示できる最大の画像よりも少し小さい画像枠に接する半径)を性能線L8として表示し、この性能線L8の負荷率を表示する。
【0049】
このため、モニタ33の画面33Aを拡大した場合や吊荷監視カメラ30をパンやチルトさせた場合に、画面33Aに限界性能線L7が表示されなくなっても性能線L8が表示されるので、吊荷を吊り上げる前に吊荷の性能線L8の状態を把握することができる。
[第2実施例]
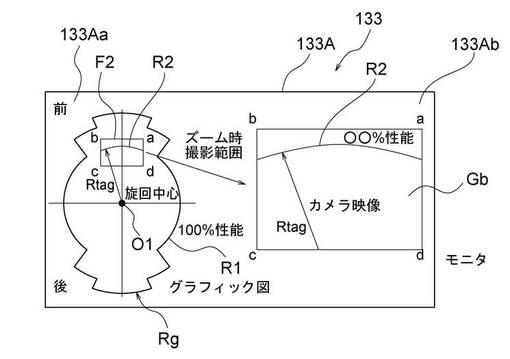
図5は第2実施例のモニタ133の画面133Aを示す。この第2実施例では、実荷重と各アウトリガ12,13の張出量とに基づいて、実荷重における最大作業半径の領域を示す限界性能線R1を求め、クレーン10の旋回中心O1を原点にした限界性能線R1を示すグラフィック画像Rgを画面133Aの左側画面133Aaにグラフィック表示し、画面133Aの右側画面133Abに吊荷監視カメラ30で撮像した画像Gaを表示する。
【0050】
また、グラフィック画像Rgに重ねて、吊荷監視カメラ30で撮像している撮像範囲の位置を示す撮像枠F1を表示する。
【0051】
この撮像枠F1内にある限界性能線R1aを、この限界性能線R1aの位置に対応する画像Gaの位置に重ねて表示する。
【0052】
この第2実施例によれば、限界性能線R1のうちどの部分の範囲を撮像しているかが分かり、伸縮ブーム16を旋回させる前に、旋回予定位置において限界性能線R1を越えてしまうか否かを予測することができる。
【0053】
図6は、吊荷監視カメラ30の撮像範囲すなわち撮像枠F2が限界性能線R1の内側にある場合を示す。この状態では、吊荷監視カメラ30で撮像した画像Gbには、限界性能線R1が表示されないことになる。
【0054】
この場合には、図7に示すように、画像Gb内に表示できる作業半径(ほぼ最大作業半径)を性能線R2として画像Gb上に表示し、この性能線R2の負荷率を画像Gb上に表示する。
【0055】
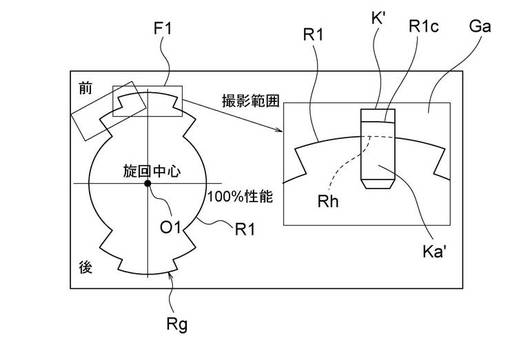
図8は、限界性能線R1上の位置に構造物Kがある場合を示す。この構造物Kの上面Kaに限界性能線R1を引くと、R1bで示すようになる。
【0056】
一方、吊荷監視カメラ30でこの構造物Kが撮像されて、図9に示すように、画像Gaに構造物像K′が表示されると、この構造物像K′の上面Ka′に破線で示すように、限界性能線Rhが表示されることになる。しかし、この限界性能線Rhが表示される位置は、図8に示すように、構造物Kの底面の位置を示すものであり、実際の限界性能線を示す位置R1bから構造物Kの高さに応じた分だけずれていることになる。
【0057】
そこで、この実施例では、構造物Kの高さに応じた分だけ、限界性能線Rhの位置を補正して、実線で示す位置に限界性能線R1cを表示する。この補正は、構造物Kの高さが高くなるにつれて、旋回中心位置から離れるように補正する。
【0058】
構造物Kが地面より低くなっている場合には、その低さすなわち深さに応じてその補正は逆となる。
【0059】
このように、構造物Kの高さや低さ(深さ)に応じた分だけ限界性能線Rhの位置を補正して表示するので、構造物Kの高さや低さ(深さ)に拘わらず限界性能線R1,Rhの位置を正しく分かることになる。
【0060】
なお、構造物Kの高さは、ブーム先端にレーザ距離センサを取り付け、撮像された画像領域をレーザでスキャンして撮像した画像中の構造物Kの高さを求め、あるいはステレオカメラを用いてその構造物Kの高さを求め、これら高さから上記の補正を行えばよい。
[第3実施例]
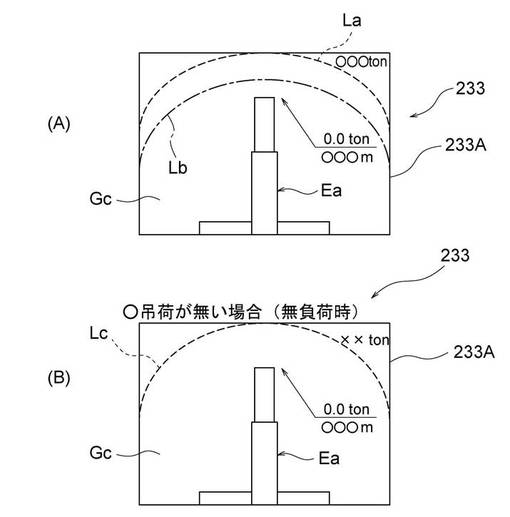
図10は第3実施例のモニタ233の画面233Aを示す。この第3実施例では、吊荷監視カメラ30で撮像した画像Gcにブームを示すグラフィック画像Eaとを重ねてモニタ233の画面233Aに表示するようにしたものである。
[吊荷のない場合]
吊荷がない場合、モニタ233の画面233Aには、図10(A)に示すように、現在の伸縮ブーム16の長さで移動させることのできる最大作業半径の領域を示す限界性能線Laと、その最大作業半径で吊すことのできる最大吊荷荷重と、この最大吊荷荷重に対して90%の負荷率を示す90%性能線Lbを画像Gcに重畳させて表示する。また、画面233Aには、吊荷を吊っていないので「00ton」の表示と、伸縮ブーム16の現在の長さとを表示する。
【0061】
この画面233Aにより、吊荷を吊り上げなくても吊荷の移動範囲を把握することができる。
【0062】
最大作業半径をモニタ233の画面233Aに表示できない場合、すなわち、撮像されている画像Gb外に最大作業半径が位置している場合、図10(B)に示すように、その画像Gb内に表示できる最大作業半径と、この最大作業半径の性能線Lcと、この最大作業半径で吊すことのできる最大吊荷荷重とを表示する。
【0063】
画面233Aに限界性能線Laが表示されなくなっても性能線Lcが表示されるので、吊荷を吊り上げる前に吊荷の性能線Lcの状態を把握することができる。
[吊荷のある場合]
吊荷がある場合、図11(A)に示すように、現在の伸縮ブーム16の長さで移動させることのできる最大作業半径(100%限界性能線)Ldと、90%性能線Leとを画像Gcに重畳させて表示する。また、吊荷の実荷重と、伸縮ブーム16の現在の長さとを表示する。
【0064】
100%限界性能線Ldが画像Gc上に表示できない場合、図11(B)に示すように、その画像Gc内に表示できる最大作業半径と、その最大作業半径の領域を示す性能線Lfと、この最大作業半径の負荷率を表示する。
【0065】
この第3実施例も第1実施例と同様な効果を得ることができる。
【0066】
この実施例では、ブームを示すグラフィック画像Eaの長さは固定されているが、実際の伸縮ブーム16の長さに応じてグラフィック画像Eaの長さを変えるようにしてもよい。
【0067】
上記実施例は、いずれもクレーンに対する限界性能線や性能線等の位置の算出をクレーンコントローラ31で行っているが、画像処理コントローラ32で算出してもよい。
【0068】
この発明は、上記実施例に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【符号の説明】
【0069】
11 キャリア(車体)
14 旋回台
16 伸縮ブーム
30 吊荷監視カメラ(撮像手段)
32 画像処理コントローラ
33 モニタ
33A 画面(表示部)
L1 限界性能線(性能線)
L2 性能線
【技術分野】
【0001】
この発明は、クレーンのブームの先端近傍に取り付けた撮像手段で撮影した画像に、クレーンの性能線を重ねて表示する性能線表示装置に関する。
【背景技術】
【0002】
従来から、クレーン機械装置の周辺を撮影するカメラを設け、このカメラが撮影した画像にブーム先端部の移動範囲を示すガイドラインを重ねて表示するカメラシステムが知られている(特許文献1参照)。
【0003】
また、ブームの旋回中心位置を中心にして安定区間と不安定区間とを表示装置に表示するクレーンの安全装置が知られている(特許文献2参照)。
【0004】
前者のカメラシステムは、現在のブームの長さのとき、このときの起伏角度でブームが旋回運動した場合、そのブームの先端部が描く円の半径を求め、この半径に基づいて円の世界座標系上における位置を求め、この円の位置をカメラの撮像面の座標系に投影変換し、この投影変換した円をガイドラインとして表示装置の撮影画像上に重ねて表示するものである。
【0005】
そして、表示装置に表示されるガイドラインよりクレーン機械装置側に近い領域が安全確認領域となり、オペレータが安全確認領域内に障害物があるか否かを注視してブームの旋回操作を行うものである。
【0006】
後者のクレーンの安全装置は、表示画面にクレーンの旋回中心と、各アウトリガジャッキの位置と、各吊り上げ荷重Wに応じた限界作業領域とを表示するものである。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2008−312004号公報
【特許文献2】特公平8−29917号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
前者のカメラシステムにあっては、現在のブームの長さで現在の起伏角度のときの吊荷の移動範囲を示すものであるから、ブームを伸長させたときや起伏角度を小さくしたときに、クレーンの限界性能内でどこまで吊荷を移動させることができるか否かが分からないという問題がある。
【0009】
また、後者のクレーンの安全装置にあっては、クレーンの旋回中心位置と、この旋回中心位置を中心にした限界作業ラインとを表示画面に表示するだけなので、実際に撮影した画像上で吊荷をどの位置まで移動させることができるかどうかを把握することができないという問題がある。
【0010】
この発明の目的は、撮影した画像上で吊荷を実際にどの位置まで移動させることができるかを把握することのできる性能線表示装置を提供することにある。
【課題を解決するための手段】
【0011】
請求項1の発明は、 車体に旋回自在に設置された旋回台と、この旋回台に起伏自在に設置された伸縮可能なブームとを有するクレーンにおいて、前記ブームの先端近傍に取り付けられる撮像手段と、この撮像手段によって撮像された画像を表示する表示部とを備えた性能線表示装置であって、
クレーンの吊荷最大性能に関わる性能線を前記表示部の画像に重ねて表示することを特徴とする。
【発明の効果】
【0012】
この発明によれば、撮像手段によって撮像された画像に、クレーンの性能線を対応した画像の位置に重ねて表示するものであるから、吊荷を実際にどの位置まで移動させることができるかを把握することができる。
【図面の簡単な説明】
【0013】
【図1】この発明に係る性能線表示装置を搭載した移動式クレーンを示した側面図である。
【図2】性能線表示装置の構成を示したブロック図である。
【図3】(A)は撮像した撮像画像に限界性能線を重畳してモニタに表示した画像の説明図、(B),(C)は撮像画像に表示できる最大作業半径を示す性能線を示した説明図である。
【図4】(A)は撮像した撮像画像に最大作業半径の性能線を重畳してモニタに表示した画像の説明図、(B)は撮像画像に表示できる最大作業半径を示す性能線を示した説明図である。
【図5】第2実施例のモニタの画面を示した説明図である。
【図6】第2実施例のモニタの画面の他の例を示した説明図である。
【図7】第2実施例のモニタの画面の他の例の表示方法を示した説明図である。
【図8】限界性能線と構造物との関係を示した説明図である。
【図9】構造物上で限界性能線を補正して表示した画面を示した説明図である。
【図10】(A)は吊荷がない場合の第3実施例のモニタの画面を示した説明図、(B)は吊荷がない場合の第3実施例のモニタの画面の他の例を示した説明図である。
【図11】(A)は吊荷がある場合の第3実施例のモニタの画面を示した説明図、(B)は吊荷がある場合の第3実施例のモニタの画面の他の例を示した説明図である。
【発明を実施するための最良の形態】
【0014】
以下、この発明に係る性能線表示装置の実施の形態である実施例を図面に基づいて説明する。
【実施例】
【0015】
[第1実施例]
図1に性能線表示装置を搭載したクレーンとしてラフテレーンクレーン10を示す。このラフテレーンクレーン10は、走行機能を有する車両の本体部分となるキャリア11と、このキャリア11の前側に設けられた左右一対の前側アウトリガ12と、キャリア11の後側に設けられた左右一対の後側アウトリガ13と、キャリア11の上部に水平旋回可能に取り付けられた旋回台14と、旋回台14に設けたキャビン20と、旋回台14に固定されたブラケット15に取り付けられた伸縮ブーム16等とを備えている。
【0016】
伸縮ブーム16は、その基端部が支持軸17を介して取り付けられており、支持軸17を中心に起伏可能となっている。ブラケット15と伸縮ブーム16との間には起伏用シリンダ18が介装され、この起伏用シリンダ18の伸縮により伸縮ブーム16が起伏される。
【0017】
伸縮ブーム16は、ベースブーム16Aと中間ブーム16Bと先端ブーム16Cとを有し、この順序でベースブーム16A内に外側から内側に入れ子式に組み合わされて構成されている。また、伸縮ブーム16は伸縮シリンダ(図示せず)によって伸縮するようになっている。
【0018】
先端ブーム16Cの先端部にはシーブ(図示せず)が設けられており、このシーブにワイヤWが掛けられ、このワイヤWによってフックブロック19が吊されている。フックブロック19にはフック21が取り付けられている。
【0019】
ワイヤWは、図示しないウインチによって巻き取られたり、送り出されたりする。
【0020】
先端ブーム16Cの先端部には、TVカメラなどの吊荷監視カメラ(撮像手段)30が真下に向けて取り付けられており、この吊荷監視カメラ30はチルト方向とパン方向へ垂直軸線に対して任意の角度に傾斜可能となっている。吊荷監視カメラ30の傾斜(向き)はキャビン20内に設けた操作部(図示せず)によって行われる。吊荷監視カメラ30の傾斜角度は、チルト角検出センサS1とパン角検出センサS2とで検出する。
【0021】
図2は、ラフテレーンクレーン10の制御系の構成を示したブロック図である。
【0022】
図2において、31はクレーンコントローラであり、このクレーンコントローラ31は、キャビン20内に設けた操作部(図示せず)の操作に基づいて各アウトリガ12,13の張出や旋回台14の旋回や伸縮ブーム16の伸縮や伸縮ブーム16の起伏などの各種の制御を行う。
【0023】
32は画像処理コントローラであり、この画像処理コントローラ32は、クレーン10が吊荷を吊っている場合、クレーンコントローラ31が取得する実荷重に基づいて伸縮ブーム16の先端部が移動できる限界性能線を求める。この限界性能線は、伸縮ブーム16の旋回中心を中心にした最大作業半径の領域を示すものである。
【0024】
また、画像処理コントローラ32は、クレーン10が吊荷を吊っていない場合、クレーンコントローラ31が取得する伸縮ブーム16の長さで吊荷の移動可能な最大作業半径を求め、この最大作業半径の領域を示す曲線を性能線として求めたり、入力される仮想荷重における最大作業半径とこの最大作業半径の領域を示す曲線を性能線として求めたりする。仮想荷重の入力はキャビン20内に設けられた操作部のキー操作によって入力する。
【0025】
なお、クレーン10の性能線は、クレーン10の吊荷限界性能線に対して一定の割合となる領域を線として示すものであり、前述したもの以外の線も含まれる。
【0026】
クレーンコントローラ31は、起伏シリンダの圧力センサ(図示せず)によって検出されるシリンダ圧力とブーム起伏角度とブーム長さとに基づいて吊荷の実荷重を算出したり、各アウトリガ張出センサ(図示せず)の検出信号と実荷重などとに基づいてクレーンに対する限界性能線や性能線等の位置を算出する。
【0027】
さらに、画像処理コントローラ32は、クレーンコントローラ31が算出した位置に基づいて吊荷監視カメラ30が撮像した画像に、求めた限界性能線や性能線を重ねてモニタ33の画面(表示部)33A(図3参照)に表示する。
【0028】
そして、吊荷監視カメラ30と画像処理コントローラ32とモニタ33とで性能線表示装置が構成される。
[動 作]
次に、上記のように構成される性能線表示装置の動作について説明する。
[吊荷のある場合]
先ず、ラフテレーンクレーン10が吊荷を吊っている場合について説明する。
【0029】
吊荷を吊っている場合、ラフテレーンクレーン10のクレーンコントローラ31が吊荷の実荷重を求める。また、吊荷監視カメラ30がその吊荷を吊っているフックブロック19に向けて上方から撮像する。この撮像画像G1が図3(A)に示すようにモニタ33の画面33Aに表示される。
【0030】
画像処理コントローラ32は、クレーンコントローラ31が取得する実荷重とアウトリガ張出センサが検出する各一対のアウトリガ12,13のそれぞれの張出量とに基づいて、伸縮ブーム16の旋回中心を中心にした最大作業半径をその中心回りに求めていく。すなわち、最大作業半径の領域を示す曲線(境界線)を限界性能線L1として求める。この限界性能線L1の位置を、旋回中心を原点として求める。
【0031】
また、画像処理コントローラ32は、吊荷監視カメラ30のズーム倍率、チルトやパン、吊荷監視カメラ30の高さ位置とに基づいて、旋回中心を原点にして撮像されている地面の範囲の各位置(座標位置)を求める。吊荷監視カメラ30の高さ位置は、クレーンコントローラ31が取得する伸縮ブーム16の長さと起伏角度とに基づいて求める。伸縮ブーム16の長さは図示しないブーム長センサが検出する検出出力によって、伸縮ブーム16の起伏角度は図示しないブーム角センサが検出する検出出力によってクレーンコントローラ31がそれぞれ求める。
【0032】
画像処理コントローラ32は、図3(A)に示すように、求めた限界性能線L1を対応した撮像画像G1の位置に重ねて表示する。つまり、限界性能線L1の位置と撮像画像G1の座標位置とを一致させて限界性能線L1と撮像画像G1とを重ねて表示するものである。限界性能線L1は例えば赤色の線で表示する。また、画面33Aには、実荷重の値と最大作業半径の値も表示する。なお、前述の実荷重の値に変えて現作業姿勢における実負荷率を表示してもよい。また、19′は撮像されたフックブロック像である。
【0033】
このように、モニタ33の画面33Aに表示される撮像画像G1は実画像なので、限界性能線L1の実際の位置を把握することができ、吊荷を移動させることのできる実際の範囲を確認することができる。このため、伸縮ブーム16の操作が行い易いものとなる。
【0034】
また、吊り上げている荷物を目標位置まで移動させることができるか否かが分かることになる。
【0035】
画像処理コントローラ32は、90%の負荷率の性能線L2を求め、上記と同様にして撮像画像G1に重ねて表示する。性能線L2は例えば黄色の線で表示する。この性能線L2の表示により、安全領域の範囲が明確となり、伸縮ブーム16の操作が行い易くなる。
【0036】
モニタ33の画面33Aには、性能線L1,L2の他に吊荷の実荷重や伸縮ブーム16の現在の長さやフックの真下の地面上の位置を示す+字マークM1なども表示する。このため、伸縮ブーム16の操作がさらに行い易いものとなる。
【0037】
伸縮ブーム16の起伏角度や吊荷監視カメラ30のズーム倍率などによって、モニタ33の画面33Aに限界性能線L1が表示されない場合、すなわち、モニタ33の画面33A外に限界性能線L1が位置してしまう場合、図3(B),(C)に示すように、画面33A内の画像G2,G3に表示できる作業半径(モニタ33に表示できる最大の画像よりも少し小さい画像枠に接する半径)を性能線L3,L4として表示し、この性能線L3,L4の負荷率を表示する。この性能線L3,L4の負荷率が例えば90%未満であれば緑色の線で表示する。
【0038】
モニタ33の画面33Aを拡大した場合や吊荷監視カメラ30をパンやチルトさせた場合、画面33Aに限界性能線L1が表示されなくなっても性能線L3,L4が表示されるので、吊荷の性能線L3,L4の状態を把握することができる。
[吊荷のない場合]
ラフテレーンクレーン10が吊荷を吊っていない場合、画像処理コントローラ32は、いま現在の伸縮ブーム16の長さでの旋回中心を中心にした最大作業半径と、この最大作業半径の円(境界線)を性能線L5として求める。この性能線L5の位置は上記と同様に旋回中心を原点として求める。なお、吊荷監視カメラ30は、フックブロック19に向けて上方から撮像し、この撮像画像G4が図4(A)に示すようにモニタ33の画面33Aに表示されているとする。
【0039】
画像処理コントローラ32は、求めた性能線L5の位置と撮像画像G4の座標位置とを一致させて性能線L5と撮像画像G4とを重ねて、図4(A)に示すようにモニタ33の画面33Aに表示する。この場合、性能線L5を例えば赤線で表示し、最大作業半径の値と、この最大作業半径で吊すことが可能な最大荷重の値とを表示する。
【0040】
また、画像処理コントローラ32は、その最大荷重における90%の負荷率の性能線L5aを求め、この性能線L5aを上記と同様にして表示する。
【0041】
オペレータは、このモニタ33の画面33Aに表示されている撮像画像G4と性能線L5とから、吊荷を吊り上げる前に、吊荷の移動範囲が一目で分かり、しかも撮影画像G4が実画像なので、実際にどの位置まで吊荷を移動させることができるかが分かる。
【0042】
伸縮ブーム16の起伏角度や吊荷監視カメラ30のズーム倍率などによって、モニタ30の画面33Aに性能線L5が表示されない場合、図4(B)に示すように、画面33A内の画像G5に表示できる作業半径(モニタ33に表示できる最大の画像よりも少し小さい画像枠に接する半径)を性能線L6として画像G5に重ねて表示し、この性能線L6の負荷率を表示する。この性能線L6の負荷率が例えば90%未満であれば緑色の線で表示する。また、その最大作業半径と、この最大作業半径で吊すことのできる最大荷重の値も表示する。
【0043】
このため、モニタ33の画面33Aを拡大した場合や吊荷監視カメラ30をパンやチルトさせた場合に、画面33Aに性能線L5が表示されなくなっても性能線L6が表示されるので、吊荷を吊り上げる前に吊荷の性能線L6の状態を把握することができる。
【0044】
なお、前述の図4(B)の表示の場合、画面33内に表示できる作業半径とその作業半径で吊り上げることができる最大荷重を表示してもよい。
[仮想荷重の入力]
吊荷がない場合にキャビン20内に設けた操作部を操作して仮想荷重を入力すると、画像処理コントローラ32は、この仮想荷重における最大作業半径を求める。
【0045】
画像処理コントローラ32は、入力された仮想荷重と各アウトリガ張出センサが検出する各アウトリガ12,13のそれぞれの張出量とに基づいて、伸縮ブーム16の旋回中心を中心にした最大作業半径をその中心回りに求めていく。すなわち、最大作業半径の領域を示す曲線(境界線)を限界性能線L7として求める。この限界性能線L7の位置を、旋回中心を原点として求める。
【0046】
そして、画像処理コントローラ32は、求めた限界性能線L7の位置と撮像画像G4の座標位置とを一致させて限界性能線L7と撮像画像G4とを重ねて、図4(A)に示すようにモニタ33の画面33Aに表示する。
【0047】
オペレータは、このモニタ33の画面33Aに表示されている撮像画像G4と性能線L7とから、吊荷を吊り上げなくても吊荷の実際の移動範囲を把握することができる。
【0048】
伸縮ブーム36の起伏角度や吊荷監視カメラ30のズーム倍率などによって、モニタ33の画面33Aに限界性能線L7が表示されない場合、図4(B)に示すように、画面33A内に表示できる作業半径(モニタ33に表示できる最大の画像よりも少し小さい画像枠に接する半径)を性能線L8として表示し、この性能線L8の負荷率を表示する。
【0049】
このため、モニタ33の画面33Aを拡大した場合や吊荷監視カメラ30をパンやチルトさせた場合に、画面33Aに限界性能線L7が表示されなくなっても性能線L8が表示されるので、吊荷を吊り上げる前に吊荷の性能線L8の状態を把握することができる。
[第2実施例]
図5は第2実施例のモニタ133の画面133Aを示す。この第2実施例では、実荷重と各アウトリガ12,13の張出量とに基づいて、実荷重における最大作業半径の領域を示す限界性能線R1を求め、クレーン10の旋回中心O1を原点にした限界性能線R1を示すグラフィック画像Rgを画面133Aの左側画面133Aaにグラフィック表示し、画面133Aの右側画面133Abに吊荷監視カメラ30で撮像した画像Gaを表示する。
【0050】
また、グラフィック画像Rgに重ねて、吊荷監視カメラ30で撮像している撮像範囲の位置を示す撮像枠F1を表示する。
【0051】
この撮像枠F1内にある限界性能線R1aを、この限界性能線R1aの位置に対応する画像Gaの位置に重ねて表示する。
【0052】
この第2実施例によれば、限界性能線R1のうちどの部分の範囲を撮像しているかが分かり、伸縮ブーム16を旋回させる前に、旋回予定位置において限界性能線R1を越えてしまうか否かを予測することができる。
【0053】
図6は、吊荷監視カメラ30の撮像範囲すなわち撮像枠F2が限界性能線R1の内側にある場合を示す。この状態では、吊荷監視カメラ30で撮像した画像Gbには、限界性能線R1が表示されないことになる。
【0054】
この場合には、図7に示すように、画像Gb内に表示できる作業半径(ほぼ最大作業半径)を性能線R2として画像Gb上に表示し、この性能線R2の負荷率を画像Gb上に表示する。
【0055】
図8は、限界性能線R1上の位置に構造物Kがある場合を示す。この構造物Kの上面Kaに限界性能線R1を引くと、R1bで示すようになる。
【0056】
一方、吊荷監視カメラ30でこの構造物Kが撮像されて、図9に示すように、画像Gaに構造物像K′が表示されると、この構造物像K′の上面Ka′に破線で示すように、限界性能線Rhが表示されることになる。しかし、この限界性能線Rhが表示される位置は、図8に示すように、構造物Kの底面の位置を示すものであり、実際の限界性能線を示す位置R1bから構造物Kの高さに応じた分だけずれていることになる。
【0057】
そこで、この実施例では、構造物Kの高さに応じた分だけ、限界性能線Rhの位置を補正して、実線で示す位置に限界性能線R1cを表示する。この補正は、構造物Kの高さが高くなるにつれて、旋回中心位置から離れるように補正する。
【0058】
構造物Kが地面より低くなっている場合には、その低さすなわち深さに応じてその補正は逆となる。
【0059】
このように、構造物Kの高さや低さ(深さ)に応じた分だけ限界性能線Rhの位置を補正して表示するので、構造物Kの高さや低さ(深さ)に拘わらず限界性能線R1,Rhの位置を正しく分かることになる。
【0060】
なお、構造物Kの高さは、ブーム先端にレーザ距離センサを取り付け、撮像された画像領域をレーザでスキャンして撮像した画像中の構造物Kの高さを求め、あるいはステレオカメラを用いてその構造物Kの高さを求め、これら高さから上記の補正を行えばよい。
[第3実施例]
図10は第3実施例のモニタ233の画面233Aを示す。この第3実施例では、吊荷監視カメラ30で撮像した画像Gcにブームを示すグラフィック画像Eaとを重ねてモニタ233の画面233Aに表示するようにしたものである。
[吊荷のない場合]
吊荷がない場合、モニタ233の画面233Aには、図10(A)に示すように、現在の伸縮ブーム16の長さで移動させることのできる最大作業半径の領域を示す限界性能線Laと、その最大作業半径で吊すことのできる最大吊荷荷重と、この最大吊荷荷重に対して90%の負荷率を示す90%性能線Lbを画像Gcに重畳させて表示する。また、画面233Aには、吊荷を吊っていないので「00ton」の表示と、伸縮ブーム16の現在の長さとを表示する。
【0061】
この画面233Aにより、吊荷を吊り上げなくても吊荷の移動範囲を把握することができる。
【0062】
最大作業半径をモニタ233の画面233Aに表示できない場合、すなわち、撮像されている画像Gb外に最大作業半径が位置している場合、図10(B)に示すように、その画像Gb内に表示できる最大作業半径と、この最大作業半径の性能線Lcと、この最大作業半径で吊すことのできる最大吊荷荷重とを表示する。
【0063】
画面233Aに限界性能線Laが表示されなくなっても性能線Lcが表示されるので、吊荷を吊り上げる前に吊荷の性能線Lcの状態を把握することができる。
[吊荷のある場合]
吊荷がある場合、図11(A)に示すように、現在の伸縮ブーム16の長さで移動させることのできる最大作業半径(100%限界性能線)Ldと、90%性能線Leとを画像Gcに重畳させて表示する。また、吊荷の実荷重と、伸縮ブーム16の現在の長さとを表示する。
【0064】
100%限界性能線Ldが画像Gc上に表示できない場合、図11(B)に示すように、その画像Gc内に表示できる最大作業半径と、その最大作業半径の領域を示す性能線Lfと、この最大作業半径の負荷率を表示する。
【0065】
この第3実施例も第1実施例と同様な効果を得ることができる。
【0066】
この実施例では、ブームを示すグラフィック画像Eaの長さは固定されているが、実際の伸縮ブーム16の長さに応じてグラフィック画像Eaの長さを変えるようにしてもよい。
【0067】
上記実施例は、いずれもクレーンに対する限界性能線や性能線等の位置の算出をクレーンコントローラ31で行っているが、画像処理コントローラ32で算出してもよい。
【0068】
この発明は、上記実施例に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【符号の説明】
【0069】
11 キャリア(車体)
14 旋回台
16 伸縮ブーム
30 吊荷監視カメラ(撮像手段)
32 画像処理コントローラ
33 モニタ
33A 画面(表示部)
L1 限界性能線(性能線)
L2 性能線
【特許請求の範囲】
【請求項1】
車体に旋回自在に設置された旋回台と、この旋回台に起伏自在に設置された伸縮可能なブームとを有するクレーンにおいて、前記ブームの先端近傍に取り付けられる撮像手段と、この撮像手段によって撮像された画像を表示する表示部とを備えた性能線表示装置であって、
クレーンの吊荷最大性能に関わる性能線を前記表示部の画像に重ねて表示することを特徴とする性能線表示装置。
【請求項2】
前記クレーンが吊荷を吊っているとき、この吊荷の実荷重で移動可能な最大作業半径を求め、この最大作業半径の領域を示す曲線を限界性能線として求め、この限界性能線を前記性能線として前記表示部に表示することを特徴とする請求項1に記載の性能線表示装置。
【請求項3】
前記クレーンが吊荷を吊っていないとき、このときのブームの長さでの吊荷の移動可能な最大作業半径を求め、この最大作業半径の領域を示す曲線を前記性能線として求め、この性能線を前記表示部に表示することを特徴とする請求項1に記載の性能線表示装置。
【請求項4】
前記クレーンが吊荷を吊っていないとき、仮想荷重を入力すると、この仮想荷重における最大作業半径を求め、この最大作業半径の領域を示す曲線を性能線として求め、この性能線を前記表示部に表示することを特徴とする請求項1に記載の性能線表示装置。
【請求項5】
前記限界性能線が表示部に表示できないとき、その表示部に表示できる作業半径を表示し、この作業半径における負荷率線を求め、この負荷率線を性能線として前記表示部に表示することを特徴とする請求項2または請求項4に記載の性能線表示装置。
【請求項6】
前記最大作業半径が前記表示部に表示できないとき、その表示部に表示できる作業半径の位置を示す曲線と、その作業半径で吊すことのできる最大荷重とを前記表示部に表示することを特徴とする請求項3に記載の性能線表示装置。
【請求項7】
車体に旋回自在に設置された旋回台と、この旋回台に起伏自在に設置された伸縮可能なブームとを有するクレーンにおいて、前記ブームの先端近傍に取り付けられる撮像手段を備えた性能線表示装置であって、
前記クレーンの旋回中心を原点とした限界性能線を示すグラフィック画像を表示する表示部を設け、
前記撮像手段が撮像している撮像範囲を示す撮像枠を、その撮像範囲に対応して前記グラフィック画像の部分に重ねて表示し、
前記撮像手段が撮像した画像を、前記グラフィック画像と異なる前記表示部の位置に表示し、
前記グラフィック画像上に重ねられた撮像枠内にある限界性能線を、この限界性能線の位置に対応する前記画像の位置に重ねて表示することを特徴とする性能線表示装置。
【請求項8】
前記撮像手段の撮像範囲に、地面の高さと異なる高さの物体がある場合、その物体の高さに応じて、前記画像に重ねて表示された限界性能線の表示位置を補正することを特徴とする請求項7に記載の性能線表示装置。
【請求項1】
車体に旋回自在に設置された旋回台と、この旋回台に起伏自在に設置された伸縮可能なブームとを有するクレーンにおいて、前記ブームの先端近傍に取り付けられる撮像手段と、この撮像手段によって撮像された画像を表示する表示部とを備えた性能線表示装置であって、
クレーンの吊荷最大性能に関わる性能線を前記表示部の画像に重ねて表示することを特徴とする性能線表示装置。
【請求項2】
前記クレーンが吊荷を吊っているとき、この吊荷の実荷重で移動可能な最大作業半径を求め、この最大作業半径の領域を示す曲線を限界性能線として求め、この限界性能線を前記性能線として前記表示部に表示することを特徴とする請求項1に記載の性能線表示装置。
【請求項3】
前記クレーンが吊荷を吊っていないとき、このときのブームの長さでの吊荷の移動可能な最大作業半径を求め、この最大作業半径の領域を示す曲線を前記性能線として求め、この性能線を前記表示部に表示することを特徴とする請求項1に記載の性能線表示装置。
【請求項4】
前記クレーンが吊荷を吊っていないとき、仮想荷重を入力すると、この仮想荷重における最大作業半径を求め、この最大作業半径の領域を示す曲線を性能線として求め、この性能線を前記表示部に表示することを特徴とする請求項1に記載の性能線表示装置。
【請求項5】
前記限界性能線が表示部に表示できないとき、その表示部に表示できる作業半径を表示し、この作業半径における負荷率線を求め、この負荷率線を性能線として前記表示部に表示することを特徴とする請求項2または請求項4に記載の性能線表示装置。
【請求項6】
前記最大作業半径が前記表示部に表示できないとき、その表示部に表示できる作業半径の位置を示す曲線と、その作業半径で吊すことのできる最大荷重とを前記表示部に表示することを特徴とする請求項3に記載の性能線表示装置。
【請求項7】
車体に旋回自在に設置された旋回台と、この旋回台に起伏自在に設置された伸縮可能なブームとを有するクレーンにおいて、前記ブームの先端近傍に取り付けられる撮像手段を備えた性能線表示装置であって、
前記クレーンの旋回中心を原点とした限界性能線を示すグラフィック画像を表示する表示部を設け、
前記撮像手段が撮像している撮像範囲を示す撮像枠を、その撮像範囲に対応して前記グラフィック画像の部分に重ねて表示し、
前記撮像手段が撮像した画像を、前記グラフィック画像と異なる前記表示部の位置に表示し、
前記グラフィック画像上に重ねられた撮像枠内にある限界性能線を、この限界性能線の位置に対応する前記画像の位置に重ねて表示することを特徴とする性能線表示装置。
【請求項8】
前記撮像手段の撮像範囲に、地面の高さと異なる高さの物体がある場合、その物体の高さに応じて、前記画像に重ねて表示された限界性能線の表示位置を補正することを特徴とする請求項7に記載の性能線表示装置。
【図1】



【図2】

【図3】
【図4】
【図5】

【図6】
【図7】
【図8】

【図9】
【図10】
【図11】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−18580(P2013−18580A)
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願番号】特願2011−151474(P2011−151474)
【出願日】平成23年7月8日(2011.7.8)
【出願人】(000148759)株式会社タダノ (419)
【Fターム(参考)】
【公開日】平成25年1月31日(2013.1.31)
【国際特許分類】
【出願日】平成23年7月8日(2011.7.8)
【出願人】(000148759)株式会社タダノ (419)
【Fターム(参考)】
[ Back to top ]