
恒温制御されたMEMS発振器デバイス
【課題】低減した周波数ドリフトを達成することができる、実質的に安定した周波数で出力信号を発生するためのMEMSにシステムを提供する。
【解決手段】所定周波数は、温度依存性及び少なくとも一つの所定の特性に基づく。さらに、所定周波数で発振するためにMEMS発振器を励振するよう構成された励振機構、及び、抵抗感知を用いてMEMS発振器の温度を検出し、周波数ドリフトを最小限にするために温度依存性及び少なくとも一つの特性に基づいて、MEMS発振器の温度が所定温度の所定範囲内にあるか否かを決定し、MEMS発振器の温度を所定範囲内に留めるように適合させるように構成された温度制御ループを含む。さらに、MEMS発振器の所定周波数を出力するように構成された周波数出力を含んでいる。
【解決手段】所定周波数は、温度依存性及び少なくとも一つの所定の特性に基づく。さらに、所定周波数で発振するためにMEMS発振器を励振するよう構成された励振機構、及び、抵抗感知を用いてMEMS発振器の温度を検出し、周波数ドリフトを最小限にするために温度依存性及び少なくとも一つの特性に基づいて、MEMS発振器の温度が所定温度の所定範囲内にあるか否かを決定し、MEMS発振器の温度を所定範囲内に留めるように適合させるように構成された温度制御ループを含む。さらに、MEMS発振器の所定周波数を出力するように構成された周波数出力を含んでいる。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は、一般的に、恒温制御された微小電気機械システム(MEMS)発振器を備えたシステムに関する。
【背景技術】
【0002】
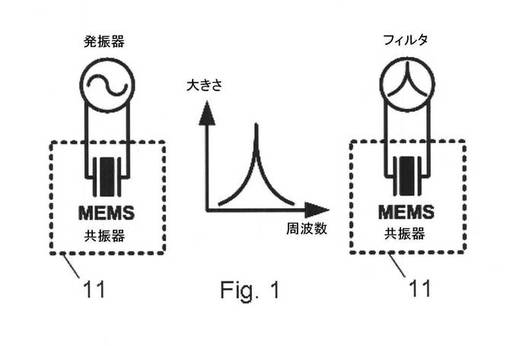
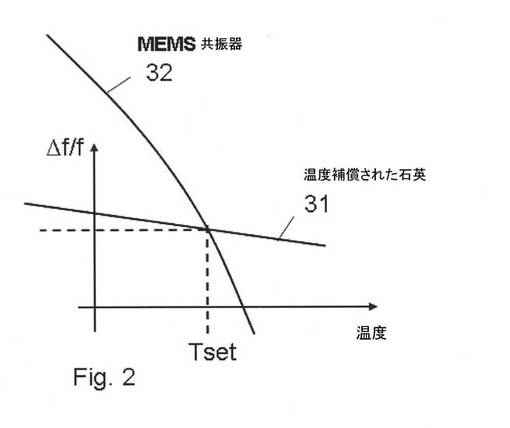
MEMシステム及び特にMEMS共振器は、非常に高い品質ファクター(Q)を有し、発振器を構築するために用いることができ、このことは、図1に示すように、周波数基準装置としてそれらが役立つように実施可能とすることが知られている。しかしながら、伝統的には水晶発振器がそれらのより良好な温度安定度のため、周波数基準としてしばしば用いられる。放送送信機システムにおけるようにより高い安定性が要求されるときには、例えば恒温槽型水晶発振器がしばしば用いられる。しかしながら、そのような石英デバイスは大きく、また、石英基準を用いるシステムは、低い集積化に悩まされる。一方、MEMS発振器は、小さく、集積化可能であり、よって、コストを著しく低下させる。しかしながら、補償無しでのMEMS共振器は、温度に関して周波数ドリフトの高い感度を示し(例えば100℃の周囲温度範囲に関して±5000ppm)、よって、図2に示すように、水晶発振器よりも温度に関してより不安定な周波数特性を有している。
【0003】
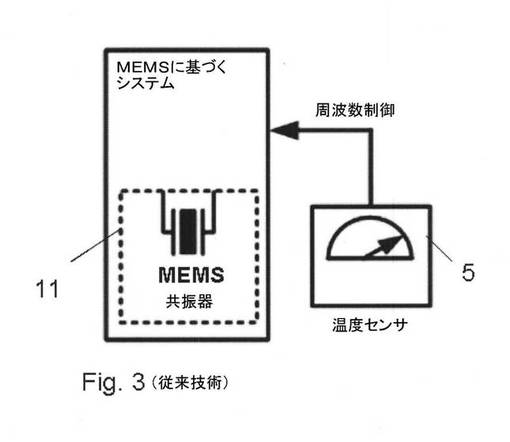
MEMS共振器は、周囲温度を感知することにより、及び測定された温度によって、(例えば電気的に)MEMS共振器を補償することによって、広い周囲温度範囲(例えば100℃の周囲温度範囲)にわたり、より良好に安定させることができる。図3は、そのような従来の解決策を図示している。周囲温度は、MEMSデバイスと良好に熱接触する外部の温度センサによって感知され、MEMS発振器システムは、測定された温度に基づいて周波数制御手段によって電気的に補正される。言い換えれば、周囲温度センサは、共振器システムの周波数補償ノブを駆動する。このように、MEMS共振器は、100℃の周囲温度範囲(例えば−20℃から+80℃周囲温度まで)にわたり、±100ppm精度まで典型的に制御されるかもしれない。
【0004】
しかしながら、それらのメカニズムの問題は、温度センサ自体の精度及び温度安定性である。温度に関するそれらのドリフトは、MEMS共振器の達成可能な温度安定性を制限する。これが、システムにおいて信頼できる(かつ高価な)温度基準がしばしば必要とされる理由である。
【0005】
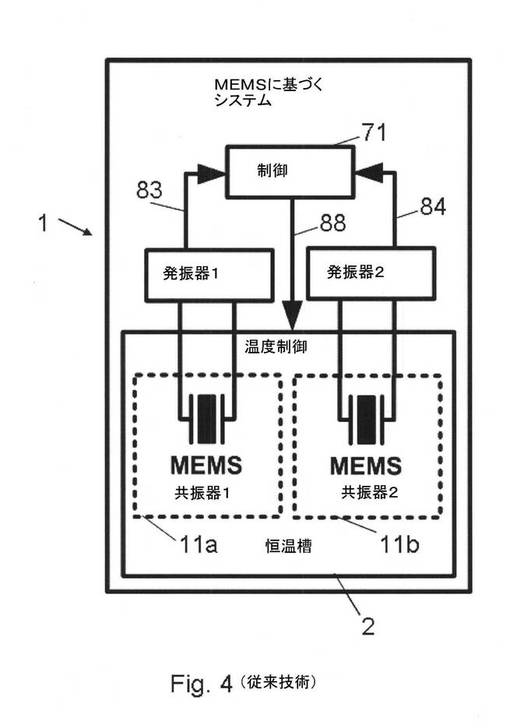
図4に示されるように、米国特許出願 2009/0243747は、一つの安定した周波数を発生するために2つの共振器を用いる。温度安定性は、温度変化に対する周波数の変化である、周波数の異なる温度係数、TCF=Δf/f.1/ΔTを有する2つの共振器を用いることにより、及び、温度ドリフトによる共振器間の周波数差を補償することによって達成される。(補償が適用されなかったならば)両方の周波数が同一のところで、所定温度Tsetが存在する。制御ループは、温度変化を補償し、周波数が他の温度においても同一に維持されることを保証する。よって、共振器周波数の安定性が達成される。しかしながら、この概念には、異なるTCFを有する2つの共振器を必要とし、よって大きなチップ面積を必要とするという欠点がある。また、両方の共振器は、さらなる回路類を必要としながら、発振器として構成されるべきである。また、所望の周波数を達成するために、両方の共振器帯(bars)での温度は同一であるべきであり、このことは、概念的には設計を一致させることによって容易であるかもしれないが、実際には保証するのは非常に難しい。最後に、両方のデバイス間の寄生性のカップリングは、余りきれいなクロック出力とはならない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許出願2009/0243747号
【発明の概要】
【0007】
低減した周波数ドリフトを達成することができる、実質的に安定した周波数で出力信号を発生するためのMEMSに基づいたシステムが開示される。
この目的は、第1請求項の技術的特徴を備えたシステムとともに本開示によって達成される。
【0008】
特に、システムの周波数ドリフトを最小限にするために、レシオメトリックな(ratiometric)温度制御ループが必要なことが分かった。これは、マイクロメカニカル発振器と連携し、抵抗感知とともにレシオメトリック原理によって、マイクロメカニカル発振器の温度を検出し、評価し、適応させるための部品を備え、及び、所定の設定温度付近の所定温度範囲内にマイクロメカニカル発振器の温度を維持するためにさらに設けられる。この所定温度範囲は、マイクロメカニカル発振器の特性及び上記周波数の温度依存性に基づいて決定される。
【0009】
開示のシステムは、自己参照されるという長所を有し、その結果、温度又は周波数用の外部参照用のソースがその動作のためにあるいは周波数ドリフトを制限するために必要ない。相対的な温度誤差のみを検出する(つまり、実際の温度が希望温度よりも高いあるいは低いかどうかを検出する)必要があるので、誤差の大きさの絶対測定を検出する必要はない。したがって、典型的に温度に関して非常に正確で安定した特性を要するアンプ又はA−D変換器は必要ない。このことは、システムを非常に単純化しより実現可能にする。関連する測定が、どの程度大きいあるいは小さいというよりもむしろ単に「高すぎる」あるいは「低すぎる」であるので、温度誤差の検出における利得誤差は、所望のTsetを達成することには無関係である。
【0010】
MEMS発振器は恒温槽に位置し、よって周囲環境から遮断されており、さらに、恒温槽における基準MEMS発振器の必要性(米国特許出願公開2009/0243747号に開示される2重の共振器システムのような)を避けることができることから、開示のシステムは、低消費電力でありえるという長所を有する。
【0011】
いくつかの実施態様において、所定の温度範囲は、高々0.10℃であるように選択されてもよい。このことは、開示するレシオメトリックな温度制御ループによって可能であり、周波数ドリフトをほんの数ppm以下に減じることができる。
【0012】
マイクロメカニカル発振器(この発振器は異なるモードあるいは複数の周波数で振動するよう設計されてもよい)が振動する一つあるいは複数の周波数は、マイクロメカニカル発振器の特性、特に、それが構成されている材料、その形態(例えば形状及び配置)、及びその寸法を備える特性によって決定される。
【0013】
好ましい材料は、シリコンゲルマニウムであり、それは−40ppm/℃のTCF(周波数の温度係数)を有する。開示する制御ループ及び0.05℃に制限された所定温度範囲で、周波数ドリフトは、2ppm.に制限することができる。さらに、よりよい安定性を達成するために、設計特性を最適化することができる。その結果、例えばシリコンゲルマニウム発振器と組み合わせて抵抗感知を有するレシオメトリックな制御ループで、1ppm以下の周波数ドリフトを達成することができる。
【0014】
別の可能な材料はシリコンであり、それは−30ppm/℃のTCFを有する。周波数ドリフトを2ppmに制限するために、0.067℃の温度範囲が制御ループにセット可能である。さらに、発振器の特性上の設計によって、ドリフトはさらに縮小することができる。MEMS発振器は、また、おまけに他の適切な材料にて構成されてもよいことに注意すべきである。
【0015】
いくつかの実施態様において、MEMS発振器は圧電共振器であってもよい。あるいは、またさらに、MEMS発振器は、弾性表面波共振器、屈曲共振器(flexural resonator)、あるいは他のいずれの共振器であってもよい。
【0016】
いくつかの実施態様において、マイクロメカニカル発振器は、真空密封パッケージにおいてMEMS発振器へ共通の接続を有する2つの支持脚を備えた各梁のような、固定−固定梁(clamped-clamped beams)によって浮かされてもよい。共振器用の支持アンカーとしてそのような梁を用いることは、マイクロメカニカル発振器の振動の結果として梁が振動するところの屈曲波長(flexural wavelength)に対して、例えば、梁の各脚を音響学的に長くすることによって(例えば、屈曲波長の倍数よりも各脚を長くすることによって)、共振器の断熱を向上させることができるという利点を有する。更なる利点として、そのような支持アンカーで、単一のMEMS発振器システムの消費電力が1mW未満にすることができることが分かり、その結果、システム全体の電力消費は、10mW以下に減じることができる。さらに更なる利点として、脚の長さは、発振器の品質ファクターに影響するのを防止するために最適化することができる。
【0017】
いくつかの実施態様において、それらの梁の一若しくは複数は、MEMS発振器を加熱するための加熱抵抗として用いることができる。このように、それらの梁の一若しくは複数は、制御ループの一部として機能してもよい。
【0018】
他の実施態様において、MEMS発振器は、他のタイプの支持アンカーによって同じように浮かされてもよい。
制御ループの一部として、発振器用の加熱は、輻射あるいは他のいずれかの加熱機構によってマイクロメカニカル共振器を加熱するための輻射源を備えてもよい。
【0019】
レシオメトリックな温度制御ループの抵抗感知は、マイクロメカニカル共振器と十分に良好な熱接触において2つの感知素子を設けることにより提供されてもよく、その結果、2つの感知素子は、共振器と実質的に同じ温度を感知する。レシオメトリックの原理は、測定されたとき測定曲線が、予め規定した設定温度Tsetに対応する予め規定の交差点にて交差するように、両方の感知素子が異なる温度依存特性を有するという点で規定することができる。このように、MEMS発振器の実際の温度が所定温度Tsetよりも上か、下か、等しいのか否かを容易に決定することができ、よって、上記ループを制御可能である。いくつかの実施態様において、第1の感知素子は第1の感知信号で感知されてもよく、第2の感知素子は第2の感知信号で感知されてもよい。いくつかの実施態様において、第1及び第2の感知信号は、実質的に同じ大きさを有していてもよい。いくつかの実施態様において、第1及び第2の感知信号は、同じ符号、位相、継続時間を有さなくてもよい。
【0020】
一つの実施態様において、制御回路は、基板に第1及び第2の感知信号を構成してもよく、その結果として差信号を決定する。制御回路は、その差信号を増幅するようにさらに構成してもよく、それによって制御信号を発生する。
【0021】
いくつかの実施態様において、制御回路は、制御信号における残余誤差を除去するように構成されたポスト補償回路に接続されてもよく、それによってポスト補償信号を発生する。ポスト補償信号は、例えば、線形の、二次の、あるいは多項式変換の制御信号を用いて決定してもよい。代わりに、あるいはさらに、ポスト補償信号は、例えば、ルックアップテーブルを用いて決定してもよい。他の例も、同様に可能である。
【0022】
ポスト補償信号は、集積電気部品の温度と予め規定の温度との差を減じるために、バイアス信号又はオフセット信号として制御回路に供給されてもよい。
残余誤差を除去するためにそのようなポスト補償回路を用いることによって、オフセット、潜在熱、及び/又は他の非理想に起因する不正確さは、さらに減じられるかもしれない。
【図面の簡単な説明】
【0023】
【図1】図1は、発振器及びフィルタにおいて適用された典型的なMEMS共振器を示す。
【図2】図2は、恒温制御された水晶振動子及び補償されていないMEMS共振器に関する、温度に対する典型的な周波数ドリフトのプロットを示す。
【図3】図3は、典型的なMEMSシステムを示す。
【図4】図4は、別の典型的なMEMSシステムを示す。
【図5A】図5Aは、実施形態によるMEMS発振器の平面図を示す。
【図5B】図5Bは、実施形態によるMEMS発振器の平面図を示す。
【図5C】図5Cは、実施形態によるMEMS発振器の断面図を示す。
【図5D】図5Dは、実施形態によるMEMS発振器の断面図を示す。
【図5E】図5Eは、実施形態によるMEMS発振器を含む真空パッケージを示す。
【図6】図6は、実施形態によるMEMSシステムの例を示す。
【図7】図7Aは、温度依存の抵抗器の値に対応する測定電圧信号の例で、実施形態による例示の測定電圧信号間の出力比較を示す 図7Bは、例示の測定電圧信号間の違いに対応する測定電圧信号の例で、実施形態による例示の測定電圧信号間の出力比較を示す。
【図8】図8は、実施形態による、ヒーターを含む例示のMEMSシステムを示す。
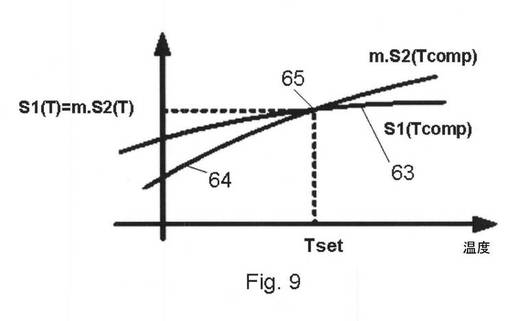
【図9】図9は、実施形態による、第1及び第2の温度依存特性を示す。
【図10】図10は、実施形態による、ヒーター及び制御ループを含む例示のMEMSシステムを示す。
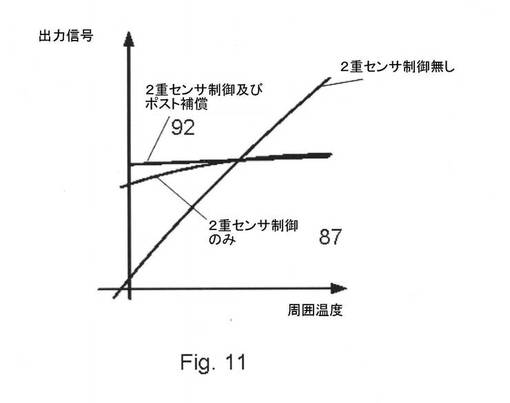
【図11】図11は、実施形態による、2重のセンサ制御が無い、2重のセンサ制御が有る、及び2重のセンサ制御及びポスト補償制御が有る、恒温制御されたMEMS発振器に関する例示の出力信号の安定性を図示する。
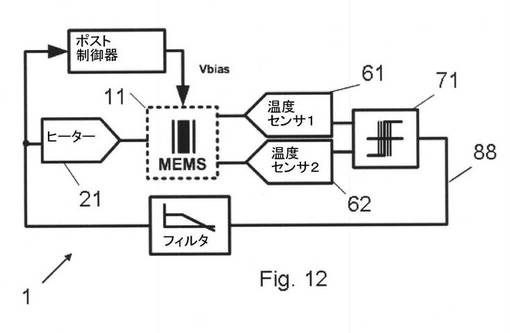
【図12】図12は、ポスト補償信号がバイアス電圧であるヒーター及び制御システムを含む例示のMEMSシステムを示す。
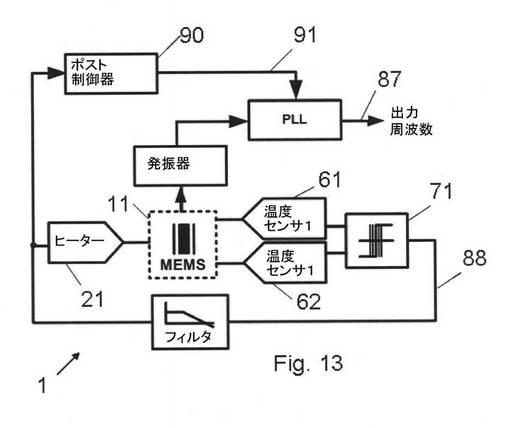
【図13】図13は、ポスト補償信号が位相同期ループに作用するヒーター及び制御システムを含む例示のMEMSシステムを示す。
【図14A】図14Aは、実施形態による、MEMS発振器を振動させる例示の変位を示す。
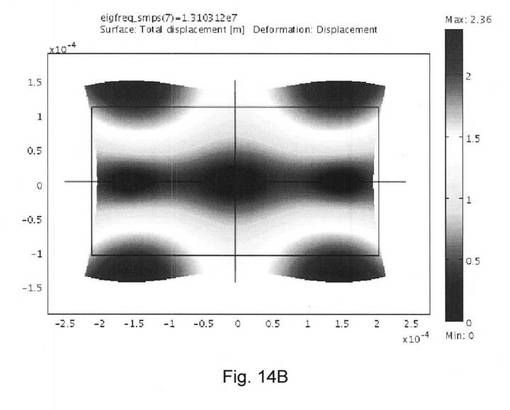
【図14B】図14Bは、実施形態による、MEMS発振器を振動させる例示の変位を示す。
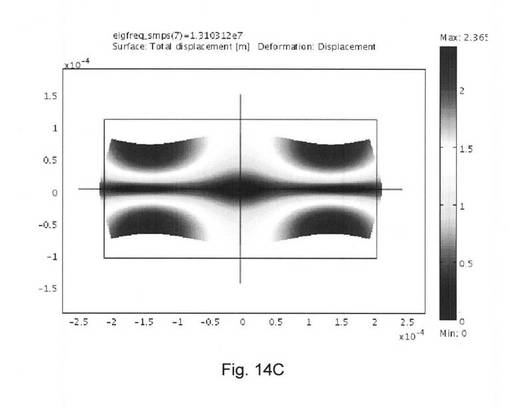
【図14C】図14Cは、実施形態による、MEMS発振器を振動させる例示の変位を示す。
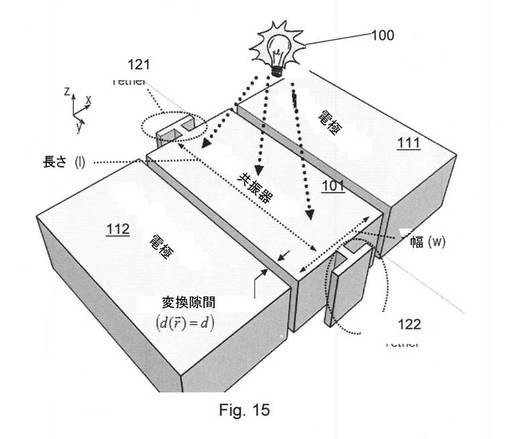
【図15】図15は、実施形態による、輻射によって加熱された圧電長手方向発振器(bulk acoustic longitudinal oscillator)の模式図を示す。
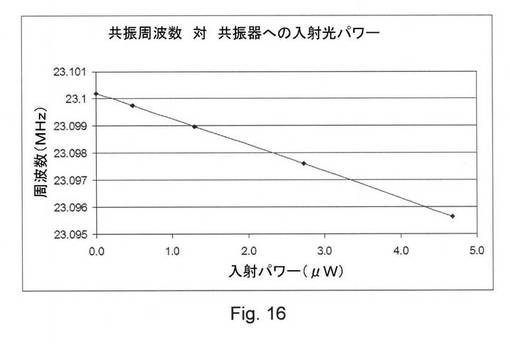
【図16】実施形態による、共振器での周波数変動対入射光パワーを示す、100x100μm SiGe発振器に関する測定データを示す。
【図17】図17は、実施形態による、例示の屈曲共振器を示す。
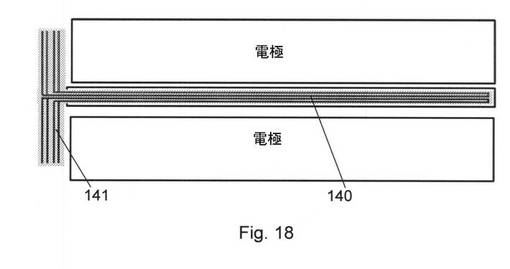
【図18】図18は、実施形態による、別の例示の屈曲共振器を示す。
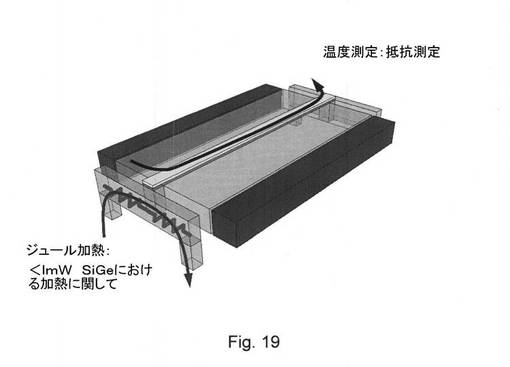
【図19】図19は、実施形態による、支持体を介してジュール加熱によって加熱された例示のMEMS発振器を示す。
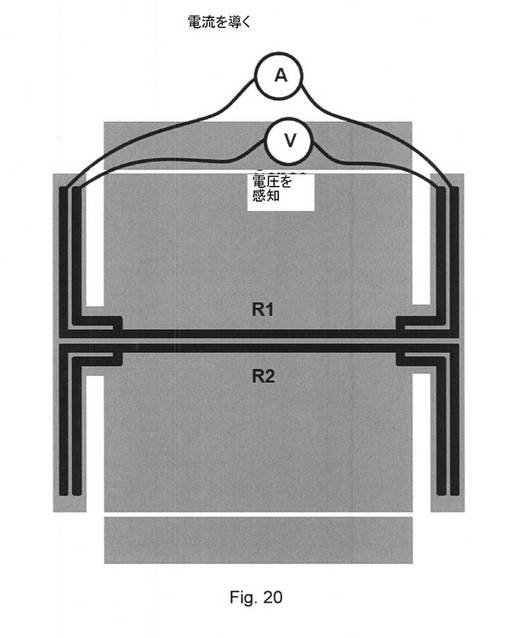
【図20】図20は、実施形態による、MEMS発振器の上部の抵抗を測定するために、4点のアクセスラインを有する2つの抵抗器が、アクセスラインの抵抗及び温度に関係なく置かれたMEMS発振器の例示を示す。
【発明を実施するための形態】
【0024】
開示は、開示のいくつかの例を説明する、添付の図及び図の説明においてさらに解明される。図は、尺度に従って描かれていないことに注意してほしい。それらの図は、開示の原理を記述することを意図している。さらに、開示の実施形態は、異なる図の異なる特徴及び要素の組み合わせを用いることができる。
【0025】
本開示は、特定の実施形態に関して、及びある図に関して記述されるだろうが、この開示はそれに限定されない。記述された図は、単に模式的であり、非限定的である。図において、要素の内のいくつかのサイズは、図示の目的のため、誇張され、尺度通りに描かれていないかもしれない。寸法及び相対的な寸法は、必ずしも開示の実施への実際の縮小に対応していない。
【0026】
さらに、実施形態及び請求範囲における第1、第2、第3等の用語は、類似の要素間を区別するために使用され、必ずしも連続的あるいは経時的な順を述べるためのものではない。それらの用語は、適切な状況下で交換可能であり、開示の実施形態は、ここに記述されあるいは図示された以外の他の順序における動作が可能である。
【0027】
さらに、実施形態及び請求範囲における上、底、上方、下方、等の用語は、便宜上、使用されるものであり、必ずしも相対的な位置を述べるものではない。それらの用語は、適切な状況下で交換可能であり、ここに記述された開示の実施形態は、ここに記述されあるいは図示された以外の他の配向における動作が可能である。
【0028】
請求範囲において使用される、用語「備える」は、それ以後に列挙する手段に限定されるように解釈すべきではない。即ち、それは、他の構成部分又は工程を排除しない。よって、そのように述べられた特徴、整数、工程、又は部品の存在を特定するように解釈されるべきであり、1つ以上の他の特徴、整数、工程、又は部品、あるいはそれらのグループの存在や追加を妨げない。したがって、表現「手段A及びBを備えたデバイス」の権利範囲は、部品A及びBのみからなるデバイスに限定されるべきではない。それは、本開示に関して、デバイスの唯一関連ある部品がA及びBであるということを意味する。
【0029】
本開示は、予め規定した温度Tsetにてマイクロエレクトロメカニカル(MEMS)発振器の温度を安定化させるためのシステムを提供する。図1は、発振器及びフィルタにおいて適用される典型的なMEMS共振器を示す。典型的なMEMS発振器11は、幾つかの場合において圧力センサ、発振器、応力センサのような種々様々の応用例に用いられてもよい。MEMS構造は小さくなる傾向があるので、例えば、相補型MOS(CMOS)チップを含む、多くのデバイスに集積化可能である。
【0030】
しかしながら、MEMS発振器11のような典型的なMEMS構造に関する問題は、それらの特性が温度とともに大きくドリフトするかもしれないということである。例えば、MEMS発振器において、その周波数は100℃の温度範囲(例えば−20℃から+80℃まで)において5000ppmでドリフトするかもしれない。例えば、MEMS発振器に基づくシリコンは、典型的にはその共振周波数fres(T)に関して温度に対して−30ppm/℃の感度を有している。そのようなシリコン系のMEMS発振器に関する周波数の温度係数TCFは、−30ppm/℃であると言われる。
【0031】
MEMS発振器の周波数を安定させるためのいくつかの技術がある。一つの技術は、電気的な補償によるものであり、これでは発振器回路のフィードバック信号が安定周波数を維持するために修正される。別の技術では、MEMS発振器の温度Tcompが安定な予め規定した温度Tsetに維持される。このために、MEMS発振器は、図1に示す恒温槽2のような恒温槽に置かれてもよく、恒温槽温度Tovenは、予め規定した温度に維持されてもよい。しかしながらこの技術は、恒温槽内の温度が所定値Tsetよりも高いかあるいは低いか否かを決定するいくつかの手段を一般的に必要とする。米国特許出願公開2009/0243747において、この決定は、異なるTCF(例えばTCF1及びTCF2)を有する2つのMEMS共振器を用いることによってなされ、図4に示すように、それら周波数を混合することに基づいて制御信号88を発生する。
【0032】
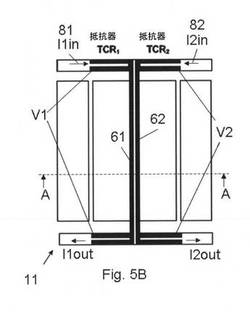
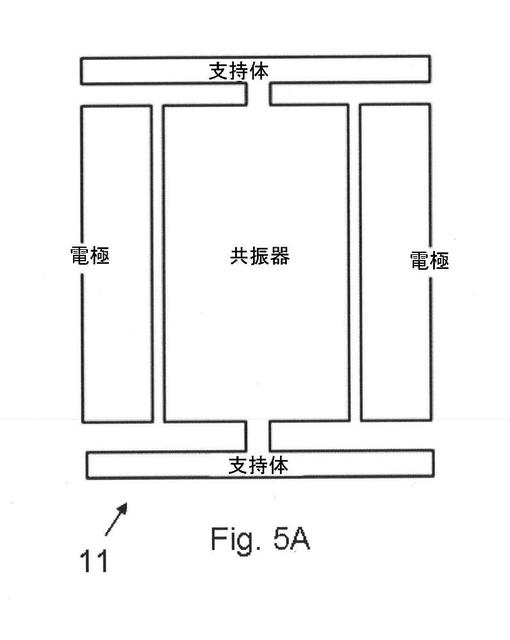
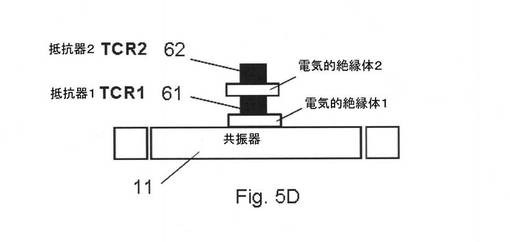
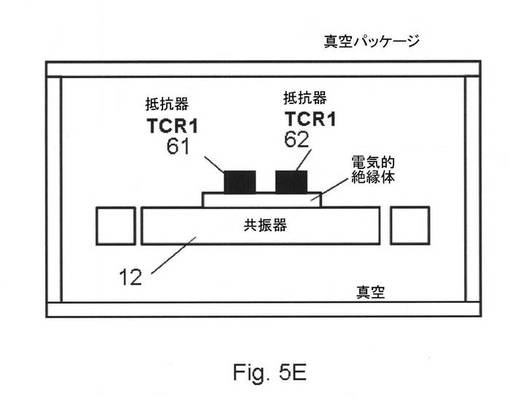
図5Aから図5Eは、実施形態による、MEMS発振器の平面を(図5A及び図5B)、MEMS発振器の断面を(図5C及び図5D)、及びMEMS発振器を含む真空パッケージを(図5E)示す。図5Bに示されるように、MEMS発振器11は、第1の抵抗r1及び第1の抵抗温度係数(TCR)TCR1を有する第1の抵抗器61を含んでいる。さらにMEMS発振器11は、第2の抵抗r2及び第2TCR TCR2を有する第2の抵抗器r2を含んでいる。第1抵抗器61及び第2抵抗器62は、MEMS発振器11の共振器バーの上部に加工されて示されている。第1抵抗器61及び第2抵抗器62は、MEMS発振器11から電気的に絶縁されるが、所望の熱的精度を有するようにMEMS発振器11と良好な熱接触にある。抵抗値は、少なくとも第1の感知信号81(I1in)及び第2の感知信号82(I2in)を組み合わせて選択される。第1感知信号81は、例えば、第1抵抗器61を流れる第1の直流(DC)信号を含んでもよい。同様に、第2感知信号82は、第2抵抗器62を流れる第2のDC信号を含んでもよい。図7Aに示される電圧曲線83、84のように、結果として生じる電圧曲線が、予め規定の温度Tsetに対応する交差点85で交差するように、抵抗値が選択されてもよい。これらの抵抗器61、62は、本開示のシステムによるレシオメトリックな制御ループにおいて用いられる抵抗性の感知素子の実施形態を形成する。
【0033】
一つの実施形態において、2つの感知信号81、82は、実質的に同じであってもよい。例えば、感知信号81、82の各々は、カレントミラーによって発生されたDC信号であってもよい。別の実施形態では、各感知信号(例えば第1感知信号81)は、例えばスイッチを用いて一つの感知素子(例えば第1感知素子62)に選択的に印加され、及び測定信号(例えば第1測定信号83)は、測定コンデンサー(図示せず)のようなストレージ手段に蓄えられてもよい。感知後、ストレージ手段に蓄えられた測定信号83、84(例えば電圧)は、制御信号88を発生するため、比較されあるいは減算されてもよい。このように、第1及び第2の感知信号81、82間のいかなる相異も回避することができる。
【0034】
第1及び第2の抵抗器61、62に加えて追加の抵抗素子が、温度依存特性63、64の交差が動作温度で得ることができる限り、つまり制御ループが「レシオメトリック」に留まる限り、さらに使用されてもよい。交差は、個々の特性あるいは他の動作の単純なスケーリングによって作成することができる。例えば、ダイオードの抵抗は、温度において実質的に指数関数的な依存性を有し、一方、電気的な抵抗器の依存性は、実質的に線形であることが知られており、よって、温度依存性は全く異なる。単純化のため、本開示の原理は抵抗器に関してさらに記述されるが、他の素子が同じように可能であることは理解されるべきである。
【0035】
図5Bに戻って実施形態において、第1及び第2の感知信号81、82は、電気デバイス7によって発生される。いくつかの実施形態において、第1及び第2の感知信号81、82は、MEMSデバイス11を備える同じチップにおいて発生してもよい。別の実施形態では、感知信号81、82は、恒温槽2の外部からのように、電気デバイス7の外部から供給されてもよい。所望の交差点65(図7Aに示すように)及び対応する所望温度Tsetは、固定されても可変であってもよい。いくつかの実施形態において、所望の交差点65及び対応する所望温度Tsetは、感知信号81、82を変更することによって調整可能かもしれない。外部の感知信号81、82の供給を許可することは、また、修正及び/又は較正を可能にするかもしれない。
【0036】
MEMS構造11、特に共振器バーと熱接触して2つの抵抗器61、62を設置することによって、電気デバイス7(例えばチップ)の動作中、共振器バーの熱Tcompが規定の温度Tsetにできるだけ接近して一致することを確認することが可能になり、それによって、共振器の周波数が共振器バーの局所的な温度に最も敏感であるように、できるだけ良好にこのMEMS構造11の共振器周波数を安定させる。電気デバイス7の動作中、恒温槽の内側温度TovenとMEMS構造11の温度との間には温度差ができることに注意すべきである。従って、MEMS構造11の近くに感知素子61、62を設けることは望ましいかもしれない。
【0037】
図5Cは図5Bの構造の断面を示し、ここで感知抵抗器61、62は、共振器の上部に設けられる電気的絶縁体上に位置決めされる。このように、電気的絶縁をしないで熱接触が達成される。図5Dは、本開示による別の実施形態を示す。他の多くの形態を用いることができることが当業者に明らかだろう。
【0038】
ある実施形態において、恒温槽は、MEMS発振器11及び加熱手段21を含む真空パッケージ22である。パッケージ22は、MEMSデバイス11から真空パッケージの外部の周囲温度まで熱的絶縁を提供し、加熱手段21とともに恒温槽2あるいは恒温化したシステムを形成する。好ましい実施形態において、MEMS素子11は、その支持脚を通して電流を導き、ジュール加熱によってMEMSデバイス11を加熱する(図19を参照)ことによって、加熱することができる。MEMS素子11及び温度感知手段61、62が良好な熱接触にあり、即ち実質的に同じ温度を有する限り、他のタイプの加熱手段21が使用可能である。
【0039】
他の例の一つは輻射加熱である。図15及び図16を参照。この実施形態において、加熱手段は、調整可能な熱輻射源100を備え、MEM共振素子101が、調整可能な熱輻射源によって発生した熱輻射を吸収するために提供される。言い換えれば、MEM共振素子101は、調整可能な熱輻射源100によって放射された熱輻射を受け入れるために配置され、一方、制御回路は、ここに記述する他の実施形態のように、例えば共振素子の上部に、抵抗性感知素子(図示せず)によってMEM共振素子の温度変化を監視するために配置される。温度の変化は、監視されたパラメーター値の変化に関して放射される熱輻射量を変更するため、調整可能な熱輻射源にその出力信号を適応する制御回路によって監視される。このことは、放射された熱輻射の強度を変更することによって、そうでなければ、その源を断続的にオン/オフを切り替えることによって、行うことができる。熱輻射の形態において熱エネルギーを提供することによって、熱エネルギーは、MEM共振素子101の方へ集中させることができ、それによりMEM共振素子の周囲を直接加熱することを減じ、あるいはさらに回避することができる。熱エネルギーがMEM共振素子によってより直接に吸収可能であるので、開示する装置の温度へのより速い反応速度が達成可能である。光源100は、例えば集積したLEDとすることができ、その強度は、LEDに供給するLED電流を制御することによって調節することができる。
【0040】
好ましくは、抵抗性の感知素子61、62は、電気的に絶縁され熱的に伝導性の層によって分離されて、MEMS素子11の上部に、下方に、あるいは隣接して、互いに隣接してあるいは互いの上方に置かれる。良好な熱接触を提供し、MEMS素子11の性能を大幅に下げない他の実施も用いることができる。
【0041】
レシオメトリックな原理は、異なるTCR値を用いることによって達成されてもよく、これは、2重のセンサループに必要な抵抗器61、62に関して2つの異なる材料を用いることによって今度は達成されてもよい。図7Aは、第1及び第2の抵抗器61、62でのそれぞれの相対的な電気抵抗r=ΔR/R、対、温度の例を示し、即ち一般的に、第1及び第2の感知素子61、62の温度依存特性63、64を示す。
【0042】
予め規定したTCR値を有する電気的な抵抗器の存在及び製造は、当該技術において良く知られている。例えば、n型又はp型シリコンに関する抵抗の温度係数TCRは、既知の公式により、ドーピング濃度に依存する。A. Razborsek及びF Schwagerは、「Thin film systems for low RCR resistors」において、Niパッドで覆われTCRを−150ppm/℃と+500 ppm/℃との間に調節可能なTaNを備えた抵抗器をどのように製造可能とするかを記述している。米国特許No.7,659,176は、調整可能な抵抗の温度係数の抵抗器、及びその製造方法について記述する。抵抗器のTCR値は、異なる材料を用いることによって変化するかもしれないが、しかし、同じ材料を備えるが異なる結晶構造あるいは結晶方位、又は、異なるドーピングレベルあるいは不純物レベルを有する抵抗器もまた、異なるTCR値を有するかもしれない。
【0043】
Tsetのまわりの小さな所定温度範囲において、温度依存特性63、64の曲線は、下記の式によって近似することができる。
R(T)=R0(1+αΔT) (1)
【0044】
ここで、αはTCRとして知られ、抵抗の温度係数と呼ばれる材料特性である。用語「抵抗器」が用いられているが、合成抵抗値r1及び合成TCR1値を有する結合した抵抗器を得るために、2つ以上の個々の抵抗器の並列又は直列の組み合わせもさらに使用されてもよいということが理解されるべきである。
【0045】
感知素子として抵抗器を用いた、本開示の実施形態において、TCR値のうちの一つは、実質的に0であり、一方、別のTCR値は正である。別の実施形態において、TCR値のうちの一つは実質的に0であり、一方、別のTCR値は負である。さらに別の実施形態では、TCR値のうちの一つは負であり、一方、別のTCR値は正である。さらに別の実施形態において、両方のTCR値は負であるが、異なる値を有している。さらに別の実施形態では、両方のTCR値は正であるが、異なる値を有している。他のTCR値も、同じように可能である。
【0046】
本開示の実施形態において、第1の感知信号81はAC電流であり、第2の感知信号82はAC電流であり、第1の測定信号83はAC電圧であり、第2の測定信号84はAC電圧である。別の実施形態において、第1感知信号81はDC電流であり、第2の感知信号82はDC電流であり、第1の測定信号83はDC電圧であり、第2の測定信号84はDC電圧である。また別の実施形態において、第1感知信号81はAC電圧であり、第2感知信号82はAC電圧であり、第1測定信号83はAC電流であり、第2測定信号84はAC電流である。さらに別の実施形態において、第1感知信号81はDC電圧であり、第2感知信号82はDC電圧であり、第1測定信号83はDC電流であり、第2測定信号84はDC電流である。感知信号81、82は、連続信号あるいは中断信号であってもよい。感知信号及び測定信号は、さらに他の形態を取っても良い。
【0047】
制御回路71の実施形態において、感知素子61、62(例えば抵抗器)によって発生した測定信号83、84(例えば電圧)は、減算され及び任意的に増幅され、図7Bに示すように例えば差信号85を生成する(又はその逆、第1測定信号が第2測定信号から減算されるあるいはその逆か否かに依存して)。任意的に、測定信号83、84のうちの一つは、減算前に拡大縮小(scaled)することができる。差信号85が正であるとき、MEMS発振器11の温度Tcompは、Tsetよりも高く、恒温槽2は冷やされるべきである。これは、受動的な場合には、冷却はヒーター21に電力を供給しないことにより達成されてもよい。差信号85が負であるときには、MEMSデバイス11の温度TcompはTsetよりも低く、恒温槽2を加熱する必要がある。実際上、Tsetは、周囲温度の少なくとも10℃上が選ばれてもよく、その結果、受動的な冷却が使用可能である。
【0048】
ヒーター21へ供給される実際の加熱電力は、いくつかの実施形態において、差信号85の大きさに比例するか、二次の、指数関数の、あるいは別の関係であってもよい。言い換えれば、制御ループは、例えば、一つの温度センサー61の温度特性(例えば抵抗)を第2の温度センサー62の温度特性(例えば抵抗)と比較することによって、MEMS発振器11の温度Tcompを評価することができる。温度制御ループによって、恒温槽温度Tovenは、特性が交差する(比較結果の差がゼロである)ところの温度Tsetへ進められ、その結果、MEMS発振器11の出力は、実質的に安定な出力信号を発生するように調整される。温度TovenがTset付近に制御される所定の温度範囲は、出力信号の可能な周波数ドリフトを決定する。抵抗性の感知を有するレシオメトリックなループを用いることによって、その温度範囲は、例えばTset付近の0.10℃に制限することができ、数ppm以下のドリフトに導く。温度範囲は、MEMS発振器11の特性及び動作周波数の温度依存性を考慮に入れることにより、例えば2若しくは1ppmの目標最大周波数ドリフトを目指して最適化(制限)することができる。
【0049】
別の実施形態において、測定信号83、84は、例えばコンパレーター(図示せず)を用いて互いと比較され、例えば図7Cに示すような比較信号86を生成する。図7Cの信号86が正であるとき、MEMSデバイス11の温度TはTsetよりも低く、恒温槽2は加熱されるべきである。コンパレーターの構成に依存して、正又は負電圧に留めるように他の比較信号86が発生されてもよく、当業者は、加熱手段21,100による要求に応じてそのような信号を容易に適応させることができる。
【0050】
図6は、実施形態による、例示のMEMSシステムを示す。恒温槽の温度Tovenの制御は、2つの素子61、62間の特性の比率又は差に基づく。システム1は、恒温槽2を備え、ここではMEMSデバイスを備えた電気デバイスが設けられ、電気デバイス7は、MEMS構造11と2つの温度センサー61、62とを備え、この2つの温度センサーは、TCR1及びTCR2をそれぞれ有する2つの抵抗器R1及びR2のような、上述したように異なる温度依存特性63、64を有する。そのシステムは、さらに、MEMS構造11、特にその素子11の温度Tcompを、固定のあるいは所望の温度Tsetに設定あるいは制御するための制御ループを実行する制御回路71を備える。制御回路71は、電気デバイス7の一部あるいは恒温槽2の一部であってもよい。このシステムは、以下のように動作する。
【0051】
各抵抗器R1、R2の抵抗rの変化が図7Aに図示され、関数r1(T)及びr2(T)として示されている。両方の抵抗は温度Tの関数である。考察の温度範囲において、r1(T)とr2(T)とが等しい一つの(また1つだけの)点がある。この点は、所定温度Tsetによって定義される。この温度に関して、r1(Tset)=r2(Tset)。この式は、目標とされる恒温槽温度、Tsetでのみ有効である。制御ループは、r1(Tset)=r2(Tset)であるように恒温槽温度を制御する。これが実現されるとき、恒温槽の温度はTsetであり、Tsetに維持される。実際、Tsetは、感知信号61、62が同一であるとき特性曲線の交点に同じである、測定曲線83、84の交差点に位置し、そうでなければ、曲線はファクターmでシフトし、ここでmは感知信号61、62の大きさの比率である。
【0052】
定常状態動作において、MEMSデバイス11の温度は、Tsetで維持され、温度ドリフトは実質的に除去される。制御ループがDC(積分器)で無限の利得を有するならば、この制御ループは、感知回路類における温度依存オフセットのような、他の回路における非理想ではない、実質的に絶対的な平均温度精度を達成することができる。
【0053】
制御ループ71は、当業者に知られたいかなるアルゴリズムも用いて、アナログ又はデジタルの方法で実行されてもよい。さらに、制御ループ71は、恒温槽2においてMEMS構造11を制御し監視するための回路を提供してもよい。制御ループは、一般に、システム7を有効に動作させるために、あるいは希望するように出力信号87(例えば、図6におけるMEMS構造の共振器の周波数)を調整するために必要ないかなる素子あるいは機構を含むことができる。特に、制御ループは、MEMS構造11の温度がTsetで維持されることを保証するだろう。MEMS構造11の信号品質ファクター及びパラメータも制御ループによって記録され、及び/又は監視されてもよい。共振器の材料、特性及び構造と同様に、熱変動、ノイズ、弾性、応力、圧力、印加された歪み、及び電圧、電界及び電流を含む電気的なバイアスのようなファクターは、MEMS構造11の出力に影響するかもしれない。これらのファクターを監視することは、共振器の出力信号の要因と共振器の出力信号特性との間の関係を発現させるのに有用であるかもしれない。これらの関係を理解することは、発生した出力信号87にわたりより多くの制御をなすことを可能にする。
【0054】
図8は、実施形態による、ヒーターを含む例示のMEMSシステムを示す。第1及び第2の感知素子61、62、並びに制御回路71の目的は、周囲温度にかかわらず、Tsetに等しい、恒温槽2の庫内温度を安定に維持することである。結果として、部品のパラメータの変化は非常に小さくなる。2つの温度センサー61、62は、MEMS部品11の温度を感知する。センサ61、62は、温度に関して異なる依存性を有する。それらは、2つの温度依存値S1、S2、例えば上述した測定電圧V1、V2、を出力する。制御ループ71は、MEMS部品11の温度Tcompを制御するヒーター21を駆動する。制御ループは、m*S2=S1、ここでmは予め規定した一定の実数である、のように、恒温槽温度を制御する。この式は、一つの単一の温度Tsetでのみ有効である。したがって、ループが安定したときには、部品11の温度はTsetであり、よって、その温度依存変数は安定している。このことは図9に示され、図9は、実施形態による、第1及び第2の温度依存特性を示す。
【0055】
ヒータ制御信号88は、周囲温度Tambの関数になりえることが観察可能である。実際に、周囲温度が下がると、恒温槽2を囲む周囲温度のため、マイクロ恒温槽2の部品温度も下がるだろう。したがって、S1及びm.S2の両方は、同じように変化するであろう(それらは温度依存性の符号によって増加あるいは減少するかもしれない)。このことは、目標温度Tsetへ恒温槽2を再び加熱するようにヒータ制御信号88を補償するため、制御ループ71を起動させるだろう。実際にループは、m.S2を戻しS1に等しくさせるだろう。制御信号74が周囲温度Tambの関数であることはこの例から見ることができる。したがって、2重センサの温度安定ループ71は、温度センサーとして用いることができる。
【0056】
図8に示す2重センサ制御ループ71が理想的であるが、現実の応用例において、2重センサ制御ループ71は非理想に苦しむかもしれない。これは、加熱された部品のパラメータ(例えば周波数)の残余の温度依存性に帰着するかもしれない。言い換えれば、Tsetは周囲温度変化に関して固定されると思われているが、図11に示すように、Tsetは周囲温度に関して僅かな残留変化を有しているかもしれない。図11は、実施形態(「2重センサ制御のみ」によって示された曲線)による、2重センサ制御無しの、2重のセンサ制御有りの、並びに、2重センサ制御及びポスト補償制御有りの場合での、恒温制御されたMEMS発振器に関する例示の出力信号の安定性を図示する。示されるように、部品のパラメータは温度に関して依然として変化するかもしれない。これは望むものではない。
【0057】
本開示の別の態様によれば、実施形態による、ヒーター及び制御ループを含む例示のMEMSシステムを示す図10に図示するように、この残余の温度依存性は、ポスト補償によってさらに縮小されるかもしれない。この方法では、周囲温度Tambを感知する必要がある。よってTambの測定は、ループの非理想の部品を修正する補償機構を誘導する。非理想による元の残余温度ドリフトが小さいので、Tambの測定はあまり正確である必要がない。ポスト補償機構は、温度ではなく興味のあるパラメータ(例えば共振器周波数)に影響を与えることができる、あらゆる独立した種類のものが可能である。例えば、周囲温度Tambの代表の制御信号88は、ポスト補償信号がバイアス電圧である、制御システム及びヒーターを含む例示のMEMSシステムを示す図12に示すように、MEMS部品11のバイアス電圧を誘導してもよい。
【0058】
図13は、ポスト補償信号が位相同期ループに作用する、ヒーター及び制御システムを含む例示のMEMSシステムを示す。図13に示す実施形態は、入力としてMEMS発振器をとり調整された出力周波数を提供する後段のPLLを調整する。この追加の補償90は、線形の、二次のあるいは多項式のような、数学のいずれの種類のもの、又は、ルックアップテーブルに基づいた、あるいは当業者に知られる他のいずれの補償に基づくものであることができる。ポスト補償90の動作、及び部品パラメータあるいは出力パラメーター92(例えば周波数)への影響は図11に図示される。図11は、実施形態による、2重センサ制御無しの、2重センサ制御有りの、及び2重センサ及びポスト補償制御有りの恒温制御されるMEMS発振器に関する例示の出力信号の安定性を図示する。示されるように、2重センサ制御及びポスト補償カーブ92は、ポスト補償90無しのシステムに対応する曲線87よりもよりフラットである。
【0059】
上述したように、2重センサループ71は、アナログループあるいはデジタルループとして実行されてもよい。したがって、周囲温度出力Tambは、アナログ又はデジタルになりえる。また、ポスト補償機構90もまたアナログ又はデジタルになりえる。
【0060】
ポスト補償90は、独立した制御信号(例えばMEMS部品11のバイアス電圧)を制御することができるが、また、それは温度ループ部品に作用することもできる。ポスト補償機構90は、またシステムの一部ではなく外部パラメーターに作用してもよい。例えば、周囲温度測定は、部品パラメータを用いる外部システムにおいてポスト補償として役立つことができる。例えば、ポスト補償は、恒温化されたMEMSに基づく発振器を用いる外部PLLにて実行することができる。
【0061】
以下では、開示によるシステムで使用するMEMS共振器デバイスの実施形態が、周波数及び電子機械的安定性、並びに高Qファクターを提供する最適な支持アンカーとともに記述される。図5、図15及び図19に示されるMEMS共振器デバイスは、それぞれ、矩形形状の、しかし他の形状も可能である(例えば正方形、円形、平行六面体、立方体等)主たる共振器本体を含む。励振は、ごく近接して、つまり主共振器本体101に変換隙間(transduction gap)で設けられた電極111、112によって達成される。その本体は、基板に主共振器本体を固定するT形状の支持体121,122によって基板上方に浮かされる。
【0062】
T形状の支持体つまりT−支持体は、基板へアンカーによって取り付けられる2つの脚と、主共振本体101への共通の接続部、及び幾つかのケースでは中央の接続部とを備えた固定−固定梁(clamped-clamped beam)を備える。MEMS共振器構造11は、少なくとも所定のモード、例えば呼吸モード(breathing mode)で共振するように構成される。主共振器本体は、その自然な応答に関係する共振周波数(fres)で共振する。固定−固定梁あるいは支持体の長さは、周波数安定性及び高Qファクターを提供する屈曲波長(支持体へ最も重要な応力部品に依存する波長のタイプ)に関するものであるように選択される。固い固定−固定支持体を利用するT−支持体の設計は、動作方向において電気機械安定性を提供する。特に、各梁の長さLTsupは、屈曲波長の半分にオフセット期間を加えたものの倍数として選択される。
【0063】
これらの実施形態において、各梁は、上記動作周波数(fres)で上記共振器本体の上記振動の結果として規定の屈曲波長での屈曲モードで振動することに適する。このことは、共振器本体の目標とした振動の結果として、梁が屈曲モード(つまり、この振幅用の低い剛性を示す)で振動するように作製されるように、梁の特性が選択されることを意味する。屈曲モードで振動するために梁の能力は、共振器の電子機械的安定性を向上させる、あるいは少なくとも維持することができ、一方、他のパラメータ用の梁の設計を最適化するために屈曲モードの理解を用いることができることが分かっている。さらに、各脚は、梁の振動の上記屈曲波長に対して「音響的に長い」ものであり、つまり脚が従来のデバイスに対して比較的長い長さを有することを意味し、このことは共振器本体の断熱を向上させる。結果として、共振器は、基板方向への著しい熱損失なしで動作温度に加熱することができ、動作周波数を実質的に安定して維持する。共通の中央の接続部は、電気機械的安定性を考慮して最小長さを有するように好ましくは選択あるいは設計される。その最小長さは、設計パラメータ及び製造工程によって決定される。
【0064】
好ましくは、各脚は、上記屈曲波長を2で割り所定のオフセットを加えたものの所定倍数に等しい長さ(LTsup,opt)を有し、その所定倍数は脚の熱抵抗の最適化を考慮して選択され、上記所定のオフセットは共振器の品質ファクターの最適化を考慮して選択される。支持脚に関してそれらの長さの一つを選択することによって、共振器の接続点でのインピーダンス及びアンカーでのインピーダンスは一致する。結果として、アンカーを介する基板へのエネルギー損失は最小にすることができ、最適化されたQファクターを有する共振器デバイスを提供することができる。好ましくは、所定のオフセットは、動作周波数(fres)に等しい第1の屈曲共振周波数を有する固定−固定梁の長さ(Lcl−cl、1)の半分と実質的に等しい。Qファクターは共振器の支持脚長の周期関数であり、及び所定のオフセットが実質的に周期関数の最大に相当するということが分かった。
【0065】
好ましい実施形態において、共振器本体は、変位が最小であるところで対称軸を有する呼吸モードで共振することに適しており、ここで、固定−固定梁の共通の接続部は上記対称軸に位置決めされる。このことは、梁が最小変位点で共振器本体に接続されることを意味し、これは、共振器の電気機械的安定性を向上させることができる。図14A〜図14Cは、本開示による実施形態で使用するに適している振動MEMS共振器の変位を示す。共振器は、呼吸モードで振動する。つまり本体が拡張、収縮する。図14Aは、元の、平面形状の、つまり変位の無い主本体を示す。図14Bは、主本体の振動の最大拡張点での変位を示す。即ち、本体の長手方向(中央)軸で実質的に変位が無く、かつ本体の長手方向端縁に沿って最大変位がある。図14Cは、主本体の振動の最大収縮点での変位を示す。即ち、同様に、本体の長手方向軸で実質的に変位が無く、かつ本体の長手方向端縁に沿って最大変位がある。このことは、この呼吸モードにおいて長手方向軸がこの発振器用の支持体を接続するのに最良の場所であることを示す。
【0066】
本開示により達成可能な高レベルの電気機械的安定性は、さらに、引き込みの危険が無く高い電圧を印加することができ、よって、より容易に集積化を導くことができるMEMS共振器の低い動インピーダンス達成する。
【0067】
好ましい実施形態において、固定−固定梁はT形状であり、共振器本体に中心に接続される。別の実施形態では、固定−固定梁は、また例えば角のある梁になりえる。
【0068】
好ましい実施形態において、固定−固定梁は硬い方向を有し、励振手段は上記梁の硬い方向において共振器本体を励振するために位置決めされる。例えばT形状梁の場合、硬い方向は、支持脚の長手方向であり、上記梁は、それに直角ないずれの方向において低い剛性を有している。
【0069】
しかしながら、本開示は、呼吸モードで振動するために設計されるマイクロメカニカル発振器に制限されない。他の動作モードが同じように可能である。
【0070】
図17は、本開示による実施形態において用いることができる屈曲の共振器の例を示す。この共振器は、2つの励振電極間に延在し、屈曲モードで共振するのに適した固定−固定梁130を備える。支持体131、132は、今度は本明細書に記載するように、音響的に長い脚を有する固定−固定梁になり得る。図5に関して上述したのと同じ方法で、共振器の上部に2つの抵抗性の感知素子が設けられる。
【0071】
図18は、本開示による実施形態において使用可能な屈曲共振器の別の例を示す。この共振器は、2つの励振電極間に延在し、屈曲モードで共振することに適した片持ち梁140を備える。支持体140は、今度は本明細書に記載するように、音響的に長い脚を有する固定−固定梁になり得る。図5に関して上述したのと同じ方法で、共振器の上部に2つの抵抗性の感知素子が設けられる。
【0072】
図20に示される別の好ましい実施形態において、異なるTCRを有する材料で構成される2つの抵抗器は感知素子である。抵抗器へのケルビン(4点)接続は、デバイス上で抵抗測定を可能にする。可能な配置において、電圧Vが監視されながら、電流Aが抵抗器を通して導かれる。そのとき抵抗は、アクセスラインの抵抗及び温度に関係なく、V/Aである。他の感知構成も同じように適用することができる。
【技術分野】
【0001】
本開示は、一般的に、恒温制御された微小電気機械システム(MEMS)発振器を備えたシステムに関する。
【背景技術】
【0002】
MEMシステム及び特にMEMS共振器は、非常に高い品質ファクター(Q)を有し、発振器を構築するために用いることができ、このことは、図1に示すように、周波数基準装置としてそれらが役立つように実施可能とすることが知られている。しかしながら、伝統的には水晶発振器がそれらのより良好な温度安定度のため、周波数基準としてしばしば用いられる。放送送信機システムにおけるようにより高い安定性が要求されるときには、例えば恒温槽型水晶発振器がしばしば用いられる。しかしながら、そのような石英デバイスは大きく、また、石英基準を用いるシステムは、低い集積化に悩まされる。一方、MEMS発振器は、小さく、集積化可能であり、よって、コストを著しく低下させる。しかしながら、補償無しでのMEMS共振器は、温度に関して周波数ドリフトの高い感度を示し(例えば100℃の周囲温度範囲に関して±5000ppm)、よって、図2に示すように、水晶発振器よりも温度に関してより不安定な周波数特性を有している。
【0003】
MEMS共振器は、周囲温度を感知することにより、及び測定された温度によって、(例えば電気的に)MEMS共振器を補償することによって、広い周囲温度範囲(例えば100℃の周囲温度範囲)にわたり、より良好に安定させることができる。図3は、そのような従来の解決策を図示している。周囲温度は、MEMSデバイスと良好に熱接触する外部の温度センサによって感知され、MEMS発振器システムは、測定された温度に基づいて周波数制御手段によって電気的に補正される。言い換えれば、周囲温度センサは、共振器システムの周波数補償ノブを駆動する。このように、MEMS共振器は、100℃の周囲温度範囲(例えば−20℃から+80℃周囲温度まで)にわたり、±100ppm精度まで典型的に制御されるかもしれない。
【0004】
しかしながら、それらのメカニズムの問題は、温度センサ自体の精度及び温度安定性である。温度に関するそれらのドリフトは、MEMS共振器の達成可能な温度安定性を制限する。これが、システムにおいて信頼できる(かつ高価な)温度基準がしばしば必要とされる理由である。
【0005】
図4に示されるように、米国特許出願 2009/0243747は、一つの安定した周波数を発生するために2つの共振器を用いる。温度安定性は、温度変化に対する周波数の変化である、周波数の異なる温度係数、TCF=Δf/f.1/ΔTを有する2つの共振器を用いることにより、及び、温度ドリフトによる共振器間の周波数差を補償することによって達成される。(補償が適用されなかったならば)両方の周波数が同一のところで、所定温度Tsetが存在する。制御ループは、温度変化を補償し、周波数が他の温度においても同一に維持されることを保証する。よって、共振器周波数の安定性が達成される。しかしながら、この概念には、異なるTCFを有する2つの共振器を必要とし、よって大きなチップ面積を必要とするという欠点がある。また、両方の共振器は、さらなる回路類を必要としながら、発振器として構成されるべきである。また、所望の周波数を達成するために、両方の共振器帯(bars)での温度は同一であるべきであり、このことは、概念的には設計を一致させることによって容易であるかもしれないが、実際には保証するのは非常に難しい。最後に、両方のデバイス間の寄生性のカップリングは、余りきれいなクロック出力とはならない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許出願2009/0243747号
【発明の概要】
【0007】
低減した周波数ドリフトを達成することができる、実質的に安定した周波数で出力信号を発生するためのMEMSに基づいたシステムが開示される。
この目的は、第1請求項の技術的特徴を備えたシステムとともに本開示によって達成される。
【0008】
特に、システムの周波数ドリフトを最小限にするために、レシオメトリックな(ratiometric)温度制御ループが必要なことが分かった。これは、マイクロメカニカル発振器と連携し、抵抗感知とともにレシオメトリック原理によって、マイクロメカニカル発振器の温度を検出し、評価し、適応させるための部品を備え、及び、所定の設定温度付近の所定温度範囲内にマイクロメカニカル発振器の温度を維持するためにさらに設けられる。この所定温度範囲は、マイクロメカニカル発振器の特性及び上記周波数の温度依存性に基づいて決定される。
【0009】
開示のシステムは、自己参照されるという長所を有し、その結果、温度又は周波数用の外部参照用のソースがその動作のためにあるいは周波数ドリフトを制限するために必要ない。相対的な温度誤差のみを検出する(つまり、実際の温度が希望温度よりも高いあるいは低いかどうかを検出する)必要があるので、誤差の大きさの絶対測定を検出する必要はない。したがって、典型的に温度に関して非常に正確で安定した特性を要するアンプ又はA−D変換器は必要ない。このことは、システムを非常に単純化しより実現可能にする。関連する測定が、どの程度大きいあるいは小さいというよりもむしろ単に「高すぎる」あるいは「低すぎる」であるので、温度誤差の検出における利得誤差は、所望のTsetを達成することには無関係である。
【0010】
MEMS発振器は恒温槽に位置し、よって周囲環境から遮断されており、さらに、恒温槽における基準MEMS発振器の必要性(米国特許出願公開2009/0243747号に開示される2重の共振器システムのような)を避けることができることから、開示のシステムは、低消費電力でありえるという長所を有する。
【0011】
いくつかの実施態様において、所定の温度範囲は、高々0.10℃であるように選択されてもよい。このことは、開示するレシオメトリックな温度制御ループによって可能であり、周波数ドリフトをほんの数ppm以下に減じることができる。
【0012】
マイクロメカニカル発振器(この発振器は異なるモードあるいは複数の周波数で振動するよう設計されてもよい)が振動する一つあるいは複数の周波数は、マイクロメカニカル発振器の特性、特に、それが構成されている材料、その形態(例えば形状及び配置)、及びその寸法を備える特性によって決定される。
【0013】
好ましい材料は、シリコンゲルマニウムであり、それは−40ppm/℃のTCF(周波数の温度係数)を有する。開示する制御ループ及び0.05℃に制限された所定温度範囲で、周波数ドリフトは、2ppm.に制限することができる。さらに、よりよい安定性を達成するために、設計特性を最適化することができる。その結果、例えばシリコンゲルマニウム発振器と組み合わせて抵抗感知を有するレシオメトリックな制御ループで、1ppm以下の周波数ドリフトを達成することができる。
【0014】
別の可能な材料はシリコンであり、それは−30ppm/℃のTCFを有する。周波数ドリフトを2ppmに制限するために、0.067℃の温度範囲が制御ループにセット可能である。さらに、発振器の特性上の設計によって、ドリフトはさらに縮小することができる。MEMS発振器は、また、おまけに他の適切な材料にて構成されてもよいことに注意すべきである。
【0015】
いくつかの実施態様において、MEMS発振器は圧電共振器であってもよい。あるいは、またさらに、MEMS発振器は、弾性表面波共振器、屈曲共振器(flexural resonator)、あるいは他のいずれの共振器であってもよい。
【0016】
いくつかの実施態様において、マイクロメカニカル発振器は、真空密封パッケージにおいてMEMS発振器へ共通の接続を有する2つの支持脚を備えた各梁のような、固定−固定梁(clamped-clamped beams)によって浮かされてもよい。共振器用の支持アンカーとしてそのような梁を用いることは、マイクロメカニカル発振器の振動の結果として梁が振動するところの屈曲波長(flexural wavelength)に対して、例えば、梁の各脚を音響学的に長くすることによって(例えば、屈曲波長の倍数よりも各脚を長くすることによって)、共振器の断熱を向上させることができるという利点を有する。更なる利点として、そのような支持アンカーで、単一のMEMS発振器システムの消費電力が1mW未満にすることができることが分かり、その結果、システム全体の電力消費は、10mW以下に減じることができる。さらに更なる利点として、脚の長さは、発振器の品質ファクターに影響するのを防止するために最適化することができる。
【0017】
いくつかの実施態様において、それらの梁の一若しくは複数は、MEMS発振器を加熱するための加熱抵抗として用いることができる。このように、それらの梁の一若しくは複数は、制御ループの一部として機能してもよい。
【0018】
他の実施態様において、MEMS発振器は、他のタイプの支持アンカーによって同じように浮かされてもよい。
制御ループの一部として、発振器用の加熱は、輻射あるいは他のいずれかの加熱機構によってマイクロメカニカル共振器を加熱するための輻射源を備えてもよい。
【0019】
レシオメトリックな温度制御ループの抵抗感知は、マイクロメカニカル共振器と十分に良好な熱接触において2つの感知素子を設けることにより提供されてもよく、その結果、2つの感知素子は、共振器と実質的に同じ温度を感知する。レシオメトリックの原理は、測定されたとき測定曲線が、予め規定した設定温度Tsetに対応する予め規定の交差点にて交差するように、両方の感知素子が異なる温度依存特性を有するという点で規定することができる。このように、MEMS発振器の実際の温度が所定温度Tsetよりも上か、下か、等しいのか否かを容易に決定することができ、よって、上記ループを制御可能である。いくつかの実施態様において、第1の感知素子は第1の感知信号で感知されてもよく、第2の感知素子は第2の感知信号で感知されてもよい。いくつかの実施態様において、第1及び第2の感知信号は、実質的に同じ大きさを有していてもよい。いくつかの実施態様において、第1及び第2の感知信号は、同じ符号、位相、継続時間を有さなくてもよい。
【0020】
一つの実施態様において、制御回路は、基板に第1及び第2の感知信号を構成してもよく、その結果として差信号を決定する。制御回路は、その差信号を増幅するようにさらに構成してもよく、それによって制御信号を発生する。
【0021】
いくつかの実施態様において、制御回路は、制御信号における残余誤差を除去するように構成されたポスト補償回路に接続されてもよく、それによってポスト補償信号を発生する。ポスト補償信号は、例えば、線形の、二次の、あるいは多項式変換の制御信号を用いて決定してもよい。代わりに、あるいはさらに、ポスト補償信号は、例えば、ルックアップテーブルを用いて決定してもよい。他の例も、同様に可能である。
【0022】
ポスト補償信号は、集積電気部品の温度と予め規定の温度との差を減じるために、バイアス信号又はオフセット信号として制御回路に供給されてもよい。
残余誤差を除去するためにそのようなポスト補償回路を用いることによって、オフセット、潜在熱、及び/又は他の非理想に起因する不正確さは、さらに減じられるかもしれない。
【図面の簡単な説明】
【0023】
【図1】図1は、発振器及びフィルタにおいて適用された典型的なMEMS共振器を示す。
【図2】図2は、恒温制御された水晶振動子及び補償されていないMEMS共振器に関する、温度に対する典型的な周波数ドリフトのプロットを示す。
【図3】図3は、典型的なMEMSシステムを示す。
【図4】図4は、別の典型的なMEMSシステムを示す。
【図5A】図5Aは、実施形態によるMEMS発振器の平面図を示す。
【図5B】図5Bは、実施形態によるMEMS発振器の平面図を示す。
【図5C】図5Cは、実施形態によるMEMS発振器の断面図を示す。
【図5D】図5Dは、実施形態によるMEMS発振器の断面図を示す。
【図5E】図5Eは、実施形態によるMEMS発振器を含む真空パッケージを示す。
【図6】図6は、実施形態によるMEMSシステムの例を示す。
【図7】図7Aは、温度依存の抵抗器の値に対応する測定電圧信号の例で、実施形態による例示の測定電圧信号間の出力比較を示す 図7Bは、例示の測定電圧信号間の違いに対応する測定電圧信号の例で、実施形態による例示の測定電圧信号間の出力比較を示す。
【図8】図8は、実施形態による、ヒーターを含む例示のMEMSシステムを示す。
【図9】図9は、実施形態による、第1及び第2の温度依存特性を示す。
【図10】図10は、実施形態による、ヒーター及び制御ループを含む例示のMEMSシステムを示す。
【図11】図11は、実施形態による、2重のセンサ制御が無い、2重のセンサ制御が有る、及び2重のセンサ制御及びポスト補償制御が有る、恒温制御されたMEMS発振器に関する例示の出力信号の安定性を図示する。
【図12】図12は、ポスト補償信号がバイアス電圧であるヒーター及び制御システムを含む例示のMEMSシステムを示す。
【図13】図13は、ポスト補償信号が位相同期ループに作用するヒーター及び制御システムを含む例示のMEMSシステムを示す。
【図14A】図14Aは、実施形態による、MEMS発振器を振動させる例示の変位を示す。
【図14B】図14Bは、実施形態による、MEMS発振器を振動させる例示の変位を示す。
【図14C】図14Cは、実施形態による、MEMS発振器を振動させる例示の変位を示す。
【図15】図15は、実施形態による、輻射によって加熱された圧電長手方向発振器(bulk acoustic longitudinal oscillator)の模式図を示す。
【図16】実施形態による、共振器での周波数変動対入射光パワーを示す、100x100μm SiGe発振器に関する測定データを示す。
【図17】図17は、実施形態による、例示の屈曲共振器を示す。
【図18】図18は、実施形態による、別の例示の屈曲共振器を示す。
【図19】図19は、実施形態による、支持体を介してジュール加熱によって加熱された例示のMEMS発振器を示す。
【図20】図20は、実施形態による、MEMS発振器の上部の抵抗を測定するために、4点のアクセスラインを有する2つの抵抗器が、アクセスラインの抵抗及び温度に関係なく置かれたMEMS発振器の例示を示す。
【発明を実施するための形態】
【0024】
開示は、開示のいくつかの例を説明する、添付の図及び図の説明においてさらに解明される。図は、尺度に従って描かれていないことに注意してほしい。それらの図は、開示の原理を記述することを意図している。さらに、開示の実施形態は、異なる図の異なる特徴及び要素の組み合わせを用いることができる。
【0025】
本開示は、特定の実施形態に関して、及びある図に関して記述されるだろうが、この開示はそれに限定されない。記述された図は、単に模式的であり、非限定的である。図において、要素の内のいくつかのサイズは、図示の目的のため、誇張され、尺度通りに描かれていないかもしれない。寸法及び相対的な寸法は、必ずしも開示の実施への実際の縮小に対応していない。
【0026】
さらに、実施形態及び請求範囲における第1、第2、第3等の用語は、類似の要素間を区別するために使用され、必ずしも連続的あるいは経時的な順を述べるためのものではない。それらの用語は、適切な状況下で交換可能であり、開示の実施形態は、ここに記述されあるいは図示された以外の他の順序における動作が可能である。
【0027】
さらに、実施形態及び請求範囲における上、底、上方、下方、等の用語は、便宜上、使用されるものであり、必ずしも相対的な位置を述べるものではない。それらの用語は、適切な状況下で交換可能であり、ここに記述された開示の実施形態は、ここに記述されあるいは図示された以外の他の配向における動作が可能である。
【0028】
請求範囲において使用される、用語「備える」は、それ以後に列挙する手段に限定されるように解釈すべきではない。即ち、それは、他の構成部分又は工程を排除しない。よって、そのように述べられた特徴、整数、工程、又は部品の存在を特定するように解釈されるべきであり、1つ以上の他の特徴、整数、工程、又は部品、あるいはそれらのグループの存在や追加を妨げない。したがって、表現「手段A及びBを備えたデバイス」の権利範囲は、部品A及びBのみからなるデバイスに限定されるべきではない。それは、本開示に関して、デバイスの唯一関連ある部品がA及びBであるということを意味する。
【0029】
本開示は、予め規定した温度Tsetにてマイクロエレクトロメカニカル(MEMS)発振器の温度を安定化させるためのシステムを提供する。図1は、発振器及びフィルタにおいて適用される典型的なMEMS共振器を示す。典型的なMEMS発振器11は、幾つかの場合において圧力センサ、発振器、応力センサのような種々様々の応用例に用いられてもよい。MEMS構造は小さくなる傾向があるので、例えば、相補型MOS(CMOS)チップを含む、多くのデバイスに集積化可能である。
【0030】
しかしながら、MEMS発振器11のような典型的なMEMS構造に関する問題は、それらの特性が温度とともに大きくドリフトするかもしれないということである。例えば、MEMS発振器において、その周波数は100℃の温度範囲(例えば−20℃から+80℃まで)において5000ppmでドリフトするかもしれない。例えば、MEMS発振器に基づくシリコンは、典型的にはその共振周波数fres(T)に関して温度に対して−30ppm/℃の感度を有している。そのようなシリコン系のMEMS発振器に関する周波数の温度係数TCFは、−30ppm/℃であると言われる。
【0031】
MEMS発振器の周波数を安定させるためのいくつかの技術がある。一つの技術は、電気的な補償によるものであり、これでは発振器回路のフィードバック信号が安定周波数を維持するために修正される。別の技術では、MEMS発振器の温度Tcompが安定な予め規定した温度Tsetに維持される。このために、MEMS発振器は、図1に示す恒温槽2のような恒温槽に置かれてもよく、恒温槽温度Tovenは、予め規定した温度に維持されてもよい。しかしながらこの技術は、恒温槽内の温度が所定値Tsetよりも高いかあるいは低いか否かを決定するいくつかの手段を一般的に必要とする。米国特許出願公開2009/0243747において、この決定は、異なるTCF(例えばTCF1及びTCF2)を有する2つのMEMS共振器を用いることによってなされ、図4に示すように、それら周波数を混合することに基づいて制御信号88を発生する。
【0032】
図5Aから図5Eは、実施形態による、MEMS発振器の平面を(図5A及び図5B)、MEMS発振器の断面を(図5C及び図5D)、及びMEMS発振器を含む真空パッケージを(図5E)示す。図5Bに示されるように、MEMS発振器11は、第1の抵抗r1及び第1の抵抗温度係数(TCR)TCR1を有する第1の抵抗器61を含んでいる。さらにMEMS発振器11は、第2の抵抗r2及び第2TCR TCR2を有する第2の抵抗器r2を含んでいる。第1抵抗器61及び第2抵抗器62は、MEMS発振器11の共振器バーの上部に加工されて示されている。第1抵抗器61及び第2抵抗器62は、MEMS発振器11から電気的に絶縁されるが、所望の熱的精度を有するようにMEMS発振器11と良好な熱接触にある。抵抗値は、少なくとも第1の感知信号81(I1in)及び第2の感知信号82(I2in)を組み合わせて選択される。第1感知信号81は、例えば、第1抵抗器61を流れる第1の直流(DC)信号を含んでもよい。同様に、第2感知信号82は、第2抵抗器62を流れる第2のDC信号を含んでもよい。図7Aに示される電圧曲線83、84のように、結果として生じる電圧曲線が、予め規定の温度Tsetに対応する交差点85で交差するように、抵抗値が選択されてもよい。これらの抵抗器61、62は、本開示のシステムによるレシオメトリックな制御ループにおいて用いられる抵抗性の感知素子の実施形態を形成する。
【0033】
一つの実施形態において、2つの感知信号81、82は、実質的に同じであってもよい。例えば、感知信号81、82の各々は、カレントミラーによって発生されたDC信号であってもよい。別の実施形態では、各感知信号(例えば第1感知信号81)は、例えばスイッチを用いて一つの感知素子(例えば第1感知素子62)に選択的に印加され、及び測定信号(例えば第1測定信号83)は、測定コンデンサー(図示せず)のようなストレージ手段に蓄えられてもよい。感知後、ストレージ手段に蓄えられた測定信号83、84(例えば電圧)は、制御信号88を発生するため、比較されあるいは減算されてもよい。このように、第1及び第2の感知信号81、82間のいかなる相異も回避することができる。
【0034】
第1及び第2の抵抗器61、62に加えて追加の抵抗素子が、温度依存特性63、64の交差が動作温度で得ることができる限り、つまり制御ループが「レシオメトリック」に留まる限り、さらに使用されてもよい。交差は、個々の特性あるいは他の動作の単純なスケーリングによって作成することができる。例えば、ダイオードの抵抗は、温度において実質的に指数関数的な依存性を有し、一方、電気的な抵抗器の依存性は、実質的に線形であることが知られており、よって、温度依存性は全く異なる。単純化のため、本開示の原理は抵抗器に関してさらに記述されるが、他の素子が同じように可能であることは理解されるべきである。
【0035】
図5Bに戻って実施形態において、第1及び第2の感知信号81、82は、電気デバイス7によって発生される。いくつかの実施形態において、第1及び第2の感知信号81、82は、MEMSデバイス11を備える同じチップにおいて発生してもよい。別の実施形態では、感知信号81、82は、恒温槽2の外部からのように、電気デバイス7の外部から供給されてもよい。所望の交差点65(図7Aに示すように)及び対応する所望温度Tsetは、固定されても可変であってもよい。いくつかの実施形態において、所望の交差点65及び対応する所望温度Tsetは、感知信号81、82を変更することによって調整可能かもしれない。外部の感知信号81、82の供給を許可することは、また、修正及び/又は較正を可能にするかもしれない。
【0036】
MEMS構造11、特に共振器バーと熱接触して2つの抵抗器61、62を設置することによって、電気デバイス7(例えばチップ)の動作中、共振器バーの熱Tcompが規定の温度Tsetにできるだけ接近して一致することを確認することが可能になり、それによって、共振器の周波数が共振器バーの局所的な温度に最も敏感であるように、できるだけ良好にこのMEMS構造11の共振器周波数を安定させる。電気デバイス7の動作中、恒温槽の内側温度TovenとMEMS構造11の温度との間には温度差ができることに注意すべきである。従って、MEMS構造11の近くに感知素子61、62を設けることは望ましいかもしれない。
【0037】
図5Cは図5Bの構造の断面を示し、ここで感知抵抗器61、62は、共振器の上部に設けられる電気的絶縁体上に位置決めされる。このように、電気的絶縁をしないで熱接触が達成される。図5Dは、本開示による別の実施形態を示す。他の多くの形態を用いることができることが当業者に明らかだろう。
【0038】
ある実施形態において、恒温槽は、MEMS発振器11及び加熱手段21を含む真空パッケージ22である。パッケージ22は、MEMSデバイス11から真空パッケージの外部の周囲温度まで熱的絶縁を提供し、加熱手段21とともに恒温槽2あるいは恒温化したシステムを形成する。好ましい実施形態において、MEMS素子11は、その支持脚を通して電流を導き、ジュール加熱によってMEMSデバイス11を加熱する(図19を参照)ことによって、加熱することができる。MEMS素子11及び温度感知手段61、62が良好な熱接触にあり、即ち実質的に同じ温度を有する限り、他のタイプの加熱手段21が使用可能である。
【0039】
他の例の一つは輻射加熱である。図15及び図16を参照。この実施形態において、加熱手段は、調整可能な熱輻射源100を備え、MEM共振素子101が、調整可能な熱輻射源によって発生した熱輻射を吸収するために提供される。言い換えれば、MEM共振素子101は、調整可能な熱輻射源100によって放射された熱輻射を受け入れるために配置され、一方、制御回路は、ここに記述する他の実施形態のように、例えば共振素子の上部に、抵抗性感知素子(図示せず)によってMEM共振素子の温度変化を監視するために配置される。温度の変化は、監視されたパラメーター値の変化に関して放射される熱輻射量を変更するため、調整可能な熱輻射源にその出力信号を適応する制御回路によって監視される。このことは、放射された熱輻射の強度を変更することによって、そうでなければ、その源を断続的にオン/オフを切り替えることによって、行うことができる。熱輻射の形態において熱エネルギーを提供することによって、熱エネルギーは、MEM共振素子101の方へ集中させることができ、それによりMEM共振素子の周囲を直接加熱することを減じ、あるいはさらに回避することができる。熱エネルギーがMEM共振素子によってより直接に吸収可能であるので、開示する装置の温度へのより速い反応速度が達成可能である。光源100は、例えば集積したLEDとすることができ、その強度は、LEDに供給するLED電流を制御することによって調節することができる。
【0040】
好ましくは、抵抗性の感知素子61、62は、電気的に絶縁され熱的に伝導性の層によって分離されて、MEMS素子11の上部に、下方に、あるいは隣接して、互いに隣接してあるいは互いの上方に置かれる。良好な熱接触を提供し、MEMS素子11の性能を大幅に下げない他の実施も用いることができる。
【0041】
レシオメトリックな原理は、異なるTCR値を用いることによって達成されてもよく、これは、2重のセンサループに必要な抵抗器61、62に関して2つの異なる材料を用いることによって今度は達成されてもよい。図7Aは、第1及び第2の抵抗器61、62でのそれぞれの相対的な電気抵抗r=ΔR/R、対、温度の例を示し、即ち一般的に、第1及び第2の感知素子61、62の温度依存特性63、64を示す。
【0042】
予め規定したTCR値を有する電気的な抵抗器の存在及び製造は、当該技術において良く知られている。例えば、n型又はp型シリコンに関する抵抗の温度係数TCRは、既知の公式により、ドーピング濃度に依存する。A. Razborsek及びF Schwagerは、「Thin film systems for low RCR resistors」において、Niパッドで覆われTCRを−150ppm/℃と+500 ppm/℃との間に調節可能なTaNを備えた抵抗器をどのように製造可能とするかを記述している。米国特許No.7,659,176は、調整可能な抵抗の温度係数の抵抗器、及びその製造方法について記述する。抵抗器のTCR値は、異なる材料を用いることによって変化するかもしれないが、しかし、同じ材料を備えるが異なる結晶構造あるいは結晶方位、又は、異なるドーピングレベルあるいは不純物レベルを有する抵抗器もまた、異なるTCR値を有するかもしれない。
【0043】
Tsetのまわりの小さな所定温度範囲において、温度依存特性63、64の曲線は、下記の式によって近似することができる。
R(T)=R0(1+αΔT) (1)
【0044】
ここで、αはTCRとして知られ、抵抗の温度係数と呼ばれる材料特性である。用語「抵抗器」が用いられているが、合成抵抗値r1及び合成TCR1値を有する結合した抵抗器を得るために、2つ以上の個々の抵抗器の並列又は直列の組み合わせもさらに使用されてもよいということが理解されるべきである。
【0045】
感知素子として抵抗器を用いた、本開示の実施形態において、TCR値のうちの一つは、実質的に0であり、一方、別のTCR値は正である。別の実施形態において、TCR値のうちの一つは実質的に0であり、一方、別のTCR値は負である。さらに別の実施形態では、TCR値のうちの一つは負であり、一方、別のTCR値は正である。さらに別の実施形態において、両方のTCR値は負であるが、異なる値を有している。さらに別の実施形態では、両方のTCR値は正であるが、異なる値を有している。他のTCR値も、同じように可能である。
【0046】
本開示の実施形態において、第1の感知信号81はAC電流であり、第2の感知信号82はAC電流であり、第1の測定信号83はAC電圧であり、第2の測定信号84はAC電圧である。別の実施形態において、第1感知信号81はDC電流であり、第2の感知信号82はDC電流であり、第1の測定信号83はDC電圧であり、第2の測定信号84はDC電圧である。また別の実施形態において、第1感知信号81はAC電圧であり、第2感知信号82はAC電圧であり、第1測定信号83はAC電流であり、第2測定信号84はAC電流である。さらに別の実施形態において、第1感知信号81はDC電圧であり、第2感知信号82はDC電圧であり、第1測定信号83はDC電流であり、第2測定信号84はDC電流である。感知信号81、82は、連続信号あるいは中断信号であってもよい。感知信号及び測定信号は、さらに他の形態を取っても良い。
【0047】
制御回路71の実施形態において、感知素子61、62(例えば抵抗器)によって発生した測定信号83、84(例えば電圧)は、減算され及び任意的に増幅され、図7Bに示すように例えば差信号85を生成する(又はその逆、第1測定信号が第2測定信号から減算されるあるいはその逆か否かに依存して)。任意的に、測定信号83、84のうちの一つは、減算前に拡大縮小(scaled)することができる。差信号85が正であるとき、MEMS発振器11の温度Tcompは、Tsetよりも高く、恒温槽2は冷やされるべきである。これは、受動的な場合には、冷却はヒーター21に電力を供給しないことにより達成されてもよい。差信号85が負であるときには、MEMSデバイス11の温度TcompはTsetよりも低く、恒温槽2を加熱する必要がある。実際上、Tsetは、周囲温度の少なくとも10℃上が選ばれてもよく、その結果、受動的な冷却が使用可能である。
【0048】
ヒーター21へ供給される実際の加熱電力は、いくつかの実施形態において、差信号85の大きさに比例するか、二次の、指数関数の、あるいは別の関係であってもよい。言い換えれば、制御ループは、例えば、一つの温度センサー61の温度特性(例えば抵抗)を第2の温度センサー62の温度特性(例えば抵抗)と比較することによって、MEMS発振器11の温度Tcompを評価することができる。温度制御ループによって、恒温槽温度Tovenは、特性が交差する(比較結果の差がゼロである)ところの温度Tsetへ進められ、その結果、MEMS発振器11の出力は、実質的に安定な出力信号を発生するように調整される。温度TovenがTset付近に制御される所定の温度範囲は、出力信号の可能な周波数ドリフトを決定する。抵抗性の感知を有するレシオメトリックなループを用いることによって、その温度範囲は、例えばTset付近の0.10℃に制限することができ、数ppm以下のドリフトに導く。温度範囲は、MEMS発振器11の特性及び動作周波数の温度依存性を考慮に入れることにより、例えば2若しくは1ppmの目標最大周波数ドリフトを目指して最適化(制限)することができる。
【0049】
別の実施形態において、測定信号83、84は、例えばコンパレーター(図示せず)を用いて互いと比較され、例えば図7Cに示すような比較信号86を生成する。図7Cの信号86が正であるとき、MEMSデバイス11の温度TはTsetよりも低く、恒温槽2は加熱されるべきである。コンパレーターの構成に依存して、正又は負電圧に留めるように他の比較信号86が発生されてもよく、当業者は、加熱手段21,100による要求に応じてそのような信号を容易に適応させることができる。
【0050】
図6は、実施形態による、例示のMEMSシステムを示す。恒温槽の温度Tovenの制御は、2つの素子61、62間の特性の比率又は差に基づく。システム1は、恒温槽2を備え、ここではMEMSデバイスを備えた電気デバイスが設けられ、電気デバイス7は、MEMS構造11と2つの温度センサー61、62とを備え、この2つの温度センサーは、TCR1及びTCR2をそれぞれ有する2つの抵抗器R1及びR2のような、上述したように異なる温度依存特性63、64を有する。そのシステムは、さらに、MEMS構造11、特にその素子11の温度Tcompを、固定のあるいは所望の温度Tsetに設定あるいは制御するための制御ループを実行する制御回路71を備える。制御回路71は、電気デバイス7の一部あるいは恒温槽2の一部であってもよい。このシステムは、以下のように動作する。
【0051】
各抵抗器R1、R2の抵抗rの変化が図7Aに図示され、関数r1(T)及びr2(T)として示されている。両方の抵抗は温度Tの関数である。考察の温度範囲において、r1(T)とr2(T)とが等しい一つの(また1つだけの)点がある。この点は、所定温度Tsetによって定義される。この温度に関して、r1(Tset)=r2(Tset)。この式は、目標とされる恒温槽温度、Tsetでのみ有効である。制御ループは、r1(Tset)=r2(Tset)であるように恒温槽温度を制御する。これが実現されるとき、恒温槽の温度はTsetであり、Tsetに維持される。実際、Tsetは、感知信号61、62が同一であるとき特性曲線の交点に同じである、測定曲線83、84の交差点に位置し、そうでなければ、曲線はファクターmでシフトし、ここでmは感知信号61、62の大きさの比率である。
【0052】
定常状態動作において、MEMSデバイス11の温度は、Tsetで維持され、温度ドリフトは実質的に除去される。制御ループがDC(積分器)で無限の利得を有するならば、この制御ループは、感知回路類における温度依存オフセットのような、他の回路における非理想ではない、実質的に絶対的な平均温度精度を達成することができる。
【0053】
制御ループ71は、当業者に知られたいかなるアルゴリズムも用いて、アナログ又はデジタルの方法で実行されてもよい。さらに、制御ループ71は、恒温槽2においてMEMS構造11を制御し監視するための回路を提供してもよい。制御ループは、一般に、システム7を有効に動作させるために、あるいは希望するように出力信号87(例えば、図6におけるMEMS構造の共振器の周波数)を調整するために必要ないかなる素子あるいは機構を含むことができる。特に、制御ループは、MEMS構造11の温度がTsetで維持されることを保証するだろう。MEMS構造11の信号品質ファクター及びパラメータも制御ループによって記録され、及び/又は監視されてもよい。共振器の材料、特性及び構造と同様に、熱変動、ノイズ、弾性、応力、圧力、印加された歪み、及び電圧、電界及び電流を含む電気的なバイアスのようなファクターは、MEMS構造11の出力に影響するかもしれない。これらのファクターを監視することは、共振器の出力信号の要因と共振器の出力信号特性との間の関係を発現させるのに有用であるかもしれない。これらの関係を理解することは、発生した出力信号87にわたりより多くの制御をなすことを可能にする。
【0054】
図8は、実施形態による、ヒーターを含む例示のMEMSシステムを示す。第1及び第2の感知素子61、62、並びに制御回路71の目的は、周囲温度にかかわらず、Tsetに等しい、恒温槽2の庫内温度を安定に維持することである。結果として、部品のパラメータの変化は非常に小さくなる。2つの温度センサー61、62は、MEMS部品11の温度を感知する。センサ61、62は、温度に関して異なる依存性を有する。それらは、2つの温度依存値S1、S2、例えば上述した測定電圧V1、V2、を出力する。制御ループ71は、MEMS部品11の温度Tcompを制御するヒーター21を駆動する。制御ループは、m*S2=S1、ここでmは予め規定した一定の実数である、のように、恒温槽温度を制御する。この式は、一つの単一の温度Tsetでのみ有効である。したがって、ループが安定したときには、部品11の温度はTsetであり、よって、その温度依存変数は安定している。このことは図9に示され、図9は、実施形態による、第1及び第2の温度依存特性を示す。
【0055】
ヒータ制御信号88は、周囲温度Tambの関数になりえることが観察可能である。実際に、周囲温度が下がると、恒温槽2を囲む周囲温度のため、マイクロ恒温槽2の部品温度も下がるだろう。したがって、S1及びm.S2の両方は、同じように変化するであろう(それらは温度依存性の符号によって増加あるいは減少するかもしれない)。このことは、目標温度Tsetへ恒温槽2を再び加熱するようにヒータ制御信号88を補償するため、制御ループ71を起動させるだろう。実際にループは、m.S2を戻しS1に等しくさせるだろう。制御信号74が周囲温度Tambの関数であることはこの例から見ることができる。したがって、2重センサの温度安定ループ71は、温度センサーとして用いることができる。
【0056】
図8に示す2重センサ制御ループ71が理想的であるが、現実の応用例において、2重センサ制御ループ71は非理想に苦しむかもしれない。これは、加熱された部品のパラメータ(例えば周波数)の残余の温度依存性に帰着するかもしれない。言い換えれば、Tsetは周囲温度変化に関して固定されると思われているが、図11に示すように、Tsetは周囲温度に関して僅かな残留変化を有しているかもしれない。図11は、実施形態(「2重センサ制御のみ」によって示された曲線)による、2重センサ制御無しの、2重のセンサ制御有りの、並びに、2重センサ制御及びポスト補償制御有りの場合での、恒温制御されたMEMS発振器に関する例示の出力信号の安定性を図示する。示されるように、部品のパラメータは温度に関して依然として変化するかもしれない。これは望むものではない。
【0057】
本開示の別の態様によれば、実施形態による、ヒーター及び制御ループを含む例示のMEMSシステムを示す図10に図示するように、この残余の温度依存性は、ポスト補償によってさらに縮小されるかもしれない。この方法では、周囲温度Tambを感知する必要がある。よってTambの測定は、ループの非理想の部品を修正する補償機構を誘導する。非理想による元の残余温度ドリフトが小さいので、Tambの測定はあまり正確である必要がない。ポスト補償機構は、温度ではなく興味のあるパラメータ(例えば共振器周波数)に影響を与えることができる、あらゆる独立した種類のものが可能である。例えば、周囲温度Tambの代表の制御信号88は、ポスト補償信号がバイアス電圧である、制御システム及びヒーターを含む例示のMEMSシステムを示す図12に示すように、MEMS部品11のバイアス電圧を誘導してもよい。
【0058】
図13は、ポスト補償信号が位相同期ループに作用する、ヒーター及び制御システムを含む例示のMEMSシステムを示す。図13に示す実施形態は、入力としてMEMS発振器をとり調整された出力周波数を提供する後段のPLLを調整する。この追加の補償90は、線形の、二次のあるいは多項式のような、数学のいずれの種類のもの、又は、ルックアップテーブルに基づいた、あるいは当業者に知られる他のいずれの補償に基づくものであることができる。ポスト補償90の動作、及び部品パラメータあるいは出力パラメーター92(例えば周波数)への影響は図11に図示される。図11は、実施形態による、2重センサ制御無しの、2重センサ制御有りの、及び2重センサ及びポスト補償制御有りの恒温制御されるMEMS発振器に関する例示の出力信号の安定性を図示する。示されるように、2重センサ制御及びポスト補償カーブ92は、ポスト補償90無しのシステムに対応する曲線87よりもよりフラットである。
【0059】
上述したように、2重センサループ71は、アナログループあるいはデジタルループとして実行されてもよい。したがって、周囲温度出力Tambは、アナログ又はデジタルになりえる。また、ポスト補償機構90もまたアナログ又はデジタルになりえる。
【0060】
ポスト補償90は、独立した制御信号(例えばMEMS部品11のバイアス電圧)を制御することができるが、また、それは温度ループ部品に作用することもできる。ポスト補償機構90は、またシステムの一部ではなく外部パラメーターに作用してもよい。例えば、周囲温度測定は、部品パラメータを用いる外部システムにおいてポスト補償として役立つことができる。例えば、ポスト補償は、恒温化されたMEMSに基づく発振器を用いる外部PLLにて実行することができる。
【0061】
以下では、開示によるシステムで使用するMEMS共振器デバイスの実施形態が、周波数及び電子機械的安定性、並びに高Qファクターを提供する最適な支持アンカーとともに記述される。図5、図15及び図19に示されるMEMS共振器デバイスは、それぞれ、矩形形状の、しかし他の形状も可能である(例えば正方形、円形、平行六面体、立方体等)主たる共振器本体を含む。励振は、ごく近接して、つまり主共振器本体101に変換隙間(transduction gap)で設けられた電極111、112によって達成される。その本体は、基板に主共振器本体を固定するT形状の支持体121,122によって基板上方に浮かされる。
【0062】
T形状の支持体つまりT−支持体は、基板へアンカーによって取り付けられる2つの脚と、主共振本体101への共通の接続部、及び幾つかのケースでは中央の接続部とを備えた固定−固定梁(clamped-clamped beam)を備える。MEMS共振器構造11は、少なくとも所定のモード、例えば呼吸モード(breathing mode)で共振するように構成される。主共振器本体は、その自然な応答に関係する共振周波数(fres)で共振する。固定−固定梁あるいは支持体の長さは、周波数安定性及び高Qファクターを提供する屈曲波長(支持体へ最も重要な応力部品に依存する波長のタイプ)に関するものであるように選択される。固い固定−固定支持体を利用するT−支持体の設計は、動作方向において電気機械安定性を提供する。特に、各梁の長さLTsupは、屈曲波長の半分にオフセット期間を加えたものの倍数として選択される。
【0063】
これらの実施形態において、各梁は、上記動作周波数(fres)で上記共振器本体の上記振動の結果として規定の屈曲波長での屈曲モードで振動することに適する。このことは、共振器本体の目標とした振動の結果として、梁が屈曲モード(つまり、この振幅用の低い剛性を示す)で振動するように作製されるように、梁の特性が選択されることを意味する。屈曲モードで振動するために梁の能力は、共振器の電子機械的安定性を向上させる、あるいは少なくとも維持することができ、一方、他のパラメータ用の梁の設計を最適化するために屈曲モードの理解を用いることができることが分かっている。さらに、各脚は、梁の振動の上記屈曲波長に対して「音響的に長い」ものであり、つまり脚が従来のデバイスに対して比較的長い長さを有することを意味し、このことは共振器本体の断熱を向上させる。結果として、共振器は、基板方向への著しい熱損失なしで動作温度に加熱することができ、動作周波数を実質的に安定して維持する。共通の中央の接続部は、電気機械的安定性を考慮して最小長さを有するように好ましくは選択あるいは設計される。その最小長さは、設計パラメータ及び製造工程によって決定される。
【0064】
好ましくは、各脚は、上記屈曲波長を2で割り所定のオフセットを加えたものの所定倍数に等しい長さ(LTsup,opt)を有し、その所定倍数は脚の熱抵抗の最適化を考慮して選択され、上記所定のオフセットは共振器の品質ファクターの最適化を考慮して選択される。支持脚に関してそれらの長さの一つを選択することによって、共振器の接続点でのインピーダンス及びアンカーでのインピーダンスは一致する。結果として、アンカーを介する基板へのエネルギー損失は最小にすることができ、最適化されたQファクターを有する共振器デバイスを提供することができる。好ましくは、所定のオフセットは、動作周波数(fres)に等しい第1の屈曲共振周波数を有する固定−固定梁の長さ(Lcl−cl、1)の半分と実質的に等しい。Qファクターは共振器の支持脚長の周期関数であり、及び所定のオフセットが実質的に周期関数の最大に相当するということが分かった。
【0065】
好ましい実施形態において、共振器本体は、変位が最小であるところで対称軸を有する呼吸モードで共振することに適しており、ここで、固定−固定梁の共通の接続部は上記対称軸に位置決めされる。このことは、梁が最小変位点で共振器本体に接続されることを意味し、これは、共振器の電気機械的安定性を向上させることができる。図14A〜図14Cは、本開示による実施形態で使用するに適している振動MEMS共振器の変位を示す。共振器は、呼吸モードで振動する。つまり本体が拡張、収縮する。図14Aは、元の、平面形状の、つまり変位の無い主本体を示す。図14Bは、主本体の振動の最大拡張点での変位を示す。即ち、本体の長手方向(中央)軸で実質的に変位が無く、かつ本体の長手方向端縁に沿って最大変位がある。図14Cは、主本体の振動の最大収縮点での変位を示す。即ち、同様に、本体の長手方向軸で実質的に変位が無く、かつ本体の長手方向端縁に沿って最大変位がある。このことは、この呼吸モードにおいて長手方向軸がこの発振器用の支持体を接続するのに最良の場所であることを示す。
【0066】
本開示により達成可能な高レベルの電気機械的安定性は、さらに、引き込みの危険が無く高い電圧を印加することができ、よって、より容易に集積化を導くことができるMEMS共振器の低い動インピーダンス達成する。
【0067】
好ましい実施形態において、固定−固定梁はT形状であり、共振器本体に中心に接続される。別の実施形態では、固定−固定梁は、また例えば角のある梁になりえる。
【0068】
好ましい実施形態において、固定−固定梁は硬い方向を有し、励振手段は上記梁の硬い方向において共振器本体を励振するために位置決めされる。例えばT形状梁の場合、硬い方向は、支持脚の長手方向であり、上記梁は、それに直角ないずれの方向において低い剛性を有している。
【0069】
しかしながら、本開示は、呼吸モードで振動するために設計されるマイクロメカニカル発振器に制限されない。他の動作モードが同じように可能である。
【0070】
図17は、本開示による実施形態において用いることができる屈曲の共振器の例を示す。この共振器は、2つの励振電極間に延在し、屈曲モードで共振するのに適した固定−固定梁130を備える。支持体131、132は、今度は本明細書に記載するように、音響的に長い脚を有する固定−固定梁になり得る。図5に関して上述したのと同じ方法で、共振器の上部に2つの抵抗性の感知素子が設けられる。
【0071】
図18は、本開示による実施形態において使用可能な屈曲共振器の別の例を示す。この共振器は、2つの励振電極間に延在し、屈曲モードで共振することに適した片持ち梁140を備える。支持体140は、今度は本明細書に記載するように、音響的に長い脚を有する固定−固定梁になり得る。図5に関して上述したのと同じ方法で、共振器の上部に2つの抵抗性の感知素子が設けられる。
【0072】
図20に示される別の好ましい実施形態において、異なるTCRを有する材料で構成される2つの抵抗器は感知素子である。抵抗器へのケルビン(4点)接続は、デバイス上で抵抗測定を可能にする。可能な配置において、電圧Vが監視されながら、電流Aが抵抗器を通して導かれる。そのとき抵抗は、アクセスラインの抵抗及び温度に関係なく、V/Aである。他の感知構成も同じように適用することができる。
【特許請求の範囲】
【請求項1】
恒温槽と、
恒温槽内部のマイクロメカニカル発振器であって、規定の温度で規定の周波数で振動し、ここで上記規定周波数が、少なくとも一部分温度依存性に基づき、及び少なくとも一つの規定の特性に基づく、マイクロメカニカル発振器と、
規定の周波数で振動するようにマイクロメカニカル発振器を励振する励振機構と、
温度制御ループであって、抵抗性感知を用いて上記マイクロメカニカル発振器の温度を検出し、上記マイクロメカニカル発振器の温度が上記規定温度の規定範囲内か否かを決定し、上記マイクロメカニカル発振器の温度を上記規定範囲内に留めるように適応させ、ここで上記規定範囲は、周波数ドリフトを最小にするために少なくとも一部分温度依存性に基づき及び少なくとも一つの規定の特性に基づく、温度制御ループと、
上記マイクロメカニカル発振器の上記規定周波数を出力する周波数出力と、
を備えた、システム。
【請求項2】
上記少なくとも一つの規定の特性は、マイクロメカニカル発振器の材料、マイクロメカニカル発振器の形態、及びマイクロメカニカル発振器の少なくとも一つの寸法を備える、請求項1に記載のシステム。
【請求項3】
上記規定の温度範囲は、上記規定温度の高々0.10℃内の温度を備える、請求項1に記載のシステム。
【請求項4】
マイクロメカニカル発振器は、シリコンゲルマニウムを備える、請求項1に記載のシステム。
【請求項5】
マイクロメカニカル発振器は、圧電共振器を備える、請求項1に記載のシステム。
【請求項6】
マイクロメカニカル発振器は、屈曲共振器を備える、請求項1に記載のシステム。
【請求項7】
マイクロメカニカル発振器は、弾性表面波共振器を備える、請求項1に記載のシステム。
【請求項8】
マイクロメカニカル発振器は、固定−固定梁を用いて浮かされ、各梁は、マイクロメカニカル発振器への共通の接続部とともに2つの支持脚を備える、請求項1に記載のシステム。
【請求項9】
各梁は、屈曲波長で屈曲モードにて振動するよう構成され、上記屈曲波長は、少なくとも一部分規定周波数に基づき、それぞれの脚は、屈曲波長に対して音響的に長い、請求項8に記載のシステム。
【請求項10】
屈曲波長に対して音響的に長いそれぞれの脚は、屈曲波長の倍数よりも長いそれぞれの脚を備える、請求項9に記載のシステム。
【請求項11】
少なくとも一つの梁は、制御ループの加熱抵抗部品を形成し、この加熱抵抗部品は、マイクロメカニカル発振器を加熱するように構成される、請求項8に記載のシステム。
【請求項12】
制御ループは、マイクロメカニカル発振器を加熱するよう構成された輻射源を備える、請求項1に記載のシステム。
【請求項13】
上記規定温度は、通常の使用中、システムの周囲温度の少なくとも10℃上である、請求項1に記載のシステム。
【請求項14】
励振機構は、恒温槽の内部でマイクロメカニカル発振器の極近くに、バイアス電圧源に接続したバイアス電極を備える、請求項1に記載のシステム。
【請求項15】
周波数出力は、恒温槽の内部でマイクロメカニカル発振器の極近くに、感知電極を備えた、請求項1に記載のシステム。
【請求項16】
上記制御ループは、
マイクロメカニカル発振器と熱接触し第1の抵抗性温度依存性を有する第1の抵抗性感知素子と、
マイクロメカニカル発振器と熱接触し第1の抵抗性温度依存性とは異なる第2の抵抗性温度依存性を有する第2の抵抗性感知素子と、ここで第1及び第2の抵抗性感知素子のそれぞれは、マイクロメカニカル発振器と実質的に同じ温度を感知する、
を備える、請求項1に記載のシステム。
【請求項17】
マイクロメカニカル発振器は、振動の間、最小の移動軸を有する形態を有し、第1及び第2の抵抗性感知素子は、その軸に沿って設けられる、請求項1に記載のシステム。
【請求項18】
残余誤差を除去するポスト補償回路をさらに備え、このポスト補償回路は、制御ループから制御信号を受け入れ、ポスト補償信号を発生するため制御信号を変換するように構成される、請求項1に記載のシステム。
【請求項19】
上記周波数出力に接続され、規定の周波数に基づいた出力信号を発生するよう構成された出力信号発生器をさらに備える、請求項1に記載のシステム。
【請求項20】
上記恒温槽は、マイクロメカニカル発振器のみを含む真空密封パッケージを備える、請求項1に記載のシステム。
【請求項1】
恒温槽と、
恒温槽内部のマイクロメカニカル発振器であって、規定の温度で規定の周波数で振動し、ここで上記規定周波数が、少なくとも一部分温度依存性に基づき、及び少なくとも一つの規定の特性に基づく、マイクロメカニカル発振器と、
規定の周波数で振動するようにマイクロメカニカル発振器を励振する励振機構と、
温度制御ループであって、抵抗性感知を用いて上記マイクロメカニカル発振器の温度を検出し、上記マイクロメカニカル発振器の温度が上記規定温度の規定範囲内か否かを決定し、上記マイクロメカニカル発振器の温度を上記規定範囲内に留めるように適応させ、ここで上記規定範囲は、周波数ドリフトを最小にするために少なくとも一部分温度依存性に基づき及び少なくとも一つの規定の特性に基づく、温度制御ループと、
上記マイクロメカニカル発振器の上記規定周波数を出力する周波数出力と、
を備えた、システム。
【請求項2】
上記少なくとも一つの規定の特性は、マイクロメカニカル発振器の材料、マイクロメカニカル発振器の形態、及びマイクロメカニカル発振器の少なくとも一つの寸法を備える、請求項1に記載のシステム。
【請求項3】
上記規定の温度範囲は、上記規定温度の高々0.10℃内の温度を備える、請求項1に記載のシステム。
【請求項4】
マイクロメカニカル発振器は、シリコンゲルマニウムを備える、請求項1に記載のシステム。
【請求項5】
マイクロメカニカル発振器は、圧電共振器を備える、請求項1に記載のシステム。
【請求項6】
マイクロメカニカル発振器は、屈曲共振器を備える、請求項1に記載のシステム。
【請求項7】
マイクロメカニカル発振器は、弾性表面波共振器を備える、請求項1に記載のシステム。
【請求項8】
マイクロメカニカル発振器は、固定−固定梁を用いて浮かされ、各梁は、マイクロメカニカル発振器への共通の接続部とともに2つの支持脚を備える、請求項1に記載のシステム。
【請求項9】
各梁は、屈曲波長で屈曲モードにて振動するよう構成され、上記屈曲波長は、少なくとも一部分規定周波数に基づき、それぞれの脚は、屈曲波長に対して音響的に長い、請求項8に記載のシステム。
【請求項10】
屈曲波長に対して音響的に長いそれぞれの脚は、屈曲波長の倍数よりも長いそれぞれの脚を備える、請求項9に記載のシステム。
【請求項11】
少なくとも一つの梁は、制御ループの加熱抵抗部品を形成し、この加熱抵抗部品は、マイクロメカニカル発振器を加熱するように構成される、請求項8に記載のシステム。
【請求項12】
制御ループは、マイクロメカニカル発振器を加熱するよう構成された輻射源を備える、請求項1に記載のシステム。
【請求項13】
上記規定温度は、通常の使用中、システムの周囲温度の少なくとも10℃上である、請求項1に記載のシステム。
【請求項14】
励振機構は、恒温槽の内部でマイクロメカニカル発振器の極近くに、バイアス電圧源に接続したバイアス電極を備える、請求項1に記載のシステム。
【請求項15】
周波数出力は、恒温槽の内部でマイクロメカニカル発振器の極近くに、感知電極を備えた、請求項1に記載のシステム。
【請求項16】
上記制御ループは、
マイクロメカニカル発振器と熱接触し第1の抵抗性温度依存性を有する第1の抵抗性感知素子と、
マイクロメカニカル発振器と熱接触し第1の抵抗性温度依存性とは異なる第2の抵抗性温度依存性を有する第2の抵抗性感知素子と、ここで第1及び第2の抵抗性感知素子のそれぞれは、マイクロメカニカル発振器と実質的に同じ温度を感知する、
を備える、請求項1に記載のシステム。
【請求項17】
マイクロメカニカル発振器は、振動の間、最小の移動軸を有する形態を有し、第1及び第2の抵抗性感知素子は、その軸に沿って設けられる、請求項1に記載のシステム。
【請求項18】
残余誤差を除去するポスト補償回路をさらに備え、このポスト補償回路は、制御ループから制御信号を受け入れ、ポスト補償信号を発生するため制御信号を変換するように構成される、請求項1に記載のシステム。
【請求項19】
上記周波数出力に接続され、規定の周波数に基づいた出力信号を発生するよう構成された出力信号発生器をさらに備える、請求項1に記載のシステム。
【請求項20】
上記恒温槽は、マイクロメカニカル発振器のみを含む真空密封パッケージを備える、請求項1に記載のシステム。
【図1】


【図2】
【図3】
【図4】
【図5A】
【図5B】

【図5C】

【図5D】
【図5E】
【図6】

【図7】

【図8】

【図9】
【図10】

【図11】
【図12】
【図13】
【図14A】

【図14B】
【図14C】
【図15】
【図16】
【図17】

【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5A】
【図5B】
【図5C】
【図5D】
【図5E】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14A】
【図14B】
【図14C】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2012−257246(P2012−257246A)
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−126224(P2012−126224)
【出願日】平成24年6月1日(2012.6.1)
【出願人】(591060898)アイメック (302)
【氏名又は名称原語表記】IMEC
【Fターム(参考)】
【公開日】平成24年12月27日(2012.12.27)
【国際特許分類】
【出願番号】特願2012−126224(P2012−126224)
【出願日】平成24年6月1日(2012.6.1)
【出願人】(591060898)アイメック (302)
【氏名又は名称原語表記】IMEC
【Fターム(参考)】
[ Back to top ]