
患者を放射線に対して位置決めするためのデバイス
本発明は、患者を放射線に対して位置決めするための多関節ロボットデバイスであって:
水平移動のための少なくとも1本の線状レールと;
前記線状レールに対して並進運動が可能であり且つ前記線状レールに対して垂直な回転軸を中心にして旋回が可能であるコネクタと;
コネクタへと接続されているロボットアームであって、患者ホルダへ接続している交差回転軸を有するリストジョイントを備えている前記ロボットアームと;
を備えている、前記デバイスに関する。

水平移動のための少なくとも1本の線状レールと;
前記線状レールに対して並進運動が可能であり且つ前記線状レールに対して垂直な回転軸を中心にして旋回が可能であるコネクタと;
コネクタへと接続されているロボットアームであって、患者ホルダへ接続している交差回転軸を有するリストジョイントを備えている前記ロボットアームと;
を備えている、前記デバイスに関する。
【発明の詳細な説明】
【発明の詳細な説明】
【0001】
本発明は、外部の放射線治療ビームに対して患者を位置決めするためのデバイスに関する。例えば、脈絡膜の黒色腫又は特定の頭蓋内腫瘍の極めて高い精度を必要とする処置に照射ビームを使用する放射線治療の分野において、極めて好都合に適用される。特には腫瘍が患者の頭蓋骨の底部に位置している場合、放射線治療の目的は、悪性の領域を、近傍に位置する視神経、脳幹、内耳、又は脊髄の重要な器官に触れないようにしつつ照射することにある。従って、腫瘍を照射する目的の放射線に対して患者を正しく位置決めすることが、最も重要である。放射線治療においては、通常は、患者がテーブル又は椅子に配置され、次いで電気機械式の設備を使用して位置決めされる。
【0002】
しかしながら、本発明は、患者又は任意の他の物体の正確な位置決めを必要とする他の分野にも適用可能であるため、更に広い範囲を有する。例えば、本発明を、所与の基準系に対して患者を精密かつ迅速に位置決めする必要があるあらゆる種類の医療の用途に適用することができる。
【0003】
従来技術において、文献US2005/0234327は、患者を担持するためのテーブルを備えている患者の位置決めのためのデバイスであって、垂直軸に沿った変位を可能にする角柱状リンクと、2つの連続的な垂直ロトイダル(rotoides)リンクと、共点的(concourant)軸を有するロボットリストとが設けられたSCARA構造のロボットアームを有しているデバイスを記載している。このようなデバイスの欠点は、ロボットアームが患者を上方に位置させつつ最大限に延ばされるときの機械的な弾性の正確なモデル化である。医療の用途に必要な精度を得るために、高度なソフトウェア補正テーブルシステムが組み込まれる必要がある。更には、垂直な並進運動の軸がかなりの応力に曝されるため、連結部品の寿命を短くし、サイズを大きくさせる可能性がある。更には、この並進運動の軸が、1メートルを超える深さのピットにデバイスを設置することを必要とする。
【0004】
更には、文献「Geometric and elastic error calibration of a high accuracy patient positionningsystem」(Marco A. Meggiolaroand al., Mechanism and Machine Theory 40 (2005) 415-427, 12 September 2004)は、患者の位置決めのための別の電気機械システムの変形の補償方法を記載している。この文献に記載のロボットモデルは、垂直方向、横方向、及び長手方向の並進運動のための3つの線状シャフトを備えている。更に、処置テーブルとの固定のインターフェイスの下方に3つの非共点的回転軸を有している。6つの自由度を有するこの位置決めシステムは、ピッチ及びロールについて限られた可能性(±3°)しか提供していない。更に、このデバイスの制御は、あらゆるロボットシステムによって提供されるような、腫瘍に関連してリストから離れた仮想の基準点を中心とする回転など、複雑な運動の実行を可能にするものではない。この設備は、先のシステムと同じ欠点(すなわち、機械的な弾性及び処置室の深いピットの必要性)を有している。
【0005】
文献WO2007/017211は、患者を適切に位置決めすることができる複数の回転軸をもつ産業ロボットを使用する位置決めデバイスを記載している。しかしながら、そのようなデバイスは、極めてかさばり、位置決めデバイスの底部を収容することができる大寸法のピットを必要とする。従って、そのようなデバイスを処置室に設置するには非常に費用がかかり、多数の制約を余儀なくさせる。
【0006】
本発明の目的は、高い精度を本質的に有しており、深いピットを必要としないコンパクトかつ極めて剛的な新規の位置決めデバイスを提案することによって、従来技術の欠点を克服することにある。
【0007】
本発明の主題は、設置の簡単な位置決めロボットの開発である。
【0008】
最後に、本発明の目的は、動作の間で患者及び担当者の安全の可能な限り最良の保証をもたらすために、位置決めロボットの高性能な制御を提案することにある。
【0009】
上述の目的のうちの少なくとも1つが、患者を放射線に対して位置決めするためのデバイスであって、
・少なくとも1本の水平移動線状レールと、
・前記線状レールに対して並進運動を実行でき、かつ前記線状レールに対して垂直な回転軸を中心にして旋回できる接続部と、
・患者支持部へと接続されている共点的回転軸を有するリストを備えており、前記接続部へと接続しているロボットアームと
を備える多関節ロボットである前記デバイスによって達成される。
【0010】
本発明は、極めてコンパクトでありながら、広い空間において極めて高い精度で操作することができる位置決めロボットを好都合に構成する。全体的な寸法が、従来技術のデバイスと比べて大幅に縮小される。実際、ここで説明される形状は、ロボットを構成する機械的部分の配置に使用される順序及び角度によって、従来の形態とは相違する。既に説明した「SCARA」という多関節又は6脚の考え方は、地面に深いピットを必要とするという大きな欠点を抱えている。
【0011】
更に、本発明は、室内で折り畳まれた位置にあるときの全体の寸法及びコンパクトさに関して革新的である。そのようなシステムの作業空間を最適にするために、床からの高さを1メートル20センチから1メートル50センチまで変化させることができる平面に中心が置かれなければならない。この制約は、放射線治療のビームによる処置の原理に固有である。
【0012】
本発明の主題は、「シリアル」(人間の腕の形式の運動を有するロボット)として知られる多関節の形態の肩部と肘部との間のリンクが、床上の線状軸と、垂直な回転中心上の上述の接続部との結合によって好都合に置き換えられるハイブリッドな位置決めロボットを構成する点で、更により特筆されるべきである。これらの変更は、可動性(並進運動の軸)及びコンパクトさ(接続部)という2つの制約を克服する。レールがロボットアーム組立部(接続部から患者支持部まで)を処置の計画によって提供される位置まで並進運動にて移動させることを可能にするため、ロボットがコンパクトである。次いで、複数の自由度を有するロボットアームが、処置の基準系における処置対象の位置を最適にするために、振幅は小さいが高い精度が要求される運動を実行することができる。
【0013】
6つの自由度を有するこのコンパクトな位置決めロボットは、ピットの深さを制限することを可能にし、標準的な放射線治療テーブルの全体寸法を有する少なくとも250kgの重い荷重を搬送することができる。本発明によるそのような線状レールによれば、約1m30という短いロボットアームを提供することが可能である。この位置決めロボットは、このロボットがベースから離れたオフセット軸を有さない限りにおいて、従来技術のシステムと比べて高い剛性及びコンパクトさを有する。
【0014】
本発明は、その形態のコンパクトさゆえに、従来技術のデバイスにおいて見られる片持ち梁の作用を抑えるために、ベースのかなり近くに重心を有する。従って、位置決めロボットの重量の全てが、地面に分配され、デバイスの安定性及び剛性が改善される。
【0015】
本発明による位置決めロボットは、作業空間を所与の用途に最適に適合させることを可能にする。実際、線状レールのサイズを、利用可能な空間及び所望の付加機能に応じて、変化させることができる。従って、部屋の片側において画像化スキャナを使用して患者の予備的な位置決めを実行し、次いでロボットのベースの純粋な並進運動によって放射線治療デバイスの下方の処置位置へと患者を直接的に送り込むために、軸の長さを増やすことが考えられる。この機能は、面倒であって特定の処置(特には、小児科学における処置)には適していない現行の手順を、好都合に置き換えると考えられる。
【0016】
ロボットの軸を組み立てる他の方法によれば、線状レールを、ベースの旋回部へと取り付けることができ、この旋回部の旋回軸は垂直である。そのような組立部の場合には、システムを、浅いピット(300mm程度の最大深さを有する)に設置することができる。この新たな軸の追加によって、ロボットは、6つの回転及び1つの並進運動を組み合わせる7つの軸を備え、6つの自由度の最大の可動性をもたらす。この追加は、アーキテクチャを冗長にし、処置室などの混雑した環境においてアクセス困難な位置への到達を可能にする。
【0017】
実際、良好な精度を保証するために、旋回部は、ボールベアリングによってベースの固定部に対して旋回させられる。ベースの固定部は、例えば小さなピットにおいて地面に取り付けられているアルミニウム形材製のマウントを備えることができる。このようにして製造される組立部は、線状レール及びロボットアームで構成される組立部の360°の回転を実行可能にする。そのような設備の作業の限界範囲(enveloppe)は、デッドスペースのない半球に相当する。
【0018】
好ましくは、ベースに対する線状レールの垂直な回転の軸が、前記放射線の軸に又は垂直に一致させられる。その結果、対象(例えば、患者の頭部)が放射線に対して適切に配置される場合、地面上の純粋な回転軸は、対象を軸に保ちつつ患者を回転させて放射線の入射の角度を変更するために充分である。これは、ロボットの移動を、ビームを成形するマルチスリットコリメータの形態に組み合わせることによって、患者の動的な処置の想定を可能にする。
【0019】
好都合には、ロボットアームが、スライド式の前腕を備える。その利点は、線状軸に従うロボットの末端へ接続される較正体積を有することである(この場合、ロボットは極めて正確である)。この体積は、極めて精密な軸(0.1mm未満の線状軸精度)に沿って移動し、処置対象の領域に連続的に追従する精度体積を有することを可能にする。エフェクタと呼ばれることもある末端は、ロボット(位置決めデバイス)の端部に相当する。一般には、ロボットと患者支持部との間の取り付けプレートである。
【0020】
本発明による線状レールによれば、位置決めデバイスの較正を簡単化することが可能である。実際、例えば立方体の体積の角に位置する8点など、限られた数の測定点を生み出すことが可能である。次いで、この体積において、各々の変位について大きな関節の変化を最大にする特定の数のデカルト位置が計算される。ロボットは、線状軸に沿って極めて正確に移動する前記ロボットの末端へと接続しているこの体積において極めて高い精度を有する。
【0021】
ロボットアームを、水平な回転軸を中心にして旋回するように接続部へと接続することができる。
【0022】
本発明の別の変形例によれば、ロボットアームが、0°〜90°の間の角度だけ水平に対して傾けられた回転軸を中心にして旋回できる態様で接続部へと接続される。好ましくは、接続部に対するロボットアームの回転軸が、45°〜60°の間の角度だけ水平に対して傾けられる。この傾きは、特には、天井高が低い限られた空間におけるアームの逆転(ロボットの前方から後方へと向かうアームの通過)に有用である。
【0023】
更には、接続部を、垂直な軸を中心として旋回できるように座へ接続することができ、前記座は、スライド可能な方法で前記少なくとも1本の線状レールへ接続している。
【0024】
リストは、標準的な電気空気式ツールチェンジャによって患者支持部へと接続される。
【0025】
本発明の好都合な特徴によれば、接続部は、U字断面の鋼材として設計されている線状レール上で転がることによって移動する。
【0026】
好都合には、本発明によるデバイスは、設置時にデバイスを支持する着脱式又は格納式の車輪を追加することによって、処置室における設置の際の取り扱いを限定するような方法で設計される。これらの車輪を、デバイスのシャシのベースに取り付けることができる。これは、デバイスの取り扱いを容易にし、既存の部屋での位置決めデバイスの容易な交換を促進する。
【0027】
本発明の好都合な特徴によれば、デバイスが、接続部が移動するときに線状レールを常に覆うために、接続部へと接続されて前記接続部の両側に配置されている2つのハーフプラットフォームによって構成される可動式のプラットフォームを備えており、各ハーフプラットフォームは、ヒンジによって互いに鎖状に連結されているいくつかの羽板によって構成されており、ハーフプラットフォームが折り畳まれた状態にある場合に、前記ハーフプラットフォームの少なくともいくつかの羽板は、折り畳まれていない状態にある前記ハーフプラットフォームを含む水平面の下方で畳まれている。
【0028】
好ましくは、プラットフォームが、2組の補助レール上をスライドし:
・内側補助レールからなる第1組を、ヒンジのうちの半分がスライドし、これら2つの内側補助レールは、互いに平行に間隔を空けて位置するとともに、上方線状部と、湾曲部と、下方線状部とを有しており;
・2本の外側補助レールで構成される第2組を、ヒンジのうちの残りの半分がスライドし、これら2本の外側補助レールは、互いに平行かつ前記2本の内側補助レールを隔てている間隔よりも大きい間隔で配置されるとともに、前記内側補助レールの前記上方線状部と実質的に同じ高さにある水平面内を線状に延びており;
2つの連続するヒンジに関して、一方が前記第1組の補助レールによって支持され、他方が前記第2組の補助レールによって支持される。
【0029】
好都合には、各々のハーフプラットフォームが、折り畳まれていない状態では、接続部に近い平坦部を有しており、そして、折り畳まれた状態では、前記内側補助レールの前記下方線状部と前記外側補助レールとの間に畳まれた部分を有している。
【0030】
本発明の好都合な変形例によれば、プラットフォームが固定される。この場合、線状レールが、床へと取り付けられかつ互いに接続される複数のモジュール要素によって構成される。これらのモジュール要素は、例えば1mの長さを有することができ、ロボットの行程を所与の用途(例えば、スキャナを部屋の片側に配置し、処置用の加速器を別の側に配置すること)に適合させることを可能にする。
【0031】
本発明の別の観点によれば、前述の位置決めデバイスと、管理ソフトウェアを統合してなる処理ユニットと、一連の患者再設定センサと、特には一連の安全センサとを備えている位置決めシステムが提案される。
【0032】
移動は、センサ及びソフトウェアを実装することによって検証される。使用されるセンサは、その一部が、例えば、既知の形状の対象物の移動に追従することができる赤外線立体視センサ、X線センサ、産業用カメラ、及びロボットの末端部材に位置する力センサの高度なセンサである。これらのセンサによって収集された全てのデータは、スーパーバイザと呼ばれる共通の処理センタに集められる。スーパーバイザは、ロボットの環境の現在の状態を知り、それを、必要とされる任務のための部屋の理論的な構成と比較することができる。この比較に付随して、障害物の回避の場合に軌道を変更することができ、危険の可能性がある領域に近付くときに速度を落とすことができ、あるいは問題の場合に作業者に警告することができる。元の計画に対する変更の各々が、管理インターフェイスにて作業者へと知らされる。医療環境における電気機械システムの設置を管理する規則によって課される制約が行き過ぎる場合に、ロボットの動力を遮断する機能を有する低レベルセンサ(レゾルバ、加速度計、各軸のパルスカウンタ、傾斜計、衝突防止片)の層を加えることによって、安全性が高められる。
【0033】
本発明によれば、処理ユニットが、
・位置決めデバイスが位置する処置室の仮想の3Dモデル化、及び
・位置決めデバイスの仮想の3Dモデル化、
を備えている3D表示モジュールを備えることができ、
前記モデル化は、センサに基づいて位置決めデバイスのリアルタイムの位置を表わし、位置決めデバイスの少なくとも1つの構成要素の周囲に仮想の限界範囲を定め、そして、仮想の限界範囲が処置室の構成要素の仮想表現と衝突するときに警報信号を生成するようにパラメータ化されている。
【0034】
処理ユニットを、前記警報信号に応えて、位置決めデバイスの停止又は位置決めデバイスの運動の再定位で構成される衝突防止プロセスを開始するようにパラメータ化することができる。
【0035】
本発明によるシステムにおいては、位置決めロボットのリモート制御が、選択される軌跡の最適化及び送信されるべき指令の容易な解釈のおかげで、移動の安全性を改善する。3D表示モジュールは、現場とロボットの移動との視覚化に特に有用である。センサによる測定(ロボットの位置)及びシステムの各部(処置用の補助具、テーブル、又は椅子)の正確なシミュレーションにもとづき、衝突を予測して回避することが可能である。この機能は、好都合には、処置室内に存在する(固定又は可動の)構成要素の各々の周囲の仮想の限界範囲に基づく。この実施態様は、衝突の恐れなく処置室においてロボットを動かすことができる衝突防止システムを構成する。
【0036】
別の好都合な特徴によれば、本発明によるデバイスが、前記リスト(好ましくは、位置決めデバイスの末端)へ取り付けられる少なくとも1つの力センサを備えており、この少なくとも1つの力センサは、当該位置決めデバイスを制御する処理ユニットへと接続されて、この少なくとも1つの力センサによって検出される任意の力に付随する協調マニピュレーションを実行する。より正確には、力センサは、6つのひずみゲージを含むことができる。検出された力は、これを処理して、力の方向への移動の指令をロボットに送信する処理ユニット(例えば、コンピュータ)へと伝えられる。この制御ループが、ユーザがいかなる質量にも制約されることなく道具を操作することを可能にする。慣性及び重量が、ロボットによって補償される。動作の可能性は、ロボットの可能性であり、すなわち3つの並進運動及び3つの回転運動という6つの自由度である。この実施態様は、ロボットの手動操作を可能にする。その目的は、特には、支持部上に配置された患者を、標準的なレーザシステムを使用して撮像装置又は処置装置の前方に直観的に整列させるために協調マニピュレーションによって移動させることである。この手動による患者の位置決めの動作は、位置決め時間の短縮を可能にする。それは、患者が不快の場合に、患者を直観的に緊急取り出しする場合にも好都合に使用することができる予備的な位置決めである。この方法は、ユーザがロボットへと加える力が位置決めデバイスの従属の変位によって中継されて電気機械システムを制御するため、直観的である。
【0037】
力センサを、支持されている荷重を測定するために使用することもできる。この測定が、協調マニピュレーションのための従属パラメータの調節に使用され、更にはロボットに加わる変形の知識を得てこれを補償するためにも使用することができる。センサによるこの直接測定は自動化され、従ってユーザにとって完全に明瞭である。
【0038】
力センサを、移動している物体との衝突の検出にも使用することができる。所定の軌跡又は動的な軌跡に従うロボットの移動の際、あるいは任意の他の操作の際に、用具が、環境の他の構成要素(人間、台車、など)に衝突する可能性がある。これらの衝突が、センサに突発的な力を生じさせ、従って衝突している物体の一方又は他方の損傷を防止するために、ロボットの非常停止を実行することが可能である。
【図面の簡単な説明】
【0039】
本発明の他の利点及び特徴が、実施態様(決して本発明を限定するものではない)の詳細な説明及び添付の図面を検討することで、明らかになるであろう。
【図1】本発明による位置決めロボットの運動原理を表す模式図である。
【図2】本発明による位置決めデバイスの第1の側面模式図である。
【図3】本発明による位置決めデバイスの第2の側面模式図である。
【図4】本発明による位置決めロボットが移動することができる作業空間を示す模式図である。
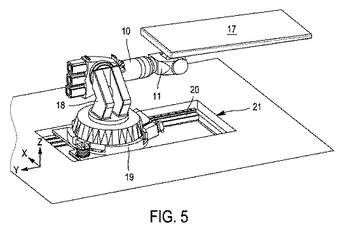
【図5】線状レールが床へ取り付けられている本発明による位置決めロボットの模式図である。
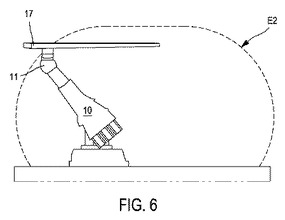
【図6】配置位置にある本発明による位置決めロボットの模式図である。
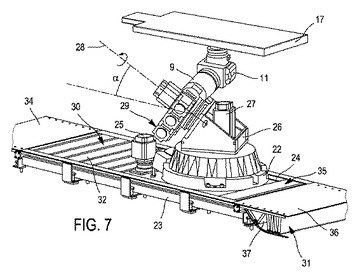
【図7】線状レール上のプラットフォームが可動である実施態様を表す模式図である。
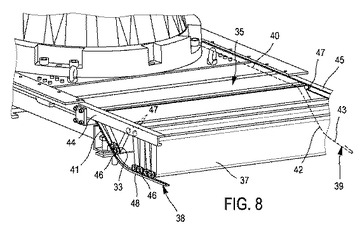
【図8】線状レール上のプラットフォームが可動である実施態様を表す模式図である。
【図9】プラットフォームが固定式であってモジュール要素で構成されている実施態様の模式図である。
【図10】患者支持部を省略した図9の位置決めロボットの側面模式図である。
【図11】図9の位置決めロボットの患者支持部の仮想表現である。
【0040】
本発明による位置決めロボットは、一般的には、外部放射線治療の際に患者を電離放射線に対して位置決めすることを目的とする。そのような位置決めロボットは、そのような治療処置に適した寸法を有する部屋に配置される。この部屋には、患者の体内の処置対象の腫瘍に焦点を合わせて放射線を生成することができる粒子加速器が備えられる。処置の開始から終了まで、患者の位置決めが可能な限り正確且つ安定でなければならないことを、容易に理解できるであろう。
【0041】
位置決めロボットは、患者が位置する支持テーブル、支持椅子、又は任意の他の支持手段を担持する関節アームである。位置決めロボットの関節運動は、処理ユニットによって制御され、患者の腫瘍を三次元の作業空間内の任意の地点に位置させることができる。
【0042】
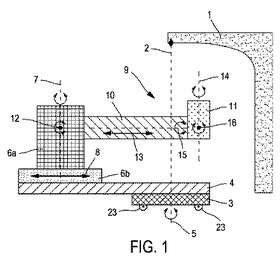
図1は、本発明による位置決めロボットの運動原理を表す概略図である。粒子発生器1が、垂直軸2に沿って下方へと放射線を生成するように設けられている。
【0043】
位置決めロボットは、ベース3を備えており、ベース3上で線状レール4が垂直な回転軸5を中心にして旋回することができる。好都合には、この垂直な回転軸5を、放射線の軸2に一致させることができる。更に、位置決めロボットは、垂直な回転軸7を中心にして旋回できるような方法で座6b上に取り付けられている接続部6aを備えている。座6bを、水平な並進運動の軸8に沿って、線状レール4上で並進運動によって線状に移動させることができる。接続部6aが、前腕10及びリスト11を備えるロボットアーム9を担持している。前腕10が、水平な回転軸12を中心にして旋回できる態様で接続部6aへと取り付けられている。好ましくは、前腕10がスライド式であり、線状軸13に沿って真っ直ぐに延長させることができる。前腕10の接続部6aから最も遠い端部が、3つの直交する共点的回転軸14、15、及び16を中心として3つの自由度を有しているリスト11を担持している。このリスト11は、前腕10のスライド部に取り付けられている。患者を受け入れる目的の支持テーブル(図示されていない)が、一般に、リスト11上に水平に取り付けられる。
【0044】
従来の方法では、本発明による位置決めロボットは、この位置決めロボットの関節運動を管理することができる処理ユニット(図示されていない)へと接続されて、患者の腫瘍を所定の位置に置く。この処理ユニットは、モータに取り付けられているエンコーダによって、各軸の関節の位置をリアルタイムで収集する。次いで、ロボットの較正からもたらされる理論的なパラメータにもとづき、処理ユニットは、仮想の処置基準フレームに対する腫瘍の基準フレームのデカルト位置(position cartesienne)をユーザに提供することができる。このようにして、ユーザがこの位置を容易に解釈し、処方に沿っていることを確認することができる。同じ方法で、ユーザは、患者を調節するために使用されるシステム(スキャナ、X線、赤外線)によって提案され、処置基準フレームにおいて腫瘍の基準フレームへと加えられる補正を、検証することができる。次いで、この指令が分析され、ロボットへの関節運動の指令へと変換される。
【0045】
更に、本発明には、現場の理論モデルと存在する種々のセンサによって集められる情報とに基づく高度な3D表示ソフトウェアが備えられる。この位置決め手順の精密なモデル化は、最終的に制御を処置室の外部へと移すことを検討可能にする。この移動は、好都合なことに、位置決めデバイスを遠方から動かすことを可能にし、従って患者の処置の入射を変更するために再び部屋へと入る作業者の時間の無駄を減らすことを可能にする。
【0046】
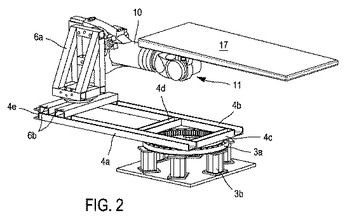
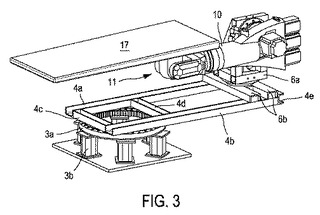
図2及び3は、本発明による位置決めロボットの実施例を示す。ベース3は、リング3a(旋回部)によって構成されており、前記リング3aは、床へと堅固に取り付けられたアルミニウム形材製のブロック3bに取り付けられている。
【0047】
線状レール4は、好ましくはU字断面の鋼材製であり、支持面を備える平行なランナからなる2本の線状レール4a及び4bによって形成されるフレームである。これら2本のレール4a及び4bは、互いに平行且つこれら2本のレール4a及び4bに対して垂直な3本のレール4c、4d、及び4eによって、互いに接続している。レール4cは、線状レール組立部の端部に位置している。2本のレール4c及び4dと、2本のレール4a及び4bの一部分とが、旋回可能な態様でリング3aへと堅固に取り付けられているフレームを構成している。線状レール4の全体は、リング3aの中心を通過する垂直な回転軸5を中心にして360°にわたって旋回させることができる。
【0048】
座6bが、2本のレール4a及び4bにスライド可能に係合している。この座6bは、垂直に保持された金属フレームである接続部6aを、垂直な回転軸7を中心にして旋回できる態様で支持している。ロボットアーム9は、「SERIAL」アーキテクチャによるアームである。ロボットアーム9は、接続部6aの上部に取り付けられ、水平な回転軸12を中心にして旋回可能である。前腕10は、接続部6aへの接続において幅広になる細長い管である。前腕の自由端はリスト11を支持し、リスト11上には、患者のための支持テーブル17が取り付けられている。このテーブル17は、大部分の時間においては実質的に水平に保たれるが、リストによって所定の位置にされる。テーブル17は、患者の搬送のための特定の事例においては、テーブル又は椅子であることができる。テーブル17は、重量を抑えつつ、放射線透過性且つ極めて剛的であるように、ハニカム構造を有するカーボン製である。
【0049】
位置決めロボットは、休止位置にあるときにコンパクトであるように構成されている。
【0050】
例えば、休止位置は、線状レール4及び前腕10が同じ垂直面内で実質的に平行である図2及び3に示されている位置であることができる。接続部が、線状レール4のベース3とは反対側の一端に配置されている。前腕10が、接続部6aへと取り付けられ、依然として線状レール4と平行に、ベース3の方に向けられている。テーブル17はリスト11の上方に保持されており、ここで、前記テーブル17の一端はリスト11へ取り付けられ、そして、他方の自由端は前腕とは反対の側に位置する。
【0051】
コンパクトさを高めるために、折り畳まれた位置において全体としての寸法が最小になるように、及び/又は、位置決めロボットの重心が回転軸5に可能な限り近くなるように、スライド式の線状レールを設けることも可能である。スライド式のレールを使用する場合には、線状動作の範囲、従って作業空間が、大きくなる。
【0052】
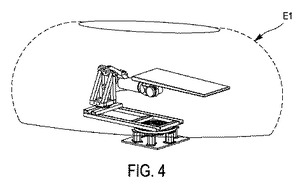
図4は、本発明による位置決めロボットの作業空間E1の模式図である。この空間E1は、平坦な上部を有する半球形の体積である。患者を、上述のように、この作業空間E1の全体積において連続的に位置させることができる。
【0053】
図5は別の実施例を示す図であり、この実施例においても、先の実施例の構成要素の大部分が存在している。この実施態様においては、接続部18が、重量の大きい上部精密接続部を設置することができるように変更されている。実際、線状レール21が床へと取り付けられ、垂直な回転軸を中心に360°にわたって座19に対して旋回できる接続部18を、問題なく受け入れることが可能である。この座19が、床へと取り付けられている2本の平行な線状レール20上で、水平な並進運動の軸に沿って線状にスライドする。この実施態様を実現するために、第1の線状レール20及び第2のレール(図5では見て取ることができない)が設置される小さなピット21が設けられる。従って、この位置決めロボットは、線状レール上の水平な並進運動の軸と、5つの回転軸(座19に対する接続部18の回転、接続部に対する前腕10の回転、及びリスト11の3つの回転軸)とを備える。もう1つの並進運動の軸を、前腕10がスライド式であることができるという事実によって、追加することも可能である。
【0054】
このような位置決めロボットにおいて、約±0.5mm及び約±0.5°の範囲内までの腫瘍の正確な位置決めと、大きな移動の可能性とを保証することができる。
ΔX=±1000mm(線状軸の公称バージョンにおける長手軸)
ΔY=±1000mm(横軸)
ΔZ=±800mm(垂直軸)
ΔRx=±20°(長手軸)
ΔRy=±20°(横軸)
ΔRz=±110°(垂直軸)
【0055】
図6は或る実施例を示す図であり、前記実施例では、位置決めロボットの展開が実施されている。ロボットアームが、斜め上方の位置にある。リスト11は、テーブル17を水平に保持している。また、作業空間E2が、上部が平坦な横長の半球形を有する体積であることを、見て取ることができる。
【0056】
図7は、本発明によるロボットの別の好都合な実施態様を示す。座22が、この座22に対して横方向に配置された2本の平行な線状レール23及び24上でスライドできることを、見て取ることができる。第1のモータ25が、座22の線状移動に関与する。座22の上方に位置する接続部26が、垂直軸を中心にして旋回できる態様で、この座22へと接続している。接続部は、底辺を座22上に位置させた三角形の形状を有しており、ロボットアーム9を受け入れる斜めの側面を有している。第2のモータ27が、座22に対する接続部26の回転に関与する。好都合には、ロボットアーム9が、接続部26へと接続されて回転軸28(水平に対してゼロでない角度αに傾けられている)を中心にして旋回する。この角度αは、好ましくは45〜60°の間である。この場合には、角度αは60°である。この斜め配置により、本発明によるロボットは、例えば2.5メートルに抑えられた天井を有している従来の病院の部屋など、小さい空間内で運動することができると同時に、患者を乗せる(特には、子供又は高齢者がテーブル17上に登る)ための60cm程度の最小高さに達することができる。斜めの配置は、回転運動の際にロボットアーム9の後部29を障害物(例えば、座それ自体)に衝突させることなく、座22上のロボットアーム9及び接続部26を地面に可能な限り近く配置することを可能にする。実際、上述の実施態様においては、例えば図3のように、ロボットアーム9が、座6bに捕まることなく回転するために充分な高さで接続部へと取り付けられる。
【0057】
このように、ロボットが、1つの並進運動及び5つの回転運動という6軸の操作性を有しており、すなわち6つの自由度を有している。従って、患者を作業空間において任意のあらゆる状態に配置することが可能である。
【0058】
図7にも示されている本発明のその他の観点によれば、2つのハーフプラットフォーム30及び31によって構成されたプラットフォームを見て取ることができる。ハーフプラットフォーム30は、ヒンジ(図8において33に見て取ることができる)によって互いに鎖状に連結された複数の羽板32を備えている。ハーフプラットフォーム30が、展開された状態にあり、すなわちユーザが立つことができる頑丈かつ平坦なプラットフォームを構成している。このハーフプラットフォーム30は、座22と一体な状態でスライドすることができる。従って、座22が左方の固定のプラットフォーム34から離れるように移動するとき、ハーフプラットフォーム30がスライドし、左方の固定のプラットフォーム34と座22に取り付けられているモータ25との間のピットを覆う。他方で、座22が左方の固定のプラットフォーム34に突き当たるとき、ハーフプラットフォーム30は、折り畳まれた状態となって左方の固定のプラットフォーム34の下方に畳まれるようにスライドする。ハーフプラットフォーム35は、ハーフプラットフォーム30と同じ方法で、しかしながら逆の態様で機能する。一方が折り畳まれるとき、他方が展開され、逆も然りである。図7においては、ハーフプラットフォーム35が、右方の固定のプラットフォーム36の下方で折り畳まれた状態にある。ハーフプラットフォーム35を構成している羽板37が、右方の固定のプラットフォーム36の下方に畳まれていることを、見て取ることができる。
【0059】
図8は、ハーフプラットフォーム35のスライド機構を更に詳しく示す図であり、これはハーフプラットフォーム30においても同様である。このハーフプラットフォーム35は、2組の補助レール上をスライドする。
【0060】
第1組は、内側補助レール38及び39(破線で示されている)である。補助レール38、39の各々は、上方線状部40(補助レール38については図示されていない)と、S字形の湾曲点41、42と、下方線状部48、43とを備えており、ここで、前記上方線状部40の上には、展開された状態の羽板37が、ユーザが前記羽板37上を歩行できるように位置しており、そして、前記下方線状部48、43は、上側の線状部40に平行であるが実質的にピットの底に配置されている。
【0061】
外側補助レール44及び45からなる第2組は、内側補助レール38、39よりも広い間隔を有している。2本の外側補助レールは、羽板37の移動の全体にわたって真っ直ぐなままである。これらの羽板は、ヒンジ部に互い違いの態様で配置されたローラを保持している。図8に見られるように、半分のローラ46が、2本の内側補助レール38、39によって案内される一方で、残りの半分のローラ47は、2本の外側補助レール44及び45によって案内される。より正確には、これらのローラが交互に配置され、ローラ46にローラ47が続き、逆もまた同様である。折り畳まれた状態において、ローラ47が外側補助レール44及び45をスライドする一方で、ローラ46が、湾曲点41、42(下方線状部43、48が位置する低いレベルへとアクセスする斜面を構成している)をスライドする。このようにして、折り畳まれた状態において、羽板37が垂直に畳まれて配置される。従って、最小限の空間しか占めず、隠されたままになる。羽板37は、重力の効果のみのもとで水平な状態から垂直な状態へと移行し、さらなる駆動手段を必要とせずに自分自身で自動的に整列する。
【0062】
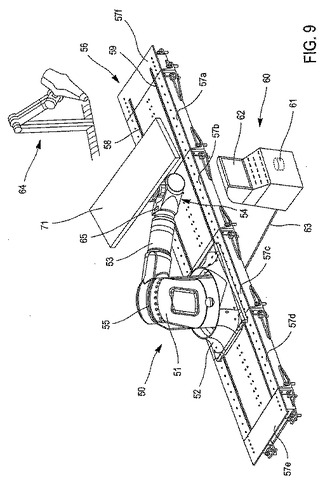
図9は、本発明による位置決めデバイスと固定及び可動の構成要素とが備え付けられた処置室における本発明によるシステムの実施態様を示す。
【0063】
位置決めデバイスは、前述の通りであることができる。好ましくは、接続部50を備えている図9の位置決めデバイスが使用され、前記接続部50は、線状レール56上をスライドし、共点的回転軸を有するリスト54が設けられたロボットアーム53を保持している。
【0064】
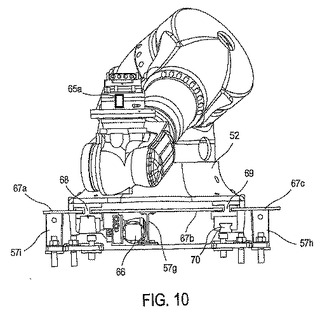
線状レール56は、好都合には床へと取り付けられ、そして、互いに接続されているいくつかのモジュール要素57a、・・・、57dによって構成されている。これらのモジュール要素は、処置室への設置が容易になるように、同一であることができる。従って、このような構成によれば、種々の長さの線状レールが容易に生み出される。患者支持部を省略した図9の位置決めデバイスの側面図を示している図10に見られるように、各モジュール要素57a、・・・、57dは、床へと堅固に取り付けられている3つの垂直材(2つの側方垂直材57h、57i、及び中央垂直材57g)に載せられる金属(あるいは、木材、プラスチック、などの他の丈夫な材料)製の上部プレート67a、67b、67cを備えている。各上部金属プレートは、図9に見られるように、互いに平行であって各々の上部金属プレートを3つの部分67a、67b、67cへと分割している2つのスロット又は側方開口部58及び59を備えている。これらのスロットが、上部金属プレート67bと床との間の閉じられた空間へのアクセスをもたらしている。この閉じられた空間が、接続部50の座52を線状レール56に対してスライドさせる目的のモータ66(図10に示されている)を収容している。より正確には、座52が、ランナ68及び69によって支えられている。これらのランナは、座52を支持するための上部と、閉じられた空間内の固定のレール70上をスライドする下部と、スロット58及び59に決して触れることなくスロット58及び59を通って上部及び下部を接続するように充分に細くかつ丈夫に設計された中央部とを備えている。
【0065】
そのような実施態様は、外から見えないようにモータを閉じられた空間内に隠すことを可能にし、空間の節約を可能にするとともに、線状レールの上面を平坦にする。ユーザが、モジュール要素57a、・・・、57dの上部金属プレートによって構成されたこのプラットフォームにわたって、全く安全に移動することができる。更に、2つのモジュール式のストッパ要素57e及び57fが設けられ、線状レール56の2つの端部にそれぞれ配置されている。
【0066】
座52が、垂直な回転軸を中心にして旋回することができる旋回部51に接続されている。ロボットアーム53が、水平に対して45〜60°の間の角度を形成する回転軸を中心にして旋回する態様で接続部50の上部へと接続されている。リスト54は、処置室の基準系において極めて正確に位置させることができる患者支持部71を担持している。
【0067】
本発明によれば、処理ユニット60が、位置決めデバイス又はロボットの電気機械的な制御を可能にする。線状レールの移動のためのモータ66を含むいくつかのモータが、ロボットの任意の関節運動を自動的に制御するような方法で、ロボット上又はロボット内に配置される。例えばリスト54に配置される傾斜計65など、従来のセンサの一式が、ロボットに配置される。センサ並びに特にはモータから、処理ユニットは、リアルタイムでロボットの位置を正確に知ることを可能にする一連のデータを集める。すなわち、部屋における支持部の位置及びロボットの種々の構成要素の傾きの角度の値は、常に知られている。
【0068】
処理ユニットは、データの取得並びにアナログ及びデジタル処理のための従来からの構成要素を備えるコンピュータ式のハードウェア部分を備えている。ハードディスク61に、環境(処置室である)に対するロボットの移動の3D表現を割り出して画面62上に表示する3D表示モジュールが組み込まれている。従って、この表示モジュールは、環境の仮想の3Dモデル化、及び環境内を移動するロボットのリアルタイムでの仮想の3Dモデル化を含んでいる。好都合には、ロボットの支持部71の周囲の仮想の限界範囲の仮想の3Dモデル化、並びに仮想の限界範囲とモデル化された環境との間のリアルタイムの衝突を検出するためのアルゴリズムも含んでいる。
【0069】
環境のモデル化は、処置室の寸法だけでなく、この処置室内に存在する構成要素又は障害物も考慮に入れる。処理ユニットそれ自体、並びに、一般的には可動である放射デバイス64が、特に重要である。好都合には、3D表示モジュールが処置室内の任意の可動の設備を表現できるように、処理ユニットは、有線63又は無線の方法でロボット及び放射デバイス64へと接続される。
【0070】
モデル化は、リアルタイムで取得されるデータ及び既定のデータから得られる。これらの既定のデータは、可動の構成要素の位置データに相当することができる。これらの位置(例えば、処理ユニットの位置など)は、事前に知られており、ユーザによる入力が可能である。
【0071】
処置室内の運動の仮想の表現は、監視システム(例えば、衝突防止手段)の設置を可能にする。
【0072】
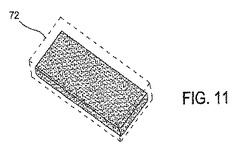
これを行うために、仮想の限界範囲が、支持部71の移動に追従させられる。図11は、画面62上で見ることができる仮想の3D表現である。簡単にするために、支持部71だけが図示されている。仮想の限界範囲72が、支持部71の仮想の表現と同じ形状を有しているが、より大きな寸法を有している。結果として、支持部71の運動時に、限界範囲72が同じ運動を辿り、支持部71が処置室内の構成要素のうちの1つと衝突する任意の可能性が、3D表示モジュールにおける限界範囲72の仮想の衝突によって先取りされる。実際、3D表現によって、仮想の限界範囲72が仮想の衝突を生じたときに、支持部71の実際の衝突のリスクをユーザに警告することが可能になる。
【0073】
図11においては、限界範囲72が支持部71の3D表現を包み込んでいるが、この限界範囲72は、支持部の形状とは異なる形状を有することができ、特には支持部の一部分のみを管理するためにより小さいサイズであってもよい。
【0074】
仮想の限界範囲の3Dモデル化を、処置室の任意の可動の構成要素について使用することもできる。このようにして、放射デバイス64の周囲に第2の仮想の限界範囲をもたらすことができ、2つの仮想の限界範囲の間で衝突を予測することができる。
【0075】
実際には、表示モジュールを、特に、最適な方法で衝突を計算するためのビデオゲーム(物理ドライブ)の分野からの3Dドライバソフトウェア及び技術に基づいて実現することができる。衝突の検出は、特には当業者にとって公知の以下のアルゴリズムなど、強力な最適化されたアルゴリズムに基づく。
・「n-body pruning」式のアルゴリズム
・時間コヒーレンスアルゴリズム
・Gilbert-Johnson-Keerthi式の距離アルゴリズム
【0076】
これらのアルゴリズムは、衝突の検出の速度を高めることを可能にする。毎秒約60回の衝突テストを想定することができる。
【0077】
衝突が検出される場合には、いくつかの行動の可能性が存在する。実際の衝突を回避するために、システムの完全な停止を要求することができるか、あるいは、ロボットの再定位(例えば、ロボットを仮想表面にわたってスライドさせる)を要求することができる。
【0078】
そのような衝突防止システムは、多数の利点を有している。
・処置室内を歩き回る者が、安全に保たれ、保護される。
・保護システムが、該当のハードウェアのための通常の運転システムの外側にある。
・運動の可能性が増え、可動の構成要素が衝突から保護され、従ってこれらの構成要素の操作性に関して作業者の利便性が向上する。
【0079】
衝突防止システムは、空間内で可動するシステムの操作性を向上させることができる。従って、作業者は、例えば医療用ロボットを接触の可能性を心配することなく全く安全に且つ容易に操作することができる。従って、デバイスはより自律的であり、自らの安全性及び周囲の安全性に気を配る。
【0080】
本発明によれば、ロボットに加えられる力を検出することと、この力によって引き起こされる運動を助けるような方法でロボットに電気機械的に指令を与えることとからなる協調マニピュレーション(co-manipulation)プロセスによって、ロボットの操作が改善される。加えられた力は、通常は、例えば自身の手を使用して患者支持部を押すことによってロボットを手動で動かすユーザに由来する。
【0081】
協調マニピュレーションプロセスは、独立したプロセスであるか、又は、仮想の限界範囲の技法による衝突防止と組み合わせられることができる。この場合、例えば協調マニピュレーションにおいてロボットを手動で動かす際に、同時に処理ユニットが衝突の検出を実施する。
【0082】
例えば図8において、センサ65aが、リスト54へと加えられる任意の力を検出するために使用される力センサであることができる。この形式の力センサを、いくつかのひずみゲージによって構成することができる。いくつかの力センサを、ロボットのいくつかの構成要素にわたって分布させて設けて、このロボットに付与される任意の力を検出することができる。
【0083】
ロボットの動きの再定位が決定される場合には、衝突防止プロセスが、仮想の限界範囲の体積内の支持部のゆっくりとしたスライドを可能にする。この原理は、協調マニピュレーションモードにおいて、処置室内に存在する構成要素の周囲の領域において、ロボットの早すぎる停止を回避し、軌跡を滑らかにすることを可能にする。更に、このスライドは、ロボットの操作及び手動での案内の補佐である。
【0084】
当然ながら、本発明は、上述した実施例に限定されず、本発明の技術的範囲を超えることなくこれらの実施例について多数の調節を行うことが可能である。特に、座をスライドさせることができるただ1本の中央のレールを設けることが可能である。
【発明の詳細な説明】
【0001】
本発明は、外部の放射線治療ビームに対して患者を位置決めするためのデバイスに関する。例えば、脈絡膜の黒色腫又は特定の頭蓋内腫瘍の極めて高い精度を必要とする処置に照射ビームを使用する放射線治療の分野において、極めて好都合に適用される。特には腫瘍が患者の頭蓋骨の底部に位置している場合、放射線治療の目的は、悪性の領域を、近傍に位置する視神経、脳幹、内耳、又は脊髄の重要な器官に触れないようにしつつ照射することにある。従って、腫瘍を照射する目的の放射線に対して患者を正しく位置決めすることが、最も重要である。放射線治療においては、通常は、患者がテーブル又は椅子に配置され、次いで電気機械式の設備を使用して位置決めされる。
【0002】
しかしながら、本発明は、患者又は任意の他の物体の正確な位置決めを必要とする他の分野にも適用可能であるため、更に広い範囲を有する。例えば、本発明を、所与の基準系に対して患者を精密かつ迅速に位置決めする必要があるあらゆる種類の医療の用途に適用することができる。
【0003】
従来技術において、文献US2005/0234327は、患者を担持するためのテーブルを備えている患者の位置決めのためのデバイスであって、垂直軸に沿った変位を可能にする角柱状リンクと、2つの連続的な垂直ロトイダル(rotoides)リンクと、共点的(concourant)軸を有するロボットリストとが設けられたSCARA構造のロボットアームを有しているデバイスを記載している。このようなデバイスの欠点は、ロボットアームが患者を上方に位置させつつ最大限に延ばされるときの機械的な弾性の正確なモデル化である。医療の用途に必要な精度を得るために、高度なソフトウェア補正テーブルシステムが組み込まれる必要がある。更には、垂直な並進運動の軸がかなりの応力に曝されるため、連結部品の寿命を短くし、サイズを大きくさせる可能性がある。更には、この並進運動の軸が、1メートルを超える深さのピットにデバイスを設置することを必要とする。
【0004】
更には、文献「Geometric and elastic error calibration of a high accuracy patient positionningsystem」(Marco A. Meggiolaroand al., Mechanism and Machine Theory 40 (2005) 415-427, 12 September 2004)は、患者の位置決めのための別の電気機械システムの変形の補償方法を記載している。この文献に記載のロボットモデルは、垂直方向、横方向、及び長手方向の並進運動のための3つの線状シャフトを備えている。更に、処置テーブルとの固定のインターフェイスの下方に3つの非共点的回転軸を有している。6つの自由度を有するこの位置決めシステムは、ピッチ及びロールについて限られた可能性(±3°)しか提供していない。更に、このデバイスの制御は、あらゆるロボットシステムによって提供されるような、腫瘍に関連してリストから離れた仮想の基準点を中心とする回転など、複雑な運動の実行を可能にするものではない。この設備は、先のシステムと同じ欠点(すなわち、機械的な弾性及び処置室の深いピットの必要性)を有している。
【0005】
文献WO2007/017211は、患者を適切に位置決めすることができる複数の回転軸をもつ産業ロボットを使用する位置決めデバイスを記載している。しかしながら、そのようなデバイスは、極めてかさばり、位置決めデバイスの底部を収容することができる大寸法のピットを必要とする。従って、そのようなデバイスを処置室に設置するには非常に費用がかかり、多数の制約を余儀なくさせる。
【0006】
本発明の目的は、高い精度を本質的に有しており、深いピットを必要としないコンパクトかつ極めて剛的な新規の位置決めデバイスを提案することによって、従来技術の欠点を克服することにある。
【0007】
本発明の主題は、設置の簡単な位置決めロボットの開発である。
【0008】
最後に、本発明の目的は、動作の間で患者及び担当者の安全の可能な限り最良の保証をもたらすために、位置決めロボットの高性能な制御を提案することにある。
【0009】
上述の目的のうちの少なくとも1つが、患者を放射線に対して位置決めするためのデバイスであって、
・少なくとも1本の水平移動線状レールと、
・前記線状レールに対して並進運動を実行でき、かつ前記線状レールに対して垂直な回転軸を中心にして旋回できる接続部と、
・患者支持部へと接続されている共点的回転軸を有するリストを備えており、前記接続部へと接続しているロボットアームと
を備える多関節ロボットである前記デバイスによって達成される。
【0010】
本発明は、極めてコンパクトでありながら、広い空間において極めて高い精度で操作することができる位置決めロボットを好都合に構成する。全体的な寸法が、従来技術のデバイスと比べて大幅に縮小される。実際、ここで説明される形状は、ロボットを構成する機械的部分の配置に使用される順序及び角度によって、従来の形態とは相違する。既に説明した「SCARA」という多関節又は6脚の考え方は、地面に深いピットを必要とするという大きな欠点を抱えている。
【0011】
更に、本発明は、室内で折り畳まれた位置にあるときの全体の寸法及びコンパクトさに関して革新的である。そのようなシステムの作業空間を最適にするために、床からの高さを1メートル20センチから1メートル50センチまで変化させることができる平面に中心が置かれなければならない。この制約は、放射線治療のビームによる処置の原理に固有である。
【0012】
本発明の主題は、「シリアル」(人間の腕の形式の運動を有するロボット)として知られる多関節の形態の肩部と肘部との間のリンクが、床上の線状軸と、垂直な回転中心上の上述の接続部との結合によって好都合に置き換えられるハイブリッドな位置決めロボットを構成する点で、更により特筆されるべきである。これらの変更は、可動性(並進運動の軸)及びコンパクトさ(接続部)という2つの制約を克服する。レールがロボットアーム組立部(接続部から患者支持部まで)を処置の計画によって提供される位置まで並進運動にて移動させることを可能にするため、ロボットがコンパクトである。次いで、複数の自由度を有するロボットアームが、処置の基準系における処置対象の位置を最適にするために、振幅は小さいが高い精度が要求される運動を実行することができる。
【0013】
6つの自由度を有するこのコンパクトな位置決めロボットは、ピットの深さを制限することを可能にし、標準的な放射線治療テーブルの全体寸法を有する少なくとも250kgの重い荷重を搬送することができる。本発明によるそのような線状レールによれば、約1m30という短いロボットアームを提供することが可能である。この位置決めロボットは、このロボットがベースから離れたオフセット軸を有さない限りにおいて、従来技術のシステムと比べて高い剛性及びコンパクトさを有する。
【0014】
本発明は、その形態のコンパクトさゆえに、従来技術のデバイスにおいて見られる片持ち梁の作用を抑えるために、ベースのかなり近くに重心を有する。従って、位置決めロボットの重量の全てが、地面に分配され、デバイスの安定性及び剛性が改善される。
【0015】
本発明による位置決めロボットは、作業空間を所与の用途に最適に適合させることを可能にする。実際、線状レールのサイズを、利用可能な空間及び所望の付加機能に応じて、変化させることができる。従って、部屋の片側において画像化スキャナを使用して患者の予備的な位置決めを実行し、次いでロボットのベースの純粋な並進運動によって放射線治療デバイスの下方の処置位置へと患者を直接的に送り込むために、軸の長さを増やすことが考えられる。この機能は、面倒であって特定の処置(特には、小児科学における処置)には適していない現行の手順を、好都合に置き換えると考えられる。
【0016】
ロボットの軸を組み立てる他の方法によれば、線状レールを、ベースの旋回部へと取り付けることができ、この旋回部の旋回軸は垂直である。そのような組立部の場合には、システムを、浅いピット(300mm程度の最大深さを有する)に設置することができる。この新たな軸の追加によって、ロボットは、6つの回転及び1つの並進運動を組み合わせる7つの軸を備え、6つの自由度の最大の可動性をもたらす。この追加は、アーキテクチャを冗長にし、処置室などの混雑した環境においてアクセス困難な位置への到達を可能にする。
【0017】
実際、良好な精度を保証するために、旋回部は、ボールベアリングによってベースの固定部に対して旋回させられる。ベースの固定部は、例えば小さなピットにおいて地面に取り付けられているアルミニウム形材製のマウントを備えることができる。このようにして製造される組立部は、線状レール及びロボットアームで構成される組立部の360°の回転を実行可能にする。そのような設備の作業の限界範囲(enveloppe)は、デッドスペースのない半球に相当する。
【0018】
好ましくは、ベースに対する線状レールの垂直な回転の軸が、前記放射線の軸に又は垂直に一致させられる。その結果、対象(例えば、患者の頭部)が放射線に対して適切に配置される場合、地面上の純粋な回転軸は、対象を軸に保ちつつ患者を回転させて放射線の入射の角度を変更するために充分である。これは、ロボットの移動を、ビームを成形するマルチスリットコリメータの形態に組み合わせることによって、患者の動的な処置の想定を可能にする。
【0019】
好都合には、ロボットアームが、スライド式の前腕を備える。その利点は、線状軸に従うロボットの末端へ接続される較正体積を有することである(この場合、ロボットは極めて正確である)。この体積は、極めて精密な軸(0.1mm未満の線状軸精度)に沿って移動し、処置対象の領域に連続的に追従する精度体積を有することを可能にする。エフェクタと呼ばれることもある末端は、ロボット(位置決めデバイス)の端部に相当する。一般には、ロボットと患者支持部との間の取り付けプレートである。
【0020】
本発明による線状レールによれば、位置決めデバイスの較正を簡単化することが可能である。実際、例えば立方体の体積の角に位置する8点など、限られた数の測定点を生み出すことが可能である。次いで、この体積において、各々の変位について大きな関節の変化を最大にする特定の数のデカルト位置が計算される。ロボットは、線状軸に沿って極めて正確に移動する前記ロボットの末端へと接続しているこの体積において極めて高い精度を有する。
【0021】
ロボットアームを、水平な回転軸を中心にして旋回するように接続部へと接続することができる。
【0022】
本発明の別の変形例によれば、ロボットアームが、0°〜90°の間の角度だけ水平に対して傾けられた回転軸を中心にして旋回できる態様で接続部へと接続される。好ましくは、接続部に対するロボットアームの回転軸が、45°〜60°の間の角度だけ水平に対して傾けられる。この傾きは、特には、天井高が低い限られた空間におけるアームの逆転(ロボットの前方から後方へと向かうアームの通過)に有用である。
【0023】
更には、接続部を、垂直な軸を中心として旋回できるように座へ接続することができ、前記座は、スライド可能な方法で前記少なくとも1本の線状レールへ接続している。
【0024】
リストは、標準的な電気空気式ツールチェンジャによって患者支持部へと接続される。
【0025】
本発明の好都合な特徴によれば、接続部は、U字断面の鋼材として設計されている線状レール上で転がることによって移動する。
【0026】
好都合には、本発明によるデバイスは、設置時にデバイスを支持する着脱式又は格納式の車輪を追加することによって、処置室における設置の際の取り扱いを限定するような方法で設計される。これらの車輪を、デバイスのシャシのベースに取り付けることができる。これは、デバイスの取り扱いを容易にし、既存の部屋での位置決めデバイスの容易な交換を促進する。
【0027】
本発明の好都合な特徴によれば、デバイスが、接続部が移動するときに線状レールを常に覆うために、接続部へと接続されて前記接続部の両側に配置されている2つのハーフプラットフォームによって構成される可動式のプラットフォームを備えており、各ハーフプラットフォームは、ヒンジによって互いに鎖状に連結されているいくつかの羽板によって構成されており、ハーフプラットフォームが折り畳まれた状態にある場合に、前記ハーフプラットフォームの少なくともいくつかの羽板は、折り畳まれていない状態にある前記ハーフプラットフォームを含む水平面の下方で畳まれている。
【0028】
好ましくは、プラットフォームが、2組の補助レール上をスライドし:
・内側補助レールからなる第1組を、ヒンジのうちの半分がスライドし、これら2つの内側補助レールは、互いに平行に間隔を空けて位置するとともに、上方線状部と、湾曲部と、下方線状部とを有しており;
・2本の外側補助レールで構成される第2組を、ヒンジのうちの残りの半分がスライドし、これら2本の外側補助レールは、互いに平行かつ前記2本の内側補助レールを隔てている間隔よりも大きい間隔で配置されるとともに、前記内側補助レールの前記上方線状部と実質的に同じ高さにある水平面内を線状に延びており;
2つの連続するヒンジに関して、一方が前記第1組の補助レールによって支持され、他方が前記第2組の補助レールによって支持される。
【0029】
好都合には、各々のハーフプラットフォームが、折り畳まれていない状態では、接続部に近い平坦部を有しており、そして、折り畳まれた状態では、前記内側補助レールの前記下方線状部と前記外側補助レールとの間に畳まれた部分を有している。
【0030】
本発明の好都合な変形例によれば、プラットフォームが固定される。この場合、線状レールが、床へと取り付けられかつ互いに接続される複数のモジュール要素によって構成される。これらのモジュール要素は、例えば1mの長さを有することができ、ロボットの行程を所与の用途(例えば、スキャナを部屋の片側に配置し、処置用の加速器を別の側に配置すること)に適合させることを可能にする。
【0031】
本発明の別の観点によれば、前述の位置決めデバイスと、管理ソフトウェアを統合してなる処理ユニットと、一連の患者再設定センサと、特には一連の安全センサとを備えている位置決めシステムが提案される。
【0032】
移動は、センサ及びソフトウェアを実装することによって検証される。使用されるセンサは、その一部が、例えば、既知の形状の対象物の移動に追従することができる赤外線立体視センサ、X線センサ、産業用カメラ、及びロボットの末端部材に位置する力センサの高度なセンサである。これらのセンサによって収集された全てのデータは、スーパーバイザと呼ばれる共通の処理センタに集められる。スーパーバイザは、ロボットの環境の現在の状態を知り、それを、必要とされる任務のための部屋の理論的な構成と比較することができる。この比較に付随して、障害物の回避の場合に軌道を変更することができ、危険の可能性がある領域に近付くときに速度を落とすことができ、あるいは問題の場合に作業者に警告することができる。元の計画に対する変更の各々が、管理インターフェイスにて作業者へと知らされる。医療環境における電気機械システムの設置を管理する規則によって課される制約が行き過ぎる場合に、ロボットの動力を遮断する機能を有する低レベルセンサ(レゾルバ、加速度計、各軸のパルスカウンタ、傾斜計、衝突防止片)の層を加えることによって、安全性が高められる。
【0033】
本発明によれば、処理ユニットが、
・位置決めデバイスが位置する処置室の仮想の3Dモデル化、及び
・位置決めデバイスの仮想の3Dモデル化、
を備えている3D表示モジュールを備えることができ、
前記モデル化は、センサに基づいて位置決めデバイスのリアルタイムの位置を表わし、位置決めデバイスの少なくとも1つの構成要素の周囲に仮想の限界範囲を定め、そして、仮想の限界範囲が処置室の構成要素の仮想表現と衝突するときに警報信号を生成するようにパラメータ化されている。
【0034】
処理ユニットを、前記警報信号に応えて、位置決めデバイスの停止又は位置決めデバイスの運動の再定位で構成される衝突防止プロセスを開始するようにパラメータ化することができる。
【0035】
本発明によるシステムにおいては、位置決めロボットのリモート制御が、選択される軌跡の最適化及び送信されるべき指令の容易な解釈のおかげで、移動の安全性を改善する。3D表示モジュールは、現場とロボットの移動との視覚化に特に有用である。センサによる測定(ロボットの位置)及びシステムの各部(処置用の補助具、テーブル、又は椅子)の正確なシミュレーションにもとづき、衝突を予測して回避することが可能である。この機能は、好都合には、処置室内に存在する(固定又は可動の)構成要素の各々の周囲の仮想の限界範囲に基づく。この実施態様は、衝突の恐れなく処置室においてロボットを動かすことができる衝突防止システムを構成する。
【0036】
別の好都合な特徴によれば、本発明によるデバイスが、前記リスト(好ましくは、位置決めデバイスの末端)へ取り付けられる少なくとも1つの力センサを備えており、この少なくとも1つの力センサは、当該位置決めデバイスを制御する処理ユニットへと接続されて、この少なくとも1つの力センサによって検出される任意の力に付随する協調マニピュレーションを実行する。より正確には、力センサは、6つのひずみゲージを含むことができる。検出された力は、これを処理して、力の方向への移動の指令をロボットに送信する処理ユニット(例えば、コンピュータ)へと伝えられる。この制御ループが、ユーザがいかなる質量にも制約されることなく道具を操作することを可能にする。慣性及び重量が、ロボットによって補償される。動作の可能性は、ロボットの可能性であり、すなわち3つの並進運動及び3つの回転運動という6つの自由度である。この実施態様は、ロボットの手動操作を可能にする。その目的は、特には、支持部上に配置された患者を、標準的なレーザシステムを使用して撮像装置又は処置装置の前方に直観的に整列させるために協調マニピュレーションによって移動させることである。この手動による患者の位置決めの動作は、位置決め時間の短縮を可能にする。それは、患者が不快の場合に、患者を直観的に緊急取り出しする場合にも好都合に使用することができる予備的な位置決めである。この方法は、ユーザがロボットへと加える力が位置決めデバイスの従属の変位によって中継されて電気機械システムを制御するため、直観的である。
【0037】
力センサを、支持されている荷重を測定するために使用することもできる。この測定が、協調マニピュレーションのための従属パラメータの調節に使用され、更にはロボットに加わる変形の知識を得てこれを補償するためにも使用することができる。センサによるこの直接測定は自動化され、従ってユーザにとって完全に明瞭である。
【0038】
力センサを、移動している物体との衝突の検出にも使用することができる。所定の軌跡又は動的な軌跡に従うロボットの移動の際、あるいは任意の他の操作の際に、用具が、環境の他の構成要素(人間、台車、など)に衝突する可能性がある。これらの衝突が、センサに突発的な力を生じさせ、従って衝突している物体の一方又は他方の損傷を防止するために、ロボットの非常停止を実行することが可能である。
【図面の簡単な説明】
【0039】
本発明の他の利点及び特徴が、実施態様(決して本発明を限定するものではない)の詳細な説明及び添付の図面を検討することで、明らかになるであろう。
【図1】本発明による位置決めロボットの運動原理を表す模式図である。
【図2】本発明による位置決めデバイスの第1の側面模式図である。
【図3】本発明による位置決めデバイスの第2の側面模式図である。
【図4】本発明による位置決めロボットが移動することができる作業空間を示す模式図である。
【図5】線状レールが床へ取り付けられている本発明による位置決めロボットの模式図である。
【図6】配置位置にある本発明による位置決めロボットの模式図である。
【図7】線状レール上のプラットフォームが可動である実施態様を表す模式図である。
【図8】線状レール上のプラットフォームが可動である実施態様を表す模式図である。
【図9】プラットフォームが固定式であってモジュール要素で構成されている実施態様の模式図である。
【図10】患者支持部を省略した図9の位置決めロボットの側面模式図である。
【図11】図9の位置決めロボットの患者支持部の仮想表現である。
【0040】
本発明による位置決めロボットは、一般的には、外部放射線治療の際に患者を電離放射線に対して位置決めすることを目的とする。そのような位置決めロボットは、そのような治療処置に適した寸法を有する部屋に配置される。この部屋には、患者の体内の処置対象の腫瘍に焦点を合わせて放射線を生成することができる粒子加速器が備えられる。処置の開始から終了まで、患者の位置決めが可能な限り正確且つ安定でなければならないことを、容易に理解できるであろう。
【0041】
位置決めロボットは、患者が位置する支持テーブル、支持椅子、又は任意の他の支持手段を担持する関節アームである。位置決めロボットの関節運動は、処理ユニットによって制御され、患者の腫瘍を三次元の作業空間内の任意の地点に位置させることができる。
【0042】
図1は、本発明による位置決めロボットの運動原理を表す概略図である。粒子発生器1が、垂直軸2に沿って下方へと放射線を生成するように設けられている。
【0043】
位置決めロボットは、ベース3を備えており、ベース3上で線状レール4が垂直な回転軸5を中心にして旋回することができる。好都合には、この垂直な回転軸5を、放射線の軸2に一致させることができる。更に、位置決めロボットは、垂直な回転軸7を中心にして旋回できるような方法で座6b上に取り付けられている接続部6aを備えている。座6bを、水平な並進運動の軸8に沿って、線状レール4上で並進運動によって線状に移動させることができる。接続部6aが、前腕10及びリスト11を備えるロボットアーム9を担持している。前腕10が、水平な回転軸12を中心にして旋回できる態様で接続部6aへと取り付けられている。好ましくは、前腕10がスライド式であり、線状軸13に沿って真っ直ぐに延長させることができる。前腕10の接続部6aから最も遠い端部が、3つの直交する共点的回転軸14、15、及び16を中心として3つの自由度を有しているリスト11を担持している。このリスト11は、前腕10のスライド部に取り付けられている。患者を受け入れる目的の支持テーブル(図示されていない)が、一般に、リスト11上に水平に取り付けられる。
【0044】
従来の方法では、本発明による位置決めロボットは、この位置決めロボットの関節運動を管理することができる処理ユニット(図示されていない)へと接続されて、患者の腫瘍を所定の位置に置く。この処理ユニットは、モータに取り付けられているエンコーダによって、各軸の関節の位置をリアルタイムで収集する。次いで、ロボットの較正からもたらされる理論的なパラメータにもとづき、処理ユニットは、仮想の処置基準フレームに対する腫瘍の基準フレームのデカルト位置(position cartesienne)をユーザに提供することができる。このようにして、ユーザがこの位置を容易に解釈し、処方に沿っていることを確認することができる。同じ方法で、ユーザは、患者を調節するために使用されるシステム(スキャナ、X線、赤外線)によって提案され、処置基準フレームにおいて腫瘍の基準フレームへと加えられる補正を、検証することができる。次いで、この指令が分析され、ロボットへの関節運動の指令へと変換される。
【0045】
更に、本発明には、現場の理論モデルと存在する種々のセンサによって集められる情報とに基づく高度な3D表示ソフトウェアが備えられる。この位置決め手順の精密なモデル化は、最終的に制御を処置室の外部へと移すことを検討可能にする。この移動は、好都合なことに、位置決めデバイスを遠方から動かすことを可能にし、従って患者の処置の入射を変更するために再び部屋へと入る作業者の時間の無駄を減らすことを可能にする。
【0046】
図2及び3は、本発明による位置決めロボットの実施例を示す。ベース3は、リング3a(旋回部)によって構成されており、前記リング3aは、床へと堅固に取り付けられたアルミニウム形材製のブロック3bに取り付けられている。
【0047】
線状レール4は、好ましくはU字断面の鋼材製であり、支持面を備える平行なランナからなる2本の線状レール4a及び4bによって形成されるフレームである。これら2本のレール4a及び4bは、互いに平行且つこれら2本のレール4a及び4bに対して垂直な3本のレール4c、4d、及び4eによって、互いに接続している。レール4cは、線状レール組立部の端部に位置している。2本のレール4c及び4dと、2本のレール4a及び4bの一部分とが、旋回可能な態様でリング3aへと堅固に取り付けられているフレームを構成している。線状レール4の全体は、リング3aの中心を通過する垂直な回転軸5を中心にして360°にわたって旋回させることができる。
【0048】
座6bが、2本のレール4a及び4bにスライド可能に係合している。この座6bは、垂直に保持された金属フレームである接続部6aを、垂直な回転軸7を中心にして旋回できる態様で支持している。ロボットアーム9は、「SERIAL」アーキテクチャによるアームである。ロボットアーム9は、接続部6aの上部に取り付けられ、水平な回転軸12を中心にして旋回可能である。前腕10は、接続部6aへの接続において幅広になる細長い管である。前腕の自由端はリスト11を支持し、リスト11上には、患者のための支持テーブル17が取り付けられている。このテーブル17は、大部分の時間においては実質的に水平に保たれるが、リストによって所定の位置にされる。テーブル17は、患者の搬送のための特定の事例においては、テーブル又は椅子であることができる。テーブル17は、重量を抑えつつ、放射線透過性且つ極めて剛的であるように、ハニカム構造を有するカーボン製である。
【0049】
位置決めロボットは、休止位置にあるときにコンパクトであるように構成されている。
【0050】
例えば、休止位置は、線状レール4及び前腕10が同じ垂直面内で実質的に平行である図2及び3に示されている位置であることができる。接続部が、線状レール4のベース3とは反対側の一端に配置されている。前腕10が、接続部6aへと取り付けられ、依然として線状レール4と平行に、ベース3の方に向けられている。テーブル17はリスト11の上方に保持されており、ここで、前記テーブル17の一端はリスト11へ取り付けられ、そして、他方の自由端は前腕とは反対の側に位置する。
【0051】
コンパクトさを高めるために、折り畳まれた位置において全体としての寸法が最小になるように、及び/又は、位置決めロボットの重心が回転軸5に可能な限り近くなるように、スライド式の線状レールを設けることも可能である。スライド式のレールを使用する場合には、線状動作の範囲、従って作業空間が、大きくなる。
【0052】
図4は、本発明による位置決めロボットの作業空間E1の模式図である。この空間E1は、平坦な上部を有する半球形の体積である。患者を、上述のように、この作業空間E1の全体積において連続的に位置させることができる。
【0053】
図5は別の実施例を示す図であり、この実施例においても、先の実施例の構成要素の大部分が存在している。この実施態様においては、接続部18が、重量の大きい上部精密接続部を設置することができるように変更されている。実際、線状レール21が床へと取り付けられ、垂直な回転軸を中心に360°にわたって座19に対して旋回できる接続部18を、問題なく受け入れることが可能である。この座19が、床へと取り付けられている2本の平行な線状レール20上で、水平な並進運動の軸に沿って線状にスライドする。この実施態様を実現するために、第1の線状レール20及び第2のレール(図5では見て取ることができない)が設置される小さなピット21が設けられる。従って、この位置決めロボットは、線状レール上の水平な並進運動の軸と、5つの回転軸(座19に対する接続部18の回転、接続部に対する前腕10の回転、及びリスト11の3つの回転軸)とを備える。もう1つの並進運動の軸を、前腕10がスライド式であることができるという事実によって、追加することも可能である。
【0054】
このような位置決めロボットにおいて、約±0.5mm及び約±0.5°の範囲内までの腫瘍の正確な位置決めと、大きな移動の可能性とを保証することができる。
ΔX=±1000mm(線状軸の公称バージョンにおける長手軸)
ΔY=±1000mm(横軸)
ΔZ=±800mm(垂直軸)
ΔRx=±20°(長手軸)
ΔRy=±20°(横軸)
ΔRz=±110°(垂直軸)
【0055】
図6は或る実施例を示す図であり、前記実施例では、位置決めロボットの展開が実施されている。ロボットアームが、斜め上方の位置にある。リスト11は、テーブル17を水平に保持している。また、作業空間E2が、上部が平坦な横長の半球形を有する体積であることを、見て取ることができる。
【0056】
図7は、本発明によるロボットの別の好都合な実施態様を示す。座22が、この座22に対して横方向に配置された2本の平行な線状レール23及び24上でスライドできることを、見て取ることができる。第1のモータ25が、座22の線状移動に関与する。座22の上方に位置する接続部26が、垂直軸を中心にして旋回できる態様で、この座22へと接続している。接続部は、底辺を座22上に位置させた三角形の形状を有しており、ロボットアーム9を受け入れる斜めの側面を有している。第2のモータ27が、座22に対する接続部26の回転に関与する。好都合には、ロボットアーム9が、接続部26へと接続されて回転軸28(水平に対してゼロでない角度αに傾けられている)を中心にして旋回する。この角度αは、好ましくは45〜60°の間である。この場合には、角度αは60°である。この斜め配置により、本発明によるロボットは、例えば2.5メートルに抑えられた天井を有している従来の病院の部屋など、小さい空間内で運動することができると同時に、患者を乗せる(特には、子供又は高齢者がテーブル17上に登る)ための60cm程度の最小高さに達することができる。斜めの配置は、回転運動の際にロボットアーム9の後部29を障害物(例えば、座それ自体)に衝突させることなく、座22上のロボットアーム9及び接続部26を地面に可能な限り近く配置することを可能にする。実際、上述の実施態様においては、例えば図3のように、ロボットアーム9が、座6bに捕まることなく回転するために充分な高さで接続部へと取り付けられる。
【0057】
このように、ロボットが、1つの並進運動及び5つの回転運動という6軸の操作性を有しており、すなわち6つの自由度を有している。従って、患者を作業空間において任意のあらゆる状態に配置することが可能である。
【0058】
図7にも示されている本発明のその他の観点によれば、2つのハーフプラットフォーム30及び31によって構成されたプラットフォームを見て取ることができる。ハーフプラットフォーム30は、ヒンジ(図8において33に見て取ることができる)によって互いに鎖状に連結された複数の羽板32を備えている。ハーフプラットフォーム30が、展開された状態にあり、すなわちユーザが立つことができる頑丈かつ平坦なプラットフォームを構成している。このハーフプラットフォーム30は、座22と一体な状態でスライドすることができる。従って、座22が左方の固定のプラットフォーム34から離れるように移動するとき、ハーフプラットフォーム30がスライドし、左方の固定のプラットフォーム34と座22に取り付けられているモータ25との間のピットを覆う。他方で、座22が左方の固定のプラットフォーム34に突き当たるとき、ハーフプラットフォーム30は、折り畳まれた状態となって左方の固定のプラットフォーム34の下方に畳まれるようにスライドする。ハーフプラットフォーム35は、ハーフプラットフォーム30と同じ方法で、しかしながら逆の態様で機能する。一方が折り畳まれるとき、他方が展開され、逆も然りである。図7においては、ハーフプラットフォーム35が、右方の固定のプラットフォーム36の下方で折り畳まれた状態にある。ハーフプラットフォーム35を構成している羽板37が、右方の固定のプラットフォーム36の下方に畳まれていることを、見て取ることができる。
【0059】
図8は、ハーフプラットフォーム35のスライド機構を更に詳しく示す図であり、これはハーフプラットフォーム30においても同様である。このハーフプラットフォーム35は、2組の補助レール上をスライドする。
【0060】
第1組は、内側補助レール38及び39(破線で示されている)である。補助レール38、39の各々は、上方線状部40(補助レール38については図示されていない)と、S字形の湾曲点41、42と、下方線状部48、43とを備えており、ここで、前記上方線状部40の上には、展開された状態の羽板37が、ユーザが前記羽板37上を歩行できるように位置しており、そして、前記下方線状部48、43は、上側の線状部40に平行であるが実質的にピットの底に配置されている。
【0061】
外側補助レール44及び45からなる第2組は、内側補助レール38、39よりも広い間隔を有している。2本の外側補助レールは、羽板37の移動の全体にわたって真っ直ぐなままである。これらの羽板は、ヒンジ部に互い違いの態様で配置されたローラを保持している。図8に見られるように、半分のローラ46が、2本の内側補助レール38、39によって案内される一方で、残りの半分のローラ47は、2本の外側補助レール44及び45によって案内される。より正確には、これらのローラが交互に配置され、ローラ46にローラ47が続き、逆もまた同様である。折り畳まれた状態において、ローラ47が外側補助レール44及び45をスライドする一方で、ローラ46が、湾曲点41、42(下方線状部43、48が位置する低いレベルへとアクセスする斜面を構成している)をスライドする。このようにして、折り畳まれた状態において、羽板37が垂直に畳まれて配置される。従って、最小限の空間しか占めず、隠されたままになる。羽板37は、重力の効果のみのもとで水平な状態から垂直な状態へと移行し、さらなる駆動手段を必要とせずに自分自身で自動的に整列する。
【0062】
図9は、本発明による位置決めデバイスと固定及び可動の構成要素とが備え付けられた処置室における本発明によるシステムの実施態様を示す。
【0063】
位置決めデバイスは、前述の通りであることができる。好ましくは、接続部50を備えている図9の位置決めデバイスが使用され、前記接続部50は、線状レール56上をスライドし、共点的回転軸を有するリスト54が設けられたロボットアーム53を保持している。
【0064】
線状レール56は、好都合には床へと取り付けられ、そして、互いに接続されているいくつかのモジュール要素57a、・・・、57dによって構成されている。これらのモジュール要素は、処置室への設置が容易になるように、同一であることができる。従って、このような構成によれば、種々の長さの線状レールが容易に生み出される。患者支持部を省略した図9の位置決めデバイスの側面図を示している図10に見られるように、各モジュール要素57a、・・・、57dは、床へと堅固に取り付けられている3つの垂直材(2つの側方垂直材57h、57i、及び中央垂直材57g)に載せられる金属(あるいは、木材、プラスチック、などの他の丈夫な材料)製の上部プレート67a、67b、67cを備えている。各上部金属プレートは、図9に見られるように、互いに平行であって各々の上部金属プレートを3つの部分67a、67b、67cへと分割している2つのスロット又は側方開口部58及び59を備えている。これらのスロットが、上部金属プレート67bと床との間の閉じられた空間へのアクセスをもたらしている。この閉じられた空間が、接続部50の座52を線状レール56に対してスライドさせる目的のモータ66(図10に示されている)を収容している。より正確には、座52が、ランナ68及び69によって支えられている。これらのランナは、座52を支持するための上部と、閉じられた空間内の固定のレール70上をスライドする下部と、スロット58及び59に決して触れることなくスロット58及び59を通って上部及び下部を接続するように充分に細くかつ丈夫に設計された中央部とを備えている。
【0065】
そのような実施態様は、外から見えないようにモータを閉じられた空間内に隠すことを可能にし、空間の節約を可能にするとともに、線状レールの上面を平坦にする。ユーザが、モジュール要素57a、・・・、57dの上部金属プレートによって構成されたこのプラットフォームにわたって、全く安全に移動することができる。更に、2つのモジュール式のストッパ要素57e及び57fが設けられ、線状レール56の2つの端部にそれぞれ配置されている。
【0066】
座52が、垂直な回転軸を中心にして旋回することができる旋回部51に接続されている。ロボットアーム53が、水平に対して45〜60°の間の角度を形成する回転軸を中心にして旋回する態様で接続部50の上部へと接続されている。リスト54は、処置室の基準系において極めて正確に位置させることができる患者支持部71を担持している。
【0067】
本発明によれば、処理ユニット60が、位置決めデバイス又はロボットの電気機械的な制御を可能にする。線状レールの移動のためのモータ66を含むいくつかのモータが、ロボットの任意の関節運動を自動的に制御するような方法で、ロボット上又はロボット内に配置される。例えばリスト54に配置される傾斜計65など、従来のセンサの一式が、ロボットに配置される。センサ並びに特にはモータから、処理ユニットは、リアルタイムでロボットの位置を正確に知ることを可能にする一連のデータを集める。すなわち、部屋における支持部の位置及びロボットの種々の構成要素の傾きの角度の値は、常に知られている。
【0068】
処理ユニットは、データの取得並びにアナログ及びデジタル処理のための従来からの構成要素を備えるコンピュータ式のハードウェア部分を備えている。ハードディスク61に、環境(処置室である)に対するロボットの移動の3D表現を割り出して画面62上に表示する3D表示モジュールが組み込まれている。従って、この表示モジュールは、環境の仮想の3Dモデル化、及び環境内を移動するロボットのリアルタイムでの仮想の3Dモデル化を含んでいる。好都合には、ロボットの支持部71の周囲の仮想の限界範囲の仮想の3Dモデル化、並びに仮想の限界範囲とモデル化された環境との間のリアルタイムの衝突を検出するためのアルゴリズムも含んでいる。
【0069】
環境のモデル化は、処置室の寸法だけでなく、この処置室内に存在する構成要素又は障害物も考慮に入れる。処理ユニットそれ自体、並びに、一般的には可動である放射デバイス64が、特に重要である。好都合には、3D表示モジュールが処置室内の任意の可動の設備を表現できるように、処理ユニットは、有線63又は無線の方法でロボット及び放射デバイス64へと接続される。
【0070】
モデル化は、リアルタイムで取得されるデータ及び既定のデータから得られる。これらの既定のデータは、可動の構成要素の位置データに相当することができる。これらの位置(例えば、処理ユニットの位置など)は、事前に知られており、ユーザによる入力が可能である。
【0071】
処置室内の運動の仮想の表現は、監視システム(例えば、衝突防止手段)の設置を可能にする。
【0072】
これを行うために、仮想の限界範囲が、支持部71の移動に追従させられる。図11は、画面62上で見ることができる仮想の3D表現である。簡単にするために、支持部71だけが図示されている。仮想の限界範囲72が、支持部71の仮想の表現と同じ形状を有しているが、より大きな寸法を有している。結果として、支持部71の運動時に、限界範囲72が同じ運動を辿り、支持部71が処置室内の構成要素のうちの1つと衝突する任意の可能性が、3D表示モジュールにおける限界範囲72の仮想の衝突によって先取りされる。実際、3D表現によって、仮想の限界範囲72が仮想の衝突を生じたときに、支持部71の実際の衝突のリスクをユーザに警告することが可能になる。
【0073】
図11においては、限界範囲72が支持部71の3D表現を包み込んでいるが、この限界範囲72は、支持部の形状とは異なる形状を有することができ、特には支持部の一部分のみを管理するためにより小さいサイズであってもよい。
【0074】
仮想の限界範囲の3Dモデル化を、処置室の任意の可動の構成要素について使用することもできる。このようにして、放射デバイス64の周囲に第2の仮想の限界範囲をもたらすことができ、2つの仮想の限界範囲の間で衝突を予測することができる。
【0075】
実際には、表示モジュールを、特に、最適な方法で衝突を計算するためのビデオゲーム(物理ドライブ)の分野からの3Dドライバソフトウェア及び技術に基づいて実現することができる。衝突の検出は、特には当業者にとって公知の以下のアルゴリズムなど、強力な最適化されたアルゴリズムに基づく。
・「n-body pruning」式のアルゴリズム
・時間コヒーレンスアルゴリズム
・Gilbert-Johnson-Keerthi式の距離アルゴリズム
【0076】
これらのアルゴリズムは、衝突の検出の速度を高めることを可能にする。毎秒約60回の衝突テストを想定することができる。
【0077】
衝突が検出される場合には、いくつかの行動の可能性が存在する。実際の衝突を回避するために、システムの完全な停止を要求することができるか、あるいは、ロボットの再定位(例えば、ロボットを仮想表面にわたってスライドさせる)を要求することができる。
【0078】
そのような衝突防止システムは、多数の利点を有している。
・処置室内を歩き回る者が、安全に保たれ、保護される。
・保護システムが、該当のハードウェアのための通常の運転システムの外側にある。
・運動の可能性が増え、可動の構成要素が衝突から保護され、従ってこれらの構成要素の操作性に関して作業者の利便性が向上する。
【0079】
衝突防止システムは、空間内で可動するシステムの操作性を向上させることができる。従って、作業者は、例えば医療用ロボットを接触の可能性を心配することなく全く安全に且つ容易に操作することができる。従って、デバイスはより自律的であり、自らの安全性及び周囲の安全性に気を配る。
【0080】
本発明によれば、ロボットに加えられる力を検出することと、この力によって引き起こされる運動を助けるような方法でロボットに電気機械的に指令を与えることとからなる協調マニピュレーション(co-manipulation)プロセスによって、ロボットの操作が改善される。加えられた力は、通常は、例えば自身の手を使用して患者支持部を押すことによってロボットを手動で動かすユーザに由来する。
【0081】
協調マニピュレーションプロセスは、独立したプロセスであるか、又は、仮想の限界範囲の技法による衝突防止と組み合わせられることができる。この場合、例えば協調マニピュレーションにおいてロボットを手動で動かす際に、同時に処理ユニットが衝突の検出を実施する。
【0082】
例えば図8において、センサ65aが、リスト54へと加えられる任意の力を検出するために使用される力センサであることができる。この形式の力センサを、いくつかのひずみゲージによって構成することができる。いくつかの力センサを、ロボットのいくつかの構成要素にわたって分布させて設けて、このロボットに付与される任意の力を検出することができる。
【0083】
ロボットの動きの再定位が決定される場合には、衝突防止プロセスが、仮想の限界範囲の体積内の支持部のゆっくりとしたスライドを可能にする。この原理は、協調マニピュレーションモードにおいて、処置室内に存在する構成要素の周囲の領域において、ロボットの早すぎる停止を回避し、軌跡を滑らかにすることを可能にする。更に、このスライドは、ロボットの操作及び手動での案内の補佐である。
【0084】
当然ながら、本発明は、上述した実施例に限定されず、本発明の技術的範囲を超えることなくこれらの実施例について多数の調節を行うことが可能である。特に、座をスライドさせることができるただ1本の中央のレールを設けることが可能である。
【特許請求の範囲】
【請求項1】
患者を放射線(2)に対して位置決めするためのデバイスであって:
・少なくとも1本の水平移動線状レール(4)と;
・前記線状レールに対して並進運動を実行でき、そして、前記線状レールに対して垂直な回転軸を中心にして旋回できる接続部(6a)と;
・前記接続部(6a)へと接続するロボットアーム(9)であって、患者支持部(17)へと接続している共点的回転軸(14、15、16)を有するリスト(11)を備えている前記ロボットアーム(9)と;
を備えている前記デバイス。
【請求項2】
ロボットアーム(9)が、水平な回転軸を中心にして旋回する態様で、接続部(6a)へと接続していることを特徴とする、請求項1に記載のデバイス。
【請求項3】
ロボットアーム(9)が、0°〜90°の間の角度だけ水平に対して傾いている回転軸を中心にして旋回する態様で、接続部(6a)へと接続していることを特徴とする、請求項1に記載のデバイス。
【請求項4】
接続部(6a)に対するロボットアーム(9)の回転軸が、45°〜60°の間の角度だけ水平に対して傾けられていることを特徴とする、請求項3に記載のデバイス。
【請求項5】
線状レール(4)が、地面に取り付けられていることを特徴とする、請求項1に記載のデバイス。
【請求項6】
線状レールが、ベース(3)の旋回部(3a)へ取り付けられており、前記旋回部(3a)の旋回軸が垂直である(5)ことを特徴とする、請求項1〜4のいずれか一項に記載のデバイス。
【請求項7】
ベース(3)に対する線状レール(4)の垂直な回転軸(5)が、前記放射線(2)の軸に一致することを特徴とする、請求項6に記載のデバイス。
【請求項8】
接続部(6a)が、垂直な軸を中心として旋回するように座(6b)へ接続しており、前記座(6b)は、スライドする態様で、少なくとも1本の線状レール(4)へ接続していることを特徴とする、請求項1〜7のいずれか一項に記載のデバイス。
【請求項9】
ロボットアーム(9)が、スライド式の前腕(10)を備えることを特徴とする、請求項1〜8のいずれか一項に記載のデバイス。
【請求項10】
リスト(11)が、産業用の電気空気式ツールチェンジャによって患者支持部(17)へと接続していることを特徴とする、請求項1〜9のいずれか一項に記載のデバイス。
【請求項11】
設置の間にデバイスを支持する着脱式の車輪(23)を備えていることを特徴とする、請求項1〜10のいずれか一項に記載のデバイス。
【請求項12】
接続部が移動するときに前記少なくとも1本の線状レール(4)を常に覆うように、接続部(6a)へと接続され且つ前記接続部(6a)の両側に配置される2つのハーフプラットフォーム(30、35)によって構成されている可動式のプラットフォームを備えていること;及び
各々のハーフプラットフォーム(30、35)が、ヒンジ(33)によって互いに鎖状に連結されている複数の羽板(32、37)によって構成されており、ハーフプラットフォームが折り畳まれた状態にある場合に、前記ハーフプラットフォームの少なくともいくつかの前記羽板が、折り畳まれていない状態にある前記ハーフプラットフォームを含む水平面の下方で畳まれていること;
を特徴とする、請求項1〜11のいずれか一項に記載のデバイス。
【請求項13】
プラットフォームが、2組の補助レール上をスライドし:
・内側補助レール(38、39)からなる第1組を、ヒンジのうちの半分(46)がスライドし、前記2本の内側補助レール(38、39)は、互いに平行に間隔を空けて位置するとともに、上方線状部(40)と、湾曲部(41、42)と、下方線状部(43、48)とを有しており;
・2本の外側補助レール(44、45)で構成される第2組を、前記ヒンジのうちの残りの半分(47)がスライドし、前記2本の外側補助レール(44、45)は、互いに平行かつ前記2本の内側補助レール(38、39)を隔てている間隔よりも大きい間隔で配置されるとともに、前記内側補助レールの上方線状部と実質的に同じ高さにある水平面内を線状に延びており;
2つの連続するヒンジに関して、一方は第1組の補助レールによって支持され、他方は第2組の補助レールによって支持されることを特徴とする、請求項12に記載のデバイス。
【請求項14】
各々のハーフプラットフォームが、折り畳まれていない状態では、前記接続部に近い平坦部を有しており、折り畳まれた状態では、内側補助レールの下方線状部と外側補助レールとの間に畳まれた部分を有していることを特徴とする、請求項13に記載のデバイス。
【請求項15】
線状レール(56)が、床へ取り付けられ且つ互いに接続された複数のモジュール要素(57a、・・・、57d)によって構成されていることを特徴とする、請求項1〜11のいずれか一項に記載のデバイス。
【請求項16】
リスト(54)へ取り付けられる少なくとも1つの力センサ(65a)を備えており、前記少なくとも1つの力センサ(65a)は、位置決めデバイス(50、53、54、71)を制御する前記処理ユニット(60)へ接続されて、前記少なくとも1つの力センサによって検出される任意の力に付随する協調マニピュレーションを実行することを特徴とする、請求項1〜15のいずれか一項に記載のデバイス。
【請求項17】
請求項1〜16のいずれか一項に記載の位置決めデバイスと、管理ソフトウェアを統合する処理ユニットと、患者再設定センサとを備えている位置決めシステム。
【請求項18】
センサが、以下のセンサ、すなわち、赤外線立体視センサ、X線センサ、産業用カメラ、及び力センサのうちの少なくとも1つを含むことを特徴とする、請求項17に記載のシステム。
【請求項19】
センサが、以下のセンサ、すなわち、レゾルバ、加速度計、過速度センサ、傾斜計、及び衝突防止片のうちの少なくとも1つを含んでいることを特徴とする、請求項17又は18に記載のシステム。
【請求項20】
処理ユニット(60)が、
・位置決めデバイスが配置されている処置室の仮想の3Dモデル化、及び
・位置決めデバイス(50、53、54、71)の仮想の3Dモデル化、
を備える3D表示モジュールを備えており、
前記モデル化は、センサに基づいて位置決めデバイスのリアルタイムの位置を表わし、位置決めデバイスの少なくとも1つの構成要素の周囲に仮想の限界範囲(72)を定め、そして、仮想の限界範囲が処置室の構成要素の仮想表現と衝突するときに警報信号を生成するようにパラメータ化されていることを特徴とする、請求項17〜19のいずれか一項に記載のシステム。
【請求項21】
前記処理ユニット(60)が、警報信号に応えて、位置決めデバイスの停止又は位置決めデバイスの移動の再定位で構成される衝突防止プロセスを開始するようにパラメータ化されることを特徴とする、請求項20に記載のシステム。
【請求項1】
患者を放射線(2)に対して位置決めするためのデバイスであって:
・少なくとも1本の水平移動線状レール(4)と;
・前記線状レールに対して並進運動を実行でき、そして、前記線状レールに対して垂直な回転軸を中心にして旋回できる接続部(6a)と;
・前記接続部(6a)へと接続するロボットアーム(9)であって、患者支持部(17)へと接続している共点的回転軸(14、15、16)を有するリスト(11)を備えている前記ロボットアーム(9)と;
を備えている前記デバイス。
【請求項2】
ロボットアーム(9)が、水平な回転軸を中心にして旋回する態様で、接続部(6a)へと接続していることを特徴とする、請求項1に記載のデバイス。
【請求項3】
ロボットアーム(9)が、0°〜90°の間の角度だけ水平に対して傾いている回転軸を中心にして旋回する態様で、接続部(6a)へと接続していることを特徴とする、請求項1に記載のデバイス。
【請求項4】
接続部(6a)に対するロボットアーム(9)の回転軸が、45°〜60°の間の角度だけ水平に対して傾けられていることを特徴とする、請求項3に記載のデバイス。
【請求項5】
線状レール(4)が、地面に取り付けられていることを特徴とする、請求項1に記載のデバイス。
【請求項6】
線状レールが、ベース(3)の旋回部(3a)へ取り付けられており、前記旋回部(3a)の旋回軸が垂直である(5)ことを特徴とする、請求項1〜4のいずれか一項に記載のデバイス。
【請求項7】
ベース(3)に対する線状レール(4)の垂直な回転軸(5)が、前記放射線(2)の軸に一致することを特徴とする、請求項6に記載のデバイス。
【請求項8】
接続部(6a)が、垂直な軸を中心として旋回するように座(6b)へ接続しており、前記座(6b)は、スライドする態様で、少なくとも1本の線状レール(4)へ接続していることを特徴とする、請求項1〜7のいずれか一項に記載のデバイス。
【請求項9】
ロボットアーム(9)が、スライド式の前腕(10)を備えることを特徴とする、請求項1〜8のいずれか一項に記載のデバイス。
【請求項10】
リスト(11)が、産業用の電気空気式ツールチェンジャによって患者支持部(17)へと接続していることを特徴とする、請求項1〜9のいずれか一項に記載のデバイス。
【請求項11】
設置の間にデバイスを支持する着脱式の車輪(23)を備えていることを特徴とする、請求項1〜10のいずれか一項に記載のデバイス。
【請求項12】
接続部が移動するときに前記少なくとも1本の線状レール(4)を常に覆うように、接続部(6a)へと接続され且つ前記接続部(6a)の両側に配置される2つのハーフプラットフォーム(30、35)によって構成されている可動式のプラットフォームを備えていること;及び
各々のハーフプラットフォーム(30、35)が、ヒンジ(33)によって互いに鎖状に連結されている複数の羽板(32、37)によって構成されており、ハーフプラットフォームが折り畳まれた状態にある場合に、前記ハーフプラットフォームの少なくともいくつかの前記羽板が、折り畳まれていない状態にある前記ハーフプラットフォームを含む水平面の下方で畳まれていること;
を特徴とする、請求項1〜11のいずれか一項に記載のデバイス。
【請求項13】
プラットフォームが、2組の補助レール上をスライドし:
・内側補助レール(38、39)からなる第1組を、ヒンジのうちの半分(46)がスライドし、前記2本の内側補助レール(38、39)は、互いに平行に間隔を空けて位置するとともに、上方線状部(40)と、湾曲部(41、42)と、下方線状部(43、48)とを有しており;
・2本の外側補助レール(44、45)で構成される第2組を、前記ヒンジのうちの残りの半分(47)がスライドし、前記2本の外側補助レール(44、45)は、互いに平行かつ前記2本の内側補助レール(38、39)を隔てている間隔よりも大きい間隔で配置されるとともに、前記内側補助レールの上方線状部と実質的に同じ高さにある水平面内を線状に延びており;
2つの連続するヒンジに関して、一方は第1組の補助レールによって支持され、他方は第2組の補助レールによって支持されることを特徴とする、請求項12に記載のデバイス。
【請求項14】
各々のハーフプラットフォームが、折り畳まれていない状態では、前記接続部に近い平坦部を有しており、折り畳まれた状態では、内側補助レールの下方線状部と外側補助レールとの間に畳まれた部分を有していることを特徴とする、請求項13に記載のデバイス。
【請求項15】
線状レール(56)が、床へ取り付けられ且つ互いに接続された複数のモジュール要素(57a、・・・、57d)によって構成されていることを特徴とする、請求項1〜11のいずれか一項に記載のデバイス。
【請求項16】
リスト(54)へ取り付けられる少なくとも1つの力センサ(65a)を備えており、前記少なくとも1つの力センサ(65a)は、位置決めデバイス(50、53、54、71)を制御する前記処理ユニット(60)へ接続されて、前記少なくとも1つの力センサによって検出される任意の力に付随する協調マニピュレーションを実行することを特徴とする、請求項1〜15のいずれか一項に記載のデバイス。
【請求項17】
請求項1〜16のいずれか一項に記載の位置決めデバイスと、管理ソフトウェアを統合する処理ユニットと、患者再設定センサとを備えている位置決めシステム。
【請求項18】
センサが、以下のセンサ、すなわち、赤外線立体視センサ、X線センサ、産業用カメラ、及び力センサのうちの少なくとも1つを含むことを特徴とする、請求項17に記載のシステム。
【請求項19】
センサが、以下のセンサ、すなわち、レゾルバ、加速度計、過速度センサ、傾斜計、及び衝突防止片のうちの少なくとも1つを含んでいることを特徴とする、請求項17又は18に記載のシステム。
【請求項20】
処理ユニット(60)が、
・位置決めデバイスが配置されている処置室の仮想の3Dモデル化、及び
・位置決めデバイス(50、53、54、71)の仮想の3Dモデル化、
を備える3D表示モジュールを備えており、
前記モデル化は、センサに基づいて位置決めデバイスのリアルタイムの位置を表わし、位置決めデバイスの少なくとも1つの構成要素の周囲に仮想の限界範囲(72)を定め、そして、仮想の限界範囲が処置室の構成要素の仮想表現と衝突するときに警報信号を生成するようにパラメータ化されていることを特徴とする、請求項17〜19のいずれか一項に記載のシステム。
【請求項21】
前記処理ユニット(60)が、警報信号に応えて、位置決めデバイスの停止又は位置決めデバイスの移動の再定位で構成される衝突防止プロセスを開始するようにパラメータ化されることを特徴とする、請求項20に記載のシステム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公表番号】特表2012−506748(P2012−506748A)
【公表日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願番号】特願2011−533796(P2011−533796)
【出願日】平成21年10月30日(2009.10.30)
【国際出願番号】PCT/FR2009/052103
【国際公開番号】WO2010/049660
【国際公開日】平成22年5月6日(2010.5.6)
【出願人】(511109777)
【氏名又は名称原語表記】ARIPA S II
【出願人】(508034266)
【Fターム(参考)】
【公表日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願日】平成21年10月30日(2009.10.30)
【国際出願番号】PCT/FR2009/052103
【国際公開番号】WO2010/049660
【国際公開日】平成22年5月6日(2010.5.6)
【出願人】(511109777)
【氏名又は名称原語表記】ARIPA S II
【出願人】(508034266)
【Fターム(参考)】
[ Back to top ]