
患者を蘇生するための装置
【課題】簡単な取扱いで患者に効果的な心肺機能蘇生術を施すことができる装置を提供する。
【解決手段】患者が載せられる蘇生板に取り付けることができる1つまたは2つの柱に支持32され、鉛直方向に調節可能な横梁31を備えた支持装置5は、駆動手段および、患者の身体に加圧マッサージを施すため駆動手段によって駆動されるプランジャを支持し、装置はさらに加圧マッサージ中のプランジャの各位置を測定する位置測定装置を備えた構成とする。
【解決手段】患者が載せられる蘇生板に取り付けることができる1つまたは2つの柱に支持32され、鉛直方向に調節可能な横梁31を備えた支持装置5は、駆動手段および、患者の身体に加圧マッサージを施すため駆動手段によって駆動されるプランジャを支持し、装置はさらに加圧マッサージ中のプランジャの各位置を測定する位置測定装置を備えた構成とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、患者を蘇生するための装置に関する。心臓停止の際に生存可能性を高めるために、CPR(心肺機能蘇生)の助けを借りて心肺機能蘇生が施される。ここで、人工呼吸と組み合わせた外部から患者の肺への加圧によって、酸素含有血液の十分な流れが生命維持に不可欠な臓器へ供給されなければならない。このような心肺機能蘇生術のための装置は、国際特許公開公報第WO 2009/136831 号で知られており、この装置では、電動機で駆動されるピストンによって患者の胸に加圧マッサージを施す。電動機の駆動で生じるピストンの往復運動が、患者の身体に機械的加圧マッサージを加える。
【発明の概要】
【発明が解決しようとする課題】
【0002】
本発明の課題は、簡単な取扱いで患者に効果的な心肺機能蘇生術を施すことができる装置を提供することである。
【課題を解決するための手段】
【0003】
上記課題は、請求項1に記載の特徴によって解決される。下位の請求項には、本発明の有利な更なる実施形態が記載される。
【0004】
本発明によれば,駆動装置によって患者の身体に加圧マッサージを加えるように駆動される加圧ピストンを備えた心肺機能蘇生のための装置が提供される。この装置には、加圧マッサージ動作中の加圧ピストンの位置を検出する位置検出装置を設けることができる。固定装置は、加圧マッサージ中に患者を固定する役割を果たす。駆動装置および加圧ピストンのための支持装置が設けられ、駆動装置と加圧ピストンは1つの構造ユニットをなして高さ調整可能に支持装置に、好ましくは横梁に搭載される。支持装置は、概ね1/4円弧に沿って延びる曲がり梁を備えることもできる。
【0005】
本発明において、駆動装置と加圧ピストンを搭載する支持装置は、支柱を介して心肺機能蘇生板に支えられる。このため、横梁または曲がり梁が、高さ調整可能に心肺機能蘇生板に支えられるか、駆動装置と加圧シリンダを収容した構造ユニットが、高さ調整可能に横梁または曲がり梁に配置される。横梁を心肺機能蘇生板に支えるために、1つまたは2つの柱を設けることができる。1つまたは2つの柱は、加圧ピストンを用いた治療の際に患者が載せられる心肺機能蘇生板に固定することができる。
【0006】
心肺機能蘇生板と横梁と1つまたは2つの柱、或いは、心肺機能蘇生板と曲がり梁は、好ましくは摩擦フィットまたは形状フィットの連結を形成し、形状フィットは、連結の部材間の対応するロックとキャッチによって作ることができる。ピストンによる加圧マッサージの際に働く力は、上記連結によって受け止められる。
【0007】
本発明の実施形態では、水平に延びる横梁を支えるために鉛直方向の柱が設けられ、或いは、曲がり梁に駆動装置が設けられ、上記柱または曲がり梁は、所望の治療位置に調整できるように鉛直軸の周りに回転可能或いは移動可能に、心肺機能蘇生板に搭載されている。加圧ピストンによる治療のため、上記横梁は、柱の上で適切な回転角に位置付けられ、適切なインターロック手段によって心肺機能蘇生板に不動に固定される。上記柱または曲がり梁は、特にプラグ・スナップ接続によって心肺機能蘇生板に固定することができる。1つの柱で支えられる横梁は、関節によって連結された少なくとも2つのアームを持つように関節を有して作られるのが好ましい。1つの関節アームは、柱,とりわけ柱の上端に取り付けられるのが好ましく、ここでは柱との旋回可能な接続が重要であって、旋回可能性は、患者を治療する際には封鎖される。他方の関節アームは、駆動装置,したがってピストンに取り付けられる。この場合、ピストンは、他方の関節アームの自由端に固定されるのが好ましい。曲がり梁も、水平な関節軸の周りに旋回可能であるのが好ましい。
【0008】
患者が治療の際に載せられる心肺機能蘇生板は、多数の部材,特に2つの部材から分解可能に形成される。板部材は、適切なプラグ・スナップ接続によって互いに接続されて、心肺機能蘇生板になる。しかし、単一部材からなる心肺機能蘇生板を用いることもできる。心肺機能蘇生板に旋回可能な支持板を設けることができる。この支持板は、支持装置を支えるための板の役割を果たす。心肺機能蘇生板は、担架,とりわけ移動できる担架として作ることができる。
【0009】
心肺機能蘇生板は、1つまたは2つの柱を固定することができる凹部をベースプレートに備えることができる。ベースプレートは、板の部分に配置するのが好ましく、心肺機能蘇生治療の際にピストンが必要な圧力を加える胸部の下に位置する。ベースプレートを側方から差し込むために、上記凹部の領域に案内装置が設けられる。ベースプレートは、心肺機能蘇生板の所望の位置にずれないように適切な歯止め機構によって固定される。
【0010】
この実施形態において、ベースプレートとこのベースプレートに連結された支持装置は、加圧マッサージ中にピストンが加える力を受け止めることができる摩擦フィットおよび形状フィットの連結を形成する。心肺機能蘇生治療中の患者の固定のために、心肺機能蘇生板に患者を固定する安全ベルトが設けられる。ベースプレートは、単一部材からなる心肺機能蘇生板としても用いることができる。
【0011】
更なる1つの実施形態では、横梁を支えるために側方に2つの柱を設けることができ、この2つの柱は、加圧マッサージ治療中に患者が心肺機能蘇生板上に横たわったとき、患者を横方向に固定する。2つの柱は、患者の大きさに応じて心肺機能蘇生板の種々の固定位置にロックすることができる。2つの柱の間に、駆動装置を収容したホルダと加圧ピストンを有する横梁が高さ調整可能に支持される。さらに、横梁は、長さを調整可能にできる。こうして、心肺機能蘇生装置は、治療すべき各患者の様々な身体の大きさに応じて、特に加圧マッサージ治療中の側方固定に適合させることができる。さらに、既述の如く1つの構造ユニットとして構成できる駆動装置と加圧ピストンは、ホルダによって高さ調整可能に横梁に支えられることができる。これによっても、心肺機能蘇生装置を種々の大きさの患者の身体,特に治療すべき胸部に適合させることができる。
【0012】
ピストンと駆動装置は、横梁または曲がり梁に回転不可能に保持される。さらに、心肺機能蘇生の進行を観察するための表示装置を更に設けることができ、この表示装置は、支持装置の上部に設けるのが好ましい。駆動装置は、好ましくは電動機を含み、電動機のトルクは、伝動装置を介して概ね直線往復運動である加圧マッサージ運動に変換される。加圧マッサージ運動中の加圧ピストンの位置を決定するため、位置測定装置によって電機子の回転角位置または伝動装置部材の位置が測定され、この測定結果から加圧ピストンの各位置が決定される。加圧ピストン野市は、電動機の制御に用いられる。
【0013】
伝動装置部材においては、電動機の回転運動を伝動する部材であって、回転運動を直線運動に変換する例えば動輪ベルトなどの更なる伝動装置部材が重要である。電動機の回転運動を伝動する伝動装置部材は、各回転角位置を決めることができる歯車にすることができる。電動機においては、好ましくは正逆転駆動できる電動機が重要である。
【0014】
本発明を図示の実施形態によって、次に詳細に説明する。
【図面の簡単な説明】
【0015】
【図1】図1は、本発明の第1実施形態の組み立てられた構成部材の正面斜視図である。
【図2】図2は、上記第1実施形態に用いた肺機能蘇生板を示す図である。
【図3】図3は、本発明による回転ピストンポンプの第1実施形態の断面図である。
【図4】図4は、患者の身体を模式的に示した第2実施形態の図である。
【図5】図5は、第2実施形態で用いた多部材から構成される肺機能蘇生板を示す図である。
【図6】図6は、板部材の連結部分を示す図である。
【図7】図7は、他の板部材の連結部分を示す図である。
【図8】図8は、部分的にずらしたベースプレートを持つ心肺機能蘇生板を示す図である。
【図9】図9は、関節付きで構成された第2実施形態の横梁の柱を示す
【図10】図10は、横梁の2つの関節アームの間の関節および駆動装置を持つ2つの関節アームを示す図である。
【図11】図11は、実施形態に用いられた駆動装置の構成部材を示す図である。
【図12】図12は、駆動装置の上部に配置されている構成部材を示す図である。
【図13】図13は、実施形態における駆動能力制御を解説するための概略ブロック回路図である。
【図14】図14は、実施形態で用いることができる制御装置のブロック回路図である。
【図15】開位置にある中央ロック機構の実施形態を示す平面図である。
【図16】図15のA−A線に沿う断面図である。
【図17】図17は、閉位置にある図15と図16に示す中央ロック機構を示す図である。
【図18】図17のA−A線に沿う断面図である。
【図19】図19は、テーパピストンを示す図である。
【図20】図20は、テーパピストンを装着した実施形態を示す図である。
【図21】図21は、支持装置の更なる実施形態を示す図である。
【図22】図22は、心肺機能蘇生板の更なる実施形態を示す図である。
【図23】図23は、加圧ピストンの下端に設けられた加圧板の実施形態を示す図である。
【0016】
図示の実施形態は、循環器系が停止した患者を蘇生するための電気機械的装置として構成されている。この装置によって、心臓加圧マッサージを長時間に亘って自立的に行うことができる。そのため、図示の装置は、加圧マッサージのため患者を図3に模式的に示すように横たえて載せる蘇生板9を備えている。
【0017】
図1〜3の実施形態では、ポータル(正面入口)として構成された支持装置4が備えられる。この支持装置4は、治療の際,患者をその間に置く側柱7,8を持ち、両側柱7,8は、加圧マッサージの間,患者を側方に固定する役目を果たす。両側柱7,8は、蘇生板9の様々な固定位置10にインターロックすることができる。これによって、両側柱7,8の間隔は、患者を側方に固定すべく患者の身体の幅に応じて調整することができる。固定位置10は、蘇生板9の長手方向縁に沿って隣接して並ぶ多くの列に配置されている。
【0018】
加圧マッサージの際の患者のずり上がりを防止するために、患者の両肩の部位が当接するストッパ15が更なる固定位置16にインターロックされる。蘇生板9の頭部端には、凹部をなす頭収容部17が設けられている。
【0019】
支持装置4のポータルは、横梁11を更に有する。横梁11は、高さ調整可能に両側柱7,8に支えられている。そのため、横梁11は、両側柱7,8内で滑動可能な鉛直スライダ18の上端に連結されている。スライダ18は、患者の胸部域の大きさに適合した高さ位置で側柱7,8にインターロックされる。横梁11は、長さを調整できるように作られている。このため、横梁11の中央部には、伸縮式の横梁要素19が設けられている。伸縮式の横梁要素19は、関節を介してスライダ18の上端に連結されるのが好ましい。関節は、不使用時にスライダ18が側柱7,8と一緒に横梁11に、省スペースな配置で折り畳むことができるように構成することができる。
【0020】
横梁11の中央には、アクティブヘッド20を装着できるホルダが設けられる。このアクティブヘッドは、加圧ピストン3と加圧ピストン3のための駆動装置を搭載する構造ユニットを構成する。このアクティブヘッドは、横梁11の対称的な長さ調整によって、両側柱7,8の中央に正確に配置することができる。しかし、横梁11の伸縮性によって、アクティブヘッド20を両側柱7,8間の任意の所望位置に配置することもできる。アクティブヘッド20には、横梁11に固定できるハウジング内に加圧ピストン3と駆動装置が収容されている。上記ハウジングは、横梁11に設けられたホルダにインターロック接続を介して高さ調整可能に差し込むことができる。そのため、ハウジングには、鉛直方向の配置でインターロック突出部が設けられ、この突出部は、その直線構造により同時に回り止め12として働く。高さ調整可能なアクティブヘッド20のインターロック接続によって、アクティブヘッド20は、加圧ピストン3の下端に設けられた加圧プレート14が患者の胸骨に載る中立位置に配置することができる。この位置でアクティブヘッド20は、横梁11とインターロックされる。
【0021】
図4〜図12に示した実施形態は、概ね鉛直に延びる柱32を有する支持装置5を備える。この柱32には、それに概ね直角に延びる横梁31が、片持ち腕の形態で固定されている。横梁31は、伸縮式であるのが好ましい柱32の上端に固定される。横梁は、鉛直軸57をなす柱軸の周りに旋回できる。この旋回は、後述するように、柱下部に対する柱上端の旋回可能性によって達成される。
【0022】
心肺機能蘇生術に際して、伸縮式の柱32は、その柱脚48の歯止め機構板58をベースプレート39の凹部に嵌め込む。この凹部の領域には、ベースプレート39にプラグ・スナップ接続33がある。歯止め機構板58は、2つの凹部のいずれかのプラグ・スナップ接続と形状嵌合して固定される。これによって、支持装置5は、ベースプレート39と強固に連結される。柱脚48とこれに連結された柱32の伸縮式部材は、鉛直軸(柱軸)57の周りに回転不能にベースプレートに連結される。解除装置49によって、柱48をベースプレート49から開放することができる。心肺機能蘇生術のためには、患者をベースプレート49に固定し、既述の支持装置5をベースプレートに固定するだけで十分である。そうすれば、ベースプレートは、心肺蘇生板として働く。
【0023】
ベースプレート39は、この実施形態では複数,特に2つの部材からなる蘇生板9の凹部37(図5)に側方から差し込むことができる。ベースプレートのための案内装置38として作られた横溝が、ベースプレート39の案内に役立つ。この場合、ベースプレート39の横縁は、案内装置38の溝に形状嵌合で保持されて案内される。図8では、ベースプレート39は、大部分が凹部37に差し込まれている。ベースプレート39を完全に差し込んだ後、心肺蘇生板9とのインターロックが、ベースプレートの一端の側部に設けられたロックレバー46を用いて行われる。蘇生板9は、板上部40と板下部41を含む。凹部37は、板上部40に設けられ、側部のロックレバー46を用いたベースプレート39のキャッチは、板上部40で行われる。蘇生板の長手方向に見て、ロックレバー46は、ベースプレート39の一端にあり、柱32のプラグ・スナップ接続33は、ベースプレート39の他端にある。
【0024】
板上部40と板下部41は、プラグ・イン機構によって互いに確実に固定することができる。この目的のため、ロック・ピン43とプラグ・イン突起45が板下部41に設けられる。プラグ・イン突起45は、組み立ての際、板上部のプラグ・イン開口59に挿入される。同時に、ロック・ピン43は、板上部40の嵌合穴44に挿入される。嵌合穴44の背後の板上部に、嵌合穴44内でロック・ピンを回転不能に確実に保持するスナップ・ロック手段42が設けられる。この結果、板上部40と板下部41の剛な連結が得られる。心肺機能蘇生術の際、患者は、組み立てられた蘇生板に載せられ、加圧プレート14をもつピストン3によって加圧マッサージが施される患者の胸部は、ベースプレート39上に配置される。
【0025】
図22は、蘇生板の他の実施形態を示す。外側へ旋回できる支持プレート101が、蘇生板の板上部40の両側の長手方向辺に枢着されている。支持プレートは、適切なスナップ・ロック手段によって複数の外側へ旋回した位置に固定できる。図示の実施形態では、右側の長手方向辺に枢着された支持プレート101が、外側へ旋回している。図示の実施形態では、支持プレートは、両側の長手方向辺に枢着されている。しかし、長手方向辺の片側だけに支持プレートを設けることもできる。2つの支持プレートの夫々は、例えば支柱などの支持装置を上述の固定手段によって固定するアタッチメント点102を有する。図1〜3に示されたポータルとして構成された支持装置4も、支持プレート101のアタッチメント点102に固定できる。アタッチメント点102は、後述するように、図21に示す支持装置の取り付けにも適している。
【0026】
柱32の上に設けられた横梁31は、鉛直軸57(柱軸)の周りの旋回可能性と組み合わされてピストン3の下端に枢着された加圧プレート14が、患者の胸骨上に載るように調整できるように設計されている。横梁31は、この目的のため図示の実施形態では軸68をもつ関節34を介して互いに連結された2つの関節腕35,36をもつ構造になっている。図示の実施形態では、関節腕35は、柱32の頂部に枢着され、柱32の底部は、既述の如く、柱脚48を適切に設計してベースプレート39に強固に連結できる。横梁31の関節構造と鉛直軸57(柱軸)周りの旋回性のお陰で、ピストン14の下端に設けた加圧プレート14は、加圧マッサージを施すべき胸部上に載ることができる。このために、支持装置5は、柱32の伸縮構造により所望の高さに調整できる。
【0027】
関節34は、この位置でロックされ、2つの関節腕35,36は、互いに剛に連結される。同時に、鉛直軸(柱軸)57周りの旋回も、図15,16を参照して後述する柱32内に設けられた例えばロック機構などの助けでロックされる。このロックは、好ましくは、図15,16を参照して後述する柱32の上端に設けられた中央ロック機構47の助けで行うことができる。
【0028】
このロック状態において、2つの関節腕35,36と柱32とベースプレート39は、患者に加圧マッサージが施されるとき生じる力を、積極的嵌合によって吸収する剛な構造を形成する。板上部40および板下部41の長手方向側縁には、例えば穴の形態などのアタッチメント部分59,60が設けられ、このアタッチメント点に、患者を板上に固定するための革紐および患者の肩部のためのストッパ部材15が取り外し可能に固定できる。
【0029】
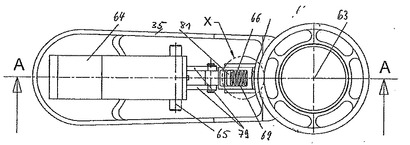
中央ロック機構47は、2つの関節腕35,36の相対位置をロックし、横梁31および柱32に連結された関節腕35の鉛直軸(柱軸)周りのいかなる回転もブロックするために設けられる。この中央ロック機構は、図15〜18により詳細に示されている。中央ロック機構は、連結点78で互いにピン連結された2つの操作レバー79,80を有する。連結点78は、2つの操作レバー79,80の間でトグル継手のように動作する。操作レバー79は、詳しくは後述するように、2つの関節腕35,36の間の関節継手34をブロックし、或いは旋回に対してロックする。操作レバー80は、プッシュロッド76を介してロック機構61に接続され、このロック機構は、ロック機構のように動作し、関節腕35をブロックし、従って鉛直軸57の周りの全横梁31の旋回をブロックする。
【0030】
2つの操作レバー79,80の連結点78は、関節腕35に回転可能に搭載された制御カム77に能動的に噛合する。制御カム77は、連結点78と相互作用する2つの固定位置を有する。図15,16に示す固定位置では、ロック機構61と継手ロック機構62は、互いに外れている。この位置で、関節腕15,16を相対回転させることができ、関節腕35,従って横梁31全体は、柱軸57の周りに旋回可能になる。
【0031】
図17,18に示す第2位置において、ロック手段61と継手ロック機構62は、ブロック位置にあって、2つの関節腕35,36は、関節34の周りに相対回転不可に連結される。関節腕35,従って横梁31も、柱軸57の周りに回転不可にブロックされる。
【0032】
制御カム77を操作するために、図16,18に示す2つの位置間を手動で旋回できるレバー64が設けられる。こうして、制御カム77は、中央ロック機構が開いた位置(図15,16)と閉じた位置(図17,18)に位置させられる。
【0033】
継手ロック機構62は、関節34に面する側にロック歯67をもつスライダ66を有する。このスライダは、関節腕35に固定されたスライダガイド70内で軸方向に移動できる。スライド運動は、関節64の関節軸63に直交する。圧縮ばね69は、板状で適合した断面の支持点81に支持されて、スライダ66を付勢する。支持点81は、関節腕35に固定される。スライダ66は、関節82を介して操作レバー79に連結される。図15,16に示された位置において、継手ロック機構62は、開いた位置にある。これは、シリンダ66を関節34から離れるように動かして、ロック歯67と関節腕36に固定された回転継手部材68(図9,10)のロック歯との噛合を外すことによって達成される。この位置は、図15,16に示される。この位置で、2つの関節腕35,36は、関節63に周りに相対回転できる。
【0034】
レバー64を図15,16の位置から図17,18の位置へ動かすと、制御カム77,従って連結点78は、圧縮ばね69がスライダ66を関節軸63の方へ動かすような位置に位置させられ、この位置でロック歯67は、関節腕36に固定連結された回転継手部材68のロック歯と噛合する。この位置で、2つの関節腕35,36は、更に相対回転しないようにロックされる。今や、2つの関節腕は、予め選ばれた相対旋回角度を成す。
【0035】
レバー64は、同時に、操作レバー80を図15,16と図16,17に示された位置間で移動させる。操作レバー80は、回転部分84に旋回可能に支持される。回転部分84は、関節腕35に固定連結され、中央ロック機構47が図15,16に示す位置にあるとき、鉛直軸57の周りに回転可能に枢支される。操作レバー80は、回転部分84上のサポート86のレバー軸85に枢着される。レバー80の一端は、ヒンジ点87においてプッシュロッド76の上端に回転可能に連結される。プッシュロッド76の下端は、リング支持部75に固定連結される。プッシュロッド76は、他のリング支持部74によって案内され、2つのリング支持部74,75の間に弾性変形可能なロックリング73が保持される。下部リング支持部75は、プッシュロッド76によって、柱の鉛直軸57の方向に上部リング支持部74に押し付くように動かされる。図15,16に示す位置では、下部リング支持部75は、回転部分84,つまり2つの関節腕35,36をもつ関節34が鉛直軸57の周りに夫々回転または旋回できる下端位置にある。レバー64が図17,18に示した位置に設定されると、プッシュロッド76は、操作レバー80の動きによって上方へ移動し、その結果、2つのリング支持部74,75の間隔は減少して、変形可能なロックリング73が圧縮され、鉛直軸57の周りのどのような回転も防止される。この過程において、変形したロックリング73は、増大する力で柱脚48の内壁および2つのリング支持部74,75との接触面を押圧するので、これらの部材間のどのような相対回転も防止される。図から分かるように、上部リング支持部74は、伸縮部分72によって回転部分84,従って関節腕35に固定連結される。このことが、柱脚48に対する,従って鉛直軸57の周りの関節腕35の回転をブロックする。
【0036】
伸縮部分72は、柱32,従って横梁31を鉛直方向に調整すべく、柱脚48に移動可能に搭載される。中央ロック機構47が開かれると(図15,16)、鉛直方向の調整と回転が可能になる。また、プッシュロッド76によってロック機構61の構成部材が動かされると、ロック機構61は、横梁31の回転を阻止するだけでなく、中央ロック機構47が閉じられると(図17,18)、調整された高さを保証する。
【0037】
図示の実施形態では、伸縮部分72と柱脚48は、管状で、中央ロック機構47が開かれたとき相対移動可能に配置されている。これは、柱およびプランジャ3の鉛直方向調整を可能にする。鉛直方向の調整は、手動、空気圧または油圧によって行うことができる。
【0038】
図21に示す支持装置95の実施形態は、円弧状の支持体96を有する。この支持体は、蘇生板9上に支持できる関節継手部材98から実質上90°の円弧に沿って延びている。円弧状の支持体96は、水平な関節軸97をもつ関節によって互いに連結された複数の関節腕35,36,100を有する。関節継手部材98によって蘇生板に固定できる円弧状の支持体96は、ロック機構47が開かれたとき、鉛直軸57の周りに回転できる。関節継手99周りの旋回性と組み合わさって、患者の身体寸法への適合が達成される。中央ロック機構47の助けによって、2つの関節腕35,100は、図15〜18に示す実施形態のように、所望の角度位置にロックすることができ、関節継手部材98は、歯止め機構板58に対する鉛直軸57周りの回転が阻止される。2つの関節腕35,36の間の関節継手99は、摩擦または積極的噛合によって回転が阻止され、プランジャ3および加圧プレート14は、鉛直方向に延びることになる。
【0039】
図19は、縮径プランジャ89を示している。この縮径プランジャ89は、図20に示すように、モータ1で駆動されるプランジャの下端に取り外し可能に固定できるスナップ・ロック手段91を上端に有する。加圧プレート90は、縮径プランジャ89の下端に設けられる。縮径リンダ89は、子供を処置するために用いられ、加圧プレート14に代えてプランジャ2の下端に取り外し可能に固定される付加的加圧部材を構成する。
【0040】
図23は、プランジャ3の下端に配置される加圧プレート14を示している。この加圧プレートは、周方向の気密シール103を有する。加圧プレート14が、患者の胸部に載せられると、患者の身体と加圧プレート14の間の気密シール103によって閉ざされた空間に負圧が生じる。この負圧は、気密シールで閉ざされた空間に適切な管を介して連通する(図示しない)ポンプの助けで生成される。
【0041】
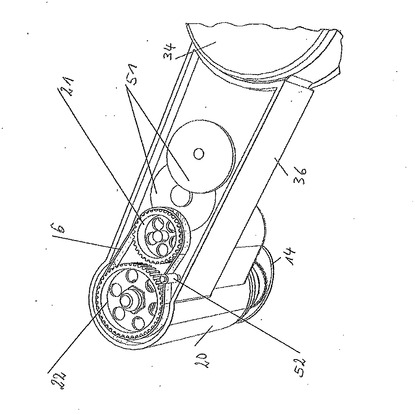
プランジャ3の駆動手段は、モータ1を備え、モータのトルクが、伝動ギヤ2を介してプランジャ3による加圧マッサージの前後運動に変換される。モータ電機子の回転運動は、モータ軸に連結されたギヤ21から駆動ベルト6を介して伝動ギヤ2上に設けられたギヤ22に伝えられる。正逆転運動であるのが好ましいモータの回転は、上述のように形成された歯付ベルトドライブを介して伝動ギヤ2に伝えられる。伝動ギヤ2は、歯付ベルトドライブによって伝えられた回転運動がプランジャ3の前後運動に変換されるように具体化されている。これに関して、伝動ギヤは、ボールねじスピンドル23によって延長できるプランジャ3を有することができ、ゴムを装着したボールねじナットが、プランジャの上端に設けられた上記ボールねじスピンドルに嵌合している。プランジャ3は、下端を滑り軸受24内に案内され、滑り軸受は、支持装置5を構成するハウジングの下端に固定される(図11)。截頭円錐形のねじを用いることもできる。ベルト張り機52は、駆動ベルトが接線方向を成すように駆動ベルト6に当接する。回転トランスデューサ51は、伝動ギヤとして具体化され、駆動ベルト8によって伝えられる回転運動を検出する。こうして、プランジャ3の夫々の位置を絶対値で検出できるようになる。プランジャ3の各ストローク長は、プランジャ3のモータ,とりわけモータ電機子において直接検出できる。歯付ベルトとギヤからなる伝動装置の代わりに、ギヤのみからなる伝動装置を用いることもできる。
【0042】
ボールねじとモータ1をもつ伝動ギヤ2は、関節腕36の自由端に取り付けられるフランジ板27に固定できる。図1〜3に示す実施形態では、フランジ板27は、横梁要素19の中央に取り付けられる。
【0043】
フランジ板27には、周方向のシールカバー28を設けることができる。このシールカバー28は、加圧マッサージ治療を開始および停止するための発/停ボタンをもつプリント配線基板を内側に有することができる。加えて、透明なカバー25の内側で表示装置13を構成する発光ダイオードを、光バー26の形態で配置することができる。この表示装置は、発光ダイオードの異なった色で、心肺蘇生段階または人工呼吸段階が行われているかを表示できる。カバーは、表示装置13の少なくとも光バーの領域で透明である。表示装置13は、施術者が患者への施術中にどこからでも見ることができるので、へ術の過程を容易にモニターすることができる。
【0044】
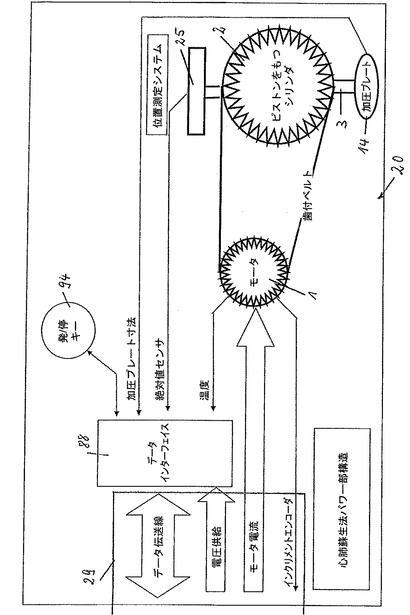
図13に示すアクティブヘッド20内の駆動手段と、図14にブロック図を示した制御装置30との接続は、概略的に示した接続ケーブル29によって行われる。キーボード54の助けでプランジャの起動, 停止, ストローク回数, ストローク深さなどの制御装置における総ての基本的制御を行うことができ、予め定められたログを起動することができる。制御装置30は、横梁31の例えば関節34内に設けることができる。しかし、制御装置は、必要なら取り外し可能に横梁31に搭載できる分離した装置として具体化できる。接続ケーブル29は、アクティブヘッド(図13)の電気システムのためのデータインターフェイス88と制御装置30内のマイクロプロセッサ56との間のデータラインおよびデータインターフェイスのための電圧供給ラインを含むことができる。しかし、データは、ワイヤレスで伝送することもできる。モータ1のための電流およびインクリメンタル位置エンコーダからのモータ1の回転角を表す信号は、接続ケーブル29を介して供給することもできる。電力は、バッテリー55または再充電可能なアキュムレータから接続ケーブル29を経てモータ1に供給される。施術の進展は、表示装置53に表示することができる。接続ケーブル29は、プラグによって制御装置30に接続される。
【0045】
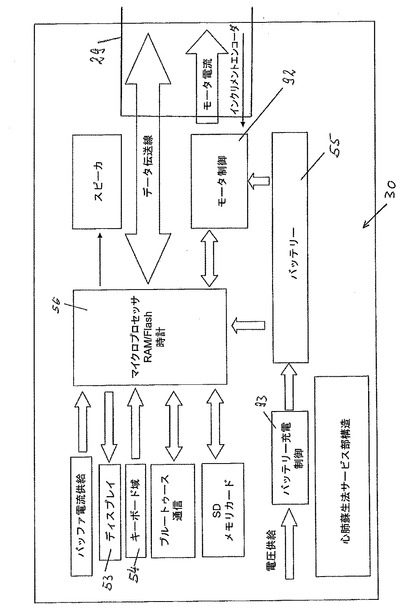
モータの電流は、バッテリー55または再充電可能なアキュムレータからモータ制御回路92を介してモータ1に供給される。バッテリーは、制御装置30内または好ましくは制御装置外の横梁31内,とりわけロック機構47の下方の関節腕35内に配置される。バッテリー55またはアキュムレータは、制御装置30内に収容された充電回路93を介して充電される。充電電流は、例えば自動車の交流発電機や送電網からの外部電流源から供給される。バッテリーまたはアキュムレータの充電状態は、マイクロプロセッサ56を介して表示装置53に表示することができる。
【0046】
アクティブヘッドの極近傍に配置されたプッシュボタン式であるのが好ましいスイッチ94は、患者に対する施術を開始および停止させるのに用いられる。モータ1に供給される電流は、プッシュボタンスイッチ94によって切り換えられる。このプッシュボタンスイッチ94は、ロック機構47が阻止位置(図17,18)にあるときにだけ、プッシュボタンスイッチ94によって患者の施術が開始できるようにロック機構47と相互作用するようになっている。より詳しくは、モータ電流は、ロック機構47が阻止位置(図17,18)にあるときにだけ、オンに切り換えることができる。ロック機構47は、例えば適切に解除できるロックなどの機械的手段によって、或いは、マイクロプロセッサ56がロック機構47の各位置を検出し,ロック機構が阻止位置にあるときのみにモータへの電流供給をモータ制御回路92を介して開始することによってプッシュボタンスイッチ94と相互作用させることができる。患者に対する施術が始まると、施術を停止すべくプッシュボタンスイッチ94が押され、モータ1は、プランジャ3が患者によって解放された開始位置へ戻るように制御される。これは、適切にプログラムされたマイクロプロセッサ56とモータ制御回路92の助けによって行われる。心肺蘇生装置を操作するために在って好ましいには、オンおよびオフのための動作方向が1つであるプッシュボタン式のスイッチ94だけである。
【0047】
プランジャ3のストローク長は、位置測定器25によってモニターでき、マイクロプロセッサ56とモータ制御回路92を介してインクリメンタル位置エンコーダからの信号と関連づけられ、インクリメンタル位置エンコーダからの信号は、モータ制御回路によって所望のストローク長に適合させることができる。患者の施術のための特定の加圧プロファイルも、マイクロプロセッサ56内に予め定義できる。この加圧プロファイルは、モータに供給される電流に関連づけられ、この電流は、モータによって生成されるトルクに比例し、モータに供給される電流は、モータ制御回路92によって制御できる。
【符号の説明】
【0048】
1 モータ 2 伝動ギヤ
3 プランジャ 4,5,95 支持装置
6 駆動ベルト 7,8,32 柱
9,68 蘇生板 10,16 固定位置
11,31 横梁 12 周り止め/鉛直調整器
13 表示装置 14,90 加圧プレート
15 ストッパ 17 頭収容部
18 スライダ 19 伸縮式の横梁要素
20 アクティブヘッド 21,22 ギヤ
23 ボールねじ 24 滑り軸受
25 位置測定器 26 光バー
27 フランジ板 28 カバー
29 接続ケーブル 30 制御装置
33 プラグ・スナップ接続 34,82,99 関節
35,36,100 関節腕 37 凹部
38 案内装置 39 ベースプレート
40,41 板上部,板下部 42,91 スナップ・ロック手段
43 ロック・ピン 44 嵌合穴
45 プラグ・イン突起 46 ロックレバー
47 ロック機構 48 脚柱
49 解除機構 50 ファン
51 回転トランスディユーサ 52 ベルト張り機
53 表示装置 54 キーボード
55 バッテリー/アキュムレータ 56 マイクロプロセッサ
57 鉛直軸 58 歯止め機構板
59 プラグ・イン開口 60,102 アタッチメント点
61 ロック機構 62 継手ロック機構
63,97 関節軸 64 レバー
65,85 レバー軸 66 スライダ
67,83 ロック歯 69 ばね
70 スライダガイド 72 伸縮部分
73 ロックリング 74,75 リング支持部
76 プッシュロッド 77 制御カム
79,80 操作レバー 81,87 支持点
84 回転部分 86 サポート
88 データインターフェイス 89 縮径プランジャ
92 モータ制御回路 93 充電回路
94 プッシュボタンスイッチ 96 円弧状支持体
98 関節継手部材 101 支持プレート
103 周方向シール
【技術分野】
【0001】
本発明は、患者を蘇生するための装置に関する。心臓停止の際に生存可能性を高めるために、CPR(心肺機能蘇生)の助けを借りて心肺機能蘇生が施される。ここで、人工呼吸と組み合わせた外部から患者の肺への加圧によって、酸素含有血液の十分な流れが生命維持に不可欠な臓器へ供給されなければならない。このような心肺機能蘇生術のための装置は、国際特許公開公報第WO 2009/136831 号で知られており、この装置では、電動機で駆動されるピストンによって患者の胸に加圧マッサージを施す。電動機の駆動で生じるピストンの往復運動が、患者の身体に機械的加圧マッサージを加える。
【発明の概要】
【発明が解決しようとする課題】
【0002】
本発明の課題は、簡単な取扱いで患者に効果的な心肺機能蘇生術を施すことができる装置を提供することである。
【課題を解決するための手段】
【0003】
上記課題は、請求項1に記載の特徴によって解決される。下位の請求項には、本発明の有利な更なる実施形態が記載される。
【0004】
本発明によれば,駆動装置によって患者の身体に加圧マッサージを加えるように駆動される加圧ピストンを備えた心肺機能蘇生のための装置が提供される。この装置には、加圧マッサージ動作中の加圧ピストンの位置を検出する位置検出装置を設けることができる。固定装置は、加圧マッサージ中に患者を固定する役割を果たす。駆動装置および加圧ピストンのための支持装置が設けられ、駆動装置と加圧ピストンは1つの構造ユニットをなして高さ調整可能に支持装置に、好ましくは横梁に搭載される。支持装置は、概ね1/4円弧に沿って延びる曲がり梁を備えることもできる。
【0005】
本発明において、駆動装置と加圧ピストンを搭載する支持装置は、支柱を介して心肺機能蘇生板に支えられる。このため、横梁または曲がり梁が、高さ調整可能に心肺機能蘇生板に支えられるか、駆動装置と加圧シリンダを収容した構造ユニットが、高さ調整可能に横梁または曲がり梁に配置される。横梁を心肺機能蘇生板に支えるために、1つまたは2つの柱を設けることができる。1つまたは2つの柱は、加圧ピストンを用いた治療の際に患者が載せられる心肺機能蘇生板に固定することができる。
【0006】
心肺機能蘇生板と横梁と1つまたは2つの柱、或いは、心肺機能蘇生板と曲がり梁は、好ましくは摩擦フィットまたは形状フィットの連結を形成し、形状フィットは、連結の部材間の対応するロックとキャッチによって作ることができる。ピストンによる加圧マッサージの際に働く力は、上記連結によって受け止められる。
【0007】
本発明の実施形態では、水平に延びる横梁を支えるために鉛直方向の柱が設けられ、或いは、曲がり梁に駆動装置が設けられ、上記柱または曲がり梁は、所望の治療位置に調整できるように鉛直軸の周りに回転可能或いは移動可能に、心肺機能蘇生板に搭載されている。加圧ピストンによる治療のため、上記横梁は、柱の上で適切な回転角に位置付けられ、適切なインターロック手段によって心肺機能蘇生板に不動に固定される。上記柱または曲がり梁は、特にプラグ・スナップ接続によって心肺機能蘇生板に固定することができる。1つの柱で支えられる横梁は、関節によって連結された少なくとも2つのアームを持つように関節を有して作られるのが好ましい。1つの関節アームは、柱,とりわけ柱の上端に取り付けられるのが好ましく、ここでは柱との旋回可能な接続が重要であって、旋回可能性は、患者を治療する際には封鎖される。他方の関節アームは、駆動装置,したがってピストンに取り付けられる。この場合、ピストンは、他方の関節アームの自由端に固定されるのが好ましい。曲がり梁も、水平な関節軸の周りに旋回可能であるのが好ましい。
【0008】
患者が治療の際に載せられる心肺機能蘇生板は、多数の部材,特に2つの部材から分解可能に形成される。板部材は、適切なプラグ・スナップ接続によって互いに接続されて、心肺機能蘇生板になる。しかし、単一部材からなる心肺機能蘇生板を用いることもできる。心肺機能蘇生板に旋回可能な支持板を設けることができる。この支持板は、支持装置を支えるための板の役割を果たす。心肺機能蘇生板は、担架,とりわけ移動できる担架として作ることができる。
【0009】
心肺機能蘇生板は、1つまたは2つの柱を固定することができる凹部をベースプレートに備えることができる。ベースプレートは、板の部分に配置するのが好ましく、心肺機能蘇生治療の際にピストンが必要な圧力を加える胸部の下に位置する。ベースプレートを側方から差し込むために、上記凹部の領域に案内装置が設けられる。ベースプレートは、心肺機能蘇生板の所望の位置にずれないように適切な歯止め機構によって固定される。
【0010】
この実施形態において、ベースプレートとこのベースプレートに連結された支持装置は、加圧マッサージ中にピストンが加える力を受け止めることができる摩擦フィットおよび形状フィットの連結を形成する。心肺機能蘇生治療中の患者の固定のために、心肺機能蘇生板に患者を固定する安全ベルトが設けられる。ベースプレートは、単一部材からなる心肺機能蘇生板としても用いることができる。
【0011】
更なる1つの実施形態では、横梁を支えるために側方に2つの柱を設けることができ、この2つの柱は、加圧マッサージ治療中に患者が心肺機能蘇生板上に横たわったとき、患者を横方向に固定する。2つの柱は、患者の大きさに応じて心肺機能蘇生板の種々の固定位置にロックすることができる。2つの柱の間に、駆動装置を収容したホルダと加圧ピストンを有する横梁が高さ調整可能に支持される。さらに、横梁は、長さを調整可能にできる。こうして、心肺機能蘇生装置は、治療すべき各患者の様々な身体の大きさに応じて、特に加圧マッサージ治療中の側方固定に適合させることができる。さらに、既述の如く1つの構造ユニットとして構成できる駆動装置と加圧ピストンは、ホルダによって高さ調整可能に横梁に支えられることができる。これによっても、心肺機能蘇生装置を種々の大きさの患者の身体,特に治療すべき胸部に適合させることができる。
【0012】
ピストンと駆動装置は、横梁または曲がり梁に回転不可能に保持される。さらに、心肺機能蘇生の進行を観察するための表示装置を更に設けることができ、この表示装置は、支持装置の上部に設けるのが好ましい。駆動装置は、好ましくは電動機を含み、電動機のトルクは、伝動装置を介して概ね直線往復運動である加圧マッサージ運動に変換される。加圧マッサージ運動中の加圧ピストンの位置を決定するため、位置測定装置によって電機子の回転角位置または伝動装置部材の位置が測定され、この測定結果から加圧ピストンの各位置が決定される。加圧ピストン野市は、電動機の制御に用いられる。
【0013】
伝動装置部材においては、電動機の回転運動を伝動する部材であって、回転運動を直線運動に変換する例えば動輪ベルトなどの更なる伝動装置部材が重要である。電動機の回転運動を伝動する伝動装置部材は、各回転角位置を決めることができる歯車にすることができる。電動機においては、好ましくは正逆転駆動できる電動機が重要である。
【0014】
本発明を図示の実施形態によって、次に詳細に説明する。
【図面の簡単な説明】
【0015】
【図1】図1は、本発明の第1実施形態の組み立てられた構成部材の正面斜視図である。
【図2】図2は、上記第1実施形態に用いた肺機能蘇生板を示す図である。
【図3】図3は、本発明による回転ピストンポンプの第1実施形態の断面図である。
【図4】図4は、患者の身体を模式的に示した第2実施形態の図である。
【図5】図5は、第2実施形態で用いた多部材から構成される肺機能蘇生板を示す図である。
【図6】図6は、板部材の連結部分を示す図である。
【図7】図7は、他の板部材の連結部分を示す図である。
【図8】図8は、部分的にずらしたベースプレートを持つ心肺機能蘇生板を示す図である。
【図9】図9は、関節付きで構成された第2実施形態の横梁の柱を示す
【図10】図10は、横梁の2つの関節アームの間の関節および駆動装置を持つ2つの関節アームを示す図である。
【図11】図11は、実施形態に用いられた駆動装置の構成部材を示す図である。
【図12】図12は、駆動装置の上部に配置されている構成部材を示す図である。
【図13】図13は、実施形態における駆動能力制御を解説するための概略ブロック回路図である。
【図14】図14は、実施形態で用いることができる制御装置のブロック回路図である。
【図15】開位置にある中央ロック機構の実施形態を示す平面図である。
【図16】図15のA−A線に沿う断面図である。
【図17】図17は、閉位置にある図15と図16に示す中央ロック機構を示す図である。
【図18】図17のA−A線に沿う断面図である。
【図19】図19は、テーパピストンを示す図である。
【図20】図20は、テーパピストンを装着した実施形態を示す図である。
【図21】図21は、支持装置の更なる実施形態を示す図である。
【図22】図22は、心肺機能蘇生板の更なる実施形態を示す図である。
【図23】図23は、加圧ピストンの下端に設けられた加圧板の実施形態を示す図である。
【0016】
図示の実施形態は、循環器系が停止した患者を蘇生するための電気機械的装置として構成されている。この装置によって、心臓加圧マッサージを長時間に亘って自立的に行うことができる。そのため、図示の装置は、加圧マッサージのため患者を図3に模式的に示すように横たえて載せる蘇生板9を備えている。
【0017】
図1〜3の実施形態では、ポータル(正面入口)として構成された支持装置4が備えられる。この支持装置4は、治療の際,患者をその間に置く側柱7,8を持ち、両側柱7,8は、加圧マッサージの間,患者を側方に固定する役目を果たす。両側柱7,8は、蘇生板9の様々な固定位置10にインターロックすることができる。これによって、両側柱7,8の間隔は、患者を側方に固定すべく患者の身体の幅に応じて調整することができる。固定位置10は、蘇生板9の長手方向縁に沿って隣接して並ぶ多くの列に配置されている。
【0018】
加圧マッサージの際の患者のずり上がりを防止するために、患者の両肩の部位が当接するストッパ15が更なる固定位置16にインターロックされる。蘇生板9の頭部端には、凹部をなす頭収容部17が設けられている。
【0019】
支持装置4のポータルは、横梁11を更に有する。横梁11は、高さ調整可能に両側柱7,8に支えられている。そのため、横梁11は、両側柱7,8内で滑動可能な鉛直スライダ18の上端に連結されている。スライダ18は、患者の胸部域の大きさに適合した高さ位置で側柱7,8にインターロックされる。横梁11は、長さを調整できるように作られている。このため、横梁11の中央部には、伸縮式の横梁要素19が設けられている。伸縮式の横梁要素19は、関節を介してスライダ18の上端に連結されるのが好ましい。関節は、不使用時にスライダ18が側柱7,8と一緒に横梁11に、省スペースな配置で折り畳むことができるように構成することができる。
【0020】
横梁11の中央には、アクティブヘッド20を装着できるホルダが設けられる。このアクティブヘッドは、加圧ピストン3と加圧ピストン3のための駆動装置を搭載する構造ユニットを構成する。このアクティブヘッドは、横梁11の対称的な長さ調整によって、両側柱7,8の中央に正確に配置することができる。しかし、横梁11の伸縮性によって、アクティブヘッド20を両側柱7,8間の任意の所望位置に配置することもできる。アクティブヘッド20には、横梁11に固定できるハウジング内に加圧ピストン3と駆動装置が収容されている。上記ハウジングは、横梁11に設けられたホルダにインターロック接続を介して高さ調整可能に差し込むことができる。そのため、ハウジングには、鉛直方向の配置でインターロック突出部が設けられ、この突出部は、その直線構造により同時に回り止め12として働く。高さ調整可能なアクティブヘッド20のインターロック接続によって、アクティブヘッド20は、加圧ピストン3の下端に設けられた加圧プレート14が患者の胸骨に載る中立位置に配置することができる。この位置でアクティブヘッド20は、横梁11とインターロックされる。
【0021】
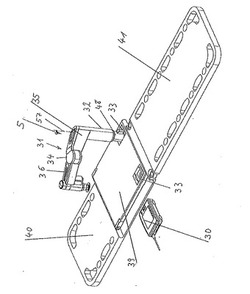
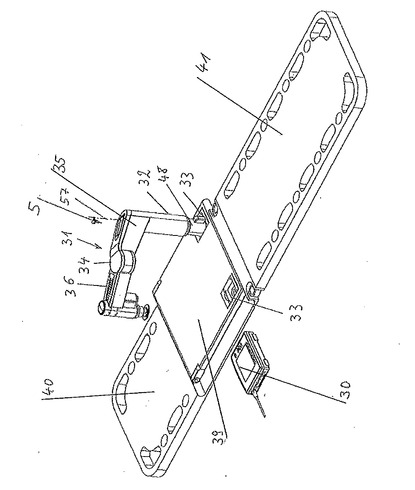
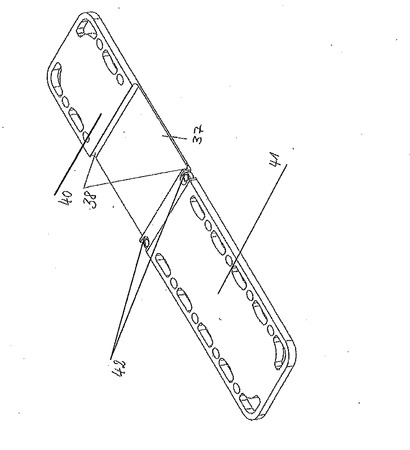
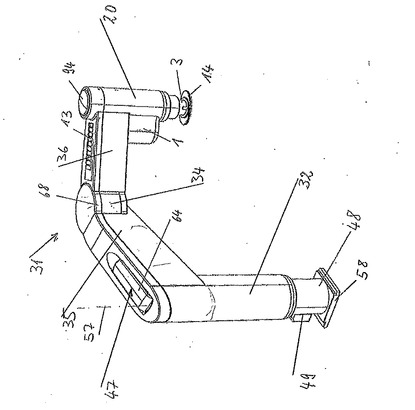
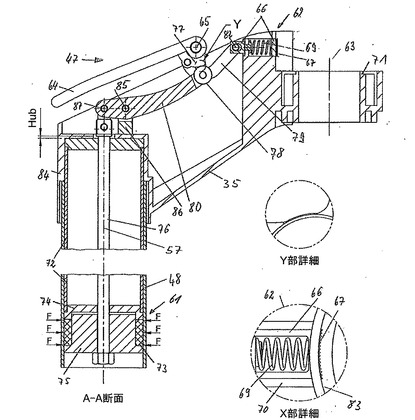
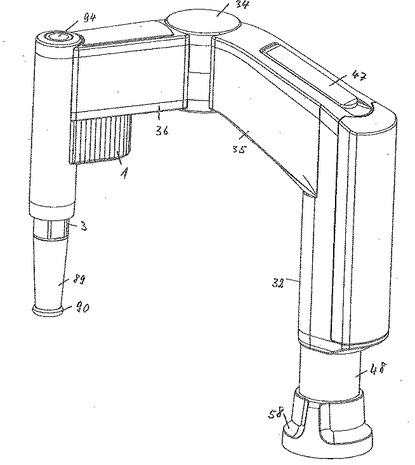
図4〜図12に示した実施形態は、概ね鉛直に延びる柱32を有する支持装置5を備える。この柱32には、それに概ね直角に延びる横梁31が、片持ち腕の形態で固定されている。横梁31は、伸縮式であるのが好ましい柱32の上端に固定される。横梁は、鉛直軸57をなす柱軸の周りに旋回できる。この旋回は、後述するように、柱下部に対する柱上端の旋回可能性によって達成される。
【0022】
心肺機能蘇生術に際して、伸縮式の柱32は、その柱脚48の歯止め機構板58をベースプレート39の凹部に嵌め込む。この凹部の領域には、ベースプレート39にプラグ・スナップ接続33がある。歯止め機構板58は、2つの凹部のいずれかのプラグ・スナップ接続と形状嵌合して固定される。これによって、支持装置5は、ベースプレート39と強固に連結される。柱脚48とこれに連結された柱32の伸縮式部材は、鉛直軸(柱軸)57の周りに回転不能にベースプレートに連結される。解除装置49によって、柱48をベースプレート49から開放することができる。心肺機能蘇生術のためには、患者をベースプレート49に固定し、既述の支持装置5をベースプレートに固定するだけで十分である。そうすれば、ベースプレートは、心肺蘇生板として働く。
【0023】
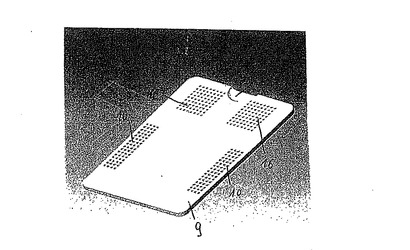
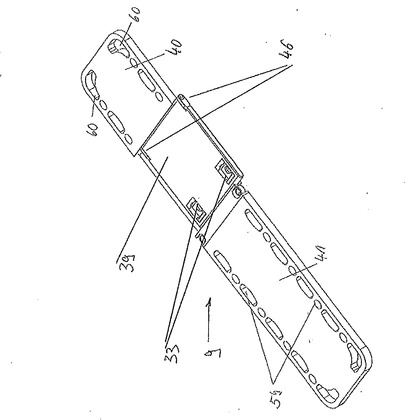
ベースプレート39は、この実施形態では複数,特に2つの部材からなる蘇生板9の凹部37(図5)に側方から差し込むことができる。ベースプレートのための案内装置38として作られた横溝が、ベースプレート39の案内に役立つ。この場合、ベースプレート39の横縁は、案内装置38の溝に形状嵌合で保持されて案内される。図8では、ベースプレート39は、大部分が凹部37に差し込まれている。ベースプレート39を完全に差し込んだ後、心肺蘇生板9とのインターロックが、ベースプレートの一端の側部に設けられたロックレバー46を用いて行われる。蘇生板9は、板上部40と板下部41を含む。凹部37は、板上部40に設けられ、側部のロックレバー46を用いたベースプレート39のキャッチは、板上部40で行われる。蘇生板の長手方向に見て、ロックレバー46は、ベースプレート39の一端にあり、柱32のプラグ・スナップ接続33は、ベースプレート39の他端にある。
【0024】
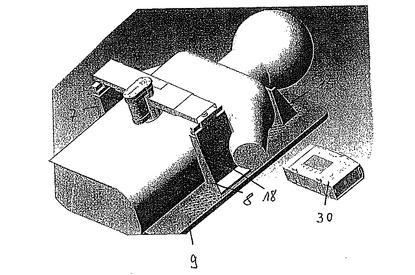
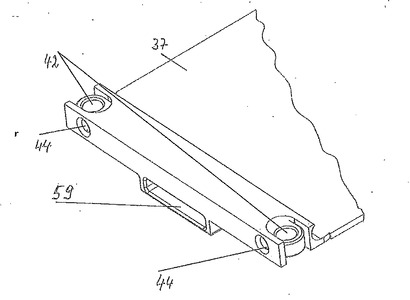
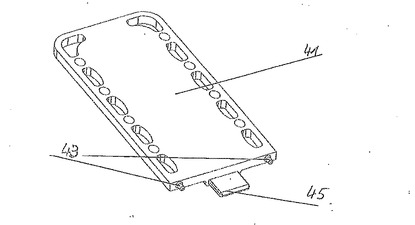
板上部40と板下部41は、プラグ・イン機構によって互いに確実に固定することができる。この目的のため、ロック・ピン43とプラグ・イン突起45が板下部41に設けられる。プラグ・イン突起45は、組み立ての際、板上部のプラグ・イン開口59に挿入される。同時に、ロック・ピン43は、板上部40の嵌合穴44に挿入される。嵌合穴44の背後の板上部に、嵌合穴44内でロック・ピンを回転不能に確実に保持するスナップ・ロック手段42が設けられる。この結果、板上部40と板下部41の剛な連結が得られる。心肺機能蘇生術の際、患者は、組み立てられた蘇生板に載せられ、加圧プレート14をもつピストン3によって加圧マッサージが施される患者の胸部は、ベースプレート39上に配置される。
【0025】
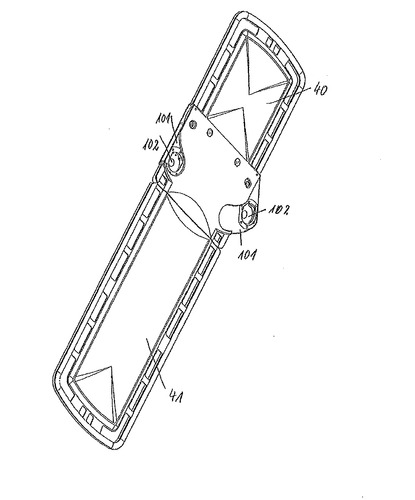
図22は、蘇生板の他の実施形態を示す。外側へ旋回できる支持プレート101が、蘇生板の板上部40の両側の長手方向辺に枢着されている。支持プレートは、適切なスナップ・ロック手段によって複数の外側へ旋回した位置に固定できる。図示の実施形態では、右側の長手方向辺に枢着された支持プレート101が、外側へ旋回している。図示の実施形態では、支持プレートは、両側の長手方向辺に枢着されている。しかし、長手方向辺の片側だけに支持プレートを設けることもできる。2つの支持プレートの夫々は、例えば支柱などの支持装置を上述の固定手段によって固定するアタッチメント点102を有する。図1〜3に示されたポータルとして構成された支持装置4も、支持プレート101のアタッチメント点102に固定できる。アタッチメント点102は、後述するように、図21に示す支持装置の取り付けにも適している。
【0026】
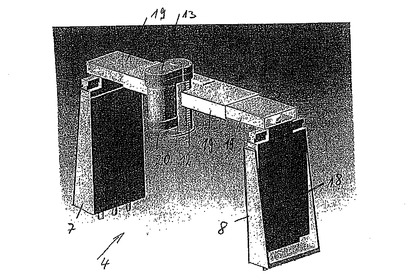
柱32の上に設けられた横梁31は、鉛直軸57(柱軸)の周りの旋回可能性と組み合わされてピストン3の下端に枢着された加圧プレート14が、患者の胸骨上に載るように調整できるように設計されている。横梁31は、この目的のため図示の実施形態では軸68をもつ関節34を介して互いに連結された2つの関節腕35,36をもつ構造になっている。図示の実施形態では、関節腕35は、柱32の頂部に枢着され、柱32の底部は、既述の如く、柱脚48を適切に設計してベースプレート39に強固に連結できる。横梁31の関節構造と鉛直軸57(柱軸)周りの旋回性のお陰で、ピストン14の下端に設けた加圧プレート14は、加圧マッサージを施すべき胸部上に載ることができる。このために、支持装置5は、柱32の伸縮構造により所望の高さに調整できる。
【0027】
関節34は、この位置でロックされ、2つの関節腕35,36は、互いに剛に連結される。同時に、鉛直軸(柱軸)57周りの旋回も、図15,16を参照して後述する柱32内に設けられた例えばロック機構などの助けでロックされる。このロックは、好ましくは、図15,16を参照して後述する柱32の上端に設けられた中央ロック機構47の助けで行うことができる。
【0028】
このロック状態において、2つの関節腕35,36と柱32とベースプレート39は、患者に加圧マッサージが施されるとき生じる力を、積極的嵌合によって吸収する剛な構造を形成する。板上部40および板下部41の長手方向側縁には、例えば穴の形態などのアタッチメント部分59,60が設けられ、このアタッチメント点に、患者を板上に固定するための革紐および患者の肩部のためのストッパ部材15が取り外し可能に固定できる。
【0029】
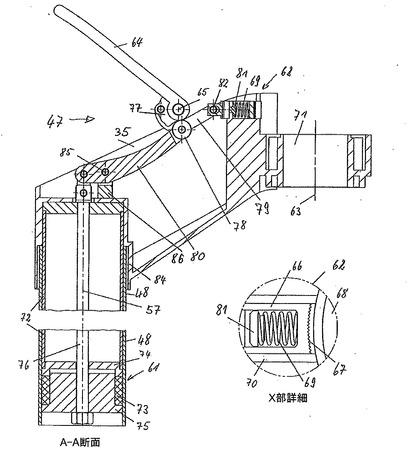
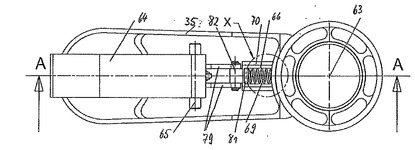
中央ロック機構47は、2つの関節腕35,36の相対位置をロックし、横梁31および柱32に連結された関節腕35の鉛直軸(柱軸)周りのいかなる回転もブロックするために設けられる。この中央ロック機構は、図15〜18により詳細に示されている。中央ロック機構は、連結点78で互いにピン連結された2つの操作レバー79,80を有する。連結点78は、2つの操作レバー79,80の間でトグル継手のように動作する。操作レバー79は、詳しくは後述するように、2つの関節腕35,36の間の関節継手34をブロックし、或いは旋回に対してロックする。操作レバー80は、プッシュロッド76を介してロック機構61に接続され、このロック機構は、ロック機構のように動作し、関節腕35をブロックし、従って鉛直軸57の周りの全横梁31の旋回をブロックする。
【0030】
2つの操作レバー79,80の連結点78は、関節腕35に回転可能に搭載された制御カム77に能動的に噛合する。制御カム77は、連結点78と相互作用する2つの固定位置を有する。図15,16に示す固定位置では、ロック機構61と継手ロック機構62は、互いに外れている。この位置で、関節腕15,16を相対回転させることができ、関節腕35,従って横梁31全体は、柱軸57の周りに旋回可能になる。
【0031】
図17,18に示す第2位置において、ロック手段61と継手ロック機構62は、ブロック位置にあって、2つの関節腕35,36は、関節34の周りに相対回転不可に連結される。関節腕35,従って横梁31も、柱軸57の周りに回転不可にブロックされる。
【0032】
制御カム77を操作するために、図16,18に示す2つの位置間を手動で旋回できるレバー64が設けられる。こうして、制御カム77は、中央ロック機構が開いた位置(図15,16)と閉じた位置(図17,18)に位置させられる。
【0033】
継手ロック機構62は、関節34に面する側にロック歯67をもつスライダ66を有する。このスライダは、関節腕35に固定されたスライダガイド70内で軸方向に移動できる。スライド運動は、関節64の関節軸63に直交する。圧縮ばね69は、板状で適合した断面の支持点81に支持されて、スライダ66を付勢する。支持点81は、関節腕35に固定される。スライダ66は、関節82を介して操作レバー79に連結される。図15,16に示された位置において、継手ロック機構62は、開いた位置にある。これは、シリンダ66を関節34から離れるように動かして、ロック歯67と関節腕36に固定された回転継手部材68(図9,10)のロック歯との噛合を外すことによって達成される。この位置は、図15,16に示される。この位置で、2つの関節腕35,36は、関節63に周りに相対回転できる。
【0034】
レバー64を図15,16の位置から図17,18の位置へ動かすと、制御カム77,従って連結点78は、圧縮ばね69がスライダ66を関節軸63の方へ動かすような位置に位置させられ、この位置でロック歯67は、関節腕36に固定連結された回転継手部材68のロック歯と噛合する。この位置で、2つの関節腕35,36は、更に相対回転しないようにロックされる。今や、2つの関節腕は、予め選ばれた相対旋回角度を成す。
【0035】
レバー64は、同時に、操作レバー80を図15,16と図16,17に示された位置間で移動させる。操作レバー80は、回転部分84に旋回可能に支持される。回転部分84は、関節腕35に固定連結され、中央ロック機構47が図15,16に示す位置にあるとき、鉛直軸57の周りに回転可能に枢支される。操作レバー80は、回転部分84上のサポート86のレバー軸85に枢着される。レバー80の一端は、ヒンジ点87においてプッシュロッド76の上端に回転可能に連結される。プッシュロッド76の下端は、リング支持部75に固定連結される。プッシュロッド76は、他のリング支持部74によって案内され、2つのリング支持部74,75の間に弾性変形可能なロックリング73が保持される。下部リング支持部75は、プッシュロッド76によって、柱の鉛直軸57の方向に上部リング支持部74に押し付くように動かされる。図15,16に示す位置では、下部リング支持部75は、回転部分84,つまり2つの関節腕35,36をもつ関節34が鉛直軸57の周りに夫々回転または旋回できる下端位置にある。レバー64が図17,18に示した位置に設定されると、プッシュロッド76は、操作レバー80の動きによって上方へ移動し、その結果、2つのリング支持部74,75の間隔は減少して、変形可能なロックリング73が圧縮され、鉛直軸57の周りのどのような回転も防止される。この過程において、変形したロックリング73は、増大する力で柱脚48の内壁および2つのリング支持部74,75との接触面を押圧するので、これらの部材間のどのような相対回転も防止される。図から分かるように、上部リング支持部74は、伸縮部分72によって回転部分84,従って関節腕35に固定連結される。このことが、柱脚48に対する,従って鉛直軸57の周りの関節腕35の回転をブロックする。
【0036】
伸縮部分72は、柱32,従って横梁31を鉛直方向に調整すべく、柱脚48に移動可能に搭載される。中央ロック機構47が開かれると(図15,16)、鉛直方向の調整と回転が可能になる。また、プッシュロッド76によってロック機構61の構成部材が動かされると、ロック機構61は、横梁31の回転を阻止するだけでなく、中央ロック機構47が閉じられると(図17,18)、調整された高さを保証する。
【0037】
図示の実施形態では、伸縮部分72と柱脚48は、管状で、中央ロック機構47が開かれたとき相対移動可能に配置されている。これは、柱およびプランジャ3の鉛直方向調整を可能にする。鉛直方向の調整は、手動、空気圧または油圧によって行うことができる。
【0038】
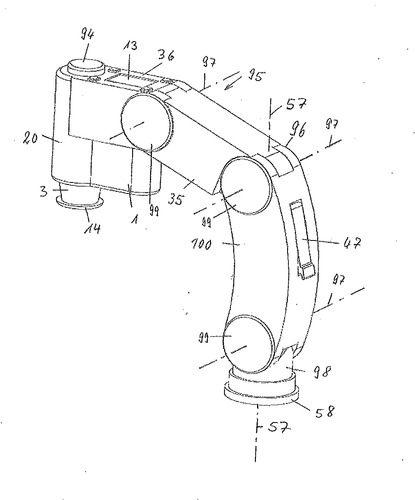
図21に示す支持装置95の実施形態は、円弧状の支持体96を有する。この支持体は、蘇生板9上に支持できる関節継手部材98から実質上90°の円弧に沿って延びている。円弧状の支持体96は、水平な関節軸97をもつ関節によって互いに連結された複数の関節腕35,36,100を有する。関節継手部材98によって蘇生板に固定できる円弧状の支持体96は、ロック機構47が開かれたとき、鉛直軸57の周りに回転できる。関節継手99周りの旋回性と組み合わさって、患者の身体寸法への適合が達成される。中央ロック機構47の助けによって、2つの関節腕35,100は、図15〜18に示す実施形態のように、所望の角度位置にロックすることができ、関節継手部材98は、歯止め機構板58に対する鉛直軸57周りの回転が阻止される。2つの関節腕35,36の間の関節継手99は、摩擦または積極的噛合によって回転が阻止され、プランジャ3および加圧プレート14は、鉛直方向に延びることになる。
【0039】
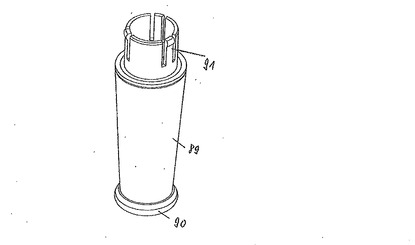
図19は、縮径プランジャ89を示している。この縮径プランジャ89は、図20に示すように、モータ1で駆動されるプランジャの下端に取り外し可能に固定できるスナップ・ロック手段91を上端に有する。加圧プレート90は、縮径プランジャ89の下端に設けられる。縮径リンダ89は、子供を処置するために用いられ、加圧プレート14に代えてプランジャ2の下端に取り外し可能に固定される付加的加圧部材を構成する。
【0040】
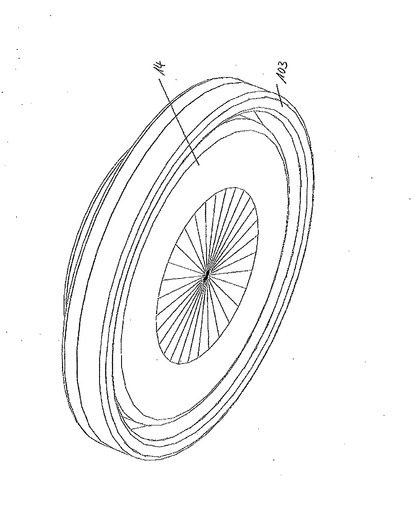
図23は、プランジャ3の下端に配置される加圧プレート14を示している。この加圧プレートは、周方向の気密シール103を有する。加圧プレート14が、患者の胸部に載せられると、患者の身体と加圧プレート14の間の気密シール103によって閉ざされた空間に負圧が生じる。この負圧は、気密シールで閉ざされた空間に適切な管を介して連通する(図示しない)ポンプの助けで生成される。
【0041】
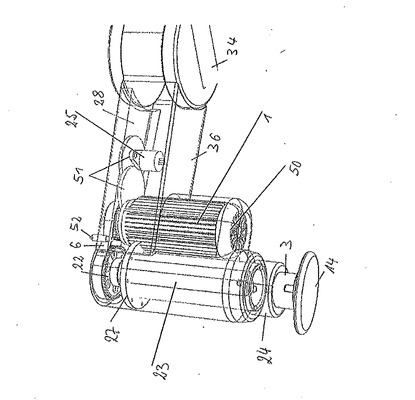
プランジャ3の駆動手段は、モータ1を備え、モータのトルクが、伝動ギヤ2を介してプランジャ3による加圧マッサージの前後運動に変換される。モータ電機子の回転運動は、モータ軸に連結されたギヤ21から駆動ベルト6を介して伝動ギヤ2上に設けられたギヤ22に伝えられる。正逆転運動であるのが好ましいモータの回転は、上述のように形成された歯付ベルトドライブを介して伝動ギヤ2に伝えられる。伝動ギヤ2は、歯付ベルトドライブによって伝えられた回転運動がプランジャ3の前後運動に変換されるように具体化されている。これに関して、伝動ギヤは、ボールねじスピンドル23によって延長できるプランジャ3を有することができ、ゴムを装着したボールねじナットが、プランジャの上端に設けられた上記ボールねじスピンドルに嵌合している。プランジャ3は、下端を滑り軸受24内に案内され、滑り軸受は、支持装置5を構成するハウジングの下端に固定される(図11)。截頭円錐形のねじを用いることもできる。ベルト張り機52は、駆動ベルトが接線方向を成すように駆動ベルト6に当接する。回転トランスデューサ51は、伝動ギヤとして具体化され、駆動ベルト8によって伝えられる回転運動を検出する。こうして、プランジャ3の夫々の位置を絶対値で検出できるようになる。プランジャ3の各ストローク長は、プランジャ3のモータ,とりわけモータ電機子において直接検出できる。歯付ベルトとギヤからなる伝動装置の代わりに、ギヤのみからなる伝動装置を用いることもできる。
【0042】
ボールねじとモータ1をもつ伝動ギヤ2は、関節腕36の自由端に取り付けられるフランジ板27に固定できる。図1〜3に示す実施形態では、フランジ板27は、横梁要素19の中央に取り付けられる。
【0043】
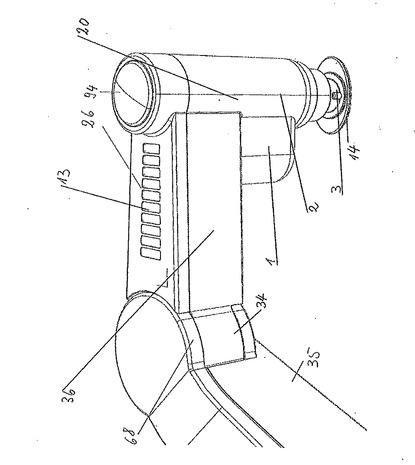
フランジ板27には、周方向のシールカバー28を設けることができる。このシールカバー28は、加圧マッサージ治療を開始および停止するための発/停ボタンをもつプリント配線基板を内側に有することができる。加えて、透明なカバー25の内側で表示装置13を構成する発光ダイオードを、光バー26の形態で配置することができる。この表示装置は、発光ダイオードの異なった色で、心肺蘇生段階または人工呼吸段階が行われているかを表示できる。カバーは、表示装置13の少なくとも光バーの領域で透明である。表示装置13は、施術者が患者への施術中にどこからでも見ることができるので、へ術の過程を容易にモニターすることができる。
【0044】
図13に示すアクティブヘッド20内の駆動手段と、図14にブロック図を示した制御装置30との接続は、概略的に示した接続ケーブル29によって行われる。キーボード54の助けでプランジャの起動, 停止, ストローク回数, ストローク深さなどの制御装置における総ての基本的制御を行うことができ、予め定められたログを起動することができる。制御装置30は、横梁31の例えば関節34内に設けることができる。しかし、制御装置は、必要なら取り外し可能に横梁31に搭載できる分離した装置として具体化できる。接続ケーブル29は、アクティブヘッド(図13)の電気システムのためのデータインターフェイス88と制御装置30内のマイクロプロセッサ56との間のデータラインおよびデータインターフェイスのための電圧供給ラインを含むことができる。しかし、データは、ワイヤレスで伝送することもできる。モータ1のための電流およびインクリメンタル位置エンコーダからのモータ1の回転角を表す信号は、接続ケーブル29を介して供給することもできる。電力は、バッテリー55または再充電可能なアキュムレータから接続ケーブル29を経てモータ1に供給される。施術の進展は、表示装置53に表示することができる。接続ケーブル29は、プラグによって制御装置30に接続される。
【0045】
モータの電流は、バッテリー55または再充電可能なアキュムレータからモータ制御回路92を介してモータ1に供給される。バッテリーは、制御装置30内または好ましくは制御装置外の横梁31内,とりわけロック機構47の下方の関節腕35内に配置される。バッテリー55またはアキュムレータは、制御装置30内に収容された充電回路93を介して充電される。充電電流は、例えば自動車の交流発電機や送電網からの外部電流源から供給される。バッテリーまたはアキュムレータの充電状態は、マイクロプロセッサ56を介して表示装置53に表示することができる。
【0046】
アクティブヘッドの極近傍に配置されたプッシュボタン式であるのが好ましいスイッチ94は、患者に対する施術を開始および停止させるのに用いられる。モータ1に供給される電流は、プッシュボタンスイッチ94によって切り換えられる。このプッシュボタンスイッチ94は、ロック機構47が阻止位置(図17,18)にあるときにだけ、プッシュボタンスイッチ94によって患者の施術が開始できるようにロック機構47と相互作用するようになっている。より詳しくは、モータ電流は、ロック機構47が阻止位置(図17,18)にあるときにだけ、オンに切り換えることができる。ロック機構47は、例えば適切に解除できるロックなどの機械的手段によって、或いは、マイクロプロセッサ56がロック機構47の各位置を検出し,ロック機構が阻止位置にあるときのみにモータへの電流供給をモータ制御回路92を介して開始することによってプッシュボタンスイッチ94と相互作用させることができる。患者に対する施術が始まると、施術を停止すべくプッシュボタンスイッチ94が押され、モータ1は、プランジャ3が患者によって解放された開始位置へ戻るように制御される。これは、適切にプログラムされたマイクロプロセッサ56とモータ制御回路92の助けによって行われる。心肺蘇生装置を操作するために在って好ましいには、オンおよびオフのための動作方向が1つであるプッシュボタン式のスイッチ94だけである。
【0047】
プランジャ3のストローク長は、位置測定器25によってモニターでき、マイクロプロセッサ56とモータ制御回路92を介してインクリメンタル位置エンコーダからの信号と関連づけられ、インクリメンタル位置エンコーダからの信号は、モータ制御回路によって所望のストローク長に適合させることができる。患者の施術のための特定の加圧プロファイルも、マイクロプロセッサ56内に予め定義できる。この加圧プロファイルは、モータに供給される電流に関連づけられ、この電流は、モータによって生成されるトルクに比例し、モータに供給される電流は、モータ制御回路92によって制御できる。
【符号の説明】
【0048】
1 モータ 2 伝動ギヤ
3 プランジャ 4,5,95 支持装置
6 駆動ベルト 7,8,32 柱
9,68 蘇生板 10,16 固定位置
11,31 横梁 12 周り止め/鉛直調整器
13 表示装置 14,90 加圧プレート
15 ストッパ 17 頭収容部
18 スライダ 19 伸縮式の横梁要素
20 アクティブヘッド 21,22 ギヤ
23 ボールねじ 24 滑り軸受
25 位置測定器 26 光バー
27 フランジ板 28 カバー
29 接続ケーブル 30 制御装置
33 プラグ・スナップ接続 34,82,99 関節
35,36,100 関節腕 37 凹部
38 案内装置 39 ベースプレート
40,41 板上部,板下部 42,91 スナップ・ロック手段
43 ロック・ピン 44 嵌合穴
45 プラグ・イン突起 46 ロックレバー
47 ロック機構 48 脚柱
49 解除機構 50 ファン
51 回転トランスディユーサ 52 ベルト張り機
53 表示装置 54 キーボード
55 バッテリー/アキュムレータ 56 マイクロプロセッサ
57 鉛直軸 58 歯止め機構板
59 プラグ・イン開口 60,102 アタッチメント点
61 ロック機構 62 継手ロック機構
63,97 関節軸 64 レバー
65,85 レバー軸 66 スライダ
67,83 ロック歯 69 ばね
70 スライダガイド 72 伸縮部分
73 ロックリング 74,75 リング支持部
76 プッシュロッド 77 制御カム
79,80 操作レバー 81,87 支持点
84 回転部分 86 サポート
88 データインターフェイス 89 縮径プランジャ
92 モータ制御回路 93 充電回路
94 プッシュボタンスイッチ 96 円弧状支持体
98 関節継手部材 101 支持プレート
103 周方向シール
【特許請求の範囲】
【請求項1】
患者の身体に加圧マッサージを施すべく駆動手段(1,2)によって駆動されるプランジャ(3)と、上記駆動手段(1,2)およびプランジャ(3)を支持する支持装置(4;5)を備えて、患者を蘇生させるための装置において、
上記支持装置(4;5,95)は、上記駆動手段(1,2)およびプランジャ(3)を搭載するとともに、蘇生板(9)に支持される鉛直方向に調節可能な横梁(11;31;96)を備えることを特徴とする装置。
【請求項2】
請求項1に記載の装置において、上記横梁(11;31)は、1つの柱(32)または2つの柱(7,8)に支持されることを特徴とする装置。
【請求項3】
請求項1または2に記載の装置において、上記1つの柱(32)または2つの柱(7,8)は、上記患者が載せられる蘇生板(9)に取り付けることができることを特徴とする装置。
【請求項4】
請求項1に記載の装置において、上記支持装置(95)は、上記蘇生板(9)に支持される関節継手部材(98)から延び出すとともに、水平な関節軸(97)をもつ関節継手(99)によって互いに連結された関節腕(35,36,100)を有する円弧状支持体(96)を備えることを特徴とする装置。
【請求項5】
請求項1乃至3のいずれか1つに記載の装置において、上記支持装置(4;5;95)と蘇生板(9)は、加圧マッサージ中に上記プランジャ(3)が発生する力を吸収する摩擦フィット構造を構成することを特徴とする装置。
【請求項6】
請求項1乃至5のいずれか1つに記載の装置において、上記横梁(31)または円弧状支持体(96)は、鉛直軸の周りに旋回でき、プランジャ(3)による処置のために蘇生板(9)上に特定の回転角位置で固定できることを特徴とする装置。
【請求項7】
の
請求項1乃至6のいずれか1つに記載の装置において、上記支持装置(4;5;95)は、上記蘇生板(9)に、とりわけプラグ・スナップ接続(33)の助けで取り外し可能に固定できることを特徴とする装置。
【請求項8】
請求項1乃至7のいずれか1つに記載の装置において、上記支持装置(4;5;95)は、上記蘇生板(9)に対して,とりわけ蘇生板の長手方向に動かすこと、或いは、異なった位置に固定することができることを特徴とする装置。
【請求項9】
請求項1乃至8のいずれか1つに記載の装置において、上記横梁(31)または円弧状支持体(96)は、関節で連結され、或いは、長手方向に調整できることを特徴とする装置。
【請求項10】
請求項1乃至9のいずれか1つに記載の装置において、上記横梁(31)または円弧状支持体(96)は、夫々の関節(34;99)によって互いに連結された少なくとも2つの関節腕(35,36,100)を有し、この2つの関節腕(35,36,100)は、特定の相互角度位置で固定できることを特徴とする装置。
【請求項11】
請求項4乃至10のいずれか1つに記載の装置において、1つの関節腕(35)は、上記1つの柱(32)に固定され、或いは、上記円弧状支持体(96)の関節腕(100)は、上記関節継手部材(98)に固定され、他の1つの関節腕(36)は、上記駆動手段(1,2)とプランジャ(3)を有することを特徴とする装置。
【請求項12】
請求項11に記載の装置において、上記1つの関節腕(35,100)は、上記1つの柱(32)およびプランジャ(3)の鉛直軸(57)の周りに旋回できることを特徴とする装置。
【請求項13】
請求項1乃至12のいずれか1つに記載の装置において、2つの関節腕(35,36;35,100)を特定の相互角度位置に固定し、上記横梁(31)または円弧状支持体(96)を鉛直軸(57)周りの特定の角度位置に固定するロック機構(47)を備えたことを特徴とする装置。
【請求項14】
請求項13に記載の装置において、上記ロック機構(47)は、上記横梁(31)に回転可能に取り付けられ,2つの位置に動かすことができる制御カム(77)を有し、この制御カム(77)は、2つの操作レバー(79,80)が互いに枢着される連結点(78)と制御嵌合し、上記一方の操作レバー(79)は、上記2つの関節腕(35,36;35,100)の相対回転を阻止し、上記他方の操作レバー(80)は、上記横梁(31)または円弧状支持体(96)の上記鉛直軸(57)周りの回転を阻止することを特徴とする装置。
【請求項15】
請求項1乃至14のいずれか1つに記載の装置において、積極的嵌合または摩擦フィットによって、上記2つの関節腕(35,36;35,100)は、特定の相対角度位置に固定されるとともに、上記横梁(31)または円弧状支持体(96)は、上記蘇生板(9)に対して上記鉛直軸(57)周りの特定の角度位置に固定されることを特徴とする装置。
【請求項16】
請求項3乃至15のいずれか1つに記載の装置において、上記蘇生板(9)は、複数の部材,とりわけ分離できる2つの部材からなることを特徴とする装置。
【請求項17】
請求項3乃至16のいずれか1つに記載の装置において、上記1つの柱(32)または2つの柱(7,8)が固定できるベーススプレート(39)のための凹部(37)が、 上記蘇生板(9)に設けられていることを特徴とする装置。
【請求項18】
請求項17に記載の装置において、上記凹部(37)の領域に、上記ベースプレート(39)を側方から挿入するための案内機構(38)が設けられていることを特徴とする装置。
【請求項19】
請求項1乃至18のいずれか1つに記載の装置において、上記蘇生板(9)に少なくとも1つの支持プレート(101)が枢着され、この支持プレートは、蘇生板(9)から離れるように旋回でき、支持装置(4;5;95)のためのアタッチメント点(102)を有することを特徴とする装置。
【請求項20】
請求項19に記載の装置において、上記少なくとも1つの支持プレート(101)は、異なった旋回角度位置でロックできることを特徴とする装置。
【請求項21】
請求項1乃至20のいずれか1つに記載の装置において、上記支持装置(4;5;95)およびこれを連結するベースプレート(38)または少なくとも1つの支持プレート(101)は、加圧マッサージ中にプランジャ(6)が発する力を吸収する摩擦フィット構造を構成することを特徴とする装置。
【請求項22】
請求項1乃至21のいずれか1つに記載の装置において、上記プランジャ(3)は、子供を処置するに適した縮径プランジャ(89)を下端に取り外し可能に取り付けうるように設計されていることを特徴とする装置。
【請求項23】
請求項1乃至22のいずれか1つに記載の装置において、上記加圧プレート(14;90)に周方向の気密シール(103)が設けられ、患者の身体と加圧プレートの間の上記気密シールで囲まれた空間に負圧が作られることを特徴とする装置。
【請求項24】
請求項1乃至23のいずれか1つに記載の装置において、患者は、固定紐によって蘇生板(9)に固定できることを特徴とする装置。
【請求項25】
請求項1乃至24のいずれか1つに記載の装置において、上記駆動手段(1,2)は、モータ(1)を備え、モータのトルクが、伝動ギヤ(2)を介して上記プランジャ(3)の加圧マッサージ運動に変換されることを特徴とする装置。
【請求項26】
請求項1乃至25のいずれか1つに記載の装置において、上記モータ(1)への電力供給は、ロック機構(47)の起動によって始まることを特徴とする装置。
【請求項27】
請求項1乃至25のいずれか1つに記載の装置において、加圧マッサージ動作中のプランジャ(3)の位置を決定するために、モータ電機子の回転角位置または伝動部の位置を検出する位置測定装置(25)を設けたことを特徴とする装置。
【請求項28】
請求項27に記載の装置において、上記伝動部は、上記モータ(1)の回転運動をとりわけ駆動ベルト(6)またはギヤ(21,22)に伝えることを特徴とする装置。
【請求項29】
請求項1乃至28のいずれか1つに記載の装置において、上記駆動手段(1,2)およびプランジャ(3)は、上記横梁(11;31)または円弧状支持体(96)上で鉛直方向に調整できることを特徴とする装置。
【請求項30】
請求項1乃至29のいずれか1つに記載の装置において、上記駆動手段(1,2)およびプランジャ(3)は、上記横張(11;13)または円弧状支持体(96)の回り止め手段(12)で保持されることを特徴とする装置。
【請求項31】
請求項1乃至30のいずれか1つに記載の装置において、蘇生過程を表示するための表示装置(13)が、支持装置(4;5;97)または患者の処置中によく見える装置の他の場所に設けられることを特徴とする装置。
【請求項32】
請求項31に記載の装置において、上記表示装置(13)は、光バー(26)として具体化されていることを特徴とする装置。
【請求項33】
請求項1乃至32のいずれか1つに記載の装置において、上記モータ(1)を制御するために、このモータに供給される電流を、プランジャのストローク長に対して予め定められた力プロファイルに対応する電流プロファイルと比較する制御ユニット(56,92)を備えたことを特徴とする装置。
【請求項34】
請求項33に記載の装置において、上記モータの各回転方向における回転数は、上記制御ユニット(56,92)によって上記予め定められた力プロファイルに応じて調整されることを特徴とする装置。
【請求項35】
請求項33または34に記載の装置において、上記モータの速度は、上記制御ユニット(56,92)によって予め定められた力プロファイルに応じて調整されることを特徴とする装置。
【請求項36】
請求項1乃至35のいずれか1つに記載の装置において、患者の処置中に装置を操作するために、スイッチ,とりわけオンおよびオフのための動作方向が1つであるプッシュボタンスイッチを設けたことを特徴とする装置。
【請求項1】
患者の身体に加圧マッサージを施すべく駆動手段(1,2)によって駆動されるプランジャ(3)と、上記駆動手段(1,2)およびプランジャ(3)を支持する支持装置(4;5)を備えて、患者を蘇生させるための装置において、
上記支持装置(4;5,95)は、上記駆動手段(1,2)およびプランジャ(3)を搭載するとともに、蘇生板(9)に支持される鉛直方向に調節可能な横梁(11;31;96)を備えることを特徴とする装置。
【請求項2】
請求項1に記載の装置において、上記横梁(11;31)は、1つの柱(32)または2つの柱(7,8)に支持されることを特徴とする装置。
【請求項3】
請求項1または2に記載の装置において、上記1つの柱(32)または2つの柱(7,8)は、上記患者が載せられる蘇生板(9)に取り付けることができることを特徴とする装置。
【請求項4】
請求項1に記載の装置において、上記支持装置(95)は、上記蘇生板(9)に支持される関節継手部材(98)から延び出すとともに、水平な関節軸(97)をもつ関節継手(99)によって互いに連結された関節腕(35,36,100)を有する円弧状支持体(96)を備えることを特徴とする装置。
【請求項5】
請求項1乃至3のいずれか1つに記載の装置において、上記支持装置(4;5;95)と蘇生板(9)は、加圧マッサージ中に上記プランジャ(3)が発生する力を吸収する摩擦フィット構造を構成することを特徴とする装置。
【請求項6】
請求項1乃至5のいずれか1つに記載の装置において、上記横梁(31)または円弧状支持体(96)は、鉛直軸の周りに旋回でき、プランジャ(3)による処置のために蘇生板(9)上に特定の回転角位置で固定できることを特徴とする装置。
【請求項7】
の
請求項1乃至6のいずれか1つに記載の装置において、上記支持装置(4;5;95)は、上記蘇生板(9)に、とりわけプラグ・スナップ接続(33)の助けで取り外し可能に固定できることを特徴とする装置。
【請求項8】
請求項1乃至7のいずれか1つに記載の装置において、上記支持装置(4;5;95)は、上記蘇生板(9)に対して,とりわけ蘇生板の長手方向に動かすこと、或いは、異なった位置に固定することができることを特徴とする装置。
【請求項9】
請求項1乃至8のいずれか1つに記載の装置において、上記横梁(31)または円弧状支持体(96)は、関節で連結され、或いは、長手方向に調整できることを特徴とする装置。
【請求項10】
請求項1乃至9のいずれか1つに記載の装置において、上記横梁(31)または円弧状支持体(96)は、夫々の関節(34;99)によって互いに連結された少なくとも2つの関節腕(35,36,100)を有し、この2つの関節腕(35,36,100)は、特定の相互角度位置で固定できることを特徴とする装置。
【請求項11】
請求項4乃至10のいずれか1つに記載の装置において、1つの関節腕(35)は、上記1つの柱(32)に固定され、或いは、上記円弧状支持体(96)の関節腕(100)は、上記関節継手部材(98)に固定され、他の1つの関節腕(36)は、上記駆動手段(1,2)とプランジャ(3)を有することを特徴とする装置。
【請求項12】
請求項11に記載の装置において、上記1つの関節腕(35,100)は、上記1つの柱(32)およびプランジャ(3)の鉛直軸(57)の周りに旋回できることを特徴とする装置。
【請求項13】
請求項1乃至12のいずれか1つに記載の装置において、2つの関節腕(35,36;35,100)を特定の相互角度位置に固定し、上記横梁(31)または円弧状支持体(96)を鉛直軸(57)周りの特定の角度位置に固定するロック機構(47)を備えたことを特徴とする装置。
【請求項14】
請求項13に記載の装置において、上記ロック機構(47)は、上記横梁(31)に回転可能に取り付けられ,2つの位置に動かすことができる制御カム(77)を有し、この制御カム(77)は、2つの操作レバー(79,80)が互いに枢着される連結点(78)と制御嵌合し、上記一方の操作レバー(79)は、上記2つの関節腕(35,36;35,100)の相対回転を阻止し、上記他方の操作レバー(80)は、上記横梁(31)または円弧状支持体(96)の上記鉛直軸(57)周りの回転を阻止することを特徴とする装置。
【請求項15】
請求項1乃至14のいずれか1つに記載の装置において、積極的嵌合または摩擦フィットによって、上記2つの関節腕(35,36;35,100)は、特定の相対角度位置に固定されるとともに、上記横梁(31)または円弧状支持体(96)は、上記蘇生板(9)に対して上記鉛直軸(57)周りの特定の角度位置に固定されることを特徴とする装置。
【請求項16】
請求項3乃至15のいずれか1つに記載の装置において、上記蘇生板(9)は、複数の部材,とりわけ分離できる2つの部材からなることを特徴とする装置。
【請求項17】
請求項3乃至16のいずれか1つに記載の装置において、上記1つの柱(32)または2つの柱(7,8)が固定できるベーススプレート(39)のための凹部(37)が、 上記蘇生板(9)に設けられていることを特徴とする装置。
【請求項18】
請求項17に記載の装置において、上記凹部(37)の領域に、上記ベースプレート(39)を側方から挿入するための案内機構(38)が設けられていることを特徴とする装置。
【請求項19】
請求項1乃至18のいずれか1つに記載の装置において、上記蘇生板(9)に少なくとも1つの支持プレート(101)が枢着され、この支持プレートは、蘇生板(9)から離れるように旋回でき、支持装置(4;5;95)のためのアタッチメント点(102)を有することを特徴とする装置。
【請求項20】
請求項19に記載の装置において、上記少なくとも1つの支持プレート(101)は、異なった旋回角度位置でロックできることを特徴とする装置。
【請求項21】
請求項1乃至20のいずれか1つに記載の装置において、上記支持装置(4;5;95)およびこれを連結するベースプレート(38)または少なくとも1つの支持プレート(101)は、加圧マッサージ中にプランジャ(6)が発する力を吸収する摩擦フィット構造を構成することを特徴とする装置。
【請求項22】
請求項1乃至21のいずれか1つに記載の装置において、上記プランジャ(3)は、子供を処置するに適した縮径プランジャ(89)を下端に取り外し可能に取り付けうるように設計されていることを特徴とする装置。
【請求項23】
請求項1乃至22のいずれか1つに記載の装置において、上記加圧プレート(14;90)に周方向の気密シール(103)が設けられ、患者の身体と加圧プレートの間の上記気密シールで囲まれた空間に負圧が作られることを特徴とする装置。
【請求項24】
請求項1乃至23のいずれか1つに記載の装置において、患者は、固定紐によって蘇生板(9)に固定できることを特徴とする装置。
【請求項25】
請求項1乃至24のいずれか1つに記載の装置において、上記駆動手段(1,2)は、モータ(1)を備え、モータのトルクが、伝動ギヤ(2)を介して上記プランジャ(3)の加圧マッサージ運動に変換されることを特徴とする装置。
【請求項26】
請求項1乃至25のいずれか1つに記載の装置において、上記モータ(1)への電力供給は、ロック機構(47)の起動によって始まることを特徴とする装置。
【請求項27】
請求項1乃至25のいずれか1つに記載の装置において、加圧マッサージ動作中のプランジャ(3)の位置を決定するために、モータ電機子の回転角位置または伝動部の位置を検出する位置測定装置(25)を設けたことを特徴とする装置。
【請求項28】
請求項27に記載の装置において、上記伝動部は、上記モータ(1)の回転運動をとりわけ駆動ベルト(6)またはギヤ(21,22)に伝えることを特徴とする装置。
【請求項29】
請求項1乃至28のいずれか1つに記載の装置において、上記駆動手段(1,2)およびプランジャ(3)は、上記横梁(11;31)または円弧状支持体(96)上で鉛直方向に調整できることを特徴とする装置。
【請求項30】
請求項1乃至29のいずれか1つに記載の装置において、上記駆動手段(1,2)およびプランジャ(3)は、上記横張(11;13)または円弧状支持体(96)の回り止め手段(12)で保持されることを特徴とする装置。
【請求項31】
請求項1乃至30のいずれか1つに記載の装置において、蘇生過程を表示するための表示装置(13)が、支持装置(4;5;97)または患者の処置中によく見える装置の他の場所に設けられることを特徴とする装置。
【請求項32】
請求項31に記載の装置において、上記表示装置(13)は、光バー(26)として具体化されていることを特徴とする装置。
【請求項33】
請求項1乃至32のいずれか1つに記載の装置において、上記モータ(1)を制御するために、このモータに供給される電流を、プランジャのストローク長に対して予め定められた力プロファイルに対応する電流プロファイルと比較する制御ユニット(56,92)を備えたことを特徴とする装置。
【請求項34】
請求項33に記載の装置において、上記モータの各回転方向における回転数は、上記制御ユニット(56,92)によって上記予め定められた力プロファイルに応じて調整されることを特徴とする装置。
【請求項35】
請求項33または34に記載の装置において、上記モータの速度は、上記制御ユニット(56,92)によって予め定められた力プロファイルに応じて調整されることを特徴とする装置。
【請求項36】
請求項1乃至35のいずれか1つに記載の装置において、患者の処置中に装置を操作するために、スイッチ,とりわけオンおよびオフのための動作方向が1つであるプッシュボタンスイッチを設けたことを特徴とする装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2012−192190(P2012−192190A)
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−62391(P2012−62391)
【出願日】平成24年3月19日(2012.3.19)
【出願人】(512071330)ゲーエス・エレクトロメディツィニシェ・ゲレーテ・ゲー・シュテンプレ・ゲゼルシャフト・ミット・ベシュレンクテル・ハフツング (1)
【氏名又は名称原語表記】GS Elektromedizinische Geraete G.Stemple GmbH
【Fターム(参考)】
【公開日】平成24年10月11日(2012.10.11)
【国際特許分類】
【出願番号】特願2012−62391(P2012−62391)
【出願日】平成24年3月19日(2012.3.19)
【出願人】(512071330)ゲーエス・エレクトロメディツィニシェ・ゲレーテ・ゲー・シュテンプレ・ゲゼルシャフト・ミット・ベシュレンクテル・ハフツング (1)
【氏名又は名称原語表記】GS Elektromedizinische Geraete G.Stemple GmbH
【Fターム(参考)】
[ Back to top ]