
患者支持デバイスおよび操作方法
放射線療法用治療システムの患者支持デバイスは、電気機械式モータと、Z方向に支持デバイスを上下させるための制御システムとを備える。この制御システムは、再生型制動コンセプトを採用し、如何なる負荷であっても支持デバイスが一定の速度で下降されるように、支持デバイスが下降される際にモータを発電機へと変換する。また、電力オフ状態において(即ち、支持デバイスに対する電力がないとき)、制御システムにより支持デバイスを下降させることが可能となる。

【発明の詳細な説明】
【技術分野】
【0001】
本出願は、2007年9月4日に出願された米国仮特許出願第60/969,904号に基づく優先権を主張するものであり、その出願の全内容が参照により本明細書に組み込まれる。
【0002】
本発明は、放射線療法の撮像および治療のシステムに関する。より具体的には、本発明は、そのようなシステムと共に使用するための患者支持デバイスに関する。
【背景技術】
【0003】
放射線療法用の医療設備は、高エネルギー放射線により潰瘍組織を治療する。線量および線量配置は、潰瘍が破壊されるのに十分な放射線を受けるように、ならびに、周囲および隣接する非潰瘍組織に対する損傷が最小限に抑えられるように、正確に制御されなければならない。強度変調放射線治療(IMRT:intensity modulated radiation therapy)は、強度および/またはエネルギーがそれぞれ別個に制御され得る複数の放射線により、患者を治療する。これらの放射線は、患者に対して様々な角度から送られ、組み合わされ、所望される線量パターンを形成する。外部放射線源を用いる放射線療法においては、患者の外部にある放射線源が、内部の潰瘍を治療する。この外部放射線源は、通常は、潰瘍部位にのみにビームが向かうようにコリメートされる。典型的には、放射線源は、高エネルギーX線、特定の線形加速器からの電子、または高度に集束された放射性同位元素からのガンマ線の何れかを含むが、他のタイプの放射線源も可能である。
【0004】
患者に対する放射線照射の位置を制御する1つの方式は、1または複数の方向に調節可能な診療台などのような患者支持デバイスを使用することによるものである。患者支持デバイスの使用は、医療分野においてよく知られており、同様の患者支持デバイスが、CTスキャン・デバイスおよび磁気共鳴撮像装置(MRI)において使用される。患者支持デバイスにより、患者を、照射される放射線の領域内または領域外に移動させることが可能となり、場合によっては、放射線治療の最中に患者の位置を調節することが可能となる。
【発明の概要】
【0005】
診療台などの患者支持デバイスがこのようにして使用されるとき、反映することを必要とする多数の変数が存在する。例えば、構造材料、および診療台を操作するために必要な適切な電子機器の構成を慎重に選択すること、および診療台の円滑な操作および診療台の位置を正確に測定すること(診療台が複数の可動部分を有するとき)を確実にしなければならない。これらの特徴が放射線照射の環境において十分に考慮されたとき、患者支持デバイスは、患者に対する成果を向上させることにおいて重要なツールになり得る。
【0006】
本発明は患者支持デバイスを提供し、患者支持デバイスは、ベースと、ベースにより支持され、患者を支持するように構成されたテーブル・アセンブリと、テーブル・アセンブリと電気的に結合され、テーブル・アセンブリの動作を制御するように動作するモータと、モータと電気的に結合され、モータへの電力が中断されるとモータを制動するための信号を生成するように動作する制御装置と、制動(ブレーキ)制御モジュールとを備える。制動制御モジュールは、モータおよび制御装置と電気的に結合され、モータの再作動時に動作可能である。この制動制御モジュールは、モータと電気的に結合され、モータの速度を上昇させる受動型動的(ダイナミック)負荷モジュール(passive dynamic load module)と、モータと電気的に結合され、AC電圧が所定の値に達するとAC電圧をDC電圧に変換するように動作する整流モジュールと、受動型ダイナミック負荷モジュールと電気的に結合された被制御ダイナミック負荷モジュール(controlled dynamic load module)と、被制御ダイナミック負荷モジュールに電気的に結合され、モータの制動動作を制御するように、モータと被制御ダイナミック負荷モジュールとを接続および接続解除するように動作するスイッチとを備える。
【0007】
別の態様においては、本発明は、患者支持デバイスおよび制御システムを備える放射線療法用治療システムを提供する。患者支持デバイスは、患者を支持するように構成されたテーブル・アセンブリと、テーブル・アセンブリと電気的に接続され、テーブル・アセンブリの動作を制御するように動作するモータとを備える。制御システムは、モータと電気的に接続され、診療台への電力が中断されると、モータの速度を制御し、テーブル・アセンブリの線形運動を生じさせるように動作する。
【0008】
本発明の他の態様は、詳細な説明および添付の図面を精査することにより明らかになろう。
【図面の簡単な説明】
【0009】
【図1】図1は、放射線療法用治療システムの斜視図である。
【図2】図2は、図1に図示される放射線療法用治療システムにおいて使用することが可能なマルチリーフ・コリメータの斜視図である。
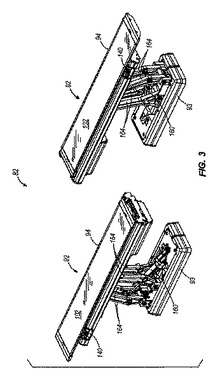
【図3】図3は、図1のシステムと共に使用するための患者支持デバイスの斜視図である。
【図4】図4は、図3の患者支持デバイスのテーブル・アセンブリの分解図である。
【図5】図5は、図4のテーブル・アセンブリの上側支持部の斜視図である。
【図6】図6は、図4のテーブル・アセンブリの下側支持部の斜視図である。
【図7】図7は、図1の患者支持デバイスと共に使用するための制御キーパッドの様々な図である。
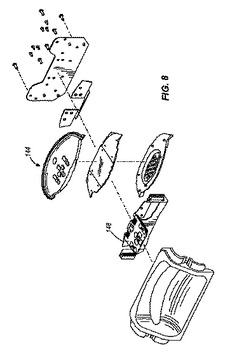
【図8】図8は、図7のキーパッドの分解図である。
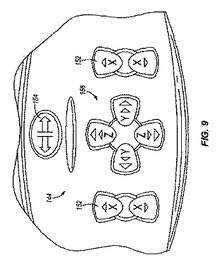
【図9】図9は、図7のキーパッドの正面図であり、制御ボタンを更に詳細に示す。
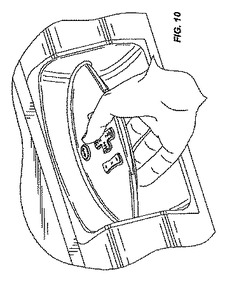
【図10】図10は、図7のキーパッドの斜視図であり、患者支持デバイスのオペレータによるボタンの操作を示す。
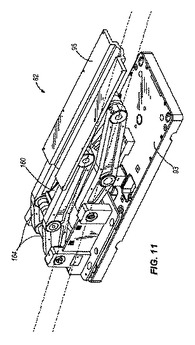
【図11】図11は、図3の患者支持デバイスの斜視図であり、下方位置にあるところを示す。
【図12】図12は、図3の患者支持デバイスのライザを示す。
【図13】図13は、本発明による1つの例示的なモータ制御システムの概略図である。
【図14】図14は、本発明による緊急ダイナミック制動制御ユニットの制御下において、モータ回転発電機(motor−turned−generator)としてフリー・ランニング・モードでモータが作動する、1つの例示的なモータ制御システムにおける方法を示す等価概略図である。
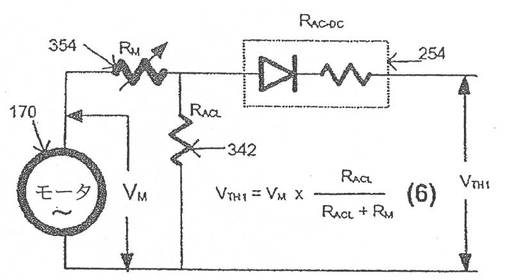
【図15】図15は、モータAC電圧源をDC電圧源VTH1に変換する1つの例示的なテブナン(Thevenin)等価の方法を示す等価概略図である。
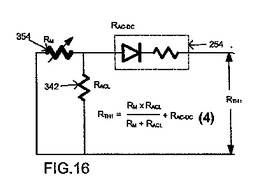
【図16】図16は、RM、RAC−DC、およびRACLをRTH1に変換する1つの例示的なテブナン等価抵抗の方法を示す等価概略図である。
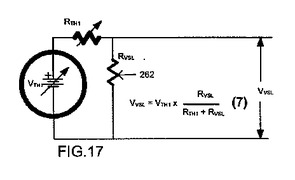
【図17】図17は、DC電圧源VTH1を電圧源VVSLに変換する1つの例示的なテブナン等価の方法を示す等価概略図である。
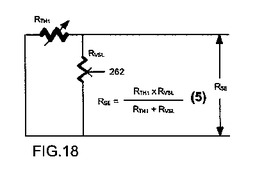
【図18】図18は、RTH1およびRVSLをRSEセンサ等価に変換する1つの例示的なテブナン等価抵抗の方法を示す等価概略図である。
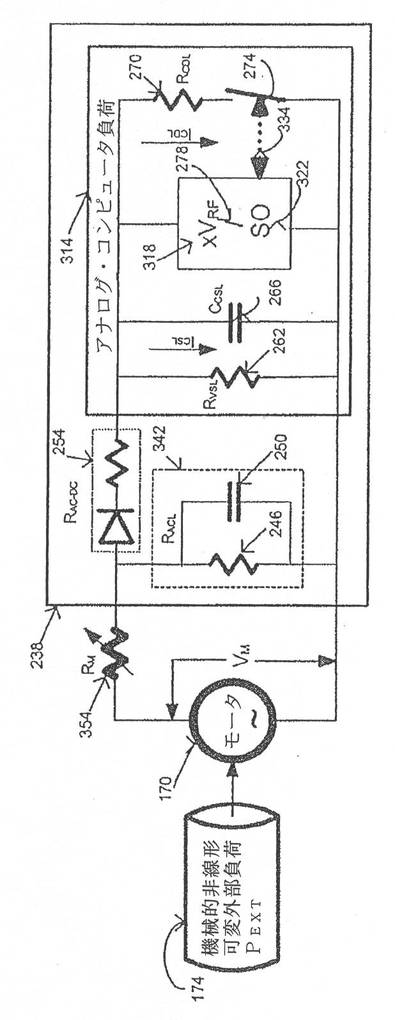
【図19】図19は、アナログ・コンピュータ負荷がアクティブであるときi緊急ダイナミック制動制御ユニットの制御下でフリー・ランニング・モードでモータが作動するときの、1つの例示的なモータ制御システムを示す概略図である。
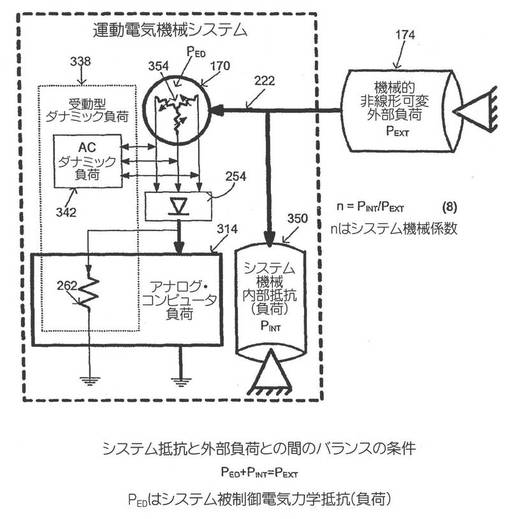
【図20】図20は、外部抵抗力PEXTとシステム機械抵抗力PINTと電気力学抵抗力PEDとの間の1つの例示的な力配分を示す図である。
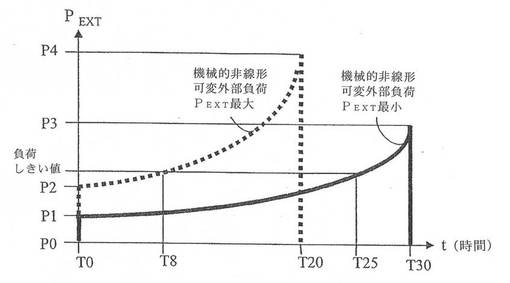
【図21】図21は、機械的非線形可変外部負荷の様々な曲線を示すグラフである。
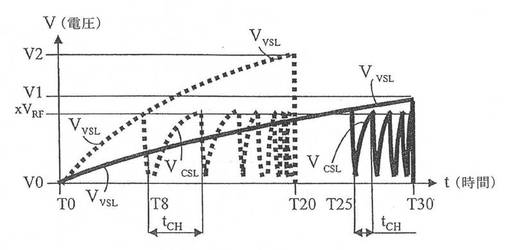
【図22】図22は、外部負荷PEXTの様々な値の下における電流センサ負荷CCSLに関する等価電圧源VVSL、電圧VCSL、およびタイム・チャージtCHの曲線を示すグラフである。
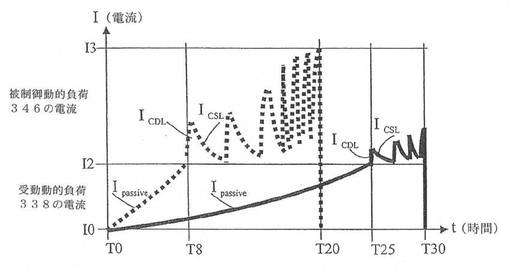
【図23】図23は、外部負荷PEXTの様々な値の下における受動型ダイナミック負荷に対する電流および被制御ダイナミック負荷に対する電流を示すグラフである。
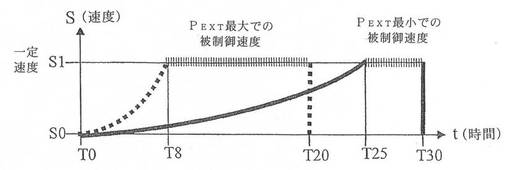
【図24】図24は、外部負荷PEXTの様々な値の下でのモータ速度制御の1つの方法を示すグラフである。
【図25】図25〜27は、本発明の1つの方法の実施形態を示す流れ図および注釈である。
【図26】図25〜27は、本発明の1つの方法の一実施形態を示す流れ図および注釈である。
【図27】図25〜27は、本発明の1つの方法の一実施形態を示す流れ図および注釈である。
【発明を実施するための形態】
【0010】
本発明の実施形態の詳細な説明を行う前に、本発明はその適用が、以下の説明において示される、または以下の図面において示される構成要素の構造および構成の詳細に限定されないことを理解されたい。本発明は、他の実施形態が可能であり、様々な様式での実施または実現が可能である。また、本明細書において使用される術語および用語は説明のためのものであり、限定的なものとして見なされるべきではないことを理解されたい。本明細書において、「含む」、「備える」、「有する」、およびそれらの変化した語が使用される場合には、以降に挙げられる物およびその均等物、ならびに追加的な物が包含される。明示されない限り、または他の様式で限定されない限り、「取り付けられた」、「接続された」、「支持された」、および「結合された」、ならびにそれらの変化した語は広義に使用され、直接的ならびに間接的な、取付け、接続、支持、および結合を包含する。
【0011】
本明細書において、図面を説明する上で上側、下側、下方向、上方向、後方、底部、前部、後部などのような、方向に関する参照がなされることがあるが、これらの参照は、便宜上の理由により図面(普通に見たとき)に対してなされる。これらの方向は、文字通り理解されることも、何らかの形態に本発明を限定することも意図されていない。更に、本明細書において、「第1の」、「第2の」、「第3の」などの語は、説明のために使用されるものであり、相対的な重要性や優位性を指示するものではなく、意図するものではない。
【0012】
更に、本発明の実施形態は、説明上の理由により、それらの構成要素の大半が専らハードウェアとして実装されたものとして示され説明され得る、ハードウェア、ソフトウェア、および電子構成要素または電子モジュールを含むことを理解されたい。しかしながら、当業者には、この詳細な説明を読めば、少なくとも1つの実施形態において、本発明の電子ベースの態様をソフトウェアとして実装でき得ることが理解されよう。従って、複数のハードウェア・ベース・デバイスおよびソフトウェア・ベース・デバイス、ならびに複数の異なる構造コンポーネントが本発明を実施するために使用され得ることに、留意されたい。更に、以降の段落において説明されるように、図面に示される特定の機械的構成は、本発明の実施形態を例示することを意図しており、他の代替の機械的構成も可能である。
【0013】
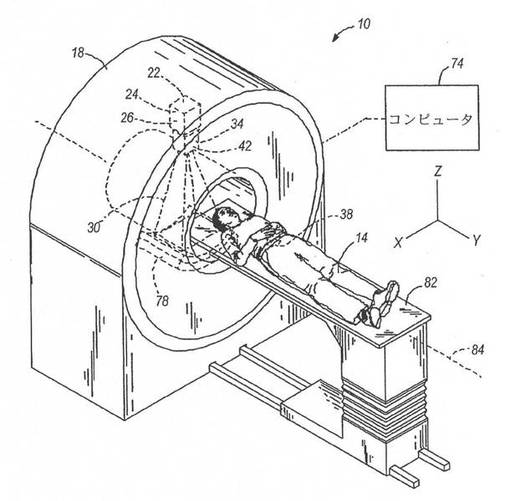
図1は、患者14に対して放射線療法を施すことが可能な放射線療法用治療システム10を示す。放射線療法による治療は、光子ベースの放射線療法、近接照射療法、電子ビーム療法、光子療法、中性子療法、粒子療法、または他のタイプの治療法を含み得る。放射線療法用治療システム10はガントリ18を含む。ガントリ18は放射線モジュール22を支持することが可能であり、放射線モジュール22は、放射線源24、および、放射線のビーム30を生成するように動作可能な線形加速器26(別称「リニアック」)を備えることが可能である。図に示されるガントリ18はリング型ガントリであり、全360°の弧を通って延び、完全なリングまたは円を形成するが、他のタイプの取付け構成も使用されてよい。例えば、C型の部分リング型ガントリやロボット・アームを使用することが可能である。また、患者14に対して様々な回転位置および/または軸方向位置において放射線モジュール22を位置決めすることが可能な任意の他のフレームワークが使用されてもよい。更に、放射線源24は、ガントリ18の形状に従わない経路を移動してよい。例えば、放射線源24は、図示されるガントリ18が略円形の形状であっても、非円形経路を移動してよい。示される実施形態のガントリ18はガントリ開口32を画定し、その開口の中を、患者14が治療の際に移動する。
【0014】
放射線モジュール22は、放射線ビーム30を変更または変調するように動作可能な変調デバイス34も備えることが可能である。変調デバイス34は、放射線ビーム30の変調を行い、患者14の方へ放射線ビーム30を向けて送る。具体的には、放射線ビーム30は、患者の一部分38へ向けられる。広く述べれば、部分38は、全身を含んでもよいが、一般的には、全身よりも狭く、2次元範囲および/または3次元体積により画定され得る。放射線を受けることが望ましい一部分または一部位(標的または標的領域と呼ばれることもある)が、関心領域の一例である。別のタイプの関心領域は、危険領域である。ある部分が危険領域を含む場合、放射線ビームは、その危険領域からそらされることが好ましい。このような変調は、強度変調放射線治療(「IMRT」)と呼ばれることもある。
【0015】
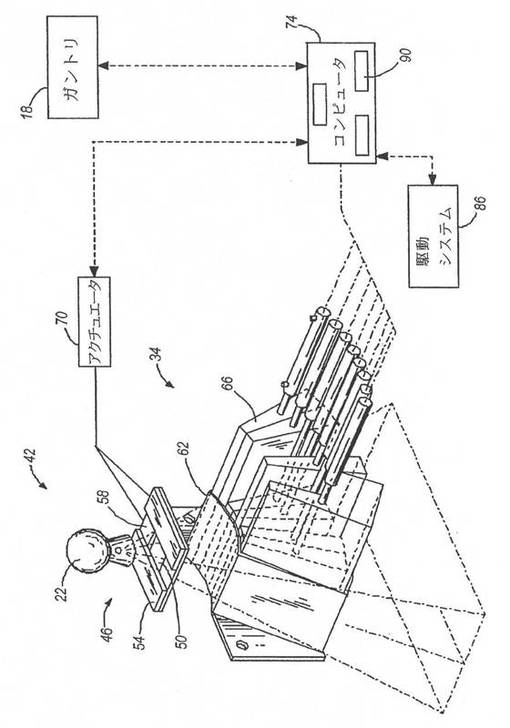
変調デバイス34は、図2に示されるようなコリメーション・デバイス42を備えることが可能である。コリメーション・デバイス42は、放射線ビーム30が通過し得る開口50のサイズを画定および調節する1組のジョー部(jaw)46を備える。ジョー部46は、上側ジョー部54および下側ジョー部58を備える。上側ジョー部54および下側ジョー部58は、開口50のサイズを調節するように移動可能である。ジョー部46の位置により、患者14へ照射されるビーム30の形状が調整される。
【0016】
一実施形態においては、図2に示されるように、変調デバイス34はマルチリーフ・コリメータ62(通称「MLC」)を備えることが可能であり、このマルチリーフ・コリメータ62は、強度変調を実施するために、ある位置間で移動するように動作可能な複数のインターレースされたリーフ66を備える。また、リーフ66は、最小開位置と最大開位置との間における任意の位置に移動され得ることに留意されたい。複数のインターレースされたリーフ66は、放射線ビーム30が患者14の部分38に達する前に、放射線ビーム30の強度、サイズ、および形状を変調する。リーフ66のそれぞれは、モータや空気弁などのようなアクチュエータ70により個別に制御され、リーフ66が放射線の通過を許可または遮断するために迅速に開閉することが可能とされる。アクチュエータ70は、コンピュータ74および/または制御装置により制御され得る。
【0017】
また、放射線療法用治療システム10は、図1に示されるように、放射線ビーム30を受けるように動作可能な、例えば、キロボルト検出器またはメガボルト検出器などのような検出器78を備えることができる。線形加速器(リニア・アクセレレータ)26および検出器78は、コンピュータ断層撮影(CT)システムとして動作して、患者14のCT画像を生成することも可能である。線形加速器26は、患者14の部分38の方へ放射線ビーム30を発する。部分38は、放射線の一部を吸収する。検出器78は、部分38により吸収された放射線量を検出または測定する。線形加速器26が患者14の周囲にて回転して患者14の方へ放射線を発すると、検出器78は、様々な角度からの吸収度データを収集する。収集された吸収度データはコンピュータ74へ伝送され、吸収度データが処理され、患者の身体組織および身体器官の画像が生成される。これらの画像は、骨、軟組織、および血管を示すことも可能である。
【0018】
また、システム10は、治療の際に患者14の少なくとも一部を支持するように動作可能な、診療台82として示されている患者支持デバイスを備えることも可能である。図示される診療台82は患者14の全身を支持するように設計されているが、本発明の他の実施形態においては、患者支持部は、全身を支持する必要はなく、治療の際に患者14の一部分のみを支持するように設計されてもよい。診療台82は、軸84(例えばY軸)に沿って、放射線領域内および放射線領域外に移動する。診療台82はまた、図に示すX軸およびZ軸に沿って移動することもできる。
【0019】
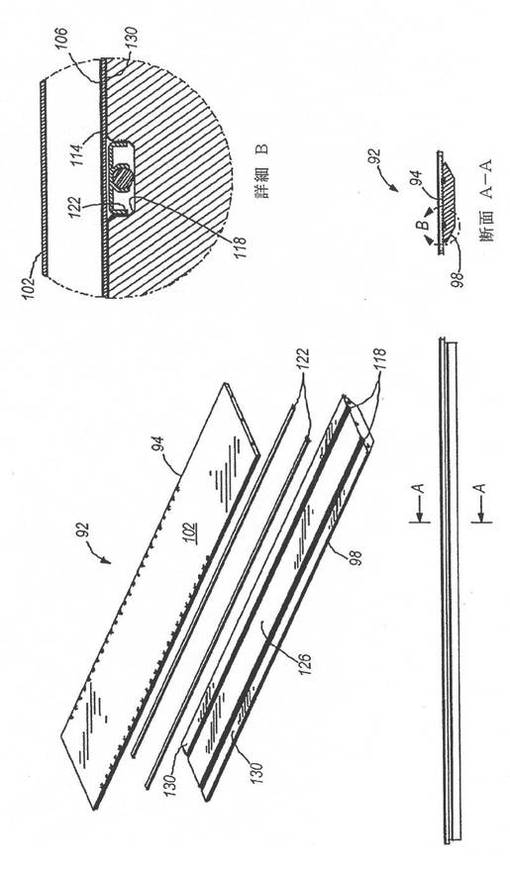
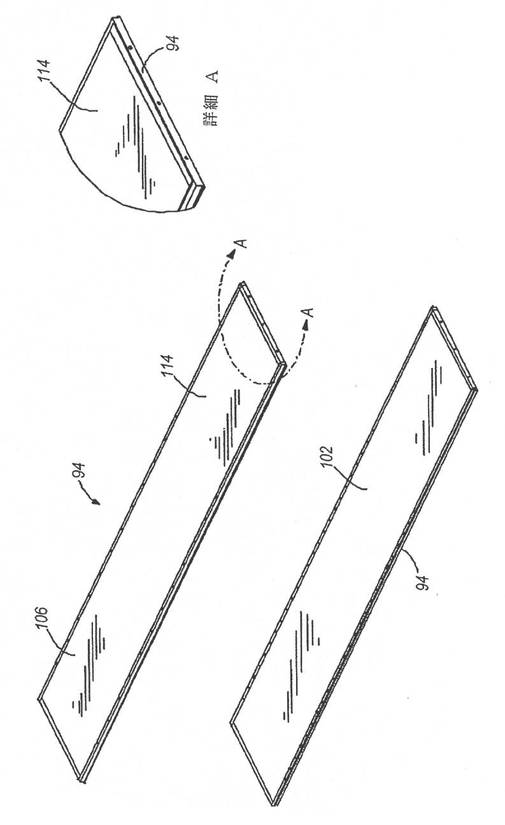
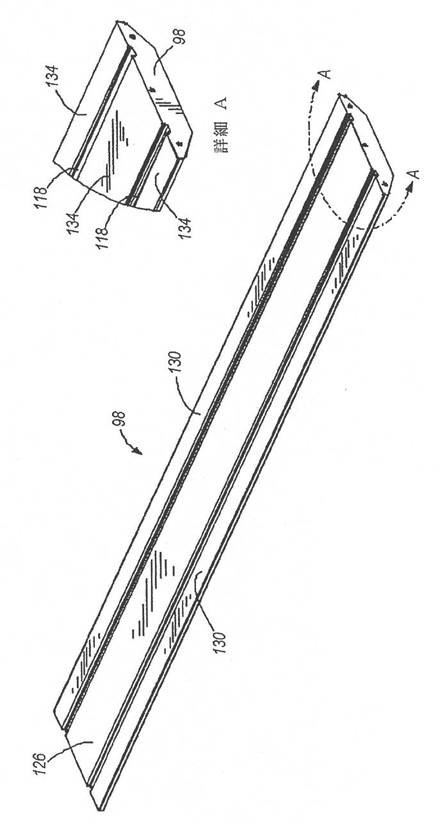
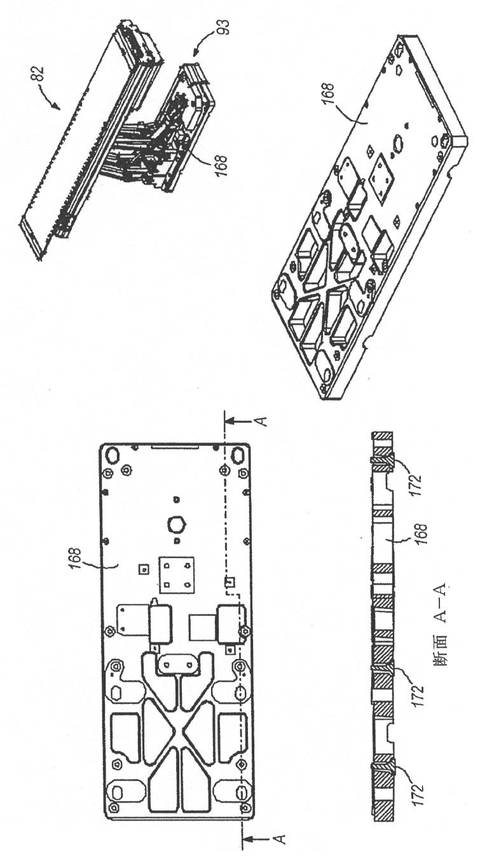
図3ないし図6を参照すると、診療台82は、プラットフォーム95を介してベース93と結合されたテーブル・アセンブリ92を備える。テーブル・アセンブリ92は、下側支持部98と可動式に結合された上側支持部94を備える。とりわけ図5を参照すると、上側支持部94は、実質的に平坦な矩形の支持部材であり、その上にて治療の際に患者が支持される。上側支持部94は、治療の際に放射線ビーム30内および放射線ビーム30外に患者を移動させるように、下側支持部98に対して移動可能である。図示される実施形態において、上側支持部94および下側支持部98は、炭素繊維複合体で構成されるが、他の適切な複合体からなる支持部も可能である。
【0020】
上側支持部94は、上側面102と、下側支持部98の上側面110に接触する下側面106とを有する。実施形態に示されるように、下側面106は、上側支持部94が下側支持部98に対して移動される際の、下側面106と下側支持部98の上側面110との間の摩擦を低減させることを意図したベアリング層114を備える。ベアリング層114およびその適用例の特定の詳細は、同時継続の米国特許出願第号(代理人整理番号第013869−9054−01号)において説明されており、その出願の全内容が参照により本明細書に組み込まれる。
【0021】
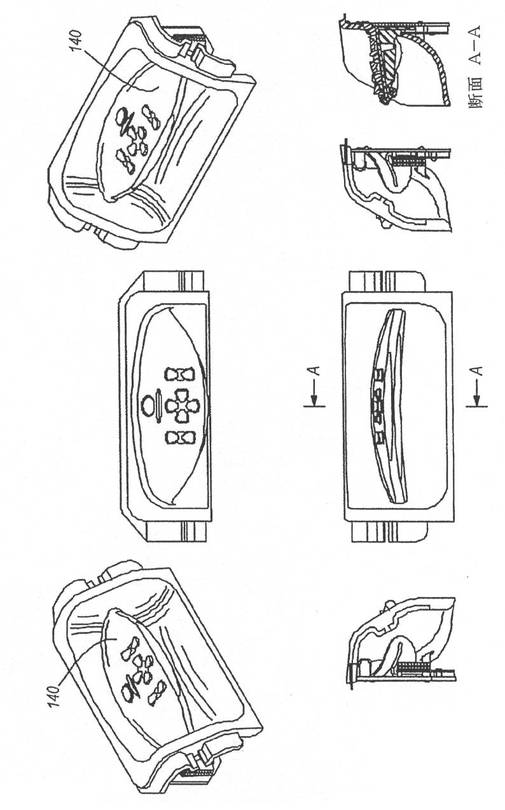
テーブル・アセンブリ92は、図1に示されるように、X、Y、およびZ方向に移動可能である。ガントリ18および放射線ビーム30に対するテーブル・アセンブリ92の位置決め、従って、患者の位置の位置決めは、患者の適切な部位へ放射線が確実に照射されるように、正確なものでなければならない。テーブル・アセンブリ92の移動は、図7ないし図10に示される制御キーパッド140を使用して診療台オペレータにより制御される。
【0022】
ユーザが、キーパッド140のボタン144を作動させると、テーブル・アセンブリ92は、ユーザの指示で移動する。従来の診療台の設計においては、液圧式リフト・システムが、Z方向にテーブル・アセンブリ92を移動させるために使用される。液圧式リフト・システムは、テーブル・アセンブリ92を下降させることに対しても何らかの制御を行なうための好都合な方法であり、システム10に電力が供給されないときに、テーブル・アセンブリ92を下降させることができるという利点を有する。患者が治療位置にある際に診療台82への電力が中断されると、テーブル・アセンブリ92は、患者が診療台から脱することが可能となるように下降させる必要があり、このような下降は、制御されて行なわれなければならない。しかしながら、液圧式システムは、実装するのにコストがかかり、あまり信頼性が高くなく、また、その運動範囲においてあまり正確でない。
【0023】
図3および図11を参照すると、本発明による診療台82は下降機構160を備え、下降機構160は、電力オフ状態においてテーブル・アセンブリ92の制御された下降を可能にする抵抗制動(ブレーキ)能力を有する。更に具体的には、下降機構160は、電気機械ローラねじ構成を使用する。この構成は、実装するのにコストが少なく、より信頼性(例えば、ローラねじの実装の信頼性)が高く、従来の液圧式リフト機構よりも正確な診療台の移動および位置決めが可能となるという利点を有する。本明細書において説明される下降機構160は、垂直方向(即ち、Z方向)の移動に関与する。
【0024】
下降機構160は、テーブル・アセンブリ92の下方への動作を制御するように、モータ170からエネルギを放散するパワー制動抵抗器(power braking resistor)を備える。制動抵抗器は減衰デバイスまたは減速デバイスとして作動し、モータ170のエネルギ出力を受け取り、電力オフ状態であってもテーブル・アセンブリ92の制御された下降を可能にする。これにより、システムへの電力が中断された場合でさえ、非線形の外部負荷の下において機械システムの線形動作を提供するフリー・ランニング(free running)・モータの調整された制御が可能となる。制動抵抗器は、テーブル・アセンブリ92に対する負荷にかかわらず、テーブル・アセンブリ92の下方への速度が同じに保たれるように、設計される。ダイナミック負荷を受ける場合でも、この速度を一定に保つことにより、動作(運動)の制御が達成される。
【0025】
下降機構160を使用する際、モータ170は、テーブル・アセンブリ92の下降プロセスの間は発電機となる(即ち、電力が制御されない場合、電力および速度は、診療台の下降と共に増加する)。これを防止するために、発電される電力に比例して加えられる負荷抵抗の変化が必要である。発電機が非常に高い負荷を有するとき、発電機は制動(ブレーキ)を開始する。抵抗の有効値は、電力抵抗器を接続および接続解除することにより変更される。電力抵抗器が、下降機構160に対して常に適用される場合、テーブル・アセンブリ92の速度は、テーブル・アセンブリ92が下降される(自由落下を模す)と増加し、それによりテーブル・アセンブリ92は、運動経路の底で衝突を起こす可能性がある。下降機構160への電力抵抗器の接続を交番させることにより、テーブル・アセンブリ92は衝突から保護される。下降機構160へ非線形の負荷を加えることにより、テーブル・アセンブリ92の速度低下は線形にされるものであり、抵抗により、以前は非線形運動であったものが線形化される。電力抵抗器が下降機構160へ接続される頻度により、制動回路内の実効抵抗が変化する。
【0026】
また、下降機構160は、ベース93のライザ168にテーブル・アセンブリ92を結合する支持アーム164を備える。実施形態において示されるように、下降機構160は2対の支持アーム164を備え、1対のアームにおける各アーム164は他方のアームに対して平行である。テーブル・アセンブリ92が、上昇および下降される際、1対のアームにおける各アーム164の長手方向軸は、他方のアームに対して平行な状態に留まり、一方の対のアームの長手方向軸により形成される平面P1は、他方の対のアームの長手方向軸により形成される平面P2と交差しない。
【0027】
いくらか詳細に述べたように、テーブル92のZ軸方向の移動は、電気機械ローラねじを使用する。Z軸運動は2重フィードバック機構により制御される。増分フィードバックはローラねじにより供給され、直接駆動エンコーダは角度を監視し、絶対的(アブソリュート)フィードバックを供給する。診療台82の全ての軸d、それらの制御機構により、ステップ移動能力を有する。Z方向においては、ステップ移動を行なうことにより、Y軸方向へのコブラ・モーション(cobra motion)が補正されることになる。
【0028】
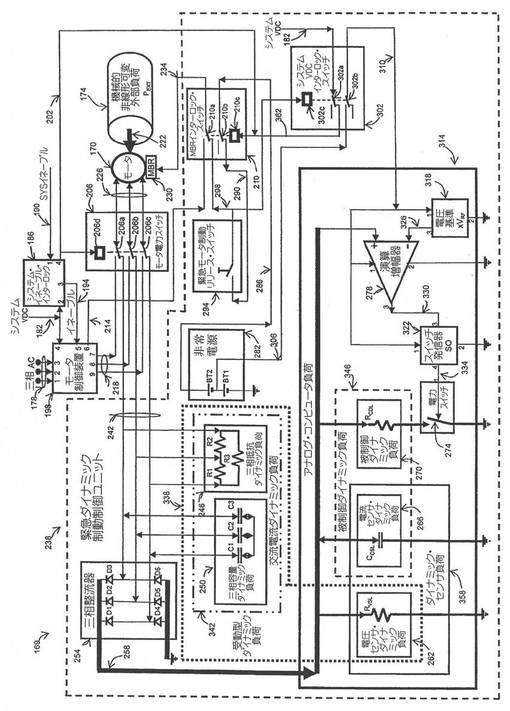
下降機構160は、図13に示されるモータ制御システム169を備える。モータ制御システム169はモータ170およびモータ制御装置198を備え、モータ制御装置198は、平常モードと、診療台82への主電力(三相ACバス178およびシステムVDCバス182)が遮断されたときの、機械的非線形可変外部負荷(mechanical non-linear variable external load)PEXT174の下における、フリー・ランニング・モータ回転発電機モードとの両方で、モータ170を制御する。図21は、機械的非線形可変外部負荷174(PEXT)の様々な曲線を示すグラフである。
【0029】
モータ制御システム169はシステム・イネーブル・インターロック186を備え、ピン1はSYSイネーブル・バス190と接続され、ピン2はVDCバス182と接続され、ピン3はイネーブル・バス194を介してモータ制御装置198のピン5と接続され、ピン4はバス202を介してモータ電力スイッチ206のコイル206dおよびモータ制動リリース(MBR)・インターロック・スイッチ210のコイル210cと接続される。
【0030】
モータ制御装置198は、三相ACバス178と接続されたピン1、ピン2、およびピン3と、システムVDCバス182と接続されたピン4と、バス214を介してMBRインターロック・スイッチ210の常開(normally-open、通常は開いている)接点210aと接続されたピン6と、三相モータ制御装置バス218を介してモータ電力スイッチ206の適切な常開接点206a、206b、206cと接続されたピン7、ピン8、およびピン9とを備える。
【0031】
モータ170は、シャフト222を介して機械的非線形可変外部負荷PEXT174と接続される。三相電力バス226は、モータ170を、モータ電力スイッチ206の適切な共通接点206a、206b、206cと接続する。モータ170は、バス234を介してMBRインターロック・スイッチ210の共通接点210aと接続されたモータ制動リリース(MBR)230を備える。
【0032】
また、モータ制御システム169は緊急ダイナミック制動制御ユニット238を備え、緊急ダイナミック制動制御ユニット238は、三相電力バス242を介してモータ電力スイッチ206の適切な常閉接点206a、206b、および206cに接続される。三角接続された三相抵抗ダイナミック負荷246が、三相電力バス242の適切な相に接続される。星型接続された三相容量ダイナミック負荷250が、三相電力バス242の適切な相に接続される。三相整流器254は、ダイオードD1−D4、D2−D5、およびD3−D6の共有点を有し、三相電力バス242の適切な相に接続される。ダイオードD4、D5、D6の共有点は接地に接続され、ダイオードD1、D2、D3の共有点は電力制御センサ・バス258に接続される。
【0033】
電力制御センサバス258は電圧センサ・ダイナミック負荷262(RVSL)と接続され、RVSLの他側は接地に接続される。また、電力制御センサバス258、電流センサ・ダイナミック負荷266(CCSL)と接続され、CCSLの他側は接地に接続される。また、電力制御センサバス258は被制御ダイナミック負荷(controlled dynamic load)270(RCDL)と接続される。RCDLの他側は、電力スイッチ274の常開接点と接続され、電力スイッチ274の共通接点は接地に接続される。更に、電力制御センサ・バス258は演算増幅器278の正入力と接続される。
【0034】
緊急ダイナミック制動制御ユニット238は非常電源282を備え、非常電源282は、直列接続された2つの再充電可能バッテリBT1、BT2を収容する。バッテリBT1の負のリードは、接地に接続され、バッテリBT2の正のリードは、バス286を介してMBRインターロック・スイッチ210の共通接点210bに接続される。常閉接点210bは、バス290を介して緊急モータ制動リリース・スイッチ294の常開接点に接続される。このスイッチ294の共通接点は、バス298を介してシステムVDCインターロック・スイッチ302のコイル302c、およびMBRインターロック・スイッチ210の常閉接点210aに接続される。バッテリBT1およびBT2の共通点は、バス306を介してシステムVDCインターロック・スイッチ302の常開接点302bに接続される。共通接点302aは、バス182を介してシステムVDCに接続され、常閉接点302aは、バス362を介してMBRインターロック・スイッチ210のコイル210cに接続される。共通接点302bはバス310に接続され、アナログ・コンピュータ負荷314を提供するものであり、電圧基準318のピン1、演算増幅器278のピン1、およびスイッチ発振器(switched oscillator、スイッチト発振器)322のピン1に接続される。電圧基準318は、ピン2により接地に接続され、ピン3によりバス326を介して演算増幅器278の負入力に接続される。演算増幅器278は、ピン2により接地に接続され、ピン3によりバス330を介してスイッチ発振器322のピン3に接続される。スイッチ発振器322は、ピン2により接地に接続され、ピン4によりバス334を介して電力スイッチ274のピン1に接続される。
【0035】
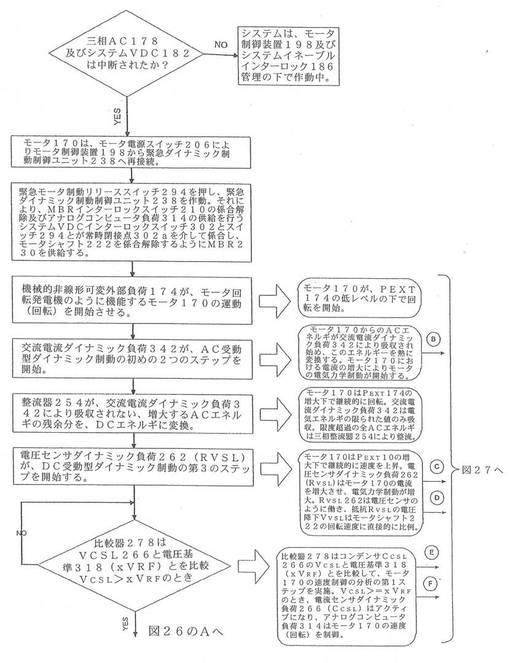
モータ170は、バス178上の三相AC電力からの信号、バス182上のシステムVDC、および、バス190上のSYSイネーブル信号を受け取ると、始動される。システム・イネーブル・インターロック186は、常閉接点302aを介して、モータ制御装置198、モータ電力スイッチ206、MBRインターロック・スイッチ210、およびシステムVDCインターロック・スイッチ302を始動させる。モータ制御装置198は、バス218、モータ電力スイッチ206の常開接点206a、206b、206c、およびバス226を介して、モータ170と通信する。モータ170は、シャフト222を介して、機械的非線形可変外部負荷PEXT174に作用を開始する。
【0036】
また、モータ制御装置198は、バス214、常開接点210a、およびバス234を介してモータ制動リリース230と通信し、モータ制動リリース230を係合解除する。バス178上の主電力三相ACおよびバス182上のシステムVDCが中断されると、スイッチ206、210は係合解除され、モータ制動リリース230は係合される。
【0037】
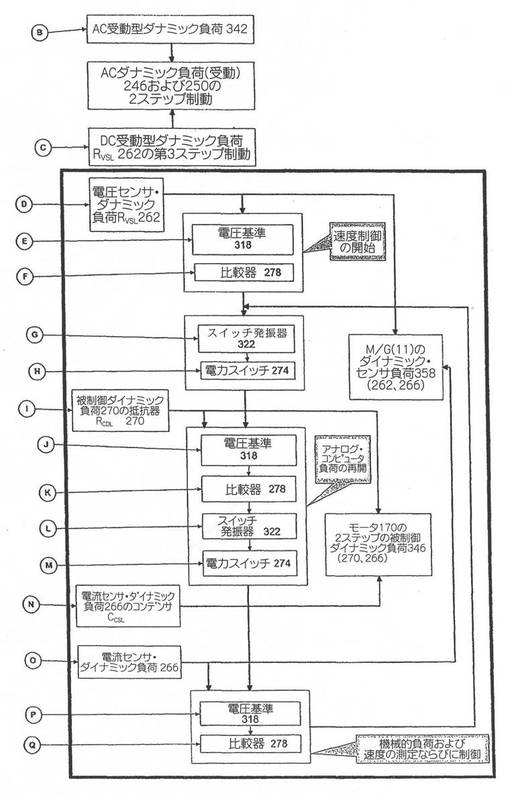
モータ170は、バス226、常時閉接点206a、206b、206cを介して、および、三相電力バス242を介して、緊急ダイナミック制動制御ユニット238と接続される。機械的非線形可変外部負荷PEXT174が、シャフト222を介してモータ170に作用を開始するときに、緊急モードを作動させるために、ユーザは、緊急モータ制動リリース・スイッチ294を押して保持する必要がある。MBRリリース・スイッチ294は、システムVDCインターロック・スイッチ302の係合されたコイル302cへの、およびMBRインターロック・スイッチ210の被係合コイル210cへの接触子302aによるスイッチ302への、バス298を介して作動される。モータは、MBR230が係合解除されると再作動される。MBR230は、MBRリリース・スイッチ294が、バス298、常閉接点210a、およびバス234を介してリリースされると、係合解除される。モータ170は、外部負荷PEXT174の下において作用を開始し、モータ170からの三相AC電圧は、受動型ダイナミック負荷338との相互作用を開始する。モータ170は、受動型ダイナミック負荷338のACダイナミック負荷342に対するダイナミック制動動作の初めの2つの段階を得る。ACダイナミック負荷342は、2つのタイプのAC負荷、即ち(1)モータからのACエネルギーを熱へと変換させる三相抵抗ダイナミック負荷246と、(2)モータ170からAC相をシフトする三相容量ダイナミック負荷250とを含む。熱放散および相シフトにより、モータ170からの電流が増加し、この電流によりモータ170の渦電流が増加し、モータ170の制動動作に影響を及ぼす。
【0038】
モータ170は、モータからのAC電圧がある一定の値に達するまで、PEXT174下において速度を継続的に上昇させ、次いで、AC電圧は、三相整流子254による整流を開始する。整流されたAC電圧は、受動型ダイナミック負荷338の電圧センサ・ダイナミック負荷262(VVSL)に対するDC受動ダイナミック制動における第3の段階を開始する。モータ170は、PEXT174下において速度の上昇を進め、DC電圧も、ある一定の値に達するまで上昇し、次いで、アナログ・コンピュータ負荷314が、ダイナミック制動動作の制御を開始する。アナログ・コンピュータ負荷314は、2つのソース、即ち(1)BT1、バス306、常開接点302b、およびバス310を介した非常電源282、ならびに(2)バス226、常閉接点206a、206b、206c、バス242、三相整流子254、および電力制御センサ・バス258を介したモータ170により、供給される。
【0039】
モータ制御システム169の作動には、2つの条件が存在する。
【0040】
条件1: xVRF>VVSL (1)
【0041】
受動型ダイナミック負荷338のみが作動している。コンデンサCCSL266の時間充電(time charge、タイム・チャージ)tCHは無限値を有することになる。
【0042】
条件2: xVRF<VVSL (2)
【0043】
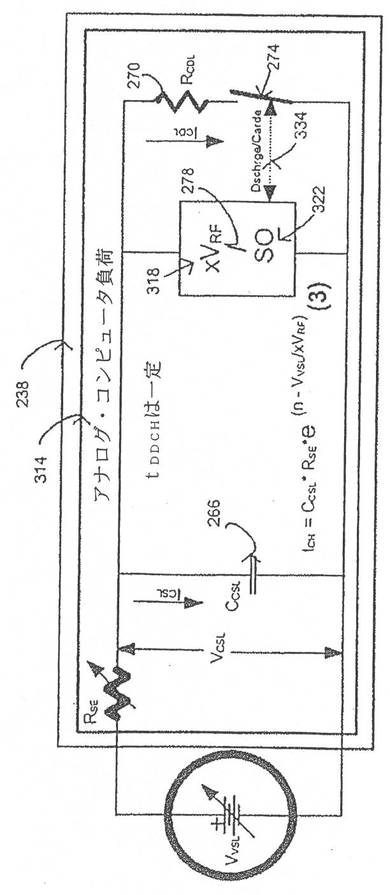
受動型ダイナミック負荷338および被制御ダイナミック負荷346は共に動作を開始し、コンデンサCCSL266の時間充電tCHは、電圧xVRF318の値まで動作する。タイム・チャージtCHのこの値は、負荷PEXT174の値に逆比例することになる。図22は、それぞれ異なる値の外部負荷PEXTの下における電流センサ負荷CCSLの、等価電圧源VVSL、電圧VCSL、および時間充電tCHの曲線を示すグラフである。
【0044】
電圧xVRFの値までのコンデンサCCSL266の時間充電tCHが図19に示されており、下記の式により決定される。
【0045】
【数1】
【0046】
ここで、RSEはセンサ等価の抵抗であり、これは、図16に示される式(4)および図18に示される式(5)により計算される。RSEは、PEXT174との関係におけるモータ170の内部抵抗を表す。
【0047】
VVSLは、モータ170のテブナン電圧源等価であり、図15に示される式(6)および図17に示される式(7)により計算される。
【0048】
nは、図20に示される式(8)(以下に提示される)により決定される。
【0049】
n=PINT/PEXT (8)
【0050】
ここで、nは、機械システム係数であり、n=0・・・1(nは正の数)、
PINTは、システム機械内部抵抗350、
PEXTは、機械的非線形可変外部負荷174、
xVRFは、電圧基準318の値、
xは、様々なモータおよび様々な制動速度制御の値について緊急ダイナミック制動制御ユニット238の調節を可能にする調節係数
である。
【0051】
図23は、外部負荷PEXTの様々な値の下における受動型ダイナミック負荷の電流および被制御ダイナミック負荷の電流を示すグラフである。電流センサ・ダイナミック負荷266の図19に示されるICSLは、PEXT174の値に対して直接的に比例する。
【0052】
【数2】
【0053】
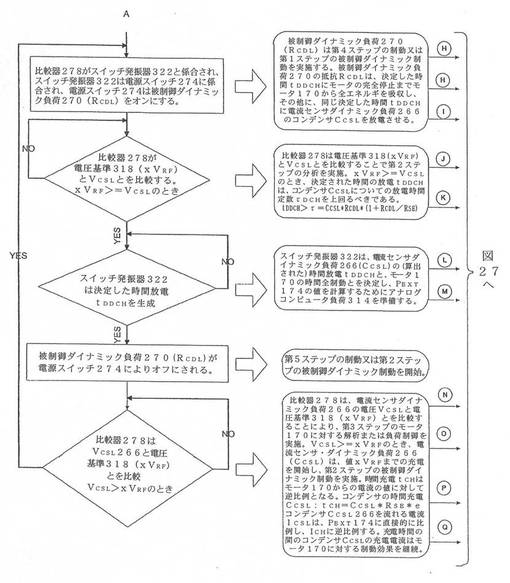
演算増幅器278は、コンデンサ・センサ・ダイナミック負荷(CCSL)262の電圧の変化を制御し、それを、電圧基準(xVRF)318の電圧の値と比較する。コンデンサCCSL262の電圧VCSLが、xVRF318の値以上になると、演算増幅器278は、スイッチ発振器322を始動させる。スイッチ発振器322は、電力スイッチ274の所定時間tDDCHで切り替えられる。電力スイッチ274は、被制御ダイナミック負荷270を接地に接続し、これにより、被制御ダイナミック負荷270に対するモータ170のダイナミック制動動作の第4の段階が開始される。被制御ダイナミック負荷270は、電流センサ・ダイナミック負荷266のコンデンサCCSLを放電する。所定の時間放電tDDCHは、放電コンデンサCCSLの時定数よりも大きなものであるべきである。
【0054】
tDDCH>τDCH=CCSL*RCDL*(1+RDCL/RSE) (10)
【0055】
演算増幅器278がコンデンサ・センサ・ダイナミック負荷262の電圧を制御する所定の時間tDDCHの間、演算増幅器278は、CCSLの電圧と電圧基準318(xVRF)の電圧の値とを、電圧xVRFが値CCSL262以上となるまで、継続的に比較する。所定の時間tDDCHが経過すると、スイッチ発振器322は電力スイッチ274を接続解除し、これにより、接地からRCDL270が接続解除され、これにより、電流センサ・ダイナミック負荷266(CCSL)に対するモータ170のダイナミック制動動作の第5の段階が開始される。
【0056】
電流センサ・ダイナミック負荷266(CCSL)のコンデンサを通る瞬間電流IINSTは、下記の式により決定される。
【0057】
【数3】
【0058】
電流センサ・ダイナミック負荷266(CCSL)に対する電圧が再び電圧基準318(xVRF)の値以上になると、演算増幅器278はスイッチ発振器322を再始動させる。スイッチ発振器322は、電力スイッチ274の所定の時間tDDCHで切り替えられる。電力スイッチ274は、被制御ダイナミック負荷270に接続されて接地し、これにより、被制御ダイナミック負荷270に対するモータ170のダイナミック制動動作の第4の段階が再び開始される。被制御ダイナミック負荷270は、電流センサ・ダイナミック負荷266(CCSL)のコンデンサを放電させる。このサイクルは、モータ170のシャフト222および機械的非線形可変外部負荷PEXT174に対して継続し、このサイクルの間に、緊急ダイナミック制動制御ユニット238は、機械的システム全体の線形運動を管理する。図24は、外部負荷PEXTの様々な値の下でのモータ速度制御を示すグラフである。
【0059】
本発明の固有の特徴の幾つかは以下のものを含む。
【0060】
(1)モータ回転発電機170が、制動力を生成するためのソースであり、その条件に関する情報のソースである。
【0061】
(2)負荷電力リンク、センサ・リンク、および制御リンクが、同じバス258上にある。
【0062】
(3)電圧センサ・ダイナミック負荷262(VCSL)および電流センサ・ダイナミック負荷266(CCSL)は多機能である。
(a)電圧センサ・ダイナミック負荷262(VCSL)は、システムの受動型ダイナミック負荷338のDC受動負荷であり、電圧センサは、それ自体の電圧降下のようにモータ170の内部抵抗を認識する。
(b)電流センサ・ダイナミック負荷266(CCSL)は、3機能のデバイスである。即ち、アナログ・コンピュータ負荷314における積分器と、電圧基準318(xVRF)の或る一定の値までコンデンサの時間充電としてモータ170の電流値を認識する電流センサと、アナログ・コンピュータ負荷314における被制御ダイナミック負荷とである。
【0063】
(4)モータのダイナミック制動は複数の段階で実施される。
(a)受動型ダイナミック負荷338はACダイナミック負荷342を含み、ACダイナミック負荷342は、三相容量ダイナミック負荷250(受動型制動−第1段階)、および三相抵抗ダイナミック負荷246(受動型制動−第2段階)、およびDCダイナミック負荷を含み、これは、電圧センサ・ダイナミック負荷262(受動型制動−第3段階)を含む。
(b)被制御ダイナミック負荷346は、被制御ダイナミック負荷270(被制御型制動−第4段階)、および電流センサ・ダイナミック負荷266(被制御型制動−第5段階)を含む。
【0064】
(6)電流センサ・ダイナミック負荷266のコンデンサは、モータ170に対して無効負荷ではなく、その理由は、コンデンサが、モータ170から充電され、被制御ダイナミック負荷270の抵抗器(1または複数)を介して放電されるからであり、これは、コンデンサは、充電されたエネルギをモータ170へ戻さないことを意味する。コンデンサは、非線形の負荷の状態を継続する。
【0065】
(7)被制御ダイナミック負荷346は2サイクル被制御ダイナミック負荷を備え、これは、モータ170に対する2サイクル被制御ダイナミック制動動作を生じさせる。第1のサイクルは被制御ダイナミック負荷270により制御され、モータ170に対してダイナミック制動の動作を行い、所定の時間tDDCHの間に電流センサ・ダイナミック負荷266(CCSL)のコンデンサを放電させる。第2のサイクルは電流センサ・ダイナミック負荷266により制御され、電流センサ・ダイナミック負荷266のコンデンサの充電時間tCHの間にモータ170に対するダイナミック制動の動作を行う。
【0066】
(8)モータ170は、モータ回転発電機として作動するとき、以下の特性を有する。
(a)モータ170は電圧源となる。
(b)電圧源の内部抵抗が可変であり、モータの速度およびモータに対する機械的負荷に対して逆比例である。このモードにおいては、モータ170はセンサのように働き、電圧がモータの速度を反映し、電流がモータのシャフト222に対する機械的負荷を反映する。
【0067】
(9)アナログ・コンピュータ負荷314は、アナログ・コンピュータおよび被制御ダイナミック負荷の特性の組み合わせを含む。
【0068】
図25ないし図27は、本発明の方法の一実施形態を示す流れ図および注釈である。
【0069】
本発明の更なる特徴は特許請求の範囲においても見ることができる。
【技術分野】
【0001】
本出願は、2007年9月4日に出願された米国仮特許出願第60/969,904号に基づく優先権を主張するものであり、その出願の全内容が参照により本明細書に組み込まれる。
【0002】
本発明は、放射線療法の撮像および治療のシステムに関する。より具体的には、本発明は、そのようなシステムと共に使用するための患者支持デバイスに関する。
【背景技術】
【0003】
放射線療法用の医療設備は、高エネルギー放射線により潰瘍組織を治療する。線量および線量配置は、潰瘍が破壊されるのに十分な放射線を受けるように、ならびに、周囲および隣接する非潰瘍組織に対する損傷が最小限に抑えられるように、正確に制御されなければならない。強度変調放射線治療(IMRT:intensity modulated radiation therapy)は、強度および/またはエネルギーがそれぞれ別個に制御され得る複数の放射線により、患者を治療する。これらの放射線は、患者に対して様々な角度から送られ、組み合わされ、所望される線量パターンを形成する。外部放射線源を用いる放射線療法においては、患者の外部にある放射線源が、内部の潰瘍を治療する。この外部放射線源は、通常は、潰瘍部位にのみにビームが向かうようにコリメートされる。典型的には、放射線源は、高エネルギーX線、特定の線形加速器からの電子、または高度に集束された放射性同位元素からのガンマ線の何れかを含むが、他のタイプの放射線源も可能である。
【0004】
患者に対する放射線照射の位置を制御する1つの方式は、1または複数の方向に調節可能な診療台などのような患者支持デバイスを使用することによるものである。患者支持デバイスの使用は、医療分野においてよく知られており、同様の患者支持デバイスが、CTスキャン・デバイスおよび磁気共鳴撮像装置(MRI)において使用される。患者支持デバイスにより、患者を、照射される放射線の領域内または領域外に移動させることが可能となり、場合によっては、放射線治療の最中に患者の位置を調節することが可能となる。
【発明の概要】
【0005】
診療台などの患者支持デバイスがこのようにして使用されるとき、反映することを必要とする多数の変数が存在する。例えば、構造材料、および診療台を操作するために必要な適切な電子機器の構成を慎重に選択すること、および診療台の円滑な操作および診療台の位置を正確に測定すること(診療台が複数の可動部分を有するとき)を確実にしなければならない。これらの特徴が放射線照射の環境において十分に考慮されたとき、患者支持デバイスは、患者に対する成果を向上させることにおいて重要なツールになり得る。
【0006】
本発明は患者支持デバイスを提供し、患者支持デバイスは、ベースと、ベースにより支持され、患者を支持するように構成されたテーブル・アセンブリと、テーブル・アセンブリと電気的に結合され、テーブル・アセンブリの動作を制御するように動作するモータと、モータと電気的に結合され、モータへの電力が中断されるとモータを制動するための信号を生成するように動作する制御装置と、制動(ブレーキ)制御モジュールとを備える。制動制御モジュールは、モータおよび制御装置と電気的に結合され、モータの再作動時に動作可能である。この制動制御モジュールは、モータと電気的に結合され、モータの速度を上昇させる受動型動的(ダイナミック)負荷モジュール(passive dynamic load module)と、モータと電気的に結合され、AC電圧が所定の値に達するとAC電圧をDC電圧に変換するように動作する整流モジュールと、受動型ダイナミック負荷モジュールと電気的に結合された被制御ダイナミック負荷モジュール(controlled dynamic load module)と、被制御ダイナミック負荷モジュールに電気的に結合され、モータの制動動作を制御するように、モータと被制御ダイナミック負荷モジュールとを接続および接続解除するように動作するスイッチとを備える。
【0007】
別の態様においては、本発明は、患者支持デバイスおよび制御システムを備える放射線療法用治療システムを提供する。患者支持デバイスは、患者を支持するように構成されたテーブル・アセンブリと、テーブル・アセンブリと電気的に接続され、テーブル・アセンブリの動作を制御するように動作するモータとを備える。制御システムは、モータと電気的に接続され、診療台への電力が中断されると、モータの速度を制御し、テーブル・アセンブリの線形運動を生じさせるように動作する。
【0008】
本発明の他の態様は、詳細な説明および添付の図面を精査することにより明らかになろう。
【図面の簡単な説明】
【0009】
【図1】図1は、放射線療法用治療システムの斜視図である。
【図2】図2は、図1に図示される放射線療法用治療システムにおいて使用することが可能なマルチリーフ・コリメータの斜視図である。
【図3】図3は、図1のシステムと共に使用するための患者支持デバイスの斜視図である。
【図4】図4は、図3の患者支持デバイスのテーブル・アセンブリの分解図である。
【図5】図5は、図4のテーブル・アセンブリの上側支持部の斜視図である。
【図6】図6は、図4のテーブル・アセンブリの下側支持部の斜視図である。
【図7】図7は、図1の患者支持デバイスと共に使用するための制御キーパッドの様々な図である。
【図8】図8は、図7のキーパッドの分解図である。
【図9】図9は、図7のキーパッドの正面図であり、制御ボタンを更に詳細に示す。
【図10】図10は、図7のキーパッドの斜視図であり、患者支持デバイスのオペレータによるボタンの操作を示す。
【図11】図11は、図3の患者支持デバイスの斜視図であり、下方位置にあるところを示す。
【図12】図12は、図3の患者支持デバイスのライザを示す。
【図13】図13は、本発明による1つの例示的なモータ制御システムの概略図である。
【図14】図14は、本発明による緊急ダイナミック制動制御ユニットの制御下において、モータ回転発電機(motor−turned−generator)としてフリー・ランニング・モードでモータが作動する、1つの例示的なモータ制御システムにおける方法を示す等価概略図である。
【図15】図15は、モータAC電圧源をDC電圧源VTH1に変換する1つの例示的なテブナン(Thevenin)等価の方法を示す等価概略図である。
【図16】図16は、RM、RAC−DC、およびRACLをRTH1に変換する1つの例示的なテブナン等価抵抗の方法を示す等価概略図である。
【図17】図17は、DC電圧源VTH1を電圧源VVSLに変換する1つの例示的なテブナン等価の方法を示す等価概略図である。
【図18】図18は、RTH1およびRVSLをRSEセンサ等価に変換する1つの例示的なテブナン等価抵抗の方法を示す等価概略図である。
【図19】図19は、アナログ・コンピュータ負荷がアクティブであるときi緊急ダイナミック制動制御ユニットの制御下でフリー・ランニング・モードでモータが作動するときの、1つの例示的なモータ制御システムを示す概略図である。
【図20】図20は、外部抵抗力PEXTとシステム機械抵抗力PINTと電気力学抵抗力PEDとの間の1つの例示的な力配分を示す図である。
【図21】図21は、機械的非線形可変外部負荷の様々な曲線を示すグラフである。
【図22】図22は、外部負荷PEXTの様々な値の下における電流センサ負荷CCSLに関する等価電圧源VVSL、電圧VCSL、およびタイム・チャージtCHの曲線を示すグラフである。
【図23】図23は、外部負荷PEXTの様々な値の下における受動型ダイナミック負荷に対する電流および被制御ダイナミック負荷に対する電流を示すグラフである。
【図24】図24は、外部負荷PEXTの様々な値の下でのモータ速度制御の1つの方法を示すグラフである。
【図25】図25〜27は、本発明の1つの方法の実施形態を示す流れ図および注釈である。
【図26】図25〜27は、本発明の1つの方法の一実施形態を示す流れ図および注釈である。
【図27】図25〜27は、本発明の1つの方法の一実施形態を示す流れ図および注釈である。
【発明を実施するための形態】
【0010】
本発明の実施形態の詳細な説明を行う前に、本発明はその適用が、以下の説明において示される、または以下の図面において示される構成要素の構造および構成の詳細に限定されないことを理解されたい。本発明は、他の実施形態が可能であり、様々な様式での実施または実現が可能である。また、本明細書において使用される術語および用語は説明のためのものであり、限定的なものとして見なされるべきではないことを理解されたい。本明細書において、「含む」、「備える」、「有する」、およびそれらの変化した語が使用される場合には、以降に挙げられる物およびその均等物、ならびに追加的な物が包含される。明示されない限り、または他の様式で限定されない限り、「取り付けられた」、「接続された」、「支持された」、および「結合された」、ならびにそれらの変化した語は広義に使用され、直接的ならびに間接的な、取付け、接続、支持、および結合を包含する。
【0011】
本明細書において、図面を説明する上で上側、下側、下方向、上方向、後方、底部、前部、後部などのような、方向に関する参照がなされることがあるが、これらの参照は、便宜上の理由により図面(普通に見たとき)に対してなされる。これらの方向は、文字通り理解されることも、何らかの形態に本発明を限定することも意図されていない。更に、本明細書において、「第1の」、「第2の」、「第3の」などの語は、説明のために使用されるものであり、相対的な重要性や優位性を指示するものではなく、意図するものではない。
【0012】
更に、本発明の実施形態は、説明上の理由により、それらの構成要素の大半が専らハードウェアとして実装されたものとして示され説明され得る、ハードウェア、ソフトウェア、および電子構成要素または電子モジュールを含むことを理解されたい。しかしながら、当業者には、この詳細な説明を読めば、少なくとも1つの実施形態において、本発明の電子ベースの態様をソフトウェアとして実装でき得ることが理解されよう。従って、複数のハードウェア・ベース・デバイスおよびソフトウェア・ベース・デバイス、ならびに複数の異なる構造コンポーネントが本発明を実施するために使用され得ることに、留意されたい。更に、以降の段落において説明されるように、図面に示される特定の機械的構成は、本発明の実施形態を例示することを意図しており、他の代替の機械的構成も可能である。
【0013】
図1は、患者14に対して放射線療法を施すことが可能な放射線療法用治療システム10を示す。放射線療法による治療は、光子ベースの放射線療法、近接照射療法、電子ビーム療法、光子療法、中性子療法、粒子療法、または他のタイプの治療法を含み得る。放射線療法用治療システム10はガントリ18を含む。ガントリ18は放射線モジュール22を支持することが可能であり、放射線モジュール22は、放射線源24、および、放射線のビーム30を生成するように動作可能な線形加速器26(別称「リニアック」)を備えることが可能である。図に示されるガントリ18はリング型ガントリであり、全360°の弧を通って延び、完全なリングまたは円を形成するが、他のタイプの取付け構成も使用されてよい。例えば、C型の部分リング型ガントリやロボット・アームを使用することが可能である。また、患者14に対して様々な回転位置および/または軸方向位置において放射線モジュール22を位置決めすることが可能な任意の他のフレームワークが使用されてもよい。更に、放射線源24は、ガントリ18の形状に従わない経路を移動してよい。例えば、放射線源24は、図示されるガントリ18が略円形の形状であっても、非円形経路を移動してよい。示される実施形態のガントリ18はガントリ開口32を画定し、その開口の中を、患者14が治療の際に移動する。
【0014】
放射線モジュール22は、放射線ビーム30を変更または変調するように動作可能な変調デバイス34も備えることが可能である。変調デバイス34は、放射線ビーム30の変調を行い、患者14の方へ放射線ビーム30を向けて送る。具体的には、放射線ビーム30は、患者の一部分38へ向けられる。広く述べれば、部分38は、全身を含んでもよいが、一般的には、全身よりも狭く、2次元範囲および/または3次元体積により画定され得る。放射線を受けることが望ましい一部分または一部位(標的または標的領域と呼ばれることもある)が、関心領域の一例である。別のタイプの関心領域は、危険領域である。ある部分が危険領域を含む場合、放射線ビームは、その危険領域からそらされることが好ましい。このような変調は、強度変調放射線治療(「IMRT」)と呼ばれることもある。
【0015】
変調デバイス34は、図2に示されるようなコリメーション・デバイス42を備えることが可能である。コリメーション・デバイス42は、放射線ビーム30が通過し得る開口50のサイズを画定および調節する1組のジョー部(jaw)46を備える。ジョー部46は、上側ジョー部54および下側ジョー部58を備える。上側ジョー部54および下側ジョー部58は、開口50のサイズを調節するように移動可能である。ジョー部46の位置により、患者14へ照射されるビーム30の形状が調整される。
【0016】
一実施形態においては、図2に示されるように、変調デバイス34はマルチリーフ・コリメータ62(通称「MLC」)を備えることが可能であり、このマルチリーフ・コリメータ62は、強度変調を実施するために、ある位置間で移動するように動作可能な複数のインターレースされたリーフ66を備える。また、リーフ66は、最小開位置と最大開位置との間における任意の位置に移動され得ることに留意されたい。複数のインターレースされたリーフ66は、放射線ビーム30が患者14の部分38に達する前に、放射線ビーム30の強度、サイズ、および形状を変調する。リーフ66のそれぞれは、モータや空気弁などのようなアクチュエータ70により個別に制御され、リーフ66が放射線の通過を許可または遮断するために迅速に開閉することが可能とされる。アクチュエータ70は、コンピュータ74および/または制御装置により制御され得る。
【0017】
また、放射線療法用治療システム10は、図1に示されるように、放射線ビーム30を受けるように動作可能な、例えば、キロボルト検出器またはメガボルト検出器などのような検出器78を備えることができる。線形加速器(リニア・アクセレレータ)26および検出器78は、コンピュータ断層撮影(CT)システムとして動作して、患者14のCT画像を生成することも可能である。線形加速器26は、患者14の部分38の方へ放射線ビーム30を発する。部分38は、放射線の一部を吸収する。検出器78は、部分38により吸収された放射線量を検出または測定する。線形加速器26が患者14の周囲にて回転して患者14の方へ放射線を発すると、検出器78は、様々な角度からの吸収度データを収集する。収集された吸収度データはコンピュータ74へ伝送され、吸収度データが処理され、患者の身体組織および身体器官の画像が生成される。これらの画像は、骨、軟組織、および血管を示すことも可能である。
【0018】
また、システム10は、治療の際に患者14の少なくとも一部を支持するように動作可能な、診療台82として示されている患者支持デバイスを備えることも可能である。図示される診療台82は患者14の全身を支持するように設計されているが、本発明の他の実施形態においては、患者支持部は、全身を支持する必要はなく、治療の際に患者14の一部分のみを支持するように設計されてもよい。診療台82は、軸84(例えばY軸)に沿って、放射線領域内および放射線領域外に移動する。診療台82はまた、図に示すX軸およびZ軸に沿って移動することもできる。
【0019】
図3ないし図6を参照すると、診療台82は、プラットフォーム95を介してベース93と結合されたテーブル・アセンブリ92を備える。テーブル・アセンブリ92は、下側支持部98と可動式に結合された上側支持部94を備える。とりわけ図5を参照すると、上側支持部94は、実質的に平坦な矩形の支持部材であり、その上にて治療の際に患者が支持される。上側支持部94は、治療の際に放射線ビーム30内および放射線ビーム30外に患者を移動させるように、下側支持部98に対して移動可能である。図示される実施形態において、上側支持部94および下側支持部98は、炭素繊維複合体で構成されるが、他の適切な複合体からなる支持部も可能である。
【0020】
上側支持部94は、上側面102と、下側支持部98の上側面110に接触する下側面106とを有する。実施形態に示されるように、下側面106は、上側支持部94が下側支持部98に対して移動される際の、下側面106と下側支持部98の上側面110との間の摩擦を低減させることを意図したベアリング層114を備える。ベアリング層114およびその適用例の特定の詳細は、同時継続の米国特許出願第号(代理人整理番号第013869−9054−01号)において説明されており、その出願の全内容が参照により本明細書に組み込まれる。
【0021】
テーブル・アセンブリ92は、図1に示されるように、X、Y、およびZ方向に移動可能である。ガントリ18および放射線ビーム30に対するテーブル・アセンブリ92の位置決め、従って、患者の位置の位置決めは、患者の適切な部位へ放射線が確実に照射されるように、正確なものでなければならない。テーブル・アセンブリ92の移動は、図7ないし図10に示される制御キーパッド140を使用して診療台オペレータにより制御される。
【0022】
ユーザが、キーパッド140のボタン144を作動させると、テーブル・アセンブリ92は、ユーザの指示で移動する。従来の診療台の設計においては、液圧式リフト・システムが、Z方向にテーブル・アセンブリ92を移動させるために使用される。液圧式リフト・システムは、テーブル・アセンブリ92を下降させることに対しても何らかの制御を行なうための好都合な方法であり、システム10に電力が供給されないときに、テーブル・アセンブリ92を下降させることができるという利点を有する。患者が治療位置にある際に診療台82への電力が中断されると、テーブル・アセンブリ92は、患者が診療台から脱することが可能となるように下降させる必要があり、このような下降は、制御されて行なわれなければならない。しかしながら、液圧式システムは、実装するのにコストがかかり、あまり信頼性が高くなく、また、その運動範囲においてあまり正確でない。
【0023】
図3および図11を参照すると、本発明による診療台82は下降機構160を備え、下降機構160は、電力オフ状態においてテーブル・アセンブリ92の制御された下降を可能にする抵抗制動(ブレーキ)能力を有する。更に具体的には、下降機構160は、電気機械ローラねじ構成を使用する。この構成は、実装するのにコストが少なく、より信頼性(例えば、ローラねじの実装の信頼性)が高く、従来の液圧式リフト機構よりも正確な診療台の移動および位置決めが可能となるという利点を有する。本明細書において説明される下降機構160は、垂直方向(即ち、Z方向)の移動に関与する。
【0024】
下降機構160は、テーブル・アセンブリ92の下方への動作を制御するように、モータ170からエネルギを放散するパワー制動抵抗器(power braking resistor)を備える。制動抵抗器は減衰デバイスまたは減速デバイスとして作動し、モータ170のエネルギ出力を受け取り、電力オフ状態であってもテーブル・アセンブリ92の制御された下降を可能にする。これにより、システムへの電力が中断された場合でさえ、非線形の外部負荷の下において機械システムの線形動作を提供するフリー・ランニング(free running)・モータの調整された制御が可能となる。制動抵抗器は、テーブル・アセンブリ92に対する負荷にかかわらず、テーブル・アセンブリ92の下方への速度が同じに保たれるように、設計される。ダイナミック負荷を受ける場合でも、この速度を一定に保つことにより、動作(運動)の制御が達成される。
【0025】
下降機構160を使用する際、モータ170は、テーブル・アセンブリ92の下降プロセスの間は発電機となる(即ち、電力が制御されない場合、電力および速度は、診療台の下降と共に増加する)。これを防止するために、発電される電力に比例して加えられる負荷抵抗の変化が必要である。発電機が非常に高い負荷を有するとき、発電機は制動(ブレーキ)を開始する。抵抗の有効値は、電力抵抗器を接続および接続解除することにより変更される。電力抵抗器が、下降機構160に対して常に適用される場合、テーブル・アセンブリ92の速度は、テーブル・アセンブリ92が下降される(自由落下を模す)と増加し、それによりテーブル・アセンブリ92は、運動経路の底で衝突を起こす可能性がある。下降機構160への電力抵抗器の接続を交番させることにより、テーブル・アセンブリ92は衝突から保護される。下降機構160へ非線形の負荷を加えることにより、テーブル・アセンブリ92の速度低下は線形にされるものであり、抵抗により、以前は非線形運動であったものが線形化される。電力抵抗器が下降機構160へ接続される頻度により、制動回路内の実効抵抗が変化する。
【0026】
また、下降機構160は、ベース93のライザ168にテーブル・アセンブリ92を結合する支持アーム164を備える。実施形態において示されるように、下降機構160は2対の支持アーム164を備え、1対のアームにおける各アーム164は他方のアームに対して平行である。テーブル・アセンブリ92が、上昇および下降される際、1対のアームにおける各アーム164の長手方向軸は、他方のアームに対して平行な状態に留まり、一方の対のアームの長手方向軸により形成される平面P1は、他方の対のアームの長手方向軸により形成される平面P2と交差しない。
【0027】
いくらか詳細に述べたように、テーブル92のZ軸方向の移動は、電気機械ローラねじを使用する。Z軸運動は2重フィードバック機構により制御される。増分フィードバックはローラねじにより供給され、直接駆動エンコーダは角度を監視し、絶対的(アブソリュート)フィードバックを供給する。診療台82の全ての軸d、それらの制御機構により、ステップ移動能力を有する。Z方向においては、ステップ移動を行なうことにより、Y軸方向へのコブラ・モーション(cobra motion)が補正されることになる。
【0028】
下降機構160は、図13に示されるモータ制御システム169を備える。モータ制御システム169はモータ170およびモータ制御装置198を備え、モータ制御装置198は、平常モードと、診療台82への主電力(三相ACバス178およびシステムVDCバス182)が遮断されたときの、機械的非線形可変外部負荷(mechanical non-linear variable external load)PEXT174の下における、フリー・ランニング・モータ回転発電機モードとの両方で、モータ170を制御する。図21は、機械的非線形可変外部負荷174(PEXT)の様々な曲線を示すグラフである。
【0029】
モータ制御システム169はシステム・イネーブル・インターロック186を備え、ピン1はSYSイネーブル・バス190と接続され、ピン2はVDCバス182と接続され、ピン3はイネーブル・バス194を介してモータ制御装置198のピン5と接続され、ピン4はバス202を介してモータ電力スイッチ206のコイル206dおよびモータ制動リリース(MBR)・インターロック・スイッチ210のコイル210cと接続される。
【0030】
モータ制御装置198は、三相ACバス178と接続されたピン1、ピン2、およびピン3と、システムVDCバス182と接続されたピン4と、バス214を介してMBRインターロック・スイッチ210の常開(normally-open、通常は開いている)接点210aと接続されたピン6と、三相モータ制御装置バス218を介してモータ電力スイッチ206の適切な常開接点206a、206b、206cと接続されたピン7、ピン8、およびピン9とを備える。
【0031】
モータ170は、シャフト222を介して機械的非線形可変外部負荷PEXT174と接続される。三相電力バス226は、モータ170を、モータ電力スイッチ206の適切な共通接点206a、206b、206cと接続する。モータ170は、バス234を介してMBRインターロック・スイッチ210の共通接点210aと接続されたモータ制動リリース(MBR)230を備える。
【0032】
また、モータ制御システム169は緊急ダイナミック制動制御ユニット238を備え、緊急ダイナミック制動制御ユニット238は、三相電力バス242を介してモータ電力スイッチ206の適切な常閉接点206a、206b、および206cに接続される。三角接続された三相抵抗ダイナミック負荷246が、三相電力バス242の適切な相に接続される。星型接続された三相容量ダイナミック負荷250が、三相電力バス242の適切な相に接続される。三相整流器254は、ダイオードD1−D4、D2−D5、およびD3−D6の共有点を有し、三相電力バス242の適切な相に接続される。ダイオードD4、D5、D6の共有点は接地に接続され、ダイオードD1、D2、D3の共有点は電力制御センサ・バス258に接続される。
【0033】
電力制御センサバス258は電圧センサ・ダイナミック負荷262(RVSL)と接続され、RVSLの他側は接地に接続される。また、電力制御センサバス258、電流センサ・ダイナミック負荷266(CCSL)と接続され、CCSLの他側は接地に接続される。また、電力制御センサバス258は被制御ダイナミック負荷(controlled dynamic load)270(RCDL)と接続される。RCDLの他側は、電力スイッチ274の常開接点と接続され、電力スイッチ274の共通接点は接地に接続される。更に、電力制御センサ・バス258は演算増幅器278の正入力と接続される。
【0034】
緊急ダイナミック制動制御ユニット238は非常電源282を備え、非常電源282は、直列接続された2つの再充電可能バッテリBT1、BT2を収容する。バッテリBT1の負のリードは、接地に接続され、バッテリBT2の正のリードは、バス286を介してMBRインターロック・スイッチ210の共通接点210bに接続される。常閉接点210bは、バス290を介して緊急モータ制動リリース・スイッチ294の常開接点に接続される。このスイッチ294の共通接点は、バス298を介してシステムVDCインターロック・スイッチ302のコイル302c、およびMBRインターロック・スイッチ210の常閉接点210aに接続される。バッテリBT1およびBT2の共通点は、バス306を介してシステムVDCインターロック・スイッチ302の常開接点302bに接続される。共通接点302aは、バス182を介してシステムVDCに接続され、常閉接点302aは、バス362を介してMBRインターロック・スイッチ210のコイル210cに接続される。共通接点302bはバス310に接続され、アナログ・コンピュータ負荷314を提供するものであり、電圧基準318のピン1、演算増幅器278のピン1、およびスイッチ発振器(switched oscillator、スイッチト発振器)322のピン1に接続される。電圧基準318は、ピン2により接地に接続され、ピン3によりバス326を介して演算増幅器278の負入力に接続される。演算増幅器278は、ピン2により接地に接続され、ピン3によりバス330を介してスイッチ発振器322のピン3に接続される。スイッチ発振器322は、ピン2により接地に接続され、ピン4によりバス334を介して電力スイッチ274のピン1に接続される。
【0035】
モータ170は、バス178上の三相AC電力からの信号、バス182上のシステムVDC、および、バス190上のSYSイネーブル信号を受け取ると、始動される。システム・イネーブル・インターロック186は、常閉接点302aを介して、モータ制御装置198、モータ電力スイッチ206、MBRインターロック・スイッチ210、およびシステムVDCインターロック・スイッチ302を始動させる。モータ制御装置198は、バス218、モータ電力スイッチ206の常開接点206a、206b、206c、およびバス226を介して、モータ170と通信する。モータ170は、シャフト222を介して、機械的非線形可変外部負荷PEXT174に作用を開始する。
【0036】
また、モータ制御装置198は、バス214、常開接点210a、およびバス234を介してモータ制動リリース230と通信し、モータ制動リリース230を係合解除する。バス178上の主電力三相ACおよびバス182上のシステムVDCが中断されると、スイッチ206、210は係合解除され、モータ制動リリース230は係合される。
【0037】
モータ170は、バス226、常時閉接点206a、206b、206cを介して、および、三相電力バス242を介して、緊急ダイナミック制動制御ユニット238と接続される。機械的非線形可変外部負荷PEXT174が、シャフト222を介してモータ170に作用を開始するときに、緊急モードを作動させるために、ユーザは、緊急モータ制動リリース・スイッチ294を押して保持する必要がある。MBRリリース・スイッチ294は、システムVDCインターロック・スイッチ302の係合されたコイル302cへの、およびMBRインターロック・スイッチ210の被係合コイル210cへの接触子302aによるスイッチ302への、バス298を介して作動される。モータは、MBR230が係合解除されると再作動される。MBR230は、MBRリリース・スイッチ294が、バス298、常閉接点210a、およびバス234を介してリリースされると、係合解除される。モータ170は、外部負荷PEXT174の下において作用を開始し、モータ170からの三相AC電圧は、受動型ダイナミック負荷338との相互作用を開始する。モータ170は、受動型ダイナミック負荷338のACダイナミック負荷342に対するダイナミック制動動作の初めの2つの段階を得る。ACダイナミック負荷342は、2つのタイプのAC負荷、即ち(1)モータからのACエネルギーを熱へと変換させる三相抵抗ダイナミック負荷246と、(2)モータ170からAC相をシフトする三相容量ダイナミック負荷250とを含む。熱放散および相シフトにより、モータ170からの電流が増加し、この電流によりモータ170の渦電流が増加し、モータ170の制動動作に影響を及ぼす。
【0038】
モータ170は、モータからのAC電圧がある一定の値に達するまで、PEXT174下において速度を継続的に上昇させ、次いで、AC電圧は、三相整流子254による整流を開始する。整流されたAC電圧は、受動型ダイナミック負荷338の電圧センサ・ダイナミック負荷262(VVSL)に対するDC受動ダイナミック制動における第3の段階を開始する。モータ170は、PEXT174下において速度の上昇を進め、DC電圧も、ある一定の値に達するまで上昇し、次いで、アナログ・コンピュータ負荷314が、ダイナミック制動動作の制御を開始する。アナログ・コンピュータ負荷314は、2つのソース、即ち(1)BT1、バス306、常開接点302b、およびバス310を介した非常電源282、ならびに(2)バス226、常閉接点206a、206b、206c、バス242、三相整流子254、および電力制御センサ・バス258を介したモータ170により、供給される。
【0039】
モータ制御システム169の作動には、2つの条件が存在する。
【0040】
条件1: xVRF>VVSL (1)
【0041】
受動型ダイナミック負荷338のみが作動している。コンデンサCCSL266の時間充電(time charge、タイム・チャージ)tCHは無限値を有することになる。
【0042】
条件2: xVRF<VVSL (2)
【0043】
受動型ダイナミック負荷338および被制御ダイナミック負荷346は共に動作を開始し、コンデンサCCSL266の時間充電tCHは、電圧xVRF318の値まで動作する。タイム・チャージtCHのこの値は、負荷PEXT174の値に逆比例することになる。図22は、それぞれ異なる値の外部負荷PEXTの下における電流センサ負荷CCSLの、等価電圧源VVSL、電圧VCSL、および時間充電tCHの曲線を示すグラフである。
【0044】
電圧xVRFの値までのコンデンサCCSL266の時間充電tCHが図19に示されており、下記の式により決定される。
【0045】
【数1】
【0046】
ここで、RSEはセンサ等価の抵抗であり、これは、図16に示される式(4)および図18に示される式(5)により計算される。RSEは、PEXT174との関係におけるモータ170の内部抵抗を表す。
【0047】
VVSLは、モータ170のテブナン電圧源等価であり、図15に示される式(6)および図17に示される式(7)により計算される。
【0048】
nは、図20に示される式(8)(以下に提示される)により決定される。
【0049】
n=PINT/PEXT (8)
【0050】
ここで、nは、機械システム係数であり、n=0・・・1(nは正の数)、
PINTは、システム機械内部抵抗350、
PEXTは、機械的非線形可変外部負荷174、
xVRFは、電圧基準318の値、
xは、様々なモータおよび様々な制動速度制御の値について緊急ダイナミック制動制御ユニット238の調節を可能にする調節係数
である。
【0051】
図23は、外部負荷PEXTの様々な値の下における受動型ダイナミック負荷の電流および被制御ダイナミック負荷の電流を示すグラフである。電流センサ・ダイナミック負荷266の図19に示されるICSLは、PEXT174の値に対して直接的に比例する。
【0052】
【数2】
【0053】
演算増幅器278は、コンデンサ・センサ・ダイナミック負荷(CCSL)262の電圧の変化を制御し、それを、電圧基準(xVRF)318の電圧の値と比較する。コンデンサCCSL262の電圧VCSLが、xVRF318の値以上になると、演算増幅器278は、スイッチ発振器322を始動させる。スイッチ発振器322は、電力スイッチ274の所定時間tDDCHで切り替えられる。電力スイッチ274は、被制御ダイナミック負荷270を接地に接続し、これにより、被制御ダイナミック負荷270に対するモータ170のダイナミック制動動作の第4の段階が開始される。被制御ダイナミック負荷270は、電流センサ・ダイナミック負荷266のコンデンサCCSLを放電する。所定の時間放電tDDCHは、放電コンデンサCCSLの時定数よりも大きなものであるべきである。
【0054】
tDDCH>τDCH=CCSL*RCDL*(1+RDCL/RSE) (10)
【0055】
演算増幅器278がコンデンサ・センサ・ダイナミック負荷262の電圧を制御する所定の時間tDDCHの間、演算増幅器278は、CCSLの電圧と電圧基準318(xVRF)の電圧の値とを、電圧xVRFが値CCSL262以上となるまで、継続的に比較する。所定の時間tDDCHが経過すると、スイッチ発振器322は電力スイッチ274を接続解除し、これにより、接地からRCDL270が接続解除され、これにより、電流センサ・ダイナミック負荷266(CCSL)に対するモータ170のダイナミック制動動作の第5の段階が開始される。
【0056】
電流センサ・ダイナミック負荷266(CCSL)のコンデンサを通る瞬間電流IINSTは、下記の式により決定される。
【0057】
【数3】
【0058】
電流センサ・ダイナミック負荷266(CCSL)に対する電圧が再び電圧基準318(xVRF)の値以上になると、演算増幅器278はスイッチ発振器322を再始動させる。スイッチ発振器322は、電力スイッチ274の所定の時間tDDCHで切り替えられる。電力スイッチ274は、被制御ダイナミック負荷270に接続されて接地し、これにより、被制御ダイナミック負荷270に対するモータ170のダイナミック制動動作の第4の段階が再び開始される。被制御ダイナミック負荷270は、電流センサ・ダイナミック負荷266(CCSL)のコンデンサを放電させる。このサイクルは、モータ170のシャフト222および機械的非線形可変外部負荷PEXT174に対して継続し、このサイクルの間に、緊急ダイナミック制動制御ユニット238は、機械的システム全体の線形運動を管理する。図24は、外部負荷PEXTの様々な値の下でのモータ速度制御を示すグラフである。
【0059】
本発明の固有の特徴の幾つかは以下のものを含む。
【0060】
(1)モータ回転発電機170が、制動力を生成するためのソースであり、その条件に関する情報のソースである。
【0061】
(2)負荷電力リンク、センサ・リンク、および制御リンクが、同じバス258上にある。
【0062】
(3)電圧センサ・ダイナミック負荷262(VCSL)および電流センサ・ダイナミック負荷266(CCSL)は多機能である。
(a)電圧センサ・ダイナミック負荷262(VCSL)は、システムの受動型ダイナミック負荷338のDC受動負荷であり、電圧センサは、それ自体の電圧降下のようにモータ170の内部抵抗を認識する。
(b)電流センサ・ダイナミック負荷266(CCSL)は、3機能のデバイスである。即ち、アナログ・コンピュータ負荷314における積分器と、電圧基準318(xVRF)の或る一定の値までコンデンサの時間充電としてモータ170の電流値を認識する電流センサと、アナログ・コンピュータ負荷314における被制御ダイナミック負荷とである。
【0063】
(4)モータのダイナミック制動は複数の段階で実施される。
(a)受動型ダイナミック負荷338はACダイナミック負荷342を含み、ACダイナミック負荷342は、三相容量ダイナミック負荷250(受動型制動−第1段階)、および三相抵抗ダイナミック負荷246(受動型制動−第2段階)、およびDCダイナミック負荷を含み、これは、電圧センサ・ダイナミック負荷262(受動型制動−第3段階)を含む。
(b)被制御ダイナミック負荷346は、被制御ダイナミック負荷270(被制御型制動−第4段階)、および電流センサ・ダイナミック負荷266(被制御型制動−第5段階)を含む。
【0064】
(6)電流センサ・ダイナミック負荷266のコンデンサは、モータ170に対して無効負荷ではなく、その理由は、コンデンサが、モータ170から充電され、被制御ダイナミック負荷270の抵抗器(1または複数)を介して放電されるからであり、これは、コンデンサは、充電されたエネルギをモータ170へ戻さないことを意味する。コンデンサは、非線形の負荷の状態を継続する。
【0065】
(7)被制御ダイナミック負荷346は2サイクル被制御ダイナミック負荷を備え、これは、モータ170に対する2サイクル被制御ダイナミック制動動作を生じさせる。第1のサイクルは被制御ダイナミック負荷270により制御され、モータ170に対してダイナミック制動の動作を行い、所定の時間tDDCHの間に電流センサ・ダイナミック負荷266(CCSL)のコンデンサを放電させる。第2のサイクルは電流センサ・ダイナミック負荷266により制御され、電流センサ・ダイナミック負荷266のコンデンサの充電時間tCHの間にモータ170に対するダイナミック制動の動作を行う。
【0066】
(8)モータ170は、モータ回転発電機として作動するとき、以下の特性を有する。
(a)モータ170は電圧源となる。
(b)電圧源の内部抵抗が可変であり、モータの速度およびモータに対する機械的負荷に対して逆比例である。このモードにおいては、モータ170はセンサのように働き、電圧がモータの速度を反映し、電流がモータのシャフト222に対する機械的負荷を反映する。
【0067】
(9)アナログ・コンピュータ負荷314は、アナログ・コンピュータおよび被制御ダイナミック負荷の特性の組み合わせを含む。
【0068】
図25ないし図27は、本発明の方法の一実施形態を示す流れ図および注釈である。
【0069】
本発明の更なる特徴は特許請求の範囲においても見ることができる。
【特許請求の範囲】
【請求項1】
患者支持デバイスであって、
ベースと、
前記ベースにより支持され、患者を支持するように構成されたテーブル・アセンブリと、
前記テーブル・アセンブリと電気的に結合され、前記テーブル・アセンブリの動作を制御するように動作するモータと、
前記モータと電気的に結合され、前記モータへの電力が中断されると前記モータを制動するための信号を生成するように動作する制御装置と、
前記モータおよび前記制御装置と電気的に結合され、前記モータの再作動時に動作可能である制動制御モジュールと
を備え、
前記制動制御モジュールは、
前記モータの速度を増加させるように前記モータと電気的に結合された受動型ダイナミック負荷モジュールと、
前記モータと電気的に結合され、AC電圧が所定の値に達したときに、前記AC電圧をDC電圧に変換するように動作する整流モジュールと、
前記受動型ダイナミック負荷モジュールと電気的に結合される被制御ダイナミック負荷モジュールと、
前記被制御ダイナミック負荷モジュールと電気的に結合され、前記モータの制動動作を制御するように、前記モータに対して前記被制御ダイナミック負荷モジュールを接続および接続解除するように動作するスイッチと
を備える、
患者支持デバイス。
【請求項2】
請求項1に記載の患者支持デバイスであって、前記モータは、前記テーブル・アセンブリの実質的に垂直の運動を制御するように動作する、患者支持デバイス。
【請求項3】
請求項1に記載の患者支持デバイスであって、前記受動型ダイナミック負荷モジュールは、容量型ダイナミック負荷モジュールおよび抵抗型ダイナミック負荷モジュールを備える、患者支持デバイス。
【請求項4】
請求項3に記載の患者支持デバイスであって、前記受動型ダイナミック負荷モジュールは、電圧センサ・ダイナミック負荷モジュールを更に備える、患者支持デバイス。
【請求項5】
請求項4に記載の患者支持デバイスであって、前記電圧センサ・ダイナミック負荷モジュールは、前記整流モジュールから前記モータの前記DC電圧を受けるように動作可能である、患者支持デバイス。
【請求項6】
請求項1に記載の患者支持デバイスであって、前記被制御ダイナミック負荷モジュールは、電流センサ・ダイナミック負荷および被制御ダイナミック負荷を備える、患者支持デバイス。
【請求項7】
放射線療法用治療システムであって、
患者を支持するように構成されたテーブル・アセンブリと、前記テーブル・アセンブリと電気的に接続され、前記テーブル・アセンブリの動作を制御するように動作可能であるモータとを含む患者支持デバイスと、
前記モータと電気的に接続され、診療台への電力が中断されると、前記モータの速度を制御し、前記テーブル・アセンブリの線形移動を生じさせるように動作可能である制御システムと
を備える放射線療法用治療システム。
【請求項8】
請求項7に記載の放射性療法用治療システムであって、前記制御システムは、前記モータおよび前記制御システムと電気的に結合され、前記モータが再始動すると動作可能な制動制御モジュールを備え、前記制動制御モジュールは、
前記モータの速度を増加させるために前記モータと電気的に結合される受動型ダイナミック負荷モジュールと、
前記モータと電気的に結合され、AC電圧が所定の値に達すると、前記AC電圧をDC電圧に変換するように動作可能である整流モジュールと、
前記受動型ダイナミック負荷モジュールと電気的に結合される被制御ダイナミック負荷モジュールと、
前記被制御ダイナミック負荷モジュールと電気的に結合され、前記モータの制動動作を制御するように、前記モータに対して前記被制御ダイナミック負荷モジュールを接続および接続解除するように動作するスイッチと
を備える、
放射性療法用治療システム。
【請求項9】
請求項8に記載の放射線療法用治療システムであって、前記被制御ダイナミック負荷モジュールは、電流センサ・ダイナミック負荷および被制御ダイナミック負荷を備える、放射線療法用治療システム。
【請求項10】
請求項9に記載の放射線療法用治療システムであって、前記電流センサ・ダイナミック負荷は、前記電流センサ・ダイナミック負荷の電圧が基準電圧以上であるときに前記モータに接続される、放射線療法用治療システム。
【請求項1】
患者支持デバイスであって、
ベースと、
前記ベースにより支持され、患者を支持するように構成されたテーブル・アセンブリと、
前記テーブル・アセンブリと電気的に結合され、前記テーブル・アセンブリの動作を制御するように動作するモータと、
前記モータと電気的に結合され、前記モータへの電力が中断されると前記モータを制動するための信号を生成するように動作する制御装置と、
前記モータおよび前記制御装置と電気的に結合され、前記モータの再作動時に動作可能である制動制御モジュールと
を備え、
前記制動制御モジュールは、
前記モータの速度を増加させるように前記モータと電気的に結合された受動型ダイナミック負荷モジュールと、
前記モータと電気的に結合され、AC電圧が所定の値に達したときに、前記AC電圧をDC電圧に変換するように動作する整流モジュールと、
前記受動型ダイナミック負荷モジュールと電気的に結合される被制御ダイナミック負荷モジュールと、
前記被制御ダイナミック負荷モジュールと電気的に結合され、前記モータの制動動作を制御するように、前記モータに対して前記被制御ダイナミック負荷モジュールを接続および接続解除するように動作するスイッチと
を備える、
患者支持デバイス。
【請求項2】
請求項1に記載の患者支持デバイスであって、前記モータは、前記テーブル・アセンブリの実質的に垂直の運動を制御するように動作する、患者支持デバイス。
【請求項3】
請求項1に記載の患者支持デバイスであって、前記受動型ダイナミック負荷モジュールは、容量型ダイナミック負荷モジュールおよび抵抗型ダイナミック負荷モジュールを備える、患者支持デバイス。
【請求項4】
請求項3に記載の患者支持デバイスであって、前記受動型ダイナミック負荷モジュールは、電圧センサ・ダイナミック負荷モジュールを更に備える、患者支持デバイス。
【請求項5】
請求項4に記載の患者支持デバイスであって、前記電圧センサ・ダイナミック負荷モジュールは、前記整流モジュールから前記モータの前記DC電圧を受けるように動作可能である、患者支持デバイス。
【請求項6】
請求項1に記載の患者支持デバイスであって、前記被制御ダイナミック負荷モジュールは、電流センサ・ダイナミック負荷および被制御ダイナミック負荷を備える、患者支持デバイス。
【請求項7】
放射線療法用治療システムであって、
患者を支持するように構成されたテーブル・アセンブリと、前記テーブル・アセンブリと電気的に接続され、前記テーブル・アセンブリの動作を制御するように動作可能であるモータとを含む患者支持デバイスと、
前記モータと電気的に接続され、診療台への電力が中断されると、前記モータの速度を制御し、前記テーブル・アセンブリの線形移動を生じさせるように動作可能である制御システムと
を備える放射線療法用治療システム。
【請求項8】
請求項7に記載の放射性療法用治療システムであって、前記制御システムは、前記モータおよび前記制御システムと電気的に結合され、前記モータが再始動すると動作可能な制動制御モジュールを備え、前記制動制御モジュールは、
前記モータの速度を増加させるために前記モータと電気的に結合される受動型ダイナミック負荷モジュールと、
前記モータと電気的に結合され、AC電圧が所定の値に達すると、前記AC電圧をDC電圧に変換するように動作可能である整流モジュールと、
前記受動型ダイナミック負荷モジュールと電気的に結合される被制御ダイナミック負荷モジュールと、
前記被制御ダイナミック負荷モジュールと電気的に結合され、前記モータの制動動作を制御するように、前記モータに対して前記被制御ダイナミック負荷モジュールを接続および接続解除するように動作するスイッチと
を備える、
放射性療法用治療システム。
【請求項9】
請求項8に記載の放射線療法用治療システムであって、前記被制御ダイナミック負荷モジュールは、電流センサ・ダイナミック負荷および被制御ダイナミック負荷を備える、放射線療法用治療システム。
【請求項10】
請求項9に記載の放射線療法用治療システムであって、前記電流センサ・ダイナミック負荷は、前記電流センサ・ダイナミック負荷の電圧が基準電圧以上であるときに前記モータに接続される、放射線療法用治療システム。
【図3】

【図8】
【図9】
【図10】
【図11】
【図16】
【図17】
【図18】
【図1】
【図2】
【図4】
【図5】
【図6】
【図7】
【図12】
【図13】
【図14】
【図15】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図8】
【図9】
【図10】
【図11】
【図16】
【図17】
【図18】
【図1】
【図2】
【図4】
【図5】
【図6】
【図7】
【図12】
【図13】
【図14】
【図15】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【公表番号】特表2010−537783(P2010−537783A)
【公表日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願番号】特願2010−524141(P2010−524141)
【出願日】平成20年9月4日(2008.9.4)
【国際出願番号】PCT/US2008/075267
【国際公開番号】WO2009/032933
【国際公開日】平成21年3月12日(2009.3.12)
【出願人】(506024320)トモセラピー・インコーポレーテッド (27)
【Fターム(参考)】
【公表日】平成22年12月9日(2010.12.9)
【国際特許分類】
【出願日】平成20年9月4日(2008.9.4)
【国際出願番号】PCT/US2008/075267
【国際公開番号】WO2009/032933
【国際公開日】平成21年3月12日(2009.3.12)
【出願人】(506024320)トモセラピー・インコーポレーテッド (27)
【Fターム(参考)】
[ Back to top ]