
情報処理プログラム、および、情報処理装置
【課題】撮像手段を備えた操作装置と画面との間に一時的に障害物が発生したときでも、適切な処理を行うことができる情報処理プログラム、および情報処理装置を提供すること。
【解決手段】動き情報取得ステップでは、動きセンサから動き情報を逐次取得する。撮像情報取得ステップでは、撮像手段から撮像情報を逐次取得する。無効情報判定ステップでは、撮像情報が所定の処理において有効な情報であるか無効な情報であるかを判定する。動作値算出ステップでは、動き情報に基づいて操作装置自身の動きの大きさを示す動作値を算出する。処理ステップでは、無効情報判定ステップで撮像情報が無効な情報であると判定され、かつ動作値算出ステップにおいて算出された動作値が所定の範囲内の値であるときは、前に取得された有効な撮像情報のうち最新の撮像情報に基づいて所定の処理を実行する。
【解決手段】動き情報取得ステップでは、動きセンサから動き情報を逐次取得する。撮像情報取得ステップでは、撮像手段から撮像情報を逐次取得する。無効情報判定ステップでは、撮像情報が所定の処理において有効な情報であるか無効な情報であるかを判定する。動作値算出ステップでは、動き情報に基づいて操作装置自身の動きの大きさを示す動作値を算出する。処理ステップでは、無効情報判定ステップで撮像情報が無効な情報であると判定され、かつ動作値算出ステップにおいて算出された動作値が所定の範囲内の値であるときは、前に取得された有効な撮像情報のうち最新の撮像情報に基づいて所定の処理を実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、情報処理プログラムおよび情報処理装置に関し、より特定的には、自身に加えられた動きに応じた動き情報を出力する動きセンサと、撮像対象を撮像するための撮像手段を備える操作装置から、当該撮像手段によって得られる撮像情報に基づいて、当該撮像対象に対する操作装置の向きに応じた所定の処理を実行する情報処理装置のコンピュータに実行させる情報処理プログラムおよび情報処理装置に関する。
【背景技術】
【0002】
従来から、スクリーンに表示される的と銃撃戦を行う射的ゲーム装置が知られている(例えば、特許文献1)。当該射的ゲーム装置では、銃を模したコントローラであるガンユニットを入力装置として用いる。当該ガンユニットの銃身の内部にはCCDカメラが内蔵されており、銃口からの画像が撮像できるようになっている。また、スクリーンには、赤外線を発光する発光ダイオードが、6個配置されている。そして、銃口をスクリーンに向けてガンユニット内蔵のCCDカメラでスクリーンを撮像し、その撮像されたデータを解析することで発光ダイオードの位置を特定する。そして、特定された発光ダイオードの位置に基づいて、着弾位置を算出している。また、上記撮像されたデータを解析した結果、発光ダイオードの位置が特定できないときは、ガンユニットの銃口がスクリーン方向に向いていないと判定される。また、スクリーンが窓際に設置され、窓から太陽光が差し込むような状態のとき、CCDカメラがその太陽光を発光ダイオードの光として拾ってしまい、この太陽光が撮像されることがある。また、発光ダイオードの近くに光沢のある物が置かれているような場合、これに反射した太陽光または発光ダイオードが発光した赤外線等がCCDカメラに拾われて撮像されることもある。その結果、撮像されたデータに多数の光が記録され、発光ダイオードの位置が特定できないという問題もあった。
【特許文献1】特開2005−253724号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上述したような上記特許文献1に開示されたゲーム装置においては、以下に示す問題点がある。上述のように、上記ゲーム装置では、撮像されたデータの解析の結果、発光ダイオードの位置が特定できないときは、ガンユニットの銃口はスクリーン方向に向いていないと判定されている。しかし、ガンユニットの銃口がスクリーン方向に向いている場合であっても、例えば人間が、スクリーンの前を横切った場合は、そのときだけ発光ダイオードの位置を特定することができない。その結果、ガンユニットの銃口がスクリーン方向を向いているにもかかわらずに、スクリーン方向に向いていないと判定されて処理が行われることがあった。つまり、スクリーンの前を人間が横切る等、スクリーンとガンユニットの銃口との間に障害物が発生した際に、一時的に発光ダイオードが遮られ、ガンユニット内蔵のCCDカメラに撮像されなかった結果、ガンユニットの銃口をスクリーン外の方向に向けたと判定されるという問題があった。
【0004】
それ故に、本発明の目的は、撮像手段を備えた操作装置と画面との間に一時的に障害物が発生したときでも、適切な処理を行うことができる情報処理プログラム、および情報処理装置を提供することである。
【課題を解決するための手段】
【0005】
本発明は、上記の課題を解決するために、以下の構成を採用した。なお、括弧内の参照符号および補足説明等は、本発明の理解を助けるために後述する実施形態との対応関係の一例を示したものであって、本発明を何ら限定するものではない。
【0006】
第1の発明は、撮像対象を撮像して撮像情報を得る撮像手段を備える操作装置を用いて、当該撮像情報に基づいて当該撮像対象の配置位置に対する操作装置の向きに応じた所定の処理を実行する情報処理装置のコンピュータに実行させる情報処理プログラムであって、動き情報取得ステップ(S2)と、撮像情報取得ステップ(S3)と、無効情報判定ステップ(S4)と、動作値算出ステップ(S33,S34、S35)と、処理ステップ(S36、S37)とをコンピュータに実行させる。動き情報取得ステップは、操作装置自身の動きに応じた動き情報を出力する動きセンサから動き情報を逐次取得する。撮像情報取得ステップは、撮像手段から撮像情報を逐次取得する。無効情報判定ステップは、撮像情報が所定の処理において有効な情報であるか無効な情報であるかを判定する。動作値算出ステップは、動き情報に基づいて操作装置自身の動きの大きさを示す動作値を算出する。処理ステップは、無効情報判定ステップにおいて撮像情報が無効な情報であると判定され、かつ動作値算出ステップにおいて算出された動作値が所定の範囲内の値であるときは、無効な撮像情報が取得されるより前に取得された有効な撮像情報のうち最新の撮像情報に基づいて所定の処理を実行する。
【0007】
第2の発明は、第1の発明において、動作値算出ステップは、撮像情報が無効な情報であるときにのみ実行される。
【0008】
第3の発明は、第1の発明において、無効情報判定ステップは、撮像情報が所定の条件を満たすか否かを判定する無効条件判定ステップを含む。更に、無効情報判定ステップは、無効条件判定ステップにおいて所定の条件を満たしていないと判定された撮像情報を無効な情報と判定する。
【0009】
第4の発明は、第1の発明において、所定の処理とは、所定の表示装置の画面におけるポインティング位置を算出する処理である。また、無効情報判定ステップは、ポインティング位置を算出することができないような撮像情報を無効な情報と判定する。更に、処理ステップは、無効情報判定ステップにおいて撮像情報が無効な情報であると判定され、かつ動作値算出ステップにおいて算出された動作値が所定の範囲内の値であるときは、有効な撮像情報のうち最新の撮像情報に基づいてポインティング位置を算出する。
【0010】
第5の発明は、第1の発明において、所定の処理とは、撮像情報から操作装置の向きの変化量を算出し、当該変化量を用いる処理である。また、無効情報判定ステップは、変化量を算出することができないような撮像情報を無効な情報と判定する。更に、処理ステップは、無効情報判定ステップにおいて撮像情報が無効な情報であると判定され、かつ動作値算出ステップにおいて算出された動作値が所定の範囲内の値であるときは、直前に算出された変化量を用いて処理を行う。
【0011】
第6の発明は、第1の発明において、所定の処理において無効な情報とは、NULLコードが含まれている撮像情報である。また、無効情報判定ステップは、撮像情報にNULLコードが含まれているか否かによって所定の処理において有効な情報であるか無効な情報であるかを判定する。
【0012】
第7の発明は、第1の発明において、情報処理プログラムは、撮像情報が無効な情報と判定された後、逐次取得される撮像情報が無効な情報と判定され続ける継続時間を計時するためのタイマーステップ(S32、S40)を更にコンピュータに実行させる。また、処理ステップは、タイマーステップにおいて計時された継続時間が所定の値以上のときは、無効情報判定ステップにおける判定結果に関わらず、無効な情報に対応する所定の処理を実行させる。
【0013】
第8の発明は、第1の発明において、動きセンサは、操作装置に生じる加速度を検出する加速度センサである。また、動き情報は、操作装置の動きに応じて加速度センサから出力される加速度データを含む。
【0014】
第9の発明は、第8の発明において、動作値算出ステップは、第1加速度ベクトル算出ステップ(S34)と、第2加速度ベクトル算出ステップ(S34)と、角度差算出ステップ(S34)とを含む。第1加速度ベクトル算出ステップは、加速度データから第1の加速度ベクトルを算出する。第2加速度ベクトル算出ステップは、1つ前に取得された加速度データから第2の加速度ベクトルを算出する。角度差算出ステップは、第1加速度ベクトルと第2加速度ベクトルとの角度差を算出する。更に、処理ステップは、角度差算出ステップで算出された角度差が所定の範囲内に含まれるときに、無効な情報である撮像情報の1つ前に取得された撮像情報に基づいて所定の処理を実行する。
【0015】
第10の発明は、第8の発明において、動作値算出ステップは、第1加速度ベクトル算出ステップと、第2加速度ベクトル算出ステップと、内積算出ステップとを含む。第1加速度ベクトル算出ステップは、加速度データから第1の加速度ベクトルを算出する。第2加速度ベクトル算出ステップは、加速度データの1つ前に取得された加速度データから第2の加速度ベクトルを算出する。内積算出ステップは、第1の加速度ベクトルと第2の加速度ベクトルとの内積を算出する。更に、処理ステップは、内積算出ステップで算出された内積が所定の範囲内に含まれるときに、無効な情報である撮像情報の1つ前に取得された撮像情報に基づいて所定の処理を実行する。
【0016】
第11の発明は、第8の発明において、加速度センサは、互いに直交する少なくとも2つ以上の座標軸の加速度を検出する加速度センサである。また、情報処理プログラムは、無効情報判定ステップにおいて撮像情報が無効な情報であると判定されたとき、当該無効な情報が取得された際に検出された加速度と、当該無効な情報が取得されるより前に検出された加速度のうち最新の加速度との差を前記各座標軸毎に算出する加速度差分算出ステップ(S41)を更にコンピュータに実行させる。更に、処理ステップは、加速度差分算出ステップによって各座標軸毎に算出された差が全て所定値以下であるときのみ、無効な情報である撮像情報が取得されるより前に取得された有効な撮像情報のうち最新の撮像情報に基づいて所定の処理を実行する。
【0017】
第12の発明は、撮像対象を撮像して撮像情報を得る撮像手段(74)を備える操作装置(7)を用いて、当該撮像情報に基づいて、当該撮像対象の配置位置に対する操作装置の向きに応じた所定の処理を実行する情報処理装置(3)であって、操作装置の動きに応じた動き情報を出力する動きセンサ(701)と、記憶手段(12)と、動き情報取得手段(19,10)と、撮像情報取得手段(19,10)と、無効情報判定手段(10)と、動作値算出手段(10)と、処理手段(10)とを備える。動き情報取得手段は、動きセンサから動き情報を逐次取得して記憶手段に記憶する。撮像情報取得手段は、撮像手段から撮像情報を逐次取得して記憶手段に記憶する。無効情報判定手段は、記憶手段から撮像情報を読み出し、当該撮像情報が所定の処理において有効な情報であるか無効な情報であるかを判定する。動作値算出手段は、動き情報を記憶手段から読み出し、当該動き情報に基づいて操作装置自身の動きの大きさを示す動作値を算出する。処理手段は、前記無効情報判定手段が前記撮像情報が無効な情報であると判定し、かつ動作値算出手段が算出した動作値が所定の範囲内の値であるときは、無効な撮像情報が取得される前に取得された有効な撮像情報のうち最新の撮像情報を記憶手段から読み出し、当該1つ前に取得された撮像情報を用いて所定の処理を実行する。
【発明の効果】
【0018】
上記第1の発明によれば、撮像情報に基づいて所定の処理を行う際に、撮像情報が当該所定の処理を行えないような無効な情報であるとき、操作装置自身の動きに基づいて、当該撮像情報が意図的に無効化されたものであるか否かを判別することができる。また、撮像情報が意図的に無効化されたものではないときは、直前に取得された有効な撮像情報を用いて所定の処理を行うことが可能となる。
【0019】
上記第2乃至第3の発明によれば、上記第1の発明と同様の効果を得ることができる。
【0020】
上記第4の発明によれば、撮像情報に基づいて画面等をポインティングするような処理において、画面外をポインティングしたときのような意図的なポインティング情報の喪失と、一時的な遮り等の、プレイヤが意図したものではないポインティング情報の喪失とを区別することができる。また、意図していないポインティング情報の喪失時には、直前に用いられていたポインティング情報を流用して、所定の処理を実行・継続することが可能となる。
【0021】
上記第5の発明によれば、撮像情報に基づく操作装置の向きの変化量に基づいた処理を行うような場合において、無効な撮像情報の発生がプレイヤの意図していないものであり、変化量が算出できないときでも、無効な撮像情報が発生する前に用いられていた変化量を流用して所定の処理を行うことが可能となる。
【0022】
上記第6の発明によれば、NULLコードを用いて無効な情報であるか否かを判定することで、処理の簡略化・汎用化を図ることができる。
【0023】
上記第7の発明によれば、操作装置が画面の外を向いていないときであっても、操作装置の撮像手段をプレイヤが意図的に手で覆い隠す等の意図的な行為が行われているか否かを判定することが可能となる。
【0024】
上記第8の発明によれば、加速度を利用して操作装置の動きを検出することができる。
【0025】
上記第9の発明によれば、無効な撮像情報が発生した際の加速度ベクトルと、その直前に検出された加速度ベクトルとの角度差を比較することで、より正確に操作装置の動きの大きさを判定することができる。
【0026】
上記第10の発明によれば、無効な撮像情報が発生した際の加速度ベクトルと、その直前に検出された加速度ベクトルとの内積に基づいて操作装置の動きの大きさを判定する。これにより、操作装置の動きの大きさをより正確に判定できる。
【0027】
上記第11の発明によれば、処理内容をより簡素にすることができ、処理の高速化を図ることが可能となる。
【0028】
上記第12の発明によれば、上記第1の発明と同様の効果が得られる。
【発明を実施するための最良の形態】
【0029】
(ゲームシステムの全体構成)
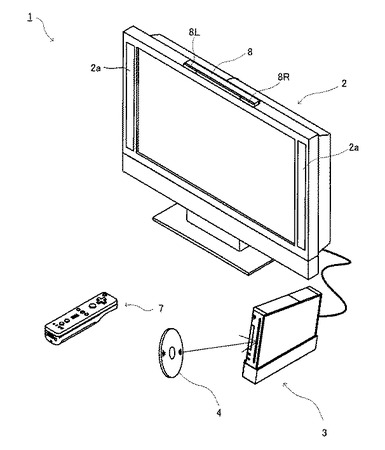
図1を参照して、本発明の実施形態に係るゲーム装置を含むゲームシステム1について説明する。図1は、ゲームシステム1の外観図である。以下、据置型のゲーム装置を一例にして、本実施形態のゲーム装置およびゲームプログラムについて説明する。図1において、ゲームシステム1は、テレビジョン受像器(以下、単に「テレビ」と記載する)2、ゲーム装置3、光ディスク4、コントローラ7、およびマーカ部8を含む。本システムは、コントローラ7を用いたゲーム操作に基づいてゲーム装置3でゲーム処理を実行するものである。
【0030】
ゲーム装置3には、当該ゲーム装置3に対して交換可能に用いられる情報記憶媒体の一例である光ディスク4が脱着可能に挿入される。光ディスク4には、ゲーム装置3において実行されるためのゲームプログラムが記憶されている。ゲーム装置3の前面には光ディスク4の挿入口が設けられている。ゲーム装置3は、挿入口に挿入された光ディスク4に記憶されたゲームプログラムを読み出して実行することによってゲーム処理を実行する。
【0031】
ゲーム装置3には、表示装置の一例であるテレビ2が接続コードを介して接続される。テレビ2は、ゲーム装置3において実行されるゲーム処理の結果得られるゲーム画像を表示する。また、テレビ2の画面の周辺(図1では画面の上側)には、マーカ部8が設置される。マーカ部8は、その両端に2つのマーカ8Rおよび8Lを備えている。マーカ8R(マーカ8Lも同様)は、具体的には1以上の赤外LEDであり、テレビ2の前方に向かって赤外光を出力する。マーカ部8はゲーム装置3に接続されており、ゲーム装置3はマーカ部8が備える各赤外LEDの点灯を制御することが可能である。
【0032】
コントローラ7は、自機に対して行われた操作の内容を示す操作データをゲーム装置3に与える入力装置である。コントローラ7とゲーム装置3とは無線通信によって接続される。本実施形態では、コントローラ7とゲーム装置3との間の無線通信には例えばBluetooth(ブルートゥース)(登録商標)の技術が用いられる。なお、他の実施形態においてはコントローラ7とゲーム装置3とは有線で接続されてもよい。
【0033】
(ゲーム装置3の内部構成)
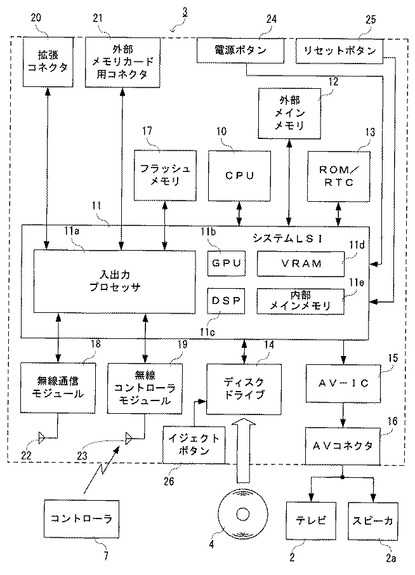
次に、図2を参照して、ゲーム装置3の内部構成について説明する。図2は、ゲーム装置3の構成を示すブロック図である。ゲーム装置3は、CPU10、システムLSI11、外部メインメモリ12、ROM/RTC13、ディスクドライブ14、およびAV−IC15等を有する。
【0034】
CPU10は、光ディスク4に記憶されたゲームプログラムを実行することによってゲーム処理を実行するものであり、ゲームプロセッサとして機能する。CPU10は、システムLSI11に接続される。システムLSI11には、CPU10の他、外部メインメモリ12、ROM/RTC13、ディスクドライブ14およびAV−IC15が接続される。システムLSI11は、それに接続される各構成要素間のデータ転送の制御、表示すべき画像の生成、外部装置からのデータの取得等の処理を行う。システムLSIの内部構成について後述する。揮発性の外部メインメモリ12は、光ディスク4から読み出されたゲームプログラムや、フラッシュメモリ17から読み出されたゲームプログラム等のプログラムを記憶したり、各種データを記憶したりするものであり、CPU10のワーク領域やバッファ領域として用いられる。ROM/RTC13は、ゲーム装置3の起動用のプログラムが組み込まれるROM(いわゆるブートROM)と、時間をカウントするクロック回路(RTC:Real Time Clock)とを有する。ディスクドライブ14は、光ディスク4からプログラムデータやテクスチャデータ等を読み出し、後述する内部メインメモリ11eまたは外部メインメモリ12に読み出したデータを書き込む。
【0035】
また、システムLSI11には、入出力プロセッサ11a、GPU(Graphics Processor Unit)11b、DSP(Digital Signal Processor)11c、VRAM11d、および内部メインメモリ11eが設けられる。図示は省略するが、これらの構成要素11a〜11eは内部バスによって互いに接続される。
【0036】
GPU11bは、描画手段の一部を形成し、CPU10からのグラフィクスコマンド(作画命令)に従って画像を生成する。より具体的には、GPU11bは、当該グラフィクスコマンドに従って3Dグラフィックスの表示に必要な計算処理、例えば、レンダリングの前処理にあたる3D座標から2D座標への座標変換などの処理や、テクスチャの張り込みなどの最終的なレンダリング処理を行うことで、ゲーム画像データを生成する。ここで、CPU10は、グラフィクスコマンドに加えて、ゲーム画像データの生成に必要な画像生成プログラムをGPU11bに与える。VRAM11dは、GPU11bがグラフィクスコマンドを実行するために必要なデータ(ポリゴンデータやテクスチャデータ等のデータ)を記憶する。画像が生成される際には、GPU11bは、VRAM11dに記憶されたデータを用いて画像データを作成する。
【0037】
DSP11cは、オーディオプロセッサとして機能し、内部メインメモリ11eや外部メインメモリ12に記憶されるサウンドデータや音波形(音色)データを用いて、音声データを生成する。
【0038】
上述のように生成された画像データおよび音声データは、AV−IC15によって読み出される。AV−IC15は、読み出した画像データをAVコネクタ16を介してテレビ2に出力するとともに、読み出した音声データを、テレビ2に内蔵されるスピーカ2aに出力する。これによって、画像がテレビ2に表示されるとともに音がスピーカ2aから出力される。
【0039】
入出力プロセッサ(I/Oプロセッサ)11aは、それに接続される構成要素との間でデータの送受信を実行したり、外部装置からのデータのダウンロードを実行したりする。入出力プロセッサ11aは、フラッシュメモリ17、無線通信モジュール18、無線コントローラモジュール19、拡張コネクタ20、および外部メモリカード用コネクタ21に接続される。無線通信モジュール18にはアンテナ22が接続され、無線コントローラモジュール19にはアンテナ23が接続される。
【0040】
入出力プロセッサ11aは、無線通信モジュール18およびアンテナ22を介してネットワークに接続し、ネットワークに接続される他のゲーム装置や各種サーバと通信することができる。入出力プロセッサ11aは、定期的にフラッシュメモリ17にアクセスし、ネットワークへ送信する必要があるデータの有無を検出し、当該データが有る場合には、無線通信モジュール18およびアンテナ22を介してネットワークに送信する。また、入出力プロセッサ11aは、他のゲーム装置から送信されてくるデータやダウンロードサーバからダウンロードしたデータを、ネットワーク、アンテナ22および無線通信モジュール18を介して受信し、受信したデータをフラッシュメモリ17に記憶する。CPU10はゲームプログラムを実行することにより、フラッシュメモリ17に記憶されたデータを読み出してゲームプログラムで利用する。フラッシュメモリ17には、ゲーム装置3と他のゲーム装置や各種サーバとの間で送受信されるデータの他、ゲーム装置3を利用してプレイしたゲームのセーブデータ(ゲームの結果データまたは途中データ)が記憶されてもよい。
【0041】
また、入出力プロセッサ11aは、コントローラ22から送信される操作データをアンテナ23および無線コントローラモジュール19を介して受信し、内部メインメモリ11eまたは外部メインメモリ12のバッファ領域に記憶(一時記憶)する。
【0042】
さらに、入出力プロセッサ11aには、拡張コネクタ20および外部メモリカード用コネクタ21が接続される。拡張コネクタ20は、USBやSCSIのようなインターフェースのためのコネクタであり、外部記憶媒体のようなメディアを接続したり、他のコントローラのような周辺機器を接続したり、有線の通信用コネクタを接続することによって無線通信モジュール18に替えてネットワークとの通信を行ったりすることができる。外部メモリカード用コネクタ21は、メモリカードのような外部記憶媒体を接続するためのコネクタである。例えば、入出力プロセッサ11aは、拡張コネクタ20や外部メモリカード用コネクタ21を介して、外部記憶媒体にアクセスし、データを保存したり、データを読み出したりすることができる。
【0043】
ゲーム装置3には、電源ボタン24、リセットボタン25、およびイジェクトボタン26が設けられる。電源ボタン24およびリセットボタン25は、システムLSI11に接続される。電源ボタン24がオンにされると、ゲーム装置3の各構成要素に対して、図示しないACアダプタを経て電源が供給される。また、一旦電源がオンにされた状態で、再度電源ボタン24を押すと、豆電球1個程度の電力しか使わない低電力スタンバイモードへの移行が行われる。この状態でも、ゲーム装置3への通電は行われているため、インターネット等のネットワークに常時接続しておくことができる。なお、一旦電源がオンにされた状態で、電源をオフにしたいときは、電源ボタン24を所定時間以上長押しすることで、電源をオフとすることが可能である。リセットボタン25が押されると、システムLSI11は、ゲーム装置3の起動プログラムを再起動する。イジェクトボタン26は、ディスクドライブ14に接続される。イジェクトボタン26が押されると、ディスクドライブ14から光ディスク4が排出される。
【0044】
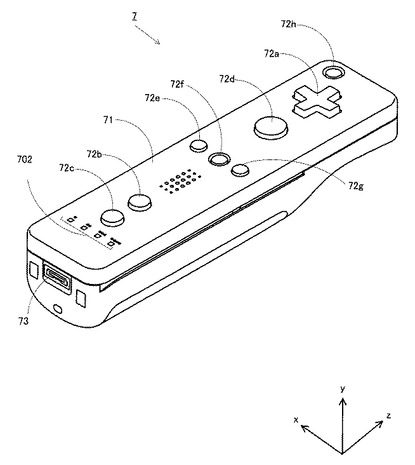
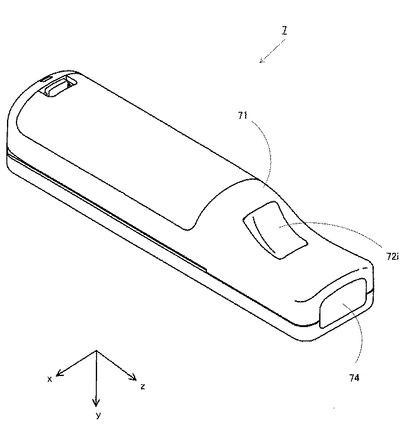
次に、図3および図4を参照して、コントローラ7について説明する。なお、図3は、コントローラ7の上面後方から見た斜視図である。図4は、コントローラ7を下面前方から見た斜視図である。
【0045】
図3および図4において、コントローラ7は、ハウジング71と、当該ハウジング71の表面に設けられた複数個の操作ボタンで構成される操作部72とを備える。本実施例のハウジング71は、その前後方向を長手方向とした略直方体形状を有しており、全体として大人や子供の片手で把持可能な大きさであり、例えばプラスチック成型によって形成されている。
【0046】
ハウジング71上面の中央前面側に、十字キー72aが設けられる。この十字キー72aは、十字型の4方向プッシュスイッチであり、4つの方向(前後左右)に対応する操作部分が十字の突出片にそれぞれ90°間隔で配置される。プレイヤが十字キー72aのいずれかの操作部分を押下することによって前後左右いずれかの方向を選択される。例えばプレイヤが十字キー72aを操作することによって、仮想ゲーム世界に登場するプレイヤキャラクタ等の移動方向を指示したり、複数の選択肢から選択指示したりすることができる。
【0047】
なお、十字キー72aは、上述したプレイヤの方向入力操作に応じて操作信号を出力する操作部であるが、他の態様の操作部でもかまわない。例えば、十字方向に4つのプッシュスイッチを配設し、プレイヤによって押下されたプッシュスイッチに応じて操作信号を出力する操作部を設けてもかまわない。さらに、上記4つのプッシュスイッチとは別に、上記十字方向が交わる位置にセンタスイッチを配設し、4つのプッシュスイッチとセンタスイッチとを複合した操作部を設けてもかまわない。また、ハウジング71上面から突出した傾倒可能なスティック(いわゆる、ジョイスティック)を倒すことによって、傾倒方向に応じて操作信号を出力する操作部を上記十字キー72aの代わりに設けてもかまわない。さらに、水平移動可能な円盤状部材をスライドさせることによって、当該スライド方向に応じた操作信号を出力する操作部を、上記十字キー72aの代わりに設けてもかまわない。また、タッチパッドを、上記十字キー72aの代わりに設けてもかまわない。
【0048】
ハウジング71上面の十字キー72aより後面側に、複数の操作ボタン72b〜72gが設けられる。操作ボタン72b〜72gは、プレイヤがボタン頭部を押下することによって、それぞれの操作ボタン72b〜72gに割り当てられた操作信号を出力する操作部である。例えば、操作ボタン72b〜72dには、1番ボタン、2番ボタン、およびAボタン等としての機能が割り当てられる。また、操作ボタン72e〜72gには、マイナスボタン、ホームボタン、およびプラスボタン等としての機能が割り当てられる。これら操作ボタン72a〜72gは、ゲーム装置3が実行するゲームプログラムに応じてそれぞれの操作機能が割り当てられる。なお、図3に示した配置例では、操作ボタン72b〜72dは、ハウジング71上面の中央前後方向に沿って並設されている。また、操作ボタン72e〜72gは、ハウジング71上面の左右方向に沿って操作ボタン72bおよび72dの間に並設されている。そして、操作ボタン72fは、その上面がハウジング71の上面に埋没しており、プレイヤが不意に誤って押下することのないタイプのボタンである。
【0049】
また、ハウジング71上面の十字キー72aより前面側に、操作ボタン72hが設けられる。操作ボタン72hは、遠隔からゲーム装置3本体の電源をオン/オフする電源スイッチである。この操作ボタン72hも、その上面がハウジング71の上面に埋没しており、プレイヤが不意に誤って押下することのないタイプのボタンである。
【0050】
また、ハウジング71上面の操作ボタン72cより後面側に、複数のLED702が設けられる。ここで、コントローラ7は、他のコントローラ7と区別するためにコントローラ種別(番号)が設けられている。例えば、LED702は、コントローラ7に現在設定されている上記コントローラ種別をプレイヤに通知するために用いられる。具体的には、コントローラ7から通信ユニット6へ送信データを送信する際、上記コントローラ種別に応じて複数のLED702のうち、種別に対応するLEDが点灯する。
【0051】
また、ハウジング71上面には、操作ボタン72bおよび操作ボタン72e〜72gの間に後述するスピーカ(図5のスピーカ706)からの音を外部に放出するための音抜き孔が形成されている。
【0052】
一方、ハウジング71下面には、凹部が形成されている。後述で明らかとなるが、ハウジング71下面の凹部は、プレイヤがコントローラ7の前面をマーカ8Lおよび8Rに向けて片手で把持したときに、当該プレイヤの人差し指や中指が位置するような位置に形成される。そして、上記凹部の傾斜面には、操作ボタン72iが設けられる。操作ボタン72iは、例えばBボタンとして機能する操作部である。
【0053】
また、ハウジング71前面には、撮像情報演算部74の一部を構成する撮像素子743が設けられる。ここで、撮像情報演算部74は、コントローラ7が撮像した画像データを解析してその中で輝度が高い場所を判別してその場所の重心位置やサイズなどを検出するためのシステムであり、例えば、最大200フレーム/秒程度のサンプリング周期であるため比較的高速なコントローラ7の動きでも追跡して解析することができる。この撮像情報演算部74の詳細な構成については、後述する。また、ハウジング70の後面には、コネクタ73が設けられている。コネクタ73は、例えばエッジコネクタであり、例えば接続ケーブルと嵌合して接続するために利用される。
【0054】
ここで、以下の説明を具体的にするために、コントローラ7に対して設定する座標系について定義する。図3および図4に示すように、互いに直交するxyz軸をコントローラ7に対して定義する。具体的には、コントローラ7の前後方向となるハウジング71の長手方向をz軸とし、コントローラ7の前面(撮像情報演算部74が設けられている面)方向をz軸正方向とする。また、コントローラ7の上下方向をy軸とし、ハウジング71の上面(操作ボタン72a等が設けられた面)方向をy軸正方向とする。さらに、コントローラ7の左右方向をx軸とし、ハウジング71の左側面(図3では表されずに図4で表されている側面)方向をx軸正方向とする。
【0055】
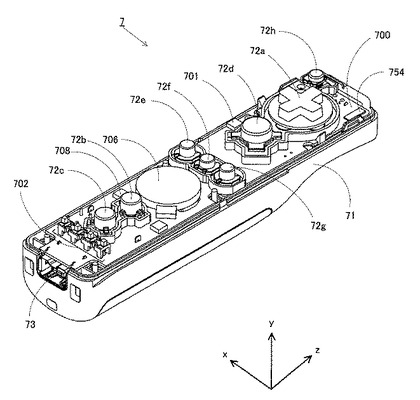
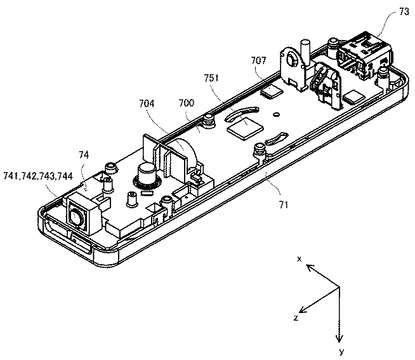
次に、図5および図6を参照して、コントローラ7の内部構造について説明する。なお、図5は、コントローラ7の上ハウジング(ハウジング71の一部)を外した状態を後面側から見た斜視図である。図6は、コントローラ7の下ハウジング(ハウジング71の一部)を外した状態を前面側から見た斜視図である。ここで、図6に示す基板700は、図5に示す基板700の裏面から見た斜視図となっている。
【0056】
図5において、ハウジング71の内部には基板700が固設されており、当該基板700の上主面上に操作ボタン72a〜72h、加速度センサ701、LED702、およびアンテナ754等が設けられる。そして、これらは、基板700等に形成された配線(図示せず)によってマイコン751等(図6、図7参照)に接続される。マイコン751は本願発明のボタンデータ発生手段の一例として、操作ボタン72a等の種類に応じた操作ボタンデータを発生させるように機能する。この仕組みは公知技術であるが、例えばキートップ下側に配置されたタクトスイッチなどのスイッチ機構による配線の接触/切断をマイコン751が検出することによって実現されている。より具体的には、操作ボタンが例えば押されると配線が接触して通電するので、この通電がどの操作ボタンにつながっている配線で発生したかをマイコン751が検出し、操作ボタンの種類に応じた信号を発生させている。
【0057】
また、コントローラ7は、図示しない無線モジュール753(図7参照)およびアンテナ754によって、ワイヤレスコントローラとして機能する。なお、ハウジング71内部には図示しない水晶振動子が設けられており、後述するマイコン751の基本クロックを生成する。また、基板700の上主面上に、スピーカ706およびアンプ708が設けられる。また、加速度センサ701は、操作ボタン72dの左側の基板700上(つまり、基板700の中央部ではなく周辺部)に設けられる。したがって、加速度センサ701は、コントローラ7の長手方向を軸とした回転に応じて、重力加速度の方向変化に加え、遠心力による成分の含まれる加速度を検出することができるので、所定の演算により、検出される加速度データからコントローラ7の回転を良好な感度でゲーム装置3等が判定することができる。
【0058】
一方、図6において、基板700の下主面上の前端縁に撮像情報演算部74が設けられる。撮像情報演算部74は、コントローラ7の前方から順に赤外線フィルタ741、レンズ742、撮像素子743、および画像処理回路744によって構成されており、それぞれ基板700の下主面に取り付けられる。また、基板700の下主面上の後端縁にコネクタ73が取り付けられる。さらに、基板700の下主面上にサウンドIC707およびマイコン751が設けられている。サウンドIC707は、基板700等に形成された配線によってマイコン751およびアンプ708と接続され、ゲーム装置3から送信されたサウンドデータに応じてアンプ708を介してスピーカ706に音声信号を出力する。
【0059】
そして、基板700の下主面上には、バイブレータ704が取り付けられる。バイブレータ704は、例えば振動モータやソレノイドである。バイブレータ704は、基板700等に形成された配線によってマイコン751と接続され、ゲーム装置3から送信された振動データに応じてその作動をオン/オフする。バイブレータ704が作動することによってコントローラ7に振動が発生するので、それを把持しているプレイヤの手にその振動が伝達され、いわゆる振動対応ゲームが実現できる。ここで、バイブレータ704は、ハウジング71のやや前方寄りに配置されるため、プレイヤが把持している状態において、ハウジング71が大きく振動することになり、振動を感じやすくなる。
【0060】
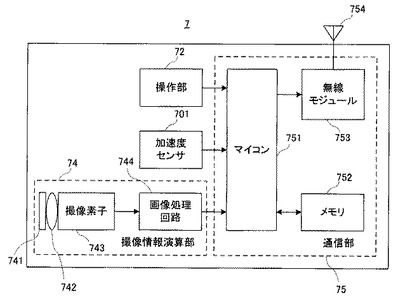
次に、図7を参照して、コントローラ7の内部構成について説明する。なお、図7は、コントローラ7の構成を示すブロック図である。図7において、コントローラ7は、上述した操作部72、撮像情報演算部74、加速度センサ701、バイブレータ704、スピーカ706、サウンドIC707、およびアンプ708の他に、その内部に通信部75を備えている。
【0061】
撮像情報演算部74は、赤外線フィルタ741、レンズ742、撮像素子743、および画像処理回路744を含んでいる。赤外線フィルタ741は、コントローラ7の前方から入射する光から赤外線のみを通過させる。レンズ742は、赤外線フィルタ741を透過した赤外線を集光して撮像素子743へ出射する。撮像素子743は、例えばCMOSセンサやあるいはCCDのような固体撮像素子であり、レンズ742が集光した赤外線を撮像する。したがって、撮像素子743は、赤外線フィルタ741を通過した赤外線だけを撮像して画像データを生成する。撮像素子743で生成された画像データは、画像処理回路744で処理される。具体的には、画像処理回路744は、撮像素子743から得られた画像データを処理して高輝度部分を検知し、それらの位置座標や面積を検出した結果を示す処理結果データを通信部75へ出力する。なお、これらの撮像情報演算部74は、コントローラ7のハウジング71に固設されており、ハウジング71自体の方向を変えることによってその撮像方向を変更することができる。その結果、その撮像方向に応じて、撮像された画像中の高輝度部分の位置が変化する。すなわち、処理結果データは、プレイヤの操作に応じた情報である。そのため、この撮像情報演算部74から出力される処理結果データに基づいて、コントローラ7の位置や動きに応じた信号を得ることができる。
【0062】
コントローラ7は、3軸(x、y、z軸)の加速度センサ701を備えていることが好ましい。この3軸の加速度センサ701は、3方向、すなわち、上下方向、左右方向、および前後方向で直線加速度を検知する。また、他の実施形態においては、ゲーム処理に用いる制御信号の種類によっては、上下および左右方向(または他の対になった方向)のそれぞれに沿った直線加速度のみを検知する2軸の加速度検出手段を使用してもよい。例えば、この3軸または2軸の加速度センサ701は、アナログ・デバイセズ株式会社(Analog Devices, Inc.)またはSTマイクロエレクトロニクス社(STMicroelectronics N.V.)から入手可能であるタイプのものでもよい。加速度センサ701は、シリコン微細加工されたMEMS(Micro Electro Mechanical Systems:微小電子機械システム)の技術に基づいた静電容量式(静電容量結合式)であってもよい。しかしながら、既存の加速度検出手段の技術(例えば、圧電方式や圧電抵抗方式)あるいは将来開発される他の適切な技術を用いて3軸または2軸の加速度センサ701が提供されてもよい。
【0063】
当業者には公知であるように、加速度センサ701に用いられるような加速度検出手段は、加速度センサの持つ各軸に対応する直線に沿った加速度(直線加速度)のみを検知することができる。つまり、加速度センサ701からの直接の出力は、その2軸または3軸のそれぞれに沿った直線加速度(静的または動的)を示す信号である。このため、加速度センサ701は、非直線状(例えば、円弧状)の経路に沿った動き、回転、回転運動、角変位、傾斜、位置、または姿勢等の物理特性を直接検知することはできない。
【0064】
しかしながら、加速度センサ701から出力される加速度の信号に基づいて、ゲーム装置のプロセッサ(例えばCPU30)またはコントローラのプロセッサ(例えばマイコン751)などのコンピュータが処理を行うことによって、コントローラ7に関するさらなる情報を推測または算出(判定)することができることは、当業者であれば本明細書の説明から容易に理解できるであろう。例えば、加速度センサを搭載するコントローラが静的な状態であることを前提としてコンピュータ側で処理する場合(すなわち、加速度センサによって検出される加速度が重力加速度のみであるとして処理する場合)、コントローラが現実に静的な状態であれば、検出された加速度に基づいてコントローラの姿勢が重力方向に対して傾いているか否か又はどの程度傾いているかを知ることができる。具体的には、加速度センサの検出軸が鉛直下方向を向いている状態を基準としたとき、1G(重力加速度)がかかっているか否かだけで傾いているか否かを知ることができるし、その大きさによってどの程度傾いているかも知ることができる。また、多軸の加速度センサの場合には、さらに各軸の加速度の信号に対して処理を施すことによって、重力方向に対してどの程度傾いているかをより詳細に知ることができる。この場合において、、加速度センサ701からの出力に基づいて、プロセッサがコントローラ7の傾き角度のデータを算出する処理をおこなってもよいが、当該傾き角度のデータを算出する処理をおこなうことなく、加速度センサ701からの出力に基づいて、おおよその傾き具合を推定するような処理としてもよい。このように、加速度センサ701をプロセッサと組み合わせて用いることによって、コントローラ7の傾き、姿勢または位置を判定することができる。一方、加速度センサが動的な状態であることを前提とする場合には、重力加速度成分に加えて加速度センサの動きに応じた加速度を検出するので、重力加速度成分を所定の処理により除去すれば、動き方向などを知ることができる。具体的には、、加速度センサ701を備えるコントローラ7がユーザの手で動的に加速されて動かされる場合に、加速度センサ701によって生成される加速度信号を処理することによって、コントローラ7のさまざまな動きおよび/または位置を算出することができる。なお、加速度センサが動的な状態であることを前提とする場合であっても、加速度センサの動きに応じた加速度を所定の処理により除去すれば、重力方向対する傾きを知ることが可能である。他の実施例では、加速度センサ701は、信号をマイコン751に出力する前に内蔵の加速度検出手段から出力される加速度信号に対して所望の処理を行うための、組込み式の信号処理装置または他の種類の専用の処理装置を備えていてもよい。例えば、組込み式または専用の処理装置は、加速度センサが静的な加速度(例えば、重力加速度)を検出するためのものである場合、検知された加速度信号をそれに相当する傾斜角(あるいは、他の好ましいパラメータ)に変換するものであってもよい。
【0065】
他の実施形態の例では、コントローラ7の動きを検出する動きセンサとして、回転素子または振動素子などを内蔵したジャイロセンサを用いてもよい。この実施形態で使用されるMEMSジャイロセンサの一例として、アナログ・デバイセズ株式会社から入手可能なものがある。加速度センサ701と異なり、ジャイロセンサは、それが内蔵する少なくとも一つのジャイロ素子の軸を中心とした回転(または角速度)を直接検知することができる。このように、ジャイロセンサと加速度センサとは基本的に異なるので、個々の用途のためにいずれの装置が選択されるかによって、これらの装置からの出力信号に対して行う処理を適宜変更する必要がある。
【0066】
具体的には、加速度センサの代わりにジャイロセンサを用いて傾きや姿勢を算出する場合には、大幅な変更を行う。すなわち、ジャイロセンサを用いる場合、検出開始の状態において傾きの値を初期化する。そして、当該ジャイロセンサから出力される角速度データを積分する。次に、初期化された傾きの値からの傾きの変化量を算出する。この場合、算出される傾きは、角度に対応する値が算出されることになる。一方、加速度センサによって傾きを算出する場合には、重力加速度のそれぞれの軸に関する成分の値を、所定の基準と比較することによって傾きを算出するので、算出される傾きはベクトルで表すことが可能であり、初期化を行わずとも、加速度検出手段を用いて検出される絶対的な方向を検出することが可能である。また、傾きとして算出される値の性質は、ジャイロセンサが用いられる場合には角度であるのに対して、加速度センサが用いられる場合にはベクトルであるという違いがある。したがって、加速度センサに代えてジャイロセンサが用いられる場合、当該傾きのデータに対して、2つのデバイスの違いを考慮した所定の変換を行う必要がある。加速度検出手段とジャイロセンサとの基本的な差異と同様にジャイロセンサの特性は当業者に公知であるので、本明細書ではさらなる詳細を省略する。ジャイロセンサは、回転を直接検知できることによる利点を有する一方、一般的には、加速度センサは、本実施形態で用いるようなコントローラに適用される場合、ジャイロセンサに比べて費用効率が良いという利点を有する。
【0067】
通信部75は、マイクロコンピュータ(Micro Computer:マイコン)751、メモリ752、無線モジュール753、およびアンテナ754を含んでいる。マイコン751は、処理の際にメモリ752を記憶領域として用いながら、送信データを無線送信する無線モジュール753を制御する。また、マイコン751は、アンテナ754を介して無線モジュール753が受信したゲーム装置3からのデータに応じて、サウンドIC707およびバイブレータ704の動作を制御する。サウンドIC707は、通信部75を介してゲーム装置3から送信されたサウンドデータ等を処理する。また、マイコン751は、通信部75を介してゲーム装置3から送信された振動データ(例えば、バイブレータ704をONまたはOFFする信号)等に応じて、バイブレータ704を作動させる。
【0068】
コントローラ7に設けられた操作部72からの操作信号(キーデータ)、加速度センサ701からの加速度信号(x、y、およびz軸方向加速度データ;以下、単に加速度データと記載する)、および撮像情報演算部74からの処理結果データは、マイコン751に出力される。マイコン751は、入力した各データ(キーデータ、加速度データ、処理結果データ)を無線コントローラモジュール52へ送信する送信データとして一時的にメモリ752に格納する。ここで、通信部75から無線コントローラモジュール52への無線送信は、所定の周期毎に行われるが、ゲームの処理は1/60秒を単位として行われることが一般的であるので、それよりも短い周期で送信を行うことが必要となる。具体的には、ゲームの処理単位は16.7ms(1/60秒)であり、ブルートゥース(Bluetooth;登録商標)で構成される通信部75の送信間隔は例えば5msである。マイコン751は、無線コントローラモジュール52への送信タイミングが到来すると、メモリ752に格納されている送信データを一連の操作情報として出力し、無線モジュール753へ出力する。そして、無線モジュール753は、例えばブルートゥース(登録商標)の技術に基づいて、所定周波数の搬送波を用いて操作情報で変調し、その電波信号をアンテナ754から放射する。つまり、コントローラ7に設けられた操作部72からのキーデータ、加速度センサ701からの加速度データ、および撮像情報演算部74からの処理結果データが無線モジュール753で電波信号に変調されてコントローラ7から送信される。そして、ゲーム装置3のアンテナ52aおよび無線コントローラモジュール52でその電波信号を受信し、ゲーム装置3で当該電波信号を復調や復号することによって、一連の操作情報(キーデータ、加速度データ、および処理結果データ)を取得する。そして、ゲーム装置3のCPU30は、取得した操作情報とゲームプログラムとに基づいて、ゲーム処理を行う。なお、ブルートゥース(登録商標)の技術を用いて通信部75を構成する場合、通信部75は、他のデバイスから無線送信された送信データを受信する機能も備えることができる。
【0069】
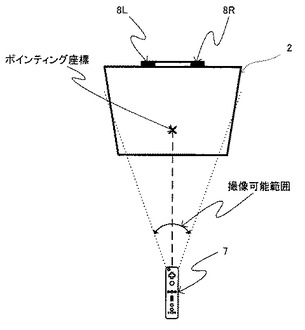
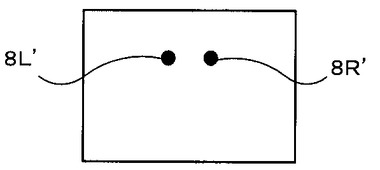
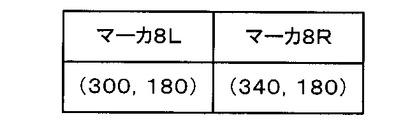
次に、上記のように構成された本ゲーム装置3の本実施形態におけるゲーム処理の概要について、以下説明する。図8は、コントローラ7の向きとテレビ2(マーカ8Lおよび8R)との位置関係を示すための図である。図8では、コントローラ7の前面(撮像情報演算部74のある側)はテレビ2の正面に向いている。この場合、コントローラ7の撮像素子40によって撮像された撮像画像では、図9に示すように、マーカ8Lの画像8L’、マーカ8Rの画像8R’が左右に並んでいる。そして、上述のように、コントローラ7の画像処理回路744は、撮像素子743から得られた撮像画像を処理して高輝度部分(マーカ8L,8Rの画像に対応)を検知し、それらの位置座標や面積を検出した結果を示す処理結果データを通信部75へ出力する。以下、この処理結果データのことを、撮像情報と呼ぶ。図10は、当該撮像情報の一例を示す図である。本実施形態では、図10に示すように、上記2つのマーカのそれぞれの位置を示す座標が撮像情報としてコントローラ7からゲーム装置3に送信されるものとする。そして、本実施形態では、ゲーム装置3側で、これらの2つのマーカの中点を算出する処理を行い、その点をテレビ2の画面上のポインティング座標として、所定のゲーム処理(例えば、射的ゲーム等)を行う。
【0070】
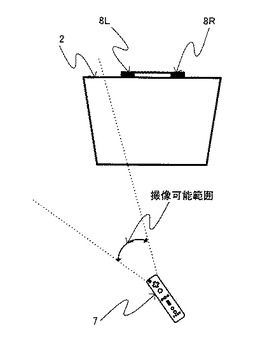
次に、コントローラ7がテレビ2に向いていない場合について、図11を用いて説明する。図11では、コントローラ7の前面が、テレビ2の左の方に向いている状態である。この場合は、コントローラ7の撮像範囲内にマーカ8Lおよび8Rが含まれない。そのため、撮像画像としては、図12に示すように、マーカが写っていない画像となる。このような場合、撮像情報としては、図13に示すように、各マーカの座標の代わりにNULLコード(あるいはNULL値)が設定されて送信されてくる。その結果、本体側では、当該撮像情報から上記ポインティング座標を算出することができない。そのため、このような撮像情報は、本実施形態では、無効なデータとして扱われる。換言すれば、本実施形態においては、NULLコードが含まれているデータはポインティング座標を算出できないため、無効なデータとして扱い、NULLコードの含まれていないデータ(図10参照)は有効なデータとして扱う。
【0071】
また、撮像範囲内にマーカ8Lおよび8Rのいずれか一方のみが含まれる場合は、撮像画像は、例えば図14に示すように、マーカ8L’1つのみが写った画像となる。このような場合、撮像情報としては、例えば、図15に示すように、撮像されていないマーカの座標にNULLが設定される。この場合も、本体側では、当該撮像情報から上記ポインティング座標を算出することができない(中点の算出ができない)ため、無効なデータとして扱われることになる。つまり、本実施形態では、撮像情報にNULLコードが1つでも含まれている場合は、当該撮像情報は無効なデータとして扱われる。
【0072】
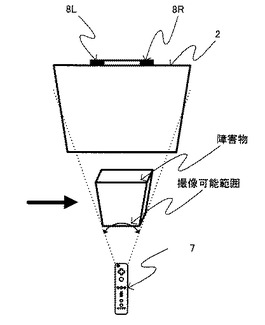
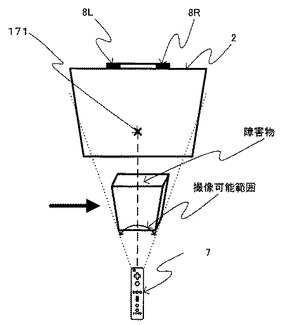
次に、コントローラ7とテレビ2(マーカ8)との間に障害物がある場合について説明する。上記図8の状態から、コントローラ7とテレビ2(マーカ8)との間に障害物、例えば人間がこの間に立ったような場合は、図16に示すように、コントローラ7は障害物に遮られて、マーカ8Lおよび8Rを撮像できない状態となる。その結果、撮像画像は上記図12のようになり、撮像情報は、上記図13に示したような、NULLコードが設定された情報となる。また、障害物がマーカ8Rおよび8Lのいずれか一方のみ遮るような位置関係にある場合は、上記図15に示したような、片方のマーカの座標情報がNULLとなった撮像情報となる。そして、従来では、このような状態のときは、上記図11で示した状態、つまり、コントローラ7がテレビ2の画面外を向いている状態であるとして処理が行われていた。しかし、本発明では、このような状態のときは、マーカ8Lや8Rが撮像できなくなる前に取得した撮像情報を用いて処理を行う。つまり、障害物によってマーカ8Lや8Rが遮られる直前に指示されていたポインティング座標を用いて所定のゲーム処理を行う。その結果、例えば、図17に示すように、障害物があるにもかかわらず、テレビ2の画面上の点171がポインティング座標であるとして処理を行うことができる。
【0073】
このような処理を行うに際して、上述のような無効なデータが送信されてきたときに、そのときの状態が上記図11に示したような、コントローラ7がテレビ2の画面外を向いているのか、図16に示したような、コントローラ7はテレビ2の画面のほうに向いてはいるが、障害物が間にあってマーカ8Lや8Rを撮像できない状態であるのかを区別する必要がある。そのため、本発明では、無効なデータが送信されてきた際のコントローラ7自身の動きの大きさを判定する。例えば、コントローラ7を、図8のような正面を向いている状態から、図11に示すようなテレビ2の外に向けた場合は、その動きは大きな動きであると考えられる。逆に、図8に示した状態から、図16に示したような、コントローラ7とテレビ2との間に障害物が入った場合は、コントローラ7の動きとしては、小さいか、ほとんど動いてないに等しい状態であると考えられる。そこで、本発明は、無効なデータが送信されてきた際のコントローラ7自身の動きの大きさを判定し、その動きが大きいものであれば、図11に示したような、コントローラ7をテレビ2の外に向けている状態であり、その動きが小さければ、図16に示したような、障害物が間に入って遮られている状態であると判定する。そして、障害物で遮られている状態のときは、直前に指示されていたポインティング座標を現在のポインティング座標として用いるものである。つまり、無効なデータが送信されてきた際のコントローラ7の動きが小さいと判定されるときは、障害物等で一時的にマーカ8Lや8Rが遮られている状態であるとして、以前に取得した有効なデータのうち最新のデータを流用して、それまで行っていた処理を継続できるようにするものである。
【0074】
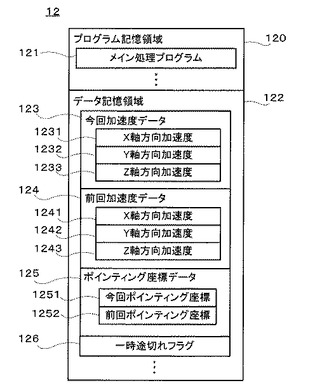
次に、本実施形態で用いられる各種データについて説明する。図18は、図2に示した外部メインメモリ12のメモリマップを示す図解図である。図18において、外部メインメモリ12は、プログラム記憶領域120およびデータ記憶領域122を含む。
【0075】
プログラム記憶領域120は、CPU10によって実行されるプログラムを記憶し、このプログラムは、メイン処理プログラム121などによって構成される。
【0076】
データ記憶領域122には、今回加速度データ123、前回加速度データ124、ポインティング座標データ125などのデータが記憶されるとともに、一時途切れフラグ126などのフラグも記憶される。
【0077】
今回加速度データ123は、コントローラ7から送信データとして送信されてくる一連の操作情報に含まれる加速度データである。今回加速度データ123には、加速度センサ701がX、Y、およびZ軸の3軸成分に分けてそれぞれ検出したX軸方向加速度1231、Y軸方向加速度1232、およびZ軸方向加速度1233が含まれる。なお、ゲーム装置3に備える受信ユニット6は、コントローラ7から所定間隔例えば5msごとに送信される操作情報に含まれる今回加速度データ123を受信し、受信ユニット6に備える図示しないバッファに蓄えられる。その後、処理間隔である1フレーム毎に読み出されて外部メインメモリ12に記憶される。また、今回加速度データ123は、−2G〜+2Gの範囲の値をとる。
【0078】
前回加速度データ124は、前回の処理ループにおいて算出された加速度データを示す。ここで、処理ループとは、後述の図19に示すステップ2〜ステップ9の処理ループをいう。また、当該処理ループは、上記処理間隔である1フレーム毎に繰り返される。なお、前回加速度データ124のファイルレイアウトは、今回加速度データ123と同じであるので、説明は省略する。
【0079】
ポインティング座標データ125は、コントローラ7から送信データとして送信されてくる一連の操作情報に含まれる撮像情報に基づいて算出されるデータであり、画面上におけるポインティング座標を示すためのデータである。ポインティング座標データ125には、今回ポインティング座標1251および前回ポインティング座標1252が含まれる。今回ポインティング座標1251は、現在の処理ループ内におけるポインティング座標を示すデータである。また、前回ポインティング座標1252は、1つ前の処理ループにおけるポインティング座標を示すデータである。その内容としては、コントローラ7から送信されてくる上記撮像情報(図10等参照)に基づき、マーカ8Lと8Rの中点の座標がポインティング座標として格納される。
【0080】
一時途切れフラグ126は、撮像情報が無効なデータであるときに、その原因が、障害物による一時的なものか、コントローラ7が画面外を向いているのかを判別するためのフラグである。つまり、無効なデータが送信されてきたときに、上記図11に示したような状態であるのか、図16に示した状態であるのかを判別するためのフラグである。当該フラグがオフのときは、図11に示すような、コントローラ7が画面外に向いている状態であることを示す。一方、オンのときは、図16に示したような、コントローラ7とマーカ8Lおよび8Rとの間が障害物によって遮られている状態であることを示す。
【0081】
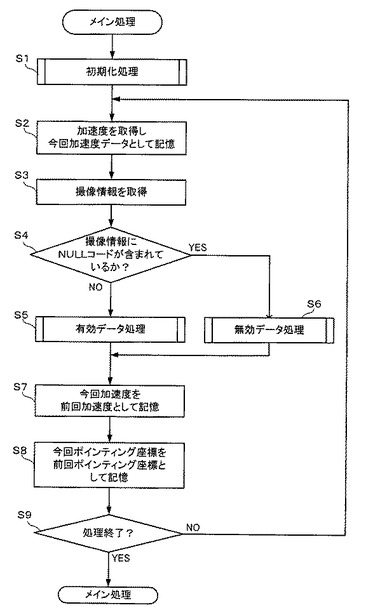
次に、図19〜図22を参照して、ゲーム装置3によって実行されるゲーム処理について説明する。なお、図19は、ゲーム装置3によって実行される処理の全体処理を示すフローチャートである。なお、本実施形態においては、図19に示すステップ2〜ステップ9の処理ループは、上述のように、1/60秒毎に繰り返し実行される。これは、本実施形態におけるゲーム処理では、1/60秒毎に画面のビデオデータが作成され、出力されることを想定しているためである。また、図19〜図22に示すフローチャートにおいては、撮像情報の処理に関する処理を中心に説明し、本願発明と直接関連しない他のゲーム処理については説明を省略する。また、図19〜図22では、CPU30が実行する各ステップを「S」と略称する。
【0082】
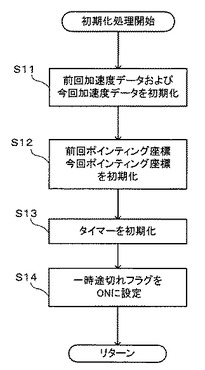
まず、各種データやフラグを初期化するための初期化処理が行われる(ステップ1)。図20は、上記ステップ1で示した初期化処理の詳細を示すフローチャートである。図20において、まず、今回加速度データ123および前回加速度データ124が初期化される(ステップ11)。次に、今回ポインティング座標1251および前回ポインティング座標1252が初期化される(ステップ12)。
【0083】
更に、タイマーが初期化される(ステップ13)。ここで、当該タイマーは、コントローラ7から送信される撮像情報が無効なデータである状態が持続する時間を計測するためのものである。これは、無効な撮像情報がコントローラ7から送信されてきたとき、例えば、プレイヤが手でコントローラ7の前面を覆い隠しているような、コントローラ7の撮像情報演算部74が意図的に遮られている状況かどうかを判定するために用いられる。最後に、一時途切れフラグ126にONを設定することで初期化する(ステップ14)。以上で初期化処理は終了する。
【0084】
図19に戻り、次に、コントローラ7から出力された加速度データが取得され、今回加速度データ123として外部メインメモリ12に記憶される(ステップ2)。
【0085】
次に、コントローラ7から出力された上記撮像情報が取得される(ステップ3)。続いて、当該取得された撮像情報に上述したようなNULLコードが含まれているか否かが判定される(ステップ4)。つまり、撮像情報が無効データであるか否かの判定が行われる。当該判定の結果、NULLコードが含まれていないときは(ステップ4でNO)、撮像情報は有効な情報であるとして、有効データ処理が行われる(ステップ5)。一方、NULLコードが含まれていたときは(ステップ4でYES)、撮像情報は無効な情報であるとして、無効データ処理が行われる(ステップ6)。
【0086】
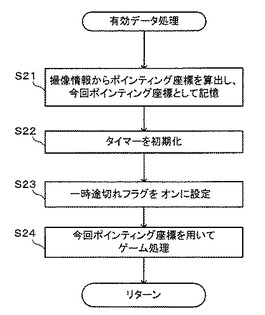
図21は、上記ステップ5で示した有効データ処理の詳細を示すフローチャートである。図21において、まず、上記ステップ3で取得された撮像情報に基づいて、ポインティング座標が算出される。具体的には、マーカ8Lおよび8Rの中点を算出し、これをポインティング座標とする。そして、算出されたポインティング座標が今回ポインティング座標1251として外部メインメモリ12に記憶される(ステップ21)。
【0087】
次に、タイマーが初期化され(ステップ22)、更に、一時途切れフラグ126がオンに設定される(ステップ23)。
【0088】
次に、上記今回ポインティング座標1251を用いた所定のゲーム処理が行われる(ステップ24)。例えば、今回ポインティング座標1251で示される画面上の位置にカーソルを表示するための処理や、射的ゲームのようなゲーム処理であれば、今回ポインティング座標1251に弾丸を着弾した様子を表示するための処理が行われる。以上で、有効データ処理は終了する。
【0089】
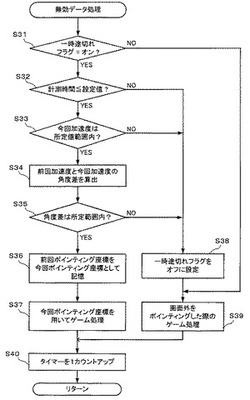
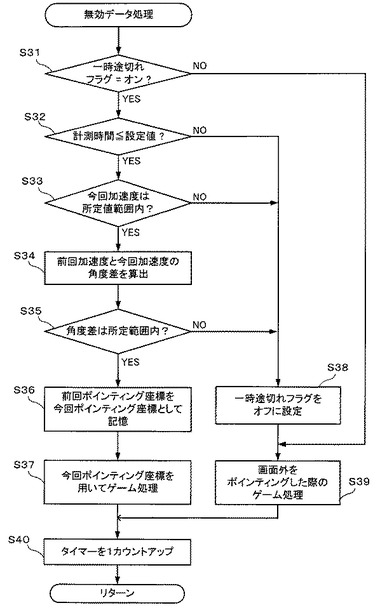
次に、上記ステップ6で示した無効データ処理について、図22を用いて説明する。図22において、まず、一時途切れフラグ126がオンであるか否かが判定される(ステップ31)。当該判定の結果、一時途切れフラグ126がオンでないときは(ステップ31でNO)、上記図11で示したような、コントローラ7が画面外を向いている(画面外をポインティングしている)状態であると考えられるため、後述するステップ39に処理が進められる。
【0090】
一方、一時途切れフラグ126がオンであると判定されたときは(ステップ31でYES)、続いて、予め設定された値と上記タイマーで計測された時間とが比較される(ステップ32)。これは、意図的な遮り、例えばプレイヤが手でコントローラ7の前面(撮像情報演算部74のある面)を覆い隠しているような状況かどうかを判定するためである。当該判定の結果、タイマーで計測された時間が設定値以下ではないと判定されたときは(ステップ32でNO)、コントローラ7の前面が意図的に覆い隠されていると考えられるため、後述するステップ38に処理が進められる。
【0091】
一方、タイマーで計測された時間が設定値以下と判定されたときは(ステップ32でYES)、次に、今回加速度データ123が外部メインメモリ12から読出され、今回加速度データ123で示される加速度が予め設定された所定範囲内の値であるか否かが判定される(ステップ33)。これは、コントローラ7自身の動きについて、大きな動きが発生したのか、大きく動かされてはおらずに小さな動きに留まっていたのかを判定するものである。この所定範囲としては、例えば、0.8G〜1.2Gのような、1Gを中心とした付近の値の範囲が考えられる。これは、地球の重力方向への加速度(重力加速度)を1Gとすると、コントローラ7が静止状態のとき、コントローラ7には重力加速度の1Gがかかっている状態となる。そして、コントローラ7の動きが小さい場合は、加速度の変動の幅も小さくなる。そのため、コントローラ7の動きが小さい場合は、その加速度も1G前後の値に留まると考えられるからである。
【0092】
ステップ33の判定の結果、今回加速度データ123が所定範囲内の値ではないと判定されたときは(ステップ33でNO)、加速度がある程度大きい、すなわち、コントローラ7自体にある程度大きな動きが加えられたと考えられる。このときは、後述するステップ38に処理が進められる。一方、今回加速度データ123が所定範囲内の値であると判定されたときは(ステップ33でYES)、次に、今回加速度データと前回加速度データとの角度差を算出する(ステップ34)。具体的には、まず、今回加速度データ123で示される3軸の重力加速度成分をベクトル合成することで、今回加速度ベクトルが算出される。次に、前回加速度データ124で示される3軸の重力加速度成分をベクトル合成することで、前回加速度ベクトルが算出される。そして、今回加速度ベクトルと前回加速度ベクトルとの角度差が算出される。
【0093】
角度差が算出されれば、続いて、当該角度差が、予め設定された所定範囲内の値であるか否かが判定される(ステップ35)。この判定は、上記のような、コントローラ7自体の動きの大きさについての判定精度をより高めるために行われる。当該判定の結果、上記角度差が所定範囲内の値でないと判定されたときは(ステップ35でNO)、コントローラ7自体の動きは大きな動きであったものと考えられる。そのため、上記図16で示したような障害物によってマーカ8Lや8Rが遮られている状態ではなく、上記図11に示したような、コントローラ7が画面の外を向いているような状態であると考えられる。このときは、後述するステップ38に処理が進められる。一方、上記角度差が所定範囲内の値であると判定されたときは(ステップ35でYES)、コントローラ7の動きは小さいと考えられる。つまり、コントローラ7自体はほとんど動きがなく、依然として画面のほうを向いていると考えられるので、図16で示したような、障害物によってマーカ8Lや8Rが遮られている状態であると考えられる。このようなときは、前回ポインティング座標1252が今回ポインティング座標1251として外部メインメモリ12に記憶される(ステップ36)。
【0094】
続けて、今回ポインティング座標1251を用いて所定のゲーム処理が行われる(ステップ37)。例えば、今回ポインティング座標1251に対応する画面上の位置にカーソルを表示する処理等が行われる。これにより、障害物によってマーカ8Lや8Rが遮られているため、撮像情報が無効なデータとなるときは、その前に用いられていたポインティング座標を利用して、本来は撮像情報が有効である際に行われる所定のゲーム処理を実行、あるいは継続することが可能となる。
【0095】
一方、上記ステップ32、ステップ33、ステップ35それぞれの判定において、それぞれの条件が満たされていないと判定されたときは(ステップ32でNO、ステップ33でNO、ステップ35でNO)、撮像情報が無効なデータとなった原因が障害物による遮りではないと考えられるため、一時途切れフラグ126がオフに設定される(ステップ38)。続いて、撮像情報が無効なデータの場合に対応するゲーム処理、本実施形態では、画面外をポインティングしたときに行われる処理が行われる(ステップ39)。例えば、コントローラ7を画面に向ける事をプレイヤに促すメッセージを画面に表示したり、あるいは、上述したような射的ゲームであれば、弾丸の補充を行うための処理等が行われる。
【0096】
次に、上記タイマーが1カウントアップされる(ステップ40)。つまり、タイマーに撮像情報が無効である状態が持続する時間をカウントさせる。例えば、CPU10の(又は図示しないクロック発生器からの)クロックを使って、無効な撮像情報が継続してコントローラ7から送信されてくる継続時間(継続フレーム数)が計測される。以上で、無効データ処理が終了する。
【0097】
図19に戻り、ステップ5、あるいはステップ6の処理の後、今回加速度データ123が前回加速度データ124として外部メインメモリ12に記憶される(ステップ7)。続けて、今回ポインティング座標1251が前回ポインティング座標1252として、外部メインメモリ12に記憶される(ステップ8)。いずれも、次の処理ループで用いるためである。
【0098】
次に、本実施形態に係るメイン処理が終了か否かが判定される(ステップ9)。YESの場合、本処理を終了し、NOの場合、ステップ2に戻って、処理が繰り返される。以上で、本実施形態に係る処理は終了する。
【0099】
このように、本実施形態では、撮像情報に基づいて所定の処理を行うとき、当該撮像情報の内容が無効なデータであるときは、その際のコントローラ7自体の動きの大きさを判定する。そして、コントローラ7自体の動きが大きければ、撮像対象が撮像範囲外にあるとして、無効なデータに対応する処理を行うが、コントローラ7の動きが小さいときは、直前に利用していた有効な撮像情報、またはこれに基づくデータを用いて、有効な撮像情報を用いる処理を行う。これにより、コントローラ7の撮像範囲内に上記マーカ8L、8Rが含まれるにもかかわらず、障害物等の原因で一時的に有効な撮像情報が取得できないときでも、コントローラ7が画面外を向いているときの処理が行われないようにすることができる。すなわち、コントローラ7が画面のほうを向いているものとして所定の処理を実行することが可能となる。
【0100】
なお、上記実施形態では、コントローラ7の動きの大きさを判定する際、上記前回加速度ベクトルと今回加速度ベクトルとの角度差を用いていたが、これに限らず、両ベクトルの内積を用いるようにしても良い。例えば、上記前回加速度ベクトルおよび今回加速度ベクトルの内積が所定範囲内の値であるか否かが判定される。そして、当該内積が所定範囲内の値であれば、コントローラ7の動きは小さいと判定され、所定範囲外の値であるときは、コントローラ7の動きは大きいと判定されるようにすればよい。また、上記内積については、例えば、次のようにして算出できる。まず、上記前回加速度ベクトルおよび今回加速度ベクトルの大きさを、それぞれ1に正規化する。そのうえで、内積を
【数1】

として求める。
そして、当該内積の値が所定範囲内であるか否かによって、コントローラ7の動きの大きさが判定される。
【0101】
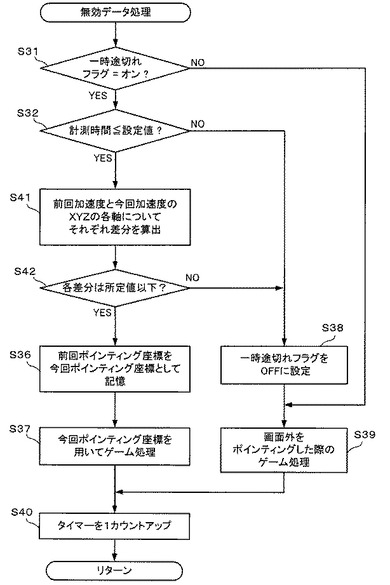
また、コントローラ7の動きの大きさの算出については、今回加速度データ123と前回加速度データ124とのXYZの3軸それぞれの加速度の差分を求め、当該差分が所定値以下であるか否かでコントローラ7が大きく動かされたか否かが判定されるようにしても良い。この場合は、上記図22で示した無効データ処理の代わりに、図23に示すような無効データ処理が行われるようにすればよい。図23においては、ステップ32の判定でYESのときに、前回加速度データ124、および、今回加速度データ123のXYZの3軸それぞれについて、その差分が算出される(ステップ41)。そして、これらの各差分がそれぞれ所定値以下であるか否かが判定され(ステップ42)、3軸共に所定値以下と判定されれば(ステップ42でYES)、コントローラ7が大きく動かされていないとして、上記ステップ36以降の処理が行われる。一方、1軸でも所定値以下ではないときは(ステップ42でNO)、コントローラ7が大きく動かされたと判定され、上記ステップ38以降の処理が行われる。これにより、上記図22に示した無効データ処理に比べて、より簡素な処理内容にすることができ、処理の高速化を図ることが可能となる。
【0102】
また、上記撮像情報について、上記実施形態では、マーカ8L、8Rの2点の座標情報が送られてくる場合を例として説明していたが、これに限らず、コントローラ7側において、上記2点の中点を算出し、この座標が撮像情報として出力されるようにしてもよい。この場合は、撮像情報が有効なデータであるときは、図24に示すように、中点の座標(指示座標)が撮像情報として出力される。一方、無効なデータであるときは、図25に示すように、NULLコードが撮像情報として出力されることになる。このような場合であっても、上述のように、撮像情報がNULLコードであるか否かを判定することで(上記ステップ4)、上記同様の処理を行うことが可能である。
【0103】
また、上記実施形態では、無効データの一例として、撮像画像から高輝度部分(図9の8L’、8R’)が1つだけしか検知できないときや、1つも検知できないときに、無効なデータであると判定する例を示した。これに限らず、撮像画像内に高輝度部分が3つ以上検知された際に、無効なデータであると判定するようにしてもよい。例えば、モニタ2を窓際に設置した場合等は、窓から差し込む太陽光(または、太陽光に含まれる赤外線)を撮像情報演算部74が拾ってしまうことがある。また、モニタ2が窓際に設置されていなくても、マーカ8の近くに光沢のある物体が置かれている場合、窓から差し込む太陽光または発光ダイオードが発光した赤外線等が当該物体に反射し、当該反射した光を撮像情報演算部74が拾ってしまうこともある。そのため、コントローラ7は、マーカ8L、8R以外の光源からの光も撮像することになり、その結果、撮像画像から高輝度部分が3つ以上検知されることが考えられる。このような場合も、上述したような中点の算出ができないため、ポインティング座標が算出できない。そのため、撮像画像から高輝度部分(図9の8L’、8R’に相当)が3つ以上検知されたときは、コントローラ7の画像処理回路744に、無効な撮像データであると判定させ、NULLコードを設定して送信させるようにしてもよい。このような場合でも、上述のように、撮像情報がNULLコードであるか否かを判定することで(上記ステップ4)、上記同様の処理を行うことが可能である。
【0104】
また、無効データであるか否かの判定についても、上述したような、NULLコードの有無による判定に限らない。別途、無効なデータであることを示すコードを用いても良いし、無効を示すための専用のコードを用いることに限らず、その他、撮像情報が所定の条件(上記実施形態では、ポインティング座標の算出ができること)を満たしていれば、無効なデータではないと判定されるようにしてもよい。
【0105】
また、上述の実施形態では、撮像情報に基づいた処理の一例として、撮像情報に基づいて画面のポインティング座標を算出し、当該座標に対して何らかの処理(カーソル表示等)を行う例を示した。このような、ポインティング座標に対して何らかの処理を行うことに限らずに、例えば、FPS(First Person Shooting Game)のようなゲーム処理において、一人称視点の仮想カメラの動き(または注視点)をコントローラ7の向きに応じて移動させるような処理にしてもよい。つまり、コントローラ7を右方向に動かせば、上記撮像情報で示される座標の変化量、すなわち、コントローラ7の向きの変化量に応じて画面が左から右へとスクロールし、コントローラ7を左方向に動かせば、同様に変化量に応じて画面が右から左へとスクロールするような処理が行われるようにしてもよい。そして、例えば、画面を右方向にスクロール中に、画面の前を人間が横切ったため撮像情報が無効なデータとなり、座標の変化量が算出できないようなときは、直前の処理ループで算出された変化量を用いて画面のスクロール処理を継続することが可能となる。
【0106】
また、撮像情報に基づいた処理について、上述のようなゲーム装置で実行されるゲーム処理に限らず、その他の情報処理についても本発明が適用可能であることは言うまでもない。例えば、パーソナルコンピュータを用いた情報処理において、カメラ付の入力装置を用い、その撮像情報に基づいて画面をポインティングする等の処理に利用することも可能である。
【産業上の利用可能性】
【0107】
本発明にかかる情報処理プログラムおよび情報処理装置は、撮像情報が意図的に無効化された状態と、意図せずに無効化されたときの状態を識別することができ、撮像手段を備えた操作装置を用いるゲーム装置やパーソナルコンピュータ等の情報処理装置に有用である。
【図面の簡単な説明】
【0108】
【図1】本発明の一実施形態に係るゲームシステム1を説明するための外観図
【図2】図1のゲーム装置3の機能ブロック図
【図3】図1のコントローラ7の上面後方から見た斜視図
【図4】図3のコントローラ7を下面前方から見た斜視図
【図5】図3のコントローラ7の上ハウジングを外した状態を示す斜視図
【図6】図3のコントローラ7の下ハウジングを外した状態を示す斜視図
【図7】図3のコントローラ7の構成を示すブロック図
【図8】コントローラ7の向きとテレビ2(マーカ8Lおよび8R)との位置関係を示すための図
【図9】撮像画像の一例
【図10】撮像情報の一例
【図11】コントローラ7の向きとテレビ2(マーカ8Lおよび8R)との位置関係を示すための図
【図12】撮像画像の一例
【図13】撮像情報の一例
【図14】撮像画像の一例
【図15】撮像情報の一例
【図16】障害物があるときのコントローラ7の向きとテレビ2(マーカ8Lおよび8R)との位置関係を示すための図
【図17】障害物があるときのコントローラ7の向きとテレビ2(マーカ8Lおよび8R)との位置関係を示すための図
【図18】外部メインメモリ12のメモリマップを示す図解図
【図19】ゲーム装置3によって実行される処理の全体処理を示すフローチャート
【図20】図19のステップ1で示した初期化処理の詳細を示すフローチャート
【図21】図19のステップ5で示した有効データ処理の詳細を示すフローチャート
【図22】図19のステップ6で示した無効データ処理の詳細を示すフローチャート
【図23】図19のステップ6で示した無効データ処理の変形例を示すフローチャート
【図24】撮像情報の一例
【図25】撮像情報の一例
【符号の説明】
【0109】
1…ゲームシステム
2…モニタ
2a…スピーカ
3…ゲーム装置
4…光ディスク
7…コントローラ
10…CPU
11…システムLSI
11a…入出力プロセッサ
11b…GPU
11c…DSP
11d…VRAM
11e…内部メインメモリ
12…外部メインメモリ
13…ROM/RTC
14…ディスクドライブ
15…AV−IC
16…AVコネクタ
17…フラッシュメモリ
18…無線通信モジュール
19…無線コントローラモジュール
20…拡張コネクタ
21…外部メモリカード用コネクタ
22…アンテナ
23…アンテナ
24…電源ボタン
25…リセットボタン
26…イジェクトボタン
71…ハウジング
72…操作部
73…コネクタ
74…撮像情報演算部
741…赤外線フィルタ
742…レンズ
743…撮像素子
744…画像処理回路
75…通信部
751…マイコン
752…メモリ
753…無線モジュール
754…アンテナ
700…基板
701…加速度センサ
702…LED
703…水晶振動子
704…バイブレータ
707…サウンドIC
708…アンプ
【技術分野】
【0001】
本発明は、情報処理プログラムおよび情報処理装置に関し、より特定的には、自身に加えられた動きに応じた動き情報を出力する動きセンサと、撮像対象を撮像するための撮像手段を備える操作装置から、当該撮像手段によって得られる撮像情報に基づいて、当該撮像対象に対する操作装置の向きに応じた所定の処理を実行する情報処理装置のコンピュータに実行させる情報処理プログラムおよび情報処理装置に関する。
【背景技術】
【0002】
従来から、スクリーンに表示される的と銃撃戦を行う射的ゲーム装置が知られている(例えば、特許文献1)。当該射的ゲーム装置では、銃を模したコントローラであるガンユニットを入力装置として用いる。当該ガンユニットの銃身の内部にはCCDカメラが内蔵されており、銃口からの画像が撮像できるようになっている。また、スクリーンには、赤外線を発光する発光ダイオードが、6個配置されている。そして、銃口をスクリーンに向けてガンユニット内蔵のCCDカメラでスクリーンを撮像し、その撮像されたデータを解析することで発光ダイオードの位置を特定する。そして、特定された発光ダイオードの位置に基づいて、着弾位置を算出している。また、上記撮像されたデータを解析した結果、発光ダイオードの位置が特定できないときは、ガンユニットの銃口がスクリーン方向に向いていないと判定される。また、スクリーンが窓際に設置され、窓から太陽光が差し込むような状態のとき、CCDカメラがその太陽光を発光ダイオードの光として拾ってしまい、この太陽光が撮像されることがある。また、発光ダイオードの近くに光沢のある物が置かれているような場合、これに反射した太陽光または発光ダイオードが発光した赤外線等がCCDカメラに拾われて撮像されることもある。その結果、撮像されたデータに多数の光が記録され、発光ダイオードの位置が特定できないという問題もあった。
【特許文献1】特開2005−253724号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上述したような上記特許文献1に開示されたゲーム装置においては、以下に示す問題点がある。上述のように、上記ゲーム装置では、撮像されたデータの解析の結果、発光ダイオードの位置が特定できないときは、ガンユニットの銃口はスクリーン方向に向いていないと判定されている。しかし、ガンユニットの銃口がスクリーン方向に向いている場合であっても、例えば人間が、スクリーンの前を横切った場合は、そのときだけ発光ダイオードの位置を特定することができない。その結果、ガンユニットの銃口がスクリーン方向を向いているにもかかわらずに、スクリーン方向に向いていないと判定されて処理が行われることがあった。つまり、スクリーンの前を人間が横切る等、スクリーンとガンユニットの銃口との間に障害物が発生した際に、一時的に発光ダイオードが遮られ、ガンユニット内蔵のCCDカメラに撮像されなかった結果、ガンユニットの銃口をスクリーン外の方向に向けたと判定されるという問題があった。
【0004】
それ故に、本発明の目的は、撮像手段を備えた操作装置と画面との間に一時的に障害物が発生したときでも、適切な処理を行うことができる情報処理プログラム、および情報処理装置を提供することである。
【課題を解決するための手段】
【0005】
本発明は、上記の課題を解決するために、以下の構成を採用した。なお、括弧内の参照符号および補足説明等は、本発明の理解を助けるために後述する実施形態との対応関係の一例を示したものであって、本発明を何ら限定するものではない。
【0006】
第1の発明は、撮像対象を撮像して撮像情報を得る撮像手段を備える操作装置を用いて、当該撮像情報に基づいて当該撮像対象の配置位置に対する操作装置の向きに応じた所定の処理を実行する情報処理装置のコンピュータに実行させる情報処理プログラムであって、動き情報取得ステップ(S2)と、撮像情報取得ステップ(S3)と、無効情報判定ステップ(S4)と、動作値算出ステップ(S33,S34、S35)と、処理ステップ(S36、S37)とをコンピュータに実行させる。動き情報取得ステップは、操作装置自身の動きに応じた動き情報を出力する動きセンサから動き情報を逐次取得する。撮像情報取得ステップは、撮像手段から撮像情報を逐次取得する。無効情報判定ステップは、撮像情報が所定の処理において有効な情報であるか無効な情報であるかを判定する。動作値算出ステップは、動き情報に基づいて操作装置自身の動きの大きさを示す動作値を算出する。処理ステップは、無効情報判定ステップにおいて撮像情報が無効な情報であると判定され、かつ動作値算出ステップにおいて算出された動作値が所定の範囲内の値であるときは、無効な撮像情報が取得されるより前に取得された有効な撮像情報のうち最新の撮像情報に基づいて所定の処理を実行する。
【0007】
第2の発明は、第1の発明において、動作値算出ステップは、撮像情報が無効な情報であるときにのみ実行される。
【0008】
第3の発明は、第1の発明において、無効情報判定ステップは、撮像情報が所定の条件を満たすか否かを判定する無効条件判定ステップを含む。更に、無効情報判定ステップは、無効条件判定ステップにおいて所定の条件を満たしていないと判定された撮像情報を無効な情報と判定する。
【0009】
第4の発明は、第1の発明において、所定の処理とは、所定の表示装置の画面におけるポインティング位置を算出する処理である。また、無効情報判定ステップは、ポインティング位置を算出することができないような撮像情報を無効な情報と判定する。更に、処理ステップは、無効情報判定ステップにおいて撮像情報が無効な情報であると判定され、かつ動作値算出ステップにおいて算出された動作値が所定の範囲内の値であるときは、有効な撮像情報のうち最新の撮像情報に基づいてポインティング位置を算出する。
【0010】
第5の発明は、第1の発明において、所定の処理とは、撮像情報から操作装置の向きの変化量を算出し、当該変化量を用いる処理である。また、無効情報判定ステップは、変化量を算出することができないような撮像情報を無効な情報と判定する。更に、処理ステップは、無効情報判定ステップにおいて撮像情報が無効な情報であると判定され、かつ動作値算出ステップにおいて算出された動作値が所定の範囲内の値であるときは、直前に算出された変化量を用いて処理を行う。
【0011】
第6の発明は、第1の発明において、所定の処理において無効な情報とは、NULLコードが含まれている撮像情報である。また、無効情報判定ステップは、撮像情報にNULLコードが含まれているか否かによって所定の処理において有効な情報であるか無効な情報であるかを判定する。
【0012】
第7の発明は、第1の発明において、情報処理プログラムは、撮像情報が無効な情報と判定された後、逐次取得される撮像情報が無効な情報と判定され続ける継続時間を計時するためのタイマーステップ(S32、S40)を更にコンピュータに実行させる。また、処理ステップは、タイマーステップにおいて計時された継続時間が所定の値以上のときは、無効情報判定ステップにおける判定結果に関わらず、無効な情報に対応する所定の処理を実行させる。
【0013】
第8の発明は、第1の発明において、動きセンサは、操作装置に生じる加速度を検出する加速度センサである。また、動き情報は、操作装置の動きに応じて加速度センサから出力される加速度データを含む。
【0014】
第9の発明は、第8の発明において、動作値算出ステップは、第1加速度ベクトル算出ステップ(S34)と、第2加速度ベクトル算出ステップ(S34)と、角度差算出ステップ(S34)とを含む。第1加速度ベクトル算出ステップは、加速度データから第1の加速度ベクトルを算出する。第2加速度ベクトル算出ステップは、1つ前に取得された加速度データから第2の加速度ベクトルを算出する。角度差算出ステップは、第1加速度ベクトルと第2加速度ベクトルとの角度差を算出する。更に、処理ステップは、角度差算出ステップで算出された角度差が所定の範囲内に含まれるときに、無効な情報である撮像情報の1つ前に取得された撮像情報に基づいて所定の処理を実行する。
【0015】
第10の発明は、第8の発明において、動作値算出ステップは、第1加速度ベクトル算出ステップと、第2加速度ベクトル算出ステップと、内積算出ステップとを含む。第1加速度ベクトル算出ステップは、加速度データから第1の加速度ベクトルを算出する。第2加速度ベクトル算出ステップは、加速度データの1つ前に取得された加速度データから第2の加速度ベクトルを算出する。内積算出ステップは、第1の加速度ベクトルと第2の加速度ベクトルとの内積を算出する。更に、処理ステップは、内積算出ステップで算出された内積が所定の範囲内に含まれるときに、無効な情報である撮像情報の1つ前に取得された撮像情報に基づいて所定の処理を実行する。
【0016】
第11の発明は、第8の発明において、加速度センサは、互いに直交する少なくとも2つ以上の座標軸の加速度を検出する加速度センサである。また、情報処理プログラムは、無効情報判定ステップにおいて撮像情報が無効な情報であると判定されたとき、当該無効な情報が取得された際に検出された加速度と、当該無効な情報が取得されるより前に検出された加速度のうち最新の加速度との差を前記各座標軸毎に算出する加速度差分算出ステップ(S41)を更にコンピュータに実行させる。更に、処理ステップは、加速度差分算出ステップによって各座標軸毎に算出された差が全て所定値以下であるときのみ、無効な情報である撮像情報が取得されるより前に取得された有効な撮像情報のうち最新の撮像情報に基づいて所定の処理を実行する。
【0017】
第12の発明は、撮像対象を撮像して撮像情報を得る撮像手段(74)を備える操作装置(7)を用いて、当該撮像情報に基づいて、当該撮像対象の配置位置に対する操作装置の向きに応じた所定の処理を実行する情報処理装置(3)であって、操作装置の動きに応じた動き情報を出力する動きセンサ(701)と、記憶手段(12)と、動き情報取得手段(19,10)と、撮像情報取得手段(19,10)と、無効情報判定手段(10)と、動作値算出手段(10)と、処理手段(10)とを備える。動き情報取得手段は、動きセンサから動き情報を逐次取得して記憶手段に記憶する。撮像情報取得手段は、撮像手段から撮像情報を逐次取得して記憶手段に記憶する。無効情報判定手段は、記憶手段から撮像情報を読み出し、当該撮像情報が所定の処理において有効な情報であるか無効な情報であるかを判定する。動作値算出手段は、動き情報を記憶手段から読み出し、当該動き情報に基づいて操作装置自身の動きの大きさを示す動作値を算出する。処理手段は、前記無効情報判定手段が前記撮像情報が無効な情報であると判定し、かつ動作値算出手段が算出した動作値が所定の範囲内の値であるときは、無効な撮像情報が取得される前に取得された有効な撮像情報のうち最新の撮像情報を記憶手段から読み出し、当該1つ前に取得された撮像情報を用いて所定の処理を実行する。
【発明の効果】
【0018】
上記第1の発明によれば、撮像情報に基づいて所定の処理を行う際に、撮像情報が当該所定の処理を行えないような無効な情報であるとき、操作装置自身の動きに基づいて、当該撮像情報が意図的に無効化されたものであるか否かを判別することができる。また、撮像情報が意図的に無効化されたものではないときは、直前に取得された有効な撮像情報を用いて所定の処理を行うことが可能となる。
【0019】
上記第2乃至第3の発明によれば、上記第1の発明と同様の効果を得ることができる。
【0020】
上記第4の発明によれば、撮像情報に基づいて画面等をポインティングするような処理において、画面外をポインティングしたときのような意図的なポインティング情報の喪失と、一時的な遮り等の、プレイヤが意図したものではないポインティング情報の喪失とを区別することができる。また、意図していないポインティング情報の喪失時には、直前に用いられていたポインティング情報を流用して、所定の処理を実行・継続することが可能となる。
【0021】
上記第5の発明によれば、撮像情報に基づく操作装置の向きの変化量に基づいた処理を行うような場合において、無効な撮像情報の発生がプレイヤの意図していないものであり、変化量が算出できないときでも、無効な撮像情報が発生する前に用いられていた変化量を流用して所定の処理を行うことが可能となる。
【0022】
上記第6の発明によれば、NULLコードを用いて無効な情報であるか否かを判定することで、処理の簡略化・汎用化を図ることができる。
【0023】
上記第7の発明によれば、操作装置が画面の外を向いていないときであっても、操作装置の撮像手段をプレイヤが意図的に手で覆い隠す等の意図的な行為が行われているか否かを判定することが可能となる。
【0024】
上記第8の発明によれば、加速度を利用して操作装置の動きを検出することができる。
【0025】
上記第9の発明によれば、無効な撮像情報が発生した際の加速度ベクトルと、その直前に検出された加速度ベクトルとの角度差を比較することで、より正確に操作装置の動きの大きさを判定することができる。
【0026】
上記第10の発明によれば、無効な撮像情報が発生した際の加速度ベクトルと、その直前に検出された加速度ベクトルとの内積に基づいて操作装置の動きの大きさを判定する。これにより、操作装置の動きの大きさをより正確に判定できる。
【0027】
上記第11の発明によれば、処理内容をより簡素にすることができ、処理の高速化を図ることが可能となる。
【0028】
上記第12の発明によれば、上記第1の発明と同様の効果が得られる。
【発明を実施するための最良の形態】
【0029】
(ゲームシステムの全体構成)
図1を参照して、本発明の実施形態に係るゲーム装置を含むゲームシステム1について説明する。図1は、ゲームシステム1の外観図である。以下、据置型のゲーム装置を一例にして、本実施形態のゲーム装置およびゲームプログラムについて説明する。図1において、ゲームシステム1は、テレビジョン受像器(以下、単に「テレビ」と記載する)2、ゲーム装置3、光ディスク4、コントローラ7、およびマーカ部8を含む。本システムは、コントローラ7を用いたゲーム操作に基づいてゲーム装置3でゲーム処理を実行するものである。
【0030】
ゲーム装置3には、当該ゲーム装置3に対して交換可能に用いられる情報記憶媒体の一例である光ディスク4が脱着可能に挿入される。光ディスク4には、ゲーム装置3において実行されるためのゲームプログラムが記憶されている。ゲーム装置3の前面には光ディスク4の挿入口が設けられている。ゲーム装置3は、挿入口に挿入された光ディスク4に記憶されたゲームプログラムを読み出して実行することによってゲーム処理を実行する。
【0031】
ゲーム装置3には、表示装置の一例であるテレビ2が接続コードを介して接続される。テレビ2は、ゲーム装置3において実行されるゲーム処理の結果得られるゲーム画像を表示する。また、テレビ2の画面の周辺(図1では画面の上側)には、マーカ部8が設置される。マーカ部8は、その両端に2つのマーカ8Rおよび8Lを備えている。マーカ8R(マーカ8Lも同様)は、具体的には1以上の赤外LEDであり、テレビ2の前方に向かって赤外光を出力する。マーカ部8はゲーム装置3に接続されており、ゲーム装置3はマーカ部8が備える各赤外LEDの点灯を制御することが可能である。
【0032】
コントローラ7は、自機に対して行われた操作の内容を示す操作データをゲーム装置3に与える入力装置である。コントローラ7とゲーム装置3とは無線通信によって接続される。本実施形態では、コントローラ7とゲーム装置3との間の無線通信には例えばBluetooth(ブルートゥース)(登録商標)の技術が用いられる。なお、他の実施形態においてはコントローラ7とゲーム装置3とは有線で接続されてもよい。
【0033】
(ゲーム装置3の内部構成)
次に、図2を参照して、ゲーム装置3の内部構成について説明する。図2は、ゲーム装置3の構成を示すブロック図である。ゲーム装置3は、CPU10、システムLSI11、外部メインメモリ12、ROM/RTC13、ディスクドライブ14、およびAV−IC15等を有する。
【0034】
CPU10は、光ディスク4に記憶されたゲームプログラムを実行することによってゲーム処理を実行するものであり、ゲームプロセッサとして機能する。CPU10は、システムLSI11に接続される。システムLSI11には、CPU10の他、外部メインメモリ12、ROM/RTC13、ディスクドライブ14およびAV−IC15が接続される。システムLSI11は、それに接続される各構成要素間のデータ転送の制御、表示すべき画像の生成、外部装置からのデータの取得等の処理を行う。システムLSIの内部構成について後述する。揮発性の外部メインメモリ12は、光ディスク4から読み出されたゲームプログラムや、フラッシュメモリ17から読み出されたゲームプログラム等のプログラムを記憶したり、各種データを記憶したりするものであり、CPU10のワーク領域やバッファ領域として用いられる。ROM/RTC13は、ゲーム装置3の起動用のプログラムが組み込まれるROM(いわゆるブートROM)と、時間をカウントするクロック回路(RTC:Real Time Clock)とを有する。ディスクドライブ14は、光ディスク4からプログラムデータやテクスチャデータ等を読み出し、後述する内部メインメモリ11eまたは外部メインメモリ12に読み出したデータを書き込む。
【0035】
また、システムLSI11には、入出力プロセッサ11a、GPU(Graphics Processor Unit)11b、DSP(Digital Signal Processor)11c、VRAM11d、および内部メインメモリ11eが設けられる。図示は省略するが、これらの構成要素11a〜11eは内部バスによって互いに接続される。
【0036】
GPU11bは、描画手段の一部を形成し、CPU10からのグラフィクスコマンド(作画命令)に従って画像を生成する。より具体的には、GPU11bは、当該グラフィクスコマンドに従って3Dグラフィックスの表示に必要な計算処理、例えば、レンダリングの前処理にあたる3D座標から2D座標への座標変換などの処理や、テクスチャの張り込みなどの最終的なレンダリング処理を行うことで、ゲーム画像データを生成する。ここで、CPU10は、グラフィクスコマンドに加えて、ゲーム画像データの生成に必要な画像生成プログラムをGPU11bに与える。VRAM11dは、GPU11bがグラフィクスコマンドを実行するために必要なデータ(ポリゴンデータやテクスチャデータ等のデータ)を記憶する。画像が生成される際には、GPU11bは、VRAM11dに記憶されたデータを用いて画像データを作成する。
【0037】
DSP11cは、オーディオプロセッサとして機能し、内部メインメモリ11eや外部メインメモリ12に記憶されるサウンドデータや音波形(音色)データを用いて、音声データを生成する。
【0038】
上述のように生成された画像データおよび音声データは、AV−IC15によって読み出される。AV−IC15は、読み出した画像データをAVコネクタ16を介してテレビ2に出力するとともに、読み出した音声データを、テレビ2に内蔵されるスピーカ2aに出力する。これによって、画像がテレビ2に表示されるとともに音がスピーカ2aから出力される。
【0039】
入出力プロセッサ(I/Oプロセッサ)11aは、それに接続される構成要素との間でデータの送受信を実行したり、外部装置からのデータのダウンロードを実行したりする。入出力プロセッサ11aは、フラッシュメモリ17、無線通信モジュール18、無線コントローラモジュール19、拡張コネクタ20、および外部メモリカード用コネクタ21に接続される。無線通信モジュール18にはアンテナ22が接続され、無線コントローラモジュール19にはアンテナ23が接続される。
【0040】
入出力プロセッサ11aは、無線通信モジュール18およびアンテナ22を介してネットワークに接続し、ネットワークに接続される他のゲーム装置や各種サーバと通信することができる。入出力プロセッサ11aは、定期的にフラッシュメモリ17にアクセスし、ネットワークへ送信する必要があるデータの有無を検出し、当該データが有る場合には、無線通信モジュール18およびアンテナ22を介してネットワークに送信する。また、入出力プロセッサ11aは、他のゲーム装置から送信されてくるデータやダウンロードサーバからダウンロードしたデータを、ネットワーク、アンテナ22および無線通信モジュール18を介して受信し、受信したデータをフラッシュメモリ17に記憶する。CPU10はゲームプログラムを実行することにより、フラッシュメモリ17に記憶されたデータを読み出してゲームプログラムで利用する。フラッシュメモリ17には、ゲーム装置3と他のゲーム装置や各種サーバとの間で送受信されるデータの他、ゲーム装置3を利用してプレイしたゲームのセーブデータ(ゲームの結果データまたは途中データ)が記憶されてもよい。
【0041】
また、入出力プロセッサ11aは、コントローラ22から送信される操作データをアンテナ23および無線コントローラモジュール19を介して受信し、内部メインメモリ11eまたは外部メインメモリ12のバッファ領域に記憶(一時記憶)する。
【0042】
さらに、入出力プロセッサ11aには、拡張コネクタ20および外部メモリカード用コネクタ21が接続される。拡張コネクタ20は、USBやSCSIのようなインターフェースのためのコネクタであり、外部記憶媒体のようなメディアを接続したり、他のコントローラのような周辺機器を接続したり、有線の通信用コネクタを接続することによって無線通信モジュール18に替えてネットワークとの通信を行ったりすることができる。外部メモリカード用コネクタ21は、メモリカードのような外部記憶媒体を接続するためのコネクタである。例えば、入出力プロセッサ11aは、拡張コネクタ20や外部メモリカード用コネクタ21を介して、外部記憶媒体にアクセスし、データを保存したり、データを読み出したりすることができる。
【0043】
ゲーム装置3には、電源ボタン24、リセットボタン25、およびイジェクトボタン26が設けられる。電源ボタン24およびリセットボタン25は、システムLSI11に接続される。電源ボタン24がオンにされると、ゲーム装置3の各構成要素に対して、図示しないACアダプタを経て電源が供給される。また、一旦電源がオンにされた状態で、再度電源ボタン24を押すと、豆電球1個程度の電力しか使わない低電力スタンバイモードへの移行が行われる。この状態でも、ゲーム装置3への通電は行われているため、インターネット等のネットワークに常時接続しておくことができる。なお、一旦電源がオンにされた状態で、電源をオフにしたいときは、電源ボタン24を所定時間以上長押しすることで、電源をオフとすることが可能である。リセットボタン25が押されると、システムLSI11は、ゲーム装置3の起動プログラムを再起動する。イジェクトボタン26は、ディスクドライブ14に接続される。イジェクトボタン26が押されると、ディスクドライブ14から光ディスク4が排出される。
【0044】
次に、図3および図4を参照して、コントローラ7について説明する。なお、図3は、コントローラ7の上面後方から見た斜視図である。図4は、コントローラ7を下面前方から見た斜視図である。
【0045】
図3および図4において、コントローラ7は、ハウジング71と、当該ハウジング71の表面に設けられた複数個の操作ボタンで構成される操作部72とを備える。本実施例のハウジング71は、その前後方向を長手方向とした略直方体形状を有しており、全体として大人や子供の片手で把持可能な大きさであり、例えばプラスチック成型によって形成されている。
【0046】
ハウジング71上面の中央前面側に、十字キー72aが設けられる。この十字キー72aは、十字型の4方向プッシュスイッチであり、4つの方向(前後左右)に対応する操作部分が十字の突出片にそれぞれ90°間隔で配置される。プレイヤが十字キー72aのいずれかの操作部分を押下することによって前後左右いずれかの方向を選択される。例えばプレイヤが十字キー72aを操作することによって、仮想ゲーム世界に登場するプレイヤキャラクタ等の移動方向を指示したり、複数の選択肢から選択指示したりすることができる。
【0047】
なお、十字キー72aは、上述したプレイヤの方向入力操作に応じて操作信号を出力する操作部であるが、他の態様の操作部でもかまわない。例えば、十字方向に4つのプッシュスイッチを配設し、プレイヤによって押下されたプッシュスイッチに応じて操作信号を出力する操作部を設けてもかまわない。さらに、上記4つのプッシュスイッチとは別に、上記十字方向が交わる位置にセンタスイッチを配設し、4つのプッシュスイッチとセンタスイッチとを複合した操作部を設けてもかまわない。また、ハウジング71上面から突出した傾倒可能なスティック(いわゆる、ジョイスティック)を倒すことによって、傾倒方向に応じて操作信号を出力する操作部を上記十字キー72aの代わりに設けてもかまわない。さらに、水平移動可能な円盤状部材をスライドさせることによって、当該スライド方向に応じた操作信号を出力する操作部を、上記十字キー72aの代わりに設けてもかまわない。また、タッチパッドを、上記十字キー72aの代わりに設けてもかまわない。
【0048】
ハウジング71上面の十字キー72aより後面側に、複数の操作ボタン72b〜72gが設けられる。操作ボタン72b〜72gは、プレイヤがボタン頭部を押下することによって、それぞれの操作ボタン72b〜72gに割り当てられた操作信号を出力する操作部である。例えば、操作ボタン72b〜72dには、1番ボタン、2番ボタン、およびAボタン等としての機能が割り当てられる。また、操作ボタン72e〜72gには、マイナスボタン、ホームボタン、およびプラスボタン等としての機能が割り当てられる。これら操作ボタン72a〜72gは、ゲーム装置3が実行するゲームプログラムに応じてそれぞれの操作機能が割り当てられる。なお、図3に示した配置例では、操作ボタン72b〜72dは、ハウジング71上面の中央前後方向に沿って並設されている。また、操作ボタン72e〜72gは、ハウジング71上面の左右方向に沿って操作ボタン72bおよび72dの間に並設されている。そして、操作ボタン72fは、その上面がハウジング71の上面に埋没しており、プレイヤが不意に誤って押下することのないタイプのボタンである。
【0049】
また、ハウジング71上面の十字キー72aより前面側に、操作ボタン72hが設けられる。操作ボタン72hは、遠隔からゲーム装置3本体の電源をオン/オフする電源スイッチである。この操作ボタン72hも、その上面がハウジング71の上面に埋没しており、プレイヤが不意に誤って押下することのないタイプのボタンである。
【0050】
また、ハウジング71上面の操作ボタン72cより後面側に、複数のLED702が設けられる。ここで、コントローラ7は、他のコントローラ7と区別するためにコントローラ種別(番号)が設けられている。例えば、LED702は、コントローラ7に現在設定されている上記コントローラ種別をプレイヤに通知するために用いられる。具体的には、コントローラ7から通信ユニット6へ送信データを送信する際、上記コントローラ種別に応じて複数のLED702のうち、種別に対応するLEDが点灯する。
【0051】
また、ハウジング71上面には、操作ボタン72bおよび操作ボタン72e〜72gの間に後述するスピーカ(図5のスピーカ706)からの音を外部に放出するための音抜き孔が形成されている。
【0052】
一方、ハウジング71下面には、凹部が形成されている。後述で明らかとなるが、ハウジング71下面の凹部は、プレイヤがコントローラ7の前面をマーカ8Lおよび8Rに向けて片手で把持したときに、当該プレイヤの人差し指や中指が位置するような位置に形成される。そして、上記凹部の傾斜面には、操作ボタン72iが設けられる。操作ボタン72iは、例えばBボタンとして機能する操作部である。
【0053】
また、ハウジング71前面には、撮像情報演算部74の一部を構成する撮像素子743が設けられる。ここで、撮像情報演算部74は、コントローラ7が撮像した画像データを解析してその中で輝度が高い場所を判別してその場所の重心位置やサイズなどを検出するためのシステムであり、例えば、最大200フレーム/秒程度のサンプリング周期であるため比較的高速なコントローラ7の動きでも追跡して解析することができる。この撮像情報演算部74の詳細な構成については、後述する。また、ハウジング70の後面には、コネクタ73が設けられている。コネクタ73は、例えばエッジコネクタであり、例えば接続ケーブルと嵌合して接続するために利用される。
【0054】
ここで、以下の説明を具体的にするために、コントローラ7に対して設定する座標系について定義する。図3および図4に示すように、互いに直交するxyz軸をコントローラ7に対して定義する。具体的には、コントローラ7の前後方向となるハウジング71の長手方向をz軸とし、コントローラ7の前面(撮像情報演算部74が設けられている面)方向をz軸正方向とする。また、コントローラ7の上下方向をy軸とし、ハウジング71の上面(操作ボタン72a等が設けられた面)方向をy軸正方向とする。さらに、コントローラ7の左右方向をx軸とし、ハウジング71の左側面(図3では表されずに図4で表されている側面)方向をx軸正方向とする。
【0055】
次に、図5および図6を参照して、コントローラ7の内部構造について説明する。なお、図5は、コントローラ7の上ハウジング(ハウジング71の一部)を外した状態を後面側から見た斜視図である。図6は、コントローラ7の下ハウジング(ハウジング71の一部)を外した状態を前面側から見た斜視図である。ここで、図6に示す基板700は、図5に示す基板700の裏面から見た斜視図となっている。
【0056】
図5において、ハウジング71の内部には基板700が固設されており、当該基板700の上主面上に操作ボタン72a〜72h、加速度センサ701、LED702、およびアンテナ754等が設けられる。そして、これらは、基板700等に形成された配線(図示せず)によってマイコン751等(図6、図7参照)に接続される。マイコン751は本願発明のボタンデータ発生手段の一例として、操作ボタン72a等の種類に応じた操作ボタンデータを発生させるように機能する。この仕組みは公知技術であるが、例えばキートップ下側に配置されたタクトスイッチなどのスイッチ機構による配線の接触/切断をマイコン751が検出することによって実現されている。より具体的には、操作ボタンが例えば押されると配線が接触して通電するので、この通電がどの操作ボタンにつながっている配線で発生したかをマイコン751が検出し、操作ボタンの種類に応じた信号を発生させている。
【0057】
また、コントローラ7は、図示しない無線モジュール753(図7参照)およびアンテナ754によって、ワイヤレスコントローラとして機能する。なお、ハウジング71内部には図示しない水晶振動子が設けられており、後述するマイコン751の基本クロックを生成する。また、基板700の上主面上に、スピーカ706およびアンプ708が設けられる。また、加速度センサ701は、操作ボタン72dの左側の基板700上(つまり、基板700の中央部ではなく周辺部)に設けられる。したがって、加速度センサ701は、コントローラ7の長手方向を軸とした回転に応じて、重力加速度の方向変化に加え、遠心力による成分の含まれる加速度を検出することができるので、所定の演算により、検出される加速度データからコントローラ7の回転を良好な感度でゲーム装置3等が判定することができる。
【0058】
一方、図6において、基板700の下主面上の前端縁に撮像情報演算部74が設けられる。撮像情報演算部74は、コントローラ7の前方から順に赤外線フィルタ741、レンズ742、撮像素子743、および画像処理回路744によって構成されており、それぞれ基板700の下主面に取り付けられる。また、基板700の下主面上の後端縁にコネクタ73が取り付けられる。さらに、基板700の下主面上にサウンドIC707およびマイコン751が設けられている。サウンドIC707は、基板700等に形成された配線によってマイコン751およびアンプ708と接続され、ゲーム装置3から送信されたサウンドデータに応じてアンプ708を介してスピーカ706に音声信号を出力する。
【0059】
そして、基板700の下主面上には、バイブレータ704が取り付けられる。バイブレータ704は、例えば振動モータやソレノイドである。バイブレータ704は、基板700等に形成された配線によってマイコン751と接続され、ゲーム装置3から送信された振動データに応じてその作動をオン/オフする。バイブレータ704が作動することによってコントローラ7に振動が発生するので、それを把持しているプレイヤの手にその振動が伝達され、いわゆる振動対応ゲームが実現できる。ここで、バイブレータ704は、ハウジング71のやや前方寄りに配置されるため、プレイヤが把持している状態において、ハウジング71が大きく振動することになり、振動を感じやすくなる。
【0060】
次に、図7を参照して、コントローラ7の内部構成について説明する。なお、図7は、コントローラ7の構成を示すブロック図である。図7において、コントローラ7は、上述した操作部72、撮像情報演算部74、加速度センサ701、バイブレータ704、スピーカ706、サウンドIC707、およびアンプ708の他に、その内部に通信部75を備えている。
【0061】
撮像情報演算部74は、赤外線フィルタ741、レンズ742、撮像素子743、および画像処理回路744を含んでいる。赤外線フィルタ741は、コントローラ7の前方から入射する光から赤外線のみを通過させる。レンズ742は、赤外線フィルタ741を透過した赤外線を集光して撮像素子743へ出射する。撮像素子743は、例えばCMOSセンサやあるいはCCDのような固体撮像素子であり、レンズ742が集光した赤外線を撮像する。したがって、撮像素子743は、赤外線フィルタ741を通過した赤外線だけを撮像して画像データを生成する。撮像素子743で生成された画像データは、画像処理回路744で処理される。具体的には、画像処理回路744は、撮像素子743から得られた画像データを処理して高輝度部分を検知し、それらの位置座標や面積を検出した結果を示す処理結果データを通信部75へ出力する。なお、これらの撮像情報演算部74は、コントローラ7のハウジング71に固設されており、ハウジング71自体の方向を変えることによってその撮像方向を変更することができる。その結果、その撮像方向に応じて、撮像された画像中の高輝度部分の位置が変化する。すなわち、処理結果データは、プレイヤの操作に応じた情報である。そのため、この撮像情報演算部74から出力される処理結果データに基づいて、コントローラ7の位置や動きに応じた信号を得ることができる。
【0062】
コントローラ7は、3軸(x、y、z軸)の加速度センサ701を備えていることが好ましい。この3軸の加速度センサ701は、3方向、すなわち、上下方向、左右方向、および前後方向で直線加速度を検知する。また、他の実施形態においては、ゲーム処理に用いる制御信号の種類によっては、上下および左右方向(または他の対になった方向)のそれぞれに沿った直線加速度のみを検知する2軸の加速度検出手段を使用してもよい。例えば、この3軸または2軸の加速度センサ701は、アナログ・デバイセズ株式会社(Analog Devices, Inc.)またはSTマイクロエレクトロニクス社(STMicroelectronics N.V.)から入手可能であるタイプのものでもよい。加速度センサ701は、シリコン微細加工されたMEMS(Micro Electro Mechanical Systems:微小電子機械システム)の技術に基づいた静電容量式(静電容量結合式)であってもよい。しかしながら、既存の加速度検出手段の技術(例えば、圧電方式や圧電抵抗方式)あるいは将来開発される他の適切な技術を用いて3軸または2軸の加速度センサ701が提供されてもよい。
【0063】
当業者には公知であるように、加速度センサ701に用いられるような加速度検出手段は、加速度センサの持つ各軸に対応する直線に沿った加速度(直線加速度)のみを検知することができる。つまり、加速度センサ701からの直接の出力は、その2軸または3軸のそれぞれに沿った直線加速度(静的または動的)を示す信号である。このため、加速度センサ701は、非直線状(例えば、円弧状)の経路に沿った動き、回転、回転運動、角変位、傾斜、位置、または姿勢等の物理特性を直接検知することはできない。
【0064】
しかしながら、加速度センサ701から出力される加速度の信号に基づいて、ゲーム装置のプロセッサ(例えばCPU30)またはコントローラのプロセッサ(例えばマイコン751)などのコンピュータが処理を行うことによって、コントローラ7に関するさらなる情報を推測または算出(判定)することができることは、当業者であれば本明細書の説明から容易に理解できるであろう。例えば、加速度センサを搭載するコントローラが静的な状態であることを前提としてコンピュータ側で処理する場合(すなわち、加速度センサによって検出される加速度が重力加速度のみであるとして処理する場合)、コントローラが現実に静的な状態であれば、検出された加速度に基づいてコントローラの姿勢が重力方向に対して傾いているか否か又はどの程度傾いているかを知ることができる。具体的には、加速度センサの検出軸が鉛直下方向を向いている状態を基準としたとき、1G(重力加速度)がかかっているか否かだけで傾いているか否かを知ることができるし、その大きさによってどの程度傾いているかも知ることができる。また、多軸の加速度センサの場合には、さらに各軸の加速度の信号に対して処理を施すことによって、重力方向に対してどの程度傾いているかをより詳細に知ることができる。この場合において、、加速度センサ701からの出力に基づいて、プロセッサがコントローラ7の傾き角度のデータを算出する処理をおこなってもよいが、当該傾き角度のデータを算出する処理をおこなうことなく、加速度センサ701からの出力に基づいて、おおよその傾き具合を推定するような処理としてもよい。このように、加速度センサ701をプロセッサと組み合わせて用いることによって、コントローラ7の傾き、姿勢または位置を判定することができる。一方、加速度センサが動的な状態であることを前提とする場合には、重力加速度成分に加えて加速度センサの動きに応じた加速度を検出するので、重力加速度成分を所定の処理により除去すれば、動き方向などを知ることができる。具体的には、、加速度センサ701を備えるコントローラ7がユーザの手で動的に加速されて動かされる場合に、加速度センサ701によって生成される加速度信号を処理することによって、コントローラ7のさまざまな動きおよび/または位置を算出することができる。なお、加速度センサが動的な状態であることを前提とする場合であっても、加速度センサの動きに応じた加速度を所定の処理により除去すれば、重力方向対する傾きを知ることが可能である。他の実施例では、加速度センサ701は、信号をマイコン751に出力する前に内蔵の加速度検出手段から出力される加速度信号に対して所望の処理を行うための、組込み式の信号処理装置または他の種類の専用の処理装置を備えていてもよい。例えば、組込み式または専用の処理装置は、加速度センサが静的な加速度(例えば、重力加速度)を検出するためのものである場合、検知された加速度信号をそれに相当する傾斜角(あるいは、他の好ましいパラメータ)に変換するものであってもよい。
【0065】
他の実施形態の例では、コントローラ7の動きを検出する動きセンサとして、回転素子または振動素子などを内蔵したジャイロセンサを用いてもよい。この実施形態で使用されるMEMSジャイロセンサの一例として、アナログ・デバイセズ株式会社から入手可能なものがある。加速度センサ701と異なり、ジャイロセンサは、それが内蔵する少なくとも一つのジャイロ素子の軸を中心とした回転(または角速度)を直接検知することができる。このように、ジャイロセンサと加速度センサとは基本的に異なるので、個々の用途のためにいずれの装置が選択されるかによって、これらの装置からの出力信号に対して行う処理を適宜変更する必要がある。
【0066】
具体的には、加速度センサの代わりにジャイロセンサを用いて傾きや姿勢を算出する場合には、大幅な変更を行う。すなわち、ジャイロセンサを用いる場合、検出開始の状態において傾きの値を初期化する。そして、当該ジャイロセンサから出力される角速度データを積分する。次に、初期化された傾きの値からの傾きの変化量を算出する。この場合、算出される傾きは、角度に対応する値が算出されることになる。一方、加速度センサによって傾きを算出する場合には、重力加速度のそれぞれの軸に関する成分の値を、所定の基準と比較することによって傾きを算出するので、算出される傾きはベクトルで表すことが可能であり、初期化を行わずとも、加速度検出手段を用いて検出される絶対的な方向を検出することが可能である。また、傾きとして算出される値の性質は、ジャイロセンサが用いられる場合には角度であるのに対して、加速度センサが用いられる場合にはベクトルであるという違いがある。したがって、加速度センサに代えてジャイロセンサが用いられる場合、当該傾きのデータに対して、2つのデバイスの違いを考慮した所定の変換を行う必要がある。加速度検出手段とジャイロセンサとの基本的な差異と同様にジャイロセンサの特性は当業者に公知であるので、本明細書ではさらなる詳細を省略する。ジャイロセンサは、回転を直接検知できることによる利点を有する一方、一般的には、加速度センサは、本実施形態で用いるようなコントローラに適用される場合、ジャイロセンサに比べて費用効率が良いという利点を有する。
【0067】
通信部75は、マイクロコンピュータ(Micro Computer:マイコン)751、メモリ752、無線モジュール753、およびアンテナ754を含んでいる。マイコン751は、処理の際にメモリ752を記憶領域として用いながら、送信データを無線送信する無線モジュール753を制御する。また、マイコン751は、アンテナ754を介して無線モジュール753が受信したゲーム装置3からのデータに応じて、サウンドIC707およびバイブレータ704の動作を制御する。サウンドIC707は、通信部75を介してゲーム装置3から送信されたサウンドデータ等を処理する。また、マイコン751は、通信部75を介してゲーム装置3から送信された振動データ(例えば、バイブレータ704をONまたはOFFする信号)等に応じて、バイブレータ704を作動させる。
【0068】
コントローラ7に設けられた操作部72からの操作信号(キーデータ)、加速度センサ701からの加速度信号(x、y、およびz軸方向加速度データ;以下、単に加速度データと記載する)、および撮像情報演算部74からの処理結果データは、マイコン751に出力される。マイコン751は、入力した各データ(キーデータ、加速度データ、処理結果データ)を無線コントローラモジュール52へ送信する送信データとして一時的にメモリ752に格納する。ここで、通信部75から無線コントローラモジュール52への無線送信は、所定の周期毎に行われるが、ゲームの処理は1/60秒を単位として行われることが一般的であるので、それよりも短い周期で送信を行うことが必要となる。具体的には、ゲームの処理単位は16.7ms(1/60秒)であり、ブルートゥース(Bluetooth;登録商標)で構成される通信部75の送信間隔は例えば5msである。マイコン751は、無線コントローラモジュール52への送信タイミングが到来すると、メモリ752に格納されている送信データを一連の操作情報として出力し、無線モジュール753へ出力する。そして、無線モジュール753は、例えばブルートゥース(登録商標)の技術に基づいて、所定周波数の搬送波を用いて操作情報で変調し、その電波信号をアンテナ754から放射する。つまり、コントローラ7に設けられた操作部72からのキーデータ、加速度センサ701からの加速度データ、および撮像情報演算部74からの処理結果データが無線モジュール753で電波信号に変調されてコントローラ7から送信される。そして、ゲーム装置3のアンテナ52aおよび無線コントローラモジュール52でその電波信号を受信し、ゲーム装置3で当該電波信号を復調や復号することによって、一連の操作情報(キーデータ、加速度データ、および処理結果データ)を取得する。そして、ゲーム装置3のCPU30は、取得した操作情報とゲームプログラムとに基づいて、ゲーム処理を行う。なお、ブルートゥース(登録商標)の技術を用いて通信部75を構成する場合、通信部75は、他のデバイスから無線送信された送信データを受信する機能も備えることができる。
【0069】
次に、上記のように構成された本ゲーム装置3の本実施形態におけるゲーム処理の概要について、以下説明する。図8は、コントローラ7の向きとテレビ2(マーカ8Lおよび8R)との位置関係を示すための図である。図8では、コントローラ7の前面(撮像情報演算部74のある側)はテレビ2の正面に向いている。この場合、コントローラ7の撮像素子40によって撮像された撮像画像では、図9に示すように、マーカ8Lの画像8L’、マーカ8Rの画像8R’が左右に並んでいる。そして、上述のように、コントローラ7の画像処理回路744は、撮像素子743から得られた撮像画像を処理して高輝度部分(マーカ8L,8Rの画像に対応)を検知し、それらの位置座標や面積を検出した結果を示す処理結果データを通信部75へ出力する。以下、この処理結果データのことを、撮像情報と呼ぶ。図10は、当該撮像情報の一例を示す図である。本実施形態では、図10に示すように、上記2つのマーカのそれぞれの位置を示す座標が撮像情報としてコントローラ7からゲーム装置3に送信されるものとする。そして、本実施形態では、ゲーム装置3側で、これらの2つのマーカの中点を算出する処理を行い、その点をテレビ2の画面上のポインティング座標として、所定のゲーム処理(例えば、射的ゲーム等)を行う。
【0070】
次に、コントローラ7がテレビ2に向いていない場合について、図11を用いて説明する。図11では、コントローラ7の前面が、テレビ2の左の方に向いている状態である。この場合は、コントローラ7の撮像範囲内にマーカ8Lおよび8Rが含まれない。そのため、撮像画像としては、図12に示すように、マーカが写っていない画像となる。このような場合、撮像情報としては、図13に示すように、各マーカの座標の代わりにNULLコード(あるいはNULL値)が設定されて送信されてくる。その結果、本体側では、当該撮像情報から上記ポインティング座標を算出することができない。そのため、このような撮像情報は、本実施形態では、無効なデータとして扱われる。換言すれば、本実施形態においては、NULLコードが含まれているデータはポインティング座標を算出できないため、無効なデータとして扱い、NULLコードの含まれていないデータ(図10参照)は有効なデータとして扱う。
【0071】
また、撮像範囲内にマーカ8Lおよび8Rのいずれか一方のみが含まれる場合は、撮像画像は、例えば図14に示すように、マーカ8L’1つのみが写った画像となる。このような場合、撮像情報としては、例えば、図15に示すように、撮像されていないマーカの座標にNULLが設定される。この場合も、本体側では、当該撮像情報から上記ポインティング座標を算出することができない(中点の算出ができない)ため、無効なデータとして扱われることになる。つまり、本実施形態では、撮像情報にNULLコードが1つでも含まれている場合は、当該撮像情報は無効なデータとして扱われる。
【0072】
次に、コントローラ7とテレビ2(マーカ8)との間に障害物がある場合について説明する。上記図8の状態から、コントローラ7とテレビ2(マーカ8)との間に障害物、例えば人間がこの間に立ったような場合は、図16に示すように、コントローラ7は障害物に遮られて、マーカ8Lおよび8Rを撮像できない状態となる。その結果、撮像画像は上記図12のようになり、撮像情報は、上記図13に示したような、NULLコードが設定された情報となる。また、障害物がマーカ8Rおよび8Lのいずれか一方のみ遮るような位置関係にある場合は、上記図15に示したような、片方のマーカの座標情報がNULLとなった撮像情報となる。そして、従来では、このような状態のときは、上記図11で示した状態、つまり、コントローラ7がテレビ2の画面外を向いている状態であるとして処理が行われていた。しかし、本発明では、このような状態のときは、マーカ8Lや8Rが撮像できなくなる前に取得した撮像情報を用いて処理を行う。つまり、障害物によってマーカ8Lや8Rが遮られる直前に指示されていたポインティング座標を用いて所定のゲーム処理を行う。その結果、例えば、図17に示すように、障害物があるにもかかわらず、テレビ2の画面上の点171がポインティング座標であるとして処理を行うことができる。
【0073】
このような処理を行うに際して、上述のような無効なデータが送信されてきたときに、そのときの状態が上記図11に示したような、コントローラ7がテレビ2の画面外を向いているのか、図16に示したような、コントローラ7はテレビ2の画面のほうに向いてはいるが、障害物が間にあってマーカ8Lや8Rを撮像できない状態であるのかを区別する必要がある。そのため、本発明では、無効なデータが送信されてきた際のコントローラ7自身の動きの大きさを判定する。例えば、コントローラ7を、図8のような正面を向いている状態から、図11に示すようなテレビ2の外に向けた場合は、その動きは大きな動きであると考えられる。逆に、図8に示した状態から、図16に示したような、コントローラ7とテレビ2との間に障害物が入った場合は、コントローラ7の動きとしては、小さいか、ほとんど動いてないに等しい状態であると考えられる。そこで、本発明は、無効なデータが送信されてきた際のコントローラ7自身の動きの大きさを判定し、その動きが大きいものであれば、図11に示したような、コントローラ7をテレビ2の外に向けている状態であり、その動きが小さければ、図16に示したような、障害物が間に入って遮られている状態であると判定する。そして、障害物で遮られている状態のときは、直前に指示されていたポインティング座標を現在のポインティング座標として用いるものである。つまり、無効なデータが送信されてきた際のコントローラ7の動きが小さいと判定されるときは、障害物等で一時的にマーカ8Lや8Rが遮られている状態であるとして、以前に取得した有効なデータのうち最新のデータを流用して、それまで行っていた処理を継続できるようにするものである。
【0074】
次に、本実施形態で用いられる各種データについて説明する。図18は、図2に示した外部メインメモリ12のメモリマップを示す図解図である。図18において、外部メインメモリ12は、プログラム記憶領域120およびデータ記憶領域122を含む。
【0075】
プログラム記憶領域120は、CPU10によって実行されるプログラムを記憶し、このプログラムは、メイン処理プログラム121などによって構成される。
【0076】
データ記憶領域122には、今回加速度データ123、前回加速度データ124、ポインティング座標データ125などのデータが記憶されるとともに、一時途切れフラグ126などのフラグも記憶される。
【0077】
今回加速度データ123は、コントローラ7から送信データとして送信されてくる一連の操作情報に含まれる加速度データである。今回加速度データ123には、加速度センサ701がX、Y、およびZ軸の3軸成分に分けてそれぞれ検出したX軸方向加速度1231、Y軸方向加速度1232、およびZ軸方向加速度1233が含まれる。なお、ゲーム装置3に備える受信ユニット6は、コントローラ7から所定間隔例えば5msごとに送信される操作情報に含まれる今回加速度データ123を受信し、受信ユニット6に備える図示しないバッファに蓄えられる。その後、処理間隔である1フレーム毎に読み出されて外部メインメモリ12に記憶される。また、今回加速度データ123は、−2G〜+2Gの範囲の値をとる。
【0078】
前回加速度データ124は、前回の処理ループにおいて算出された加速度データを示す。ここで、処理ループとは、後述の図19に示すステップ2〜ステップ9の処理ループをいう。また、当該処理ループは、上記処理間隔である1フレーム毎に繰り返される。なお、前回加速度データ124のファイルレイアウトは、今回加速度データ123と同じであるので、説明は省略する。
【0079】
ポインティング座標データ125は、コントローラ7から送信データとして送信されてくる一連の操作情報に含まれる撮像情報に基づいて算出されるデータであり、画面上におけるポインティング座標を示すためのデータである。ポインティング座標データ125には、今回ポインティング座標1251および前回ポインティング座標1252が含まれる。今回ポインティング座標1251は、現在の処理ループ内におけるポインティング座標を示すデータである。また、前回ポインティング座標1252は、1つ前の処理ループにおけるポインティング座標を示すデータである。その内容としては、コントローラ7から送信されてくる上記撮像情報(図10等参照)に基づき、マーカ8Lと8Rの中点の座標がポインティング座標として格納される。
【0080】
一時途切れフラグ126は、撮像情報が無効なデータであるときに、その原因が、障害物による一時的なものか、コントローラ7が画面外を向いているのかを判別するためのフラグである。つまり、無効なデータが送信されてきたときに、上記図11に示したような状態であるのか、図16に示した状態であるのかを判別するためのフラグである。当該フラグがオフのときは、図11に示すような、コントローラ7が画面外に向いている状態であることを示す。一方、オンのときは、図16に示したような、コントローラ7とマーカ8Lおよび8Rとの間が障害物によって遮られている状態であることを示す。
【0081】
次に、図19〜図22を参照して、ゲーム装置3によって実行されるゲーム処理について説明する。なお、図19は、ゲーム装置3によって実行される処理の全体処理を示すフローチャートである。なお、本実施形態においては、図19に示すステップ2〜ステップ9の処理ループは、上述のように、1/60秒毎に繰り返し実行される。これは、本実施形態におけるゲーム処理では、1/60秒毎に画面のビデオデータが作成され、出力されることを想定しているためである。また、図19〜図22に示すフローチャートにおいては、撮像情報の処理に関する処理を中心に説明し、本願発明と直接関連しない他のゲーム処理については説明を省略する。また、図19〜図22では、CPU30が実行する各ステップを「S」と略称する。
【0082】
まず、各種データやフラグを初期化するための初期化処理が行われる(ステップ1)。図20は、上記ステップ1で示した初期化処理の詳細を示すフローチャートである。図20において、まず、今回加速度データ123および前回加速度データ124が初期化される(ステップ11)。次に、今回ポインティング座標1251および前回ポインティング座標1252が初期化される(ステップ12)。
【0083】
更に、タイマーが初期化される(ステップ13)。ここで、当該タイマーは、コントローラ7から送信される撮像情報が無効なデータである状態が持続する時間を計測するためのものである。これは、無効な撮像情報がコントローラ7から送信されてきたとき、例えば、プレイヤが手でコントローラ7の前面を覆い隠しているような、コントローラ7の撮像情報演算部74が意図的に遮られている状況かどうかを判定するために用いられる。最後に、一時途切れフラグ126にONを設定することで初期化する(ステップ14)。以上で初期化処理は終了する。
【0084】
図19に戻り、次に、コントローラ7から出力された加速度データが取得され、今回加速度データ123として外部メインメモリ12に記憶される(ステップ2)。
【0085】
次に、コントローラ7から出力された上記撮像情報が取得される(ステップ3)。続いて、当該取得された撮像情報に上述したようなNULLコードが含まれているか否かが判定される(ステップ4)。つまり、撮像情報が無効データであるか否かの判定が行われる。当該判定の結果、NULLコードが含まれていないときは(ステップ4でNO)、撮像情報は有効な情報であるとして、有効データ処理が行われる(ステップ5)。一方、NULLコードが含まれていたときは(ステップ4でYES)、撮像情報は無効な情報であるとして、無効データ処理が行われる(ステップ6)。
【0086】
図21は、上記ステップ5で示した有効データ処理の詳細を示すフローチャートである。図21において、まず、上記ステップ3で取得された撮像情報に基づいて、ポインティング座標が算出される。具体的には、マーカ8Lおよび8Rの中点を算出し、これをポインティング座標とする。そして、算出されたポインティング座標が今回ポインティング座標1251として外部メインメモリ12に記憶される(ステップ21)。
【0087】
次に、タイマーが初期化され(ステップ22)、更に、一時途切れフラグ126がオンに設定される(ステップ23)。
【0088】
次に、上記今回ポインティング座標1251を用いた所定のゲーム処理が行われる(ステップ24)。例えば、今回ポインティング座標1251で示される画面上の位置にカーソルを表示するための処理や、射的ゲームのようなゲーム処理であれば、今回ポインティング座標1251に弾丸を着弾した様子を表示するための処理が行われる。以上で、有効データ処理は終了する。
【0089】
次に、上記ステップ6で示した無効データ処理について、図22を用いて説明する。図22において、まず、一時途切れフラグ126がオンであるか否かが判定される(ステップ31)。当該判定の結果、一時途切れフラグ126がオンでないときは(ステップ31でNO)、上記図11で示したような、コントローラ7が画面外を向いている(画面外をポインティングしている)状態であると考えられるため、後述するステップ39に処理が進められる。
【0090】
一方、一時途切れフラグ126がオンであると判定されたときは(ステップ31でYES)、続いて、予め設定された値と上記タイマーで計測された時間とが比較される(ステップ32)。これは、意図的な遮り、例えばプレイヤが手でコントローラ7の前面(撮像情報演算部74のある面)を覆い隠しているような状況かどうかを判定するためである。当該判定の結果、タイマーで計測された時間が設定値以下ではないと判定されたときは(ステップ32でNO)、コントローラ7の前面が意図的に覆い隠されていると考えられるため、後述するステップ38に処理が進められる。
【0091】
一方、タイマーで計測された時間が設定値以下と判定されたときは(ステップ32でYES)、次に、今回加速度データ123が外部メインメモリ12から読出され、今回加速度データ123で示される加速度が予め設定された所定範囲内の値であるか否かが判定される(ステップ33)。これは、コントローラ7自身の動きについて、大きな動きが発生したのか、大きく動かされてはおらずに小さな動きに留まっていたのかを判定するものである。この所定範囲としては、例えば、0.8G〜1.2Gのような、1Gを中心とした付近の値の範囲が考えられる。これは、地球の重力方向への加速度(重力加速度)を1Gとすると、コントローラ7が静止状態のとき、コントローラ7には重力加速度の1Gがかかっている状態となる。そして、コントローラ7の動きが小さい場合は、加速度の変動の幅も小さくなる。そのため、コントローラ7の動きが小さい場合は、その加速度も1G前後の値に留まると考えられるからである。
【0092】
ステップ33の判定の結果、今回加速度データ123が所定範囲内の値ではないと判定されたときは(ステップ33でNO)、加速度がある程度大きい、すなわち、コントローラ7自体にある程度大きな動きが加えられたと考えられる。このときは、後述するステップ38に処理が進められる。一方、今回加速度データ123が所定範囲内の値であると判定されたときは(ステップ33でYES)、次に、今回加速度データと前回加速度データとの角度差を算出する(ステップ34)。具体的には、まず、今回加速度データ123で示される3軸の重力加速度成分をベクトル合成することで、今回加速度ベクトルが算出される。次に、前回加速度データ124で示される3軸の重力加速度成分をベクトル合成することで、前回加速度ベクトルが算出される。そして、今回加速度ベクトルと前回加速度ベクトルとの角度差が算出される。
【0093】
角度差が算出されれば、続いて、当該角度差が、予め設定された所定範囲内の値であるか否かが判定される(ステップ35)。この判定は、上記のような、コントローラ7自体の動きの大きさについての判定精度をより高めるために行われる。当該判定の結果、上記角度差が所定範囲内の値でないと判定されたときは(ステップ35でNO)、コントローラ7自体の動きは大きな動きであったものと考えられる。そのため、上記図16で示したような障害物によってマーカ8Lや8Rが遮られている状態ではなく、上記図11に示したような、コントローラ7が画面の外を向いているような状態であると考えられる。このときは、後述するステップ38に処理が進められる。一方、上記角度差が所定範囲内の値であると判定されたときは(ステップ35でYES)、コントローラ7の動きは小さいと考えられる。つまり、コントローラ7自体はほとんど動きがなく、依然として画面のほうを向いていると考えられるので、図16で示したような、障害物によってマーカ8Lや8Rが遮られている状態であると考えられる。このようなときは、前回ポインティング座標1252が今回ポインティング座標1251として外部メインメモリ12に記憶される(ステップ36)。
【0094】
続けて、今回ポインティング座標1251を用いて所定のゲーム処理が行われる(ステップ37)。例えば、今回ポインティング座標1251に対応する画面上の位置にカーソルを表示する処理等が行われる。これにより、障害物によってマーカ8Lや8Rが遮られているため、撮像情報が無効なデータとなるときは、その前に用いられていたポインティング座標を利用して、本来は撮像情報が有効である際に行われる所定のゲーム処理を実行、あるいは継続することが可能となる。
【0095】
一方、上記ステップ32、ステップ33、ステップ35それぞれの判定において、それぞれの条件が満たされていないと判定されたときは(ステップ32でNO、ステップ33でNO、ステップ35でNO)、撮像情報が無効なデータとなった原因が障害物による遮りではないと考えられるため、一時途切れフラグ126がオフに設定される(ステップ38)。続いて、撮像情報が無効なデータの場合に対応するゲーム処理、本実施形態では、画面外をポインティングしたときに行われる処理が行われる(ステップ39)。例えば、コントローラ7を画面に向ける事をプレイヤに促すメッセージを画面に表示したり、あるいは、上述したような射的ゲームであれば、弾丸の補充を行うための処理等が行われる。
【0096】
次に、上記タイマーが1カウントアップされる(ステップ40)。つまり、タイマーに撮像情報が無効である状態が持続する時間をカウントさせる。例えば、CPU10の(又は図示しないクロック発生器からの)クロックを使って、無効な撮像情報が継続してコントローラ7から送信されてくる継続時間(継続フレーム数)が計測される。以上で、無効データ処理が終了する。
【0097】
図19に戻り、ステップ5、あるいはステップ6の処理の後、今回加速度データ123が前回加速度データ124として外部メインメモリ12に記憶される(ステップ7)。続けて、今回ポインティング座標1251が前回ポインティング座標1252として、外部メインメモリ12に記憶される(ステップ8)。いずれも、次の処理ループで用いるためである。
【0098】
次に、本実施形態に係るメイン処理が終了か否かが判定される(ステップ9)。YESの場合、本処理を終了し、NOの場合、ステップ2に戻って、処理が繰り返される。以上で、本実施形態に係る処理は終了する。
【0099】
このように、本実施形態では、撮像情報に基づいて所定の処理を行うとき、当該撮像情報の内容が無効なデータであるときは、その際のコントローラ7自体の動きの大きさを判定する。そして、コントローラ7自体の動きが大きければ、撮像対象が撮像範囲外にあるとして、無効なデータに対応する処理を行うが、コントローラ7の動きが小さいときは、直前に利用していた有効な撮像情報、またはこれに基づくデータを用いて、有効な撮像情報を用いる処理を行う。これにより、コントローラ7の撮像範囲内に上記マーカ8L、8Rが含まれるにもかかわらず、障害物等の原因で一時的に有効な撮像情報が取得できないときでも、コントローラ7が画面外を向いているときの処理が行われないようにすることができる。すなわち、コントローラ7が画面のほうを向いているものとして所定の処理を実行することが可能となる。
【0100】
なお、上記実施形態では、コントローラ7の動きの大きさを判定する際、上記前回加速度ベクトルと今回加速度ベクトルとの角度差を用いていたが、これに限らず、両ベクトルの内積を用いるようにしても良い。例えば、上記前回加速度ベクトルおよび今回加速度ベクトルの内積が所定範囲内の値であるか否かが判定される。そして、当該内積が所定範囲内の値であれば、コントローラ7の動きは小さいと判定され、所定範囲外の値であるときは、コントローラ7の動きは大きいと判定されるようにすればよい。また、上記内積については、例えば、次のようにして算出できる。まず、上記前回加速度ベクトルおよび今回加速度ベクトルの大きさを、それぞれ1に正規化する。そのうえで、内積を
【数1】
として求める。
そして、当該内積の値が所定範囲内であるか否かによって、コントローラ7の動きの大きさが判定される。
【0101】
また、コントローラ7の動きの大きさの算出については、今回加速度データ123と前回加速度データ124とのXYZの3軸それぞれの加速度の差分を求め、当該差分が所定値以下であるか否かでコントローラ7が大きく動かされたか否かが判定されるようにしても良い。この場合は、上記図22で示した無効データ処理の代わりに、図23に示すような無効データ処理が行われるようにすればよい。図23においては、ステップ32の判定でYESのときに、前回加速度データ124、および、今回加速度データ123のXYZの3軸それぞれについて、その差分が算出される(ステップ41)。そして、これらの各差分がそれぞれ所定値以下であるか否かが判定され(ステップ42)、3軸共に所定値以下と判定されれば(ステップ42でYES)、コントローラ7が大きく動かされていないとして、上記ステップ36以降の処理が行われる。一方、1軸でも所定値以下ではないときは(ステップ42でNO)、コントローラ7が大きく動かされたと判定され、上記ステップ38以降の処理が行われる。これにより、上記図22に示した無効データ処理に比べて、より簡素な処理内容にすることができ、処理の高速化を図ることが可能となる。
【0102】
また、上記撮像情報について、上記実施形態では、マーカ8L、8Rの2点の座標情報が送られてくる場合を例として説明していたが、これに限らず、コントローラ7側において、上記2点の中点を算出し、この座標が撮像情報として出力されるようにしてもよい。この場合は、撮像情報が有効なデータであるときは、図24に示すように、中点の座標(指示座標)が撮像情報として出力される。一方、無効なデータであるときは、図25に示すように、NULLコードが撮像情報として出力されることになる。このような場合であっても、上述のように、撮像情報がNULLコードであるか否かを判定することで(上記ステップ4)、上記同様の処理を行うことが可能である。
【0103】
また、上記実施形態では、無効データの一例として、撮像画像から高輝度部分(図9の8L’、8R’)が1つだけしか検知できないときや、1つも検知できないときに、無効なデータであると判定する例を示した。これに限らず、撮像画像内に高輝度部分が3つ以上検知された際に、無効なデータであると判定するようにしてもよい。例えば、モニタ2を窓際に設置した場合等は、窓から差し込む太陽光(または、太陽光に含まれる赤外線)を撮像情報演算部74が拾ってしまうことがある。また、モニタ2が窓際に設置されていなくても、マーカ8の近くに光沢のある物体が置かれている場合、窓から差し込む太陽光または発光ダイオードが発光した赤外線等が当該物体に反射し、当該反射した光を撮像情報演算部74が拾ってしまうこともある。そのため、コントローラ7は、マーカ8L、8R以外の光源からの光も撮像することになり、その結果、撮像画像から高輝度部分が3つ以上検知されることが考えられる。このような場合も、上述したような中点の算出ができないため、ポインティング座標が算出できない。そのため、撮像画像から高輝度部分(図9の8L’、8R’に相当)が3つ以上検知されたときは、コントローラ7の画像処理回路744に、無効な撮像データであると判定させ、NULLコードを設定して送信させるようにしてもよい。このような場合でも、上述のように、撮像情報がNULLコードであるか否かを判定することで(上記ステップ4)、上記同様の処理を行うことが可能である。
【0104】
また、無効データであるか否かの判定についても、上述したような、NULLコードの有無による判定に限らない。別途、無効なデータであることを示すコードを用いても良いし、無効を示すための専用のコードを用いることに限らず、その他、撮像情報が所定の条件(上記実施形態では、ポインティング座標の算出ができること)を満たしていれば、無効なデータではないと判定されるようにしてもよい。
【0105】
また、上述の実施形態では、撮像情報に基づいた処理の一例として、撮像情報に基づいて画面のポインティング座標を算出し、当該座標に対して何らかの処理(カーソル表示等)を行う例を示した。このような、ポインティング座標に対して何らかの処理を行うことに限らずに、例えば、FPS(First Person Shooting Game)のようなゲーム処理において、一人称視点の仮想カメラの動き(または注視点)をコントローラ7の向きに応じて移動させるような処理にしてもよい。つまり、コントローラ7を右方向に動かせば、上記撮像情報で示される座標の変化量、すなわち、コントローラ7の向きの変化量に応じて画面が左から右へとスクロールし、コントローラ7を左方向に動かせば、同様に変化量に応じて画面が右から左へとスクロールするような処理が行われるようにしてもよい。そして、例えば、画面を右方向にスクロール中に、画面の前を人間が横切ったため撮像情報が無効なデータとなり、座標の変化量が算出できないようなときは、直前の処理ループで算出された変化量を用いて画面のスクロール処理を継続することが可能となる。
【0106】
また、撮像情報に基づいた処理について、上述のようなゲーム装置で実行されるゲーム処理に限らず、その他の情報処理についても本発明が適用可能であることは言うまでもない。例えば、パーソナルコンピュータを用いた情報処理において、カメラ付の入力装置を用い、その撮像情報に基づいて画面をポインティングする等の処理に利用することも可能である。
【産業上の利用可能性】
【0107】
本発明にかかる情報処理プログラムおよび情報処理装置は、撮像情報が意図的に無効化された状態と、意図せずに無効化されたときの状態を識別することができ、撮像手段を備えた操作装置を用いるゲーム装置やパーソナルコンピュータ等の情報処理装置に有用である。
【図面の簡単な説明】
【0108】
【図1】本発明の一実施形態に係るゲームシステム1を説明するための外観図
【図2】図1のゲーム装置3の機能ブロック図
【図3】図1のコントローラ7の上面後方から見た斜視図
【図4】図3のコントローラ7を下面前方から見た斜視図
【図5】図3のコントローラ7の上ハウジングを外した状態を示す斜視図
【図6】図3のコントローラ7の下ハウジングを外した状態を示す斜視図
【図7】図3のコントローラ7の構成を示すブロック図
【図8】コントローラ7の向きとテレビ2(マーカ8Lおよび8R)との位置関係を示すための図
【図9】撮像画像の一例
【図10】撮像情報の一例
【図11】コントローラ7の向きとテレビ2(マーカ8Lおよび8R)との位置関係を示すための図
【図12】撮像画像の一例
【図13】撮像情報の一例
【図14】撮像画像の一例
【図15】撮像情報の一例
【図16】障害物があるときのコントローラ7の向きとテレビ2(マーカ8Lおよび8R)との位置関係を示すための図
【図17】障害物があるときのコントローラ7の向きとテレビ2(マーカ8Lおよび8R)との位置関係を示すための図
【図18】外部メインメモリ12のメモリマップを示す図解図
【図19】ゲーム装置3によって実行される処理の全体処理を示すフローチャート
【図20】図19のステップ1で示した初期化処理の詳細を示すフローチャート
【図21】図19のステップ5で示した有効データ処理の詳細を示すフローチャート
【図22】図19のステップ6で示した無効データ処理の詳細を示すフローチャート
【図23】図19のステップ6で示した無効データ処理の変形例を示すフローチャート
【図24】撮像情報の一例
【図25】撮像情報の一例
【符号の説明】
【0109】
1…ゲームシステム
2…モニタ
2a…スピーカ
3…ゲーム装置
4…光ディスク
7…コントローラ
10…CPU
11…システムLSI
11a…入出力プロセッサ
11b…GPU
11c…DSP
11d…VRAM
11e…内部メインメモリ
12…外部メインメモリ
13…ROM/RTC
14…ディスクドライブ
15…AV−IC
16…AVコネクタ
17…フラッシュメモリ
18…無線通信モジュール
19…無線コントローラモジュール
20…拡張コネクタ
21…外部メモリカード用コネクタ
22…アンテナ
23…アンテナ
24…電源ボタン
25…リセットボタン
26…イジェクトボタン
71…ハウジング
72…操作部
73…コネクタ
74…撮像情報演算部
741…赤外線フィルタ
742…レンズ
743…撮像素子
744…画像処理回路
75…通信部
751…マイコン
752…メモリ
753…無線モジュール
754…アンテナ
700…基板
701…加速度センサ
702…LED
703…水晶振動子
704…バイブレータ
707…サウンドIC
708…アンプ
【特許請求の範囲】
【請求項1】
撮像対象を撮像して撮像情報を得る撮像手段を備える操作装置を用いて、当該撮像情報に基づいて当該撮像対象の配置位置に対する操作装置の向きに応じた所定の処理を実行する情報処理装置のコンピュータに実行させる情報処理プログラムであって、
前記操作装置自身の動きに応じた動き情報を出力する動きセンサから前記動き情報を逐次取得する動き情報取得ステップと、
前記撮像手段から前記撮像情報を逐次取得する撮像情報取得ステップと、
前記撮像情報が前記所定の処理において有効な情報であるか無効な情報であるかを判定する無効情報判定ステップと、
前記動き情報に基づいて前記操作装置自身の動きの大きさを示す動作値を算出する動作値算出ステップと、
前記無効情報判定ステップにおいて前記撮像情報が無効な情報であると判定され、かつ前記動作値算出ステップにおいて算出された動作値が所定の範囲内の値であるときは、前記無効な情報である撮像情報が取得されるより前に取得された有効な撮像情報のうち最新の撮像情報に基づいて前記所定の処理を実行する処理ステップとを前記コンピュータに実行させる情報処理プログラム。
【請求項2】
前記動作値算出ステップは、前記撮像情報が無効な情報であるときにのみ実行される、請求項1に記載の情報処理プログラム。
【請求項3】
前記無効情報判定ステップは、
前記撮像情報が所定の条件を満たすか否かを判定する無効条件判定ステップを含み、
前記無効条件判定ステップにおいて所定の条件を満たしていないと判定された撮像情報を前記無効な情報と判定する、請求項1に記載の情報処理プログラム。
【請求項4】
前記所定の処理とは、所定の表示装置の画面におけるポインティング位置を算出する処理であり、
前記無効情報判定ステップは、前記ポインティング位置を算出することができないような撮像情報を無効な情報と判定し、
前記処理ステップは、前記無効情報判定ステップにおいて前記撮像情報が無効な情報であると判定され、かつ前記動作値算出ステップにおいて算出された動作値が所定の範囲内の値であるときは、前記有効な撮像情報のうち最新の撮像情報に基づいて前記ポインティング位置を算出する、請求項1に記載の情報処理プログラム。
【請求項5】
前記所定の処理とは、前記撮像情報から前記操作装置の向きの変化量を算出し、当該変化量を用いる処理であり、
前記無効情報判定ステップは、前記変化量を算出することができないような撮像情報を無効な情報と判定し、
前記処理ステップは、前記無効情報判定ステップにおいて前記撮像情報が無効な情報であると判定され、かつ前記動作値算出ステップにおいて算出された動作値が所定の範囲内の値であるときは、直前に算出された変化量を用いて処理を行う、請求項1に記載の情報処理プログラム。
【請求項6】
前記所定の処理において無効な情報とは、NULLコードが含まれている撮像情報であり、
前記無効情報判定ステップは、前記撮像情報にNULLコードが含まれているか否かによって有効な情報であるか無効な情報であるかを判定する、請求項1に記載の情報処理プログラム。
【請求項7】
前記情報処理プログラムは、前記撮像情報が無効な情報と判定された後、逐次取得される撮像情報が無効な情報と判定され続ける継続時間を計時するためのタイマーステップを更に前記コンピュータに実行させ、
前記処理ステップは、前記タイマーステップにおいて計時された継続時間が所定の値以上のときは、前記無効情報判定ステップにおける判定結果に関わらず、前記無効な情報に対応する所定の処理を実行させる、請求項1に記載の情報処理プログラム。
【請求項8】
前記動きセンサは、前記操作装置に生じる加速度を検出する加速度センサであり、
前記動き情報は、前記操作装置の動きに応じて前記加速度センサから出力される加速度データを含む、請求項1に記載の情報処理プログラム。
【請求項9】
前記動作値算出ステップは、
前記加速度データから第1の加速度ベクトルを算出する第1加速度ベクトル算出ステップと、
前記加速度データの1つ前に取得された加速度データから第2の加速度ベクトルを算出する第2加速度ベクトル算出ステップと、
前記第1の加速度ベクトルと第2の加速度ベクトルとの角度差を算出する角度差算出ステップとを含み、
前記処理ステップは、前記角度差算出ステップで算出された角度差が所定の範囲内に含まれるときに、前記無効な情報である撮像情報が取得されるより前に取得された有効な撮像情報のうち最新の撮像情報に基づいて前記所定の処理を実行する、請求項8に記載の情報処理プログラム。
【請求項10】
前記動作値算出ステップは、
前記加速度データから第1の加速度ベクトルを算出する第1加速度ベクトル算出ステップと、
前記加速度データの1つ前に取得された加速度データから第2の加速度ベクトルを算出する第2加速度ベクトル算出ステップと、
前記第1の加速度ベクトルと第2の加速度ベクトルとの内積を算出する内積算出ステップとを含み、
前記処理ステップは、前記内積算出ステップで算出された内積が所定の範囲内に含まれるときに、前記無効な情報である撮像情報が取得されるより前に取得された有効な撮像情報のうち最新の撮像情報に基づいて前記所定の処理を実行する、請求項8に記載の情報処理プログラム。
【請求項11】
前記加速度センサは、互いに直交する少なくとも2つ以上の座標軸の加速度を検出する加速度センサであり、
前記情報処理プログラムは、前記無効情報判定ステップにおいて前記撮像情報が無効な情報であると判定されたとき、当該無効な情報が取得された際に検出された加速度と、当該無効な情報が取得されるより前に検出された加速度のうち最新の加速度との差を前記各座標軸毎に算出する加速度差分算出ステップを更に前記コンピュータに実行させ、
前記処理ステップは、前記加速度差分算出ステップによって各座標軸毎に算出された差が全て所定値以下であるときにのみ、前記無効な情報である撮像情報が取得されるより前に取得された有効な撮像情報のうち最新の撮像情報に基づいて前記所定の処理を実行する、請求項8に記載の情報処理プログラム。
【請求項12】
撮像対象を撮像して撮像情報を得る撮像手段を備える操作装置を用いて、当該撮像情報に基づいて当該撮像対象の配置位置に対する操作装置の向きに応じた所定の処理を実行する情報処理装置であって、
前記操作装置の動きに応じた動き情報を出力する動きセンサと、
記憶手段と、
前記動きセンサから前記動き情報を逐次取得して前記記憶手段に記憶する動き情報取得手段と、
前記撮像手段から前記撮像情報を逐次取得して前記記憶手段に記憶する撮像情報取得手段と、
前記記憶手段から前記撮像情報を読み出し、当該撮像情報が前記所定の処理において有効な情報であるか無効な情報であるかを判定する無効情報判定手段と、
前記動き情報を前記記憶手段から読み出し、当該動き情報に基づいて前記操作装置自身の動きの大きさを示す動作値を算出する動作値算出手段と、
前記無効情報判定手段が前記撮像情報が無効な情報であると判定し、かつ前記動作値算出手段が算出した動作値が所定の範囲内の値であるときは、前記無効な撮像情報が取得されるより前に取得された有効な撮像情報のうち最新の撮像情報を前記記憶手段から読み出し、当該読み出した撮像情報を用いて前記所定の処理を実行する処理手段とを備える、情報処理装置。
【請求項1】
撮像対象を撮像して撮像情報を得る撮像手段を備える操作装置を用いて、当該撮像情報に基づいて当該撮像対象の配置位置に対する操作装置の向きに応じた所定の処理を実行する情報処理装置のコンピュータに実行させる情報処理プログラムであって、
前記操作装置自身の動きに応じた動き情報を出力する動きセンサから前記動き情報を逐次取得する動き情報取得ステップと、
前記撮像手段から前記撮像情報を逐次取得する撮像情報取得ステップと、
前記撮像情報が前記所定の処理において有効な情報であるか無効な情報であるかを判定する無効情報判定ステップと、
前記動き情報に基づいて前記操作装置自身の動きの大きさを示す動作値を算出する動作値算出ステップと、
前記無効情報判定ステップにおいて前記撮像情報が無効な情報であると判定され、かつ前記動作値算出ステップにおいて算出された動作値が所定の範囲内の値であるときは、前記無効な情報である撮像情報が取得されるより前に取得された有効な撮像情報のうち最新の撮像情報に基づいて前記所定の処理を実行する処理ステップとを前記コンピュータに実行させる情報処理プログラム。
【請求項2】
前記動作値算出ステップは、前記撮像情報が無効な情報であるときにのみ実行される、請求項1に記載の情報処理プログラム。
【請求項3】
前記無効情報判定ステップは、
前記撮像情報が所定の条件を満たすか否かを判定する無効条件判定ステップを含み、
前記無効条件判定ステップにおいて所定の条件を満たしていないと判定された撮像情報を前記無効な情報と判定する、請求項1に記載の情報処理プログラム。
【請求項4】
前記所定の処理とは、所定の表示装置の画面におけるポインティング位置を算出する処理であり、
前記無効情報判定ステップは、前記ポインティング位置を算出することができないような撮像情報を無効な情報と判定し、
前記処理ステップは、前記無効情報判定ステップにおいて前記撮像情報が無効な情報であると判定され、かつ前記動作値算出ステップにおいて算出された動作値が所定の範囲内の値であるときは、前記有効な撮像情報のうち最新の撮像情報に基づいて前記ポインティング位置を算出する、請求項1に記載の情報処理プログラム。
【請求項5】
前記所定の処理とは、前記撮像情報から前記操作装置の向きの変化量を算出し、当該変化量を用いる処理であり、
前記無効情報判定ステップは、前記変化量を算出することができないような撮像情報を無効な情報と判定し、
前記処理ステップは、前記無効情報判定ステップにおいて前記撮像情報が無効な情報であると判定され、かつ前記動作値算出ステップにおいて算出された動作値が所定の範囲内の値であるときは、直前に算出された変化量を用いて処理を行う、請求項1に記載の情報処理プログラム。
【請求項6】
前記所定の処理において無効な情報とは、NULLコードが含まれている撮像情報であり、
前記無効情報判定ステップは、前記撮像情報にNULLコードが含まれているか否かによって有効な情報であるか無効な情報であるかを判定する、請求項1に記載の情報処理プログラム。
【請求項7】
前記情報処理プログラムは、前記撮像情報が無効な情報と判定された後、逐次取得される撮像情報が無効な情報と判定され続ける継続時間を計時するためのタイマーステップを更に前記コンピュータに実行させ、
前記処理ステップは、前記タイマーステップにおいて計時された継続時間が所定の値以上のときは、前記無効情報判定ステップにおける判定結果に関わらず、前記無効な情報に対応する所定の処理を実行させる、請求項1に記載の情報処理プログラム。
【請求項8】
前記動きセンサは、前記操作装置に生じる加速度を検出する加速度センサであり、
前記動き情報は、前記操作装置の動きに応じて前記加速度センサから出力される加速度データを含む、請求項1に記載の情報処理プログラム。
【請求項9】
前記動作値算出ステップは、
前記加速度データから第1の加速度ベクトルを算出する第1加速度ベクトル算出ステップと、
前記加速度データの1つ前に取得された加速度データから第2の加速度ベクトルを算出する第2加速度ベクトル算出ステップと、
前記第1の加速度ベクトルと第2の加速度ベクトルとの角度差を算出する角度差算出ステップとを含み、
前記処理ステップは、前記角度差算出ステップで算出された角度差が所定の範囲内に含まれるときに、前記無効な情報である撮像情報が取得されるより前に取得された有効な撮像情報のうち最新の撮像情報に基づいて前記所定の処理を実行する、請求項8に記載の情報処理プログラム。
【請求項10】
前記動作値算出ステップは、
前記加速度データから第1の加速度ベクトルを算出する第1加速度ベクトル算出ステップと、
前記加速度データの1つ前に取得された加速度データから第2の加速度ベクトルを算出する第2加速度ベクトル算出ステップと、
前記第1の加速度ベクトルと第2の加速度ベクトルとの内積を算出する内積算出ステップとを含み、
前記処理ステップは、前記内積算出ステップで算出された内積が所定の範囲内に含まれるときに、前記無効な情報である撮像情報が取得されるより前に取得された有効な撮像情報のうち最新の撮像情報に基づいて前記所定の処理を実行する、請求項8に記載の情報処理プログラム。
【請求項11】
前記加速度センサは、互いに直交する少なくとも2つ以上の座標軸の加速度を検出する加速度センサであり、
前記情報処理プログラムは、前記無効情報判定ステップにおいて前記撮像情報が無効な情報であると判定されたとき、当該無効な情報が取得された際に検出された加速度と、当該無効な情報が取得されるより前に検出された加速度のうち最新の加速度との差を前記各座標軸毎に算出する加速度差分算出ステップを更に前記コンピュータに実行させ、
前記処理ステップは、前記加速度差分算出ステップによって各座標軸毎に算出された差が全て所定値以下であるときにのみ、前記無効な情報である撮像情報が取得されるより前に取得された有効な撮像情報のうち最新の撮像情報に基づいて前記所定の処理を実行する、請求項8に記載の情報処理プログラム。
【請求項12】
撮像対象を撮像して撮像情報を得る撮像手段を備える操作装置を用いて、当該撮像情報に基づいて当該撮像対象の配置位置に対する操作装置の向きに応じた所定の処理を実行する情報処理装置であって、
前記操作装置の動きに応じた動き情報を出力する動きセンサと、
記憶手段と、
前記動きセンサから前記動き情報を逐次取得して前記記憶手段に記憶する動き情報取得手段と、
前記撮像手段から前記撮像情報を逐次取得して前記記憶手段に記憶する撮像情報取得手段と、
前記記憶手段から前記撮像情報を読み出し、当該撮像情報が前記所定の処理において有効な情報であるか無効な情報であるかを判定する無効情報判定手段と、
前記動き情報を前記記憶手段から読み出し、当該動き情報に基づいて前記操作装置自身の動きの大きさを示す動作値を算出する動作値算出手段と、
前記無効情報判定手段が前記撮像情報が無効な情報であると判定し、かつ前記動作値算出手段が算出した動作値が所定の範囲内の値であるときは、前記無効な撮像情報が取得されるより前に取得された有効な撮像情報のうち最新の撮像情報を前記記憶手段から読み出し、当該読み出した撮像情報を用いて前記所定の処理を実行する処理手段とを備える、情報処理装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2008−229188(P2008−229188A)
【公開日】平成20年10月2日(2008.10.2)
【国際特許分類】
【出願番号】特願2007−75523(P2007−75523)
【出願日】平成19年3月22日(2007.3.22)
【出願人】(000233778)任天堂株式会社 (1,115)
【Fターム(参考)】
【公開日】平成20年10月2日(2008.10.2)
【国際特許分類】
【出願日】平成19年3月22日(2007.3.22)
【出願人】(000233778)任天堂株式会社 (1,115)
【Fターム(参考)】
[ Back to top ]