
情報処理プログラム、情報処理システム、および情報処理方法

【課題】ユーザ自身の動作に基づいた操作を行って当該ユーザ動作に基づいた処理を行う場合に、ユーザが当該処理結果を好適な状況で見ることができる情報処理プログラム、情報処理システム、および情報処理方法を提供する。
【解決手段】可搬型表示装置から出力される姿勢データに基づいて、仮想世界に配置されたオブジェクトの姿勢を制御する。また、荷重検出装置に加えられた荷重に基づくデータに基づいて、仮想世界においてオブジェクトを移動させる。そして、オブジェクトを少なくとも含む仮想世界を示す第1画像を可搬型表示装置に表示する。
【解決手段】可搬型表示装置から出力される姿勢データに基づいて、仮想世界に配置されたオブジェクトの姿勢を制御する。また、荷重検出装置に加えられた荷重に基づくデータに基づいて、仮想世界においてオブジェクトを移動させる。そして、オブジェクトを少なくとも含む仮想世界を示す第1画像を可搬型表示装置に表示する。
Notice: Undefined index: DEJ in /mnt/www/gzt_disp.php on line 298
【特許請求の範囲】
【請求項1】
可搬型表示装置本体の姿勢に応じた姿勢データを少なくとも出力する当該可搬型表示装置に画像を表示することが可能な情報処理装置のコンピュータで実行される情報処理プログラムであって、
前記コンピュータを、
荷重検出装置に加えられた荷重に基づくデータを取得する荷重取得手段と、
前記姿勢データに基づいて、仮想世界に配置されたオブジェクトの姿勢を制御するオブジェクト姿勢制御手段と、
前記荷重取得手段が取得したデータに基づいて、仮想世界において前記オブジェクトを移動させるオブジェクト移動手段と、
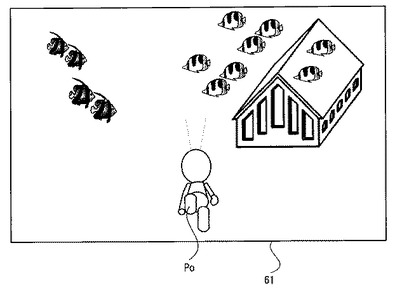
前記オブジェクトを少なくとも含む仮想世界を示す第1画像を前記可搬型表示装置に表示する表示制御手段として機能させる、情報処理プログラム。
【請求項2】
前記姿勢データに基づいて、当該可搬型表示装置の姿勢を算出する姿勢算出手段として、さらに前記コンピュータを機能させ、
前記オブジェクト姿勢制御手段は、前記可搬型表示装置の姿勢に基づいて、前記オブジェクトの姿勢を制御する、請求項1に記載の情報処理プログラム。
【請求項3】
前記姿勢算出手段は、実空間の所定方向を基準とした前記可搬型表示装置の姿勢を算出し、
前記オブジェクト姿勢制御手段は、前記所定方向を基準とした前記可搬型表示装置の姿勢に基づいて、当該所定方向に対応する前記仮想世界に設定された所定方向を基準として前記オブジェクトの姿勢の制御を行う、請求項2に記載の情報処理プログラム。
【請求項4】
前記姿勢算出手段は、実空間の重力方向を実空間の前記所定方向とし、当該重力方向を基準とした前記可搬型表示装置の姿勢を算出し、
前記オブジェクト姿勢制御手段は、実空間の重力方向を基準とした前記可搬型表示装置の姿勢に基づいて、前記仮想世界に設定された重力方向を基準として前記オブジェクトの姿勢の制御を行う、請求項3に記載の情報処理プログラム。
【請求項5】
前記姿勢算出手段は、実空間の重力方向周りに前記可搬型表示装置が回転する姿勢を少なくとも算出し、
前記オブジェクト姿勢制御手段は、実空間の重力方向周りに前記可搬型表示装置が回転する姿勢に基づいて、前記仮想世界に設定された重力方向周りに前記オブジェクトを回転させて姿勢を制御する、請求項4に記載の情報処理プログラム。
【請求項6】
前記姿勢算出手段は、実空間の重力方向に垂直な水平方向周りに前記可搬型表示装置が上下振り運動する姿勢を少なくとも算出し、
前記オブジェクト姿勢制御手段は、前記水平方向周りに前記可搬型表示装置が上下振り運動する姿勢に基づいて、当該水平方向に対応する前記仮想世界に設定された水平方向周りに前記オブジェクトが上下振り運動する姿勢を制御する、請求項4に記載の情報処理プログラム。
【請求項7】
前記姿勢算出手段は、前記第1画像が表示される前記可搬型表示装置の表示画面に垂直な当該表示画面の奥行方向に直交する2軸周りにそれぞれ回転する姿勢を少なくとも算出し、
前記オブジェクト姿勢制御手段は、前記可搬型表示装置が前記2軸周りにそれぞれ回転する姿勢に応じて、前記オブジェクトの正面方向に直交する2軸の周りに当該オブジェクトを回転させることによって当該オブジェクトの姿勢の制御を行う、請求項2乃至4のいずれか1つに記載の情報処理プログラム。
【請求項8】
前記姿勢算出手段は、前記奥行方向に直交する前記可搬型表示装置の表示画面の横方向の軸および縦方向の軸周りにそれぞれ回転する姿勢を少なくとも算出し、
前記オブジェクト姿勢制御手段は、前記可搬型表示装置が前記横方向の軸周りに回転する姿勢に応じて前記オブジェクトの正面方向に直交する当該オブジェクトの横方向の軸周りに当該オブジェクトを回転させ、前記可搬型表示装置が前記縦方向の軸周りに回転する姿勢に応じて前記オブジェクトの正面方向および当該横方向共に直交する当該オブジェクトの軸周りに当該オブジェクトを回転させることによって当該オブジェクトの姿勢の制御を行う、請求項7に記載の情報処理プログラム。
【請求項9】
前記姿勢算出手段は、
実空間における前記可搬型表示装置の基準姿勢を設定する実空間基準姿勢設定手段と、
前記可搬型表示装置から出力されるデータに基づいて、現時点における前記可搬型表示装置の姿勢と前記基準姿勢との実空間における所定軸周りの角度差を算出する角度差算出手段とを含み、
前記オブジェクト姿勢制御手段は、
仮想世界における前記オブジェクトの基準姿勢を設定する仮想世界基準姿勢設定手段と、
前記角度差算出手段が算出した角度差に基づいて、実空間における前記所定軸周りに対応する仮想世界の所定軸周りに、前記オブジェクトの基準姿勢から前記オブジェクトの方向を回転させて当該オブジェクトの姿勢を制御する方向制御手段とを含む、請求項2乃至8のいずれか1つに記載の情報処理プログラム。
【請求項10】
前記オブジェクト姿勢制御手段は、前記角度差算出手段が算出した角度差に応じた変位量で、仮想世界の前記所定軸周りに、前記仮想世界基準姿勢設定手段が設定する前記オブジェクトの基準姿勢の方向を回転変位させる基準姿勢変位手段を、さらに含み、
前記方向制御手段は、前記角度差算出手段が算出した角度差に基づいて、仮想世界の前記所定軸周りに、前記変位した基準姿勢から前記オブジェクトの方向を回転させて当該オブジェクトの姿勢を制御する、請求項9に記載の情報処理プログラム。
【請求項11】
仮想世界における前記オブジェクトの後方から当該オブジェクトが前記第1画像内に含まれるように、当該仮想世界の画像を生成するための第1仮想カメラを配置する第1仮想カメラ制御手段として、さらに前記コンピュータを機能させ、
前記表示制御手段は、前記第1仮想カメラから見た仮想世界を示す画像を、前記第1画像として前記可搬型表示装置に表示する、請求項2乃至10のいずれか1つに記載の情報処理プログラム。
【請求項12】
前記第1カメラ制御手段は、前記オブジェクトの姿勢および前記オブジェクトの仮想世界における位置に基づいて、前記第1仮想カメラの位置および姿勢の制御を行う、請求項11に記載の情報処理プログラム。
【請求項13】
前記第1カメラ制御手段は、前記第1画像における前記オブジェクトの表示位置が固定されるように、前記第1仮想カメラの位置および姿勢の制御を行う、請求項11に記載の情報処理プログラム。
【請求項14】
前記オブジェクト移動手段は、前記オブジェクト姿勢制御手段が制御する前記オブジェクトの正面方向に、当該オブジェクトを移動させる、請求項2乃至13のいずれか1つに記載の情報処理プログラム。
【請求項15】
前記表示制御手段は、前記第1画像とは別に、前記仮想世界を示す第2画像を、前記情報処理装置に接続された別の表示装置にさらに表示する、請求項2乃至14のいずれか1つに記載の情報処理プログラム。
【請求項16】
前記表示制御手段は、前記第1画像を生成する仮想世界の視点とは異なる視点から見た当該仮想世界の前記オブジェクトを含む画像を、前記第2画像として前記別の表示装置に表示する、請求項15に記載の情報処理プログラム。
【請求項17】
前記表示制御手段は、前記第1画像を生成する仮想世界の視点から前記オブジェクトまでの距離より当該オブジェクトから離れた位置に、前記第2画像を生成する当該仮想世界の視点を設定し、
前記表示制御手段は、前記第1画像で示される仮想世界の範囲より広い範囲を、前記第2画像として前記別の表示装置に表示する、請求項16に記載の情報処理プログラム。
【請求項18】
前記表示制御手段は、仮想世界において前記オブジェクトを鳥瞰する位置に、前記第2画像を生成する視点を設定し、
前記表示制御手段は、仮想世界に配置された前記オブジェクトを鳥瞰した画像を、前記第2画像として前記別の表示装置に表示する、請求項16に記載の情報処理プログラム。
【請求項19】
前記表示制御手段は、前記第1画像を生成する第1仮想カメラおよび前記第2画像を生成する第2仮想カメラを設定し、仮想世界における当該第1仮想カメラの視線方向の変化に応じて、当該第2仮想カメラの当該仮想世界における視線方向を変化させる、請求項15乃至18の何れか1つに記載の情報処理プログラム。
【請求項20】
前記表示制御手段は、仮想世界における前記オブジェクトの背後から当該オブジェクトの正面方向が撮像方向となるように前記第1仮想カメラを配置し、仮想世界における前記オブジェクトの正面方向にある位置を注視点として前記第2画像において当該オブジェクトが同じ位置に表示されるように前記第2仮想カメラを配置して、前記オブジェクトの動作に応じて前記第1仮想カメラおよび前記第2仮想カメラの位置および/または姿勢を制御する、請求項19に記載の情報処理プログラム。
【請求項21】
前記姿勢算出手段は、実空間の重力方向を基準とした前記奥行方向の向きを少なくとも算出し、
前記オブジェクト姿勢制御手段は、仮想世界に設定された重力方向と前記オブジェクトの正面方向との位置関係が、前記実空間の重力方向と前記奥行方向との位置関係と実質的に同じとなるように、当該オブジェクトの正面方向を設定して当該オブジェクトの姿勢の制御を行う、請求項7に記載の情報処理プログラム。
【請求項22】
前記オブジェクト姿勢制御手段は、前記可搬型表示装置の姿勢と実質的に同じ姿勢となるように、前記オブジェクトの姿勢を制御する、請求項2乃至21のいずれか1つに記載の情報処理プログラム。
【請求項23】
前記荷重取得手段が取得したデータに基づいて、前記荷重検出装置に加えられた荷重の重心位置を算出する重心位置算出手段として、さらに前記コンピュータを機能させ、
前記オブジェクト移動手段は、前記重心位置算出手段で算出される重心位置に基づいて、前記オブジェクトを移動させる、請求項2乃至22のいずれか1つに記載の情報処理プログラム。
【請求項24】
前記オブジェクト移動手段は、前記重心位置算出手段で算出される重心位置の往復移動に基づいて、前記オブジェクトを移動させる、請求項23に記載の情報処理プログラム。
【請求項25】
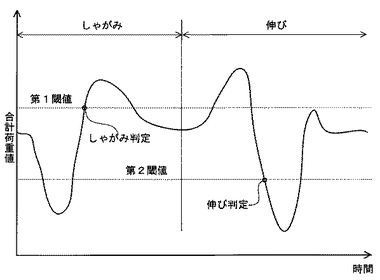
前記オブジェクト移動手段は、前記重心位置が前記往復移動する際に所定の境界の一方側から他方側へ移動した場合に前記オブジェクトが行う第1の動作に応じた移動速度で当該オブジェクトを移動させ、前記重心位置が当該境界の他方側から一方側へ移動した場合に前記オブジェクトが行う第2の動作に応じた移動速度で当該オブジェクトを移動させる、請求項24に記載の情報処理プログラム。
【請求項26】
前記オブジェクト移動手段は、予め設定された基準位置から前記重心位置算出手段で算出される重心位置までの距離に基づいて前記オブジェクトの移動速度を設定し、当該基準位置から当該重心位置への方向に基づいて前記オブジェクトの移動方向を設定して、前記オブジェクトを移動させる、請求項23に記載の情報処理プログラム。
【請求項27】
前記オブジェクト移動手段は、前記荷重取得手段が取得したデータが示す荷重の変化に基づいて、前記オブジェクトを移動させる、請求項2乃至22のいずれか1つに記載の情報処理プログラム。
【請求項28】
前記オブジェクト移動手段は、前記荷重検出装置に加えられた荷重が所定値以上に上昇する変化をした時点で、前記オブジェクトが行う第1の動作に応じた移動速度で当該オブジェクトを移動させる、請求項27に記載の情報処理プログラム。
【請求項29】
前記オブジェクト移動手段は、前記荷重検出装置に加えられた荷重が所定値以上に上昇する変化をした後に、前記荷重検出装置に加えられた荷重が所定値以下まで降下する変化をしたことに応じて、前記オブジェクトを移動させる、請求項27に記載の情報処理プログラム。
【請求項30】
前記オブジェクト移動手段は、前記荷重が所定値以上に上昇する変化をした時点から、当該荷重が所定値以下まで降下する変化をした時点までの時間長さに基づいた移動速度で前記オブジェクトを移動させる、請求項29に記載の情報処理プログラム。
【請求項31】
前記可搬型表示装置は、ジャイロセンサおよび加速度センサの少なくとも一方を含み、
前記姿勢算出手段は、前記ジャイロセンサおよび前記加速度センサの少なくとも一方から出力されるデータに基づいて、前記可搬型表示装置の姿勢を算出する、請求項2乃至301のいずれか1つに記載の情報処理プログラム。
【請求項32】
前記表示制御手段は、前記第1画像を示す画像データを前記可搬型表示装置へ出力し、
前記可搬型表示装置は、
前記情報処理装置から出力された画像データを取得する画像データ取得手段と、
前記画像データ取得手段が取得した画像データが示す前記第1画像を表示する表示手段とを備える、請求項1乃至31のいずれか1つに記載の情報処理プログラム。
【請求項33】
前記第1画像を示す画像データを圧縮して圧縮画像データを生成する圧縮画像生成手段として、さらに前記コンピュータを機能させ、
前記表示制御手段は、前記圧縮画像生成手段が生成した圧縮画像データを前記可搬型表示装置へ出力し、
前記画像データ取得手段は、前記情報処理装置から出力された圧縮画像データを取得し、
前記可搬型表示装置は、前記圧縮画像データを伸張して前記第1の表示画像を示す画像データを得る表示画像伸張手段を、さらに備え、
前記表示手段は、前記画像データ取得手段が取得して前記表示画像伸長手段が伸長した画像データが示す前記第1画像を表示する、請求項32に記載の情報処理プログラム。
【請求項34】
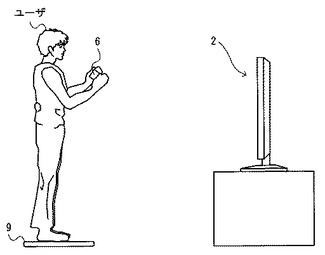
可搬型表示装置と、荷重検出装置と、当該可搬型表示装置に画像を表示することが可能な情報処理装置とを含む情報処理システムであって、
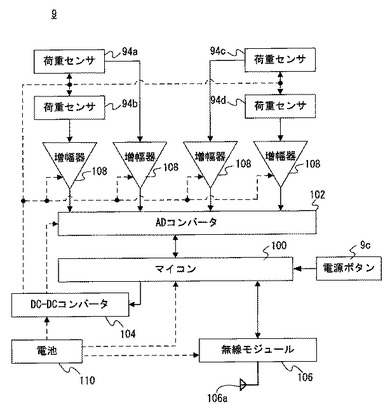
前記荷重検出装置は、当該荷重検出装置に加わる荷重に基づいたデータを前記情報処理装置へ出力する荷重検出手段を備え、
前記可搬型表示装置は、少なくとも当該可搬型表示装置の姿勢に応じた姿勢データを前記情報処理装置へ出力する姿勢データ出力手段を備え、
前記情報処理装置は、
前記荷重検出装置から出力されたデータを取得する取得手段と、
前記姿勢データに基づいて、仮想世界に配置されたオブジェクトの姿勢を制御するオブジェクト姿勢制御手段と、
前記取得手段が取得したデータに基づいて、仮想世界において前記オブジェクトを移動させるオブジェクト移動手段と、
前記オブジェクトを少なくとも含む仮想世界を示す第1画像を前記可搬型表示装置に出力する画像データ出力手段とを備え、
前記可搬型表示装置は、
前記情報処理装置から出力された前記第1画像のデータを取得する画像データ取得手段と、
前記画像データ取得手段が取得した画像データが示す前記第1画像を表示する表示手段とを、さらに備える、情報処理システム。
【請求項35】
可搬型表示装置本体の姿勢に応じた姿勢データを少なくとも出力する当該可搬型表示装置に画像を表示することが可能な少なくとも1つの情報処理装置により構成される情報処理システムに含まれる1つのプロセッサまたは複数のプロセッサ間の協働により実行される情報処理方法であって、
荷重検出装置に加えられた荷重に基づくデータを取得する荷重取得ステップと、
前記姿勢データに基づいて、仮想世界に配置されたオブジェクトの姿勢を制御するオブジェクト姿勢制御ステップと、
前記荷重取得ステップにおいて取得されたデータに基づいて、仮想世界において前記オブジェクトを移動させるオブジェクト移動ステップと、
前記オブジェクトを少なくとも含む仮想世界を示す第1画像を前記可搬型表示装置に表示する表示制御ステップとを含む、情報処理方法。
【請求項36】
可搬型表示装置と荷重検出装置とを含む情報処理システムであって、
前記荷重検出装置は、当該荷重検出装置に加わる荷重に基づいたデータを前記可搬型表示装置へ出力する荷重検出手段を備え、
前記可搬型表示装置は、
少なくとも前記可搬型表示装置の姿勢に応じた姿勢データを生成する姿勢データ生成手段と、
荷重検出装置から出力されたデータを取得する取得手段と、
前記姿勢データに基づいて、仮想世界に配置されたオブジェクトの姿勢を制御するオブジェクト姿勢制御手段と、
前記取得手段が取得したデータに基づいて、仮想世界において前記オブジェクトを移動させるオブジェクト移動手段と、
前記オブジェクトを少なくとも含む仮想世界を示す第1画像を生成する画像生成手段と、
前記画像生成手段が生成した前記第1画像を表示する表示手段とを備える、情報処理システム。
【請求項1】
可搬型表示装置本体の姿勢に応じた姿勢データを少なくとも出力する当該可搬型表示装置に画像を表示することが可能な情報処理装置のコンピュータで実行される情報処理プログラムであって、
前記コンピュータを、
荷重検出装置に加えられた荷重に基づくデータを取得する荷重取得手段と、
前記姿勢データに基づいて、仮想世界に配置されたオブジェクトの姿勢を制御するオブジェクト姿勢制御手段と、
前記荷重取得手段が取得したデータに基づいて、仮想世界において前記オブジェクトを移動させるオブジェクト移動手段と、
前記オブジェクトを少なくとも含む仮想世界を示す第1画像を前記可搬型表示装置に表示する表示制御手段として機能させる、情報処理プログラム。
【請求項2】
前記姿勢データに基づいて、当該可搬型表示装置の姿勢を算出する姿勢算出手段として、さらに前記コンピュータを機能させ、
前記オブジェクト姿勢制御手段は、前記可搬型表示装置の姿勢に基づいて、前記オブジェクトの姿勢を制御する、請求項1に記載の情報処理プログラム。
【請求項3】
前記姿勢算出手段は、実空間の所定方向を基準とした前記可搬型表示装置の姿勢を算出し、
前記オブジェクト姿勢制御手段は、前記所定方向を基準とした前記可搬型表示装置の姿勢に基づいて、当該所定方向に対応する前記仮想世界に設定された所定方向を基準として前記オブジェクトの姿勢の制御を行う、請求項2に記載の情報処理プログラム。
【請求項4】
前記姿勢算出手段は、実空間の重力方向を実空間の前記所定方向とし、当該重力方向を基準とした前記可搬型表示装置の姿勢を算出し、
前記オブジェクト姿勢制御手段は、実空間の重力方向を基準とした前記可搬型表示装置の姿勢に基づいて、前記仮想世界に設定された重力方向を基準として前記オブジェクトの姿勢の制御を行う、請求項3に記載の情報処理プログラム。
【請求項5】
前記姿勢算出手段は、実空間の重力方向周りに前記可搬型表示装置が回転する姿勢を少なくとも算出し、
前記オブジェクト姿勢制御手段は、実空間の重力方向周りに前記可搬型表示装置が回転する姿勢に基づいて、前記仮想世界に設定された重力方向周りに前記オブジェクトを回転させて姿勢を制御する、請求項4に記載の情報処理プログラム。
【請求項6】
前記姿勢算出手段は、実空間の重力方向に垂直な水平方向周りに前記可搬型表示装置が上下振り運動する姿勢を少なくとも算出し、
前記オブジェクト姿勢制御手段は、前記水平方向周りに前記可搬型表示装置が上下振り運動する姿勢に基づいて、当該水平方向に対応する前記仮想世界に設定された水平方向周りに前記オブジェクトが上下振り運動する姿勢を制御する、請求項4に記載の情報処理プログラム。
【請求項7】
前記姿勢算出手段は、前記第1画像が表示される前記可搬型表示装置の表示画面に垂直な当該表示画面の奥行方向に直交する2軸周りにそれぞれ回転する姿勢を少なくとも算出し、
前記オブジェクト姿勢制御手段は、前記可搬型表示装置が前記2軸周りにそれぞれ回転する姿勢に応じて、前記オブジェクトの正面方向に直交する2軸の周りに当該オブジェクトを回転させることによって当該オブジェクトの姿勢の制御を行う、請求項2乃至4のいずれか1つに記載の情報処理プログラム。
【請求項8】
前記姿勢算出手段は、前記奥行方向に直交する前記可搬型表示装置の表示画面の横方向の軸および縦方向の軸周りにそれぞれ回転する姿勢を少なくとも算出し、
前記オブジェクト姿勢制御手段は、前記可搬型表示装置が前記横方向の軸周りに回転する姿勢に応じて前記オブジェクトの正面方向に直交する当該オブジェクトの横方向の軸周りに当該オブジェクトを回転させ、前記可搬型表示装置が前記縦方向の軸周りに回転する姿勢に応じて前記オブジェクトの正面方向および当該横方向共に直交する当該オブジェクトの軸周りに当該オブジェクトを回転させることによって当該オブジェクトの姿勢の制御を行う、請求項7に記載の情報処理プログラム。
【請求項9】
前記姿勢算出手段は、
実空間における前記可搬型表示装置の基準姿勢を設定する実空間基準姿勢設定手段と、
前記可搬型表示装置から出力されるデータに基づいて、現時点における前記可搬型表示装置の姿勢と前記基準姿勢との実空間における所定軸周りの角度差を算出する角度差算出手段とを含み、
前記オブジェクト姿勢制御手段は、
仮想世界における前記オブジェクトの基準姿勢を設定する仮想世界基準姿勢設定手段と、
前記角度差算出手段が算出した角度差に基づいて、実空間における前記所定軸周りに対応する仮想世界の所定軸周りに、前記オブジェクトの基準姿勢から前記オブジェクトの方向を回転させて当該オブジェクトの姿勢を制御する方向制御手段とを含む、請求項2乃至8のいずれか1つに記載の情報処理プログラム。
【請求項10】
前記オブジェクト姿勢制御手段は、前記角度差算出手段が算出した角度差に応じた変位量で、仮想世界の前記所定軸周りに、前記仮想世界基準姿勢設定手段が設定する前記オブジェクトの基準姿勢の方向を回転変位させる基準姿勢変位手段を、さらに含み、
前記方向制御手段は、前記角度差算出手段が算出した角度差に基づいて、仮想世界の前記所定軸周りに、前記変位した基準姿勢から前記オブジェクトの方向を回転させて当該オブジェクトの姿勢を制御する、請求項9に記載の情報処理プログラム。
【請求項11】
仮想世界における前記オブジェクトの後方から当該オブジェクトが前記第1画像内に含まれるように、当該仮想世界の画像を生成するための第1仮想カメラを配置する第1仮想カメラ制御手段として、さらに前記コンピュータを機能させ、
前記表示制御手段は、前記第1仮想カメラから見た仮想世界を示す画像を、前記第1画像として前記可搬型表示装置に表示する、請求項2乃至10のいずれか1つに記載の情報処理プログラム。
【請求項12】
前記第1カメラ制御手段は、前記オブジェクトの姿勢および前記オブジェクトの仮想世界における位置に基づいて、前記第1仮想カメラの位置および姿勢の制御を行う、請求項11に記載の情報処理プログラム。
【請求項13】
前記第1カメラ制御手段は、前記第1画像における前記オブジェクトの表示位置が固定されるように、前記第1仮想カメラの位置および姿勢の制御を行う、請求項11に記載の情報処理プログラム。
【請求項14】
前記オブジェクト移動手段は、前記オブジェクト姿勢制御手段が制御する前記オブジェクトの正面方向に、当該オブジェクトを移動させる、請求項2乃至13のいずれか1つに記載の情報処理プログラム。
【請求項15】
前記表示制御手段は、前記第1画像とは別に、前記仮想世界を示す第2画像を、前記情報処理装置に接続された別の表示装置にさらに表示する、請求項2乃至14のいずれか1つに記載の情報処理プログラム。
【請求項16】
前記表示制御手段は、前記第1画像を生成する仮想世界の視点とは異なる視点から見た当該仮想世界の前記オブジェクトを含む画像を、前記第2画像として前記別の表示装置に表示する、請求項15に記載の情報処理プログラム。
【請求項17】
前記表示制御手段は、前記第1画像を生成する仮想世界の視点から前記オブジェクトまでの距離より当該オブジェクトから離れた位置に、前記第2画像を生成する当該仮想世界の視点を設定し、
前記表示制御手段は、前記第1画像で示される仮想世界の範囲より広い範囲を、前記第2画像として前記別の表示装置に表示する、請求項16に記載の情報処理プログラム。
【請求項18】
前記表示制御手段は、仮想世界において前記オブジェクトを鳥瞰する位置に、前記第2画像を生成する視点を設定し、
前記表示制御手段は、仮想世界に配置された前記オブジェクトを鳥瞰した画像を、前記第2画像として前記別の表示装置に表示する、請求項16に記載の情報処理プログラム。
【請求項19】
前記表示制御手段は、前記第1画像を生成する第1仮想カメラおよび前記第2画像を生成する第2仮想カメラを設定し、仮想世界における当該第1仮想カメラの視線方向の変化に応じて、当該第2仮想カメラの当該仮想世界における視線方向を変化させる、請求項15乃至18の何れか1つに記載の情報処理プログラム。
【請求項20】
前記表示制御手段は、仮想世界における前記オブジェクトの背後から当該オブジェクトの正面方向が撮像方向となるように前記第1仮想カメラを配置し、仮想世界における前記オブジェクトの正面方向にある位置を注視点として前記第2画像において当該オブジェクトが同じ位置に表示されるように前記第2仮想カメラを配置して、前記オブジェクトの動作に応じて前記第1仮想カメラおよび前記第2仮想カメラの位置および/または姿勢を制御する、請求項19に記載の情報処理プログラム。
【請求項21】
前記姿勢算出手段は、実空間の重力方向を基準とした前記奥行方向の向きを少なくとも算出し、
前記オブジェクト姿勢制御手段は、仮想世界に設定された重力方向と前記オブジェクトの正面方向との位置関係が、前記実空間の重力方向と前記奥行方向との位置関係と実質的に同じとなるように、当該オブジェクトの正面方向を設定して当該オブジェクトの姿勢の制御を行う、請求項7に記載の情報処理プログラム。
【請求項22】
前記オブジェクト姿勢制御手段は、前記可搬型表示装置の姿勢と実質的に同じ姿勢となるように、前記オブジェクトの姿勢を制御する、請求項2乃至21のいずれか1つに記載の情報処理プログラム。
【請求項23】
前記荷重取得手段が取得したデータに基づいて、前記荷重検出装置に加えられた荷重の重心位置を算出する重心位置算出手段として、さらに前記コンピュータを機能させ、
前記オブジェクト移動手段は、前記重心位置算出手段で算出される重心位置に基づいて、前記オブジェクトを移動させる、請求項2乃至22のいずれか1つに記載の情報処理プログラム。
【請求項24】
前記オブジェクト移動手段は、前記重心位置算出手段で算出される重心位置の往復移動に基づいて、前記オブジェクトを移動させる、請求項23に記載の情報処理プログラム。
【請求項25】
前記オブジェクト移動手段は、前記重心位置が前記往復移動する際に所定の境界の一方側から他方側へ移動した場合に前記オブジェクトが行う第1の動作に応じた移動速度で当該オブジェクトを移動させ、前記重心位置が当該境界の他方側から一方側へ移動した場合に前記オブジェクトが行う第2の動作に応じた移動速度で当該オブジェクトを移動させる、請求項24に記載の情報処理プログラム。
【請求項26】
前記オブジェクト移動手段は、予め設定された基準位置から前記重心位置算出手段で算出される重心位置までの距離に基づいて前記オブジェクトの移動速度を設定し、当該基準位置から当該重心位置への方向に基づいて前記オブジェクトの移動方向を設定して、前記オブジェクトを移動させる、請求項23に記載の情報処理プログラム。
【請求項27】
前記オブジェクト移動手段は、前記荷重取得手段が取得したデータが示す荷重の変化に基づいて、前記オブジェクトを移動させる、請求項2乃至22のいずれか1つに記載の情報処理プログラム。
【請求項28】
前記オブジェクト移動手段は、前記荷重検出装置に加えられた荷重が所定値以上に上昇する変化をした時点で、前記オブジェクトが行う第1の動作に応じた移動速度で当該オブジェクトを移動させる、請求項27に記載の情報処理プログラム。
【請求項29】
前記オブジェクト移動手段は、前記荷重検出装置に加えられた荷重が所定値以上に上昇する変化をした後に、前記荷重検出装置に加えられた荷重が所定値以下まで降下する変化をしたことに応じて、前記オブジェクトを移動させる、請求項27に記載の情報処理プログラム。
【請求項30】
前記オブジェクト移動手段は、前記荷重が所定値以上に上昇する変化をした時点から、当該荷重が所定値以下まで降下する変化をした時点までの時間長さに基づいた移動速度で前記オブジェクトを移動させる、請求項29に記載の情報処理プログラム。
【請求項31】
前記可搬型表示装置は、ジャイロセンサおよび加速度センサの少なくとも一方を含み、
前記姿勢算出手段は、前記ジャイロセンサおよび前記加速度センサの少なくとも一方から出力されるデータに基づいて、前記可搬型表示装置の姿勢を算出する、請求項2乃至301のいずれか1つに記載の情報処理プログラム。
【請求項32】
前記表示制御手段は、前記第1画像を示す画像データを前記可搬型表示装置へ出力し、
前記可搬型表示装置は、
前記情報処理装置から出力された画像データを取得する画像データ取得手段と、
前記画像データ取得手段が取得した画像データが示す前記第1画像を表示する表示手段とを備える、請求項1乃至31のいずれか1つに記載の情報処理プログラム。
【請求項33】
前記第1画像を示す画像データを圧縮して圧縮画像データを生成する圧縮画像生成手段として、さらに前記コンピュータを機能させ、
前記表示制御手段は、前記圧縮画像生成手段が生成した圧縮画像データを前記可搬型表示装置へ出力し、
前記画像データ取得手段は、前記情報処理装置から出力された圧縮画像データを取得し、
前記可搬型表示装置は、前記圧縮画像データを伸張して前記第1の表示画像を示す画像データを得る表示画像伸張手段を、さらに備え、
前記表示手段は、前記画像データ取得手段が取得して前記表示画像伸長手段が伸長した画像データが示す前記第1画像を表示する、請求項32に記載の情報処理プログラム。
【請求項34】
可搬型表示装置と、荷重検出装置と、当該可搬型表示装置に画像を表示することが可能な情報処理装置とを含む情報処理システムであって、
前記荷重検出装置は、当該荷重検出装置に加わる荷重に基づいたデータを前記情報処理装置へ出力する荷重検出手段を備え、
前記可搬型表示装置は、少なくとも当該可搬型表示装置の姿勢に応じた姿勢データを前記情報処理装置へ出力する姿勢データ出力手段を備え、
前記情報処理装置は、
前記荷重検出装置から出力されたデータを取得する取得手段と、
前記姿勢データに基づいて、仮想世界に配置されたオブジェクトの姿勢を制御するオブジェクト姿勢制御手段と、
前記取得手段が取得したデータに基づいて、仮想世界において前記オブジェクトを移動させるオブジェクト移動手段と、
前記オブジェクトを少なくとも含む仮想世界を示す第1画像を前記可搬型表示装置に出力する画像データ出力手段とを備え、
前記可搬型表示装置は、
前記情報処理装置から出力された前記第1画像のデータを取得する画像データ取得手段と、
前記画像データ取得手段が取得した画像データが示す前記第1画像を表示する表示手段とを、さらに備える、情報処理システム。
【請求項35】
可搬型表示装置本体の姿勢に応じた姿勢データを少なくとも出力する当該可搬型表示装置に画像を表示することが可能な少なくとも1つの情報処理装置により構成される情報処理システムに含まれる1つのプロセッサまたは複数のプロセッサ間の協働により実行される情報処理方法であって、
荷重検出装置に加えられた荷重に基づくデータを取得する荷重取得ステップと、
前記姿勢データに基づいて、仮想世界に配置されたオブジェクトの姿勢を制御するオブジェクト姿勢制御ステップと、
前記荷重取得ステップにおいて取得されたデータに基づいて、仮想世界において前記オブジェクトを移動させるオブジェクト移動ステップと、
前記オブジェクトを少なくとも含む仮想世界を示す第1画像を前記可搬型表示装置に表示する表示制御ステップとを含む、情報処理方法。
【請求項36】
可搬型表示装置と荷重検出装置とを含む情報処理システムであって、
前記荷重検出装置は、当該荷重検出装置に加わる荷重に基づいたデータを前記可搬型表示装置へ出力する荷重検出手段を備え、
前記可搬型表示装置は、
少なくとも前記可搬型表示装置の姿勢に応じた姿勢データを生成する姿勢データ生成手段と、
荷重検出装置から出力されたデータを取得する取得手段と、
前記姿勢データに基づいて、仮想世界に配置されたオブジェクトの姿勢を制御するオブジェクト姿勢制御手段と、
前記取得手段が取得したデータに基づいて、仮想世界において前記オブジェクトを移動させるオブジェクト移動手段と、
前記オブジェクトを少なくとも含む仮想世界を示す第1画像を生成する画像生成手段と、
前記画像生成手段が生成した前記第1画像を表示する表示手段とを備える、情報処理システム。
【図1】



【図2】
【図3】

【図4】
【図5】
【図6】

【図7】
【図8】
【図9】
【図10A】
【図10B】

【図11】
【図12】
【図13】

【図14】
【図15】
【図16】

【図17】
【図18A】
【図18B】
【図19】

【図20】

【図21】
【図22】
【図23】

【図24】
【図25A】
【図25B】
【図26】

【図27】
【図28】
【図29】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10A】
【図10B】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18A】
【図18B】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25A】
【図25B】
【図26】
【図27】
【図28】
【図29】
【公開番号】特開2012−221023(P2012−221023A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−83456(P2011−83456)
【出願日】平成23年4月5日(2011.4.5)
【出願人】(000233778)任天堂株式会社 (1,115)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月5日(2011.4.5)
【出願人】(000233778)任天堂株式会社 (1,115)
【Fターム(参考)】
[ Back to top ]