
情報処理装置、情報処理システム及び情報処理方法

【課題】標識が撮像範囲に含まれない場合であっても、現実環境に対応する付加画像の表示が可能な情報処理装置、情報処理システム及び情報処理方法を提供すること。
【解決手段】第1の撮像手段4、現実空間を撮像して第1の背景画像を取得する。
第1の位置関係推定部20は、第1の背景画像に、予め登録され現実空間に配置された標識の画像である第1の標識画像が含まれるときには第1の標識画像を基に上記第1の撮像手段の上記標識に対する空間的な位置関係である第1の位置関係を推定し、第1の背景画像に第1の標識画像が含まれないときには第1の背景画像から抽出された特徴点の変位から第1の位置関係を推定する。
合成画像生成部22は、第1の位置関係を基に第1の付加画像を生成し、第1の付加画像と第1の背景画像とを合成して合成画像を生成する。
表示手段は、合成画像を表示させる。
【解決手段】第1の撮像手段4、現実空間を撮像して第1の背景画像を取得する。
第1の位置関係推定部20は、第1の背景画像に、予め登録され現実空間に配置された標識の画像である第1の標識画像が含まれるときには第1の標識画像を基に上記第1の撮像手段の上記標識に対する空間的な位置関係である第1の位置関係を推定し、第1の背景画像に第1の標識画像が含まれないときには第1の背景画像から抽出された特徴点の変位から第1の位置関係を推定する。
合成画像生成部22は、第1の位置関係を基に第1の付加画像を生成し、第1の付加画像と第1の背景画像とを合成して合成画像を生成する。
表示手段は、合成画像を表示させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、現実環境の画像に、現実環境に対応する画像を合成して表示する情報処理装置、情報処理システム及び情報処理方法に関する。
【背景技術】
【0002】
現実環境の画像に、現実環境に対応する画像を付加する、拡張現実(Augmented Reality:AR)と呼ばれる技術がある。ARでは、カメラ等によって現実環境の画像が取得され、取得された現実環境の画像に、現実環境に対応する付加的な画像(以下、付加画像)が合成され、表示画面に表示される。ユーザは、現実環境の画像と付加画像が合成された画像を見ることにより、あたかも現実環境に付加画像として表示されている物体又は画像が存在しているかのように認識することができる。
【0003】
ARでは、取得された現実環境の画像に対し、付加画像の正確な対応付け、即ち、付加画像の位置、サイズ、角度等の現実環境への適合ができることが重要である。正確に対応付けされない場合、表示される付加画像の位置、サイズ、角度等が現実環境に対して不自然になる。
【0004】
例えば、非特許文献1には、マーカーを利用したARシステムについて記載されている。このシステムでは、予めマーカー(所定のサイズを有する着色された正方形)の画像情報が登録される。マーカーの画像が現実環境の画像に含まれると、現実環境の画像からマーカーが検出され、その大きさ、角度等の情報から、マーカーに対するカメラの空間的な位置関係が算出される。その位置関係を基に、カメラとの相対位置が固定されたHDMに仮想物体が表示され、ユーザは現実環境と共に仮想物体を視認することができる。
【0005】
さらに、ARでは、現実環境に付加画像を関連付けて表示するのみならず、ユーザによる入力に応じて付加画像を変更することも可能とされる。例えば、ユーザが、付加画像が付加された現実環境を視認しながら現実環境に向けてポインタを向けると、指示された現実環境の位置に対応する付加画像が変更されるような動作が可能となる。このような動作を可能とするものとして、特許文献1には、情報処理プログラムについて記載されている。
【0006】
特許文献1には、モニタの周縁に離間して配置された2つのマーカ(赤外線光源)と、これらマーカを撮像することが可能な撮像装置を備えたコントローラを有する装置が記載されている。ユーザがコントローラをモニタに向けて操作すると、撮像装置によって撮像された2つのマーカの距離、角度等からコントローラのモニタに対する空間的な位置関係が算出され、ユーザの操作が該装置に入力される。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−75213号公報(段落[0086]、図7)
【非特許文献】
【0008】
【非特許文献1】加藤博一 Mark Billinghurst 浅野浩一 橘啓八郎 "マーカ追跡に基づく拡張現実感システムとそのキャリブレーション" 日本バーチャルリアリティ学会論文誌Vol.4, No4, 1999 http://intron.kz.tsukuba.ac.jp/tvrsj/4.4/kato/p-99_VRSJ4_4.pdf
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、特許文献1および非特許文献1に記載の技術では、ともに、撮像手段の撮像範囲に標識(マーカ)が含まれている必要がある。このため、標識が撮像手段によって撮像される範囲内でしか、付加画像が合成された画像を表示することができない。
【0010】
以上のような事情に鑑み、本発明の目的は、標識が撮像範囲に含まれない場合であっても、現実環境に対応する付加画像の表示が可能な情報処理装置、情報処理システム及び情報処理方法を提供することにある。
【課題を解決するための手段】
【0011】
上記目的を達成するため、本発明の一形態に係る情報処理装置は、第1の撮像手段と、第1の位置関係推定部と、画像生成部と、表示手段とを具備する。
上記第1の撮像手段は、現実空間を撮像して第1の背景画像を取得する。
上記第1の位置関係推定部は、上記第1の背景画像に、予め登録され上記現実空間に配置された標識の画像である第1の標識画像が含まれるときには上記第1の標識画像を基に上記第1の撮像手段の上記標識に対する空間的な位置関係である第1の位置関係を推定し、上記第1の背景画像に上記第1の標識画像が含まれないときには上記第1の背景画像から抽出された特徴点の変位から上記第1の位置関係を推定する。
上記画像生成部は、上記第1の位置関係を基に第1の付加画像を生成し、上記第1の付加画像と上記第1の背景画像とを合成して合成画像を生成する。
上記表示手段は、上記合成画像を表示させる。
【0012】
第1の背景画像に第1の標識画像が含まれている場合、第1の位置関係推定部は、第1の標識画像と予め第1の位置関係推定部に登録されている標識の情報とを比較することで第1の位置関係を推定することが可能である。一方、第1の背景画像に第1の標識画像が含まれていない場合、第1の位置関係推定部は、以前に第1の撮像手段によって撮像された、標識画像が含まれる背景画像から抽出された特徴点と、第1の背景画像から抽出された特徴点の変位から、第1の位置関係を推定することが可能である。画像生成部は、第1の位置関係を用いて、第1の背景画像に適合する第1の付加画像の位置、向き、大きさ等を決定し、第1の背景画像に合成する。第1の付加画像は、第1の位置関係に応じて、即ち、現実空間における標識に対する第1の撮像手段の位置及び向きに応じて生成されるため、あたかも現実空間に存在しているかのような仮想的なオブジェクトをユーザに認識させる。情報処理装置は、第1の背景画像に第1の標識画像が含まれていない、即ち、第1の撮像手段の撮影範囲に標識が含まれていない場合であっても、第1の背景画像に適合する第1の付加画像が合成された合成画像を表示することが可能となる。
【0013】
上記情報処理装置は、現実空間を撮像して第2の背景画像を取得する第2の撮像手段を有し、上記第2の背景画像に上記標識の画像である第2の標識画像が含まれるときには上記第2の標識画像を基に上記第2の撮像手段の上記標識に対する空間的な位置関係である第2の位置関係を推定し、上記第2の背景画像に上記第2の標識画像が含まれないときには上記第2の背景画像から抽出された特徴点の変位から上記第2の位置関係を推定する装置から送信された上記第2の位置関係を受信する受信部と、上記第1の位置関係及び上記受信された上記第2の位置関係を基に第1の付加画像を生成し、上記第1の付加画像と上記第1の背景画像とを合成して合成画像を生成する画像生成部とをさらに具備してもよい。
【0014】
この構成によれば、画像生成部は、第1の位置関係に加え、第2の撮像手段の位置関係である第2の位置関係を取得し、画像生成部が第1の位置関係及び第2の位置関係を基に第1の付加画像に変更を加えることが可能となる。これにより、仮想的オブジェクトに第2の位置関係に応じた変更が加えられたかのように第1の付加画像を変更することが可能となる。
【0015】
上記目的を達成するため、本発明の一形態に係る情報処理システムは、第1の情報処理装置と、第2の情報処理装置とを具備する。
上記第1の情報処理装置は、第1の撮像手段と、第1の位置関係推定部とを具備する。
上記第1の撮像手段は、現実空間を撮像して第1の背景画像を取得する。
上記第1の位置関係推定部は、上記第1の背景画像に、予め登録され上記現実空間に配置された標識の画像である第1の標識画像が含まれるときには上記第1の標識画像を基に上記第1の撮像手段の上記標識に対する空間的な位置関係である第1の位置関係を推定し、上記第1の背景画像に上記第1の標識画像が含まれないときには上記第1の背景画像から抽出された特徴点の変位から上記第1の位置関係を推定する。
上記第2の情報処理装置は、第2の撮像手段と、第2の位置関係推定部と、送信部とを具備する。
上記第2の撮像手段は、現実空間を撮像して第2の背景画像を取得する。
上記第2の位置関係推定部は、上記第2の背景画像に上記標識の画像である第2の標識画像が含まれるときには上記第2の標識画像を基に上記第2の撮像手段の上記標識に対する空間的な位置関係である第2の位置関係を推定し、上記第2の背景画像に上記第2の標識画像が含まれないときには上記第2の背景画像から抽出された特徴点の変位から上記第2の位置関係を推定する。
上記送信部は、上記第2の位置関係を上記第1の情報処理装置に送信する。
上記第1の情報処理装置は、さらに、受信部と、画像生成部と、表示手段とを具備する。
上記受信部は、上記第2の情報処理装置から送信された上記第2の位置関係を受信する。
上記画像生成部は、上記第1の位置関係及び上記受信された上記第2の位置関係を基に第1の付加画像を生成し、上記第1の付加画像と上記第1の背景画像とを合成して合成画像を生成する。
上記表示手段は、上記第1の位置関係及び上記第2の位置関係を基に第1の付加画像を生成し、上記第1の付加画像と上記第1の背景画像とを合成して合成画像を生成する。
【0016】
第1の撮像手段と第2の撮像手段によって現実空間が撮像される。例えば、第1の撮像手段は装置本体に設けられたカメラであり、第2の撮像手段はコントローラに設けられているカメラである。第1の撮像手段と第2の撮像手段の空間的位置の相違から、第1の背景画像と第2の背景画像は異なる画像となる。第1の撮像手段については上述のように第1の位置関係推定部によって第1の位置関係が推定される。第2の撮像手段については、第2の位置関係推定部が、第2の標識画像と予め第2の位置関係推定部に登録されている標識の情報とを比較することで第2の位置関係を推定し、又は、以前に第2の撮像手段によって撮像された、標識画像が含まれる背景画像から抽出された特徴点と、第2の背景画像から抽出された特徴点の変位から、第2の位置関係を推定する。したがって、画像生成部が第1の位置関係及び第2の位置関係を基に第1の付加画像に変更を加えることが可能となる。これにより、仮想的オブジェクトに第2の位置関係に応じた変更が加えられたかのように第1の付加画像を変更することが可能となる。
【0017】
上記第2の情報処理装置は、ユーザによる操作入力を可能とする入力部をさらに具備し、
上記画像生成部は、上記入力部から入力された指示に応じて上記第1の付加画像を変更してもよい。
【0018】
この構成によれば、情報処理システムは、ユーザによる指示が入力されたときの第2の位置関係に応じて変更された第1の付加画像を表示することが可能となる。
【0019】
上記画像生成部は、上記第1の位置関係及び上記第2の位置関係を基に、上記第1の撮像手段に対する上記第2の撮像手段の空間的な位置関係である第3の位置関係を算出し、上記第3の位置関係を基に上記背景画像に付加される第2の付加画像をさらに生成し、上記第1の付加画像と上記背景画像と上記第2の付加画像とを合成して上記合成画像を生成してもよい。
【0020】
情報処理システムは、第1の撮像手段に対する第2の撮像手段の空間的な位置関係に応じて第2の付加画像を現実画像に合成することが可能となる。例えば、情報処理システムは、第1の撮像手段の撮像範囲に第2の撮像手段が含まれる場合に、第2の撮像手段を表す画像を、第2の撮像手段の第1の撮像手段に対する位置関係、即ち第3の位置関係にあわせて合わせて表示させることが可能となる。
【0021】
上記目的を達成するため、本発明の一形態に係るプログラムは、第1の位置関係推定部と、画像生成部としてコンピュータを機能させる。
上記第1の位置関係推定部は、第1の撮像手段によって撮像された第1の背景画像に、予め登録され上記現実空間に配置された標識の画像である第1の標識画像が含まれるときには上記第1の標識画像を基に上記第1の撮像手段の標識に対する空間的な位置関係である第1の位置関係を推定し、上記第1の背景画像に上記第1の標識画像が含まれないときには上記第1の背景画像から抽出された特徴点の変位から上記第1の位置関係を推定する。
上記画像生成部は、上記第1の位置関係を基に第1の付加画像を生成し、上記第1の付加画像と上記第1の背景画像とを合成して表示手段に表示させる合成画像を生成する。
【0022】
上記目的を達成するため、本発明の一形態に係る情報処理方法は、第1の撮像手段が、現実空間を撮像して第1の背景画像を取得する。
第1の位置関係推定部が、上記第1の背景画像に、予め登録され上記現実空間に配置された標識の画像である第1の標識画像が含まれるときには上記第1の標識画像を基に上記第1の撮像手段の上記標識に対する空間的な位置関係である第1の位置関係を推定し、上記第1の背景画像に上記第1の標識画像が含まれないときには上記第1の背景画像から抽出された特徴点の変位から上記第1の位置関係を推定する。
画像生成部が、上記第1の位置関係を基に第1の付加画像を生成し、上記第1の付加画像と上記第1の背景画像とを合成して合成画像を生成する。
表示手段が、上記合成画像を表示させる。
【発明の効果】
【0023】
以上、本発明によれば、標識が撮像範囲に含まれない場合であっても、現実環境に対応する付加画像の表示が可能な情報処理装置、情報処理システム及び情報処理方法を提供することが可能となる。
【図面の簡単な説明】
【0024】
【図1】第1の実施形態に係る情報処理装置の外観を示す斜視図である。
【図2】同情報処理装置の構成を示すブロック図である。
【図3】同情報処理装置による拡張現実画像の生成の概要を例示する模式図である。
【図4】同情報処理装置の機能的な構成を示すブロック図である。
【図5】同情報処理装置の位置関係推定部の詳細を示すブロック図である。
【図6】マーカを示す模式図である。
【図7】特徴点の設定の様子を示す模式図である。
【図8】第1の実施形態に係る情報処理装置の動作を示すフローチャートである。
【図9】同情報処理装置により撮像される現実画像及び生成される拡張現実画像を示す模式図である。
【図10】第2の実施形態に係る情報処理システムの外観を示す斜視図である。
【図11】同情報処理システムのARコントローラを示す斜視図である。
【図12】同情報処理システムの構成を示すブロック図である。
【図13】同情報処理システムよる拡張現実画像の生成の概要を例示する模式図である
【図14】同情報処理システムの機能的な構成を示すブロック図である。
【図15】同情報処理システムの動作を示すフローチャートである。
【図16】第3の実施形態に係る情報処理システムによる拡張現実画像の生成の概要を例示する模式図である。
【発明を実施するための形態】
【0025】
以下、図面を参照しながら、本発明の実施形態を説明する。
【0026】
<第1の実施形態>
本発明の第1の実施形態について説明する。
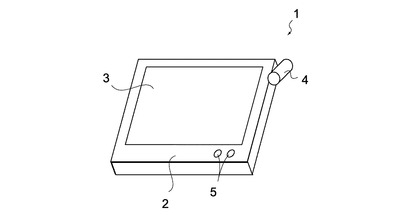
図1は、本発明の第1の実施形態に係る情報処理装置1の外観を示す斜視図である。
情報処理装置1の一例として、ポータブル型の情報端末について説明する。
図1に示すように、情報処理装置1は、本体2、ディスプレイ3及びカメラ4(第1の撮像手段)を有する。本体2には、押しボタンスイッチ等である入力部5が設けられている。ディスプレイ3は、液晶ディスプレイ、プラズマディスプレイ、有機EL(Electro-Luminescence)ディスプレイ等、軽量、薄型化が容易な表示素子を用いたものであればよい。カメラ4は、例えば、CCD(Charge Coupled Device)、CMOS(Complementary Metal Oxide Semiconductor)等の撮像素子を用いて構成されたものであればよい。カメラ4は、撮像方向が、ユーザの視線方向と同方向、即ち、ディスプレイ3の表示面側とは逆向きになるように本体2に設けられている。以下で説明するように、AR(Augmented Reality)システムでは、カメラ4がユーザの視覚の替わりとなる。
【0027】
図2は、情報処理装置1の構成を示すブロック図である。
図2に示すように、情報処理装置1は、CPU(Central Processing Unit)10、メモリ11、ディスプレイインターフェイス12及びカメラインターフェイス13をさらに有する。ディスプレイ3はディスプレイインターフェイス12に接続されており、カメラ4はカメラインターフェイス13に接続されている。CPU10、メモリ11、ディスプレイインターフェイス12、カメラインターフェイス13及び入力部5は、それぞれバス15によって接続されている。なお、情報処理装置1の構成はここに示すものに限られない。
【0028】
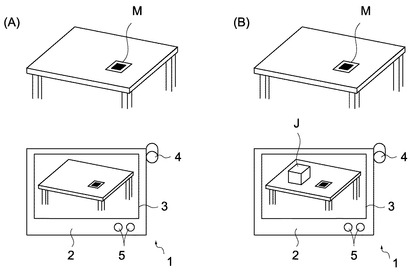
図3は、情報処理装置1によるAR画像(拡張現実画像)の生成の概要を例示する模式図である。ここでは、現実空間に置かれた現実の物体として「机」を例とする。机には、マーカMが置かれている。図3(A)に示すように、情報処理装置1のカメラ4によって、現実空間の画像(以下、現実画像)が撮像され、ディスプレイ3に表示される。現実画像にはマーカMの画像が含まれている。情報処理装置1にユーザからのAR画像生成の指示が与えられると、図3(B)に示すように、現実画像にオブジェクトの画像(以下、オブジェクト画像)Jが合成された、あたかも現実空間の中に仮想的なオブジェクトが存在しているかのようなAR画像がディスプレイ3に表示される。なお、図3の例では、オブジェクトは仮想的な3次元(立体)オブジェクトであるとするが、仮想的な2次元(平面)オブジェクトであってもよい。AR画像の生成プロセスの詳細については後述する。
【0029】
図4は、情報処理装置1の機能的な構成を示すブロック図である。
図4に示すように、情報処理装置1の機能的な構成として、上述のディスプレイ3、カメラ4及び入力部5に加え、位置関係推定部20(第1の位置関係推定部)、オブジェクトデータ記憶部21及び画像データ生成部22(画像生成部)が含まれる。なお、位置関係推定部20、オブジェクトデータ記憶部21及び画像データ生成部22は、CPU10、メモリ11等によって実現されている。
【0030】
カメラ4は、現実空間を撮像し、撮像された現実空間の画像データ(以下、現実画像データ)を位置関係推定部20及び画像データ生成部22に供給する。
【0031】
位置関係推定部20は、カメラ4から供給された現実画像データから、現実空間におけるマーカMに対するカメラ4の空間的位置関係を推定する。空間的位置関係とは、現実空間における座標及び向きを意味する。具体的には、位置関係推定部20は、現実空間におけるマーカMを基準とした座標系(以下、マーカ座標系)を、現実空間におけるカメラ4を基準とした座標系(以下、カメラ座標系)に変換するための空間座標変換行列を生成する。位置関係推定部20は、その空間座標変換行列を画像データ生成部22に供給する。位置関係推定部20の詳細については後述する。
【0032】
オブジェクトデータ記憶部21は、予めオブジェクトの描画のためのデータ(以下、オブジェクトデータ)を記憶している。オブジェクトデータ記憶部21に記憶されているオブジェクトデータは、3次元のオブジェクトのデータであってもよく、2次元のオブジェクトであってもよい。また、オブジェクトデータは、一つの仮想的なオブジェクトのデータであってもよく、複数の仮想的なオブジェクトのデータであってもよい。
【0033】
画像データ生成部22は、オブジェクトデータ記憶部21から供給されたオブジェクトデータと、位置関係推定部20から供給された空間座標変換行列とから、カメラ座標系でのオブジェクト画像データを算出する。画像データ生成部22は、ユーザによる入力部5を介した指示を受けてオブジェクト画像データと現実画像データとを合成することによって、AR画像データを生成する。このようにして生成されたAR画像データは、CPU10によってディスプレイ3に供給される。
【0034】
ディスプレイ3は、供給されたAR画像データをAR画像として表示する。
【0035】
このようにして、ディスプレイ3にAR画像が表示される。なお、これらの一連の処理は、1フレーム(例えば、1/30秒)ごと、あるいはそれより短い時間ごとに実行される。これにより、時系列的に連続するAR画像がディスプレイ3に動画として表示される。カメラ4がマーカMに対して移動すれば、オブジェクト画像Jもそれに応じて変更される。
【0036】
位置関係推定部20の詳細について説明する。
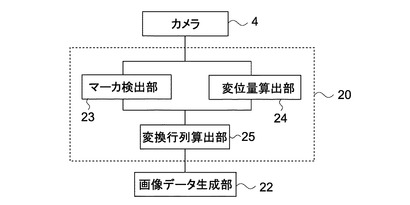
図5は、位置関係推定部20の詳細な機能的構成を示すブロック図である。
同図に示すように、位置関係推定部20は、マーカ検出部23、変位量算出部24及び変換行列算出部25を有する。
【0037】
カメラ4によって撮像された現実画像データは、マーカ検出部23及び変位量算出部24に供給される。
【0038】
マーカ検出部23について説明する。
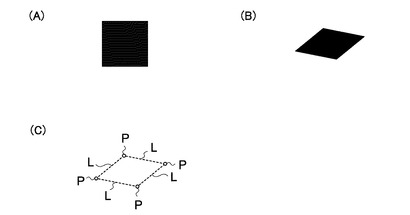
マーカ検出部23には、予めマーカの情報が登録されている。マーカの情報は、例えば、図6(A)に示すようにマーカが正方形である場合、マーカを所定の距離で垂直方向から撮像した画像におけるの各辺の長さ等である。なお、マーカ検出部23に、予め現実空間に存在する物体の情報を登録することで、当該物体をマーカとして用いることも可能である。
【0039】
マーカ検出部23は、現実画像データを閾値を用いて2値化し、連結領域(同一の値の連続する領域)ごとに面積・外接長方形の計算を行う。例えば、図6の場合、連結領域として、「黒」の値が連続する1以上の領域について、面積・外接長方形の計算を行う。続いて、マーカ検出部23は、面積値が閾値より大きい領域を巨大領域として、面積値が他方の閾値より小さい領域を微少領域として除外し、外接長方形情報から、画像外縁に位置する連結領域も除外する。
【0040】
マーカ検出部23は、さらに残りの連結領域に対して輪郭線追跡を行い、輪郭線上の画素位置を全て記憶する。次に、マーカ検出部23は、輪郭線を、直線の連結からなる折れ線へ近似する処理を行い、その近似結果である連結領域をマーカMの候補として検出する。ここでは、所定の大きさを有する黒色の正方形がマーカとして登録されているので、互いに略等しい長さを有する4本の直線の連結を輪郭線とする連結領域がマーカMの候補となる。図6(B)は、マーカMの候補とされた連結領域の撮影画像を示す概念図であり、図6(C)は、当該画像に対する上述の処理により生成される折れ線近似後の輪郭線Lを示す。マーカ検出部23は、マーカM候補として検出された連結領域の輪郭線を構成する直線の交点(図6(C)に点Pとして示す)の、現実画像における画素位置を記憶しておく。
【0041】
次に、マーカ検出部23は、マーカM候補の連結領域を正規化、即ち、垂直方向からみた形状に変換する。本例としては、マーカとして正方形が採用されているので、マーカ検出部23は、4つの交点Pの画素位置が正方形の4頂点となるような平面座標変換行列を生成し、マーカM候補とされた連結領域の画像に対して平面座標変換行列を用いた座標変換を行う。続いて、マーカ検出部23は、座標変換された連結領域の画像に対し、登録されたマーカとのパターンマッチングを実行する。マーカ検出部23は、パターンマッチングの結果、登録されたマーカと類似性が最も高いと判定された連結領域をマーカMと認識する。マーカ検出部23は、マーカMとして認識された連結領域の4つの交点Pの画素位置(以下、マーカ画素位置)を変換行列算出部25に供給する。マーカ検出部23は、マーカMの検出を失敗した場合は、変換行列算出部25にその旨の指示を供給する。マーカ検出部23がマーカMの検出を失敗する場合とは、全ての連結領域が上記巨大領域あるいは微少領域として除外された場合、類似度が閾値以下であった場合等である。
【0042】
次に、変位量算出部24の推定処理について説明する。
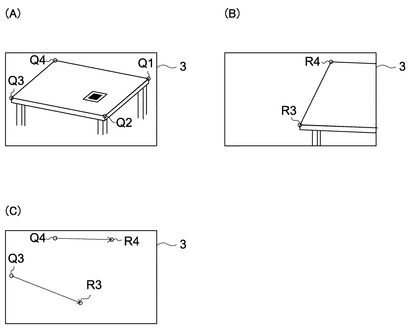
まず、変位量算出部24は、カメラ4から供給された特定のフレームの現実画像(第1フレーム画像とする)から特徴点を抽出する。特徴点は変位量算出部24が安定的に検出することが可能な点である。具体的には、特徴点は、Moravec演算子等により検出することが可能な、現実画像に表示されている物体の角とすることができる。変位量算出部24は、現実画像において分散した複数の画素位置に特徴点を設定する。図7(A)は、図3(A)で例示した現実画像において設定される特徴点を模式的に示した図である。図7(A)には、第1フレーム画像の特徴点を点Q1、Q2、Q3及びQ4として示す。なお、実際にはより多くの特徴点が設定される。
【0043】
変位量算出部24は、さらに、特徴点を中心とする複数の画素の情報をテンプレートとして抽出する。変位量算出部24は、特徴点の画素位置及び画素位置に関連付けられたテンプレートを記憶しておく。
【0044】
変位量算出部24に次のフレームの現実画像(第2フレーム画像とする)の画像データが供給されると、変位量算出部24は、第2フレーム画像に対し、上記テンプレートを用いてテンプレートマッチングを実行する。具体的には、変位量算出部24は、まず、二乗誤差を評価尺度とした残差逐次検定法により粗な探索を行なう。変位量算出部24は、縮小画像を用いて粗な探索を行い、テンプレートマッチングを行なう間隔も大きくする。変位量算出部24は、次に、最もマッチングの相関が高くなった位置の近傍で正規化相互相関を用いて密な探索を行なう。変位量算出部24は、このようにして、第2フレーム画像に、第1フレーム画像の特徴点と対応する特徴点を設定する。図7(B)は、第2フレーム画像の特徴点を点R3及びR4として示す。点R3は点Q3に対応し、点R4は点Q4に対応するものとする。
【0045】
次に、変位量算出部24は、第1フレーム画像と第2フレーム画像の対応するそれぞれの特徴点、Q3とR3との間及びQ4とR4との間でその画素位置の変位量(変位ベクトル)を求める。図7(C)は、変位量算出部24の求める変位ベクトルを模式的に示す。変位量算出部24は、このようにして得られた、対応する特徴点のそれぞれの画素位置の変位量(以下、画素位置変位量)を変換行列算出部25に供給する。
【0046】
次に、変換行列算出部25について説明する。
【0047】
変換行列算出部25に、マーカ検出部23からマーカ画素位置が供給された場合について説明する。
変換行列算出部25は、マーカ画素位置、即ち、4つの交点Pの画素位置から、向かい合う2辺の直線の方程式を求める。マーカMの2辺は現実空間において同一平面内にあることから、現実画像の平面を現実空間の平面として変換するための回転変換成分が得られる。また、4つの交点Pの画素位置と回転変換成分を用いて、現実空間の平面内における平行移動成分が得られる。変換行列算出部25は、これらの回転変換成分と平行移動成分から空間座標変換行列を算出し、画像データ生成部22に供給する。
【0048】
変換行列算出部25に、マーカ検出部23からマーカMが検出されなかった旨の指示が供給された場合について説明する。
【0049】
変換行列算出部25は、マーカMが検出されなかった旨の指示が供給された際のフレームの一つ前のフレームにおいて算出されていた空間座標変換行列に、変位量算出部24から供給された画素位置変位量を適用する。具体的には、変換行列算出部25は、前フレームの特徴点の画素位置を、当該フレームの特徴点の画素位置に変換するための空間座標変換行列を生成し、それを一つ前のフレームにおいて算出されていた空間座標変換行列に乗する。これにより、撮像範囲にマーカMが含まれない場合であっても、空間座標変換行列を推定することが可能となる。
【0050】
情報処理装置1の一連の動作をフローチャートを用いて説明する。図8は、情報処理装置1の動作を示すフローチャートである。現実画像データからマーカMが検出されると、以下の処理が開始される。
【0051】
カメラ4が現実空間の画像を撮像し、現実画像データを取得する(St101)。次に、マーカ検出部23が現実画像におけるマーカMの検出処理をする(St102)。マーカMが検出された(Yes)場合、マーカ検出部23がマーカ画素位置を変換行列算出部25に供給する(St103)。マーカMが検出されなかった(No)場合、変位量算出部24が画素位置変位量を変換行列算出部25に供給する(St104)。次に、変換行列算出部25がマーカ画素位置又は画素位置変位量を基に空間座標変換行列を算出する(St105)。続いて、画像データ生成部22が空間座標変換行列を基にオブジェクト画像データを算出し、現実画像データに合成してAR画像データを生成する(St106)。そして、ディスプレイ3がAR画像データを表示画面にAR画像として表示する(St107)。この後、次フレームの現実画像の撮像からAR画像の表示までの処理が繰り返し実行される。
【0052】
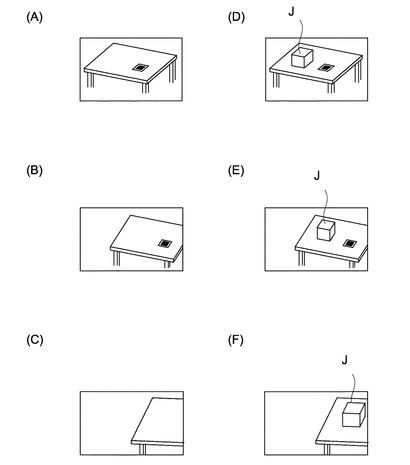
図9は、情報処理装置1により撮像される現実画像及び生成されるAR画像の例である。カメラ4が現実空間に対して移動しながら現実空間を撮像したものとする。図9(A)、(B)、(C)は、この順で撮像された現実画像を示す。図9(D)は、図9(A)に示す現実画像に対して生成されたAR画像、図9(E)は、図9(B)に示す現実画像に対して生成されたAR画像、図9(F)は、図9(C)に示す現実画像に対して生成されたAR画像をそれぞれ示す。
【0053】
図9(A)に示すように、撮像範囲にマーカMが含まれている場合、情報処理装置1は現実画像におけるマーカ画素位置を基にオブジェクト画像Jを合成し、図9(D)に示すAR画像を生成する。次に、図9(B)に示すように、カメラ4の移動後も依然として撮像範囲にマーカMが含まれている場合、情報処理装置1は、カメラ4の移動後の現実画像におけるマーカ画素位置を基にオブジェクト画像Jを合成し、図9(E)に示すAR画像を生成する。さらに、図9(C)に示すように、カメラ4の移動後の撮像範囲にマーカMが含まれていない場合、情報処理装置1は、図9(B)に示した現実画像と図9(C)に示した現実画像の間での画素位置変位量を基にオブジェクト画像Jを合成し、図9(F)に示すAR画像を生成する。
【0054】
以上のように、本実施形態に係る情報処理装置は、マーカ検出と特徴点変位の両方を用いてマーカMに対するカメラ4の空間的な位置関係を推定することが可能である。これにより情報処理装置1は、一度、カメラ4の撮像範囲にマーカを捉えれば、以降は撮像範囲にマーカが含まれていなくてもAR画像を生成することが可能となる。
【0055】
<第2の実施形態>
本発明の第2の実施形態について説明する。
第2の実施形態において、第1の実施形態と同一の構成には同一の符号を付し、説明を省略する。なお、第1の実施形態におけるカメラ4、入力部5及び位置関係推定部20は、本実施形態においてそれぞれ第1のカメラ4、第1の入力部5及び第1の位置関係推定部20とする。
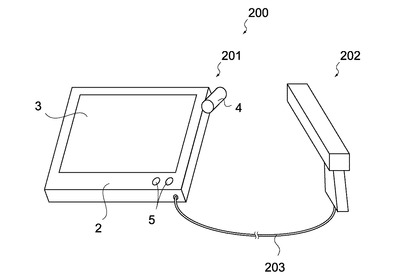
図10は、本発明の第2の実施形態に係る情報処理システム200の外観を示す斜視図である。図10に示すように、情報処理システム200は、ARビューア201(第1の情報処理装置)及びARコントローラ202(第2の情報処理装置)を有する。ARビューア201は、第1の実施形態に係る情報処理装置1と同様の構成を有する。即ち、本体2にディスプレイ3、第1のカメラ4(第1の撮像手段)及び第1の入力部5が設けられている。ARビューア201とARコントローラ202とはケーブル203によって接続されている。なお、この接続は無線接続であってもよい。
【0056】
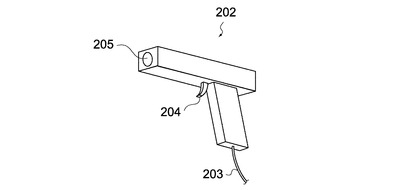
図11は、ARコントローラ202を示す斜視図である。図11に示すように、ARコントローラ202は、例えば「銃」を模した形状を有し、引き金に当たるスイッチとして第2の入力部204(入力部)が設けられている。また、ARコントローラ202の先端には第2のカメラ205(第2の撮像手段)が設けられている。なお、ARコントローラ202の形状はここに示すものに限られず、第2のカメラ205と第2の入力部204を備えた他の形状とすることができる。
【0057】
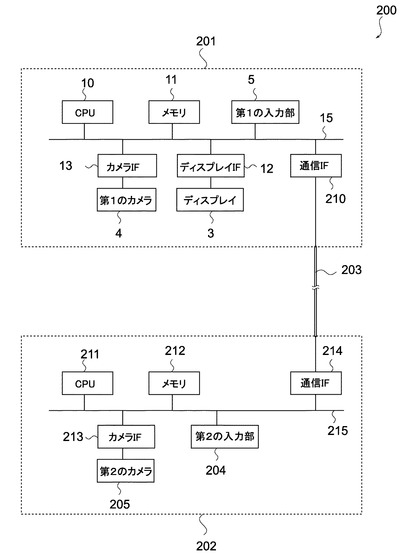
図12は、情報処理システム200の構成を示すブロック図である。
図12に示すように、ARビューア201は、第1の実施形態に係る情報処理装置1の構成に加え、バス15に接続された通信インターフェイス210(受信部)をさらに有する。通信インターフェイス210にはケーブル203が接続されている。
【0058】
ARコントローラ202は、CPU211、メモリ212、カメラインターフェイス213及び通信インターフェイス214(送信部)をさらに有する。第2のカメラ205はカメラインターフェイス213に接続されている。通信インターフェイス214にはケーブル203が接続されている。CPU211、メモリ212、カメラインターフェイス213、第2の入力部204及び通信インターフェイス214は、それぞれバス215によって接続されている。なお、ARコントローラ202の構成はここに示すものに限られない。
【0059】
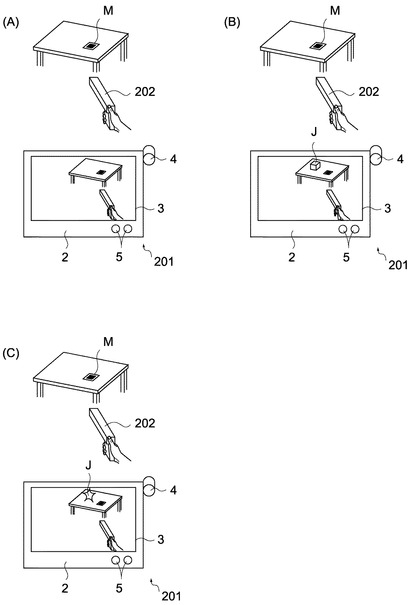
図13は、情報処理システム200のAR画像の生成の概要を例示する模式図である。図13(A)に示すように、ユーザが、ARコントローラ202を現実空間に向けているものとする。第1のカメラ4によって現実画像が撮像されディスプレイ3に表示されている。ディスプレイ3には、ユーザが把持するARコントローラ202が現実画像として表示されている。情報処理システム200にユーザからのAR画像生成の指示が与えられると、図13(B)に示すように、現実画像にオブジェクト画像Jが合成されたAR画像がディスプレイ3に表示される。ここまでは、第1の実施形態に係る情報処理装置1の動作と同様である。
【0060】
ユーザが、ディスプレイ3に表示されているAR画像を見ながら、ARコントローラ202の照準を、オブジェクト画像Jで示されている仮想的なオブジェクトに向け、第2の入力部204を操作すると、図13(C)に示すようにオブジェクト画像Jが変更される。図13(C)では、オブジェクト画像Jに対して、銃弾が命中したかのようなエフェクトがかけられている。このような情報処理システム200の動作の詳細については後述する。
【0061】
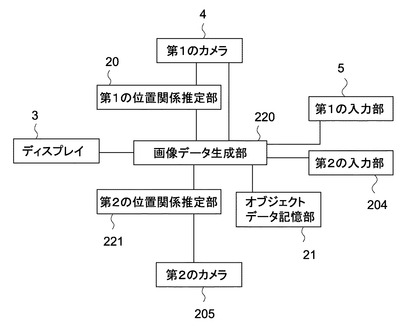
図14は、情報処理システム200の機能的な構成を示すブロック図である。
図14に示すように、情報処理システム200の機能的な構成として、第1の実施形態に係る情報処理装置1の構成に加え、上述した第2のカメラ205及び第2の入力部204と、第2の位置関係推定部221が含まれる。また、第1の実施形態に係る画像データ生成部22に替えて画像データ生成部220が含まれる。なお、第2の位置関係推定部221は、CPU211、メモリ212等によって実現されている。
【0062】
第2のカメラ205は、現実空間を撮像し、現実画像データを第2の位置関係推定部221に供給する。第2のカメラ223は、第1のカメラ4と空間的位置が異なるため、第2のカメラ223によって撮像される現実画像は第1のカメラ4のものとは異なる。以下、第1のカメラ4によって撮像された現実画像を「第1の現実画像」、第1の現実画像のデータを「第1の現実画像データ」とし、第2のカメラ223によって撮像された現実画像を「第2の現実画像」、第2の現実画像のデータを「第2の現実画像データ」とする。
【0063】
第2の位置関係推定部221は、第2のカメラ223から供給された第2の現実画像データから、マーカMを基準としたマーカ座標系を第2のカメラ223を基準とした第2のカメラ座標系に変換するための第2の空間座標変換行列を生成する。第2の位置関係推定部221は、その空間座標変換行列を画像データ生成部220に供給する。第2の位置関係推定部221の詳細については後述する。
【0064】
画像データ生成部220は、第1の実施形態と同様に、オブジェクトデータ記憶部21から供給されたオブジェクトデータと、第1の位置関係推定部20から供給された第1の空間座標変換行列とから、第1のカメラ4を基準とする第1のカメラ座標系でのオブジェクト画像データを生成する。
【0065】
さらに、画像データ生成部220は、オブジェクトデータ記憶部21から供給されたオブジェクトデータと第2の位置関係推定部221から供給された第2の空間座標変換行列とから、ARコントローラ202と仮想的なオブジェクトとの間に所定の位置関係が成立しているかどうかを判断する。所定の位置関係とは、例えば、ARコントローラ202の軸方向に仮想的なオブジェクトが想定されているような位置関係である。画像データ生成部220は、所定の位置関係が成立していると判断した場合、上記第1のカメラ座標系でのオブジェクト画像データに変更を加える。ここで、変更とは、例えば、オブジェクト画像データに対して、銃弾が命中したことを示すエフェクトを追加すること等である。一方、所定の位置関係が成立していないと判断した場合、オブジェクト画像データに対し、照準が外れていたことを示す変更を加えてもよく、なんらの変更を加えなくてもよい。
【0066】
画像データ生成部220は、第1の空間座標変換行列を用いて算出されたオブジェクト画像データ、又は上述のように変更されたオブジェクト画像データを第1の現実画像データに合成してAR画像を生成する。このようにして生成されたAR画像データは、CPU10によってディスプレイ3に供給される。
【0067】
第2の位置関係推定部221の詳細について説明する。
第2の位置関係推定部221は、図5に示した第1の実施形態に係る位置関係推定部20及び本実施形態に係る第1の位置関係推定部20と同様の構成を有する。即ち、第2の位置関係推定部221は、マーカ検出部23、変位量算出部24及び変換行列算出部25を有する。第1の位置関係推定部20が第1のカメラ4によって撮像された第1の現実画像データから第1の変換行列を生成するのに対し、第2の位置関係推定部221は第2のカメラ205によって撮像された第2の現実画像データから第2の変換行列を生成する。
【0068】
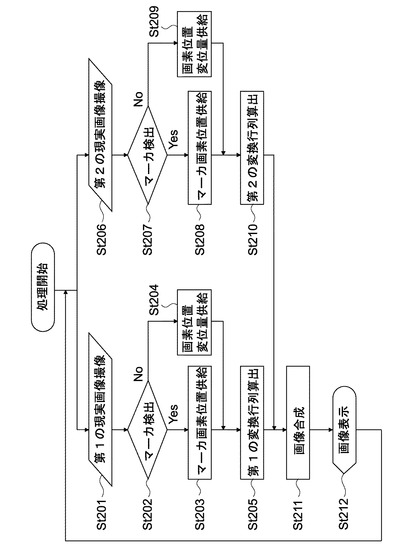
情報処理システム200の一連の動作をフローチャートを用いて説明する。図15は、情報処理システム200の動作を示すフローチャートである。第1の現実画像データ及び第1の現実画像データからマーカMが検出されると、以下の処理が開始される。
【0069】
St201〜205は、第1の実施形態に係る情報処理装置1の動作と同様である。即ち、第1のカメラ4が現実空間の画像を撮像し、第1の現実画像データを取得する(St201)。次に、マーカ検出部23が第1の現実画像におけるマーカMの検出処理をする(St202)。マーカMが検出された(Yes)場合、マーカ検出部23がマーカ画素位置を変換行列算出部25に供給する(St203)。マーカMが検出されなかった(No)場合、変位量算出部24が画素位置変位量を変換行列算出部25に供給する(St204)。次に、変換行列算出部25がマーカ画素位置又は画素位置変位量を基に第1の空間座標変換行列を算出する(St205)。
【0070】
第1のカメラ4が現実空間の画像を撮像し、第1の現実画像データを取得すると同時に、第2のカメラ205も現実空間の画像を撮像し、第2の現実画像データを取得する(St206)。次に、マーカ検出部23が第2の現実画像におけるマーカMの検出処理をする(St207)。マーカMが検出された(Yes)場合、マーカ検出部23がマーカ画素位置を変換行列算出部25に供給する(St208)。マーカMが検出されなかった(No)場合、変位量算出部24が画素位置変位量を変換行列算出部25に供給する(St209)。次に、変換行列算出部25がマーカ画素位置又は画素位置変位量を基に第2の空間座標変換行列を算出する(St210)。
【0071】
次に、画像データ生成部220が、第1の空間座標変換行列を基にオブジェクト画像データを抽出して第1の現実画像データに合成し、又は第2の空間座標変換行列を基に変更されたオブジェクト画像データを現実画像データに合成してAR画像データを生成する(St211)。ディスプレイ3がAR画像データを表示画面にAR画像として表示する(St212)。この後、次フレームの現実画像の撮像からAR画像の表示までの処理が繰り返し実行される。
【0072】
以上のように、本実施形態に係る情報処理システム200は、マーカ検出と特徴点変位の両方を用いて、マーカMに対する第1のカメラ4及び第2のカメラ205の空間的な位置関係を推定することが可能である。これにより、情報処理システム200は、ARコントローラ202と仮想的なオブジェクトとの所定の位置関係が成立しているかどうかを判断し、ユーザの操作入力に応じてオブジェクト画像Jに変更を加えることが可能となる。
【0073】
本実施形態の別の例として、情報処理システム200は、オブジェクト画像Jとして表示している仮想的なオブジェクトとARコントローラ202との所定の位置関係が成立すると、オブジェクト画像Jの色彩を変更する、あるいはオブジェクト画像Jを明滅させる等の変更させ、ARコントローラ202と仮想的なオブジェクトとの所定の位置関係が成立していることをユーザに示すようにすることが可能である。また、ARコントローラ202を光源とみなして、仮想的なオブジェクトにARコントローラ202から光が照射されたかのようにオブジェクト画像Jを表示することも可能である。
【0074】
<第3の実施形態>
本発明の第3の実施形態について説明する。
第3の実施形態において、第1の実施形態及び第2の実施形態と同一の構成には同一の符号を付し、説明を省略する。本実施形態に係る情報処理システムの外観及び構成は、第2の実施形態に係る情報処理システム200と同一であり、画像データ生成部220の機能的な構成が異なる。
【0075】
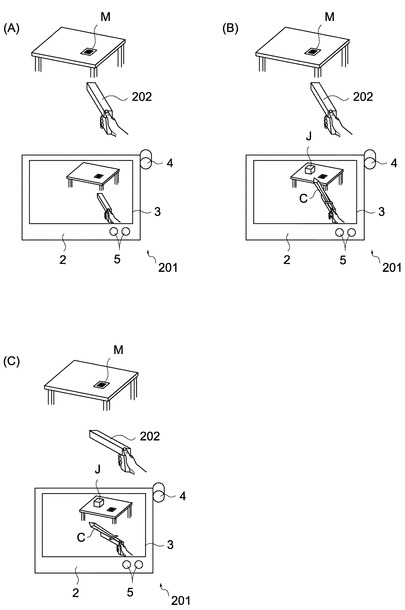
図16は、本実施形態に係る情報処理システムのAR画像の生成の概要を例示する模式図である。図16(A)に示すように、ユーザが、ARコントローラ202を現実空間に向けているものとする。第1のカメラ4によってARコントローラ202を含む現実画像が撮像され、ディスプレイ3には、ARコントローラ202を含む現実画像が表示されている。ARビューア201に設けられた第1の入力部5又はARコントローラ202に設けられた第2の入力部204を介して、ユーザからのAR画像生成の指示が与えられると、図16(B)に示すように、現実画像に、オブジェクト画像J及びARコントローラ202に対応する画像(以下、コントローラ画像)Cが合成されたAR画像がディスプレイ3に表示される。ここでは、コントローラ画像Cとして「剣」の画像を用いた場合を示す。また、図16(B)に示す状態から、ユーザがARコントローラ202のマーカMに対する空間的位置関係を変更すると、図16(C)に示すように、コントローラ画像Cもそれに応じて変更される。
【0076】
以下に、上記の動作の詳細を説明する。
本実施形態の画像データ生成部220は、第1の実施形態及び第2の実施形態と同様に、オブジェクトデータ記憶部21から供給されたオブジェクトデータと、第1の位置関係推定部20から供給された第1の空間座標変換行列とから、第1のカメラ4を基準とする第1のカメラ座標系でのオブジェクト画像データを算出する。
【0077】
また、画像データ生成部220は、第1の位置関係推定部20から供給された第1の空間座標変換行列と、第2の位置関係推定部221から供給された第2の空間座標変換行列とから、第3の空間座標変換行列を算出する。第3の空間座標変換行列は、第2のカメラ205を基準とする第2のカメラ座標系を、第1のカメラ4を基準とする第1のカメラ座標系に変換するための空間座標変換行列である。例えば、第3の空間座標変換行列は、第1の空間座標変換行列を第2の空間座標変換行列で除すること等により算出することが可能である。
【0078】
画像データ生成部220は、オブジェクトデータ記憶部21に記憶されている、ARコントローラ202を表すオブジェクトデータ(以下、コントローラオブジェクトデータ)と、第3の空間座標変換行列とから、第1のカメラ座標系でのコントローラ画像データを算出する。ここで、コントローラオブジェクトデータは3次元データであってもよく、2次元データであってもよい。
【0079】
このように、画像データ生成部220は、第1の空間座標変換行列によってマーカ座標系を第1のカメラ座標系に変換してオブジェクト画像データを算出し、第3の空間座標変換行列によって第2のカメラ座標系を第1のカメラ座標系に変換してコントローラ画像データを算出する。
【0080】
画像データ生成部220は、オブジェクト画像データ及びコントローラ画像データを現実画像に合成してAR画像データを生成する。ディスプレイ3は、オブジェクト画像J及びコントローラ画像Cが現実画像に合成されたAR画像をディスプレイ3に表示する。コントローラ画像データは、第2のカメラ座標系を第1のカメラ座標系に変換するための第3の空間座標変換行列を基に算出されるため、コントローラ画像CはARコントローラ202に対応する画像となる。なお、「対応する」とは、コントローラオブジェクトが、あたかもARコントローラ202と同一の空間的位置関係を有しているかのように、コントローラ画像Cが表示されることを意味する。
【0081】
さらに本実施形態の画像データ生成部220は、第2の空間座標変換行列あるいは第3の空間座標変換行列から、ARコントローラ202とオブジェクト画像Jとして表示されている仮想的なオブジェクトの所定の位置関係が成立しているかどうかを判断することができる。所定の位置関係とは、例えば、ARコントローラ202の軸方向に仮想的なオブジェクトが想定されているような位置関係、あるいは、コントローラ画像Cとオブジェクト画像Jが重なるような位置関係である。画像データ生成部220は、このような所定の位置関係が成立した場合、あるいは成立しなかった場合に、オブジェクト画像Jに対して変更を加えることが可能となる。
【0082】
本実施形態に係る情報処理システムは、マーカ検出と特徴点変位の両方を用いて、マーカMに対する第1のカメラ4及び第2のカメラ205の空間的な位置関係を推定し、それを基に第1のカメラ4に対する第2のカメラ205の空間的な位置関係を算出しする。これにより、情報処理システムは、ARコントローラ202に対応する画像が合成されたAR画像を生成することが可能である。
【0083】
本実施形態の別の例として、情報処理システムは、ARコントローラ202が現実空間において移動した軌跡を「線」としてディスプレイ3に表示してもよい。これにより、情報処理システムは、ユーザが現実空間に立体的に描いたかのような線をディスプレイ3に表示することが可能である。また、本実施形態に係る情報処理システムは、コントローラ画像を鑑賞するために用いることも可能である。例えば、コントローラオブジェクトデータとして「飛行機」の外観を表す3次元データを用いれば、情報処理システムは、ARコントローラ202の空間的位置関係を変えることによって、飛行機が飛んでいるかのように表示させることが可能である。
【0084】
本発明は上述の実施形態にのみ限定されるものではなく、本発明の要旨を逸脱しない範囲内において変更され得る。
【0085】
上述の実施形態では、ARコントローラにおいて第2の空間座標変換行列が生成されるとしたがこれに限られない。ARコントローラの第2のカメラによって撮像された画像がARビューアに送信され、ARビューアにおいて第2の空間座標変換行列が生成されるようにすることも可能である。
【0086】
上述の実施形態では、ARビューアにおいて、第1の変換行列あるいは第2の空間座標変換行列を用いてAR画像が生成されるとしたがこれに限られない。例えば、第1の空間座標変換行列及び第2の空間座標変換行列が、ARビューアに設けられた通信手段により別の情報処理装置に送信され、当該情報処理装置においてAR画像が生成されるようにすることも可能である。
【0087】
上述の実施形態では、1つのARビューアに1つのARコントローラが付属するものとしたがこれに限られない。1つのARビューアに2つ以上のARコントローラが付属するものとしてもよい。これにより、例えば、ユーザが2つのARコントローラを右手及び左手でそれぞれ把持し、仮想的なオブジェクトを両手で挟んで持ち上げるような処理を可能とすることができる。
【0088】
一つのマーカを複数のARビューアの第1のカメラで撮像することにより、複数のユーザが当該マーカを基準とする仮想空間を共有することが可能となる。例えば、一つの仮想的なオブジェクトは、位置の異なる複数のARビューアには、それぞれ別の角度から見たオブジェクト画像として表示される。複数のARビューアを連携させることにより、それぞれのARビューアは他のARビューアの空間的位置関係を把握することが可能となる。例えば、ARビューアが他のARビューアの位置に他のユーザを現すオブジェクト画像を表示することが可能となる。
【0089】
上述の実施形態では、第1のカメラによって撮像された現実画像とオブジェクト画像が合成されたAR画像がディスプレイに表示されるビデオシースルー型のARシステムについて説明した。しかし、本発明は、オブジェクト画像が現実画像と合成されることなく、単独で透過型ディスプレイに表示される光学シースルー型のARシステムに適用することも可能である。
【符号の説明】
【0090】
1…情報処理装置
3…ディスプレイ
4…カメラ、第1のカメラ
20…位置関係推定部、第1の位置関係推定部
22…画像データ生成部
200…情報処理システム
205…第2のカメラ
221…第2の位置関係推定部
220…画像データ生成部
210、214…通信インターフェイス
【技術分野】
【0001】
本発明は、現実環境の画像に、現実環境に対応する画像を合成して表示する情報処理装置、情報処理システム及び情報処理方法に関する。
【背景技術】
【0002】
現実環境の画像に、現実環境に対応する画像を付加する、拡張現実(Augmented Reality:AR)と呼ばれる技術がある。ARでは、カメラ等によって現実環境の画像が取得され、取得された現実環境の画像に、現実環境に対応する付加的な画像(以下、付加画像)が合成され、表示画面に表示される。ユーザは、現実環境の画像と付加画像が合成された画像を見ることにより、あたかも現実環境に付加画像として表示されている物体又は画像が存在しているかのように認識することができる。
【0003】
ARでは、取得された現実環境の画像に対し、付加画像の正確な対応付け、即ち、付加画像の位置、サイズ、角度等の現実環境への適合ができることが重要である。正確に対応付けされない場合、表示される付加画像の位置、サイズ、角度等が現実環境に対して不自然になる。
【0004】
例えば、非特許文献1には、マーカーを利用したARシステムについて記載されている。このシステムでは、予めマーカー(所定のサイズを有する着色された正方形)の画像情報が登録される。マーカーの画像が現実環境の画像に含まれると、現実環境の画像からマーカーが検出され、その大きさ、角度等の情報から、マーカーに対するカメラの空間的な位置関係が算出される。その位置関係を基に、カメラとの相対位置が固定されたHDMに仮想物体が表示され、ユーザは現実環境と共に仮想物体を視認することができる。
【0005】
さらに、ARでは、現実環境に付加画像を関連付けて表示するのみならず、ユーザによる入力に応じて付加画像を変更することも可能とされる。例えば、ユーザが、付加画像が付加された現実環境を視認しながら現実環境に向けてポインタを向けると、指示された現実環境の位置に対応する付加画像が変更されるような動作が可能となる。このような動作を可能とするものとして、特許文献1には、情報処理プログラムについて記載されている。
【0006】
特許文献1には、モニタの周縁に離間して配置された2つのマーカ(赤外線光源)と、これらマーカを撮像することが可能な撮像装置を備えたコントローラを有する装置が記載されている。ユーザがコントローラをモニタに向けて操作すると、撮像装置によって撮像された2つのマーカの距離、角度等からコントローラのモニタに対する空間的な位置関係が算出され、ユーザの操作が該装置に入力される。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−75213号公報(段落[0086]、図7)
【非特許文献】
【0008】
【非特許文献1】加藤博一 Mark Billinghurst 浅野浩一 橘啓八郎 "マーカ追跡に基づく拡張現実感システムとそのキャリブレーション" 日本バーチャルリアリティ学会論文誌Vol.4, No4, 1999 http://intron.kz.tsukuba.ac.jp/tvrsj/4.4/kato/p-99_VRSJ4_4.pdf
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、特許文献1および非特許文献1に記載の技術では、ともに、撮像手段の撮像範囲に標識(マーカ)が含まれている必要がある。このため、標識が撮像手段によって撮像される範囲内でしか、付加画像が合成された画像を表示することができない。
【0010】
以上のような事情に鑑み、本発明の目的は、標識が撮像範囲に含まれない場合であっても、現実環境に対応する付加画像の表示が可能な情報処理装置、情報処理システム及び情報処理方法を提供することにある。
【課題を解決するための手段】
【0011】
上記目的を達成するため、本発明の一形態に係る情報処理装置は、第1の撮像手段と、第1の位置関係推定部と、画像生成部と、表示手段とを具備する。
上記第1の撮像手段は、現実空間を撮像して第1の背景画像を取得する。
上記第1の位置関係推定部は、上記第1の背景画像に、予め登録され上記現実空間に配置された標識の画像である第1の標識画像が含まれるときには上記第1の標識画像を基に上記第1の撮像手段の上記標識に対する空間的な位置関係である第1の位置関係を推定し、上記第1の背景画像に上記第1の標識画像が含まれないときには上記第1の背景画像から抽出された特徴点の変位から上記第1の位置関係を推定する。
上記画像生成部は、上記第1の位置関係を基に第1の付加画像を生成し、上記第1の付加画像と上記第1の背景画像とを合成して合成画像を生成する。
上記表示手段は、上記合成画像を表示させる。
【0012】
第1の背景画像に第1の標識画像が含まれている場合、第1の位置関係推定部は、第1の標識画像と予め第1の位置関係推定部に登録されている標識の情報とを比較することで第1の位置関係を推定することが可能である。一方、第1の背景画像に第1の標識画像が含まれていない場合、第1の位置関係推定部は、以前に第1の撮像手段によって撮像された、標識画像が含まれる背景画像から抽出された特徴点と、第1の背景画像から抽出された特徴点の変位から、第1の位置関係を推定することが可能である。画像生成部は、第1の位置関係を用いて、第1の背景画像に適合する第1の付加画像の位置、向き、大きさ等を決定し、第1の背景画像に合成する。第1の付加画像は、第1の位置関係に応じて、即ち、現実空間における標識に対する第1の撮像手段の位置及び向きに応じて生成されるため、あたかも現実空間に存在しているかのような仮想的なオブジェクトをユーザに認識させる。情報処理装置は、第1の背景画像に第1の標識画像が含まれていない、即ち、第1の撮像手段の撮影範囲に標識が含まれていない場合であっても、第1の背景画像に適合する第1の付加画像が合成された合成画像を表示することが可能となる。
【0013】
上記情報処理装置は、現実空間を撮像して第2の背景画像を取得する第2の撮像手段を有し、上記第2の背景画像に上記標識の画像である第2の標識画像が含まれるときには上記第2の標識画像を基に上記第2の撮像手段の上記標識に対する空間的な位置関係である第2の位置関係を推定し、上記第2の背景画像に上記第2の標識画像が含まれないときには上記第2の背景画像から抽出された特徴点の変位から上記第2の位置関係を推定する装置から送信された上記第2の位置関係を受信する受信部と、上記第1の位置関係及び上記受信された上記第2の位置関係を基に第1の付加画像を生成し、上記第1の付加画像と上記第1の背景画像とを合成して合成画像を生成する画像生成部とをさらに具備してもよい。
【0014】
この構成によれば、画像生成部は、第1の位置関係に加え、第2の撮像手段の位置関係である第2の位置関係を取得し、画像生成部が第1の位置関係及び第2の位置関係を基に第1の付加画像に変更を加えることが可能となる。これにより、仮想的オブジェクトに第2の位置関係に応じた変更が加えられたかのように第1の付加画像を変更することが可能となる。
【0015】
上記目的を達成するため、本発明の一形態に係る情報処理システムは、第1の情報処理装置と、第2の情報処理装置とを具備する。
上記第1の情報処理装置は、第1の撮像手段と、第1の位置関係推定部とを具備する。
上記第1の撮像手段は、現実空間を撮像して第1の背景画像を取得する。
上記第1の位置関係推定部は、上記第1の背景画像に、予め登録され上記現実空間に配置された標識の画像である第1の標識画像が含まれるときには上記第1の標識画像を基に上記第1の撮像手段の上記標識に対する空間的な位置関係である第1の位置関係を推定し、上記第1の背景画像に上記第1の標識画像が含まれないときには上記第1の背景画像から抽出された特徴点の変位から上記第1の位置関係を推定する。
上記第2の情報処理装置は、第2の撮像手段と、第2の位置関係推定部と、送信部とを具備する。
上記第2の撮像手段は、現実空間を撮像して第2の背景画像を取得する。
上記第2の位置関係推定部は、上記第2の背景画像に上記標識の画像である第2の標識画像が含まれるときには上記第2の標識画像を基に上記第2の撮像手段の上記標識に対する空間的な位置関係である第2の位置関係を推定し、上記第2の背景画像に上記第2の標識画像が含まれないときには上記第2の背景画像から抽出された特徴点の変位から上記第2の位置関係を推定する。
上記送信部は、上記第2の位置関係を上記第1の情報処理装置に送信する。
上記第1の情報処理装置は、さらに、受信部と、画像生成部と、表示手段とを具備する。
上記受信部は、上記第2の情報処理装置から送信された上記第2の位置関係を受信する。
上記画像生成部は、上記第1の位置関係及び上記受信された上記第2の位置関係を基に第1の付加画像を生成し、上記第1の付加画像と上記第1の背景画像とを合成して合成画像を生成する。
上記表示手段は、上記第1の位置関係及び上記第2の位置関係を基に第1の付加画像を生成し、上記第1の付加画像と上記第1の背景画像とを合成して合成画像を生成する。
【0016】
第1の撮像手段と第2の撮像手段によって現実空間が撮像される。例えば、第1の撮像手段は装置本体に設けられたカメラであり、第2の撮像手段はコントローラに設けられているカメラである。第1の撮像手段と第2の撮像手段の空間的位置の相違から、第1の背景画像と第2の背景画像は異なる画像となる。第1の撮像手段については上述のように第1の位置関係推定部によって第1の位置関係が推定される。第2の撮像手段については、第2の位置関係推定部が、第2の標識画像と予め第2の位置関係推定部に登録されている標識の情報とを比較することで第2の位置関係を推定し、又は、以前に第2の撮像手段によって撮像された、標識画像が含まれる背景画像から抽出された特徴点と、第2の背景画像から抽出された特徴点の変位から、第2の位置関係を推定する。したがって、画像生成部が第1の位置関係及び第2の位置関係を基に第1の付加画像に変更を加えることが可能となる。これにより、仮想的オブジェクトに第2の位置関係に応じた変更が加えられたかのように第1の付加画像を変更することが可能となる。
【0017】
上記第2の情報処理装置は、ユーザによる操作入力を可能とする入力部をさらに具備し、
上記画像生成部は、上記入力部から入力された指示に応じて上記第1の付加画像を変更してもよい。
【0018】
この構成によれば、情報処理システムは、ユーザによる指示が入力されたときの第2の位置関係に応じて変更された第1の付加画像を表示することが可能となる。
【0019】
上記画像生成部は、上記第1の位置関係及び上記第2の位置関係を基に、上記第1の撮像手段に対する上記第2の撮像手段の空間的な位置関係である第3の位置関係を算出し、上記第3の位置関係を基に上記背景画像に付加される第2の付加画像をさらに生成し、上記第1の付加画像と上記背景画像と上記第2の付加画像とを合成して上記合成画像を生成してもよい。
【0020】
情報処理システムは、第1の撮像手段に対する第2の撮像手段の空間的な位置関係に応じて第2の付加画像を現実画像に合成することが可能となる。例えば、情報処理システムは、第1の撮像手段の撮像範囲に第2の撮像手段が含まれる場合に、第2の撮像手段を表す画像を、第2の撮像手段の第1の撮像手段に対する位置関係、即ち第3の位置関係にあわせて合わせて表示させることが可能となる。
【0021】
上記目的を達成するため、本発明の一形態に係るプログラムは、第1の位置関係推定部と、画像生成部としてコンピュータを機能させる。
上記第1の位置関係推定部は、第1の撮像手段によって撮像された第1の背景画像に、予め登録され上記現実空間に配置された標識の画像である第1の標識画像が含まれるときには上記第1の標識画像を基に上記第1の撮像手段の標識に対する空間的な位置関係である第1の位置関係を推定し、上記第1の背景画像に上記第1の標識画像が含まれないときには上記第1の背景画像から抽出された特徴点の変位から上記第1の位置関係を推定する。
上記画像生成部は、上記第1の位置関係を基に第1の付加画像を生成し、上記第1の付加画像と上記第1の背景画像とを合成して表示手段に表示させる合成画像を生成する。
【0022】
上記目的を達成するため、本発明の一形態に係る情報処理方法は、第1の撮像手段が、現実空間を撮像して第1の背景画像を取得する。
第1の位置関係推定部が、上記第1の背景画像に、予め登録され上記現実空間に配置された標識の画像である第1の標識画像が含まれるときには上記第1の標識画像を基に上記第1の撮像手段の上記標識に対する空間的な位置関係である第1の位置関係を推定し、上記第1の背景画像に上記第1の標識画像が含まれないときには上記第1の背景画像から抽出された特徴点の変位から上記第1の位置関係を推定する。
画像生成部が、上記第1の位置関係を基に第1の付加画像を生成し、上記第1の付加画像と上記第1の背景画像とを合成して合成画像を生成する。
表示手段が、上記合成画像を表示させる。
【発明の効果】
【0023】
以上、本発明によれば、標識が撮像範囲に含まれない場合であっても、現実環境に対応する付加画像の表示が可能な情報処理装置、情報処理システム及び情報処理方法を提供することが可能となる。
【図面の簡単な説明】
【0024】
【図1】第1の実施形態に係る情報処理装置の外観を示す斜視図である。
【図2】同情報処理装置の構成を示すブロック図である。
【図3】同情報処理装置による拡張現実画像の生成の概要を例示する模式図である。
【図4】同情報処理装置の機能的な構成を示すブロック図である。
【図5】同情報処理装置の位置関係推定部の詳細を示すブロック図である。
【図6】マーカを示す模式図である。
【図7】特徴点の設定の様子を示す模式図である。
【図8】第1の実施形態に係る情報処理装置の動作を示すフローチャートである。
【図9】同情報処理装置により撮像される現実画像及び生成される拡張現実画像を示す模式図である。
【図10】第2の実施形態に係る情報処理システムの外観を示す斜視図である。
【図11】同情報処理システムのARコントローラを示す斜視図である。
【図12】同情報処理システムの構成を示すブロック図である。
【図13】同情報処理システムよる拡張現実画像の生成の概要を例示する模式図である
【図14】同情報処理システムの機能的な構成を示すブロック図である。
【図15】同情報処理システムの動作を示すフローチャートである。
【図16】第3の実施形態に係る情報処理システムによる拡張現実画像の生成の概要を例示する模式図である。
【発明を実施するための形態】
【0025】
以下、図面を参照しながら、本発明の実施形態を説明する。
【0026】
<第1の実施形態>
本発明の第1の実施形態について説明する。
図1は、本発明の第1の実施形態に係る情報処理装置1の外観を示す斜視図である。
情報処理装置1の一例として、ポータブル型の情報端末について説明する。
図1に示すように、情報処理装置1は、本体2、ディスプレイ3及びカメラ4(第1の撮像手段)を有する。本体2には、押しボタンスイッチ等である入力部5が設けられている。ディスプレイ3は、液晶ディスプレイ、プラズマディスプレイ、有機EL(Electro-Luminescence)ディスプレイ等、軽量、薄型化が容易な表示素子を用いたものであればよい。カメラ4は、例えば、CCD(Charge Coupled Device)、CMOS(Complementary Metal Oxide Semiconductor)等の撮像素子を用いて構成されたものであればよい。カメラ4は、撮像方向が、ユーザの視線方向と同方向、即ち、ディスプレイ3の表示面側とは逆向きになるように本体2に設けられている。以下で説明するように、AR(Augmented Reality)システムでは、カメラ4がユーザの視覚の替わりとなる。
【0027】
図2は、情報処理装置1の構成を示すブロック図である。
図2に示すように、情報処理装置1は、CPU(Central Processing Unit)10、メモリ11、ディスプレイインターフェイス12及びカメラインターフェイス13をさらに有する。ディスプレイ3はディスプレイインターフェイス12に接続されており、カメラ4はカメラインターフェイス13に接続されている。CPU10、メモリ11、ディスプレイインターフェイス12、カメラインターフェイス13及び入力部5は、それぞれバス15によって接続されている。なお、情報処理装置1の構成はここに示すものに限られない。
【0028】
図3は、情報処理装置1によるAR画像(拡張現実画像)の生成の概要を例示する模式図である。ここでは、現実空間に置かれた現実の物体として「机」を例とする。机には、マーカMが置かれている。図3(A)に示すように、情報処理装置1のカメラ4によって、現実空間の画像(以下、現実画像)が撮像され、ディスプレイ3に表示される。現実画像にはマーカMの画像が含まれている。情報処理装置1にユーザからのAR画像生成の指示が与えられると、図3(B)に示すように、現実画像にオブジェクトの画像(以下、オブジェクト画像)Jが合成された、あたかも現実空間の中に仮想的なオブジェクトが存在しているかのようなAR画像がディスプレイ3に表示される。なお、図3の例では、オブジェクトは仮想的な3次元(立体)オブジェクトであるとするが、仮想的な2次元(平面)オブジェクトであってもよい。AR画像の生成プロセスの詳細については後述する。
【0029】
図4は、情報処理装置1の機能的な構成を示すブロック図である。
図4に示すように、情報処理装置1の機能的な構成として、上述のディスプレイ3、カメラ4及び入力部5に加え、位置関係推定部20(第1の位置関係推定部)、オブジェクトデータ記憶部21及び画像データ生成部22(画像生成部)が含まれる。なお、位置関係推定部20、オブジェクトデータ記憶部21及び画像データ生成部22は、CPU10、メモリ11等によって実現されている。
【0030】
カメラ4は、現実空間を撮像し、撮像された現実空間の画像データ(以下、現実画像データ)を位置関係推定部20及び画像データ生成部22に供給する。
【0031】
位置関係推定部20は、カメラ4から供給された現実画像データから、現実空間におけるマーカMに対するカメラ4の空間的位置関係を推定する。空間的位置関係とは、現実空間における座標及び向きを意味する。具体的には、位置関係推定部20は、現実空間におけるマーカMを基準とした座標系(以下、マーカ座標系)を、現実空間におけるカメラ4を基準とした座標系(以下、カメラ座標系)に変換するための空間座標変換行列を生成する。位置関係推定部20は、その空間座標変換行列を画像データ生成部22に供給する。位置関係推定部20の詳細については後述する。
【0032】
オブジェクトデータ記憶部21は、予めオブジェクトの描画のためのデータ(以下、オブジェクトデータ)を記憶している。オブジェクトデータ記憶部21に記憶されているオブジェクトデータは、3次元のオブジェクトのデータであってもよく、2次元のオブジェクトであってもよい。また、オブジェクトデータは、一つの仮想的なオブジェクトのデータであってもよく、複数の仮想的なオブジェクトのデータであってもよい。
【0033】
画像データ生成部22は、オブジェクトデータ記憶部21から供給されたオブジェクトデータと、位置関係推定部20から供給された空間座標変換行列とから、カメラ座標系でのオブジェクト画像データを算出する。画像データ生成部22は、ユーザによる入力部5を介した指示を受けてオブジェクト画像データと現実画像データとを合成することによって、AR画像データを生成する。このようにして生成されたAR画像データは、CPU10によってディスプレイ3に供給される。
【0034】
ディスプレイ3は、供給されたAR画像データをAR画像として表示する。
【0035】
このようにして、ディスプレイ3にAR画像が表示される。なお、これらの一連の処理は、1フレーム(例えば、1/30秒)ごと、あるいはそれより短い時間ごとに実行される。これにより、時系列的に連続するAR画像がディスプレイ3に動画として表示される。カメラ4がマーカMに対して移動すれば、オブジェクト画像Jもそれに応じて変更される。
【0036】
位置関係推定部20の詳細について説明する。
図5は、位置関係推定部20の詳細な機能的構成を示すブロック図である。
同図に示すように、位置関係推定部20は、マーカ検出部23、変位量算出部24及び変換行列算出部25を有する。
【0037】
カメラ4によって撮像された現実画像データは、マーカ検出部23及び変位量算出部24に供給される。
【0038】
マーカ検出部23について説明する。
マーカ検出部23には、予めマーカの情報が登録されている。マーカの情報は、例えば、図6(A)に示すようにマーカが正方形である場合、マーカを所定の距離で垂直方向から撮像した画像におけるの各辺の長さ等である。なお、マーカ検出部23に、予め現実空間に存在する物体の情報を登録することで、当該物体をマーカとして用いることも可能である。
【0039】
マーカ検出部23は、現実画像データを閾値を用いて2値化し、連結領域(同一の値の連続する領域)ごとに面積・外接長方形の計算を行う。例えば、図6の場合、連結領域として、「黒」の値が連続する1以上の領域について、面積・外接長方形の計算を行う。続いて、マーカ検出部23は、面積値が閾値より大きい領域を巨大領域として、面積値が他方の閾値より小さい領域を微少領域として除外し、外接長方形情報から、画像外縁に位置する連結領域も除外する。
【0040】
マーカ検出部23は、さらに残りの連結領域に対して輪郭線追跡を行い、輪郭線上の画素位置を全て記憶する。次に、マーカ検出部23は、輪郭線を、直線の連結からなる折れ線へ近似する処理を行い、その近似結果である連結領域をマーカMの候補として検出する。ここでは、所定の大きさを有する黒色の正方形がマーカとして登録されているので、互いに略等しい長さを有する4本の直線の連結を輪郭線とする連結領域がマーカMの候補となる。図6(B)は、マーカMの候補とされた連結領域の撮影画像を示す概念図であり、図6(C)は、当該画像に対する上述の処理により生成される折れ線近似後の輪郭線Lを示す。マーカ検出部23は、マーカM候補として検出された連結領域の輪郭線を構成する直線の交点(図6(C)に点Pとして示す)の、現実画像における画素位置を記憶しておく。
【0041】
次に、マーカ検出部23は、マーカM候補の連結領域を正規化、即ち、垂直方向からみた形状に変換する。本例としては、マーカとして正方形が採用されているので、マーカ検出部23は、4つの交点Pの画素位置が正方形の4頂点となるような平面座標変換行列を生成し、マーカM候補とされた連結領域の画像に対して平面座標変換行列を用いた座標変換を行う。続いて、マーカ検出部23は、座標変換された連結領域の画像に対し、登録されたマーカとのパターンマッチングを実行する。マーカ検出部23は、パターンマッチングの結果、登録されたマーカと類似性が最も高いと判定された連結領域をマーカMと認識する。マーカ検出部23は、マーカMとして認識された連結領域の4つの交点Pの画素位置(以下、マーカ画素位置)を変換行列算出部25に供給する。マーカ検出部23は、マーカMの検出を失敗した場合は、変換行列算出部25にその旨の指示を供給する。マーカ検出部23がマーカMの検出を失敗する場合とは、全ての連結領域が上記巨大領域あるいは微少領域として除外された場合、類似度が閾値以下であった場合等である。
【0042】
次に、変位量算出部24の推定処理について説明する。
まず、変位量算出部24は、カメラ4から供給された特定のフレームの現実画像(第1フレーム画像とする)から特徴点を抽出する。特徴点は変位量算出部24が安定的に検出することが可能な点である。具体的には、特徴点は、Moravec演算子等により検出することが可能な、現実画像に表示されている物体の角とすることができる。変位量算出部24は、現実画像において分散した複数の画素位置に特徴点を設定する。図7(A)は、図3(A)で例示した現実画像において設定される特徴点を模式的に示した図である。図7(A)には、第1フレーム画像の特徴点を点Q1、Q2、Q3及びQ4として示す。なお、実際にはより多くの特徴点が設定される。
【0043】
変位量算出部24は、さらに、特徴点を中心とする複数の画素の情報をテンプレートとして抽出する。変位量算出部24は、特徴点の画素位置及び画素位置に関連付けられたテンプレートを記憶しておく。
【0044】
変位量算出部24に次のフレームの現実画像(第2フレーム画像とする)の画像データが供給されると、変位量算出部24は、第2フレーム画像に対し、上記テンプレートを用いてテンプレートマッチングを実行する。具体的には、変位量算出部24は、まず、二乗誤差を評価尺度とした残差逐次検定法により粗な探索を行なう。変位量算出部24は、縮小画像を用いて粗な探索を行い、テンプレートマッチングを行なう間隔も大きくする。変位量算出部24は、次に、最もマッチングの相関が高くなった位置の近傍で正規化相互相関を用いて密な探索を行なう。変位量算出部24は、このようにして、第2フレーム画像に、第1フレーム画像の特徴点と対応する特徴点を設定する。図7(B)は、第2フレーム画像の特徴点を点R3及びR4として示す。点R3は点Q3に対応し、点R4は点Q4に対応するものとする。
【0045】
次に、変位量算出部24は、第1フレーム画像と第2フレーム画像の対応するそれぞれの特徴点、Q3とR3との間及びQ4とR4との間でその画素位置の変位量(変位ベクトル)を求める。図7(C)は、変位量算出部24の求める変位ベクトルを模式的に示す。変位量算出部24は、このようにして得られた、対応する特徴点のそれぞれの画素位置の変位量(以下、画素位置変位量)を変換行列算出部25に供給する。
【0046】
次に、変換行列算出部25について説明する。
【0047】
変換行列算出部25に、マーカ検出部23からマーカ画素位置が供給された場合について説明する。
変換行列算出部25は、マーカ画素位置、即ち、4つの交点Pの画素位置から、向かい合う2辺の直線の方程式を求める。マーカMの2辺は現実空間において同一平面内にあることから、現実画像の平面を現実空間の平面として変換するための回転変換成分が得られる。また、4つの交点Pの画素位置と回転変換成分を用いて、現実空間の平面内における平行移動成分が得られる。変換行列算出部25は、これらの回転変換成分と平行移動成分から空間座標変換行列を算出し、画像データ生成部22に供給する。
【0048】
変換行列算出部25に、マーカ検出部23からマーカMが検出されなかった旨の指示が供給された場合について説明する。
【0049】
変換行列算出部25は、マーカMが検出されなかった旨の指示が供給された際のフレームの一つ前のフレームにおいて算出されていた空間座標変換行列に、変位量算出部24から供給された画素位置変位量を適用する。具体的には、変換行列算出部25は、前フレームの特徴点の画素位置を、当該フレームの特徴点の画素位置に変換するための空間座標変換行列を生成し、それを一つ前のフレームにおいて算出されていた空間座標変換行列に乗する。これにより、撮像範囲にマーカMが含まれない場合であっても、空間座標変換行列を推定することが可能となる。
【0050】
情報処理装置1の一連の動作をフローチャートを用いて説明する。図8は、情報処理装置1の動作を示すフローチャートである。現実画像データからマーカMが検出されると、以下の処理が開始される。
【0051】
カメラ4が現実空間の画像を撮像し、現実画像データを取得する(St101)。次に、マーカ検出部23が現実画像におけるマーカMの検出処理をする(St102)。マーカMが検出された(Yes)場合、マーカ検出部23がマーカ画素位置を変換行列算出部25に供給する(St103)。マーカMが検出されなかった(No)場合、変位量算出部24が画素位置変位量を変換行列算出部25に供給する(St104)。次に、変換行列算出部25がマーカ画素位置又は画素位置変位量を基に空間座標変換行列を算出する(St105)。続いて、画像データ生成部22が空間座標変換行列を基にオブジェクト画像データを算出し、現実画像データに合成してAR画像データを生成する(St106)。そして、ディスプレイ3がAR画像データを表示画面にAR画像として表示する(St107)。この後、次フレームの現実画像の撮像からAR画像の表示までの処理が繰り返し実行される。
【0052】
図9は、情報処理装置1により撮像される現実画像及び生成されるAR画像の例である。カメラ4が現実空間に対して移動しながら現実空間を撮像したものとする。図9(A)、(B)、(C)は、この順で撮像された現実画像を示す。図9(D)は、図9(A)に示す現実画像に対して生成されたAR画像、図9(E)は、図9(B)に示す現実画像に対して生成されたAR画像、図9(F)は、図9(C)に示す現実画像に対して生成されたAR画像をそれぞれ示す。
【0053】
図9(A)に示すように、撮像範囲にマーカMが含まれている場合、情報処理装置1は現実画像におけるマーカ画素位置を基にオブジェクト画像Jを合成し、図9(D)に示すAR画像を生成する。次に、図9(B)に示すように、カメラ4の移動後も依然として撮像範囲にマーカMが含まれている場合、情報処理装置1は、カメラ4の移動後の現実画像におけるマーカ画素位置を基にオブジェクト画像Jを合成し、図9(E)に示すAR画像を生成する。さらに、図9(C)に示すように、カメラ4の移動後の撮像範囲にマーカMが含まれていない場合、情報処理装置1は、図9(B)に示した現実画像と図9(C)に示した現実画像の間での画素位置変位量を基にオブジェクト画像Jを合成し、図9(F)に示すAR画像を生成する。
【0054】
以上のように、本実施形態に係る情報処理装置は、マーカ検出と特徴点変位の両方を用いてマーカMに対するカメラ4の空間的な位置関係を推定することが可能である。これにより情報処理装置1は、一度、カメラ4の撮像範囲にマーカを捉えれば、以降は撮像範囲にマーカが含まれていなくてもAR画像を生成することが可能となる。
【0055】
<第2の実施形態>
本発明の第2の実施形態について説明する。
第2の実施形態において、第1の実施形態と同一の構成には同一の符号を付し、説明を省略する。なお、第1の実施形態におけるカメラ4、入力部5及び位置関係推定部20は、本実施形態においてそれぞれ第1のカメラ4、第1の入力部5及び第1の位置関係推定部20とする。
図10は、本発明の第2の実施形態に係る情報処理システム200の外観を示す斜視図である。図10に示すように、情報処理システム200は、ARビューア201(第1の情報処理装置)及びARコントローラ202(第2の情報処理装置)を有する。ARビューア201は、第1の実施形態に係る情報処理装置1と同様の構成を有する。即ち、本体2にディスプレイ3、第1のカメラ4(第1の撮像手段)及び第1の入力部5が設けられている。ARビューア201とARコントローラ202とはケーブル203によって接続されている。なお、この接続は無線接続であってもよい。
【0056】
図11は、ARコントローラ202を示す斜視図である。図11に示すように、ARコントローラ202は、例えば「銃」を模した形状を有し、引き金に当たるスイッチとして第2の入力部204(入力部)が設けられている。また、ARコントローラ202の先端には第2のカメラ205(第2の撮像手段)が設けられている。なお、ARコントローラ202の形状はここに示すものに限られず、第2のカメラ205と第2の入力部204を備えた他の形状とすることができる。
【0057】
図12は、情報処理システム200の構成を示すブロック図である。
図12に示すように、ARビューア201は、第1の実施形態に係る情報処理装置1の構成に加え、バス15に接続された通信インターフェイス210(受信部)をさらに有する。通信インターフェイス210にはケーブル203が接続されている。
【0058】
ARコントローラ202は、CPU211、メモリ212、カメラインターフェイス213及び通信インターフェイス214(送信部)をさらに有する。第2のカメラ205はカメラインターフェイス213に接続されている。通信インターフェイス214にはケーブル203が接続されている。CPU211、メモリ212、カメラインターフェイス213、第2の入力部204及び通信インターフェイス214は、それぞれバス215によって接続されている。なお、ARコントローラ202の構成はここに示すものに限られない。
【0059】
図13は、情報処理システム200のAR画像の生成の概要を例示する模式図である。図13(A)に示すように、ユーザが、ARコントローラ202を現実空間に向けているものとする。第1のカメラ4によって現実画像が撮像されディスプレイ3に表示されている。ディスプレイ3には、ユーザが把持するARコントローラ202が現実画像として表示されている。情報処理システム200にユーザからのAR画像生成の指示が与えられると、図13(B)に示すように、現実画像にオブジェクト画像Jが合成されたAR画像がディスプレイ3に表示される。ここまでは、第1の実施形態に係る情報処理装置1の動作と同様である。
【0060】
ユーザが、ディスプレイ3に表示されているAR画像を見ながら、ARコントローラ202の照準を、オブジェクト画像Jで示されている仮想的なオブジェクトに向け、第2の入力部204を操作すると、図13(C)に示すようにオブジェクト画像Jが変更される。図13(C)では、オブジェクト画像Jに対して、銃弾が命中したかのようなエフェクトがかけられている。このような情報処理システム200の動作の詳細については後述する。
【0061】
図14は、情報処理システム200の機能的な構成を示すブロック図である。
図14に示すように、情報処理システム200の機能的な構成として、第1の実施形態に係る情報処理装置1の構成に加え、上述した第2のカメラ205及び第2の入力部204と、第2の位置関係推定部221が含まれる。また、第1の実施形態に係る画像データ生成部22に替えて画像データ生成部220が含まれる。なお、第2の位置関係推定部221は、CPU211、メモリ212等によって実現されている。
【0062】
第2のカメラ205は、現実空間を撮像し、現実画像データを第2の位置関係推定部221に供給する。第2のカメラ223は、第1のカメラ4と空間的位置が異なるため、第2のカメラ223によって撮像される現実画像は第1のカメラ4のものとは異なる。以下、第1のカメラ4によって撮像された現実画像を「第1の現実画像」、第1の現実画像のデータを「第1の現実画像データ」とし、第2のカメラ223によって撮像された現実画像を「第2の現実画像」、第2の現実画像のデータを「第2の現実画像データ」とする。
【0063】
第2の位置関係推定部221は、第2のカメラ223から供給された第2の現実画像データから、マーカMを基準としたマーカ座標系を第2のカメラ223を基準とした第2のカメラ座標系に変換するための第2の空間座標変換行列を生成する。第2の位置関係推定部221は、その空間座標変換行列を画像データ生成部220に供給する。第2の位置関係推定部221の詳細については後述する。
【0064】
画像データ生成部220は、第1の実施形態と同様に、オブジェクトデータ記憶部21から供給されたオブジェクトデータと、第1の位置関係推定部20から供給された第1の空間座標変換行列とから、第1のカメラ4を基準とする第1のカメラ座標系でのオブジェクト画像データを生成する。
【0065】
さらに、画像データ生成部220は、オブジェクトデータ記憶部21から供給されたオブジェクトデータと第2の位置関係推定部221から供給された第2の空間座標変換行列とから、ARコントローラ202と仮想的なオブジェクトとの間に所定の位置関係が成立しているかどうかを判断する。所定の位置関係とは、例えば、ARコントローラ202の軸方向に仮想的なオブジェクトが想定されているような位置関係である。画像データ生成部220は、所定の位置関係が成立していると判断した場合、上記第1のカメラ座標系でのオブジェクト画像データに変更を加える。ここで、変更とは、例えば、オブジェクト画像データに対して、銃弾が命中したことを示すエフェクトを追加すること等である。一方、所定の位置関係が成立していないと判断した場合、オブジェクト画像データに対し、照準が外れていたことを示す変更を加えてもよく、なんらの変更を加えなくてもよい。
【0066】
画像データ生成部220は、第1の空間座標変換行列を用いて算出されたオブジェクト画像データ、又は上述のように変更されたオブジェクト画像データを第1の現実画像データに合成してAR画像を生成する。このようにして生成されたAR画像データは、CPU10によってディスプレイ3に供給される。
【0067】
第2の位置関係推定部221の詳細について説明する。
第2の位置関係推定部221は、図5に示した第1の実施形態に係る位置関係推定部20及び本実施形態に係る第1の位置関係推定部20と同様の構成を有する。即ち、第2の位置関係推定部221は、マーカ検出部23、変位量算出部24及び変換行列算出部25を有する。第1の位置関係推定部20が第1のカメラ4によって撮像された第1の現実画像データから第1の変換行列を生成するのに対し、第2の位置関係推定部221は第2のカメラ205によって撮像された第2の現実画像データから第2の変換行列を生成する。
【0068】
情報処理システム200の一連の動作をフローチャートを用いて説明する。図15は、情報処理システム200の動作を示すフローチャートである。第1の現実画像データ及び第1の現実画像データからマーカMが検出されると、以下の処理が開始される。
【0069】
St201〜205は、第1の実施形態に係る情報処理装置1の動作と同様である。即ち、第1のカメラ4が現実空間の画像を撮像し、第1の現実画像データを取得する(St201)。次に、マーカ検出部23が第1の現実画像におけるマーカMの検出処理をする(St202)。マーカMが検出された(Yes)場合、マーカ検出部23がマーカ画素位置を変換行列算出部25に供給する(St203)。マーカMが検出されなかった(No)場合、変位量算出部24が画素位置変位量を変換行列算出部25に供給する(St204)。次に、変換行列算出部25がマーカ画素位置又は画素位置変位量を基に第1の空間座標変換行列を算出する(St205)。
【0070】
第1のカメラ4が現実空間の画像を撮像し、第1の現実画像データを取得すると同時に、第2のカメラ205も現実空間の画像を撮像し、第2の現実画像データを取得する(St206)。次に、マーカ検出部23が第2の現実画像におけるマーカMの検出処理をする(St207)。マーカMが検出された(Yes)場合、マーカ検出部23がマーカ画素位置を変換行列算出部25に供給する(St208)。マーカMが検出されなかった(No)場合、変位量算出部24が画素位置変位量を変換行列算出部25に供給する(St209)。次に、変換行列算出部25がマーカ画素位置又は画素位置変位量を基に第2の空間座標変換行列を算出する(St210)。
【0071】
次に、画像データ生成部220が、第1の空間座標変換行列を基にオブジェクト画像データを抽出して第1の現実画像データに合成し、又は第2の空間座標変換行列を基に変更されたオブジェクト画像データを現実画像データに合成してAR画像データを生成する(St211)。ディスプレイ3がAR画像データを表示画面にAR画像として表示する(St212)。この後、次フレームの現実画像の撮像からAR画像の表示までの処理が繰り返し実行される。
【0072】
以上のように、本実施形態に係る情報処理システム200は、マーカ検出と特徴点変位の両方を用いて、マーカMに対する第1のカメラ4及び第2のカメラ205の空間的な位置関係を推定することが可能である。これにより、情報処理システム200は、ARコントローラ202と仮想的なオブジェクトとの所定の位置関係が成立しているかどうかを判断し、ユーザの操作入力に応じてオブジェクト画像Jに変更を加えることが可能となる。
【0073】
本実施形態の別の例として、情報処理システム200は、オブジェクト画像Jとして表示している仮想的なオブジェクトとARコントローラ202との所定の位置関係が成立すると、オブジェクト画像Jの色彩を変更する、あるいはオブジェクト画像Jを明滅させる等の変更させ、ARコントローラ202と仮想的なオブジェクトとの所定の位置関係が成立していることをユーザに示すようにすることが可能である。また、ARコントローラ202を光源とみなして、仮想的なオブジェクトにARコントローラ202から光が照射されたかのようにオブジェクト画像Jを表示することも可能である。
【0074】
<第3の実施形態>
本発明の第3の実施形態について説明する。
第3の実施形態において、第1の実施形態及び第2の実施形態と同一の構成には同一の符号を付し、説明を省略する。本実施形態に係る情報処理システムの外観及び構成は、第2の実施形態に係る情報処理システム200と同一であり、画像データ生成部220の機能的な構成が異なる。
【0075】
図16は、本実施形態に係る情報処理システムのAR画像の生成の概要を例示する模式図である。図16(A)に示すように、ユーザが、ARコントローラ202を現実空間に向けているものとする。第1のカメラ4によってARコントローラ202を含む現実画像が撮像され、ディスプレイ3には、ARコントローラ202を含む現実画像が表示されている。ARビューア201に設けられた第1の入力部5又はARコントローラ202に設けられた第2の入力部204を介して、ユーザからのAR画像生成の指示が与えられると、図16(B)に示すように、現実画像に、オブジェクト画像J及びARコントローラ202に対応する画像(以下、コントローラ画像)Cが合成されたAR画像がディスプレイ3に表示される。ここでは、コントローラ画像Cとして「剣」の画像を用いた場合を示す。また、図16(B)に示す状態から、ユーザがARコントローラ202のマーカMに対する空間的位置関係を変更すると、図16(C)に示すように、コントローラ画像Cもそれに応じて変更される。
【0076】
以下に、上記の動作の詳細を説明する。
本実施形態の画像データ生成部220は、第1の実施形態及び第2の実施形態と同様に、オブジェクトデータ記憶部21から供給されたオブジェクトデータと、第1の位置関係推定部20から供給された第1の空間座標変換行列とから、第1のカメラ4を基準とする第1のカメラ座標系でのオブジェクト画像データを算出する。
【0077】
また、画像データ生成部220は、第1の位置関係推定部20から供給された第1の空間座標変換行列と、第2の位置関係推定部221から供給された第2の空間座標変換行列とから、第3の空間座標変換行列を算出する。第3の空間座標変換行列は、第2のカメラ205を基準とする第2のカメラ座標系を、第1のカメラ4を基準とする第1のカメラ座標系に変換するための空間座標変換行列である。例えば、第3の空間座標変換行列は、第1の空間座標変換行列を第2の空間座標変換行列で除すること等により算出することが可能である。
【0078】
画像データ生成部220は、オブジェクトデータ記憶部21に記憶されている、ARコントローラ202を表すオブジェクトデータ(以下、コントローラオブジェクトデータ)と、第3の空間座標変換行列とから、第1のカメラ座標系でのコントローラ画像データを算出する。ここで、コントローラオブジェクトデータは3次元データであってもよく、2次元データであってもよい。
【0079】
このように、画像データ生成部220は、第1の空間座標変換行列によってマーカ座標系を第1のカメラ座標系に変換してオブジェクト画像データを算出し、第3の空間座標変換行列によって第2のカメラ座標系を第1のカメラ座標系に変換してコントローラ画像データを算出する。
【0080】
画像データ生成部220は、オブジェクト画像データ及びコントローラ画像データを現実画像に合成してAR画像データを生成する。ディスプレイ3は、オブジェクト画像J及びコントローラ画像Cが現実画像に合成されたAR画像をディスプレイ3に表示する。コントローラ画像データは、第2のカメラ座標系を第1のカメラ座標系に変換するための第3の空間座標変換行列を基に算出されるため、コントローラ画像CはARコントローラ202に対応する画像となる。なお、「対応する」とは、コントローラオブジェクトが、あたかもARコントローラ202と同一の空間的位置関係を有しているかのように、コントローラ画像Cが表示されることを意味する。
【0081】
さらに本実施形態の画像データ生成部220は、第2の空間座標変換行列あるいは第3の空間座標変換行列から、ARコントローラ202とオブジェクト画像Jとして表示されている仮想的なオブジェクトの所定の位置関係が成立しているかどうかを判断することができる。所定の位置関係とは、例えば、ARコントローラ202の軸方向に仮想的なオブジェクトが想定されているような位置関係、あるいは、コントローラ画像Cとオブジェクト画像Jが重なるような位置関係である。画像データ生成部220は、このような所定の位置関係が成立した場合、あるいは成立しなかった場合に、オブジェクト画像Jに対して変更を加えることが可能となる。
【0082】
本実施形態に係る情報処理システムは、マーカ検出と特徴点変位の両方を用いて、マーカMに対する第1のカメラ4及び第2のカメラ205の空間的な位置関係を推定し、それを基に第1のカメラ4に対する第2のカメラ205の空間的な位置関係を算出しする。これにより、情報処理システムは、ARコントローラ202に対応する画像が合成されたAR画像を生成することが可能である。
【0083】
本実施形態の別の例として、情報処理システムは、ARコントローラ202が現実空間において移動した軌跡を「線」としてディスプレイ3に表示してもよい。これにより、情報処理システムは、ユーザが現実空間に立体的に描いたかのような線をディスプレイ3に表示することが可能である。また、本実施形態に係る情報処理システムは、コントローラ画像を鑑賞するために用いることも可能である。例えば、コントローラオブジェクトデータとして「飛行機」の外観を表す3次元データを用いれば、情報処理システムは、ARコントローラ202の空間的位置関係を変えることによって、飛行機が飛んでいるかのように表示させることが可能である。
【0084】
本発明は上述の実施形態にのみ限定されるものではなく、本発明の要旨を逸脱しない範囲内において変更され得る。
【0085】
上述の実施形態では、ARコントローラにおいて第2の空間座標変換行列が生成されるとしたがこれに限られない。ARコントローラの第2のカメラによって撮像された画像がARビューアに送信され、ARビューアにおいて第2の空間座標変換行列が生成されるようにすることも可能である。
【0086】
上述の実施形態では、ARビューアにおいて、第1の変換行列あるいは第2の空間座標変換行列を用いてAR画像が生成されるとしたがこれに限られない。例えば、第1の空間座標変換行列及び第2の空間座標変換行列が、ARビューアに設けられた通信手段により別の情報処理装置に送信され、当該情報処理装置においてAR画像が生成されるようにすることも可能である。
【0087】
上述の実施形態では、1つのARビューアに1つのARコントローラが付属するものとしたがこれに限られない。1つのARビューアに2つ以上のARコントローラが付属するものとしてもよい。これにより、例えば、ユーザが2つのARコントローラを右手及び左手でそれぞれ把持し、仮想的なオブジェクトを両手で挟んで持ち上げるような処理を可能とすることができる。
【0088】
一つのマーカを複数のARビューアの第1のカメラで撮像することにより、複数のユーザが当該マーカを基準とする仮想空間を共有することが可能となる。例えば、一つの仮想的なオブジェクトは、位置の異なる複数のARビューアには、それぞれ別の角度から見たオブジェクト画像として表示される。複数のARビューアを連携させることにより、それぞれのARビューアは他のARビューアの空間的位置関係を把握することが可能となる。例えば、ARビューアが他のARビューアの位置に他のユーザを現すオブジェクト画像を表示することが可能となる。
【0089】
上述の実施形態では、第1のカメラによって撮像された現実画像とオブジェクト画像が合成されたAR画像がディスプレイに表示されるビデオシースルー型のARシステムについて説明した。しかし、本発明は、オブジェクト画像が現実画像と合成されることなく、単独で透過型ディスプレイに表示される光学シースルー型のARシステムに適用することも可能である。
【符号の説明】
【0090】
1…情報処理装置
3…ディスプレイ
4…カメラ、第1のカメラ
20…位置関係推定部、第1の位置関係推定部
22…画像データ生成部
200…情報処理システム
205…第2のカメラ
221…第2の位置関係推定部
220…画像データ生成部
210、214…通信インターフェイス
【特許請求の範囲】
【請求項1】
現実空間を撮像して第1の背景画像を取得する第1の撮像手段と、
前記第1の背景画像に、予め登録され前記現実空間に配置された標識の画像である第1の標識画像が含まれるときには前記第1の標識画像を基に前記第1の撮像手段の前記標識に対する空間的な位置関係である第1の位置関係を推定し、前記第1の背景画像に前記第1の標識画像が含まれないときには前記第1の背景画像から抽出された特徴点の変位から前記第1の位置関係を推定する第1の位置関係推定部と、
前記第1の位置関係を基に第1の付加画像を生成し、前記第1の付加画像と前記第1の背景画像とを合成して合成画像を生成する画像生成部と、
前記合成画像を表示させる表示手段と
を具備する情報処理装置。
【請求項2】
請求項1に記載の情報処理装置であって、
現実空間を撮像して第2の背景画像を取得する第2の撮像手段を有し、前記第2の背景画像に前記標識の画像である第2の標識画像が含まれるときには前記第2の標識画像を基に前記第2の撮像手段の前記標識に対する空間的な位置関係である第2の位置関係を推定し、前記第2の背景画像に前記第2の標識画像が含まれないときには前記第2の背景画像から抽出された特徴点の変位から前記第2の位置関係を推定する装置から送信された前記第2の位置関係を受信する受信部と、
前記第1の位置関係及び前記受信された前記第2の位置関係を基に第1の付加画像を生成し、前記第1の付加画像と前記第1の背景画像とを合成して合成画像を生成する画像生成部と
をさらに具備する情報処理装置。
【請求項3】
第1の情報処理装置と第2の情報処理装置とを具備する情報処理システムであって、
前記第1の情報処理装置は、
現実空間を撮像して第1の背景画像を取得する第1の撮像手段と、
前記第1の背景画像に、予め登録され前記現実空間に配置された標識の画像である第1の標識画像が含まれるときには前記第1の標識画像を基に前記第1の撮像手段の前記標識に対する空間的な位置関係である第1の位置関係を推定し、前記第1の背景画像に前記第1の標識画像が含まれないときには前記第1の背景画像から抽出された特徴点の変位から前記第1の位置関係を推定する第1の位置関係推定部とを具備し、
前記第2の情報処理装置は、
現実空間を撮像して第2の背景画像を取得する第2の撮像手段と、
前記第2の背景画像に前記標識の画像である第2の標識画像が含まれるときには前記第2の標識画像を基に前記第2の撮像手段の前記標識に対する空間的な位置関係である第2の位置関係を推定し、前記第2の背景画像に前記第2の標識画像が含まれないときには前記第2の背景画像から抽出された特徴点の変位から前記第2の位置関係を推定する第2の位置関係推定部と、
前記第2の位置関係を前記第1の情報処理装置に送信する送信部とを具備し、
前記第1の情報処理装置は、さらに、
前記第2の情報処理装置から送信された前記第2の位置関係を受信する受信部と、
前記第1の位置関係及び前記受信された前記第2の位置関係を基に第1の付加画像を生成し、前記第1の付加画像と前記第1の背景画像とを合成して合成画像を生成する画像生成部と、
前記合成画像を表示させる表示手段とを具備する
情報処理システム。
【請求項4】
請求項3に記載の情報処理システムであって、
前記第2の情報処理装置は、ユーザによる操作入力を可能とする入力部をさらに具備し、
前記画像生成部は、前記入力部から入力された指示に応じて前記第1の付加画像を変更する
情報処理システム。
【請求項5】
請求項4に記載の情報処理システムであって、
前記画像生成部は、前記第1の位置関係及び前記第2の位置関係を基に、前記第1の撮像手段に対する前記第2の撮像手段の空間的な位置関係である第3の位置関係を算出し、前記第3の位置関係を基に前記背景画像に付加される第2の付加画像をさらに生成し、前記第1の付加画像と前記背景画像と前記第2の付加画像とを合成して前記合成画像を生成する
情報処理システム。
【請求項6】
第1の撮像手段によって撮像された第1の背景画像に、予め登録され前記現実空間に配置された標識の画像である第1の標識画像が含まれるときには前記第1の標識画像を基に前記第1の撮像手段の標識に対する空間的な位置関係である第1の位置関係を推定し、前記第1の背景画像に前記第1の標識画像が含まれないときには前記第1の背景画像から抽出された特徴点の変位から前記第1の位置関係を推定する第1の位置関係推定部と、
前記第1の位置関係を基に第1の付加画像を生成し、前記第1の付加画像と前記第1の背景画像とを合成して表示手段に表示させる合成画像を生成する画像生成部
としてコンピュータを機能させるプログラム。
【請求項7】
第1の撮像手段が、現実空間を撮像して第1の背景画像を取得し、
第1の位置関係推定部が、前記第1の背景画像に、予め登録され前記現実空間に配置された標識の画像である第1の標識画像が含まれるときには前記第1の標識画像を基に前記第1の撮像手段の前記標識に対する空間的な位置関係である第1の位置関係を推定し、前記第1の背景画像に前記第1の標識画像が含まれないときには前記第1の背景画像から抽出された特徴点の変位から前記第1の位置関係を推定し、
画像生成部が、前記第1の位置関係を基に第1の付加画像を生成し、前記第1の付加画像と前記第1の背景画像とを合成して合成画像を生成し、
表示手段が、前記合成画像を表示させる
情報処理方法。
【請求項1】
現実空間を撮像して第1の背景画像を取得する第1の撮像手段と、
前記第1の背景画像に、予め登録され前記現実空間に配置された標識の画像である第1の標識画像が含まれるときには前記第1の標識画像を基に前記第1の撮像手段の前記標識に対する空間的な位置関係である第1の位置関係を推定し、前記第1の背景画像に前記第1の標識画像が含まれないときには前記第1の背景画像から抽出された特徴点の変位から前記第1の位置関係を推定する第1の位置関係推定部と、
前記第1の位置関係を基に第1の付加画像を生成し、前記第1の付加画像と前記第1の背景画像とを合成して合成画像を生成する画像生成部と、
前記合成画像を表示させる表示手段と
を具備する情報処理装置。
【請求項2】
請求項1に記載の情報処理装置であって、
現実空間を撮像して第2の背景画像を取得する第2の撮像手段を有し、前記第2の背景画像に前記標識の画像である第2の標識画像が含まれるときには前記第2の標識画像を基に前記第2の撮像手段の前記標識に対する空間的な位置関係である第2の位置関係を推定し、前記第2の背景画像に前記第2の標識画像が含まれないときには前記第2の背景画像から抽出された特徴点の変位から前記第2の位置関係を推定する装置から送信された前記第2の位置関係を受信する受信部と、
前記第1の位置関係及び前記受信された前記第2の位置関係を基に第1の付加画像を生成し、前記第1の付加画像と前記第1の背景画像とを合成して合成画像を生成する画像生成部と
をさらに具備する情報処理装置。
【請求項3】
第1の情報処理装置と第2の情報処理装置とを具備する情報処理システムであって、
前記第1の情報処理装置は、
現実空間を撮像して第1の背景画像を取得する第1の撮像手段と、
前記第1の背景画像に、予め登録され前記現実空間に配置された標識の画像である第1の標識画像が含まれるときには前記第1の標識画像を基に前記第1の撮像手段の前記標識に対する空間的な位置関係である第1の位置関係を推定し、前記第1の背景画像に前記第1の標識画像が含まれないときには前記第1の背景画像から抽出された特徴点の変位から前記第1の位置関係を推定する第1の位置関係推定部とを具備し、
前記第2の情報処理装置は、
現実空間を撮像して第2の背景画像を取得する第2の撮像手段と、
前記第2の背景画像に前記標識の画像である第2の標識画像が含まれるときには前記第2の標識画像を基に前記第2の撮像手段の前記標識に対する空間的な位置関係である第2の位置関係を推定し、前記第2の背景画像に前記第2の標識画像が含まれないときには前記第2の背景画像から抽出された特徴点の変位から前記第2の位置関係を推定する第2の位置関係推定部と、
前記第2の位置関係を前記第1の情報処理装置に送信する送信部とを具備し、
前記第1の情報処理装置は、さらに、
前記第2の情報処理装置から送信された前記第2の位置関係を受信する受信部と、
前記第1の位置関係及び前記受信された前記第2の位置関係を基に第1の付加画像を生成し、前記第1の付加画像と前記第1の背景画像とを合成して合成画像を生成する画像生成部と、
前記合成画像を表示させる表示手段とを具備する
情報処理システム。
【請求項4】
請求項3に記載の情報処理システムであって、
前記第2の情報処理装置は、ユーザによる操作入力を可能とする入力部をさらに具備し、
前記画像生成部は、前記入力部から入力された指示に応じて前記第1の付加画像を変更する
情報処理システム。
【請求項5】
請求項4に記載の情報処理システムであって、
前記画像生成部は、前記第1の位置関係及び前記第2の位置関係を基に、前記第1の撮像手段に対する前記第2の撮像手段の空間的な位置関係である第3の位置関係を算出し、前記第3の位置関係を基に前記背景画像に付加される第2の付加画像をさらに生成し、前記第1の付加画像と前記背景画像と前記第2の付加画像とを合成して前記合成画像を生成する
情報処理システム。
【請求項6】
第1の撮像手段によって撮像された第1の背景画像に、予め登録され前記現実空間に配置された標識の画像である第1の標識画像が含まれるときには前記第1の標識画像を基に前記第1の撮像手段の標識に対する空間的な位置関係である第1の位置関係を推定し、前記第1の背景画像に前記第1の標識画像が含まれないときには前記第1の背景画像から抽出された特徴点の変位から前記第1の位置関係を推定する第1の位置関係推定部と、
前記第1の位置関係を基に第1の付加画像を生成し、前記第1の付加画像と前記第1の背景画像とを合成して表示手段に表示させる合成画像を生成する画像生成部
としてコンピュータを機能させるプログラム。
【請求項7】
第1の撮像手段が、現実空間を撮像して第1の背景画像を取得し、
第1の位置関係推定部が、前記第1の背景画像に、予め登録され前記現実空間に配置された標識の画像である第1の標識画像が含まれるときには前記第1の標識画像を基に前記第1の撮像手段の前記標識に対する空間的な位置関係である第1の位置関係を推定し、前記第1の背景画像に前記第1の標識画像が含まれないときには前記第1の背景画像から抽出された特徴点の変位から前記第1の位置関係を推定し、
画像生成部が、前記第1の位置関係を基に第1の付加画像を生成し、前記第1の付加画像と前記第1の背景画像とを合成して合成画像を生成し、
表示手段が、前記合成画像を表示させる
情報処理方法。
【図1】


【図2】

【図3】
【図4】

【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2011−141828(P2011−141828A)
【公開日】平成23年7月21日(2011.7.21)
【国際特許分類】
【出願番号】特願2010−3140(P2010−3140)
【出願日】平成22年1月8日(2010.1.8)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成23年7月21日(2011.7.21)
【国際特許分類】
【出願日】平成22年1月8日(2010.1.8)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]