
情報処理装置、情報処理方法、プログラム、及び記録媒体
【課題】登山時のユーザの体調を高度に基づいて判定することのできる、新規かつ改良された情報処理装置、情報処理方法、プログラム、及び記録媒体を提供する。
【解決手段】情報処理装置は、高度情報を取得する高度情報取得部151と、前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部159とを有する。
【解決手段】情報処理装置は、高度情報を取得する高度情報取得部151と、前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部159とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は、情報処理装置、情報処理方法、プログラム、及び記録媒体に関する。
【背景技術】
【0002】
近年、登山をする人が増えてきた。安全に山に登るためには、体調管理が重要である。特に高山では地上と比較して空気が薄い。このため、血中酸素濃度が低下することで身体に変調をきたす高山病に陥ることがある。
【0003】
登山時の体調管理を補助するために、例えば特許文献1には、生体センサにより取得したユーザの生体データ(例えば体温、血圧、心拍数など)と、ユーザの周辺の気象データ(例えば気温、湿度、気圧など)とに基づいてユーザの体調を判断及び警告する装置が提案されている。また、特許文献2には、生体センサにより取得したユーザの生体データに基づいてユーザの体調を判断する基地局が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−20971号公報
【特許文献2】特開2002−22479号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記特許文献1及び特許文献2に記載の装置はいずれも生体センサを用いて取得した生体データを用いている。従ってユーザは、生体センサを身体に取付ける煩わしさなどがあり、体調管理システム導入の障害となっていた。
【0006】
そこで、本開示では、登山時のユーザの体調を高度に基づいて判定することのできる、新規かつ改良された情報処理装置、情報処理方法、プログラム、及び記録媒体を提案する。
【課題を解決するための手段】
【0007】
本開示によれば、高度情報を取得する高度情報取得部と、上記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、を有する情報処理装置が提供される。
【0008】
かかる構成によれば、高度情報に基づいてユーザの身体にかかる負荷の危険度(例えば高山病の症状を発症する危険度を判定することができる。高度情報は、ユーザの身体の特定部位にセンサを取付けることなく取得することができる。よって、生体センサ等を用いる場合と比較して、簡易な構成で、ユーザの身体にかかる負荷の危険度を判定することができる。
【0009】
また、本開示によれば、高度情報を取得することと、上記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定することと、を含む情報処理方法が提供される。
【0010】
また、本開示によれば、コンピュータを、高度情報を取得する高度情報取得部と、上記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、を有する情報処理装置として機能させるためのプログラムが提供される。
【0011】
また、本開示によれば、コンピュータを、高度情報を取得する高度情報取得部と、上記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、を有する情報処理装置として機能させるためのプログラムを記録した、コンピュータに読取り可能な記録媒体が提供される。
【発明の効果】
【0012】
以上説明したように本開示によれば、登山時のユーザの体調を高度に基づいて判定することができる。
【図面の簡単な説明】
【0013】
【図1】本開示の第1の実施形態に係るPNDの外観図である。
【図2】同実施形態にかかるPNDの構成を示すブロック図である。
【図3】同実施形態にかかるPNDの座標系を示す説明図である。
【図4】同実施形態にかかるPNDの制御部の詳細構成を示すブロック図である。
【図5】同実施形態にかかるPNDの動作を示すフローチャートである。
【図6】同実施形態において例示するユーザがスタート地点から目標地点まで移動する時間と高度の関係を示すグラフである。
【図7】同実施形態にかかるPNDが出力する警告メッセージの一例を示す表である。
【図8】同実施形態にかかるPNDの警告メッセージ表示画面の一例を示す説明図である。
【図9】同実施形態にかかるPNDが実行する予定ルートの区間分割の一例を示す説明図である。
【図10】同実施形態にかかるPNDが実行する予定ルートの区間分割の他の一例を示す説明図である。
【図11】本開示の第2の実施形態にかかる危険度判定システムの構成図である。
【図12】同実施形態にかかる危険度判定サーバの構成を示すブロック図である。
【図13】同実施形態にかかる携帯端末の構成を示すブロック図である。
【図14】同実施形態にかかる危険度判定システムの動作を示すシーケンス図である。
【図15】本開示の第3の実施形態にかかる危険度通報システムの構成図である。
【図16】同実施形態にかかる携帯端末の詳細構成を示すブロック図である。
【図17】同実施形態にかかる危険度通報システムの動作を示すシーケンス図である。
【発明を実施するための形態】
【0014】
以下に添付図面を参照しながら、本開示の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0015】
なお、説明は以下の順序で行うものとする。
1.概要
2.第1の実施形態(PNDの例)
2−1.構成
2−2.動作例
2−3.高度上昇率の算出
2−4.平均移動速度の算出
2−5.予想高度上昇率の算出
2−6.算出区間の分割
3.第2の実施形態(サーバ側で危険度を判定する例)
3−1.構成
3−2.動作
4.第3の実施形態(通報システムの例)
4−1.構成
4−2.動作
【0016】
<1.概要>
本開示では、高度情報に基づいてユーザの身体にかかる負荷の危険度を判定する情報処理装置について説明する。このユーザの身体にかかる負荷は、高山病の症状を引き起こす。特に、近年山登りは一部の愛好家だけの趣味に留まらず、初心者が気軽に挑戦することのできる趣味となってきている。そこで、初心者が山登りを行うことも増えてきた。山登りをするときには、通常生活時と異なる注意点がある。しかし、初心者が山に対する十分な知識を持たないまま山登りを行うことも増えてきてしまった。
【0017】
山登りの愛好家であれば、自分の体調をより正確に知るために、生体センサを身体に取付けて体調管理に用いることも煩わしく感じない場合が多い。しかし、初心者にとっては、頻繁には行わない山登りのために専用のセンサを取付けることを煩わしく感じることが多いと考えられる。そこで、より簡易に、ユーザの体調管理の目安となる情報を得ることのできる方法が潜在的に求められている。そこで、ここでは高山病の危険度を簡易に判定する情報処理装置について説明する。
【0018】
高山病と呼ばれる症状は、高度の高い場所において起こりやすい。高山病の主な原因は、血中酸素濃度の不足である。運動による酸素消費量が呼吸による酸素供給量を継続的に上回ることによって、血中酸素濃度が低下する。この高山病の症状は、血中酸素濃度の低下を抑制することによって回避される可能性が高い。血中酸素濃度の低下を抑制するためには、運動による酸素消費量よりも多くの酸素を供給すればよい。従って、例えば休憩をとる、ゆっくり登るなど、登り方に注意をするだけでも高山病を回避することができる可能性は高まる。
【0019】
特に、2400m以上の高山では高山病が発症しやすいといわれている。また、2000m以上となったときも注意が必要である。高度が高まるほど空気中の酸素濃度は低下する。従って、高度に基づいてユーザに注意喚起することは有効である。また、高度の上昇率も高山病の発症率に関係する。従って、高度上昇率に基づいてユーザに注意喚起をすることもまた有効である。
【0020】
以下の各実施形態では、まず高山病の危険度を判定する情報処理装置のPND(Personal Navigation Device)への適用例を第1の実施形態として説明する。また、携帯端末のユーザについての高山病の危険度を判定するサーバ装置について第2の実施形態として説明する。また、危険度を判定してユーザ自身に通知するだけでなく、外部へ通報する通報システムについて第3の実施形態として説明する。
【0021】
<2.第1の実施形態(PNDの例)>
[2−1.構成]
ここで、図1〜図4を参照しながら、本開示の第1の実施形態にかかるPNDの構成について説明する。図1は、本開示の第1の実施形態に係るPNDの外観図である。図2は、同実施形態にかかるPNDの構成を示すブロック図である。図3は、同実施形態にかかるPNDの座標系を示す説明図である。図4は、同実施形態にかかるPNDの制御部の詳細構成を示すブロック図である。
【0022】
まず図1を参照すると、高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する情報処理装置の一例であるPND(Personal Navigation Device)10の外観例が示される。
【0023】
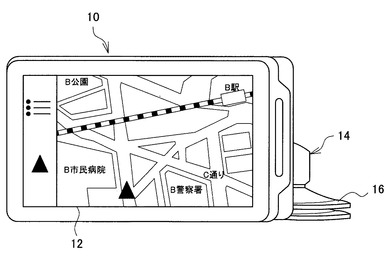
((PND10))
PND10は、目的地までの経路を案内するナビゲーション機能を有し、位置情報に対応付けられた各種の情報をユーザに提供する機能を有する。PND10は、その前面にユーザに対して各種の情報を提供する情報提供画面を表示する表示部12を有し、車両のダッシュボード上に吸盤16を介して取付けられた車両用クレードル14によってその筐体が保持される。PND10は、車両用クレードル14に容易に取付けることができるとともに、容易に取り外しすることもできる。このため、PND10は、1台を複数の車両で使用することができる。またこのPND10は、自転車用のクレードルを介して、自転車に取付けることができてもよい。
【0024】
またこのPND10は、PND10の現在の位置情報を取得する機能を有するとともに、地図データを記憶している。このため、PND10は、地図上に現在の位置情報を重畳して表示部12に表示させることができる。さらにPND10は、移動履歴情報を記録し、いわゆるGPS(Global Positioning System)ロガーとして機能することができてもよい。GPSロガーとして機能するとき、PND10は、表示部12に表示画面を表示させないことで消費電力を低減することができてもよい。
【0025】
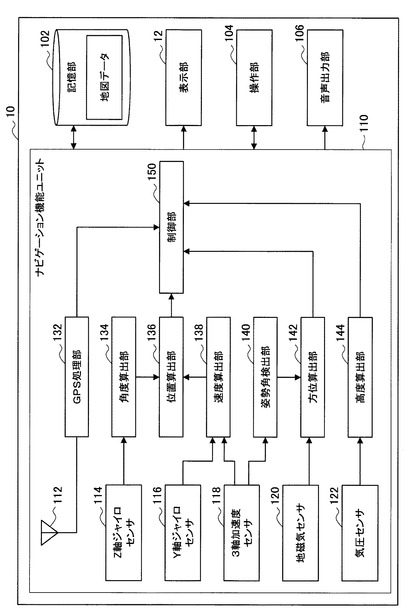
次に、図2を参照しながらこのPND10の構成の一例について説明する。PDN10は、表示部12と、記憶部102と、操作部104と、音声出力部106と、ナビゲーション機能ユニット110とを主に有する。
【0026】
(ナビゲーション機能ユニット110)
ナビゲーション機能ユニット110は、GPSアンテナ112と、Z軸ジャイロセンサ114と、Y軸ジャイロセンサ116と、3軸加速度センサ118と、地磁気センサ120と、気圧センサ122と、GPS処理部132と、角度算出部134と、位置算出部136と、速度算出部138と、姿勢角検出部140と、方位算出部142と、高度算出部144と、制御部150とを主に有する。
【0027】
(表示部12)
表示部12は、ユーザに対して表示画面を出力する表示装置である。例えばここで出力される表示画面は、地図データに現在位置を示すアイコン等を重畳した画面であってよい。この表示部12は、例えば、液晶ディスプレイ(LCD:Liquid Crystal Display)、有機EL(Electroluminescence)ディスプレイなどの表示装置であってよい。
【0028】
(記憶部102)
記憶部102は、PND10が動作するためにプログラムや、地図データ等を記憶する記憶媒体である。この記憶部102は、例えば、Flash ROM(またはFlash Memory)、EEPROM(Electrically Erasable Programmable Read−Only Memory)、EPROM(Erasable Programmable ROM)などの不揮発性メモリ、ハードディスクおよび円盤型磁性体ディスクなどの磁気ディスク、CD(Compact Disc)、DVD−R(Digital Versatile Disc Recordable)およびBD(Blu−Ray Disc(登録商標))などの光ディスク、並びに、MO(Magneto Optical)ディスクなどの記憶媒体であってもよい。また、記憶部102に記憶される地図データは、PND10の出荷段階で予め記憶部102に記憶されていてもよい。また、記憶部102に記憶される地図データは、通信部またはリムーバブルメディア(共に図示せず)を介して取得されてもよい。なお、この地図データは、それぞれの地点の高度情報を含んでもよい。
【0029】
(操作部104)
操作部104は、ユーザによる操作指示を受付け、その操作内容をナビゲーション機能ユニット110に出力する。ユーザによる操作指示としては、例えば、目的地の設定、地図の拡大および縮小、音声案内設定、画面表示設定などが挙げられる。この操作部104は、表示部12と一体的に設けられるタッチセンサであってもよい。或いは、操作部104は、ボタン、スイッチ、およびレバーなど、表示部12と分離して設けられる物理的構成であってもよい。また、操作部104は、リモートコントローラから送信されたユーザによる操作指示を示す信号を検出する信号受信部であってもよい。
【0030】
(音声出力部106)
音声出力部106は、音声データを出力する出力装置であり、例えば、スピーカであってよい。この音声出力部106は、例えば、ナビゲーション機能ユニットが目的地までの経路を案内するとき、進行車線や曲がる方向などの音声ガイダンスを出力する。ユーザは、この音声ガイダンスを聞くことにより表示部12を見なくても進むべき経路を知ることができる。また音声出力部106は、後述する危険度判定処理により、ユーザの身体にかかる負荷の危険度が高い(高山病にかかる恐れがある)ときに、警告メッセージを音声出力することもできる。
【0031】
(GPSアンテナ112)
GPSアンテナ112は、複数のGPS衛星からのGPS信号を受信することができる。GPSアンテナ112は、受信したGPS信号をGPS処理部132に入力する。なお、ここで受信されるGPS信号には、GPS衛星の軌道を示す軌道データと、信号の送信時刻などの情報が含まれていてよい。
【0032】
(GPS処理部132)
GPS処理部132は、GPSアンテナ112から入力された複数のGPS信号に基づいてPND10の現在位置を示す位置情報を算出する。GPS処理部132は、算出した位置情報を制御部150に供給する。具体的には、GPS処理部132は、複数のGPS信号をそれぞれ復調することにより得られる軌道データから各GPS衛星の位置を算出し、GPS信号の送信時刻と受信時刻との差分から各GPS衛星から当該PND10との距離を算出することができる。そして、GPS処理部132は、算出された各GPS衛星の位置と、各GPS衛星からPND10までの距離とに基づいて、現在の3次元位置を算出することができる。
【0033】
ナビゲーション機能ユニット110は、上記のGPSアンテナ112とGPS処理部132による絶対位置取得機能に加えて、各種のセンサを用いた相対位置取得機能を有する。この相対位置の情報は、絶対位置を取得することができない状況、例えばトンネルや森林など上空が覆われていて、GPS信号を受信することができない位置にPND10が存在している状況において用いられてもよい。または、相対位置の情報は、絶対位置の情報と合わせて用いられてもよい。
【0034】
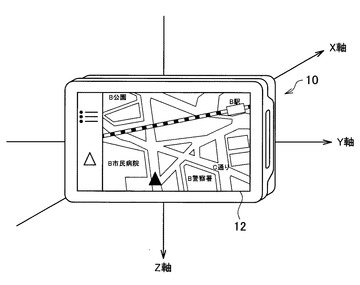
(Z軸ジャイロセンサ114)
Z軸ジャイロセンサ114は、PND10が旋回しているときのZ軸周りの回転角の変化する速度(角速度)であるヨーレートωzを電圧値として検出する機能を有するセンサである。Z軸ジャイロセンサ114は、所定のサンプリング周波数でヨーレートωzを検出し、検出されたヨーレートωzを示すデータを角度算出部134に入力する。なお、図3に示したように、Z軸は鉛直方向に対応する。そして、X軸はPND10の進行方向に対応し、Y軸はX軸に直交する水平方向に対応する。
【0035】
(角度算出部134)
角度算出部134は、Z軸ジャイロセンサ114から入力されたヨーレートωzにサンプリング周波数を積算することにより、PND10が旋回したときの角度θを算出し、その角度θが示された角度データを位置算出部136に入力する。
【0036】
(Y軸ジャイロセンサ116)
Y軸ジャイロセンサ116は、Y軸周りの角速度であるピッチレートωyを電圧値として検出する機能を有するセンサである。Y軸ジャイロセンサ116は、このピッチレートωyを所定のサンプリング周波数で検出して、検出されたピッチレートωyを示すデータを速度算出部138に入力する。
【0037】
(3軸加速度センサ118)
3軸加速度センサ118は、X軸に沿った加速度αx、Y軸に沿った加速度αy、及びZ軸に沿った加速度αzをそれぞれ電圧値として検出する機能を有するセンサである。3軸加速度センサ118は、この加速度αx、加速度αy、および加速度αzを所定のサンプリング周波数で検出して、検出された加速度を示すデータを速度算出部138および姿勢角検出部140に入力する。
【0038】
(速度算出部138)
速度算出部138は、3軸加速度センサ118から入力されたZ軸に沿った加速度αzをY軸ジャイロセンサ116から入力されたピッチレートωyで除算することにより進行方向に対する速度Vを算出し、算出した速度Vを位置算出部136に入力する。
【0039】
(位置算出部136)
位置算出部136は、速度算出部138により算出された速度Vおよび角度算出部134により算出された角度θに基づき、現在位置の位置情報を算出する機能を有する。具体的には、位置算出部136は、速度Vおよび角度θに基づいて前回算出時の位置から現在位置までの変化量を求める。そして、位置算出部136はこの変化量を制御部150に供給する。
【0040】
(姿勢角検出部140)
姿勢角検出部140は、まず3軸加速度センサ118から入力された加速度データαx、αyおよびαzに基づいて所定の姿勢角検出処理を行うことにより、PND10の姿勢角を示す姿勢角データを生成して方位算出部142に入力する。
【0041】
(地磁気センサ120)
地磁気センサ120は、X軸方向、Y軸方向、およびZ軸方向それぞれの地磁気Mx、MyおよびMzをそれぞれ電圧値として検出するセンサである。地磁気センサ120は、この検出した地磁気データMx、MyおよびMzを方位算出部142に入力する。
【0042】
(方位算出部142)
方位算出部142は、地磁気センサ120から入力された地磁気データMx、MyおよびMzに対して所定の補正処理を施し、補正した地磁気データと姿勢角検出部140から入力された姿勢角データとに基づいてPND10の方位を示す方位データを生成する。方位算出部142は、生成した方位データを制御部150に供給する。
【0043】
すなわち地磁気センサ120、3軸加速度センサ118、姿勢角検出部140、および方位算出部142は、いわゆる電子コンパスとして機能し、方位データを生成する。制御部150は、主にPND10がクレードル14から離脱されて使用されるとき(例えば徒歩にて使用される場合など)にこの方位データを利用してPND10の向きに合わせて表示した地図データをユーザに提供することができる。なお、PND10は、車載モードで動作するときには、走行履歴と地図データにある道路との対応付けを行い、地図の方位に基づいてPND10の向きに合わせた地図データをユーザに提供することもできる。あるいは、PND10は、取得したGPS方位からPND10の向きを算出してその向きに合わせた地図データをユーザに提供することもできる。
【0044】
(気圧センサ122)
気圧センサ122は、周囲の気圧を電圧値として検出する機能を有するセンサである。気圧センサ122は、気圧を所定のサンプリング周波数で検出し、検出した気圧データを高度算出部144に入力する。
【0045】
(高度算出部144)
高度算出部144は、気圧センサ122から入力された気圧データに基づいて、PND10の高度を算出し、算出された高度データを制御部150に供給する。
【0046】
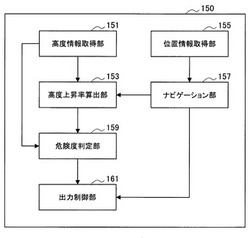
(制御部150)
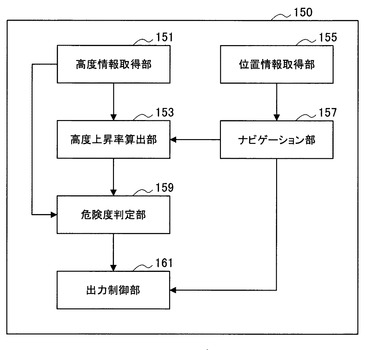
制御部150は、PND10全体の動作を制御する機能を有する。制御部150は、例えば図4に示されるように、高度情報取得部151と、高度上昇率算出部153と、位置情報取得部155と、ナビゲーション部157と、危険度判定部159と、出力制御部161との機能を主に有する。
【0047】
(高度情報取得部151)
高度情報取得部151は、現在地の高度を取得する機能を有する。高度情報取得部151は、例えば高度算出部144により算出される高度データを現在地の高度として取得することができる。或いは、高度情報取得部151は、GPS信号から取得することのできる高度データを現在地の高度として取得してもよい。高度情報取得部151は、取得した現在地の高度を、高度上昇率算出部153及び危険度判定部159に供給することができる。なお、高度情報取得部151は、取得した現在地の高度を記憶部102に記録することにより高度の履歴情報を生成してもよい。
【0048】
(高度上昇率算出部153)
高度上昇率算出部153は、算出部の一例であり、高度情報に基づいて高度上昇率を算出する機能を有する。高度上昇率算出部153が算出する高度上昇率は、現時点までの実際の移動履歴に基づいた高度上昇率であってもよい。或いは、高度上昇率算出部153が算出する高度上昇率は、今後予想される高度上昇率であってもよい。この予想高度上昇率は、例えばナビゲーション部157から供給される今後の予定ルートの情報を用いて算出することができる。高度上昇率算出部153は、現時点までの実際の移動速度を用いて今後の移動速度を予想し、予想された移動速度で今後の予定ルートを移動したときの予想高度上昇率を算出してもよい。このとき高度上昇率算出部153は、予定ルートの高度差に応じて、現時点までの実際の移動速度に対して補正した予想移動速度を用いて予想高度上昇率を算出することもできる。例えば、高度上昇率算出部153は、予定ルートの高度差が大きいときには、予想移動速度が小さくなるように補正することができる。同じ距離を移動したときでも、高度差が大きいときには移動速度が小さくなると考えられる。このため、高度差に応じて補正された予想移動速度を用いることにより、より正確な移動時間を算出することができ、さらにより正確な予想高度上昇率が算出される。
【0049】
また、高度上昇率算出部153は、ルートを複数の区間に分割して、分割されたそれぞれの区間毎に高度上昇率を算出することができる。このルートの分割は、例えば単純に所定の距離毎に行われてよい。或いはルートの分割は、例えばルートの高度に基づいて行われてよい。このとき、高度上昇率算出部153は、例えば高度変化の度合いに基づいてルートを複数の区間に分割することができる。
【0050】
(位置情報取得部155)
位置情報取得部155は、PND10の現在地の位置情報を取得する機能を有する。位置情報取得部155は、例えばGPS処理部132から供給される絶対位置の情報を取得することができる。また、位置情報取得部155は、位置算出部136から供給される前回算出時の位置から現在位置までの変化量を取得し、自律航法による位置情報を算出することもできる。また、位置情報取得部155は、方位算出部142から供給されるPND10の方位を取得することもできる。また位置情報取得部155は、高度算出部144から供給されるPND10の高度データを取得することもできる。位置情報取得部155は、取得した各種の情報から選択して、或いは、取得した各種の情報を組み合わせることによってPND10の現在の位置情報を取得することができる。
【0051】
また、位置情報取得部155は、PND10が車載モードで動作しているときには、取得した現在の位置情報と、地図データに含まれる道路ネットワークデータとに基づいたマップマッチング処理により移動している道路を特定し、位置情報が道路上の位置となるように補正してもよい。また位置情報取得部155は、その他のあらゆる位置情報補正処理を実行することによりさらに正確な位置情報を取得してもよい。
【0052】
(ナビゲーション部157)
ナビゲーション部157は、選択された経路に従った道順を案内する機能を有する。ナビゲーション部157は、例えば出力制御部161に各種の表示画面を表示させることによってユーザに道順を案内することができる。例えば、ナビゲーション部157は、ユーザが曲がるべき交差点に差し掛かる手前で、地図上に曲がる方向を示す矢印を表示させることにより道順を案内することができる。またナビゲーション部157は、出力制御部161が音声出力部106を制御することによって音声出力部106に音声を出力させてユーザに道順を案内することもできる。
【0053】
なお、ナビゲーション部157は、案内する経路を探索する経路探索部の機能も有する。ナビゲーション部157は、例えば現在地から指定された目的地までの経路を探索する機能を有する。なお、ナビゲーション部157は、PND10の動作モードに応じて適した経路を探索することができてもよい。この動作モードは、例えば車載モード、徒歩モード、及び自転車モードを含んでよい。例えば動作モードは、ユーザ操作に応じて切替えられてもよいし、クレードル14から取り外されたことを検知すると自動的に徒歩モードに切り替わるよう構成されてもよい。例えばPND10が車載モードで動作しているとき、ナビゲーション部157は、高速道路を含む経路を探索することができる。また、PND10が車載モードで動作しているとき、ナビゲーション部157は、渋滞予測を用いて渋滞が予測される区間を避けた経路を探索することもできる。或いは、PND10が徒歩モードで動作しているとき、ナビゲーション部157は、車載用の地図データとは異なる徒歩用の地図データを用いて、地下道、駅内コンコース、歩道橋、公園など歩行に適した経路を探索することができる。また、PND10が自転車モードで動作しているとき、ナビゲーション部157は、自転車用に合わせた経路を設定することができる。例えばPND10が自転車モードで動作しているとき、ナビゲーション部157は、車では通りにくい細い道も探索するため、より自転車に適した経路を探索することができる。ナビゲーション部157は、高度上昇率算出部153が今後の予測高度上昇率を算出するとき、予定ルートの情報を高度上昇率算出部153に供給することができる。すなわち、ナビゲーション部157は、予定ルート取得部の一例であってよい。
【0054】
(危険度判定部159)
危険度判定部159は、高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部の一例である。危険度判定部159は、現在の高度に基づいて危険度を判定することができる。上述の通り、高山病は、高度2400m以上になった場合に特に発症しやすい。このため、危険度判定部159は、現在の高度が2400m以上となった場合に、危険度が高いと判定することができる。また高山病は、高度2000m以上の場合であっても、急な高度上昇をした場合には、発症しやすくなる。そこで、危険度判定部159は、2400m以下であっても2000m以上の場合には、高度上昇率算出部153により算出される高度上昇率に基づいて危険度を判定することができる。なお、ここで2000mは高度の第1の閾値の一例である。また2400mは、第1の閾値より大きい第2の閾値の一例である。危険度判定部159は、実際の移動履歴情報に基づいた高度上昇率に基づいて危険度を判定してもよい。或いは、危険度判定部159は、さらに予想高度上昇率に基づいて危険度を判定してもよい。このとき危険度判定部159は、予想高度上昇率が分割された複数の区間毎に算出される場合には、この区間毎の高度上昇率に基づいて危険度を判定することができる。危険度判定部159は、閾値を用いることによって高度上昇率に基づいた危険度の判定を行うことができる。ここで用いられる閾値は、所定の値であってもよいし、ユーザにより選択されてもよい。或いはここで用いられる閾値は、学習により調整された値であってもよい。
【0055】
(出力制御部161)
出力制御部161は、危険度判定部159により危険度が高いと判定されると出力される警告情報の出力を制御する。この出力制御部161は、例えば表示部12の表示を制御することによって、警告情報の出力を制御することができる。また出力制御部161は、音声出力部106を制御することによって、警告情報の出力を制御することができる。ここで警告情報は、危険度が高い旨に加えて、危険度が高いと判定された原因を含むものであることが好ましい。例えば出力制御部161は、現在地の高度が2000m以上であって、高度上昇率が高いと判定されたとき、急な高度上昇による危険を警告する警告情報の出力を制御することができる。また出力制御部161は、現在地の高度が2400m以上であるときには、高度が高いことによる危険を警告する警告情報の出力を制御することができる。
【0056】
以上、本実施形態に係るPND10の機能の一例を示した。上記の各構成要素は、汎用的な部材や回路を用いて構成されていてもよいし、各構成要素の機能に特化したハードウェアにより構成されていてもよい。また、各構成要素の機能を、CPU(Central Processing Unit)などの演算装置がこれらの機能を実現する処理手順を記述した制御プログラムを記憶したROM(Read Only Memory)やRAM(Random Access Memory)などの記憶媒体から制御プログラムを読出し、そのプログラムを解釈して実行することにより行ってもよい。従って、本実施形態を実施する時々の技術レベルに応じて、適宜、利用する構成を変更することが可能である。
【0057】
なお、上述のような本実施形態に係るPND10の各機能を実現するためのコンピュータプログラムを作成し、パーソナルコンピュータ等に実装することが可能である。また、このようなコンピュータプログラムが格納された、コンピュータで読み取り可能な記録媒体も提供することができる。記録媒体は、例えば、磁気ディスク、光ディスク、光磁気ディスク、フラッシュメモリなどである。また、上記のコンピュータプログラムは、記録媒体を用いずに、例えばネットワークを介して配信してもよい。
【0058】
[2−2.動作例]
次に、図5〜図8を参照しながら、同実施形態にかかるPND10の危険度算出及び警告に関する動作の一例について説明する。図5は、同実施形態にかかるPNDの動作を示すフローチャートである。図6は、同実施形態において例示するユーザがスタート地点から目標地点まで移動する時間と高度の関係を示すグラフである。図7は、同実施形態にかかるPNDが出力する警告メッセージの一例を示す表である。図8は、同実施形態にかかるPNDの警告メッセージ表示画面の一例を示す説明図である。
【0059】
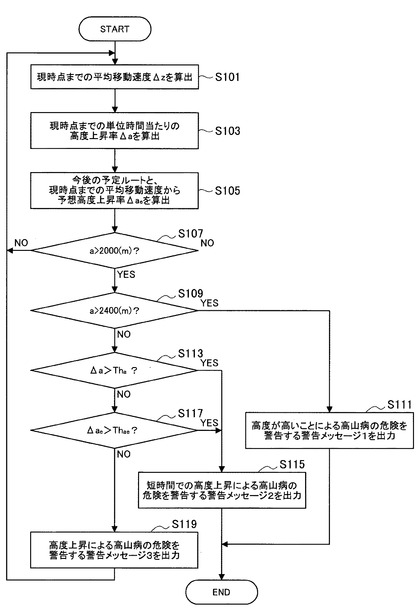
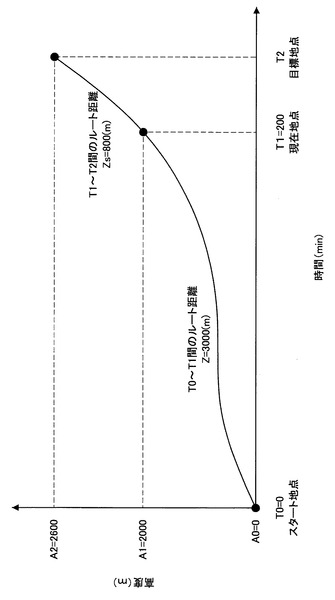
まず図5を参照すると、高度上昇率算出部153は、現時点までの平均移動速度Δzを算出する(S101)。図6の例を用いて説明すると、この平均移動速度Δzは、現在時点がT1であるとき、スタート時点T0から現在時点T1までの平均移動速度であってよい。高度上昇率算出部153は、例えば現時点までの距離(Z=3000m)と移動時間(T1−T0=200min)を用いて平均移動速度Δzを算出することができる。
【0060】
そして、高度上昇率算出部153は、現時点までの単位時間当たりの高度上昇率Δaを算出する(S103)。また高度上昇率算出部153は、ナビゲーション部157より取得された今後の予定ルートと、現時点までの平均移動速度Δzから、予想高度上昇率Δaeを算出する(S105)。なお、予想高度上昇率Δaeは、現時点までの平均移動速度Δzで今後のルートを移動した場合に予想される高度上昇率である。ここで用いられる平均移動速度Δzは、2地点間の高度差を考慮した値であってもよいし、高度差を考慮しない値であってもよい。
【0061】
次に、危険度判定部159は、現在地点の高度aが2000mより高いか否かを判断する(S107)。現在地点の高度aが2000mより高い場合には、高山病の危険性が高まってきている。このため、次に危険度判定部159は、現在地点の高度aが2400mより高いか否かを判断する(S109)。ここで、現在地点の高度aが2400mより高いと判定された場合には、さらに高山病の危険性が高い。このため、危険度判定部159は、出力制御部161に警告メッセージ1を出力するように指示し、出力制御部161は警告メッセージ1の出力を制御する(S111)。
【0062】
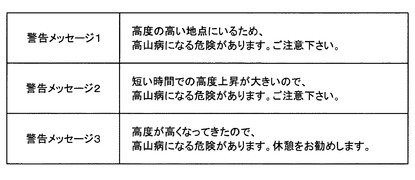
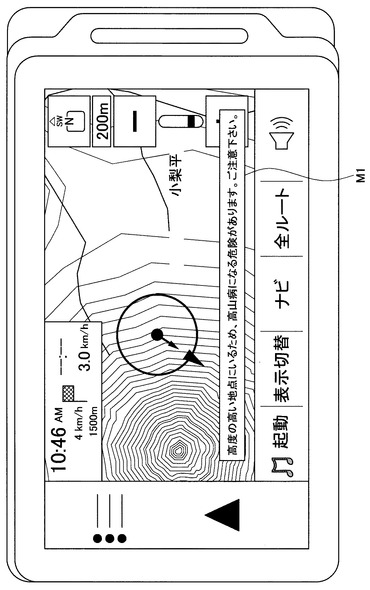
ここで出力メッセージ1は、高度が高いことによる高山病の危険を警告するメッセージであり、例えば図7に示されるように、「高度の高い地点にいるため、高山病になる危険があります。ご注意下さい。」というメッセージであってよい。この警告メッセージは、例えば図8に示されるように、警告メッセージM1が地図表示画面に重畳して表示されることによりユーザに提供されてよい。或いは、警告メッセージは、音声出力によりユーザに提供されてよい。
【0063】
再び図5を参照すると、ステップS109において現在地点の高度aが2400m以下であると判断されたとき、次に危険度判定部159は、現時点までの高度上昇率Δaが所定の閾値Thaより大きいか否かを判断する(S113)。ここで、現時点までの高度上昇率Δaが所定の閾値Thaより大きいとき、危険度判定部159は、出力制御部161に警告メッセージ2を出力するように指示し、出力制御部161は、警告メッセージ2の出力を制御する(S115)。
【0064】
ここで出力メッセージ2は、短時間での高度上昇による高山病の危険を警告するメッセージであり、例えば図7に示されるように、「短い時間での高度上昇が大きいので、高山病になる危険があります。ご注意下さい。」というメッセージであってよい。警告メッセージの出力方法については、警告メッセージ1の場合と同様であるためここでは説明を省略する。ユーザは、この警告メッセージを参照することによって、移動ペースを落としたり、休憩を取るなどの対応をとることができる。
【0065】
再び図5を参照すると、ステップS113において現時点までの高度上昇率Δaが所定の閾値Tha以下であると判断されたとき、次に危険度判定部159は、予想高度上昇率Δaeが、所定の閾値Thaeより大きいか否かを判断する(S117)。ここで、予想高度上昇率Δaeが所定の閾値Thaeより大きいとき、危険度判定部159は、出力制御部161に警告メッセージ2を出力するように指示し、出力制御部161は、警告メッセージ2の出力を制御する(S115)。
【0066】
一方、ステップS117において予想高度上昇率Δaeが所定の閾値Thae以下であると判断された場合には、危険度判定部159は、出力制御部161に警告メッセージ3を出力するように指示し、出力制御部161は、警告メッセージ3の出力を制御する(S119)。
【0067】
ここで出力メッセージ3は、高度上昇による高山病の危険を警告するメッセージであり、例えば図7に示されるように、「高度が高くなってきたので、高山病になる危険があります。休憩をお勧めします。」というメッセージであってよい。警告メッセージの出力方法については、警告メッセージ1の場合と同様であるためここでは説明を省略する。
【0068】
[2−3.高度上昇率の算出]
ここで、高度上昇率Δaの算出について、図6の例を用いながらより詳細に説明する。図6の例によると、スタート時点T0から山登りを行い、経過時間が200(min)となったとき(時刻T1)を現時点とする。このときの高度は、a=A1=2000(m)である。また、T0〜T1間に移動したルート距離がZ=3000(m)とする。またこの先目標地点までの予定ルートのルート距離がZs=800(m)である。
【0069】
このとき、現時点までの高度上昇率Δaは、移動地点間の高度差を移動時間で割ることにより算出される。例えば図6の例においては、移動地点間の高度差は、
A1−A0=2000−0=2000(m)
である。また、移動時間は、
T1−T0=200−0=200(min)
である。従って、高度上昇率Δaは、
Δa=2000/200=10(m/min)
【0070】
[2−4.平均移動速度の算出]
ここで、引き続き図6の例を用いて、平均移動速度の算出について説明する。まず、高度上昇率算出部153は、T0〜T1までの平均移動速度Δzを算出する。高度上昇率算出部153は、この先の予想高度上昇率Δaeを算出するに当たって、この平均移動速度Δzを用いる。具体的には、高度上昇率算出部153は、現時点までの平均移動速度でユーザが予定ルートの移動を続けた場合の予想高度上昇率Δaeを算出する。従って、まずここで用いられる平均移動速度Δzを算出する。
【0071】
この平均移動速度Δzは、2地点間の高度差を考慮した値であってもよいし、高度差を考慮しない値であってもよい。
【0072】
例えば、高度差を考慮しない場合には、平均移動速度Δzは、下式で表される。
Δz=移動距離/移動時間=3000/200=15(m/min)
【0073】
なお、移動距離は、2地点間の斜面にそった実際の移動距離であってもよいし、地図上の2地点間の水平距離であってもよい。
【0074】
また、高度上昇分を考慮した場合の平均移動速度Δzaは、下式で表される。
Δza=Δz×((移動距離+高度差)/移動距離)
=15×((3000+2000)/3000)=25(m/min)
【0075】
この平均移動速度Δzまたは平均移動速度Δzaを用いて、予想高度上昇率が算出される。
【0076】
[2−5.予想高度上昇率の算出]
次に、引き続き図6の例を用いて、予想高度上昇率の算出について説明する。予想高度上昇率は、上述の通り、現時点までの平均移動速度でユーザが予定ルートの移動を続けた場合に予想される高度上昇率である。平均移動速度は、上述の平均移動速度Δzが用いられてもよいし、平均移動速度Δzaが用いられてもよい。
【0077】
まず、高度差を考慮しない平均移動速度Δzを用いた場合の予想高度上昇率Δaeは、下式で表される。
Δae=予定ルートの高度差/(予定ルート距離/平均移動速度)
=(A2−A1)/(Zs/Δz)
=600/(800/15)=11.25(m/min)
【0078】
次に、高度差を考慮した平均移動速度Δzaを用いた場合の予想高度上昇率Δaeaは、下式で表される。
Δaea=Δza/((予定ルート距離+予定ルート高度差)/予定ルート距離)
=Δza/(((Zs+(A2−A1))/Zs)
=25/(800+600/800)≒14.285
【0079】
[2−6.算出区間の分割]
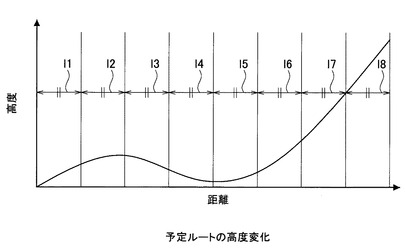
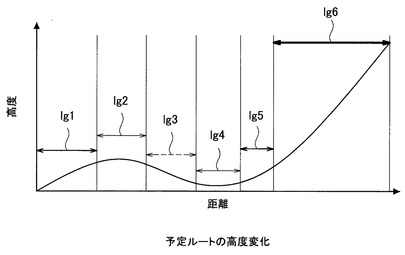
次に、高度上昇率の算出区間の分割について説明する。上述の例では、いずれも現時点から、予定ルートの目標地点までの全ルートを対象として予想高度上昇率を算出して危険度が判定された。しかし、本技術はかかる例に限定されず、予定ルートを複数の区間に分割し、分割した区間毎に高度上昇率が算出されてもよい。この区間の分割の方法について、ここで図9及び図10を参照しながら説明する。図9は、同実施形態にかかるPNDが実行する予定ルートの区間分割の一例を示す説明図である。図10は、同実施形態にかかるPNDが実行する予定ルートの区間分割の他の一例を示す説明図である。
【0080】
例えば、高度上昇率算出部153は、図9に示されるように、予定ルートを一定の距離で均一に複数の区間I1〜I8に分割し、この区間毎に予想高度上昇率を算出してもよい。危険度判定部159は、分割された区間毎の予想高度上昇率を用いて、危険度を区間毎に判定することができる。
【0081】
また例えば、高度上昇率算出部153は、図10に示されるように、予定ルートの傾斜度に基づいて、一定の傾斜幅のグループで予定ルートを複数の区間Ig1〜区間Ig6に分割し、この区間毎に予想高度上昇率を算出してもよい。危険度判定部159は、分割された区間毎の予想高度上昇率を用いて、危険度を区間毎に判定することができる。
【0082】
<3.第2の実施形態(サーバ側で危険度を判定する例)>
次に、本開示の第2の実施形態について説明する。第2の実施形態は、サーバ側で危険度判定を行う例である。
【0083】
[3−1.構成]
まず、図11〜図13を参照しながら、同実施形態に係る危険度判定システムの構成について説明する。図11は、本開示の第2の実施形態にかかる危険度判定システムの構成図である。図12は、同実施形態にかかる危険度判定サーバの構成を示すブロック図である。図13は、同実施形態にかかる携帯端末の構成を示すブロック図である。
【0084】
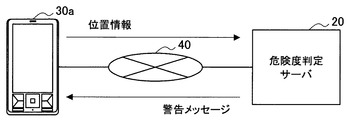
図11を参照すると、本実施形態に係る危険度判定システムは、携帯端末30aと、ネットワーク40を介して接続される危険度判定サーバ20とを含む。携帯端末30aは、例えば携帯電話、携帯用音楽再生装置、携帯用映像処理装置、携帯用ゲーム機器などの情報処理装置であってよい。携帯端末30aは、少なくとも位置情報を危険度判定サーバ20に送信し、危険度判定サーバ20は、携帯端末30aから受信した情報に基づいて、携帯端末30aのユーザが高山病にかかる危険度を判定する。そして危険度判定サーバ20aは、ユーザの危険度が高いときに警告メッセージを携帯端末30aに出力する。
【0085】
((危険度判定サーバ20))
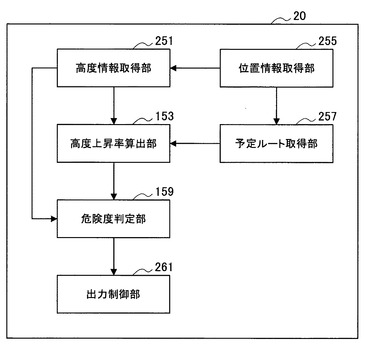
図12を参照すると、危険度判定サーバ20の構成が示される。危険度判定サーバ20は、高度情報取得部251と、高度上昇率算出部153と、位置情報取得部255と、予定ルート取得部257と、危険度判定部159と、出力制御部261とを主に有する。
【0086】
(高度情報取得部251)
高度情報取得部251は、携帯端末30aが位置する場所の高度情報を取得する機能を有する。高度情報取得部251は、例えば位置情報取得部255が携帯端末30aから取得した位置情報に基づいて高度情報を取得することができる。このとき高度情報取得部251は、例えば地図情報に含まれるそれぞれの地点の高度の情報を用いて、位置情報から高度情報を取得することができる。或いは、高度情報取得部251は、携帯端末30aが高度情報を取得する機能を有するときには、携帯端末30aから送信される高度情報を受信することによって高度情報を取得してもよい。高度情報取得部251は、高度上昇率算出部153及び危険度判定部159に高度情報を供給することができる。
【0087】
(位置情報取得部255)
位置情報取得部255は、携帯端末30aの位置情報を取得する機能を有する。位置情報取得部255は、取得した位置情報を高度情報取得部251及び予定ルート取得部257に供給することができる。
【0088】
(予定ルート取得部257)
予定ルート取得部257は、携帯端末30aのユーザが予定している予定ルートの情報を取得する機能を有する。予定ルート取得部257は、例えば携帯端末30aから予定ルートの情報を受信することにより予定ルートの情報を取得することができる。
【0089】
(出力制御部261)
出力制御部261は、危険度判定部159の指示に基づいて、警告情報の出力を制御することができる。出力制御部261は、危険度判定部159の指示に基づいて、警告メッセージを携帯端末30aに送信することができる。
【0090】
((携帯端末30))
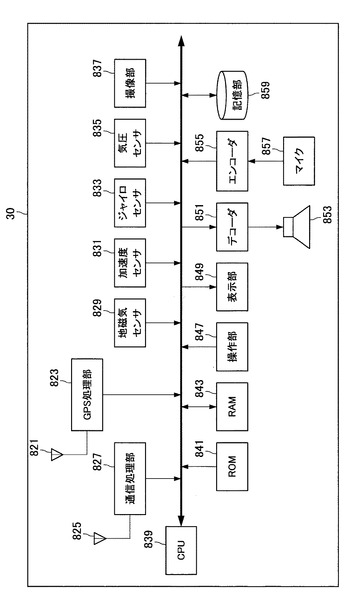
ここで、携帯端末30の構成の一例について説明する。図13を参照すると、携帯端末30は、例えば、GPSアンテナ821と、GPS処理部823と、通信アンテナ825と、通信処理部827と、地磁気センサ829と、加速度センサ831と、ジャイロセンサ833と、気圧センサ835と、撮像部837と、CPU(Central Processing Unit)839と、ROM(Read Only Memory)841と、RAM(Random Access Memory)843と、操作部847と、表示部849と、デコーダ851と、スピーカ853と、エンコーダ855と、マイク857と、記憶部859とを有する。
【0091】
(GPSアンテナ821)
GPSアンテナ821は、測位衛星からの信号を受信するアンテナの一例である。GPSアンテナ821は、複数のGPS衛星からのGPS信号を受信することができ、受信したGPS信号をGPS処理部823に入力する。
【0092】
(GPS処理部823)
GPS処理部823は、測位衛星から受信された信号に基づいて位置情報を算出する算出部の一例である。GPS処理部823は、GPSアンテナ821から入力された複数のGPS信号に基づいて現在の位置情報を算出し、算出した位置情報を出力する。具体的には、GPS処理部823は、GPS衛星の軌道データからそれぞれのGPS衛星の位置を算出し、GPS信号の送信時刻と受信時刻との差分時間に基づいて、各GPS衛星から当該携帯端末30までの距離をそれぞれ算出する。そして、算出された各GPS衛星の位置と、各GPS衛星から当該携帯端末30までの距離とに基づいて、現在の3次元位置を算出することができる。なお、ここで用いられるGPS衛星の軌道データは、例えばGPS信号に含まれていてもよい。或いは、GPS衛星の軌道データは、通信アンテナ825を介して外部のサーバから取得されてもよい。
【0093】
(通信アンテナ825)
通信アンテナ825は、例えば携帯通信網や無線LAN(Local Area Network)通信網を介して通信信号を受信する機能を有するアンテナである。通信アンテナ825は、受信した信号を通信処理部827に供給することができる。
【0094】
(通信処理部827)
通信処理部827は、通信アンテナ825から供給された信号に各種の信号処理を行う機能を有する。通信処理部827は、供給されたアナログ信号から生成したデジタル信号をCPU839に供給することができる。
【0095】
(地磁気センサ829)
地磁気センサ829は、地磁気を電圧値として検出するセンサである。地磁気センサ829は、X軸方向、Y軸方向、及びZ軸方向の地磁気をそれぞれ検出する3軸地磁気センサであってよい。地磁気センサ829は、検出した地磁気データをCPU839に供給することができる。
【0096】
(加速度センサ831)
加速度センサ831は、加速度を電圧値として検出するセンサである。加速度センサ831は、X軸方向に沿った加速度、Y軸方向に沿った加速度、及びZ軸方向に沿った加速度をそれぞれ検出する3軸加速度センサであってよい。加速度センサ831は、検出した加速度データをCPU839に供給することができる。
【0097】
(ジャイロセンサ833)
ジャイロセンサ833は、物体の角度や角速度を検出する計測器の一種である。このジャイロセンサ833は、X軸、Y軸、及びZ軸周りの回転角の変化する速度(角速度)を電圧値として検出する3軸ジャイロセンサであってよい。ジャイロセンサ833は、検出した角速度データをCPU839に供給することができる。
【0098】
(気圧センサ835)
気圧センサ835は、周囲の気圧を電圧値として検出するセンサである。気圧センサ835は、気圧を所定のサンプリング周波数で検出し、検出した気圧データをCPU839に供給することができる。
【0099】
(撮像部837)
撮像部837は、CPU839の制御に従い、レンズを介して静止画像又は動画像を撮影する機能を有する。撮像部837は、撮影した画像を記憶部859に記憶させてもよい。
【0100】
(CPU839)
CPU839は、演算処理装置及び制御装置として機能し、各種プログラムに従って携帯端末30内の動作全般を制御する。またCPU839は、マイクロプロセッサであってもよい。このCPU839は、各種プログラムに従って様々な機能を実現することができる。
【0101】
(ROM841,RAM843)
ROM841は、CPU839が使用するプログラムや演算パラメータ等を記憶することができる。RAM843は、CPU839の実行において使用するプログラムや、その実行において適宜変化するパラメータ等を一時記憶することができる。
【0102】
(操作部847)
操作部847は、ユーザが所望の操作をするための入力信号を生成する機能を有する。操作部847は、例えばタッチセンサ、マウス、キーボード、ボタン、マイク、スイッチ及びレバーなどユーザが情報を入力するための入力部と、ユーザによる入力に基づいて入力信号を生成し、CPU839に出力する入力制御回路などから構成されてよい。
【0103】
(表示部849)
表示部849は、出力装置の一例であり、液晶ディスプレイ(LCD:Liquid Crystal Display)装置、有機EL(OLED:Organic Light Emitting Diode)ディスプレイ装置などの表示装置であってよい。表示部849は、ユーザに対して画面を表示することにより情報を提供することができる。
【0104】
(デコーダ851,スピーカ853)
デコーダ851は、CPU839の制御に従い、入力されたデータのデコード及びアナログ変換などを行う機能を有する。デコーダ851は、例えば通信アンテナ825及び通信処理部827を介して入力された音声データのデコード及びアナログ変換などを行い、音声信号をスピーカ853に出力する。スピーカ853は、デコーダ851から供給される音声信号に基づいて音声を出力することができる。
【0105】
(エンコーダ855,マイク857)
エンコーダ855は、CPU839の制御に従い、入力されたデータのデジタル変換及びエンコードなどを行う機能を有する。エンコーダ855は、マイク857から入力される音声信号のデジタル変換及びエンコードなどを行い、音声データを出力することができる。マイク857は、音声を集音し、音声信号として出力することができる。
【0106】
(記憶部859)
記憶部859は、データ格納用の装置であり、記憶媒体、記憶媒体にデータを記録する記録装置、記憶媒体からデータを読み出す読出し装置、および記憶媒体に記録されたデータを削除する削除装置などを含むことができる。ここで記憶媒体としては、例えばフラッシュメモリ、MRAM(Magnetoresistive Random Access Memory)、FeRAM(Ferroelectric Random Access Memory)、PRAM(Phase change Random Access Memory)、及びEEPROM(Electronically Erasable and Programmable Read Only Memory)などの不揮発性メモリや、HDD(Hard Disk Drive)などの磁気記録媒体などが用いられてよい。
【0107】
以上、本実施形態に係る危険度判定サーバ20及び携帯端末30の構成の一例を示した。上記の各構成要素は、汎用的な部材や回路を用いて構成されていてもよいし、各構成要素の機能に特化したハードウェアにより構成されていてもよい。また、各構成要素の機能を、CPU(Central Processing Unit)などの演算装置がこれらの機能を実現する処理手順を記述した制御プログラムを記憶したROM(Read Only Memory)やRAM(Random Access Memory)などの記憶媒体から制御プログラムを読出し、そのプログラムを解釈して実行することにより行ってもよい。従って、本実施形態を実施する時々の技術レベルに応じて、適宜、利用する構成を変更することが可能である。
【0108】
なお、上述のような本実施形態に係る危険度判定サーバ20及び携帯端末30の各機能を実現するためのコンピュータプログラムを作成し、パーソナルコンピュータ等に実装することが可能である。また、このようなコンピュータプログラムが格納された、コンピュータで読み取り可能な記録媒体も提供することができる。記録媒体は、例えば、磁気ディスク、光ディスク、光磁気ディスク、フラッシュメモリなどである。また、上記のコンピュータプログラムは、記録媒体を用いずに、例えばネットワークを介して配信してもよい。
【0109】
[3−2.動作]
次に、図14を参照しながら、同実施形態にかかる危険度判定システムの動作について説明する。図14は、同実施形態にかかる危険度判定システムの動作を示すシーケンス図である。
【0110】
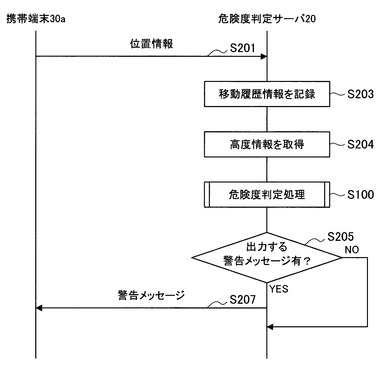
まず、携帯端末30aは、位置情報を取得して危険度判定サーバ20に送信する(S201)。このとき携帯端末30aは、現時点の位置情報をその都度危険度判定サーバ20に送信してもよい。また携帯端末30aは、位置情報を取得された日時と対応付けて記録しておき、位置情報及び位置情報に対応する日時の情報を危険度判定サーバ20に送信してもよい。
【0111】
次に、位置情報を受信した危険度判定サーバ20は、位置情報と位置情報が取得された日時とを対応づけて記録することにより、移動履歴情報を生成する(S203)。次に危険度判定サーバ20は、高度情報を取得する(S204)。
【0112】
そして、危険度判定サーバ20は、危険度判定処理を実行する(S100)。ここで、ステップS100の危険度判定処理は、図5において説明したステップS101〜ステップS119の処理である。危険度判定処理を実行すると、危険度判定サーバ20は、出力する警告メッセージがあるか否かを判断する(S205)。ステップS205において、出力する警告メッセージがあると判断されたとき、出力制御部261は、警告メッセージを携帯端末30に送信する(S207)。
【0113】
<4.第3の実施形態(通報システムの例)>
次に、本開示の第3の実施形態について説明する。第3の実施形態は、ユーザが高山病になる危険度が高いときに通報を行う通報システムの例である。
【0114】
[4−1.構成]
まず、図15及び図16を参照しながら、同実施形態に係る通報システムの構成について説明する。図15は、本開示の第3の実施形態にかかる危険度通報システムの構成図である。図16は、同実施形態にかかる携帯端末の詳細構成を示すブロック図である。
【0115】
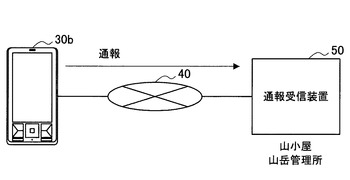
図15を参照すると、本実施形態に係る通報システムは、携帯端末30b、及び携帯端末30bとネットワーク40を介して接続される通報受信装置50とを含む。携帯端末30bは、例えば携帯電話、携帯用音楽再生装置、携帯用映像処理装置、携帯用ゲーム機器などの情報処理装置であってよい。携帯端末30bは、携帯端末30bのユーザが高山病になる危険度を判定する。そして携帯端末30bは、危険度が高いと判定されると、通報受信装置50に危険度が高い旨を通報することができる。ここで通報受信装置50は、携帯端末30bからの通報を受信する通信機能を有する情報処理装置である。例えば通報受信装置50は、携帯端末30bのユーザが登っている山の山小屋、及び山岳管理所など、通報を受けた場合に、ユーザを救助するための対応を取ることの出来る人が参照可能な情報処理装置であることが望ましい。
【0116】
((携帯端末30b))
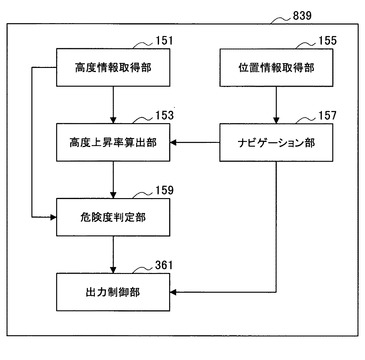
図16を参照すると、携帯端末30bの構成が示される。なお、この携帯端末30bは、図13において説明された全体構成を有する。そして、図16に示す機能がCPU839の動作により実現される。従って、携帯端末30bは、高度情報取得部151と、高度上昇率算出部153と、位置情報取得部155と、ナビゲーション部157と、危険度判定部159と、出力制御部361との機能を主に有する。
【0117】
なお、ここで高度情報取得部151と、高度上昇率算出部153と、位置情報取得部155と、ナビゲーション部157と、危険度判定部159と、の機能については、第1の実施形態において説明した機能と同様であるためここでは説明を省略する。
【0118】
(出力制御部361)
出力制御部361は、出力制御部161の機能に加えて、携帯端末30bのユーザが高山病になる危険度が高いとき、近傍の山小屋や山岳管理所などの施設に通報を行う機能を有する。出力制御部361は、例えば携帯端末30bの現在の位置情報を通報受信装置50に送信する機能を有する。出力制御部361は、通報受信装置50に例えば山登り中の移動軌跡情報、今後の予定コース、ユーザの危険度の情報を送信してもよい。
【0119】
[4−2.動作]
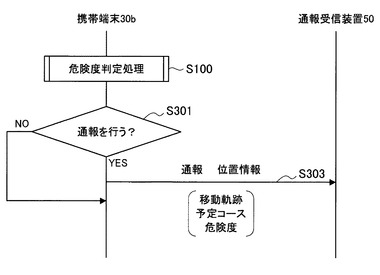
次に、図17を参照しながら、同実施形態にかかる通報システムの動作について説明する。図17は、同実施形態にかかる危険度通報システムの動作を示すシーケンス図である。
【0120】
まず、携帯端末30bは、危険度判定処理を実行する(S100)。この危険度判定処理は、図5において説明したステップS101〜ステップS119の処理である。危険度判定処理を実行すると、携帯端末30bの出力制御部361は、通報を行うか否かを判断する(S301)。そして、通報を行うと判断したときには、出力制御部361は、例えば位置情報を含む通報を行う(S303)。この通報には、上述の通り移動軌跡情報、予定コース、及び危険度の情報が含まれてもよい。
【0121】
以上、添付図面を参照しながら本開示の好適な実施形態について詳細に説明したが、本開示の技術的範囲はかかる例に限定されない。本開示の技術分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本開示の技術的範囲に属するものと了解される。
【0122】
例えば、上記第3の実施形態では、携帯電話による通報システムの例を示したが、本技術はかかる例に限定されない。例えば、PNDが通信機能を有する場合には、PNDが通報を行う構成としてもよい。
【0123】
尚、本明細書において、フローチャート又はシーケンス図に記述されたステップは、記載された順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的に又は個別的に実行される処理をも含む。また時系列的に処理されるステップでも、場合によっては適宜順序を変更することが可能であることは言うまでもない。
【0124】
なお、以下のような構成も本開示の技術的範囲に属する。
(1)
高度情報を取得する高度情報取得部と、
前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、
を備える、情報処理装置。
(2)
前記高度情報に基づいて、高度上昇率を算出する算出部、
をさらに備え、
前記判定部は、前記高度上昇率に基づいて、前記危険度を判定する、
前記(1)に記載の情報処理装置。
(3)
前記算出部は、前記高度情報の履歴を用いて、現時点までの高度上昇率を算出する、
前記(2)に記載の情報処理装置。
(4)
予定ルートの情報を取得する予定ルート取得部、
をさらに備え、
前記算出部は、前記予定ルートの情報に基づいて、今後予想される前記高度上昇率を算出し、
前記判定部は、今後予想される前記高度上昇率に基づいて前記危険度を判定する、
前記(2)または(3)のいずれかに記載の情報処理装置。
(5)
前記算出部は、前記予定ルートの高度差に応じて補正した予想移動速度を用いて、前記高度上昇率を算出する、
前記(4)に記載の情報処理装置。
(6)
前記算出部は、前記予定ルートを複数の区間に分割し、分割されたそれぞれの前記区間毎に前記高度上昇率を算出し、
前記判定部は、前記区間毎の前記高度上昇率に基づいて前記危険度を判定する、
前記(4)または(5)のいずれかに記載の情報処理装置。
(7)
前記算出部は、前記予定ルートの高度に基づいて、前記予定ルートを複数の区間に分割する、
前記(6)に記載の情報処理装置。
(8)
前記算出部は、前記予定ルートの高度変化の度合いに基づいて、前記予定ルートを複数の区間に分割する、
前記(7)に記載の情報処理装置。
(9)
前記判定部により前記危険度が高いと判定されると、警告情報の出力を制御する出力制御部、
をさらに備える、前記(1)〜(8)のいずれかに記載の情報処理装置。
(10)
前記出力制御部は、現在地の高度が第1の閾値以上であり、前記高度上昇率が高いと判定されたとき、急な高度上昇による危険を警告する前記警告情報の出力を制御する、
前記(9)に記載の情報処理装置。
(11)
前記出力制御部は、現在地の高度が前記第1の閾値より大きい第2の閾値以上であるとき、高度が高いことによる危険を警告する前記警告情報の出力を制御する、
前記(10)に記載の情報処理装置。
(12)
前記出力制御部は、前記警告情報を含む表示画面の出力を制御する、
前記(9)〜(11)のいずれかに記載の情報処理装置。
(13)
前記出力制御部は、前記警告情報の音声出力を制御する、
前記(9)〜(12)のいずれかに記載の情報処理装置。
(14)
前記出力制御部は、前記危険度が高いと判定されると、通信路を介して接続される第2の情報処理装置への通報情報の出力を制御する、
前記(9)〜(13)のいずれかに記載の情報処理装置。
(15)
現在の位置情報を取得する位置情報取得部、
をさらに備え、
前記通報情報は、少なくとも前記位置情報を含む、
前記(14)に記載の情報処理装置。
(16)
前記通報情報は、予定される移動ルートの情報、及び前記危険度の少なくともいずれかをさらに含む、
前記(15)に記載の情報処理装置。
(17)
前記算出部は、所定距離毎に前記予定ルートを複数の区間に分割する、
前記(5)に記載の情報処理装置。
(18)
高度情報を取得することと、
前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定することと、
を含む、情報処理方法。
(19)
コンピュータを、
高度情報を取得する高度情報取得部と、
前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、
を備える、情報処理装置として機能させるためのプログラム。
(20)
コンピュータを、
高度情報を取得する高度情報取得部と、
前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、
を備える、情報処理装置として機能させるためのプログラムを記録した、コンピュータに読取り可能な記録媒体。
【符号の説明】
【0125】
10 PND(情報処理装置)
151 高度情報取得部
153 高度上昇率算出部(算出部)
155 位置情報取得部
157 ナビゲーション部
161 出力制御部
20 危険度判定サーバ
30 携帯端末
【技術分野】
【0001】
本開示は、情報処理装置、情報処理方法、プログラム、及び記録媒体に関する。
【背景技術】
【0002】
近年、登山をする人が増えてきた。安全に山に登るためには、体調管理が重要である。特に高山では地上と比較して空気が薄い。このため、血中酸素濃度が低下することで身体に変調をきたす高山病に陥ることがある。
【0003】
登山時の体調管理を補助するために、例えば特許文献1には、生体センサにより取得したユーザの生体データ(例えば体温、血圧、心拍数など)と、ユーザの周辺の気象データ(例えば気温、湿度、気圧など)とに基づいてユーザの体調を判断及び警告する装置が提案されている。また、特許文献2には、生体センサにより取得したユーザの生体データに基づいてユーザの体調を判断する基地局が提案されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−20971号公報
【特許文献2】特開2002−22479号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記特許文献1及び特許文献2に記載の装置はいずれも生体センサを用いて取得した生体データを用いている。従ってユーザは、生体センサを身体に取付ける煩わしさなどがあり、体調管理システム導入の障害となっていた。
【0006】
そこで、本開示では、登山時のユーザの体調を高度に基づいて判定することのできる、新規かつ改良された情報処理装置、情報処理方法、プログラム、及び記録媒体を提案する。
【課題を解決するための手段】
【0007】
本開示によれば、高度情報を取得する高度情報取得部と、上記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、を有する情報処理装置が提供される。
【0008】
かかる構成によれば、高度情報に基づいてユーザの身体にかかる負荷の危険度(例えば高山病の症状を発症する危険度を判定することができる。高度情報は、ユーザの身体の特定部位にセンサを取付けることなく取得することができる。よって、生体センサ等を用いる場合と比較して、簡易な構成で、ユーザの身体にかかる負荷の危険度を判定することができる。
【0009】
また、本開示によれば、高度情報を取得することと、上記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定することと、を含む情報処理方法が提供される。
【0010】
また、本開示によれば、コンピュータを、高度情報を取得する高度情報取得部と、上記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、を有する情報処理装置として機能させるためのプログラムが提供される。
【0011】
また、本開示によれば、コンピュータを、高度情報を取得する高度情報取得部と、上記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、を有する情報処理装置として機能させるためのプログラムを記録した、コンピュータに読取り可能な記録媒体が提供される。
【発明の効果】
【0012】
以上説明したように本開示によれば、登山時のユーザの体調を高度に基づいて判定することができる。
【図面の簡単な説明】
【0013】
【図1】本開示の第1の実施形態に係るPNDの外観図である。
【図2】同実施形態にかかるPNDの構成を示すブロック図である。
【図3】同実施形態にかかるPNDの座標系を示す説明図である。
【図4】同実施形態にかかるPNDの制御部の詳細構成を示すブロック図である。
【図5】同実施形態にかかるPNDの動作を示すフローチャートである。
【図6】同実施形態において例示するユーザがスタート地点から目標地点まで移動する時間と高度の関係を示すグラフである。
【図7】同実施形態にかかるPNDが出力する警告メッセージの一例を示す表である。
【図8】同実施形態にかかるPNDの警告メッセージ表示画面の一例を示す説明図である。
【図9】同実施形態にかかるPNDが実行する予定ルートの区間分割の一例を示す説明図である。
【図10】同実施形態にかかるPNDが実行する予定ルートの区間分割の他の一例を示す説明図である。
【図11】本開示の第2の実施形態にかかる危険度判定システムの構成図である。
【図12】同実施形態にかかる危険度判定サーバの構成を示すブロック図である。
【図13】同実施形態にかかる携帯端末の構成を示すブロック図である。
【図14】同実施形態にかかる危険度判定システムの動作を示すシーケンス図である。
【図15】本開示の第3の実施形態にかかる危険度通報システムの構成図である。
【図16】同実施形態にかかる携帯端末の詳細構成を示すブロック図である。
【図17】同実施形態にかかる危険度通報システムの動作を示すシーケンス図である。
【発明を実施するための形態】
【0014】
以下に添付図面を参照しながら、本開示の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0015】
なお、説明は以下の順序で行うものとする。
1.概要
2.第1の実施形態(PNDの例)
2−1.構成
2−2.動作例
2−3.高度上昇率の算出
2−4.平均移動速度の算出
2−5.予想高度上昇率の算出
2−6.算出区間の分割
3.第2の実施形態(サーバ側で危険度を判定する例)
3−1.構成
3−2.動作
4.第3の実施形態(通報システムの例)
4−1.構成
4−2.動作
【0016】
<1.概要>
本開示では、高度情報に基づいてユーザの身体にかかる負荷の危険度を判定する情報処理装置について説明する。このユーザの身体にかかる負荷は、高山病の症状を引き起こす。特に、近年山登りは一部の愛好家だけの趣味に留まらず、初心者が気軽に挑戦することのできる趣味となってきている。そこで、初心者が山登りを行うことも増えてきた。山登りをするときには、通常生活時と異なる注意点がある。しかし、初心者が山に対する十分な知識を持たないまま山登りを行うことも増えてきてしまった。
【0017】
山登りの愛好家であれば、自分の体調をより正確に知るために、生体センサを身体に取付けて体調管理に用いることも煩わしく感じない場合が多い。しかし、初心者にとっては、頻繁には行わない山登りのために専用のセンサを取付けることを煩わしく感じることが多いと考えられる。そこで、より簡易に、ユーザの体調管理の目安となる情報を得ることのできる方法が潜在的に求められている。そこで、ここでは高山病の危険度を簡易に判定する情報処理装置について説明する。
【0018】
高山病と呼ばれる症状は、高度の高い場所において起こりやすい。高山病の主な原因は、血中酸素濃度の不足である。運動による酸素消費量が呼吸による酸素供給量を継続的に上回ることによって、血中酸素濃度が低下する。この高山病の症状は、血中酸素濃度の低下を抑制することによって回避される可能性が高い。血中酸素濃度の低下を抑制するためには、運動による酸素消費量よりも多くの酸素を供給すればよい。従って、例えば休憩をとる、ゆっくり登るなど、登り方に注意をするだけでも高山病を回避することができる可能性は高まる。
【0019】
特に、2400m以上の高山では高山病が発症しやすいといわれている。また、2000m以上となったときも注意が必要である。高度が高まるほど空気中の酸素濃度は低下する。従って、高度に基づいてユーザに注意喚起することは有効である。また、高度の上昇率も高山病の発症率に関係する。従って、高度上昇率に基づいてユーザに注意喚起をすることもまた有効である。
【0020】
以下の各実施形態では、まず高山病の危険度を判定する情報処理装置のPND(Personal Navigation Device)への適用例を第1の実施形態として説明する。また、携帯端末のユーザについての高山病の危険度を判定するサーバ装置について第2の実施形態として説明する。また、危険度を判定してユーザ自身に通知するだけでなく、外部へ通報する通報システムについて第3の実施形態として説明する。
【0021】
<2.第1の実施形態(PNDの例)>
[2−1.構成]
ここで、図1〜図4を参照しながら、本開示の第1の実施形態にかかるPNDの構成について説明する。図1は、本開示の第1の実施形態に係るPNDの外観図である。図2は、同実施形態にかかるPNDの構成を示すブロック図である。図3は、同実施形態にかかるPNDの座標系を示す説明図である。図4は、同実施形態にかかるPNDの制御部の詳細構成を示すブロック図である。
【0022】
まず図1を参照すると、高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する情報処理装置の一例であるPND(Personal Navigation Device)10の外観例が示される。
【0023】
((PND10))
PND10は、目的地までの経路を案内するナビゲーション機能を有し、位置情報に対応付けられた各種の情報をユーザに提供する機能を有する。PND10は、その前面にユーザに対して各種の情報を提供する情報提供画面を表示する表示部12を有し、車両のダッシュボード上に吸盤16を介して取付けられた車両用クレードル14によってその筐体が保持される。PND10は、車両用クレードル14に容易に取付けることができるとともに、容易に取り外しすることもできる。このため、PND10は、1台を複数の車両で使用することができる。またこのPND10は、自転車用のクレードルを介して、自転車に取付けることができてもよい。
【0024】
またこのPND10は、PND10の現在の位置情報を取得する機能を有するとともに、地図データを記憶している。このため、PND10は、地図上に現在の位置情報を重畳して表示部12に表示させることができる。さらにPND10は、移動履歴情報を記録し、いわゆるGPS(Global Positioning System)ロガーとして機能することができてもよい。GPSロガーとして機能するとき、PND10は、表示部12に表示画面を表示させないことで消費電力を低減することができてもよい。
【0025】
次に、図2を参照しながらこのPND10の構成の一例について説明する。PDN10は、表示部12と、記憶部102と、操作部104と、音声出力部106と、ナビゲーション機能ユニット110とを主に有する。
【0026】
(ナビゲーション機能ユニット110)
ナビゲーション機能ユニット110は、GPSアンテナ112と、Z軸ジャイロセンサ114と、Y軸ジャイロセンサ116と、3軸加速度センサ118と、地磁気センサ120と、気圧センサ122と、GPS処理部132と、角度算出部134と、位置算出部136と、速度算出部138と、姿勢角検出部140と、方位算出部142と、高度算出部144と、制御部150とを主に有する。
【0027】
(表示部12)
表示部12は、ユーザに対して表示画面を出力する表示装置である。例えばここで出力される表示画面は、地図データに現在位置を示すアイコン等を重畳した画面であってよい。この表示部12は、例えば、液晶ディスプレイ(LCD:Liquid Crystal Display)、有機EL(Electroluminescence)ディスプレイなどの表示装置であってよい。
【0028】
(記憶部102)
記憶部102は、PND10が動作するためにプログラムや、地図データ等を記憶する記憶媒体である。この記憶部102は、例えば、Flash ROM(またはFlash Memory)、EEPROM(Electrically Erasable Programmable Read−Only Memory)、EPROM(Erasable Programmable ROM)などの不揮発性メモリ、ハードディスクおよび円盤型磁性体ディスクなどの磁気ディスク、CD(Compact Disc)、DVD−R(Digital Versatile Disc Recordable)およびBD(Blu−Ray Disc(登録商標))などの光ディスク、並びに、MO(Magneto Optical)ディスクなどの記憶媒体であってもよい。また、記憶部102に記憶される地図データは、PND10の出荷段階で予め記憶部102に記憶されていてもよい。また、記憶部102に記憶される地図データは、通信部またはリムーバブルメディア(共に図示せず)を介して取得されてもよい。なお、この地図データは、それぞれの地点の高度情報を含んでもよい。
【0029】
(操作部104)
操作部104は、ユーザによる操作指示を受付け、その操作内容をナビゲーション機能ユニット110に出力する。ユーザによる操作指示としては、例えば、目的地の設定、地図の拡大および縮小、音声案内設定、画面表示設定などが挙げられる。この操作部104は、表示部12と一体的に設けられるタッチセンサであってもよい。或いは、操作部104は、ボタン、スイッチ、およびレバーなど、表示部12と分離して設けられる物理的構成であってもよい。また、操作部104は、リモートコントローラから送信されたユーザによる操作指示を示す信号を検出する信号受信部であってもよい。
【0030】
(音声出力部106)
音声出力部106は、音声データを出力する出力装置であり、例えば、スピーカであってよい。この音声出力部106は、例えば、ナビゲーション機能ユニットが目的地までの経路を案内するとき、進行車線や曲がる方向などの音声ガイダンスを出力する。ユーザは、この音声ガイダンスを聞くことにより表示部12を見なくても進むべき経路を知ることができる。また音声出力部106は、後述する危険度判定処理により、ユーザの身体にかかる負荷の危険度が高い(高山病にかかる恐れがある)ときに、警告メッセージを音声出力することもできる。
【0031】
(GPSアンテナ112)
GPSアンテナ112は、複数のGPS衛星からのGPS信号を受信することができる。GPSアンテナ112は、受信したGPS信号をGPS処理部132に入力する。なお、ここで受信されるGPS信号には、GPS衛星の軌道を示す軌道データと、信号の送信時刻などの情報が含まれていてよい。
【0032】
(GPS処理部132)
GPS処理部132は、GPSアンテナ112から入力された複数のGPS信号に基づいてPND10の現在位置を示す位置情報を算出する。GPS処理部132は、算出した位置情報を制御部150に供給する。具体的には、GPS処理部132は、複数のGPS信号をそれぞれ復調することにより得られる軌道データから各GPS衛星の位置を算出し、GPS信号の送信時刻と受信時刻との差分から各GPS衛星から当該PND10との距離を算出することができる。そして、GPS処理部132は、算出された各GPS衛星の位置と、各GPS衛星からPND10までの距離とに基づいて、現在の3次元位置を算出することができる。
【0033】
ナビゲーション機能ユニット110は、上記のGPSアンテナ112とGPS処理部132による絶対位置取得機能に加えて、各種のセンサを用いた相対位置取得機能を有する。この相対位置の情報は、絶対位置を取得することができない状況、例えばトンネルや森林など上空が覆われていて、GPS信号を受信することができない位置にPND10が存在している状況において用いられてもよい。または、相対位置の情報は、絶対位置の情報と合わせて用いられてもよい。
【0034】
(Z軸ジャイロセンサ114)
Z軸ジャイロセンサ114は、PND10が旋回しているときのZ軸周りの回転角の変化する速度(角速度)であるヨーレートωzを電圧値として検出する機能を有するセンサである。Z軸ジャイロセンサ114は、所定のサンプリング周波数でヨーレートωzを検出し、検出されたヨーレートωzを示すデータを角度算出部134に入力する。なお、図3に示したように、Z軸は鉛直方向に対応する。そして、X軸はPND10の進行方向に対応し、Y軸はX軸に直交する水平方向に対応する。
【0035】
(角度算出部134)
角度算出部134は、Z軸ジャイロセンサ114から入力されたヨーレートωzにサンプリング周波数を積算することにより、PND10が旋回したときの角度θを算出し、その角度θが示された角度データを位置算出部136に入力する。
【0036】
(Y軸ジャイロセンサ116)
Y軸ジャイロセンサ116は、Y軸周りの角速度であるピッチレートωyを電圧値として検出する機能を有するセンサである。Y軸ジャイロセンサ116は、このピッチレートωyを所定のサンプリング周波数で検出して、検出されたピッチレートωyを示すデータを速度算出部138に入力する。
【0037】
(3軸加速度センサ118)
3軸加速度センサ118は、X軸に沿った加速度αx、Y軸に沿った加速度αy、及びZ軸に沿った加速度αzをそれぞれ電圧値として検出する機能を有するセンサである。3軸加速度センサ118は、この加速度αx、加速度αy、および加速度αzを所定のサンプリング周波数で検出して、検出された加速度を示すデータを速度算出部138および姿勢角検出部140に入力する。
【0038】
(速度算出部138)
速度算出部138は、3軸加速度センサ118から入力されたZ軸に沿った加速度αzをY軸ジャイロセンサ116から入力されたピッチレートωyで除算することにより進行方向に対する速度Vを算出し、算出した速度Vを位置算出部136に入力する。
【0039】
(位置算出部136)
位置算出部136は、速度算出部138により算出された速度Vおよび角度算出部134により算出された角度θに基づき、現在位置の位置情報を算出する機能を有する。具体的には、位置算出部136は、速度Vおよび角度θに基づいて前回算出時の位置から現在位置までの変化量を求める。そして、位置算出部136はこの変化量を制御部150に供給する。
【0040】
(姿勢角検出部140)
姿勢角検出部140は、まず3軸加速度センサ118から入力された加速度データαx、αyおよびαzに基づいて所定の姿勢角検出処理を行うことにより、PND10の姿勢角を示す姿勢角データを生成して方位算出部142に入力する。
【0041】
(地磁気センサ120)
地磁気センサ120は、X軸方向、Y軸方向、およびZ軸方向それぞれの地磁気Mx、MyおよびMzをそれぞれ電圧値として検出するセンサである。地磁気センサ120は、この検出した地磁気データMx、MyおよびMzを方位算出部142に入力する。
【0042】
(方位算出部142)
方位算出部142は、地磁気センサ120から入力された地磁気データMx、MyおよびMzに対して所定の補正処理を施し、補正した地磁気データと姿勢角検出部140から入力された姿勢角データとに基づいてPND10の方位を示す方位データを生成する。方位算出部142は、生成した方位データを制御部150に供給する。
【0043】
すなわち地磁気センサ120、3軸加速度センサ118、姿勢角検出部140、および方位算出部142は、いわゆる電子コンパスとして機能し、方位データを生成する。制御部150は、主にPND10がクレードル14から離脱されて使用されるとき(例えば徒歩にて使用される場合など)にこの方位データを利用してPND10の向きに合わせて表示した地図データをユーザに提供することができる。なお、PND10は、車載モードで動作するときには、走行履歴と地図データにある道路との対応付けを行い、地図の方位に基づいてPND10の向きに合わせた地図データをユーザに提供することもできる。あるいは、PND10は、取得したGPS方位からPND10の向きを算出してその向きに合わせた地図データをユーザに提供することもできる。
【0044】
(気圧センサ122)
気圧センサ122は、周囲の気圧を電圧値として検出する機能を有するセンサである。気圧センサ122は、気圧を所定のサンプリング周波数で検出し、検出した気圧データを高度算出部144に入力する。
【0045】
(高度算出部144)
高度算出部144は、気圧センサ122から入力された気圧データに基づいて、PND10の高度を算出し、算出された高度データを制御部150に供給する。
【0046】
(制御部150)
制御部150は、PND10全体の動作を制御する機能を有する。制御部150は、例えば図4に示されるように、高度情報取得部151と、高度上昇率算出部153と、位置情報取得部155と、ナビゲーション部157と、危険度判定部159と、出力制御部161との機能を主に有する。
【0047】
(高度情報取得部151)
高度情報取得部151は、現在地の高度を取得する機能を有する。高度情報取得部151は、例えば高度算出部144により算出される高度データを現在地の高度として取得することができる。或いは、高度情報取得部151は、GPS信号から取得することのできる高度データを現在地の高度として取得してもよい。高度情報取得部151は、取得した現在地の高度を、高度上昇率算出部153及び危険度判定部159に供給することができる。なお、高度情報取得部151は、取得した現在地の高度を記憶部102に記録することにより高度の履歴情報を生成してもよい。
【0048】
(高度上昇率算出部153)
高度上昇率算出部153は、算出部の一例であり、高度情報に基づいて高度上昇率を算出する機能を有する。高度上昇率算出部153が算出する高度上昇率は、現時点までの実際の移動履歴に基づいた高度上昇率であってもよい。或いは、高度上昇率算出部153が算出する高度上昇率は、今後予想される高度上昇率であってもよい。この予想高度上昇率は、例えばナビゲーション部157から供給される今後の予定ルートの情報を用いて算出することができる。高度上昇率算出部153は、現時点までの実際の移動速度を用いて今後の移動速度を予想し、予想された移動速度で今後の予定ルートを移動したときの予想高度上昇率を算出してもよい。このとき高度上昇率算出部153は、予定ルートの高度差に応じて、現時点までの実際の移動速度に対して補正した予想移動速度を用いて予想高度上昇率を算出することもできる。例えば、高度上昇率算出部153は、予定ルートの高度差が大きいときには、予想移動速度が小さくなるように補正することができる。同じ距離を移動したときでも、高度差が大きいときには移動速度が小さくなると考えられる。このため、高度差に応じて補正された予想移動速度を用いることにより、より正確な移動時間を算出することができ、さらにより正確な予想高度上昇率が算出される。
【0049】
また、高度上昇率算出部153は、ルートを複数の区間に分割して、分割されたそれぞれの区間毎に高度上昇率を算出することができる。このルートの分割は、例えば単純に所定の距離毎に行われてよい。或いはルートの分割は、例えばルートの高度に基づいて行われてよい。このとき、高度上昇率算出部153は、例えば高度変化の度合いに基づいてルートを複数の区間に分割することができる。
【0050】
(位置情報取得部155)
位置情報取得部155は、PND10の現在地の位置情報を取得する機能を有する。位置情報取得部155は、例えばGPS処理部132から供給される絶対位置の情報を取得することができる。また、位置情報取得部155は、位置算出部136から供給される前回算出時の位置から現在位置までの変化量を取得し、自律航法による位置情報を算出することもできる。また、位置情報取得部155は、方位算出部142から供給されるPND10の方位を取得することもできる。また位置情報取得部155は、高度算出部144から供給されるPND10の高度データを取得することもできる。位置情報取得部155は、取得した各種の情報から選択して、或いは、取得した各種の情報を組み合わせることによってPND10の現在の位置情報を取得することができる。
【0051】
また、位置情報取得部155は、PND10が車載モードで動作しているときには、取得した現在の位置情報と、地図データに含まれる道路ネットワークデータとに基づいたマップマッチング処理により移動している道路を特定し、位置情報が道路上の位置となるように補正してもよい。また位置情報取得部155は、その他のあらゆる位置情報補正処理を実行することによりさらに正確な位置情報を取得してもよい。
【0052】
(ナビゲーション部157)
ナビゲーション部157は、選択された経路に従った道順を案内する機能を有する。ナビゲーション部157は、例えば出力制御部161に各種の表示画面を表示させることによってユーザに道順を案内することができる。例えば、ナビゲーション部157は、ユーザが曲がるべき交差点に差し掛かる手前で、地図上に曲がる方向を示す矢印を表示させることにより道順を案内することができる。またナビゲーション部157は、出力制御部161が音声出力部106を制御することによって音声出力部106に音声を出力させてユーザに道順を案内することもできる。
【0053】
なお、ナビゲーション部157は、案内する経路を探索する経路探索部の機能も有する。ナビゲーション部157は、例えば現在地から指定された目的地までの経路を探索する機能を有する。なお、ナビゲーション部157は、PND10の動作モードに応じて適した経路を探索することができてもよい。この動作モードは、例えば車載モード、徒歩モード、及び自転車モードを含んでよい。例えば動作モードは、ユーザ操作に応じて切替えられてもよいし、クレードル14から取り外されたことを検知すると自動的に徒歩モードに切り替わるよう構成されてもよい。例えばPND10が車載モードで動作しているとき、ナビゲーション部157は、高速道路を含む経路を探索することができる。また、PND10が車載モードで動作しているとき、ナビゲーション部157は、渋滞予測を用いて渋滞が予測される区間を避けた経路を探索することもできる。或いは、PND10が徒歩モードで動作しているとき、ナビゲーション部157は、車載用の地図データとは異なる徒歩用の地図データを用いて、地下道、駅内コンコース、歩道橋、公園など歩行に適した経路を探索することができる。また、PND10が自転車モードで動作しているとき、ナビゲーション部157は、自転車用に合わせた経路を設定することができる。例えばPND10が自転車モードで動作しているとき、ナビゲーション部157は、車では通りにくい細い道も探索するため、より自転車に適した経路を探索することができる。ナビゲーション部157は、高度上昇率算出部153が今後の予測高度上昇率を算出するとき、予定ルートの情報を高度上昇率算出部153に供給することができる。すなわち、ナビゲーション部157は、予定ルート取得部の一例であってよい。
【0054】
(危険度判定部159)
危険度判定部159は、高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部の一例である。危険度判定部159は、現在の高度に基づいて危険度を判定することができる。上述の通り、高山病は、高度2400m以上になった場合に特に発症しやすい。このため、危険度判定部159は、現在の高度が2400m以上となった場合に、危険度が高いと判定することができる。また高山病は、高度2000m以上の場合であっても、急な高度上昇をした場合には、発症しやすくなる。そこで、危険度判定部159は、2400m以下であっても2000m以上の場合には、高度上昇率算出部153により算出される高度上昇率に基づいて危険度を判定することができる。なお、ここで2000mは高度の第1の閾値の一例である。また2400mは、第1の閾値より大きい第2の閾値の一例である。危険度判定部159は、実際の移動履歴情報に基づいた高度上昇率に基づいて危険度を判定してもよい。或いは、危険度判定部159は、さらに予想高度上昇率に基づいて危険度を判定してもよい。このとき危険度判定部159は、予想高度上昇率が分割された複数の区間毎に算出される場合には、この区間毎の高度上昇率に基づいて危険度を判定することができる。危険度判定部159は、閾値を用いることによって高度上昇率に基づいた危険度の判定を行うことができる。ここで用いられる閾値は、所定の値であってもよいし、ユーザにより選択されてもよい。或いはここで用いられる閾値は、学習により調整された値であってもよい。
【0055】
(出力制御部161)
出力制御部161は、危険度判定部159により危険度が高いと判定されると出力される警告情報の出力を制御する。この出力制御部161は、例えば表示部12の表示を制御することによって、警告情報の出力を制御することができる。また出力制御部161は、音声出力部106を制御することによって、警告情報の出力を制御することができる。ここで警告情報は、危険度が高い旨に加えて、危険度が高いと判定された原因を含むものであることが好ましい。例えば出力制御部161は、現在地の高度が2000m以上であって、高度上昇率が高いと判定されたとき、急な高度上昇による危険を警告する警告情報の出力を制御することができる。また出力制御部161は、現在地の高度が2400m以上であるときには、高度が高いことによる危険を警告する警告情報の出力を制御することができる。
【0056】
以上、本実施形態に係るPND10の機能の一例を示した。上記の各構成要素は、汎用的な部材や回路を用いて構成されていてもよいし、各構成要素の機能に特化したハードウェアにより構成されていてもよい。また、各構成要素の機能を、CPU(Central Processing Unit)などの演算装置がこれらの機能を実現する処理手順を記述した制御プログラムを記憶したROM(Read Only Memory)やRAM(Random Access Memory)などの記憶媒体から制御プログラムを読出し、そのプログラムを解釈して実行することにより行ってもよい。従って、本実施形態を実施する時々の技術レベルに応じて、適宜、利用する構成を変更することが可能である。
【0057】
なお、上述のような本実施形態に係るPND10の各機能を実現するためのコンピュータプログラムを作成し、パーソナルコンピュータ等に実装することが可能である。また、このようなコンピュータプログラムが格納された、コンピュータで読み取り可能な記録媒体も提供することができる。記録媒体は、例えば、磁気ディスク、光ディスク、光磁気ディスク、フラッシュメモリなどである。また、上記のコンピュータプログラムは、記録媒体を用いずに、例えばネットワークを介して配信してもよい。
【0058】
[2−2.動作例]
次に、図5〜図8を参照しながら、同実施形態にかかるPND10の危険度算出及び警告に関する動作の一例について説明する。図5は、同実施形態にかかるPNDの動作を示すフローチャートである。図6は、同実施形態において例示するユーザがスタート地点から目標地点まで移動する時間と高度の関係を示すグラフである。図7は、同実施形態にかかるPNDが出力する警告メッセージの一例を示す表である。図8は、同実施形態にかかるPNDの警告メッセージ表示画面の一例を示す説明図である。
【0059】
まず図5を参照すると、高度上昇率算出部153は、現時点までの平均移動速度Δzを算出する(S101)。図6の例を用いて説明すると、この平均移動速度Δzは、現在時点がT1であるとき、スタート時点T0から現在時点T1までの平均移動速度であってよい。高度上昇率算出部153は、例えば現時点までの距離(Z=3000m)と移動時間(T1−T0=200min)を用いて平均移動速度Δzを算出することができる。
【0060】
そして、高度上昇率算出部153は、現時点までの単位時間当たりの高度上昇率Δaを算出する(S103)。また高度上昇率算出部153は、ナビゲーション部157より取得された今後の予定ルートと、現時点までの平均移動速度Δzから、予想高度上昇率Δaeを算出する(S105)。なお、予想高度上昇率Δaeは、現時点までの平均移動速度Δzで今後のルートを移動した場合に予想される高度上昇率である。ここで用いられる平均移動速度Δzは、2地点間の高度差を考慮した値であってもよいし、高度差を考慮しない値であってもよい。
【0061】
次に、危険度判定部159は、現在地点の高度aが2000mより高いか否かを判断する(S107)。現在地点の高度aが2000mより高い場合には、高山病の危険性が高まってきている。このため、次に危険度判定部159は、現在地点の高度aが2400mより高いか否かを判断する(S109)。ここで、現在地点の高度aが2400mより高いと判定された場合には、さらに高山病の危険性が高い。このため、危険度判定部159は、出力制御部161に警告メッセージ1を出力するように指示し、出力制御部161は警告メッセージ1の出力を制御する(S111)。
【0062】
ここで出力メッセージ1は、高度が高いことによる高山病の危険を警告するメッセージであり、例えば図7に示されるように、「高度の高い地点にいるため、高山病になる危険があります。ご注意下さい。」というメッセージであってよい。この警告メッセージは、例えば図8に示されるように、警告メッセージM1が地図表示画面に重畳して表示されることによりユーザに提供されてよい。或いは、警告メッセージは、音声出力によりユーザに提供されてよい。
【0063】
再び図5を参照すると、ステップS109において現在地点の高度aが2400m以下であると判断されたとき、次に危険度判定部159は、現時点までの高度上昇率Δaが所定の閾値Thaより大きいか否かを判断する(S113)。ここで、現時点までの高度上昇率Δaが所定の閾値Thaより大きいとき、危険度判定部159は、出力制御部161に警告メッセージ2を出力するように指示し、出力制御部161は、警告メッセージ2の出力を制御する(S115)。
【0064】
ここで出力メッセージ2は、短時間での高度上昇による高山病の危険を警告するメッセージであり、例えば図7に示されるように、「短い時間での高度上昇が大きいので、高山病になる危険があります。ご注意下さい。」というメッセージであってよい。警告メッセージの出力方法については、警告メッセージ1の場合と同様であるためここでは説明を省略する。ユーザは、この警告メッセージを参照することによって、移動ペースを落としたり、休憩を取るなどの対応をとることができる。
【0065】
再び図5を参照すると、ステップS113において現時点までの高度上昇率Δaが所定の閾値Tha以下であると判断されたとき、次に危険度判定部159は、予想高度上昇率Δaeが、所定の閾値Thaeより大きいか否かを判断する(S117)。ここで、予想高度上昇率Δaeが所定の閾値Thaeより大きいとき、危険度判定部159は、出力制御部161に警告メッセージ2を出力するように指示し、出力制御部161は、警告メッセージ2の出力を制御する(S115)。
【0066】
一方、ステップS117において予想高度上昇率Δaeが所定の閾値Thae以下であると判断された場合には、危険度判定部159は、出力制御部161に警告メッセージ3を出力するように指示し、出力制御部161は、警告メッセージ3の出力を制御する(S119)。
【0067】
ここで出力メッセージ3は、高度上昇による高山病の危険を警告するメッセージであり、例えば図7に示されるように、「高度が高くなってきたので、高山病になる危険があります。休憩をお勧めします。」というメッセージであってよい。警告メッセージの出力方法については、警告メッセージ1の場合と同様であるためここでは説明を省略する。
【0068】
[2−3.高度上昇率の算出]
ここで、高度上昇率Δaの算出について、図6の例を用いながらより詳細に説明する。図6の例によると、スタート時点T0から山登りを行い、経過時間が200(min)となったとき(時刻T1)を現時点とする。このときの高度は、a=A1=2000(m)である。また、T0〜T1間に移動したルート距離がZ=3000(m)とする。またこの先目標地点までの予定ルートのルート距離がZs=800(m)である。
【0069】
このとき、現時点までの高度上昇率Δaは、移動地点間の高度差を移動時間で割ることにより算出される。例えば図6の例においては、移動地点間の高度差は、
A1−A0=2000−0=2000(m)
である。また、移動時間は、
T1−T0=200−0=200(min)
である。従って、高度上昇率Δaは、
Δa=2000/200=10(m/min)
【0070】
[2−4.平均移動速度の算出]
ここで、引き続き図6の例を用いて、平均移動速度の算出について説明する。まず、高度上昇率算出部153は、T0〜T1までの平均移動速度Δzを算出する。高度上昇率算出部153は、この先の予想高度上昇率Δaeを算出するに当たって、この平均移動速度Δzを用いる。具体的には、高度上昇率算出部153は、現時点までの平均移動速度でユーザが予定ルートの移動を続けた場合の予想高度上昇率Δaeを算出する。従って、まずここで用いられる平均移動速度Δzを算出する。
【0071】
この平均移動速度Δzは、2地点間の高度差を考慮した値であってもよいし、高度差を考慮しない値であってもよい。
【0072】
例えば、高度差を考慮しない場合には、平均移動速度Δzは、下式で表される。
Δz=移動距離/移動時間=3000/200=15(m/min)
【0073】
なお、移動距離は、2地点間の斜面にそった実際の移動距離であってもよいし、地図上の2地点間の水平距離であってもよい。
【0074】
また、高度上昇分を考慮した場合の平均移動速度Δzaは、下式で表される。
Δza=Δz×((移動距離+高度差)/移動距離)
=15×((3000+2000)/3000)=25(m/min)
【0075】
この平均移動速度Δzまたは平均移動速度Δzaを用いて、予想高度上昇率が算出される。
【0076】
[2−5.予想高度上昇率の算出]
次に、引き続き図6の例を用いて、予想高度上昇率の算出について説明する。予想高度上昇率は、上述の通り、現時点までの平均移動速度でユーザが予定ルートの移動を続けた場合に予想される高度上昇率である。平均移動速度は、上述の平均移動速度Δzが用いられてもよいし、平均移動速度Δzaが用いられてもよい。
【0077】
まず、高度差を考慮しない平均移動速度Δzを用いた場合の予想高度上昇率Δaeは、下式で表される。
Δae=予定ルートの高度差/(予定ルート距離/平均移動速度)
=(A2−A1)/(Zs/Δz)
=600/(800/15)=11.25(m/min)
【0078】
次に、高度差を考慮した平均移動速度Δzaを用いた場合の予想高度上昇率Δaeaは、下式で表される。
Δaea=Δza/((予定ルート距離+予定ルート高度差)/予定ルート距離)
=Δza/(((Zs+(A2−A1))/Zs)
=25/(800+600/800)≒14.285
【0079】
[2−6.算出区間の分割]
次に、高度上昇率の算出区間の分割について説明する。上述の例では、いずれも現時点から、予定ルートの目標地点までの全ルートを対象として予想高度上昇率を算出して危険度が判定された。しかし、本技術はかかる例に限定されず、予定ルートを複数の区間に分割し、分割した区間毎に高度上昇率が算出されてもよい。この区間の分割の方法について、ここで図9及び図10を参照しながら説明する。図9は、同実施形態にかかるPNDが実行する予定ルートの区間分割の一例を示す説明図である。図10は、同実施形態にかかるPNDが実行する予定ルートの区間分割の他の一例を示す説明図である。
【0080】
例えば、高度上昇率算出部153は、図9に示されるように、予定ルートを一定の距離で均一に複数の区間I1〜I8に分割し、この区間毎に予想高度上昇率を算出してもよい。危険度判定部159は、分割された区間毎の予想高度上昇率を用いて、危険度を区間毎に判定することができる。
【0081】
また例えば、高度上昇率算出部153は、図10に示されるように、予定ルートの傾斜度に基づいて、一定の傾斜幅のグループで予定ルートを複数の区間Ig1〜区間Ig6に分割し、この区間毎に予想高度上昇率を算出してもよい。危険度判定部159は、分割された区間毎の予想高度上昇率を用いて、危険度を区間毎に判定することができる。
【0082】
<3.第2の実施形態(サーバ側で危険度を判定する例)>
次に、本開示の第2の実施形態について説明する。第2の実施形態は、サーバ側で危険度判定を行う例である。
【0083】
[3−1.構成]
まず、図11〜図13を参照しながら、同実施形態に係る危険度判定システムの構成について説明する。図11は、本開示の第2の実施形態にかかる危険度判定システムの構成図である。図12は、同実施形態にかかる危険度判定サーバの構成を示すブロック図である。図13は、同実施形態にかかる携帯端末の構成を示すブロック図である。
【0084】
図11を参照すると、本実施形態に係る危険度判定システムは、携帯端末30aと、ネットワーク40を介して接続される危険度判定サーバ20とを含む。携帯端末30aは、例えば携帯電話、携帯用音楽再生装置、携帯用映像処理装置、携帯用ゲーム機器などの情報処理装置であってよい。携帯端末30aは、少なくとも位置情報を危険度判定サーバ20に送信し、危険度判定サーバ20は、携帯端末30aから受信した情報に基づいて、携帯端末30aのユーザが高山病にかかる危険度を判定する。そして危険度判定サーバ20aは、ユーザの危険度が高いときに警告メッセージを携帯端末30aに出力する。
【0085】
((危険度判定サーバ20))
図12を参照すると、危険度判定サーバ20の構成が示される。危険度判定サーバ20は、高度情報取得部251と、高度上昇率算出部153と、位置情報取得部255と、予定ルート取得部257と、危険度判定部159と、出力制御部261とを主に有する。
【0086】
(高度情報取得部251)
高度情報取得部251は、携帯端末30aが位置する場所の高度情報を取得する機能を有する。高度情報取得部251は、例えば位置情報取得部255が携帯端末30aから取得した位置情報に基づいて高度情報を取得することができる。このとき高度情報取得部251は、例えば地図情報に含まれるそれぞれの地点の高度の情報を用いて、位置情報から高度情報を取得することができる。或いは、高度情報取得部251は、携帯端末30aが高度情報を取得する機能を有するときには、携帯端末30aから送信される高度情報を受信することによって高度情報を取得してもよい。高度情報取得部251は、高度上昇率算出部153及び危険度判定部159に高度情報を供給することができる。
【0087】
(位置情報取得部255)
位置情報取得部255は、携帯端末30aの位置情報を取得する機能を有する。位置情報取得部255は、取得した位置情報を高度情報取得部251及び予定ルート取得部257に供給することができる。
【0088】
(予定ルート取得部257)
予定ルート取得部257は、携帯端末30aのユーザが予定している予定ルートの情報を取得する機能を有する。予定ルート取得部257は、例えば携帯端末30aから予定ルートの情報を受信することにより予定ルートの情報を取得することができる。
【0089】
(出力制御部261)
出力制御部261は、危険度判定部159の指示に基づいて、警告情報の出力を制御することができる。出力制御部261は、危険度判定部159の指示に基づいて、警告メッセージを携帯端末30aに送信することができる。
【0090】
((携帯端末30))
ここで、携帯端末30の構成の一例について説明する。図13を参照すると、携帯端末30は、例えば、GPSアンテナ821と、GPS処理部823と、通信アンテナ825と、通信処理部827と、地磁気センサ829と、加速度センサ831と、ジャイロセンサ833と、気圧センサ835と、撮像部837と、CPU(Central Processing Unit)839と、ROM(Read Only Memory)841と、RAM(Random Access Memory)843と、操作部847と、表示部849と、デコーダ851と、スピーカ853と、エンコーダ855と、マイク857と、記憶部859とを有する。
【0091】
(GPSアンテナ821)
GPSアンテナ821は、測位衛星からの信号を受信するアンテナの一例である。GPSアンテナ821は、複数のGPS衛星からのGPS信号を受信することができ、受信したGPS信号をGPS処理部823に入力する。
【0092】
(GPS処理部823)
GPS処理部823は、測位衛星から受信された信号に基づいて位置情報を算出する算出部の一例である。GPS処理部823は、GPSアンテナ821から入力された複数のGPS信号に基づいて現在の位置情報を算出し、算出した位置情報を出力する。具体的には、GPS処理部823は、GPS衛星の軌道データからそれぞれのGPS衛星の位置を算出し、GPS信号の送信時刻と受信時刻との差分時間に基づいて、各GPS衛星から当該携帯端末30までの距離をそれぞれ算出する。そして、算出された各GPS衛星の位置と、各GPS衛星から当該携帯端末30までの距離とに基づいて、現在の3次元位置を算出することができる。なお、ここで用いられるGPS衛星の軌道データは、例えばGPS信号に含まれていてもよい。或いは、GPS衛星の軌道データは、通信アンテナ825を介して外部のサーバから取得されてもよい。
【0093】
(通信アンテナ825)
通信アンテナ825は、例えば携帯通信網や無線LAN(Local Area Network)通信網を介して通信信号を受信する機能を有するアンテナである。通信アンテナ825は、受信した信号を通信処理部827に供給することができる。
【0094】
(通信処理部827)
通信処理部827は、通信アンテナ825から供給された信号に各種の信号処理を行う機能を有する。通信処理部827は、供給されたアナログ信号から生成したデジタル信号をCPU839に供給することができる。
【0095】
(地磁気センサ829)
地磁気センサ829は、地磁気を電圧値として検出するセンサである。地磁気センサ829は、X軸方向、Y軸方向、及びZ軸方向の地磁気をそれぞれ検出する3軸地磁気センサであってよい。地磁気センサ829は、検出した地磁気データをCPU839に供給することができる。
【0096】
(加速度センサ831)
加速度センサ831は、加速度を電圧値として検出するセンサである。加速度センサ831は、X軸方向に沿った加速度、Y軸方向に沿った加速度、及びZ軸方向に沿った加速度をそれぞれ検出する3軸加速度センサであってよい。加速度センサ831は、検出した加速度データをCPU839に供給することができる。
【0097】
(ジャイロセンサ833)
ジャイロセンサ833は、物体の角度や角速度を検出する計測器の一種である。このジャイロセンサ833は、X軸、Y軸、及びZ軸周りの回転角の変化する速度(角速度)を電圧値として検出する3軸ジャイロセンサであってよい。ジャイロセンサ833は、検出した角速度データをCPU839に供給することができる。
【0098】
(気圧センサ835)
気圧センサ835は、周囲の気圧を電圧値として検出するセンサである。気圧センサ835は、気圧を所定のサンプリング周波数で検出し、検出した気圧データをCPU839に供給することができる。
【0099】
(撮像部837)
撮像部837は、CPU839の制御に従い、レンズを介して静止画像又は動画像を撮影する機能を有する。撮像部837は、撮影した画像を記憶部859に記憶させてもよい。
【0100】
(CPU839)
CPU839は、演算処理装置及び制御装置として機能し、各種プログラムに従って携帯端末30内の動作全般を制御する。またCPU839は、マイクロプロセッサであってもよい。このCPU839は、各種プログラムに従って様々な機能を実現することができる。
【0101】
(ROM841,RAM843)
ROM841は、CPU839が使用するプログラムや演算パラメータ等を記憶することができる。RAM843は、CPU839の実行において使用するプログラムや、その実行において適宜変化するパラメータ等を一時記憶することができる。
【0102】
(操作部847)
操作部847は、ユーザが所望の操作をするための入力信号を生成する機能を有する。操作部847は、例えばタッチセンサ、マウス、キーボード、ボタン、マイク、スイッチ及びレバーなどユーザが情報を入力するための入力部と、ユーザによる入力に基づいて入力信号を生成し、CPU839に出力する入力制御回路などから構成されてよい。
【0103】
(表示部849)
表示部849は、出力装置の一例であり、液晶ディスプレイ(LCD:Liquid Crystal Display)装置、有機EL(OLED:Organic Light Emitting Diode)ディスプレイ装置などの表示装置であってよい。表示部849は、ユーザに対して画面を表示することにより情報を提供することができる。
【0104】
(デコーダ851,スピーカ853)
デコーダ851は、CPU839の制御に従い、入力されたデータのデコード及びアナログ変換などを行う機能を有する。デコーダ851は、例えば通信アンテナ825及び通信処理部827を介して入力された音声データのデコード及びアナログ変換などを行い、音声信号をスピーカ853に出力する。スピーカ853は、デコーダ851から供給される音声信号に基づいて音声を出力することができる。
【0105】
(エンコーダ855,マイク857)
エンコーダ855は、CPU839の制御に従い、入力されたデータのデジタル変換及びエンコードなどを行う機能を有する。エンコーダ855は、マイク857から入力される音声信号のデジタル変換及びエンコードなどを行い、音声データを出力することができる。マイク857は、音声を集音し、音声信号として出力することができる。
【0106】
(記憶部859)
記憶部859は、データ格納用の装置であり、記憶媒体、記憶媒体にデータを記録する記録装置、記憶媒体からデータを読み出す読出し装置、および記憶媒体に記録されたデータを削除する削除装置などを含むことができる。ここで記憶媒体としては、例えばフラッシュメモリ、MRAM(Magnetoresistive Random Access Memory)、FeRAM(Ferroelectric Random Access Memory)、PRAM(Phase change Random Access Memory)、及びEEPROM(Electronically Erasable and Programmable Read Only Memory)などの不揮発性メモリや、HDD(Hard Disk Drive)などの磁気記録媒体などが用いられてよい。
【0107】
以上、本実施形態に係る危険度判定サーバ20及び携帯端末30の構成の一例を示した。上記の各構成要素は、汎用的な部材や回路を用いて構成されていてもよいし、各構成要素の機能に特化したハードウェアにより構成されていてもよい。また、各構成要素の機能を、CPU(Central Processing Unit)などの演算装置がこれらの機能を実現する処理手順を記述した制御プログラムを記憶したROM(Read Only Memory)やRAM(Random Access Memory)などの記憶媒体から制御プログラムを読出し、そのプログラムを解釈して実行することにより行ってもよい。従って、本実施形態を実施する時々の技術レベルに応じて、適宜、利用する構成を変更することが可能である。
【0108】
なお、上述のような本実施形態に係る危険度判定サーバ20及び携帯端末30の各機能を実現するためのコンピュータプログラムを作成し、パーソナルコンピュータ等に実装することが可能である。また、このようなコンピュータプログラムが格納された、コンピュータで読み取り可能な記録媒体も提供することができる。記録媒体は、例えば、磁気ディスク、光ディスク、光磁気ディスク、フラッシュメモリなどである。また、上記のコンピュータプログラムは、記録媒体を用いずに、例えばネットワークを介して配信してもよい。
【0109】
[3−2.動作]
次に、図14を参照しながら、同実施形態にかかる危険度判定システムの動作について説明する。図14は、同実施形態にかかる危険度判定システムの動作を示すシーケンス図である。
【0110】
まず、携帯端末30aは、位置情報を取得して危険度判定サーバ20に送信する(S201)。このとき携帯端末30aは、現時点の位置情報をその都度危険度判定サーバ20に送信してもよい。また携帯端末30aは、位置情報を取得された日時と対応付けて記録しておき、位置情報及び位置情報に対応する日時の情報を危険度判定サーバ20に送信してもよい。
【0111】
次に、位置情報を受信した危険度判定サーバ20は、位置情報と位置情報が取得された日時とを対応づけて記録することにより、移動履歴情報を生成する(S203)。次に危険度判定サーバ20は、高度情報を取得する(S204)。
【0112】
そして、危険度判定サーバ20は、危険度判定処理を実行する(S100)。ここで、ステップS100の危険度判定処理は、図5において説明したステップS101〜ステップS119の処理である。危険度判定処理を実行すると、危険度判定サーバ20は、出力する警告メッセージがあるか否かを判断する(S205)。ステップS205において、出力する警告メッセージがあると判断されたとき、出力制御部261は、警告メッセージを携帯端末30に送信する(S207)。
【0113】
<4.第3の実施形態(通報システムの例)>
次に、本開示の第3の実施形態について説明する。第3の実施形態は、ユーザが高山病になる危険度が高いときに通報を行う通報システムの例である。
【0114】
[4−1.構成]
まず、図15及び図16を参照しながら、同実施形態に係る通報システムの構成について説明する。図15は、本開示の第3の実施形態にかかる危険度通報システムの構成図である。図16は、同実施形態にかかる携帯端末の詳細構成を示すブロック図である。
【0115】
図15を参照すると、本実施形態に係る通報システムは、携帯端末30b、及び携帯端末30bとネットワーク40を介して接続される通報受信装置50とを含む。携帯端末30bは、例えば携帯電話、携帯用音楽再生装置、携帯用映像処理装置、携帯用ゲーム機器などの情報処理装置であってよい。携帯端末30bは、携帯端末30bのユーザが高山病になる危険度を判定する。そして携帯端末30bは、危険度が高いと判定されると、通報受信装置50に危険度が高い旨を通報することができる。ここで通報受信装置50は、携帯端末30bからの通報を受信する通信機能を有する情報処理装置である。例えば通報受信装置50は、携帯端末30bのユーザが登っている山の山小屋、及び山岳管理所など、通報を受けた場合に、ユーザを救助するための対応を取ることの出来る人が参照可能な情報処理装置であることが望ましい。
【0116】
((携帯端末30b))
図16を参照すると、携帯端末30bの構成が示される。なお、この携帯端末30bは、図13において説明された全体構成を有する。そして、図16に示す機能がCPU839の動作により実現される。従って、携帯端末30bは、高度情報取得部151と、高度上昇率算出部153と、位置情報取得部155と、ナビゲーション部157と、危険度判定部159と、出力制御部361との機能を主に有する。
【0117】
なお、ここで高度情報取得部151と、高度上昇率算出部153と、位置情報取得部155と、ナビゲーション部157と、危険度判定部159と、の機能については、第1の実施形態において説明した機能と同様であるためここでは説明を省略する。
【0118】
(出力制御部361)
出力制御部361は、出力制御部161の機能に加えて、携帯端末30bのユーザが高山病になる危険度が高いとき、近傍の山小屋や山岳管理所などの施設に通報を行う機能を有する。出力制御部361は、例えば携帯端末30bの現在の位置情報を通報受信装置50に送信する機能を有する。出力制御部361は、通報受信装置50に例えば山登り中の移動軌跡情報、今後の予定コース、ユーザの危険度の情報を送信してもよい。
【0119】
[4−2.動作]
次に、図17を参照しながら、同実施形態にかかる通報システムの動作について説明する。図17は、同実施形態にかかる危険度通報システムの動作を示すシーケンス図である。
【0120】
まず、携帯端末30bは、危険度判定処理を実行する(S100)。この危険度判定処理は、図5において説明したステップS101〜ステップS119の処理である。危険度判定処理を実行すると、携帯端末30bの出力制御部361は、通報を行うか否かを判断する(S301)。そして、通報を行うと判断したときには、出力制御部361は、例えば位置情報を含む通報を行う(S303)。この通報には、上述の通り移動軌跡情報、予定コース、及び危険度の情報が含まれてもよい。
【0121】
以上、添付図面を参照しながら本開示の好適な実施形態について詳細に説明したが、本開示の技術的範囲はかかる例に限定されない。本開示の技術分野における通常の知識を有する者であれば、特許請求の範囲に記載された技術的思想の範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、これらについても、当然に本開示の技術的範囲に属するものと了解される。
【0122】
例えば、上記第3の実施形態では、携帯電話による通報システムの例を示したが、本技術はかかる例に限定されない。例えば、PNDが通信機能を有する場合には、PNDが通報を行う構成としてもよい。
【0123】
尚、本明細書において、フローチャート又はシーケンス図に記述されたステップは、記載された順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的に又は個別的に実行される処理をも含む。また時系列的に処理されるステップでも、場合によっては適宜順序を変更することが可能であることは言うまでもない。
【0124】
なお、以下のような構成も本開示の技術的範囲に属する。
(1)
高度情報を取得する高度情報取得部と、
前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、
を備える、情報処理装置。
(2)
前記高度情報に基づいて、高度上昇率を算出する算出部、
をさらに備え、
前記判定部は、前記高度上昇率に基づいて、前記危険度を判定する、
前記(1)に記載の情報処理装置。
(3)
前記算出部は、前記高度情報の履歴を用いて、現時点までの高度上昇率を算出する、
前記(2)に記載の情報処理装置。
(4)
予定ルートの情報を取得する予定ルート取得部、
をさらに備え、
前記算出部は、前記予定ルートの情報に基づいて、今後予想される前記高度上昇率を算出し、
前記判定部は、今後予想される前記高度上昇率に基づいて前記危険度を判定する、
前記(2)または(3)のいずれかに記載の情報処理装置。
(5)
前記算出部は、前記予定ルートの高度差に応じて補正した予想移動速度を用いて、前記高度上昇率を算出する、
前記(4)に記載の情報処理装置。
(6)
前記算出部は、前記予定ルートを複数の区間に分割し、分割されたそれぞれの前記区間毎に前記高度上昇率を算出し、
前記判定部は、前記区間毎の前記高度上昇率に基づいて前記危険度を判定する、
前記(4)または(5)のいずれかに記載の情報処理装置。
(7)
前記算出部は、前記予定ルートの高度に基づいて、前記予定ルートを複数の区間に分割する、
前記(6)に記載の情報処理装置。
(8)
前記算出部は、前記予定ルートの高度変化の度合いに基づいて、前記予定ルートを複数の区間に分割する、
前記(7)に記載の情報処理装置。
(9)
前記判定部により前記危険度が高いと判定されると、警告情報の出力を制御する出力制御部、
をさらに備える、前記(1)〜(8)のいずれかに記載の情報処理装置。
(10)
前記出力制御部は、現在地の高度が第1の閾値以上であり、前記高度上昇率が高いと判定されたとき、急な高度上昇による危険を警告する前記警告情報の出力を制御する、
前記(9)に記載の情報処理装置。
(11)
前記出力制御部は、現在地の高度が前記第1の閾値より大きい第2の閾値以上であるとき、高度が高いことによる危険を警告する前記警告情報の出力を制御する、
前記(10)に記載の情報処理装置。
(12)
前記出力制御部は、前記警告情報を含む表示画面の出力を制御する、
前記(9)〜(11)のいずれかに記載の情報処理装置。
(13)
前記出力制御部は、前記警告情報の音声出力を制御する、
前記(9)〜(12)のいずれかに記載の情報処理装置。
(14)
前記出力制御部は、前記危険度が高いと判定されると、通信路を介して接続される第2の情報処理装置への通報情報の出力を制御する、
前記(9)〜(13)のいずれかに記載の情報処理装置。
(15)
現在の位置情報を取得する位置情報取得部、
をさらに備え、
前記通報情報は、少なくとも前記位置情報を含む、
前記(14)に記載の情報処理装置。
(16)
前記通報情報は、予定される移動ルートの情報、及び前記危険度の少なくともいずれかをさらに含む、
前記(15)に記載の情報処理装置。
(17)
前記算出部は、所定距離毎に前記予定ルートを複数の区間に分割する、
前記(5)に記載の情報処理装置。
(18)
高度情報を取得することと、
前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定することと、
を含む、情報処理方法。
(19)
コンピュータを、
高度情報を取得する高度情報取得部と、
前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、
を備える、情報処理装置として機能させるためのプログラム。
(20)
コンピュータを、
高度情報を取得する高度情報取得部と、
前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、
を備える、情報処理装置として機能させるためのプログラムを記録した、コンピュータに読取り可能な記録媒体。
【符号の説明】
【0125】
10 PND(情報処理装置)
151 高度情報取得部
153 高度上昇率算出部(算出部)
155 位置情報取得部
157 ナビゲーション部
161 出力制御部
20 危険度判定サーバ
30 携帯端末
【特許請求の範囲】
【請求項1】
高度情報を取得する高度情報取得部と、
前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、
を備える、情報処理装置。
【請求項2】
前記高度情報に基づいて、高度上昇率を算出する算出部、
をさらに備え、
前記判定部は、前記高度上昇率に基づいて、前記危険度を判定する、
請求項1に記載の情報処理装置。
【請求項3】
前記算出部は、前記高度情報の履歴を用いて、現時点までの高度上昇率を算出する、
請求項2に記載の情報処理装置。
【請求項4】
予定ルートの情報を取得する予定ルート取得部、
をさらに備え、
前記算出部は、前記予定ルートの情報に基づいて、今後予想される前記高度上昇率を算出し、
前記判定部は、今後予想される前記高度上昇率に基づいて前記危険度を判定する、
請求項2に記載の情報処理装置。
【請求項5】
前記算出部は、前記予定ルートの高度差に応じて補正した予想移動速度を用いて、前記高度上昇率を算出する、
請求項4に記載の情報処理装置。
【請求項6】
前記算出部は、前記予定ルートを複数の区間に分割し、分割されたそれぞれの前記区間毎に前記高度上昇率を算出し、
前記判定部は、前記区間毎の前記高度上昇率に基づいて前記危険度を判定する、
請求項4に記載の情報処理装置。
【請求項7】
前記算出部は、前記予定ルートの高度に基づいて、前記予定ルートを複数の区間に分割する、
請求項6に記載の情報処理装置。
【請求項8】
前記算出部は、前記予定ルートの高度変化の度合いに基づいて、前記予定ルートを複数の区間に分割する、
請求項7に記載の情報処理装置。
【請求項9】
前記判定部により前記危険度が高いと判定されると、警告情報の出力を制御する出力制御部、
をさらに備える、請求項1に記載の情報処理装置。
【請求項10】
前記出力制御部は、現在地の高度が第1の閾値以上であり、前記高度上昇率が高いと判定されたとき、急な高度上昇による危険を警告する前記警告情報の出力を制御する、
請求項9に記載の情報処理装置。
【請求項11】
前記出力制御部は、現在地の高度が前記第1の閾値より大きい第2の閾値以上であるとき、高度が高いことによる危険を警告する前記警告情報の出力を制御する、
請求項10に記載の情報処理装置。
【請求項12】
前記出力制御部は、前記警告情報を含む表示画面の出力を制御する、
請求項9に記載の情報処理装置。
【請求項13】
前記出力制御部は、前記警告情報の音声出力を制御する、
請求項9に記載の情報処理装置。
【請求項14】
前記出力制御部は、前記危険度が高いと判定されると、通信路を介して接続される第2の情報処理装置への通報情報の出力を制御する、
請求項9に記載の情報処理装置。
【請求項15】
現在の位置情報を取得する位置情報取得部、
をさらに備え、
前記通報情報は、少なくとも前記位置情報を含む、
請求項14に記載の情報処理装置。
【請求項16】
前記通報情報は、予定される移動ルートの情報、及び前記危険度の少なくともいずれかをさらに含む、
請求項15に記載の情報処理装置。
【請求項17】
前記算出部は、所定距離毎に前記予定ルートを複数の区間に分割する、
請求項5に記載の情報処理装置。
【請求項18】
高度情報を取得することと、
前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定することと、
を含む、情報処理方法。
【請求項19】
コンピュータを、
高度情報を取得する高度情報取得部と、
前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、
を備える、情報処理装置として機能させるためのプログラム。
【請求項20】
コンピュータを、
高度情報を取得する高度情報取得部と、
前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、
を備える、情報処理装置として機能させるためのプログラムを記録した、コンピュータに読取り可能な記録媒体。
【請求項1】
高度情報を取得する高度情報取得部と、
前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、
を備える、情報処理装置。
【請求項2】
前記高度情報に基づいて、高度上昇率を算出する算出部、
をさらに備え、
前記判定部は、前記高度上昇率に基づいて、前記危険度を判定する、
請求項1に記載の情報処理装置。
【請求項3】
前記算出部は、前記高度情報の履歴を用いて、現時点までの高度上昇率を算出する、
請求項2に記載の情報処理装置。
【請求項4】
予定ルートの情報を取得する予定ルート取得部、
をさらに備え、
前記算出部は、前記予定ルートの情報に基づいて、今後予想される前記高度上昇率を算出し、
前記判定部は、今後予想される前記高度上昇率に基づいて前記危険度を判定する、
請求項2に記載の情報処理装置。
【請求項5】
前記算出部は、前記予定ルートの高度差に応じて補正した予想移動速度を用いて、前記高度上昇率を算出する、
請求項4に記載の情報処理装置。
【請求項6】
前記算出部は、前記予定ルートを複数の区間に分割し、分割されたそれぞれの前記区間毎に前記高度上昇率を算出し、
前記判定部は、前記区間毎の前記高度上昇率に基づいて前記危険度を判定する、
請求項4に記載の情報処理装置。
【請求項7】
前記算出部は、前記予定ルートの高度に基づいて、前記予定ルートを複数の区間に分割する、
請求項6に記載の情報処理装置。
【請求項8】
前記算出部は、前記予定ルートの高度変化の度合いに基づいて、前記予定ルートを複数の区間に分割する、
請求項7に記載の情報処理装置。
【請求項9】
前記判定部により前記危険度が高いと判定されると、警告情報の出力を制御する出力制御部、
をさらに備える、請求項1に記載の情報処理装置。
【請求項10】
前記出力制御部は、現在地の高度が第1の閾値以上であり、前記高度上昇率が高いと判定されたとき、急な高度上昇による危険を警告する前記警告情報の出力を制御する、
請求項9に記載の情報処理装置。
【請求項11】
前記出力制御部は、現在地の高度が前記第1の閾値より大きい第2の閾値以上であるとき、高度が高いことによる危険を警告する前記警告情報の出力を制御する、
請求項10に記載の情報処理装置。
【請求項12】
前記出力制御部は、前記警告情報を含む表示画面の出力を制御する、
請求項9に記載の情報処理装置。
【請求項13】
前記出力制御部は、前記警告情報の音声出力を制御する、
請求項9に記載の情報処理装置。
【請求項14】
前記出力制御部は、前記危険度が高いと判定されると、通信路を介して接続される第2の情報処理装置への通報情報の出力を制御する、
請求項9に記載の情報処理装置。
【請求項15】
現在の位置情報を取得する位置情報取得部、
をさらに備え、
前記通報情報は、少なくとも前記位置情報を含む、
請求項14に記載の情報処理装置。
【請求項16】
前記通報情報は、予定される移動ルートの情報、及び前記危険度の少なくともいずれかをさらに含む、
請求項15に記載の情報処理装置。
【請求項17】
前記算出部は、所定距離毎に前記予定ルートを複数の区間に分割する、
請求項5に記載の情報処理装置。
【請求項18】
高度情報を取得することと、
前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定することと、
を含む、情報処理方法。
【請求項19】
コンピュータを、
高度情報を取得する高度情報取得部と、
前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、
を備える、情報処理装置として機能させるためのプログラム。
【請求項20】
コンピュータを、
高度情報を取得する高度情報取得部と、
前記高度情報に基づいて、ユーザの身体にかかる負荷の危険度を判定する判定部と、
を備える、情報処理装置として機能させるためのプログラムを記録した、コンピュータに読取り可能な記録媒体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−34767(P2013−34767A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2011−175008(P2011−175008)
【出願日】平成23年8月10日(2011.8.10)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願日】平成23年8月10日(2011.8.10)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]